

Page 1

F
I
FANUC SERVO AMPLI
I/O Link オプション
保 守 説 明 書
ER #* series
B-65395JA/01
Page 2
・本書からの無断転載を禁じます。
・本機の外観および使用は改良のため変更することがあります。
本説明書では、できるだけ色々な事柄を書くように努めています。
しかし、こういう事はやってはいけない、こういう事はできないという事は非常に多く
説明書が膨大になり、書ききれません。
したがって、本書で特にできると書いていない事は「できない」と解釈して下さい。
Page 3
B-65395JA/01 安全にご使用いただくために
安全にご使用いただくために
「安全にご使用いただくために」には、弊社のサーボモータ、およびサーボア
ンプ(βiSVM)をより安全にご使用いただくための留意事項が記載されていま
す。モータおよびアンプをご使用になる前に「安全にご使用いただくために」
を十分にお読みください。
また、モータ又はアンプの各機能については、本編をお読みになり、十分に理
解された上で正しくご使用ください。
なお、「安全にご使用いただくために」に記載のない事項は、原則として禁止
と致します。これらの事項につきましては、作業前に予め弊社までご相談くだ
さい。
目次
1.1 警告、注意、注について ................................................................................s-2
1.2 FANUC AC SERVO MOTOR βis series........................................................... s-3
1.2.1 警告 .................................................................................................. s-3
1.2.2 注意 .................................................................................................. s-5
1.2.3 注 ...................................................................................................... s-6
1.3 FANUC SERVO AMPLIFIER βi series ............................................................ s-8
1.3.1 据付け時における警告および注意...............................................s-8
1.3.1.1 警告 ............................................................................................s-8
1.3.1.2 注意 ............................................................................................ s-9
1.3.1.3 注.............................................................................................. s-11
1.3.2 試運転時における警告および注意............................................. s-12
1.3.2.1 警告 .......................................................................................... s-12
1.3.2.2 注意 .......................................................................................... s-13
1.3.3 保守時における警告および注意................................................. s-14
1.3.3.1 警告 .......................................................................................... s-14
1.3.3.2 注意 .......................................................................................... s-16
1.3.3.3 注.............................................................................................. s-17
s-1
Page 4
安全にご使用いただくために B-65395JA/01
1.1 警告、注意、注について
「安全にご使用いただくために」では、使用者の安全および機械の破損防止の
ために、安全に関する注意事項の程度に応じて、本文中に『警告』および『注
意』の表記をしています。
また、補足的な説明を記述するために『注』の表記をしています。
使用する前に、『警告』、『注意』、『注』に記載されている事項をよく読ん
で下さい。
警告
取扱いを誤った場合に、使用者が死亡又は重傷を負う危険の状態が生
じることが想定される場合に用いられます。
注意
取扱いを誤った場合に、使用者が軽傷を負うか又は物的損害のみが発
生する危険の状態が生じることが想定される場合に用いられます。
注
警告又は注意以外のことで、補足的な説明を記述する場合に用いられ
ます。
※ 本説明書を熟読し、大切に保管して下さい。
s-2
Page 5
B-65395JA/01 安全にご使用いただくために
1.2 FANUC AC SERVO MOTOR βis series
1.2.1 警告
- モータ取り扱い時には安全な服装で作業にあたってください。
エッジ・突起部による怪我や、感電の恐れがあります。安全確保ため、手
袋や安全靴等を着用ください。
- モータの移動にはクレーン等の機器をご利用ください
モータは重量物ですので、人手で持ち上げると腰を痛める、モータが落下
して重傷を負う等の危険があります。必要に応じてクレーン等の機器を使
用して下さい。(モータの重量につきましては、仕様説明書を参照くださ
い)。
クレーン等の機器による移動の場合、吊りボルト用タップが設けられてい
るモータでは必ず吊りボルトを、それ以外のモータでは布製ロープ等を使
用してください。機械などにモータが取り付けられている場合にモータの
吊りボルトを使用して移動させないでください。吊りボルトやモータが破
損する恐れがあります。
- 結線作業時は、電源が遮断されていることをご確認ください。
感電の恐れがあり大変危険です。
- 動力線が緩まないように確実に結線してください。
端子が緩んだ状態で運転すると、端子台が異常発熱し、火災が発生する可
能性があります。また、端子が外れて地絡や短絡、感電につながる恐れが
あります。なお、動力線、ショートバーを端子台に取り付ける際の締付ト
ルクは、本説明書に記載してありますので、参照下さい。
- モータは確実に接地してください。
感電事故を防ぐために、端子箱内のアース端子と機械のアースを確実に接
続してください。
- モータの動力線の端子を地絡させたり、互いに短絡させたりしないでくだ
さい。
感電又は巻線を焼損するおそれがあります。
※ 一部のモータには、巻線切換など、特殊な結合を必要とする物もあり
ます。詳細については各モータの仕様説明書を参照ください。
- モータに通電する際には、端子が露出しない状態にしてください。
手が触れたり導通物が接触したりすると感電する恐れがあり危険です。
s-3
Page 6

安全にご使用いただくために B-65395JA/01
- 危険物をモータに近づけないでください。
モータは強電回路に接続されています。また、モータは発熱します。可燃
物等が側にあると、発火・引火・爆発の恐れがあり大変危険です。
- モータ回転中は回転部分に近寄ったり触れたりしないでください。
モータ回転中には、衣類や指などを巻き込まれて怪我をする恐れがありま
す。また、回転させる前に、回転により飛散する物(キーなど)がないこと
をご確認ください。
- 濡れた手でモータに触れないでください。
感電の恐れがあり大変危険です。
- モータに触れる場合は、電源を遮断してください。
モータが動いていない場合でも端子間に電圧が印可されている場合があ
り危険です。
特に電源接続部を触れる時には感電の恐れがありますので、十分な予防措
置をとってください。
- 電源遮断後しばらくの間(5分以上)は、端子に触れないでください。
電源遮断後もしばらくの間は動力端子間には高電圧が印可されています
ので、触れたり他の機器に接続したりしないでください。感電又は破損の
恐れがあります。
- モータは、指定のアンプ及びパラメータで駆動してください。
誤った組合わせで駆動すると、モータが暴走する、過大なトルクが出るな
どの異常な動作をして、モータや機械を破損させる恐れがあります。また、
過度の回転によりワーク、工具等の物が飛散して、使用者が怪我をする可
能性があり危険です。
- 電源遮断後しばらくの間(30 分以上)は回生放電ユニットに触れないで
下さい。
稼動時の発熱により回生放電ユニットが高温になる場合があります。
火傷の恐れがありますので、十分に冷めるまでは回生放電ユニットに触れ
ないで下さい。
- 機械の設計、組立てにあたっては、EN60204-1 に適合させて下さい。
機械の安全性確保および欧州規格への対応のため、EN60204-1 に適合する
ように機械の設計および機械の組立てを行ってください。機械の詳細につ
きましては、規格書をご覧ください。
s-4
Page 7

B-65395JA/01 安全にご使用いただくために
1.2.2 注意
- 稼働中又は停止直後のモータには触れないでください。
稼働時の発熱により、モータが高温になる場合があります。火傷の恐れが
ありますので、十分に冷めるまではモータに触れないでください。
- ファンモータに頭髪や衣類等が吸い込まれないようにご注意ください。
ファンモータ搭載モデルで、ファンが吸気を行っている場合は特にご注意
ください。
また、モータが停止していてもアンプに通電中はファンモータが回ってい
ますのでご注意ください。
- 弊社のモータは機械用です。他の目的でのご使用はお避けください。
他の目的でご使用になると、予期しない現象やトラブルを招く恐れがあり
ます。他の目的でご使用の場合は、予め弊社までご相談ください。
- モータ取り付け部分の強度を十分に確保してください。
モータは重量物ですので、強度が不足すると精度が出ない等の不具合の原
因となります。
- モータおよび周辺部品の取り付けは確実に行ってください。
モータ運転中にモータや部品がずれたり外れたりすると危険です。
- ケーブルは正しく接続してください。
誤接続は異常発熱や誤動作、故障の原因となります。また、適切な容量(太
さ)のケーブルをご使用ください。接続方法等詳細については仕様説明書
を参照ください。
- 強制冷却が必要なモータでは、冷却を確実に行ってください。
冷却がうまく行われない場合、故障や不具合の原因となります。ファンモ
ータ冷却の場合は、ゴミやチリによる詰まりにご注意ください。液冷の場
合は、液量や管路の詰まりにご注意ください。いずれの場合も、定期的な
清掃・点検をお願い致します。
- シャフトにプーリ等のイナーシャを取り付ける場合は、アンバランス量を
十分に小さくしてください。
アンバランス量が大きいと異常振動が発生し、モータが破損することがあ
ります。
- キー付シャフトのモータでは、必ずキーをご使用ください。
キー付きシャフトのモータをキー無しで運転すると、トルク伝達強度が不
十分になったり、アンバランスの原因となりモータが故障する恐れがあり
ます。
s-5
Page 8

安全にご使用いただくために B-65395JA/01
1.2.3 注
- モータに乗ったり、腰掛けたりしないでください。
モータが変形したり壊れたりする恐れがあります。また、梱包を解いた状
態で積み重ねたりしないでください。
- 常温(0~40℃)で、乾燥した(結露しない)場所に保管してください。
モータ部品が損傷を受けたり、劣化したりします。また、保管の際は、シ
ャフトを水平にし、端子箱を上にしてください。
- 銘板をはがさないでください。
はがれた場合は紛失しないようにご注意ください。モータの機種がわから
なくなり、保守できなくなる恐れがあります。ビルトインスピンドルモー
タの場合は、必ず主軸に添付してください。
- モータに衝撃を与えたり、傷をつけたりしないでください。
モータ部品に悪影響を及ぼし、正常な運転が出来なくなることがあります。
また、プラスチック部分やセンサ・巻線は破損しやすいので、取り扱いに
は十分にご注意ください。特に、プラスチック部分や巻線・動力線を利用
してモータを持ち上げるのはお避けください。
- 検出器に対して、耐圧試験や絶縁試験(メガテスト)を行わないでください。
素子を破壊する恐れがあります。
- モータの試験(巻線抵抗、絶縁抵抗等)を行う場合は、IEC60034 に記載さ
れている条件以下で行ってください。
これを越える過酷な条件で試験を行うと、モータを損傷する恐れがありま
す。
- モータを分解しないでください。
故障や不具合の原因となることがあります。
保守等で分解が必要な場合は、弊社の担当サービスまでご連絡ください。
- モータを加工しないでください。
弊社が指定した場合以外は、モータを加工しないでください。故障や不具
合の原因となります。
- モータは、適切な環境・条件でご使用ください。
適切でない環境・条件でのご使用は、故障や事故の原因となります。使用
環境、使用条件等詳細につきましては、仕様説明書を参照ください。
- モータに直接商用電源を印加しないでください。
直接商用電源を印可すると、モータの巻線が焼損する恐れがあります。必
ず指定のアンプから接続してください。
s-6
Page 9
B-65395JA/01 安全にご使用いただくために
- 端子箱付きモデルのコンジット穴は、指定の場所に設けてください。
穴開け作業が必要なモデルでは、他の部分を割ったり、傷つけたりしない
ようにご注意ください。詳細については仕様説明書を参照ください。
- モータ使用前に、巻線抵抗、絶縁抵抗等を測定し、正常であるかどうかご
確認ください。
特に長期間保管したモータに対しては、必ずチェックを行ってください。
保存状態や保存期間によっては、モータの劣化が進んでいる恐れがありま
す。巻線抵抗値に関しては、仕様説明書を参照いただくか、又は弊社まで
お問い合わせください。絶縁抵抗値は下記別表を参照ください。
- モータを長く安全にお使いいただくために、定期的に保守・点検(巻線抵
抗、絶縁抵抗等の測定)を行ってください。
ただし、過度の検査(耐圧試験など)は巻線を傷めることがありますのでご
注意ください。巻線抵抗値に関しては、仕様説明書を参照いただくか、又
は弊社までお問い合わせください。絶縁抵抗値は下記別表を参照ください。
モータの絶縁抵抗の測定
メガオーム計(DC500V)を用いて、巻線~フレーム間の絶縁抵抗を測定
し、以下の判定に従ってください。
絶縁抵抗値 判定
100MΩ以上 良好。
10~100MΩ 劣化が始まっています。性能上の問題はありません
1~10MΩ 劣化が進んでおり、特に注意が必要です。定期的に
1MΩ未満 不良。モータを交換してください。
が、定期的に点検を行ってください。
点検を行ってください。
s-7
Page 10
安全にご使用いただくために B-65395JA/01
1.3 FANUC SERVO AMPLIFIER βi series
1.3.1 据付け時における警告および注意
1.3.1.1 警告
- アンプの仕様を確認して下さい。
ご指定通りのアンプが納入されているかご確認下さい。
- 漏電ブレーカを設置して下さい。
火災防止および人体への感電事故を防ぐために、工場側電源又は機械には
必ず漏電ブレーカ(インバータ対応)を設置して下さい。
- 接地を確実に行って下さい。
アンプおよびモータのアース端子および金属フレームを強電盤の共通ア
ース板に確実に接続して下さい。
- アンプ類の重量に注意して下さい。
アンプおよび AC リアクトル、AC ラインフィルタの中には、重量物が存
在します。輸送、盤への取り付け時には、ご注意下さい。また、盤とアン
プの間で指を挟まないように注意して下さい。
- 電源線、動力線の地絡、短絡がないようにして下さい。
線材に屈曲等のストレスがかからないようにして下さい。また、端末処理
は確実に行って下さい。
- 電源線、動力線および信号線の接続を確認して下さい。
ネジの緩み、コネクタの挿入不良、圧着端子の圧着不良等がありますと、
モータの誤動作や発熱、地絡短絡事故の原因になります。特に、大きい電
流が流れる電源線,モータ動力線および DC リンク接続につきましては、
ネジの緩みや圧着端子の圧着不良(コネクタの場合には接触不良やコネク
タ端子とケーブルの接続不良)がありますと、火災につながる可能性があ
りますので、十分に注意して下さい。
- 露出充電部分は必ず、絶縁処理を施して下さい。
- 回生放電ユニットおよび放熱器に直接手が触れないようにして下さい。
回生放電ユニットおよび放熱器の表面は、高温になります。直接、手を触
れないようにして下さい。また、構造面からも配慮下さい。
- 配線終了後、アンプのカバーは必ず閉じて下さい。
感電事故につながる可能性があります。
s-8
Page 11

B-65395JA/01 安全にご使用いただくために
1.3.1.2 注意
- アンプに乗ったり、腰掛けたりしないで下さい。
また、梱包を解いた状態で積み重ねたりしないで下さい。
- アンプの使用環境に配慮して下さい。
周囲温度等詳細につきましては、仕様説明書をご参照下さい。
- 腐食性、導電性のミスト、水滴がアンプに直接付着しないようにして下さ
い。
必要に応じて、フィルタをご使用下さい。
- アンプに衝撃を与えたりしないで下さい。
アンプの上に物を載せたりしないで下さい。
- アンプを分解しないで下さい。
- 放熱器への通風を塞がないようにして下さい。
切削液、オイルミスト、切削屑等が付着しますと、冷却効率が低下し、仕
様を満足できなくなる場合があります。また、半導体の寿命低下にもつな
がります。特に、外気導入での使用の場合には、吸入口、排気口にフィル
タの設置をお願いします。フィルタは定期的に交換が必要です。交換しや
すい構造にして下さい。
- 電源線、動力線の接続は正しい端子, コネクタに接続して下さい。
- 信号線の接続は正しいコネクタに接続して下さい。
- 電源線、動力線の線材は、適切な線径、許容温度であることを確認して下
さい。
- プラスチック部分に不要な力をかけないで下さい。
プラスチック部が割れて、内部の部品に損傷を与え、正常な運転ができな
くなる可能性があります。また、割れた部分で負傷することもありますの
でご注意下さい。
- 電源接続の前に、電源電圧を確認して下さい。
仕様書に記載の電圧範囲であることを確認の上、接続して下さい。
- モータとアンプの組合せが正しいか確認して下さい。
- パラメータが正しく入力されているか確認して下さい。
モータとアンプの組合せにあったパラメータ以外では、モータが正常に動
作しないだけでなく、アンプやモータを破損させる可能性があります。
s-9
Page 12

安全にご使用いただくために B-65395JA/01
- アンプ周辺機器の接続を確認して下さい。
電磁接触器、ブレーカ等アンプ外部に設置される機器間およびそれらの機
器とアンプ間の接続を確実に行って下さい。
- 強電盤へのアンプの取り付けが確実に行われているか確認して下さい。
強電盤とアンプ取り付け面に隙間があると外部からの粉塵の浸入等によ
り、アンプの正常な動作を妨げる可能性があります。
- ノイズ対策
アンプが正常動作を行うために、ノイズ対策には十分配慮して下さい。
例えば、信号線と電源線、動力線は必ず分離して配線して下さい。
- コネクタの抜き差し
特に記載の無い限り、電源が入った状態でコネクタの抜き差しは行わない
でください。アンプの故障が発生する場合があります。
s-10
Page 13

B-65395JA/01 安全にご使用いただくために
1.3.1.3 注
- 銘板が確認し易いように配慮して下さい。
- 銘板の文字を消さないように注意して下さい。
- 開梱後、アンプの外観上異常がないか確認して下さい。
- 定期点検、日常保守がし易い位置への取り付けに配慮して下さい。
- 機械・装置の扉付近は、保守上十分なスペースを確保して下さい。
扉の開閉を妨げる重量物は極力置かないようにして下さい。
- パラメータ表、予備品類は判りやすい場所に置いて下さい。
また、仕様書類についても同様です。いつでも即座に参照できるようにし
て下さい。
- シールド線の処理を確実に行って下さい。
シールド処理が必要なケーブルは、ケーブルクランプ等にて確実にアース
板に接続されるようにして下さい。
s-11
Page 14
安全にご使用いただくために B-65395JA/01
1.3.2 試運転時における警告および注意
1.3.2.1 警告
- 電源投入前に強電盤、アンプに接続されているケーブルのコネクタ、動力
線や電源線が確実に接続されているか、また、ゆるみはないか確認下さい。
ネジの緩み、コネクタの挿入不良、圧着端子の圧着不良等がありますと、
モータの誤動作や発熱、地絡短絡事故の原因になります。
特に、大きい電流が流れる電源線,モータ動力線および DC リンク接続に
つきましては、ネジの緩みや圧着端子の圧着不良等(コネクタの場合には
接触不良やコネクタ端子とケーブルの接続不良)がありますと、火災につ
ながる可能性がありますので、十分に注意して下さい。
- 電源投入前に強電盤は確実に接地されているか確認下さい。
- 電源投入前に強電盤などの扉を確認下さい。
アンプが収納されている強電盤などの扉が確実に閉じていることを確認
下さい。強電盤などの扉は運転中においても必ず閉じて施錠して下さい。
- 強電盤などの扉を開く必要が生じた時に注意して下さい。
その機械、装置の保守に関する教育を受けた人が、強電盤の入力ブレーカ
と強電盤へ供給する工場側の開閉器の両方をしゃ断してから扉を開いて
下さい。また、機械調整等で扉を開けたまま運転する場合には、電圧が印
加されている所に手や工具が触れないように注意して下さい。この場合、
その機械、装置の保守に関する教育を受けた人が行って下さい。
- 初めて機械を運転する場合には指令通りに動作するか確認下さい。
モータへの指令は最初は小さい値から徐々に立ち上げて指令通りに動作
するか確認下さい。正常に回らない時には直ちに非常停止して下さい。
- 電源投入時非常停止回路の動作を確認下さい。
非常停止ボタンを操作した場合、モータは速やかに停止してアンプ入力部
の電磁接触器がしゃ断することを確認下さい。
- 機械調整中に機械の扉や保護カバーを開けて作業を行う場合には、必ず非
常停止状態にしてモータが停止していることを確認して行って下さい。
s-12
Page 15

