

Page 1

REAKTOR CORE
Tutorial
Page 2
The information in this document is subject to change without notice and does
not represent a commitment on the part of Native Instruments Software Synthesis
GmbH. The software described by this document is subject to a License Agreement
and may not be copied to other media. No part of this publication may be copied,
reproduced or otherwise transmitted or recorded, for any purpose, without prior
written permission by Native Instruments Software Synthesis GmbH. All product
and company names are trademarks of their respective owners.
And also, if you’re reading this, it means you bought the software rather than stole
it. It’s because of people like you that we can continue to create great tools and
update them. So, thank you very much.
Manual written by NI and Len Sasso
© Native Instruments Software Synthesis GmbH, 2005. All rights reserved.
REAKTOR, REAKTOR 5 and REAKTOR CORE are a trademarks of
Native Instruments Software Synthesis.
Germany USA
Native Instruments GmbH Native Instruments USA, Inc.
Schlesische Str. 28 5631 A Hollywood Boulevard
D-10997 Berlin Los Angeles, CA 90028
Germany USA
info@native-instruments.de info@native-instruments.com
www.native-instruments.de www.native-instruments.com
Page 3

Table of Contents
1. First steps in Reaktor Core ..................................................................... 11
1.1. What is Reaktor Core ...............................................................11
1.2. Using core cells .......................................................................12
1.3. Using core cells in a real example ..............................................15
1.4. Basic editing of core cells .........................................................17
2. Getting into Reaktor Core ......................................................................22
2.1. Event and audio core cells ....................................................... 22
2.2. Creating your first core cell .......................................................24
2.3. Audio and control signals ........................................................ 36
2.4. Building your first Reaktor Core macros ..................................... 42
2.5. Using audio as control signal ....................................................49
2.6. Event signals .......................................................................... 50
2.7. Logic signals .......................................................................... 54
3. Reaktor Core fundamentals: the core signal model .................................56
3.1. Values ................................................................................... 56
3.2. Events ................................................................................... 56
3.3. Simultaneous events ............................................................... 59
3.4. Processing order .....................................................................61
3.5. Event core cells reviewed ......................................................... 62
4. Structures with internal state ................................................................68
4.1. Clock signals .......................................................................... 68
4.2. Object Bus Connections .......................................................... 69
4.3. Initialization ............................................................................72
4.4. Building an event accumulator ..................................................75
4.5. Event merging .........................................................................76
4.6. Event accumulator with reset and initialization ........................... 78
4.7. Fixing the event shaper ............................................................ 84
5. Audio processing at its core ..................................................................87
5.1. Audio signals .......................................................................... 87
5.2. Sampling rate clock bus .......................................................... 89
5.3. Connection feedback .............................................................. 90
5.4. Feedback around macros ......................................................... 93
5.5. Denormal values ..................................................................... 97
5.6. Other bad numbers ................................................................ 101
5.7. Building a 1-pole low pass filter ............................................... 101
REAKTOR CORE – III
Page 4

6. Conditional processing ........................................................................ 105
6.1. Event routing .........................................................................105
6.2. Building a signal clipper ......................................................... 107
6.3. Building a simple sawtooth oscillator .......................................108
7. More signal types ................................................................................ 110
7.1. Float signals .......................................................................... 110
7.2. Integer signals .......................................................................112
7.3. Building an event counter ....................................................... 114
7.4. Building a rising edge counter macro ........................................ 116
8. Arrays ................................................................................................. 119
8.1. Introduction to arrays ............................................................. 119
8.2. Building an audio signal selector .............................................122
8.3. Building a delay ....................................................................128
8.4. Tables ................................................................................. 134
9. Building optimal structures .................................................................. 139
9.1. Latches and modulation macros ..............................................139
9.2. Routing and merging ..............................................................140
9.3. Numerical operations ............................................................. 141
9.4. Conversions between floats and integers ..................................141
Appendix A. Reaktor Core user interface ..................................................143
A.1. Core cells .............................................................................143
A.2. Core modules/macros ............................................................143
A.3. Core ports ............................................................................144
A.4. Core structure editing ............................................................144
Appendix B. Reaktor Core concept ...........................................................145
B.1. Signals and events .................................................................145
B.2. Initialization ..........................................................................145
B.3. OBC connections ..................................................................145
B.4. Routing ................................................................................145
B.5. Latching ...............................................................................146
B.6. Clocking ...............................................................................146
Appendix C. Core macro ports .................................................................. 147
C.1. In ........................................................................................ 147
C.2. Out ...................................................................................... 147
C.3. Latch (input) .........................................................................147
C.4. Latch (output) ....................................................................... 147
C.5. Bool C (input) .......................................................................147
C.6. Bool C (output) .....................................................................148
IV – REAKTOR CORE
Page 5

Appendix D. Core cell ports .....................................................................149
D.1. In (audio mode) .....................................................................149
D.2. Out (audio mode) ..................................................................149
D.3. In (event mode) ....................................................................149
D.4. Out (event mode) ..................................................................149
Appendix E. Built-in busses .....................................................................150
E.1. SR.C ....................................................................................150
E.2. SR.R ....................................................................................150
Appendix F. Built-in modules .................................................................... 150
F.1. Const ....................................................................................150
F.2. Math > + ..............................................................................150
F.3. Math > - ............................................................................... 151
F.4. Math > * ............................................................................... 151
F.5. Math > / ...............................................................................151
F.6. Math > |x| .............................................................................151
F.7. Math > –x ..............................................................................151
F.8. Math > DN Cancel .................................................................152
F.9. Math > ~log ..........................................................................152
F.10. Math > ~exp ........................................................................152
F.11. Bit > Bit AND ......................................................................152
F.12. Bit > Bit OR ........................................................................153
F.13. Bit > Bit XOR ......................................................................153
F.14. Bit > Bit NOT ......................................................................153
F.15. Bit > Bit << .........................................................................153
F.16. Bit > Bit >> .........................................................................154
F.17. Flow > Router ......................................................................154
F.18. Flow > Compare ...................................................................154
F.19. Flow > Compare Sign ............................................................154
F.20. Flow > ES Ctl ......................................................................155
F.21. Flow > ~BoolCtl ...................................................................155
F.22. Flow > Merge ......................................................................155
F.23. Flow > EvtMerge ..................................................................156
F.24. Memory > Read ...................................................................156
F.25. Memory > Write ...................................................................156
F.26. Memory > R/W Order ...........................................................156
F.27. Memory > Array ...................................................................157
F.28. Memory > Size [ ] ................................................................157
F.29. Memory > Index ..................................................................157
F.30. Memory > Table ...................................................................158
F.31. Macro .................................................................................158
REAKTOR CORE – V
Page 6

Appendix G. Expert macros ...................................................................... 159
G.1. Clipping > Clip Max / IClip Max ...............................................159
G.2. Clipping > Clip Min / IClip Min ................................................159
G.3. Clipping > Clip MinMax / IClipMinMax .....................................159
G.4. Math > 1 div x ......................................................................159
G.5. Math > 1 wrap ......................................................................159
G.6. Math > Imod ........................................................................160
G.7. Math > Max / IMax ................................................................160
G.8. Math > Min / IMin .................................................................160
G.9. Math > round ........................................................................160
G.10. Math > sign +- ....................................................................160
G.11. Math > sqrt (>0) .................................................................160
G.12. Math > sqrt ........................................................................161
G.13. Math > x(>0)^y ..................................................................161
G.14. Math > x^2 / x^3 / x^4 ........................................................161
G.15. Math > Chain Add / Chain Mult ............................................. 161
G.16. Math > Trig-Hyp > 2 pi wrap ................................................. 161
G.17. Math > Trig-Hyp > arcsin / arccos / arctan ..............................161
G.18. Math > Trig-Hyp > sin / cos / tan ...........................................162
G.19. Math > Trig-Hyp > sin –pi..pi / cos –pi..pi / tan –pi..pi .............162
G.20. Math > Trig-Hyp > tan –pi4..pi4 ...........................................162
G.21. Math > Trig-Hyp > sinh / cosh / tanh .....................................162
G.22. Memory > Latch / ILatch ......................................................162
G.23. Memory > z^-1 / z^-1 ndc ....................................................162
G.24. Memory > Read [] ...............................................................163
G.25. Memory > Write [] ...............................................................163
G.26. Modulation > x + a / Integer > Ix + a .....................................163
G.27. Modulation > x * a / Integer > Ix * a ......................................163
G.28. Modulation > x – a / Integer > Ix – a ......................................164
G.29. Modulation > a – x / Integer > Ia – x ......................................164
G.30. Modulation > x / a ...............................................................164
G.31. Modulation > a / x ...............................................................164
G.32. Modulation > xa + y .............................................................164
Appendix H. Standard macros .................................................................. 165
H.1. Audio Mix-Amp > Amount ......................................................165
H.2. Audio Mix-Amp > Amp Mod ...................................................165
H.3. Audio Mix-Amp > Audio Mix ...................................................165
H.4. Audio Mix-Amp > Audio Relay ................................................165
H.5. Audio Mix-Amp > Chain (amount) ...........................................166
H.6. Audio Mix-Amp > Chain (dB) ..................................................166
VI – REAKTOR CORE
Page 7

H.7. Audio Mix-Amp > Gain (dB) ....................................................166
H.8. Audio Mix-Amp > Invert .........................................................167
H.9. Audio Mix-Amp > Mixer 2 … 4 ...............................................167
H.10. Audio Mix-Amp > Pan ..........................................................167
H.11. Audio Mix-Amp > Ring-Amp Mod ..........................................167
H.13. Audio Mix-Amp > Stereo Mixer 2 … 4 ...................................168
H.14. Audio Mix-Amp > VCA ..........................................................168
H.15. Audio Mix-Amp > XFade (lin) ................................................ 169
H.16. Audio Mix-Amp > XFade (par) ...............................................169
H.17. Audio Shaper > 1+2+3 Shaper ..............................................169
H.18. Audio Shaper > 3-1-2 Shaper ...............................................169
H.19. Audio Shaper > Broken Par Sat ............................................. 170
H.20. Audio Shaper > Hyperbol Sat ...............................................170
H.21. Audio Shaper > Parabol Sat .................................................170
H.22. Audio Shaper > Sine Shaper 4 / 8 ......................................... 171
H.23. Control > Ctl Amount ..........................................................171
H.24. Control > Ctl Amp Mod ........................................................171
H.25. Control > Ctl Bi2Uni ............................................................ 171
H.26. Control > Ctl Chain .............................................................172
H.27. Control > Ctl Invert ..............................................................172
H.28. Control > Ctl Mix ................................................................172
H.29. Control > Ctl Mixer 2 ...........................................................172
H.30. Control > Ctl Pan ................................................................173
H.31. Control > Ctl Relay ..............................................................173
H.32. Control > Ctl XFade .............................................................173
H.33. Control > Par Ctl Shaper ......................................................173
H.34. Convert > dB2AF ................................................................ 174
H.35. Convert > dP2FF ................................................................ 174
H.36. Convert > logT2sec .............................................................174
H.37. Convert > ms2Hz ................................................................ 174
H.38. Convert > ms2sec ...............................................................175
H.39. Convert > P2F .................................................................... 175
H.40. Convert > sec2Hz ...............................................................175
H.41. Delay > 2 / 4 Tap Delay 4p ...................................................175
H.42. Delay > Delay 1p / 2p / 4p ...................................................175
H.43. Delay > Diff Delay 1p / 2p / 4p ............................................. 176
H.44. Envelope > ADSR ...............................................................176
H.45. Envelope > Env Follower ......................................................177
H.46. Envelope > Peak Detector ....................................................177
H.47. EQ > 6dB LP/HP EQ ............................................................177
REAKTOR CORE – VII
Page 8

H.48. EQ > 6dB LowShelf EQ .......................................................177
H.49. EQ > 6dB HighShelf EQ .......................................................178
H.50. EQ > Peak EQ ....................................................................178
H.51. EQ > Static Filter > 1-pole static HP .....................................178
H.52. EQ > Static Filter > 1-pole static HS .....................................178
H.53. EQ > Static Filter > 1-pole static LP ......................................179
H.54. EQ > Static Filter > 1-pole static LS ......................................179
H.55. EQ > Static Filter > 2-pole static AP .....................................179
H.56. EQ > Static Filter > 2-pole static BP .....................................179
H.57. EQ > Static Filter > 2-pole static BP1 .................................... 179
H.58. EQ > Static Filter > 2-pole static HP .................................... 180
H.59. EQ > Static Filter > 2-pole static HS .................................... 180
H.60. EQ > Static Filter > 2-pole static LP ..................................... 180
H.61. EQ > Static Filter > 2-pole static LS ..................................... 180
H.62. EQ > Static Filter > 2-pole static N .......................................181
H.63. EQ > Static Filter > 2-pole static Pk ......................................181
H.64. EQ > Static Filter > Integrator ..............................................181
H.65. Event Processing > Accumulator ...........................................181
H.66. Event Processing > Clk Div ...................................................182
H.67. Event Processing > Clk Gen ..................................................182
H.68. Event Processing > Clk Rate .................................................182
H.69. Event Processing > Counter ..................................................182
H.70. Event Processing > Ctl2Gate ............................................... 183
H.71. Event Processing > Dup Flt / IDup Flt ................................... 183
H.72. Event Processing > Impulse ................................................. 183
H.73. Event Processing > Random ................................................ 183
H.74. Event Processing > Separator / ISeparator ............................. 183
H.75. Event Processing > Thld Crossing ......................................... 184
H.76. Event Processing > Value / IValue ......................................... 184
H.77. LFO > MultiWave LFO ......................................................... 184
H.78. LFO > Par LFO .................................................................. 184
H.79. LFO > Random LFO .............................................................185
H.80. LFO > Rect LFO .................................................................185
H.81. LFO > Saw(down) LFO .........................................................185
H.82. LFO > Saw(up) LFO ............................................................185
H.83. LFO > Sine LFO ................................................................. 186
H.84. LFO > Tri LFO ................................................................... 186
H.85. Logic > AND ..................................................................... 186
H.86. Logic > Flip Flop ................................................................ 186
H.87. Logic > Gate2L .................................................................. 186
VIII – REAKTOR CORE
Page 9

H.88. Logic > GT / IGT .................................................................187
H.89. Logic > EQ .........................................................................187
H.90. Logic > GE .........................................................................187
H.91. Logic > L2Clock ..................................................................187
H.92. Logic > L2Gate ...................................................................187
H.93. Logic > NOT ...................................................................... 188
H.94. Logic > OR ........................................................................ 188
H.95. Logic > XOR ...................................................................... 188
H.96. Logic > Schmitt Trigger ...................................................... 188
H.97. Oscillators > 4-Wave Mst ..................................................... 188
H.98. Oscillators > 4-Wave Slv ......................................................189
H.99. Oscillators > Binary Noise ....................................................189
H.100. Oscillators > Digital Noise ..................................................189
H.101. Oscillators > FM Op ...........................................................190
H.102. Oscillators > Formant Osc ..................................................190
H.103. Oscillators > MultiWave Osc ................................................190
H.104. Oscillators > Par Osc .........................................................190
H.105. Oscillators > Quad Osc .......................................................191
H.106. Oscillators > Sin Osc .........................................................191
H.107. Oscillators > Sub Osc 4 ......................................................191
H.108. VCF > 2 Pole SV ...............................................................191
H.109. VCF > 2 Pole SV C ............................................................192
H.110. VCF > 2 Pole SV (x3) S ......................................................192
H.111. VCF > 2 Pole SV T (S) ........................................................192
H.112. VCF > Diode Ladder ...........................................................193
H.113. VCF > D/T Ladder .............................................................193
H.114. VCF > Ladder x3 ...............................................................193
Appendix I. Core cell library ....................................................................194
I.1. Audio Shaper > 3-1-2 Shaper ...................................................194
I.2. Audio Shaper > Broken Par Sat ................................................194
I.3. Audio Shaper > Hyperbol Sat ...................................................194
I.4. Audio Shaper > Parabol Sat .....................................................195
I.5. Audio Shaper > Sine Shaper 4/8 ..............................................195
I.6. Control > ADSR .....................................................................195
I.7. Control > Env Follower .............................................................196
I.8. Control > Flip Flop .................................................................196
I.9. Control > MultiWave LFO .........................................................196
I.10. Control > Par Ctl Shaper ........................................................197
I.11. Control > Schmitt Trigger .......................................................197
I.12. Control > Sine LFO ...............................................................197
REAKTOR CORE – IX
Page 10

I.13. Delay > 2/4 Tap Delay 4p ......................................................198
I.14. Delay > Delay 4p ..................................................................198
I.15. Delay > Diff Delay 4p ............................................................198
I.16. EQ > 6dB LP/HP EQ .............................................................198
I.17. EQ > HighShelf EQ ................................................................199
I.18. EQ > LowShelf EQ ................................................................199
I.19. EQ > Peak EQ ......................................................................199
I.20. EQ > Static Filter > 1-pole static HP ......................................199
I.21. EQ > Static Filter > 1-pole static HS ...................................... 200
I.22. EQ > Static Filter > 1-pole static LP ...................................... 200
I.23. EQ > Static Filter > 1-pole static LS ...................................... 200
I.24. EQ > Static Filter > 2-pole static AP ...................................... 200
I.25. EQ > Static Filter > 2-pole static BP .......................................201
I.26. EQ > Static Filter > 2-pole static BP1 .....................................201
I.27. EQ > Static Filter > 2-pole static HP .......................................201
I.28. EQ > Static Filter > 2-pole static HS ......................................201
I.29. EQ > Static Filter > 2-pole static LP ...................................... 202
I.30. EQ > Static Filter > 2-pole static LS ...................................... 202
I.31. EQ > Static Filter > 2-pole static N ........................................ 202
I.32. EQ > Static Filter > 2-pole static Pk ...................................... 202
I.33. Oscillator > 4-Wave Mst ....................................................... 203
I.34. Oscillator > 4-Wave Slv ........................................................ 203
I.35. Oscillator > Digital Noise ...................................................... 204
I.36. Oscillator > FM Op .............................................................. 204
I.37. Oscillator > Formant Osc ...................................................... 204
I.38. Oscillator > Impulse ............................................................ 204
I.39. Oscillator > MultiWave Osc ................................................... 205
I.40. Oscillator > Quad Osc .......................................................... 205
I.41. Oscillator > Sub Osc ............................................................ 205
I.42. VCF > 2 Pole SV C .............................................................. 206
I.43. VCF > 2 Pole SV T ............................................................... 206
I.44. VCF > 2 Pole SV x3 S ...........................................................207
I.45. VCF > Diode Ladder .............................................................207
I.46. VCF > D/T Ladder ............................................................... 208
I.47. VCF > Ladder x3 .................................................................. 208
Index ......................................................................................................209
X – REAKTOR CORE
Page 11

