

Page 1
ControlLogix Drive
Module
1756-DMD30, 1756-DMF30
User Manual
Page 2
Important User Information
Solid state equipment has operational characteristics differing from those of
electromechanical equipment. “ Safety Guidelines for the Application,
Installation and Maintenance of Solid State Controls ” (Publication SGI-1.1
available from your local Rockwell Automation Sales Office or online at
http://www.ab.com/manuals/gi ) describes some important differences
between solid state equipment and hard-wired electromechanical devices.
Because of this difference, and also because of the wide variety of uses for
solid state equipment, all persons responsible for applying this equipment
must satisfy themselves that each intended application of this equipment is
acceptable.
In no event will Rockwell Automation, Inc. be responsible or liable for
indirect or consequential damages resulting from the use or application of
this equipment.
The examples and diagrams in this manual are included solely for
illustrative purposes. Because of the many variables and requirements
associated with any particular installation, Rockwell Automation, Inc.
cannot assume responsibility or liability for actual use based on the
examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to
use of information, circuits, equipment, or software described in this
manual.
Reproduction of the contents of this manual, in whole or in part, without
written permission of Rockwell Automation, Inc. is prohibited.
Throughout this manual we use notes to make you aware of safety
considerations.
WARNING
Identifies information about practices or
circumstances that can cause an explosion in a
hazardous environment, which may lead to personal
injury or death, property damage, or economic loss.
!
ATTENTION
Identifies information about practices or
circumstances that can lead to personal injury or
death, property damage, or economic loss.
!
IMPORTANT
Identifies information that is critical for successful
application and understanding of the product.
Page 3
Rockwell Automation Support
Before you contact Rockwell Automation for technical assistance, we
suggest you please review the troubleshooting information contained
in this publication first.
If the problem persists, call your local Rockwell Automation
representative or contact Rockwell Automation in one of the
following ways:
Phone
Internet
United
States/Canada
Outside United
States/Canada
⇒
1.262.512.8176
You can access the phone number for your
country via the Internet:
1. Go to http://www.ab.com
2. Click on Product Support
(http://support.automation.rockwell.com)
3. Under Support Centers , click on Contact
Information
1. Go to http://www.ab.com
2. Click on Product Support
(http://support.automation.rockwell.com)
Your Questions or Comments on this Manual
If you find a problem with this manual, please notify us by using one
of these two methods:
•
Filling out the enclosed "How Are We Doing" form
•
Filling out the "Tell Us How We Can Make Our Manuals Better"
form online at
http://www.ab.com/manuals/dr/manuals_feedback.html
Page 4

Page 5

1
Important User Information . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Rockwell Automation Support . . . . . . . . . . . . . . . . . . . . . . 1-3
Your Questions or Comments on this Manual . . . . . . . . 1-3
Summary of Changes
Preface
What is the ControlLogix Drive
Module?
Drive Comm (Drive
Communication)
Drive Module Features
Installing the Drive Module
Who Should Use This Manual . . . . . . . . . . . . . . . . . . . . . . P-1
Purpose of This Manual. . . . . . . . . . . . . . . . . . . . . . . . . . . P-1
What This Manual Contains . . . . . . . . . . . . . . . . . . . . . . . . P-2
Related Products and Documentation. . . . . . . . . . . . . . . . . P-2
What is the ControlLogix
Drive Module?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
What Are Some of the Features Available On the ControlLogix
Drive Module? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Connecting the Drive Module to SynchLink and Drive Comm . .
1-3
SynchLink . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
Drive Comm (Drive Communication) . . . . . . . . . . . . . . 1-3
Physical Features of the ControlLogix Drive Module . . . 1-4
Using Module Identification and Status Information . . . . . . 1-5
Preventing Electrostatic Discharge . . . . . . . . . . . . . . . . . . . 1-7
Removal and Insertion Under Power . . . . . . . . . . . . . . . . . 1-7
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . 1-8
Interface to DPS Drive Equipment . . . . . . . . . . . . . . . . . . . 2-1
Drive Communication Protocol . . . . . . . . . . . . . . . . . . . . . 2-1
Initialization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
Synchronized Communication . . . . . . . . . . . . . . . . . . . . . . 2-2
Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
Synchronization with CST. . . . . . . . . . . . . . . . . . . . . . . 2-3
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . 2-3
General Module Features. . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
Removal and Insertion Under Power (RIUP) . . . . . . . . . 3-2
Module Fault Reporting . . . . . . . . . . . . . . . . . . . . . . . . 3-2
Fully Software Configurable . . . . . . . . . . . . . . . . . . . . . 3-3
LED Status Information . . . . . . . . . . . . . . . . . . . . . . . . 3-3
Class I Division 2 Certification . . . . . . . . . . . . . . . . . . . 3-4
Agency Certification. . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
Configurable Module Features . . . . . . . . . . . . . . . . . . . . . . 3-4
Controller Communication Format . . . . . . . . . . . . . . . . 3-5
SynchLink Communications Format . . . . . . . . . . . . . . . 3-5
Module-Defined Data Tags. . . . . . . . . . . . . . . . . . . . . . 3-7
Electronic Keying. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-8
Requested Packet Interval . . . . . . . . . . . . . . . . . . . . . . 3-10
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . 3-10
Noting the Power Requirements . . . . . . . . . . . . . . . . . . . . 4-1
Installing the Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
Connecting SynchLink Cables . . . . . . . . . . . . . . . . . . . . . . 4-3
Connecting (Drive Comm Drive Communication) Cables . . 4-5
Publication 1756-UM522B-EN-P - February 2003
Page 6

2
Configuring the Drive Module
Troubleshooting the Drive Module
Specifications
1756-DMD30 Specific Information
Removing the Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-6
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . 4-7
Overview of the Configuration Process . . . . . . . . . . . . . . . 5-1
Planning the System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
Understanding the Controller - Drive Module Interface . 5-2
Choosing the SynchLink Communication Formats . . . . . 5-2
Choosing the SynchLink Network Topology . . . . . . . . . 5-4
Checking and Updating the DriveExecutive Database. . . . . 5-6
Checking the DriveExecutive Database . . . . . . . . . . . . . 5-6
Checking the DriveExecutive Database (continued). . . . 5-7
Updating the DriveExecutive Database . . . . . . . . . . . . . 5-8
Using RSLogix 5000 to Configure the Drive Module . . . . . . 5-9
Using DriveExecutive to Configure Drive Module. . . . . . . . 5-16
Return to RSLogix 5000 to Finish Configuring the Drive Module
5-23
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . 5-24
Using the Status Indicators . . . . . . . . . . . . . . . . . . . . . . . . 6-1
Using DriveExecutive to Troubleshoot the Module . . . . . . . 6-3
Warning Signal on Main Screen . . . . . . . . . . . . . . . . . . 6-3
Fault and Alarm Window . . . . . . . . . . . . . . . . . . . . . . . 6-4
Fault and Alarm Window (continued). . . . . . . . . . . . . . 6-5
Fault and Alarm Window (continued). . . . . . . . . . . . . . 6-6
Diagnostic Parameters . . . . . . . . . . . . . . . . . . . . . . . . . 6-6
Diagnostic Parameters (continued) . . . . . . . . . . . . . . . . 6-7
Using RSLogix 5000 to Troubleshoot the Module . . . . . . . . 6-8
Warning Signal on Main Screen . . . . . . . . . . . . . . . . . . 6-8
Module Properties Window . . . . . . . . . . . . . . . . . . . . . 6-9
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . 6-10
Module Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
Communication Specifications . . . . . . . . . . . . . . . . . . . . . . A-1
Control Block Diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . B-2
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-2
Speed Control - Reference . . . . . . . . . . . . . . . . . . . . . . B-3
Speed Control - Regulator . . . . . . . . . . . . . . . . . . . . . . B-4
Process Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-5
Position Control - Interpolated/Direct . . . . . . . . . . . . . . B-6
Position Control - Point to Point . . . . . . . . . . . . . . . . . B-7
Position Control - Auxiliary . . . . . . . . . . . . . . . . . . . . . B-8
Torque Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-9
Speed / Position Feedback. . . . . . . . . . . . . . . . . . . . . B-10
Peak Detector / Control Logix . . . . . . . . . . . . . . . . . . B-11
Field Economy. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-12
Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-13
How Parameters are Organized . . . . . . . . . . . . . . . . . B-15
Parameter Data In Linear List Format . . . . . . . . . . . . . B-24
Parameter Cross Reference By Name . . . . . . . . . . . . B-153
Publication 1756-UM522B-EN-P - February 2003
Page 7

1756-DMF30 Specific Information
Index
3
Interpretting Drive Module Faults in DriveExecutive . . . . B-159
Parameter 169 [Drive I/O Status]. . . . . . . . . . . . . . . . B-159
Parameter 323 [Fault Status 1] . . . . . . . . . . . . . . . . . . B-160
Parameter 324 [Fault Status 2] . . . . . . . . . . . . . . . . . . B-161
Parameter 326 [Alarm Status 1] . . . . . . . . . . . . . . . . . B-162
Parameter 327 [Alarm Status 2] . . . . . . . . . . . . . . . . . B-162
Parameter 1229 [SL Error Status] . . . . . . . . . . . . . . . . B-163
Parameter 2044 [Rail Port 0 Faults] . . . . . . . . . . . . . . B-164
Parameter 2050 [Rail Port 1 Faults] . . . . . . . . . . . . . . B-165
Parameter 2122 [MC Faults]. . . . . . . . . . . . . . . . . . . . B-166
Parameter 2123 [MC Warnings] . . . . . . . . . . . . . . . . . B-167
Parameter 2124 [Pwr Device Status] . . . . . . . . . . . . . B-169
Parameter 2125 [Interlock Code] . . . . . . . . . . . . . . . . B-170
Control Block Diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . C-2
Current Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C-2
Speed Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C-3
Peak Detector/Control Logic. . . . . . . . . . . . . . . . . . . . . C-4
Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C-5
How Parameters Are Organized . . . . . . . . . . . . . . . . . . C-7
Parameter Data In Linear List Format . . . . . . . . . . . . . C-14
Interpretting Drive Module Faults in DriveExecutive . . . . C-100
Parameter 323 [Fault Status 1] . . . . . . . . . . . . . . . . . . C-100
Parameter 324 [Fault Status 2] . . . . . . . . . . . . . . . . . . C-101
Parameter 326 [Alarm Status 1] . . . . . . . . . . . . . . . . . C-102
Parameter 327 [Alarm Status 2] . . . . . . . . . . . . . . . . . C-102
Parameter 1229 [SL Error Status] . . . . . . . . . . . . . . . . C-103
Parameter 2044 [Rail Port 0 Faults] . . . . . . . . . . . . . . C-104
Parameter 2050 [Rail Port 1 Faults] . . . . . . . . . . . . . . C-105
Parameter 2122 [MC Faults]. . . . . . . . . . . . . . . . . . . . C-106
Parameter 2123 [MC Warnings] . . . . . . . . . . . . . . . . . C-107
Parameter 2124 [Pwr Device Status] . . . . . . . . . . . . . C-108
Parameter 2125 [Interlock Code] . . . . . . . . . . . . . . . . C-109
Publication 1756-UM522B-EN-P - February 2003
Page 8

4
Publication 1756-UM522B-EN-P - February 2003
Page 9
Summary of Changes
The table below summarizes the changes to this publication since the
last update:
For this updated information: See:
Reliability specification A-1
Documentation of 1756-DMD30 (Firmware Revision 2.01) Algorithms,
Parameters and Faults
Documentation of 1756-DMF30 (Firmware Revision 1.09) Algorithms,
Parameters and Faults
B-1
C-1
1 Publication 1756-UM522B-EN-P - February 2003
Page 10

Summary of Changes 2
Notes:
Publication 1756-UM522B-EN-P - February 2003
Page 11
Preface
About This Preface
This preface describes how to use this manual. The following table
describes what this preface contains and its location.
For information about: See page:
Who Should Use This Manual Preface-1
Purpose of This Manual Preface-1
Related Products and Documentation Preface-2
Who Should Use This Manual
Purpose of This Manual
You must be able to program and operate an Allen-Bradley
Control
efficiently use your Drive module.
We assume that you know how to do this in this manual. If you do
not, refer to Related Documentation, before you attempt to use this
module.
IMPORTANT
This manual describes how to install, configure, and troubleshoot
your ControlLogix Drive module.
Logix
™ Logix controller and ControlLogix I/O modules to
SynchLink must be used in conjunction with a standard
control network, such as ControlNet or Ethernet. A
standard network is used for general control interlocking
and transfer of diagnostic data across the system.
SynchLink does not function as a standard control network
(e.g. it broadcasts data in a unidirectional manner).
1 Publication 1756-UM522B-EN-P - February 2003
Page 12
•
•
•
Preface 2
•
•
•
•
•
What This Manual Contains
Related Products and
This user manual contains the following sections:
The following table lists related Allen-Bradley products and
documentation:
Documentation
Table Preface.A
Related Documentation
Catalog
number:
1756-DM ControlLogix Drive Module Installation Instructions 1756-IN577
1756-A4, -A7,
-A10, -A13
1756-PA72,
-PB72
1756-PA75,
-PB75
1756-Series ControlLogix Module Installation Instructions
1756-Series ControlLogix System User Manual 1756-UM001
Multiple
numbers
1751-SLBA SynchLink Base Block Installation Instructions 1751-IN001
1751-SL4SP SynchLink 4-port Splitter Block Installation
1751-SLBP SynchLink Bypass Switch Block Installation
PowerFlex
700S
Description of the Drive module
Description of Drive Communication
Description of Drive module certifications and features
Description of how to install the Drive module and connect the
fiber optic cables
Description of how to configure the Drive module with RSLogix
5000 and DriveExecutive programming software
Description of how to troubleshoot the Drive module
Listing of Drive module specifications
Information specific to the SD3000 Interface (1756-DMD30)
Document title: Pub. number:
ControlLogix Chassis Installation Instructions 1756-IN080B
ControlLogix Power Supply Installation Instructions 1756-5.67
ControlLogix Power Supply Installation Instructions 1756-5.78
Multiple 1756-IN
(Each module has separate installation document.)
SynchLink Design Guide 1756-TD008
Instructions
Instructions
PowerFlex 700S User Manual 20D-UM001
numbers
1751-IN002
1751-IN003
Publication 1756-UM522B-EN-P - February 2003
Page 13
Preface 3
The following table lists related Reliance Electric products and
documentation:
Table Preface.B
Related Documentation
Catalog
Document title: Pub. number:
number:
Multiple
Distributed Power System Overview S-3005
numbers
SD3000,
SF3000
SD3000
SD3000,
SF3000
SD3000 Distributed Power System
SF3000 Distributed Power System
SD3000,
SF3000
Distributed Power System
SD3000/SF3000
Power Module Interface Rack and Modules
Distributed Power System
SD3000 Drive
Diagnostics, Troubleshooting, and Start-Up Guidelines
Distributed Power System
SD3000/SF3000
3-Phase DC Power Models
High Horsepower D-C Power Bridge
1000 HP Power Modules
SF3000 Panel-Mounted
Single-Phase Field Power Modules
Distributed Power System
SD3000/SF3000
Parallel Gate Amplifier System
S-3008
S-3011
S-3037
S-3039
S-3060
S-3045
If you need more information on these products, contact your local
Allen-Bradley integrator or sales office for assistance. Information and
manuals are also available online at http://www.ab.com/manuals/ and
http://www.theautomationbookstore.com/ .
Publication 1756-UM522B-EN-P - February 2003
Page 14

