

Page 1

Operating instructions
I
Contents
1- GENERAL 3
1.1 - GENERAL SAFETY RECOMMENDATIONS 3
1.1.1 - STANDARD SAFETY DEVICES 3
1.2 - FIELD OF APPLICATION 3
1.3 - OVERALL DIMENSIONS (42" GUARD) 3
1.4 - SPECIFICATION 4
2 - HANDLING AND LIFTING 4
3 - COMMISSIONING 5
3.1 - ANCHORING 5
3.2 - ELECTRICAL CONNECTION 5
3.3 - ADAPTER MOUNTING 5
3.4 - GUARD MOUNTING AND ADJUSTMENT 6
3.5 - SPACER WD 6
4 - CONTROLS AND COMPONENTS 7
4.1 - BRAKE PEDAL 7
4.2 - AUTOMATIC DISTANCE AND DIAMETER GAUGE 7
4.3 - AUTOMATIC WIDTH GAUGE (OPTIONAL) 7
4.4 - AUTOMATIC WHEEL POSITIONING 7
4.5 - KEYBOARD 7
5 - INDICATIONS AND USE OF THE WHEEL BALANCER 8
5.1 - INITIAL SCREEN 8
5.1.1 - SCREEN-SAVE SCREEN 8
5.2 - MENU ACCESS DIAGRAM 9
5.3 - PRESETTING OF WHEEL DIMENSIONS 10
5.3.1 - AUTOMATIC PRESETTING (SEE ALSO CORRECTION MODE)10
5.3.1.1 - STANDARD WHEELS 10
5.3.1.2 - AUTOMATIC WIDTH MEASUREMENT (OPTIONAL) 11
5.3.1.3 - WHEELS ALUS 12
5.3.2 - MANUAL PRESETTING 13
5.4 - USER CONTROL 14
5.4.1 - USER MEMORIZATION 14
5.4.2 - TO CALL USER 14
5.5 - RESULT OF MEASUREMENT 15
5.5.1 - INDICATION OF EXACT CORRECTION WEIGHT POSITION 16
5.5.2 - “SPLIT” CONTROL 17
5.5.3 - UNBALANCE OPTIMIZATION 18
5.5.4 - CORRECTION MODE 18
5.5.5 - AUTOMATIC MINIMIZATION OF STATIC UNBALANCE 19
5.6 - WHEN AND WHY MATCHING 20
5.7 - ECCENTRICITY MEASUREMENT (OPTIONAL) 22
6 - SETUP (SEE DIAGRAM SHOWING ACCESS TO THE MENUS) 2
6.1 - LANGUAGE 24
6.2 - UNIT
6.3 - UNBALANCE DISPLA
6.4 - UNBALANCE DISPLAY PITCH 24
6.5 - SPIN WITH GUARD CLOSED
6.6 - SCREEN-SA
6.7 - VISUAL
6.8 -
6.9 - CORRECTION METHOD
6.9.1 - ST
OF UNBALANCE MEASUREMENT 2
Y THRESHOLD 2
VER TIME 2
ECCENTRICITY CHECK 2
ACOUSTIC SIGNAL 2
ANDARD CORRECTION METHOD 2
4
4
4
2
4
4
4
4
2
5
5
GB
I 0567 - 1
Page 2

6.9.2 - EXTERNAL PLANE CORRECTION METHOD 25
6.9.3 - I.C. (INTELLIGENT
6.10 - b FOR I.C.
7 - SPECIAL
7.1 - OPTIONS 27
7.1.1 - ENABLING OF WIDTH MEASUREMENT
7.1.2 - ENABLING OF ECCENTRICITY
7.1.3 - VIDEO INTERF
7.1.4 - CONTROL OF SERIAL OUTPUT RS232C 27
7.2 - PRESETTING
7.3 - CALIBRA
7.3.1 - GAUGE CALIBRA
7.3.1.1 - DIST
7.3.1.2 - DIAMETER GAUGE CALIBRA
7.3.1.3 - WIDTH GAUGE CALIBRA
7.3.2 - BALANCING MACHINE CALIBRA
7.3.3 -
8 - ERRORS 30
9 - ROUTINE MAINTENANCE
- TO REPLACE THE FUSES 3
9.1
CALIBRATIONS AND FUNCTIONS (SEE MENU ACCESS DIAGRAM ) 2
TIONS 2
ANCE GAUGE CALIBRATION 2
AUTODIAGNOSTICS 2
CORRECTION) CORRECTION METHOD 2
2
2
MEASUREMENT 2
ACE 2
THE CUSTOMER AND USER NAME 2
TION 2
TION 2
TION 2
TION 2
3
5
6
7
7
7
7
7
7
8
8
8
8
8
9
1
1
I 0567 - 2
GB
Page 3

1- GENERAL
1.1 - General safety recommendations
►
The balancing machine should only be used by duly authorized and trained personnel.
The balancing machine should not be used for purposes other than those described in the instruction
manual.
Under no way should the balancing machine be modifi ed except for those modifi cations made explicitly
by the manufacturer.
Never remove the safety devices. Any work on the machine should only be carried out by duly authorized
specialist personnel.
Do not use strong jets of compressed air for cleaning.
Use alcohol to clean plastic panels or shelves (AVOID LIQUIDS CONTAINING SOLVENTS).
Before starting the wheel balancing cycle, make sure that the wheel is securely locked on the adapter.
The machine operator should not wear clothes with fl apping edges. Make sure that unauthorized person
nel do not approach the balancing machine during the work cycle.
Avoid placing counterweights or other objects in the base which could impair the correct operation of the
balancing machine.
1.1.1 - Standard safety devices
►
STOP push button for stopping the wheel under emergency conditions.
The safety guard of high impact plastic is with shape and size designed to prevent risk of counterweights
from fl ying out in any direction except towards the fl oor.
A microswitch prevents starting the machine if the guard is not lowered and stops the wheel whenever
the guard is raised.
1.2 - Field of application
►
The machine is designed for balancing car or motorcycle wheels weighing less than 75 kg. It can be operated within a
temperature range of 0° to + 45°C.
It can measure the geometric radial run-out of the wheels (optional)
1.3 - Overall dimensions (42" guard)
►
1
GB
I 0567 - 3
Page 4

