

Page 1

*
FANUC Series 0 -TC
BETRIEBSHANDBUCH
B-64114GE/01
Page 2

Ȧ Kein Teil dieses Handbuchs darf in irgendeiner Form reproduziert
werden
Ȧ Änderungen in allen Spezifikationen und Ausführungen sind
vorbehalten.
Im Handbuch werden soviele Themen wie möglich angesprochen. Es
würde jedoch den Umfang des Handbuchs sprengen, wenn alle
Möglichkeiten, die unterbleiben sollten oder nicht verwirklicht werden
dürfen, behandelt würden. Funktionen, die nicht ausdrücklich als
zulässig bezeichnet sind, dürfen nicht durchgeführt werden.
Page 3
SICHERHEITSMASSNAHMEN
Im nachfolgendenAbschnitt werden Sicherheitsmaßnahmen im Umgang mit CNC--Steuerungen erläutert. Diese
Sicherheitsmaßnahmen sind unbedingteinzuhalten, umdie BetriebssicherheitCNC--gesteuerter Maschinen(von
dieser Konfiguration wird i m folgenden ausgegangen) zu gewährleisten. Einige Sicherheitsmaßnahmen sind
ausschließlich speziellen Funktionen zugeordnet und kommen deshalb nicht bei allen CNC--Steuerungen zum
Tragen.
Vom Benutzer sind außerdem maschinenbezogene Sicherheitsmaßnahmen zu beachten, die sich im zugehörigen
Handbuch des Maschinenherstellers finden. Vor Inbetriebnahme der Maschine bzw. der Erstellung eines
Programms zur Steuerung der Maschine hat sich der Bediener mit dem vorliegenden Handbuch und dem
jeweiligen Handbuch des Maschinenherstellers eingehend vertraut zu machen.
Bedeutung
1. DEFINITION VON WARNUNG, VORSICHT UND ANMERKUNG s--2............
2. ALLGEMEINE WARN-- UND VORSICHTSHINWEISE s--3......................
3. WARN-- UND VORSICHTSHINWEISE ZUR PROGRAMMIERUNG s--5..........
4. WARN-- UND VORSICHTSHINWEISE ZUR BEDIENUNG s--7..................
5. WARNUNGHINWEISE ZUR TÄGLICHEN WARTUNG s--9.....................
s- 1
Page 4

1
SICHERHEITSMASSNAHMEN
B--64114GE/01
DEFINITION VON WARNUNG, VORSICHT UND ANMERKUNG
Das Handbuch enthält Sicherheitshinweise, die der Sicherheit des Benutzers dienen und eine
Beschädigung der Maschine verhindern sollen. Es wird nach Sicherheitsrelevanz unterschieden in
Warnhinweise und Vorsichtshinweise. Bei Anmerkungen handelt es sich um Zusatzinformationen.
Warnhinweise, Vorsichtshinweise und Anmerkungen vor Inbetriebnahme der Maschine sorgfältig
lesen.
WARNUNG
Hinweis, daß bei Nichtbeachtung der vorgeschriebenen Verfahrensweise für den Benutzer
Verletzungsgefahr besteht, beziehungsweise Gefahr sowohl für den Benutzer als auch für die
Maschine besteht.
VORSICHT
Hinweis, daß bei Nichtbeachtung der vorgeschriebenen Verfahrensweise die Gefahr einer
Beschädigung der Maschine besteht.
ANMERKUNG
Hinweis auf ergänzende Informationen, bei denen es sich nicht um Warnhinweise oder
Vorsichtshinweise handelt.
` Handbuch sorgfältig lesen und an einem sicheren Ort aufbewahren.
s- 2
Page 5
B--64114GE/01
2
SICHERHEITSMASSNAHMEN
ALLGEMEINE WARN-- UND VORSICHTSHINWEISE
WARNUNG
1. Vor der Bearbeitung eines Werkstücks ist die Funktion der Maschine zu prüfen. Dazu wird ein
Probelauf inder Funktion ’Einzelsatz’,’Vorschub--Override’ oder’Maschinensperre’oder ohne
Werkzeug und Werkstück durchgeführt. Andernfalls besteht Gefahr, daß sich die Maschine
während der Bearbeitung unerwartet verhält und Werkstück, Maschine und Personen zu
Schaden kommen.
2. Vor Inbetriebnahme der Maschine sind die Eingabedaten sorgfältig zu überprüfen.
Wird die Maschine mit falschen Daten angesteuert, besteht die Gefahr eines unerwarteten
Maschinenverhaltens, durch das es zu einer Beschädigung des Werkstücks und/oder der
Maschine beziehungsweise einer Verletzung des Benutzers kommen kann.
3. Die Vorschubgeschwindigkeit ist dem gewünschten Arbeitsvorgang anzupassen. Generell ist
für jede Maschine eine Begrenzung der Vorschubgeschwindigkeit eingerichtet. Die richtige
Vorschubgeschwindigkeit hängt von dem jeweiligen Bearbeitungsvorgang ab. Die maximal
zulässige Vorschubgeschwindigkeit ist im Maschinenhandbuch angegeben. Das Ansteuern der
Maschine mit einem ungeeigneten Geschwindigkeitsbefehl kann dazu führen, daß sich die
Maschine unerwartet verhält und Werkstück, Maschine und Personen zu Schaden kommen.
4. Bei Verwendung einer Werkzeugkompensationsfunktion sind Richtung und Betrag der
Kompensation sorgfältig zu prüfen.
Wird die Maschine mit falschen Daten angesteuert, besteht die Gefahr eines unerwarteten
Maschinenverhaltens, durch das es zu einer Beschädigung des Werkstücks und/oder der
Maschine beziehungsweise einer Verletzung des Benutzers kommen kann.
5. Die CNC-- und PMS--Parameter sind werksseitig eingestellt und brauchen normalerweise nicht
verändert werden. Ist eine Abänderung dieser Parameter unumgänglich, muss deren Funktion
genauestens bekannt sein.
Bei falsch eingestellten Parametern besteht die Gefahr eines unerwarteten Maschinenverhaltens, durch das es zu einer Beschädigung des Werkstücks und/oder der Maschine
beziehungsweise einer Verletzung des Benutzers kommen kann.
6. Nach dem Einschalten der Spannung darf die Handeingabetastatur erst dann betätigt werden,
wenn aufdem Maschinen--Bildschirm diePositionsanzeige bzw. eine Alarmmeldungerscheint.
Die Handeingabetastatur besitzt unter anderem Tasten, die Wartungszwecken oder anderen
Sonderfunktionen zugeordnet sind. und führen dazu, daß sich die CNC--Maschine beim Start
anders als erwartet verhält.
7. Mit der CNC werden ein Bedienungshandbuch und ein Programmierhandbuch ausgeliefert.
Diese Handbücher enthalten Beschreibungen der Maschinenfunktionen und eventuell
optionaler Funktionen. Ob eine in diesem Handbuch beschriebene optionale Funktion zur
Verfügung steht, richtet sich nach der Ausführung der Maschine. Im Zweifelsfall ist die
Maschinenbeschreibung hinzuzuziehen.
s- 3
Page 6
SICHERHEITSMASSNAHMEN
B--64114GE/01
WARNUNG
8. Zum Teil werden Funktionen nach Angaben des Maschinenherstellers eingerichtet. Hinweise
zur Benutzungsolcher Funktionen und entsprechende Vorsichtsmaßnahmen sindin diesem Fall
dem Handbuch des Maschinenherstellers zu entnehmen.
ANMERKUNG
Programme, Parameter und Makrovariablen werden im nichtflüchtigen Speicher der CNC
gespeichert. und gehen normalerweise auch bei abgeschalteter Spannung nicht verloren. Es kann
jedoch zu einem versehentlichen oder im Zuge der Fehlerbeseitigung notwendigen Löschen dieser
Daten aus dem nichtflüchtigen Speicher kommen.
Um diesen Fall auszuschließen und eine schnelle Wiederherstellung gelöschter Daten zu
gewährleisten,sichern Sie alleIhre Daten, undbewahren Siedie Sicherungskopie aneinem sicheren
Ort auf.
s- 4
Page 7
B--64114GE/01
3
1. Einrichten eines Koordinatensystems
SICHERHEITSMASSNAHMEN
WARN-- UND VORSICHTSHINWEISE ZUR
PROGRAMMIERUNG
Der nachfolgende Abschnitt enthält die wichtigsten im Zusammenhang mit der P rogrammierung
zu beachtenden Sicherheitshinweise. Vor der Programmierung Bedienungshandbuch und
Programmierhandbuch sorgfältig lesen.
WARNUNG
Bei einem falsch eingerichteten Koordinatensystem besteht aufgrund der Tatsache, dass das
Programm einen ansonsten richtigen Verfahrbefehl ausgibt, die Gefahr eines unerwarteten
Maschinenverhaltens, durch dases zu einer Beschädigung des Werkzeugs, Werkstücks und/oder
der Maschine beziehungsweise einer Verletzung des Benutzers kommen kann.
2. Positionierung durch Nichtlineare Interpolation
Bei Positionierung mittels nichtlinearer Interpolation (Positionierung durch nichtlineares
Verfahren zwischen Start-- und Endpunkt) ist vor der Programmierung die Werkzeugbahn
sorgfältig zu überprüfen.
Die Positionierungerfolgt im Eilgang. Bei einer Kollision vonWerkzeug undWerkstückbesteht
die Gefahr, daß Werkzeug, Werkstück, Maschine und Personen zu Schaden kommen.
3. Funktionen mit Rundachse
Bei der Programmierung einer Polarkoordinaten--Interpolation bzw. einer S t euerung in
Normalenrichtung(senkrecht)ist auf die Drehzahl der Rotationsachse besonders zuachten. Eine
inkorrekte Programmierung kann dazu führen, dass die Drehzahl der Rotationsachse zu hoch
wird. Bei nicht ordnungsgemäß eingesetztem Werkstück kann sich durch die entstehende
Zentrifugalkraft das Spannfutter vom Werkstück lösen.
Hierdurch werden Werkzeug, Maschine oder Werkstück beschädigt und/oder der Benutzer
verletzt.
4. Umschaltung Zoll/Metrisch
Beim Umschalten der Eingabe--Einheiten von Zoll auf metrisch und umgekehrt werden die
Maßeinheiten von Daten wie Werkstücknullpunkt-- Versatz, Parameter und momentane Position
nicht verändert. Vor dem Einschalten der Maschine ist deshalb zu überprüfen, welche Einheiten
verwendetwerden. Sind beim Startder Maschinefalsche Datenwirksam, besteht dieGefahr, daß
Werkzeug, Werkstück, Maschine und Personen zu Schaden kommen.
5. Konstante Schnittgeschwindigkeits--Steuerung
Beim Verfahren einer Achse unter konstanter Schnittgeschwindigkeits--Steuerung zum
Ursprungspunkt des Werkstück--Koordinatensystems kann dieSpindeldrehzahl unzulässighoch
ansteigen. Um dies zu verhindern, muß eine Höchstdrehzahl festgelegt werden. Bei falsch
eingestellter Höchstdrehzahl besteht die Gefahr, daß Werkzeug, Werkstück, Maschine und
Personen zu Schaden kommen.
s- 5
Page 8
SICHERHEITSMASSNAHMEN
WARNUNG
6. Verfahrbereichskontrolle
Nach dem Einschalten der Spannung ist gegebenenfalls ein manuelles Referenzpunktfahren
durchzuführen. Eine Verfahrbereichskontrolle ist erst nach manuellem Referenzpunktfahren
möglich. Bei deaktivierter Verfahrbereichskontrolle wird auch bei Wegüberschreitung kein
Alarm ausgelöst. Es besteht die Gefahr, daß Werkzeug, Werkstück, Maschine und Personen zu
Schaden kommen.
7. Absolut--/Inkrementalmaß--Modus
Wird ein unter Verwendung von Absolutmaßwerten erstelltes Programm im
Inkrementalmaß--Modus ausgeführt oder umgekehrt, besteht die Gefahr eines unerwarteten
Maschinenverhaltens.
8. Ebenenwahl
Werden für Kreisinterpolation, Helix--Interpolation oder einen festen Arbeitszyklus falsche
Ebenen angegeben, besteht die Gefahr eines unerwarteten Maschinenverhaltens. Einzelheiten
hierzu sind den Beschreibungen der betreffenden Funktionen zu entnehmen.
B--64114GE/01
9. Restweg löschen mit Drehmomentgrenze
Dieser Vorgang ist nur möglich, wenn zuvor eine Drehmomentgrenze festgelegt wurde. Der
Befehl zum Restweg Löschen mit Drehmomentgrenze ohne Angabe eines Drehmomentgrenzwertsführt dazu, daß der betreffendeVerfahrbefehl ohne Löschendes Restwegs ausgeführt
wird.
10.Kompensationsfunktion
Wird im Kompensations--Modus ein auf das Maschinen--Koordinatensystem bezogener Befehl
oder ein Befehl zum R eferenzpunktfahren ausgegeben, führt dies zu einem vorübergehenden
Aussetzen der Kompensationsfunktion und unerwartetem Maschinenverhalten.
DerKompensations--Modus ist deshalbvor Ausgabeeines derartigenBefehls stetsabzuschalten.
s- 6
Page 9
B--64114GE/01
4
1. Handbetrieb
SICHERHEITSMASSNAHMEN
WARN-- UND VORSICHTSHINWEISE ZUR BEDIENUNG
Der nachfolgende Abschnitt enthält Sicherheitsmaßnahmen im Zusammenhang mit der
Maschinenbedienung. Vor der Inbetriebnahme Bedienungshandbuch und Programmierhandbuch
sorgfältig lesen.
WARNUNG
Vor der manuellen Bedienung der Maschine sind sorgfältig die momentanen Positionen von
Werkzeug und Werkstück sowie die vorgegebene Achse, Verfahrrichtung und Vorschubgeschwindigkeit zu prüfen. Bei fehlerhafter Bedienung besteht die Gefahr, daß Werkzeug,
Werkstück, Maschine und Personen zu Schaden kommen.
2. Manuelle Rückkehr zur Referenzposition
Nach dem Einschalten der Spannung ist gegebenenfalls ein manuelles Referenzpunktfahren
durchzuführen. Wird die Maschine ohne vorheriges manuelles Referenzpunktfahren betrieben,
kann es zu einem unerwarteten Maschinenverhalten kommen. Eine Verfahrbereichskontrolle ist
erst nach manuellem R eferenzpunktfahren möglich.
Bei unerwartetem Maschinenverhalten besteht die Gefahr einer Beschädigung des Werkzeugs,
Werkstücks und/oder der Maschine beziehungsweise einer Verletzung des Benutzers.
3. Handradvorschub
Bei Handradverfahren mit großem Skalierungsfaktor, z.B. 100, verfahren Werkzeug und Tisch
mit hoher Geschwindigkeit. Unvorsichtigkeit und Unachtsamkeit können dazu führen, daß
Werkzeug, Maschine und Personen zu Schaden kommen.
4. Deaktivierter Override
Bei deaktiviertem Override (gemäß Befehl in einer Makrovariablen) während des
Gewindeschneidens, Gewindebohrens ohne Ausgleichsfutter oder anderweitigen Gewindebohrens kann es zu unvorhergesehenen Drehzahlen kommen. Werkzeug, Werkstück und
Maschine können beschädigt oder der Benutzer verletzt werden.
5. Ursprungspunkt--Voreinstellung
Eine Ursprungspunkt--Voreinstellung darfgrundsätzlich nievorgenommen werden,währenddie
Maschine unterProgrammsteuerung arbeitet. Andernfalls besteht dieGefahr eines unerwarteten
Maschinenverhaltens, wodurch Werkzeug und Maschine beschädigt oder der Benutzer verletzt
werden können.
s- 7
Page 10
SICHERHEITSMASSNAHMEN
WARNUNG
6. Verschiebung des Werkstück--Koordinatensystems
Manuelle Eingriffe, Maschinensperre und Achsenspiegelung können zur Verschiebung des
Werkstück--Koordinatensystems führen. Bevor die Maschine unter Programmsteuerung zum
Anlauf gebracht wird, ist das Koordinatensystem sorgfältig zu überprüfen. Wird die Maschine
ohne Berücksichtigung einer Verschiebung des Werkstück--Koordinatensystems unter
Programmsteuerung zum Anlauf gebracht, besteht die Gefahr eines unerwarteten
Maschinenverhaltens, durch dases zu einer Beschädigung des Werkzeugs, Werkstücks und/oder
der Maschine beziehungsweise einer Verletzung des Benutzers kommen kann.
7. Software--Maschinenbedienfeld und Menüschalter
Über das Software--Maschinenbedienfeld und die Menüschalter können in Verbindung mit der
Handeingabetastatur Vorgänge, z. B. Moduswechsel, Änderung von Korrekturwerten und
Tippvorschub, durchgeführt werden, die vom Maschinen--Bedienfeld nicht unterstützt werden.
Es ist jedoch daraufzu achten, daßdie Tastender Handeingabetastatur nicht unbeabsichtigtoder
unkontrolliert betätigt werden, da sonst die Gefahr eines unerwarteten Maschinenverhaltens
besteht, durch das es zu einerBeschädigung des Werkzeugs, Werkstücks und/oder derMaschine
beziehungsweise einer Verletzung des Benutzers kommen kann.
B--64114GE/01
8. Manueller Eingriff
Werden während des Programmbetriebs manuelle Eingriffe vorgenommen, kann sich die
Werkzeugbahnbeim Neustartder Maschineändern. Deshalb sindnach einem manuellen Eingriff
und vor dem Neustart der Maschine stetsdie Einstellungen des Manuell--Absolut--Schalters, der
Parameter und des Modus ”Absolut/Inkrementalmaß” zu kontrollieren.
9. Vorschub--Halt, Override und Einzelsatz
Die Funktionen Vorschub--Halt, Vorschub--Override und Einzelsatz können mit Hilfe der
Kundenmakro--Systemvariablen Nr. 3004 gesperrt werden. S eien Sie in diesem Fall vorsichtig
beim Betrieb dieser Maschine.
10.Trockenlauf
Die Funktionsweise der Maschine wird in der Regel in einem Trockenlauf überprüft. Im
Trockenlauf verfährt die Maschine nicht mit der programmierten Vorschubgeschwindigkeit,
sondern mit Trockenlaufgeschwindigkeit. Die Trockenlaufgeschwindigkeit kann höher als die
programmierte Verfahrgeschwindigkeit sein.
11. Schneidenradiuskompensation im Handeingabe--Modus
Gehen Sie im Fall einer Werkzeugbahn, die durch einen Befehl im Handeingabe--Modus
festgelegt ist, mit besonderer Sorgfalt vor, da hierbei keine Schneidenradiuskompensation
erfolgt. Wenn Sie per MDI einen Befehl zur Unterbrechung des Automatikbetriebs im Modus
”Schneidenradiuskompensation” eingeben, achtenSie bei der anschließenden Wiederaufnahme
des Automatikbetriebs besonders sorgfältigauf die Werkzeugbahn. Einzelheiten hierzu sind der
Beschreibung der betreffenden Funktionen zu entnehmen.
12.Programm editieren
Wurde die Maschine zum Editieren des Bearbeitungsprogramms (Ändern, Einfügen, Löschen)
angehalten und die Bearbeitung anschließend wieder aufgenommen, kann es beim Neustart des
Programmszu einemunerwartetenMaschinenverhaltenkommen. An Bearbeitungsprogrammen
dürfen während ihrer Ausführung grundsätzlich keine Änderungen, Einfügungen oder
Löschungen vorgenommen werden.
s- 8
Page 11
B--64114GE/01
5
1. Auswechseln von Speicher--Pufferbatterien
SICHERHEITSMASSNAHMEN
WARNHINWEISE ZUR TÄGLICHEN WARTUNG
WARNUNG
Zum Auswechselnvon Speicher--Pufferbatterienistdie Maschine (CNC)eingeschaltet zulassen
und an der Maschine Notaus auszulösen. Da diese Arbeit bei eingeschalteter Spannung und
geöffnetem Schaltschrank durchgeführt wird, darf sie nur von eingewiesenem Personal mit
speziellem Sicherheitsnachweis durchgeführt werden.
Beim Auswechseln darauf achten, daß die Hochspannung führenden Stromkreise
(gekennzeichnet
Beim Berühren ungeschützter Hochspannungsstromkreisebesteht die Gefahr eines elektrischen
Schlages.
und mit Isolationsabdeckung versehen) nicht berührt werden.
ANMERKUNG
Die CNC ist mit Batterien ausgerüstet, um denSpeicher zu puffern, da Programm--, Korrektur-- und
Parameter--Daten auch bei abgeschalteter Netzspannung erhalten bleiben müssen.
Bei nachlassender Batteriespannung erscheint am Maschinenbedienfeld bzw. auf dem Bildschirm
eine entsprechende Meldung.
Bei niedriger Batteriespannung (Meldung) Batterien innerhalb einer Woche ersetzen. Andernfalls
geht der Inhalt des CNC--Speichers verloren.
Erläuterungen zum Auswechseln der Batterie finden Sie im Abschnitt ”Wartung” des vorliegenden
Handbuches.
s- 9
Page 12
SICHERHEITSMASSNAHMEN
B--64114GE/01
WARNUNG
2. Batteriewechsel an Absolut--Drehgebern
Zum Auswechselnvon Speicher--Pufferbatterienistdie Maschine (CNC)eingeschaltet zulassen
und an der Maschine Notaus auszulösen. Da diese Arbeit bei eingeschalteter Spannung und
geöffnetem Schaltschrank durchgeführt wird, darf sie nur von eingewiesenem Personal mit
speziellem Sicherheitsnachweis durchgeführt werden.
Beim Auswechseln darauf achten, daß die Hochspannung führenden Stromkreise
(gekennzeichnet
Beim Berühren ungeschützter Hochspannungsstromkreisebesteht die Gefahr eines elektrischen
Schlages.
und mit Isolationsabdeckung versehen) nicht berührt werden.
ANMERKUNG
Absolut--Drehgeber sind zur Erhaltung der Absolutpositions--Daten mit Batterien ausgerüstet.
Bei nachlassender Batteriespannung erscheint am Maschinenbedienfeld bzw. auf dem Bildschirm
eine entsprechende Meldung.
Bei niedriger Batteriespannung (Meldung) Batterien innerhalb einer Woche ersetzen. Andernfalls
gehen die Absolutpositions--Daten des Drehgebers verloren.
Der Batteriewechsel ist im Wartungshandbuch für den FANUC--Servomotor Serie αi näher
beschrieben.
s- 10
Page 13
B--64114GE/01
3. Auswechseln von Sicherungen
SICHERHEITSMASSNAHMEN
WARNUNG
Das Auswechseln der Sicherungen verschiedener Baugruppen ist im Kapitel ”Tägliche
Wartung” des Bedienungs-- bzw. Programmierhandbuchs beschrieben.
Vor dem Auswechseln einer durchgebrannten Sicherung ist die Ursache für den
Sicherungsausfall zu bestimmen und zu beseitigen.
Daher darf diese Arbeit nur von eingewiesenem Personal mit speziellem Sicherheitsnachweis
durchgeführt werden.
Beim Auswechseln von Sicherungen bei geöffnetem Schaltschrank darauf achten, daß die
Hochspannung führenden Stromkreise (gekennzeichnet
versehen) nicht berührt werden.
Beim Berühren ungeschützter Hochspannungsstromkreisebesteht die Gefahr eines elektrischen
Schlages.
und mit Isolationsabdeckung
s- 11
Page 14

