


3001
Módulo No. 3001
Diagnóstico de problema TICS
Texto de entrenamiento por módulos

Módulo No. 3001 1/14
Diagnóstico de problema TICS
Bosquejo
Propósito del diagnóstico del problema TICS
La sociedad coloca severas condiciones sobre los motores a diesel de trabajo mediano y pesado, demandando que ellos tengan bajos consumos de combustible, potencias altas y pocas emisiones.
El Sistema Hino TE (totalmente electrónico) fue desarrollado como un sistema de control totalmente
electrónico en el cual todas las condiciones de funcionamiento del motor están electrónicamente controladas de tal manera que el motor pueda entregar su máxima potencia.
Hay cuatro tipos de sistemas TE: el tipo de control de la toma de aire, el tipo de la bomba de pre-recorrido
(TICS), el tipo governor electrónico, y el tipo common rail de inyección de combustible. Esta descrito
aquí el tipo de bomba de pre-recorrido, al cual lo llamamos “Sistema de Control del Rango del Tiempo
e Inyección (TICS)”.
EL TICS trabaja para controlar el tiempo y el rango de inyección variando la posición del pre-rrecorrido
(inicio de la inyección estática). Este logra un rango de inyección alto acortando el tiempo de inyección
en los rangos de velocidad baja y media y contribuye a incrementar el torque y a aclarar las emisiones.
El sistema de bomba de pre-recorrido tiene muchas más funciones de control que aquel de la bomba convencional de inyección, y todas sus funciones están controladas por una computadora ECU (Unidad de
Control Electrónico).
Un mal funcionamiento en el sistema TE conducirá a problemas tales como insuficiente potencia para el
motor, golpeteos en el ralentí, paradas del motor y un arranque duro, así como también problemas medio
ambientales tales como ruido y emisiones de humo negro.
En este módulo, adicionalmente a estudiar las funciones estructurales del sistema TE y los procedimientos de mantenimiento, nosotros conoceremos los pasos adecuados y los métodos necesarios para el diagnóstico pronto de problemas de tal manera que el desempeño que se intenta obtener del vehículo se
muestre en todo momento.
Procedimiento
1. Lea las notas y el Manual de Taller en las secciones relacionadas a este ítem, y luego conteste las pregun-
tas en la sección 1.
2. Ejecute el procedimiento en el vehículo, siguiendo las indicaciones dadas.
AVISO
