

Flintec LDU 68.2 User Manual
m
b
Y
e
T
e
m
e
C
U
N
s
6
n
t
8
M
8
1
n
&
A
A
G
8
.
Load
ell Digi
izing U
it
yp
LD
TECH
U 6
ICAL
.1
NU
6
L
.2
Fir
ware Ver
Hardwar
Flintec G
Bemanns
74909 Me
GERMAN
www.flint
bH
ruch 9
ckesheim
c.com
Version
Docume
ion 68.1
8.101.5.v
t No. G1
1.v.4.00 o
.3.00 & 68
9 Rev12
higher
.201.5 v.3
B
.00

Table of Contents:
1. Safety Instructions .................................................................................................................................... 4
2. Declaration of Conformity ........................................................................................................................ 5
3. Introduction and Specifications ............................................................................................................... 6
4. Communications and Getting started ..................................................................................................... 7
4.1. Serial Interface ......................................................................................................................................... 7
4.2. Command Language ................................................................................................................................ 7
4.3. Baud Rate / Device Address .................................................................................................................... 8
4.4. Getting Started ......................................................................................................................................... 8
5. Hardware and Wiring ................................................................................................................................. 9
5.1. Wiring ....................................................................................................................................................... 9
5.2. With Unit Adapter UA 77.1 (RS232) ........................................................................................................ 9
5.3. With Unit Adapter UA 73.2 (RS422 / RS485 Full-/Half-Duplex) .............................................................. 9
5.4. Terminal Configuration ........................................................................................................................... 10
5.5. Load Cell Connection ............................................................................................................................. 10
6. Calibration and Calibration Sequence ................................................................................................... 11
7. Commands – Overview ........................................................................................................................... 12
8. Commands Description .......................................................................................................................... 13
8.1. System Diagnosis Commands – ID, IV, IS, SR, RS .............................................................................. 13
8.1.1. ID Get Device Identity ................................................................................................................................... 13
8.1.2. IV Get Firmware Version ............................................................................................................................... 13
8.1.3. IS Get Device Status ..................................................................................................................................... 13
8.1.4. SR Reset LDU XX.X Firmware ...................................................................................................................... 13
8.1.5. RS Read Serial Number ................................................................................................................................ 13
8.2. Calibration Commands – CE, CM, DS, DP, CZ, CG, ZT, ZI, FD, CS .................................................... 14
8.2.1. CE Read TAC* Counter / Open Calibration Sequence ................................................................................. 14
8.2.2. CM Set Maximum Output Value ..................................................................................................................... 14
8.2.3. DS Set Display Step Size .............................................................................................................................. 14
8.2.4. DP Set Decimal Point Position ...................................................................................................................... 14
8.2.5. CZ Set Calibration Zero Point ....................................................................................................................... 14
8.2.6. CG Set Calibration Gain (Span) ..................................................................................................................... 15
8.2.7. ZT Enable / Disable Zero Tracking ................................................................................................................ 15
8.2.8. ZI Initial Zero Range ...................................................................................................................................... 15
8.2.9. FD Reset to Factory Default Settings ............................................................................................................ 15
8.2.10. CS Save the Calibration Data ....................................................................................................................... 15
8.3. Motion Detection Commands – NR, NT ................................................................................................. 16
8.3.1. NR Set No-motion Range ............................................................................................................................... 16
8.3.2. NT Set No-motion Time Period ..................................................................................................................... 16
8.4. Filter Setting Commands – FL, FF, UR .................................................................................................. 17
8.4.1. FL Filter Settings ........................................................................................................................................... 17
8.4.2. FF Moving Average ....................................................................................................................................... 17
8.4.3. UR Update Rate ............................................................................................................................................. 17
8.5. Taring and Zeroing Commands – SZ, RZ, ST, RT ................................................................................ 18
8.5.1. SZ Set Zero ................................................................................................................................................... 18
8.5.2. RZ Reset Zero Point...................................................................................................................................... 18
8.5.3. ST Set Tare ................................................................................................................................................... 18
8.5.4. RT Reset Tare ............................................................................................................................................... 18
8.6. Output Commands – GG, GN, GT, GS, GF, GW, GA ........................................................................... 19
8.6.1. GG Get Gross Value ...................................................................................................................................... 19
8.6.2. GN Get Net Value .......................................................................................................................................... 19
8.6.3. GT Get Tare Value ........................................................................................................................................ 19
8.6.4. GS Get ADC Sample Value ........................................................................................................................... 19
8.6.5. GF Get Filtered Value ................................................................................................................................... 19
8.6.6. GW Get Data String “Net, Gross and Status“ ................................................................................................. 19
8.6.7. GA Get Triggered Average Value .................................................................................................................. 19
LDU 68.1 & 68.2 Technical Manual, Rev. 12 January 2010
Page 2 of 28

8.7.
