

Page 1
Machine Controller MP3000 Series
MP3300
Product Manual
CPU Module model: JAPMC-CP3301-1-E, -CP3301-2-E, -CP3302-1-E, -CP3302-2-E
Base Unit model: JEPMC-BU3301-E, -BU3302-E, -BU3303-E, -BU3304-E
MANUAL NO. SIEP C880725 21D
Introduction
Appearances and Parts
CPU Module Functionality
Specifications
External Dimensions
1
2
3
4
5
Page 2
Copyright © 2014 YASKAWA ELECTRIC CORPORATION
All rights reserved. No part of this publication may be reproduced, stored in a
retrieval system, or transmitted, in any form, or by any means, mechanical, electronic, photocopying, recording, or otherwise, without the prior written permission
of Yaskawa. No patent liability is assumed with respect to the use of the information contained herein. Moreover, because Yaskawa is constantly striving to
improve its high-quality products, the information contained in this manual is subject to change without notice. Every precaution has been taken in the preparation
of this manual. Nevertheless, Yaskawa assumes no responsibility for errors or
omissions. Neither is any liability assumed for damages resulting from the use of
the information contained in this publication.
Page 3
About this Manual
This manual describes the specifications and system configuration of MP3300 Machine Controllers
and the functionality of the CPU Modules.
Read this manual carefully to ensure the correct usage of the Machine Controller and apply the
Machine Controller to control your manufacturing system.
Keep this manual in a safe place so that it can be referred to whenever necessary.
Using this Manual
Basic Terms
Unless otherwise specified, the following definitions are used:
Basic Terms Meaning
MP2000 A Machine Controller in the MP2000 Series
MP3000 A Machine Controller in the MP3000 Series
MPE720 The Engineering Tool or a personal computer running the Engineering Tool
PLC A Programmable Logic Controller
MP3300 A generic name for the CPU Module and Base Unit.
Machine Controller An MP3300 Machine Controller in the MP3000 Series
Motion Control Function Modules
Communications Function Modules
The Function Modules in the Motion Modules and the Function Modules in the
SVC, SVC32, SVR, or SVR32 built into the CPU Modules.
The Function Modules in the Communications Modules and the Function Modules in the 218IFD built into the CPU Module.
MPE720 Engineering Tool Version Number
In this manual, the operation of MPE720 is described using screen captures of MPE720 version 7.
Indication of Reverse Signals
In this manual, the names of reverse signals (ones that are valid when low) are written with a forward slash (/) before the signal name, as shown in the following example:
Notation Examples
• S-ON
• P-CON
= /S-ON
= /P-CON
Terms Used to Describe “Torque”
Although the term “torque” is commonly used when describing rotary Servomotors and “force” is
used when describing linear Servomotors, this manual uses “torque” when describing either one
(excluding parameter names).
Copyrights
• MECHATROLINK is a trademark of the MECHATROLINK Members Association.
• DeviceNet is a registered trademark of the ODVA (Open DeviceNet Venders Association).
• PROFIBUS is a trademark of the PROFIBUS User Organization.
• Ethernet is a registered trademark of the Xerox Corporation.
• Other product names and company names are the trademarks or registered trademarks of the
®
respective company. “TM” and the
manual.
mark do not appear with product or company names in this
iii
Page 4

Important
Example
Information
Term
Visual Aids
The following aids are used to indicate certain types of information for easier reference.
Indicates precautions or restrictions that must be observed.
Indicates alarm displays and other precautions that will not result in machine dam-
age.
Indicates items for which caution is required or precautions to prevent operating mis-
Note
takes.
Indicates operating or setting examples.
Indicates supplemental information to deepen understanding or useful information.
Indicates definitions of difficult terms or terms that have not been previously
explained in this manual.
iv
Page 5

Related Manuals
The following table lists the related manuals. Refer to these manuals as required.
Be aware of all product specifications and restrictions to product application before you attempt to
use any product.
Category Manual Name Manual Number Contents
Describes the functions of the
MP2000/MP3000-series Machine Controllers and the procedures that are
required to use the Machine Controller,
from installation and connections to
settings, programming, trial operation,
and debugging.
Describes troubleshooting an MP3000series MP3200 Machine Controller.
Describes the specifications and system configuration of an MP3000-series
MP3200 Machine Controller and the
functions of the CPU Unit.
Describes the functions, specifications, and application methods of the
MP2200 Machine Controller.
Describes the functions, specifications, operating methods, maintenance, inspections, and
troubleshooting of the MP2000-series
MPU-01 Multi-CPU Module.
Describes the specifications, system
configuration, and communications
connection methods for the Ethernet
communications that are used with an
MP3000-series Machine Controller.
Provides information on the Communications Modules that can be connected
to an MP2000-series Machine Controller and describes the communications
methods.
Describes the specifications and communications methods for the FL-net
Communications Module that can be
connected to an MP2000-series
Machine Controller.
Describes the specifications and communications methods for the EtherNet/
IP Communications Module that can be
connected to an MP2000-series
Machine Controller.
Describes the specifications and communications methods for the CompoNet Communications Module that
can be connected to an MP2000-series
Machine Controller.
Continued on next page.
Basic functionality
Communications functionality
Machine Controller MP2000/MP3000
Series
Machine Controller System
Setup Manual
Machine Controller MP3000 Series
MP3200/MP3300
Troubleshooting Manual
Machine Controller MP3000 Series
MP3200 User’s Manual
Machine Controller MP2200
User’s Manual
Machine Controller MP2000 Series
MPU-01 Multi-CPU Module
User’s Manual
Machine Controller MP3000 Series
Communications
User’s Manual
Machine Controller MP2000 Series
Communication Module
User’s Manual
Machine Controller MP2000 Series
262IF-01 FL-net Communication Module
User’s Manual
Machine Controller MP2000 Series
263IF-01 EtherNet/IP Communication
Module User’s Manual
Machine Controller MP2000 Series
265IF-01 CompoNet Module
User’s Manual
SIEP C880725 00
SIEP C880725 01
SIEP C880725 10
SIEP C880700 14
SIEP C880781 05
SIEP C880725 12
SIEP C880700 04
SIEP C880700 36
SIEP C880700 39
SIEP C880700 44
v
Page 6
Continued from previous page.
Category Manual Name Manual Number Contents
Describes the specifications, system
Motion control functionality
Programming
Engineering
Tools
I/O Modules
Machine Controller MP3000 Series
Motion Control
User’s Manual
Machine Controller MP2000 Series
Pulse Output Motion Module PO-01
User’s Manual
Machine Controller MP2000 Series
SVA-01 Motion Module
User’s Manual
Machine Controller MP2000 Series
Built-in SVB/SVB-01 Motion Module
User’s Manual
Machine Controller MP2000 Series
SVC-01 Motion Module
User’s Manual
Machine Controller MP3000 Series
Ladder Programming Manual
Machine Controller MP3000 Series
Motion Programming Manual
Machine Controller MP2000/MP3000
Series
MPLoader Ver. 4
User’s Manual
Machine Controller MP2000/MP3000
Series
MPLoad Maker Version 4
User’s Manual
Machine Controller MP2000/MP3000
Series
Engineering Tool
MPE720 Version 7
User’s Manual
Machine Controller MP2000 Series
Analog Input/Analog Output Module
AI-01/AO-01 User’s Manual
Machine Controller MP2000 Series
Counter Module CNTR-01
User’s Manual
Machine Controller MP2000 Series
I/O Module
User’s Manual
SIEP C880725 11
SIEP C880700 28
SIEP C880700 32
SIEP C880700 33
SIEP C880700 41
SIEP C880725 13
SIEP C880725 14
SIEP C880761 01
SIEP C880761 02
SIEP C880761 03
SIEP C880700 26
SIEP C880700 27
SIEP C880700 34
configuration, and operating methods
for the SVC32/SVR32 Motion Function
Modules that are used in an MP3000series Machine Controller.
Describes the functions, specifications, and operating methods of the
MP2000-series PO-01 Motion Module.
Describes the functions, specifications, and operating methods of the
MP2000-series SVA-01 Motion Module.
Describes the functions, specifications, and operating methods of the
MP2000-series Motion Module (built-in
Function Modules: SVB, SVB-01, and
SVR).
Describes the functions, specifications, and operating methods of the
MP2000-series SVC-01 Motion Module.
Describes the ladder programming
specifications and instructions of
MP3000-series Machine Controller.
Describes the motion programming
and sequence programming specifications and instructions of MP3000series Machine Controller.
Describes how to install and operate
the MPLoader.
Describes how to install and operate
the MPLoad Maker.
Describes how to operate MPE720 version 7.
Describes the functions, specifications, and operating methods of the AI01 and AO-01 I/O Modules for
MP2000-series Machine Controllers.
Describes the functions, specifications, and operating methods of the
CNTR-01 Counter Module for MP2000series Machine Controllers.
Describes the
tions,
and operating methods of the
LIO-01, LIO-02, LIO-04, LIO-05, LIO06, and DO-01 I/O Modules for
MP2000-series Machine Controllers.
functions, specifica-
Continued on next page.
vi
Page 7

Continued from previous page.
Category Manual Name Manual Number Contents
Describes the functions, specifica-
MECHATROLINK
I/O
MECHATROLINK-III Compatible I/O
Module
User’s Manual
Machine Controller MP900/MP2000
Series
Distributed I/O Module
User’s Manual
MECHATROLINK System
SIEP C880781 04
SIE-C887-5.1
tions, operating methods, and MECHATROLINK-III communications for the
Remote I/O Modules for MP2000/
MP3000-series Machine Controllers.
Describes MECHATROLINK distributed I/O for MP900/MP2000-series
Machine Controllers.
vii
Page 8
DANGER
WARNING
CAUTION
NOTICE
Safety Precautions
Safety Information
To prevent personal injury and equipment damage in advance, the following signal words are used
to indicate safety precautions in this document. The signal words are used to classify the hazards
and the degree of damage or injury that may occur if a product is used incorrectly. Information
marked as shown below is important for safety. Always read this information and heed the precautions that are provided.
Indicates precautions that, if not heeded, are likely to result in loss of life, serious injury, or fire.
Indicates precautions that, if not heeded, could result in loss of life, serious injury, or fire.
Indicates precautions that, if not heeded, could result in relatively serious or minor injury, or in
fire.
Indicates precautions that, if not heeded, could result in property damage.
viii
Page 9
Safety Precautions That Must Always Be Observed
WARNING
CAUTION
General Precautions
The installation must be suitable and it must be performed only by an experienced technician.
There is a risk of electrical shock or injury.
Before connecting the machine and starting operation, make sure that an emergency stop pro-
cedure has been provided and is working correctly.
There is a risk of injury.
Do not approach the machine after a momentary interruption to the power supply. When power
is restored, the Machine Controller and the device connected to it may start operation suddenly.
Provide safety measures in advance to ensure human safety when operation restarts.
There is a risk of injury.
Do not touch anything inside the Machine Controller.
There is a risk of electrical shock.
Do not remove the front cover, cables, connector, or options while power is being supplied.
There is a risk of electrical shock, malfunction, or damage.
Do not damage, pull on, apply excessive force to, place heavy objects on, or pinch the cables.
There is a risk of electrical shock, operational failure of the Machine Controller, or burning.
Do not attempt to modify the Machine Controller in any way.
There is a risk of injury or device damage.
Storage and Transportation Precautions
Do not store the Machine Controller in any of the following locations.
• Locations that are subject to direct sunlight
• Locations that are subject to ambient temperatures that exceed the storage conditions
• Locations that are subject to ambient humidity that exceeds the storage conditions
• Locations that are subject to rapid temperature changes and condensation
• Locations that are subject to corrosive or inflammable gas
• Locations that are subject to excessive dust, dirt, salt, or metallic powder
• Locations that are subject to water, oil, or chemicals
• Locations that are subject to vibration or shock
There is a risk of fire, electrical shock, or device damage.
Hold onto the main body of the Machine Controller when transporting it.
Holding the cables or connectors may damage them or result in injury.
Do not overload the Machine Controller during transportation. (Follow all instructions.)
There is a risk of injury or an accident.
Never subject the Machine Controller to an atmosphere containing halogen (fluorine, chlorine,
bromine, or iodine) during transportation.
There is a risk of malfunction or damage.
If disinfectants or insecticides must be used to treat packing materials such as wooden frames,
pallets, or plywood, the packing materials must be treated before the product is packaged, and
methods other than fumigation must be used.
Example: Heat treatment, where materials are kiln-dried to a core temperature of 56°C for 30 minutes or more.
If the electronic products, which include stand-alone products and products installed in machines,
are packed with fumigated wooden materials, the electrical components may be greatly damaged
by the gases or fumes resulting from the fumigation process. In particular, disinfectants containing
halogen, which includes chlorine, fluorine, bromine, or iodine can contribute to the erosion of the
capacitors.
ix
Page 10
CAUTION
Installation Precautions
Do not install the Machine Controller in any of the following locations.
• Locations that are subject to direct sunlight
• Locations that are subject to ambient temperatures that exceed the operating conditions
• Locations that are subject to ambient humidity that exceeds the operating conditions
• Locations that are subject to rapid temperature changes and condensation
• Locations that are subject to corrosive or inflammable gas
• Locations that are subject to excessive dust, dirt, salt, or metallic powder
• Locations that are subject to water, oil, or chemicals
• Locations that are subject to vibration or shock
There is a risk of fire, electrical shock, or device damage.
Never install the Machine Controller in an atmosphere containing halogen (fluorine, chlorine,
bromine, or iodine).
There is a risk of malfunction or damage.
Do not step on the Machine Controller or place heavy objects on the Machine Controller.
There is a risk of injury or an accident.
Do not block the air exhaust ports on the Machine Controller. Do not allow foreign objects to
enter the Machine Controller.
There is a risk of internal element deterioration, malfunction, or fire.
Always mount the Machine Controller in the specified orientation.
There is a risk of malfunction.
Leave the specified amount of space between the Machine Controller, and the interior surface
of the control panel and other devices.
There is a risk of fire or malfunction.
Do not subject the Machine Controller to strong shock.
There is a risk of malfunction.
Suitable Battery installation must be performed and it must be performed only by an experi-
enced technician.
There is a risk of electrical shock, injury, or device damage.
Do not touch the electrodes of the Battery.
Static electricity may damage the Battery.
x
Page 11
Wiring Precautions
CAUTION
Check the wiring to be sure it has been performed correctly.
There is a risk of motor run-away, injury, or accidents.
Always use a power supply of the specified voltage.
There is a risk of fire or accident.
In places with poor power supply conditions, ensure that the input power is supplied within the
specified voltage range.
There is a risk of device damage.
Install breakers and other safety measures to provide protection against shorts in external wir-
ing.
There is a risk of fire.
Provide sufficient shielding when using the Machine Controller in the following locations.
• Locations that are subject to noise, such as from static electricity
• Locations that are subject to strong electromagnetic or magnetic fields
• Locations that are subject to radiation
• Locations that are near power lines
There is a risk of device damage.
Configure the circuits to turn ON the power supply to the CPU Module before the 24-V I/O
power supply. Refer to the following manual for details on circuits.
MP3000 Series MP3300 CPU Module Instructions Manual (Manual No.: TOBP C880725 23)
If the power supply to the CPU Module is turned ON after the external power supply, e.g., the 24-V
I/O power supply, the outputs from the CPU Module may momentarily turn ON when the power
supply to the CPU Module turns ON. This can result in unexpected operation that may cause injury
or device damage.
Provide emergency stop circuits, interlock circuits, limit circuits, and any other required safety
measures in control circuits outside of the Machine Controller.
There is a risk of injury or device damage.
If you use MECHATROLINK I/O Modules, use the establishment of MECHATROLINK communi-
cations as an interlock output condition.
There is a risk of device damage.
Connect the Battery with the correct polarity.
There is a risk of battery damage or explosion.
Select the I/O signal wires for external wiring to connect the Machine Controller to external
devices based on the following criteria:
• Mechanical strength
• Noise interference
• Wiring distance
• Signal voltage
Separate the I/O signal cables for control circuits from the power cables both inside and outside
the control panel to reduce the influence of noise from the power cables.
If the I/O signal lines and power lines are not separated properly, malfunction may occur.
Example of Separated Cables
Power cable
Steel separator
I/O signal
cables in
control circuits
xi
Page 12
CAUTION
CAUTION
Operation Precautions
Follow the procedures and instructions in the user’s manuals for the relevant products to per-
form normal operation and trial operation.
Operating mistakes while the Servomotor and machine are connected may damage the machine or
even cause accidents resulting in injury or death.
Implement interlock signals and other safety circuits external to the Machine Controller to
ensure safety in the overall system even if the following conditions occur.
• Machine Controller failure or errors caused by external factors
• Shutdown of operation due to Machine Controller detection of an error in self-diagnosis and the sub-
sequent turning OFF or holding of output signals
• Holding of the ON or OFF status of outputs from the Machine Controller due to fusing or burning of
output relays or damage to output transistors
• Voltage drops from overloads or short-circuits in the 24-V output from the Machine Controller and
the subsequent inability to output signals
• Unexpected outputs due to errors in the power supply, I/O, or memory that cannot be detected by
the Machine Controller through self-diagnosis.
There is a risk of injury, device damage, or burning.
Maintenance and Inspection Precautions
Do not attempt to disassemble or repair the Machine Controller.
There is a risk of electrical shock, injury, or device damage.
Do not change any wiring while power is being supplied.
There is a risk of electrical shock, injury, or device damage.
Suitable Battery replacement must be performed and it must be performed only by an experi-
enced technician.
There is a risk of electrical shock, injury, or device damage.
Do not forget to perform the following tasks when you replace the CPU Module:
• Back up all programs and parameters from the CPU Module that is being replaced.
• Transfer all saved programs and parameters to the new CPU Module.
If you operate the CPU Module without transferring this data, unexpected operation may occur.
There is a risk of injury or device damage.
Do not touch the heat sink on the CPU Module while the power supply is turned ON or for a suf-
ficient period of time after the power supply is turned OFF.
The heat sink may be very hot, and there is a risk of burn injury.
Disposal Precautions
Dispose of the Machine Controller as general industrial waste.
Observe all local laws and ordinances when you dispose of used Batteries.
General Precautions
The products shown in the illustrations in this manual are sometimes shown without covers or
protective guards. Always replace the cover or protective guard as specified first, and then
operate the products in accordance with the manual.
The illustrations that are presented in this manual are typical examples and may not match the
product you received.
If the manual must be ordered due to loss or damage, inform your nearest Yaskawa representa-
tive or one of the offices listed on the back of this manual.
xii
Page 13

