

Page 1

R
PicoBlaze 8-bit
Embedded Microcontroller
User Guide
for Spartan-3, Virtex-II, and
Virtex-II Pro FPGAs
UG129 (v1.1.2) June 24, 2008
Page 2
Xilinx is disclosing this Document and Intellectual Property (hereinafter “the Design”) to you for use in the development of designs to operate
R
on, or interface with Xilinx FPGAs. Except as stated herein, none of the Design may be copied, reproduced, distributed, republished,
downloaded, displayed, posted, or transmitted in any form or by any means including, but not limited to, electronic, mechanical,
photocopying, recording, or otherwise, without the prior written consent of Xilinx. Any unauthorized use of the Design may violate copyright
laws, trademark laws, the laws of privacy and publicity, and communications regulations and statutes.
Xilinx does not assume any liability arising out of the application or use of the Design; nor does Xilinx convey any license under its patents,
copyrights, or any rights of others. You are responsible for obtaining any rights you may require for your use or implementation of the
Design. Xilinx reser ves the right to make changes, at any time, to the Design as deemed desirable in the sole discretion of Xilinx. Xilinx
assumes no obligation to correct any errors contained herein or to advise you of any correction if such be made. Xilinx will not assume any
liability for the accuracy or correctness of any engineering or technical support or assistance provided to you in connection with the Design.
THE DESIGN IS PROVIDED “AS IS” WITH ALL FAULTS, AND THE ENTIRE RISK AS TO ITS FUNCTION AND IMPLEMENTATION IS
WITH YOU. YOU ACKNOWLEDGE AND AGREE THAT YOU HAVE NOT RELIED ON ANY ORAL OR WRITTEN INFORMATION OR
ADVICE, WHETHER GIVEN BY XILINX, OR ITS AGENTS OR EMPLOYEES. XILINX MAKES NO OTHER WARRANTIES, WHETHER
EXPRESS, IMPLIED, OR STATUTORY, REGARDING THE DESIGN, INCLUDING ANY WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE, TITLE, AND NONINFRINGEMENT OF THIRD-PARTY RIGHTS.
IN NO EVENT WILL XILINX BE LIABLE FOR ANY CONSEQUENTIAL, INDIRECT, EXEMPLARY, SPECIAL, OR INCIDENTAL
DAMAGES, INCLUDING ANY LOST DATA AND LOST PROFITS, ARISING FROM OR RELATING TO YOUR USE OF THE DESIGN,
EVEN IF YOU HAVE BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. THE TOTAL CUMULATIVE LIABILITY OF XILINX IN
CONNECTION WITH YOUR USE OF THE DESIGN, WHETHER IN CONTRACT OR TORT OR OTHERWISE, WILL IN NO EVENT
EXCEED THE AMOUNT OF FEES PAID BY YOU TO XILINX HEREUNDER FOR USE OF THE DESIGN. YOU ACKNOWLEDGE THAT
THE FEES, IF ANY, REFLECT THE ALLOCATION OF RISK SET FORTH IN THIS AGREEMENT cc THAT XILINX WOULD NOT MAKE
AVAILABLE THE DESIGN TO YOU WITHOUT THESE LIMITATIONS OF LIABILITY.
The Design is not designed or intended for use in the development of on-line control equipment in hazardous environments requiring failsafe controls, such as in the operation of nuclear facilities, aircraft navigation or communications systems, air traffic control, life support, or
weapons systems (“High-Risk Applications”). Xilinx specifically disclaims any express or implied warranties of fitness for such High-Risk
Applications. You represent that use of the Design in such High-Risk Applications is fully at your risk.
© 2004-2008 Xilinx, Inc. All rights reser ved. XILINX, the Xilinx logo, and other designated brands included herein are trademarks of Xilinx,
Inc. PowerPC is a trademark of IBM Corp. and used under license. PCI, PCI-X, and PCI EXPRESS are registered trademarks of PCI-SIG.