Auto–transmit Commands – SG, SN, SF, SW, SA ................................................................................ 20
8.7.1. SG Send Gross Value continuously ............................................................................................................... 20
8.7.2. SN Send Net Value continuously .................................................................................................................. 20
8.7.3. SF Send Filtered Value continuously (Display Mode only) ............................................................................ 20
8.7.4. SW Send Data String “Net, Gross and Status“ continuously .......................................................................... 20
8.7.5. SA Send Triggered Average Value automatically ......................................................................................... 20
8.8. Commands for External I/O Control – IN, IO, IM ................................................................................... 21
8.8.1. IN Read the Status of the Input Channels ..................................................................................................... 21
8.8.2. IO Read / Set the Status of the Output Channels .......................................................................................... 21
8.8.3. IM Control of the logic outputs by the host application .................................................................................. 21
8.9. Setpoint Output Commands – Sn, Hn, An ............................................................................................. 22
8.9.1. S0 / S1 Setpoint Value ................................................................................................................................... 22
8.9.2. H0 / H1 Setpoint Hysteresis and Switching Action ......................................................................................... 22
8.9.3. A0 / A1 Allocation of Gros or Net Value ......................................................................................................... 22
8.10. Communication Setup Commands – AD, BR, CL, DX, TD, OP ......................................................... 23
8.10.1. AD Device Address ........................................................................................................................................ 23
8.10.2. BR Baud Rate ................................................................................................................................................ 23
8.10.3. CL Close Device Address n .......................................................................................................................... 23
8.10.4. DX Half-duplex or Full-duplex ....................................................................................................................... 23
8.10.5. TD Transmission Delay ................................................................................................................................. 23
8.10.6. OP Open Device ............................................................................................................................................ 23
8.11. Save Calibration and Setup Data Commands – CS, WP, SS, GI, PI ................................................ 24
8.11.1. WP Save the Setup Parameters .................................................................................................................... 24
8.11.2. SS Schaltpunkt-Parameter sichern ............................................................................................................... 24
8.11.3. GI Save an Image File from the EEPROM .................................................................................................... 24
8.11.4. PI Download an Image File to the EEPROM ................................................................................................. 24
8.12. Trigger Commands – SD, MT, GA, TE, TR, TL, SA ........................................................................... 25
8.12.1. SD Start Delay Time...................................................................................................................................... 25
8.12.2. MT Measuring Time ....................................................................................................................................... 25
8.12.3. GA Get Triggered Average Value .................................................................................................................. 25
8.12.4. TE Trigger Edge ............................................................................................................................................ 25
8.12.5. TR Software Trigger ...................................................................................................................................... 25
8.12.6. TL Trigger Level ............................................................................................................................................ 26
8.12.7. SA Send Triggered Average Value automatically ......................................................................................... 26
9. Use in “Approved” Applications (LDU 68.1 only) ................................................................................ 27
10. Updates – Firmware Download .............................................................................................................. 28
LDU 68.1 & 68.2 Technical Manual, Rev. 12 January 2010
Page 3 of 28

.
