

REV. D
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
a
Software Programmable
Gain Amplifier
AD526
FEATURES
Digitally Programmable Binary Gains from 1 to 16
Two-Chip Cascade Mode Achieves Binary Gain from
1 to 256
Gain Error:
0.01% Max, Gain = 1, 2, 4 (C Grade)
0.02% Max, Gain = 8, 16 (C Grade)
0.5 ppm/ⴗC Drift Over Temperature
Fast Settling Time
10 V Signal Change:
0.01% in 4.5 s (Gain = 16)
Gain Change:
0.01% in 5.6 s (Gain = 16)
Low Nonlinearity: ⴞ0.005% FSR Max (J Grade)
Excellent DC Accuracy:
Offset Voltage: 0.5 mV Max (C Grade)
Offset Voltage Drift: 3 V/ⴗC (C Grade)
TTL-Compatible Digital Inputs
PRODUCT DESCRIPTION
The AD526 is a single-ended, monolithic software programmable gain amplifier (SPGA) that provides gains of 1, 2, 4, 8
and 16. It is complete, including amplifier, resistor network
and TTL-compatible latched inputs, and requires no external
components.
Low gain error and low nonlinearity make the AD526 ideal for
precision instrumentation applications requiring programmable
gain. The small signal bandwidth is 350 kHz at a gain of 16. In
addition, the AD526 provides excellent dc precision. The FETinput stage results in a low bias current of 50 pA. A guaranteed
maximum input offset voltage of 0.5 mV max (C grade) and low
gain error (0.01%, G = 1, 2, 4, C grade) are accomplished using
Analog Devices’ laser trimming technology.
To provide flexibility to the system designer, the AD526 can be
operated in either latched or transparent mode. The force/sense
configuration preserves accuracy when the output is connected
to remote or low impedance loads.
The AD526 is offered in one commercial (0°C to +70°C) grade,
J, and three industrial grades, A, B and C, which are specified
from –40°C to +85°C. The S grade is specified from –55°C to
+125°C. The military version is available processed to MIL-
STD 883B, Rev C. The J grade is supplied in a 16-lead plastic
DIP, and the other grades are offered in a 16-lead hermetic
side-brazed ceramic DIP.
PIN CONFIGURATION
TOP VIEW
(Not to Scale)
16
15
14
13
12
11
10
9
1
2
3
4
5
6
7
8
DIG GND A1
AD526
NULL A0
V
IN
CS
NULL
CLK
ANALOG GND 2 A2
ANALOG GND 1 B
–V
S
+V
S
V
OUT
SENSE V
OUT
FORCE
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 World Wide Web Site: http://www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 1999
ORDERING GUIDE
Temperature Package Package
Model Range Descriptions Options
AD526JN Commercial 16-Lead Plastic DIP N-16
AD526AD Industrial 16-Lead Cerdip D-16
AD526BD Industrial 16-Lead Cerdip D-16
AD526CD Industrial 16-Lead Cerdip D-16
AD526SD Military 16-Lead Cerdip D-16
AD526SD/883B Military 16-Lead Cerdip D-16
5962-9089401MEA* Military 16-Lead Cerdip D-16
*Refer to official DESC drawing for tested specifications.
APPLICATION HIGHLIGHTS
1. Dynamic Range Extension for ADC Systems: A single
AD526 in conjunction with a 12-bit ADC can provide
96 dB of dynamic range for ADC systems.
2. Gain Ranging Preamps: The AD526 offers complete digital
gain control with precise gains in binary steps from 1 to 16.
Additional gains of 32, 64, 128 and 256 are possible by cascading two AD526s.
AD526J AD526A AD526B/S AD526C
Model Min Typ Max Min Typ Max Min Typ Max Min Typ Max Units
GAIN
Gain Range
(Digitally Programmable) 1, 2, 4, 8, 16 1, 2, 4, 8, 16 1, 2, 4, 8, 16 1, 2, 4, 8, 16
Gain Error
Gain = 1 0.05 0.02 0.01 0.01 %
Gain = 2 0.05 0.03 0.02 0.01 %
Gain = 4 0.10 0.03 0.02 0.01 %
Gain = 8 0.15 0.07 0.04 0.02 %
Gain = 16 0.15 0.07 0.04 0.02 %
Gain Error Drift
Over Temperature
G = 1 0.5 2.0 0.5 2.0 0.5 2.0 0.5 2.0 ppm/°C
G = 2 0.5 2.0 0.5 2.0 0.5 2.0 0.5 2.0 ppm/°C
