


 Loading...
Loading...GE Fanuc Automation
Computer Numerical Control Products
Series 16i / 18i / 160i / 180i – Model A
Parameter Manual
GFZ-63010EN/01 |
April 1997 |

GFL-001
Warnings, Cautions, and Notes as Used in this Publication
Warning
Warning notices are used in this publication to emphasize that hazardous voltages, currents, temperatures, or other conditions that could cause personal injury exist in this equipment or may be associated with its use.
In situations where inattention could cause either personal injury or damage to equipment, a Warning notice is used.
Caution
Caution notices are used where equipment might be damaged if care is not taken.
Note
Notes merely call attention to information that is especially significant to understanding and operating the equipment.
This document is based on information available at the time of its publication. While efforts have been made to be accurate, the information contained herein does not purport to cover all details or variations in hardware or software, nor to provide for every possible contingency in connection with installation, operation, or maintenance. Features may be described herein which are not present in all hardware and software systems. GE Fanuc Automation assumes no obligation of notice to holders of this document with respect to changes subsequently made.
GE Fanuc Automation makes no representation or warranty, expressed, implied, or statutory with respect to, and assumes no responsibility for the accuracy, completeness, sufficiency, or usefulness of the information contained herein. No warranties of merchantability or fitness for purpose shall apply.
©Copyright 1997 GE Fanuc Automation North America, Inc.
All Rights Reserved.

B±63010EN/01 |
PREFACE |
|
|
The mode covered by this manual, and their abbreviations are :
Product Name |
|
Abbreviations |
|
|
|
|
|
FANUC Series 16 ±TA |
16 ±TA |
T series or |
|
|
|
T series (two±path control) *1 |
|
FANUC Series 160 ±TA |
160 ±TA |
||
|
|||
|
|
|
|
FANUC Series 16 ±MA |
16 ±MA |
M series or |
|
|
|
M series (two±path control) *1 |
|
FANUC Series 160 ±MA |
160 ±MA |
||
|
|||
|
|
|
|
FANUC Series 18 ±TA |
18 ±TA |
T series or |
|
|
|
T series (two±path control) *1 |
|
FANUC Series 180 ±TA |
180 ±TA |
||
|
|||
|
|
|
|
FANUC Series 18 ±MA |
18 ±MA |
M series |
|
|
|
||
FANUC Series 180 ±MA |
180 ±MA |
||
|
|||
|
|
|
NOTE
Some functions described in this manual may not be applied to some products.
For details, refer to the DESCRIPTIONS (B±63002EN).
The table below lists manuals related to MODEL A of Series 16i, Series 18i, Series 160i, Series 180i. In the table, this manual is maked with an asterisk (*).
Table 1 Related manuals
Manual name |
Specification |
|
Number |
|
|
|
|
|
|
|
|
DESCRIPTIONS |
B±63002EN |
|
|
|
|
CONNECTION MANUAL (Hardware) |
B±63003EN |
|
|
|
|
CONNECTION MANUAL (Function) |
B±63003EN±1 |
|
|
|
|
OPERATOR'S MANUAL FOR LATHE |
B±63004EN |
|
|
|
|
OPERATOR'S MANUAL FOR MACHINING CENTER |
B±63014EN |
|
|
|
|
MAINTENANCE MANUAL |
B±63005EN |
|
|
|
|
PARAMETER MANUAL |
B±63010EN |
* |
|
|
|
PROGRAMMING MANUAL |
B±61803E±1 |
|
(Macro Compiler/Macro Executor) |
|
|
|
|
|
|
|
|
FAPT MACRO COMPILER PROGRAMMING MANUAL |
B±66102E |
|
|
|
|
FANUC Super CAP T OPERATOR'S MANUAL |
B±62444E±1 |
|
|
|
|
FANUC Super CAP M OPERATOR'S MANUAL |
B±62154E |
|
|
|
|
FANUC Super CAP M PROGRAMMING MANUAL |
B±62153E |
|
|
|
|
CONVERSATIONAL AUTOMATIC PROGRAMMING |
B±61804E±1 |
|
FUNCTION I FOR LATHE OPERATOR'S MANUAL |
|
|
|
|
|
|
|
|
CONVERSATIONAL AUTOMATIC PROGRAMMING |
B±61804E±2 |
|
FUNCTION FOR LATHE OPERATOR'S MANUAL |
|
|
|
|
|
|
|
|
p±1

B±63010EN/01 |
Table of Contents |
PREFACE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
p±1 |
||
1. |
DISPLAYING PARAMETERS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
1 |
|
2. |
SETTING PARAMETERS FROM MDI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
2 |
|
3. |
INPUTTING AND OUTPUTTING PARAMETERS THROUGH |
|
|
|
THE READER/PUNCHER INTERFACE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
4 |
|
|
3.1 |
OUTPUTTING PARAMETERS THROUGH THE READER/PUNCHER INTERFACE . . . . . . . . . |
5 |
|
3.2 |
INPUTTING PARAMETERS THROUGH THE READER/PUNCHER INTERFACE . . . . . . . . . . . |
6 |
4. |
DESCRIPTION OF PARAMETERS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
7 |
|
|
4.1 |
PARAMETERS OF SETTING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
9 |
4.2PARAMETERS OF READER/PUNCHER INTERFACE, REMOTE BUFFER,
|
DNC1, DNC2, AND M±NET INTERFACE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
12 |
|
|
4.2.1 |
Parameters Common to all Channels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
13 |
|
4.2.2 |
Parameters of Channel 1 (I/O CHANNEL=0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
14 |
|
4.2.3 |
Parameters of Channel 1 (I/O CHANNEL=1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
15 |
|
4.2.4 |
Parameters of Channel 2 (I/O CHANNEL=2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
15 |
|
4.2.5 |
Parameters of Channel 3 (I/O CHANNEL=3) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
16 |
4.3 |
PARAMETERS OF DNC1/DNC2 INTERFACE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
18 |
|
4.4 |
PARAMETERS OF M±NET INTERFACE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
21 |
|
4.5 |
PARAMETERS OF DNC1 INTERFACE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
24 |
|
4.6 |
PARAMETERS OF ONLINE CUSTOM SCREEN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
26 |
|
4.7 |
PARAMETERS OF DATA SERVER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
28 |
|
4.8 |
PARAMETERS OF POWER MOTION MANAGER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
29 |
|
4.9 |
PARAMETERS OF AXIS CONTROL/INCREMENT SYSTEM . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
30 |
|
4.10 |
PARAMETERS OF COORDINATES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
38 |
|
4.11 |
PARAMETERS OF STROKE CHECK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
43 |
|
4.12 |
PARAMETERS OF THE CHUCK AND TAILSTOCK BARRIER (T SERIES) . . . . . . . . . . . . . . . . |
47 |
|
4.13 |
PARAMETERS OF FEEDRATE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
51 |
|
4.14 |
PARAMETERS OF ACCELERATION/DECELERATION CONTROL . . . . . . . . . . . . . . . . . . . . . . |
62 |
|
4.15 |
PARAMETERS OF SERVO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
80 |
|
4.16 |
PARAMETERS OF DI/DO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
107 |
|
4.17 |
PARAMETERS OF MDI, DISPLAY, AND EDIT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
111 |
|
4.18 |
PARAMETERS OF PROGRAMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
135 |
|
4.19 |
PARAMETERS OF PITCH ERROR COMPENSATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
144 |
|
4.20 |
PARAMETERS OF SPINDLE CONTROL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
149 |
|
4.21 |
PARAMETERS OF TOOL COMPENSATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
181 |
|
4.22 |
PARAMETERS OF GRINDING±WHEEL WEAR COMPENSATION . . . . . . . . . . . . . . . . . . . . . . . |
192 |
|
4.23 |
PARAMETERS OF CANNED CYCLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
193 |
|
|
4.23.1 Parameter of canned Cycle for Drilling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
193 |
|
|
4.23.2 Parameter of Thread Cutting Cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
197 |
|
|
4.23.3 Parameter of Multiple Repetitive Canned Cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
197 |
|
|
4.23.4 Parameters of Peck Drilling Cycle of a Small Diameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
200 |
|
4.24 |
PARAMETERS OF RIGID TAPPING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
204 |
|
4.25 |
PARAMETERS OF SCALING/COORDINATE ROTATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
225 |
|
c±1