All other trademarks are the property of their respective owners.
Revision History
The following table shows the revision history for this document...
Version Revision
05/20/04 1.0 Initial Xilinx release.
06/10/04 1.1 Various minor corrections, updates, and enhancements throughout.
11/21/05 1.1.1 Minor updates.
06/24/08 1.1.2 Corrected typo in example for “LOAD sX, Operand — Load Register sX with Operand”.
Updated trademarks and links.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com UG129 (v1.1.2) June 24, 2008
Page 3
R
Limitations
Limited Warranty and Disclaimer
These designs are provided to you “as-is”. Xilinx and its licensors make and you receive no
warranties or conditions, express, implied, statutory or otherwise, and Xilinx specifically
disclaims any implied warranties of merchantability, non-infringement, or fitness for a
particular purpose. Xilinx does not warrant that the functions contained in these designs
will meet your requirements, or that the operation of these designs will be uninterrupted
or error free, or that defects in the Designs will be corrected. Furthermore, Xilinx does not
warrant or make any representations regarding use or the results of the use of the designs
in terms of correctness, accuracy, reliability, or otherwise.
Limitation of Liability
In no event will Xilinx or its licensors be liable for any loss of data, lost profits, cost or
procurement of substitute goods or services, or for any special, incidental, consequential,
or indirect damages arising from the use or operation of the designs or accompanying
documentation, however caused and on any theory of liability. This limitation will apply
even if Xilinx has been advised of the possibility of such damage. This limitation shall
apply not-withstanding the failure of the essential purpose of any limited remedies herein.
Preface
Technical Support Limitations
This module is not supported by general Xilinx Technical support as an official Xilinx
product. Please refer any issues initially to the provider of the module. The author will
gratefully receive any issues or potential continued improvements of the PicoBlaze™
microcontroller.
Ken Chapman
Senior Staff Engineer
E-mail: picoblaze@xilinx.com
The author will also be pleased to hear from anyone using the PicoBlaze™ microcontroller
with information about your application and how these macros have been useful.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 3
UG129 (v1.1.2) June 24, 2008
Page 4
R
Acknowledgments
Xilinx thanks the following individuals for their contribution to the PicoBlaze
microcontroller cause:
• Henk van Kampen, Mediatronix
Developer of the pBlazIDE graphical, integrated development environment.
• Prof. Dr.-Ing. Bernhard Lang, University of Applied Sciences, Osrabrueck,
Germany
Concept of using VHDL simulation variables to display disassembled op-code
instructions.
• Kris Chaplin, Xilinx Ltd.
JTAG-based program loader, update function.
Preface: Acknowledgments
4 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 5
Guide Contents
R
About This Guide
The PicoBlaze™ embedded microcontroller is an efficient, cost-effective embedded
processor core for Spartan
describes the capabilities, features, and benefits of PicoBlaze hardware design and how to
effectively use the PicoBlaze instruction set and tools to create software applications.
Guide Contents
This manual contains the following chapters:
• Chapter 1, “Introduction,” describes the features and functional blocks of the
• Chapter 2, “PicoBlaze Interface Signals,” defines the PicoBlaze signals.
• Chapter 3, “PicoBlaze Instruction Set,” summarizes the instruction set of the
• Chapter 4, “Interrupts,” describes how the PicoBlaze microcontroller uses interrupts.
• Chapter 5, “Scratchpad RAM,” describes the 64-byte scratchpad RAM.
