

Page 1

Instructions for use
Contents Page
1 - GENERAL...............................................................................................................................................................3
1.1 - GENERAL SAFETY REGULATIONS
1.1.1 - STANDARD SAFETY DEVICES ..........................................................................................................3
1.2 - FIELD OF APPLICATION .............................................................................................................................3
1.3 - OVERALL DIMENSIONS .............................................................................................................................3
1.4 - SPECIFICATION ......................................................................................................................................... 4
2 - HANDLING, HOISTING ........................................................................................................................................ 4
3 - START-UP
3.1 - ANCHORING
3.2 - ELECTRICAL CONNECTION .......................................................................................................................5
3.3 - PNEUMATIC CONNECTION (VERSIONS SE ).............................................................................................5
3.4 - EXTRA SAFETY DEVICES (VERSION SE ).................................................................................................5
3.5 - ADAPTER MOUNTING ................................................................................................................................ 5
SE2 MOUNTING.....................................................................................................................................................6
SE2 DISMOUNTING...............................................................................................................................................7
3.5 - WHEEL GUARD ASSEMBLY AND ADJUSTMENT........................................................................................ 8
3.7 - SPACER WD ..................................................................................................................................................8
4 - CONTROLS AND COMPONENTS
4.1 - BRAKE PEDAL............................................................................................................................................... 8
4.2 - PNEUMATIC LOCKING PEDAL (Version SE)................................................................................................8
4.3 - AUTOMATIC RIM DISTANCE AND DIAMETER GAUGE ..............................................................................9
4.4 - AUTOMATIC WIDTH (OPTIONAL) ................................................................................................................9
4.5 - AUTOMATIC WHEEL POSITIONING ............................................................................................................9
4.6 - CONTROL PANEL AND DISPLAY ................................................................................................................9
4.6.1 - CONTROL OF THE FUNCTIONS MENU ...........................................................................................10
5 - INDICATIONS AND USE OF THE WHEEL BALANCER
5.1 - DOUBLE OPERATOR PROGRAM
5.2 - USING THE GAUGE INSTALLED ON THE MACHINE............................................................................... 11
5.3 - AUTOMATIC SETTING OF WHEEL DIMENSIONS..................................................................................... 11
5.4 - RESULT OF MEASUREMENT ...................................................................................................................13
5.4.1 - EXACT POSITIONING OF THE ADHESIVE WEIGHT BY MEANS OF THE GAUGE WITH CLIPS ...14
5.5 - RECALCULATION OF THE UNBALANCE .................................................................................................15
5.6 - SPLIT FUNCTION (HIDDEN WEIGHT) .......................................................................................................15
5.7 - UNBALANCE OPTIMIZATION ..................................................................................................................... 17
5.8 - AUTOMATIC MINIMIZATION OF STATIC UNBALANCE ............................................................................17
5.9 - ECCENTRICTY MEASUREMENT (OPTION) ..............................................................................................18
6 - SET UP
6.1 - SELF-DIAGNOSTICS ................................................................................................................................. 19
6.2 - SELF-CALIBRATION ..................................................................................................................................19
6.3 - MANUAL DIMENSION PRESETTING (USE ONLY IN PARTICULAR CASES OR FOR TEST).................20
6.3.1 - STEEL WHEEL RIMS................................................................................................................................20
6.3.2 - ALUS RIMS..........................................................................................................................................20
6.3.2.1 - ALUS VARIANT WITH INSIDE CLAMP WEIGHT............................................................................. 21
6.4 - SCREEN SAVER.........................................................................................................................................21
6.5 - TYPE OF DISPLAY OF UNBALANCE PHASE ............................................................................................22
6.6 - AUTOMATIC GAUGES ..............................................................................................................................23
6.6.1 - RIM DISTANCE GAUGE ....................................................................................................................23
6.6.2 - DIAMETER GAUGE ...........................................................................................................................24
6.6.3 - WIDTH GAUGE (OPTIONAL)..............................................................................................................25
6.7 - AMBIENT TEMPERATURE ..........................................................................................................................25
7 - ERRORS ............................................................................................................................................................. 26
7.1 - INCONSISTENT UNBALANCE READINGS
8 - ROUTINE MAINTENANCE ................................................................................................................................27
8.1 - TO REPLACE THE FUSES
9 - RECOMMENDED SPARE PARTS LIST ..............................................................................................................28
.............................................................................................................................................................5
................................................................................................................................................5
...............................................................................................................................................................19
..........................................................................................................................27
...........................................................................................................3
......................................................................................................................8
................................................................................... 11
.............................................................................................................. 11
..............................................................................................27
I
GB
I 0391 - 1
Page 2
I 0391 - 2
I 0391 - 3
GB
GB
Page 3
1- General
1.1 - General safety recommendations
- The balancing machine should only be used by duly authorized and trained personnel.
- The balancing machine should not be used for purposes other than those described in the instruction
manual.
- Under no way should the balancing machine be modied except for those modications made explicitly by
the manufacturer.
- Never remove the safety devices. Any work on the machine should only be carried out by duly authorized
specialist personnel.
- Do not use strong jets of compressed air for cleaning.
- Use alcohol to clean plastic panels or shelves (AVOID LIQUIDS CONTAINING SOLVENTS).
- Before starting the wheel balancing cycle, make sure that the wheel is securely locked on the adapter.
- The machine operator should not wear clothes with apping edges. Make sure that unauthorized personnel
do not approach the balancing machine during the work cycle.
- Avoid placing counterweights or other objects in the base which could impair the correct operation of the
balancing machine.
1.1.1 - Standard safety devices
- STOP push button for stopping the wheel under emergency conditions.
- The safety guard of high impact plastic is with shape and size designed to prevent risk of counterweights
from ying out in any direction except towards the oor.
- A microswitch prevents starting the machine if the guard is not lowered and stops the wheel whenever the
guard is raised.
1.2 - Field of application
The machine is designed for balancing car or motorcycle wheels weighing less than 75 kg. It can be operated within
a temperature range of 0° to + 45°C.
It can measure the geometric radial run-out of the wheels (optional)
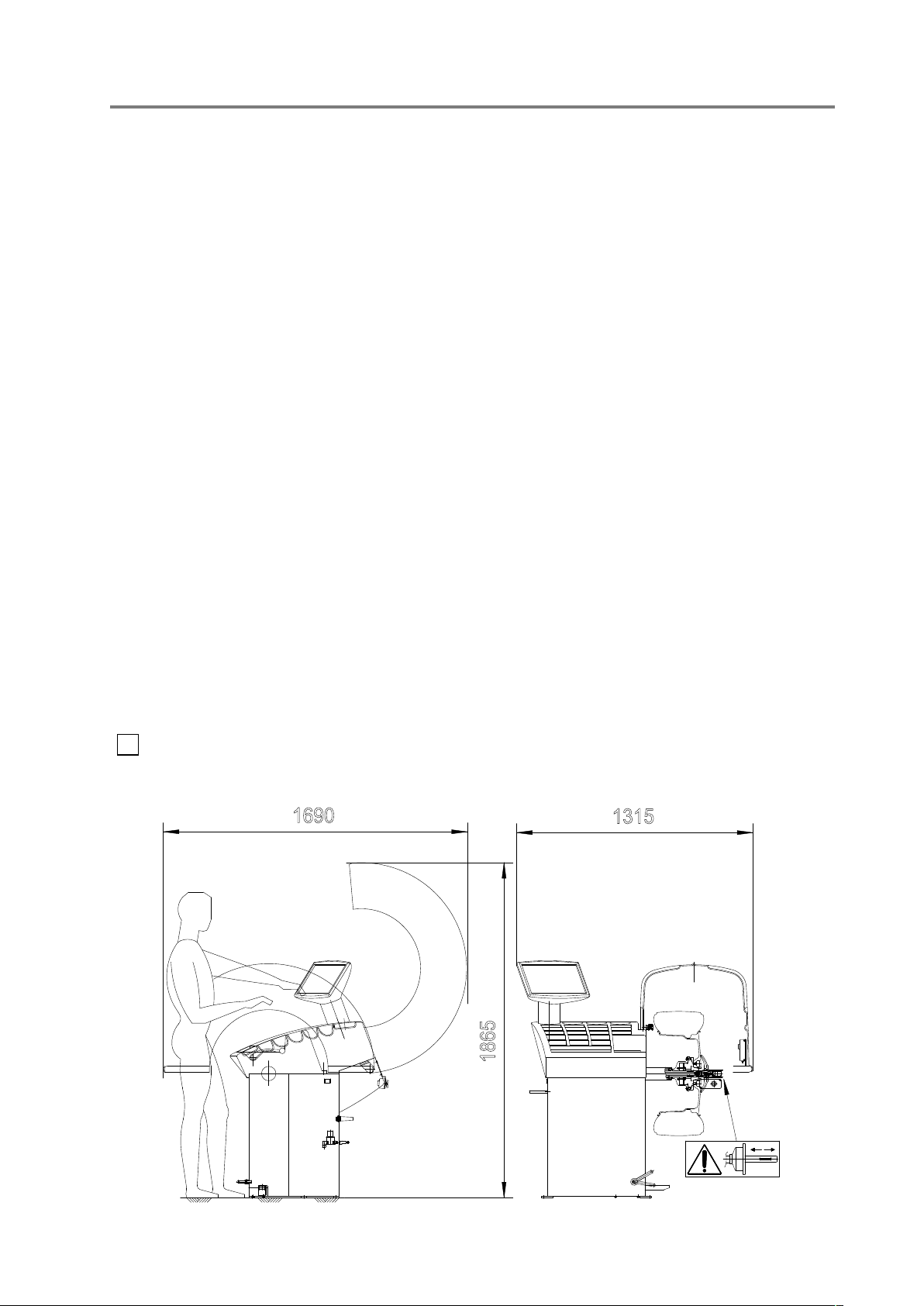
1.3 - Overall dimensions (42" Protection)
1
GB
I 0391 - 3
Page 4