Preface 4
Notes:
Publication 1756-UM522B-EN-P - February 2003
Page 15
Chapter
1
What is the ControlLogix Drive Module?
This chapter describes the ControlLogix Drive module. It also
describes what you must know and do before using the Drive
module.
For information about: See page:
What is the ControlLogix Drive Module? 1-1
Connecting the Drive Module to SynchLink
and Drive Comm
Using Module Identification and Status
Information
Preventing Electrostatic Discharge 1-7
Removal and Insertion Under Power 1-7
Chapter Summary and What’s Next 1-8
1-3
1-5
What is the ControlLogix
Drive Module?
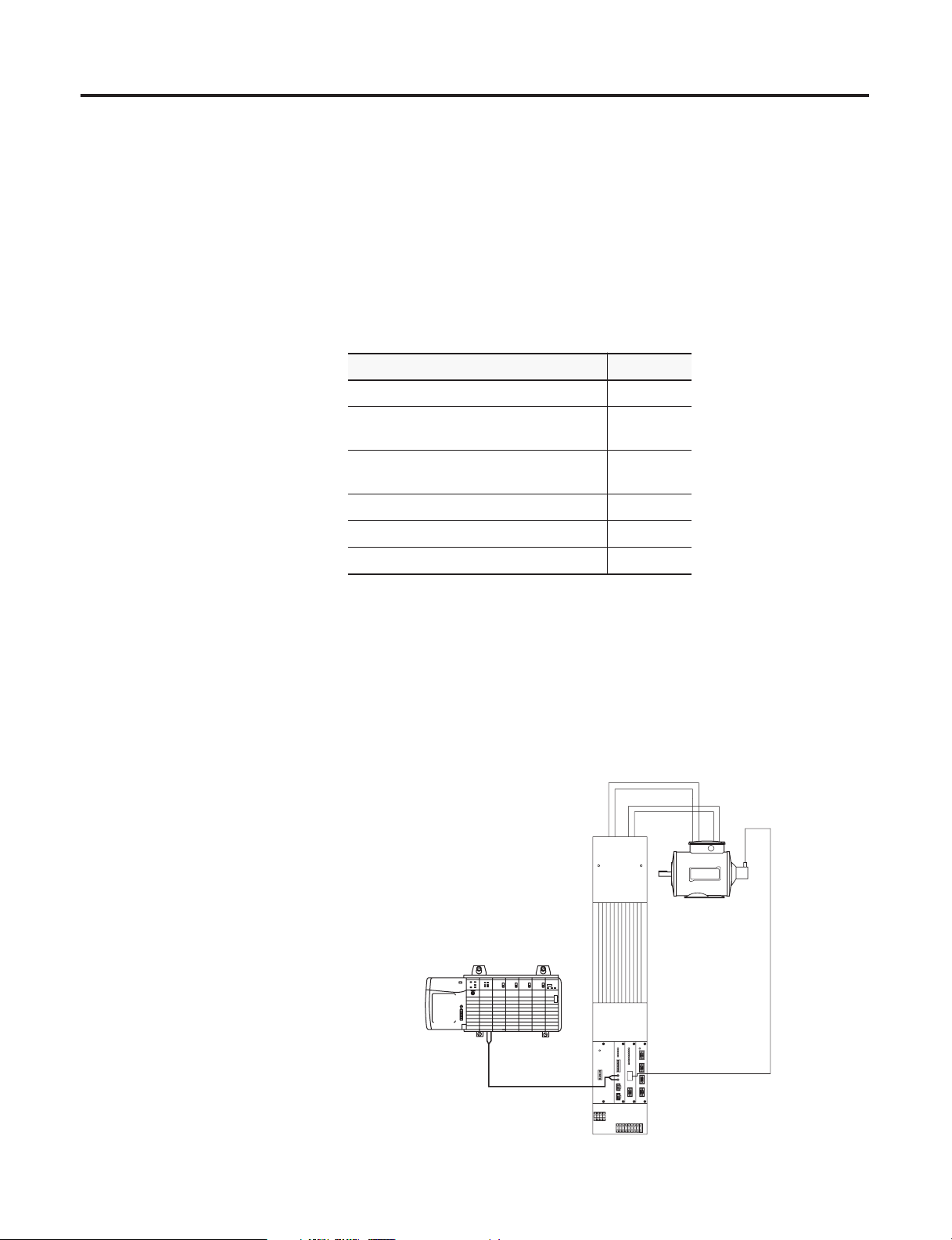
The 1756-DM Drive Module is a single slot ControlLogix based
module for interface to Reliance Electric Distributed Power System
(DPS) drive equipment. Each drive module interfaces with an
individual Power Module Interface (PMI) chassis, performing velocity
and position and outer torque control.
Figure 1.1 SD3000 System Example
ControlLogix Chassis
with Drive Module
Drive Communication
Motor with
resolver
DPS with PMI
Chassis
1 Publication 1756-UM522B-EN-P - February 2003
Page 16
•
•
•
•
1-2 What is the ControlLogix Drive Module?
There are two types of Drive module, each works with a different
type of DPS drive equipment.
Table 1.A
Drive Module DPS Equipment Description
1756-DMD30 SD3000 6 Pulse DC Drive S6 and S6R
SD3000 12 Pulse DC Drive S12 and S12R
1756-DMF30 SF3000 Three Phase Field Supply
What Are Some of the Features Available On the ControlLogix Drive Module?
The following are some of the features available on the ControlLogix
Drive module:
The 1756-DMD30 utilizes velocity and position and outer torque
control similar to the PowerFlex 700S
•
Motor Control capability mimics the respective Reliance Electric
Distributed Power drive
•
PC Tools, such as RSLogix 5000
DriveTools 2000
TM
program suite, used for programming,
TM
and DriveExecutive
TM
in the
configuring, monitoring and troubleshooting
Fiber optic connection to the Power Module Interface
SynchLink
TM
for advanced high performance synchronization
and data transfer.
Removal and insertion under power (RIUP) - This system feature
allows you to remove and insert the module while power is
applied. For more information on RIUP, see page 1-7.
•
Class I Division 2, UL, CSA, and CE Agency Certification
Publication 1756-UM522B-EN-P - February 2003
Page 17
What is the ControlLogix Drive Module? 1-3
Connecting the Drive Module to SynchLink and Drive Comm
SynchLink
The ControlLogix Drive module mounts in a ControlLogix chassis and
connects to other SynchLink nodes through a fiber optic cable system.
Table 1.B
Fiber Optic Cables for SynchLink
Catalog Number: Cable Length Cables per box:
1403-CF001 1 meter 2
1403-CF003 3 meters 2
1403-CF005 5 meters 2
1403-CF010 10 meters 1
1403-CF020 20 meters 1
1403-CF050 50 meters 1
1403-CF100 100 meters 1
1403-CF250 250 meters 1
Drive Comm (Drive Communication)
The ControlLogix Drive module connects to a PMI chassis through
special Drive Communication fiber optic cables.
Table 1.C
Fiber Optic Cables for Drive Communication
Catalog Number Length
1756-DMCF001 1 meter
1756-DMCF003 3 meters
1756-DMCF010 10 meters
1756-DMCF030 30 meters
1756-DMAF
(1)
Use the 1756-DMAF to connect existing UDC/PMI fiber optic cables to the Drive Module
(1)
N/A
Publication 1756-UM522B-EN-P - February 2003
Page 18
•
1-4 What is the ControlLogix Drive Module?
Before you install and use your module you should have already:
installed and grounded a 1756 chassis and power supply. For
more information, refer to the publications listed in Table 1.D.
Table 1.D
Chassis and Power Supply Documentation
ControlBus
Connector-
Interface to the
ControlLogix
system
backplane
Catalog
Document title: Pub. number:
number:
1756-A4, -A7,
ControlLogix Chassis Installation Instructions 1756-IN080
-A10, -A13
1756-PA72,
ControlLogix Power Supply Installation Instructions 1756-5.67
-PB72
1756-PA75,
ControlLogix Power Supply Installation Instructions 1756-5.78
-PB75
1756-PA75R/A,
-PB75R/A
ControlLogix Redundant Power Supply Installation
Instructions
1756-IN573
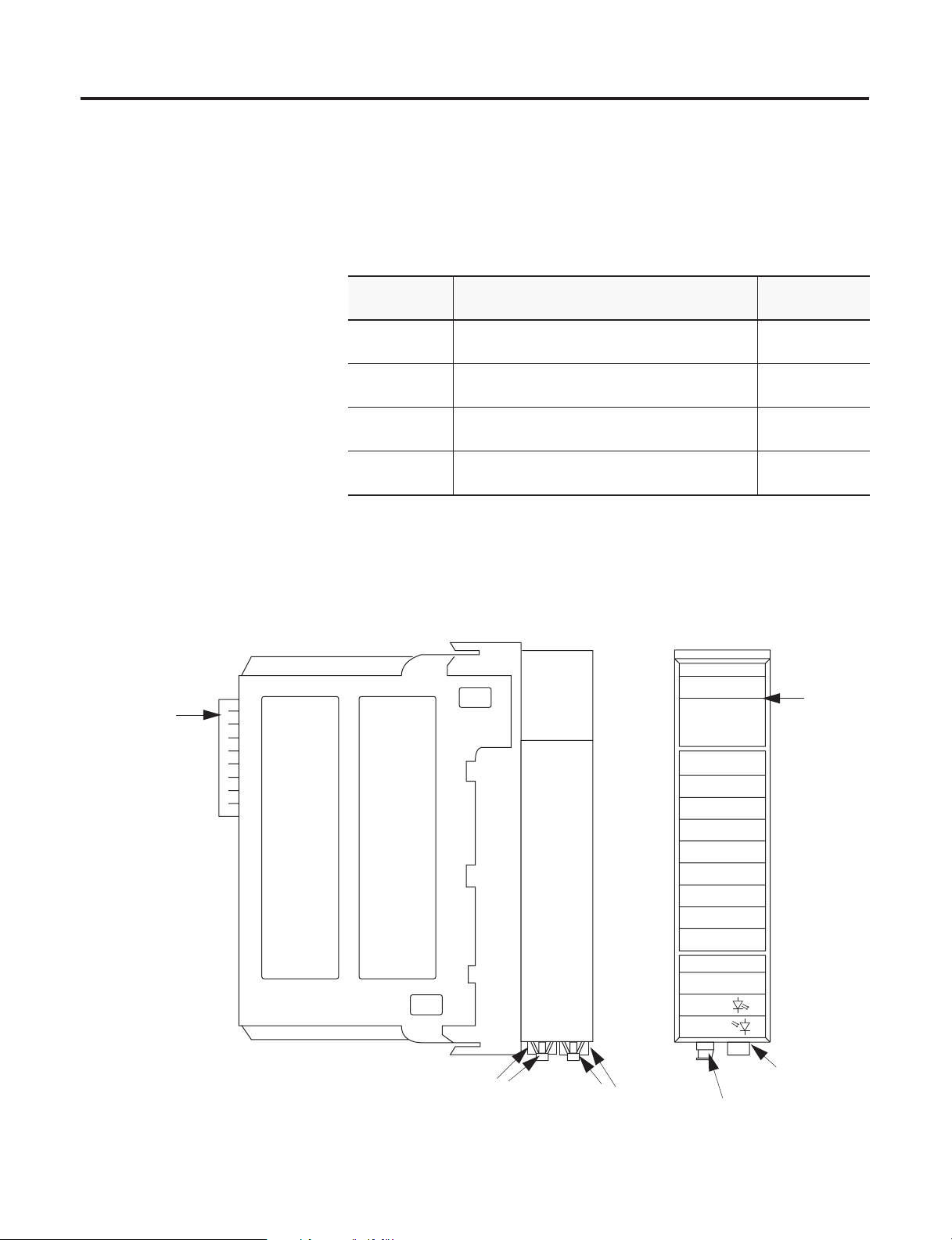
Physical Features of the ControlLogix Drive Module
Module side view Module front view
SD3000 INTERFACE
LINK
LINK
COMM
SYNC
DRIVE
OS OK OK
DRIVE
FAULT
COMM OK
Status
Indicators
The 1756-DMD30, SD3000 Interface, is shown. Physical
features are common to all ControlLogix Drive Modules.
Publication 1756-UM522B-EN-P - February 2003
Transmit Ports
(in back)
Receive Ports
(in front)
Tx (rear)
Rx (front)
SynchLink
Ports
Drive
Communication
Ports
Page 19
What is the ControlLogix Drive Module? 1-5
Backplane Connector - The backplane connector connects the
module to the ControlLogix chassis backplane.
Status Indicators - The status indicators display the module’s
communications, Drive Communication and SynchLink system status.
SynchLink Transmit Fiber Port - The transmit fiber port allows
connection (via fiber optic cables) to other SynchLink modules so the
module can send data.
SynchLink Receive Fiber Port - The receive fiber port allows
connection (via fiber optic cables) to other SynchLink modules so the
module can receive data.
Drive Communication Transmit Fiber Port - The transmit fiber
port allows connection (via fiber optic cables) to the PMI processor of
the drive.
Using Module Identification
and Status Information
Drive Communication Receive Fiber Port - The receive fiber port
allows connection (via fiber optic cables) to the PMI processor of the
drive.
Each ControlLogix Drive module maintains specific identification
information that separates it from all other modules. This information
assists you in tracking all the components of your system.
For example, you can track module identification information to be
aware of exactly what modules are located in any ControlLogix rack
at any time. While retrieving module identity, you can also retrieve
the module’s status.
Each module maintains the following information:
Table 1.E
Module Identification and Status Information
Module Identification: Description:
Product Type Module’s product type, such as Digital I/O or
Analog I/O module
Catalog Code Module’s catalog number
Major Revision Module’s major firmware revision number
Minor Revision Module’s minor firmware revision number
Publication 1756-UM522B-EN-P - February 2003
Page 20
1-6 What is the ControlLogix Drive Module?
•
•
•
–
–
–
–
–
–
•
•
•
•
Table 1.E
Module Identification and Status Information
Module Identification: Description:
Status Module’s status. Returns the following information:
Controller ownership (if any)
Whether module has been configured
Device Specific Status, such as:
Self-Test
Flash update in progress
Communications fault
Not owned (outputs in program mode)
Internal fault (need flash update)
Run mode
Minor recoverable fault
Minor unrecoverable fault
Major recoverable fault
Major unrecoverable fault
Vendor ID Module manufacturer vendor, for example Allen-Bradley
Serial Number Module serial number
Length of ASCII Text String Number of characters in module’s text string
ASCII Text String Module name
IMPORTANT
To retrieve this information, you can use the WHO
service in the RSLinx software. For more information
on how to retrieve module identification information,
see the RSLinx online help.
Publication 1756-UM522B-EN-P - February 2003
Page 21
What is the ControlLogix Drive Module? 1-7
Preventing Electrostatic Discharge
This module is sensitive to electrostatic discharge.
ATTENTION
!
Preventing Electrostatic Discharge
This equipment is sensitive to electrostatic discharge,
which can cause internal damage and affect normal
operation. Follow these guidelines when you handle
this equipment:
•
Touch a grounded object to discharge potential
static.
•
Wear an approved grounding wrist strap.
•
Do not touch connectors or pins on component
boards.
•
Do not touch circuit components inside the
equipment.
•
If available, use a static-safe workstation.
•
When not in use, store the equipment in
appropriate static-safe packaging.
Removal and Insertion Under Power
These modules are designed to be installed or removed while chassis
power is applied, while in non-hazardous locations only.
WARNING
!
ATTENTION
When you insert or remove the module while
backplane power is on, an electrical arc can occur.
This could cause an explosion in hazardous location
installations. Be sure that power is removed or the
area is nonhazardous before proceeding.
The removal of a Drive Module while under power
may cause personal injury or property damage. Make
sure that removal of the module does not adversely
impact other parts of the system.
!
IMPORTANT
Repeated electrical arcing causes excessive wear to
contacts on both the module and its mating
connector. Worn contacts may create electrical
resistance that can affect module operation.
Publication 1756-UM522B-EN-P - February 2003
Page 22

