

Page 1
Allen-Bradley
Bulletin 161
AC Drive
(Series B)
0.2-3.7kW
(0.3 to 5 hp)
FRN 2.001
User
Manual
Page 2
Important User Information
Solid State equipment has operational characteristics differing from those of electromechanical
equipment. ªSafety Guidelines for the Application, Installation and Maintenance of Solid-State
Controlsº (Publication SGI-1.1) describes some important differences between solid-state
equipment and hardwired electromechanical devices. Because of this difference, and also because
of the wide variety of uses for solid-state equipment, all persons responsible for applying this
equipment must satisfy themselves that each intended application of this equipment is acceptable.
In no event will Rockwell Automation be responsible or liable for indirect or consequential damages
resulting from the use or application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of
the many variables and requirements associated with any particular installation, Rockwell
Automation cannot assume responsibility or liability for actual use based on the examples and
diagrams.
No patent liability is assumed by Rockwell Automation with respect to use of information, circuits,
equipment, or software described in this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of
Rockwell Automation is prohibited.
Throughout this manual we use notes to make you aware of safety considerations
ATTENTION: Identifies information about practices or circumstances that can lead to
personal injury or death, property damage or economic loss.
Attention statements help you to:
● Identify a hazard
● Avoid a hazard
● Recognize the consequences
IMPOR TAN T: Identifies information that is especially important for successful application and
understanding of the product.
Shock Hazard labels located on or inside the drive indicate that dangerous voltage may be
present.
Page 3

i
Table of Contents
1. Getting Started ........................................................................................
Important Precautions p.1
Conventions used in this manual p.2
Catalog Number Explanation p.2
Receiving Your New Drive p.3
Nameplate Label p.3
Drive Features p.4
2. Installation & Wiring ...............................................................................
Storage and Operating Conditions p.5
CE Compliance p.5
Installation p.5
Clearances p.5
Terminal Blocks p.6
Power Wiring p.7
Power Terminal Block Wiring Specifications p.8
Branch Circuit Protection Devices p.8
Input Power Conditioning p.8
Grounding p.8
Control Wiring p.9
Control Terminal Descriptions p.10
Programmable Digital Input (Control terminal block inputs 1 through 5) Functions p.12
3. Parameters & Programming ..................................................................
Programming Keypad p.15
Programming Examples p.16
Initial Power Up p.16
Scrolling through parameter groups p.16
Operation of the Drive via the Fixed Keypad p.17
Activating the Speed Pot on the Keypad P.17
Restoring Factory Defaults p.18
Parameter Groups p.19
Parameter Descriptions p.21
d Group - Display and Diagnostic Parameters (Read Only) p.21
F Group – Basic Function Parameters p.22
A Group – Advanced Function Parameters p.22
b Group – Advanced Control and Protection Parameters p.29
C Group – Intelligent I/O and Communication Parameters p.33
4. Faults & Troubleshooting ......................................................................
Fault Information p.35
How to Clear a Fault p.35
Bulletin 161 Fault Descriptions p.35
Possible Problems and Corrective Actions p.36
Other Displays p.37
Page 4