I 0391 - 5
GB
1.4 - Specication
Single phase power supply ....................................... 115 - 230 V 50-60 Hz
Protection class ........................................................ IP 54
Max. power consumption .......................................... 1,1 Kw
Balancing speed approx............................................ 180 min
Cycle time for average wheel (14 Kg) ..................... (14 Kg) 6 seconds
Balancing accuracy ................................................... 0,1 grammi
Position resolution ..................................................... ± 1.4 °
Average noise level
Distance rim - machine.............................................. 0 - 280 mm (400 mm can be preset)
Rim width setting range ............................................ 1.5" ÷ 20” or 40 ÷ 510 mm
Diameter setting range .............................................. 10” ÷ 26” or 265 ÷ 665 mm
Total wheel diameter within guard
Total wheel width within guard
Min/max. compressed air pressure ...........................
.................................................................................................. approx. 100 to 145 PSI.
................................................... < 70 dB(A)
............................. 1067 (42”)
................................... 500 (42”)
7 ÷ 10 Kg/cm2 approx. 0.7 to 1 Mpa; approx. 7 to 10 BAR;
-1
2 - Handling and hoisting
2
2a
I 0391 - 4
GB
NB: DO NOT HOIST THE MACHINE USING DIFFERENT GRIPS.
Page 5
3 - Commissioning
3.1 - Anchoring
The machine can be operated on any at non-resilient oor.
Make sure that the machine rests solely on the three support points provided (g. 2a).
It is advisable to secure the system to the ground using the specic feet (see Figure 2a) in the event of continual use with wheels weighing over 35 Kg.
3.2 - Electrical connection
The machine is supplied with a single phase mains cable plus earth (ground).
The supply voltage (and mains frequency) is given on the machine nameplate. It may NOT be changed.
Connection to the mains should always be made by expert personnel.
The machine should not be started up without proper earth (ground) connection.
Connection to the mains should be through a slow acting safety switch rated at 4A (230V) or 10A (115V).
3.3 - Pneumatic connection (versions SE)
For operation of the spindle with pneumatic locking (costant thrust air spring) connect the balancing to the compressed air main. The connection tting is located at the back of the machine. At least 7 Kg/cm2 (~ 0.7 MPa; ~ 7 BAR; ~
100 PSI) pressure is needed for correct operation of the release device.
3.4 - Extra safety devices (version SE)
- Wheel always locked even when there is pressure failure during the balancing cycle.
- Always actuate the unlocking control pedal with the machine stationary in order to avoid stress and
abnormal wear on the adapter.
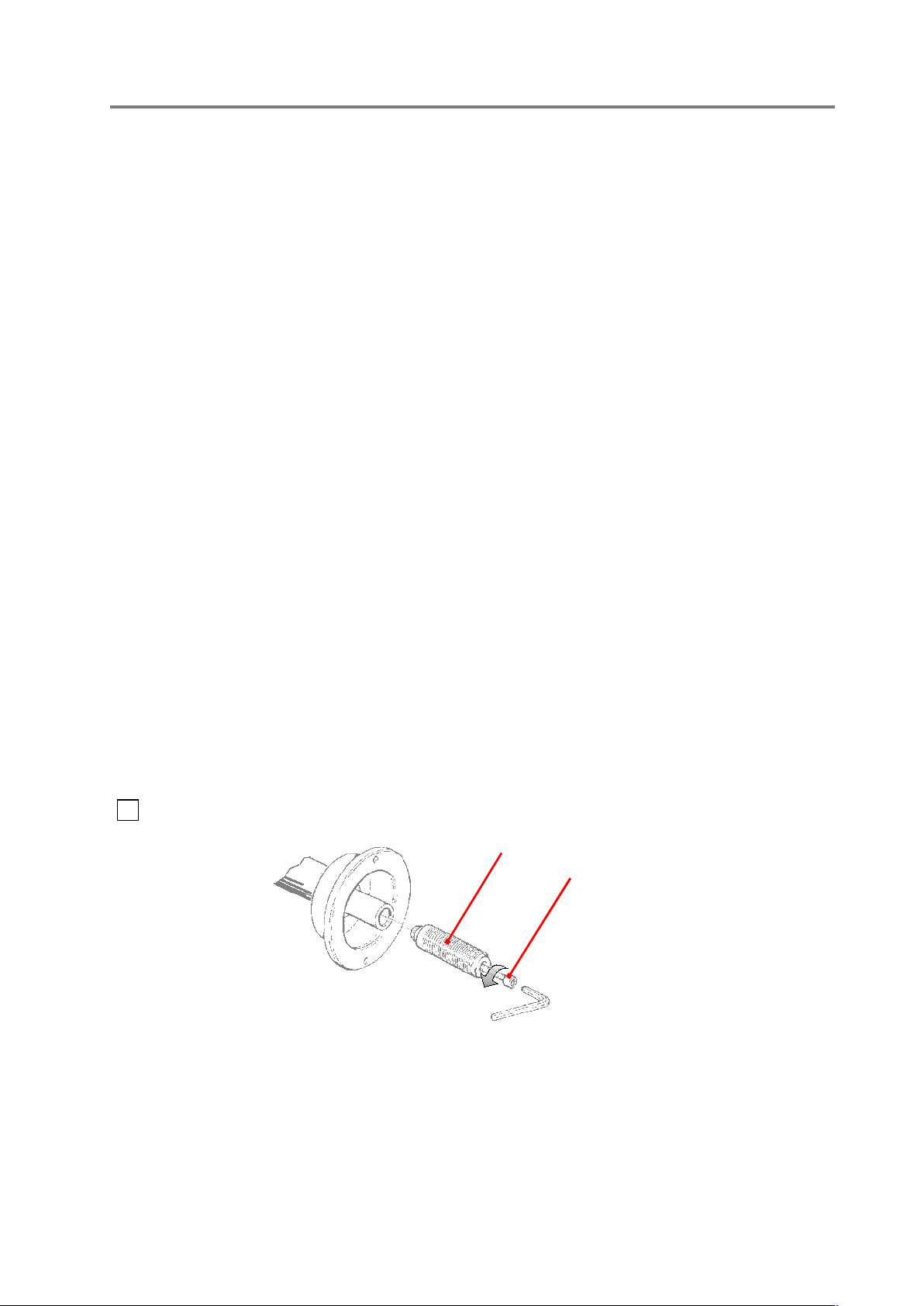
3.5 - Adapter mounting
The balancing machine is supplied complete with cone adapter for fastening wheels with central bore. Other optional
anges can be mounted once the terminal part is removed (also see enclosed brochures).
N.B. Carefully clean the coupling surfaces before performing any operation
DISMOUNTING THREADED END PIECE (standard machine)
3
a) Back-off screw B and remove threaded end-piece A.
b) Fit the new adapter
GB
I 0391 - 5
Page 6

