

Page 1

User Manual
1732E ArmorBlock EtherNet/IP Dual Port 8-Point
Sequence of Events Input and Scheduled Output
Modules
Catalog Numbers
1732E-IB8M8SOER, 1732E-OB8M8SR
Page 2
Important User Information
IMPORTANT
Solid-state equipment has operational characteristics differing from those of electromechanical equipment. Safety
Guidelines for the Application, Installation and Maintenance of Solid State Controls (publication SGI-1.1
your local Rockwell Automation sales office or online at http://www.rockwellautomation.com/literature/
important differences between solid-state equipment and hard-wired electromechanical devices. Because of this difference,
and also because of the wide variety of uses for solid-state equipment, all persons responsible for applying this equipment
must satisfy themselves that each intended application of this equipment is acceptable.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from
the use or application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and
requirements associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or
liability for actual use based on the examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or
software described in this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation,
Inc., is prohibited.
Throughout this manual, when necessary, we use notes to make you aware of safety considerations.
WARNING: Identifies information about practices or circumstances that can cause an explosion in a hazardous
environment, which may lead to personal injury or death, property damage, or economic loss.
available from
) describes some
ATTENTION: Identifies information about practices or circumstances that can lead to personal injury or death,
property damage, or economic loss. Attentions help you identify a hazard, avoid a hazard, and recognize the
consequence
SHOCK HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that
dangerous voltage may be present.
BURN HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that
surfaces may reach dangerous temperatures.
Identifies information that is critical for successful application and understanding of the product.
Allen-Bradley, Rockwell Software, Rockwell Automation, ArmorBlock, RSLogix, R SLinx, and TechConnect are trademarks of Rockwell Automation, Inc.
Trademarks not belonging to Rockwell Automation are property of their respective companies.
Page 3

Preface
Read this preface to familiarize yourself with the rest of the manual. It provides
information concerning:
• who should use this manual
• the purpose of this manual
• related documentation
• conventions used in this manual
Who Should Use this
Manual
Purpose of this Manual
Resource Description
ArmorBlock Dual-Port EtherNet/IP 8-Point Digital Modules
1732E-WD002
Use this manual if you are responsible for designing, installing, programming, or
troubleshooting control systems that 1732E ArmorBlock EtherNet/IP Dual Port
8-Point Sequence of Events Input and Scheduled Output Modules.
You should have a basic understanding of electrical circuitry and familiarity with
relay logic. If you do not, obtain the proper training before using this product.
This manual is a reference guide for the 1732E-IB8M8SOER,
1732E-OB8M8SR modules. It describes the procedures you use to install, wire,
troubleshoot, and use your module.
Related Documentation
The following documents contain additional information concerning Rockwell
Automation products. To obtain a copy, contact your local Rockwell Automation
office or distributor.
Information on wiring the ArmorBlock Dual-Port EtherNet/IP 8-Point Digital
Modules.
1732E ArmorBlock 2 Port Ethernet Module Installation
Instructions, publication 1732E-IN007
1732E ArmorBlock 2 Port Ethernet Module Release Notes,
publication 1732E-RN001
ControlLogix Sequence of Events Module User Manual,
publication 1756-UM528
EtherNet/IP Embedded Switch Technology Application Guide,
publication ENET-AP005
EtherNet/IP Modules in Logix5000 Control Systems User
Manual, publication ENET-UM001
Integrated Architecture and CIP Sync Configuration Application
Techniques, publication IA-AT003
Getting Results with RSLogix 5000, publication
9399-RLD300GR
Allen-Bradley Industrial Automation Glossary, AG-7.1
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 iii
Information on installing the ArmorBlock EtherNet/IP module.
Release notes to supplement the existing documentation supplied with the
ArmorBlock EtherNet/IP module.
A manual on how to install, configure and troubleshoot the ControlLogix
Sequence of Events module in your ControlLogix application.
A manual on how to install, configure and maintain linear and Device-level
Ring (DLR) networks using Rockwell Automation EtherNet/IP devices with
embedded switch technology.
A manual on how to use EtherNet/IP modules with Logix5000 controllers and
communicate with various devices on the Ethernet network.
A manual on how to configure CIP Sync with Intergrated Architecture products.
and applications.
Information on how to install and navigate RSLogix 5000. The guide includes
troubleshooting information and tips on how to use RSLogix 5000 effectively.
A glossary of industrial automation terms and abbreviations.
Page 4

Common Techniques Used
in this Manual
The following conventions are used throughout this manual:
• Bulleted lists such as this one provide information, not procedural steps.
• Numbered lists provide sequential steps or hierarchical information.
• Italic type is used for emphasis.
iv Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 5
Summary of Changes
This manual contains new and updated information. Changes throughout this
revision are marked by change bars, as shown to the right of this paragraph.
New and Updated
Information
This table contains the changes made to this revision.
Topic Page
Additional warning for I/O connectors 20
Updated values of the following input specifications:
•On-state current, min
•Off-state current, max
93
Publication 1732E-UM003B-EN-E - March 2014
Page 6

vi Summary of Changes
Notes:
Publication 1732E-UM003B-EN-E - March 2014
Page 7

Table of Contents
Preface
Who Should Use this Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Purpose of this Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Related Documentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Common Techniques Used in this Manual . . . . . . . . . . . . . . . . . . . . . . . . . . iv
Chapter 1
About ArmorBlock Modules Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Module Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Hardware/Software Compatibility. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Use of the Common Industrial Protocol (CIP) . . . . . . . . . . . . . . . . . . . . . . 2
Understand the Producer/Consumer Model. . . . . . . . . . . . . . . . . . . . . . . . . 2
Specify the Requested Packet Interval (RPI) . . . . . . . . . . . . . . . . . . . . . . . . . 2
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Chapter 2
Module Overview and Features
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
EtherNet/IP Network Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Introduction to CIP Sync . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
What is IEEE 1588 PTP (Precision Time Protocol)? . . . . . . . . . . . . . 7
CIP Sync Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
What is CIP Sync?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
What is Time Stamping? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Introduction to the Sequence of Events Input Module. . . . . . . . . . . . . . . . 8
High Performance Sequence of Events Applications in the Logix
Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
First Fault Detection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Time Stamped I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
High Speed Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Motion Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Global Position Registration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Introduction to Scheduled Output Module. . . . . . . . . . . . . . . . . . . . . . . . . 11
Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
High Speed Product Reject . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Chapter 3
Use the Modules in an
ArmorBlock System
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Differences Between Module and Standard I/O. . . . . . . . . . . . . . . . . . . . . 15
Similar Functionality to Standard ArmorBlock . . . . . . . . . . . . . . . . . . . . . 15
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Chapter 4
Install Your Module
vii Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Install the Module. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Page 8

viii Table of Contents
Configure the Module for Your
EtherNet/IP Network
Set the Network Address . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Mount the Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Wire the Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Power Connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Chapter 5
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Configuration Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
IP Address . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Gateway Address . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Subnet Mask . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Set the Network Address. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Use the Rockwell Automation BootP/DHCP Utility . . . . . . . . . . . . . . . 27
Save the Relation List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Use DHCP Software to Configure Your Module . . . . . . . . . . . . . . . . . . . 30
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Configure the Module Using
RSLogix 5000 Software
Common Features of the
1732E-IB8M8SOER and
1732E-OB8M8SR Modules
Chapter 6
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Set Up the Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Create the
Example Application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Configure Your I/O Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
RSLogix 5000 Configuration Software . . . . . . . . . . . . . . . . . . . . . . . . . 36
Overview of the Configuration Process through RSLogix 5000. . . . . . . 36
Add a New Bridge and Module to Your RSLogix 5000 Project . . . . . . . 36
Add the Local EtherNet/IP Bridge to the I/O Configuration . . . . 37
Add the I/O module as a child of the 1756-EN2T module . . . . . . . 38
Use the Default Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Change the Default Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Download Your Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Edit Your Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Access Module Data in RSLogix 5000 Software . . . . . . . . . . . . . . . . . . . . . 45
Configure RSLogix 5000 and the 1756-EN2T Communication Module
for CIP Sync . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Chapter 7
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Communications Format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Electronic Keying . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Module Inhibiting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Module Fault Reporting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Fully Configurable via Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 9

Producer/Consumer Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Status Indicator Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Agency Certifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Chapter 8
Specific Features of the
1732E-IB8M8SOER Sequence of
Events Input Module
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Determine Module Compatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Operational Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Timestamp Latching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Software Configurable Input Filters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Sync to Master . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Chapter 9
Specific Features of the
1732E-OB8M8SR Scheduled
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Operational Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Output Module
Configurable Point-Level Output Fault States . . . . . . . . . . . . . . . . . . . . . . 61
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Table of Contents ix
Time-Scheduled Output Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Output State . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Use the Sequence of Events
Input and Scheduled Output
Modules
Chapter 10
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Use the Sequence of Events Input Module. . . . . . . . . . . . . . . . . . . . . . . . . . 65
How Does 1732E-IB8M8SOER Store Timestamp Data?. . . . . . . . 65
Use Timestamp Latching. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Use Timestamp Capture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Operational Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Manage the Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Module Sends Data to the Controller . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Copy Relevant Input Data to a Separate Data Structure. . . . . . . . . . 74
Acknowledge Timestamp Latching Timestamp Data . . . . . . . . . . . . 76
Sort the Data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Clear All Data From the Module Buffer At Once. . . . . . . . . . . . . . . . 78
Propagate a Signal From Input Pin to EtherNet . . . . . . . . . . . . . . . . . 78
Per Point Mode of Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Use the Scheduled Output Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Usage with MAOC Instruction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
I/O Subsystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Schedule Processing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Chapter 11
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 10

x Table of Contents
Troubleshoot the Module
Interpret Status Indicators
Specifications
Module Tags
Data Tables
Troubleshoot the Module. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Determine Fault Type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Chapter Summary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Chapter 12
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Appendix A
Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Appendix B
Fault and Status Reporting Between the Module and Controllers. . . . . 97
Module Tag Names and Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Tags Used. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Appendix C
Communicate with Your Module. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Connection Points. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Connect to Networks via
Ethernet Interface
1732E ArmorBlock Embedded
Web Server
Appendix D
ArmorBlock Module and Ethernet Communication . . . . . . . . . . . . . . . 119
ArmorBlock module and PC Connections to the Ethernet Network. 119
Ethernet Network Topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Connecting to an Ethernet Network . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
EtherNet/IP Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Duplicate IP Address Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Configure Ethernet Communications on the ArmorBlock module . . 121
Configure Using
RSLogix 5000 Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Configure Using Web Server . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Appendix E
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Typical Applications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Browser Requirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Access the Home Page of the Web Server. . . . . . . . . . . . . . . . . . . . . . . . . . 124
Log On to the Web Server . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Navigate the 1732E ArmorBlock I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Access Diagnostic Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Index
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 11
About ArmorBlock Modules
Chapter
1
Overview
Module Features
This chapter is an overview of the ArmorBlock family of modules. You will need
to understand the concepts discussed in this chapter to configure your module
and use it in an EtherNet/IP control system. The following table guides you
where to find specific information in this chapter.
Topic Page
Module Features 1
Hardware/Software Compatibility 1
Use of the Common Industrial Protocol (CIP) 2
Understand the Producer/Consumer Model 2
Specify the Requested Packet Interval (RPI) 2
The module features include:
• use of EtherNet/IP messages encapsulated within standard TCP/UDP/IP
protocol
• common application layer with ControlNet and DeviceNet
• interfacing via Category 5 rated twisted pair cable
• half/full duplex 10 Mbit or 100 Mbit operation
• mounting on a wall or panel
• communication supported by RSLinx software
• IP address assigned via standard DHCP tools
• I/O configuration via RSLogix 5000 software
• no network scheduling required
• no routing tables required
• supports connections from multiple controllers simultaneously
Hardware/Software Compatibility
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 1
The module and the applications described in this manual are compatible with
the following firmware versions and software releases.
Contact Rockwell Automation if you need software or firmware upgrades to use
this equipment.
Product Firmware Version / Software Release
1732E-IB8M8SOER and 1732E-OB8M8SR Firmware rev. 1.1 or later
Page 12
Chapter 1 About ArmorBlock Modules
Product Firmware Version / Software Release
1756-EN2T, 1756-EN2TR, 1756-EN3TR 3.x version when using RSLogix 5000 v18 or later
RSLogix 5000 software 18 or later
RSLinx software 2.56 or later
For a complete ControlLogix compatibility matrix, see publication IA-AT003.
Use of the Common Industrial Protocol (CIP)
Understand the Producer/ Consumer Model
The 1732E-IB8M8SOER and 1732E-OB8M8SR modules use the Common
Industrial Protocol (CIP). CIP is the application layer protocol specified for
EtherNet/IP, the Ethernet Industrial Protocol. It is a message-based protocol that
implements a relative path to send a message from the “producing” device in a
system to the “consuming” devices.
The producing device contains the path information that steers the message along
the proper route to reach its consumers. Because the producing device holds this
information, other devices along the path simply pass this information; they do
not need to store it.
This has two significant benefits:
• You do not need to configure routing tables in the bridging modules,
which greatly simplifies maintenance and module replacement.
• You maintain full control over the route taken by each message, which
enables you to select alternative paths for the same end device.
The CIP “producer/consumer” networking model replaces the old source/
destination (“master/slave”) model. The producer/consumer model reduces
network traffic and increases speed of transmission. In traditional I/O systems,
controllers poll input modules to obtain their input status. In the CIP system,
input modules are not polled by a controller. Instead, they produce their data
either upon a change of state (CoS) or periodically. The frequency of update
depends upon the options chosen during configuration and where on the
network the input module resides. The input module, therefore, is a producer of
input data and the controller is a consumer of the data.
The controller can also produce data for other controllers to consume. The
produced and consumed data is accessible by multiple controllers and other
devices over the EtherNet/IP network. This data exchange conforms to the
producer/consumer model.
Specify the Requested Packet Interval (RPI)
2 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
The Requested Packet Interval (RPI) is the update rate specified for a particular
piece of data on the network. This value specifies how often to produce the data
for that device. For example, if you specify an RPI of 50 ms, it means that every
Page 13

About ArmorBlock Modules Chapter 1
50 ms the device sends its data to the controller or the controller sends its data to
the device.
RPIs are only used for devices that exchange data. For example, a ControlLogix
EtherNet/IP bridge module in the same chassis as the controller does not require
an RPI because it is not a data-producing member of the system; it is used only as
a bridge to remote modules.
Chapter Summary and What’s Next
In this chapter you were given an overview of the 1732E ArmorBlock family of
modules.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 3
Page 14