B-65395JA/01 安全にご使用いただくために
1.3.2.2 注意
- 電源投入時や運転中にアンプに関係するアラーム表示等がないか確認下
さい。
アラームの内容により保守説明書に従い適切な処置を実施ください。強電
盤の扉を開けての作業が生じる場合は、その機械、装置の保守に関する教
育を受けた人が、行って下さい。また、アラームによっては強制的にリセ
ットして使用した場合には、アンプを破損させる可能性がありますので、
適切な処置後使用下さい。
- 初めてモータを運転する場合には位置・速度検出器の取付け調整を実施下
さい。
主軸用の位置・速度検出器については、保守説明書に従い必ず適切な波形
になるように調整下さい。未調整の場合、モータが正常に回転しない、ま
た、主軸が正しい位置に停止しない可能性があります。
- 運転中にモータから異常音や振動が生じた場合には、直ちに停止させて下
さい。
異常音や振動が発生したまま使用しますと、アンプの故障が発生する場合
があります。適切な処置を実施した後運転を再開して下さい。
- 周囲温度に注意してアンプの定格出力以下で使用下さい。
周囲温度によりアンプの連続定格出力や連続使用時間を低減しているも
のがありますので注意して下さい。過負荷状態で連続に使用した場合には
アンプが故障する可能性があります。
- 特に記載のない限り、電源が入った状態でコネクタの抜き差しは行わない
で下さい。アンプの故障が発生する場合があります。
s-13
Page 16
安全にご使用いただくために B-65395JA/01
1.3.3 保守時における警告および注意
1.3.3.1 警告
- 保守説明書を熟読し、内容を理解して下さい。
日常保守時、アラーム発生時の処置等が保守説明書に記載されています。
内容を理解して作業して下さい。
- ヒューズ、プリント板交換時の注意
1) 必ず強電盤のブレーカが遮断されていることを確認した上で作業し
て下さい。
2) 充電中表示 LED(赤)が消灯していることを確認してください。各アン
プの充電中表示 LED の位置は仕様説明書を参照して下さい。この LED
が点灯中は危険電圧が残っており、感電をする可能性がありますので
注意して下さい。
3) プリント板上には高温になる部品があります。火傷には十分ご注意下
さい。
4) ヒューズの定格を確認して、定格が違うヒューズを使用しないように
して下さい。
5) プリント板の仕様を確認して下さい。特に改造図番が施してある場合
には、交換する前にファナックにお問い合わせ下さい。また、交換前
後での設定ピンを確認して下さい。
6) ヒューズ交換後は、ヒューズがソケットに根元まで挿入されているこ
とを確認して下さい。
7) プリント板交換後は、コネクタへの挿入を確認して下さい。
8) 動力線、電源線、コネクタ類の接続を確認して下さい。
- ネジの紛失に注意して下さい。
ケースやプリント基板を外す際には、外したネジを紛失しないよう気をつ
けて下さい。紛失したネジがユニット内部に残っていたりしたまま電源を
投入すると機械を破損する可能性があります。
- アブソリュートパルスコーダ用のバッテリの交換
バッテリの交換は電源を ON した状態で行います。電源を OFF した状態で
バッテリを交換すると、記憶されている機械の絶対位置が失われますので、
ご注意下さい。βi シリーズサーボアンプモジュールにはバッテリがサーボ
アンプに搭載されている場合があります。この場合には、強電盤の扉を開
き、制御電源を遮断せずに、かつ、非常停止状態としてアンプの動力系統
の入力を遮断した上で、バッテリの交換を行う必要があります。このため、
保守および安全に関して十分教育を受けた人以外は、作業をしてはいけま
せん。アンプが設置されている強電盤内には高電圧部があり、感電をする
可能性があります。
s-14
Page 17

B-65395JA/01 安全にご使用いただくために
- アラーム番号を確認して下さい。
アラーム発生にて機械が停止した場合には、必ずアラーム番号を確認して
下さい。アラームによっては、部品の交換無しに電源再投入されると、別
の部品を破損させてしまい、真の原因究明が困難になります。
- アラームリセットは、障害要因を確実に取り除いた上で行って下さい。
- 保守上における疑問点については、早急にファナックまでご連絡下さい。
s-15
Page 18

安全にご使用いただくために B-65395JA/01
1.3.3.2 注意
- 部品の未実装に注意して下さい。
部品およびプリント板の交換を行い、再度組付ける際にはスナバコンデン
サ等の部品実装を確認して下さい。たとえば、スナバコンデンサがないと
IPM が破損します。
- ネジ締めは確実に行って下さい。
- ヒューズ、プリント板等の部品仕様を確認して下さい。
ヒューズ、プリント板を交換する際はそれらの仕様が正しいことを確認し、
正しい位置に組み付けてください。誤った仕様のものを組み付けたり、誤
った位置に組み付けると正常に動作しません。
- カバーの組付け違いに注意して下さい。
アンプ正面のカバーには仕様を示すラベルが貼られています。正面カバー
を外した場合には、必ず同じユニットに組み付けて頂くようお願いします。
- ヒートシンク、ファンモータの清掃
1) ヒートシンク、ファンモータが汚れていると、半導体冷却性能が落ち、
その結果、信頼性を低下させることになります。定期的に清掃して下
さい。
2) エアによって清掃される場合、塵埃の散乱に注意して下さい。もし、
アンプや周辺機器に導電性の塵埃が付着した場合には、故障の原因に
なります。
3) ヒートシンクの清掃をするときは電源を遮断し、ヒートシンクの温度
が室温程度に冷えていることを確認したあとで行ってください。運転
中及び電源遮断直後はヒートシンクの温度が非常に高いため火傷す
る可能性がありますので、ヒ-トシンクに触れる場合には注意して下
さい。
- アンプを外す場合
電源が遮断されていることを確認の上、行って下さい。また、アンプと強
電盤に指を挟まないように注意して下さい。
s-16
Page 19

B-65395JA/01 安全にご使用いただくために
1.3.3.3 注
- バッテリのコネクタは正しい位置に確実に挿入してください。
組付けを誤まったまま電源を遮断すると、機械の絶対位置の内容が失われ
ます。
- マニュアル類は、大切に保管して下さい。
保守時には、即座に参照できるようにして下さい。
- ファナックにご連絡される場合
保守部品等の手配をスムーズに行うため、アラーム内容およびアンプの仕
様を確認して、ご連絡下さい。
s-17
Page 20

Page 21
B-65395JA/01 はじめに
はじめに
本説明書の構成
本説明書は FANUC サーボアンプβi シリーズSVM、FANUC サーボモータβis
シリーズの保守に必要な事項を記述しています。
第Ⅰ編、第Ⅱ編、第Ⅲ編、第Ⅳ編、には、βi シリーズSVMの立上げ手順、取
り扱い、障害が発生した時の処理手順、保守について記述しています。
第Ⅴ編にはβi
*本説明書では本文中、下記の略称を使用することがあります。
FANUC Series 15i FS15i
FANUC Series 16i FS16i
FANUC Series 18i FS18i
FANUC Series 21i FS21i
FANUC Series 0i FS0i
FANUC Series 30i FS30i
FANUC Series 31i FS31i
FANUC Series 32i FS32i
FANUC Power Mate i–D
FANUC Power Mate i–H
FANUC SERVO Amplifier βi series SVM
ワーサプライモジュール
* 本書に関連する内容の説明書として下記が用意されています。
本書からこれらの仕様書および説明書を参照先として指定する場合があ
ります。
1) FANUC SERVO AMPLFIER βi series 仕様説明書 B-65322JA
2) FANUC AC SERVO MOTOR βis series 仕様説明書 B-65302JA
3) FANUC AC SERVO MOTOR αis/αi/βis series パラメータ説明書 B-65270JA
サーボアンプモジュールの保守・点検時等は、必ず電源を遮断し、さ
S シリーズサーボモータの保守について記述しています。
機種名 略称
PMi
βiSVM、SVM、
サーボアンプモジュール
警告
らに、サーボアンプモジュールの前面にある充電中表示のLED
(赤)が消灯していることを確認した後に、作業を行って下さい。(付
録A参照)
p-1
Page 22

Page 23
B-65395JA/01 目次
目次
安全にご使用いただくために ..........................................................................................s-1
はじめに ..........................................................................................................................p-1
I. 立ち上げ手順
1 概要 ............................................................................................................................ 3
2 構成 ............................................................................................................................ 4
2.1 構成 ..........................................................................................................................................5
2.2 主な構成要素 ...........................................................................................................................6
2.2.1 サーボアンプモジュール ..................................................................................................................6
3 立ち上げ手順.............................................................................................................. 7
3.1 立ち上げ時の手順(概要)......................................................................................................8
3.2 電源の接続 ...............................................................................................................................9
3.2.1 電源電圧と容量の確認 ......................................................................................................................9
3.2.2 保護アースの接続 ..............................................................................................................................9
3.2.3 漏洩電流と漏電しゃ断器の選定.......................................................................................................9
3.3 初期設定(スイッチ、ダミーコネクタ)..............................................................................10
3.4 パラメータの初期設定...........................................................................................................11
4 動作確認方法............................................................................................................ 15
4.1 確認手順.................................................................................................................................16
5 サーボアンプの定期保守.......................................................................................... 19
5.1 アブソリュートパルスコーダ用バッテリ..............................................................................20
5.2 サーボアンプの定期点検について.........................................................................................27
II. 取扱
1 概要 .......................................................................................................................... 31
1.1 サーボアンプモジュールとのインタフェース.......................................................................32
1.2 FANUC I/O Link 上のインタフェース領域.............................................................................32
1.3 インタフェース......................................................................................................................33
1.3.1 周辺機器制御インタフェース.........................................................................................................33
1.3.2 ダイレクトコマンドインタフェース.............................................................................................33
1.3.3 インタフェースの切り換え.............................................................................................................33
1.4 パワーメイト CNC マネージャ使用時の注意........................................................................34
2 信号説明................................................................................................................... 35
2.1 DI/DO 信号 .............................................................................................................................36
2.1.1 周辺機器制御インタフェース.........................................................................................................36
2.1.2 ダイレクトコマンドインタフェース.............................................................................................38
2.2 信号一覧(グループ別) ............................................................................................................40
2.3 信号詳細.................................................................................................................................42
2.3.1 準備完了 ............................................................................................................................................42
2.3.2 リセット・非常停止 ........................................................................................................................43
2.3.3 アラーム.................................................................................................................................44
c-1
Page 24

目次 B-65395JA/01
2.3.4 モード選択 ........................................................................................................................................45
2.3.5 手動連続送り ....................................................................................................................................46
2.3.6 状態信号 ............................................................................................................................................46
2.3.7 送り速度 ............................................................................................................................................51
2.3.8 インタロック ....................................................................................................................................53
2.3.9 レファレンス点復帰 ........................................................................................................................53
2.3.10 自動運転 ............................................................................................................................................54
2.3.11 クランプ・アンクランプ(周辺機器制御のみ) ..............................................................................56
2.3.12 サーボオフ ........................................................................................................................................57
2.3.13 周辺機器制御機能コード関連.........................................................................................................58
2.3.14 ダイレクトコマンド機能コード関連.............................................................................................62
2.3.15 直接入力信号 ....................................................................................................................................68
3 周辺機器制御............................................................................................................ 70
3.1 周辺機器制御のコマンドの形式 ............................................................................................71
3.2 周辺機器制御の制御手順 .......................................................................................................72
3.2.1 機能コードによる指令方法.............................................................................................................72
3.2.2 応答データの受信方法 ....................................................................................................................72
3.3 機能コード .............................................................................................................................73
3.3.1 機能コード一覧表 ............................................................................................................................73
3.4 機能コード詳細......................................................................................................................75
3.4.1 ATC/タレット制御 ...........................................................................................................................75
3.4.2 ポイント位置決め制御 ....................................................................................................................77
3.4.3 レファレンス点復帰 ........................................................................................................................79
3.4.4 レファレンス点設定(レファレンス点外部設定機能を使用する場合).......................................81
3.4.5 位置決め制御(アブソリュート, インクレメンタル指定, スキップ機能用)...............................83
3.4.6 速度制御 ............................................................................................................................................85
3.4.6.1 概要 ...................................................................................................................................................... 85
3.4.6.2 システム構成...................................................................................................................................... 85
3.4.6.3 周辺機器制御指令フォーマット...................................................................................................... 86
3.4.6.4 指令タイムチャート.......................................................................................................................... 88
3.4.6.5 パラメータ.......................................................................................................................................... 91
3.4.6.6 信号 ...................................................................................................................................................... 93
3.4.6.7 アラーム.............................................................................................................................................. 94
3.4.6.8 その他 .................................................................................................................................................. 94
3.4.7 座標系設定 ........................................................................................................................................95
3.4.8 パラメータ書換 ................................................................................................................................96
3.4.8.1 概要 ...................................................................................................................................................... 96
3.4.8.2 システム構成...................................................................................................................................... 96
3.4.8.3 周辺機器制御指令フォーマット...................................................................................................... 97
3.4.8.4 指令タイムチャート.......................................................................................................................... 98
3.4.8.5 アラーム.............................................................................................................................................. 98
3.4.8.6 パラメータ.......................................................................................................................................... 98
3.4.9 ポイントデータ外部設定機能の制御.............................................................................................99
3.4.10 ティーチングによるデータ設定の制御.......................................................................................100
3.5 ドグ付レファレンス点復帰機能 ..........................................................................................102
3.5.1 機能説明 ..........................................................................................................................................102
3.5.1.1 レファレンス点復帰の動作(グリッド方式)................................................................................. 102
3.5.1.2 減速リミットスイッチの設置条件................................................................................................ 103
3.5.1.3 参考 .................................................................................................................................................... 104
3.5.2 パラメータ ......................................................................................................................................105
3.6 回転軸制御機能レベルアップ ..............................................................................................106
3.6.1 回転軸高速原点復帰の復帰方向指定機能...................................................................................106
3.6.1.1 機能説明 ..........................................................................................................................................106
3.6.1.2 パラメータ ......................................................................................................................................106
c-2
Page 25

B-65395JA/01 目次
3.6.2 回転軸回転方向符号指定機能.......................................................................................................107
3.6.2.1 機能説明............................................................................................................................................ 107
3.6.2.2 プログラム例.................................................................................................................................... 107
3.6.2.3 パラメータ........................................................................................................................................ 107
3.7 クランプ・アンクランプ制御機能レベルアップ .................................................................108
3.7.1 クランプ時サーボオフするまでのタイマの開始.......................................................................108
3.7.1.1 機能説明............................................................................................................................................ 108
3.7.1.2 パラメータ........................................................................................................................................ 108
3.7.2 JOG 運転停止時クランプ無効 ......................................................................................................108
3.7.2.1 機能説明............................................................................................................................................ 108
3.7.2.2 パラメータ........................................................................................................................................ 108
3.8 応答データ読み出し機能レベルアップ................................................................................109
3.8.1 概要 .............................................................................................................................................109
3.8.2 機能詳細 ..........................................................................................................................................109
3.8.3 DI/DO 信号 ......................................................................................................................................110
3.8.4 パラメータ ......................................................................................................................................111
3.8.5 注意事項 ..........................................................................................................................................112
3.9 タレット・マガジン番号出力改良.......................................................................................114
3.9.1 概要 .............................................................................................................................................114
3.9.2 機能詳細 ..........................................................................................................................................114
3.9.3 信号 .............................................................................................................................................118
3.9.4 パラメータ ......................................................................................................................................120
3.9.4.1 関連パラメータ................................................................................................................................ 121
3.10 手動ハンドルインタフェース ..............................................................................................124
3.10.1 概要 .............................................................................................................................................124
3.10.2 機能詳細 ..........................................................................................................................................124
3.10.3 信号 .............................................................................................................................................125
3.10.3.1 サーボアンプモジュール側の信号................................................................................................ 125
3.10.3.2 CNC(ホスト)側の信号..................................................................................................................... 126
3.10.4 パラメータ ......................................................................................................................................127
3.10.4.1 サーボアンプモジュール側のパラメータ....................................................................................127
3.10.4.2 CNC(ホスト)側のパラメータ......................................................................................................... 127
4 ダイレクトコマンド............................................................................................... 128
4.1 ダイレクトコマンドの形式..................................................................................................129
4.2 ダイレクトコマンドの制御手順 ..........................................................................................131
4.2.1 ダイレクトコマンドの制御手順...................................................................................................131
4.2.2 指令コマンドの制御 (EBUF,EBSY,ECNT) ..................................................................................132
4.2.3 応答コマンドの制御 (EOREND,EOSTB, EOPC, USR1, ECONT) ..............................................133
4.2.4 コマンド完了通知 (ECF) ...............................................................................................................133
4.2.5 アラーム (DAL) ..............................................................................................................................134
4.2.6 ダイレクトコマンドの実行結果...................................................................................................134
4.3 ダイレクトコマンド指令一覧 ..............................................................................................135
4.4 ダイレクトコマンドの機能詳細 ..........................................................................................136
4.4.1 信号操作コマンド ..........................................................................................................................136
4.4.2 パラメータ ......................................................................................................................................137
4.4.3 状態読み出し ..................................................................................................................................140
4.4.4 軸移動コマンド ..............................................................................................................................154
4.5 32 ブロックバッファリング運転 .........................................................................................167
4.5.1 概要 .............................................................................................................................................167
4.5.2 メモリ登録手順 ..............................................................................................................................167
4.5.3 運転手順 ..........................................................................................................................................168
5 外部パルス入力機能............................................................................................... 169
5.1 概要 ......................................................................................................................................170
c-3
Page 26

目次 B-65395JA/01
5.2 詳細 ......................................................................................................................................171
6 異常負荷検出機能 .............................................................................................. 172
6.1 概要 ......................................................................................................................................173
6.2 適用ソフト系列・版数.........................................................................................................174
6.3 設定方法...............................................................................................................................175
6.3.1 概要 .............................................................................................................................................175
6.3.2 設定方法の詳細 ..............................................................................................................................176
6.4 信号 ......................................................................................................................................180
6.5 パラメータ ...........................................................................................................................181
6.6 アラーム...............................................................................................................................183
6.7 診断 ......................................................................................................................................183
7 停止距離短縮機能 .................................................................................................. 184
7.1 概要 ......................................................................................................................................185
7.2 適用ソフト系列・版数.........................................................................................................185
7.3 設定方法...............................................................................................................................185
7.4 パラメータ ...........................................................................................................................186
III. 障害追跡および処置
1 概要 ........................................................................................................................ 189
2 アラーム表示とその処置........................................................................................ 190
3 ノイズ対策 ............................................................................................................. 202
3.1 アース系の配線の注意事項..................................................................................................204
3.2 スパークキラーの選定上の注意事項 ...................................................................................206
IV. サーボアンプモジュールの保守
1 ヒューズ、プリント板等の交換方法...................................................................... 211
1.1 ヒューズ,制御プリント板の交換方法................................................................................212
1.1.1 制御プリント板図番 ......................................................................................................................213
1.1.2 ヒューズ実装位置 ..........................................................................................................................214
1.2 ファンモータの交換方法 .....................................................................................................215
1.2.1 内部攪拌用ファンモータの場合 SVM1-4i, SVM1-20i................................................................215
1.2.2 内部攪拌用ファンモータの場合 SVM1-40i, SVM1-80i..............................................................216
1.2.3 外部ファンモータ ..........................................................................................................................217
V. サーボモータの保守
1 サーボモータの保守............................................................................................... 221
1.1 サーボモータの受け入れと保管 ..........................................................................................222
1.2 サーボモータの日常点検 .....................................................................................................223
1.3 サーボモータの定期点検 .....................................................................................................225
1.4 パルスコーダの交換.............................................................................................................228
1.5 交換部品の仕様番号.............................................................................................................230
付録
A サーボアンプモジュールの前面図 ......................................................................... 233
c-4
Page 27
B-65395JA/01 目次
B パラメータリスト .................................................................................................. 235
B.1 制御軸関係のパラメータ .....................................................................................................243
B.2 座標系ストロークリミット関係のパラメータ.....................................................................244
B.3 送り速度関係のパラメータ..................................................................................................248
B.4 加減速制御関係のパラメータ ..............................................................................................251
B.5 入出力信号関係のパラメータ ..............................................................................................254
B.6 サーボ関係のパラメータ .....................................................................................................265
B.7 ディジタルサーボ標準パラメータ表 ...................................................................................287
C 診断リスト ............................................................................................................. 289
C.1 CNC(ホスト)-->サーボアンプモジュール信号 .........................................................290
C.1.1 周辺機器制御インタフェース(DRC=0) ...........................................................................290
C.1.2 ダイレクトコマンドインタフェース(DRC=1) ...............................................................290
C.2 サーボアンプモジュール>CNC(ホスト)信号 .............................................................291
C.2.1 周辺機器制御インタフェース(DRC=0) ...........................................................................291
C.2.2 ダイレクトコマンドインタフェース(DRC=1) ...............................................................291
C.3 サーボ位置偏差量(サーボアンプモジュール).................................................................292
C.4 加減速遅れ量(サーボアンプモジュール) ........................................................................292
C.5 機能ビット(サーボアンプモジュール)............................................................................292
C.6 直接入力信号状態(サーボアンプモジュール).................................................................292
D パワーメイトCNCマネージャ機能...................................................................... 293
D.1 パワーメイト CNC マネージャ機能 (Series 16, 18, 21, Power Mate) ................................294
D.1.1 概要 .............................................................................................................................................294
D.1.2 FANUC I/O Link の接続.................................................................................................................294
D.1.3 機能の選択と終了 ..........................................................................................................................294
D.1.3.1 選択 .................................................................................................................................................... 294
D.1.3.2 機能選択ソフトキー........................................................................................................................ 295
D.1.3.3 終了 .................................................................................................................................................... 295
D.1.3.4 パワーメイトCNCマネージャ機能無視.................................................................................... 295
D.1.3.5 パラメータ設定 ................................................................................................................................ 296
D.1.3.6 制限 .................................................................................................................................................... 297
D.1.4 機能概略 ..........................................................................................................................................298
D.1.4.1 ソフトキー変遷図............................................................................................................................ 298
D.1.4.2 各画面の構成 .................................................................................................................................... 300
D.1.4.3 アクティブスレーブの操作............................................................................................................ 302
D.1.5 機能詳細 ..........................................................................................................................................303
D.1.5.1 システム構成 .................................................................................................................................... 303
D.1.5.2 パラメータ ........................................................................................................................................ 305
D.1.5.3 診断 .................................................................................................................................................... 307
D.1.5.4 絶対座標 ............................................................................................................................................ 309
D.1.5.5 機械座標 ............................................................................................................................................ 309
D.1.5.6 アラーム ............................................................................................................................................ 310
D.1.6 パワーメイト CNC マネージャのアラーム表示.........................................................................311
D.2 パワーメイト CNC マネージャ機能 (Series 30i, 31i, 32i)...................................................312
D.2.1 画面表示 ..........................................................................................................................................313
D.2.2 パラメータ入出力 ..........................................................................................................................319
D.2.3 パラメータ ......................................................................................................................................321
D.2.4 注意事項 ..........................................................................................................................................323
E サーボチェックボード ........................................................................................... 324
c-5
Page 28