Warranty
Details of Warranty
Warranty Period
The warranty period for a product that was purchased (hereinafter called “delivered product”) is
one year from the time of delivery to the location specified by the customer or 18 months from the
time of shipment from the Yaskawa factory, whichever is sooner.
Warranty Scope
Yaskawa shall replace or repair a defective product free of charge if a defect attributable to
Yaskawa occurs during the warranty period above. This warranty does not cover defects caused
by the delivered product reaching the end of its service life and replacement of parts that require
replacement or that have a limited service life.
This warranty does not cover failures that result from any of the following causes.
• Improper handling, abuse, or use in unsuitable conditions or in environments not described in
product catalogs or manuals, or in any separately agreed-upon specifications
• Causes not attributable to the delivered product itself
• Modifications or repairs not performed by Yaskawa
• Abuse of the delivered product in a manner in which it was not originally intended
• Causes that were not foreseeable with the scientific and technological understanding at the time
of shipment from Yaskawa
• Events for which Yaskawa is not responsible, such as natural or human-made disasters
Limitations of Liability
• Yaskawa shall in no event be responsible for any damage or loss of opportunity to the customer
that arises due to failure of the delivered product.
• Yaskawa shall not be responsible for any programs (including parameter settings) or the results of
program execution of the programs provided by the user or by a third party for use with programmable Yaskawa products.
• The information described in product catalogs or manuals is provided for the purpose of the customer purchasing the appropriate product for the intended application. The use thereof does not
guarantee that there are no infringements of intellectual property rights or other proprietary rights
of Yaskawa or third parties, nor does it construe a license.
• Yaskawa shall not be responsible for any damage arising from infringements of intellectual property rights or other proprietary rights of third parties as a result of using the information described
in catalogs or manuals.
Suitability for Use
• It is the customer’s responsibility to confirm conformity with any standards, codes, or regulations
that apply if the Yaskawa product is used in combination with any other products.
• The customer must confirm that the Yaskawa product is suitable for the systems, machines, and
equipment used by the customer.
• Consult with Yaskawa to determine whether use in the following applications is acceptable. If use
in the application is acceptable, use the product with extra allowance in ratings and specifications, and provide safety measures to minimize hazards in the event of failure.
• Outdoor use, use involving potential chemical contamination or electrical interference, or use in conditions
or environments not described in product catalogs or manuals
• Nuclear energy control systems, combustion systems, railroad systems, aviation systems, vehicle systems,
medical equipment, amusement machines, and installations subject to separate industry or government
regulations
• Systems, machines, and equipment that may present a risk to life or property
• Systems that require a high degree of reliability, such as systems that supply gas, water, or electricity, or
systems that operate continuously 24 hours a day
• Other systems that require a similar high degree of safety
xiii
Page 14

• Never use the product for an application involving serious risk to life or property without first
ensuring that the system is designed to secure the required level of safety with risk warnings and
redundancy, and that the Yaskawa product is properly rated and installed.
• The circuit examples and other application examples described in product catalogs and manuals
are for reference. Check the functionality and safety of the actual devices and equipment to be
used before using the product.
• Read and understand all use prohibitions and precautions, and operate the Yaskawa product
correctly to prevent accidental harm to third parties.
Specifications Change
The names, specifications, appearance, and accessories of products in product catalogs and
manuals may be changed at any time based on improvements and other reasons. The next editions of the revised catalogs or manuals will be published with updated code numbers. Consult
with your Yaskawa representative to confirm the actual specifications before purchasing a product.
xiv
Page 15
1
Contents
About this Manual. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .iii
Using this Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .iii
Related Manuals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Safety Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
Warranty . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
Introduction
2
1.1
1.2
1.3
1.4
Definition of Terms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1.1.1 MP3300 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1.1.2 Racks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1.1.3 Main Rack and Expansion Racks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1.1.4 Rack Numbers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
1.1.5 Slot Numbers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
System Configuration Example . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
Devices and Components That Are Required to Build a System. . . 1-6
1.3.1 MP3300 Module/Unit List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
1.3.2 Optional Modules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-8
Precautions When Setting the Parameters . . . . . . . . . . . . . . . . 1-9
1.4.1 Precautions When Setting the Circuit Numbers . . . . . . . . . . . . . . . . . . . . . . 1-9
1.4.2 Precautions When Setting Module Configuration Definitions . . . . . . . . . . . . 1-9
Appearances and Parts
2.1
CPU Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.1.1 Appearance and Part Names. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.1.2 Display and Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2.1.3 Switches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
2.1.4 Connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
2.1.5 Temperature Sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
2.2
Base Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
2.2.1 Appearance and Part Names. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
2.2.2 Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
xv
Page 16
CPU Module Functionality
3
4
3.1
3.2
Basic Functionality. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3.1.1 Programs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-2
3.1.2 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-17
3.1.3 Execution Scheduling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-28
3.1.4 Scans . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-29
Function Modules. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-35
3.2.1 Self Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-35
3.2.2 Communications Function Module (218IFD) . . . . . . . . . . . . . . . . . . . . . . . .3-45
3.2.3 Motion Control Function Modules (SVC, SVC32, SVR, and SVR32) . . . . . .3-47
3.2.4 The M-EXECUTOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-53
3.2.5 Data Logging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-66
3.2.6 USB Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-80
3.2.7 File Transfer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-84
3.2.8 Security . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-94
3.2.9 Calendar. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-94
3.2.10 Maintenance Monitoring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-95
Specifications
4.1
Installation and Usage Conditions . . . . . . . . . . . . . . . . . . . . . . . 4-2
4.1.1 Installation and Operating Conditions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-2
4.1.2 Control Panel Cooling Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-3
4.2
4.3
CPU Module Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
4.2.1 Hardware Specifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-4
4.2.2 Performance Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-5
4.2.3 Communications Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-8
4.2.4 Motion Control Function Module Specifications . . . . . . . . . . . . . . . . . . . . . .4-9
4.2.5 M-EXECUTOR Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-10
4.2.6 USB Memory Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-11
4.2.7 System Register Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-11
Base Unit Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-72
External Dimensions
5
5.1
5.2
Index
Revision History
CPU Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
Base Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-3
xvi
Page 17
Introduction
This chapter introduces the MP3300.
1
1.1
1.2
1.3
1.4
Definition of Terms . . . . . . . . . . . . . . . . . . . 1-2
1.1.1 MP3300 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1.1.2 Racks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1.1.3 Main Rack and Expansion Racks . . . . . . . . . . . . 1-2
1.1.4 Rack Numbers . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
1.1.5 Slot Numbers . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
System Configuration Example . . . . . . . . . . 1-5
Devices and Components That Are Required to Build a System . . 1-6
1.3.1 MP3300 Module/Unit List . . . . . . . . . . . . . . . . . . 1-7
1.3.2 Optional Modules . . . . . . . . . . . . . . . . . . . . . . . . 1-8
Precautions When Setting the Parameters . . .1-9
1.4.1 Precautions When Setting the Circuit Numbers . . . 1-9
1.4.2 Precautions When Setting Module
Configuration Definitions . . . . . . . . . . . . . . . . . . . 1-9
Page 18
1.1 Definition of Terms
CPU Module
+
Base Unit
1.1.1 MP3300
1.1
1.1.1
1.1.2
Definition of Terms
This section defines terms that have specific meanings in this manual.
MP3300
“MP3300” is a collective term that refers to the following CPU Modules and Base Units.
Name Primary Function
CPU Module
Base Unit
Racks
A Rack is a Base Unit with Modules mounted to it.
Connection Example
Stores the module definitions and programs, and interprets the programs. The CPU
Module also controls the Optional Modules.
Provides the backplane to which Modules are mounted and supplies the required
power to the Modules.
1.1.3
Main Rack and Expansion Racks
You can add Units and Optional Modules to a Rack to expand functionality. However, if a
restriction such as the power supply capacity or number of Base Unit slots for one Rack is
exceeded, you must add an Expansion Rack.
You can achieve the following things by adding Units or Optional Modules to a Rack.
• Increase the number of Optional Modules that you can use.
• Increase the number of axes that are controlled.
If you add Racks, the Racks are classified into the Main Rack and Expansion Racks.
Typ e Description
Main Rack
Expansion
Racks
Refer to the following section for an expansion example.
MP3300 Expansion Example
The Main Rack contains the Main CPU Module.
There can be only one Main Rack in any one system configuration.
Expansion Racks are connected to the Main Rack.
You can connect up to three Expansion Racks to the Main Rack. (The Expansion Racks use
EXIOIF Modules.)
on page 1-3
1-2
Page 19

1
Introduction
MP3300 Expansion Example
MP2200
M
B
U
-02
PO
W
ER
DC
EXIOIF
MP2200
M
B
U
-02
PO
W
ER
DC
EXIOIF
MP2200
M
B
U
-02
PO
W
ER
DC
EXIOIF
Main Rack
CPU Module
EXIOIF Module
MP2200 Base Unit*
MP2200 Base Unit*
EXIOIF Module
MP2200 Base Unit*
EXIOIF Module
Expansion Racks with EXIOIF Modules
(up to 3 Racks)
EXIOIF Module*
Rack 1
Rack 2 Rack 3 Rack 4
MP2200
M
BU-02
PO
WER
DC
EXIOIF
MP2200
M
BU-02
PO
WER
DC
EXIOIF
MP2200
M
BU-02
PO
WER
DC
EXIOIF
次回用
An MP3300 expansion example is given in the following figure.
1.1 Definition of Terms
1.1.4 Rack Numbers
1.1.4
*
Refer to the following manual for details on the MP2200 Base Unit and EXIOIF Module.
MP2200 Series User's Manual (Manual No.: SIEP C880700 14)
Rack Numbers
When you add Expansion Racks, the MPE720 automatically assigns a number to each Rack so that the Racks
can be identified.
Rack No. Description
Rack 1 Main Rack
Rack 2
Expansion Racks added by using EXIOIF ModulesRack 3
Rack 4
The following figure illustrates Rack numbers.
1-3
Page 20

1.1 Definition of Terms
1.1.5 Slot Numbers
1.1.5
Slot Numbers
The MPE720 automatically assigns slot numbers to the slots on the Base Unit so that the slots
can be identified.
Numbers 1 to 9* are assigned to the slots in order from the left.
* The highest slot number depends on the specifications of the Base Unit.
1-4
Page 21
1.2 System Configuration Example
1
Introduction
PC
266IF-02
217IF-01
218IF-01
218IF-02
260IF-01
261IF-01
263IF-01
264IF-01
265IF-01
266IF-01
Communications Modules
SVA-01
SVB-01
PO-01
SVC-01
MPU-01
Motion Modules
EXIOIF
Expansion Rack Module
MPALL00-0
MPAL000-0
AFMP-01
MPANL00-0
AFMP-02-C/-CA
MPAN000-0
Other Modules (including those from
other manufacturers)
External outputs
External inputs
RS-232C
Ethernet
DeviceNet
PROFIBUS
RS422/485
215 communications
SERVOPACK
AnyWire
A-net/A-link
I/O Modules
CC-Link
Up to 21 stations, including I/O (with up to 16 Servo axes.)
Host PLC
LIO-01
LIO-02
LIO-04
LIO-05
DO-01
LIO-06
AI-01
AO-01
CNTR-01
I/O
Servomotor
Servomotor
Servomotor
Optional Modules
MP3300
RLYOUT
connector cable
MPE720 Integrated
Engineering Tool Version 7
Expansion Interface
Module Cable
Expansion Interface
Module Cable
Front cover for unused slot
Front cover for unused slot
Battery
Battery
24-VDC power supply,
AC power supply, or
status monitoring device
Power cable
24-VDC power supply
or AC power supply
262IF-01
215AIF-01
MPCUNET-0
Power cable
24-VDC power supply
or AC power supply
Battery
Power cable
24-VDC power supply
or AC power supply
Expansion Interface
Module Cable
Front cover for unused slot
Battery
Power cable
24-VDC power supply
or AC power supply
MECHATROLINK-III Cable
MECHATROLINK-III
I/O Module with
MECHATROLINK-III
Communications
SERVOPACKs with
MECHATROLINK-III
Communications
Ethernet communications cable
HUB
Front cover for
unused slot
*
Up to 4 Racks
1.2
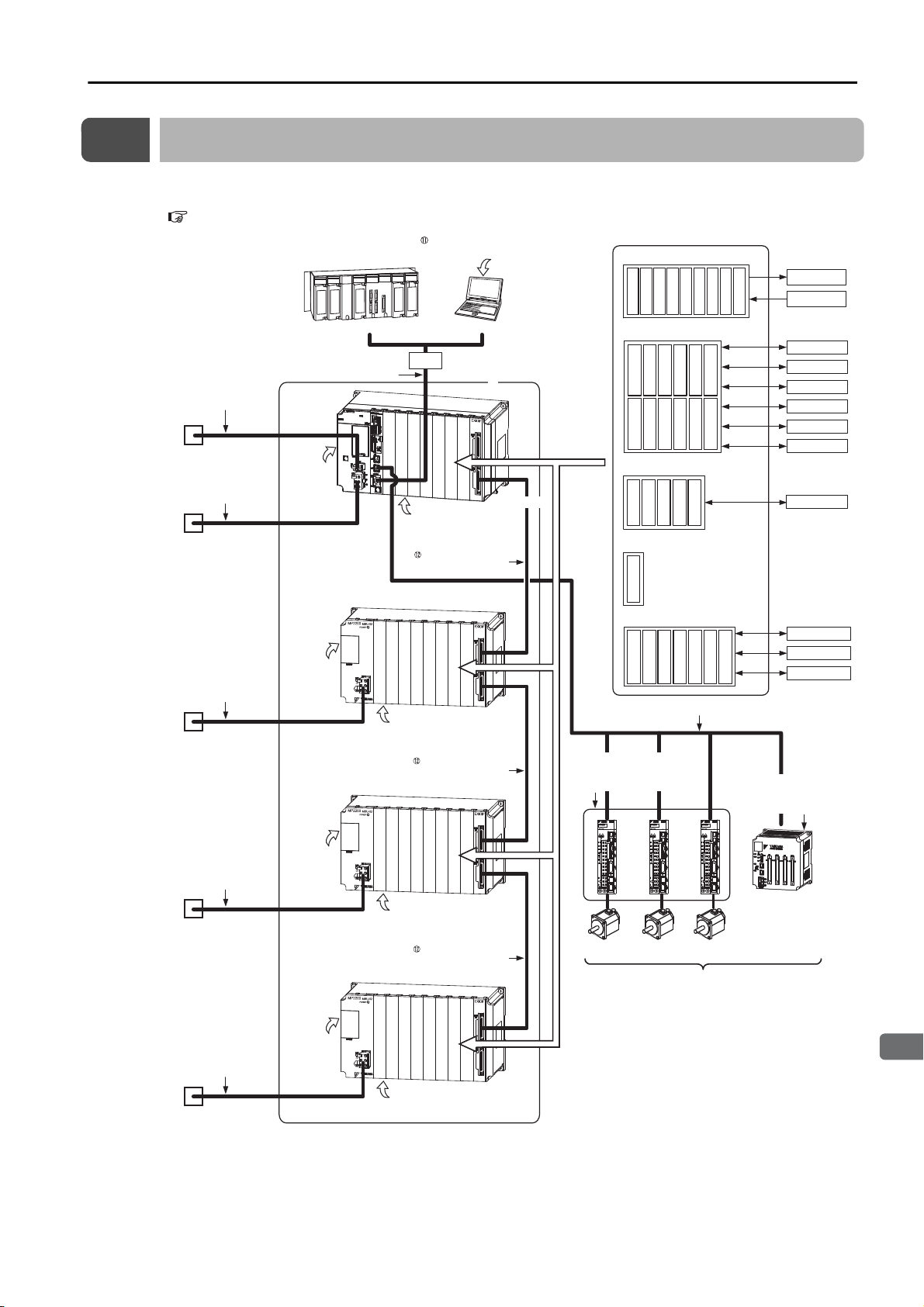
System Configuration Example
The following figure shows a typical system configuration. Refer to the following section for
details on 1 to 12 in the following figure.
1.3 Devices and Components That Are Required to Build a System on page 1-6
* This manual primarily describes this area.
Note: Supplying Power When Using Expansion Racks
• Either supply power simultaneously to both the Main Rack and Expansion Racks or supply power to the
Expansion Racks first.
• If you turn the power supply OFF and ON again to an Expansion Rack, turn the power supply OFF and
ON again to the Main Rack as well. (Unless of course you turn the power supply OFF and ON again
simultaneously.)
1-5
Page 22
1.3 Devices and Components That Are Required to Build a System
1.3
Devices and Components That Are Required to Build a System
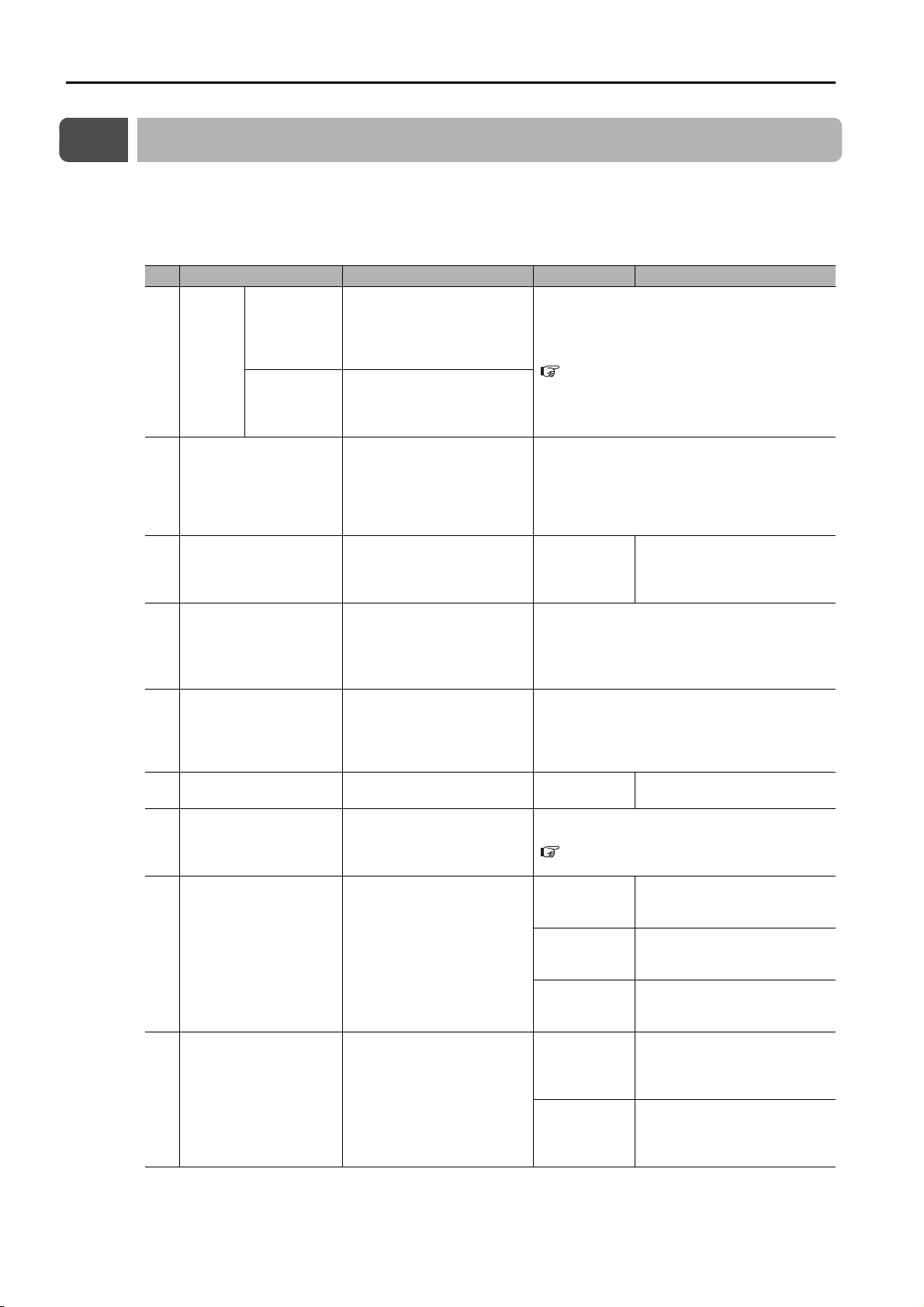
The following table lists the devices and components that are required to build the system that
is shown in 1.2 System Configuration Example on page 1-5. The numbers 1 to 12 correspond
to the numbers in the figure in 1.2 System Configuration Example on page 1-5.
No. Name Use Model Remarks
Stores the module definitions and programs, and
CPU Module
MP3300
Base Unit
Ethernet communica-
tions cables
Battery with Special
Connector
Power supply cable
RLYOUT connector
cable
Front cover for unused
slot
Optional Modules
MECHATROLINK-III
Cable
SERVOPACK with
MECHATROLINK-III
Communications
interprets the programs. The
CPU Module also controls
the Optional Modules.
Provides the backplane to
which Modules are mounted
and supplies the required
power to the Modules.
Used to connect the CPU
Module to Ethernet communications devices or to connect the CPU Module to a
PC that has the MPE720
installed on it.
Provides power for the calendar and backup memory
while the power is turned
OFF.
Connects the power supply
of the Base Unit to a 24VDC power supply or an AC
power supply.
Connects the power supply
of the Base Unit to a 24VDC power supply, an AC
power supply, or a status
monitoring device.
Used to cover unused slots
on the Base Unit.
Motion Modules, I/O Modules, and Communications
Modules are selected based
on the application.
Connects the CPU Module
to MECHATROLINK-III communications devices.
Used to control Servomotors.
Refer to the following section for details.
1.3.1 MP3300 Module/Unit List
Use a commercially available cable that meets
the following conditions:
• Ethernet specification: 100Base-TX
• Category 5 or higher
• Twisted-pair cable with RJ-45 connectors
JZSP-BA01
Use a commercially available cable that meets
the following conditions:
• Wire size: AWG18 to AWG13 (0.8 to 2.6
2
mm
)
• Twisted-pair cable
Use a commercially available cable that meets
the following conditions:
• Wire size: AWG28 to AWG14 (0.08 to 2.0
2
mm
)
JEPMCOP3301-E
Refer to the following section for details.
1.3.2 Optional Modules on page 1-8
JEPMCW6012-E
JEPMCW6013-E
JEPMCW6014-E
SGD7S-
20
SGD7W-
20
The Battery is provided with
the CPU Module.
−
Standard cable
Length: 0.2 to 50 m
Cable with ferrite cores
Length: 10 to 50 m
Cable with loose wires at one
end
Length: 0.5 to 50 m
Σ
7S (Single-axis)
AC SERVOPACK with
MECHATROLINK-III Communications
Σ
7W (Two-axis)
AC SERVOPACK with
MECHATROLINK-III Communications
Continued on next page.
on page 1-7
1-6
Page 23