1. First steps in Reaktor Core
1.1. What is Reaktor Core
Reaktor Core is a new level of functionality within Reaktor with a new and
different set of features. Because there is also an older level of functionality,
we will hereinafter refer to these two levels as the core level and the primary
level, respectively. Also when we say “primary-level structure” we will mean the
structure of an instrument or macro, but not the structure of an ensemble.
The features of Reaktor Core are not directly compatible with those of the
primary level, so some interfacing is required between them, and that comes
in the form of core cells. Core cells exist inside primary-level structures, and
they look similar and behave similarly to primary-level built-in modules. Here
is an example structure, using a HighShelf EQ core cell, which differs from
the primary-level built-in module version in that it has frequency and boost
controls:
Inside of core cells are Reaktor Core structures. Those provide an efficient way
to implement custom low-level DSP functionality as well as to build larger-scale
signal-processing structures using such functionality. We will take a detailed
look at these structures later.
Although one of the main purposes of Reaktor Core is to build low level DSP
structures, it is not limited to that. For users with little DSP programming
experience, we have provided a library of pre-built modules, which you can
connect inside core structures, just as you do with ordinary modules and
macros in primary-level structures. We have also provided you with a library
of pre-built core cells, which are immediately available for you to use in primary-level structures.
In the future, Native Instruments will put less emphasis on creating
new primary-level modules. Instead, we will use our new Reaktor Core
technology and provide them in the form of core cells. For example,
you will already find a set of new filters, envelopes, effects, and so on
in the core cell library.
REAKTOR CORE – 11
Page 12
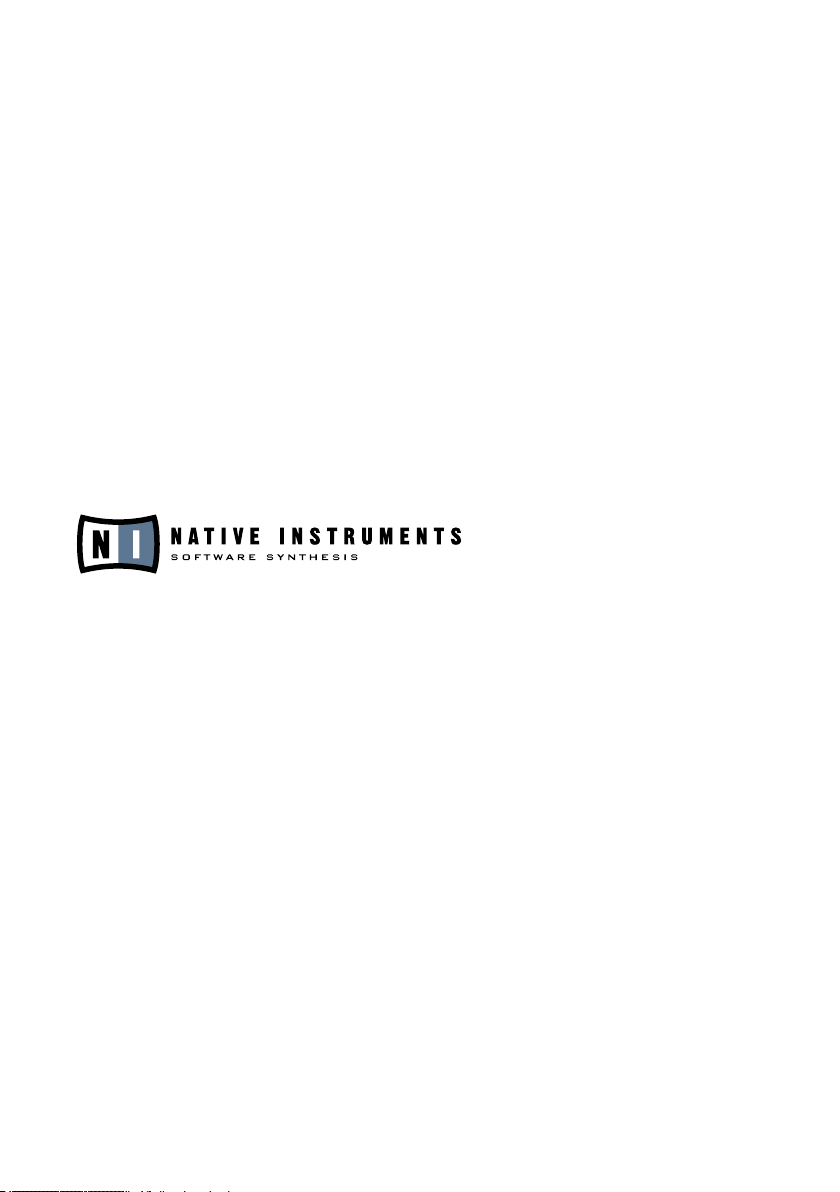
1.2. Using core cells
The core cell library can be accessed from primary-level structures by rightclicking on the background and using the Core Cell submenu:
As you can see, there are all different kinds of core cells; they can be used
in the same way as primary-level built-in modules.
An important limitation of core cells is that you are not allowed to use
them inside event loops. Any event loop occurring through a core cell
will be blocked by Reaktor.
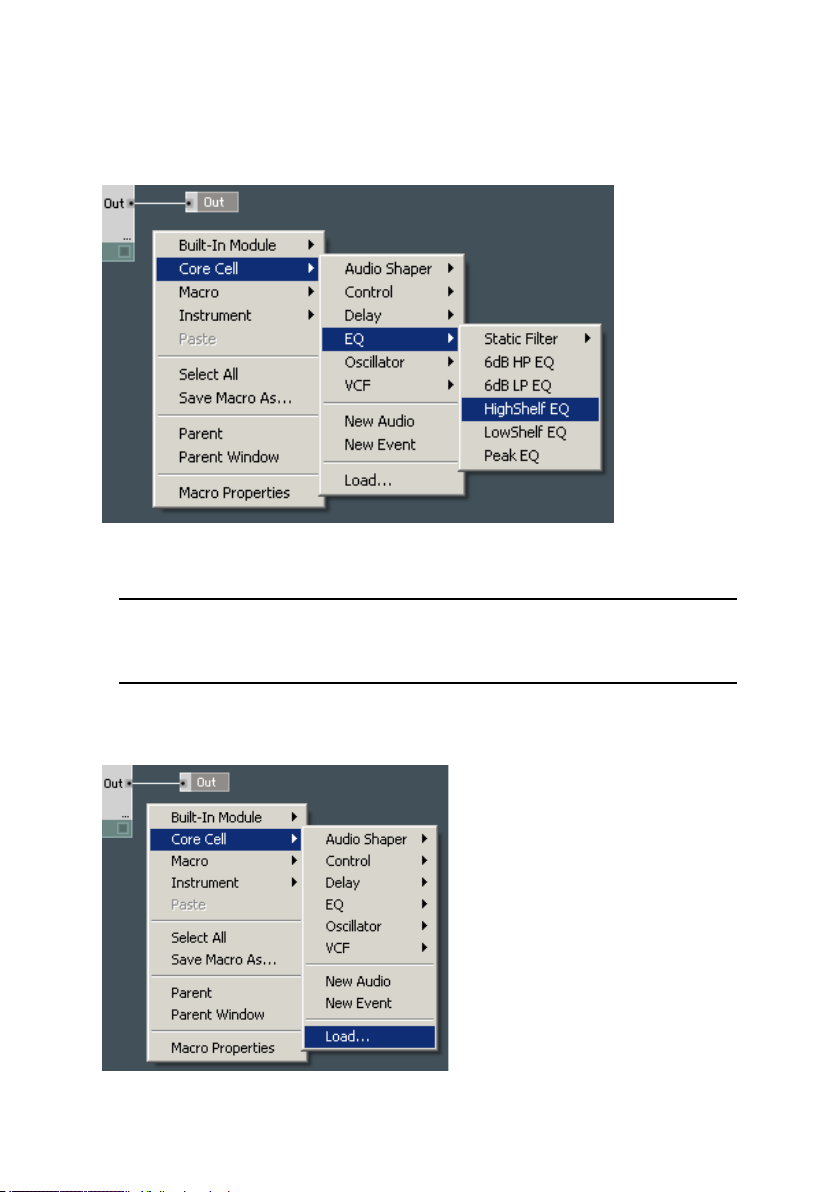
You can also insert core cells that are not in the library. To do that, use the
Load… command from the Core Cell menu:
12 – REAKTOR CORE
Page 13
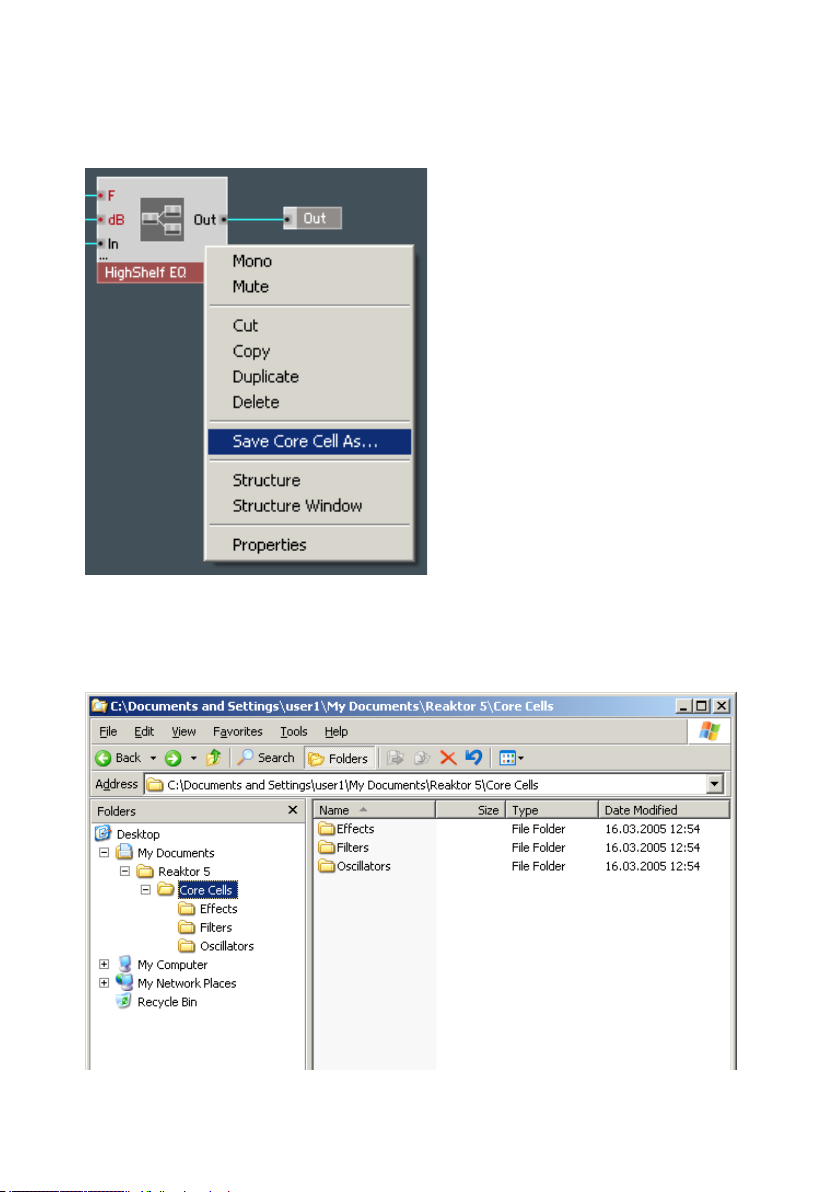
You may also want to save core cells you’ve created or modified, so that you
can load them into other structures. To save a core cell, right-click on it and
select Save Core Cell As:
Rather than using the Load… command, you can have your core cells ap-
pear in the menu by putting them into the Core Cells subdirectory of your
user library folder. Better still, you can further organize them into subgroups.
Here’s an example:
REAKTOR CORE – 13
Page 14
“My Documents\Reaktor 5” is the user library folder in this example. On your
computer there may be a different path, depending on the choice you’ve made
during installation and any changes you’ve made in Reaktor’s preferences.
Inside the user library folder there’s a folder named “Core Cells”. (Create it
manually if it doesn’t exist.)
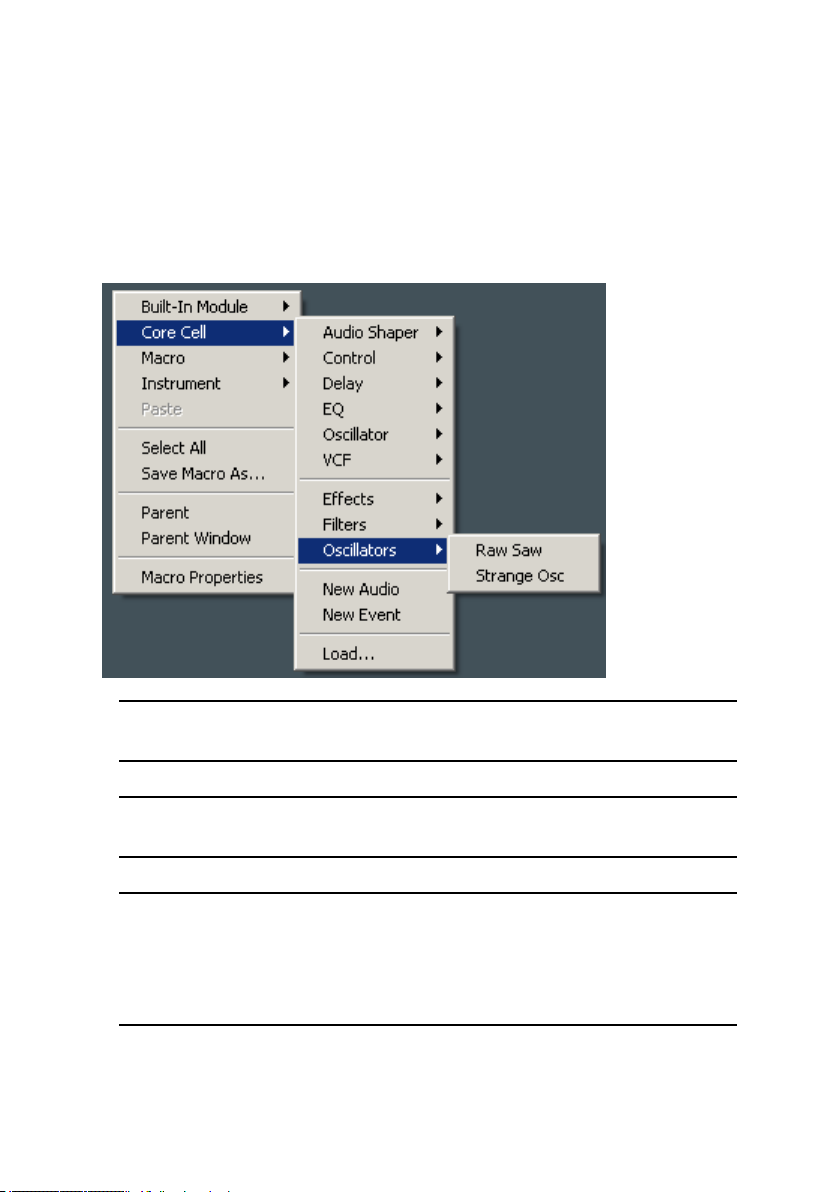
Inside the Core Cells folder, notice the folder structure consisting of the Ef-
fects, Filters, and Oscillators folders. Inside those folders are core cell files
that will be displayed in the user part of the Core Cell menu:
The menu contents are scanned once during Reaktor startup, so after
putting new files into these folders, you should restart Reaktor.
Empty folders are not displayed in the menu; a folder must contain
some files to be displayed.
Under no circumstances should you put your own files into the system
library. The system library may be changed or even completely replaced
when installing updates, in which case your files will be lost. The user
library is the right place for any content that is not included in the
software itself.
14 – REAKTOR CORE
Page 15
1.3. Using core cells in a real example
Here we are going to take a Reaktor instrument built using only primary-level
modules and modify it by putting in a few core cells. In the Core Tutorial
Examples folder in your Reaktor installation, find the One Osc.ens ensemble
and open it. This ensemble consists of only one instrument, which has the
internal structure shown:
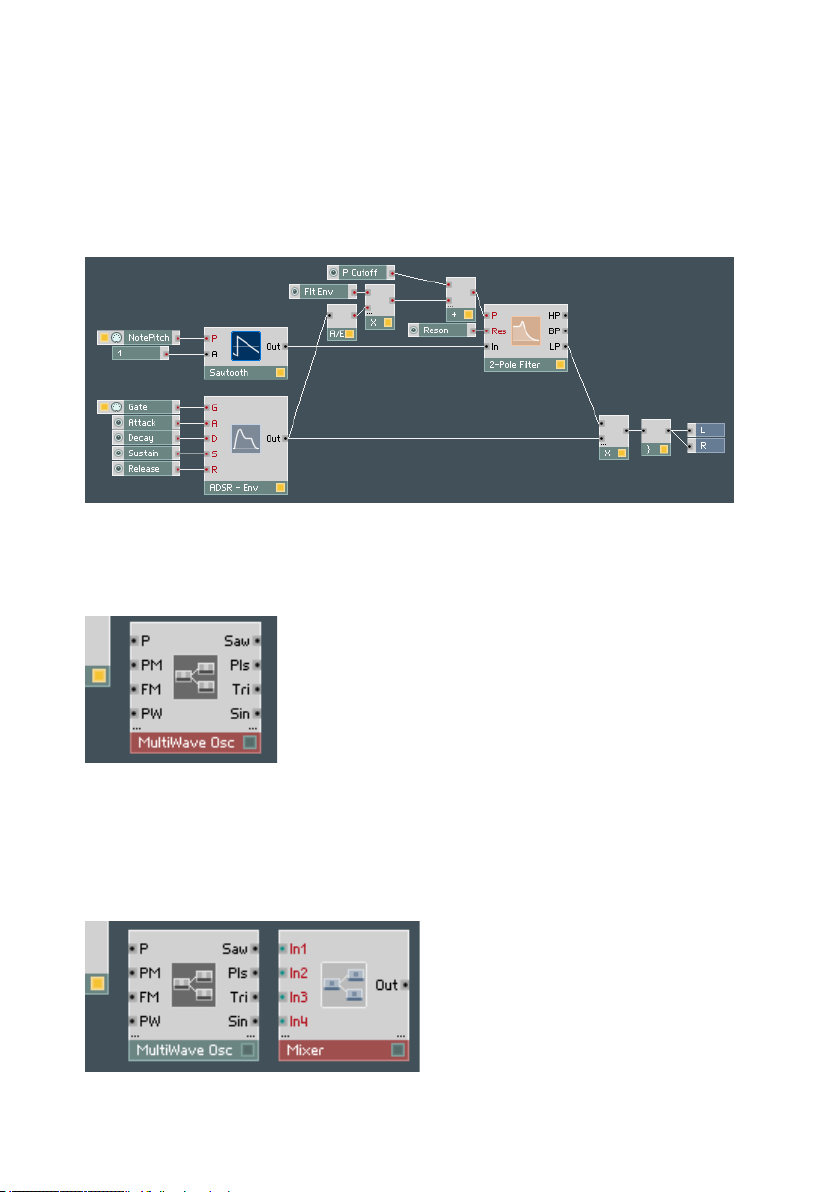
As you can see this is a very simple subtractive synthesizer consisting of one
oscillator, one filter and one envelope. We are going to replace the oscillator
with a different, more powerful one. Right-click on the background and select
Core Cell > Oscillator > MultiWave Osc:
The most important feature of this oscillator is that it simultaneously provides
different analog waveforms that are locked in phase. We are going to replace
the Sawtooth oscillator with the MultiWave Osc and use a mix of its waveforms
instead of a single sawtooth waveform. Fortunately, there’s already a mixer
macro available from Insert Macro > Classic Modular > 02 - Mixer Amp >
Mixer – Simple – Mono:
REAKTOR CORE – 15
Page 16