Table of Contents |
B±63010EN/01 |
|
|
4.26 PARAMETERS OF UNI±DIRECTIONAL POSITIONING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227 4.27 PARAMETERS OF POLAR COORDINATE INTERPOLATION . . . . . . . . . . . . . . . . . . . . . . . . . . . 228 4.28 PARAMETERS OF NORMAL DIRECTION CONTROL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230 4.29 PARAMETERS OF INDEXING INDEX TABLE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233 4.30 PARAMETERS OF INVOLUTE INTERPOLATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235 4.31 PARAMETERS OF EXPONENTIAL INTERPOLATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238 4.32 PARAMETERS OF STRAIGHTNESS COMPENSATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239 4.33 PARAMETERS OF BALL SCREW EXTENSIONAL COMPENSATION . . . . . . . . . . . . . . . . . . . . 241 4.34 PARAMETERS OF CUSTOM MACROS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243 4.35 PARAMETERS OF PATTERN DATA INPUT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250 4.36 PARAMETERS OF POSITIONING BY OPTIMUL ACCELERATION . . . . . . . . . . . . . . . . . . . . . . 251 4.37 PARAMETERS OF SKIP FUNCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
4.38PARAMETERS OF AUTOMATIC TOOL COMPENSATION (T SERIES) AND
AUTOMATIC TOOL LENGTH COMPENSATION (M SERIES) . . . . . . . . . . . . . . . . . . . . . . . . . . . 258 4.39 PARAMETERS OF EXTERNAL DATA INPUT/OUTPUT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259 4.40 PARAMETERS OF GRAPHIC DISPLAY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
|
4.40.1 Parameters of Graphic Display/Dynamic Graphic Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
260 |
|
4.40.2 Parameters of Graphic Color . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
263 |
4.41 |
PARAMETERS OF DISPLAYING OPERATION TIME AND NUMBER OF PARTS . . . . . . . . . . . |
265 |
4.42 |
PARAMETERS OF TOOL LIFE MANAGEMENT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
268 |
4.43 |
PARAMETERS OF POSITION SWITCH FUNCTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
273 |
4.44 |
PARAMETERS OF MANUAL OPERATION AND AUTOMATIC OPERATION . . . . . . . . . . . . . . |
275 |
4.45PARAMETERS OF MANUAL HANDLE FEED, HANDLE INTERRUPTION AND
HANDLE FEED IN TOOL AXIAL DIRECTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
4.46PARAMETERS OF REFERENCE POSITION SETTING WITH MECHANICAL STOPPER . . . . 282
4.47 PARAMETERS OF SOFTWARE OPERATOR'S PANEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284 4.48 PARAMETERS OF PROGRAM RESTART . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288
4.49PARAMETERS OF HIGH±SPEED MACHINING
(HIGH±SPEED CYCLE MACHINING/HIGH±SPEED REMOTE BUFFER) . . . . . . . . . . . . . . . . . 289 4.50 PARAMETERS OF POLYGON TURNING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292 4.51 PARAMETERS OF THE EXTERNAL PULSE INPUT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296 4.52 PARAMETERS OF THE HOBBING MACHINE AND SIMPLE ELECTRIC GEAR BOX . . . . . . 297 4.53 PARAMETERS OF ATTITUDE CONTROL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302 4.54 PARAMETERS OF AXIS CONTROL BY PMC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305 4.55 PARAMETERS OF TWO±PATH CONTROL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310
4.56PARAMETERS OF CHECKING INTERFERENCE BETWEEN TOOL POSTS
(TWO±PATH CONTROL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311 4.57 PARAMETERS OF PATH AXIS REASSIGNMENT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314 4.58 PARAMETERS OF ANGULAR AXIS CONTROL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325 4.59 PARAMETERS OF B±AXIS CONTROL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 326 4.60 PARAMETERS OF SIMPLE SYNCHRONOUS CONTROL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 329 4.61 PARAMETERS OF CHECK TERMINATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335 4.62 PARAMETERS OF CHOPPING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336
4.63PARAMETERS OF HIGH±SPEED HIGH±PRECISION CONTOUR CONTROL
BY RISC (M SERIES) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
338 |
|
4.63.1 |
Parameters of Acceleration and Deceleration before Interpolation . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
338 |
c±2

B±63010EN/01 |
o on n |
|
|
|
4.63.2 |
Parameters of Automatic Velocity Setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
340 |
|
4.63.3 |
Parameters of Axis Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
345 |
4.64 |
OTHER PARAMETERS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
346 |
|
4.65 |
PARAMETERS OF MAINTENANCE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
350 |
|
APPENDIX
A. CHARACTER CODE LIST . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
353 |
c±3