Si es que usted tiene el conocimiento o las habilidades relacionadas con este procedimiento.
Usted puede también obtener aprobación solicitando al instructor una evaluación sobre sus destrezas.
Ítems de práctica
1) Diagnóstico de problemas usando el monitor de diagnóstico
2) Medición del voltaje y de la resistencia del circuito del sistema, los sensores y los
interruptores
Módulo No. 3001 2/14
Diagnóstico de problema TICS
Descripción
Características del sistema
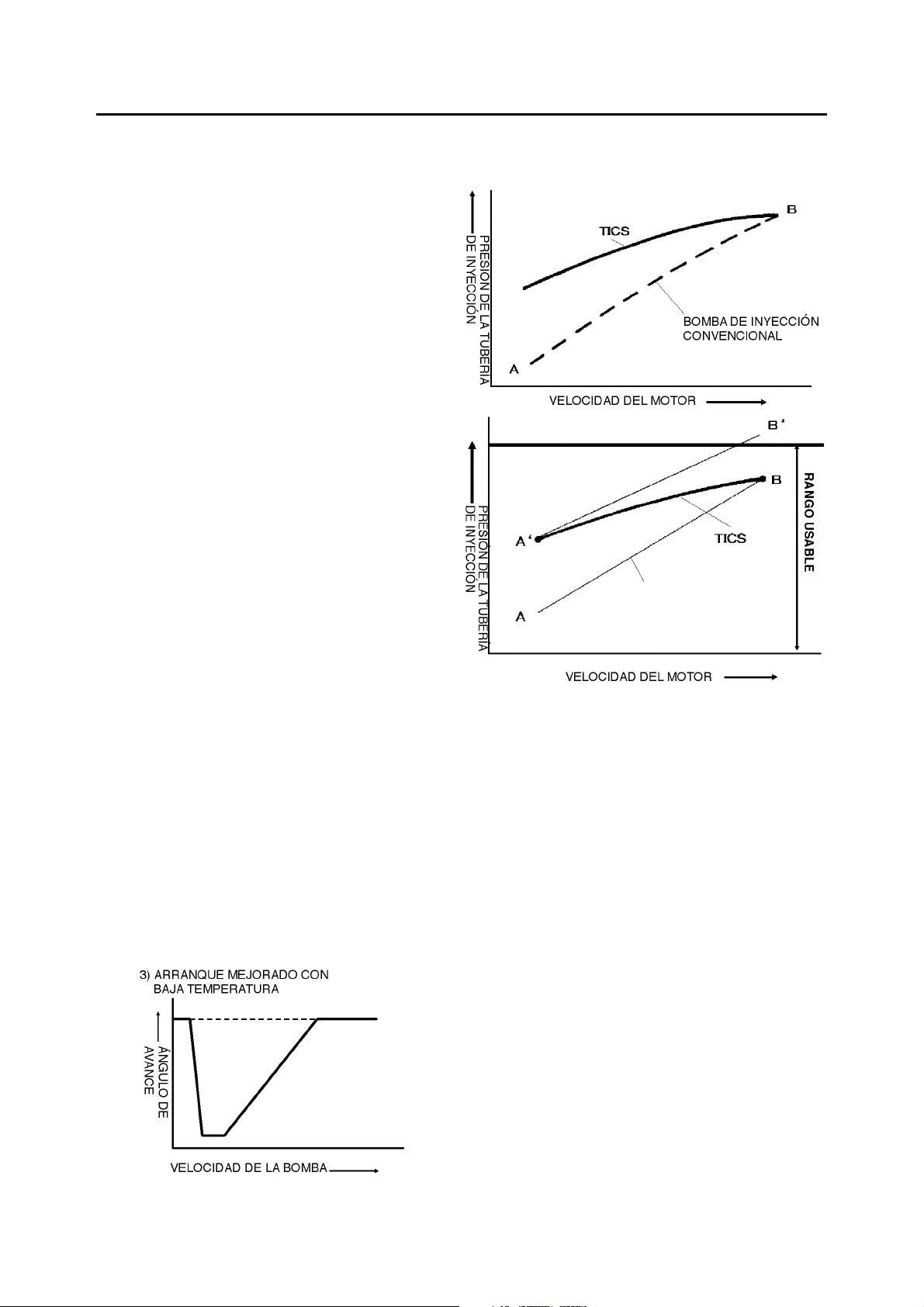
La presión máxima de inyección de la tobera de
inyección es proporcional a la velocidad del motor, como se muestra en la figura, y esta se eleva
a medida que el tiempo va avanzando, aún hasta
que permanezca igual la cantidad de entrega total. En un rango de baja velocidad del motor, la
velocidad de elevación del émbolo cae y cae la
presión de inyección máxima. Esto afecta adversamente al perfil de rociado de la tobera de inyección y torna imposible obtener una mixtura
buena de aire-combustible. Para obtener una
mixtura favorable de aire-combustible y en los
rangos de velocidad baja y media, la presión de
inyección máxima debe ser alcanzada en un corto período de tiempo.
Con una bomba de inyección convencional, si la
presión de inyección máxima es fijada en A’ a
fin de obtener una alta presión en los rangos de
velocidad baja y mínima, esta se moverá fuera
del rango usable hacia B’ cuando el motor esté
corriendo a alta velocidad, como se muestra en la
figura.
Con nuestra bomba de inyección tipo control
electrónico sin embargo, la máxima presión de
inyección puede ser mantenida en B en un rango
de alta velocidad por medio del mecanismo de variación del pre-recorrido (que será descrito más tarde)
aún si la presión máxima está fijada en A’. Este mecanismo logra una presión de inyección máxima en
todos los rangos de velocidad: baja, media y alta.
Arranque mejorado a baja temperatura
A diferencia de un sistema de variador convencional en el cual el tiempo es controlado por la fuerza
centrífuga generada por la velocidad del motor, el tiempo en este sistema puede ser avanzado antes de
que el motor sea arrancado. Como resultado, el tiempo requerido avanzado puede ser obtenido sin una
demora en el tiempo, y la capacidad de arrancar a bajas temperaturas puede ser dramáticamente mejorada. Un ángulo típico de avance versus la relación de la velocidad de la bomba se muestra en el
siguiente dibujo.
