

Page 1
Adjustable Frequency AC Drive
Drehzahlveränderbarer Frequenzumrichter
Variateur de vitesse c.a.
Inverter CA a frequenza variabile
Variador de Frecuencia Ajustable de CA
Inversor CA de Freqüência Ajustável
FRN 1.xx - 2.xx
Quick Start
Kurzanleitung
Guide de mise en route
Avviamento rapido
Inicio rápido
Início rápido
www.abpowerflex.com
Page 2

Page 3
Quick Start
PowerFlex® 40P Adjustable
Frequency AC Drive
FRN 1.xx - 2.xx
This Quick Start guide summarizes the basic steps needed to install,
start-up and program the PowerFlex 40P Adjustable Frequency AC
Drive. The information provided Does Not
and is intended for qualified drive service personnel only.
For detailed PowerFlex 40P information including EMC instructions,
application considerations and related precautions, refer to the
PowerFlex 40P User Manual, Publication 22D-UM001… at
www.rockwellautomation.com/literature.
General Precautions
ATTENTION: The drive contains high v oltage capacitors which tak e
time to discharge after removal of mains supply. Before working on
!
drive, ensure isolation of mains supply from line inputs [R, S, T (L1,
L2, L3)]. W ait three minutes for capacitors to discharge to safe voltage
levels. Failure to do so may result in personal injury or death.
Darkened display LEDs is not an indication that capacitors have
discharged to safe voltage levels.
ATTENTION: Equipment damage and/or personal injury may result
if parameter A092 [Auto Rstrt Tries] or A094 [Start At PowerUp] is
used in an inappropriate application. Do not use this function without
considering applicable local, national and international codes,
standards, regulations or industry guidelines.
ATTENTION: Only qualified personnel familiar with adjustable
frequency AC drives and associated machinery should plan or
implement the installation, start-up and subsequent maintenance of the
system. Failure to comply may result in personal injury and/or
equipment damage.
ATTENTION: This drive contains ESD (Electrostatic Discharge)
sensitive parts and assemblies. Static control precautions are required
when installing, testing, servicing or repairing this assembly.
Component damage may result if ESD control procedures are not
followed. If you are not familiar with static control procedures,
reference A-B publication 8000-4.5.2, “Guarding Against Electrostatic
Damage” or any other applicable ESD protection handbook.
ATTENTION: An incorrectly applied or installed drive can result in
component damage or a reduction in product life. Wiring or application
errors, such as, undersizing the motor, incorrect or inadequate AC
supply, or e xcessive ambient temperatures may result in malfunction of
the system.
A TTENTION: Risk of injury or equipment damage ex ists. Dri v e does
not contain user-serviceable components. Do not disassemble drive
chassis.
replace the User Manual
Page 4
English-2
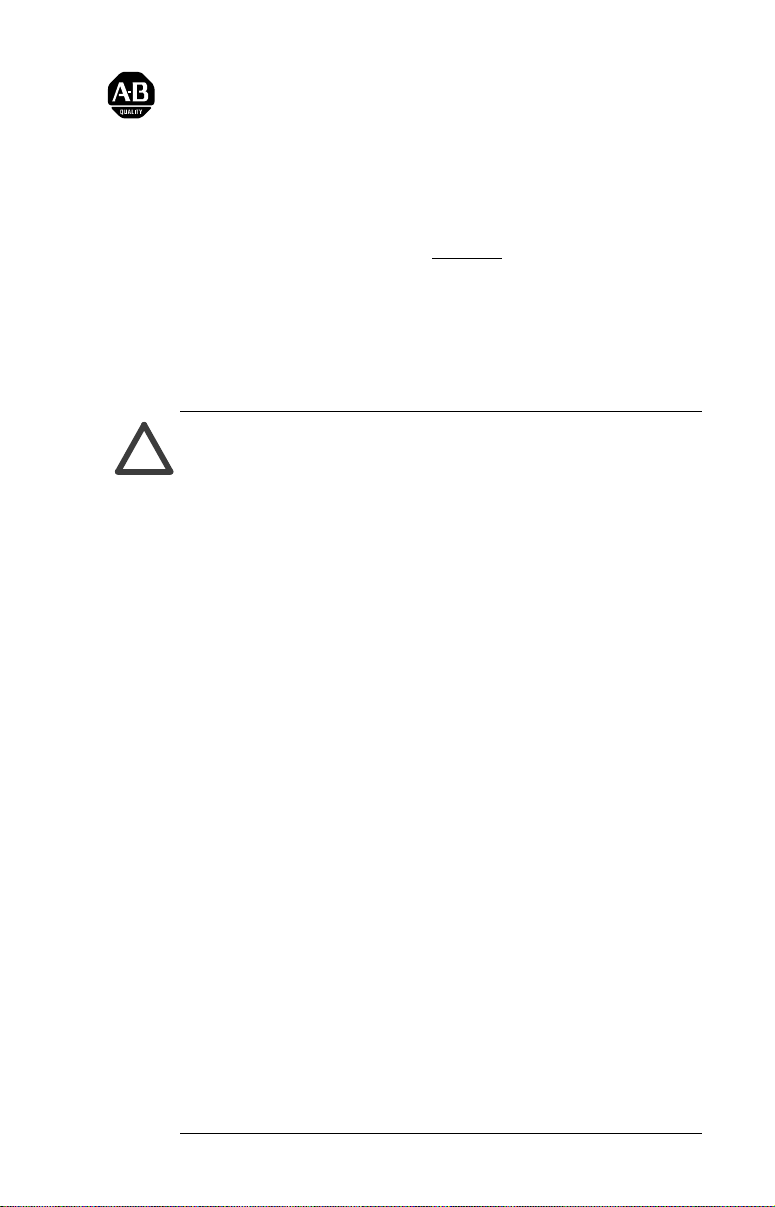
Mounting Considerations
• Mount the drive upright on a flat, vertical and level surface.
Frame Screw Size Screw Torque DIN Rail
B M4 (#8-32) 1.56-1.96 N-m (14-17 lb.-in.) 35 mm
C M5 (#10-24) 2.45-2.94 N-m (22-26 lb.-in.) –
• Protect the cooling fan by avoiding dust or metallic particles.
• Do not expose to a corrosive atmosphere.
• Protect from moisture and direct sunlight.
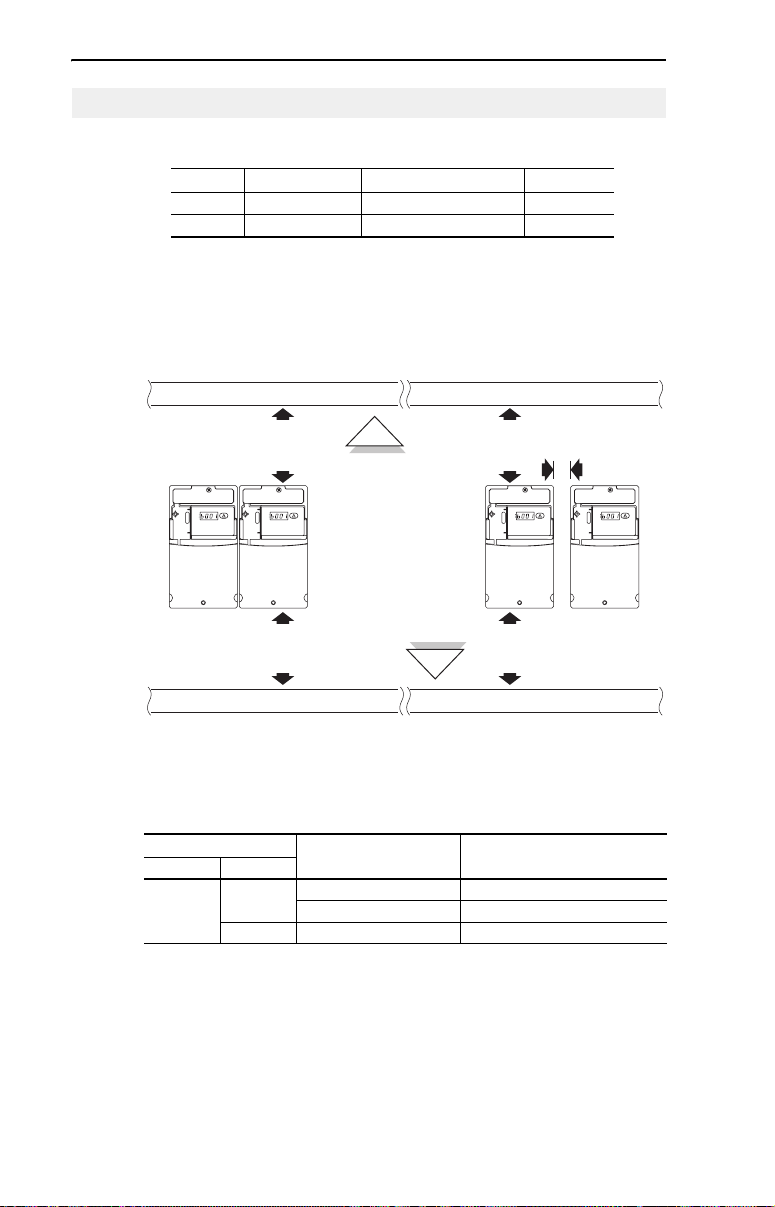
Minimum Mounting Clearances
See page 20 for mounting dimensions.
120 mm
(4.7 in.)
RUN
REV
FAULT
RUN
REV
FAULT
Closest object that
120 mm
(4.7 in.)
RUN
REV
FAULT
25 mm
(1.0 in.)
RUN
REV
FAULT
may restrict air flow
through the drive heat
sink and chassis
120 mm
(4.7 in.)
Mounting Option A
No clearance required
between drives.
120 mm
(4.7 in.)
Mounting Option B
Ambient Operating Temperatures
Ambient Temperature Enclosure Rating Minimum Mounting
Minimum Maximum
IP 20/Open Type Use Mounting Option A
IP 30/NEMA 1/UL Type 1
-10°C (14°F)
40°C (104°F)
50°C (122°F) IP 20/Open Type Use Mounting Option B
(1)
Rating requires installation of the PowerFlex 40P IP 30/NEMA 1/UL Type 1 option kit.
Clearances
(1)
Use Mounting Option B
Page 5
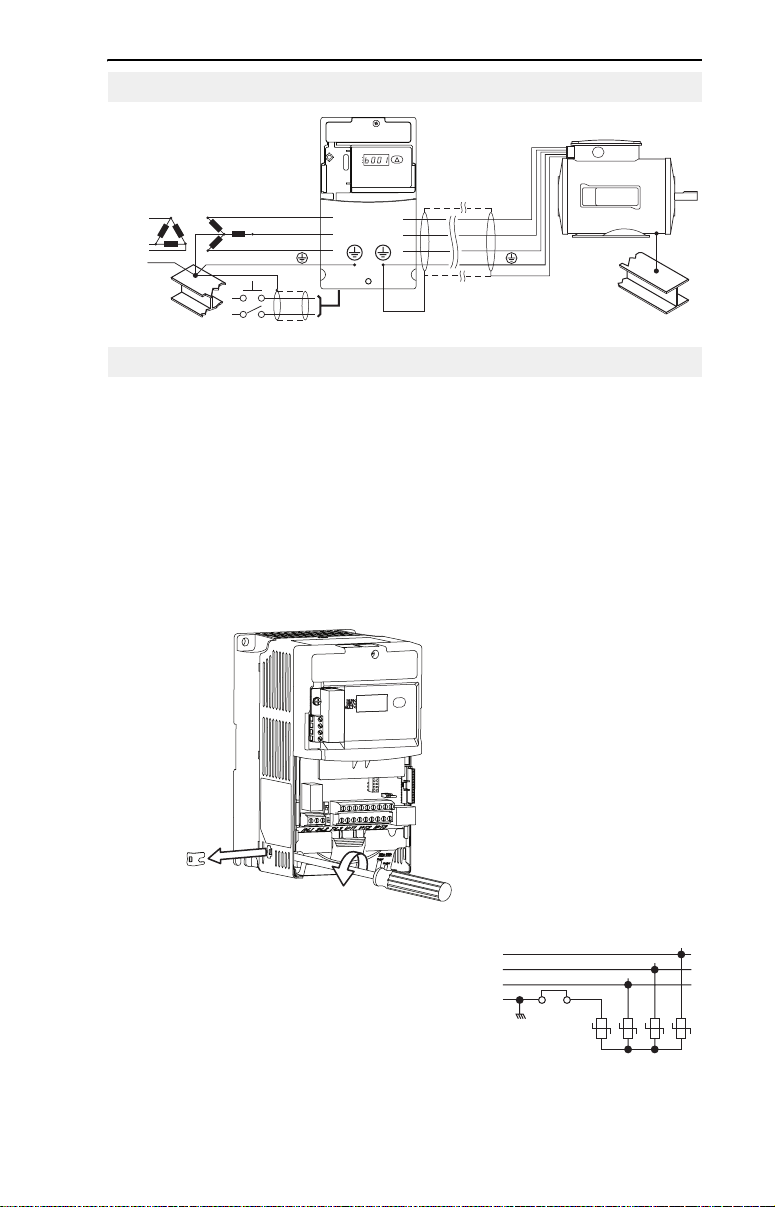
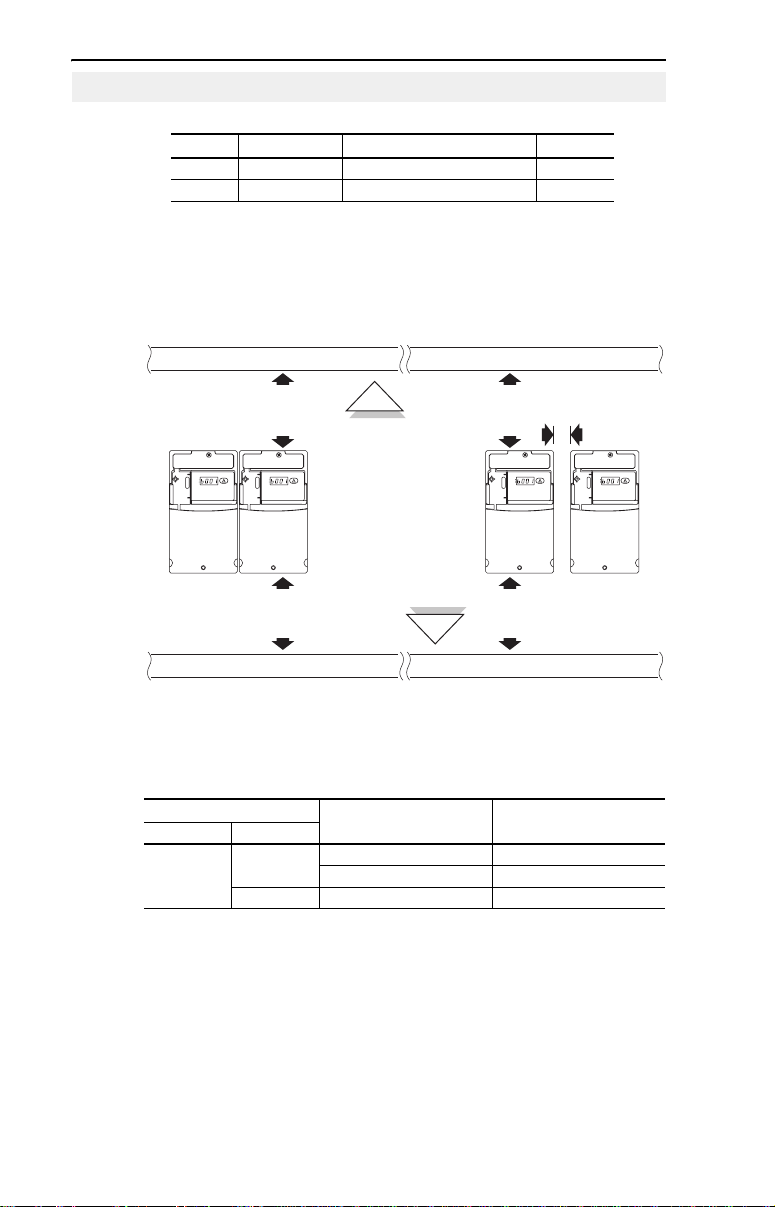
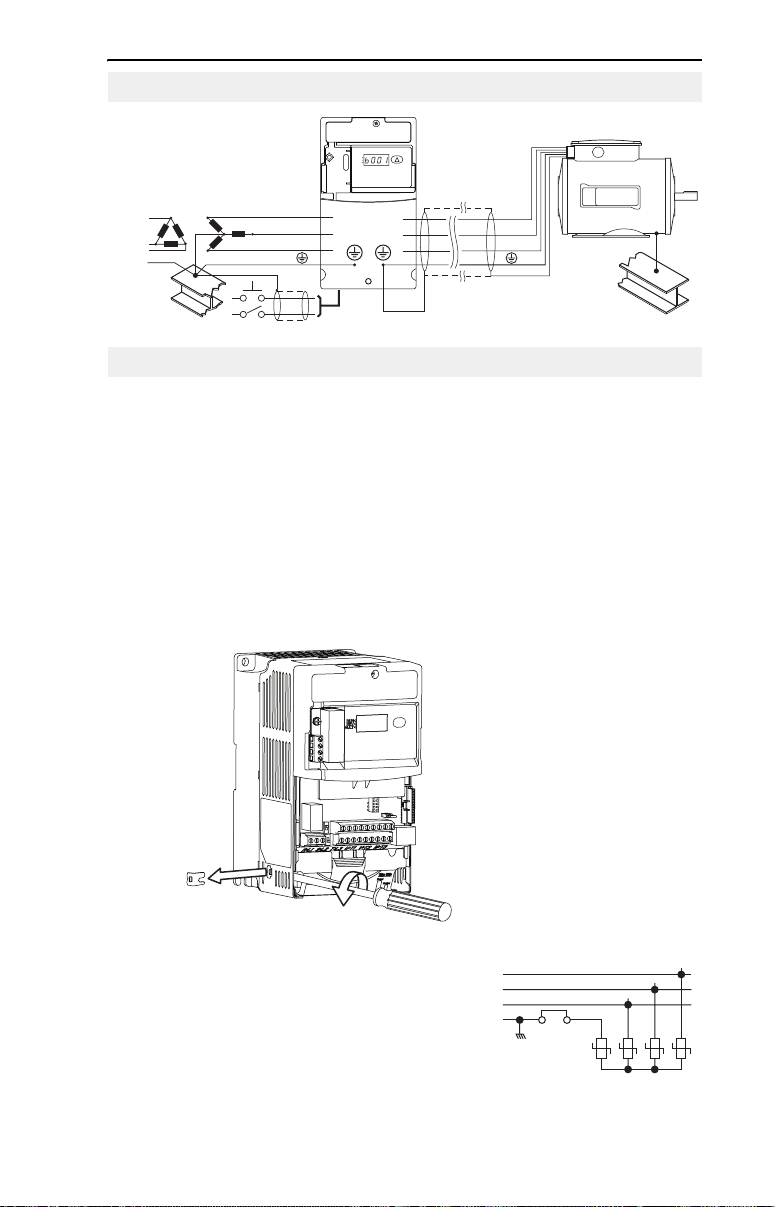
Typical Grounding
English-3
RUN
REV
FAULT
R/L1
S/L2
T/L3
SHLD
U/T1
V/T2
W/T3
Disconnecting MOVs
To prevent drive damage, the MOVs connected to ground shall be
disconnected if the drive is installed on an ungrounded distribution
system where the line-to-ground voltages on any phase could exceed
125% of the nominal line-to-line voltage. To disconnect these devices,
remove the jumper shown in the figures below.
1. Turn the screw counterclockwise to loosen.
2. Pull the jumper completely out of the driv e chassis.
3. Tighten the screw to k eep it in place.
Jumper Location
Phase to Ground MOV Removal
AC Input
R/L1
S/L2
T/L3
Three-Phase
Important: Tighten scre w after jumper removal.
Jumper
1234
Page 6
English-4
CE Conformity
Refer to the PowerFlex 40P User Manual for details on how to comply
with the Low Voltage (LV) and Electromagnetic Compatibility (EMC)
Directives.
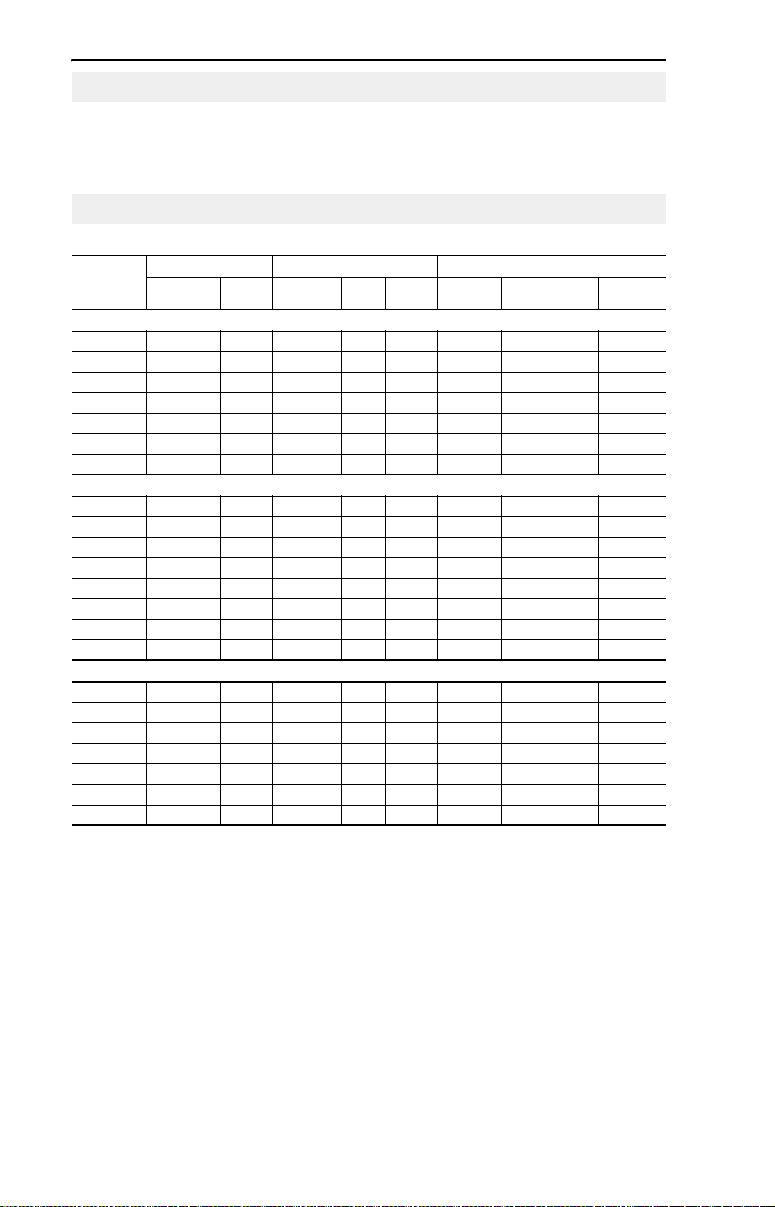
Specifications, Fuses and Circuit Breakers
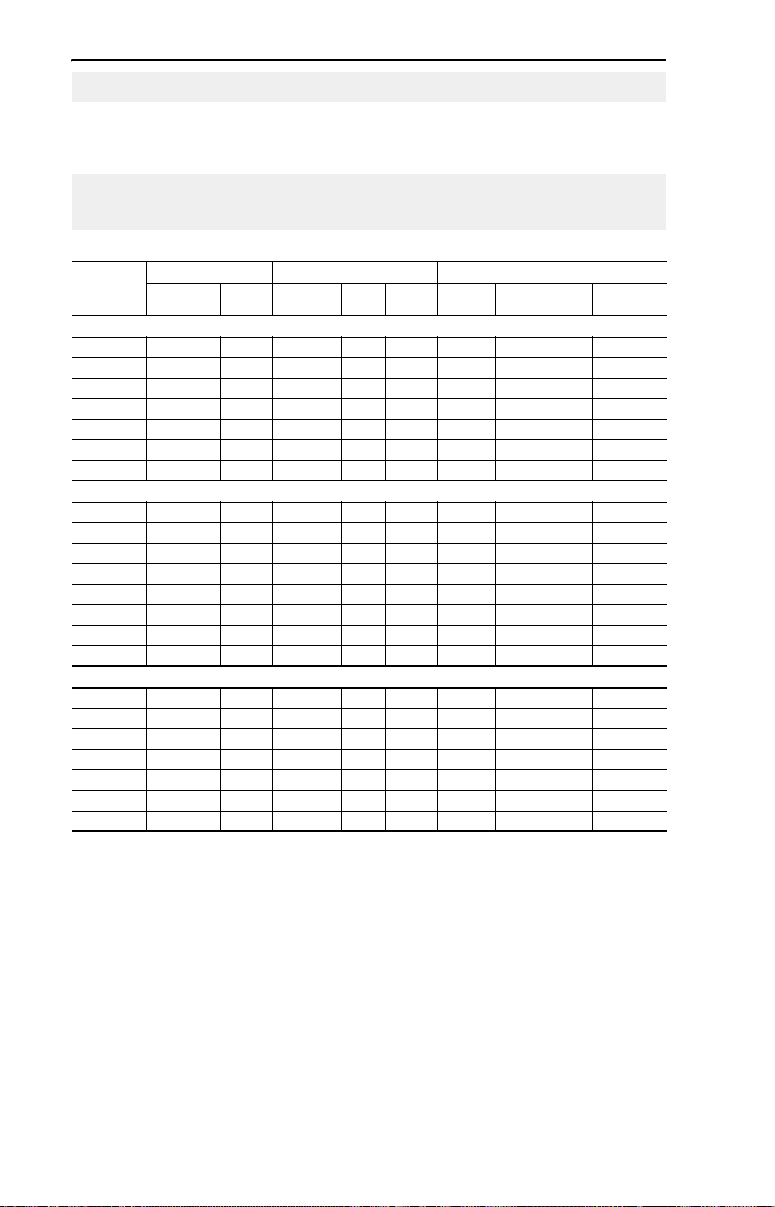
Drive Ratings
Catalog
Number
200 - 240V AC (±10%) – 3-Phase Input, 0 - 230V 3-Phase Output
22D-B2P3 0.4 (0.5) 2.3 180-264 1.15 2.5 6 140M-C2E-B40 100-C07
22D-B5P0 0.75 (1.0) 5.0 180-264 2.45 5.7 10 140M-C2E-C10 100-C09
22D-B8P0 1.5 (2.0) 8.0 180-264 4.0 9.5 15 140M-C2E-C16 100-C12
22D-B012 2.2 (3.0) 12.0 180-264 5.5 15.5 25 140M-C2E-C16 100-C23
22D-B017 3.7 (5.0) 17.5 180-264 8.6 21.0 30 140M-F8E-C25 100-C23
22D-B024 5.5 (7.5) 24.0 180-264 11.8 26.1 40 140M-F8E-C32 100-C37
22D-B033 7.5 (10.0) 33.0 180-264 16.3 34.6 60 140M-G8E-C45 100-C60
380 - 480V AC (±10%) – 3-Phase Input, 0 - 460V 3-Phase Output
22D-D1P4 0.4 (0.5) 1.4 342-528 1.4 1.8 3 140M-C2E-B25 100-C07
22D-D2P3 0.75 (1.0) 2.3 342-528 2.3 3.2 6 140M-C2E-B40 100-C07
22D-D4P0 1.5 (2.0) 4.0 342-528 4.0 5.7 10 140M-C2E-B63 100-C09
22D-D6P0 2.2 (3.0) 6.0 342-528 5.9 7.5 15 140M-C2E-C10 100-C09
22D-D010 4.0 (5.0) 10.5 342-528 10.3 13.0 20 140M-C2E-C16 100-C23
22D-D012 5.5 (7.5) 12.0 342-528 11.8 14.2 25 140M-D8E-C20 100-C23
22D-D017 7.5 (10.0) 17.0 342-528 16.8 18.4 30 140M-D8E-C20 100-C23
22D-D024 11.0 (15.0) 24.0 342-528 23.4 26.0 50 140M-F8E-C32 100-C43
460 - 600V AC (±10%) – 3-Phase Input, 0 - 575V 3-Phase Output
22D-E1P7 0.75 (1.0) 1.7 414-660 2.1 2.3 6 140M-C2E-B25 100-C09
22D-E3P0 1.5 (2.0) 3.0 414-660 3.65 3.8 6 140M-C2E-B40 100-C09
22D-E4P2 2.2 (3.0) 4.2 414-660 5.2 5.3 10 140M-C2E-B63 100-C09
22D-E6P6 4.0 (5.0) 6.6 414-660 8.1 8.3 15 140M-C2E-C10 100-C09
22D-E9P9 5.5 (7.5) 9.9 414-660 12.1 11.2 20 140M-C2E-C16 100-C16
22D-E012 7.5 (10.0) 12.2 414-660 14.9 13.7 25 140M-C2E-C16 100-C23
22D-E019 11.0 (15.0) 19.0 414-660 23.1 24.1 40 140M-D8E-C25 100-C30
(1)
Output Ratings Input Ratings Branch Circuit Protection
(1)
kW (HP) Amps
Voltage
Range kVA Amps Fuses
140M Motor
Protectors Contactors
Ratings apply to all drive types; Panel Mount (N104), Flange Mount (F104), and Plate Drive
(H204).
Page 7
English-5
Category Specification
Agency
Certification
W
.
.
TUV
E
Rheinland
C
Production inspected
Product Safety
The drive is also designed to meet the appropriate portions of the following specifications:
NFPA 70 - US National Electrical Code
NEMA ICS 3.1 - Safety standards for Construction and Guide for Selection, Installation and
Operation of Adjustable Speed Drive Systems.
Protection Bus Overvoltage Trip
IEC 146 - International Electrical Code.
200-240V AC Input:
380-460V AC Input:
460-600V AC Input:
Bus Undervoltage Trip
200-240V AC Input:
380-480V AC Input:
460-600V AC Input
P042 = 3 “High Voltage”:
P042 = 2 “Low Voltage”:
EN 50178
U
®
CUS
TUV
Rheinland
Power Ride-Thru: 100 milliseconds
Logic Control Ride-Thru: 0.5 seconds minimum, 2 seconds typical
Electronic Motor Overload Protection: I
Overcurrent: 200% hardware limit, 300% instantaneous fault
Ground Fault Trip: Phase-to-ground on drive output
Short Circuit Trip: Phase-to-phase on drive output
Environment Altitude: 1000 m (3300 ft) max. without derating. Above 1000 m
Maximum Surrounding Air Temperature
without derating:
IP20, Open Type:
IP30, NEMA Type 1, UL Type 1:
Flange and Plate Mount:
Cooling Method
Convection:
Fan:
Storage Temperature: –40 to 85 degrees C (–40 to 185 degrees F)
Atmosphere: Important: Drive must
Relative Humidity: 0 to 95% non-condensing
Shock (operating): 15G peak for 11ms duration (±1.0 ms)
Vibration (operating): 1G peak, 5 to 2000 Hz
Electrical Voltage Tolerance: 200-240V ±10%
Frequency Tolerance: 48-63 Hz
Input Phases: Three-phase input provides full rating. Single-phase
Displacement Power Factor: 0.98 across entire speed range
Maximum Short Circuit Rating: 100,000 Amps Symmetrical
Actual Short Circuit Rating: Determined by AIC Rating of installed fuse/circuit
Transistor Type: Isolated Gate Bipolar (IGBT)
Listed to UL508C and CAN/CSA-22.2
L
Certified to AS/NZS, 1997 Group 1, Class A
Marked for all applicable European Directives
EMC Directive (89/336)
EN 61800-3, EN 50081-1, EN 50082-2
Low Voltage Directive (73/23/EEC)
EN 50178, EN 60204
Bauart geprüft
Certified to EN 954-1, Category 3.
Functional
..
Meets Functional Safety (FS) when used with the
Safety
Type approved
DriveGuard Safe-Off Option (Series B).
405V DC bus (equivalent to 290V AC incoming line)
810V DC bus (equivalent to 575V AC incoming line)
1005V DC bus (equivalent to 711V AC incoming line)
210V DC bus (equivalent to 150V AC incoming line)
390V DC bus (equivalent to 275V AC incoming line)
487V DC bus (equivalent to 344V AC incoming line)
390V DC bus (equivalent to 275V AC incoming line)
2
t protection - 150% for 60 seconds, 200% for 3
seconds (Provides Class 10 protection)
(3300 ft) derate 3% for every 305 m (1000 ft).
–10 to 50° C (14 to 122° F)
–10 to 40° C (14 to 104° F)
Heatsink: –10 to 40° C (14 to 104° F)
Drive: –10 to 50° C (14 to 122° F)
0.4 kW (0.5 HP) drives and all Flange and Plate drives
All other drive ratings
where the ambient atmosphere contains volatile or
corrosive gas, vapors or dust. If the drive is not going
to be installed for a period of time, it must be stored in
an area where it will not be exposed to a corrosive
atmosphere.
380-480V ±10%
460-600V ±10%
not be installed in an area
operation provides 35% rated current.
breaker
Page 8
English-6
Category Specification
Control Method: Sinusoidal PWM, Volts/Hertz, and Sensorless Vector
Control Inputs Digital: Bandwidth: 10 Rad/Secs for open and closed loop
Encoder Type: Incremental, dual channel
Control Outputs Relay: Quantity: (1) Programmable Form C
Carrier Frequency 2-16 kHz, Drive rating based on 4 kHz.
Frequency Accuracy
Digital Input:
Analog Input:
Analog Output:
Speed Regulation
Open Loop with Slip Compensation:
With Encoder:
Output Frequency: 0-500 Hz (programmable)
Efficiency: 97.5% (typical)
Stop Modes: Multiple programmable stop modes including - Ramp,
Accel/Decel: Four independently programmable accel and decel
Intermittent Overload: 150% Overload capability for up to 1 minute
Electronic Motor Overload Protection Class 10 protection with selectable speed sensitive
Quantity: (2) Semi-programmable
Current: 6 mA
Typ e
Source Mode (SRC):
Analog: Quantity: (2) Isolated, –10 to 10V and 4-20mA
Supply: 12V, 250 mA. 12V, 10 mA minimum inputs isolated
Quadrature: 90°, ±27 degrees at 25 degrees C.
Duty Cycle: 50%, +10%
Requirements: Encoders must be line driver type, quadrature (dual
Opto: Quantity:
Analog: Quantity: (1) Non-Isolated 0-10V or 4-20mA
Sink Mode (SNK):
Specification
Resolution:
0 to 10V DC Analog:
4-20mA Analog:
External Pot:
Specification
Resistive Rating:
Inductive Rating:
Specification: 30V DC, 50mA Non-inductive
Specification
Resolution:
0 to 10V DC Analog:
4-20mA Analog:
Within ±0.05% of set output frequency
Within 0.5% of maximum output frequency, 10-Bit
resolution
±2% of full scale, 10-Bit resolution
±1% of base speed across a 80:1 speed range
±0.3% of base speed across a 80:1 speed range
±0.05% of base speed across a 20:1 speed range
Coast, DC-Brake, and Ramp-to-Stop
times. Each time may be programmed from 0 - 600
seconds in 0.1 second increments.
200% Overload capability for up to 3 seconds
response and power-down overload retention function
when enabled.
(5) Programmable
18-24V = ON, 0-6V = OFF
0-6V = ON, 18-24V = OFF
10-bit
100k ohm input impedance
250 ohm input impedance
1-10k ohm, 2 Watt minimum
with differential transmitter, 250 kHz maximum.
channel) or pulse (single channel), 3.5-26V DC output,
single-ended or differential and capable of supplying a
minimum of 10 mA per channel. Allowable input is DC
up to a maximum frequency of 250 kHz. The encoder
I/O automatically scales to allow 5V, 12V and 24V DC
nominal voltages.
3.0A at 30V DC, 3.0A at 125V, 3.0A at 240V AC
0.5A at 30V DC, 0.5A at 125V, 0.5A at 240V AC
(2) Programmable
10-bit
1k ohm minimum
525 ohm maximum
Page 9
English-7
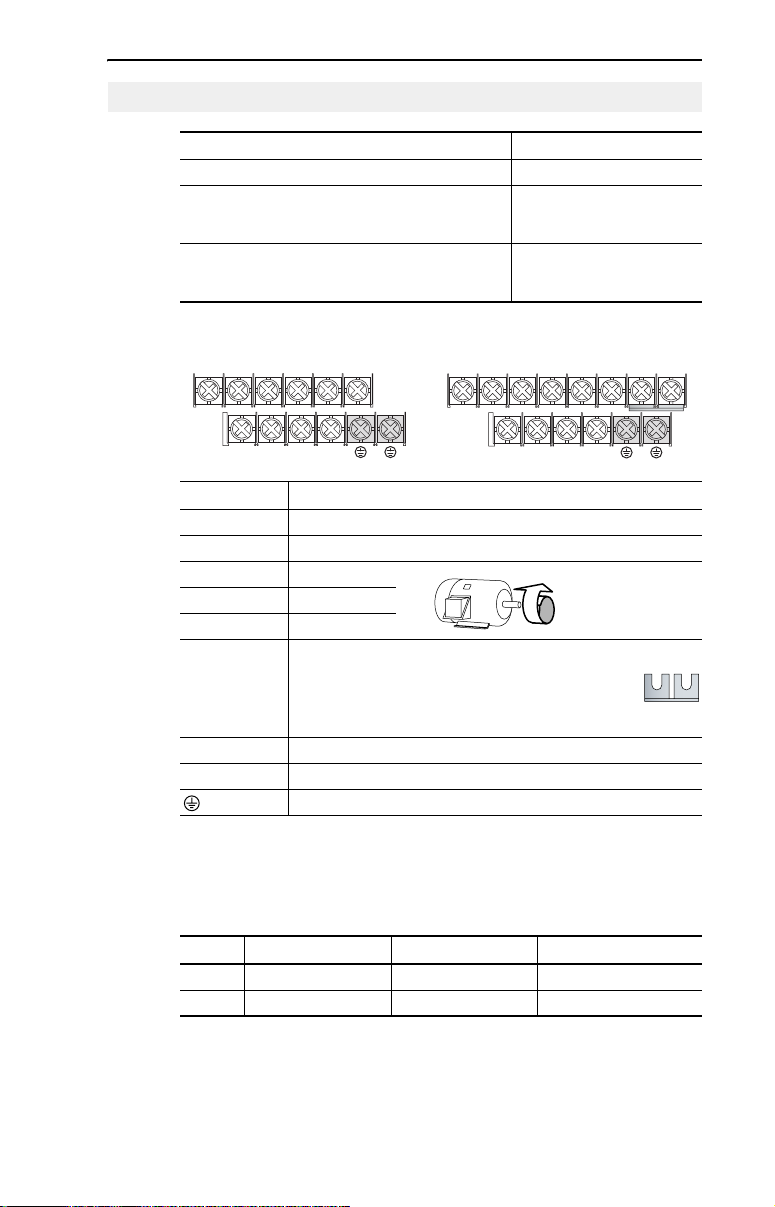
Power Wiring
Power Wire Rating Recommended Copper Wire
Unshielded 600V, 75°C (167°F) THHN/THWN 15 Mils insulated, dry location
Shielded 600V, 75°C or 90°C (167°F or 194°F) RHH/
RHW-2
Shielded Tray rated 600V, 75°C or 90°C (167°F or
194°F) RHH/RHW-2
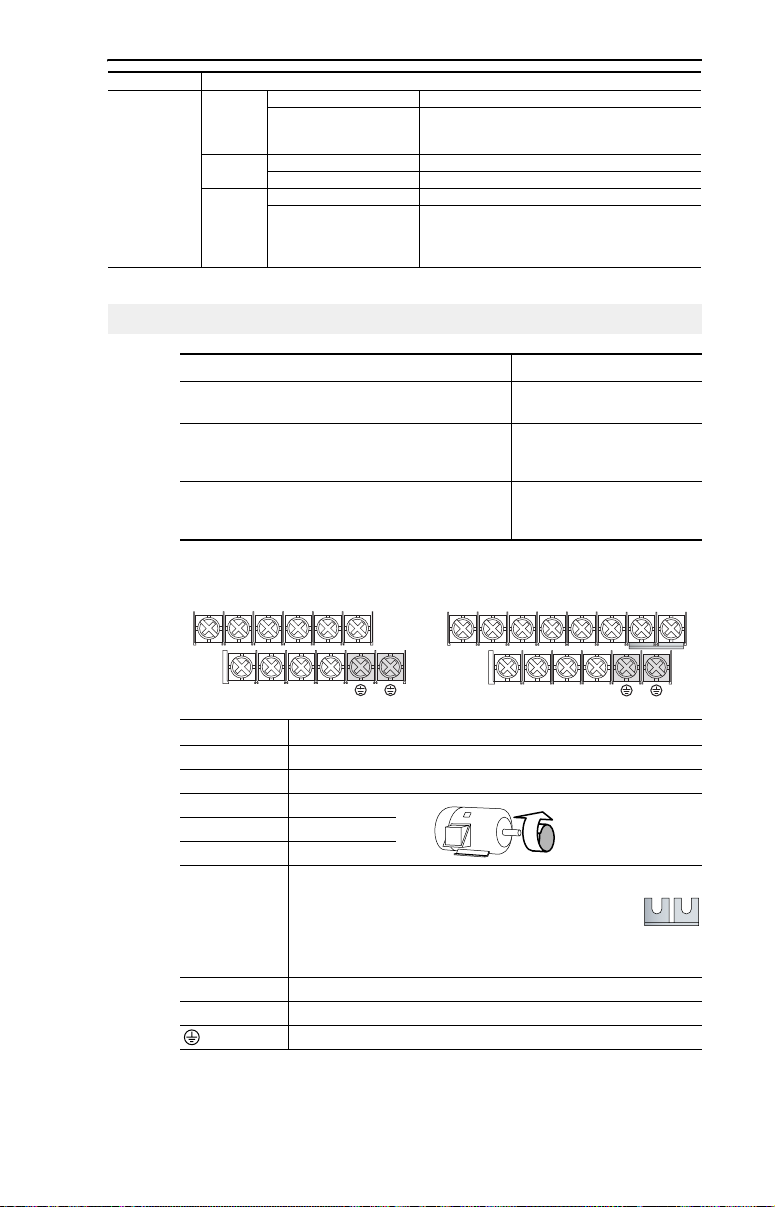
Power Terminal Block
B Frame C Frame
V/T2T/L3S/L2R/L1 U/T1 W/T3
Anixter OLF-7xxxxx,
Belden 29501-29507 or
equivalent
Anixter 7V-7xxxx-3G
Shawflex 2ACD/3ACD or
equivalent
V/T2T/L3S/L2R/L1 U/T1 W/T3 P2 P1
BR+ BR-DC- DC+
(1)
Terminal
Description
R/L1, S/L2 1-Phase Input
(2)
BR+ BR-DC- DC+
R/L1, S/L2, T/L3 3-Phase Input
U/T1 To Motor U/T1
V/T2 To Motor V/T2
W/T3 To Motor W/T3
=
Switch any two motor
leads to change
forward direction.
DC Bus Inductor Connection (C Frame drives only.)
P2, P1
The C Frame drive is shipped with a jumper between
Terminals P2 and P1. Remove this jumper only when a DC
Bus Inductor will be connected. Drive will not power up
without a jumper or inductor connected.
DC+, DC- DC Bus Connection
BR+, BR- Dynamic Brake Resistor Connection
Safety Ground - PE
(1)
Important: Terminal screws may become loose during shipment. Ensure that all
terminal screws are tightened to the recommended torque before applying power to
the drive.
(2)
Single-phase operation requires a 65% derate of drive rated current.
Power Terminal Block Specifications
Frame Maximum Wire Size
B 5.3 mm
C 8.4 mm
(1)
Maximum/minimum sizes that the terminal block will accept - these are not
2
(10 AWG) 1.3 mm2 (16 AWG) 1.7-2.2 N-m (16-19 lb.-in.)
2
(8 AWG) 1.3 mm2 (16 AWG) 2.9-3.7 N-m (26-33 lb.-in.)
(1)
Minimum Wire Size
(1)
Torque
recommendations.
Page 10
English-8
Input Power Conditions
Input Power Condition Corrective Action
Low Line Impedance (less than 1% line reactance) • Install Line Reactor
Greater than 120 kVA supply transformer
Line has power factor correction capacitors • Install Line Reactor
Line has frequent power interruptions
Line has intermittent noise spikes in excess of
6000V (lightning)
Phase to ground voltage exceeds 125% of normal
line to line voltage
Ungrounded distribution system
240V open delta configuration (stinger leg)
(1)
For drives applied on an open delta with a middle phase grounded neutral system, the
phase opposite the phase that is tapped in the middle to the neutral or earth is
referred to as the “stinger leg,” “high leg,” “red leg,” etc. This leg should be identified
throughout the system with red or orange tape on the wire at each connection point.
The stinger leg should be connected to the center Phase B on the reactor. Refer to the
PowerFlex 40P User Manual for specific line reactor part numbers.
(2)
Refer to Appendix B of the PowerFlex 40P User Manual for accessory ordering
information.
• or Isolation Transformer
• or Bus Inductor – 5.5 & 11 kW
(7.5 & 15 HP) drives only
• or Isolation Transformer
• Remove MOV jumper to ground.
• or Install Isolation Transformer
with grounded secondary if
(1)
necessary.
• Install Line Reactor
(2)
Common Bus/Precharge Notes
If drives with internal precharge are used with a disconnect switch to the
common bus, then an auxiliary contact on the disconnect must be
connected to a digital input of the drive. The corresponding input
(parameter A051-A054) must be set to option 29, “Precharge Enable.”
This provides the proper precharge interlock, guarding against possible
damage to the drive when connected to a common DC bus.
Page 11
English-9
I/O Wiring Recommendations
Signal and Control Wire Types
Signal Type/
Where Used
Analog I/O & PTC 8760/9460 0.750 mm2(18AWG), twisted
Remote Pot 8770 0.750 mm2(18AWG), 3
Encoder/Pulse I/O 89730
(1)
Stranded or solid wire.
(2)
9728 or 9730 are equivalent and may be used but may not fit in the drive wire channel.
(3)
If the wires are short and contained within a cabinet which has no sensitive circuits,
Belden Wire Type(s)
(or equivalent)
(2)
the use of shielded wire may not be necessary, but is always recommended.
Recommended Control Wire for Digital I/O
Type Wire Type(s) Description
Unshielded Per US NEC or applicable
national or local code
Shielded Multi-conductor shielded
cable such as Belden
8770(or equiv.)
I/O Terminal Block Specifications
Frame Maximum Wire Size
B & C 1.3 mm
(1)
Maximum/minimum sizes that the terminal block will accept - these are not
2
(16 AWG) 0.2 mm2 (24 AWG) 0.5-0.8 N-m (4.4-7 lb.-in.)
recommendations.
Refer to the PowerFlex 40P User Manual for recommendations on
maximum power and control cable length.
(1)
Description
pair, 100% shield with drain
cond., shielded
0.196 mm2(24AWG),
individually shielded pairs
– 300V,
2
0.750 mm
(18AWG), 3
conductor, shielded.
(1)
Minimum Wire Size
(1)
Torque
Min. Insulation
Rating
300V,
(3)
75-90° C
(167-194° F)
Minimum
Insulation Rating
60 degrees C
(140 degrees F)
Page 12
English-10
Relay N.O.
Relay Common
Relay N.C.
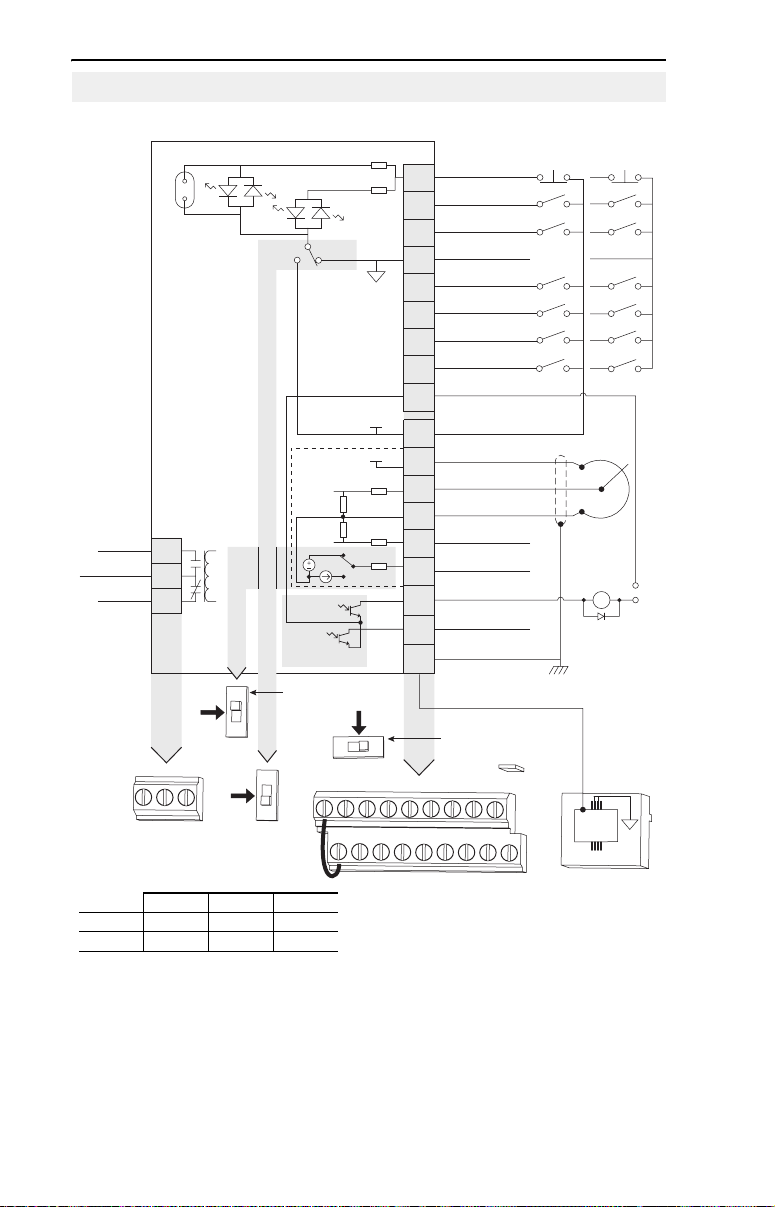
Control Terminal Block
Control Wiring Block Diagram
0-10V
0-20mA
(6)
SNK
SRC
SRCSNK
30V DC
50mA
Non-inductive
Analog Output Select
+
/-10V
01 02 03 04 05
(1)
Enable Jumper
R1
R2
R3
R1 R2 R3
01
02
03
04
05
06
07
08
09
+24V
11
+10V
12
13
14
10V
15
16
17
18
19
(4)
0-10V
0/4-20mA
11 12 13 14 15
(1)(6)
Stop
Start/Run FWD
Direction/Run REV
Digital Common
Digital Input 1
Digital Input 2
Digital Input 3
Digital Input 4
Opto Common
+24V DC
+10V DC
0-10V (or ±10V) Input
Analog Common
4-20mA Input
Analog Output
Opto Output 1
Opto Output 2
RS485 Shield
Voltage Range Select
06 07 08 09
16 17 18 19
(2)
ENBL
Typical
SRC Wiring
(3)
(4)
(6)
Enable
Jumper
Typical
SNK Wiring
Pot must be
1-10k ohm
2 Watt Min.
Common
RS485
(DSI)
1
(5)
24V
Resistive 3.0A 3.0A 3.0A
30V DC 125V AC 240V AC
Inductive 0.5A 0.5A 0.5A
See Control Wiring Block Diagram Notes on next page.
Page 13
English-11
Control Wiring Block Diagram Notes
(1)
Important: I/O Terminal 01 is always a coast to stop input except when P036 [Start
Source] is set to “3-Wire”, “2-W Lvl Sens” or “Momt FWD/REV” control. In three wire
control, I/O Terminal 01 is controlled by P037 [Stop Mode]. All other stop sources are
controlled by P037 [Stop Mode].
P036 [Start Source] Stop I/O Terminal 01 Stop
3-Wire Per P037 Per P037
2-Wire Per P037 Coast
2-W Lvl Sens Per P037 Per P037
2-W Hi Speed Per P037 Coast
RS485 Port Per P037 Coast
Momt FWD/REV Per P037 Per P037
Important: The drive is shipped with a jumper installed between I/O Terminals 01 and
11. Remove this jumper when using I/O Terminal 01 as a stop or enable input.
(2)
Two wire control shown. For three wire control use a momentary input on I/O
Terminal 02 to command a start. Use a maintained input for I/O Terminal 03 to
change direction.
(3)
The function of I/O Terminal 03 is fully programmable. Program with E202 [Digital
Term 3 ].
(4)
Match the Voltage Range Select DIP switch setting with the control scheme for proper
Uni-Polar or Bipolar operation.
(5)
When using an opto output with an inductive load such as a relay, install a recovery
diode parallel to the relay as shown, to prevent damage to the output.
(6)
When the ENBL enable jumper is removed, I/O Terminal 01 will always act as a
hardware enable, causing a coast to stop without software interpretation.
(6)
(6)
(6)
Page 14
English-12
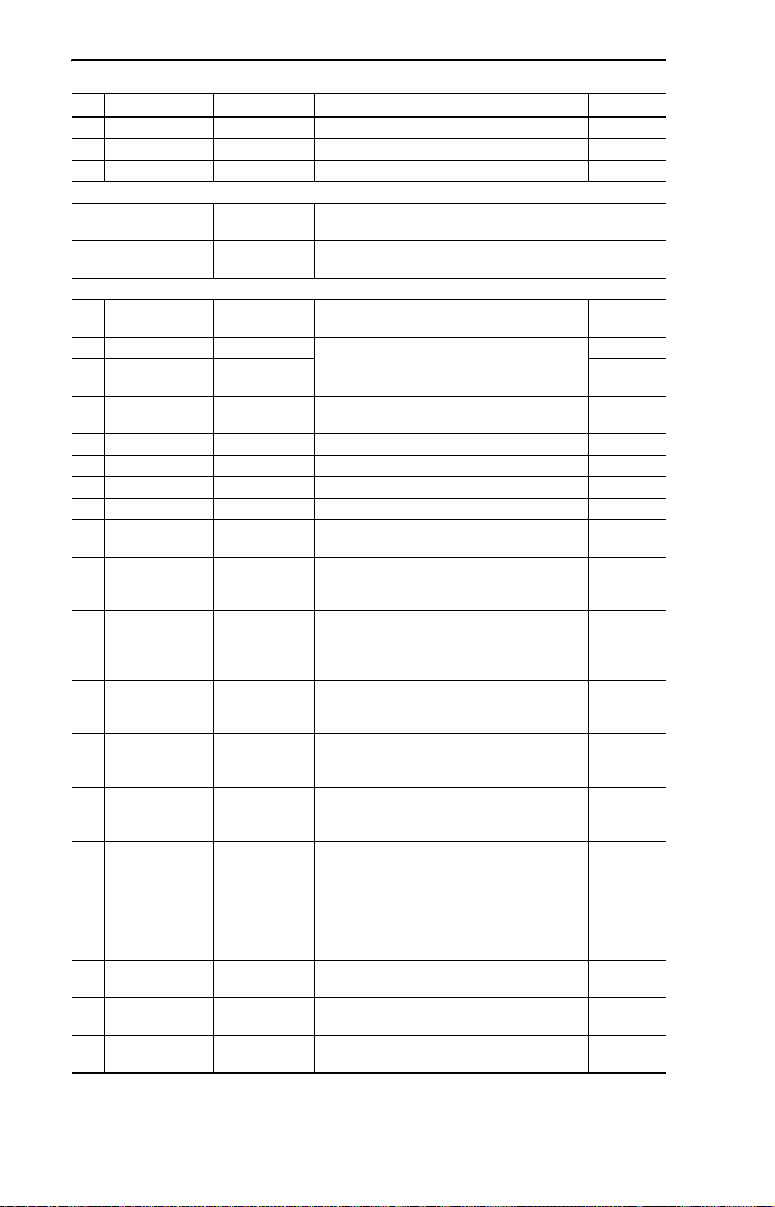
Control I/O Terminal Designations
No. Signal Default Description Param.
R1 Relay N.O. Fault Normally open contact for output relay. A055
R2 Relay Common – Common for output relay.
R3 Relay N.C. Fault Normally closed contact for output relay. A055
Analog Output Select
DIP Switch
Sink/Source
DIP Switch
(1)
01 Stop
02 Start/Run FWD Not Active I/O Terminal 03 is fully programmable. Program with
03 Digital Term 3 Not Active P036, P037,
04 Digital Common – For digital inputs. Electronically isolated with digital
05 Digital Input 1 Preset Freq Program with A051 [Digital In1 Sel]. A051
06 Digital Input 2 Preset Freq Program with A052 [Digital In2 Sel]. A052
07 Digital Input 3 Local Program with A053 [Digital In3 Sel]. A053
08 Digital Input 4 Jog Forward Program with A054 [Digital In4 Sel]. A054
09 Opto Common – For opto-coupled outputs. Electronically isolated with
11 +24V DC – Referenced to Digital Common.
12 +10V DC – Referenced to Analog Common.
13 ±10V In
14 Analog Common – For 0-10V In or 4-20mA In. Electronically isolated
15 4-20mA In
16 Analog Output OutFreq 0-10 The default analog output is 0-10V. To covert to a
17 Opto Output 1 MotorRunning Program with A058 [Opto Out1 Sel] A058, A059,
18 Opto Output 2 At Frequency Program with A061 [Opto Out2 Sel] A061, A062,
19 RS485 (DSI) Shield – Terminal should be connected to safety ground - PE
(1)
(2)
(2)
See Footnotes (1) and (6) on page 11.
0-10V In and 4-20mA In are distinct input channels and may be connected simultaneously.
0-10V Sets analog output to either voltage or current. Setting must match
Source (SRC) Inputs can be wired as Sink (SNK) or Source (SRC) via DIP Switch
Coast The factory installed jumper or a normally closed
Not Active For external 0-10V (unipolar) or ±10V (bipolar) input
(2)
Not Active For external 4-20mA input supply
A065 [Analog Out Sel].
setting.
input must be present for the drive to start.
E202 [Digital Term 3]. To disable reverse operation,
see A095 [Reverse Disable].
inputs from analog I/O and opto outputs.
opto outputs from analog I/O and digital inputs.
Drive supplied power for digital inputs.
Maximum output current is 100mA.
Drive supplied power for 0-10V external
potentiometer.
Maximum output current is 15mA.
supply (input impedance = 100k ohm) or
potentiometer wiper.
with analog inputs and outputs from digital I/O and
opto outputs.
(input impedance = 250 ohm).
current value, change the Analog Output Select DIP
Switch to 0-20mA. Program with A065 [Analog Out
Sel]. Max analog value can be scaled with A066
[Analog Out High].
Maximum Load: 4-20mA = 525 ohm (10.5V)
when using the RS485 (DSI) communications port.
0-10V = 1k ohm (10mA)
(1)
P036
P036, P037
A095, E202
P038
P038,
A051-A054,
A123, A132
P038,
A051-A054,
A132
A065, A066
A064
A064
Inputs may be used independently for speed control or jointly when operating in PID mode.
Page 15
English-13
Encoder Interface
The PowerFlex 40P Encoder Interface can source 5 or12 volt power and
accept 5, 12 or 24 volt single ended or differential inputs.
12V
+V Cm B- BA-A
5V
➊
Terminal Description
No. Signal Description
+V 5V-12V Power
Cm Power Return
B- Encoder B (NOT)
B Encoder B
A- Encoder A (NOT)
A Encoder A
➊ Output DIP switch selects 12 or 5 volt power supplied at terminals “+V”
(1)
When using 12V Encoder power, 24V I/O power, maximum output current at I/O
Terminal 11 is 50 mA.
Important: A quadrature encoder provides rotor speed and direction.
(1)
Internal power source 250 mA (isolated).
Quadrature B input.
Single channel, pulse train, or quadrature A input.
and “Cm” for the encoder.
Therefore, the encoder must be wired such that the forward
direction matches the motor forw ard direction. If the drive
is reading encoder speed but the position regulator or other
encoder function is not working properly, remo ve power to
the drive and swap the A and B encoder channels or swap
any two motor leads. Drives using FRN 2.xx and greater
will fault when an encoder is incorrectly wired and E216
[Motor Fdbk Type] is set to option 5 “Quad Check”.
Page 16
English-14
Prepare For Drive Start-Up
ATTENTION: Power must be applied to the drive to perform the
following start-up procedures. Some of the voltages present are at
!
incoming line potential. To avoid electric shock hazard or damage to
equipment, only qualified service personnel should perform the
following procedure. Thoroughly read and understand the procedure
before beginning. If an event does not occur while performing this
procedure, Do Not Proceed. Remove All Power including user
supplied control voltages. User supplied voltages may exist even when
main AC powe r is not ap plied to the drive. Correct the malfunction
before continuing.
Before Applying Power to the Drive
❏ 1. Confirm that all inputs are connected to the co rrect terminals and are
secure.
❏ 2. Verify that AC line power at the disconnect device is within the rated
value of the drive.
❏ 3. Verify that any digital control power is 24 volts.
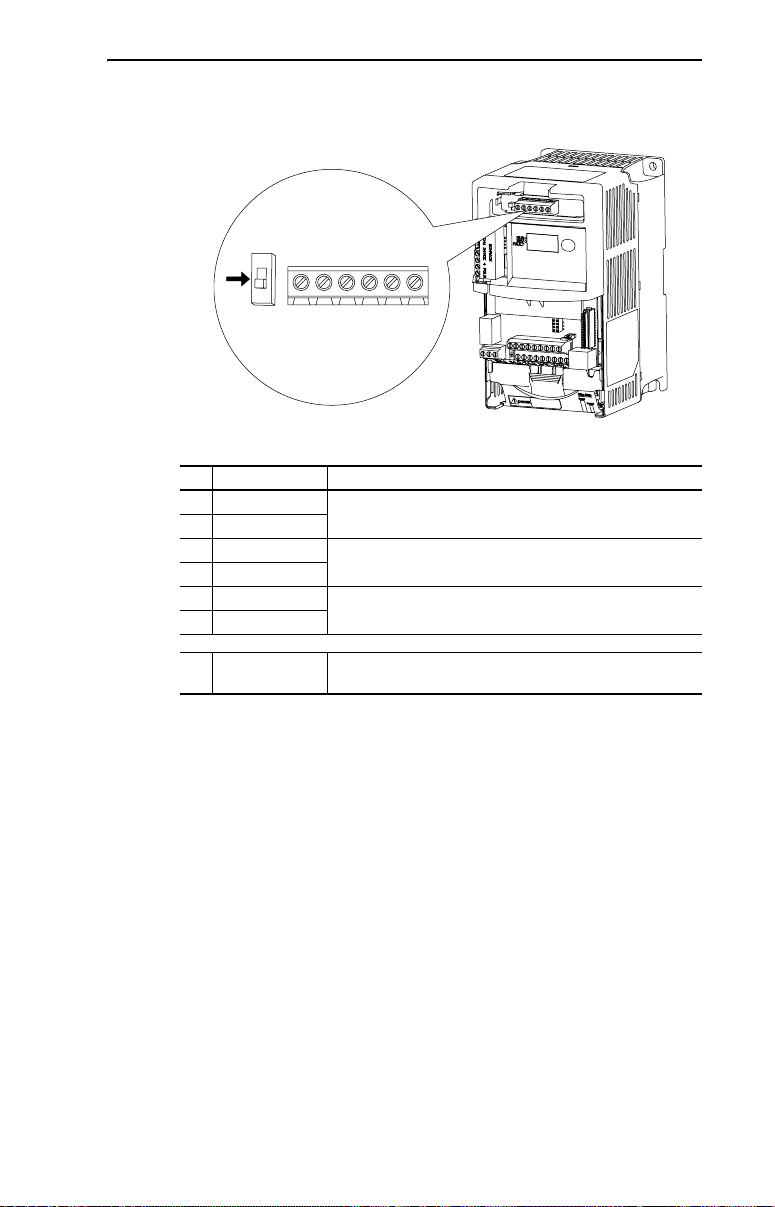
❏ 4. Verify that the Sink (SNK)/Source (SRC) Setup DIP Switch is set to
match your control wiring scheme. See page 10 for location.
Important: The default control scheme is Source (SRC). The Stop
terminal is jumpered to allow starting from comms. If the
control scheme is changed to Sink (SNK), the jumper must
be removed from I/O Terminals 01 and 11 and installed
between I/O Terminals 01 and 04.
❏ 5. Verify that the Stop input is present or the drive will not start.
Important: If I/O Terminal 01 is used as a stop input, the jumper
between I/O Terminals 01 and 11 must be removed.
Applying Power to the Drive
❏ 6. Apply AC power and control voltages to the drive.
Start, Stop, Direction and Speed Control
Factory default parameter values allow the drive to be controlled from
comms. No programming is required to start, stop, change direction and
control speed directly from comms.
Important: To disable reverse operation, see A095 [Rev erse Disab le].
If a fault appears on power up, refer to page 19 for an explanation of the
fault code. For complete troubleshooting information, refer to the
PowerFlex 40P User Manual.
Page 17
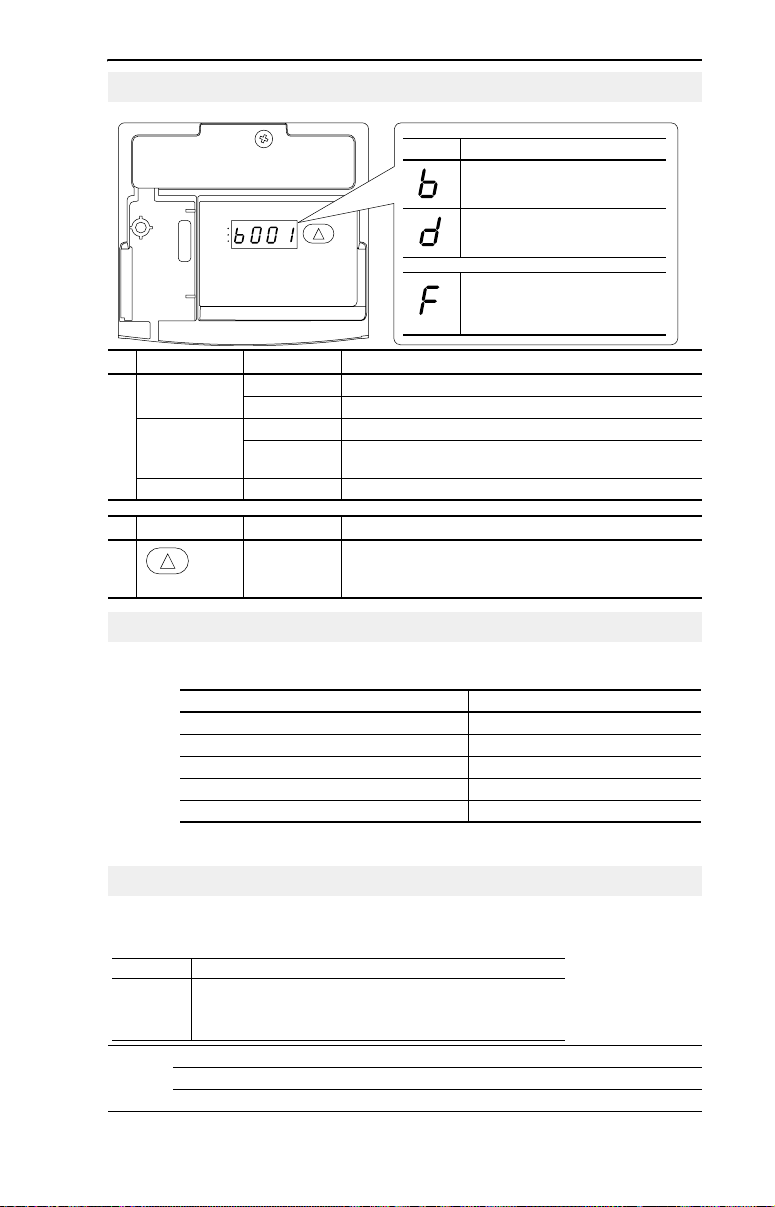
Display/Fault Reset
Menu Description
Basic Display Group (View Only)
Commonly viewed drive operating
conditions.
RUN
REV
FAULT
➊
➋
No. LED LED State Description
Run Status Steady Red Indicates drive is running.
➊
Flashing Red Drive has been commanded to change direction.
Direction Status Steady Red Indicates drive is running in reverse direction.
Flashing Red Drive has been commanded to change direction and motor is
decelerating to zero.
Fault Status Flashing Red Indicates drive is faulted.
No. Key Name Description
➋
Up Arrow Scroll: Press and release to scroll through user-selectable
Display Group and parameters.
Reset: Press and hold for three seconds to clear active fault.
Advanced Display Group (View Only)
Consists of advanced drive operating
conditions.
Fault Designator
Consists of list of codes for specific fault
conditions. Displayed only when fault is
present.
English-15
Drive Programming Tools
For additional drive programming and control, a DSI remote HIM or PC
programming tools (DriveExplorer™ or DriveTools™ SP) should be used.
Description Catalog Number
Serial Converter Module 22-SCM-232
DriveExplorer Software
DriveTools SP Software
Remote Panel Mount, LCD Display 22-HIM-C2S
Remote Handheld, LCD Display 22-HIM-A3
(1)
Requires a Serial Converter Module.
(1)
(1)
9306-4EXP02ENE
9303-4DTS01ENE
Set Parameter Display Option
E201 [LED Display Opt]
Selects which parameters can be viewed by the drive’s LED interface.
E201 Option Parameter Set
0
1
2
3
Values Default: 2
All Basic Display (Group b) and Advanced Display (Group d) parameters
All Basic Display Group (b001-b029) parameters
Basic Display Group parameters b001-b007 and b010
Basic Display Group parameter b001-b004
Min/Max: 0/3
Display: 1
Page 18
English-16
Basic Display Group
Output Freq b001
Commanded Freq b002
Output Current b003
Basic Program Group Motor NP Volts P031
Advanced Program Group
Digital In1 Sel A051
Digital In2 Sel A052
Digital In3 Sel A053
Digital In4 Sel A054
Relay Out Sel A055
Relay Out Level A056
Opto Out1 Sel A058
Opto Out1 Level A059
Opto Out2 Sel A061
Opto Out2 Level A062
Opto Out Logic A064
Analog Out Sel A065
Analog Out High A066
Accel Time 2 A067
Decel Time 2 A068
Internal Freq A069
Preset Freq 0 A070
Preset Freq 1 A071
Preset Freq 2 A072
Preset Freq 3 A073
Preset Freq 4 A074
Preset Freq 5 A075
Preset Freq 6 A076
Preset Freq 7 A077
Enhanced Program Group
LED Display Opt E201
Digital Term 3 E202
Accel Time 3 E203
Decel Time 3 E204
Accel Time 4 E205
Decel Time 4 E206
Advanced Display Group Drive Status 2 d301
Output Voltage b004
DC Bus Voltage b005
Drive Status b006
Fault 1 Code b007
Fault 2 Code b008
Fault 3 Code b009
Process Display b010
Control Source b012
Motor NP Hertz P032
Motor OL Current P033
Jog Frequency A078
Jog Accel/Decel A079
DC Brake Time A080
DC Brake Level A081
DB Resistor Sel A082
S Curve % A083
Boost Select A084
Start Boost A085
Break Voltage A086
Break Frequency A087
Maximum Voltage A088
Current Limit 1 A089
Motor OL Select A090
PWM Frequency A091
Auto Rstrt Tries A092
Auto Rstrt Delay A093
Start At PowerUp A094
Reverse Disable A095
Flying Start En A096
Compensation A097
SW Current Trip A098
Process Factor A099
Fault Clear A100
Program Lock A101
Tes tp oin t S el A 10 2
Comm Data Rate A103
Comm Node Addr A104
Comm Loss Action A105
Comm Loss Time A106
Comm Format A107
Language A108
Comm Write Mode E207
Power Loss Mode E208
Half Bus Enable E209
Max Traverse E210
Traverse Inc E211