ii
5. Specifications & Dimensions ................................................................
Technical Data p.39
Dimensions p.40
Accessories p.42
A. CE Conformity ........................................................................................
CE Compliance p.43
General Notes and Instructions p.43
Essential Requirements for a Conforming EMC Installation p.43
Motor Cable p.43
Control Cable p.43
Page 5
1
Chapter 1 – Getting Started
Important Precautions
In addition to the precautions listed throughout this manual, you must read and understand the following
statements which identify hazards associated with AC drives.
ATTENTION
The Bulletin 161 drive contains high voltage DC bus capacitors which take time to discharge after
removal of input power. Before working on the drive, wait five minutes for capacitors to discharge to
safe voltage levels.
Darkened display LEDs are not an indication that capacitors have discharged to safe voltage levels.
Failure to observe this precaution could result in severe bodily injury or loss of life.
ATTENTION
This Bulletin 161 drive generates dangerous electrical voltages and controls potentially dangerous
rotating mechanical parts. Disregarding the guidelines provided in this manual could result in severe
bodily injury or loss of life.
Only personnel familiar with the drive and associated machinery should plan or implement the
installation, start-up and subsequent maintenance of the system. Failure to comply could result in
bodily injury and/or damage to the equipment.
ATTENTION
This drive contains ESD (Electrostatic Discharge) sensitive parts and assemblies. Static control
precautions are required when installing, testing, servicing or repairing this assembly. Component damage
may result if ESD control procedures are not followed. Failure to observe this precaution could result in
damage to the equipment.
ATTENTION
The drive is intended to be installed with a fixed ground connection. The protective ground only offers
protection for the drive, not against personal injury. According to EN50178 it is not recommended to use
the Bulletin 161 drives on protective fault current switches as, due to a possible DC component (rectifier
load), the sensitivity of the safety switch will be reduced in the event of a failure. If unavoidable, only type
B Residual Current Operated Protective Devices (RCD’s) should be used. As a precautionary measure,
the EN50178 regulations should be observed. Failure to observe this precaution could result in severe
bodily injury or loss of life.
ATTENTION
An incorrectly applied or installed drive can result in component damage or reduction in product life.
Wiring or application errors such as undersizing the motor, supplying an incorrect or an inadequate AC
supply, or excessive ambient temperatures may result in system malfunction. Failure to observe this
precaution could result in damage to the equipment.
Page 6
Getting Started
2
1 Ratings through 3 HP (2.2 KW) are rated for single or three phase input
ATTENTION
• To prevent any injuries or damage, do not touch any components located within the housing with
your hands or with any other objects while input voltage is applied or if the DC-bus capacitors are
not discharged. Do not carry out any work on the wiring or check any signals if input voltage is
applied.
ATTENTION
• Ensure that the input voltage corresponds to the voltage indicated on the product nameplate.
Environmental influences such as high temperatures and high relative humidity are to be avoided as
well as dust, dirt and corrosive gases. The mounting location should be well ventilated and not
exposed to direct sunlight. Install the device upright on a non-flammable, vertical wall. Failure to
observe this precaution could result in damage to the equipment.
ATTENTION
• The drive start/stop and enable control circuitry includes solid-state components. If hazards due to
accidental contact with moving machinery or unintentional flow of liquid, gas or solids exist, an
additional hardwired stop circuit is required to remove AC input power to the drive.
• All the pertinent safety regulations, e.g. accident prevention regulations, professional association
regulations, EN, VDE regulations etc. must be observed. As these regulations are implemented
differently in different countries, the user must observe the regulations that apply for his particular
country.
Failure to observe these precautions could result in severe bodily injury or loss of life.
General information
Conventions used in this manual
To help differentiate parameter names and parameter settings from other text
the following conventions will be used:
• Parameter numbers and names are shown in the following way: Pd01 - [Output Frequency]
• Parameter Settings for inputs and outputs are shown with the setting number followed by the alpha
description in {Braces} ex: 18{RS}
Catalog Number Explanation
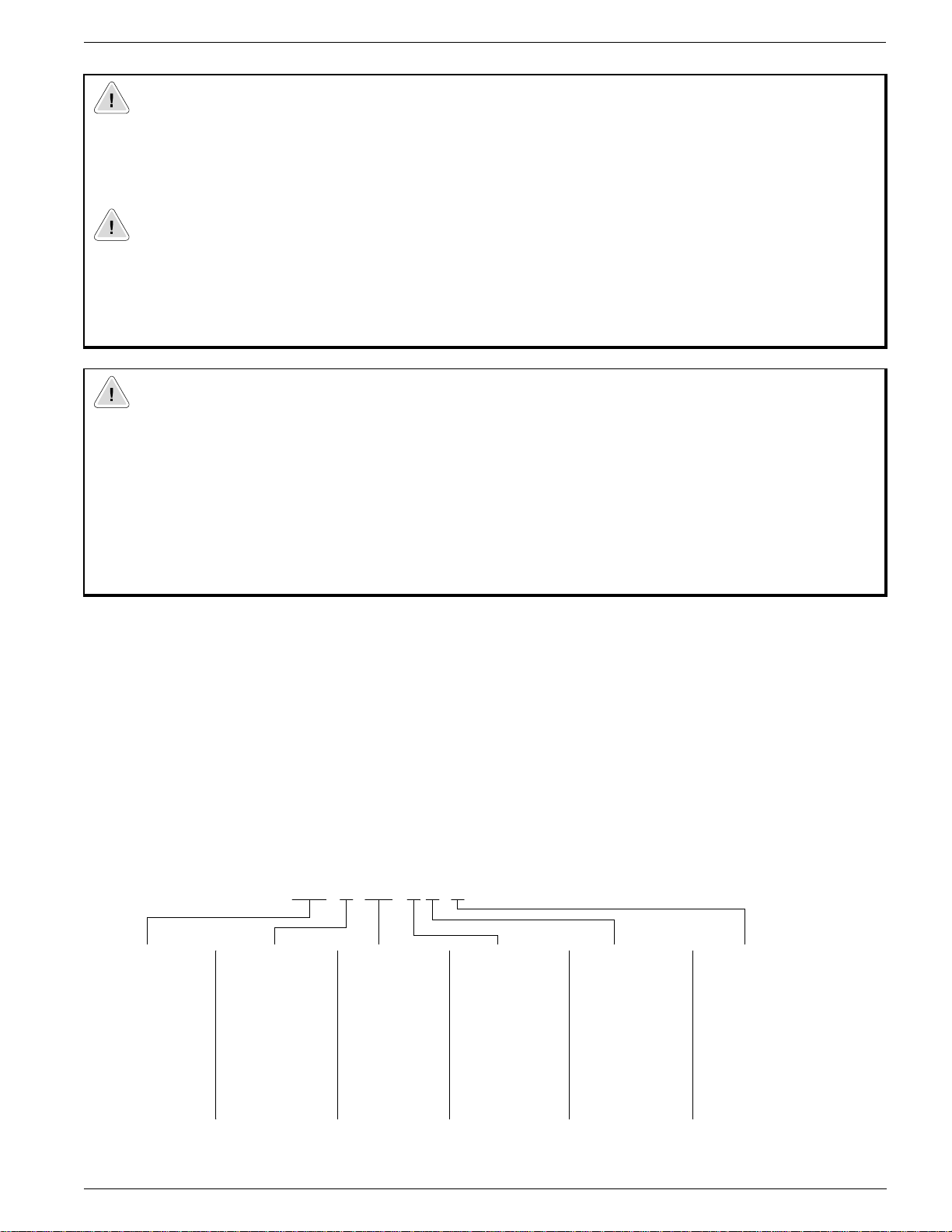
Figure 1.1 below describes the 161 catalog numbering scheme. Please note that not all combinations
can be configured as a Drive, refer to Chapter 5 – Specifications & Dimensions.
Figure 1.1Catalog Number
161S
First Position Second Position Third Position Fourth Position Fifth Position Sixth Position
A A01 N P K-
Bulletin Number Voltage Rating Current Rating Enclosure Type Programmer Default Setting
S = Standard
1
A = 200-240V A 01 N = Open (IP20) P = Fixed Keypad K = 50 Hz default settings
D = 100-120V A 02
A 03
U = 60 Hz default settings
A 04
A 05
A 07
A 10
A 15
Page 7
3
Getting Started
Receiving Your New Drive
It is your responsibility to thoroughly inspect the equipment before accepting shipment from the freight
company. Check the item(s) received against your purchase order. If any items are obviously damaged, do
not accept delivery until the freight agent notes the damage on the freight bill.
Unpacking
Remove all packing material, wedges, or braces from within and around the drive. Remove all packing material
from the heat sink. Leave the debris cover in place on the top of the drive.
If you find any concealed damage during unpacking, notify the freight agent. Also, leave the shipping container
intact and have the freight agent make a visual inspection of the equipment to verify damage.
Inspecting
After unpacking, check the item(s) nameplate catalog number against your purchase order. An explanation of
the catalog numbering system for the Bulletin 161 drive was provided in Figure 1.1 as an aide for nameplate
interpretation.
IMPORTANT: Before you install and start up your Bulletin 161, inspect for mechanical integrity. Look closely for
loose parts, wires and connections.
Nameplate Label
Figure 1.2 depicts a typical Bulletin 161 Nameplate Label.
Figure 1.2Bulletin 161 Nameplate Label
Series
Catalog Number
Letter
161S-AA01NPK SERIES B
FRN: 2.001
NE16452-2
MADE IN JAPAN
I
N
A: 3.1(1.8)
P
U
Hz: 50/60
T
VA: 500
S/N:
Allen-Bradley
82TT1362281161
O
V: 200-230 3ØV: 200-240 1Ø (3Ø)
U
A: 1.4
T
P
Hz: 0.5-360
U
T
Motor
Rating:
IP20
POWER TERMINAL WIRE
Use 75°C Cu Wire
2.1- 0.75mm2 (14-18 AWG)
Torque 0.9 Nm (8 in.-lbs.)
0.2 kW / 0.3 HP
Date: 9927
Serial Number Enclosure Rating Firmware
Version
Page 8
Getting Started
4
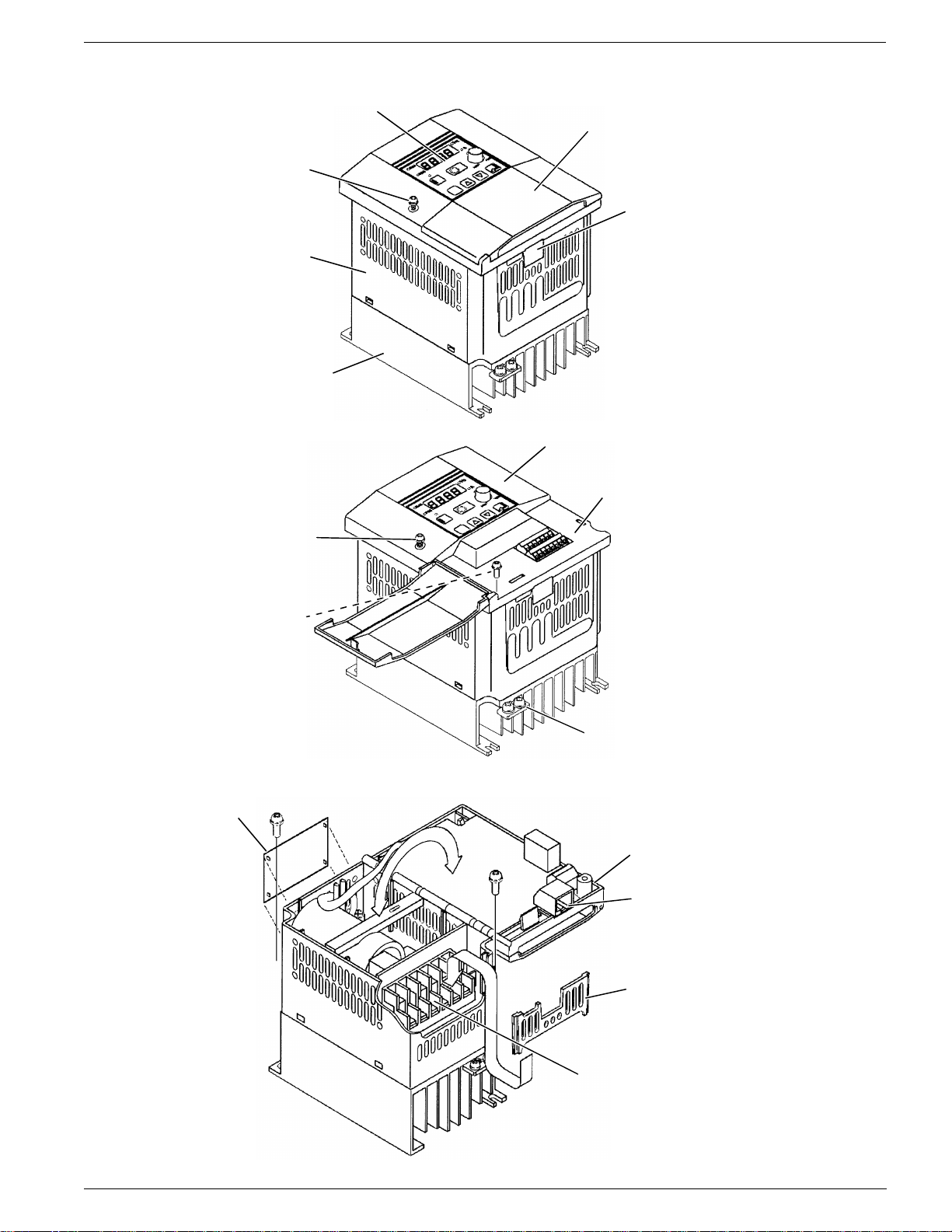
Drive Features
Fixed keypad
Control terminal block cover
Screw
RS422 serial interface
Enclosure
Heat sink
Front case
Screw
To wire the power terminals
and fault relay, loosen the
screw and open the front
case.
Note that for ratings AA01AA03 the screw is located
under the control terminal
block cover.
Debris
cover
Control terminal block
Protective earth ground
connection
Fault relay terminals
RS422 serial interface
Terminal cover
Power terminal block
Page 9
Chapter 2 – Installation & Wiring
Storage and Operating Conditions
Follow these recommendations to prolong drive life and performance:
• Store within an ambient temperature range of –25
• Store within a relative humidity range of 20 to 90%, non-condensing.
• Avoid storing or operating the drive where it could be exposed to a corrosive atmosphere.
• Protect from moisture and direct sunlight.
• Operate within an ambient temperature range of –10
IMPORTANT: To operate the drive between 40
o
➢ Reduce the carrier frequency to 2kHz
➢ Reduce the output current to 80% of the drives rated current
➢ Remove the debris cover from the top of the drive
CE Compliance
Refer to Appendix A – CE Conformity.
Installation
Mount the drives on a flat, vertical and level surface. Drive orientation must be vertical (top up) for
proper heat dissipation.
• Install the drive with screws, recommended screw sizes are listed in the table below. Note that
ratings AA01-AA03 require screws at the upper left and lower right corners only.
o
C to 70oC.
o
C to 40oC.
C and 50oC, make the following adjustments:
Description Metric English
Mounting Torque 1.2 – 1.3 Nm 10.6 – 11.5 lb.in.
Mounting Base Screws M4 x 0.7 #8-32
• Ensure that debris cover is in place when installing the drive to prevent filings, cable insulation and dust
from entering the drive.
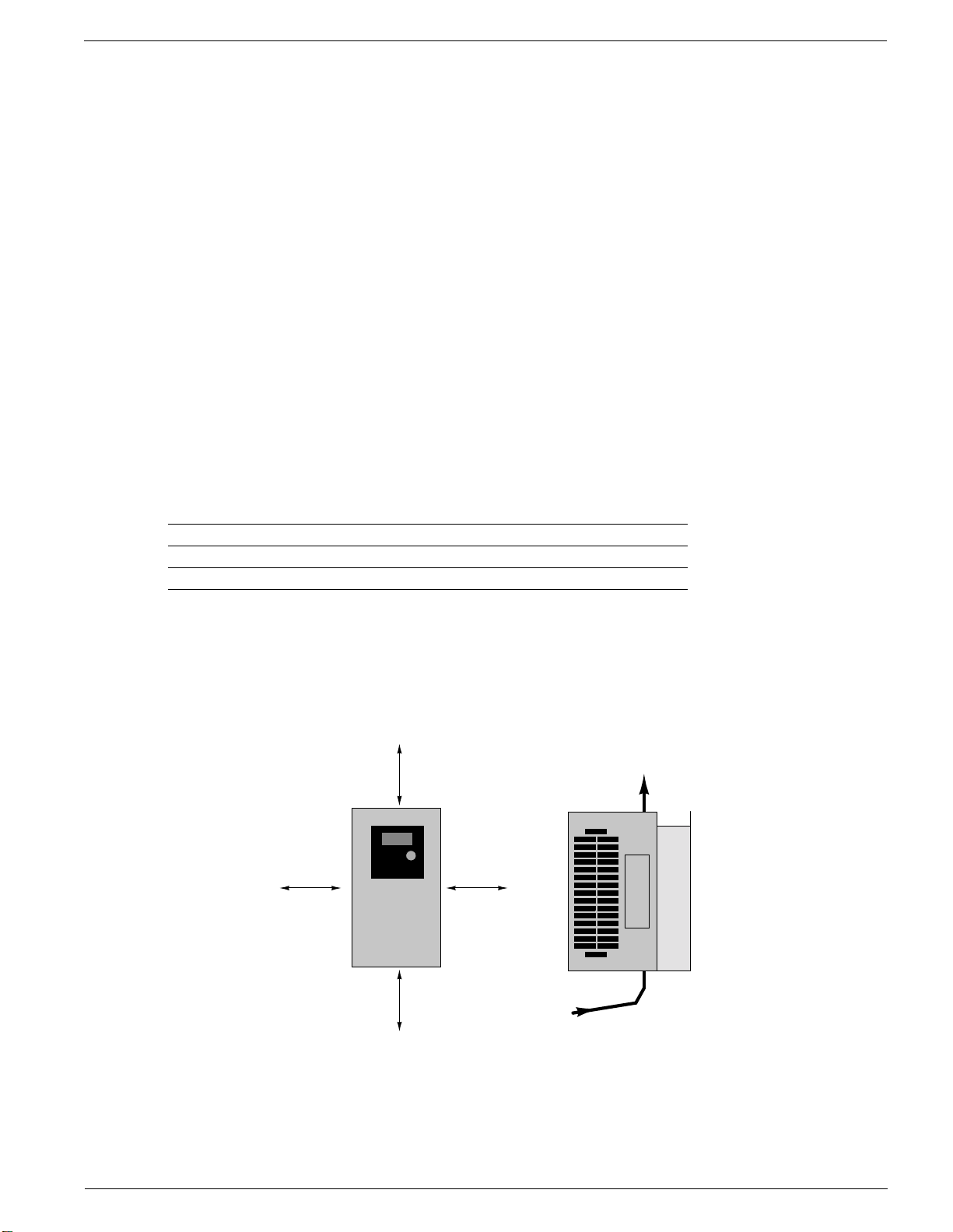
Clearances
• The drive should be installed using the minimum clearances shown in Figure 2.1.
Figure 2.1 Bulletin 161 Minimum Clearances and Airflow
100 mm
(3.94 in)
30 mm
(1.18 in)
30 mm
(1.18 in)
Air
Circulation
100 mm
(3.94 in)
5
Page 10
Installation & Wiring
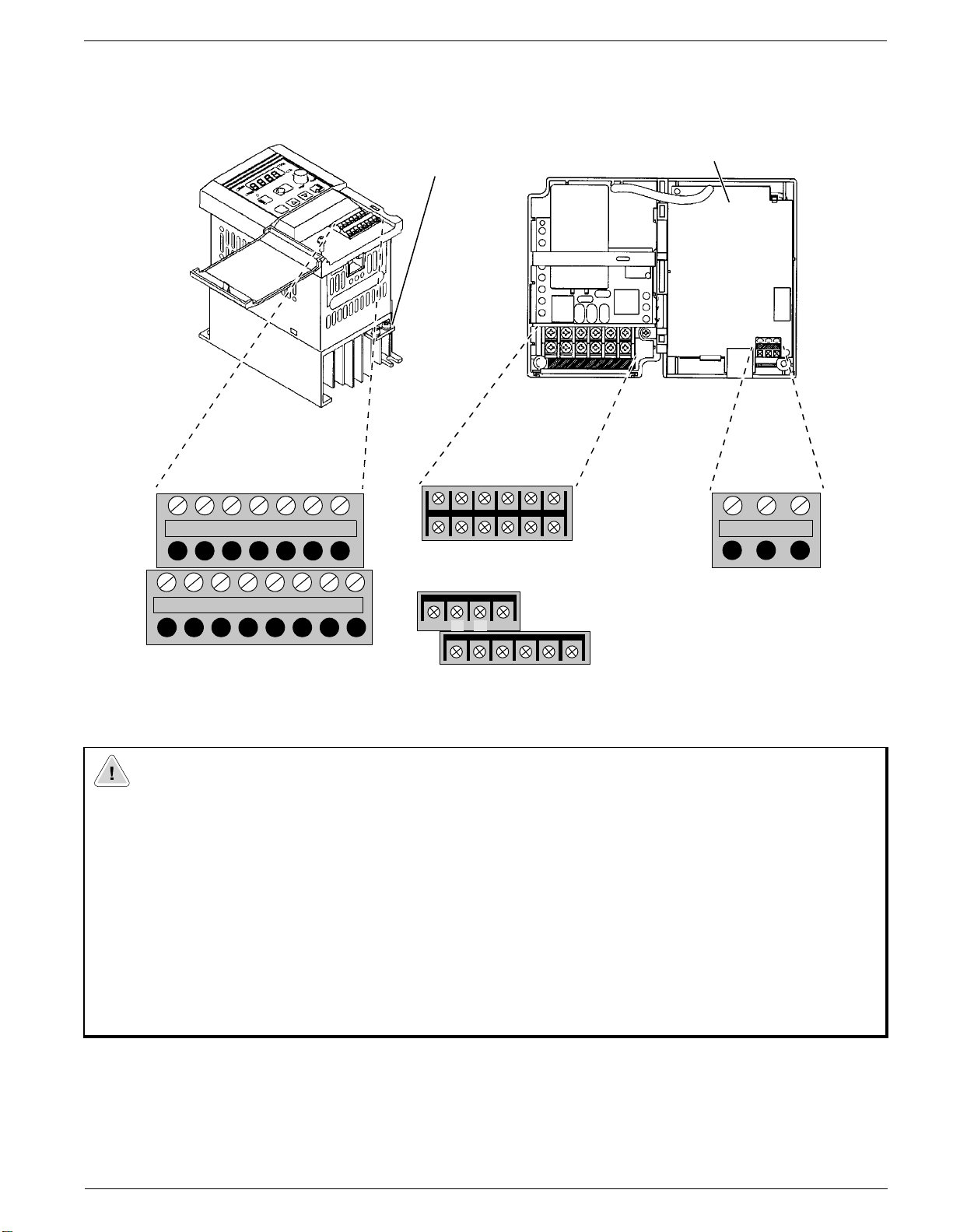
Terminal Blocks
Figure 2.2 Location of Power, Control, and Fault Relay Terminal Blocks
L
54321
Protective earth
Front cover opened
ground connection
+1 –+
P24 AL0
***
L1
L2 N/L3 U/T1 V/T2 W/T3
Power terminal block, AA01 - AA03 ratings only
+1(/) –+
terminal block
AL1 AL2
Faul t relay
HO0I LFM
Control terminal block
CM2 12 11
L1
Power terminal block, all ratings except AA01 - AA03
*
Not Used
L2 N/L3 U/T1 V/T2 W/T3
ATTENTION
• The installation, commissioning and maintenance of these drives may only be carried out by
experienced personnel who are thoroughly familiar with the functioning of the equipment and the
entire machine.
• The devices feature DC-bus capacitors that are energized even when the input supply is switched
off. For this reason wait at least 5 minutes after switching off the input supply before you open the
device and start working on it. Take care that you do not touch any live parts.
• Do not apply input voltage to the output terminals U/T1, V/T2 and W/T3 as drive damage could
occur.
• Contact the motor or machine manufacturers if standard motors with frequencies greater than 60
Hz will be used in your application.
• Failure to follow these precautions could result in severe bodily injury, loss of life or damage to the
equipment.
6
Page 11
Installation & Wiring
Power Wiring
Precautions:
ATTENTION
• Ensure that the input voltage corresponds to the voltage indicated on the product nameplate.
• In normal operation apply the START/STOP commands via the control terminals or the control
panel and not by disconnecting and reapplying input power to the drive or motor contactor. If it
is necessary to use this method for starting and stopping, or if frequent cycling of power is
unavoidable, make certain it does not occur more than once every 5 minutes. Do not install any
capacitors or suppressors to the drive output terminals.
• Exercise particular caution if automatic restart is activated. To prevent injuries caused by
automatic restarting of the drive following a power failure, install a switching component at the input
that is deactivated in the event of a power failure and that may only be manually switched
on again on return of the power supply (e.g. contactor etc.).
• Suitable for use on a circuit capable of delivering not more than 5,000 rms symmetrical amperes,
240V maximum.
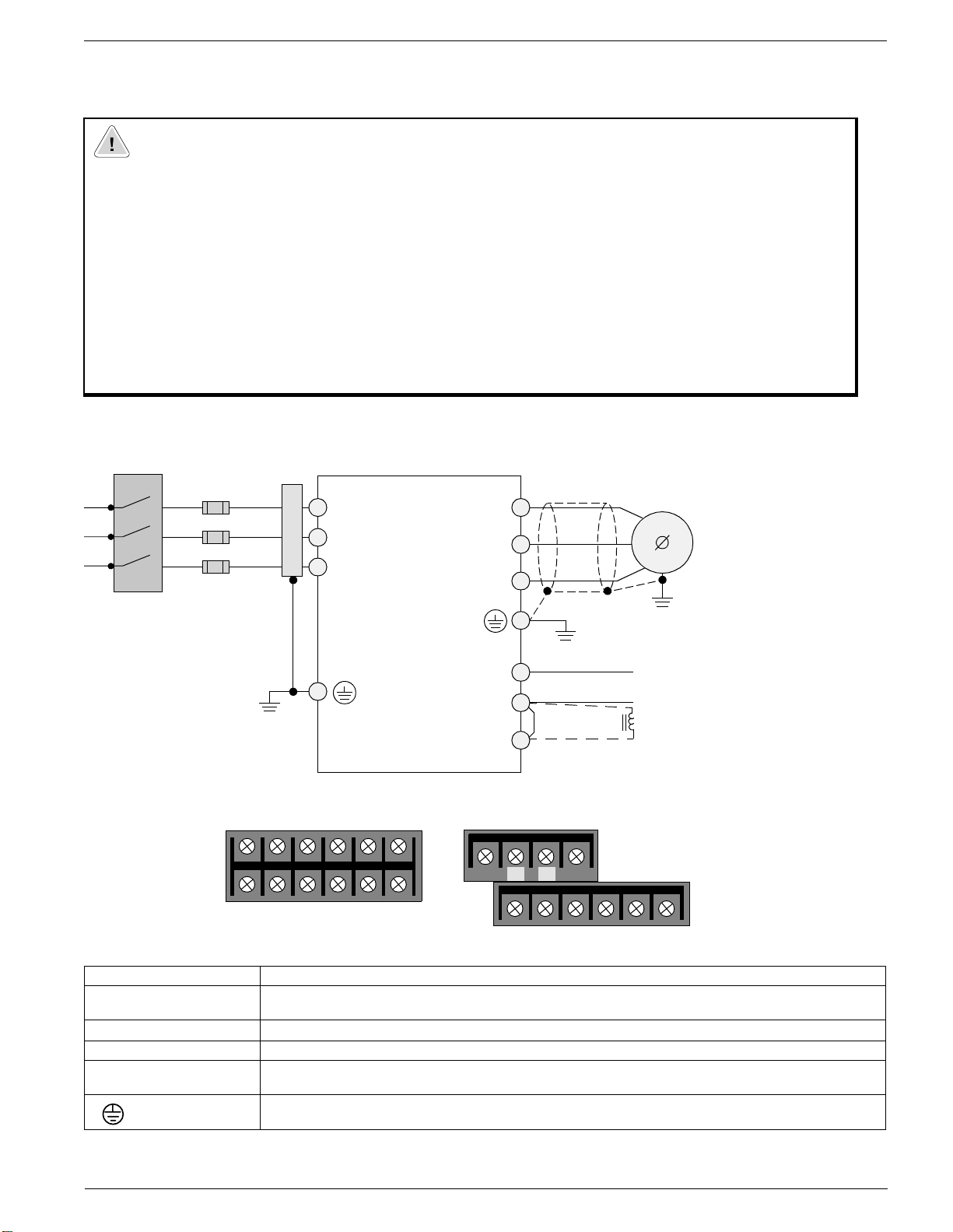
Figure 2.3 Power wiring block diagram
Input power supply
Disconnect
Device
Fuses
Optional
Filter
L1
L2
N/L3
U/T1
3
V/T2
Motor
W/T3
Bulletin 161
–
+
+1
DC
Bus
Optional
DC Bus Reactor
1
Figure 2.4 Power terminal block descriptions
+1 –+
***
L1
L2 N/L3 U/T1 V/T2 W/T3
AA01 - AA03 Power terminal block
Terminal Description
L1, L2, N/L3 Connection to incoming power. For single phase input applications, connect the AC input power to
U/T1, V/T2, W/T3 Motor connections
-/+ DC Bus connection
+1
+
*
Not Used
input terminals L1 and N/L3
These terminals are connected by a jumper. For applications requiring a DC bus reactor, remove
the jumper prior to installing the third party device.
Protective earth ground connection
+1(/) –+
L1
All ratings except AA01 - AA03 Power terminal block
L2 N/L3 U/T1 V/T2 W/T3
1 DC Bus Reactor would be used to assist in limiting harmonic distortion from the 161 to the line and reducing capacitive heating due to low impedance lines.
7
Page 12
Installation & Wiring
Power Terminal Block Wiring Specifications
2
Model Screw Size Max/Min Wire Size mm
AA01-AA02 M3.5 2.1 – .75 (14-18) 0.9-0.8 (8.0-7.0)
AA03 M3.5 2.1 – 1.3 (14-16) 0.9-0.8 (8.0-7.0)
AA04, DA01 M4 5.3 – 1.3 (10-16) 1.3-1.2 (11.5-10.6)
AA05-AA10, DA02-DA03 M4 5.3 – 2.1 (10-14) 1.3-1.2 (11.5-10.6)
AA15 M4 5.3 – 3.3 (10-12) 1.3-1.2 (11.5-10.6)
(AWG) Max/Min Torque Nm (lbin)
Power Terminal Connection
IMPORTANT:
• Bulletin 161 Drives feature an electronic overload protection to monitor the motor current. In the
case of multi-motor operation, thermal contacts or PTC resistors must be used for each motor.
• In the case of motor lead lengths greater than 50 meters (165 feet), motor reactors should be used.
Branch Circuit Protection Devices
The following table shows the minimum recommended values for the branch circuit protection devices:
Fuse Rating (Class CC, J) Bulletin 140
Model 1 Ph 3 Ph 1 Ph 3 Ph
AA01 10 10 140M-D8N-C10 140M-D8N-B40
AA02-AA03 10 10 140M-D8N-C10 140M-D8N-B63
AA04-AA05 15 15 140M-D8N-C16 140M-D8N-C10
AA07 20 15 140M-D8N-C16 140M-D8N-C16
AA10 30 20 140M-D8N-C25 140M-D8N-C16
AA15 N/A 30 N/A 140M-D8N-C25
DA01 10 N/A 140M-D8N-C10 N/A
DA02 15 N/A 140M-D8N-C10 N/A
DA04 20 N/A 140M-D8N-C16 N/A
Input Power Conditioning
The drive is suitable for connection to input power within the rated voltage of the drive (see specifications).
The power factor of the input power supply must not exceed .99. Compensation systems must ensure that
over compensation does not occur at any time.
If the drive must be installed in any of the following conditions, an Input Line Reactor must be used:
Input Power Condition Corrective Action
Line has intermittent noise spikes in excess of 2000V Install 3% impedance Input Line Reactor
If frequent voltage dips occur Install 3% impedance Input Line Reactor
The drive is operated on a generator Install 3% impedance Input Line Reactor
Line has power factor correction capacitors Install 3% impedance Input Line Reactor
Several drives are linked via a short common power supply bus bar. Install 3% impedance Input Line Reactor
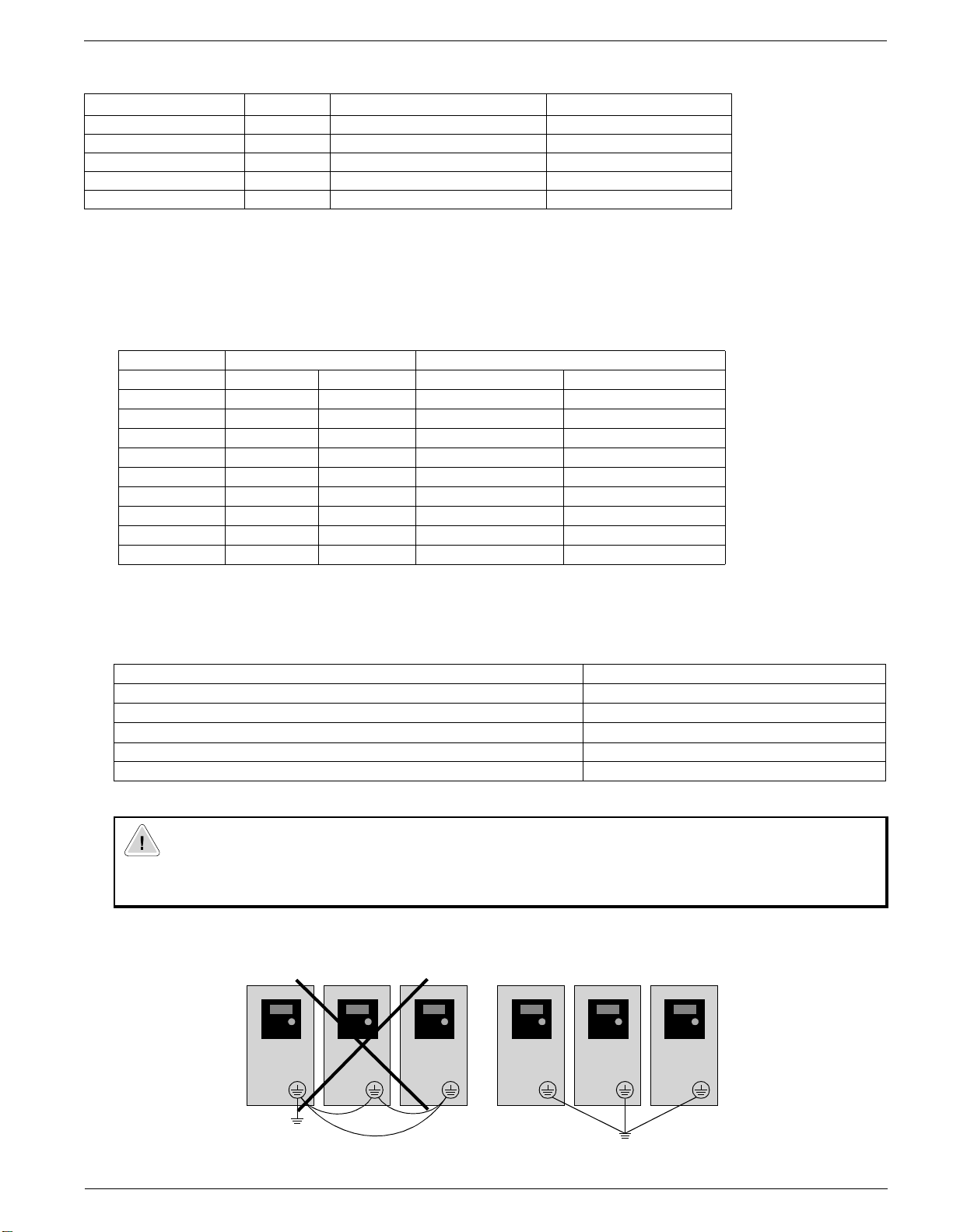
Grounding
ATTENTION
• The Bulletin 161 has a high leakage current and must be permanently (fixed) hard wired to ground.
Failure to observe this precaution could result in severe bodily injury or loss of life.
Ground the drive. Be sure to separate the drive’s grounding pole from those of other electrical machinery. If
multiple drives are used, make certain grounding connections do not create a loop as shown in Figure 2.5.
Figure 2.5 Suggested 161 Grounding
Bulletin 161
Protective
Earth
Ground
8
Bulletin 161 Bulletin 161 Bulletin 161 Bulletin 161 Bulletin 161
Protective
Earth
Ground
Page 13
Control Wiring
Requirements
• Run all signal wiring in either a shielded cable or separate metal conduit.
• Do not exceed control wiring length of 20 meters (65.6 feet).
• Use Belden 8760 (or equivalent) –18 AWG (0.750mm
• Avoid crossing the power lines or motor lines with the control wires. If they must cross, ensure that they
cross at right (90
o
) angles.
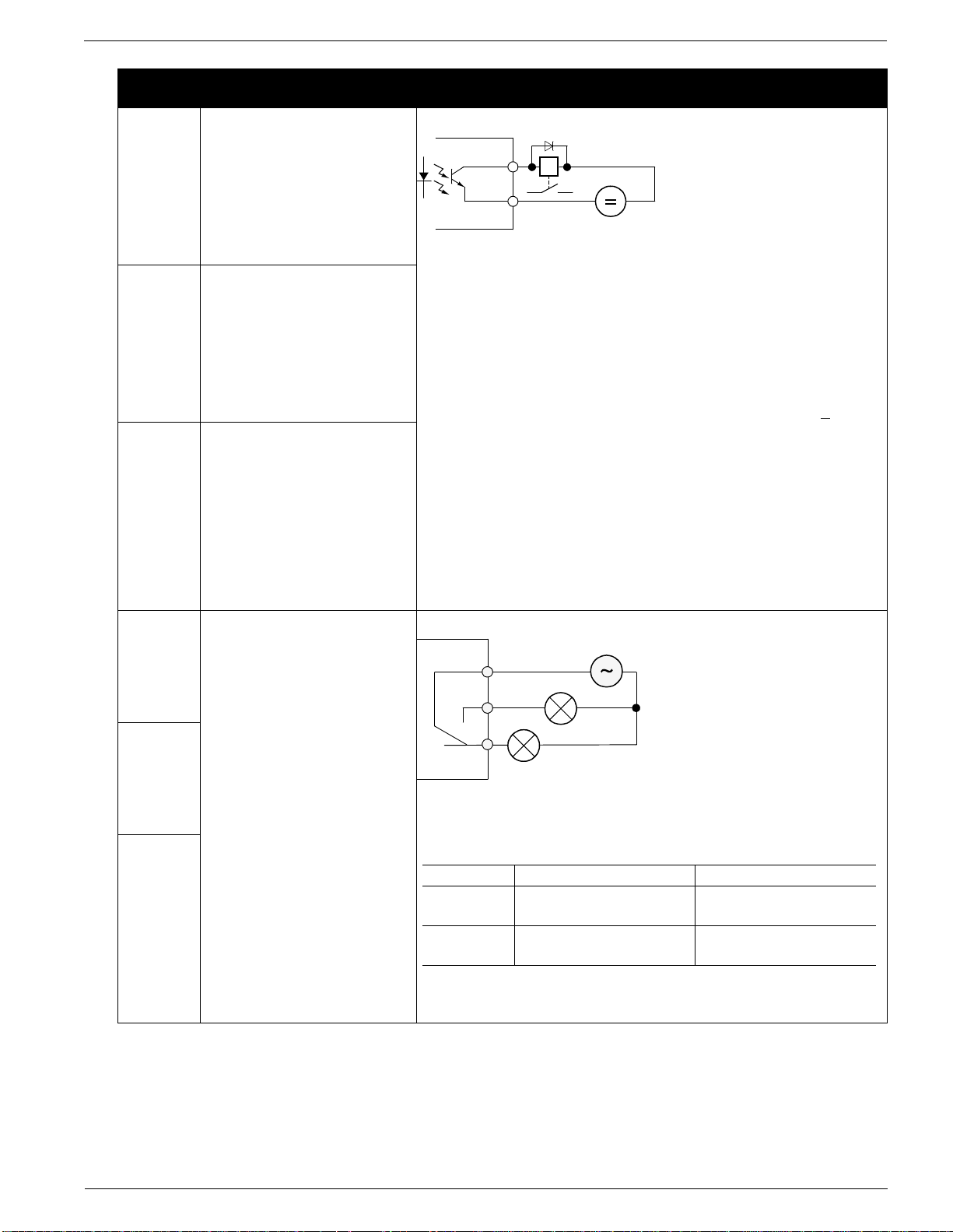
• If using transistor outputs 11 or 12, with an inductive load such as a relay, install a recovery diode parallel
to the relay as shown in Figure 2.6, to prevent damage to the output.
Control Terminal Block Wiring Specifications
2
Max/Min wire size mm
0.750 – 0.14 (18-28) 0.25 - 0.2 (2.21 – 1.77)
Note: 0.75mm2 (18 AWG) wire must be used for the alarm relay. Torque the mounting screw
to: 0.5-0.6 Nm (4.4-5.3 in lb).
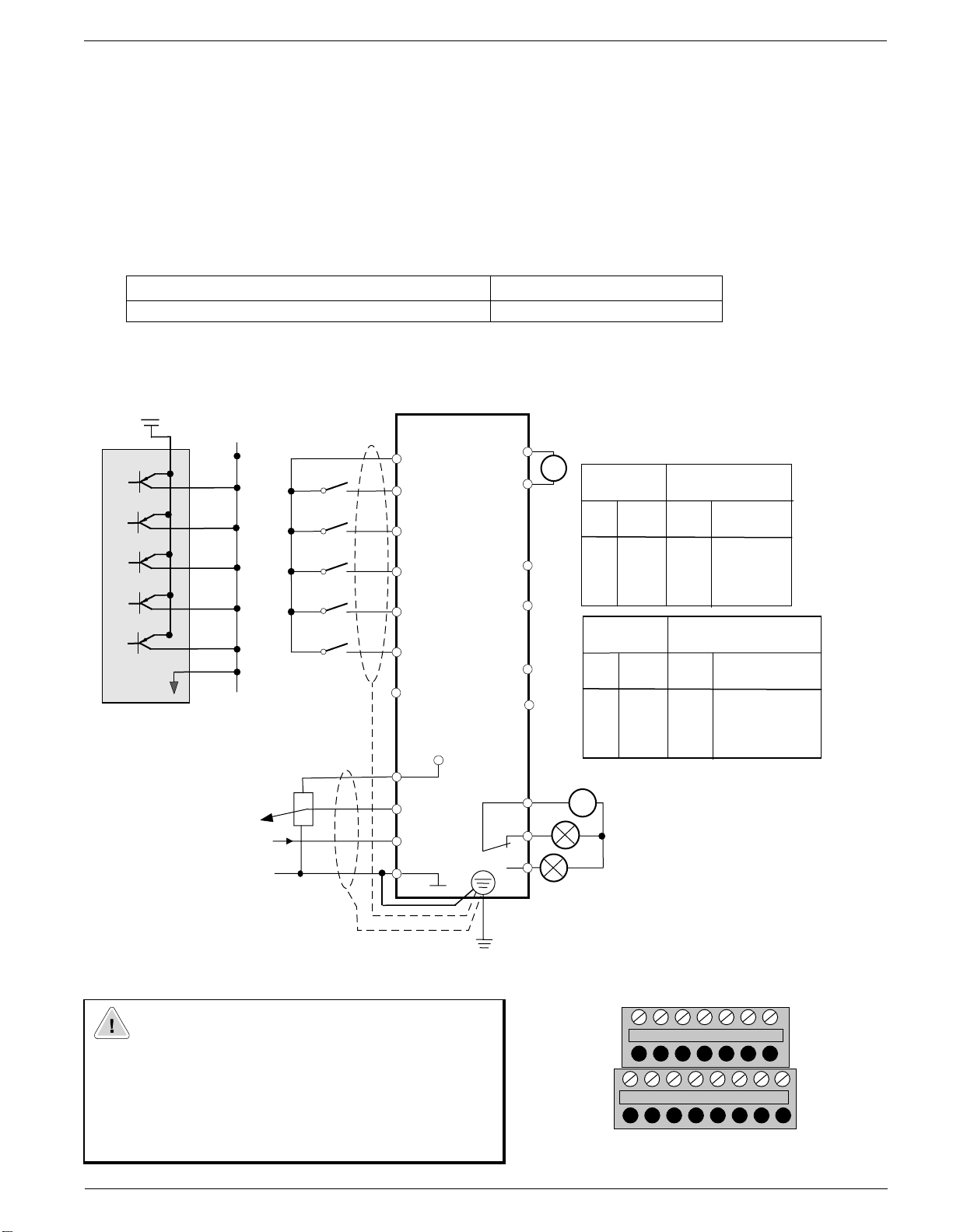
Figure 2.6 Control Wiring Block Diagram
(AWG) Max/Min Torque Nm (in lb)
2
), twisted pair, shielded or 3 conductor.
Installation & Wiring
24V
External
Power
MPORTANT: Only one frequency
ource may be connected at a time.
f more than one reference is
onnected at the same time,
n undetermined frequency
eference will result.
o improve noise immunity, the
ommon (terminal L) must be
onnected to ground terminal/
protective earth.
1-2k Ohm
P24
1
2
3
4
5
L
Pot.
0-10V
4-20mA
Internal
Power
Frequency
Reference
P24
1
2
3
See Note 2
4
5
L
H
O
OI
L
10V
FM
11
CM2
12
CM2
AL0
AL1
AL2
L
0-10V
PWM OutPut
V
Parm
C01
C02
C03
C04
C05
Parm
C01
C02
C03
C04
C05
Notes:
~
Fault Relay
230V AC
Factory Default
Setting & Description
Input
Terminal
1
2
3
4
5
"U"
Default
22
20
21
18
13
2
1
"U" Default
Description
3 wire fwd/rev
3 wire run
3 wire stop
reset
USP
Factory Default
Setting & Description
Input
Terminal
1
2
3
4
5
1. Parameter C13 is NC. This input must be active
(jumpered) for the drive to run. See following pages
for description of these settings.
2. A contact closure on terminals 3 and P24 is required
for the controller to respond to a Start/Run command.
"K"
"K" Default
Default
Description
0
Run fwd
1
Run rev
2
Preset input 1 (CF1)
3
Preset input 2 (CF2)
13
USP
Figure 2.7 Control terminal block descriptions
ATTENTION
A hazard of electrical shock, death or equipment damage exists.
Control terminals are isolated but not tied to earth ground. If
terminal (L) on the control terminal block is not grounded,
exposed conductors, shields or metal conductors can be at
hazardous voltage levels.
Failure to observe this precaution could result in severe injury or
loss of life.
L
54321P24
HO0ILFM
Control Terminal Block
CM2 12 11
9
Page 14
Installation & Wiring
Control Terminal Descriptions
ATTENTION
• DO NOT jumper or short circuit terminals H and L or P24 and L or drive damage could occur.
The following table gives a description of each of the terminals on the control terminal block as well as
the fault relay:
Control
Terminal
P24 24 V DC 24 V potential for digital inputs 1-5 max. load 30mA
1 Programmable Digital
Inputs.
2
26V max, 5KΩ input
impedance.
3
4
5
L 0 V 0 V potential for output FM
H 10 V Reference Voltage for
Analog Frequency
Command
O Voltage Analog Input
Frequency Command
(0-10V)
OI Current Analog Input
Frequency Command
(4-20 mA)
L 0 V Reference Potential for
Frequency Command Inputs
FM Programmable Analog
Output
Analog or Pulse Output
Frequency or Motor Current
Function Description
Digital inputs 1 – 5 are fully programmable level triggered inputs
via parameters C01 thru C05. These inputs are level triggered. An
overview of the possible functions can be found in the digital input
description table in Chapter 2.
The inputs are fully programmable with these exceptions:
1. No two inputs can have the same function
2. Only input 5 can be programmed as PTC.
3. With the exception of the reset setting which must be
NO (active high), all of the inputs can be set as NO
(active high) or NC (active open) via PC11-[Digital
Input 1 Logic] - PC15-[Digital Input 5 Logic].
Note: A signal must be applied to the digital inputs for at least 12 ms
Potentiometer
1 to 2 kOhm
H
O
OI
L
PE PE
0-9.6 V
nominal 0-10 V
H
+
O
Input impedance
OI
10 kOhm
L
-
Input OI for 4-20mA is activated when one of the digital inputs is
set to 16{AT} via PC01-[Digital Input 1] – PC05-[Digital Input 5]
The analog input reference can be adjusted using PA11-[Analog
Frequency Minimum] – PA16-[Analog Filter Select].
If no digital input is programmed as 16{AT}, the set values are the
sum of O and OI.
This output can be used to monitor the output frequency of the
drive (either Analog or Pulse) or the motor current. This output is
programmable using PC23-[Output FM].
Analog Signal
Frequency or Current
t
10 V
+
-
Pulse Signal (50% duty cycle)
Frequency only
10 V
4-19.6 mA
nominal 0-20 mA
H
O
Input impedance
OI
250 Ohm
L
PE
10
s
T
T=4ms (constant) T = (Variable)
T
s
Analog Signal: The relation t/T (duty cycle) changes
proportionally with the frequency or current. The maximum
voltage of 10V (100% duty cycle) is reached when the maximum
frequency or 200% of the rated current is reached. Pb81 [Output FM Factor] may be used as a scaling factor.
Accuracy: +/- 5% for frequency , +/- 20% for current
Pulse Signal: Frequency = output frequency x Pb86-[Process
Display Scale Factor], but the maximum frequency is 3.6 kHz (ex.
Freq = 60Hz x 60 = 3.6kHz).
Page 15
Installation & Wiring
Control
Function Description
Terminal
CM2 Reference potential for
outputs 11 and 12
12 Programmable Digital
Output
11 Programmable Digital
Output
AL0 Fault Relay
Transistor output, max. 27 Vdc, 50 mA
11,12
CM2
– +
24V
The outputs can be programmed as either NO (active high) or
NC (active open) contacts using PC31-[Digital Output 11Logic]
and PC32-[Digital Output 12 Logic].
The following 6 settings may be programmed using PC21 - [Digital
Output 11] and PC22-[Digital Output 12]:
00{RUN} = Motor Running (Signal if output frequency > 0.5 Hz)
01{FA1} = At frequency (Signal when the set frequency is
reached and that frequency is > 0.5Hz)
02{FA2} = Above frequency (Signal if output frequencies >
the
frequencies set under PC42-[Above Frequency Accel
Setting] or PC43-[Above Frequency Decel Setting] and >
0.5 Hz).
03{OL} = Motor overload (Signal if the motor current exceeds
the value set under PC41-[Overload Alarm Setting]
04{OD} = PID-deviation (Signal if the deviation between the
set value and the actual value returned is greater than the
value set under PC44-[PID Deviation Setting]).
Only available
if the PID control PA71 –[PID Enable] is active.
05{AL} = Fault (Signal if a fault is indicated)
250 VAC, 2.5 A resistive
AL0
230V AC
0.2A inductive
AL1
AL2
AL1
30 VDC, 3.0A resistive
0.7A inductive
min. 100 VAC, 10mA
AL2
5 VDC 100 mA
Faulted / De-energized State
PC33-[Fault Relay AL1 Logic] can be used to invert the
operation.
PC33 PC33 = 01 PC33 = 00
AL0 – AL1 Open when Faulted
Open when Power Off
AL0 – AL2 Closed when Faulted
Closed when power off
Closed when faulted
Open when Power Off
Open when Faulted
Closed when Power Off
The fault relay is set with a time delay of approximately 2s after
the power is switched on.
11
Page 16

