

Page 1

р
Серия FANUC 0i-МОДЕЛЬ C
Се
ия FANUC 0i Mate-МОДЕЛЬ C
РУКОВОДСТВО ПО
ПАРАМЕТРАМ
B-64120RU/01
Page 2

Page 3
B-64120RU/01 ОПРЕДЕЛЕНИЕ ТЕРМИНОВ ПРЕДОСТЕРЕЖЕНИЕ, ПРЕДУПРЕЖДЕНИЕ И ПРИМЕЧАНИЕ
ОПРЕДЕЛЕНИЕ ТЕРМИНОВ
"ПРЕДУПРЕЖДЕНИЕ", "ПРЕДОСТЕРЕЖЕНИЕ" И
"ПРИМЕЧАНИЕ"
Данное руководство включает меры предосторожности для
защиты пользователя и предотвращения повреждения станка.
Меры предосторожности подразделяются на предупреждения и
предостережения в соответствии с уровнем опасности, на который
они указывают. Кроме того, в качестве примечания приводится
дополнительная информация. Внимательно читайте
предупреждения, предостережения и примечания до начала
работы со станком.
ПРЕДУПРЕЖДЕНИЕ
Применяется тогда, когда при несоблюдении
утвержденной процедуры существует опасность
травмирования пользователя или вместе с тем
возможно повреждение оборудования.
ПРЕДУПРЕЖДЕНИЕ
Применяется тогда, когда при несоблюдении
утвержденной процедуры существует опасность
повреждения оборудования.
ПРИМЕЧАНИЕ
Примечание используется для указания
дополнительной информации, отличной от
относящейся к предупреждению и
предостережению.
- Внимательно прочитайте данное руководство и храните его в
надежном месте.
м-1
Page 4

Page 5
B-64120RU/01 ВВЕДЕНИЕ
ВВЕДЕНИЕ
В данном руководстве описаны следующие модели, для которых
используются также сокращенные названия:
Наименование модели Сокращение
Серия FANUC 0i - TC 0i-TC
Серия FANUC 0i - MC 0i -MC
Серия FANUC 0 i Mate - TC 0i Mate-TC
Серия FANUC 0i Mate - MC 0i Mate-MC
ПРИМЕЧАНИЕ
1 Для облегчения объяснения, модели могут быть
распределены по категориям следующим
образом:
Серия T: 0i -TC/0i Mate -TC
Серия M: 0i -MC/0i Mate -MC
2 Некоторые функции, описанные в данном
руководстве, нельзя применить к некоторым
продуктам.
Подробные сведения смотрите в руководстве
ОПИСАНИЯ (DESCRIPTIONS) (B-64112RU).
3 Для серий 0i /0i Mate необходима установка
параметров для подключения части базовых
функций. Для перечня параметров, которые
необходимо установить, сморите Раздел 4.46,
"ПАРАМЕТРЫ БАЗОВЫХ ФУНКЦИЙ FS0i".
Серия 0i-C 0i
Серия 0i Mate - С 0i Mate
в-1
Page 6
ВВЕДЕНИЕ B-64120RU/01
Соответствующие руководства серии 0i/0iМОДЕЛЬ C
В следующей таблице приведен список руководств, относящихся
к серии 0i/0iMate-МОДЕЛЬ C. Настоящее руководство отмечено
звездочкой(*).
Соответствующие руководства серии 0i/0iМОДЕЛЬ C
Наименование руководства
ОПИСАНИЯ B-64112RU
CONNECTION MANUAL (HARDWARE) B-64113EN
CONNECTION MANUAL (FUNCTION) B-64113EN-1
РУКОВОДСТВО ОПЕРАТОРА серии 0i-TC
РУКОВОДСТВО ОПЕРАТОРА серии 0i-MC
РУКОВОДСТВО ОПЕРАТОРА серии 0i Mate-TC
РУКОВОДСТВО ОПЕРАТОРА серии 0i Mate-MC
РУКОВОДСТВО ПО ТЕХНИЧЕСКОМУ ОБСЛУЖИВАНИЮ B-64115RU
РУКОВОДСТВО ПО ПАРАМЕТРАМ B-64120RU *
PMC
PMC Ladder Language PROGRAMMING MANUAL B-61863E
PMC C Language PROGRAMMING MANUAL B-61863E-1
Сеть
Profibus-DP Board OPERATOR'S MANUAL B-62924EN
FAST Ethernet Board/FAST DATA SERVER
OPERATOR'S MANUAL
Ethernet Board/DATA SERVER Board OPERATOR'S MANUAL B-63354EN
DeviceNet Board OPERATOR'S MANUAL B-63404EN
Функция ПК
Screen Display Function OPERATOR'S MANUAL B-63164EN
Разомкнутое ЧПУ
FANUC Open CNC OPERATOR’S MANUAL
(Basic Operation Package 1(For Windows 95/NT))
FANUC Open CNC OPERATOR’S MANUAL
(DNC Operation Management Package)
Обозначение в
спецификации
B-64114RU
B-64124RU
B-64134RU
B-64144RU
B-63644EN
B-62994EN
B-63214EN
в-2
Page 7
B-64120RU/01 ВВЕДЕНИЕ
Соответствующие руководства по серводвигателю серии αis/αi/βis/βi
В следующей таблице дан список руководств, относящихся к
СЕРВОДВИГАТЕЛЮ серии αis/αi/βis/βi
Наименование руководства
FANUC AC SERVO MOTOR αis series
FANUC AC SERVO MOTOR αi series
DESCRIPTIONS
FANUC AC SPINDLE MOTOR αi series
DESCRIPTIONS
FANUC AC SERVO MOTOR βis series
DESCRIPTIONS
FANUC AC SPINDLE MOTOR βi series
DESCRIPTIONS
FANUC SERVO AMPLIFIER αi series
DESCRIPTIONS
FANUC SERVO AMPLIFIER βi series
DESCRIPTIONS
FANUC SERVO MOTOR αis series
FANUC SERVO MOTOR αi series
FANUC AC SPINDLE MOTOR αi series
FANUC SERVO AMPLIFIER αi series
MAINTENANCE MANUAL
FANUC SERVO MOTOR βis series
FANUC AC SPINDLE MOTOR βi series
FANUC SERVO AMPLIFIER βi series
MAINTENANCE MANUAL
FANUC AC SERVO MOTOR αis series
FANUC AC SERVO MOTOR αi series
FANUC AC SERVO MOTOR βis series
PARAMETER MANUAL
FANUC AC SPINDLE MOTOR αi series
FANUC AC SPINDLE MOTOR βi series
PARAMETER MANUAL
Обозначение в
спецификации
B-65262EN
B-65272EN
B-65302EN
B-65312EN
B-65282EN
B-65322EN
B-65285EN
B-65325EN
B-65270EN
B-65280EN
в-3
Page 8

Page 9
B-64120RU/01 СОДЕРЖАНИЕ
СОДЕРЖАНИЕ
ОПРЕДЕЛЕНИЕ ТЕРМИНОВ "ПРЕДУПРЕЖДЕНИЕ",
"ПРЕДОСТЕРЕЖЕНИЕ" И "ПРИМЕЧАНИЕ".........................................m-1
ВВЕДЕНИЕ ...............................................................................................b-1
1 ОТОБРАЖЕНИЕ ПАРАМЕТРОВ .........................................................1
2 УСТАНОВКА ПАРАМЕТРОВ ПРИ ПОМОЩИ РУЧНОГО
ВВОДА ДАННЫХ ................................................................................. 3
3 ВВОД И ВЫВОД ПАРАМЕТРОВ ЧЕРЕЗ ИНТЕРФЕЙС
СЧИТЫВАТЕЛЯ/ ПЕРФОРАТОРА...................................................... 5
3.1 ВЫВОД ПАРАМЕТРОВ ЧЕРЕЗ ИНТЕРФЕЙС
СЧИТЫВАТЕЛЯ/ПЕРФОРАТОРА............................................................... 6
3.2 ВВОД ПАРАМЕТРОВ ЧЕРЕЗ ИНТЕРФЕЙС
СЧИТЫВАТЕЛЯ/ПЕРФОРАТОРА............................................................... 7
4 ОПИСАНИЕ ПАРАМЕТРОВ.................................................................8
4.1 ПАРАМЕТРЫ УСТАНОВКИ.......................................................................10
4.2 ПАРАМЕТРЫ ИНТЕРФЕЙСА СЧИТЫВАТЕЛЯ/ ПЕРФОРАТОРА,
УДАЛЕННЫЙ БУФЕР, DNC1, DNC2, И ИНТЕРФЕЙС M-NET................. 15
4.2.1 Параметры общие для всех каналов...................................................................16
4.2.2 Параметры канала 1 (I/O CHANNEL=0) ............................................................17
4.2.3 Параметры канала 1 (I/O CHANNEL=1) ............................................................19
4.2.4 Параметры канала 2 (I/O CHANNEL=2) ............................................................19
4.3 ПАРАМЕТРЫ ИНТЕРФЕЙСА DNC2 ......................................................... 22
4.4 ПАРАМЕТРЫ УДАЛЕННОЙ ДИАГНОСТИКИ........................................... 25
4.5 ПАРАМЕТРЫ ИНТЕРФЕЙСА КАРТЫ ПАМЯТИ ...................................... 28
4.6 ПАРАМЕТРЫ СЕРВЕРА ДАННЫХ ........................................................... 29
4.7 ПАРАМЕТРЫ ETHERNET ......................................................................... 30
4.8 ПАРАМЕТРЫ АДМИНИСТРАТОРА ЧПУ POWER MATE........................31
4.9 ПАРАМЕТРЫ УПРАВЛЕНИЯ ОСЯМИ/СИСТЕМЫ ПРИРАЩЕНИЙ ....... 32
4.10 ПАРАМЕТРЫ КООРДИНАТ ...................................................................... 44
4.11 ПАРАМЕТРЫ ОГРАНИЧЕНИЯ ХОДА....................................................... 50
4.12 ПАРАМЕТРЫ ЗАЖИМНОГО И НАТЯЖНОГО УСТРОЙСТВ (СЕРИИ T) 56
4.13 ПАРАМЕТРЫ СКОРОСТИ ПОДАЧИ......................................................... 60
4.14 ПАРАМЕТРЫ КОНТРОЛЯ УСКОРЕНИЯ/ЗАМЕДЛЕНИЯ........................ 79
4.15 ПАРАМЕТРЫ СИСТЕМЫ СЛЕЖЕНИЯ (1 ИЗ 2) .................................... 102
c - 1
Page 10

СОДЕРЖАНИЕ B-64120RU/01
4.16 ПАРАМЕТРЫ DI/DO................................................................................. 137
4.17 ПАРАМЕТРЫ ДИСПЛЕЯ И РЕДАКТИРОВАНИЯ (1 ИЗ 2) .................... 143
4.18 ПАРАМЕТРЫ ПРОГРАММ ...................................................................... 169
4.19 ПАРАМЕТРЫ КОРРЕКЦИИ МЕЖМОДУЛЬНОГО СМЕЩЕНИЯ ........... 178
4.20 ПАРАМЕТРЫ УПРАВЛЕНИЯ ШПИНДЕЛЕМ.......................................... 186
4.21 ПАРАМЕТРЫ КОРРЕКЦИИ НА ИНСТРУМЕНТ ..................................... 223
4.22 ПАРАМЕТРЫ ПОСТОЯННЫХ ЦИКЛОВ................................................. 235
4.22.1 Параметры постоянных циклов для сверления...............................................235
4.22.2 Параметр цикла нарезания резьбы ...................................................................242
4.22.3 Параметр многократно повторяющегося постоянного цикла .......................242
4.22.4 Параметр цикла сверления с периодическим выводом сверла
для небольших диаметров .................................................................................246
4.23 ПАРАМЕТРЫ ЖЕСТКОГО НАРЕЗАНИЯ РЕЗЬБЫ................................ 251
4.24 ПАРАМЕТРЫ МАСШТАБИРОВАНИЯ/ВРАЩЕНИЯ КООРДИНАТ ....... 275
4.25 ПАРАМЕТРЫ ОДНОНАПРАВЛЕННОГО ПОЗИЦИОНИРОВАНИЯ...... 277
4.26 ПАРАМЕТРЫ ИНТЕРПОЛЯЦИИ В ПОЛЯРНЫХ КООРДИНАТАХ ....... 279
4.27 ПАРАМЕТРЫ УПРАВЛЕНИЯ НОРМАЛЬНЫМ НАПРАВЛЕНИЕМ
ДВИЖЕНИЯ..............................................................................................281
4.28 ПАРАМЕТРЫ ИНДЕКСИРОВАНИЯ ДЕЛИТЕЛЬНО-ПОВОРОТНОГО
СТОЛА ...................................................................................................... 285
4.29 ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЬСКИХ МАКРОСОВ...............................287
4.30 ПАРАМЕТРЫ ВВОДА ДАННЫХ ИЗОБРАЖЕНИЯ................................. 296
4.31 ПАРАМЕТРЫ ФУНКЦИИ ПРОПУСКА..................................................... 297
4.32 ПАРАМЕТРЫ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ
ПОГРЕШНОСТЕЙ ИНСТРУМЕНТА (СЕРИЯ T) И
АВТОМАТИЧЕСКОЙ КОРРЕКЦИИ ИНСТРУМЕНТА
ПО ДЛИНЕ (СЕРИЯ M) ............................................................................ 303
4.33 ПАРАМЕТРЫ ВНЕШНЕГО ВВОДА/ВЫВОДА ДАННЫХ........................305
4.34 ПАРАМЕТРЫ ГРАФИЧЕСКОГО ДИСПЛЕЯ ........................................... 306
4.34.1 Параметры графического дисплея/динамического графического дисплея..306
4.34.2 Параметры цветов графики...............................................................................308
4.35 ПАРАМЕТРЫ ОТОБРАЖЕНИЯ ВРЕМЕНИ ОПЕРАЦИИ И ЧИСЛА
ДЕТАЛЕЙ..................................................................................................311
4.36 ПАРАМЕТРЫ УПРАВЛЕНИЯ РЕСУРСОМ ИНСТРУМЕНТА................. 315
4.37 ПАРАМЕТРЫ ФУНКЦИЙ ПЕРЕКЛЮЧЕНИЯ ПОЛОЖЕНИЯ................. 321
4.38 ПАРАМЕТРЫ РУЧНОЙ И АВТОМАТИЧЕСКОЙ ОПЕРАЦИИ............... 325
c - 2
Page 11

B-64120RU/01 СОДЕРЖАНИЕ
4.39 ПАРАМЕТРЫ РУЧНОЙ ПОДАЧИ РУКОЯТКОЙ, РУЧНОГО
ПРЕРЫВАНИЯ РУКОЯТКОЙ И ПОДАЧИ ИНСТРУМЕНТА
РУКОЯТКОЙ............................................................................................. 330
4.40 ПАРАМЕТРЫ УСТАНОВКИ РЕФЕРЕНТНОГО ПОЛОЖЕНИЯ
СТЫКОВОГО ТИПА ................................................................................. 334
4.41 ПАРАМЕТРЫ ПАНЕЛИ ОПЕРАТОРА ПРОГРАММНОГО
ОБЕСПЕЧЕНИЯ....................................................................................... 336
4.42 ПАРАМЕТРЫ ПЕРЕЗАПУСКА ПРОГРАММЫ........................................ 339
4.43 ПАРАМЕТРЫ ОБТОЧКИ МНОГОУГОЛЬНИКА ...................................... 340
4.44 ПАРАМЕТРЫ ОТВОДА ОБЩЕГО НАЗНАЧЕНИЯ ................................. 343
4.45 ПАРАМЕТРЫ УПРАВЛЕНИЯ ОСЯМИ PMC........................................... 345
4.46 ПАРАМЕТРЫ БАЗОВЫХ ФУНКЦИЙ FS0i .............................................. 352
4.47 ПАРАМЕТРЫ УПРАВЛЕНИЯ НАКЛОННЫМИ ОСЯМИ......................... 355
4.48 ПАРАМЕТРЫ ПРОСТОГО СИНХРОННОГО УПРАВЛЕНИЯ ................ 358
4.49 ПАРАМЕТРЫ СРАВНЕНИЯ НОМЕРОВ ПОСЛЕДОВАТЕЛЬНОСТИ
И ОСТАНОВА........................................................................................... 367
4.50 ПРОЧИЕ ПАРАМЕТРЫ............................................................................368
4.51 ПАРАМЕТРЫ ДИАГНОСТИКИ ОТКАЗОВ .............................................. 373
4.52 ПАРАМЕТРЫ ОБСЛУЖИВАНИЯ............................................................374
4.53 ПАРАМЕТРЫ ПРОВЕРКИ СКОРОСТИ СИСТЕМЫ СЛЕЖЕНИЯ......... 375
4.54 ПАРАМЕТРЫ ФУНКЦИИ РУЧНОЙ РУКОЯТКИ ..................................... 376
4.55 ПАРАМЕТРЫ УПРАВЛЕНИЯ УСКОРЕНИЕМ........................................ 378
4.56 ПАРАМЕТРЫ ИСТОРИИ ОПЕРАЦИЙ.................................................... 380
4.57 ПАРАМЕТРЫ ДИСПЛЕЯ И РЕДАКТИРОВАНИЯ (2/2) .......................... 385
4.58 ПАРАМЕТРЫ ВЫБОРА УСЛОВИЙ ОБРАБОТКИ.................................. 387
4.59 ПАРАМЕТРЫ СИСТЕМЫ СЛЕЖЕНИЯ (2) ............................................. 391
ПЕРЕЧЕНЬ КОДОВ СИМВОЛОВ
A ПЕРЕЧЕНЬ КОДОВ СИМВОЛОВ....................................................395
c - 3
Page 12

Page 13
B-64120RU/01 1.ОТОБРАЖЕНИЕ ПАРАМЕТРОВ
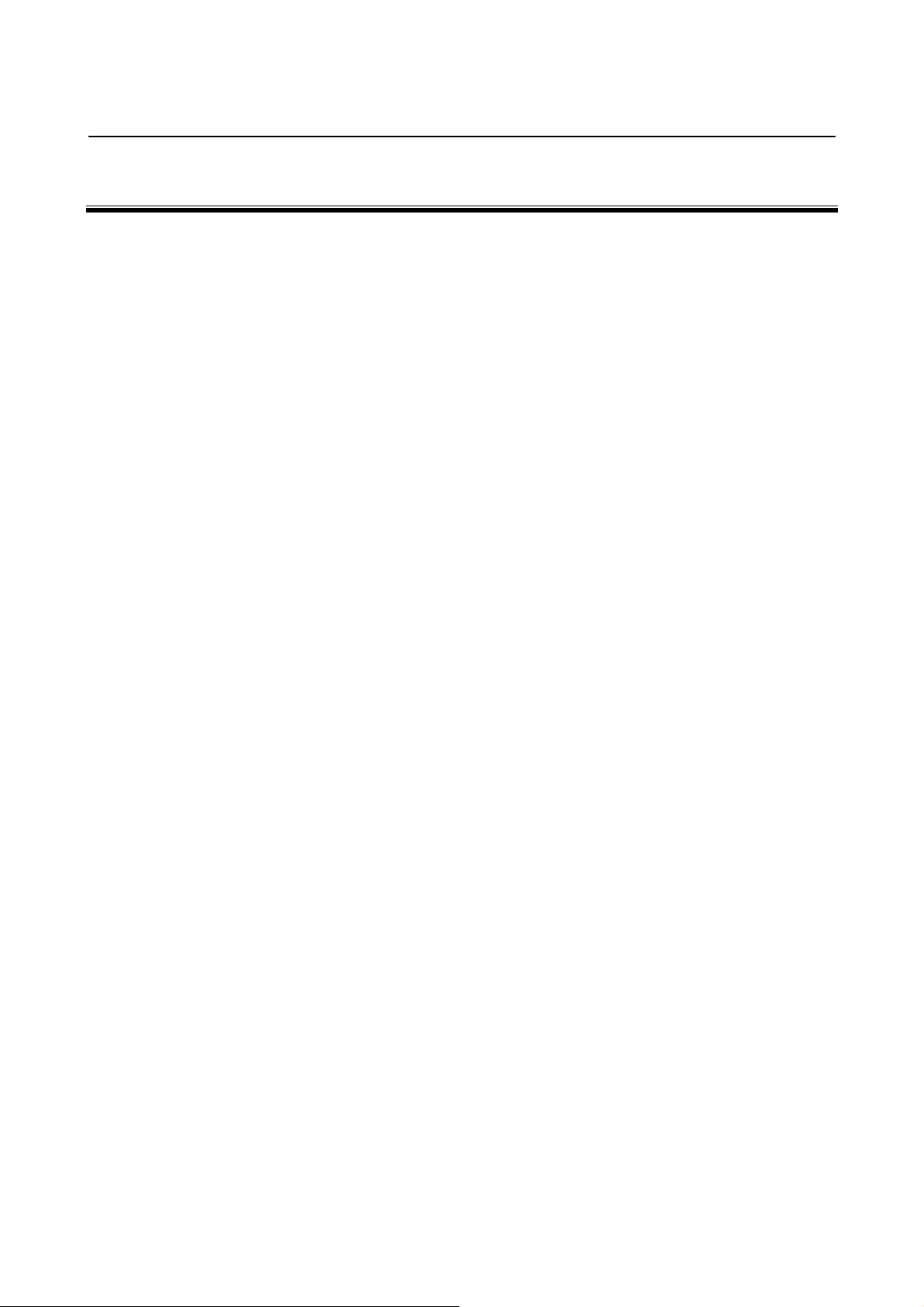
1 ОТОБРАЖЕНИЕ ПАРАМЕТРОВ
Для отображения параметров, следуйте процедуре описанной
ниже.
(1) Нажмите функциональную клавишу
данных столько раз, сколько требуется, либо, нажмите
функциональную клавишу
клавишу в разделе PARAM. Выбирается окно параметров.
один раз, а затем дисплейную
на ручном вводе
Функциональные
клавиши
Курсор
Отображение дисплейных
клавиш (выбор раздела)
Клавиша возврата меню Клавиша продолжения меню
Дисплейные клавиши
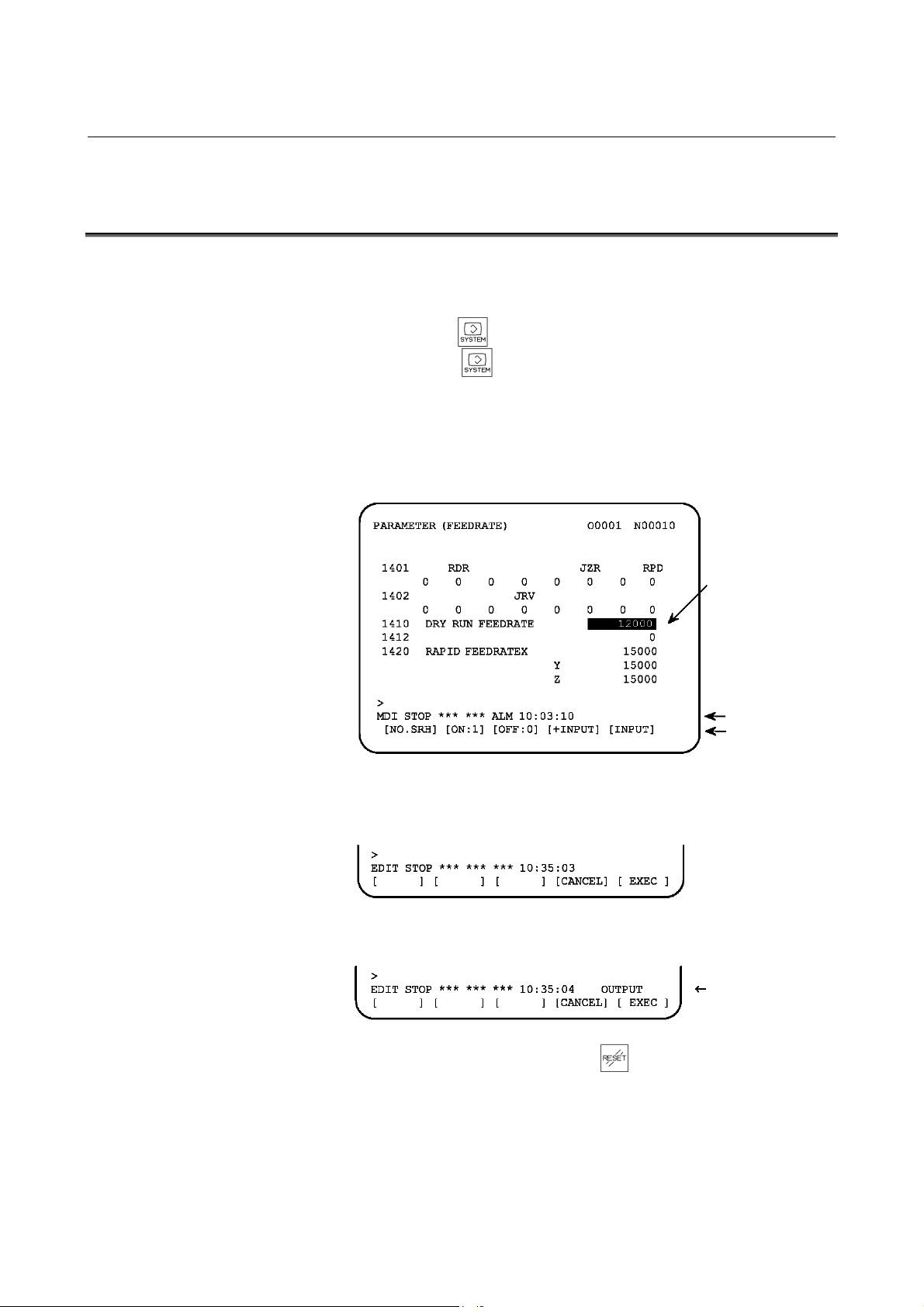
(2) Окно параметров состоит из нескольких страниц. Выполните
шаги (a) или (b) для отображения страницы, которая
содержит параметр, который вы хотите вывести.
(a) Используйте клавишу выбора страницы, или клавиши
курсора, для отображения нужной страницы.
(b) Введите с клавиатуры номер данных, параметра которо-
го вы хотите вывести, а затем нажмите дисплейную клавишу [NO.SRH]. Отображается страница, содержащая
нужный параметр, с курсором, установленным на номере данных. (Данные отображаются в инверсном виде.)
ПРИМЕЧАНИЕ
Если ввод данных начинается при отображае-
мых дисплейных клавишах выбора раздела, то
они автоматически заменяются на дисплейные
клавиши выбора операции, включая клавишу
[NO.SRH]. Нажатие дисплейной клавиши
[(OPRT)] так же приводит к отображению клавиш
выбора операции.
- 1 -
Page 14