Traverse Dec E212
P Jump E213
Sync Time E214
Speed Ratio E215
Fibers Status d302
Contrl In Status b013
Dig In Status b014
Comm Status b015
Control SW Ver b016
Drive Type b017
Elapsed Run Time b018
Testpoint Data b019
Analog In 0-10V b020
Minimum Freq P034
Maximum Freq P035
Start Source P036
Stop Mode P037
Speed Reference P038
Anlg Out Setpt A109
Anlg In 0-10V Lo A110
Anlg In 0-10V Hi A111
Anlg In4-20mA Lo A112
Anlg In4-20mA Hi A113
Slip Hertz @ FLA A114
Process Time Lo A115
Process Time Hi A116
Bus Reg Mode A117
Current Limit 2 A118
Skip Frequency A119
Skip Freq Band A120
Stall Fault Time A121
Analog In Loss A122
10V Bipolar Enbl A123
Var PWM Disa ble A124
Torque Perf Mode A125
Motor NP FLA A126
Autotune A127
IR Voltage Drop A128
Flux Current Ref A129
PID Trim Hi A130
PID Trim Lo A131
PID Ref Sel A132
PID Feedback Sel A133
PID Prop Gain A134
PID Integ Time A135
PID Diff Rate A136
PID Setpoint A137
PID Deadband A138
PID Preload A139
Motor Fdbk Type E216
Motor NP Poles E217
Encoder PPR E218
Pulse In Scale E219
Ki Speed Loop E220
Kp Speed Loop E221
Positioning Mode E222
Find Home Freq E223
Find Home Dir E224
Encoder Pos Tol E225
Counts Per Unit E226
Slip Hz Meter d303
Speed Feedback d304
Encoder Speed d306
Analog In 4-20mA b021
Output Power b022
Output Powr Fctr b023
Drive Temp b024
Counter Status b025
Timer Status b026
Stp Logic Status b028
Torque Current b029
Accel Time 1 P039
Decel Time 1 P040
Reset To Defalts P041
Voltage Class P042
Motor OL Ret P043
Stp Logic 0 A140
Stp Logic 1 A141
Stp Logic 2 A142
Stp Logic 3 A143
Stp Logic 4 A144
Stp Logic 5 A145
Stp Logic 6 A146
Stp Logic 7 A147
Stp Logic Time 0 A150
Stp Logic Time 1 A151
St
p Lo
gic Time 2 A152
Stp Logic Time 3 A153
Stp Logic Time 4 A154
Stp Logic Time 5 A155
Stp Logic Time 6 A156
Stp Logic Time 7 A157
EM Brk Off Delay A160
EM Brk On Delay A161
MOP Reset Sel A162
DB Threshold A163
Step Units 0 E230
Step Units 1 E232
Step Units 2 E234
Step Units 3 E236
Step Units 4 E238
Step Units 5 E240
Step Units 6 E242
Step Units 7 E244
Pos Reg Filter E246
Pos Reg Gain E247
Enh Control Word E248
Cmd Stat Select E249
Units Traveled H d308
Units Traveled L d309
Page 19
Display Group Parameters
No. Parameter Min/Max Display/Options
b001 [Output Freq] 0.00/ [Maximum Freq] 0.01 Hz
b002 [Commanded Freq] 0.00/ [Maximum Freq] 0.01 Hz
b003 [Output Current] 0.00/(Drive Amps × 2) 0.01 Amps
b004 [Output Voltage] 0/Drive Rated Volts 1 VAC
b005 [DC Bus Voltage] Based on Drive Rating 1 VDC
b006 [Drive Status] 0/1 (1 = Condition True) Bit 3
b007-
[Fault x Code] F2/F122 F1
b009
b010 [Process Display] 0.00/9999 0.01 – 1
b012 [Control Source] 0/112 Digit 2&3 = Speed Command
b013 [Contrl In Status] 0/1 (1 = Input Present) Bit 3
b014 [Dig In Status] 0/1 (1 = Input Present) Bit 3
b015 [Comm Status] 0/1 (1 = Condition True) Bit 3
b016 [Control SW Ver] 1.00/99.99 0.01
b017 [Drive Type] 1001/9999 1
b018 [Elapsed Run Time] 0/9999 Hrs 1 = 10 Hrs
b019 [Testpoint Data] 0/FFFF 1 Hex
b020 [Analog In 0-10V] 0.0/100.0% 0.1%
b021 [Analog In 4-20mA] 0.0/100.0% 0.1%
b022 [Output Power] 0.00/(Drive Power × 2) 0.01 kW
b023 [Output Powr Fctr] 0.0/180.0 deg 0.1 deg
b024 [Drive Temp] 0/120 degC 1 degC
b025 [Counter Status] 0/9999 1
b026 [Timer Status] 0.0/9999 Secs 0.1 Secs
b028 [Stp Logic Status] 0/8 1
b029 [Torque Current] 0.00/(Drive Amps × 2) 0.01 Amps
Decelerating Accelerating Forward Running
(See P038; 9 = “Jog Freq”) (See P036; 9 = “Jog”)
DB Trans On Stop Input Dir/REV In Start/FWD In
Digital In 4 Digital In 3 Digital In 2 Digital In 1
Comm Error DSI Option Transmitting Receiving
Bit 2 Bit 1 Bit 0
Bit 2 Bit 1 Bit 0
Bit 2 Bit 1 Bit 0
Bit 2 Bit 1 Bit 0
English-17
Digit 1 = Start Command
Smart Start-Up with Basic Program Group Parameters
The PowerFlex 40P is designed so that start up is simple and efficient. The Program Group
contains the most commonly used parameters.
= Stop drive before changing this parameter.
No. Parameter Min/Max Display/Options Default
P031 [Motor NP Volts] 20/Drive Rated Volts 1 VAC Based on Drive Rating
Set to the motor nameplate rated volts.
P032 [Motor NP Hertz] 15/500 Hz 1 Hz 60 Hz
Set to the motor nameplate rated frequency.
P033 [Motor OL Current] 0.0/(Dr ive Rated Amps× 2) 0.1 Amps Based on Drive Rating
Set to the maximum allowable motor current.
P034 [Minimum Freq] 0.00/500.0 Hz 0.01 Hz 0.00 Hz
Sets the lowest frequency the drive will output
continuously.
P035 [Maximum Freq] 0.00/500.0 Hz 0.01 Hz 60.00 Hz
Sets the highest frequency the drive will output.
P036 [Start Source] 1/6 1 = “3-Wire”
Sets the control scheme used to star t the drive.
2 = “2-Wire”
3 = “2-W Lvl Sens”
4 = “2-W Hi Speed”
5 = “Comm Port”
6 = “Momt FWD/REV”
5
Page 20
English-18
= Stop drive before changing this parameter.
No. Parameter Min/Max Display/Options Default
P037 [Stop Mode] 0/9 0 = “Ramp, CF”
Active stop mode for all stop sources [e.g. run
forward (I/O Terminal 02), run reverse (I/O
Terminal 03), RS485 port] except as noted.
Important: I/O Terminal 01 is always a coast to
stop input except when P036 [Start Source] is set
for “3-Wire” control. When in th ree wire control, I/O
Terminal 01 is controlled by P037 [Stop Mode].
P038 [Speed Reference] 1/9 1 = “InternalFreq”
Sets the source of the speed reference to the
drive.
Important: When A051 or A052 [Digital Inx Sel] is
set to option 2, 4, 5, 6, 13 or 14 and the digital
input is active, A051, A052, A053 or A054 will
override the speed reference commanded by this
parameter. Refer to Chapter 1 of the PowerFlex
40P User Manual for details.
P039 [Accel Time 1] 0.0/600.0 Secs 0.1 Secs 10.0 Secs
Sets the rate of accel for all speed increases.
P040 [Decel Time 1] 0.0/600.0 Secs 0.1 Secs 10.0 Secs
Sets the rate of decel for all speed decreases.
P041 [Reset To Defalts] 0/1 0 = “Ready/Idle”
Resets all parameter values to factory defaults.
P042 [Voltage Class] 2/3
Sets the voltage class of 600V drives.
P043 [Motor OL Ret] 0/1 1 = “Enabled” 0 = “Disabled”
Enables/disables the Motor Overload Retention function.
1 = “Coast, CF”
2 = “DC Brake, CF”
3 = “DCBrkAuto,CF”
4 = “Ramp”
5 = “Coast”
6 = “DC Brake”
7 = “DC BrakeAuto”
8 = “Ramp+EM B,CF”
9 = “Ramp+EM Brk”
(1)
Stop input also clears active fault.
2 = “0-10V Input”
3 = “4-20mA Input”
4 = “Preset Freq”
5 = “Comm Port”
6 = “Stp Logic”
7 = “Anlg In Mult”
8 = “Encoder”
9 = “Positioning”
1 = “Factory Rset”
2 = “Low Voltage” (480V)
3 = “High Voltage” (600V)
(1)
(1)
(1)
(1)
0
5
0
3
Advanced Display Group Parameters
No. Parameter Min/Max Display/Options
d301 [Drive Status 2] 0/1 1
d302 [Fibers Status] 0/1 1
d303 [Slip Hz Meter] 0.0/25.0 Hz 0.1 Hz
d304 [Speed Feedback] 0/64000 RPM 1 RPM
d305 [Speed Feedback F] 0.0/0.9 0.1
d306 [Encoder Speed] 0/64000 1
d307 [Encoder Speed F] 0.0/0.9 0.1
d308 [Units Traveled H] 0/64000 1
d309 [Units Traveled L] 0.00/0.99 0.01
Program Group Parameters
Refer to the PowerFlex 40P User Manual supplied with the drive for
complete listing of parameters.
Page 21
English-19
Fault Codes
To clear a fault, press the Stop key, cycle power or set A100 [Fault Clear] to 1 or
2.
No. Fault Description
F2 Auxiliary Input
F3 Power Loss Monitor the incoming AC line for low voltage or line power interruption.
F4 UnderVoltage
F5 OverVoltage
F6 Motor Stalled
F7 Motor Overload
F8 Heatsink OvrTmp
F12 HW OverCurrent Check programming. Check for excess load, improper DC boost setting, DC brake volts set too
F13 Ground Fault Check the motor and external wiring to the drive output terminals for a grounded condition.
F29 Analog Input Loss
F33 Auto Rstrt Tries Correct the cause of the fault and manually clear.
F38 Phase U to Gnd Check the wiring between the drive and motor.
F39 Phase V to Gnd
F40 Phase W to Gnd
F41 Phase UV Short Check the motor and drive output terminal wiring for a shorted condition.
F42 Phase UW Short
F43 Phase VW Short
F48 Params Defaulted The drive was commanded to write default values to EEPROM.
F63 SW OverCurrent
F64 Drive Overload Reduce load or extend Accel Time.
F70 Power Unit Cycle power. Replace drive if fault cannot be cleared.
F71 Net Loss The communication network has faulted.
F80 SVC Autotune The autotune function was either cancelled by the user of failed. Restart procedure.
F81 Comm Loss If adapter was not intentionally disconnected, check wiring to the port. Replace wiring, port
F91 Encoder Loss Requires differential encoder. One of the 2 encoder channel signals is missing.
F100 Parameter Checksum Restore factory defaults.
F111 Enable Hardware DriveGuard Safe-Off Option (Series B) board is installed and the ENBL enable jumper has not
F122 I/O Board Fail Cycle power. Replace drive if fault cannot be cleared.
(1)
Auto-Reset/Run type fault. Configure with parameters A092 and A093.
(1)
Check remote wiring.
Verify communications programming for intentional fault.
Check input fuses.
(1)
Monitor the incoming AC line for low voltage or line power interruption.
(1)
Monitor the AC line for high line voltage or transient conditions. Bus overvoltage can also be
caused by motor regeneration. Extend the decel time or install dynamic brake option.
(1)
Increase [Accel Time x] or reduce load so drive output current does not exceed the current set
by parameter A089 [Current Limit].
(1)
An excessive motor load exists. Reduce load so drive output current does not exceed the
current set by parameter P033 [Motor OL Current]. Verify A084 [Boost Select] setting.
(1)
Check for blocked or dirty heat sink fins. Verify that ambient temperature has not exceeded
40° C (104°F) for IP 30/NEMA 1/UL Type 1 installations or 50°C (122°F) for Open type installations.
Check fan.
high or other causes of excess current.
(1)
An analog input is configured to fault on signal loss. A signal loss has occurred.
Check parameters. Check for broken/loose connections at inputs.
Check motor for grounded phase.
Replace drive if fault cannot be cleared.
Replace drive if fault cannot be cleared.
Clear the fault or cycle power to the drive. Program the drive parameters as needed.
(1)
Check load requirements and A098 [SW Current Trip] setting.
Cycle power. Check communications cabling.
Check network adapter setting. Check external network status.
expander, adapters or complete drive as required.
Check connection.
An adapter was intentionally disconnected. Turn off using A105 [Comm Loss Action].
Connecting I/O Terminal 04 to ground may improve noise immunity.
Check Wiring.
If P038 [Speed Reference] = 9 “Positioning” and E216 [Motor Fdbk Type] = 5 “Quad Check”
swap the Encoder channel inputs (see page 13) or swap any two motor leads.
Replace encoder.
been removed.
Remove the ENBL enable jumper. Cycle power.
DriveGuard Safe-Off Option (Series B) board has failed.
Remove power to the drive. Replace DriveGuard Safe-Off Option (Series B) board.
Hardware Enable circuitry has failed.
Replace drive.
Page 22
English-20
a
d
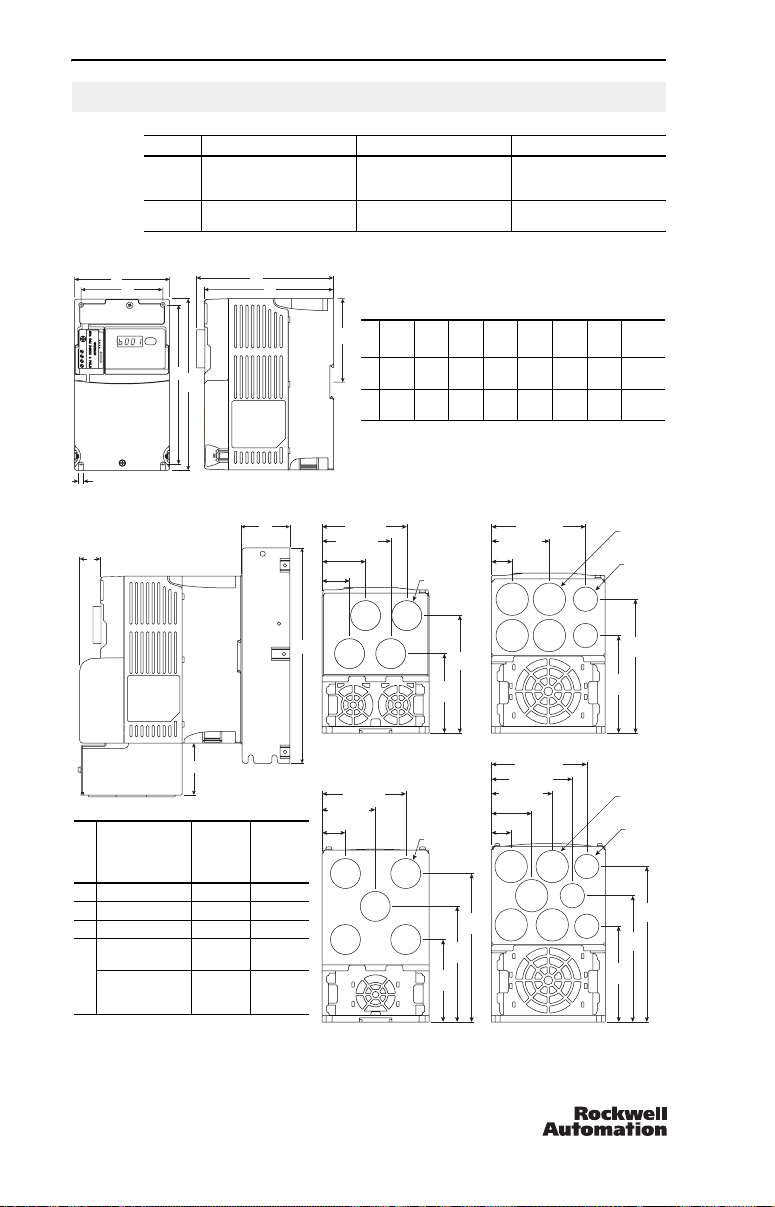
Drive Dimensions
PowerFlex 40P Frames – Ratings are in kW and (HP)
Frame 240V AC – 3-Phase 480V AC – 3-Phase 600V AC – 3-Phase
B 0.4 (0.5)
0.75 (1.0)
1.5 (2.0)
C 5.5 (7.5)
7.5 (10.0)
PowerFlex 40P AC Drive
2.2 (3.0)
3.7 (5.0)
c
f
0.4 (0.5)
0.75 (1.0)
1.5 (2.0)
5.5 (7.5)
7.5 (10.0)
2.2 (3.0)
4.0 (5.0)
11.0 (15.0) 5.5 (7.5)
0.75 (1.0)
1.5 (2.0)
2.2 (3.0)
7.5 (10.0)
Dimensions are in millimeters and (inches).
Weights are in kilograms and (pounds).
4.0 (5.0)
11.0 (15.0)
RUN
RUN
REV
REV
FAULT
FAULT
20A-DG01
e
b
5.5 (0.22)
Communication, RFI Filter, IP 30/NEMA 1/UL Type 1 Option Kits
b
a
d
B Frame
Option
Dimension
a Comm Cover 25 (0.98) 25 (0.98)
b EMC Line Filter 50 (1.97) 60 (2.36)
c EMC Line Filter 229 (9.02) 309 (12.17)
d IP30/NEMA 1/UL
Typ e 1
IP30/NEMA 1/UL
Type 1 for Comm
Cover
C Frame
Drive
Drive
33 (1.30) 60 (2.36)
64 (2.52) 60 (2.36)
g
abcdefg
Frame
B100
(3.94)
C130
(5.1)
79.1 (3.11)
64.1 (2.52)
40.6 (1.60)
25.6 (1.01)
c
B Frame - 22-JBAB
77.5 (3.05)
50.0 (1.97)
22.5 (0.89)
B Frame - 22-JBCB
(used with Comm Cover)
180
(7.09)
260
(10.2)
∅
(0.87)
∅
(0.87)
148
(5.83)87(3.43)
192
(7.56)
22.2
109.9
(4.33)
74.3
(2.93)
22.2
105.3
(4.15)
76.3
(3.00)
168
(6.61)
116
246
(4.57)
(9.7)
107.0 (4.21)
66.0 (2.60)
24.0 (0.94)
C Frame - 22-JBAC
108.7 (4.28)
92.2 (3.63)
69.2 (2.72)
45.7 (1.80)
22.2 (0.87)
134.3
(5.29)
C Frame - 22-JBCC
(used with Comm Cover)
136
(5.35)
180
(7.1)
Ship
Weigh t
87.4
2.2
(3.44)
(4.9)
–4.3
(9.5)
∅
28.5
(1.12)
∅
22.2
(0.87)
152.2
(5.99)
111.2
(4.38)
∅
28.5
(1.12)
∅
22.2
(0.87)
179.8
(7.08)
144.8
(5.70)
109.8
(4.32)
U.S. Allen-Bradley Drives Technical Support
Tel: (1) 262.512.8176, Fax: (1) 262.512.2222, Email: support@drives.ra.rockwell.com, Online: www.ab.com/support/abdrives
Publication 22D-QS001C-EN-P – October 2008
Supersedes May 2007 Copyright © 2008 Rockwell Automation, Inc. All rights reserved.
Page 23
Kurzanleitung
Frequenzumrichter
PowerFlex
FRN 1.xx – 2.xx
In dieser Kurzanleitung werden die grundlegenden Schritte
für die Einrichtung, Inbetriebnahme und Programmierung des
Frequenzumrichters PowerFlex 40P beschrieben. Die hierin enthaltenen
Informationen sind jedoch kein
und sind nur für qualifiziertes FU-Wartungspersonal vorgesehen.
Genauere Informationen über den PowerFlex40P, einschließlich
EMV-Hinweise, Anwendungsaspekte und die entsprechenden
sicherheitstechnischen Hinweise, finden Sie im
PowerFlex 40P-Benutzerhandbuch, Publikation 22D-UM001…, unter
www.rockwellautomation.com/literature.
Allgemeine Vorsichtshinweise
ACHTUNG: Der FU enthält Hochspannungskondensatoren, die sich erst
nach gewisser Zeit nach dem Trennen vom Netz entladen. Vor Arbeiten am
!
Frequenzumrichter muss sichergestellt werden, dass die Netzspannung von
den Netzanschlüssen [R, S, T (L1, L2, L3)] getrennt ist. Drei Minuten
warten, bis die Kondensatoren sich auf eine ungefährliche Spannung
entladen haben. Nichtbeachtung kann schwere oder tödliche Verletzungen
zur Folge haben.
Eine dunkle LED-Anzeige bedeutet nicht, dass sich die Kondensatoren auf
eine ungefährliche Spannung entladen haben.
ACHTUNG: Die sachwidrige Verwendung des Parameters A092
[Fhl Neustartvers] oder A094 [Autostart] kann zu Schäden am Gerät und/
oder Verletzungen führen. Diese Funktionen sind nur unter Beachtung der
lokal, national und international geltenden Gesetze, Standards, Vorschriften
und der in der Industrie geltenden Bestimmungen anzuwenden.
ACHTUNG: Die Planung und Ausführung der Installation sowie
die Inbetriebnahme und spätere Wartung des Systems sollte nur
von qualifiziertem Fachpersonal ausgeführt werden, das mit
Frequenzumrichtern und den daran angeschlossenen Maschinen vertraut ist.
Zuwiderhandlungen können zu Personen- und/oder Sachschäden führen.
ACHTUNG: Dieser FU enthält Teile und Baugruppen, die empfindlich
auf elektrostatische Entladung reagieren. Bei der Installation, Prüfung und
Wartung oder Reparatur des Geräts müssen deshalb Vorsichtsmaßnahmen
getroffen werden, um solch eine elektrostatische Entladung zu verhindern,
da Komponenten andernfalls beschädigt werden können. Sollten Sie mit
dem Verfahren zur Verhinderung statischer Entladung nicht vertraut sein,
ziehen Sie bitte die A-B-Publikation 8000-4.5.2, „Guarding Against
Electrostatic Damage“ oder ein entsprechendes Handbuch heran.
ACHTUNG: Wird ein FU nicht ordnungsgemäß eing esetzt bzw . installiert,
können Komponenten beschädigt und dadurch die Lebensdauer des
Produkts verkürzt werden. Verdrahtungs- bzw. Anwendungsfehler,
wie z.B. unzureichende Motorgröße, falsche oder unzureichende
Netzversorgung und zu hohe Umgebungstemperaturen, können zu
Fehlfunktionen im System führen.
ACHTUNG: Es besteht die Gefahr von Verletzungen bzw. von
Schäden am Gerät. Der FU enthält keine vom Anwender zu wartenden
Komponenten. Nehmen Sie das Chassis des FUs nicht auseinander.
®
40P
Ersatz für das Benutzerhandbuch
Page 24
Deutsch-2
Erläuterungen zum Aufstellen des FUs
• Befestigen Sie den FU aufrecht auf einer flachen, senkrechten und
ebenen Fläche.
Baugröße Schraubengröße Anzugsmoment DIN-Schiene
B M4 (#8-32) 1,56–1,96 Nm 35 mm
C M5 (#10-24) 2,45–2,94 Nm –
• Das Kühlgebläse vor Staub und Metallpartikeln schützen.
• FU keine r korrosiven Umgebung ausse tzen.
• FU vor Feuchtigkeit und direktem Sonnenlicht schützen.
Beim Aufstellen zu beachtende Mindestabstände
Einbauabmessungen finden Sie auf Seite 21.
120 mm120 mm
25 mm
RUN
REV
FAULT
RUN
REV
FAULT
Nächstes Objekt, das
den Luftstrom durch
RUN
REV
FAULT
RUN
REV
FAULT
den Kühlkörper und
das Gehäuse des FUs
blockieren könnte
120 mm120 mm
Befestigungsoption A
Kein Abstand zwischen
Befestigungsoption B
FUs erforderlich.
Umgebungs-/Betriebstemperatur
Umgebungstemperatur Schutzart Beim Aufstellen zu beachtende
Minimum Maximum
IP 20/offen Befestigungsoption A verwenden
IP 30/NEMA 1/UL-Typ 1
–10 °C
40 °C
50 °C IP 20/offen Befestigungsoption B verwenden
(1)
Nennwert erfordert die Installation des PowerFlex 40P-Optionskits
IP 30/NEMA 1/UL-Typ 1.
Mindestabstände
(1)
Befestigungsoption B verwenden
Page 25
Allgemeine Voraussetzungen für die Erdung
RUN
REV
FAULT
Deutsch-3
R/L1
S/L2
T/L3
SHLD
U/T1
V/T2
W/T3
Entfernen von MOVs
Um Schäden am FU zu vermeiden, sollten die MOV-Verbindungen
zur Erde bei Installation des FUs in einem nicht geerdeten
Verteilungssystem, in dem die Spannungen zwischen einer der
Phasen 125 % der Nenn-Leiter-/Leiter-Spannung übersteigen könnten,
unterbrochen werden. Dazu sind die in den nachstehenden Abbildungen
aufgeführten Brücken zu entfernen.
1. Zum Lösen der Schraube, diese gegen den Uhrzeigersinn drehen.
2. Brücke abziehen und aus dem FU-Gehäuse enfernen.
3. Schraube fest ziehen.
Brückenposition
Entfernung des Leiter/Erde-MOV
AC Input
R/L1
S/L2
T/L3
Jumper
1234
Three-Phase
Wichtig: Ziehen Sie die Schraube nach dem Entfernen der Brücke fest.
Page 26
Deutsch-4
Einhaltung der EU-Richtlinien
Einzelheiten zur Einhaltung der Niederspannungs- und der
EMV-Richtlinie finden Sie im
PowerFlex 40P-Benutzerhandbuch.
Sicherungen und Leistungsschalter –
Technische Daten
FU-Nennwerte
Bestellnummer
200–240 V AC (±10 %) – Dreiphaseneingang, 0–230-V-Dreiphasenausgang
22D-B2P3 0,4 (0,5) 2,3 180–264 1,15 2,5 6 140M-C2E-B40 100-C07
22D-B5P0 0,75 (1,0) 5,0 180–264 2,45 5,7 10 140M-C2E-C10 100-C09
22D-B8P0 1,5 (2,0) 8,0 180–264 4,0 9,5 15 140M-C2E-C16 100-C12
22D-B012 2,2 (3,0) 12,0 180–264 5,5 15,5 25 140M-C2E-C16 100-C23
22D-B017 3,7 (5,0) 17,5 180–264 8,6 21,0 30 140M-F8E-C25 100-C23
22D-B024 5,5 (7,5) 24,0 180–264 11,8 26,1 40 140M-F8E-C32 100-C37
22D-B033 7,5 (10,0) 33,0 180–264 16,3 34,6 60 140M-G8E-C45 100-C60
380–480 V AC (±10 %) – Dreiphaseneingang, 0–460-V-Dreiphasenausgang
22D-D1P4 0,4 (0,5) 1,4 342–528 1,4 1,8 3 140M-C2E-B25 100-C07
22D-D2P3 0,75 (1,0) 2,3 342–528 2,3 3,2 6 140M-C2E-B40 100-C07
22D-D4P0 1,5 (2,0) 4,0 342–528 4,0 5,7 10 140M-C2E-B63 100-C09
22D-D6P0 2,2 (3,0) 6,0 342–528 5,9 7,5 15 140M-C2E-C10 100-C09
22D-D010 4,0 (5,0) 10,5 342–528 10,3 13,0 20 140M-C2E-C16 100-C23
22D-D012 5,5 (7,5) 12,0 342–528 11,8 14,2 25 140M-D8E-C20 100-C23
22D-D017 7,5 (10,0) 17,0 342–528 16,8 18,4 30 140M-D8E-C20 100-C23
22D-D024 11,0 (15,0) 24,0 342–528 23,4 26,0 50 140M-F8E-C32 100-C43
460–600 V AC (±10 %) – Dreiphaseneingang, 0–575-V-Dreiphasenausgang
22D-E1P7 0,75 (1,0) 1,7 414–660 2,1 2,3 6 140M-C2E-B25 100-C09
22D-E3P0 1,5 (2,0) 3,0 414–660 3,65 3,8 6 140M-C2E-B40 100-C09
22D-E4P2 2,2 (3,0) 4,2 414–660 5,2 5,3 10 140M-C2E-B63 100-C09
22D-E6P6 4,0 (5,0) 6,6 414–660 8,1 8,3 15 140M-C2E-C10 100-C09
22D-E9P9 5,5 (7,5) 9,9 414–660 12,1 11,2 20 140M-C2E-C16 100-C16
22D-E012 7,5 (10,0) 12,2 414–660 14,9 13,7 25 140M-C2E-C16 100-C23
22D-E019 11,0 (15,0) 19,0 414–660 23,1 24,1 40 140M-D8E-C25 100-C30
(1)
Ausgangsnennwerte Eingangsnennwerte Netzstromleitungsschutz
(1)
kW (HP) A
Spannungsbereich kVA A
Sicherungen
Motorschutzschalter 140M
Überbrückungsschütze
Nennwerte gelten für alle FU-Ausführungen; Schrankmontage (N104), Flanschmontage (F104)
und Plattenantrieb (H204).
Page 27
Deutsch-5
Kategorie Spezifikation
Zulassungen Zugelassen nach UL508C und CAN/CSA-22.2
W
.
.
TUV
E
Rheinland
C
Production inspected
Product Safety
Der FU ist so konstruiert, dass er die entsprechenden Teile der folgenden Spezifikationen erfüllt:
NFPA 70 – US National Electrical Code
NEMA ICS 3.1 – Sicherheitsnormen für Konstruktion und Leitfaden für Auswahl, Installation
und Betrieb von drehzahlveränderbaren Antriebssystemen.
Schutzvorrichtungen
IEC 146 – International Electrical Code.
DC-Bus-Überspannungsauslösung
200–240-V-AC-Eingang:
380–460-V-AC-Eingang:
460–600-V-AC-Eingang:
DC-Bus-Unterspannungsauslösung
200–240-V-AC-Eingang:
380–480-V-AC-Eingang:
460–600-V-AC-Eingang
P042 = 3 „Hochspannung“:
P042 = 2 „Niederspannung“:
Fehlerfreie Netzausfallüberbrückung: 100 ms
Steuervermögen bei Netzausfall: Mindestens 0,5 s, typisch 2 s
Elektronischer Motorüberlastschutz: I
Überstrom: 200 % Hardwaregrenze, 300 % Impulsgrenze
Erdschlussauslösung: Phase-Erde am FU-Ausgang
Kurzschlussauslösung: Phase-Phase am FU-Ausgang
Umgebungsbedingungen
Aufstellhöhe: Max. 1000 m ohne Leistungsminderung. Über 1000 m
Maximale Umgebungslufttemperatur
ohne Leistungsminderung:
IP20, offener Typ:
IP30, NEMA-Typ 1, UL-Typ 1:
Flansch- und Plattenmontage:
Kühlmethode
Konvektion:
Lüfter:
Lagertemperatur: –40 bis 85 °C
Atmosphäre: Wichtig: Der FU darf
Relative Luftfeuchtigkeit: 0 bis 95 %, nicht kondensierend
Erschütterung (Betrieb): 15 g Spitze über eine Dauer von 11 ms (±1,0 ms)
Schwingung (Betrieb): 1 g Spitze, 5 bis 2000 Hz
EN 50178
U
L
®
CUS
Bauart geprüft
Functional
..
TUV
Safety
Rheinland
Type approved
Zertifiziert gemäß AS/NZS, 1997, Gruppe 1, Klasse A
Für alle anwendbaren europäischen Richtlinien
gekennzeichnet
EMV-Richtlinie (89/336)
EN 61800-3, EN 50081-1, EN 50082-2
Niederspannungsrichtlinie (73/23/EEC)
EN 50178, EN 60204
Zertifiziert nach EN 954-1, Kategorie 3.
Erfüllt Funktionssicherheit (FS) bei Verwendung
in Verbindung mit der Option DriveGuard Safe-Off
(Serie B).
405 V DC Busspannung (entspricht 290 V AC
Eingangsleitung)
810 V DC Busspannung (entspricht 575 V AC
Eingangsleitung)
1005 V DC Busspannung (entspricht 711 V AC
Eingangsleitung)
210 V DC Busspannung (entspricht 150 V AC
Eingangsleitung)
390-V-DC-Bus (entsprechend 275 V AC am Eingang)
487 V DC Busspannung (entspricht 344 V AC
Eingangsleitung)
390-V-DC-Busspannung (entspricht 275 V AC
Eingangsleitung)
2
t-Überlastschutz – 150 % für 60 s, 200 % für 3 s
(bietet Schutz gem. Klasse 10)
Leistungsminderung um 3 % alle 305 m.
–10 bis 50 °C
–10 bis 40 °C
Kühlung: –10 bis 40 °C
FU: –10 bis 50 °C
0,4-kW-Antriebe sowie alle Flansch- und
Plattenantriebe
Alle anderen FU-Nennwerte
aufgestellt werden, in dem die Umgebungsluft
flüchtige oder korrosive Gase, Dämpfe oder Staub
enthält. Wenn der FU erst nach einiger Zeit eingebaut
werden soll, muss er in einem Bereich gelagert
werden, in dem er keiner korrosiven Atmosphäre
ausgesetzt ist.
nicht in einem Bereich
Page 28
Deutsch-6
Kategorie Spezifikation
Elektrische
Daten
Steuerung Methode: Sinuscodierte PWM, Volt/Hertz und sensorloser Vektor
Steuereingänge Digital: Bandbreite: 10 rad/s bei offenem und geschlossenem Regelkreis
Encoder Typ: Inkremental, Zweikanal
Spannungstoleranz: 200–240 V ±10 %
Frequenztoleranz: 48–63 Hz
Eingangsphasen: Dreiphasen-Eingang für gesamten Nennstrom.
Verschiebungsfaktor: 0,98 über den gesamten Drehzahlbereich
Maximaler Kurzschluss-Nennwert: 100 000 A, symmetrisch
Kurzschluss-Istwert: Durch AIC-Nennwert der eingebauten Sicherung/des
Transistortyp: Bipolar mit isoliertem Gate (IGBT)
Taktfrequenz: 2–16 kHz, FU-Nennleistung beruht auf 4 kHz.
Frequenzgenauigkeit
Digitaleingang:
Analogeingang:
Analogausgang:
Drehzahlregelung
Offener Regelkreis mit
Schlupfkompensation:
Mit Encoder:
Ausgangsfrequenz: 0–500 Hz (programmierbar)
Wirkungsgrad: 97,5 % (typisch)
Stoppmodi: Mehrere programmierbare Stoppmodi, wie Rampe,
Beschleunigung/Verzögerung: Vier voneinander unabhängig programmierbare
Intermittierende Überlast: 150 % Überlastfähigkeit für max. 1 Minute
Elektronischer Motorüberlastschutz Schutz der Klasse 10 mit wählbarer
Anzahl: (2) teilprogrammierbar
Strom: 6 mA
Typ
SRC-Modus:
Analog: Anzahl: (2) isoliert, –10 bis 10 V und 4–20 mA
Versorgung: 12 V, 250 mA. Eingänge mit minimal 12 V, 10 mA
Quadratur: 90°, ±27 Grad bei 25° C.
Arbeitszyklus: 50 %, +10 %
Anforderungen: Encoder müssen leitungsgesteuert sein, Quadratur
SNK-Modus:
Spezifikation
Auflösung:
0 bis 10 V DC analog:
4 bis 20 mA analog:
Externer Poti:
380–480 V ±10 %
460–600 V ±10 %
Einphasen-Betrieb für 35% des Nennstroms.
Leistungsschalters vorgegeben
Innerhalb ±0,05 % der eingestellten
Ausgangsfrequenz
Innerhalb 0,5 % der maximalen Ausgangsfrequenz,
10-Bit-Auflösung
±2 % der vollen 10-Bit-Auflösung
±1 % der Grunddrehzahl über einen
Drehzahlbereich von 80:1
±0,3 % der Grunddrehzahl über einen
Drehzahlbereich von 80:1
±0,05 % der Grunddrehzahl über einen
Drehzahlbereich von 20:1
Auslauf, DC-Bremse und Rampe bis Stillstand
Beschleunigungs- und Verzögerungszeiten.
Jede Zeit in 0,1-s-Inkrementen von 0–600 s
programmiert werden.
200 % Überlastfähigkeit für max. 3 Sekunden
drehzahlempfindlicher Reaktion und
Abschalt-Überlastverzögerungsfunktion
bei Aktivierung.
(5) programmierbar
18–24 V = EIN, 0–6 V = AUS
0–6 V = EIN, 18–24 V = AUS
10 Bit
100 kOhm Eingangsimpedanz
250 Ohm Eingangsimpedanz
1–10 kOhm, min. 2 Watt
isoliert mit Differenzialsender, maximal 250 kHz.
(Zweikanal) oder Impuls (Einkanal), 3,5–26 V DC
Ausgang, Single-Ended oder differenzial, sowie
geeignet für eine Versorgung von mindestens
10 mA pro Kanal. Am Eingang ist Gleichstrom
mit einer Frequenz von bis zu 250 kHz zulässig.
Die Encoder-E/A werden automatisch für
Nennspannungen von 5 V, 12 V und 24 V DC skaliert.
Page 29
Kategorie Spezifikation
Steueraus-
gänge
Relais: Anzahl: (1) programmierbar, Form C
Opto: Anzahl:
Analog: Anzahl: (1) nicht isoliert, 0 bis 10 V oder 4–20 mA
Netzanschluss
Verdrahtungsnennwerte Empfohlener Kupferdraht
Nicht abgeschirmt, 600 V, 75 °C THHN/THWN
Abgeschirmt, 600 V, 75 °C bzw. 90 °C RHH/RHW-2
Abgeschirmter Kabelkanal mit Nennwert 600 V,
75 °C bzw. 90 °C RHH/RHW-2
Klemmenleiste für den Netzanschluss
Baugröße B Baugröße C
Spezifikation
Ohmsche Last:
Induktivlast:
Spezifikation: 30 V DC, 50 mA, nicht induktiv
Spezifikation
Auflösung:
0 bis 10 V DC analog:
4 bis 20 mA analog:
3,0 A bis 30 V DC, 3,0 A bei 125 V, 3,0 A bei 240 V AC
0,5 A bis 30 V DC, 0,5 A bei 125 V, 0,5 A bei 240 V AC
(2) programmierbar
10 Bit
1 kOhm min.
525 Ohm max.
0,4 mm, isoliert, für
trockene Standorte
Anixter OLF-7xxxxx,
Belden 29501-29507
oder gleichwertig
Anixter 7V-7xxxx-3G
Shawflex 2ACD/3ACD
oder gleichwertig
V/T2T/L3S/L2R/L1 U/T1 W/T3
Deutsch-7
V/T2T/L3S/L2R/L1 U/T1 W/T3 P2 P1
BR+ BR-DC- DC+
(1)
Klemme
Beschreibung
R/L1, S/L2 1-Phasen-Eingang
(2)
BR+ BR-DC- DC+
R/L1, S/L2, T/L3 3-Phasen-Eingang
U/T1 Zu Motor U/T1
V/T2 Zu Motor V/T2
W/T3 Zu Motor W/T3
=
Zwei Motorkabel
vertauschen, um
Drehrichtung zu
ändern.
DC-Bus-Induktoranschluss (nur bei FUs der Baugröße C).
Beim FU der Baugröße C ist bei Anlieferung zwischen den
P2, P1
Klemmen P2 und P1 eine Brücke installiert. Entfernen Sie
diese Brücke nur, wenn ein DC-Bus-Induktor angeschlossen
werden soll. Der FU kann nicht ohne eine angeschlossene
Brücke oder einen angeschlossenen Induktor gestartet werden.
DC+, DC– DC-Busverbindung
BR+, BR– Anschluss des Widerstands für den Brems-Chopper
Schutzerde – PE
(1)
Wichtig: Klemmenschrauben können sich während des Transports lösen. Stellen
Sie vor dem Einschalten des FUs sicher, dass alle Klemmenschrauben mit dem
empfohlenen Drehmoment angezogen sind.
(2)
Für Einphasen-Betrieb ist eine Minderung des FU-Nennstroms um 65 % erforderlich.
Page 30
Deutsch-8
Klemmenleiste für den Netzanschluss – Technische Daten
BaugrößeMaximaler
Leiterquerschnitt
2
B 5,3 mm
C 8,4 mm
(1)
Der angegebene Leiterquerschnitt bezeichnet Maximal- bzw. Minimalgrößen,
(10 AWG) 1,3 mm2 (AWG 16) 1,7–2,2 Nm
2
(8 AWG) 1,3 mm2 (AWG 16) 2,9–3,7 Nm
Minimaler
(1)
Leiterquerschnitt
(1)
Moment
die in die Klemmenleiste passen – es handelt sich nicht um Empfehlungen.
Netzeigenschaften
Netzeigenschaften Abhilfemaßnahme
Niedrige Impedanz (weniger als 1 % Reaktanz) • Netzdrossel
Größer als 120 kVA Netztransformator
• oder Trenntransformator
• oder Businduktor installieren –
(2)
nur bei FUs zwischen 5,5 und
11 kW (7,5 bzw. 15 HP)
Leitung verfügt über
Blindleistungskompensationskondensatoren
Häufige Netzunterbrechungen
• Netzdrossel
• oder Trenntransformator
installieren
Kurzfristige Spannungsspitzen von mehr als
6000 V (Blitzschlag)
Leiter-Erde-Spannung überschreitet 125 % der
normalen Leiter-Leiter-Spannung
Ungeerdetes Verteilungssystem
Offene Delta-Konfiguration (240 V)
(1)
Für FUs, die in offenen Delta-Konfigurationen mit einem neutralen System eingesetzt
(1)
• MOV-Brücke zu Erde entfernen
• und Trenntransformator mit
geerdeter Sekundärwicklung
installieren.
• Netzdrossel installieren
werden, bei dem die mittlere Phase geerdet ist, wird die Phase gegenüber der
in der Mitte der Masse oder Erdung abgenommen Phase als „Hauptzweig“,
„Spannungszweig“, „roter Zweig“ o. Ä. bezeichnet. Dieser Zweig sollte im gesamten
System jeweils am Anschlusspunkt mit rotem oder orangefarbenem Klebeband
gekennzeichnet werden. Der Hauptzweig sollte an der mittleren Phase B der Drossel
angeschlossen werden. Die genauen Artikelnummern der Netzdrosseln sind dem
PowerFlex 40P-Benutzerhandbuch zu entnehmen.
(2)
Bestellinformationen für Zubehörteile sind Anhang B des
PowerFlex 40P-Benutzerhandbuch zu entnehmen.
Hinweise zum gemeinsamen Bus und zur Vorladung
Wenn FUs mit interner Vorladung über einen Trennschalter an den
gemeinsamen Bus angeschlossen werden, muss ein Hilfskontakt des
Trennschalters mit einem Digitaleingang des FUs verbunden werden.
Der entsprechende Eingang (Parameter A051–A054) muss auf
Option 29, „Precharge Enable“, gesetzt werden. Auf diese Weise
wird die erforderliche Vorladungsverriegelung erreicht und der
FU gegen mögliche Schäden beim Anschluss an einen gemeinsamen
DC-Bus geschützt.
Page 31