Installation & Wiring
Programmable Digital Input (Control terminal block inputs 1 through 5) Functions
The function of the digital inputs 1 through 5 are programmed via the corresponding PC01 [Digital Input 1]
through PC05 - [Digital Input 5]. The following programming guidelines must be followed:
• No two inputs can be programmed for the same function.
• The PTC input (setting 19) is only programmable on input terminal 5.
The digital inputs can be programmed to respond to NO (Active High) or NC (Active Open) inputs via
PC11 - [Digital Input 1 Logic] through PC15 - [Digital Input 5 Logic].
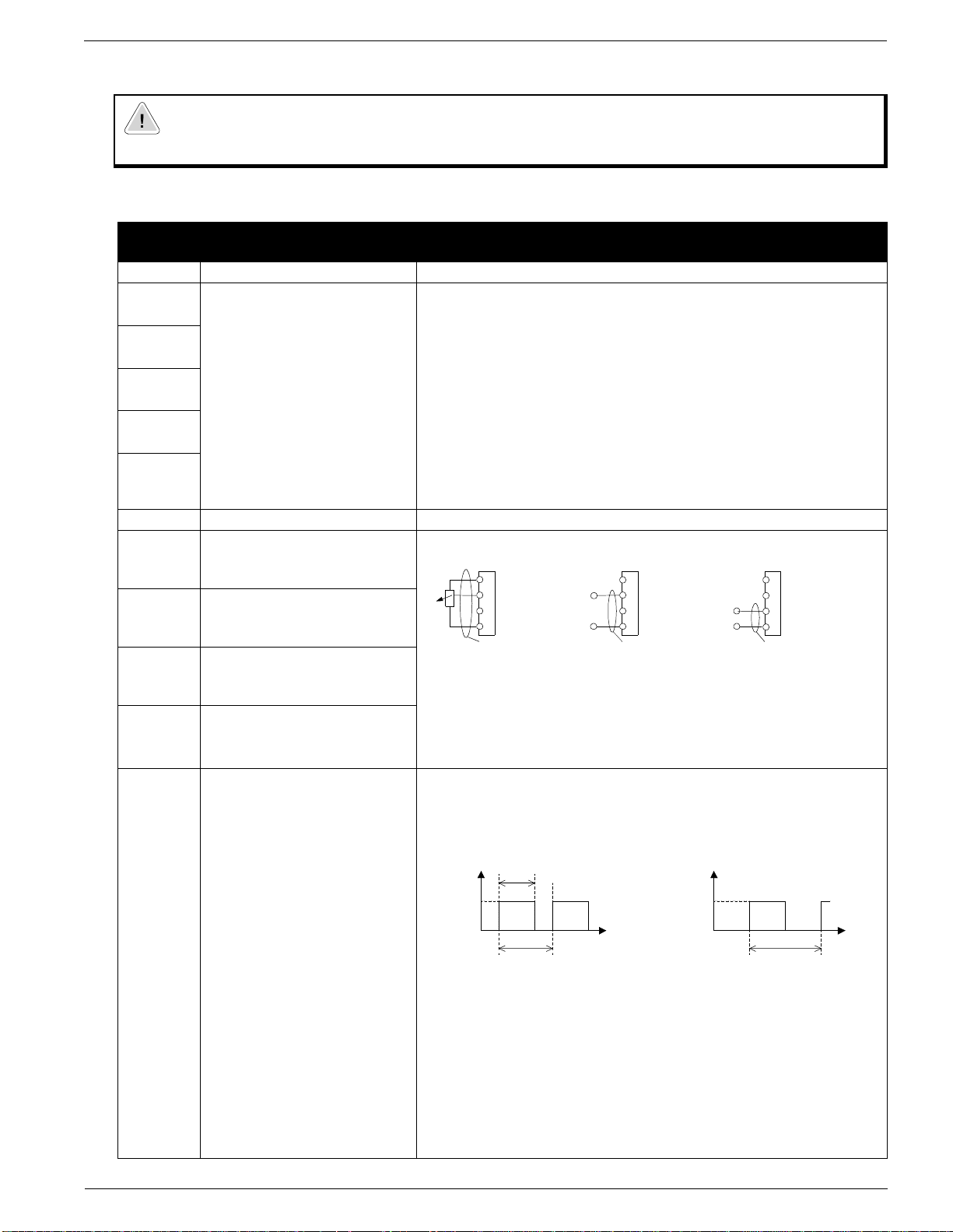
ATTENTION
• All digital inputs respond to level sensitive commands.
• Inputs do not require a voltage transition (cycle) after a fault condition is cleared, after input power cycling or after
programming the logic of the digital input.
• All digital inputs can be programmed as NO or NC. HOWEVER, THE START COMMAND SHOULD BE SET AS NO
(ACTIVE HIGH) AND THE STOP COMMAND SHOULD BE SET AS NC (ACTIVE OPEN). If set opposite of this, an
inadvertent start or failure to stop could occur should a discrete connection be lost or control wire come loose. IF THE
USER CHOOSES TO DISREGARD THIS SAFETY PRACTICE – THE RISK ASSUMED BY THE USER CAN BE
REDUCED BY ASSURING THAT OTHER SAFEGUARDS ARE USED TO INSURE PROPER START AND STOP
OPERATION. Depending on the application: This may include appropriate emergency stops, redundant wiring,
electronic guards and/or mechanical guards.
Failure to observe this precaution could result in severe bodily injury or loss of life.
C01 - C05
Setting
Alpha
Setting
Function Description
00 {FW} Forward 2-Wire (maintained) Run Forward/Run Reverse settings.
01 {RV} Reverse
02 {CF1} Preset
frequency input
00{FW}(N.O.)
01{RV}(N.O.)
Motor Speed
The preset frequencies may be programmed in two ways:
1. By programming desired preset frequency values via PA21-
[Preset Frequency 1] through PA35-[Preset Frequency 15].
03 {CF2} Preset
frequency input
04 {CF3} Preset
frequency input
05 {CF4} Preset
frequency input
2. By selecting the corresponding digital input setting and entering the desired frequency via PF01-[Frequency Command].
Setting Input
02 CF1ONONONONONONONON
03 CF2 ONON ONON ONON ONON
04 CF3 ONONONON ONONONON
05 CF4 ONONONONONONONON
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Preset Speed
Note: If any preset frequency input is active, all other frequency commands
will be ignored.
06 {JG} Jog When this input is active, the 00{FW} or 01{RV} inputs will
respond to the frequency programmed via PA38-[Jog Frequency].
The accel ramp is NOT active.
The stop command is determined by PA39-[Jog Stop Mode].
Note: The Jog command will not work with 3-wire control.
09 {2CH}
12
nd
Accel/Decel
2
ramp
Input 06 {JG} (NO)
Run Cmd (NO)
Motor Speed
2nd Accel/Decel ramp times are activated via this input and
programmed via PA92-[Accel Time 2] and PA93-[Decel Time 2].
Page 17