RIGHTS
A
e
t
e
t
I
s
c
o
s
T
©
S
h
L
h
s
n
o
t
o
d
i
o
1
n
a
e
H
A
Y
G
N
A
E
O
O
A
e
r
r
s
t
s
h
d
c
t
o
u
G
h
A
m
s
P
O
O
E
N
E
T
W
S
D
V
n
s
e
f
c
a
a
e
a
n
e
t
e
9
B
n
r
c
n
A
C
P
T
C
W
N
U
e
F
r
a
h
a
a
m
n
e
e
m
c
R
E
R
O
N
O
O
A
M
T
R
e
p
c
s
h
N
e
o
i
s
r
s
f
A
P
T
V
G
Y
U
S
G
m
p
e
s
e
v
c
a
h
d
a
o
e
q
o
n
N
O
A
O
E
R
R
N
S
o
e
o
n
r
o
c
n
O
d
A
M
E
N
N
T
T
R
E
Q
N
f
a
m
f
w
s
t
T
C
O
O
ND LIABI
ITIES
All rights r
No part of
means, m
GmbH
No patent l
precaution
omissions.
herein.
The inform
informed if
the use of
FLINTEC r
Neither FL
losses, co
this produ
FLINTEC
FLINTEC
consumabl
NOTICE:
Copyright
served.
his publicati
chanical, p
iability is as
has been ta
Neither is a
ation herein
any errors
his manual.
eserves the
NTEC nor i
ts, or expen
t or unauth
perating an
hall not be l
e products
he contents
2010-201
on may be r
otocopying,
umed with
ken in the p
y liability a
is believed
ccur. FLINT
right to revi
s affiliates s
ses incurre
rized modifi
maintenan
able agains
ther than th
of this man
by Flintec
produced,
recording, o
espect to th
eparation o
sumed for d
o be both a
EC cannot
e this manu
all be liable
by purchas
ations, rep
e instructio
any damag
se designa
al are subj
mbH, 7490
tored in a r
r otherwise,
use of the
this book,
amages res
curate and
ccept any li
l and alter i
to the purc
r or third p
irs, or alter
ns.
es or proble
ed as Origi
ct to chang
9 Meckeshe
trieval syst
without the
information
LINTEC as
ulting from t
eliable. FLI
bility for dir
ts content w
aser of this
rties as a re
tions to this
s arising fr
al FLINTEC
without not
im, Bemann
m, or trans
rior written
ontained h
umes no re
e use of th
TEC, howe
ct or indire
thout notific
product or t
sult of: acci
product, or f
m the use
Products.
ce.
bruch 9, G
itted in any
permission
rein. While
ponsibility f
informatio
er, would b
t damages
tion at any
ird parties f
ent, misuse
ailure to stri
f any optio
rmany
form or by
f Flintec
very
r errors or
contained
obliged to
esulting fro
time.
r damages,
, or abuse o
tly comply
s or any
ny
be
ith
1.
afety I
CAUTION
instructions
operate, cle
this equipm
ENGINEER
WARNING
EXERCISE
MADE WIT
BODILY H
WARNING
PROPERL
WARNING
SERVICIN
WARNING
COMPONE
LWAYS R
CONNECTI
PRECAUTI
BODILY H
CAUTION
DEVICES.
structi
READ t
carefully. S
n, inspect,
nt from the
ING for part
ONLY
CARE WHE
POWER
RM.
FOR C
GROUND
DISCO
.
BEFOR
TS OR IN
MOVE PO
NS OR DI
NS COUL
RM.
OBSER
ons
is manual
VE this ma
aintain, se
power sour
, informatio
ERMIT QU
N MAKING
N. FAILING
NTINUED
D OUTLET
NECT ALL
CONNEC
ERCONNE
ER AND
CONNECT
RESULT I
E PRECA
EFORE op
ual for futur
rvice, or ta
e before cle
, and servi
LIFIED PE
HECKS, T
TO OBSE
ROTECTI
ONLY. DO
POWER T
ING/DISC
TING WIRI
AIT AT LE
IONS ARE
DAMAGE
TIONS FO
rating or se
e reference.
per with thi
aning or per
e.