• Chapter 6, “Input and Output Ports,” describes the input and output ports supported
• Chapter 7, “Instruction Storage Configurations,” provides several examples of
• Chapter 8, “Performance,”provides performance values for the PicoBlaze
• Chapter 10, “Using the PicoBlaze Microcontroller in an FPGA Design,” describes the
• Chapter 9, “PicoBlaze Development Tools,” describes the available development
• Chapter 11, “Assembler Directives,” describes the assembler directives that provide
• Chapter 12, “Simulating PicoBlaze Code,” describes the tools that simulate PicoBlaze
• Appendix A, “Related Materials and References,” provides additional resources
• Appendix B, “Example Program Templates,” provides example KCPSM3 and
• Appendix C, “PicoBlaze Instruction Set and Event Reference,” summarizes the
• Appendix D, “Instruction Codes,” provides the 18-bit instruction codes for all
• Appendix E, “Register and Scratchpad RAM Planning Worksheets,” provides
®
-3, Virtex®-II, and Virtex-II Pro FPGAs. This user guide
PicoBlaze microcontroller.
PicoBlaze microcontrollers.
by the PicoBlaze microcontroller.
instruction storage with the PicoBlaze microcontroller.
microcontroller.
design flow process with the PicoBlaze microcontroller.
tools.
advanced control.
code.
useful for the PicoBlaze microcontroller design.
pBlazIDE code templates for use in application programs.
PicoBlaze instructions and events in alphabetical order.
PicoBlaze instructions.
worksheets to use for the PicoBlaze microcontroller design.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 5
UG129 (v1.1.2) June 24, 2008
Page 6

Preface: About This Guide
R
6 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 7
Table of Contents
Preface: Limitations
Limited Warranty and Disclaimer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Limitation of Liability. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Technical Support Limitations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Preface: Acknowledgments
²: About This Guide
Guide Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Chapter 1: Introduction
PicoBlaze Microcontroller Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
PicoBlaze Microcontroller Functional Blocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
General-Purpose Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1,024-Instruction Program Store . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Arithmetic Logic Unit (ALU) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Flags . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
64-Byte Scratchpad RAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Input/Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Program Counter (PC). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Program Flow Control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
CALL/RETURN Stack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Interrupts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Why the PicoBlaze Microcontroller? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Why Use a Microcontroller within an FPGA? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Chapter 2: PicoBlaze Interface Signals
Chapter 3: PicoBlaze Instruction Set
Address Spaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Processing Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Logic Instructions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Bitwise AND, OR, XOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Complement/Invert Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Invert or Toggle Bit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Clear Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Set Bit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Clear Bit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Arithmetic Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
ADD and ADDCY Add Instructions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
SUB and SUBCY Subtract Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 7
UG129 (v1.1.2) June 24, 2008
Page 8

R
Increment/Decrement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Negate. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Multiplication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Division . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
No Operation (NOP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Setting and Clearing CARRY Flag. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Clear CARRY Flag . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Set CARRY Flag . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Test and Compare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Compare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Shift and Rotate Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Shift. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Rotate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Moving Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Program Flow Control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
JUMP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
CALL/RETURN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Chapter 4: Interrupts
Example Interrupt Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Chapter 5: Scratchpad RAM
Address Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Direct Addressing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Indirect Addressing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Implementing a Look-Up Table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Stack Operations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
FIFO Operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Chapter 6: Input and Output Ports
PORT_ID Port . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
INPUT Operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Applications with Few Input Sources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
READ_STROBE Interaction with FIFOs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
OUTPUT Operations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Simple Output Structure for Few Output Destinations . . . . . . . . . . . . . . . . . . . . . . . . . 56
Pipelining for Maximum Performance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Repartitioning the Design for Maximum Performance . . . . . . . . . . . . . . . . . . . . . . . 60