Chapter 1 About ArmorBlock Modules
Notes:
4 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 15
Module Overview and Features
Chapter
2
Overview
This chapter provides an overview of the 1732E ArmorBlock EtherNet/IP Dual
Port 8-Point Sequence of Events Input and Scheduled Output Modules,
1732E-IB8M8SOER and 1732E-OB8M8SR. The modules provide
timestamping functionality when an input event occurs and allow for scheduling
of outputs.
Although primarily described in this manual as having CIP Sync functionality,
both modules can be configured to function as standard I/O modules.
The following table indicates where you can information on this chapter:
Topic Page
EtherNet/IP Network Overview 6
Introduction to CIP Sync 7
What is IEEE 1588 PTP (Precision Time Protocol)? 7
CIP Sync Support 7
What is CIP Sync? 8
What is Time Stamping? 8
Introduction to the Sequence of Events Input Module 8
High Performance Sequence of Events Applications in the Logix Architecture 9
First Fault Detection 10
High Speed Applications 10
Motion Control 11
Global Position Registration 11
Introduction to Scheduled Output Module 11
Operation 11
High Speed Product Reject 12
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 5
Page 16
Chapter 2 Module Overview and Features
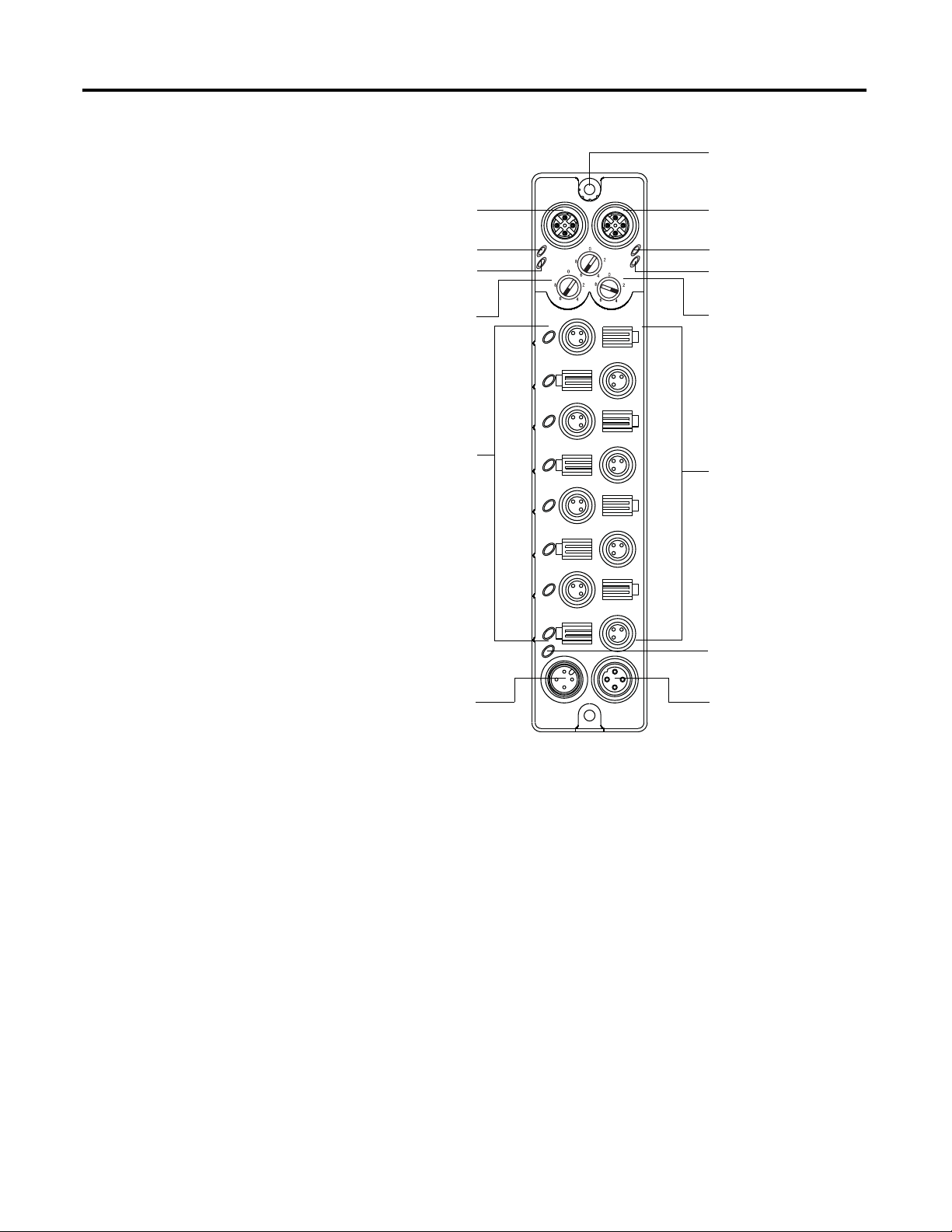
LINK1
NET
MOD
X10
X100
X1
LINK2
45766
Functional Earth ground
(1)
M8 I/O connectors
Node address switches
EtherNet/IP D-Code
M12 connector
EtherNet/IP D-Code
M12 connector
M8 I/O connectors/
status indicators
Power status
indicator
Network status LED
Link 1 status LED
Link 2 status LED
Module status LED
Node address switches
Power connector
Power connector
(1)
Functional Earth grounds the I/O block’s EtherNet/IP communication circuitry which is designed to
mitigate the effect of noise on the network. It requires a solid earth ground connection, either through a
metal screw to a grounded metal panel or through a wire.
EtherNet/IP Network Overview
The modules incorporate embedded switch technology. They support Star, Tree,
Daisychain or Linear, and Ring network topologies.
• Star or Tree topologies can connect to either Port 1 or Port 2.
• Daisy Chain/Linear topologies will pass communications from Port 1 to 2,
or Port 2 to 1.
• Ring topology will pass communications from Port 1 to 2, or Port 2 to 1.
The 1732E-IB8M8SOER and 1732E-OB8M8SR modules support the
management of network traffic to ensure timely delivery of critical data, Quality
of Service (QoS) and Internet Group Management Protocol (IGMP) protocols
6 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
are supported.
Page 17

Module Overview and Features Chapter 2
If the ring topology is used, the Ring Master (not the 1732E ArmorBlock
EtherNet/IP Dual Port 8-Point Sequence of Events Input or Scheduled Output)
must be designated in the system, and determines the beacon rate and the timeout
period. For more information on topologies, refer to publication ENET-AP005
The 1732E-IB8M8SOER and 1732E-OB8M8SR modules are CIP Sync slave
only devices. There must be another module on the network that functions as a
master clock.
.
Introduction to CIP Sync
CIP is the Common Industrial Protocol that we use to let all
Rockwell Automation products communicate with each other whether it be on a
DeviceNet, ControlNet, and/or an EtherNet network. Since it is an ODVA
standard, other industrial product manufacturers develop products to
communicate via the CIP protocol.
CIP Sync is a CIP implementation of the IEEE 1588 PTP (Precision Time
Protocol) in which devices can bridge the PTP time across backplanes and on to
other networks via EtherNet/IP ports.
What is IEEE 1588 PTP (Precision Time Protocol)?
The IEEE 1588 standard specifies a protocol to synchronize independent clocks
running on separate nodes of a distributed measurement and control system to a
high degree of accuracy and precision. The clocks communicate with each other
over a communication network. In its basic form, the protocol is intended to be
administration free. The protocol generates a master slave relationship among the
clocks in the system. Within a given subnet of a network there will be a single
master clock. All clocks ultimately derive their time from a clock known as the
grandmaster clock. This is called Precision Time Protocol (PTP).
The PTP is a time-transfer protocol defined in the IEEE 1588-2008 standard
that allows precise synchronization of networks, for example, Ethernet. Accuracy
within the nanosecond range can be achieved with this protocol when using
hardware generated synchronization.
IEEE 1588 is designed for local systems requiring very high accuracies beyond
those attainable using Network Time Protocol (NTP). NTP is used to
synchronize the time of a computer client or server to another server or reference
time source, such as a GPS.
CIP Sync Support
CIP Sync supports the IEEE 1588-2008 synchronization standard. In this
architecture, a grandmaster clock provides a master time reference for the system
time. The 1732E-IB8M8SOER, 1732E-OB8M8SR modules are CIP Sync slave
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 7
Page 18

Chapter 2 Module Overview and Features
only devices. There must be another module on the network that will function as
a master clock. The grandmaster could be:
• a 1756 ControlLogix L6 or L7 controller when using RSLogix 5000
software v18 or later.
• an Ethernet bridge that supports IEEE 1588 V2, or
• a Symmetricom Grand Master GPS or equivalent.
What is CIP Sync?
CIP Sync is a CIP implementation of the IEEE 1588 PTP (Precision Time
Protocol). CIP Sync provides accurate real-time (Real-World Time) or Universal
Coordinated Time (UTC) synchronization of controllers and devices connected
over CIP networks. This technology supports highly distributed applications
that require time stamping, sequence of events recording, distributed motion
control, and increased control coordination.
What is Time Stamping?
Each input has its own individual timestamp recorded for both ON and OFF
transitions. The offset from the timestamp to the local clock is also recorded so
that steps in time can be detected and resolved.
Timestamping uses the 64-bit system time whose time base is determined by the
modules master clock resolved in microseconds. Each timestamp is updated as
soon as an input transition is detected, before input filtering occurs. When
filtering is enabled, the transition is only recorded if the transition passes the
filter.
The module starts timestamping as soon as it powers up, even if it is not
synchronized to a master clock. If it is synchronized to a master clock and then
becomes unsynchronized it continues to time stamp. All time stamps and offsets
have a value of zero at power-up.
For more information on how to use CIP Sync technology, see the Integrated
Architecture and CIP Sync Configuration Application Technique publication
IA-AT003
.
Introduction to the Sequence of Events Input Module
8 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
The 1732E-IB8M8SOER is an input module that offers sub-millisecond
timestamping on a per point basis in addition to providing the basic ON/OFF
detection. It supports two modes of operation: Per Point Mode and FIFO (First
In First Out) Mode. To learn more about using the modules in these modes of
operation, see Operational Modes on page 68.
Page 19
Module Overview and Features Chapter 2
All input point event times are recorded and returned in a single buffer. The
module returns two 64-bit timestamps for each input, thus allowing:
• ON and OFF events for each point to be displayed simultaneously in the
input data.
• ladder logic not being explicitly required to see events, although needed to
archive events.
• events to be kept in the controller memory during remote power loss thus
eliminating data loss.
All inputs on the module can be filtered for both ON to OFF and OFF to ON
transitions. The timestamp for a filtered input will be the time of the initial
transition to the new state and not the time that the filter validates the event as
real.
Selective Event Capturing allows particular events to be disabled per input and
per transition, ON to OFF or OFF to ON.
Event latching ensures that events are not overwritten. A single transition in each
direction is recorded per point. Any new event, which occurs after the point has
captured a timestamp, is dropped until the stored events have been
acknowledged.
If latching is not enabled in point mode, new events will overwrite old events
when they are received. In FIFO mode, up to 256 events per input will be
buffered before events are overwritten. Thus, if inputs are changing rapidly it may
be possible that events will be lost either in the module or the controller prior to
an event being operated on by ladder logic.
When events are lost, either old ones being overwritten or new ones being
ignored due to latching, an EventOverflow bit will be set for each point that loses
an event. The EventOverflow bit will clear when the blocking events for that
point are acknowledged.
Timestamping is a feature that registers a time reference to a change in input
data. For the 1732E-IB8M8SOER, the time mechanism used for timestamping is
(PTP) system time. The 1732E-IB8M8SOER module is a PTP slave-only device.
There must be another module on the network that functions as a master clock.
High Performance Sequence of Events Applications in the Logix Architecture
Sequence of Events (SOE) applications span a wide range of industry
applications. Typically any event that needs to be compared against a second
event can be classified as SOE.
• Used on discrete machines to identify failure points
• Used in Power Substations or power plants to indicate first fault
conditions
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 9
Page 20

Chapter 2 Module Overview and Features
• Used in SCADA applications to indicate pump failures or other discrete
events
• Used in motion control applications to increase control coordination.
• Used in high speed applications
• Used in Global Position Registration
In today's environment, specifications for SOE applications typically require 1 ms
or better resolution on timestamps. There are two types of SOE applications.
• First Fault – measures the time between events with no correlation to
events outside of that system.
• Real Time – captures the time of an event occurrence as it relates to some
master clock. Typically this is a GPS, NTP server or some other very
accurate clock source. This method allows distributed systems to capture
events and build a history of these events. These events are almost always
digital, however some are analog for which lower performance
requirements can be configured.
First Fault Detection
An example of first fault detection would be intermittent failure from a sensor on
a safety system faults a machine and halts production cascading a flood of other
interrelated machine faults. Traditional fault detection or alarms may not appear
in the correct timed order of actual failure making root cause of the down time
difficult or impossible.
Time Stamped I/O
High precision timestamps on I/O allows very accurate first fault detection
making it easy to identify the initial fault that caused machine down time.
Common Time base for Alarming System logs user interaction as well as alarm
events using common time reference.
The power industry requires sub 1 ms accuracy on first fault across geographically
dispersed architecture.
High Speed Applications
Packaging machines or sorters that have fast part cycles are often bottlenecked by
controller scan times. By switching to a time-based solution, you can remove
many scan time critical components of the system. This programming technique
allows you to do predictive events and schedule outputs to run things like
diverters without having a scan time to match the part cycle time.
10 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 21
Module Overview and Features Chapter 2
IMPORTANT
Motion Control
CIP Sync also provides a common time reference for distributed VFD drives,
servos, and controllers throughout the system. This allows controllers to request
axes, reach a pre-defined position at a known time reference, or run at a set speed
using the same reference. Since all drives and controllers in the system have the
same reference to time, the controller can issue simple requests for axes to reach
target positions in a synchronized fashion.
Global Position Registration
Registration refers to a function usually performed by the drive where a physical
input is triggered causing the drive to precisely capture the actual axis position
when the input event occurred. Rather than wiring inputs to the registration
input on all of the drives, this time-based system lets you wire an input to only
one time based SOE input module. The timestamp returned for that input, can
be used by the motion planner to calculate the actual axis position at the time the
input triggered. This simplifies system installation, reduces wiring costs, and
provides a global machine registration for all the axes in the system thru one SOE
input.
Introduction to Scheduled Output Module
The 1732E-OB8M8SR Scheduled Output module is designed to work in
conjunction with the MAOC motion instruction to provide position-based
output control (also known as PLS). The MAOC instruction by itself allows
position-based output control using the position of any motion axis in
ControlLogix as the position reference and any output or boolean as the output.
The MAOC updates the outputs based on motion axis position at the motion
group coarse update rate (typically 2…10 ms). While this is adequate for some
applications, it is too slow for many high speed applications typically found in
converting and packaging segments. The 1732E-OB8M8SR module improves
performance by supporting the ability to schedule the output turn-on/turnoff time of its 8 outputs (outputs 0…7) in 1 µs increments. Outputs are
scheduled by entering data into one or more of the 16 schedules provided by the
output connection data store.
When using the 1732E-OB8M8SR module with the MAOC instruction,
make sure you use the default Communication Format for the module,
that is, Schedule Output Data Per Point. If you change the
Communication Format when the module is used with an MAOC
instruction, an error may result.
Operation
This scheduled output implementation schedules outputs on a per point basis
and each individual output point is controlled by its own timestamp.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 11
Page 22
Chapter 2 Module Overview and Features
Individual schedules are created in the controller, stored in the output image table
for the module, and sent over the backplane to the Scheduled Output module.
The schedule specifies a sequence count, the output point to be associated with
the schedule, the time at which an output value should be applied to the physical
output point, and the value to be applied at the scheduled time. The I/O module
receives and stores the schedule. The CIPSync time of each schedule is monitored
by the module. When a schedule has expired, that is the current time, matches the
scheduled timestamp, the output value is then applied to the corresponding
output bit. Timer hardware in the ASIC is used to optimize the scheduling
algorithm. This hardware also reduces the latency and jitter performance. Status
of each schedule is reported in the output echo connection and reflected in the
input image for the module.
The scheduled output functionality relies on CIPSync time. Unused outputs may
be used as normal outputs and are applied immediately rather than waiting for
the CIPSync time to expire. A mask is sent to the module to indicate which
outputs are to function as normal outputs. The scheduled output module
supports up to 8 outputs that can be individually scheduled. The scheduled
outputs must be between output points 0 and 7. The 1732E-OB8M8SR module
supports up to 16 schedules with two schedules per output. Outputs that are not
“scheduled” are used as normal output points. A mask is used to indicate which
points are scheduled and which points are unscheduled. Jitter performance is less
than 25 µs. All of the scheduling configuration is done through the MAOC
instruction.
If a new schedule as indicated by a change in the sequence count is received by the
I/O module before the current schedule has expired, the current schedule is
overwritten. This mechanism can be used to cancel currently active schedule.
Status bits returned in the output echo connection may be used to determine the
current state of each schedule and to trigger corresponding event tasks.
If a new schedule is sent by the controller and the CIPSync time has already past,
the output is asserted until the CIPSync time has completely wrapped around.
The module does not check for an expired CIPSync time.
WARNING: If the time between two schedules is less than the
minimum schedule interval (for example, 100 µs), then deviation occurs.
This means that even though two outputs are scheduled at different
times (for example, time 90 and time 110), they both activate at the
same time (for example, time 90). The minimum schedule interval should
not be set to faster than 100 µs.
High Speed Product Reject
In a control system you can program a scheduled output module, which can
trigger multiple outputs simultaneously or trigger a reject at the precise point a
product is at the reject station.
12 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 23

Module Overview and Features Chapter 2
By using time to schedule the output in advance,and identifying when the
product will be at a known position, hitting the exact point when a part is in front
of a reject station on a high speed packaging machine, can be controlled.
Chapter Summary and What’s Next
In this chapter, you were given an overview of the 1732E ArmorBlock EtherNet/
IP Dual Port 8-Point Sequence of Events Input and Scheduled Output Modules
modules. The next chapter describes how the modules operate in an ArmorBlock
system.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 13
Page 24