SONNEL T
STS AND
VE THESE
N AGAINS
OT REMO
THIS UNIT
NNECTIN
NG BETWE
ST THIRT
ADE. FAIL
O OR DE
HANDLIN
vicing this e
DO NOT all
equipment.
orming mai
SERVICE
DJUSTME
RECAUTI
SHOCK H
E THE GR
BEFORE R
ANY INTE
N ELECT
(30) SECO
RE TO OB
TRUCTION
ELECTRO
quipment. F
ow untraine
ALWAYS D
tenance. C
THIS EQUI
TS THAT
NS CAN R
ZARD CO
UND PRO
MOVING
NAL ELEC
ONIC EQUI
DS BEFO
SERVE TH
OF THE E
STATIC SE
LLOW the
personnel
ISCONNEC
LL FLINTE
PMENT.
UST BE
SULT IN
NECT TO
G.
HE FUSE
RONIC
PMENT
E ANY
SE
UIPMENT
SITIVE
e
o
R
R
LDU 68
.1 & 68.2 Tec
nical Manual
Rev. 12 Ja
uary 2010
Page 4 o
28

.
2.
D
0
a
e
h
u
b
p
t
m
n
e
ä
3
t
A
t
t
e
h
n
A
p
E
h
t
/
t
A
:
g
m
e
e
c
i
e
e
i
R
C
K
D
m
t
o
r
1
c
m
n
p
e
a
n
r
h
c
A
A
u
A
r
n
m
m
t
n
o
r
h
t
m
e
s
e
m
e
g
Pr
k
C
/
n
7
u
e
r
ulawcom
r
A
s
i
e
l
d
c
a
in
fe
m
9
h
r
E
8
e
e
e
5/
e
d
e
n
n
a
y
e
m
ro
n
g
v
g
e
O
r
h
O
(
5
e
y
e
a
n
s
2
0
s
f
eclara
ion of
onfor
ity
Mon
Herst
Ansc
Prod
Das
This
Rich
Parla
zur A
Mitgli
Vertr
89/3
Rich
ktbezeichnun
t/Jahr: month
ller: Manufac
rift:
ddress
ezeichnete P
roduct confir
linie 2004/10
ents und de
gleichung d
dstaaten üb
glichkeit und
6/EWG
linie 2006/95
EG-
EC-
year:
urer:
: Product na
rodukt stimm
s with the foll
8/EG des Eu
s Rates vom
r Rechtsvors
r die elektro
zur Aufhebu
/EG Nieders
onfor
eclara
e:
mit folgende
wing regulati
opäischen
5. Dezembe
hriften der
agnetische
g der Richtlin
annungs-Ric
itätser
ion of
Vorschriften
ns of the Dir
2004
ie
tlinie
lärung
onfor
07
2010
Fli
tec GmbH
mannsbruch
Be
4909 Meckes
DDe
tschland / Ge
LD
U 68.1 / LDU
der Europäis
ctives of the
Di
ective 2004/10
Co
ncil of 15th D
s of the Memb
patibility and r
ective 2006/9
Di
it
eim
any
68.2
hen Richtlini
uropean Co
/EC of the Eu
ember 2004 o
r States relatin
pealing Directi
EC Low Volta
en überein:
munit
opean Parliam
n the approxim
to electromag
e 89/336/EEC
e Directive
nt and of the
tion of the
etic
Die
bsicherung al
Quali
ätsmerkmale
Quali
ätsmanagem
Diese
Erklärung bes
den g
nannten Richtl
Zusic
erung von Eig
Folge
de Normen w
s a
roof of conform
OIML
-76-1
DIN
N 45501
ler produktsp
erfolgt auf B
ent-Systems
heinigt die Übe
nien, beinhaltet
nschaften.
rden zum Nac
ty with the dire
Nicht-Selbsttäti
Non-automatic
Metrologische
nhang B.3: F
nhang C: Ve
zifischen
sis eines zer
ach DIN ISO
einstimmung
jedoch keine
weis der Über
tives following
Waagen – M
weighing syste
spekte nichts
nktionsprüfun
fahren für die
ifizierten
9001.