1.ОТОБРАЖЕНИЕ ПАРАМЕТРОВ B-64120RU/01
Введенные с
клавиатуры
данные
Отображение
дисплейных
клавиш
(выбор раздела)
- 2 -
Page 15
B-64120RU/01 2.УСТАНОВКА ПАРАМЕТРОВ ПРИ ПОМОЩИ РУЧНОГО ВВОДА ДАННЫХ
2 УСТАНОВКА ПАРАМЕТРОВ ПРИ
ПОМОЩИ РУЧНОГО ВВОДА ДАННЫХ
Для установки параметров, следуйте процедуре описанной ниже.
(1) Переведите ЧПУ в режим ручного ввода данных или в
состояние аварийной остановки.
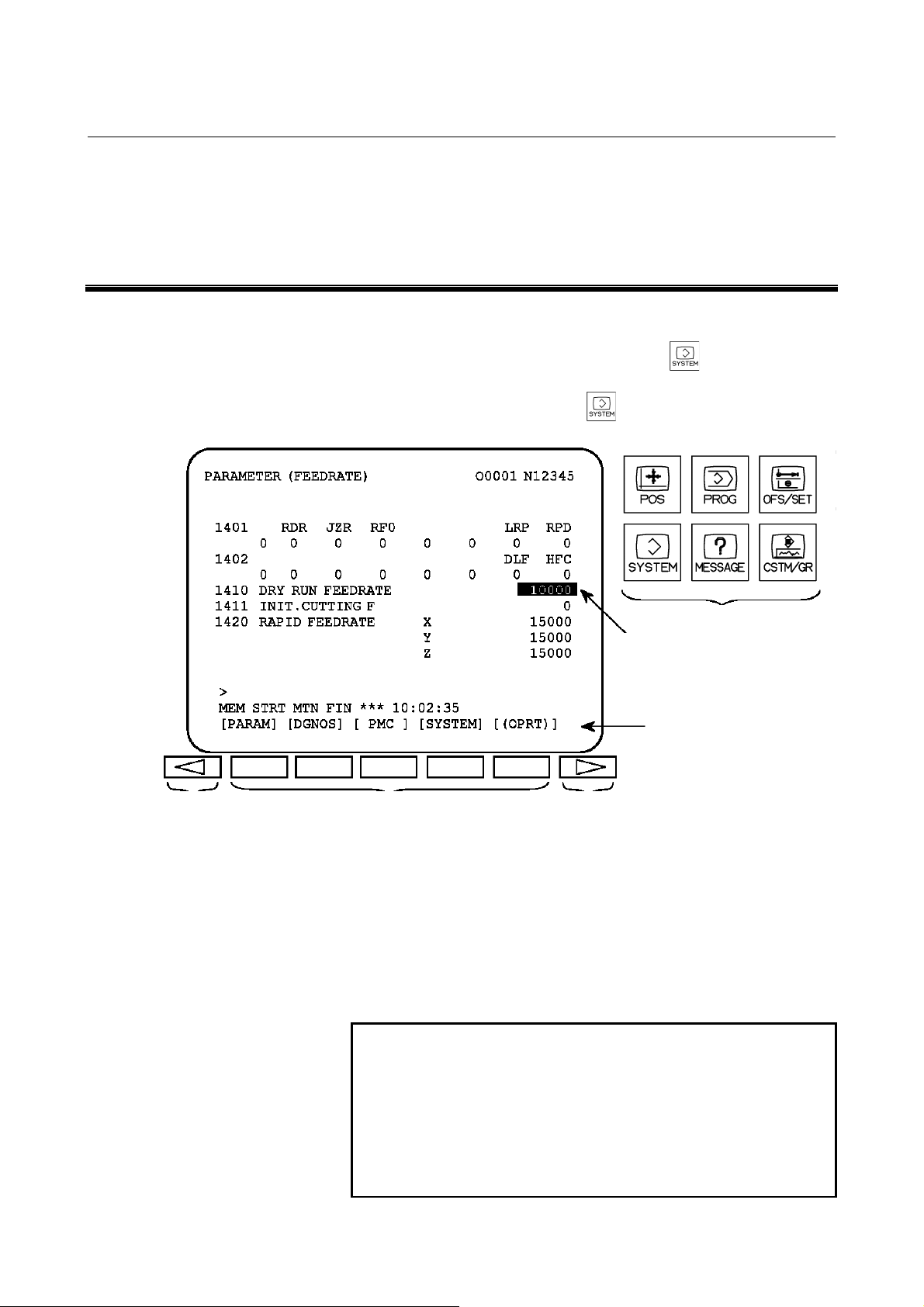
(2) Выполните подпункты указанные ниже, для активации
записи параметров.
1. Для отображения окна установок, нажмите
функциональную клавишу
количество раз, либо нажмите ее один раз, а затем
нажмите дисплейную клавишу выбора раздела
[SETTING]. Появляется первая страница установок.
2. Клавишами курсора выделите пункт "PARAMETER
WRITE" (ЗАПИСЬ ПАРАМЕТРОВ).
необходимое
3. Нажмите дисплейную клавишу [(OPRT)] для
отображения дисплейных клавиш выбора операции.
4. Для установки "PARAMETER WRITE=" (ЗАПИСЬ
ПАРАМЕТРОВ) в 1, нажмите дисплейную клавишу
ON:1, либо введите 1 и нажмите дисплейную клавишу
INPUT (ВВОД). С этого момента, можно устанавливать
параметры. В это же время, на ЧПУ возникает сигнал
тревоги (P/S100 PARAMETER WRITE ENABLE)
(АКТИВИРОВАНА ЗАПИСЬ ПАРАМЕТРОВ).
(3) Для отображения окна параметров, нажмите
функциональную клавишу
либо нажмите клавишу
дисплейную клавишу выбора раздела PARAM.
(См."1. Отображение параметров.")
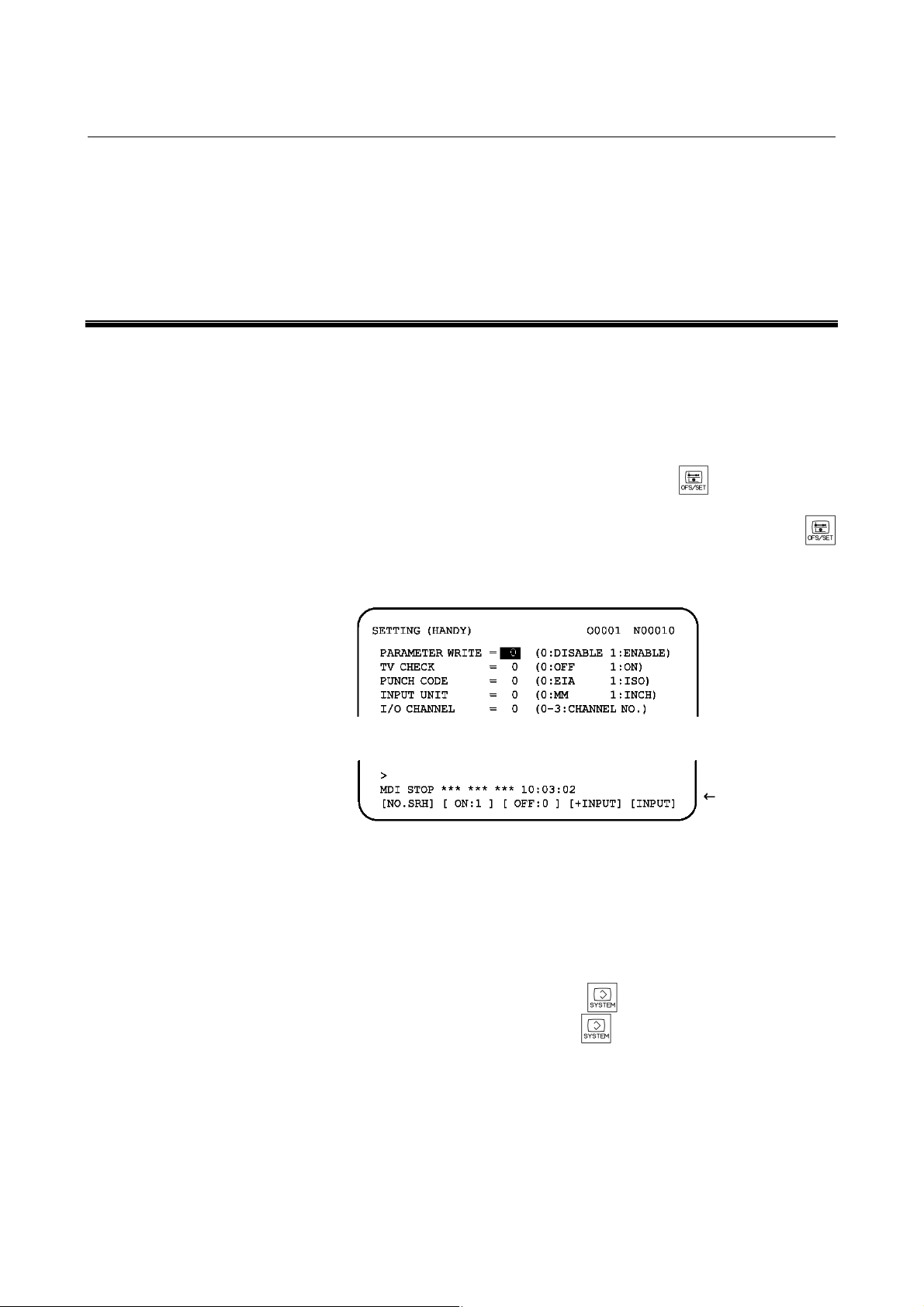
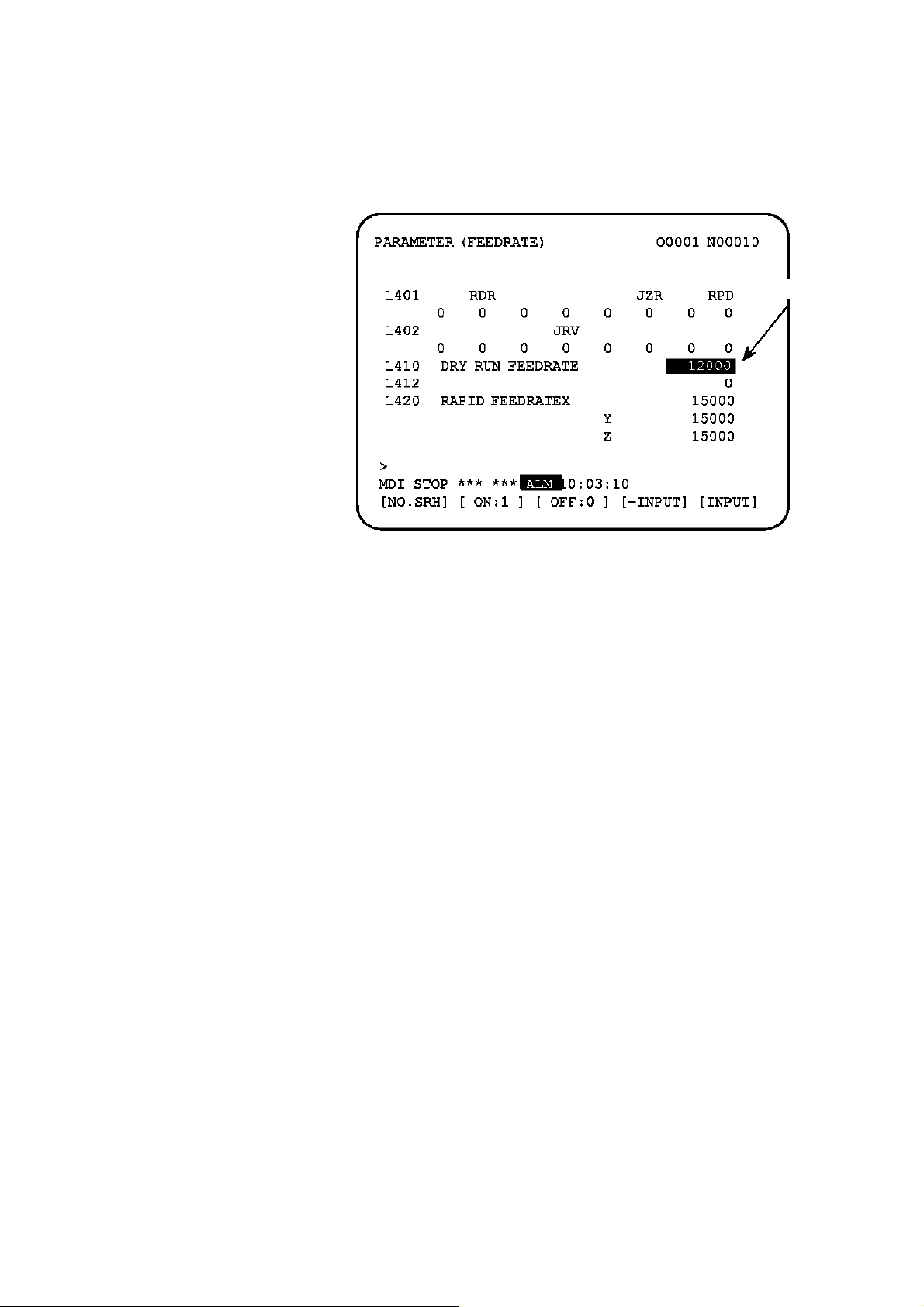
(4) Выведите страницу, содержащую параметр, который вы
хотите установить, и выделите этот параметр курсором.
(См."1. Отображение параметров.")
(5) Введите данные, затем нажмите дисплейную клавишу
[INPUT]. Параметр, подсвеченный курсором, установлен во
введенное значение.
необходимое количество раз,
один раз, а затем нажмите
Отображение дисплейных
клавиш (выбор раздела)
- 3 -
Page 16
2.УСТАНОВКА ПАРАМЕТРОВ ПРИ ПОМОЩИ РУЧНОГО ВВОДА ДАННЫХ B-64120RU/01
[Пример] 12000 [INPUT]
Курсор
Данные могут вводиться для нескольких параметров
последовательно, начиная с текущего, путем разделения
данных при помощи точки с запятой (;).
[Пример]
Ввод 10;20;30;40 и нажатие клавиши INPUT передает
значения 10, 20, 30, и 40 параметрам, начиная с
параметра подсвеченного курсором.
(6) При необходимости повторите пункты (4) и (5).
(7) Если ввод параметров завершен, установите "PARAMETER
WRITE=" (ЗАПИСЬ ПАРАМЕТРОВ) в 0 на экране установок,
для отмены дальнейшей установки параметров.
(8) Выполните сброс ЧПУ для снятия сигнала тревоги (P/S100).
При возникновении на ЧПУ сигнала тревоги (P/S000 PLEASE
TURN OFF POWER) (ОТКЛЮЧИТЕ ПИТАНИЕ), сбросьте
его перед продолжением работы.
- 4 -
Page 17
B-64120RU/01 3.ВВОД И ВЫВОД ПАРАМЕТРОВ ЧЕРЕЗ ИНТЕРФЕЙС СЧИТЫВАТЕЛЯ/ ПЕРФОРАТОРА
3 ВВОД И ВЫВОД ПАРАМЕТРОВ ЧЕРЕЗ
ИНТЕРФЕЙС СЧИТЫВАТЕЛЯ/
ПЕРФОРАТОРА
В данном разделе описаны процедуры ввода/вывода параметров
для устройств ввода/вывода подключенных к интерфейсу
считывателя/перфоратора.
В последующем описании предполагается, что устройства
ввода/вывода готовы к работе. Также предполагается, что были
заранее установлены параметры специфичные для устройств
ввода/вывода, например скорость передачи и количество
стоповых битов. (См. 4.2.)
- 5 -
Page 18
3.ВВОД И ВЫВОД ПАРАМЕТРОВ ЧЕРЕЗ ИНТЕРФЕЙС СЧИТЫВАТЕЛЯ/ ПЕРФОРАТОРА B-64120RU/01
3.1 ВЫВОД ПАРАМЕТРОВ ЧЕРЕЗ ИНТЕРФЕЙС
СЧИТЫВАТЕЛЯ/ПЕРФОРАТОРА
(1) Выберите режим EDIT (РЕДАКТИРОВАНИЕ) либо
выполните аварийную остановку.
(2) Для выбора окна параметров, нажмите функциональную
клавишу
необходимое количество раз, либо нажмите
клавишу
один раз, а затем нажмите дисплейную
клавишу выбора раздела PARAM.
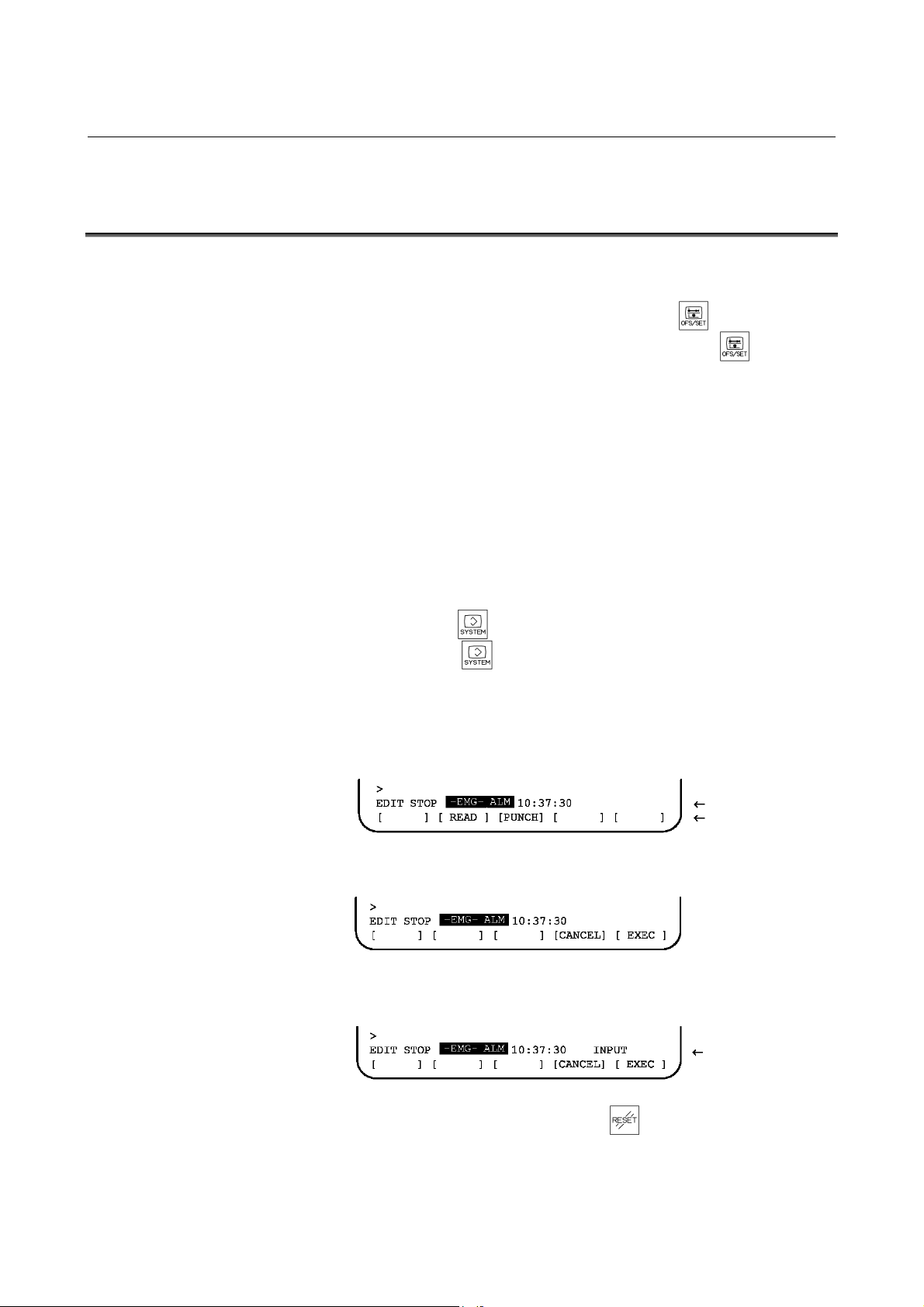
(3) Нажмите клавишу [(OPRT)] для отображения дисплейных
клавиш выбора операции, затем нажмите клавишу вывода
меню расположенную справа от дисплейных клавиш, для
отображения другого набора клавиш выбора операции,
включая клавишу [PUNCH].
Курсор
Отображение
состояния
Отображение
дисплейных
клавиш
(выбор операции)
(4) Нажатие дисплейной клавиши [PUNCH] меняет отображение
клавиш, как показано ниже:
(5) Нажмите дисплейную клавишу [EXEC], чтобы начать вывод
параметров. Во время выполнения вывода параметров,
"OUTPUT" мигает в окне состояния в нижней части экрана.
Мигает OUTPUT
(6) Когда вывод параметров прекращается, "OUTPUT" перестает
мигать. Нажмите клавишу
для прекращения вывода
параметров.
- 6 -
Page 19
B-64120RU/01 3.ВВОД И ВЫВОД ПАРАМЕТРОВ ЧЕРЕЗ ИНТЕРФЕЙС СЧИТЫВАТЕЛЯ/ ПЕРФОРАТОРА
3.2 ВВОД ПАРАМЕТРОВ ЧЕРЕЗ ИНТЕРФЕЙС
СЧИТЫВАТЕЛЯ/ПЕРФОРАТОРА
(1) Переведите ЧПУ в состояние аварийной остановки.
(2) Активируйте запись параметров.
1. Для отображения окна установок, нажмите
функциональную клавишу
необходимое
количество раз, либо нажмите клавишу
один раз, а
затем нажмите дисплейную клавишу выбора раздела
[SETTING]. Появляется первая страница установок.
2. Клавишами курсора выделите пункт "PARAMETER
WRITE" (ЗАПИСЬ ПАРАМЕТРОВ).
3 Нажмите дисплейную клавишу [(OPRT)] для
отображения дисплейных клавиш выбора операции.
4. Для установки "PARAMETER WRITE=" (ЗАПИСЬ
ПАРАМЕТРОВ) в 1, нажмите дисплейную клавишу
ON:1, либо введите 1 и нажмите дисплейную клавишу
INPUT (ВВОД). С этого момента, можно устанавливать
параметры. В это же время, на ЧПУ возникает сигнал
тревоги (P/S100 PARAMETER WRITE ENABLE)
(АКТИВИРОВАНА ЗАПИСЬ ПАРАМЕТРОВ).
(3) Для выбора окна параметров, нажмите функциональную
клавишу
клавишу
необходимое количество раз, либо нажмите
один раз, а затем нажмите дисплейную
клавишу выбора раздела [PARAM].
(4) Нажмите клавишу [(OPRT)] для отображения дисплейных
клавиш выбора операции, затем нажмите клавишу вывода
меню расположенную справа от дисплейных клавиш, для
отображения другого набора клавиш выбора операции,
включая клавишу [READ].
Отображение
состояния
Отображение
дисплейных клавиш
(5) Нажатие дисплейной клавиши [READ] меняет отображение
клавиш, как показано ниже:
(6) Нажмите клавишу [EXEC] для начала ввода параметров с
устройства ввода/вывода. Во время выполнения ввода
параметров, "INPUT" мигает в окне состояния в нижней
части экрана.
Мигает INTPUT
(7) Когда ввод параметров прекращается, "INPUT" перестает
мигать. Нажмите клавишу
для прекращения ввода
параметров.
(8) При прекращении ввода параметров, "INPUT" перестает
мигать, и на ЧПУ возникает сигнал тревоги (P/S000).
Сбросьте его перед продолжением работы.
- 7 -
Page 20
4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
Д
Д
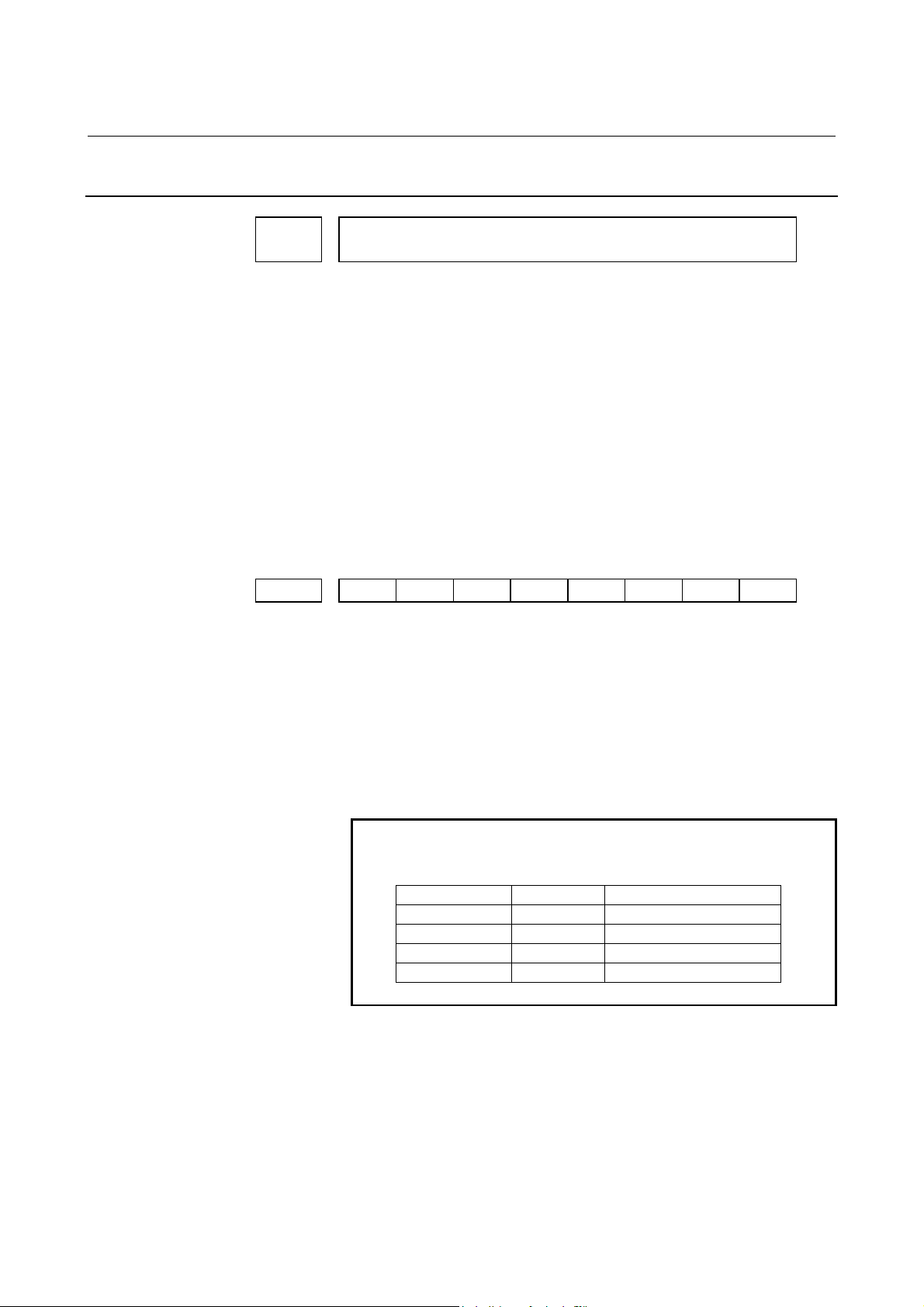
4 ОПИСАНИЕ ПАРАМЕТРОВ
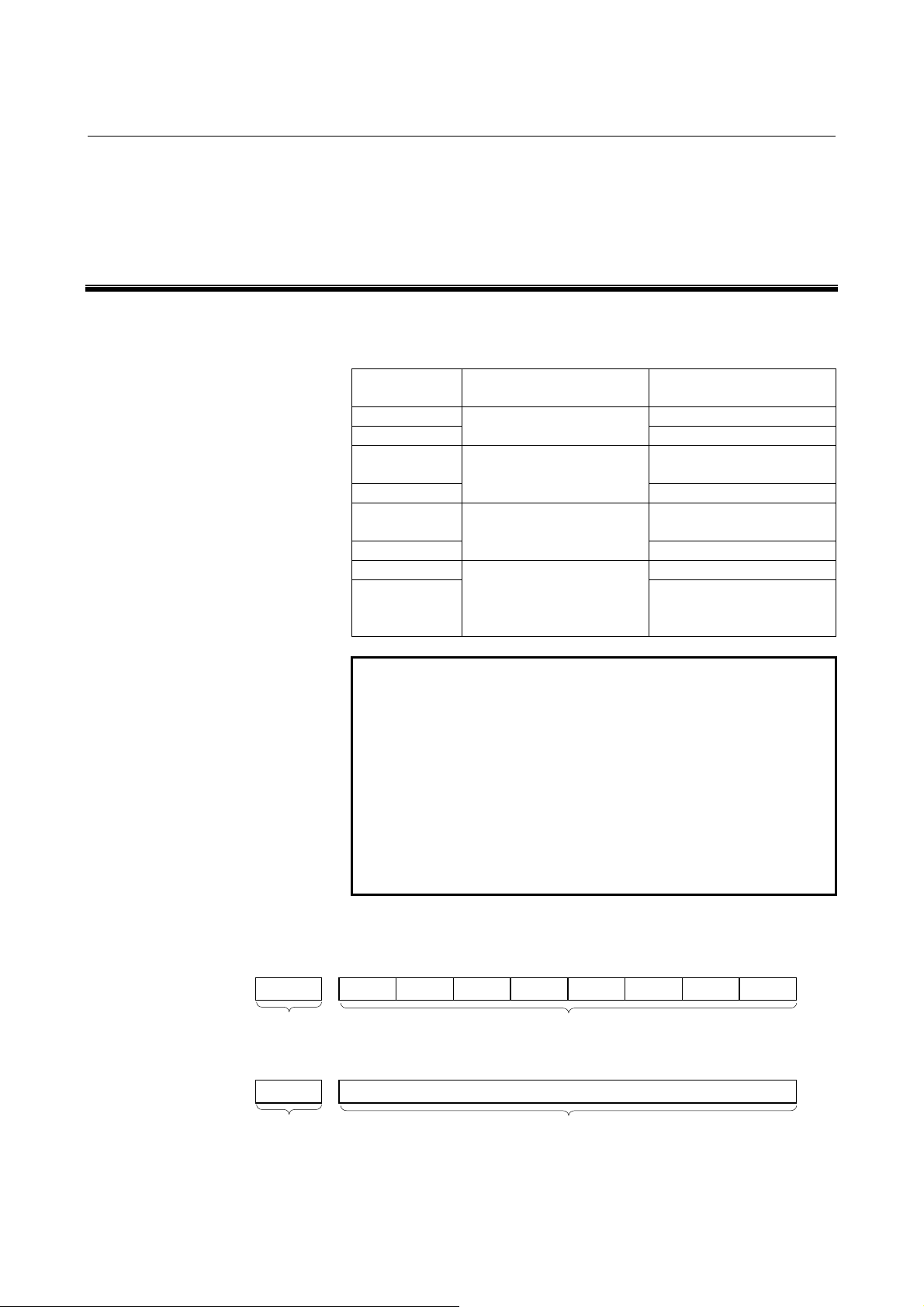
Параметры классифицируются согласно типу данных:
Таблица 4 Типы данных и диапазон действительных данных
для параметров
Тип данных Диапазон действ.
данных
Бит
Битовая ось
Байт
Байтовая ось
Слово
Ось со словом
2-слова
Ось с
двойным
словом
0 или 1
от -128 до 127
от 0 до 255
от -32768 до 32767
от 0 до 65535
от -99999999 до 99999999
ПРИМЕЧАНИЕ
1 Для параметров битового типа и битовой оси,
число присваивается 8 битам. Каждый бит имеет
свое значение.
2 Тип ось, позволяет задавать данные независимо
для каждой управляемой оси.
3 Диапазон действ. данных для каждого типа
данных указывает общий диапазон. Диапазон
варьируется согласно параметрам. Для
диапазона достоверных данных конкретного
параметра смотрите пояснение к параметру.
(1) Запись параметров битового типа и битовой оси
[Пример]
#7 #6 #5 #4 #3 #2 #1 #0
0021 ABC DEFGH IJKL TGFHJK FGTH FGTY HGU
Данные ном.
0021 Номер сервооси для указанной оси
Ном. данных
анные с #0 по #7 это положения бита.
(2) Запись параметров отличных от битового типа и битовой оси
анные.
Комментарии
В некоторых параметрах,
знаки игнорируются.
В некоторых параметрах,
знаки игнорируются.
- 8 -
Page 21
B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
ПРИМЕЧАНИЕ
1 Биты, оставленные пустыми в 4. ОПИСАНИЕ
ПАРАМЕТРОВ и номера параметров отображаемые на
экране, но не перечисленные в перечне параметров,
зарезервированы для будущего использования. они
должны всегда равняться 0.
2 Параметры имеющие разное значение в сериях T и M, и
параметры действительные только для серий T или M
отображаются в два уровня, как показано ниже.
Параметры оставленные пустыми недоступны.
Пример 1
Параметр 5010 имеет разное значение для серий T и M.
5010
Коррекция на радиус вершины инструмента ...
Компенсация погрешностей инструмента C ...
Серия T
Серия М
Пример 2
DPI это параметр общий для серий M и T, а параметры
GSB и GSC применимы только в серии T.
#7 #6 #0
3401
GSC GSB DPI
DPI
Серия T
M-серия
Пример 3
Следующий параметр доступен только для серии M.
1450
F1 разрядная подача ...
Серия T
M-серия
- 9 -
Page 22
4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
4.1 ПАРАМЕТРЫ УСТАНОВКИ
#7 #6 #5 #4 #3 #2 #1 #0
0000 SEQ INI ISO TVC
[Тип данных] Бит
TVC Проверка TV
ISO Код, используемый для вывода данных
INI Единицы ввода
SEQ Автоматическая вставка номеров последовательности
#7 #6 #5 #4 #3 #2 #1 #0
0001 FCV
[Тип данных] Бит
FCV Формат ленты
Ввод данных допустим.
0: Не выполняется
1: Выполняется
0: Код EIA
1: Код ISO
0: В мм
1: В дюймах
0: Не выполняется
1: Выполняется
Если программа подготавливается с использованием клавиш
ручного ввода данных, в хранилище программы обработки
деталей и в режиме редактирования, номер последовательности
может быть автоматически назначен каждому блоку в
установленных инкрементах. Установите значение инкремента в
параметре 3216.
Ввод данных допустим.
0: Стандартный формат серии 0
(Формат серии 16/18)
1: Формат серии 10 / 11
ПРИМЕЧАНИЕ
Программы, созданные в формате ленты серии
10/11, могут использоваться для выполнения
следующих функций:
1 Вызов подпрограммы M98
2 Нарезание резьбы с одинаковым шагом G32
(серия T)
3 Постоянный цикл G90, G92, G94 (серия T)
4 Многократно повторяемый постоянный цикл от
G71 до G76 (серия T)
5 Постоянный цикл сверления G73, G74, G76, G80
по G89 (серия M)
6 Коррекция на режущий инструмент C (серия M)
2 При использовании формата ленты серии 10/11
для данного ЧПУ, могут налагаться некоторые
ограничения. Обратитесь к РУКОВОДСТВУ
ПОЛЬЗОВАТЕЛЯ Серии 0i/0i Mate-МОДЕЛЬ C.
- 10 -
Page 23
B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
#7 #6 #5 #4 #3 #2 #1 #0
0002 SJZ RDG
Ввод данных допустим.
[Тип данных] Бит
RDG Удаленная диагностика
0: Не выполняется
1: Выполняется.
Для использования последовательного порта RS-232-C для
выполнения удаленной диагностики, подсоедините и настройте
модем, кабель, и все необходимое, а затем установите 1 в данном
параметре. При использовании модемной карты, установка не
требуется.
SJZ Ручное референтное положение действует следующим образом:
0: Если референтное положение не установлено, возврат на
референтную позицию выполняется при помощи тормозных
упоров. Если референтное положение установлено, возврат
на референтную позицию выполняется при помощи
ускоренного подвода и тормозные упоры игнорируются.
1: Возврат на референтную позицию всегда выполняется с
использованием тормозных упоров.
ПРИМЕЧАНИЕ
SJZ активирован, если бит 3 (HJZ) параметра
ном. 1005 установлен в 1. Если референтное
положение установлено без упора, (т.е. если бит
1 (DLZ) параметра ном. 1002 установлен в 1 или
бит 1 (DLZx) параметра ном. 1005 установлен в
1), возврат на референтную позицию после
установки референтного положения всегда
выполняется с использованием ускоренного
подвода, вне зависимости от установки SJZ.
#7 #6 #5 #4 #3 #2 #1 #0
0012
[Тип данных] Разрядная ось
MIRx Зеркальное отображение для каждой оси
AICx Расстояние перемещения по команде оси:
RMVx AICx MIRx
RMVx MIRx
Ввод данных допустим.
0: Зеркальное отображение отключено.
1: Зеркальное отображение включено.
0: Определяется значением задаваемым в адресе.
1: Всегда принимается как инкрементное значение.
- 11 -
Page 24