Page 29

I. 立ち上げ手順
Page 30

Page 31

B-65395JA/01 立ち上げ手順 1.概要
1 概要
本編では、構成要素の確認、サーボモータのアンプの立上げに必要な各種事項
として
• 構成
• 立ち上げ手順
• 動作確認方法
• サーボアンプの定期保守
について述べています
- 3 -
Page 32

2.構成 立ち上げ手順 B-65395JA/01
2 構成
- 4 -
Page 33

B-65395JA/01 立ち上げ手順 2.構成
β
β
A
2.1 構成
FANUC サーボアンプβi シリーズ SVM を使用したシステムは、次のユニット
および部品から構成されます。
(1) サーボアンプモジュール(SVM) (ベイシック)
(2) ACラインフィルタ (ベイシック)
(3) コネクタ類(接続ケーブル用) (ベイシック)
(4) ヒューズ (オプション)
(5) 電源トランス (オプション)
構成要素(例)
制御電源 DC24V±
10%
3Φ AC200 ~240V
または
1 Φ AC220 ~240V
(4A, 20A
モデルのみ)
i
ー
゙
SVM
ブレーカ
電磁
接触器
C
ライン
フィルタ
ー
゙
モー
:ベイシック
:オプション
:機械メーカ殿でご準備いただく機器
注
1 ブレーカ、電磁接触器、AC ラインフィルタは必ず設置して下さい。
2 強電盤の電源取入口には、落雷によるサージ電圧からの装置保護のた
めに、ライン-ライン間、ライン-アース間に雷サージ保護器を設置し
て下さい。
3 AC ラインフィルタは、別の用途で使用されるACリアクトルとは異
なるものです。代用、共用はできません。
モー
ー
i
SVM
゙
ー
゙
- 5 -
Page 34

2.構成 立ち上げ手順 B-65395JA/01
2.2 主な構成要素
2.2.1 サーボアンプモジュール
(1) サーボアンプモジュール (SVM1)
名称 ご注文仕様図番 ユニット図番 パワープリント板図番 制御プリント板図番
SVM1-4i
SVM1-20i
SVM1-40i
SVM1-80i
A06B-6132-H001 A06B-6132-C001 A20B-2101-0090
A06B-6132-H002 A06B-6132-C002 A20B-2101-0091
A06B-6132-H003 A06B-6132-C003 A16B-3200-0512
A06B-6132-H004 A06B-6132-C004 A16B-3200-0513
A20B-8101-0200
- 6 -
Page 35

B-65395JA/01 立ち上げ手順 3.立ち上げ手順
3 立ち上げ手順
- 7 -
Page 36
3.立ち上げ手順 立ち上げ手順 B-65395JA/01
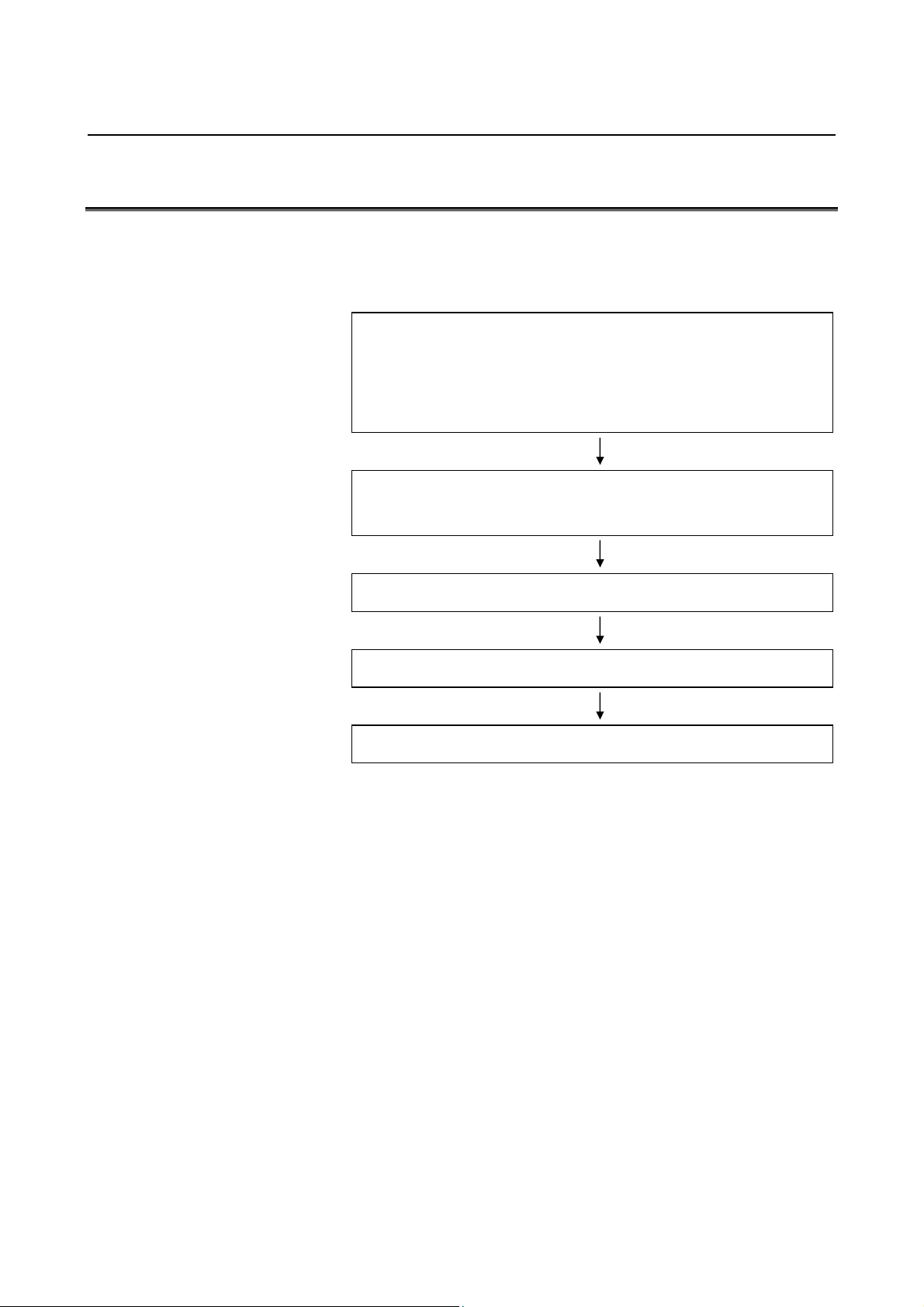
3.1 立ち上げ時の手順(概要)
CNC, サーボモータ, サーボアンプ等の仕様の確認, 接続および結合の確認を
行なった後、電源を投入して下さい。
1.
ブレーカを投入する前に接続される電源電圧を確認して下さい。
保護アースの接続、漏洩電流と漏電しゃ断器の選定が正しくなされて
いるか、確認して下さい。
3.2
項を参照して下さい
→
2.
使用時に設定(スイッチ、ダミーコネクタなど)が必要なものがありま
すので確認して下さい
3.
サーボアンプモジュールを立上げます。
4. CNC
5.
を立ち上げます。
パラメータを設定します。
→ 3.3
項を参照して下さい
- 8 -
Page 37

B-65395JA/01 立ち上げ手順 3.立ち上げ手順
3.2 電源の接続
3.2.1 電源電圧と容量の確認
電源を接続する前に AC 電源電圧を測定して下さい。
表 3.2.1(a) AC 電源電圧に対する処置(200V 入力タイプ)
許容電圧変動巾 公称値 処置
-15%
+10%
-15%
+10%
上記以外
入力電源仕様は表 3.2.1(b)の通りです。電源容量は最大負荷時にでも電圧低下
による不具合が発生しない様に十分余裕のある電源を使用して下さい。
表 3.2.1(b) AC 電源電圧仕様(200V 入力タイプ)
モデル
公称定格電圧
電源周波数 50/60Hz ±1Hz
電源設備容量(主回路用)[kVA]
電源設備容量(制御回路用)[VA]
3.2.2 保護アースの接続
SVM1-4i, SVM1-20i
3 相
200V∼
240V
単相
220V
~240V
SVM1-4i SVM1-20i SVM1-40i SVM1-80i
AC200V∼240V -15%,+10%
0.2 1.9 3.9 6.2
SVM1-40i, SVM1-80i
可。
注) 但し、電圧が定格入力電圧に満たない場
合、定格出力が出ない場合があります。
SVM1-4i, SVM1-20i
電源が中性点接地の AC380V~415V 時
単相入力が可能です。
SVM1-4i, SVM1-20i
SVM1-40i, SVM1-80i
不可
絶縁トランスを使用して、入力電圧を調整し
て下さい。
22
保護アースが正しく接続されている事を確認して下さい
3.2.3 漏洩電流と漏電しゃ断器の選定
漏電ブレーカの選定が正しく行なわれている事を確認して下さい
- 9 -
Page 38

3.立ち上げ手順 立ち上げ手順 B-65395JA/01
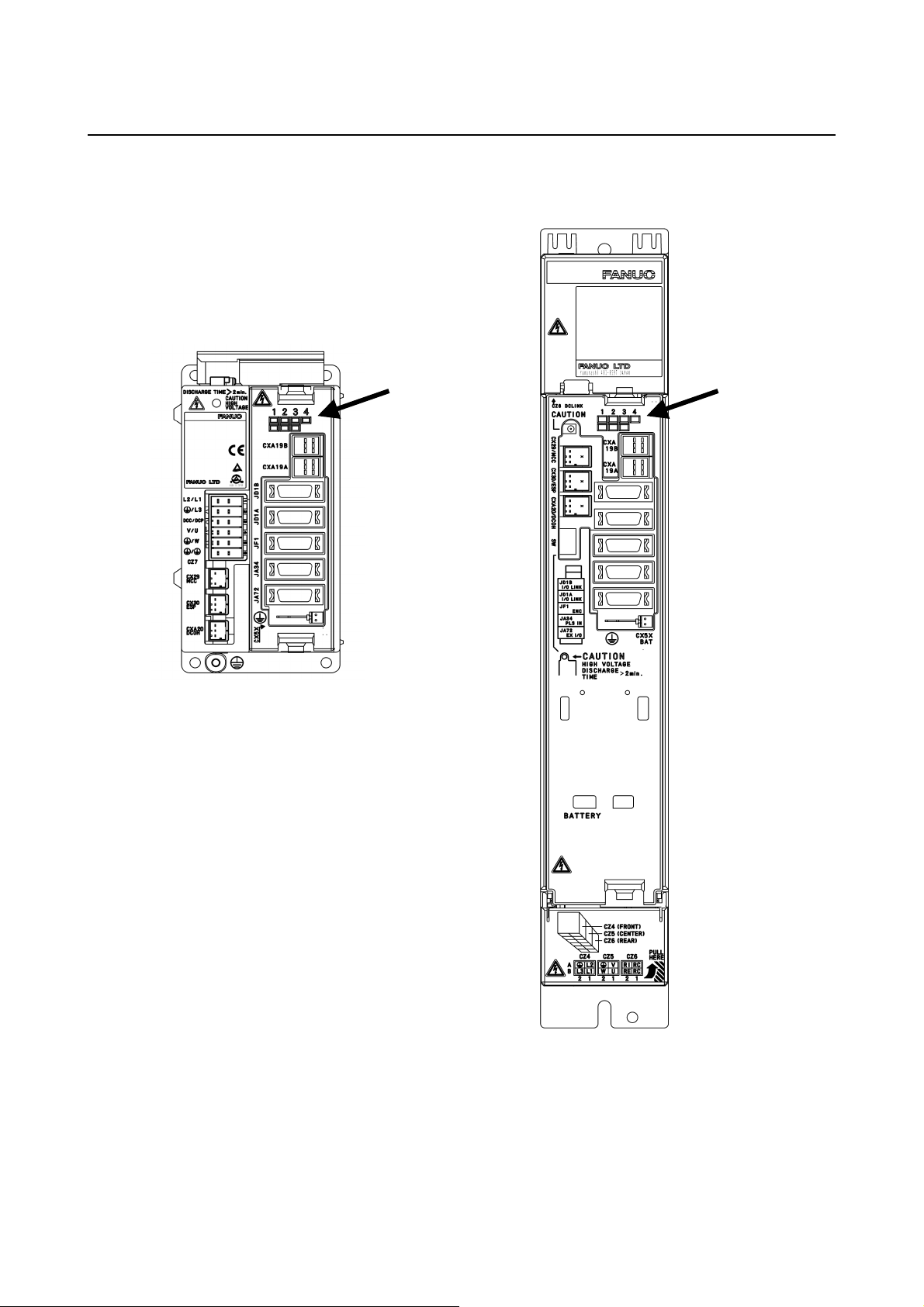
3.3 初期設定(スイッチ、ダミーコネクタ)
SVM1-4i, SVM1-20i
回生抵抗未使用時
コネクタ CXA20 をダミーコネクタでショートしてください。
FANUC SERVO AMPLIFIER βi series 仕様説明書 B-65322JA を参照く
ださい。
SVM1-40i, SVM1-80i
スイッチ(SW)の設定
回生抵抗のアラームレベル設定用です。使用する回生抵抗(内蔵回生抵
抗または別置回生抵抗)ごとに設定条件が異なります。正しい設定をお
こなってください。
警告
設定を誤ると、回生抵抗がダメージをうける危険性があります。
FANUC SERVO AMPLIFIER βi series 仕様説明書 B-65322JA を参照く
ださい。
内蔵回生抵抗使用時
コネクタ CXA20 をダミーコネクタでショートしてください。
コネクタ CZ6 をダミーコネクタでショートしてください。
FANUC SERVO AMPLIFIER βi series 仕様説明書 B-65322JA を参照く
ださい。
- 10 -
Page 39

B-65395JA/01 立ち上げ手順 3.立ち上げ手順
3.4 パラメータの初期設定
(1) サーボパラメータの初期設定にあたって
サーボパラメータの初期設定を行うため,以下の情報を確認します。
① サーボモータのモデル名 (例 β8/3000is)
② モータ1回転あたりの移動量 (例 10 mm/モータ 1 回転)
検出単位を決め、モータ 1 回転あたりのパルス数を計算します。
モータ1回転あたりのパルス数=モータ1回転あたりの移動量/検出単位
(例 検出単位を 1μm とすると、
10mm/1μm=10000 より 10000 パルス/モータ 1 回転)
(2) サーボパラメータの初期設定手順
① サーボアンプモジュールの電源をONします。
② 非常停止状態でホストコントローラの電源をONします。
③ CNC からパラメータの初期設定を行います。
以下のパラメータ値を設定します。(⑤~⑨を参照)
モータ型式番号
CMR
1回転あたりのパルス数分子
1回転あたりのパルス数分母
移動方向
レファレンスカウンタ容量
④ 初期設定ビット DGPR を0にします。
b7 b6 b5 b4 b3 b2 b1 b0
No.12 DGPR
例 パラメータ番号
258 No.125
2 No.32
10000 No.105
1 No.106
111 No.31
10000 No.180
このビットを0にすると電源断要求アラーム(アラーム番号0)が発
生しますが以下の⑤~⑨の設定は可能です。
- 11 -
Page 40

3.立ち上げ手順 立ち上げ手順 B-65395JA/01
初期設定を開始
(⑪までCNCの電源は OFFしません)
SVM1-4i
モータモデル
モータ図番
モータ形式番号
SVM1-20i
モータモデル
モータ図番
モータ形式番号
モータモデル
モータ図番
モータ形式番号
モータモデル
モータ図番
モータ形式番号
SVM1-40i
モータモデル
モータ図番
モータ形式番号
SVM1-80i
モータモデル
モータ図番
モータ形式番号
DGPR (b1) = 0
⑤ モータ型式番号を設定します。
使用するサーボモータのモータ形式番号をパラメータ No.125 に設
定します。
β0.2/5000is β0.3/5000is
0111 0112
260 261
α1/5000i
0202 0061 0205 0063 0075
252 253 255 256 258
α2/5000is α4/5000is αC4/3000i αC8/2000i
0212 0215 0221 0226 0114
262 265 271 276 280
β0.5/5000is β1/5000is
0115 0116 0241
281 282 291
β12/3000is α4/4000i β22/2000is α8/3000i αC22/2000i
0078 0223 0085 0227 0246
272 273 274 277 296
α8/4000is α12/4000is α12/3000i α22/3000i αC30/1500i
0235 0238 0243 0247 0251
285 288 293 297 301
← 電源 OFF/ON 後、1と自動設定されます。
β2/4000is
α2/5000i
αC12/2000i
β4/4000is β8/3000is
β0.4/5000is
- 12 -
Page 41