1.3 Devices and Components That Are Required to Build a System
1
Introduction
11
12
1.3.1 MP3300 Module/Unit List
Continued from previous page.
No. Name Use Model Remarks
64-point I/O
Module
Analog Input
Module
Communications
I/O Modules with MECHATROLINK-III
Analog Output Module
Pulse Train
Input Module
Pulse Train
Output Module
MPE720 Integrated
Engineering Tool Version
7
Expansion Interface
Module Cables
− Panel-mounting Bracket
Used to input or output digital, analog, or pulse train
signals.
Used to adjust, maintain,
and program AC Servo
Drives and Inverters that are
connected to the network.
Used to use an Expansion
Interface Module to connect
the Main Rack to an Expansion Rack or to connect two
Expansion Racks.
Used to mount the MP3300
inside a control panel.
JEPMCMTD2310-E
JEPMCMTA2900-E
JEPMCMTA2910-E
JEPMCMTP2900-E
JEPMCMTP2910-E
CPMCMPE780D
JEPMCW2094-A5-E
JEPMCW2094-01-E
JEPMCW2094-2A5-E
JEPMCOP2300S-E
24 VDC, 64 inputs, 64 outputs
8 analog input channels
4 analog output channels
2 pulse-train inputs
4 pulse-train outputs
−
Length: 0.5 m
Length: 1.0 m
Length: 2.5 m
−
1.3.1
MP3300 Module/Unit List
The following table lists the MP3300 Modules and Units.
Typ e Abbreviation Model Description
CPU Module for 16 axes
Motion Control
Function Modules
Communications
Function Module
CPU Module for for 32 axes
Motion Control
Function Module
Communications
Function Module
Base Unit
* Refer to the following section for details.
3.2.3 Motion Control Function Modules (SVC, SVC32, SVR, and SVR32) on page 3-47
CPU-301 (16 axes) JAPMC-CP3301-1-E −
CPU-302 (16 axes) JAPMC-CP3302-1-E −
SVC − MECHATROLINK-III
SVR − Virtual axes*
218IFD − Ethernet
CPU-301 (32 axes) JAPMC-CP3301-2-E −
CPU-302 (32 axes) JAPMC-CP3302-2-E −
SVC32 − MECHATROLINK-III
SVR32 − Virtual axes*
218IFD − Ethernet
MBU-303 JEPMC-BU3303-E 3 slots
MBU-304 JEPMC-BU3304-E 1 slot
1-7
Page 24

1.3 Devices and Components That Are Required to Build a System
1.3.2 Optional Modules
1.3.2
Optional Modules
You can add the Optional Modules that are listed in the following table for as many open slots
there are in the Base Unit.
Unit Abbreviation Model Description
SVC-01 JAPMC-MC2320-E MECHATROLINK-III × 1
SVB-01 JAPMC-MC2310-E MECHATROLINK-II × 1
Motion
Modules
Communications Modules
I/O
Modules
Expansion
Interface
Module
* Refer to the manuals for individual Optional Modules for details.
SVA-01 JAPMC-MC2300 2-axis analog servo interface
PO-01 JAPMC-PL2310-E 4-axis control with pulse-train output
Optional Module with CPU Module and SVC-01
MPU-01 JAPMC-CP2700-E
217IF-01 JAPMC-CM2310-E RS-232C/RS-422 communications
218IF-01 JAPMC-CM2300-E RS-232C/Ethernet communications (10Base-T)
218IF-02 JAPMC-CM2302-E
260IF-01 JAPMC-CM2320-E RS-232C/DeviceNet communications
261IF-01 JAPMC-CM2330-E RS-232C/PROFIBUS communications
262IF-01 JAPMC-CM2303-E FL-net communications
263IF-01 JAPMC-CM2304-E EtherNet/IP communications
264IF-01 JAPMC-CM2305-E EtherCAT (EtherCAT slave)
265IF-01 JAPMC-CM2390-E
266IF-01 JAPMC-CM2306-E PROFINET master
266IF-02 JAPMC-CM2307-E PROFINET slave
267IF-01 JAPMC-CM23A0 CC-Link master
215AIF-01
AFMP-01 − Anywire-Master DB by Anywire Corporation
AFMP-02-C − CC-Link by Anywire Corporation
AFMP-02-CA −
MPANL00-0 − A-net/A-Link by ALGO System
MPALL00-0 − A-Link/A-Link by ALGO System
MPAL000-0 − A-Link by ALGO System
MPAN000-0 − A-net by ALGO System
MPCUNET-0 − CUnet by ALGO System
LIO-01 JAPMC-IO2300-E 16 inputs, 16 sinking outputs, 1 pulse-train input
LIO-02 JAPMC-IO2301-E 16 inputs, 16 sourcing outputs, 1 pulse-train input
LIO-04 JAPMC-IO2303-E 32 inputs, 32 sinking outputs
LIO-05 JAPMC-IO2304-E 32 inputs, 32 sourcing outputs
LIO-06 JAPMC-IO2305-E
DO-01 JAPMC-DO2300-E 64 sinking outputs
AI-01 JAPMC-AN2300-E 8 analog input channels
AO-01 JAPMC-AN2310-E 4 analog output channels
CNTR-01 JAPMC-PL2300-E 2 counter channels, input circuits: 5 V or 12 V
EXIOIF JAPMC-EX2200-E −
JAPMC-CM2360-E RS-232C/MPLINK communications
JAPMC-CM2361 RS-232C/CP-215 communications
functionality
MECHATROLINK-III × 1
RS-232C/Ethernet communications (100Base-TX/
10Base-T)
CompoNet (I/O communications and message
communications)
CC-Link and Anywire-Master DB by Anywire Corporation
8 digital inputs, 8 digital sinking outputs
1 analog input channel and 1 analog output channel
1 pulse-train counter channel
1-8
Page 25

1.4 Precautions When Setting the Parameters
1
Introduction
1.4.1 Precautions When Setting the Circuit Numbers
1.4
1.4.1
Precautions When Setting the Parameters
Observe the following precautions when setting the Machine Controller.
Precautions When Setting the Circuit Numbers
When assigning circuit numbers to the Motion Control and Communications Function Modules,
the numbers must be within the following ranges.
Circuit
numbers
1 to 16
1 to 8
Function Modules in
CPU Module
Optional Modules
Unit Abbreviations of Built-in Modules
Motion Control
Function Module
Communications
Function Module
Motion Modules
Communications
Modules
SVC and SVR 1 to 16
SVC32 and SVR32 1 to 16
218IFD 1 to 8
SVA-01 (SVA), SVB-01 (SVB01),
SVC-01 (SVC), MPU-01 (MPUIF),
PO-01 (PO)
217IF-01 (217IF) 1 to 16
218IF-01 (218IF), 218IF-02 (218IFB),
260IF-01 (260IF (DeviceNet)),
261IF-01 (261IFS (Profibus)),
262IF-01 (FL-net),
263IF-01 (EtherNet/IP),
264IF-01 (EtherCAT-S),
265IF-01 (Componet),
266IF-01, 266IF-02,
215AIF-01 (MPLINK),
215AIF-01 (CP-215),
267IF-01 (CC-Link)
1.4.2
Precautions When Setting Module Configuration Definitions
Observe the following precautions when writing module configuration definitions.
• Write the module configuration definitions only when the high-speed scan has sufficient
unused processing time.
Otherwise, processing may exceed the time limit of the high-speed scan.
• Before writing module configuration definitions, make sure the machine is not in operation.
• Before you use the Machine Controller, save any written data to flash memory and turn the
power supply to the Racks OFF and ON again.
1-9
Page 26
Appearances and Parts
This section describes the appearance and parts of the
MP3300.
2
2.1
2.2
CPU Module . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.1.1 Appearance and Part Names . . . . . . . . . . . . . . . 2-2
2.1.2 Display and Indicators . . . . . . . . . . . . . . . . . . . . 2-4
2.1.3 Switches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
2.1.4 Connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
2.1.5 Temperature Sensor . . . . . . . . . . . . . . . . . . . . . 2-10
Base Units . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
2.2.1 Appearance and Part Names . . . . . . . . . . . . . . 2-11
2.2.2 Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
Page 27

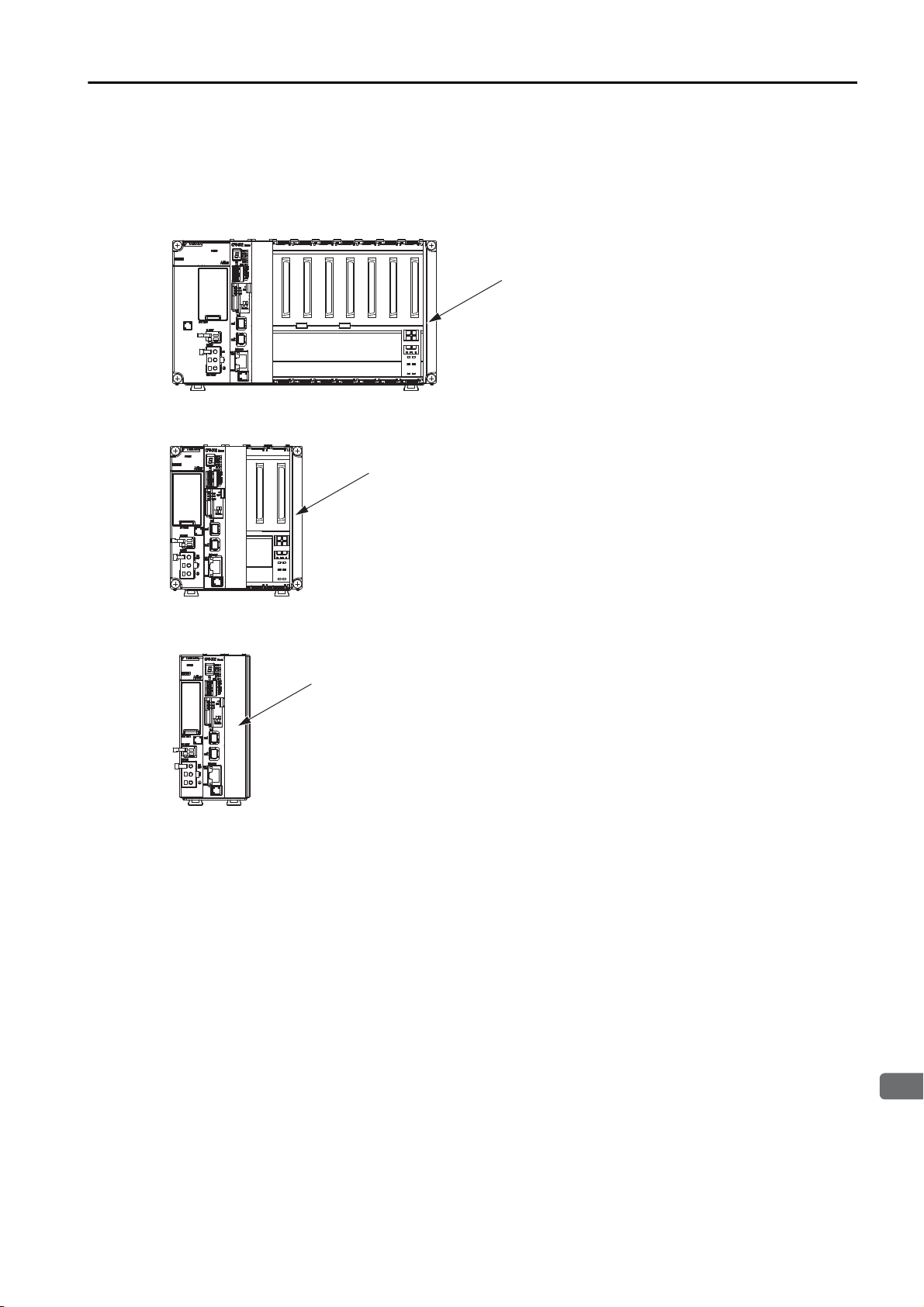
2.1 CPU Module
Display
MECHATROLINK-III status indicators
MECHATROLINK-III connectors
Status indicators
Mode switches
Ethernet status indicators
Ethernet connector
USB status indicator
Display
MECHATROLINK-III status indicators
MECHATROLINK-III connectors
Status indicators
Mode switches
Ethernet status indicators
Ethernet connector
USB status indicator
2.1.1 Appearance and Part Names
2.1
2.1.1
CPU Module
The CPU Module stores the module definitions and programs, and interprets the programs.
The CPU Module also controls the Optional Modules.
This section shows the appearance and part names of the CPU Module and describes the indicators, switches, and connectors.
Appearance and Part Names
The following figure shows the appearance of the CPU Module and the part names.
CPU-301
CPU-302
2-2
Page 28
2.1 CPU Module
2
Appearances and Parts
You can mount seven
Optional Modules.
You can mount two
Optional Modules.
You cannot mount any
Optional Modules.
2.1.1 Appearance and Part Names
Precautions When Using a CPU-302 Module
The CPU-302 Module uses the CPU Slot and one option slot. As shown below, the number of
usable Option Modules will be reduced by one when you mount the CPU-302 to any Base Unit.
MBU-01 or MBU-02 (Eight Slots)
MBU-03 (Three Slots)
MBU-04 (One Slot)
2-3
Page 29
2.1 CPU Module
2.1.2 Display and Indicators
2.1.2
Display and Indicators
The CPU Module has the following display and four types of indicators.
• Display
• Status indicators
• USB status indicator
• MECHATROLINK-III status indicators
• Ethernet status indicators
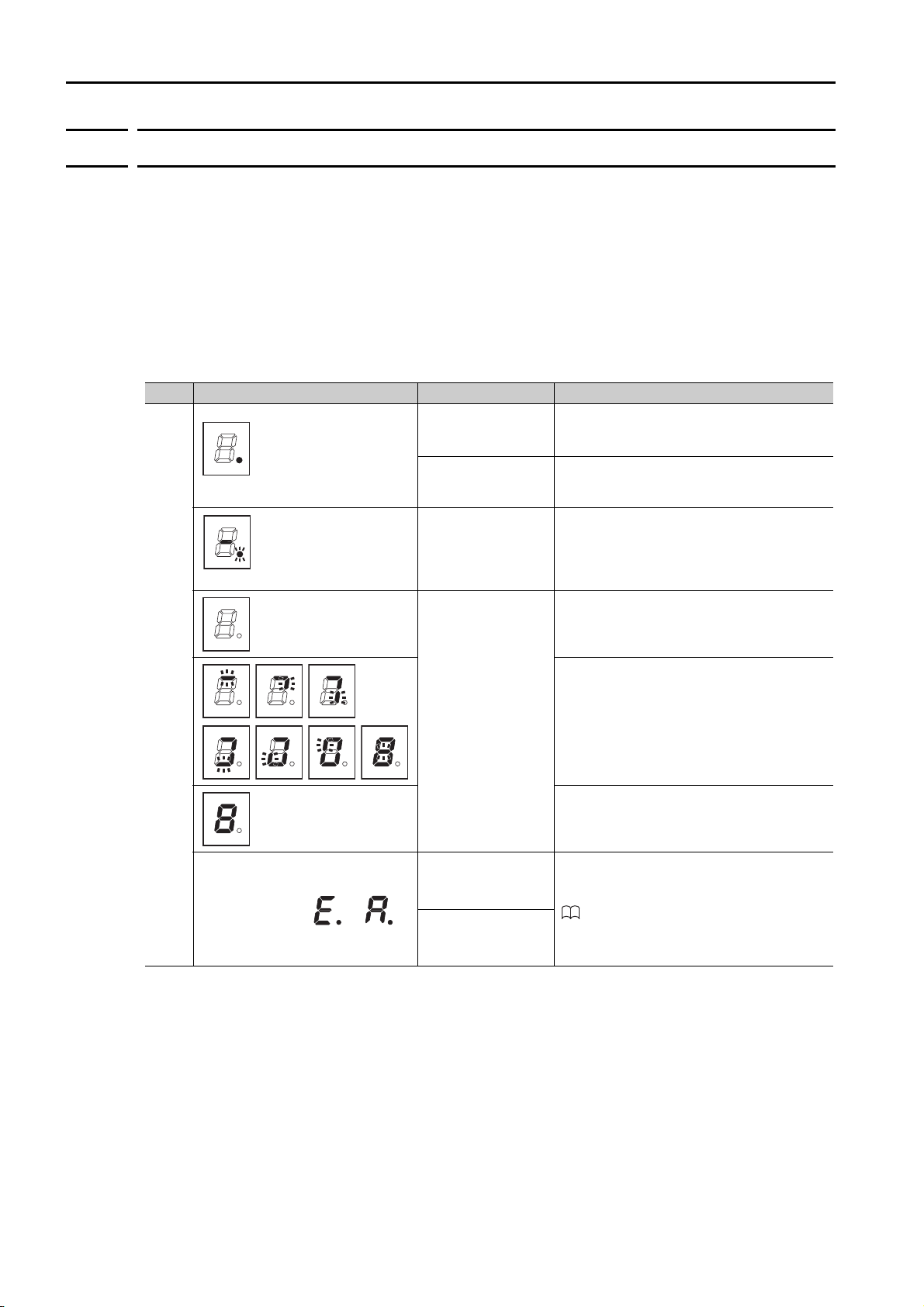
Display
The display shows the execution or error status of the CPU Module.
Color Display Status Description
Lit dot at lower right
Flashing dot at lower right
Initializing
(The RDY status
indicator is not lit.)
Normal operation
(The RDY status
indicator is lit.)
CPU stopped The CPU is stopped.
The CPU Module started normally after the
power was turned ON or after the system
was reset.
The CPU Module is operating normally.
Red
Three digits after or
USB memory batch
transfer
A system error
occurred.
An alarm occurred.
Save or load is starting.
Save or load is in progress.
Save or load was completed.
After 2 seconds, the display will indicate
the status of the CPU Module.
Refer to the following manual for details on
errors.
MP3000 Series MP3200/MP3300 Troubleshooting Manual (Manual No.: SIEP
C880725 01)
2-4
Page 30
2
Appearances and Parts
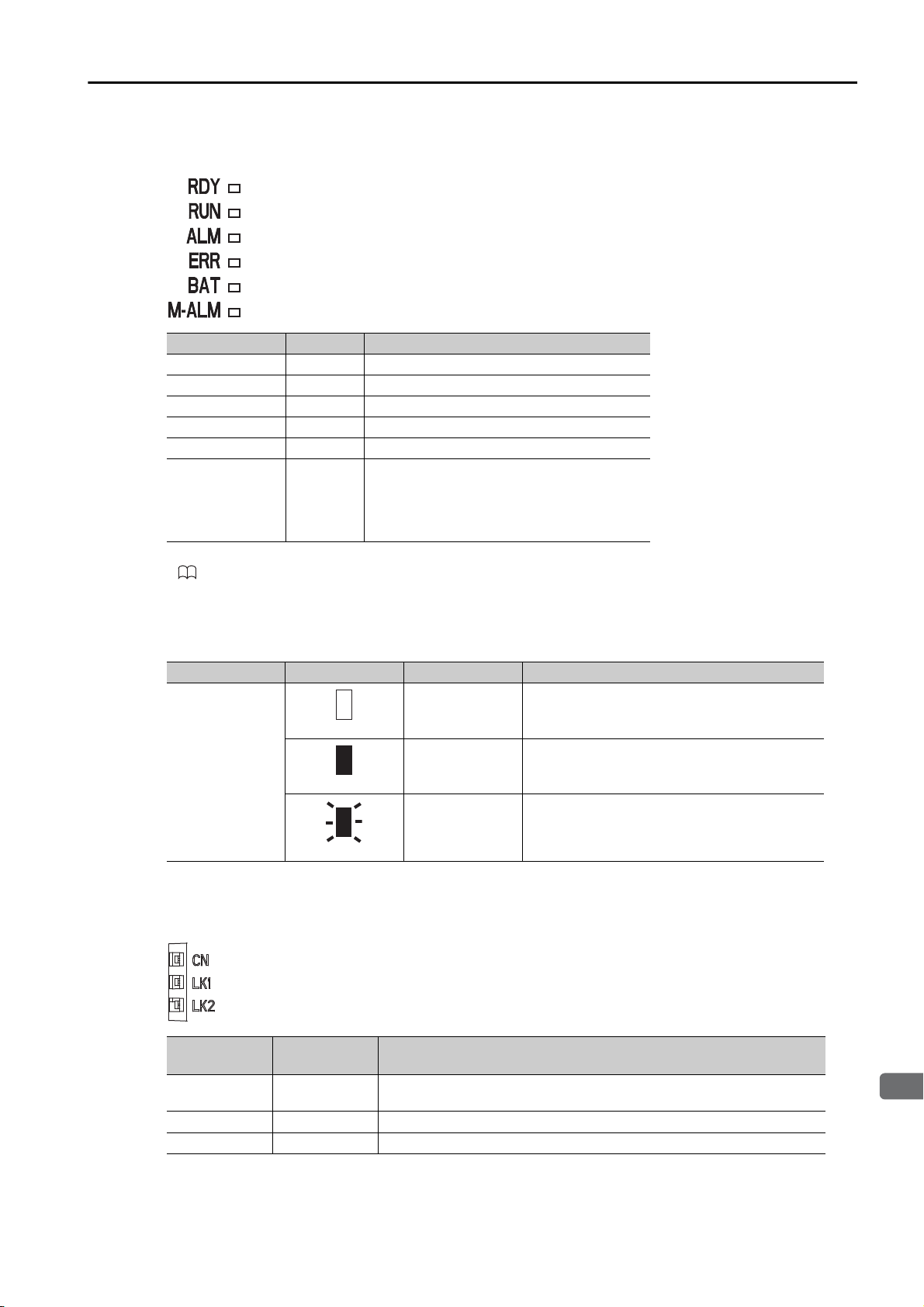
Status Indicators
These indicators show the status of the CPU Module.
Indicator Name Color Status When Lit*
RDY Green Operation is normal.
RUN Green A user program is being executed.
ALM Red An alarm occurred.
ERR Red An error occurred.
BAT Red The battery alarm occurred.
An error occurred with one of the Servo
axes:
M-ALM Red
* Refer to the following manual for details.
MP3000 Series MP3200/MP3300 Troubleshooting Manual (Manual No.: SIEP C880725 01)
• Warning
• Alarm
• Command Error Completed Status
2.1 CPU Module
2.1.2 Display and Indicators
USB Status Indicator
This indicator shows the status of the USB memory.
Indicator Name Indicator Status Status Description
No USB memory device has been inserted yet,
or the USB memory device is ready to be
removed.
A USB memory device is inserted.
The USB memory is being accessed.
USB
ACTIVE
Not lit
Lit
Flashing
No USB memory device
USB memory
device inserted
Accessing USB
memory
MECHATROLINK-III Status Indicators
These indicators show the status of the MECHATROLINK-III communications.
Indicator
Name
CN Green
LK1 Green MECHATROLINK-III communications are active on PORT1.
LK2 Green MECHATROLINK-III communications are active on PORT2.
Color Status When Lit
MECHATROLINK-III communications is established with the CPU
Module as a slave (i.e., the Connect command is ON).
2-5
Page 31