B±63010EN/01 |
1. DISPLAYING PARAMETERS |
|
|
1 DISPLAYING PARAMETERS
Follow the procedure below to display parameters.
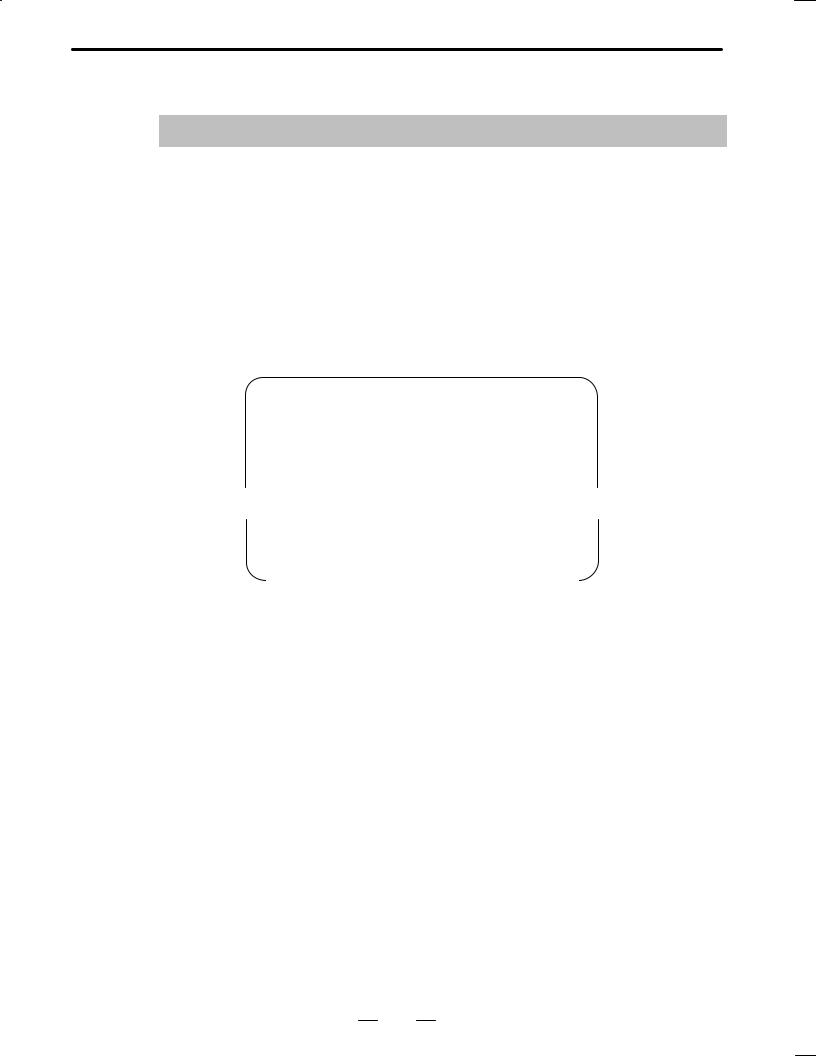
(1)Press the SYSTEM function key on the MDI as many times as required, or alternatively, press the SYSTEM function key once, then the PARAM section display soft key. The parameter screen is then selected.
PARAMETER (FEEDRATE) |
|
O0001 N12345 |
POS |
PROG |
OFFSET |
CUSTOM |
||||||
|
SETTING |
|||||||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1401 |
|
RDR |
JZR |
RF0 |
|
|
LRP |
RPD |
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
SYSTEM |
MESSAGE |
GRAPH |
|
1402 |
|
|
|
|
|
|
DLF |
HFC |
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
|
|
1410 |
DRY RUN FEEDRATE |
|
|
10000 |
|
|
|
|
||||
1411 |
INIT.CUTTING F |
|
|
|
0 |
|
Function key |
|
|
|||
1420 |
RAPID FEEDRATE |
X |
|
15000 |
|
|
|
|||||
|
|
|
|
|
||||||||
|
|
|
|
|
Y |
|
15000 |
Cursor |
|
|
|
|
|
|
|
|
|
Z |
|
15000 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
>
MEM STRT MTN FIN *** 10:02:35
[PARAM] [DGNOS] [ PMC ] [SYSTEM] [(OPRT)]  Soft key display (section select)
Soft key display (section select)
Return menu key |
Soft key |
Continuous menu key |
(2)The parameter screen consists of multiple pages. Use step (a) or (b) to display the page that contains the parameter you want to display.
(a)Use the page select key or the cursor move keys to display the desired page.
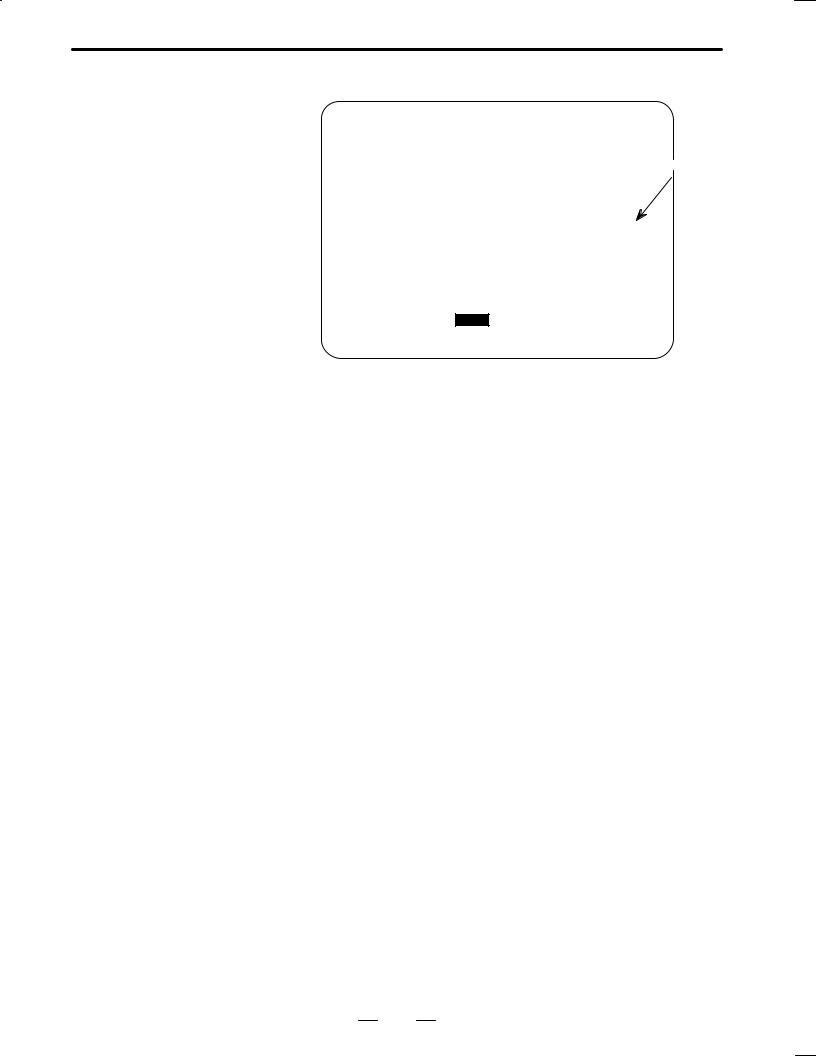
(b)Enter the data number of the parameter you want to display from the keyboard, then press the [NO.SRH] soft key. The parameter page containing the specified data number appears with the cursor positioned at the data number. (The data is displayed in reverse video.)
NOTE
If key entry is started with the section select soft keys displayed, they are replaced automatically by operation select soft keys including [NO.SRH]. Pressing the [(OPRT)] soft key can also cause the operation select keys to be displayed.
> |
← |
Data entered from |
|
the keyboard |
|||
MEM STRT MTN FIN *** 10:02:34 |
|||
|
Soft key display |
||
[NO.SRH] [ ON:1 ] [ OFF:0 ] [+INPUT] [INPUT ] |
← |
||
|
(section select) |
1
2. SETTING PARAMETERS FROM MDI B±63010EN/01
2 SETTING PARAMETERS FROM MDI
Follow the procedure below to set parameters.
(1)Place the NC in the MDI mode or the emergency stop state.
(2)Follow the substeps below to enable writing of parameters.
1.To display the setting screen, press the SETTING function key as many times as required, or alternatively press the SETTING function key once, then the SETTING section select soft key. The first page of the setting screen appears.
2.Position the cursor on ªPARAMETER WRITEº using the cursor move keys.
SETTING (HANDY) |
|
|
PARAMETER WRITE = |
|
|
0 |
||
TV CHECK |
= |
0 |
PUNCH CODE |
= |
0 |
INPUT UNIT |
= |
0 |
I/O CHANNEL |
= |
0 |
O0001 N00010
(0:DISABLE 1:ENABLE) (0:OFF 1:ON) (0:EIA 1:ISO) (0:MM 1:INCH) (0±3:CHANNEL NO.)
3. Press the [(OPRT)] soft key to display operation select soft keys.
> |
|
|
|
MDI STOP *** *** *** 10:03:02 |
← Soft key display |
||
[NO.SRH] [ ON:1 ] [ OFF:0 ] [+INPUT] [INPUT] |
|||
(section select) |
|||
|
|
||
|
|
|
|
4.To set ªPARAMETER WRITE=º to 1, press the ON:1 soft key, or alternatively enter 1 and press the INPUT soft key. From now on, the parameters can be set. At the same time an alarm condition (P/S100 PARAMETER WRITE ENABLE) occurs in the CNC.
(3)To display the parameter screen, press the SYSTEM function key as many times as required, or alternatively press the SYSTEM function key once, then the PARAM section select soft key.
(See ª1. Displaying Parameters.º)
(4)Display the page containing the parameter you want to set, and position the cursor on the parameter. (See ª1. Displaying Parameters.º)
(5)Enter data, then press the [INPUT] soft key. The parameter indicated by the cursor is set to the entered data.
2
B±63010EN/01 2. SETTING PARAMETERS FROM MDI
[Example] 12000 [INPUT]
PARAMETER (FEEDRATE) |
|
|
O0001 N00010 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
1401 |
|
RDR |
|
|
|
JZR |
|
RPD |
Cursor |
|
|
|
|
|
|
|
|||||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
1402 |
|
|
|
JRV |
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
1410 |
DRY RUN FEEDRATE |
|
|
|
|
|
||||
|
|
12000 |
|
|
||||||
1412 |
|
|
|
|
|
|
|
0 |
|
|
1420 |
RAPID FEEDRATEX |
|
|
15000 |
|
|
||||
|
|
|
|
|
Y |
|
15000 |
|
|
|
|
|
|
|
|
Z |
|
15000 |
|
|
|
>
MDI STOP *** *** ALM 10:03:10
[NO.SRH] [ ON:1 ] [ OFF:0 ] [+INPUT] [INPUT]
Data can be entered continuously for parameters, starting at the selected parameter, by separating each data item with a semicolon (;).
[Example] Entering 10;20;30;40 and pressing the INPUT key assigns values 10, 20, 30, and 40 to parameters in order starting at the parameter indicatedby the cursor.
(6)Repeat steps (4) and (5) as required.
(7)If parameter setting is complete, set ªPARAMETER WRITE=º to 0 on the setting screen to disable further parameter setting.
(8)Reset the NC to release the alarm condition (P/S100).
If an alarm condition (P/S000 PLEASE TURN OFF POWER) occurs in the NC, turn it off before continuing operation.
3