SE2-Mounting
0 mm
a
1-2 mm
c
b
d
e
g
f
SE2_ 0140
Page 7

SE2-Dismounting
360°
a
c
b
d
Cone
e
- Quando possibile, centrare le ruote con cono dall'interno (vedi disegno).
- Evitare di usare il manicotto RL con cerchi di ferro.
- Whenever possible, centre the wheels with the cone from the inside (see the drawing).
- Avoid using the RL sleeve with metal rims.
- Lorsque c’est possible, centrer les roues avec le cône de l’intérieur (voir dessin).
- Eviter d’utiliser le manchon RL avec les jantes en fer.
- Wenn möglich, die Räder mit Konus von Innen heraus zentrieren (siehe Zeichnung).
- Bei Eisenfelgen die Verwendung der Muffe RL vermeiden.
- Siempre que sea posible, centrar las ruedas con cono desde dentro (véase dibujo).
- Evitar usar el manguito RL con llantas de hierro.
SE2_ 0140
Page 8
3.6 - Guard mounting and adjustment
a) Fasten the components to the base as illustrated in specific exploded view.
b) The position of the wheel guard when closed can be adjusted with relative screw accessible at the back. Correct
position is shown in Fig. 1.
c) With the guard closed check that the microswitch prod has slipped into place on the ring.
d) Appropriately adjust the angular position of the control ring.
3.7 - Spacer WD
When balancing very wide wheels (9”), there is not enough space to turn the distance gauge. To withdraw the wheel
from the machine side, fit spacer WD on the adapter body and secure it with the standard issue nuts. When centring
the wheel with the cone on the inside, fit the spacer DC to obtain spring thrust.
4
DC
WD
Spring
4 - Controls and components
4.1 - Brake pedal
5
Cone
This pedal allows the operator to hold the
wheel when fitting the counterweights.
It must not be actuated during the measuring cycle.
4.2 - Pneumatic locking pedal (version SE)
6
I 0391 - 8
GB
This pedal allows releasing the device
fastening the wheel on the adapter.
actuate this pedal during the machine
cycle and/or when adapters other than
the standard cone adapter are mounted.
The pedal has two stable positions: top,
wheel unclamped; bottom, wheel
clamped.
Do not
Page 9

GB
4.3 - Automatic distance and diameter gauge
This gauge allows measurement of the distance of the wheel from the machine and the wheel diameter at the point of
application of the counterweight.
It also allows correct positioning of the counterweights on the inside by using the specic function which allows reading the position used for the measurement within the rim.
The gauge can only be used with the counterweight pincers mounted.
4.4 - Automatic width (optional)
Width gauging is through a SONAR device which measures the distance of the wheel without mechanical contact,
merely by closing the guard and each time a valid measurement has been made with gauge DISTANCE AND
DIAMETER GAUGE.
4.5 - Automatic wheel positioning
At the end of the spin, the wheel is positioned according to the unbalance on the outside or else according to the
static unbalance (when selected).
Precision is ± 20° for wheels up to 25 kg. in weight. Positioning is automatically disenabled for wheels of less than 13”
in diameter.
4.6 - Control panel and display
7
5
7
3
8
1
1-2 Digital readouts, AMOUNT OF UNBALANCE,
inside/outside
3-4 Digital readouts, POSITION OF
UNBALANCE, inside/outside
5 Indicators, correction mode selected
6 User Indicators
7 Weight correction position indicators
8 Distance gauge position indicator
9 SPLIT “ON” indicator
10 OPT “ON” indicator
11 Measurements in mm indicator
12 ALUS “ON” indicator
13 Push button, operator selection
14 Push button, SPLIT (unbalance resolution)
6
4
9
10
11
12
2
17
20
23
13
14
18
21
24
26
15
16
19
22
25
15 Emergency push button
16 Push button, cycle start
17 OPT Pushbutton (unbalance optimisation)
18 HOME Pushbutton (terminate function)
19 Push button, FUNCTIONS MENU
20 Inch/mm dimensions selection pushbutton
21 Push button, eccentricity measurement selection
(optional)
22 Push button, menu selection conrmation
23 Push button, selection of mode of correction
24 Position repeater push button
25 Push button, unbalance reading < 5 g (25 oz)
26 Push buttons, manual DISTANCE/DIAMETER/
WIDTH setting
Note: - Only use the ngers to press the push buttons. Never use the counterweight pincers or other pointed
objects.
- In case of audible alarm connected (see par. OPERATION FUNCTIONS MENU), any push button operation
sounds with a “beep” alarm.
I 0391 - 9
Page 10