G = 4 0.5 3.0 0.5 3.0 0.5 3.0 0.5 3.0 ppm/°C
G = 8 0.5 5.0 0.5 5.0 0.5 5.0 0.5 5.0 ppm/°C
G = 16 1.0 5.0 1.0 5.0 1.0 5.0 1.0 5.0 ppm/°C
Gain Error (T
MIN
to T
MAX
)
Gain = 1 0.06 0.03 0.02 0.015 %
Gain = 2 0.06 0.04 0.03 0.015 %
Gain = 4 0.12 0.04 0.03 0.015 %
Gain = 8 0.17 0.08 0.05 0.03 %
Gain = 16 0.17 0.08 0.05 0.03 %
Nonlinearity
Gain = 1 0.005 0.005 0.005 0.0035 % FSR
Gain = 2 0.001 0.001 0.001 0.001 % FSR
Gain = 4 0.001 0.001 0.001 0.001 % FSR
Gain = 8 0.001 0.001 0.001 0.001 % FSR
Gain = 16 0.001 0.001 0.001 0.001 % FSR
Nonlinearity (T
MIN
to T
MAX
)
Gain = 1 0.01 0.01 0.01 0.007 % FSR
Gain = 2 0.001 0.001 0.001 0.001 % FSR
Gain = 4 0.001 0.001 0.001 0.001 % FSR
Gain = 8 0.001 0.001 0.001 0.001 % FSR
Gain = 16 0.001 0.001 0.001 0.001 % FSR
VOLTAGE OFFSET, ALL GAINS
Input Offset Voltage 0.4 1.5 0.25 0.7 0.25 0.5 0.25 0.5 mV
Input Offset Voltage Drift Over
Temperature 5 20 3 10 3 10 3 10 µV/°C
Input Offset Voltage
T
MIN
to T
MAX
2.0 1.0 0.8 0.8 mV
Input Offset Voltage vs. Supply
(V
S
± 10%) 80 80 84 90 dB
INPUT BIAS CURRENT
Over Input Voltage Range ± 10 V 50 150 50 150 50 150 50 150 pA
ANALOG INPUT
CHARACTERISTICS
Voltage Range
(Linear Operation) ⴞ10 ±12 ⴞ10 ±12 ⴞ10 ±12 ⴞ10 ±12 V
Capacitance 5555pF
RATED OUTPUT
Voltage ⴞ10 ±12 ⴞ10 ±12 ⴞ10 ±12 ⴞ10 ±12 V
Current (V
OUT
= ±10 V) ±10 ⴞ5 ±10 ⴞ5 ±10 ⴞ5 ±10 mA
Short-Circuit Current 15 30 15 30 15 30 15 30 mA
DC Output Resistance 0.002 0.002 0.002 0.002 Ω
Load Capacitance
(For Stable Operation) 700 700 700 700 pF
AD526–SPECIFICATIONS
(@ VS = ⴞ15 V, RL = 2 k⍀ and TA = +25ⴗC unless otherwise noted)
REV. D
–2–
AD526
AD526J AD526A AD526B/S AD526C
Model Min Typ Max Min Typ Max Min Typ Max Min Typ Max Units
NOISE, ALL GAINS
Voltage Noise, RTI
0.1 Hz to 10 Hz 3 3 3 3 µV p-p
Voltage Noise Density, RTI
f = 10 Hz 70 70 70 70 nV√Hz
f = 100 Hz 60 60 60 60 nV√Hz
f = 1 kHz 30 30 30 30 nV√Hz
f = 10 kHz 25 25 25 35 nV√Hz
DYNAMIC RESPONSE
–3 dB Bandwidth (Small Signal)
G = 1 4.0 4.0 4.0 4.0 MHz
G = 2 2.0 2.0 2.0 2.0 MHz
G = 4 1.5 1.5 1.5 1.5 MHz
G = 8 0.65 0.65 0.65 0.65 MHz
G = 16 0.35 0.35 0.35 0.35 MHz
Signal Settling Time to 0.01%
(∆V
OUT
= ±10 V)
G = 1 2.1 4 2.1 4 2.1 4 2.1 4 µs
G = 2 2.5 5 2.5 5 2.5 5 2.5 5 µs
G = 4 2.7 5 2.7 5 2.7 5 2.7 5 µs
G = 8 3.6 7 3.6 7 3.6 7 3.6 7 µs
G = 16 4.1 7 4.1 7 4.1 7 4.1 7 µs
Full Power Bandwidth
G = 1, 2, 4 0.10 0.10 0.10 0.10 MHz
G = 8, 16 0.35 0.35 0.35 0.35 MHz
Slew Rate
G = 1, 2, 4 4 6 4 6 4 6 4 6V/µs
G = 8, 16 18 24 18 24 18 24 18 24 V/µs
DIGITAL INPUTS
(T
MIN
to T
MAX
)
Input Current (V
H
= 5 V) 60 100 140 60 100 140 60 100 140 60 100 140 µA
Logic “1” 2 6 2 6 2 6 2 6 V
Logic “0” 0 0.8 0 0.8 0 0.8 0 0.8 V
TIMING
1
(VL = 0.2 V, VH = 3.7 V)
A0, A1, A2
T
C
50 50 50 50 ns
T
S
30 30 30 30 ns
T
H
30 30 30 30 ns
B
T
C
50 50 50 50 ns
T
S
40 40 40 40 ns
T
H
10 10 10 30 ns
TEMPERATURE RANGE
Specified Performance 0 +70 –40 +85 –40/–55 +85/+125 –40 +85 °C
Storage –65 +125 –65 +150 –65 +150 –65 +150 °C
POWER SUPPLY
Operating Range ⴞ4.5 ⴞ16.5 ⴞ4.5 ⴞ16.5 ⴞ4.5 ⴞ16.5 ⴞ4.5 ⴞ16.5 V
Positive Supply Current 10 14 10 14 10 14 10 14 mA
Negative Supply Current 10 13 10 13 10 13 10 13 mA
PACKAGE OPTIONS
Plastic (N-16) AD526JN
Ceramic DIP (D-16) AD526AD AD526BD AD526SD AD526CD
AD526SD/883B
NOTES
1
Refer to Figure 25 for definitions. FSR = Full Scale Range = 20 V. RTI = Referred to Input.
Specifications subject to change without notice.
Specifications shown in boldface are tested on all production units at final electrical test. All min and max specifications are guaranteed, although only those shown in
boldface are tested on all production units.