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
0020
[Тип данных] Байт
[Диапазон действит. данных] от 0 до 35
I/O CHANNEL (КАНАЛ ВВОДА-ВЫВОДА): Выбор устройства
ввода/вывода или выбора приоритетного устройства ввода
Ввод данных допустим.
I/O CHANNEL (КАНАЛ ВВОДА-ВЫВОДА): Выбор
используемого устройства ввода/вывода
ЧПУ предоставляет следующие интерфейсы для передачи данных
на головной компьютер и внешние устройства ввода/вывода:
• Интерфейс устройства ввода/вывода (RS-232-C
последовательные порты 1 и 2)
• Интерфейс DNC2
Ввод/вывод данных может производиться с персонального
компьютера с использованием карт FOCAS1/Ethernet или
FOCAS1/HSSB. Ввод/вывод данных так же может производиться с
ЧПУ Power Mate через линию FANUC I/O.
Данный параметр выбирает интерфейс используемый для
передачи данных на и от устройства ввода/вывода.
Задание Описание
0, 1 Последовательный порт RS-232-С 1
2 Последовательный порт RS-232С 2
4 Интерфейс карты памяти
5 Интерфейс сервера данных
6 Выполняется прямое цифровое управление или указана
M198 в FOCAS1/ Ethernet.
10 Интерфейс DNC2, OSI-Ethernet
15 M198 указано в FOCAS1/HSSB. (Бит 1 (NWD) параметра
ном. 8706) так же должен быть задан.)
20
21
22
34
35
Группа 0
Группа 1
Группа 2
-
Группа 14
Группа 15
Данные передаются между ЧПУ и power mate
ЧПУ в группе n (n: от 0 до 15) через
соединение FANUC I/O.
Дополнительное замечание 1
Если прямое цифровое управление выполняется при помощи
FOCAS1/HSSB, установка параметра ном. 20 значения не
имеет. Используется сигнал DMMC <G042.7>.
Дополнительное замечание 2
Если бит 0 (IO4) параметра ном. 110 установлен для
независимого управления каналами ввода/вывода, то каналы
ввода/вывода могут быть разделены на четыре типа:
приоритетный ввод и вывод и фоновый ввод и вывод. В этом
случае, параметр ном. 20 становится параметром для выбора
приоритетного устройства ввода.
- 12 -
Page 25
B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
ПРИМЕЧАНИЕ
1 Устройство ввода/вывода так же может быть выбрано на экране установок.
Обычно, для установки используется экран установок.
2 Спецификации (такие как скорость ввода и количество стоповых битов)
подключаемых устройств ввода/вывода, должны быть заранее установлены в
соответствующих параметрах для каждого интерфейса. (Смотрите раздел 4.2.)
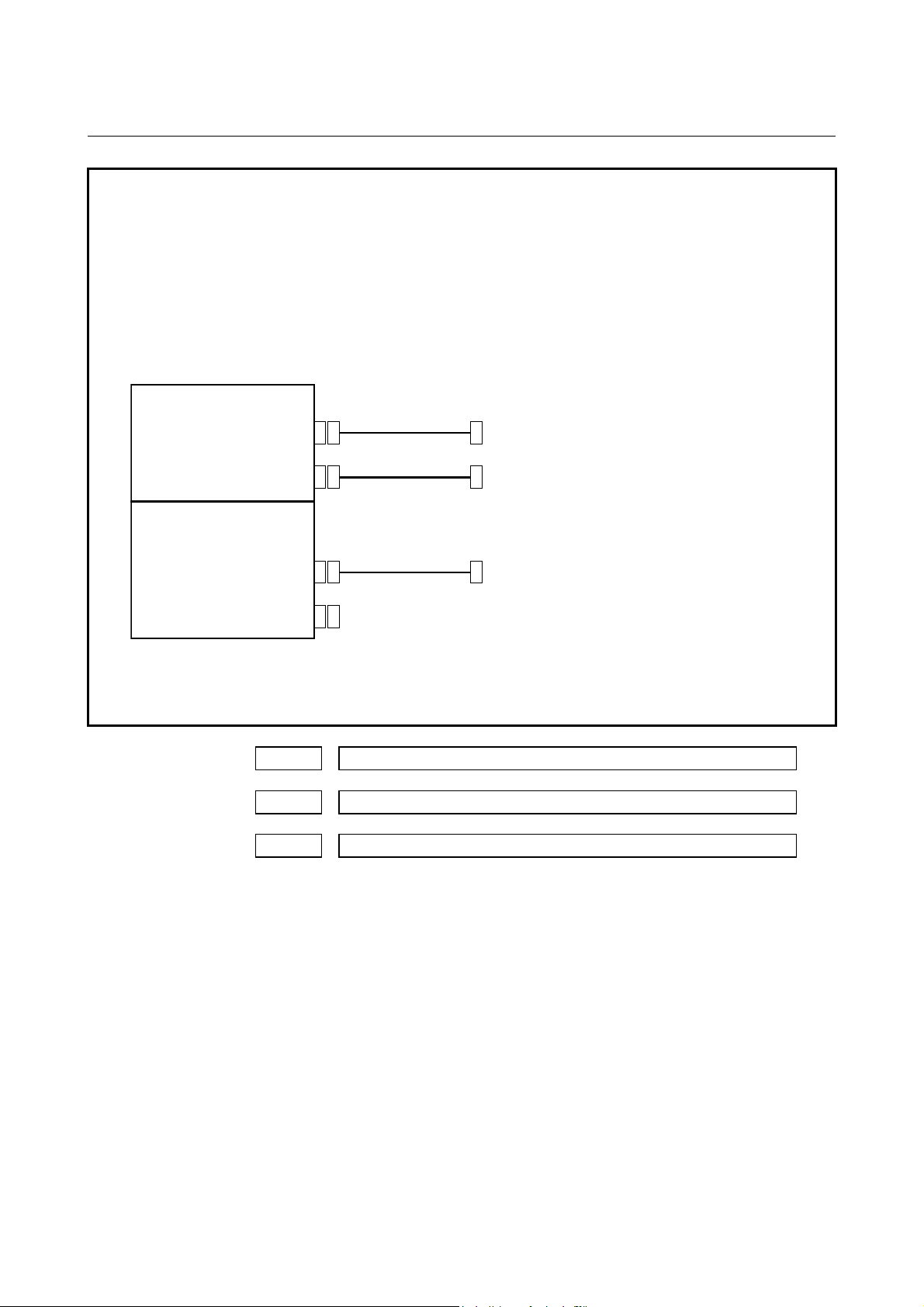
I/O CHANNEL (канал ввод/вывода) = 0 и I/O CHANNEL (канал ввод/вывода) = 1
представляют устройства ввода/вывода подключенные к последовательному
порту RS-232-C 1. Для каждого канала имеются отдельные параметры для
скорости, стоповых битов и других установок.
Материнская плата
Последовательный порт
RS-232-С 1
Последовательный порт
RS-232С 2
Плата последовательного
соединения
Плата DNC2
R232-1 (JD36A)
R232-2 (JD36B)
R2323(JD28A)
КАНАЛ ВВОДА-
ВЫВОДА=0, 1
(Канал 1)
КАНАЛ ВВОДА-
ВЫВОДА=2
(Канал 2)
КАНАЛ ВВОДА-
ВЫВОДА=3
(Канал 3)
Устр. ввода-вывода RS-232-C
Устр. ввода-вывода RS-232-C
Устр. ввода-вывода RS-232-C
(если используется плата DNC2)
R4221(JD6A)
3 Интерфейс устройства ввода/вывода может восприниматься как интерфейс
считывателя/перфоратора.
Последовательный порт RS-232-C 1 и RS-232-C 2 так же воспринимаются как
канал 1 и канал 2, соответственно.
0021 Выбор приоритетного устройства вывода
0022 Выбор фонового устройства ввода
0023 Выбор фонового устройства вывода
Ввод данных допустим.
[Тип данных] Байт
[Диапазон действит. данных] от 0 до 2, 5, 10
Данные параметры действительны, только если бит 0 (IO4)
параметра
ном. 110 установлен для независимого контроля каналов
ввода/вывода.
Параметры устанавливающие индивидуальные устройства
ввода/вывода если каналы ввода/вывода
разделены на следующие четыре типа: приоритетный ввод и
вывод, и фоновый ввод и вывод. Приоритетное устройство ввода
устанавливается в параметре ном. 20. Для подробностей установок,
смотри таблицу, сопровождающую описание параметра ном. 20.
- 13 -
Page 26
4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
ПРИМЕЧАНИЕ
Если разные устройства ввода/вывода
одновременно используются как приоритетные и
фоновые, для фонового устройства может
использоваться только значение с 0 до 2.
При попытке использовать занятое устройство
ввода/вывода, выдается сигнал тревоги (P/S233
или BP/S233). Помните, что значения 0 и 1
обозначают одно и то же устройство
ввода/вывода.
- 14 -
Page 27
B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
4.2 ПАРАМЕТРЫ ИНТЕРФЕЙСА СЧИТЫВАТЕЛЯ/
ПЕРФОРАТОРА, УДАЛЕННЫЙ БУФЕР, DNC1, DNC2, И
ИНТЕРФЕЙС M-NET
Перед тем как данные (программы, параметры, и так далее) могут
быть считаны с, и переданы на внешнее устройство ввода/вывода,
через интерфейс устройства ввода/вывода (последовательный
порт RS-232-C), должны быть установлены параметры описанные
ниже.
Параметр установки I/O CHANNEL (канала ввода/вывода),
используемое устройство ввода/вывода, выбирается путем
задания одного из двух каналов (последовательный порт RS-232-C
1 и последовательный порт RS-232-C 2) который подсоединен к
устройству ввода/вывода.
В дополнение, спецификации устройств ввода/вывода
подсоединенных к каждому каналу (Например, номер
спецификации, скорость передачи, и количество стоповых бит
устройства ввода/вывода) должны быть заранее установлены в
параметрах относящихся к каждому каналу.
Для канала 1 предусмотрены две комбинации параметров для
установки данных устройства ввода-вывода.
Следующее показывает взаимосвязь между параметрами
интерфейса устройства ввода/вывода для каналов.
Номер канала ввода/вывода (параметр 0020)
↓
I/O CHANNEL
0020
Установите канал для
устройства ввода-вывода.
I/O CHANNEL
(КАНАЛ ВВОДА-ВЫВОДА)
= 0 : Канал 1
= 1 : Канал 1
= 2 : Канал 2
(КАНАЛ
ВВОДА-ВЫВОДА)
Рис. 4.2 Установки интерфейса устройства ввода/вывода
КАНАЛ
ВВОДА-ВЫВОДА=0
(Канал 1)
КАНАЛ
ВВОДА-ВЫВОДА=1
(Канал 1)
КАНАЛ
ВВОДА-ВЫВОДА=2
(Канал 2)
0101
0102
0103
0111
0112
0113
0121
0122
0123
Стоповый бит и другие данные
Заданный номер для устройства
ввода-вывода
Скорость передачи данных в бодах
Стоповый бит и другие данные
Заданный номер для устройства
ввода-вывода
Скорость передачи данных в бодах
Стоповый бит и другие данные
Заданный номер для устройства
ввода-вывода
Скорость передачи данных в бодах
- 15 -
Page 28
4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
4.2.1 Параметры общие для всех каналов
0024
[Тип данных] Байт
#7 #6 #5 #4 #3 #2 #1 #0
0100 ENS IOP ND3 NCR CRF CTV
[Тип данных] Бит
CTV: Подсчет символов для проверки TV в разделе комментариев
CRF EOB (конец блока) должен выводиться в коде ISO:
NCR Вывод в конце блока (EOB) в коде ISO
ND3 При прямом цифровом управлении, программа:
Порт для связи с PCI модулем инструмента цепной обработки (FANUC
LADDER-III)
Следующий параметр может быть установлен на "Экране
установок".
Данный параметр устанавливает порт для связи PCI модулем
инструмента цепной обработки (FANUC LADDER-III).
0: Согласно установкам на экране установок PCI модуля
1: RS-232-C последовательный порт 1 (JD36A)
2: RS-232-C последовательный порт 2 (JD36B)
10: Высокоскоростной интерфейс (HSSB (COP7) или Ethernet)
11: Высокоскоростной интерфейс или последовательный порт
RS-232-C 1
12: Высокоскоростной интерфейс или последовательный порт
RS-232-C 2
программы.
0: Выполняется
1: Не выполняется
0: В зависимости от установки бита 3 (NCR) параметра ном.
100.
1: это перевод строки "CR""LF".
ПРИМЕЧАНИЕ
Выходные шаблоны вывода EOB (конца блока)
показаны ниже:
NCR CRF EOB выходной формат
0 0 "LF" "CR" "CR"
0 1 "CR" "LF"
1 0 "LF"
1 1 "CR" "LF"
0: LF, CR, CR выведены.
1: Только LF выведен.
0: Считывается поблочно. (Код DC3 на выходе для каждого
блока.)
1: Непрерывное считывание до заполнения буфера. (Код DC3 на
выходе по заполнении буфера.)
- 16 -
Page 29
B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
ПРИМЕЧАНИЕ
В основном, считывание выполняется более
эффективно, когда ND3 установлен в 1. Данная
спецификация уменьшает число прерываний
буферизации вызванное считыванием
последовательности блоков задающих короткие
перемещения. Это в свою очередь уменьшает
эффективное время цикла.
IOP Задает как производить остановку операций ввода/вывода в
программе.
0: Сброс числового управления может остановить операции
ввода/вывода в программе.
1: Только дисплейная клавиша [STOP] может остановить
операции ввода/вывода в программе. (Сброс числового
управления не может остановить операции ввода/вывода в
программе.)
ENS Действие производимое, когда при чтении кода EIA, найден код
NULL
0: Выдается сигнал тревоги.
1: Код NULL игнорируется.
#7 #6 #5 #4 #3 #2 #1 #0
0110 IO4
[Тип данных] Бит
IO4 раздельное управление каналом ввода/вывода:
0: Не выполняется
1: Выполняется.
Если раздельное управление каналами ввода/вывода не
выполняется, установите устройство ввода/вывода в параметре
ном. 20.
Если раздельное управление каналами ввода/вывода выполняется,
установите приоритетные устройства ввода и вывода и фоновые
устройства ввода и вывода в параметрах ном. 20 - ном. 23,
соответственно.
Раздельное управление каналами ввода/вывода позволяет
производить фоновое редактирование, ввод/вывод программы, и
тому подобное, во время прямого цифрового управления.
4.2.2 Параметры канала 1 (I/O CHANNEL=0)
#7 #6 #5 #4 #3 #2 #1 #0
0101
NFD ASI SB2
NFD ASI HAD SB2
[Тип данных] Бит
SB2 Количество стоповых битов
0: 1
1: 2
HAD Сигнал тревоги выдаваемый для внутреннего файла:
0: Не отображается в деталях на экране числового управления.
(Отображается сигнал тревоги PS 86.)
1: Отображается в деталях на экране числового управления.
- 17 -
Page 30
4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
ASI Код используемый для ввода данных
0: EIA или ISO код (ввод: определяется автоматически, вывод:
установка бита 1 параметра ном. 0000)
1: ASCII код для ввода и вывода
ПРИМЕЧАНИЕ
Если код ASCII используется для входных и
выходных данных (если ASI установлен в 1), так
же установите бит 1 параметра ном. 0000 - 1.
NFD Подача перед и после данных при выводе данных
0: Вывод
1: Нет вывода
ПРИМЕЧАНИЕ
При использовании устройств ввода/вывода
отличных от FANUC PPR, установите NFD в 1.
0102
[Тип данных] Байт
Число заданное для устройства ввода/вывода (когда I/O CHANNEL
установлен в 0)
Установите число заданное для устройства ввода/вывода
используемое когда I/O CHANNEL установлен в 0, с одним из
установленных значений перечисленных в Таблице 4.2.2 (a).
Таблица 4.2.2 (a) Установленное значение и устройство
ввода/вывода
Установленное
значение
0
1
2
3
4
5
6
RS-232-C
(Используемые коды управления DC1 - DC4)
FANUC CASSETTE ADAPTOR (кассетный адаптер)1
(FANUC CASSETTE B1/ B2)
FANUC CASSETTE ADAPTOR (кассетный адаптер)3
(FANUC CASSETTE F1)
FANUC PROGRAM FILE Mate (файл программы),
Адаптер карт FANUC FA
FANUC FLOPPY CASSETTE ADAPTOR (адаптер
магнитных кассет), Внутренний файл FANUC
FANUC SYSTEM P-МОДЕЛЬ H
RS-232-C
(Неиспользуемые коды управления DC1 - DC4)
Портативное устройство считывания с ленты
(PPR)
Устройство считывания/вывода FANUC
FANUC SYSTEM P-МОДЕЛЬ G, FANUC SYSTEM
P-МОДЕЛЬ H
Устройство ввода-вывода
- 18 -
Page 31