Page 15

B--64114GE/01
Inhaltsverzeichnis
SICHERHEITSMASSNAHMEN s--1.............................................
I. ALLGEMEINES
1. ALLGEMEINES 3........................................................
1.1 ALLGEMEINER BETRIEBSABLAUF BEI EINER CNC--WERKZEUGMASCHINE 6.........
1.2 HINWEISE FÜR DEN UMGANG MIT DIESEM HANDBUCH 8...........................
1.3 HINWEIS ZUR DATENSICHERHEIT 8...............................................
II. PROGRAMMIERUNG
1. ALLGEMEINES 11........................................................
1.1 WERKZEUGBEWEGUNG ENTLANG DER WERKSTÜCKKONTUR--INTERPOLATION 12....
1.2 VORSCHUBFUNKTION 14..........................................................
1.3 WERKSTÜCKZEICHNUNG UND WERKZEUGBEWEGUNG 15...........................
1.3.1 Referenzpunkt (maschinenspezifischer Punkt) 15...........................................
1.3.2 Koordinatensystem der Werkstückzeichnung und CNC--Koordinatensystem 16....................
1.3.3 Maßbefehle für die Werkzeugbewegung -- Absolut-- /Inkrementalmaß--Befehle 19.................
1.4 SCHNITTGESCHWINDIGKEIT -- SPINDELDREHZAHLFUNKTION 21....................
1.5 WERKZEUGAUSWAHL FÜR DIE VERSCHIEDENEN
BEARBEITUNGSVORGÄNGE -- WERKZEUGFUNKTION 22.............................
1.6 MASCHINENBEDIENBEFEHL -- ZUSATZFUNKTION 22................................
1.7 PROGRAMMKONFIGURATION 23...................................................
1.8 KOMPENSATIONSFUNKTIONEN 26.................................................
1.9 WERKZEUGVERFAHRBEREICH 27..................................................
2. GESTEUERTE ACHSEN 28................................................
2.1 GESTEUERTE ACHSEN 29..........................................................
2.2 ACHSENBEZEICHNUNG 29........................................................
2.3 INKREMENTALMASSSYSTEM 30...................................................
2.4 MAXIMALER VERF AHRWEG 31....................................................
3. WEGBEDINGUNG (G--FUNKTION) 32......................................
4. INTERPOLATIONSFUNKTIONEN 37........................................
4.1 POSITIONIERUNG (G00) 38.........................................................
4.2 LINEARE INTERPOLATION (G01) 40.................................................
4.3 KREISINTERPOLATION (G02, G03) 41...............................................
4.4 HELIX--INTERPOLATION (G02, G03) 45..............................................
4.5 POLARKOORDINATEN--INTERPOLATION (G12.1, G13.1) 46............................
4.6 ZYLINDRISCHE INTERPOLATION (G07.1) 50.........................................
4.7 GEWINDE MIT KONSTANTER STEIGUNG (G32) 54....................................
4.8 GEWINDESCHNEIDEN MIT VARIABLER STEIGUNG (G34) 58..........................
4.9 UNTERBRECHUNGSLOSES GEWINDESCHNEIDEN 59.................................
4.10 MEHRFACH--GEWINDESCHNEIDEN 60..............................................
i-1
Page 16

Inhaltsverzeichnis
B--64114GE/01
4.11 RESTWEG LÖSCHEN (G31) 62......................................................
4.12 MEHRSTUFIGES RESTWEG--LÖSCHEN 64...........................................
4.13 RESTWEG LÖSCHEN MIT DREHMOMENTGRENZE (G31 P99) 65........................
5. VORSCHUBFUNKTIONEN 67..............................................
5.1 ALLGEMEINES 68.................................................................
5.2 EILGANG 69......................................................................
5.3 SCHNITTVORSCHUB 70...........................................................
5.4 VERWEILEN (G04) 72..............................................................
6. REFERENZPUNKT 73.....................................................
6.1 ANFAHREN DES REFERENZPUNKTS 74.............................................
7. KOORDINATENSYSTEM 77...............................................
7.1 MASCHINEN--KOORDINATENSYSTEM 78............................................
7.2 WERKSTÜCK--KOORDINA TENSYSTEM 79...........................................
7.2.1 Einrichten eines Werkstück--Koordinatensystems 79.........................................
7.2.2 Auswählen eines Werkstück--Koordinatensystems 81........................................
7.2.3 Ändern eines Werkstück--Koordinatensystems 82...........................................
7.2.4 Werkstück--Koordinatensystem--Voreinstellung (G92.1) 84....................................
7.2.5 Werkstück--Koordinatensystem--Verschiebung 86...........................................
7.3 LOKALES KOORDINATENSYSTEM 87...............................................
7.4 EBENENAUSW AHL 89.............................................................
8. KOORDINATENWERTE UND MASSE 90....................................
8.1 ABSOLUT-- UND INKREMENTALMASSPROGRAMMIERUNG (G90, G91) 91...............
8.2 UMSCHALTUNG ZOLL/METRISCH (G20, G21) 92.....................................
8.3 PROGRAMMIERUNG VON DEZIMALZAHLEN 93.....................................
8.4 DURCHMESSER-- UND RADIUSPROGRAMMIERUNG 94...............................
9. SPINDELDREHZAHLFUNKTION 95........................................
9.1 FESTLEGEN DER SPINDELDREHZAHL PER CODE 96.................................
9.2 DIREKTES FESTLEGEN DER SPINDELDREHZAHL (5--STELLIGER S--BEFEHL) 96........
9.3 KONSTANTE SCHNITTGESCHWINDIGKEITSSTEUERUNG (G96, G97) 97.................
9.4 ÜBERWACHUNG DER SPINDELDREHZAHL--ABWEICHUNG (G25, G26) 101...............
9.5 SPINDELPOSITIONIERUNG 104......................................................
9.5.1 Spindelorientierung 104...............................................................
9.5.2 Spindelpositionierung 104..............................................................
9.5.3 Spindelpositionierung beenden 106.......................................................
10.WERKZEUGFUNKTION (T--FUNKTION) 107..................................
10.1 WERKZEUGAUSWAHL 108..........................................................
10.2 WERKZEUGSTANDZEIT--VERWALTUNG 109..........................................
10.2.1 Programm für Werkzeugstandzeitdaten 109.................................................
10.2.2 Werkzeug--Standzeiterfassung 112.......................................................
10.2.3 Angabe einer Werkzeuggruppe im Bearbeitungsprogramm 113.................................
i-2
Page 17

B--64114GE/01
Inhaltsverzeichnis
11.HILFSFUNKTION 114......................................................
11.1 HILFSFUNKTION (M--FUNKTION) 115................................................
11.2 MEHRERE M--BEFEHLE IN EINEM SATZ 116..........................................
11.3 SEKUNDÄRE HILFSFUNKTIONEN (B--CODES) 117.....................................
12.PROGRAMMKONFIGURATION 118.........................................
12.1 ANDERE PROGRAMMKOMPONENTEN 120...........................................
12.2 PROGRAMMABSCHNITT--KONFIGURATION 123.......................................
12.3 UNTERPROGRAMM (M98, M99) 129..................................................
13.FUNKTIONEN, DIE DAS PROGRAMMIEREN ERLEICHTERN 132..............
13.1 FESTZYKLEN (G90, G92, G94) 133....................................................
13.1.1 Schneidezyklus Außendurchmesser/Innendurchmesser (G90) 133...............................
13.1.2 Gewindeschneidzyklus (G92) 135........................................................
13.1.3 Zyklus für Stirnflächendrehen (G94) 138..................................................
13.1.4 Verwendung von Festzyklen (G90, G92, G94) 141...........................................
13.2 MEHRFACH--WIEDERHOL--ZYKLEN (G70 -- G76) 143...................................
13.2.1 Materialabnahme beim Drehen (aussen) (G71) 143...........................................
13.2.2 Materialabnahme beim Plandrehen (innen) (G72) 147........................................
13.2.3 Musterwiederholung (G73) 148.........................................................
13.2.4 Feinbearbeitungszyklus (G70) 149.......................................................
13.2.5 Bohrzyklus mit Späne-- Entfernung in Z-- Richtung (G74) 152...................................
13.2.6 Bohrzyklus Außendurchmesser/Innendurchmesser (G75) 153..................................
13.2.7 Zyklus für Mehrfach--Gewindeschneiden (G76) 154..........................................
13.2.8 Hinweise zu Mehrfach--Wiederhol--Zyklen (G70 -- G76) 158...................................
13.3 BOHR--FESTZYKLEN (G80 -- G89) 159.................................................
13.3.1 Stirnbohrzyklus (G83) / Seitenbohrzyklus (G87) 163.........................................
13.3.2 Stirngewindebohrzyklus (G84) / Gewindebohrzyklus in X--Richtung (G88) 166....................
13.3.3 Stirnbohrzyklus (G85) / Seitenbohrzyklus (G89) 168.........................................
13.3.4 Bohr-- Festzyklus beenden (G80) 169.....................................................
13.3.5 Vorsichtmaßnahmen 170...............................................................
13.4 SCHLEIF--FESTZYKLEN (FÜR SCHLEIFMASCHINE) 171................................
13.4.1 Zeilenschleifzyklus (G71) 171...........................................................
13.4.2 Direkter Konstantmaß--Zeilenschleifzyklus (G72) 172........................................
13.4.3 Schwing--Schleifzyklus (G73) 173.......................................................
13.4.4 Direkter Konstantmaß--Schwingschleifzyklus 174...........................................
13.5 ANFASEN UND VERRUNDEN 175....................................................
13.6 ACHSENSPIEGELUNG FÜR DOPPELREVOLVERKOPF (G68, G69) 178.....................
13.7 DIREKTE ZEICHNUNGSMASSPROGRAMMIERUNG 179................................
13.8 GEWINDEBOHREN OHNE AUSGLEICHSFUTTER 184...................................
13.8.1 Zyklus für Stirngewindebohren ohne Ausgleichsfutter (G84) /
13.8.2 Gewindebohren ohne Ausgleichsfutter beenden (G80) 187.....................................
Zyklus für Gewindebohren ohne Ausgleichsfutter in X--Richtung (G88) 185.......................
14.KOMPENSATIONSFUNKTIONEN 188........................................
14.1 WERKZEUGKORREKTUR 189.......................................................
14.1.1 Werkzeuggeometriekorrektur und Werkzeugverschleißkorrektur 189.............................
14.1.2 T--Code für Werkzeugkorrektur 190......................................................
14.1.3 Werkzeugauswahl 190.................................................................
14.1.4 Werkzeugkorrekturnummer 190.........................................................
14.1.5 Werkzeugkorrektur 191................................................................
i-3
Page 18

Inhaltsverzeichnis
14.1.6 Die Befehle G53, G28 und G30 bei aktivierter Werkzeuglagenkorrektur 194.......................
B--64114GE/01
14.2 SCHNEIDENRADIUSKOMPENSATION -- ÜBERSICHT 197...............................
14.2.1 Imaginärer Schneidenmittelpunkt 197.....................................................
14.2.2 Richtung des imaginären Schneidenmittelpunkts 199.........................................
14.2.3 Werkzeugkorrekturnummer und Korrekturwert 200..........................................
14.2.4 Werkstückposition und Verfahrbefehl 202..................................................
14.2.5 Hinweise zur Schneidenradiuskompensation 207............................................
14.3 SCHNEIDENRADIUSKOMPENSATION IM DETAIL 210..................................
14.3.1 Allgemeines 210.....................................................................
14.3.2 Werkzeugbewegung beim Anlauf 212.....................................................
14.3.3 Werkzeugbewegung im Werkzeugkorrekturmodus 214........................................
14.3.4 Werkzeugbewegung beim Beenden des Werkzeugkorrekturmodus 227...........................
14.3.5 Interferenzprüfung 230................................................................
14.3.6 Überschnitt durch Schneidenradiuskompensation 235.........................................
14.3.7 Korrektur beim Anfasen und Verrunden 236................................................
14.3.8 Befehlseingabe über Handeingabetastatur 238...............................................
14.3.9 Allgemeine Vorsichtsmaßnahmen im Korrekturbetrieb 239.....................................
14.3.10 Befehle G53, G28 und G30 im Modus Werkzeugschneidenradiuskompensation 240.................
14.4 WERKZEUGKOMPENSATIONSWERTE, NUMMERN DER KOMPENSA TIONSWER TE,
EINGABE VON PROGRAMMWERTEN (G10) 249.......................................
14.4.1 Werkzeugkompensation und Kompensationsnummer 249.....................................
14.4.2 Ändern von Werkzeugkorrekturbeträgen 250...............................................
14.5 AUTOMATISCHE WERKZEUGKORREKTUR (G36, G37) 251.............................
15.KUNDENMAKRO 254......................................................
15.1 VARIABLEN 255...................................................................
15.2 SYSTEMVARIABLEN 259...........................................................
15.3 ARITHMETISCHE UND LOGISCHE OPERATIONEN 266.................................
15.4 MAKRO--ANWEISUNGEN UND NC--ANWEISUNGEN 271................................
15.5 VERZWEIGUNG UND WIEDERHOLUNG 272..........................................
15.5.1 Unbedingte Verzweigung (GOTO--Anweisung) 272..........................................
15.5.2 Bedingte Verzweigung (IF--Anweisung) 273................................................
15.5.3 Wiederholung (WHILE-- Anweisung) 274..................................................
15.6 MAKROAUFRUF 277...............................................................
15.6.1 Einfacher Aufruf (G65) 278............................................................
15.6.2 Modaler Aufruf (G66) 282.............................................................
15.6.3 Makroaufruf mit G--Code 284...........................................................
15.6.4 Makroaufruf mit M--Code 285...........................................................
15.6.5 Unterprogrammaufruf mit M--Code 286...................................................
15.6.6 Unterprogrammaufruf mit T--Code 287....................................................
15.6.7 Programmbeispiel 288.................................................................
15.7 VERARBEITEN VON MAKROANWEISUNGEN 290.....................................
15.8 REGISTRIERUNG VON KUNDENMAKRO--PROGRAMMEN 292..........................
15.9 BESCHRÄNKUNGEN 293............................................................
15.10 EXTERNE AUSGABEBEFEHLE 294...................................................
15.11 INTERRUPT--GESTEUERTES KUNDENMAKRO 298.....................................
15.11.1 Einsatz 299.........................................................................
15.11.2 Funktionen 300......................................................................
i-4
Page 19

B--64114GE/01
Inhaltsverzeichnis
16.PARAMETEREINGABE MITTELS PROGRAMM (G10) 307.....................
17.SPEICHERBETRIEB MIT LOCHSTREIFENFORMAT SERIE 10/1 1 310...........
17.1 ADRESSEN UND WERTEBEREICHE FÜR DAS LOCHSTREIFENFORMAT SERIE 10/11 311...
17.2 GEWINDESCHNEIDEN MIT KONSTANTER STEIGUNG 312..............................
17.3 UNTERPROGRAMMAUFRUF 313.....................................................
17.4 FESTZYKLUS 314..................................................................
17.5 MEHRFACH--WIEDERHOL--ZYKLEN FÜR DREHEN 315.................................
17.6 FORMAT EINES BOHR--FESTZYKLUS 317.............................................
18.FUNKTIONEN FÜR HOCHGESCHWINDIGKEITS--BEARBEITUNG 321..........
18.1 ERWEITERTE LOOK--AHEAD--STEUERUNG (G08) 322..................................
19.ACHSENSTEUERUNGSFUNKTIONEN 327...................................
19.1 POLYGONALES DREHEN 328........................................................
19.2 ENDLOS DREHENDE RUNDACHSE 333...............................................
19.3 EINFACHE SYNCHRONSTEUERUNG 334..............................................
19.4 TANDEMSTEUERUNG 336..........................................................
19.5 WINKELACHSENSTEUERUNG MIT BELIEBIGEM WINKEL 337..........................
20.EINGABEFUNKTION FÜR BILDPUNKT--DATEN 339..........................
20.1 MUSTER--MENÜ ANZEIGEN 340.....................................................
20.2 BILDPUNKT--DATEN ANZEIGEN 344.................................................
20.3 ZEICHEN UND CODES FÜR BILDPUNKT--DATEN 348..................................
III. BETRIEB
1. ALLGEMEINES 353........................................................
1.1 HANDBETRIEB 354.................................................................
1.2 PROGRAMMIERTE WERKZEUGBEWEGUNG -- AUTOMATIKBETRIEB 356................
1.3 AUTOMATIKBETRIEB 357..........................................................
1.4 PROGRAMMÜBERPRÜFUNG 359....................................................
1.4.1 Überprüfung durch Achsenverfahren 359..................................................
1.4.2 Überprüfung anhand der Positionsanzeige (bei stehender Maschine) 360..........................
1.5 EDITIEREN VON TEILEPROGRAMMEN 361...........................................
1.6 EINSTELLUNG UND ANZEIGE VON DATEN 362.......................................
1.7 ANZEIGE 365......................................................................
1.7.1 Programmanzeige 365.................................................................
1.7.2 Anzeige der aktuellen Position 366.......................................................
1.7.3 Alarmanzeige 366....................................................................
1.7.4 Anzeige von Betriebsstunden und Werkstückzahl 367.........................................
1.7.5 Grafikanzeige (siehe Abschnitt III--12) 367.................................................
1.8 DA TENAUSGABE 368...............................................................
i-5
Page 20

Inhaltsverzeichnis
B--64114GE/01
2. BEDIENEINRICHTUNGEN 369..............................................
2.1 EINGABE-- UND ANZEIGEGERÄTE 370...............................................
2.1.1 7,2″--Schwarzweiß--/8,4″--Farb-- LCD --/Tastatureinheit (horizontale Ausführung) 371.................
2.1.2 7,2″--Schwarzweiß--/8,4″--Farb-- LCD--/Tastatureinheit (vertikale Ausführung) 372...................
2.1.3 Tastenanordnung Bedientastatur (LC--Display--/Tastatureinheit in horizontaler Ausführung) 373........
2.1.4 Tastenanordnung Bedientastatur (LC--Display--/Tastatureinheit in vertikaler Ausführung) 374..........
2.2 ERLÄUTERUNG DER TASTATUR 375.................................................
2.3 FUNKTIONSTASTEN UND SOFTKEYS 377............................................
2.3.1 Allgemeine Vorgehensweise am Bildschirm 377.............................................
2.3.2 Funktionstasten 378...................................................................
2.3.3 Softkeys 379........................................................................
2.3.4 Tastatureingabe und Eingabezwischenspeicher 395...........................................
2.3.5 Warnmeldungen 396..................................................................
2.4 EXTERNE E/A--GERÄTE 397.........................................................
2.4.1 FANUC Handy File 399...............................................................
2.5 EIN-- UND AUSSCHALTEN 400.......................................................
2.5.1 Einschalten 400......................................................................
2.5.2 Bildschirm unmittelbar nach dem Einschalten 401...........................................
2.5.3 Ausschalten 402.....................................................................
3. HANDBETRIEB 403........................................................
3.1 MANUELLE RÜCKKEHR ZUR REFERENZPOSITION 404................................
3.2 TIPPVORSCHUB 406................................................................
3.3 INKREMENTAL--VORSCHUB 408.....................................................
3.4 HANDRADVORSCHUB 409..........................................................
3.5 MANUELL--ABSOLUT--SCHALTER 412................................................
4. AUTOMATIKBETRIEB 417..................................................
4.1 SPEICHERBETRIEB 418.............................................................
4.2 HANDEINGABEBETRIEB 421........................................................
4.3 DNC--BETRIEB 424.................................................................
4.4 PROGRAMM--NEUSTART 426........................................................
4.5 PLANUNGSFUNKTION 434..........................................................
4.6 FUNKTION ”UNTERPROGRAMMAUFRUF” (M198) 439.................................
4.7 HANDRADVORSCHUB--UNTERBRECHUNG 441.......................................
4.8 ACHSENSPIEGELUNG 444..........................................................
4.9 MANUELLER EINGRIFF UND RÜCKKEHR ZUM BETRIEB 446...........................
4.10 DNC--BETRIEB MIT SPEICHERKARTE 448............................................
4.10.1 Beschreibung 448....................................................................
4.10.2 Vorgänge 449.......................................................................
4.10.2.1 DNC--BETRIEB 449...........................................................
4.10.2.2 Unterprogrammaufruf (M198) 450.................................................
4.10.3 Beschränkungen und Anmerkungen 451...................................................
4.10.4 Parameter 451.......................................................................
4.10.5 Verfahren zur Befestigung der Speicherkarte 451............................................
i-6
Page 21

B--64114GE/01
Inhaltsverzeichnis
5. TESTBETRIEB 453........................................................
5.1 MASCHINENSPERRE UND HILFSFUNKTIONSSPERRE 454..............................
5.2 VORSCHUB--OVERRIDE 456.........................................................
5.3 EILGANG--OVERRIDE 457...........................................................
5.4 TROCKENLAUF 458................................................................
5.5 EINZELSATZ 459...................................................................
6. SICHERHEITSFUNKTIONEN 462............................................
6.1 NOTAUS 463.......................................................................
6.2 VERFAHRWEGÜBERSCHREITUNG 464...............................................
6.3 SOFTENDLAGEN--ÜBERWACHUNG 465...............................................
6.4 FUTTER-- UND REITSTOCK--SICHERHEITSZONEN 469.................................
6.5 KONTROLLE DER VERFAHRGRENZE VOR DEM VERFAHREN 476.......................
7. ALARM-- UND SELBSTDIAGNOSEFUNKTIONEN 479.........................
7.1 ALARMANZEIGE 480...............................................................
7.2 ALARMARCHIV--ANZEIGE 482......................................................
7.3 SELBSTDIAGNOSE--BILDSCHIRM 483................................................
8. DATENEINGABE UND DATENAUSGABE 486................................
8.1 DATEIEN 487......................................................................
8.2 DATEI--SUCHE 489.................................................................
8.3 DATEI LÖSCHEN 491...............................................................
8.4 EINGABE UND AUSGABE VON PROGRAMMEN 492....................................
8.4.1 Eingabe von Programmen 492..........................................................
8.4.2 Ausgabe von Programmen 495..........................................................
8.5 EINGABE UND AUSGABE VON KORREKTURDATEN 497...............................
8.5.1 Eingabe von Korrekturdaten 497.........................................................
8.5.2 Ausgabe von Korrekturdaten 498........................................................
8.6 EINGABE UND AUSGABE VON PARAMETERN UND
STEIGUNGSFEHLER--KOMPENSATIONSDATEN 499....................................
8.6.1 Eingabe von Parametern 499............................................................
8.6.2 Ausgabe von Parametern 500...........................................................
8.6.3 Eingabe von Steigungsfehler--Kompensationsdaten 501.......................................
8.6.4 Ausgabe von Steigungsfehler--Kompensationsdaten 502.......................................
8.7 EINGABE UND AUSGABE VON GLOBALEN KUNDENMAKRO--VARIABLEN 503..........
8.7.1 Eingabe von globalen Kundenmakro--Variablen 503..........................................
8.7.2 Ausgabe globaler Kundenmakro--Variable 504..............................................
8.8 ANZEIGE VON DISKETTENVERZEICHNISSEN 505.....................................
8.8.1 Verzeichnisanzeige 506................................................................
8.8.2 Einlesen von Dateien 509..............................................................
8.8.3 Ausgabe von Programmen 510..........................................................
8.8.4 Löschen von Dateien 511..............................................................
8.9 AUSGABE EINER PROGRAMMGRUPPENLISTE 513....................................
8.10 EINGABE UND AUSGABE VON DATEN IM BILDSCHIRM ”ALLE E/A” 514................
8.10.1 Einrichten von Eingabe-- /Ausgabeparametern 515...........................................
8.10.2 Eingabe und Ausgabe von Programmen 516................................................
8.10.3 Eingabe und Ausgabe von Parametern 520.................................................
i-7
Page 22