it
instimmung mit
tandards are fu
trologische un
ms – Metrologi
lbsttätiger Wa
en unter Störe
rüfung derStör
sy
Th
dir
ll
product-relat
tem in accor
s declaration c
ctives, but it is
den Richtlinien
filled:
technische A
al and technic
gen; Deutsche
flüssen
stigkeit gegen
d features ar
ance with IS
rtifies the confo
o promise of c
eingehalten:
forderungen (
l requirements
Fassung EN 4
ochfrequente
e assured by
9001.
rmity with the li
aracteristics.
IML R-76:200
(OIML R-76:20
501:1992
lektromagneti
a quality
ted
Teil 1)
2 Part 1)
che Felder.
LDU 68
.1 & 68.2 Tec
nical Manual
Rev. 12 Ja
uary 2010
Page 5 o
28
3. Introduction and Specifications
The model LDU 68.x is a precise digital amplifier for weighing and force measurements with strain gauge (SG)
sensors. The LDU 68.2 can be used for industrial applications,the LDU 68.1 can be used in legal for trade as
well as for industrial applications. The device features full multi-drop communications capability and can be
programmed via a straightforward ASCII command set.
The LDU XX.X series and the amplifier DAS 72.1 with on-board digital display, use the same command set.
You can connect up to 32 SG amplifiers of either the LDU XX.X series or DAS 72.1 type onto a single RS 485
bus. The LDU 68.x with its accurate A to D converter and an internal sample rate of up to 90 measurement
values per second, is particularly suitable for static or dynamic measurements and control purposes.
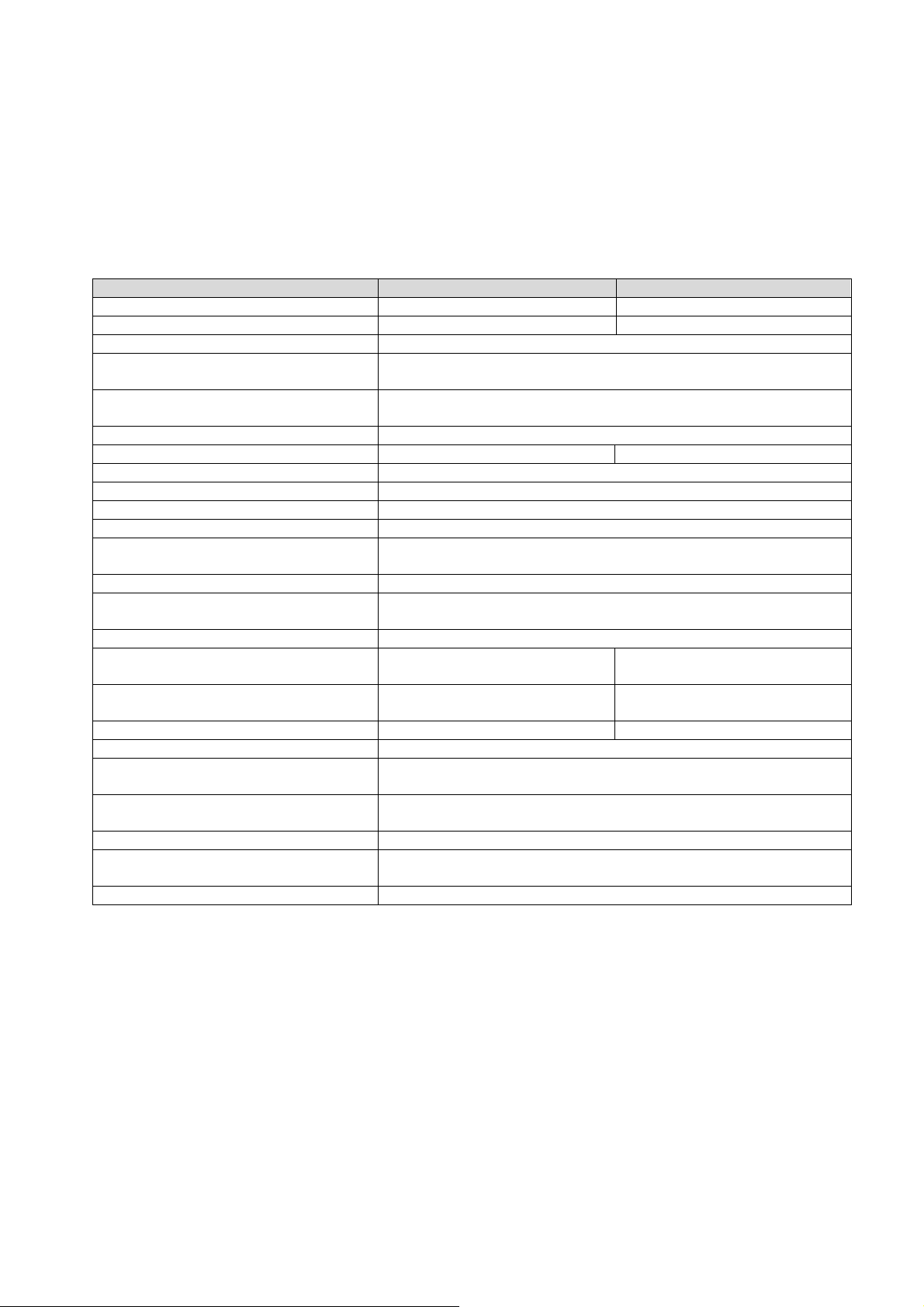
Specifications LDU 68.1 LDU 68.2
Accuracy class III Test certificate according OIML R76 10 000 Teile -
Linearity < 0.002 % FS
Excitation
Analogue input range
Minimum input sensitivity 0.1 μV / d