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
0103 Скорость передачи (если I/O CHANNEL установлен в 0)
[Тип данных] Байт
Установите скорость передачи устройства ввода/вывода
используемую когда I/O CHANNEL установлен в 0, при помощи
установленного значения в Таблице 4.2.2 (b).
Таблица 4.2.2 (b)
Скорость
передачи
данных в
бодах
(бит/с)
Установленное
значение
1 50 7 600
2 100 8 1200
3 110 9 2400
4 150 10 4800
5 200 11 9600
6 300 12 19200
Скорость
передачи
данных в
бодах
(бит/с)
Установленное
значение
4.2.3 Параметры канала 1 (I/O CHANNEL=1)
#7 #6 #5 #4 #3 #2 #1 #0
0111 NFD ASI SB2
[Тип данных] Бит
Эти параметры используются, когда I/O CHANNEL установлен в 1.
Значения битов те же что и для параметра 0101.
0112
Число заданное для устройства ввода/вывода (когда I/O CHANNEL
установлен в 1)
[Тип данных] Байт
Установите число, заданное для устройства ввода/вывода
используемое когда I/O CHANNEL установлен в 1, с одним из
установленных значений перечисленных в Таблице 4.2.2 (a).
0113 Скорость передачи (если I/O CHANNEL установлен в 1)
[Тип данных] Байт
Установите скорость передачи устройства ввода/вывода
используемую когда I/O CHANNEL установлен в 1, при помощи
установленного значения в Таблице 4.2.2 (b).
4.2.4 Параметры канала 2 (I/O CHANNEL=2)
#7 #6 #5 #4 #3 #2 #1 #0
0121 NFD ASI SB2
[Тип данных] Бит
Данные параметры используются когда I/O CHANNEL установлен
в 2. значения битов те же, что и для параметра 0101.
0122
Число заданное для устройства ввода/вывода (когда I/O CHANNEL
[Тип данных] Байт
установлен в 2)
- 19 -
Page 32

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
Установите число заданное для устройства ввода/вывода
используемое, когда I/O CHANNEL установлен в 2, со значением в
Таблице 4.2.2 (a).
0123 Скорость передачи (если I/O CHANNEL установлен в 2)
[Тип данных] Байт
Установите скорость передачи устройства ввода/вывода
используемую, когда I/O CHANNEL установлен в 2, при помощи
установленного значения в Таблице 4.2.2 (b).
#7 #6 #5 #4 #3 #2 #1 #0
0134 NCD SYN PRY
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] Бит
PRY Бит четности
0: Не используется
1: Используется
SYN сброс/сигнал тревоги в протоколе B
0: Не передается на хост
1: Передается на хост с кодами SYN и NAK
NCD CD (определение качества сигналов) интерфейса RS-232-C
0: Проверено
1: Не проверено
#7 #6 #5 #4 #3 #2 #1 #0
0135 RMS PRA ETX ASC
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] Бит
ASC Код связи кроме данных числового управления
0: Код ISO
1: Код ASCII
ETX Код конца для протокола A, или расширенного протокола A
0: CR код в ASCII/ISO
1: ETX код в ASCII/ISO
ПРИМЕЧАНИЕ
Использование ASCII/ISO задается в ASC.
PRA Протокол связи
0: Протокол B
1: Протокол A
RMS Состояние удаленной/ленточной операции при использовании
протокола A
0: Всегда возвращается 0.
1: Возвращается содержимое запроса на замену при
удаленной/ленточной операции в команде SET от хоста.
- 20 -
Page 33

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
#7 #6 #5 #4 #3 #2 #1 #0
0138 MDN OWN
[Тип данных] Бит
OWM Если данные числового управления или программы числового
управления выводятся на карту памяти, то сообщение о
перезаписи файла:
0: Отображается.
1: Не отображается.
MDN Функция прямого цифрового управления при помощи карты
памяти:
0: Отключена.
1: Включена. (Необходимо подключение карты PCMCIA.)
ПРИМЕЧАНИЕ
Используйте подключения для карты PCMCIA
подходящее для ЧПУ, для закрепления карты
памяти в ЧПУ.
- 21 -
Page 34

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
4.3 ПАРАМЕТРЫ ИНТЕРФЕЙСА DNC2
#7 #6 #5 #4 #3 #2 #1 #0
0140 ECD NCE BCC
[Тип данных] Бит
BCC Значение BCC (символы проверки блока) для интерфейса DNC2:
NCE Сигналы ER (RS-232-C) и TR (RS422):
ECD Код ошибки при отрицательном квитировании
0143
[Тип данных] Байт
[Единица измерения данных] сек
[Диапазон действ. данных] от 1 до 60 (Стандартное значение 3.)
0144
[Тип данных] Байт
[Единица измерения данных] сек
[Диапазон действ. данных] от 1 до 60 (Стандартное значение 5.)
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
0: Проверяется.
1: Не проверяется.
Если значение BCC не проверяется, само значение BCC должно
быть задано.
0: Проверяются.
1: Не проверяются.
Этот параметр специфичен для интерфейса DNC2.
0: Четырех разрядный шестнадцатеричный код ошибки
добавляется к отрицательному квитированию.
1: Код ошибки не добавляется к отрицательному квитированию.
Этот параметр специфичен для интерфейса DNC2.
ПРИМЕЧАНИЕ
Для использования коммуникационной
библиотеки FANUC DNC2 для компьютерахоста, установите этот параметр в 1.
Ограничение по времени для таймера мониторинга ответа (интерфейс
DNC2)
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
Ограничение по времени для таймера мониторинга сигнала EOT
(интерфейс DNC2)
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
- 22 -
Page 35

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
0145 Время, требуемое для переключения RECV и SEND (интерфейс DNC2)
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] Байт
[Единица измерения данных] сек
[Диапазон действ. данных] от 1 до 60 (Стандартное значение 1.)
0146
Число раз, которое система пытается переустановить связь (интерфейс
DNC2)
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] Байт
[Единица измерения данных] сек
[Диапазон действ. данных] от 1 до 10 (Стандартное значение 3.)
Устанавливает максимальное количество раз, которое система
пытается переустановить связь с удаленным устройством, если
устройство использует неверный протокол передачи данных, или
не отвечает на запрос.
0147
Число раз, которое система посылает ответное сообщение на сигнал
NAK (интерфейс DNC2)
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] Байт
[Единица измерения данных] Число раз
[Диапазон действ. данных] от 1 до 10 (Стандартное значение 2.)
Устанавливает число раз, которое система посылает ответное
сообщение на сигнал NAK.
0148 Число символов при переполнении (интерфейс DNC2)
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] Байт
[Диапазон действ. данных] от 10 до 225 (Стандартное значение 10.)
Устанавливает число символов которое система может принять
после прекращения передачи (CS отключено).
- 23 -
Page 36

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
0149
Число символов в секции данных в коммуникационном пакете
(интерфейс DNC2)
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] Слово
[Диапазон действ. данных] от 80 до 256 (Стандартное значение 256.)
Стандартное значение 256. Ели указанное значение выходит за
диапазон, то используется значение 80 или 256.
Этот параметр определяет максимальную длину пакета
используемую при передаче через интерфейс DNC2. Включая два
символа в начале пакета, четыре символа, используемые для
команды, и три символа в конце, максимальное число символов в
пакете это девять плюс число заданное в параметре ном. 0149.
Длина пакета
DLE
STX
2 байтов 4 байта от 80 до 256 байт 3 байтов
Команда Раздел данных DEL ETX BCC
- 24 -
Page 37

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
4.4 ПАРАМЕТРЫ УДАЛЕННОЙ ДИАГНОСТИКИ
#7 #6 #5 #4 #3 #2 #1 #0
0002 RDG
[Тип данных] Бит
RDG Удаленная диагностика:
#7 #6 #5 #4 #3 #2 #1 #0
0201 NCR ASC SB2
[Тип данных] Бит
SB2 Количество стоповых битов:
ASC Код используемый для вывода данных:
NCR EOB (конец блока) выводится как:
0203 Скорость передачи (для удаленной диагностики)
[Тип данных] Байт
0: Не выполняется.
1: Выполняется.
Если для выполнения удаленной диагностики используется
последовательный порт RS-232-C, то подсоедините и настройте
модем, кабель, и все необходимое, а затем установите 1 в данном
параметре.
0: 1.
1: 2.
Для проведения удаленной диагностики, установите 0.
0: Код ISO.
1: Код ASCII.
Для проведения удаленной диагностики, установите 1.
0: "LF""CR""CR".
1: Просто "LF".
Для проведения удаленной диагностики, установите 1.
Установите скорость для приема/передачи данных для удаленной
диагностики, согласно нижеприведенным таблицам.
При использовании последовательного порта RS-232-C
Скорость
передачи
данных в
бодах
(бит/с)
Установленное
значение
1 50 7 600
2 100 8 1200
3 110 9 2400
4 150 10 4800
5 200 11 9600
6 300 12 19200
Скорость
передачи
данных в
бодах
(бит/с)
Установленное
значение
ПРИМЕЧАНИЕ
В таблицах выше указана скорость связи между
ЧПУ и модемом. Фактическая скорость передачи
данных может быть снижена, в зависимости от
модема и линии связи.
- 25 -
Page 38

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
0204 Канал удаленной диагностики
[Тип данных] Байт
[Диапазон действ. данных] 0, 1, 2
Интерфейс используемый для удаленной диагностики:
0,1: RS-232-C последовательный порт 1 (канал 1).
2 : RS-232-C последовательный порт 2 (канал 2).
0211 Пароль 1 для удаленной диагностики
0212 Пароль 2 для удаленной диагностики
0213 Пароль 3 для удаленной диагностики
[Тип данных] двойное слово
[Диапазон действ. данных] от 1 до 99999999
Задайте пароль для использования функции удаленной
диагностики.
Функция удаленной диагностики имеет следующие установки
пароля. Данные могут защищаться для предотвращения
постороннего доступа к параметрам системы или программе
обработки без разрешения.
Пароль 1:
Установите пароль для всей функции удаленной диагностики.
(Функции удаленной диагностики доступны только если на
хост-системе введен пароль (Например, на компьютере).)
Пароль 2:
Пароль на программу обработки деталей. (Ввод/вывод,
проверка, и идентичность программы возможны только если
на хост-системе введен пароль (Например, на компьютере).)
Пароль 3:
Установите пароль на параметр. (Ввод/вывод, и
идентичность параметра возможны только если на
хост-системе введен пароль (Например, на компьютере).)
ПРИМЕЧАНИЕ
Как только в качестве пароля указано значение
отличное от 0, пароль можно изменить только
если такое же значение задано в
соответствующем ключевом слове (параметры
ном. 221 - 223). Как только в качестве пароля
указано значение отличное от 0, пароль не
отображается на экране установок параметров
(показывается пустой экран). Будьте осторожны
при установке пароля.
0221 Ключевое слово 1 для удаленной диагностики
0222 Ключевое слово 2 для удаленной диагностики
- 26 -
Page 39

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
0223 Ключевое слово 3 для удаленной диагностики
[Тип данных] 2-слова
[Диапазон действ. данных] от 1 до 99999999
Устанавливает ключевое слово для пароля на функцию удаленной
диагностики.
Ключевое слово 1: Ключевое слово для пароля 1 (параметр 211)
Ключевое слово 2: Ключевое слово для пароля 2 (параметр 212)
Ключевое слово 3: Ключевое слово для пароля 3 (параметр 213)
Как только в качестве пароля указано значение отличное от 0,
(параметры ном. 211 - ном. 213), пароль можно изменить только
если такое же значение задано в соответствующем ключевом
слове.
ПРИМЕЧАНИЕ
Значение ключевого слова сбрасывается на 0
при включении питания. На экране установки
параметров, значение ключевого слова не
отображается (показывается пустой экран).
- 27 -
Page 40

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
4.5 ПАРАМЕТРЫ ИНТЕРФЕЙСА КАРТЫ ПАМЯТИ
#7 #6 #5 #4 #3 #2 #1 #0
0300 PCM
[Тип данных] Бит
PCM Если активирована функция экранного отображения ЧПУ, если
имеется интерфейс карты памяти на стороне ЧУ (соединение
HSSB),
0: Используется интерфейс карты памяти на стороне ЧУ.
1: Используется интерфейс карты памяти на стороне ПК.
Этот параметр действителен, если параметр ном. 20 установлен в 4
(интерфейс карты памяти). Данный параметр действителен,
только если активирована функция экранного отображения ЧПУ.
- 28 -
Page 41
B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
4.6 ПАРАМЕТРЫ СЕРВЕРА ДАННЫХ
#7 #6 #5 #4 #3 #2 #1 #0
0900 ONS DSV
[Тип данных] Бит
DSV Функция сервера данных
0: Включена
1: Отключена
ONS Если номер O в имени файла сервера данных и номер O в
программе ЧУ не совпадают:
0: Номер O в имени файла имеет приоритет.
1: Номер O в программе ЧУ имеет приоритет.
0921 OS выбранная для хост-компьютера 1 сервера данных
0922 OS выбранная для хост-компьютера 2 сервера данных
0923 OS выбранная для хост-компьютера 3 сервера данных
[Тип данных] Слово
[Диапазон действ. данных] от 0 до 1
0: Выбрана Windows95/98/NT.
1: Выбрана UNIX или VMS.
0924 Установка латентности для DNC1/Ethernet или FOCAS1/Ethernet
[Тип данных] Слово
[Единица измерения данных] мсек
[Диапазон действ. данных] от 0 до 255
Устанавливает латентность сервиса FOCAS1/Ethernet если
FOCAS1/Ethernet используется совместно с функцией сервера
данных.
Если установлено значение между 0 и 2, предполагается значение
2 мсек.
- 29 -
Page 42

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
4.7 ПАРАМЕТРЫ ETHERNET
0931
0932
0933
0934
0935
[Тип данных] Байт
[Диапазон действ. данных] от 32 до 95
Специальный код символа, относящийся к дисплейной клавише
[CHAR-1]
Специальный код символа, относящийся к дисплейной клавише
[CHAR-2]
Специальный код символа, относящийся к дисплейной клавише
[CHAR-3]
Специальный код символа, относящийся к дисплейной клавише
[CHAR-4]
Специальный код символа, относящийся к дисплейной клавише
[CHAR-5]
Данные параметры позволяют обеспечить ввод специальных
символов, которых нет на панели ручного ввода данных, но
которые должны быть в имени пользователя, пароле или при
регистрации DIR путем нажатия дисплейной клавиши на экране
параметров Ethernet.
Если на входе параметра имеется значение отличное от 0,
отображается специальный символ назначенный дисплейной
клавише от [CHAR-1] до [CHAR-5].
Коды специальных символов приводятся в ASCII кодах.
Примеры кодов специальных символов
Специаль-
ный
символ
Пустой 32 ) 41 < 60
! 33 * 42 > 62
" 34 + 43 ? 63
# 35 , 44 @ 64
$ 36 - 45 [ 91
% 37 . 46 ^ 92
& 38 / 47 # 93
' 39 : 58 ] 94
( 40 ; 59 _ 95
Код
Специаль-
ный
символ
Код
Специаль-
ный
символ
Код
- 30 -
Page 43

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
4.8 ПАРАМЕТРЫ АДМИНИСТРАТОРА ЧПУ POWER MATE
#7 #6 #5 #4 #3 #2 #1 #0
0960 ASG SPW PMN MD2 MD1 SLV
[Тип данных] Бит
SLV Если выбрано управление ЧПУ power mate, на экране
отображается:
0: Один ведомый.
1: До четырех подчиненных устройств, путем деления экрана на
четыре части.
MD1,MD2 Эти параметры устанавливают направление ввода/вывода
подчиненного параметра.
MD2 MD1 Назначение ввода-вывода
0 0
0 1 Карта памяти
В любом случае, подчиненные параметры выводятся в формате
программы.
PMN Функция администратора ЧПУ power mate:
0: Включена.
1: Отключена. (Связь с подчиненными не производится.)
SPW Менеджер ЧПУ power mate позволяет установку параметров
подчиненных:
0: Вне зависимости от установок PWE.
1: В зависимости от установок PWE.
ASG Является ли количество байтов выделенных для назначения
ввода/вывода усилителя β с соединением каналом ввода-вывода
равным 16 байтам или нет:
0: Не проверяется.
1: Проверяется.
Сохранение программы
обработки деталей
- 31 -
Page 44

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
4.9 ПАРАМЕТРЫ УПРАВЛЕНИЯ ОСЯМИ/СИСТЕМЫ
ПРИРАЩЕНИЙ
#7 #6 #5 #4 #3 #2 #1 #0
1001 INM
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] Бит
INM Минимальное приращение команды на линейной оси
0: В мм (станок метрической системы)
1: В дюймах (станок системы измерения в дюймах)
#7 #6 #5 #4 #3 #2 #1 #0
1002
[Тип данных] Бит
JAX Число осей, управляемых одновременно при ручной постоянной
DLZ Функция установки референтного положения без упора
SFD Функция для смещения референтного положения
AZR Если никакое референтное положение не задано, команда G28
IDG XIK SFD DLZ JAX
IDG XIK AZR SFD DLZ JAX
подаче, ускоренном подводе вручную и ручном возврате в
референтное положение
0: 1 ось
1: 3 оси
0: Отключена
1: Включена (для всех осей)
ПРИМЕЧАНИЕ
1 Данная функция может быть задана для каждой
оси при помощи DLZx, бит 1 параметра ном.
1005.
2 Для систем включающих ось контроля контура
Cs или позиционирования шпинделя, избегайте
использование данного параметра. Используйте
вместо этого бит 1 (DLZx) параметра ном. 1005
для установки только для требуемой оси.
0: Не используется.
1: Используется.
выполняет:
0: Возврат на референтную позицию с использованием упоров
замедления (как и при ручном возврате на референтную
позицию).
1: Подается сигнал тревоги P/S ном. 090.
- 32 -
Page 45

