

Page 1

2354235 11/2008
Altivar 71
Variadores de velocidad para
motores síncronos y motores asíncronos
Guía de programación
Software V3.3
11/2009
1755857
www.schneider-electric.com
Page 2

Indice
Indice ______________________________________________________________________________________________________ 2
Antes de empezar_____________________________________________________________________________________________ 3
Biblioteca ___________________________________________________________________________________________________ 4
Evoluciones del software _______________________________________________________________________________________ 5
Etapas de la instalación _____________________________________________ ___________________________________________ 8
Configuración de fábrica________________________________________________________________________________________ 9
Funciones de las aplicaciones __________________________________________________________________________________ 10
Puesta en marcha - Recomendaciones preliminares_________________________________________________________________ 14
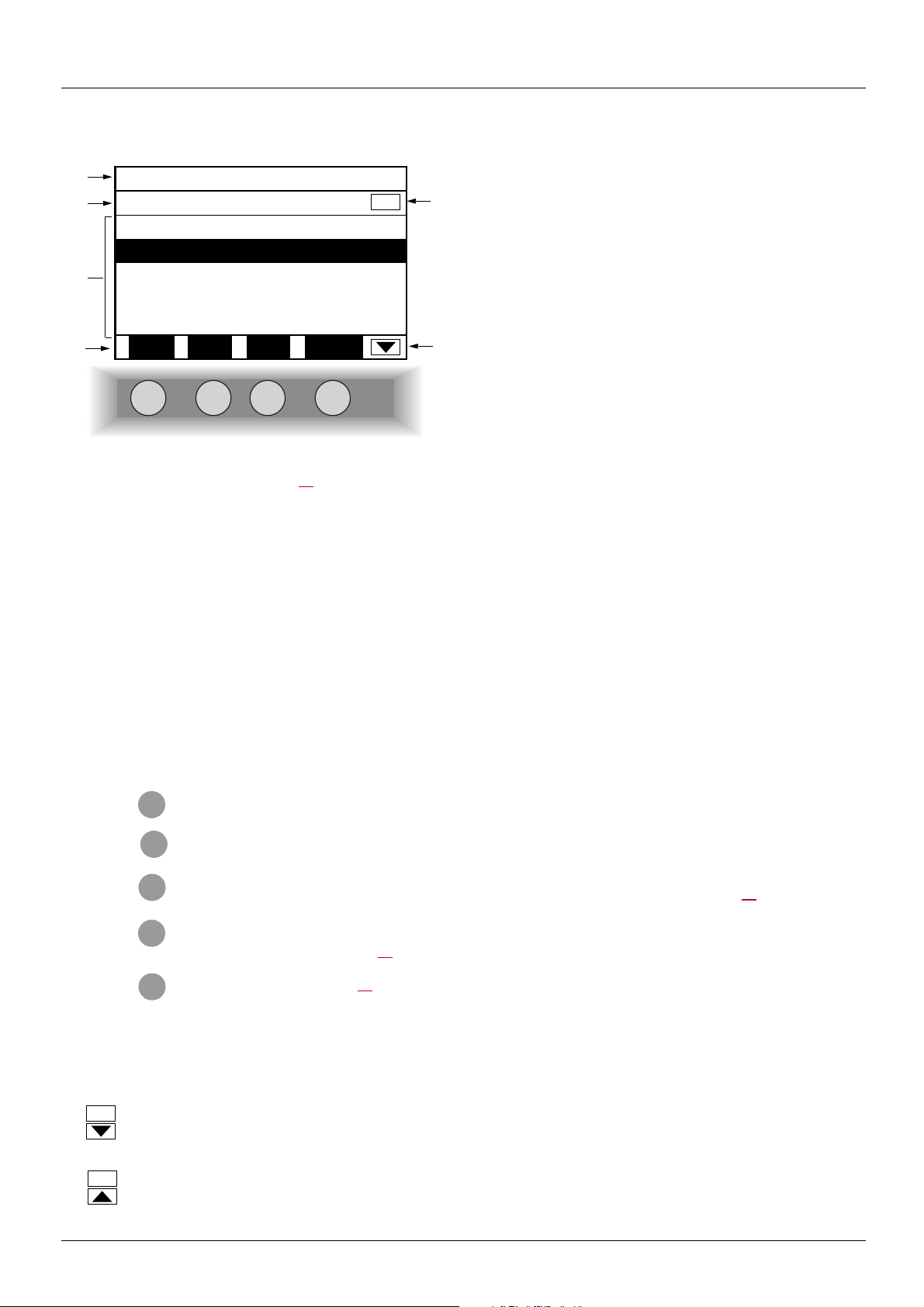
Terminal gráfico _____________________________________________________________________________________________ 17
Descripción del terminal___________________________________________ ______________________________________ 17
Descripción de la pantalla gráfica_____________________________________________________ _____________________ 18
Primera puesta en tensión - Menú [5. IDIOMA] _______________________________________________________ ________ 21
Puestas en tensión posteriores ___________________________________________________________________________ 22
Programación: ejemplo de acceso a un parámetro ____________________________________________________________ 23
Menú rápido _____________________________________________________________ _____________________________ 24
Terminal integrado ___________________________________________________________________________________________ 27
Funciones del visualizador y las teclas______________________________________________________________________ 27
Acceso a los menús ____________________________________________________________________________________ 28
Acceso a los parámetros de los menús _____________________________________________________________________ 29
[2. NIVEL ACCESO] (LAC-) ________________________________________________________________________________ ____ 30
Estructura de las tablas de parámetros ___________________________________________________________________________ 33
Interdependencia de los valores de los parámetros__________________________________________________________________ 34
Búsqueda de un parámetro en esta guía__________________________________________________________________________ 35
[1.1 ARRANQUE RÁPIDO] (SIM-) _______________________________________________________________________________ 36
[1.2 SUPERVISIÓN] (SUP-)____________________________________________________________________________________ 44
[1.3 AJUSTES] (SEt-)_________________________________________________________________________________________ 53
[1.4 CONTROL MOTOR] (drC-) _________________________________________________________________________________ 67
[1.5 ENTRADAS/SALIDAS] (I-O-) __________________________________________________________ _____________________ 87
[1.6 CONTROL] (CtL-) _______________________________________________________________________________________ 115
[1.7 FUNCIONES APLICACIÓN] (FUn-) _________________________________________________________________________ 128
[1.8 GESTIÓN DE FALLOS] (FLt-)______________________________________________________________________________ 216
[1.9 COMUNICACIÓN] (COM-) ________________________________________________________________________________ 241
[1.10 DIAGNÓSTICO]________________________________________________________________________________________ 245
[1.11 IDENTIFICACIÓN]______________________________________________________________________________________ 247
[1.12 AJUSTES DE FÁBRICA] (FCS-)___________________________________________________________________________ 248
[1.13 MENÚ USUARIO] (USr-)_________________________________________________________________________________ 251
[1.14 MENÚ CARTA PROG.] (PLC-) ____________________________________________________________________________ 252
[3. ABRIR/GUARDAR ]___________________________________________________________________________ ____________ 253
[4. CÓDIGO DE ACCESO] (COd-)______________________________________________________________________________ 255
[6 PANTALLA SUPERVISIÓN]_________________________________________________________________________________ 257
[7 CONFIG. VISUALIZACIÓN]_________________________________________________________________________________ 261
[RET.PANT. MULTIPUNTO]___________________________________________________________________________________ 266
Mantenimiento _____________________________________________________________________________________________ 267
Fallos - causas - soluciones__________________________________________________ _________________________________ 268
Tablas de ajustes del usuario__________________________________________________________________________________ 274
Índice de funciones__________________________________________________________________________________________ 276
Índice de códigos de parámetros_______________________________________________________________________________ 277
1755857 11/2009 2
Page 3
Antes de empezar
Lea y siga estas instrucciones antes de empezar cualquier procedimiento con este variador.
PELIGRO
TENSIÓN PELIGROSA
• Antes de instalar y utilizar el varia dor de velocidad ATV71, debe leer y comprender la gu ía de instalación en su totalidad.
La instalación, el ajuste y las reparaciones son tareas que debe realizar personal cualificado.
• El usuario es el responsable de que se cumplan todas las normas de electricidad internacionales y nacionales en vigor
con respecto a la conexión a tierra de protección de todos los aparatos.
• Bastantes piezas de este variador de velocidad, incluidas las tarjetas de circuito impreso, funcionan con la tensión
de la red. NO LAS TOQUE.
Utilice únicamente herramientas que dispongan de aislamiento eléctrico.
• Si el aparato está conectado a la tensión, no toque los componentes sin blindaje ni los tornillos de los borneros.
• No cortocircuite los bornes PA/+ y PC/– ni los condensadores del bus de CC.
• Antes de poner el variador en tensión, instale y cierre todas las tapas.
• Antes de realizar cualquier tipo de mantenimiento o reparación en el variador de velocidad:
- Corte la alimentación.
- Coloque una etiqueta "NO PONER EN TENSIÓN" en el disyuntor o el seccionador del variador de velocidad.
- Bloquee el disyuntor o el seccionador en posición abierta.
• Antes de manipular el variador de velocidad, corte la alimentación, incluida la alimentación de control externo, si se utiliza.
ESPERE 15 MINUTOS para permitir que los condensadores del bus de CC se descarguen. A continuació n, siga el
procedimiento de medida de la tensión del bus de CC ind icado en la guía de instalación para comprob ar si la tensión
continua es inferior a 42 V. El LED del variador de velocidad no es un indicador preciso de la ausencia de tensi ón
del bus de CC.
Si no se respetan estas instrucciones, se producirán graves daños corporales o la muerte.
ATENCIÓN
EQUIPO DAÑADO
No instale el variador ni lo ponga en funcionamiento si parece que está dañado.
Si no se tiene en cuenta esta precaución, se pueden producir daños materiales.
3 1755857 11/2009
Page 4

Biblioteca
Los documentos técnicos siguientes relativos al Alt ivar 71 están di sponibles en el sitio de Int ernet www.schneid er-electric.co m y en el CDROM suministrado con cada variador.
Guía de instalación
En esta guía se describen el montaje y la conexión del variador.
Guía de programación
En esta guía se describen las funciones, los parámetros y cómo utiliz ar el terminal del variador (terminal integrado y terminal gráfico).
Las funciones de comunicación no se indican en esta guía, sino en la guía del bus o de la red que se utilice.
Guía de parámetros de comunicación
En esta guía se describen:
• los parámetros del variador con los elementos específicos para utilizarlos mediante un bus o una red de comunicaciones;
• los modos de marcha específicos de la comunicación (gráfico de estado);
• la interacción entre la comunicación y el control local.
Guías de Modbus, CANopen, Ethernet, Profibus, INTERBUS, Uni-Telway, FIPIO,
Modbus Plus, etc.
En estas guías se describen el montaje, la conexión al bus o a la red, la señali zación, el diagnós tico y la configuración mediante el termi nal
integrado o el terminal gráfico de los parámetros específicos de la comunicación.
Además se indican los servicios de comunicación de los protocolos.
Guía de migración ATV 58-58F/ATV 71
En esta guía se explican las diferencias entre el Altivar 71 y el Altivar 58/58F así como las indicaciones que deben seguirse para sustituir
el Altivar 58 o 58F, incluidas las indicaciones para los variadores que se comunican por bus o por red.
Guía de migración ATV 78/ATV 61/71
En esta guía se detallan las diferencias existentes en tre los Altivar 61/71 y el Altivar 78 y se exp lican las disposiciones que deben ado ptarse
para sustituir un Altivar 78.
1755857 11/2009 4
Page 5
Evoluciones del software
Desde que se inició su comercialización, se han agregado funciones complementarias al Altivar ATV 71. La versión del software pasa a
ser la V2.7. La nueva versión puede sustituir a las antiguas sin cambios.
Esta documentación hace referencia a la versión V2.7, pero se puede seguir utilizando con las vers iones anteriores, porque las novedades
añaden valores y parámetros y no modifican ni suprimen parámetros de versiones anteriores.
La versión del software aparece en la etiqueta de características adherida a uno de los lados del variador.
Cambios de la versión V1.2 con respecto a la versión V1.1
Ajuste de fábrica
Nota 1: En la versión V1.1, la entrada analógica era de 0 ± 10 V. Por motiv os de seguridad, en la nue va versión esta entrad a está
configurada a 0 + 10 V.
Nota 2: En la versión V1.1, la salida analógica AO1 estaba asignada a la frecuenc ia del motor. En la nueva versión esta sali da no
está asignada.
Con la excepción de estos dos parámetros, el ajuste de fábrica de la versión V1.1 se co nserva en la nuev a versión. La s nueva s funciones
están inactivas en el ajuste de fábrica.
Rango de frecuencia del motor
El rango de frecuencia de salida máxima se amplía de 1.000 a 1.600 Hz (posibilidad según calibre y ley de control elegidos).
Nuevos parámetros y nuevas funciones
Menú [1.2 SUPERVISIÓN] (SUP-)
Incorporación de los estados y valores internos relativos a las nuevas funciones descritas a continuación.
Menú [1.3 AJUSTES] (SEt-)
• [Nivel par alto] (ttH), vea la página 65.
• [Nivel par bajo] (ttH), vea la página 65.
• [Nivel alarma pulsos] (FqL) vea la página 66.
• [Niv. parada R.libre] (FFt), vea la página 66.
Menú [1.4 CONTROL MOTOR] (drC-)
• [Incremento rpm] (InSP), vea la página 68.
• Extensión a todos los calibres de variadores de las configuraciones siguientes, antes limitados a 45 kW para ATV71pppM3X y a 75 kW
para ATV71
81; reducción de ruido [Frec.Corte Aleatoria] (nrd), vea la página 82; equili brado de frenado [Equilibrado frenado] (bbA), vea la p ágina
84.
pppN4: motor síncrono [Motor síncrono] (SYn), vea la página 70; filtro senoidal [Filtro senoidal] (OFI), vea la página
Menú [1.5 ENTRADAS/SALIDAS] (I-O-)
• La entrada AI1 pasa a ser configurable en 0 + 10 V o 0 ± 10 V por [Configuración de AI1] (AI1t), vea la página 93.
• [Canal AI - Red] (AIC1), vea la página 97.
• Nuevas posibilidades de asignación de lo s relés y las sal idas lógicas, v ea la página 102: cable destensado, par superior a nivel alto,
par inferior a nivel bajo, motor en rotación de giro adelante, motor en rotación de giro atrás, nivel de velocidad medido alcanzado,
detección de variación de carga.
• La salida analógica AO1 pasa a ser utilizable en sali da lógica y asignable a las funcion es de los relés y salidas lógicas, vea la página 107.
• Nueva posibilidad de modificar la es cala de l as s alidas an aló gica s (ve a l a p ágina 109) por los parámetros [Escala mín AOx] (ASLx)
y [Escala máx AOx] (ASHx).
• Nuevas posibilidades de asignación de las salidas analógicas, vea la página 110: par motor con signo y velocidad del motor medida.
• Nuevas posibilidades de asignación de los grupos de alarma, vea la página 114: cable destensado, par superior a nivel alto, par inferior
a nivel bajo, nivel de velocidad medido alcanzado, detección de variación de carga.
5 1755857 11/2009
Page 6
Evoluciones del software
Menú [1.7 FUNCIONES APLICACIÓN] (Fun-)
• Las funciones de referencia sumatoria, inversa y multiplicadora pasan a ser asignables a la entrada virtual [AI red] (AIU1),
vea
la página 135.
• Nuevo parámetro [Niv. parada R.libre] (FFt), vea la página 140, que permite ajustar un nivel de paso a rueda libre al final de la parada
sobre rampa o de la parada rápida.
• Cierre del freno a velocidad nula regulada [Cierre del freno a 0] (bECd), vea la página 161.
• La medida de peso [Asig. pesado carga] (PES), vea la página 166, pasa a ser asignable a la entrada virtual [AI red] (AIU1).
• Nueva función "cable d estensado", vea la página 170, con los parámetros [Conf.cable destens.] (rSd) y [Niv.Par cable dest.] (rStL).
• Utilización de la rampa [Aceleración 2] (AC2), vea la página 178, durante los arranques y los despertares de la función PID.
• La limitación de par [LIMITACIÓN PAR] (tOL-), vea la página 185, pasa a ser configurable en % o 0,1% por [Incremento par] (IntP)
y asignable a la entrada virtual [AI red] (AIU1).
• Nueva función "parada a distancia calculada después del fina l de carrera de ralentización", vea la página 194, con los parámetros
[Distancia de parada] (Std), [Velocidad lineal] (nLS) y [Corre ctor de parada] (SFd).
• El posicionamiento por captador o fin de carrera [POSIC. POR CAPTADORES] (LPO-), vea la página, 195 pasa a ser configurable
en lógica positiva o negativa por [Conf. FdC de paro] (SAL) y [Conf. FdC ralent.] (dAL).
• La conmutación de los parámetros [CONMUT. JUEGO PARAM.] (MLP-), vea la página 198, pasa a ser asignable a los niveles
de frecuencia alcanzados [N.frec.alcan.] (FtA) y [N.frec.2alcan.] (F2A).
• Nueva función semi-etapa: menú [TRAYECTO CORTO] (HFF-), vea la página 212.
Menú [1.8 GESTIÓN DE FALLOS] (FLt)
• Posibilidad de reinicializar el variador sin desconectarlo, con [Reset producto] (rP), vea la página 219.
• Posibilidad de reinicializar el variador por entrada lógica sin desconectarlo, con [Asig. reset producto] (rPA), vea la página 219.
• La posibilidad de configuración del f allo "pé rdida d e fase d el motor" [Pérdida fase motor] (OPL), vea la página 224, en [C.fase mot.]
(OAC) se amplía a todos los calibres de variadores (hasta los limitados a 45 kW para ATV71pppM3X y a 75 kW par a ATV71 pppN4).
• El fallo externo [FALLO EXTERNO] (EtF-), vea la página 227, pasa a ser configurable en lógic a positiva o negativ a con [Config. fallo
externo] (LEt).
• Nueva función de supervisión con medida de velocidad mediante la entrada "Entrada de pulsos", vea la página 234, en el menú
[CONTADOR FRECUENCIA] (FqF-).
• Nueva función de detección de variación de carga , vea la página 236, mediante el menú [DET. VARIACIÓN CARGA] (dLd-).
• El fallo de cortocircuito del módulo de frenado pasa a ser configurable con [Gest. fallo res. freno] bUb), vea la página 238.
Menú [7 CONFIG. VISUALIZACIÓN]
• Incorporación en [7.4 AJUSTES CONSOLA] , vea la página 265, de los parámetros [CONTRASTE CONSOLA] y
[TPO. SALVAPANTALLAS] para aju s t ar el co n traste y la puesta en espera del visualizador gráfico.
Novedades de la versión V1.6 con respecto a la versión V1.2
Ampliación de la gama con la incorporación de los variadores ATV71ppppY para redes de 500 a 690 V.
No existen nuevos parámetros, si bien los rangos de ajustes y los ajustes de fábrica de ciertos parámetros se han adaptado a las nuevas
tensiones.
Menú [1.5 ENTRADAS/SALIDAS] (I-O-)
Aumento del rango de ajuste de los parámetros de retardo de los relés y las salidas lógicas: 0 a 60.000 ms en lugar de 0 a 9.999 ms.
Novedades de la versión V2.5 con respecto a la versión V1.6
Menú [1.3 AJUSTES] (SEt-)
• Nuevos parámetros [Frecuencia oculta] (JPF), [Frecue ncia oculta 2] (JF2) y [3º Frecuencia oculta] (JF3) página 66 permitiendo evitar
velocidades críticas que pueden ocasionar resonancias.
• Nuevo parámetro [Histéresis Evitar Frecuencia] (JFH) página 66 ajusta el ancho de banda de histéresis en frecuencia evit ándo las
mismas.
• Posibilidad de ajustar el parámetro [Relación de Par] (trt) página 66 (visible tambien en menú [CONT ROL DE PAR] (tOr-) página 182.
Importante:
Para la versión V2.5, el comportamiento de las siguientes funciones es diferente respecto a las versiones previas cuando el modo de
parada "en rueda libre NST" es seleccionado (valor de fábrica):
• función [FINALES DE CARRERA] (LSt-),
• función [POSICIONAMIENTO POR CAPTADORES] (LPO-),
• comando "inhibición" por comunicación (ver caracter de estado CiA402 en el manual de parámetros de comuni cación).
Realmente, en las versiones previas, el modo de parada "en rueda libre NST" no era factible.
1755857 11/2009 6
Page 7

Mejoras del software
Mejoras realizadas en la versión V2.7 en relación con la versión V2.5
Menú [7 CONFIG. VISUALIZACIÓN]
• Adición en [7.4 PARÁMETROS CONSOLA] página 261 del [Menú de arranque]. Este parámetro permite elegir el menú que se
muestra en el variador durante la puesta en tensión.
Menú [1.3 AJUSTES] (SEt-)
El rango de ajuste de [Tpo de rearranque] (ttr) página 162 ahora puede configurarse entre 0,00 y 15,00 segun dos.
Mejoras realizadas en la versión V3.3 en relación con la versión V2.7
Menú [1.7 FUNCIONES APLICACIÓN] (Fun-)
• Nuevo parámetro [Conex. regenerativo] (AFE), página 214, La alimentación eléctrica direct a mediante Front End activo (AFE) reduce
los armónicos de corriente inyectados en la red a menos del 4% y permite al variador realimentar la energía de regeneración a la
alimentación de red
.
7 1755857 11/2009
Page 8
Etapas de la instalación
INSTALACIÓN
v 1 Consulte la guía de instalación
PROGRAMACIÓN
Procedimiento aplicable si la configura ción de fábrica de la página 9 y la utilización
del único menú [ARRANQUE RÁPIDO] (SIM-) son suficientes para la aplicación.
b 2 Ponga el dispositivo en tensión sin
dar la orden de marcha
v En caso de alimentación separada
del control, respete el procedimiento
descrito en la página 14.
b 3 Elija el idioma, si el variador está
provisto de un terminal gráfico
b 4 Configure el menú
[ARRANQUE RÁPIDO]
(SIM-)
v Control 2 hilos o 3 hilos
v Macro configuración
v Parámetros motor
) Realice un autoajuste
v Corriente térmica del motor
v Rampas de aceleración
y deceleración
v Rango de variación de velocidad
Recomendaciones:
• Prepare la programación; para ello,
rellene las tablas de ajustes del usuario.
Vea la página
274.
• Realice un autoajuste para optimizar las
prestaciones. Vea la página
42.
• Si no sabe o no recuerda los ajustes
definidos, recupere los ajustes de fábrica.
Vea la página
250.
Nota: Asegúrese de que el cableado
del variador es compatible con su
configuración.
b 5 Arranque
1755857 11/2009 8
Page 9