Certified accuracy according OIML R76 1.0 μV / e Resolution > ± 130 000 counts (input); ± 100 000 counts (output)
Conversion rate 90 values/second internal, up to 90 values/second external
Digital filter IIR filter 0.2 to 5 Hz; Bessel; in 8 steps adjustable
Calibration By software via ASCII commands, sehr einfach durchführbar
Communication interface
Standard weighing functions Gross, tare, net, zero, etc.
Digital inputs
Digital outputs 2x open collector outputs, < 30 V DC, max. 200 mA
Temperature effect on zero
Temperature effect on span
Operation temperature range –15 °C to +55 °C –15 °C to +50 °C
Storage temperature range –30 °C to +70 °C
Enclosure
Dimensions and weight
Power supply 12 ... 24 V DC ±10 %, < 60 mA, not galvanically isolated
Available accesoires
EMC OIML R-76:2006 and DIN EN 45 501:1992/AC1993
5 V DC, load cells 350 – 1 150 Ohm (87,5 – 1 150 Ohm at supply
voltage up to max. 12 V DC); 6 wire technique
±11 mV (bipolar; for weighing applications, force and torque
measurements)
RS485 oder RS422; Voll-Duplex oder Halb-Duplex;
9600 ... 115200 Baud; busfähig bis zu 32 Einheiten
2x opto-isolated inputs, 10 ... 30 V DC max. 3 mA,
Status via software
Typical 7 ppm/°K;
max. < 10 ppm/°K
Typical 2 ppm/°K;
max. < 5 ppm/°K
Typical 25 ppm/°K;
max. < 50 ppm/°K
Typical 15 ppm/°K;
max. < 30 ppm/°K
Tinned steel enclosure, IP40 protection,
special IP65 housing on request
82 x 31 x 6 mm, weighs approx. 30 g;
with adaptor board 99 x 41 x 12 mm, approx. 50 g
Adaptor board UA73.2 (RS485 / RS422) or
Adaptor board UA77.1 (inkl. converter RS422/RS232)
LDU 68.1 & 68.2 Technical Manual, Rev. 12 January 2010
Page 6 of 28
4. Communications and Getting started
4.1. Serial Interface
Communicating with the LDU 68.1 digitizer is carried out via the RS422/RS485 port.