Inhaltsverzeichnis
8.10.4 Eingabe und Ausgabe von Korrekturdaten 522..............................................
8.10.5 Ausgabe von globalen Kundenmakro--Variablen 524.........................................
8.10.6 Eingabe und Ausgabe von Dateien auf Diskette 525..........................................
B--64114GE/01
8.11 EINGABE UND AUSGABE MIT SPEICHERKARTE 530..................................
9. EDITIEREN VON PROGRAMMEN 542.......................................
9.1 EINFÜGEN, ÄNDERN UND LÖSCHEN VON WÖRTERN 543..............................
9.1.1 Wortsuche 544.......................................................................
9.1.2 Sprung zum Programmanfang 546.......................................................
9.1.3 Einfügen von Wörtern 547.............................................................
9.1.4 Ändern von Wörtern 548...............................................................
9.1.5 Löschen von Wörtern 549..............................................................
9.2 LOESCHEN VON SÄTZEN 550.......................................................
9.2.1 Löschen eines Satzes 550..............................................................
9.2.2 Löschen mehrerer Sätze 551............................................................
9.3 PROGRAMMNUMMERNSUCHE 552..................................................
9.4 SATZNUMMERNSUCHE 553.........................................................
9.5 LÖSCHEN VON PROGRAMMEN 555..................................................
9.5.1 Löschen eines einzelnen Programms 555..................................................
9.5.2 Löschen aller Programme 555...........................................................
9.5.3 Löschen mehrerer Programme in einem Bereich 556..........................................
9.6 ERWEITERTES EDITIEREN VON TEILEPROGRAMMEN 557.............................
9.6.1 Kopieren ganzer Programme 558........................................................
9.6.2 Kopieren von Programmteilen 559.......................................................
9.6.3 Verschieben von Programmteilen 560.....................................................
9.6.4 Zusammenführen von Programmen 561...................................................
9.6.5 Ergänzende Erläuterungen zum Kopieren, Verschieben und Zusammenführen 562..................
9.6.6 Ersetzen von Wörtern und Adressen 564...................................................
9.7 EDITIEREN VON KUNDENMAKROS 566..............................................
9.8 EDITIEREN IM HINTERGRUND 567..................................................
9.9 PASSWORT--FUNKTION 568.........................................................
10.ERSTELLEN VON PROGRAMMEN 570......................................
10.1 ERSTELLEN VON PROGRAMMEN ÜBER DIE HANDEINGABETASTATUR 571.............
10.2 AUTOMATISCHES EINFÜGEN VON SATZNUMMERN 572...............................
10.3 ERSTELLEN VON PROGRAMMEN IM LERNMODUS (WIEDERGABE) 574.................
10.4 DIALOGPROGRAMMIERUNG MIT GRAFIKFUNKTION 577..............................
11.EINSTELLUNG UND ANZEIGE VON DATEN 581..............................
11.1 BILDSCHIRMAUFRUF ÜBER DIE FUNKTIONSTASTE 590..........................
11.1.1 Positionsanzeige im Werkstück--Koordinatensystem 590......................................
11.1.2 Positionsanzeige im relativen Koordinatensystem 591........................................
11.1.3 Gesamtpositionsanzeige 593............................................................
11.1.4 Werkstück--Koordinatensystem--Voreinstellung 594..........................................
11.1.5 Anzeige der Ist --Vorschubgeschwindigkeit 595..............................................
11.1.6 Anzeige von Laufzeit und Stückzahl 597..................................................
11.1.7 Betriebsmonitor--Anzeige 598...........................................................
11.2 BILDSCHIRMAUFRUF ÜBER DIE FUNKTIONSTASTE
(IM MODUS MEM ODER MDI) 600....................................................
i-8
Page 23

B--64114GE/01
11.3 BILDSCHIRMAUFRUF ÜBER DIE FUNKTIONSTASTE (IM MODUS EDIT) 605.........
11.4 BILDSCHIRMAUFRUF ÜBER DIE FUNKTIONSTASTE 611..........................
Inhaltsverzeichnis
11.2.1 Bildschirm “Programminhalt” 600.......................................................
11.2.2 Bildschirm ”Aktueller Satz” 601.........................................................
11.2.3 Bildschirm ”Nächster Satz” 602.........................................................
11.2.4 Bildschirm ”Programmprüfung” 603......................................................
11.2.5 Programmbildschirm für Handeingabebetrieb 604...........................................
11.3.1 Anzeige von belegtem Speicher und Programmliste 605.......................................
11.3.2 Anzeigen einer Programmgruppenliste 608.................................................
11.4.1 Einstellen und Anzeigen von Werkzeugkorrekturwerten 612...................................
11.4.2 Direkteingabe von Werkzeugkorrekturwerten 615............................................
11.4.3 Werkzeuglängen--/Arbeitsnullpunktmessung B 617..........................................
11.4.4 Eingabe von Korrekturwerten über den Werkzeug--Standzeitmesser 619..........................
11.4.5 Betrag der Werkstück--Koordinatensystemverschiebung einrichten 620...........................
11.4.6 Y--Achsen--Korrektur 622..............................................................
11.4.7 Einrichten und Anzeigen von Einstelldaten 625.............................................
11.4.8 Satznummernvergleich und Anhalten 627..................................................
11.4.9 Anzeigen und Einstellen von Laufzeiten und Stückzahlen 629..................................
11.4.10 Anzeigen und Einstellen von Werkstückursprungs--Korrekturwerten 631..........................
11.4.11 Eingabe gemessener Werkstückursprungs--Korrekturwerte 632..................................
11.4.12 Anzeigen und Einstellen von globalen Kundenmakro--Variablen 634.............................
11.4.13 Anzeigen von Bildpunkt--Daten und Muster--Menüs 635......................................
11.4.14 Anzeigen und Einstellen des Software-- Maschinenbedienfelds 637...............................
11.4.15 Anzeigen und Einstellen von Werkzeugstandzeit--Verwaltungsdaten 639..........................
11.5 BILDSCHIRMAUFRUF ÜBER DIE FUNKTIONSTASTE 642..........................
11.5.1 Anzeigen und Einstellen von Parametern 643...............................................
11.5.2 Anzeigen und Einstellen von Steigungsfehler--Kompensationsdaten 645..........................
11.6 ANZEIGE VON PROGRAMMNUMMER, SATZNUMMER, STATUS UND
WARNMELDUNGEN BEIM EINRICHTEN ODER EINGEBEN/AUSGEBEN VON DATEN 648...
11.6.1 Anzeige der Programmnummer und Satznummer 648........................................
11.6.2 Anzeige von Status und Warnmeldungen beim Programmieren und bei der
Eingabe und Ausgabe von Daten 649.....................................................
11.7 BILDSCHIRMAUFRUF ÜBER DIE FUNKTIONSTASTE 651..........................
11.7.1 Bildschirm Meldungs--Archiv 651........................................................
11.8 BILDSCHIRMSCHONER 653.........................................................
11.8.1 Bildschirmschoner aktivieren 653........................................................
11.8.2 Bildschirmschoner automatisch aktivieren 654..............................................
12.GRAFIKFUNKTIONEN 655.................................................
12.1 GRAFIKANZEIGE 656...............................................................
12.2 DYNAMISCHE GRAFIK 661.........................................................
13.HILFE--FUNKTION 662.....................................................
14.BILDSCHIRM--HARDCOPY 667.............................................
i-9
Page 24

Inhaltsverzeichnis
IV. MANUAL GUIDE 0i
1. MANUAL GUIDE 0i 673....................................................
1.1 ÜBERSICHT 674....................................................................
1.2 EINFÜHRUNG 675..................................................................
1.3 VORGÄNGE ZUM ERSTELLEN VON PROGRAMMEN 676...............................
1.3.1 Anlauf 676.........................................................................
1.3.2 Anlauf 677.........................................................................
1.3.3 Erstellen eines neuen Teileprogramms 678.................................................
1.3.4 Entwicklungsunterstützung 680.........................................................
1.3.5 G--Code--Unterstützung 682............................................................
1.3.6 M--Code--Unterstützung 685............................................................
1.4 FESTZYKLUS--BEARBEITUNG 687...................................................
1.4.1 Vorgang 688........................................................................
1.4.2 Daten für jeden Festzyklus 690..........................................................
1.4.2.1 Bearbeitungsart--Satz zum Bohren auf der Drehmaschine 690............................
1.4.2.2 Bearbeitungsart--Satz zur Materialabnahme beim Drehen 691.............................
1.4.2.3 Bearbeitungsart--Satz zum Schlichten beim Drehen 691.................................
1.4.2.4 Kontursatz zur Materialabnahme beim Drehen und zum Schlichten 692.....................
1.4.2.5 Bearbeitungsart--Satz zur Einstech--Schruppbearbeitung beim Drehen 693...................
1.4.2.6 Bearbeitungsart--Satz zur Einstech--Feinbearbeitung beim Drehen 693......................
1.4.2.7 Kontursatz zum Einstechen beim Drehen 694.........................................
1.4.2.8 Bearbeitungsart--Satz zum Gewindeschneiden 695.....................................
1.4.2.9 Kontursatz zum Gewindeschneiden 696.............................................
1.5 KONTURPROGRAMMIERUNG 697...................................................
1.5.1 Vorgänge bei der Konturprogrammierung 698..............................................
1.5.1.1 Aufrufen des Konturprogrammierungs--Bildschirms 698................................
1.5.1.2 Wahl des Verfahrens zum Editieren von Konturprogrammen 699..........................
1.5.1.3 Aufrufen von Konturprogrammen 700..............................................
1.5.1.4 Überprüfen von Konturverläufen 704...............................................
1.5.1.5 NC--Programmkonvertierung 705..................................................
1.5.2 Details zu Konturverlaufsdaten 707.......................................................
1.5.2.1 Bogen 707....................................................................
1.5.2.2 Verrunden 707.................................................................
1.5.2.3 Fasen 708....................................................................
1.5.2.4 Auswählen des Kontur-- Schnittpunktes 708..........................................
1.5.3 Details zur Konturberechnung 709.......................................................
1.5.3.1 Linie 709.....................................................................
1.5.3.2 Bogen 712....................................................................
1.5.3.3 Tangente an zwei Bögen 716......................................................
1.5.3.4 Kreisbogen, der sich schneidende Linien und Bögen berührt 717..........................
1.5.3.5 Kreisbogen, der eine Linie und einen Bogen berührt, die sich nicht schneiden 718.............
1.5.3.6 Kreisbogen, der zwei sich nicht schneidende Bögen berührt 719..........................
1.5.4 Details zur Hilfsberechnung 720.........................................................
1.5.4.1 Allgemeines Werkzeug 720.......................................................
1.5.4.2 Startpunkt 721.................................................................
1.5.4.3 Linie 726.....................................................................
1.5.4.4 Bogen 728....................................................................
B--64114GE/01
i-10
Page 25

B--64114GE/01
1.5.5 Hinweise 730........................................................................
1.5.5.1 Berechnung von Eingabedaten 730.................................................
1.5.5.2 Bei der Konturprogrammierung sollten die Anmerkungen beachtet werden 731...............
1.5.5.3 Beim Makro--Ausführungsprogramm sollten diese Anmerkungen beachtet werden 731.........
1.6 PARAMETER 732...................................................................
1.7 ALARMMELDUNGEN 739...........................................................
Inhaltsverzeichnis
V. WARTUNG
1. BATTERIEWECHSEL 743..................................................
1.1 SPEICHER--DATENSICHERUNGSBATTERIE (3 V DC) 744................................
1.2 BATTERIE FÜR SEPARATE ABSOLUT--DREHGEBER (6 V DC) 748........................
1.3 BATTERIE FÜR IN DEN MOTOR EINGEBAUTE ABSOLUT--DREHGEBER (6 V DC) 749......
ANHANG
A. LOCHSTREIFEN--CODELISTE 753..........................................
B. LISTE DER FUNKTIONEN UND LOCHSTREIFENFORMATE 756...............
C. BEFEHLSWERTBEREICHE 761.............................................
D. NOMOGRAMME 764.......................................................
D.1 GEWINDELÄNGENFEHLER 765......................................................
D.2 EINFACHE BERECHNUNG DES GEWINDELÄNGENFEHLERS 767........................
D.3 WERKZEUGBAHN AN ECKEN 769...................................................
D.4 RADIUSRICHTUNGSFEHLER BEIM KREISVERFAHREN 772.............................
E. STATUS BEIM EINSCHALTEN, LÖSCHEN UND RESET 773...................
F. REFERENZTABELLE ZEICHEN -- CODES 775................................
G. VERZEICHNIS DER ALARMMELDUNGEN 776...............................
i-11
Page 26

Page 27

I. ALLGEMEINES
Page 28
Page 29
B--64114GE/01
ALLGEMEINES
1
Über dieses Handbuch
ALLGEMEINES
Dieses Handbuch umfaßt folgende Kapitel:
I. ALLGEMEINES
Kapitelaufbau, beschriebene Modelle, zugehörige Handbücher und
Hinweise für den Umgang mit diesem Handbuch
II. PROGRAMMIERUNG
Beschreibung der Funktionen: Format für die Programmierung von
Funktionen in NC--Sprache, Eigenschaften und Beschränkungen.
III. BETRIEB
Manueller und automatischer B etrieb der Maschine, Eingabe und
Ausgabe von Daten und Aufbereiten (Editieren) von Programmen
IV. MANUAL GUIDE 0i
Beschreibung des MANUAL GUIDE 0i
V. WARTUNG
Batteriewechsel
ANHANG
Lochstreifencodes, zulässige Dateneingabebereiche und Fehlercodes
1. ALLGEMEINES
Es treffen nicht alle in diesem Handbuch beschriebenen Funktionen auf
alle Produkte zu. Nähere Informationen finden Sie im Handbuch
”BESCHREIBUNGEN” (B--64112EN).
Parameter werden in diesem Handbuch nicht im Detail behandelt.
Ausführliche Informationen über Parameter, die in diesem Handbuch
erwähnt werden, finden Sie im Parameterhandbuch (B--64120EN).
Es werden sämtliche optionalen Funktionen beschrieben. Mit welchen
Optionen Ihr S ystem ausgerüstet ist, entnehmen Si e bitte dem Handbuch
des Maschinenherstellers.
Modelle, auf die sich dieses Handbuch bezieht, und deren Abkürzungen:
Produktbezeichnung Abkürzungen
FANUC Serie 0i-- T C 0i-- T C Serie 0i
3
Page 30
ALLGEMEINES1. ALLGEMEINES
B--64114GE/01
Sonderzeichen
_
D P
I
D ;
Zugehörige Handbücher
der Serie 0i-- C / 0 i Mate--C
Dieses Handbuch verwendet folgende Symbole:
Bezeichnet eine Kombination von Achsen, z.B. X__ Y__ Z (bei der
Programmierung).
Bezeichnet das Ende eines Satzes. Entspricht ISO--Code LF bzw.
EIA--Code CR.
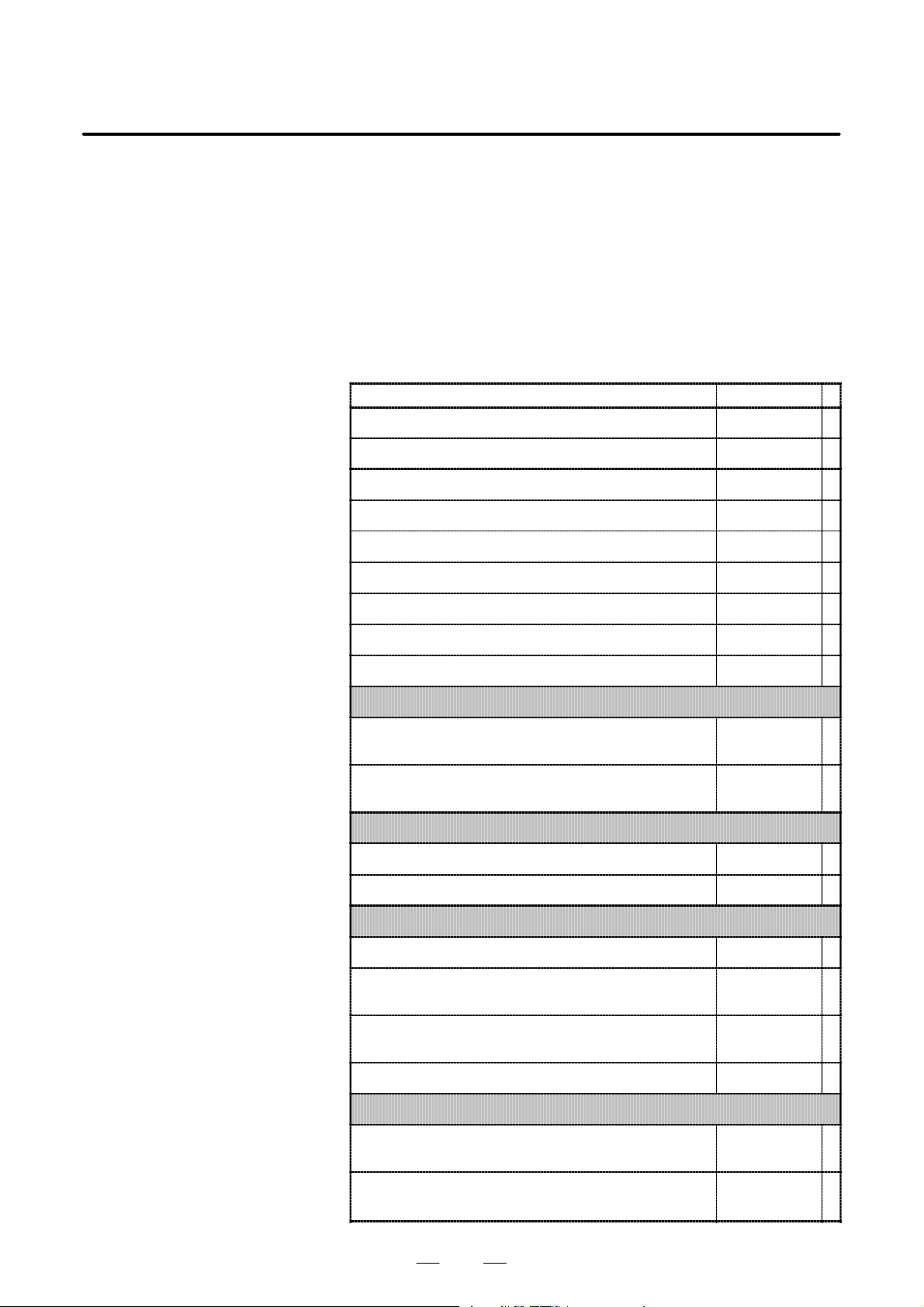
Die folgende Tabelle enthält die zur Serie 0i--C und 0i Mate--C
gehörenden Handbücher. Dieses Handbuch ist durch ein Sternsymbol (*)
gekennzeichnet.
Name des Handbuchs Nummer
DESCRIPTIONS B--64112EN
CONNECTION MANUAL (HARDWARE) B--64113EN
CONNECTION MANUAL (FUNCTION) B--64113EN--1
Serie 0i--TC BEDIENUNGSHANDBUCH B--64114GE *
Series 0i--MC OPERATOR’S MANUAL B--64124EN
Series 0i Mate-- TC OPERATOR’S MANUAL B --64134EN
Series 0i Mate-- MC OPERATOR’S MANUAL B--64144EN
MAINTENANCE MANUAL B--64115EN
PARAMETER MANUAL B--64120EN
PROGRAMMIERHANDBUCH
Macro Compiler/Macro Executor
PROGRAMMING MANUAL
FANUC MACRO COMPILER (For Personal Computer)
PROGRAMMING MANUAL
PMC
PMC Ladder Language PROGRAMMING MANUAL B--61863E
PMC C Language PROGRAMMING MANUAL B--61863E-- 1
Netzwerk
Profibus--DP Board OPERATOR’S MANUAL B--62924EN
Ethernet Board/DATA SERVER Board
OPERATOR’S MANUAL
FAST Ethernet Board/FAST DATA SERVER
OPERATOR’S MANUAL
DeviceNet Board OPERATOR’S MANUAL B--63404EN
B--61803E-- 1
B--66102E
B--63354EN
B--63644EN
OPEN CNC
FANUC OPEN CNC OPERATOR’S MANUAL
(Basic Operation Package (For Windows 95/NT))
FANUC OPEN CNC OPERATOR’S MANUAL
(OPERATION MANAGEMENT PACKAGE)
4
B--62994EN
B--63214EN
Page 31

B--64114GE/01
ALLGEMEINES
1. ALLGEMEINES
Zugehörige Handbücher
der Servomotoren Serie
αis/αi/βis
Die folgende Tabelle enthält die zu den Servomotoren Serie αis/αi/βis
gehörenden Handbücher.
Name des Handbuchs Nummer
FANUC AC SERVO MOTOR αis/αi series
DESCRIPTIONS
FANUC AC SERVO MOTOR βis series DESCRIPTIONS B--65302EN
FANUC AC SERVO MOTOR αis/αi/βisseries
PARAMETER MANUAL
FANUC AC SPINDLE MOTOR αi series DESCRIPTIONS B--65272EN
FANUC AC SPINDLE MOTOR βi series DESCRIPTIONS B--65312EN
FANUC AC SPINDLE MOTOR αi/βi series
PARAMETER MANUAL
FANUC SERVO AMPLIFIER αi series DESCRIPTIONS B--65282EN
FANUC SERVO AMPLIFIER βi series DESCRIPTIONS B--65322EN
FANUC AC SERVO MOTOR αis/αi series
FANUC AC SPINDLE MOTOR αi series
FANUC SERVO AMPLIFIER αi series
MAINTENANCE MANUAL
FANUC AC SERVO MOTOR βi series
FANUC AC SPINDLE MOTOR βi series
FANUC SERVO AMPLIFIER βi series
MAINTENANCE MANUAL
B--65262EN
B--65270EN
B--65280EN
B--65285EN
B--65325EN
5
Page 32