Empfohlene E/A-Verdrahtung
Signal- und Steuerkabelarten
Signaltyp/
Einsatz
Analog-E/A und
PTC
Dezentrales Poti 8770 0,750 mm2(AWG 18), 3-adrig,
Encoder-/
Impuls-E/A
(1)
Litze oder Volldraht.
(2)
9728 und 9730 sind gleichwertig und können beide eingesetzt werden, passen
jedoch unter Umständen nicht in den Kabelkanal des FUs.
(3)
Wenn die Kabel kurz sind und sich in einem Schaltschrank befinden, der keine
Belden-Leiterart(en)
(oder gleichwertig)
8760/9460 0,750 mm2(AWG 18), verdrillt,
(2)
89730
empfindlichen Schaltungen enthält, ist zwar keine Abschirmung für diese Kabel
erforderlich, jedoch wird diese empfohlen.
Empfohlenes Steuerkabel für Digital-E/A
Typ Leiterart(en) Beschreibung
Nicht
abgeschirmt
Nach US NEC oder jeweils
geltenden Bestimmungen
Abgeschirmt Mehradriges abgeschirmtes
Kabel, z. B. Belden 8770
(oder gleichw.)
(1)
Beschreibung
100 % abgeschirmtes Kabel
mit Ableiter
abgeschirmt
0,196 mm2(AWG 24), einzeln
abgeschirmte Paare
(3)
– 300 V,
2
0,750 mm
(AWG 18),
3-adrig, abgeschirmt.
Minimale Isolationsspannung
60 °C
Deutsch-9
Min. Isolationsspannung
300 V,
75–90 °C
E/A-Klemmenleiste – Technische Daten
Baugröße
B und C 1,3 mm
(1)
Leiterquerschnitt
2
(16 AWG) 0,2 mm2 (24 AWG) 0,5–0,8 Nm
Maximal- bzw. Minimalgrößen, die in die Klemmenleiste passen – es handelt sich
Maximaler
Minimaler
(1)
Leiterquerschnitt
(1)
Moment
nicht um Empfehlungen.
Empfehlungen zu den maximalen Längen für Netz- und Steuerkabel sind
dem PowerFlex 40P-Benutzerhandbuch zu entnehmen.
Page 32

Deutsch-10
Steuerein- und Steuerausgänge
Darstellung der Steuerklemmenleiste
Ohmscher Widerstand 3,0 A 3,0 A 3,0 A
Induktiv 0,5 A 0,5 A 0,5 A
30 V DC 125 V AC 240 V AC
Siehe Hinweise zur Darstellung der Steuerklemmenleiste auf der
nächsten Seite.
Page 33