Módulo No. 3001 3/14
Diagnóstico de problema TICS
Descripción
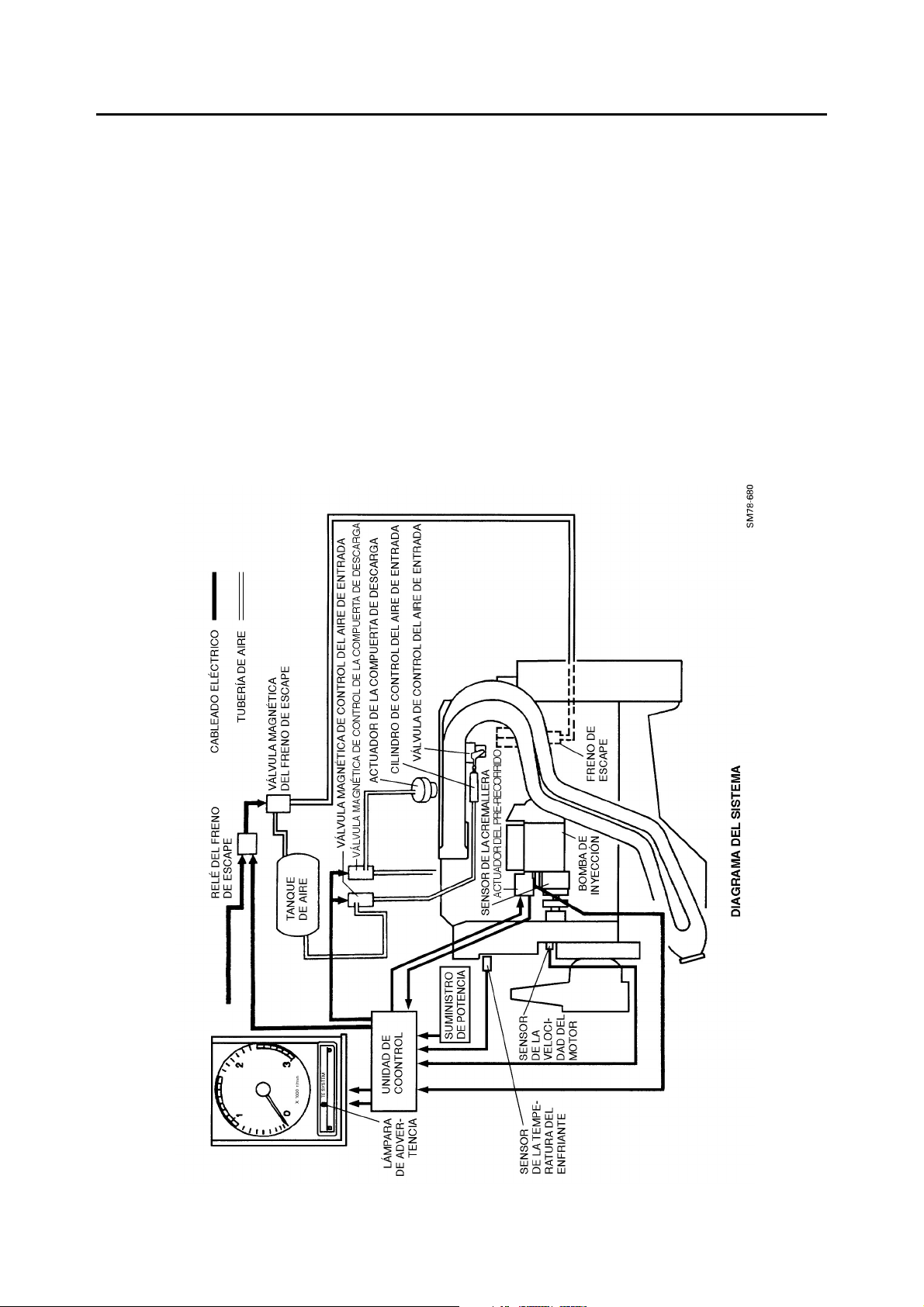
Bosquejo del sistema
La unidad de control recibe información acerca de las condiciones de funcinonamiento del motor desde
el sensor de velocidad del motor y el sensor de carga (sensor de cremallera), y esta envía una señal de
control al actuador del governor eléctrico, al actuador de pre-recorrido, a la válvula magnética de control
del aire de entrada y a la válvula magnética del CBCS, de tal manera que se puedan obtener condiciones
óptimas de funcionamiento. Lo que es más, el sistema tiene una función de autodiagnóstico para moni-
torearse a si mismo todo el tiempo, una función de alarma para informar al conductor cuando ocurre un
problema, una función de falla-seguridad y una función de respaldo para evitar que el problema afecte
adversamente al desempeño y la vida del motor.