2.1 CPU Module
2.1.2 Display and Indicators
Ethernet Status Indicators
These indicators show the status of Ethernet communications.
Indicator Name Color Status When Not Lit, Lit, or Flashing
LINK/ACT Yellow
100M Green
Lit: Ethernet link established.
Flashing: Ethernet communications activity.
Not lit: 10 M connection
Lit: 100 M connection
2-6
Page 32

2.1 CPU Module
2
Appearances and Parts
2.1.3 Switches
2.1.3
Switches
The CPU Module has the following two types of switches.
• DIP switches: Mode switches
• STOP/SAVE switch
DIP Switches: Mode Switches
These DIP switches primarily set the operating mode of the CPU Module.
Pin Name Status Operating Mode Default Remarks
STOP
E-INIT
INIT
CNFG
ON Stops the user programs.
OFF
ON
OFF
ON Resets memory.
OFF Normal operation
ON Configuration Mode
OFF Normal operation
Executes the user programs.
Sets the default IP
address.
Does not set the default IP
address.
OFF
OFF
OFF
OFF
Turn ON the pin to stop execution of the user
program.
If this pin is set to ON, the IP address is set to
192.168.1.1.
If this pin is set to OFF, the IP address for the
definition that is stored in flash memory is
used. If there is no definition stored in flash
memory, the IP address is set to 192.168.1.1.
Turn OFF the pin to execute the programs that
are stored in the flash memory.
Turn ON the pin to perform self configuration.
Turn OFF the pin to operate according to the
definitions that are stored in the flash memory.
LOAD
TEST
MNT
−
ON Loads data.
OFF Does not load data.
ON Reserved for system.
OFF Normal operation
ON Reserved for system.
OFF Normal operation
ON Reserved for system.
OFF Normal operation
Turn ON the pin and then turn ON the power
to batch load data from the USB memory to
OFF
OFF Keep this pin OFF at all times.
OFF Keep this pin OFF at all times.
OFF −
the CPU Module.
Refer to the following section for details.
3.2.6 USB Memory on page 3-80
2-7
Page 33

2.1 CPU Module
Open the cover.
STOP/SAVE switch
2.1.3 Switches
STOP/SAVE Switch
This switch is used when removing the USB memory device, or when batch saving data to the
USB memory.
• Lightly press this switch to prepare the USB memory device for removal. The USB memory
device can be safely removed when the USB status indicator changes from flashing to not lit.
• Press and hold this switch for at least 2 seconds to save all of the data to the USB memory.
The display will show the progress of saving.
2-8
Page 34

2.1 CPU Module
2
Appearances and Parts
Open the cover.
USB connector
Note
2.1.4 Connectors
2.1.4
Connectors
The CPU Module has three types of connectors: MECHATROLINK-III, Ethernet, and USB.
MECHATROLINK-III Connectors
These connectors are used to connect MECHATROLINK-III communications devices.
Ethernet Connectors
These connectors are used to connect Ethernet communications devices.
USB Connector
This connector is used to connect a USB memory device.
Before removing the USB memory device, press the STOP/SAVE switch and wait until the USB
status indicator goes out. If the USB memory device is removed while the USB status indicator is
lit or flashing, the data may become corrupted.
2-9
Page 35

2.1 CPU Module
Important
2.1.5 Temperature Sensor
2.1.5
Temperature Sensor
A temperature sensor is built into the CPU Module.
The temperature sensor constantly monitors for abnormal temperatures in the CPU Module. If a
temperature error is detected, an alarm is displayed on the CPU Module.
There are four levels of alarms, as shown in the following table.
Display
A.241 Lit A rise in the internal temperature was detected.
E.081 Lit
E.082 Lit
hLit
ALM Indi-
cator
The temperature continued to increase after A.241 was detected and is
approaching the permissible temperature of the internal parts.
(The CPU Module will stop.)
The temperature continued to increase after E.081 was detected and
has reached the permissible temperature of the internal parts.
(The CPU Module will stop.)
The failsafe function was activated for E.082 (Temperature Warning).
(The CPU Module will stop.)
(This alarm is displayed if the temperature continues to increase after
E.082 was detected.)
If any one of the above alarms occurs, take the following actions.
• A.241: Check the ambient environment and installation conditions.
If you are using natural cooling for the control panel, we recommend that you change to
forced-air cooling.
• E.081, E.082, or h: Turn OFF the power supply to the Machine Controller immediately and
check the ambient environment and installation conditions.
Refer to the following section for details on the ambient environment and installation requirements.
4.1 Installation and Usage Conditions on page 4-2
Error Description
2-10
Page 36

2.2 Base Units
2
Appearances and Parts
RLYOUT connector
Power connector
2.2.1 Appearance and Part Names
2.2
2.2.1
Base Units
The Base Unit provides the backplane to which Modules are mounted and supplies the
required power to the Modules. There are two models of Base Units, a one-slot model and a
three-slot model.
This section shows the appearance and part names of the Base Unit and describes the connector.
Appearance and Part Names
The following figure shows the appearance of the Base Unit and a part name.
2.2.2
Connector
The Base Unit has two connectors: an RLYOUT connector and a power connector.
RLYOUT Connector
This connector outputs the status of the CPU Module.
Model: 734-302
Pin Assignments
No. Signal Label Description
1OUT
2OUT
• Normal operation: Circuit closed.
• Error: Circuit open.
2-11
Page 37

2.2 Base Units
2.2.2 Connector
Power Connector
Connect the power supply to this connector.
AC Power Supply DC Power Supply
AC power supply 3-2134249-3 Black
DC power supply 4-2013522-3 White
Pin Assignments: AC Power Supply
Ty pe Model Color
Pin No. Signal Label Description
3AC AC input
2AC AC input
1 FG Connects to the frame ground. (Ground to 100 Ω max.)
Pin Assignments: DC Power Supply
Pin No. Signal Label Description
3 DC24 V 24-VDC input
2DC0 V 0-VDC input
1 FG Connects to the frame ground. (Ground to 100 Ω max.)
2-12
Page 38

CPU Module Functionality
This chapter describes the functionality of the MP3300
CPU Module.
3
3.1
3.2
Basic Functionality . . . . . . . . . . . . . . . . . . . 3-2
3.1.1 Programs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3.1.2 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-17
3.1.3 Execution Scheduling . . . . . . . . . . . . . . . . . . . . 3-28
3.1.4 Scans . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-29
Function Modules . . . . . . . . . . . . . . . . . . . 3-35
3.2.1 Self Configuration . . . . . . . . . . . . . . . . . . . . . . . 3-35
3.2.2 Communications Function Module (218IFD) . . . 3-45
3.2.3 Motion Control Function Modules
(SVC, SVC32, SVR, and SVR32) . . . . . . . . . . . . 3-47
3.2.4 The M-EXECUTOR . . . . . . . . . . . . . . . . . . . . . . 3-53
3.2.5 Data Logging . . . . . . . . . . . . . . . . . . . . . . . . . . 3-66
3.2.6 USB Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-80
3.2.7 File Transfer . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-84
3.2.8 Security . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-94
3.2.9 Calendar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-94
3.2.10 Maintenance Monitoring . . . . . . . . . . . . . . . . . . 3-95
Page 39

3.1 Basic Functionality
3.1.1 Programs
3.1
3.1.1
Basic Functionality
This section describes the basic functionality of the CPU Module.
Programs
A program is a list of instructions to be processed by the CPU Module.
This section describes the types of programs and gives an overview of each type.
Types of Programs
There are three types of user programs:
• Ladder programs
• Motion programs
• Sequence programs
This section describes these programs.
Ladder Programs
Ladder programs are managed as drawings (ladder diagrams) that are identified by their drawing numbers (DWG numbers). These drawings form the basis of the user program.
Drawing Types and Hierarchical Configuration
This section describes the types of ladder drawings and their hierarchical configuration.
• Ty pe s
Ladder drawings are divided into four different types based on their purpose.
• DWG.A (Startup Drawings)
This type of ladder drawing is used to set register data. These ladder drawings are executed before high-speed scan process drawings and low-speed scan process drawings.
• DWG.I (Interrupt Drawings)
This type of ladder drawing is used to perform processing with priority given to signals
input from an Optional Module. These ladder drawings are executed with higher priority
than high-speed scan process drawings regardless of the scan cycle.
• DWG.H (High-speed Scan Process Drawings)
This type of ladder drawing is used to perform motion control or high-speed I/O control.
• DWG.L (Low-speed Scan Process Drawings)
This type of ladder drawing is used for communications with HMIs and external devices
as well as for standard I/O control.
The following table lists the priority, execution conditions, and maximum number of drawings
for each type of ladder drawing.
Maximum
Drawing Type Priority* Execution Condition
DWG.A (Startup Drawings) 1
DWG.I (Interrupt Drawings) 2
DWG.H (High-speed Scan
Process Drawings)
DWG.L (Low-speed Scan
Process Drawings)
* Drawings with lower numbers have higher priority.
3
4
Power ON (These drawings are executed once
when the power supply is turned ON.)
External interrupt (These drawings are executed
when a DI interrupt or counter match interrupt is
received from an Option Module.)
Started at fixed intervals. (These drawings are
executed once every high-speed scan.)
Started at fixed intervals. (These drawings are
executed once every low-speed scan.)
Number of
Drawings
64
64
1,000
2,000
3-2
Page 40

3.1 Basic Functionality
3
CPU Module Functionality
User Functions
Grandchild
Drawings
Child
Drawings
Parent
Drawing
Note: = A, I, H, or L
DWG. DWG.01
DWG.nn
DWG.01.01
DWG.01.02
FUNC-001
FUNC-006
FUNC-032
FUNC-064
DWG.01.03
DWG notation:
Grandchild drawing number
Parent drawing type (A, I, H, or L)
Child drawing number
Note: The following notation is used for operation error drawings.
Parent drawing type (A, I, H, or L) of the
drawing where the error occurs
Fixed value (00)
DWG. .
DWG. 00
3.1.1 Programs
• Hierarchical Configuration
There are four types of ladder drawings: parent drawings, child drawings, grandchild drawings, and operation error drawings.
• Parent Drawings
These drawings are automatically executed by the system program when the execution
conditions are met.
• Child Drawings
These drawings are executed when they are called from a parent drawing with a SEE
instruction.
• Grandchild Drawings
These drawings are executed when they are called from a child drawing with a SEE
instruction.
• Operation Error Drawings
These drawings are automatically executed by the system program when an operation
error occurs.
A parent drawing cannot call a child drawing from a different type of drawing. Similarly, a child
drawing cannot call a grandchild drawing from a different type of drawing. A parent drawing
cannot call a grandchild drawing directly. The parent drawing first must call the child drawing,
and then the child drawing must call the grandchild drawing. This is called the hierarchical
configuration of drawings.
The following figure shows the parent-child-grandchild structure in which a program is created.
3-3
Page 41

3.1 Basic Functionality
Information
3.1.1 Programs
The breakdown of the number of ladder drawings in each category is given in the following
table.
Drawings
DWG.A DWG.I DWG.H DWG.L
Number of Drawings
Parent Drawings 1111
Operation Error Drawings 1 1 1 1
Child Drawings
Grandchild Drawings
Total of 62 max. Total of 62 max.
Total of 998
max.
Total of 1,998
max.
There are separate functions that can be called from the drawings as required. Functions
are executed when they are called from a parent, child, or grandchild drawing with the
FUNC instruction. You can create up to 2,000 functions.
Execution Processing of Drawings
The drawings are executed by calling them from the top to the bottom, following the hierarchy
of the drawings. The following figure illustrates the execution processing of a high-speed scan
drawing (DWG.H).
Execution is started by the
system program when the
execution condition is met.
Parent Drawing
DWG.H
SEE
H01
Child Drawings Grandchild Drawings
DWG.H01
SEE
H01.H01
DWG.H01.01
FUNC
01
Functions
FUNC 01
END
END
END
SEE
H02
END
Note: 1. The parent drawing is automatically called and executed by the system. Child drawings and grandchild
drawings are executed by calling them from a parent drawing or a child drawing using the SEE instruction.
2. You can call functions from any drawing. You can also call functions from other functions.
3. If an operation error occurs, the operation error drawing for the drawing type will be started automatically.
4. Always specify 00 as the drawing number for operation error drawings.
H02
An operation
error occurs.
END
Execution is
automatically
started by the
system.
H00
END
3-4
Page 42

3.1 Basic Functionality
3
CPU Module Functionality
Information
3.1.1 Programs
Functions
Functions are executed when they are called from a parent, child, or grandchild drawing with
the FUNC instruction.
Functions can be freely called from any drawing. The same function can be called simultaneously from different types of drawings or different levels of drawings. You can also call functions
from other functions that you have created.
The use of functions provides the following merits:
• Easy user program modularization
• Easy user program creation and maintenance
You can use standard functions that are provided by the system, and you can define user functions.
• Standard System Functions
The following functions for communications and other purposes are provided as standard functions in the system. You cannot change the system functions.
Function Name
COUNTER Counter
FINFOUT First-in First-out
TRACE Trace
DTRC-RD Read Data Trace
DTRC-RDE Read Data Trace Extended
MSG-SND Send Message
MSG-SNDE Send Message Extended
MSG-RCV Receive Message
MSG-RCVE Receive Message Extended
ICNS-WR Inverter Parameter Write
ICNS-RD Inverter Parameter Read
MLNK-SVW Write SERVOPACK Parameters
MOTREG-W Write Motion Register
MOTREG-R Read Motion Register
IMPORT Import
IMPORTL Import Extended
EXPORT Export
EXPORTL Export Extended
• User Functions
You can freely program the body of a user function and program the user function definitions.
A maximum of 2,000 user function drawings can be defined.
Refer to the following manual for details on how to define functions.
MP3000 Series Ladder Programming Manual (Manual No.: SIEP C880725 13)
Motion Programs
A motion program is a program that is written in a text-based motion language.
There are two types of motion programs.
Ty pe
Main programs
Subprograms
Designation
Method
MPM
(
=
1 to
512)
MPS
(
=
1 to
512)
Features Number of Programs
• Main programs are called
from a DWG.H drawing.
• Main programs are called
from the M-EXECUTOR program execution definitions.
Subprograms are called from
a main program.
You can create up to 512 motion programs, including the following programs:
• Motion main programs
• Motion subprograms
• Sequence main programs
• Sequence subprograms
3-5
Page 43