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
ПРИМЕЧАНИЕ
Если задан возврат на референтную позицию
без упоров, (если бит 1 (DLZ) параметра ном.
1002 имеет значение 1. Команда G28, заданная
до задания референтной позиции, вызывает
сигнал тревоги PS ном.090, независимо от
установки AZR.
XIK Если LRP, бит 1 параметра ном. 1401, имеет значение 0, а именно,
если выполняется позиционирование нелинейного типа, если к
станку применяется взаимоблокировка вдоль одной из осей при
позиционировании,
0: Машина прекращает двигаться вдоль оси, к которой
применяется блокировка, и продолжает двигаться вдоль
других осей.
1: Машина прекращает движение вдоль всех осей.
IDG Если референтное положение задано без упоров, автоматическое
задание параметра IDGx (бит 0 параметра ном. 1012) для
недопущения повторного задания референтной позиции:
0: Не выполняется
1: Выполняется.
#7 #6 #5 #4 #3 #2 #1 #0
1004
IPR ISC
IPR IPI ISC ISA
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] Бит
ISA, ISC, ISD Устанавливаются наименьшее приращение ввода и наименьшее
приращение команды.
ISC ISA
0 0 0.001 мм, 0.001 градуса или 0.0001 дюйма IS-B
0 1 0.01 мм, 0.01 градуса или 0.001 дюйма IS-A
1 0 0.0001 мм, 0.0001 градуса или 0.00001 дюйма IS-C
Наименьшее приращение ввода и
наименьшее приращение команды
Обозна-
чение
ПРИМЕЧАНИЕ
IS-A не может использоваться в настоящий
момент.
IPI Бит 7 (IPR) параметра ном. 1004:
0: Параметр требует отключения питания для того, чтобы
значение стало допустимым, и который становится
недопустимым при неметрическом вводе.
1: Параметр не требует отключения питания, и который
допустим при неметрическом вводе.
IPR Устанавливается ли наименьшее приращение ввода для каждой
оси в значение в 10 раз большее, чем наименьшее заданное
приращение команды, в системах приращений IS-B или IS-C при
задании мм.
0: Наименьшее приращение ввода не устанавливается в
значение в 10 раз большее, чем наименьшее заданное
приращение команды.
1: Наименьшее приращение ввода устанавливается в значение в
10 раз большее, чем наименьшее заданное приращение
команды.
- 33 -
Page 46

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
Если IPR установлено в 1, наименьшее приращение ввода
устанавливается следующим образом:
Приращение ввода Наименьшее вводимое приращение
IS-B 0.01 мм, 0.01 градуса или 0.0001 дюйма
IS-C 0.001 мм, 0.001 градуса или 0.00001 дюйма
ПРИМЕЧАНИЕ
Для IS-A наименьшее приращение ввода не
может устанавливаться в значение в 10 раз
большее, чем наименьшее заданное
приращение команды.
Наименьшее приращение ввода не умножается
на 10 так же если используется ввод десятичной
точки калькуляторного типа (бит 0 (DPI)
параметра ном. 3401).
#7 #6 #5 #4 #3 #2 #1 #0
1005 EDMx EDPx HJZx DLZx ZRNx
[Тип данных] Разрядная ось
ZRNx При задании в автоматическом режиме команды перемещения за
исключением G28 (MEM, MDI, или DNC) и если возврат в
референтное положение не производился с момента включения
питания
0: Выдается сигнал тревоги (P/S 224).
1: Не выдается сигнал тревоги.
ПРИМЕЧАНИЕ
1 Состояние в котором референтное положение
не было установлено, этот состояние при
котором возврат на референтную позицию не
производился с момента включения питания,
когда не используется детектор абсолютного
положения, или состояние, при котором, не
производилось сопоставление положения
станка с положением, определенным
детектором абсолютного положения (смотри
описание бита 4 (APZx) параметра ном. 1815)
при использовании детектора абсолютного
положения.
2 Для использования функции которая
устанавливает референтную точку и производит
перемещение при помощи команды отличной от
G28, Например, оси контроля контура Cs,
установите этот параметр для относительной
оси.
3 При использовании функции установки
координат оси Cs (бит 2 (CSF) параметра ном.
3712), рекомендуется установить этот параметр
в 0.
DLZx Функция для установки референтного положения без упоров
0: Отключена
1: Включена
- 34 -
Page 47

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
ПРИМЕЧАНИЕ
1 Если бит 1 (DLZ) параметра ном. 1002 равен 0,
DLZx активирована. Если бит 1 (DLZ) параметра
ном. 1002 равен 1, DLZx отключен, и функция
для установки референтного положения без
упоров активирована для всех осей.
2 Не устанавливайте этот параметр для оси
контроля контура Cs или оси позиционирования
шпинделя.
HJZx Если референтное положение уже установлено:
0: Ручной возврат в референтное положение выполняется при
помощи тормозных упоров.
1: Ручной возврат в референтное положение выполняется при
помощи ускоренного подвода без тормозных упоров, либо
ручной возврат в референтное положение выполняется при
помощи тормозных упоров, в зависимости от установок бита
7 (SJZ) параметра ном. 0002.
ПРИМЕЧАНИЕ
Если используется функция (смотри бит 1 (DLZ)
параметра ном. 1002) для установки
референтного положения без упоров,
позиционирование в референтное положение
всегда выполняется при помощи ускоренного
подвода при возврате на референтную позицию
после установления референтного положения,
вне зависимости от установки HJZ.
EDPx Внешний сигнал замедления в положительном направлении для
каждой оси
0: Действительно только для ускоренного подвода
1: Действительно для ускоренного подвода и рабочей подачи
EDMx Внешний сигнал замедления в отрицательном направлении для
каждой оси
0: Действительно только для ускоренного подвода
1: Действительно для ускоренного подвода и рабочей подачи
- 35 -
Page 48
4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
#7 #6 #5 #4 #3 #2 #1 #0
1006
ZMIx DIAx ROSx ROTx
ZMIx ROSx ROTx
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] Разрядная ось
ROTx, ROSx Задание линейной оси или оси вращения.
ROSx ROTx Значение
0 0 Линейная ось
0 1 Ось вращения (A тип)
1 0 Установка недействительна (не использована)
1 1 Ось вращения (В тип)
(1) Преобразование из дюймовой в метрическую систему
выполнено.
(2) Все значения координат типа линейной оси.
(Не округлены от 0 до 360°)
(3) Сохраненная коррекция межмодульного смещения
оси линейного типа.
(См. параметр ном. 3624)
(1) Преобразование из дюймовой в метрическую систему
не выполнено.
(2) Значения координат станка округлены от 0 до 360°.
Абсолютные значения координат округлены или не
округлены параметром ном. 1008#0(ROAx) и
#2(RRLx).
(3) Сохраненная коррекция межмодульного смещения
типа вращения. (См. параметр ном. 3624)
(4) Автоматический возврат на референтную позицию
(G28, G30) выполняется в направлении возврата на
референтную позицию, а величина перемещения не
превышает одного вращения.
(1) Преобразование из дюймов в метры, абсолютные
значения координат и относительные значения
координат не выполнены.
(2) Значения координат станка, абсолютные значения
координат и относительные значения координат
относятся к типу линейной оси. (Не округлены от 0 до
360°)
(3) Сохраненная коррекция межмодульного смещения
типа линейной оси (См. параметр ном. 3624)
(4) Не могут быть использованы, когда ось вращения
проходит над функцией, а делительно-поворотный
стол индексирует функцию (M серия)
Для оси вращения, используемой для цилиндрической
интерполяции, установите ROTx в 1.
DIAx Диаметр или радиус используется для определения величины
перемещения по каждой оси.
0: Радиус
1: Диаметр
ZMIx Направление возврата на референтную позицию.
0: Положительное направление
1: Отрицательное направление
ПРИМЕЧАНИЕ
Направление свободного хода, который
возникает при включении питания,
противоположно направлению возврата на
референтную позицию.
- 36 -
Page 49

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
#7 #6 #5 #4 #3 #2 #1 #0
1007
[Тип данных] Разрядная ось
RTLx Операция возврата на референтную позицию для оси вращения:
OKIx ALZx RTLx
OKIx
0: Вращающегося типа оси.
1: Линейного типа оси.
ПРИМЕЧАНИЕ
Операции возврата на референтную позицию
для вращающегося типа оси, и линейного типа
оси отличаются следующим образом, в
зависимости от момента нажатия на упор
(сигнал торможения для возврата на
референтную позицию):
• Ось линейного типа:
Если упор нажат до остановки сигнала
единичного вращения, выдается сигнал
тревоги P/S ном. 090.
• Ось вращающегося типа:
Если упор нажат до остановки сигнала
единичного вращения, операция возврата на
референтную позицию продолжается без
выдачи сигнала тревоги.
ALZx Операция автоматического возврата на референтную позицию
вызывает:
0: Возврат в референтное положение путем позиционирования.
Если операция ручного возврата в референтное положение не
производилась после включения питания, операция
проводится в той же последовательности, что и для ручного
возврата в референтное положение.
1: Возврат в референтное положение проводится в той же
последовательности, что и для ручного возврата в
референтное положение.
ПРИМЕЧАНИЕ
Данный параметр не влияет на оси для которых
возврат на референтную позицию проводится
без упоров.
OKIx При установке референтного положения путем подачи оси на
стопор, после выполнения возврата на референтную позицию,
сигал тревоги P/S 000:
0: Выдается.
(Если эта установка выполнена, требуется детектор
абсолютного положения при использовании функции
установки референтного положения путем подачи оси на
стопор.)
1: Не выдается.
(Если эта установка выполнена, не требуется детектор
абсолютного положения, даже при использовании функции
установки референтного положения путем подачи оси на
стопор.)
- 37 -
Page 50

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
#7 #6 #5 #4 #3 #2 #1 #0
1008 RMCx RRLx RABx ROAx
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] Разрядная ось
ROAx Функция развертывания оси вращения
0: Недействительна
1: Действительна
ПРИМЕЧАНИЕ
ROAx задает функцию только для оси вращения
(для которой ROTx, #0 параметра ном. 1006,
имеет значение 1)
RABx В абсолютных командах ось вращается в направлении
0: В котором расстояние до мишени короче.
1: Заданном символом значения команды.
ПРИМЕЧАНИЕ
RABx верно только в случае, если ROAx равно 1.
RRLx Относительные координаты
0: Не округлены величиной смещения на одно вращение
1: Округлены величиной смещения на одно вращение
ПРИМЕЧАНИЕ
1 RRLx верно только в случае, если ROAx равно 1.
2 Присвоить величину смещения на один оборот в
параметре ном. 1260.
RMCx Если указан выбор системы машинных координат (G53) или
выбор высокоскоростной системы машинных координат (G53P1),
для функции развертывания оси вращения, установка бита 1
(RABx) параметра ном. 1008, который устанавливает направление
вращения для абсолютных команд:
0: Недействительна.
1: Действительна.
1010 Количество осей управляемых ЧПУ
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] Байт
[Диапазон действит. данных] 1, 2, 3, ..., число управляемых осей
- 38 -
Page 51

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
Устанавливает максимальное число осей которые могут
управляться ЧПУ.
Примеры
Предположим, что первая ось, это ось X, а вторая и
последующие оси, это оси Y, Z, и A в таком порядке, и что
они контролируются следующим образом:
оси X, Y, и Z: Контролируются ЧПУ
ось A : Контролируются модулем PCI
Затем установите этот параметр в 3 (всего 3: с 1-й по 3-ю ось)
При этой установке, четвертая ось (ось A) контролируется
только модулем PCI, и поэтому не может напрямую
управляться ЧПУ.
- 39 -
Page 52

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
#7 #6 #5 #4 #3 #2 #1 #0
1012 IDGx
[Тип данных] Разрядная ось
IDGx Функция для новой установки референтного положения, без
упоров:
0: Не запрещена.
1: Запрещена.
ПРИМЕЧАНИЕ
1 IDGx разрешена если параметр IDG (бит 7
параметра ном. 1002) равен 1.
2 При использовании функции установки
референтного положения без упоров, и
референтное положение потеряно по какой либо
причине, выдается сигнал тревоги
запрашивающий возврат на референтную
позицию (No.300) при следующем включении
питания. Если оператор выполняет возврат на
референтную позицию, в результате
ошибочного восприятия сигнала тревоги, как
сигнала который требует от оператора
нормального возврата на референтную
позицию, может быть установлено неверное
референтное положение. Для предотвращения
такой ошибки оператора, имеется параметр
IDGx который предотвращает возврат в
референтное положение без упоров.
(1) Если параметр IDG (бит 7 параметра ном.
1002) установлен в 1, параметр IDGx (бит 0
параметра ном. 1012) автоматически
устанавливается в 1, если референтное
положение устанавливается с
использованием функции установки
референтного положения без упоров. Это
предотвращает новую установку
референтного положения без упоров.
(2) Как только референтное положение
защищено от новой установки для оси, без
упоров, любая попытка установить
референтное положение для оси без упоров
вызывает сигнал тревоги (ном. 090).
(3) Если референтное положение необходимо
снова задать без использования упоров,
установите IDGx в 0 перед установкой
референтного положения.
- 40 -
Page 53

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
#7 #6 #5 #4 #3 #2 #1 #0
1015
DWT WIC SVS ZRL RHR
DWT WIC ZRL RHR
[Тип данных] Бит
RHR После переключения системы приращений (дюймовая/
метрическая), для оси вращения, первая команда G28 вызывает
возврат на референтную позицию:
0: На низкой скорости.
1: На высокой скорости.
ZRL Для высокоскоростного возврата на референтную позицию по
команде G28, со второго по четвертый возврат на референтную
позицию по командам G30, и G53:
0: Выполняется нелинейное позиционирование.
1: Выполняется линейное позиционирование.
Этот параметр активен если бит 1 (LRP) параметра ном. 1401
устанавливается в 1.
SVS Если система слежения по оси отключена, простое синхронное
управление:
0: Разблокировано.
1: Блокировано.
WIC Прямой ввод измеренных значений для коррекции начала
координат заготовки:
0: Активирован только для системы координат заготовки.
1: Активирован для всех систем координат.
ПРИМЕЧАНИЕ
Ели этот параметр установлен в 0, измеренные
значения могут быть введены напрямую только
в текущей выбранной системе координат
заготовки, или для внешней системы координат
заготовки. Если измеренные значения вводятся
напрямую для смещения начала координат
заготовки в другой системе координат, выдается
предупреждение.
DWT Если время выстоя задано P, единицы измерения данных:
0: 1 мс для IS-B, или 0.1 мс для IS-C.
1: 1 мс. (Вне зависимости от системы приращений.)
1020 Имя оси в программе для каждой оси
[Тип данных] Байтовая ось
Установите имя программной оси для каждой управляемой оси,
используя одно из значений в следующей таблице:
Имя
Задание Имя
оси
X 88 U 85 А 65 E 69
Y 89 V 86 В 66 - -
Z 90 W 87 C 67 - -
оси
Задание Имя
оси
Задание Имя
оси
Задание
- 41 -
Page 54

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
ПРИМЕЧАНИЕ
1 В серии T, с G кодами системы A, U, V, и W не
могут использоваться в качестве имени оси.
Только при использовании G кодов систем B или
C, U, V, и W могут использоваться в качестве
имени оси.
2 Одинаковое имя оси не может назначаться
более чем одной оси.
3 При наличии вторичной вспомогательной
функции (опции), адрес используемый этой
функцией (адрес B в серии T или M, адрес,
задаваемый в параметре ном. 3460) не может
использоваться в качестве имени оси.
4 В серии T, когда адрес C или A используется для
снятия фаски, закругления углов, или прямого
программирования чертежных размеров (если
CCR параметр (бит 4 параметра ном. 3405)
установлен в 1), адреса C или A не могут
использоваться в качестве имени оси.
5 Только в серии T, адрес E может использоваться
в качестве имени оси. Адрес E не может
использоваться в серии M. Если адрес E
используется в качестве имени оси, имейте в
виду следующее:
- При использовании G кодов системы A, адрес
E всегда присваивается абсолютной команде.
- При подаче команды нарезания резьбы с
одинаковым шагом (G32) в формате команды
FS10/11, адрес E не может задавать шаг
резьбы. Используйте адрес F для задания шага
резьбы.
1022 Задание каждой оси в основной системе координат
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] Байтовая ось
Для определения следующих плоскостей, используемых для
круговой интерполяции, коррекция на режущий инструмент C
(для серий M), коррекция на радиус вершины инструмента (для
серий T), и т.д., каждая управляемая ось устанавливается на три
базовых оси X, Y, и Z, или на ось параллельную оси X, Y, или Z.
G17: Плоскость Xp-Yp
G18: Плоскость Zp-Xp
G19: Плоскость Yp-Zp
Только одна ось может быть установлена на каждую из базовых
осей X, Y, и Z, однако могут быть установлены две и более
параллельных осей.
Установленное
значение
0 Ни одна из базовых осей или параллельных осей
1 X ось из основных трех осей
Значение
- 42 -
Page 55

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
Установленное
значение
2 Y ось из основных трех осей
3 Z ось из основных трех осей
5 Ось, параллельная оси X
6 Ось, параллельная оси Y
7 Ось, параллельная оси Z
Значение
1023 Число сервоосей для каждой оси
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] Байтовая ось
[Диапазон действит. данных] 1, 2, 3, ..., число управляемых осей/-1,-2
Установить сервоось для каждой оси управления.
Обычно задается на то же число, что и число оси управления.
Число оси управления - порядковый номер, используемый для
задания параметров типа оси или сигналов станка типа оси
Для использования управляемой оси в качестве шпинделя,
укажите -1.
Установка параметра CSS (бит 7 параметра ном. 3704) в 1
активирует возможность назначить второй последовательный
шпиндель в качестве оси контроля контура Cs.
Для использования последовательного шпинделя в качестве оси
контроля контура Cs, установите -2.
Для использования гипотетической си Cs для контроля контура Cs,
так же выполните установку назначения шпинделя.
Обратитесь к разделу FSSB РУКОВОДСТВО ПО
ПОДКЛЮЧЕНИЮ (Функция) (B-64113EN-1).
- 43 -
Page 56

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
X
X X X
4.10 ПАРАМЕТРЫ КООРДИНАТ
#7 #6 #5 #4 #3 #2 #1 #0
1201
[Тип данных] Бит
ZCL Локальная система координат, когда выполняется ручной возврат
AWK Если значение величины коррекции нулевой точки заготовки
WZR После сброса, система координат заготовки:
1202
[Тип данных] Бит
EWD Направление смещения системы координат заготовки, это:
WZR AWK ZCL
AWK ZCL
в референтное положение
0: Локальная система координат не отменена.
1: Локальная система координат отменена.
изменяется
0: Отображение абсолютного положения меняется при
выполнении следующего сбуферированного блока.
1: Отображение абсолютного положения меняется немедленно.
(Действительно если не начата автоматическая операция)
Измененное значение действительно после буферизации
следующего блока.
0: Не возвращается к той, которая указана в G54
1: Возвращается к той, которая указана в G54
#7 #6 #5 #4 #3 #2 #1 #0
SNC RLC G50 EWS EWD
SNC G52 RLC
0: Направление заданное внешним значением величины
коррекции нулевой точки заготовки
1: В направлении, противоположном направлению заданному
внешним значением величины коррекции нулевой точки
заготовки
EWD=0
Z
EXOFS
Z
EXOFS : Величина внешнего смещения нулевой точки заготовки
EWD=1
EXOFS
(Смещенная система
Z
координат заготовки)
(Оригинальная
система координат
Z
заготовки)
EWS Значения смещения системы координат заготовки и внешнего
значения величины коррекции нулевой точки заготовки
0: Хранятся в отдельных областях памяти.
1: Хранятся в одной области памяти, это значит, что смещение и
величина коррекции одинаковы.
- 44 -
Page 57

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
G50 Если задана команда G50 для установки системы координат (или
команда G92 в системе G команд B или C),
0: Команда G50 выполняется, и сигнал тревоги не выдается.
1: Команда G50 не выполняется и выдается сигнал тревоги P/S
(ном. 010).
RLC Локальная система координат
0: Не отменяется при сбросе
1: Отменяется при сбросе
G52 В локальной системе координат установка (G52), вектора
коррекции на режущий инструмент:
0: Не рассматривается.
1: Рассматривается.
ПРИМЕЧАНИЕ
Выбирайте операцию установки локальной сис-
темы координат при наличии коррекции на режущий инструмент, и когда два или более блоков
не задают перемещения перед указанием команды G52, или когда команда G52 задается
после прекращения коррекции на режущий
инструмент без уничтожения вектора коррекции.
SNC После сброса сигнала тревоги системы слежения, локальная
система координат (G52 или G92 (серии M), или G52 или G50
(серии T)):
0: Сброшена.
1: Не сброшена
ПРИМЕЧАНИЕ
Даже если этот параметр установлен в 1,
локальная система координат очищается, если
сделана настройка которая разрешает удаление
локальной системы координат при сбросе (бит 3
(RLC) параметра ном. 1202 = 1).
#7 #6 #5 #4 #3 #2 #1 #0
1203
[Тип данных] Бит
EMC Расширенная функция смещения внешней нулевой точки станка:
MMD 68A EMC
MMD EMC
0: Отключена.
1: Включена.
ПРИМЕЧАНИЕ
Если расширенная функция смещения внешней
нулевой точки станка активирована, обычная
функция смещения внешней нулевой точки
станка отключена.
68A При автоматической установке системы координат по детектору
абсолютного положения в режиме зеркального отображения при
торцевой обработке двумя держателями (G68):
0: Зеркальное отображение при торцевой обработке двумя
держателями не учитывается.
1: Зеркальное отображение при торцевой обработке двумя
держателями учитывается.
- 45 -
Page 58

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
MMD При ручной работе, направление перемещения оси для которой
функция зеркального отображения активирована:
0: Не тоже направление, что при автоматической работе.
1: Тоже направление, что и при автоматической работе.
#7 #6 #5 #4 #3 #2 #1 #0
1205
[Тип данных] Бит
R1O Вывод сигнала для первого референтного положения:
R2O Вывод сигнала для второго референтного положения:
1220 Величина внешнего смещения нулевой точки заготовки
[Тип данных] 2-слова ось
[Единица измерения данных]
[Диапазон действ. данных] от -99999999 до 99999999
R2O R1O
0: Отключен.
1: Включен.
Требуется функция вывода сигнала референтного положения.
Смотри описание параметра ном. 1245.
0: Отключен.
1: Включен.
Требуется функция вывода сигнала референтного положения.
Смотри описание параметра ном. 1246.
Приращение ввода IS-A IS-B IS-C Единица
Линейная ось (ввод в мм) 0.01 0.001 0.0001 мм
Линейная ось (ввод в
дюймах)
Ось вращения 0.01 0.001 0.0001 град
0.001 0.0001 0.00001 дюйм
Это один из параметров который определяет положение начала
координат системы координат заготовки (с G54 по G59). Это
делает коррекцию начала координат заготовки общим для всех
систем координат заготовки.
В общем случае, коррекция меняется в зависимости от системы
координат заготовки. Значение может быть установлено с модуля
PCI используя функцию внешнего ввода данных.
- 46 -
Page 59

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
1221
Значение коррекции нулевой точки заготовки в системе координат
заготовки 1 (G54)
1222
Значение коррекции нулевой точки заготовки в системе координат
заготовки 2 (G55)
1223
Значение коррекции нулевой точки заготовки в системе координат
заготовки 3 (G56)
1224
Значение коррекции нулевой точки заготовки в системе координат
заготовки 4 (G57)
1225
Значение коррекции нулевой точки заготовки в системе координат
заготовки 5 (G58)
1226
Значение коррекции нулевой точки заготовки в системе координат
заготовки 6 (G59)
[Тип данных] 2-слова ось
[Единица измерения данных]
Приращение ввода IS-A IS-B IS-C Единица
Линейная ось (ввод в мм) 0.01 0.001 0.0001 мм
Линейная ось (ввод в
дюймах)
Ось вращения 0.01 0.001 0.0001 град
0.001 0.0001 0.00001 дюйм
[Диапазон действ. данных] от -99999999 до 99999999
Устанавливает значение коррекции нулевой точки заготовки в
системе координат заготовки с 1 по 6 (с G54 по G59).
Система координат заготовки 1 (G54)
Смещение нулевой точки
заготовки
Начало системы координат станка
Система координат заготовки 2 (G55)
ПРИМЕЧАНИЕ
Коррекция начала координат заготовки может
так же быть установлена на экране системы
координат заготовки.
- 47 -
Page 60

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
1240
Значение координаты первой референтной позиции по каждой оси в
системе координат станка
1241
Значение координаты второй референтной позиции по каждой оси в
системе координат станка
1242
Значение координаты третей референтной позиции по каждой оси в
системе координат станка
1243
Значение координаты четвертой референтной позиции по каждой оси в
системе координат станка
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] 2-слова ось
[Единица измерения данных]
Система приращений IS-A IS-B IS-C Единица
Миллиметр обработки 0.01 0.001 0.0001 мм
Дюйм обработки 0.001 0.0001 0.00001 дюйм
Ось вращения 0.01 0.001 0.0001 град
[Диапазон действ. данных] от -99999999 до 99999999
Устанавливает значение координат для с первой по четвертую
референтную позицию в системе машинных координат.
1260 Величина смещения на один оборот оси вращения
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] 2-слова ось
[Единица измерения данных]
Система
приращений
IS-A 0.01 град 36000
IS-B 0.001 град 360000
IS-C 0.0001 град 3600000
[Диапазон действ. данных] от 1000 до 99999999
Задать величину смещения на один оборот оси вращения
Для оси вращения, используемой для цилиндрической
интерполяции, задайте стандартное значение.
Единица данных
Стандартное
значение
- 48 -
Page 61