1-8 What is the ControlLogix Drive Module?
Chapter Summary and What’s Next
In this chapter, you learned about the ControlLogix Drive module.
Move to Chapter 2, Drive Comm (Drive Communication) for details
on the communications interface to DPS equipment.
Publication 1756-UM522B-EN-P - February 2003
Page 23
Chapter
2
Drive Comm (Drive Communication)
This chapter describes Drive Comm (Drive Communication), the
interface between the ControlLogix Drive module communicates and
Distributed Power System (DPS).
For information about: See page:
Interface to DPS Drive Equipment 2-1
Drive Communication Protocol 2-1
Initialization 2-2
Synchronized Communication 2-2
Chapter Summary and What’s Next 2-3
Interface to DPS Drive Equipment
Drive Communication Protocol
The main function of the Drive module is to interface to Distributed
Power System (DPS) drive equipment, enabling a ControlLogix
processor to control the drive equipment. A ControlLogix processor
performs high level control algorithms and drive coordination. The
Drive module performs outer control loop processing
Power Module Interface (PMI) performs real-time control of the
Power Module.
Each drive module interfaces with an individual Power Module
Interface (PMI) processor. It resides in a ControlLogix chassis and
connects to a PMI processor via fiber-optic and Drive Communication
protocol.
Drive Communication is a point to point serial link between the Drive
module and the Power Module Interface (PMI), on fiber-optic cable. It
is similar to the protocol used between the Universal Drive Controller
(UDC) and the PMI processor in an AutoMax DPS environment. The
data is Manchester-encoded and transmitted over the fiber-optic links
at a rate of 10M bits per second. Transfers on fiber-optic cables are
immune to electromagnetic interference (EMI).
(1)
, and the
During initialization, the Drive Module and PMI processor use an
asynchronous master-slave protocol to transfer the PMI operating
system to the PMI processor and to establish synchronized
communication. After initialization, they use synchronized “Set
(1)
The 1756-DMF30 does not perform outer control loop processing - it only functions as a bridge between the
ControlLogix controller and the PMI processor.
1 Publication 1756-UM522B-EN-P - February 2003
Page 24

2-2 Drive Comm (Drive Communication)
Point/Feedback Data Exchange” to transfer data. The Drive Module
sends set point data to the PMI processor, which returns feedback
data to the Drive Module.
Initialization
Synchronized Communication
At boot time, the Drive Module and PMI processor use an
asynchronous master-slave protocol to transfer the PMI operating
system and establish synchronized communication. The PMI
processor is the master, and commences by requesting its operating
system. The Drive Module responds by downloading the operating
system in a special message, containing up to 256 byte packets.
When the operating system transfer is complete, the Drive Module
sends a configuration message and a gain message. The configuration
message contains information that fixes the communication frequency
at 4 mS. Once the Drive Module and PMI processor have
synchronized communications, normal Set Point/Feedback data
transfer can begin.
The synchronized protocol is called “Set Point/Feedback Data
Exchange”. The drive module sends set point data to the PMI
processor. The set point data contains reference data, for drive
control, and a time stamp. This time stamp enables the PMI processor
to calculate what the proper time is for the next feedback message.
The PMI processor sends feedback messages to the Drive Module.
The feedback messages contains data about drive operation.
Publication 1756-UM522B-EN-P - February 2003
Timing
The velocity loop updates (reads from, and writes to Drive
Communication) every 2 mS. After every other velocity loop update
(at a 4 mS interval), the position loop performs its update. After every
position update, the Drive Module sends set point data to the PMI
processor. After the next velocity update (but before the following
one), the PMI processor sends feedback data to the Drive Module.
Refer to the following timing chart.
Page 25
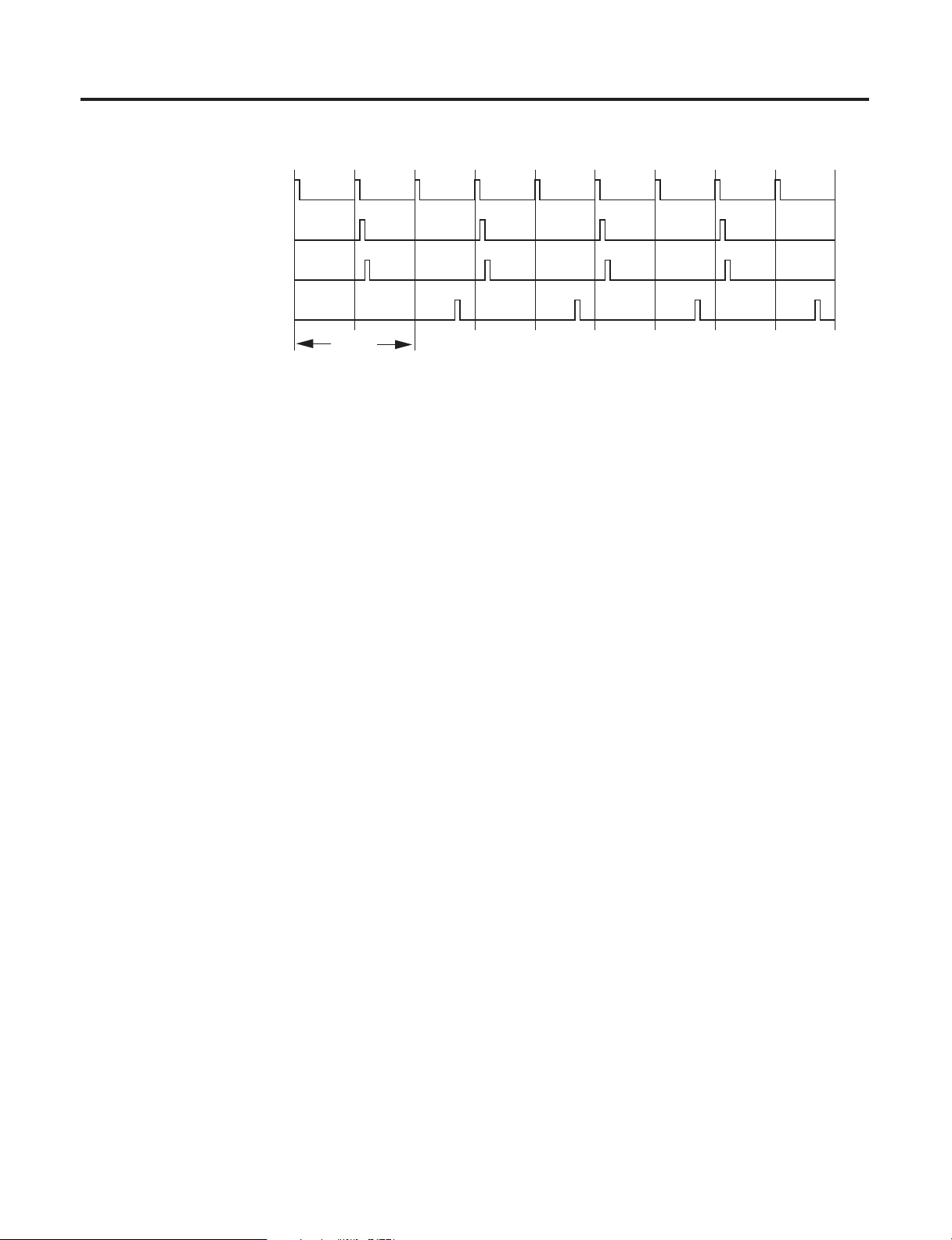
Velocity Loop Update
Position Loop Update
Set Point Data to PMI
Feedback Data
to Drive Module
Drive Comm (Drive Communication) 2-3
Figure 2.1 Drive Communication Timing
4 mS
Synchronization with CST
Chapter Summary and What’s Next
Synchronization to Coordinated System Time (CST) is not necessary to
synchronize Drive Communication between the Drive Module and the
PMI processor. However, if the Drive Module is synchronized to the
CST, Drive Communication will also synchronize to the CST.
In this chapter, you learned about Drive Communication. For more
information on Drive Module features see Chapter 3, Drive Module
Features.
Publication 1756-UM522B-EN-P - February 2003
Page 26

2-4 Drive Comm (Drive Communication)
Notes:
Publication 1756-UM522B-EN-P - February 2003
Page 27
•
•
•
•
•
•
Chapter
Drive Module Features
This chapter describes the ControlLogix Drive module features.
For information about: See page:
General Module Features 3-1
Configurable Module Features 3-4
Chapter Summary and What’s Next 3-10
General
Under Power) that are supported on the module regardless of
configuration and application.
module features are features (e.g. Removal and Insertion
3
General Module Features
Configurable module features are features (e.g. Communications
Format) that can be configured to work differently in various
applications.
The following general module features are available with the
ControlLogix Drive module:
Removal and Insertion Under Power (RIUP)
Module Fault Reporting
Fully Software Configurable
LED Status Information
Class I Division 2 Certification
Agency Certification
1 Publication 1756-UM522B-EN-P - February 2003
Page 28
3-2 Drive Module Features
Removal and Insertion Under Power (RIUP)
All ControlLogix Drive modules may be removed and inserted from
the chassis while power is applied. This feature allows greater
availability of the overall control system because, while the module is
being removed or inserted, there is no additional disruption to the rest
of the controlled process.
WARNING
!
ATTENTION
!
IMPORTANT
When you insert or remove the module while
backplane power is on, an electrical arc can occur.
This could cause an explosion in hazardous location
installations. Be sure that power is removed or the
area is nonhazardous before proceeding.
The removal of a Drive Module while under power
may cause personal injury or property damage. Make
sure that removal of the module does not adversely
impact other parts of the system.
Repeated electrical arcing causes excessive wear to
contacts on both the module and its mating
connector. Worn contacts may create electrical
resistance that can affect module operation.
Publication 1756-UM522B-EN-P - February 2003
Module Fault Reporting
ControlLogix Drive modules provide both hardware and software
indication when a module fault has occurred. Each module’s LED fault
indicator as well as DriveExecutive and RSLogix 5000 will graphically
display this fault and include a fault message describing the nature of
the fault.
This feature allows you to determine how your module has been
affected and what action should be taken to resume normal
operation.
Page 29

Drive Module Features 3-3
Fully Software Configurable
RSLogix 5000 and DriveExecutive software packages use custom,
easily understood interfaces to determine the module configuration.
All module features are enabled or disabled through the configuration
portions of the software.
You can also use the software to interrogate any module in the system
to retrieve
•
serial number
•
revision information
•
catalog number
•
vendor identification
•
error/fault information
By eliminating such tasks as setting hardware switches and jumpers,
the software makes module configuration easier.
LED Status Information
The ControlLogix Drive module has LED indicators on the front of the
module that allow you to check the module health and operational
status.
The following status can be checked with the LED indicators:
•
SynchLink and ControlLogix backplane status
•
Drive Comm status
•
Drive status
•
Module health status
For examples of LED indicators, see page 6-1.
Publication 1756-UM522B-EN-P - February 2003
Page 30
3-4 Drive Module Features
•
•
•
•
•
•
Class I Division 2 Certification
The ControlLogix Drive module is certified for use in nonhazardous
locations as well as Class I, Division 2 hazardous Locations containing
gas groups A, B, C, and D. This equipment may be used as a
component of a control system which is certified to operate in
hazardous locations.
WARNING
!
ATTENTION
When you insert or remove the module while
backplane power is on, an electrical arc can occur.
This could cause an explosion in hazardous location
installations. Be sure that power is removed or the
area is nonhazardous before proceeding.
The removal of a Drive Module while under power
may cause personal injury or property damage. Make
sure that removal of the module does not adversely
impact other parts of the system.
!
Agency Certification
When the Drive module is marked appropriately, the following
agency certifications apply:
Configurable Module
Features
Publication 1756-UM522B-EN-P - February 2003
•
UL Listed Industrial Control Equipment
•
CSA Certified Process Control Equipment
•
CSA Certified for Class I, Division 2 Hazardous Locations
The following Drive module features are configurable via RSLogix
5000 and DriveExecutive:
Controller Communication Format
SynchLink Controller Communication Format
Electronic Keying
Requested Packet Interval
Transmitted Direct Words
SynchLink Mastership
Page 31