3.1 Basic Functionality
Important
MPM001 MPM002 MPM003
MPS010
Main program
Call (MSEE) Call (MSEE) Call (MSEE)
The common
process is
written as a
subprogram.
Subprogram
Main program Main program
3.1.1 Programs
Term
1. The same numbers are used to manage the motion programs and sequence programs. Use a
unique number for each program.
• Motion program numbers are given in the form MPM or MPS.
• Sequence program numbers are given in the form SPM or SPS.
2. The number of motion programs that can be executed simultaneously depends on the model
of the Machine Controller. If the number of simultaneously executable programs is exceeded,
an alarm will occur (No System Work Available Error).
Motion Subprograms
Subprograms are created to perform common operations. They help minimizing the number of
program steps and allow efficient use of memory.
Motion Program Execution
Motion programs are called with an MSEE instruction from a ladder program in an H drawing.
You can also register the motion program in the M-EXECUTOR (Motion Executor) to call it. Refer
to the following section for details.
Note
3.2.4 The M-EXECUTOR on page 3-53
After you create the motion program, place a Call Motion Program (MSEE) instruction in the
ladder program of an H drawing. Motion programs can be called from any H drawing, regardless of whether it is a parent, child, or grandchild drawing.
3-6
Page 44

3
CPU Module Functionality
The following figure shows an execution example.
MSEE
MPM001
DWG.H
SEE
H01
DEND
DWG.H01
SEE H01.01
END
DEND
END
RETEND
DEND
MPM003
MPS101
DWG.H01.01
MPM001
MPM002
MSEE
MPM002
MSEE
MPM003
MSEE
MPS101
VEL [a1]5000 [b1]..
FMX T10000000;
IAC T25;
IDC T30;
MOV [a1]300. [b1]..
MVS [a1]200. [b1]..
Execution is started by
the system program
when the execution
condition is met.
Parent drawing
Child drawing
Grandchild drawing
Motion programs
Subprogram
Note
3.1 Basic Functionality
3.1.1 Programs
The ladder instruction in the H drawing is executed every high-speed scan cycle according to
the hierarchical organization of parent-child-grandchild drawings.
The above programming only prepares for execution of the motion program. The motion program is not executed when the MSEE instruction is inserted. To start the motion program after
inserting the MSEE instruction, use a control signal to turn ON the Request for Start of Program
Operation.
The motion program is executed in the scan cycle, but unlike ladder programs, the entire program is not executed in a single scan. Motion programs are controlled specifically by the system’s motion management.
The following points must be taken into consideration when executing motion programs.
• Motion programs that are registered in the M-EXECUTOR cannot be executed with MSEE
instructions.
• More than one instance of the same motion program (i.e., the same program number) cannot
be executed with MSEE instructions.
• Subprograms (MPS) cannot be executed with MSEE instructions in a ladder program.
You can call subprograms only from motion programs and motion subprograms (MPM
and MPS).
• You cannot call the same subprogram more than once at the same time.
• Sequence programs (SPM or SPS) cannot be called with MSEE instructions from a
ladder program.
3-7
Page 45

3.1 Basic Functionality
ABS;
MOV[X] _ [Y] _
MOV[X] _ [Y] _
MVS[X] _ [Y] _ F
IOW MB0001
.
.
.
MPM001
MSEE Instruction
MPM address
Ladder Program
Motion Program
0 3
ABS;
IOW MB0001
.
.
.
MOV[X] _ [Y] _
MOV[X] _ [Y] _
MVS[X] _ [Y] _ F
* MW00200 = 3
MPM003
Setting device
The value is stored
in the MW00200
register.
MSEE Instruction
Register address
Ladder Program Motion Program
3.1.1 Programs
Specifying Motion Programs
There are two methods that you can use to specify motion programs.
• Calling the motion program by specifying it directly
• Calling the motion program by specifying it indirectly
These two methods are described below.
• Calling the Motion Program by Specifying It Directly
Direct designation is used to call a motion program by specifying its program number
(MPM) directly.
To call the motion program from a ladder program with the MSEE instruction, specify the program number in the Program Number operand of the MSEE instruction.
3-8
• Calling the Motion Program by Specifying It Indirectly
Indirect designation is used to call a motion program by specifying its number in a register.
In this method, the program (MPM) whose number is the same as the value that is stored
in the register is called.
To call the motion program from a ladder program with an MSEE instruction, use the Program
Number operand of the MSEE instruction to specify the M or D register that indirectly designates the motion program.
Page 46

3.1 Basic Functionality
3
CPU Module Functionality
3.1.1 Programs
Work Registers
Work registers are used to set and monitor motion programs.
The address of the first work register for the motion program that is called with an MSEE
instruction is specified in the MSEE instruction in the ladder program. The following figure
shows the structure of the work registers.
Address of rst work register
(M register or D register)
Wor k Reg ister Contents Reference
1st register Motion Program Status Flags Page 3-9
2nd register Motion Program Control Signals Page 3-10
3rd register Interpolation Override Page 3-13
4th register System Work Number Page 3-13
• Status Flags
The Motion Program Status Flags give the execution condition of the motion program. The following table describes the meanings of the Status Flags.
Bit No. Name Description
This bit is set to 1 when a motion program is running.
Bit 0 Program Executing
Bit 1 Program Paused
Bit 2
Bit 3 Reserved for system. −
Bit 4
Bit 5 Reserved for system. −
Bit 6 Reserved for system. −
Bit 7 Reserved for system. −
Bit 8 Program Alarm
Bit 9
Bit A Reserved for system. −
Bit B
Bit C Program Type
Program Stopped for
Stop Request
Program Single-block
Execution Stopped
Program Stopped at
Breakpoint
Debug Operation
Mode
0: Motion program is stopped.
1: Motion program is running.
This bit is set to 1 when execution of a motion program is paused by a
Request for Pause of Program.
After a Request for Pause of Program control signal is input, it is confirmed
that the axis decelerated to a stop and then the status flag is turned ON.
0: Program is not stopped by a pause request.
1: Program is stopped by a pause request.
This bit is set to 1 when execution of a motion program is stopped by a
Request for Stop of Program.
0: Program is not stopped by a stop request.
1: Program is stopped by a stop request.
This bit is set to 1 when execution of a single block is stopped in Debug
Operation Mode.
0: Single block execution is not stopped.
1: Single block execution is stopped.
This bit is set to 1 when a program alarm occurs.
When this bit is set to 1, details on the error will be displayed in the Error
Information Dialog Box and are given in the S registers.
0: There is no program alarm.
1: A program alarm occurred.
This bit is set to 1 when execution of a program stops at a breakpoint in
Debug Operation Mode.
0: Not stopped at a breakpoint.
1: Stopped at a breakpoint.
This bit is set to 1 when a program is running in Debug Operation Mode.
0: Not in Debug Operation Mode (Normal Execution Mode).
1: In Debug Operation Mode.
This bit reports whether the program that is being executed is a motion
program or a sequence program.
0: Motion program
1: Sequence program
Continued on next page.
3-9
Page 47

3.1 Basic Functionality
3.1.1 Programs
Bit No. Name Description
Bit D Start Request History
Bit E
Bit F
Note: If a program alarm occurs, motion program error information is provided in the Error Information Dialog Box
and given in the S registers.
• Control Signals
To control the execution of a motion program, you must input program control signals (Request
for Start of Program Operation, or Request for Stop of Program, etc.). The following table
describes the control signals for motion programs.
: This mark indicates that the signal must be kept ON until the system acknowledges it.
: This mark indicates that the signal needs to be turned ON only for one high-speed scan.
No System Work Error
or Execution Scan
Error
Main Program Number
Limit Exceeded Error
Continued from previous page.
This bit is set to 1 when the Request for Start of Program Operation is ON.
0: Request for Start of Program Operation is OFF.
1: Request for Start of Program Operation is ON.
This bit is set to 1 when a system work number that was needed to execute
a motion program could not be obtained, or when an MSEE instruction is
programmed in a drawing other than a DWG.H.
0: There is no system work error or execution scan error.
1: A no system work error or execution scan error occurred.
This bit is set to 1 when the specified motion program number is out of
range.
Motion program number range:1 to 512
0: There is no motion program number error.
1: A motion program number error occurred.
Bit No. Name Description
Bit 0
Bit 1
Bit 2
Bit 3
Bit 4
Bit 5
Bit 6
Bit 7
Request for Start
of Program
Operation
Request for
Pause of Program
Request for Stop
of Program
Program
Single-block
Mode Selection
Program
Single-block Start
Request
Program Reset
and Alarm Reset
Request
Request for Start
of Continuous
Program
Operation
Reserved for
system.
This bit makes a request to start execution of a motion program. The motion
program starts when this bit changes from 0 to 1. This bit is ignored when there
is a motion program alarm.
0: Turn OFF the request to start the program.
1: Turn ON the request to start the program.
This bit makes a request to pause execution of a motion program.
Execution of the program that was paused will resume when the pause request
is turned OFF.
0: Turn OFF the request to pause the program (i.e., cancel the pause).
1: Turn ON the request to pause the program.
This bit makes a request to stop execution of a motion program.
A motion program alarm occurs if this bit is set to 1 while the axis is in motion.
0: Turn OFF the request to stop the program.
1: Turn ON the request to stop the program.
This bit makes a request to select Program Single-block Execution Mode.
This mode can be used in place of Debug Operation Mode.
0: Turn OFF the request to select single-block mode.
1: Turn ON the request to select single-block mode.
When this bit is changed from 0 to 1, program execution changes to singleblock execution (step execution). This bit is valid only when bit 3 (Program Single-block Mode Selection) in the control signals is set to 1.
0: Turn OFF the request to start the program in single-block mode.
1: Turn ON the request to start the program in single-block mode.
This bit resets motion programs and alarms.
0: Turn OFF the request to reset the program and alarms.
1: Turn ON the request to reset the program and alarms.
This bit makes a request to resume execution of a program that was stopped
by a Request for Stop of Program.
0: Turn OFF the request to resume the program.
1: Turn ON the request to resume the program.
−
Continued on next page.
3-10
Page 48

3.1 Basic Functionality
3
CPU Module Functionality
Continued from previous page.
Bit No. Name Description
If this bit changes to 1 while an axis is in motion due to a SKP instruction (when
Bit 8
Skip 1
Information
the skip input signal selection is set to SS1), the axis will decelerate to a stop,
and the reference in the remaining travel distance will be canceled.
0: Turn OFF the skip 1 signal.
1: Turn ON the skip 1 signal.
If this bit changes to 1 while an axis is in motion due to a SKP instruction (when
Bit 9
Skip 2
Information
the skip input signal selection is set to SS2), the axis will decelerate to a stop,
and the reference in the remaining travel distance will be canceled.
0: Turn OFF the skip 2 signal.
1: Turn ON the skip 2 signal.
Bit A, B
Bit C
Bit D
Bit E
Bit F
*1. System Work Number Setting
• When the Motion Program Is Registered in M-EXECUTOR:
• When a Motion Program Is Called from a Ladder Program with an MSEE Instruction:
• OFF: The system will use an automatically acquired system work number. The system work number will be
• ON: The work number that is specified by the system will be used.
• However, if the work number is assigned to the M-EXECUTOR, a No System Work Available Error (Status Flag
*2. Interpolation Override Setting
• OFF: The interpolation override is always 100%.
• ON: The interpolation override in the parameter setting is used.
Note: 1. Use the specified signal types for the ladder program inputs.
Reserved for
system.
Reserved for
system.
System Work
Number Setting
Interpolation
Override Setting
Reserved for
system.
The system work number cannot be specified. The system will use the definition number as the system work
number.
different each time.
Bit E) is reported.
2. At startup, the motion programs for which the Request for Start of Program Operation control signals are
ON will be executed.
−
−
To specify a system work number, set this bit to 1.
0: Do not specify a system work number.
*1
1: Specify a system work number.
To specify an interpolation override, set this bit to 1.
0: Do not specify an interpolation override.
*2
1: Specify an interpolation override.
−
3.1.1 Programs
3-11
Page 49

3.1 Basic Functionality
Example
Control signal: Request for Start of
Program Operation
Status ag: Program Executing
Axis operation: Pulse distribution
Control
signal: Request for Start of
Program Operation
Status ag: Program Executing
Axis operation: Pulse distribution
Control signal: Request for Pause of
Program
Status ag: Program Paused
1 scan*
Control signal: Request for Start of Program
Operation
Status ag: Program Executing
Axis operation: Pulse distribution for
Positioning instruction
Control signal: Request for Stop of Program
Axis operation: Pulse distribution for Zero
Point Return instruction
Axis operation: Pulse distribution for
Interpolation instruction
Status ag: Program Stopped for Stop
Request
Status ag: Program Alarm
Control signal: Program Reset and Alarm
Reset Request
1 scan*
1 scan*
3.1.1 Programs
Timing chart examples for axis operations and status flags after a control signal is input are
provided below.
Request for Start of Program Operation
Request for Pause
* Status flags related to control signal input are updated after one scan.
Request for Stop
* Status flags related to control signal input are updated after one scan.
3-12
Page 50

3
CPU Module Functionality
If a Motion Program Alarm Occurs
Control signal: Request for Start of
Program Operation
Status ag: Program Alarm
Status ag: Program Executing
Axis operation: Pulse distribution for
Interpolation instruction
Control signal: Program Reset and Alarm
Reset Request
Axis operation: Pulse distribution for
Positioning instruction
Axis operation: Pulse distribution for
Zero Point Return instruction
1 scan*
Important
Important
* Status flags related to control signal input are updated after one scan.
3.1 Basic Functionality
3.1.1 Programs
1. If the Request for Stop of Program control signal is turned ON while the axis is being controlled for a motion language instruction, an alarm will occur.
2. If the Request for Stop of Program control signal is turned ON while the axis is being controlled for an interpolation motion language instruction, the axes will stop immediately. To perform a deceleration stop, use the Request for Pause of Operation control signal.
3. The Request for Pause of Program control signal is not acknowledged while a Zero Point
Return (ZRN) instruction is being executed. To stop the operation, use the Request for Stop of
Program control signal.
4. If a motion program alarm occurs while an axis is in motion, the axis stops immediately.
Refer to the following manuals for details on programming examples for controlling motion programs.
MP3000 Series Motion Programming Manual (Manual No.: SIEP C880725 14)
• Interpolation Override
An interpolation override allows you to change the output ratio of the axis movement speed reference for interpolation motion language instructions.
Set the override value to use when executing interpolation instructions (MVS, MCW, MCC, or
SKP).
The interpolation override is valid only when bit E (Interpolation Override Setting) in the control
signals is ON.
The setting range of the interpolation override is 0 to 32,767.
Unit: 1 = 0.01%
• System Work Numbers
When you call a motion program from a ladder program with the MSEE instruction, set the system work number to use to call the motion program. This system work number is valid only
when bit D (System Work Number Setting) of the control signals is ON.
Setting range: 1 to 32
When using MSEE instructions in ladder programs along with the M-EXECUTOR, do not specify
the system work numbers that are for the M-EXECUTOR in the MSEE instructions in the ladder
programs. If you specify one, a No System Work Error will occur.
System work numbers for the M-EXECUTOR: 0 to the set value of the number of program definitions
3-13
Page 51

3.1 Basic Functionality
Information
3.1.1 Programs
Monitoring Motion Program Execution Information
The execution information for motion programs can be monitored using the S registers
(SW03200 to SW05119 and SW08192 to SW09125).
The execution information is monitored differently, depending on whether the motion program
is called from a ladder program with an MSEE instruction, or the motion program is registered
in the M-EXECUTOR program execution definitions.
This section describes these two monitoring methods.
• When the Motion Program Is Called from the Ladder Program with an MSEE Instruction
When a motion program is called from the ladder program with an MSEE instruction, the monitoring method depends on the setting of bit D (System Work Number Setting) in the Motion
Program Control Signals.
Bit D (System Work Number Set-
ting) in the Control Signal Word
for Motion Programs
ON
OFF
You cannot set the system work numbers when you use the M-EXECUTOR. The system will
use system work numbers that are the same as the definition numbers.
Monitoring
The execution information is reported in the Work n Program Information
registers (SW03264 to SW05119 and SW08192 to SW09125).
For example, if the system work number is 1, you can monitor the execution information of the motion program with the Work 1 Program Information registers (SW03264 to SW03321).
The system automatically determines the system work number to use.
You can check the work numbers that are in use in the Active Program
Numbers registers (SW03200 to SW03231).
For example, if MPM001 is the motion program to be monitored and
SW03202 contains a 1, the system work number is 3. You can therefore
monitor the execution information of the motion program with the Work 3
Program Information registers (SW03380 to SW03437).
• When the Motion Program Is Registered in the M-EXECUTOR Program Execution Definitions:
When the motion program is registered in the M-EXECUTOR program execution definitions, the
system work number used will be the same as the program execution registration number in
the M-EXECUTOR.
For example, if the motion program is registered for execution as number 3, system work number 3 is used. You can therefore monitor the execution information of the motion program with
the Work 3 Program Information registers (SW03380 to SW03437).
3-14
Page 52

3
CPU Module Functionality
Sequence Programs
Important
END
END
RET
END
SPM003
SPS101
SPM001
SPM002
SSEE
SPS101
IF MW000<32767;
MW000=MW000+1;
ELSE;
MW000;
IEND;
M-EXECUTOR Program Execution Denitions
Sequence programs
Subprogram
A sequence program is written in a text-based motion language.
There are two types of sequence programs.
3.1 Basic Functionality
3.1.1 Programs
Ty pe
Main programs
Subprograms
Designation
Method
SPM
(=1 to
512)
SPS
(=1 to
512)
Features Number of Programs
Main programs are called from
the M-EXECUTOR program
execution definitions.
Subprograms are called from
a main program.
You can create up to 512 motion programs, including the following programs:
• Motion main programs
• Motion subprograms
• Sequence main programs
• Sequence subprograms
The same numbers are used to manage the sequence programs and motion programs.
Use a unique number for each program.
• Motion program numbers are given in the form MPM or MPS.
• Sequence program numbers are given in the form SPM or SPS.
Sequence Program Execution
A sequence program is executed by registering it in the M-EXECUTOR execution definitions.
The sequence programs are executed in ascending order.
The following figure shows an execution example.
If the execution type is set to an H-scan sequence program or L-scan sequence program, then
the program will be executed as soon as the definition is saved. If the execution type is set to a
startup sequence program, then the program will be executed the next time when the power
supply is turned ON.
3-15
Page 53

3.1 Basic Functionality
SPM001
IF MW000<32767;
MW000=MW000+1;
ELSE;
MW000;
IEND;
Sequence program
M-EXECUTOR Program Execution Denitions
Note
3.1.1 Programs
Specifying Sequence Programs
Sequence programs must be specified directly. Indirect designations cannot be used.
Specify the program number of the sequence program to execute (SPM).
Work Registers
Work registers are used to monitor sequence programs.
The work registers have Status Flags inside the M-EXECUTOR control registers, in the same
way as motion programs that are registered in the M-EXECUTOR.
• Sequence Program Status Flags
The Sequence Program Status Flags give the execution condition of the sequence program.
The following table describes the meanings of the Status Flags.
Bit No. Name Status
0 Program Executing Program is being executed.
1 − Reserved for system.
2 − Reserved for system.
3 − Reserved for system.
4 − Reserved for system.
5 − Reserved for system.
6 − Reserved for system.
7 − Reserved for system.
8 Program Alarm There is a program alarm.
9 Program Stopped at Breakpoint Execution is stopped at a breakpoint.
A − Reserved for system.
B Debug Operation Mode The program is in Debug Mode (EWS debugging).
C Program Type Program Type, 1: Sequence program
D Start Request History There is a request to start program execution.
E − Reserved for system.
F − Reserved for system.
Sequence Program Alarms
When an error is detected, bit 8 (Program Alarm) turns ON in the Status Flags in the M-EXECUTOR control registers.
When the error is removed, this bit turns OFF.
The following errors can occur.
• The called program is not registered.
• The called program is not a sequence program.
• The called program is not a subprogram (a main program was called).
• Called Program Number Limit Exceeded Error
• Too Many Nesting Levels Error
3-16
Page 54