►
1.4 - Specifi cation
Single phase power supply 115 - 230 V 50-60 Hz
Protection class IP 54
Max. power consumption 1,1 Kw
Monitor SVGA 15"
Balancing speed approx. 180 min
-1
Cycle time for average wheel (14 Kg) 6 seconds
Balancing accuracy 0,5 grams
Position resolution ± 1.4 °
Average noise level < 70 dB(A)
Distance rim - machine 0 - 280 mm (400 mm can be preset)
Rim width setting range 1.5" ÷ 20" or 40 ÷ 510 mm
Diameter setting range 10" ÷ 30" or 265 ÷ 765 mm
Total wheel diameter within guard 1067mm (42")
Total wheel width within guard 500 mm (42")
Min/max. compressed air pressure 7 ÷ 10 Kg/cm
2
approx. 0.7 to 1 Mpa;
approx. 7 to 10 BAR;
approx. 100 to 145 PSI.
2 - HANDLING AND LIFTING
N.B.: DO NOT HOIST THE WHEEL BALANCER USING DIFFERENT GRIPS.
2
2a
I 0567 - 4
GB
Page 5

3 - COMMISSIONING
►
3.1 - Anchoring
The machine can be operated on any fl at non-resilient fl oor.
Make sure that the machine rests solely on the three support points provided (fi g. 2a).
If possible, it is advisable to anchor to the fl oor using relative mounting feet (see fi g. 2a) in the event of continual use
with wheels weighing over 35 Kg.
►
3.2 - Electrical connection
The machine is supplied with a single phase mains cable plus earth (ground).
The supply voltage (and mains frequency) is given on the machine nameplate. It may NOT be changed.
Connection to the mains should always be made by expert personnel.
The machine should not be started up without proper earth (ground) connection.
Connection to the mains should be through a slow acting safety switch rated at 4A amp (230V) or 10 amp (115V) .
3.3 - Adapter mounting
►
The balancing machine is supplied complete with cone adapter for fastening wheels with central bore. Other optional
fl anges can be mounted once the terminal part is removed (also see enclosed brochures)
N.B. : CAREFULLY CLEAN THE COUPLING SURFACES BEFORE PERFORMING ANY
OPERATION.
DISMOUNTING THREADED END PIECE
3
a) Back-off screw B and remove threaded end-piece A.
b) Fit the new adapter.
A
B
GB
I 0567 - 5
Page 6

►
3.4 - Guard mounting and adjustment
a) Fasten the components to the base as illustrated in specifi c exploded view.
b) The position of the wheel guard when closed can be adjusted with relative screw accessible at the back. Correct
position is shown in Fig. 1.
c) Check that the microswitch is held down when the guard is closed.
d) Adjust the angular position of microswitch control.
►
3.5 - Spacer WD
When balancing very wide wheels (9”), there is not enough space to turn the distance gauge. To withdraw the wheel
from the machine side, fi t spacer WD on the adapter body and secure it with the standard issue nuts. When centring
the wheel with the cone on the inside, fi t the other cone as a spacer to obtain spring thrust.
4
DC
Spring
WD
Cone
I 0567 - 6
GB
Page 7

4 - CONTROLS AND COMPONENTS
4.1 - Brake pedal►
5
This pedal allows the operator to hold the
wheel when fi tting the counterweights. It
must not be actuated during the measuring cycle.
4.2 - Automatic distance and diameter gauge
►
This gauge allows measurement of the distance of the wheel from the machine and the wheel diameter at the point of
application of the counterweight. It also allows correct positioning of the counterweights on the inside rim by using the
specifi c function (see
the position used for the measurement within the rim (for calibration, see the corresponding section).
►
4.3 - Automatic width gauge (optional)
Width gauging is through a SONAR device which measures the distance of the wheel without mechanical contact,
merely by closing the guard and each time a valid measurement has been made with gauge
AND DIAMETER GAUGE.
INDICATION OF EXACT CORRECTION WEIGHT POSITION ) which allows reading, on the monitor,
AUTOMATIC DISTANCE
►
4.4 - Automatic wheel positioning
At the end of the spin, the wheel is positioned according to the unbalance on the outside or else according to the static
unbalance (when selected).
Accuracy is ± 20 degrees.
►
4.5 - Keyboard
FUNCTION KEYS: they directly select the function on screen
Confi rm
Selection of special
function
N.B.: Press the buttons with the fi ngers only: never use the counterweight pincers or other
pointed objects.
When the beep signal is enabled (see section
button is accompanied by a “beep”.
The TFT monitor is NOT a TOUCH SCREEN type.
Starts measuring
cycle
ACOUSTIC SIGNAL), pressing of any push
Stops machine
cycle
GB
I 0567 - 7
Page 8

5 - INDICATIONS AND USE OF THE WHEEL BALANCER
The monitor shows several information and suggests various alternative ways of use to the operator.
This is through various “screens”.
5.1 - Initial screen►
Buttons enabled:
: main functions screen (see
: selecting static correction
: balancing spin (see
Dimensions gauge
DIMENSIONS
If the machine remains on the initial screen for a certain amount of time without being used, the system is
automatically switched to a screen-save. Striking of any key, movement of the wheel of distance + diameter gauge
will cause automatic switching from the screen-save menu to the initial screen.
5.1.1 - Screen-save screen
►
Name of the wheel balancer’s owner. Can be preset via the monitor.
: when extracted, the Dimensions screen is selected (see PRESETTING OF WHEEL
).
MENU ACCESS DIAGRAM)
RESULT OF MEASUREMENT)
I 0567 - 8
GB
Page 9

►
5.2 - Menu access diagram
N.B. : - The symbol indicates the presence of a further menu.
- To return to the previous menu, press button
- To return to the initial screen, press button
A
User control
B
H
C
PASSWORD : + + +
FOR SPECIALIZED PERSONNEL ONLY
D
F
User
E
GB
I 0567 - 9
Page 10