Drive Module Features 3-5
Each of these features is described in this section, including
information on which RSLogix 5000 and DriveExecutive configuration
screens should be used to configure the feature. For an overview of
the entire configuration process, see Chapter 5, Configuring the Drive
Module.
Controller Communication Format
The controller communications format defines the connection
between the owner-controller and the module (i.e. determines what
type of data is transferred between them). The 1756-DMD30 module
supports Velocity Control, Position Control, User-Defined and Custom
User-Defined communication formats. The 1756-DMF30 supports the
User-Defined communication format.
SynchLink Communications Format
The SynchLink communications format defines the connection at the
SynchLink Receive Port and the SynchLink Transmit Port. It
determines the type and number of data type in each connection.
SynchLink messages are structured as six 32-bit words; the words are
divided into three types:
•
Direct - Data delivered in a single message. A SynchLink
message can contain a maximum of four direct data words; each
word is 32 bits in length. Direct data can be automatically
forwarded to the next node in the daisy chain and ring
configurations.
•
Buffered - Data that exceeds the four word limit of a direct data
transfer. A maximum of 18 buffered are transfered every 500µS.
Buffered data is appropriately segmented at the transmitting
module and reassembled at the receiving module. Buffered data
cannot be automatically forwarded to the next node in the daisy
chain and ring configurations.
•
Axis - the Drive module does not support this data type.
Multiple Port Communications Formats in Single Module
You must set a communications format for receiving data (Receive
Port Communications Format) and transmitting data (Transmit Port
Communications Format) in each SynchLink node.
Publication 1756-UM522B-EN-P - February 2003
Page 32

3-6 Drive Module Features
•
The following requirements apply to communication format choices:
If a Drive module does not receive data (e.g. the first node in a
daisy chain topology), you must choose the
No Receive Data
Receive Port communication format.
•
If a Drive module does not transmit data (e.g. an end node), you
must choose the
No Transmit Data
Transmit Port
communications format.
•
The receive communication format for any Drive module that
receives data must match the transmit communications format of
the upstream node in the system.
IMPORTANT
The receive and transmit on the same module do not have
to match.
Also, once the module is created, the communications
format cannot be changed. The module must be deleted
and recreated.
Internal Scan on Drive Module
Every 500 µ S, the Drive module scans its internal hardware and
captures a “snapshot” of the data there. This data is then sent to the
local owner-controller at the Change of State (COS) instance,
independent of the requested packet interval (RPI) rate. But,
depending on the communications formats chosen during module
configuration, data types are transmitted between SynchLink nodes
(via the fiber optic cable) at various rates and may be transmitted
multiple times between the 500µS snapshots.
IMPORTANT
The transfer rate times listed in Table 3.A and
Table 3.B only represent the rate at which data is
passed between SynchLink modules over the fiber
optic cable.
Publication 1756-UM522B-EN-P - February 2003
Although the data is passed over the fiber optic cable
at various rates, depending on the communications
format choices, the
chassis only
receive the data
SynchLink module’s internal scan
owner-controllers
after the local
every 500µS
in each local
.
The Drive module updates its receive and transmit buffers once every
500µS. Because direct data can be passed through from node to node
once every 50µS, up to 10 nodes can be updated with direct data in a
single 500µS SynchLink scan. Pass-through functionality only applies
Page 33

Drive Module Features 3-7
to direct data in a daisy chain configuration, In order to pass-through
buffered data, the local controller must intervene to move data along.
Table 3.A
Drive Module Receive Communications Formats
Receive Port Communications Format Transfer Rate (across the fiber optic
cable) for Each Data Type:
2 Direct Words, 18 Buffered Direct Data - Updated every 50 µ S
Buffered Data - Updated every 250 µ S
4 Direct Words, 18 Buffered Direct Data - Updated every 50 µ S
Buffered Data - Updated every 500 µ S
4 Direct Words, 8 Buffered Direct Data - Updated every 50 µ S
Buffered Data - Updated every 250 µ S
No Receive Data No data updated in this format
Table 3.B
Drive Module Transmit Communications Formats
Transmit Port Communications Format
2 Direct Words, 18 Buffered Direct Data - Updated every 50 µ S
4 Direct Words, 18 Buffered Direct Data - Updated every 50 µ S
4 Direct Words, 8 Buffered Direct Data - Updated every 50 µ S
Listen Only, No Transmit Data No data updated in this format
No Transmit Data No data updated in this format
Transfer Rate (across the fiber optic
cable) for Each Data Type:
Buffered Data - Updated every 250 µ S
Buffered Data - Updated every 500 µ S
Buffered Data - Updated every 250 µ S
Module-Defined Data Tags
When you create a module, module-defined data types and tags are
created in the RSLogix 5000 programming software. These tags allow
you to access the Input and Output Data of the module via the
controller’s ladder logic, if necessary
The types of tags created vary, depending on which communications
format you choose when creating a module. There are two types of
tags:
•
Input Data Tags
•
Output Data Tags
Publication 1756-UM522B-EN-P - February 2003
Page 34

3-8 Drive Module Features
Electronic Keying
Instead of plastic mechanical backplane keys, electronic keying
allows the ControlLogix system to control what modules belong in the
various slots of a configured system.
During module configuration, you must choose one of the following
keying options for your SynchLink module:
• Exact Match
• Compatible Match
• Disable Keying
When the controller attempts to connect to and configure a Drive
module (e.g. after program download), the module compares the
following parameters before allowing the connection and
configuration to be accepted:
• Vendor
• Product Type
• Catalog Number
• Major Revision
• Minor Revision
The comparison is made between the keying information present in
the Drive module and the keying information in the controller’s
program. This feature can guard against the inadvertent operation of a
control system with the wrong module in the wrong slot.
Exact Match
All of the parameters listed above must match or the inserted module
will reject a connection to the controller.
Compatible Match
The Compatible Match mode allows a Drive module to determine
whether it can emulate the module defined in the configuration sent
from the controller.
Publication 1756-UM522B-EN-P - February 2003
With ControlLogix Drive modules, the module can emulate older
revisions. The module will accept the configuration if the controller’s
major.minor revision is less than or equal to the physical
module’s revision.
Page 35

Drive Module Features 3-9
For example, if the configuration contains a major.minor revision of
2.7, the module inserted into the slot must have minor revision of 2.7
or higher for a connection to be made.
TIP
We recommend using Compatible Match whenever
possible. Remember, though, the module will only
work to the level of the configuration.
For example, if a slot is configured for a module
with major.minor revision of 2.7 and you insert a
module with a major.minor revision of 3.1, the
module works at the 2.7 level despite having been
previously upgraded.
If possible, we suggest you make sure configuration
is updated to match the revision levels of all Drive
modules. Failure to do so may not prevent the
application from working but may defeat the
purpose of upgrading your modules’ revision levels.
Disable Keying
The inserted module attempts to accept a connection to the controller
regardless of its type.
ATTENTION
Be extremely cautious when using the disable
keying option; if used incorrectly, this option can
lead to personal injury or death, property damage
or economic loss.
!
If keying is disabled, a controller makes a connection with most
modules of the same type as that used in the slot configuration.
A controller will not establish a connection if any of the following
conditions exist, even if keying is disabled:
• The slot is configured for one module type (e.g. digital input
module) and a module of another type (e.g. Drive module) is
inserted in the slot.
• The module inserted into the slot cannot accept some portion of
the configuration. This case should not arise if the slot is
configured for a Drive module and one is inserted.
Publication 1756-UM522B-EN-P - February 2003
Page 36

3-10 Drive Module Features
Requested Packet Interval
The Requested Packet Interval (RPI) is a configurable parameter that
defines when the module multicasts its data onto the local chassis
backplane.
In addition to the RPI, Change of State (COS) functionality also causes
the module to produce its data to the consuming controller whenever
the values of the data changes. The RPI timer is asynchronous to the
COS functionality. Both cause the module to produce data when
triggered.
Buffered, Direct and Diagnostic Data - RPI Effect on Output Data (from the
controller)
As a producing controller writes data to the Drive module, the output
data is placed in a local buffer until the next RPI reset occurs. When
the RPI timer expires, the output data is moved from the controller’s
local buffer to the Drive module.
Chapter Summary and What’s Next
The RPI timer is asynchronous to the program execution. Therefore, a
worst case update to the Drive module can be calculated by adding
the program execution time to the RPI timer setting, as configured by
the user.
In this chapter, you learned about the ControlLogix Drive module
features. Move to Chapter 4, Installing the Drive Module, to learn how
to install the module.
Publication 1756-UM522B-EN-P - February 2003
Page 37

Installing the Drive Module
This chapter describes how to install the ControlLogix
Drive module.
For information about: See page:
Noting the Power Requirements 4-1
Installing the Module 4-2
Connecting SynchLink Cables 4-3
Connecting (Drive Comm Drive
Communication) Cables
Removing the Module 4-6
Chapter Summary and What’s Next 4-7
4-5
Chapter
4
Noting the Power Requirements
This module receives power from the 1756 chassis power supply and
requires 2 sources of power from the backplane:
•
1.35A at 5.1V dc
•
3.0mA at 24V dc
Account for this power consumption (6.96W) in addition to the
requirements of all other modules in the chassis to prevent
overloading the power supply.
1 Publication 1756-UM522B-EN-P - February 2003
Page 38

1.
4-2 Installing the Drive Module
Installing the Module
You can install or remove the module while chassis power is applied.
WARNING
!
ATTENTION
When you insert or remove the module while
backplane power is on, an electrical arc can occur.
This could cause an explosion in hazardous location
installations. Be sure that power is removed or the
area is nonhazardous before proceeding.
The removal of a Drive Module while under power
may cause personal injury or property damage. Make
sure that removal of the module does not adversely
impact other parts of the system.
!
IMPORTANT
Repeated electrical arcing causes excessive wear to
contacts on both the module and its mating
connector. Worn contacts may create electrical
resistance that can affect module operation.
Align the circuit board with the top and bottom chassis guides.
Printed
Circuit
Board
Publication 1756-UM522B-EN-P - February 2003
Page 39

2.
Installing the Drive Module 4-3
Slide the module into the chassis until the module locking
tabs ‘click’.
Locking tab
Connecting SynchLink Cables
The two fiber optic ports on the bottom-left of the module are for
SynchLink. The front-left port is receives SynchLink data, and the
rear-left port is transmits SynchLink data.
ATTENTION
The Drive module is a Class I LED product. Light
levels may cause damage to eyesight. Do not look
directly into the fiber ports or fiber cables.
!
TIP
Keep the plugs that were removed to connect the
fiber optic cables. When the cables are disconnected,
you can reinsert the plugs into the ports to protect
them.
Publication 1756-UM522B-EN-P - February 2003
Page 40

4-4 Installing the Drive Module
Figure 4.1 SynchLink Connections
Tx (rear)
Rx (front)
Tx Rx
Refer to See Table 1.B on page 1-3 for information on available
pre-configured fiber optic SynchLink cables.
Table 4.A lists the possible connections that might be made to your
1756-DM module and where to connect the fiber optic cable.
Table 4.A
Making Fiber Optic Cable Connections to the 1756-DM Module
If your 1756-DM module
is configured to:
transmit data only Connect the fiber optic cable to the rear port. The other end
receive data only Connect the fiber optic cable to the front port. The other end
transmit and receive data 1. Connect the fiber optic cable going to (i.e. transmitting
Make this fiber optic cable connection:
of the cable should be connected to a device receiving data
over the SynchLink from your 1756-DM module.
of the cable should be connected to a device transmitting
data to your 1756-DM module over the SynchLink.
the data to) a module receiving the data to the front port.
2. Connect the fiber optic cable coming from (i.e. receiving
the data from) a module transmitting data to the rear port.
Publication 1756-UM522B-EN-P - February 2003
Page 41

Installing the Drive Module 4-5
Connecting (Drive Comm Drive Communication) Cables
The two fiber optic ports on the bottom-right of the module are for
Drive Comm. The front-right port receives data from the PMI
processor on the drive. The rear-right port transmits data to the PMI
processor.
•
Connect the 1756-DM transmit port (Tx) to the PMI receive port
(RCV).
•
Connect the 1756-DM receive port (Rx) to the PMI transmit port
(XMT). .
ATTENTION
The Drive module is a Class I LED product. Light
levels may cause damage to eyesight. Do not look
directly into the fiber ports or fiber cables.
!
TIP
Keep the plugs that were removed to connect the
fiber optic cables. When the cables are disconnected,
you can reinsert the plugs into the ports to protect
them.
Figure 4.2 Drive Comm - Drive Module End Connections
Tx (rear)
Rx (front)
Tx Rx
Publication 1756-UM522B-EN-P - February 2003
Page 42

4-6 Installing the Drive Module
1.
2.
Figure 4.3 Drive Comm - PMI Processor Connections
XMT
C
O
RCV
M
M
Removing the Module
Refer to See Table 1.C on page 1-3 for information on available
pre-configured fiber optic Drive Comm cables.
ATTENTION
Before you remove the module, you must disconnect
the fiber optic cables.
!
Push in the top and bottom locking tabs.
TIP
If you kept the plugs that were removed to
connect the fiber optic cables, reinsert them to
protect the ports.
Publication 1756-UM522B-EN-P - February 2003
Pull the module out of the chassis as shown.
Page 43

Figure 4.4
Installing the Drive Module 4-7
Locking tabs
Chapter Summary and What’s Next
In this chapter, you learned how to install the ControlLogix Drive
module. Move to Chapter 5, Configuring the Drive Module, to learn
how to configure the module.
Publication 1756-UM522B-EN-P - February 2003
Page 44

4-8 Installing the Drive Module
Notes:
Publication 1756-UM522B-EN-P - February 2003
Page 45

1.
•
•
•
2.
3.
4.
Chapter
Configuring the Drive Module
This chapter describes how to configure the ControlLogix Drive
Module using RSLogix 5000 and DriveExecutive in the DriveTools
2000 programming suite.
For information about: See page:
Overview of the Configuration Process 5-1
Planning the System 5-2
Checking and Updating the DriveExecutive
Database
Using RSLogix 5000 to Configure the Drive
Module
Using DriveExecutive to Configure Drive
Module
Return to RSLogix 5000 to Finish
Configuring the Drive Module
Chapter Summary and What’s Next 5-24
5-6
5-9
5-16
5-23
5
Overview of the
Configuration Process
To configure your ControlLogix Drive Module, you must perform the
following steps:
Plan the system.
Choose Controller Communication format
Choose SynchLink communications format (if you are using
SynchLink)
Choose SynchLink topology (if you are using SynchLink)
Make sure DriveExecutive has database for the firmware
revision and configuration of the module.
Configure each Drive Module with RSLogix 5000.
Configure each Drive Module with DriveExecutive, and
download parameters and links to Drive module.
5.
Return to RSLogix 5000, and download program to ControlLogix
processor.
1 Publication 1756-UM522B-EN-P - February 2003
Page 46