Configuración de fábrica
Preajustes del variador
El Altivar 71 se entrega preajustado de fábrica para las condiciones de uso más habituales:
• Macro configuración: Marcha/paro.
• Frecuencia del motor: 50 Hz.
• Aplicación de par constante, motor asíncrono, control vectorial de flujo sin captador.
• Modo de paro normal en rampa de deceleración.
• Modo de paro por fallo: rueda libre.
• Rampas lineales de aceleración y deceleración: 3 segundos.
• Velocidad mínima: 0 Hz.
• Velocidad máxima: 50 Hz.
• Corriente térmica del motor = intensidad nominal del variador.
• Corriente de frenado por inyección en la parada = 0,7 x corriente nominal del variador, durante 0,5 segundos.
• Sin rearranque automático después de un fallo.
• Frecuencia de corte: 2,5 o 4 kHz según el calibre del variador.
• Entradas lógicas:
- LI1: marcha adelante, LI2: marcha atrás (2 sentidos de la marcha), control 2 hilos por transición.
- LI3, LI4, LI5, LI6: inactivas (no asignadas).
• Entradas analógicas:
- AI1: consigna de velocidad 0 + 10 V.
- AI2: 0-20 mA, inactiva (no asignada).
• Relé R1: el contacto se abre en caso de fallo (o si el variador está sin tensión).
• Relé R2: inactivo (no asignado).
• Salida analógica AO1: 0-20 mA, inactiva (no asignada).
En caso de que los valores anteriores sean compatibles con la aplicación, utilice el variador sin modificar los ajustes.
Preajustes de las tarjetas opcionales
Las entradas y las salidas de las tarjetas opcionales no están asignadas en ajustes de fábrica.
9 1755857 11/2009
Page 10
Funciones de las aplicaciones
En las tablas siguientes se indi can las asociaciones más comu nes entre funciones y apl icaciones, que pueden servirle de ayuda en su elecció n.
Las aplicaciones que figuran en estas tablas se refieren especialmente a las máquinas siguientes:
• elevación: grúas, puentes grúa, grúa de pórtico (elevaci ón vertical, translación, giro), secciones elevadoras
• ascensores: renovación de máquinas hasta 1,2 m/s
• manutención: paletizadores/despaletizadores, cintas transportadoras, mesas de rodillos
• embalaje: encartonadoras, etiquetadoras
• textil: telares, cardadoras, lavadoras, hiladoras, estiradoras
• madera: tornos automáticos, sierras, mecanizado
• inercia elevada: centrifugadoras, mezcladoras, máquinas excéntricas (bombas de balancín, prensas)
• proceso
No se mencionan todas las asociaciones y las que se mencionan no son obligatorias, puesto que cada una de las máquinas
presenta particularidades propias.
Algunas funciones están dedicadas particularmente a una aplicación definida. En tal caso, la aplicación se especifica en una
pestaña situada al margen de las páginas de programación relacion adas.
Funciones del control motor
Aplicaciones
Funciones Página
Ley U/F
Control vectorial de flujo sin captador
Control vectorial de flujo con captador
Control vectorial de dos puntos
Motor síncrono en lazo abierto
Frecuencia de salida hasta 1.600 Hz
Limitación de sobretensiones de motor
Conexión en bus CC (consulte la guía de explotación)
Magnetización del motor por entrada lógica
Frecuencia de corte máxima de 16 kHz
Autoajuste
70
70
70
70
70
68
82
-
153
81
69
Elevación
Ascensores
Manutención
Embalaje
Textil
Madera
Inercia elevada
b b b
b b b b b b b b
b b b b b b b b
b b
b
b b
b b
b b
b b b
b b b
b b b b b b b b
Proceso
1755857 11/2009 10
Page 11
Funciones de las aplicaciones
Funciones de consignas de velocidad
Funciones Página
Aplicaciones
Consigna diferencial bipo l ar 90
Puntos intermedios en consigna (efecto lupa) 92
Entrada de control en frecuencia 124
Conmutación de consignas
Suma de consignas 133
Resta de consignas 133
Multiplicación de consignas 133
Rampas en S 136
Marcha paso a paso (JOG) 144
Velocidades preseleccionadas 145
+/– velocidad mediante botones de un nivel 148
+/– velocidad mediante botones de dos niveles 148
+/– velocidad en torno a una consigna 150
Memorización de la consigna 152
125 - 134
Elevación
Ascensores
Manutención
Embalaje
Textil
Madera
b b b
b b
b b
b
b
b
b
b b b
b b b
b b b b b
b
b b
Inercia elevada
Proceso
b
b
11 1755857 11/2009
Page 12
Funciones de las aplicaciones
Funciones específicas de las aplicaciones
Funciones Página
Aplicaciones
Parada rápida 140
Gestión de finales de carrera 154
Control de freno 156
Medida de carga 165
Elevación de alta velocidad 167
Tensado de cable 170
Regulador PID 172
Control de par 181
Limitación de par motor/generador 184
Equilibrado de carga 84
Control de contactor de línea 188
Control de contactor aguas abajo 190
Posicionamiento en finales de carrera o captadores 192
Parada a distancia calculada después del final de carrera
de ralentización
Sistema ENA (mecánico con carga excéntrica) 79
Conmutación de parámetros 197
Conmutación de motores o de configuraciones 200
Guiado hilo 204
Configuración del tipo de parada 140
Rescate 211
Trayecto corto 212
194
Elevación
Ascensores
Manutención
Embalaje
Textil
Madera
Inercia elevada
b b
b b b
b b b
b b
b
b
b b b
b b b b
b b
b b b
b
b b
b b
b
b b b b b b b b
b b b
b
b b b b
b
b
Proceso
b
1755857 11/2009 12
Page 13
Funciones de las aplicaciones
Funciones de seguridad/gestión de fallos
Funciones Página
Aplicaciones
Power removal (función de seguridad; consulte la guía
de explotación)
Parada en alarma térmica 226
Gestión de alarmas 114
Gestión de fallos 217 a 240
Test IGBT 229
Recuperación al vuelo 221
Protección térmica de resistencias de frenado 238
Protección del motor por sondas PTC 217
Gestión de subtensión 228
Pérdida 4-20 mA 230
Corte aguas abajo controlado (pérdida de fase
del
motor)
Rearranque automático 220
Medida de la velocidad de rotac ión del motor mediante
la entrada Entrada de pulsos
Detección de variación de carga 236
-
224
234
Elevación
Ascensores
Manutención
Embalaje
Textil
Madera
Inercia elevada
b b b b b b b b
b
b b b b b b b b
b b b b b b b b
b b b b b b b b
b b b
b b b b
b b b b b b b b
b b b
b b b b b b
b
b
b b b
b
Proceso
13 1755857 11/2009
Page 14
Puesta en marcha - Recomendaciones preliminares
PELIGRO
FUNCIONAMIENTO INESPERADO DEL APARATO
• Antes de poner en tensión el Altivar 71 y configurarlo, asegúres e de que la entrada PWR (POWER REMOVAL) está
desactivada (en el estado 0) con el fin de evitar cualquier tipo de rearranque in esperado.
• Antes de ponerlo en tensión o al salir de los menús de configuración, asegúrese de que las ent radas asignadas
al control de marcha estén desactivadas (estado 0), ya que pueden provocar el arranque inmedia to del motor.
Si no se tienen en cuenta estas precauciones, se pueden producir heridas graves o incluso la muerte.
ATENCIÓN
TENSIÓN DE LA RED INCOMPATIBLE
Antes de poner en tensión el variador y configurarlo, asegú rese de que la tensi ón de la red sea comp atible con la t ensión
de alimentación del variador. El variador podría dañarse si la tensión de la red no es compatible.
Si no se tiene en cuenta esta precaución, se pueden producir daños materiales.
ATENCIÓN
RIESGO DE DESTRUCTION DEL MATERIAL
Evite manipular con frecuencia el contactor (existe el riesgo de desgaste prematuro de los condensadores de filtrado).
Si el tiempo de ciclo es < 60 s, la resistencia de carga puede quedar inutilizable.
Si no se tiene en cuenta estas precauciones, se pueden producir da ños materiales.
PELIGRO
FUNCIONAMIENTO INESPERADO DEL EQUIPO
• Asegúrese de que los cambios realizados en los ajustes durante el funcionamiento no impliquen ningún peligro.
• Se recomienda realizar los cambios cuando se haya detenido el variador.
Si no se tienen en cuenta estas precauciones, se pueden producir heridas graves o incluso la muerte.
Puesta en tensión y configuración del variador
Alimentación separada del control
Cuando el control del variador se alimenta indep endi ent eme nte de l a p ote ncia (bo rn es P24 y 0 V), desp ués de añadir una ta rj eta opcional
o de sustituir cualquier tarjeta, sólo debe alimentarse la potencia en la primera puesta en tensión. De otro modo, la tarjeta puede no ser
reconocida. Si la nueva tarjeta no se reconoce, no será posible configurarla y el variador se puede bloquear.
Control de potencia por contactor de línea
Ajustes de usuario y ampliación de las funciones
• El visualizador y los botones permiten modificar los ajustes y ampliar las funciones que se detallan en las páginas siguientes.
• La recuperación de los ajustes de fábrica es posible mediante el menú [1.12 AJUSTES DE FÁBRICA] (FCS-), vea la página 248.
• Hay tres tipos de parámetros:
- Visualización: valores que muestra el variador.
- Ajuste: Modificables tanto en funcionamiento como cuando está parado
- Configuración: Modificables únicamente cuando está parado y no está frenando. Pueden visualizarse en funcionamiento.
1755857 11/2009 14
Page 15
Puesta en marcha - Recomendaciones preliminares
ATENCIÓN
FUNCIONAMIENTO INESPERADO DEL EQUIPO
La protección térmica del motor no está asegurada por el variador si la corriente del motor es inferior a 0,2 veces la
corriente nominal del variador. En tal caso, utilice otro dispositivo de protección térmica.
Si no se tiene en cuenta esta precaución, se pueden producir daños materiales.
ATENCIÓN
FUNCIONAMIENTO INESPERADO DEL EQUIPO
La protección térmica de los motores ya no está asegurada por el variador. En tal caso, utilice un dispo sitivo de protección
térmica diferente en cada motor.
Si no se tiene en cuenta esta precaución, se pueden producir daños materiales.
Arranque
Importante:
• En la configuración de fábrica, el motor sólo puede ser aliment ado tras la reinicialización previa de las órdenes "adelante", "atrás",
"parada por inyección de corriente continua" en los casos siguientes:
- Cuando se produce una puesta en tensión o una reinicialización de fallo manual o después de una orden de parada.
Por defecto, el visualizador muestra el mensaje "nSt", pero el variador no arranca.
• Estas órdenes se tienen en cuenta sin reinicialización previa si la función de rearranque automático está configurada (parámetro
[Rearranque auto.] (Atr) del menú [1.8- GESTIÓN DE FALLOS] (FLt-); vea la página
Prueba en motor de baja potencia o sin motor
• Con el ajuste de fábrica, la detección [Pérdida fase m otor] (OPL), página 224, está activa (OPL = YES). Para comprobar el variador
en un entorno de prueba o de mantenimiento, y sin recurrir a un motor equi valente al calibre del variador (en particul ar para los variadores
de altas potencias), desactive la opción [Pérdida fase motor] (OPL = no).
• Configure [Tipo control motor] (Ctt) = [U/F 2 puntos] (UF2) o [U/F 5 puntos] (UF5) (menú [1.4- CONT ROL MOTOR] (drC-), vea la página 70).
220).
Utilización de motores en paralelo
• Configure [Tipo control motor] (Ctt) = [U/F 2 puntos] (UF2) o [U/ F 5 puntos] (UF5) (menú [1.4- CONTROL MOTOR] (drC-), v ea l a página 70).
15 1755857 11/2009
Page 16
Puesta en marcha - Recomendaciones preliminares
ATENCIÓN
OPERACIÓN DEL EQUIPO NO INTENCIONADA
• Para proteger a un motor que tiene una tensión nominal mas baja que la tensión de alimentación del variador, es
obligatorio usar la función [Control Vectorial 2pt] (UC2) con motivo de limitar la tensión máxima de el motor y que
sea mas baja que la de la red.
• Sin embargo, es necesario comprobar que la tensi ón instan tánea aplicad a al motor (relaci onada con l a tensión del
bus C.C.) sea compatible con las características de éste.
Si no se tiene en cuenta estas precauciónes, se pueden producir da ños materiales.
ATV71pppY - Red eléctrica que presenta a menudo defecto de tensión baja
Para asegurar un óptimo funcionamiento de un ATV71 pppY en una red que presenta el defecto antes comentado (tensión de red contenida
entre 425V y 446V), es necesario ajustar [Nivel de Prevenci ón] (UPL) = 383V (menú [1.8 GESTION DE FALLOS] (FLt-), ver página
Usar un motor con tensión nominal menor que la tensión de alimentación del
variador
• Configurar [Control Vectorial 2pt] (UC2) = [SI] (SI) (menú [1.4-CONTROL MOTOR] (drC-), ver página 72).
229).
1755857 11/2009 16
Page 17
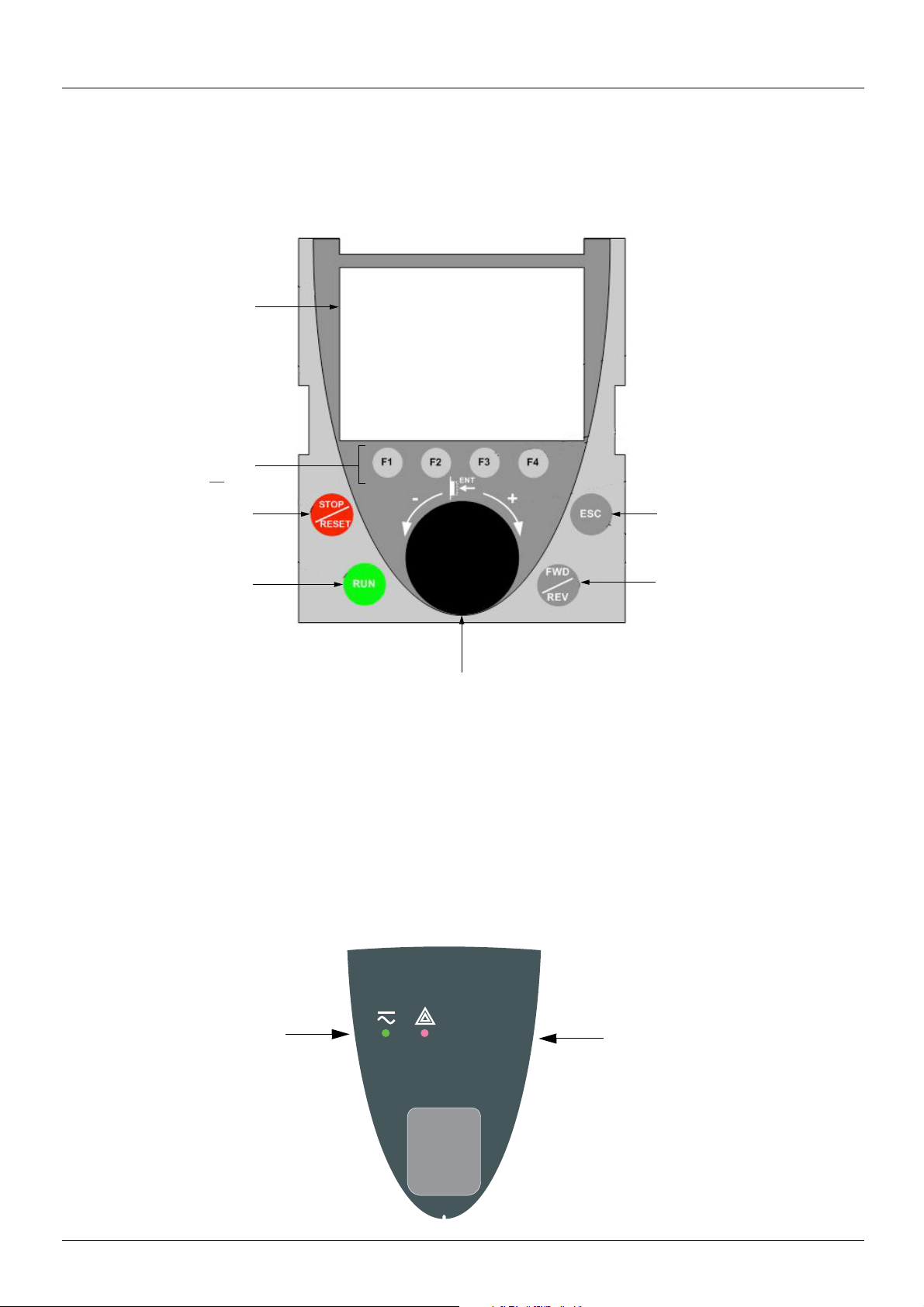
Terminal gráfico
1 Visualizador gráfico
2 Teclas de función
F1, F2, F3, F4,
vea la página 18
.
3 Tecla de paro/
borrado de fallos
4 Tecla de marcha
5 Botón de navegación:
• Pulsación
(ENT):
- guarda el valor en curso
- se accede al menú o al parámetro seleccionado
• Giro (+/–): - aumenta o disminuye el valor
- pasa a la línea siguiente o anterior
- aumenta o disminuye la consigna si el control por
terminal está activado
7 Tecla ESC: abandona un valor,
un parámetro o un menú para
regresar a la opción anterior
6 Tecla de inversión del sentid o
de giro del motor
HMI Modbus
Indicador verde:
Bus CC en tensión
Indicador rojo:
Fallo
El terminal gráfico viene siempre con todos l os calibres de variadore s, pero los calibres pequeños se pueden pedir si n este terminal (véa se
el catálogo). Este terminal es desconectable y puede montarse remotamente, por ejemplo en una puerta de armario, mediante los cables y
los accesorios opcionales (véase el catálogo).
Descripción del terminal
Nota: Las teclas 3, 4, 5 y 6 permiten controlar directamente el variador, si el control por terminal está activado.
Terminal desmontado
Cuando el terminal está desmontado, se pueden ver en su sitio dos indicadores de señalización:
17 1755857 11/2009
Page 18
Terminal gráfico
F1 F2 F3 F4
RDY Term +0,00 Hz 0 A
1 MENÚ VARIADOR
1.1 ARRANQUE RÁPIDO
1.2 SUPERVISIÓN
1.3 AJUSTES
1.4 CONTROL MOTOR
1.5 ENTRADAS/SALIDAS
Code << >> Quick
1
2
3
4
6
5
• Code F1
•HELP F1
• << F2
• >> F3
• Quick F4
Descripción de la pantalla gráfica
1. Línea de visualización: su contenido es configurable. Con el ajuste de fábrica, indica:
• estado del variador (vea la página 19)
• canal de control activo:
- Term: Bornero
- HMI: Terminal gráfico
- Mdb: Modbus integrado
- CAN: CANopen integrado
- Carta COM.: Carta comunicación
- APP: Tarjeta Controller Insi de
• referencia de frecuencia
• corriente en el motor
2. Línea de menú: indica el nombre del menú o del submenú en curso.
3. Visualización de menús, submenús, parámetros, valores, barras de LED, etcétera, en forma de ventana desplazable, en cinco líneas
como máximo.
La línea o el valor seleccionado por el botón de navegación se visualiza resaltado.
4. Visualización de las funciones asignadas a las teclas F1 a F4, alineadas sobre ellas, por ejemplo:
Las teclas de función son dinámicas y contextuales.
Mediante el menú [1.6 CONTROL], se pueden asignar otras funciones (funciones de aplicación) a estas teclas.
Si se pulsa una tecla de función que tiene asi gnada una velocidad preseleccion ada, el motor funcionará a esa vel ocidad hasta que se pulse
otra velocidad preseleccionada o JOG, se cambie la velocidad de referencia o se pulse la tecla STOP.
5. Significa que esta ventana de visualización no sigue más abajo.
Significa que esta ventana de visualización sigue más abajo.
6. Significa que esta ventana de visualización no empieza más arriba.
Significa que esta ventana de visualización empieza más arriba.
: Visualización del código del parámetro seleccionado. El código es el que corresponde al visualizador de 7 segmentos.
: Ayuda contextual.
Navegación horizontal hacia la izquierda o paso al menú o submenú anterior, o bien si se trata de un valor,
:
paso
a un dígito de rango superior, que se visualiza resaltado (véase el ejemplo de la página 20).
Navegación horizontal hacia la derecha o paso al menú o submenú siguiente (paso al menú [2 NIVEL ACCESO]
en este ejemplo), o bien si se trata de un valor, paso a un dígito de rango inferior, que se visualiza resaltado
:
(véase
el ejemplo de la página 20).
: Menú rápido, vea la página 24.
1755857 11/2009 18
Page 19

Terminal gráfico
Códigos de estado del variador:
- ACC: Rampa aceleración
- CLI: Limitación de in tensidad
- CTL: Parada controlada tras pérdida de fase de red
- DCB: Frenado por inyección de corriente continua en curso
- DEC: Rampa deceleración
- FLU: Magnetización del motor en curso
- FST: Parada rápida
- NLP: Potencia no alimentada (sin red en L1, L2, L3)
- NST: Parada en rueda libre
- OBR: Deceleración autoadaptada
- PRA: Función Power removal activada (variador bloqueado)
- RDY: Variador listo
- RUN: Variador en marcha
- SOC: Corte aguas abajo controlado en curso
- TUN: Autoajuste en curso
- USA: Alarma de subtensión
19 1755857 11/2009
Page 20
Terminal gráfico
RDY Term +0,00 Hz 0 A
5 IDIOMA
English
Français
Deutsch
Español
Italiano
<< >> Quick
Chinese
SELECCIÓN PARÁMETROS
1.3 AJUSTES
Incremento rampa
Rampa aceleración
Rampa deceleración
Aceleración 2
Deceleración 2
Edit
RDY Term +0,00 Hz 0 A
Rampa aceleración
9,51 s
Mín. = 0,01 Máx. = 99,99
<< >> Quick
>>
RDY Term +0,00 Hz 0 A
Rampa aceleración
9,51 s
Mín. = 0,01 Máx. = 99,99
<< >> Quick
Ejemplos de ventanas de configuración:
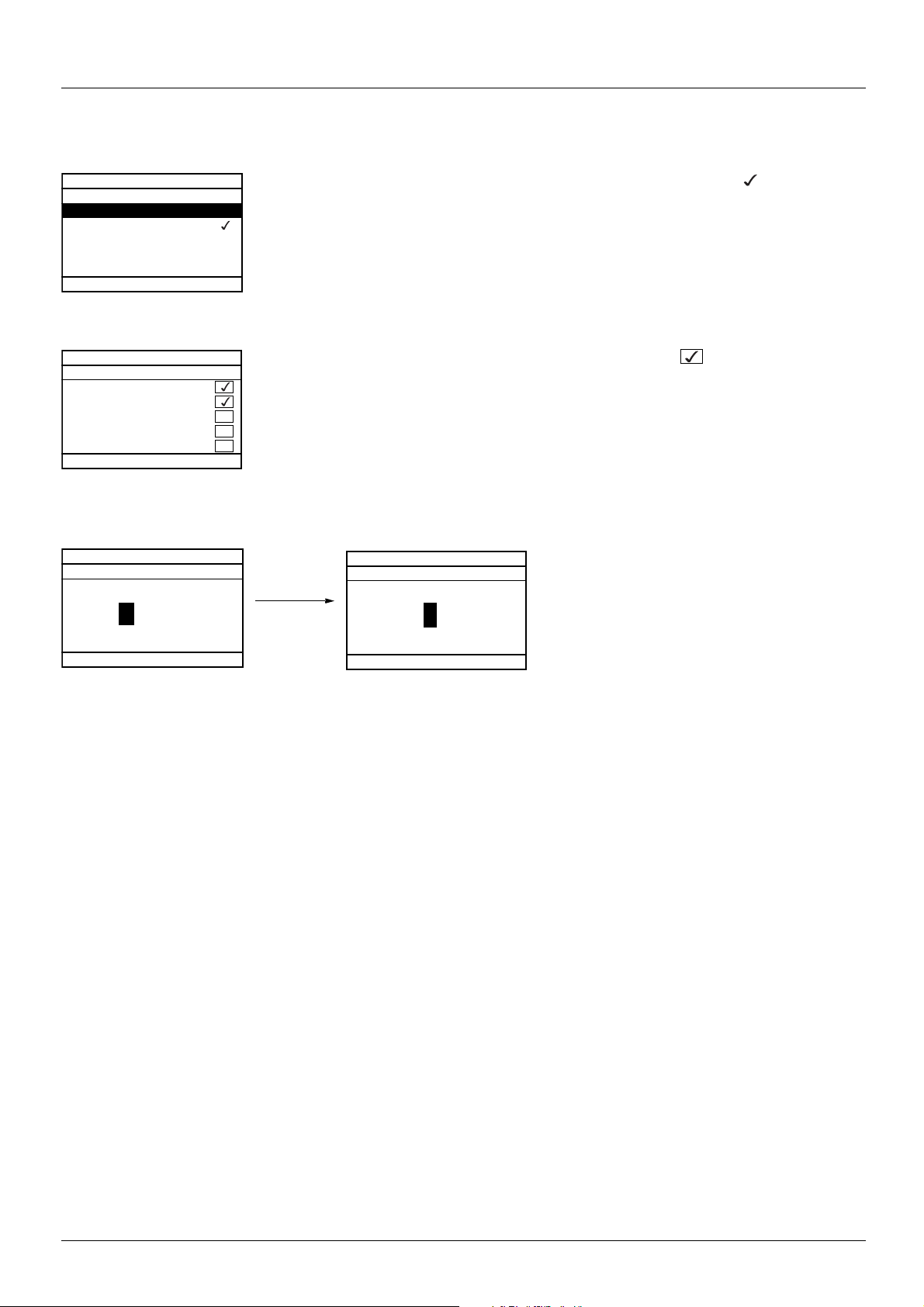
Cuando sólo se puede seleccionar una opción, ésta se señala mediante el signo .
Ejemplo: sólo se puede seleccionar un idioma.
Cuando se pueden seleccionar varias opciones, éstas se señalan con .
Ejemplo: se pueden elegir varios parámetros para formar el [MENÚ USUARIO].
Ejemplo de ventana de configuración de un valor:
Las flechas << y >> (teclas F2 y F3) permiten seleccionar el dígito que se va a modificar; el giro del botón de navegación permit e aumentar
o disminuir el dígito.
1755857 11/2009 20
Page 21
Terminal gráfico
ATV71HU22N4
2,2 kW/3 cv 380/480 V
Config. n.°1
5 IDIOMA
English
Français
Deutsch
Español
Italiano
Chinese
Russian
Turkish
RDY Term +0,00 Hz 0,0 A
2 NIVEL ACCESO
Básico
Estándar
Avanzado
Experto
RDY Term +0,00 Hz 0,0 A
1 MENÚ VARIADOR
1.1 ARRANQUE RÁPIDO
1.2. SUPERVISIÓN
1.3. AJUSTES
1.4. CONTROL MOTOR
1.5. ENTRADAS/SALIDAS
Code << >> Quick
RDY Term +0,00 Hz 0,0 A
MENÚ GENERAL
1 MENÚ VARIADOR
2 NIVEL ACCESO
3 ABRIR/GUARDAR
4 CÓDIGO DE ACCESO
5 IDIOMA
Code Quick
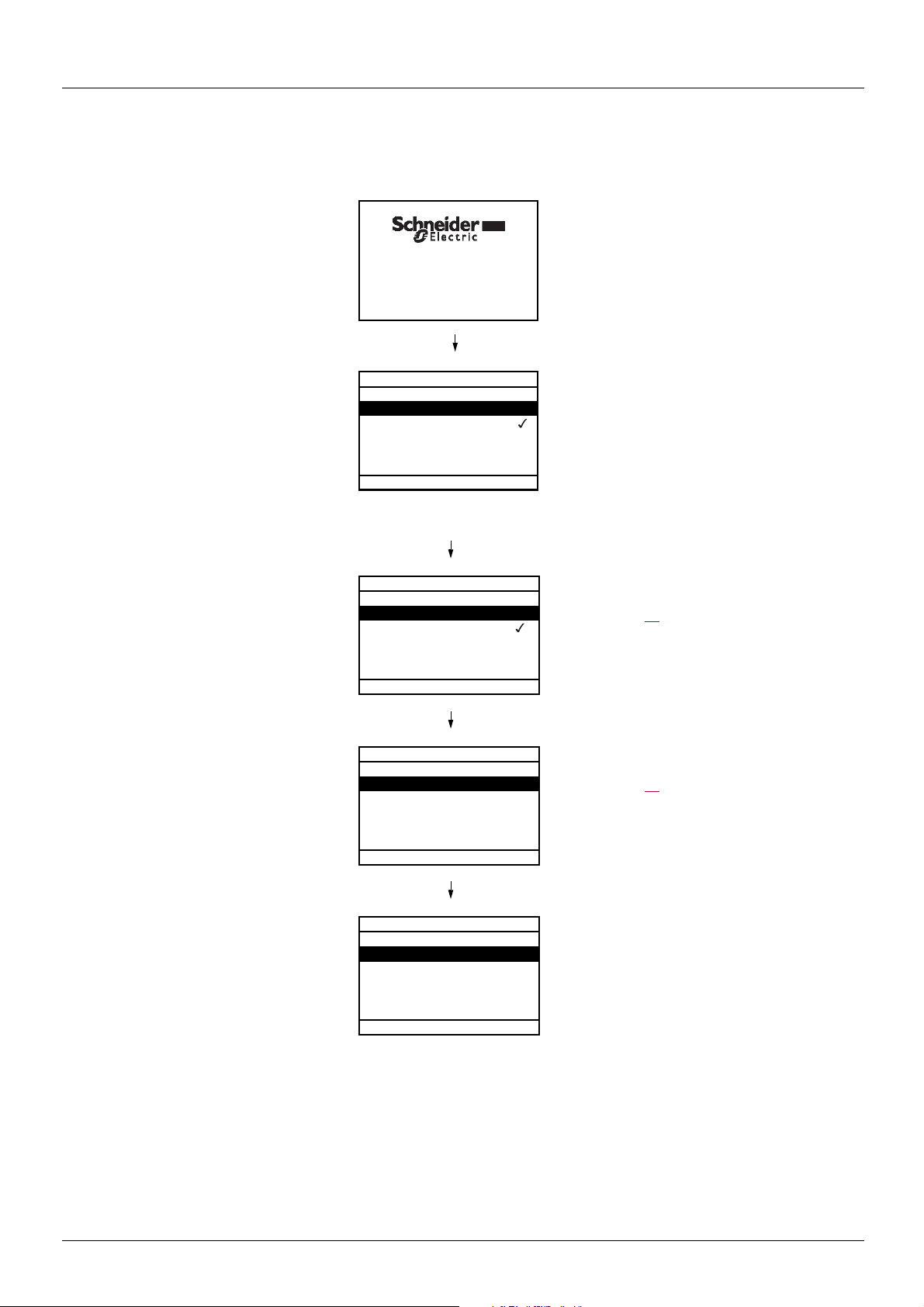
Primera puesta en tensión - Menú [5. IDIOMA]
En la primera puesta en tensión, la ruta de menús es obligatoria hasta [1. MENÚ VARIADOR], con el objeto de ayudar al usuario.
Antes de arrancar el motor, deben c onfigurarse los parámetros del submenú [1 .1 ARRANQUE RAPIDO] y debe haberse realizado el autoa ju ste.
Visualización durante 3 segundos después
de
la puesta en tensión.
3 segundos
Paso al menú [5 IDIOMA]
automáticamente 3 segundos después.
Elija el idioma y pulse ENT.
ESC
Paso al menú [2 NIVEL ACCESO]
(vea la página 30).
Elija nivel de acceso y pulse ENT.
Paso al [1 MENÚ VARIADOR]
(vea la página 26).
Retorno al [MENÚ GENERAL] mediante ESC.
21 1755857 11/2009
Page 22
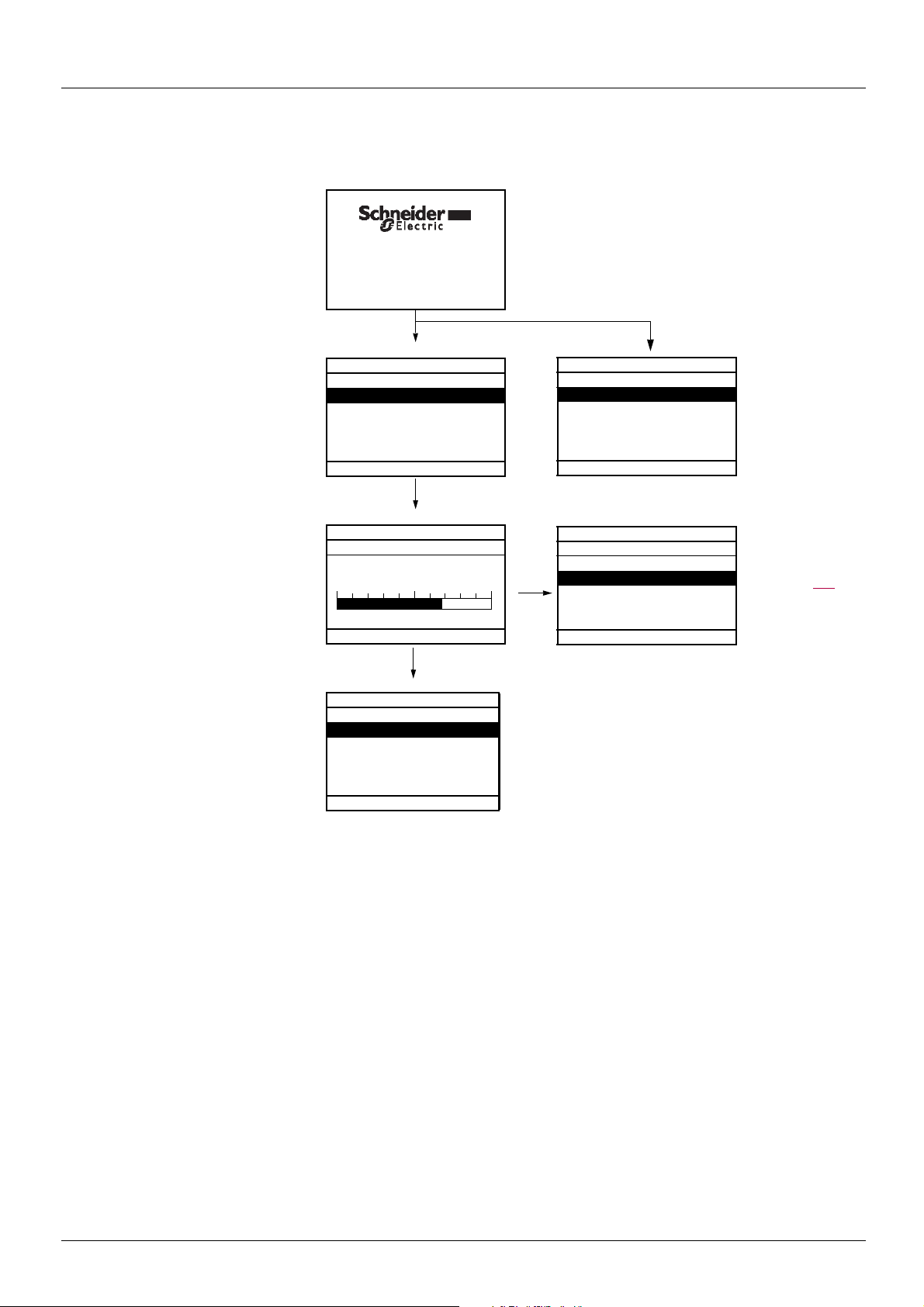
Terminal gráfico
Paso a
[1. MENÚ VARIADOR] o a
[1.14 MENÚ CARTA PROG.] 3
segundos después.
Si no se lleva a cabo ninguna
acción, se pasa automáticamente
a "Visualización" 10 segundos
después (visualización que
depende de la configuración
elegida).
Retorno eventual al [MENÚ
GENERAL] mediante ENT o ESC.
3 segundos
10 segundos
ESC
ATV71HU22N4
2,2 kW/3 cv 380/480 V
Config. n.°1
RDY Term +38 Hz 0,0 A
1. MENÚ VARIADOR
1.1 ARRANQUE RÁPIDO
1.2 SUPERVISIÓN
1.3 AJUSTES
1.4 CONTROL MOTOR
1.5 ENTRADAS/SALIDAS
Code << >> Quick
RDY Term +38 Hz 0 A
Referencia frec.
Mín.=0 Máx.=60
Quick
RDY Term +38 Hz 0 A
MENÚ GENERAL
1 MENÚ VARIADOR
2 NIVEL ACCESO
3 ABRIR/GUARDAR
4 CÓDIGO DE ACCESO
5 IDIOMA
Code Quick
38 Hz
RDY Term +0,00 Hz 0 A
1.14 MENÚ CARTA PROG.
Direc.carta Prog. :17
AJUSTE FECHA/HORA
<< >> Quick
RDY Term +0,00 Hz 0 A
1.3 AJUSTES
Incremento rampa: 01
Aceleración 9,51 s
Deceleración: 9,67 s
Aceleración 2: 12,58 s
Deceleración 2: 13,45 s
Code << >> Quick
Menú
seleccionado en
el [Menú de
arranque] 265
ENT
o, si la tarjeta Controller Inside está presente
Puestas en tensión posteriores
1755857 11/2009 22
Page 23
Terminal gráfico
RDY Term +0,00 Hz 0 A
1 MENÚ VARIADOR
1.1 ARRANQUE RÁPIDO
1.2 SUPERVISIÓN
1.3 AJUSTES
1.4 CONTROL MOTOR
1.5 ENTRADAS/SALIDAS
Code << >> Quick
ENT
ESC
RDY Term +0,00 Hz 0 A
1.3 AJUSTES
Incremento rampa: 01
Rampa aceleración 9,51 s
Deceleración: 9,67 s
Aceleración 2: 12,58 s
Deceleración 2: 13,45 s
Code << >> Quick
ENT
ENT o
ESC
RDY Term +0,00 Hz 0 A
Rampa aceleración
9,51 s
Mín. = 0,01 Máx. = 99,99
<< >> Quick
Programación: ejemplo de acceso a un parámetro
Acceso a la rampa de aceleración
Advertencia:
• Selección de parámetro:
- mediante giro del botón de navegación para desplazarse verticalmente
• Modificación del parámetro:
- selección del dígito que se va a modifi car mediante las teclas << y > > (F2 y F3) para desplazarse verti calmente (el dígito seleccionado
pasa a ser blanco sobre fondo negro)
- modificación del dígito mediante giro del botón de navegación
• Cancelación de la modificación:
- mediante pulsación de la tecla ESC
• Registro de la modificación:
- mediante pulsación del botón de navegación (ENT)
23 1755857 11/2009
Page 24
Terminal gráfico
RDY Term +0,00 Hz 0 A
1.4 CONTROL MOTOR
Frec. estándar motor: 50 Hz IEC
Pot. nominal motor: 0,37 kW
Tensión Nom.Motor: 206 V
Int. Nominal Motor: 1,0 A
Frec. nom.Motor: 50,0 Hz
Code << >> Quick
ENT
RDY Term +0,00 Hz 0 A
MENÚ RÁPIDO
RET. MENÚ GENERAL
ACCESO DIRECTO A...
ÚLTIMAS 10 MODIFIC.
RET. PANT. MULTIPUNTO
Code
Vea la página 266.
RDY Term +0,00 Hz 0 A
MENÚ GENERAL
1 MENÚ VARIADOR
2 NIVEL ACCESO
3 ABRIR/GUARDAR
4 CÓDIGO DE ACCESO
5 IDIOMA
Code Quick
RDY Term +0,00 Hz 0 A
ACCESO DIRECTO A...
1.3
AJUSTES
<< >>
ENT
RDY Term +0,00 Hz 0 A
1.3 AJUSTES
Incremento rampa: 01
Rampa aceleración 9,51 s
Deceleración: 9,67 s
Aceleración 2: 12,58 s
Deceleración 2: 13,45 s
Code << >> Quick
RDY Term +0,00 Hz 0 A
ÚLTIMAS 10 MODIFIC.
Rampa aceleración: 10 s
Gan. prop. ENA: 1,2
Int. Nominal Motor: 15 A
Vel. preselecc.4: 20 Hz
Vel. preselecc.5: 30 Hz
Code
ESC
ENT
RDY Term +0,00 Hz 0 A
Int. Nominal Motor
15,0 A
<< >>
Menú rápido
Se puede acceder rápidamente a un parámetro desde cualquier pantalla, si la función "Quick" aparece debajo de la tecla F4.
Ejemplo:
Si pulsa la tecla F4 se abre la ventana de menú rápido, que ofrece
4 posibilidades.
• [HOME]: retorno al [MENÚ GENERAL].
• [ACCESO DIRECTO A...]: se abre la ventana de acceso directo,
que muestra "1". Las teclas de función << y >> (F2 y F3) p ermiten
seleccionar cada uno de los números y el botón de navegación
permite aumentar o disminuir los números 1.3 en el ejemplo siguiente.
• [ÚLTIMAS 10 MODIFIC.]: se abre una ventana q ue permite el acceso
directo a los 10 últimos parámetros modificados.
1755857 11/2009 24
Page 25
Terminal gráfico
RDY Term +0,00 Hz 0 A
MENÚ GENERAL
1 MENÚ VARIADOR
2 NIVEL ACCESO
3 ABRIR/GUARDAR
4 CÓDIGO DE ACCESO
5 IDIOMA
Code Quick
6.PANTALLA SUPERVISIÓN
7 CONFIG. VISUALIZACIÓN
RDY Term +0,00 Hz 0 A
1 MENÚ VARIADOR
1.1 ARRANQUE RÁPIDO
1.2 SUPERVISIÓN
1.3 AJUSTES
1.4 CONTROL MOTOR
1.5 ENTRADAS/SALIDAS
Code << >> Quick
1.6 CONTROL
1.7 FUNCIONES APLICACIÓN
1.8 GESTIÓN DE FALLOS
1.9 COMUNICACIÓN
1.10 DIAGNÓSTICO
1.11 IDENTIFICACIÓN
1.12 AJUSTES DE FÁBRICA
1.13 MENÚ USUARIO
1.14 MENÚ CARTA PROG.
[MENÚ GENERAL] - Mapa de los menús
Contenido de los menús del [MENÚ GENERAL]
[1 MENÚ VARIADOR] Vea la página siguiente.
[2 NIVEL ACCESO] Define la accesibilidad a los menús (nivel de complejidad).
[3 ABRIR/GUARDAR] Permite guardar y recuperar archivos de configuración del variador.
[4 CÓDIGO DE ACCESO] Protección de la configuración mediante código de acceso.
[5 IDIOMA] Elección del idioma.
[6 PANTALLA SUPERVISIÓN] Personalización de la información que se muestra en el terminal gráfico en funcionamiento.
[7 CONFIG. VISUALIZACIÓN] • Personalización de los parámetros.
• Creación de un menú de usuario personalizado.
• Personalización de la visibilidad y de la protección de menús y parámetros.
25 1755857 11/2009
Page 26
Terminal gráfico
[1 MENÚ VARIADOR]
RDY Term +0,00 Hz 0 A
1 MENÚ VARIADOR
1.1 ARRANQUE RÁPIDO
1.2 SUPERVISIÓN
1.3 AJUSTES
1.4 CONTROL MOTOR
1.5 ENTRADAS/SALIDAS
Code << >> Quick
1.6 CONTROL
1.7 FUNCIONES APLICACIÓN
1.8 GESTIÓN DE FALLOS
1.9 COMUNICACIÓN
1.10 DIAGNÓSTICO
1.11 IDENTIFICACIÓN
1.12 AJUSTES DE FÁBRICA
1.13 MENÚ USUARIO
1.14 MENÚ CARTA PROG.
Contenido de los menús del [1. MENÚ VARIADOR]:
[1.1 ARRANQUE RÁPIDO]: Menú simplificado para la puesta en servicio rápida
[1.2 SUPERVISIÓN]: Visualización de los valores usuales, del motor y de entradas/salidas
[1.3 AJUSTES]: Parámetros de ajuste modificables durante el funcionamiento
[1.4 CONTROL MOTOR]: Parámetros del motor (placa de características del motor, autoajuste, frecuencia de corte,
algoritmos
[1.5 ENTRADAS/SALIDAS]: Configuración de las entradas y salidas (puesta a escala, filtrado, c ontrol 2 hilo s, control 3 hil os...)
[1.6 CONTROL]: Configuración de los canales de control y de consigna (terminal, borneros, bus,…)
[1.7 FUNCIONES APLICACIÓN]: Configuración de las funciones de aplicación (ej.: velocidades preseleccionadas, PID,
control
[1.8 GESTIÓN DE FALLOS]: Configuración de la gestión de fallos
[1.9 COMUNICACIÓN]: Parámetros de comunicación (bus de camp o)
[1.10 DIAGNÓSTICO]: Diagnóstico del motor/variador
[1.11 IDENTIFICACIÓN]: Identificación del variador y de las opciones internas
[1.12 AJUSTES DE FÁBRICA]: Acceso a los archivos de configuración y retorno a los ajustes de fábrica
[1.13 MENÚ USUARIO]: Menú específico creado por el usuario en el menú [7. CONFIG. VISUALIZACIÓN]
[1.14 MENÚ CARTA PROG.]: Configuración de la tarjeta Controller Inside opcional
de control...)
de freno...)
1755857 11/2009 26
Page 27