Adicionalmente, el sistema es fácil para dar mantenimiento gracias a su función de autodiagnóstico (la
cual incluye una función de memoria que guarda los síntomas de los problemas que surgen mientras se
conduce aún después de que el interruptor del arrancador ha sido girado a la posición LOCK).
Referirse al Manual de Taller para detalles relacionados a la construcción y operación de las partes estructurales del sistema.
Módulo No. 3001 4/14
Diagnóstico de problema TICS
Descripción
Operación de la Bomba de Inyección Tipo Pre-recorrido
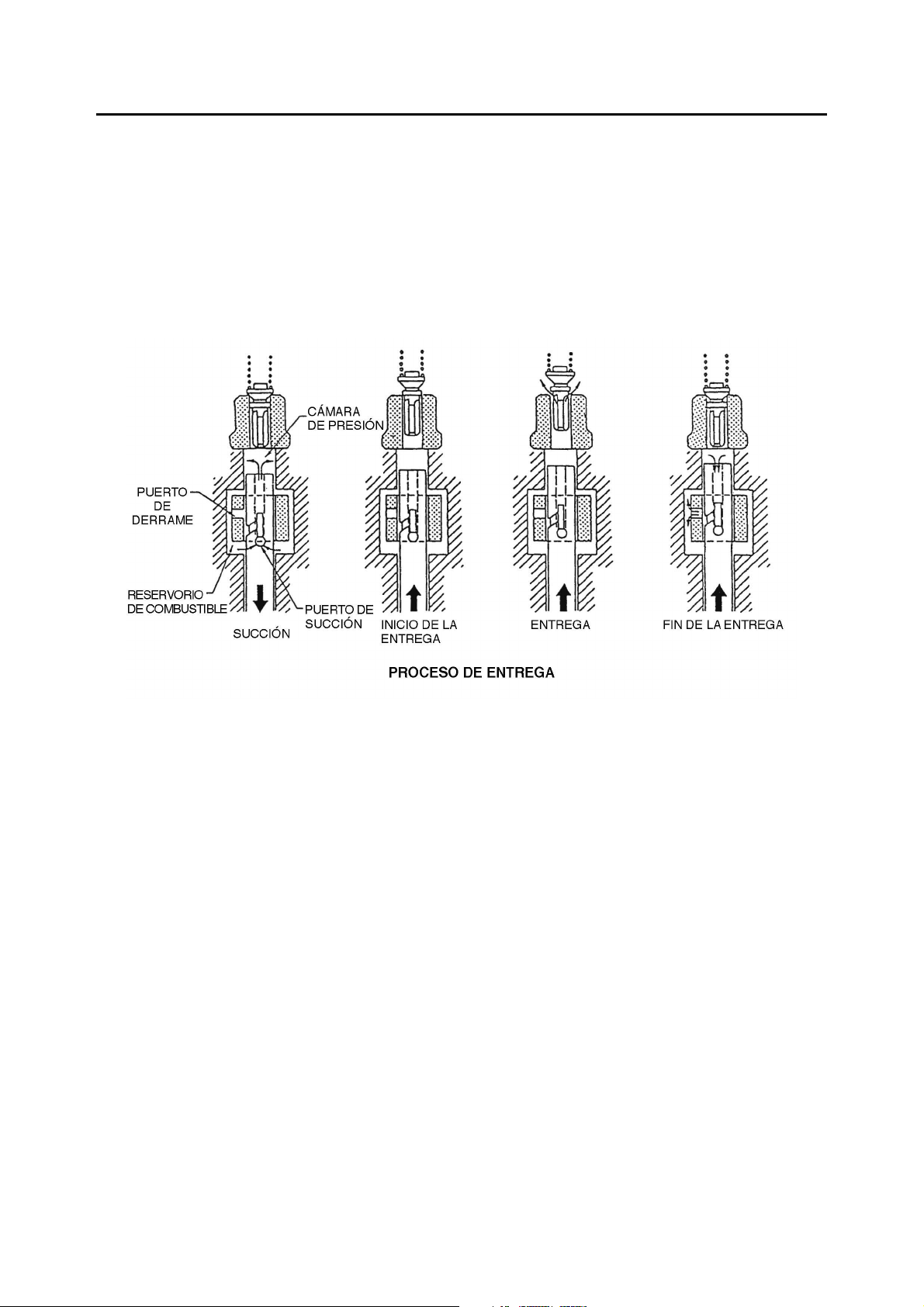
1. Proceso de entrega de combustible
El proceso de entrega de combustible de una bomba de pre-recorrido está ilustrado en los diagramas de
a continuación.