Deutsch-11
Hinweise zur Darstellung der Steuerklemmenleiste
(1)
Wichtig: E/A-Klemme 01 ist immer ein Leerlauf-Stopp-Eingang, sofern nicht
P036 [Startquelle] auf eine der Steuerungen „3-Draht“, „2-W PegSens“ oder
„MomVW/RWStrg“ gesetzt ist. Bei der 3-Draht-Steuerung wird E/A-Klemme 01
über P037 [Stoppmodus] gesteuert. Alle weiteren Stoppquellen werden über
P037 [Stoppmodus] gesteuert.
P036 [Startquelle] Stopp E/A-Klemme 01 Stopp
3-Draht Gemäß P037 Gemäß P037
2-Draht Gemäß P037 Auslauf
2-W PegSens Gemäß P037 Gemäß P037
2-W Ho Drehz Gemäß P037 Auslauf
RS485-Anschluss Gemäß P037 Auslauf
MomVW/RWStrg Gemäß P037 Gemäß P037
Wichtig: Bei Anlieferung des FUs ist zwischen E/A-Klemme 01 und 11 eine Brücke
installiert. Wenn E/A-Klemme 01 als Stopp- oder Aktivierungseingang verwendet
wird, muss diese Brücke entfernt werden.
(2)
Hier 2-Draht-Steuerung. Bei der 3-Draht-Steuerung ist ein einmaliger Befehl an
E/A-Klemme 02 für einen Start erforderlich. Zur Richtungsänderung an E/A-Klemme
03 ist ein Dauerbefehl erforderlich.
(3)
Die Funktion von E/A-Klemme 03 ist vollständig programmierbar. Programmierung
erfolgt über E202 [Dig.anschluss 3].
(4)
DIP-Schalter für Spannungsbereichswahl gemäß dem Steuerungsschema für
unipolaren oder bipolaren Betrieb einstellen.
(5)
Bei Verwendung eines Optoausgangs mit einer induktiven Last (z. B. Relais)
installieren Sie, wie gezeigt, eine Seriendiode parallel zum Relais, um Schäden
am Ausgang zu vermeiden.
(6)
Wenn die ENBL-Brücke entfernt ist, fungiert die E/A-Klemme 01 immer als
Hardwareaktivierung und bewirkt einen Auslauf ohne Softwareinterpretation.
(6)
(6)
(6)
Bezeichnungen der Steuerungs-E/A-Klemmen
Nr. Signal Werkseinstellung Beschreibung Param.
R1 Schließerrelais Fehler Schließerkontakt für Ausgangsrelais. A055
R2 Relais-
Bezugspotenzial
R3 Öffnerrelais Fehler Öffnerkontakt für Ausgangsrelais. A055
Wahl des
AnalogausgangsDIP-Schalters
DIP-Schalter
(stromziehend/
stromliefernd)
– Ausgangsrelais-Bezugspotenzial.
0–10 V Stellt den Analogausgang auf Spannung oder Strom ein. Diese
Einstellung muss mit A065 [Wahl Anlg. Ausg.] übereinstimmen.
Stromliefernd (SRC) Eingänge können über die DIP-Schaltereinstellung als
stromziehend (SNK) oder stromliefernd (SRC) verdrahtet werden.
Page 34

Deutsch-12
Nr. Signal Werkseinstellung Beschreibung Param.
01 Stopp
02 Start/Vorwärtslauf Nicht aktiv E/A-Klemme 03 ist vollständig programmierbar.
03 Dig.anschluss 3 Nicht aktiv P036, P037,
04 Digitales
05 Digitaleingang 1 Voreinst Freq Mit A051 [Wahl Dig. Eing1] programmieren. A051
06 Digitaleingang 2 Voreinst Freq Mit A052 [Wahl Dig. Eing2] programmieren. A052
07 Digitaleingang 3 Lokal Mit A053 [Wahl Dig. Eing3] programmieren. A053
08 Digitaleingang 4 Tipp vor Mit A054 [Wahl Dig. Eing4] programmieren. A054
09 Opto-
11 +24 V DC – Bezug auf digitales Bezugspotenzial.
12 +10 V DC – Bezug auf analoges Bezugspotenzial.
13 ±10 V Ein
14 Analog-Sollw. – Für 0–10-V-Eing.- oder 4–20-mA-Eing. Durch
15 4–20-mA-Eing.
16 Analogausgang Ausg.freq 0–10 Der standardmäßige Analogausgang ist 0–10 V.
17 Optischer
18 Optischer
19 RS485- (DSI-)
(1)
(2)
(1)
Bezugspotential
Bezugspotenzial
Ausgang 1
Ausgang 2
Abschirmung
Auslauf Die werkseitig installierte Brücke oder
– Für Digitaleingänge. Durch Digitaleingänge
– Für optisch gekoppelte Ausgänge. Durch
(2)
Nicht aktiv Für externe 0–10-V- (unipolare) oder
(2)
Nicht aktiv Für externe 4–20-mA-Eingangsversorgung
Motor läuft Mit A058 [Wahl Optoausg1] programmieren. A058, A059,
Frequenz erreicht Mit A061 [Wahl Optoausg2] programmieren. A061, A062,
– Klemme sollte mit dem Massepunkt PE verbunden
ein Öffnereingang muss vorhanden sein,
um den FU zu starten.
Programmierung erfolgt über E202 [Dig.anschluss
3]. Zur Deaktivierung des Rückwärtslaufs siehe
A095 [Rückw deak].
von Analog-E/A und Optoausgängen
elektronisch getrennt.
Optoausgänge von Analog-E/A und
Digitaleingängen elektronisch getrennt.
FU lieferte Strom für Digitaleingänge.
Maximaler Ausgangsstrom beträgt 100 mA.
FU lieferte Strom für externes
0–10-V-Potenziometer.
Maximaler Ausgangsstrom beträgt 15 mA.
±10-V- (bipolare) Eingangsversorgung
(Eingangsimpedanz = 100 kOhm) oder
Potenziometeranschluss.
Analogein- und -ausgänge von Digital-E/A
und Optoausgängen elektronisch getrennt.
(Eingangsimpedanz = 250 Ohm).
Zum Konvertieren in einen Stromwert stellen
Sie den Analogausgang-DIP-Wahlschalter
auf 0–20 mA. Mit A065 [Wahl Anlg. Ausg.]
programmieren. Der maximale Analogwert
kann mit A066 [Anlg. Ausg. OG] skaliert werden.
Maximallast: 4–20 mA = 525 Ohm (10,5 V)
sein, wenn der RS485- (DSI-) Kommunikationsport
verwendet wird.
0–10 V = 1 kOhm (10 mA)
Siehe Fußnoten (1) und (6) auf Seite 11.
0–10-V-Eing. und 4–20-mA-Eing. sind zwei verschiedene Eingangskanäle, die gleichzeitig
(1)
P036
P036, P037
A095, E202
P038
P038,
A051-A054,
A123, A132
P038,
A051-A054,
A132
A065, A066
A064
A064
angeschlossen werden können.
Diese Eingänge können unabhängig voneinander zur Drehzahlsteuerung oder gemeinsam im
PID-Modus benutzt werden.
Page 35

Deutsch-13
Encoder-Schnittstelle
Die Encoder-Schnittstelle des PowerFlex 40P ist für Eingangsleistu ngen
bei 5 oder 12 Volt ausgelegt und für asymmetrische oder differenzielle
Eingänge bei 5, 12 oder 24 geeignet.
12V
5V
+V Cm B- BA-A
➊
Klemmenbeschreibung
Nr. Signal Beschreibung
+V 5–12 V Spannung
Cm Rückführung
B- Encoder B (NOT)
B Encoder B
A- Encoder A (NOT)
A Encoder A
➊ Ausgang DIP-Schalter wählt zwischen 12 und 5 Volt
(1)
Bei Verwendung von 12 V Encoder-Spannung, 24 V E/A-Spannung, beträgt der
maximale Ausgangsstrom an E/A-Klemme 11 50 mA.
Wichtig: Ein Quadratur-Encoder liefert Drehzahl und Richtung
für den Rotor. Daher muss der Encoder so verdrahtet sein,
dass die Vorwärtsrichtung der Vorwärtsrichtung des Motors
entspricht. Wenn der FU die Pulsgeberdrehzahl ermittelt,
aber die Positionssteuerung oder eine andere
Encoder-Funktion nicht ordnungsgemäß funktioniert,
trennen Sie die Stromversorgung des FUs und tauschen
Sie die Encoder-Kanäle A und B oder zwei beliebige
Motorleitungen. FUs mit FRN 2.xx und höher lösen
einen Fehler aus, wenn ein Encoder fehlerhaft verdrahtet
und E216 [Motorrückfüh.typ] auf Option 5, „Quad.pruef.“,
eingestellt ist.
(1)
Interne 250-mA-Stromquelle (isoliert).
Quadratur-B-Eingang.
Einzelkanal-, Impulsfolge- oder Quadratur-A-Eingang.
Eingangsspannung an Klemmen „+V“ und
„Cm“ für den Encoder.
Page 36

Deutsch-14
Vorbereitung auf die FU-Inbetriebnahme
ACHTUNG: Legen Sie zunächst Spannung an den FU an, um
die im Folgenden beschriebenen Vorgänge für die Inbetriebnahme
!
durchführen zu können. Im Gerät liegen allerdings Spannungen in
der Höhe der Netzspannung an. Zur Vermeidung eines elektrischen
Schlags bzw. von Geräteschäden sollten die folgenden Schritte nur
von qualifiziertem Wartungspersonal durchgeführt werden. Lesen Sie
vor der Inbetriebnahme sämtliche Anweisungen aufmerksam durch.
Fahren Sie nicht fort, falls während der Durchführung dieser
Anweisung ein beschriebenes Ereignis nicht eintritt. Schalten
Sie sämtliche Stromversorgungen aus einschließlich aller
anlageninternen Steuerspannungen. Es können anlageninterne
Spannungen anliegen, auch wenn am FU kein Netzstrom anliegt.
Beheben Sie die Betriebsstörung, bevor Sie fortfah ren.
Vor dem Einschalten
❏ 1. Stellen Sie sicher, dass sämtliche Eingänge an die korrekten
Klemmen angeschlossen und gesichert sind.
❏ 2. Stellen Sie sicher, dass die anzuschließende Netzspannung innerhalb
des für den FU zulässigen Bereichs liegt.
❏ 3. Stellen Sie sicher, dass die digitale Steuerspannung 24 V beträgt.
❏ 4. Stellen Sie sicher, dass die DIP-Schaltereinstellung für SNK
(stromziehend)/SRC (stromliefernd) dem Steuerverdrahtungsplan
entspricht. Für Standort siehe Seite 10.
Wichtig: Der voreingestellte Steuerplan lautet stromliefernd (SRC).
Die Stoppklemme ist überbrückt, um den Start über den
integrierten Tastenblock zu ermöglichen. Wenn der
Steuerplan auf stromziehend (SNK) geändert wird, muss
die Brücke von E/A-Klemme 01 und 11 entfernt und
zwischen E/A-Klemme 01 und 04 angebracht werden.
❏ 5. Stellen Sie sicher, dass der Stoppeingang vorhanden ist, andernfalls
wird der FU nicht gestartet.
Wichtig: Wenn E/A-Klemme 01 als Stoppeingang verwendet
wird, muss die Brücke zwischen E/A-Klemme 01 und
11 entfernt werden.
Einschalten des FUs
❏ 6. Schalten Sie die Netzspannung und Eingangssteuerspannungen
zum FU ein.
Page 37

Deutsch-15
Start-, Stopp-, Richtungs- und Drehzahlsteuerung
Der FU kann anhand der werkseitig eingestellten Parameterwerte über
den integrierten Tastenblock gesteuert werden. Zum Starten, Stoppen,
Ändern der Richtung und zur Drehzahlsteuerung direkt über den
integrierten Tastenblock ist keine Programmierung erforderlich.
Wichtig: Zur Deaktivierung des Rückwärtslaufs siehe A095
[Rückw deak].
Falls während des Einschaltvorgangs ein Fehlercode angezeigt wird,
finden Sie eine entsprechende Erläuterung auf Seite 20.
Ausführliche Informationen zur Fehlersuche sind dem
PowerFlex 40P-Benutzerhandbuch zu entnehmen.
Anzeige/Fehler-Reset
Menü Beschreibung
Basisanzeigegruppe (nur Ansicht)
Häufig angezeigte FU-Betriebszustände.
RUN
REV
FAULT
➊
Nr. LED LED-Zustand Beschreibung
Betriebsstatus Stetig rot FU läuft und Motordrehung erfolgt in Sollrichtung.
➊
Richtungsstatus Stetig rot FU wird in Gegenrichtung betrieben.
Fehlerstatus Blinkt rot Es liegt ein FU-Fehler vor.
Blinkt rot FU hat einen Richtungswechselbefehl erhalten.
Blinkt rot FU wurde angewiesen, die Richtung zu ändern,
➋
und der Motor wird auf null gebremst.
Erweiterte Anzeigegruppe (nur Ansicht)
Erweiterte FU-Betriebszustände.
Störung
Besteht aus einer Auflistung von Codes für
bestimmte Fehlerzustände. Wird nur dann
angezeigt, wenn ein Fehler vorliegt.
Nr. Taste Bezeichnung Beschreibung
➋
Pfeil nach oben Bildlauf: Zum Blättern durch auswählbare Anzeigegruppen
und Parameter Taste drücken und loslassen.
Rücksetzen: Zum Löschen des aktiven Fehlers Taste
drücken und für drei Sekunden gedrückt halten.
Page 38

Deutsch-16
Werkzeuge für die Programmierung des FUs
Für zusätzliche Programmierung und Steuerung des FUs sollten
ein dezentrales DSI-HIM oder PC-Programmierwerkzeuge
(DriveExplorer™ oder DriveTools™ SP) verwendet werden.
Beschreibung Bestellnummer
Serielles Wandlermodul 22-SCM-232
DriveExplorer-Software
DriveTools SP-Software
Dezentrales Schaltschrankgerät, LCD-Anzeige 22-HIM-C2S
Dezentrales Handgerät, LCD-Anzeige 22-HIM-A3
(1)
Serielles Wandlermodul erforderlich
(1)
(1)
9306-4EXP02ENE
9303-4DTS01ENE
Festlegen der Parameter-Anzeigeoptionen
E201 [LED-Anzeigeoption]
Wählt aus, welche Parameter über die LED-Schnittstelle des FUs angezeigt werden können.
Option E201 Parametergruppe
0
1
2
3
Werte Werkseinstellung: 2
Alle Parameter der Basisanzeige (Gruppe b) and der erweiterten Anzeige (Gruppe d)
Alle Parameter der Basisanzeigegruppe (b001–b029)
Parameter b001–b007 und b010 der Basisanzeigegruppe
Parameter b001–b004 der Basisanzeigegruppe
Min./Max.: 0/3
Anzeige: 1
Basisanzeigegruppe
Ausgangsfreq b001
Frequenzsollwert b002
Ausgangsstrom b003
Basisprogrammpruppe Motornennspg. P031
Ausgangsspannung b004
DC-Busspannung b005
Gerätestatus b006
Code Störung 1 b007
Code Störung 2 b008
Code Störung 3 b009
Prozessanzeige b010
Steuerquelle b012
Motornennfreq. P032
Überlaststrom P033
Steuereing Stat. b013
Dig.Eing. Status b014
Komm. Status b015
Regler-SW Vers. b016
Gerätetyp b017
Betriebszeit b018
Testpunkt Daten b019
Anlg Eing 0-10V b020
Minimalfrequenz P034
Maximalfrequenz P035
Startquelle P036
Stoppmodus P037
Solldrehzahl. P038
Anlg Eing 4-20mA b021
Ausgangsleist. b022
Ausg-Leistungsf. b023
Gerätetemp. b024
Zählerstatus b025
Timerstatus b026
Stp. Logikstatus b028
Wirkstrom b029
Beschl-Zeit 1 P039
Verzög-Zeit 1 P040
Reset Werkseinst P041
Spannungsklasse P042
MtrUeL-Spei P043
Page 39

Deutsch-17
Erweiterte
Programmgruppe
Wahl Dig. Eing1 A051
Wahl Dig. Eing2 A052
Wahl Dig. Eing3 A053
Wahl Dig. Eing4 A054
Wahl Relaisaug A055
Ebene Relaisausg A056
Wahl Optoausg1 A058
Ebene Optoausg1 A059
Wahl Optoausg2 A061
Ebene Optoausg2 A062
Optoausg. Logik A064
Wahl Anlg. Ausg. A065
Anl. Ausg. OG A066
Beschl-Zeit 2 A067
Verzög-Zeit 2 A068
Interne Freq A069
Voreinst Freq 0 A070
Voreinst Freq 1 A071
Voreinst Freq 2 A072
Voreinst Freq 3 A073
Voreinst Freq 4 A074
Voreinst Freq 5 A075
Voreinst Freq 6 A076
Voreinst Freq 7 A077
Zusatzprogrammgruppe
LED-Display-Opt E201
Dig.anschluss 3 E202
Beschl-Zeit 3 E203
Verzög-Zeit 3 E204
Beschl-Zeit 4 E205
Verzög-Zeit 4 E206
Erweiterte Anzeigegruppe FU-Status 2 d301
Tippfrequenz A078
Beschl/Verzög A079
Dauer DC-Bremse A080
Ebene DC-Bremse A081
Wahl DB-Widerst. A082
S-Kurve % A083
Wahl Verstärk A084
Startverstärk A085
Knickspannung A086
Knickfrequenz A087
Maximalspannung A088
Strombegrenz 1 A089
Überlast-Modus A090
Taktfrequenz A091
Fhl Neustartvers A092
Int Neustartvers A093
Autosta rt A094
Rückw deak A095
Flieg-Start EIN A096
Kompensation A097
SW-Stromauslös A098
Prozess-Faktor A099
Sörungsquitt A100
Progr blockiert A101
Testpunkt Wahl A102
Komm.-Datenrate A103
Komm.-Knotenadr. A104
Maßn KommVerlust A105
Komm.Verlustzeit A106
Komm.-Format A107
Sprache A108
Komm.-Schreibmod. E207
Netzunterbr.mod. E208
Halb.Bus aktiv. E209
Max. Travers. E210
Traversier-Erhö. E211
Trav.-Verring. E212
P-Sprung E213
Sync-Zeit E214
Drhzhl.verh. E215
Faser-Status d302
AnlgAusg.-Sollw. A109
AnlgEing. 0-10V UG A110
AnlgEing. 0-10V OG A111
AnlEing 4-20mA UG A112
AnlEing 4-20mA OG A113
SchlupfHz Voll-A A114
Prozesszeit Min. A115
Prozesszeit Max. A116
Busreg. Modus A117
Strombegrenz 2 A118
Sprungfrequenz A119
Sprungfreq-Band A120
Verz. Störung A121
Verl. Anlg.Eing. A122
10V Bipolar akt. A123
Var. PDM deakt. A124
Momentperf.mod. A125
Motonennstrom A126
Autotuning. A127
IR-Spgsabfall A128
Magn.stromvorg. A129
PID-Trimm OG A130
PID-Trimm UG A131
Wahl PID-Sollw. A132
PID-Istw.Auswahl A133
PID-Prop.-Verst. A134
PID-Integ. Zeit A135
PID-Diff. Rate. A136
PID-Sollwert A137
PID-Totband A138
PID-Voreinst. A139
Motorrückfüh.typ E216
Motornennpole E217
Pulsg Puls/Umdr E218
Skal. Enc.pulse E219
Dämpf.i.Reglschw E220
Dämpf.p.Reglschw E221
Pos.-modus E222
Homefreq. suchen E223
Homericht suchen E224
Encoder-Pos.-Tol. E225
Zahl pro Einheit E226
Schl.Freq.messer d303
Geschw.
Rückkopplung d304
Encoder-Geschw. d306
Stp Logik 0 A140
Stp Logik 1 A141
Stp Logik 2 A142
Stp Logik 3 A143
Stp Logik 4 A144
Stp Logik 5 A145
Stp Logik 6 A146
Stp Logik 7 A147
Stp Logikzeit 0 A150
Stp Logikzeit 1 A151
Stp Logikzeit 2 A152
Stp Logikzeit 3 A153
Stp Logikzeit 4 A154
Stp Logikzeit 5 A155
Stp Logikzeit 6 A156
Stp Logikzeit 7 A157
EM-BrmsAus-Verz. A160
EM-BrmsEin-Verz. A161
WhlMOP-Resetmod. A162
DB-Schwelle A163
SchrittEinhtn 0 E230
SchrittEinhtn 1 E232
SchrittEinhtn 2 E234
SchrittEinhtn 3 E236
SchrittEinhtn 4 E238
SchrittEinhtn 5 E240
SchrittEinhtn 6 E242
Sc
tEinhtn 7 E244
hrit
Pos.Reg.filter E246
Pos.R eg.ve rst. E247
Enh. Cntr.-Wort E248
Whl Bfhl u. Stat E249
Zurückg. Einh. H d308
Zurückg. Einh. L d309
Parameter der Anzeigegruppe
Nr. Parameter Min./Max. Anzeige/Optionen
b001 [Ausgangsfreq] 0,00/[Maximalfrequenz] 0,01 Hz
b002 [Frequenzsollwert] 0,00/[Maximalfrequenz] 0,01 Hz
b003 [Ausgangsstrom] 0,00/(FU-Strom × 2) 0,01 A
b004 [Ausgangsspannung] 0/FU-Nennspannung 1 V AC
b005 [DC-Busspannung] Basierend auf
b006 [Gerätestatus] 0/1 (1 = Zustand wahr) Bit 3
b007–
[Code Störung x] F2/F122 F1
b009
b010 [Prozessanzeige] 0.00/9999 0.01 – 1
b012 [Steuerquelle] 0/112 Ziffer 2 und 3 = Drehzahlsollwert
b013 [Steuereing Stat.] 0/1 (1 = Eingang aktuell) Bit 3
b014 [Dig.Eing. Status] 0/1 (1 = Eingang aktuell) Bit 3
FU-Nennspannung
1 V DC
Verzögerung Beschleunigung Vorwärts Betrieb
(Siehe P038; 9 = „Tippfreq“) (Siehe P036; 9 = „Tippbetrieb“)
DB Trans.ein Stopp-Eing Richt/RW Ein Strt/VW Eing
Dig. Eing. 4 Dig. Eing. 3 Dig. Eing.2 Dig. Eing. 1
Bit 2 Bit 1 Bit 0
Bit 2 Bit 1 Bit 0
Bit 2 Bit 1 Bit 0
Ziffer 1 = Startbefehl
Page 40

Deutsch-18
Nr. Parameter Min./Max. Anzeige/Optionen
b015 [Komm. Status] 0/1 (1 = Zustand wahr) Bit 3 Bit 2 Bit 1 Bit 0
b016 [Regler-SW Vers.] 1.00/99.99 0.01
b017 [Gerätetyp] 1001/9999 1
b018 [Betriebszeit] 0/9999 Std. 1 = 10 Std.
b019 [Testpunkt Daten] 0/FFFF 1 hexadezimal
b020 [Anlg Eing 0-10V] 0,0/100,0 % 0,1 %
b021 [Anlg Eing 4-20mA] 0,0/100,0 % 0,1 %
b022 [Ausgangsleistung] 0,00/(FU-Leistung × 2) 0,01 kW
b023 [Ausg-Leistungsf.] 0,0/180,0 Grad 0,1 Grad
b024 [Gerätetemp.] 0/120 °C 1 °C
b025 [Zählerstatus] 0/9999 1
b026 [Timerstatus] 0,0/9999 s 0,1 s
b028 [Stp Logikstatus] 0/8 1
b029 [Wirkstrom] 0,00/(FU-Strom × 2) 0,01 A
Fehler DSI Tx Rx
Schnell-Inbetriebnahme mit den wichtigsten
Parametern der Programmgruppe.
Der PowerFlex 40P ist für eine schnelle und problemlose Inbetriebnahme konstruiert.
Die Programmgruppe enthält die am häufigsten verwendeten Parameter.
= Bevor dieser Parameter geändert wird, muss der FU gestoppt werden.
Nr. Parameter Min./Max. Anzeige/Optionen Werkseinstellung
P031 [Motornennspg.] 20/FU-Nennspannung 1 V AC Basierend auf
Eingestellt auf die Nennspannung des Motors
(Typenschild).
P032 [Motnennfreq.] 15/500 Hz 1 Hz 60 Hz
Eingestellt auf die Nennfrequenz des Motors
(Typenschild).
P033 [Überlaststrom] 0,0/(FU-Nennspannung × 2) 0,1 A Basierend auf
Eingestellt auf den maximal zulässigen
Motorstromwert.
P034 [Minimalfrequenz] 0,00/500,0 Hz 0,01 Hz 0,00 Hz
Legt die niedrigste kontinuierliche
Ausgangsfrequenz des FUs fest.
P035 [Maximalfrequenz] 0,00/500,0 Hz 0,01 Hz 60,00 Hz
Legt die höchste Ausgangsfrequenz des FUs fest.
P036 [Startquelle] 1/6 1 = „3-Draht“
Stellt den zum Starten des FUs verwendeten
Steuerplan ein.
P037 [Stoppmodus] 0/9 0 = „Rampe, CF“
Aktiver Stoppmodus für alle Stoppquellen
[z. B. Vorwärtslauf (E/A-Klemme 02), Rückwärtslauf
(E/A-Klemme 03), RS485-Anschluss], sofern nicht
anders angegeben.
Wichtig: An E/A-Klemme 01 erfolgt nur dann
kein Auslauf, wenn P036 [Startquelle] auf
„3-Draht“-Steuerung eingestellt ist. Bei der
3-Draht-Steuerung wird E/A-Klemme 01
über P037 [Stoppmodus] gesteuert.
2 = „2-Draht“
3 = „2-W PegSens“
4 = „2-W Ho Drehz“
5 = „COM-Port“
6 = „MomVW/RWStrg“
1 = „Auslauf, CF“
2 = „DC-Bremse CF“
3 = „DCBrAuto,CF“
4 = „Rampe“
5 = „Auslauf“
6 = „DC-Bremse“
7 = „DC-Br Auto“
8 = „Rmp+EMBSg,FQ“
9 = „Rmp+EMB-Strg“
(1)
Stoppeingang löscht auch
aktiven Fehler.
(1)
(1)
(1)
(1)
FU-Nennspannung
FU-Nennspannung
5
0
Page 41

Deutsch-19
= Bevor dieser Parameter geändert wird, muss der FU gestoppt werden.
Nr. Parameter Min./Max. Anzeige/Optionen Werkseinstellung
P038 [Solldrehzahl] 1/9 1 = „Int Frequ“
Stellt die Drehzahlsollwert-Quelle des FUs ein.
Wichtig: Wenn A051 oder A052 [Wahl Dig.Eing. x]
auf Option 2, 4, 5, 6, 13 oder 14 eingestellt ist und
der Digitaleingang aktivier t ist, übersteuern A051,
A052, A053 bzw. A054 den durch diesen
Parameter festgelegten Drehzahlsollwert.
Weitere Informationen finden Sie in Kapitel 1 des
PowerFlex 40P-Benutzerhandbuchs.
P039 [Beschl-Zeit 1] 0,0/600,0 s 0,1 s 10,0 s
Definiert die Zeit, die der FU für die Beschleunigung
auf sämtliche Frequenzen benötigt.
P040 [Verzög-Zeit 1] 0,0/600,0 s 0,1 s 10,0 s
Definiert die Zeit, die der FU für Verzögerungen
benötigt.
P041 [Reset Werkseinst] 0/1 0 = „Bereit/Inakt“
Setzt die Werte aller Parameter auf die
Werkseinstellung zurück.
P042 [Spannungsklasse] 2/3
Legt die Spannungsklasse der FUs mit 600 V fest.
P043 [MtrUeL-Spei] 0/1 1 = „Freigabe“ 0 = „AUS“
Aktiviert/deaktiviert die Motorüberlastspeicherungs-Funktion.
2 = „0-10V Eing“
3 = „4-20mA Eing“
4 = „Eingest Freq“
5 = „COM-Port“
6 = „Stp Logik“
7 = „AlgEingMulti“
8 = „Encoder“
9 = „Positionierung“
1 = „Rücks Std“
2 = „Niedersp“ (480 V)
3 = „Hochsp“ (600 V)
5
0
3
Parameter der erweiterten Anzeigegruppe
Nr. Parameter Min./Max. Anzeige/Optionen
d301 [FU-Status 2] 0/1 1
d302 [Faser-Status] 0/1 1
d303 [Schl.Freq.messer] 0,0/25,0 Hz 0,1 Hz
d304 [Drehzahlmeld.] 0/64000 UPM 1 UPM
d305 [Drehzahlmeld. F] 0,0/0,9 0,1
d306 [Plsg. Drhzhl] 0/64000 1
d307 [Plsg. Drhzhl F] 0,0/0,9 0,1
d308 [Gef. Einh. OT] 0/64000 1
d309 [Gef. Einh. UT] 0,00/0,99 0,01
Parameter der Programmgruppe
Eine vollständige Liste der Parameter finden Sie im
PowerFlex 40P-Benutzerhandbuch.
Page 42

Deutsch-20
Fehlercodes
Um einen Fehler zu löschen, die Stopp-Taste drücken, die Stromversorgung
aus- und wieder einschalten oder A100 [Störungsquitt] auf 1 oder 2 einstellen.
Nr. FEHLER Beschreibung
F2 Hilfseingang
F3 Netzstörung Eine Überprüfung auf niedrige Netzspannung oder Spannungsunterbrechungen durchführen.
F4 Unterspannung
F5 Überspannung
F6 Motor blockiert
F7 Motor überlastet
F8 Kühlk.Übertemp
F12 HW-Überstrom Programmierung prüfen. Auf übermäßige Belastung, falsche DC-Boost-Einstellung, zu hoch
F13 Erdschluss Den Motor und die externe Verdrahtung zu den Ausgangsklemmen des FUs auf Erdung
F29 Verl. Anlg.Eing.
F33 Fhl Neustartvers Fehlerursache beheben und manuell quittieren.
F38 Erdschluss Ph U Verdrahtung zwischen FU und Motor überprüfen.
F39 Erdschluss Ph V
F40 Erdschluss Ph W
F41 Kurzschluss UV Motor und Verdrahtung der FU-Ausgangsklemmen auf Kurzschluss prüfen.
F42 Kurzschluss UW
F43 Kurzschluss VW
F48 ParamWerkseinst. Der FU hat den Befehl erhalten, Standardwerte in den EEPROM zu schreiben.
F63 SW-Überstrom
F64 FU-Überlast Last verringern oder Beschl-Zeit verlängern.
F70 Leistungseinheit Stromzufuhr aus- und wieder einschalten. FU auswechseln, wenn Fehler nicht behoben
F71 Adpt.Ntzw.-Verl. Im Kommunikationsnetz ist ein Fehler aufgetreten.
F80 Autotune-Fehler Die Autotuning-Funktion wurde durch den Benutzer abgebrochen oder ist ausgefallen.
F81 Komm.-Verlust Falls der Adapter nicht absichtlich getrennt wurde, die Verdrahtung zum Anschluss prüfen.
F91 Encoder-Verlust Differenzieller Encoder erforderlich. Eines der beiden Encoder-Kanalsignale fehlt.
F100 Param-Prüfsumme Werkseinstellungen wiederherstellen.
F111 Hardware akt. Optionsplatine DriveGuard Safe-Off (Serie B) ist installier t, und die ENBL-Brücke wurde
F122 E/A-Kartenfehler Stromzufuhr aus- und wieder einschalten. FU auswechseln, wenn Fehler nicht behoben
(1)
Auto-Reset/Betriebsfehler. Mit den Parametern A092 und A093 konfigurieren.
(1)
Dezentrale Verdrahtung überprüfen.
Kommunikationsprogrammierung auf beabsichtigten Fehler überprüfen.
Eingangssicherungen prüfen.
(1)
Eine Überprüfung auf niedrige Netzspannung oder Spannungsunterbrechungen durchführen.
(1)
Die Netzleitung auf hohe Leiterspannung oder Übergangszustände prüfen. Überhöhte
Busspannung kann auch auf generatorischen Motorbetrieb zurückzuführen sein.
Verzögerungszeit verlängern oder optionalen Brems-Chopper installieren.
(1)
[Beschl-Zeit x] erhöhen bzw. die Last verringern, damit der FU-Ausgangsstrom den
mit Parameter A089 [Strombegrenz] eingestellten Stromwert nicht überschreitet.
(1)
Die Motorlast ist zu hoch. Sie muss reduzier t werden, sodass der FU-Ausgangsstrom
den mit Parameter P033 [Überlaststrom] eingestellten Stromwert nicht überschreitet.
Einstellung A084 [Wahl Verstärk] prüfen.
(1)
Den Kühlkörper auf blockierte oder verschmutzte Kühlrippen untersuchen. Prüfen, ob die
Umgebungstemperatur über 40 ° C für IP-30-Installationen (NEMA 1/UL-Typ 1) bzw. über 50 °C für
offene Installationen angestiegen ist.
Lüfter prüfen.
eingestellte Spannung für DC-Bremse oder andere Ursachen für Überstrom prüfen.
überprüfen.
(1)
Ein Analogeingang ist so konfiguriert, dass bei einem Signalverlust ein Fehler ausgegeben
wird. Es ist ein Signalverlust aufgetreten.
Parameter prüfen. Auf getrennte/gelockerte Anschlüsse an den Eingängen prüfen.
Motor auf Erdschluss in einer Phase prüfen.
FU auswechseln, wenn Fehler nicht behoben werden kann.
FU auswechseln, wenn Fehler nicht behoben werden kann.
Fehler quittieren oder FU aus- und wieder einschalten. FU-Parameter nach Bedarf
programmieren.
(1)
Lastanforderungen und Einstellung des Parameters A098 [SW-Stromauslös] über prüfen.
werden kann.
Stromzufuhr aus- und wieder einschalten. Kommunikationskabel prüfen.
Netzwerkadaptereinstellungen prüfen. Status des externen Netzwerks prüfen.
Prozedur neu starten.
Nach Bedarf Verdrahtung, Anschlusserweiterung, Adapter oder vollständigen FU austauschen.
Verbindung überprüfen.
Ein Adapter wurde absichtlich getrennt. Mit A105 [Maßn KommVerlust] ausschalten.
Die Störfestigkeit kann durch Erdung der E/A-Klemme 04 erhöht werden.
Verdrahtung überprüfen.
Wenn P038 [Solldrehzahl] = 9 „Positionierung“ und E216 [Motorrückfüh.typ] = 5 „Quad Pruef.“,
die Encoder-Kanaleingänge vertauschen (siehe Seite 13), oder zwei Motorleitungen
vertauschen.
Encoder ersetzen.
nicht entfernt.
ENBL-Brücke entfernen. Stromzufuhr aus- und wieder einschalten.
Optionsplatine DriveGuard Safe-Off (Serie B) ausgefallen.
FU ausschalten. Optionsplatine DriveGuard Safe-Off (Serie B) ersetzen.
Hardware-Aktivierungsstromkreis ausgefallen.
FU auswechseln.
werden kann.
Page 43

FU-Abmessungen
Baugrößen des PowerFlex 40P – Nennwerte in kW und HP
Baugröße 240 V AC – Drei Phasen 480 V AC – Drei Phasen 600 V AC – Drei Phasen
B 0,4 (0,5)
0,75 (1,0)
1,5 (2,0)
C 5,5 (7,5)
7,5 (10,0)
Frequenzumrichter PowerFlex 40P
a
d
2,2 (3,0)
3,7 (5,0)
c
f
0,4 (0,5)
0,75 (1,0)
1,5 (2,0)
5,5 (7,5)
7,5 (10,0)
2,2 (3,0)
4,0 (5,0)
11,0 (15,0) 5,5 (7,5)
0,75 (1,0)
1,5 (2,0)
2,2 (3,0)
7,5 (10,0)
Abmessungen sind in mm angegeben.
Gewicht ist in kg angegeben.
Deutsch-21
4,0 (5,0)
11,0 (15,0)
RUN
RUN
REV
REV
FAULT
FAULT
20A-DG01
e
b
5,5 (0,22)
Kommunikation, HF-Filter, Optionskit gemäß IP30//NEMA 1/UL-Typ 1
b
a
d
FU der
FU der
Baugröße
Option
Abmessungen
a Komm.-Abdeckung 25 (0,98) 25 (0,98)
b EMV-Netzfilter 50 (1,97) 60
c EMV-Netzfilter 229 309 (12,17)
d IP30/NEMA 1/
UL-Typ 1
IP30/NEMA 1/
UL-Typ 1 für
Komm.-Abdeckung
B
33 (1,30) 60
64 (2,52) 60
Baugröße
C
g
abcdefg
Baugröße
B 100
(3,94)
C 130
(5,1)
79,1 (3,11)
64,1 (2,52)
40,6 (1,60)
25,6 (1,01)
c
Baugröße B – 22-JBAB
77,5 (3,05)
50,0 (1,97)
22,5 (0,89)
Baugröße B – 22-JBCB
(Verwendung mit
Komm.-Abdeckung)
180
(7,09)
260
(10,2)
∅
(0,87)
∅
(0,87)
148
(5,83)87(3,43)
192
(7,56)
22,2
109,9
(4,33)
74,3
(2,93)
22,2
105,3
(4,15)
76,3
(3,00)
134,3
(5,29)
116
(4,57)
168
136
(5,35)
180
(7,1)
87,4
(3,44)
–4,3
(6,61)
246
(9,7)
107,0 (4,21)
66,0 (2,60)
24,0 (0,94)
Baugröße C – 22-JBAC
108,7 (4,28)
92,2 (3,63)
69,2 (2,72)
45,7 (1,80)
22,2 (0,87)
Baugröße C – 22-JBCC
(Verwendung mit
Komm.-Abdeckung)
111,2
(4,38)
109,8
(4,32)
2,2
(4,9)
(9,5)
∅
28,5
(1,12)
∅
22,2
(0,87)
152,2
(5,99)
∅
28,5
(1,12)
∅
22,2
(0,87)
179,8
(7,08)
144,8
(5,70)
Versandgewicht
Page 44

Deutsch-22
Publikation 22D-QS001C-DE-P – Oktober 2008
Ersetzt Publikation vom Mai 2007 Copyright © 2008 Rockwell Automation, Inc. Alle Rechte vorbehalten.
Page 45