Connect the mixer and the oscillator together and use their combination to
replace the sawtooth oscillator:
Switch to the panel view. Now you can use the four faders of the mixer to
vary the waveform mix.
Let’s do one more modification to the instrument and add a Reaktor Core-based
chorus effect. We say Reaktor Core based, because although the chorus itself
is built as a core cell, the part containing panel controls for this chorus is still
built using the primary-level features. That’s because at this time Reaktor
Core structures cannot have their own control panels – the panels have to be
built on the primary level.
Select Insert Macro > Building Blocks > Effects > SE-IV Chorus and insert it
after the Voice Combiner module:
If you look inside the chorus you can see the chorus core cell and the panel
controls:
16 – REAKTOR CORE
Page 17
1.4. Basic editing of core cells
Now we are about to learn a few things about editing core cells. We are going to start with something simple: modifying an existing core cell to your
particular needs.
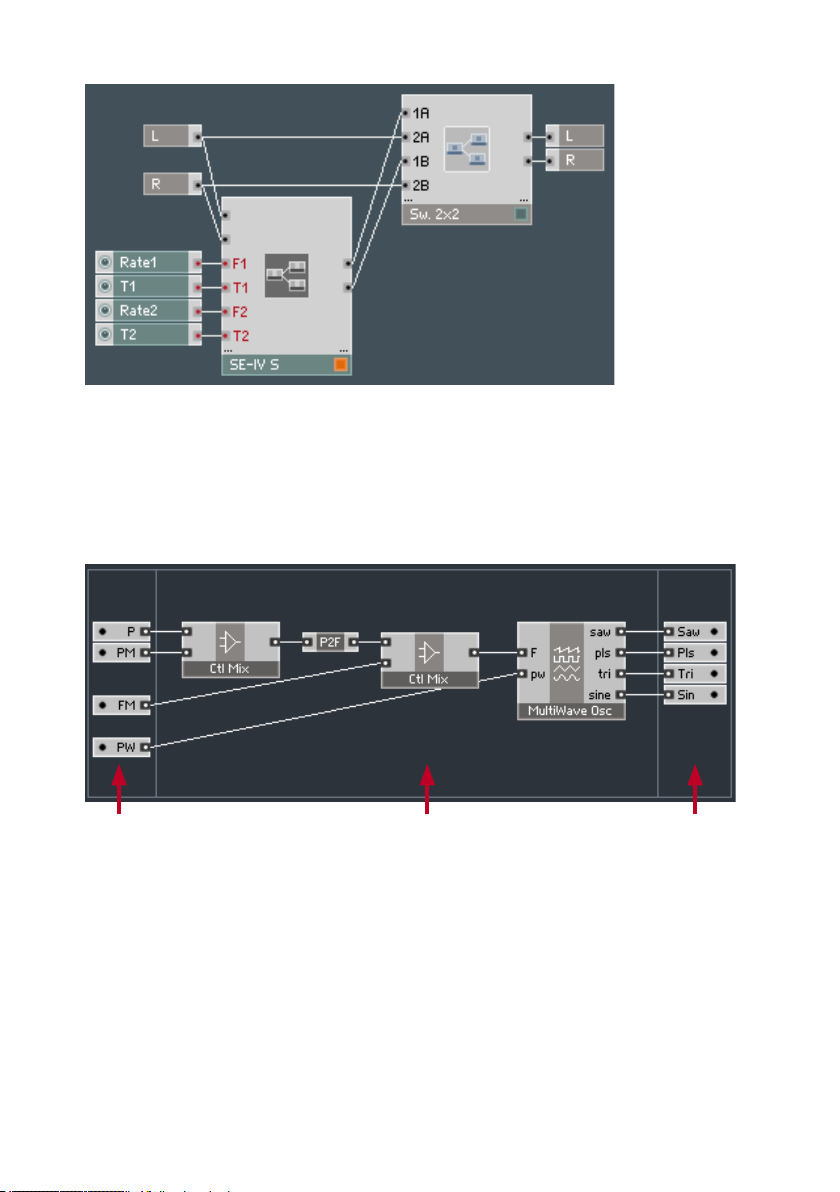
First, double-click the MultiWave Osc to go inside:
Inputs Normal Outputs
What you see now is a Reaktor Core structure. The three areas separated by
vertical lines are for three different kinds of modules: inputs (on the left),
outputs (on the right), and normal modules (center).
Whereas normal modules can move in all directions, the inputs and outputs
can only be moved vertically, and their relative order matches the order in
which they appear outside. So, you can easily rearrange their outside order by
moving them around. Try moving the FM input below the PW input:
REAKTOR CORE – 17
Page 18
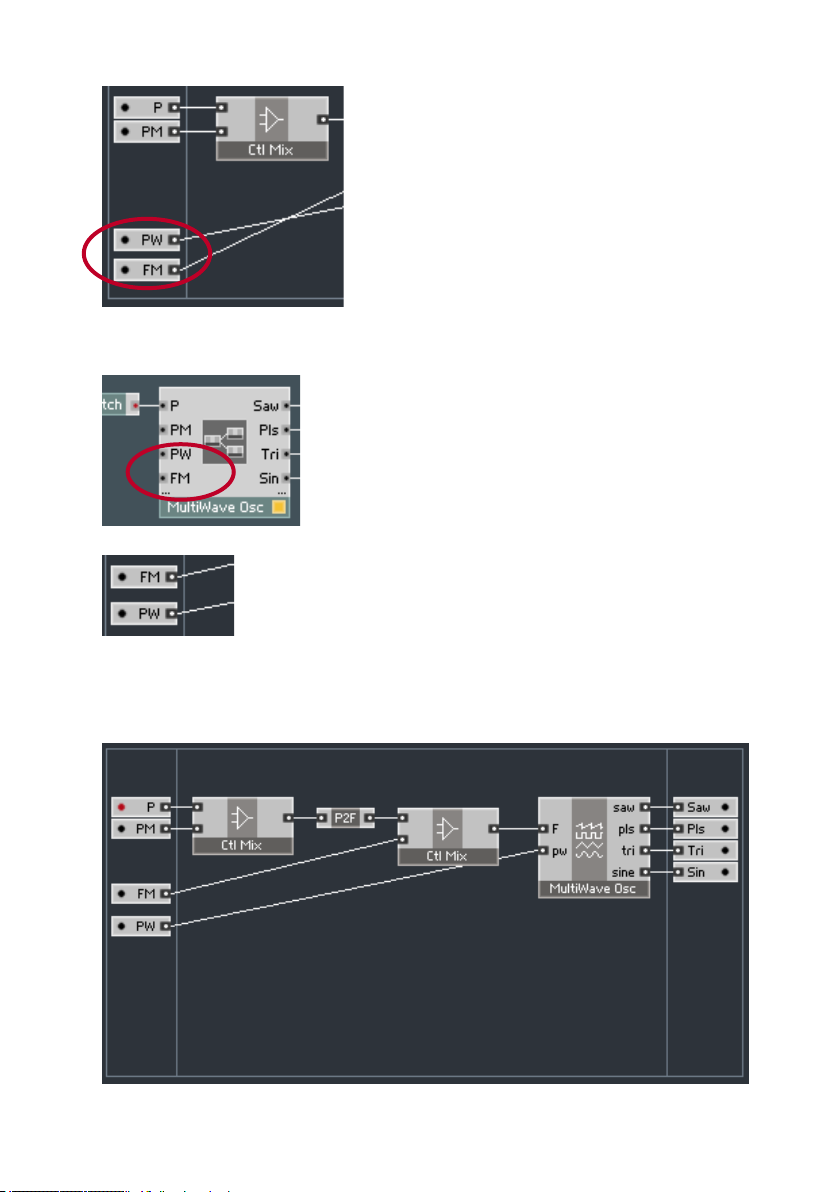
You can double-click the background now to ascend to the outside, primarylevel structure and see the changed port order:
Now go back to the core level and restore the original port order:
As you have probably already noticed, if you move modules around, the three
areas of the core structure automatically grow to accommodate all modules
inside them. However, they do not automatically shrink, which can lead to
these areas sometimes becoming unnecessarily large:
18 – REAKTOR CORE
Page 19
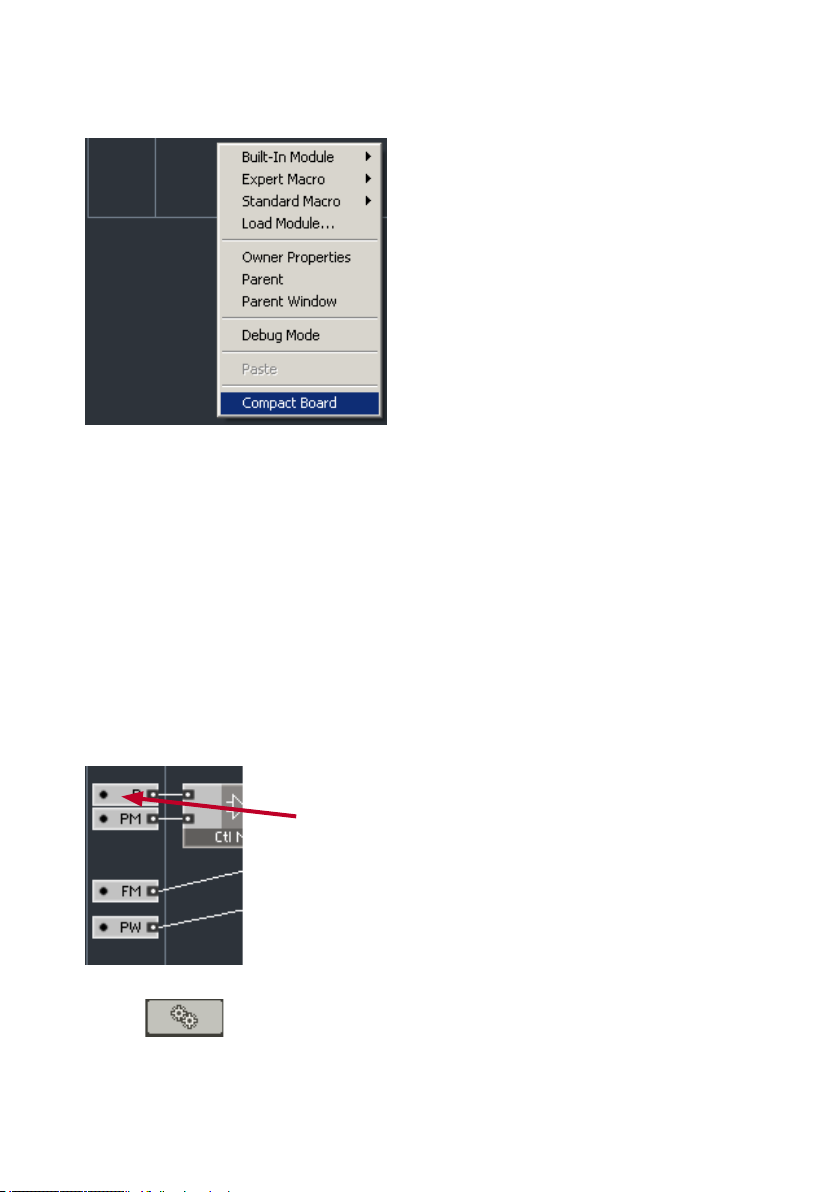
You can shrink them back by right-clicking on the background and selecting
Compact Board command:
Now that we have learned to move the things around and rearrange the port
order of a core cell, let’s try a few more options.
For a core cell that has audio outputs it’s possible to switch the type of its
inputs between audio and event (a more detailed explanation can be found
later in this manual). In the above example, we used a MultiWave Osc module,
all of whose inputs and outputs are audio. However, in this example we don’t
really need them as audio, because the only thing connected to the oscillator
is a pitch knob. Wouldn’t it be more CPU efficient to have at least some of
the ports set to event type? The obvious answer is, “yes, it would.” Here’s
how to do that.
Changing both P and PM inputs to event mode should produce the largest
CPU improvement. To do that double-click on the P port module to open its
properties window:
Double-click here
Switch the properties window to the function page, if necessary, by clicking
on the tab. You should now see the Signal Mode property:
REAKTOR CORE – 19
Page 20
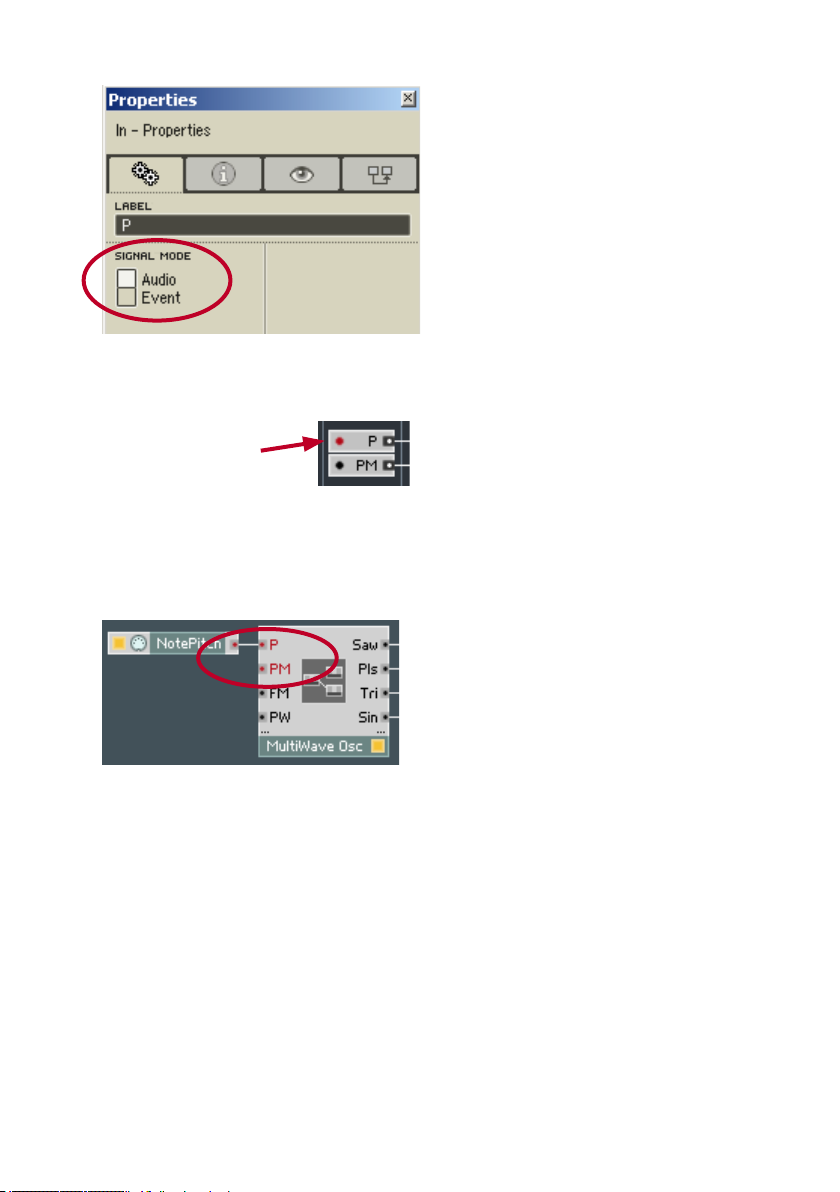
Change it to event. Note how the large dot at the left of the input module
changes from black to red indicating that the input is now in event mode (it’s
more easily visible after you deselect the port – just click elsewhere):
The dot turns red
Now click on the PM input to select it, and change it to event mode, too. If
you want, you can change the two remaining inputs to event mode as well.
Finally, double-click the structure background to return to the primary level
and observe that the port colors have changed to red and the CPU usage has
gone down.
Sometimes it doesn’t make sense to switch a port from one type to another.
For example, it doesn’t make sense to switch an input that receives a real
audio signal (meaning real audio, not just an audio-rate control signal like an
envelope) to an event rate. In some cases such switching could even ruin the
functionality of the module. Going in the other direction, it doesn’t make sense
to change an event input that is really event sensitive, such as an envelope’s
event trigger input (for example, gate inputs of Reaktor primary-level envelopes).
If you change such an input to audio, it will no longer work correctly.
In addition to cases in which port-type switching obviously does not make sense
there may be cases in which it does make sense, but in which the modules
will not work correctly if you switch their port types. Such cases are quite
special, although they can also result from mistakes in the implementation
20 – REAKTOR CORE
Page 21
or design of the module. Generally, port-type switching should work; hence
the following switching rule:
In a well designed core cell, an audio-rate control input can typically
be switched to event mode without any problem. An event input can
be switched to audio only if it doesn’t have a trigger (or other eventsensitive) function.
Another way to save CPU is to disconnect the outputs that you don’t need,
thereby deactivating unused parts of the Reaktor Core structure. You have to
do that from inside the structure – outside connections do not have any effect
on deactivating the core structure elements.
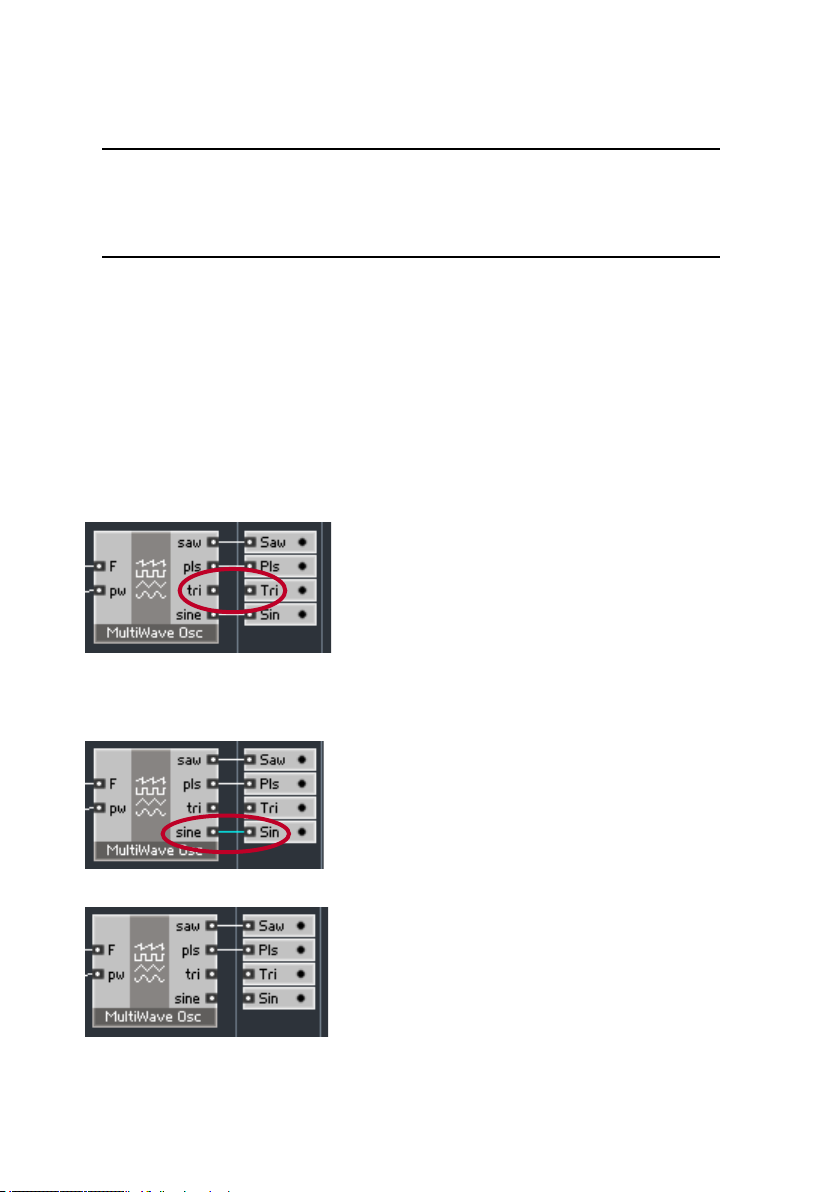
Suppose in our example we decide that we only need the sawtooth and pulse
outputs. We can lower the CPU usage by going inside the MultiWave Osc and
disconnecting the unused outputs. Disconnecting is simple in Reaktor Core,
you click on the input port of the connection, drag the mouse to the any empty
part of the background and release it. For example, click on the input port of
the Tri output and drag the mouse into empty space on the background.
There’s another way to delete a connection. Click on the wire between the
sine output of the MultiWave Osc and Sin output of the core cell, so that it
gets selected (you can tell that it’s selected by its blue color):
Now you can press the Delete key to delete the wire:
After you deleted both wires, the CPU meter should go down a little more.
REAKTOR CORE – 21
Page 22
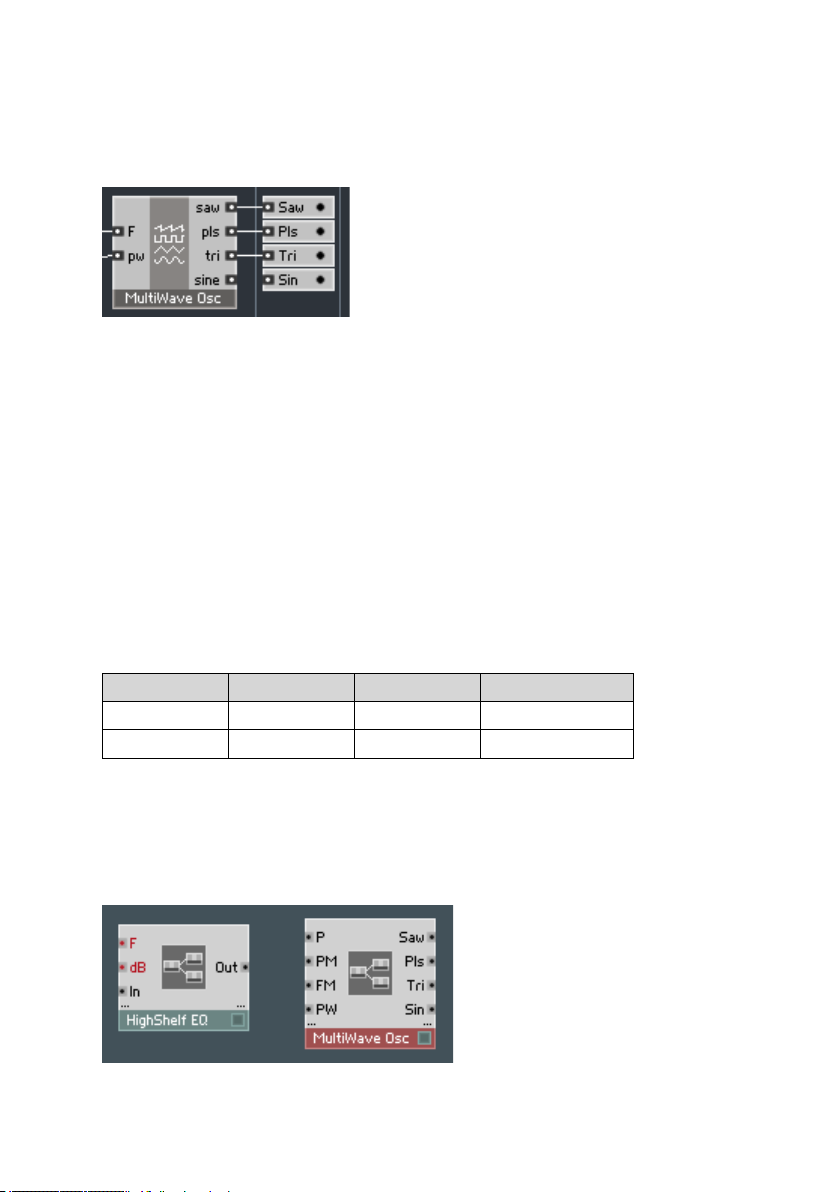
If you change your mind, you can reactivate the outputs by clicking on either
the input or the output that you want to reconnect and dragging the mouse to
the other port. For example, click on the Tri output of the MultiWave Osc and
drag to the input of the Tri output module. The connection is back:
Of course, numerous fine-tuning adjustments can be made to core cells. You
will learn about many more options as you proceed through this manual.
2. Getting into Reaktor Core
2.1. Event and audio core cells
Core cells exist in two flavors: Event and Audio. Event core cells can receive
only primary-level event signals at their inputs and produce only primary-level
event signals at their outputs in response to such input events. Audio core
cells can receive both event and audio signals at their inputs but provide only
audio outputs:
Flavor Inputs Outputs Clock Src
Event Event Event Disabled
Audio Event/Audio Audio Enabled
Therefore audio cells can implement oscillators, filters, envelopes, effects and
other stuff, while event cells are suitable only for event processing tasks.
The HighShelf EQ and MultiWave Osc modules that you are already familiar
with are examples of audio core cells (you can tell that by the fact that they
have audio outputs):
22 – REAKTOR CORE
Page 23
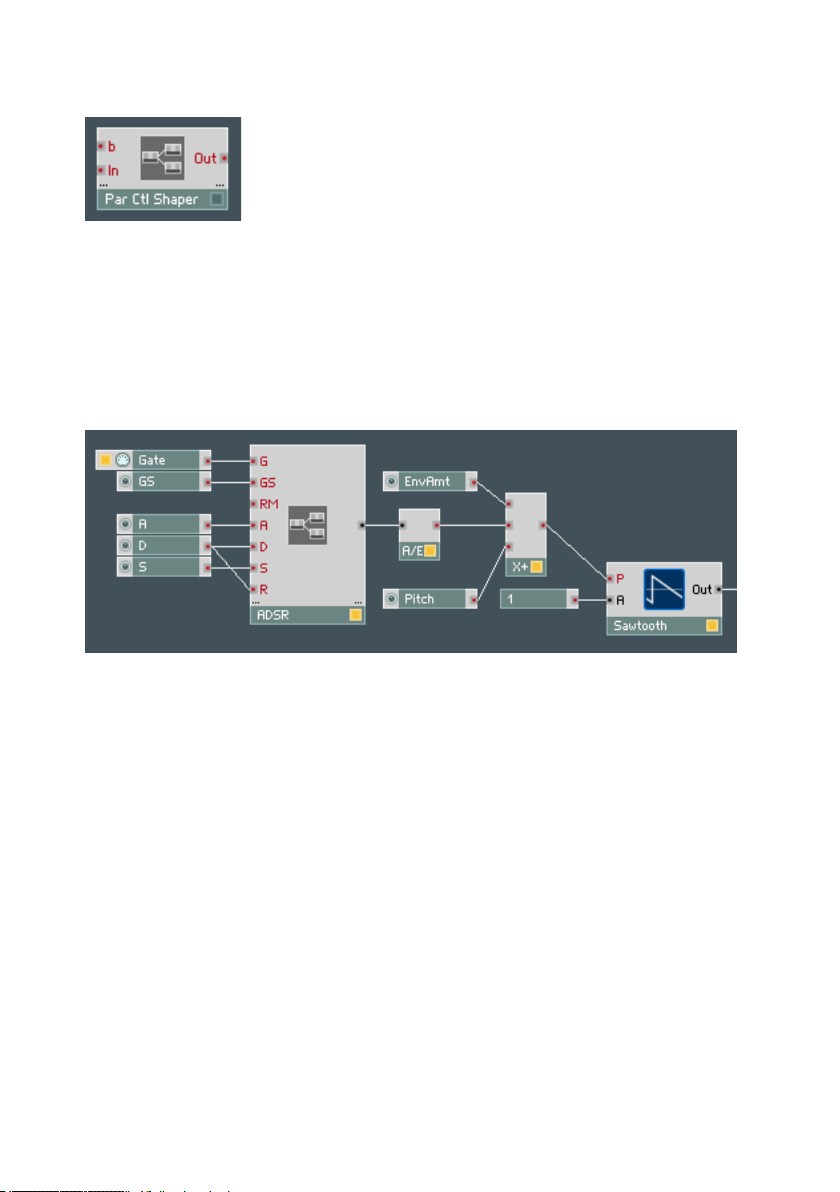
And here is an example of an event core cell:
This module is a parabolic shaper for control signals, which can be used to
implement velocity curves or LFO signal shaping, for example.
As previously mentioned, event core cells are restricted to event processing
tasks. Because clock sources are disabled inside them (see the table above),
they cannot generate their own events and, therefore, cannot implement modules such as event-rate LFOs and envelopes. When you need such modules,
we suggest that you take an audio cell and convert its output to event rate
using one of the primary-level audio to event converters:
The above structure uses an audio core cell implementing an ADSR envelope
and converts it to event rate to modulate an oscillator.
REAKTOR CORE – 23
Page 24
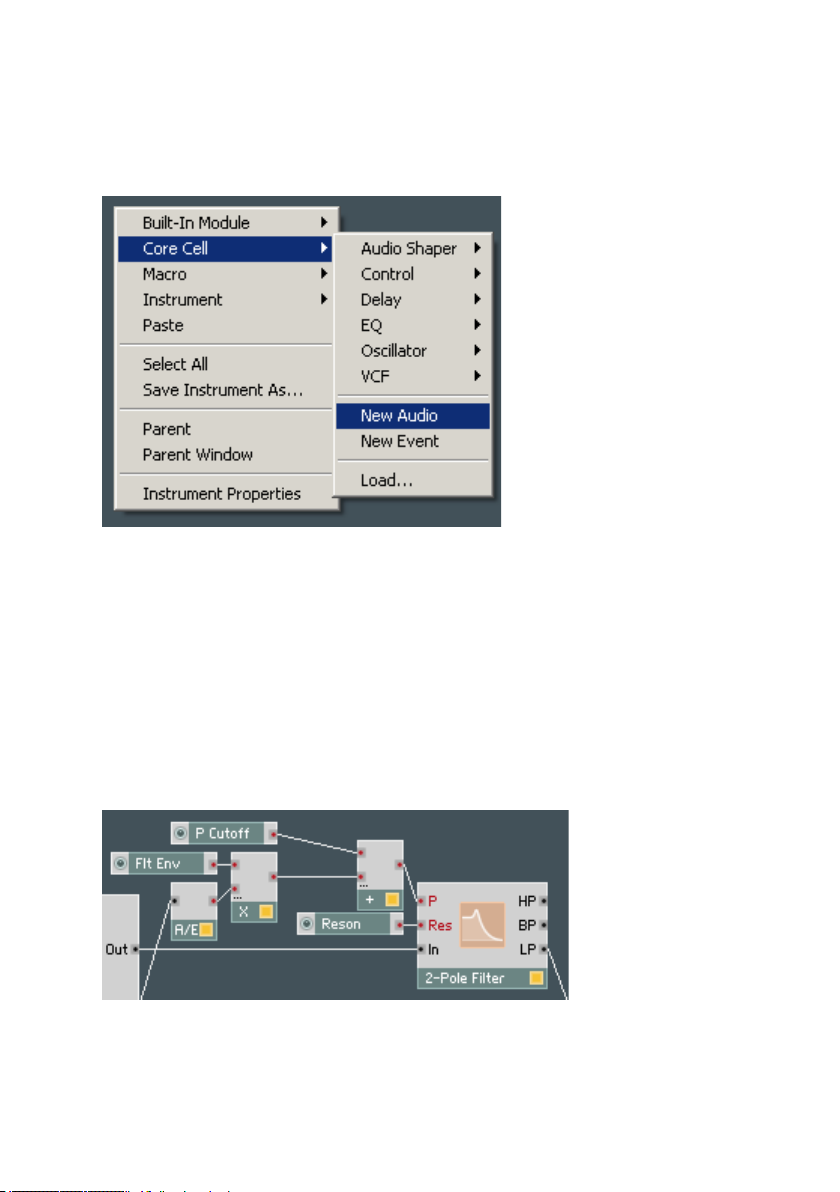
2.2. Creating your first core cell
You create new core cells by right-clicking on the background in a primary-level
structure and selecting Core Cell > New Audio or, for event cells, Core Cell
> New Event:
We are going to build a new core cell from scratch inside the same One Osc.ens
you already played with. We will be using the modified version of that ensemble
with the new oscillator and chorus that we built in the last chapter, but if
you didn’t save it don’t worry, you can do the same steps using the original
One Osc.ens.
As you can see, in this ensemble we are modulating the filter at the P input,
which accepts only event signals. We are not using the FM version of the same
filter because it does not perform as well at higher cutoff frequencies, and
because the modulation scale is linear at an FM input, which generally gives
less musical results when modulated by an envelope. (That phenomenon is
typically but incorrectly referred to as “slow envelopes”.):
Because we need to apply the modulation at an event input, we also need
to convert the envelope’s output to an event signal, which we do with an A/E
24 – REAKTOR CORE
Page 25