En contraste con las bombas de inyección convencionales, la bomba de pre-recorrido es capaz de mover
sus puertos hacia arriba y hacia abajo. Sin embargo, para el tiempo que nos permite proceder como que
si ella estuviera estática, en otras palabras, como si el manguito del tiempo no se moviera.
1) Succión
Cuando un émbolo está en la posición inferior, el combustible en el reservorio fluye hacia la cámara
de presión a través del puerto de succión. Cuando el émbolo se mueve hacia arriba, a medida que el
combustible en la cámara de presión fluye hacia atrás hacia el reservorio, la presión del combustible
no se forma.
2) Inicio de la entrega
A medida que el émbolo se mueve hacia arriba un poco más, el puerto de succión y el conductor son
cerrados por el manguito del tiempo y empieza a formarse la presión de combustible en la cámara de
presión.
3) Entrega
A medida que el puerto de succión y el conductor son cerrados por el manguito del tiempo, el mov-
imiento hacia arriba del émbolo entrega el combustible en las cámaras de presión.
4) Fin de la entrega
Cuando el conductor en el émbolo encuentra el puerto de derrame del manguito del tiempo, el combustible a alta presión en la cámara de presión fluye hacia afuera del reservorio a través del puerto de
derrame. La presión en la cámara de presión cae rápidamente para finalizar la entrega del combustible.
Módulo No. 3001 5/14
Diagnóstico de problema TICS
Descripción
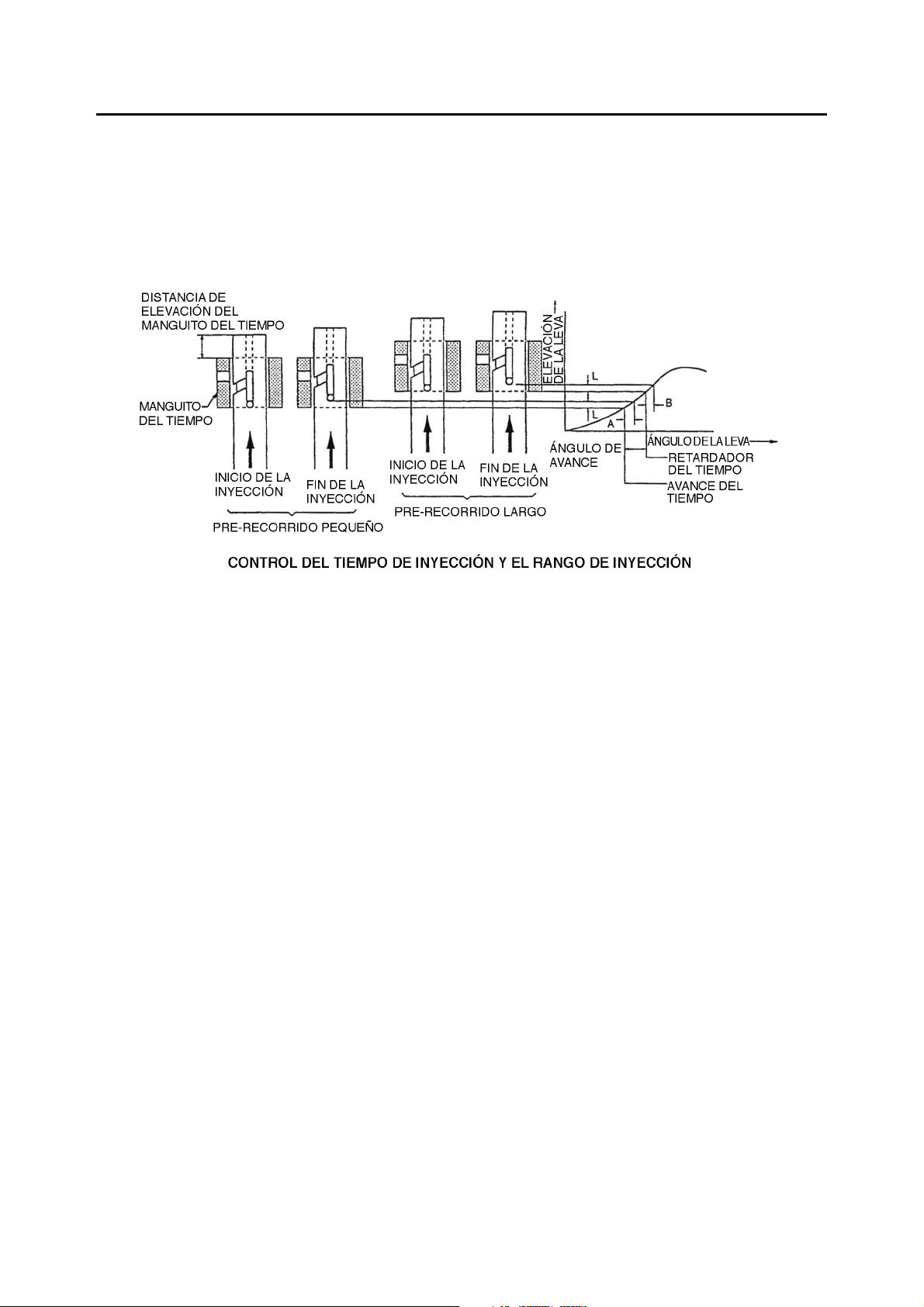
2. Control del tiempo de inyección y del rango de inyección
La relación entre la cantidad de la elevación de la leva y del ángulo de leva cuando cambia la posición
del pre-recorrido (en otras palabras: el manguito del tiempo) están ilustrados en los diagramas de a continuación.