3.1 Basic Functionality
3
CPU Module Functionality
3.1.2 Registers
3.1.2
Registers
Registers are areas that store data within the Machine Controller. Variables are registers with
labels (variable names).
There are two kinds of registers: global registers that are shared between all programs, and
local registered that are used only by a specific program.
Global Registers
Global registers are shared by ladder programs, user functions, motion programs, and
sequence programs. Memory space for global registers is reserved by the system for each register type.
Ladder
program
User functions Motion
programs/
sequence
programs
Global registers
S registers
65,535
words
M registers
1,048,576
words
G registers
2,097,152
words
I registers
65,536
words
Input data +
Monitor
parameters +
CPU interface
inputs
O registers
65,536
words
Output data +
Setting
parameters +
CPU interface
outputs
C registers
16,384
words
Local Registers
Local registers can be used within each specific drawing. These registers cannot be shared by
other drawings. Local registers are stored in the program memory for each drawing.
Ladder Program Conceptual Diagram
Parent drawing
H
# registers
D registers D registers
These registers cannot be shared between
different drawings.
Child drawing
H01
# registers
User function
FUNC01 FUNC02
X registers
Y registers
Z registers
# registers
D registers
User function
X registers
Y registers
Z registers
# registers
D registers
These registers cannot be shared between
different drawings.
3-17
Page 55

3.1 Basic Functionality
Motion program
(MPM001)
MSEE MPS002;
D registers
(DW00000
to
DW00031)
Subprogram
(MPS002)
D registers
(DW00000
to
DW00031)
Sequence program
(SPM003)
D registers
(DW00000
to
DW00031)
Subprogram
(SPS004)
D registers
(DW00000
to
DW00031)
SSEE SPS004;
D registers cannot be shared between
different drawings.
D registers cannot be shared between
different drawings.
Register address = S W 00000
Range (The number of digits depends on the register type and data type.)
Data type
Register type
Information
3.1.2 Registers
Motion Program Conceptual Diagram
Structure of Register Addresses
Register Types
This section describes global and local registers.
Global Registers
Global registers are shared by ladder programs, user functions, motion programs, and
sequence programs. In other words, the operation results of a ladder program can be used by
other user functions, motion programs, or sequence programs.
Ty pe Name
S
3-18
M
You can also use index registers or array registers as variables to address specific registers.
Refer to the following sections for details.
Index Registers (i, j) on page 3-25
Array Registers ([ ]) on page 3-27
System registers
(S registers)
Data registers
(M registers)
Designation
Method
SBnnnnnh,
SWnnnnn,
SLnnnnn,
SQnnnnn,
SFnnnnn,
SDnnnnn,
SAnnnnn
MBnnnnnnnh,
MWnnnnnnn,
MLnnnnnnn,
MQnnnnnnn,
MFnnnnnnn,
Usable Range Description
These registers are prepared by the system.
They report the status of the Machine Controller
SW00000 to
SW65534
and other information.
The system clears the registers from SW00000
to SW00049 to 0 at startup.
They have a battery backup.
MW0000000
to
MW1048575
These registers are used as interfaces between
programs.
They have a battery backup.
MDnnnnnnn,
MAnnnnnnn
Continued on next page.
Page 56

3
CPU Module Functionality
Typ e Name
G G registers
Input registers
I
(I registers)
Output registers
O
(O registers)
Constant regis-
C
ters (C registers)
Note: n: decimal digit, h: hexadecimal digit
Designation
Method
GBnnnnnnnh,
GWnnnnnnn,
GLnnnnnnn,
GQnnnnnnn,
GFnnnnnnn,
GDnnnnnnn,
GAnnnnnnn
IBhhhhhh,
IWhhhhh,
ILhhhhh,
IQhhhhh,
IFhhhhh,
IDhhhhh,
IAhhhhh
OBhhhhhh,
OWhhhhh,
OLhhhhh,
OQhhhhh,
OFhhhhh,
ODhhhhh,
OAhhhhh
CBnnnnnh,
CWnnnnn,
CLnnnnn,
CQnnnnn,
CFnnnnn,
CDnnnnn,
CAnnnnn
3.1 Basic Functionality
Continued from previous page.
Usable Range Description
GW0000000
to
GW2097151
IW00000 to
IW07FFF,
IW10000 to
IW17FFF
IW08000 to
IW0FFFF
IW20000 to
IW21FFF
OW00000 to
OW07FFF,
OW10000 to
OW17FFF
OW08000 to
OW0FFFF
OW20000 to
OW21FFF
CW00000 to
CW16383
These registers are used as interfaces between
programs.
They do not have a battery backup.
These registers are used for input data.
These registers store the motion monitor parameters.
These registers are used for Motion Modules.
These registers are used as interfaces between
the CPU Modules when Expansion Racks are
used (CPU interface registers).
These registers are used for output data.
These store the motion setting parameters.
These registers are used for Motion Modules.
These registers are used as interfaces between
the CPU Modules when Expansion Racks are
used (CPU interface registers).
These registers can be read in programs but
they cannot be written.
The values are set from the MPE720.
3.1.2 Registers
Local Registers
Local registers are valid within only one specific program. The local registers in other programs
cannot be accessed.
You specify the usable range from the MPE720.
Typ e Name
# # registers
D D registers
Designation
Method
#Bnnnnnh,
#Wnnnnn,
#Lnnnnn,
#Qnnnnn,
#Fnnnnn,
#Dnnnnn,
#Annnnn
DBnnnnnh,
DWnnnnn,
DLnnnnn,
DQnnnnn,
DFnnnnn,
DDnnnnn,
DAnnnnn
Description Features
These registers can be read in programs but they cannot be written.
The values are set from the MPE720.
These registers can be used for general purposes
within a program.
By default, 32 words are reserved for each program.
The default value after startup depends on the setting
of the D Register Clear when Start option.
Refer to the following section for details.
• Setting the D Register Clear When Start Option on
page 3-21
Continued on next page.
Programspecific
3-19
Page 57

3.1 Basic Functionality
Important
3.1.2 Registers
Typ e Name
Function
X
input
registers
Function
Y
output
registers
Function
Z
internal
registers
Function
A
external
registers
Note: n: decimal digit, h: hexadecimal digit
Designation
Method
XBnnnnnh,
XWnnnnn,
XLnnnnn,
XQnnnnn,
XFnnnnn,
XDnnnnn
YBnnnnnh,
YWnnnnn,
YLnnnnn,
YQnnnnn,
YFnnnnn,
YDnnnnn
ZBnnnnnh,
ZWnnnnn,
ZLnnnnn,
ZQnnnnn,
ZFnnnnn,
ZDnnnnn
ABnnnnnh,
AWnnnnn,
ALnnnnn,
AQnnnnn,
AFnnnnn,
ADnnnnn
Continued from previous page.
Description Features
These registers are used for inputs to functions.
• Bit inputs: XB000000 to XB00000F
• Integer inputs: XW00001 to XW00016
• Double-length integers: XL00001 to XL00015
• Quadruple-length integers: XQ00001 to XQ00013
• Real numbers: XF00001 to XF00015
• Double-precision real numbers: XD00001 to
XD00013
These registers are used for outputs from functions.
• Bit outputs: YB000000 to YB00000F
• Integer outputs: YW00001 to YW00016
• Double-length integers: YL00001 to YL00015
• Quadruple-length integers: YQ00001 to YQ00013
• Real numbers: YF00001 to YF00015
• Double-precision real numbers: YD00001 to
YD00013
These are internal registers that are unique within each
function. You can use them for internal processing in
functions.
• Bits: ZB000000 to ZB00063F
• Integers: ZW00000 to ZW00063
• Double-length integers: ZL00000 to ZL00062
• Quadruple-length integers: ZQ00000 to ZQ00060
• Real numbers: ZF00000 to ZF00062
• Double-precision real numbers: ZD00000 to
ZD00060
These are external registers that use the address input
value as the base address.
When the address input value of an M or D register is
provided by the source of the function call, then the
registers of the source of the function call can be
accessed from inside the function by using that
address as the base.
Functionspecific
User functions can be called from any programs, any number of times.
Precautions When Using Local Registers within a User Function
When you call a user function, consider what values could be in the local registers, and perform
initialization as needed.
Name Precautions
X registers (function
input registers)
Y registers (function
output registers)
Z registers (function
internal registers)
# registers These are constant registers. Their values cannot be changed.
If input values are not set, the values will be uncertain.
Do not use X registers that are outside of the range that is specified in the input definitions.
If output values are not set, the values will be uncertain.
Always set the values of the range of Y registers that is specified in the output definitions.
When the function is called, the previously set values will be lost and the values will be
uncertain.
These registers are not appropriate for instructions if the previous value must be
retained.
Use them only after initializing them within the function.
Continued on next page.
3-20
Page 58

3
CPU Module Functionality
Continued from previous page.
Name Precautions
When the function is called, the previously set values are preserved.
If a previous value is not necessary, initialize the value, or use a Z register instead.
D registers retain the data until the power is turned OFF.
D registers
The default value after startup depends on the setting of the D Register Clear when
Start option.
Refer to the following sections for details.
• Setting the D Register Clear When Start Option on page 3-21
• Setting the D Register Clear When Start Option
1.
Select File − Environment Setting from the MPE720 Version 7 Window.
2.
Select Setup − System Setting.
3.
Select Enable or Disable for the D Register Clear when Start option.
Disable: The initial values will be uncertain.
Enable: The initial values will be 0.
3.1 Basic Functionality
3.1.2 Registers
Data Types
There are various data types that you can use depending on the purpose of the application: bit,
integer, double-length integer, quadruple-length integer, real number, double-precision real
number, and address.
Symbol Data Type Range of Values Data Size Description
B Bit 1 (ON) or 0 (OFF) −
W Integer
Double-length
L
integer
Quadruple-
Q
length integer
-32,768 to 32,767
(8000 to 7FFF hex)
-2,147,483,648 to 2,147,483,647
(80000000 to 7FFFFFFF hex)
-9,223,372,036,854,775,808 to
9,223,372,036,854,775,807
*1
(8000000000000000 to
7FFFFFFFFFFFFFFF hex)
1 word
2 words
4 words
Used in relay circuits and to
determine ON/OFF status.
Used for numeric operations.
The values in parentheses on
the left are for logical operations.
Used for numeric operations.
The values in parentheses on
the left are for logical operations.
Used for numeric operations.
The values in parentheses on
the left are for logical operations.
Continued on next page.
3-21
Page 59

3.1 Basic Functionality
Important
[MW0000100]
[MW0000101]
[MW0000102]
[MW0000103]
[ML0000100]
[MF0000100]
[ML0000102]
[MF0000102]
0123456789ABCDEF
[MA0000101]
……
[MB00001003]
[MB0000103B]
Data Types and Register Designations
One word is allocated for
each register address.
An extra digit that species the bit (3) is appended
to the end of the register address (0000100).
Address data type
Integer data type
Bit data type
Bit data type
Double-length
integer or real
number data type
The addressed register (0000102) and the
following register (0000103) are combined
as a 2-word area. Therefore the register
addresses are specied at intervals of 2.
If MA0000101 is specied as a pointer, it addresses a
continuous data area with the specied register
address (0000101) as the starting address. This data
area can be used with all data types in internal
processing for functions.
3.1.2 Registers
Symbol Data Type Range of Values Data Size Description
F Real number
D
A Address 0 to 2,097,152 −
*1. These data types cannot be used for indirect designation of motion programs.
*2. Conforms to IEEE754 standards.
Continued from previous page.
Used for advanced numeric
operations.
*2
Used for advanced numeric
operations.
*2
Double-precision
real number
*1
± (1.175E - 38 to 3.402E + 38) or 0
± (2.225E - 308 to 1.798E + 308) or
0
2 words
4 words
Used only as pointers for
addressing.
The MP3000-series Machine Controller does not have separate registers for each data type. As
shown in the following figure, the same address will access the same register even if the data
type is different.
For example, MB00001003, a bit address, and the MW0000100, an integer address, have different data types, but they both access the same register, MW0000100.
Pointer Designation
When an address is passed to a function as a parameter, this is referred to as pointer designation. When pointer designation is used, the continuous data area starting from the address of the
3-22
Term
specified register address can be used in internal processing for functions with all data types.
Page 60

3.1 Basic Functionality
3
CPU Module Functionality
3.1.2 Registers
Precautions for Operations Using Different Data Types
If you perform an operation using different data types, be aware that the results will be different
depending on the data type of the storage register, as described below.
• Storing Real Number Data in an Integer Register
MW0000100 = MF0000200; the real number is stored after it is converted to an integer.
(00001) (1.234)
Note: There may be rounding error due to storing a real number in an integer register.
Whether numbers are rounded or truncated when converting a real number to an integer can be set
in the properties of the drawing.
Setting for Real Number Casting on page 3-23
MW0000100 = MF0000200 + MF0000202
(0124) (123.48) (0.02)The result of the operation may be different depending on the
value of the variable.
(0123) (123.49) (0.01)
• Storing Real Number Data in a Double-length Integer Register
ML0000100 = MF0000200; the real number is stored after it is converted to an integer.
(65432) (65432.1)
• Storing Double-length Integer Data in an Integer Register
MW0000100 = ML0000200; the lower 16 bits of the double-length integer are stored without
change.
(
-
00001) (65535)
• Storing Integer Data in a Double-length Integer Register
ML0000100 = MW0000200; the integer is stored after it is converted to double-length integer data.
(0001234) (1234)
Setting for Real Number Casting
The casting method (truncating or rounding) can be set in the detailed definitions in the Drawing Properties Dialog Box. The method to use for real number casting is set for each drawing.
Use the following procedure to display the Program Property Dialog Box.
1.
In the Ladder Pane, select the ladder program for which to view the properties.
2.
Right-click the selected program and select Property from the pop-up menu.
The Program Property Dialog Box will be displayed.
3-23
Page 61

3.1 Basic Functionality
Information
FEDCBA9876543 210Bit
MB00001006
MW0000100
ML0000100
MW0000100
5678 hex
MW0000101
1234 hex
MQ0000100
MW0000100
DEF0 hex
MW0000101
9ABC hex
MW0000102
5678 hex
MW0000103
1234 hex
3.1.2 Registers
The data is little endian, as shown in the following example.
• MB00001006
• MW0000100 = 1234 hex
MW0000100 1234 hex
• ML0000100 = 12345678 hex
• MQ0000100 = 123456789ABCDEF0 hex
3-24
Page 62

3.1 Basic Functionality
3
CPU Module Functionality
DWG.H DWG.LDWG.A DWG.I
Motion
program
*
Sequence
program
*
i and j registers i and j registers i and j registers i and j registers i and j registers i and j registers
i = 2;
DB000000 = MB00000000i; DB000000 = MB00000002;
Equivalent
DW00000 = MW0000031;DW00000 = MW0000001j;
j = 30;
Equivalent
3.1.2 Registers
Index Registers (i, j)
There are two special registers, i and j, that are used to modify relay and register addresses.
The functions of i and j are identical. They are used to handle register addresses like variables.
There are subscript registers for each program type, as shown in the following figure.
* Motion programs and sequence programs have separate i and j registers for each task.
Note: Functions reference the i and j registers that belong to the calling drawing.
For example, a function called by DWG.H will reference the i and j registers for DWG.H.
We will describe this with examples for each register data type.
Attaching an Index to a Bit Register
Using an index is the same as adding the value of i or j to the register address.
For example, if i = 2, MB00000000i is the same as MB00000002.
Attaching an Index to an Integer Register
Using an index is the same as adding the value of i or j to the register address.
For example, if j = 30, MW0000001j is the same as MW0000031.
3-25
Page 63

3.1 Basic Functionality
If j = 0, ML0000000j is ML0000000.
If j = 1, ML0000000j is ML0000001.
Double-length Integer Upper Word
MW0000001
Lower Word
MW0000000
If j = 0, MF0000000j is MF0000000.
If j = 1, MF0000000j is MF0000001.
Real Number
Upper Word
MW0000001
Lower Word
MW0000000
MW0000002 MW0000001
MW0000002 MW0000001
If j = 0, MQ0000000j is MQ0000000.
If j = 2, MQ0000000j is MQ0000002.
Quadruple-length Integer Upper 2 words
Lower 2 words
Upper 2 words Lower 2 words
If j = 0, MD0000000j is MD0000000.
If j = 2, MD0000000j is MD0000002.
Double-precision Real Number
Upper 2 words Lower 2 words
Upper 2 words Lower 2 words
MW0000003 MW0000002
MW0000005
MW0000004
MW0000001 MW0000000
MW0000003 MW0000002
MW0000003 MW0000002
MW0000005
MW0000004
MW0000001 MW0000000
MW0000003 MW0000002
3.1.2 Registers
Attaching an Index to a Double-length Integer or a Real Number
Register
Using an index is the same as adding the value of i or j to the register address.
For example, if j = 1, ML0000000j is the same as ML0000001. Similarly, if j = 1, MF0000000j is
the same as MF0000001.
Note
Double-length integers and real numbers use a region that is 2 words in size. For example, when
using ML0000000j with both j = 0 and j = 1, the one-word area of MW0000001 will overlap. Be
careful of overlapping areas when indexing double-length integer or real number register
addresses.
Attaching an Index to a Quadruple-length Integer or a Double-precision
Real Number Register
Using an index is the same as adding the value of i or j to the register address.
For example, if j = 2, MQ0000000j is the same as MQ0000002. Similarly, if j = 2, MD0000000j
is the same as MD0000002.
Quadruple-length integers and double-precision real numbers use a region that is 4 words in
Note
3-26
size. For example, when using MQ0000000j with both j = 0 and j = 2, the two-word area of
MW0000002 and MW0000003 will overlap. Be careful of overlapping areas when indexing quadruple-length integer or double-precision real number register addresses.
Page 64

3.1 Basic Functionality
3
CPU Module Functionality
DW00000 = 2;
DB000020 = MB00000000[DW00000]; DB000020 = MB00000002;
Equivalent
DW00000 = 30;
DL00002 = ML0000002[DW00000]; DL00002 = ML0000062;
Equivalent
3.1.2 Registers
Array Registers ([ ])
Array registers are used to modify register addresses, and are denoted by square brackets [ ].
These are used to handle register addresses like variables.
Similarly to index registers, an offset is added to the register address.
Attaching an Array Register to a Bit Register
Using an array register is the same as adding the value of the array register to the register
address.
For example, if DW00000 = 2, MB00000000[DW00000] is the same as MB00000002.
Attaching an Array Register to a Register Other Than a Bit Register
Using an array register is the same as adding the word size of the data type of the array register
times the value of the array register to the register address.
For example, if DW00000 = 30, ML0000002[DW00000] is the same as ML0000062.
DL00002 = ML00000 (30 × 2 + 2) = ML0000062
3-27
Page 65

3.1 Basic Functionality
3.1.3 Execution Scheduling
3.1.3
Execution Scheduling
This section describes the execution order of drawings.
Controlling the Execution of Drawings
Drawings are executed based on their priorities, as shown in the following figure.
Power ON
DWG.A
(Startup Drawings)
Every high-speed scan
Batch output
Batch input
DWG.H (high-speed
scan process drawing)
*1. DWG.A drawings are executed immediately after the power supply is turned ON.
*2. When an interrupt signal is input, execution of the DWG.I drawing is given priority even if execution of a DWG.H
or DWG.L drawing is currently in progress.
Note: The parent drawing of each drawing is automatically called and executed by the system.
Every low-speed scan
DWG.L (low-speed scan
*1
Batch output
Batch input
process drawing)
Interrupt signal
DWG.I
(interrupt drawing)
Execution is continued
from the point before
the interrupt.
*2
Scheduling the Execution of High-speed and Low-speed
Scan Process Drawings
High-speed scan process drawings (DWG.H) and low-speed scan process drawings (DWG.L)
cannot be executed at the same time. DWG.L drawings are executed during the idle time of
DWG.H drawings.
The period during which DWG.H drawings are executed is called the high-speed scan time.
The period during which DWG.L drawings are executed is called the low-speed scan time.
Low-speed scan time
High-speed
scan time
DWG.H
(high-speed
scan process
drawing)
DWG.L
(low-speed
scan process
drawing)
Background
processing*
* Background processing is used to execute internal system processing, such as communications processing.
High-speed
scan time
: Actual processing time during the scan
Refer to the following section for the setting procedure for the high-speed and low-speed
scans.
Setting the High-speed and Low-speed Scan Times on page 3-32
High-speed
scan time
High-speed
scan time
3-28
Page 66