–3–
REV. D
AD526–Typical Performance Characteristics
REV. D
–4–
SUPPLY VOLTAGE – 6V
OUTPUT VOLTAGE SWING – 6V
20
15
0
05 20
10 15
10
5
+258C
R
L
= 2kV
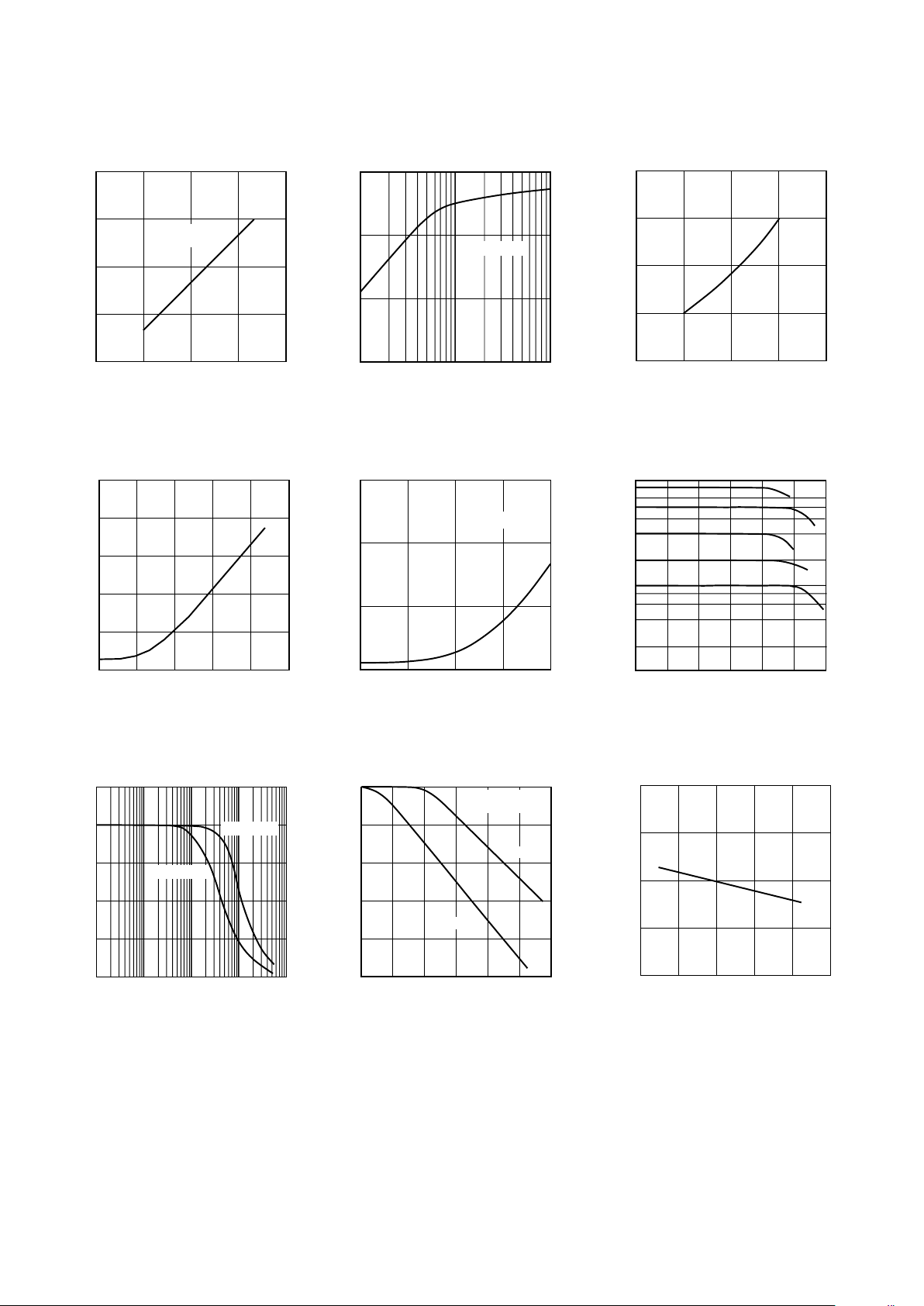
Figure 1. Output Voltage Swing vs.
Supply Voltage, G = 16
TEMPERATURE – 8C
INPUT BIAS CURRENT
100nA
10nA
1pA
–60 –20 140
20 60 100
1nA
100pA
10pA
Figure 4. Input Bias Current vs.
Temperature
FREQUENCY – Hz
FULL POWER RESPONSE – V p-p
25
1k
GAIN = 8, 16
GAIN = 1, 2, 4
20
15
10
5
0
10k 100k 1M 10M
Figure 7. Large Signal Frequency
Response
LOAD RESISTANCE – V
OUTPUT VOLTAGE SWING – 6V
30
0
100 1k 10k
20
10
@ VS = 615V
Figure 2. Output Voltage Swing vs.
Load Resistance
INPUT VOLTAGE – V
INPUT BIAS CURRENT – pA
75
–10
50
25
0
–5 0 5 10
VS = 615V
Figure 5. Input Bias Current vs. Input
Voltage
FREQUENCY – Hz
POWER SUPPLY REJECTION – dB
100
1
80
60
40
20
10
10 100 1k 10k 100k 1M
615V WITH 1V p-p
SINE WAVE
+SUPPLY
–SUPPLY
Figure 8. PSRR vs. Frequency
SUPPLY VOLTAGE – 6V
INPUT BIAS CURRENT – pA
20
15
0
05 20
10 15
10
5
VIN = 0
Figure 3. Input Bias Current vs.