Guide de mise en route
Variateur de vitesse c.a.
PowerFlex
FRN 1.xx - 2.xx
Ce guide de mise en route résume les étapes de base nécessaires à
l'installation, la mise en service et la programmation du variateur de
vitesse c.a. PowerFlex 40P. Les inf ormations fournies ne remplacent
pas le manuel utilisateur et s'adressent uniquement au personnel
qualifié pour la maintenance des variateurs. Pour des informations
détaillées sur le PowerFlex 40P, dont les directives relatives à la
compatibilité électromagnétique (CEM), des remarques sur les
applications et les précautions associées, reportez-vous au Manuel
Utilisateur du PowerFlex 40P (publication 22D-UM001…), sur le site
Internet
Précautions générales
!
www.rockwellautomation.com/literature.
ATTENTION : le variateur contient des condensateurs à haute tension dont le
déchargement prend un certain temps après coupure de l'alimentation secteur.
Avant d'intervenir sur le variateur, verrouillez l'isolation entre le secteur et les
entrées d'alimentation [R, S, T (L1, L2, L3)]. Attendez trois minutes que les
condensateurs se déchargent et atteignent des niv eaux de tension non dangereux.
En cas de non-respect de cette consigne, vous vous exposez à des blessures
corporelles graves, voire mortelles.
Des voyants éteints n'indiquent pas que les condensateurs se sont déchargés et
ont atteint des niveaux de tension non dangereux.
ATTENTION : l'utilisation des paramètres A092 [Essai Dém Auto] ou A094
[Démarr. Mise S/T] dans une application inadaptée risque de détériorer
l'équipement et/ou d'occasionner des blessures corporelles. Ne pas utiliser cette
fonction sans avoir pris en considération les lois locales, nationales et
internationales en vigueur, de même que les normes, réglementations ou
recommandations en vigueur dans l'industrie.
ATTENTION : seul un personnel qualifié, familiarisé avec les variateurs c.a. et
les équipements annexes, doit concevoir ou procéder à l'installation, la mise en
service et la maintenance du système. Le non-respect de ces consignes risque
d'occasionner des blessures corporelles et/ou des dégâts matéri els.
ATTENTION : ce variateur contient des pièces et des composants aux
décharges électrostatiques (ESD). Des précautions de contrôle de l'électricité
statique doivent être prises lors de l'installation, du test, de la maintenance ou de
la réparation de cet appareil. En cas de non-respect des procédures de contrôle
des décharges électrostatiques, les composants du variateur risquent d'être
détériorés. Si vous n'êtes pas familiarisé avec ces procédures, reportez-vous à la
documentation A-B 8000-4.5.2, « G uarding Against Electrostatic Damage » ou
tout autre manuel traitant de la protection contre les décharges électrostatiques.
ATTENTION : une utilisation ou une installation incorrecte du variateur risque
de détériorer ses composants ou de réduire sa durée de vie. Des erreurs de
câblage ou d'application, telles qu'un moteur sous-dimensionné, une
alimentation c.a. inappropriée ou inadaptée, ou des températures ambiantes
excessives peuvent entraîner un dysfonctionnement du système.
ATTENTION : risque de blessure corporelle ou de dégât matériel. Le variateur
ne contient aucune pièce réparable par l'utilisateur. Ne pas démonter le châssis
du variateur.
®
40P
Page 46

Français-2
Instructions de montage
• Monter le variateur verticalement, sur une surface plate, verticale et
plane.
Taille Taille des vis Couple de serrage Rail DIN
B M4 (n° 8-32) 1,56-1,96 Nm (14-17 lb.-in.) 35 mm
C M5 (n° 10-24) 2,45-2,94 Nm (22-26 lb.-in.) –
• Protéger le ventilateur de la poussière ou des particules métalliques.
• Ne pas exposer à une atmosphère corrosive.
• Protéger de l'humidité et des rayons directs du soleil.
Dégagements minimum pour le montage
Voir page 22 pour les dimensions de montage.
120 mm
(4,7 in.)
RUN
REV
FAULT
RUN
REV
FAULT
Objet le plus proche
120 mm
(4,7 in.)
RUN
REV
FAULT
25 mm
(1,0 in.)
RUN
REV
FAULT
susceptible de gêner
la circulation de l'air à
travers le dissipateur
thermique et le
châssis
120 mm
(4,7 in.)
Option de montage A
Aucun dégagement
requis entre les
120 mm
(4,7 in.)
Option de montage B
variateurs.
Températures ambiantes de fonctionnement
Température ambiante Type de coffret Dégagements minimum
Minimum Maximum
IP20/Type ouvert
40 °C (104 °F)
-10 °C (14 °F)
IP30/NEMA 1/UL type 1
50 °C (122 °F) IP20/Type ouvert
(1)
Cette classification nécessite l'installation du kit PowerFlex 40P IP30/NEMA 1/UL
type 1 en option.
pour le montage
Utilisez l’option de
montage A
Utilisez l’option de
(1)
montage B
Utilisez l’option de
montage B
Page 47

Critères généraux de mise à la terre
RUN
REV
FAULT
Français-3
R/L1
S/L2
T/L3
SHLD
U/T1
V/T2
W/T3
Débranchement des MOV
Pour éviter d'endommager le variateur, les MOV raccordées à la terre
doivent être débranchées si le variateur est installé sur un réseau de
distribution sans mise à la terre dans lequel les tensions entre phase et
terre sur n'importe quelle phase pourraient dépasser 125 % de la tension
nominale entre phases. Pour débrancher ces composants, retirez le
cavalier comme indiqué dans les figures ci-dessous.
1. T ournez la vis dans le sens inverse des aiguilles d'une montre pour la
desserrer.
2. Retirez complètement le cavalier du châssis du variateur.
3. Serrez la vis pour la maintenir en place.
Emplacement du cavalier
Retrait de la MOV entre phase et terre
R/L1
Entrée c.a.
S/L2
triphasée
T/L3
Cavalier
Important : serrez la vis après avoir retiré le cavalier.
1234
Page 48

Français-4
Conformité CE
Reportez-vous au Manuel Utilisateur du PowerFlex 40P pour savoir
comment vous conformer aux Directives Basse Tension (LV) et de
Compatibilité Electromagnétique (CEM).
Caractéristiques, fusibles et disjoncteurs
Caractéristiques nominales des variateurs
Caractéristiques
nominales de sortie
(1)
Référence
kW (CV) A
Entrée triphasée 200 - 240 V c.a. (± 10 %) – sortie triphasée 0- 230 V
22D-B2P3 0,4 (0,5) 2,3 180-264 1,15 2,5 6 140M-C2E-B40 100-C07
22D-B5P0 0,75 (1) 5 180-264 2,45 5,7 10 140M-C2E-C10 100-C09
22D-B8P0 1,5 (2) 8 180-264 4 9,5 15 140M-C2E-C16 100-C12
22D-B012 2,2 (3) 12 180-264 5,5 15,5 25 140M-C2E-C16 100-C23
22D-B017 3,7 (5) 17,5 180-264 8,6 21 30 140M-F8E-C25 100-C23
22D-B024 5,5 (7,5) 24 180-264 11,8 26,1 40 140M-F8E-C32 100-C37
22D-B033 7,5 (10) 33 180-264 16,3 34,6 60 140M-G8E-C45 100-C60
Entrée triphasée 380 - 480 V c.a. (± 10 %) – sortie triphasée 0 - 460 V
22D-D1P4 0,4 (0,5) 1,4 342-528 1,4 1,8 3 140M-C2E-B25 100-C07
22D-D2P3 0,75 (1) 2,3 342-528 2,3 3,2 6 140M-C2E-B40 100-C07
22D-D4P0 1,5 (2) 4,0 342-528 4 5,7 10 140M-C2E-B63 100-C09
22D-D6P0 2,2 (3) 6 342-528 5,9 7,5 15 140M-C2E-C10 100-C09
22D-D010 4 (5) 10,5 342-528 10,3 13 20 140M-C2E-C16 100-C23
22D-D012 5,5 (7,5) 12 342-528 11,8 14,2 25 140M-D8E-C20 100-C23
22D-D017 7,5 (10) 17 342-528 16,8 18,4 30 140M-D8E-C20 100-C23
22D-D024 11 (15) 24 342-528 23,4 26 50 140M-F8E-C32 100-C43
Entrée triphasée 460 - 600 V c.a. (± 10 %) – sortie triphasée 0 - 575 V
22D-E1P7 0,75 (1) 1,7 414-660 2,1 2,3 6 140M-C2E-B25 100-C09
22D-E3P0 1,5 (2) 3 414-660 3,65 3,8 6 140M-C2E-B40 100-C09
22D-E4P2 2,2 (3) 4,2 414-660 5,2 5,3 10 140M-C2E-B63 100-C09
22D-E6P6 4 (5) 6,6 414-660 8,1 8,3 15 140M-C2E-C10 100-C09
22D-E9P9 5,5 (7,5) 9,9 414-660 12,1 11,2 20 140M-C2E-C16 100-C16
22D-E012 7,5 (10) 12,2 414-660 14,9 13,7 25 140M-C2E-C16 100-C23
22D-E019 11 (15) 19 414-660 23,1 24,1 40 140M-D8E-C25 100-C30
(1)
Ces caractéristiques nominales s'appliquent à tous les types de variateurs ; montage sur panneau
(N104), par bride (F104) et sur plaque (H204).
Caractéristiques nominales
d'entrée
Plage de
tensions kVA A Fusibles
Protection du circuit de dérivation
Protections
moteur 140M Contacteurs
Page 49

Français-5
Catégorie Caractéristiques
Certification Listé UL508C et CAN/CSA-22.2
W
.
.
TUV
E
Rheinland
C
Production inspected
Product Safety
Le variateur est aussi conçu pour répondre aux parties appropriées des normes suivantes :
NFPA 70 : Code national de l'électricité des Etats-Unis
NEMA ICS 3.1 : Safety standards for Construction and Guide for Selection, Installation and
Operation of Adjustable Speed Drive Systems.
Protection Déclenchement en surtension du bus
CEI 146 : Code international de l'électricité.
Entrée 200-240 V c.a. :
Entrée 380-460 V c.a. :
Entrée 460-600 V c.a. :
Déclenchement en sous-tension du bus
Entrée 200-240 V c.a. :
Entrée 380-480 V c.a. :
Entrée 460-600 V c.a. :
P042 = 3 « Tens Elevée » :
P042 = 2 « Tens Faible » :
Tenue aux microcoupures réseau : 100 ms
Tenue de la logique aux microcoupures : 0,5 seconde minimum ( 2 secondes en général)
Protection électronique contre les
surcharges moteur :
Surintensité : Limite matériel 200 %, défaut instantané 300 %
Déclenchement sur défaut de terre : Entre phase et terre à la sortie du variateur
Déclenchement sur court-circuit : Entre phases à la sortie du variateur
Environnement Altitude : 1000 m (3300 pieds) max. sans déclassement.
Température ambiante maximum sans
déclassement :
IP20, type ouvert :
IP30, NEMA 1, UL type 1 :
Montage sur bride et plaque :
Mode de refroidissement
Convection :
Ventilateur :
Température de stockage : –40 à +85 °C (–40 à 185 °F)
Atmosphère : Important : le variateur ne
Humidité relative : 0 à 95 % sans condensation
Tenue aux chocs (en fonctionnement) : 15 G pendant 11 ms (±1ms)
Résistance aux vibrations
(en fonctionnement) :
EN 50178
U
L
®
CUS
Bauart geprüft
Functional
..
TUV
Safety
Rheinland
Type approved
Certifié AS/NZS, 1997 Groupe 1, Classe A
Marqué pour toutes les directives européennes en
vigueur
Directive CEM (89/336)
EN 61800-3, EN 50081-1, EN 50082-2
Directive Basse Tension (73/23/CEE)
EN 50178, EN 60204
Certifié de catégorie 3 selon la norme EN 954-1.
Répond aux exigences de sécurité fonctionnelle (FS)
lorsqu'il est utilisé avec l'option d'arrêt sécurisé
DriveGuard (série B)
Bus 405 V c.c. (équivalent à une alimentation d'arrivée
de 290 V c.a.
Bus 810 V c.c. (équivalent à une alimentation d'arrivée
de 575 V c.a.
Bus 1005 V c.c. (équivalent à une alimentation
d'arrivée 711 V c.a.
Bus 210 V c.c. (équivalent à une alimentation d'arrivée
de 150 V c.a.)
Bus 390 V c.c. (équivalent à une alimentation d'arrivée
de 275 V c.a.)
Bus 487 V c.c. (équivalent à une alimentation d'arrivée
de 344 V c.a.)
Bus 390 V c.c. (équivalent à une alimentation d'arrivée
de 275 V c.a.)
2
Protection I
pendant 3 secondes (offre une protection de
classe 10)
Au-dessus de 1000 m (3300 pieds), déclassement de
3 % tous les 305 m (1000 pieds).
–10 à +50 °C (14 à 122 °F)
–10 à +40 °C (14 à 104 °F)
Dissipateur thermique :–10 à +40 °C (14 à 104 °F)
Variateur : –10 à +50 °C (14 à 122 °F)
Variateurs de 0,4 kW (0,5 CV) et tous variateurs
montés sur bride ou plaque
Toutes autres puissances nominales de variateurs
une zone dont l'atmosphère contient des gaz volatils
ou corrosifs, des vapeurs ou de la poussière. Si le
variateur n'est pas installé immédiatement, il doit être
entreposé dans un local en atmosphère non corrosive.
t : 150 % pendant 60 secondes, 200 %
doit pas être installé dans
1 G crête, entre 5 et 2000 Hz
Page 50

Français-6
Catégorie Caractéristiques
Electrique Tolérance de tension : 200-240 V ± 10 %
Tolérance de fréquence : 48-63 Hz
Phases d'entrée : L'entrée triphasée fournit les valeurs nominales. Le
Facteur de puissance : 0,98 sur toute la plage de vitesses
Valeur nominale de court-circuit
maximum :
Valeur nominale de court-circuit réel : Déterminée par le pouvoir de coupure nominal du
Type de transistor : IGBT (Isolated Gate Bipolar, transistor bipolaire à
Commande Méthode : MLI sinusoïdale, Volts/Hertz et vectoriel sans codeur
Entrées de
commande
Fréquence porteuse 2-16 kHz, puissance nominale du variateur donnée à
Précision de la fréquence
Entrée TOR :
Entrée analogique :
Sortie analogique :
Régulation de vitesse
Boucle ouverte avec compensation
de glissement :
Avec codeur :
Fréquence de sortie : 0-500 Hz (programmable)
Rendement : 97,5 % (en général)
Modes d’arrêt : Plusieurs modes d'arrêt programmables comprenant :
Accél/Décél : Quatre temps d'accél. et de décél. programmables
Surcharge intermittente : Capacité de surcharge de 150 % pendant 1 minute.
Protection électronique
contre les surcharges moteur :
TOR : Bande passante : 10 rad/s pour une boucle ouverte ou fermée
Analogiques :
Quantité : 2 semi-programmables
Courant : 6 mA
Typ e
Mode SRC (PNP) :
Mode SNK (NPN) :
Quantité : 2 isolées, de –10 à +10 V et de 4 à 20 mA
Spécification
Résolution :
analogique
de0à10Vc.c.:
analogique
de4à20mA:
Potentiomètre externe :
380-480 V ± 10 %
460-600 V ± 10 %
fonctionnement en monophasé fournit 35 % du
courant assigné.
100 ,000 A symétrique
fusible ou du disjoncteur installé
porte isolée)
4kHz.
Inférieure à ± 0,05 % de la fréquence de sortie réglée.
Inférieure à 0,5 % de la fréquence de sortie maximale,
résolution de 10 bits
± 2 % de la pleine échelle, résolution de 10 bits
± 1 % de la vitesse nominale sur une plage de
vitesses de 80:1
± 0,3 % de la vitesse nominale sur une plage de
vitesses de 80:1
± 0,05 % de la vitesse nominale sur une plage de
vitesses de 20:1
rampe, roue libre, freinage c.c. et rampe jusqu'à arrêt
indépendamment. Chaque temps est programmable
entre 0 et 600 secondes, par incréments de
0,1 seconde
Capacité de surcharge de 200 % pendant 3 secondes.
Protection de classe 10 avec réponse sensible à la
vitesse et fonction de rétention de la surcharge à la
mise hors tension programmables, lorsque la
protection est activée.
5 programmables
De 18 à 24 V = ON, de 0 à 6 V = OFF
De 0 à 6 V = ON, de 18 à 24 V = OFF
10 bits
Impédance d’entrée 100 kohms
Impédance d’entrée 250 ohms
1-10 kohms, 2 watts minimum
Page 51

Catégorie Caractéristiques
Codeur Type : Incrémental, double voie
Sorties de
commande
Alimentation : 12 V, 250 mA. Entrées 12 V, 10 mA minimum isolées
Quadrature : 90°, ± 27 degrés à 25 °C.
Facteur d'utilisation : 50 %, +10 %
Impératifs : Les codeurs doivent être du type à amplificateur de
Relais : Quantité : 1 programmable, forme C
Opto. : Quantité :
Analogiques :
Spécification
Charge résistive :
Charge inductive :
Spécification : 30 V c.c., 50 mA non inductif
Quantité : 1 non isolée, 0 à 10 V ou 4 à 20 mA
Spécification
Résolution :
analogique de 0 à
10 V c.c. :
analogique de 4 à
20 mA :
avec transmetteur différentiel, 250 kHz maximum.
ligne, quadrature (double voie) ou impulsion
(monovoie), sortie 3,5-26 V c.c., en mode commun ou
différentiel et capables de fournir au minimum 10 mA
par voie. Entrée admissible = c.c. jusqu'à 250 kHz au
maximum. Les E/S du codeur s'adaptent
automatiquement pour accepter des tensions
nominales de 5 V, 12 V et 24 V c.c.
3 A sous 30 V c.c., 3 A sous 125 V,
3 A sous 240 V c.a.
0,5 A sous 30 V c.c., 0,5 A sous 125 V,
0,5 A sous 240 V c.a.
2 programmables
10 bits
1 kohm minimum
525 ohms maximum
Français-7
Page 52

Français-8
Câblage de puissance
Caractéristiques des câbles d’alimentation Conducteur de cuivre
recommandé
Non blindé 600 V, 75 °C THHN/THWN Isolation 0,4 mm, endroit sec
Blindé 600 V, 75 °C ou 90 °C RHH/RHW-2
Qualité pour goulotte, blindé 600 V, 75 °C ou 90 °C
RHH/RHW-2
Anixter OLF-7xxxxx,
Belden 29501-29507 ou
équivalent
Anixter 7V-7xxxx-3G
Shawflex 2ACD/3ACD ou
équivalent
Bornier de puissance
Taille B Taille C
V/T2T/L3S/L2R/L1 U/T1 W/T3
BR+ BR-DC- DC+
Borne
(1)
Description
R/L1, S/L2 Entrée monophasée
(2)
V/T2T/L3S/L2R/L1 U/T1 W/T3 P2 P1
BR+ BR-DC- DC+
R/L1, S/L2, T/L3 Entrée triphasée
U/T1 Vers U/T1 moteur
V/T2 Vers V/T2 moteur
W/T3
Vers W/T3
moteur
=
Inversez l'un des deux
fils moteur pour
changer le sens de
rotation.
Connexion de la self de bus c.c. (variateurs de taille C uniquement)
P2, P1
Le variateur de taille C est livré avec un cavalier entre les
bornes P2 et P1.Retirez ce cavalier seulement quand une
self de bus c.c. doit être connectée. Le variateur ne
démarrera pas en cas d'absence de cavalier ou de self.
DC+, DC- Connexion du bus c.c.
BR+, BR- Connexion de la résistance de freinage dynamique
Terre de sécurité (PE)
(1)
Important : les vis des bornes peuvent se desserrer pendant le transport. Vérifiez
que toutes les vis des bornes sont serrées avec le couple recommandé avant de
mettre le variateur sous tension.
(2)
Le fonctionnement en monophasé requiert un déclassement de 65 % du courant
nominal du variateur.
Spécifications du bornier de puissance
Taille Section max. du
conducteur
B5,3mm
C8,4mm
(1)
Sections maximum/minimum tolérées par le bornier : il ne s'agit pas de
(1)
2
(10 AWG) 1,3 mm2 (16 AWG) 1,7-2,2 Nm (16-19 lb.-in.)
2
(8 AWG) 1,3 mm2 (16 AWG) 2,9-3,7 Nm (26-33 lb.-in.)
Section min. du
conducteur
(1)
Couple
recommandations.
Page 53

Français-9
Conditionnement de l'entrée d'alimentation
Conditionnement de l’entrée d’alimentation Action corrective
Basse impédance de ligne (réactance de ligne
inférieure à 1 %)
Transformateur d'alimentation supérieur à 120 kVA
Ligne possédant des condensateurs de correction
du facteur de puissance
Ligne ayant de fréquentes coupures d’alimentation
Ligne ayant des surtensions transitoires
supérieures à 6000 V (foudre)
Tension entre phase et terre supérieure à 125 % de
la tension entre phases
Système de distribution sans terre
Configuration en triangle ouvert 240 V (colonne)
(1)
Pour les variateurs connectés en triangle ouvert avec une phase centrale reliée au
neutre mise à la terre du système, la phase opposée à la phase centrale connectée
au neutre ou à la terre est appelée « colonne », « colonne haute », « colonne
rouge », etc. Le fil de cette phase doit être repéré dans tout le système par du ruban
adhésif rouge ou orange à chaque point de connexion. La « stinger leg » doit être
connectée à la phase B centrale sur la self de ligne. Pour connaître les références
spécifiques de la self de ligne, reportez-vous au Manuel Utilisateur du
PowerFlex 40P.
(2)
Pour savoir comment commander un accessoire, reportez-vous à l’Annexe B du
Manuel Utilisateur du PowerFlex 40P.
• Installez une self de ligne
• ou un transformateur
d’isolement
• ou une bobine d'inductance de
bus : sur les variateurs de 5,5 et
11 kW (7,5 et 15 CV)
uniquement
• Installez une self de ligne
• ou un transformateur
d’isolement
• Retirez le cavalier de mise à la
terre des varistances (MOV)
• ou installez, si nécessaire, un
transformateur d’isolement dont
le secondaire est mis à la terre.
(1)
• Installez une self de ligne
(2)
Remarques à propos du bus commun
et de la précharge
Si vous utilisez des variateurs avec précharge interne a vec un
sectionneur sur le bus commun, vous devez connecter un contact
auxiliaire du sectionneur à une entrée TOR du variateur. L'entrée
correspondante (paramètre A051-A054) doit être paramétrée sur
l'option 29, « Valid Prchrg ». Ceci assure un verrouillage correct de la
précharge et protège le variateur de dommages potentiels lorsqu'il est
raccordé à un bus c.c. commun.
Page 54

Français-10
Recommandations de câblage des E/S
Types de conducteurs pour les signaux et la commande
Type(s) de fils
Type de signal/
Utilisation
E/S analogiques et
PTC
Potentiomètre
décentralisé
E/S Impulsion/
Codeur
(1)
Fil multifilaire ou plein.
(2)
9728 ou 9730 sont équivalents et peuvent être utilisés mais ils ne pourront peut-être
pas passer pas dans la goulotte du variateur.
(3)
Si les fils sont courts et enfermés à l'intérieur d'une armoire n'ayant pas de
composants sensibles, l'utilisation de fil blindé n'est pas indispensable, mais toujours
préférable.
Câble de commande recommandé pour les E/S TOR
Type Type(s) de conducteur Description
Non blindé Conforme au NEC (code
national de l'électricité
américain) ou aux
réglementations nationales
ou locales en vigueur
Blindé Câble blindé
multiconducteur, tel que
Belden 8770 (ou équiv.)
(1)
Belden
(ou équivalent(s))
8760/9460 0,750 mm2 (18 AWG), paire
8770 0,750 mm2 (18 AWG),
(2)
89730
Description
torsadée, 100 % blindée avec
fil de décharge
3 conducteurs, blindé.
0,196 mm2 (24 AWG), paires
blindées individuellement.
(3)
.
–300V,
2
0,750 mm
(18 AWG),
3 conducteurs, blindé.
Isolation
nominale min.
300 V,
75-90 °C
(167-194 °F)
Isolation nominale
min.
60 °C
(140 °F)
Spécifications du bornier d'E/S
Taille Section max. du
conducteur
B et C 1,3 mm
(1)
Sections maximum/minimum tolérées par le bornier : il ne s'agit pas de
(1)
2
(16 AWG) 0,2 mm2(24 AWG) 0,5-0,8 Nm (4,4-7 lb.-in.)
Section min. du
conducteur
(1)
Couple
recommandations.
Pour connaître les recommandations concernant les longueurs
maximales pour les câbles de puissance et de commande, reportez-vous
au Manuel Utilisateur du PowerFlex 40P.
Page 55

Bornier de commande
Schéma de principe du câblage de commande
Français-11
Relais N.O.
Commun relais
Relais N.F.
Cavalier de validation
R1
R2
R3
0-10V
0-20mA
R1 R2 R 3
(5)
NPN
PNP
PNPNPN
+24V
+10V
0-10V
0/4-20mA
30 V c.c.
50mA
non inductif
Sélection sortie analogique
01 02 0 3 04 05
11 12 1 3 14 15
(1)
(1)(5)
Arrêt
01
Démar./Marche AV
02
Sens/Marche ARR
03
Commun TOR
04
Entrée Dig. 1
05
Entrée Dig. 2
06
Entrée Dig. 3
07
Entrée Dig. 4
08
Commun opto.
09
+24 V c.c.
11
10 V c.c.
12
Entrée 0-10 V (ou ± 10 V)
13
Commun analogique
14
Entrée 4-20 mA
15
Sortie analogique
16
Sortie opto 1
17
Sortie opto 2
18
Blindage RS485
19
ENBL
06 07 0 8 09
16 17 1 8 19
Câblage
PNP type
(2)
(3)
Cavalier
de validation
Le pot. doit
être entre
1 et 10 kohms
2 W min.
Commun
(5)
RS485
(DSI)
1
Câblage
NPN type
(4)
24V
Résistif 3A 3A 3A
30 V c.c. 125 V c.a. 240 V c.a.
Inductif 0,5 A 0,5 A 0,5 A
Voir les remarques relatives au schéma de principe du câblage de
commande à la page suivante.
Page 56

Français-12
Remarques relatives au schéma de principe du câblage de commande
(1)
Important : la borne 01 des E/S est toujours une entrée d'arrêt en roue libre sauf si le
paramètre P036 [Source Démarrage] est réglé sur la commande « 3 Fils »,
«2FDétNiv» ou «CdeAVNT/ARR». En mode trois fils, la borne01 des E/S est
commandée par le paramètre P037 [Mode Arrêt]. Toutes les autres sources d’arrêt
sont commandées par le paramètre P037 [Mode Arrêt].
P036 [Source Démarrage] Arrêt Arrêt borne 01 des E/S
(6)
3 Fils Selon P037 Selon P037
2 Fils Selon P037 Roue libre
(6)
2 F Dét Niv Selon P037 Selon P037
2 F Hte Vit Selon P037 Roue libre
Port RS485 Selon P037 Roue libre
(6)
Cde AVNT/ARR Selon P037 Selon P037
Important : le variateur est livré avec un cavalier installé entre les bornes 01 et 11 du
bornier des E/S. Retirez ce cavalier quand vous utilisez la borne 01 des E/S comme
entrée d'arrêt ou de validation.
(2)
Commande deux fils représentée. Pour la commande trois fils, utilisez une entrée
impulsionnelle sur la borne 02 des E/S pour commander un démarrage. Utilisez
une entrée à encliquetage sur la borne 03 des E/S pour modifier le sens de
rotation.
(3)
La fonction de la borne 03 des E/S est entièrement programmable. Programmez-la
avec le paramètre E202 [Borne Numérique3].
(4)
Adaptez le réglage du micro-interrupteur de sélection de la plage de tensions au
système de commande pour un fonctionnement unipolaire ou bipolaire correct.
(5)
Lorsque vous utilisez une sortie opto avec une charge inductive telle qu'un relais,
installez une diode de protection en parallèle sur le relais, comme indiqué, pour éviter
d'endommager la sortie.
(6)
Lorsque le cavalier de validation ENBL est retiré, la borne 01 des E/S agit toujours en
tant que validation câblée, provoquant un arrêt en roue libre sans interprétation
logicielle.
Page 57

Français-13
Désignations des bornes E/S de commande
N° Signal Par défaut Description Param.
R1 Relais N.O. Défaut Contact normalement ouvert pour sortie relais. A055
R2 Commun relais – Commun pour sortie relais.
R3 Relais N.F. Défaut Contact normalement fermé pour sortie relais. A055
Micro-interrupteur de
sélection de la sortie
analogique
Micro-interrupteur
NPN/PNP
(1)
01 Arrêt
02 Démarrage/Marche
avant
03 Borne Numérique3 Inactif P036, P037,
04 Commun TOR – Pour les entrées TOR. Isolation électronique entre les
05 Entrée digitale 1 Fréq Présél A programmer avec le paramètre A051 [Sél Entr Dig 1]. A051
06 Entrée digitale 2 Fréq Présél A programmer avec le paramètre A052 [Sél Entr Dig 2]. A052
07 Entrée digitale 3 Local A programmer avec le paramètre A053 [Sél Entr Dig 3]. A053
08 Entrée digitale 4 A-Coups Avt. A programmer avec le paramètre A054 [Sél Entr Dig 4]. A054
09 Commun Opto – Pour les sorties opto-couplées. Isolation électronique
11 +24 V c.c. – Référencée au commun TOR.
12 +10 V c.c. – Référencée au commun analogique.
13 Entrée ±10 V
14 Commun analogique – Pour entrée 0-10 V ou entrée 4-20 mA. Isolation
15 Entrée 4-20 mA
16 Sortie analogique SrtFréq 0-10 La sortie analogique par défaut est 0-10 V. Pour
17 Sortie opto 1 Mot en Mrche A programmer avec le paramètre A058
18 Sortie opto 2 FréqAtteinte A programmer avec le paramètre A061
19 Blindage RS485
(DSI)
(1)
Voir les notes de bas de page (1) et (6), page 12.
(2)
Les entrées 0-10 V et 4-20 mA sont des voies d’entrée distinctes qui peuvent être connectées
0-10V Règle la sortie analogique pour la tension ou le courant. Le réglage doit
SRC (PNP) Le réglage du micro-interrupteur permet de câbler les entrées en NPN
Roue libre Le cavalier installé en usine ou une entrée normalement
Inactif La borne 03 des E/S est entièrement programmable.
(2)
Inactif Pour l’entrée d’alimentation externe 0-10 V (unipolaire)
(2)
Inactif Pour entrée d'alimentation externe 4-20 mA
– En cas d'utilisation du port de communication RS485
correspondre à celui du paramètre A065 [Sél Sort Ana].
ou en PNP.
fermée doit être présent pour que le variateur puisse
démarrer.
Programmez-la avec le paramètre E202
[Borne Numérique3]. Pour désactiver la marche arrière,
voir le paramètre A095 [Désact Arrière].
entrées TOR et les E/S analogiques et les sorties opto.
entre les sorties opto et les E/S analogiques et les
entrées TOR.
Alimentation des entrées TOR fournie par le variateur.
Le courant de sortie maximum est de 100 mA.
Alimentation du potentiomètre externe 0-10 V.fournie
par le variateur.
Le courant de sortie maximum est de 15 mA.
ou ±10 V (bipolaire) (impédance d’entrée = 100 kohms)
ou le curseur du potentiomètre.
électronique entre les entrées et sorties analogiques et
les E/S TOR et les sorties opto.
(impédance d'entrée = 250 ohms).
convertir en valeur de courant, réglez le
micro-interrupteur de sélection de la sortie analogique
sur 0-20 mA. Programmez-la avec le paramètre A065
[Sél Sortie Ana]. La valeur analogique max. peut être
mise à l’échelle à l’aide du paramètre A066
[Sortie Ana Haute].
Charge maximale : 4-20 mA = 525 ohms (10,5 V)
[Sél Sort Opto 1].
[Sél Sort Opto 2].
(DSI), la borne doit être reliée à la terre de sécurité
(PE).
0-10V = 1 kohm (10 mA)
(1)
P036
P036, P037
A095, E202
P038
P038,
A051-A054,
A123, A132
P038,
A051-A054,
A132
A065, A066
A058, A059,
A064
A061, A062,
A064
simultanément Les entrées peuvent être utilisées indépendamment pour la commande de vitesse
ou conjointement lorsqu’on fonctionne en mode PID.
Page 58

Français-14
Interface codeur
L'interface codeur du PowerFlex 40P peut fournir une alimentation en 5
ou 12 volts et accepter des entrées en mode commun ou différentielles
de 5, 12 ou 24 volts.
12V
5V
+V Cm B- BA-A
➊
Description du bornier
N° Signal Description
+V Alimentation
Cm Commun alim.
B- Codeur B (NON)
B Codeur B
A- Codeur A (NON)
A Codeur A
➊ Sortie Le micro-interrupteur permet de sélectionner une alimentation
(1)
Lorsque le codeur est alimenté en 12 V ou les E/S en 24 V, le courant maximum en
sortie à la borne 11 des E/S est de 50 mA.
Important : un codeur en quadrature indique la vitesse et le sens de
(1)
5V-12V
Alimentation interne 250 mA (isolée).
Entrée quadrature B
Entrée A monovoie, à train d'impulsions ou quadrature.
en 12 ou 5 volts sur les bornes « +V » et « Cm » pour le codeur.
rotation du rotor. Le codeur doit donc être câblé de telle
sorte que le sens de rotation en marche avant du codeur
corresponde à celle du moteur. Si le variateur lit la vitesse
du codeur mais si le régulateur de position, ou une autre
fonction du codeur, ne fonctionne pas correctement, coupez
l'alimentation du variateur e t intervertissez les voies A et B
du codeur ou deux des fils du moteur. Les variateurs
utilisant le firmware FRN 2.xx ou un firmware ultérieur
généreront un défaut si un codeur n'est pas correctement
câblé et si le paramètre E216 [Type Retr Moteur] est réglé
sur l'option 5 « Vérif Quad ».
Page 59

Français-15
Préparation de la mise en service du variateur
ATTENTION : pour procéder à la mise en service du variateur, vous
devez le mettre sous tension. Certaines des tensions présentes sont au
!
potentiel de l’alimentation d'arrivée. Pour éviter tout risque
d'électrocution ou de dégât matériel, la procédure suivante doit être
exécutée uniquement par un personnel qualifié. Vous devez lire
attentivement et comprendre la procédure avant de commencer. Si rien
ne se produit pas pendant l'exécution de cette procédure, ne continuez
pas. Coupez toutes les alimentations y compris les tensions de
commande fournies par l'utilisateur . Des tensions utilisateurs peuvent
être présentes même si le variateur n'est pas alimen té par la source
principale. Corrigez le dysfonctionnement avant de continuer.
Avant de mettre le variateur sous tension
❏ 1. Assurez-vous que toutes les entrées sont correctement connectées
aux bornes correspondantes.
❏ 2. Vérifiez sur le sectionneur que la tension d'alimentation c.a. est dans
les tolérances de la valeur nominale du variateur.
❏ 3. Vérifiez que toute alimentation de commande TOR est à 24 volts.
❏ 4. Vérifiez que le réglage du micro-interrupteur NPN/PNP correspond
à votre système de câblage de commande. Pour connaître son
emplacement, voir page 11.
Important : le système de commande par défaut est PNP. La borne
Arrêt comporte un cavalier permettant d'autoriser le
démarrage à partir des communications. Si le système de
commande est modifié en NPN, le cavalier reliant les
bornes 01 et 11 des E/S doit être retiré et installé entre les
bornes 01 et 04.
❏ 5. Vérifiez que l’entrée Arrêt est présente, sinon le variateur ne pourra
pas démarrer.
Important : si la borne 01 des E/S est utilisée comme entrée d'arrêt, le
cavalier reliant les bornes 01 et 11 doit être retiré.
Mise sous tension du variateur
❏ 6. Appliquez l'alimentation c.a. et les tensions de commande au
variateur.
Commandes Démarrage, Arrêt, Sens et Vitesse
Les valeurs par défaut des paramètres permettent de commander le
variateur à partir des communications. Aucune programmation n'est
nécessaire pour démarrer, arrêter, changer le sens de rotation et
commander la vitesse directement à partir des communications.
Important : Pour désactiver la marche arrière, voir le paramètre A095
[Désact Arrière].
Page 60

Français-16
Si un défaut apparaît à la mise sous tension, reportez-vous à la page 21
pour l'explication du code de défaut. Pour des informations détaillées sur
le dépannage, reportez-vous au Manuel Utilisateur du PowerFlex40P.
Affichage/Effacement d'un défaut
Menu Description
Groupe Affichage de base
(visualisation uniquement)
Conditions de fonctionnement du variateur
couramment consultées.
RUN
REV
FAULT
➊
➋
N° Voyant État du voyant Description
Etat Marche Rouge statique Indique que le variateur est en fonctionnement.
➊
Rouge
clignotant
Le variateur a reçu l’ordre de changer de sens de rotation.
État Sens Rouge statique Indique que le variateur fonctionne en sens marche arrière.
Rouge
clignotant
État Défaut Rouge
clignotant
Le variateur a reçu l'ordre de changer de sens de rotation et
le moteur décélère jusqu'à zéro.
Indique que le variateur est en défaut.
Groupe Affichage évolué
(visualisation uniquement)
Conditions de fonctionnement évoluées du
varia teur.
Indicateur de défaut
Liste des codes correspondant à des
conditions de défaut spécifiques. Affiché
uniquement en cas de défaut.
N° Touche Nom Description
➋
Flèche Haut Défilement : appuyer puis relâcher pour parcourir les
groupes d'affichage et les paramètres sélectionnables par
l'utilisateur.
Réinitialisation : appuyer et maintenir pendant trois
secondes pour effacer le défaut actif.
Outils de programmation du variateur
Pour davantage de possibilités de programmation et de commande du
variateur , v ous pouv ez utiliser une HIM décentralisée sur port DSI ou des
outils de programmation sur PC (DriveExplorer™ ou Driv eTools™ SP).
Description Référence
Module convertisseur série 22-SCM-232
Logiciel DriveExplorer
Logiciel DriveTools SP
HIM à écran LCD, montage sur panneau
décentralisé
HIM à écran LCD, portative décentralisée 22-HIM-A3
(1)
Requiert un module convertisseur série.
(1)
(1)
9306-4EXP02ENE
9303-4DTS01ENE
22-HIM-C2S
Page 61