Chapter 7: Instruction Storage Configurations
Standard Configuration – Single 1Kx18 Block RAM . . . . . . . . . . . . . . . . . . . . . . . . . 61
Standard Configuration with UART or JTAG Programming Interface . . . . . . . . 62
Two PicoBlaze Microcontrollers Share a 1Kx18 Code Image. . . . . . . . . . . . . . . . . . 62
Two PicoBlaze Microcontrollers with Separate Code Images in a Block RAM 63
Distributed ROM Instead of Block RAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
8 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 9

R
Chapter 8: Performance
Input Clock Frequency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Predicting Executing Performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Chapter 9: PicoBlaze Development Tools
KCPSM3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Assembler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Assembly Errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Input and Output Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Mediatronix pBlazIDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Configuring pBlazIDE for the PicoBlaze Microcontroller . . . . . . . . . . . . . . . . . . . . . . . 69
Importing KCPSM3 Code into pBlazIDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Differences Between the KCPSM3 Assembler and pBlazIDE. . . . . . . . . . . . . . . . . 71
Directives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Chapter 10: Using the PicoBlaze Microcontroller in an FPGA Design
VHDL Design Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
KCPSM3 Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Connecting the Program ROM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Black Box Instantiation of KCPSM3 using KCPSM3.ngc . . . . . . . . . . . . . . . . . . . . . 75
Generating the Program ROM using prog_rom.coe. . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Generating an ESC Schematic Symbol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Verilog Design Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Chapter 11: Assembler Directives
Locating Code at a Specific Address . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Naming or Aliasing Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Defining Constants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Naming the Program ROM Output File. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
KCPSM3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
pBlazIDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Defining I/O Ports (pBlazIDE). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Input Ports. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Output Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Input/Output Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Custom Instruction Op-Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Chapter 12: Simulating PicoBlaze Code
Instruction Set Simulation with pBlazIDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Simulator Control Buttons . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Using the pBlazIDE Instruction Set Simulator with KCPSM3 Programs . . . . . . . . . . 86
Simulating FPGA Interaction with the pBlazIDE Instruction Set Simulator . . . . . . . 86
Turbocharging Simulation using FPGAs! . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 9
UG129 (v1.1.2) June 24, 2008
Page 10

R
Appendix A: Related Materials and References
Appendix B: Example Program Templates
KCPSM3 Syntax . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
pBlazIDE Syntax . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Appendix C: PicoBlaze Instruction Set and Event Reference
ADD sX, Operand —Add Operand to Register sX. . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
ADDCY sX, Operand —Add Operand to Register sX with Carry . . . . . . . . . . . . . 94
AND sX, Operand — Logical Bitwise AND Register sX with Operand. . . . . . . . 95
CALL [Condition,] Address — Call Subroutine at Specified Address. . . . . . . . . 96
COMPARE sX, Operand — Compare Operand with Register sX. . . . . . . . . . . . . . 98
DISABLE INTERRUPT — Disable External Interrupt Input. . . . . . . . . . . . . . . . . . 99
ENABLE INTERRUPT — Enable External Interrupt Input . . . . . . . . . . . . . . . . . . . 99
FETCH sX, Operand — Read Scratchpad RAM Location to Register sX . . . . . . 100
INPUT sX, Operand — Set PORT_ID to Operand, Read value on IN_PORT. 101
INTERRUPT Event, When Enabled. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
JUMP [Condition,] Address — Jump to Specified Address . . . . . . . . . . . . . . . . . . 103
LOAD sX, Operand — Load Register sX with Operand. . . . . . . . . . . . . . . . . . . . . . 104
OR sX, Operand — Logical Bitwise OR Register sX with Operand . . . . . . . . . . 105
OUTPUT sX, Operand — Write Register sX Value to OUT_PORT. . . . . . . . . . . 106
RESET Event. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
RETURN [Condition] — Return from Subroutine Call . . . . . . . . . . . . . . . . . . . . . . 108
RETURNI [ENABLE/DISABLE] — Return from Interrupt Service Routine . . 109
RL sX — Rotate Left Register sX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
RR sX — Rotate Right Register sX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
SL[ 0 | 1 | X | A ] sX — Shift Left Register sX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
SR[ 0 | 1 | X | A ] sX — Shift Right Register sX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
STORE sX, Operand — Write Register sX Value to Scratchpad RAM . . . . . . . . 114
SUB sX, Operand —Subtract Operand from Register sX. . . . . . . . . . . . . . . . . . . . . 115
SUBCY sX, Operand —Subtract Operand from Register sX with Borrow . . . . 116
TEST sX, Operand — Test Bit Location in Register sX, Generate Odd Parity . 118
XOR sX, Operand — Logical Bitwise XOR Register sX with Operand. . . . . . . . 120
Appendix D: Instruction Codes
Appendix E: Register and Scratchpad RAM Planning Worksheets
Registers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Scratchpad RAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
10 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 11

R
Introduction
Chapter 1
The PicoBlaze™ microcontroller is a compact, capable, and cost-effective fully embedded
8-bit RISC microcontroller core optimized for the Spartan
FPGA families. The PicoBlaze microcontroller provides cost-efficient microcontrollerbased control and simple data processing.