converter. As a result, our control rate is pretty low. Of course we could have
used a converter running at a significantly higher rate (and eating up significantly more CPU), but what we are going to do instead is replace this filter
with one which we build as a core cell. Alternatively, we could have taken an
existing filter from the core-cell library, but then we would miss all the fun of
making our first Reaktor Core structure.
We’ll start by creating a new audio core cell. Select Core Cell > New Audio
and an empty audio core cell will appear:
Double-click it to see its structure, which is obviously empty. As you surely remember, the three areas are meant for input, output, and normal modules:
REAKTOR CORE – 25
Page 26
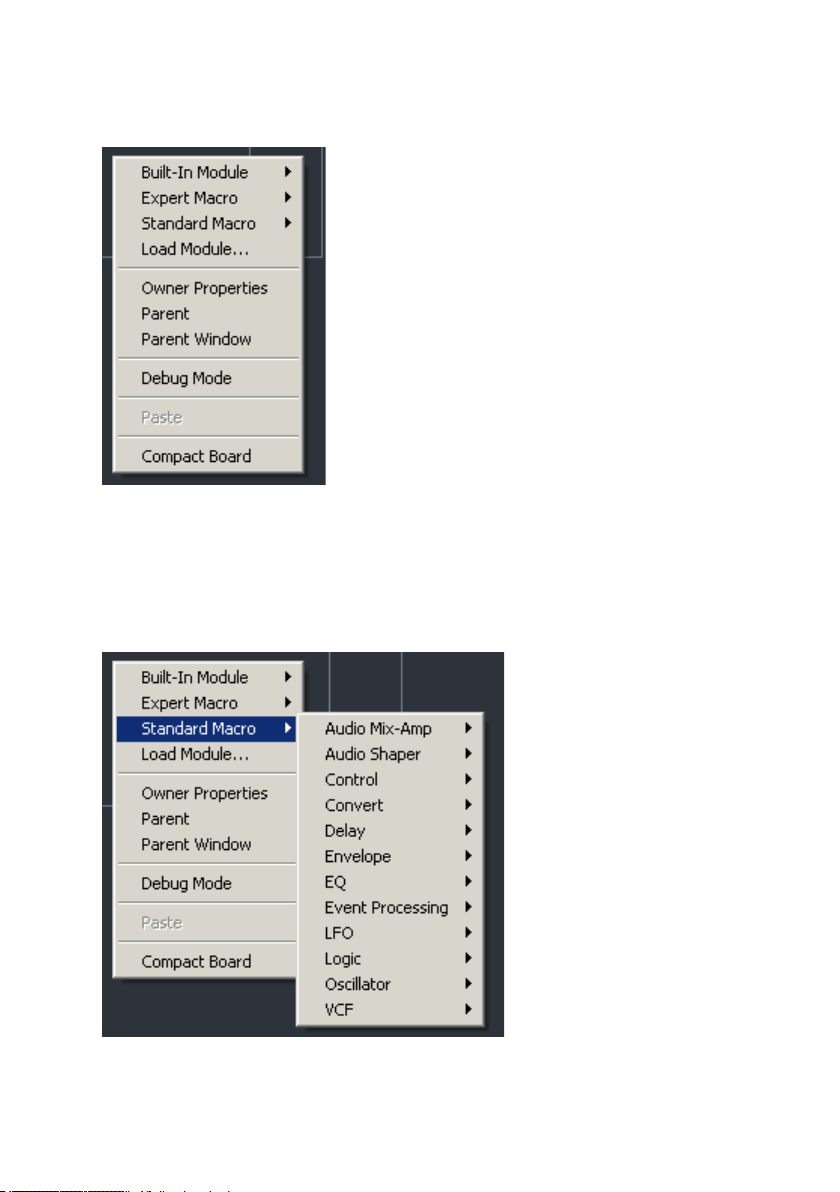
Attention: we are going to insert our first module into a core structure right
now! Right-click in the normal area to bring up the module creation menu:
The first submenu is called Built-In Module and provides access to the built-
in modules of Reaktor Core, which are generally meant to do really low-level
stuff and will be discussed later.
The second submenu is called Expert Macro and contains macros meant to
be used alongside built-in modules for low-level stuff.
The third submenu, called Standard Macro, is the one we want to use:
26 – REAKTOR CORE
Page 27
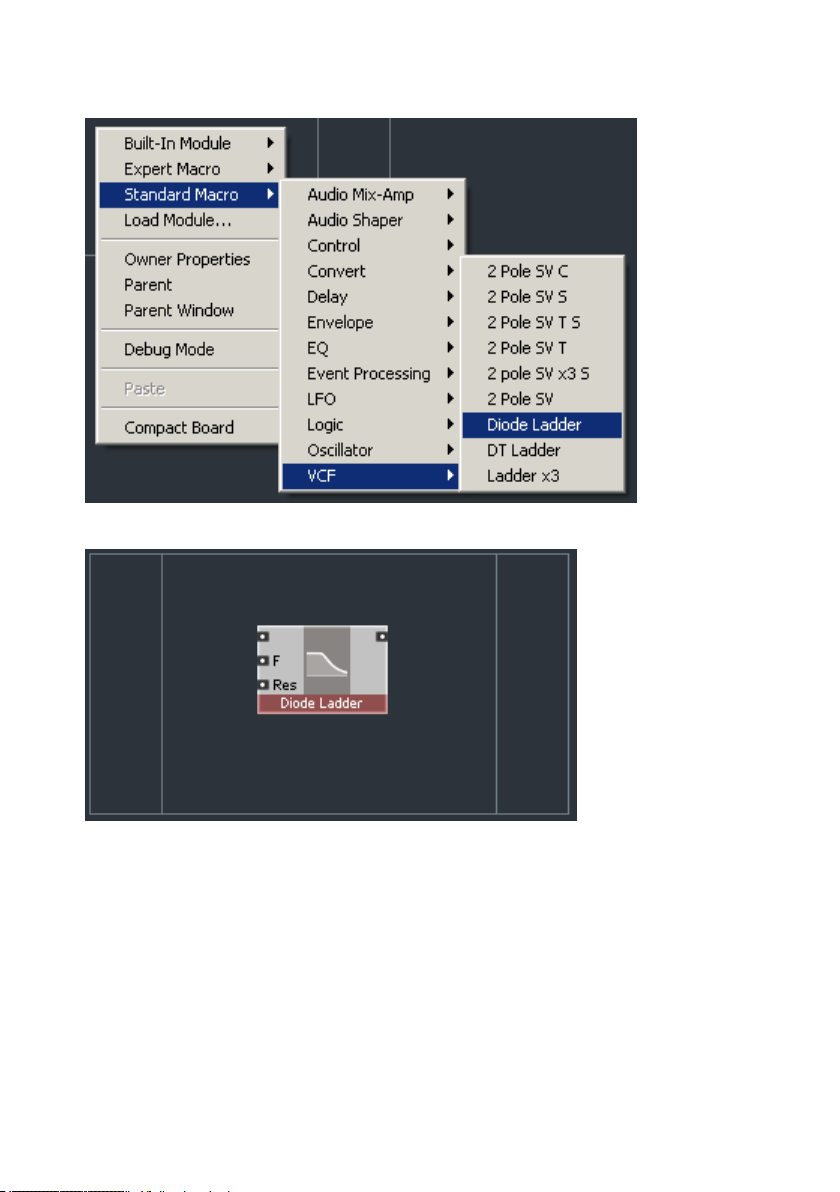
The VCF section could be promising, let’s look inside:
Let’s try Diode Ladder:
Well, maybe that was not the best idea, because a diode ladder might sound
significantly different from the primary-level filter module we are trying to
replace. At minimum, Diode Ladder is a 4-pole (24dB/octave) filter, and the
one we are replacing is a 2-pole filter (12dB/octave). To delete it there are two
options. One is to right-click on the module and select Delete Module:
REAKTOR CORE – 27
Page 28
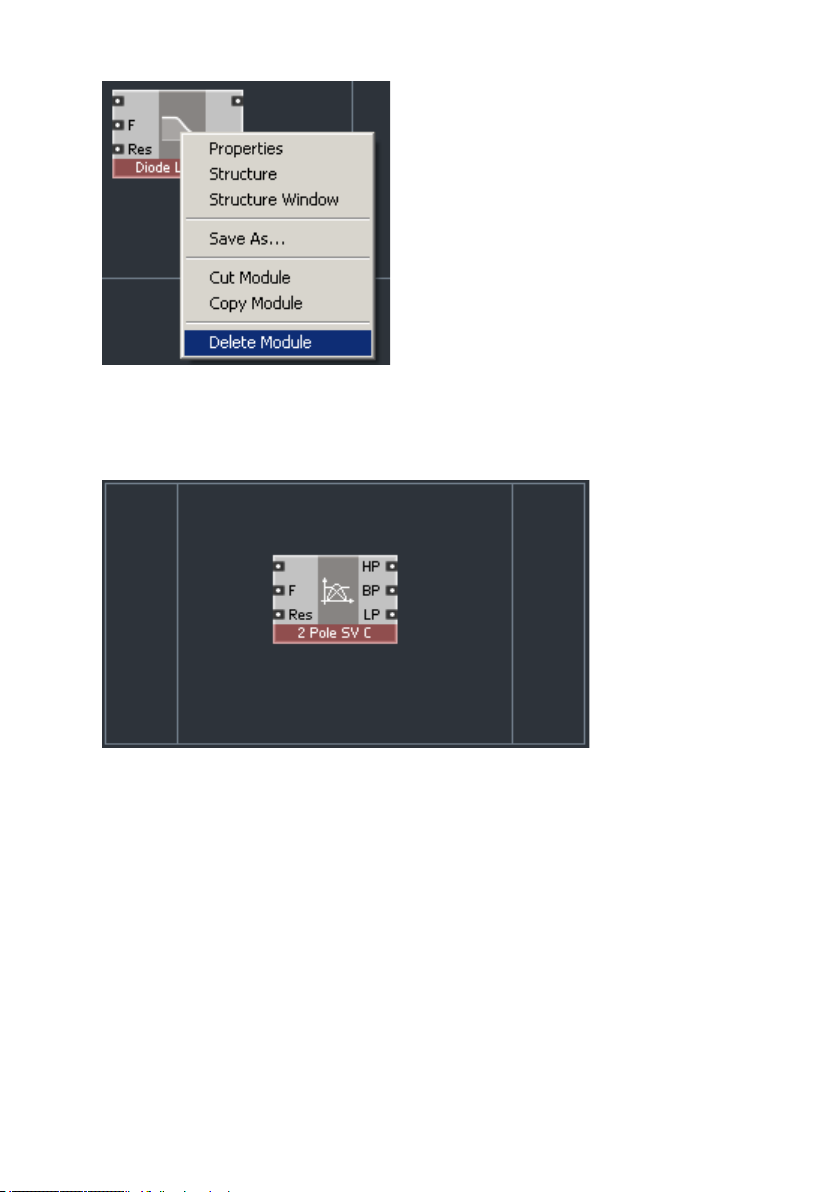
The other option is to select the module by clicking on it and pressing the
Delete key.
After deleting the Diode Ladder, insert a 2 Pole SV C filter from the same VCF
section of the Standard Macro submenu:
This is a 2-pole, state-variable filter and is similar to the one we are replacing
(there are some differences, but they are quite subtle). What’s important is
that we can modulate this filter at audio rates.
Obviously, we need some inputs and some outputs for our core cell. To be
exact we need only one output – for the LP signal. To create it right-click in
the outputs area:
28 – REAKTOR CORE
Page 29
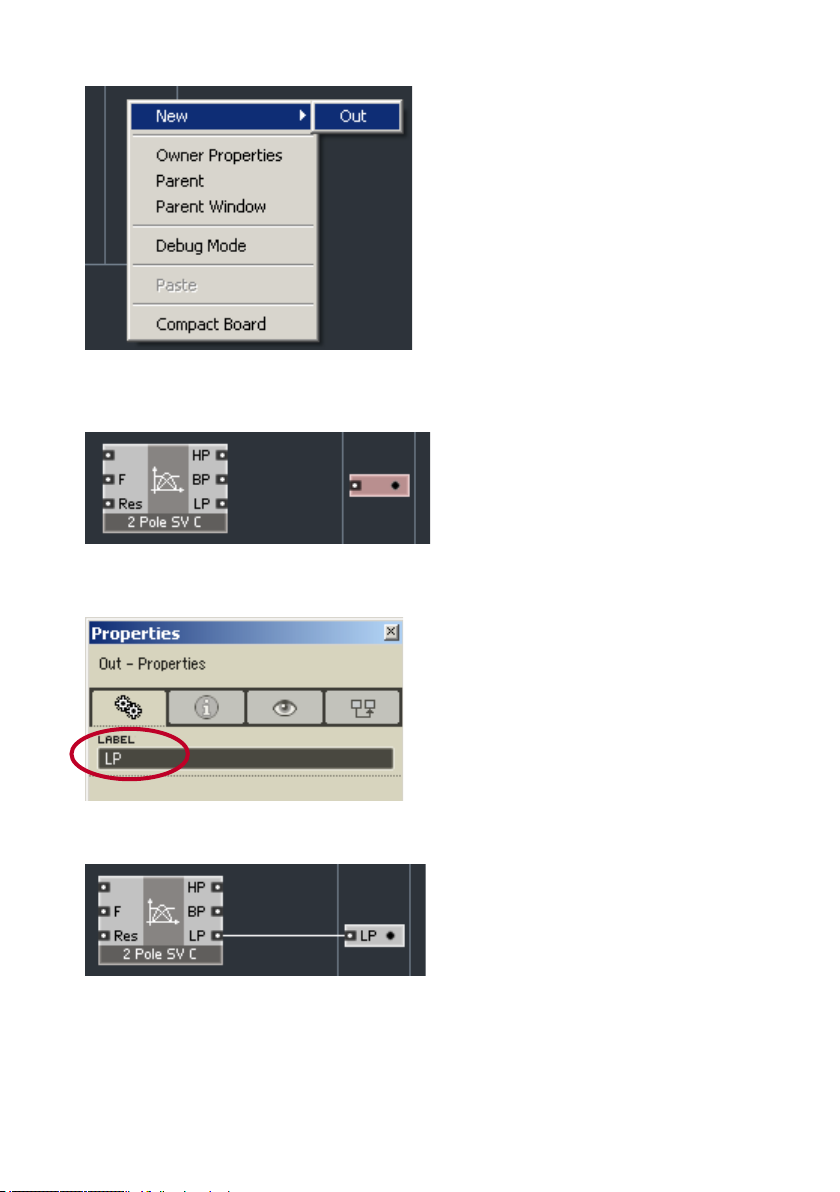
There’s only one kind of module you can create there, so select it. This is
what the structure is going to look like:
Double-click the output module to open the Properties window (if it’s not
already open). Type “LP” in the label field:
Now connect the LP output of the filter to the output module:
Now let’s start with the inputs. The first input will be an audio-signal input.
Right-click in the background of the inputs area and select New > In:
REAKTOR CORE – 29
Page 30
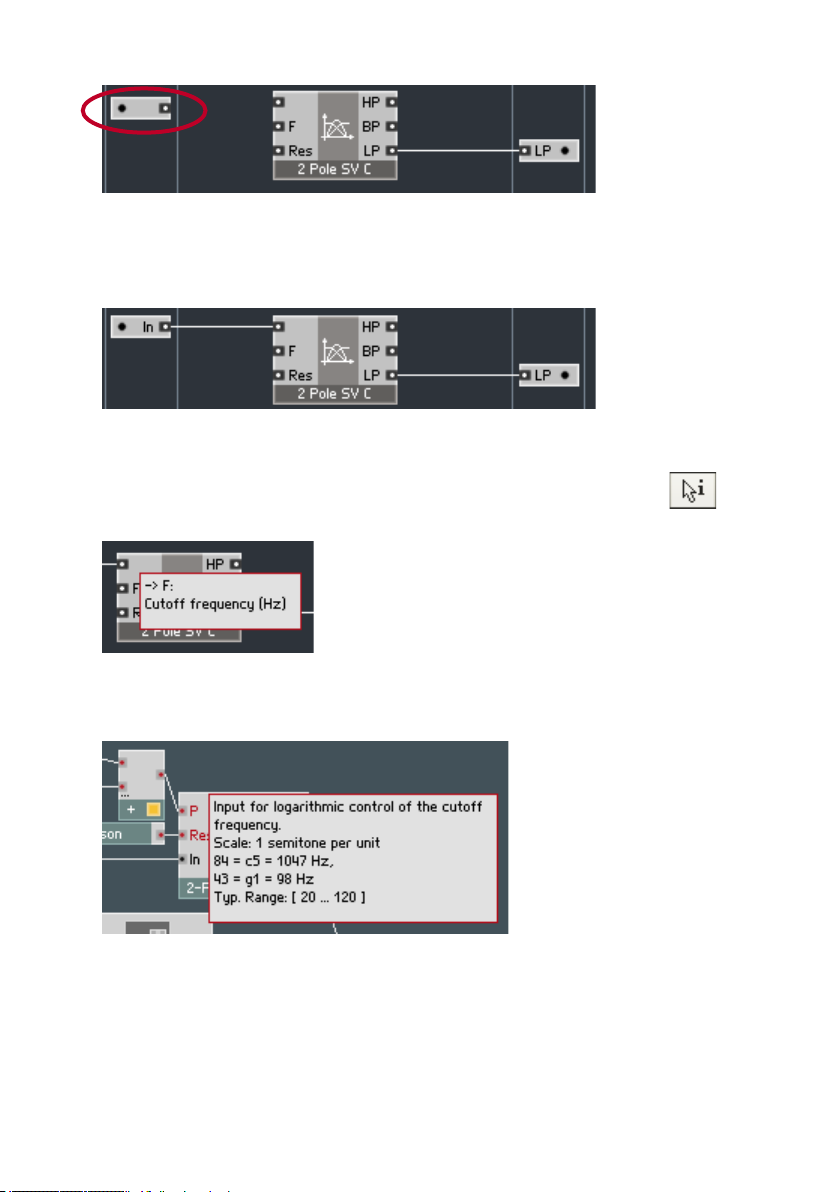
The input is automatically created with the right type – it’s an audio input,
as you can tell by the large black dot. Rename this input to “In” in the same
way you renamed the output to “LP”, then connect it to the first input of the
filter module:
The second input is a little bit more complicated. As you can see, the second input of the filter Reaktor Core module is labeled “F”. That means frequency,
and if you hold your mouse over that input for a while (make sure the button is active), you’ll see the info text, which says “Cutoff frequency (Hz)”:
As we know, the cutoff of our primary-level filter module is controlled by an
input labeled “P”, and as you can see from the info text, the signal uses a
semitone scale.
We obviously need to convert from semitones to Hz. We can do that either
on the primary level (using the Expon. (F) module) or inside our Reaktor Core
structure. Because we are learning to build Reaktor Core structures, let’s go
for the latter option. Right-click in the background of the normal area and
select Standard Macro > Convert > P2F:
30 – REAKTOR CORE
Page 31