Installation & Wiring
C01 - C05
Setting
Alpha
Setting
Function Description
11 {FRS} Coast to Stop The motor voltage will be switched off immediately and the motor
will coast. This function can be programmed to operate in two
different modes via Pb88-[FRS Select].
s
d
e
e
s
p
r
o
t
o
m
Run (NO)
Input 11 {FRS} (NO)
Motor speed
Waiting time
Note: The drive will start when 11 {FRS} input is removed without
reissuing a start command even if in 3 wire (momentary) control.
0
t
r
a
t
s
z
H
f
o
n
o
t
i
i
z
a
n
o
h
r
c
n
y
12 {EXT} External Fault When this input is active, an E12 fault indication will be issued
(e.g. an input received from thermal contacts). The fault
indication will be cleared with a reset 18{RS}.
Important: After a reset 18{RS} command, the drive will start
again if a start command is active (00{FW}, 01{RV},or 20{STA}).
Run (NO)
Input 12 {EXT} (NO)
Motor will
Coast
Motor Speed
Input 18 {RS} (NO)
Fault relay (ALO-AI2) (NO)
13 {USP} Unintentional
Start Protection
on Power Up
This function is designed to guard against unintended starting
when input power is removed and then restored. In this case,
if a start/run command is issued immediately upon/after power
is restored an E13 fault will be issued. A new start command
or a reset 18{RS} command will clear the fault indication.
Power Supply
00{FW} or
01 {RV} (N.O.)
13 {USP}(N.C.)
Fault relay (N.O.)
Motor Speed
Min. 3 Sec
15 {SFT} Program Lock Protects stored parameter values from being overwritten. See
Pb31-[Program Lock Select] for the 4 different levels of protection.
16 {AT} 4-20mA Select Activates input terminal OI for use as a 4-20mA input. If no
input terminal is programmed for this setting, the factory
default input is O (0-10V) and the output frequency will
correspond to the value of the inputs to the O and/or OI control
inputs.
Note: PA01-[Frequency Command Select] determines from
what source the output frequency is commanded.
13
Page 18

Installation & Wiring
C01 - C05
Setting
Alpha
Setting
Function Description
18 {RS} Reset Used to clear a fault condition. If a 18 {RS} command is given
during operation, the output IGBT’s are switched off and the
motor will coast.
min 12 ms
18 {RS} (NO)
Fault indication
19 {PTC} PTC Input This input can only be programmed to digital input terminal 5
and the PTC should be referenced to terminal L.
If the PTC resistance exceeds 3k Ohms the output voltage to the
motor will be switched off and an E35 fault code will be issued.
5
L
20 {STA} 3 wire run 3-Wire (Momentary) control inputs. Both settings 20 {STA} and
21 {STP} must be programmed as digital inputs for 3-wire control
to function. If 20 {STA} is programmed into any digital input then
2-wire (maintained) control will not function.
21 {STP} 3 wire stop
Note: 3-wire stop command (21 {STP}) cannot be used to clear a
fault.
20{STA} (NO)
ca. 30 ms
22 {F/R} 3 wire Forward/
Reverse
21{STA} (NC)
22 {FR} (NO)
Motor Speed
27 {UP} Remote ControlUPThese settings allow digital inputs to increase and decrease
the commanded frequency for the drive. PA01-[Frequency
Command Select] must be set to 02 to activate this function.
These inputs will change the value of PF01-[Frequency
Command] in Hz/Sec as defined by PA04-[Maximum
Frequency] ÷ (Accel time or Decel time).
28 {DWN} Remote Control
DOWN
31 {OPE} Run
Command
RUN (NO)
27 {UP} (NO)
28 {DWN} (NO)
PF01[Freq. Command]
Motor Speed
This setting is used to determine the source of the Run
commands.
Source Select
Inactive Start command will come from the control terminals only,
Active Start command will come from the start key on the keypad only
regardless of the setting of PA02 - [Start Command Select]
regardless of the setting of PA02 - [Start Command Select]
14
Page 19

Chapter 3 – Parameters & Programming
ATTENTION
Wait at least 6 seconds after programming the Bulletin 161 before issuing a start, reset command, or
switching off the power supply. Failure to wait 6 seconds, could result in failure to recognize programming
changes, which could lead to bodily injury or damage to the equipment.
Programming Keypad
The keypad is located on the front panel of the drive. This is an integrated keypad that can be used to monitor
drive operation, program parameters, and operate the drive. See page 17 for details on controlling the start, stop
& speed reference from the keypad.
Keypad Features
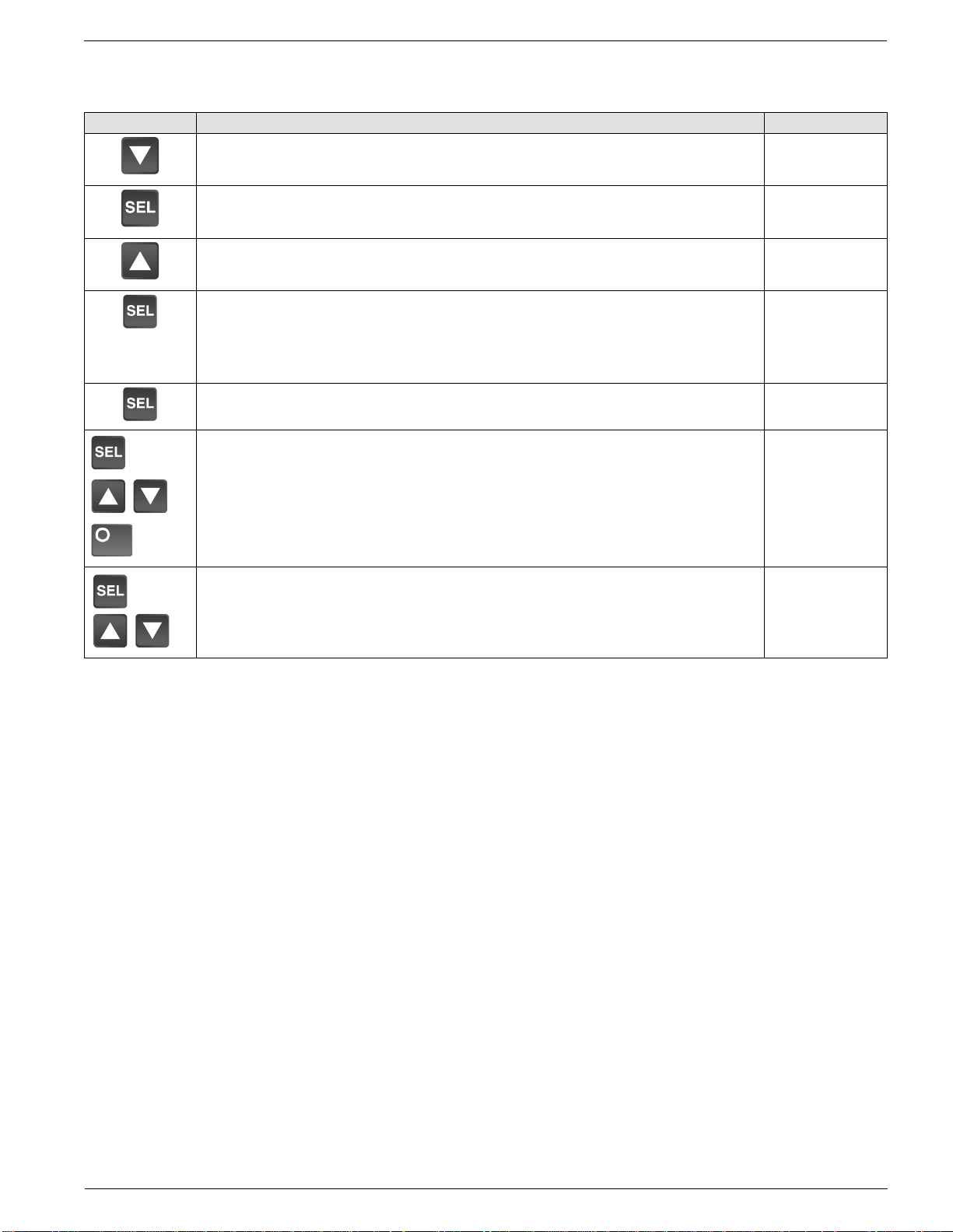
Keypad Functions Other Functions
The SELect key is a dual purpose key. It is used to
view parameter groups and to switch between
parameter numbers and values. The SELect key
also acts as an Escape key to exit the parameter
values without changing them.
The Up/Down Arrow keys are used to scroll
through parameters, or to increase and decrease
parameter values.
The ENTER key is used to enter the current value
into memory.
The PRG LED will be lit when a
programmable parameter is displayed.
The Hz and A LEDs are used to inform you
whether Hz or Amps are being displayed.
The RUN LED will be lit when the drive is in
operation.
Start key
The
Command Select] or digital input setting 31{OPE}.
When active, the key will start the motor in the
direction of rotation defined in PF04-[Start Key
Direction].
NOTE: If the drive is set for 3 wire control (C03 set
to 21), the Stop Input must be jumpered for the
drive to run.
Speed Potentiometer
The
commanded frequency. This can be activated using
Min Max
PA01-[Frequency Command Select].
The Stop key is used to stop the motor. If the drive
has stopped due to a fault, pressing this key will
clear the fault.
Figure 3.1 Operator Interface
can be activated using PA02-[Start
can be used to set the
Start Key
The
green LED’s which will light when the item is
active.
ATTENTION:
used to clear a fault and there is a valid run
command, the drive will start to run as soon
as the fault is cleared without cycling the run input.
Failure to observe this precaution
could result in severe bodily injury.
Speed Pot LED’s
and
If the Stop Key is
are
Programming Keypad
15
Page 20

Parameters & Programming
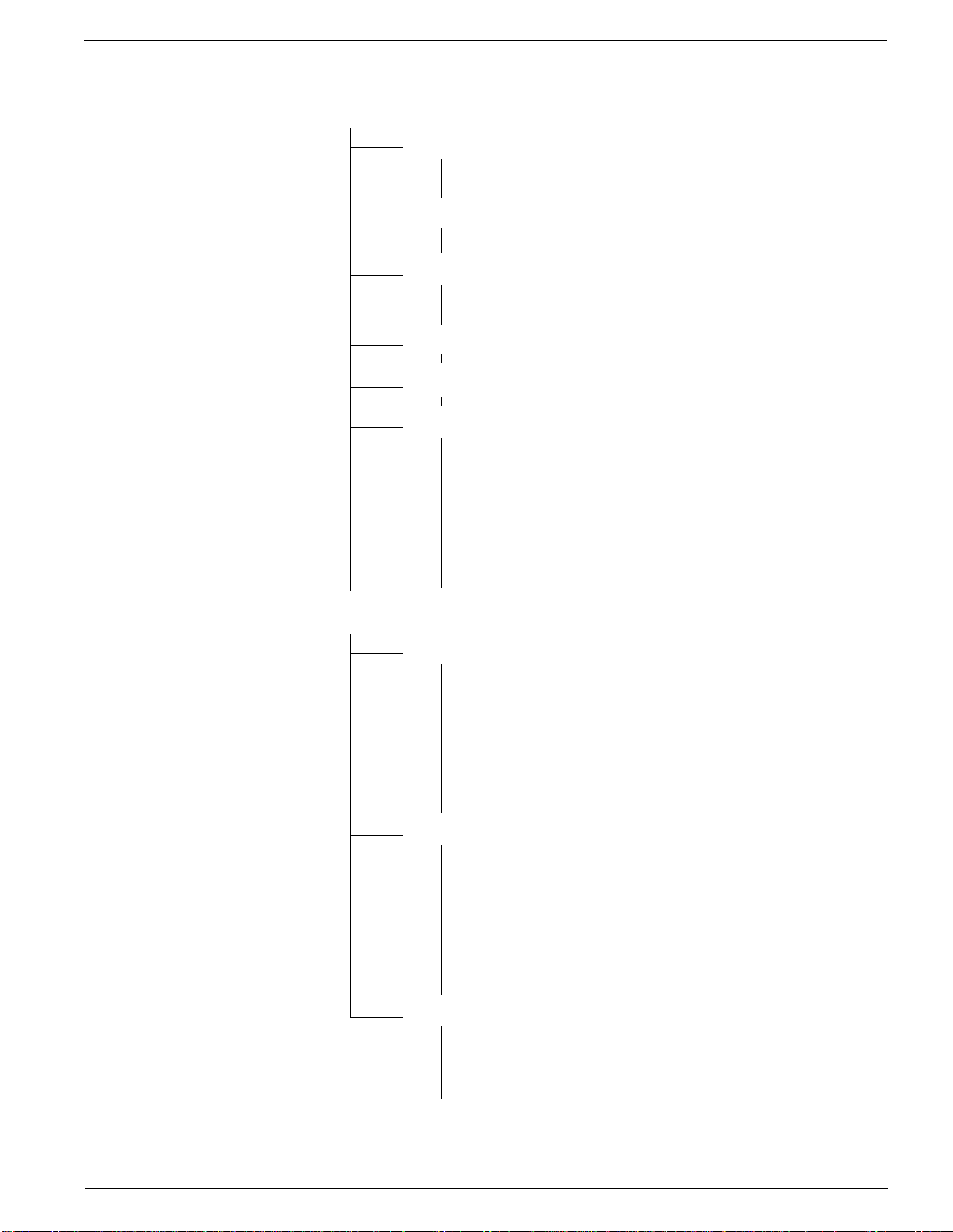
Figure 3.2 Programming Guide
Scroll Thru
Parameter Groups
d01
d09
F01
F04
A ..
B ..
C ..
Press SEL to enter
parameter group.
A01
A98
b01
b89
C01
C91
Scroll Thru
Parameter Numbers
View
Parameter
Value
Change
Parameter
Value
Save
Entered
Parameter
Value
Programming Examples
In this section you will find four different programming examples to help you program the 161 drive.
Initial Power Up
This example shows you how to proceed from the power up parameter value to the actual parameter number.
Action Description Display
1. Apply power to the Drive
Note: If you were viewing a display parameter when power was last removed from the
drive, the same display parameter value will reappear when the drive is re-powered. If
you were viewing any other parameter value when power was removed, the
parameter group or parameter number will appear when the drive is re-powered.
2. Press the SELect Key to switch from the parameter value to the parameter
number.
Scrolling through parameter groups
This example will show you how to check a parameter value without changing the value of the parameter.
For this example, the operation of PC21 - [Digital Output 11] will be verified.
Action Description Display
3. Press the Up/Down keys to scroll through the parameter groups, stopping
at the C group.
Note: You must scroll thru all of the d and F group parameters, but the A, b, and C
parameters are grouped and the group must be SELected to view the parameters
within that specified group. Figure 3.3 contains a hierarchy which details which
parameters are in each group.
4. Press the SELect Key to enter into the C group. PC01 - [Digital Input 1]
should appear on the display.
Note: When parameter groups are entered, the number of the parameter that was
being viewed when you last exited the group will be displayed.
5. Press the Up Key to scroll through the parameters contained within the
group, continue pressing the Up Key until PC21 - [Digital Output 11] is
displayed.
Note: When viewing parameters within the A, b and C groups the parameters will
wrap from A01 through C91 by pressing the Up/Down Keys. To view parameters
within the d and F groups the SELect Key must be pressed until the display shows
A - -, b - - or C- -. Once the group letter is displayed, the Up/Down Key will scroll to
the d and F parameters.
0.0
0.0
0.00.0
d 01
d 01
d 01d 01
C - -
C - -
C - -C - -
C 01
C 01
C 01C 01
C 21
C 21
C 21C 21
16
Page 21