ALLGEMEINES1. ALLGEMEINES
Bearbeitungsvorgang
B--64114GE/01
1.1
ALLGEMEINER
BETRIEBSABLAUF
BEI EINER
CNC --WERKZEUGMASCHINE
Zur Bearbeitung eines Werkstücks mit einer CNC--gesteuerten
Werkzeugmaschine wird zunächst ein Programm zur Steuerung der
Maschine erstellt.
1) Das Programm wird anhand einer Werkstückzeichnung erstellt und
steuert den Betrieb der CNC--Werkzeugmaschine.
Hinweise für das Erstellen von Programmen finden Sie im Kapitel II
”PROGRAMMIERUNG”.
2) Anschließendwird das Programm in die CNC--Steuerung eingelesen.
Nach dem Einrichten der Werkstücke und Werkzeuge an der Maschine
werden die Werkzeuge dann programmgemäß angesteuert und
positioniert, um schließlich die eigentliche Bearbeitung
durchzuführen.
Hinweise zur Bedienung der CNC--Steuerung finden Sie im Kapitel
III ”BETRIEB”.
Werkstück-zeichnung
Teile-programmierung
CNC
WERKZEUGMASCHINE
KAPITEL II ”PROGRAMMIERUNG” KAPITEL III ”BETRIEB”
Vor der eigentlichen Programmierung wird ein Bearbeitungsplan
erstellt.
Bearbeitungsplan
1. Festlegung des Bearbeitungsbereichs der Werkstücke
2. Einrichtverfahren der Werkstücke an der Werkzeugmaschine
3. Bearbeitungsfolge beim einzelnen Bearbeitungsvorgang
4. Bearbeitungswerkzeuge und Bearbeitungsbedingungen
Für jeden Bearbeitungsvorgang wird das Bearbeitungsverfahren
gewählt.
1 2
Bearbeitungsverfahren
1. Bearbeitungsverfahren:
Grob
Mittel
Fein
2. Bearbeitungswerkzeuge
3. Bearbeitungsbedingungen:
Vorschubgeschwindigkeit
Schnittiefe
4. Werkzeugbahn
Planfräsen
Fräsen am
Außendurch-
messer
Einstech-
drehen
3
6
Page 33

B--64114GE/01
ALLGEMEINES
Nuten
Fräsen am
Außen-durchmesser
Werkstück
1. ALLGEMEINES
Plan-fräsen
Für jeden Bearbeitungsvorgang wird ein P rogramm erstellt, das
Werkzeugbahn und Bearbeitungsbedingungen der Werkstückkontur
entsprechend festlegt.
7
Page 34

1.2
HINWEISE FÜR DEN UMGANG MIT DIESEM HANDBUCH
ALLGEMEINES1. ALLGEMEINES
VORSICHT
1 Der Betrieb einer CNC--gesteuerten Werkzeugmaschine ist
nicht nur von der CNC--Einheit abhängig, sondern auch von
der Kombination aus Werkzeugmaschine, Schaltschrank,
Servosystem, CNC--Steuerung, Bedienfeld usw. Die
Beschreibung von Funktionsweise, Programmierung und
Betrieb sämtlicher Kombinationen würde hier zu weit
führen. Die Betrachtung in diesem Handbuch erfolgt daher
generell aus Sicht der CNC--Steuerung. Details einer
bestimmtenCNC--Werkzeugmaschine entnehmen Sie bitte
dem vom Maschinenhersteller mitgelieferten Handbuch,
das im Zweifelsfall Priorität gegenüber diesem Handbuch
hat.
2 Überschriften sind am linken Seitenrand plaziert. Das
Auffinden und der Zugriff auf die benötigten Informationen
werden dadurch wesentlich erleichtert.
3 In dem vorliegenden Handbuch sind so viele gängige
Variationen der Anwendungsmöglichkeiten wie möglich
beschrieben.Es ist dagegen nicht möglich, alle Funktionen,
Optionen und Befehle zu erwähnen, die nicht kombiniert
werden sollten.
Im Zweifelsfall sind in diesem Handbuch nicht abgehandelte Betriebsfunktionen nicht zu kombinieren.
B--64114GE/01
1.3
HINWEIS ZUR DATENSICHERHEIT
VORSICHT
Bearbeitungsprogramme, Parameter, Variablen usw. sind
im internen nichtflüchtigen Speicher der CNC--Einheit
abgelegt. Im allgemeinen geht der Inhalt dieses Speichers
beim Ein-- und Ausschalten der Spannung nicht verloren.
Es kann jedoch vorkommen, daß im diesem Speicher
abgelegte wichtige Daten nach einer Fehlbedienung oder
im Zuge einer Fehlerbehebung gelöscht werden müssen.
Im Sinne einer schnelleren Wiederherstellung empfiehlt es
sich, grundsätzlich Sicherungskopien der verschiedenen
Daten anzufertigen.
8
Page 35

II. PROGRAMMIERUNG
Page 36

Page 37

B--64114GE/01
1
ALLGEMEINES
PROGRAMMIERUNG
1. ALLGEMEINES
11
Page 38

PROGRAMMIERUNG1. ALLGEMEINES
B--64114GE/01
1.1
WERKZEUGBEWEGUNG
ENTLANG DER
WERKSTÜCKKONTUR -INTERPOLATION
Erläuterungen
D Werkzeugbewegung
entlang einer Geraden
Das Werkzeug wird entlang von Geraden und Bögen entsprechend den
Werkstückkonturen bewegt (siehe II--4).
X
Werkzeug
Werkstück
Abb. 1.1 (a) Werkzeugbewegung entlang einer Geraden
parallel zur Z--Achse
Programm
G01 Z...;
Z
D Werkzeugbewegung
entlang eines Bogens
X
Werkzeug
Werkstück
Abb. 1.1 (b) Werkzeugbewegung entlang einer Konuslinie
X
Werkstück
Werkzeug
Programm
G01 X ... Z... ;
Z
Programm
G02X ... Z ... R ... ;
oder
G03X ... Z ... R ... ;
Z
Abb. 1.1 (c) Werkzeugbewegung entlang eines Bogens
12
Page 39

B--64114GE/01
PROGRAMMIERUNG
1. ALLGEMEINES
Interpolation bezeichnet einen Vorgang, bei dem das Werkzeug wie oben
beschrieben entlang einer Geraden oder eines Bogens bewegt wird.
Die Symbole der programmierten Befehle G01, G02, ... heißen
”Wegbedingungen” und geben an, welche Interpolation in der Steuerung
ausgeführt wird.
(a) Werkzeugbewegung
entlang einer Geraden
G01 Z__;
X -- -- Z -- -- -- -- ;
Steuerung
Interpolation
a) Werkzeug-
bewegung
entlang einer
Geraden
b) Werkzeug-
bewegung
entlang eines
Bogens
Abb. 1.1 (d) Interpolationsfunktion
(b) Werkzeugbewegung
entlang eines Bogens
G 0 3 X -- -- Z -- -- ;
X--Achse
Y--Achse
Werkzeugbewegung
ANMERKUNG
Einige Maschinen verfahren nicht das Werkzeug, sondern
das Werkstück (die Spindel); hier wird jedoch davon
ausgegangen, daß das Werkzeug relativ zum Werkstück
bewegt wird.
D Gewindeschneiden
Zum Gewindeschneiden wird die Werkzeugbewegung mit der
Spindeldrehung synchronisiert. Die Funktion ”Gewindeschneiden” wird
im Programm mit G32 befohlen.
X
Werkstück
Abb. 1.1 (e) Schneiden eines zylindrischen Gewindes
13
Werkzeug
Programm
G 3 2 Z -- -- F -- -- ;
Z
Page 40

PROGRAMMIERUNG1. ALLGEMEINES
B--64114GE/01
1.2
VORSCHUBFUNKTION
X
Werkstück
Abb. 1.1 (f) Schneiden eines Kegelgewindes
Werkzeug
Programm
G 3 2 X -- -- Z -- -- F -- -- ;
Z
Das Bewegen des Werkzeug mit einer bestimmten Geschwindigkeit zur
Bearbeitung des Werkstücks heißt Vorschub.
Spannfutter
Werkstück
Werkzeug
Abb. 1.2 Vorschubfunktion
Die Vorschubgeschwindigkeit wird durch entsprechende Zahlenwerte
festgelegt.
Mit dem folgenden Befehl kann zum Beispiel pro Umdrehung des
Werkstücks ein Vorschub des Werkzeugs von 2 mm ausgeführt werden :
F2.0
Die Funktion zur Festlegung der Vorschubgeschwindigkeit wird als
Vorschubfunktion bezeichnet (siehe II--5).
14
Page 41

B--64114GE/01
PROGRAMMIERUNG
1.3
WERKSTÜCKZEICHNUNG UND WERKZEUGBEWEGUNG
1. ALLGEMEINES
1.3.1
Referenzpunkt (maschinenspezifischer Punkt)
Erläuterungen
Eine CNC--Werkzeugmaschine besitzt einen Fixpunkt. Werkzeugwechsel und Programmierung des absoluten Nullpunkts, die an anderer
Stelle behandelt werden, werden normalerweise an diesem Punkt
vorgenommen. Man bezeichnet diese Position als Referenzpunkt.
Werkzeugträger
Spannfutter
Abb. 1.3.1 Referenzpunkt
Das Werkzeug kann auf zwei Arten zum Referenzpunkt gefahren werden:
1. Manuelle Rückkehr zur Referenzposition (siehe III--3.1)
Die Rückkehr zum Referenzpunkt wird manuell per Knopfdruck
ausgelöst.
Referenzpunkt
2. Automatische Rückkehr zum Referenzpunkt (siehe II--6)
Im allgemeinen wird nach dem Einschalten der Netzspannung ein
manuelles Referenzpunktfahren durchgeführt. Zu einem nachfolgenden Werkzeugwechsel kann das Werkzeug dann mit Hilfe der
automatischen Funktion zum Referenzpunkt zurückgefahren
werden.
15
Page 42

1.3.2
Koordinatensystem der
Werkstückzeichnung und
CNC--Koordinatensystem
PROGRAMMIERUNG1. ALLGEMEINES
X
Werkstückzeichnung
B--64114GE/01
X
Programm
Z
Z
Koordinatensystem
CNC
Befehl
X
Werkstück
Erläuterungen
D Koordinatensystem
Z
Werkzeugmaschine
Abb. 1.3.2 (a) Koordinatensystem
Es werden zwei Koordinatensysteme festgelegt(siehe II--7)
1. Koordinatensystem der Teilezeichnung
Das Koordinatensystem befindet sich auf der Werkstückzeichnung.
Als Programmdaten werden die Werte dieses Koordinatensystems
verwendet.
2. CNC--Koordinatensystem
Dieses Koordinatensystem wird am eigentlichen Maschinentisch
errichtet. Dazu wird die Entfernung zwischen aktueller Werkzeugposition und Nullpunkt des einzurichtenden Koordinatensystems
programmiert.
Programm-Nullpunkt
X
230
300
Abb. 1.3.2 (b) CNC--Koordinatensystem
Aktuelle Werkzeugposition
Entfernung zum Nullpunkt des
einzurichtenden Koordinatensystems
Z
16
Page 43

B--64114GE/01
PROGRAMMIERUNG
1. ALLGEMEINES
Das Werkzeug wird i nnerhalb des CNC--Koordinatensystems vom
Steuerungsprogramm, welches unter Zugrundelegung des Koordinatensystems der Werkstückzeichnung eingerichtet wurde, bewegt. Auf diese
Weise erhält das Werkstück die auf der Zeichnung spezifizierte Kontur.
Um daher die in der Zeichnung definierte Werkstückkontur korrekt
schneiden zu können, müssen beide Koordinatensysteme an derselben
Position errichtet werden.
D Einrichten der beiden
Koordinatensysteme an
derselben Position
Das Einrichten zweier Koordinatensysteme an derselben P osition
geschieht in der Regel folgendermaßen:
1. Der Koordinatennullpunkt sitzt auf der S tirnfläche des S pannfutters
X
Werkstück
60
40
150
Abb. 1.3.2 (c) Koordinaten und Maße der Werkstückzeichnung
X
40
Z
Werkstück
Z
Abb. 1.3.2 (d) CNC--Koordinatensystem der Drehmaschine
(in derselben Position wie das Koordinatensystem der
Werkstückzeichnung)
17
Page 44

PROGRAMMIERUNG1. ALLGEMEINES
B--64114GE/01
2. Der Koordinatennullpunkt sitzt auf der Werkstückstirnfläche.
X
Werkstück
60
100
Abb. 1.3.2 (e) Koordinaten und Maße der Werkstückzeichnung
Werkstück
80
30
30
Z
X
Z
Abb. 1.3.2 (f) CNC--Koordinatensystem der Drehmaschine
(in derselben Position wie das Koordinatensystem der
Werkstückzeichnung)
18
Page 45

B--64114GE/01
1.3.3
Maßbefehle für die
Werkzeugbewegung -Absolut--/Inkrementalmaß-Befehle
PROGRAMMIERUNG
1. ALLGEMEINES
Erläuterungen
D Absolutmaß--Befehl
Die Koordinatenwerte in Werkzeug--Verfahrbefehlen können als
Absolutmaßwerte oder als Inkrementalmaßwerte programmiert werden
(siehe II--8.1).
Das Werkzeug wird zu dem Punkt bewegt, der um den programmierten
Betrag vom Nullpunkt des Koordinatenystems entfernt liegt, also zur
Position der Koordinatenwerte.
Werkzeug
X
Werkstück
φ30
70
B
110
A
Z
Befehl für das Verfahren von Punkt A nach Punkt B
G90X30.0Z70.0;
Koordinaten des Punkts B
Abb. 1.3.3 (a) Absolutmaß--Befehl
19
Page 46

PROGRAMMIERUNG1. ALLGEMEINES
B--64114GE/01
D Inkrementalmaß--Befehl
Entfernung von der vorherigen Werkzeugposition zur nächsten
Werkzeugposition
Werkzeug
A
X
φ60
B
Z
φ30
40
Befehl für das Verfahren von Punkt A nach Punkt B
U--30.0W--40.0
Entfernung und Richtung für das
Verfahren entlang der Achsen
D Durchmesser-
programmierung /
Radiusprogrammierung
Abb. 1.3.3 (b) Inkrementalmaß--Befehl
Die Werte für die X--Achse können als Durchmesser-- oder Radiusmaß
festgelegt werden. Durchmesserprogrammierung oder Radiusprogrammierung sind von der Maschine unabhängig.
1. Durchmesserprogrammierung
Bei der Durchmesserprogrammierung dient der in der Zeichnung
angegebene Durchmesserwert als Wert für die X--Achse.
X
B
φ30
A
Z
Werkstück
φ40
60
80
Koordinatenwerte der Punkte A und B
A (30.0, 80.0), B (40.0, 60.0)
Abb. 1.3.3 (c) Durchmesserprogrammierung
20
Page 47

B--64114GE/01
PROGRAMMIERUNG
1. ALLGEMEINES
2. Radiusprogrammierung
Bei der Radiusprogrammierung dient der Abstand von der
Werkstückmitte, also der Radius, als Wert für die X--Achse.
X
B
20
Werkstück
60
80
Koordinatenwerte der Punkte A und B
A (15.0, 80.0), B (20.0, 60.0)
Abb. 1.3.3 (d) Radiusprogrammierung
A
15
Z
1.4
SCHNITTGESCHWINDIGKEIT -SPINDELDREHZAHL-FUNKTION
Beispiele
Die Geschwindigkeit, mit der sich das Werkzeug beim Schneiden relativ
zum Werkstück bewegt, wird als Schnittgeschwindigkeit bezeichnet.
Bei CNC--gesteuerten Maschinen kann die S chnittgeschwindigkeit über
die Spindeldrehzahl in min
Abb. 1.4 Schnittgeschwindigkeit
-- 1
festgelegt werden.
Werkzeug
Werkstück
V: Schnittgeschwindigkeit
vm/min
-- 1
φD
Nmin
<Bearbeitung eines Werkstücks mit einem Durchmesser von
200 mm mit einer Schnittgeschwindigkeit von 300 m/min>
Die Spindeldrehzahl beträgt ungefähr 478 min
-- 1
(errechnet aus
N = 1000v/πD). Demnach muß der Befehl lauten:
S478 ;
Befehle, die sich auf die Spindeldrehzahl beziehen, werden in der
Spindeldrehzahl--Funktion zusammengefaßt (siehe II--9).
Die Schnittgeschwindigkeit v (m/min) kann auch unmittelbar über einen
Geschwindigkeitswert festgelegt werden. Ändert sich der Werkstückdurchmesser, paßt die CNC die Spindeldrehzahl so an, daß die
Schnittgeschwindigkeit konstant bleibt. Diese Funktion heißt Konstante
Schnittgeschwindigkeits--Steuerung (siehe II--9.3).
21
Page 48

PROGRAMMIERUNG1. ALLGEMEINES
B--64114GE/01
1.5
WERKZEUGAUSWAHL
FÜR DIE
VERSCHIEDENEN
BEARBEITUNGSVORGÄNGE -WERKZEUGFUNKTION
Beispiele
Für Bearbeitungsvorgänge wie Vollbohren, Gewindebohren, Aufbohren,
Fräsen usw. muß jeweils das passende Werkzeugangesteuert werden. Die
Werkzeugansteuerung erfolgt durch Zuordnung von Nummern zu den
Werkzeugen und Angabe der Nummern im Programm.
Werkzeugnummer
01
06
02 05
04
03
Abb. 1.5 Werkzeuge für diverse Bearbeitungsvorgänge
Werkzeugträger
<Die Nr. 01 wurde einem Schruppwerkzeug zugewiesen>
Befindetsich das Werkzeug im Werkzeugträgeran der Position 01, erfolgt
der Aufruf dieses Werkzeugs durch die Eingabe T0101.
Dieser Vorgang wird als Werkzeugfunktion bezeichnet (siehe II--10).
1.6
MASCHINENBEDIENBEFEHL -ZUSATZFUNKTION
Beim Start des eigentlichen Bearbeitungsvorgangs muß die Spindel
drehen, und es muß Kühlmittel zugeführt werden. Dazu müssen der
Spindelmotor und das Kühlmittelventil gesteuert werden (siehe II --11).
Kühlmittel
ein/aus
Spannfutter auf/zu
Werkstück
Abb. 1.6 Maschinenbedienbefehl
Spindelantrieb im US
Die Funktion zum Ein-- und Ausschalten der verschiedener Maschinenkomponenten wird ”Zusatzfunktion” genannt. Die Programmierung
erfolgt im allgemeinen über einen M--Code.
Wirdz.B. M03 programmiert, dreht sich die Spindel mit der angegebenen
Drehzahl in Uhrzeigerrichtung.
22
Page 49

B--64114GE/01
PROGRAMMIERUNG
1. ALLGEMEINES
1.7
PROGRAMMKONFIGURATION
Bei einem Programm handelt es sich um eine in die CNC eingegebene
Gruppe von Befehlen für den Maschinenbetrieb. Mittels dieser Befehle
wird das Werkzeug entlang einer Geraden oder eines Bogens bewegt und
der Spindelmotor ein-- und ausgeschaltet.
Im Programm werden die Befehle in der Reihenfolge der tatsächlichen
Werkzeugbewegungen angegeben.
Satz
Programm
Satz
Satz
Satz
⋅
⋅
⋅
⋅
Satz
Abfolge der
Werkzeugbewegungen
Abb. 1.7 (a) Programmkonfiguration
Die Befehlsgruppe für jeden einzelnen Bearbeitungsschritt ist der Satz.
Das Programm besteht also aus einer Gruppe von Sätzen für eine Reihe
von Bearbeitungsvorgängen. Jeder Satz erhält eine eigene Satznummer,
jedes Programm eine Programmnummer (siehe II--12).
23
Page 50

PROGRAMMIERUNG1. ALLGEMEINES
B--64114GE/01
Erläuterungen
D Satz
Satz und Programm sind wie folgt aufgebaut:
1Satz
N fffff Gff Xff.f Zfff.f M ff S ff T ff ;
Satznummer
Wegbedingung
Maß--Befehl Zusatz-
funktion
Abb. 1.7 (b) Satzkonfiguration
Spindelfunktion
Werkzeugfunktion
Satzende
Ein Satz beginnt mit einer Satznummer zur Kennzeichnung des Satzes
und endet mit einem Satzende--Code.
In diesem Handbuch ist der Satzende--Code durch ein Semikolon (;)
angegeben. (LF im ISO-- Code und CR im EIA--Code).
Der Inhalt des Maß--Befehls richtet sich nach der Wegbedingung. In
diesem Handbuch entspricht IP_ einem Maß--Befehl.
D Programm
;
Offff;
⋅
⋅
⋅
M30 ;
Abb. 1.7 (c) Programmkonfiguration
Programmnummer
Satz
Satz
Satz
⋅
⋅
⋅
Programmende
Normalerweise wird hinter dem Satzende--Code (;) am Programmanfang
eine Programmnummer angegeben und das Programm mit einem
Programmende--Code (M02 oder M30) abgeschlossen.
24
Page 51

B--64114GE/01
PROGRAMMIERUNG
1. ALLGEMEINES
D Hauptprogramm und
Unterprogramm
Kommt ein identisches Bearbeitungsmuster mehrfach innerhalb
desselben Programms vor, wird für dieses Muster ein eigenes Programm
erstellt. Hierbei handelt es sich dann um ein Unterprogramm. Das
Ausgangsprogramm gilt als das Hauptprogramm. Taucht während der
Ausführung des Hauptprogramms ein Ausführungsbefehl für ein
Unterprogramm auf, werden die Befehle des Unterprogramms
ausgeführt. Nach Ausführung des Unterprogrammes kehrt die Steuerung
wieder zum Hauptprogramm zurück.
Hauptprogramm
⋅
⋅
M98P1001
⋅
⋅
⋅
M98P1002
⋅
⋅
⋅
M98P1001
⋅
Unterprogramm Nr. 1
O1001
M99
Unterprogramm Nr. 2
O1002
Programm für
Bohrung #1
Programm für
Bohrung #2
⋅
⋅
M99
25
Page 52

1.8
KOMPENSATIONSFUNKTIONEN
Erläuterungen
PROGRAMMIERUNG1. ALLGEMEINES
B--64114GE/01
D Bearbeitung mit dem
Werkzeugende -Funktion ”Werkzeuglängenkompensation”
In der Regel werden für die Bearbeitung eines Werkstückes mehrere
Werkzeuge gebraucht, die häufig unterschiedlich lang sind. Das
Abändern des Programms auf jede neue Werkzeuglängeist sehrmühsam.
Daher sollten die Längen der einzelnen Werkzeuge vorab gemessen
werden. Durch Einstellen des Unterschieds zwischen der Länge des
Standard--Werkzeugs und der tatsächlichen Länge des jeweiligen
Werkzeugs in der CNC (Anzeigenund Einstellen von Daten: siehe III--11)
kann die Bearbeitung ohne Programmänderung durchgeführt werden,
auch wenn das Werkzeug gewechselt wird. Es handelt sich um die
Funktion ”Werkzeuglängenkompensation”.
Feinbearbeitung
Nuten
Gewinde-schneiden
Werkstück
GrobStandardwerkzeug
Abb. 1.8 Werkzeugkorrektur
bearbei-
tung
26
Page 53

B--64114GE/01
PROGRAMMIERUNG
1. ALLGEMEINES
1.9
WERKZEUGVERFAHRBEREICH
An den Enden der Maschinenachsen sind Endschalter installiert, die
verhindern, daß Werkzeuge über das Achsenende hinaus bewegt werden.
Der zulässige Bewegungsbereich von Werkzeugen nennt sich
Verfahrbereich. Neben den maschinenseitigen Endschaltern kann auch in
der Steuerung ein Bereich definiert werden, in den die Werkzeuge nicht
hineinbewegt werden dürfen.
Tisch
Motor
Endschalter
Maschinennullpunkt
Entfernungen eingeben
In diesen Bereich dürfen die Werkzeuge nicht gelangen. Der Bereich
wird durch gespeicherte Daten bzw. ein Programm definiert.
Neben dem durch Endschalter begrenzten Verfahrbereich kann der
Bediener auch durch entsprechende Programmierung bzw. Speicherung
von Daten einen Bereich definieren, in den die Werkzeuge nicht
hineinbewegt werden dürfen. Diese Funktion heißt Verfahrbereichskontrolle, Endlagenbegrenzung oder ”Software--Endschalter”
(siehe III--6.3).
27
Page 54