Chapter 2 Module Overview and Features
Notes:
14 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 25
Chapter
3
Use the Modules in an ArmorBlock System
Introduction
Differences Between Module and Standard I/O
Difference Description
Additional data produced for controller The modules produce significantly more data for its owner-controller than
CIP Sync These modules have an internal clock that is synchronized with a master
Only one owner-controller per module While multiple controllers can simultaneously own other digital input
This chapter describes how the 1732E ArmorBlock EtherNet/IP Dual Port 8Point Sequence of Events Input and Scheduled Output Modules modules operate
in an ArmorBlock system.
Topic Page
Differences Between Module and Standard I/O 15
Similar Functionality to Standard ArmorBlock 15
In many aspects, the modules behave the same as any other ArmorBlock digital
module. However, the modules offer several significant differences from other
EtherNet/IP ArmorBlock digital input modules, including those described in the
following table.
standard ArmorBlock digital input modules. While other input modules only
produce ON/OFF and fault status, the modules produce data such as ON/
OFF and fault status, timestamp data, indication of whether new data was
produced for specific input points or if transitions were not timestamped.
clock using CIP Sync. This clock is used for time stamping inputs and
outputs.
modules, the module only supports a single owner-controller.
Similar Functionality to Standard ArmorBlock
Concept Description
Ownership Every module in an ArmorBlock system must be owned by a Logix5000 controller. This
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 15
This chapter focuses on how the module behavior differs from that of other
ArmorBlock modules. However, you should be aware of aspects in which the
module is similar to standard EtherNet/IP ArmorBlock modules. The following
table describes the similarities.
owner-controller:
• stores configuration data for every module that it owns.
• sends the module configuration data to define the module behavior and begin
operation with the control system.
This module does not support multiple owner-controllers.
Page 26
Chapter 3 Use the Modules in an ArmorBlock System
Concept Description
Using RSLogix 5000 software The I/O configuration portion of RSLogix 5000 software, v18 or greater, generates the
configuration data for each module.
Configuration data is transferred to the controller during the program download and
subsequently transferred to the appropriate modules.
Modules are ready to run as soon as the configuration data has been downloaded.
Configure all modules for a given controller using RSLogix 5000 software and download
that information to the controller.
Chapter Summary and What’s Next
In this chapter, you learned about the differences between this module and other
EtherNet/IP ArmorBlock I/O modules. The next chapter describes how to
install and wire your module.
16 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 27
Install Your Module
Chapter
4
Overview
Install the Module
This chapter shows you how to install and wire the 1732E ArmorBlock
EtherNet/IP Dual Port 8-Point Sequence of Events Input and Scheduled Output
Modules modules. The only tools you require are a flat or Phillips head
screwdriver and drill. This chapter includes the following topics:
Topic Page
Install the Module 17
Set the Network Address 17
Mount the Module 18
Wire the Module 19
Power Connectors 20
To install the module:
• Set the network address
• Mount the module
• Connect the I/O, Network, and Auxiliary cables to the module.
Set the Network Address
The I/O block ships with the rotary switches set to 999 and DHCP enabled. To
change the network address, you can do one of the following:
• adjust the node address switches on the front of the module.
• use a Dynamic Host Configuration Protocol (DHCP) server, such as
Rockwell Automation BootP/DHCP.
• retrieve the IP address from nonvolatile memory.
The I/O block reads the switches first to determine if the switches are set to a
valid number. To set the network address:
1. Remove power.
2. Remove the switch dust caps.
3. Rotate the three (3) switches on the front of the module using a small
blade screwdriver.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 17
Page 28
Chapter 4 Install Your Module
45765
Millimeters
(Inches)
Functional Earth
Grounds the I/O block
EtherNet/IP communication
circuitry which is designed to
mitigate the effect of noise on
the network. It requires a solid
earth ground connection,
either through a metal screw
to a grounded metal panel or
through a wire.
4. Line up the small notch on the switch with the number setting you wish to
use.
Valid settings range from 001…254.
5. Replace switch dust caps. Make sure not to over tighten.
6. Reapply power.
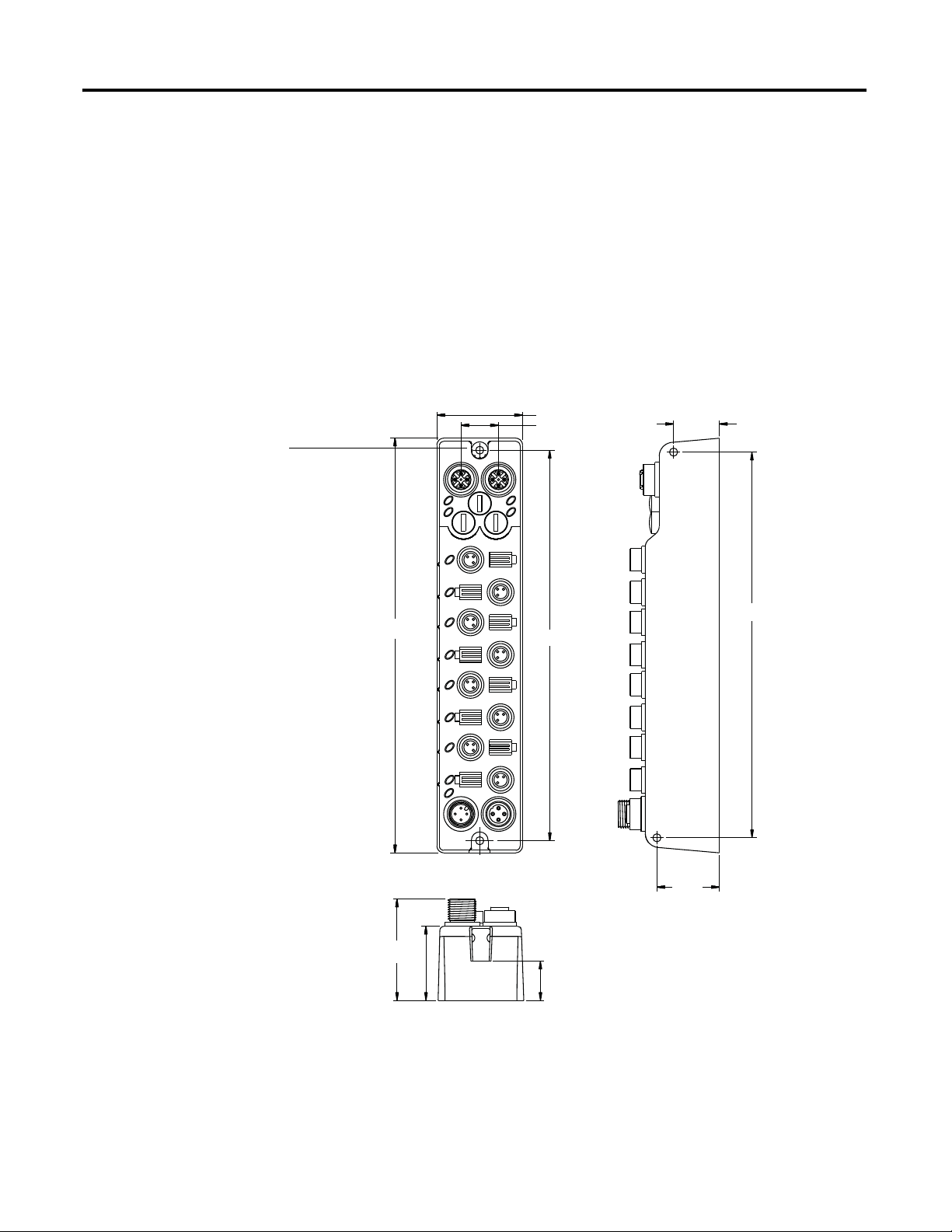
Mount the Module
To mount the module on a wall or panel, use the screw holes provided in the
module. Refer to the drilling dimensions illustration to guide you in mounting
the module.
179 (7.05)
37 (1.46)
16.2 (0.64)
168.6 (6.64)
19.8
(0.78)
166.5 (6.56)
27 (1.06)
Side Mounting
43.3 (1.70)
32 (1.26 )
Front Mounting
18 (0.71)
Install the mounting base as follows:
1. Lay out the required points as shown above in the drilling dimension
drawing.
18 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 29
Install Your Module Chapter 4
45768
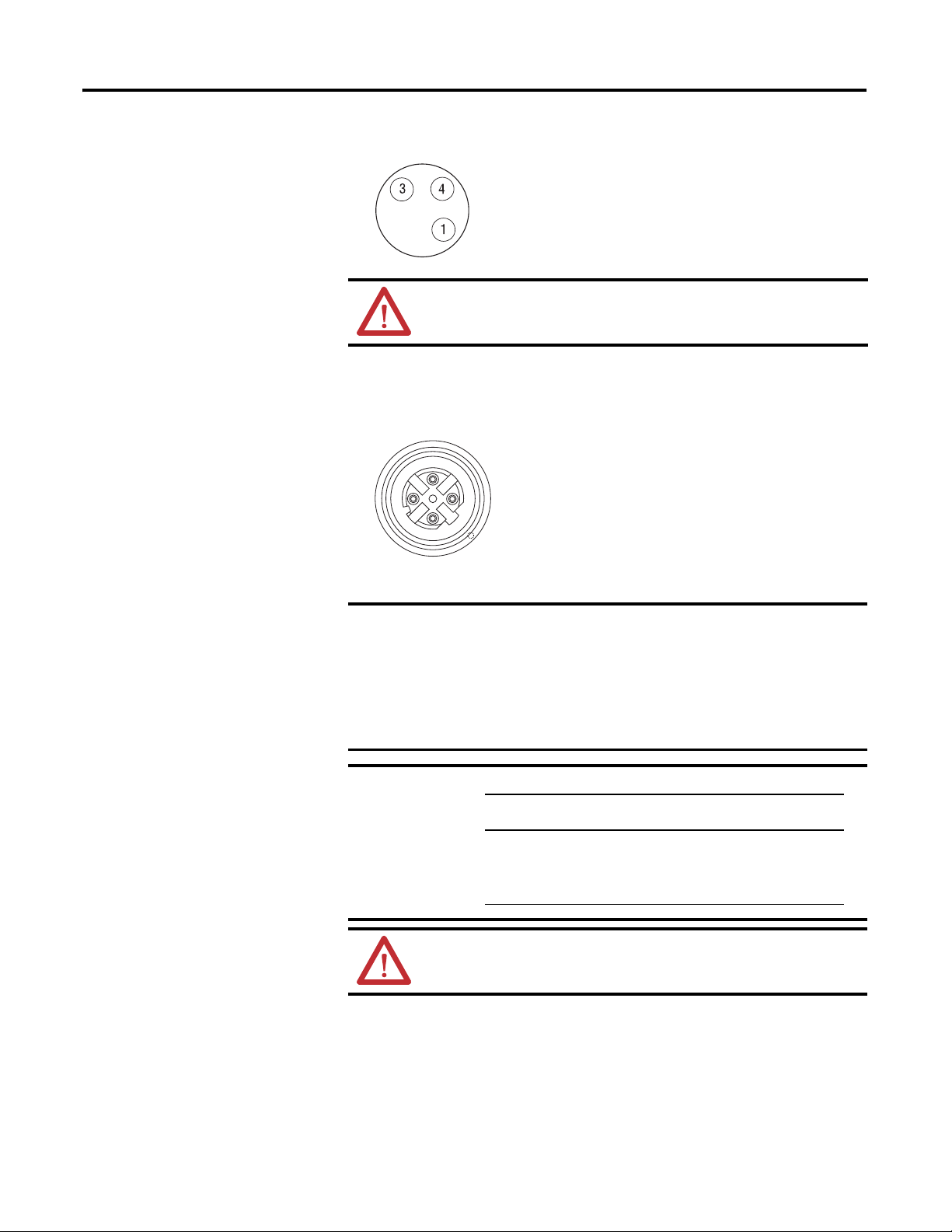
Lock washer
Flat washer
(View into connector)
Pin 1 Sensor source voltage
Pin 3 Return
Pin 4 Input
43583
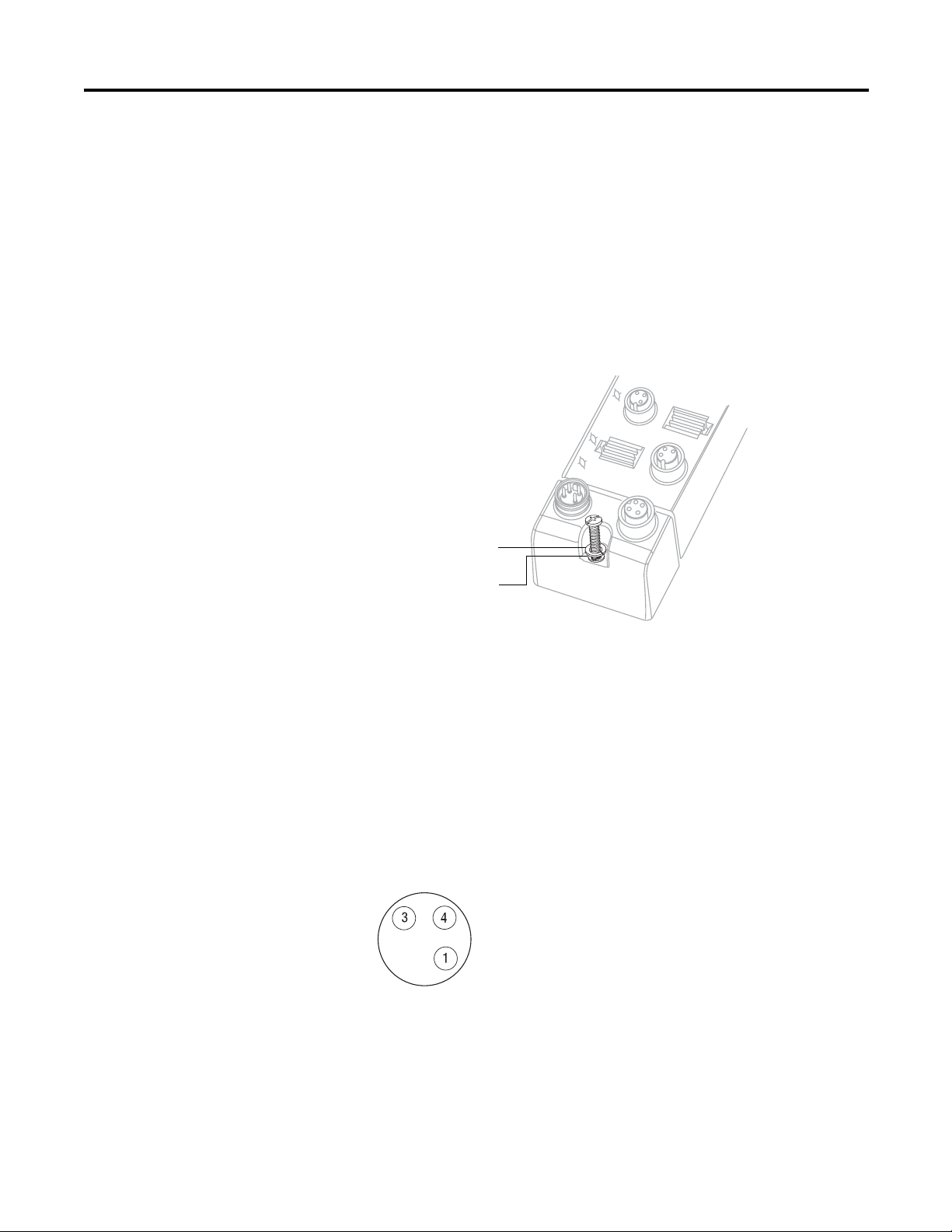
2. Drill the necessary holes for #6 (M3) pan head screws.
3. Mount the module using #6 (M3) screws.
Mount the Module in High Vibration Areas
If you mount the module in an area that is subject to shock or vibration, we
recommend you use a flat and a lock washer to mount the module. Mount the flat
and the lock washer as shown in the mounting illustration. Torque the mounting
screws to 0.68 Nm (6 lb-in.).
High Vibration Area Mounting
Wire the Module
The 1732E-OB8M8SR and 1732E-IB8M8SOER ArmorBlock EtherNet/IP
modules have 3-pin pico-style I/O connectors. We provide caps to cover the
unused connectors on your module. Connect the quick-disconnect cord sets you
selected for your module to the appropriate ports.
I/O Connectors
Refer to the pinout diagrams for the I/O connectors.
Pico-style 3-Pin Input Female Connector
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 19
Page 30
Chapter 4 Install Your Module
IMPORTANT
IMPORTANT
43583
(View into connector)
Pin 1 Sensor Source Voltage
Pin 3 Return
Pin 4 Output
(View into connector)
Pin 1Tx+
Pin 2 Rx+
Pin 3 TxPin 4 RxPin 5 Shell
44808
D-Code
M12 Pin
Wire Color Signal 8-way Modular
RJ45 Pin
1 White-Orange TX+ 1
2 White-Green RX+ 3
3 Orange TX- 2
4 Green RX- 6
Pico-style 3-Pin Output Female Connector
ATTENTION: Sensors/actuators power should not be
supplied externally.
Ethernet Connectors
Refer to the pinout diagrams for the network connectors.
4
31
2
5
.
Use the 1585D–M4DC–H: Polyamide small body unshielded mating
connectors for the D-Code M12 female network connector.
Note that the distance between the center of each Ethernet
connector is 16.2 mm (see dimensions on page 18).
Rockwell Automation recommends the use of suitable cable based
on this measurement. Some of the recommended cables are 1585DM4TBJM-x and 1585D-M4TBDM-x for daisychains.
Use two twisted pair CAT5E UTP or STP cable.
ATT ENTI ON: Make sure all connectors and caps are securely
tightened to properly seal the connections against leaks and maintain
IP enclosure type requirements.
Power Connectors
20 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Attach the mini-style 4-pin connector to the mini-style 4-pin receptacle as shown
below.
Page 31

Micro-style 4-Pin Input Male Receptacle
IMPORTANT
3
4
1
2
45764
(View into receptacle)
Pin 1 Auxiliary power+
Pin 2 Module power+
Pin 3 Module powerPin 4 Auxiliary power-
45763
Male Input
Female Output
2
Install Your Module Chapter 4
3
1
4
The maximum current that any pin on the power connectors can
carry is 4 A.
The power required by the module is based on a 4-pin micro-style connector
system. The module receives its required power through the male connector on
the left. A female connector on the right is also provided so that power can be
daisy-chained from module to module.
Both modules require two 24V DC (nominal) supplies. These supplies are called
the Module Power and the Auxiliary Power. The Module Power powers the
microprocessor and Ethernet portions of the module. The Auxiliary Power
provides power for the Digital Outputs, the Digital Inputs, and the Sensor
Vo l t a g e .
Internally, the Module Power and Auxiliary Power are isolated from each other.
The Module Power current required for a module can be estimated as 2.4W/
(Module Power Voltage). For example, if the Module Power Voltage is 24V DC,
then the Module Power current (Imp) would be,
Imp ~ 2.4W/24VDC = 100 mA DC
If the power for four modules were daisy-chained together and the voltage is 24V
DC, then the Module Power current through the first connector in the daisychain would be 4 x Im ~ 400 mA which is less than 4 A, so Module Power current
is within acceptable limits.
The Auxiliary Power current is more complicated. The equation is below:
Iap ~ Iapm + Isp0 + Isp1+ Isp2+ Isp3 + Isp5+ Isp5 + Isp6 + Isp7 + IDO0
+ IDO1 + IDO2 + IDO3 + IDO4 + IDO5 + IDO6 + IDO7 +
IAPDC
Where:
Iap i s t h e A u x i l i a r y P o w e r c u r r e nt t h r o u g h t h e f i r s t c o n n e c t o r i n t h e d a i s y - c h a i n .
Iapm is the Auxiliary Power current required by the module itself.
IspN is the Sensor Power current for Digital Input N (0…7).
I
DON is the Digital Output current for Digital Output N (0…7).
I
APDC is the Auxiliary Power current requirement for the remaining modules in
the daisy-chain.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 21
Iapm can be approximated by 0.5W/(Auxiliary Power Voltage).
Page 32