The PicoBlaze microcontroller is optimized for efficiency and low deployment cost. It
occupies just 96 FPGA slices, or only 12.5% of an XC3S50 FPGA and a miniscule 0.3% of an
XC3S5000 FPGA. In typical implementations, a single FPGA block RAM stores up to 1024
program instructions, which are automatically loaded during FPGA configuration. Even
with such resource efficiency, the PicoBlaze microcontroller performs a respectable 44 to
100 million instructions per second (MIPS) depending on the target FPGA family and
speed grade.
The PicoBlaze microcontroller core is totally embedded within the target FPGA and
requires no external resources. The PicoBlaze microcontroller is extremely flexible. The
basic functionality is easily extended and enhanced by connecting additional FPGA logic
to the microcontroller’s input and output ports.
The PicoBlaze microcontroller provides abundant, flexible I/O at much lower cost than
off-the-shelf controllers. Similarly, the PicoBlaze peripheral set can be customized to meet
the specific features, function, and cost requirements of the target application. Because the
PicoBlaze microcontroller is delivered as synthesizable VHDL source code, the core is
future-proof and can be migrated to future FPGA architectures, effectively eliminating
product obsolescence fears. Being integrated within the FPGA, the PicoBlaze
microcontroller reduces board space, design cost, and inventory.
The PicoBlaze FPC is supported by a suite of development tools including an assembler, a
graphical integrated development environment (IDE), a graphical instruction set
simulator, and VHDL source code and simulation models. Similarly, the PicoBlaze
microcontroller is also supported in the Xilinx System Generator development
environment.
®
-3, Virtex®-II, and Virtex-II Pro
The various PicoBlaze code examples throughout this application note are written for the
Xilinx KCPSM3 assembler. The Mediatronix pBlazIDE assembler has a code import
function that reads the KCPSM3 syntax.
PicoBlaze Microcontroller Features
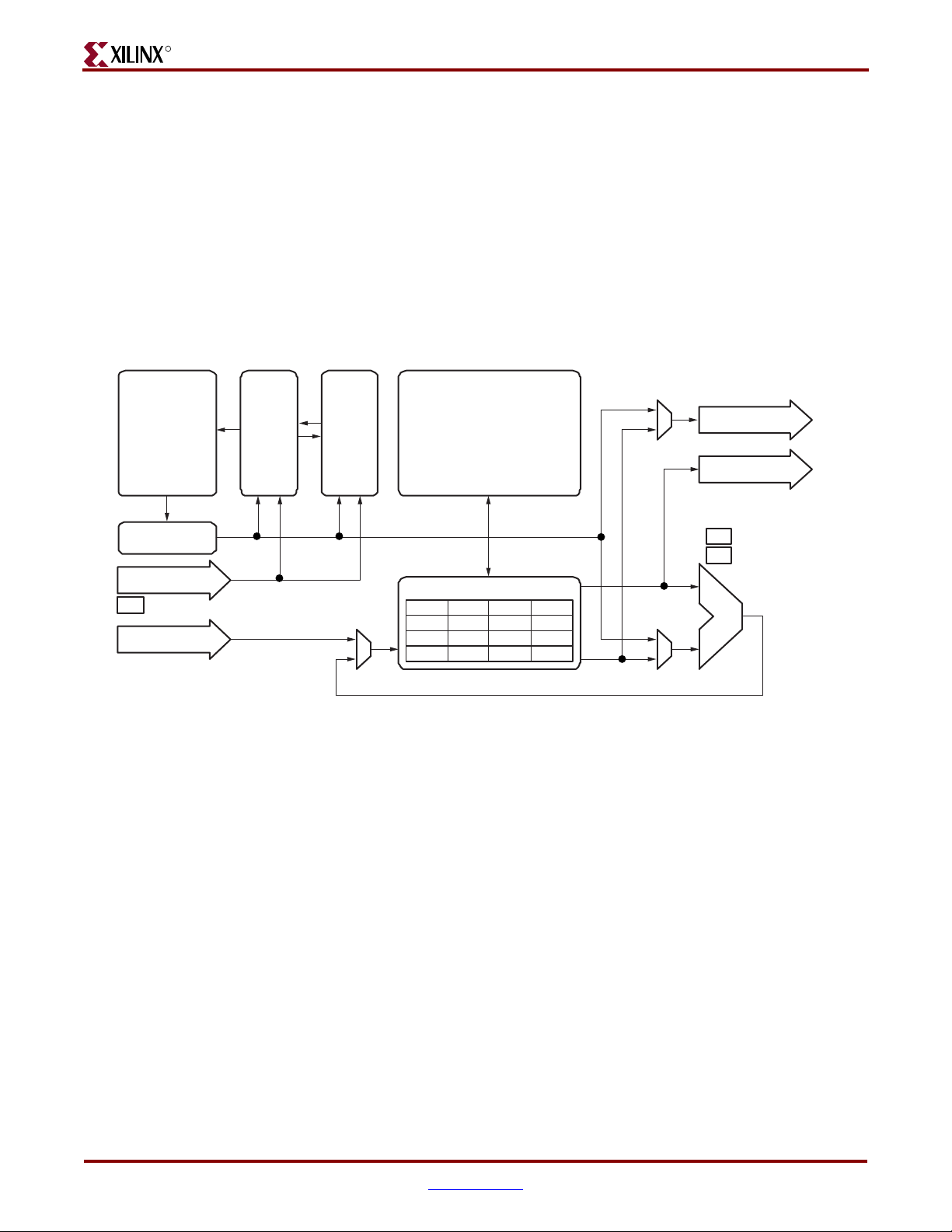
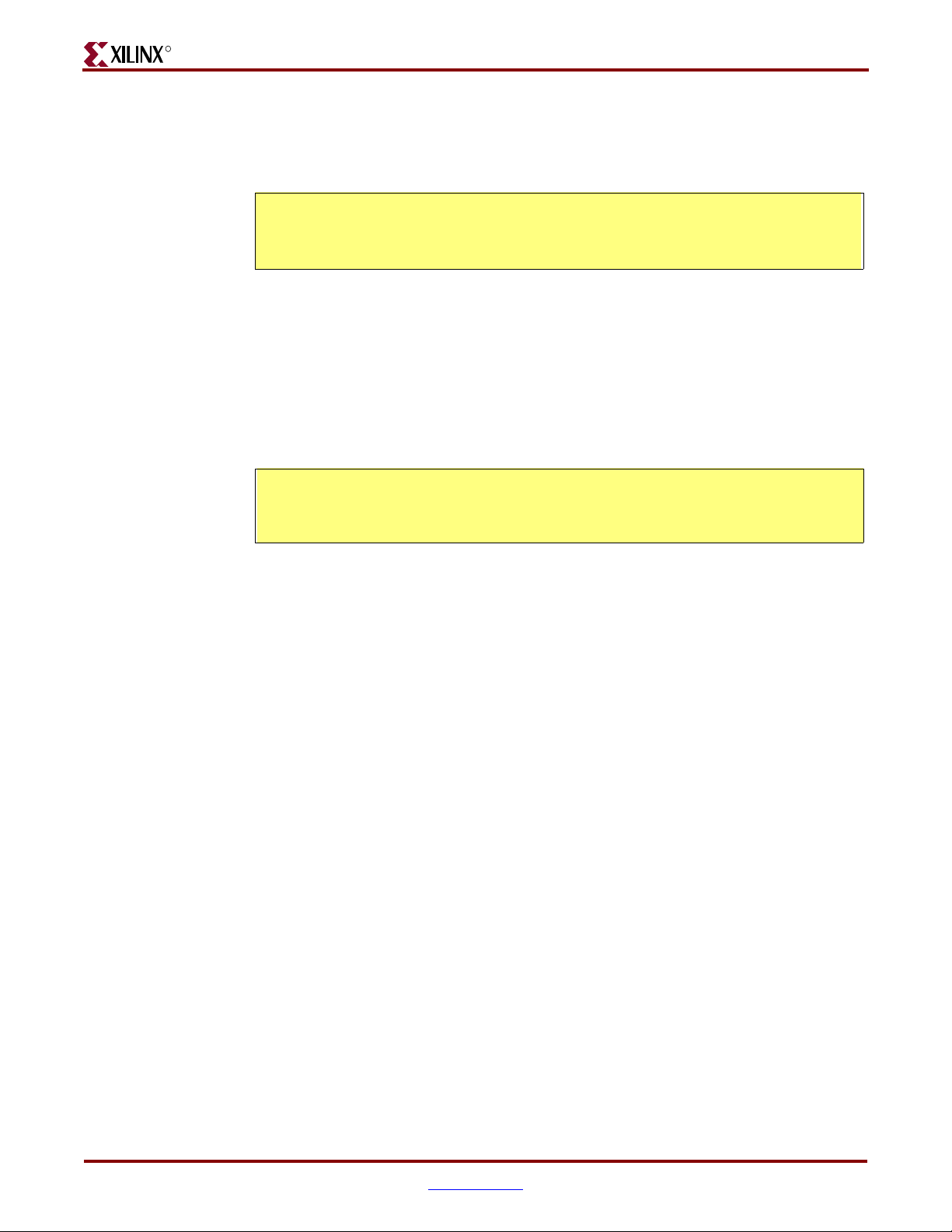
As shown in the block diagram in Figure 1-1, the PicoBlaze microcontroller supports the
following features:
• 16 byte-wide general-purpose data registers
• 1K instructions of programmable on-chip program store, automatically loaded during
FPGA configuration
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 11
UG129 (v1.1.2) June 24, 2008
Page 12
Chapter 1: Introduction
R
s0 s1 s2 s3
s4 s5 s6 s7
s8 s9 sA sB
sC sD sE sF
Z
C
Zero
Carry
OUT_PORT
PORT_ID
IN_PORT
64-Byte
Scratchpad RAM