Terminal integrado
• Visualizador
de 4 dígitos
de 7 segmentos
• Para entrar en un menú
o en un parámetro o para
guardar el parámetro
o el valor mostrado
• Para pasar al menú
o al parámetro previo,
o bien para aumentar
el valor mostrado
• Para salir de un menú o un
parámetro o para desechar
el valor mostrado y volver
al valor anterior grabado
en la memoria
• Para pasar al menú
o al parámetro
siguiente, o bien
para disminuir
el valor mostrado
• 2 indicadores de estado
CANopen
• 2 indicadores de
estado Modbus
****Nota:
Los pequeños calibres del Altivar 71 (véase el catálogo) tienen como opción un terminal integrado con un visualizador de "7 segmentos"
que muestra 4 dígitos. Por defecto, incluyen el terminal gráfico descrito en las páginas anteriores.
Funciones del visualizador y las teclas
• Al pulsar el botón o , no se graba en memoria el valor elegido.
• Si se pulsa de forma continua (>2 s) o , el desplazamiento se hará rápidamente.
Grabación en memoria y registro de los valores mostrados: ENT
Al grabar un valor en la memoria, el visualizador parpadea.
Visualización normal si no hay fallos y no está en puesta en servicio:
- 43.0: visualización del parámetro seleccionado en el menú SUP (por defecto: frecuencia motor)
- CLI: Limitación de co rri e nt e
- CtL: Parada controlada tras corte de red
- dCb: Frenado por inyección de corriente continua en curso
- FLU: Magnetización del motor en curso
- FSt: Parada rápida
- nLP: Potencia no alimentada (sin red en L1, L2, L3)
- nSt: Parada en rueda libre
- Obr: Deceleración autoadaptada
- PrA: Función Power removal (variador bloqueado)
- rdY: Variador listo
- SOC: Corte aguas abajo controlado en curso
- tUn: Autoajuste en curso
- USA: Alarma de subtensión
En caso de fallo, el código de fallo aparece parpadeando.
27 1755857 11/2009
Page 28
Terminal integrado
XXX
CtL-
FUn-
SIM-
I-O-
SEt-
SUP-
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ENT
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
FCS-
LAC-
CON-
FLt-
ESC
ESC
ESC
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
SPL-
ESC
ENT
ESC
drC-
COd-
USr-
ESC
ENT
ESC
Visualización del estado del variador
AJUSTES
FUNCIONES
ENTRADAS/SALIDAS
GESTIÓN DE FALLOS
ARRANQUE RÁPIDO
Menús
SUPERVISIÓN
CONTROL MOTOR
CONTROL
Puesta en tensión
AJUSTES DE FÁBRICA
CÓDIGO DE ACCESO
NIVEL ACCESO
COMUNICACIÓN
(página 53) Parámetros de ajuste modificables durante
el funcionamiento.
(página 128
) Configuración de las funciones de aplicación (ej.:
velocidades preseleccionadas, PID, control de freno...).
(página 87
) Configuración de las entradas y salidas
(puesta a escala, filtrado, control 2 hilos, control 3 hilos...).
(página 216
) Configuración de la gestión de fallos.
(página 36
) Menú simplificado para la puesta en servicio rápida.
(página 44
) Visualización de los valores us ua l es, d el mo to r
y de entradas/salidas.
(página 69
) Parámetros del motor (placa de características del
motor, autoajuste, frecuencia de corte, algoritmos de control...).
(página 115
) Configuración de los canales de control y de consigna
(terminal, borneros, bus…).
(página 248
) Acceso a los archivos de configuración y retorno
a los ajustes de fábrica.
(página 255
)
(página 30
)
(página 241
) Parámetros de comunicación (bus de campo).
(página 251
) Menú específico creado por el usuario con ayuda
del terminal gráfico.
MENÚ USUARIO
MENÚ CARTA PROG.
(página 252
) Menú de la tarjeta Controller Inside, si esta tarjeta
está instalada.
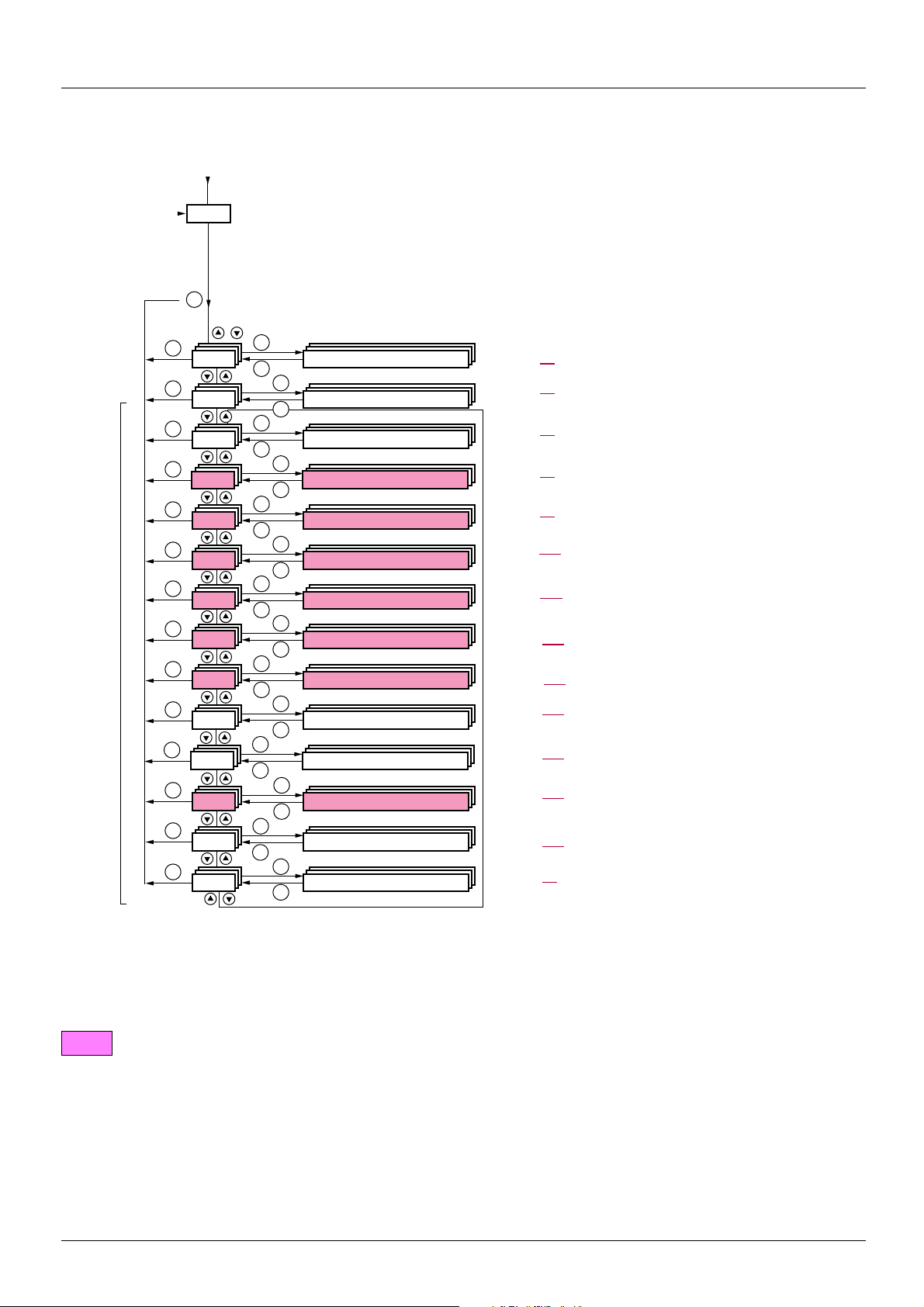
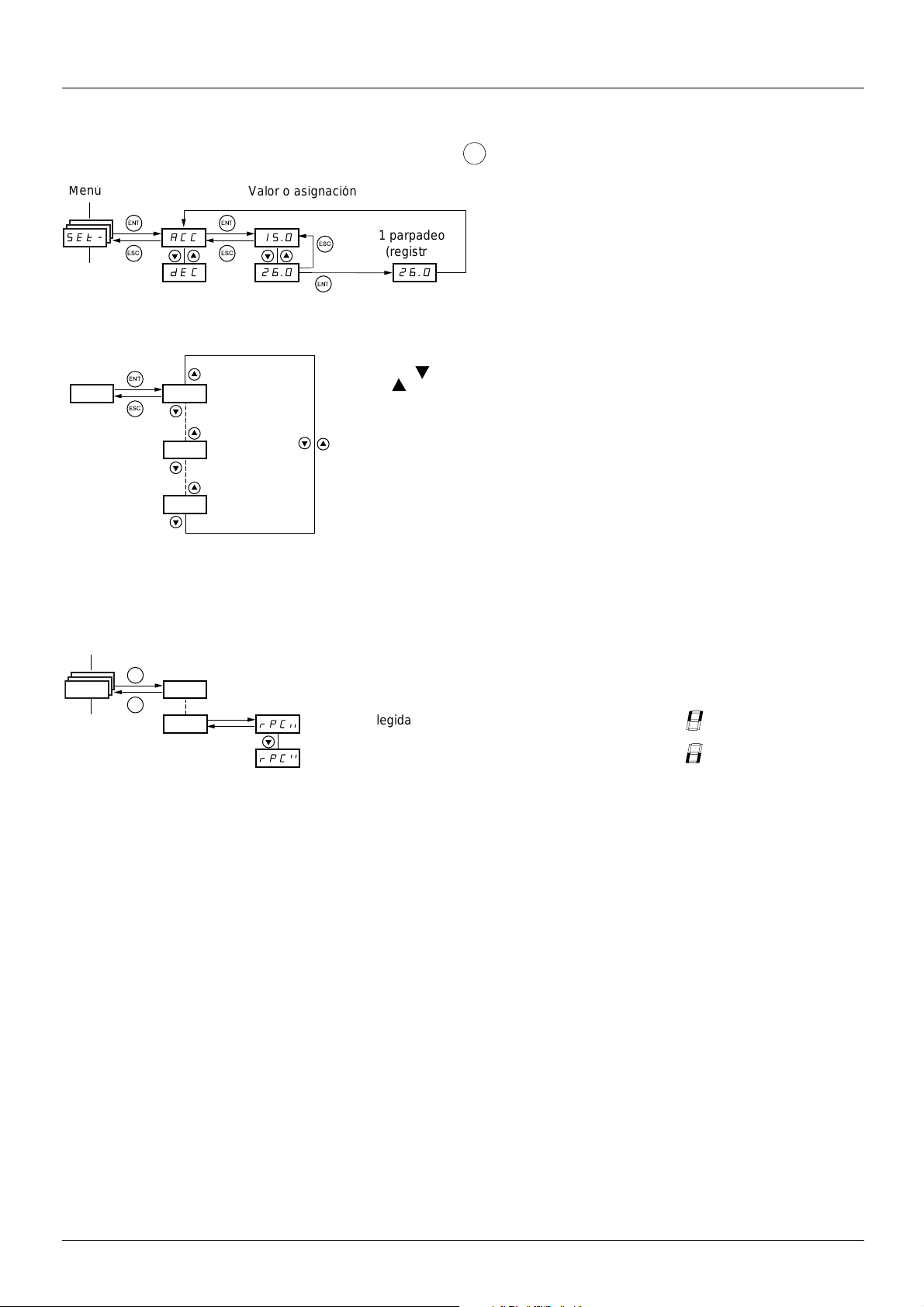
Acceso a los menús
Los códigos de los menús y submenús se diferencian de los códigos de los parámetros por un guión a la derecha.
Ejemplos: menú FUn-, parámetro ACC.
1755857 11/2009 28
Es posible que no pueda acceder a los menús sombreados según la configuración del nivel de acceso LAC.
Page 29
Terminal integrado
ENT
ACC 15.0
ENT
ESC
ENT
ESC
26.0 26.0
ESC
dEC
ENT
SEt-
Menú
Valor o asignación
1 parpadeo
(registro)
Parámetro
(Parámetro siguiente)
ENT
ESC
1
º
n-ésimo
último
Menú
ENT
ESC
I-O-
Alarma no elegida
Alarma elegida
Acceso a los parámetros de los menús
Grabación en memoria y registro de los valores seleccionados:
Todos los menús son circulares, es decir, que después del último parámetro, si se sigue
pulsando , se accede al primer parámetro, y viceversa: del primero al último si se
pulsa .
Al grabar un valor en la memoria, el visualizador parpadea.
Opciones de asignaciones múltiples para un parámetro
Ejemplo: lista de las alarmas del grupo 1 en el menú
[ENTRADAS/SALIDAS] (I-O-)
Se pueden seleccionar varias alarmas como se indica
a
continuación.
El dígito de la derecha significa: opción seleccionada
opción no seleccionada
Se utiliza el mismo principio para todas las opciones múltiples.
29 1755857 11/2009
Page 30
[2. NIVEL ACCESO] (LAC-)
RDY Term +0,00 Hz 0 A
2 NIVEL ACCESO
Básico
Estándar
Avanzado
Experto
<< >> Quick
RDY Term +0,00 Hz 0 A
MENÚ GENERAL
1 MENÚ VARIADOR
2 NIVEL ACCESO
3 ABRIR/GUARDAR
4 CÓDIGO DE ACCESO
5 IDIOMA
Code << >> Quick
RDY Term +0,00 Hz 0 A
1. MENÚ VARIADOR
1.1 ARRANQUE RÁPIDO
1.2. SUPERVISIÓN
1.3. AJUSTES
1.11. IDENTIFICACIÓN
1.12. AJUSTES DE FÁBRICA
Code << >> Quick
1.13 MENÚ USUARIO
RDY Term +0,00 Hz 0 A
MENÚ GENERAL
1 MENÚ VARIADOR
2 NIVEL ACCESO
3 ABRIR/GUARDAR
4 CÓDIGO DE ACCESO
5 IDIOMA
Code Quick
6 PANTALLA SUPERVISIÓN
RDY Term +0,00 Hz 0 A
1 MENÚ VARIADOR
1.1 ARRANQUE RÁPIDO
1.2 SUPERVISIÓN
1.3 AJUSTES
1.4 CONTROL MOTOR
1.5 ENTRADAS/SALIDAS
Code << >> Quick
1.6 CONTROL
1.7 FUNCIONES APLICACIÓN
1.8 GESTIÓN DE FALLOS
1.9 COMUNICACIÓN
1.10 DIAGNÓSTICO
1.11 IDENTIFICACIÓN
1.12 AJUSTES DE FÁBRICA
1.13 MENÚ USUARIO
1.14 MENÚ CARTA PROG.
RDY Term +0,00 Hz 0 A
MENÚ GENERAL
1 MENÚ VARIADOR
2 NIVEL ACCESO
3 ABRIR/GUARDAR
4 CÓDIGO DE ACCESO
5 IDIOMA
Code Quick
6 PANTALLA SUPERVISIÓN
7 CONFIG. VISUALIZACIÓN
RDY Term +0,00 Hz 0 A
MENÚ GENERAL
1 MENÚ VARIADOR
2 NIVEL ACCESO
3 ABRIR/GUARDAR
4 CÓDIGO DE ACCESO
5 IDIOMA
Code Quick
6 PANTALLA SUPERVISIÓN
7 CONFIG. VISUALIZACIÓN
Con terminal gráfico
Básico
Acceso sólo a 5 menús y a sólo 6 submenús del menú [1. MENÚ VARIADOR].
Sólo se puede asignar una función a cada entrada.
Estándar
Es el nivel de ajuste de fábrica. Acceso sólo a 6 menús y a todo s los submenús
del menú [1. MENÚ VARIADOR].
Sólo se puede asignar una función a cada entrada.
1755857 11/2009 30
Avanzado
Acceso a todos los menús y submenús.
Se pueden asignar varias funciones a ca da
entrada.
Experto
Acceso a todos los menús y submenús como en el nivel [Avanzado] y acceso
a los parámetros adicionales.
Se pueden asignar varias funciones a cada entrada.
Page 31

[2. NIVEL ACCESO] (LAC-)
XXX
SIM-
ESC
ESC
ENT
LAC-
ESC
ENT
ESC
COd-
Visualización del estado del variador
NIVEL ACCESO
Puesta en tensión
Con terminal integrado:
Cód. Nombre/descripción Ajuste de fábrica
LAC-
bAS
Std
Adu
Epr
• bAS: Acceso limitado a los menús SIM, SUP, SEt, FCS, USr, COd y LAC. Sólo se puede asignar una función
a
cada entrada.
• Std: Acceso a todos los menús del terminal integrado. Sólo se puede asignar una función a cada entrada.
• AdU: Acceso a todos los menús del terminal integrado. Se pueden asignar varias funciones a cada entrada.
• EPr: Acceso a todos los menús del terminal integrado y acces o a lo s parámetros ad ici ona les . Se pueden asi gna r
Std
varias funciones a cada entrada.
31 1755857 11/2009
Page 32
[2. NIVEL ACCESO] (LAC-)
Cuadro comparativo de terminal gráfico/terminal integrado: menús accesibles
Terminal gráfico Terminal integrado Nivel de acceso
[2 NIVEL ACCESO] LAC- (Nivel de acceso)
[3 ABRIR/GUARDAR] [4 CÓDIGO DE ACCESO] COd- (Código de acceso)
[5 IDIOMA] [1 MENÚ VARIADOR] [1.1 ARRANQUE RÁPIDO] SIM- (Arranque rápido)
[1.2 SUPERVISIÓN] SUP-(Supervisión)
[1.3 AJUSTES] SEt- (Ajustes)
[1.11 IDENTIFICACIÓN] [1.12 AJUSTES DE FÁBRICA] FCS- (Ajustes de fábrica)
[1.13 MENÚ USUARIO] USr- (Menú Usuario)
Sólo se puede asignar una función a cada entrada. Sólo se puede asignar una función a
cada entrada.
[1.4 CONTROL MOTOR] drC- (Control motor)
[1.5 ENTRADAS/SALIDAS] I-O- (Configuración de E/S)
[1.6 CONTROL] CtL- (Control)
[1.7 FUNCIONES APLICACIÓN] FUn- (FUNCIONES
APLICACIÓN)
[1.8 GESTIÓN DE FALLOS] FLt- (Gestión de fallos)
[1.9 COMUNICACIÓN] COM- (Comunicación)
[1.10 DIAGNÓSTICO] [1.14 MENÚ CARTA PROG.] (1) PLC- (Tarjeta Controller Inside)
(1)
[6 PANTALLA SUPERVISIÓN] -
Sólo se puede asignar una función a cada entrada. Sólo se puede asignar una función
a
cada entrada.
[7 CONFIG. VISUALIZACIÓN] -
Se pueden asignar varias funciones a cada entrada. Se pueden asignar varias funciones
a cada entrada.
Parámetros de nivel experto Parámetros de nivel experto
Se pueden asignar varias funciones a cada entrada. Se pueden asignar varias funciones
a cada entrada.
Básico bAS
Avanzado AdU
Estándar Std(ajuste de fábrica)
Experto EPr
(1)Accesible si hay una tarjeta Controller Inside instalada.
1755857 11/2009 32
Page 33

Estructura de las tablas de parámetros
5
2
3
1
4
6
8
7
1. Nombre del menú en el visualizador de 4 dígitos
y "7 segmentos".
2. Código de submenú en el visualizador de 4 dígitos
y "7 segmentos".
3. Código del parámetro en el visualizador de 4 dígitos
y "7 segmentos".
4. Valor del parámetro en el visualizador de 4 dígitos
y "7 segmentos".
5. Nombre del menú en el terminal gráfico.
6. Nombre del submenú en el terminal gráfico.
7. Nombre del parámetro en el terminal gráfico.
8. Valor del parámetro en el terminal gráfico.
Las tablas de parámetros contenidas en las descripciones de los diferentes menús se pueden utilizar con el terminal gráfico y con el terminal
integrado. Incluyen etiquetas de los dos terminales como se describe a continuación.
Ejemplo:
[1.7 FUNCIONES APLICACIÓN] (FUn-)
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
UPd-
USP
LI1
Nota:
• Los textos y los corchetes [ ] corresponden a los visualizadores del terminal gráfico.
• Los ajustes de fábrica corresponden a la [Macro c onfiguración] (CFG) = [Marcha/paro] (StS) que es la macro configuración
de salida de fábrica.
b [+/– VELOCIDAD]
Función accesible mediante el canal de consigna [Canal Ref. 2] (Fr2) = [+/- velocidad] (UPdt),
vea
la página 125.
M [Asig. + velocidad]
no
v [No] (nO): Función inactiva
v [LI1] (LI1)
[No] (nO)
33 1755857 11/2009
Page 34

Interdependencia de los valores de los parámetros
La configuración de determinados parámetros modifica el rango de ajuste de otros parámetros, con el objeto de reducir el riesgo de posibles
errores. Ello puede conllevar la modificación de un ajuste de fábrica o de un valor ya seleccionado.
Ejemplo:
1. [Limitación Intensidad] (CLI), vea la página 60, ajustado con el valor 1,6 In o con el ajuste de fábrica 1,5 In.
2. [Frecuencia de Corte] (SFr), vea la página 60, ajustado con el valor 1 kHz (y validado con "ENT") limita [Limitación Intensidad] (CLI) a 1,36 In.
3. Si se aumenta [Frecuencia de Corte] (SFr) a 4 kHz, [Limitación Intensidad] (CLI) deja de estar limitado, y tiene el valor 1,36 In. Si desea
que el valor sea 1,6
In, debe volver a ajustar el parámetro [Limitación Intensidad] (CLI).
1755857 11/2009 34
Page 35

Búsqueda de un parámetro en esta guía
F1
RDY Term +0,00 Hz 0 A
1.3 AJUSTES
Incremento rampa: 01
Rampa aceleración 9,51 s
Rampa deceleración: 9,67 s
Aceleración 2: 12,58 s
Deceleración 2: 13,45 s
Code << >> Quick
Code
RDY Term +0,00 Hz 0 A
1.3 AJUSTES
Incremento rampa: 01
ACC 9,51 s
Rampa deceleración: 9,67 s
Aceleración 2: 12,58 s
Deceleración 2: 13,45 s
Code << >> Quick
La búsqueda de información sobre un parámetro se puede realizar:
• Con el terminal integrado: Utilice directamente el índice de los códigos de parámetros de la página 277 para averiguar la página que
contiene información sobre el parámetro visualizado.
• Con el terminal gráfico: Seleccion e el parámetro que busca y pu lse la tecla : [Código]. Mientras la tecla se mantenga pulsada,
se visualizará el código del parámetro en lugar del nombre.
Ejemplo: ACC
Utilice a continuación el índice de los códigos de parámetros de la página 277 para averiguar la página que contiene información sobre
el parámetro visualizado.
35 1755857 11/2009
Page 36

[1.1 ARRANQUE RÁPIDO] (SIM-)
RDY Term +0,00 Hz 0 A
MENÚ GENERAL
1 MENÚ VARIADOR
2 NIVEL ACCESO
3 ABRIR/GUARDAR
4 CÓDIGO DE ACCESO
5 IDIOMA
Code Quick
ENT
RDY Term +0,00 Hz 0 A
1 MENÚ VARIADOR
1.1 ARRANQUE RÁPIDO
1.2 SUPERVISIÓN
1.3 AJUSTES
1.4 CONTROL MOTOR
1.5 ENTRADAS/SALIDAS
Code << >> Quick
ENT
RUN Term +50,00 Hz 80 A
1.1 ARRANQUE RÁPIDO
Control 2 / 3 Hilos
Macro configuración
Macro. personaliz.
Frec.estándar motor
Pérdida fase red
Code << >> Quick
XXX
SIM-
SUP-
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
Visualización del estado del variador
ARRANQUE RÁPIDO
Puesta en tensión
Con terminal gráfico:
Con terminal integrado:
El menú [1.1- ARRANQUE RÁPIDO] (SIM-) permite efectuar una puesta en servicio rápida, suficiente en la mayoría de las aplicaciones.
Los parámetros de este menú sólo pueden modificarse en parada, sin orden de marcha, con las siguientes excepciones:
• autoajuste que conlleva la puesta en tensión del motor
• parámetros de ajuste de la página 43
Nota: Los parámetros del menú [1.1 ARRANQUE RÁPIDO] (SIM-) deben ajustarse en el orden en el que se presentan, puesto que
los primeros afectan a los siguientes.
Por ejemplo, [Control 2 / 3 Hilos] (tCC) debe configurarse en primer lugar.
El menú [1.1 ARRANQUE RÁPIDO] (SIM-) debe configurarse sólo o antes que otr os menús de configuración del variador. Si previamente
se ha realizado una modificación en uno de éstos, en particular en [1.4 CONTROL MOTOR] (drC-), algunos parámetros de [1.1 ARRANQUE
RÁPIDO] (SIM-) pueden modificarse como, por ejemplo, los parámetros del motor si se ha elegido un motor síncrono. Regresar al menú
[1.1 ARRANQUE RÁPIDO] (SIM-) después de haber modifi cado otro menú de configuraci ón del variador no tiene ningún efecto pero tampoco
supone un riesgo. Para no complicar inútil mente la lect ura de este capítulo, no se des cribirán los cambios que siguen a una modif icación
de otro menú de configuración.
Macro configuración
La macro configuración permite la configuración rápida de las funciones de un dominio de aplicación específico.
Se distinguen siete macro configuraciones:
• marcha/paro (configu r ac i ó n de fá brica)
• manutención
• uso general
• elevación
• regulador PID
• bus de comunicación
• maestro/esclavo
La elección de una macro configuración conlleva la asignación de los parámetros de dicha macro configuración.
Cada macro configuración puede modificarse en los otros menús.
1755857 11/2009 36
Page 37