5-2 Configuring the Drive Module
Planning the System
Before programming, you must choose a Controller - Drive Module
interface (Controller Communication Format) for each Drive Module
in the system.
If you are going to use SynchLink, you must choose the SynchLink
data format, and a SynchLink network topology. This chapter covers
these topics.
Understanding the Controller - Drive Module Interface
You must configure communications between the ControlLogix
controller and the Drive Module by selecting a “Controller
Communication Format”. A controller communication format is a set
of links that connects controller output tags to Drive Module sinking
parameters, and connects controller input tags to Drive Module
sourcing parameters. There are four controller communication formats
to choose from, depending on which module you are configuring:
•
Velocity Control
•
Position Control
•
User-Defined Control
•
Custom User-Defined Control
Each controller communication format contains both required
connections and user definable connections. You must use both
RSLogix 5000 and DriveExecutive to configure these connections. The
programming software will not allow you to choose Velocity Control
or Position control for the 1756-DMF30.
IMPORTANT
Once the module is created, the communications
format cannot be changed. The module must be
deleted and recreated.
Choosing the SynchLink Communication Formats
You must set a communications format for receiving data (Receive
Port Communications Formats) and transmitting data (Transmit Port
Communications Formats) in each module.
The following requirements apply to communication format choices:
Publication 1756-UM522B-EN-P - February 2003
Page 47

•
•
•
•
•
•
•
•
•
•
•
Configuring the Drive Module 5-3
If a Drive module does not receive data (e.g. the first module in
a non-loop topology), you must choose the No Receive Data
Receive Port communication format.
If a Drive module does not transmit data (e.g. an end node in
the daisy chain configuration or star), you must choose the No
Transmit Data Transmit Port communications format.
The receive communication format for any SynchLink node that
receives data must match the transmit communications format of
the previous node in the system.
Receive Port Communications Formats
The following communications formats are available for the receive
port of your Drive module:
2 Direct Words, 18 Buffered - Data updated every 500 µ S
4 Direct Words, 18 Buffered - Data updated every 500 µ S
4 Direct Words, 8 Buffered - Data updated every 500 µ S
No Receive Data - Data updated every 500 µ S
Transmit Port Communications Formats
The following communications formats are available for the transmit
port of your Drive module:
2 Direct Words, 18 Buffered - Data updated every 500 µ S
4 Direct Words, 18 Buffered - Data updated every 500 µ S
4 Direct Words, 8 Buffered - Data updated every 500 µ S
No Transmit Data - Data updated every 500 µ S
IMPORTANT
The update times referenced above are for data
updates across the SynchLink fiber optic cable only
and do not represent full processing time. Refer to
3-5 for more information regarding data updates and
processing times.
Publication 1756-UM522B-EN-P - February 2003
Page 48

5-4 Configuring the Drive Module
First Drive Module
(Master Node)
SynchLink Module
(Center Node)
•
•
Choosing the SynchLink Network Topology
You can use one of the following SynchLink topologies:
Daisy Chain
Drive Module
(Center Node)
SynchLink Module
(Center Node)
-DMD30
-SYNCH
-DMD30
-SYNCH
Drive Module
(Center Node)
Drive Module
(Center Node)
SynchLink Module
(Center Node)
-DMD30 -DMD30
-SYNCH -SYNCH
SynchLink Module
(End Node)
SynchLink
Drive Module
(End Node)
Note: the order of the modules is not important.
Star (asynchronous)
First Drive Module
(Master Node)
SynchLink
-DMD30
Hub
-DMD30
-DMD30 -DMD30
Hub
-DMD30 -DMD30
ControlNet)
Hub
-DMD30
Drive Module
(End Node)
Drive Module
(End Node)
Publication 1756-UM522B-EN-P - February 2003
Drive Module
(End Node)
Drive Module
(End Node)
Drive Module
(End Node)
Page 49

•
Hybrid (synchronous)
Configuring the Drive Module 5-5
Note: the first module must
be the SynchLink Master
Daisy Chain Connection
between first SynchLink
Module and first Drive
Module
SynchLink Module
(End Node)
Drive Module
(End Node)
-DMD30 -SYNCH
SynchLink Module
(End Node)
First SynchLink Module
(CST Time Master and
SynchLink Master)
-DMD30 -SYNCH -DMD30 -SYNCH
Drive Module
(End Node)
First Drive Module
-DMD30 -SYNCH
Hub
SynchLink Module
(End Node)
Drive Module
(End Node)
ControlNet)
-DMD30 -SYNCH
SynchLink Module
(End Node)
Star Connections for
all other modules
Drive Module
(End Node)
Publication 1756-UM522B-EN-P - February 2003
Page 50

5-6 Configuring the Drive Module
Checking and Updating the DriveExecutive Database
Select New from File
Menu
Checking the DriveExecutive Database
DriveExecutive must have a database for the Drive module firmware
revision and power module configuration, in order to configure the
module’s parameters and links. In addition, the database is required
for RSLogix and DriveExecutive to synchronize. Check the availability
of the database by attempting to create a new module with the
desired firmware revision level and power module configuration.
Select desired
Device Type
Publication 1756-UM522B-EN-P - February 2003
Click Next to move to
next page.
Page 51

Configuring the Drive Module 5-7
Checking the DriveExecutive Database (continued)
Check to see if desired
Firmware Revision is
available
Check to see if desired power module
configuration is available
(The configuration number is the same as
the power module’s part number)
Click Cancel to end
test
Publication 1756-UM522B-EN-P - February 2003
Page 52

5-8 Configuring the Drive Module
•
•
Updating the DriveExecutive Database
There are two ways to obtain the desired database if your computer
does not contain it.
Connecting to the module and creating the database in
DriveExecutive
Downloading the database from the DriveTools 2000 software
website ( http://www.ab.com/drives/drivetools_2000 )
If you have access to a Drive module with the desired firmware
revision, DriveExecutive can read the database from the module.
Select Create Database
from Drive Menu
From here, DriveExecutive and RSLinx will guide you to connect the
Drive module and create the database.
Publication 1756-UM522B-EN-P - February 2003
Page 53

Configuring the Drive Module 5-9
Using RSLogix 5000 to
Create a new RSLogix 5000 Project
Configure the Drive Module
Select New from File
Menu
Select the controller type
Enter the project name
Enter the project
description if desired
Select the chassis type
Click OK when all the
information is correct
Enter project location
Publication 1756-UM522B-EN-P - February 2003
Page 54

5-10 Configuring the Drive Module
Add a Drive Module to the Project
Select the correct catalog
number for the Drive Module
Place the cursor over the I/O
Configuration folder
Click the right
mouse button
and select New
Module
Select the correct major
revision level.
Publication 1756-UM522B-EN-P - February 2003
Click OK to open
Module Properties
window
Page 55

Add a Drive Module to the Project (continued)
Configuring the Drive Module 5-11
Enter the module name
Enter a description
Enter the correct minor
revision level
ATTENTION
!
Verify Slot Number
Select the Comm
Format
Be extremely cautious when using the disable
keying option; if used incorrectly, this option can
lead to personal injury or death, property damage or
economic loss.
Click Next to
advance the wizard
Select Electronic
Keying mode
Enter the desired RPI
Click Next to
advance the wizard
Publication 1756-UM522B-EN-P - February 2003
Page 56

5-12 Configuring the Drive Module
Add a Drive Module to the Project (continued)
Click Next to
advance the wizard
Click Next to
advance the wizard
Select the Power Unit Type
Select the Voltage
Select the Power
Structure Rating
(configuration)
Publication 1756-UM522B-EN-P - February 2003
Page 57

Add a Drive Module to the Project (continued)
Configuring the Drive Module 5-13
Enter a filename or click
browse to search for an
existing DriveExecutive
file
Click Finish
Monitor and Configure the Module
Place the cursor over
the Drive Module
Click the right
mouse button and
select Properties
Publication 1756-UM522B-EN-P - February 2003
Page 58

5-14 Configuring the Drive Module
Monitor and Configure the Module (continued)
Use the General tab to view
or modify the module name,
slot number, controller
communication format,
revision or keying
configurations
Use the Connection tab to
view or modify the
configuration of the
connection to the controller
and to view module faults.
Use the Module Info tab to
view module identification
information, module status
and CST status.
Publication 1756-UM522B-EN-P - February 2003
Page 59

Monitor and Configure the Module (contintued)
Use the Power tab to view or
modify configuration for the
power unit connected to the
Drive Module
Configuring the Drive Module 5-15
Click this button to
launch DriveExecutive
Publication 1756-UM522B-EN-P - February 2003
Page 60

5-16 Configuring the Drive Module
Using DriveExecutive to
Configure Drive Module
On the SynchLink Setup Tab
The settings you make on this tab determine what the
module does during every SynchLink Update cycle
Configure the Drive Module’s Peer Communication
Select Peer
Communication from
Drive Menu
Select sources
for Direct Data
transmissions
Select the Receive
and Transmit Formats
Configure the
Multiplier Block
Select source
parameters for
Buffered Data
transmissions
Select source
parameters for
Direct Data, if
the sources are
drive
parameters
Publication 1756-UM522B-EN-P - February 2003
Click SynchLink Node Configuration to open
SynchLink Node Configuration Window
Page 61

Check this box if the
module is to be the
Time Keeper
Configure the Drive Module’s Peer Communication (continued)
The value tab is useful for configuring the module as a Time Keeper
Configuring the Drive Module 5-17
Click OK when the
configuration is as
desired
Publication 1756-UM522B-EN-P - February 2003
Page 62

5-18 Configuring the Drive Module
Configure the Drive Module’s Peer Communication (continued)
Click the From
Controller tab
These links are part of the selected
Controller Communication Format.
They are not changeable.
Select parameters in the Drive
Module that will consume data
produced by tags in the controller.
This displays the Controller
Communication Format, chosen in
RSLogix 5000.
If you need to change the Controller
Communication Format, choose another
from the pull-down menu.
Publication 1756-UM522B-EN-P - February 2003
IMPORTANT
Conflicts between the DriveExecutive and RSLogix
5000 configurations cause communication faults.
Make sure the Controller Communication Format is
the same in DriveExecutive and RSLogix 5000 before
downloading.
Page 63

Configuring the Drive Module 5-19
Configure the Drive Module’s Peer Communication (continued)
Click the To Controller
tab
Select parameters
in the Drive
Module that will
produce data
consumed by tags
in the controller.
Click OK when all the data on these tabs is correct
Publication 1756-UM522B-EN-P - February 2003
Page 64

5-20 Configuring the Drive Module
Double - click on the parameter you
want to consume SynchLink data
Configure the Drive Module’s Links to SynchLink Data
On the Link List
Click on the Link Data tab
Publication 1756-UM522B-EN-P - February 2003
Page 65

Select Parameter
Enter parameter
number or
select
parameter from
list
Configuring the Drive Module 5-21
Configure the Drive Module’s Links to SynchLink Data (continued)
On the Link Data Tab
IMPORTANT
Click OK
The data format (e.g. Real or Integer) of the sink
parameter must match the data format of the source
parameter.
Publication 1756-UM522B-EN-P - February 2003
Page 66

5-22 Configuring the Drive Module
Select Save from the File menu
Save the Project
Download the Project
Select Download from the Drive menu
Publication 1756-UM522B-EN-P - February 2003
Page 67

Configuring the Drive Module 5-23
Return to RSLogix 5000 to
Finish Configuring the Drive
Module
Click on this button to cause additional user
defined links (links created in DriveExecutive
in addition to the default links associated
with the Controller Communication Format) to
be transferred from the Drive File into
RSLogix 5000.
Complete Setup Properties
Click Apply to make
the changes to the
configuration
IMPORTANT
Click OK when
satisfied with
configuration
Refreshed links will not take affect unless both the
RSLogix and Drive Executive projects have been
downloaded.
Publication 1756-UM522B-EN-P - February 2003
Page 68

5-24 Configuring the Drive Module
Select Save from the File menu
Save and Download
Chapter Summary and What’s Next
Select Download from the
Communications menu
In this chapter, you learned how to configure the ControlLogix Drive
Module. Move to Chapter 6, Troubleshooting the Drive Module, to
learn how to troubleshoot the module.
Publication 1756-UM522B-EN-P - February 2003
Page 69

Chapter
6
Troubleshooting the Drive Module
This chapter describes how to troubleshoot the ControlLogix Drive
module.
For information about: See page:
Using the Status Indicators 6-1
Using DriveExecutive to Troubleshoot the
Module
Using RSLogix 5000 to Troubleshoot the
Module
Chapter Summary and What’s Next 6-10
6-3
6-8
Using the Status Indicators
Bi-colored (red/green) LEDs indicate the status of several module
functions.
SD3000 INTERFACE
LINK
LINK
COMM
SYNC
DRIVE
DRIVE
COMM OK
FAULT
OS OK OK
SD3000 INTERFACE
Tx (rear)
Rx (front)
LINK
COMM
DRIVE
COMM OK
OS OK OK
Indicators shown are typical for all Drive Modules.
LINK
SYNC
DRIVE
FAULT
During power up, the OK indicator turns red for 5 seconds and then turns
to flashing green if it has passed the self-test.
1 Publication 1756-UM522B-EN-P - February 2003
Page 70

6-2 Troubleshooting the Drive Module
Use the table on the next page to troubleshoot your module.
LED Indicator Display Means Take this Action
OK Green Connection is running. None
Flashing
Green
Red Non-Recoverable Fault Remove module from
Flashing Red Flash download in progress. None
Off Module is powered down. None
DRIVE
FAU LT
LINK
SYNC
OS OK Green System and parameter constants
DRIVE
COMM
OK
LINK
COMM
Red Module is faulted. See Fault Status
Off No fault is present or module is
Green The module is the time master or a
Flashing
Green
Flashing Red The module is configured as a CST
Off The module is not configured as a
Off Checksum failure. Reflash the module.
Green DPS communication is active and
Off DPS communication is not active, is
Green The module is configured and
Off The module is configured but not
Inhibited I/O connection. None
service
parameters.
powered down.
time relay and synchronization is
complete.
The module is configured as a time
relay from CST to SynchLink but is not
synchronized with a CST master on
the backplane.
The module is configured as a time
relay from SynchLink to CST but has
not synchronized with the upstream
device.
master and has detected another CST
master.
The module is configured as a time
master on SynchLink and has
received time information from another
time master on SynchLink.
time master or time relay or module is
powered down.
loaded.
synchronized.
not synchronized, or the module is
powered down.
receiving valid data from SynchLink.
The module is configured and enabled
to only transmit on SynchLink.
receiving valid data from SynchLink.
The module is configured but not
enabled to transmit on SynchLink.
Module is powered down. Power the module.
None
None
N/A
N/A
N/A
Ensure that only 1 time
master is present and
transmitting time
information on SynchLink.
None
None
None
Ver ify that cables are
securely connected.
None
None
Ver ify that cables are
securely connected.
Enable module transmitter.
Publication 1756-UM522B-EN-P - February 2003
Page 71