3. INPUTTING AND OUTPUTTING PARAMETERS THROUGH |
|
|
|
THE READER/PUNCHER INTERFACE |
B±63010EN/01 |
|
|
|
|
|
|
INPUTTING AND OUTPUTTING PARAMETERS THROUGH THE |
|
|
|
3 |
READER/PUNCHER INTERFACE |
|
|
|
|
|
|
|
|
|
|
This section explains the parameter input/output procedures for input/output devices connected to the reader/puncher interface.
The following description assumes the input/output devices are ready for input/output. It also assumes parameters peculiar to the input/output devices, such as the baud rate and the number of stop bits, have been set in advance.
4
|
3. INPUTTING AND OUTPUTTING PARAMETERS THROUGH |
B±63010EN/01 |
THE READER/PUNCHER INTERFACE |
|
|
3.1
OUTPUTTING
PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
(1)Select the EDIT mode or set to Emergency stop.
(2)To select the parameter screen, press the SYSTEM function key as many times as required, or alternatively press the SYSTEM function key once, then the PARAM section select soft key.
(3)Press the [(OPRT)] soft key to display operation select soft keys, then press the forward menu key located at the right±hand side of the soft keys to display another set of operation select keys including PUNCH.
PARAMETER (FEEDRATE) |
|
|
O0001 |
N00010 |
|
||||||
1401 |
|
RDR |
|
|
|
JZR |
|
RPD |
|
||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
Cursor |
|
1402 |
|
|
|
JRV |
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
|
1410 |
DRY RUN FEEDRATE |
|
|
|
|
|
|
||||
|
|
|
12000 |
|
|
||||||
1412 |
|
|
|
|
|
|
|
|
0 |
|
|
1420 |
RAPID FEEDRATEX |
|
|
|
15000 |
|
|||||
|
|
|
|
|
Y |
|
|
15000 |
|
||
|
|
|
|
|
Z |
|
|
15000 |
|
||
> |
|
MDI STOP *** *** ALM 10:03:10 |
State display |
[NO.SRH] [ON:1] [OFF:0] [+INPUT] [INPUT] |
Soft key display |
|
(operation select) |
(4)Pressing the [PUNCH] soft key changes the soft key display as shown below:
>
EDIT STOP *** *** *** 10:35:03
[ ] [ ] [ ] [CANCEL] [ EXEC ]
(5)Press the [EXEC] soft key to start parameter output. When parameters are being output, ªOUTPUTº blinks in the state display field on the lower part of the screen.
> |
|
|
|
|
← OUTPUT blinking |
EDIT STOP *** *** *** 10:35:04 |
OUTPUT |
||||
[ |
] [ |
] [ |
] [CANCEL] [ EXEC ] |
|
|
(6)When parameter output terminates, ªOUTPUTº stops blinking. Press the RESET key to interrupt parameter output.
5
3. INPUTTING AND OUTPUTTING PARAMETERS THROUGH |
|
THE READER/PUNCHER INTERFACE |
B±63010EN/01 |
3.2
INPUTTING PARAMETERS THROUGH THE READER/PUNCHER INTERFACE
(1)Place the NC in the emergency stop state.
(2)Enable parameter writing.
1.To display the setting screen, press the SETTING function key as many times as required, or alternatively press the SETTING function key once, then the SETTING section select soft key. The first page of the setting screen appears.
2.Position the cursor on ªPARAMETER WRITEº using the cursor move keys.
3.Press the [(OPRT)] soft key to display operation select soft keys.
4.To set ªPARAMETER WRITE=º to 1, press the ON:1 soft key, or alternatively enter 1, then press the [INPUT] soft key. From now on, parameters can be set. At the same time an alarm condition (P/S100 PARAMETER WRITE ENABLE) occurs in the NC.
(3)To select the parameter screen, press the SYSTEM function key as many times as required, or alternatively press the SYSTEM key once, then [PARAM] soft key.
(4)Press the [(OPRT)] soft key to display operation select keys, then press the forward menu key located at the right±hand side of the soft keys to display another set of operation select soft keys including [READ].
> |
|
|
|
|
|
|
|
EDIT STOP |
±EMS± ALM |
10:37:30 |
|
|
← |
State display |
|
|
|
|
|||||
[ |
] [ READ ] [PUNCH] [ |
] [ |
] |
← |
Soft key display |
||
(5)Pressing the [READ] soft key changes the soft key display as shown below:
> |
|
|
|
EDIT STOP |
±EMS± ALM |
10:37:30 |
|
[ |
] [ |
] [ |
] [CANCEL] [ EXEC ] |
(6)Press the [EXEC] soft key to start inputting parameters from the input/output device. When parameters are being input, ªINPUTº blinks in the state display field on the lower part of the screen.
> |
|
|
|
|
|
EDIT STOP |
±EMS± ALM |
10:37:30 |
INPUT |
← INPUT blinking |
|
|
|||||
[ |
] [ |
] [ |
] [CANCEL] [ EXEC ] |
|
|
(7)When parameter input terminates, ªINPUTº stops blinking. Press the RESET key to interrupt parameter input.
(8)When parameter read terminates, ªINPUTº stops blinking, and an alarm condition (P/S000) occurs in the NC. Turn it off before continuing operation.
6
B±63010EN/01 4. DESCRIPTION OF PARAMETERS
4 DESCRIPTION OF PARAMETERS
Parameters are classified by data type as follows:
Table 4 Data Types and Valid Data Ranges of Parameters
Data type |
Valid data range |
Remarks |
|
|
|
Bit |
0 or 1 |
|
|
|
|
Bit axis |
|
|
|
|
|
|
|
|
Byte |
0 to 127 |
In some parameters, signs are |
Byte axis |
0 to 255 |
ignored. |
|
|
|
Word |
0 to 32767 |
In some parameters, signs are |
Word axis |
0 to 65535 |
ignored. |
|
|
|
2±word |
0 to 99999999 |
|
|
|
|
2±word axis |
|
|
|
|
NOTE
1For the bit type and bit axis type parameters, a single data number is assigned to 8 bits. Each bit has a different meaning.
2The axis type allows data to be set separately for each control axis.
3The valid data range for each data type indicates a general range. The range varies according to the parameters. For the valid data range of a specific parameter, see the explanation of the parameter.
(1) Notation of bit type and bit axis type parameters
[Example]
|
|
|
#7 |
#6 |
#5 |
#4 |
#3 |
|
#2 |
#1 |
|
#0 |
|
|
0000 |
|
|
|
SEQ |
|
|
|
|
INI |
ISO |
|
TVC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Data No. |
|
|
Data #0 to #7 are bit positions. |
|
|
|
|
|||||
(2) |
Notation of parameters other than bit type and bit axis type |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|||||
|
1023 |
|
|
|
Servo axis number of a specific axis |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Data No. |
|
|
|
|
Data. |
|
|
|
|
|||
7
4. DESCRIPTION OF PARAMETERS |
B±63010EN/01 |
|
|
NOTE
1The bits left blank in 4. DESCRIPTION OF PARAMETERS and parameter numbers that appear on the display but are not found in the parameter list are reserved for future expansion. They must always be 0.
2Parameters having different meanings between the T series and M series and parameters that are valid only for the T or M series are indicated in two levels as shown below. Parameters left blank are unavailable.
Example1
Parameter 5010 has different meanings for the T series and M series.
5010 |
|
Tool nose radius compensation ... |
T series |
|
|
|
|
|
Tool compensation C ... |
M series |
|
|
|
||
|
|
|
Example2
DPI is a parameter common to the M and T series, but GSB and GSC are parameters valid only for the T series.
#7 |
#6 |
#0 |
|
|||||||
3401 |
|
GSC |
GSB |
|
|
|
|
|
DPI |
T series |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
DPI |
M series |
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Example3
The following parameter is provided only for the M series.
1450 |
|
|
T series |
|
|
|
|
|
F1 digit feed ... |
M series |
|
|
|
||
|
|
|
8

B±63010EN/01 |
4. DESCRIPTION OF PARAMETERS |
|
|
4.1
PARAMETERS OF SETTING
#7 |
#6 |
#5 |
#4 |
#3 |
#2 |
#1 |
#0 |
||
0000 |
|
|
|
SEQ |
|
|
INI |
ISO |
TVC |
|
|
|
|
|
|
|
|
|
|
Setting entry is acceptable.
[Data type] Bit
TVC TV check
0 : Not performed
1 : Performed
ISO Code used for data output 0 : EIA code
1 : ISO code
INI Unit of input 0 : In mm
1 : In inches
SEQ Automatic insertion of sequence numbers
0:Not performed
1:Performed
NOTE
When a program is prepared by using MDI keys in the part program storage and edit mode, a sequence number can automatically be assigned to each block in set increments. Set the increment to parameter 3216.
|
|
#7 |
#6 |
#5 |
#4 |
#3 |
#2 |
#1 |
#0 |
||
|
0001 |
|
|
|
|
|
|
|
FCV |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Setting entry is acceptable. |
|
|
|
|
|
||||
[Data type] |
Bit |
|
|
|
|
|
|
|
|||
FCV |
Tape format |
|
|
|
|
|
|
|
|||
0:Series 16 standard format
1:Series 15 format
NOTE
Programs created in the Series 15 tape format can be used for operation on the following functions:
1Subprogram call M98
2Thread cutting with equal leads G32 (T series)
3Canned cycle G90, G92, G94 (T series)
4Multiple repetitive canned cycle G71 to G76 (T series)
5Drilling canned cycle G73, G74, G76, G80 to G89 (M series)
6Cutter compensation C (M series)
When the tape format used in the Series 15 is used for this CNC, some limits may add. Refer to the Series 16 /18 /160 /180 ±MODEL A OPERATOR'S MANUAL .
9