As the name implies (and the info text states), this module converts between
P (pitch) and F (frequency) scales – exactly what we need. So let’s create a
second input labeled “P” and connect it using the P2F module:
That should do it, but wait! In our instrument we have a “P Cutoff” knob defining the base cutoff of the filter, and to that is added the modulation signal
from the envelope, which we have to convert to an event signal on the primary
level in order to feed it into the P input of the filter. Now that the conversion
is no longer necessary, we can remove the A/E module and plug the audio
signal directly into the audio P input of our new filter. Although this approach
is fine, let’s look at another way, just for fun.
We’ll start with our P input in event mode and add another modulation input
in audio mode. (If you remember our discussion about slow envelopes, you will
understand why we decided to call this input “PM”, not “FM”.) We also need
to have the modulation input use the semitones (pitch) scale. That’s exactly
how it was done in our original instrument: we added our envelope signal to
the “P Cutoff” signal and plugged the sum into the P input.
So first change the P input to the event mode (as described previously) and
add another PM input, which should be in audio mode:
As a user of the Reaktor primary level, you probably expect us to add the
two signals together now. In fact, we could do that, but in Reaktor Core the
Add is considered a low-level module, and using it generally requires some
knowledge of fundamental Reaktor Core low-level working principles. They
are not that complex and will be described later in this text. For now, you
don’t need to know them; just use a control signal mixer instead, for example,
Standard Macro > Control > Ctl Mix:
REAKTOR CORE – 31
Page 32

The last input that we need is a resonance input, it doesn’t need to be at
audio rate, so let’s use an event input:
One other thing we need to do is to give our core cell a name. If the Properties window is already open, click on the background to display the core
cell’s properties. If it’s not open, right-click on the background and select the
Owner Properties command:
32 – REAKTOR CORE
Page 33

Now you can type some text into the label field:
Double-click the background to see your result:
Wow, looks nice except that the audio-signal input is at the top of the core cell,
while the primary-level filter module input is on the bottom. We could leave it
as is, but it’s easy to fix, and you already know how. Let’s do it together, and
we’ll show you a new feature on the way.
The first thing to do is go back inside and drag the audio-signal input all the
way to the bottom:
That does the trick, but that diagonal wire over the whole structure doesn’t
look particularly nice. That’s what we are going to fix now.
Right-click on the output of the In input module and select the Con-
nect to New QuickBus command:
REAKTOR CORE – 33
Page 34

This is what you should see now:
Also, the Properties window should open to display the properties of the
QuickBus you’ve just created. The most useful QuickBus property is the ability to change its name (other properties are quite advanced, so don’t touch
them for now). You can open the Properties window later by double-clicking
on the QuickBus.
Although you can rename this QuickBus, we believe the current name is perfect, because it matches the name of the input connected to the QuickBus.
(QuickBusses are local to the given structure, so you don’t need to worry about
possible name conflicts when a neighboring or nested structure is using a
QuickBus with the same name.)
The next thing you should do is right-click on the top input of the 2 Pole SV C
filter module and select Connect to QuickBus > In:
In the above menu “In” is the name of the QuickBus you are connecting to.
You don’t want to create a new QuickBus, you want to connect to one that
already exists, and that’s what you’re doing. This is how your structure should
look now:
34 – REAKTOR CORE
Page 35

Instead of a nasty looking diagonal wire, we get two nice references, stating
that the input and output are connected by a QuickBus whose name is “In”.
Now we can go back out to the primary level and modify our structure to use
the new filter we’ve just built. The Add and A/E modules can be thrown away.
This is our final result:
Takes quite a bit more CPU, doesn’t it? Well, don’t forget that this filter is
modulated at audio rate in pitch scale. If you don’t like it, you can still revert
to the old structure or use the Multi 2-pole FM filter module from the primary
level (slow envelopes, remember?), but we hope that you do like it. Even if you
don’t, there are quite a few other filters with new features that you might like
better. And, if you don’t like the new Reaktor Core filters, there are a whole
bunch of other Reaktor Core modules you can try.
REAKTOR CORE – 35
Page 36

2.3. Audio and control signals
Before we proceed we need to take a look at one particular convention used
in the Standard Macros of the Reaktor Core library. The modules you find in
that area are best described in terms of several different types of signals:
audio, control, event, and logic. We will explain event and logic signals a little
bit later; for now we’ll concentrate on the first two types.
Audio signals are obviously signals which carry audio information. These include
signals taken at the outputs of oscillators, filters, amplifiers, delays, and so
on. Furthermore, modules such as filters, amplifiers, saturators, delays and
the like would normally receive an incoming audio signal to process.
Control signals, on the other hand, do not carry audio, they are used to control other modules. For example, outputs of envelopes and LFOs as well as
keyboard pitch and velocity signals do not carry any sound, but can be used
to control a filter’s cutoff or resonance, or a delay line’s delay time, and so
on. Correspondingly, a filter’s cutoff or resonance input port, or a delay’s time
input port are intended to receive control signals.
Here is an example of a Reaktor Core filter module which you already know:
The upper input of the filter is for the audio signal to be filtered and, therefore,
expects an audio-type signal. The F and Res inputs are obviously control type.
The outputs of the filter carry different kinds of filtered audio, so all those
signals are also audio type.
A sine oscillator module, on the other hand, has only a single control input
(for the frequency), and a single audio output:
And if we take a look at the Rect LFO module, it has two control inputs – for
controlling the frequency and pulse width (the third input is of event type)
– and one control output (because it would be used to control things like filter
cutoff or VCA levels, and so on):
36 – REAKTOR CORE
Page 37

Some types of processing, mixing for example, make sense for both
audio and control types of signals. In those cases, you will find versions
of such macros dedicated to processing audio and versions dedicated to
processing control signals. For example, there are audio mixers and control mixers, audio amplifiers and control amplifiers, and so on. Generally
it’s not a very good idea to misuse a module to process signals of types
it was not intended for, unless you really know what you’re doing.
Having said that, quite often it’s possible to use audio signals for control
purposes. The most common example would be to modulate an oscillator’s frequency or a filter’s cutoff by an audio signal. That is absolutely
OK because you are intending to use an audio signal as a control signal.
We assume that the opposite case, in which you really mean to use a
control signal as an audio signal, would be pretty rare.
The separation between audio, control, event, and logic signals is not to
be confused with event/audio separation on the Reaktor primary level. The
primary-level event/audio classification refers to speed of processing, audio
signals being processed faster and requiring more CPU. Also as you probably
know, primary-level event signals have different propagation rules than audio
signals. The difference between audio, control, and event signals in Reaktor
Core terminology is purely semantic, defining the meaning of the signal rather
than the type of processing. There is not a one-to-one relationship between
primary-level event/audio and Reaktor Core audio/control/event/logic terms,
but we can still try to explain their relationship:
- a primary-level audio signal normally corresponds to either a Reaktor
Core audio signal (for example, an output of an oscillator or an audio
filter) or a Reaktor Core control signal (for example, an output of an
envelope).
- a primary-level event signal is typically a control signal in terms of
Reaktor Core. An example of such signal would be an output of an
LFO, a knob, or a MIDI pitch or velocity source.
- sometimes a primary-level event signal corresponds to a Reaktor Core
event signal. The most typical example of that is a MIDI gate (Reaktor
Core event signals will be described later, as we promised).
- sometimes a primary event signal resembles a Reaktor Core logic
signal; however, they are not fully compatible, and there must be
explicit conversion between them (a topic that also will be covered
later). Examples include signals processed by Logic AND or similar
primary-level modules.
REAKTOR CORE – 37
Page 38

It’s important to understand that when you select the type for a corecell input port, you are choosing between the primary-level event and
audio signals, not between Reaktor Core event and audio signals. The
core-cell ports are the place where both worlds meet, and therefore,
they use a bit of the primary-level terminology.
We are going to learn a little bit more about this concept while trying to build
a tape-echo-effect emulation. We will start by building a simple digital echo,
then enhance it to emulate some features of a tape echo.
Start by creating an empty audio core cell; then go inside and set its name
to “Echo”.
The first module we are going to put into the structure is a delay module. We
will pick a 4-point interpolating delay, because it has better quality than a 2point delay, and a non-interpolating delay would not be suitable for our tape
emulation: Standard Macro > Delay > Delay 4p:
We obviously need an audio input and an audio output for our delay core cell.
We will use a QuickBus connection for the input and a normal connection
for the output:
We also need an event input for controlling the delay time. One thing to
be aware of here is that, on the primary level, the delay time is usually expressed in milliseconds, while Reaktor Core library delay macros expect it to
be in seconds. No problem, there is a conversion module available for that.
Standard Macro > Convert > ms2sec:
So far, we only have a single echo, and it would also be nice to hear the original
signal, not just the echo. To get the original signal at the output we need to
38 – REAKTOR CORE
Page 39

mix it with the delayed signal. Because we are mixing audio signals here, we
need to use an audio mixer (you may remember we used a control mixer to
mix control signals when we were building a filter core cell). Even better, we
can use a particular audio mixer type that is specifically designed to crossfade
between two signals: Standard Macro > Audio Mix-Amp > XFade (par):
Here “(par)” stands for parabolic, which produces a more natural sounding
crossfade than a linear crossfade. We will connect the control (x) input of the
crossfade to a new event input to control the mix between the dry (unprocessed)
and wet (delayed) signals. When the control signal is 0 we will hear only the
original signal, and when it’s 1, we will hear only the delayed signal:
Now we can hear the original signal and the echo, but there’s still only one
echo. To have multiple echoes we need to feed a fraction of the delayed signal
back to the delay input. First we need to attenuate the delayed signal. Following the same guidelines, use an audio amplifier to attenuate an audio signal
by choosing Standard Macro > Audio Mix-Amp > Amount.
We use the Amount amp because we want to control the amount of the signal
that is fed back. Also, this amplifier will allow us to invert the signal by using
negative amount settings. In contrast, for example Amp (dB), which would
be quite suitable to control the signal volume, is not very good here because
it doesn’t allow us to invert signals. We connect the amplitude control input
of the amplifier to an event input controlling the feedback amount:
REAKTOR CORE – 39
Page 40