Parameters & Programming
Action Description Display
6. Press the SELect Key to view the parameter value stored in PC21 - [Digital
Output 11].
7. Press the SELect Key again to exit from the parameter value back to the
parameter number without changing the stored value.
8. Press the SELect Key again to exit from the parameter number to the
parameter group display.
Operation of the Drive via the Fixed Keypad
The following steps demonstrate configuring the drive for operation from the keypad.
Activate the Start Key on the Keypad.
Action Description Display
9. Press the SELect Key to switch from the parameter value to the parameter
number.
01
01
0101
C 21
C 21
C 21C 21
C - -
C - -
C - -C - -
d 01
10. Press the Up/Down Keys to scroll through the parameter groups stopping at
the A group.
11. Press the SELect Key to enter into the A group.
12. Press the Up Key to display PA 02 - [Start Command Select].
13. Press the SELect Key to view the parameter value stored in parameter A02 -
[Start Command Select].
14. Use the Up Key to change the value of PA 02 - [Start Command Select] from
the default value of 01 to 02. This will switch the source of the start input from
the control terminal block to the keypad.
15. When the desired value is displayed, press the Enter Key. This writes the new
value to memory and the display will return to the parameter number.
The green LED above the Start key will be illuminated when the Start key is active.
Note:
Note: The factory default settings for the “U” version drive is three wire control (PC03 is set to 21 and C13 is set to
01). A jumper is required between terminals P24 and 3 on the control terminal block for the drive to run.
Note: The direction of rotation is controlled by PF04 - [Start Key Direction]. Refer to page 22 of the User Manual for
parameter setting options.
A --
A 01
A02
01
02
A02
Activating the Speed Pot on the Keypad
Parameter A01-[Frequency Command Select] is used to select the source of the frequency command.
Action Description Display
16. Press the Down Key until PA01 - [Frequency Command Select] is
displayed.
A01
17. Press the SELect key to view the parameter value.
18. Use the Down Key to change the value of PA01 - [Frequency Command
Select] from the default value of 01 to 00. This will switch the source of the
frequency command to the potentiometer on the keypad.
19. When the desired value is displayed, press the Enter Key. This writes the
new value to memory and the display will return to the parameter number.
Note: The output frequency of the Bulletin 161 can also be controlled digitally from the keypad by setting PA 01 to setting 02, then using PF01-[Frequency Command] to change to output frequency of the drive.
Note: If a digital input is set as 27 (UP) or 28 (DWN), when activated these inputs will also change the frequency of
the drive.
01
00
A01
17
Page 22
Parameters & Programming
Restoring Factory Defaults
This example will show you how to reset the factory defaults of the drive.
Action Description Display
20. Press the Down Key to advance to the b parameter group.
b - -
21. Press the SELect key to enter into the b parameter group.
22. Press the Up Key to scroll through the parameters until parameter b84 [Reset Functions] is displayed.
23. Press the SELect Key to view the parameter value stored in parameter b84 -
[Reset Functions] and verify that it is set to 01. If it is not 01, use the UP key to
change the value to 01, then press the Enter key.
Note: The defaults will be reset to the values determined by parameter b85 Factory Default Select].
24. Press the SELect Key to exit the parameter value back to the parameter
number without changing the stored value.
25. Press and hold the SELect, Up, Down and Stop Keys for 3 seconds.
+
+
+
NOTE: The keys can be pressed and held in any sequence, but the Stop Key
MUST be the last key held.
26. Release the Stop Key and continue to hold the SELect, Up and Down Keys
until the display begins to blink. Release the remaining keys. When this is
done, 0.0 will be displayed (this is parameter d01 - [Output Frequency]).
00
b 01
b 84
01
b 84
b 84
”Blinking”
0.0
18
Page 23

Figure 3.3 Parameter Groups
d group - Display and Diagnostic Parameters (Read only)
Display & Diagnostic Functions
d01 Output Frequency
d02 Output Current
d03 Direction
d04 PID Process Display
d05 Digital Input Status
d06 Output Status
d07 Process Display
d08 Last Fault
d09 Fault Register
d16 Elapsed Run Time
F group - Basic Function Parameters
Basic Functions
F01 Frequency Command
F02 Accel Time 1
F03 Decel Time 1
F04 Start Key Direction
A group - Advanced Function Parameters
Parameters & Programming
Parameter Tree
Basic Functions
A01 Frequency Command Select
A02 Start Command Select
A03 Base Frequency
A04 Maximum Frequency
Analog Input Reference Adjustment
A11 Analog Frequency Minimum
A12 Analog Frequency Maximum
A13 Analog Input Minimum
A14 Analog Input Maximum
A15 Analog Start Select
A16 Analog Filter Select
Preset Frequencies
A20 Internal Frequency
A21 Preset Frequency 1
A22 Preset Frequency 2
A23 Preset Frequency 3
A24 Preset Frequency 4
A25 Preset Frequency 5
A26 Preset Frequency 6
A27 Preset Frequency 7
A28 Preset Frequency 8
A29 Preset Frequency 9
A30 Preset Frequency 10
A31 Preset Frequency 11
A32 Preset Frequency 12
A33 Preset Frequency 13
A34 Preset Frequency 14
A35 Preset Frequency 15
A38 Jog Frequency
A39 Jog Stop Mode
V/F Characteristics/Boost
A41 Boost Select
A42 Manual Boost Voltage
A43 Manual Boost Frequency
A44 V/Hz Select
A45 Maximum Voltage
DC Brake
A51 DC Brake Select
A52 DC Brake Start Frequency
A53 DC Wait Time
A54 DC Hold Voltage
A55 DC Hold Time
Operating Frequency Range
A61 Upper Frequency Limit
A62 Minimum Frequency
A63 Skip Frequency 1
A64 Skip Frequency Band 1
A65 Skip Frequency 2
A66 Skip Frequency Band 2
A67 Skip Frequency 3
A68 Skip Frequency Band 3
PID Controller
A71 PID Enable
A72 PID Proportional Gain
A73 PID Integral Gain
A74 PID Differential Gain
A75 Process Reference Scale Factor
A76 Analog Feedback Select
Automatic Voltage Regulation
A81 AVR Function Select
A82 Base Voltage
Second Acceleration/Deceleration Ramp
A92 Accel Time 2
A93 Decel Time 2
A94 Accel/Decel 2 Select
A95 Accel 2 Start Frequency
A96 Decel 2 Start Frequency
A97 Accel Curve
A98 Decel Curve
19
Page 24
Parameters & Programming
Parameter Tree cont.
b Group - Advanced Control and Protection
Automatic Start After a Fault
b01 Restart Mode Select
b02 Power Loss Time
b03 Restart Time
Electronic Motor Protection
b12 Motor Overload Current
b13 Motor Overload Select
Current Limit
b21 Current Limit Select
b22 Current Limit
b23 Current Limit Decel Time
Parameter Protection
b31 Program Lock Select
Current Feedback Tuning
b32 Relative Current Setting
Initialization/Adjustment Function
b81 Output FM Adjustment
b82 Start Frequency
b83 PWM Frequency
b84 Reset Functions
b85 Factory Default Select
b86 Process Display Scale Factor
b87 STOP Key select
b88 FRS Select
b89 Keypad Display
b92 Reserved
C group - Intelligent I/O and Communication
Digital Inputs 1-5
C01 Digital Input 1
C02 Digital Input 2
C03 Digital Input 3
C04 Digital Input 4
C05 Digital Input 5
C11 Digital Input 1 Logic
C12 Digital Input 2 Logic
C13 Digital Input 3 Logic
C14 Digital Input 4 Logic
C15 Digital Input 5 Logic
Outputs 11, 12, FM, AL0 - AL1
C21 Digital Output 11
C22 Digital Output 12
C23 Output FM Select
C31 Digital Output 11 Logic
C32 Digital Output 12 Logic
C33 Fault Relay AL1 Logic
C41 Overload Alarm Threshold
C42 Above Frequency Accel Threshold
C43 Above Frequency Decel Threshold
C44 PID Deviation Threshold
Communications
C70 Communication Command Select
C71 Unassigned
C72 Unassigned
C79 Communication Error Select
C91 Debug Mode
20
Page 25

Parameters & Programming
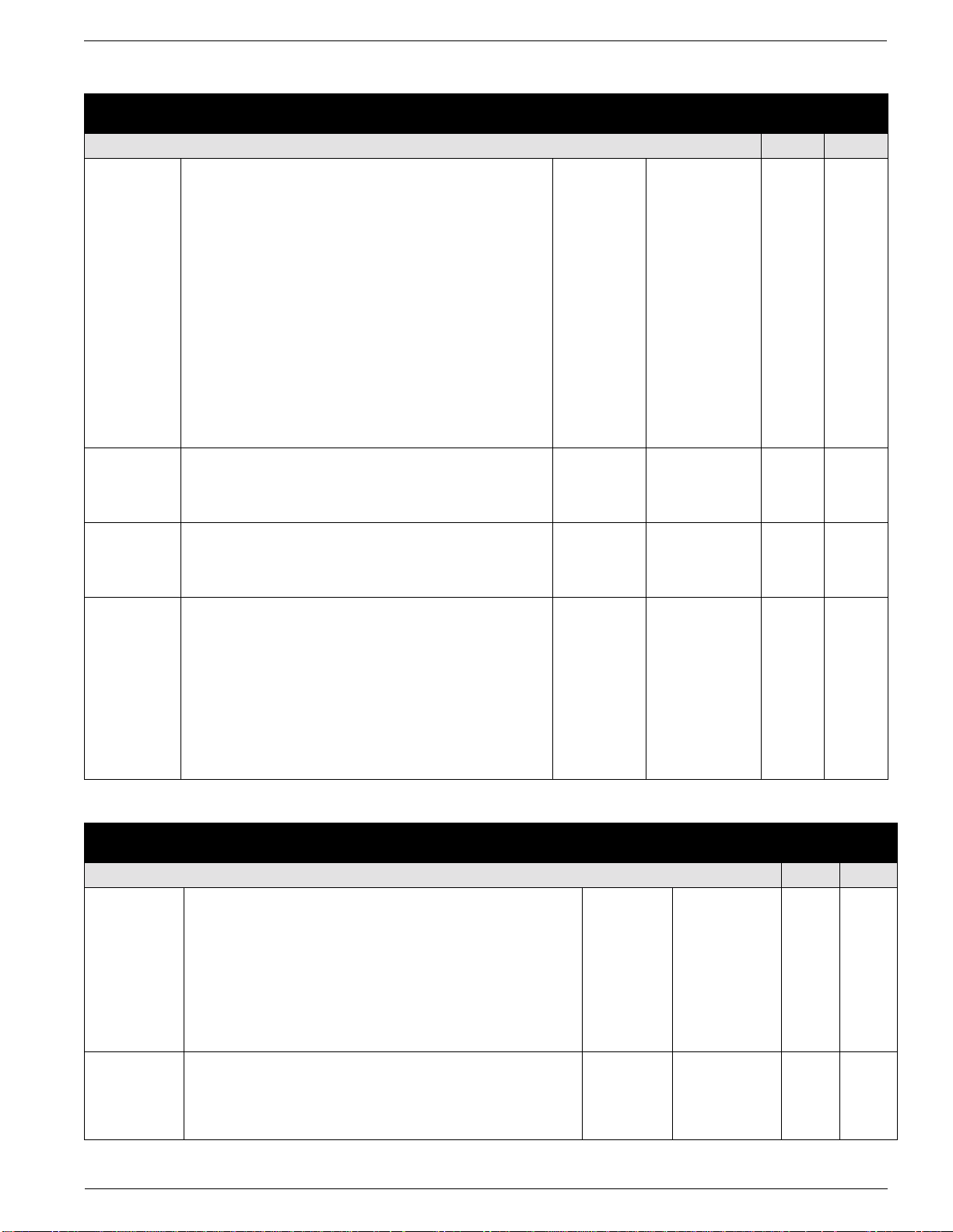
Parameter Descriptions
D Group - Display and Diagnostic Parameters (Read Only)
This group of parameters consists of commonly viewed drive operation conditions such as output
frequency. All parameters in this group are Read Only.
Parameter
Parameter Name / Description Min./Max
Number
Display and Diagnostic Functions
d01 [Output Frequency]
Displays the output frequency to the motor.
d02 [Output Current]
Displays the output current to the motor.
d03 [Direction]
Displays the present direction of rotation.
F=Forward
r=Reverse
o=Stop
d04 [PID Process Display]
Displays the scaled PID Process variable (feedback), this is
only available when the PID control is active. The scale factor
is set using parameter C15 - [Digital Input 5 Logic].
d05 [Digital Input Status]
Displays the status of the 5 digital inputs regardless of how
each input is programmed in parameter C11 - [Digital Input 1
Logic] through parameter C15 - [Digital Input 5 Logic].
5 4 3 2 1
Active
Inactive
d06 [Output Status]
Displays the status of the digital outputs and the fault
indication relays.
AL12 11
Active
Inactive
d07 [Process Display]
Displays parameter d01 - [Output Frequency ] scaled by the
variable set in parameter b86 - [Process Display Scale Factor].
Note: If there are more than 4 digits, the LSB will be dropped.
d08 [Last Fault]
Displays the last fault. The output frequency, motor current,
and DC-bus voltage at the time of the last fault can be viewed
by pressing the SELect key. If there has not been a fault or the
register has been cleared, then --- will be displayed.
d09 [Fault Register]
nd
Displays the 2
and 3rd fault, if there are no faults stored in
this register, then --- will be displayed. To view the 3
press the SELect key.
d16 [Elapsed Run Time]
Displays the elapsed running time of the drive. The elapsed
running time is the displayed value x 10.
rd
fault,
Units
Range
0.0/360.0 0.1 Hz
0.00/
0.01A
999.9
Alpha
Numeric
Value
Alpha
Numeric
Value
0/100.0 0.01%
N/A N/A
N/A N/A
0.00/9999 0.01
N/A ---
N/A ---
0/9999 10
hours
21
Page 26
Parameters & Programming
F Group – Basic Function Parameters
Parameter
Number
Parameter Name / Description Min./Max
Range
Units Factory
Basic Functions U
F01 [Frequency Command]
0.0/360.0 0.1 Hz N/A N/A
When parameter A01- [Frequency Command Select]
is set to 00 or 01, this parameter will display the
commanded frequency. When PA01 - [Frequency
Command Select] is set to 02, this parameter can
be used to change the commanded frequency on
the fly and write the value into parameter A20 -
[Internal Frequency]. When a preset frequency is
active, this parameter can be used to program or
change the value of the preset input on the fly while
writing the value into the corresponding parameter
(PA21 - [Preset Frequency 1] – PA35 - [Preset
Frequency 15]).
Note: The value Is changed in real time and written to memory
without using the Enter key.
This parameter can be changed while motor is running.
F02 [Accel Time 1]
Time for the drive to ramp from 0.0 Hz to PA04 -
0.1/3000 <1000, 0.1 s
>1000, 1 s
10.0 10.0
[Maximum Frequency]
This parameter can be changed while motor is running.
F03 [Decel Time 1]
Time for the drive to ramp from PA04 - [Maximum
0.1/3000 <1000, 0.1 s
>1000, 1 s
10.0 10.0
Frequency] to 0.0 Hz
This parameter can be changed while motor is running.
F04 [Start Key Direction]
00/02 Numeric Value 00 0.0
Sets the direction of motor rotation when the drive
is set to Start Key mode, which is controlled by
PA02 - [Start Command Select] and digital input
setting 31 {OPE}.
Settings: 00=Forward
01=Reverse
02=Control Terminal – Digital inputs
(C01-C05) settings 00 {FW} and 01 {RV}
determine direction of Start Key.
Defaults
1
1
K
A Group – Advanced Function Parameters
Parameter
Number
Basic Functions U
A01 [Frequency Command Select]
A02 [Start Command Select]
1
U = 50Hz default settings, K = 50 Hz default settings. Settable using Pb85 – [Factory Default Select]
22
Parameter Name / Description Min./Max
Range
00/02 Numeric Value 01 01
Selects the source of the frequency command for
the drive.
Note: If any preset frequency inputs are active, all
other frequency commands will be ignored.
Settings: 00= Keypad frequency potentiometer
01=Input O/OI (Analog reference)
02=Internal frequency (PF01 -
[Frequency Command]/ PA20 -
[Internal Frequency])
01/02 Numeric Value 01 01
Selects the source of the start command. Settings:
01=Control terminal block
02=Start Key (Input from Start Key on drive keypad)
If PC03 is set to 21, terminals P24 and 3 must be jumpered for drive to run.
Note:
Units Factory
Defaults
1
1
K
Page 27