2
PROGRAMMIERUNG2. GESTEUERTE ACHSEN
GESTEUERTE ACHSEN
B--64114GE/01
28
Page 55

B--64114GE/01
2.1
GESTEUERTE ACHSEN
PROGRAMMIERUNG
Element 0i-- T C
Anzahl steuerbarer Grundachsen 2 Achsen
SteuerbareAchsen einschl. Zusatzachsen Max. 4 Achsen
Anzahl gleichzeitig steuerbarer
Grundachsen
Gleichzeitig steuerbare Achsen
einschl. Zusatzachsen
2. GESTEUERTE ACHSEN
(in Cs--Achse enthalten)
2 Achsen
Max. 4 Achsen
ANMERKUNG
Die Anzahl gleichzeitig steuerbarer Achsen für manuellen
Tippvorschub, manuelles Referenzpunktfahren und manuellen Eilgang beträgt 1 oder 3 (1, wenn das Bit 0 (JAX) von
Parameter1002 auf 0 gesetzt ist, und 3, wenn dieses Bit auf
1 gesetzt ist).
2.2
ACHSENBEZEICHNUNG
Beschränkungen
D Ersatzbezeichnung für
Achsen
D Doppelter Achsenname
Zwei Grundachsen werden immer mit X und Z bezeichnet; die
Bezeichnungen von Zusatzachsen können nachstehend über den
Parameter Nr.1020 optional ausgewählt werden.
D G--Code--System A: Y, A, B und C
D G--Code--System B/C: Y, U, V, W, A, B und C
Jede Achsenbezeichnung wird entsprechend Parameter Nr. 1020
festgelegt. Gibt der Parameter 0 oder eine andere Bezeichnung als einen
der neun Buchstaben an, wird als Achsenbezeichnung automatisch eine
Zahl von 1 bis 4 erstellt.
Bei Verwendung eines automatisch erstellten Ersatznamens (1 bis 4)
kann das System nicht im MEM-- oder MDI--Modus arbeiten.
Wird im Parameter ein Achsenname mehrfach angegeben, ist nur die
Achse, welcher dieser Name zuerst zugewiesen wurde, betriebsbereit.
ANMERKUNG
1 Im G --Code--System A können U, V und W nicht als Achsen-
namen benutzt werden (bei max. sechs steuerbaren
Achsen), da diese Buchstaben als Inkrementalmaß-Befehle für X, Y und Z gelten. U, V und W als Achsenbezeichnungen sind nur im G--Code--System B oder C
möglich. Ähnlich gilt der Buchstabe H als Inkrementalmaß-Befehl für C, d.h. es können keine Inkrementalmaß-Befehle gegeben werden, wenn A oder B als Achsenbezeichnung gewählt wird.
2 Bei G76 (mehrgängiges Gewinde) gilt die Adresse A in
einem Satz nicht als Befehl für die Achse A, sondern
bezeichnet vielmehr den Schneidenwinkel.
Werden C oder A als Achsennamen verwendet, können
diese Buchstaben nicht als Befehl für den Winkel einer
Geraden beim Anfasen bzw. in der Direkten Zeichnungsmaßprogrammierung benutzt werden. C und A sollten also
entsprechend dem Bit 4 (CCR) von Parameter Nr. 3405
benutzt werden.
29
Page 56

PROGRAMMIERUNG2. GESTEUERTE ACHSEN
metri
-
Zoll-
-
metri
-
Zoll-
-
B--64114GE/01
2.3
INKREMENTALMASSSYSTEM
Das Inkrementalmaßsystem besteht aus dem kleinsten Eingabe-Inkrement (für die Eingabe) und dem kleinsten Befehls--Inkrement (für
die Ausgabe). Das kleinste Eingabe--Inkrement stellt den kleinsten Wert
dar, der als Verfahrbetrag programmiert werden kann. Das kleinste
Befehls--Inkrement ist das kleinste Wegelement, um den das Werkzeug an
der Maschine verfahren werden kann. Beide Inkremente werden in mm,
Zoll oder Grad angegeben.
Beim Inkrementalmaßsystem wird unterschieden nach IS--B und IS--C
(Tabellen 2.3 (a) und 2.3 (b)). Wählen Sie durch Setzen von Bit 1 (ISC)
von Parameter Nr. 1004, welches Inkrementalmaßsystem verwendet
werdensoll. Die Einstellung von Bit 1 (ISC) von ParameterNr.1004 wird
auf alle Achsen angewendet. Wenn beispielsweise das System IS--C
ausgewählt ist, gilt IS--C als Inkrementalmaßsystem für alle Achsen.
Tabelle 2.3 (a) Inkrementalmaßsystem IS --B
Maschine mit
metrischem
System
Maschine mit
Zoll-System
Eingabe
in mm
Eingabe
in Zoll
Eingabe
in mm
Eingabe
in Zoll
Kleinstes
Eingabe--Inkrement
0,001 mm (Durchmesser) 0,0005 mm
0,001 mm (Radius) 0,001 mm
0,001 Grad 0,001 Grad
0,0001 Zoll (Durchmesser) 0,0005 mm
0,0001 Zoll (Radius) 0,001 mm
0,001 Grad 0,001 Grad
0,001 mm (Durchmesser) 0,00005 Zoll
0,001 mm (Radius) 0,0001 Zoll
0,001 Grad 0,001 Grad
0,0001 Zoll (Durchmesser) 0,00005 Zoll
0,0001 Zoll (Radius) 0,0001 Zoll
0,001 Grad 0,001 Grad
Kleinstes
Befehls--Inkrement
Tabelle 2.3 (b) Inkrementalmaßsystem IS --C
Maschine mit
metrischem
System
Maschine mit
Zoll-System
Eingabe
in mm
Eingabe
in Zoll
Eingabe
in mm
Eingabe
in Zoll
Kleinstes
Eingabe--Inkrement
0,0001 mm (Durchmesser) 0,00005 mm
0,0001 mm (Radius) 0,0001 mm
0,0001 Grad 0,0001 Grad
0,00001 Zoll (Durchmesser) 0,00005 mm
0,00001 Zoll (Radius) 0,0001 mm
0,0001 Grad 0,0001 Grad
0,0001 mm (Durchmesser) 0,000005 Zoll
0,0001 mm (Radius) 0,00001 Zoll
0,0001 Grad 0,0001 Grad
0,00001 Zoll (Durchmesser) 0,000005 Zoll
0,00001 Zoll (Radius) 0,00001 Zoll
0,0001 Grad 0,0001 Grad
Kleinstes
Befehls--Inkrement
30
Page 57

B--64114GE/01
I
S--B
I
S--C
PROGRAMMIERUNG
2. GESTEUERTE ACHSEN
Ob das kleinste Befehls--Inkrement in Millimetern oder in Zoll gemessen
wird, richtet sich nach der Maschine. Die Einstellung erfolgt im
Parameter INM (Nr. 1001#0). Das kleinste B efehls--Inkrement kann mit
einem G--Code (G20 oder G21) oder einem Einstellparameter zwischen
Eingabe in Millimeter und Eingabe in Zoll umgeschaltet werden.
Achsenmit metrischem System und Achsen mit Zollsystem können nicht
kombiniert werden. Außerdem sind manche Funktionen wie
Kreisinterpolation und Schneidenradiuskompensation nicht unter
Achsen mit unterschiedlichenMaßeinheiten ausführbar.Hinweise zu den
Einheiten entnehmen S i e bitte dem Handbuch des Maschinenherstellers.
2.4
MAXIMALER VERFAHRWEG
Von der CNC kontrollierter maximaler Verfahrweg:
Maximaler V erfahrweg = Kleinstes Befehls--Inkrement
Tabelle 2.4 Maximale Verfahrwege
Inkrementalmaßsystem
Maschine mit
metrischemSystem
Maschine mit
Zoll--System
Maschine mit
metrischemSystem
Maschine mit
Zoll--System
Maximale Verfahrwege
99999.999 mm
99999.999 Grad
9999.9999 Zoll
99999.999 Grad
9999.9999 mm
9999.9999 Grad
999.99999 Zoll
9999.9999 Grad
( 99999999)
ANMERKUNG
1 Bei den Einheiten der Tabelle handelt es sich um den
Durchmesser bei Durchmesserprogrammierung bzw. den
Radius bei Radiusprogrammierung.
2 Ein Befehl, bei dem eine der Verfahrgrenzen überschritten
wird, kann nicht programmiert werden.
3 Der tatsächliche Verfahrweg ist abhängig von der
Werkzeugmaschine.
31
Page 58

3
PROGRAMMIERUNG3. WEGBEDINGUNG (G--FUNKTION)
WEGBEDINGUNG (G--FUNKTION)
Eine Zahl hinter der Adresse G legt die B edeutung des Befehls für den
betreffenden Satz fest.
G--Codes lassen sich in die folgenden zwei Typen unterscheiden.
Typ Bedeutung
Einfach wirksamer G-- Code Der G-- Code ist nur wirksam in dem Satz, in dem
er steht.
Modaler G --Code Der G--Code bleibt solange wirksam, bis ein an-
derer G--Code derselben Gruppe programmiert
wird.
Beispiel:
G01 und G00 sind modale G--Codes.
B--64114GE/01
G01X_;
Z_ ;
X_ ;
G00Z_;
Es gibt drei G-- Code--Systeme : A, B und C (Tabelle 3). Wählen Sie
mittels der Bits 6 (GSB) und 7 (GSC) von Parameter 3401 ein
G-- Code--S ystem. In diesem Handbuch wird generell die Verwendungdes
G-- Code--Systems A beschrieben, es sei denn, das beschriebene Element
kann nur G--Code--System B oder C verwenden. ln diesen Fällen wird die
Verwendung von G--Code--System B oder C beschrieben.
G01 ist in diesem Bereich wirksam.
32
Page 59

B--64114GE/01
PROGRAMMIERUNG
3. WEGBEDINGUNG (G--FUNKTION)
Erläuterungen
1. Wird beim Einschalten der Spannung oder nach einem Reset der
Löschzustand hergestellt (siehe Bit 6 (CLR ) von Parameter 3402),
ändern sich die modalen G--Codes wie folgt:
(1)Es werden die in der Tabelle 3 mit
gekennzeichneten G--Codes
aktiv.
(2)G20 und G21 bleiben unverändert, wenn das System beim
Einschalten der Spannung und nach einem Reset in den
Löschzustand versetzt wird.
(3)Ob beim Einschalten der Spannung G22 oder G23 wirksam ist,
wird mit dem Bit 7 von Parameter Nr. 3402 festgelegt. G22 bzw.
G23 bleiben unverändert, wenn durch ein Reset der Löschzustand
hergestellt wird.
(4)In Bit 0 (G01) von Parameter 3402 wird eingestellt, ob der Code
G00 oder G01 wirksam ist.
(5)Im G--Code--System B oder C bestimmt die Einstellung von Bit 3
(G91)von Parameter3402, welcher Code (G90 oder G91) wirksam
ist.
2. G--C odes der Gruppe 00, außer G10 und G11, sind einfach wirksame
G--Codes.
3. Bei Angabe eines nicht in der Liste aufgeführten G--Codes bzw. eines
G--Codes ohne zugehörige Option wird P/S--Alarm (Nr. 010)
ausgelöst.
4. In einem Satz können mehrere G--Codes spezifiziert werden, wenn
diese unterschiedlichen Gruppen angehören.
Werden mehrere G--Codes derselben Gruppe im einem Satz
angegeben, ist immer nur der zuletzt prorammierte G--Code wirksam.
5. Ein G--Code der Gruppe 01 in einem Festzyklus bewirkt, daß der
Zyklus abgebrochen wird und hat in diesem Fall denselben Effekt wie
G80. G--Codes für feste Arbeitszyklen haben keinen Einfluß auf
G--Codes aus der Gruppe 01.
6. B ei Verwendung des G--Code--Systems A wird die Absolut-- oder
Inkrementalmaßprogrammierung nicht über einen G--Code
(G90/G91) festgelegt, sondern über ein Adreßwort (X/U, Z/W, C/H,
Y/V, siehe II--8.1). Wenndas G--Code--System A in einem Bohrzyklus
benutzt wird, steht nur die Ausgangsebene als Rückzugspunkt zur
Verfügung.
7. G--Codes werden nach Gruppennummern angezeigt.
33
Page 60

PROGRAMMIERUNG3. WEGBEDINGUNG (G--FUNKTION)
G
Funkti
0
1
0
9
0
8
2
0
Tabelle 3 G--Code--Liste (1/3)
G--Code
A B C
G00 G00 G00
G01 G01 G01
G02 G02 G02
G03 G03 G03 Kreisinterpolation gegen US oder Helix--Interpolation gegen US
G04 G04 G04 Verweilen
G07.1
(G107)
G08 G08 G08
G10 G10 G10 Dateneingabe mittels Programm
G11 G11 G11 Modus ”Dateneingabe mittels Programm” Ende
G12.1
(G112)
G13.1
(G113)
G17 G17 G17 Auswahl Ebene XpYp
G18 G18 G18
G19 G19 G19 Auswahl Ebene YpZp
G20 G20 G70
G21 G21 G71
G22 G22 G22
G23 G23 G23
G25 G25 G25
G26 G26 G26
G27 G27 G27 Referenzpunkt prüfen
G28 G28 G28
G30 G30 G30
G31 G31 G31 Funktion ”Restweg löschen”
G32 G33 G33
G34 G34 G34
G36 G36 G36
G37 G37 G37
G40 G40 G40
G41 G41 G41 07 Schneidenradiuskompensation links
G42 G42 G42 Schneidenradiuskompensation rechts
G50 G92 G92
G50.3 G92.1 G92.1
G50.2
(G250)
G51.2
(G251)
G07.1
(G107)
G12.1
(G112)
G13.1
(G113)
G50.2
(G250)
G51.2
(G251)
G07.1
(G107)
G12.1
(G112)
G13.1
(G113)
G50.2
(G250)
G51.2
(G251)
ruppe
Positionierung (Eilgang)
Lineare Interpolation (Schnittvorschub)
Kreisinterpolation im US oder Helix--Interpolation im US
Zylindrische Interpolation
00
21
16 Auswahl Ebene ZpXp
06
00
01
00
00
Erweiterte Look--Ahead -- Steuerung
Modus ”Polarkoordinaten--Interpolation”
Modus ”Polarkoordinaten--Interpolation” Ende
Eingabe in Zoll
Eingabe in mm
Funktion ”Softendlagen--Überwachung” Ein
Funktion ”Softendlagen--Überwachung” Aus
Spindeldrehzahlüberwachung Aus
Spindeldrehzahlüberwachung Ein
Anfahren des Referenzpunkts
Anfahren des 2., 3. und 4. Referenzpunkts
Gewindeschneiden
Gewindeschneiden mit variabler Steigung
Automatische Werkzeugkompensation X
Automatische Werkzeugkompensation Z
Schneidenradiuskompensation Ende
Koordinatensystem oder max. Spindeldrehzahl einstellen
Werkstück--Koordinatensystem--Voreinstellung
Polygonales Drehen Ende
Polygonales Drehen
on
B--64114GE/01
34
Page 61

B--64114GE/01
G
Funkti
1
4
1
0
A B C
G52 G52 G52
G53 G53 G53
G54 G54 G54
G55 G55 G55 Auswahl Werkstück--Koordinatensystem 2
G56 G56 G56
G57 G57 G57
G58 G58 G58 Auswahl Werkstück--Koordinatensystem 5
G59 G59 G59 Auswahl Werkstück--Koordinatensystem 6
G65 G65 G65 00 Makroaufruf
G66 G66 G66
G67 G67 G67
G68 G68 G68
G69 G69 G69
G70 G70 G72 Feinbearbeitungszyklus
G71 G71 G73
G72 G72 G74
G73 G73 G75 Musterwiederholung
G74 G74 G76 Bohren mit Späne -- Entfernung in Z--Richtung
G75 G75 G77 Außendurchmesser/Innendurchmesser-- Bohren
G76 G76 G78 Zyklus für Mehrfach--Gewindeschneiden
G71 G71 G72 Zeilenschleifzyklus (für Schleifmaschine)
G--Code
PROGRAMMIERUNG
Tabelle 3 G--Code--Liste (2/3)
ruppe
00
12
04
00
Bestimmung des lokalen Koordinatensystems
Errichten des Maschinen--Koordinatensystems
Auswahl Werkstück--Koordinatensystem 1
Auswahl Werkstück--Koordinatensystem 3
Auswahl Werkstück--Koordinatensystem 4
Modaler Makroaufruf
Modaler Makroaufruf Ende
Achsenspiegelung für Doppelrevolverköpfe EIN
Achsenspiegelung für Doppelrevolverköpfe AUS
Materialabnahme beim Drehen (außen)
Materialabnahme beim Plandrehen (innen)
3. WEGBEDINGUNG (G--FUNKTION)
on
G72 G72 G73
G73 G73 G74 Schwingschleifzyklus (für Schleifmaschine)
G74 G74 G75
G80 G80 G80
G83 G83 G83 Tiefloch--Bohrzyklus in Z--Richtung
G84 G84 G84
G86 G86 G86
G87 G87 G87 Tiefloch--Bohrzyklus in X--Richtung
G88 G88 G88 Gewindebohrzyklus in X-- Richtung
G89 G89 G89 Bohrzyklus in X --Richtung
G90 G77 G20 Zyklus für Außendurchmesser/Innendurchmesser--Bearbeitung
G92 G78 G21
G94 G79 G24 Zyklus für Stirnflächendrehen
G96 G96 G96
G97 G97 G97
01
01
02
Direkter Konstantmaß--Zeilenschleifzyklus
(für Schleifmaschine)
Direkter Konstantmaß--Schwingschleifzyklus
(für Schleifmaschine)
Bohr--Festzyklus Ende
Gewindebohrzyklus in Z--Richtung
Bohrzyklus in Z--Richtung
Gewindeschneidzyklus
Konstante Schnittgeschwindigkeits--Steuerung
Konstante Schnittgeschwindigkeits--Steuerung Ende
35
Page 62

G--Code
G
Funkti
0
3
A B C
G98 G94 G94
G99
−
− G91 G91
− G98 G98
− G99 G99
G95 G95
G90 G90
PROGRAMMIERUNG3. WEGBEDINGUNG (G--FUNKTION)
Tabelle 3 G--Code--Liste (3/3)
ruppe
05
11
Vorschub pro Minute
Vorschub pro Umdrehung
Absolutmaßprogrammierung
Inkrementalmaßprogrammierung
Rückkehr zur Ausgangsebene
Rückkehr zur Ebene mit dem Punkt R
B--64114GE/01
on
36
Page 63

B--64114GE/01
4
PROGRAMMIERUNG
INTERPOLATIONSFUNKTIONEN
4. INTERPOLATIONSFUNKTIONEN
37
Page 64

PROGRAMMIERUNG4. INTERPOLATIONSFUNKTIONEN
B--64114GE/01
4.1
POSITIONIERUNG (G00)
Format
Erläuterungen
Der Befehl G00 bewegt ein Werkzeug im Eilgang an die mit einem
Absolut-- oder Inkrementalmaß--Befehl festgelegte Position im
Werkstück--Koordinatensystem.
In einem Absolutmaß--Befehl werden die Koordinaten des Endpunkts
programmiert.
In einem Inkrementalmaß--Befehl wird die Entfernung, um die das
Werkzeug bewegt wird, programmiert.
G00IP_;
IP_: Bei einem Absolutmaß--Befehl die Koordinaten der
Endposition, bei einem Inkrementalmaß--Befehl die
Entfernung, um die das Werkzeug bewegt wird
Je nach Einstellung des Bits 1 (LRP) von Parameter 1401 kann eine der
folgenden Werkzeugbahnen gewählt werden
D Positionierung durch nichtlineare Interpolation
Das Werkzeug wird im Eilgang achsenweise positioniert. Die
Werkzeugbahn ist normalerweise gerade.
D Positionierung durch lineare Interpolation
Die Werkzeugbahn ist gleich der bei linearer Interpolation (G01). Das
Werkzeug wird innerhalb der kürzestmöglichen Zeit mit einer
Geschwindigkeit, die die Eilganggeschwindigkeit in den einzelnen
Achsen nicht überschreiten darf, positioniert. Die Werkzeugweg ist
anders als bei Linearer Interpolation (G01).
Positionierung durch lineare Interpolation
Endposition
Positionierung durch nichtlineare Interpolation
Startposition
Die Eilganggeschwindigkeit in G00 wird vom Werkzeugmaschinenhersteller unabhängig für jede Achse im Parameter Nr. 1420 eingerichtet.
In dem mit G00 aktivierten Positioniermodus wird das Werkzeug am
Satzanfang auf eine vordefinierte Geschwindigkeit beschleunigt und am
Ende des Satzes wieder abgebremst. Nach Überprüfung der korrekten
Position wird der nächste Satz ausgeführt.
“Korrekte Position” bedeutet, dass der Vorschubmotor innerhalb des
vorgeschriebenen Bereichs steht.
Dieser Bereich wird vom Werkzeugmaschinenhersteller mit dem
Parameter Nr. 1826 festgelegt.
38
Page 65

B--64114GE/01
Beispiele
PROGRAMMIERUNG
X
56.0
4. INTERPOLATIONSFUNKTIONEN
30.5
30.0
Beschränkungen
φ 40.0
Z
< Radiusprogrammierung >
G00X40.0Z56.0 ; (Absolutmaß--Befehl)
oder
G00U--60.0W--30.5 ; (Inkrementalmaß--Befehl)
Die Eilganggeschwindigkeit kann nicht mit der Adresse F festgelegt
werden.
Auch wenn Positionierung durch lineare Interpolation angegeben ist,
wird die Positionierung in den folgend genannten Fällen nichtlinear
ausgeführt. Es ist hier darauf zu achten, daß Werkzeug und Werkstück
nicht kollidieren.
D G28 gibt eine Positionierung zwischen der Referenzposition und
Zwischenpositionen an.
D G53
39
Page 66

PROGRAMMIERUNG4. INTERPOLATIONSFUNKTIONEN
B--64114GE/01
4.2
LINEARE INTERPOLATION (G01)
Format
Erläuterungen
Die Werkzeuge können entlang einer Linie bewegt werden.
G01 IP_F_;
IP_: Bei einem Absolutmaß--Befehl die Koordinaten der
Endposition, bei einem Inkrementalmaß--Befehl die
Entfernung, um die das Werkzeug bewegt wird
F_: Geschwindigkeit des Werkzeugvorschubs
(Vorschubgeschwindigkeit)
Das Werkzeug verfährt mit der bei F spezifizierten Vorschubgeschwindigkeit zur angegebenen Position.
Die bei F angegebene Vorschubgeschwindigkeit bleibt solange wirksam,
bis ein neuer Wert programmiert wird. Sie muss nicht für jeden Satz
einzeln eingegeben werden.
Die über F--Code programmierte Vorschubgeschwindigkeit wird entlang
der Werkzeugbahn gemessen. Ohne Programmierung eines F--Codes
wird von einer Vorschubgeschwindigkeit gleich Null ausgegangen.
Im Modus ”Vorschub pro Minute” unter gleichzeitiger Steuerung von
zwei Achsen errechnet sich die Vorschubgeschwindigkeit entlang der
einzelnen Achsen wie folgt :
Beispiele
D Lineare Interpolation
G01ααββ
< Durchmesserprogrammierung >
G01X40.0Z20.1F20 ; (Absolutmaß--Befehl)
oder
G01U20.0W--25.9F20 ; (Inkrementalmaß--Befehl)
Ff ;
Vorschubgeschwindigkeit in α--Achsenrichtung:
Vorschubgeschwindigkeit in β--Achsenrichtung:
2
L = α
+ β
2
X
46.0
20.1
Endpunkt
φ 40.0
Startpunkt
Fα =
F
=
β
φ20.0
α
× f
L
β
× f
L
Z
40
Page 67