Supply Voltage
FREQUENCY – Hz
GAIN
20
10 100 10M
10
1
1k 10k 100k 1M
16
8
4
2
1
Figure 6. Gain vs. Frequency
TEMPERATURE – 8C
NORMALIZED GAIN
1.0002
–60
1.0001
1.0000
0.9999
0.9998
–20 20 60 100 140
Figure 9. Normalized Gain vs.
Temperature, Gain = 1
AD526
REV. D
–5–
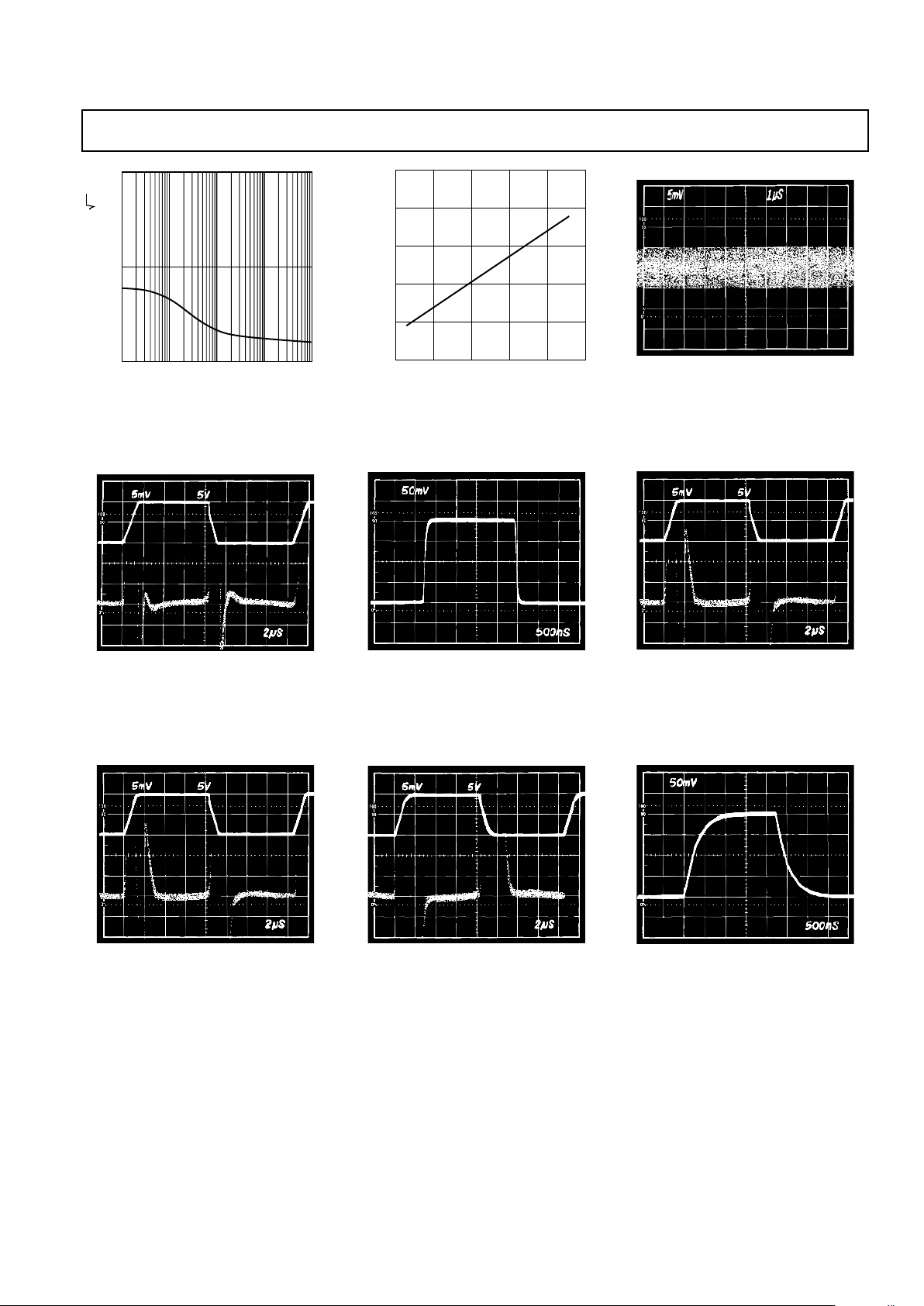
*For Settling Time Traces, 0.01% = 1/2 Vertical Division
FREQUENCY – Hz
1000
10
100
INPUT NOISE VOLTAGE – nV/ Hz
10 100k100
1k
10k
Figure 10. Noise Spectral Density
Figure 13. Large Signal Pulse
Response and Settling Time,*
G = 1
Figure 16. Small Signal Pulse
Response, G = 2
TEMPERATURE – 8C
NONLINEARITY – %FSR
0.006
–60
0.004
0.002
0.000
–0.002
–0.004
–20 20 60 100 140
Figure 11. Nonlinearity vs.
Temperature, Gain = 1
Figure 14. Small Signal Pulse
Response, G = 1
Figure 17. Large Signal Pulse
Response and Settling Time,*
G = 4
Figure 12. Wideband Output Noise,
G = 16 (Amplified by 10)
Figure 15. Large Signal Pulse
Response and Settling Time,*
G = 2
Figure 18. Small Signal Pulse
Response, G = 4

AD526
REV. D
–6–
*For Settling Time Traces, 0.01% = 1/2 Vertical Division
**Scope Traces are: Top: Output Transition; Middle: Output Settling; Bottom: Digital Input.
Figure 19. Large Signal Pulse
Response and Settling Time,* G = 8
Figure 22. Small Signal Pulse
Response, Gain = 16
FREQUENCY – Hz
OUTPUT IMPEDANCE – V
100
1
10k 10M
10
100k 1M
G = 4, 16
G = 1
G = 2, 8
Figure 25. Output Impedance vs.