B-65395JA/01 立ち上げ手順 3.立ち上げ手順
⑥ CMRを設定します。
CNCからサーボ系への移動量の指令倍率をパラメータ No.32 に設
定します。
CMR=指令単位/検出単位
CMRが 1 ~ 48 設定値=CMR×2
CMRが 1/2 ~ 1/27 設定値=1/CMR+100
通常は,CMR=1なので,2を設定します。
⑦ モータ1回転あたりのパルス数を設定します。
ボールネジのリード、減速比と検出単位から、モータ 1 回転あたりの
フィードバックパルス数を設定します。
モータ1回転あたりのパルス数=モータ1回転あたりの移動量/検出単位
1回転あたりのパルス数の分子 = (パラメータNo.105)(≦32767)
1回転あたりのパルス数の分母 (パラメータNo.106)(≦32767)
= (パラメータNo.179)(>32767)
(パラメータNo.106)(≦32767)
設定例)セミクローズで検出単位が10μm の場合
ボールネジのリード 1回転あたりのパルス数
分子/分母
10 (mm/rev)
20 (mm/rev)
30 (mm/rev)
10mm/10μm=1000/1
20mm/10μm=2000/1
30mm/10μm=3000/1
設定例)回転軸,減速比 10:1 で検出単位が1/100 度の場合
モータ1回転するとテーブルは 360/10 度回転します。
よってモータ1回転あたりのパルス数は、360/10 ÷(1/100) =
3600 パルスなので 分子=3600 分母=1と設定します。
⑧ モータの移動方向をパラメータ No.31 に設定します。
111
-111
パルスコーダ側から見て時計回り
パルスコーダ側から見て反時計回り
- 13 -
Page 42
3.立ち上げ手順 立ち上げ手順 B-65395JA/01
⑨ レファレンスカウンタの容量を設定します。(パラメータ No.180)
グリッド方式レファレンス点復帰を行う際に使用します。
必ず、モータ1回転あたりの位置パルス数か、あるいはその整数分の
1を設定してください。
設定例)
αi パルスコーダ,セミクローズ(検出単位1μm)
ボールネジのリード モータ1回転あた
りのパルス数
10mm/回転
20
30
⑩ CNCとサーボアンプモジュールの電源をOFF/ONします。
サーボパラメータの初期設定は終了です。
αi パルスコーダを使用して絶対位置通信を行う場合には,次の手順で
⑪
行います。
1 次のパラメータを設定し、ホストCNCとサーボアンプモジュー
ルの電源をOFF/ONします。
b7 b6 b5 b4 b3 b2 b1 b0
No.11 APCX ABSX
10000/1
20000/1
30000/1
レファレンスカウンタ グリッド幅
10000
20000
30000
10mm
20mm
30mm
APCX (#7) アブソリュート・パルスコーダの検出器が
0:ついていません 1:ついている
ABSX (#0) 絶対位置検出器と機械位置との対応づけが
0:未完了 1:完了
2 アブソリュートパルスコーダ用バッテリが接続してあることを
確認し、ホストCNCとサーボアンプモジュールの電源をOFF
/ONします。
3 原点復帰要求が表示されます。
4 JOG等でサーボモータを一回転以上回転させます。
5 ホストCNCとサーボアンプモジュールの電源をOFF/ON
します。
6 再度原点復帰要求が表示されます。
7 原点復帰を行います。原点復帰が正常に終了すると絶対位置検出
器と機械位置との対応づけが完了し、ABSX=1 になります。
- 14 -
Page 43

B-65395JA/01 立ち上げ手順 4.動作確認方法
4 動作確認方法
- 15 -
Page 44

4.動作確認方法 立ち上げ手順 B-65395JA/01
4.1 確認手順
1.電源を供給します。
LEDの表示が , 以外の場合
Ⅲ編の障害追跡および処置を参照ください。
2.LEDが と表示される。
3.非常停止を解除します。
LEDの表示が にならない。
サーボアンプモジュールの*ESP入力を確認します。
I/O Link経由の*ESP入力信号を確認します。
4.LEDが と表示される。
5.ホストコントローラから指令する。
6.サーボモータの動作を確認します。
アラームが発生する
Ⅲ編の障害追跡および処置を参照ください。
モータが動かない
コマンドの内容を確認します。
パラメータの内容を確認します。
サーボアンプモジュールの*RILK入力を確認します。
モータの動作がおかしい。
パラメータの標準設定が正しく設定されているか確認して下さい。No.100(負荷イナ
ーシャ比)、No.107(位置ループゲイン)の値を確認して下さい。
- 16 -
Page 45
B-65395JA/01 立ち上げ手順 4.動作確認方法
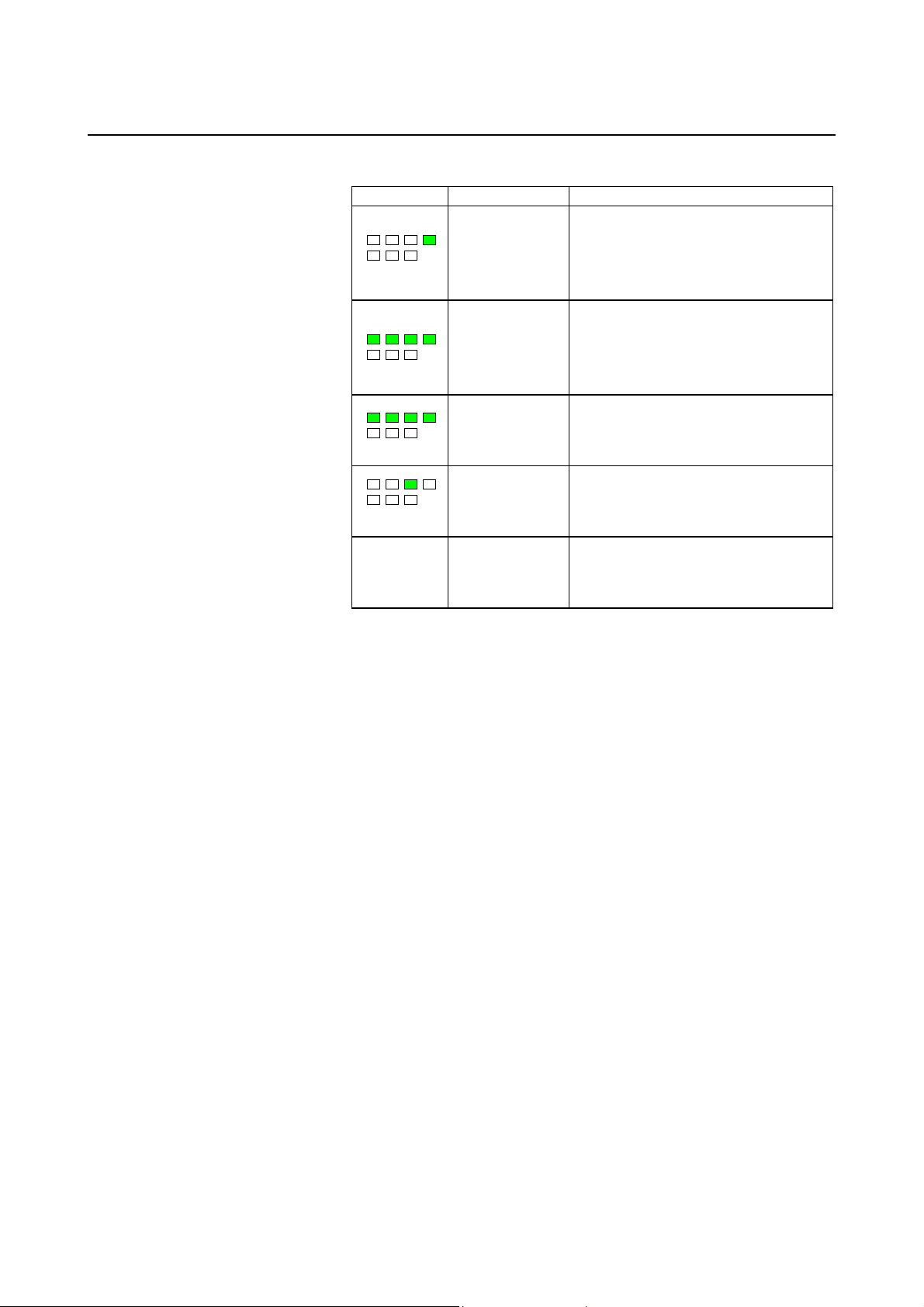
表 4.1 LED表示と内容
LED表示 状態 内容
制御電源(DC+24V)が供給されてい
ることを示します。
アラームはありませんが、モータはまだレ
ディ状態になっていません。
モータがレディ状態となっており、コマン
ドを受け付ける準備が整っていることを
示します。
コマンドを受け付けて実行中であること
を示します。
パワーメイトCNCマネージャからパラ
メータの一括ローディング中を示します。
アラームが発生しています。
アラームの内容についてはⅢ編の障害追
跡および処置を参照ください。
の点滅表示
の点滅表示
上記以外の
表示
サーボアンプモジ
ュール
NOT READY
サーボアンプモジ
ュール
READY
コマンド実行中
パラメータローデ
ィング中
アラーム
- 17 -
Page 46
4.動作確認方法 立ち上げ手順 B-65395JA/01
LED LED
4/20A
40/80A
- 18 -
Page 47
B-65395JA/01 立ち上げ手順 5.サーボアンプの定期保守
5 サーボアンプの定期保守
- 19 -
Page 48

5.サーボアンプの定期保守 立ち上げ手順 B-65395JA/01
5.1 アブソリュートパルスコーダ用バッテリ
アブソリュートパルスコーダ用バッテリには、以下の[接続方式 1]と [接続方
式 2]の2種類の接続方法があります。
[接続方式 1] 1 台のバッテリから複数台の SVM へバッテリ電源を供給する方法
バッテリケース
A06B-6050-K060
SVM SVM
CXA19B CXA19B
CXA19A CXA19A
APC(アブソリュートパルスコーダ)アラームのバッテリ低下、または、
バッテリ電圧 0 になった場合、バッテリを交換して下さい。
なお、バッテリ電圧0となった場合、原点復帰作業が必要となります。
βi
バッテリの寿命は、サーボモータ 6 軸接続時で、βi
バッテリは、単1アルカリ乾電池(4 本)です。バッテリは、市販品を
S シリーズサーボモータ(β0.4/5000iS ~β
リュートパルスコーダ内部にバックアップキャパシタを内蔵しています。
それにより、10分程度の絶対位置検出動作が可能であるため、その時
間内であれば、サーボアンプの電源を切ってバッテリを交換しても、原
点復帰作業は不要です。
一方、βシリーズサーボモータと一部のβi
0.2/5000iS ~β 0.3/5000iS)の場合には、パルスコーダ内部にバックア
(β
ップキャパシタを内蔵していませんので、注意が必要です。詳細につい
ては、項末の[バッテリ交換時の注意事項 NO.1]をご覧下さい。
0.4/5000iS ~β 22/2000iS)の場合は約 2 年、βシリーズサーボモータ
タ(β
と一部のβi
約 1 年が目安です。したがって、バッテリの寿命に応じて定期的にバッ
テリを交換をされることをお勧めします。
使用することが可能です。A06B-6050-K061 はファナックからオプション
として供給しているバッテリです。
警告
1 複数のバッテリを、同一の BAT(B3)のラインに接続しないで下さい。
異なるバッテリの出力電圧同士がショートし、バッテリが高温になる
可能性があり危険です。
2 バッテリ接続の際には、プラス・マイナスの極性にご注意下さい。極
性を逆に接続した場合、バッテリの発熱、破裂、発火の原因となりま
す。
S シリーズサーボモータ(β
22/2000iS)は、標準でアブソ
S シリーズサーボモータ
0.2/5000iS, β 0.3/5000iS)の場合は
バッテリ
A06B-6050-K061
コネクタ
A06B-6130-K201
S シリーズサーボモー
- 20 -
Page 49

B-65395JA/01 立ち上げ手順 5.サーボアンプの定期保守
[接続方式 2] 内蔵バッテリを各 SVM に内蔵する方法
SVM
CX5X CX5X
バッテリケース
A06B-6093-K002
バッテリ
A06B-6093-K001
SVM
バッテリケース
A06B-6093-K002
バッテリ
A06B-6093-K001
APC(アブソリュートパルスコーダ)アラームのバッテリ低下、または、
バッテリ電圧 0 になった場合、バッテリ(A06B-6093-K001)を交換して下
さい。
なお、バッテリ電圧0となった場合、原点復帰作業が必要となります。
βi
S シリーズサーボモータ(β
0.4/5000iS ~β 22/2000iS )は、標準でアブソ
リュートパルスコーダ内部にバックアップキャパシタを内蔵しています。
それにより、10分程度の絶対位置検出動作が可能であるため、その時
間内であれば、サーボアンプの電源を切ってバッテリを交換しても、原
点復帰作業は不要です。
一方、βシリーズサーボモータと一部のβi
0.2/5000iS ~β 0.3/5000iS )の場合には、パルスコーダ内部にバックア
(β
S シリーズサーボモータ
ップキャパシタを内蔵していませんので、注意が必要です。詳細につい
ては、項末の[バッテリ交換時の注意事項 NO.1]をご覧下さい。
バッテリの寿命は、βi
22/2000iS )の場合は約 2 年、βシリーズサーボモータと一部のβiS シリ
~β
ーズサーボモータ(β
S シリーズサーボモータ(β
0.2/5000iS ~β 0.3/5000iS )の場合は約 1 年が目安で
0.4/5000iS
す。したがって、バッテリの寿命に応じて定期的にバッテリを交換され
ることをお勧めします。
内蔵バッテリは、市販品ではありませんので、必ず、弊社から購入頂く
必要があります。したがいまして、予備の内蔵バッテリをあらかじめ準
備頂くことを推奨致します。
- 21 -
Page 50

5.サーボアンプの定期保守 立ち上げ手順 B-65395JA/01
警告
1 内蔵バッテリ(A06B-6093-K001)を使用する場合、コネクタ
CXA19A/CXA19B の BAT(B3)は絶対に接続しないで下さい。
異なる SVM のバッテリの出力電圧同士がショートし、バッテリが高
温になる可能性があり危険です。
2 複数のバッテリを、同一の BAT(B3)のラインに接続しないで下さい。
異なるバッテリの出力電圧同士がショートし、バッテリが高温になる
可能性があり危険です。
【バッテリの取り付け方法】
SVM1-4i, SVM1-20i
1 バッテリを SVM に取り付ける。
2 バッテリケースを取り付ける。
3 バッテリのコネクタを、SVM の CX5X に取り付ける。
バッテリ
バッテリケース
SVM
挿入方向
コネクタ
CX5X
ケーブル側
+6V
赤
0V
黒
+6V
0V
- 22 -
Page 51

B-65395JA/01 立ち上げ手順 5.サーボアンプの定期保守
【バッテリの取り付け方法】
SVM1-40i, SVM1-80i
1 バッテリを SVM に取り付ける。
2 バッテリケースを取り付ける。
3 バッテリのコネクタを、SVM の CX5X に取り付ける。
SVM
挿入方向
ケーブル側
赤:+6V
黒: 0V
CX5X
コネクタ
バッテリ
バッテリケース
+6V
0V
注意
1 SVM にバッテリを取り付ける際に、ケーブルの引き出し口の方からバ
ッテリを取り付けると、ケーブルが張った状態となることがありますの
で、ケーブルの余長が出来る方向から取り付けて下さい。バッテリケー
ブルが張った状態でバッテリを取り付けると、接触不良などを起こす可
能性があります。
2 コネクタの取扱については、注意が必要です。詳細については、項末の
[バッテリ交換時の注意事項 NO.2]をご覧下さい。
- 23 -
Page 52

5.サーボアンプの定期保守 立ち上げ手順 B-65395JA/01
【バッテリ交換時の注意事項 NO.1】
βシリーズサーボモータと一部のβiS シリーズサーボモータ(β 0.2/5000iS
0.3/5000iS )の場合、パルスコーダ内部にバックアップキャパシタを標準搭
~β
載していません。したがいまして、アブソリュートパルスコーダの絶対位置情
報を失わないためには、制御用の電源が投入された状態でバッテリの交換を行
う必要があります。交換手順は以下の通りです。
[交換作業手順]
1 SVM の電源が入っている(SVM 正面の LED が点灯している)こと
を確認する。
2 システムの非常停止ボタンが押されていることを確認する。
3 モータが励磁状態でないことを確認する。
4 SVM の DC リンク充電用の LED が消灯していることを確認する。
5 古いバッテリを取り外し、新しいバッテリを取り付ける。
6 交換完了。システムの電源を落としても大丈夫です。
警告
1 バッテリ交換時には、盤内の裸体の金属部分に触れないようにして下
さい。特に、高圧部に触れると感電の恐れがありますのでご注意下さ
い。
2 サーボアンプ正面の DC リンク充電確認用の LED が消灯していること
を確認してからバッテリの交換を行って下さい。LED が消灯していな
い場合、感電の恐れがありますのでご注意下さい。
3 バッテリ接続の際には、プラス・マイナスの極性にご注意下さい。極
性を逆に接続した場合、バッテリの発熱、破裂、発火の原因となりま
す。
4 バッテリやケーブルの’+6V’と’0V’とをショートさせないよう、注意し
て下さい。バッテリをショートすると、バッテリの発熱、破裂、発火
の原因となります。
- 24 -
Page 53

B-65395JA/01 立ち上げ手順 5.サーボアンプの定期保守
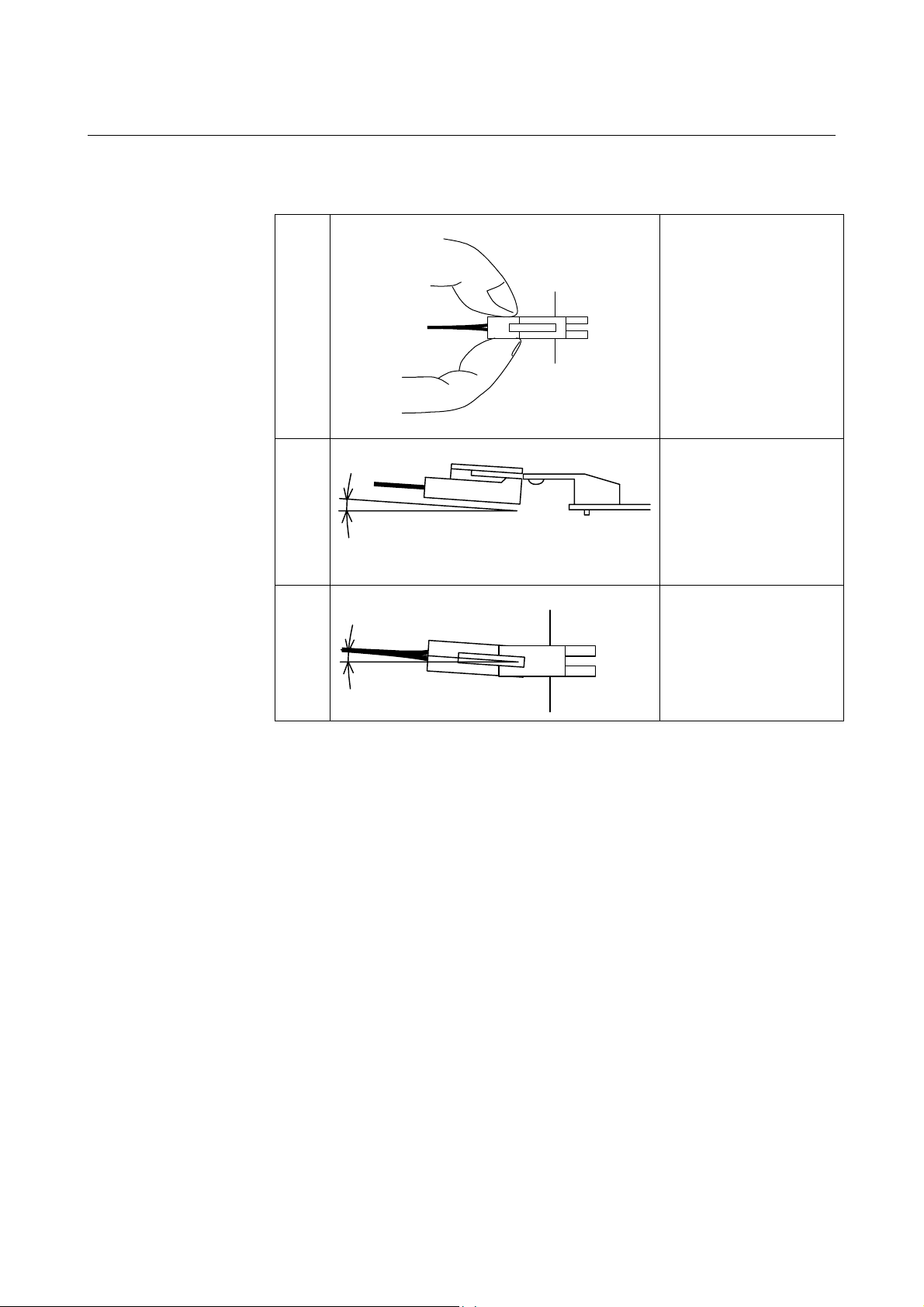
【バッテリ交換時の注意事項 NO.2】
CX5A からコネクタを挿抜する時に、過剰なストレスが加えられると、接触不
良などを起こす可能性があります。以下にしたがい、バッテリコネクタを挿抜
するときには、過大なねじり力がコネクタに加わらないよう注意して下さい。
(1) コネクタの取り付け
①
②
⑤
③
取り付け位置を確認する。
ケーブル側を少し持ち上げ
気味に挿入する。
10
度以下
この際、水平方向について
は 5 度以下とする。
5
度以下
ロックのダボを越えたら、
後は真っ直ぐに押し込んで
下さい。
④
取り付け完了
- 25 -
Page 54
5.サーボアンプの定期保守 立ち上げ手順 B-65395JA/01
(2) コネクタの取り外し
ケーブル側のインシュレー
①
タの横とケーブル両方を持
ち、水平に引っ張り離脱し
て下さい。
②
③
10
度以下
5
度以下
ケーブル側を少し持ち上げ
気味に引き抜く。
この際、水平方向について
は 5 度以下とする。
- 26 -
Page 55