The data format is the familiar 8/N/1 structure (8 data bits, no parity, 1 stop bit).
Available baud rates via the RS422/RS485 port are as follows: 9 600, 19 200, 38 400, 57 600 or 115 200 baud.
RS422:
Connection using a 4 wire technique
Point-to-Point connection, i.e. no bus communication possible
Half duplex setup (DX=0)
RS485:
Connection using 2- or 4-wire techniques
Multi-drop connection possible, up to 32 LDU XX.X
Half or Full Duplex (DX=0 or DX=1) possible
(RS232):
The optional adapter board UA 77.1 is available which has an RS485/RS232 converter built in.
4.2. Command Language
The command set of LDU XX.X series is based on a simple ASCII format (2 capital letters). This enables the
user to setup the device, get results or check parameters.
Example: LDU XX.X with the address or channel number 1 is connected via the RS 485 port to a bus system.
You want to get the net weight.
In this manual means: Space “_“ and Enter (CR/LF) ““
Master (PC / SPS) sends Slave (LDU XX.X) responds Meaning
OP 1
OK
GN
N+123.45
Net weight with algebraic sign / floating point
The command OP_2 opens the communication channel to LDU XX.X device #2. Now device #2 acknowledges
that it is active and responds to any commands on the bus. Communication with device #2 will be closed by
another OP command (for another device on the bus e.g. OP_5) or by the command CL_2.
Each OP_X command implies a CL command to all other devices on the bus except device #X. This makes the
address structures easier and the system performance improves.
Open device #1
Device # 1 ready
Get net weight
LDU 68.1 & 68.2 Technical Manual, Rev. 12 January 2010
Page 7 of 28

4.3. Baud Rate / Device Address
Baud Rate:
For baud rate setup use command BR, see chapter 8.10
Factory default: 9 600 baud
Device Address:
For address setup use command AD, see chapter 8.10
Factory default: Address 0
Setting the device address to 0 will set the continuously active mode, where the device becomes permanently
active, and will listen and respond to any command on the bus, without the need for an OP xxx command.
Note: The LDU XX.X series has sets of special solder pads on the under side of the PCB (see chapter 5.1). If
the solder pads are bridged then the LDU will be in a special configuration mode to set up the baud rate and
device address. This function should be used only when baud rate or address is unknown.
After power up, the LDU XX.X will enter a special baud rate search mode – waiting for a space character (0x20)
to be received. The time duration of this character is measured by the LDU and its baud rate timing will be set
accordingly – i.e. the baud rate of the terminal used will be the baud rate used by the LDU subsequently. The
device address will also be set to ”0“
4.4. Getting Started
You will require:
PC or PLC with either a RS422 or RS485 communication port
If using a PC / PLC with RS232 port, a RS422/485 to RS232 converter will be required (option UA 77.1)
Interconnecting cabling - confirm that all relevant pins are used – see the wiring diagram at the end of
this section
A load cell / scale with test weights or a load cell simulator
A 12-24 VDC power supply capable of delivering approximately 100mA for each LDU and load cell
One or more LDU 68.1
A suitable ASCII communication software *
Refer to the following wiring diagram in chapter 5.
* You can easily communicate between a PC and an LDU using programs such as Procomm, Telemate, Kermit
or HyperTerminal (included in Windows).
Also the DOP software with graphical user interface and oscilloscope function, running under Windows
2000/XP is available as freeware. This software is included on the Flintec product CD-ROM (2008 or later).
LDU 68.1 & 68.2 Technical Manual, Rev. 12 January 2010
Page 8 of 28
.
5.