3.1 Basic Functionality
3
CPU Module Functionality
Note
Information
3.1.4 Scans
3.1.4
Scans
A scan refers to the processing that starts at fixed intervals.
This section describes the scans.
Types o f S c a n s
The CPU Modules has two types of scans, the high-speed H scan and low-speed L scan.
A high-speed H scan has higher priority than a low-speed L scan. The fixed period for each
scan, also known as the scan time, can be set by the user.
This section describes the settings for the scan times.
High-speed (H) Scan
The following table shows the different high-speed scan time set values depending on whether
the MP2000 Optional Module is used.
There are restrictions on the set value of the high-speed scan time. Refer to the following section
for details.
High-speed Scan Time Set Value Restrictions on page 3-29
When the MP2000 Optional Module Is Not Used When the MP2000 Optional Module Is Used
CPU-301: 0.25 to 32.0 ms (in increments of 0.125 ms)
CPU-302: 0.125 to 32.0 ms (in increments of 0.125 ms)
0.250 ms or
0.5 to 32.0 ms (in increments of 0.5 ms)
The default high-speed scan time is 4.0 ms.
High-speed Scan Time Set Value Restrictions
This section describes the restrictions on the set value of the high-speed scan time.
Restrictions Imposed by the MECHATROLINK-III Communications Cycle
The high-speed scan of the CPU Module is synchronized with the MECHATROLINK-III communications cycle of the SVC or SVC32 Module in the CPU Module. This imposes the following
restrictions in the set value of the high-speed scan time.
Communica-
tions Cycle
125 μs Integral multiple of 125 μs
250 μs
500 μs
1 ms
1.5 ms
2 ms
3 ms
High-speed Scan Time Set
Value Res tri cti ons
Integral multiple of 250 μs or
1 times the integer portion
Integral multiple of 500 μs or
1 times the integer portion
Integral multiple of 1 ms or 1
times the integer portion
Integral multiple of 1.5 ms or
1 times the integer portion
Integral multiple of 2 ms or 1
times the integer portion
Integral multiple of 3 ms or 1
times the integer portion
When MP2000 Optional Module
Is Not Used
0.25 to 32.0 ms
CPU-301
CPU-302
0.250 to 32.0 ms
(in increments of 0.250 ms)
0.5 to 32.0 ms
(in increments of 0.5 ms)
1.0 to 32.0 ms
(in increments of 1 ms)
1.5 to 31.5 ms
(in increments of 1.5 ms)
2.0 to 32.0 ms
(in increments of 2 ms)
3.0 to 30.0 ms
(in increments of 3 ms)
(in increments of
0.125 ms)
0.125 to 32.0 ms
(in increments of
0.125 ms)
Possible Set Values
When MP2000 Optional
Module Is Used
0.25 ms or 0.5 to 32.0 ms
(in increments of 0.5 ms)
0.125 ms, 0.25 ms, or 0.5 to
32.0 ms
(in increments of 0.5 ms)
0.250 ms or 0.5 to 32.0 ms
(in increments of 0.5 ms)
0.5 to 32.0 ms
(in increments of 0.5 ms)
1.0 to 32.0 ms
(in increments of 1 ms)
1.5 to 31.5 ms
(in increments of 1.5 ms)
2.0 to 32.0 ms
(in increments of 2 ms)
3.0 to 30.0 ms
(in increments of 3 ms)
3-29
Page 67

3.1 Basic Functionality
System service
register
SB000008*
Basic cycle
(0.5 ms)
MP2000
Optional
Module
High-speed scan
0.125 ms
0.5 ms
Reference issued at
Reference issued at
Reference issued at
3.1.4 Scans
If these restrictions are not observed, the high-speed scan cycle will stop and an alarm will
occur. The alarm is reported in the M-III Restrictions Error Bit (SB00041D) in the CPU Error Status System Register. Refer to the following section for details.
System Status on page 4-17
Restrictions Imposed by Σ-V SERVOPACKs
The specifications of MECHATROLINK-III Σ-V-series SERVOPACKs impose the following
restrictions on the set value of the high-speed scan time.
Σ-V SERVOPACK
Ver sion
Restrictions
High-speed scan time set value ≤ (32 × Communications cycle)
Lower than version 21
Example: If the MECHATROLINK-III communications cycle is 250 μs, the set value of
the high-speed scan time can be up to 8.0 ms (250 μs × 32).
High-speed scan time set value ≤ (254 × Communications cycle)
Version 21 or higher
Example: If the MECHATROLINK-III communications cycle is 250 μs, the set value of
the high-speed scan time can be up to 63.50 ms (250 μs × 254).
If these restrictions are not observed, an A.94B Data Setting Warning 2 (Data Out of Range)
warning will occur in the SERVOPACK.
I/O Processing
If the high-speed scan time is set to at least 0.5 ms, the I/O service (I/O processing) of the
MP2000 Optional Module will be performed every scan.
If the high-speed scan time is set to less than 0.5 ms (0.125 ms or 0.250 ms), the I/O service (I/
O processing) of the MP2000 Optional Module will be performed at the filtered basic cycle of
0.5 ms.
The following figures show the timing results for these settings.
Example: High-speed Scan Time Set to 0.125 ms
3-30
* The purpose of this system service register is to determine from a ladder program whether the I/O scan
service is being executed for MP2000 Optional Modules.
Page 68

3
CPU Module Functionality
Example: High-speed Scan Time Set to 0.250 ms
0.5 ms
c
c
c
d
d
d
e
e
e
High-speed scan
MP2000
Optional Module
System service
register SB000008*
Basic cycle
(0.5 ms)
Reference issued at c Reference issued at d Reference issued at e
Information
0.5 ms
0.25 ms
High-speed scan
c
d
e
3.1 Basic Functionality
3.1.4 Scans
f
g
Basic cycle
(0.5 ms)
MP2000
Optional Module
System service
register SB000008*
* The purpose of this system service register is to determine from a ladder program whether the I/O scan
service is being executed for MP2000 Optional Modules.
c
Reference issued at c
c
e
e
Example: High-speed Scan Time Set to 0.5 ms
Reference issued at e
g
Reference
issued at g
g
* The purpose of this system service register is to determine from a ladder program whether the I/O scan
service is being executed for MP2000 Optional Modules.
Low-speed (L) Scan
The setting range for the low-speed scan time is 2.0 to 300.0 ms (in increments of 0.5 ms).
The default low-speed scan time is 200.0 ms.
I/O Processing
During the low-speed scan, the I/O service (I/O processing) is performed every scan, regardless of the set value.
3-31
Page 69

3.1 Basic Functionality
3.1.4 Scans
Setting the High-speed and Low-speed Scan Times
Use MPE720 version 7 and perform the procedure given below to set the high-speed and lowspeed scan times.
1.
Stop the CPU Module.
2.
Select File − Environment Setting from the menu bar. Alternatively, click the System
Setting Icon on the Start Tab Page.
The Environment Setting Dialog Box will be displayed.
3.
Select Setup − Scan Time Setting.
The following dialog box will be displayed.
Setting Value:Enter the scan time settings.
Current Value:A value of 0.0 ms is displayed when the MPE720 is offline. Otherwise, the actual processing times for the scans are displayed.
Maximum Value:The maximum processing time for the scan is displayed. You can set the maximum
value. The setting is retained until it is exceeded.
4.
Enter the high-speed scan time in the Setting Value Box under High-speed Scan. Enter
the low-speed scan time in the Setting Value Box under Low-speed Scan.
The following table shows the possible set values and default values for each scan time.
Item Possible Set Values Default
High-speed Scan Time 0.25 to 32.0 ms (in increments of 0.125 ms) 4.0 ms
Low-speed Scan Time 2.0 to 300.0 ms (in 0.5-ms increments) 200.0 ms
Note: The possible set values and default values depend on the model. Refer to the user’s manual for the Mod-
ule you are using for details.
5.
Click the OK Button.
The settings will be saved and the Environment Setting Dialog Box will close.
3-32
Page 70

3.1 Basic Functionality
3
CPU Module Functionality
Important
High-speed
scan
Keep Latest Value region:
The value from before
the input error (201) is held for 3 scans.
100 101 102 103 104 105
200 201
201
0
106 107
207
Input value to
I/O Module 1
Input value
to I/O
Module 2
The number of scans set
for the Keep Latest
Value setting was
exceeded, so the input
value is treated as 0.
Reading the input
value is automatically
started again.
Input error occurred in
I/O Module 2.
Input error removed
from I/O Module 2.
3.1.4 Scans
Observe the following precautions when setting the high-speed scan time and low-speed
scan time.
1. Set the scan set value so that it is 1.25 times greater than the maximum value.
If the scan set value is too close to the maximum value, the refresh rate of the MPE720 window
will noticeably drop and can cause communications timeout errors to occur. If the maximum
value exceeds the scan set value, a watchdog error may occur and cause the Machine Controller system to shut down.
2. If you are using MECHATROLINK-II or MECHATROLINK-III, set values that are an integral mul-
tiple of the communications cycle. If you change the communications cycle, check the scan
time set values.
3. Do not change the scan set value while the Servo is ON. Never change the scan set value
while an axis is in motion (i.e., while the motor is rotating). Doing so may cause the motor to
rotate out of control.
4. After changing or setting a scan time, always save the data to flash memory.
Keep Latest Value Setting in High-speed/Low-speed Scans
You can use the Keep Latest Value setting to specify the number of scans to hold previous data
when an input error occurs. If the input error still exists after the number of scans specified for
the Keep Latest Value setting, the input values will be treated as 0. When the input error is
removed, reading the input values is resumed automatically. There are separate Keep Latest
Value settings for the high-speed scan and the low-speed scan.
Operation
The following figure illustrates the operation for the Keep Latest Value setting.
Keep Latest Value setting: 3 scans for high-speed scan
Setting Procedure
Perform the following procedure with MPE720 version 7 to set the Keep Latest Value setting.
1.
Select File − Environment Setting from the menu bar. Alternatively, click the System
Setting Icon on the Start Tab Page.
The Environment Setting Dialog Box will be displayed.
2.
Select Setup − System Setting.
The following dialog box will be displayed.
3-33
Page 71

3.1 Basic Functionality
Information
3.1.4 Scans
3.
Set values in the High-speed Input and Low-speed Input Boxes in the Keep Latest
Value Group.
4.
Click the OK Button.
The settings will be saved and the Environment Setting Dialog Box will close.
The Keep Latest Value setting specifies the number of scans to process before the I/O service clears the input registers.
If the high-speed scan time setting is set to 0.250, the scan at which the input registers are
cleared will differ for the MP2000-series Optional Module and the 218IFD, SVC, or SVC32
Function Module that is built into the CPU Unit.
In the following example, an input error occurs simultaneously on the MP2000-series
Optional Module and the 218IFD, SVC, SVC32 Function Modules in the CPU Unit when the
high-speed scan setting is set to 0.250 ms and the Keep Latest Value setting is set to 5
scans.
The input registers in the 218IFD, SVC, or SVC32 Function Module built into the CPU Unit are
cleared on the sixth scan that immediately follows the specified number of scans, whereas on
the MP2000-series Optional Module, the input registers are cleared on the seventh service
scan that immediately follows the specified number of scans.
Input error
Keep Latest Value setting = 5 scans for high-speed scan
0.5 ms
0.250 ms
High-speed scan
Function Module
(218IFD, SVC, or SVC32)
in the CPU Module
Input registers in the
Function Module in the
CPU Module are cleared.
The input registers in the MP2000
Optional Module are cleared.
3-34
MP2000
Optional Module
Service scan on MP2000-series Optional Module
immediately after the specied number of scans
Service scan on Function Modules in the CPU Module
immediately after the specied number of scans
Page 72

3.2 Function Modules
3
CPU Module Functionality
3.2.1 Self Configuration
3.2
3.2.1
Function Modules
This section describes the built-in functionality of the CPU Module.
Self Configuration
Self configuration is a feature that automatically recognizes all the Optional Modules that are
installed in the Machine Controller and all the slave devices that are connected via the MECHATROLINK connector (such as Servo Drives), and creates the module configuration definition
files based on that information. Self configuration greatly reduces the steps that are required to
set up the system. Use the DIP switch on the CPU Module or use the MPE720 to execute self
configuration.
The following figure illustrates self configuration.
Executing Self Conguration
Host PLC
MPE720 Integrated Engineering
Tool Version 7
PC
HUB
MECHATROLINK-III
Servomotor Servomotor Servomotor
Detection of motion parameter
information (SERVOPACKs)
Detection of information from
the Function Modules in the
CPU Module (218IFD, SVC,
SVC32, SVR, SVR32, and
M-EXECUTOR) and from
Optional Modules
Detection of
slave device
information
I/O
Automatically writing the Module
conguration denitions
Automatically writing the MECHATRO-
LINK communications denitions
Automatically writing the SVC/SVC32 denitions
3-35
Page 73

3.2 Function Modules
Important
3.2.1 Self Configuration
Operating Procedures
This section describes the procedures for executing self configuration.
• Refer to the following section when you perform self configuration for the first time after connecting the devices.
Self Configuration Using the DIP Switch on page 3-36
• If the Machine Controller and the MPE720 are already connected, the self configuration can
be performed by using the MPE720.
Self Configuration Using the MPE720 on page 3-39
Self Configuration Using the DIP Switch
The procedure for executing self configuration using the DIP switch depends on whether self
configuration is being done for the first time since the devices were connected, or if SERVOPACKs or other devices have been added.
Both procedures are described below.
First Self Configuration after Connecting the Devices
The following procedure performs a new self configuration of the CPU Module, and creates
new definition files.
1. Before performing this procedure, turn ON the power supply to the SERVOPACKs and other
devices.
2. This procedure will clear the following data:
• All definition files
• All user programs
• All registers
1.
Turn OFF the power supply to the Base Unit.
2.
Turn ON only the INIT and CNFG pins on the DIP switches (mode switches) on the CPU
Module.
3.
Turn ON the power supply to the Base Unit.
Self configuration will be executed.
4.
Confirm that the status indicators on the CPU Module change in the following way:
• RDY: Goes out, and then lights.
• RUN: Goes out, flashes, and then lights.
3-36
Page 74

3.2 Function Modules
3
CPU Module Functionality
ImportantImportant
ImportantImportant
3.2.1 Self Configuration
5.
Turn OFF the INIT and CNFG pins on the DIP switches (mode switches) on the CPU
Module.
1. INIT Pin on the DIP Switch and RAM Data
If the power supply is turned OFF and ON again when the INIT pin on the Machine Controller
SW1 DIP switch is turned ON, the data in RAM will be cleared.
If the power supply is turned OFF and ON again when the INIT pin is turned OFF, the data from
the flash memory will be loaded and will overwrite the RAM data. Therefore, if the power supply
must be turned OFF while writing or editing a program, make sure you save the data to the
Machine Controller’s flash memory to protect the RAM data.
2. Power Interruptions after Self Configuration
After performing self configuration, turn OFF the power supply to the Machine Controller only
after the definition data is saved to the flash memory of the Machine Controller.
If by chance, the power supply is turned OFF before the data is saved, perform self configuration again.
Refer to the following manual for details on saving data to the flash memory.
MP2000/MP3000 Series Machine Controller System Setup Manual (Manual No.: SIEP C880725 00)
After Adding SERVOPACKs, Optional Modules, and Other Devices
The following procedure will create the definitions for devices and Function Modules that are
newly detected by MECHATROLINK communications. This procedure will not update any of
the definitions that were made for existing devices and Function Modules. The definitions
before self configuration will be retained.
Before performing this procedure, turn ON the power supply to the SERVOPACKs and other
devices.
1.
Turn OFF the power supply to the Base Unit.
2.
Turn ON only the CNFG pin on the DIP switches (mode switches) on the CPU Module.
3.
Turn ON the power supply to the Base Unit.
Self configuration will be executed.
4.
Confirm that the status indicators on the CPU Module change in the following way:
• RDY: Goes out, and then lights.
• RUN: Goes out, flashes, and then lights.
3-37
Page 75

3.2 Function Modules
ImportantImportant
3.2.1 Self Configuration
5.
Turn OFF the CNFG pin on the DIP switches (mode switches) on the CPU Module.
Power Interruptions after Self Configuration
After performing self configuration, turn OFF the power supply to the Machine Controller only
after the definition data is saved to the flash memory of the Machine Controller.
If by chance, the power supply is turned OFF before the data is saved, perform self configuration
again.
Refer to the following manual for details on saving data to the flash memory.
MP2000/MP3000 Series Machine Controller System Setup Manual (Manual No.: SIEP C880725 00)
3-38
Page 76

3.2 Function Modules
3
CPU Module Functionality
ImportantImportant
3.2.1 Self Configuration
Self Configuration Using the MPE720
There are two types of self configuration that can be performed with the MPE720.
• Self configuration of all Modules: Use this mode when the system is being set up for the first
time, or after the entire system has been changed.
• Self configuration of specified Modules: Use this mode when a part of the system has been
changed. This process will automatically recognize all devices that have been added or
removed, and automatically generate definition files for them.
Self Configuration of All Modules
Before performing this procedure, turn ON the power supply to the SERVOPACKs and other
devices.
1.
Click the Module Configuration Icon on the Start Tab Page.
The following Module Configuration Definition Tab Page will be displayed.
3-39
Page 77

3.2 Function Modules
3.2.1 Self Configuration
2.
Click the Module Button.
3.
Click the All modules Button on the Launcher.
The MC-Configurator Dialog Box will be displayed.
3-40
4.
Click the OK Button.
Self configuration will be executed.
Page 78

3
CPU Module Functionality
Self Configuration of Specified Modules
ImportantImportant
Before performing this procedure, turn ON the power supply to the SERVOPACKs and other
devices.
1.
Click the Module Configuration Icon on the Start Tab Page.
3.2 Function Modules
3.2.1 Self Configuration
The following Module Configuration Definition Tab Page will be displayed.
2.
In the Function Module/Slave Column, select the Modules to configure using self configuration.
3-41
Page 79

3.2 Function Modules
3.2.1 Self Configuration
3.
Click the specified module Button on the Launcher.
The MC-Configurator Dialog Box will be displayed.
4.
Click the OK Button.
Self configuration will be executed only for the new devices that are detected by MECHATROLINK
communications.
3-42
Page 80