Frequency
Figure 20. Small Signal Pulse
Response, G = 8
FREQUENCY – Hz
TOTAL HARMONIC DISTORTION – dB
–60
10
–70
–80
–90
–100
100 1k 10k 100k
Figure 23. Total Harmonic Distortion
vs. Frequency Gain = 16
Figure 26. Gain Change Settling
Time,** Gain Change: 1 to 2
Figure 21. Large Signal Pulse
Response and Settling Time,* G = 16
FREQUENCY – Hz
PHASE DISTORTION – Dedrees
10
10
5
0
–5
–10
100 1k 10k 100k
Figure 24. Phase Distortion vs.
Frequency, Gain = 16
Figure 27. Gain Change Settling
Time,** Gain Change 1 to 4

AD526
REV. D
–7–
Figure 28. Gain Change Settling
Time,* Gain Change 1 to 8
Figure 29. Gain Change Settling
Time,* Gain Change 1 to 16
*Scope Traces are:
Top: Output Transition
Middle: Output Settling
Bottom: Digital Input
OP37
AD526
G = 16
TEKTRONIX
7000 SERIES
SCOPE
7A13
PREAMP
5MHz BW
++
10mF10mF
+15V –15V
+
10mF
++
10mF10mF
+15V –15V
+5V
G = 10
900V
100V
SHIELD
Vo = 160 3 e
p-p
NOTE: COAX CABLE 1 FT. OR LESS
Figure 30. Wideband Noise Test Circuit
++
10mF10mF
+15V –15V
AD526
++
10mF10mF
+15V –15V
DATA
DYNAMICS
5109
(OR EQUIVALENT
FLAT-TOP PULSE
GENERATOR)
AD3554
+
+
10mF10mF
5pF
5.6kV
1pF
+15V–15V
50V
R
IN
5kV
G
1
2
4
8
16
5.6kV
2.8kV
1.4kV
715V
348V
R
IN
5kV
+
–
AD711
V
ERROR
IN6263
2kV
POT.
+
–
AD3554
+
10mF10mF
1pF
+15V–15V
+
–
+
1.25kV
5kV
5kV
V
ERROR
3 5
IN6263
TEKTRONIX
7000 SERIES
SCOPE
7A13
PREAMP
5MHz BW
G
1
2
4
8
16
1.2ms
1.2ms
1.2ms
1.4ms
1.8ms
T
X
T
SET
= TMEAS2 – T
X
2
Figure 31. Settling Time Test Circuit

AD526
REV. D
–8–
THEORY OF OPERATION
The AD526 is a complete software programmable gain amplifier
(SPGA) implemented monolithically with a drift-trimmed
BiFET amplifier, a laser wafer trimmed resistor network, JFET
analog switches and TTL compatible gain code latches.
A particular gain is selected by applying the appropriate gain
code (see Table I) to the control logic. The control logic turns
on the JFET switch that connects the correct tap on the gain
network to the inverting input of the amplifier; all unselected
JFET gain switches are off (open). The “on” resistance of the
gain switches causes negligible gain error since only the
amplifier’s input bias current, which is less than 150 pA, actually flows through these switches.
The AD526 is capable of storing the gain code, (latched mode),
B, A0, A1, A2, under the direction of control inputs CLK and
CS. Alternatively, the AD526 can respond directly to gain code
changes if the control inputs are tied low (transparent mode).
For gains of 8 and 16, a fraction of the frequency compensation
capacitance (C1 in Figure 32) is automatically switched out of
the circuit. This increases the amplifier’s bandwidth and improves its signal settling time and slew rate.
AMPLIFIER
+V
S
V
IN
N1 N2
C1
C2
OUT
FORCE
OUT
SENSE
–V
S
A0
A1
A2
B
CLK
CS
DIGITAL
GND
L
A
T
C
H
E
S
C
O
N
T
R
O
L
L
O
G
I
C
G = 8
G = 16
ANALOG
GND2
ANALOG
GND1
1kV 1.7kV
G = 2
G = 4
1.7kV
3.4kV
1kV
14kV
RESISTOR
NETWORK
Figure 32. Simplified Schematic of the AD526
TRANSPARENT MODE OF OPERATION
In the transparent mode of operation, the AD526 will respond
directly to level changes at the gain code inputs (A0, A1, A2) if
B is tied high and both CS and CLK are allowed to float low.
After the gain codes are changed, the AD526’s output voltage
typically requires 5.5 µs to settle to within 0.01% of the final
value. Figures 26 to 29 show the performance of the AD526 for
positive gain code changes.
16 15 14 13 12 11 10 9
12345678
+
–
OUT
FORCE
OUT
SENSE
V
OUT
0.1mF
AD526
168421
GAIN NETWORK
A1 A0 CS CLK A2 B
LOGIC AND LATCHES
–V
S
0.1mF
+V
S
+5V
A2
A1
A0
V
IN
Figure 33. Transparent Mode
LATCHED MODE OF OPERATION
The latched mode of operation is shown in Figure 34. When
either CS or CLK go to a Logic “1,” the gain code (A0, A1, A2,
B) signals are latched into the registers and held until both CS
and CLK return to “0.” Unused CS or CLK inputs should be tied
to ground . The CS and CLK inputs are functionally and electri-
cally equivalent.