H
W
W
W
h
r
W
r
r
n
1
2
2
2
e
f
ardwa
e and
iring
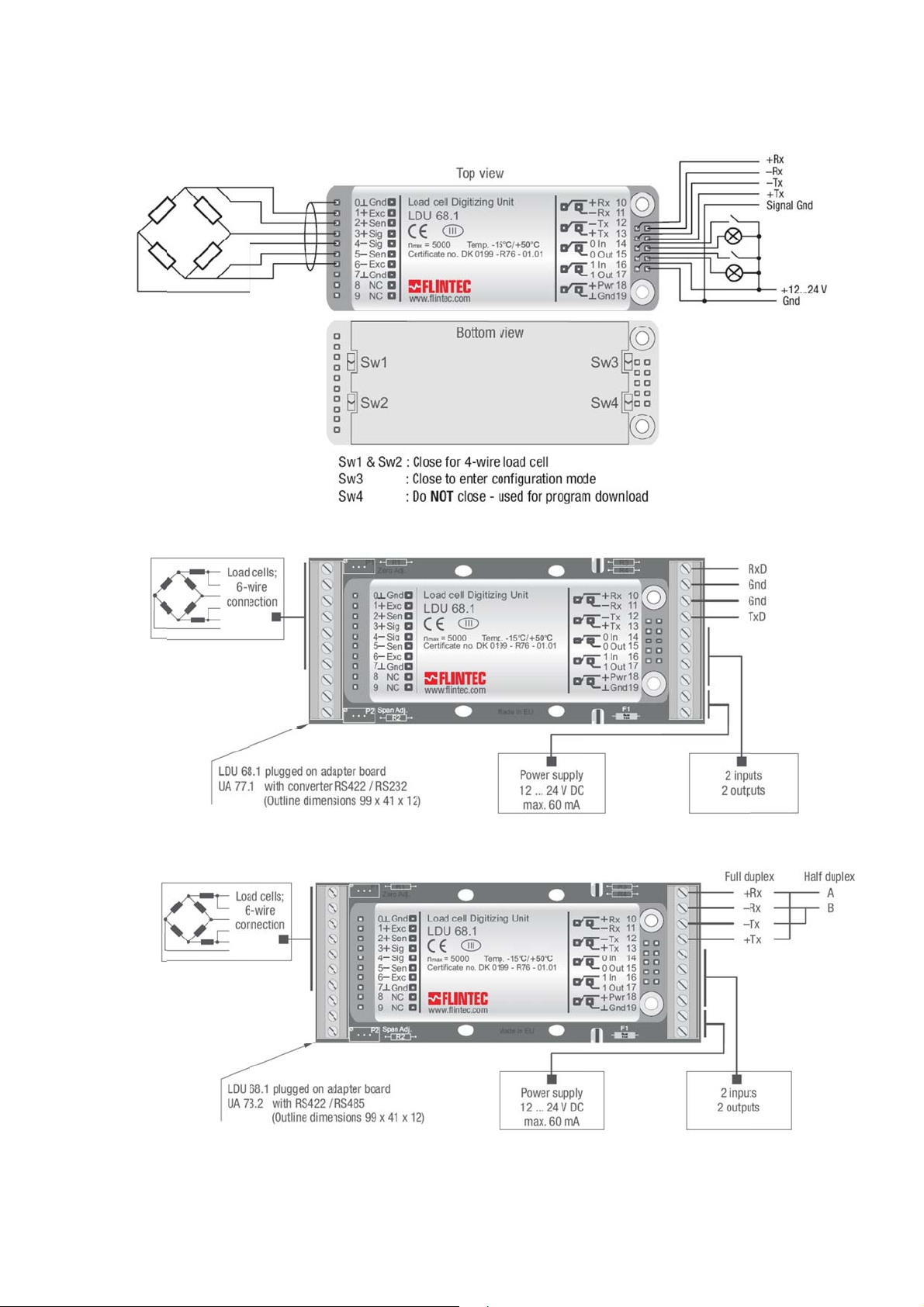
5.1.
5.2.
iring
ith Unit
Adapte
UA 77.
(RS23
)
5.3.
LDU 68
ith Unit
.1 & 68.2 Tec
Adapte
nical Manual
UA 73.
Rev. 12 Ja
(RS42
uary 2010
/ RS485 Full-/Half-Dupl
x)
Page 9 o
28
 Loading...
Loading...