Réglage de l'affichage des paramètres
E201 [Opt AffichageDEL]
Permet de sélectionner les paramètres qui apparaîtront sur l'interface du variateur.
Option E201 Jeu de paramètres
0
1
2
3
Valeurs Par défaut : 2
Tous les paramètres des groupes Affichage de base (Groupe b) et
Affichage évolué (Groupe d)
Tous les paramètres du groupe Affichage de base (b001-b029)
Paramètres b001-b007 et b010 du groupe Affichage de base
Paramètres b001-b004 du groupe Affichage de base
Min./Max. : 0/3
Affichage : 1
Français-17
Groupe Affichage de base
Fréq Sortie b001
Fréq Commandée b002
Intensité Sortie b003
Groupe Programmation
de base
Groupe Programmation
évoluée
Sél Entr Dig 1 A051
Sél Entr Dig 2 A052
Sél Entr Dig 3 A053
Sél Entr Dig 4 A054
Sél Sort Relais A055
Niv Sort Relais A056
Sél Sort Opto 1 A058
Niv Sort Opto 1 A059
Sél Sort Opto 2 A061
Niv Sort Opto 2 A062
Log Sort Opto A064
Sél Sort Ana A065
Sortie Ana Haute A066
Temps Accél. 2 P067
Temps Décél. 2 P068
Fréq. Interne A069
Fréq Présél 0 A070
Fréq Présél 1 A071
Fréq Présél 2 A072
Fréq Présél 3 A073
Fréq Présél 4 A074
Fréq Présél 5 A075
Fréq Présél 6 A076
Fréq Présél 7 A077
Tension Sortie b004
Tension Bus CC b005
Etat Variateur b006
Code Défaut 1 b007
Code Défaut 2 b008
Code Défaut 3 b009
Visu. Process b010
Source Commande b012
Tens Nom Moteur P031
Fréq Nom Moteur P032
Int Surch Moteur P033
Fréq. A-Coups A078
Acc/Déc A-Coups A079
Tps Frein. CC A080
Niv Frein. CC A081
Sél Résist Frein A082
% Courbe en S A083
Sélect Boost A084
Boost Démarrage A085
Tension Cassure A086
Fréq. Cassure A087
Tension Maxi A088
Lim Intensité 1 A089
Sél Surch Moteur A090
Fréquence MLI A091
Essai Démar Auto A092
Tps Redémar Auto A093
Démarr. Mise S/T A094
Désact. Arrière A095
Valid Repr Volée A096
Compensation A097
Surintens. Soft A098
Echelle Process A099
RAZ Défaut A100
Verrou. Prog. A101
Sél. Point Test A102
Vitesse Comm A103
Adr Station Comm A104
Act. Perte Comm A105
Temps Perte Comm A106
Format Comm A107
Langue A108
Etat Entr Cde b013
Etat Entr. Digit b014
Etat Comm b015
Version Logiciel b016
Type Variateur b017
Temps Fonct Var. b018
Données Pt Test b019
Entr Ana 0-10 V b020
Fréquence Mini P034
Fréquence Maxi P035
Source Démarrage P036
Mode Arrêt P037
Réf. Vitesse P038
Consign Sort Ana A109
EntAna 0-10V Bas A110
EntAna 0-10V Hte A110
EntAna 4-20mABas A112
EntAna 4-20mAHte A113
Hz Glissmt @ In A114
Tps Process Bas A115
Tps Process Hte A116
Mode Régul Bus A117
Lim Intensité 2 A118
Saut Fréquence A119
Bande Saut Fréq. A120
Tps Déf Blocage A121
Perte Entr Ana A122
Valid 10V Bipolr A123
Désact MLI Var A124
Mode Prod Couple A125
Int Nom Moteur A126
Réglage Auto A127
Chute Tension RI A128
Réf. Int. Flux A129
Corr PID Hte A130
Corr PID Bas A131
Sél Réf PID A132
Sél Retour PID A133
Gain Prop PID A134
Temps Intégr PID A135
Taux Diff PID A136
Consigne PID A137
Plage Morte PID A138
Précharge PID A139
Entr Ana 4-20 mA b021
Puissance Sortie b022
Fact Puiss Sort b023
Température Var. b024
Etat Compteur b025
Etat Temporisat. b026
Etape Etat Log b028
Courant Couple b029
Temps Accél. 1 P039
Tem ps Dé cél . 1 P 04 0
Valeurs Défaut P041
Classe Tension P042
Mém Surchrge Mot P043
Etape Log 0 A140
Etape Log 1 A141
Etape Log 2 A142
Etape Log 3 A143
Etape Log 4 A144
Etape Log 5 A145
Etape Log 6 A146
Etape Log 7 A147
Tps Etape Log 0 A150
Tps Etape Log 1 A151
Tps Etape Log 2 A152
Tps Etape Log 3 A153
Tp
pe Log 4 A154
s Eta
Tps Etape Log 5 A155
Tps Etape Log 6 A156
Tps Etape Log 7 A157
Tempo Décl Frein A160
Tempo Encl Frein A161
Sél Mode RAZ MOP A162
Seuil Tens Frein A163
Page 62

Français-18
Groupe Programmation
étendue
Opt AffichageDEL E201
Borne Numérique3 E202
Temps Accél. 3 E203
Tem ps Déc él . 3 E 204
Temps Accél. 4 E205
Tem ps Déc él . 4 E 206
Groupe Affichage évolué Etat Var 2 d301
Mode Ecrit Comm E207
Mode Perte Puiss E208
Valid 1/2 Bus CC E209
Ampl. Dent Scie E210
Incr. Dent Scie E211
Décr. Dent Scie E212
Fréq. Dent Scie E213
Durée Synchro. E214
Rapport Vitesse E215
Etat Textile d302
Type Retr Moteur E216
Pôles Mot Nom E217
Pts/tr Codeur E218
Ech Entr Impuls E219
Ki Bcle Vitesse E220
Kp Bcle Vitesse E221
Mode Positionmt E222
Fréq Prise Orign E223
Sens Prise Orign E224
Tol Pos Codeur E225
Pts par Unité E226
Val Hz Glissmt d303
Retour Vitesse d304
Vitesse Codeur d306
Paramètres du groupe Affichage de base
N° Paramètre Min./Max. Affichage/Options
b001 [Fréq Sortie] 0,00/[Fréquence Maxi] 0,01 Hz
b002 [Fréq Commandée] 0,00/[Fréquence Maxi] 0,01 Hz
b003 [Intensité Sortie] 0,00/(Intensité du
b004 [Tension Sortie] 0/Tension nominale du
b005 [Tension Bus CC] En fonction de la tension
b006 [Etat Variateur] 0/1 (1 = Condition vraie) Bit 3
b007-
[Code Défaut x] F2/F122 F1
b009
b010 [Visu. Process] 0,00/9999 0,01 – 1
b012 [Source Commande] 0/112 Chiffre 2&3 = Cde de vitesse
b013 [Etat Entr Cde] 0/1 (1 = Entrée présente) Bit 3
b014 [Etat Entr. Digit] 0/1 (1 = Entrée présente) Bit 3
b015 [Etat Comm] 0/1 (1 = Condition vraie) Bit 3
b016 [Version Logiciel] 1.00/99.99 0.01
b017 [Type Variateur] 1001/9999 1
b018 [Temps Fonct Var.] 0/9999 h 1 = 10 h
b019 [Données Pt Test] 0/FFFF 1 Hex
b020 [Entr Ana 0-10 V] 0,0/100,0 % 0,1 %
b021 [Entr Ana 4-20 mA] 0,0/100,0 % 0,1 %
b022 [Puissance Sortie] 0,00/(Puissance du
b023 [Fact Puiss Sort] 0,0/180,0 deg 0,1 deg
b024 [Température Var.] 0/120 °C 1 °C
b025 [Etat Compteur] 0/9999 1
b026 [Etat Temporisat.] 0,0/9999 s 0,1 s
b028 [Etape Etat Log] 0/8 1
b029 [Courant Couple] 0,00/(Intensité du
variateur × 2)
variateur
nominale du variateur
variateur × 2)
variateur × 2)
0,01 A
1Vc.a.
1 V c.c.
En Décél En Accél Avant En Marche
(Voir P038 ; 9 = « Fréq A-Coups »
Chiffre
(Voir P036 ; 9 = « A-Coups »)
Tst FrnDynOn Entrée Arrêt Ent Sens/Arr Ent Mrch/Avt
Entrée Dig 4 Entrée Dig 3 Entrée Dig 2 Entrée Dig 1
Err DSI Tx Rx
0,01 kW
0,01 A
Bit 2 Bit 1 Bit 0
1 = Cde de démarrage
Bit 2 Bit 1 Bit 0
Bit 2 Bit 1 Bit 0
Bit 2 Bit 1 Bit 0
Unités Pas 0 E230
Unités Pas 1 E232
Unités Pas 2 E234
Unités Pas 3 E236
Unités Pas 4 E238
Unités Pas 5 E240
Unités Pas 6 E242
Unités Pas 7 E244
Filtre Régul Pos E246
Gain Régul Pos E247
Mot Cde Evoluée E248
Sélect Stat Cmd E249
Cumul Unités d308
FracCumul Unités d309
Page 63

Français-19
Mise en service intelligente (SMART) avec les
paramètres du groupe Programmation de base
Le PowerFlex 40P a été conçu afin que sa mise en service soit simple et efficace. Le
groupe Programmation de base contient les paramètres les plus couramment utilisés.
= Arrêter le variateur avant de modifier ce paramètre.
N° Paramètre Min./Max. Affichage/Options Par défaut
P031 [Tens Nom Moteur] 20/Tension nominale du
Réglé à la tension nominale indiquée sur la plaque
signalétique du moteur.
P032 [Fréq Nom Moteur] 15/500 Hz 1 Hz 60 Hz
Réglé à la fréquence nominale indiquée sur la
plaque signalétique du moteur.
P033 [Int Surch Moteur] 0,0/(Tension nominale du
Réglé sur le courant moteur admissible max.
P034 [Fréquence Mini] 0,00/500,0 Hz 0,01 Hz 0,00 Hz
Définit la fréquence la plus basse qui sera délivrée
en permanence par le variateur.
P035 [Fréquence Maxi] 0,00/500,0 Hz 0,01 Hz 60,00 Hz
Définit la fréquence la plus élevée qui s era délivrée
par le variateur.
P036 [Source Démarrage] 1/6 1 = « 3 Fils »
Définit le système de commande utilisé pour
démarrer le variateur.
P037 [Mode Arrêt] 0/9 0 = « Rampe, CF »
Mode d'arrêt actif pour toutes les sources d'arrêt
[par ex. marche avant (borne 02 des E/S), marche
arrière (borne 03 des E/S), port RS485], sauf pour
l'exception indiquée ci-dessous.
Important : la borne 01 des E/S est toujours une
entrée d'arrêt en roue libre, sauf lorsque le
paramètre P036 [Source Démarrage] est réglé sur
la commande « 3 Fils ». En commande trois fils, la
borne 01 des E/S est commandée par le
paramètre P037 [Mode Arrêt].
P038 [Réf. Vitesse] 1/9 1 = « Fréq Interne »
Définit la source de la référence de vitesse du
variateur.
Important : lorsque le paramètre A051 ou A052
[Sél Entr Dig x] est réglé sur l'option 2, 4, 5, 6, 13
ou 14 et lorsque l'entrée TOR est active, le
paramètre A051, A052, A053 ou A054 sera
prioritaire sur la référence de vitesse commandée
par ce paramètre. Pour plus de détails,
reportez-vous au Chapitre 1 du Manuel Utilisateur
du PowerFlex 40P.
P039 [Temps Accél. 1] 0,0/600,0 s 0,1 s 10,0 s
Définit la rampe d'accélération pour toutes les
augmentations de vitesse.
P040 [Temps Décél. 1] 0,0/600,0 s 0,1 s 10,0 s
Définit la rampe de décélération pour toutes les
diminutions de vitesse.
P041 [Valeurs Défaut] 0/1 0 = « Prêt/Attente »
Rétablit les valeurs par défaut de tous les
paramètres.
P042 [Classe Tension] 2/3
Définit la classe de tension pour tous les variateurs
de 600 V.
P043 [Mém Surchrge Mot] 0/1 1 = « Activé » 0 = « Désactivé »
Active/désactive la fonction de mémorisation de la surcharge du moteur.
variateur
variateur × 2)
1 V c.a. En fonction de la tension
0,1 A En fonction de la tension
2 = «2Fils»
3 = «2FDétNiv»
4 = «2FHteVit»
5 = « Port Comm »
6 = « Cde AVNT/ARR »
1 = « Roue Lbr, CF »
2 = « Frein CC, CF »
3 = « FrnCCAuto,CF »
4 = « Rampe »
5 = « Roue Libre »
6 = « Freinage CC »
7 = « FreinCC Auto »
8 = « Ramp+F EM,CF »
9 = « Ramp+Frn EM »
(1)
L'entrée Arrêt efface aussi le défaut
actif.
2 = « Entr 0-10V »
3 = «Entrée4-20mA»
4 = «FréqPrésél»
5 = « Port Comm »
6 = « Etape Log »
7 = « Mult EntrAna »
8 = « Codeur »
9 = « Positionnemt »
1 = « RAZ Val/Déf »
2 = « Tens Faible » (480 V)
3 = «TensElevée» (600V)
(1)
(1)
(1)
(1)
nominale du variateur
nominale du variateur
5
0
5
0
3
Page 64

Français-20
Paramètres du groupe Affichage évolué
N° Paramètre Min./Max. Affichage/Options
d301 [Etat Variateur 2] 0/1 1
d302 [Etat Textile] 0/1 1
d303 [Val Hz Glissmt] 0,0/25,0 Hz 0,1 Hz
d304 [Retour Vitesse] 0/64000 tr/min 1 tr/min
d305 [Frac Retour Vit] 0,0/0,9 0,1
d306 [Vitesse Codeur] 0/64000 1
d307 [Frac Vit Codeur] 0,0/0,9 0,1
d308 [Cumul Unités] 0/64000 1
d309 [FracCumul Unités] 0,00/0,99 0,01
Paramètres du groupe Programmation
Pour la liste complète des paramètres, reportez-vous au Manuel
Utilisateur du PowerFlex 40P.
Page 65

Français-21
Codes de défaut
Pour effacer un défaut, appuyez sur la touche Arrêt, coupez puis rétablissez
l’alimentation ou réglez le paramètre A100 [RAZ Défaut] sur 1 ou 2.
N° Défaut Description
F2 Entrée Aux.
F3 Perte Ligne Surveillez l'alimentation d’arrivée c.a. pour détecter des baisses ou des microcoupures de tension.
F4 Sous-tension
F5 Surtension
F6 Moteur bloqué
F7 Surcharge Moteur
F8 Surchauf Radiat
F12 Surintens Matér. Vérifiez la programmation. Vérifiez que la charge n’est pas excessive, que le réglage du boost CC
F13 Défaut de terre Vérifiez que le moteur et le câblage externe aux bornes de sortie du variateur ne présentent pas de
F29 Perte Entr Ana
F33 Essai Démar Auto Corrigez la cause du défaut et effacez-le manuellement.
F38 Phase U Terre Vérifiez le câblage entre le variateur et le moteur.
F39 Phase V Terre
F40 Phase W Terre
F41 Phases UV C-Circ Vérifiez qu'il n'y a pas de cour t-circuit dans le moteur et dans le câblage en sortie du variateur.
F42 Phases UW C-Circ
F43 Phases VW C-Circ
F48 Param/Défaut Le variateur a reçu l'ordre d'écrire les valeurs par défaut dans l'EEPROM.
F63 Surintens. Soft
F64 Surcharge Var. Réduisez la charge ou augmentez le temps d'accélération.
F70 Alimentation Coupez puis rétablissez l'alimentation. Remplacez le variateur si vous ne parvenez pas à effacer le
F71 Perte Réseau Le réseau de communication est en défaut.
F80 Echec Régl Auto La fonction de réglage automatique a été annulée par l’utilisateur ou a échoué. Recommencez la
F81 Perte Comm. Si l’adaptateur n’a pas été délibérément déconnecté, vérifiez le câblage au niveau du por t.
F91 Perte Codeur Nécessite un codeur différentiel. Il n'y a pas de signal au niveau de l'une des deux voies du codeur.
F100 Checksum Param. Rétablissez les valeurs par défaut.
F111 Défaut Valid HW La carte d'arrêt sécurisé DriveGuard (série B) en option est installée et le cavalier de validation
F122 Défaut Carte E/S Coupez puis rétablissez l'alimentation. Remplacez le variateur si vous ne parvenez pas à effacer le
(1)
Défaut du type RAZ Auto/Marche. A configurer avec les paramètres A092 et A093.
(1)
Vérifiez le câblage extérieur.
Vérifiez s'il n'y a pas un défaut délibéré dans la programmation des communications.
Vérifiiez les fusibles d'entrée.
(1)
Surveillez l'alimentation d’arrivée c.a. pour détecter des baisses ou des microcoupures de tension.
(1)
Vérifiez que l'alimentation c.a. ne présente pas de conditions de tension élevée ou de transitoires.
Une surtension du bus peut aussi être provoquée par la régénération du moteur. Augmentez le
temps de décélération ou installez une option de freinage dynamique.
(1)
Augmentez le [Temps Accél. x] ou réduisez la charge afin que le courant de sortie du variateur ne
dépasse pas le courant défini par le paramètre A089 [Lim Intensité].
(1)
La charge du moteur est excessive. Réduisez la charge afin que le courant de sortie du variateur ne
dépasse pas le courant défini par le paramètre P033 [Int Surch Moteur]. Vérifiez le réglage du
paramètre A084 [Sélect Boost].
(1)
Vérifiez que les ailettes du dissipateur thermique ne sont pas obstruées ou sales. Vérifiez que la
température ambiante n'a pas dépassé 40 °C (104 ° F) pour les installations IP30/NEMA 1/UL type 1 ou
50 °C (122 °F) pour les installations de type ouvert.
Vérifiez le ventilateur.
est correct, que la tension de freinage CC n’est pas trop élevée ou tout autre cause susceptible de
provoquer un courant excessif.
défaut de mise à la terre.
(1)
Une entrée analogique est configurée pour se mettre en défaut en cas de perte du signal. Une perte
de signal s’est produite.
Vérifiez les paramètres. Vérifiez le bon état des connexions d'entrée.
Vérifiez qu'une phase du moteur n'est pas à la terre.
Remplacez le variateur si vous ne parvenez pas à effacer le défaut.
Remplacez le variateur si vous ne parvenez pas à effacer le défaut.
Effacez le défaut ou coupez et remettez le variateur sous tension. Programmez les paramètres du
variateur selon les besoins.
(1)
Vérifiez les critères de charge et le réglage du paramètre A098 [Surintens. Soft].
défaut.
Coupez puis rétablissez l'alimentation. Vérifiez le câblage des communications.
Vérifiez le paramétrage de l'adaptateur réseau. Vérifiez l'état du réseau externe.
procédure.
Remplacez le câblage, le multiplexeur de port, les adaptateurs ou l'ensemble du variateur selon le
cas.
Vérifiez la connexion.
Un adaptateur a été délibérément déconnecté. Arrêtez à l'aide du paramètre A105
[Act. Perte Comm.].
Connecter la borne 04 des E/S à la terre peut renforcer l'immunité aux parasites.
Vérifiez le câblage.
Si P038 [Réf. Vitesse] = 9 « Positionmt » et E216 [Type Retr Moteur] = 5 « Vérif Quad », permutez
les entrées des voies codeur (voir page 14) ou deux fils du moteur.
Remplacez le codeur.
ENBL n'a pas été retiré.
Retirez le cavalier de validation ENBL. Coupez puis rétablissez l'alimentation.
La carte d'arrêt sécur isé DriveGuard (série B) en option est défectueuse.
Coupez l'alimentation du variateur. Remplacez la car te d'arrêt sécurisé DriveGuard (série B) en
option.
Le circuit d'activation du matériel est défectueux.
Remplacez le variateur.
défaut.
Page 66

Français-22
(
)
a
d
RUN
RUN
REV
REV
FAULT
FAULT
5,5 (0,22)
a
Dimensions du variateur
Tailles du PowerFlex 40P : les puissances nominales sont indiquées en kW et en (CV).
Taille 240 V c.a. – Triphasé 480 V c.a. – Triphasé 600 V c.a. – Triphasé
B 0,4 (0,5)
0,75 (1)
1,5 (2)
C 5,5 (7,5)
7,5 (10)
Variateur c.a. PowerFlex 40P
20A-DG01
e
b
Kits d'options Communications, Filtre RFI, IP30/NEMA 1/UL type 1
2,2 (3)
3,7 (5)
c
f
0,4 (0,5)
0,75 (1)
1,5 (2)
5,5 (7,5)
7,5 (10)
2,2 (3)
4 (5)
11 (15) 5,5 (7,5)
0,75 (1)
1,5 (2)
2,2 (3)
7,5 (10)
4 (5)
11 (15)
Les dimensions sont indiquées en millimètres
et en (pouces).
Les poids sont indiqués en kilogrammes
g
et en (livres).
Poids à
abcdefg
Taille
B100
180
(7,09)
260
(10,2)
∅
(0,87)
148
(5,83)87(3,43)
192
(7,56)
22,2
(3,94)
C130
(5,1)
b
79,1 (3,11)
64,1 (2,52)
40,6 (1,60)
25,6 (1,01)
116
(4,57)
66,0 (2,60)
24,0 (0,94)
168
(6,61)
246
(9,7)
107,0 (4,21)
136
(5,35)
180
(7,1)
l'expédition
87,4
2,2
(3,44)
(4,9)
–4,3
(9,5)
∅
28,5
(1,12)
∅
22,2
(0,87)
111,2
(4,38)
109,8
(4,32)
152,2
(5,99)
∅
28,5
(1,12)
∅
22,2
(0,87)
179,8
(7,08)
144,8
(5,70)
Option
Dimension
d
Variateur
taille B
Variateur
taille C
c
Taille B - 22-JBAB
77,5 (3,05)
50,0 (1,97)
22,5 (0,89)
(4,33)
74,3
(2,93)
∅
22,2
(0,87)
109,9
Taille C - 22-JBAC
108,7 (4,28)
92,2 (3,63)
69,2 (2,72)
45,7 (1,80)
22,2 (0,87)
a Capot Comm. 25 (0,98) 25 (0,98)
b Filtre de ligne CEM 50 (1,97) 60 (2,36)
c Filtre de ligne CEM 229 (9,02) 309 (12,17)
dIP30/NEMA1/
UL type 1
IP30/NEMA 1/
UL type 1 pour
capot Comm.
U.S. Allen-Bradley Drives Technical Support
Tel: (1) 262.512.8176, Fax: (1) 262.512.2222, Email: support@drives.ra.rockwell.com, Online: www.ab.com/support/abdrives
33 (1,30) 60 (2,36)
64 (2,52) 60 (2,36)
Taille B - 22-JBCB
(utilisé avec le capot Comm.)
134,3
(5,29)
105,3
(4,15)
76,3
(3,00)
utilisé avec le capot Comm.
Taille C - 22-JBCC
Publication 22D-QS001B-FR-P – Mai 2007
Publication 22D-QS001C-FR-P - Octobre 2008
Remplace Mai 2007 Copyright © 2008 Rockwell Automation, Inc. Tous droits réservés.
Page 67

Avviamento rapido
Inverter a frequenza
variabile PowerFlex
FRN 1.xx - 2.xx
Questa guida di avviamento rapido descrive i passi fondamentali per
installare, avviare e programmare l’inverter PowerFlex 40P a frequenza
variabile. Le informazioni contenute in questa sede non
manuale per l’utente e sono destinate solo a personale specializzato negli
interventi di manutenzione all’inverter. Per informazioni dettagliate sul
PowerFlex 40P, incluse le istruzioni sulla compatibilità elettromagnetica, le
considerazioni sulle applicazioni dell’inverter e le relative precauzioni a cui
attenersi, consultare il Manuale dell’utente di PowerFlex40P,
pubblicazione 22D-UM001… oppure visitate l’indirizzo
www.rockwellautomation.com/literature.
Precauzioni generali
ATTENZIONE: L’inverter contiene condensatori ad alta tensione che si
scaricano lentamente dopo la rimozione dell'alimentazione di rete. Prima di
!
intervenire sull’inve rter , accertarsi che l’alimentazione di rete sia isolata dagli
ingressi di linea [R, S, T (L1, L2, L3)]. Attendere tre minuti affinché
i condensatori si scarichino per garantire livelli di tensione sicuri. La mancata
osservanza di questa precauzione può causare gravi lesioni o morte.
Le spie LED spente sul display non indicano che i condensatori si sono
scaricati ad un livello di tensione sicuro.
ATTENZIONE: Se il parametro A092 [Tent riavvio aut] o A094
[Avvioall’acc.] viene utilizzato in un’applicazione inadeguata, potrebbero
derivarne danni alle apparecchiature e/o lesioni a persone. Non usare questa
funzione senza considerare codici, standard, normative o direttive del
settore, siano esse locali, nazionali ed internazionali.
ATTENZIONE: Le procedure di installazione, avviamento o successiva
manutenzione del sistema vanno espletate esclusivamente da personale
qualificato con un’adeguata conoscenza degli inverter a frequenza variabile
e dei macchinari ad essi associati. La mancata osservanza di questa
precauzione può causare lesioni a persone e/o danni alle apparecchiature.
ATTENZIONE: Questo inverter contiene parti e gruppi sensibili
a scariche elettrostatiche. Durante le procedure di installazione, prova,
manutenzione o riparazione di questo prodotto, si consiglia di osservare le
opportune precauzioni. La mancata osservanza di queste precauzioni di
protezione ESD può causare danni ai componenti. Qualora non si avesse
dimestichezza con le procedure di protezione ESD, consultare la
pubblicazione A-B 8000-4.5.2, “Guarding Against Electrostatic Damage”
o un altro manuale di pertinenza.
ATTENZIONE: Un inverter applicato o installato in modo incorretto può
causare danni ai componenti o compromettere la vita utile del prodotto.
Errori di cablaggio o di applicazione, quali una taglia di motore
sottodimensionata, alimentazione in CA incorretta o inadeguata
o temperature ambiente eccessive, possono causare guasti al sistema.
ATTENZIONE: Rischio di lesioni a persone o danni alle apparecchiature.
L'inverter non contie ne componenti riparabili dall'utente. Non smontare lo
chassis dell'inverter.
®
40P
sostituiscono il
Page 68

Italiano-2
Considerazioni sul montaggio
• Montare l’inverter in posizione verticale, su una superficie piatta
ed in piano.
Frame Misura viti Coppia di serraggio Guida DIN
B M4 (#8-32)
C M5 (#10-24)
• Proteggere la ventola di raffreddamento e vitando polvere o particelle
metalliche.
• Non esporre ad atmosfere corrosive.
• Proteggere dall’umidità e dall’esposizione diretta ai raggi solari.
Distanze minime per il montaggio
Per le dimensioni del montaggio, vedere a pagina 20.
1,56 -1,96 Nm
(14 - 17 libbre-pollici)
2,45-2,94 Nm
(22 - 26 libbre-pollici)
35 mm
–
120 mm
(4,7 poll.)
120 mm
(4,7 poll.)
Oggetto più vicino che
RUN
REV
FAULT
RUN
REV
FAULT
potrebbe ostacolare il
flusso dell'aria
RUN
REV
FAULT
attraverso il
dissipatore termico
e lo chassis
dell'inverter.
120 mm
(4,7 poll.)
Opzione di montaggio A
120 mm
(4,7 poll.)
Opzione di montaggio B
Nessuna distanza tra gli inverter.
Temperature ambiente di funzionamento
Temperatura ambiente Grado di protezione
Minima Massima
-10°C (14°F)
40°C (104°F)
custodia
IP 20/Tipo aperto Usare l’opzione di montaggio A
IP 30/NEMA 1/UL tipo 1
50°C (122°F) IP 20/Tipo aperto Usare l’opzione di montaggio B
(1)
Questa classificazione richiede l’installazione di un kit opzionale PowerFlex 40P IP
30/NEMA 1/UL tipo 1.
Distanze minime per il
montaggio
(1)
Usare l’opzione di montaggio B
25 mm
(1,0 poll.)
RUN
REV
FAULT
Page 69

Messa a terra standard
RUN
REV
FAULT
Italiano-3
R/L1
S/L2
T/L3
SHLD
U/T1
V/T2
W/T3
Disinserimento dei varistori ad ossido metallico (MOV)
Per evitare danni all'inverter, è necessario che i varistori ad ossido
metallico (MOV) collegati a terra vengano disinseriti se l'inverter
è installato in un sistema di distribuzione senza messa a terra dove la
tensione da linea a terra su ogni fase potrebbe superare il 125% della
tensione nominale da linea a linea. Per disinserire questi dispositivi,
rimuovere il ponticello illustrato nelle figure seguenti.
1. Girare la vite in senso antiorario per allentarla.
2. Estrarre completamente il ponticello dallo chassis dell'inverter.
3. Serrare la vite per fissarla in posizione.
Posizione del ponticello
Rimozione del MOV da fase a terra
AC Input
R/L1
S/L2
T/L3
Jumper
1234
Three-Phase
Importante: Dopo la rimozione del ponticello, serrare la vite.
Page 70

Italiano-4
Conformità CE
Consultare il Manuale dell’utente di PowerFlex 40P per dettagli sulla
conformità alle direttive sull a bassa tensione (LV) e sulla compatibilità
elettromagnetica (EMC).
Specifiche, fusibili ed interruttori automatici
Valori nominali inverter
Valori nominali uscita Valori nominali ingresso Protezione circuito derivato
Numero di
(1)
catalogo
kW (HP) A
Ingresso trifase da 200 - 240 V CA (±10%), uscita trifase da 0 - 230 V
22D-B2P3 0,4 (0,5) 2,3 180-264 1,15 2,5 6 140M-C2E-B40 100-C07
22D-B5P0 0,75 (1,0) 5,0 180-264 2,45 5,7 10 140M-C2E-C10 100-C09
22D-B8P0 1,5 (2,0) 8,0 180-264 4,0 9,5 15 140M-C2E-C16 100-C12
22D-B012 2,2 (3,0) 12,0 180-264 5,5 15,5 25 140M-C2E-C16 100-C23
22D-B017 3,7 (5,0) 17,5 180-264 8,6 21,0 30 140M-F8E-C25 100-C23
22D-B024 5,5 (7,5) 24,0 180-264 11,8 26,1 40 140M-F8E-C32 100-C37
22D-B033 7,5 (10,0) 33,0 180-264 16,3 34,6 60 140M-G8E-C45 100-C60
Ingresso trifase da 380 - 480 V CA (±10%), uscita trifase da 0 - 460 V
22D-D1P4 0,4 (0,5) 1,4 342-528 1,4 1,8 3 140M-C2E-B25 100-C07
22D-D2P3 0,75 (1,0) 2,3 342-528 2,3 3,2 6 140M-C2E-B40 100-C07
22D-D4P0 1,5 (2,0) 4,0 342-528 4,0 5,7 10 140M-C2E-B63 100-C09
22D-D6P0 2,2 (3,0) 6,0 342-528 5,9 7,5 15 140M-C2E-C10 100-C09
22D-D010 4,0 (5,0) 10,5 342-528 10,3 13,0 20 140M-C2E-C16 100-C23
22D-D012 5,5 (7,5) 12,0 342-528 11,8 14,2 25 140M-D8E-C20 100-C23
22D-D017 7,5 (10,0) 17,0 342-528 16,8 18,4 30 140M-D8E-C20 100-C23
22D-D024 11,0 (15,0) 24,0 342-528 23,4 26,0 50 140M-F8E-C32 100-C43
Ingresso trifase da 460 - 600 V CA (±10%), uscita trifase da 0 - 575 V
22D-E1P7 0,75 (1,0) 1,7 414-660 2,1 2,3 6 140M-C2E-B25 100-C09
22D-E3P0 1,5 (2,0) 3,0 414-660 3,65 3,8 6 140M-C2E-B40 100-C09
22D-E4P2 2,2 (3,0) 4,2 414-660 5,2 5,3 10 140M-C2E-B63 100-C09
22D-E6P6 4,0 (5,0) 6,6 414-660 8,1 8,3 15 140M-C2E-C10 100-C09
22D-E9P9 5,5 (7,5) 9,9 414-660 12,1 11,2 20 140M-C2E-C16 100-C16
22D-E012 7,5 (10,0) 12,2 414-660 14,9 13,7 25 140M-C2E-C16 100-C23
22D-E019 11,0 (15,0) 19,0 414-660 23,1 24,1 40 140M-D8E-C25 100-C30
(1)
I valori nominali sono relativi a tutti i tipi di inverter: inverter con montaggio a pannello (N104),
Gamma
tensione kVA A Fusibili
con montaggio a flangia (F104) e con piastra (H204).
Interruttori
automatici
di protezione
motore 140M Contattori
Page 71

Italiano-5
Categoria Specifica
Certificazione Certificato UL508C e CAN/CSA-22.2
W
.
.
TUV
E
Rheinland
C
Production inspected
Product Safety
L'inverter è inoltre concepito per soddisfare le sezioni pertinenti delle seguenti specifiche:
NFPA 70 Codice elettrico nazionale statunitense
NEMA ICS 3.1 - Standard di sicurezza per la co struzione e guida a selezione, installazione e funzionamento
dei sistemi di inverter a velocità variabile.
Protezione Intervento per sovratensione bus
IEC 146 Codice elettrico internazionale.
Ingresso da 200-240 V CA:
Ingresso da 380-460 V CA:
Ingresso da 460-600 V CA:
Intervento per sottotensione bus
Ingresso da 200-240 V CA:
Ingresso da 380-480 V CA:
Ingresso da 460-600 V CA:
P042 = 3 “Alta tens”:
P042 = 2 “Bassa tens”:
Autonomia in caso di perdita alimentazione: 100 millisecondi
Autonomia in caso di perdita alimentazione
controllo
Protezione da sovraccarico motore elettronica: Protezione I
Sovracorrente: 200% del limite hardware, 300% del guasto istantaneo
Intervento per guasto verso terra: Da fase a terra sull'uscita inverter
Intervento per cortocircuito: Da fase a fase sull'uscita inverter
Ambiente Altitudine: Max. 1000 m senza declassamento. Sopra 1000 m
Temperatura massima ambiente circostante
senza declassamento:
IP20, Tipo aperto:
IP30, Tipo NEMA 1, UL tipo 1:
Montaggio a flangia e a piastra:
Metodo di raffreddamento
Convezione:
Ventola:
Temperatura di immagazzinaggio: Da –40 a 85 gradi C
Atmosfera: Importante: l'inverter non
Umidità relativa: da 0 a 95% senza condensa
Urto (in esercizio): 15 G di picco per la durata di 11 ms (±1,0 ms)
Specifiche
elettriche
Vibrazione (in esercizio): 1 G di picco, da 5 a 2000 Hz
Tolleranza tensione: 200-240 V ±10%
Tolleranza frequenza: 48-63 Hz
Fasi di ingresso: L'ingresso trifase fornisce il 100% della corrente nominale.
Cosfi: 0,98 in tutta la gamma di velocità
Corrente massima di corto circuito: 100.000 ampere simmetrici
Corrente effettiva di corto circuito: Determinato dall'AIC nominale di fusibile/interruttore
Tipo di transistore: IGBT (Isolated Gate Bipolar)
EN 50178
U
L
®
CUS
Bauart geprüft
Functional
..
TUV
Safety
Rheinland
Type approved
Certificato AS/NZS, 1997 Gruppo 1, Classe A
Contrassegnato per tutte le direttive europee di per tinenza
Direttiva EMC (89/336)
EN 61800-3, EN 50081-1, EN 50082-2
Direttiva sulla bassa tensione (73/23/EEC)
EN 50178, EN 60204
Certificato EN 954-1, Categoria 3.
Soddisfa i requisiti di sicurezza funzionale (FS, Functional
Security) se utilizzato con la Funzione Safe-Off
di DriveGuard (Serie B).
Bus di 405 V CC (equivalente a una linea di ingresso da 290 V CA)
Bus di 810 V CC (equivalente a una linea di ingresso da 575 V CA)
Bus di 1005 V CC (equivalente a una linea di ingresso da 711 V CA)
Bus di 210 V CC (equivalente a una linea di ingresso da 150 V CA)
Bus di 390 V CC (equivalente a una linea di ingresso da 275 V CA)
Bus di 487 V CC (equivalente a una linea di ingresso da 344 V CA)
Bus di 390 V CC (equivalente a una linea di ingresso da 275 V CA)
0,5 secondi minimo, 2 secondi tipici
2
(fornisce protezione di Classe 10)
t - 150% per 60 secondi, 200% per 3 secondi
declassamento del 3% ogni 305 m.
Da –10 a 50° C
da –10 a 40° C
Dissipatore: da –10 a 40° C
Inverter: Da –10 a 50° C
Inverter da 0,4 kW (0,5 HP) e tutti gli inverter a flangia e a piastra
Tutte le altre taglie di inverter
cui l'atmosfera ambiente contiene gas volatile o corrosivo,
vapori o polvere. Se l'inverter non viene installato per un
periodo di tempo, va conservato in un luogo non esposto ad
atmosfera corrosiva.
380-480 V ±10%
460-600 V ±10%
deve essere installato in un'area in
Il funzionamento monofase fornisce corrente nominale al 35%.
automatico installati
Page 72

Italiano-6
Categoria Specifica
Controllo Metodo: PWM sinusoidale, Volt/Hertz e vettoriale sensorless
Ingressi di
controllo
Encoder Tipo: Incrementale, doppio canale
Uscite di
controllo
Frequenza portante 2-16 kHz, valore nominale inverter in base a 4 kHz.
Precisione frequenza
Ingresso digitale:
Ingresso analogico:
Uscita analogica:
Regolazione della velocità
Loop aperto con compensazione di
scorrimento:
Con encoder:
Frequenza uscita: 0-500 Hz (programmabile)
Rendimento: 97,5% (tipico)
Modalità arresto: Le varie modalità di arresto programmabile includono: Rampa,
Accel/Decel: Quattro tempi di accelerazione e decelerazione programmabili
Sovraccarico intermittente: 150% di capacità di sovraccarico fino ad 1 minuto
Protezione elettronica da sovraccarico motore: Protezione di Classe 10 con risposta sensibile alla velocità
Digitali: Larghezza di banda: 10 Rad/sec per loop aperto e chiuso
Analogici: Quantità: (2) Isolati, da –10 a 10 V e 4-20 mA
Alimentazione: ingressi da 12 V, 250 mA. 12 V, 10 mA minimo isolati con
Quadratura: 90°, ±27 gradi a 25°C.
Ciclo di funzionamento: 50%, +10%
Requisiti: Gli encoder devono essere di tipo line driver, in quadratura
Relè: Quantità: (1) Form C programmabile
Optoisolate: Quantità: (2) Programmabili
Analogiche: Quantità: (1) 0-10 V o 4-20 mA non isolata
Quantità: (2) Semi-programmabili
Corrente: 6 mA
Tipo
Modalità source (SRC):
Modalità sink (SNK):
Specifica
Risoluzione:
Da 0 a 10V CC analogico:
4-20 mA analogico:
Potenziometro esterno:
Specifica
Valore nominale resistivo:
Valore nominale induttivo:
Specifica: 30 V CC, 50 mA non induttive
Specifica
Risoluzione:
Da 0 a 10V CC analogiche:
4-20 mA analogiche:
Entro ±0,05% della frequenza in uscita impostata
Entro 0,5% della frequenza in usci ta massima, risoluzione a 10 bit
±2% della scala intera, risoluzione a 10 bit
±1% di velocità base su gamma di velocità 80:1
±0,3% di velocità base su gamma di velocità 80:1
±0,05% di velocità base su gamma di velocità 20:1
Inerzia, Freno CC e Arresto in rampa.
indipendentemente. Ogni tempo può essere programmato
da 0 a 600 secondi con incrementi di 0,1 secondi.
200% di capacità di sovraccarico fino a 3 secondi
selezionabile e funzione di ritenzione del sovraccarico motore
quando attivata.
(5) Programmabili
18-24 V = ON, 0-6 V = OFF
0-6 V = ON, 18-24 V = OFF
10 bit
impedenza ingresso da 100k ohm
impedenza ingresso da 250 ohm
minimo 1-10k ohm, 2 Watt
trasmettitore differenziale, 250 kHz massimo.
(a doppio canale) o a impulsi (canale singolo), uscita 3,5-26 V
CC, di modo comune o differenziali e in grado di fornire almeno
10 mA per canale. L'ingresso consentito è CC fino a una
frequenza massima di 250 kHz. L'I/O dell'encoder viene
convertito in scala automaticamente fino a consentire tensioni
nominali pari a 5 V, 12 V e 24 V CC.
3,0 A a 30 V CC, 3,0 A a 125 V, 3,0 A a 240 V CA
0,5 A a 30 V CC, 0,5 A a 125 V, 0,5 A a 240 V CA
10 bit
Minimo 1k ohm
Massimo 525 ohm
Page 73