5.3 - Presetting of wheel dimensions
►
5.3.1 - Automatic presetting (see also CORRECTION MODE)
►
INDICATOR
L.T. function enabled
(see Buttons
Enabled)
INDICATOR: Width
Sonar function
enabled
5.3.1.1 - Standard wheels
►
The screen appears upon removing the distance + diameter gauge.
The “dimension acquired” message is indicated by the correction weight symbol, which changes from blue to red.
- INNER SIDE WEIGHT: Using the special grip, move the end of the gauge against the rim in position:
a) Sprung weight : in one of the positions A/B indicated in fi gure 8.
8
b) Adhesive weight: in the position indicated below
8a
Position of adhesive
weight
Pos A
Pos B
FI
Note: Always use the round part of the striker plate.
Hold the gauge in position for at least 2 seconds.
If the acoustic signal is enabled (see
“beep”.
I 0567 - 10
GB
ACOUSTIC SIGNAL), the acquisition of the dimensions is accompanied by a
Page 11

b
Set the distance+diameter gauge to the rest position.
The current width value is displayed inside the tyre.
- Set the nominal width, which is normally shown on the rim, or measure the width “b” with the
caliper gauge provided.
b
The other enabled buttons are:
Select the type of weight to apply (see
User call/save control.
Return to initial frame.
Launch balancing.
►
5.3.1.2 - Automatic width measurement (optional
Gradually lower the guard after carrying out measurement of distance + diameter in automatic mode.
If the width measured is incorrect (out of range), the following message appears:
“Sonar measure is out of range:”
“F1 = repeat”
“F2 = manual set-up”
Press F1 to re-lower the guard and repeat the width measurement. Press F2 to go to the dimensions panel for
manual insertion of the width measurement.
Manually presetting is possible by using the push buttons as described in
CORRECTION METHODS).
)
MANUAL PRESETTING.
GB
I 0567 - 11
Page 12

►
5.3.1.3 - Wheels ALUS
After the measurement performed for the FI inner side, as indicated in fi g. 9, pull out the gauge again to store the
data for the FE outer side; choose position A or B (fi g. 8) at your choice. Keep this position for at least 2 seconds.
The counterweight symbols change colour.
When the acoustic signal is enabled (see
ACOUSTIC SIGNAL), the acquisition is accompanied by a “beep”.
9
Position of
adhesive
weights
After having detected the dimensions, use the key to indicate the type of correction selected for the inner
side.
The following buttons are enabled:
Management of save user recall
Selection of clip or adhesive weight for inside.
Only for automatic width option:
The L.T. key (LIGHT TRUCK) used to improve the dimensional calibration of large-diameter
wheels such as off-road, trucks, wheels which protrude signifi cantly from the rim. Press the L.T. key,
after distance measurement, immediately before lowering the guard for Width Measurement.
The option is disengaged at the end of current Width Measurement.
Selecting the manual dimension presetting screen
FI
FE
I 0567 - 12
GB
Return to initial screen.
Balancing run.
Page 13

5.3.2 - Manual presetting
►
If necessary, the dimensions can be inserted or edited in manual mode as follows:
- press
- press
- press / to preset the required value.
- press
- press to preset the dimensions for the ALUS correction mode
Defi nition of dimensions for correction using spring weights:
d = DIAMETER: Preset the nominal diameter stamped on the rim.
b = WIDTH: Preset the nominal width indicated on the rim (see
a = DISTANCE: Preset the distance of the inside of the wheel from the machine, after measuring
+
to select the dimension to be preset (red).
to change unit of measurement.
STANDARD WHEELS) .
it with relative gauge as described in fi g. 8.
10
b
a
d
In the event of correction type other than standard (spring weight), follow the instructions on the screen for correct
detection of dimensions.
GB
I 0567 - 13
Page 14

5.4 - USER control►
The wheel balancer can be used simultaneously by 4 different users who, through a simple sequence, can memorize
their work condition and call it when needed. The users’ names can be memorized
(
PRESETTING THE CUSTOMER AND USER NAME).
5.4.1 - USER memorization
►
Preset the dimensions correctly according to the procedures already described in sections
PRESETTING
.
AUTOMATIC
Press
Press
Press the number corresponding to the required USER. The system returns to the initial screen automatically.
5.4.2 - To call USER
►
Perform a measuring spin with any dimensions.
Press button
Press
Press the number corresponding to the required USER. The system automatically returns to the initial screen with
; the “MENU” window appears on the monitor.
; a window appears with the list of available USERS. The current user is displayed in red.
; the “MENU” window appears on the screen.
: a window appears with the list of available USERS. The current user is displayed in red.
recalculation of the unbalance values on the basis of the effective dimensions of the USER called.
N.B.: The dimensions memorized as USER are lost when the machine is switched off.
The USER control is also valid for the ALUS dimensions.
The current USER is always displayed in the Measurements and Dimensions screens.
I 0567 - 14
GB
Page 15

5.5 - Result of measurement►
After performing a balancing spin, the unbalance values are displayed as well as arrows useful for positioning the point
of application of the correction weight. After positioning the wheel, apply the weight in the 12 o’clock position. When
the beep signal is enabled (see section
“beep”.
If the unbalance is less than the chosen threshold value, the “OK” appears instead of the unbalance value to indicate,
on that particular side, the wheel is in tolerance; the residual unbalance can be displayed by pressing button
with an accuracy of 0.5 g (0.1 oz).
ACUSTIC SIGNAL), reaching of the correction position is accompanied by a
The following buttons are enabled:
Display of residual unbalance
Selection of correction mode (STATIC/DUAL SURFACE). When the mode is changed, the
unbalance values are recalculated automatically on the basis of the previous spin.
Simultaneous display of the dynamic+static unbalance can be enabled through the special
function in Setup (see par. DYNAMIC + STATIC).
When this push button is held down for more than 1.5 seconds, eccentricity measurement is temporarily
disenabled (enabled in
[4] again for more than 1.5 seconds. Every time the machine is switched on, the status of eccentricity
measurement refl ects the settings in
Split control for splitting of unbalance over presettable components (
only enabled in STATIC or ALUS correction.
Indication of the longitudinal position of the unbalance (
POSITION) is enabled.
For selection of special functions
Balancing spin.
SPECIAL FUNCTIONS). To re-enable eccentricity measurement, press push button
SPECIAL FUNCTIONS.
“SPLIT” CONTROL). Button
INDICATION OF EXACT CORRECTION WEIGHT
N.B.: If the machine remains on this screen without being used for more than the time
preset in the Setup parameters
, the screen automatically returns to the
screen-save.
GB
I 0567 - 15
Page 16

