


R
ELECTRONICS
Original Instruction
DENVER DBO-6550 MK2
www.facebook.dk/denver-electronics
Before operating this vehicle, read all the instructions for safe assembly and operations. User’s manual can guide you through the functions and usage of Balance scooter. Before using this scooter, familiarize yourself with how to operate, so that you can keep the scooter in the best condition possible.
Chapter 1 General information
1.1.The risk of driving
WARNING!
-Learn how to drive safely before you drive fast on the scooter.
-Failing, losing control, crashing, including violating the rules in the user’s manual can lead to injury.
-Speed and range may differ based on rider weight, terrain, temperature, and driving style.
-Make sure to wear helmet and protective clothing before using the scooter.
-Make sure to read the manual carefully before using the scooter.
-Only for use in dry weather.
-We do not recommend the use of any balance scooters on public roads
-Please make sure to check with your national laws in your country for usage this product.
1.2.The preparation before operation
Before using, the battery should be fully charged. Please check Chapter 6.
1.3.The weight limitation of the operator
The reason of the weight limitation: 1. guarantee the safety of the operator; 2. decrease the damage of overloading.
Maximum load: 120kg. Minimum load: 20kg.
Chapter 2 Operating the Balance scooter
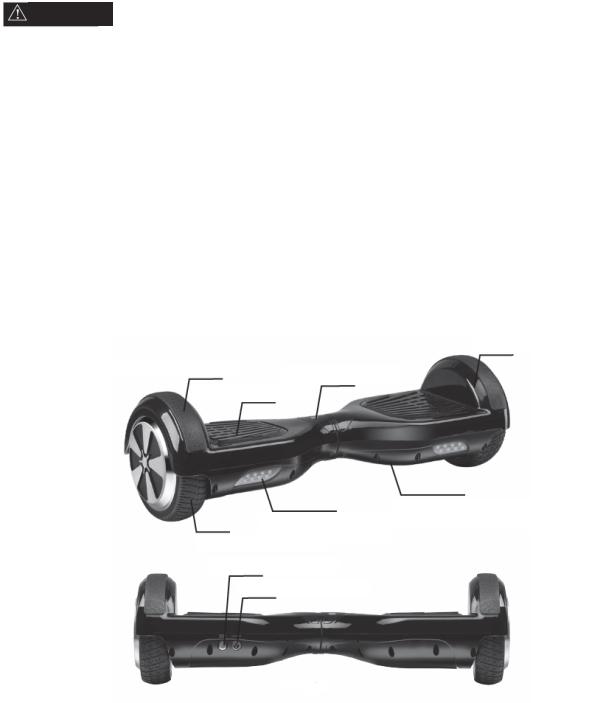
2.1.Description and identification
Fender
Bumper Strip
Indicator
Pedal
Protective cap for chassis
Decorative Light
Tire
Power On/Off
DC Port
2.2.Calibration
If your scooter seems to pull to the left or right, you may need to recalibrate its sensors. Step as below: Step 1: Shut down/level the scooter
Step 2: Press the Power button for more than 10 seconds until you see the light flashing 5 times. Step 3: Shutdown scooter again.
Step 4: Power on, finished calibration.

2.3.Operating principal
-Balancing scooter uses Dynamic equilibrium, using internal gyroscope and acceleration sensors. The status of the scooter is controlled by the center-of gravity. It is adjusted by motor, which is controlled by the servo control system. When you lean forward, it will sense your actions to accelerate. When you need to turn, slow it down and move your foot forwards or backwards then the center-of gravity of the body moves left or right therefore the scooter can sense moving left or right.
-Balance scooter has inertial dynamic stabilization system, so it can keep anterior-posterior balance but cannot guarantee the left and right. So when turning, the scooter needs to be operated slowing, otherwise, you may be injured.
2.4.Learn how to use it
Step 1: Press the power button to turn on the scooter.
Step 2: Put the scooter on a flat ground and make sure all safety measures are taken. Put one foot on the pad that will trigger the pedal switch to turn on the operation indicator, after the system enters the selfbalancing mode, put the other foot on the pad.
Step 3: Take control of the scooters’ forwards or backwards, do remember the movement of your body should not be abrupt.
NOTE:
If you are not in a balanced condition when you trigger the foot-switch, the buzzer will alarm, and the warning LED will light. The system is not in a self-balanced condition. Without a balanced condition, you should not operate the scooter. Then you need to calibrate the sensors, see point 2.2.
Step 4: Control the left and right direction of the scooter.
Step 5: Before you get off, make sure that the scooter is still in balanced condition and stopped, then step off one foot, then the other foot.
Tilt right foot forwardTurn Left |
Tilt left foot forwardTurn Right |
WARNING!
You should never turn violently when driving fast.
 Loading...
Loading...