Parameters & Programming
Parameter
Number
Parameter Name / Description Min./Max
Range
Units Factory
Basic Functions U
A03 [Base Frequency]
50/360 1 Hz 60 50
Set value to rated nameplate frequency of motor
Voltage
100%
0
Start
Frequency
b82
Base
Frequency
A03
A04 [Maximum Frequency]
Maximum
Frequency
A04
Frequency
Command
Frequency
Minimum
Frequency
A62
Upper
Frequency Limit
A61
Hz
50/360 1Hz 60 50
Highest frequency the drive will output.
Note: If a maximum frequency less than PA03 – [Base Frequency] is
needed, use PA61 – [Upper Frequency Limit].
Refer to diagram in PA03 – [Base Frequency].
Analog input reference adjustment U
A11 [Analog Frequency Minimum]
0.0/360.0 0.1 Hz 0.0 0.0
Sets the frequency that corresponds to a 0V or 4mA
analog signal.
A12
Defaults
1
1
1
K
1
K
A11
0V 10VA13 A14
4mA 20mA
A12 [Analog Frequency Maximum]
Sets the frequency that corresponds to a 10V or 20mA
analog signal. A value of 0.0 will disable this function.
Refer to diagram in PA11 – [Analog Frequency Minimum].
A13 [Analog Input Minimum]
Sets the starting point (offset) for the analog input range.
Refer to diagram in PA11 - [Analog Frequency Minimum]
A14 [Analog Input Maximum]
The ending point (offset) for the analog input range.
to diagram in PA11 - [Analog Frequency Minimum].
A15 [Analog Start Select]
Sets the output frequency when frequency reference is
below value set in PA13 – [Analog Input Minimum].
Settings: 00 = PA11 - [Analog Frequency Minimum]
01 = 0 Hz
Frequency
A12
A15=00
A11
0V 10VA13 A14
4mA 20mA
A15=01
% Input
Scale
A16 [Analog Filter Select]
Sets the level of the Analog input smoothing filter where:
1 = low. (Bandwidth = 200 Hz)
8 = high. (Bandwidth = 25 Hz)
% Input
Scale
0.0/360.0 0.1 Hz 0.0 0.0
0/99 1% 0 0
0/100 1% 100 100
Refer
00/01 Numeric Value 01 01
1/8 Numeric Value 8 8
23
Page 28
Parameters & Programming
1
U = 50Hz default settings, K = 50 Hz default settings. Settable using Pb85 – [Factory Default Select]
Parameter
Number
Pre-Set Frequencies U
A20 [Internal Frequency]
Parameter Name / Description Min./Max
Range
0.0/360.0 0.1 Hz 60.0 0.0
Units Factory
Defaults
1
K
When PA01-[Frequency Command Select] is set to
02, this parameter will provide the drives frequency
command. This parameter will change the frequency
command only after the new frequency is entered into
memory.
This value can also be changed via PF01 [Frequency Command] if no preset frequency inputs
are active.
This Parameter can be changed while motor is running.
A21 [Preset Frequency 1] The programmed value
0.0/360.0 0.1 Hz 0.0 0.0
sets the frequency that
A22 [Preset Frequency 2] 0.0/360.0 0.1 Hz 3.0 0.0
the drive outputs when
selected. (Refer to
A23 [Preset Frequency 3] 0.0/360.0 0.1 Hz 5.0 0.0
A24 [Preset Frequency 4] 0.0/360.0 0.1 Hz 10.0 0.0
A25 [Preset Frequency 5] 0.0/360.0 0.1 Hz 15.0 0.0
A26 [Preset Frequency 6] 0.0/360.0 0.1 Hz 20.0 0.0
A27 [Preset Frequency 7] 0.0/360.0 0.1 Hz 25.0 0.0
digital input settings
table in Chapter 2).
Note: If
a preset frequency input is
active, the keypad frequency
pot and analog frequency
commands will be ignored.
Note: The value of any Preset
Frequency can be changed via
PF01 - [Frequency Command]
A28 [Preset Frequency 8] 0.0/360.0 0.1 Hz 30.0 0.0
when the Preset Frequency is
activated via the digital inputs.
A29 [Preset Frequency 9] 0.0/360.0 0.1 Hz 35.0 0.0
These Parameters can be
changed while motor is
A30 [Preset Frequency 10] 0.0/360.0 0.1 Hz 40.0 0.0
running.
1
A31 [Preset Frequency 11] 0.0/360.0 0.1 Hz 45.0 0.0
A32 [Preset Frequency 12] 0.0/360.0 0.1 Hz 50.0 0.0
A33 [Preset Frequency 13] 0.0/360.0 0.1 Hz 55.0 0.0
A34 [Preset Frequency 14] 0.0/360.0 0.1 Hz 60.0 0.0
A35 [Preset Frequency 15] 0.0/360.0 0.1 Hz 0.0 0.0
A38 [Jog Frequency]
0.5/9.9 0.1 Hz 5.0 5.0
This parameter sets the frequency the drive will
output when it receives a valid jog command.
This Parameter can be changed while motor is running.
A39 [Jog Stop Mode]
This parameter sets the stop method when the jog
00/02 Numeric
Value
01 01
input is removed.
Settings:
00=Coast
01=Ramp
02=DC Brake (See PA53 - [DC Wait
Time] – PA55 - [DC Hold Time])
1
U = 60 Hz default settings, K = 50 Hz default settings. Settable using Pb85 – [Factory Default Select]
24
Page 29

Parameters & Programming
Parameter
Number
Parameter Name / Description Min./Max
Range
Units Factory
V/F Characteristics / Boost U
A41 [Boost Select]
Used to select auto or manual boost
00/01 Numeric
Value
Settings:
00=Manual Boost
01=Auto Boost
A42 [Manual Boost Voltage]
Sets the boost level as a percent of PA82 - [Base
0/99 Numeric
Value
Voltage].
This Parameter can be changed while motor is running.
Vol ta ge
100%
A42
A43 30Hz 60Hz
1/2 Base
frequency
A43 [Manual Boost Frequency]
Base frequency
~
99 = 20%
of Base Voltage at 0Hz,
then linear scale down
~
e.g. 25 = 5%
Frequency
0.0/50.0% 0.1% 2.0 10.0
Sets the boost frequency point as a percent of PA03 -
[Base Frequency].
Refer to diagram in PA42 –
[Manual Boost Voltage]
This Parameter can be changed while motor is running.
Defaults
1
K
00 00
25 11
1
A44 [V/Hz Select]
Used to select the V/Hz mode.
00/01 Numeric
Value
Settings: 00=Constant Torque
01=Variable Torque
Vol ta ge
100%
A44 = 00
Constant
To r q u e
0
A45 [Maximum Voltage Gain]
A44 = 01
Var ia ble
To r qu e
Base frequency
frequency
50/100 1% 100 100
Sets the voltage gain of the V/Hz characteristic.
Value is a percent of PA82 - [Base Voltage].
This Parameter can be changed while motor is running.
100%
A45
50%
0
1
U = 60 Hz default settings, K = 50 Hz default settings. Settable using Pb85 – [Factory Default Select]
Base frequency
frequency
00 00
25
Page 30
Parameters & Programming
Parameter
Number
Parameter Name / Description Min./Max
Range
Units Factory
DC Brake U
A51 [DC Brake Enable]
00/01 Numeric Value 00 00
Used to enable/disable DC injection braking
Settings: 00=Disabled
01=Enabled
A52 [DC Brake Start Frequency]
0.5/10.0 0.1Hz 10.0 10.0
Sets the frequency at which the DC brake will
become active.
A53 [DC Brake Wait Time]
0.0/5.0 0.1 seconds 0.0 0.0
Sets the time the drive will wait after PA52 -
[DC Brake Start Frequency] before applying
PA54 - [DC Hold Voltage].
A54 [DC Hold Voltage]
Sets the level of DC braking voltage in percent
0/100 1% of drive
rating
of PA82 - [Base Voltage].
A55 [DC Hold Time]
0.0/60.0 0.1 seconds 0.0 0.0
The time that PA54 -[DC Hold Voltage] is
applied to the motor after PA53 - [DC Brake
Waiting Time] has expired.
Operating Frequency Range U
A61 [Upper Frequency Limit]
0.5/360.0 0.1Hz 0.0 0.0
This is an upper frequency limit similar to PA04 [Maximum Frequency] except that it can be
set lower than PA03 - [Base Frequency]. A
value of 0.0 will disable this parameter.
Output Frequency
Output Frequency
A61
Defaults
1
1
K
00
1
1
K
A62
Frequency Command
A62 [Minimum Frequency]
0.0/360.0 0.1Hz 0.0 0.0
Lowest frequency the drive will output
continuously.
Refer to diagram in PA61 – [Upper Frequency Limit].
A63 [Skip Frequency 1]
0.0/360.0 0.1Hz 0.0 0.0
Sets a frequency at which the drive will not output
continuously.
A64 [Skip Frequency Band 1]
0.0/10.0 0.1Hz 0.5 0.5
Sets the bandwidth around PA63 -[Skip
Frequency 1]. The bandwidth is 2x PA64 –
[Skip Frequency Band 1] with ½ the band
below and ½ the band above PA63 - [Skip
Frequency 1].
A65 [Skip Frequency 2]
0.0/360.0 0.1Hz 0.0 0.0
Sets a frequency at which the drive will not output
continuously.
A66 [Skip Frequency Band 2]
0.0/10.0 0.1Hz 0.5 0.5
Sets the bandwidth around PA65 -[Skip
Frequency 2]. The bandwidth is 2x PA66 -
[Skip Frequency Band 2] with ½ the band
below and ½ the band above PA65 - [Skip
Frequency 2].
1
U = 60 Hz default settings, K = 50 Hz default settings. Settable using Pb85 – [Factory Default Select]
26
Page 31

Parameters & Programming
Parameter
Number
Parameter Name / Description Min./Max
Range
Units Factory
Operating Frequency Range cont. U
A67 [Skip Frequency 3]
0.0/360.0 0.1Hz 0.0 0.0
Sets a frequency at which the drive will not output
continuously.
A68 [Skip Frequency Band 3]
0.0/10.0 0.1 Hz 0.5 0.5
Sets the bandwidth around PA67 - [Skip
Frequency 3]. The bandwidth is 2x PA68 -
[Skip Frequency Band 3] with ½ the band
below and ½ the band above PA67 - [Skip
Frequency 3].
PID Controller U
A71 [PID Enable]
Used to disable / enable the use of PID control.
00/01 Numeric
Value
Settings: 00=disable
01=enable
(See Figure 4.1 for PID block diagram)
A72 [PID Proportional Gain]
0.2/5.0 N/A 1.0 1.0
Sets the proportional gain for the PID control.
This Parameter can be changed while motor is running.
A73 [PID Integral Gain]
0.0/150.0 0.1 seconds 1.0 1.0
Sets the integral gain for the PID control.
This Parameter can be changed while motor is running.
A74 [PID Differential Gain]
0.0/100.0 N/A 0.0 0.0
Sets the differential gain for the PID control.
This Parameter can be changed while motor is running.
A75 [Process Reference Scale Factor]
0.01/99.99 N/A 1.00 1.00
Used to scale the target value equivalent to the
PID feedback value.
A76 [Analog Feedback Select]
Selects the source from which the PID
00/01 Numeric
Value
feedback originates
Settings: 00=Input OI
01=Input O
Automatic Voltage Regulation (AVR) U
A81 [AVR Function Select]
Used to select the Automatic Voltage Regulation
00/02 Numeric
Value
function.
Settings: 00=Active
01=Inactive
02=Inactive during deceleration
A82 [Base Voltage]
Set voltage to rated nameplate voltage of motor.
200/220/230
/240
Volts 230 230
Second Acceleration / Deceleration Ramp U
A92 [Accel Time 2]
Time for the drive to ramp from 0.0 Hz to PA04 -
0.1/3000 <1000, 0.1 s
>1000, 1 s
[Maximum Frequency]. PA94 - [Accel/Decel
2 Select] is used to determine when active.
This Parameter can be changed while motor is running
A93 [Decel Time 2]
Sets the time for the drive to ramp from PA04 -
0.1/3000 <1000, 0.1 s
>1000, 1 s
[Maximum Frequency] to 0.0 Hz. PA94 -[Accel/Decel2
Select] is used to determine when active.
This Parameter can be changed while motor is running.
1
U = 60 Hz default settings, K = 50 Hz default settings. Settable using Pb85 – [Factory Default Select]
Defaults
1
K
1
K
00 00
00 00
1
K
02 02
1
K
15.0 15.0
15.0 15.0
1
1
1
1
27
Page 32

Parameters & Programming
Parameter
Number
Parameter Name / Description Min./Max
Range
Units Factory
Operating Frequency Range cont. U
A94 [Accel / Decel 2 Select]
Used to determine when the PA92 – [Accel
00/01 Numeric
Value
Time 2] and PA93 - [Decel Time 2] are used.
Settings: 00=Digital inputs (C01-C05) set to 09{2CH}
01=Automatic if frequency
programmed in PA95 - [Accel 2
Start Frequency]/ PA96 - [Decel 2
Start Frequency] is reached.
A95 [Accel 2 Start Frequency]
0.0/360.0 0.1 Hz 30.0 0.0
Sets the frequency at which PA92 - [Accel Time
2] will take effect if PA94 - [Accel/Decel 2
Select] is set to 01.
A96 [Decel 2 Start Frequency]
0.0/360.0 0.1 Hz 30.0 0.0
Sets the frequency at which PA93 - [Decel Time
2] will take effect if PA94 - [Accel/Decel 2
Select] is set to 01.
A97 [Accel Curve]
Selects the type of acceleration curve.
00/01 Numeric
Value
Settings: 00=Linear
01=S-curve
A98 [Decel Curve]
Selects the type of deceleration curve.
00/01 Numeric
Value
Settings: 00=Linear
01=S-curve
Defaults
1
K
00 00
00 00
00 00
1
Figure 3.4 PID Loop Block Diagram
Frequency
Command
Setting
PF01
Preset
Frequency
Setting
PA20 to PA35
Pote ntiom et er
on keypad
V/I input
select
[AT]
Voltage
[O]
A GND
L
Set point
(Target)
Process Reference
Scale Factor
reciprocal
1/PA75
Analog input reference adjustment
Frequency
Command
Select
PA01
Process Variable
(Feedback)
PA12
PA11
PA15 PA13 PA14
Process Reference
Scale Factor
PA75
PID
Proportional
Gain
PA72
Error
SP
EE
PV
Process Reference
Scale Factor
Differential
PA75
PID
Integral
Gain
PA73
PID
Gain
PA74
Frequency
Command
PF01
Frequency
Setting
PID
Process Display
Pd04
28
OI
Current
PA76
Analog
Feedback
select
Page 33

b Group – Advanced Control and Protection Parameters
Parameters & Programming
Parameter
Number
Parameter Name / Description Min./Max
Range
Units Factory
Automatic Start After a Fault U
b01 [Restart Mode Select]
00/03 Numeric Value 00 00
Selects the restart mode for the drive
Settings: 00=Fault indication
01=0 Hz start
02=Synchronize.
03=Synchr. and stop
Note: If set to 01, 02 or 03 the drive will attempt to restart the
following number of times after the following events:
Overcurrent – 3 restarts
Overvoltage – 3 restarts
Undervoltage – 16 restarts (refer to Pb03 – [Restart Time] for time
between restart attempts)
ATTENTION:
This parameter may only be used as
outlined in NFPA 79, “Under Voltage Protection.”
Equipment damage and/or personal injury may result if this
parameter is used in an inappropriate application.
b02 [Power Loss Time]
If undervoltage exists longer than the
0.3/25.0 0.1
seconds
programmed time, the drive will fault even if Pb01 -
[Restart Mode Select] is active.
b03 [Restart Time]
Sets the time between restart attempts after an
0.3/100.0 0.1
seconds
undervoltage fault or the removal of a digital
input set to 11 {FRS}.
1
U = 60 Hz default settings, K = 50 Hz default settings. Settable using Pb85 – [Factory Default Select]
Defaults
1
K
1.0 1.0
1.0 1.0
1
Parameter
Number
Parameter Name / Description Min./Max
Range
Units Factory
Electronic Thermal Motor Protection U
b12 [Motor Overload Current]
Set to motor nameplate full load amps.
b13 [Motor Overload Select]
5/120% of
rated
current
0.01A 115%
of drive
rating
00/02 Numeric Value 01 01
Selects the characteristics of the electronic thermal
motor protection.
Settings: 00=Derating1
01=No Derating
02=Derating2
To r q u e
100%
b13 = 02
80%
60%
5Hz 20Hz 60Hz
b13 = 01
b13 = 00
Output frequency
120Hz
Defaults
1
115%
of drive
rating
1
K
29
Page 34

Parameters & Programming
Parameter
Number
Parameter Name / Description Min./Max
Range
Units Factory
Current Limit U
b21 [Current Limit Select]
Selects the mode for current limit.
00/02 Numeric
Value
Settings: 00=Inactive
01=Active
02=Inactive in acceleration
b22 [Current Limit]
Sets the maximum output current allowed before
current limiting occurs. Value set in percent of drive
50/150% of
rated current
0.01 A 150% of
drive
rating
rated output current.
b23 [Current Limit Decel Time]
0.3/30.0 0.1 second 1.0 1.0
Sets the deceleration time when the current limiting
occurs.
Parameter Protection U
b31 [Program Lock Select]
Sets the mode of program lock used.
00/03 Numeric
Value
Settings: 00=All parameters locked when digital
input setting 15 {SFT} active.
01=All parameters locked except PF01
– [Frequency Command] when
digital input setting 15 {SFT} active.
02=All parameters locked
03=All parameters locked except PF01
– [Frequency Command].
Current Feedback Tuning U
b32 [Reactive Current Setting]
Use to improve accuracy by calibrating drive
motor combination. For improved accuracy,
0.00/100% 0.01A 40% of
drive
rating
adjust this value during no load operation until
Pd02 - [Output Current] matches actual motor
current.
1
U = 60 Hz default settings, K = 50 Hz default settings. Settable using Pb85 – [Factory Default Select]
2
5hp (3.7 kW) ratings have a default value of 35%.
Defaults
1
K
01 01
150% of
drive
rating
1
K
01 01
1
K
40% of
drive
2
rating
1
1
1
30
Page 35
Parameters & Programming
Parameter
Number
Parameter Name / Description Min./Max
Range
Units Factory
Initialization / Adjustment Function U
b81 [Output FM Adjustment]
0/255 N/A 80 80
Sets the multiplier applied to output duty cycle for the
FM analog signal.
This Parameter can be changed while motor is running.
b82 [Start Frequency]
0.5/9.9 0.1 Hz 0.5 0.5
Sets the frequency at which the drive will start.
Refer to diagram in PA03 – [Base Frequency]
b83 [PWM Frequency]
0.5/16.0 0.1 kHz 5.0 5.0
Carrier frequency for the PWM output waveform.
Output current must be derated by twenty percent
when set above 12 kHz.
b84 [Reset Functions]
00/01 Numeric Value 01 00
Resets the factory defaults or clears fault history.
Settings: 00=Clear fault history
01=Reset defaults
Note: To activate this parameter, set the value and press the Enter
Key, then hold the SELect, Up, Down, and STOP Keys for 3
seconds, release only the STOP Key until display is blinking, then
release all of the keys.
Note: Defaults will reset to factory settings determined by Pb85 –
[Factory Defaults Select]
Defaults
1
1
K
b85 [Factory Default Select]
Determines the default settings of all parameters. The
drive will reset to these default values when a “reset
defaults” command is executed as described in Pb84,
setting 01 = reset defaults.
Settings: 06=K (50 Hz default settings)
07=U (60 Hz default settings)
Note: Parameter default values for settings 00 - 05 are not
published in this manual and are not recommended. If using these
default settings Pb87 becomes active. Refer to the Attention
statement under Pb87.
b86 [Process Display Scale Factor]
Sets the frequency factor for Pd07 –[Process Display].
Also sets the multiplier that is applied to the output
frequency for the FM pulse signal.
This Parameter can be changed while motor is running
b87 [STOP Key Select]
This parameter is not active when Pb85 is set to setting
06 or 07.
ATTENTION:
this parameter will control the operation of the keypad STOP key. Setting
00 will enable the STOP key and 01 will disable the STOP key. Disabling
the STOP key is not recommended as it could result in personal injury, loss
of life or equipment damage.
If Pb85 settings 00 through 05, are activated,
06/07 Numeric Value 07 06
0.1/99.9 N/A 30.0 1.0
00/01 Numeric
00 00
Value
1
U = 60 Hz default settings, K = 50 Hz default settings. Settable using Pb85 – [Factory Default Select]
31
Page 36
Parameters & Programming
Parameter
Number
Parameter Name / Description Min./Max
Range
Units Factory
Initialization / Adjustment Function U
b88 [FRS Select]
00/01 Numeric Value 00 00
Selects operation of the drive after a digital input
(C01 – C05) setting 11{FRS} input is removed.
Settings: 00=0 Hz start
01=Synchronization of motor speed
after waiting period programmed via
Pb03 – [Restart Time].
b89 [Reserved]
01/07 Numeric Value 01 01
Reserved for Future Use, DO NOT CHANGE
b92 [Reserved]
00/01 00
Reserved for Future Use, DO NOT CHANGE
1
U = 60 Hz default settings, K = 50 Hz default settings. Settable using Pb85 – [Factory Default Select]
Defaults
1
1
K
32
Page 37