I 0391 - 11
*
*
*
*
GB
4.6.1 - Operation functions menu
Eccentricity
measurement
on/off (option)
guard on/off
on/off start
from guard
closing
approximates
1-5g or .1-.25 oz
on/off beep
signal
See SELF-DIAGNOSTICS chapter
See SELF-CALIBRATION chapter
g/oz unit of
unbal.
measurement
Screen-saver
duration
(in minutes)
Type of
display of
unbalance
phase
Calibration of automatic RIM DISTANCE gauge
CONFIRM
CONFIRM
CONFIRM
CONFIRM
CONFIRM
CONFIRM
CONFIRM
CONFIRM
Calibration of automatic DIAMETER gauge
Calibration of automatic WIDTH gauge (optional)
RETURNS TO MEASUREMENT SCREEN
N.B. If such indications fail to appear, contact Technical Service.
Ambient
temperature
(in °C)
CONFIRM
I 0391 - 10
GB
Page 11
b
Pos B
Pos A
5 - Indications and use of the wheel balancer
5.1 - Double operator program
This program allows memorizing the dimensions of two types of wheels. Thus two operators can work simultaneously
on two different cars using the same balancing machine. The system memorizes two programs with various preset
dimensions.
1 - Press to select operator (1 or 2). Selection is conrmed by panel-mounted LED.
2 - Enter the dimensions (see PRESETTING OF WHEEL DIMENSIONS)
3 - carry out the balancing as usual.
With program 1 or 2 is called for subsequent balancing operations without having to newly enter the
dimensions.
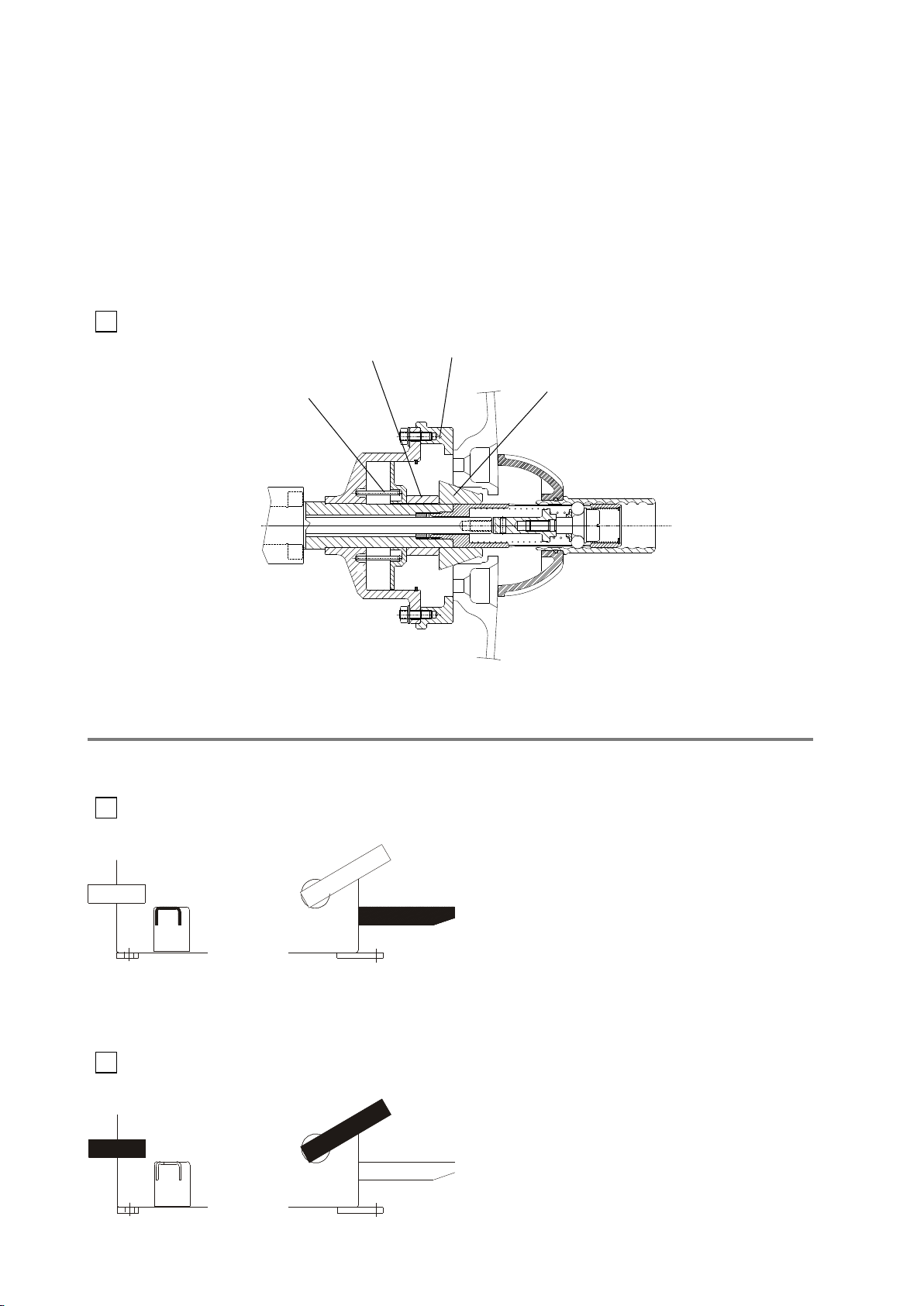
5.2 - Using the gauge installed on the machine
8
For clamp weights, use the gauge in the top position
A.
For adhesive weights, use the gauge as preferred in
top position A or bottom position B.
Note: Always use the round part of the striker
plate resting on the rim.
8a
Indication of gauge in movement.
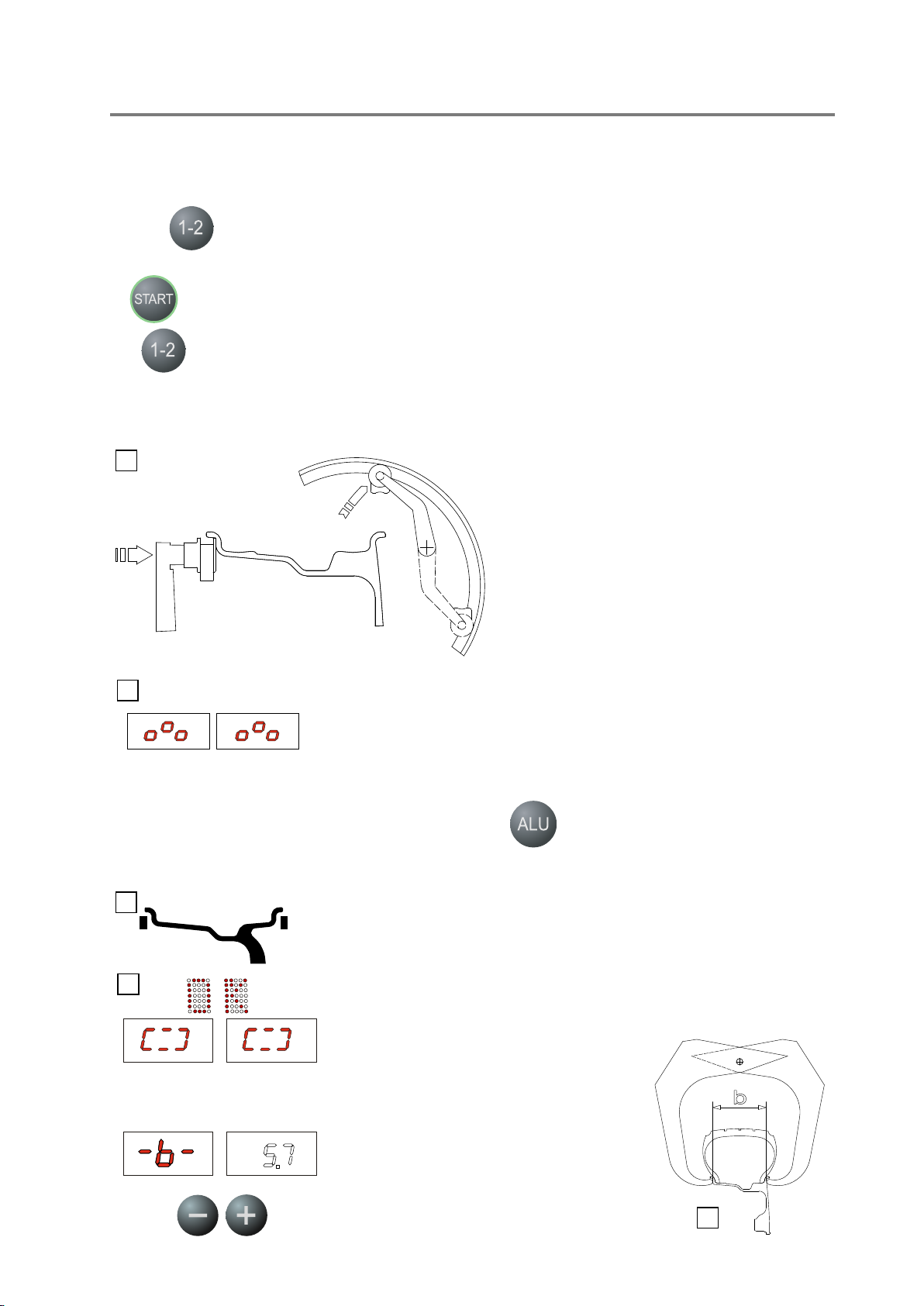
5.3 - Automatic setting of wheel dimensions
The machine automatically detects the correct balancing program for steel and aluminium rims (ALUS).
The counterweight position proposed may be changed using the button.
a) DYNAMIC balancing of steel or light alloy rims with application of clip-on weights on the edges of the rim.
8b
8c
Pull out the gauge as far as the inner edge of the rim such as indicated in g. 8.
Hold it in this position until the symbol shown in Fig. 8c is displayed.
Indication of dimensions acquired
N.B.: When the beep signal is enabled (see section CONTROL OF THE
FUNCTIONS MENU), reaching of the dimensions
is accompanied by a “beep” .
Return the gauge to rest position.
The machine has automatically detected
DISTANCE + DIAMETER and goes to MANUAL
WIDTH SETTING.
- The nominal width is normally stamped
on the rim; if not, proceed to measure
dimension “-b-” with the calibre gauge
(supplied as standard).
8d
I 0391 - 11
GB
Page 12