B--64114GE/01
PROGRAMMIERUNG
4. INTERPOLATIONSFUNKTIONEN
4.3
KREISINTERPOLATION (G02, G03)
Format
Folgender Befehl bewegt das Werkzeug entlang eines Kreisbogens:
BogeninderXpYp--Ebene
G17
G02
Xp_Yp_
G03
Bogen in der ZpXp--Ebene
G18
Bogen in der YpZp--Ebene
G19
G02
G03
G02
G03
Xp_Zp_
Yp_ Zp_
I_ J_
R_
I_K_
R_
J_ K_
R_
F_
F_
F_
Tabelle 4.3 Beschreibung des Befehlsformats
Befehl Beschreibung
G17 Programmierung eines Kreisbogens in der XpYp--Ebene
G18 Programmierung eines Kreisbogens in der ZpXp -- Ebene
G19 Programmierung eines Kreisbogens in der YpZp--Ebene
G02 Kreisinterpolation in Uhrzeigerrichtung (US)
G03 Kreisinterpolation entgegen Uhrzeigerrichtung (gegen US)
X
p_
Y
p_
Z
p_
I_ Xp--Achsenabstand zwischen Startpunkt und Mittelpunkt eines
J_ Yp--Achsenabstand zwischen Startpunkt und Mittelpunkt eines
Befehlswerte der X -- Achse oder der zugehörigen Parallelachse
(festgelegt im Parameter Nr. 1022)
Befehlswerte der Y -- Achse oder der zugehörigen Parallelachse
(festgelegt im Parameter Nr. 1022)
Befehlswerte der Z --Achse oder der zugehörigen Parallelachse
(festgelegt im Parameter Nr. 1022)
Bogens mit Vorzeichen, Radiuswert
Bogens mit Vorzeichen, Radiuswert
k_ Zp--Achsenabstand zwischen Startpunkt und Mittelpunkt eines
Bogens mit Vorzeichen, Radiuswert
R_ Bogenradius ohne Vorzeichen (immer mit Radiuswert)
F_ Vorschubgeschwindigkeit entlang des Bogens
41
Page 68

Erläuterungen
PROGRAMMIERUNG4. INTERPOLATIONSFUNKTIONEN
B--64114GE/01
ANMERKUNG
Die Achsen U, V und W (paralle l zur Grundachse) sind mit
den G--Codes B und C ansprechbar.
D Richtung der
Kreisinterpolation
D Verfahrbetrag entlang
eines Kreisbogens
D Entfernung zwischen
Startpunkt und
Bogenmittelpunkt
”Im Uhrzeigersinn” (G02) und ”entgegen dem Uhrzeigersinn” (G03) in
der X
Betrachtung der X
Z
--Achse (bzw. Yp--Achse oder Xp--Achse) im kartesischen
p
-- E b e n e ( ZpXp--Ebene oder YpZp--Ebene) ergeben sich aus der
pYp
--Ebene in Positiv --Negativ--Richtung der
pYp
Koordinatensystem. Siehe Abbildung unten.
Yp:
G02
G17
G03
Xp
Xp:
G03
G02
Zp
G18
Zp
G02
G19
G03
Yp
Der Endpunkt eines Kreisbogens wird über die Adresse Xp, Yp oder Zp
programmiert und wird je nach G90 oder G91 als Absolut-- oder
Inkrementalwert ausgedrückt. Bei Inkrementalmaß--Programmierung
wird der Abstand vom Startpunkt des Bogens bis zum Endpunkt
angegeben.
Die Bogenmitte wird für die Achsen Xp, Yp und Zp jeweils über die
Adressen I, J und K festgelegt. Der numerische W ert hinter I, J und K ist
jedoch eine Vektorkomponente, bei der sich die Bogenmitte auf den
Startpunkt bezieht und die unabhängig von G90 oder G91 immer als
Inkrementalwert angegeben wird (siehe unten).
I, J und K sind entsprechend der Richtung mit einem Vorzeichen zu
versehen.
D Vollkreis--Programmierung
Endpunkt (x,y)
yx
x
Mitte
Start-
i
punkt
j
Endpunkt (z,x)
z
Mitte
Endpunkt (y,z)
z
Mitte
y
Start-
j
punkt
k
k
Startpunkt
i
I0, J0 und K0 können entfallen.
Ist die Differenz zwischen den Radiuswerten am Startpunkt und am
Endpunkt höher als der Parameterwert (Nr. 3410), wird P/S--Alarm
ausgegeben (Nr. 020).
Wenn X
und Zpausgelassenwerden (Endpunkt ist gleich Startpunkt),
p,Yp
und die Mitte mit I, J und K festgelegt wird, entsteht ein 360° --Bogen
(Kreis).
42
Page 69

B--64114GE/01
PROGRAMMIERUNG
4. INTERPOLATIONSFUNKTIONEN
D Bogenradius
Der Abstand zwischen einem Bogen und dem Mittelpunkt eines Kreises,
in dem dieser Bogen enthalten ist, kann über den KreisradiusR anstatt mit
I, J und K definiert werden.
In diesem Fall ist ein Bogen kleiner 180°, der andere größer 180°. Bögen
mit einem Sektorwinkel gleich 180
° oder weiter sind nicht möglich. Wenn
Xp, Yp und Zp ausgelassen werden, also Endpunkt gleich Startpunkt ist,
wird mit R ein Bogen von 0
° programmiert.
G02R ; (Der Fräser bleibt stehen.)
Bei Bogen (1) (kleiner als 180°)
G02 W60.0 U10.0 R50.0
Bei Bogen (2) (größer als 180°)
Bögen mit einem Sektorwinkel von
180° oder größer können
nicht innerhalb eines
Einzelsatzes festgelegt
werden.
F300.0 ;
(2)
Startpunkt
r=50mm
X
Endpunkt
(1)
r=50mm
D Vorschubgeschwindigkeit
Beschränkungen
D Gleichzeitige
Programmierung von R
und I, J und K
D Angabe einer Achse
außerhalb der
programmierten Ebene
Z
Die Vorschubgeschwindigkeit bei Kreisinterpolation ist gleich der durch
F--Code festgelegten Geschwindigkeit, und die Vorschubgeschwindigkeit entlang des Bogens (tangentiale Vorschubgeschwindigkeit des
Bogens) wird so gesteuert, dass sie dieser vorgegebenenGeschwindigkeit
entspricht.
Die Abweichung zwischen der Soll--Vorschubgeschwindigkeit und der
tatsächlichenWerkzeugvorschubgeschwindigkeit beträgt maximal
±2%.
Die Vorschubgeschwindigkeit entlang des Bogens wird jedoch erst nach
der Schneidenradiuskompensation gemessen.
Werden gleichzeitigdie AdressenI, J, K und R programmiert, hat der über
Adresse R definierte Bogen Vorrang, und die übrigen Adressen werden
ignoriert.
Wird eine Achse außerhalb der programmierten Ebene angegeben,
erscheint eine Alarmmeldung.
Ist beispielweiseim G--Code--System B oder C die Ebene ZX ausgewählt,
und werden dann die Achsen X oder U (parallel zur X--Achse)
angesprochen, wird P/S--Alarm Nr. 028 ausgelöst.
43
Page 70

PROGRAMMIERUNG4. INTERPOLATIONSFUNKTIONEN
B--64114GE/01
D Radiusänderung
zwischen Start-- und
Endpunkt
Ist die Radiusdifferenz zwischen Startpunkt und Endpunkt höher als der
zulässige Parameterwert (Nr. 3410), wird P/S--Alarm ausgegeben
(Nr. 020).
Liegt der Endpunkt nicht auf dem Kreisbogen, verfährt das Werkzeug
nach Erreichen des Endpunkts geradlinig entlang einer Achse.
D Halbkreis mit R
programmieren
Bei der Definition eines Bogens mit einem Mittelpunktswinkel gegen
180 Grad über R können sich falsche Mittelpunktkoordinaten ergeben. In
diesem Fall ist die Bogenmitte über I, J und K festzulegen.
Beispiele
D Befehl für
Kreisinterpolation X, Z
G02X_Z_I_K_F_; G03X_Z_I_K_F_;
Endpunkt
X--Achse
Bogenmittelpunkt
(Durchmesser--
programmierung)
X
Z
K
Startpunkt
Z--Achse Z--Achse
Endpunkt
X--Achse
X
Z
G02X_Z_R_F_;
Bogenmittelpunkt
Endpunkt
X--Achse
(Durchmesser--
programmierung)
Startpunkt
K
R
X
Z
(Durchmesser--
programmierung)
Startpunkt
Z--Achse
(Absolutmaßprogrammierung)
X
15.0
10.0
φ50.0
30.0
50.0
(Absolutmaßprogrammierung)
R25.0
(Absolutmaßprogrammierung)
(Durchmesser programmierung)
G02X50.0Z30.0I25.0F0.3; oder
G02U20.0W--020.0I25.0F0.3; oder
G02X50.0Z30.0R25.0F0.3 oder
G02U20.0W--20.0R25.F0.3;
Z
44
Page 71

B--64114GE/01
PROGRAMMIERUNG
4. INTERPOLATIONSFUNKTIONEN
4.4
HELIX--INTERPOLATION
(G02, G03)
Format
Erläuterungen
Die Helixinterpolation für eine Werkzeugbewegung entlang einer
Schraubenlinie wird durch Angabe von bis zu zwei weiteren Achsen, die
sich durch Kreisverfahrbefehle synchron mit der Kreisinterpolation
bewegen, programmiert.
Synchron mit Bogen in der XpYp--Ebene
G17
Synchron mit Bogen in der ZpXp --Ebene
G18
Synchron mit Bogen in der YpZp --Ebene
G19
α, β : Jede Achse, für die keine Kreisinterpolation definiert ist.
G02
G03
G02
G03
G02
G03
Es können bis zu zwei weitere Achsen festgelegt werden.
Xp_Yp_
Xp_Zp_
Yp_ Zp_
I_ J_
R_
I_ K_
R_
J_ K_
R_
α_(β_)F_;
α_(β_)F_;
α_(β_)F_;
Mit der Befehlsmethode wird einfach bzw. nachträglich eine
Verfahrbefehlsachse, die keine Kreisinterpolationsachse darstellt,
hinzugefügt. Ein F--Befehl gibt die Vorschubgeschwindigkeit entlang
eines Kreisbogens an. Somit ergibt sich folgende Vorschubgeschwindigkeit für die lineare Achse:
Länge der linearen Achse
F×
Länge des Kreisbogens
Die Vorschubgeschwindigkeit ist so zu wählen, daß die Vorschubgeschwindigkeit entlang der linearen Achse keinen der Grenzwerte
überschreitet. Dies kann über das Bit 0 (HFC) von Parameter Nr. 1404
erreicht werden.
Beschränkungen
Z
Werkzeugbahn
YX
Die Vorschubgeschwindigkeit entlang der Umfanglinie zweier kreisinterpolierter Achsen stellt die Soll--Vorschubgeschwindigkeit dar.
D Schneidenradiuskompensation findet nur bei einem Kreisbogen statt.
D Werkzeugkorrektur und Werkzeuglängenkompensation können nicht
in einem Satz mit Helix--Interpolation verwendet werden.
45
Page 72

PROGRAMMIERUNG4. INTERPOLATIONSFUNKTIONEN
B--64114GE/01
4.5
POLARKOORDINATEN-INTERPOLATION
(G12.1, G13.1)
Format
D G12.1 und G13.1
werden in getrennten
Sätzen programmiert
Erläuterungen
D Ebene für
Polarkoordinaten-Interpolation
Bei der Polarkoordinaten--Interpolation erfolgt die Bahnsteuerung durch
Umsetzen eines im kartesischen Koordinatensystem programmierten
Befehls in die B ewegung einer linearen Achse (Werkzeugbewegung) und
einer Rotationsachse (Werkstückdrehung). Sie eignet sich für die
Bearbeitung einer Frontfläche und das Schleifen einer Nockenwelle auf
der Drehmaschine.
G12.1 ;
G13.1 ;
Startet den Modus ”Polarkoordinaten--Interpolation”
(ermöglicht Polarkoordinaten--Interpolation).
Lineare oder Kreisinterpolation wird durch Angabe der
Koordinaten in einem kartesischen Koordinatensystem,
bestehend aus einer linearen Achse und einer Rundachse
(virtuellen Achse), spezifiziert.
Beendet den Modus ”Polarkoordinaten--Interpolation”
(keine Polarkoordinaten--Interpolation).
G112 und G113 können anstelle von G12.1 bzw. G13.1
benutzt werden.
G12.1 aktiviert den M odus ”Polarkoordinaten--Interpolation” und wählt
eine Ebene aus (Abb. 4.5), in der die Polarkoordinate n--Interpolation
ausgeführt wird.
Rundachse (virtuelle Achse)
(Einheit:mm oder Zoll)
Lineare Achse
(Einheit: mm oder Zoll)
Ursprung des Werkstück--Koordinatensystems
Abb. 4.5 Polarkoordinaten--Interpolationsebene
Nach dem Einschalten der Spannung oder bei einem System--Reset wird
die Polarkoordinaten--Interpolation gelöscht (G13.1).
Die linearenund Rundachsenfür Polarkoordinaten--Interpolation müssen
zuvor in den Parametern (Nr. 5460 und Nr. 5461) gesetzt werden.
VORSICHT
Die vor der Programmierung von G12.1 benutzte (über
G17, G18 oder G19 angewählte) Ebene wird gelöscht. Sie
wird über G13.1 (Polarkoordinaten--Interpolation Ende)
wiederhergestellt.
Bei einem System--Reset wird die Polarkoordinaten-Interpolation gelöscht und die über G17, G18 oder G19
definierte Ebene benutzt.
46
Page 73

B--64114GE/01
PROGRAMMIERUNG
4. INTERPOLATIONSFUNKTIONEN
D Verfahrbetrag und
Vorschubgeschwindigkeit
für Polarkoordinaten-Interpolation
Die Einheit für die
Koordinaten der
hypothetischen Achse ist
gleich der für die lineare
Achse (mm/Zoll)
Die Einheit für die
Vorschubgeschwindigkeit
ist mm/min oder Zoll/min
D G--Codes, die im Modus
”Polarkoordinaten-Interpolation”
programmiert
werden können
Im Modus ”Polarkoordinaten--Interpolation” werden die Programmbefehle über kartesische Koordinaten in der Polarkoordinaten-Interpolationsebene angelegt. Die Achsenadresse der Rundachse dient
als Achsenadressefür die zweite Achse (virtuelle Achse) in der Ebene. Ob
für die erste Achse in der Ebene ein Durchmesser oder ein Radius gesetzt
wird, hängt allein von der Rundachse ab.
Die virtuelle Achse wird unmittelbar nach Programmierung von G12.1
bei Koordinate 0 angelegt. Die Polarinterpolation wird gestartet, wobei
nach G12.1 ein Winkel von 0 als Werkzeugposition angenommen wird.
Die Vorschubgeschwindigkeit wird mit F als einer Geschwindigkeit
(relativen Geschwindigkeit zwischen Werkstück und Werkzeug)
tangential zur Polarkoordinaten--Interpolationsebene (im kartesischen
Koordinatensystem) angegeben.
G01 Lineare Interpolation..............
G02, G03
G04
G40, G41, G42
Kreisinterpolation.........
Verweilen..............
Schneidenradiuskompensation....
(Polarkoordinaten--Interpolation wird nach der Werkzeugradiuskompensation auf die Werkzeugbahn
angewandt.)
G65, G66, G67 Kundenmakrobefehl....
G98, G99
Vorschub pro Minute, Vorschub pro Umdrehung.........
D Kreisinterpolation in der
Polarkoordinatenebene
D Bewegung entlang den
Achsen nicht in der
Polarkoordinaten-Interpolationsebene
Die Adressen für den Radius eines Bogens bei Kreisinterpolation (G02
oder G03) in der Polarkoordinaten--Interpolationsebenerichten sich nach
der ersten Achse in der Ebene (lineare Achse).
D I und J in der Xp--Yp--Ebene, wenn die lineare Achsedie X--Achseoder
eine P arallele der X --Achse ist
D J und K in der Yp--Zp--Ebene, wenn die lineare Achse die Y--Achse
oder eine Parallele der Y-- Achse ist
D K und I in der Zp--Xp--Ebene, wenn die lineare Achse die Z--Achse
oder eine Parallele der Z--Achse ist
Der Bogenradius läßt sich auch über einen R--Befehl programmieren.
ANMERKUNG
Die Achsen U, V und W (paralle l zur Grundachse) sind mit
den G--Codes B und C ansprechbar.
Das Werkzeug verfährt unabhängig von der Polarkoordinaten-Interpolation normal entlang dieser Achsen.
D Anzeige der aktuellen
Position im Modus
”Polarkoordinaten-Interpolation”
Es werden die tatsächlichen Koordinaten angezeigt. Der in einem Satz
verbleibende restliche Verfahrbetrag wird jedoch basierend auf den
Koordinaten in der P olarkoordinaten--Interpolationsebene (kartesischen
Koordinaten) angezeigt.
47
Page 74

Beschränkungen
PROGRAMMIERUNG4. INTERPOLATIONSFUNKTIONEN
B--64114GE/01
D
Koordinatensystem für
Polarkoordinaten-Interpolation
D Befehl für Schneiden-
radiuskompensation
D Programm--Neustart
D Schnittvorschubgeschwin-
digkeit der Rundachse
Vor der Programmierung von G12.1 muß ein Werkstück--Koordinatensystem,
in dem der Ursprung des Koordinatensystems von der Mitte der Rundachse
gebildet wird, eingerichtet werden. Im G12.1--Modus darf das Koordinatensystem nicht geändert werden (G92, G52, G53, Rücksetzung de r relativen
Koordinaten, G54 mit G59, etc.).
Der Modus ”Polarkoordinaten--Interpolation” kann nicht im Modus
”Schneidenradiuskompensat ion” (G41 oder G42) gestartet oder beendet
werden (G12.1 oder G13.1). G12. 1 oder G13.1 müssen im Modus ” Schneidenradiuskompensation Ende” (G40) programmiert werden.
In einem Satz im G12.1--Modus kann das Programm nicht zum Wiederanlauf
gebracht werden.
Bei der Polarkoordinaten--Interpolation wird die Werkzeugbewegung für eine
im kartesischen Koordinatensystem programmierte Kontur in eine Werkzeugbewegung in der Rundachse (C--Achse) und in der linearen Achse (X--Achse)
umgesetzt. Nähert sich das Werkzeug der Werkstückmitte, wird die
C--Achsenkomponente der Vorschubgeschwindigkeit größer, und die maximale
Schnittvorschubgeschwindigkeit für die C--Achse (eingestel lt in Parameter (Nr.
1422) kann u. U. überschritten werden. Es wird in diesem Fall Alarm ausgelöst
(siehe Abbildung unten). Um zu verhindern, daß die C--Achsenkomponente die
maximale Schnittvorschubgeschwindigkeit für die C--Achse überschreit et, muß
die über Adresse F vorgegebene Vorschubgeschwindigkeit reduziert oder das
Programm so erstellt werden, daß sich das Werkzeug (Werkzeugmitte bei
Schneidenradiuskompensation) nicht der Werkstückmitte nähert.
WARNUNG
Betrachtet werden die Linien L1, L2 und L3. ∆X ist die Entfernung, um
∆
X
θ1
θ2
θ3
L1
L: Entfernung (in mm) zwischen dem Werkzeugmittelpunkt und dem Werkstückmittelpunkt, wenn der
Werkzeugmittelpunkt dem Werkstückmittelpunkt am nächsten ist.
R: Maximale Schnittvorschubgeschwindigkeit (Grad/min) der C--Achse
Nun kann anhand den Formel unten eine über die Adresse F zu programmierende Geschwindigkeit für
die Polarkoordinaten--Interpolation berechnet werden. Berechnung der zulässigen Geschwindigkeit anhand der Formel: Diese Formel liefert einen theoretischen Wert. Es ist möglich, dass in der Praxis infolge
von Rechenungenauigkeiten ein etwas kleinerer als der theoretisch Wert verwendet werden muss.
F<L× R ×
π
180
die sich das Werkzeug pro Zeiteinheit mit der über Adresse F programmierten Vorschubgeschwindigkeit im kartesischen Koordinatensystem bewegt. Im Verlauf der Werkzeugbewegung von L1 zu L2 zu L3
erhöht sich der Winkel, um den sich das Werkzeug pro Zeiteinheit bei ∆X
L2
im kartesischen Koordinatensystem bewegt, von θ1 auf θ 2 auf θ3. Mit
L3
anderen Worten, die X--Achsenkomponente der Vorschubgeschwindigkeit wird umso größer, je mehr sich das Werkzeug der Werkstückmitte
nähert. Die maximale Schnittvorschubgeschwindigkeit für die C--Achse
kann von der C--Komponente der Vorschubgeschwindigkeit überschritten werden, da die Werkzeugbewegung im kartesischen Koordinatensystem in eine Werkzeugbewegung für C--Achse und X--Achse
umgesetzt wurde.
(mm/min)
D Durchmesser -- und
Radiusprogrammierung
Auch bei Durchmesserprogrammierung für die lineare Achse (X--Achse) wird
für die Rundachse (C--Achse) Radiusprogrammierung benutzt.
48
Page 75

B--64114GE/01
PROGRAMMIERUNG
4. INTERPOLATIONSFUNKTIONEN
Beispiele
Programmbeispiel für Polarkoordinaten--Interpolation, basierend auf
X--Achse (lineare Achse) und C--Achse (Rundachse)
C’ (hypothetische Achse)
N204
N205
N206
C--Achse
N203
N202
N208
N207
Werkzeugbahn nach
Schneidenradiuskompensation
Programmierte Werkzeugbahn
N201
N200
Werkzeug
Z--Achse
X--Achse
X--Achse mit Durchmesserprogrammierung, C--Achse mit Radiusprogrammierung.
O0001 ;
N010 T0101
N0100 G00 X120.0 C0 Z _ ; Positionierung an der Startposition
N0200 G12.1 ; Start der Polarkoordinaten--Interpolation
N0201 G42 G01 X40.0 F _ ;
N0202 C10.0 ;
N0203 G03 X20.0 C20.0 R10.0 ;
N0204 G01 X--40.0 ; Geometrieprogramm
N0205 C--10.0 ; (Programm basierend auf kartesischen
Koordinaten in der X--C’--Ebene)
206 G03 X--20.0 C--20.0 I10.0 J0 ;
N0207 G01 X40.0 ;
N0208 C0 ;
N0209 G40 X120.0 ;
N0210 G13.1 ; Beendigung der Polarkoordinaten--Interpolation
N0300 Z __ ;
N0400 X __C __ ;
N0900M30 ;
49
Page 76