Parameters & Programming
C Group – Intelligent I/O and Communication Parameters
This parameter group is used to program the functions of the digital and analog I/O.
ATTENTION
• All digital inputs respond to level sensitive commands.
• Inputs do not require a voltage transition (cycle) after a fault condition is cleared, after input power cycling or after
programming the logic of the digital input.
• All digital inputs can be programmed as NO or NC. HOWEVER, The START COMMAND SHOULD BE SET AS NO (ACTIVE
HIGH) AND THE STOP COMMAND SHOULD BE SET AS NC (ACTIVE OPEN). If set opposite of this, an inadvertent start
or failure to stop could occur should a discrete connection be lost or control wire come loose. IF THE USER CHOOSES TO
DISREGARD THIS SAFETY PRACTICE – THE RISK ASSUMED BY THE USER CAN BE REDUCED BY ASSURING THAT
OTHER SAFEGUARDS ARE USED TO INSURE PROPER START AND STOP OPERATION. Depending on the application:
This may include appropriate emergency stops, redundant wiring, electronic guards and/or mechanical guards.
Failure to observe this precaution could result in severe bodily injury or loss of life.
Parameter
Number
Digital Inputs 1 – 5 U
Parameter Name / Description Min./Max
Range
Units Factory
Defaults
1
Parameter
C01 [Digital Inputs 1-5]
00/31 Numeric Value 22 00
Used to program the function of digital inputs 1 – 5.
Settings: 00={FW} (Forward)
01={RV} (Reverse)
C02 20 01
C03 21 02
C04 18 03
C05 13 13
02={CF1} (Preset Frequency Input)
03={CF2} (Preset Frequency Input)
04={CF3} (Preset Frequency Input)
05={CF4} (Preset Frequency Input)
06={JG} (Jog)
09={2CH} (Accel/Decel 2 Select)
11={FRS} (Coast to Stop)
12={EXT} (External Trip)
13={USP} (Unintentional Start Protection)
15={SFT} (Program Lock)
16={AT} (4-20mA Select)
18={RS} (Reset)
19={PTC} (PTC Input)
20={STA} (3 Wire Run)
21={STP} (3 Wire Stop)
22={F/R} (3 Wire Forward/Reverse)
27={UP} (Remote Control Up)
28={DWN} (Remote Control Down)
31={OPE} (Run/Stop Command Source Select)
input C05 only
Refer to Chapter 2 for setting descriptions of the “Programmable
Digital Input Functions” listed above.
C11 [Digital Inputs 1-5 Logic]
C12 00 00
C13 01 00
Sets the digital inputs to be NO or NC contacts
Settings: 00=NO contact (active high)
01=NC contact (active open)
00/01 Numeric Value 00 00
C14 00 00
C15 01 01
Outputs 11, 12, FM, AL0-AL1 U
C21 [Digital Outputs 11-12] Sets the operation of the
digital outputs
Settings: 00={RUN} (Motor running above 0.5 Hz)
01={FA1} (At frequency and above 0.5 Hz)
C22 00 00
02={FA2} (Above frequency)
03={OL} (Overload alarm)
04={OD} (PID deviation)
05={AL} (Fault)
Refer to control terminal table in Chapter 2 for setting descriptions
1
U = 60 Hz default settings, K = 50 Hz default settings. Settable using Pb85 – [Factory Default Select]
00/05 Numeric
Value
.
1
01 01
1
K
1
K
33
Page 38
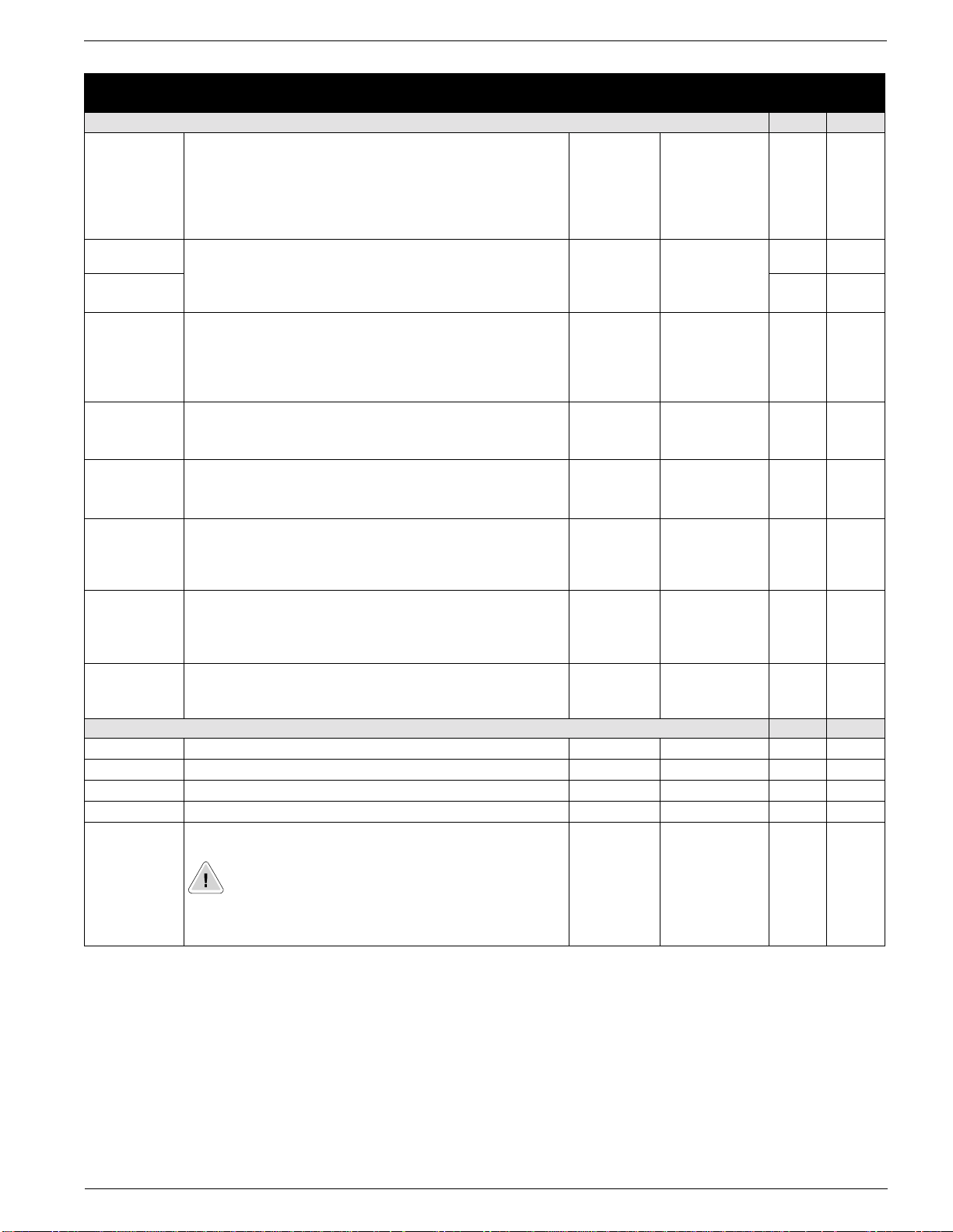
Parameters & Programming
Parameter
Number
Outputs 11, 12, FM, AL0-AI1
C23 [Output FM Select]
Parameter Name / Description Min./Max
Range
00/02 Numeric Value 00 00
Units Factory
Defaults
1
U
K
Sets the operation of the output FM.
Settings: 00={A-F} (Analog Output Frequency)
01={A} (Motor Current)
02={D-F} (Digital Output Frequency)
Refer to control inputs table in Chapter 2 for setting descriptions
C31 [Digital Output 11-12 Logic]
.
00/01 Numeric Value 00 00
Sets the digital outputs to be NO or NC contacts.
C32 00 00
Settings: 00=NO contact (Active high)
01=NC contact (Active open)
C33 [Fault Relay AL1 Logic]
00/01 Numeric Value 01 01
Sets the fault relay to be either NO or NC contacts.
Settings: 00 = NO contact (active high)
01 = NC contact (active open)
Refer to control inputs table in Chapter 2 for setting descriptions
C41 [Overload Alarm Threshold]
Sets the allowable overload level before digital outputs
11-12 change state when set to 03 {0L}.
C41 [Overload Alarm Threshold]
Sets the allowable overload level before digital
outputs 11-12 change state when set to 03 {0L}.
C42 [Above Frequency Accel Threshold]
.
0/200% of
drive rating
0.01 A 100%
of drive
rating
0/200% of
drive rating
0.01 A 100%
of drive
rating
0.0/360.0 0.1 Hz 0.0 0.0
100%
of drive
rating
100%
of drive
rating
Sets the frequency at which digital outputs 11-12
change state when set to 02 {FA2} if the drive is
accelerating.
C43 [Above Frequency Decel Threshold]
0.0/360.0 0.1 Hz 0.0 0.0
Sets the frequency at which digital outputs 11-12
change state when set to 02 {FA2} if the drive is
decelerating.
C44 [PID Deviation Threshold]
0.0/100% +/- 0.1% +/-3.0 +/-3.0
Sets the allowable PID Loop error before digital outputs
11-12 change state when set to 04 {OD}.
Communications
1
U
K
C70 [Unassigned]
C71 [Unassigned]
C72 [Unassigned]
C79 [Unassigned]
C91 Debug Mode
Used by Rockwell Automation field service personnel.
1
1
ATTENTION If PC91-[Debug Mode] is set to 01
parameters PC92-PC95 are enabled. Changing parameters
PC92-PC95 can lead to personal injury, death, or equipment
damage. DO NOT CHANGE PARAMETERS PC91-PC95.
1
U = 60 Hz default settings, K = 50 Hz default settings. Settable using Pb85 – [Factory Default Select]
34
Page 39

Chapter 4 – Faults & Troubleshooting
Fault Information
This chapter provides information to guide you in troubleshooting the drive. Included is a list and description of
drive faults and problems that may occur.
How to Clear a Fault
When a fault occurs, the cause must be corrected before the fault can be cleared. After corrective action has
been taken, any of the following actions will clear the fault.
• Press the stop button on the Keypad.
• “Reset” the drive via a digital input that is programmed to setting 18 {RS}.
• Cycle power to the drive.
ATTENTION
• A hazard of personal injury or equipment damage exists. If a fault is cleared while there is a valid
run command, the drive will run as soon as the fault is cleared without cycling the input.
Note: If any digital input (C01-C05) is set to 31 {OPE} then the setting of parameter A02 is ignored as the digital input
overrides this setting. If the input is programmed, but not
nals. If the input is programmed and
active, the start command will come from the start key on the keypad.
Bulletin 161 Fault Descriptions
active, the start command will come from the control termi-
Fault
Number
E 01
E 02
E 03
E 04
E 05
E 07
E 08
E 09
E 11
E 22
E 12
E 13
* For a description of the reset function see digital input description table in Chapter 2, and parameters PC01 [Digital Input 1] PC05 [Digital Input 5] in Chapter 3.
Fault Name Fault Description Corrective Action
Overcurrent
While running
Overcurrent
During
Deceleration
Overcurrent
During
Acceleration
Overcurrent at a
Standstill
Internal Motor
Protection
Overvoltage The maximum DC Bus Voltage has
EEPROM Error The EEPROM has invalid data. Reset EEPROM by resetting the defaults using
Undervoltage The DC Bus voltage fell below the
Processor Error
Processor Error
External Fault External fault 12 {EXT} indication has
Unintentional
Start Protection
An overcurrent has been detected in
the hardware trip circuit while the
drive was running.
An overcurrent has been detected in
the hardware trip circuit while the
drive was decelerating.
An overcurrent has been detected in
the hardware trip circuit while the
drive was accelerating.
An overcurrent has been detected in
the hardware trip circuit while the
drive was at a standstill.
The internal electronic motor
protection has been triggered due to
overloading of the connected motor.
been exceeded due to regenerative
energy from motor.
minimum rated voltage.
There is a malfunction or abnormality
of the CPU
been received at one of the digital
inputs (C01-C05).
An input (C01-C05) was set to 13
{USP} and power was restored while
a run input was active.
Check for a short circuit at the drive output or for
excessive load conditions at the motor.
Check for a short circuit at the drive output or for
excessive load conditions at the motor.
Check for a short circuit at the drive output,
excessive load conditions at the motor, an
acceleration time that is too short, or for a
manual boost setting that is improperly set.
Check the output lines or the motor for a ground
fault.
Check the entry under Pb12 - [Motor Overload
Current]. Reduce PA42 - [Manual Boost
Voltage]. Check the motor and drive rating.
Motor regeneration has caused a bus
overvoltage. Extend the decel time.
Pb84 - [Reset Functions].
Monitor the incoming AC line for low voltage or
line power interruptions.
Check external wiring for a possible cause. If
problems persist have drive serviced by
authorized Rockwell-Automation service
personnel.
Remove the cause of the fault in the external
wiring and clear the fault.
Check incoming line voltage for low voltage or
line power interruptions. Remove the run
command before power-up.
35
Page 40

Faults & Troubleshooting
Fault
Number
E 14
E 15
E 21
E 35
E 60
Fault Name Fault Description Corrective Action
Ground Fault There was a ground fault at the
motor output terminals.
Excess Input
Voltage
Overtemperature
fault
PTC circuit
triggered.
Communication
Error
The input voltage is higher than
permitted.
Excessive heat has been detected
inside the drive.
The resistance from the external
thermistor was too large. (Greater
than 3 kΩ)
A loss of communication has
occurred.
Check for a ground fault at the output terminals.
Check the incoming AC line.
Clear blocked or dirty heat sink fins. Check
ambient temperature. Check for proper
clearance distances. On models with a fan,
check for fan operation. Check for excessive
motor load.
Check for an overload condition at the motor, or
check for proper ventilation at the motor.
Check communication connections.
Possible Problems and Corrective Actions
Problem Corrective Action
The motor does not start. 1. Check the power circuit.
• Check the supply voltage.
• Check all fuses and disconnects.
2. Check the Motor.
• Verify that the motor is connected properly.
• Verify that no mechanical problems exist.
3. Check the control input signals.
• Verify that the start signal is present.
• Verify that either the Run Forward or Run Reverse signal
is active, but not both.
• Verify wiring of H, O, and L terminals if a remote speed
pot is being used.
• If using 3 wire start, ensure that a 3 wire stop is
programmed.
• Verify that the reset command {RS} is not active.
4. Check the setting of PA01-[Frequency Command Select].
5. Check setting of PA02 - [Start Command Select].
• If set to keypad start check PF04-[Start Key Direction],
when set to 02, the 00 {FW} or 01 {RV} digital input must
be active before pressing start key.
• If set to keypad control, ensure that a jumper is connected
between terminals 3 and P24.
6. If any digital input is set to 31{OPE} then the setting of A02 is
ignored as the digital input overrides this setting. The start
command will come from the control terminals. If the input is
programmed, but NOT active the start command will come
from the control terminals. If the input is programmed AND
active the start command will come from the Start key on the
keypad.
The direction of motor rotation is incorrect. 1. Check the motor output connections, reverse two of the three
phases if necessary.
2. Check that the control inputs have been wired correctly.
3. If using 3 wire control ensure that the 3 wire forward/reverse
input is programmed.
4. Check setting of PF04 – [Start Key Direction].
36
Page 41

Faults & Troubleshooting
Problem Corrective Action
The motor does not accelerate properly. 1. Check to see that a frequency has been commanded.
2. Check to see if a preset frequency has been selected.
3. Check to see if the motor load is too high.
4. Check to see if the acceleration time is too long.
5. Check to see if manual boost and current limit are set properly.
The speed of the motor does not match the
frequency.
1. Check to see that the maximum frequency has been entered
correctly.
2. Check the rated speed of the motor and the reduction ratio of
the gear.
3. Check to see if manual boost and current limit are set properly.
4. If PID control is used, check gain adjustments.
The motor runs unstable. 1. If sudden high load changes occur, choose a drive and motor
with higher ratings or reduce the load changes.
2. If resonant frequencies occur in the motor, set up skip
frequency bands.
3. If the input voltage is not constant, change the PWM carrier
frequency.
The parameters stored do not match the values
entered.
1. When the input voltage was switched off the entered values
were transferred to the power-failure safe EEPROM.
Reprogram the values and wait at least 6 seconds before
powering down.
No entries can be made. 1. Check to see if the parameter protection is activated via a
digital input setting of 15 {SFT}.
The electronic motor protection (fault E05) is
triggered.
1. Check the manual boost setting to see if it is too high.
2. Check the electronic motor protection setting to make sure that
it is correct.
Other Displays
Display Description
A reset signal has been issued.
The Bulletin 161 drive is in standby mode.
Note: If motor was running when the 18 {RS} input was received, the motor will coast to a
stop.
- - -
06
_ _ _
The input voltage has been switched off.
The waiting time before automatic restart has expired (see Pb01-[Restart Mode Select] - Pb03[Restart time]).
The factory setting has been selected and the drive is in the initialization phase
(see Pb84-[Reset Functions], Pb85-[Factory Defaults Select]). If your drive is a K version,
parameters for the 50Hz version are loaded. If your drive is a U version, parameters for the 60 Hz
version are loaded.
No data present or the function is not active.
37
Page 42