B-65395JA/01 立ち上げ手順 5.サーボアンプの定期保守
5.2 サーボアンプの定期点検について
サーボアンプを長期に渡って使用していただくために,また高性能,高信頼性
を確保するために日常的な保守,点検をお願い致します。
点検箇所 点検項目
環境 周囲温度 ○
環境 湿度 ○
環境
環境 冷却風通路 ○
環境 異常振動,音 ○
環境 電源電圧 ○
アンプ 全般 ○
アンプ 全般 ○
アンプ ネジ
アンプ ファンモータ ○
アンプ コネクタ
アンプ ケーブル
外部機器 電磁接触器
外部機器 漏電ブレーカ
外部機器
塵埃
オイルミスト
ACライン
フィルタ
点検周期
日常 定期
強電盤周囲 0~45℃
強電盤内 0~55℃
90%RH 以下(結露していないこと)
○
(*1) 一般にファンモータは定期保守部品です。
サーボアンプではファンモータが停止しても即座にアンプが破損するこ
とはありませんが、日常的な点検を実施いただき,予防的に交換すること
をお勧めします。
サーボアンプ近傍に付着していないこと。
風の流れが妨げられていないか
冷却ファンモータは動作しているか
(1) 過去に無かった異常音,振動が無いこと。
(2) アンプ近傍の振動が 0.5G 以下であること
3相入力時:200~240V 内にあること
単相入力時:220~240V 内にあること
異常音,異臭はないか
塵埃,オイルミストが付着していないか。
異常音,異臭はないか
○ ネジの緩みがないこと
(1) 正常に回転しているか
(2) 異常振動,音がないこと
(3) 塵埃,オイルミストが付着していないこと
○ 緩みはないか
(1) 発熱痕跡はないか
○
(2) 被覆の劣化(変色,ヒビ割れ)はないか。
○ ビビリ音,チャタリングがないこと
○ 漏電トリップが動作すること
○ 唸り音等がないこと
判定基準 備考
(*1)
- 27 -
Page 56

5.サーボアンプの定期保守 立ち上げ手順 B-65395JA/01
ファンユニット図番
- SVM
SVM 名称
SVM1-4i
SVM1-20i
SVM1-40i
SVM1-80i
ファンユニット(*1) ファンモータ ファンユニット(*1) ファンモータ
-
A06B-6110-C605 A90L-0001-0510 - -
A06B-6110-C605 A90L-0001-0510 A06B-6134-K002 -
内部攪拌用 外部放熱フィン冷却用
A90L-0001-0423#50 - -
(*1) ファンユニットはファンモータとファンモータ取付用カバーがセットに
なったものです。
- 28 -
Page 57

II. 取扱
Page 58

Page 59
B-65395JA/01 取扱 1.概要
1 概要
- 31 -
Page 60
1.概要 取扱 B-65395JA/01
インタ
領域
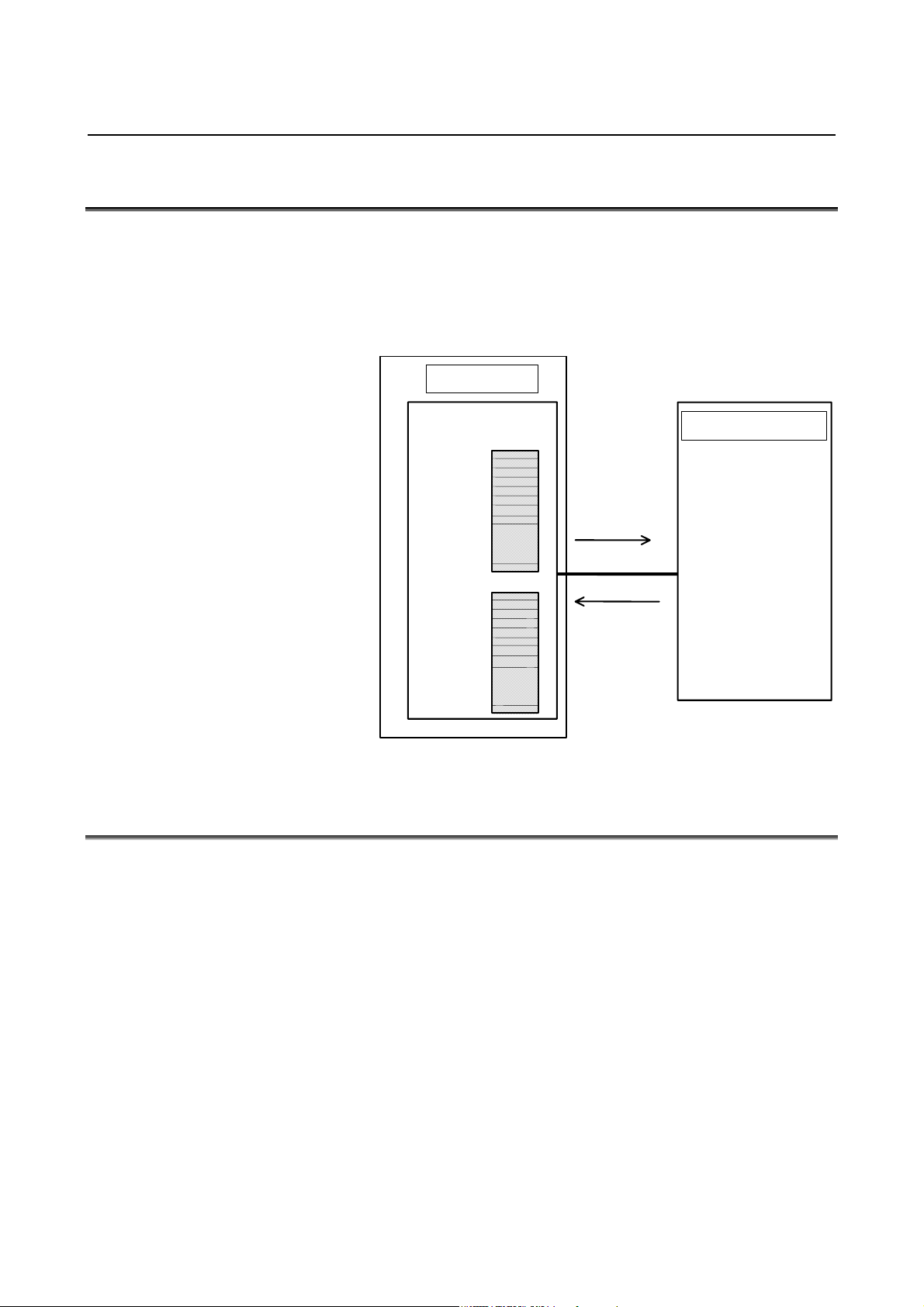
1.1 サーボアンプモジュールとのインタフェース
CNC などのホスト装置とサーボアンプモジュールは FANUC I/O Link の
DI/DO=128/128 点を介して接続して下さい。ホスト装置のラダープログラムに
より、このインタフェースを通じて、サーボアンプモジュールに対して移動指
令を送ったり、サーボアンプモジュールの状態を監視したりします。
ホスト装置
CNC側のPMCI/O
Yy+0
Yy+1
・
Yy+7
・
Yy+15
Xx+0
Xx+1
・
Xx+7
・
Xx+15
フェース
指令コマンド
I/O Link
応答コマンド
1.2 FANUC I/O Link 上のインタフェース領域
FANUC I/O Link を介してデータの授受を行うインタフェース領域は、リセッ
ト信号、アラーム信号を扱う「信号領域」と、移動指令や状態監視のための指
令コードのやり取りを行う「指令コード領域」に分かれています。
「信号領域」にある信号については、ホスト装置より直接読み書きすることが
可能であり、モード選択、運転の起動停止などの指令やアラーム状態の監視な
どが行えます。
また、「指令コード領域」では、機能コードと指令データの組合わせによりサ
ーボアンプモジュールに対して各種指令を発行できます。例えば、アブソリュ
ート/インクレメンタル移動指令やレファレンス点復帰などの移動指令のブロ
ックを送ったり、現在位置データなどの受信を行なったりできます。
サーボアンプモジュール
- 32 -
Page 61
B-65395JA/01 取扱 1.概要
1.3 インタフェース
サーボアンプモジュールとのデータ授受のためインタフェースが設けられて
おり、用途によって 2 種類の使い方が準備されています。それは「周辺機器制
御インタフェース」と「ダイレクトコマンドインタフェース」で、「信号領域」
の DRC 信号によりいずれを使うか選択します。
1.3.1 周辺機器制御インタフェース
Power Mate-E の周辺機器制御機能とほぼ互換性のあるインタフェースです。工
作機械の周辺機器などの制御に適した指令が準備されており、一つの指令で軸
のクランプ、アンクランプを含めた一連の位置決め動作を行なわせることがで
きます。すでにこのインタフェースで作成したラダーを持っており、これを利
用したい場合に有効です。
1.3.2 ダイレクトコマンドインタフェース
周辺機器制御のように 1 命令で複数の動作を行うことはなく、基本的には 1 つ
の指令で 1 つの位置決め動作などを行なうことができます。ただし、位置決め
指令以外に待ち合わせ指令やパラメータの読み書き、診断データの読み込みな
ど各種の指令が準備されており多彩な操作を行なわせることができます。
「周辺機器制御インタフェース」と「ダイレクトコマンドインタフェース」は、
途中で切り換えることも可能ですが、信号の意味が変わりラダーが繁雑となる
ため、通常は何れか一方のインタフェースに固定してサーボアンプモジュール
を制御して下さい。
1.3.3 インタフェースの切り換え
運転の状況において「周辺機器制御」と「ダイレクトコマンド」の 2 種類のイ
ンタフェースがあります。通常、電源が入っている途中で切り替えることはあ
りませんが、もし、切り替える必要が生じた場合、ホストは、”DRC”信号によ
り切り替えます。
指令データは、”DRC”信号が”0”では「周辺機器制御インタフェース」が選択
され、”1”では「ダイレクトコマンドインタフェース」が選択されます。
サーボアンプモジュールから返される応答データは、”DRCO”が”0”の場合「周
辺機器制御インタフェース」となっており、また”1”の場合「ダイレクトコマ
ンドインタフェース」になっています。
“DRC”信号の切り換えは、リセット状態で行って下さい。使用している信号の
意味が変わりますので、指令の途中や軸の移動中にインタフェースを切り換え
ると思わぬ動作を引き起こす可能性がありますので注意して下さい。
“DRC”信号を切り換えたら”DRCO”信号が追従して切り換わってから更に 1 ス
キャン以上待ってから指令を発行して下さい。また、”DRCO”が切り換わる前
- 33 -
Page 62

1.概要 取扱 B-65395JA/01
に再度”DRC”信号を反転させると、サーボアンプモジュールとのデータの通信
が正しく行なえなくなリます。再度”DRC”信号を反転させるには”DRCO”信号
が追従して切り換わってから更に 1 スキャン以上待ってから行って下さい。
1.4 パワーメイト CNC マネージャ使用時の注意
ダイレクトコマンドインタフェースを選択時、同時にパワーメイト CNC マネ
ージャ機能を使用すると、応答コマンド(Xx+4~Xx+15)の領域を共通に使うこ
とになります。このため、どちらの指令コマンドに対する応答コマンドか区別
して、ホストの PMC に対する応答コマンドだけを受け取る必要があります。
どちらの応答コマンドであるかは、応答コマンド中の”USR1”で区別して下さ
い。
“USR1”が”0”の場合はホストの PMC に対する応答コマンドであり受け取る事
ができますが、”USR1”が”1”の場合パワーメイト CNC マネージャに対する応
答コマンドですので、PMC は無視して下さい。
- 34 -
Page 63

B-65395JA/01 取扱 2.信号説明
2 信号説明
- 35 -
Page 64

2.信号説明 取扱 B-65395JA/01
2.1 DI/DO 信号
CNC などのホスト装置は、サーボアンプモジュールと FANUC I/O Link の
DI/DO=128/128 点を介して接続します。
注意
FANUC I/O Link のインタフェース上の信号の割り付けは、「周辺機
器制御インタフェース」の場合と「ダイレクトコマンドインタフェー
ス」の場合とで異なります。
2.1.1 周辺機器制御インタフェース
「信号領域」は、DO 用に Yy+0, Yy+1, Yy+7、DI 用に, Xx+0, Xx+1, X
x+2, Xx+7 が割り当てられており、この信号を直接オン/オフしたり読み込
んだりすることにより、サーボアンプモジュールを制御して下さい。
「指令コマンド領域」は、Yy+2 に機能コード/指令データ 1、Yy+3~6 に
指令データ 2 が割り当てられており、これによりサーボアンプモジュールに対
する指令を送って下さい。また、Xx+3~6 に応答コマンドが割り当てられて
おり、指令コマンドに対する応答データを受け取って下さい。
CNC(ホスト)
→
サーボアンプモジュール(DRC=0)
7 6 5 4 3 2 1 0
Yy+0 ST UCPS2 -X +X DSAL MD4 MD2 MD1
Yy+1 DRC ABSRD *ILK SVFX *ESP ERS
Yy+2 機能コード 指令データ1
Yy+3
Yy+4
Yy+5
Yy+6
Yy+7 RT DRN ROV2/MP2 ROV1/MP1 *OV8 *OV4 *OV2 *OV1
Yy+8
Yy+9
Yy+10
Yy+11
Yy+12
Yy+13
Yy+14
Yy+15
指令データ2
使用できません
(システムリザーブ領域)
- 36 -
Page 65

B-65395JA/01 取扱 2.信号説明
サーボアンプモジュール → CNC(ホスト) (DRC=0)
7 6 5 4 3 2 1 0
Xx+0 OPC4 OPC3 OPC2 OPC1 INPX SUPX IPLX DEN2
Xx+1 OP SA STL UCPC2 OPTENB ZRFX DRCO ABSWT
Xx+2 MA AL DSP2 DSP1 DSALO TRQM RST ZPX
Xx+3
Xx+4
Xx+5
Xx+6
Xx+7 SVERX PSG2 PSG1 MVX APBAL MVDX
Xx+8
Xx+9
Xx+10
Xx+11
Xx+12
Xx+13
Xx+14
Xx+15
(パワーメイトCNCマネージャ用応答領域)
応答データ
使用できません
信号の詳細については、2.3 節の信号詳細、機能コード/指令データ/応答データについては、
3.3 節の機能コードを参照下さい。
注意
従来”V READY OFF アラーム無視信号(IGNVRY<Yy+1#6>)”があり
ましたが、サーボアンプモジュールが正常な時、V READY OFF アラ
ーム(No.401)は発生しません。従って本信号は削除しました。もしラ
ダープログラム上、本信号を使用していましたら削除して下さい。
注
Yy+7#4,#5 は早送りオーバライド信号(ROV1,ROV2)とインクレメン
タルフィード信号(MP1,MP2)が共用しています。パラメータ
No.5#5(MP) が”1”でかつ手動ハンドルモードのときインクレメンタ
ルフィード信号の意味となり、MP が”0”または手動ハンドルモード以
外では早送りオーバライド信号の意味となります。また MP が”1”の
とき、手動ハンドルモードから他のモードに切り換えるとき、本信号
を早送りオーバライド信号の場合の設定に戻す必要があります。
- 37 -
Page 66

2.信号説明 取扱 B-65395JA/01
2.1.2 ダイレクトコマンドインタフェース
「信号領域」は、DO 用に Yy+0~3、DI 用に,Xx+0~3 が割り当てられており、
この信号を直接オン/オフしたり読み込んだりすることにより、サーボアンプ
モジュールを制御して下さい。
「指令コマンド領域」は、Yy+4~15 にダイレクトコマンドの指令コマンドが
割り当てられており、これによりサーボアンプモジュールに対する指令を送り
ます。また、Xx+4~15 にダイレクトコマンドの応答コマンドが割り当てられ
ており、指令コマンドに対する応答コマンドを受け取って下さい。
CNC(ホスト) → サーボアンプモジュール(DRC=1)
7 6 5 4 3 2 1 0
Yy+0 ST -X +X MD4 MD2 MD1
Yy+1 DRC WFN *ILK SVFX *ESP ERS
Yy+2 RT DRN ROV2 ROV1 *OV8 *OV4 *OV2 *OV1
Yy+3 INPF
Yy+4 EBUF EOREND ECNT
Yy+5 ダイレクトコマンド(機能コード)
Yy+6 ダイレクトコマンド(指令データ1)
Yy+7 ダイレクトコマンド(指令データ2)
Yy+8 ダイレクトコマンド(指令データ3)
Yy+9 ダイレクトコマンド(指令データ4)
Yy+10 ダイレクトコマンド(指令データ5)
Yy+11 ダイレクトコマンド(指令データ6)
Yy+12 ダイレクトコマンド(指令データ7)
Yy+13 ダイレクトコマンド(指令データ8)
Yy+14 ダイレクトコマンド(指令データ9)
Yy+15 ダイレクトコマンド(指令データ10)
注意
従来”V READY OFF アラーム無視信号(IGNVRY<Yy+1#6>)”があり
ましたが、サーボアンプモジュールが正常な時、V READY OFF アラ
ーム(No.401)は発生しません。従って本信号は削除しました。もしラ
ダープログラム上、本信号を使用していましたら削除して下さい。
- 38 -
Page 67

B-65395JA/01 取扱 2.信号説明
サーボアンプモジュール
7 6 5 4 3 2 1 0
Xx+0 INPX SUPX IPLX DEN2
Xx+1 OP SA STL OPTENB ZRFX DRCO WAT
Xx+2 MA AL TRQM RST ZPX
Xx+3 INPFO SVERX PSG2 PSG1 MVX APBAL MVDX
Xx+4 EBSY EOSTB ECF USR1 EOPC DAL ECONT
Xx+5 ダイレクトコマンド(機能コード)
Xx+6 予備 実行結果
Xx+7 ダイレクトコマンド(応答データ1)
Xx+8 ダイレクトコマンド(応答データ2)
Xx+9 ダイレクトコマンド(応答データ3)
Xx+10 ダイレクトコマンド(応答データ4)
Xx+11 ダイレクトコマンド(応答データ5)
Xx+12 ダイレクトコマンド(応答データ6)
Xx+13 ダイレクトコマンド(応答データ7)
Xx+14 ダイレクトコマンド(応答データ8)
Xx+15 ダイレクトコマンド(応答データ9)
→
CNC(ホスト) (DRC=1)
信号の詳細については、2.3 節の信号詳細、機能コード/指令データ/応答データ
については、4.4 節のダイレクトコマンドの機能詳細を参照下さい。
- 39 -
Page 68