PROGRAMMIERUNG4. INTERPOLATIONSFUNKTIONEN
B--64114GE/01
4.6
ZYLINDRISCHE INTERPOLATION (G07.1)
Format
Der mit einem Winkel programmierte Verfahrbetrag einer Rundachse
wird intern einmalig in die Entfernung einer linearen Achse entlang der
Außenfläche umgewandelt, so daß Linear-- oder Kreisinterpolation mit
eineranderenAchse durchgeführtwerden können. Nach der Interpolation
wird dieser Abstand wieder zurück in den Verfahrbetrag der Rundachse
umgewandelt.
Die Funktion ”Zylindrische Interpolation” ermöglicht die Abwicklung
der Zylinder--Mantelfläche für die P rogrammierung. Aufdiese Weise l äßt
sich beispielsweise leicht ein Programm für zylindrische
Nockenbearbeitung erstellen.
G07.1 IP r ; Modus ”Zylindrische Interpolation” starten
(ermöglicht zylindrische Interpolation).
:
:
:
G07.1 IP 0 ; Der Zylinderinterpolationsmodus wird beendet.
IP : Adresse der Rundachse
r : Radius des Zylinders
G07.1 IP r ; und G07.1 IP 0; werden in getrennten Sätzen
angegeben. G107 kann anstelle von G07.1 benutzt werden.
Erläuterungen
D Ebenenwahl
(G17, G18,G19)
D Vorschubgeschwindigkeit
Über Parameter (Nr. 1002) wird festgelegt, ob die X--, Y -- oder Z--Achse
odereinederen Parallelachsenals Rundachse gilt. DerG--Code wählt eine
Ebene, in der die Rundachse als Linearachse definiert ist.
Wenn zum Beispiel die Rundachse eine Parallele der X--Achse ist, muß
G17 eine Ebene Xp--Yp aufrufen, die von der Rundachse und der
Y--Achse bzw. einer Parallelen der Y--Achse definiert wird.
Bei zylindrischer Interpolation kann nur eine Rundachse vorgegeben
werden.
ANMERKUNG
Die Achsen U, V und W (paralle l zur Grundachse) sind mit
den G--Codes B und C ansprechbar.
Die im Modus ”Zylindrische Interpolation” festgelegte Vorschubgeschwindigkeit bezieht sich auf eine Geschwindigkeit auf der
abgewickelten Zylinderfläche.
50
Page 77

B--64114GE/01
PROGRAMMIERUNG
4. INTERPOLATIONSFUNKTIONEN
D Kreisinterpolation
(G02,G03)
D Schneidenradius-
kompensation
Im Modus ”Zylindrische Interpolation” ist Kreisinterpolation unter
Verwendung der Rundachse und einer weiteren linearen Achse möglich.
Der Radius R wird in Befehlen genauso verwendet wie in Abschnitt 4.4
beschrieben.
Der Radius wird nicht in Grad, sondern in Millimetern (bei metrischer
Eingabe) bzw. Zoll (bei Zoll--Eingabe) angegeben.
< Beispiel: Kreisinterpolation zwischen Z-- und C--Achse >
Für die C--Achse von Parameter Nr.1022 wird 5 (Achse parallel zur
X--Achse) eingerichtet. Der Befehl für Kreisinterpolation lautet dann
G18 Z__C__;
G02 (G03) Z__C__R__;
Für die C--Achse von Parameter Nr.1022 kann stattdessen 6 (Achse
parallel zur Y--Achse) angegeben werden. Der B efehl für Kreisinterpolation lautet dann allerdings
G19 C__Z__;
G02 (G03) Z__C__R__;
Um Schneidenradiuskompensation im Modus ”Zylindrische
Interpolation” ausführen zu können, muß zunächst die laufende
Schneidenradiuskompensation beendet und anschließend der Modus
”Zylindrische Interpolation” aufgerufen werden. Die Schneidenradiuskompensation wird später vom Modus ”Zylindrische Interpolation” aus
gestartet und beendet.
D Genauigkeit bei
zylindrischer
Interpolation
Im Modus ”Zylindrische Interpolation” wird der durch einen Winkel
angegebene Verfahrbetrag einer Rundachse intern einmalig in die
Entfernung einer linearen Achse auf der Außenfläche umgewandelt, so
daß Linear-- oder Kreisinterpolation mit einer weiteren Achse ausgeführt
werden können. Nach der Interpolation wird diese Entfernung wieder in
einen Winkel umgerechnet. Bei der Umrechnung wird der Verfahrbetrag
auf das kleinste Eingabe--Inkrement gerundet.
Bei einem kleinen Zylinderradius kann es deshalb vorkommen, daß der
tatsächliche Verfahrbetrag vom vorgegebenen Verfahrbetrag abweicht.
Dieser Fehler ist jedoch nicht akkumulativ.
Wird bei eingeschaltetem Manuell --Absolut--Schalter im Modus
”Zylindrische Interpolation” ein manueller Vorgang ausgeführt, kann es
aus oben genanntem Grund zur Ausgabe eines Fehlers kommen.
Tatsächlicher
Verfahrbetrag
VORSCHUB/U
VORSCHUB/U
=
2×2πR
Verfahrbetrag pro Umdrehung der Rundachse
:
(Einstellwert Parameter Nr. 1260)
R
:
Werkstückradius
: :Gerundet auf das kleinste Eingabe--Inkrement
×
Sollbetrag
2×2πR
×
VORSCHUB/U
51
Page 78

Beschränkungen
PROGRAMMIERUNG4. INTERPOLATIONSFUNKTIONEN
B--64114GE/01
D Bogenradius im Modus
”Zylindrische Interpolation”
D Kreisinterpolation und
Schneidenradiuskompensation
D Positionierung
D Einrichten eines
Koordinatensystems
D Modus ”Zylindrische
Interpolation” einstellen
D Festzyklus für Bohren im
Modus ”Zylindrische
Interpolation”
Im Modus ”Zylindrische Interpolation” kann ein Bogenradius nicht über
die Wortadresse I, J oder K festgelegt werden.
Beim Start des Modus ”Zylindrische Interpolation” nach bereits
angewandter Schneidenradiuskompensaton wird die Kreisinterpolation
im Modus ”Zylindrische Interpolation” nicht korrekt ausgeführt.
Im Modus ”Zylindrische Interpolation” können keine Positioniervorgänge (einschließlich solcher, die Eilgangzyklen bewirken, wie G28
und G80 mit G89) angelegt werden. Der Modus ”Zylindrische
Interpolation” muß zuvor beendet werden. Zylindrische Interpolation
(G07.1) kann nicht im Positioniermodus (G00) stattfinden.
Im Modus ”Zylindrische Interpolation” kann kein Werkstück-Koordinatensystem G50 angelegt werden.
Der Modus ”Zylindrische Interpolation” kann nicht vom Modus
”Zylindrische Interpolation” aus rückgestellt werden. Der Modus
”Zylindrische Interpolation” muß vor einem Reset des Modus beendet
werden.
Die B ohr--Festzyklen G81 bis G89 sind unter Zylindrischer Interpolation
nicht m öglich.
D Achsenspiegelung für
Doppelrevolverkopf
”Achsenspiegelung für Doppelrevolverkopf” (G68 und G69) ist im
Modus ”Zylindrische Interpolation” nicht möglich.
52
Page 79

B--64114GE/01
Beispiele
PROGRAMMIERUNG
4. INTERPOLATIONSFUNKTIONEN
mm
120
110
90
70
60
Programmbeispiel für zylindrische Interpolation
O0001 (ZYLINDERINTERPOLATION ) ;
N01 G00 Z100.0 C0 ;
N02G01G18W0H0;
N03 G07.1 H57299 ;
N04 G01 G42 Z120.0 D01 F250 ;
N05C30.0;
N06 G03 Z90.0 C60.0 R30.0 ;
N07 G01 Z70.0 ;
N08 G02 Z60.0 C70.0 R10.0 ;
N09 G01 C150.0 ;
N10 G02 Z70.0 C190.0 R75.0 ;
N11 G01 Z110.0 C230.0 ;
N12 G03 Z120.0 C270.0 R75.0 ;
N13 G01 C360.0 ;
N14 G40 Z100.0 ;
N15G07.1C0;
N16 M30 ;
Z
N05
N06
N07
N08
N09
N12
N11
N10
N13
C
RZ
Grad
C
0
30
60 70
150
230190
270
360
53
Page 80

PROGRAMMIERUNG4. INTERPOLATIONSFUNKTIONEN
B--64114GE/01
4.7
GEWINDE MIT KONSTANTER STEIGUNG (G32)
L
Abb. 4.7 (a) Zylindrisches Gewinde
Format
Mit dem Befehl G32 können konische Gewinde und Spiralgewinde
ebenso wie zylindrische Gewinde mit konstanter Steigung geschnitten
werden.
Der Positionsgeber an der Spindel liest die Spindeldrehzahl in Echtzeit
ein und rechnet diese in die Schnittvorschubgeschwindigkeit (Vorschub
pro Minute) um, mit der das Werkzeug dann bewegt wird.
L
L
Abb. 4.7 (b) Konusgewinde
Abb. 4.7 (c) Kreisgewinde
G32IP_F_;
IP_: Endpunkt
F_: Steigung entlang der
langen Achse (immer
Radiusprogrammierung)
Erläuterungen
X--Achse
Endpunkt
δ
X
0
Abb. 4.7 (d) Beispiel für Gewindeschneiden
2
Z
α
δ
1
L
Startpunkt
Z--Achse
Im allgemeinen wird das Gewindeschneiden vom Grobschneiden bis
zum Feinschneiden einer Schraube in derselben Werkzeugbahn
ausgeführt. Da das Gewindeschneiden aufgenommen wird, wenn der
Positionsgeber an der Spindel das Signal für 1 Drehung ausgibt, setzt der
Schneidvorgang an einem festen Punkt an, und die Werkzeugbahn am
Werkstück bleibt in sämtlichen Gewindeschneidvorgängen unverändert.
Zu beachten ist, daß die Spindeldrehzahl von der Grob-- bis zur
Feinbearbeitung konstant sein muß. Fehlerhafte Gewindesteigungen
können s onst die Folge sein.
54
Page 81

B--64114GE/01
E
i
0.0001b
is500.000
0mmE
i
ll0.000001Zollb
is9.999999Zol
l
PROGRAMMIERUNG
X
LX
α≦45° Steigung beträgt LZ
α≧45° Steigung beträgt LX
Abb. 4.7 (e) LZ und LX bei Konusgewinde
4. INTERPOLATIONSFUNKTIONEN
Konusgewinde
α
Z
LZ
Im allgemeinen verursacht die Verzögerung des Servosystems usw. leicht
unkorrekte Gewindesteigungen an den Start-- und Endpunkten eines
Gewindes. Um dies auszugleichen, sollte die Länge des Gewindeschnitts
etwas länger als benötigt gewählt werden.
Tabelle 4.7 zeigt die zulässigen B ereiche für die Angabe der
Gewindesteigung.
ngabeinmm
ngabeinZo
Tabelle 4.7 Zulässige Steigungsmaße
Kleinstes Befehls--Inkrement
55
Page 82

Erläuterungen
1. Zylindrisches Gewinde schneiden
X--Achse
δ
2
70
2. Kegelgewinde schneiden
X--Achse
φ50
0
φ43
30
δ
2
40
PROGRAMMIERUNG4. INTERPOLATIONSFUNKTIONEN
B--64114GE/01
Bei der Programmierung werden folgende Werte
benutzt :
Gewindesteigung: 4 mm
δ
=3mm
30 mm
1
δ
=1.5mm
2
Schnittiefe: 1 mm (doppelter Schnitt)
(metrische Eingabe, Durchmesserprogrammierung)
δ
1
G00 U--62.0 ;
Z--Achse
G32 W--74.5 F4.0 ;
G00 U62.0 ;
W74.5 ;
U--64.0 ;
(Zweiter Schnitt 1 mm mehr)
G32 W--74.5 ;
G00 U64.0 ;
W74.5 ;
Bei der Programmierung werden folgende Werte benutzt :
Gewindesteigung : 3.5 mm in Richtung der Z--Achse
δ
=2mm
1
δ
=1mm
2
Schnittiefe in X--Achsen--Richtung 1 mm
(doppelter Schnitt)
(metrische Eingabe, Durchmesserprogrammierung)
δ
1
Z--Achse
φ14
G00 X 12.0 Z72.0 ;
G32 X 41.0 Z29.0 F3.5 ;
G00 X 50.0 ;
Z 72.0 ;
X 10.0 ;
(Zweiter Schnitt 1 mm mehr)
G32 X 39.0 Z29.0 ;
G00 X 50.0 ;
Z 72.0 ;
56
Page 83

B--64114GE/01
PROGRAMMIERUNG
4. INTERPOLATIONSFUNKTIONEN
WARNUNG
1 Vorschub--Override (fest bei 100%) ist während des Gewindeschneidens wirksam.
2 Eine Vorschubunterbrechung des Gewindeschneiders ohne vorheriges Anhalten der Spindel
ist gefährlich. Die Schnittiefe wird plötzlich erhöht. Die Funktion ”Vorschub--Halt” ist deshalb
während des Gewindeschneidens unwirksam. Wird die Taste ”Vorschub--Halt” während des
Gewindeschneidens betätigt, hält das Werkzeug nach der Ausführung eines Satzes ohne
Gewindeschneiden so an, als wäre die Taste EINZELSATZ gedrückt worden. Die
Vorschub--Halt--Lampe (SPL --Lampe) allerdings leuchtet auf, wenn die Taste ”Vorschub--Halt”
am Maschinenbedienfeld betätigt wird. Sobald das Werkzeug stillsteht, erlischt die Lampe
(Status ”Einzelsatzhalt”).
3 Bei gedrückter Taste Vorschub--Halt oder nochmaliger Betätigung im ersten Satz ohne
Gewindeschneidenunmittelbarnach einem Satz mit Gewindeschneiden hält das Werkzeug an
dem Satz ohne Gewindeschneiden an.
4 Beim Gewindeschneiden im Status ”Einzelsatz” hält das Werkzeug nach der Ausführung des
erstens Satzes ohne Gewindeschneiden an.
5 Im Falle eines Moduswechsels von Automatikbetrieb zu Handbetrieb während des Gewinde-
schneidens hält das Werkzeug genau wie bei der in Anmerkung 3 genannten Betätigung der
Vorschubhalt--Taste am ersten Satz ohne Gewindeschneiden an.
Erfolgt der Moduswechsel allerdings von einem Automatikbetrieb--Modus zu einem anderen,
hält das Werkzeugwie beim Einzelsatz--Modus gemäß Anmerkung4 nach der Ausführung des
Satzes ohne Gewindeschneiden an.
6 Handelte es sich beim vorhergehenden Satz um einen Satz mit Gewindeschneiden, wird das
Schneiden, ohne Abwarten des Nullimpuls--Signals, sofort aufgenommen, auch wenn der
aktuelle Satz ein Satz mit Gewindeschneiden ist.
G32Z_F_;
Z_ ; (Vor dem Satz wird kein Nullimpuls--Signal erkannt.)
G32 ; (Angenommen als Satz mit Gewindeschneiden.)
Z_ F_ ;(Ebenfalls keine Erkennung des Nullimpuls--Signals.)
7 Wennwährend des Kreis -- od. Konusgewindeschneidens Konstante Schnittgeschwindigkeits--
Steuerung wirksam ist und sich die Spindeldrehzahl ändert, wird keine korrekte
Gewindesteigung erzeugt. Konstante Schnittgeschwindigkeits--Steuerung soll deshalb beim
Gewindeschneiden nicht eingesetzt werden. Stattdessen ist G97 zu benutzen.
8 Ein Satz mit Verfahrbewegung vor einem Satz mit Gewindeschneiden darf keinen Befehl für
Anfasen oder Verrunden enthalten.
9 Ein Satz mit Gewindeschneiden darf kein Anfasen oder Verrunden befehlen.
10 Die Funktion ”Spindeldrehzahl--Override”ist während des Gewindeschneidens deaktiviert.Die
Spindeldrehzahl ist fest auf 100 % gesetzt.
11 Die Rückzugfunktion ist im Gewindezyklus bei G32 unwirksam.
57
Page 84

PROGRAMMIERUNG4. INTERPOLATIONSFUNKTIONEN
B--64114GE/01
4.8
GEWINDESCHNEIDEN MIT VARIABLER STEIGUNG (G34)
Format
Durch Angabe einer Erhöhung bzw. Verringerung der Steigung pro
Schraubendrehung können Gewinde mit variabler Steigung geschnitten
werden.
Abb. 4.8 Gewinde mit variabler Steigung
G34 IP_F_K_;
IP : Endpunkt
F : Steigung in Längsrichtung der Achse am Anfangspunkt
K : Erhöhung oder Verringerung der Steigung pro Spindelumdrehung
Erläuterungen
Adressen außer K sind gleich denen beim Schneiden von zylindrischen
Gewinden/Kegelgewinden mit G32.
Tabelle 4.8 zeigt den zulässigen Wertebereich für K.
Tabelle 4.8 Zulässiger Wertebereich für K
Metrische Eingabe 0.0001 bis500.0000 mm
Zoll--Eingabe 0.000001 bis9.999999 Zoll
Es wird P/S--Alarm (Nr. 14) ausgegeben, wenn K zum Beispiel den in
Tabelle 4.8 angegebenen Wert überschreitet, die maximale Gewindesteigung durch die Vergrößerung bzw. Verkleinerung um K überschritten
wird, oder für die Gewindesteigung ein negativer Wert definiert wird.
WARNUNG
“Rückzug im Gewindeschneidzyklus” ist bei G34 nicht
wirksam.
Beispiele
Steigung am Startpunkt : 8,0 mm
Wegzuwachs der Steigung : 0,3 mm
G34Z--72.0F8.0K0.3;
58
Page 85

B--64114GE/01
PROGRAMMIERUNG
4. INTERPOLATIONSFUNKTIONEN
4.9
UNTERBRECHUNGSLOSES GEWINDE SCHNEIDEN
Erläuterungen
Bei dieser Funktion zum unterbrechungslosen Gewindeschneiden
werden an einen Übergang zwischen Verfahrsätzen ausgegebene
Teilimpulse mit dem nächsten Schritt zur Impulsverarbeitung u. -ausgabe überlappt (Satzüberlappung).
Dadurch werden durch die Unterbrechung des Verfahrens während der
kontinuierlichen Satzbearbeitung verursachte unregelmäßige Bearbeitungsabschnitte vermieden, so daß der Satz für Gewindeschneidanweisungen kontinuierlich geführt werden kann.
Da das System so gesteuert wird, daß der Synchronismus
mit der Spindel am Übergang zwischen Sätzen nach Möglichkeit nicht
gestört wird, können spezielle Gewindeschneidvorgänge durchgeführt
werden, bei denen sich Steigung und Kontur auf halbem Wege ändern.
G32
G32
Abb. 4.9 Unterbrechungsloses Gewindeschneiden
G32
Das System erlaubt auch bei Wiederholung desselben Abschnitts für
Gewindeschneiden und Änderung der Schnittiefe eine korrekte
Bearbeitung ohne Beeinträchtigung des Gewindes.
ANMERKUNG
1 Satzüberlappung ist auch beim Befehl G01 wirksam und
erzeugt eine hervorragend endbearbeitete Oberfläche.
2 Bei extrem kleinen Sätzen wirkt die Satzüberlappung nicht.
59
Page 86

PROGRAMMIERUNG4. INTERPOLATIONSFUNKTIONEN
B--64114GE/01
4.10
MEHRFACH-GEWINDESCHNEIDEN
Format
Über die Adresse Q kann ein Winkel zwischen dem Signal für 1
Spindeldrehung und dem Beginn des Schneidevorgangsfestgelegt und so
der Anfangswinkel für den Gewindeschnitt verschoben werden. So
können mühelos mehrgängige Gewinde erstellt werden.
Mehrgängige Gewinde
(Gewinde mit konstanter Steigung)
G32 IP_F_Q_;
G32 IP_Q_;
IP_: Endpunkt
F_ : Steigung in Längsrichtung
Q_ : Anfangswinkel für Gewindeschnitt
Erläuterungen
D Zulässige Befehle für
Gewindeschneiden
Beschränkungen
D Anfangswinkel
D
Anfangswinkel--Inkrement
D Zulässiger Bereich für
Anfangswinkel
G32: Gewinde mit konstanter St eigung
G34: Gewindeschneiden mit variabler Steigung
G76: Gewindeschneidzyklus für mehrgängige Gewinde
G92: Gewindeschneidzyklus
Der Anfangswinkel ist kein Dauerwert (modaler Wert). Er muß jedesmal
neu angegeben werden. Fehlt die Angabe, wird der Winkel mit 0
angenommen.
Das Inkrement (Vergrößerungsschritt)für den Anfangswinkel (Q) beträgt
0.001 Grad. Dezimalpunkt ist nicht möglich.
Beispiel:
Für einen Verschiebungswinkel von 180 Grad ist Q180000 zu
programmieren.
Q180.000 kann wegen des Dezimalpunkts nicht eingegeben
werden.
Es sind Anfangswinkel (Q) zwischen 0 und 360000 (in
0.001--Grad--S chritten) möglich. Ein Wert größer 360000 (360 Grad)
wird auf 360000 (360 Grad) abgerundet.
D Mehrgängige Gewinde
(G76)
Der Befehl G76 für das Schneiden mehrgängiger Gewinde ist stets im
Format FS15 anzugeben.
60
Page 87

B--64114GE/01
Beispiele
PROGRAMMIERUNG
4. INTERPOLATIONSFUNKTIONEN
Programm für zweigängige Gewinde
(mit Anfangswinkeln 0 und 180 Grad)
G00 X40.0 ;
G32 W--38.0F4.0Q0;
G00 X72.0 ;
W38.0 ;
X40.0 ;
G32 W--38.0 F4.0 Q180000
;
G00 X72.0 ;
W38.0 ;
61
Page 88