Chapter 4 Install Your Module
The table Auxiliary Power Calculation shows the resulting Auxiliary Power
current calculation for a system of four modules. The Auxiliary Power voltage is
24V DC in this example. As can be seen in the cell with value set in bold, the
Auxiliary Power current through the first connector in the daisy-chain is 3.898A
which is less than 4A, so this system is adequate.
Auxiliary Power Calculation
Module 1 Module 2 Module 3 Module 4
APDC 3.108A 2.772A 1.301A 0.000A
I
Iapm 0.021A 0.021A 0.021A 0.021A
Isp0 0.000A 0.000A 0.300A 0.050A
Isp1 0.000A 0.000A 0.000A 0.000A
Isp2 0.000A 0.000A 0.000A 0.250A
Isp3 0.000A 0.000A 0.000A 0.000A
Isp4 0.000A 0.000A 0.000A 0.000A
Isp5 0.000A 0.000A 0.000A 0.000A
Isp6 0.000A 0.000A 0.000A 0.000A
Isp7 0.000A 0.000A 0.000A 0.000A
I
DO0 0.270A 0.025A 0.500A 0.025A
I
DO1 0.200A 0.290A 0.300A 0.500A
IDO2 0.300A 0.000A 0.250A 0.300A
IDO3 0.000A 0.000A 0.100A 0.125A
I
DO4 0.000A 0.000A 0.000A 0.030A
IDO5 0.000A 0.000A 0.000A 0.000A
IDO6 0.000A 0.000A 0.000A 0.000A
I
DO7 0.000A 0.000A 0.000A 0.000A
Iapm 3.898A 3.108A 2.772A 1.301A
ATTENTION: To comply with the CE Low Voltage Directive (LVD), this
equipment and all connected I/O must be powered from a source
compliant with the following:
Safety Extra Low Voltage (SELV) or Protected Extra Low Voltage (PELV).
ATTENTION: To comply with UL restrictions, this equipment must be
powered from a source compliant with the following: Limited Voltage.
ATTENTION: The device meets UL Type 1 Enclosure rating.
Chapter Summary and What’s Next
In this chapter, you learned how to install and wire your module. The following
chapter describes how to configure your module to communicate on the
EtherNet/IP network by providing an IP address, gateway address, and Subnet
mask.
22 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 33

Configure the Module for Your EtherNet/IP Network
Chapter
5
Introduction
Before using the modules in an EtherNet/IP network, you need to configure
them with an IP address, subnet mask, and optional Gateway address. This
chapter describes these configuration requirements and the procedures for
providing them. Here are the ways you can do this:
• Use the Rockwell Automation BootP/DHCP utility, version 2.3 or
greater, that ships with RSLogix 5000 or RSLinx software. You can also
use this utility to reconfigure a device whose IP address must be changed.
• Use a third party DHCP (Dynamic Host Configuration Protocol) server.
• Use the Network Address switches.
• Have your network administrator configure the module via the network
server.
See the table for a list of where to find specific information in this chapter.
Topic Page
Configuration Requirements 23
IP Address 24
Gateway Address 25
Subnet Mask 26
Set the Network Address 27
Use the Rockwell Automation BootP/DHCP Utility 27
Save the Relation List 30
Use DHCP Software to Configure Your Module 30
Configuration Requirements
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 23
Before you can use your module, you must configure its IP address, its subnet
mask, and optionally, gateway address. You have the option to use the Rockwell
Automation BootP/DHCP utility, version 2.3 or greater, to perform the
configuration. You also have the option to use a DHCP server or the network
address switches to configure these parameters.
Page 34

Chapter 5 Configure the Module for Your EtherNet/IP Network
IMPORTANT
Class C
Net ID
Host ID
Class B
Net ID
Host ID
Class A
Net ID
Host ID
0
0
0
1 0
1 1 0
0
78
31
15 16
31
233124
If the module needs to be reset to factory defaults, set the switches on the module
to the value 888 and then cycle power to the module.
IP Address
The IP address identifies each node on the IP network (or system of connected
networks). Each TCP/IP node on a network (including your module) must have
a unique IP address.
If using the BootP/DHCP utility, you will need to know the
Ethernet hardware address of your module.
Rockwell Automation assigns each module a unique 48-bit
hardware address at the factory. The address is printed on a
label on the side of your module. It consists of six
hexadecimal digits separated by colons. This address is fixed
by the hardware and cannot be changed.
If you change or replace the module, you must enter the
new Ethernet hardware address of the module when you
configure the new module.
The IP address is 32 bits long and has a net ID part and a Host ID part. Networks
are classified A, B, C, (or other). The class of the network determines how an IP
address is formatted.
You can distinguish the class of the IP address from the first integer in its dotteddecimal IP address as follows:
Classes of IP Addresses
Range of first integer Class Range of first integer Class
0…127 A 192…223 C
128...191 B 224…255 other
Each node on the same logical network must have an IP address of the same class
and must have the same net ID. Each node on the same network must have a
different Host ID thus giving it a unique IP address.
24 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 35

Configure the Module for Your EtherNet/IP Network Chapter 5
EXAMPLE
Network 1
Network 2
128.2.0.3
128.1.0.2
128.1.0.1
128.2.0.1
128.2.0.2
A
B
C
G
IP addresses are written as four decimal integers (0...255) separated by periods
where each integer gives the value of one byte of the IP address.
For example, the 32-bit IP address:
10000000 00000001 00000000 00000001 is written as
128.1.0.1.
Gateway Address
This section applies to multi-network systems. If you have a single network
system, go to the next section.
The gateway address is the default address of a network. It provides a single
domain name and point of entry to the site. Gateways connect individual
networks into a system of networks. When a node needs to communicate with a
node on another network, a gateway transfers the data between the two
networks. The following figure shows gateway G connecting Network 1 with
Network 2.
When host B with IP address 128.2.0.1 communicates with host C, it knows
from C’s IP address that C is on the same network. In an Ethernet environment,
B then resolves C’s IP address into a hardware address (MAC address) and
communicates with C directly.
When host B communicates with host A, it knows from A’s IP address that A is
on another network (the net IDs are different). In order to send data to A, B must
have the IP address of the gateway connecting the two networks. In this example,
the gateway’s IP address on Network 2 is 128.2.0.3.
The gateway has two IP addresses (128.1.0.2 and 128.2.0.3). The first must be
used by hosts on Network 1 and the second must be used by hosts on Network 2.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 25
To be usable, a host’s gateway must be addressed using a net ID matching its own.
Page 36

Chapter 5 Configure the Module for Your EtherNet/IP Network
EXAMPLE
1111111 11111111 11000000 00000001 = 255.255.192.0
These two bits of the host ID used to
extend the net ID
Network 1
Network 2.1
Network 2.2
128.1.0.1
128.1.0.2
128.2.128.3
A
B
C
G
DE
G2
128.2.64.3
128.2.128.2
128.2.128.1
128.2.64.1
Subnet Mask
The subnet mask is used for splitting IP networks into a series of subgroups, or
subnets. The mask is a binary pattern that is matched up with the IP address to
turn part of the Host ID address field into a field for subnets.
Two bits of the Class B host ID have been used to extend the net ID. Each unique
combination of bits in the part of the Host ID where subnet mask bits are 1
specifies a different logical network.
Take Network 2 (a Class B network) in the previous
example and add another network. Selecting the following
subnet mask would add two additional net ID bits, allowing
for four logical networks:
The new configuration is:
A second network with Hosts D and E was added. Gateway G2 connects
Network 2.1 with Network 2.2.
Hosts D and E use Gateway G2 to communicate with hosts not on Network 2.2.
Hosts B and C use Gateway G to communicate with hosts not on Network 2.1.
When B is communicating with D, G (the configured gateway for B) routes the
data from B to D through G2.
26 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 37

Configure the Module for Your EtherNet/IP Network Chapter 5
This example
shows the network
address set at 163
44233
Note: You need to remove the
protective switch dust caps
before you can adjust the
address settings.
Set the Network Address
The I/O block ships with the rotary switches set to 999 and DHCP enabled. To
change the network address, you can do one of the following:
1. Adjust the switches on the front of the module.
2. Use a Dynamic Host Configuration Protocol (DHCP) server, such as
Rockwell Automation BootP/DHCP.
3. Retrieve the IP address from nonvolatile memory.
The I/O block reads the switches first to determine if the switches are set to a
valid number. Set the network address by adjusting the 3 switches on the front of
the module. Use a small blade screwdriver to rotate the switches. Line up the
small notch on the switch with the number setting you wish to use. Valid settings
range from 001…254.
Network Address Example
2
0
2
4
0
6
8
4
8
6
2
0
4
6
8
Use the Rockwell Automation BootP/DHCP Utility
When the switches are set to a valid number, the I/O block’s IP address is
192.168.1.xxx (where xxx represents the number set on the switches). The I/O
block’s subnet mask is 255.255.255.0 and the gateway address is set to 0.0.0.0.
When the I/O block uses the network address set on the switches, the I/O block
does not have a host name assigned to it or use any Domain Name Server.
If the switches are set to an invalid number (for example, 000 or a value greater
than 254, excluding 888), the I/O block checks to see if DHCP is enabled. If
DHCP is enabled, the I/O block asks for an address from a DHCP server. The
DHCP server also assigns other Transport Control Protocol (TCP) parameters.
If DHCP is not enabled, and the switches are set to an invalid number, the I/O
block uses the IP address (along with other TCP configurable parameters) stored
in nonvolatile memory.
The Rockwell Automation BootP/DHCP utility is a standalone program that
incorporates the functionality of standard BootP/DHCP software with a userfriendly graphical interface. It is located in the Utils directory on the
RSLogix 5000 installation CD. The module must have DHCP enabled (factory
default and the network address switches set to an illegal value) to use the utility.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 27
To configure your module using the BootP/DHCP utility, perform the following
steps:
Page 38

Chapter 5 Configure the Module for Your EtherNet/IP Network
1. Run the BootP/DHCP software.
The BOOTP/DHCP Request History dialog appears showing the
hardware addresses of devices issuing BootP/DHCP requests.
2. Double-click the hardware address of the device you want to configure.
The New Entry dialog appears showing the device’s Ethernet
Address (MAC).
3. Enter the IP Address you want to assign to the device and click OK.
28 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 39

Configure the Module for Your EtherNet/IP Network Chapter 5
TIP
The device is added to the Relation List, displaying the Ethernet Address
(MAC) and corresponding IP Address, Hostname and Description (if
applicable).
When the IP address assignment is made, the address displays in the IP
Address column in the Request History section.
4. To assign this configuration to the device, highlight the device in the
Relation List panel and click Disable BOOTP/DHCP. When power is
cycled to the device, it uses the configuration you assigned and does not
issue a DHCP request.
To enable DHCP for a device that has had DHCP disabled,
highlight the device in the Relation List and click Enable
DHCP. You must have an entry for the device in the
Relation List panel to re-enable DHCP.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 29
Page 40

Chapter 5 Configure the Module for Your EtherNet/IP Network
Save the Relation List
You can save the Relation List to use later. To save the Relation List do the
following:
1. Select Save As... from the File menu.
Use DHCP Software to Configure Your Module
The Save As dialog box appears.
2. Select the folder you want to save the list to.
3. Enter a file name for the Relation List (for example, control system
configuration) and click Save.
If you want to see your saved file names in the Open dialog box, save your
files using the default file type (*.bpc).
Dynamic Host Configuration Protocol (DHCP) software automatically assigns
IP addresses to client stations logging onto a TCP/IP network. DHCP is based
on BootP and maintains some backward compatibility. The main difference is
that BootP was designed for manual configuration, while DHCP allows for
30 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 41

Configure the Module for Your EtherNet/IP Network Chapter 5
dynamic allocation of network addresses and configurations to newly attached
devices.
Be aware that a DHCP server typically assigns a finite lease time to the offered IP
address. When 50 percent of the leased time has expired, the module will attempt
to renew its IP address with the DHCP server. The module could be assigned a
different IP address, which would cause communicating with the ControlLogix
controller to cease.
ATTENTION: To avoid unintentional control, the module must be
assigned a fixed IP address. The IP address of this module should not be
dynamically provided. If a DHCP server is used, it must be configured to
assign a fixed IP address for your module.
ATTENTION: Failure to observe this precaution may result in unintended
machine motion or loss of process control.
Chapter Summary and What’s Next
In this chapter, you learned how to configure the module to communicate on
your EtherNet/IP network by providing an IP address, gateway address, and
Subnet mask. The next chapter describes an example application in which you
configure discrete I/O.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 31
Page 42

Chapter 5 Configure the Module for Your EtherNet/IP Network
Notes:
32 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 43

Configure the Module Using RSLogix 5000 Software
Chapter
6
Introduction
This chapter guides you through the steps required to configure your 1732E
ArmorBlock EtherNet/IP Dual Port 8-Point Sequence of Events Input and
Scheduled Output Modules modules using the RSLogix 5000 software. Note
that the modules presented in this chapter are configured using RSLogix 5000
software, version 18 or later.
Topic Page
Set Up the Hardware 34
Create the Example Application 35
Configure Your I/O Module 35
Overview of the Configuration Process through RSLogix 5000 36
Add a New Bridge and Module to Your RSLogix 5000 Project 36
Use the Default Configuration 41
Change the Default Configuration 41
Download Your Configuration 43
Edit Your Configuration 43
Access Module Data in RSLogix 5000 Software 45
Configure RSLogix 5000 and the 1756-EN2T Communication Module for CIP Sync 46
The configuration of the two modules through the RSLogix 5000 software
involve the same procedure. Note, however, that the two modules have different
Module Definition properties and Configuration tabs. Both are distinctly
covered in this chapter.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 33
Page 44

Chapter 6 Configure the Module Using RSLogix 5000 Software
Local
Chassis
1732E
ArmorBlock
Logix5565
Controller (slot 1)
1756-EN2T
192.168.1.1 (slot 3)
Data
Switch
192.168.1.100
Programming
Terminal
0
1732E ArmorBlock
Ethernet Module
192.168.1.20
44971
32Slot 1
Embedded
Tec hn ol og y
Set Up the Hardware
In this example, a ControlLogix chassis contains the Logix5565 processor in slot
1 and a 1756-EN2T bridge module in slot 3. The 1732E ArmorBlock module is
mounted remotely.
LINK2LINK1
X10
NET
Logix5565
EtherNet/IP
Logix5565
1756-EN2T
MOD
X1
X100
AUX POWER
To work along with this example set up your system as shown.
• Note that in the example application, the Logix5565 controller and
1756-EN2T module (firmware version 2.3 or higher) are assumed to be in
the slots shown.
• Verify the IP addresses for your programming terminal, 1756-EN2T
module and 1732E ArmorBlock Ethernet module.
• Verify that you connected all wiring and cabling properly.
• Be sure you configured your communication driver (for example,
AB_ETH-1 or AB-ETHIP-1) in RSLinx software.
34 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 45

Configure the Module Using RSLogix 5000 Software Chapter 6
Create the Example Application
Perform the following steps to create the example application:
1. From the File menu, select New.
The New Controller dialog opens.
2. Enter an appropriate name for the Controller, for example,
ArmorBlock_IO_Controller.
3. Select the correct version, chassis type, and slot number of the controller,
and the folder where you want to save the RSLogix 5000 software file
(Create In). The Description is optional.
To use redundancy in your system, select the Redundancy Enabled
checkbox.
4. Click OK.
Configure Your I/O Module
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 35
You must configure your module upon installation. The module will not work
until it has been configured with at least the default configuration.
Page 46

Chapter 6 Configure the Module Using RSLogix 5000 Software
IMPORTANT
RSLogix 5000 Configuration Software
You must use RSLogix 5000, version 18 or later, to configure your module. You
have the option of accepting default configuration for your module or writing
point-level configuration specific to your application.
Both options are explained in detail, including views of software screens, in this
chapter.
Overview of the Configuration Process through RSLogix 5000
Add a New Bridge and Module to Your RSLogix 5000 Project
When you use the RSLogix 5000 software to configure a module, you must
perform the following steps:
1. Add the Local EtherNet/IP Bridge (1756-EN2T, 1756-EN2TR, or 1756EN3TR) to your project’s I/O Configuration.
2. Add the 1732E-IB8M8SOER or 1732E-OB8M8SR module as a child of
the 1756-EN2T module.
3. Accept the default configuration or change it to specific configuration for
the module.
4. Edit configuration for a module when changes are needed.
After you have started RSLogix 5000 software and created a controller, you must
add a new bridge and a new module to your project. The bridge allows your
module to communicate with the controller.
The wizard allows you to create a new module and write configuration. You can
use default configuration or write specific configuration for your application.
Click Help on the configuration dialogs shown in this
section if you need assistance in selecting and setting the
parameters.
36 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 47