3.2 Function Modules
3
CPU Module Functionality
Note
3.2.1 Self Configuration
Definition Information Updated by Self Configuration
The definition information that is updated by self configuration is described below.
This procedure will not update any of the definitions that were made for existing devices and
Function Modules. The definitions before self configuration will be retained.
I/O Registers
I/O registers are assigned to the Function Modules (218IFD, SVC, SVC32, SVR, SVR32, MEXECUTOR, and CPUIF) in the CPU Module as shown below.
I/O registers will also be automatically assigned to any Optional Modules mounted on the Base
Unit.
Item Settings after Self Configuration
• First I/O registers: IW00000 and OW00000
218IFD
MECHATROLINK
SVC/
SVC32
Motion
parameters
SVR/
SVR32
M-EXECUTOR
Motion
parameters
SVC
SVC32
SVR
SVR32
• Last I/O registers: IW007FF and OW007FF
(input registers: IW00000 to IW007FF,
output registers: OW00000 to OW007FF)
• First I/O registers: IW00800 and OW00800
• Last I/O registers: IW00BFF and OW00BFF
(input registers: IW00800 to IW00BFF,
output registers: OW00800 to OW00BFF)
• First motion registers: IW08000 and OW08000
• Last motion registers: IW087FF and OW087FF
(input registers: IW08000 to IW087FF,
output registers: OW08000 to OW087FF)
• First motion registers: IW08000 and OW08000
• Last motion registers: IW08FFF and OW08FFF
(input registers: IW08000 to IW08FFF,
output registers: OW08000 to OW08FFF)
• First motion registers: IW08800 and OW08800
• Last motion registers: IW08FFF and OW08FFF
(input registers: IW08800 to IW08FFF,
output registers: OW08800 to OW08FFF)
• First motion registers: IW09000 and OW09000
• Last motion registers: IW09FFF and OW09FFF
(input registers: IW09000 to IW09FFF,
output registers: OW09000 to OW09FFF)
• First I/O registers: IW00C00 and OW00C00
• Last I/O registers: IW00C3F and OW00C3F
(input registers: IW00C00 to IW00C3F,
output registers: OW00C00 to OW00C3F)
218IFD Definition
Item Settings after Self Configuration
Local IP Address 192.168.1.1
Subnet Mask 255.255.255.0
Gateway IP Address 0.0.0.0
Module Name Definition CONTROLLER NAME
Engineering Port 9999 (UDP)
MEMOBUS Response Time 0 s
Count of Retry 0
Note: Self configuration sets up the 218IFD for an engineering communications connection with the MPE720.
If you want to use MEMOBUS message communications, manually set up automatic reception or I/O message communications, or use MSG-SNDE and MSG-RCVE functions.
3-43
Page 81

3.2 Function Modules
Information
3.2.1 Self Configuration
MECHATROLINK Communications Definition
When Set as the Master
Master/Slave Master
My station address 0×0001
Communication Cycle 250 μs
Message Communications Enabled
Number of Retry to Slaves 1
Number of connection 8
Slave synchronous function Disabled
When Set as a Slave
Master/Slave Slave
My station address 0×0003
Communication Cycle −
Message Communications Disabled
Number of Retry to Slaves −
Number of connection 1
Slave synchronous function Disabled
Item Settings after Self Configuration
Item Settings after Self Configuration
To use the Module as a slave, set the parameter settings in the MECHATROLINK communications definition to Slave before performing self configuration in the MPE720.
SVC/SVC32 Definitions
Refer to the following manual for details.
MP3000 Series Motion Control User’s Manual (Manual No.: SIEP C880725 11)
SVR/SVR32 Definitions
Item Settings after Self Configuration
SVR Defined Axes 16 axes (unused axes)
SVR32 Defined Axes 32 axes (unused axes)
M-EXECUTOR Definition
Item Settings after Self Configuration
Program Definition Number 8
Program Assignments Not supported.
Control Register Assignments Not supported.
3-44
Page 82

3.2 Function Modules
3
CPU Module Functionality
3.2.2 Communications Function Module (218IFD)
3.2.2
Communications Function Module (218IFD)
This Function Module is used for communications with a host device.
The following table describes the communication features.
Function Module Features Remarks
The MP3000 Controller supports multiple
Ethernet
protocols to enable general-purpose
Ethernet communications with PLCs and
touch panels from various manufacturers
without writing special applications.
Setting Method
Settings are made on the 218IFD Dialog Box after connecting the MP3000-series Controller to
the host device. Use the following procedure to display the 218IFD Dialog Box. Refer to the following manual for details on settings.
MP3000 Series Communications User’s Manual (Manual No.: SIEP C880725 12)
1.
Connect the Machine Controller to the PC, and start the MPE720.
Refer to the following manual for details.
MP2000/MP3000 Series Machine Controller System Setup Manual (Manual No.: SIEP C880725 00)
2.
Execute self configuration as required.
Operating Procedures on page 3-36
• Supported Protocols
MODBUS/TCP, OMRON, MELSEC Acompatible 1E/QnA-compatible 3E,
Extended MEMOBUS, MEMOBUS, and
TOYOPUC
3.
Click the Module Configuration Icon on the Start Tab Page.
3-45
Page 83

3.2 Function Modules
Cells for
218IFD
settings
3.2.2 Communications Function Module (218IFD)
The following Module Configuration Definition Tab Page will be displayed.
4.
Double-click the 218IFD cell.
The 218IFD Detail Definition Dialog Box will be displayed.
Refer to the following manual for details on settings.
MP3000 Series Communications User’s Manual (Manual No.: SIEP C880725 12)
3-46
Page 84

3.2 Function Modules
3
CPU Module Functionality
Information
3.2.3 Motion Control Function Modules (SVC, SVC32, SVR, and SVR32)
3.2.3
Motion Control Function Modules (SVC, SVC32, SVR,
and SVR32)
The Motion Control Function Module is used for communications with a MECHATROLINK communications device.
There are two types of Motion Control Function Modules, the SVC and SVC32 and the SVR
and SVR32. Both types can provide the following forms of motion control.
• Position control
• Synchronized phase control
• Torque control*
• Speed control*
* The SVR and SVR32 contain some parameters that you cannot set or monitor.
Motion fixed and setting parameters must be set to use these controls.
The features of the SVC and SVR are described below.
Function Module Features
SVC/SVC32
SVR/SVR32
Controls MECHATROLINK-III-compatible interface devices, such as Servo Drives and I/O
Modules.
Provides an interface for virtual axes. This allows you to test programs and create references without connecting to physical motors.
Refer to the following manual for details.
MP3000 Series Motion Control User’s Manual (Manual No.: SIEP C880725 11)
Setting Method
Settings are made in the locations given below after the MP3000-series Controller is connected
to the MECHATROLINK device.
• MECHATROLINK Dialog Box
• SVC/SVC32 Definition Tab Page
Use the following procedure to display the tab pages and dialog boxes. Refer to the following
manual for details on settings.
MP3000 Series Motion Control User’s Manual (Manual No.: SIEP C880725 11)
1.
Connect the Machine Controller to the PC, and start the MPE720.
Refer to the following manual for details.
MP2000/MP3000 Series Machine Controller System Setup Manual (Manual No.: SIEP C880725 00)
2.
Execute self configuration as required.
Operating Procedures on page 3-36
3-47
Page 85

3.2 Function Modules
Cells for
SVC/
SVC32
settings
Cells for
SVR/
SVR32
settings
3.2.3 Motion Control Function Modules (SVC, SVC32, SVR, and SVR32)
3.
Click the Module Configuration Icon on the Start Tab Page.
The following Module Configuration Definition Tab Page will be displayed.
3-48
Page 86

3.2 Function Modules
3
CPU Module Functionality
3.2.3 Motion Control Function Modules (SVC, SVC32, SVR, and SVR32)
4.
Double-click the SVC/SVC32 cell in the Module Configuration Definition Tab Page.
The MECHATROLINK Communications Definition Dialog Box is displayed.
Information
5.
Set the MECHATROLINK communications definitions as required.
Refer to the following manual for details on settings.
MP3000 Series Motion Control User’s Manual (Manual No.: SIEP C880725 11)
If more than one Module is mounted, select the Module to be checked or set.
6.
Click the Close Button on the MECHATROLINK Communications Definition Dialog Box.
3-49
Page 87

3.2 Function Modules
3.2.3 Motion Control Function Modules (SVC, SVC32, SVR, and SVR32)
7.
Select View − Work Space from the menu bar.
The Work Space Pane is displayed on the left side of the MC-Configurator Window.
8.
Click the Expand [+] Button beside each program in the Work Space Pane to display
motion parameters as shown below.
3-50
Page 88

3.2.3 Motion Control Function Modules (SVC, SVC32, SVR, and SVR32)
3
CPU Module Functionality
9.
Double-click the motion parameter to set or monitor.
The Axis Display Selection Dialog Box (“Display in axis selected”) will be displayed.
10.
Select the axis to set or monitor, and then click the OK Button.
3.2 Function Modules
The SVC/SVC32 Definition Tab Page for the selected motion parameters will be displayed.
Information
The following examples show the SVC/SVC32 Definition Tab Page for each group of motion parameters.
• Fixed Parameters Tab Page
To change which motion parameters are displayed, double-click the required motion
parameters in the Work Space Pane.
3-51
Page 89

3.2 Function Modules
3.2.3 Motion Control Function Modules (SVC, SVC32, SVR, and SVR32)
• Setting/Monitor Parameters Tab Page
• Servo/Servo Monitor Parameters Tab Page
3-52
11.
Set the SVC/SVC32 definitions as required.
Refer to the following manual for details on settings.
MP3000 Series Motion Control User’s Manual (Manual No.: SIEP C880725 11)
Page 90

3.2 Function Modules
3
CPU Module Functionality
Term
Information
Information
Initializing the M-EXECUTOR on page 3-54
M-EXECUTOR Detail Settings on page 3-57
MP3000 Series Motion Programming Manual
(Manual No.: SIEP C880725 14)
Registering Program Execution on page 3-63
3.2.4 The M-EXECUTOR
3.2.4
The M-EXECUTOR
This section describes the functionality of the M-EXECUTOR Motion Executor and the contents
of its various displays.
The M-EXECUTOR is a software module that executes motion and sequence programs.
Introduction
The M-EXECUTOR provides the following merits:
• Motion programs can be executed without using a ladder program.
Motion programs can be executed without placing MSEE instructions in the ladder programs.
It is still possible to use MSEE instructions in the ladder programs.
• Motion programs can be controlled without using the ladder programs.
Motion programs can be controlled directly from a host PLC.
• Sequence control can be written in motion language.
A sequence program can be used in place of a ladder program.
Refer to the following manuals for instructions that can be used in sequence programs.
MP3000 Series Motion Programming Manual (Manual No.: SIEP C880725 14)
The execution of a sequence program is completed in one scan.
Sequence programs are written using the same text-based language as motion programs.
Using the M-EXECUTOR
Set the M-EXECUTOR
(enable the M-EXECUTOR).
Set the detailed settings for the
M-EXECUTOR.
Create motion programs.
Register program execution.
Programs are executed.
3-53
Page 91

3.2 Function Modules
3.2.4 The M-EXECUTOR
Initializing the M-EXECUTOR
Use the following procedure to initialize the M-EXECUTOR.
1.
Click the Module Configuration Icon on the Start Tab Page.
The Module Configuration Definition Tab Page will be displayed.
3-54
Page 92

3
CPU Module Functionality
2.
Double-click the M-EXECUTOR cell.
The M-EXECUTOR Definition Dialog Box will be displayed.
3.2 Function Modules
3.2.4 The M-EXECUTOR
3-55
Page 93

3.2 Function Modules
3.2.4 The M-EXECUTOR
3.
Click the OK Button.
The Detail Definition Dialog Box will be displayed.
4.
Select File − Save from the toolbar.
The M-EXECUTOR definitions will be saved.
3-56
Page 94

3.2 Function Modules
3
CPU Module Functionality
Cells for
M-EXECUTOR
settings
3.2.4 The M-EXECUTOR
M-EXECUTOR Detail Settings
The detailed settings for the M-EXECUTOR are performed on the Module Configuration Tab
Page and the Detail Definition Dialog Box.
This section provides the procedures to display this tab page and dialog box, and describes their contents.
Module Configuration Definition Tab Page
Use the following procedure to display the Module Configuration Definition Tab Page.
• Click the Module Configuration Icon on the Start Tab Page.
The following table describes the M-EXECUTOR items that are displayed on the Module Configuration Definition Tab Page.
No. Item Display/Setting Item Editing
Displays whether the M-EXECUTOR is enabled.
Function Module/Slave
Status Displays the status of the M-EXECUTOR. Possible
Circuit No./
Axis Address
Motion Register
Start
Occupied
circuits
Register
(Input/
Output)
Comment
Disabled
Start- End
Size
Scan
• UNDEFINED: Disabled
• M-EXECUTOR: Enabled
Not used.
“----” is always displayed.
Not used.
“----” is always displayed.
Not used.
“----” is always displayed.
Displays the range of registers that is used as the I/O area.
• Setting range: 00000 to 07FFF hex or 10000 to 17FFF hex
Refer to the following section for details.
Details on the I/O Registers on page 3-58
The size of the I/O area is displayed in words.
• Setting range: 64 to 128
Four words each of input registers and output registers are
required to register a single motion program or sequence program in the M-EXECUTOR. If you need to register more than
16 programs, set the size with four additional words for each
program to add. A maximum of 32 programs can be registered (maximum number of program definitions).
Not used.
“----” is always displayed.
Display the user comment.
Enter a comment of up to 16 characters.
Possible
Not possible
Not possible
Not possible
Possible
Possible
Not possible
Possible
3-57
Page 95

3.2 Function Modules
···
···
···
···
···
···
···
···
···
···
···
···
3.2.4 The M-EXECUTOR
Details on the I/O Registers
The I/O registers that are assigned to the M-EXECUTOR are used to execute motion and
sequence programs, as well as to monitor sequence programs.
The following tables give the contents of the M-EXECUTOR I/O registers.
M-EXECUTOR Input Registers M-EXECUTOR Output Registers
M-EXECUTOR
Input Register
IW + 0
IW + 1 Reserved. OW + 1 Control Signals
IW + 2 Reserved. OW + 2 Override
IW + 3 Reserved. OW + 3 Reserved.
IW + 4
IW + 5 Reserved. OW + 5 Control Signals
IW + 6 Reserved. OW + 6 Override
IW + 7 Reserved. OW + 7 Reserved.
Definition
No. 1
Definition
No. 2
Item
Status OW + 0
Status OW + 4
M-EXECUTOR
Output Register
Item
Program Number
Definition
No. 1
Program Number
Definition
No. 2
IW + 3C
IW + 3D Reserved. OW + 3D Control Signals
IW + 3E Reserved. OW + 3E Override
IW + 3F Reserved. OW + 3F Reserved.
IW + 40
IW + 41 Reserved. OW + 41 Control Signals
IW + 42 Reserved. OW + 42 Override
IW +
IW + 7C
IW + 7D Reserved. OW + 7D Control Signals
IW + 7E Reserved. OW + 7E Override
IW + 7F Reserved. OW + 7F Reserved.
Definition
No. 16
Definition
No. 17
43 Reserved. OW
Definition
No. 32
Status OW + 3C
Status OW + 40
+ 43 Reserved.
Status OW + 7C
Program Number
Definition
No. 16
Program Number
Definition
No. 17
Program Number
Definition
No. 32
Detail Definition Dialog Box
The Detail Definition Dialog Box has two tab pages, the Program Definition Tab Page and the
Allocation Control Register Tab Page.
Use the following procedure to display the Detail Definition Dialog Box.
1.
Click the Module Configuration Icon on the Start Tab Page.
2.
Double-click the Button in row 05 of the Function Module/Slave Column.
3-58
Page 96

3.2 Function Modules
3
CPU Module Functionality
3.2.4 The M-EXECUTOR
Program Definition Tab Page
Register the motion or sequence programs to execute.
This section describes the items that are displayed on the Program Definition Tab Page.
Individual Display Button
Click this button to display the Program Execution Registration Dialog Box.
Program Definition Number
Set the number of program definitions that can be registered in the M-EXECUTOR.
• Setting range: 0 to 32
• Default value: 8
No.
The execution order of the programs is displayed. Programs are executed in the scans in
ascending order of their numbers.
D
Enable or disable the definitions.
• Not selected: Definition is enabled.
• Selected: Definition is disabled.
Execution Type
Set the execution type of the program.
Execution Type Executed Programs Execution Condition
---------- Not supported. −
Startup sequence
program
L-scan sequence
program
H-scan sequence
program
Motion program Motion programs
Sequence programs
Startup (These programs are executed once
when the power supply is turned ON.)
Started at a fixed interval. (These programs
are executed once every low-speed scan
cycle.)
Started at a fixed interval. (These programs
are executed once every high-speed scan
cycle.)
Request for Start of Program Operation control signal (The program is executed when the
Request for Start of Program Operation is
turned ON.)
3-59
Page 97

3.2 Function Modules
3.2.4 The M-EXECUTOR
Setting
Set the program designation method.
The designation method can be different for each program.
Program
Designation
Method
Direct
designation
Indirect
designation
Motion
Programs
Possible Possible
Possible Not possible
Sequence
Programs
Description
The program is specified with the program number.
Examples: MPM001 or SPM002
The program is specified by specifying a register that
contains the program number.
Example: OW0C0C (If 1 is stored in OW0C0C,
MPM001 will be called.)
Set the program number.
Execution Type Description
Sequence programs
(Startup, L-scan, or H-scan)
Motion programs
Execution Monitor Registers (S Registers)
If you enter 1 and press the Enter Key, SPM001 will be set automatically.
You can specify a program that is not registered or leave the program
number empty. In either case, no program will be executed.
Direct designation: If you enter 1 and press the Enter Key, MPM001 will
be set automatically.
You can specify a program that is not registered or leave the program
number empty. In either case, no program will be executed.
Indirect designation: The O register of the M-EXECUTOR Module will be
set automatically. Only the system can set this.
If the execution type is set to a motion program, the range of the execution monitor registers
(S registers) will be displayed. Refer to the following section for details on the execution monitor registers.
Motion Program Execution Information on page 4-30
3-60
Page 98

3.2 Function Modules
3
CPU Module Functionality
Information
3.2.4 The M-EXECUTOR
Allocation Control Register Tab Page
This tab page is used to assign registers.
This section describes the items that are displayed on the Allocation Control Register Tab
Page.
M-EXECUTOR Control Registers
This column displays the I/O registers that are assigned to the M-EXECUTOR.
The M-EXECUTOR control registers are used to control or monitor the motion programs.
M-EXECUTOR Control Register Application
Program Number
Status Monitors the program execution status.
Control Signals Controls the program.
Override
Allocation Disable
Sets the program number.
This register is only used for indirect designation.
Sets the override value to use when executing interpolation
motion instructions.
Use these check boxes to enable or disable the assigned registers.
• Not selected: Definition is enabled.
• Selected: Definition is disabled.
Direction
This column displays the data I/O directions.
Allocation Register
Data is copied between the assigned registers and the M-EXECUTOR control registers
according to the arrow in the Direction Column (
You can set word-type I, O, or M registers (except motion registers) in the Allocation register Column.
). You can assign any registers.
3-61
Page 99

3.2 Function Modules
Information
3.2.4 The M-EXECUTOR
Allocation Contact Interlock
This contact controls copying data between the assigned registers and the M-EXECUTOR
control registers. When the assigned interlock contact is ON, the data in the assigned registers and the M-EXECUTOR control registers is copied in the direction that is given by the
arrow in the Direction Column (
Any register bit number can be assigned as the interlock contact.
Note
Status and Control Signal Details
Double-click the Status or the Control signal cell to display the Detail Dialog Box.
This dialog box is used to verify the status and the control signals.
• Status
).
You can set bit-type I, O, S, M, or C registers (except motion registers) in the Allocation
Contact interlock Column.
The assigned interlock contact is used to interlock motion program operation.
If you assign a register, always assign an assigned interlock contact.
• Control Signals
Creating Motion Programs
Refer to the following manual for details.
MP3000 Series Motion Programming Manual (Manual No.: SIEP C880725 14)
3-62
Page 100

3
CPU Module Functionality
Registering Program Execution
Information
This section gives the procedure to register the execution of programs.
1.
Display the program to register for execution.
2.
Click the Task Allocation () Icon.
The Task Allocation Dialog Box will be displayed.
You can also use the Task Allocation Dialog Box to change the settings. Refer to the following manual for details.
MP3000 Series Motion Programming Manual (Manual No.: SIEP C880725 14)
3.2 Function Modules
3.2.4 The M-EXECUTOR
3.
Check that the settings match the contents of the Allocation Control Register Tab Page,
and then click the Set Button.
The registered contents will be saved.
Refer to the following section for details on the Allocation Control Register Tab Page.
Allocation Control Register Tab Page on page 3-61
3-63
 Loading...
Loading...