[1.1 ARRANQUE RÁPIDO] (SIM-)
Parámetros de las macro configuraciones
Asignación de las entradas/salidas
Entrada/
salida
AI1 [Canal Ref. 1] [Canal Ref. 1] [Canal Ref. 1] [Canal Ref. 1] [Canal Ref. 1]
AI2 [No] [Ref. sumat. 2] [Ref. sumat. 2] [No] [Retorno PID] [No] [Ref. de par]
AO1 [No] [No] [No] [No] [No] [No] [No]
R1 [Sin fallo] [Sin fallo] [Sin fallo] [Sin fallo] [Sin fallo] [Sin fallo] [Sin fallo]
R2 [No] [No] [No] [Ctrl. Freno] [No] [No] [No]
LI1 (2 hilos) [Marcha
LI2 (2 hilos) [Marcha atrás] [Marcha atrás] [Marcha atrás] [Marcha atrás] [Marcha atrás] [Marcha atrás] [Marcha atrás]
LI3 (2 hilos) [No] [2 Vel.
LI4 (2 hilos) [No] [4 Vel. preselecc.] [ Borrar fallos] [Fallo ext.] [2 Ref. PID
LI5 (2 hilos) [No] [8 Vel. preselecc.] [Limit. de par] [No] [4 Ref. PID
LI6 (2 hilos) [No] [Borrar fallos] [No] [No] [No] [No] [No]
LI1 (3 hilos) Parar Parar Parar Parar Parar Parar Parar
LI2 (3 hilos) [Marcha
LI3 (3 hilos) [Marcha atrás] [Marcha atrás] [Marcha atrás] [Marcha atrás] [Marcha atrás] [Marcha atrás] [Marcha atrás]
LI4 (3 hilos) [No] [2 Vel.
LI5 (3 hilos) [No] [4 Vel.
LI6 (3 hilos) [No] [8 Vel.
LI7 a LI14 [No] [No] [No] [No] [No] [No] [No]
LO1 a LO4 [No] [No] [No] [No] [No] [No] [No]
R3/R4 [No] [No] [No] [No] [No] [No] [No]
AI3, AI4 [No] [No] [No] [No] [No] [No] [No]
RP [No] [No] [No] [No] [No] [No] [No]
AO2 [Int. motor] [Int. motor] [Int. motor] [Int. motor] [Int. motor] [Int. motor] [Int. motor]
AO3 [No] [Signo par] [No] [Signo par] [Salida PID] [No] [Frec. motor]
Tecla F1 [No] [No] [No] [No] [No] Control a través
Teclas
F2, F3, F4
[Marcha/
[Manutención] [Uso general] [Elevación] [R egul. PID]
paro]
(Consigna PID)
[Marcha
Adelante]
Adelante]
[No] [No] [No] [No] [No] [No] [No]
Adelante]
preselecc.]
[Marcha
Adelante]
preselecc.]
preselecc.]
preselecc.]
[Marcha
Adelante]
[Jog] [Borrar fallos] [inhibir integral
[Marcha
Adelante]
[Jog] [Borrar fallos] [inhibir integral
[Borrar fallos] [Fallo ext.] [2 Ref. PID
[Limit. de par] [No] [4 Ref. PID
Teclas del terminal gráfico
[Marcha
Adelante]
[Marcha
Adelante]
Tarjetas opcionales
[Marcha
Adelante]
PID]
preselecc.]
preselecc.]
[Marcha
Adelante]
PID]
preselecc.]
preselecc.]
[Bus Com.]
[Canal Ref. 2]
([Canal Ref. 1] =
Modbus
integrado) (1)
[Marcha
Adelante]
[Conmutación
Ref2]
[Borrar fallos] [Borrar fallos]
[No] [No]
[Marcha
Adelante]
[Conmutación
Ref2]
[Borrar fallos] [Borrar fallos]
[No] [No]
del terminal
gráfico
[Maest/Escl.]
[Canal Ref. 1]
[Marcha
Adelante]
[Conmut. par / vel.]
[Marcha
Adelante]
[Conmut. par / vel.]
[No]
En control tres hilos la asignación de las entradas LI1 a LI6 se realiza de forma desfasada.
(1) Para arrancar con Modbus integrado es necesario configurar primero [Direc.Modbus] (Add) página 243.
Advertencia: Estas asignaciones se reinicializan con cada cambio de macro configuración.
37 1755857 11/2009
Page 38

[1.1 ARRANQUE RÁPIDO] (SIM-)
Parámetros de las macro configuraciones
Otros ajustes y configuraciones
Además de la asignación de las entradas y salidas, se asignan otros parámetros, únicamente en las macro configuraciones Elevac ión
y Maest/Escl.
Elevación:
• [Tipo de movimiento] (bSt) = [Elevación] (UEr) en la página 160.
• [I apert.freno subida] (bCI) = [No] (nO) en la página 160.
• [Imp. apertura freno] (bIP) = [No] (nO) en la página 160.
• [Tiempo Apert. Freno] (Ibr) = [Int. Nominal Motor] (nCr) en la página 160.
• [Tiempo Apertura Freno] (brt) = 0,5 s en la página 161.
• [Frec. apertura freno] (bIr) = [Auto] (AUtO) en la página 161.
• [Frec.cierre freno (Hz)] (bEn) = [Auto] (AUto) en la página 161.
• [Tiempo cierre freno] (bEt) = 0,5 s en la página 161.
• [Cerrar a la invers.] (bEd) = [No] (nO) en la página 162.
• [Salto en inversión] (JdC) = [Auto] (AUtO) en la página 162.
• [Tpo de rearranque] (ttr) = 0 s en la página 162.
• [Tiempo rampa Int.] (brr) = 0 s en la página 164.
• [Velocidad Mínima] (LSP) = deslizamiento nominal del motor calculado por el variador, en la página 43.
• [Pérdida fase motor] (OPL) = [Si] (YES) en la página 224. Este parámetro no se puede volver a modificar.
• [Recuper. al vuelo] (FLr) = [No] (nO) en la página 221. Este parámetro no se puede volver a modificar.
Maestro/esclavo:
• [Tipo control motor] (Ctt) = [SVC I] (CUC) en la página 70.
Advertencia: Estas asignaciones se fuerz an en cada cambio de macr o configuración, exc epto [Tipo control motor] (Ctt) para la macro
configuración maestro/escalvo, si tiene el valor [FVC] (FUC).
Retorno a ajustes de fábrica:
Retorno a ajustes de fábrica con [Elecc.config. fuente] (FCSI) = [Macroconf.] (InI) en la página 250 provoca un retorno a la macro configuración
seleccionada. El parámetro [Macro configuración] (CFG) no cambia, pero [Macro.personaliz.] (CCFG) desaparece.
Nota:
• Los ajustes de fábrica que figuran en las tablas de parámetros corresponden a la [Macro configuración] (CFG) =
[Marcha/paro] (StS) qu e es la macro config uració n de s alida d e fábric a.
1755857 11/2009 38
Page 39

[1.1 ARRANQUE RÁPIDO] (SIM-)
UWV
L1 L3
ATV71H
KM10
R2A
R2C
L2
M
3
3
2
(1)
AI1
LI1 LI2+24
Freno electromagnético
Adelante
(Subida)
Atrás
(Bajada)
UWV
L1 L3
AI1
L2
M1
3
3
COMA01
LI1 LI2+24
COM AI2 UWV
LI1 +24
AI1
LI2
M2
3
LI3 L1 L3L2
3
ATV 71Hpppp
Variador esclavo
ATV 71H
pppp
Variador maestro
ParVelocidad
AtrásAdelante
AtrásAdelante
Ejemplos de esquemas para asociar a las macro configuraciones
Esquema [Elevación] (HSt)
(1)Es preciso insertar un contacto del módulo Preventa en el ci rcuito de cont rol del freno pa ra ajustarlo c on seguridad durant e la activ ación
de la función de seguridad "Power removal" (véanse los esquemas de conexión de la guía de instalación).
Esquema [Maest/Escl.] (MSL)
Cuando los dos motores están vinculados mecánicamente el cierre del contacto velocidad/par conlleva el funcionamiento en modo
maestro/esclavo. El variador maestro regula la velocidad y controla el variador esclavo en par para garantizar la repartición de la carga.
39 1755857 11/2009
Page 40

[1.1 ARRANQUE RÁPIDO] (SIM-)
+24 LI1 LIx
ATV 71
+24 LI1 LI2 LIx
ATV 71
ADVERTENCIA
FUNCIONAMIENTO INESPERADO DEL EQUIPO
El cambio de asignación de [Control 2 / 3 Hilos] (tCC) requiere que se mantenga pulsada durante
2 segundos la tecla "ENT".
Esta acción conlleva el retorno al ajuste de fábrica de la función: [Control 2 hilos] (tCt) en la página 88
y de todas las funciones que afecten a las entradas lógicas.
También conlleva un retorno a la macro configuración seleccionada si ésta se ha personalizado
(pérdida de las personalizaciones).
Asegúrese de que este cambio es compatible con el esquema de cableado utilizado.
Si no se tiene en cuenta esta precaución, se pueden producir heridas graves o incluso la muerte.
ADVERTENCIA
FUNCIONAMIENTO INESPERADO DEL EQUIPO
El cambio de la [Macro configuración] (CFG) requiere que se manten ga pulsada durante 2 segundos
la tecla ENT.
Compruebe que la macro configuración elegida sea compatible con el esquema de cableado utilizado.
Si no se tiene en cuenta esta precaución, se pueden producir heridas graves o i ncluso la muert e.
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
tCC
M [Control 2 / 3 Hilos]
2C
3C
v [Control 2 hilos] (2C)
v [Control 3 hilos] (3C)
Control 2 hilos: El estado (0 ó 1) o el flanco (0 a 1 ó 1 a 0) de la entrada que controla la marcha o la parada.
Ejemplo de cableado en posición "Source":
Control 3 hilos (control por pulsos): Un pulso "adelante" o "atrás" es suficiente para controlar el arranque;
un
pulso de "parada" es suficiente para controlar la parada.
Ejemplo de cableado en posición "Source":
[Control 2 hilos] (2C)
LI1: adelante
LIx: atrás
LI1: parada
LI2: adelante
LIx: atrás
1755857 11/2009 40
CFG
StS
HdG
HSt
GEn
PId
nEt
MSL
CCFG
YES
M [Macro configuración]
v [MarchaParo] (StS): Marcha/paro
v [Manutención] (HdG): Manutención
v [Elevación] (HSt): Elevación
v [Uso general] (GEn): Uso general
v [Regul. PID] (PId): Regulación PID
v [Bus Com.] (nEt): Bus de comunicación
v [Maest/Escl.] (MSL): Maestro/esclavo
M [Macro. personaliz.]
Parámetro de solo lectura, que se visualiza si se cambia al menos un parámetro de la macro configuración.
v [Sí] (YES)
[Marcha/paro] (StS)
Page 41

[1.1 ARRANQUE RÁPIDO] (SIM-)
100 - deslizamiento en %
100
50 - deslizamiento en Hz
50
60 - deslizamiento en Hz
60
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
bFr
IPL
YES
nPr
UnS
nCr
FrS
nSP
M [Frec. estándar motor]
50
60
v [50 Hz IEC] (50): IEC
v [60 Hz NEMA] (60): NEMA
Este parámetro modifica los preajustes de los parámetros:[Tensión Nom. Motor] (UnS) a continuación,
máxima] (HSP) en la página 43, [Nivel Frecuencia] (Ftd) en la página 66, [Frec. nom. Motor] (FrS)
[Vel.
y [Frecuencia Máxima] (tFr) que se indican a continuación.
M [Pérdida fase red]
nO
v [Fallo ignor.] (nO): fallo ignorado. Se u tiliza cuando el variador se alimenta de la red monofási ca o mediante
el bus CC.
v [Rueda libre] (YES): Fallo, con parada en rueda libre.
Si se interrumpe una fase, el variador pasa a estar en fallo [Pérdida fase red] (IPL), pero si se interrumpen
2 o 3 fases, el variador sigue funcionando hasta que se disp are por fallo de subtensión.
Sólo se puede acceder a este parámetro en ese menú en los variadores ATV71H037M3 a HU75M3
(utilizables en red monofásica).
M [Pot. nominal motor]
Potencia nominal del motor indicada en la placa de características, en kW si [Frec. estándar motor] (bFr) =
Hz IEC] (50), en HP si [Frec. estándar motor] (bFr) = [60 Hz NEMA] (60).
[50
M [Tensión Nom. Motor]
Tensión nominal del motor indicada en la placa de características.
ATV71pppM3: 100 a 240 V - ATV71pppN4: 200 a 480 V - ATV61pppY: 400 a 690 V
M [Int. Nominal Motor]
Corriente nominal del motor indicada en la placa de características.
M [Frec. nom. Motor]
Frecuencia nominal del motor indicada en la placa de características.
El ajuste de fábrica es de 50 Hz y es sustituido por un preajuste de 60 Hz si [Frec. estándar motor] (bFr)
establece en 60 Hz.
se
M [Vel. Nominal Motor]
Velocidad nominal del motor indicada en la placa de características.
De 0 a 9.999 rpm y después de 10,00 a 60,00 krpm en el visualizador integrado.
Si la placa de características no indica la velocidad nominal, sino la velocidad de sincronismo, y el deslizamiento
en Hz o en %, la velocidad nominal debe calcularse de la siguiente forma:
[50 Hz IEC] (50)
Según el calibre
del
variador
Según el calibre
del
variador
Según el calibre
del
variador
de 0,25 a 1,5 In (1) Según el calibre
de 10 a 500 Hz 50 Hz
De 0 a 60.000 rpm Según el calibre
Según el calibre
del
variador
Según el calibre
del
variador y [Frec.
estándar motor] (bFr)
del
variador y [Frec.
estándar motor] (bFr)
del
variador
tFr
(1)In corresponde a la corriente nominal del variador que se indica en la guía de instalación y en la placa de caracte rí sticas del variador.
41 1755857 11/2009
• velocidad nominal = velocidad de sincronismo x
o
• velocidad nominal = velocidad de sincronismo x (motores 50 Hz)
o
• velocidad nominal = velocidad de sincronismo x (motores 60 Hz)
M [Frecuencia Máxima]
El ajuste de fábrica es de 60 Hz y es sustituido por un preajuste de 72 Hz si [Frec. estándar motor] (bFr)
establece en 60 Hz.
se
El valor máximo está limitado por las siguientes condiciones:
• No puede sobrepasar 10 veces el valor de [Frecuencia nom. Motor] (FrS)
• No puede sobrepasar los 500 Hz para los variadores ATV71pppY o de calibres superiores a ATV71HD37
(los valores de 500 Hz a 1.600 Hz sólo son posibles para potencias limitadas a 37 kW).
de 10 a 1.600 Hz 60 Hz
Page 42

[1.1 ARRANQUE RÁPIDO] (SIM-)
Cód. Nombre/descripción Ajuste de fábrica
tUn
dOnE
tUS
PEnd
PrOG
FAIL
dOnE
PHr
nO
YES
tAb
AbC
ACb
M [Autoajuste]
[No] (nO)
v [No] (nO): Autoajuste no realizado.
v [Sí] (YES): El autoajuste se realiza cuando es posible y, a continuación, el parámetro pasa automáticamente
a
[Realizado] (dOnE).
v [Realizado] (dOnE): Uso de los valores proporcionados por el autoajuste anterior.
Atención:
• Es imprescindible que todos los parámetros del motor ([Tensión Nom. Motor] (UnS), [Frec. nom. Motor] (FrS),
[Int. Nominal Motor] (nCr), [Vel. Nominal Motor] (nSP), [Pot. nominal motor] (nPr)) estén configurados
correctamente antes de realizar el autoajuste.
Si se modifica por lo menos uno de estos parámetros después de realizar el autoajuste, [Autoajuste] (tUn)
vuelve a [No] (nO) y debe volver a realizarse.
• El autoajuste tiene lugar únicamente si no h ay ninguna orden activada. Si se ha asign ado la función "Parada
en rueda libre" o "Parada rápida" a una entrada lógica, ha y que poner dicha entrada en el estado 1 (acti va en 0).
• El autoajuste es prioritario para las órdenes de marcha o de premagnetización que se tendrán en cuenta
después de la secuencia de autoajuste.
• Si el autoajuste falla, el vari ador muestra [No] (nO) y, después la configuración de [Gest. f allo autoajust] (tnL)
en la página
• El proceso de autoajuste pued e durar de 1 a 2 segundos . No lo interrumpa y e spere a que el visual izador
pase a "[Realizado] (dOnE)" o a "[No] (nO)".
238, puede presentar un fallo [Autoajuste] (tnF).
Nota: Durante el autoajuste, la corriente nominal recorre el motor.
M [Estado autoajuste]
(información, no parametrizable)
[No realiz.] (tAb)
v [No realiz.] (tAb): Se utiliza el valo r po r de f ec t o de la res istencia de estátor para controlar el m ot o r.
v [Pendiente] (PEnd): El autoajuste se ha solicitado pero todavía no se ha realizado.
v [En curso] (PrOG): Autoajuste en curso.
v [Fallo] (FAIL): El autoajuste ha fallado.
v [Realizado] (dOnE): se utiliza la resistencia del estátor medida por la función de autoajuste para controlar
el motor.
M [Rotación fases]
[ABC] (AbC)
v [ABC] (AbC): Sentido normal.
v [ACB] (ACb): Sentido inverso.
Este parámetro permite invertir el sentido de rotación del motor sin invertir el cableado.
1755857 11/2009 42
Page 43

[1.1 ARRANQUE RÁPIDO] (SIM-)
Parámetros modificables en marcha y en parada
Cód. Nombre/descripción Ajuste de fábrica
ItH
ACC
dEC
LSP
HSP
(1)In corresponde a la corriente nominal del variador que se indica en la guía de instalación y en la placa de caracte rí sticas del variador.
M [I Térmica motor]
Corriente de protección térmica del motor, que debe ajustarse a la intensidad nominal indicada en su placa
de
características.
M [Rampa Aceleración]
Tiempo necesario para acelerar de 0 a la [Frec. nom. Motor] (FrS) (página 41). Asegúrese de que este valor
sea compatible con la inercia accionada.
M [Rampa deceleración]
Tiempo necesario para decelerar desde la [Frec. nom. Motor] (FrS) (página 41) a 0. Asegúrese de que este
valor sea compatible con la inercia accionada.
M [Velocidad Mínima]
Frecuencia del motor con consigna mínima, ajuste de 0 a [Vel. máxima] (HSP).
M [Vel. máxima]
Frecuencia del motor con consigna máxima, ajuste de [Velocidad Mí nima] (LSP) a [Frecuencia Máxima ] (tFr ).
El ajuste de fábrica pasa a ser 60 Hz si [Frec.estándar motor] (bFr) = [60
De 0,2 a 1,5 In (1) Según calibre
del
variador
De 0,1 a 999,9 s 3,0 s
De 0,1 a 999,9 s 3,0 s
0
50 Hz
Hz NEMA] (60).
43 1755857 11/2009
Page 44

[1.2 SUPERVISIÓN] (SUP-)
RDY Term +0,00 Hz 0 A
MENÚ GENERAL
1 MENÚ VARIADOR
2 NIVEL ACCESO
3 ABRIR/GUARDAR
4 CÓDIGO DE ACCESO
5 IDIOMA
Code Quick
ENT
RDY Term +0,00 Hz 0 A
1 MENÚ VARIADOR
1.1 ARRANQUE RÁPIDO
1.2 SUPERVISIÓN
1.3 AJUSTES
1.4 CONTROL MOTOR
1.5 ENTRADAS/SALIDAS
Code << >> Quick
ENT
RUN Term +50,00 Hz 80 A
1.2 SUPERVISIÓN
IMAGEN E/S
IMAGEN E/S CARTA PROG.
IMAGEN COM.
Grupos de alarma :
Ref. frec. consola :
Code << >> Quick
XXX
SIM-
SEt-
SUP-
ESC
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
Visualización del estado del variador
SUPERVISIÓN
Puesta en tensión
Con terminal gráfico:
Con terminal integrado:
1755857 11/2009 44
Page 45

[1.2 SUPERVISIÓN] (SUP-)
Entradas/Salidas
Entradas y salidas de la tarjeta Controller Inside, si hay una
Datos y valores de comunicación
Estados de los valores internos del variador (véase la página 50
)
ENT
ENT
ENT
ENT
1
0
1
0
Con terminal gráfico
Este menú permite visualizar las en tradas y las salidas, los estados de los valores i nternos del variador, los dato s y los valores de comunicación.
RUN Term +50,00 Hz 80 A
IMAGEN E/S
IMAGEN E/S CARTA PROG.
IMAGEN COMUNICACIÓN
Grupos de alarma :
Ref. frec. consola :
1.2 SUPERVISIÓN
Code << >> Quick
Entradas/Salidas
Estado 0
Estado 1
RUN Term +50,00 Hz 80 A
IMAGEN ENTRADAS LÓGICAS
IMAGEN ENT. ANALÓGICAS
IMAGEN SALIDAS LÓGICAS
IMAGEN SAL. ANALÓGICAS
IMAGEN CODIF. Y PULSOS.
Code Quick
RUN Term +50,00 Hz 80 A
PR LI1 LI2 LI3 LI4 LI5 LI6 LI7 Marcha adelante
LI8 LI9 LI10 LI11 LI12 LI13 LI14 Retardo 0 ->1 LI1 : 0 ms
IMAGEN E/S
IMAGEN ENTRADAS LÓGICAS Asignación LI1
<< >> Quick << >> Quick
Desplazamiento de una pantalla
a
otra (de IMAGEN ENTRADAS
LÓGICAS a IMAGEN CODIF. Y
PULSOS) mediante rotación del
botón de navegación
Acceso a la configuración de la
entrada o de la salida seleccionada:
pulsar la tecla ENT
RUN Term +50,00 Hz 80 A
Magnetización motor
Estado 0
Estado 1
RUN Term +50,00 Hz 80 A RUN Term +50,00 Hz 80 A
IMAGEN ENT. ANALÓGICAS Asignaciones de AI1
AI1 : 9,87 V Canal Ref. 1
AI2 : 2,35 mA Canal Forc. local
Referencia de par
Valor mínimo AI1 : 0,0 V
Valor máximo AI1 : 10,0 V
Code << >> Quick Quick
RUN Term +50,00 Hz 80 A RUN Term +50,00 Hz 80 A
IMAGEN SALIDAS LÓGICAS Asignación LO1
R1 R2 LO No
Retardo LO1 : 0 ms
LO1 activo en : 1
LOA : 0000000000000010b Mantenimiento LO1 : 0 ms
<< >> Quick << >> Quick
RUN Term +50,00 Hz 80 A RUN Term +50,00 Hz 80 A
IMAGEN SAL. ANALÓGICAS Asignación AO1
AO1 : 9,87 V Frec. motor
Valor mínimo AO1 : 4 mA
Valor máximo AO1 : 20 mA
Filtro salida AO1 : 10 ms
Code << >> Quick Quick
RUN Term +50,00 Hz 80 A RUN Term +50,00 Hz 80 A
IMAGEN CODIF. Y PULSOS Entrada de pulsos
Entrada pulsos : 25,45 kHz Referencia frec.
Codificador : 225 kHz Valor mín.entrada pulsos : 2 kHz
Valor máx.entrada pulsos : 50 kHz
Filtro entrada pulsos : 0 ms
Code << >> Quick Quick
45 1755857 11/2009
Page 46
[1.2 SUPERVISIÓN] (SUP-)
ENT
ENT
1
0
1
0
1
0
Con terminal gráfico
Entradas/salidas de la tarjeta Controller Inside
Estado 0
Estado 1
Estado 0
Estado 1
RUN Term +50,00 Hz 80 A
IMAGEN E/S CARTA PROG.
IMAGEN LI. C. PROGR
IMAGEN AI CARTA PROG.
IMAGEN LO. C. PLC
IMAGEN AO CARTA PRG.
Code Quick
RUN Term +50,00 Hz 80 A
IMAGEN LI. C. PROGR
LI51 LI52 LI53 LI54 LI55 LI56 LI57 LI58
LI59 LI60
<< >> Quick
RUN Term +50,00 Hz 80 A RUN Term +50,00 Hz 80 A
IMAGEN AI CARTA PROG. AI51
AI51 : 0.000 mA
AI52 : 9,87 V
Desplazamiento de una pantalla
a
otra (de IMAGEN LI C.PROGR.
a IMAGEN AO CARTA PRG.)
mediante rotación del botón de
navegación
0.000 mA
Code << >> Quick << >> Quick
RUN Term +50,00 Hz 80 A
IMAGEN LO. C. PLC
LO51 LO52 LO53 LO54 LO55 LO56
Mín. = 0,001 Máx. = 20.000
<< >> Quick
RUN Term +50,00 Hz 80 A RUN Term +50,00 Hz 80 A
IMAGEN AO CARTA PRG. AO51
AO51 : 0.000 mA
AO52 : 9,87 V
0.000 mA
Code << >> Quick << >> Quick
Mín. = 0,001 Máx. = 20.000
1755857 11/2009 46
Page 47

[1.2 SUPERVISIÓN] (SUP-)
RUN Term +50,00 Hz 80 A
IMAGEN COMUNICACIÓN
Canal Ctrl: Modbus
Registro de Ctrl: ABCD Hex
Canal ref. activo: CANopen
Referencia frec.: - 12,5 Hz
Palabra estado ETA: 2153 Hex
Code Quick
W3141 : F230 Hex
W2050 : F230 Hex
W4325 : F230 Hex
W0894 : F230 Hex
COMUNIC. SCAN IN
COMUNIC. SCAN OUT
IMAGEN PALABRAS CTRL
IMAGEN REF. FREC.
DIAG. MODBUS RED
DIAG. MODBUS CONSOLA
IMAGEN CANOpen
SCANNER CARTA PLC
RUN Term +50,00 Hz 80 A
COMUNIC. SCAN IN
Val Com Scan In1: 0
Val Com Scan In2: 0
Val Com Scan In3: 0
Val Com Scan In4: 0
Val Com Scan In5: 0
Code Quick
Val Com Scan In6: 0
Val Com Scan In7: 0
Val Com Scan In8: 0
RUN Term +50,00 Hz 80 A
COMUNIC. SCAN OUT
Val Com Scan out1: 0
Val Com Scan out2: 0
Val Com Scan out3: 0
Val Com Scan out4: 0
Val Com Scan out5: 0
Code Quick
Val Com Scan out6: 0
Val Com Scan out7: 0
Val Com Scan out8: 0
RUN Term +50,00 Hz 80 A
IMAGEN PALABRAS CTRL
Reg.control
Modbus:
0000 Hex.
Reg.control
CANopen:
0000 Hex.
Reg.control
Carta COM.:
0000 Hex.
Reg. Ctrl
Carta PLC:
0000 Hex.
Code Quick
RUN Term +50,00 Hz 80 A
IMAGEN REF. FREC.
Ref. Modbus: 0,0 Hz
Ref. CANopen: 0,0 Hz
Ref. Carta COM.: 0,0 Hz
Ref. Frec. carta PLC: 0,0 Hz
Code Quick
Con terminal gráfico
Comunicación
[IMAGEN COMUNICACIÓN] indica los tipos d e bus utiliza dos en control o consigna,
los
valores de control y de consigna correspondientes, la palabra de estado, las palabras
seleccionadas en el menú [CONFIG. VISUALIZACIÓN], etcétera.
La visualización en hexadecimal o decimal se configura en el menú [CONFIG.
VISUALIZACIÓN].
[COM. SCAN IN] y [COM. SCAN OUT]:
Visualización de los registros interc ambiados periódicamen te (ocho en entrada y ocho en salida) para Modbus integrado y para las tarj etas
de bus de campo.
47 1755857 11/2009
Page 48

[1.2 SUPERVISIÓN] (SUP-)
RUN Term +50,00 Hz 80 A
IMAGEN COMUNICACIÓN
Canal Ctrl: Modbus
Registro de Ctrl: ABCD Hex
Canal ref. activo: CANopen
Referencia frec.: - 12,5 Hz
Palabra estado ETA: 2153 Hex
Code Quick
W3141 : F230 Hex
W2050 : F230 Hex
W4325 : F230 Hex
W0894 : F230 Hex
COMUNIC. SCAN IN
COMUNIC. SCAN OUT
IMAGEN PALABRAS CTRL
IMAGEN REF. FREC.
DIAG.MODBUS RED
DIAG.MODBUS CONSOLA
IMAGEN CANOpen
SCANNER CARTA PLC
Comunicación por Modbus
RUN Term +50,00 Hz 80 A
DIAG.MODBUS RED
LED COM :
Nº tramas Mb Red
Nº Err. CRC Mb Red
Code Quick
Comunicación a través del terminal gráfico
RUN Term +50,00 Hz 80 A
DIAG.MODBUS CONSOLA
LED COM :
Nº tramas Mb HMI
Nº Err. CRC Mb HMI
Code Quick
Configuración de PDO a través
de la herramienta de la red.
Algunas PDO no se pueden
utilizar
RUN Term +50,00 Hz 80 A
IMAGEN PDO1
Recibida PD01-1 : FDBA Hex
Recibida PD01-2
Recibida PD01-3
Recibida PD01-4
Transmitir PD01-1 : FDBA Hex
Code Quick
Transmitir PD01-2
Transmitir PD01-3
Transmitir PD01-4
RUN Term +50,00 Hz 80 A
IMAGEN PDO2
Recibida PD02-1 : FDBA Hex
Recibida PD02-2
Recibida PD02-3
Recibida PD02-4
Transmitir PD02-1 : FDBA Hex
Code Quick
Transmitir PD02-2
Transmitir PD02-3
Transmitir PD02-4
RUN Term +50,00 Hz 80 A
IMAGEN PDO3
Recibida PD03-1 : FDBA Hex
Recibida PD03-2
Recibida PD03-3
Recibida PD03-4
Transmitir PD03-1 : FDBA Hex
Code Quick
Transmitir PD03-2
Transmitir PD03-3
Transmitir PD03-4
Comunicación a través de CANopen
Las imágenes PDO sólo son visibles
si se ha validado CANopen (dirección
distinta de OFF) y si las PDO están
activas.
RUN Term +50,00 Hz 80 A
IMAGEN CANOpen
LED RUN:
LED ERROR:
IMAGEN PDO1
IMAGEN PDO2
IMAGEN PDO3
Code Quick
Estado NMT esclavo
Número de Tx PDO 0
Número de Rx PDO 0
Código de error 0
Error contador RX 0
Error contador Tx 0
Con terminal gráfico
Comunicación (continuación)
Para cada uno de los bus se ve el estado de los LED, los datos periódic os, la dirección,
la velocidad, el formato, etc.
LED apagado
LED encendido
1755857 11/2009 48
Page 49