4. DESCRIPTION OF PARAMETERS |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B±63010EN/01 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
#7 |
|
#6 |
|
#5 |
|
#4 |
|
#3 |
#2 |
#1 |
#0 |
||
|
0002 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
SJZ |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Setting entry is acceptable. |
|
|
|
|
|
|
|
||||||||
[Data type] |
Bit |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
SJZ |
Manual reference position si performed as follows: |
|
|
|
|||||||||||||||
|
|
|
|
0 : When no reference position has been set, reference position return is |
|||||||||||||||
|
|
|
|
|
|
performed using deceleration dogs. When a reference position is |
|||||||||||||
|
|
|
|
|
|
already set, reference position return is performed using rapid traverse |
|||||||||||||
|
|
|
|
|
|
and deceleration dogs are ignored. |
|
|
|
|
|
||||||||
|
|
|
|
1 : Reference position return is performed using deceleration dogs at all |
|||||||||||||||
|
|
|
|
|
|
times. |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Note |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
SJZ is enabled when bit 3 (HJZ) of parameter No.1005 is |
||||||||||||
|
|
|
|
|
|
|
set to 1. When a reference position is set without a dog, |
||||||||||||
|
|
|
|
|
|
|
(i.e. when bit 1 (DLZ) of parameter No.1002 is set to 1 or |
||||||||||||
|
|
|
|
|
|
|
bit 1 (DLZx) of parameter No.1005 is set to |
1) reference |
|||||||||||
|
|
|
|
|
|
|
position return after reference position setting is |
|
|||||||||||
|
|
|
|
|
|
|
performed using rapid traverse at all times, regardless of |
||||||||||||
|
|
|
|
|
|
|
the setting of SJZ. |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
#7 |
|
#6 |
|
#5 |
|
#4 |
|
#3 |
#2 |
#1 |
#0 |
||
|
0012 |
|
|
RMVx |
|
|
|
|
|
|
|
|
|
|
|
MIRx |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Setting entry is acceptable. |
|
|
|
|
|
|
|
||||||||
[Data type] |
Bit axis |
|
|
|
|
|
|
|
|
|
|
|
|||||||
MIRx |
Mirror image for each axis |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
0 : Mirror image is off. |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
1 : Mirror image is on. |
|
|
|
|
|
|
|
|
|
||||||
RMVx |
Releasing the assignment of the control axis for each axis |
|
|||||||||||||||||
|
|
|
|
0 : Not released |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
1 : Released |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
NOTE |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
RMVx is valid when RMBx in parameter 1005#7 is 1. |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
(1) |
Parameters related to setting |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
0020 |
|
|
|
|
I/O CHANNEL: Selection of an input/output device |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Setting entry is acceptable.
[Data type] Byte
[Valid data range] 0 to 35
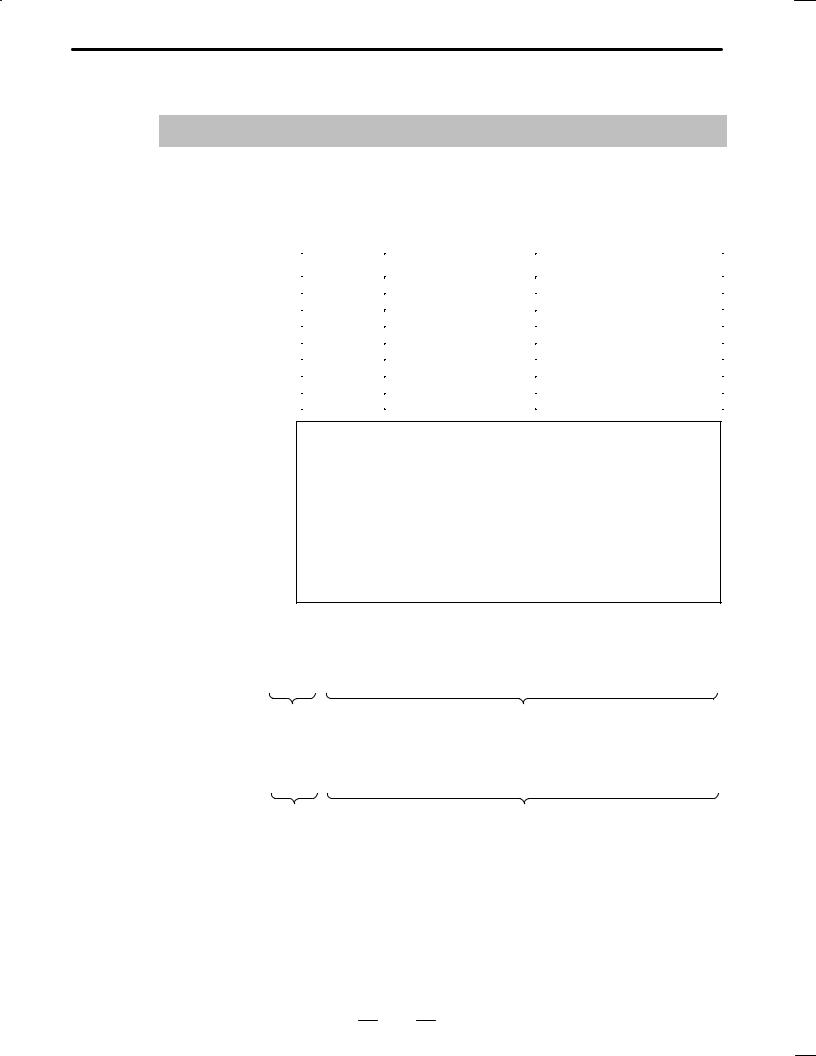
The CNC provides the following interfaces for data transfer to and from the host computer and external input/output devices:
Input/output device interface (RS±232C serial port)
Remote buffer interface (RS±232C/RS±422)
DNC1/DNC2 interface
10

B±63010EN/01 |
4. DESCRIPTION OF PARAMETERS |
|
|
In addition, data can be transferred to and from the Power Mate via the FANUC I/O Link.
This parameter selects the interface used to transfer data to and from an input/output device.
Setting |
Description |
0, 1 RS±232C serial port 1
2RS±232C serial port 2
3Remote buffer interface
4Memory card interface
5Data server interface
10 DNC1/DNC2 interface, OSI±Ethernet
20Group 0
21Group 1
22 |
Group 2 |
Data is transferred between the CNC and a Power |
| |
| |
Mate in group n (n: 0 to 15) via the FANUC I/O Link. |
34Group 14
35Group 15
NOTE
1An input/output device can also be selected using the setting screen. Usually, the setting screen is used.
2The specifications (such as the baud rate and the number of stop bits) of the input/output devices to be connected must be set in the corresponding parameters for each interface beforehand. (See Section 4.2.) I/O CHANNEL = 0 and I/O CHANNEL = 1 represent input/output devices connected to RS±232C serial port 1. Separate parameters for the baud rate, stop bits, and other specifications are provided for each channel.
Mother board |
|
|
|
|
|
|
RS±232±C serial port 1 |
|
|
|
I/O CHANNEL=0, 1 |
|
RS-232-C I/O device |
|
|
|
|
|||
R232±1(JD36A) |
|
|
|
(Channel 1) |
|
|
|
|
|
|
|
||
|
|
|
|
|
||
RS±232±C serial port 2 |
|
|
|
I/O CHANNEL=2 |
|
RS-232-C I/O device |
|
|
|
|
|||
R232±2(JD36B) |
|
|
|
(Channel 2) |
|
|
|
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
|
|
Serial communication board |
|
|
|
|
|
|
Remote buffer board |
|
|
|
|
|
|
DNC1 board |
|
|
|
|
|
|
DNC2 board |
|
|
|
I/O CHANNEL=3 |
|
RS-232-C I/O device |
|
|
|
|
|||
R232-3(JD28A) |
|
|
|
|
|
|
|
|
|
(Channel 3) |
|
||
|
|
|
|
|
(when a remote buffer or DNC2 board is used) |
|
|
|
|
|
I/O CHANNEL=3 |
|
|
R422-1(JD6A) |
|
|
|
|
RS-422 I/O device |
|
|
|
|
|
|||
|
|
|
|
|
||
|
|
|
(Channel 3) |
|
||
|
|
|
|
|
(when a remote buffer or DNC1 board is used) |
|
|
|
|
|
|
||
|
|
|
|
|
|
3The input/output unit interface may be referred to as the reader/punch interface.
RS±232C serial port 1 and RS±232C serial port 2 are also referred to as channel 1 and channel 2, respectively. The remote buffer interface is also referred to as channel 3.
11