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
1280
Первый адрес сигнальной группы используемой в расширении внешней
коррекции нулевой точки станка
[Тип данных] Слово
[Диапазон действ. данных] от 0 до 65535
Устанавливает первый адрес сигнальной группы используемой в
расширении внешней коррекции нулевой точки станка. Если
указано 100, могут использоваться с R0100 по R0115.
R0100
R0101
R0102
R0103
R0114
R0115
Величина смещения расширения внешней коррекции нулевой
точки станка для первой оси (НИЗКАЯ)
Величина смещения расширения внешней коррекции нулевой
точки станка для первой оси (ВЫСОКАЯ)
Величина смещения расширения внешней коррекции нулевой
точки станка для второй оси (НИЗКАЯ)
Величина смещения расширения внешней коррекции нулевой
точки станка для второй оси (ВЫСОКАЯ)
: :
Величина смещения расширения внешней коррекции нулевой
точки станка для восьмой оси (НИЗКАЯ)
Величина смещения расширения внешней коррекции нулевой
точки станка для восьмой оси (ВЫСОКАЯ)
ПРИМЕЧАНИЕ
1 Если указанный номер отсутствует, расширение
внешней коррекции нулевой точки станка
отключено.
2 Величина смещения расширения внешней
коррекции нулевой точки станка может быть
записана через исполнитель макросов.
3 Этот параметр действителен, когда бит 0 (EMC)
параметра ном. 1203 устанавливается в 1.
1290
[Тип данных] 2-слова
[Единица измерения данных]
[Диапазон действ. данных] от 0 до 99999999
Расстояние между двумя противоположными держателями
инструмента при зеркальном отображении
Система приращений IS-A IS-B IS-C Единица
Миллиметр обработки 0.01 0.001 0.0001 мм
Дюйм обработки 0.001 0.0001 0.00001 дюйм
Устанавливает расстояние между двумя противоположными
держателями инструмента в зеркальном отображении.
- 49 -
Page 62
4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
4.11 ПАРАМЕТРЫ ОГРАНИЧЕНИЯ ХОДА
#7 #6 #5 #4 #3 #2 #1 #0
1300
[Тип данных] Бит
OUT Область внутри или снаружи сохраненного ограничения хода 2
LMS Сигнал EXLM <G007#6> для переключения сохраненного
RL3 Сигнал сброса ограничения хода 3 RLSOT3 <G007#4>
LZR Проверка ограничения хода 1 во время от включения питания до
BFA LZR RL3 LMS OUT
BFA LZR LMS OUT
устанавливается как область торможения (устанавливается
параметрами ном. 1322 и ном. 1323).
0: Внутри
1: Снаружи
ограничения хода
0: Отключен
1: Включен
ПРИМЕЧАНИЕ
Сохраненное ограничение хода 1 поддерживает
две пары параметров для установки
запрещенной области. Сигнал переключения
сохраненного ограничения хода используется
для включения запрещенных областей
устанавливаемых этими парами параметров.
(1) Запрещенная область I:
Параметры ном. 1320 и ном. 1321
(2) Запрещенная область II:
Параметры ном. 1326 и ном. 1327
0: Отключен
1: Включен
ручного возврата в референтное положение
0: Проверка ограничения хода 1 выполняется.
1: Проверка ограничения хода 1 игнорируется.
ПРИМЕЧАНИЕ
При использовании детектора абсолютного
положения и референтное положение уже
установлено при включении питания, проверка
сохраненного ограничения хода 1 запускается
немедленно после включения питания,
независимо от установки.
- 50 -
Page 63

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
BFA При запуске команды которая превышает сохраненное
ограничение хода
0: Сигнал тревоги выдается после превышения ограничения
хода.
1: Сигнал тревоги выдается до превышения ограничения хода.
ПРИМЕЧАНИЕ
Инструмент останавливается в точке на
F/7500 мм перед, или за границами.
(F: Скорость подачи по достижении
инструментом границы (мм/мин))
#7 #6 #5 #4 #3 #2 #1 #0
1301 PLC OTF OF1 OTA NPC DLM
[Тип данных] Бит
DLM Сигналы переключения сохраненного ограничения хода <G104,
G105> для каждого осевого направления:
0: Отключены.
1: Включены.
NPC Как часть проверки ограничения хода выполняемой перед
перемещением, перемещение в блоке заданное в команде G31
(пропуск) и G37 (автоматическое измерение длины инструмента
(для серий M) или автоматическая коррекция на инструмент (для
серий T)):
0: Проверяется
1: Не проверяется
OTA Если инструмент уже находится в запрещенной области при
включении питания, сигнал тревоги сохраненного ограничения
хода 2 (внутри) или ограничения хода 3:
0: Выдается немедленно.
1: Не выдается до выполнения перемещения.
Замечание) Если сигнал тревоги выдается немедленно, система
переходит в состояние перед отключением питания.
Если тот параметр установлен в 1, сигнал тревоги не выдается до
выполнения перемещения. Если направление такого перемещения
выполняется от запрещенной области, перемещения могут
выполняться только в противоположном направлении.
Соответственно, существует опасность, что инструмент попадет в
запрещенную область без сигнала тревоги.
OF1 Если инструмент перемещается в область допустимую для данной
оси, после подачи сигнала тревоги от сохраненной проверки хода 1,
0: Сигнал тревоги не прекращается до выполнения сброса.
1: Сигнал тревоги OT прекращается немедленно.
ПРИМЕЧАНИЕ
В случаях ниже, функция автоматического
прекращения отключена. Для прекращения
сигнала тревоги, требуется операция сброса.
1 Если сделана установка для выдачи сигнала
тревоги до превышения сохраненного
предела хода (бит 7 (BFA) параметра ном.
1300)
2 Если уже выдан другой сигнал тревоги
перехода через крайнее положение
(Например, сохраненное ограничения хода 2
сохраненное ограничения хода 3)
- 51 -
Page 64

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
OTF При подаче сигнала тревоги перехода через крайнее положение:
0: Сигнал не выводится.
1: Сигналы выводятся на F124 и F126.
PLC Проверка предела хода до перемещения:
0: Не выполняется
1: Выполняется
#7 #6 #5 #4 #3 #2 #1 #0
1310
[Тип данных] Разрядная ось
OT2x Выполняется ли проверка сохраненного ограничения хода 2 для
OT3x Выполняется ли проверка сохраненного ограничения хода 3 для
OT3x OT2x
OT2x
каждой оси.
0: Проверка сохраненного хода 2 не выполняется.
1: Проверка сохраненного хода 2 выполняется.
каждой оси.
0: Проверка сохраненного хода 3 не выполняется.
1: Проверка сохраненного хода 3 выполняется.
- 52 -
Page 65

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
1320
Значение координаты I контроля сохраненного хода 1 в положительном
направлении на каждой оси
1321
Значение координаты I контроля сохраненного хода 1 в отрицательном
направлении на каждой оси
[Тип данных] 2-слова ось
[Единица измерения данных]
Система приращений IS-A IS-B IS-C Единица
Миллиметр обработки 0.01 0.001 0.0001 мм
Дюйм обработки 0.001 0.0001 0.00001 дюйм
Ось вращения 0.01 0.001 0.0001 град
[Диапазон действ. данных] от -99999999 до 99999999
Значения координат для сохраненного ограничения хода 1 в
положительном и отрицательном направлении, устанавливается
для каждой оси в системе машинных координат. Наружная
область двух границ установленных в параметрах является
запрещенной.
(Xp,Yp,Zp)
(Xm,Ym,Zm)
Устанавливает машинные координаты в
границах в положительном направлении
(Xp, Yp, и Zp) используя параметр ном.
1320, и в границах в отрицательном
направлении (Xm, Ym, и Zm) используя
параметр ном. 1321. Запрещенная
область, таким образом, становится
ограниченной на рисунке слева.
ПРИМЕЧАНИЕ
1 Для осей с указанием диаметра, значение
диаметра должно быть установлено.
2 Если параметры устанавливаются следующим
образом, ход становится неограниченным:
параметр 1320 < параметра 1321
Для перемещения по осям для которых
установлен неограниченный ход, доступны
только инкрементные команды. (Сигналы
переключения пределов хода, так же становятся
недействительными.) При подаче абсолютной
команды для этой оси, абсолютный регистр
может переполниться, и нормальное
перемещение не произойдет.
3 Запрещенная область заданная этим
параметром становится недействительной, если
бит 2 (LMS) параметра ном. 1300 установлен в 1
и сигнал переключения сохраненного предела
хода EXLM <G007#6> установлен в 1. В этом
случае, вместо этого, используются установки
параметров ном. 1326 и 1327.
- 53 -
Page 66

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
х
1322
1323
[Тип данных] 2-слова ось
[Единица измерения данных]
[Диапазон действ. данных] от -99999999 до 99999999
Значение координаты контроля сохраненного хода 2 в положительном
направлении на каждой оси
Значение координаты контроля сохраненного хода 2 в отрицательном
направлении на каждой оси
Система приращений IS-A IS-B IS-C Единица
Миллиметр обработки 0.01 0.001 0.0001 мм
Дюйм обработки 0.001 0.0001 0.00001 дюйм
Ось вращения 0.01 0.001 0.0001 град
Значения координат для сохраненного ограничения хода 2 в
положительном и отрицательном направлении, устанавливаются
для каждой оси в системе машинных координат. OUT, #0
параметра 1300, устанавливает является ли запрещенной областью,
область внутри или снаружи границ указанных в параметрах.
(1) Если запрещенная область внутри границ (OUT = 0)
(Xp,Yp,Zp)
(Xm,Ym,Zm)
(2) Если запрещенная область вне границ
(OUT = 1)
(Xp,Yp,Zp)
Устанавливает машинные
координаты в границах в
положительном направлении
(Xp, Yp, и Zp) используя
параметр ном. 1322, и в граница
в отрицательном направлении
(Xm, Ym, и Zm) используя
параметр ном. 1323.
Запрещенная область, таким
образом, становится
ограниченной на рисунке слева.
(Xm,Ym,Zm)
ПРИМЕЧАНИЕ
Для осей с указанием диаметра, значение
диаметра должно быть установлено.
- 54 -
Page 67

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
1324
Значение координаты контроля сохраненного хода 3 в положительном
направлении на каждой оси
1325
Значение координаты контроля сохраненного хода 3 в отрицательном
направлении на каждой оси
[Тип данных] 2-слова ось
[Единица измерения данных]
Система приращений IS-A IS-B IS-C Единица
Миллиметр обработки 0.01 0.001 0.0001 мм
Дюйм обработки 0.001 0.0001 0.00001 дюйм
Ось вращения 0.01 0.001 0.0001 град
[Диапазон действ. данных] от -99999999 до 99999999
Устанавливает координату границы проверки сохраненного хода
3 в положительном направлении
и в отрицательном направлении для каждой оси в системе
машинных координат. Область внутри границ заданных в
параметрах, является запрещенной.
ПРИМЕЧАНИЕ
Указывайте диаметры для всех осей, для
которых указано программирование диаметров.
1326
Значение координаты II контроля сохраненного хода 1 в положительном
направлении на каждой оси
1327
Значение координаты II контроля сохраненного хода 1 в отрицательном
направлении на каждой оси
[Тип данных] 2-слова ось
[Единица измерения данных]
Система приращений IS-A IS-B IS-C Единица
Миллиметр обработки 0.01 0.001 0.0001 мм
Дюйм обработки 0.001 0.0001 0.00001 дюйм
Ось вращения 0.01 0.001 0.0001 град
[Диапазон действ. данных] от -99999999 до 99999999
Значения координат для сохраненного ограничения хода 1 в
положительном и отрицательном направлении, устанавливаются
для каждой оси в системе машинных координат.
Инструмент не может войти в область вне пределов заданных в
параметре. запрещенная область указанная в параметре
активирована, если бит 2 (LMS) параметра ном. 1300 равно 1 и
сигнал переключения сохраненного предела хода EXLM
<G007#6> равен 1.
ПРИМЕЧАНИЕ
1 Задать значения диаметров для любых осей,
для которых задано программирование
диаметра.
2 Эти параметры недействительны, если бит 2
(LMS) параметра ном. 1300 установлен в 0, или
если сигнал переключения сохраненного
предела хода EXLM <G007#6> установлен в 0. В
этом случае, вместо этого, используются
установки параметров ном. 1320 и 1321.
- 55 -
Page 68

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
4.12 ПАРАМЕТРЫ ЗАЖИМНОГО И НАТЯЖНОГО
УСТРОЙСТВ (СЕРИИ T)
1330 Профиль зажимного устройства
[Тип данных] Байт
[Диапазон действ. данных] от 0 до 1
0: Зажимное устройство, удерживающее заготовку за
внутреннюю поверхность
1: Зажимное устройство, удерживающее заготовку за внешнюю
поверхность
1331
1332
1333
1334
1335
1336
[Тип данных] 2-слова
[Единица измерения данных]
[Действительный диапазон] С ном. 1331 по ном. 1334: от 0 до 99999999
Размеры грейфера зажимного устройства (L)
Размеры грейфера зажимного устройства (W)
Размеры части грейфера, на которой удерживается заготовка (L1)
Размеры части грейфера, на которой удерживается заготовка (W1)
Координата X зажимного устройства (CX)
Координата ZX зажимного устройства (CZ)
Система приращений IS-B IS-C Единица
Миллиметр обработки 0.001 0.0001 мм
Дюйм обработки 0.0001 0.00001 дюйм
С ном. 1335 по ном. 1336: от -99999999 до 99999999
Задает форму зажимного устройства.
- 56 -
Page 69

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
W
X
W
X
Зажимное устройство, удерживающее заготовку за
наружную поверхность (TY= 1)
L
L1
А
Зажимное устройство, удерживающее заготовку за
внутреннюю поверхность (TY= 0)
L
А
W1
W1
CX
Z
CZ
Нулевая точка
системы координат
станка
L1
CZ
CX
Z
Нулевая точка
системы координат
станка
Обозначение Описание
Профиль зажимного устройства (0: Зажимное
TY
CX X координата зажимного устройства
CZ Z координата зажимного устройства
L Размеры захвата зажимного устройства
W Размеры захвата зажимного устройства (ввод радиуса)
L1
W1
устройство, удерживающее заготовку за внутреннюю
поверхность 1: Зажимное устройство, удерживающее
заготовку за внешнюю поверхность)
Размеры части захвата, в которой удерживается
заготовка
меры части захвата, в которой удерживается заготовка
(ввод радиуса)
TY Задает форму зажимного устройства. Если TY установлен в 0,
задается зажимное устройство удерживающее заготовку за
внутреннюю поверхность. Если TY установлен в 1, задается
зажимное устройство удерживающее заготовку за наружную
поверхность. Предполагается, что профиль зажимного устройства
симметричен относительно оси Z.
CX, b CZ Задают положение (точку A) зажимного устройства с
координатами в системе координат заготовки
. В этом случае, не
используйте координаты в системе машинных координат.
ПРИМЕЧАНИЕ
Задание координат с диаметром или радиусом,
зависит от того, отвечает ли соответствующая
ось спецификациям для диаметра или радиуса.
Если ось отвечает таким спецификациям,
задавайте координаты с диаметром.
- 57 -
Page 70

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
L, L1, W и W1 Определяют профиль зажимного устройства.
ПРИМЕЧАНИЕ
Всегда задавайте радиус W и W1 с радиусом.
задавайте L и L1 с радиусами, если ось Z
отвечает спецификациям для радиуса.
1341
1342
1343
1344
1345
1346
1347
1348
[Тип данных] 2-слова
[Единица измерения данных]
[Действительный диапазон] с ном. 1341 по ном. 1347: от 0 до 99999999
Длина захвата (L)
Диаметр захвата (D)
Длина захвата (L1)
Диаметр захвата (D1)
Длина захвата (L2)
Диаметр захвата (D2)
Диаметр отверстия захвата (D3).
Координата Z захвата (TZ)
Система приращений IS-B IS-C Единица
Миллиметр обработки 0.001 0.0001 мм
Дюйм обработки 0.0001 0.00001 дюйм
ном. 1348: от -99999999 до 99999999
Задает форму захвата.
- 58 -
Page 71
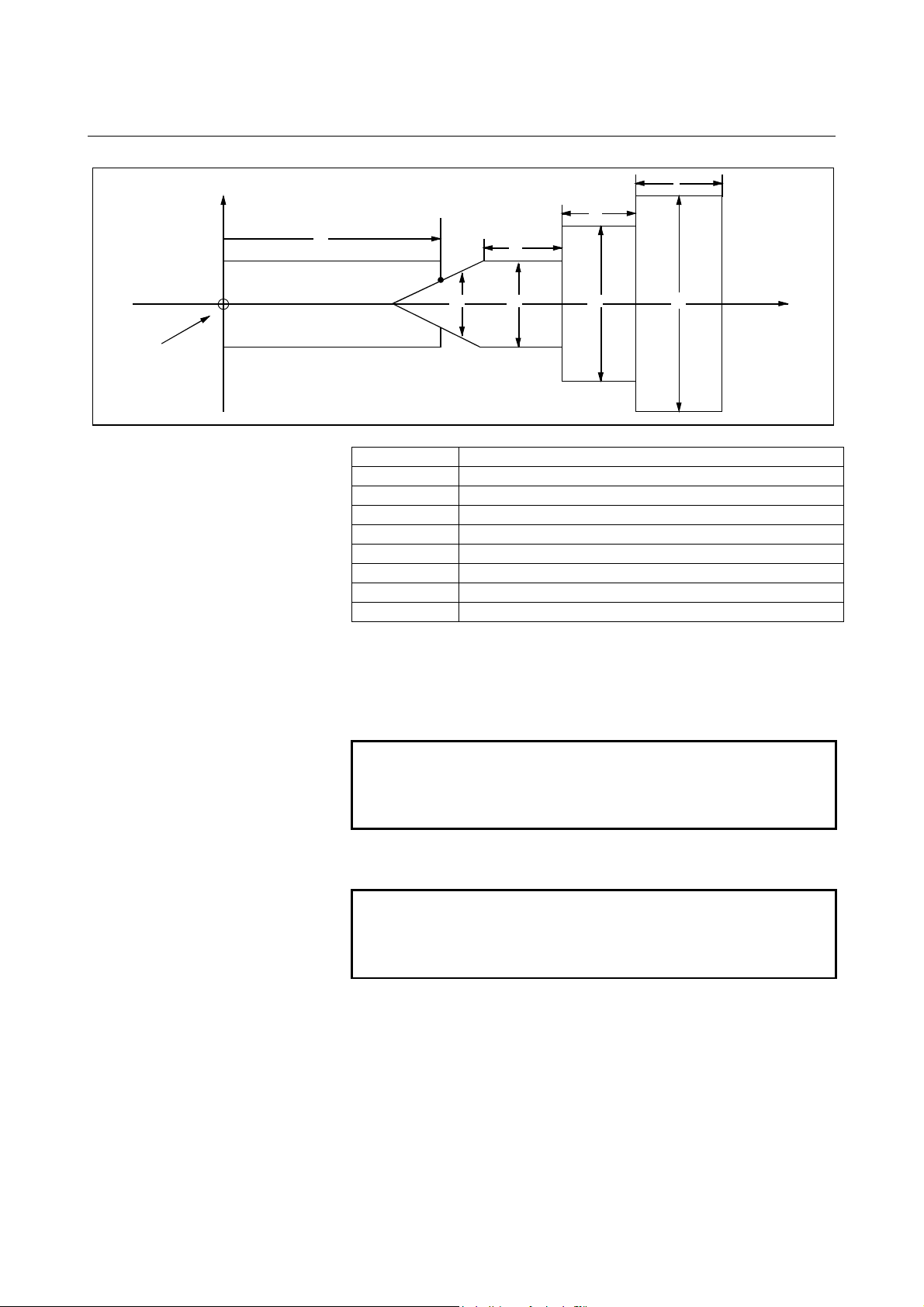
B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
X
L
L
Нулевая точка
системы
координат станка
Заготовка
T
В
D
D D
L
D
Z
Обозначение Описание
TZ Координата захвата по оси Z
L Длина захвата
D Диаметр захвата (ввод диаметра)
L1 Длина захвата (1)
D1 Диаметр захвата (1) (ввод диаметра)
L2 Длина захвата (2)
D2 Диаметр захвата (2) (ввод диаметра)
D3 Диаметр отверстия захвата (ввод диаметра).
TZ : Задает положение (точку B) захвата в координате по оси Z в
системе координат заготовки. В этом случае, не используйте
координату в системе машинных координат. Предполагается, что
профиль захвата симметричен относительно оси Z.
ПРИМЕЧАНИЕ
Задание положения захвата с диаметром или
радиусом, зависит от того, отвечает ли ось Z
спецификациям для диаметра или радиуса.
L, L1, L2, D, D1, D2, и D3 Определяет профиль захвата.
ПРИМЕЧАНИЕ
Всегда задавайте D, D1, D2, и D3 с диаметрами.
Задавайте L и L1 с радиусами, если ось Z
отвечает спецификациям для радиуса.
- 59 -
Page 72

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
4.13 ПАРАМЕТРЫ СКОРОСТИ ПОДАЧИ
#7 #6 #5 #4 #3 #2 #1 #0
1401
[Тип данных] Бит
RPD Ручной ускоренный подвод во время периода от включения
LRP Позиционирование (G00)
JZR Ручной возврат в референтное положение при неравномерной
RF0 Когда ручная коррекция скорости рабочей подачи равна 0% в
TDR Холостой ход во время нарезания резьбы или нарезание резьбы
RDR Холостой ход для команды ускоренного подвода
1402
[Тип данных] Бит
NPC Команда подачи за оборот:
JOV Отмена задачи:
JRV Нелинейная подача или инкрементная подача
RDR TDR RF0 JZR LRP RPD
RDR TDR RF0 LRP RPD
питания до завершения возврата на референтную позицию.
0: Отключен (Неравномерная подача выполняется.)
1: Включен
0: Позиционирование выполняется с позиционированием
нелинейного типа, так чтобы инструмент перемещался вдоль
каждой оси независимо с ускоренный подвод.
1: Позиционирование выполняется с линейной интерполяцией,
так чтобы инструмент перемещался по прямой линии.
скорости подачи JOG
0: Не выполняется
1: Выполняется
течение ускоренного подвода,
0: Инструмент станка не прекращает движение.
1: Инструмент станка прекращает движение.
метчиком (цикл нарезания резьбы метчиком G74 или G84, жестко
закрепленное нарезание резьбы метчиком)
0: Включено
1: Отключено
0: Отключен
1: Включен
#7 #6 #5 #4 #3 #2 #1 #0
JRV JOV NPC
JOV NPC
0: Неработает при отсутствии шифратора положения.
1: Работает даже при отсутствии шифратора положения
(поскольку ЧПУ конвертирует ее в команду скорости подачи
в минуту из команды F в команду S).
ПРИМЕЧАНИЕ
Для использования шифратора положения,
установите этот параметр в 0. Если этот
параметр установлен в 1, нарезание резьбы не
может быть выполнено, даже при наличии
шифратора положения.
0: Включена
1: Отключена (выполняется на 100%)
- 60 -
Page 73

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
0: Выполнена при подаче в минуту.
1: Выполнена при подаче в оборот.
ПРИМЕЧАНИЕ
Задайте скорость подачи в параметре ном. 1423.
#7 #6 #5 #4 #3 #2 #1 #0
1403
RTV MIF
ПРИМЕЧАНИЕ
Если задан этот параметр, то следует отключить
питание, прежде чем продолжить работу.
[Тип данных] Бит
MIF Скорость рабочей подачи при подаче в минуту задается командой F
0: В единицах 1 мм/мин для метрических станков или
0.01 дюйм/мин для неметрических станков.
1: В единицах 0.001 мм/мин для метрических станков или
0.00001 дюйм/мин для неметрических станков.
ПРИМЕЧАНИЕ
В сериях M этого параметра нет. Скорость
рабочей подачи задается командой F в единицах
0.001 мм/мин для метрических станков или
0.00001 дюйм/мин для неметрических станков.
RTV Отмена при отводе инструмента при нарезании резьбы
0: Действует отмена.
1: Отмена не оказывает влияния.
#7 #6 #5 #4 #3 #2 #1 #0
1404
[Тип данных] Бит
HFC Скорость подачи при винтовой интерполяции:
DLF После установки референтного положения, ручной возврат в
FC0 FRV F8A DLF HFC
FC0 HCF FRV F8A DLF HFC
0: Ограничивается таким образом, что скорость подачи вдоль
дуги и линейной оси не превышает максимальную скорость
рабочей подачи заданную в параметре (ном. 1422 или 1430).
1: Ограничивается таким образом, что комбинированная
скорость подачи вдоль дуги и линейной оси не превышает
максимальную скорость рабочей подачи заданную в
параметре (ном. 1422).
референтное положение выполняется на:
0: Скорости ускоренного подвода (параметр ном. 1420)
1: Скорости ручного ускоренного подвода (параметр ном. 1424)
- 61 -
Page 74