The reasonable feedback amount range is something like [-0.9..0.9]
here. When you try out this delay, be careful with the feedback amount,
because you can easily reach excessive signal levels (there is no saturation in our circuitry yet). We could have embedded a safety feedback
amount clipper into our delay core cell, but because we are going to
have saturation there a little bit later, we didn’t think that was necessary.
Without it, you will be able to experiment with high feedback levels and
hear the delay saturating.
We need to mix the feedback signal with the input signal. An audio mixer
(Standard Macro > Audio Mix-Amp > Audio Mix) is a natural choice
:
You may wonder what happened to the upper input of the Amount module
above, which now shows a large orange “Z”:
Actually, depending on the version of the software and other conditions, the
Z sign could appear at some other input in the structure, but don’t worry you
too much about it. The Z sign indicates that a digital feedback has occurred
in the structure, and it is meant for advanced structure design, where such
information can be an important hint for the structure designer.
For simple structures like the one above, one normally needn’t worry about
the Z sign; its presence just shows that there will be a 1-sample delay (about
40 – REAKTOR CORE
Page 41

0.02ms at 44.1kHz, even less at higher sampling rates) at that point in the
structure. We assume you won’t notice if your delay time is 0.02ms off the
specified value.
Let’s get back to our structure, which now can produce a series of decaying
echoes. It is already a decent digital echo, but we want to show you a feature
of the library that you can use as a trick to make your structure smaller.
Among the audio amplifiers are amplifiers called “Chain”. These amplifiers are
capable of amplifying a given signal and mixing it with another, chained signal.
One of them is the Audio Mix-Amp > Chain(amount) amplifier, which works
similarly to the Amount amplifier except that it also does chained mixing:
The signal at the second input of this module will be attenuated according to
the amount given at the A input and mixed with the signal at the chain (>>)
input. The signal at the chain input is not attenuated. Such amplifiers can
be used to build mixing chains, where the >> port connections constitute a
mixing bus:
In our case we don’t need a mixing bus, but we can use this module to replace both our Audio Mix and Amount modules. The fed back signal will be
attenuated by the amount specified by the Fbk input and mixed to the input
signal exactly as it was before:
Congratulations, you have built a simple digital-echo effect. The next step is
to add some tape feel to it.
REAKTOR CORE – 41
Page 42

2.4. Building your first Reaktor Core macros
In the echo effect we just built, we used a Delay 4p macro from the library,
which gives us a reasonably high-quality digital delay. But, high-quality or
not, it still sounds too digital. We will make it sound warmer by adding two
features found in tape delays: saturation and flutter.
Let’s start by deleting the delay macro from the structure and creating an
empty macro instead. Right-click on the background as select Built-In Module
> Macro:
Double-click it to dive inside. You will see an empty structure, similar to the
one you are diving from:
It also works similarly, but there are some important differences because the
previous one was a structure of a Reaktor Core cell, whereas this one is an
internal structure of a Reaktor Core macro. These differences have to do with
the available input and output modules, which are different:
42 – REAKTOR CORE
Page 43

The Latch and Bool C types of ports will be explained much later in this manual
and are used for advanced stuff. We are interested now only in the first type,
which is called “Out” (or “In” for inputs). It’s a general type of port that can
accept audio-, control-, event-, and logic-type signals. In fact, the port doesn’t
care whether it’s audio, control, event, or logic; the difference is important
only for you as a user, because it describes how the signal is to be used;
for Reaktor Core they are all the same. There is also no difference between
audio/event inputs/outputs as on the previous structure level, because we
don’t have Reaktor primary-level signals on the outside any longer, it is pure
Reaktor Core now. The first thing we are going to do is name the macro, which
is done in the same way as for core cells, by right-clicking on the background,
selecting Owner Properties, and typing in the name:
The remaining properties of the macro control various aspects of its appearance and its signal processing.
While you are free to experiment with remaining properties as you see fit,
we strongly advise against turning the Solid parameter off. We also advise
changing the FP Precision sparingly. The meaning of these parameters
will be described in the advanced topics of this manual.
The next thing is to create a set of inputs and outputs for our Tape Delay
macro:
REAKTOR CORE – 43
Page 44

The upper input will receive the audio input, and the lower will receive the
time parameter. You may have noticed extra ports on the left side of the input
modules; we will explain them a little bit later.
As the central part of our macro we will use the same Delay 4p module:
A simple emulation of the saturation effect can be done easily by connecting
a saturator module before the delay. Saturator is a kind of signal shaper, so
we will look for it among the audio shapers (because it is an audio saturator).
Standard Macro > Audio Shaper > Parabol Sat:
The input signal will now be saturated within the range of –1..+1. Actually, the
range is controlled by the L input of the saturator module, if it is disconnected
it defaults to 1. That might be surprising to you because you are probably
used to disconnected inputs being treated as if they receive no signal, or put
differently, a zero signal. Well, this is not exactly the case in Reaktor Core
structures—modules can specify special treatment for disconnected inputs. The
saturator, for example, specifies the L input to have a default value of 1.
Now we are going to learn to do exactly the same, by specifying a new default
value for our T input. Let’s say that if our T input is disconnected we would
like it to be treated as if the input value was 0.25 sec. Very easy. Right-click
on the port on the left of the T input module and select Connect to New
QuickConst. This is what you should see:
In addition, you should have the properties window displaying the properties
of the constant (if it shows a different page, press the tab):
44 – REAKTOR CORE
Page 45

In the value field type a new value of 0.25:
This is how the QuickConst should look now in the structure:
Let’s explain what we have just done. The port on the left side of the input
module specifies a so-called default signal. That means that if the input is
not connected (on the outside of the macro), the default signal will be taken
as the input source. In our case, if the T input of the Tape Delay macro is not
connected on the outside, it will behave as if you have connected a constant
value of 0.25 to it.
Of course, a connection to the QuickConst is not the only possible connection
for the default signal input. You can connect it to any other module in the
structure, including other input modules.
Now that we have saturation and a default value for the T input, let’s emulate
a tape flutter effect. A simple way to do that is to modulate the delay time
with an LFO. You could experiment with different LFO shapes for better flutter effect, but for now, just take one from the library: Standard Macro > LFO
> Par LFO:
REAKTOR CORE – 45
Page 46

This is a parabolic LFO, which produces a signal similar in shape to a sine,
but uses less CPU. Its F input must receive a signal specifying the oscillation
rate. We can use a QuickConst again here. A rate of 4 Hz seems reasonable
so we can try that:
The Rst input is used for restarting the LFO; we won’t need it for now.
Now we need to specify a modulation amount by scaling the output of the
LFO. Currently the LFO output signal varies in the range –1 .. 1 and that is
way too much. Because we are dealing with control signals here, we are going
to use a control amount module, which is similar to the Amount amplifier we
used for audio. Standard Macro > Control > Ctl Amount:
A modulation amplitude of 0.0002 should do fine, so we scale the signal to
that amount:
Ultimately, we can mix the two control signals (one from the T input and one
from the Ctl Amount module) and feed them into the T input of the delay
module. The already familiar Ctl Mix module can be used for that:
Actually, we have a Chain type of control mixer that is similar to the mixer we
have for audio signals. We could use it to replace the Ctl Amount and the Ctl Mix
46 – REAKTOR CORE
Page 47

modules in the same way we did earlier in the audio path. Standard Macro >
Control > Ctl Chain:
As one last touch for our macro, we are going to change the buffer size for
our delay, which defines the maximum possible delay time. If you hold your
mouse cursor over the Delay 4p macro (and provided the button is ac-
tive), you can read in the hint text that the default buffer size corresponds to
1 sec of delay at 44.1kHz:
Let’s increase the amount to 5 seconds (44,100*5 = 220,500 samples). Because each sample requires 4 bytes, we need 220,500*4 = 882,000 bytes,
which is almost 1MB). Double-click on the Delay 4p macro:
The module on the left is the delay buffer module. Double-click it (or right-
click and select Show Properties) to edit its properties. Select the
tab and you should see the Size property. Change it to 220,500 samples:
REAKTOR CORE – 47
Page 48

As we have seen, a delay buffer for 5 seconds of audio takes almost
1MB of memory, so be careful when changing delay buffers. That’s
most important when the delays are used in polyphonic areas of the
structure, because the size of the buffer will be multiplied by the number of voices.
Now we can go outside the Delay 4p macro and then outside the Tape Delay
macro we’ve just created (double-click the background) and make the outside
connections:
If you haven’t done so yet, try out the echo module now. Here’s a Reaktor
primary-level test structure, as simple as possible (note that the Echo module
is set to mono):
You might want to enhance it in various ways, for example, by providing
knobs controlling the echo parameters, by using a real synthesizer as a signal
source, and so on.
48 – REAKTOR CORE
Page 49

2.5. Using audio as control signal
We have mentioned above that it is possible to use an audio signal as a control signal. As an example of that, we are going to create a Reaktor Core cell
implementing a pair of oscillators, in which one modulates the other. Start by
creating two multiwave oscillators:
We need pitch control for both of the oscillators, and we are going to listen
to the output of the second one, so let’s create the necessary inputs and
outputs:
Now we want to take the output of the left oscillator and use it to modulate
the frequency of the right oscillator:
The Mod input controls the modulation amount.
REAKTOR CORE – 49
Page 50

Notice that we are mixing the modulation signal with the P1 input after a
P2F converter so the modulation will take place in frequency scale. (It’s also
possible to modulate in pitch scale.)
It’s also a good idea to scale the modulation amount according to the base
oscillation frequency:
If you analyze the above structure from the point of view of control and audio
signals you will notice that all of the signals in the structure except the outputs of the oscillators are control signals. The outputs of both oscillators are
obviously audio signals. Notice, however, that we are misusing the output of
the left oscillator as control signal at the point at which we feed it into the
Ctl Chain mixer.
2.6. Event signals
As we said earlier, there are different meanings of the term event signal. You
should already be familiar with the idea of Reaktor primary-level event signals. There are several ways of using a primary-level event signal. One is as
a control signal (for example, LFO output, knob output, and so on), because
it uses less CPU than a primary-level audio signal. In that case, you probably
could achieve the same effect with an audio signal. But, there are also cases
in which an audio signal won’t work for control, for instance, when you are
interested in both the value of the signal and when the value is sent. A primary-level envelope-gate signal is an example of that, because the envelope
will be triggered when the event arrives at the gate input.
When we were talking about audio, control, event, and logic signals in Reaktor
Core we were not really talking about different types of signals (technically
they are all the same in Reaktor Core). Rather we are talking about different
ways of using a signal. As we now know, a Reaktor primary-level event signal
can be used as a control, event, or even logic signal, and as we’ve seen from
an earlier example, a Reaktor primary-level audio signal can be used as audio
or control.
We have already learned to feed primary-level event signals into Reaktor Core
structures and use them there as control signals. Event-mode inputs for an
audio core cell implementing a filter that we built earlier is a good example of
that. There are also cases in which you would use an event core cell to process
50 – REAKTOR CORE
Page 51

some primary-level event signals used as control signals. Here’s an example
in which an event core cell wraps a control shaper core macro:
The control shaper receives an event rate control signal from the primary level
(for example, a MIDI velocity signal, or a primary-level LFO signal), bends it
according to the Shp parameter, and forwards the result to the output.
An important restriction of event core cells, which we mentioned earlier,
is that all clock sources are disabled inside them. That means that not
only oscillators and filters, but also envelopes and LFOs do not work
inside event core cells. Those modules are restricted to receiving events
from the primary level of Reaktor, processing them, and sending them
back to the primary level, as in the above example.
Alternatively, signals derived from primary-level events can be used as true
event signals inside Reaktor Core structures. Let’s take a look at a couple of
simple cases of using events inside Reaktor Core.
The first case is using an envelope in a core structure. As you can guess from
the disabled-clock restriction on event core cells, this has to be an audio core
cell. So, create a new audio core cell and choose Standard Macro > Envelope
> ADSR:
REAKTOR CORE – 51
Page 52

The top input of the envelope is a gate input, which works similarly to the gate
inputs of primary-level envelopes—that is, it opens or closes the envelope in
response to incoming events. For that we create an event input for our core
cell:
This input will translate the incoming primary-level gate events into the core
events.
Now let’s take a look at the A, D, S, R inputs. The S (sustain level) input
works similarly to the primary level; it expects the incoming signal to be in
the 0 to 1 range:
The A, D, R inputs are different, however. Unlike primary-level envelopes they
expect time to be specified in seconds:
That can be solved by using a Standard Macro > Convert > logT2sec, which
converts the primary-level envelope times to seconds:
Although all inputs in the above structure are in event mode, the first input
produces an event signal, whereas the others produce control signals.
Our envelope still has two unconnected ports. The GS port sets the gate
sensitivity amount. At 0 the envelope completely ignores the gate level and
52 – REAKTOR CORE
Page 53

is always at full amplitude. At 1 the gate level has maximum effect, as on
the Reaktor primary level. We can control this amount from the outside by
adding another input:
The RM port specifies the retrigger mode for the envelope:
The look of this port is different from the others because it expects integer
values, but that doesn’t mean we cannot connect non-integer signals to this
port. We can simply use another event input, and the incoming values will be
rounded to the nearest integer:
REAKTOR CORE – 53
Page 54

Now let’s take a look at another example using a true event signal:
The above structure implements a kind of pitch modulation effect. The effect is produced by a delay whose time varies in the range 250±100 ms. The
rate of variation is determined by the Rate input, which controls the rate of
the modulating LFO (the value is in Hz)—that is a pure control signal. The
Rst input is a true event signal and can be used for restarting the LFO. The
incoming value specifies the restart phase, where 0 would restart the LFO at
the beginning of the cycle, 0.5 in the middle, and 1 in the end. You can try it
out by connecting a button to send a specific value to this input.
2.7. Logic signals
Now that we have learned about control and event signals, it’s time to learn
about another way of using signals in Reaktor Core, that would be as logic
signals. Here’s an example of a module that processes logic signals:
Notice that the ports of this module are integer type, just as was the RM input
of the envelope. That is because, generally, logic signals carry only integer
values; more precisely, they carry only values of 0 and 1.
For logic signals, a value of 1 stands for true, and a value of 0 stands for
false. The meaning of “true” and “false” is, of course, up to the user; for
instance, it could mean (as in the example here) whether a particular gate is
open (true) or closed (false):
Here a Gate2L macro checks the incoming gate signal and produces a true (1)
output if the gate is open and false (0) output if the gate is closed.
We can use logic signals to do logical processing. For example, here we’ve
built a gate processor that applies a regular clocked gate over a MIDI gate:
54 – REAKTOR CORE
Page 55

The Gate2L, AND, and L2Gate modules are logic modules and can be found
in Standard Macro > Logic menu. The Gate LFO is a macro, which we’ve built
for this processor; it generates an opening and closing gate signal at regular
intervals.
The input gate and the output of the LFO are connected to Gate2L converters,
which convert the gate signals to logic signals, transforming open gates into
true and closed gates into false. The AND module outputs a true signal only if
both gates are in the open state at the same time. In other words the output
of the AND module is true if and only if the user holds a key and at the same
time the LFO outputs an open gate. That means that, as long as the user holds
a key, there will be alternating true and false values at the output of the AND
module, the speed of the alternation defined by the LFO rate. The output of
the AND module is converted back to a gate signal, whose amplitude is taken
from the gate input, thereby leaving the gate level unchanged.
Here is the structure for our Gate LFO macro:
The F input defines the rate of the gate repetitions, and the W input defines
the duration of open gates (at 0 they are 50% of the gate period, at –1 it’s
0%, and at 1 it’s 100%). The Rst input restarts the LFO in response to incoming events (hence the LFO is restarted each time there’s a gate event at
the main gate input).
The module connected to the Rst input of the Rect LFO is called Value and
can be found in Standard Macro > Event Processing. It ensures the LFO is
restarted at zero phase by replacing the values of all incoming events by
the value at its lower input, which is zero. The LFO output is converted into
a gate signal by using a Ctl2Gate converter, also found in Standard Macro
>Event Processing.
Remember, LFOs do not work inside event core cells. If you want to try
out this structure, you’ll need to use an audio core cell.
REAKTOR CORE – 55
Page 56

3. Reaktor Core fundamentals: the core signal model
3.1. Values
Most of the outputs of Reaktor Core modules produce values. (Producing a
value means that at any moment in time there is a value associated with the
output.) The values are available to all modules whose inputs are connected
to those outputs.
In the following example an adder module gets values 2 and 3 from the two
modules whose outputs are connected to its inputs, and it produces a value
of 5 at its output.
If you want to draw an analogy to the hardware world you can think of
values as signal levels (voltages), especially with relatively large-scale
modules such as oscillators, filters, envelopes, and so on. However,
values are not limited to those kinds of processing—they are just values
and can be used to implement any processing algorithm, not just voltage-modeling algorithms.
3.2. Events
Time is not continuous in the digital world; it is discrete. Probably the most
familiar example of this is that a digitally stored recording doesn’t store the
full information about an audio signal, which is continuously changing over
time, but rather stores only information about the signal level at regularly
spaced points in time. The number of points per second bears the famous
name of sampling rate.
56 – REAKTOR CORE
Page 57

Here is a picture of a continuous signal:
�
�
and its digital representation:
Because we are in the digital world, the outputs of our modules cannot change
values continuously. On the other hand, we don’t have to limit ourselves to
changing values at regularly spaced points in time. For one thing, we do not
have to maintain a particular sampling rate all over our structures. For another
thing, in certain areas of our structures we do not even have to maintain any
sampling rate at all; that is, our changes do not have to happen at regular
intervals.
For example, at time zero the output of our adder could have a value of 5. The
first change could occur at time 1 ms (one millisecond). The second change
could occur at 4 ms. The third at 6 ms:
REAKTOR CORE – 57
Page 58

In the picture above we can see changes of the output of our adder occurring
during the time from 0 to 7 ms. At the moment in time that the output changes
its value, it generates an event. An event means that the output reports a
change of its state, meaning that it has got a new value.
In the following example, the upper left module has changed its output value
from 2 to 4, generating an event. In response, the adder module will change
its output value and generate an event at its output, too.
Alternatively, the upper left module could have generated a new event with the
same value as the old one. The adder would have still responded by generating
a new event, but this time, without changing its output value.
The new value appearing at the output is not required to be different
from the old one. However, the only way an output can change its value
is by generating an event.
As you have seen from the previous examples, an event occurring at an output of some module will be sensed by downstream modules, which would in
turn produce further events (remember the adder producing an output event
in response to an incoming event). Those new events would be sensed by
the modules connected to the corresponding outputs and propagated further
downstream, until the propagation stops for one of the reasons discussed
later in this text.
Events in Reaktor Core are not the same as events on the Reaktor
primary level. They behave according to different rules, which will be
explained below.
58 – REAKTOR CORE
Page 59