Italiano-7
Cablaggio di alimentazione
Tipo cavo di alimentazione Filo in rame consigliato
Non schermato da 600 V, 75°C (167°F) THHN/THWN
Schermato da 600 V, 75°C o 90°C (167°F o 194°F)
RHH/RHW-2
Schermato resistente alla fiamma da 600 V, 75°C o 90°C
(167°F o 194°F) RHH/RHW-2
Morsettiera di alimentazione
Frame B Frame C
V/T2T/L3S/L2R/L1 U/T1 W/T3
Isolato da 15 mil (0,38 mm),
per ambienti asciutti
Anixter OLF-7xxxxx,
Belden 29501-29507
o equivalente
Anixter 7V-7xxxx-3G
Shawflex 2ACD/3ACD
o equivalente
V/T2T/L3S/L2R/L1 U/T1 W/T3 P2 P1
BR+ BR-DC- DC+
(1)
Morsetto
Descrizione
R/L1, S/L2 Ingresso monofase
(2)
BR+ BR-DC- DC+
R/L1, S/L2, T/L3 Ingresso trifase
U/T1 A U/T1 motore
V/T2 A V/T2 motore
W/T3 A W/T3 motore
=
Scambiare due
conduttori del motore
per invertire la
direzione di marcia.
Collegamento bobine d'induttanza bus CC (solo inverter frame C).
P2, P1
L'inverter con frame C viene spedito con un ponticello tra
i morsetti P2 e P1. Togliere il ponticello solo se viene
collegata una bobina d'induttanza bus CC. L'inverter non si
accende senza un ponticello o una bobina d'induttanza collegata.
CC+, CC- Collegamento bus CC
BR+, BR- Collegamento resistenza di frenatura dinamica
Terra di sicurezza - PE
(1)
Importante: le viti dei morsetti potrebbero allentarsi durante la spedizione. Accertarsi
che tutti i morsetti siano serrati secondo i valori di coppia consigliati prima di
alimentare l'inverter.
(2)
Il funzionamento monofase richiede un declassamento al 65% della corrente
nominale dell'inverter.
Specifiche della morsettiera di alimentazione
Frame Sezione massima del filo
(1)
Sezione massima del filo
B 5,3 mm2 (10 AWG) 1,3 mm2 (16 AWG)
C 8,4 mm2 (8 AWG) 1,3 mm2 (16 AWG)
(1)
Le misure massima e minima accettate dalla morsettiera - Obbligatorie.
(1)
Coppia
1,7-2,2 Nm
(16 - 19 libbre-pollici)
2,9-3,7 Nm
(26 - 33 libbre-pollici)
Page 74

Italiano-8
Condizioni alimentazione di ingresso
Condizioni alimentazione in ingresso Soluzione
Impedenza di linea bassa (reattanza di linea
inferiore all'1%)
Trasformatore di alimentazione superiore a 120 kVA
La linea dispone di condensatori di rifasamento • Installare una reattanza di linea
La linea subisce frequenti interruzioni
La linea subisce picchi di disturbi intermittenti
superiori a 6000 V (fulmini)
La tensione tra fase e terra supera il 125% della
tensione normale fase-fase.
Sistema di distribuzione senza messa a terra
Configurazione a triangolo aperta da 240 V
(stinger leg)
(1)
(2)
(1)
Per gli inverter in configurazione a triangolo aperto con un sistema con neutro a terra
nella fase intermedia, la fase opposta alla fase derivata al centro al neutro o alla terra
viene definita “stinger leg”, “high leg”, “red leg” e così via. Questa fase deve essere
identificata nel sistema con un nastro rosso o arancione sul filo in corrispondenza di
ogni punto di connessione. Lo "stinger leg" deve essere collegato alla Fase B centrale
della reattanza. Consultare il Manuale dell’utente di PowerFlex 40P per informazioni
sui codici prodotto delle reattanze di linea.
Consultare l’Appendice B del Manuale dell’utente di PowerFlex 40P per informazioni
su come ordinare gli accessori.
• Installare una reattanza
• o trasformatore di isolamento
• o bobina d'induttanza del bus –
• o un trasformatore di isolamento
• Togliere il ponticello MOV a terra.
• Oppure installare il
• Installare una reattanza di linea
(2)
di linea
solo per inverter da 5,5 e 11 kW
(7,5 e 15 HP)
trasformatore di isolamento con
messa a terra del secondario,
se necessario.
Note su bus comune/precarica
Se si fa uso di inverter con precarica interna con un sezionatore al b us
comune, allora occorre collegare un contatto ausiliario sul sezionatore ad
un ingresso digitale dell’inverter. L’ingresso corrispondente (parametro
A051-A054) deve essere impostato sull’opzione 29, “Abilita precarica”.
Questo garantisce un adeguato sistema di interblocco per la precarica,
proteggendo da possibili danni all'inverter se collegato al bus CC comune.
Page 75

Consigli sul cablaggio I/O
Tipi di cavi di segnale e controllo
Tipo di segnale/
Punto di utilizzo
I/O e PTC
analogico
Potenz. remoto 8770 0,750 mm2(18AWG),
Encoder/I/O
impulsi
(1)
A treccia o con filo unico.
(2)
I cavi 9728 o 9730 sono equivalenti ed entrambi utilizzabili, tuttavia possono non
essere adatti alla canalina dei cavi dell'inverter.
(3)
Se i cavi sono corti e rientrano in un armadio elettrico privo di circuiti sensibili,
Tipi di cavo Belden
(o equivalenti)
8760/9460 0,750 mm2(18AWG),
(2)
89730
(1)
Descrizione
doppino intrecciato,
schermato al 100% con
(3)
drenaggio
3 conduttori, schermato
0,196 mm2(24AWG), coppie
schermate individualmente
potrebbe non essere necessario usare un filo schermato, tuttavia sempre consigliato.
Cavo di controllo consigliato per I/O digitali
Tipo Tipo di cavo Descrizione
Non
schermato
Schermati Cavo schermato a più
Secondo US NEC o il codice
nazionale o locale vigente
conduttori, quale Belden
– 300 V,
2
0,750 mm
(18AWG),
3 conduttori, schermato.
8770 (o equivalente)
Isolamento
minimo
nominale
300 V,
75-90° C
(167-194° F)
Isolamento
minimo nominale
60 gradi C
(140 gradi F)
Italiano-9
Specifiche della morsettiera I/O
Frame Sezione massima del filo
(1)
Sezione massima del filo
(1)
Coppia
B e C 1,3 mm2 (16 AWG) 0,2 mm2 (24 AWG) 0,5-0,8 Nm
(4,4 - 7 libbre-pollici)
(1)
Le misure massima e minima accettate dalla morsettiera. Obbligatorie.
Consultare il Manuale dell’utente di PowerFlex 40P per informazioni
sulla lunghezza massima consigliata per i cavi di alimentazione e
controllo.
Page 76

Italiano-10
Relay N.O.
Relay Common
Relay N.C.
Morsettiera di controllo
Schema a blocchi del cablaggio di controllo
0-10V
0-20mA
(6)
SNK
SRC
SRCSNK
+24V
+10V
0-10V
0/4-20mA
30V DC
50mA
Non-inductive
Analog Output Select
+
10V
/-10V
01 02 03 04 05
11 12 13 14 15
(1)
(4)
Enable Jumper
R1
R2
R3
R1 R2 R3
(1)(6)
Stop
01
Start/Run FWD
02
Direction/Run REV
03
Digital Common
04
Digital Input 1
05
Digital Input 2
06
Digital Input 3
07
Digital Input 4
08
Opto Common
09
+24V DC
11
+10V DC
12
0-10V (or ±10V) Input
13
Analog Common
14
4-20mA Input
15
Analog Output
16
Opto Output 1
17
Opto Output 2
18
RS485 Shield
19
Voltage Range Select
ENBL
06 07 08 09
16 17 18 19
Typical
SRC Wiring
(2)
(3)
(4)
Enable
Jumper
Pot must be
1-10k ohm
2 Watt Min.
(6)
Typical
SNK Wiring
Common
RS485
(DSI)
1
(5)
24V
Resistivo 3,0 A 3,0 A 3,0 A
30 V CC 125 V CA 240 V CA
Induttivo 0,5 A 0,5 A 0,5 A
Vedere Note sullo schema a blocchi del cablaggio di controllo nella
pagina successiva.
Page 77

Italiano-11
Note sullo schema a blocchi del cablaggio di controllo
(1)
Importante: il morsetto I/O 01 è sempre un ingresso di arresto per inerzia tranne
quando P036 [Fonte avvio] è impostato sul comando “A 3 fili”, “SensLiv 2fil” o “Av/Ind
temp”. Nel comando a tre fili, il morsetto I/O 01 è controllato da P037 [Modo Arresto].
Tutte le altre fonti di arresto vengono controllate dal parametro P037 [Modo Arresto].
P036 [Fonte avvio] Arresto Morsetto I/O 01 Arresto
A 3 fili Per P037 Per P037
A 2 fili Per P037 Inerzia
SensLiv 2fil Per P037 Per P037
Vel al 2 fil Per P037 Inerzia
Porta RS485 Per P037 Inerzia
Av/Ind temp. Per P037 Per P037
Importante: l’inverter viene spedito con un ponticello installato tra i morsetti I/O 01
e 11. Togliere questo ponticello se si utilizza il morsetto I/O 01 come ingresso di
arresto o di abilitazione.
(2)
La figura riporta il controllo a due fili. Per il controllo a tre fili usare un ingresso
instabile sul morsetto I/O 02 per comandare un avvio. Usare un ingresso
stabile per il morsetto I/O 03 per cambiare direzione.
(3)
La funzione del morsetto I/O 03 è completamente programmabile. Eseguire la
programmazione con E202 [Term digit 3].
(4)
Abbinare l'impostazione del microinterruttore che consente di selezionare la gamma
della tensione con lo schema di controllo corretto per un funzionamento unipolare
o bipolare.
(5)
Se si usa un'uscita optoisolata con un carico induttivo, quale un relè, installare
un diodo di recupero parallelo al relè, come mostrato in figura, per impedire
danni all'uscita.
(6)
Con il ponticello ENBL rimosso, il morsetto I/O 01 agisce sempre da abilitazione
hardware, causando un arresto per inerzia senza interpretazione del software.
(6)
(6)
(6)
Page 78

Italiano-12
Designazione dei morsetti I/O di controllo
N. Segnale
R1 Relè normalmente
aperto
R2 Comune relè – Comune per il relè di uscita.
R3 Relè normalmente
chiuso
Val ore
predefinito Descrizione Param.
Errore Contatto nor malmente aperto per il relè di uscita. A055
Errore Contatto nor malmente chiuso per il relè di uscita. A055
Microinterruttore selezione
uscita analogica
Microinterruttore
Sink/Source
01 Arresto
02 Avvio/marcia avanti Non attivo Il morsetto I/O 03 è completamente programmabile.
03 Term digit. 3 Non attivo P036, P037,
04 Comune digitale –
05 Ingr digitale 1 Freq. predef. Programmare con A051 [Sel ingr digit 1] A051
06 Ingr digitale 2 Freq. predef. Programmare con A052 [Sel ingr digit 2]. A052
07 Ingr digitale 3 Locale Programmare con A053 [Sel ingr digit 3]. A053
08 Ingr digitale 4 Jog avanti Programmare con A054 [Sel ingr digit 4]. A054
09 Comune uscite
11 +24 V CC – Riferiti al comune digitale.
12 +10 V CC – Riferiti al comune analogico.
13 Ingresso da ±10 V
14 Comune analogico – Per l'ingresso da 0-10 V o 4-20 mA. Isolato
15 Ingr 4-20 mA
16 Uscita analogica Freq. uscita 0-10 L'uscita analogica predefinita è 0-10 V. Per passare ad
17 Uscita optoisolata 1 Mot in marc Programmare con A058 [Sel usc ottica 1] A058, A059,
18 Uscita optoisolata 2 A frequenza Programmare con A061 [Sel usc ottica 2] A061, A062,
19 Schermo RS485 (DSI) – Se si utilizza la porta di comunicazione RS485 (DSI), il
(1)
(2)
(1)
optoisolate
Vedere le note a piè di pagina (1) e (6) a pagina 11.
Gli ingressi da 0-10 V e 4-20 mA sono canali di ingresso separati e possono essere collegati simultaneamente.
Gli ingressi possono essere usati indipendentemente per il controllo di velocità, oppure insieme in modalità PID.
0-10 V Imposta l'uscita analogica su tensione o corrente. L'impostazione deve
Source (SRC) Gli ingressi possono essere cablati come sink (SNK) o source (SRC)
Inerzia Per poter avviare l’inverter devono essere presenti il
–
(2)
Non attivo Per l'alimentazione di ingresso esterna da 0-10 V
(2)
Non attivo Per l'alimentazione di ingresso esterna da 4-20 mA
corrispondere a A065 [Sel. uscita anlg].
impostando il microinterruttore.
ponticello installato in fabbrica o un ingresso
normalmente chiuso.
Eseguire la programmazione con E202 [Term digit 3].
Per disattivare il funzionamento in inversione, vedere il
parametro A095 [Disab inversione].
Per ingressi digitali . Isolato elettronicament e con gli ingressi
digitali dagli I/O analogici e dalle uscite optoisolate.
Per uscite optoisolate. Isolato elettronicamente con le
uscite optoisolate dagli I/O analogici e dagli ingressi digitali.
Tensione fornita dall’inverter agli ingressi digitali.
La corrente in uscita massima è 100 mA.
Alimentazione fornita dall’inverter al potenziometro
esterno da 0-10 V.
La corrente in uscita massima è 15 mA.
(unipolare) o da ±10V (bipolare) (impedenza ingresso =
100k ohm) o cursore del potenziometro.
elettronicamente con gli ingressi e le uscite analogici da
I/O digitali e uscite optoisolate.
(impedenza ingresso = 250 ohm).
un valore di corrente, cambiare il microinterruttore di
selezione uscite analogiche su 0-20 mA. Programmare
con A065 [Sel. uscita anlg]. Il valore analogico massimo
può essere scalato con A066 [Uscita anlg alta].
Carico massimo: 4-20 mA = 525 ohm (10,5 V)
morsetto deve essere collegato alla terra di sicurezza - PE.
0-10V = 1k ohm (10 mA)
(1)
P036
P036, P037
A095, E202
P038
P038,
A051-A054,
A123, A132
P038,
A051-A054,
A132
A065, A066
A064
A064
Page 79

Italiano-13
Interfaccia encoder
L’interfaccia encoder PowerFlex 40P può generare 5 o 12 Volt di tensione
ed accettare 5, 12 o 24 V per gli ingressi differenziali o di modo comune.
12V
5V
+V Cm B- BA-A
➊
Descrizione morsetti
N. Segnale Descrizione
+V Alimentazione
da 5 - 12 V
Cm Ritorno
alimentazione
B- Encoder B (NOT)
B Encoder B
A- Encoder A (NOT)
A Encoder A
➊ Uscita Il microinterruttore seleziona l'alimentazione a 12 o 5 volt fornita
(1)
Quando si utilizza l'alimentazione all'encoder di 12 V, l'alimentazione I/O da 24 V,
la corrente di uscita massima al morsetto I/O 11 è di 50 mA.
Importante: Un encoder in quadratura fornisce la velocità del rotore e la
(1)
Fonte di alimentazione interna da 250 mA (isolata).
Ingresso B in quadratura.
Ingresso A a canale singolo, a treno di impulsi o in quadratura.
ai morsetti “+V” e “Cm” per l'encoder.
direzione. Pertanto l'encoder deve essere cablato in modo
tale che la direzione in avanti corrisponda alla direzione in
avanti del motore. Se l'in verter legge la velocità dell'encoder
ma il regolatore di posizione o un'altra funzione dell'encoder
non funziona correttamente, togliere l'alimentazione
all'inverter e invertire i canali A e B dell'encoder oppure
invertire due f ili qualsiasi del motore. Negli inverter che
utilizzano FRN 2.xx e versioni superiori si verificherà
un guasto se l'encoder non è cablato in modo corretto
e [Tipo fdbk mot] è impostato sull'opzione 5 “Ctrl quad”.
Page 80

Italiano-14
Preparazione dell'inverter per l'avviamento
ATTENZIONE: Per poter eseguire le procedure di avviamento che
seguono occorre alimentare l’inverter . Alcune delle tensioni presenti sono al
!
potenziale della linea di ingresso. Onde evitare il pericolo di folgorazione
o danni alle apparecchiature, per la seguente procedura rivolgersi
esclusivamente a personale di servizio qualificato. Prima di cominciare,
leggere e comprendere bene le istruzioni. Se durante questa procedura uno
degli eventi non si verifica, non continuare. Eliminare tutte le
alimentazioni, incluse le tensioni di controllo fornite dall'uten te. Anche nel
caso in cui non si alimenti l’inverter, potrebbero tuttavia esistere tensioni
fornite dall’utente. Prima di continuare eliminare il problema.
Prima di alimentare l’inverter
❏ 1. Accertarsi che tutti gli altri ingressi siano collegati ai morsetti giusti
❏ 2. Controllare che l’alimentazione di linea c.a. al sezionatore rientri nei valori
❏ 3. Controllare che tutte le alimentazioni di controllo digitale siano di 24 volt.
❏ 4. Controllare che il microinterruttore di sink (SNK)/source (SRC) sia
❏ 5. Controllare che l’ingresso di arresto sia presente, altrimenti l’inverter non
❏ 6. Fornire l'alimentazione CA e le tensioni di controllo all'inverter.
e siano fissati.
nominali dell’inverter.
impostato in modo da corrispondere al proprio schema di cablaggio di
controllo. Vedere pagina 10 per l’ubicazione.
Importante: Lo schema di controllo predefinito è (SRC). Il morsetto di
arresto è ponticellato per consentire l’avviamento da modulo di
comunicazione. Se lo schema di controllo viene cambiato in
sink (SNK), il ponticello va rimosso dai morsetti I/O 01 e 11 ed
installato tra 01 e 04
si avvia.
Importante: Se il morsetto I/O 01 viene usato come ingresso di arresto,
occorre rimuovere il ponticello tra i morsetti I/O 01 e 11.
Alimentare l’inverter
Avvio, arresto, direzione e controllo velocità
I valori dei parametri predefiniti di fabbrica consentono il controllo dell’inverter
da modulo di comunicazione. Non occorre alcuna programmazione per avviare,
arrestare, cambiare direzione e controllare la velocità direttamente da modulo di
comunicazione.
Importante: Per disattivare il funzionamento in inversione, vedere il
parametro A095 [Disab inversione].
Se all’accensione viene rilevato un guasto, vedere pagina 19 per una spiegazione
del codice di guasto. Per informazioni dettagliate sulla ricerca guasti, consultare il
Manuale dell’utente di PowerFlex 40P.
Page 81

Visualizzazione/Reset degli errori
Menu Descrizione
Gruppo visualizzazione di base
(solo visualizzazione)
Include condizioni operative dell’inverter
visualizzate comunemente.
RUN
REV
FAULT
➊
➋
N. LED Stato LED Descrizione
Stato marcia Rosso fisso Indica che l'inverter è in funzione.
➊
Rosso lampeggiante L’inverter ha ricevuto il comando di cambiare direzione
di marcia.
Stato direzione Rosso fisso Indica che l’inverter è in funzione, con direzione
Rosso lampeggiante L’inverter ha ricevuto il comando di cambiare direzione
di marcia inversa.
di marcia e il motore decelera per arrivare a zero.
Stato guasto Rosso lampeggiante Indica un guasto all’inverter.
N. Tasto Nome Descrizione
➋
Freccia su Scorrimento: premere e rilasciare per scorrere il gruppo
di visualizzazione e i parametri selezionabili dall'utente.
Reset: tenere premuto per tre secondi per azzerare
l'errore attivo.
Gruppo visualizzazione avanzata
(solo visualizzazione)
Include condizioni operative avanzate
dell'inverter.
Indicatore di guasto
Include un elenco di codici per condizioni
di guasto specifiche. Visualizzato solo in
caso di guasto.
Italiano-15
Strumenti di programmazione dell'inverter
Per eseguire programmazioni e controlli aggiuntivi, è necessario utilizzare un
modulo interfaccia operatore (HIM) remoto DSI o strumenti di programmazione
da PC (DriveExplorer™ o DriveTools™ SP).
Descrizione Numero di catalogo
Modulo convertitore seriale 22-SCM-232
Software DriveExplorer
Software DriveTools SP
(1)
(1)
9306-4EXP02ENE
9303-4DTS01ENE
Montaggio a pannello remoto, display LCD 22-HIM-C2S
Palmare remoto, display LCD 22-HIM-A3
(1)
Richiede un modulo convertitore seriale.
Opzione di visualizzazione dei parametri impostati
E201 [Opz visual LED]
Consente di selezionare i parametri visualizzabili dall'interfaccia LED dell'inverter.
Opzione E201 Parametro impostato
0
1
2
3
Valori Valore predefinito: 2
Tutti i parametri di visualizzazione di base (Gruppo b) e di visualizzazione avanzata (Gruppo d)
Tutti i parametri del gruppo di visualizzazione di base (b001-b029)
Parametri del gruppo di visualizzazione di base b001-b007 e b010
Parametri del gruppo di visualizzazione di base b001-b004
Min/Max: 0/3
Display: 1
Page 82

Italiano-16
Gruppo di visualizzazione
di base
Freq uscita b001
Freq comandata b002
Corr. in uscita b003
Gruppo Programmazione
di base
Gruppo Programmazione
avanzata
Sel ingr digit 1 A051
Sel ingr digit 2 A052
Sel ingr digit 3 A053
Sel ingr digit 4 A054
Sel. uscita relè A055
Liv. uscita relè A056
Sel usc ottica 1 A058
Liv usc ottica 1 A059
Sel usc ottica 2 A061
Liv usc ottica 2 A062
Log usc ottica A064
Sel. uscita anlg A065
Uscita anlg alta A066
Tempo accel. 2 A067
Tempo decel. 2 A068
Freq interna A069
Freq. predef. 0 A070
Freq. predef. 1 A071
Freq. predef. 2 A072
Freq. predef. 3 A073
Freq. predef. 4 A074
Freq. predef. 5 A075
Freq. predef. 6 A076
Freq. predef. 7 A077
Gruppo Programmazione
avanzata
Opz visual LED E201
Term digit 3 E202
Tempo accel. 3 E203
Tempo decel. 3 E204
Tempo accel. 4 E205
Tempo decel. 4 E206
Gruppo di visualizzazione
avanzata
Tens. in uscita b004
Tens. bus CC b005
Stato unità b006
Codice guasto 1 b007
Codice guasto 2 b008
Codice guasto 3 b009
Display di proc. b010
Fonte controllo b012
Tens Targa mot. P031
Freq. nom. mot. P032
Corr sovracc mot P033
Frequenza jog A078
Accel/decel/ jog A079
Tempo freno CC A080
Liv freno CC A081
Sel res freno d. A082
% Curva S A083
Selezione boost A084
Boost in Avvio A085
Tensione interr. A086
Freq. interr. A087
Tensione massima A088
Limite corr. 1 A089
Sel. sovr. mot. A090
Frequenza PWM A091
Tent riavvio aut A092
Rit riavvio aut A093
Avvio all’acc. A094
Disab inversione A095
StartVolo abil. A096
Compensazione A097
Scatto corr SW A098
Fattore di proc A099
Azzera guasti A100
Blocco programma A101
Sel. testpoint A102
Freq. dati comun A103
Ind. nodo comun. A104
AzioneGuastiCom A105
Tempo perd com. A106
Formato comun. A107
Lingua A108
Mod scritt comun E207
Modo perd potenza E208
Abil mezzo bus E209
Trasv max E210
Inc trasv E211
Dec trasv E212
Salto P E213
Tempo sinc E214
Rapp vel E215
Stato inver. 2 d301
Stato fibra d302
Stato ingr contr b013
Stato ingr dig b014
Stato comun. b015
Vers softw contr b016
Tipo inverter b017
Tempo avvio scad b018
Dati testpoint b019
Ingr anlg 0-10 V b020
Freq minima P034
Frequenza max P035
Fonte avvio P036
Modo Arresto P037
Rif velocità P038
Prest usc anal A109
Ing an 0-10 V ba A110
Ing an 0-10 V al A111
Ing an 4-20 mA b A112
Ing an 4-20 mA a A113
Freq scorr a FLA A114
Tempo proc basso A115
Tempo proc alto A116
Modo reg bus A117
Limite corr. 2 A118
Frequenza salto A119
Banda freq.salto A120
Tempo mot stallo A121
Perd ingr anal. A122
Abil. bipol 10 V A123
Disab PWM variab A124
Mod prest coppia A125
FLA nom. mot. A126
Autotune A127
Cad tensione IR A128
Rif corr. fluss A129
Trim PID alto A130
Trim PID basso A131
Sel rif. PID A132
Sel feedback PID A133
Guad prop PID A134
Tempo integr PID A135
Tasso diff PID A136
PID prestab. A137
PID banda morta A138
PID precarico A139
Tipo fdbk mot E216
Poli nom mot E217
PPRencoder E218
Imp in scala E219
Ki anel vel E220
Kp anel vel E221
Mod posiz E222
Freq Find Home E223
Dir Find Home E224
Toll pos enc E225
Imp per unit E226
Mis. Hz scorr. d303
Feedback veloc. d304
Veloc. encoder d306
Ingr an 4-20 mA b021
Potenza Uscita b022
Fatt pot uscita b023
Temp inverter b024
Stato conteggio b025
Stato timer b026
Stato logica STP b028
Corr. di coppia b029
Tempo accel. 1 P039
Tempo decel. 1 P040
Reset a default P041
Categ tensione P042
Tratt sovrac mot P043
Logica passo 0 A140
Logica passo 1 A141
Logica passo 2 A142
Logica passo 3 A143
L
passo 4 A144
ogica
Logica passo 5 A145
Logica passo 6 A146
Logica passo 7 A147
Tempo log passo0 A150
Tempo log passo1 A151
Tempo log passo2 A152
Tempo log passo3 A153
Tempo log passo4 A154
Tempo log passo5 A155
Tempo log passo6 A156
Tempo log passo7 A157
RitFrMeccDisatt A160
RitFrenoMeccAtt A161
Sel reset MOP A162
Lim freno dinam A163
Unità passo 0 E230
Unità passo 1 E232
Unità passo 2 E234
Unità passo 3 E236
Unità passo 4 E238
Unità passo 5 E240
Unità passo 6 E242
Unità passo 7 E244
Filtr reg pos E246
Guad reg pos E247
Par ctrl avan E 248
Sel stat cmd E249
Unità percorse H d308
Unità percorse L d309
Page 83

Parametri del gruppo Visualizzazione
N. Parametro Min/Max Display/Opzioni
b001 [Freq uscita] 0,00/[Frequenza max] 0,01 Hz
b002 [Freq comandata] 0,00/[Frequenza max] 0,01 Hz
b003 [Corr. in uscita] 0,0/(Ampere inverter × 2) 0,01 Amp
b004 [Tens. in uscita] 0/Tens nom inverter 1 V CA
b005 [Tens. bus CC] In base alla taglia
b006 [Stato unità] 0/1 (1 = Condizione vera) Bit 3
b007-
[Codice guasto x] F2/F122 F1
b009
b010 [Display di proc.] 0,00/9999 0,01 – 1
b012 [Fonte controllo] 0/112 Cifra 2 e 3 = Comando velocità
b013 [Stato ingr contr] 0/1 (1 = Ingresso
b014 [Stato ingr dig] 0/1 (1 = Ingresso
b015 [Stato comun.] 0/1 (1 = Condizione vera) Bit 3
b016 [Vers softw contr] 1.00/99.99 0.01
B017 [Tipo inverter] 1001/9999 1
b018 [Tempo avvio scad] 0/9999 ore 1 = 10 ore
b019 [Dati testpoint] 0/FFFF 1 esadecimale
b020 [Ingr anlg 0-10 V] 0,0/100,0% 0,1%
b021 [Ingr an 4-20 mA] 0,0/100,0% 0,1%
b022 [Potenza Uscita] 0,00/(Potenza inverter × 2) 0,01 kW
b023 [Fatt pot uscita] 0,0/180,0 deg 0,1 deg
b024 [Temp inverter] 0/120°C 1°C
b025 [Stato conteggio] 0/9999 1
b026 [Stato timer] 0,0/9999 sec 0,1 sec
b028 [Stato logica STP] 0/8 1
b029 [Corr. di coppia] 0,0/(Ampere inverter × 2) 0,01 Amp
dell’inverter
presente)
presente)
1 V CC
In decel. In accel. Avanti In marcia
(Vedere P038; 9 = “Freq Jog”) (Vedere P036; 9 = “Jog”)
Bit 3
TransDBacc Ingr arr Dir/Indiet Avvio/Avanti
Bit 3
Ingr digit 4 Ingr digit 3 Ingr digit 2 Ingr digit 1
Errore DSI Tx Rx
Bit 2 Bit 1 Bit 0
Bit 2 Bit 1 Bit 0
Bit 2 Bit 1 Bit 0
Bit 2 Bit 1 Bit 0
Italiano-17
Cifra 1 = Comando di avvio
Avviamento facilitato con i parametri di base del
gruppo Programma
L’inverter PowerFlex 40P è concepito per un avviamento semplice ed efficiente. Il gruppo
Programma contiene i parametri usati con maggiore frequenza.
= Prima di cambiare questo parametro, arrestare l’inverter.
N. Parametro Min/Max Display/Opzioni Valore predefinito
P031 [Tens Targa mot.] 20/Tens nom inverter 1 V CA In base alla taglia
Impostare sulla tensione nominale riportata sulla targhetta dati
del motore.
P032 [Freq. nom. mot.] 15/500 Hz 1 Hz 60 Hz
Impostare sulla frequenza nomina le riportata sulla targhetta dati
del motore.
P033 [Corr sovracc mot] 0,0/(ampere nominali inverter× 2) 0,1 A In base alla taglia
Impostato sulla corrente motore massima consentita.
P034 [Freq minima] 0,00/500,0 Hz 0,01 Hz 0,00 Hz
Imposta il livello minimo di frequenza generato di continuo
dall’inverter.
P035 [Frequenza max] 0,00/500,0 Hz 0,01 Hz 60,00 Hz
Imposta il livello massimo di frequenza generato dall’inverter.
dell’inverter
dell’inverter
Page 84

Italiano-18
= Prima di cambiare questo parametro, arrestare l’inverter.
N. Parametro Min/Max Display/Opzioni Valore predefinito
P036 [Fonte avvio] 1/6 1 = “A 3 fili”
Imposta lo schema di controllo usato per avviare l’inverter.
P037 [Modo Arresto] 0/9 0 = “Rampa, CF”
Modalità di arresto attiva per tutte le fonti di arresto [ad esempio,
marcia avanti (morsetto I/O 02),inversione marcia (morsetto
I/O 03), porta RS485] ad eccezione di quanto annotato di seguito.
Importante: il morsetto I/O 01 è sempre imp ostato sull’arresto per
inerzia, ad eccezione di quando il parametro P036 [Fonte avvio]
è impostato sul controllo a tre fi li. Nel controllo a tre fili, il morsetto
I/O 01 viene controllato dal parametro P037 [Modo Arresto].
P038 [Rif velocità] 1/9 1 = “Freq interna”
Imposta la sorgente del riferimento della velocità per l’inverter.
Importante: quando il parametro [Sel ingr digit x] A051 o A052
è impostato sull’opzione 2, 4, 5, 6, 13 o 14 e l’ingresso digitale
è attivo, A051, A052, A053 o A054 sovrascrive il riferimento
della velocità comandato da questo parametro. Consultare il
Capitolo 1 del Manuale dell’utente di PowerFlex 40P per ulteriori
informazioni.
P039 [Tempo accel. 1] 0,0/600,0 sec 0,1 sec 10,0 Sec
Imposta la frequenza di accelerazione per tutti gli incrementi
di velocità.
P040 [Tempo decel. 1] 0,0/600,0 sec 0,1 sec 10,0 Sec
Imposta la frequenza di decelerazione per tutti i decrementi
di velocità.
P041 [Reset a default] 0/1 0 = “Pronto/Fermo”
Ripristina tutti i parametri sui valori predefiniti di fabbrica.
P042 [Categ tensione] 2/3
Imposta la classe di tensione per gli inverter da 600 V.
P043 [Tratt sovrac mot] 0/1 1 = “Abilitato” 0 = “Disabilitato”
Abilita/disabilita la funzione ritentiva della protezione da sovraccarico motore.
2 = “A 2 fili”
3 = “SensLiv 2fil”
4 = “Vel al 2 fil”
5 = “Porta com.”
6 = “Av/Ind temp.”
1 = “Inerzia, CF”
2 = “Freno CC, CF”
3 = “FrenAutCC,CF”
4 = “Rampa”
5 = “Inerzia ”
6 = “Freno CC ”
7 = “Freno Aut CC”
8 = “Ramp+CtrFrEM”
9 = “Rampa+FrenEM”
(1)
L'ingresso di arresto azzera
anche l'errore attivo.
2 = “Ingr. 0-10 V”
3 = “Ingr. 4-20 mA”
4 = “Freq prestab”
5 = “Porta com.”
6 = “Logica arr”
7 = “MoltIngAnal”
8 = “Encoder”
9 = “Posizion.”
1 = “Rip val fabb”
2 = “Bassa tens” (480V)
3 = “Alta tens” (600V)
(1)
(1)
(1)
(1)
5
0
5
0
3
Parametri del gruppo Visualizzazione avanzata
N. Parametro Min/Max Display/Opzioni
d301 [Stato inver. 2] 0/1 1
d302 [Stato fibra] 0/1 1
d303 [Mis. Hz scorr.] 0,0/25,0 Hz 0,1 Hz
d304 [Feedback veloc.] 0/64000 giri/min 1 giri/min
d305 [Feedback vel. F] 0,0/0,9 0,1
d306 [Veloc. encoder] 0/64000 1
d307 [Veloc encoder F] 0,0/0,9 0,1
d308 [Unità percorse H] 0/64000 1
d309 [Unità percorse L] 0,00/0,99 0,01
Parametri gruppo Programma
Per un elenco completo dei parametri, fare riferimento al Manuale
dell'utente del PowerFlex40P.
Page 85

Italiano-19
Codice di errore
Per azzerare un guasto, premere il tasto Arresto, spegnere e riaccendere
o impostare il parametro A100 [Azzera guasti] su 1 o 2.
N. Errore Descrizione
F2 Ingresso ausil.
F3 Perd potenza
F4 Sotto tensione
F5 Sopratensione
F6 Motore in stallo
F7 Sovracc. Motore
F8 Sovrat. dissip. Controllare che le alette del dissipatore di calore non siano bloccate o sporche. Controllare che la
F12 Sovrac. Hardware Controllare la programmazione. Controllare che non si causi una corrente eccessiva a seguito di
F13 Guasto terra Controllare il cablaggio motore ed esterno ai morsetti di uscita dell'inverter per una messa a terra
F29 Perd ingr anal.
F33 Tent riavvio aut Correggere la causa del guasto ed eliminare manualmente.
F38 Da faseU a terra Controllare il cablaggio tra l’inverter ed il motore.
F39 Da faseV a terra
F40 Da faseW a terra
F41 Cortoc fase UV Controllare il cablaggio del motore e dei morsetti di uscita dell'inverter per rilevare un cortocircuito.
F42 Cor toc fase UW
F43 Cor toc fase VW
F48 Param a default L’inverter ha ricevuto il comando di scrivere i valori predefiniti sulla EEPROM.
F63 Sovrac SW
F64 Sovracc inverter Ridurre il carico o aumentare il tempo di accelerazione.
F70 Unità di pot Spegnere e riaccendere. Sostituire l’inverter qualora non fosse possibile eliminare il guasto.
F71 Perd rete adat La rete di comunicazione non funziona.
F80 Guasto autotune La funzione di autotune è stata annullata dall’utente o non è riuscita. Riavviare la procedura.
F81 Perdita comunic. Se l'adattatore non è stato scollegato intenzionalmente, controllare il cablaggio alla por ta.
F91 Perdita encoder Richiede un encoder differenziale. Uno dei 2 segnali del canale encoder manca.
F100 Checksum param. Ripristinare i valori predefiniti di fabbrica.
F111 Abil hardware La scheda della Funzione Safe-Off di DriveGuard (Serie B) è installata e il ponticello ENBL non
F122 Guasto scheda I/O Spegnere e riaccendere. Sostituire l’inverter qualora non fosse possibile eliminare il guasto.
(1)
Errore di auto-reset/run. Configurare con i parametri A092 e A093.
(1)
Controllare il cablaggio remoto.
Verificare la programmazione delle comunicazioni alla ricerca di guasti intenzionali.
Monitorare la linea in CA in entrata per condizioni di bassa tensione o un’interruzione alla linea stessa.
Verificare i fusibili di ingresso.
(1)
Monitorare la linea in CA in entrata per condizioni di bassa tensione o un’interruzione alla linea stessa.
(1)
Monitorare la linea CA per rilevare condizioni di alta tens ione di linea o transitori. La sovratensione
bus può essere causata anche dalla rigenerazione del motore. Estendere il tempo di
decelerazione o installare l’opzione di frenatura dinamica.
(1)
Aumentare [Tempo accel. x] o ridurre il carico in modo che la corrente in uscita dell’inverter non
superi il valore impostato dal parametro A089 [Limite corr.].
(1)
Condizione di carico motore eccessivo. Ridurre il carico in modo che la corrente in uscita
dell’inverter non superi la corrente impostata dal parametro P033 [Corr sovracc mot]. Verificare
l'impostazione A084 [Selezione boost].
temperatura ambiente non abbia superato i 40° C (104°F) per configurazioni I P 30/NEMA 1/UL tipo 1
o 50°C (122°F) per configurazio ni di tipo aperto.
Controllare la ventola.
un carico eccessivo, di un’impostazione di boost CC non adeguata, di tensione di frenatura CC
troppo alta o di altre cause.
appropriata.
(1)
Un ingresso analogico è configurato per generare un errore in caso di perdita del segnale.
Si è verificata una perdita del segnale.
Verificare i parametri. Verificare la presenza di collegamenti rotti/allentati agli ingressi.
Controllare il motore per rilevare una fase a massa.
Sostituire l’inverter qualora non fosse possibile eliminare il guasto.
Sostituire l’inverter qualora non fosse possibile eliminare il guasto.
Azzerare il guasto o spegnere e riavviare l’inverter. Programmare i parametri dell’inverter
secondo necessità.
(1)
Controllare i requisiti di carico e l’impostazione A098 [Scatto corr SW].
Spegnere e riaccendere. Verificare il cavo di comunicazione.
Verificare l'impostazione della scheda di rete. Verificare lo stato della rete esterna.
Sostituire il cablaggio, l’espansione porta, gli adattatori o l'inverter secondo necessità.
Controllare il collegamento.
Un adattatore è stato scollegato intenzionalmente. Spegnere usando A105 [AzioneGuastiCom].
Il collegamento del morsetto I/O 04 a terra può migliorare l'immunità ai disturbi.
Controllare il cablaggio.
Se P038 [Rif velocità] = 9 “Posiz” e E216 [Tipo fdbk mot] = 5 “Ctrl quad”, invertire gli ingressi del
canale dell'encoder (vedere a pagina 13) o invertire due cavi qualsiasi del motore.
Sostituire l'encoder.
è stato rimosso.
Rimuovere il ponticello ENBL. Spegnere e riaccendere.
Guasto della scheda della Funzione Safe-Off di DriveGuard (Serie B).
Togliere alimentazione all'inverter. Sostituire la scheda della Funzione Safe-Off di DriveGuard (Serie B).
Guasto del circuito di abilitazione hardware.
Sostituire l'inverter.
Page 86