•
•
•
Troubleshooting the Drive Module 6-3
Using DriveExecutive to
Troubleshoot the Module
Faulted Indication
DriveExecutive (a program in the DriveTools 2000 suite) alerts you to
fault conditions. If your are online with the Drive Module, the
software will alert you in the following ways:
Warning signal on the main screen
Notification in the Fault and Alarm Information Window
Diagnostic parameters
Warning Signal on Main Screen
Click the warning icon to
open the Fault and Alarm
Information window
Publication 1756-UM522B-EN-P - February 2003
Page 72

6-4 Troubleshooting the Drive Module
Fault and Alarm Window
Fault Queue Tab
The Fault Queue -
a list of fault codes,
descriptions and the
times they occurred
The Alarm Queue a list of alarm codes,
descriptions and the
times they occurred
Click here to clear faults
Click here to empty fault queue
Click here to get new fault
information from the Drive
Module
Alarm Queue Tab
Click here to clear alarms
Click here to empty alarm queue
Click here to get new alarm
information from the Drive
Module
Publication 1756-UM522B-EN-P - February 2003
Page 73

Troubleshooting the Drive Module 6-5
Fault and Alarm Window (continued)
Fault Words Tab
Select a fault word
parameter
This tab shows bit-wise
views of the primary fault
parameters
Click here to clear faults
Click here to get online help
about the parameter
Click here to clear faults
Red indication of
set fault bit
Click here to get online help
about the parameter
Refer to the appropriate appendix to interpret fault information that is specific to a certain Drive Module
Publication 1756-UM522B-EN-P - February 2003
Page 74

6-6 Troubleshooting the Drive Module
Code, description,
date and time of
fault that tripped
the Drive Module
Fault and Alarm Window (continued)
Trip Fault Tab
Click here to clear faults
Click here to get online help
about Trip Fault
Double-click on the Utility
folder to expand it
Diagnostic Parameters
Publication 1756-UM522B-EN-P - February 2003
Page 75

Double-click on the
Diagnostics group to
Troubleshooting the Drive Module 6-7
Diagnostic Parameters (continued)
expand it
An check mark
indicates the
presence of a fault
Double-click on the
parameter you want to
examine
Refer to the appropriate appendix to interpret fault information that is specific to a certain Drive Module
Publication 1756-UM522B-EN-P - February 2003
Page 76

•
•
6-8 Troubleshooting the Drive Module
Using RSLogix 5000 to Troubleshoot the Module
RSLogix 5000 alerts you to fault conditions. If your are online with the
Drive Module the software will alert you in the following ways:
Warning signal on the main screen next to the module-This
occurs when the connection to the module is broken
Status on the Module Info Page
Warning Signal on Main Screen
Warning Icon indicates
presence of a
communication fault
!
Publication 1756-UM522B-EN-P - February 2003
Place the right mouse button
over the Drive Module icon
Click the right mouse button and
select Properties to open the
Module Properties window
Page 77

Troubleshooting the Drive Module 6-9
Module Properties Window
General Tab
Status line provides
information on the
connection to the module
ATTENTION
Be extremely cautious when using the disable
keying option; if used incorrectly, this option can
lead to personal injury or death, property damage or
economic loss.
!
Connection Tab
Code number and
description of fault
Status line provides
information on the
connection to the module
Publication 1756-UM522B-EN-P - February 2003
Page 78

6-10 Troubleshooting the Drive Module
Module Properties Window (continued)
Module Info Tab
Status line provides
information on the
connection to the module
Chapter Summary and What’s Next
Click Reset Module
to clear fault
Click Refresh to
update Module Info
In this chapter, you learned how to troubleshoot the ControlLogix
Drive module. Move to Appendix A to see the module’s
specifications.
Publication 1756-UM522B-EN-P - February 2003
Page 79

Module Specifications
Appendix
Specifications
Consideration Description
Module Location 1756 ControlLogix Chassis
Backplane Current 1.35A at 5.1V DC and 3.0mA at 24V DC
Maximum Power Dissipation 6.96 W
Thermal Dissipation 23.7 BTU/hr
Indicators Green and red indicators for operation, status, and
diagnostics.
Environmental Conditions
Operating Temperature
Storage Temperature
Relative Humidity
Shock
Operating
Non-operating
Vibration Tested 2g at 10-500Hz per IEC 68-2-6
Reliability Mean Time Between Failure (MTBF) 1.7 million hours
Agency Certification
(When product is marked.)
0° to 60°C (32° to 140°F)
-40° to 85°C (-40° to 185°F)
5 to 95% non condensing
30g peak acceleration, 11 (±1 ms) pulse width
50g peak acceleration, 11 (±1 ms) pulse width
Listed Industrial Control
Equipment
Certified Process Control
Equipment
Certified Class I, Division 2,
Group A, B, C, D
Approved Class I, Division 2,
Group A, B, C, D
Marked for all applicable
directives
Marked for all applicable acts
A
Communication
Specifications
1 Publication 1756-UM522B-EN-P - February 2003
Consideration SynchLink Drive Communication
Connecting
Cables
Maximum
Cable Length
Minimum
Cable Length
(1)
200/230 micron HCS (Hard Clad
Silica)
Versalink V-System
Lucent Technologies,
Specialty Fibers Technology Division
300 meters with no more than one
splice or one adapter
1 meter 1 meter
(2)
62.5/125 micron glass
One pair SC Style, one pair ST Style
Breakout Cables:
Belden 225362 or Mohawk M92021
300 meters with no more than one
splice or one adapter
Page 80

A-2 Specifications
Consideration SynchLink Drive Communication
Operating
650 nm (Red) 820 nm (InfraRed)
Wavelength
Data Rate 5 Mbps 10 Mbps
Maximum
Node Count
(1)
See page 1-3 for Allen-Bradley catalog numbers.
(2)
See page 1-3 for Allen-Bradley catalog numbers.
10 - Daisy Chain,
256 - Star Configuration
1 - PMI Chassis
Publication 1756-UM522B-EN-P - February 2003
Page 81

Appendix
B
1756-DMD30 Specific Information
This appendix contains information that applies specifically to the
1756-DMD30.
For information about: See page:
Control Block Diagrams B-2
Parameters B-13
Interpretting Drive Module Faults in DriveExecutive B-159
1 Publication 1756-UM522B-EN-P - February 2003
Page 82

B-2 1756-DMD30 Specific Information
Control Block Diagrams
1756-DMD30
Overview
302
Spd Reg PI Out
Lead Lag
Block Diagrams
PI Regulator
Lead Lag
301
Speed Control - Regulator (2ms)
300
Motor Speed Ref
Motor Spd
+
81
Spd Reg P Gain
Fdbk
82
90
Spd Reg BW
Spd Reg I Gain
Rack
Current
SD3000 PMI
Fiber
305
Mtr TorqCurr Ref
Processing
Limit
1
Flux
Notch
Control
Torque
Selection
+
Motor
*, /, +
Motor
R/T
Protection
Gear
Load
Read Only Parameter
Read / Write Parameter
Read Only Parameter with Bit Enumeration
Read / Write Parameter with Bit Enumeration
Provides additional information
222321
Link
318
Posit Spd Output
Point
Point to
PI Regulator
770
768
Posit Reg Integ
PositReg P Gain
[ N ]
[ D ]
Gear Rat
(Mode)
Selection
Reference
Position
Interpolator
748
743
Aux Posit Ref
Position Control (4ms)
CoarsePosit Trgt
Pt-Pt Posit Ref
+
Posit Ref Sel
758
Offset
Position
742
Mtr Posit FB
Speed Trim 3
Proportional Channel
762
R/T
Integration Channel
[ N ]
[ D ]
764
Link
Gear Rat
Posit Load Fdbk
Speed Control - Reference (2ms)
302
Spd Reg PI Out
To rque Control (0.5ms)
Link
4643
Lead Lag
Linear
S Curve
Ramp &
40
Selected Spd Ref S Curve Spd Ref Scaled Spd Ref
+
/
*
10111213141520
FricComp TorqAdd
Link
Selection
Speed Ref
59
145
Inertia Torq Add
59
145
Inertia Comp
Friction Comp
Speed Ref Sel
xxx
Torque Ref Inputs
Link
PI Output
16
Process Control (2ms)
Definations of the Per Unit system:
1.0 PU Speed = Base Speed of the Motor
1.0 PU Torque = Base Torque of the Motor
180
PI Regulator
181
182
PI Feedback
PI Reference
( ) = Enumerated Parameter
1.0 PU Current = Base Current of the Motor
Limit
186
PI Prop Gain
PI Integ Time
ex. 3A2 = pg 3, Column A, Row 2
[ ] = Page and Coordinate
187
Publication 1756-UM522B-EN-P - February 2003
Page 83

1756-DMD30 Specific Information B-3
Speed Control - Reference
FE HG I
D
(2 ms)
Speed Control - Reference
153 00
Control Options
157 00
Logic Ctrl State
152
41
Limited Spd Ref
Limit
40
Selected Spd Ref
0
1
X
Max
0
0
1
0
0
18
30
31
Rev Speed Limit
Fwd Speed Limit
152
Applied LogicCmd
23
20
21
(Unipol Rev) -1
(Unipol Fwd) +1
145
to Torque
Control [8B2]
FricComp TorqAdd
Friction Comp
151 11
(Frict Comp)
Logic Command
140
FricComp Spd Ref
Link
Inertia SpeedRef
141
142
143
FricComp Slip
FricComp Stick
FricComp Setup
t
n
Inertia Comp
56
151 10
Link
(Inertia Comp)
Logic Command
59
Inertia Torq Add
144
FricComp Rated
9
57
58
Total Iner tia
InertiaAccelGain
InertiaDecelGain
to Torque
Control [8B1]
Spd Trim1 SpdRef
Scaled Spd Ref
44
Filtered Spd Ref
s + wn
(kn * s) + wn
37
Spd Ref Bypass
Link
S Curve Spd Ref
43
47
to Speed Control
- Regulator [3A2]
+
46
X
38
Speed Ref Scale
Lead Lag
35
153 01
SpdRef Filt Gain
(SRef Filt En)
Control Options
21
Speed Trim 1
Link
180
Control [4F2]
from Process
PI Output
36
Delayed Spd Ref
45
SpdRef Filt BW
One
Scan
Delay
Virt Encdr Dlyed
63
Virt Encdr Posit
62
One
4x internal
Virtual Encoder
61
Virt Encoder PPR
Scan
Delay
17
18
Jog Speed 1
Applied LogicCmd
C
16
0
0
Jog Speed 2
1
2
3
4
5
6
Ramped Spd Ref
+
Speed Ref Sel
BA
1
/
10
11
Speed Ref 1
Spd Ref1 Divide
X
12
13
Speed Ref 2
Spd Ref2 Multi
2
14
15
Speed Ref 5
Speed Ref 4
20
Speed Ref DPI
3
4
34
S Curve Time
42
Ramp S Curve
32
33
1 0
Inv
Accel Time
Decel Time
151 00
Logic Command
(SpdRamp Dsbl)
0 1
&
157 01
Logic
5
Logic Ctrl State
(SRef SCrv En)
157 02
Logic Ctrl State
(SRef Ramp En)
1 0
0 1
151 01
(Spd S Crv En)
Logic Command
Logic
6
Publication 1756-UM522B-EN-P - February 2003
Page 84

B-4 1756-DMD30 Specific Information
Speed Control - Regulator
(2 ms)
Spd Reg BW
Spd Reg Damping
SpdReg P Gain Mx
Motor Inertia
Total Iner tia
909291
Speed Control - Regulator
set param 90 = 0
*
to manually adjust
param 81 & 82
2189
2190
157 08
(Spd Reg En)
Logic Ctrl State
302
Spd Reg PI Out
1
0
0
s + wn
(kn * s) + wn
[8B1]
to Torque Control
Lead Lag
95
SRegOut FiltGain
SReg Out Filt BW
96
Limit
102
P Gain
103
Spd Reg Pos Lim
Spd Reg Neg Lim
81
Spd Reg P Gain
SpdReg Integ Out
101
s
ki
+
-
FE HG I
+
1
0
157 06
(CurrLim Stop)
Logic Ctrl State
0
Limit
kp
-
30
31
+
+
D
157 04
Logic Ctrl State
C
X
BA
23
24
Speed Trim 3
SpdTrim 3 Scale
1
0
(Inrta Tst En)
+
4x
47
Spd Trim1 SpdRef
- Reference [2H4]
from Speed Control
1
Bypass
Autotune
Ovr Smpl
Posit Spd Output
2
19
(kn * s) + wn
22
Speed Trim 2
318
s + wn
(J Tst FulSpd)
(Spd Reg En)
8
157 5
Atune Spd Ref
Logic Ctrl State
Lead Lag
25
STrim2 Filt Gain
from Position
Control [5H3]
26
SpdTrim2 Filt BW
s
ks
ServoLck
LPass
71
s + wn
(kn * s) + wn
300
from Feedback [9H2]
4
85
89
Servo Lock Gain
Filtered SpdFdbk
Lead Lag
93
94
SReg FB Filt BW
SReg FB Filt Gain
nff
FeedFwd
Order
Filter
84
nd
2
100
Speed Error
SpdReg AntiBckup
3
Spd Err Filt BW
+
-
301
Motor Speed Ref
Motor Spd Fdbk
Droop
I Gain
82
Spd Reg I Gain
*
80 02
153 12
(Integ Hold)
(Jog -NoInteg)
Speed Reg Ctrl
Speed Reg Ctrl
Control Options
86
Spd Reg Droop
0
80 01
87
(Preset Sel)
Speed Reg Ctrl
80 03
(Integ Reset)
5
SReg Torq Preset
1
303
Motor Torque Ref
6
Publication 1756-UM522B-EN-P - February 2003
Page 85

1756-DMD30 Specific Information B-5
Process Control
(2 ms)
Process Control
207
208
Limit Gen Lo Out
Limit Gen Hi Out
-1
-1 +1
FE HG I
180
PI Output
to Speed Control
- Reference [2G5]
1
0
0
OR
(ProcsTrim En)
Logic Ctrl State
183 00
157 31
(Enable)
PI Command
D
&
C
155 1
151 12
(Running)
Logic Status
BA
(ProcsTrim En)
Logic Command
Limit
191
192
Process Control Complimentary Functions
+
PI High Limit
190
PI Lower Limit
PI Integ Output
kp
P Gain
186
PI Prop Gain
Filter
LPass
184
+
-
Limit
188
189
s
ki
I Gain
187
PI Integ LLim
PI Integ HLim
185
PI Integ Time
PI Preload
Limit Generator
206
LimGen X axis In
201
Time Axis Output
Time Func Generator
200
OR
Time Axis Rate
183 1
205
LimGen Y axis Mn
204
LimGen Y axis Mx
151 3
PI Lpass Filt BW
181
182
PI Reference
PI Feedback
1
2
3
4
PI Command
(Time Lim En)
5
(Time Axis En)
Logic Command
6
Publication 1756-UM522B-EN-P - February 2003
Page 86