Instruction
Decoder
1Kx18
Instruction
PROM
INTERRUPT
16 Byte-Wide Registers
ALU
Operand 1
Operand 2
IE
Enable
Flags
Constants
UG129_c1_01_051204
Program Counter
(PC)
31x10
CALL/RETURN
Stack
• Byte-wide Arithmetic Logic Unit (ALU) with CARRY and ZERO indicator flags
• 64-byte internal scratchpad RAM
• 256 input and 256 output ports for easy expansion and enhancement
• Automatic 31-location CALL/RETURN stack
• Predictable performance, always two clock cycles per instruction, up to 200 MHz or
100 MIPS in a Virtex-II Pro FPGA
• Fast interrupt response; worst-case 5 clock cycles
• Optimized for Xilinx Spartan-3, Virtex-II, and Virtex-II Pro FPGA architectures—just
96 slices and 0.5 to 1 block RAM
• Assembler, instruction-set simulator support
Figure 1-1: PicoBlaze Embedded Microcontroller Block Diagram
PicoBlaze Microcontroller Functional Blocks
General-Purpose Registers
The PicoBlaze microcontroller includes 16 byte-wide general-purpose registers,
designated as registers s0 through sF. For better program clarity, registers can be renamed
using an assembler directive. All register operations are completely interchangeable; no
registers are reserved for special tasks or have priority over any other register. There is no
dedicated accumulator; each result is computed in a specified register.