5.5.1 - Indication of exact correction weight position
►
It is possible use this function in the event of correction of the external side using an adhesive weight placed inside
the rim. Remember to thoroughly clean the application areas.
This function allows cancelling approximations in the mounting of counterweights with consequent reduction of the
residual unbalance.
Press button
Pull out the rim distance+diameter gauge in position A, fi gure 8. Approach of the weight to the correction position
is indicated by a moving coloured arrow [ ].
When a fi xed arrow [
ght by turning the tip of the gauge towards the outside, into the position in which the pincers touches the wheel.
Compensation is made for the fact that the weight application position is no longer at 12 o’clock (where appropriate
use the weight pusher) (fi g. 11).
11
from the Measurements screen.
] is reached, rotate the wheel to correction position (FI or FE) and apply the counterwei-
N.B.: when the acoustic signal is enabled (see
arrow [
FI
] is accompanied by a “beep”.
FE
ACOUSTIC SIGNAL), the reaching of a fi xed
I 0567 - 16
GB
Page 17

5.5.2 - “SPLIT” control
►
SPLIT is only possible in the event of static unbalance or ALUS external side and is used to hide any adhesive
weights correcting unbalance behind the rim spokes.
To split the unbalance detected in two different positions, proceed as follows :
1. Position static unbalance or ALUS external side in the correction position :
2. Select a spoke close to the 12 o’clock postion to be corrected, more it into the 12 o’clock position and press button
[6].
3. Turn the wheel in the rotation direction indicated on the unbalance display, brining the second spoke to the 12
o’clock position and press button [6].
- Turn the wheel in direction of rotation.
- Turn the wheel in reverse direction of rotation.
4. At this stage, the screen shows the graphic display of the correction spokes with the relative weight of the
unbalance detected.
5. Position the spokes indicated on screen in the 12 o’clock position and correct with the value displayed.
Any error in this procedure is clearly shown on screen.
Always follow the information provided by the wheel to optimise correction.
Note: When SPLIT is enabled, the icon
appears on the left of the screen.
GB
I 0567 - 17
Page 18

5.5.3 - Unbalance optimization
►
The symbol is displayed automatically for static unbalance exceeding 30 grams (1.1 oz). The program allows
reducing the total unbalance of the wheel by compensating, when possible, the unbalance of the tyre with that of the
rim. It requires two spins with rotation of the tyre on the rim in the second spin.
Press
►
5.5.4 - Correction mode
+ after a fi rst spin and follow the instructions appearing on the monitor.
After having performed automatic measurement of the inner side, it is possible to place the correction weights as
required by pressing pushbuttons
and .
N.B.: In the event of automatic measurement of both sides, if the difference between the inner and
outer diameters is greater than or equal to 2”, the system sets the inner side spring weight. To
modify this presetting, press the button. The external side may only be “adhesive”.
To display static unbalance, press the
diameter is always considered).
I 0567 - 18
GB
button on the measurement screen (for ALUS static, the inner side
Page 19

ALUS:
x
g
g
x
°
x
g
g
x
g
g
g
g
x
g
g
x
x
g
g
x
x
g
g
x
Possible types of correction:
12
Balancing of steel or light alloy rims with application of clip-on
weights on the rim edges
The STATIC mode is necessary for motorcycle wheels or when it is
not possible to place the counterweights on both sides of the rim.
Balancing of light alloy rims with application of adhesive weights on
the rim shoulders.
Combined balancing: adhesive weight on the outside, clip-on weight
inside.
Combined balancing: clip-on weight outside and adhesive
weight inside.
Balancing of alloy rims with hidden application of the adhesive
weight on the outside.
Combined balancing: clip-on weight inside and adhesive hidden
weight outside (Mercedes).
5.5.5 - Automatic minimization of static unbalance
►
Initial unbalance
ssx
ddx
g
g
5500°
ssx
g
residual static
Choice with minimum
static residual
ddx
g
g
11g
ssx
ddx
g
residual static
With conventional
wheel balancer
g
44g
phase shift
Possible approximations
ssx
ddx
g
residual static residual static
33g
This program is designed to improve the quality of
balancing without any mental effort or loss of time by
the operator. In fact by using the normal commercially
available weights, with pitch of 5 in every 5 g, and by
ssx
g
applying the two counterweights which a conventional
ddx
wheel balancer rounds to the nearest value, there
g
could be a residual static unbalance of up to 4 g.
66g
The damage of such approximation is emphasized
by the fact that static unbalance is cause of most
of disturbances on the vehicle. This new function,
resident in the machine, automatically indicates
the optimum entity of the weights to be applied by
approximating them in an “intelligent” way according
to their position in order to minimize residual static
unbalance.
GB
I 0567 - 19
Page 20