B-6 1756-DMD30 Specific Information
Position Control (4 ms)
FE HG I
D
C
BA
Position Control - Interpolated/Direct
Position Cmmd
*
747
Interpolated/Direct
Σ
Accum
PositRef EGR Out
*
+
744
Σ
Accum
[ N ]
[ D ]
Gear Rat
745
746
PositRef EGR Div
PositRef EGR Mul
Deriv
∆
Posit Ref Sel
742
Interp Speed
750
x
x
0
Interp Position
x
748
749
1
743
Aux Posit Ref
Interpolator
740 13
2
Position Control
Diagram page 6
See Point-to-Point
Synchronize
786 00
753
Posit Offset 1
751
Position Control
756
X Offst SpdFilt
Filter
LPass
Rate Lim
+
754
755
Posit Offset 2
Posit Offset Spd
Position Control
&
740 01
157 03
(Position En)
Logic Ctrl State
(Speed Out En)
740 04
740 05
(X Offset Pol)
(X Offset Ref)
Position Control
157 03
Posit Spd Output
0
0
Calib
769
Position Error
+
Mtr Posit Fdbk
0
318
to Speed Control
1
Limit
+
kp
P Gain
Const
Σ
Accum
-
Deriv
∆
762
- Regulator [3A2]
(X Spd HLim)
(X Spd LLim)
741 02
741 03
Position Status
775
776
XReg Spd LoLim
XReg Integ Out
ki
768
+
PositReg P Gain
Calib
Σ
+
[ N ]
Link
XReg Spd HiLim
774
741 00
Position Status
Limit
s
I Gain
770
-
PositReg Integ
Const
Accum
Act Motor Posit
*
763
-
[ D ]
Gear Rat
Deriv
∆
764
Position Control
(ActPosit Rst)
740 06
If p740 b6 = 1 and the position
*
741 01
Droop
772
773
XReg Integ HiLim
XReg Integ LoLim
Posit Actl Load
*
765
Σ
AccumΣAccum
766
767
Posit FB EGR Div
Posit FB EGR Mul
regulator is NOT enabled,
accumulated values are set to
the value of p762. If p740 b6 =
0 and the position regulator is
NOT enabled, accumulated
values are set to the reference
value.
771
PositReg Droop
Inv &
740 02
740 03
(Integ En)
(Integ Hold)
Position Control
Position Control
152 17
(Start)
Applied LogicCmd
Logic Ctrl State
(Position En)
&
152 26 157 03
(Position En)
Applied LogicCmd
1
Publication 1756-UM522B-EN-P - February 2003
CoarsePosit Trgt
(Interp Rev)
(Sync Pulse)
Xsync Status
Position Control
2
Interp Spd Scale
(Position En)
Logic Ctrl State
3
Fdbk [9H2]
from Speed/Posit
Posit Load Fdbk
4
5
6
Page 87

1756-DMD30 Specific Information B-7
Position Control - Point to Point
318
Posit Spd Output
to Speed Control
- Regulator [3A2]
Position Control
Point-To-Point
Position Control (4 ms)
Position Cmmd
*
747
(ActPosit Rst)
If p740 b6 = 1 and the position
regulator is NOT enabled,
accumulated values are set to
the value of p762. If p740 b6 =
740 06
0 and the position regulator is
*
NOT enabled, accumulated
values are set to the reference
1
0
&
value.
740 01
0
157 03
(X Spd LLim)
(X Spd HLim)
741 02
741 03
Position Status
769
Position Error
Σ
+
-
∆
Limit
Accum
Deriv
Point to Point Position
768
PositReg P Gain
761
759
760
Pt-Pt Filt BW
Pt-Pt Accel Time
Pt-Pt Decel Time
*
775
XReg Spd LoLim
Act Motor Posit
763
Σ
Accum
776
XReg Spd HiLim
Σ
Accum
FE HG I
PositRef EGR Out
*
Accum
[ N ]
0
+
[ D ]
∆
Gear Rat
745
PositRef EGR Mul
Deriv
1
2
746
753
PositRef EGR Div
Posit Offset 1
756
X Offst SpdFilt
Filter
LPass
Rate Lim
+
754
755
Posit Offset 2
Posit Offset Spd
Position Control
740 04
(X Offset Pol)
Position Control
740 05
(X Offset Ref)
744
Σ
D
[Position En]
Logic Ctrl State
C
742
Logic Ctrl State
(Speed Out En)
Position Control
(Position En)
BA
Posit Ref Sel
See Interpolated/Direct
Position Control Diagram
1
2
Reref
Page 5
758
740 10
(Pt-Pt ReRef)
Position Control
Pt-Pt Posit Ref
3
157 03
(Position En)
Logic Ctrl State
0
4
762
Mtr Posit Fdbk
Fdbk [9H2]
from Speed/Posit
5
6
Publication 1756-UM522B-EN-P - February 2003
Page 88

B-8 1756-DMD30 Specific Information
Position Control - Auxiliary
Auxiliary
Position Status
(Posit Watch1)
Position Status
(Posit Watch2)
Position Status
(In Position)
Position Control (4 ms)
FE HG I
D
741 08
763
Act Motor Posit
Position Control
789
Position Watch 1
740 16
740 17
(X Watch 1 En)
(X Watch 1 Dir)
780
PositDtct1 Stpt
Xsync Out 2
791
One
741 09763
740 18
Act Motor Posit
Position Control
Xsync Out 2 Dly
Xsync Out 3
794
792
Delay
Scan
Position Watch 2
781
740 19
PositDtct2 Stpt
(X Watch 2 En)
(X Watch 2 Dir)
Xsync Out 3 Dly
795
One
Delay
Scan
741 10
In Position Detect
769
Position Error
Xsync Status
(Sync Pulse)
786 00
782
In Posit BW
783
InPosit Dwell
C
BA
1
Publication 1756-UM522B-EN-P - February 2003
(p787)
Sync Generator
Latch788
Xsync In 1 Xsync Out 1
2
Latch
790
Xsync In 2
3
Latch
793
Xsync In 3
0.5ms
317
SL System Time
4
0.5ms * 2
0.5ms
Sync Pulse Generator
787
Xsync Gen Period
5
6
Page 89

1756-DMD30 Specific Information B-9
Torque Control
to Motor Control
(2 ms)
305
Mtr TorqCurr Ref
Torque Control
FE HG I
D
117
Notch Filt Mode
157 09
(Torq Ref En)
Logic Ctrl State
157 10
Logic Ctrl State
(Forced Spd)
Iq
Delay
355
Curr Rate Limited
Limit Status
0
157 11
0
(CurrRef En)
Logic Ctrl State
Option
304
Limit Rate Lim
1
+
351
(Curr Delay)
153 11
Control Options
354
Curr Rate Limit
122
Curr PosLim Actl
303
304
Motor Torque Ref
0
0
Limit Status
Limit
121
122
1
2
0
IIR
FIR
Notch
118
1
Notch Filt Freq
Curr PosLim Actl
Curr NegLim Actl
+
116
1
0
Torque Step
Calculated at Autotune
(may be overwritten)
*
121
Curr NegLim Actl
C
BA
110
1
0
0
Spd/Torq ModeSel
+
59
302
from Speed Control
[3H4]
[2H4]
Spd Reg PI Out
Inertia Torq Add
1
2
Min
145
[2H3]
FricComp TorqAdd
350
3
4
5
Max
/
111
112
Torque Ref 1
Torq Ref1 Div
2
6
+
X +
113
114
Torque Ref 2
Torq Ref2 Multi
Abs
Min
115
Torque Trim
Torque
3
Current Actl Ref
153 15
Control Options
[ Inv Mtr TroqCurr ]
Current
4
-1
1
flux
360
Min Flux
Current Ref Trim
1
Filter
LPass
362
Motor Flux
Min
120
Current Ref Trim
361
Flx LpassFilt BW
-1
2184
PMI Curr Lim
5
Max
119
Current NegLimit
6
Publication 1756-UM522B-EN-P - February 2003
Page 90

B-10 1756-DMD30 Specific Information
Speed / Position Feedback
FE HG I
(2 ms)
Mtr Posit FB
Speed/Posit Fdbk
-1
762
[5B3] & [6B5]
to Position Control
Logic Command
(TachLoss Rst)
151 02
Feedback
Loss
Detect
300
to Speed
Control [3A4]
Motor Spd Fdbk
-1
0
1
Observer
Speed Fdbk
0
0
72
Scaled Spd Fdbk
X
Filter
if 0.1
Speed Calc
1
1
NOT USED
73
LPass
221
Load Estimate
Spd Fdbk Scale
Control Options
[ Invert Spd Fbk ]
220
Spd Observer BW
153 14
D
222
0
0
C
BA
Motor Fdbk Sel
230
Reslover SpdFdbk
Resolver
1
2135
Resolver Scan
Processing
2201 8-11
(Res Type)
PMI IO Confg
1
1
240
Anlg Tach SpdFB
Ta ch
Analog
2201 12-15
2134
Analog Input
PMI IO Config
(Spd Fbk type)
2
241
Anlg Tach Posit
Processing
2201 8-11
PMI IO Confg
2
2201 12-15
(Res Type)
PMI IO Config
2
NOT USED
(Spd Fbk type)
3
3
NOT USED
3
MtrSpd Simulated
4
76
Motor
Simulator
4
70
Spd Calc
4
MtrSpd Sim Posit
Accum
5
Arm Volts SpdFB
242
Motor
2137
5
243
Voltage
Arm Volt Cnts
Arm Volts Posit
Processing
2151
Arm Resistance
2127
CML Feedback
5
6
Publication 1756-UM522B-EN-P - February 2003
Page 91

1756-DMD30 Specific Information B-11
Peak Detector / Control Logix
Peak Detector/
FE HG I
D
C
Control Logic
(Peak 2 Chng)
1
211
Peak Ctrl Status
(Peak 2 Sel)
210 6
PeakDtct Ctrl In
(Peak 1 Chng)
0211
Peak Ctrl Status
(Peak 1 Sel)
210 2
PeakDtct1 Ctrl In
(Peak 2 Hold)
PeakDtct2 Ctrl In
Inv
PeakDtct1 Ctrl In
Inv
5
PeakDtct2 Ctrl In
210
217
PkDtct2 In Real
(Peak 1 Hold)
1210
PeakDtct1 Ctrl In
(Peak 2 Set)
4210
OR
216
PeakDtct2 In Int
(Peak 1 Set)
0210
227
Peak Detect2 Out
215
Peak Detect1 Out
218
PeakDtct2 Preset
214
PeakDtct1 Preset
152
Applied LogicCmd
0
0
600 151
Integer In00 Logic Command
0
15
15
from
RSLogix
15
31
31
NOTE:
FALSE. Change is also set to FALSE if the detector is in HOLD or SET.
The change bit is set TRUE if the peak detect value changes, otherwise the change bit is set
BA
1
2
OR
212
213
PkDtct1 In Real
PeakDtct1 In Int
3
4
5
6
Publication 1756-UM522B-EN-P - February 2003
Page 92

B-12 1756-DMD30 Specific Information
Field Economy
Field Economy
0
4095
FE HG I
1
2107
Field Curr Out
2108
Limit
2105
Field Curr Ref
Fld Economy Lmt
Delay
2188
Field Economy Delay
Field Off Delay
&
D
C
BA
1
Publication 1756-UM522B-EN-P - February 2003
Inv
157 28
Logix Ctrl State
2
Inv
157 29
Logix Ctrl State
(Lgx Run Mode)
OR
(Lgx I/O Cnx)
3
166 18
(Fld Econ En)
Motor Ctrl Cmmd
Inv
167 0
(Arm Enable)
Motor Ctrl Ackn
4
5
6
Page 93

•
•
1756-DMD30 Specific Information B-13
Parameters
To configure a Drive module to operate in a specific way, drive
parameters may have to be set. Three types of parameters exist:
ENUM Parameters
These parameters allow a selection from 2 or more items
Bit Parameters
These parameters have individual bits associated with features
or conditions. If the bit is 0, the feature is off or the condition is
false. If the bit is 1, the feature is on or the condition is true.
•
Numeric Parameters
These parameters have a single numeric value (i.e. 0.1 Volts).
The example on the following page shows how each parameter type
is presented in this manual.
Publication 1756-UM522B-EN-P - February 2003
Page 94

16
B-14 1756-DMD30 Specific Information
➊➋ ➌
No. Name
80
11
Description
Speed Ref Sel
Enter or write a value to select the source of the
speed reference to the drive.
Speed Reg Ctrl
Enter or write a value to configure the speed
regulator integrator.
Spd Ref1 Divide
Speed Ref 1 is divided by this number. Use this
parameter to scale the value of Speed Ref 1.
Values
Default: Val 1 Spd Ref 1
Options: Val 0
File:
Group:
Default: 0000 0000
Options: Bit 0
File:
Group:
Default:
Min:
Max:
Type:
File:
Group:
Val 1
Val 2
Speed Control
Reference
Bit 1
Bit 2
Bit 3
Bit 4
Speed Control
Regulator
1
-2200000000
2200000000
Non-Linkable Read-Write Floating Point
Speed Control
Reference
Zero Speed
Spd Ref 1
Spd Ref 2
Reserved
Preset Sel
Integ Hold
Integ
Reset
No. Description
No. - Parameter Number.
➊
= Stop drive before changing this parameter.
Name - Parameter name as is appears in DriveExecutive software.
➋
Description - Brief description of parameter function.
Values - Defines the various operating characteristics of the parameter. Three types exist
➌
ENUM Default:
Options:
File:
Group:
Bit Default:
Options:
File:
Group:
Numeric Default:
Min:
Max:
Type:
File:
Group
Lists the value assigned at the factory.
Displays the selections available.
Lists the major parameter file category.
Lists the parameter group within the file.
Lists the bit pattern assigned at the factory.
Displays the selections available.
Lists the major parameter file category.
Lists the parameter group within the file.
Lists the value assigned at the factory.
Displays lowest possible setting.
Displays highest possible setting.
Indicates if parameter is linkable, read-write, read-only, and data type (i.e. integer, floating point, boolean).
Lists the major parameter file category.
Lists the parameter group within the file.
Publication 1756-UM522B-EN-P - February 2003
Page 95