3.3. Simultaneous events
Consider the situation in which the two modules on the left side in the previous examples simultaneously produce an event.
This is one of the key features of the Reaktor Core event model—events can
occur simultaneously at several places. In that situation, the events originating
at both the left-side modules will arrive at the inputs of the adder simultaneously, and most importantly, the adder will produce exactly one output event
in response.
That is not the same as on the Reaktor primary level, where events cannot happen simultaneously, and the Add module (in event mode) would
produce two output events in such a situation.
Of course, in reality, the events are not produced simultaneously by the upperleft and the lower-left modules, because both modules are being processed
by the same CPU, and the CPU can process only one module at a time. But,
what is important for us, is that these events are logically simultaneous, that
is they are treated as simultaneous by the modules receiving them.
Here is another example of simultaneous event propagation:
In the example above, the leftmost module is sending an event, changing its
output value from 2 to 3. The event is sent simultaneously to both the inverter
(–x) and the multiplier (*) modules. In response to the incoming event the
inverter will produce a new output value –3. It is important to notice that
although the output event of the inverter was produced in response to the
event sent by the leftmost module, and as such should happen later than the
REAKTOR CORE – 59
Page 60

incoming event, both events are still logically simultaneous. That means they
simultaneously arrive at the inputs of the multiplier, and the multiplier again
produces only one output event, with a value of –9.
Again, on the primary level you would have had two events at the output
of the Event Mult module. It is also not defined whether the event at the
output of the leftmost module would have been sent first to the inverter
or to the multiplier (although that is irrelevant for the given structure).
In general you can use the following rule to figure out whether two events are
simultaneous or not:
All events originating from (sent in response to) the same event are simultaneous. All events originating from an arbitrary number of simultaneous
events (occurring at different outputs, but known to be simultaneous)
are also simultaneous.
The last example shows the benefit of having simultaneous events. In that case,
we eliminate the redundant processing of the second event by the multiplier,
which would have taken extra CPU time. In longer structures, in the absence
of simultaneous events, the number of events can grow uncontrollably unless
the structure designer pays particular attention to keeping the number of
duplicate events low.
In addition to saving CPU time, the concept of simultaneity leads to important
differences in one’s approach to structure construction, especially for the structures implementing low-level DSP algorithms. You will become more familiar
with these differences as you start constructing your own structures.
60 – REAKTOR CORE
Page 61

3.4. Processing order
As you have seen from the previous examples, when a module sends an event,
the downstream modules respond to that event. From that, one might conclude that, despite producing logically simultaneous events, the modules are
definitely not processed simultaneously. One might further conclude that, for
a given connection, it would be reasonable to process the upstream module
of the connection before the downstream module of the connection. All those
conclusions are, in fact, correct.
The general rule of processing order of the modules is:
If two connected modules are processing logically simultaneous events,
then the upstream module will be processed first. If the events are not
simultaneous, then of course, the order of processing for the modules
is the order of the processed events.
From the above rule it follows that as long as there is a one-direction connection path (always upstream or always downstream) between two modules,
then there is a defined processing order for these two modules: the upstream
module is processed first.
If there is no one-direction connection path between two modules, their
processing order relative to each other is undefined for logically simultaneous events. That means that the order is arbitrary and can change
as a result of various actions. The structure designer must take care
that such situations occur only for modules whose relative processing
order is unimportant. That is normally automatically the case as long
as no OBC connections (see below) are involved.
Here is an example, the digits showing the order of module processing:
For the above structure, there is an alternative valid processing order:
REAKTOR CORE – 61
Page 62

There is no way to tell which one will be taken by the software. Fortunately,
as long as you do not use OBC connections, the relative order of modules in
such cases is really unimportant.
The above rules for processing order cannot be applied if there is feedback in the structures, because in that case, for any pair of modules in
the feedback loop we cannot tell which one is upstream to the other.
The problem of handling feedback loops, including the processing order,
will be addressed later.
For the above structure, it is not possible to define whether, for example,
module B is upstream to module D or vice versa, because there is an upstream
connection going from D to B as well as an upstream connection going from
B to D (via E).
3.5. Event core cells reviewed
Let’s take a look at event core cells from the point of view of the just described
event concept of Reaktor Core.
As you’ll remember, event core cells have event inputs and event outputs.
These inputs and outputs are the interface between Reaktor’s primary level
and the Reaktor Core level; they perform the conversion between primarylevel events and core events, and vice versa. The rules of the conversion are
as follows:
62 – REAKTOR CORE
Page 63

Event Inputs send core events to the inside of the structure in response
to primary-level events coming from outside. Because the outside
primary-level events cannot arrive simultaneously at the inputs, the
internally produced events also do not occur simultaneously.
Event Outputs send primary-level events to the outside of the structure in
response to core events coming from the inside. Although core events
can occur simultaneously at several outputs, primary-level events cannot be sent simultaneously. Therefore, for simultaneous core events,
the corresponding primary-level events will be sent one after another,
with upper outputs always sending before lower ones.
Let’s try that in practice by building an event processing module that performs
signal shaping according to the formula: y = 0.25*x*(4-|x|)
The graph of this function looks as follows:
Let’s start by creating a new event core cell with one input and one output,
labeled “x” and “y”, respectively.
Now let’s create the structure which computes the formula. We need to create
|x| (absolute value), - (subtract), and two * (multiply) modules in the normal
area. These are not core macros, but rather true Reaktor Core built-in modules.
To insert built-in modules into core structures, right-click in the background
of the normal area and select the Built-In Module submenu:
REAKTOR CORE – 63
Page 64

You’ll find all the necessary modules in the Built-In Module > Math sub-
menu:
We’ll need two constant values: 0.25 and 4. We could use QuickConsts
exactly like we did earlier, but we can also insert real constant modules:
Built-In Module > Const (as with the QuickConst, their values can be specified
in the Properties window):
64 – REAKTOR CORE
Page 65

Of course, in this particular case there is no benefit in using Const modules
instead of QuickConsts, but sometimes you might want to. For example, if
the same constant has to be connected to multiple inputs, it may be better
to use a Const module, because then you need only one of them and you also
have a single place to edit the value.
The above structure now shapes the signal in the way described, but as we’ll
see at the end of this section, the implementation is not perfect. For now,
let’s give our module a name and go back to the primary level:
Now let’s test it. Set the number of voices for the Reaktor instrument to 1,
so that it will be easier to use a Meter module:
REAKTOR CORE – 65
Page 66

Create a Knob and a Meter and connect them to the input and output of your
module:
Set up the properties for the knob and the meter. Don’t forget to set the meter
to display its value:
and to check the Always Active box:
66 – REAKTOR CORE
Page 67

Now move the knob and watch the output value change.
The event-shaper structure we’ve built should work perfectly for shaping control
signals, but it still has one minor flaw in its event-processing behavior. We will
return to that problem and fix it a little bit later.
REAKTOR CORE – 67
Page 68

4. Structures with internal state
4.1. Clock signals
How a Reaktor Core module processes an incoming event is completely up
to the module. Normally a module would process the incoming value in some
way, but it can also completely ignore it. The most typical case of such processing is clock inputs.
One example of a module with a clock input is a Latch. The Latch is not a
built-in module; it’s a macro; nevertheless, it’s perfect for demonstrating the
clock principle.
The Latch has two inputs – one for the value and one for the clock.
The value input (the upper one) will store the incoming value to the internal
memory of the latch in response to an incoming event; nothing will be sent
to the output. The clock input will send the last stored value to the output in
response to an incoming event.
Clock inputs (unless otherwise specified) completely ignore the value
of the incoming event and respond only to the fact that the event is
coming.
(Because now we are discussing clock signals, not latches, examples of using
the Latch module will come later.)
Because there are modules with clock inputs, it should be clear that some of
the signals in the structure do not carry any used (or, for that matter, useful)
values. Some signals can even be produced for the sole purpose of being used
as a clock source. We will call them clock signals.
A sampling-rate clock is one example of a clock signal. It produces an event
for each new audio sample to be generated, so at 44.1 kHz sampling rate it
would tick 44,100 times per second. The value of the signal has no meaning,
is not intended to be used in any way, and is (in the current implementation)
always zero.
68 – REAKTOR CORE
Page 69

4.2. Object Bus Connections
Object Bus Connections (OBC) are a special type of connection between
modules. An OBC connection between two modules declares that they share
some internal object. The most typical case of modules using OBC connections
are memory Read and Write modules, which would share a common memory
if connected by an OBC.
The functionality of the Write module is to write a value that is incoming at its
input, to the OBC-shared memory. The functionality of the Read module is to
read a value from the OBC-shared memory in response to an incoming clock
signal (C input). The read value is sent to the output of the Read module.
The above structure implements the functionality of the Latch macro (in fact,
it is the internal structure of the Latch macro). The M and S pins of Read and
Write modules are pins of Latch OBC type. The M pin is the master connec-
tion input, the S pin is the slave connection output. The master input of the
Read module is connected to the slave output of the Write module (the other
two master and slave pins are unused). Therefore in this structure the Write
and Read modules share the common memory.
In the next structure, there are two pairs of Write and Read modules. Each
pair has its own memory. Notice that the connection in the middle (from the
output of Read to the input of Write) is not an OBC connection.
One could ask what the difference is between master and slave. From the
point of view of owning the shared object (in this case memory), there is no
difference. However, as you may remember from a previous section of this
manual, there is a rule that upstream modules are processed before downstream modules when processing simultaneous events. Therefore, in the two
REAKTOR CORE – 69
Page 70

last examples the Write modules will be processed before their slave Read
modules, which is obviously not the same as the reverse.
The relative order of processing of OBC connected modules is defined
using the same rules as for other modules: upstream modules are processed first.
Indeed, let’s consider two different cases. In both cases, the original state of
the memory will be 2, and the same event of value 5 will be sent to both the
Write and Read modules. In one case, the Write module will be the master
and in the other case the Read will be the master.
Above we have the structure for the first case. The module on the left side
sends an event of value 5, which first arrives at the Write module, causing
it to write the new value of 5 into the memory shared by the Write and Read
modules. Next, the event arrives at the Read module, working as a clock event
and triggering the read operation, which in turn reads the recently stored value
of 5 and sends it to the output. That is the functionality provided by the Latch
macro in the Reaktor Core macro library.
Now consider the second structure:
Here we have the opposite situation. First, the clock event arrives at the Read
module, sending the stored value of 2 to the output. Only after that does the
event arrive at the input of the Write module, changing the stored value to 5.
This structure implements the functionality of a Z-1 block (one sample delay),
widely used in DSP theory. Indeed, the output value is always one step behind
the input value here.
70 – REAKTOR CORE
Page 71

As mentioned, the above structure implements the Z-1 functionality.
However, before you can really build or use such structures yourself, there
are a few other important things you have to know, so please read on.
When there are more than two modules connected by OBC wires, they all
share the same object. Then it becomes very important to know whether the
order of specific read and write operations is important, and if so, what that
order should be.
For example, in the following structure the relative order of the two read
operations is undefined, but they both happen after the write operation, so it
should be completely OK:
In the next structure, the relative order of the write operation and the second
read operation is undefined. That can be a potentially dangerous structure
and generally has to be avoided:
A better way to realize the above structure is possibly this one:
Or this one:
REAKTOR CORE – 71
Page 72

Even when it appears that the relative order of read and write operations is
irrelevant, it doesn’t hurt to impose a particular order, and it’s a little bit
safer.
The relative order of write operations is important. The relative order of
read operations does not matter, as long as their order relative to the
write operations remains defined.
OBC connections are not compatible with normal signal connections.
Furthermore, OBC connections corresponding to different types of objects (for example, different floating point precision of memory storage)
are not compatible with each other. Pins of incompatible types cannot
be connected; for example, you cannot connect a normal signal output
to an OBC input.
4.3. Initialization
As we are starting to work with objects that have an internal state (in case of
Read and Write, the shared memory of the objects is their internal state), it
becomes important to understand what the initial state of the structure you’ve
built is. For example if we are going to read a value from memory (using a
Read module) before anything is written to it, what value will be read? And,
if we don’t like the default value, how can we change it?
Those questions are addressed by the initialization mechanism of Reaktor Core.
The initialization of core structures is performed in the following way:
- first, all state elements are initialized to some default values, usually
zeroes. Particularly all shared memory and all output values of the
modules will be set to zeroes, unless explicitly specified otherwise in
the documentation
- second, an initialization event is sent simultaneously from all initializa-
tion sources. The initialization sources include most of the modules
that do not have an input: Const modules (including QuickConsts), core
cell inputs (typically), and some others. The sources would normally
send their initial values during an initialization event; for example,
72 – REAKTOR CORE
Page 73

constants would send their values and core cell inputs would send
the initial values received from the primary level structure outside.
If a module is an initialization event source, you will find information
about initialization in the module reference section for the module. If
a module is not an initialization source, it treats the initialization event
exactly like any other incoming event. Mostly initialization sources are
those and only those modules that do not have inputs.
Here’s a look at how initialization works:
This is a part of the structure; the Read module on the left is connected to
some clock source, which also sends an initialization event (as clock sources
typically do).
Initially, all signal outputs and the internal state of Read-Write-Read chain
are set to zero.
Then an initialization event is sent simultaneously from the clock source and
from the constant 5.
REAKTOR CORE – 73
Page 74

The Read module on the left is processed before the Write module and
therefore the clock event arrives there before the new value is written into the
memory, so the output of this module is zero. Then the value is written into
the memory by the Write module. Now the second Read module is triggered,
producing a value of 5 at the output. Lastly the adder module is processed,
producing a sum of 5.
As you remember, disconnected inputs are treated in Reaktor Core as
zero values (unless otherwise specified by a particular module). More
precisely, they are treated as zero constants. That means that these
inputs also receive the initialization event, exactly as if a real constant
module with zero value were connected there.
Above, an adder with one input disconnected and one connected to a constant
module receives two simultaneous initialization events, one from the default
zero constant connection and one from a real connection to a constant.
There can also be special meaning for disconnected inputs that are not
signal inputs (obviously they cannot be connected to a zero constant).
For example a disconnected master input of a Write module means that
the shared memory chain starts there and continues to the modules
connected to the slave output.
74 – REAKTOR CORE
Page 75

4.4. Building an event accumulator
The event accumulator module that we want to build now is going to have two
inputs: one for the event values to be accumulated, and one for resetting the
accumulator to zero. There is also going to be one output, which outputs the
sum of the accumulated events.
We are going to build this module in the form of a core macro, which would
be easy to use inside an event core cell:
This is what the inside of our macro looks like:
Obviously the accumulator module needs to have an internal state where
it’s going to store its current accumulated value. We are going to use Read
and Write modules to build the accumulator loop. They can be found in the
Built-In Module > Memory submenu:
The module which you see on the left (with an arrow pointing outwards) is
the Read module and the module on the right (arrow pointing inwards) in the
Write module.
In response to an incoming event, the accumulator loop should take the current
value and add the new value to it. Therefore, we have to use a Read module
to retrieve the current state, use an adder to add the new value, and use a
Write module to store the sum.
REAKTOR CORE – 75
Page 76

Note that the Read module is clocked by the incoming event and, of course,
that its OBC-connected Write module is located downstream, because we
want to write after we read.
The above structure works in the sense that it accumulates incoming values
and outputs their total at its output. What is missing is reset functionality and
circuitry to ensure the correct initial state.
Let’s build the resetting circuitry first. Because we are within the Reaktor Core
world, the In input and the Rst input can send events simultaneously, and if
we want this to be a generally usable core macro, we need to take that into
account. Let’s assume that the In and Rst inputs simultaneously produce an
event. What do we want to happen? Is the reset logically supposed to happen
before the accumulated event is processed or after? (This is very similar to
the difference between the Latch and the Z-1 functionality, which differ only
in relative processing order for the signal and clock inputs).
We suggest taking the Latch approach, because that module is very widely
used in Reaktor Core structures, and therefore such behavior would be more
intuitive. In a Latch, the clock signal logically arrives later than the value signal.
In our case, the reset signal should arrive logically after the accumulated signal
(forcing the state and the output to zero). Therefore, we need to somehow
override the accumulator output with an initial value. To achieve that we will
need to use a new concept, which we are about to discuss.
4.5. Event merging
You have seen various ways of combining two different signals in Reaktor Core,
including arithmetic operations and other ways. What has been missing is a
way to simply merge two signals.
Merging is not adding. Merging means that the result of the operation is the last
incoming value, rather than the sum of all incoming values. To merge signals
you need to use the Merge module. Let’s take a look at how it works.
Imagine we have a Merge module with two inputs. The initial output value
(before the initialization event) is, as for most of the modules, zero:
76 – REAKTOR CORE
Page 77

Now an event with a value of 4 arrives at the second input of the module:
The event goes through the module and appears at the output. Now the output
of the merge has a value of 4.
Then another even with a value of 5 arrives at the first input:
The event goes through the module and appears at the output, which changes
its value to 5.
Now two events with values of 2 and 8 arrive simultaneously at both inputs.
Here we have a special rule for the Merge module:
Events arriving simultaneously at the inputs of a Merge module are
processed in the order of the input numbering. Still there is only one
output event generated, because a Reaktor Core output cannot produce
several simultaneous events.
In the above case this means that the event at the second input will be processed after the first event, overriding the value of 2 by the value of 8, which
then appears at the output.
REAKTOR CORE – 77
Page 78

4.6. Event accumulator with reset and initialization
So, in order to achieve the desired reset functionality we need to override the
adder output by some initial value. To do this we can use a Merge module
(found in the Built-In Module > Flow submenu). The simplest way is to con-
nect the second input of the merge module to the Rst input.
Now the reset event will be immediately sent to the Merge module, overriding
the adder output, should the accumulated event arrive at the same time. From
there it goes to the output and into the internal state of the accumulator.
In the above structure, the value occurring at the Rst input will be used as the
new value of the accumulator. Maybe it’s even not such a bad idea, but then
it’s not exactly a reset function, but rather a set function, as implemented in
the standard Reaktor event accumulator module. If we want to have a true
reset function we should write only zero values into the state, regardless of
the value appearing at the Rst input. So what we have to do is to send a zero
value to the Write module each time an event occurs at the Rst input.
Sending an event with a particular value in response to an incoming event is
a quite common operation in Reaktor Core, and we suggest using the Latch
library macro for that. Expert Macro > Memory > Latch:
As we have already described, the Latch module has a value input (top) and
a clock input (bottom). We need to connect the Rst input to the clock input
of the latch to trigger the sending of an event to the output of the latch, and
we also need to connect a zero constant to the value input of the latch, because we want the output events to always be zero. Or we can remember that
disconnected inputs are considered to be zero constants (unless otherwise
specified), and we can leave the value input of the latch disconnected:
78 – REAKTOR CORE
Page 79

Now the reset works as specified.
The last thing we have to do is ensure the correct initialization, which of course
requires defining what is the correct initialization. Let’s take a look at how the
above structure is going to be initialized.
If the initialization event is sent simultaneously from the In and Rst inputs
of the core cell top-level structure, and also from the implicit zero constant
at the value input of the Latch, then the Latch triggered by the Rst input will
send a value of zero to the second input of the Merge, overriding whatever
value arrives at the first input of the Merge. Therefore, zero will be written
into the internal state and sent to the output – perfect!
There’s one little problem with that, however. It could be that the initialization
event doesn’t arrive at one or both of the ports. That could be because the
initialization event didn’t arrive at the corresponding input of the event core cell
or because this macro is used in a more complicated Reaktor Core structure
that also doesn’t get the initialization event on all its wires (we will learn how
that can be arranged later). So we need to do a last final modification to the
structure to make it more universal.
Go to the properties of the Merge module and change the number of inputs
to 3.
Now, even if there was no event arriving at the Rst input, the implicit zero
constant at the third input of the Merge would still send an initialization event,
producing the correct output and initial state values.
Let’s try out our new event accumulator by building the following primary level
structure using the newly created Event Accum module.
REAKTOR CORE – 79
Page 80

The instrument number of voices should be set to 1, and the meter should
be set to display a value and to be always active, as in the previous example.
The button should be set to the trigger mode.
Now switch to the Panel and see the values incrementing in steps of 1 each
second and resetting in response to pressing the button.
We are going to use this opportunity to introduce Reaktor Core’s debug mode.
As you’ve probably already noticed, unlike on Reaktor’s primary level, where
you can see the value at the output of a module if you keep your mouse cursor over the output, output values don’t appear under the cursor in Reaktor
Core structures. That is an unfortunate side effect of Reaktor Core’s internal
optimization—values from Reaktor Core structures are typically unavailable
on the outside.
Ok, we already hear you complaining, and we’ve provided a compromise. You
can disable the optimization for a particular core structure in order to see the
80 – REAKTOR CORE
Page 81

output values. Let’s try that with the structure we’ve just built. Right-click on
the background and select Debug Mode:
(You can do the same thing using the button on the toolbar).
Now if you keep your cursor over a particular output, you will see its value
(or range of values):
You can disable debug mode by selecting the same command (or pressing
the button) again:
REAKTOR CORE – 81
Page 82