4. DESCRIPTION OF PARAMETERS |
B±63010EN/01 |
|
|
4.2
PARAMETERS OF READER/PUNCHER INTERFACE, REMOTE BUFFER, DNC1, DNC2, AND M±NET INTERFACE
This CNC has three channels of input/output device interfaces. The input/output device to be used is specified by setting the channel connected to that device in setting parameter I/O CHANNEL.
The specified data, such as a baud rate and the number of stop bits, of an input/output device connected to a specific channel must be set in parameters for that channel in advance.
For channel 1, two combinations of parameters to specify the input/output device data are provided.
The following shows the interrelation between the input/output device interface parameters for the channels.
Input/output channel number (parameter No.0020)
↓
0020 I/O CHANNEL
Specify a channel for an input/output device.
I/ O CHANNEL
=0 : Channel1
=1 : Channel1
=2 : Channel2
=3 : Channel3
I/O CHANNEL=0 (channel 1)
I/O CHANNEL=1 (channel 1)
I/O CHANNEL=2 (channel 2)
I/O CHANNEL=3 (channel 3)
0101
0102
0103
0111
0112
0113
0121
0122
0123
0131
0132
0133
0134
0135
Stop bit and other data
Number specified for the input/ output device
Baud rate
Stop bit and other data
Number specified for the input/ output device
Baud rate
Stop bit and other data
Number specified for the input/ output device
Baud rate
Stop bit and other data
Number specified for the input/ output device
Baud rate
Selection of protocol
Selection of RS±422 or RS±232C, and other data
Fig.4.2 I/O Device Interface Settings
12
B±63010EN/01 |
4. DESCRIPTION OF PARAMETERS |
|
|
4.2.1
Parameters Common
to all Channels |
|
0024 |
|
|
Port for communication with the PMC ladder development tool (FAPT LADDER±II) |
||||||||||
|
[Data type] |
Byte |
|
|
|
|
|
|
|
|
|||||
|
|
|
This parameter sets the port to be used for communication with the PMC |
||||||||||||
|
|
|
ladder development tool (FAPT LADDER±II). |
|
|
|
|||||||||
|
|
|
0 |
: HSSB (COP7) |
|
|
|
|
|
|
|
||||
|
|
|
1 |
: RS±232C serial port 1 (JD36A) |
|
|
|
|
|
||||||
|
|
|
2 |
: RS±232C serial port 2 (JD36B) |
|
|
|
|
|
||||||
|
|
|
3 |
: Remote buffer interface (RS±232C) (JD28A) |
|
|
|
||||||||
|
|
|
|
#7 |
|
#6 |
#5 |
#4 |
#3 |
|
#2 |
#1 |
#0 |
||
|
|
0100 |
|
|
ENS |
|
IOP |
ND3 |
|
NCR |
|
|
CTV |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Setting entry is acceptable. |
|
|
|
|
|
|
||||||
|
[Data type] |
Bit |
|
|
|
|
|
|
|
|
|||||
|
CTV: Character counting for TV check in the comment section of a program. |
||||||||||||||
|
|
|
0 |
: Performed |
|
|
|
|
|
|
|
|
|||
|
|
|
1 |
: Not performed |
|
|
|
|
|
|
|
||||
NCR Output of the end of block (EOB) in ISO code 0 : LF, CR, CR are output.
1 : Only LF is output.
ND3 In DNC operation, a program is:
0 : Read block by block. (A DC3 code is output for each block.)
1 : Read continuously until the buffer becomes full. (A DC3 code is output when the buffer becomes full.)
NOTE
In general, reading is performed more efficiently when ND3 set to 1. This specification reduces the number of buffering interruptions caused by reading of a series of blocks specifying short movements. This in turn reduces the effective cycle time.
IOP Specifies how to stop program input/output operations.
0 : An NC reset can stop program input/output operations.
1 : Only the [STOP] soft key can stop program input/output operations. (An reset cannot stop program input/output operations.)
ENS Action taken when a NULL code is found during read of EIA code 0 : An alarm is generated.
1 : The NULL code is ignored.
13

4. DESCRIPTION OF PARAMETERS |
B±63010EN/01 |
|
|
4.2.2
Parameters of
Channel 1
(I/O CHANNEL=0)
|
|
|
#7 |
#6 |
|
#5 |
#4 |
#3 |
#2 |
#1 |
#0 |
|
|
0101 |
|
NFD |
|
|
|
|
ASI |
|
|
SB2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[Data type] |
Bit type |
|
|
|
|
|
|
|
|
|||
SB2 |
The number of stop bits |
|
|
|
|
|
|
|||||
|
|
0 : |
1 |
|
|
|
|
|
|
|
|
|
|
|
1 : |
2 |
|
|
|
|
|
|
|
|
|
ASI Code used at data input
0 : EIA or ISO code (automatically distinguished)
1 : ASCII code
NFD Feed before and after the data at data output 0 : Output
1 : Not output
NOTE
When input/output devices other than the FANUC PPR are used, set NFD to 1.
0102 Number specified for the input/output device (when the I/O CHANNEL is set to 0)
[Data type] Byte
Set the number specified for the input/output device used when the I/O CHANNEL is set to 0, with one of the set values listed in Table 4.2 (a).
|
|
|
|
Table 4.2.2 (a) Set value and Input/Output Device |
|
|
|
|
|
|
|
|
Set value |
|
Input/output device |
||
|
|
|
|
|
|
|
0 |
|
RS±232±C (Used control codes DC1 to DC4) |
||
|
|
|
|
|
|
|
1 |
|
FANUC CASSETTE ADAPTOR 1 (FANUC CASSETTE B1/ B2) |
||
|
|
|
|
|
|
|
2 |
|
FANUC CASSETTE ADAPTOR 3 (FANUC CASSETTE F1) |
||
|
|
|
|
|
|
|
3 |
|
FANUC PROGRAM FILE Mate, FANUC FA Card Adaptor |
||
|
|
|
|
|
FANUC FLOPPY CASSETTE ADAPTOR, FANUC Handy File |
|
|
|
|
|
FANUC SYSTEM P-MODEL H |
|
|
|
|
|
|
|
4 |
|
RS±232±C (Not used control codes DC1 to DC4) |
||
|
|
|
|
|
|
|
5 |
|
Portable tape reader |
||
|
|
|
|
|
|
|
6 |
|
FANUC PPR |
||
|
|
|
|
|
FANUC SYSTEM P-MODEL G, FANUC SYSTEM P-MODEL H |
|
|
|
|
|
|
0103 |
|
|
|
Baud rate (when the I/O CHANNEL is set to 0) |
|
|
|
|
|
|
|
[Data type] Byte
Set baud rate of the input/output device used when the I/O CHANNEL is set to 0, with a set value in Table 4.2 (b).
Table 4.2.2 (b)
Set value |
Baud rate (bps) |
|
|
1 |
50 |
2 |
100 |
3 |
110 |
4 |
150 |
5 |
200 |
6 |
300 |
Set value |
Baud rate (bps) |
|
|
7 |
600 |
|
|
8 |
1200 |
9 |
2400 |
|
|
10 |
4800 |
11 |
9600 |
12 |
19200 |
14
B±63010EN/01 |
4. DESCRIPTION OF PARAMETERS |
|
|
4.2.3
Parameters of
Channel 1 |
|
|
|
|
|
#7 |
#6 |
#5 |
#4 |
#3 |
|
#2 |
#1 |
#0 |
0111 |
|
|
NFD |
|
|
|
ASI |
|
|
|
SB2 |
|||
(I/O CHANNEL=1) |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[Data type] |
Bit |
|
|
|
|
|
|
|
|
|
||||
|
|
|
These parameters are used when I/O CHANNEL is set to 1. The meanings |
|||||||||||
|
|
|
of the bits are the same as for parameter 0101. |
|
|
|
||||||||
|
|
|
|
|||||||||||
|
|
0112 |
|
|
Number specified for the input/output device (when I/O CHANNEL is set to 1) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[Data type] |
Byte |
|
|
|
|
|
|
|
|
|
||||
|
|
|
Set the number specified for the input/output device used when the I/O |
|||||||||||
|
|
|
CHANNEL is set to 1, with one of the set values listed in Table 4.2 (a). |
|||||||||||
|
|
|
|
|
|
|
|
|||||||
|
|
0113 |
|
|
|
|
Baud rate (when I/O CHNNEL is set to 1) |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[Data type] |
Byte |
|
|
|
|
|
|
|
|
|
||||
|
|
|
Set the baud rate of the input/output device used when I/O CHANNEL is |
|||||||||||
|
|
|
set to 1, with a value in Table 4.2 (b). |
|
|
|
|
|
||||||
4.2.4
Parameters of
Channel 2 |
|
|
|
|
|
#7 |
#6 |
#5 |
#4 |
#3 |
|
#2 |
|
#1 |
#0 |
|
0121 |
|
|
NFD |
|
|
|
|
ASI |
|
|
|
|
SB2 |
|||
(I/O CHANNEL=2) |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[Data type] |
Bit |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
These parameters are used when I/O CHANNEL is set to 2. The meanings |
|||||||||||||
|
|
|
of the bits are the same as for parameter 0101. |
|
|
|
|
|||||||||
|
|
|
|
|||||||||||||
|
|
0122 |
|
|
Number specified for the input/output device (when I/O CHANNEL is set to 2) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[Data type] |
Byte |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Set the number specified for the input/output device used when I/O |
|||||||||||||
|
|
|
CHANNEL is set to 2, with a value in Table 4.2 (a). |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
0123 |
|
|
|
|
Baud rate (when the I/O CHANNEL is set to 2) |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[Data type] |
Byte |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Set the baud rate of the input/output device used when I/O CHANNEL is |
|||||||||||||
|
|
|
set to 2, with a value in Table 4.2 (b). |
|
|
|
|
|
|
|||||||
15
4. DESCRIPTION OF PARAMETERS |
B±63010EN/01 |
|
|
4.2.5
Parameters of
Channel 3
(I/O CHANNEL=3)
|
|
#7 |
#6 |
#5 |
#4 |
#3 |
#2 |
#1 |
#0 |
0131 |
|
NFD |
|
|
|
ASI |
|
|
SB2 |
|
|
|
|
|
|
|
|
|
|
NOTE
When this parameter is set, the power must be turned off before operation is continued.
[Data type] Bit
These parameters are used when I/O CHANNEL is set to 3. The meanings of the bits are the same as for parameter 0101.
0132 |
|
Number specified for the input/output device (when I/O CHANNEL is set to 3) |
|
|
|
NOTE
When this parameter is set, the power must be turned off before operation is continued.
[Data type] Byte
Set the number specified for the input/output device used when I/O CHANNEL is set to 3, with a number in Table 4.2 (a).
0133 |
|
Baud rate (when the I/O CHANNEL is set to 3) |
|
|
|
NOTE
When this parameter is set, the power must be turned off before operation is continued.
[Data type] Byte
Set the baud rate of the input/output device used when the I/O CHANNEL is set to 3 according to the table 4.2 (c).
NOTE
Valid data range: 1 to 15 (up to a baud rate of 86400 bps) for the RS±422 interface or 1 to 12 (up to a baud rate of 19200 bps) for the RS±232C interface.
Table 4.2.5 Baud Rate Settings
Set value |
Baud rate (bps) |
|
|
1 |
50 |
|
|
2 |
100 |
|
|
3 |
110 |
|
|
4 |
150 |
|
|
5 |
200 |
6 |
300 |
|
|
7 |
600 |
|
|
8 |
1200 |
|
|
Set value |
Baud rate (bps) |
|
|
9 |
2400 |
|
|
10 |
4800 |
|
|
11 |
9600 |
|
|
12 |
19200 |
|
|
13 |
38400 |
|
|
14 |
76800 |
|
|
14 |
86400 |
|
|
16