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
ПРИМЕЧАНИЕ
Этот параметр выбирает скорость подачи для
возврата на референтную позицию,
выполняемую без упоров. Этот параметр так же
выбирает скорость подачи при выполнении
ручного возврата в референтное положение
согласно биту 7 (SJZ) параметра ном. 0002
используя ускоренный подвод без тормозных
упоров после установки референтного
положения.
<Для серий Т>
F8A Диапазон действительных данных для команды F в режиме подачи
в минуту
0: Диапазон задаваемы битом 0 (MIF) параметра ном. 1403
1:
Система
приращений
Ввод данных в
миллиметрах
Ввод данных в
дюймах
Ось вращения град/мин 1 - 240000. 1 - 100000.
Единицы
измерения
мм/мин 0.001 - 240000. 0.001 - 100000.
дюйм/мин 0.00001 - 9600. 0.00001 - 4000.
IS-A, IS-B IS-C
<Для серий М>
F8A Диапазон действительных данных для команды F с десятичной
точкой в режиме подачи в минуту
0:
Система
приращений
Ввод данных в
миллиметрах
Ввод данных в
дюймах
Ось вращения (мм) град/мин 1 - 240000. 1 - 100000.
Ось вращения
(дюйм)
1:
Система
приращений
Ввод данных в
миллиметрах
Ввод данных в
дюймах
Ось вращения град/мин 1 - 240000. 1 - 100000.
FRV Для дюймового ввода, действительный диапазон скорости подачи
заданной для подачи на оборот:
0: Стандартный диапазон. (F0.000001 до 9.999999 дюймов на
оборот)
1: расширен до F50.0 дюймов на оборот. (F0.000001 до
50.000000 дюймов на оборот)
HCF При контроле контура AI (серии M), как скорость подачи при
винтовой интерполяции:
0: Задается композитная скорость подачи.
1: Задается скорость подачи по дуге.
FC0 Задает поведение инструмента станка, при запуске блока (G01,
G02, G03, и т.д.) содержащего команду скорости подачи (команду
F) равную 0 при автоматической операции:
0: Отображается сигнал тревоги P/S (ном. 011), и блок не
выполняется.
1: Сигнал тревоги не отображается, и блок выполняется.
Единицы
измерения
мм/мин 0.001 - 99999.999.
дюйм/мин 0.00001 - 999.99999.
град/мин 1 - 9600. 1 - 4000.
Единицы
измерения
мм/мин 0.001 - 240000. 0.001 - 100000.
дюйм/мин 0.00001 - 9600. 0.00001 - 4000.
IS-A, IS-B IS-C
IS-A, IS-B IS-C
- 62 -
Page 75

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
#7 #6 #5 #4 #3 #2 #1 #0
1405
FCI EDR
FCI EDR FD3 F1U
[Тип данных] Бит
F1U Задает единицы данных для параметров, которые задают скорости
подачи команд скорости подачи разряда F1 (параметра ном. 1451 -
1459).
Единицы данных Система
приращений
Миллиметр
обработки
Дюйм обработки 0.001 дюйм/мин 0.1 дюйм/мин
Ось вращения 0.1 град/мин 1 град/мин
Если F1U равен 0 Если F1U равен 1
0.1 мм/мин 1 мм/мин
FD3 Число значимых разрядов в дробной части в
команде скорости подачи (команда F) для подачи на оборот:
0: До двух десятичных разрядов (три десятичных разряда для
дюймового ввода).
1: До трех десятичных разрядов (четыре десятичных разряда
для дюймового ввода).
EDR Выбирает параметр для установки внешнего замедления
применяемого при ускоренном подводе интерполяционного типа
(бит 1 (LRP) параметра ном. 1401 = 1).
0: Параметр ном. 1426 используется для установки степени
внешнего замедления применяемого при ускоренном подводе
интерполяционного типа.
1: Первая ось параметра ном. 1427 используется для установки
степени внешнего замедления применяемого при ускоренном
подводе интерполяционного типа.
Аналогично, для внешнего замедления 2, 3, 4, и 5, первая ось
параметра установки степени внешнего замедления
применяемого при ускоренном подводе используется если
EDR установлен в 1.
FCI При использовании дюймового ввода и подачи на оборот,
фиксация скорости подачи для рабочей подачи устанавливается в:
0: 9600 дюйм/мин
1: 144000 дюйм/мин
- 63 -
Page 76

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
#7 #6 #5 #4 #3 #2 #1 #0
1406
[Тип данных] Бит
ED2 Внешнее замедление 2:
ED3 Внешнее замедление 3:
1407
[Тип данных] Бит
ACS Если возврат на референтную позицию для оси Cs не завершен,
ACF В режиме расширенного контроля предпросмотра AI или
1408
[Тип данных] Разрядная ось
RFD Скорость подачи по оси вращения управляется:
1410 Скорость холостого хода
[Тип данных] Слово
ED3 ED2
0: Отключено.
1: Включено.
0: Отключено.
1: Включено.
#7 #6 #5 #4 #3 #2 #1 #0
ACS
ACF ACS
когда задано позиционирование с линейной интерполяцией,
включая ось Cs:
0: Перемещение выполняется с позиционированием с
нелинейной интерполяцией (ускоренный подвод
выполняется отдельно для каждой оси).
1: Выдается сигнал тревоги P/S (ном. 5334).
контроля контура AI, значение фиксации скорости подачи:
0: Заданное значение параметра ном. 1432 или установки
параметра ном. 1422, смотря что меньше.
(Если одно из этих значений равно 0, выдается сигнал тревоги
P/S (ном. 5157).)
1: Заданное значение параметра ном. 1432 если ненулевое
значение установлено в параметре ном. 1432.
Если 0 установлен в параметре ном. 1432, установка
параметра ном. 1422.
Если 0 установлен в параметре ном. 1422, выдается сигнал
тревоги P/S (ном. 5157).
ном. параметра 1422 = Максимальная скорость рабочей подачи
ном. параметра 1432 = Максимальная скорость рабочей подачи
для каждой оси в режиме расширенного контроля предпросмотра
#7 #6 #5 #4 #3 #2 #1 #0
RFD
0: Обычным методом.
1: Путем конвертации скорости вращения по оси вращения в
скорость перемещения по замкнутой кривой виртуальной
окружности.
Установите радиус виртуальной окружности в параметре ном.
1465.
- 64 -
Page 77

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 6 до 6000 от 6 до 4800
данных
1 мм/мин от 6 до 15000 от 6 до 12000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Установите уровень холостого хода если ручная скорость подачи
блокируется на 100%.
1411
Скорость рабочей подачи в автоматическом режиме при включении
питания (начальное значение)
Следующий параметр может быть установлен на "Экране
установок".
[Тип данных] Слово
[Единицы данных, диапазон действ. данных]
Система
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 6 до 32767
Единица
данных
1 мм/мин от 6 до 32767
Диапазон действ. данных
Если для станка необходимо небольшое изменение скорости
рабочей подачи во время резания, то скорость рабочей подачи
можно задать в параметре. Это исключает необходимость задавать
скорость рабочей подачи (команда F) в программе ЧУ.
Скорость рабочей подачи задаваемая этим параметром
действительна после того, как ЧПУ переводится в исходное
состояние после включения питания или сброса до того, как
скорость подачи задается программной командой (командой F).
После того, как скорость подачи задается командой F, скорость
подачи становится действительной.
1420 Скорость ускоренного подвода для каждой оси
[Тип данных] 2-слова ось
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 30 до 96000 от 6 до 48000
Ось вращения 1 град/мин от 30 до 240000 от 6 до 100000
данных
1 мм/мин от 30 до 240000 от 6 до 100000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Задать скорость ускоренного подвода, когда перерегулирование
составляет 100% для каждой оси.
- 65 -
Page 78

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
1421 F0 скорость перерегулирования ускоренного подвода для каждой оси
[Тип данных] Слово ось
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 30 до 6000 от 30 до 4800
Ось вращения 1 град/мин от 30 до 15000 от 30 до 12000
данных
1 мм/мин от 30 до 15000 от 30 до 12000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Задать скорость F0 перерегулирования ускоренного подвода для
каждой оси.
Сигнал ручной коррекции ускоренного
подвода
ROV2 ROV1
0 0 100%
0 1 50%
1 0 25%
1 1 F0
Величина ручной
коррекции
F0: Параметр 1421
1422 Максимальная скорость рабочей подачи для всех осей
[Тип данных] 2-слова
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 6 до 96000 от 6 до 48000
данных
1 мм/мин от 6 до 240000 от 6 до 100000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Задайте максимальную скорость рабочей подачи.
Скорость подачи в тангенциальном направлении ограничивается
рабочей подачей, так что она не превышает скорость подачи
заданную в этом параметре.
ПРИМЕЧАНИЕ
1 Максимальную скорость можно задавать для
каждой оси только при линейной и круговой
интерполяции, используя параметр ном. 1430.
2 Даже если используется параметр ном. 1430,
ограничение скорости рабочей подачи
основанное на параметре ном. 1422 доступно
при интерполяции в полярных координатах и при
цилиндрической интерполяции.
- 66 -
Page 79

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
1423
Скорость подачи в ручной непрерывной скорости подачи
(неравномерной подачи) для каждой оси
[Тип данных] Слово ось
(1) В сериях M, или в сериях T если JRV, бит 4 параметра ном.
1402, имеет значение 0 (подача в минуту), задает скорость
неравномерной подачи при подаче в минуту с
перерегулированием в 100%.
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр обработки 1 мм/мин от 6 до 15000 от 6 до 12000
Дюйм обработки 0.1 дюйм/мин от 6 до 6000 от 6 до 4800
Ось вращения 1 град/мин от 6 до 15000 от 6 до 12000
данных
Диапазон действ. данных Система
IS-A, IS-B IS-C
(2) Когда JRV, бит 4 параметра ном. 1402, имеет значение 1
(подача в оборот), в сериях Т, задает скорость неравномерной
подачи (подача в оборот) при перерегулировании в 100%.
[Единицы данных, диапазон действ. данных]
Система приращений
Миллиметр обработки 0,01 мм/оборот
Дюйм обработки 0,001 мм/оборот
Ось вращения 0,01 град/оборот
1424 Скорость ручного ускоренного подвода для каждой оси
Единица
данных
Диапазон действ.
данных
от 0 до 32767
[Тип данных] 2-слова ось
[Единицы данных, Диапазон действ. данных]
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 30 до 96000 от 30 до 48000
Ось вращения 1 град/мин от 30 до 240000 от 30 до 100000
данных
1 мм/мин от 30 до 240000 от 30 до 100000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Задать скорость ручного ускоренного подвода, когда
перерегулирование составляет 100% для каждой оси.
ПРИМЕЧАНИЕ
Если значение задано равным 0, используется
скорость установленная в параметре 1420.
1425 FL скорость возврата на референтную позицию для каждой оси
[Тип данных] Слово ось
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр обработки 1 мм/мин от 6 до 15000 от 6 до 12000
Дюйм обработки 0.1 дюйм/мин от 6 до 6000 от 6 до 4800
Ось вращения 1 град/мин от 6 до 15000 от 6 до 12000
данных
Задать скорость подачи (FL скорость) после замедления, когда
возврат на референтную позицию выполняется для каждой оси.
Диапазон действ. данных Система
IS-A, IS-B IS-C
- 67 -
Page 80

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
1426 Скорость внешнего замедления 1 рабочей подачи
[Тип данных] Слово
[Единицы данных, диапазон действ. данных]
1427 Скорость внешнего замедления 1 ускоренного подвода для каждой оси
[Тип данных] Слово ось
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 6 до 6000 от 6 до 4800
данных
1 мм/мин от 6 до 15000 от 6 до 12000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Устанавливает скорость внешнего замедления рабочей подачи.
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 6 до 6000 от 6 до 4800
Ось вращения 1 град/мин от 6 до 15000 от 6 до 12000
данных
1 мм/мин от 6 до 15000 от 6 до 12000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Задать скорость внешнего замедления ускоренного подвода для
каждой оси
- 68 -
Page 81

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
1428 Скорость подачи при возврате в референтную позицию
[Тип данных] 2-слова ось
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 30 до 96000 от 6 до 48000
Ось вращения 1 град/мин от 30 до 240000 от 6 до 100000
данных
1 мм/мин от 30 до 240000 от 6 до 100000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Данный параметр задает скорость ускоренного подвода для
работы возврата на референтную позицию с использованием
упоров замедления или для работы возврата на референтную
позицию до того, как референтная позиция задана.
Данный параметр также используется для задания скорости
подачи для команды ускоренного подвода (G00) в автоматической
работе до того, как задается референтное положение.
ПРИМЕЧАНИЕ
1 Этот параметр недействителен для оси
использующей масштабирования
референтными отметками с абсолютной
адресацией.
2 Если в этом параметре установлен 0, этот
параметр отключает функцию установки
скорости подачи при возврате на референтную
позицию.
Возврат в референтную позицию
командой G28
Команда ускоренного подвода (G00)
при автоматической работе
Ручной возврат
в референтное
положение
Ручной ускоренный подвод
Без упоров
С упорами
(*1)
ном. 1420 или ном. 1424
(*1)
Перед установкой референтного
положения
ном. 1428 ном. 1428
= 0 ≠0 = 0 ≠0
ном. 1420 ном. 1420
ном. 1428
ном. 1424
(*2)
ном. 1423 или ном. 1424
*1 С/без упоров: Операция возврата на референтную позицию
не использует/использует тормозные упоры
*2 Для ручного ускоренного подвода перед установкой
референтного положения, используется неравномерная
скорость подачи (параметр ном. 1423) или скорость ручного
ускоренного подвода (параметр ном. 1424) в зависимости от
установки бита 0 (RPD) параметра ном. 1401.
*3 Скорость ускоренного подвода установленная в параметре
ном. 1424 или ном. 1420 используется согласно установке
бита 1 (DLF) параметра ном. 1404 если возврат на
референтную позицию выполняется без упоров, или если
операция возврата на референтную позицию выполняется с
битом 7 (SJZ) параметра ном. 0002 установленным в 1 после
установки референтного положения (когда операция возврата
на референтную позицию выполняется используя
ускоренный подвод без тормозных упоров).
После установки референтного
положения
(*3)
ном. 1424 ном. 1428
ном. 1424
- 69 -
Page 82

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
1430 Максимальная скорость рабочей подачи для каждой оси
[Тип данных] 2-слова ось
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 6 до 96000 от 6 до 48000
Ось вращения 1 град/мин от 6 до 240000 от 6 до 100000
данных
1 мм/мин от 6 до 240000 от 6 до 100000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Задать максимальную скорость рабочей подачи для каждой оси.
Скорость подачи для каждой оси ограничивается рабочей подачей,
так что она не превышает максимальную скорость подачи
заданную для каждой оси.
ПРИМЕЧАНИЕ
1 Данный параметр действителен только в
режиме линейной интерполяции и круговой
интерполяции. Даже если этот параметр
установлен, активно ограничение до
максимальной скорости рабочей подачи
основанное на параметре ном. 1422 во время
интерполяции в полярных координатах, при
цилиндрической и эвольвентой интерполяции
(серии M).
2 Если этот параметр установлен в 0 для всех
осей, активно ограничение до максимальной
скорости рабочей подачи основанное на
параметре ном. 1422.
Это означает, что если значение отличное от 0
установлено данным параметром для любой из
осей, ограничение до максимальной скорости
рабочей подачи выполняется для всех осей во
время линейной или круговой интерполяции
согласно данному параметру.
1431
[Тип данных] 2-слова
[Единицы данных, диапазон действ. данных]
Максимальная скорость рабочей подачи для всех осей в режиме
расширенного контроля предпросмотра
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 0 до 96000 от 0 до 48000
Ось вращения 1 град/мин от 0 до 240000 от 0 до 100000
данных
1 мм/мин от 0 до 240000 от 0 до 100000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Задает максимальную скорость рабочей подачи для всех осей в
режиме расширенного контроля предпросмотра
Скорость подачи в тангенциальном направлении ограничивается
рабочей подачей, так что она не превышает скорость подачи
заданную в этом параметре.
- 70 -
Page 83

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
ПРИМЕЧАНИЕ
1 Для задания максимальной скорости рабочей
подачи для каждой оси, используйте вместо
этого параметр ном. 1432.
2 В режиме отличном от предварительного
режима, используется максимальная скорость
рабочей подачи заданная в параметре ном. 1422
или ном. 1430 и скорость подачи ограничивается
этой максимальной скоростью.
Максимальная скорость рабочей подачи для каждой оси в режиме
расширенного контроля предпросмотра
1432
Максимальная скорость рабочей подачи для каждой оси в режиме
расширенного контроля предпросмотра AI / контроля контура AI или
расширенного контроля предпросмотра
[Тип данных] 2-слова ось
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 0 до 96000 от 0 до 48000
Ось вращения 1 град/мин от 0 до 240000 от 0 до 100000
данных
1 мм/мин от 0 до 240000 от 0 до 100000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Задает максимальную скорость рабочей подачи для каждой оси в
режиме расширенного контроля предпросмотра AI / контроля
контура AI или расширенного контроля предпросмотра
Скорость подачи для каждой оси ограничивается во время рабочей
подачи, так что она не превышает максимальную скорость
рабочей подачи заданную для каждой оси.
ПРИМЕЧАНИЕ
1 Данный параметр работает только в режиме
линейной интерполяции и круговой
интерполяции. При интерполяции в полярных
координатах и цилиндрической интерполяции,
используется максимальная скорость подачи
для всех осей задаваемая в параметре ном.
1431.
2 Если установить для каждой оси 0,
максимальная скорость подачи заданная в
параметре ном. 1431 применяется для всех осей
и скорость подачи ограничивается
максимальной скоростью подачи.
3 В режиме отличном от режима расширенного
контроля предпросмотра AI / контроля контура AI
или расширенного контроля предпросмотра,
применяется максимальная скорость рабочей
подачи заданная в параметре ном. 1422 или
ном. 1430 и скорость подачи ограничивается
этой максимальной скоростью.
- 71 -
Page 84

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
1436
[Тип данных] 2-слова ось
[Единицы данных, диапазон действ. данных]
1440 Скорость внешнего замедления 2 рабочей подачи
[Тип данных] Слово
[Единицы данных, диапазон действ. данных]
1441 Скорость внешнего замедления 2 ускоренного подвода для каждой оси
[Тип данных] Слово ось
[Единицы данных, диапазон действ. данных]
Максимальная скорость каждой оси для функции проверки скорости
Единица
приращений
Миллиметр
обработки
Дюйм
обработки
Ось вращения 1 град/мин от 0,30 до 240000 от 0,6 до 100000
данных
1 мм/мин от 0,30 до 240000 от 0,6 до 100000
0.1 дюйм/мин от 0,30 до 96000 от 0,6 до 48000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Если задан 0, функция отключена.
Введите максимальную скорость по каждой оси. Если
превышается скорость установленная в этом параметре, выдается
сигнал тревоги P/S (ном. 5323) обозначающий превышение
скорости, и перемещение замедляется, а затем останавливается.
Функция проверки скорости, проверяет данные, полученные
путем конвертации значения этого параметра в величину
перемещения совершаемого каждые 8 мс.
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 6 до 6000 от 6 до 4800
данных
1 мм/мин от 6 до 15000 от 6 до 12000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Устанавливает скорость внешнего замедления рабочей подачи.
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 6 до 6000 от 6 до 4800
Ось вращения 1 град/мин от 6 до 15000 от 6 до 12000
данных
1 мм/мин от 6 до 15000 от 6 до 12000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Задать скорость внешнего замедления ускоренного подвода для
каждой оси
- 72 -
Page 85

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
1442 Максимальная скорость маховика ручной подачи 2 для каждой оси
[Тип данных] Слово ось
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 6 до 6000 от 6 до 4800
Ось вращения 1 град/мин от 6 до 15000 от 6 до 12000
данных
1 мм/мин от 6 до 15000 от 6 до 12000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Устанавливает максимальную скорость маховика ручной подачи 2
для каждой оси
1443 Скорость внешнего замедления 3 рабочей подачи
[Тип данных] Слово
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 6 до 6000 от 6 до 4800
Устанавливает скорость внешнего замедления рабочей подачи.
1444 Скорость внешнего замедления 3 ускоренного подвода для каждой оси
данных
1 мм/мин от 6 до 15000 от 6 до 12000
Диапазон действ. данных Система
IS-A, IS-B IS-C
[Тип данных] Слово ось
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 6 до 6000 от 6 до 4800
Ось вращения 1 град/мин от 6 до 15000 от 6 до 12000
данных
1 мм/мин от 6 до 15000 от 6 до 12000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Задать скорость внешнего замедления ускоренного подвода для
каждой оси
1445 Максимальная скорость маховика ручной подачи 3 для каждой оси
[Тип данных] Слово ось
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 6 до 6000 от 6 до 4800
Ось вращения 1 град/мин от 6 до 15000 от 6 до 12000
данных
1 мм/мин от 6 до 15000 от 6 до 12000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Устанавливает максимальную скорость маховика ручной подачи 2
для каждой оси
- 73 -
Page 86

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
1450
[Тип данных] Байт
[Диапазон действ. данных] от 1 до 127
Изменения скорости подачи на деление шкалы для ручного
импульсного генератора при цифровой подаче с кодом F1
Задать константу, определяющую изменение скорости подачи, в
то время как ручной импульсный генератор поворачивается на
одно деление при цифровой подаче с кодом F1.
max
100
iF
(где, i=1 или 2)
n
=∆
F
В вышеуказанном уравнении, установите n. Таким образом
получается, число оборотов
ручного импульсный генератора, требуемое для достижения
скорости подачи Fmaxi. Fmaxi указывает верхний предел скорости
подачи для команды цифровой подачи с кодом F1 и задает ее в
параметрах 1460 или 1461
Fmax1: Верхний предел скорости подачи для F1 до F4 (параметр
ном.1460).
Fmax2: Верхний предел скорости подачи для F5 до F9 (параметр
ном.1461).
- 74 -
Page 87

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
1451
Скорость подачи для цифровой команды F1 F1
1452
Скорость подачи для цифровой команды F1 F2
1453
Скорость подачи для цифровой команды F1 F3
1454
Скорость подачи для цифровой команды F1 F4
1455
Скорость подачи для цифровой команды F1 F5
1456
Скорость подачи для цифровой команды F1 F6
1457
Скорость подачи для цифровой команды F1 F7
1458
Скорость подачи для цифровой команды F1 F8
1459
Скорость подачи для цифровой команды F1 F9
Следующий параметр может быть установлен на "Экране
установок".
[Тип данных] 2-слова
[Единицы данных, диапазон действ. данных]
(1) Если параметр F1U (бит 0 параметра ном. 1405) равен 0
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0,01 дюйм/мин от 6 до 60000 от 6 до 48000
Ось вращения 0.1 град/мин от 6 до 150000 от 6 до 120000
данных
0.1 мм/мин от 6 до 150000 от 6 до 120000
Диапазон действ. данных Система
IS-A, IS-B IS-C
(2) Если параметр F1U (бит 0 параметра ном. 1405) равен 1
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 6 до 6000 от 6 до 4800
Ось вращения 1 град/мин от 6 до 15000 от 6 до 12000
данных
1 мм/мин от 6 до 15000 от 6 до 12000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Эти параметры устанавливают скорость подачи 1-разрядных
команд подачи с F1 по F9. Когда задается команда 1-разрядной
цифровой подачи, пока скорость подачи изменяется поворотом
ручного импульсного генератора, значения этих параметров также
соответственно изменяются.
- 75 -
Page 88

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
1460
1461
Верхний предел скорости цифровой подачи с кодом F (F1 по F4)
Верхний предел скорости цифровой подачи с кодом F (F5 по F9)
[Тип данных] 2-слова
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 6 до 6000 от 6 до 4800
Ось вращения 1 град/мин от 6 до 15000 от 6 до 12000
данных
1 мм/мин от 6 до 15000 от 6 до 12000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Задает верхний предел скорости подачи для команды цифровой
подачи с кодом F1.
Поскольку скорость подачи увеличивается поворотом ручного
импульсного генератора, скорость подачи фиксируется при
достижении заданного верхнего предела. Если выполняется
команда цифровой подачи с кодом F от F1 до F4, верхним
пределом является тот, который задан в параметре 1460. Если
выполняется команда цифровой подачи с кодом F от F5 до F9,
верхним пределом является тот, который задан в параметре 1461.
- 76 -
Page 89