►
5.6 - When and why matching
The software associated with eccentricity measurement is a powerful tool for determining the need to perform relative
rotation between the rim and tyre in order to reduce the eccentricity of the wheel down to acceptable limits. The principle adopted is based on the consideration that a rim with acceptable tolerance, mounted with an acceptable tyre,
can statistically generate a total eccentricity which is not acceptable but can be improved by matching.
Generally speaking, rim measurement is not necessary, accurate or useful because:
• To measure the rim it is necessary to remove the tyre. There can by coarse errors on the outside (e.g. aluminium
wheels!)
• The two rim sides can be eccentric in a very different way. Therefore to which one to make reference? What is the
effect on the tyre mounted?
• To improve the eccentricity of a wheel, the rim should be eccentric, to compensate the tyre. And viceversa.
• If after a rotation by 180° of a wheel, the value is still out-of-tolerance, either the tyre or rim are too eccentric: One
of the two must be replaced!
wheel
Example 1
Ideal wheel
rotation axle
SOLUTION:
Rotate the tyre on the rim by 180°
Ideal wheel
rim
tyre
excessive, due to an acceptable
rim or tyre but randomly placed in an
RESULT:
wheel eccentricity 0.3 - 0.4 mm (in tolerance)
wheel
rim
Rim + 0.8 mm
Tyre + 0.6 mm
Wheel + 1.3 mm
Eccentricity of the wheel is
“unfortunate” relative position.
Example 2
Rim + 0.8 mm
Tyre - 0.6 mm
rotation axle
I 0567 - 20
GB
tyre
Wheel + 0.3 mm
Eccentricity of the single items has
been compensated.
The wheel is acceptable.
Page 21

Ideal wheel
rotation axle
wheel
rim
tyre
Example 3
Rim 0 mm
Tyre + 1.2 mm
Wheel + 1,2 mm
Eccentricity of the wheel cannot be
compensated by the rotation because
the rim is perfect!
SOLUTION:
Rotate the tyre on the rim by 180°
5.6.1 - Presetting of tolerance on the machine
There is no general rule concerning acceptability of an eccentricity value . As a fi rst approximation we consider it cor-
rect to use a threshold of 1 to 1.5 mm. The E/ECE/324 standard prescribes 1.5 mm as max. eccentricity of a rebuilt
tyre.
5.6.2 - Value of static unbalance, correlated with eccentricity
Clear indication is given in the Measurement screen of both the value and position of the static unbalance as well
as the eccentricity. In fact, it is interesting to check the correlations of the two values, above all of the two positions.
When the two positions have a similar angle (± 30° one from the other), there is a clear sign that an eccentricity is
present which can be compensated by matching.
5.6.3 - Value of unbalance corresponding to eccentricity
For user’s reference, the centrifugal force is calculated corresponding to a certain speed, compared to the force generated by the eccentricity present on the tyre (calculated with an approximate average elastic constant).
RESULT:
no improvement is obtained
GB
I 0567 - 21
Page 22

5.7 - Eccentricity measurement (optional) ►
The much enlarged fi gures show the outer tyre surface and axis of wheel rotation.
Fig. A - shows measurement of the total Peak-to-Peak eccentricity defi ned as maximum radial deviation of the tyre
surface.
Fig. B - shows measurement of the eccentricity of the 1st
harmonic, i.e. the eccentricity of that circle which “recopies”
the tyre shape, by averaging the local deviations of the tyre
from the round shape.
Obviously the P.P. measurement is normally greater than
that of the 1st harmonic. Tyre manufacturers normally supply
two different tolerances for the two eccentricities.
At the end of the balancing spin it is possible to automatically measure the eccentricity of the tyre through the SONAR
sensor installed on the guard. The sensor should be positioned by hand in front of the tyre tread.
A B
GRAPH 1 - (yellow)
GRAPH 2 - (red)
GRAPH 1 : represents the actual Peak-to-Peak eccentricity.
GRAPH 2 : represents the eccentricity of the 1st harmonic. For a wheel in optimum conditions, such graph
should approach a straight line.
While rotating the wheel, the screen cursor indicates the current value, with the stage referred to the
eccentricity measurement sensor.
The following buttons are enabled:
: Start an eccentricity optimisation procedure (see
: A box is displayed indicating the offset effect that that eccentricity of the fi rst harmonic measured
may have, at an average speed of 120 Km/h.
: Return to measurement screen.
ECCENTRICITY OPTIMISATION).
I 0567 - 22
GB
Page 23

N.B.:
In the event that the value of the fi rst harmonic is higher than 1,2 mm, at the end of eccentricity measurement the
following window appears:
The following buttons are enabled:
: Start an eccentricity optimisation procedure (see ECCENTRICITY OPTIMISATION).
: A box is displayed indicating the offset effect that that eccentricity of the fi rst harmonic measured
may have, at an average speed of 120 Km/h.
: Select the display box of the graph for the eccentricity measured (see
(OPTIONAL)
5.8.1 - Eccentricity optimisation
This procedure is used to assess the possibility of adequately rotating the tyre on the rim in order to minimise wheel
eccentricity.
Eccentricity optimisation, in general, is advised for values of the fi rst harmonic higher than 1.2 mm.
Follow the simple on-screen instructions. At the end, the following is displayed:
: Return to measurement screen.
.
ECCENTRICITY MEASUREMENT
Mark the rim and the tyre in the positions indicated on screen and move the tyre on the rim until the marks coincide.
: Return to measurement panel.
GB
I 0567 - 23
Page 24

6 - SETUP (see Diagram showing access to the menus)
The Setup screen provides the user with many possibilities required for presetting the machine according to his own
requirements. Such settings remain unaltered even when the machine is switched off.
The following buttons are enabled:
: return to previous window
: return to Measurement screen
from to : for selection of the parameter.
6. ► 1 - Language
This function allows selecting the language to be used for displaying descriptive and diagnostic messages regarding
machine operation.
6.2 - Unit of unbalance measurement ►
It is possible to select whether to display the unbalance values expressed in grams or ounces.
6.3 - Unbalance display threshold ►
This consists of the unbalance threshold below which the wording “-OK-” appears on the screen at the end of the spin
instead of the unbalance; the presettable values vary according to the unit of measurement selected.
6.4 - Unbalance display pitch ►
This represents the display pitch of the unbalance and varies according to the unit of measurement selected. The selection
“5 g” (1/4 oz) enables display of the correction values on both sides such as to bring the static unbalance to 0 (theoretical). It is recommended to preset this function as standard use of the machine as it improves the balancing quality. The
computer makes a complex calculation which allows cancelling the residual static unbalance by varying the value and
position of the counterweights fi xed in steps of 5 grams (1/4 oz).
6.5 - Spin with guard closed ►
When “ON” is selected the automatic start of the spin is enabled when the guard is closed.
6.6 - Screen-saver time ►
If this function is enabled, the screensaver will automatically be activated when the machine is not used for a certain
period of time. This function can be disabled by setting it to 0
6.7 - Visual eccentricity check ►
At the end of wheel acceleration, as soon as the motor is disengaged, the guard can be opened for visual control of
any wheel eccentricity as the rotation speed gradually drops.
Do not strike the wheel during the entire deceleration stage; to brake the wheel, close the guard. However, avoid using
the brake as far as possible because this may compromise unbalance measurements. The unbalance values measured are only displayed when the wheel has come to a standstill. This function is active for only one machine run.
6 ► .8 - Acoustic signal
When “ON” is selected, the sending of an acoustic signal (beep) is enabled in the following cases:
- when any push button is pressed;
- when dimensions are acquired in automatic mode;
- when the correct angular position for weight application is reached in the Measurement screen;
- when the correct angular position for weight application is reached in the Position Repeater screen.
I 0567 - 24
GB
Page 25