I 0391 - 13
FE
FI
GB
"Automatic width” option
If WIDTH measurement with SONAR is enabled, the machine is set for the acquisition of this value:
8e
The LT script on the LH matrix display indicates that LIGHT TRUCK wheel measurement is set (large dimension
wheels such as off-road, trucks or wheels which protrude signicantly from the rim).
This function can be enabled/disenabled by pressing push button prior to the measurement, which is then
performed by closing the guard; once completely closed and if “automatic START on guard closure” is enabled, the
launch will be made for unbalance measurement. If automatic START is disenabled, once the guard is closed the
display will show the width value measured.
This setting is also valid for the following correction modes:
The STATIC mode is required for motorcycle wheels or when it is not possible to
place the counterweights on the two sides of the rim.
Balancing of light alloy rims with application of adhesive weights on the shoulders of the
rims. The position of the weights is xed from the edges of the rim to the inside of the rim.
Combined balancing: adhesive weight on the outside and clip-on weight on the inside. The
position of the outside weight is xed from the outside edge of the rim to the inside of the
rim.
Combined balancing: adhesive weight on the inside and clip-on weight on the outside.
The position of the inside weight is xed from the edge of the rim to the inside of the rim.
b) Balancing of alloy rims with hidden application of the outside adhesive weight.
9
Slide out the gauge on the LH side, at the point where a
weight is to be tted. Wait until the symbol shown in Figure
8c is displayed. Pull it out further towards the right plane and
wait until the symbol shown in Figure 6A is displayed. The
wheel balancer automatically identies ALUS mode.
The measurement can be made in both the position shown in
Fig. 8/Pos. A and that shown in Fig. 8/Pos. B.
I 0391 - 12
GB
Page 13

9a
Position of the counterweights proposed automatically when the difference in the
diameters dI, dE is less than 2”.
Position of the counterweights proposed automatically when the difference in the
diameters dI, dE is greater than or equal to 2”.
With the button it is in any case possible to select the type of ALU desired.
5.4 - Result of measurement
Inside correction Outside correction
10
After performing a balancing spin, the amounts of unbalance are shown on the digital readouts.
The matrix displays indicate the correct angular wheel position to mount the counterweights (12 o’clock position).
When the beep signal is enabled (see section CONTROL OF THE FUNCTIONS MENU ), this is activated when the wheel
reaches the correction position.
If the unbalance is less than the threshold selected,
ble to read the values below the threshold chosen gram by gram.
If the static unbalance is greater than 30 g, the LED ashes to suggest an unbalance optimisation operation
(chapter UNBALANCE OPTIMISATION).
is displayed instead of the unbalance, with it is possi-
GB
I 0391 - 13
Page 14

I 0391 - 15
FI
FE
GB
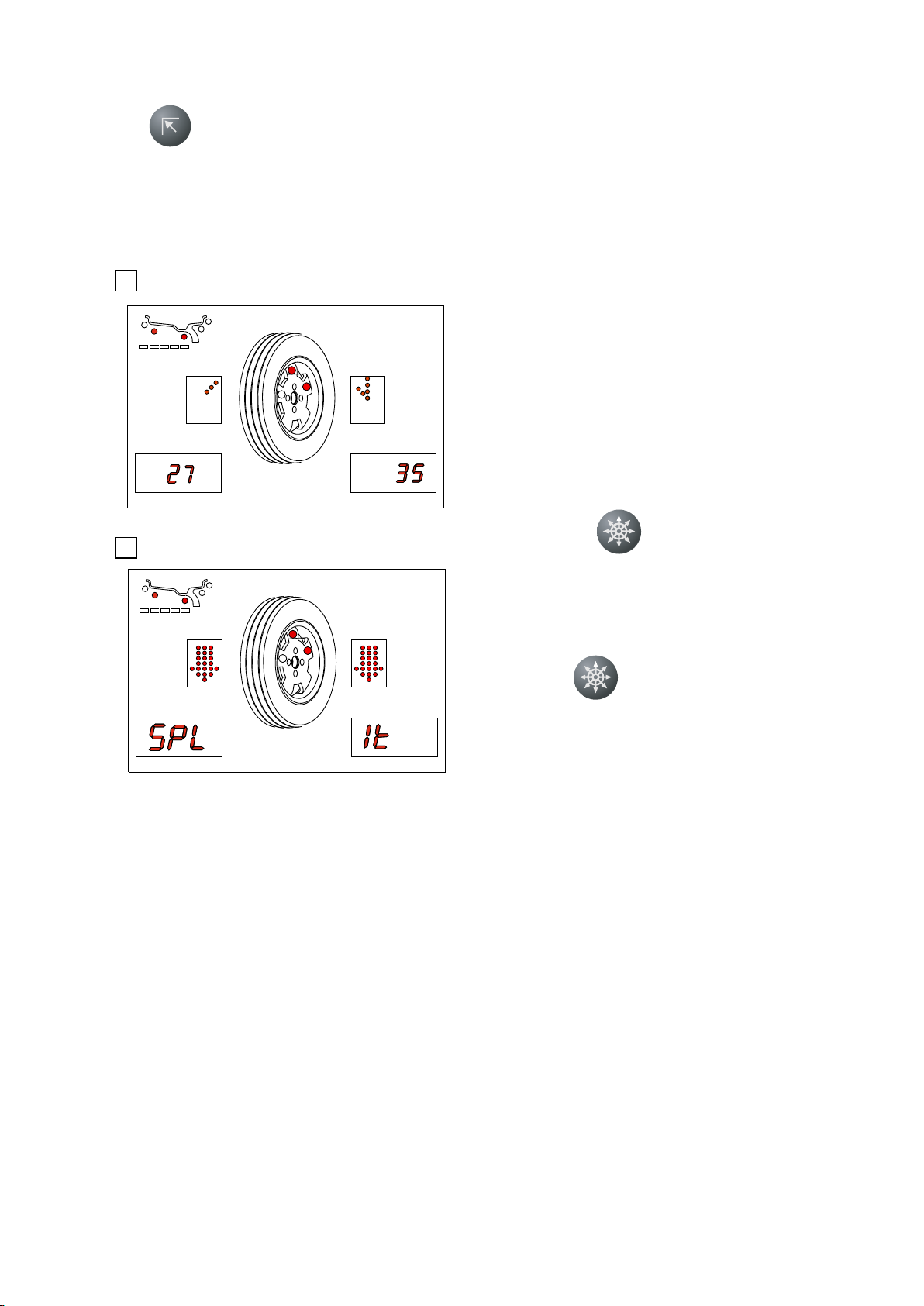
5.4.1 - Exact positioning of the adhesive weight by means of the gauge with clips
In correction mode ALUS it is possible to cancel approximations in the mounting of the counterweights by proceeding
as follows:
- press
- Insert the correction weight into the specic seat on the weight clip with the adhesive part facing upwards
- Remove the gauge when the display shows:
to indicate that the gauge should be pulled further out
to indicate that the gauge should be returned to rest position
The left display gives the indications for reaching the position regarding the inside, while the right display that of the
outside. The position of the gauge is also indicated by the position repeater Led (8).
11
Position
reached on
the internal side
12
Position
reached on
the external side
- Bring the wheel into correct angular position
- Move the gauge until the display corresponding to the selected correction plane shows the unbalance
- Rotate the rim until the correct weight lies against the rim.
- The fact that the weight application position is no longer vertical (g. 13) is offset automatically (where appropriate
use the weight pusher).
N.B. : It is not possible to put automatically the correction weight in the Fig.8/Pos.B position; always
rotate the rim in Fig.8/Pos.A.
13
I 0391 - 14
GB
Page 15
5.5 - Recalculation of the unbalance
Press after new setting of the measurement value again.
5.6 - Split function (hidden weight)
The SPLIT function is used to position the adhesive weights behind the wheel spokes so that they are not visible. This
function should be used only in the case of static unbalance or where the hidden adhesive weight is to be applied on the
outside. Input the wheel dimensions and do a spin.
Start the SPLIT function as follows:
14
Example of display prior to SPLIT function
- Place the wheel in the outside unbalance correction
position.
- Set one of the top spokes (preferably the one to the left
of the unbalance) to 12 o’clock.
15
- Press the button
- Follow the UP/DOWN indication of the positioning
LEDs and set the second top spoke to 12 o’clock.
- Press button .
GB
I 0391 - 15
Page 16