[1.2 SUPERVISIÓN] (SUP-)
RUN Term +50,00 Hz 80 A
IMAGEN COMUNICACIÓN
Canal Ctrl: Modbus
Registro de Ctrl: ABCD Hex
Canal ref. activo: CANopen
Referencia frec.: - 12,5 Hz
Palabra estado ETA: 2153 Hex
Code Quick
W3141 : F230 Hex
W2050 : F230 Hex
W4325 : F230 Hex
W0894 : F230 Hex
COMUNIC. SCAN IN
COMUNIC. SCAN OUT
IMAGEN PALABRAS CTRL
IMAGEN REF. FREC.
DIAG. MODBUS RED
DIAG. MODBUS CONSOLA
IMAGEN CANOpen
SCANNER CARTA PLC
Tarjeta Controller Inside
RUN Term +50,00 Hz 80 A
SCANNER CARTA PLC
INPUT SCANNER
OUTPUT SCANNER
Code Quick
RUN Term +50,00 Hz 80 A
INPUT SCANNER
Carta prog.scan in 1: 0
Carta prog.scan in 2: 0
Carta prog.scan in 3: 0
Carta prog.scan in 4: 0
Carta prog.scan in 5: 0
Code Quick
Carta prog.scan in 6: 0
Carta prog.scan in 7: 0
Carta prog.scan in 8: 0
RUN Term +50,00 Hz 80 A
OUTPUT SCANNER
Carta prog. scan out 1: 0
Carta prog. scan out 2: 0
Carta prog. scan out 3: 0
Carta prog. scan out 4: 0
Carta prog. scan out 5: 0
Code Quick
Carta prog. scan out 6: 0
Carta prog. scan out 7: 0
Carta prog. scan out 8: 0
Con terminal gráfico
Comunicación (continuación)
[INPUT SCANNER] y [OUTPUT SCANNER]:
Visualización de registros intercambiados periódicamente (ocho en entrada y ocho en salida).
49 1755857 11/2009
Page 50
[1.2 SUPERVISIÓN] (SUP-)
Con terminal gráfico: Estados y valores internos del variador
Nombre/descripción
[Grupos de alarma] (ALGr)
[Ref. frec. consola] (LFr)
[Ref. Interna PID] (rP I )
[Ref. Par por Consola] (Ltr)
[Coef. multiplicador] (MFr)
[Referencia frec.] (F r H )
[Referencia de par] (trr)
[Frecuencia de salida] (rFr)
[Frec. salida medida] (MMF)
[Frec.trabajo ent. puls.]
(FqS)
[Intensidad motor] (LCr)
[Vel. media ENA] (AUS )
[Velocidad motor] (SPd)
[Tensión motor] (UOP)
[Pot. salida motor] (OPr)
[Par motor] (Otr)
[Tensión red] (ULn)
[Est.térmico motor] (tHr)
[Est.térm.var.] (tHd)
[Est. térmico resist.] (tHb)
[Consumo potencia] (APH)
[T. funcionamiento] (rtH)
[T. equipo en tensión] (PtH)
[Tiemp.alarma IGBT] (tAC)
[Referencia PID] (rPC)
[Retorno PID] (rPF)
[Error PID] (rPE)
[Salida PID] (rPO)
[Fecha / Hora] (CLO)
[- - - - -] (o02)
a
[- - - - -] (o06)
[Config. activa] (CnFS)
[Juego parám. usado]
(CFPS)
[ALARMAS] (ALr-)
[OTROS ESTADOS] (SSt-)
Números de grupos de alarma presentes.
En Hz. Referencia de frecuencia mediante terminal gráfico (accesible si la función está configurada).
En valor de proceso. Referencia PID mediante terminal gráfico (accesible si la función está configurada).
En % de par nominal. Referencia de par mediante terminal gráfico.
En % (accesible si está asignado [Ref.multip.-] (MA2, MA3) en la página 135).
En Hz.
En % de par nominal (accesible si la función está configurada).
En Hz.
En Hz: velocidad del motor medida con signo si una tarjeta de codificador está presente; de lo contrario,
el valor visualizado es 0.
En Hz: frecuencia de la entrada "Entrada de pulsos" utilizada por la función [CONTADOR FRECUENCIA]
(FqF-) en la página 235.
En A.
En Hz: parámetro accesible si [Sistema ENA] (EnA) = [Sí] (YES) (véase la página 80)
En rpm.
En V.
En % de la potencia nominal.
En % de par nominal.
En V. Tensión de red desde el punto de vista del bus CC en régimen de motor o parado.
En %.
En %.
En % (accesible sólo en calibres grandes de variadores).
En Wh, kWh o MWh (consumo acumulado).
En segundos, minutos u horas (tiempo de puesta en tensión del motor).
En segundos, minutos u horas (tiempo de puesta en tensión del variador).
En segundos (tiempo de puesta en alarma "temperatura IGBT").
En valor de proceso (accesible si PID está configurado).
En valor de proceso (accesible si PID está configurado).
En valor de proceso (accesible si PID está configurado).
En Hz (accesible si PID está configurado).
Fecha y hora actuales, generadas por la tarjeta Controller Inside (accesible si hay una tarjeta).
Palabras generadas por la tarjeta Controller Inside (accesibles si hay una tarjeta).
Configuración activa [Config. n° 0, 1 o 2].
[Juego Parámetros Nº 1, 2 o 3] (accesible si la conmutación de parámetros es válida, véase la página 198).
Lista de alarmas presentes. Si hay una alarma, se visualizará .
Lista de estados secundarios:
- [Magnetizando motor] (FLX): Magnetizando motor
- [Alarma ptc1] (PtC1): Alarma de las sondas 1
- [Alarma ptc2] (PtC2): Alarma de las sondas 2
- [Alarma LI6=PTC] (PtC3): Alarma de las sondas LI6 =
PTC
- [En parada rápida] (FSt): En parada rápida
- [Nivel Int.alcanzado] (CtA): Umbral de corriente
alcanzado ([Nivel de intensidad] (Ctd) en la página
- [Nivel Frec.alcanz.] (FtA): Umbral de frecuencia
alcanzado ([Nivel frecuencia] (Ftd) en la página
- [Nivel Frec. 2 alcanz.] (F2A): 2º umbral de frecuencia
alcanzado ([Nivel frecuencia 2] (F2d) en la página
- [Ref.frec. alcanzada] (SrA): Referencia de frecuencia
alcanzada
- [Estado térm.mot.alc] (tSA): Estado térmico del motor 1
alcanzado
- [Al. fallo ext.] (EtF): Alarma de fallo externo
- [En Rearranque auto.] (AUtO): En rearranque
automático
- [Remoto] (FtL): Control en línea
- [Autoajuste] (tUn): Autoajuste
- [Subtensión] (USA): Alarma de subtensión
- [Conf.1 activa] (CnF1): Configuración 1 activa
- [Conf.2 activa] (CnF2): Configuración 2 activa
65)
66)
66)
- [V.máx.alc.] (FLA): Velocidad máxima
alcanzada
- [Pérdida carga] (AnA): Alarma de deviraje
- [Juego parámetros1 activo] (CFP1):
Juego 1 de parámetros activo
- [Juego parámetros 2 activo] (CFP2):
Juego 2 de parámetros activo
- [Juego parámetros 3 activo] (CFP3):
Juego 3 de parámetros activo
- [Frenando] (brS): Variador en frenado
- [Cargando bus DC] (dbL): Bus CC en carga
- [Marcha Adelante] (MFrd): Motor en rotación
en marcha adelante
- [Marcha atrás] (MrrS): Motor en rotación
en marcha atrás
- [Al.Par alto alcanz.] (ttHA): Par motor
superior en el umbral alto [Al. par alto] (ttH)
en la página
- [Al.Par bajo alcanz.] (ttLA): Par motor
inferior en el umbral bajo [Al. par bajo] (ttL)
en la página
- [Alarma Cont.Frec.] (FqLA): Umbral de
velocidad medida alcan zado: [Nivel
alarma pulsos] (FqL) en la página
65
65
66
1755857 11/2009 50
Page 51

[1.2 SUPERVISIÓN] (SUP-)
Estado 1
Estado 0
LI1 LI2 LI3 LI4 LI5 LI6 LI7 LI8
Estado 1
Estado 0
LI9 LI10 LI11 LI12 LI13 LI14 PR
Con terminal integrado
Este menú permite visualizar las entradas, los estados y los valores internos del variador.
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
IOM-
LIA
L1A
a
L14A
LIS1
LIS2
IMAGEN DE LAS ENTRADAS
b Funciones de las entradas lógicas
Permite visualizar las funciones asignadas a cada entrada. Si no hay asignada ninguna función,
se
visualiza "nO".
Las flechas y permiten examinar todas las funciones. Si hay varias funciones asignadas
a una misma entrada, asegúrese de que sean compatibles.
b Estado de las entradas lógicas LI1 a LI8
Permite visualizar el estado de las entradas lógicas LI1 a LI8
(uso de los segmentos del visualizador: alto = 1, bajo = 0).
Ejemplo anterior: LI1 y LI6 están a 1, LI2 a LI5, LI7 y LI8 están a 0.
b Estado de las entradas lógicas LI9 a LI14 y Power Removal
Permite visualizar el estado de las entradas lógicas LI9 a LI14 y PR (Power Removal)
(uso de los segmentos del visualizador: alto = 1, bajo = 0).
AIA-
AI1A
AI2A
AI3A
AI4A
Ejemplo anterior: LI9 y LI14 están a 1, de LI10 a LI13 están a 0 y PR (Power Removal) está a 1.
b Funciones de las entradas analógicas
Permite visualizar las funciones asignadas a cada entrada. Si no se visualiza ninguna función, se visualiza
"nO". Las flechas
a una misma entrada, asegúrese de que sean compatibles.
y permiten examinar todas las funciones. Si hay varias funciones asignadas
51 1755857 11/2009
Page 52

[1.2 SUPERVISIÓN] (SUP-)
Con terminal integrado: Estados y valores internos del variador
Cód. Nombre/descripción Unidad
ALGr
rPI
MFr
FrH
trr
rFr
MMF
FqS
LCr
AUS
SPd
UOP
OPr
Otr
ULn
tHr
tHd
tHb
APH
rtH
PtH
tAC
rPC
rPF
rPE
rPO
CLO-
o02
o03
o04
o05
o06
CnFS
CFPS
Grupos de alarma: Números de grupos de alarma presentes
Ref. Interna PID: Referencia PID mediante terminal gráfico (accesible si la función está configurada). En valor
Coeficiente multiplicador (accesible si está asignado [Ref.multip.-] (MA2, MA3) en la página 135). %
Referencia frec. Hz
Referencia de par: Accesible si la función está configurada. %.
Frecuencia de salida Hz
Velocidad del motor medida con signo si una tarjeta de codificador está presente; de lo contrario, el valor
visualizado es 0.
Frecuencia de la entrada "Entrada de pulsos" utilizada por la función [CONTADOR FRECUENCIA] (FqF-)
en
la página 235.
Intensidad motor A
Velocidad media ENA: Parámetro accesible si EnA = YES (véase la página 80). Hz
Velocidad del motor RPM
Tensión del motor V
Potencia salida motor %
Par motor %
Tensión red: Tensión de red desde el punto de vista del bus CC en régimen de motor o parado. V
Est.térmico motor %
Est. térm. var. %
Estado térmico de resistencia de frenado: Accesible sólo en calibres grandes de variadores. %
Consumo potencia Wh, kWh
Tiempo de funcionamiento: Tiempo de puesta en tensión del motor. Segundos,
T. equipo en tensión: Tiempo de puesta en tensión del variador.
T. alarma IGBT: Tiempo de puesta en alarma "temperatura IGBT". Segundos
Referencia PID: Accesible si PID está configurado. En valor
Retorno PID: Accesible si PID está configurado.
Error PID: Accesible si PID está configurado.
Salida PID: Accesible si PID está configurado. Hz
tIME, dAY: Fecha y hora actuales, generadas por la tarjeta Controller Inside, accesibles si hay una tarjeta.
Palabra generada por la tarjeta Controller Inside, accesible si hay una tarjeta.
Palabra generada por la tarjeta Controller Inside, accesible si hay una tarjeta.
Palabra generada por la tarjeta Controller Inside, accesible si hay una tarjeta.
Palabra generada por la tarjeta Controller Inside, accesible si hay una tarjeta.
Palabra generada por la tarjeta Controller Inside, accesible si hay una tarjeta.
Configuración activa: Configuración 0, 1 o 2 (accesible si la conmutación de los motores o de las
config uracion es es válida, véase la página
Juego parám. utilizado: CFP1, 2 o 3 (accesible si la conmutación de los parámetros es válida,
véase
la página 198).
203).
de
proceso
Hz
Hz
o
MWh
minutos
u
horas
de
proceso
1755857 11/2009 52
Page 53
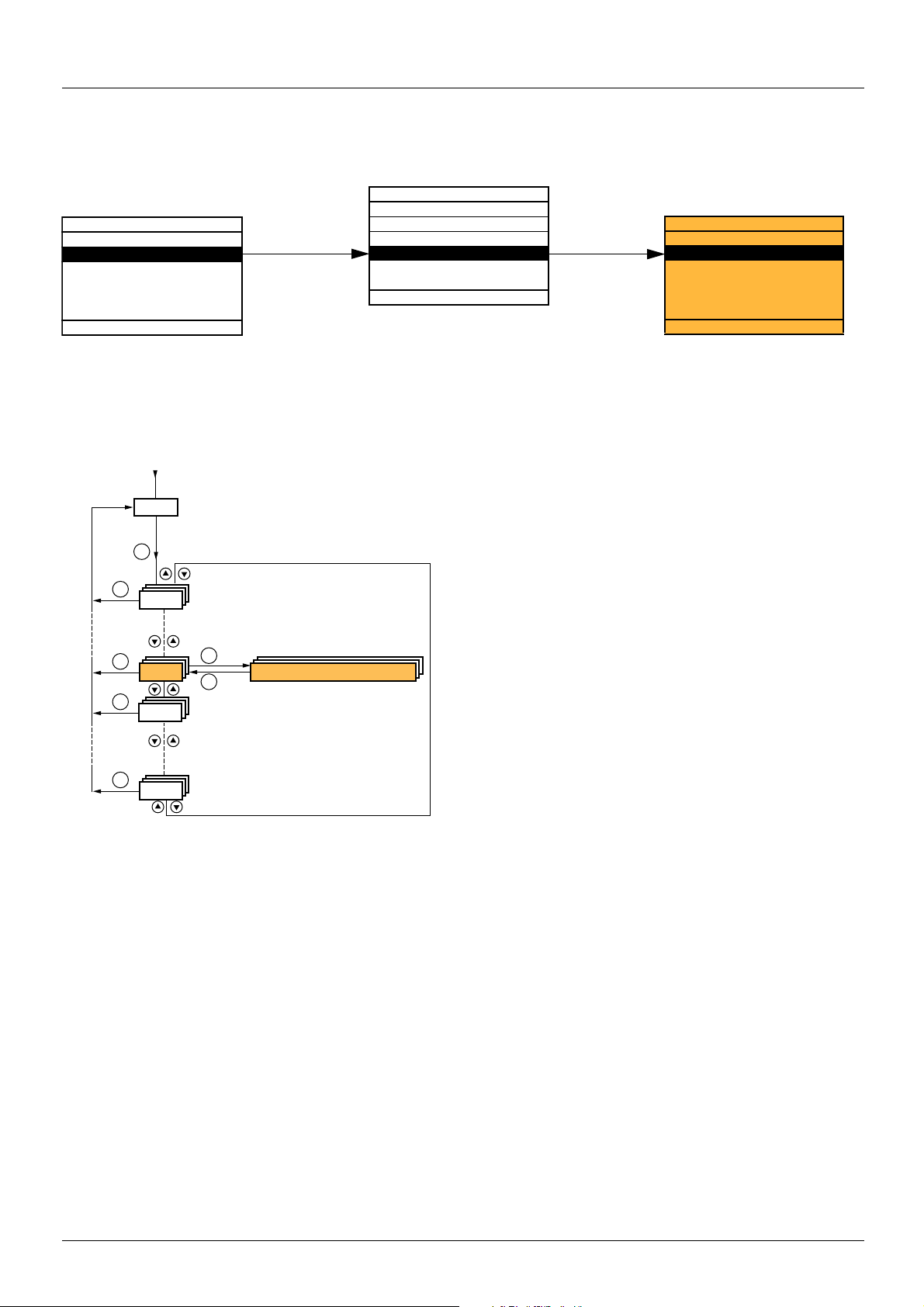
[1.3 AJUSTES] (SEt-)
RDY Term +0,00 Hz 0 A
MENÚ GENERAL
1 MENÚ VARIADOR
2 NIVEL ACCESO
3 ABRIR/GUARDAR
4 CÓDIGO DE ACCESO
5 IDIOMA
Code Quick
ENT
RDY Term +0,00 Hz 0 A
1 MENÚ VARIADOR
1.1 ARRANQUE RÁPIDO
1.2 SUPERVISIÓN
1.3 AJUSTES
1.4 CONTROL MOTOR
1.5 ENTRADAS/SALIDAS
Code << >> Quick
ENT
RUN Term +50,00 Hz 80 A
1.3 AJUSTES
Incremento rampa
Rampa aceleración
Rampa deceleración
Aceleración 2
Deceleración 2
Code << >> Quick
XXX
SIM-
SEt-
ESC
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
drC-
Visualización del estado del variador
AJUSTES
Puesta en tensión
Con terminal gráfico:
Con terminal integrado:
53 1755857 11/2009
Page 54

[1.3 AJUSTES] (SEt-)
PELIGRO
FUNCIONAMIENTO INESPERADO DEL EQUIPO
• Asegúrese de que los cambios realizados en los ajustes durante el funcionamiento no impliquen ningún peligro.
• Se recomienda realizar los cambios cuando se haya detenido el variador.
Si no se tienen en cuenta estas precauciones, se pueden producir heridas graves o incluso la muerte.
Los parámetros de ajuste se pueden modificar en marcha o en parada.
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
Inr
0.01
ACC
dEC
AC2
g
dE2
g
tA1
g
tA2
g
tA3
g
0.1
M [Incremento rampa]
v [0,01]: Rampa hasta 99,99 segundos
v [0,1]: Rampa hasta 999,9 segundos
1
v [1]: Rampa hasta 6.000 segundos
Este parámetro se aplica a [Rampa aceleración] (ACC), [Rampa deceleración] (dEC), [Aceleración 2] (AC2)
y
[Deceleración 2] (dE2).
M [Rampa aceleración]
Tiempo necesario para acelerar de 0 a la [Frec. nom.Motor] (FrS) (página 68). Asegúrese de que este valor
sea compatible con la inercia accionada.
M [Rampa deceleración]
Tiempo necesario para decelerar desde la [Frec. nom.Motor] (FrS) (página 68) a 0. Asegúrese de que este
valor sea compatible con la inercia accionada.
M [Aceleración 2]
Véase la página 138.
Tiempo necesario para acelerar de 0 a la [Frec. nom.Motor] (FrS). Asegúrese de que este valor sea compatible
con la inercia accionada.
M [Deceleración 2]
Véase la página 138.
Tiempo necesario para decelerar desde la [Frec. nom.Motor] (FrS) a 0. Asegúrese de que este valor sea
compatible con la inercia accionada.
M [Coef. red. inicio ACC]
Véase la página 137.
Redondeo inicial de la rampa de aceleración en % de tiempo de la rampa [Rampa aceleración] (ACC)
o
[Aceleración 2] (AC2).
M [Coef. red. final ACC]
Véase la página 137.
- Redondeo final de la rampa de aceleración en % de tiempo de la rampa [Rampa aceleración] (ACC)
o
[Aceleración 2] (AC2).
- Ajustable del 0 al (100% – [Coef. red.inicio ACC] (tA1)).
M [Coef. red. inicio DEC]
Véase la página 137.
Redondeo inicial de la rampa de deceleración en % de tiempo de la rampa [Rampa deceleración] (dEC)
o
[Deceleración 2] (dE2).
0,01 - 0,1 - 1 0,1
De 0,01 a 6.000 s (1) 3,0 s
De 0,01 a 6.000 s (1) 3,0 s
De 0,01 a 6.000 s (1) 5,0 s
De 0,01 a 6.000 s (1) 5,0 s
Del 0 al 100% 10%
10%
Del 0 al 100% 10%
(1)Rango de ajuste de 0,01 a 99,99 s o de 0,1 a 999,9 s o de 1 a 6.000 s según [Incremento rampa] (Inr).
Estos parámetros sólo aparecen si la función correspondiente se ha selecci onado en otro menú. Cuando son accesibles
y
g
1755857 11/2009 54
ajustables desde el menú de configuración de la función correspondiente, para una programación más cómoda,
sus
descripciones se incluyen en los menús en las páginas indicadas.
Page 55

[1.3 AJUSTES] (SEt-)
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
tA4
g
M [Coef. red. final DEC]
Véase la página 137.
- Redondeo final de la rampa de deceleración en % de tiempo de la rampa [Rampa deceleración] (dEC)
o
[Deceleración 2] (dE2).
- Ajustable del 0 al (100% – [Coef. red.inicio DEC] (tA3)).
10%
LSP
HSP
ItH
SPG
SIt
SFC
(1)In corresponde a la corriente nominal del variador que se indica en la guía de instalación o en la placa de características del variador.
M [Velocidad Mínima]
Frecuencia del motor con consigna mínima, ajuste de 0 a [Vel. máxima] (HSP).
M [Vel. máxima]
Frecuencia del motor con consigna máxima, ajuste de [Velocidad Mí nima] (LSP) a [Frecuencia Máxima ] (tFr ).
El ajuste de fábrica pasa a ser 60 Hz si [Frec.estándar motor] (bFr) = [60
M [I Térmica motor]
Corriente de protección térmica del motor, que debe ajustarse a la intensidad nominal indicada en su placa
de
características.
M [Ganancia prop.velocidad]
Ganancia proporcional del bucle de velocidad.
M [T. integr. velocidad]
Constante de tiempo de la integral del bucle de velocidad.
M [K filtro bucle vel.]
Coeficiente de filtrado del bucle de velocidad.
Hz NEMA] (60).
De 0,2 a 1,5 In (1) Según calibre
Del 0 al 1.000% 40%
Del 1 al 1.000% 100%
De 0 a 100 0
0 Hz
50 Hz
del
variador
55 1755857 11/2009
Page 56

[1.3 AJUSTES] (SEt-)
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Escalón medida de consigna
Tiempo en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Escalón medida de consigna
Tiempo en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Escalón medida de consigna
Tiempo en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Escalón medida de consigna
Tiempo en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Escalón medida de consigna
Tiempo en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Escalón medida de consigna
Tiempo en ms
Ajuste de los parámetros [K filtro bucle vel.] (SFC), [Ganancia prop.vel.] (SPG)
y
[T. integr. velocidad] (SIt)
• Estos parámetros sólo están accesibles en leyes de control vectorial: [Tipo contro l motor] (Ctt) en la página 70 = [SVC por U] (UUC),
[SVC por Int.] (CUC), [CVF] (FUC) o [Motsíncrono] (SYn) y si [Sistema ENA] (EnA) en la página 80 = [No] (nO).
• Los ajustes de fábrica son los adecuados para la mayoría de las aplicacione s.
Caso general: ajuste con [K filtro bucle vel.] (SFC) = 0
El regulador es de tipo "IP" y dispone de fi l trado de la co ns igna de velocidad , para las aplica ciones que nece sitan flexi bili dad y estabilidad
(elevación o fuerte inercia, por ejemplo).
• [Ganancia prop.velocidad] (SPG) influye en el rebasamiento de la velocidad.
• [T. integr. velocidad] (SIt) influye sobre la banda pasante y el tiempo de respuesta.
Respuesta inicial Disminución de SIT Disminución de SIT
Respuesta inicial Aumento de SPG Aumento de SPG
1755857 11/2009 56
Page 57

[1.3 AJUSTES] (SEt-)
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Escalón medida de consigna
Tiempo en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Escalón medida de consigna
Tiempo en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Escalón medida de consigna
Tiempo en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Escalón medida de consigna
Tiempo en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Escalón medida de consigna
Tiempo en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Escalón medida de consigna
Tiempo en ms
Caso especial: parámetro [K filtro bucle vel.] (SFC) diferente de 0
Este parámetro debe reservarse para aplicaciones concretas que requieren un tiempo de respuesta corto (por ejemplo, posicionamiento
o regulación de trayectoria).
- Ajustado a 100 como se describe a continuación, el regulador es de tipo "PI", sin filtrado de la consigna de velocidad.
- Ajustado entre 0 y 100, el funcionamiento obtenido es intermedio entre los ajustes siguientes y los de la página anterior.
Ejemplo: ajuste con [K filtro bucle vel.] (SFC) = 100
• [Ganancia prop.velocidad] (SPG) influye sobre la banda pasante y el tiempo de respuesta.
• [T. integr. velocidad] (SIt) influye en el rebasamiento de la velocidad.
Respuesta inicial Disminución de SIT Disminución de SIT
Respuesta inicial Aumento de SPG Aumento de SPG
57 1755857 11/2009
Page 58

[1.3 AJUSTES] (SEt-)
ATENCIÓN
Asegúrese de que el motor admite esta corriente sin sobrecalentamiento.
Si no se tiene en cuenta esta precaución, se pueden producir daños materiales.
ATENCIÓN
Asegúrese de que el motor admite esta corriente sin sobrecalentamiento.
Si no se tiene en cuenta esta precaución, se pueden producir daños materiales.
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
GPE
g
GIE
g
UFr
g
SLP
g
dCF
g
IdC
g
M [Ganancia prop. ENA]
Véase la página 80.
M [Ganancia int. ENA]
Véase la página 80.
M [Compensación RI]
Véase la página 73.
M [Compens.Desliz.]
Véase la página 73.
M [Coef. parada rápida]
Véase la página 140.
M [Int. frenado DC 1]
Véase la página 141.
Intensidad de corriente de freno por inyección de co rriente continua activada por entrada lógica o sel eccionada
como modo de parada.
De 1 a 9.999 250
De 0 a 9.999 100
Del 25 al 200% 100%
Del 0 al 300% 100%
De 0 a 10 4
De 0,1 a 1,41 In (1) 0,64 In (1)
tdI
g
IdC2
g
tdC
g
(1)In corresponde a la corriente nominal del variador que se indica en la guía de instalación o en la placa de características del variador.
g
M [Tpo inyección DC1]
Véase la página 141.
Duración máxima de inyección de la corriente [Int. frenado DC] (IdC). Transcurrido este período de tiempo
la
inyección pasa a [ Int. frenado DC 2] (IdC2).
M [Int. frenado DC 2]
Véase la página 141.
Corriente de inyección activada por entrada lógica o seleccionada como modo de parada, una vez transcurrido
el
tiempo [Tpo inyección DC1] (tdI).
M [Tpo inyección DC2]
Véase la página 141.
Duración máxima de la inyección [Int. frenado DC 2] (IdC2) únicamente para la inyección e legida como modo
de parada.
Estos parámetros sólo aparecen si la función correspondiente se ha selecci onado en otro menú. Cuando son accesibles
y
ajustables desde el menú de configuración de la función correspondiente, para una programación más cómoda,
sus
descripciones se incluyen en los menús en las páginas indicadas.
De 0,1 a 30 s 0,5 s
0,1 In (2) a [Int.
frenado DC] (IdC)
De 0,1 a 30 s 0,5 s
0,5 In (1)
1755857 11/2009 58
Page 59

[1.3 AJUSTES] (SEt-)
ATENCIÓN
Asegúrese de que el motor admite esta corriente sin sobrecalentamiento.
Si no se tiene en cuenta esta precaución, se pueden producir daños materiales.
ATENCIÓN
Asegúrese de que el motor admite esta corriente sin sobrecalentamiento.
Si no se tiene en cuenta esta precaución, se pueden producir daños materiales.
AdC SdC2 Funcionamiento
SI
x
Ct
≠
0
Ct
= 0
Orden de marcha
Velocidad
t
SdC1
SdC2
tdC1 tdC1 + tdC2
I
t
SdC1
I
t
SdC1
SdC2
tdC1
I
t
0
t
1
0
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
SdC1
g
M [Nivel Int. DC auto 1]
Intensidad de la corriente de inyección en la parada. Parámetro accesible si [Inyección DC automáti ca] (AdC)
en la página
Este parámetro se fuerza a 0 si [T ip o c on t ro l mo tor] (Ctt) en la página 70 = [Motsíncrono] (SYn).
142 es diferente de [No] (nO).
De 0 a 1,2 In (1) 0,7 In (1)
tdCI
g
SdC2
g
tdC2
g
M [Tpo Iny. DC auto 1]
Tiempo de inyección en la parada. Parámetro ac cesi ble si [ I nyecc ión DC aut omát ica] (AdC) en l a p ágina 142
es diferente de [No] (nO).
Si [Tipo control motor] (Ctt) en la página 70 = [FVC] (FUC) o [Motsíncrono] (SYn), este tiempo corresponde
al tiempo de mantenimiento de la velocidad nula.
M [Nivel Int. DC auto 2]
2a intensidad de la corriente de inyección en la parada.
Parámetro accesible si [Inyección DC automática] (AdC) en la página 142 es diferente de [No] (nO).
Este parámetro se fuerza a 0 si [T ip o c on t ro l mo tor] (Ctt) en la página 70 = [Motsíncrono] (SYn).
M [Tpo Iny. DC auto 2]
2o tiempo de inyección en la parada.
Parámetro accesible si [Inyección DC automática] (AdC) en la página 142 = [Sí] (YES)
De 0,1 a 30 s 0,5 s
De 0 a 1,2 In (1) 0,5 In (1)
De 0 a 30 s 0 s
Observación: Cuando [Tipo control motor]
(Ctt) en la página
[Nivel Int. DC auto 1] (SdC1), [Nivel Int.
DC
auto 2] (SdC2) y [Tpo Iny. DC auto 2]
(tdC2) no son accesibles; únicamente
[Tpo
Iny. DC auto 1] (tdC1) es accesible,
por
lo que corresponde a un tiempo de
mantenimiento de la velocidad nula.
70 = [FVC] (FUC):
(1)In corresponde a la corriente nominal del variador que se indica en la guía de instalación o en la placa de características del variador.
59 1755857 11/2009
Page 60

[1.3 AJUSTES] (SEt-)
ATENCIÓN
En los variadores ATV71p075N4 a U40N4, si los filtros RFI están desconectados (uso en una red IT), la frecuencia
de corte del variador no debe superar los 4 kHz.
Si no se tiene en cuenta esta precaución, se pueden producir daños materiales.
ATENCIÓN
Asegúrese de que el motor admite esta corriente, en especial, si se trata de un motor síncrono con imanes
permanentes para el que existe riesgo de desmagnetización.
Si no se tiene en cuenta esta precaución, se pueden producir daños materiales.
ATENCIÓN
Asegúrese de que el motor admite esta corriente, en especial, si se trata de un motor síncrono con imanes
permanentes para el que existe riesgo de desmagnetización.
Si no se tiene en cuenta esta precaución, se pueden producir daños materiales.
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
SFr
M [Frecuencia de Corte]
Ajuste de la frecuencia de corte.
Rango de ajuste: puede variar de 1 a 16 kHz, pero los valores mínimo y má ximo y el ajuste de fábrica pueden
limitarse según el tipo de variador (ATV71H o W), s eg ún el c ali bre (en potencia y en tensión) y según la
configuración de los parámetros [Filtro senoidal] (OFI) y [Lim. sobretens.mot.] (SUL) en la página
Si el valor es inferior a 2 kHz, [Limit. Intensidad] (CLI) y [Limit. intensidad 2] (CL2) en la página 60 están limitadas
a 1,36 In.
Ajuste en marcha:
- Si el valor inicial es inferior a 2 kHz, no puede superar los 1,9 kHz en marcha.
- Si el valor inicial es superior o igual a 2 kHz, no puede ser inferior a los 2 kHz en marcha.
Ajuste parado: sin limitación.
Nota: En caso de calentamiento excesivo , el variador disminuye aut omáticamente la frecuencia de corte
y la restablece cuando la temperatura vuelve a la normalidad.
Nota: Si [Tipo control motor] (Ctt) en la página 70 = [FVC] (FUC) se desaconseja ajustar la frecuencia
de corte a un valor inferior a 2 kHz, ya que puede conllevar inestabilidades de velocidad.
Según el calibre Según el calibre
82.
CLI
CL2
g
M [Limit. Intensidad]
Permite limitar la corriente del motor.
El rango de ajuste está limitado a 1,36 In si [Frecuencia de Corte] (SFr) en la página 60 es inferior a 2 kHz.
Nota: Si el ajuste es inferior a 0,25 In, existe riesgo de bloqueo por fallo [Pérdida fa se motor] (OPF)
si dicho ajuste se valida (véase la página 224). Si es inferior a la intensidad del motor en vacío,
la limitación deja de actuar.
M [Limit. intensidad 2]
Véase la página 187.
El rango de ajuste está limitado a 1,36 In si [Frecuencia de Corte] (SFr) en la página 60 es inferior a 2 kHz.
Nota: Si el ajuste es inferior a 0,25 In, existe riesgo de bloqueo por fallo [Pérdida fa se motor] (OPF)
si dicho ajuste se valida (véase la página 224). Si es inferior a la intensidad del motor en vacío,
la limitación deja de actuar.
De 0 a 1,65 In (1) 1,5 In (1)
De 0 a 1,65 In (1) 1,5 In (1)
(1)In corresponde a la corriente nominal del variador que se indica en la guía de instalación o en la placa de características del variador.
Estos parámetros sólo aparecen si la función correspondiente se ha selecci onado en otro menú. Cuando son accesibles
y
g
1755857 11/2009 60
ajustables desde el menú de configuración de la función correspondiente, para una programación más cómoda,
sus
descripciones se incluyen en los menús en las páginas indicadas.
Page 61
[1.3 AJUSTES] (SEt-)
ATENCIÓN
Asegúrese de que el motor admite esta corriente sin sobrecalentamiento.
Si no se tiene en cuenta esta precaución, se pueden producir daños materiales.
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
FLU
FnC
FCt
FnO
M [Magnet. motor]
v [No continua] (FnC): Modo no continuo.
v [Continua] (FCt): Modo continuo. Esta elección es posible si [Inyección DC auto.] (AdC) en la página 142
es diferente de [Sí] (YES), o si [Tipo de parada] (Stt) en la página 140 es diferente de [Rueda libre] (nSt).
v [No] (FnO): Función inactiva Esta elección es imposible si [Tipo control motor] (Ctt) en la página 70 = [SVCI]
(CUC) o [FVC] (FUC).
Si [Tipo control motor] (Ctt) en la página 70 = [SVCI] (CUC), [FVC] (FUC) o [Motsíncrono] (SYn) el ajuste
de fábrica se sustituye por [No continua] (FnC).
Para obtener rápidamente un par importante durante el a rranque, es neces ario establecer prev iamente
en
el motor el flujo magnético.
• En modo [Continua] (FCt) el variador establece el flujo automáticamente a partir de la puesta en tensión.
• En modo [No continua] (FnC) la magnetización se realiza al arrancar el motor.
El valor de la corriente de magnetización es superior a n Cr (corriente nominal del motor) durante el establecimi ento
del flujo magnético. Después, se regula al valor de la corriente magnetizante del motor.
[No] (FnO)
Si [Tipo control motor] (Ctt) en la página 70 = [Motsíncrono] (SYn), el parámetro [Magnetiz. motor] (FLU)
conlleva la alineación del rotor y no la magnetización.
Si [Control lógica de freno] (bLC) en la página 160 es diferente de [No] (nO), el parámetro [Magnetiz. motor] (FLU)
queda sin efecto.
tLS
JGF
g
JGt
g
(1)In corresponde a la corriente nominal del variador que se indica en la guía de instalación o en la placa de características del variador.
g
M [Tpo a Vel. mínima]
Tiempo máximo de funcio na m i en to [Velocidad Mínima] (LSP) (véase la página 43).
Después de estar funcionando en LSP durante el tiempo establecido, la parada del motor se genera
automáticamente. El motor rearranca si la referencia es superior a LSP y si hay una orden de marcha activa.
Atención: el valor 0 corresponde a un tiempo ilimitado de funcionamiento.
Nota: Si [T po a Vel. mínima] (tLS) es diferente de 0, el parámetro [Tipo de parada] (Stt) en la página 140
se fuerza a [Paro rampa] (rMP) (sólo se puede configurar la parada en rampa).
M [Frecuencia Jog]
Véase la página 144.
Consigna en marcha por impulso
M [Tiempo Jog]
Véase la página 144.
Temporización entre dos marchas paso a paso (JOG) consecutivas.
Estos parámetros sólo aparecen si la función correspondiente se ha selecci onado en otro menú. Cuando son accesibles
y
ajustables desde el menú de configuración de la función correspondiente, para una programación más cómoda,
sus
descripciones se incluyen en los menús en las páginas indicadas.
De 0 a 999,9 s 0 s
De 0 a 10 Hz 10 Hz
De 0 a 2,0 s 0,5 s
61 1755857 11/2009
Page 62