Also, it will be automatically turned off when you leave the structure, so you
may need to enable it again for another structure.
After debugging our core macro we might consider saving it as a separate file
for future use. That can be done by right-clicking on the macro and selecting
Save As…:
As with core cells you have the option of having your own macros in the menu.
The macros have to be put into the Core Macros subfolder of the Reaktor user
library folder:
82 – REAKTOR CORE
Page 83

Should any files be found in this Core Macros folder or its subfolders a new
submenu appears in the right-click menu:
Similar restrictions apply to the Core Macros folder as apply to the Core Cells
folder:
- empty folders are not displayed in the menu
- never put your own files into the system library, put them into your
user library folder
REAKTOR CORE – 83
Page 84

4.7. Fixing the event shaper
We can now discuss in more detail exactly what’s wrong with the event shaper
module structure we built earlier:
The problem is the initialization event. If you consider how the initialization
of the above structure will happen you’ll notice the following:
- the x input is firing or not firing an initialization event depending on
whether it receives an initialization event from the outside, primarylevel structure (that is the initialization event rule for core-cell event
inputs)
- the constants 4 and 0.25 are always firing an initialization event
Thus, in case for whatever reason the initialization event does not occur at
the input of the shaper, the output of the shaper will still receive the event
from the last multiplier and will forward that event to the outside primary
level structure.
Although for control signal processing purposes, that might be OK (in case of a
missing input initialization event, the input is considered zero, and the output
initialization event is still fired), it is not exactly what one would intuitively expect from an event processing module. A more intuitive behavior would be for
the module to send an output event only in response to an incoming event.
So, the problem is that our two constant modules may be sending events at
a wrong time (that is when there’s no input event). As a solution, we suggest
replacing the subtraction and multiplication modules, which have constants
at their inputs, with their Modulation counterparts.
The Modulation macros is a group of modules in the Reaktor Core library found
under Expert Macro > Modulation:
84 – REAKTOR CORE
Page 85

The name “Modulation”, although not 100% correct, still reflects their purpose of using one signal to modulate another. (That will be especially easy to
see later, when we use control signals to modulate audio signals in low-level
structures). Most of the modulation macros combine two signals, one is carrier and the other is modulator. Unlike built-in arithmetic core modules, the
modulation macros generate output events only in response to events at the
carrier input. The events at the modulator input do not trigger the recalculation process.
The internal implementation of modulation macros is very simple, they just
latch the modulator signal, the latch being clocked by the carrier. Here is an
example of a modulation multiplier macro’s internal structure:
The latch at the modulatior input (a) ensures that the modulator value will be
sent to the multiplier only when the event at the carrier input arrives.
Here we replace the subtraction module by the a – x modulation macro and
the second multiplication module by x mul a modulation macro. This is how
our structure is going to look after the replacement (we also replaced the
Const modules with QuickConst, but that’s unimportant):
REAKTOR CORE – 85
Page 86

You can normally tell the modulator inputs of modulation macros by their
icons (pictures on the modules). A modulator input is indicated by an arrow
icon. In case of the subtraction module, the arrow is on top, therefore the
modulation input is on top. In case of the multiplication module, it’s the other
way around. You may also notice that the output of these modules is located
against the carrier input, which is an additional source of information. You
can move your mouse cursor over the modules and their inputs and read the
corresponding hint texts.
In the above structure no events will be sent unless there’s an event at the
input of the core cell:
- the |x| module is triggered by the core cell input event directly
- the subsequent subtraction module will be triggered only by the output
of the |x| module, which sends an event only in response to the input
event, the QuickConst has no triggering effect
- the first multiplier is triggered by either the output of the subtraction
module or the core cell input event, but we have already seen that
both occur only simultaneously
- the second multiplier is triggered only by the incoming event and not
by the QuickConst
So, now our structure’s behavior is a little more intuitive.
86 – REAKTOR CORE
Page 87

5. Audio processing at its core
5.1. Audio signals
There is no special type for audio signals in Reaktor Core; audio signals are
represented by events that, from the structure point of view, do not differ
from any other event. What is different is that along the audio signal path the
events are normally produced at regularly spaced time intervals, where the
time between events is determined by the sampling rate.
To produce regularly spaced events (or for that matter, any events) we need
some event source. As with event core cells, where the inputs of the module
are the event sources, in audio core cells the inputs are also event sources.
However, we now have an extra input type available:
Audio Inputs repeatedly send core events to the inside of the structure
at the rate determined by the sampling rate setting of the outside
primary-level structure. The events are sent simultaneously from all
audio inputs of a core-cell structure.
The audio inputs also send the initialization event to the core-cell
structure. This event is sent regardless of what happens in the primarylevel structure outside. However the value sent by these inputs during
the initialization is dependent on the outside initialization process.
There is also a new output type which has to be used instead of event out-
puts.
Audio Outputs deliver the last value received from the inside core structure
to the outside primary-level structure. Because the audio outputs in the
primary level do not send events, no events are sent to the outside.
Now we are going to rebuild the same shaper we built for events in audio
mode. Therefore we create a new audio core cell. Generally we can use exactly
the same structure, except instead of event inputs and outputs we will have
audio inputs and outputs:
You may wonder why didn’t we use the modulation macros in this case? The
reason is that we are processing audio signals here, and audio signals always
send the initialization event, so it’s safe to do it this way. (You could use
modulation macros if you prefer; it doesn’t really matter.)
REAKTOR CORE – 87
Page 88

We could also pack the above structure into a macro, which could be used
inside other Reaktor Core structures for both audio and event processing. In
that case, we better use modulation macros inside, because we don’t know
in advance what kind of signal will be processed by the macro:
This is the inside structure of the audio core cell in that case:
To test it we are going to connect a sawtooth oscillator and an oscilloscope
to it. An oscilloscope can be found under Insert Macro > Classic Modular >
00 Classic Modular – Display > Simple Scope (from a primary-level structure).
Also don’t forget to make sure the number of voices for the instrument is 1.
We are using the external trigger for the oscilloscope for better synchronization
at high distortion levels (the Ext button on the oscilloscope panel must be on
for that to work). Change the range of the Ampl knob to something like 0 to
5 to be able to see the shaping.
88 – REAKTOR CORE
Page 89

5.2. Sampling rate clock bus
A couple more features are needed for building audio structures. One is to be
able to create audio core cells with no audio inputs. (More precisely, we can
create them, but what do we use as an audio event source?) Because many DSP
algorithms need to know the current sampling rate, the other feature we need
is to be able to access that. Of course, we have included both features:
There is a special connection possibility available in every Reaktor Core structure called the “sampling rate clock bus”. The bus carries two signals: the
clock and the rate.
Clock is a signal source that sends regularly spaced events at the audio
sampling rate. As do all standard audio signals, it also sends an
initialization event. The values of all events are currently zero, but
generally any structure using the clock signal should ignore the values,
because it may be changed in the future.
Rate is a signal source whose value is always equal to the current audio
sampling rate in Hz. The events are sent from this source during the
initialization and whenever the sampling rate is changed.
You can access the sampling-rate bus by right-clicking on any signal input
and selecting “Connect to SR.C” for clock signal or “Connect to SR.R” for
rate signal.
REAKTOR CORE – 89
Page 90

The connection will be displayed next to the input:
The sample rate clock bus doesn’t work inside event core cells.
5.3. Connection feedback
As we have already seen, the processing order rules cannot be applied if there
are feedback connections within a structure. Therefore we need to provide
additional rules, defining how feedback is handled.
The main rule is: Reaktor Core structures cannot handle feedback.
Well, not exactly so. You can make feedback connections in Reaktor Core;
but because the Reaktor Core engine cannot handle structures with feedback,
it will resolve them. Resolving the feedback means that the structure will be
modified internally (you won’t see it on the screen) in a way that results in
no feedback.
The reason that is necessary is that, in the digital world, feedback without
delay is not possible. Normally there is a one-sample (minimum) delay in the
digital audio feedback path, and that is what the Reaktor Core engine will
do during feedback resolution—it will introduce a one-sample delay module
(Z^-1) into the feedback path.
As you already know, places where implicit Z^-1’s have been introduced are
indicated by the large orange Z displayed in place of the normal port icon:
90 – REAKTOR CORE
Page 91

We have already seen a structure built using a Read and a Write module that
implements Z^-1 functionality. Let’s try putting that construction into our
structure. We will put it on the wire where the automatic feedback resolution
took place:
So, first we write, then we read (note that the Read module is clocked by
SR.C to make sure that the reading is happening once per audio tick). That
makes the read value always one audio sample behind the written one. Now
there is no feedback in the structure. Don’t see it? OK, let’s move the modules
around a little bit (we won’t change a single connection):
Do you see it now? Of course.
So, inserting an explicit Z^-1 module formally removes the feedback from the
structure, while keeping it there logically (with a one audio sample delay).
Actually, the inside structure of a Z^-1 macro is a little bit more complicated than a pair of Read and Write modules. We will learn how and
why in the next section.
REAKTOR CORE – 91
Page 92

You don’t have any control over the place where automatic feedback resolution
will occur. It occurs on an arbitrary signal wire in the feedback loop. It is not
even guaranteed that the resolution will always occur on a particular wire—it
could change in the next version of the software, it could change in response
to a change elsewhere in the structure, and it could be different the next time
you load the structure from disk.
Hence, automatic feedback resolution is meant for the structures for which
it’s not important where exactly the resolution occurs. For example, such
structures might be built by users who are not deep enough into DSP to understand these problems. Automatic feedback resolution allows them to still
get reasonable results.
If you need to have precise control over feedback resolution points you
can achieve that by explicitly inserting Z^-1 modules in your structures.
These modules will formally explicitly eliminate the feedback and automatic resolution will not be needed.
Here is a version of the above structure with a Z^-1 macro inserted (it can be
found in Expert Macro > Memory submenu):
As you can see, the big orange Z mark is gone now. Also note that the 1-sample
delay point is different from the one which was automatically inserted (the
automatic one was on the wire going from the Adder output to the Multiplier
input and now it’s on the wire going from the Multiplier output to the Adder
input).
The meaning of the second input of the Z^-1 module will be explained
later. Typically you would just leave it disconnected.
Feedback on OBC and other types of non-signal connections (which will be
introduced later) does not make any sense and, therefore, is not allowed. Should
feedback loops occur that do not have any signal wires in them, one of the
92 – REAKTOR CORE
Page 93

connections will be marked as invalid and considered not to exist. The Invalid
mark is displayed as a big red X-shaped cross in the place of the port:
On the other hand, feedback loops with mixed types of the connections, are
perfectly OK as long as they contain some normal signal wires in them; in that
case they will be resolved in the normal way, with the resolution occurring on
one of the normal signal wires:
In essence, this means that non-signal connections are never affected by
feedback resolution, unless you make a completely non-signal feedback,
which doesn’t make any sense.
5.4. Feedback around macros
In terms of feedback resolution, macros are generally treated in the same way
as built-in modules.
Let’s consider a macro which just passes the incoming signal through to the
output. Here is the internal structure of such a macro:
Now assume we build a feedback structure using this macro:
The feedback loop goes through two wires in the above structure and through
REAKTOR CORE – 93
Page 94

another wire inside of the macro. Now where is the resolution going to occur?
(OK, you can see in the above picture that is occurring at the adder input in
this particular case, but we know it might as well have occurred at another
point.)
Imagine for a moment that Thru was not a macro but a built-in module. In
that case, it’s obvious that the feedback resolution could not occur within the
module, it must occur outside.
Well, we are trying our best to make macros look and behave as if they were
built-in modules. For that reason by default, the resolution of feedback loops
will occur outside the macro. It’s not specified exactly where it will take place,
but it will take place outside of the macro.
As a general rule, feedback resolution occurs on the highest structure
level of the feedback loop.
However, you can change that behavior and allow feedback resolution to happen
inside the macros. In fact, you should have wondered, if macros are treated
the same as built-in modules, how can a Z^-1 macro resolve the feedback.
Consider the following structure:
If macros and built-in modules are the same then nothing should change when
we replace the multiplier by a Z^-1 macro:
But it is different, because the implicit feedback is now gone. There must be
something special about the Z^-1 macro. And, in fact, there is.
If we look inside this macro we’ll see almost the same structure as the one
we mentioned earlier to implement the Z^-1 functionality:
94 – REAKTOR CORE
Page 95

As you can see, the clock input of the macro is connected to the internal Read
module. The default connection for this input is not to a zero constant, but
the audio clock, and that’s what you would want in most cases. The module
connected between the upper input and the write module will be explained
later, for now just ignore it.
So far, there’s nothing special about this macro, except that it seems to implement the Z^-1 structure we have discussed earlier. So how does the Reaktor
Core engine know that this structure is meant to resolve feedback loops?
Obviously, the engine can know that it can resolve feedback loops, but how
does it know that it’s intended to?
This is controlled by the Solid setting in the macro properties:
The Solid property tells the Reaktor Core engine whether the macro is to be
considered as a solid built-in module for the purposes of feedback resolution
or whether it is to be considered transparent. In 99% of the cases, you would
want to keep this property on. That’s because you typically don’t want implicit
feedback resolution to happen inside your macros.
One reason for that is that the resolution happening inside a macro won’t be
visible unless you go into the macro, so that some of the implicit feedback
REAKTOR CORE – 95
Page 96

delays can go unnoticed. For example, we can take our previous structure with
the Thru macro and disable the Solid setting (make sure you are editing the
Solid setting for the right macro, you can see it by the Thru text in the label
field of the properties):
Make sure you’re
editing the right macro
Disable the Solid setting
Now your outside structure probably still looks the same (we say probably
because you never can be sure where exactly the automatic feedback resolution will happen):
But if you change your structure a little, connecting the output to another
module, it could look like this:
Our feedback resolution delay seems gone. So in a larger and more complicated
structure we could easily miss the fact that there’s an implicit delay. Where’s
this delay gone? Of course, it’s now inside the Thru macro—the only place
96 – REAKTOR CORE
Page 97

left which we cannot see from the outside:
Another reason for keeping the Solid property on is that with it off, in some
cases the macro’s internal operation could change once it’s put in the feedback
path. So please do yourself a favor and turn the property off only if you build
macros which are meant to resolve feedback. There won’t be many.
Now let’s return to the Z^-1 module. Because the Solid property is turned
off for this macro, the boundary of this macro is completely transparent for
feedback resolution. Thus the Z^-1 macro is not really treated as a built-in
module and is capable of resolving feedback in the way described earlier in
this text.
5.5. Denormal values
The signal values in the structures that we have been building in the previous
sections are represented inside the computer by a binary data type called
floating point numbers or floats for short. Floats are an efficient representation
for a wide range of values.
The term floating point numbers does not exactly specify how the numbers
are represented. It just describes the approach taken to represent them, still
leaving lots of freedom for implementation details.
The CPUs of today’s personal computer use the IEEE floating point standard. This standard defines exactly how the floating point numbers should
be represented and what should be the results of operations on them (for
example, how to handle limited precision issues, and so on.) In particular,
this standard says that, for a group of particularly small floating point values,
which because of limited floating point precision cannot be represented in
the normal way, a special representation form is to be used. This other form
is called “denormal” representation.
Denormal representation for 32 bit float values is used roughly in the
range from 10
-38
to 10
-45
and from -10
-38
to -10
-45
. Values less than 10
-45
in absolute magnitude cannot be represented at all and are considered
to be zero.
Because their representation is somewhat different from that of normal numbers, some CPUs have certain problems with handling these numbers. In
particular, operations on these numbers can be performed much much more
slowly (as much as 10 times or more) on some processors.
REAKTOR CORE – 97
Page 98

A typical situation in which denormal numbers appear for prolonged
tf
out
c
eVV
�20
c
f
V10V
periods of time is in calculating exponentially decaying values, as in
filters, some envelopes, and feedback structures. In such structures,
after the input signal reaches zero level, the output signal asymptotically
decays to zero. Asymptotically means that the signal gets closer and
closer to zero without ever reaching it. In that situation, denormal numbers can appear and stay in the structure for relatively long time (until
their absolute value falls below 10
-45
), and that can cause a significant
increase in CPU load.
Another situation in which denormal numbers may occur is when you
change the precision of a floating point value from a higher precision (64
bit) to a lower precision (32 bit), because a value 10
-41
is not a denormal
in a 64 bit precision float but it is a denormal in a 32 bit precision float
(changing the precision of floats is discussed later).
Let’s consider modeling an analog 1-pole lowpass filter with its cutoff set to
20 Hz. Our digital signal values will correspond to analog voltages (measured
in volts). Let’s imagine that the input signal level was equal to 1V (volt) over a
long enough period of time. Then the voltage at the filter output is also equal
to 1V. Now we abruptly change the input voltage to zero. The output voltage
will decay according to the law:
where
is the filter cutoff in Hz, t is time in seconds and
(initial
voltage).
Then the output voltage will change as follows:
after 0.5 sec V
after 0.6 sec V
after 0.7 sec V
after 0.8 sec V
Oops, the numbers between 10
out
out
out
out
≈10
≈10
≈10
≈10
-29
volt
-33
volt
-38
volt
-44
-38
and 10
volt
-45
are in the denormal range. So in
the time period from approximately 0.7 to 0.8 seconds, our voltage is represented by a denormal value. And it’s not only inside the filter. The filter output
is probably further processed by the downstream structure, causing at least
the few following modules also to deal with denormal values.
At a sampling rate of 44.1 kHz, the time interval of 0.1 second corresponds to
4,410 samples. Assuming that the typical ASIO buffer size is a few hundred
98 – REAKTOR CORE
Page 99

samples, we have to produce several buffers at a significantly higher CPU
load. Should the CPU load (per buffer computation) get close enough to or
exceed 100%, it will cause audio dropouts.
From the above text you need to draw one conclusion: denormal values
are bad in real-time audio.
Reaktor primary-level modules are programmed in a way that generally prevents
denormals from occurring inside them. Specifically, the DSP algorithms have
been modified in a way that they generally shouldn’t produce any denormal
values. If you are designing your own low-level DSP structures in Reaktor
Core you also have to take care of denormals. To help you with that job we
have introduced the Denormal Cancel module, available in Built-In Module
> Math submenu:
The Denormal Cancel module has one input and one output, and it tries to
slightly modify the incoming value in a way that prevents denormals from
occurring at the output:
The way this module modifies the signal is not fixed and may change from one
software version to another, or even from one place in the structure to another.
Currently it adds a very small constant to the input value. Because of precision
losses, this addition does not modify values that are large enough (a value as
large as 10
-10
will not be modified at all), and because of the same precision
losses, it is very unlikely that the result of addition can be a denormal value
(in most of the cases it is probably even impossible).
REAKTOR CORE – 99
Page 100

If for whatever reason the Denormal Cancel module does not work for
your structure, you are, of course, free to use your own denormal canceling techniques. But the problem may be that a technique that works on
one platform sometimes may not work on another, whereas we are going
to adapt the built-in DN Cancel algorithm to each supported platform.
So whenever possible, try to use the DN cancel module. We will even
consider building alternative algorithms into this module – feel free to
discuss this with us on the support forum.
Some CPUs offer an option to violate the IEEE standard by disabling the
production of denormal numbers, forcing the denormal results to zero.
Because Reaktor Core structures are meant to be platform independent,
it’s strongly advised to always take care of denormal canceling in your
structures, even if your particular system does not suffer from them.
Because one of the most typical situations for the denormals to appear are
exponentially decaying feedback loops, and because most of feedback loops
in audio processing are exponentially decaying (including but not limited to
filters and feedback structures with delays), we decided to build denormal
canceling into the standard Z^-1 macro.
As you remember, the inside of this macro looks like this:
Now you probably can tell what the Denormal Cancel module is doing in there.
Because you would often use the Z^-1 macro inside feedback structures,
there’s a good possibility of denormals occurring. We therefore decided to put
the DNC module into the Z^-1 macro structure.
There’s another version of this macro called Z^-1 ndc which does not perform
denormal canceling (ndc = no denormal cancel). You can use it in the structures
that you are sure do not generate denormals (for example, FIR filters):
100 – REAKTOR CORE
 Loading...
Loading...