2.信号説明 取扱 B-65395JA/01
2.2 信号一覧(グループ別)
※ 制御装置の直接入出力信号*ESP, *-OT, *+OT, *RILK, *DEC, HDI も含ま
れています。
※ アドレスはホストのスレーブ毎の各I/O Link 割り付けアドレスを先頭とし
ます。
●
機能一覧表
グループ 信号名称 シンボル
準備完了信号
1
サーボ準備完了信号
非常停止信号
外部リセット信号
2
リセット中信号
アラーム信号
3
アブソリュートパルスコーダ
バッテリアラーム信号
モード選択信号
4
送り軸方向選択信号
5
残移動量範囲内信号
分配パルス信号
加減速パルス信号
インポジション信号
サーボ位置偏差監視信号
6
軸移動中信号
移動方向信号
領域信号
速度制御モード中信号
機能有効信号
送り速度オーバライド信号 *OV1~*OV8
手動早送り選択信号
7
早送りオーバライド信号
インクレメンタルフィード信号
インタロック信号
8
レファレンス点復帰完了信号
9
レファレンス点確立信号
自動運転起動信号
自動運転起動中信号
10
自動運転中信号
ドライラン信号
MA Xx+2#7 2.3.1
SA Xx+1#6 2.3.1
*ESP Yy+1#1 2.3.2
ERS Yy+1#0 2.3.2
RST Xx+2#1 2.3.2
AL Xx+2#6 2.3.3
APBAL Xx+7#1 Xx+3#1 2.3.3
MD4,MD2,MD1
+X,-X Yy+0#4,Yy+0#5 2.3.5
DEN2 Xx+0#0 2.3.6
IPLX Xx+0#1 2.3.6
SUPX Xx+0#2 2.3.6
INPX Xx+0#3 2.3.6
SVERX Xx+7#6 Xx+3#6 2.3.6
MVX Xx+7#2 Xx+3#2 2.3.6
MVDX Xx+7#0 Xx+3#0 2.3.6
PSG1,PSG2 Xx+7#3,Xx+7#4 Xx+3#3,Xx+3#4 2.3.6
TRQM Xx+2#2 2.3.6
OPTENB Xx+1#3 2.3.6
RT Yy+7#7 Yy+2#7 2.3.7
ROV1,ROV2 Yy+7#4,Yy+7#5 Yy+2#4,Yy+2#5 2.3.7
MP1, MP2 Yy+7#4,Yy+7#5 -- 2.3.7
*ILK Yy+1#3 2.3.8
ZPX Xx+2#0 2.3.9
ZRFX Xx+1#2 2.3.9
ST Yy+0#7 2.3.10
STL Xx+1#5 2.3.10
OP Xx+1#7 2.3.10
DRN Yy+7#6 Yy+2#6 2.3.10
アドレス
周辺機器 ダイレクトコマンド
Yy+0#0~Yy+0#2
Yy+7#0~Yy+7#3
Yy+2#0~
Yy+2#3
参照
項目
2.3.4
2.3.7
- 40 -
Page 69

B-65395JA/01 取扱 2.信号説明
グループ 信号名称 シンボル
アンクランプ指令信号
11
クランプ/アンクランプ状態出力信号
サーボオフ信号
12
動作完了信号
機能コード
指令データ 1
指令データ 2
応答データ
13
応答データ内容確認信号
応答データ書き込み完了信号
応答データ読み取り完了信号
アラーム出力指令信号
アラーム出力状態確認信号
機能コード指令ストローブ信号
機能コード指令読取完了信号
機能コード
指令データ
応答データ
常時出力データ出力中信号
応答データ読み取り可信号
応答データ読み取り完了信号
指令コマンド継続通知信号
14
PMM データ信号
応答データ継続通知信号
機能コード指令完了通知信号
アラーム信号
待ち合わせ信号
待ち合わせ完了信号
メモリ登録信号
メモリ登録中信号
インタフェース切り替え信号
インタフェース状態通知信号
非常停止信号
オーバトラベル信号
高速インタロック信号
15
レファレンス点復帰用減速信号
スキップ信号
UCPC2 Xx+1#4 -- 2.3.11
UCPS2 Yy+0#6 -- 2.3.11
SVFX Yy+1#2 2.3.12
OPC1, OPC2, OPC3,
OPC4
CMD CODEP
CMD DATA1
CMD DATA2
ANS DATAP
DSP1,DSP2
ABSWT Xx+1#0 -- 2.3.13
ABSRD Yy+1#4 -- 2.3.13
DSAL Yy+0#3 -- 2.3.13
DSALO Xx+2#3 -- 2.3.13
EBUF -- Yy+4#7 2.3.14
EBSY -- Xx+4#7 2.3.14
CMD CODE -- Yy+5 2.3.14
CMD DATA --
ANS DATA --
EOPC -- Xx+4#2 2.3.14
EOSTB -- Xx+4#6 2.3.14
EOREND -- Yy+4#6 2.3.14
ECNT -- Yy+4#0 2.3.14
USR1 -- Xx+4#3 2.3.14
ECONT -- Xx+4#0 2.3.14
ECF -- Xx+4#5 2.3.14
DAL -- Xx+4#1 2.3.14
WAT -- Xx+1#0 2.3.14
WFN -- Yy+1#4 2.3.14
INPF -- Yy+3#7 2.3.14
INPFO -- Xx+3#7 2.3.14
DRC -- Yy+1#5 2.3.14
DRCO -- Xx+1#1 2.3.14
*ESP
*-OT,*+OT
*RILK
*DEC
HDI
アドレス
周辺機器 ダイレクトコマンド
Xx+0#4~Xx+0#7
Yy+2#4~Yy+2#7
Yy+2#0~Yy+2#3
Yy+3~Yy+6
Xx+3~Xx+6
Xx+2#4~Xx+2#5
Yy+6~Yy+15
Xx+7~Xx+15
直接入力
直接入力
直接入力
直接入力
直接入力
-- 2.3.13
-- 2.3.13
-- 2.2.13
-- 2.3.13
-- 2.3.13
-- 2.3.13
参照
項目
2.3.14
2.3.14
2.3.15
2.3.15
2.3.15
2.3.15
2.3.15
- 41 -
Page 70

2.信号説明 取扱 B-65395JA/01
2.3 信号詳細
2.3.1 準備完了
(1) 準備完了信号 MA
[区分] 入力信号 <Xx+2#7>( 周辺機器制御、ダイレクトコマンド共通)
[機能] サーボアンプモジュールが正常に動作を行なえる状態にあることを通知しま
す。
[入力条件] 下記の場合に”1”になります。
1. サーボアンプモジュールの電源が投入された後、サーボアンプモジュール
の自己診断が正常に完了した時。
下記の場合に”0”になります。
1. サーボアンプモジュールの電源が切断された時。
2. CPU 異常、メモリ異常などの制御装置自体のエラーを検出した時。
(2) サーボ準備完了信号 SA
[区分] 入力信号 <Xx+1#6> (周辺機器制御、ダイレクトコマンド共通)
[機能] サーボアンプモジュールが正常に動作を行なえる状態にあることを通知しま
す。逆に、この信号が送出されていない時は、サーボアンプモジュールは動作
していないことを示しています。
[入力条件] 下記の場合に”1”になります。
1. 制御装置の電源が投入された後, サーボ系の診断が正常に完了した時。
2. サーボアラーム発生後, そのアラームがリセットで解除された時。
3. 非常停止が解除された時。
下記の場合に”0”になります。
1. 制御装置の電源が切断された時。
2. サーボアラームを検出した時。
3. 非常停止がかけられた時。
注
サーボオフ状態では SA を”0”にする別の条件がない限り SA は”1”のま
まです。
- 42 -
Page 71

B-65395JA/01 取扱 2.信号説明
2.3.2 リセット・非常停止
(1) 非常停止信号 *ESP
[区分] 出力信号 <Yy+1#1> (周辺機器制御、ダイレクトコマンド共通)
[機能] 制御装置を緊急に停止します。
[動作] ”0”になると制御装置は下記のように動作します。
1. 軸移動中は, 緊急に停止します。
2. 停止後, リセットがかかります。
3. 非常停止信号が”0”の間サーボアンプモジュールは動作しません。したが
ってサーボ準備完了信号 SA は”0”になります。だたし, その間に移動した
量は制御装置の現在座標に, 反映されますので位置は失いません(フォロ
ーアップ)。
4. 非常停止信号が”0”の間はジョグ送りおよび機能コード指令はできません。
(2) 外部リセット信号 ERS
[区分] 出力信号 <Yy+1#0> (周辺機器制御、ダイレクトコマンド共通)
[機能] サーボアンプモジュールをリセットします。
[動作] ”1”になるとサーボアンプモジュールは下記のように動作します。
1. 軸移動中は, 緊急に減速停止します。
2. 停止後, リセットがかかります。下記の動作を実行します。
・機能コード指令は, 実行中指令, バッファリングされている指令, そして
入力信号上の指令もキャンセルします。
・アラーム状態であればキャンセルできるアラームをキャンセルします。
3. 外部リセット信号が”1”の間はジョグ送りおよび機能コード指令はできま
せん。
(3) リセット中信号 RST
[区分] 入力信号 <Xx+2#1> (周辺機器制御、ダイレクトコマンド共通)
[機能] 制御装置がリセット中であることを通知します。
[入力条件] 下記の場合に”0”になります。
1. リセット処理が終了した時。
下記の場合に”1”になります。
1. リセット処理中である時。
外部リセット信号 ERS[2.3.2(2)]が”1”になっている間
非常停止信号*ESP[2.3.2(1)]が”0”になっている間
- 43 -
Page 72

2.信号説明 取扱 B-65395JA/01
2.3.3 アラーム
(1) アラーム信号 AL
[区分] 入力信号 <Xx+2#6> (周辺機器制御、ダイレクトコマンド共通)
[機能] サーボアンプモジュールがアラーム状態であることを通知します。
[入力条件] 下記の場合に”1”になります。
1. サーボアンプモジュールがアラーム状態になった時。
アラーム状態には次のものがあります。
1) P/S アラーム
2) パルスコーダアラーム
3) サーボアラーム
4) オーバトラベルアラーム
下記の場合に”0”になります。
1. サーボアンプモジュールにリセットをかけてアラームを解除した時。
アラームによってはリセットでキャンセルしてもアラームの原因自体が
解除されてないとまたすぐにアラーム状態となり AL が送出されます。こ
のような場合一瞬 AL が”0”になることがあります。
(2) アブソリュートパルスコーダバッテリアラーム信号 APBAL
[区分] 入力信号 <Xx+7#1> (周辺機器制御)
<Xx+3#1> (ダイレクトコマンド)
[機能] アブソリュートパルスコーダのバッテリ交換時期であることを通知します。
[入力条件] 下記の場合に”1”になります。
1. アブソリュートパルスコーダのバッテリ電圧が低下した時。
下記の場合に”0”になります。
1. アブソリュートパルスコーダのバッテリを交換し規定の電圧以上になっ
た時。リセットでキャンセルしますがアラームの原因自体が解除されてな
いとまたすぐにアラーム状態となり APBAL が送出されます。このような
場合一瞬 APBAL が”0”になることがあります。
注意
本信号にて機械操作盤で表示を行なって下さい。ホストコントローラ
側では、パワーメイト CNC マネージャ画面を出していないと、この
バッテリアラームは表示されません。
- 44 -
Page 73

B-65395JA/01 取扱 2.信号説明
2.3.4 モード選択
(1) モード選択信号 MD1, MD2, MD4
[区分] 出力信号<Yy+0#0~#2>(周辺機器制御、ダイレクトコマンド共通)
[機能] 操作モードを選択します。
[動作] モード選択信号は MD1, MD2, MD4 の 3 ビットから構成されるコード信号で
あり、これらの信号の組み合わせにより自動運転(AUTO), 手動ハンドル送り
(HANDLE), 手動連続送り(JOG)の 3 つのモードが選択できます。
MD4 MD2 MD1
0 0 1
1 0 0
1 0 1
注意
自動運転中は、モードを AUTO から他のモードヘ切り替えないで下
さい。自動運転停止後、切り替えて下さい。
注
手動ハンドル送りの詳細は、「3.10 手動ハンドルインタフェース」
または「5 外部パルス入力機能」を参照して下さい。
自動運転(AUTO)
手動ハンドル送り(HANDLE)
+X,-X による手動連続送り(JOG)
補足
- 45 -
Page 74

2.信号説明 取扱 B-65395JA/01
2.3.5 手動連続送り
(1) 送り軸方向選択信号 +X, -X
[区分] 出力信号 <Yy+0#4,#5>(周辺機器制御、ダイレクトコマンド共通)
[機能] 手動連続送りの移動(回転)方向の選択と, その方向への送りを始めます。
[動作] 手動連続送り(JOG)モードが選択されている時有効な信号で、送り方向を示し
ます。手動連続送りモードを選択した後、送り軸方向選択信号+X, -X のう
ち動かそうとする軸方向の信号を”0”の状態から”1”にすると、該当する方向に、
この信号が”1”になっている間オーバライド信号*OV1~*OV8[2.3.7(1)]あ
るいは手動早送り選択信号 RT[2.3.7(2)]により決まる速度で移動します。
注
1 -方向選択と+方向選択とを同時に”1”にすると, どちらも選択され
ず, ”0”の場合と等価にみなされます。
2 手動連続送り(JOG)モードが選択されるよりも前に, 送り軸方向選択
信号が”1”になっている場合, それらの信号は無効です。
手動連続送り(JOG)モードを選択した後で, いったん”0”にし, その
後”1”にする必要があります。サーボアンプモジュールは、信号の立
ち上りをとらえて送りを開始します。
2.3.6 状態信号
(1) 残移動量範囲内信号 DEN2
[区分] 入力信号 <Xx+0#0> (周辺機器制御、ダイレクトコマンド共通)
[機能] サーボアンプモジュールは、軸移動指令の残り分配パルス(残移動量)がパラメ
[入力条件] 下記の場合”1”になります。
ータ設定値以下に、なったことを通知します。
1. 軸移動指令の残り分配パルス(残移動量)がパラメータ設定値以下に、なっ
た時。
下記の場合”0”になります。
1. 軸移動指令の残り分配パルス(残移動量)がパラメータ設定値以上ある時。
2. 残移動量範囲内信号用パラメータ値がゼロの時。
注
1 手動連続送り(JOG)中は, ”0”のままです。
2 次の移動指令が来るまで前の状態を保ちます。
- 46 -
Page 75

B-65395JA/01 取扱 2.信号説明
(2) 分配パルス信号 IPLX
[区分] 入力信号 <Xx+0#1> (周辺機器制御、ダイレクトコマンド共通)
[機能] サーボアンプモジュールは、軸移動指令の分配パルス(残移動量)があることを
通知します。
[入力条件] 下記の場合”1”になります。
1. 軸移動指令の分配パルス(残移動量)がある時。
下記の場合”0”になります。
1. 軸移動指令の分配パルス(残移動量)が無くなった時。
注
手動連続送り(JOG)でも有効です。
(3) 加減速パルス信号 SUPX
[区分] 入力信号 <Xx+0#2> (周辺機器制御、ダイレクトコマンド共通)
[機能] サーボアンプモジュールは、軸移動の分配パルスが加減速制御部に溜りパルス
として残っていることを通知します。
[入力条件] 下記の場合”1”になります。
1. 軸移動の分配パルスが加減速制御部に溜りパルスとして残っている時。
下記の場合”0”になります。
1. 軸移動の分配パルスが加減速制御部にも無くなった時。
(4) インポジション信号 INPX
[区分] 入力信号 <Xx+0#3> (周辺機器制御、ダイレクトコマンド共通)
[機能] サーボアンプモジュールは、制御軸がインポジション(指令値に達した)の状態
にあることを通知します。
[入力条件] 下記の場合”1”になります。
1. 制御軸の加減速の遅れ(溜りパルス)がゼロで, かつ, サーボの位置偏差量
もパラメータ設定範囲内にはいっている時。
下記の場合”0”になります。
1. 制御軸の加減速の遅れ(溜りパルス)がゼロでない時。
2. サーボの位置偏差量がパラメータ設定範囲を越えている時。
(5) サーボ位置偏差監視信号 SVERX
[区分] 入力信号 <Xx+7#6> (周辺機器制御)
<Xx+3#6> (ダイレクトコマンド)
[機能] サーボアンプモジュールは、サーボ位置偏差量がパラメータ設定値を越えてい
ることを通知します。
[入力条件] 下記の場合”1”になります。
1. サーボ位置偏差量がパラメータ設定値を越えている時。
下記の場合”0”になります。
1. サーボ位置偏差量のパラメータ設定値がゼロである時。
2. サーボ位置偏差量がパラメータ設定値の範囲内にある時。
- 47 -
Page 76
2.信号説明 取扱 B-65395JA/01
(6) 軸移動中信号 MVX
[区分] 入力信号 <Xx+7#2> (周辺機器制御)
<Xx+3#2> (ダイレクトコマンド)
[機能] サーボアンプモジュールは、制御軸が移動中であることを通知します。
[入力条件] 下記の場合”1”になります。
1. 制御軸が移動を開始した時。
2. クランプ中またはサーボオフ中にフォローアップを行う設定(パラメータ
No.010#7(SVFP)=1)で、サーボ位置偏差量(DGN No.032)がゼロでない時。
下記の場合”0”になります。
1. 制御軸が移動を停止し, インポジションになった時。
2. クランプ中またはサーボオフ中にフォローアップを行う設定(パラメータ
No.010#7(SVFP)=1)で、サーボ位置偏差量(DGN No.032)がゼロである時。
注
手動連続送り(JOG)でも有効です。
(7) 移動方向信号 MVDX
[区分] 入力信号 <Xx+7#0> (周辺機器制御)
<Xx+3#0> (ダイレクトコマンド)
[機能] サーボアンプモジュールは、制御軸の移動方向を通知します。
[入力条件] 下記の場合”1”になります。
1. 制御軸がマイナス方向に移動を開始した時。
下記の場合”0”になります。
1. 制御軸がプラス方向に移動を開始した時。
注
1 手動連続送り(JOG)でも有効です。
2 停止中は以前の状態を保っています。マイナス方向に移動し停止して
もこの信号は”0”とはなりません。
3 サーボアンプモジュールは、フォローアップ中でも上記の状態により
出力します。
- 48 -
Page 77

B-65395JA/01 取扱 2.信号説明
(8) 領域信号 PSG1, PSG2
[区分] 入力信号 PSG1<Xx+7#3>, PSG2<Xx+7#4>
(周辺機器制御)
PSG1<Xx+3#3>, PSG2<Xx+3#4>
(ダイレクトコマンド)
[機能] サーボアンプモジュールは、現在の機械座標がそれぞれのパラメータの設定区
間内にあることを 2 点の信号でコード入力します。
[入力条件] 下記の図の様にパラメータを設定した場合, それぞれの区間で PSG1,
PSG2 が下図の様に入力されます。
パラメータ設定座標は, それぞれ(1) から(3) まであります。
(-)───────▼───────▼───────▼──────(+)
機械座標 ABSMT < 1) ≦ABSMT < 2) ≦ABSMT < 3) ≦ ABSMT
←~─区間1─→┃←─区間2─→┃←─区間3─→┃←─区間4─~→
PSG1 ”0”
PSG2 ”0”
━━━━━━━┻━━━━━━━┻━━━━━━┻━━━━━━━━
┃ ”1” ┃ ”0” ┃ ”1”
┃ ”0” ┃ ”1” ┃ ”1”
注
1 サーボアンプモジュールは、フォローアップ中でも上記の状態により
入力します。
2 パラメータ No.007#1(PSSV)が”1”のとき加減速遅れ量, サーボ位置
偏差量等を考慮した位置(実際のモータの位置)により入力します。
(9) 速度制御モード中信号 TRQM
[区分] 入力信号 <Xx+2#2>
[機能] サーボアンプモジュールは速度制御モード中を通知します。
[入力条件] 下記の場合”1”になります。
1. 速度制御の起動がかかり速度制御モード中の時。
下記の場合”0”になります。
1. 速度制御停止指令を実行した時。
2. サーボアラーム、オーバトラベルアラーム、リセット、非常停止、サーボ
オフ時。
- 49 -
Page 78

2.信号説明 取扱 B-65395JA/01
(10) 機能有効信号 OPTENB
[区分] 入力信号 <Xx+1#3> (周辺機器制御、ダイレクトコマンド共通)
[機能] サーボアンプモジュールは機能が有効(使用可能)であることを通知します。
機能には次のものがあります。
・異常負荷検出機能(ソフトオプション機能)
[入力条件] 下記の場合”1”になります。
1. 機能が使用可能になった時
下記の場合”0”になります。
1. 電源投入直後で、機能が準備中の時
2. 機能が手配されていない時
注意
本信号が”1”になるまでは異常負荷検出機能は無効です。必ず本信号
が”1”になったのを確認してから軸移動を開始して下さい。
- 50 -
Page 79