OUT
FORCE
OUT
SENSE
V
OUT
0.1mF
–V
S
0.1mF
+V
S
+5V
A2
A1
A0
V
IN
TIMING SIGNAL
16 15 14 13 12 11 10 9
12345678
+
–
AD526
168421
GAIN NETWORK
A1 A0 CS CLK A2 B
LOGIC AND LATCHES
Figure 34. Latched Mode

AD526
REV. D
–9–
The specifications on page 3, in combination with Figure 35,
give the timing requirements for loading new gain codes.
VALID DATA
GAIN CODE
INPUTS
CLK OR CS
T
C
T
H
T
S
TC = MINIMUM CLOCK CYCLE
T
S
= DATA SETUP TIME
T
H
= DATA HOLD TIME
NOTE: THRESHOLD LEVEL FOR
GAIN CODE, CS, AND CLK IS 1.4V.
Figure 35. AD526 Timing
TIMING AND CONTROL
Table I. Logic Input Truth Table
Gain Code Control Condition
A2 A1 A0 B CLK (CS = 0) Gain Condition
XXXX 1 Previous State Latched
0001 0 1 Transparent
0011 0 2 Transparent
0101 0 4 Transparent
0111 0 8 Transparent
1 X X 1 0 16 Transparent
XXX0 0 1 Transparent
XXX0 1 1 Latched
0001 1 1 Latched
0011 1 2 Latched
0101 1 4 Latched
0111 1 8 Latched
1 X X 1 1 16 Latched
NOTE: X = Don’t Care.
DIGITAL FEEDTHROUGH
With either CS or CLK or both held high, the AD526 gain state
will remain constant regardless of the transitions at the A0, A1,
A2 or B inputs. However, high speed logic transitions will unavoidably feed through to the analog circuitry within the AD526
causing spikes to occur at the signal output.
This feedthrough effect can be completely eliminated by operating the AD526 in the transparent mode and latching the gain
code in an external bank of latches (Figure 36).
To operate the AD526 using serial inputs, the configuration
shown in Figure 36 can be used with the 74LS174 replaced by a
serial-in/parallel-out latch, such as the 54LS594.
OUT
FORCE
OUT
SENSE
V
OUT
0.1mF
–V
S
0.1mF
+V
S
+5V
V
IN
74LS174
1mF
BA2A0A1
TIMING
SIGNAL
16 15 14 13 12 11 10 9
12345678
+
–
AD526
168421
GAIN NETWORK
A1 A0 CS CLK A2 B
LOGIC AND LATCHES
Figure 36. Using an External Latch to Minimize Digital
Feedthrough

AD526
REV. D
–10–
GROUNDING AND BYPASSING
Proper signal and grounding techniques must be applied in
board layout so that specified performance levels of precision
data acquisition components, such as the AD526, are not
degraded.
As is shown in Figure 37, logic and signal grounds should be
separate. By connecting the signal source ground locally to the
AD526 analog ground Pins 5 and 6, gain accuracy of the
AD526 is maintained. This ground connection should not be
corrupted by currents associated with other elements within the
system.
GAIN
NETWORK
LATCHES AND LOGIC
DIGITAL
GROUND
AMP
V
OUT
FORCE
V
OUT
SENSE
ANALOG
GROUND 1
ANALOG
GROUND 2
+V
S
–V
S
AD526
V
IN
+15V –15V
0.1mF
0.1mF
0.1mF0.1mF
1mF
+5V
AD574
12-BIT
A/D
CONVERTER
Figure 37. Grounding and Bypassing
OUT
FORCE
OUT
SENSE
0.1mF
–V
S
0.1mF
+V
S
+5V
A2
A1
A0
V
IN
CLK
16 15 14 13 12 11 10 9
12345678
+
–
AD526
168421
GAIN NETWORK
A1 A0 CS CLK A2 B
LOGIC AND LATCHES
OUT
FORCE
OUT
SENSE
V
OUT
0.1mF
–V
S
0.1mF
+V
S
+5V
16 15 14 13 12 11 10 9
12345678
+
–
AD526
168421
GAIN NETWORK
A1 A0 CS CLK A2 B
LOGIC AND LATCHES
Figure 38. Cascaded Operation
Utilizing the force and sense outputs of the AD526, as shown in
Figure 38, avoids signal drops along etch runs to low impedance
loads.
Table II. Logic Table for Figure 38
V
OUT/VIN
A2 A1 A0
1000
2001
4010
8011
16 1 0 0
32 1 0 1
64 1 1 0
128 1 1 1

AD526
REV. D
–11–
OFFSET NULLING
Input voltage offset nulling of the AD526 is best accomplished
at a gain of 16, since the referred-to-input (RTI) offset is amplified the most at this gain and therefore is most easily trimmed.
The resulting trimmed value of RTI voltage offset typically
varies less than 3 µV across all gain ranges.
Note that the low input current of the AD526 minimizes RTI
voltage offsets due to source resistance.
OUT
FORCE
OUT
SENSE
V
OUT
0.1mF
–V
S
0.1mF
+V
S
V
IN
16 15 14 13 12 11 10 9
12345678
+
–
AD526
168421
GAIN NETWORK
A1 A0 CS CLK A2 B
LOGIC AND LATCHES
20kV
Figure 39. Offset Voltage Null Circuit
OUTPUT CURRENT BOOSTER
The AD526 is rated for a full ±10 V output voltage swing into
2 kΩ. In some applications, the need exists to drive more cur-
rent into heavier loads. As shown in Figure 40, a high current
booster may be connected “inside the loop” of the SPGA to
provide the required current boost without significantly degrading overall performance. Nonlinearities, offset and gain inaccuracies of the buffer are minimized by the loop gain of the
AD526 output amplifier.