Faults & Troubleshooting
This Page Intentionally Blank
38
Page 43

Chapter 5 – Specifications & Dimensions
Technical Data
Series Bulletin 161
Type A01 A02 A03 A04 A05 A07 A10 A15
Drive rating kW (HP)
115V Input rated current (A)
230V 1F Input rated current (A)
230V 3F Input rated current (A)
Output rated current (A)
Power Dissipation (W)
Mass (kg)
Input voltage (V)
Output voltage
Type of protection
PWM carrier frequency
V/Hz characteristics
Type of control
Output frequency
Accuracy of frequency
command
Frequency resolution
Overload capacity
Starting torque
DC brake
Analog inputs
Digital inputs
Analog outputs
Digital outputs
Relay output
Protection functions
Other functions
Ambient temperature
Relative humidity
Vibration/Shock
Max. installation altitude
Options
Standards
0.2 (0.3) 0.4 (0.5) .55 (.75) 0.75 (1) 1.1 (1.5) 1.5 (2) 2.2 (3) 3.7 (5)
5.5 10.0 N/A 16.0 N/A N/A N/A N/A
3.1 5.8 6.7 9.0 11.2 16.0 22.5 N/A
1.8 3.4 3.9 5.2 6.5 9.3 13.0 20.0
1.4 2.6 3.0 4.0 5.0 7.1 10.0 15.9
17 29 33 41 53 70 101 169
See dimension drawings on following page.
200 V -10% to 240 V + 5%, 50/60 Hz +/- 5%; 100V -5% to 120V +5%
3 Φ adjustable from 0 to 230V
IP20
0.5 - 16 kHz
Programmable V/Hz ratio, V/Hz control (constant torque, variable torque)
Voltage-driven, PWM sine weighted, IGBT-Power module
0.5 - 360 Hz
Digital: +/- 0.01% of max. frequency
Analog: +/- 0.2% of max. frequency
Digital: 0.1 Hz, analog: 0.01% of max. frequency
Software: 150% for 60 s (once in a period of 10 min.), Hardware: 220%
min. 150% at frequencies >3 Hz
Starting frequency, braking torque, running times are variable.
0 -10 V, input impedance 10 kΩ
4 - 20 mA, input impedance 250 Ω PTC input
5 programmable level triggered inputs, 24V PNP logic, NO or NC contacts
1 programmable output. 0-10V, 1mA, Accuracy: +/- 5% for frequency, +20% for
current.
2 open collector outputs. 27VDC, 50mA
1 fault indication relay (change-over contact)
Resistive rating: 2.5A at 250VAC – 3A at 30VDC
Inductive rating: 0.2A at 250VAC – .7A at 30VDC
Over-current, over-voltage, under-voltage, electronic motor protection, overtemperature, ground fault, overload etc. (see Chap.4).
15 preset speeds, PID control, unintentional start protection, RS422 serial interface,
skip frequencies etc.
-10 - +40 °C (up to +50 °C by removing top cover, reducing carrier frequency to
2kHz, and derating output current by 20%)
20 - 90% relative humidity, no condensation
Vibration: 0.6G operational / Shock: 10.0G operational
1000 m (3300 ft.) above sea level
Line filter modules
EN 61800-3 EMC guidelines in connection with optional line filter modules
in line with installation guidelines, EN 50178 Low-Voltage guideline,
39
Page 44

Specifications & Dimensions
Figure 5.1 Bulletin 161 Dimensions
(All dimensions are in millimeters and (inches).
AA01 / AA02 / AA03
Mass Kg (lb)
0.7 (1.54)
AA02/AA03
0.85 (1.87)
AA01
AA04 / AA05
Mass Kg (lb)
AA04/AA05
1.3 (2.87)
AA07
Mass Kg (lb)
AA07
2.2 (4.85)
AA10/AA15
Mass Kg (lb)
AA10/AA15
2.8 (6.17)
40
Page 45
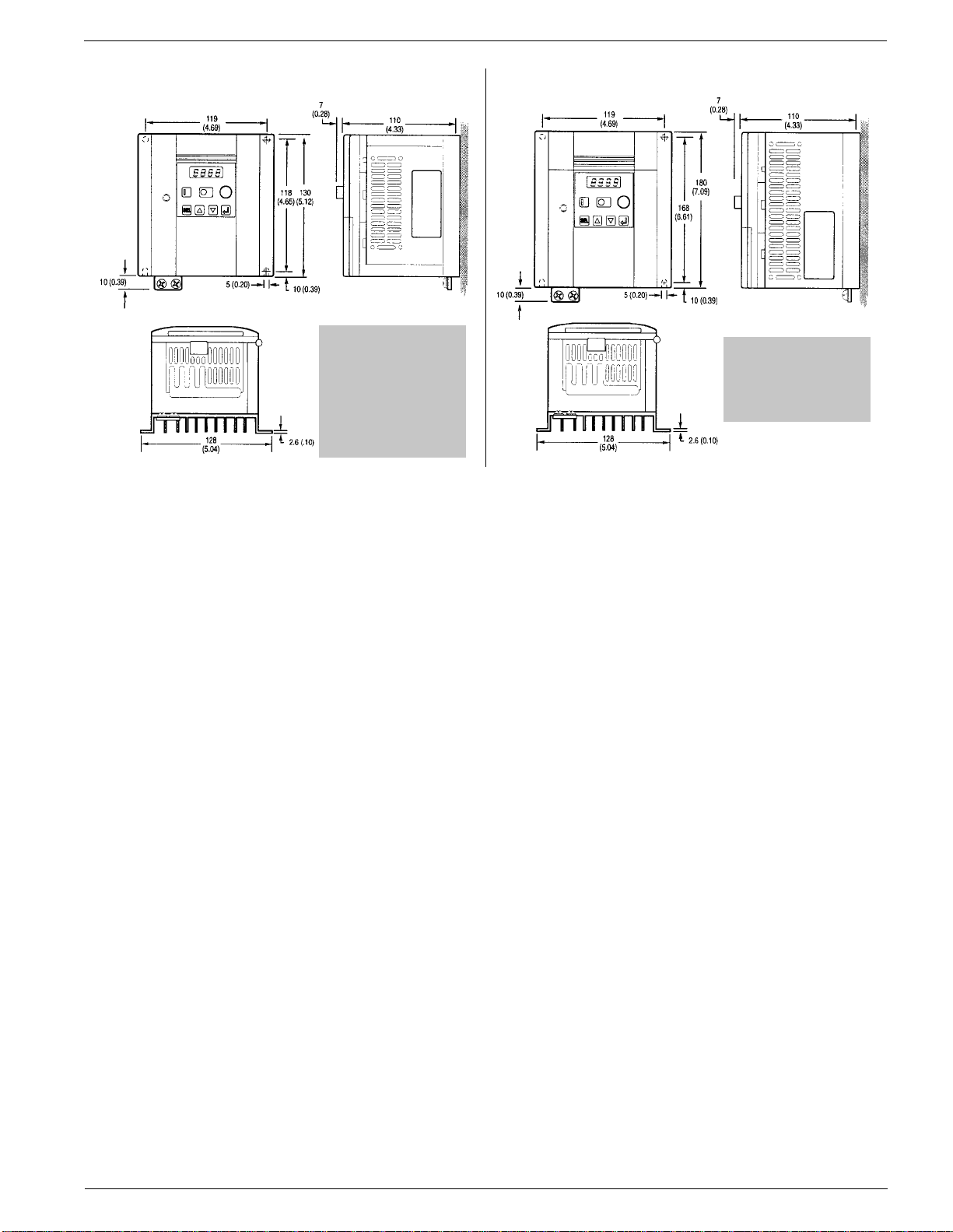
Specifications & Dimensions
DA01 / DA02
Mass Kg (lb)
DA01
1.1 (2.42)
DA02
1.2 (2.64)
DA04
Mass Kg (lb)
DA04
1.5 (3.31)
41
Page 46
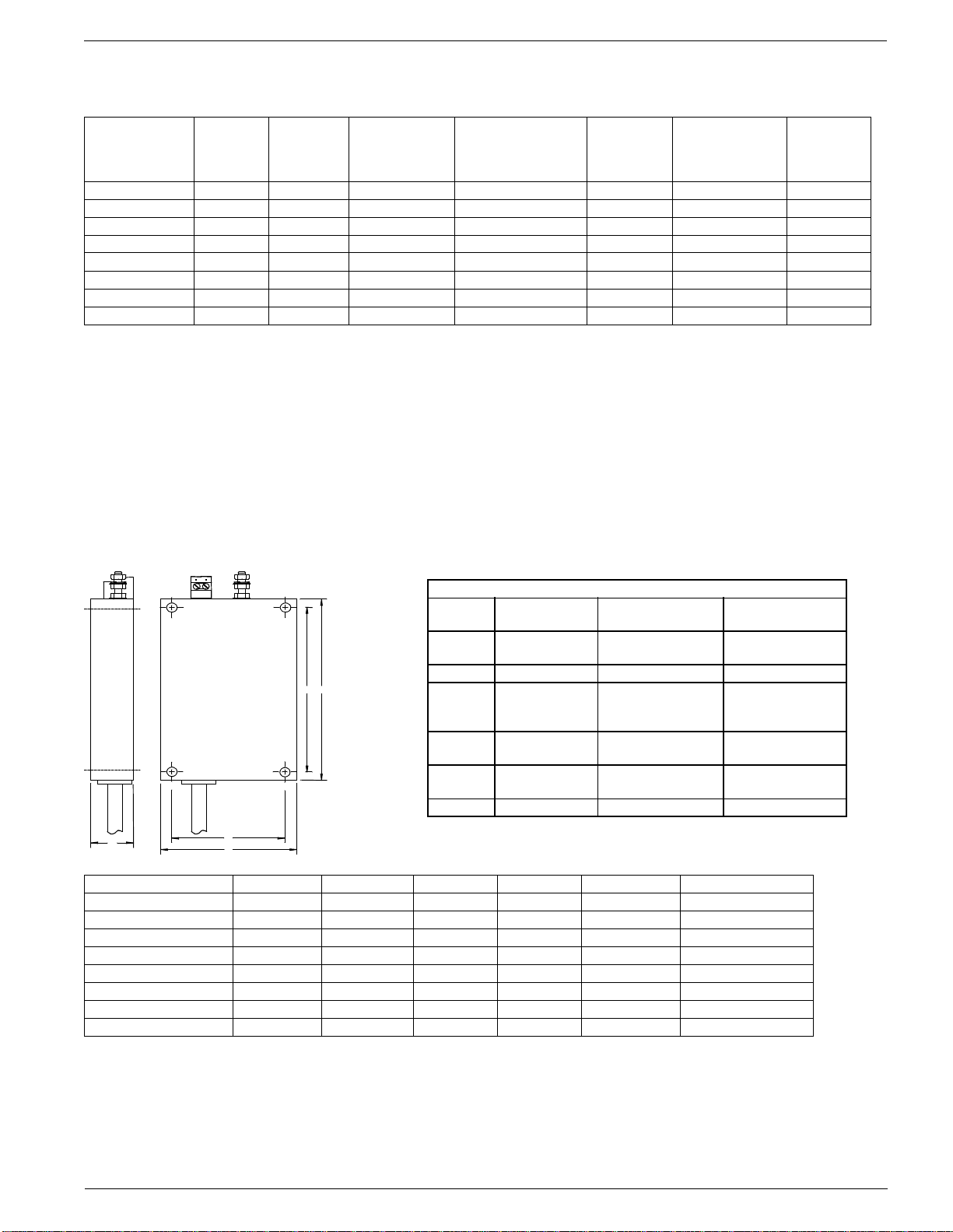
Specifications & Dimensions
Accessories
Line Filter Module Specifications
Test voltage
Line Filter
Module
Nominal
Volt ag e
[V]
Nominal
Current
at 40°C [A]
Leakage Current
at 50 Hz (mA)
[VDC for 2s]
ph. to ph;
ph. to grd
161S-RFD-10-B 120 +5% 10 A < 3.5 NA 4 (.006) 1.5 (.002) NA
161S-RFD-16-C 120 +5% 16 A < 3.5 NA 4 (.006) 1.5 (.002) NA
161S-RFA-7-A 240 +5% 7 A < 3.5 1400 / 2800 4 (.006) 1.5 (.002) 6
161S-RFA-12-B 240 +5% 12A < 3.5 1400 / 2800 4 (.006) 1.5 (.002) 7
161S-RFA-22-C 240 +5% 22A < 15 1400 / 1400 4 (.006) 2.5 (.004) 9
161-RFA-4-A 240 +5% 4A < 3.5 1400 / 2800 4 (.006) 1.5 (.002) NA
161-RFA-7-B 240 +5% 7A < 3.5 1400 / 2800 4 (.006) 1.5 (.002) NA
161-RFA-20-C 240 +5% 20A < 3.5 1400 / 1400 4 (.006) 2.5 (.004) NA
Current: at 40°C ambient temperature
Overload: 150% I
for 10 min
N
Frequency: 50 / 60 Hz
Material: steel, surface finished
Humidity class: C
Operation height: < 1000 m (3200 ft.) without derating
> 1000 m, I
-2%, for each 1000m
N
Temperature range: -25°C to +85°C
Connections Input terminals IP 20 and PE-screw M5
Load side: cable, unshielded
Input wire
max. cross
section
2
[mm
(in2)]
Output cable
cross section
[mm2 (in2)]
Heat
dissipation
[W]
Figure 5.2 Line Filter Module Dimensions [mm (in)]:
Line Filter Selection Guide
Φ
F
type 1
Ratings
S-DA01
S-DA02
Drive
Input Voltage
100V - 120V 161S-RFD-10-B N/A
Φ Series B
1
Φ Φ
Filter Module
Line
S-DA04 100V - 120V 161S-RFD-16-C N/A
D
A
S-AA01
S-AA02
S-AA03
S-AA04
200V - 240V
200V - 240V
161S-RFA-7-A 161-RFA-4-A
200V - 240V
200V - 240V 161S-RFA-12-B 161-RFA-7-B
S-AA05
S-AA07
200V - 240V 161S-RFA-22-C 161-RFA-20-C
S-AA10
S-AA15 200V - 240V N/A 161-RFA-20-C
C
E
B
Line Filter Module A B C D E F
161S-RFD-10-B 130 (5.12) 128 (5.04) 27 (1.06) 118 (4.65) 119 (4.69) 4 x 6 (.24)
161S-RFD-16-C 180 (7.09) 128 (5.04) 27 (1.06) 168 (6.61) 119 (4.69) 4 x 6 (.24)
161S-RFA-7-A 120 (4.72) 80 (3.15) 25 (0.98) 110 (4.33) 67 (2.64) 2 x 6 (.24)
161S-RFA-12-B 130 (5.12) 110 (4.33) 27 (1.06) 118 (4.65) 98 (3.86) 4 x 6 (.24)
161S-RFA-22-C 180 (7.09) 140 (5.51) 29 (1.14) 168 (6.61) 128 (5.04) 4 x 6 (.24)
161-RFA-4-A 120 (4.72) 80 (3.15) 25 (0.98) 110 (4.33) 67 (2.64) 2 x 6 (.24)
161-RFA-7-B 130 (5.12) 110 (4.33) 27 (1.06) 118 (4.65) 98 (3.86) 4 x 6 (.24)
161-RFA-20-C 180 (7.09) 140 (5.51) 29 (1.14) 168 (6.61) 128 (5.04) 4 x 6 (.24)
Φ
Φ Series B
3
Φ Φ
Filter Module
Line
42
Page 47

Appendix A – CE Conformity
CE Compliance
This drive is a component intended for implementation in machines or systems for the industrial environment. It is
CE marked for conformity to the Low Voltage (LV) directive 73/23/EEC when installed as described. It also has
been tested to meet the Council Directive 89/336 Electromagnetic Compatibility (EMC). The standards used for
this testing are, LV: EN50178, EN60204-1, EN60950, EMC: EN61800-3 (EN55011, Group 1, Class B (Industrial
Environment)).
General Notes and Instructions
• The motor cable should be kept as short as possible in order to avoid electromagnetic emission as well as
capacitive currents. The cable length increases the capacitive current and electromagnetic emission.
It is recommended that the motor cable length does not exceed 50m.
It is always recommended to install output reactors if the cable length exceeds 50m.
• The filters contain capacitors between the phases and the phases to ground as well as suitable
discharging resistors, but after switching off the line voltage wait a minimum of 60 seconds before
removing protective covers or touching terminals to avoid an electric shock.
• The use of ground fault monitoring devices (RCD’s) is not recommended. If unavoidable, only monitoring
devices which are suited for DC, AC and High Frequency ground currents (type B RCD’s) should be used.
It is recommended to use devices whose responsiveness and time characteristics are adjustable, to avoid
nuisance tripping during power up of the drive.
• The thermal capacity of the line filter is guaranteed up to a maximum motor cable length of 50m.
• The line filters have been developed for use in grounded systems. Use in ungrounded systems is not
recommended.
Essential Requirements for a Conforming EMC Installation
The following items are required for CE conformance.
1. An input filter module (See Chapter 5 Specifications and Dimensions) must be installed to reduce
conducted emissions.
Compliance of the Bulletin 161 drive to the conducted emissions levels with appropriate line filter module is
as follows:
PWM Carrier Frequency Motor Cable Length Limit
</= 16kHz 10m Class B
</= 5kHz 20m Class B
</= 16kHz 50m Class A
2. Grounding of equipment and cable shields must be solid with low impedance connections.
3. All motor cables must use shielded cable, or be in grounded metal conduit.
4. All control and signal wiring must use shielded cable or be in grounded metal conduit.
5. Ensure that the protective earth ground terminal (PE) of the filter is properly connected with the protective
earth ground terminal of the drive. The filter must be solidly and permanently connected with the ground
potential to avoid electric shock.
General Instructions for an EMC Compliant Installation
Motor Cable
• The cable between the drive and motor must be 4-wire shielded cable (three phases and ground).
• Do not exceed the maximum motor cable length for the specific line filter module used.
Control Cable
• Control wiring must use shielded cable or grounded metal conduit.
• The shield must be connected to PE at both ends of the cable.
43
Page 48

CE Conformity
This Page Intentionally Blank
44
Page 49

CE Conformity
45
Page 50

Publication 0161-5.0MU – March, 2001 NB591XA
Supersedes 161-5.0MU dated September, 2000 Copyright 2001 Rockwell International Corporation. All rights reserved. Printed in USA
 Loading...
Loading...