I 0391 - 17
15
30
15
15
30
30
GB
Results:
Unbalance breakdown NOT
in position
Correction position 1
Correction position 2
N.B.: If error 24 is displayed, repeat the SPLIT function ensuring that the minimum distance between the spokes is
greater than 18 degrees. If error 25 is displayed,repeat the split function ensuring that the maximum distance
between the spikes is smaller than 120 degrees.
To return to normal unbalance display, press any button.
To carry out a new spin, press the button.
I 0391 - 16
GB
Page 17

s
x
g
g
d
x
5
0
°
s
x
g
g
d
x
4
g
3
g
1
g
6
g
s
x
g
g
d
x
s
x
g
g
d
x
s
x
g
g
d
x
5.7 - Unbalance optimization
- This function serves to reduce the amount of weight to be added in order to balance the wheel.
- It is suitable for static unbalance exceeding 30 g.
- It improves the residual eccentricity of the tyre.
Unbalance already measured
TYRE
POSITION
No previous unbalance
measurement
unbalance measurement
- Mark with chalk a reference point on the adapter and rim.
- With the aid of a tyre remover, turn the tyre on the rim by
180°.
- Ret the wheel with the reference mark coinciding between
rim and adapter.
- RH display: percentage reduction
- LH display: actual static unbalance which can be reduced
by rotation.
RIM
POSITION
5.8 - Automatic minimization of static unbalance
Initial unbalance
phase shift
Possible approximations
residual static
With conventional
wheel balancer
residual static
residual static
Choice with minimum
static residual
residual static
- Mark the two positions of the rim and tyre, and turn the
tyre on the rim until the positions correspond in order to
obtain the optimization on the display.
RETURN TO MEASUREMENT SCREEN.
This program is designed to improve the quality of
balancing without any mental effort or loss of time by
the operator. In fact by using the normal commercially
available weights, with pitch of 5 in every 5 g, and by
applying the two counterweights which a conventional
wheel balancer rounds to the nearest value, there
could be a residual static unbalance of up to 4 g. The
damage of such approximation is emphasized by the
fact that static unbalance is cause of most of disturbances on the vehicle. This new function, resident
in the machine, automatically indicates the optimum
entity of the weights to be applied by approximating
them in an “intelligent” way according to their position
in order to minimize residual static unbalance.
GB
I 0391 - 17
Page 18
I 0391 - 19
GB
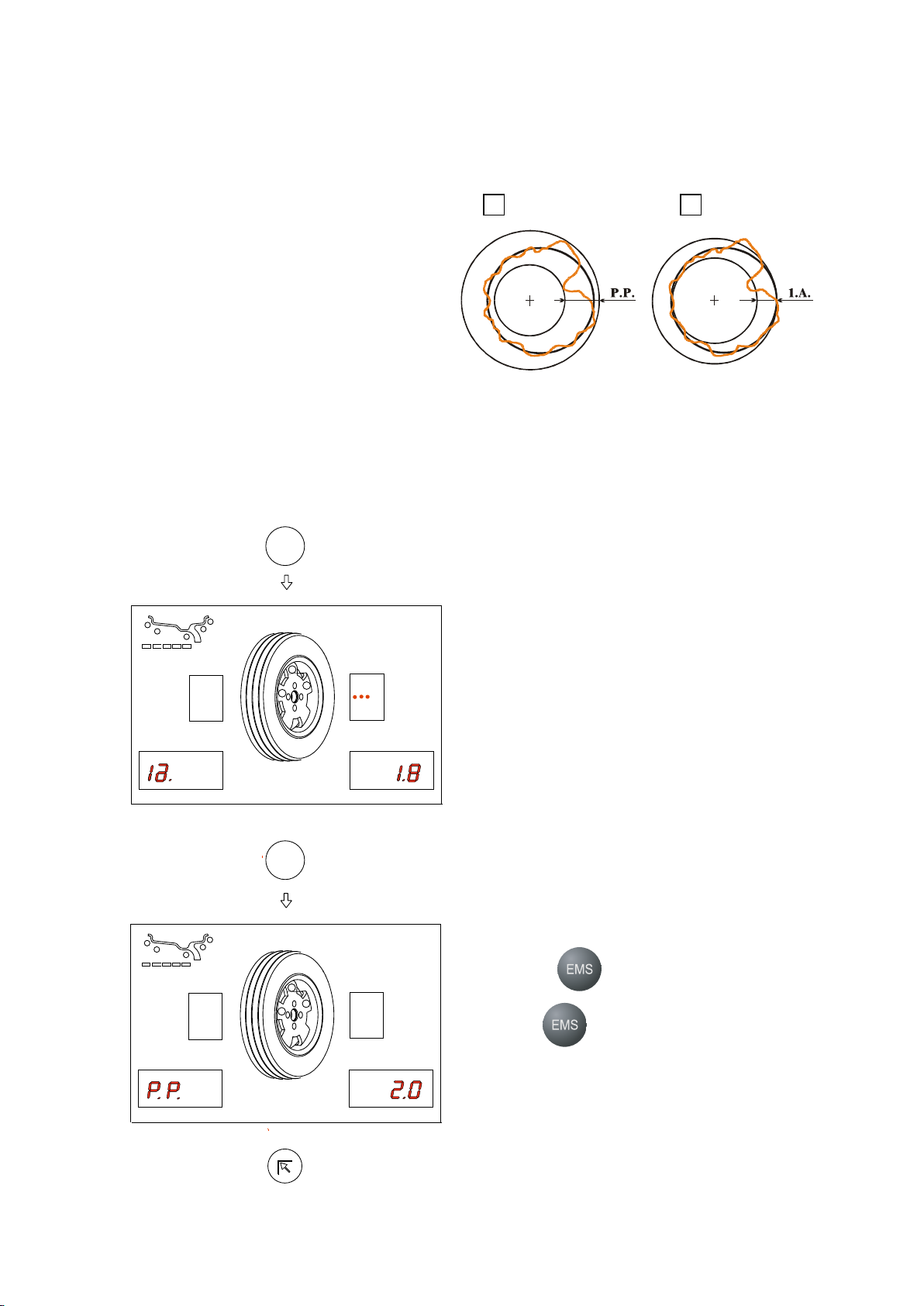
5.9 - Eccentricty measurement (option)
The gures are signicantly enlarged to highlight the external surface of the tyre and the wheel rotation axis.
Fig. A highlights the total Peak-Peak eccentricity measurement, dened as the maximum radial offset of the surface
of the tyre.
Fig. B highlights the 1st harmonic eccentricity measurement, i.e. the eccentricity of the rim “reecting” the shape
of the tyre, to calculate the averages values of local offset
of the tyre from roundness.
It is evident that the P-P measurement is
normally higher than the 1st harmonic
measurement. Tyre manufacturers usually provide two
different tolerances for the two types of eccentricity.
At the end of a balancing spin, eccentricity measurement of the tyre can be performed automatically using the
SONAR sensor placed on the guard. To enable measurement at the end of every spin, see the section MENU
FUNCTION CONTROL.
Measurement results:
A B
The value of the rst harmonic with the relative phase is
displayed.
Hold down the button to display the Peak-Peak
value.
Release the button to return to the display of the
rst harmonic value.
BACK TO MEASUREMENT WINDOW.
N.B.: The eccentricity measurement is valid up to max. tyre Ø of 1000 mm.
I 0391 - 18
GB
Page 19

6 - Set up
6.1 - Self-diagnostics
Performs tests useful for maintenance staff.
6.2 - Self-calibration
For machine self-calibration proceed as follows:
- Fit a medium-sized metal wheel on the shaft. Example: 6” x 14” (± 1”)
- Preset the exact dimensions of the wheel mounted.
CAUTION!! Presetting of incorrect dimensions would mean that the machine is not correctly calibrated,
therefore all subsequent measurements will be incorrect until a new self-calibration is performed
with the correct dimensions!
- Perform a spin under normal conditions.
- Add a 100 g. sample weight (3.5 oz) on the outside in any angular position.
- Shift the sample weight from the outside to the inside keeping the same
angular position.
- Shift the sample weight to the 12 o’clock position.
END OF SELF-CALIBRATION
CANCELS SELF-CALIBRATION IN ANY PHASE.
GB
I 0391 - 19
Page 20