Italiano-20
a
d
Dimensioni inverter
Frame PowerFlex 40P – I valori sono in kW e (HP)
Frame 240 V CA – Trifase 480 V CA – Trifase 600 V CA – Trifase
B 0,4 (0,5)
0,75 (1,0)
1,5 (2,0)
C 5,5 (7,5)
7,5 (10,0)
Inverter PowerFlex 40P
2,2 (3,0)
3,7 (5,0)
c
f
0,4 (0,5)
0,75 (1,0)
1,5 (2,0)
5,5 (7,5)
7,5 (10,0)
2,2 (3,0)
4,0 (5,0)
11,0 (15,0) 5,5 (7,5)
0,75 (1,0)
1,5 (2,0)
2,2 (3,0)
7,5 (10,0)
Le dimensioni sono espresse in millimetri (pollici).
I pesi sono espressi in chilogrammi (libbre).
4,0 (5,0)
11,0 (15,0)
RUN
RUN
REV
REV
FAULT
FAULT
20A-DG01
e
b
g
abcdefg
Frame
B100
180
(3,94)
C130
(5,1)
(7,09)
260
(10,2)
148
(5,83)87(3,43)
192
(7,56)
116
(4,57)
168
(6,61)
246
(9,7)
136
(5,35)
180
(7,1)
Peso
alla
spedizione
87,4
2,2
(3,44)
(4,9)
–4,3
(9,5)
5,5 (0,22)
Kit per le opzioni di comunicazione, filtro RFI, IP 30/NEMA 1/UL Tipo 1
b
a
c
79,1 (3,11)
64,1 (2,52)
40,6 (1,60)
25,6 (1,01)
∅
22,2
(0,87)
(4,33)
74,3
(2,93)
109,9
Frame B - 22-JBAB
d
77,5 (3,05)
50,0 (1,97)
22,5 (0,89)
Inverter
Opzione
Dimensioni
a Copertura per
adattatori di
comunicazione
Inverter
Frame B
Frame C
25 (0,98) 25 (0,98)
b Filtro di linea EMC 50 (1,97) 60 (2,36)
c Filtro di linea EMC 229 (9,02) 309 (12,17)
d IP 30/NEMA 1/UL
tipo 1
IP30/NEMA 1/UL
Tipo 1 per copertura
per adattatori di
comunicazione
U.S. Allen-Bradley Drives Technical Support
Tel: (1) 262.512.8176, Fax: (1) 262.512.2222, Email: support@drives.ra.rockwell.com, Online: www.ab.com/support/abdrives
Pubblicazione 22D-QS001C-IT-P – Ottobre 2008
Sostituisce la pubblicazione di maggio 2007 Copyright © 2008 Rockwell Automation, Inc. Tutti i diritti riservati.
33 (1,30) 60 (2,36)
64 (2,52) 60 (2,36)
Frame B - 22-JBAB
(usato con la coper tura per
adattatori di comunicazione)
∅
22,2
(0,87)
105,3
(4,15)
76,3
(3,00)
107,0 (4,21)
66,0 (2,60)
24,0 (0,94)
Frame C - 22-JBAC
108,7 (4,28)
92,2 (3,63)
69,2 (2,72)
45,7 (1,80)
22,2 (0,87)
134,3
(5,29)
Frame C - 22-JBCC
(usato con la copertura per
adattatori di comunicazione)
111,2
(4,38)
109,8
(4,32)
∅
28,5
(1,12)
∅
22,2
(0,87)
152,2
(5,99)
∅
28,5
(1,12)
∅
22,2
(0,87)
179,8
(7,08)
144,8
(5,70)
Page 87

Inicio rápido
Variador de CA de frecuencia
ajustable PowerFlex
FRN 1.xx - 2.xx
Esta guía de inicio rápido resume los pasos básicos necesarios para instalar , poner
en marcha y programar el variador de CA de frecuencia ajustable PowerFlex 40P.
La información proporcionada no
dirigida sólo al personal calificado a cargo de realizar el mantenimiento
del variador.
Para obtener información detallada sobre el PowerFlex 40P, incluidas las
instrucciones sobre compatibilidad electromagnética (EMC), consideraciones de
aplicación y medidas de precaución relacionadas, consulte el
usuario del PowerFlex 40P
www.rockwellautomation.com/literature.
Precauciones generales
ATENCIÓN: El variador contiene condensadores de alto voltaje, los
cuales demoran algún tiempo en descargarse después de desconectarse el
suministro eléctrico. Antes de trabajar en el variador, asegúrese de que la
!
alimentación principal se ha desconectado de las entradas de línea [R, S, T
(L1, L2, L3)]. Espere tres minutos para que se descarguen los
condensadores hasta niveles de voltaje ino cuos. El no observar estas
indicaciones puede resultar en lesiones personales o la muerte.
Los indicadores LED apagados no constituyen una indicación de que los
condensadores se han descargado hasta niveles de voltaje inocuos.
ATENCIÓN: Existe el riesgo de daño al equipo y/o lesiones personales si
el parámetro A092 [Int. rearme auto] o A094 [Inic al encender] se utilizan
en una aplicación inapropiada. No utilice esta función sin antes considerar
los reglamentos, estándares y códigos locales, nacionales e internacionales,
o pautas de la industria.
ATENCIÓN: Sólo el personal calificado y familiarizado con los
variadores de CA de frecuencia ajustable y la maquinaria asociada debe
planificar y llevar a cabo la instalación, puesta en marcha y posterior
mantenimiento del sistema. El no observar estas indicaciones puede resultar
en lesiones personales y/o daño al equipo.
ATENCIÓN: Este variador contiene piezas y ensambles sensibles a las
descargas electrostáticas (ESD), por lo que se deben tomar precauciones
para controlar la estática al instalar, probar , realizar el servicio o reparar este
ensamble. El no seguir los procedimientos para controlar la electricidad
estática puede resultar en daño a los componentes. Si no está familiarizado
con los procedimientos de control de estática, consulte la publicación
8000-4.5.2 de A-B titulada “Guarding Against Electrostatic Damage”
o cualquier otro manual apropiado sobre protección contra las descargas
electrostáticas.
ATENCIÓN: La instalación o aplicación incorrecta de un variador puede
producir daños en los componentes o reducir la vida útil del producto.
Los errores de cableado o de aplicación, tales como tamaño insuficiente del
motor, fuente de alimentación de CA incorrecta o inadecuada,
o temperatura ambiente excesiva pueden resultar en un mal funcionamiento
del sistema.
ATENCIÓN: Existe peligro de lesiones personales o daño al equipo.
El variador no tiene componentes que requieren mantenimiento por parte
del usuario. No desmonte el chasis del variador.
, Publicación 22D-UM001… en
®
40P
reemplaza el manual del usuario y está
Manual del
Page 88

Español-2
Consideraciones para el montaje
• Instale el variador en posición vertical sobre una superficie v ertical
y nivelada.
Estructura Tamaño de los
tornillos
B M4 (#8-32) 1.56 -1.96 N-m (14-17 lb-pulg.) 35 mm
C M5 (#10-24) 2.45 -2.94 N-m (22-26 lb-pulg.) –
• Evite el polvo o las partículas metálicas para proteger el ventilador
de enfriamiento.
• No lo exponga a una atmósfera corrosiva.
• Proteja la unidad contra la humedad y la luz solar directa.
Espacios libres mínimos de montaje
Véase la página 20 para obtener información sobre las dimensiones
de montaje.
Par de apriete de los tornillos Riel DIN
120 mm
(4.7 pulg.)
RUN
REV
FAULT
RUN
REV
FAULT
El objeto más cercano
que puede restringir el
120 mm
(4.7 pulg.)
RUN
REV
FAULT
flujo de aire a través
del disipador térmico
del variador y el
chasis
120 mm
(4.7 pulg.)
Opción de montaje A
No se requiere espacio libre
entre los variadores.
120 mm
(4.7 pulg.)
Opción de montaje B
Temperatura ambiente de funcionamiento
Temperatura ambiente Clasificación del
Mínimo Máximo
-10 °C (14 °F)
40 °C (104 °F)
envolvente
IP 20/tipo abierto Use la opción de montaje A
IP 30/NEMA 1/UL tipo 1
50 °C (122 °F) IP 20/tipo abierto Use la opción de montaje B
(1)
La clasificación requiere la instalación del kit opcional IP 30/NEMA 1/UL tipo 1 del
PowerFlex 40P.
Espacios libres mínimos
de montaje
(1)
Use la opción de montaje B
25 mm
(1.0 pulg.)
RUN
REV
FAULT
Page 89

Puesta a tierra típica
RUN
REV
FAULT
Español-3
R/L1
S/L2
T/L3
SHLD
U/T1
V/T2
W/T3
Desconexión de varistores MOV
Para evitar daños en el variador, se desconectarán los varistores MOV
conectados a tierra si el variador se instala en un sistema de distribución
sin conexión a tierra, donde los voltajes entre fases en cualquier fase
pueden superar el 125% del voltaje nominal entre líneas.
Para desconectar estos dispositivos, retire el puente que aparece
en las figuras siguientes.
1. Gire el tornillo en el sentido contrario a las agujas del reloj
para aflojarlo.
2. Extraiga completamente el puente del chasis del variador.
3. Apriete el tornillo para mantenerlo en su lugar.
Ubicación del puente
Eliminación del varistor MOV entre fase y tierra
AC Input
R/L1
S/L2
T/L3
Jumper
Three-Phase
Importante: Apriete el tornillo después de retirar el puente.
1234
Page 90

Español-4
Conformidad con CE
Consulte el Manual del usuario del PowerFlex 40P para obtener detalles
respecto a cómo cumplir con las directivas sobre bajo voltaje (LV) y
sobre compatibilidad electromagnética (EMC).
Especificaciones, fusibles y disyuntores
Clasificaciones de los variadores
Clasificaciones
Número de
catálogo
Entrada trifásica 200 - 240 VCA (±10%) – Salida trifásica 0 - 230 V
22D-B2P3 0.4 (0.5) 2.3 180-264 1.15 2.5 6 140M-C2E-B40 100-C07
22D-B5P0 0.75 (1.0) 5.0 180-264 2.45 5.7 10 140M-C2E-C10 100-C09
22D-B8P0 1.5 (2.0) 8.0 180-264 4.0 9.5 15 140M-C2E-C16 100-C12
22D-B012 2.2 (3.0) 12.0 180-264 5.5 15.5 25 140M-C2E-C16 100-C23
22D-B017 3.7 (5.0) 17.5 180-264 8.6 21.0 30 140M-F8E-C25 100-C23
22D-B024 5.5 (7.5) 24.0 180-264 11.8 26.1 40 140M-F8E-C32 100-C37
22D-B033 7.5 (10.0) 33.0 180-264 16.3 34.6 60 140M-G8E-C45 100-C60
Entrada trifásica 380 - 480 VCA (±10%) – Salida trifásica 0 - 460 V
22D-D1P4 0.4 (0.5) 1.4 342-528 1.4 1.8 3 140M-C2E-B25 100-C07
22D-D2P3 0.75 (1.0) 2.3 342-528 2.3 3.2 6 140M-C2E-B40 100-C07
22D-D4P0 1.5 (2.0) 4.0 342-528 4.0 5.7 10 140M-C2E-B63 100-C09
22D-D6P0 2.2 (3.0) 6.0 342-528 5.9 7.5 15 140M-C2E-C10 100-C09
22D-D010 4.0 (5.0) 10.5 342-528 10.3 13.0 20 140M-C2E-C16 100-C23
22D-D012 5.5 (7.5) 12.0 342-528 11.8 14.2 25 140M-D8E-C20 100-C23
22D-D017 7.5 (10.0) 17.0 342-528 16.8 18.4 30 140M-D8E-C20 100-C23
22D-D024 11.0 (15.0) 24.0 342-528 23.4 26.0 50 140M-F8E-C32 100-C43
Entrada trifásica 460 - 600 VCA (±10%) – Salida trifásica 0 - 575 V
22D-E1P7 0.75 (1.0) 1.7 414-660 2.1 2.3 6 140M-C2E-B25 100-C09
22D-E3P0 1.5 (2.0) 3.0 414-660 3.65 3.8 6 140M-C2E-B40 100-C09
22D-E4P2 2.2 (3.0) 4.2 414-660 5.2 5.3 10 140M-C2E-B63 100-C09
22D-E6P6 4.0 (5.0) 6.6 414-660 8.1 8.3 15 140M-C2E-C10 100-C09
22D-E9P9 5.5 (7.5) 9.9 414-660 12.1 11.2 20 140M-C2E-C16 100-C16
22D-E012 7.5 (10.0) 12.2 414-660 14.9 13.7 25 140M-C2E-C16 100-C23
22D-E019 11.0 (15.0) 19.0 414-660 23.1 24.1 40 140M-D8E-C25 100-C30
(1)
de salida
(1)
kW (hp) A
Las clasificaciones se aplican a todos los tipos de variador: para montaje en panel (N104), para
montaje en brida (F104) y para montaje en placa (H204).
Clasificaciones de entrada Protección de circuitos derivados
Rango de
voltajes kVA A Fusibles
Protectores de
motor 140 M Contactores
Page 91

Español-5
Categoría
Certificación
de organismos
Protección
Características
ambientales
Características
eléctricas
Especificación
U
®
CUS
En lista de UL508C y CAN/CSA-22.2
L
Certificado según AS/NZS, 1997 grupo 1, clase A
Con distintivos de todas las directivas europeas aplicables
Directiva sobre compatibilidad electromagnética (89/336)
EN 61800-3, EN 50081-1, EN 50082-2
Directiva sobre bajo voltaje (73/23/EEC)
EN 50178, EN 60204
Bauart geprüft
Certificación según EN 954-1, categoría 3.
Functional
EN 50178
TUV
Rheinland
..
Satisface los requisitos de seguridad funcional (FS) cuando
Safety
Type approved
se utiliza con la opción de desactivación segura DriveGuard
(Serie B).
Bus de 405 VCC (equivalente a línea de entrada de 290 VCA)
Bus de 810 VCC (equivalente a línea de entrada de 575 VCA)
Bus de 1005 VCC (equivalente a línea de entrada de 711 VCA)
Bus de 210 VCC (equivalente a línea de entrada de 150 VCA)
Bus de 390 VCC (equivalente a línea de entrada de 275 VCA)
Bus de 487 VCC (equivalente a línea de entrada de 344 VCA)
Bus de 390 VCC (equivalente a línea de entrada de 275 VCA)
100 milisegundos
mínimo 0.5 segundos; típico 2 segundos
2
Protección I
3 segundos (proporciona protección clase 10)
Más de 1000 m (3300 pies) con deterioro de 3% de las
características por cada 305 m (1000 pies).
–10 a 50 °C (14 a 122 °F)
–10 a 40 °C (14 a 104 °F)
Disipador térmico: –10 a 40 °C (14 a 104 °F)
Variador: –10 a 50 °C (14 a 122 °F)
Variadores de 0.4 kW (0.5 hp) y todos los variadores para
montaje en brida y en placa
Todas las demás clasificaciones de variador
que contenga gases volátiles o corrosivos, vapores o polvo.
Si el variador no se instalará durante algún tiempo, deberá
almacenarse en un área donde no esté expuesto a una
atmósfera corrosiva.
380 - 480 V ±10%
460-600 V ±10%
El funcionamiento monofásico proporciona un 35% de la
corriente nominal.
t – 150% durante 60 segundos, 200% durante
debe instalarse en una atmósfera
100,000 A simétricos
instalado
W
.
.
TUV
E
Rheinland
C
Production inspected
Product Safety
El variador también está diseñado para cumplir las porciones apropiadas de las especificaciones
siguientes:
NFPA 70 – Código Eléctrico Nacional de los EE.UU.
NEMA ICS 3.1 – Normas de seguridad para la construcción y Guía para la selección, instalación
y operación de sistemas de variador de velocidad ajustable.
IEC 146 – Código eléctrico internacional.
Disparo por sobrevoltaje de bus
Entrada de 200-240 VCA:
Entrada de 380-460 VCA:
Entrada de 460-600 VCA:
Disparo por voltaje insuficiente de bus
Entrada de 200-240 VCA:
Entrada de 380-480 VCA:
Entrada de 460-600 VCA
P042 = 3 “alto voltaje”:
P042 = 2 “bajo voltaje”:
Intervalo de autonomía
de la alimentación eléctrica:
Tiempo de sustentación de control
de lógica:
Protección electrónica contra sobrecarga
del motor:
Sobrecorriente: 200% límite del hardware, 300% fallo instantáneo
Disparo por fallo de tierra: Fase a tierra en la salida del variador
Disparo por cortocircuito: Fase a fase en la salida del variador
Altitud: 1000 m (3300 pies) máx. sin deterioro de las características.
Temperatura ambiente máxima en
alrededores sin deterioro de las
características:
IP20/NEMA tipo abierto:
IP30, NEMA tipo 1, UL tipo 1:
Para montaje en brida y en placa:
Método de enfriamiento
Convección:
Ventilador:
Temperatura de almacenamiento: –40 a 85 °C (–40 a 185 °F)
Atmósfera: Importante: El variador no
Humedad relativa: 0 a 95% sin condensación
Choque (en funcionamiento): 15 G pico durante 11 ms (±1.0 ms)
Vibración (en funcionamiento): 1 G pico, 5 a 2000 Hz
Tolerancia de voltaje: 200-240 V ±10%
Tolerancia de frecuencia: 48-63 Hz
Fases de entrada: La entrada trifásica proporciona la capacidad nominal total.
Factor de potencia de desplazamiento: 0.98 en todo el rango de velocidades
Capacidad nominal máxima de
cortocircuito:
Capacidad nominal real de cortocircuito: Determinada por clasificación AIC del fusible/disyuntor
Tipo de transistor: Bipolar de puerta aislada (IGBT)
Page 92

Español-6
Categoría
Control
Entradas de
control
Encoder
Salidas de
control
Especificación
Método: PWM senoidal, relación V/Hz y vectorial sin sensores
Frecuencia portadora 2-16 kHz, clasificación de variador basada en 4 kHz.
Exactitud de frecuencia
Entrada digital:
Entrada analógica:
Salida analógica
Regulación de la velocidad
Lazo abierto con compensación de
deslizamiento:
Con encoder:
Frecuencia de salida: 0-500 Hz (programable)
Eficiencia: 97.5% (típica)
Modos de paro: Múltiples modos de paro programables, incluidos: rampa,
Acel./decel.: Cuatro tiempos de aceleración y desaceleración
Sobrecarga intermitente: Capacidad de sobrecarga del 150% por un máximo de
Protección electrónica contra sobrecarga
del motor
Digitales: Ancho de banda: 10 rad/s para lazo abierto y cerrado
Analógicas: Cantidad: (2) aisladas, –10 a 10 V y 4 a 20 mA
Tipo: Canal doble, incremental
Alimentación: 12V, 250 mA. Entradas aisladas 12V y 10 mA mínimo con
Cuadratura: 90°, ±27 grados a 25 grados C.
Ciclo de servicio: 50%, +10%
Requisitos: Los encoders deben ser de tipo manejador de línea,
Relé: Cantidad: (1) programables formato C
Optoacopla
dor:
Analógicas: Cantidad: (1) no aislada, 0-10 V o 4-20 mA
Cantidad: (2) semiprogramables
Corriente: 6 mA
Tipo
Modo surtidor (SRC):
Modo drenador (SNK):
Especificación
Resolución:
0 a 10 VCC analógicas:
4-20 mA analógicas:
Pot. externo:
Especificación
Clasificación resistiva:
Clasificación inductiva:
Cantidad: (2) programables
Especificación: 30 VCC, 50 mA no inductivas
Especificación
Resolución:
0 a 10 VCC analógicas:
4-20 mA analógicas:
Dentro de ±0.05% de la frecuencia de salida establecida
Dentro del 0.5% de la frecuencia máxima de salida,
resolución de 10 bits
±2% de plena escala, resolución de 10 bits
±1% de la velocidad base dentro de un rango de velocidades
de 80:1
±0.3% de la velocidad base dentro de un rango de
velocidades de 80:1
±0.05% de la velocidad base dentro de un rango de
velocidades de 20:1
inercia, freno de CC y rampa hasta paro
programables independientemente. Cada tiempo se puede
programar de 0 a 600 segundos en incrementos de 0.1 s.
1 minuto
Capacidad de sobrecarga del 200% por un máximo
de 3 segundos
Protección clase 10 con respuesta sensible a velocidad
seleccionable y función de retención de sobrecarga durante
desactivación cuando está habilitado.
(5) programables
18-24 V = Activado, 0-6 V = Desactivado
0-6 V = Activado, 18-24 V = Desactivado
10 bits
Impedancia de entrada de 100k ohms
Impedancia de entrada de 250 ohms
1-10k ohms, 2 watts mínimo
transmisor diferencial, 250 kHz máximo.
cuadratura (canal doble) o impulso (canal sencillo), salida de
3,5-26 V CC, unipolar o diferencial y con la capacidad de
suministrar un mínimo de 10 mA por canal. Entrada permitida
en CC hasta una frecuencia máxima de 250 kHz. La E/S del
encoder automáticamente se ajusta en escala para permitir
voltajes nominales de 5, 12 y 24 VCC.
3.0 A a 30 VCC, 3.0 A a 125 V, 3.0 A a 240 VCA
0.5 A a 30 VCC, 0.5 A a 125 V, 0.5 A a 240 VCA
10 bits
1k ohm mínimo
525 ohms máximo
Page 93

Cableado de alimentación eléctrica
Español-7
Clasificación del cableado de alimentación eléctrica Alambre de cobre
recomendado
600 V sin blindaje, 75 °C (167 °F) THHN/THWN
600 V con blindaje, 75 °C o 90 °C (167 °F o 194 °F)
RHH/RHW-2
Bandeja blindada con capacidad nominal de 600 V,
75 °C o 90 °C (167 °F o 194 °F) RHH/RHW-2
15 milésimas de pulg. con
aislamiento, para lugares secos
Anixter OLF-7xxxxx, Belden
29501-29507 o equivalente
Anixter 7V-7xxxx-3G Shawflex
2A CC/3A CC o equivalente
Bloque de terminales de alimentación eléctrica
Estructura B Estructura C
V/T2T/L3S/L2R/L1 U/T1 W/T3
BR+ BR-DC- DC+
(1)
Terminal
Descripción
R/L1, S/L2 Entrada monofásica
(2)
V/T2T/L3S/L2R/L1 U/T1 W/T3 P2 P1
BR+ BR-DC- DC+
R/L1, S/L2, T/L3 Entrada trifásica
U/T1 Al Motor U/T1
V/T2 Al Motor V/T2
W/T3 Al Motor W/T3
=
Conmute cualesquier
par de conductores del
motor para cambiar la
dirección de avance.
Conexión de inductor de bus de CC (únicamente en variadores con
estructura C).
P2, P1
El variador con estructura C se envía con un puente entre
los terminales P2 y P1. Retire este puente de conexión
únicamente cuando se vaya a conectar un inductor de bus
de CC. El variador no se encenderá si no está conectado un puente
o un inductor.
DC+, DC- Conexión de bus de CC
BR+, BR- Conexión de resistencia de freno dinámico
Conexión a tierra de seguridad – PE
(1)
Importante: Los tornillos de los terminales pueden aflojarse durante el transporte.
Asegúrese de que todos los tornillos de los terminales estén apretados con el par de
apriete recomendado antes de aplicar la alimentación eléctrica al variador.
(2)
El funcionamiento monofásico exige una reducción del 65% de la corriente nominal
del variador.
Especificaciones del bloque de terminales de alimentación eléctrica
Estructura Calibre máximo
B 5.3 mm
C 8.4 mm
(1)
Calibres máximos/mínimos que acepta el bloque de terminales. Esto no constituye
(1)
de cable
2
(10 AWG) 1.3 mm2 (16 AWG)
2
(8 AWG) 1.3 mm2 (16 AWG)
Calibre mínimo
(1)
de cable
Par de apriete
1.7 -2.2 N-m
(16-19 lb-pulg.)
2.9 -3.7 N-m
(26-33 lb-pulg.)
recomendación alguna.
Page 94

Español-8
Condiciones de alimentación de entrada
Condición de la alimentación de entrada Acción correctiva
Baja impedancia de línea (menos de 1% de la
reactancia de línea)
Transformador de alimentación eléctrica de más
de 120 kVA
La línea tiene condensadores para corrección del
factor de potencia
La línea tiene interrupciones frecuentes de la
alimentación eléctrica
La línea tiene picos de ruido intermitentes
superiores a 6000 V (rayos)
El voltaje entre fase y tierra excede el 125% del
voltaje normal entre línea y línea.
Sistema de distribución sin conexión a tierra
240 V en configuración triángulo abierto (rama de
(1)
extensión)
(1)
Para variadores usados en un triángulo abierto con un sistema con neutro a tierra de
fase central, la fase opuesta a la fase con la toma central al neutro o tierra física se
conoce como “rama de extensión”, “rama alta”, “rama roja”, etc. Esta rama debe
identificarse en todo el sistema con una cinta roja o anaranjada en el cable en cada
punto de conexión. La rama de extensión deberá conectarse a la fase B central del
reactor. Consulte el Manual del usuario del PowerFlex 40P para obtener los números
de parte específicos de los reactores de línea.
(2)
Consulte el Apéndice B del Manual del usuario del PowerFlex 40P para obtener
información sobre cómo hacer pedidos de accesorios.
• Instale un reactor de línea
• o un transformador de
aislamiento
• o inductor de bus – sólo
variadores de velocidad 5.5
y 11 kW (7.5 y 15 hp)
• Instale un reactor de línea
• o un transformador de
aislamiento
• Retire el puente de MOV a tierra.
• o instale un transformador de
aislamiento con secundario
conectado a tierra si es necesario.
• Instale un reactor de línea
(2)
Notas acerca del bus común/precarga
Si se usan variadores con precarga interna jun to con un desconectador al
bus común, el contacto auxiliar del desconectador debe conectarse a una
entrada digital del variador. La entrada correspondiente (parámetro
A051-A054) debe establecerse en la opción 29, “Habilitación de
precarga”. Esto proporciona el enclavamiento de precarga apropiado,
para proteger contra posibles daños al variador cuando se conecta a un
bus común de CC.
Page 95

Recomendaciones para el cableado de E/S
Tipos de cables de señales y control
Tipo(s) de cable
Tipo de señal/
dónde se utiliza
E/S analógicas
yPTC
Pot. remoto 8770 0.750 mm2(18AWG),
E/S de impulsos/
encoder
(1)
Cable multifilar o macizo.
(2)
El 9728 y el 9730 son equivalentes y pueden usarse, pero quizás no quepan en el
canal para cable del variador.
(3)
Si los cables son cortos y están dentro de un envolvente que no tiene circuitos
(1)
Belden
(o equivalente)
8760/9460 0.750 mm2(18AWG), par
(2)
89730
Descripción
trenzado, 100% de blindaje
con cable de tierra
3 conductores, blindado.
0.196 mm2(24AWG), pares
blindados individualmente.
(3)
sensibles, quizás no sea necesario el uso de cables blindados, pero siempre es
recomendable usarlos.
Cable de control recomendado para E/S digitales
Tipo Tipos de cables Descripción
Sin blindaje Según el NEC de EE.UU.,
– 300 V,
o el código nacional o local
aplicable
Blindado Cable blindado con múltiples
conductores, como el
Belden 8770 o equiv.
2
0.750 mm
(18AWG),
3 conductores,
blindado.
Mín.
capacidad
nominal del
aislamiento
300 V,
75-90 ° C
.
(167-194 ° F)
Clasificación de
aislamiento
mínima
60
° C
° F)
(140
Español-9
Especificaciones del bloque de terminales de E/S
Estructura Calibre máximo
B y C 1.3 mm
(1)
de cable
2
(16 AWG) 0.2 mm2 (24 AWG) 0.5 -0.8 N-m
Calibre mínimo
(1)
de cable
Par de apriete
(4.4-7 lb-pulg.)
(1)
Calibres máximos/mínimos que acepta el bloque de terminales. Esto no constituye
recomendación alguna.
Consulte el Manual del usuario del PowerFlex 40P para obtener las
recomendaciones sobre máxima longitud del cable de alimentación
eléctrica y control.
Page 96

Español-10
Relay N.O.
Relay Common
Relay N.C.
Bloque de terminales de control
Diagrama de bloques del cableado de control
0-10V
0-20mA
(6)
SNK
SRC
SRCSNK
+24V
+10V
0-10V
0/4-20mA
30V DC
50mA
Non-inductive
Analog Output Select
+
10V
/-10V
01 02 03 04 05
11 12 13 14 15
(1)
01
02
03
04
05
06
07
08
09
11
12
13
14
15
16
17
18
19
(4)
Enable Jumper
R1
R2
R3
R1 R2 R3
(1)(6)
Stop
Start/Run FWD
Direction/Run REV
Digital Common
Digital Input 1
Digital Input 2
Digital Input 3
Digital Input 4
Opto Common
+24V DC
+10V DC
0-10V (or ±10V) Input
Analog Common
4-20mA Input
Analog Output
Opto Output 1
Opto Output 2
RS485 Shield
Voltage Range Select
06 07 08 09
16 17 18 19
(2)
ENBL
Typical
SRC Wiring
(3)
(4)
(6)
Enable
Jumper
Typical
SNK Wiring
Pot must be
1-10k ohm
2 Watt Min.
Common
RS485
(DSI)
1
(5)
24V
Resistivo 3.0 A 3.0 A 3.0 A
30 VCC 125 VCA 240 VCA
Inductivo 0.5 A 0.5 A 0.5 A
Vea las notas sobre el diagrama de bloques del cableado de control en la
siguiente página.
Page 97

Español-11
Notas sobre el diagrama de bloques del cableado de control
(1)
Importante: El terminal de E/S 01 siempre es una entrada de paro por inercia
excepto cuando P036 [Fuente Arranque] se establece en control de “3 cables”, “2-W
Lvl Sens” o “Momt FWD/REV”. En el control de tres cables, el terminal de E/S 01 está
controlado por el P037 [Modo de Paro]. Todas las demás fuentes de paro están
controladas por P037 [Modo de Paro].
P036 [Fuente
Arranque] Paro
3 hilos Según P037 Según P037
2 hilos Según P037 Inercia
Sens nvl 2-W Según P037 Según P037
Alt Vel 2-W Según P037 Inercia
Puerto RS485 Según P037 Inercia
Av/Ret.Impul Según P037 Según P037
Importante: El variador se envía con un puente instalado entre los terminales de E/S
01 y 11. Retire este puente cuando use el terminal de E/S 01 como entrada de paro
o de habilitación.
(2)
Se muestra el control de dos hilos. Para el control de tres hilos, utilice una entrada
momentánea en el terminal E/S 02 para comandar un arranque. Use una
entrada con mantenimiento para el terminal de E/S 03 a fin de cambiar
de dirección.
(3)
La función del terminal de E/S 03 es totalmente programable. Se programa con E202
[Term. Digital 3].
(4)
Haga coincidir el ajuste del microinterruptor de selección del rango de voltaje con el
esquema de control para un funcionamiento unipolar o bipolar apropiado.
(5)
Al usar una salida óptica con una carga inductiva como un relé, instale un diodo de
recuperación en paralelo con el relé según se muestra, para evitar dañar la salida.
(6)
Cuando se retira el puente de habilitación ENBL, el terminal de E/S 01 siempre
actuará como habilitación de hardware, causando un paro por inercia sin
interpretación del software.
Terminal de E/S 01
"Stop"
(6)
(6)
(6)
Page 98

Español-12
Designaciones de terminales de E/S de control
N.º Señal
R1 Relé N. A. Fallo Contacto normalmente abierto para el relé de salida. A055
R2 Común de relé – Común del relé de salida.
R3 Relé N.C. Fallo Contacto normalmente cerrado del relé de salida. A055
Val or
predeterminado Descripción Parám.
Microinterruptor de selección
de salida analógica
Microinterruptor
de drenador/surtidor
(1)
01 Paro
02 Arranque/Marcha
AVANCE
03 Term Digital 3 Inactivo P036, P037,
04 Común digital – Para entradas digitales. Electrónicamente aisladas con
05 Entrada digital 1 Frec presel Se programa con A051 [Sel. ent digt 1]. A051
06 Entrada digital 2 Frec presel Se programa con A052 [Sel. ent digt 2]. A052
07 Entrada digital 3 Local Se programa con A053 [Sel. ent digt 3]. A053
08 Entrada digital 4 Impulso avance Se programa con A054 [Sel. ent digt 4]. A054
09 Común opto. – Para las salidas con acoplamiento óptico. Electrónicamente
11 +24 V CC – Referenciada al común digital.
12 +10 V CC – Referenciada al común analógico.
13 Ent ±10 V
14 Común analógico – Para ent. de 0-10 V o de 4-20 mA. Electrónicamente
15 Ent 4-20 mA
16 Salida analógica FrecSal 0-10 La salida analógica predeter minada es de 0-10 V. Para
17 Salida Óptica 1 MotorMarcha Se programa con A058 [Sel Sal Óptica 1] A058, A059,
18 Salida Óptica 2 EnFrecuencia Se programa con A061 [Sel Sal Óptica 2] A061, A062,
19 Blindaje RS485 (DSI) – Cuando se use el puerto de comunicaciones RS485 (DSI)
(1)
Vea las notas de pie de página (1) y (6) en la página 11.
(2)
Ent 0-10 V y Ent 4-20 mA son canales de entrada diferentes y se pueden conectar simultáneamente.
0-10 V Establece la salida analógica en voltaje o corriente. Los ajustes deben
Surtidor (SRC) Las entradas se pueden cablear como drenador (SNK) o surtidor (SRC)
Inercia Es necesario que esté presente el puente instalado en
Inactivo El terminal de E/S 03 es totalmente programable.
(2)
Inactivo Para la alime ntación de entrada externa de 0-10 V (unipolar)
(2)
Inactivo Para alimentación externa de entrada de 4-20 mA
corresponder con A065 [Sel. Sal. Anlg.].
mediante ajustes de los microinterruptores.
fábrica o una entrada normalmente cerrada para que
arranque el variador.
Se programa con E202 [Term. Digital 3]. Para inhabilitar la
operación de retroceso, consulte A095 [Inver Deshab.].
entradas digitales de E/S analógicas y salidas ópticas.
aisladas con salidas ópticas de E/S analógicas y entradas
digitales.
Potencia suministrada por el variador para las
entradas digitales.
La corriente máxima de salida es de 100 mA.
Alimentación eléctrica suministrada por el variador para el
potenciómetro externo de 0-10 V.
La corriente máxima de salida es de 15 mA.
o ±10 V (bipolar) (impedancia de entrada = 100k ohms)
o deslizador de potenciómetro.
aisladas con entradas y salidas analógicas de E/S digitales
y salidas ópticas.
(impedancia de entrada = 250 ohms).
convertir a un valor de corriente, cambie el microinterruptor
de selección de salida analógica a 0-20 mA. Se programa
con A065 [Sel. Sal. Anlg.]. El valor analógico máximo se
puede escalar con A066 [Sal. Anlg. Máx.].
Carga máxima: 4-20 mA = 525 ohms (10.5 V)
deberá conectarse el terminal a la tierra de seguridad (PE).
0-10 V = 1k ohm (10 mA)
(1)
P036
P036, P037
A095, E202
P038
P038,
A051-A054,
A123, A132
P038,
A051-A054,
A132
A065, A066
A064
A064
Se pueden usar las entradas independientemente para controlar la velocidad o en conjunto al funcionar en modo PID.
Page 99

Español-13
Interface de encoder
La interface de encoder del PowerFlex 40P puede surtir 5 ó 12 volts de
alimentación y aceptar entradas diferenciales o unipolares de 5, 12 ó 24 volts.
12V
5V
+V Cm B- BA-A
➊
Descripción de terminales
N.º Señal Descripción
+V Alimentación
de 5 V - 12 V
Cm Retorno de
alimentación
B- Encoder B (NOT)
B Encoder B
A- Encoder A (NOT)
A Encoder A
➊ Salida El microinterruptor selecciona alimentación de 12 ó 5 volts
(1)
Cuando se usa alimentación de encoder de 12 V, alimentación de E/S de 24 V,
la corriente máxima en el terminal de E/S 11 es 50 mA.
Importante: Un encoder de cuadratura proporciona dirección
(1)
Fuente de alimentación eléctrica interna de 250 mA (aislada).
Entrada en cuadratura B.
Entrada en cuadratura A, un solo canal o tren de impulsos.
suministrados en los terminales “+V” y “Cm” para el encoder.
y velocidad de rotor. Por lo tanto, el encoder debe estar
cableado de forma que la dirección de avance coincida con
la dirección de avance del motor. Si el variador está
leyendo la velocidad del encoder, pero el regulador de
posición u otra función del encoder no está funcionando
correctamente, desconecte la alimentación eléctrica del
variador e intercambie los canales de encoder A y B,
o intercambie dos conductores del motor. Los variadores
de velocidad que utilizan FRN 2.xx o superior entrarán en
fallo si un encoder no está correctamente cableado y E216
[Tipo motor Fdbk] se establece en la opción 5
“Comprobación de Quad”.
Page 100

Español-14
Preparación de la puesta en marcha del variador
ATENCIÓN: La fuente de alimentación debe estar conectada al variador para
realizar los siguientes procedimientos de puesta en marcha. Algunos de los
!
voltajes presentes están al potencial de la línea de entrada. Para evitar el peligro
de descarga eléctrica o daño al equipo, el siguiente procedimiento debe ser
realizado únicamente por personal de servicio calificado. Lea detenidamente
y comprenda el procedimiento antes de comenzar. Si alguno de los eventos
descritos no se produce mientras realiza este procedimiento, no prosiga.
Desconecte toda la alimentación eléctrica, incluso los voltajes de control
suministrados por el usuario. Es posible que estén presentes voltajes
suministrados por el usuario aun cuando la potencia de CA no esté conectada al
variador. Corrija el mal funcionamiento antes de continuar.
Antes de conectar la fuente de alimentación al variador
❏ 1. Confirme que todas las entradas se encuentren firmemente conectadas a los
❏ 2. Verifique que la alimentación eléctrica de la línea de CA en el desconectador
❏ 3. Verifique que toda la alimentación eléctrica de control digital sea de 24 volts.
❏ 4. V erifique que el microinterruptor de ajuste de drenador (SNK)/surtidor (SRC)
❏ 5. Verifique que esté presente la entrada de paro o no se pondrá en marcha
❏ 6. Conecte la alimentación de CA y los voltajes de control al variador.
terminales correctos.
esté dentro del valor nominal del variador.
esté configurado de manera que corresponda con el esquema de cableado de
control. Vea la página 10 para determinar su ubicación.
Importante: El esquema de control predeterminado es el de surtidor (SRC).
El terminal de paro se conecta en puente para permitir el arranque
mediante los terminales comunes. Si se cambia el esquema de
control a drenador (SNK), habrá que retirar el puente de los
terminales de E/S 01 y 11 e instalarlo entre los terminales
de E/S 01 y 04.
el variador.
Importante: Si se utiliza el terminal de E/S 01 como entrada de paro, debe
quitarse el puente de conexión entre los terminales de E/S 01 y 11.
Conexión de la fuente de alimentación al variador
Inicio, paro, dirección y control de velocidad
Los valores de los parámetros predeterminados en fábrica permiten controlar el
variador mediante los terminales comunes. No se requiere programación para
iniciar, parar, cambiar de dirección y controlar la velocidad directamente desde
los terminales comunes.
Importante: Para inhabilitar la operación de retroceso, consulte A095
[Inver Deshab.].
Si se presenta un fallo durante el arranque, la página 19 incluye una explicación
del código de fallo. Para obtener información completa sobre la resolución de
problemas, consulte el Manual del usuario del PowerFlex 40P.
 Loading...
Loading...