Configure the Module Using RSLogix 5000 Software Chapter 6
If you are not offline, use this
pull-down menu to go offline.
A. Right-click I/O Configuration.
B. Select New Module.
A. Select the 1756-EN2T
EtherNet/IP Bridge.
B. Click OK.
Add the Local EtherNet/IP Bridge to the I/O Configuration
1. If necessary, go offline.
2. Add the EtherNet/IP Bridge to your RSLogix 5000 project.
3. Expand Communications and select the new module in the Select Module
dialog that appears. Select the 1756-EN2T EtherNet/IP Bridge.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 37
Page 48

Chapter 6 Configure the Module Using RSLogix 5000 Software
A. Name the bridge.
B. Enter the IP address.
C. Select slot 3 for the EtherNet/IP bridge.
D. Make sure the Minor Revision number
matches your module revision number.
E. Choose an Electronic Keying method.
For more information, see page 48
.
F. Click OK.
A. Select the I/O module.
B. Click OK.
4. The New Module dialog opens.
Configure the bridge module as illustrated below.
The local 1756-EN2T communication module will communicate with the
1732E ArmorBlock module on EtherNet. Before you can communicate with
your module, you need to add it as a child of the 1756-EN2T communication
module. For more information about using 1756 controller and EtherNet/IP
products, see publication ENET-UM001
.
Add the I/O module as a child of the 1756-EN2T module
1. Right-click the Ethernet folder that appears below the 1756-EN2T bridge
you added to the I/O Configuration tree and select New Module.
2. Expand Digital in the Select Module dialog that appears.
Select the 1732E-IB8M8SOER or the 1732E-OB8M8SR module.
38 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 49

Configure the Module Using RSLogix 5000 Software Chapter 6
TIP
If the 1732E-IB8M8SOER, 1732E-OB8M8SR modules are
not listed in the digital section of the Select Module dialog
you may need to download the Add-On Profile (AOP) for
the 1732E ArmorBlock R 2-Port and install it as an add-on
to RSLogix 5000. The AOP file can be downloaded from:
support.rockwellautomation.com/controlflash/
LogixProfiler.asp
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 39
Page 50

Chapter 6 Configure the Module Using RSLogix 5000 Software
A. Name the module.
B. Enter theIP address of the module as
shown.
C. Make sure the Module Definition
information matches this example.
D. Click Change... to edit the Module
Definition for your module before
downloading the program to the controller.
E. Click OK to accept the default
configuration.
On the General tab, the 1732E-OB8M8SR module
does not have a Connection Format field under
Module Definition section.
1732E-IB8M8SOER
1732E-OB8M8SR
3. The New Module dialog appears.
Fill in the Module Properties information as shown, and then click OK.
Module Properties Values
Field Name Value
Name TEST_1732EIB8M8SOER or TEST_1732EOB8M8SR
IP address 192.168.1.20
Electronic keying Compatible Module
Connection Format Data (This field does not exist for the 1732-EOB8M8SR module.)
Revision 1.1
Tim estam p Per Point
You can either accept or change the default configuration as shown.
40 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 51

Configure the Module Using RSLogix 5000 Software Chapter 6
When you click Change..., the Module Definition dialog is shown.
Through the Module Definition dialog, you can:
A. Select the module series.
B. Make sure the Major and Minor Revision numbers match your
module’s revision.
C. Choose an Electronic Keying method.
D. On the 1732E-IB8M8SOER module, select the Connection type.
Available options are Data and Listen Only.
(This field is not available for 1732E-OB8M8SR module.)
E. Select the Timestamp Format.
On the 1732E-IB8M8SOER module, the options available are
Per Point, First In First Out, and None.
On the 1732E-OB8M8SR module, the options available are Per
Point, and None.
For more information about timestamping format, see Use the
Sequence of Events Input and Scheduled Output Modules on
page 63
.
F. Click OK to return to theGeneral tab of the Module Properties
dialog.
G. On the General tab, you can click OK to close the Module
Properties dialog and download your configuration, or
H. Click the Connection tab to configure connection properties.
On 1732E-IB8M8SOER
On 1732E-OB8M8SR
Use the Default Configuration
Change the Default Configuration
If you use the default configuration and click OK, you are done.
You can skip to Download Your Configuration on page 43
for instructions on
how to download your default configuration to the controller.
If you click Change... in step D on page 40, you can change the Module
Definition information. Note that the 1732E-IB8M8SOER and 1732EOB8M8SR modules have slightly different Module Definition dialogs (1732OB8M8SR module does not have the Connection field. The screenshots below
will guide you through the dialog.
Select tabs on the Module Properties dialog to edit specific configuration for your
module in RSLogix 5000 software, for example the Configuration tab.
Some of the screens that appear during this initial module configuration process
are blank (such as Module Info, Network, and Time Sync) and are not shown
here. These screens mostly provide information and status and can be important
during online monitoring. To see these screens in use, see Chapter 10,
Troubleshoot the Module on page 87
.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 41
Page 52

Chapter 6 Configure the Module Using RSLogix 5000 Software
From the Connection tab, you can:
A. Change the RPI.
B. Inhibit the module. For more
information on Module Inhibiting, see
page 49
.
C. Make sure a Major Fault occurs on
the module’s owner-controller if there
is a connection failure between the
module and the controller.
D. Click the Configuration tab to go to
the next screen, or
E. Click OK to close the Module
Properties dialog and download your
configuration.
For the 1732E-IB8M8SOER module, you can
do the following through the Configuration
tab:
A. Set the Input Filter Times. For more
information on Input Filters, see
page 55
B. Enable Timestamp Capture for all
input points or for specific points. For
more information on Timestamp
Capture, see page 54
.
C. Click the box Latch Timestamps to
enable Timestamp Latching. For more
information, see page 54
.
D. Click the box to Sync to Master. The
feature is not enabled by default.
E. Click OK to close the Module
Properties dialog and download your
configuration.
F. Click Help to access the RSLogix 5000
software Add-On Profile help for
descriptions of tabs that are not
required for setting up your module.
1732E-IB8M8SOER Configuration Tab
The next tab available in the Module Properties dialog is the Configuration tab.
Note that the 1732E-IB8M8SOER and 1732E-OB8M8SR modules do not have
the same Configuration tabs. The following screenshots will guide you through
the Configuration tabs of each.
42 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 53

Configure the Module Using RSLogix 5000 Software Chapter 6
For the 1732E-OB8M8SR, you can do the following
through the Configuration tab:
A. Set the Output State during Program Mode and
Fault Mode for Points 0…7.
B. Set the Fault Duration and Fault Final State for
Points 0…7.
Grayed out unless Hold Duration is something
other than “Forever”.
C. Click OK to close the Module Properties dialog
and download your configuration, or
D. Click Help to access the RSLogix 5000 software
Add-On Profile help for descriptions of tabs that
are not required for setting up your module.
For more information on Output States, see Configurable
Point-Level Output Fault States on page 61
.
1732E-OB8M8SR Configuration Tab
A. Click here to see the
pull-down menu.
B. Click download.
Download Your Configuration
After you write configuration for your module, the module does not use this
configuration until you download it to the owner-controller. The download
transfers the entire program to the controller, overwriting any existing program.
Download module configuration as shown below:
Edit Your Configuration
Depending on your application, a variety of RSLogix 5000 software screens may
appear to choose a path to your ControlLogix controller and to verify the
download. Navigate those screens as best fits your application.
This completes the download process.
After you have set configuration for a module, you can review and change your
choices. You can change configuration data and download it to the controller
while online. This is called dynamic reconfiguration.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 43
Page 54

Chapter 6 Configure the Module Using RSLogix 5000 Software
IMPORTANT
A. Right-click the module.
B. Select Properties.
The Internet Protocol tab is grayed out if you are offline.
Through this tab, you can do the following:
A. Specify Internet Protocol Settings. This allows you to
set manual or automatic configuration for your IP
settings.
B. To manually configure, specify IP Settings
Configuration by providing the following information:
- Physical Module IP address
- Subnet Mask
- Gateway Address
- Domain Name
- Host Name
- Primary and Secondary DNS Server
C. If you make changes in Step A or Step B, then click
Set. Changes will not take effect until you reset the
module or cycle the power to the module.
D. Click OK to close the Module Properties dialog and
download your configuration, or
E. Click Port Configuration tab to go to the next screen.
Your freedom to change some configurable features, though, depends on whether
the controller is in Remote Run Mode or Program Mode.
The editing process begins on the main page of RSLogix 5000 software:
Although you can change configuration while online, you
must go offline to add or delete modules from the project.
The General tab of the Module Properties dialog appears.
Click the tab of the page that you want to view or reconfigure and make any
appropriate changes, as shown in the example.
44 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 55

Configure the Module Using RSLogix 5000 Software Chapter 6
The Port Configuration screen is grayed out
unless you are online with the controller and
module. On this screen, you can:
A. Enable or disable external ports.
B. Select Auto-negotiate on enabled ports.
If Auto-negotiate is disabled then select
the correct speed and duplex.
C. Click Port Diagnostics to display the Port
Diagnostics dialog.
D. If you make changes in Step A or Step B
then click Set. Changes will not take
effect until you reset the module or
cycle the power to the module.
E. Click the Network tab to see the next
screen, or
F. Click OK to close the Module Properties
dialog and download your configuration.
Access Module Data in RSLogix 5000 Software
Use the following information to use the 1732E-IB8M8SOER, 1732EOB8M8SR data in the ladder logic program.
Use the controller tags in your ladder program to read input data or write output
data.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 45
Page 56

Chapter 6 Configure the Module Using RSLogix 5000 Software
• For RSLogix 5000 programming instructions, refer to RSLogix 5000
Getting Results, publication no. 9399-RLD300GR
• For ControlLogix controller information, refer to ControlLogix System
User Manual, publication no. 1756-UM001
.
.
Configure RSLogix 5000 and the 1756-EN2T Communication Module for CIP Sync
Chapter Summary and What’s Next
If you are using RSLogix 5000 software version 17, follow these steps to
configure the 1756-EN2T communication module to be the PTP (CIP Sync)
master clock.
1. In your web browser, go to the Rockwell Automation Sample Code
Library at http://samplecode.rockwellautomation.com/idc/groups/
public/documents/webassets/sc_home_page.hcst.
The Search Our Sample Code Library page appears.
2. In the Filename/ID field enter MMS_048132.
3. Click Search.
The 1732E ArmorBlock EtherNet/IP Dual Port 8-Point Sequence of
Events Input and Scheduled Output Modulesmodule synchronizes to the
grandmaster clock as a child module as described in the document.
If you are using RSLogix 5000 version 18 or greater, refer to publication
IA-AT003
module and the ContolLogix processor so that the processor can function as the
PTP (CIP Sync) master clock.
In this chapter, you read about configuring your module in RSLogix 5000. The
next chapter describes the module features.
for instructions on configuring the 1756-EN2T communication
46 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 57

Chapter
7
Common Features of the 1732E-IB8M8SOER and 1732E-OB8M8SR Modules
Introduction
This chapter describes the features common to both the 1732E Sequence of
Events Input and Scheduled Output modules.
Topic Page
Communications Format 47
Electronic Keying 48
Module Inhibiting 49
Module Fault Reporting 50
Fully Configurable via Software 50
Producer/Consumer Model 51
Status Indicator Information 51
Agency Certifications 51
To learn more about the features specific to the two modules, see:
• Specific Features of the 1732E-IB8M8SOER Sequence of Events Input
Module on page 53
• Specific Features of the 1732E-OB8M8SR Scheduled Output Module on
page 59
Communications Format
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 47
The communications format determines what operational mode your module
uses and, consequently, what tags RSLogix 5000 generates when configuration is
complete. Once a module is created, you cannot change the communications
format unless you delete and recreate the module.
The communication format determines:
• what type of configuration options are made available.
• what type of data is transferred between the module and its owner-
controller.
• what tags are generated when the configuration is complete.
Once a module is created, you cannot change the communication format unless
you delete and recreate the module. The communication format also defines the
connection between the controller writing the configuration and the module
itself. The number and type of choices varies depending on what module you are
using and whether it is in a local or remote chassis.
Page 58

Chapter 7 Common Features of the 1732E-IB8M8SOER and 1732E-OB8M8SR Modules
The table describes the communication formats used with input modules.
Data Return Communication Format Module
Module returns input data with
the value of the system clock
(from its local chassis) when the
input data changes.
The owner-controller sends the
module output data and a CIPSync
(PTP) time value
CIPSync/PTP time input data 1732E-IB8M8SOER
Scheduled output data 1732E-OB8M8SR
Electronic Keying
Electronic keying allows the ControlLogix system to control what modules
belong in the configured system.
During module configuration, you must choose one of the following keying
options for your module:
• Exact Match
• Compatible Module
• Disable Keying
When the controller attempts to connect to and configure a module (for
example, after program download), the module compares the following
parameters before allowing the connection and configuration to be accepted:
• Ve n d o r
• Product Type
• Product Code
• Major Revision – Change that affects the module function or
RSLogix 5000 interface
• Minor Revision – Change that does not affect the module’s intended
function or RSLogix 5000 interface
The comparison is made between the keying information present in the module
and the keying information in the controller program, preventing the inadvertent
operation of a system with the wrong module. For example, if you select Exact
Match and a module with revision 1.2 is placed in a location configured for a
module with revision 1.4, the controller does not make a connection to the new
module because of the mismatched revisions.
48 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 59

The following table describes the keying options available with your module.
TIP
Keying option Definition
Exact Match
Compatible Module
Disable Keying
All of the parameters listed above must match or the inserted module rejects a connection to the
controller.
The Compatible Module mode allows the module to determine whether it can emulate the module
defined in the configuration sent from the controller. Some modules can emulate older revisions. The
module will accept the configuration if the configuration’s major.minor revision is less than or equal to
the physical module’s revision.
For example, if the configuration contains a major.minor revision of 1.7, the module must have a
firmware revision of 1.7 or higher for a connection to be made. When a module is inserted with a
major.minor revision that is less than the revision configured (that is, the module has a revision of 1.6
and the slot is configured for a module with revision 1.8), no connection is made between the controller
and the I/O module.
The inserted module attempts to accept a connection to the controller regardless of its type.
Common Features of the 1732E-IB8M8SOER and 1732E-OB8M8SR Modules Chapter 7
We recommend using Compatible Module whenever possible. Remember, though,
with major revision changes, the module only works to the level of the
configuration.
At the time of this printing, the module uses a major.minor revision of 1.6
However, if a new major revision for the module is released, consider this example.
If a module is configured for major.minor revision of 1.7 and you insert a module
with a major.minor revision of 2.3, the module works at the 1.7 level, with respect
to module functions that are related to RSLogix 5000 software such as interface
changes. Anomaly updates that are affected by the module’s firmware, though,
would work at the 2.3 revision level.
If possible, we recommend that you make sure configuration is updated to match
the revision levels of all I/O modules, including your module. Failure to do so may
not prevent the application from working but may defeat the purpose of upgrading
your modules revision levels.
Be extremely cautious when using the disable keying option; if used incorrectly, this
option can lead to personal injury or death, property damage or economic loss.
(1)
.
(1) Minor revisions are incremented by single counts such that minor level 10 (major.minor revision level = 1.10) follows minor revision level 9 (1.9).
Module Inhibiting
If keying is disabled, a controller makes a connection with most modules of the same type as that used in
the configuration.
A controller will NOT establish a connection if any of the following conditions exist, even if keying is
disabled:
• The module is configured for one module type (for example, input module) and a module of another
type (for example, output module) is used.
• The module cannot accept some portion of the configuration. For example, if a non-diagnostic input
module is configured for a diagnostic input module, the controller cannot make a connection because
the module will not accept/process the diagnostic configuration.
With module inhibiting, you can indefinitely suspend a connection between an
owner-controller and a module. This process can occur in the following way:
• You write configuration for a module but inhibit the module to prevent it
from communicating with the owner-controller. In this case, the ownercontroller does not establish a connection and configuration is not sent to
the module until the connection is uninhibited.
The following examples are instances where you may need to use module
inhibiting:
• You want to FLASH upgrade your module. We recommend you:
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 49
Page 60

Chapter 7 Common Features of the 1732E-IB8M8SOER and 1732E-OB8M8SR Modules
Tick this box to inhibit or
uninhibit the module.
a. Inhibit the module.
b. Perform the upgrade.
c. Uninhibit the module.
• You are using a program that includes a module that you do not physically
possess yet, but you do not want the controller to continually look for a
module that does not exist yet. In this case, you can inhibit the module in
your program until it physically resides on the network.
You can inhibit your module on the Connection tab in RSLogix 5000, as shown
in the example.
Module Fault Reporting
Fully Configurable via Software
Your module provides both a hardware and software indication when a module
fault occurs. The module’s status indicators and RSLogix 5000 display each fault
and include a fault message describing the nature of the fault.
This feature allows you to determine how the fault affects your module and what
action you should take to resume normal operation. For more information on
how to use hardware and software indicators when a module fault occurs, see
Interpret Status Indicators on page 91
RSLogix 5000 software uses a custom, easily understood interface to write
configuration. All module features are enabled or disabled through the I/O
configuration portion of the software.
You can also use the software to interrogate your module to retrieve:
• serial number
• revision information
• product code
• vendor identification
• error/fault information
and Troubleshoot the Module on page 87.
50 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 61