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
1465
Виртуальный радиус для контроля скорости подачи вокруг оси
вращения
[Тип данных] 2-слова ось
[Единица измерения данных]
Система
приращений
Ввод метрических
данных
Ввод данных в
дюймах
IS-A IS-B IS-C Единица
мм
0.01 0.001 0.0001
дюйм
[Диапазон действ. данных] от 0 до 99999999
Устанавливает радиус виртуальной окружности, при
использовании такого метода контроля, при котором скорость
подачи по оси вращения конвертируется в скорость перемещения
по окружности с виртуальным радиусом.
ПРИМЕЧАНИЕ
1 Отметьте, что система приращений остается без
изменений вне зависимости от того,
используется ли метрический или дюймовый
ввод.
2 Данная функция активирована, если бит 0
(ROTx) параметра ном. 1006 и бит 0 (RFDx)
параметра ном. 1408 устанавливаются в 1.
3 Будьте осторожны при установке бита 0 (RFDx)
параметр ном. 1408 и параметра ном. 1465
(виртуальный радиус). В особенности, если эта
функция используется с маленьким
виртуальным радиусом, перемещение по оси
ускоряется.
4 Если установлено большое значение для
величины перемещения и параметра ном. 1465
(виртуальный радиус), выдается сигнал тревоги
(P/S 5307: Внутренние данные превышают
допустимый диапазон.).
5 Данная функция не может использоваться со
следующими режимами:
Ускоренный подвод, подача с
обратнозависимым временем (G93), подача на
оборот (G94), нарезание резьбы, расширенный
контроль предпросмотра AI, контроль контура AI
- 77 -
Page 90

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
я
1466
[Тип данных] 2-слова
[Единицы данных, диапазон действ. данных]
[Пример] Если задано G92
Скорость подачи отвода в цикле нарезания резьбы
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 30 до 96000 от 6 до 48000
Ось вращения 1 град/мин от 30 до 240000 от 6 до 100000
данных
1 мм/мин от 30 до 240000 от 6 до 100000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Задает скорость подачи отвода в цикле нарезания резьбы
Если в этом параметре установлен 0, перемещение выполняется на
скорости подачи (скорости ускоренного подвода) установленной в
параметре ном. 1420.
R1
Начальна
точка
R2
C
C
R1
На вышеуказанном рисунке, R1 обозначает скорость ускоренного
подвода, а C обозначает скорость рабочей подачи.
В данном параметре устанавливается скорость подачи R2. Если 0
установлен в этом параметре, R2 это та же скорость подачи что и R1.
- 78 -
Page 91

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
4.14 ПАРАМЕТРЫ КОНТРОЛЯ УСКОРЕНИЯ/ЗАМЕДЛЕНИЯ
#7 #6 #5 #4 #3 #2 #1 #0
1601
[Тип данных] Бит
OVB Перекрытие блоков при рабочей подаче
(Число добавляемых импульсов)=F2×
NCI RTO
ACD NCI RTO OVB
0: Блоки не перекрываются при рабочей подаче.
1: Блоки перекрываются при рабочей подаче.
При перекрытии блоков выдает импульсы распределителя
импульсов в конце блока совместно с распределяемыми
импульсами в следующем блоке. Это устраняет изменения в
скоростях подачи между блоками.
Перекрытие блоков активируется когда блоки содержащие G01,
G02, или G03 последовательно задаются в режиме G64. Однако
если последовательно задаются минутные блоки, перекрытие
может не производиться.
Следующие импульсы в блоке F2 добавляются к импульсам
остающимся в конце распределителя импульсов в блоке F1.
Число импульсов, требуемых в конце блока F1
F1
Если F1 = F2
F
F1 F2
Если перекрытие блоков отключено
F
F1 F2
Если перекрытие блоков включено
RTO Перекрытие блоков при ускоренном подводе
0: Блоки не перекрываются при ускоренном подводе.
1: Блоки перекрываются при ускоренном подводе.
ПРИМЕЧАНИЕ
Смотри описание параметра ном. 1722.
NCI Проверка нахождения в положении при замедлении
0: Выполняется
1: Не выполняется
t
t
- 79 -
Page 92

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
ACD Функция автоматического снижения скорости подачи на углах
(функция автоматического изменения скорости подачи при
обработке углов)
0: Функция не используется.
1: Функция используется.
#7 #6 #5 #4 #3 #2 #1 #0
1602
[Тип данных] Бит
FWB Ускорение/замедление рабочей подачи до интерполяции
<Пример процесса замедления> <Пример процесса ускорения>
LS2 G8S CSD FWB
LS2 G8S CSD BS2 COV FWB
0: Используется ускорение/замедление перед интерполяцией
типа A.
1: Используется ускорение/замедление перед интерполяцией
типа B.
Тип A:
Если скорость подачи изменяется командой, ускорение/
замедление начинается после того, как программа переходит
в блок в котором задается команда.
Тип B:
Если скорость подачи изменяется командой, ускорение/
замедление начинается и заканчивается в блоке до того, как
программа переходит в блок в котором задается команда.
Если скорость подачи изменяется командой, ускорение
начинается после того, как программа переходит в блок в
котором задается команда.
Скорость
подачи
Точка 1
F3
F2
F1
Тип B
N1 N2
Для изменения скорости подачи от F3 до F2, необходимо начать уменьшать скорость подачи в точке 1.
Указанная скорость подачи
Применяется скорость
подачи после ускорения/
замедления перед
интерполяцией.
Тип A
Время
Скорость
подачи
F3
F2
F1
N1 N2
Указанная скорость подачи
Применяется скорость
подачи после ускорения/
замедления перед
интерполяцией.
Время
COV Функция изменения скорости рабочей подачи по наружной дуге в
функции автоматического изменения скорости подачи при
обработке углов:
0: Не используется.
1: Используется.
BS2 Тип ускорения/замедления после интерполяции при рабочей
подачи в режиме расширенного контроля предпросмотра:
0: Задается битом 6 (LS2) параметра ном. 1602.
1: Колоколообразное ускорение/замедление
- 80 -
Page 93
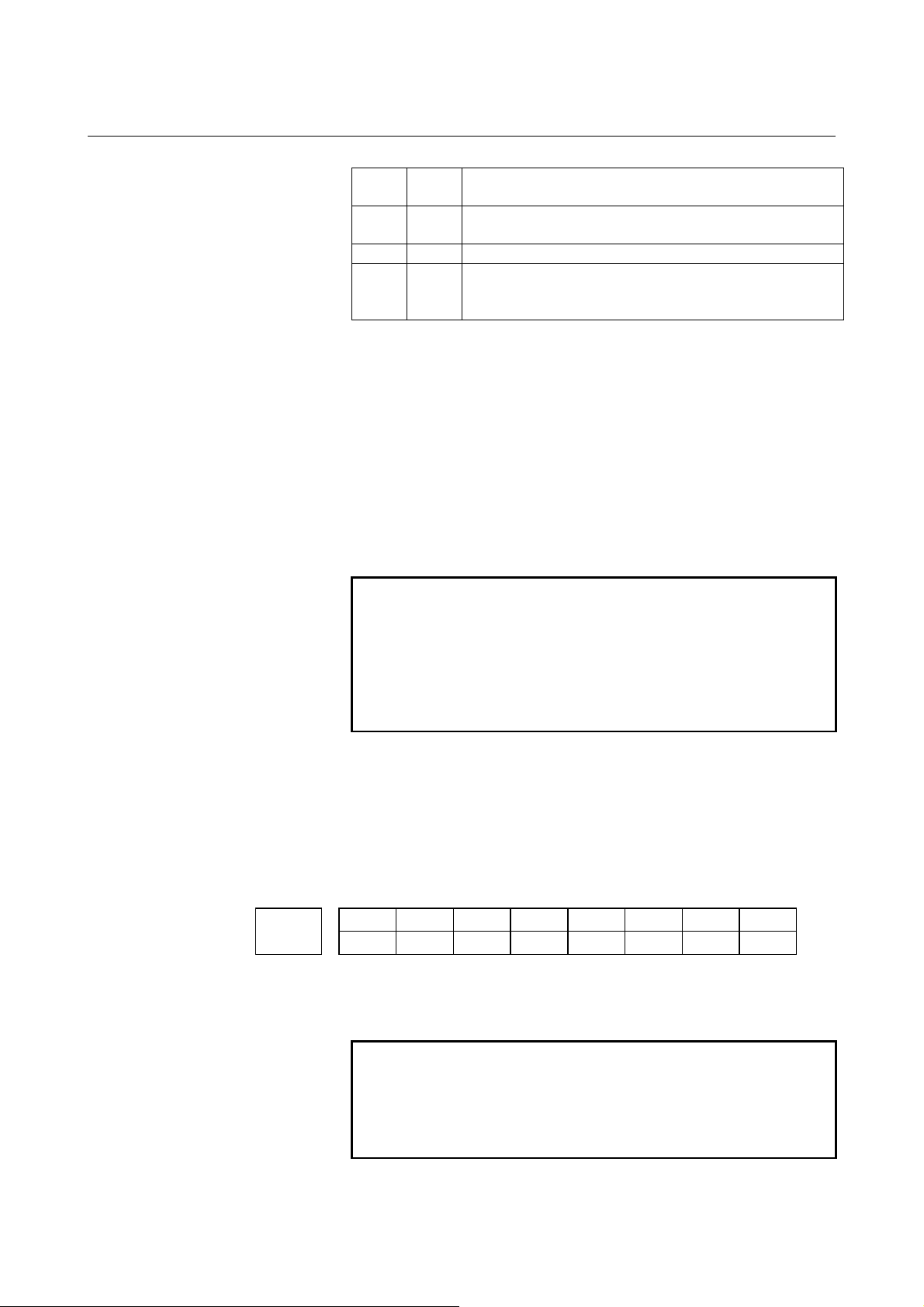
B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
BS2 LS2 Ускорение/замедление
ускоренного подвода
0 0
0 1 Линейное ускорение/замедление после интерполяции
1 0
Экспоненциальное ускорение/замедление после
интерполяции
Колоколообразное ускорение/замедление после
интерполяции. (Требуется опция ускорение/замедление
после интерполяции для рабочей подачи.)
CSD В функции для автоматического уменьшения скорости подачи на
углах,
0: Для контроля рабочей подачи используются углы.
1: Для контроля рабочей подачи используется разница в
рабочих подачах.
G8S Расширенное управление предпросмотром последовательного
шпинделя:
0: Отключено.
1: Включено.
Если включено, расширенное управление предпросмотром может
использоваться в следующих функциях:
• Жесткое нарезание резьбы
• Управление контуром Сs
• Позиционирование шпинделя (только если бит 3 параметра
ном. 1800 равен 1)
ПРИМЕЧАНИЕ
Для контроля контура Cs и жесткого нарезания
резьбы, расширенное управление
предпросмотром активно только для первого
шпинделя. Контроль контура Cs и жесткое
нарезание резьбы, для второго шпинделя не
поддерживает расширенное управление
предпросмотром.
LS2 Тип ускорения/замедления после интерполяции при рабочей
подаче при расширенном управлении предпросмотром,
расширенном управлении предпросмотром AI, или контроле
контура AI
0: Применяется экспоненциальное ускорение/замедление
(расширенное управление предпросмотром), или не
применяется ускорение/замедление (расширенное
управление предпросмотром AI и контроль контура AI).
1: Применяется линейное ускорение/замедление.
#7 #6 #5 #4 #3 #2 #1 #0
1603
RPT
BEL RBL RPT
[Тип данных] Бит
PRT Выполняется ускорение/замедление ускоренного подвода
интерполяционного типа:
0: С постоянным наклоном.
1: С постоянным временем.
ПРИМЕЧАНИЕ
1 Используется константа времени
ускорения/замедления и коррекция для
ускоренного подвода.
2 Наложение блоков ускоренного подвода не
может быть использована.
- 81 -
Page 94

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
RBL При расширенном контроле предпросмотра AI / контроле контура
AI, ускорение/замедление ускоренного подвода:
0: Линейное ускорение/замедление
1: Колоколообразное ускорение/замедление
ПРИМЕЧАНИЕ
Бит 4 (PRT) параметра ном. 1603
недействителен.
BEL В режиме контроля контура AI:
0: Используется линейное ускорение/замедление перед
предварительной интерполяцией.
1: Используется колоколообразное ускорение/замедление перед
предварительной интерполяцией.
#7 #6 #5 #4 #3 #2 #1 #0
1604
DS2
[Тип данных] Бит
DS2 Если выдается сигнал тревоги перехода через крайнее положение
для проверки сохраненного хода 2 при линейном
ускорении/замедлении перед интерполяцией, функция
выполнения предварительного замедления, так чтобы скорость
подачи установленная в параметре ном. 12700 могла быть
достигнута при выдаче сигнала тревоги:
0: Отключена.
1: Включена.
#7 #6 #5 #4 #3 #2 #1 #0
1610
JGLx CTLx
JGLx CTBx CTLx
[Тип данных] Разрядная ось
CTLx Ускорение/замедление при рабочей подаче включая подачу при
холостом ходе
0: Применяется экспоненциальное ускорение/замедление.
1: Применяется линейное ускорение/замедление после
интерполяции.
ПРИМЕЧАНИЕ
Для использования колоколообразного
ускорения/замедления после интерполяции,
установите этот параметр в 0 и выберите
ускорение/замедление, используя CTBx, бит 1
параметра ном. 1610.
Параметр
CTBx CTLx
0 0 Экспоненциальное ускорение/замедление
0 1
1 0
Линейное ускорение/замедление после
интерполяции
Колоколообразное ускорение/замедление
после интерполяции.
ускорение/замедление
ускоренного подвода
- 82 -
Page 95

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
CTBx Ускорение/замедление при рабочей подаче включая подачу при
холостом ходе
0: Применяется экспоненциальное ускорение/замедление или
линейное ускорение/ замедление после интерполяции (в
зависимости от установки CTLx, бит 0 параметра ном. 1610).
1: Применяется колоколообразное ускорение/замедление после
интерполяции.
ПРИМЕЧАНИЕ
Данный параметр эффективен только если
имеется функция колоколообразного
ускорения/замедления после интерполяции при
рабочей подаче. Если функция отсутствует,
установка CTLx, бит 0 параметра ном. 1610,
определяет тип ускорения/замедления вне
зависимости от установки этого параметра.
JGLx Ускорение/замедление при толчковой подаче
0: Применяется экспоненциальное ускорение/замедление.
1: Применяется линейное ускорение/замедление после
интерполяции или колоколообразное ускорение/замедление
после интерполяции (в зависимости от того, какое
используется при рабочей подаче).
Константа времени T или T
1620
ускорения/замедления или для колоколообразного
ускорения/замедления при ускоренном подводе для каждой оси.
[Тип данных] Слово ось
[Единица измерения данных] мсек
[Диапазон действ. данных] от 0 до 4000
Задает постоянную времени для колоколообразного
ускорения/замедления при ускоренном подводе для каждой оси
(1) Если установлено колоколообразное ускорение/замедление
Установите постоянную времени T
ускорения/замедления в этом параметре, установите
постоянную времени T2 в параметре ном. 1621.
(2) Если установлено линейное ускорение/замедление
Установите постоянную времени T для ускорения/замедления в
этом параметре, и установите 0 в параметре ном. 1621.
используется для экспоненциального
1
для колоколообразного
1
- 83 -
Page 96

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
ПРИМЕЧАНИЕ
1 Если параметр ном. 1621 (постоянная времени
T2 используемая для колоколообразного
ускорения/замедления при ускоренном подводе)
установлен в 0, линейное ускорение/замедление
применяется при ускоренном подводе, даже
если функция присутствует. В этом случае, этот
параметр содержит постоянную времени
используемую при линейном
ускорении/замедлении при ускоренном подводе.
2 В зависимости от установки значений
постоянной времени, перемещение может
производиться при скорости подачи несколько
меньшей чем скорость ускоренного подвода в
течении некоторого времени, до того, как
скорость ускоренного подвода достигается
ускорением. Для предотвращения этого,
устанавливайте постоянные времени кратные 8.
<Ускоренный подвод линейное ускорение/замедление>
Скорость
:Скорость
форсированной
продольной
подачи
Время
T
T : Константа времени линейного ускорения / замедления.
T
<Ускоренный подвод колоколообразное ускорение/замедление>
Скорость
Скорость
ускоренного
подвода
Время
T
/
2
T
2
: Устанавливает постоянную времени линейного ускорения/замедления
T
1
: Устанавливает время для округления.
T
2
Общее время =T
Линейное время =T
Время для округения =T
+ T2
1
- T2
1
2
T1
T
/2
2
- 84 -
Page 97

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
Установите значение, когда скорость ускоренного подвода равна
100%. Если она меньше 100%, общее время уменьшается. (Метод
постоянного ускорения)
Значение T
Обычно устанавливайте значение T
определяется из вращающего момента двигателя.
1
от 24 мс до 32 мс.
2
1621
Постоянная времени t T
ускорения/замедления при ускоренном подводе для каждой оси
, используемая для колоколообразного
2
[Тип данных] Слово ось
[Единица измерения данных] мсек
[Диапазон действ. данных] от 0 до 512
Задает постоянную времени t T
, используемую для
2
колоколообразного ускорения/замедления при ускоренном
подводе для каждой оси
ПРИМЕЧАНИЕ
1 Установите параметр ном. 1620 в постоянную
времени T1 используемую для
колоколообразного ускорения/замедления при
ускоренном подводе, и установите этот
параметр в постоянную времени T2.
Для деталей по постоянным времени T1 и T2,
смотри описание параметра ном. 1620.
2 Если этот параметр установлен в 0,
применяется линейное ускорение/ замедление
при ускоренном подводе. Установка параметра
ном. 1620 используется как постоянная времени
при линейном ускорении/замедлении.
Постоянная времени, для экспоненциального ускорения/замедления
1622
[Тип данных] Слово ось
[Единица измерения данных] мсек
[Диапазон действ. данных] от 0 до 4000 (экспоненциальное ускорение/замедление при
при рабочей подаче, или колоколообразном ускорении/замедлении
после интерполяции или линейном ускорении/замедлении после
интерполяции при рабочей подаче для каждой оси.
рабочей подаче)
От 0 до 512 (линейное или колоколообразное ускорение/
замедление после интерполяция при рабочей подаче)
Задать постоянную времени, используемую для
ускорения/замедления при рабочей подаче, колоколообразном
ускорении/замедлении после интерполяции или линейном
ускорении/замедлении после интерполяции при рабочей подаче
для каждой оси. За исключением специальных применений та же
константа времени должна быть задана для всех осей в этом
параметре. Если постоянные времени для осей отличаются друг от
друга, невозможно будет получить правильные прямые линии и
дуги.
Этот параметр действителен для нарезания резьбы, вне
зависимости от типа ускорения/замедления. Для циклов нарезания
резьбы G76 и G92 (G78 в G кодах систем B или C), этот параметр
действителен для операций отличных от экспоненциального
ускорения/замедления. (T-серия)
- 85 -
Page 98

4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
Колоколообразное ускорение/замедление после интерполяции рабочей подачи
Скорость
Время
T
T : Общее время, это константа независящая от скорости подачи.
(Постоянная времени неизменна).
Кривая соответствует T
установите в параметре ном. 1620 и 1621.
= T/2 и T2 = T/2
1
1623
Уровень FL экспоненциального ускорения/замедления при рабочей
подаче для каждой оси
[Тип данных] Слово ось
[Единицы данных, диапазон действ. данных]
Система приращений
Миллиметр обработки 1 мм/мин 0, 6 - 15000 0, 6 - 12000
Дюйм обработки 0.1 дюйм/мин 0, 6 - 6000 0, 6 - 4800
Ось вращения 1 град/мин 0, 6 - 15000 0, 6 - 12000
Единица
данных
Диапазон действ. данных
IS-A, IS-B IS-C
Установите нижний предел (уровень FL) экспоненциального
ускорения/замедления при рабочей подаче ля каждой оси.
ПРИМЕЧАНИЕ
За исключением особых приложений, этот
параметр должен быть установлен в 0 для всех
осей. Если задано значение отличное от 0,
истинные прямые линии и дуги не могут быть
получены.
Постоянная времени, для экспоненциального ускорения/замедления,
1624
[Тип данных] Слово ось
[Единица измерения данных] мсек
[Диапазон действ. данных] от 0 до 4000 (экспоненциальное ускорение/замедление при
или колоколообразном ускорении/замедлении или линейном
ускорении/замедлении после интерполяции при толчковой подаче для
каждой оси.
толчковой подаче)
От 0 до 512 (линейное или колоколообразное ускорение/
замедление после интерполяция при толчковой подаче)
Устанавливает постоянную времени, для экспоненциального
ускорения/замедления, или колоколообразном ускорении/
замедлении или линейном ускорении/замедлении после
интерполяции при толчковой подаче для каждой оси.
Выбираемый тип зависит от установок параметров CTLx, CTBx, и
JGLx (ном. 1610#0, #1, и #4).
- 86 -
Page 99

B-64120RU/01 4.ОПИСАНИЕ ПАРАМЕТРОВ
1625
Уровень FL экспоненциального ускорения/замедления при толчковой
подаче для каждой оси
[Тип данных] Слово ось
[Единицы данных, диапазон действ. данных]
Система приращений
Миллиметр обработки 1 мм/мин от 6 до 15000 от 6 до 12000
Дюйм обработки 0.1 дюйм/мин от 6 до 6000 от 6 до 4800
Ось вращения 1 град/мин от 6 до 15000 от 6 до 12000
Единица
данных
Диапазон действ. данных
IS-A, IS-B IS-C
Установите нижний предел (уровень FL) экспоненциального
ускорения/замедления при рабочей подаче ля каждой оси.
Постоянная времени для экспоненциального ускорения/замедления в
1626
цикле резьбонарезания для каждой оси
[Тип данных] Слово ось
[Единица измерения данных] мсек
[Диапазон действ. данных] от 0 до 4000
Устанавливает постоянную времени для экспоненциального
ускорения/замедления в цикле резьбонарезания (G76, G78 (G92 в
G кодах системы A)) для каждой оси.
Если тип ускорения не экспоненциальное ускорение/замедление,
параметр ном. 1622 становится действительным.
Уровень FL для экспоненциального ускорения/замедления в цикле
1627
резьбонарезания для каждой оси
[Тип данных] Слово ось
[Единицы данных, диапазон действ. данных]
Единица
приращений
Миллиметр
обработки
Дюйм обработки 0.1 дюйм/мин от 6 до 6000 от 6 до 4800
данных
1 мм/мин от 6 до 15000 от 6 до 12000
Диапазон действ. данных Система
IS-A, IS-B IS-C
Устанавливает нижний предел (уровень FL) для
экспоненциального ускорения/замедления в цикле
резьбонарезания (G76, G78 (G92 в G кодах системы A)) для
каждой оси.
- 87 -
Page 100
4.ОПИСАНИЕ ПАРАМЕТРОВ B-64120RU/01
Минимальный коэффициент замедления (MDR) для изменения
1710
внутренней круговой рабочей скорости, автоматическим изменением
скорости подачи при обработке углов
[Тип данных] Байт
[Единица измерения данных] %
[Диапазон действ. данных] от 1 до 100
Этот параметр устанавливает минимальный коэффициент
замедления (MDR) если изменение внутренней круговой рабочей
скорости, выполняется автоматическим изменением скорости
подачи при обработке углов.
При круговой резке с внутренней коррекцией, фактическая
скорость подачи
для заданной скорости подачи (F) выражается следующим
образом:
Rc
F ×
Rp
Rc : Радиус траектории центра режущего инструмента.
Rp : Запрограммированный радиус
Затем, фактическая скорость подачи контролируется таким
образом, что скорость подачи по запрограммированной
траектории может достигнуть заданной скорости подачи F.
Rc
Траектория
Rp
центра
режущего
инструмента
Рис. 4.17 (a) Rp и Rc
Если Rc слишком мало по сравнению с Rp, так что Rc/Rp 0, это
приведет к остановке инструмента. Для предотвращения этого,
устанавливается минимальный коэффициент замедления (MDR).
1711
Угол (θp) используемый для распознавания внутреннего угла при
коррекции внутренних углов
[Тип данных] Байт
[Единица измерения данных] Градус
[ Диапазон действ. данных] от 1 до 179 (стандартное значение 91)
Этот параметр устанавливает угол используемый для
распознавания внутреннего угла при коррекции внутренних углов,
при помощи автоматического изменения скорости подачи при
обработке углов.
1712
Величина коррекции для внутреннего угла
[Тип данных] Байт
[Единица измерения данных] %
[ Диапазон действ. данных] от 1 до 100 (стандартное значение 50)
Устанавливает величину коррекции для внутреннего угла.
Запрограммированная
траектория
- 88 -
 Loading...
Loading...