Favor notar que el recorrido efectivo del émbolo, L, se asume como constante.
1) Control del tiempo de inyección
1. Cuando el pre-recorrido es pequeño
Cuando el pre-recorrido es pequeño, el manguito del tiempo está en la posición inferior. La inyección
del combustible comienza relativamente a la primera mitad de la elevación de la leva y la inyección
del tiempo es avanzada.
2. Cuando el pre-recorrido es largo
Cuando el pre-recorrido es largo, el manguito del tiempo está en la posición superior. La inyección de
combustible comienza relativamente en la última mitad de la elevación de la leva y el tiempo de inyección es retardado.
Módulo No. 3001 6/14
2) Control del rango de inyección
Se asume que el ángulo de la leva desde el inicio de la entrega de combustible hacia el final de la entrega en el pre-recorrido pequeño es A y que en el pre-recorrido largo es B.
Basado A > B.
El recorrido efectivo L está en proporción a la cantidad de entrega Q.
Cuando la cantidad de entrega es igual,
Cantidad entregada
Rango de inyección =
El ángulo de la leva desde el inicio de la entrega del combustible hacia el final
Se ha obtenido Q/A < Q/B.
Diagnóstico de problema TICS
Descripción
de la entrega
Por lo tanto, el rango de inyección en el pre-recorrido largo es mayor que aquel del pre-recorrido
pequeño.
Pre-recorrido Tiempo de inyección Rango de inyección Velocidad del motor
Pre-recorrido pequeño
Pre-recorrido largo
Avanzado
Retardado
Pequeño