I 0391 - 21
dI
dE
aI
aE
a
b
d
GB
6.3 - Manual dimension presetting (Use only in particular cases or for test)
6.3.1 - Steel wheel rims (use for setting dimensions in AUTOCALIBRATION)
- Measuring:
- Setting:
- Set the distance “a ” between the inside of the wheel and the machine
6.3.2 - ALUS rims
- Measuring:
- Setting:
- Set the nominal width, normally indicated on the rim, or measure the
width “b” using the caliper gauge supplied (see g. 8e).
- Set the nominal diameter “d” indicated on the tyre.
N.B.: This setting is also valid for the correction modes
indicated at “AUTOMATIC SETTING OF WHEEL DIMENSIONS”.
20
0 gauge
I 0391 - 20
GB
Note: not setting dE as it is automatic, dE = dI - 1”.
Page 21

dI
dE
aI
aE
6.3.2.1 - ALUS variant with inside clamp weight
- Measuring:
- Setting:
21
0 gauge
0 calibro
(Nominal)
Note: not setting dE as it is automatic, dE = dI - 2”.
6.4 - Screen saver
It is possible to enable a screen saver function which temporarily replaces the data displayed with moving symbols.
This function acts when the balancing system is not used for the time period dened in the relative set-up:
Modify time expressed in minutes.
CONFIRM.
If the value is set to 0, the screen saver is automatically disenabled.
The screen saver is not active in the balancing machine set-up menu.
To return to normal balancing machine function, simply press any button or move the wheel or the distance gauge.
GB
I 0391 - 21
Page 22

I 0391 - 23
15
30
15
15
30
30
GB
6.5 - Type of display of unbalance phase
The type of display of the unbalance phase can be selected, different from what is described in the manual to date.
Changing the type of display of the unbalance phase.
CONFIRMATION
In this case the unbalance phase is indicated in the following way:
MEASURING RESULT :
Inside correction Outside correction
- MEASURING RESULT OF SPLIT UNBALANCE:
Each weight to be applied has its own display (1 for the inside and 2 for the outside in ALUS).
Unbalance inconsistent NOT in position
Correction position 1
Correction position 2
N.B.: The standard type of display is type 1, i.e. that
described throughout the manual.
I 0391 - 22
GB
Page 23

6.6 - Automatic gauges
6.6.1 - Rim distance gauge
- Shift the distance gauge to position
- Move the gauge to position
CORRECT CALIBRATION
- Return the gauge to rest position
- The wheel balancer is ready for operation
N.B.: In the event of errors or faulty operation, the writing appears on the display : shift the gauge to
position
Technical Service Department. In the event of incorrect input in the rim distance gauge calibration function,
press to cancel it.
and repeat the calibration operation exactly as described above. If the error persists, contact the
, keeping it quite still, press
, press
GB
I 0391 - 23
Page 24

I 0391 - 24
I 0391 - 25
40 mm
40 mm
GB
GB
6.6.2 - Diameter gaugeE40 mm
Place the round part of the gauge terminal on the ange as shown
in the gure and press
.
- The number 353 ± 1° appears on the left display .
- Turn the gauge downward position the round part of the gauge
terminal at 40 mm (radial distance) from the ange as indicated
in the gure.
- The number 256 ± 3° should appear on the left display.
- If not, press the button holding the gauge still at 40 mm:
the number 256 appears on the left display.
- Return the gauge to rest position.
In the event of incorrectly accessing the diameter gauge calibration
function, press to cancel it.
Page 25