B±63010EN/01 |
|
|
4. DESCRIPTION OF PARAMETERS |
|||||||
|
|
|
|
|
|
|
|
|
|
|
#7 |
#6 |
#5 |
#4 |
#3 |
#2 |
#1 |
#0 |
|||
|
0134 |
|
|
|
CLK |
NCD |
|
SYN |
PRY |
|
|
|
|
|
|
|
|
|
|
|
|
NOTE
When this parameter is set, the power must be turned off before operation is continued.
[Data type] Bit
PRY Parity bit
0:Not used
1:Used
SYN Reset/alarm in protocol B
0:Not reported to the host
1:Reported to the host with SYN and NAK codes
NCD CD (signal quality detection) of the RS±232C interface
0:Checked
1:Not checked
CLK Baud rate clock when the RS±422 interface is used
0:Internal clock
1:External clock
NOTE
When the RS±232C interface is used, set this bit to 0.
|
|
#7 |
#6 |
#5 |
#4 |
#3 |
#2 |
#1 |
#0 |
0135 |
|
RMS |
|
|
|
R42 |
PRA |
ETX |
ASC |
|
|
|
|
|
|
|
|
|
|
NOTE
When this parameter is set, the power must be turned off before operation is continued.
[Data type] Bit
ASC Communication code except NC data
0:ISO code
1:ASCII code
ETX End code for protocol A or extended protocol A
0:CR code in ASCII/ISO
1:ETX code in ASCII/ISO
NOTE
Use of ASCII/ISO is specified by ASC.
PRA Communication protocol
0:Protocol B
1:Protocol A
R42 Interface
0:RS±232C interface
1:RS±422 interface
RMS State of remote/tape operation when protocol A is used
0:Always 0 is returned.
1:Contents of the change request of the remote/tape operation in the SET command from the host is returned.
17

4. DESCRIPTION OF PARAMETERS B±63010EN/01
4.3
PARAMETERS OF |
#7 |
#6 |
#5 |
#4 |
#3 |
#2 |
#1 |
#0 |
|||||
|
0140 |
|
|
|
|
|
|
|
|
BCC |
|||
DNC1/DNC2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
INTERFACE |
|
|
|
NOTE |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
When this parameter is set, the power must be turned off |
|||||||
|
|
|
|
|
|
before operation is continued. |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
[Data type] Bit |
|
|
|
|
|
|
|
|||||
|
|
BCC The BCC value (block check characters) for the DNC2 interface is: |
|||||||||||
0:Checked.
1:Not checked.
0141 |
|
System for connection between the CNC and host (DNC1 interface) |
|
|
|
[Data type] Byte
[Valid data range] 1 or 2
This parameter specifies the system for connection (DNC1 interface) between the CNC and host.
Set value
1 : Point±to±point connection
2 : Multipoint connection
|
|
|
NOTE |
||
|
|
|
|
|
When this parameter is set, the power must be turned off |
|
|
|
|
|
before operation is continued. |
|
|
|
|
|
|
|
|
|
|
||
|
0142 |
|
|
Station address of the CNC (DNC1 interface) |
|
|
|
|
|
|
|
[Data type] |
Byte |
||||
[Valid data range] |
2 to 52 |
||||
|
|
This parameter specifies the station address of the CNC when the CNC is |
|||
|
|
connected via the DNC1 interface using multipoint connection. |
|||
|
|
|
|
||
|
|
|
NOTE |
||
|
|
|
|
|
When this parameter is set, the power must be turned off |
|
|
|
|
|
before operation is continued. |
|
|
|
|
|
|
|
|
|
|
||
|
0143 |
|
|
Time limit specified for the timer monitoring a response (DNC2 interface) |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
NOTE |
||
|
|
|
|
|
When this parameter is set, the power must be turned off |
|
|
|
|
|
before operation is continued. |
[Data type] |
|
||||
Byte |
|||||
[Unit of data] |
Seconds |
||||
[Valid data range] |
1 to 60 (The standard setting is 3.) |
||||
18

B±63010EN/01 |
4. DESCRIPTION OF PARAMETERS |
|
|
|
0144 |
|
|
Time limit specified for the timer monitoring the EOT signal (DNC2 interface) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
NOTE |
||
|
|
|
|
|
When this parameter is set, the power must be turned off |
|
|
|
|
|
before operation is continued. |
[Data type] |
|
|
|
||
Byte |
|||||
[Unit of data] |
Seconds |
||||
[Valid data range] |
1 to 60 (The standard setting is 5.) |
||||
|
|
|
|
|
|
|
0145 |
|
|
Time required for switching RECV and SEND (DNC2 interface) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
NOTE |
||
|
|
|
|
|
When this parameter is set, the power must be turned off |
|
|
|
|
|
before operation is continued. |
[Data type] |
|
|
|
||
Byte |
|||||
[Unit of data] |
Seconds |
||||
[Valid data range] |
1 to 60 (The standard setting is 1.) |
||||
|
|
|
|
||
|
0146 |
|
|
Number of times the system retries holding communication (DNC2 interface) |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
NOTE |
||
|
|
|
|
|
When this parameter is set, the power must be turned off |
|
|
|
|
|
before operation is continued. |
[Data type] |
|
||||
Byte |
|||||
[Unit of data] |
Seconds |
||||
[Valid data range] |
1 to 10 (The standard setting is 3.) |
||||
|
|
Set the maximum number of times the system retries holding |
|||
|
|
communication with the remote device if the remote device uses an |
|||
|
|
invalid protocol in the data±link layer or the remote device does not |
|||
|
|
respond to the request. |
|||
|
|
|
|
|
|
|
0147 |
|
|
Number of times the system sends the message in response to the NAK signal |
|
|
|
|
(DNC2 interface) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
NOTE |
||
|
|
|
|
|
When this parameter is set, the power must be turned off |
|
|
|
|
|
before operation is continued. |
[Data type] |
|
||||
Byte |
|||||
[Unit of data] |
Number of times |
||||
[Valid data range] |
1 to 10 (The standard setting is 2.) |
||||
|
|
Set the maximum number of times the system retries sending the message |
|||
|
|
in response to the NAK signal. |
|||
19