Grande
Alta
Baja
Módulo No. 3001 7/14
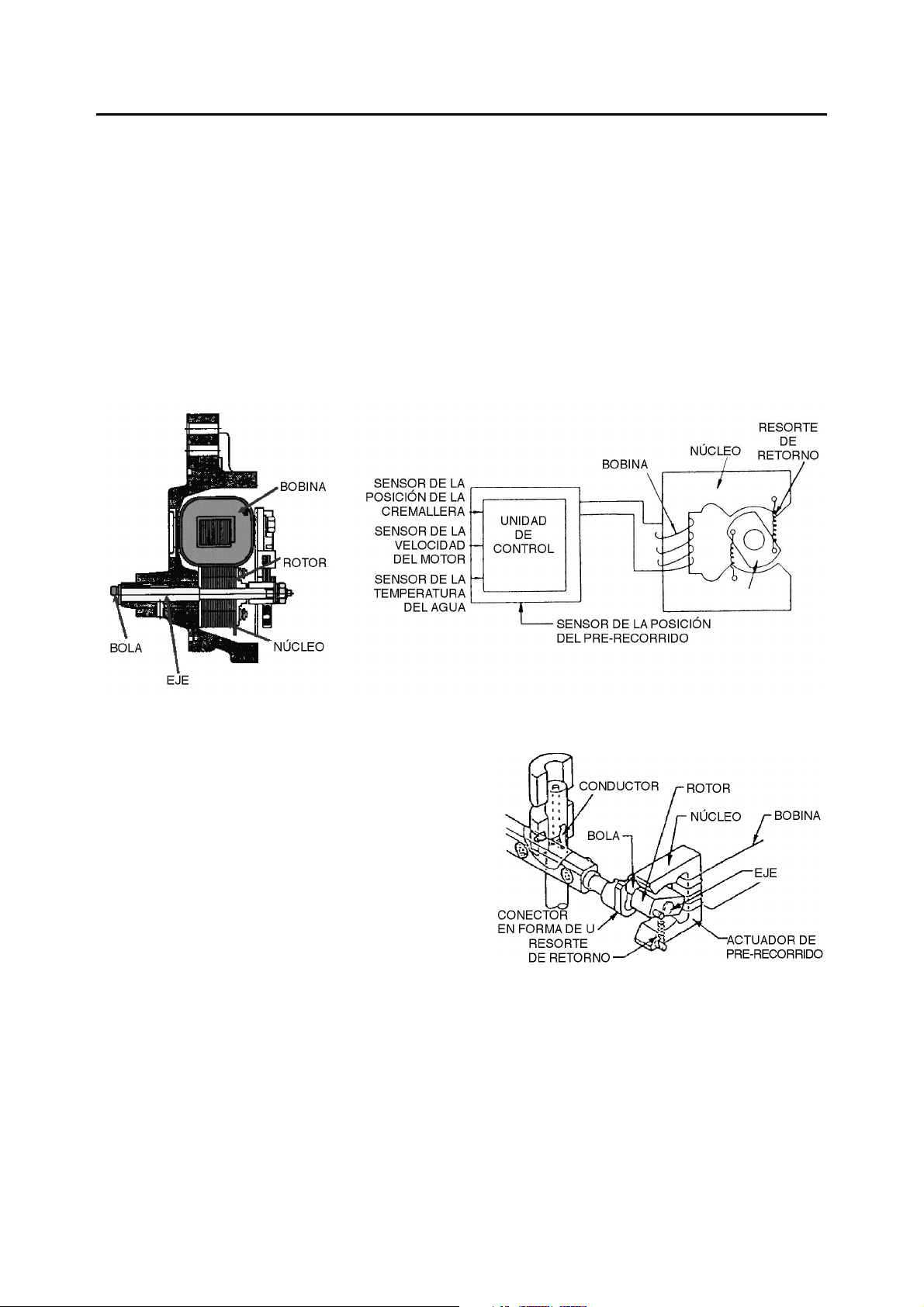
3. Actuador del pre-recorrido
Como se muestra en la figura, el actuador del pre-recorrido esta integrado con un sensor de pre-recorrido
y consiste de: una bobina, rotor, núcleo, eje, y otras partes.
El eje y el rotor están integrados en una bola que está fijada en el extremo del eje de tal manera que éste
es excéntrico con aquel. Dos resortes de retorno que están empujados en la dirección opuesta a la dirección de giro del rotor están montados en el rotor.
La bobina es activada por una señal proveniente de la unidad de control a base de señales procedentes de
varios sensores. Cuando esto ocurre, un campo magnético se establece en el núcleo y en los giros del rotor. El rotor, sin embargo, detendrá su giro cuando el tamaño del campo magnético en el núcleo esté balanceado por la fuerza de retracción de los resortes de retorno.
Diagnóstico de problema TICS
Descripción
Como se muestra en la figura, el actuador de prerecorrido y la varilla del tiempo forman una unidad
debido a que la bola al extremo del eje se fija dentro
de la ranura en el conector en forma de U de la varilla del tiempo. Cuando el eje rota, el conector en
forma de U gira la varilla del tiempo. La rotación de
la varilla del tiempo es transmitida hacia el manguito del tiempo a través de un pasador, y el manguito
del tiempo se mueve hacia arriba y hacia abajo y
varía el pre-recorrido.