B-65395JA/01 取扱 2.信号説明
2.3.7 送り速度
(1) オーバライド信号 *OV1~*OV8
[区分] 出力信号 <Yy+7#0~#3> (周辺機器制御)
<Yy+2#0~#3> (ダイレクトコマンド)
[機能] ホストは、手動連続送り、切削送り速度にオーバライドをかけます。
[動作] 4 点の 2 進コード信号であり、オーバライド値とつぎのように対応します。
*OV8 *OV4 *OV2 *OV1
1 1 1 1 0
1 1 1 0 10
1 1 0 1 20
1 1 0 0 30
1011 40
1 0 1 0 50
1 0 0 1 60
1 0 0 0 70
0 1 1 1 80
0 1 1 0 90
0 1 0 1 100
0 1 0 0 110
0 0 1 1 120
0 0 1 0 130
0 0 0 1 140
0 0 0 0 150
手動連続送りまたは自動運転の切削送り時、指令された速度に対してこの信号
で指定されたオーバライド値をかけたものが実際の送り速度になります。
(2) 手動早送り選択信号 RT
[区分] 出力信号 <Yy+7#7> (周辺機器制御)
<Yy+2#7> (ダイレクトコマンド)
[機能] ホストは、手動連続送りで早送りを選択します。
[動作] 手動連続送り(JOG)が選択されている時有効な信号で、”1”にすると手動連続送
り速度が早送りとなります。この状態で、送り軸方向選択信号(+X, -X)を”1”
にすると、指令された方向に早送りで送られます。
また手動連続送りが選択されていて、かつ送り軸方向選択信号(+X, -X)が”1”
になっていてオーバライド信号により動いている時に RT を”1”にすると早送
りで送られます。
“0”にすると早送りはもとの速度にもどります。
オーバライド値(%)
- 51 -
Page 80

2.信号説明 取扱 B-65395JA/01
(3) 早送りオーバライド信号 ROV1、ROV2
[区分] 出力信号 <Yy+7#4~#5> (周辺機器制御)
<Yy+2#4~#5> (ダイレクトコマンド)
[機能] ホストは、早送り時のオーバライドを指定します。
[動作] オーバライド量は以下の表のようになります。
ROV2 ROV1
0 0 100%
0 1 50%
1 0 25%
1 1 F0
注
F0 はパラメータ(No.061)により設定された値です。
(4) インクレメンタルフィード信号 MP1, MP2
[区分] 出力信号 <Yy+7#4~#5> (周辺機器制御)
[機能] サーボアンプモジュールの手動ハンドル送りの倍率を選択します。
[動作] サーボアンプモジュールは、手動ハンドルモード中、入力された手動パルス発
生器のパルスに本信号の倍率をかけたパルスだけモータを駆動させます。
MP1 MP2
0 0
0 1
1 0
1 1
注
1 サーボアンプモジュールのパラメータ No.5#5(MP)=1 の場合に有効
です。
2 手動ハンドルモードにおいてのみ有効です。
3 本信号は早送りオーバライド信号と共用しています。手動ハンドルモ
ードでは、インクレメンタルフィード信号を意味し、手動ハンドルモ
ード以外では早送りオーバライド信号を意味します。手動ハンドルモ
ードから他のモードに切り換えるとき、本信号を早送りオーバライド
信号の場合の設定に戻す必要があります。
手動パルス発生器 1 目盛あたりの移動量
1ユーザ単位
10ユーザ単位
100 ユーザ単位
(M/N)ユーザ単位
(M=パラメータ No.62 , N=パラメータ No.63)
オーバライド量
- 52 -
Page 81

B-65395JA/01 取扱 2.信号説明
2.3.8 インタロック
(1) インタロック信号 *ILK
[区分] 出力信号 <Yy+1#3> (周辺機器制御、ダイレクトコマンド共通)
[機能] ホストは、すべての移動指令の送りを止めます。
[入力条件] ”0”の間、すべての移動指令の送りを 0 にして制御軸の送りを止めます。移動
中だった軸は減速停止します。
“0”の間も移動指定そのものは有効に活き続け、信号が”1”に復旧するとただち
に移動を再開します。移動指令以外の指令は影響を受けません。
注
手動連続送り(JOG)でもインタロック信号が有効です。
2.3.9 レファレンス点復帰
(1) レファレンス点復帰完了信号 ZPX
[区分] 入力信号 <Xx+2#0> (周辺機器制御、ダイレクトコマンド共通)
[機能] サーボアンプモジュールはレファレンス点上にいることを通知します。
[入力条件] 下記の場合”1”になります。
1. 手動レファレンス点復帰が完了し, インポジションに入った時。
2. 機能コード指令のレファレンス点復帰指令が完了し, インポジションに入
った時。
下記の場合”0”になります。
1. レファレンス点から離れた時。
(2) レファレンス点確立信号 ZRFX
[区分] 入力信号 <Xx+1#2> (周辺機器制御、ダイレクトコマンド共通)
[機能] サーボアンプモジュールは、レファレンス点確立の状態をホストに通知しま
す。
[入力条件] 下記の場合”1”になります。
1. レファレンス点の確立が完了している時。
下記の場合”0”になります。
1. レファレンス点が確立していない時。
注
パラメータ No.004#2(ZRNO) が”1”のとき有効となります。
- 53 -
Page 82

2.信号説明 取扱 B-65395JA/01
2.3.10 自動運転
(1) 自動運転起動信号 ST
[区分] 出力信号 <Yy+0#7> (周辺機器制御、ダイレクトコマンド共通)
[機能] ホストは、周辺機器制御において ATC 動作の一部およびポイント位置決め等
の機能コード命令の起動をかけます。
ホストは、ダイレクトコマンドにて 32 ブロックバッファリング運転の起動を
かけます。
[動作] 信号を”1”にした後”0”にすると、サーボアンプモジュールは、動作を開始しま
す。周辺機器制御にて ST 信号の有効な機能コードについては項目 3.3.1 機能
コード一覧表を参照下さい。
注
パラメータ STON(No.003#7)にて ST 信号の立ち上がり(オフ→オン)
にて起動をかけることも可能です。
(2) 自動運転起動中信号 STL
[区分] 入力信号 <Xx+1#5> (周辺機器制御、ダイレクトコマンド共通)
[機能] 自動運転起動中を示す信号です。
[入力条件] 下記の場合”1”になります。
自動運転の起動がかかった時
下記の場合”0”になります。
自動運転停止状態になった時
(3) 自動運転中信号 OP
[区分] 入力信号 <Xx+1#7>(周辺機器制御、ダイレクトコマンド共通)
[機能] 一連の自動運転が継続していることを示す信号です。
[入力条件] 下記の場合”1”になります。
自動運転の起動がかかった時。自動運転停止状態でも保持されます。
下記の場合”0”になります。
リセット状態になった時
- 54 -
Page 83

B-65395JA/01 取扱 2.信号説明
(4) ドライラン信号 DRN
[区分] 出力信号 <Yy+7#6>(周辺機器制御)
<Yy+2#6>(ダイレクトコマンド)
[機能] ドライランは自動運転(AUTO モード)の場合に有効です。
ドライラン状態では自動運転で指令される送り速度指令は無視され、速度はオ
ーバライド信号*OV1~*OV8[2.3.7(1)]によって定められる手動送り速度
となります。また早送りに対してもドライランは有効です。ドライラン中に信
号 RT[2.3.7(2)]を ”1”にすると、そのブロックが早送りのブロックならば「早
送り速度」で切削送りであれば「手動送り速度の最大値の速度」で送られ、信
号 RT を”0”にすれば、また「手動送り速度と同じ送り速度」にもどります。
[動作] ”1”にすると、ドライラン状態となります。
“0”にすると送り速度は自動運転で指令された速度にもどります。
- 55 -
Page 84

2.信号説明 取扱 B-65395JA/01
2.3.11 クランプ・アンクランプ(周辺機器制御のみ)
注
以下の信号を使用する場合は、速度制御および外部パルス入力機能は
使用できません。
(1) アンクランプ指令信号 UCPC2
[区分] 入力信号 <Xx+1#4>
[機能] 機械のクランプ/アンクランプの実際の操作はホスト側で行います。サーボア
ンプモジュールは、周辺機器制御の機能コード命令実行時に本信号を出力しホ
スト側にクランプ/アンクランプの操作を依頼します。
[入力条件] 下記の場合”1”になります。
ホストに、アンクランプ操作を要求する時
下記の場合”0”になります。
ホストに、クランプ操作を要求する時
サーボアンプモジュールは、機能コードによる移動指令開始時、UCPC2 を”1”
にします。また移動指令終了時、”0”にします。詳細については、周辺機器制
御の各機能コードのタイミング図を参照下さい。
注
本信号は、パラメータ NCLP(No.003#1)が”0”の時、有効となります。
(2) クランプ/アンクランプ状態出力信号 UCPS2
[区分] 出力信号 <Yy+0#6>
[機能] サーボアンプモジュールから UCPC2 によりクランプ/アンクランプの要求が
きた場合、ホストは、クランプ/アンクランプの操作を行い、操作が完了した
らクランプ/アンクランプの状態をサーボアンプモジュールに通知します。こ
れを受けてサーボアンプモジュールは次の処理へ進みます。
[動作] アンクランプ状態になったら”1”にします。
クランプ状態になったら”0”にします。
詳細については、周辺機器制御の各機能コードのタイミング図を参照下さい。
注
本信号は、パラメータ NCLP(No.003#1)が”0”の時、有効となります。
- 56 -
Page 85

B-65395JA/01 取扱 2.信号説明
2.3.12 サーボオフ
(1) サーボオフ指令信号 SVFX
[区分] 出力信号 <Yy+1#2> (周辺機器制御、ダイレクトコマンド共通)
[機能] ホストは、制御軸をサーボオフにします。すなわち、サーボモータに電流を流
すのを止めます。位置制御は行えなくなりますが, 位置検出そのものは働き続
けますので、位置を失うことはありません。
[動作] ”1”の間, サーボオフ状態になります。サーボオフ中は位置制御は行えませんか
ら, 機械が外力で動くと、機械座標がずれたままになります。そのずれた量の
処置は、パラメータにより次のいずれかを選択できます。
1. サーボの誤差量としてエラーカウンタに残します。
この方法の場合、サーボオフ信号が”0”に復旧した時点で, 誤差を打ち消そ
うとして機械が動きます。
2. フォローアップします。
すなわち, 機械が動いた分, 指令があったものとみなしてエラーカウンタ
が 0 になるように制御装置の現在位置を動かします。
この方法の場合は, サーボオフ信号が”0”に復旧しても機械はずれたまま
の位置を保ちますが、制御装置の現在位置は機械の位置に対応しています
から、次にアブソリュート指令を行うと正しい位置に移動します。
[用途] 一般に上記 1.は制御軸が停止している間機械的にクランプしたい時クランプ
力がサーボモータの力よりも強い場合に, クランプ中のサーボモータに過大
な電流が流れるのを防止するために使用します。ホストは、また通常サーボオ
フ信号を”1”にしている間は, インタロック信号も”0”にします。
上記 2.は一般にメカハンドルのために使用します。メカ的なハンドル送り機構
によってモータを動かし機械を動かすというものです。
- 57 -
Page 86

2.信号説明 取扱 B-65395JA/01
2.3.13 周辺機器制御機能コード関連
(1) 動作完了信号 OPC1, OPC2, OPC3, OPC4
[区分] 入力信号 <Xx+0#4~#7>
[機能] サーボアンプモジュールは、各機能コードの完了状況を通知します。ホストは
この信号の状態によりホスト側のシーケンスを進めます。
[入力条件] 入力タイミングは、各機能コードのタイミング図を参照下さい。
OPC1 は指令コマンドを受け取ったことをホストに通知します。サーボアンプ
モジュールは、アンクランプ処理をホストが行うようアンクランプ指令
(UCPC2=1)を通知します。
OPC2 はアンクランプ完了指令(UCPS2=1)を受け取ったことをホストに通知
します。サーボアンプモジュールは軸動作を起動します。
OPC3 は軸動作が完了してインポジション状態になった時、クランプ指令
(UCPC2=0)と同時にホストに通知します。
OPC4 はクランプ完了指令(UCPS2=0)を受け取り、すべての指令コマンドが
完了したことをホストに通知します。
入力時間は、パラメータ No.166 に設定します。
注意
アンクランプ指令信号(UCPC2)およびクランプ/アンクランプ状態出
力信号(UCPS2)を使用しない(パラメータ No.003#1(NCLP)=1)場合、
外部リセット、非常停止、アラームなどによって指令コマンドが中断
された場合も OPC4 はホストに出力されます。
注
アンクランプ指令信号(UCPC2)およびクランプ/アンクランプ状態出
力信号(UCPS2)を使用しない(パラメータ No.003#1(NCLP)=1)場合、
OPC2、OPC3 はホストに出力されません。またこの場合、軸動作が
完了してインポジション状態になった時、OPC4 がホストに出力され
ます。
(2) 機能コード
[区分] 出力信号 <Yy+2#4~#7>
[機能] ホストは、周辺機器制御の機能コードをセットします。
[出力条件] 出力タイミングは、各機能コードのタイミング図を参照下さい。
詳細については 3.3.機能コードおよび 3.4.機能コード詳細を参照下さい。
(3) 指令データ 1
[区分] 出力信号 <Yy+2#0~#3>
[機能] ホストは、周辺機器制御の送り速度などを与える指令データ 1 をセットします。
[出力条件] 出力タイミングは、各機能コードのタイミング図を参照下さい。
詳細については 3.3.機能コードおよび 3.4.機能コード詳細を参照下さい。
- 58 -
Page 87

B-65395JA/01 取扱 2.信号説明
(4) 指令データ 2
[区分] 出力信号 <Yy+3~Yy+6>
[機能] ホストは、周辺機器制御の移動距離などを与える指令データ 2 をセットします。
[出力条件] 出力タイミングは、各機能コードのタイミング図を参照下さい。
詳細については 3.3.機能コードおよび 3.4.機能コード詳細を参照下さい。
(5) 応答データ
[区分] 入力信号 <Xx+3~Xx+6>
[機能] (A) サーボアンプモジュールは、ポイント・ATC 制御のときの現在位置番号(ポ
イント・タレット・マガジン番号)を出力します。本応答データは位置決め
完了時にセットされます。それまでは前の番号を出力します。
(B) パラメータ No.020 の設定により次のデータをリアルタイムに出力するこ
とも可能です。
・機械座標値
・ワーク座標値
・モータの電流値
・スキップ測定データ
・実送り速度
・実回転数
・トルク指令
注
スキップ測定データは、スキップ信号入力時または終点到達時に出力
されます。
(C) DSAL 信号[2.3.13(9)]が”1”の場合、サーボアンプモジュールは、アラー
ム個数と 1 つ目のアラーム番号を出力します。
[入力条件] 詳しくは「機能コード指令一覧表」を参照下さい。
注意
1 本データをホストが使用する場合、ホストでの表示用に限定されま
す。
本データは、32 ビットの DI 信号で構成されており、データ更新のタ
イミングが全ビット同一でなくばらつきがあります。
このため軸移動中に座標値を読む時、たまたまデータ更新中であると
正しい位置が読めないことがあります。
本データは、ホスト側での位置表示に準備されたものであり、このデ
ータを機械の領域チェックに使用することはできません。
ただしホストとサーボアンプモジュール間で同期をとることによ
り、軸移動中においても正しい座標値を読み取ることが可能となりま
す。
詳細については「3.8 応答データ読み出し機能レベルアップ」を参
照して下さい。これはリアルタイムに出力されるデータすべてに該当
します。
- 59 -
Page 88

2.信号説明 取扱 B-65395JA/01
注意
2 現在位置番号(ポイント・タレット・マガジン番号)はレファレンス点
が確立するまでは出力されません。ただし、パラメータ
No.007#2(NZRPO)が”1”のときはレファレンス点が確立していなく
ても出力されます。
3 現在位置番号(ポイント・タレット・マガジン番号)は、電源投入時は
0 であり、周辺機器制御の ATC 動作、ポイント位置決めまたはレフ
ァレンス点復帰にて位置決め完了時に出力されます。その後、JOG
運転等の移動指令を行うと現在位置番号と軸の現在位置との関係が
合わなくなりますので、ATC 動作、ポイント位置決めまたはレファ
レンス点復帰完了後、JOG 運転等の移動指令の起動をかけた後は、
ホストにて現在位置番号の出力を見て軸の現在位置を制御すること
はできません。また、ATC 動作の割り出し指令起動後、途中でリセ
ットあるいはアラーム等が発生して中断した時も、現在位置番号と軸
の現在位置との対応は合っていません。
ただし、タレット・マガジン番号に関しては改良仕様により、上記制
約をなくして常時正しい番号を出力することができます。詳細につい
ては「3.9 タレット・マガジン番号出力改良」を参照して下さい。
(6) 応答データ内容確認信号 DSP1, DSP2
[区分] 入力信号 <Xx+2#4~#5>
[機能] サーボアンプモジュールは、応答データの内容を通知します。
[入力条件] 以下の表のように信号の組合わせでサーボアンプモジュールが応答データに
出力中のデータの内容をセットします。
DSP2 DSP1
0 0
1 1
1 0
0 1
注
1 座標値、モータの電流値、スキップ測定データ、トルク指令の区別は、
パラメータ No.20 の設定値によります。
2 実送り速度または実回転数の区別は、パラメータ No.20 の設定値に
よります。
出力していません
座標値またはモータの電流値
またはスキップ測定データ
またはトルク指令
現在位置番号(ATC、ポイント番号)
実送り速度または実回転数
応答データ内容
- 60 -
Page 89

B-65395JA/01 取扱 2.信号説明
(7) 応答データ書き込み完了信号 ABSWT
[区分] 入力信号 <Xx+1#0>
[機能] サーボアンプモジュールが応答データの書き込み(Xx+3~Xx+6)を行った後、
本信号を反転してホストに通知します。
[動作] サーボアンプモジュールは、ABSWT と ABSRD の排他的論理和をとり結果
が”0”になると応答データ(Xx+3~Xx+6)を書き込み、本信号を反転します。
(8) 応答データ読み取り完了信号 ABSRD
[区分] 出力信号 <Yy+1#4>
[機能] ホストが応答データの読み取り(Xx+3~Xx+6)を行った後、本信号を反転して
サーボアンプモジュールに通知します。
[動作] ホストは、ABSWT と ABSRD の排他的論理和をとり結果が”1”になると応答
データ(Xx+3~Xx+6)を読み取り、本信号を反転します。
(9) アラーム出力指令信号 DSAL
[区分] 出力信号 <Yy+0#3>
[機能] ホストは、応答データにアラーム情報を出力するよう指定します。DSAL に”1”
が出力されると応答データは下記の通りです。
Xx+3
Xx+4,Xx+5
[動作] ”0”の間、応答データは、タレット, マガジン, ポイント番号または、座標値ま
たはモータの電流値を出力します。
“1”の間、応答データは、アラーム個数と 1 つ目のアラーム番号を出力します。
アラーム個数(バイト型)
アラーム番号(ワード型)
(10) アラーム出力状態確認信号 DSALO
[区分] 入力信号 <Xx+2#3>
[機能] サーボアンプモジュールは、応答データの内容を通知します。
[入力条件] ”0”の間、応答データは、タレット, マガジン, ポイント番号または、座標値ま
たはモータの電流値を出力しています。
“1”の間、応答データは、アラーム個数と 1 つ目のアラーム番号を出力してい
ます。
- 61 -
Page 90

2.信号説明 取扱 B-65395JA/01
2.3.14 ダイレクトコマンド機能コード関連
(1) 機能コード指令ストローブ信号 EBUF
[区分] 出力信号 <Yy+4#7>
[機能] ホストは、機能コード(Yy+5), 指令データ(Yy+6~Yy+15)を設定した後, この
信号の論理を反転させサーボアンプモジュールへ機能コード指令が準備でき
たことを知らせます。
[動作] サーボアンプモジュールは EBUF と EBSY の排他的論理和をとり結果が”1”
になると下記のように動作します。
(A) 機能コードの指令がバッファリングする指令である時
1. 機能コード指令バッファが空いていれば, 機能コード指令をサーボア
ンプモジュール内部の機能コード指令バッファに取り込みます。
2. 機能コード指令バッファが空いていない場合は, このバッファが空く
のを待ちます。つまりサーボアンプモジュールへの取り込みは行なわ
れず次の機会に回されます。
(B) 機能コードの指令がバッファリングしないで即座に実行する指令である
時
1. 機能コードの指令は, 即座に実行用バッファに取り込まれこの機能コ
ード指令に従い処理を即座に始めます。
(2) 機能コード指令読取完了信号 EBSY
[区分] 入力信号 <Xx+4#7>
[機能] サーボアンプモジュールは、機能コード指令をサーボアンプモジュール内に取
り込んだことを知らせます。
取り込んだ後 EBUF とEBSY の排他的論理和の結果が”0”となりますので次の
機能コード指令を与えることができます。
[入力条件] 下記の条件で”0”または”1”の状態を反転させます。
機能コード指令をサーボアンプモジュール内に取り込んだ時。
(3) 機能コード
[区分] 出力信号 <Yy+5>
[機能] ホストは、機能コード指令でどの指令をするか指定します。
[動作] サーボアンプモジュール内に取り込まれ実行される時この指定に従った動作
をします。
詳しくは「ダイレクトコマンド機能詳細」を参照下さい。
(4) 指令データ
[区分] 出力信号 <Yy+6~Yy+15>
[機能] ホストは、機能コード命令のデータを与えます。
[動作] サーボアンプモジュール内に取り込まれ実行される時この指定に従った動作
をします。
詳しくは「ダイレクトコマンド機能詳細」を参照下さい。
- 62 -
Page 91