6.9 - Correction method ►
One of the three possible correction methods can be selected based on the specifi c requirements of the customer.
6.9.
► 1 - Standard correction method
The wheel balancer considers the unbalance within tolerance when the value of each single plane is lower than the
tolerance set.
6.9.2 - External plane correction method
►
If correcting with adhesive weights, the unbalance is considered within tolerance when the recalculated external
plane weight (clip-on weights) is lower than the tolerance set.
Additional windows appear on the screen always displaying the residual external plane value (clip-on weight):
6.9.3 - I.C. (intelligent correction) correction method
► - The option is not enabled for Canada and the USA
The correction plane unbalance is considered within tolerance when both the STATIC and the DYNAMIC TORQUE
unbalances are lower than the tolerance set.
This correction method allows considerably reducing the weight to be applied, yet maintaining excellent balancing
quality. An icon appears on the screen showing the value of weight saved with respect to standard balancing.
If a special icon appears near the button
, it means that the wheel balancer is suggesting static balancing,
however, such that also the dynamic torque unbalance will be brought within tolerance.
When pressing the button
, the position repeater frame is accessed which clearly indicates where the weight
should be positioned in the rim.
GB
I 0567 - 25
Page 26

6.10 - ► b for I.C.
In the case of the I.C. correction method, when this function is set to ON it allows:
displaying the unbalance correction values with an approximation of 1g/0.1 ounce;
enable the graphic display of the residual static unbalance and torque as the distance and the diameter change;
Given the complexity of the information provided to the user, it is recommended to set this function to ON only on
explicit request and when the wheel balancer is used by expert personnel.
NOTE: The innovative IC software has been designed to reduce the amount of weight used to correct the
unbalance, leaving a residual unbalance on the wheel within the set tolerances.
The tolerance used by the machine is obtained from a tolerance of a reference wheel, modifi ed in order to
make the vibration generated by the reference wheel comparable with that in use.
This is obtained according to the coded theory of the ISO standards.
In general, a wheel balanced using IC has a higher residual unbalance than a wheel balanced at best using
the conventional method, but, although generating a tolerable vibration from the vehicle, it has the
advantage of considerably reducing the counterweights used.
I 0567 - 26
GB
Page 27

- Caution -
7 - SPECIAL CALIBRATIONS AND FUNCTIONS (see MENU ACCESS DIAGRAM )
In order to gain access to the “Reserved Calibrations and functions” it is necessary to enter a password.
Any incorrect operation within the functions described below could impair the operation of the wheel balancing
machine. Unauthorized use will cause cancellation of the warranty on the machine.
7.1 - Options ►
7.1.1 - Enabling of width measurement
►
This function enables/disables automatic width measurement with SONAR or contact device; always select “SONAR”.
7.1.2 - Enabling of eccentricity measurement
►
Enables/disables measurement of the tyre eccentricity during an unbalance measurement spin.
7.1.3 - Video interface
►
Select based on the monitor used. Incorrect selection results in the images being displayed in very dark colours.
7.1.4
► - Control of serial output RS232C
This option enables/disables the sending of the measured unbalance and phase values to serial output RS232C.
Transmission speed = 9600 baud
Data format = 7 bit Start
7 bit Data
1 bit Even parity
1 bit Stop
At the end of each unbalancing measuring spin, the balancing machine enables the RTS signal, then places the "$"
character on standby to be able to transmit the data; all functions remain on hold until data transmission is enabled, at
the end of which the RTS signal is reset to the inactive state.
The items of data transmitted via serial line are in ASCII format and are separated between each other by the <cr>
character (0x0d).
Sending sequence is as follows:
- 00000 <cr>
- Value of correction weight, left side <cr>
- Correction phase, left side <cr>
- Value of correction weight, right side <cr>
- Correction phase, right side <cr>
The fi rst 5 zero bytes represents the start of transmission message. The correction values are expressed in grams, in
steps of .1 gram. The phase values are expressed in degrees, in the range 0 ÷ 359. See specifi c computer board
on exploded drawings.
7.2 - Presetting the customer and user name ►
The machine can be customized by presetting:
a) The name appearing on the Initial screen (screen-save).
b) The name of 4 different machine users (USER NAME).
An “ideal” keyboard appears on the monitor with the set of characters available for composition of the wordings.
The Customer’s name consists of three lines, each max. 30 characters.
The USER NAME consists of a wording max. 15 characters.
7.3 - Calibrations ►
When
is pressed from the Special Functions menu, access is gained to the Calibration menu.
GB
I 0567 - 27
Page 28