DISTANZA
0 (Zero calibro)
6.6.3 - Width gauge (optional)
Set with the distance in mm between the SONAR
sensor and the distance gauge clamp in pos. 0.
gauge
DISTANCE
- In the event of incorrect input in the width gauge calibration function, press .
6.7 - Ambient temperature
When automatic width measurement or eccentricity measurement are enabled, the ambient temperature must be set
to ensure correct calibration of the sonar sensors.
Set the average ambient temperature for the
location of the balancing machine.
CONFIRM.
GB
I 0391 - 25
Page 26
I 0391 - 27
GB
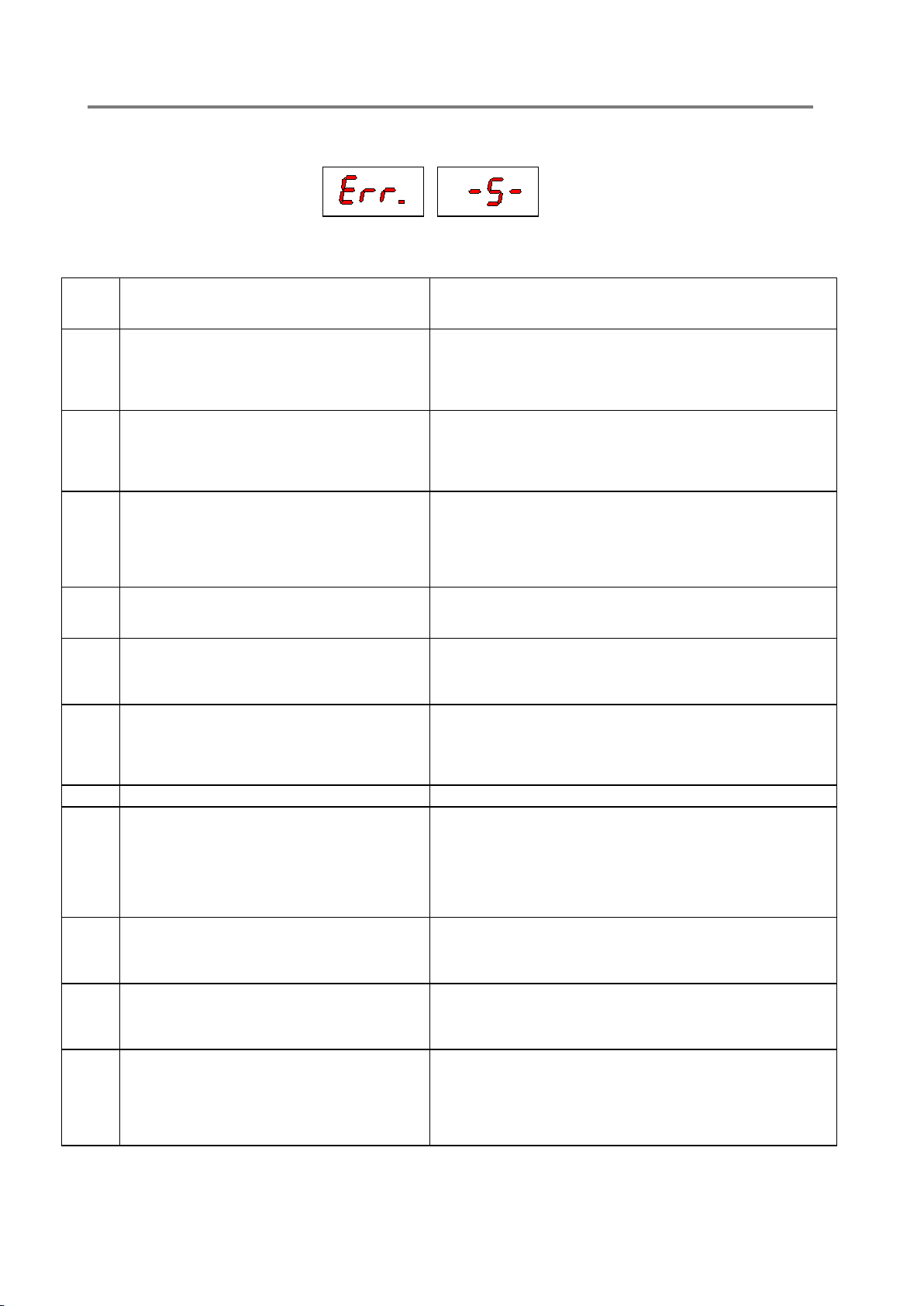
7 - Errors
During machine operation, various causes of faulty operation could occur. If detected by the microprocessor, they
appear on the display as follows:
ERRORS CAUSES CONTROLS
Black The wheel balancer does not come on. 1. Check proper connection to the mains.
Err. 1 No rotation signal. 1. Verify belt tautness.
Err. 2 Speed too low during detection.
Err. 3 Unbalance too high. 1. Verify wheel dimension settings.
Err. 4 Rotation in opposite direction.
Err. 5 Guard open
Err. 7 /
Err. 8
Err. 9 NOVRAM parameter write error. Replace the computer board.
Err. 10 Measured width too small.
Err. 11 Speed too high error.
Err. 12 Unbalance measuring cycle error. 1. Verify phase pick-up board function.
Err.13/
Err.14/
Err.15/
Err.16/
Err.17/
Err.18
During unbalance measurement rotation, wheel speed
is less than 42 rpm.
After pressing [START], the wheel begins to rotate in
the opposite direction (anticlockwise).
The [START] pushbutton was pressed without rst
closing the guard.
NOVRAM parameter read error 1. Repeat machine calibration
N.B.: Minimum width accepted by the
wheel balancer is 1.5” or 40 mm.
During unbalance measurement rotation, wheel speed
is more than 270 rpm.
Unbalance measurement error. 1. Verify phase pick-up board function.
2. Check and if necessary replace the fuses on the power board.
3. Replace the computer board.
2. Verify the function of the phase pick-up board and, in particular,
the reset signal.
3. Replace the phase pick-up board.
4. Replace the computer board.
1. Make sure that a vehicle wheel is mounted on the wheel balancer.
2. Verify belt tautness.
3. Verify the function of the phase pick-up board and, in particular,
the reset signal.
4. Replace the computer board.
2. Check detection unit connections.
3. Perform machine calibration.
4. Mount a wheel with more or less known unbalance (less than 100
grammes) and verify the response of the machine.
5. Replace the computer board.
1. Verify the connection of the UP/DOWN – RESET signals on the
phase pick-up board.
1. Reset the error by pressing pushbutton [7]=End.
2. Close the guard.
3. Verify the function of the protection uSwitch.
4. Press the [START] pushbutton.
2. Shut down the machine.
3. Wait for a minimum time of ~ 1 Min.
4. Re-start the machine and verify correct operation.
5. Replace the computer board.
1. Repeat the distance measurement.
2. Repeat the width measurement.
3. Verify the calibration of the distance gauge and replace the
distance gauge potentiometer as necessary.
4. Verify the calibration of the width gauge and replace the width
gauge potentiometer as necessary.
5. Replace the computer board.
1. Check if there is any damage or dirt on the timing disc.
2. Verify the function of the phase pick-up board and, in particular,
the reset signal.
3. Replace the computer board.
2. Verify correct motor operation.
3. Verify belt tautness.
4. Replace the computer board.
2. Check detection unit connections.
3. Verify machine earth/ground connection.
4. Mount a wheel with more or less known unbalance (less than 100
grammes) and verify the response of the machine.
5. Replace the computer board.
I 0391 - 26
GB
Page 27
Err. 20 Wheel at standstill. The wheel is at a standstill for
more than one second after START.
Err. 24 Distance between the spokes smaller
than 18 degrees.
Err. 25 Distance between the spokes greater
than 120 degree
Err.54 Sonar readout error.
Sonar value readout impossible.
Err.55 Sonar readout error.
Sonar values are insufcient for correct measurement
of eccentricity.
1. Check functioning of the phase generator.
2. Check the connections on the power board.
3. Replace the computer board.
1. The minimum distance between the spokes where to split the
unbalance must be greater than 18 degrees
2. Repeat the SPLIT function increasing the distance between the
spokes.
1. The minimum distance between the spokes where to split the
unbalance must be smaller than 120 degrees
2. Repeat the SPLIT function increasing the distance between the
spokes.
1. Position the eccentricity measurement sonar correctly before
performing the measurement.
2. Check eccentricity sonar connections.
3. Check the power supplies on the power card.
4. Replace the eccentricity measurement sonar.
5. Make sure that the wheel does not halt before completing at least
4/5 revolutions after the first braking impulse.
6. Verify belt tautness.
7. Replace the computer board.
1. Position the eccentricity measurement sonar correctly before
performing the measurement.
2. Make sure that the wheel does not halt before completing at least
4/5 revolutions after the rst braking impulse.
3. Verify belt tautness.
4. Mount a wheel of medium dimensions (14”x5 ”) and perform an
eccentricity measurement . If in these conditions error 55 no longer
occurs, this means that the wheel inertia causing the problem is
such as to half the wheel before having acquired the minimum
number of values necessary for reliable eccentricity measurement.
7.1 - Inconsistent unbalance readings
Sometimes after balancing a wheel and removing it from the balancing machine, it is found that, upon mounting it on
the machine again, the wheel is not balanced.
This does not depend on incorrect indication of the machine, but only on faulty mounting of the wheel on the adapter;
i.e. in the two mountings, the wheel has assumed a different position with respect to the balancing machine shaft
centre line. If the wheel has been mounted on the adapter with screws, it could be possible that the screws have not
been correctly tightened, i.e. crosswise one by one, or else (as often occurs) holes have been drilled on the wheel
with too wide tolerances.
Small errors, up to 10 grams (0.4 oz) are to be considered normal in wheels locked by a cone; the error is normally
greater for wheels fastened with screws or studs.
If, after balancing, the wheel is found to be still out-of-balance when retted on the vehicle, this could be due to
the unbalance of the car brake drum or very often due to the holes for the screws on the rim and drum sometimes
drilled with too wide tolerances. In such case a readjustment could be advisable using the balancing machine with
the wheel mounted.
8 - Routine maintenance
Switch off the machine from the mains before carrying out any operation.
8.1 - To replace the fuses
The power supply board, accessible from the rear by removing the rear cover, is tted with safety fuses (see
Exploded Drawings). If fuses require replacement, use ones of the same current rating.
If the fault persists, contact the Technical Service Department.
NONE OF THE OTHER MACHINE PARTS REQUIRE MAINTENANCE.
I 0391 - 27
GB
Page 28

I 0391 - 29
GB
9 - Recommended spare parts list (For further details, see exploded drawings)
CODE DESCRIPTION
020600503 Bearing 6005-2Z dia. 25/47/12
181198630 Spring 19863P
080077007 Rigid belt Poly V - TB2 - 770 - 7 Vee’s
67M38954C Position pick-up board with cable
182245870 Spring, brake lever 24587P
05PR50728 LEXAN panel
182185750 Spring, rim distance gauge
67M48208A Power board with 2 relays/ 2 sonar
681002000 Fuses DM 5x20 - 2A
511242101 Oscillating switch 16A
86SC65796 Computer board
86SB38988 Cable, automatic rim distance gauge
86SB36493 Cable, automatic diameter gauge
86SB45568 Width sonar (optional)
86SB38585 Cable with microswitch for 42” protection
SPECIAL PARTS FOR 230V MACHINES
50FG55641 Single phase motor 230V/50-60 Hz -0.18Kw 63/B3 - 4p HB63D-4
86SZ50844 Complete power board
611000314 Braking transformer 30VA 230 - 0/50
568001458 Capacitor 14MF 450 V FASTON screw M8
611051827 Power transformer 40VA
SPECIAL PARTS FOR 115V MACHINES
50FG55643 Single phase motor 115V/50-60Hz- 0.18Kw - 63/ B3 - 4p HB63D-4
86SZ50845 Complete power board
611000313 Braking transformer 30VA 115-0/25
568002557 Capacitor 25MF 450V FASTON screw M8
611051828 Power transformer 40VA
SPECIAL PARTS FOR SPINDLE SE
020600702 Bearing 6007 - LLB/2AV1 dia. 35/62x14 Front.
020600703 Bearing 6007 - 2Z dia. 35/62x14 Rear.
18FP29329 Air spring 115 kg. stroke 75 mm.
16FB42177 Coil valve
18FB42639 Spring, pneumatic pedal
SPECIAL PARTS FOR EMS SONAR (OPTION)
86SB43673 Ems sonar
I 0391 - 28
GB
 Loading...
Loading...