Common Features of the 1732E-IB8M8SOER and 1732E-OB8M8SR Modules Chapter 7
• diagnostic counters.
By eliminating such tasks as setting hardware switches and jumpers, the software
makes module configuration easier and more reliable.
Producer/Consumer Model
Status Indicator Information
Agency Certifications
Chapter Summary and What’s Next
By using the Producer/Consumer model, modules can produce data without
having been polled by a controller first. The module produces the data and the
owner-controller device consumes it.
Each module has Status Indicators on the front of the module that allows you to
check the module health and operational status.
For more information on how to use the module status indicators, and
RSLogix 5000, when troubleshooting your application, see Interpret Status
Indicators on page 91
The module is marked for any agency certifications (for example, c-UL-us, CE,
C-Tick and EtherNet/IP) it has obtained. See the module label for all agency
certifications. For more information on full certification specifications, see
Appendix A on page 93
In this chapter, you read about the features common to both Sequence of Events
Input and Scheduled Output modules. The next chapter describes the features
specific to the Sequence of Events Input module.
and Troubleshoot the Module on page 87.
.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 51
Page 62

Chapter 7 Common Features of the 1732E-IB8M8SOER and 1732E-OB8M8SR Modules
Notes:
52 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 63

Chapter
8
Specific Features of the 1732E-IB8M8SOER Sequence of Events Input Module
Introduction
Determine Module Compatibility
This chapter describes the features specific to the 1732E Sequence of Events
Input module.
Topic Page
Determine Module Compatibility 53
Operational Modes 53
Timestamp Latching 54
Software Configurable Input Filters 55
Sync to Master 57
These features are configurable through the RSLogix 5000 software.
Primarily, the Sequence of Events Input module 1732E-IB8M8SOER is used to
interface to sensing devices and detect whether they are ON or OFF and to
timestamp ON and OFF transitions. The module converts ON/OFF signals
from user devices to appropriate logic level for use in the processor. Typical input
devices include:
• auxiliary contacts
• limit switches
When designing a system using this module, you must consider:
• the voltage necessary for your application
• whether you need a solid state device
• current leakage
• if your application should use sinking or sourcing wiring.
For more information on compatibility of other Rockwell Automation products
to modules, see the I/O Systems Overview, publication CIG-SO001
Operational Modes
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 53
The 1732E-IB8M8SOER input module operates in FIFO and Per Point modes:
.
Page 64

Chapter 8 Specific Features of the 1732E-IB8M8SOER Sequence of Events Input Module
Select this box to enable the
Timestamp Latching feature.
Unselect the box to disable
the feature.
• FIFO – Each channel provides buffering of the timestamped input data for
every input transition. A minimum of ten buffers is provided for every
input channel (total twenty data buffers for every input to contain both
OFF to ON and ON to OFF transition). The stored data is utilized on a
first-in-first-out (FIFO) basis.
• Per Point Mode – The module produces timestamps for up to 2 input
transitions per input, one for OFF to ON transitions and another for ON
to OFF transitions; these timestamps can occur simultaneously on separate
inputs.
For detailed information about operational modes, see Use the Sequence of
Events Input and Scheduled Output Modules on page 63.
Timestamp Latching
Timestamp Latching can be used to prevent the module from overwriting input
data once it is timestamped. This feature is available on the 1732E-IB8M8SOER
input module.
• If Timestamp Latching is enabled, the module timestamps an input in a
given direction and ignores future input transitions in that direction until
the controller acknowledges the timestamp data already received.
• If Timestamp Latching is disabled, the module timestamps every input
transition and may overwrite previously recorded timestamp data if the
controller does not acknowledge the data quickly enough.
This feature is set on a modulewide basis and is enabled by default. It works in
both FIFO and Per Point modes.
Use the Configuration tab in RSLogix 5000 software to enable Timestamp
Latching, as shown in the example.
54 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 65

Specific Features of the 1732E-IB8M8SOER Sequence of Events Input Module Chapter 8
IMPORTANT
Software Configurable Input Filters
To account for hard contact “bounce”, you can configure ON to OFF and OFF to
ON input filter times in RSLogix 5000 software for your module. These filters
define how long an input transition must remain in the new state before the
module considers the transition valid.
Input filters are applied to all inputs on the module. You
cannot apply input filters to individual inputs on the
module.
When an input transition occurs, the module timestamps the transition on the
initial edge of the transition and stores data for the transition on-board; the
module then scans the input where the transition occurred every millisecond for
the length of the filter time setting to verify that the input remains in the new
state (remained OFF or ON).
• If the input remains in the new state for a time period equal to the filter
time setting, the module sends data for the transition to the controller.
When an input transition is detected, the module counts the number of
1 ms intervals the input is in the new state until the count reaches the filter
value.
• If the input changes state again (returns to the original state) before the
length of time of the filter setting has elapsed, the module starts
decrementing the number of 1 ms intervals counted until it reaches zero.
At this point the module stops filtering the input and discards the
timestamp. During this continued scan period, one of the following events
occurs:
– At some point while still filtering the input, the input returns to the
transitioned state and remains there until the module counts the
number of 1 ms intervals equal to the filter setting. In this case, the
module sends data from the transition to the controller.
– The input does not remain in the transitioned state for a time period
equal to the filter setting and the 1 ms counter decrements to zero. In
this case, the module does not consider the original transition valid and
drops the timestamp.
The following example illustrates how the module’s input filters operate.
In the example, a module:
• is Timestamp Capture-enabled for all of its points
• uses a 2 ms input filter setting for OFF to ON transitions
Three possible scenarios can result after an input transitioning from OFF to ON
in the given circumstances.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 55
Page 66

Chapter 8 Specific Features of the 1732E-IB8M8SOER Sequence of Events Input Module
012345678
Input turns ON;
timestamp recorded
Time in milliseconds
Input remains ON for at least 2 ms; transition is considered
valid and the timestamp is sent to the controller
43671
012345678
Time in milliseconds
Input turns ON and remains ON for
1…2 ms.
The module sends the timestamp recorded
at the original transition point to the
controller.
Input turns OFF before 2 ms have elapsed.
43672
Input turns ON;
timestamp recorded
• Scenario #1 (no bounce) – The input turns ON and remains for the full
2 ms. In this case, the module considers the transition valid and sends the
data recorded at the transition to the controller.
Note the input was sampled as being on three different times: 0 ms, 1 ms
and 2 ms.
• Scenario #2 – The input turns ON but turns OFF before 2 ms (length of
the input filter setting) elapses. In this case, the module continues to scan
the input every millisecond. At some point, less than 2 ms later, the input
turns ON again and remains for 1 to 2 ms, the third ON sampled 1 ms
interval (in this case at 6 ms). In this case, the module considers the
transition valid and sends the data timestamped at the original transition
to the controller.
56 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 67

Specific Features of the 1732E-IB8M8SOER Sequence of Events Input Module Chapter 8
012345678
Time in milliseconds
43671
Input turns OFF before
2 ms have elapsed.
In none of these time periods is the input
ON for at least 2 consecutive ms intervals.
After 7 ms, the module drops the data
recorded at the original transition. If an RPI
occurs during this 7 ms, the module sends
the controller its current valid input data; the
data that is sent does not include data from
the transition describes in this graphic
because the timestamp has not been
validated.
The next time the input turns ON, the
module records the transition as
timestamp #1, with the timestamp of the
new input transition.
Input turns ON;
timestamp #1 recorded
Type the filter times or use the
drop down menu to select the
Input Filter Time.
The Input Filter Time range is 0,
1, 2, 4, 8 or 16 ms.
• Scenario #3 – The input turns ON but turns OFF before 2 ms (length of
the input filter setting) elapses. In this case, the module continues to scan
the input every millisecond until the 1 ms counter decrements to zero. The
input never remains ON for at least 2 consecutive ms intervals, the third
ON sampled 1 ms interval. In this case, the module considers the
transition invalid and drops the data timestamped at the original
transition.
Use the Configuration tab in RSLogix 5000 software to configure Input Filters,
as shown in the example below.
Sync to Master
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 57
The Sync to Master feature in the 1732E-IB8M8SOER module indicates
whether the module should have synchronization with a master clock. When
enabled, the module remains in, or transitions to, the configuring state until
Page 68

Chapter 8 Specific Features of the 1732E-IB8M8SOER Sequence of Events Input Module
synchronized with a master clock. When disabled, the module operates normally
whether it is synchronized with a master clock or not.
The Sync to Master attribute is a read/writeable Boolean with a default value of 0
(master synchronization disabled).
Chapter Summary and What’s Next
In this chapter, you learned about the features of the Sequence of Events Input
module. The next chapter describes the features specific to the Scheduled Output
module.
58 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 69

Chapter
9
Specific Features of the 1732E-OB8M8SR Scheduled Output Module
Introduction
Determine Module
Compatibility
This chapter describes the features specific to the 1732E Scheduled Output
module.
Top i c Pa ge
Determine Module Compatibility 59
Operational Modes 60
Time-Scheduled Output Control 60
Time-Scheduled Output Control 60
Configurable Point-Level Output Fault States 61
Output State 62
These features can be configured through the RSLogix 5000 software.
The Scheduled Output module 1732E-OB8M8SR serves to provide high speed
scheduling of every output signal based on time scheduling. Time scheduling is
obtained via CIP synchronization (CIP Sync).
All outputs can be individually scheduled. Users shall be able to define the
number of outputs to be used for scheduling purposes, leaving the other outputs
for use as “normal” outputs.
When designing a system using this module, you must consider:
• the voltage necessary for your application
• whether you need a solid state device
• current leakage
• if your application should use sinking or sourcing wiring.
For more information on compatibility of other Rockwell Automation products
to modules, see the I/O Systems Overview, publication CIG-SO001
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 59
.
Page 70

Chapter 9 Specific Features of the 1732E-OB8M8SR Scheduled Output Module
Operational Modes
The 1732E-OB8M8SR output module has two modes of handling the individual
output points:
• Normal Output – The output behaves like a normal output point such
that the module updates the output point upon receiving new I/O data
from the client controller.
• Scheduled Mode – The output module is updated at a specific scheduled
time. The client controller sends the output data value along with the
associated time information to the output point. When the system time as
kept by the module reaches the scheduled time, the output value is written.
If the module system time is already past the scheduled time, the output
value is written immediately.
Each individual output point can provide high-speed scheduling of every output
signal based on time scheduling. The user can configure which output points are
to be used for scheduling purposes, leaving the other output points for use as
"normal" outputs.
Time-Scheduled Output Control
Time-scheduled output control is a feature available on the eight outputs of the
1732E-OB8M8SR module.
By using the time-scheduled output control feature, the module can turn the
outputs On or Off at a specific CIPSync time. You can set the time setpoint (in
1 µs increments) for the output to turn On or Off in the application program.
The 1732E-OB8M8SR module manages the time locally as such that the output
is turned On or Off at the time specified.
MAOC Instructions with Time-Scheduled Output Control
The Motion Axis Output Cam (MAOC) instruction provides position-based
control of outputs, by using position and velocity information of any motion axis.
When the 1732E-OB8M8SR module is specified as the output source for the
MAOC instruction, then the MAOC instruction automatically handles the
time-based output scheduling and enables it on the eight outputs on the
1732E-OB8M8SR module. The benefit of using output scheduling in this
manner is that the resolution of the output control is improved from the motion
coarse update rate (typically 1…32 ms), to 100 µs.
To learn more about this feature and usage of the module, see the chapter
entitled,Use the Sequence of Events Input and Scheduled Output Modules on
page 63.
60 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 71

Specific Features of the 1732E-OB8M8SR Scheduled Output Module Chapter 9
IMPORTANT
Configurable Point-Level Output Fault States
Individual outputs can be independently configured to unique fault states, either
On, Off, or Hold in case of a communication failure or Program mode.
Whenever you inhibit an output module, it enters the
Program mode and all outputs change to the state
configured for the Program mode. For example, if an
output module is configured so that the state of the outputs
turn off during Program mode, whenever that module is
inhibited, the outputs will turn off.
Through the RSLogix 5000 software, the user can set output state during
Program Mode and Fault Mode for channels 0…7. Valid values are On, Off, and
Hold.
Fault Duration can be set with 1, 2, 5, 10 seconds and Forever or 0.
Fault Final State can be set as On or Off. On the Configuration tab, it is grayed
out unless Fault Duration is something other than "Forever".
Follow these steps to enable a fault state.
1. On the Module Properties dialog box, click the Configuration tab.
2. Click the pull-down arrow to choose the Program Mode for each channel.
Options available are Off (default), On and Hold.
3. Click the pull-down arrow to choose the Fault Mode for each channel.
Options available are Off (default), On and Hold.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 61
Page 72

Chapter 9 Specific Features of the 1732E-OB8M8SR Scheduled Output Module
4. Specify Fault Duration.
When active, Fault Duration has options of "Forever", "1 Second",
"2 Seconds", "5 Seconds" or "10 Seconds". Default is "Forever" or 0.
5. Specify the Fault Final State.
Note that this is grayed out unless Hold Duration is something other than
“Forever”. When active, Fault Final State has the options, “Off” and “On”.
Default value is Off.
6. If communications fail in program mode, specify whether to “Leave
outputs in program mode” or “Change outputs to fault mode state”.
7. Click OK.
Output State
The Scheduled Output module allows the user to define output state when in
Program Mode and Fault Mode.
Chapter Summary and What’s Next
Program Mode refers to the state where the following events occur:
• Controller program is not executing.
• Inputs are still actively producing data.
• Outputs are not actively controlled and go to their configured Program
mode.
Fault Mode selects the behavior the output channel takes if a communication
fault occurs. FaultValue defines the value to go to on fault if the bit is set.
Fault Mode provides individual fault mode selection for output channels. When
this selection is disabled [the bit is reset (0)] and the system enters the fault mode,
the module holds the last output state value. This means that the output remains
at the last converted value prior to the condition that caused the system to enter
the fault mode.
In this chapter, you read about the features specific to the Scheduled Output
module. The next chapter describes using the modules.
62 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 73

Chapter
Use the Sequence of Events Input and Scheduled Output Modules
10
Introduction
This chapter describes how to use the Sequence of Events Input and Scheduled
Output modules (1732E-IB8M8SOER, 1732E-OB8M8SR).
This chapter has two main sections:
• Use the 1732E-IB8M8SOER Sequence of Events Input Module
on page 65-83
• Use the 1732E-OB8M8SR Scheduled Output Module on page 81-88
The following table includes the list of topics available in this chapter.
Topic Page
Overview 53
Use the Sequence of Events Input Module 65
How Does 1732E-IB8M8SOER Store Timestamp Data? 66
Use Timestamp Latching 67
Operational Modes 68
Use the Sequence of Events Module in FIFO Mode 68
How Does the On-Board Buffer Work in FIFO Mode? 69
Typical Applications of FIFO Mode 70
Configure the Module for FIFO Mode 70
Choose a Communications Format 70
Manage the Data in FIFO Mode 70
Retrieve Data in FIFO Mode 71
Manage the Data 73
Module Sends Data to the Controller 74
Copy Relevant Input Data to a Separate Data Structure 74
Acknowledge Timestamp Latching Timestamp Data 76
Sort the Data 77
Clear All Data From the Module Buffer At Once 78
Propagate a Signal From Input Pin to EtherNet 78
Use the Scheduled Output Module 81
Usage with MAOC Instruction 81
I/O Subsystem 83
Schedule Processing 84
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 63
Page 74

Chapter 10 Use the Sequence of Events Input and Scheduled Output Modules
Overview
The 1732E-IB8M8SOER module can be configured to timestamp two
transitions per input, one in each direction (OFF to ON and ON to OFF).
When specific points that are Timestamp Capture-enabled transition (for
example, input 1 is configured so that Timestamp Capture is enabled for OFF to
ON transitions and the input turns ON), the module timestamps the transition
with the current system time value on the network. The module produces data
for the owner-controller the RPI after the input filter criteria have been met and
at subsequent RPIs.
For the 1732E-OB8M8SR module, timestamping can be used in conjunction
with the scheduled outputs feature so that after input data changes state and a
timestamp occurs, an output point will actuate at some configured time in the
future. You can schedule outputs up to 16 seconds into the future.
When you use timestamping of inputs and scheduled outputs, you must:
• choose a Communication Format for each input and output module that
allows timestamping. See Communication Format for more information.
• disable Change of State for all input points on the input module except the
point being timestamped.
64 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 75

Use the Sequence of Events Input and Scheduled Output Modules Chapter 10
Input 1
Input 2
Input 7
OFF/ON timestamp data
ON/OFF timestamp data
The module is installed, wired to input
devices and ready to begin operation. All
inputs are configured to timestamp any
transition that occurs.
At this point, timestamp data for each
input is 0 because no input transitions
have occurred.
Note that only 8 bits of the 64-bit
timestamp are shown.
Input 1 transitions from OFF to ON.
The module timestamps the transition;
the module sends the data to the ownercontroller (not shown) and also stores it
locally.
Input 2 transitions from ON to OFF.
The module timestamps the transition;
the module sends the data to the ownercontroller (not shown) and also stores it
locally.
Note that the module continues to store
the timestamp for the OFF to ON
transition on input 1.
OFF/ON timestamp data
ON/OFF timestamp data
OFF/ON timestamp data
ON/OFF timestamp data
OFF/ON timestamp data
ON/OFF timestamp data
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
Input 0
Input 1
Input 2
Input 7
OFF/ON timestamp data
ON/OFF timestamp data
OFF/ON timestamp data
ON/OFF timestamp data
OFF/ON timestamp data
ON/OFF timestamp data
OFF/ON timestamp data
ON/OFF timestamp data
0 0 0 0 0
0 0 0 0 0
0 1 0 1 1
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
Input 0
Input 1
Input 2
Input 7
OFF/ON timestamp data
ON/OFF timestamp data
OFF/ON timestamp data
ON/OFF timestamp data
OFF/ON timestamp data
ON/OFF timestamp data
OFF/ON timestamp data
ON/OFF timestamp data
0 0 0 0 0
0 0 0 0 0
0 1 0 1 1
0 0 0 0 0
0 0 0 0 0
1 1 0 0 1
0 0 0 0 0
0 0 0 0 0
Input 0
Use the Sequence of Events
The following section describes how to use the Sequence of Events Input module.
Input Module
How Does 1732E-IB8M8SOER Store Timestamp Data?
With each timestamped transition, 1732E-IB8M8SOER stores data for that
point. An overview of how the module stores timestamp data is shown in the
following figure.
Generally the following occurs:
1. The module timestamps each transition for inputs that are Timestamp
Capture-enabled. The module can timestamp each transition with a
unique system time.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 65
Page 76