►
7.3.1 - Gauge calibration
7.3.1.1 - Distance gauge calibration ►
To calibrate the distance gauge, set it to position 0 and then to position 150.
When done, set the gauge in rest position. If calibration is correct, the wheel balancer is ready for operation, otherwise an error message may be displayed if there are errors or malfunctioning; in this case repeat calibration.
Press
►
7.3.1.2 - Diameter gauge calibration
to cancel the distance gauge calibration function if has erroneously been accessed.
To calibrate the diameter gauge, place it on the adapter fl ange and press .
For better calibration turn the gauge downward and position it 40 mm away from the adapter plane.
On the screen a value is shown near the word POS: if it is 256+/- 3°, set the gauge to rest position, otherwise press
.
Press
7.3.1.3 - Width gauge calibration
►
to cancel the diameter gauge calibration function if it has erroneously been accessed.
N.B. When calibrating the width gauge, set a measurable dimension as follows:
A - GAUGE “ZERO” DISTANCE
SONAR “ZERO DISTANCE
13
0 (gauge zero) DISTANCE
0 (Zero calibro)
DISTANZA
Press [F1], [F2] to set the distance in mm between the SONAR sensor and the distance gauge clip in pos. 0.
Press
Press
►
7.3.2 - Balancing machine calibration
to confi rm.
to cancel the width gauge calibration function if it has erroneously been accessed.
To calibrate the balancing machine, use a wheel with steel rim of average dimensions, e.g. 6” x 14” (±1”).
To properly perform the procedure:
- Mount a wheel on the machine, even unbalanced, and very carefully set its dimensions.
N.B.: Setting incorrect measurements will result in the machine not being correctly calibrated,
and balancing of subsequent wheels will hence be incorrect until the machine is recalibra ted with the correct measurements!!
Press
to execute the fi rst spin.
- Add a sample weight of 60 g on the outside.
I 0567 - 28
GB
Page 29

Press
- Move the sample weight to the inside in the same position as it was on the outside.
to execute the second spin.
Press
- Turn the wheel until the sample weight is in the correction position.
Press [OK] to confi rm.
Press
►
7.3.3 - Autodiagnostics
An automatic autodiagnostic cycle is run to facilitate troubleshooting. At the end of the autodiagnostic cycle, numerous parameters are indicated, useful for Technical Service to identify machine imperfections.
Returns to the previous menu.
to execute the third spin.
to cancel the balancing machine calibration function if it has erroneously been accessed.
1
2
3
4
5
11
6
7
8
9
10
In the event of a fault or malfunctioning of the wheel balancer, communicate all the parameters displayed to Technical
Service.
1 Pos. : Turning the spindle shaft the following must occur:
- the angular position “POS” must change from 0 to 128
- the word “UP” must appear when turning the wheel clockwise and “DOWN” when turning it
anticlockwise
2 Dist : Pulling out the distance gauge, the value increases and pushing it back in the value decreases
(varies between 50 and 1000 when fully pulling out the distance gauge)
3 Width : Generally, the value is greater than 1000
4 Sonar1: Width sonar check. From 65000 to 3000 approaching a target. Useful range between 40 and 11
cm
5 Vco I : Knocking the wheel on the inside, the value displayed must change
6J : The fi rst bit indicates whether or not the printer option is available (only for models where provided
for).
7 Diam : Turning the diameter gauge to the outside of the machine, the value increases.
Vice versa the value decreases (varies between 50 and 1000 when opening the diameter gauge
to the maximum)
8 Ecc : Generally, the value is greater than 1000
9 Sonar2: Eccentricity sonar check (option). From 65000 to 3000 approaching a target. Useful range between
40 and 11 cm
10 Vco E : Knocking the wheel on the outside, the value displayed must change.
11 Machine calibration parameters
GB
I 0567 - 29
Page 30
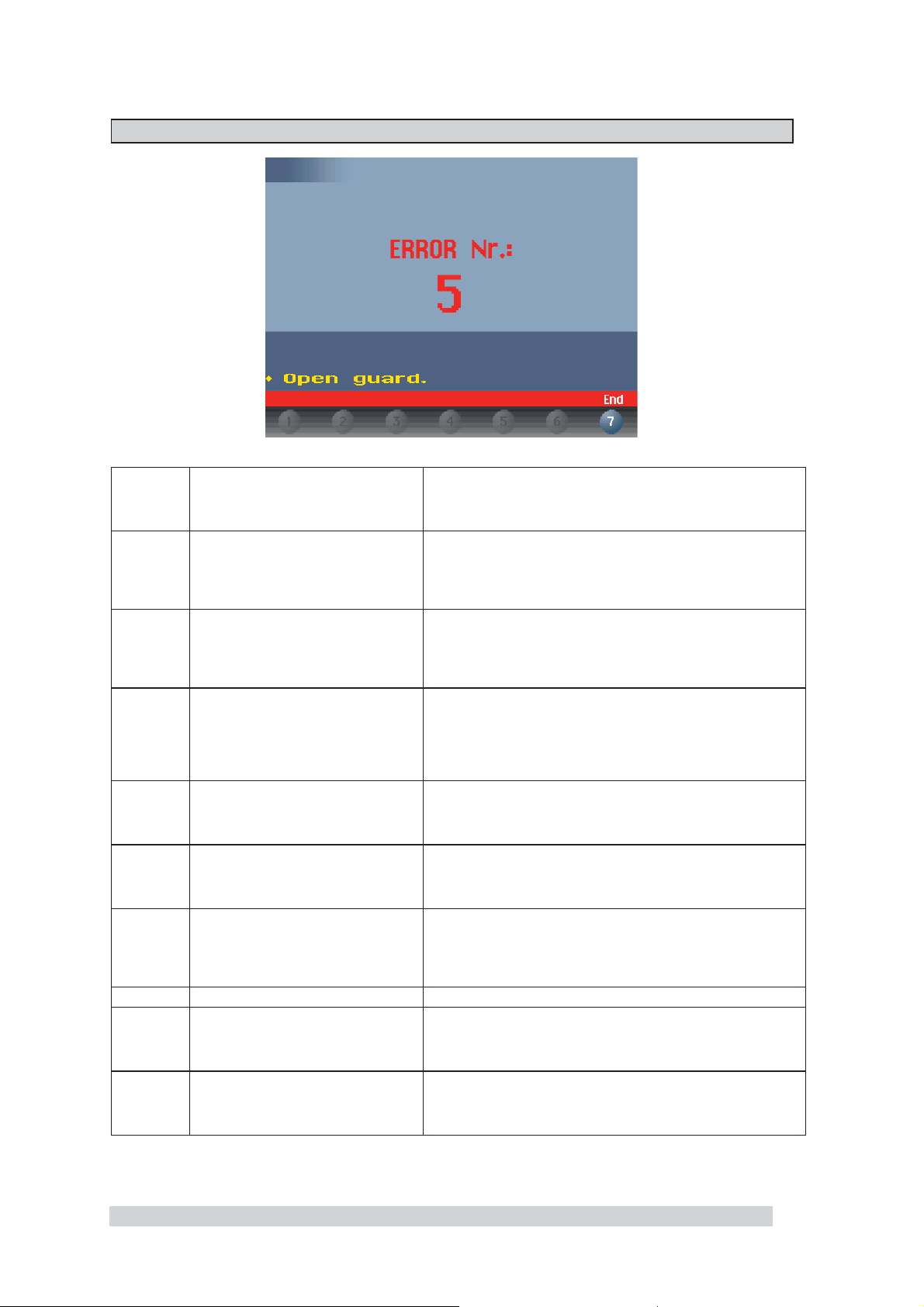
8 - ERRORS
ERRORS CAUSES CONTROLS
Black The wheel balancer does not switch on. 1. Verify correct connection to the mains.
Err. 1 No rotation signal. 1. Verify belt tautness.
Err. 2 Speed too low during detection.
During unbalance measurement rotation,
wheel speed is less than 42 rpm.
Err. 3 Unbalance too high. 1. Verify wheel dimension settings.
Err. 4 Rotation in opposite direction.
After pressing [START], the wheel begins
to rotate in the opposite direction (anticlockwise).
Err. 5 Guard open
The [START] pushbutton was pressed
without fi rst closing the guard.
Err. 7 / Err. 8 NOVRAM parameter read error 1. Repeat machine calibration
Err. 9 NOVRAM parameter write error. Replace the computer board.
Err. 11 Speed too high error.
During unbalance measurement rotation,
wheel speed is more than 270 rpm.
Err. 12 Unbalance measuring cycle error. 1. Verify phase pick-up board function.
2. Verify and eventually replace the fuses on the power card.
3. Verify monitor function.
4. Replace the computer board.
2. Verify the function of the phase pick-up board and, in particular,
the reset signal.
3. Replace the phase pick-up board.
4. Replace the computer board.
1. Make sure that a vehicle wheel is mounted on the wheel balancer.
2. Verify belt tautness.
3. Verify the function of the phase pick-up board and, in particular,
the reset signal.
4. Replace the computer board.
2. Check detection unit connections.
3. Perform machine calibration.
4. Mount a wheel with more or less known unbalance (less than 100
grammes) and verify the response of the machine.
5. Replace the computer board.
1. Verify the connection of the UP/DOWN – RESET signals on the
phase pick-up board.
1. Reset the error by pressing pushbutton [7]=End.
2. Close the guard.
3. Verify the function of the protection uSwitch.
4. Press the [START] pushbutton.
2. Shut down the machine.
3. Wait for a minimum time of ~ 1 Min.
4. Re-start the machine and verify correct operation.
5. Replace the computer board.
1. Check if there is any damage or dirt on the timing disc.
2. Verify the function of the phase pick-up board and, in particular,
the reset signal.
3. Replace the computer board.
2. Verify correct motor operation.
3. Verify belt tautness.
4. Replace the computer board.
CAUTION
I 0567 - 30
GB
Page 31