B-65395JA/01 取扱 2.信号説明
(5) 応答データ
[区分] 入力信号 <Xx+7~Xx+15>
[機能] (A) サーボアンプモジュールは、機能コード指令の実行結果を返します。
(B) サーボアンプモジュールは、機能コード指令で要求されたデータを返しま
す。
(C) サーボアンプモジュールは、連続読み取り指令で要求された現在位置など
のデータを常時出力します。
[入力条件] (A) サーボアンプモジュールは、機能コード指令の実行結果を出力します。移
動指令などバッファにためられるタイプの命令ではいちいち実行結果を返
さなくすることもできます。
(B) サーボアンプモジュールは、アラーム情報など機能コードで要求されたデ
ータを出力します。
(C) 現在位置など常時監視したいデータをホストが受け取る時、一度だけ要求
を出しておけばサーボアンプモジュールは、データを連続して出力します。
サーボアンプモジュールは上記のデータまたは結果を設定したら EOSTB
の論理を反転します。EOREND と EOSTB の排他的論理和の結果が”1”の
時読み取り可能です。
常時出力データの出力であるかは EOPC で区別します。”0”で A),B)、”1”
で常時出力データ C) となります。
(6) 常時出力データ出力中信号 EOPC
[区分] 入力信号 <Xx+4#2>
[機能] サーボアンプモジュールは、機能コード指令で要求された常時出力データを応
答データに出力していることを通知します。
[入力条件] 下記の場合”1”になります。
1. 機能コード指令で要求した常時出力データを応答データに出力中である
時。
下記の場合”0”になります。
1. 機能コード指令で要求した常時出力以外のデータを応答データに出力中
である時。
(7) 応答データ読み取り可信号 EOSTB
[区分] 入力信号 <Xx+4#6>
[機能] サーボアンプモジュールは、機能コード指令の要求に従ったデータを応答デー
タに出力してその読み取りが可能であることを通知します。
[入力条件] 下記の条件で”0”または”1”の状態を反転させます。
1. 応答データが読み取り可能である時。
- 63 -
Page 92
2.信号説明 取扱 B-65395JA/01
(8) 応答データ読み取り完了信号 EOREND
[区分] 出力信号 <Yy+4#6>
[機能] ホストは、応答データの読み取りが完了したことをサーボアンプモジュールに
通知します。
[動作] ”0”または”1”の状態を反転させるとサーボアンプモジュールは下記のように動
作します。
1. 機能コード指令の実行結果を応答データに出力します。
2. 機能コード指令にデータ出力指令がある場合は, この指令を実行してその
データまたは結果を応答データに出力します。
注
EOSTB と EOREND の排他的論理和が”1”の場合は, 次の指令のデー
タが出力できなくなりますので、しかるべき処理をして EOREND の
論理を反転して下さい。
(9) 指令コマンド継続通知信号 ECNT
[区分] 出力信号 <Yy+4#0>
[機能] ホストは、指令コマンドのデータ量が多く一度で送りきれない場合、ECNT
を 1 にして、まだデータが残っていることをスレーブに通知します。
[動作] サーボアンプモジュールは、ECNT が”1”になると下記のように動作します。
1. バッファにある指令データを受け取った後、EBSY を反転し EBUF の状態
と一致させ、次のデータの送信を促してきます。
一連の指令コマンドの最後のデータの時”0”とします。
(10) PMM データ信号 USR1
[区分] 入力信号 <Xx+4#3>
[機能] ダイレクトコマンドは、パワーメイト CNC マネージャ機能も同時に同じ領域
を使用してデータのやり取りを行っています。USR1 が 0 の場合は、ラダーに
対する応答ですので読みだし処理を行うことが必要です。USR1 が 1 の場合、
応答コマンド(Xx+4~)はパワーメイト CNC マネージャ用であるためホストの
ラダーは無視します。
[入力条件] 下記の場合”1”になります。
1. 応答コマンドのデータがパワーメイト CNC マネージャのデータである時。
下記の場合”0”になります。
1. 応答コマンドのデータがラダーからのデータである時。
- 64 -
Page 93

B-65395JA/01 取扱 2.信号説明
(11) 応答データ継続通知信号 ECONT
[区分] 入力信号 <Xx+4#0>
[機能] 応答コマンドのデータ量が多く一度のやり取りで全てのデータが送れない場
合、ECONTが 1となっていますので、現在のデータの読みだしを行なった後、
ホストは、次のデータを待ちます。ホストは、ECONT が 0 となるまで繰り返
してデータの読みだしを行う必要があります。なお、”次のデータ”は Xx+5 か
ら入力されます。
[入力条件] 下記の場合”1”になります。
1. 応答コマンドのデータがまだ残っている時。
下記の場合”0”になります。
1. 応答コマンドをすべて読み出した時。
(12) 機能コード指令完了通知信号 ECF
[区分] 入力信号 <Xx+4#5>
[機能] NMOD を 1 に設定して機能コード指令実行完了通知モードに
した場合、サーボアンプモジュールは、この指令の位置決めが完了したことを
ECF を 1 にして通知し、ホストから応答があるまで次のコマンドの実行を待
ちます。ホストは「FIN 指令」コマンドを指令して、次のコマンドに進めます。
[入力条件] 下記の場合”1”になります。
1. NMOD を 1 に設定して機能コード指令実行完了通知モードにした場合で、
機能コードによる位置決めが完了した時。
下記の場合”0”になります。
1. 「FIN 指令」コマンドが実行された時。
(13) アラーム信号 DAL
[区分] 入力信号 <Xx+4#1>
[機能] サーボアンプモジュールにアラームが発生するとサーボアンプモジュールは、
DAL を 1 にします。ホストは、アラームの詳細が必要なときには、「アラー
ム情報の読み出し」コマンドを指令します。
[入力条件] 下記の場合”1”になります。
1. スレーブにアラームが発生した時。
下記の場合”0”になります。
1. スレーブがアラームでない時。
(14) 待ち合わせ信号 WAT
[区分] 入力信号 <Xx+1#0>
[機能] サーボアンプモジュールは、待ち合わせ状態に入ったことをホストに通知しま
す。ホストは必要な処理を行った後待ち合わせ完了信号”WFN”を返し運転を
続行させます。メモリ運転でサーボアンプモジュールが連続動作中にホスト側
に処理を依頼する場合に使用します。
[入力条件] 下記の場合”1”になります。
1. メモリ運転中サーボアンプモジュールが待ち合わせ指令を実行した時。
下記の場合”0”になります。
1. ホストが待ち合わせ完了信号”WFN”を 0 から 1 にした時。
- 65 -
Page 94

2.信号説明 取扱 B-65395JA/01
(15) 待ち合わせ完了信号 WFN
[区分] 出力信号 <Yy+1#4>
[機能] サーボアンプモジュールが待ち合わせ信号”WAT”を出力し待ち合わせ状態に
ある時、ホストは、サーボアンプモジュールの待ち合わせ状態を終わらせます。
サーボアンプモジュールは完了信号を受け取ると次の指令を実行します。
[動作] サーボアンプモジュールが待ち合わせ状態にある時サーボアンプモジュール
は待ち合わせ信号”WAT”を”1”にします。
この時 WFN を”1”にすると下記のように動作します。
1. サーボアンプモジュールは待ち合わせ信号”WAT”を”0”にします。ホスト
は待ち合わせ信号 WAT が”0”になるのを確認し WFN を”0”に戻します。サ
ーボアンプモジュールは待ち合わせを完了して次の指令を実行します。
(16) メモリ登録信号 INPF
[区分] 出力信号 <Yy+3#7>
[機能] ホストは、サーボアンプモジュールのメモリに機能コード指令を記憶させ、こ
のデータでメモリ運転することができます。INPF を”1”にして位置決め指令な
どのバッファリングタイプの機能コード指令を行うと、その指令は実行されず
にメモリに登録されます。最大 32 ブロック登録できます。一連の登録作業が
終了した時、INPF を”0”に戻します。この指令は電源がオフされると消えます
ので、メモリ運転する前に登録しておく必要があります。
また、メモリにデータが記憶されている状態で再度 INPF を”1”にすると、登
録されていたデータはクリアされ初めから登録されます。
[動作] INPF を”1”にしてバッファリングタイプの機能コード指令を行うと、その指令
は実行されずにメモリに記憶されます。
(17) メモリ登録中信号 INPFO
[区分] 入力信号 <Xx+3#7>
[機能] サーボアンプモジュールがメモリ登録モード中であることをホストに通知し
ます。この信号が”1”の間に行われた位置決め指令などのバッファリングタイ
プの機能コード指令は、実行されずにメモリに記憶されます。
[入力条件] 下記の場合”1”になります。
1. ホストが INPF を”1”としてメモリ登録モードを指令し、サーボアンプモジ
ュールがメモリ登録モードになった時。
下記の場合”0”になります。
1. ホストが INPF を”0”としてメモリ登録モードを解除し、サーボアンプモジ
ュールがメモリ登録モードをぬけた時。
- 66 -
Page 95

B-65395JA/01 取扱 2.信号説明
(18) インタフェース切り替え信号 DRC
[区分] 出力信号 <Yy+1#5>
[機能] ホストは、使用するインタフェース(周辺機器制御インタフェースまたはダイ
レクトコマンドインタフェース)をサーボアンプモジュールに通知します。
[動作] ”0”の間、スレーブは周辺機器制御インタフェースで動作します。”1”の間、サ
ーボアンプモジュールはダイレクトコマンドインタフェースで動作します。ま
た、サーボアンプモジュールは同時に、インタフェース状態通知信号 DRCO
[2.3.14(19)]をホストへ出力します。ホストは DRCO を確認後、各種コマン
ドを発行します。
“DRC”信号を切り換えたら”DRCO”信号が追従して切り換わってから更に 1 ス
キャン以上待ってから指令を発行して下さい。また、”DRCO”が切り換わる前
に再度”DRC”信号を反転させると、サーボアンプモジュールとのデータの通信
が正しく行なえなくなリます。再度”DRC”信号を反転させるには”DRCO”信号
が追従して切り換わってから更に 1 スキャン以上待ってから行って下さい。
注
DRC は、通常、電源が入っている途中で切り替えることはありませ
ん。もし、切り替える必要が生じた場合、自動運転中、JOG 運転中
でないリセット状態にて切り替えて下さい。またモータがインポジシ
ョンをはずれている状態では切り替えないで下さい。
(19) インタフェース状態通知信号 DRCO
[区分] 入力信号 <Xx+1#1>
[機能] サーボアンプモジュールは、現在のインタフェースの状態(周辺機器制御イン
タフェースまたはダイレクトコマンドインタフェース)をホストに通知します。
ホストは DRCO 信号を確認後、各種コマンドを発行します。
[入力条件] 下記の場合”1”になります。
1. スレーブがダイレクトコマンドインタフェース状態の時。
下記の場合”0”になります。
1. スレーブが周辺機器制御インタフェース状態の時。
- 67 -
Page 96

2.信号説明 取扱 B-65395JA/01
2.3.15 直接入力信号
注
以下の信号はホスト/サーボアンプモジュール間の FANUC I/O Link
上のインタフェース信号ではありません。
(1) 非常停止信号 *ESP
[区分] サーボアンプモジュール直接入力信号
[機能] ホストは、サーボアンプモジュールを緊急に停止します。
[動作] ”0”になるとサーボアンプモジュールは下記のように動作します。
1. 軸移動中は, 緊急に停止します。
2. 停止後, リセットがかかります。
3. 非常停止信号が”0”の間サーボアンプモジュールは動作しません。したが
ってサーボ準備完了信号 SA は”0”になります。だたし, その間に移動した
量はサーボアンプモジュールの現在座標に, 反映されますので位置は失い
ません(フォローアップ)。
4. 非常停止信号が”0”の間はジョグ送りおよび機能コード指令はできません。
(2) オーバトラベル信号 *-OT, *+OT
[区分] サーボアンプモジュール直接入力信号
[機能] ホストは、制御軸が下記の方向のストロークリミットまで達したことを通知し
ます。
*-OT はマイナス方向のストロークリミットに達した。
*+OT はプラス方向のストロークリミットに達した。
[動作] ”0”になるとサーボアンプモジュールは下記のように動作します。
1. 制御軸を零速度停止による減速で緊急に停止させ, 入力方向の OT アラー
ムとします。
手動連続送りまたは手動ハンドル送りにて逆方向に移動させることは可
能です。
機能コード指令の実行及び指令の取り込みは停止します。
2. いったん”0”になった方向は記憶します。信号が”1”に復旧しても OT アラ
ームをリセットするまでの間, 制御軸をこの方向に動かすことはできませ
ん。
(3) 高速インタロック信号 *RILK
[区分] サーボアンプモジュール直接入力信号
[機能] ホストは、すべての移動指令の送りを止めます。
[動作] サーボアンプモジュールは、”0”の間、すべての移動指令の送りを 0 にして制
御軸の送りを止めます。移動中だった軸は減速停止します。
“0”の間も移動指令そのものは有効であり, 信号が”1”に復旧するとただちに移
動を再開します。移動指令以外の指令は影響を受けません。
- 68 -
Page 97

B-65395JA/01 取扱 2.信号説明
(4) レファレンス点復帰用減速信号 *DEC
[区分] サーボアンプモジュール直接入力信号
[機能] ホストは、レファレンス点復帰指令の送りを減速します。
[動作] サーボアンプモジュールは、”1”から”0”になると、レファレンス点復帰の送り
を減速します。減速後、FL 速度(パラメータ No.054)で移動します。
FL 速度で移動中、”0”から”1”になると、その後の最初のグリッドで移動中の
軸は停止し、その位置をレファレンス点とし、レファレンス点復帰完了信号
(ZPX)が”1”になります。
詳しくは「3.5 ドグ付レファレンス点復帰機能」を参照下さい。
注
本信号使用時、高速インタロック信号(*RILK)は使用できません。
(5) スキップ信号 HDI
[区分] サーボアンプモジュール直接入力信号
[機能] 本信号が入力された時点でのワーク座標値を記録します。
[動作] スキップ機能用位置決めの周辺機器制御コマンド(機能コード 8)を実行中、本
信号の立ち上がり(”0”→”1”)、あるいは立ち下がり(”1”→”0”)をとらえると、軸
の移動をただちに停止し、コマンドの実行を終了します。また、本信号を入力
した時点でのワーク座標値(スキップ測定データ)が記録されます。記録された
データは、パラメータ No.020 に”5”を設定することにより、応答データとして
読み出すことが可能です。
スキップ機能用位置決めのダイレクトコマンド(アブソリュート位置決め指令、
およびインクレメンタル位置決め指令の SKIP ビットを立てる)を単独で実行
中の場合にも、軸の移動をただちに停止し、コマンドの実行を終了します。32
ブロック・バッファリング運転中の場合には、現在実行中のブロックをスキッ
プし、次のブロックに進みます。ダイレクトコマンド実行時も、スキップ測定
データが記録されます。記録されたデータは、”スキップ測定データの読み出
し”のダイレクトコマンドを実行することにより、ホスト側で読み出すことが
できます。
注
1 スキップ機能用位置決めを行うにはパラメータ No.017#0(HENB)
を”1”(スキップ機能を使用する)に設定する必要があります。
2 スキップ機能用位置決め(周辺機器制御/ダイレクトコマンド)実行時
に、スキップ信号(HDI)が入力されず終点まで達した時、前回のスキ
ップ測定データを保持するか、指令された終点座標を記録するかを、
パラメータにより切り換えることができます。パラメータ
NO.17#2(SPCO) を”0”とした場合は、前回のスキップ測定データ、”1”
とした場合は、指令された終点座標が記録されます。
3 周辺機器制御でスキップ測定データを読み出す場合、スキップ機能用
位置決めの完了(OPC4=1)を確認した後、行って下さい。
4 スキップ機能用位置決め(周辺機器制御/ダイレクトコマンド)実行
中、外部リセット, 非常停止, アラームなどによって実行が中断した
場合には、スキップ測定データは更新されません。
- 69 -
Page 98
3.周辺機器制御 取扱 B-65395JA/01
3 周辺機器制御
- 70 -
Page 99

B-65395JA/01 取扱 3.周辺機器制御
3.1 周辺機器制御のコマンドの形式
サーボアンプモジュールはホストから決められた形式のコマンドを受け取り、
周辺機器を制御するための一連の動作を実行します。また、現在位置の読み取
り指令を行うと、サーボアンプモジュールはホストにその結果を戻します。こ
のような指令のやり取りをインタフェース領域で次のような形式で行います。
● 指令コマンドの一般形式 (ホスト→サーボアンプモジュール)
7 6 5 4 3 2 1 0
Yy+2
Yy+3
Yy+4
Yy+5
Yy+6
●
応答コマンドの一般形式 (サーボアンプモジュール→ホスト)
7 6 5 4 3 2 1 0
Xx+3
Xx+4 応答データ
Xx+5
Xx+6
機能コード 指令データ1
指令データ2
● データの型
7 6 5 4 3 2 1 0 BIT
バイト型:
(BYTE)
7 6 5 4 3 2 1 0 BIT
ワード型: 下位バイト
(WORD) 上位バイト
データ=上位バイト*256+下位バイト
7 6 5 4 3 2 1 0 BIT
倍精度型: 最下位バイト
(DWORD) 下位バイト
上位バイト
最上位バイト
データ = 最上位バイト * 16777216
+ 上位バイト * 65536
+ 下位バイト * 256
+ 最下位バイト
- 71 -
Page 100

3.周辺機器制御 取扱 B-65395JA/01
3.2 周辺機器制御の制御手順
3.2.1 機能コードによる指令方法
周辺機器制御では、ホストは機能コード、指令データ 1、指令データ 2 をセッ
トした後、インタフェース領域の自動運転起動信号(ST)をオン/オフして指令コ
マンドを起動します。ただし、指令コマンドによっては送り軸方向選択信号
(+X,-X)を使用するものもあります。
サーボアンプモジュールは、コマンドの実行の進捗状況により動作完了信号
(OPC1,OPC2,OPC3,OPC4)を返してきますのでホストはそれに対応する処理を
します。
OPC1: 機能コードを受信したことをホストに通知します。同時にアンクラ
ンプ指令を出力します。
OPC2: アンクランプ状態出力信号を受信したことをホストに通知します。
OPC3: 移動が完了したことをホストに通知します。同時にクランプ指令を
出します。
OPC4: クラ 7 ンプ状態出力信号を受信し、機能コードの実行が完了したこ
とをホストに通知します。この時応答データがあれば同時にセット
されます。
OPC4 を受け取るまで次の指令コマンドをセットしてはいけません。
注
クランプ/アンクランプを使用しない場合、OPC2, OPC3 はサーボア
ンプモジュールから出力されません。
3.2.2 応答データの受信方法
ホストは、応答データによりサーボアンプモジュールの制御する軸の現在位置
やアラーム情報を読み取ることができます。
ホストは、アラーム情報を取り込む場合はアラーム出力指令信号(DSAL)を”1”
にセットします。アラーム出力状態確認信号(DSALO)が”1”の時は応答データ
にアラーム個数と番号が返されてきます。
アラーム出力指令信号(DSAL)を”0”にすると位置情報が応答データにセット
されます。位置データはパラメータ No.20(PHOUT)で選択できます。データの
種類は応答データ内容確認信号(DSP1,DSP2)で確認できます。
- 72 -
 Loading...
Loading...