1756-DMD30 Specific Information B-15
How Parameters are Organized
DriveExecutive programming software displays parameters in “Linear
List” or “File Group Parameter” format. Viewing the parameters in
“File Group Parameter” format simplifies programming by grouping
parameters that are used for similar functions. There are eleven files.
Each file is divided into multiple groups of parameters.
Metering
72
300
307
308
762
Scaled Spd Fdbk
Motor Spd Fdbk
Output Voltage
Output Current
Mtr Posit Fdbk
Monitor
Dynamic Control
Speed Control
Torque Control
Process Control
Position Control
Configuration
151
152
153
160
168
335
Speed/Posit Fdbk
Logic Command
Applied LogicCmd
Control Options
Zero Speed Lim
Drive I/O Ctrl
Abs OverSpd Lim
Utility
DPS/PMI
Communications
SynchLink
Control Status
150
Logic State Mach
155
Logic Status
156
Run Inhibit Stat
157
Logic Ctrl State
165
Test Status
166
Motor Ctrl Cmmd
167
Motor Ctrl Ackn
317
SL System Time
Drive Data
314
VPL Firmware Rev
1001
SynchLink Rev
1002
SL System Rev
2214
PMI OS Version
Overload Protect
336
Service Factor
337
Mtr I2T Curr Min
338
Mtr I2T Spd Min
339
Mtr I2T Calibrat
340
Mtr I2T Trp ThrH
Stop/Brake Modes
154 Stop Dwell Time
Publication 1756-UM522B-EN-P - February 2003
Page 96

B-16 1756-DMD30 Specific Information
Reference
10
Speed Ref 1
11
Spd Ref1 Divide
12
Speed Ref 2
13
Spd Ref2 Multi
14
Speed Ref 4
15
Speed Ref 5
16
Speed Ref Sel
17
Jog Speed 1
18
Jog Speed 2
21
Speed Trim 1
30
Rev Speed Limit
31
Fwd Speed Limit
32
Accel Time
33
Decel Time
34
S Curve Time
35
SpdRef Filt Gain
36
SpdRef Filt BW
37
Spd Ref Bypass
38
Speed Ref Scale
40
Selected Spd Ref
41
Limited Spd Ref
42
Ramped Spd Ref
43
S Curve Spd Ref
44
Filtered Spd Ref
45
Delayed Spd Ref
46
Scaled Spd Ref
47
Spd Trim1 SpdRef
56
Inertia SpeedRef
57
InertiaAccelGain
58
InertiaDecelGain
59
Inertia Torq Add
61
Virt Encoder PPR
62
Virt Encdr Posit
63
Virt Encdr Dlyed
Monitor
140
141
142
143
144
145
Dynamic Control
Speed Control
FricComp Spd Ref
FricComp Setup
FricComp Stick
FricComp Slip
FricComp Rated
FricComp TorqAdd
Process Control
To rq ue Control
Regulator
19
22
23
24
25
26
30
31
47
71
80
81
82
84
85
86
87
89
90
91
92
93
94
95
96
100
101
102
103
301
2185
2187
300
302
2189
2190
Position Control
Speed/Posit Fdbk
Atune Spd Ref
Speed Trim 2
Speed Trim 3
SpdTrim 3 Scale
STrim2 Filt Gain
SpdTrim2 Filt BW
Rev Speed Limit
Fwd Speed Limit
Spd Trim1 SpdRef
Filtered SpdFdbk
Speed Reg Ctrl
Spd Reg P Gain
Spd Reg I Gain
SpdReg AntiBckup
Servo Lock Gain
Spd Reg Droop
SReg Torq Preset
Spd Err Filt BW
Spd Reg BW
Spd Reg Damping
SpdReg P Gain Mx
SRegFB Filt Gain
SReg FB Filt BW
SRegOut FiltGain
SReg Out Filt BW
Speed Error
SpdReg Integ Out
Spd Reg Pos Lim
Spd Reg Neg Lim
Motor Speed Ref
Hot Field Curr
Field Loss Amps
Motor Spd Fdbk
Spd Reg PI Out
Motor Inertia
Total Inertia
Utility
Communications
DPS/PMI
Setpoint Monitor
171
Set Speed Lim
172
Setpt 1 Data
173
Setpt1 TripPoint
174
Setpt 1 Limit
175
Setpt 2 Data
176
Setpt2 TripPoint
177
Setpt 2 Limit
SynchLink
Publication 1756-UM522B-EN-P - February 2003
Page 97

1756-DMD30 Specific Information B-17
Current
119
120
121
122
305
350
351
354
355
360
361
362
2180
Torque
59
110
111
112
113
114
115
116
117
118
121
122
145
302
303
Dynamic Control
Monitor
Current NegLimit
Current PosLimit
Curr NegLim Actl
Curr PosLim Actl
Mtr TorqCurr Ref
Current Actl Ref
Current Ref Trim
Curr Rate Limit
Curr RateLimited
Min Flux
Flux LpassFlt BW
Motor Flux
Motor NP RPM
Inertia Torq Add
Spd/Torq ModeSel
Torque Ref 1
Torq Ref1 Div
Torque Ref 2
Torq Ref2 Mult
Torque Trim
Torque Step
Notch Filt Mode
Notch Filt Freq
Curr NegLim Actl
Curr PosLim Actl
FricComp TorqAdd
Spd Reg PI Out
Motor Torque Ref
Speed Control
Tor que Control
Process Control
Position Control
Speed/Posit Fdbk
Utility
Limit Generator
200
Time Axis Rate
201
Time Axis Output
204
LimGen Y axis Mx
205
LimGen Y axis Mn
206
LimGen X axis In
207
Limit Gen Hi Out
208
Limit Gen Lo Out
Process Config
181
PI Reference
182
PI Feedback
183
PI Command
Regulator
180
PI Output
184
PI Lpass Filt BW
185
PI Preload
186
PI Prop Gain
187
PI Integ Time
188
PI Integ HLim
189
PI Integ LLim
190
PI Integ Output
191
PI High Limit
192
PI Lower Limit
DPS/PMI
Communications
SynchLink
Publication 1756-UM522B-EN-P - February 2003
Page 98

B-18 1756-DMD30 Specific Information
Interp/Direct
318
Posit Spd Output
743
Aux Posit Ref
744
PositRef EGR Out
745
PositRef EGR Mul
746
PositRef EGR Div
747
Position Cmmd
748
CoarsePosit Trgt
749
Interp Position
750
Interp Speed
751
Interp Spd Scale
753
Posit Offset 1
754
Posit Offset 2
755
Posit Offset Spd
756
X Offst SpdFilt
762
Mtr Posit Fdbk
763
Act Motor Posit
764
Posit Load Fdbk
765
Posit Actl Load
766
Posit FB EGR Mul
767
Posit FB EGR Div
768
PositReg P Gain
769
Position Error
770
PositReg Integ
771
PositReg Droop
772
XReg Integ LoLim
773
XReg Integ HiLim
774
XReg Integ Out
775
XReg Spd LoLim
776
XReg Spd HiLim
Monitor
Dynamic Control
Speed Control
Process Control
To rque Control
Point to Point
318
744
745
746
747
753
754
755
756
758
759
760
761
762
763
768
769
775
776
Posit Detection
763
769
780
781
782
783
Position Control
Speed/Posit Fdbk
Posit Spd Output
PositRef EGR Out
PositRef EGR Mul
PositRef EGR Div
Position Cmmd
Posit Offset 1
Posit Offset 2
Posit Offset Spd
X Offst SpdFilt
Pt-Pt Posit Ref
Pt-Pt Accel Time
Pt-Pt Decel Time
Pt-Pt Filt BW
Mtr Posit Fdbk
Act Motor Posit
PositReg P Gain
Position Error
XReg Spd LoLim
XReg Spd HiLim
Act Motor Posit
Position Error
PositDetct1 Stpt
PositDetct2 Stpt
In Posit BW
In Posit Dwell
Utility
DPS/PMI
Communications
SynchLink
Position Config
740
Position Control
741
Position Status
742
Posit Ref Sel
Sync Generator
317
SL System Time
786
Xsync Status
787
Xsync Gen Period
788
Xsync In 1
789
Xsync Out 1
790
Xsync In 2
791
Xsync Out 2
792
Xsync Out 2 Dly
793
Xsync In 3
794
Xsync Out 3
795
Xsync Out 3 Dly
Publication 1756-UM522B-EN-P - February 2003
Page 99

1756-DMD30 Specific Information B-19
Dynamic Control
Monitor
Armature Volts
242
Arm Volts Spd FB
243
Arm Volts Posit
Calculated Fdbk
7076MtrSpd Sim Posit
MtrSpd Simulated
Resolver
230
Resolver SpdFdbk
231
Resolver PositFB
2135
Res Scan Posit
Feedback Config
72
Scaled Spd Fdbk
73
Spd Fdbk Scale
219
Spd Obs Trq Gain
220
Spd Observer BW
221
Load Estimate
222
Motor Fdbk Sel
300
Motor Spd Fdbk
Speed Control
Torque Control
Process Control
Diagnostics
167
Motor Ctrl Ackn
169
Drive I/O Status
304
Limit Status
316
SynchLink Status
320
Exception Event1
321
Exception Event2
323
Fault Status 1
324
Fault Status 2
326
Alarm Status 1
327
Alarm Status 2
1229
SL Error Status
1230
SL CRC Err Accum
1231
SL CRC Error
1232
SL BOF Err Accum
1233
SL BOF Error
1234
SL CRC Err Limit
1235
SL BOF Err Limit
2122
MC Faults
2123
MC Warnings
2124
Pwr DeviceStatus
2125
Interlock Code
Fault/Alm Config
369
SL CommLoss Cnfg
370
SL CommLoss Data
371
Mtr OL Trip Cnfg
372
Mtr OL Pend Cnfg
373
Motor Stall Time
374
Motor Stall Cnfg
381
PMI Warning Cnfg
382
Lgx OutOfRunCnfg
383
Lgx Timeout Cnfg
384
Lgx Closed Cnfg
385
Lgx LinkChngCnfg
386
Lgx CommLossData
387
SL MultErr Cnfg
Speed/Posit Fdbk
Position Control
Utility
DPS/PMI
Peak Detection
210
PeakDtct Ctrl In
211
Peak Ctrl Status
212
PeakDtct1 In Int
213
PkDtct1 In Real
214
PeakDtct1 Preset
215
PeakDetect1 Out
216
PeakDtct2 In Int
217
PkDtct2 In Real
218
PeakDtct2 Preset
227
PeakDetect2 Out
Test Points
50
Spd Ref TP Sel
51
Spd Ref TP RPM
52
Spd Ref TP Data
77
Spd Fdbk TP Sel
78
Spd Fdbk TP RPM
79
Spd Fdbk TP Data
98
Spd Gain TP Sel
99
Spd Gain TP Data
108
Spd Reg TP Sel
109
Spd Reg TP Data
130
Torq Ref TP Sel
131
Torq Ref TP Data
161
Logic TP Sel
162
Logic TP Data
163
Stop Oper TP Sel
164
StopOper TP Data
193
PI TP Sel
194
PI TP Data
329
Fault TP Sel
330
Fault TP Data
363
Curr Ref TP Sel
364
Curr Ref TP Data
777
Posit TP Select
778
PositTP Data Int
779
PositTP DataReal
1226
SL Comm TP Sel
1227
SL Comm TP Data
Communicatio
ns
SynchLink
User Selections
396
397
398
399
User Data 1
User Data 2
User Data 3
User Data 4
Publication 1756-UM522B-EN-P - February 2003
Page 100

B-20 1756-DMD30 Specific Information
Comm Status
2000
DM Comm PortStat
2001
DM Good Msg Cnt
2002
DM CRC Error Cnt
2003
DM Frmt ErrorCnt
2004
PMIComm PortStat
2005
PMI Good Msg Cnt
2006
PMI CRC ErrorCnt
2007
PMIFrmt ErrorCnt
2008
DM Link Status
2009
DM Tx Msg Count
2010
DM Sync WarngCnt
2011
DM Bad Msg Cnt
2012
DM Sync Count
2013
PMI Gain Count
2014
DM Tx Time
2015
DM Tx Time Avail
Inputs & Outputs
2040
Rail Port 0 Ch 0
2041
Rail Port 0 Ch 1
2042
Rail Port 0 Ch 2
2043
Rail Port 0 Ch 3
2044
Rail Port 0 Flt
2045
RailPrt 0FltCnt
2046
Rail Port 1 Ch 0
2047
Rail Port 1 Ch 1
2048
Rail Port 1 Ch 2
2049
Rail Port 1 Ch 3
2050
Rail Port 1 Flt
2051
RailPrt 1FltCnt
2080
Meter Port1 Sel
2081
MeterP1 +10v Val
2082
MeterP1 -10v Val
2083
Meter Port2 Sel
2084
MeterP2 +10v Val
2085
MeterP2 -10v Val
2086
Meter Port3 Sel
2087
MeterP3 +10v Val
2088
MeterP3 -10v Val
2089
Meter Port4 Sel
2090
MeterP4 +10v Val
2091
MeterP4 -10v Val
Monitor
Dynamic Control
Speed Control
Commands
2100
2102
2103
2104
2105
2106
Feedback
307
308
2122
2123
2124
2125
2126
2127
2130
2131
2132
2133
2134
2135
2136
2137
2149
To rque Control
Process Control
Drive Ctrl Word
Arm Test Angle
Arm Curr Ref
Field Test Angle
Field Curr Ref
PMI D/A Output
Output Voltage
Output Current
MC Faults
MC Warnings
Pwr DeviceStatus
Interlock Code
AC Line Volt FB
CML Feedback
Counter EMF
FML Feedback
Field Amps Fdbk
Field Volt Fdbk
User Anlg Input
Res Scan Posit
Res Strobe Posit
Arm Volt FB Cnts
NV Faults
Position Control
Speed/Posit Fdbk
Utility
Regulator Config
2150
CML Crossovr Frq
2151
Arm Resistance
2152
Arm TimeConstant
2153
Arm ContCurr Lvl
2154
FML Crossovr Frq
2155
Field Resistance
2156
Fld TimeConstant
2157
SCR Diag Gain
2158
SCR Decay Rate
2159
SCR Deadband
Motor Data
2160
SCR Trip Point
2161
Resolver Gain
2162
Resolver Balance
2163
CML Ref Rate
2180
Motor NP RPM
2181
Overspd Trip Pt
2182
Motor NP FLA
2183
Motor NP Volts
2184
PMI Curr Lim
2186
Min Field Curr
2187
Field Loss Amps
2188
Field Off Delay
2189
Motor Inertia
2190
Total Inertia
DPS/PMI
Communications
SynchLink
Drive Config
2200
PMI Drive Config
2201
PMI I/O Config
2202
AC LineVolt(RMS)
2203
Out Volt Rating
2204
Out Curr Rating
2205
Curr Xfmr Ratio
2206
Field AC In Volt
2208
Anlg Tach Volts
2209
Ph Xfmr In Volt
2213
Pwr Config Code
2214
PMI OS Version
Publication 1756-UM522B-EN-P - February 2003
 Loading...
Loading...