Err.13 /
Err.14 /
Err.15 /
Err.16 /
Err.17 /
Err.18
Err. 20 The wheel comes to a halt before comple-
Err.40/
Err.41/
Err.42/
Err.43
N
Err.45/
Err.46/
Err.47/
Err.48
Err.50/
Err.51/
Err.52/
Err.53
Err.54 Sonar readout error.
Err.55 Sonar readout error.
Unbalance measurement error. 1. Verify phase pick-up board function.
ting positioning correctly.
Eccentricity graph plotting procedure error. Perform a new eccentricity measurement.
Eccentricity graph value display readout
error.
Eccentricity graph current value cursor
plotting procedure error.
Sonar value readout impossible.
Sonar values are insuffi cient for correct
measurement of eccentricity.
2. Check detection unit connections.
3. Verify machine earth/ground connection.
4. Mount a wheel with more or less known unbalance (less than 100
grammes) and verify the response of the machine.
5. Replace the computer board.
1. Make sure that the wheel to be balanced is at least 10” in diameter.
2. Verify the correct setting of wheel dimensions on screen.
3. Verify belt tautness.
4. For wheels less than 12” in diameter wheels: disenable the
eccentricity measurement procedure
Perform a new eccentricity measurement.
Perform a new eccentricity measurement.
1. Position the eccentricity measurement sonar correctly before
performing the measurement.
2. Check eccentricity sonar connections.
3. Check the power supplies on the power card.
4. Replace the eccentricity measurement sonar.
5. Make sure that the wheel does not halt before completing at least
4/5 revolutions after the fi rst braking impulse.
6. Verify belt tautness.
7. Replace the computer board.
1. Position the eccentricity measurement sonar correctly before
performing the measurement.
2. Make sure that the wheel does not halt before completing at least
4/5 revolutions after the fi rst braking impulse.
3. Verify belt tautness.
4. Mount a wheel of medium dimensions (14”x5 ¾”) and perform an
eccentricity measurement . If in these conditions error 55 no longer
occurs, this means that the wheel inertia causing the problem is
such as to half the wheel before having acquired the minimum
number of values necessary for reliable eccentricity measurement.
9 - ROUTINE MAINTENANCE
Before performing any action on the plant, isolate the electrical power supply.
9.1 - To replace the fuses ►
Remove the weight holder shelf to gain access to the power supply board where the 4 fuses are located (see Exploded Drawings). If fuses require replacement, use ones of the same current rating. If the fault persists, contact
Technical Service.
NONE OF THE OTHER MACHINE PARTS REQUIRE MAINTENANCE.
GB
I 0567 - 31
 Loading...
Loading...