Chapter 10 Use the Sequence of Events Input and Scheduled Output Modules
IMPORTANT
2. The module sends all of its input data, including the new data from the
most recent transition, to the controller immediately after timestamping
the transition and passing the input filter to make sure the transition was
valid.
3. You copy new data from the controller tags to a separate data structure for
later sorting.
4. Acknowledge the timestamp, using output tags, so that the module can
capture another timestamp on that input without losing any data.
5. Once the data is copied to a separate data structure, you may sort the data
in the controller to determine the order of events.
Some of these typical events are described in greater detail in the rest of this
chapter. For typical applications for Sequence of Events modules, refer to High
Performance Sequence of Events Applications in the Logix Architecture on
page 9
.
Use Timestamp Latching
When enabled, timestamp latching prevents the module from overwriting
recorded timestamp data once a transition occurs. This feature is set on a
modulewide basis and is enabled by default. The following table describes how
Timestamp Latching affects the module.
If Timestamp
Latching is:
Enabled The module timestamps two transitions for each input–one for OFF to ON and one
Disabled The module timestamps each transition for each input as it occurs. In this case,
(1) This table assumes the transition occurs on inputs that have Timestamp Capture enabled. If Timestamp Capture
is disabled, the module does not timestamp transitions on that input and, therefore, Timestamp Latching does
not affect module behavior.
the following occurs
for ON to OFF. If similar transitions occur on inputs where a transition has already
been timestamped and the data was not yet acknowledged (for more information
on Acknowledge Timestamp Latching Timestamp Data, see page 76), the module
does not timestamp the new transition.
When a transition is not timestamped, the module sets the I.EventOverflow tag for
that point to inform the controller that an input transitioned but a timestamp was
not produced for the transition.
By default, Timestamp Latching is enabled.
when multiple transitions occur in the same direction on the same input, the
module records the new timestamp data, overwriting any previously-recorded data
which had yet to be acknowledged (for more information on Acknowledge
Timestamp Latching Timestamp Data, see page 76
When the module overwrites data, it sets the I.EventOverflow tag for that point to
inform the controller that events have been overwritten.
(1)
).
We suggest you monitor the I.EventOverflow bits to make
sure you are aware of transitions that were either not
timestamped or when timestamp data was overwritten.
66 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 77

Use the Sequence of Events Input and Scheduled Output Modules Chapter 10
Select this box to enable the
Timestamp Latching feature.
De-select the box to disable
the feature.
Use the Configuration tab in RSLogix 5000 software to enable Timestamp
Latching on the 1732E-IB8M8SOER, as shown in the example.
Use Timestamp Capture
Timestamp Capture causes the module to timestamp specific input transitions
(Off to On and On to Off). However, keep the following in mind when using
this feature:
Typically, Timestamp Latching is enabled. The configuration of this feature
determines whether the module timestamps only the first transition on an input
until the timestamp is acknowledged, or every transition on an input while
overwriting timestamps that have not yet been acknowledged.
If Timestamp Capture is enabled, the module timestamps only the enabled
transitions (OFF to ON and ON to OFF) for each input.
Whenever an input transition is timestamped as a valid transition, the module
sends updated input data for all inputs to the controller at the next RPI and at
every subsequent RPI.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 67
Page 78

Chapter 10 Use the Sequence of Events Input and Scheduled Output Modules
Click the Configuration tab.
· Select the individual boxes for
each input point to enable
Timestamp Capture for that
point.
· Unselect the individual boxes
for each input point to disable
Timestamp Capture for that
point.
You can also use these boxes to enable
or disable all points simultaneously.
Use the Configuration tab in RSLogix 5000 software to set Timestamp Capture,
as shown in the example below.
Operational Modes
The 1732E-IB8M8SOER module operates in FIFO and Per Point modes:
• FIFO – Each channel provides buffering of the timestamped input data for
every input transition. There are 256 timestamp buffers for each of the 8
input channels. Each buffer can contain a single Off to On or On to Off
event.
• Per Point Mode – The module produces timestamps for up to 2 input
transitions per input, one for OFF to ON transitions and another for ON
to OFF transitions; these timestamps can occur simultaneously on separate
inputs.
Use the Sequence of Events Module in FIFO Mode
In First In First Out (FIFO) mode, the Sequence of Events module timestamps
multiple input transitions on any CIPSync/PTP Capture-enabled inputs. The
module stores the timestamp data in on-board buffers that hold 256 timestamp
events per channel. Each of the 8 inputs has its own buffer.
When an input transitions, the module timestamps the event and records specific
input data related to the transition. The owner-controller must retrieve the data
68 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 79

Use the Sequence of Events Input and Scheduled Output Modules Chapter 10
IMPORTANT
IMPORTANT
from the Sequence of Events module using one of the two methods described
later in this chapter.
Keep in mind that, although the Sequence of Events module can store up
to 256 events per input, if you manage the buffer effectively (that is,
retrieve data in a timely fashion), the module can timestamp an infinite
number of input transitions and the controller will be able to retrieve and
use the data.
How Does the On-Board Buffer Work in FIFO Mode?
The module stores up to 256 events per input. Once data is stored on the module,
the controller must retrieve it. Typically, the controller retrieves data from the
first slot in the on-board buffer; the data in the first slot is also known as the
current event.
The current event is the event for which the Sequence of Events module
is currently producing data. The current event is NOT the most recentlytimestamped input transition.
After the controller retrieves the current event data, it acknowledges the data and
clears it from the Sequence of Events module’s on-board buffers, and the data
from the next slot in the buffer becomes the current event (that is, the module
produces this data for the controller).
In FIFO mode, generally the following occurs:
1. You configure the Sequence of Events module to operate in FIFO mode via
the Communication Format selection.
2. The Sequence of Events module timestamps each transition and stores the
data in its on-board buffer. The module can timestamp each transition
with a unique CIPSync/PTP as long as the transitions occur 25 µs apart.
3. The controller retrieves data from the Sequence of Events module as
described in the following steps:
a. Immediately after the Sequence of Events module timestamps an input
transition, it records data in the first slot of its on-board buffer and
produces the data for the controller; the data is the current event. The
module produces the data from the current event at every subsequent
RPI until the controller clears it (as described in step C).
b. The controller copies the data from the controller tags to a separate data
structure for later use.
c. The controller acknowledges the current event in the Sequence of
Events module’s buffer by I.EventNumber to O.EventNumber.
d. Once the current event is cleared from the Sequence of Events module’s
buffer, data for the next transition stored in the buffer becomes the
current event, and the module begins producing this data for the
controller as described in step a.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 69
Page 80

Chapter 10 Use the Sequence of Events Input and Scheduled Output Modules
4. The Sequence of Events module timestamps input transitions and records
the data in its on-board buffer as long as the buffer is not full. (The module
stores up to 256 events per input.)
Typical Applications of FIFO Mode
FIFO mode is intended for use in applications where multiple transitions occur
on multiple inputs in relatively rapid succession (that is, faster than the controller
can acknowledge the data as the transitions occur). Because of this intention, the
Sequence of Events module uses an on-board buffer to store the data for up to
256 events per input.
The following are example typical applications for FIFO mode:
• Sequence monitoring
• Process and machine optimization
Configure the Module for FIFO Mode
You configure the same general set of configurable features whether you are using
the Sequence of Events module in CIPSync/PTP Per Point mode or FIFO mode.
However, for some features, the module behavior as dictated by the feature, varies
according to operational mode. For example, Latch Timestamp impacts the
Sequence of Events module behavior slightly differently in CIPSync/PTP Per
Point mode than in FIFO mode.
You should be aware of the impact the following configurable features have on
module behavior in FIFO mode:
• Communications Format
• Latch Timestamp
• Enable CIPSync/PTP Timestamp Capture
Choose a Communications Format
During initial module configuration, you must choose a communication format
for the module. The communications format determines what operational mode
your Sequence of Events module uses and, consequently, what tags RSLogix 5000
generates when configuration is complete.
To operate the Sequence of Events module in FIFO mode, you must choose the
FIFO communication format, as shown below.
Manage the Data in FIFO Mode
In FIFO Mode, the Sequence of Events module sends input data for the current
event to the controller immediately after the first input transition has been
timestamped and at each RPI. You must manage the data coming from the
Sequence of Events module.
70 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 81

Use the Sequence of Events Input and Scheduled Output Modules Chapter 10
The following occurs in the process of the managing data coming from the
Sequence of Events module in CIPSync/PTP Per Point mode:
1. The controller retrieves current event data from the Sequence of Events
module in one of two retrieval methods.
2. The controller copies the relevant portions of the current event data to a
separate array.
3. At the user’s discretion, controller clears current data from the Sequence of
Events module by copying the current event number (I.EventNumber) to
the O.EventAck tag, preparing the module send data from the next current
event.
This process is described in the rest of this section.
Retrieve Data in FIFO Mode
In FIFO Mode, the Sequence of Events module automatically sends the
controller the data from the first timestamped transition in its buffer. The
controller must retrieve the data for the remaining timestamped transitions in the
Sequence of Events module’s buffers.
The controller can retrieve data in one of the following ways:
• Standard Retrieval – By default, the module uses this retrieval method
which returns events in order of occurrence.
• Retrieval by Point
Standard Retrieval
In Standard Retrieval, the controller retrieves the data for each event in the order
in which the events occurred. This retrieval method includes the following:
1. At each RPI, the Sequence of Events produces the current event in its onboard buffer.
2. The controller copies relevant input data from the current event to a
separate data structure for later use.
3. The controller clears the current event from the Sequence of Events
module’s on-board buffer by acknowledging the data via the module’s
output word.
4. When the current event is cleared, the next event in the module’s on-board
buffer becomes the new current event. If no other events are present, the
event data will be 0.
5. The Sequence of Events module produces the new current event as
described in step 1.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 71
Page 82

Chapter 10 Use the Sequence of Events Input and Scheduled Output Modules
IMPORTANT
This process continues as long as the Sequence of Events module timestamps
input transitions and the controller continues to retrieve the data for each
transition.
Retrieval by Point
Retrieval by Point is similar to Standard Retrieval by time except that with this
method, the controller only retrieves timestamp data for input transitions that
occurred on a specific point.
The Sequence of Events module still timestamps input transitions for any events
that occur on Enable Timetamp Capture-enabled inputs. The module stores up
to 256 events per input.
The module stores up to 256 events per input. Each input's buffer is
independent of the others.
You must manage the module buffer effectively to make sure that the
module timestamps all transitions on a specific input.
Consider the following example:
You are using Retrieve by Point to retrieve timestamp data from input 4,
and 10 of the first 34 input transitions that the Sequence of Events
module timestamps occur on input 4.
If Latch Timestamp is enabled for the module and you fail to clear any
of the timestamp data for input 4 before the input transitions again, the
Sequence of Events module will not timestamp the next transition for
input 4, even though there are 126 slots still available in the module’s
on-board buffer.
Additional Module Settings Required with Retrieval by Point Method
By default, the Sequence of Events module operates as if the controller will use
Standard Retrieval to retrieve data. To use the Retrieval by Point method, you
must change the following two tags in the module’s output word:
• O.RetrieveByPoint = 1 (default value is 0)
• O.PointtoRetrieve = input point for which you want the controller to
retrieve data – for example, if you want to retrieve the data for input 8, you
must change this tag to 8.
Retrieval Process Similar to Standard Retrieval
After you make the output tag changes listed above, the controller retrieves the
data for each transition on the specified input in the order in which the
transitions occur.
72 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 83

Use the Sequence of Events Input and Scheduled Output Modules Chapter 10
The only exception to the process is that in Retrieval by Point, the current event is
not necessarily the data in the first slot of of the on-board buffer. Instead, the
current event is the first slot (up to 256 events per input) that contains data for a
transition timestamped at the specified input.
For example, if you are using Retrieval by Point to retrieve data for input 7 and
the first transition that occurs on input 7 is the 5th transition the module
timestamped, the current event is located in slot 5 of the module’s on-board
buffer.
Change Between Retrieval Methods
When using the Sequence of Events module in FIFO mode, you may determine
that you need to change retrieval methods. You can change retrieval methods, but
keep the following in mind before doing so:
• The change will NOT take effect until all events are acknowledged/cleared
from the module’s buffers.
• When you change retrieval methods dynamically, the ideal way is to reset
events in the module buffers (as described above) and immediately switch
FIFO retrieval modes. Make sure you do not need the data being cleared
from the module buffer prior to resetting events.
To change retrieval methods, change the O.RetrieveByPoint tag to the new
method.
• To use the standard retrieval by time method, O.RetrieveByPoint = 0
• To use the retrieval by point method, O.RetrieveByPoint = 1
Manage the Data
The module sends all of its input data to the controller the next RPI after an
input transition has been timestamped and at each subsequent RPI. You must
manage the data coming from the module.
The following occurs in the process of the managing data coming from the
module:
1. The module sends data to the controller.
2. The controller copies the relevant portions of the input data to separate
array.
3. At the user’s discretion, the controller clears latched timestamp data from
the module via the O.EventAck and O.NewData tags, preparing the
module to timestamp the next transition.
This process is described in the rest of this section.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 73
Page 84

Chapter 10 Use the Sequence of Events Input and Scheduled Output Modules
1. Input 1 transitions
from OFF to ON.
4. Module timestamps
the transition.
3. Module sends input
data to the controller.
1732E-IB8M8SOER
ControlLogix controller
I.Fault
I.OffsetTimeStamp
I.TimeStampOffOn
I.Data
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 1 0 1 1 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
I.EventOverflow
I.NewData
I.GrandMasterClockID
I.LocalClockOffset
I.TimeStampOnOff
I.EventNumber
I.SyncToMaster
IMPORTANT
Module Sends Data to the Controller
The following figure shows an example of the module sending data to the
controller. In the example, the following occurs:
1. Input 1 transitions from OFF to ON. (The input has Timestamp Capture
enabled).
2. The module timestamps the transition.
3. The module sends its input data, including the transition timestamp from
input 1, to the controller.
74 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
The Module Tags describe the data that is sent for each input. These tags are sent
to the controller the next RPI after the module timestamps a transition on any
input as well as all other RPIs. For detailed descriptions of the tags, refer to
Appendix B.
Copy Relevant Input Data to a Separate Data Structure
When the module sends input data to the controller, the data is stored in the
controller tags. We recommend you use a COP or CPS instruction to
programmatically copy new timestamp data from the controller tags to a separate
array in the controller memory. Later, you can combine timestamp data from
multiple modules and use a Sort routine to determine the order of events, with
relative time reference, that occurred in a specific time period.
When you copy relevant timestamp data from the controller
tags to a separate data structure, make sure you copy
enough information for each timestamp that you can
differentiate between timestamps for different inputs.
Page 85

Use the Sequence of Events Input and Scheduled Output Modules Chapter 10
Controller tags
Separate array
4. Controller
copies
relevant
data from
controller
tags to a
separate
array.
1. Input 1 transitions
from OFF to ON.
2. Module timestamps
the transition.
3. Module sends input
data to the controller.
ControlLogix controller
I.Fault
I.EventOverlow
I.OffsetTimeStamp
I.EventNumber
I.Timestamp[16].OffOn[2]
I.Timestamp[16].OnOff[2]
I.Data
I.NewData
I.ShortCircuit
I.OpenWire
I.GrandMasterClockID
I.LocalClockOffset
I.SyncedToMaster
1732E-IB8M8SOER
I.Fault
I.OffsetTimeStamp
I.TimeStampOffOn
I.Data
I.EventOverflow
I.NewData
I.GrandMasterClockID
I.LocalClockOffset
I.TimeStampOnOff
I.EventNumber
I.SyncToMaster
The following figure shows when to use the COP instruction. In this example,
the module timestamped a transition on input 1 and is sending input data to the
controller at each RPI. The controller copies input data from the controller tags
to a separate data structure.
Your application determines what input data should be copied from the
controller tags to a separate data structure. Although you can copy all the input
data to another array, typically, only the data from specific tags is copied.
The following figure shows an example of ladder logic in which the controller
only moves OFF to ON timestamp data for inputs 0…3 from the controller tags
to a separate data structure named myarray. The data in the myarray structure is
then moved to another array used to sort the data. In this example, 32 bits of each
64-bit timestamp are moved to the new array.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 75
Page 86