[1.3 AJUSTES] (SEt-)
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
SP2
g
SP3
g
SP4
g
SP5
g
SP6
g
SP7
g
SP8
g
SP9
g
SP10
g
SP11
g
SP12
g
SP13
g
SP14
g
M [Vel. preselecc. 2]
Véase la página 147.
Vel. preselecc. 2
M [Vel. preselecc.3]
Véase la página 147.
Vel. preselecc. 3
M [Vel. preselecc. 4]
Véase la página 147.
Vel. preselecc. 4
M [Vel. preselecc. 5]
Véase la página 147.
Vel. preselecc. 5
M [Vel. preselecc. 6]
Véase la página 147.
Vel. preselecc. 6
M [Vel. preselecc. 7]
Véase la página 147.
Vel. preselecc. 7
M [Vel. preselecc. 8]
Véase la página 147.
Vel. preselecc. 8
M [Vel. preselecc. 9]
Véase la página 147.
Vel. preselecc. 9
M [Vel. preselecc. 10]
Véase la página 147.
Vel. preselecc. 10
M [Vel. preselecc. 11]
Véase la página 147.
Vel. preselecc. 11
M [Vel. preselecc. 12]
Véase la página 147.
Vel. preselecc. 12
M [Vel. preselecc. 13]
Véase la página 147.
Vel. preselecc. 13
M [Vel. preselecc. 14]
Véase la página 147.
Vel. preselecc. 14
De 0 a 1.600 Hz 10 Hz
De 0 a 1.600 Hz 15 Hz
De 0 a 1.600 Hz 20 Hz
De 0 a 1.600 Hz 25 Hz
De 0 a 1.600 Hz 30 Hz
De 0 a 1.600 Hz 35 Hz
De 0 a 1.600 Hz 40 Hz
De 0 a 1.600 Hz 45 Hz
De 0 a 1.600 Hz 50 Hz
De 0 a 1.600 Hz 55 Hz
De 0 a 1.600 Hz 60 Hz
De 0 a 1.600 Hz 70 Hz
De 0 a 1.600 Hz 80 Hz
Estos parámetros sólo aparecen si la función correspondiente se ha selecci onado en otro menú. Cuando son accesibles
y
g
1755857 11/2009 62
ajustables desde el menú de configuración de la función correspondiente, para una programación más cómoda,
sus
descripciones se incluyen en los menús en las páginas indicadas.
Page 63

[1.3 AJUSTES] (SEt-)
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
SP15
g
SP16
g
MFr
SrP
g
rPG
g
rIG
g
rdG
g
PrP
g
POL
g
POH
g
PAL
g
PAH
g
M [Vel. preselecc. 15]
Véase la página 147.
Vel. preselecc. 15
M [Vel. preselecc. 16]
Véase la página 147.
Vel. preselecc. 16
M [Coef. multiplicador]
Coeficiente multiplicador, accesible si [Referencia multiplic.-] (MA2,MA3) en la página 135 se asigna
al terminal gráfico.
M [Limit. +/- velocidad]
Véase la página 151.
Limitación de la variación +/– velocidad.
M [Ganancia prop. (PID)]
Véase la página 176.
Ganancia proporcional
M [Ganancia Int. (PID)]
Véase la página 177.
Ganancia integral
M [Ganancia deriv. PID]
Véase la página 177.
Ganancia derivada
M [Rampa PID]
Véase la página 177.
Rampa de aceleración/deceleración del PID, de finida para ir de [Ref erencia mínima PID] (PIP1) a [Referencia
máxima PID] (PIP2) y a la inversa.
M [Salida mínima PID]
Véase la página 177.
Valor mínimo de la salida del regulador, en Hz.
M [Salida máxima PID]
Véase la página 177.
Valor máximo de la salida del regulador, en Hz.
M [Al. retorno mínimo]
Véase la página 177.
Umbral de supervisión mínimo de retorno del regulador.
M [Al. retorno máximo]
Véase la página 177.
Umbral de supervisión máximo de retorno del regulador.
De 0 a 1.600 Hz 90 Hz
De 0 a 1.600 Hz 100 Hz
Del 0 al 100% 100%
Del 0 al 50% 10%
De 0,01 a 100 1
De 0,01 a 100 1
De 0,00 a 100 0
De 0 a 99,9 s 0
De –500 a 500
o de –1.600 a 1.600,
según el calibre
De 0 a 500 o 1.600
según el calibre
Véase la
página 177 (1)
Véase la
página 177 (1)
0 Hz
60 Hz
100
1000
(1)A falta de terminal gráfico, en el visualizador de 4 dígitos los valores superiores a 9.999 se muestr an con un punto como separador de miles,
por ejemplo, 15.65 en lugar de 15650.
Estos parámetros sólo aparecen si la función correspondiente se ha selecci onado en otro menú. Cuando son accesibles
y
g
63 1755857 11/2009
ajustables desde el menú de configuración de la función correspondiente, para una programación más cómoda,
descripciones se incluyen en los menús en las páginas indicadas.
sus
Page 64

[1.3 AJUSTES] (SEt-)
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
PEr
g
PSr
g
rP2
g
rP3
g
rP4
g
Ibr
g
Ird
g
brt
g
bIr
g
bEn
g
tbE
g
M [Alarma error PID]
Véase la página 177.
Umbral de supervisión del error del regulador.
M [% ref. velocidad]
Véase la página 178.
Coeficiente multiplicador de la entrada de velocidad predictiva.
M [Ref. presel.2 PID]
Véase la página 180.
Referencia PID preseleccionada.
M [Ref. presel.3 PID]
Véase la página 180.
Referencia PID preseleccionada.
M [Ref. presel.4 PID]
Véase la página 180.
Referencia PID preseleccionada.
M [I apert. freno subida]
Véase la página 160.
Umbral de corriente al abrir el freno en marcha de subida o adelante.
M [I apert. freno bajada]
Véase la página 160.
Umbral de corriente al abrir el freno en marcha de bajada o atrás.
M [Tiempo Apert. Freno]
Véase la página 161.
Temporización al abrir el freno.
M [Frec. apertura freno]
Véase la página 161.
Umbral de frecuencia al abrir el freno.
M [Frec. cierre freno]
Véase la página 161.
Umbral de frecuencia de cierre del freno.
M [Ret. cierre freno]
Véase la página 161.
Temporización antes de la demanda de cierre del freno. Para retrasar el cierre del freno, sólo para movimiento
horizontal, si se desea que el freno se cierre cuando la parada sea completa.
De 0 a 65.535 (1) 100
Del 1 al 100% 100%
Véase la página 180
(1)
Véase la página 180
(1)
Véase la página 180
(1)
De 0 a 1,32 In (2) 0
De 0 a 1,32 In (2) 0
De 0 a 5,00 s 0 s
[Automática] (AUtO)
De 0 a 10 Hz
[Automática] (AUtO)
De 0 a 10 Hz
De 0 a 5,00 s 0 s
300
600
900
[Automática] (AUtO)
[Automática] (AUtO)
(1)A falta de terminal gráfico, en el visualizador de 4 dígitos los valores superiores a 9.999 se muestr an con un punto como separador de miles,
por ejemplo, 15.65 en lugar de 15650.
(2)In corresponde a la corriente nominal del variador que se indica en la guía de instalación o en la placa de características del variador.
Estos parámetros sólo aparecen si la función correspondiente se ha selecci onado en otro menú. Cuando son accesibles
y
g
1755857 11/2009 64
ajustables desde el menú de configuración de la función correspondiente, para una programación más cómoda,
sus
descripciones se incluyen en los menús en las páginas indicadas.
Page 65

[1.3 AJUSTES] (SEt-)
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
bEt
g
JdC
g
ttr
g
tLIM
g
tLIG
g
trH
g
M [Tiempo cierre freno]
Véase la página 161.
Tiempo de cierre del freno (tiempo de respuesta del freno).
M [Salto en inversión]
Véase la página 162.
M [Tpo de rearranque]
Véase la página 162.
Temporización entre el fin de una secuencia de cerrar el freno y el inicio de una secuencia de apertura del freno.
M [Limit. par motor]
Véase la página 185.
Limitación del par en régimen de generador, en % o en 0,1% del par nominal según el parámetro
[Incremento
par] (IntP) en la página 185.
M [Limit. par generador]
Véase la página 185.
Limitación del par en régimen de generador, en % o en 0,1% del par nominal según el parámetro
[Incremento
par] (IntP) en la página 185.
M [Frec. alta G. hilo]
Véase la página 209.
De 0 a 5,00 s 0 s
[Automática] (AUtO)
De 0 a 10 Hz
De 0,00 a 15,00 s 0 s
Del 0 al 300% 100%
Del 0 al 300% 100%
De 0 a 10 Hz 4 Hz
[Automática] (AUtO)
trL
g
qSH
g
qSL
g
Ctd
ttH
ttL
(1)In corresponde a la corriente nominal del variador que se indica en la guía de instalación o en la placa de características del variador.
M [Frec. baja G. hilo]
Véase la página 209.
M [Despl. rápido arriba]
Véase la página 209.
M [Despl. rápido abajo]
Véase la página 209.
M [Nivel de intensidad]
Umbral de corriente de la función [Nivel Int. alc.] (CtA) asignado a un relé o a una salida lógica (véase la página 102).
M [Nivel par alto]
Umbral de par alto de la función [Al. Par alto] (ttHA) asignado a un relé o a una salida lógica (véase la página 102),
en % del par nominal del motor.
M [Nivel par bajo]
Umbral de par bajo de la función [Al. Par bajo] (ttLA) asignado a un relé o a u na salida lógica (véase la página 102),
en % del par nominal del motor.
De 0 a 10 Hz 4 Hz
De 0 a[Frec.alta
Guiado de hilo] (trH)
De 0 a [Frec.baja
Guiado de hilo] (trL)
De 0 a 1,5 In (1) In (1)
De –300% a +300% 100%
De –300% a +300% 50%
0 Hz
0 Hz
Estos parámetros sólo aparecen si la función correspondiente se ha selecci onado en otro menú. Cuando son accesibles
y
g
65 1755857 11/2009
ajustables desde el menú de configuración de la función correspondiente, para una programación más cómoda,
sus
descripciones se incluyen en los menús en las páginas indicadas.
Page 66
[1.3 AJUSTES] (SEt-)
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
FqL
g
Ftd
F2d
FFt
g
ttd
g
JPF
JF2
JF3
JFH
M [Nivel alarma pulsos]
Nivel de velocidad medido por la función [CONTADOR FRECUENCIA] FqF-) en la página 235, asignado a un
relé o a una salida lógica (véase la página 102).
M [Nivel Frecuencia]
Nivel de frecuencia de la función [N.frec.alcan] (FtA) asignado a un relé o a una salida lógica (véase la página
102), o utilizado por la función [CONMUT. JUEGO PARÁM.] (MLP-) en la página 198.
M [Nivel Frecuencia 2]
Nivel de frecuencia de la función [N.frec2.alc.] (F2A) asignado a un relé o a una salida lógica (vé ase la página
102), o utilizado por la función [CONMUT. JUEGO PARÁM.] (MLP-) en la página 198.
M [Niv. parada R. libre]
Véase la página 140.
Paso de parada en rampa o de parada rápida a parada en rueda libre con un nivel de velocidad bajo.
Parámetro accesible si [Tipo de parada] (Stt) = [Parad.rápid.] (FSt) o [Paro rampa] (rMP).
v 0,0: Sin paso a rueda libre.
v De 0,1 a 1.600 Hz: Nivel de velocida d en el que e l motor pasa a par a da en rue d a libre.
M [Temp. mot.alcanz.]
Véase la página 223.
Nivel de disparo de la alarma térmica del motor (salida lógica o relé).
M [Frec. Oculta]
Frecuencia oculta. Este parámetro impide un f uncionamiento prolongado en un rango ajustable alrededor de
la frecuencia ajustada. Esta función permite eliminar la s velocid ades críticas que provoq uen una resonanc ia.
El ajuste a 0 desactiva la función.
M [Frec. Ocult. 2]
2a frecuencia oculta. Este parámetro impide un funcionamiento prolongado en un rango ajustable alrededor
de la frecuencia ajustada. Esta función permite eliminar las velocidades críticas que provoquen una
resonancia. El ajuste a 0 desactiva la función.
M [Frec. Oculta 3]
3a frecuencia oculta. Este parámetro impide un funcionamiento prolongado en un rango ajustable alrededor
de la frecuencia ajustada. Esta función permite eliminar las velocidades críticas que provoquen una
resonancia. El ajuste a 0 desactiva la función.
M [Histéresis Frec. Ocul.]
Parámetro visible si al menos uno de los ajustes de frecuencias oclutas [Frecuencia oculta] (JPF),
[Frecuencia
Rango de frecuencias ocultas: de (JPF – JFH) a (JPF + JFH) por ejemplo.
Este ajuste es común para las 3 frecuencias JPF, JF2 y JF3.
oculta 2] (JF2) y [3º Frecuencia oculta] (JF3) está a un valor diferente de 0.
De 0 Hz a 30,00 kHz 0 Hz
De 0,0 a 1.600 Hz [Vel.máxima] (HSP)
De 0,0 a 1.600 Hz [Vel.máxima] (HSP)
De 0,0 a 1.600 Hz 0,0 Hz
Del 0 al 118% 100%
de 0 a 500 o 1.600 Hz
según el calibre
de 0 a 500 o 1.600 Hz
según el calibre
de 0 a 500 o 1.600 Hz
según el calibre
De 0,1 a 10 Hz 1 Hz
0 Hz
0 Hz
0 Hz
LbC
g
trt
T
g
1755857 11/2009 66
M [Corrección carga]
Véase la página 84.
Corrección nominal en Hz.
M [Ratio de par]
Coeficiente aplicado a la [Referencia de par] (tr 1).
Estos parámetros sólo aparecen si la función correspondiente se ha selecci onado en otro menú. Cuando son accesibles
y
ajustables desde el menú de configuración de la función correspondiente, para una programación más cómoda,
sus
descripciones se incluyen en los menús en las páginas indicadas.
De 0 a 1.000 Hz 0
Del 0 al 1.000% 100%
Page 67
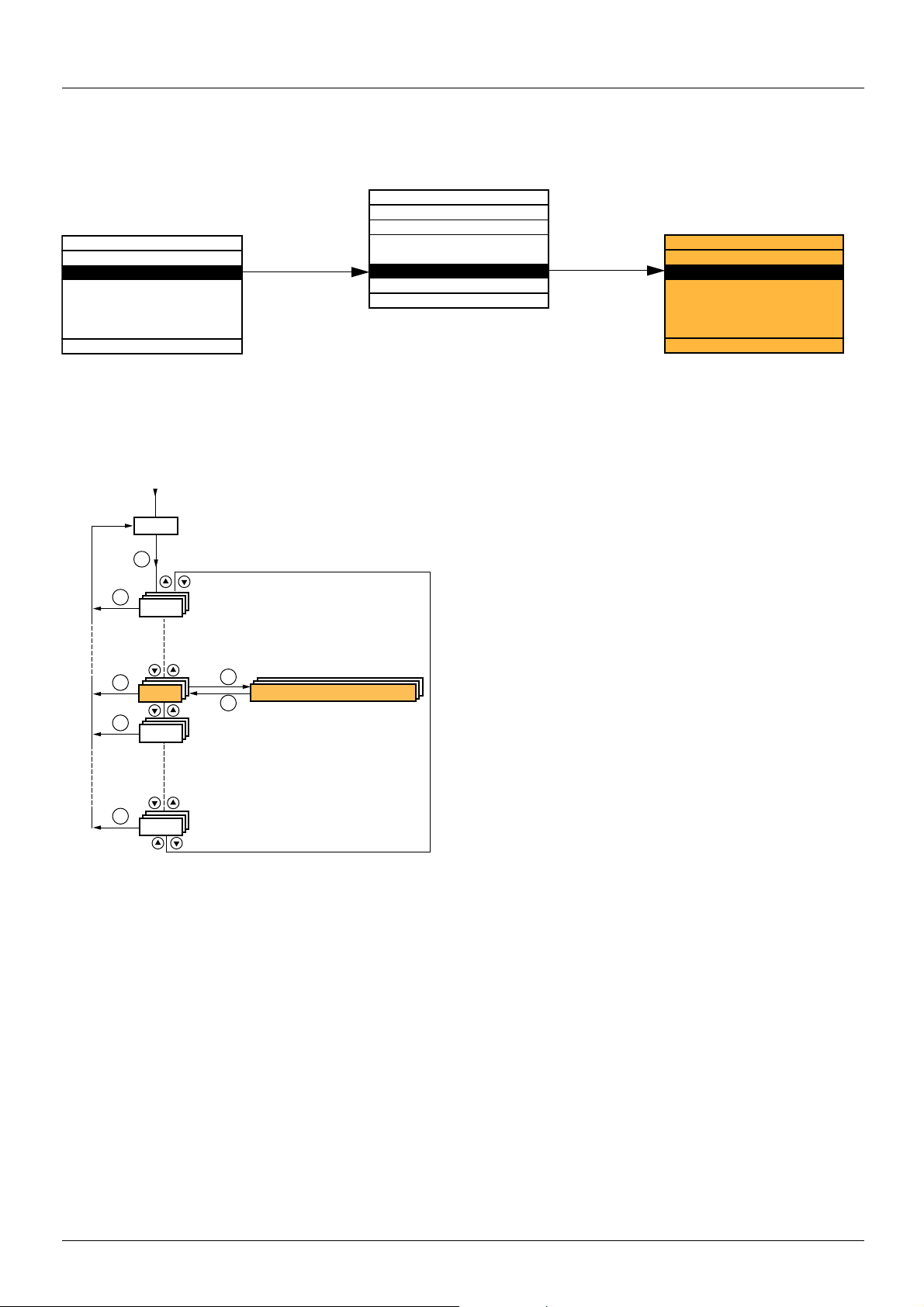
[1.4 CONTROL MOTOR] (drC-)
RDY Term +0,00 Hz 0 A
MENÚ GENERAL
1 MENÚ VARIADOR
2 NIVEL ACCESO
3 ABRIR/GUARDAR
4 CÓDIGO DE ACCESO
5 IDIOMA
Code Quick
ENT
RDY Term +0,00 Hz 0 A
1 MENÚ VARIADOR
1.1 ARRANQUE RÁPIDO
1.2 SUPERVISIÓN
1.3 AJUSTES
1.4 CONTROL MOTOR
1.5 ENTRADAS/SALIDAS
Code << >> Quick
ENT
RUN Term +50,00 Hz 80 A
1.4 CONTROL MOTOR
Frec. estándar motor
Pot. nominal motor
Tensión Nom.Motor
Int. Nominal Motor
Frec. nom.Motor
Code << >> Quick
XXX
SIM-
I-O-
ESC
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
drC-
Visualización del estado del variador
CONTROL MOTOR
Puesta en tensión
Con terminal gráfico:
Con terminal integrado:
67 1755857 11/2009
Page 68

[1.4 CONTROL MOTOR] (drC-)
100 - deslizamiento en %
100
50 - deslizamiento en Hz
50
60 - deslizamiento en Hz
60
Los parámetros del menú [1.4 CONTROL MOTOR] (drC-) sólo pueden modificars e en la parada sin orden de marcha con las si guientes
excepciones:
• [Autoajuste] (tUn) en la página 69 que conlleva la puesta en tensión del motor.
• Los parámetros que incluyen el signo Ten la columna de código, que pueden modificarse en marcha o en parada.
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
bFr
nPr
UnS
nCr
FrS
M [Frec.estándar motor]
50
60
v [50 Hz IEC] (50): IEC
v [60Hz NEMA] (60): NEMA
Este parámetro modifica los preajustes de los parámetros: [Vel.máxima] (HSP) en la página 43,
[Nivel Frecuencia] (Ftd) en la página 66, [Tensión Nom.Motor] (UnS), [Frec. nom.Motor] (FrS)
y [Frecuencia Máxima] (tFr) que se indican a continuación.
M [Pot. nominal motor]
Parámetro no accesible si [Tipo control motor] (Ctt) en la página 70 = [Motsíncrono] (SYn).
Potencia nominal del motor indicada en la placa de características, en kW si [Frec.estándar motor] (bFr) =
[50
Hz IEC] (50), en HP si [Frec.estándar motor] (bFr) = [60Hz NEMA] (60).
M [Tensión Nom. Motor]
Parámetro no accesible si [Tipo control motor] (Ctt) en la página 70 = [Motsíncrono] (SYn).
Tensión nominal del motor indicada en la placa de características.
ATV71pppM3: 100 a 240 V - ATV71pppN4: 200 a 480 V - ATV61pppY: 400 a 690 V.
M [Int. Nominal Motor]
Parámetro no accesible si [Tipo control motor] (Ctt) en la página 70 = [Motsíncrono] (SYn).
Corriente nominal del motor indicada en la placa de características.
M [Frec. nom. Motor]
Parámetro no accesible si [Tipo control motor] (Ctt) en la página 70 = [Motsíncrono] (SYn).
Frecuencia nominal del motor indicada en la placa de características.
El ajuste de fábrica es de 50 Hz y es sustituido por un preajuste de 60 Hz si [Frec.estándar motor] (bFr)
se
establece en 60 Hz.
El valor máximo se limita a 500 Hz si [Tipo control motor] (Ctt) (página 70) es diferente de U/F o para los
variadores ATV71pppY o de calibres superiores a ATV71HD37.
Los valores de 500 Hz a 1.600 Hz sólo son posibles en control U / F y para las potencias li mitadas a 3 7 kW.
En este caso, configure [Tipo control motor] (Ctt) antes que [Frec. nom Motor] (FrS).
[50 Hz IEC] (50)
Según el calibre
del
variador
Según el calibre
del
variador
De 0,25 a 1,5 In (1) Según el calibre
De 10 a 1.600 Hz 50 Hz
Según el calibre
del
variador
Según el calibre
del
variador y [Frec.
estándar motor] (bFr)
del
variador y [Frec.
estándar motor] (bFr)
InSP
10
nSP
(1)In corresponde a la corriente nominal del variador que se indica en la guía de instalación y en la placa de caracte rí sticas del variador.
1755857 11/2009 68
M [Incremento rpm]
Incremento del parámetro [Vel. Nominal Motor] (nSP).
1
v [x1 rpm] (1): incremento de 1 RPM, que se utilizará si [Vel. Nominal Motor] (nSP) no sobrepasa las 65.535 RPM.
v [x10 rpm] (10): incremento de 10 RPM, que se utilizará si [Vel. Nominal Motor] (nSP) no sobrepasa las 65.535 RPM.
Nota 1: Cualquier cambio de [Incremento rpm] (InSP) hace que [Vel. Nominal Motor] (nSP)
vuelva al ajuste de fábrica.
Nota 2: Para la gama ATV71pppY, [Incremento rpm] (InSP) es fijado a 1.
M [Vel. Nominal Motor]
Parámetro no accesible si [Tipo control motor] (Ctt) en la página 70 = [Motsíncrono] (SYn).
Velocidad nominal del motor indicada en la placa de características. Ajustable de 0 a 65.535 RPM
si
[Incremento rpm] (InSP) = [x1 rpm] (1) o de 0,00 a 96,00 krpm si [Incremento rpm] (InSP) = [x10 rpm] (10).
De 0 a 9.999 rpm y después de 10,00 a 65,53 krpm en el visualizador integrado.
Si la placa de características no indica la velocidad nominal, sino la velocidad de sincronismo, y el deslizamiento
en Hz o en %, la velocidad nominal debe calcularse de la siguiente forma:
• velocidad nominal = velocidad de sincronismo x
o
• velocidad nominal = velocidad de sincronismo x (motores 50 Hz)
o
• velocidad nominal = velocidad de sincronismo x (motores 60 Hz)
[x1 rpm] (1)
De 0 a 96.000 rpm Según el calibre
del
variador
Page 69

[1.4 CONTROL MOTOR] (drC-)
Cód. Nombre/descripción Ajuste de fábrica
tFr
tUn
dOnE
nO
YES
M [Frecuencia Máxima]
El ajuste de fábrica es de 60 Hz, y es sustituido por un preajuste de 72 Hz si [Fre c.estándar motor] (bFr)
establece en 60 Hz.
se
El valor máximo está limitado por las siguientes condiciones:
• No puede sobrepasar 10 veces el valor de [Frecuencia nom.Motor] (FrS)
• No puede superar 500 Hz si [Tipo control motor] (Ctt) (página 70) es diferente de U / F o para los variadores
ATV71pppY o de calibres superiores a ATV71HD37.
Los valores de 500 Hz a 1.600 Hz sólo son posibles en control U / F y para potencias limitadas a 37 kW.
este caso, configure [Tipo control motor] (Ctt) antes que [Frecuencia Máxima] (tFr).
En
M [Autoajuste]
De 10 a 1.600 Hz
[No] (nO)
v [No] (nO): Autoajuste no realizado.
v [Sí] (YES): El autoajuste se realiza cuando es posible y, a continuación, el parámetro pasa automáticamente
[Realizado] (dOnE).
a
v [Realizado] (dOnE): Uso de los valores proporcionados por el autoajuste anterior.
Atención:
• Es imprescindible configurar correctamente todos los parámetros del motor antes de realizar el autoajuste.
- motor asíncrono: [Tensión Nom.Motor](UnS), [Frec. nom.Motor] (FrS), [Int. Nominal Motor] (nCr),
[Vel.
Nominal Motor] (nSP), [Pot. nominal motor] (nPr)
- motor síncrono: [Int.nominal sincrono] (nCrS), [Vel.nominal sincron] (nSPS), [Pares polos sinc.] (PPnS),
[Constante FEM sínc.] (PHS), [Inductancia eje d] (LdS), [Inductancia eje q] (LqS)
Si se modifica por lo menos uno de estos parámetros después de realizar el autoajuste, [Autoajuste] (tUn)
vuelve a [No] (nO) y debe volver a realizarse.
• El autoajuste tiene lugar únicamente si no h ay ninguna orden activada. Si se ha asign ado la función "Parada
en rueda libre" o "Parada rápida" a una entrada lógica, ha y que poner dicha entrada en el estado 1 (acti va en 0).
• El autoajuste es prioritario para las órdenes de marcha o de premagnetización que se tendrán en cuenta
después de la secuencia de autoajuste.
• Si el autoajuste falla, el variador muestra [No] (nO) y, después la configuración de [Gest.fallo autoajust] (tnL)
en la página
• El proceso de autoajuste puede durar de 1 a 2 segundos. No l o interrumpa y espere a que el visualizador
pase a "[Realizado] (dOnE)" o a "[No] (nO)".
238, puede presentar un fallo [Autoajuste] (tnF).
Nota: Durante el autoajuste, la corriente nominal recorre el motor.
AUt
tUS
PEnd
PrOG
FAIL
dOnE
PHr
nO
YES
tAb
CUS
AbC
ACb
M [Autoajuste autom.]
[No] (nO)
v [No] (nO): Función inactiva
v [Sí] (YES): El autoajuste se realiza cada vez que hay una puesta en tensión.
Atención: Deben tenerse en cuenta las mismas observaciones que las indicadas para [Autoajuste] (tUn) del
parámetro anterior.
Nota: Si [Perfil] (CHCF) = [Serie 8] (SE8), entonces [Autoajuste autom.] (AUt) es fijado a [No] (nO)
M [Estado autoajuste]
Información, no parametrizab l e.
[No realiz.] (tAb)
v [No realiz.] (tAb): Se utiliza el valo r po r de f ec t o de la res istencia de estátor para controlar el m ot o r.
v [Pendiente] (PEnd): El autoajuste se ha solicitado pero todavía no se ha realizado.
v [En curso] (PrOG): Autoajuste en curso.
v [Fallo] (FAIL): El autoajuste ha fallado.
v [Realizado] (dOnE): Se utiliza la resistencia del estátor medida por la función de autoajuste para controlar
el motor.
v [Person.] (CUS): Se ha realizado el autoajuste pero por lo menos un parámetro fijado por dicho autoajuste
se ha modificado con posterioridad. El parámetro [Autoajuste] (tUn) vuelve , por tanto, a [No] (nO). Los parámetros
de autoajuste implicados son:
[Res. estátor sinc.] (rSAS) en la página 73, [Aj.resist.estator] (rSA), [Aj.int.magnet.] (IdA), [Aj.Ind.dispers.]
(LFA) y [Aj.cte.tiempo rotor] (trA) en la página 74.
M [Rotación fases]
[ABC] (AbC)
v [ABC] (AbC): Sentido normal.
v [ACB] (ACb): Sentido inverso.
Este parámetro permite invertir el sentido de rotación del motor sin invertir el cableado.
No modifique el parámetro [Rotación fases] (PHr) cuando [Tipo control motor] (Ctt) en la
página 70 = [FVC] (FUC). En este caso el sentido de la rotación debe modificarse eventualmente
antes del procedimiento de ve rificación del codifi cador (o durant e el mismo) en l a página 77 cuando
[Tipo control motor] (Ctt) es diferente de [FVC] (FUC).
69 1755857 11/2009
Page 70
[1.4 CONTROL MOTOR] (drC-)
Tensión
Frecuencia
FrS
UnS
U0
La ley se define mediante los
valores de los parámetros
UnS, FrS y U0.
Tensión
Frecuencia
FrS
UnS
U5
U4
U3
U1
U2
U0
F1 F2
F3
F4 F5
FrS > F5 > F4 > F3 > F2 > F1
La ley se define mediante los
valores de los parámetros
UnS, FrS y de U0 a U5
y de F1 a F5.
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
Ctt
UUC
CUC
FUC
UF2
M [Tipo control motor]
[SVC por U] (UUC)
v [SVC por U] (UUC): Control vectorial de flujo en tensión, e n lazo abierto, con compensación aut omática del
deslizamiento en función de la carga. Se recomi enda ut iliz ar este t ipo de control e n caso de sust itución de un
ATV58. Permite la marcha con varios motores conectados en paralelo a un mismo variador, si son idénticos.
v [SVC por Int.] (CUC): Control vectorial de flujo en corri ente, en lazo abierto. Se recomienda util izar este
tipo de control en caso de sustitu ción de un ATV58F utilizad o en lazo abierto. No permite la marcha con varios
motores conectados en paralelo a un mismo variador.
v [CVF] (FUC): Control vectorial de flujo en corriente, en lazo cerrado para motor con captador de tipo
codificador incremental, elección posible sólo si una tarjeta de codificador incremental está presente. La
utilización de un codificador que genere solamente una señal "A" no permite este funcionamiento. Se
recomienda utilizar este tipo de control en caso de sustitución de un ATV58F utilizado en lazo cerrado. Es el
que tiene mejores prestaciones en precisión de velocidad y de par, y permite obtener el par a velocidad nula.
No permite la marcha con varios motores conectados en paralelo a un mismo variador.
Es imprescindible que la verificación del codificador de páginas 77 se realice correctamente
antes de seleccionar [CVF] (FUC).
v [U/F 2 puntos] (UF2): Ley U/F simple, sin compensación de deslizamiento. Permite la marcha con:
- motores especiales (rotor bobinado, rotor cónico...)
- varios motores en paralelo en un mismo variador
- motores de alta velocidad
- motores de poca potencia en relación con la del variador
UF5
SYn
1755857 11/2009 70
v [U/F5 punt.] (UF5): Ley U/F 5 puntos: como la ley U/F 2 puntos, pero además permite evitar los fenómenos
de resonancias (saturación).
v [Motsíncrono] (SYn): Únicamente para motores síncronos de imanes permanentes con fuerza
electromotriz FEM sinusoidal. Opción no permitida con los ATV71
Esta opción convierte en inaccesibles los parámetros de motores asíncronos y convierte en accesibles los
parámetros de motores síncronos.
ppppY (500 a 690 V).
Page 71