Módulo No. 3001 8/14
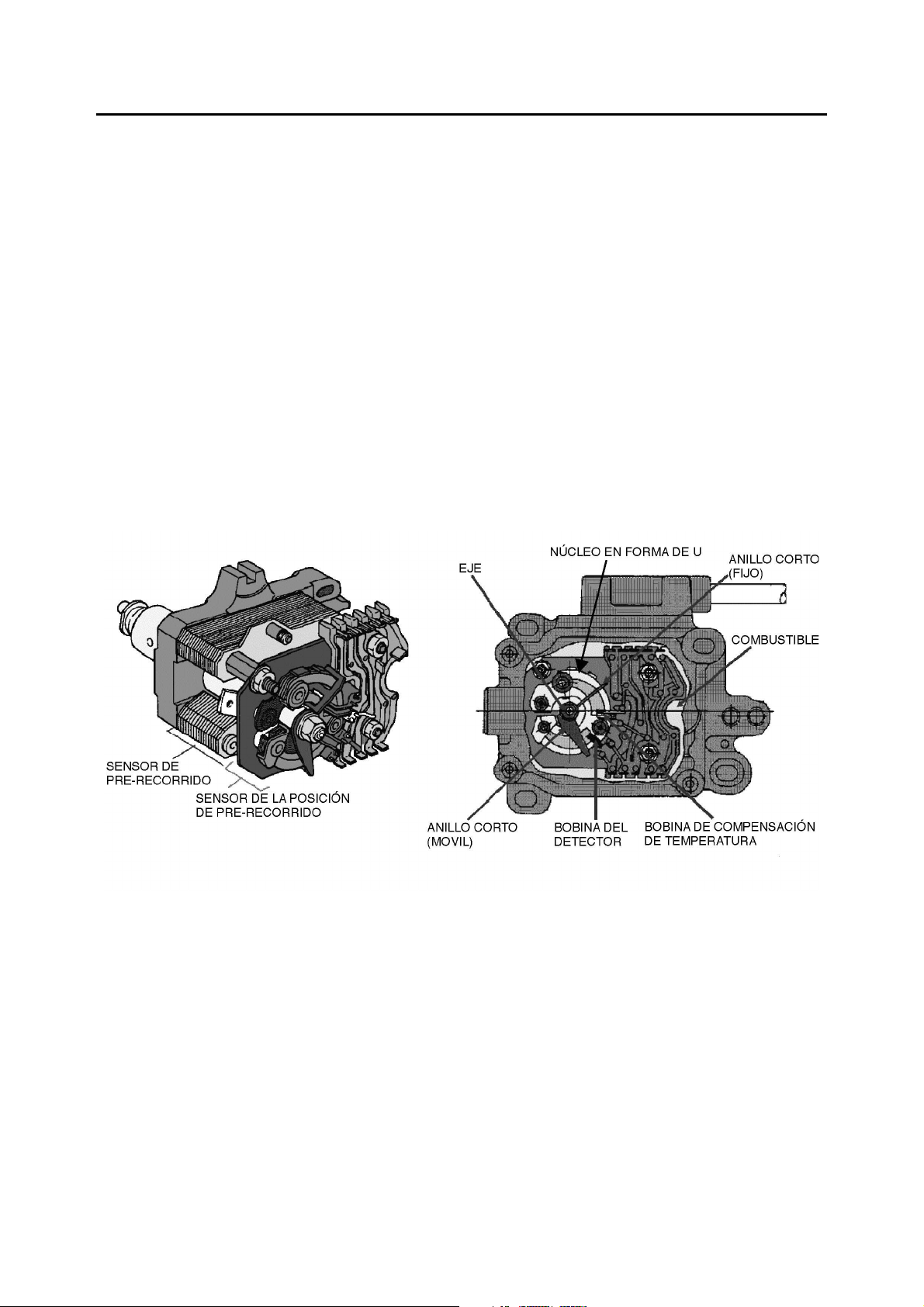
4. Sensor de Pre-recorrido
Basado en las instrucciones provenientes de la unidad de control, el sensor de pre-recorrido ingresa la
posición actual del pre-recorrido como una señal retroalimentadora dentro de la unidad de control, la cual
la compara con la posición objetiva del pre-recorrido. El sensor está integrado con el actuador de prerecorrido, como se muestra en la figura de la izquierda, y sus principales componentes son: el anillo corto
móvil, anillo corto fijo, bobina del detector, bobina de compensación de la tempertura, núcleo en forma
de U, y un eje, como se muestra en la figura de la derecha.
El anillo corto móvil el montado en la bobina del detector y gira con el eje, y el anillo corto fijo está montado en la bobina de compensación de la tempertura.
Puesto que el anillo corto móvil rota con el eje, este hace que el campo magnético alrededor de la bobina
del detector varíe, generando una contrafuerza electromotriz a través de la inducción electromagnética.
Puesto que este voltaje es proporcional a la rotación del anillo corto móvil, este es ingresado dentro de la
unidad de control como una señal de posición del pre-recorrido.
Además, el anillo corto fijo y la bobina de compensación de temperatura, la cual corrije las variaciones
de voltaje causados por los efectos de la tempertura, elimina el error relacionado a la tempertura obteniendo la posición de pre-recorrido desde el rango de inductancia de las dos bobinas.
Diagnóstico de problema TICS
Descripción
 Loading...
Loading...