4. DESCRIPTION OF PARAMETERS |
B±63010EN/01 |
|
|
|
0148 |
|
|
|
|
|
|
Number of characters in overrun (DNC2) interface) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
NOTE |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
When this parameter is set, the power must be turned off |
||||||||||
|
|
|
|
|
|
|
before operation is continued. |
|
|
|
|
||||||
[Data type] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Byte |
|
|
|
|
|
|
|
|
||||||||
[Valid data range] |
|
10 to 225 (The standard setting is 10.) |
|
|
|
|
|||||||||||
|
|
|
Set the number of characters the system can receive after transmission is |
||||||||||||||
|
|
|
stopped (CS off). |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0149 |
|
|
|
Number of characters in the data section of the communication packet (DNC2 |
||||||||||||
|
|
|
|
interface) |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
NOTE |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
When this parameter is set, the power must be turned off |
||||||||||
|
|
|
|
|
|
|
before operation is continued. |
|
|
|
|
||||||
[Data type] |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Word |
|
|
|
|
|
|
|
|
||||||||
[Valid range] |
|
80 to 256 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
The standard setting is 256. If the specified value is out of range, a value of |
||||||||||||||
|
|
|
80 or 256 is used. |
|
|
|
|
|
|
|
|
||||||
|
|
|
This parameter determines the maximum length of the packet used in |
||||||||||||||
|
|
|
transmission over the DNC2 interface. Including the two characters at the |
||||||||||||||
|
|
|
start of the packet, the four characters used for a command, and the three |
||||||||||||||
|
|
|
characters at the end, the maximum number of characters in the packet is |
||||||||||||||
|
|
|
nine plus the number specified in parameter No.0149. |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Length of the packet |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
DLE |
STX |
|
Command |
Data section |
DEL |
ETX |
BCC |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 bytes |
|
4 bytes |
80 to 256 bytes |
|
3 bytes |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20

B±63010EN/01 4. DESCRIPTION OF PARAMETERS
4.4
PARAMETERS OF |
|
|
|
#7 |
#6 |
#5 |
#4 |
#3 |
|
#2 |
#1 |
#0 |
||
|
0161 |
|
|
SRS |
|
PEO |
SRP |
|
|
SRL |
|
|
||
M±NET INTERFACE |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
NOTE |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
When this parameter is set, the power must be turned off |
||||||||
|
|
|
|
|
|
before operation is continued. |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||
[Data type] Bit |
|
|
|
|
|
|
|
|
||||||
|
SRL Number of characters used in the serial interface |
|
|
|
||||||||||
0:Seven bits
1:Eight bits
SRP Vertical parity in the serial interface
0:Vertical parity is not checked.
1:Vertical parity is checked.
PEO Either odd or even parity is used for vertical parity in the serial interface
0:Odd parity is used.
1:Even parity is used.
NOTE
This bit is effective when bit SRP is set to 1.
SRS Stop bit in the serial interface
0:One stop bit is used.
1:Two stop bits are used.
NOTE
Set this parameter (No.0161) when the M±NET interface is used.
0171 |
|
Length of DI data in bytes in M±NET |
|
|
|
NOTE
When this parameter is set, the power must be turned off before operation is continued.
[Data type] Byte
[Valid range] 1 to 32
Specify the length of DI data in bytes (number of byte of data actually transferred from the PLC unit to the CNC unit) in the serial interface.
0172 |
|
Length of DO data in bytes in M±NET |
|
|
|
NOTE
When this parameter is set, the power must be turned off before operation is continued.
[Data type] Byte
[Valid range] 1 to 32
Specify the length of DO data in bytes (number of bytes of data actually transferred from the CNC unit to the PLC unit) in the serial interface.
21

4. DESCRIPTION OF PARAMETERS |
B±63010EN/01 |
|
|
NOTE
When a self±loop test is performed, specify the same value in parameters No.0171 and No.0172.
0173 |
|
Station address in M±NET |
|
|
|
NOTE
When this parameter is set, the power must be turned off before operation is continued.
[Data type] Byte
[Valid range] 1 to 15
Specify a station address in the serial interface.
0174 |
|
Baud rate in M±NET |
|
|
|
NOTE
When this parameter is set, the power must be turned off before operation is continued.
[Data type] Byte
[Valid range] 0 to 6
Specify a baud rate for the serial interface. The standard setting is 3.
|
Setting |
Baud rate (bps) |
|
||
|
1 |
2400 |
|
||
|
2 |
4800 |
|
||
|
3 |
9600 |
|
||
|
4 |
19200 |
|
||
|
5 |
38400 |
|
||
|
6 |
57600 |
|
||
|
|
7 |
76800 |
|
|
|
|
|
|
||
0175 |
|
|
Time required for connecting two stations in M±NET |
||
|
|
|
|
|
|
NOTE
When this parameter is set, the power must be turned off before operation is continued.
[Data type] Word
[Unit of data] ms
[Valid range] 1 to 32767
Specify a time limit from when the connection sequence is completed for the self±station to when the normal transfer sequence starts in the serial interface. The standard setting is 10000.
22

B±63010EN/01 |
4. DESCRIPTION OF PARAMETERS |
|
|
0176 |
|
Time required for polling in M±NET |
|
|
|
NOTE
When this parameter is set, the power must be turned off before operation is continued.
[Data type] Word
[Unit of data] ms
[Valid data range] 1 to 32767
Specify a time limit for polling in the normal sequence at the self±station in the serial interface. The standard setting is 500.
0177 |
|
Time required from SAI to BCC in M±NET |
|
|
|
NOTE
When this parameter is set, the power must be turned off before operation is continued.
[Data type] Word
[Unit of data] ms
[Valid data range] 1 to 32767
Specify a time limit from when the SAI signal starts to be transferred to when the BCC signal has been sent. The standard setting is 50.
0178 |
|
Time between a reception and the next transmission in M±NET |
|
|
|
NOTE
When this parameter is set, the power must be turned off before operation is continued.
[Data type] Word
[Unit of data] ms
[Valid data range] 1 to 32767
Specify the time from when data has been received to when the next data starts to be transmitted. The standard setting is 1.
23

4. DESCRIPTION OF PARAMETERS |
B±63010EN/01 |
|
|
4.5
PARAMETERS OF |
#7 #6 #5 #4 |
#3 #2 |
#1 #0 |
||||||||
DNC1 INTERFACE |
|
|
|
|
|
|
|
|
|
|
|
0231 |
|
NFD |
|
|
|
ASI |
|
|
SB2 |
||
|
|
|
|
|
|
|
|||||
|
|
NOTE |
|
|
|
|
|||||
|
|
|
|
When this parameter is set, the power must be turned off |
|||||||
|
|
|
|
before operation is continued. |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
[Data type]
SB2 Number of stop bits
0:1 bit
1:2 bits
ASI Data input code
0:IEA or ISO (automatic recognition)
1:ASCII Code
NFD When data is out, feed holes are
0:Output before and after data section
1:Not output
|
|
|
0233 |
|
|
|
|
Baud rate (DNC1 interface #2) |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
NOTE |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
When this parameter is set, the power must be turned off |
||||||||
|
|
|
|
|
|
|
before operation is continued. |
|
|
|
|
||||
|
[Data type] |
|
|
|
|
|
|
|
|
|
|
||||
|
|
Byte |
|
|
|
|
|
|
|
|
|||||
[Valid data range] |
|
1 to 15 |
|
|
|
|
|
|
|
|
|||||
|
Baud rate |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||||||
|
Set value |
Baud rate (bps) |
|
Set value |
Baud rate (bps) |
|
Set value |
Baud rate (bps) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
50 |
|
bps |
|
6 |
300 |
bps |
|
11 |
9600 |
bps |
|
|
2 |
|
|
100 |
|
|
|
7 |
600 |
|
|
12 |
19200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
110 |
|
|
|
8 |
1200 |
|
|
13 |
38400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
150 |
|
|
|
9 |
2400 |
|
|
14 |
76800 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
200 |
|
|
|
10 |
4800 |
|
|
15 |
86400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|||||||||||
|
|
|
0241 |
|
|
Mode of connection between the host and CNC (DNC1 interface #2) |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
NOTE
When this parameter is set, the power must be turned off before operation is continued.
[Data type] Byte
[Valid data range] 1 to 2
This parameter sets the mode of connection between the host and CNC.
Setting |
Mode |
1 |
Point±to±point mode |
2 |
Multipoint mode |
24
Loading...