OUT
FORCE
OUT
SENSE
–V
S
0.1mF
+V
S
V
IN
16 15 14 13 12 11 10 9
12345678
+
–
AD526
168421
GAIN NETWORK
A1 A0 CS CLK A2 B
LOGIC AND LATCHES
HOS-100
0.01mF
0.1mF
0.01mF
R
L
Figure 40. Current Output Boosting
CASCADED OPERATION
A cascade of two AD526s can be used to achieve binarily
weighted gains from 1 to 256. If gains from 1 to 128 are needed,
no additional components are required. This is accomplished by
using the B pin as shown in Figure 38. When the B pin is low,
the AD526 is held in a unity gain stage independent of the other
gain code values.
OFFSET NULLING WITH A D/A CONVERTER
Figure 41 shows the AD526 with offset nulling accomplished
with an 8-bit D/A converter (AD7524) circuit instead of the
potentiometer shown in Figure 39. The calibration procedure is
the same as before except that instead of adjusting the potentiometer, the D/A converter corrects for the offset error. This
calibration circuit has a number of benefits in addition to eliminating the trimpot. The most significant benefit is that calibration can be under the control of a microprocessor and therefore
can be implemented as part of an autocalibration scheme. Secondly, dip switches or RAM can be used to hold the 8-bit word
after its value has been determined. In Figure 42 the offset null
sensitivity, at a gain of 16, is 80 µV per LSB of adjustment,
which guarantees dc accuracy to the 16-bit performance level.
OUT
FORCE
OUT
SENSE
V
OUT
0.1mF
–V
S
0.1mF
+V
S
V
IN
16 15 14 13 12 11 10 9
12345678
+
–
AD526
168421
GAIN NETWORK
A1 A0 CS CLK A2
B
LOGIC AND LATCHES
AD581 OR
AD587
+10V
V
REF
7.5MV
3.3MV
AD548
0.01mF
0.01mF
–
+
+V
S
–V
S
ALL BYPASS CAPACITORS ARE 0.1mF
AD7524
GND
10
mF
1kV
OUT 1
OUT 2
+V
S
MSB
LSB
CS
WR
Figure 41. Offset Nulling Using a DAC

AD526
REV. D
–12–
FLOATING-POINT CONVERSION
High resolution converters are used in systems to obtain high
accuracy, improve system resolution or increase dynamic range.
There are a number of high resolution converters available with
throughput rates of 66.6 kHz that can be purchased as a single
component solution; however in order to achieve higher throughput rates, alternative conversion techniques must be employed.
A floating point A/D converter can improve both throughput
rate and dynamic range of a system.
In a floating point A/D converter (Figure 42), the output data is
presented as a 16-bit word, the lower 12 bits from the A/D
converter form the mantissa and the upper 4 bits from the digital signal used to set the gain form the exponent. The AD526
programmable gain amplifier in conjunction with the comparator circuit scales the input signal to a range between half scale
and full scale for the maximum usable resolution.
The A/D converter diagrammed in Figure 42 consists of a pair
of AD585 sample/hold amplifiers, a flash converter, a five-range
programmable gain amplifier (the AD526) and a fast 12-bit A/D
converter (the AD7572). The floating-point A/D converter
achieves its high throughput rate of 125 kHz by overlapping the
acquisition time of the first sample/hold amplifier and the settling time of the AD526 with the conversion time of the A/D
converter. The first sample/hold amplifier holds the signal for
the flash autoranger, which determines which binary quantum
the input falls within, relative to full scale. Once the AD526 has
settled to the appropriate level, then the second sample/hold
amplifier can be put into hold which holds the amplified signal
while the AD7572 perform its conversion routine. The acquisi-
tion time for the AD585 is 3 µs, and the conversion time for the
AD7572 is 5 µs for a total of 8 µs, or 125 kHz. This performance
relies on the fast settling characteristics of the AD526 after the
flash autoranging (comparator) circuit quantizes the input signal. A 16-bit register holds the 3-bit output from the flash autoranger and the 12-bit output of the AD7572.
The A/D converter in Figure 42 has a dynamic range of 96 dB.
The dynamic range of a converter is the ratio of the full-scale
input range to the LSB value. With a floating-point A/D converter the smallest value LSB corresponds to the LSB of the
monolithic converter divided by the maximum gain of the PGA.
The floating point A/D converter has a full-scale range of 5 V, a
maximum gain of 16 V/V from the AD526 and a 12-bit A/D
converter; this produces:
LSB = ([FSR/2
N
]/Gain) = ([5 V/4096]/16) = 76 µV. The
dynamic range in dBs is based on the log of the ratio of the
full-scale input range to the LSB; dynamic range = 20 log
(5 V/76 µV) = 96 dB.