PROGRAMMIERUNG4. INTERPOLATIONSFUNKTIONEN
B--64114GE/01
4.11
RESTWEG LÖSCHEN (G31)
Format
Erläuterungen
Lineare Interpolation kann durch Programmieren einer axialen
Bewegung nach einem G31--Befehl, z.B. G01, befohlen werden. Wird
während der Ausführung dieses Befehls ein externes Signal ”Restweg
löschen” (Ausblendsignal) gegeben, wird die Befehlsausführung
abgebrochen und der nachfolgende Satz ausgeführt. Die Funktion
”Restweg löschen” wird eingesetzt, wenn das Ende der Bearbeitung nicht
programmiert ist, sondern von einem Maschinensignal bestimmt wird,
z.B beim Schleifen. Sie kann auch zur Werkstück- vermessung eingesetzt
werden.
Einzelheiten zur Verwendung dieser Funktion enthält das Handbuch des
Maschinenherstellers.
G31 IP_;
G31: Einfach wirksamer G--Code
(nur wirksam für den betreffenden Satz)
Die Koordinatenwerte bei Ausgabe des Signals ”Restweg löschen”
können in einem Kundenmakro verwendet werden, da sie in den
Kundenmakro-- Systemvariablen #5061 bis #5068 gespeichert werden:
#5061 Koordinatenwert X --Achse
#5062 Koordinatenwert Z--Achse
#5063 Koordinatenwert 3. Achse
#5064 Koordinatenwert 4. Achse
WARNUNG
Um eine exaktere Werkzeugposition beim Eintreffen des
Signals ”Restweg löschen” zu erhalten, sind
Vorschub--Override, Trockenlauf u. Automatische
Beschleunigung/Verzögerung bei der Funktion ”Restweg
löschen”deaktiviert, wenn die Vorschubgeschwindigkeitals
Vorschub pro Minute definiert ist. Zur Aktivierung dieser
Funktionen ist Bit 7 (SKF) von Parameter Nr. 6200 auf 1 zu
setzen. Wenn die Vorschubge- schwindigkeit als Vorschub
pro Umdrehung definiert ist, sind Vorschub--Override,
Trockenlauf und Automatische Beschleunigung/
Verzögerung bei der Funktion ”Restweg löschen”
unabhängig von der Einstellung des SKF --Bits aktiviert.
ANMERKUNG
1 Die Ausgabe des Befehls G31 bei laufender Schneiden-
radiuskompensation löst P/S--Alarm Nr. 035 aus.
Werkzeugradiuskompensation vor dem Befehl G31 mit
dem Befehl G40 beenden.
2 Beim schnellen Restweg--Löschen bewirkt das Ausführen
von G31 im Modus ”Vorschub pro Umdrehung”, daß der
P/S--Alarm Nr. 211 ausgelöst wird.
62
Page 89

B--64114GE/01
Beispiele
D Der Satz nach G31 ist ein
Inkrementalmaß--Befehl
PROGRAMMIERUNG
G31 W100.0 F100;
U50.0;
4. INTERPOLATIONSFUNKTIONEN
U50.0
D Der Satz nach G31 ist ein
Absolutmaß--Befehl für
1 Achse
Signal ”Restweg löschen”
X
100.0
Tatsächliche Bewegung
Z
Abb. 4.11 (a) Der Folgesatz ist ein Inkrementalmaß--Befehl
G31 Z200.00 F100;
X100.0;
Signal ”Restweg löschen”
Bewegung ohne Signal ”Restweg löschen”
X100.0
50.0
W100
X200.0
D Der Satz nach G31 ist ein
Absolutmaß--Befehl für
2 Achsen
Tatsächliche Bewegung
Bewegung ohne Signal ”Restweg löschen”
Abb. 4.11 (b) Der Folgesatz ist ein Absolutmaß--Befehl für 1 Achse
G31 G90X200.0 F100;
X300.0 Z100.0;
X
Signal ”Restweg löschen”
100
100 200 300
Abb. 4.11 (c) Der Folgesatz ist ein Absolutmaß--Befehl für 2 Achsen
(300,100)
Tatsächliche Bewegung
Bewegung ohne Signal ”Restweg
löschen”
Z
63
Page 90

PROGRAMMIERUNG4. INTERPOLATIONSFUNKTIONEN
B--64114GE/01
4.12
MEHRSTUFIGES
RESTWEG-- LÖSCHEN
Format
In einem Satz mit P1 bis P4 hinter G31 speichert die Funktion
”Mehrstufiges Restweg--Löschen” Koordinaten in einer Kundenmakrovariablen, wenn ein Signal ”Restweg löschen” (4--P unkt oder 8--Punkt;
8--Punkt, wenn ein Signal ”Schnelles Restweg--Löschen” benutzt wird)
aktiviert wird.
Über die Parameter Nr. 6202 bis Nr. 6205 wird ein 4--Punkt-- bzw.
8--Punkt (Schnelles Restweg--Löschen)--Signal ausgewählt. Mit einem
Signal ”Restweg löschen” können mehrere Pn oder Qn (n = 1, 2, 3, 4) oder
Pn oder Qn 1 : 1 verbunden werden.
Ein Signal ”Restweg löschen” z. B. aus einem Festgrößen--Meßgerät
kann zum Überspringenaktuell ausgeführterProgramme benutzt werden.
Beim Profil-- oder Einstechschleifen zum Beispiel kann eine Reihe von
Bearbeitungsvorgängen, vom Schruppen bis hin zum Ausfunken,
automatisch durchgeführt werden, indem nach Ende eines jeden
Schrupp--, Halbfertig--, Schlicht-- oder Ausfunkvorgangs ein Signal
”Restweg löschen” gegeben wird.
Verfahrbefehl
G31 IP __ F __ P __ ;
IP_: Endpunkt
F_ : Vorschubgeschwindigkeit
P_ : P1--P4
Erläuterungen
D Entsprechungen
des Signal
”Restweg löschen”
Verweilen
G04 X (U, P)__ (Q__) ;
X(U, P)_ : Verweilzeit
Q_ : Q1 -- Q4
Mehrstufiges Restweg--Löschen wird über P1, P2, P3 oder P4 in einem
G31--Satz festgelegt. Erläuterung zur Auswahl (P1, P2, P 3 oder P4) siehe
im Handbuch des Maschinenherstellers.
Über Q1, Q2, Q3 oder Q4 in G04 (Verweilbefehl) kann das Verweilen
ähnlich wie mit G31 übersprungen werden. Restweg löschen ist auch
ohne Programmierung von Q möglich. Erläuterungen zur Auswahl (Q1,
Q2, Q3 oder Q4) finden S ie im Handbuch des Maschinenherstellers.
Die Parameter 6202 bis 6205 legen fest, ob ein 4--Punkt-- oder
8--Punkt--Signal ”Restweg löschen”(8 Punkt = Signal für Schnelles
Restweg--Löschen) verwendet wird. Die Angabe ist nicht auf eine 1 :
1--Entsprechung beschränkt. Ein Signal ”Restweg löschen” kann zwei
oder mehr Entsprechungen in Pn oder Qn haben (n = 1, 2, 3, 4). Die Bits
0 (DS1) bis 7 (DS8) von Parameter Nr. 6206 können zum Programmieren
einer Verweilzeit benutzt werden.
VORSICHT
Die Verweilzeit kann nicht ausgeblendet werden, wenn Qn
nicht angegeben ist oder die Parameter DS1 -- DS8
(Nr. 6206#0 --#7) nicht eingerichtet sind.
64
Page 91

B--64114GE/01
PROGRAMMIERUNG
4. INTERPOLATIONSFUNKTIONEN
4.13
RESTWEG LÖSCHEN
MIT DREHMOMENTGRENZE (G31 P99)
Format
Erläuterungen
D G31 P99
Bei begrenztem Motordrehmoment (z. B. per Drehmomentbegrenzungsbefehl,ausgegebenüber das PMS--Fenster) kann mit einem Verfahrbefehl
nach G31 P99 (oder G31 P98) derselbe Schnittvorschub erzeugt werden
wie mit G01 (Lineare Interpolation).
Das Signal zur Anzeige, daß die Drehmomentgrenze erreicht ist (weil
Druck aufgebracht wird oder aus einem anderen Grund) bewirkt ein
Restweg--Löschen.
Einzelheiten zur Verwendung dieser Funktion sind dem Handbuch des
Maschinenherstellers zu entnehmen.
G31 P99 IP_F_;
G31 P98 IP_F_;
G31: Einfach wirksamer G--Code
(nur wirksam für den betreffenden Satz)
Bei Erreichen der Drehmomentgrenze oder Eingang eines Signals
”Restweg löschen” während der Ausführung von G31 P99 wird der
laufende Verfahrbefehl vorzeitig abgebrochen und der nächste Satz
ausgeführt.
D G31 P98
D Dre hmoment-
begrenzungsbefehl
D Kundenmakro--
Systemvariable
Beschränkungen
D Achsenbefehl
Bei Erreichen der Drehmomentgrenze während der Ausführung von G31
P98 wird der laufende Verfahrbefehl vorzeitig abgebrochen und der
nächste Satz ausgeführt. Das Signal ”Restweg löschen” <X0004#7/
Werkzeugträger 2 X0013#7> hat keinen Einfluß auf G31 P98.
Ein Signal ”Restweg löschen” während der Ausführung von G31 P98 löst
kein Restweg--Löschen aus.
Der Verfahrbefehl wird fortgesetzt, wenn vor Ausführung von G31
P99/98 keine Drehmomentbegrenzung angegeben wird. Selbst bei
Erreichen einer Drehmomentgrenze wird kein Restweg--Löschen
durchgeführt.
Nach G31 P99/98 sind in den Kundenmakrovariablen die Koordinaten
nach dem Restweg--Löschen gespeichert. (Siehe Abschnitt 4.9.)
Wird durch ein Signal ”Restweg löschen” ein Restweg--Löschen mit G31
P99 ausgelöst, enthalten die Kundenmakro--Systemvariablen die
Koordinaten basierend auf dem Maschinen--Koordinatensystem nach der
Beendigung des Vorgangs, nicht die Koordinaten beim Eingang des
Signals ”Restweg löschen”.
In einem Satz mit G31 P98/99 kann jeweils nur eine Achse gesteuert
werden. Ist in diesen Sätzen die Steuerung von zwei oder mehr Achsen
angegeben oder wird kein Achsenbefehl ausgegeben, wird P/S--Alarm
Nr. 015 ausgelöst.
D Servofehler
Geht während der Ausführung von G31 P99/98 ein Signal ein, daß die
Drehmomentgrenze erreichtist, wird bei einem Servofehler größer 32767
P/S--Alarm Nr. 244 ausgegeben.
65
Page 92

PROGRAMMIERUNG4. INTERPOLATIONSFUNKTIONEN
B--64114GE/01
D Schnelles
Restweg--Löschen
D Einfache Synchronisation
und Winkelachsensteuerung
D Geschwindigkeits-
steuerung
D Aufeinanderfolgende
Befehle
Mit G31 P99 kann durch ein Signal ”Restweg löschen” Restweg-Löschen, nicht aber Schnelles Restweg--Löschen ausgelöst werden.
G31 P99/98 kann nicht sich nicht auf einfach synchronisierte Achsenoder
X--Achsen und Z--Achsen unter Winkelachsensteuerung beziehen.
Über das Bit 7 (SKF) von Parameter Nr. 6200 müssen Trockenlauf,
Overrideund automatischesBeschleunigen/Verzögernin Verbindung mit
G31--Befehlen für Restweg--Löschen deaktiviert werden.
G31 P99/98 darf nicht in aufeinanderfolgenden Sätzen befohlen werden.
WARNUNG
Vor einem Befehl G31 P99/98 ist stets eine Drehmomentbegrenzung anzugeben. Andernfalls läßt G31 P99/98 die
Ausführung von Verfahrbefehlen ohne Restweg-- Löschen
zu.
ANMERKUNG
Der Befehls G31 während laufender Schneidenradiuskompensation löst P/S--Alarm Nr. 035 aus. Schneidenradiuskompensation ist deshalb vor G31 mit G40 abzuschalten.
Beispiele
O0001 ;
:
:
Mjj ;
:
:
G31 P99 X200. F100 ;
:
G01 X100. F500 ;
:
:
MDD ;
:
:
M30 ;
:
%
In der PMS wird die Drehmomentbegrenzung über das Fenster festgelegt.
Befehl für Restweg löschen mit Drehmomentgrenze
Verfahrbefehl, für den Drehmomentbegrenzung gilt
Drehmomentbegrenzung beendet
durch PMS
66
Page 93

B--64114GE/01
5
PROGRAMMIERUNG
VORSCHUBFUNKTIONEN
5. VORSCHUBFUNKTIONEN
67
Page 94

PROGRAMMIERUNG5. VORSCHUBFUNKTIONEN
B--64114GE/01
5.1
ALLGEMEINES
D Vorschubfunktionen
D Ov erride
D Automatische
Beschleunigung/
Verzögerung
Von den Vorschubfunktionen wird die Vorschubgeschwindigkeit des
Werkzeugs gesteuert. Es stehen diese beiden Vorschubfunktionen zur
Verfügung:
1. Eilgang
Per Positionierbefehl (G00) wird das Werkzeug mit der in der CNC
(Parameter Nr. 1420) gespeicherten Eilganggeschwindigkeit
verfahren.
2. S chnittvorschub
Das Werkzeug verfährt mit der programmierten Schnittvorschubgeschwindigkeit.
Eilganggeschwindigkeit oder Schnittvorschubgeschwindigkeit können
mit dem Schalter am Maschinenbedienfeld übersteuert werden.
Um mechanische Stöße zu vermeiden, wird das Werkzeugam Anfang und
am Ende der Verfahrbewegung automatischbeschleunigt und abgebremst
(Abb. 5.1 (a)).
Eilganggeschwindigkeit
F
R
0
T
R
Vorschubgeschwindigkeit
F
C
0
T
C
F
:Eilgang-
R
geschwindigkeit
: Zeitkonstante
T
R
für Beschleunigung/
Verzögerung
im Eilgang
Zeit
T
R
F
: Vorschubgeschwin-
C
digkeit
: Zeitkonstante für
T
C
Beschleunigung/
Verzögerung im
Schnittvorschub
Zeit
T
C
Abb. 5.1 (a) Automatische Beschleunigung/Verzögerung (Beispiel)
68
Page 95

B--64114GE/01
PROGRAMMIERUNG
5. VORSCHUBFUNKTIONEN
D Werkzeugbahn im
Schnittvorschub
Wird die Verfahrrichtung zwischen programmierten Sätzen während des
Schnittvorschubs geändert, kann es zu einer Werkzeugbahn mit
gerundeten Ecken kommen (Abb. 5.1 (b)).
X
Programmierte Werkzeugbahn
Tatsächliche Werkzeugbahn
0
Abb. 5.1 (b) Beispielbahn zwischen zwei Sätzen
Z
Bei Kreisinterpolation kommt es zu einer radialen Abweichung
(Abb. 5.1 (c)).
X
∆r: Fehler
Programmierte Werkzeugbahn
Tatsächliche Werkzeugbahn
r
0
Z
5.2
EILGANG
Format
Erläuterungen
Abb. 5.1 (c) Beispiel für radiale Abweichung bei Kreisinterpolation
Das Ausmaß der Eckenrundung in Abb. 5.1 (b) und der Abweichung in
Abb. 5.1 (c) ist abhängig von der Vorschubgeschwindigkeit. Die
Vorschubgeschwindigkeit ist deshalb so zu steuern, daß das Werkzeug
wie programmiert verfährt.
G00 IP_;
G00: G--Code (Gruppe 01) für Positionierung (Eilgang)
IP_ ; Maß--Befehl für den Endpunkt
Der Positionierbefehl (G00) positioniert das Werkzeug im Eilgang. Im
Eilgang wird der nachfolgende Satz ausgeführt, sobald die
vorgeschriebene Vorschubgeschwindigkeit 0 ist und der Servomotor in
einen bestimmten, vom Maschinenhersteller eingestellten Bereich
gelangt (Positionsprüfung). Die Eilganggeschwindigkeit wird für jede
Achseüber Parameter Nr. 1420 festgelegt, eineEilvorschubgeschwindigkeit braucht also nicht programmiert zu werden.
Die Eilganggeschwindigkeit kann über den Schalter am Maschinen-Bedienfeld übersteuert werden: F0, 25, 50, 100%
F0: Erlaubt die Festlegung einer festen Vorschubgeschwindigkeit für jede
Achse über Parameter Nr. 1421.
Nähere Angaben sind dem entsprechenden Handbuch des Maschinenherstellers zu entnehmen.
69
Page 96

PROGRAMMIERUNG5. VORSCHUBFUNKTIONEN
B--64114GE/01
5.3
SCHNITTVORSCHUB
Format
Die Vorschubgeschwindigkeit bei Linearer Interpolation (G01),
Kreisinterpolation (G02, G03) usw . wird mit Ziffern nach dem F--Code
festgelegt.
Im Schnittvorschub wird der nachfolgende Satz so ausgeführt, daß die
Vorschubgeschwindigkeitsänderung gegenüber dem vorhergehenden
Satz minimal gehalten wird.
Es gibt zwei Modi zur Spezifizierung:
1. Vorschub pro Minute (G98)
Nach F wird der Werkzeugvorschubbetrag pro Minute angegeben.
2. Vorschub pro Umdrehung (G99)
Nach F wird der Werkzeugvorschubbetrag pro Spindelumdrehung
angegeben.
Vorschub pro Minute
G98 ; G--Code (Gruppe 05) für Vorschub pro Minute
F_ ; Vorschubgeschwindigkeitsbefehl (mm/min oder Zoll/min)
Vorschub pro Umdrehung
G99 ; G--Code (Gruppe 05) für Vorschub pro Umdrehung
F_ ; Vorschubgeschwindigkeitsbefehl (mm oder Zoll)
Erläuterungen
D Konstante Tangential-
geschwindigkeits -Steuerung
D Vorschub pro Minute
(G98)
Der Schnittvorschub wird so gesteuert, daß die tangentiale Vorschubgeschwindigkeit immer der Soll--Vorschubgeschwindigkeit entspricht.
X
Endpunkt
F
Startpunkt
Lineare Interpolation
Abb. 5.3 (a) Tangentiale Vorschubgeschwindigkeit (F)
X
Startpunkt
F
Mittelpunkt Endpunkt
ZZ
Kreisinterpolation
Nach G98 (im Modus ”Vorschub pro Minute”) wird der Werkzeugvorschubbetrag pro Minute direkt über eine Zahl nach F festgelegt. G98
ist ein modaler Code. G98 bleibt bis zur Angabe von G99 (Vorschub pro
Umdrehung) wirksam. Beim Einschalten ist der Modus ”Vorschub pro
Umdrehung” wirksam.
Der Vorschub pro Minute kann von 0 % bis 254 % (in 1% --Schritten)über
den Schalter am Maschinen--Bedienfeld übersteuert werden. Weitere
Hinweise finden Sie im Handbuch des Maschinenherstellers.
70
Page 97

B--64114GE/01
PROGRAMMIERUNG
5. VORSCHUBFUNKTIONEN
D Vorschub pro Umdrehung
(G99)
F
Abb. 5.3 (b) Vorschub pro Minute
Vorschubbetrag pro Minute
(mm/min oder Zoll/min)
WARNUNG
Einige Befehle, z.B. für das Gewindeschneiden,lassen sich
nicht übersteuern.
Nach G99 (im Modus ”Vorschub pro Umdrehung”) wird der
Werkzeugvorschubbetrag pro Spindeldrehung direkt über eine Zahl nach
F festgelegt. G99 ist ein modaler Code. G99 bleibt bis G98 (Vorschub pro
Minute) wirksam.
Der Vorschub pro Drehung kann von 0 % bis 254 % (in 1% --Schritten)
über den Schalter am Maschinen--Bedienfeld übersteuert werden. Weitere
Hinweise finden Sie im Handbuch des Maschinenherstellers.
Wenn das Bit 0 (NPC) von Parameter Nr. 1402 auf 1 gesetzt ist, sind
Vorschub--pro--Umdrehung--Befehle auch ohne Positionsgeber m öglich.
(Befehle für Vorschub pro Umdrehung werden von der CNC in Befehle
für Vorschub pro Minute umgerechnet.)
F
Abb. 5.3 (c) Vorschub pro Umdrehung
Vorschubbetrag pro Spindelumdrehung
(mm oder Zoll)
VORSICHT
1 Bei niedriger Spindeldrehzahl kann es zu Schwankungen
der Vorschubgeschwindigkeit kommen. Geschindigkeitsschwankungen nehmen mit abnehmender Drehzahl zu.
2 Einige Befehle, z.B. für das Gewindeschneiden,lassen sich
nicht übersteuern.
71
Page 98

PROGRAMMIERUNG5. VORSCHUBFUNKTIONEN
U
B--64114GE/01
D Festeinstellung des
Schnittvorschubs
D Referenz
5.4
VERWEILEN (G04)
Für die Schnittvorschubgeschwindigkeit entlang jeder Achse kann über
den Parameter Nr. 1422 eine gemeinsame Obergrenze festgelegt werden.
Wenn eine aktuelle Schnittvorschubgeschwindigkeit (bei aktivierter
Übersteuerung) eine vorgegebene Obergrenze überschreitet, wird sie auf
diesen Maximalwert begrenzt.
HINWEIS
Eine Obergrenze wird in mm/min oder Zoll/min festgelegt.
Bei der Berechnung der CNC kann es zu einem Vorschubgeschwindigkeitsfehler von ±2% gegenüber einem Sollwert
kommen. Dies gilt allerdings nicht für Beschleunigung/
Verzögerung. Genau gesagt, wird dieser Fehler beim
Messen der Zeit, die das Werkzeug beim Stetigbahnfahren
für eine Strecke von 500 mm benötigt, verursacht.
Befehlwertebereich für die Vorschubgeschwindigkeit siehe Anhang C.
Format
Erläuterungen
Verweilen G04 X_ ; oder G04 U_ ; oder G04 P_ ;
X_ : Angabe einer Zeit (Dezimalzeichen erlaubt)
U_ : Angabe einer Zeit (Dezimalzeichen erlaubt)
P_ : Angabe einer Zeit (Dezimalzeichen nicht erlaubt)
Durch die Angabe einer Verweilzeit wird die Ausführung des
nachfolgenden Satzes um die angegebene Zeit verzögert.
Das Bit 1 (DWL) von Parameter Nr. 3405 kann ein Verweilen bei jeder
Umdrehung im Modus ”Vorschub pro Minute” (G99) vorschreiben.
Tabelle 5.4 (a)
Befehlswertebereich der Verweilzeit (Befehl X oder U)
Inkrementalmaß-
system
IS--B 0.001 bis 99999.999
IS--C 0.0001 bis 9999.9999
Befehlswertebereich der Verweilzeit (Befehl P)
Befehlswerte-
bereich
Tabelle 5.4 (b)
Verweilzeit--
Einheit
soder
Inkrementalmaß-
system
IS--B 1 bis 99999999 0.001 s oder U
IS--C 1 bis 99999999 0,0001 s oder U
72
Befehlswerte-
bereich
Verweilzeit--
Einheit
Page 99

B--64114GE/01
6
REFERENZPUNKT
Eine CNC--Werkzeugmaschine besitzt eine spezielle Position, an der,
wie später beschrieben, normalerweise das Werkzeug gewechselt oder
das Koordinatensystem eingerichtet wird. Man bezeichnet die Position
als Referenzpunkt.
PROGRAMMIERUNG
6. REFERENZPUNKT
73
Page 100

6.1
ANFAHREN DES REFERENZPUNKTS
PROGRAMMIERUNG6. REFERENZPUNKT
B--64114GE/01
D Referenzpunkt
Der Referenzpunkt ist ein Fixpunkt an einer Werkzeugmaschine, zu dem
das Werkzeug leicht mittels der F unktion ”Referenzpunktfahren”
verfahren werden kann.
Beispielsweise wird der R eferenzpunkt als Position für den
automatischen Werkzeugwechsel benutzt. Durch Angabe der
Koordinaten im Maschinen--Koordinatensystem in den Parametern
(Nr. 1240 bis 1243) können bis zu vier Referenzpunkte festgelegt werden.
Y
2. Referenzpunkt
3. Referenzpunkt
Referenzpunkt
4. Referenzpunkt
Maschinennullpunkt
Abb. 6.1 (a) Maschinennullpunkt und Referenzpunkte
X
74
 Loading...
Loading...