Chapter 10 Use the Sequence of Events Input and Scheduled Output Modules
Acknowledge Timestamp Latching Timestamp Data
In most cases, Timestamp Latching is enabled. This means that once the module
timestamps an input transition, the module will not timestamp another
transition in the same direction on the same input until you acknowledge the data
from the first timestamped transition; when you acknowledge data, you clear it
from the module.
To clear data from the module, you must acknowledge them via the module
output tags. You can clear data in the following ways:
• Clear latched timestamp data for specific inputs – As data is
acknowledged, it is cleared from the module, and the module will once
again timestamp the first new transition for the input in the cleared
direction(s).
To clear timestamp data for specific inputs, you must complete the
following steps:
a. Write to the EventAck output tag (O.EventAck). This tag determines
which edge you will clear (acknowledge).
• 0 = clear only the falling edge timestamp (I.Timestamp[x].OnOff)
• 1 = clear only the rising edge timestamp (I.Timestamp[x].OffOn)
• 2 = clear both the falling and rising edge timestamps
b. Change the NewDataAck output tag (O.NewDataAck.x) to a rising
edge (set the tag =1). This tag determines which inputs will be cleared
(acknowledged). There are 8 bits (x = 0…7) that can be transitioned;
each corresponding to an input. More than one bit can be transitioned
at the same time.
• If the bit = 0, change the bit to 1.
• If the bit = 1, change the bit to 0, wait for at least one RPI, and change
the bit to 1.
The corresponding I.EventOverflow and I.NewData tags are also cleared.
• Clear all latched data for the module – This transition erases all
timestamp data from the module, clearing data from all inputs
simultaneously. Once the data is cleared, the module timestamps the first
transition in each direction for each input and sends the data to the
controller (assuming those inputs are configured with Timestamp Capture
enabled in each direction).
To clear all data for the module, transition the O.ResetEvents tag to 1.
– If the bit = 0, change the bit to 1.
– If the bit = 1, change the bit to 0, wait for at least one RPI, and change
the bit to 1.
The following figure shows when to clear data from the module. In this example,
the module sent input data to the controller, and the controller copied the
76 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 87

Use the Sequence of Events Input and Scheduled Output Modules Chapter 10
5. Controller clears data from input 2 on the module.
O.EventAck = 1
O.NewDataAck.2 = 1
Controller tags
Separate array
4. Controller
copies
relevant
data from
controller
tags to a
separate
array.
1. Input 2 transitions
from OFF to ON.
5. Module timestamps
the transition.
3. Module sends input
data to the controller.
1732E-IB8M8SOER
ControlLogix controller
I.Fault
I.EventOverlow
I.OffsetTimeStamp
I.EventNumber
I.Timestamp[16].OffOn[2]
I.Timestamp[16].OnOff[2]
I.Data
I.NewData
I.ShortCircuit
I.OpenWire
I.GrandMasterClockID
I.LocalClockOffset
I.SyncedToMaster
I.Fault
I.OffsetTimeStamp
I.TimeStampOffOn
I.Data
I.EventOverflow
I.NewData
I.GrandMasterClockID
I.LocalClockOffset
I.TimeStampOnOff
I.EventNumber
I.SyncToMaster
relevant input data to a separate structure. Now, the controller must clear the data
from the module.
In this example, to clear data from the module, the controller writes the following
to the Sequence of Events output word:
• O.EventAck = 1
• O.NewDataAck.2 = 1
If Timestamp Latch is disabled, the module sends new data, from subsequent
transitions, to the controller as soon as they occur. The controller overwrites
timestamp data from the last transition, regardless of whether it saved the data or
not.
If the controller does not acknowledge the timestamp data then the NewData bits
in the input tags remains set and the EventOverflow bit is set as well.
Sort the Data
If you need to determine the order of events that occurred in a cascade, you must
use a Sort routine to determine the order of events. Rockwell Automation offers a
sample sort routine that you can use to determine the order of events in an event
cascade.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 77
Page 88

Chapter 10 Use the Sequence of Events Input and Scheduled Output Modules
Visit the Rockwell Automation Sample Code Library at http://
samplecode.rockwellautomation.com/idc/groups/public/documents/webassets/
sc_home_page.hcst.
Clear All Data From the Module Buffer At Once
If necessary, you can reset the events in the module, in effect clearing all data from
previously timestamped transitions. In other words, when all data is cleared from
the module buffers, all of the module input tags return to 0.
To reset events in the module buffer, transition the O.ResetEvents tag to 1 as
described below:
• If the bit = 0, change the bit to 1.
• If the bit = 1, change the bit to 0, wait for at least one RPI, and change the
bit to 1.
Once the data is cleared, the module begins timestamping input transitions again
and storing them in its on-board buffer.
Propagate a Signal From Input Pin to EtherNet
The module receives a signal at its input pin and processes it internally before
sending the input and timestamp data to the controller at the Requested Packet
Interval (RPI) via EtherNet.
When you operate the module, you must account for signal propagation delays
that exist during internal processing. Some of these delays are inherent to the
module and others are controlled by temperature and input voltage.
During processing, the following delays exist:
• hardware delay – The time it takes an input signal to propagate from the
module input pin to its microprocessor. This time varies according to input
transition type (OFF to ON/ON to OFF), input voltage and temperature.
• firmware delay time – The time it takes the module to acquire a timestamp
once its microprocessor receives the input signal.
• input filter delay – user-configurable number from 0…16 ms. The input
filter does not affect when the timestamp is acquired. It acquires the
"firmware delay time" after the input changes state at the module
microprocessor. The input filter simply delays the amount of time the
input must be in a certain state before input is considered valid and the
timestamp data will be sent to the controller.
• RPI – Once the timestamp is acquired by the microprocessor and the
input is filtered, the input and timestamp data is sent to the controller at
the next RPI.
78 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 89

Use the Sequence of Events Input and Scheduled Output Modules Chapter 10
EXAMPLE
Timestamp Accuracy = +/- 12.5 μs.
Module Input Pin OFF->ON to Timestamp (Hardware + Firmware) Delay (µs)
Ambient Temp ºC -20 25 60
Voltage
10V DC
24V DC
30V DC
Module Input Pin ON->OFF to Timestamp (Hardware + Firmware) Delay (µs)
Ambient Temp ºC -20 25 60
Voltage
10V DC
24V DC
30V DC
23 24 25
18 19 19
18 19 19
59 75 84
70 84 93
71 85 94
(1)
Maximum input frequency (for each input) = 250 Hz 50% duty cycle. The
module can provide unique timestamps for input transitions on separate inputs as
long as they occur 25 µs apart. An input that changes state less than 25 µs after
another input may receive the timestamp of the first input.
For example, if you are turning ON a 1732E-IB8M8SOER
module input at 24V DC in 25 ºC conditions, the signal
propagation delay is 19 µs. If you want to calculate the
actual time the signal reaches the module input pin, subtract
19 µs from the timestamp.
If you are turning OFF an input at 30V DC in 60 ºC
conditions, the signal propagation delay is 94 µs. If you
want to calculate the actual time the signal reaches the
module’s input pin, subtract 94 µs from the timestamp.
The timestamps acquired are accurate to +/- 40 µs as noted
earlier.
The timestamp data being produced on EtherNet is also
delayed by the input filter setting and the RPI setting.
(1) The timestamp accuracy of +/- 40 µs does not include errors introduced by the module clock being tuned using
CIP Sync. This error can be less than one microsecond on a properly configured network.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 79
Page 90

Chapter 10 Use the Sequence of Events Input and Scheduled Output Modules
Per Point Mode of Operation
The Per Point mode of operation provides a single On and Off timestamp for
each input point on the module. The 1732E-IB8M8SOER module employs
employs CIP Sync Per Point.
Per Point operation begins with the selection of the appropriate Timestamp
Format in RSLogix 5000 software.
Choosing the Per Point Timestamp Format results in an input tag structure with
a single On and Off timestamp value per input point, as well as some additional
general-purpose CIP Sync status tags. It results in the creation of two additional
input tags to assist in timestamp corrections in a CIP Sync architecture:
I:LocalClockOffset and I:OffsetTimestamp.
For more information about Per Point mode, see the ControlLogix Sequence of
Events Module User Manual, publication 1756-UM528
.
The Latch checkbox latches CIP Sync timestamp so that recorded events are not
discarded until you acknowledge them. As a result, if latching is selected and new
events occur, they will be ignored until the existing event is acknowledged.
80 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 91

Use the Sequence of Events Input and Scheduled Output Modules Chapter 10
IMPORTANT
IMPORTANT
Use the Scheduled Output Module
The Motion Planner Output Cam (MAOC) instruction offers the functionality
to set and reset output bits based on an axis position.
Usage with MAOC Instruction
When used with motion and the MAOC instruction values in the output image
are controlled by the Motion Planner firmware in the controller, the Motion
Planner triggers the data to be sent to the module. Although, the normal
program/task scan also triggers data to be sent to the module. Data integrity is
maintained by the firmware always setting the sequence count for a given
schedule last.
When a programmed on or off event is detected, a schedule is sent to the output
module to turn the output on/off at the appropriate time within the next coarse
update period.
The Output Cam instruction divides the coarse update period into sixteen time
slots. For example, a coarse update period of 2 µs will yield sixteen 125 µs time
slots. Cam on/off events will be assigned to time slots based on their position
within the coarse update period. If both latch and unlatch events for a cam
element are assigned to the same time slot, they will cancel each other out. This
implies that the minimum pulse width of a cam element is greater than one time
slot.
The minimum pulse width of a cam element should be greater than the 100 µs
1732E-OB8M8SR minimum pulse width, or the 1/16 coarse update minimum
pulse width, whichever is larger.
The 1732E-OB8M8SR Scheduled Output Module can be
associated with one (1) MAOC axis/execution target only.
The MAOC instruction detects latch and unlatch events one coarse update
ahead and schedules the event to occur within the next coarse update. This is
accomplished by applying a one coarse update internal delay to each scheduled
output latch and unlatch position. When the latch or unlatch event is detected,
the delta time from the start of the coarse update to the event is calculated, and
the output is scheduled to occur at the CIPSync corresponding to the next coarse
update period. To facilitate this, Output Cam functionality has access to the
CIPSync captured when the current coarse update period occurred.
The MAOC instruction is able to process scheduled output bits for the
1732E-OB8M8SR. The MAOC instruction sets the schedule mask bits that are
defined for use by the application.
The outputs 0…7 can be forced by forcing the Data Bit to 0 or 1
and its corresponding bit in the ScheduleMask to 0.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 81
Page 92

Chapter 10 Use the Sequence of Events Input and Scheduled Output Modules
Coarse Update Period (10 ms)
Time Slot assignment for each
slot event
Interval = 5000 uSec
Latch position
Cam element
Coarse updates are divided into 16 time slots.
For 10 ms updates, each time slot is 625 uSec
Due to the limit of 16 schedules supported by the 1732E-OB8M8SR module,
some constraints are applied to the number of events that can be processed every
coarse update period.
Only eight schedules are available each coarse update. This allows for two
consecutive coarse updates in which each update contains eight output events.
The following diagram illustrates the relationship between the coarse update
period, a cam latch event and the time slots.
Inter-relationship of Coarse Update Period, Cam Latch, and Time Slots
Each Time Slot stores the information described in the following table.
Time Slot Information
Topic Description
Latch Event Mask When a latch event is detected, the time slot in which it belongs is
Unlatch Event Mask When an unlatch event is detected, the time slot in which it
82 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Interval The time in micro-seconds from the start of the coarse update in
Pulse Off Mask For pulsed outputs, the time slot in which a pulse off event is
Output On Mask For normal outputs, the bit corresponding to the output bit of the
calculated and the bit in the Latch Event Mask corresponding to
the output bit of the latch is set.
belongs is calculated and the bit in the Unlatch Event Mask
corresponding to the output bit of the unlatch is set.
which the Latch or Unlatch event occurs.
calculated and the bit in the Pulse Off Mask corresponding to the
output bit of the pulse event is set.
Latch or Pulse On event is set indicating that the output is to be
turned on for these events.
For inverted outputs, the bit corresponding to the output bit of the
Unlatch or Pulse Off event is set indicating that the output is to be
turned on for these events.
Page 93

Use the Sequence of Events Input and Scheduled Output Modules Chapter 10
Latch/unlatch detection
Interval
Latch Event Mask
Unlatch Event Mask
Pulsed Output Processing
Normal/Inverted Output Processing
Output On Mask
Output Off Mask
Write Outputs
Time Slot Information
Topic Description
Output Off Mask For normal outputs, the bit corresponding to the output bit of the
Unlatch or Pulse Off event is set indicating that the output is to be
turned off for these events.
For inverted outputs, the bit corresponding to the output bit of the
Latch or Pulse On event is set indicating that the output is to be
turned off for these events.
The following is a simplified overview of how Time Slot data is utilized.
Overview of How Time Slot Data Utilization
Time slots are also used to process overlapping cam elements. A semaphore is
maintained to indicate the currently active state of each output bit. In addition, if
a programmed cam element Latch and Unlatch event occurs in the same time
slot, they cancel each other out.
I/O Subsystem
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 83
The user can specify the Output parameter of an MAOC instruction as either a
memory tag or an Output Module’s data tag. A pointer to the tag is passed into
the MAOC instruction. Also passed into the MAOC instruction is an internal
parameter of type IO_MAP. If the Output parameter references controller
memory, the IO_MAP parameter is NULL. If the Output parameter references
an output module, the IO_MAP parameter points to the map structure for the
module. The MAOC instruction can then determine if the Output parameter is
Page 94

Chapter 10 Use the Sequence of Events Input and Scheduled Output Modules
associated with a 1732E-OB8M8SR module by checking the module type stored
in the driver table.
Output Data Structure
Field Size Description
Value 4 bytes Data values for un-scheduled output bits.
Mask 4 bytes Selects which output bits are to be scheduled.
Array of 16 Schedule Structures
Field Size Description
Schedule ID 1 byte Valid ID’s are 1…16. Any other value indicates that the
Sequence Number 1 byte The 1732E-OB8M8SR maintains a copy of the schedule.
Point ID 1 byte Indicates the output bit associated with this schedule.
Point Value 1 byte Next state of output bit specified in Point ID.
Timestamp 4 bytes The lower 32 bits of CIPSync. Indicates when to change
0 = Off
1 = On
The eight bits (0…7) can be scheduled.
0 = Not scheduled
1 = Scheduled
schedule is not to be considered.
A change in sequence number tells the 1732E-OB8M8SR
to process the data in this schedule.
Entered as a value 00…07.
0 = Off
1 = On
the state of the specified output bit.
Schedule Processing
The Value and Mask fields are processed and all unscheduled data bits are moved
to the module output data store. This data is written to the output terminals after
all schedules have been processed.
Each schedule is processed. The schedule is not considered if:
• the Schedule ID is not in the range of 1…16.
• the Point ID is not in the range of 0…7.
• the Sequence Number has not changed.
If the schedule is to be considered, it is marked “active”. All “active” schedules are
examined every 200 ms. The schedule timestamp is compared to the current
CIPSync time. If the current CIPSync time is greater than or equal to the
scheduled Time Stamp, the Point Value in the schedule is moved to the module
output data store for the specified output bit.
84 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 95

Use the Sequence of Events Input and Scheduled Output Modules Chapter 10
Chapter Summary and What’s Next
In this chapter, you learned how to use the modules. The next chapter describes
interpreting the status indicators.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 85
Page 96

Chapter 10 Use the Sequence of Events Input and Scheduled Output Modules
Notes:
86 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 97

Chapter
Warning icon appears
when a communications
fault occurs or if the
module is inhibited
Warning signal – The module has a communications fault
11
Troubleshoot the Module
This chapter describes how to troubleshoot the 1732E ArmorBlock EtherNet/IP
Dual Port 8-Point Sequence of Events Input and Scheduled Output Modules
modules using RSLogix 5000 software.
Troubleshoot the Module
In addition to the status indicators on the module, RSLogix 5000 software alerts
you to fault and other conditions in one of three ways:
· Warning signal on the main screen next to the module – This occurs when
the connection to the module is broken.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 87
Page 98

Chapter 11 Troubleshoot the Module
Status line provides information
on the module fault and on the
connection to the module
RSLogix 5000 software generates 1 s in
response to a module communication
fault.
In this example, a communication fault
occurred between the controller and the
module, so the controller automatically
writes 1 s for all bits in the word.
· Message in a screen’s status line.
· Notification in the Tag Monitor – General module faults are also reported
in the Tag Monitor. Communication faults are reported in the input tags.
88 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
Page 99

Troubleshoot the Module Chapter 11
The fault type is listed here.
Click Help for a detailed
listing of the possible faults,
their causes and suggested
solutions.
Determine Fault Type
When you are monitoring a module’s configuration properties in RSLogix 5000
software and receive a Communications fault message, the Connection page lists
the type of fault.
For a detailed listing of the possible faults, their causes and suggested solutions,
see Module Faults in the RSLogix 5000 Software Online Help.
Chapter Summary
Refer to the RSLogix 5000 AOP help to troubleshoot using the Module Info tab,
Internet Protocol tab, Port Diagnostics dialog, Time Sync tab, or Network tab.
Access the AOP help by clicking Help on any of these tabs.
This chapter provided the user with an explanation of how to troubleshoot the
Sequence of Events Input and Scheduled Sourcing Output modules using
RSLogix 5000 software.
Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014 89
Page 100

Chapter 11 Troubleshoot the Module
Notes:
90 Rockwell Automation Publication 1732E-UM003B-EN-E - March 2014
 Loading...
Loading...