74–
LS174
74–
LS174
74–
LS174
AD7572
LSB
MSB
V
IN
1/6
56
+
+
+
+
10kV
S/H
AD585
2.5MHz
+
+
1ms1/6
3
4
1/6
1
2
AD526
V
IN
B
F
S
A0 A1 A2
+
+
10kV
S/H
AD585
74-
123
1/2
CLOCK
125MHz
LM339A
1/4
10kV
10kV
10kV
10kV
1/4
1/4
1/4
1/4
+5V
1/6
+
+15V–15V
10mF
+
AD588
10mF
+15V–15V
+5V
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
E1
E2
E3
68pF
68pF
BUSY
47mF
10mF
10mF
+15V–15V
10mF
10mF
+15V–15V
10mF
+5V
+5V
50kV
30pF
+5V
10mF
+15V–15V
10mF
V
IN
+5V
10mF
10kV
+5V
REF
5kV
2.5kV
1.25kV
1.25kV
1mF
1
2
4
5
9
10
3
6
8
12
13
11
1
2
3
11 10
74ALS86
A0
A1
A2
NOTE: ALL BYPASS CAPACITORS ARE 0.1mF
Figure 42. Floating-Point A/D Converter

AD526
REV. D
–13–
HIGH ACCURACY A/D CONVERTERS
Very high accuracy and high resolution floating-point A/D converters can be achieved by the incorporation of offset and gain
calibration routines. There are two techniques commonly used
for calibration, a hardware circuit as shown in Figure 43 and/or
a software routine. In this application the microprocessor is
functioning as the autoranging circuit, requiring software overhead; therefore, a hardware calibration technique was applied
which reduces the software burden. The software is used to set
the gain of the AD526. In operation the signal is converted, and
if the MSB of the AD574 is not equal to a Logical 1, the gain is
increased by binary steps, up to the maximum gain. This maximizes the full-scale range of the conversion process and insures
a wide dynamic range.
The calibration technique uses two point correction, offset and
gain. The hardware is simplified by the use of programmable
magnitude comparators, the 74ALS528s, which can be “burned”
for a particular code. In order to prevent under or over range
hunting during the calibration process, the reference offset and
gain codes should be different from the endpoint codes. A calibration cycle consists of selecting whether gain or offset is to be
calibrated then selecting the appropriate multiplexer channel to
apply the reference voltage to the signal channel. Once the operation has been initiated, the counter, a 74ALS869, drives the
D/A converter in a linear fashion providing a small correction
voltage to either the gain or offset trim point of the AD574. The
output of the A/D converter is then compared to the value preset in the 74ALS528 to determine a match. Once a match is
detected, the 74ALS528 produces a low going pulse which stops
the counter. The code at the D/A converter is latched until the
next calibration cycle. Calibration cycles are under the control
of the microprocessor in this application and should be implemented only during periods of converter inactivity.
A2
A1
A4
A3
AD588
NOISE
REDUCTION
R8
R1
R2
R3
R4
R5
R6
1mF
+V
S
–V
S
–5V
+5V
+15V
–15V
SYS
GND
0.1mF
0.1mF
AD7501
V
IN1
V
IN2
V
IN3
V
IN4
DECODED
ADDRESS
AD526
DECODED
ADDRESS
WR WR
ADDRESS BUS
10kV
–15V +15V
AD585
–15V +15V
200pF
F
S
21
7404
OP27
+15V
–15V
V
REF
DE-
CODED
ADD
WR
+
+
+15V –15V+5V
10mF
10mF
MSB
LSB
+5V
50kV
1kV
AD574
DATA
BUS
1212
MSB
LSB
74ALS
528
GAIN
P = Q
+5V
MSB
LSB
74ALS
528
OFFSET
P = Q
+5V
7475
7475
1/2
+5V
+5V
7475
1/2
7400
1
3
2
7400
6
4
5
PIN 28
AD574
ADG221
CONTROL
LOGIC
INPUT
BUFFER
LATCH DAC A
LATCH DAC B
AD7628
WR A/B
V
REF
V
REF
WR
74ALS
869
MSB
LSB
CALIBRATION
PRESET
VALUE
+5V
+5V
5kV
RFB ARFB ARFB A
RFB B
A1
C1
2
R2
1
OUT A
AD712
R7
2
10kV
A2
AD712
R6
2
20kV
PIN 15
AD588
R5
20kV
R11
5kV
A3
C2
2
R4
1
OUT B
AD712
AGND
AGND
R9
2
10kV
R10
2
20kV
PIN 15
AD588
A2
AD712
R8
20kV
R12
5kV
AGND
OFFSET
GAIN
NOTE: ALL BYPASS CAPACITORS ARE 0.1mF
Figure 43. High Accuracy A/D Converter

AD526
REV. D
–14–
OUTLINE DIMENSIONS
Dimensions shown in inches and (mm).
16-Lead Plastic
DIP Package (N-16)
16
18
9
PIN 1
SEATING
PLANE
0.100
(2.54)
0.87 (22.1) MAX
0.31
(7.87)
0.25
(6.25)
0.125 (3.18)
MIN
0.18
(4.57)
0.035
(0.89)
0.018
(0.46)
0.033
(0.84)
0.3 (7.62)
0.18
(4.57)
MAX
0.011
(0.28)
16-Lead Sided-Brazed
Ceramic Package (D-16)
16
1
8
9
PIN 1
0.265
(6.73)
0.290 ⴞ0.010
(7.37 ⴞ0.254)
0.430
(10.922)
0.040R
0.180 ⴞ0.03
(4.57 ⴞ0.762)
0.800 ⴞ0.010
(20.32 ⴞ0.254)
0.100
(2.54)
BSC
SEATING
PLANE
0.095 (2.41)
0.310 ⴞ0.01
(7.874 ⴞ0.254)
0.047 ⴞ0.007
(1.19 ⴞ0.18)
0.700 (17.78) BSC
+0.003
–0.002
0.017
+0.076
–0.05
(0.43 )
0.035 ⴞ0.01
(0.889 ⴞ0.254)
0.125
(3.175)
MIN
0.300
(7.62)
REF
0.085 (2.159)
0.010 ⴞ0.002
(0.254 ⴞ0.05)
PRINTED IN U.S.A.
C1103d–0–8/99
 Loading...
Loading...