[1.4 CONTROL MOTOR] (drC-)
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
U0
U1
F1
U2
F2
U3
F3
U4
F4
U5
F5
M [U0]
M [U1]
M [F1]
M [U2]
M [F2]
M [U3]
M [F3]
M [U4]
M [F4]
M [U5]
M [F5]
De 0 a 600 o 1.000 V
según el calibre
Ajuste de ley U/F. Parámetro accesible si [Tipo control motor] (Ctt) = [U/F 2 puntos] (UF2) o [U/F5 punt.] (UF5).
De 0 a 600 o 1.000 V
según el calibre
Ajuste de ley U/F. Parámetro accesible si [Tipo control motor] (Ctt) = [U/F5 punt.] (UF5).
De 0 a 1.600 Hz 0
Ajuste de ley U/F. Parámetro accesible si [Tipo control motor] (Ctt) = [U/F5 punt.] (UF5).
De 0 a 600 o 1.000 V
según el calibre
Ajuste de ley U/F. Parámetro accesible si [Tipo control motor] (Ctt) = [U/F5 punt.] (UF5).
De 0 a 1.600 Hz 0
Ajuste de ley U/F. Parámetro accesible si [Tipo control motor] (Ctt) = [U/F5 punt.] (UF5).
De 0 a 600 o 1.000 V
según el calibre
Ajuste de ley U/F. Parámetro accesible si [Tipo control motor] (Ctt) = [U/F5 punt.] (UF5).
De 0 a 1.600 Hz 0
Ajuste de ley U/F. Parámetro accesible si [Tipo control motor] (Ctt) = [U/F5 punt.] (UF5).
De 0 a 600 o 1.000 V
según el calibre
Ajuste de ley U/F. Parámetro accesible si [Tipo control motor] (Ctt) = [U/F5 punt.] (UF5).
De 0 a 1.600 Hz 0
Ajuste de ley U/F. Parámetro accesible si [Tipo control motor] (Ctt) = [U/F5 punt.] (UF5).
De 0 a 600 o 1.000 V
según el calibre
Ajuste de ley U/F. Parámetro accesible si [Tipo control motor] (Ctt) = [U/F5 punt.] (UF5).
De 0 a 1.600 Hz 0
Ajuste de ley U/F. Parámetro accesible si [Tipo control motor] (Ctt) = [U/F5 punt.] (UF5)
0
0
0
0
0
0
71 1755857 11/2009
Page 72

[1.4 CONTROL MOTOR] (drC-)
Tensión del motor
Frecuencia
Frecuencia nominal FrS
Tensión máxima UCP
Frecuencia máxima FCP
Tensión nominal UnS
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
UC2
UCP
FCP
nO
YES
M [Ctrl vectorial 2 ptos]
Parámetro accesible si [Tipo control motor] (Ctt) es diferente de [Motsíncrono] (SYn).
v [No] (nO): Función inactiva
v [Sí] (YES): Función activa.
Se utiliza en las aplicaciones en las que se desee sobrepasar la velocidad y la frecuencia nominales del mot or,
a fin de optimizar el funcionamiento a potencia constante, o cuando se desea limitar la tensión máxima del motor
a un valor inferior al de la tensión de la red.
La ley de tensión de frecuencia deberá adaptarse a las posibilidades del motor que vaya a funcionar con la tensión
máxima UCP y con la frecuencia máxima FCP.
M [U Potencia Cte]
Parámetro accesible si [Ctrl vectorial 2 ptos] (UC2) = [Sí] (YES).
M [Frec. potencia cte.]
Parámetro accesible si [Ctrl vectorial 2 ptos] (UC2) = [Sí] (YES).
Según calibre
del
variador
Según el calibre
del
variador y [Frec.
nom.Motor] (FrS)
[No] (nO)
Según el calibre
del
variador y [Frec.
estándar motor] (bFr)
= [Frec.estándar
motor] (bFr)
1755857 11/2009 72
Page 73

[1.4 CONTROL MOTOR] (drC-)
Parámetros de motor síncrono:
Estos parámetros son accesi bles si [Tipo control motor] (Ctt) en la página 70 = [Motsíncrono ] (SYn). En este caso no es posible acceder a los
parámetros de motor asíncrono.
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
nCrS
nSPS
PPnS
PHS
LdS
LqS
rSAS
M [Int.nominal sincrono]
Corriente nominal del motor síncrono indicada en la placa de características.
M [Vel.nominal sincron]
Velocidad nominal del motor síncrono indicada en la placa de características.
En el visualizador integrado de 0 a 9.999 rpm y después de 10,00 a 60,00 krpm.
M [Pares polos sinc.]
Número de pares de polos del motor síncrono.
M [Constante FEM sínc.]
Constante de FEM del motor síncrono, en mV por rpm (tensión de pico por fase).
En el visualizador integrado de 0 a 9.999 y después de 10,00 a 65,53 (de 10.000 a 65.536).
M [Inductancia eje d]
Inductancia estatórica del eje "d" en mH (por fase).
En los motores con polos lisos [Inductancia eje d] (LdS) = [Inductancia eje q] (LqS) = Inductancia estat órica L.
M [Inductancia eje q]
Inductancia estatórica del eje "q" en mH (por fase).
En los motores con polos lisos [Inductancia eje d] (LdS) = [Inductancia eje q] (LqS) = Inductancia estat órica L.
M [Res. estátor sinc.]
Resistencia estatórica en frío (por bobinado). El ajust e de fábrica se sus titu ye por el resulta do del autoaj uste,
si éste se realiza.
Si el usuario conoce el valor, puede indicarlo.
Valor en miliohmios (mΩ) hasta 75 kW, en centésimas de miliohmios (mΩ/100) por encima de 75 kW.
En el visualizador integrado de 0 a 9.999 y después de 10,00 a 65,53 (de 10.000 a 65.536).
De 0,25 a 1,5 In (2) Según calibre
De 0 a 60.000 rpm Según calibre
De 1 a 50 Según calibre
De 0 a 65.535 Según calibre
De 0 a 655,3 Según calibre
De 0 a 655,3 Según calibre
Según calibre
variador
del
variador
del
variador
del
variador
del
variador
del
variador
del
variador
del
Según calibre
variador
del
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
UFr
T
SLP
T
(1)Parámetro igualmente accesible en el menú [1.3 AJUSTES] (SEt-).
(2)In corresponde a la corriente nominal del variador que se indica en la guía de instalación y en la placa de caracte rí sticas del variador.
T
M [Compensación RI]
Parámetro accesible si [Tipo control motor] (Ctt) es distinto de [U/F 2 puntos] (UF2) y de [U/F5 punt.] (UF5).
Permite optimizar el par a velocidad muy baja (aumente el valor de [Compensación RI] (UFr) en caso de par
insuficiente).
Asegúrese de que el valor de la [Compensación RI] (UFr) no es demasiado elevado con el motor en caliente
(riesgo de inestabilidad).
M [Compens. Desliz.]
Parámetro accesible si [Tipo control motor] (Ctt) es distinto de [U/F 2 puntos] (UF2), de [U/F5 punt.] (UF5)
de [Motsíncrono](SYn).
y
Permite ajustar la compensación de deslizamiento en torno al valor fijado por la velocidad nominal del motor.
En las placas de los motores, las indicaciones de velocidad no son siempre exactas.
• Si el deslizamiento ajustado es < el deslizamiento real: el motor no gira a la velocidad correcta en el régimen
establecido, sino a una velocidad inferior a la consigna.
• Si el deslizamiento ajustado es > el deslizamiento real: el motor está sobrecompensado y la velocidad es inestable.
Parámetro modificable tanto en funcionamiento como en parada.
(1)
(1) Del 0 al 300% 100%
Del 25 al 200% 100%
73 1755857 11/2009
Page 74

[1.4 CONTROL MOTOR] (drC-)
Parámetros de los motores accesibles en modo [Experto].
Aquí encontramos:
• Los parámetros calculados por el variador durante el autoajuste, sólo lectura. Por ejemplo R1r, resistencia estatórica en frío calculada.
• La posibilidad de sustituir algunos de estos parámetros calculados por otros valores, en caso necesario. Por ejemplo
[Aj.resist.estator], resistencia estatórica en frío calculada.
Cuando el usuario modifica un parámetro Xyw, el variador lo utiliza en lugar del parámetro calculado Xyr.
Motor asíncrono
Si se efectúa un autoajuste o se modifica algu no de lo s parámetros de mot or qu e condici ona n el autoaj ust e ( [Tensión Nom. Motor] (UnS),
[Frec. nom.Motor] (FrS), [Int. Nominal Motor] (nCr), [Vel. Nominal Motor] (nSP), [Pot. nominal motor] (nPr)), los parámetros Xyw vuelven a tener
los ajustes de fábrica o calculados.
Cód. Nombre/descripción
rSM
IdM
LFM
trM
nSL
PPn
rSA
M [Res.estator Medida]
Resistencia estatórica en frío calculada por el variador, sólo lectu ra. Valor en miliohmios (mΩ) hasta 75 kW,
en centésimas de miliohmios (m
M [Int.magn.calculada]
Corriente de magnetización en A calculada por el variador, sólo lectura.
M [Cálculo induct.disp.]
Inductancia de fuga en mH calculada por el variador, sólo lectura.
M [Cálculo cte.t.rotor]
Constante de tiempo rotórica en mS calculada por el variador, sólo lectura.
M [Desliz.nom.mot.]
Deslizamiento nominal en Hz, calculado por el variador, sólo lectura.
Para modificar el deslizamiento nominal, modifique la [Vel. Nominal Motor] (nSP) (página 68).
M [Nºpares polos calc.]
Número de pares de polos calculado por el variador, sólo lectura.
M [Aj.resist.estator]
Resistencia estatórica en frío (por bobinado), valor modificable. En miliohmios (mΩ) hasta 75 kW,
en
centésimas de miliohmios (mΩ/100) a partir de 75 kW. En el visualizador integrado de 0 a 9.999
y
después de 10,00 a 65,53 (de 10.000 a 65.536).
Ω/100) a partir de 75 kW.
IdA
LFA
trA
1755857 11/2009 74
M [Aj.int.magnet.]
Corriente de magnetización en A, valor modificable.
M [Aj.Ind.dispers.]
Inductancia de fuga en mH, valor modificable.
M [Aj.cte.tiempo rotor]
Constante de tiempo rotórico en mS, valor modificable.
Page 75

[1.4 CONTROL MOTOR] (drC-)
Motor síncrono
Cód. Nombre/descripción
rSMS
FrSS
M [R.estát.frío m.sinc]
Resistencia estatórica en frío (por bobinad o), sólo lectura. Es el ajuste de fábric a del variador o el resultado
del autoajuste si éste se ha realizado.
Valor en miliohmios (mΩ) hasta 75 kW, en centésimas de miliohmios (mΩ/100) a partir de 75 kW.
En el visualizador integrado de 0 a 9.999 y después de 10,00 a 65,53 (de 10.000 a 65.536).
M [Frec.nom. síncrono]
Frecuencia del motor a velocidad nominal en Hz calculada por el varia dor (fre cuencia n omin al d el motor),
de sólo lectura.
75 1755857 11/2009
Page 76

[1.4 CONTROL MOTOR] (drC-)
Elección del codificador
Respete las recomendaciones del catálogo y la guía de instalación.
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
EnS
AAbb
PGI
(1)Los parámetros relativos al codificador no son accesibles si la tarjeta del codificador no está presente, y las opciones propuestas dependen
del tipo de tarjeta de codificador utilizada. También es posible acceder a la configuración del codificador desde el menú [1.5- ENTRADAS/
SALIDAS] (E/S).
M [Señal codificador]
Parámetro accesible si una tarjeta de codificador incremental está presente (1).
Se debe configurar según el tipo de codificador utilizado.
v [AABB] (AAbb): Para señales A, A-, B, B-.
Ab
A
v [AB] (Ab): Para señales A, B.
v [A] (A): Para la señal A. Valor inaccesible si [Utiliz. codificador] (EnU) página 78 = [Reg+segur.] (rEG).
M [Número impulsos]
Número de impulsos por vuelta de codificador.
Parámetro accesible si una tarjeta de codificador está presente (1).
De 100 a 5.000 1024
[AABB] (AAbb)
1755857 11/2009 76
Page 77

[1.4 CONTROL MOTOR] (drC-)
Procedimiento de verificación del codificador
Este procedimiento es aplicable a todos los tipos de codificadores.
1. Configure el [Tipo control motor] (Ctt) de forma distinta a [CVF] (FUC) incluso si se trata de la configuración buscada. Utilice, por
ejemplo, [SVC por U] (UUC) para un motor asíncrono y [Motsíncrono] (SYn) para un motor síncrono.
2. Configure los parámetros del motor conforme a su placa de características.
• Motor asíncrono (véase la página 68): [Pot. nominal motor] (nPr), [Tensión Nom.Motor] (UnS), [Int. Nominal Motor] (nCr), [Frec.
nom.Motor] (FrS), [Vel. Nominal Motor] (nSP).
• Motor síncrono (véase "Parámetros de motor síncrono" en l a página 73): [Int.nominal sincro no] (nCrS), [Vel.nominal sincron] (nSPS),
[Pares polos sinc.] (PPnS), [Constante FEM sínc.] (PHS), [Inductancia eje d] (LdS), [Inductancia eje q] (LqS), [Res. estátor sinc.]
(rSAS). La [Limit. Intensidad] (CLI) no debe exceder la corriente máxima del motor; de lo contrario, existe el riesgo de que se
produzca una desmagnetización.
3. Configure [Utiliz. codificador] (EnU) = [No] (nO).
4. Efectúe un autoajuste.
5. En el caso de un codificador incremental, configure [Señal codificador] (EnS) y [Número impulsos] (PGI), página 76, conforme al
codificador utilizado.
6. Configure [Verif. codificador] (EnC) = [Sí] (YES)
7. Asegúrese de que la rotación del motor no suponga ningún peligro.
8. Controle la rotación del motor con la velocidad estabilizada en ≈ 15% de la velocidad nominal durante al menos 3 segundos, y utilice
el menú [1.2-SUPERVISIÓN] (SUP-) para supervisar el comportamiento.
9. En el caso de activación en [Fallo codificador] (EnF), [Verif. codificador] (EnC) vuelve a [No] (nO).
- Verifique la configuración de los parámetros (consulte los puntos del 1 al 4 anteriores).
- Verifique el buen funcionamiento mecánico y eléctrico del codificador, así como la alimentación y la conexión del mismo.
- Invierta el sentido de rotación del motor (parámetro [Rotación fases] (PHr) en la página 69) o las señales del codificador.
10. Vuelva a iniciar la operación a partir de 5 hasta que [Verif. codificador] (EnC) pase a [Realizado] (dOnE).
11. Vuelva a configurar el [Tipo control motor] (Ctt) si debe ser [CVF] (FUC).
77 1755857 11/2009
Page 78
[1.4 CONTROL MOTOR] (drC-)
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
EnC
dOnE
EnU
nO
YES
nO
SEC
rEG
PGr
M [Verif. codificador]
Comprobación del retorno del codificador. Véase el procedimiento en la página precedente.
Parámetro accesible si una tarjeta de codificador está presente (1).
[No realiz.] (nO)
v [No realiz.] (nO): Verificación no realizada.
v [Sí] (YES): Activa la supervisión del codificador.
v [Realizado] (dOnE): Verificación realizada correctamente.
El procedimiento de verificación controla:
- el sentido de rotación del codificador/motor
- la presencia de señales (continuidad de cableado)
- el número de impulsos/vuelta
En caso de fallo, el variador se bloquea con un [Fallo codificador] (EnF).
M [Utiliz. codificador]
Parámetro accesible si una tarjeta de codificador está presente (1).
[No] (nO)
v [No] (nO): Función inactiva
v [Seguridad] (SEC): El codificador se utiliza como retorno de velocidad solamente para la supervisión.
v [Reg+segur.] (rEG): El codificador se utili za como reto rno de ve locidad pa ra la regulació n y la sup ervisión.
Esta configuración es automática si el variador está configurado en lazo cerrado ([Tipo control motor] (Ctt) =
[CVF] (FUC). Si [Tipo control motor] (Ctt) = [SVC por U] (UUC) el codificador actúa en retorno de velocidad
y
permite una corrección estática de la velocidad. Para los demás valores de [Tipo control motor] (Ctt) esta
configuración no está disponible.
v [Referencia] (PGr): El codificador se utiliza como consigna. Opción posible únicamente con tarjeta para
codificador incremental.
(1)Los parámetros relativos al codificador no son accesibles si la tarjeta del codificador no está presente, y las opciones propuestas dependen
del tipo de tarjeta de codificador utilizada. También es posible acceder a la configuración del codificador desde el menú [1.5- ENTRADAS/
SALIDAS] (E/S).
1755857 11/2009 78
Page 79

[1.4 CONTROL MOTOR] (drC-)
Bombas de balancín
[Sistema ENA]
El Sistema ENA es una ley de control destinada a las máquinas giratorias excéntri cas.
La aplicación principal es la bomba de petróleo. El principio de funcionamiento retenido permite:
- el funcionamiento sin resistencia de frenado
- reducir las limitaciones mecánicas en el vástago
- reducir las fluctuaciones de corriente de línea
- ahorrar energía al mejorar la relación potencia eléctrica-caudal
[Ganancia prop. ENA]
Este ajuste se efectúa de forma que se alcance un e quilibrio entre el ahorro de energía obte nido (o las fluc tuaciones d e corriente de l ínea)
y las limitaciones mecánicas impuestas al vástago.
El ahorro de energía se consigue gracias a la disminución de la fluctuación de la corriente y al mayor caudal conseguido con una misma
velocidad media.
[Ganancia int. ENA]
Este ajuste permite alisar la tensión del bus de corriente continua.
Arranque la máquina con una ganancia inte gral y proporcio nal baja (proporci onal del 25% e i ntegral del 10 %) a fin de evita r que se dispare p or
sobretensión ante la ausencia de resistencia de frenado. Observe si estos ajustes son los adecuados.
Consejo de ajuste durante el funcionamiento:
• Para eliminar la resistencia de frenado y la consiguiente subida de tensión en el bus de corriente continua:
Observe la velocidad de la máquina en el terminal gráfico.
Disminuya el valor de la ganancia integral hasta alcanzar el que provoque la caída de l a velocidad de la máquina. Cuando se alcance dicho
valor, aumente la ganancia integral hasta lograr una velocidad de la máquina estable.
Mediante el terminal gráfico o un osciloscopio, verifique si la tensión del bus de corriente continua es estable.
• Para ahorrar energía:
Al disminuir la ganancia proporcional (de manera progresiva) puede favorecerse el ahorro de energía mediante la disminución del valor
máximo de corriente de línea y el aumento de las variaciones de velocidad y, en consecuencia, de los esfuerzos mecánicos.
El objetivo consiste en encontrar los ajustes que permitan ahorrar energ ía y a la vez minimizar los esfuerzos mecánicos.
Cuando se disminuye la ganancia proporcional, puede ser necesario reajustar la ganancia integral a fin de evitar un disparo por
sobretensión.
Observación: Cuando se hayan realizado los ajustes necesarios, es conveniente verificar si la bomba arranca correctamente. La falta de par
al arrancar puede deberse a un valor de ajuste de la ganancia integral ENA demasiado bajo.
[Relación reducción]
Este ajuste corresponde a la relación existente entre la velocidad del motor antes del re ductor y la que se establezc a después del reductor.
Este parámetro sirve para ver en el terminal gráfico la velocidad media en Hz y la velocidad de la máquina en unidades de cliente
(por
ejemplo: en sacudidas por minuto). Para poder verlas en el terminal gráfico, estas magnitudes deben seleccionarse en el menú
[1.2
SUPERVISIÓN] (SUP-).
Consejos de ajuste para evitar disparos por fallo [Sobrevelocidad] (SOF)
El sistema ENA autoriza rebasamientos de velocidad que pueden conducir a disparos por fallo [Sobrevelocidad] (SOF). Con el fin de
evitarlo, se recomienda aumentar de forma razonable el valor de los siguientes parámetros:
• [Frecuencia Máxima] (tFr), página 69
• [Niv.sobrevel.pulsos] (FqA), página 235, si está configurada la función "Cont. Frecuencia".
79 1755857 11/2009
Page 80

[1.4 CONTROL MOTOR] (drC-)
Bombas de balancín
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
EnA
YES
GPE
T
GIE
T
rAP
T
(1)Parámetro igualmente accesible en el menú [1.3 AJUSTES] (SEt-).
T
M [Sistema ENA]
Parámetro accesible si [Tipo control motor] (Ctt) = [SVC por U] (UUC), véase la página 70.
nO
v [No] (nO): Función inactiva.
v [Sí] (YES): Función activa.
M [Ganancia prop. ENA]
Parámetro accesible si [Sistema ENA] (EnA) = [Sí] (YES).
M [Ganancia int. ENA]
Parámetro accesible si [Sistema ENA] (EnA) = [Sí] (YES).
M [Relación reducción]
Parámetro accesible si [Sistema ENA] (EnA) = [Sí] (YES).
Parámetro modificable tanto en funcionamiento como en parada.
[No] (nO)
(1) De 1 a 9.999 250
(1) De 0 a 9.999 100
(1) De 10,0 a 999,9 10
1755857 11/2009 80
Page 81

[1.4 CONTROL MOTOR] (drC-)
ATENCIÓN
Si [Filtro senoidal] (OFI) = [Sí] (YES), [Tipo control motor] (Ctt), página 70, debe ser únicamente [ U/F2 puntos]
(UF2), [U/F5 punt.] (UF5) (o [SVC por U] (UUC) hasta 45 kW para ATV71
pppM3X y 75 kW para ATV71pppN4)
y [Frecuencia Máxima] (tFr) no debe exceder los 100 Hz.
Si no se tiene en cuenta esta precaución, se pueden producir daños materiales.
ATENCIÓN
En los variadores ATV71p075N4 a U40N4, si los filtros RFI están desconectados (uso en una red IT), la frecuencia
de corte del variador no debe superar los 4 kHz.
Si no se tiene en cuenta esta precaución, se pueden producir daños materiales.
ATENCIÓN
Asegúrese de que el motor admite esta corriente, en especial, si se trata de un motor síncrono con imanes
permanentes para el que existe riesgo de desmagnetización.
Si no se tiene en cuenta esta precaución, se pueden producir daños materiales.
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
OFI
SFr
T
nO
YES
M [Filtro senoidal]
[No] (nO)
v [No] (nO): Sin filtro senoidal.
v [Sí] (YES): Utilización de un filtro senoidal, para limitar la sobretensión del motor y disminuir la corriente
de
fuga a tierra.
[Filtro senoidal] (OFI) se fuerza a [No] (nO) para los calibres ATV71p037M3, ATV71p075N4 y todos los
ATV71
ppppY.
Nota: Los ajustes de [Limit. Intensidad] (CLI) y [Limit. intensidad 2] (CL2) en la página 60 deben realizarse
tras la configuración de [Filtro senoidal] (OFI) = [Sí] (YES) y [Tipo control motor] (Ctt) en la página 70 =
[U/F 2 puntos] (UF2) o [U/F5 punt.] (UF5), porque para ciertos calibres esta configuración provoca un ajuste
de fábrica reducido (1,36 In) de las limitaciones de corriente.
M [Frecuencia de Corte]
Ajuste de la frecuencia de corte.
Rango de ajuste: puede variar de 1 a 16 kHz, pero los valores mínimo y má ximo y el ajuste de fábrica pueden
limitarse según el tipo de variador (ATV71H o W), s eg ún el c ali bre (en potencia y en tensión) y según la
configuración de los parámetros [Filtro senoidal] (OFI) y [Lim. sobretens.mot.] (SUL) en la página
Si el valor es inferior a 2 kHz, [Limit. Intensidad] (CLI) y [Limit. intensidad 2] (CL2) en la página 60 están
limitadas a 1,36 In.
Ajuste en marcha:
- Si el valor inicial es inferior a 2 kHz, no puede superar los 1,9 kHz en marcha.
- Si el valor inicial es superior o igual a 2 kHz, no puede ser inferior a los 2 kHz en marcha.
Ajuste parado: sin limitación.
Nota: En caso de calentamiento excesivo, el variador disminuye automáticamente la frecuencia de corte
y la restablece cuando la temperatura vuelve a la normalidad.
Nota: Si [Tipo con trol motor] (Ctt) en la página 70 = [FVC] (FUC) se desaconseja ajustar la frecuencia
de corte a un valor inferior a 2 kHz, ya que puede conllevar inestabilidades de velocidad.
(1) Según el calibre Según el calibre
82.
CLI
T
(1)Parámetro igualmente accesible en el menú [1.3 AJUSTES] (SEt-).
(2)In corresponde a la corriente nominal del variador que se indica en la guía de instalación y en la placa de caracte rí sticas del variador.
T
81 1755857 11/2009
M [Limit. Intensidad]
Permite limitar la corriente del motor.
El rango de ajuste está limitado a 1,36 In si [Frecuencia de Corte] (SFr) es inferior a 2 kHz.
Nota: Si el ajuste es inferior a 0,25 In, existe riesgo de bloqueo por fallo [Pérdida f ase motor] (OPF)
si dicho ajuste se valida (vea la página 224). Si es inferior a la intensidad del motor en vacío,
la limitación deja de actuar.
Parámetro modificable tanto en funcionamiento como en parada.
(1) De 0 a 1,65 In (2) 1,5 In (2)
Page 82

[1.4 CONTROL MOTOR] (drC-)
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
nrd
SUL
SOP
nO
YES
nO
YES
M [Frec. Corte Aleatoria]
Según el calibre
v [No] (nO): Frecuencia fija. Ajuste de fábrica a partir de los calibres ATV71HD55M3X, ATV71HD90N4 y
ATV71HC11Y.
v [Sí] (YES): Frecuencia con modulación aleatoria. Ajuste de fábrica hasta los calibres ATV71HD45M3X,
ATV71HD75N4 y ATV71HD90Y.
La modulación de frecuen cia aleatoria evita lo s posibles ruidos de reso nancia que pueden prod ucirse con una
frecuencia fija.
M [Lim. sobretens.mot.]
Esta función limita las sobretensiones de los motores y es de utili dad en los siguientes casos:
- motores NEMA
- motores japoneses
- motores de cabezal
- motores rebobinados
[No] (nO)
v [No] (nO): Función inactiva.
v [Sí] (YES): Función activa.
Este parámetro se fuerza a [No] (nO) si [Filtro senoidal] (OFI) página anterior = [Sí] (YES).
Este parámetro puede permanecer = [No] (nO) para los motores de 230/400 V si se utilizan a 230 V, o bien
si
la longitud del cable entre el variador y el motor no sobrepasa los si guientes valores:
- 4 m con cables no blindados
- 10 m con cables blindados
M [Optim. lim. sobretens]
Parámetro de optimización de sobretensiones transitorias en los bornes del motor,
accesible
Ajuste a 6, 8 o 10 μs, según la siguiente tabla.
si [Lim. sobretensión motor] (SUL) = [Sí] (YES).
10 μs
El valor del parámetro "SOP" corresponde al tiempo de atenuación del cable utilizado. Se define para impedir la superposición de reflexiones
de ondas de tensión debidas a la gran longitud de los cables. Limita el rebasamiento al doble de la tensión nominal del bus CC.
En las tablas de la página siguiente se muestran ejemplos de correspondencia del parámetro "SOP" con la longitud de cable entre el variador
y el motor. Para longitudes superiores es necesario utilizar un filtro senoidal o un filtro de protección contra dV/dt.
• Cuando se trata de motores en paralelo, la longitud de cable que debe te nerse en cuenta es la suma de todas las longitudes. A continuació n,
debe compararse la longitud dada por la l ínea de la tabla correspondiente a l a potencia de un motor con la correspondi ente a la potencia
total, y tomar la longitud más pequeña. Ejemplo: Dos motores de 7,5 kW; tome las longitudes de la línea de 15 kW de la tabla,
inferiores a las de la línea de 7,5 kW y divida dicho valor por el número de motores para obtener la longitud por motor. (Con cable
"GORSE" no blindado y SOP = 6, el resultado es 40/2 = 20 m máximo por cada motor de 7,5 kW).
En casos especiales (por ejemplo, otro s ti pos de cabl es , mo to res de poten ci as di fere nt es en parale lo , l ong i tude s de cab l e dife r entes
en
paralelo, etc.), es aconsejable verificar con un osciloscopio los valores de las sobretensiones obtenidos en los bornes de los motore s.
A fin de conservar el pleno rendimiento de variador no es recomendable aumentar el valor de SOP si ello no es necesario.
1755857 11/2009 82
Page 83

[1.4 CONTROL MOTOR] (drC-)
Tablas de correspondencia entre el parámetro SOP y la longitud de cable, para una red
de 400 V
Altivar 71 Motor Sección de cable Longitud máxima de cable en metros
Referencia Potencia Cable "GORSE" no blindado
kW HP en mm
ATV71H075N4 0,75 1 1,5 14 100 m 70 m 45 m 105 m 85 m 65 m
ATV71HU15N4 1,5 2 1,5 14 100 m 70 m 45 m 105 m 85 m 65 m
ATV71HU22N4 2,2 3 1,5 14 110 m 65 m 45 m 105 m 85 m 65 m
ATV71HU30N4 3 - 1,5 14 110 m 65 m 45 m 105 m 85 m 65 m
ATV71HU40N4 4 5 1,5 14 110 m 65 m 45 m 105 m 85 m 65 m
ATV71HU55N4 5,5 7,5 2,5 14 120 m 65 m 45 m 105 m 85 m 65 m
ATV71HU75N4 7,5 10 2,5 14 120 m 65 m 45 m 105 m 85 m 65 m
ATV71HD11N4 11 15 6 10 115 m 60 m 45 m 100 m 75 m 55 m
ATV71HD15N4 15 20 10 8 105 m 60 m 40 m 100 m 70 m 50 m
ATV71HD18N4 18,5 25 10 8 115 m 60 m 35 m 150 m 75 m 50 m
ATV71HD22N4 22 30 16 6 150 m 60 m 40 m 150 m 70 m 50 m
ATV71HD30N4 30 40 25 4 150 m 55 m 35 m 150 m 70 m 50 m
ATV71HD37N4 37 50 35 5 200 m 65 m 50 m 150 m 70 m 50 m
ATV71HD45N4 45 60 50 0 200 m 55 m 30 m 150 m 60 m 40 m
ATV71HD55N4 55 75 70 2/0 200 m 50 m 25 m 150 m 55 m 30 m
ATV71HD75N4 75 100 95 4/0 200 m 45 m 25 m 150 m 55 m 30 m
2
AWG SOP = 10 SOP = 8 SOP = 6 SOP = 10 SOP = 8 SOP = 6
Tipo H07 RN-F 4Gxx
Cable "GORSE" blindado
Tipo GVCSTV-LS/LH
Altivar 71 Motor Sección de cable Longitud máxima de cable en metros
Referencia Potencia Cable "BELDEN" blindado
kW HP en mm
ATV71H075N4 0,75 1 1,5 14 50 m 40 m 30 m
ATV71HU15N4 1,5 2 1,5 14 50 m 40 m 30 m
ATV71HU22N4 2,2 3 1,5 14 50 m 40 m 30 m
ATV71HU30N4 3 - 1,5 14 50 m 40 m 30 m
ATV71HU40N4 4 5 1,5 14 50 m 40 m 30 m
ATV71HU55N4 5,5 7,5 2,5 14 50 m 40 m 30 m
ATV71HU75N4 7,5 10 2,5 14 50 m 40 m 30 m
ATV71HD11N4 11 15 6 10 50 m 40 m 30 m
ATV71HD15N4 15 20 10 8 50 m 40 m 30 m
ATV71HD18N4 18,5 25 10 8 50 m 40 m 30 m
ATV71HD22N4 22 30 16 6 75 m 40 m 25 m
ATV71HD30N4 30 40 25 4 75 m 40 m 25 m
ATV71HD37N4 37 50 35 5 75 m 40 m 25 m
ATV71HD45N4 45 60 50 0 75 m 40 m 25 m
ATV71HD55N4 55 75 70 2/0 75 m 30 m 15 m
ATV71HD75N4 75 100 95 4/0 75 m 30 m 15 m
Para los motores de 230/400 V que se utilizan a 230 V, el parámetro [Lim. sobretensión motor] (SUL) puede permanecer = [No] (nO).
2
AWG SOP = 10 SOP = 8 SOP = 6 SOP = 10 SOP = 8 SOP = 6
Tipo 2950x
Cable "PROTOFLEX" blindado
Tipo EMV 2YSLCY-J
83 1755857 11/2009
Page 84

[1.4 CONTROL MOTOR] (drC-)
LbC
LbC
Par
Par nominal
Par nominal
Frecuencia
0
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
Ubr
T
bbA
nO
YES
M [Nivel de frenado]
Nivel de tensión de bus CC a partir del cual el transistor de frenado se activa y limita dicha tensión.
ATV71ppppM3p: Ajuste de fábrica 395 V.
ATV71ppppN4: Ajuste de fábrica 785 V.
ATV71ppppS6Y: ajuste de fábrica 980 V.
ATV71ppppY: Ajuste de fábrica 1.127 V o 1.080 V según el calibre.
El rango de ajuste depende del calibre de la tensión del variador y del parámetro [Tensión red] (UrES)
en
la página 228.
M [Equilibrado frenado]
v [No] (nO): Función inactiva.
v [Sí] (YES): Función activa, que se utiliza en los variadores conectados en paralelo por su bus CC.
Permite
equilibrar la potencia de frenado entre los variadores. El parámetro [Nivel de frenado] (Ubr)
debe
ajustarse con el mismo valor en todos los variadores.
El valor [Sí] (YES) es posible sólo si [Adapt.rampa dec.] (brA) = [No] (nO) (véase la página 139)
Según calibre de
tensión del variador
[No] (nO)
LbA
LbC
T
nO
YES
M [Equilibrado carga]
Cuando dos motores se conectan mecánicamente y, por tanto, a la misma velocidad necesariamente,
y
cuando son controlados por un v aria dor d is tinto ca da un o, esta función permite repartir mejor el p ar
entre
los dos motores. Por este motivo, da una variación de velocidad en función del par.
v [No] (nO): Función inactiva.
v [Sí] (YES): Función activa.
Este parámetro es accesible solamente si [Tipo control motor] (Ctt) en la página 70 es diferente
de [U/F 2 puntos] (UF2) o [U/F5 punt.] (UF5).
M [Corrección carga]
Corrección nominal en Hz.
Parámetro accesible si [Equilibrado carga] (LbA) = [Sí] (YES)
[No] (nO)
(1) De 0 a 1.000 Hz 0
(1)Parámetro igualmente accesible en el menú [1.3 AJUSTES] (SEt-).
T
1755857 11/2009 84
Parámetro modificable tanto en funcionamiento como en parada.
Page 85

[1.4 CONTROL MOTOR] (drC-)
+
-
Consigna
Velocidad
Rampa
Bucle de velocidad
Equilibrado
K
Filtro
Referencia de par
LBC
LBC1
LBC2
LBC3
LBF
K1
Velocidad
LBC1 LBC2
1
K2
Par
LBC3
LBC3
Par
nominal x (1 + LBC3)
LBC
LBC
Equilibrado de carga, parámetros accesibles en nivel experto
Principio
El factor de equilibrado K depende del par y de la velocidad, con dos factores K1 y K2 (K = K1 x K2).
85 1755857 11/2009
Page 86

[1.4 CONTROL MOTOR] (drC-)
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
LbC1
T
LbC2
T
LbC3
T
LbF
T
T
M [Corrección baja]
Parámetro accesible si [Equilibrado carga] (LbA) = [Sí] (YES).
Velocidad mínima para la corrección de carga en Hz. Por debajo de este nivel no se aplica ninguna corrección.
Se utiliza para inhibir la corrección a una velocidad muy baja si obstaculiza la rotación del motor.
M [Corrección alta]
Parámetro accesible si [Equilibrado carga] (LbA) = [Sí] (YES).
Nivel de velocidad en Hz a partir del cual la corrección de la carga es máxima.
M [Offset de par]
Parámetro accesible si [Equilibrado carga] (LbA) = [Sí] (YES).
Par mínimo para la corrección de la carga, en % de par nominal. Por debajo de este nivel no se aplica ninguna
corrección. Se utiliza para evitar inestabilidades cuando el sentido del par es cambiante.
M [Filtro equilibrado]
Parámetro accesible si [Equilibrado carga] (LbA) = [Sí] (YES).
Constante de tiempo (filtro) para la corrección, en ms. Se utiliza en caso de acoplamiento mecánico elástico para
evitar las inestabilidades.
Parámetro modificable tanto en funcionamiento como en parada.
De 0 a 999,9 Hz 0
[Corrección baja]
(LbC1) + de 0,1
a 1.000 Hz
Del 0 al 300% 0%
De 100 ms a 20 s 100 ms
0,1
1755857 11/2009 86
Page 87

[1.5 ENTRADAS/SALIDAS] (I-O-)
RDY Term +0,00 Hz 0 A
MENÚ GENERAL
1 MENÚ VARIADOR
2 NIVEL ACCESO
3 ABRIR/GUARDAR
4 CÓDIGO DE ACCESO
5 IDIOMA
Code Quick
ENT
RDY Term +0,00 Hz 0 A
1 MENÚ VARIADOR
1.1 ARRANQUE RÁPIDO
1.2 SUPERVISIÓN
1.3 AJUSTES
1.4 CONTROL MOTOR
1.5 ENTRADAS/SALIDAS
Code << >> Quick
ENT
RUN Term +50,00 Hz 80 A
1.5 ENTRADAS/SALIDAS
Control 2/3Hilos
Tipo Control 2 Hilos
Asig. marcha Atrás
CONFIGURACIÓN LI1
CONFIGURACIÓN LIx
Code << >> Quick
XXX
CtL-
SIM-
I-O-
ESC
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
Visualización del estado del variador
ENTRADAS/SALIDAS
Puesta en tensión
Con terminal gráfico:
Con terminal integrado:
87 1755857 11/2009
Page 88
[1.5 ENTRADAS/SALIDAS] (I-O-)
+24 LI1 LIx
ATV 71
+24 LI1 LI2 LIx
ATV 71
ADVERTENCIA
FUNCIONAMIENTO INESPERADO DEL EQUIPO
El cambio de asignación de [Co ntrol 2 / 3 Hilos] (tCC) requiere que se mantenga pulsada durante
2 segundos la tecla "ENT".
Esta acción conlleva el retorno al ajuste de fábrica de las funciones [Ctrl. 2 hilos] (tCt) y [Asig. marcha
Atrás] (rrS) siguientes, y de todas las funciones que asignan ent radas lógicas y analógicas.
También conlleva un retorno a la macro configuración seleccionada si ésta se ha personalizado
(pérdida de las personalizaciones).
Se recomienda establecer este parámetro antes de configurar los menús [1.6 CONTROL] (CtL-)
y [1.7 FUNCIONES APLICACIÓN] (FUn-).
Asegúrese de que este cambio es compatible con el esquema de cableado utilizado.
Si no se tiene en cuenta esta precaución, se pueden producir heridas graves o incluso la muerte.
Los parámetros del menú [1.5 ENTRADAS/SALIDAS] (I-O-) sólo pueden modificarse en parada, sin orden de marcha.
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
tCC
M [Control 2 / 3 Hilos]
2C
3C
v [Ctrl. 2 hilos] (2C)
v [Ctrl. 3 hilos] (3C)
Control 2 hilos: El estado (0 o 1) o el flanco (0 a 1 o 1 a 0) de la entrada que controla la marcha o la parada.
Ejemplo de cableado en posición "Source":
Control 3 hilos (control por pulsos): Un pulso "adelante" o "atrás" es suficiente para controlar el arranque;
un
pulso de "parada" es suficiente para controlar la parada.
Ejemplo de cableado en posición "Source":
[Ctrl. 2 hilos] (2C)
LI1: adelante
LIx: atrás
LI1: parada
LI2: adelante
LIx: atrás
1755857 11/2009 88
tCt
LEL
trn
PFO
rrS
LI1
C101
Cd00
M [Tipo Control 2 Hilos]
v [Nivel] (LEL): El estado 0 o 1 se tiene en cuenta para la marcha (1) o la parada (0).
v [Transición] (trn): Es necesario cambiar de estado (transición o flanco) para activar l a marcha a fin de evitar
un rearranque imprevisto tras una interrupción de la aliment ación.
v [Priorid.FW] (PFO): El estado 0 o 1 se tiene en cuenta para la marcha o la parada, pero la entrada de giro
"adelante" siempre tiene prioridad sobre la entrada de giro "atrás".
M [Asig. marcha Atrás]
nO
v [No] (nO): Sin asignar
v [LI1] (LI1) a [LI6] (LI6)
-
-
v [LI7] (LI7) a [LI10] (LI10): Si hay instalada una tarjeta de entradas y salidas lógicas VW3A3201
v [LI11] (LI11) a [LI14] (LI14): Si hay inst alada una tarjeta de entradas y salidas ampliadas VW3A3202
v [C101] (C101) a [C115] (C115): Con Modbus integrado en [Perfil E/S] (IO)
-
-
-
v [C201] (C201) a [C215] (C215): Con CANopen integrado en [Perfil E/S] (IO)
v [C301] (C301) a [C315] (C315): Con una tarjeta de comunicación en [Perfil E/S] (IO)
v [C401] (C401) a [C415] (C415): Con una tarjeta Controller Inside en [Perfil E/S] (IO)
v [CD00] (Cd00) a [CD13] (Cd13): En [Perfil E/S] (IO) conmutable con entradas lógicas posibles
-
v [CD14] (Cd14) a [CD15] (Cd15): En [Perfil E/S] (IO) conmutable sin entradas lógicas posibles
Asignación de la orden de giro atrás.
[Transición] (trn)
[LI2] (LI2)
Page 89

[1.5 ENTRADAS/SALIDAS] (I-O-)
ADVERTENCIA
FUNCIONAMIENTO INESPERADO DEL EQUIPO
Asegúrese de que el retardo ajustado no co mporte ningún peligro ni ni ngún funcionamiento no deseado.
Según los valores de retardos de las distintas entradas lógicas, el orden relat ivo tomado en cuenta
de estas entradas puede modificarse y, por tanto, provocar un funcion amiento imprevisto.
Si no se tiene en cuenta esta precaución, se pueden producir heridas graves o incluso la muerte.
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
L1-
L--
L1A
L1d
b [CONFIGURACIÓN LI1]
M [Asignación LI1]
Parámetro de sólo lectura, no configurable.
Muestra todas las funciones asignadas a la entrada LI1 para comprobar las asign aciones múltiples.
M [Retardo conexión --> 1 LI1]
Este parámetro permite tener en cuenta el paso al estado 1 de la entrada lógica con un retardo ajustable
de 0 a 200 milisegundos para filtrar posibles interferencias. El paso al estado 0 se tiene en cuenta sin retardo.
b [CONFIGURACIÓN LIx]
Todas las entradas lógicas presentes en el variador se tratan como en el ejemplo LI1 anterior, hasta LI6,
LI10 o LI14 según si hay tarjetas opcionales instaladas.
De 0 a 200 ms 0
89 1755857 11/2009
Page 90

[1.5 ENTRADAS/SALIDAS] (I-O-)
Consigna
100%
0%
[Valor
mínimo]
(CrLx o
ULx o PIL)
[Valor máximo]
(CrHx o
UHx o PFr)
20 mA o 10 V
o 30,00 kHz
Consigna
100%
0%
[Valor
mínimo]
(CrLx o
ULx o PIL)
[Valor
máximo]
(CrHx o
UHx o PFr
Entrada
de corriente
o tensión
o pulsos
Entrada
de corriente
o tensión
o pulsos
20 mA o 10 V
o 30,00 kHz
Consigna
100%
0%
[Valor
mínimo]
(PIL)
[Valor máximo]
(PFr)
30,00
kHz
Entrada
de pulsos
-30,00
kHz
Consigna
100%
0%
[Valor mínimo] [Valor máximo]
Rango 0
V 100%
Consigna
100%
0%
[Valor mínimo]
[Valor máximo]
Entrada
de corriente
o tensión
Entrada
de corriente
o tensión
- 100%
Rango –100%
V + 100%
20 mA
o 10 V
20 mA
o 10 V
Configuración de las entradas analógicas y Entrada de pulsos
Los valores mínimos y máximos de las entradas (en voltios, mA...) se traducen en % para adaptar las consignas a la aplicación.
Valores mínimos y máximos de las entradas:
El valor mínimo corresponde a una consigna de 0%, y el valor máximo a una consigna de 100%. El valor mínimo puede ser superior al
valor máximo:
En las entradas bidireccionales +/–, el valor mínimo y el valor máximo están relacionados con el valor absoluto, por ejemplo, +/–2 a 8 V.
Valor mínimo negativo de la entrada Entrada de pulsos:
Rango (valores de salida): Sólo para entradas analógicas
Este parámetro permite configurar el rango de consignas en [0% V100%] o [–100% V + 100%] a fin de obtener una salida bidireccional a partir
de una entrada unidireccional.
1755857 11/2009 90
Page 91

[1.5 ENTRADAS/SALIDAS] (I-O-)
Frecuencia
Consigna
LSP
-100%
+ 100%
HSP
LSP
HSP
0%
Frecuencia
Consigna
LSP
-100%
+ 100%
HSP
LSP
HSP
Frecuencia
Consigna
LSP
-100%
+ 100%
HSP
LSP
HSP
0
Frecuencia
Consigna
LSP
-100%
+ 100%
HSP
LSP
HSP
0%
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
bSP
bSd
bLS
M [Forma referencia]
v [Estándar] (bSd)
v [Esc.veloc.] (bLS)
[Estándar] (bSd)
En consigna nula la frecuencia = LSP
En consigna = 0 en LSP la frecuencia = LSP
bnS
bnS0
91 1755857 11/2009
v [Huec.veloc.] (bnS)
v [H.vel.(0 Hz)] (bnS0)
Este parámetro define la función que tiene en cuenta la consigna de velocidad, para las entradas
analógicas y la entrada Entrada de pulsos únicamente. En el caso del regulador PID, se trata de la
consigna de salida del PID.
Los límites vienen dados por los parámetros [Velocida d Mínima] (LSP) y [Vel. máxima] (HSP); véase la pági na 43.
En consigna = 0 en LSP la frecuencia = 0
Este funcionamiento es equivalente al
[Estándar] (bSd) salvo que en consigna nula
la
frecuencia = 0 en los casos siguientes:
• La señal es inferior a [valor mínimo], que es
superior a 0 (por ejemplo, 1 V en una entrada
2
–10 V).
• La señal es superior a [valor mínimo],
que
es superior al [valor máximo] (por ejemplo,
11 V en
una entrada 10 –0 V).
En los casos en que el rango de la entrada
está
configurado como "bidireccional",
el
funcionamiento continúa siento idéntico
al
[Estándar] (bSd).
Page 92
[1.5 ENTRADAS/SALIDAS] (I-O-)
Consigna
100%
0%
[Valor mínimo]
(0%)
[Punto X
Interm.]
[Valor máximo]
(100%)
Entrada
de corriente
o tensión
[Punto Y Interm.]
20 mA
o 10 V
Consigna
100%
0%
[Valor mínimo]
(-100%)
[Punto X
Interm.]
[Valor máximo]
(100%)
Entrada
de corriente
o tensión
[Punto Y
Interm.]
– [Punto Y
Interm.]
- 100%
– [Punto X
Interm.]
0%
20 mA
o 10 V
Características lineales por tramos: Sólo para entradas analógicas
Se puede obtener una característica lineal por tramos definiendo un punto intermedio en la "curva entrada/consigna de salida" para esta entrada:
Para el rango 0 V 100%
Nota: Para [Punto X Interm.] 0% corresponde a [Valor mínimo] y 100% corresponde a [Valor máximo]
Para el rango –100% V 100%
1755857 11/2009 92
Page 93
[1.5 ENTRADAS/SALIDAS] (I-O-)
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
AI1-
AI1A
AI1t
UIL1
UIH1
AI1F
AI1E
AI1S
10U
n10U
b [CONFIGURACIÓN AI1]
M [Asignaciones de AI1]
Parámetro de sólo lectura, no configurable.
Muestra todas las funciones asignadas a la entrada AI1 para comprobar, por ejemplo, si existen problemas
de compatibilidad.
M [Configuración de AI1]
v [Tensión] (10U): Entrada en tensión positiva (los valores negativos se consideran nulos: la entrada
es
unidireccional).
v [U bipolar +/-] (n10U): Entrada en tensión positiva y negativa (la entrada es bi direccional).
M [Valor mínimo AI1]
M [Valor máximo AI1]
M [Filtro de AI1]
Filtrado de posibles interferencias.
M [Punto X Interm. AI1]
Coordenada del punto intermedio de la característica
(a
la entrada).
• 0% corresponde a [Valor mínimo AI1] (UIL1).
• 100% corresponde a [Valor máximo AI1] (UIH1).
M [Punto Y Interm. AI1]
Coordenada del punto intermedio de la característica (a la salida: consigna de frecuencia).
[Tensión] (10U)
De 0 a 10,0 V 0 V
De 0 a 10,0 V 10,0 V
De 0 a 10,00 s 0 s
Del 0 al 100% 0%
Del 0 al 100% 0%
93 1755857 11/2009
Page 94

[1.5 ENTRADAS/SALIDAS] (I-O-)
[Valor máximo] + [Valor mínimo]
2
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
AI2-
AI2A
AI2t
CrL2
UIL2
CrH2
UIH2
AI2F
AI2L
AI2E
10U
0A
POS
nEG
b [CONFIGURACIÓN AI2]
M [Asignaciones de AI2]
Parámetro de sólo lectura, no configurable.
Muestra todas las funciones asignadas a la entrada AI2 para comprobar, por ejemplo, si existen problemas
de compatibilidad.
M [Configuración de AI2]
v [Tensión] (10U): Entrada en tensión.
v [Intensidad] (0 A): Entrada en corriente.
M [Valor mínimo AI2]
Parámetro accesible si [Configuración AI2] (AI2t) = [Intensidad] (0 A).
M [Valor mínimo AI2]
Parámetro accesible si [Configuración AI2] (AI2t) = [Tensión] (10U).
M [Valor máximo AI2]
Parámetro accesible si [Configuración AI2] (AI2t) = [Intensidad] (0 A).
M [Valor máximo AI2]
Parámetro accesible si [Configuración AI2] (AI2t) = [Tensión] (10U).
M [Filtro de AI2]
Filtrado de posibles interferencias.
M [Rango de ajuste AI2]
v [0-100%] (POS): Entrada unidireccional.
v [+/-100%] (nEG): Entrada bidireccional.
Ejemplo: En una entrada 0/10 V
- 0 V corresponde a la consigna -100%.
- 5 V corresponde a la consigna 0%.
- 10 V corresponde a la consigna + 100%.
M [Punto X Interm. AI2]
Coordenada del punto intermedio de la característica (a la entrada).
• 0% corresponde a [Valor mínimo] si el rango es 0 V 100%.
[Intensidad] (0 A)
De 0 a 20,0 mA 0 mA
De 0 a 10,0 V 0 V
De 0 a 20,0 mA 20,0 mA
De 0 a 10,0 V 10,0 V
De 0 a 10,00 s 0 s
[0-100%] (POS)
Del 0 al 100% 0%
AI2S
1755857 11/2009 94
• 0% corresponde a si el rango es –100% V + 100 %.
• 100% corresponde a [Valor máximo].
M [Punto Y Interm. AI2]
Coordenada del punto intermedio de la característica (a la salida: consigna de frecuencia).
Del 0 al 100% 0%
Page 95

[1.5 ENTRADAS/SALIDAS] (I-O-)
[Valor máximo] (CrH3) + [Valor mínimo] (CrL3)
2
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
AI3-
AI3A
AI3t
CrL3
CrH3
AI3F
AI3L
AI3E
0A
POS
nEG
b [CONFIGURACIÓN AI3]
Accesible si hay instalada una tarjeta opcional VW3A3202.
M [Asignaciones de AI3]
Parámetro de sólo lectura, no configurable.
Muestra todas las funciones asignadas a la entrada AI3 para comprobar, por ejemplo, si existen problemas
de compatibilidad.
M [Configuración de AI3]
Parámetro de sólo lectura, no configurable.
v [Intensidad] (0 A): Entrada en corriente.
M [Valor mínimo AI3]
M [Valor máximo AI3]
M [Filtro de AI3]
Filtrado de posibles interferencias.
M [Rango de ajuste AI3]
v [0-100%] (POS): Entrada unidireccional.
v [+/-100%] (nEG): Entrada bidireccional.
Ejemplo: en una entrada 4 - 20 mA
- 4 mA corresponde a la consigna –100%.
- 12 mA corresponde a la consigna 0%.
- 20 mA corresponde a la consigna + 100%.
Siendo AI3 físicamente una entrada bidireccional, la configuración [+/–100%] (nEG) sólo se debe utilizar
si
la señal aplicada es unidireccional. No se debe acumular una señal bidireccional y una configuración
bidireccional.
M [Punto X Interm. AI3]
Coordenada del punto intermedio de la característica (a la entrada).
• 0% corresponde a [Valor mínimo] (CrL3) si el rango es 0 V 100%.
[Intensidad] (0 A)
De 0 a 20,0 mA 0 mA
De 0 a 20,0 mA 20,0 mA
De 0 a 10,00 s 0 s
[0-100%] (POS)
Del 0 al 100% 0%
• 0% corresponde a si el rango es -100% V + 100 %.
• 100% corresponde a [Valor máximo] (CrH3).
AI3S
95 1755857 11/2009
M [Punto Y Interm. AI3]
Coordenada del punto intermedio de la característica (a la salida: consigna de frecuencia).
Del 0 al 100% 0%
Page 96

[1.5 ENTRADAS/SALIDAS] (I-O-)
[Valor máximo] + [Valor mínimo]
2
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
AI4-
AI4A
AI4t
CrL4
UIL4
CrH4
UIH4
AI4F
AI4L
AI4E
10U
0A
POS
nEG
b [CONFIGURACIÓN AI4]
Accesible si hay instalada una tarjeta opcional VW3A3202.
M [Asignaciones de AI4]
Parámetro de sólo lectura, no configurable.
Muestra todas las funciones asignadas a la entrada AI4 para comprobar, por ejemplo, si existen problemas
de compatibilidad.
M [Configuración AI4]
v [Tensión] (10U): Entrada en tensión.
v [Intensidad] (0 A): Entrada en corriente.
M [Valor mínimo AI4]
Parámetro accesible si [Configuración AI4] (AI4t) = [Intensidad] (0 A).
M [Valor mínimo AI4]
Parámetro accesible si [Configuración AI4] (AI4t) = [Tensión] (10U).
M [Valor máximo AI4]
Parámetro accesible si [Configuración AI4] (AI4t) = [Intensidad] (0 A).
M [Valor máximo AI4]
Parámetro accesible si [Configuración AI4] (AI4t) = [Tensión] (10U).
M [Filtro de AI4]
Filtrado de posibles interferencias.
M [Rango de ajuste AI4]
v [0-100%] (POS): Entrada unidireccional.
v [+/-100%] (nEG): Entrada bidireccional.
Ejemplo: En una entrada 0/10 V
- 0 V corresponde a la consigna –100%.
- 5 V corresponde a la consigna 0%.
- 10 V corresponde a la consigna + 100%.
M [Punto X Interm. AI4]
Coordenada del punto intermedio de la característica (a la entrada).
• 0% corresponde a [Valor mínimo] si el rango es 0 V 100%.
[Tensión] (10U)
De 0 a 20,0 mA 0 mA
De 0 a 10,0 V 0 V
De 0 a 20,0 mA 20,0 mA
De 0 a 10,0 V 10,0 V
De 0 a 10,00 s 0 s
[0-100%] (POS)
Del 0 al 100% 0%
AI4S
1755857 11/2009 96
• 0% corresponde a si el rango es –100% V + 100 %.
• 100% corresponde a [Valor máximo].
M [Punto Y Interm. AI4]
Coordenada del punto intermedio de la característica (a la salida: consigna de frecuencia).
Del 0 al 100% 0%
Page 97

[1.5 ENTRADAS/SALIDAS] (I-O-)
ADVERTENCIA
FUNCIONAMIENTO INESPERADO DEL EQUIPO
Si se pasa a forzado local (vea la página 244), la entrada vi rtual queda fija en el úl timo valor transmitido.
No se debe utilizar la entrada virtual y el forzado local en una misma configuración.
Si no se tiene en cuenta esta precaución, se pueden producir heridas graves o incluso la muerte.
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
AU1-
AIC1
nO
Mdb
CAn
nEt
APP
b [AI1 VIRTUAL]
M [Canal AI - Red]
Entrada virtual.
A este parámetro también se puede acceder en el submenú [REGULADOR PID] (PId-) en la página 176.
[No] (nO): Sin asignar (en este caso la entrada virtual no aparece en los parámetros de asignación de entradas
analógicas de las funciones).
v [Modbus] (Mdb): Modbus integrado
v [CANopen] (CAn): CANopen integrado
v [Carta COM.] (nEt): Tarjeta de comunicación (si está instalada).
v [Carta prog.] (APP): Tarjeta Controller Inside (si está instalada).
Escala: El valor 8.192 transmitido por esta entrada equivale a 10 V en una entrada 10 V.
[No] (nO)
97 1755857 11/2009
Page 98

[1.5 ENTRADAS/SALIDAS] (I-O-)
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
PLI-
PIA
PIL
PFr
PFI
b [CONFIGURACIÓN RP]
Accesible si hay instalada una tarjeta opcional VW3A3202.
M [Asignación RP]
Parámetro de sólo lectura, no configurable.
Muestra todas las funciones asignada s a la entrada Entrada de pul sos para comprobar, por ejemplo, si existen
problemas de incompatibilidad.
M [Valor mínimo RP]
Frecuencia correspondiente a la velocidad mínima.
M [Valor máximo RP]
Frecuencia correspondiente a la velocidad máxima.
M [Filtro entrada RP]
Filtrado de posibles interferencias.
De –30,00 a 30,00 kHz 0
De 0 a 30,00 kHz 30,00 kHz
De 0 a 1.000 ms 0
1755857 11/2009 98
Page 99

[1.5 ENTRADAS/SALIDAS] (I-O-)
Consigna
100%
0
[Valor mínimo]
(EIL)
[Valor máximo]
(EFr)
300 kHz
Consigna
100%
0
[Valor mínimo]
(EIL)
[Valor máximo]
(EFr)
Entrada de
frecuencia
Entrada de
frecuencia
300 kHz
Consigna
100%
[Valor mínimo]
(EIL)
[Valor máximo]
(EFr)
300 kHz
Entrada de
frecuencia
0
Configuración de la entrada del codificador utilizada como consigna con un
generador de frecuencia
Esta consigna no tiene signo, por lo que los sentidos de la marcha también se deben indicar a través del canal de control (por ejemplo,
entradas lógicas).
Valores mínimos y máximos (valores de entrada):
El valor mínimo corresponde a una consigna mínima de 0%, y el valor máximo a una consigna máxima de 100%. El valor mínimo puede ser
superior al valor máximo y también puede ser negativo.
La asignación de un valor negativo para el valor mínimo permite obtener una consigna con frecuencia nula.
99 1755857 11/2009
Page 100

[1.5 ENTRADAS/SALIDAS] (I-O-)
También es posible acceder a la configuración del codificador desde el menú [1.4 CONTROL MOTOR] (drC-).
Cód. Nombre/descripción Rango de ajuste Ajuste de fábrica
IEn-
EnS
EnC
AAbb
Ab
nO
YES
dOnE
b [CONFIG. CODIFICADOR]
Los parámetros relativos al codificador no son accesibles si la tarjeta del codificador no está presente,
y
las opciones propuestas dependen del tipo de tarjeta de codificador utilizada.
M [Señal codificador]
Parámetro accesible si una tarjeta de codificador incremental está presente.
Se debe configurar según el tipo de codificador utilizado.
v [AABB] (AAbb): Para señales A, A-, B, B-.
v [AB] (Ab): Para señales A, B.
A
v [A] (A): Para la señal A. Valor no accesible si [Utiliz. codificador] (EnU) en la página 101 = [Reg+segur.]
(rEG).
M [Verif. codificador]
Comprobación del retorno del codificador. Véase el procedimien to en la página 79.
Parámetro accesible si hay una tarjeta de codificador y si [Utiliz. codificador] (EnU) en la página 101
es diferente de [Referencia] (PGr).
v [No realiz.] (nO): Verificación no realizada.
v [Sí] (YES): Activa la supervisión del codificador.
v [Realizado] (dOnE): Verificación realizada correctamente.
El procedimiento de verificación controla:
- el sentido de rotación del codificador/motor
- la presencia de señales (continuidad de cableado)
- el número de impulsos/vuelta
En caso de fallo, el variador se bloquea con un [Fallo codificador] (EnF).
[AABB] (AAbb)
[No realiz.] (nO)
1755857 11/2009 100
 Loading...
Loading...