1,024-Instruction Program Store
The PicoBlaze microcontroller executes up to 1,024 instructions from memory within the
FPGA, typically from a single block RAM. Each PicoBlaze instruction is 18 bits wide. The
instructions are compiled within the FPGA design and automatically loaded during the
FPGA configuration process.
12 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 13

PicoBlaze Microcontroller Functional Blocks
R
Other memory organizations are possible to accommodate more PicoBlaze controllers
within a single FPGA or to enable interactive code updates without recompiling the FPGA
design. See Chapter 7, “Instruction Storage Configurations,” for more information.
Arithmetic Logic Unit (ALU)
The byte-wide Arithmetic Logic Unit (ALU) performs all microcontroller calculations,
including:
• basic arithmetic operations such as addition and subtraction
• bitwise logic operations such as AND, OR, and XOR
• arithmetic compare and bitwise test operations
• comprehensive shift and rotate operations
All operations are performed using an operand provided by any specified register (sX).
The result is returned to the same specified register (sX). If an instruction requires a second
operand, then the second operand is either a second register (sY) or an 8-bit immediate
constant (kk).
Flags
ALU operations affect the ZERO and CARRY flags. The ZERO flag indicates when the
result of the last operation resulted in zero. The CARRY flag indicates various conditions,
depending on the last instruction executed.
The INTERRUPT_ENABLE flag enables the INTERRUPT input.
64-Byte Scratchpad RAM
The PicoBlaze microcontroller provides an internal general-purpose 64-byte scratchpad
RAM, directly or indirectly addressable from the register file using the STORE and FETCH
instructions.
The STORE instruction writes the contents of any of the 16 registers to any of the 64 RAM
locations. The complementary FETCH instruction reads any of the 64 memory locations
into any of the 16 registers. This allows a much greater number of variables to be held
within the boundary of the processor and tends to reserve all of the I/O space for real
inputs and output signals.
The six-bit scratchpad RAM address is specified either directly (ss) with an immediate
constant, or indirectly using the contents of any of the 16 registers (sY). Only the lower six
bits of the address are used; the address should not exceed the 00 - 3F range of the available
memory.
Input/Output
The Input/Output ports extend the PicoBlaze microcontroller’s capabilities and allow the
microcontroller to connect to a custom peripheral set or to other FPGA logic. The PicoBlaze
microcontroller supports up to 256 input ports and 256 output ports or a combination of
input/output ports. The PORT_ID output provides the port address. During an INPUT
operation, the PicoBlaze microcontroller reads data from the IN_PORT port to a specified
register, sX. During an OUTPUT operation, the PicoBlaze microcontroller writes the
contents of a specified register, sX, to the OUT_PORT port.
See Chapter 6, “Input and Output Ports,” for more information.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 13
UG129 (v1.1.2) June 24, 2008
Page 14

R
Program Counter (PC)
The Program Counter (PC) points to the next instruction to be executed. By default, the PC
automatically increments to the next instruction location when executing an instruction.
Only the JUMP, CALL, RETURN, and RETURNI instructions and the Interrupt and Reset
Events modify the default behavior. The PC cannot be directly modified by the application
code; computed jump instructions are not supported.
The 10-bit PC supports a maximum code space of 1,024 instructions (000 to 3FF hex). If the
PC reaches the top of the memory at 3FF hex, it rolls over to location 000.
Program Flow Control
The default execution sequence of the program can be modified using conditional and
non-conditional program flow control instructions.
The JUMP instructions specify an absolute address anywhere in the 1,024-instruction
program space.
CALL and RETURN instructions provide subroutine facilities for commonly used sections of
code. A CALL instruction specifies the absolute start address of a subroutine, while the
return address is automatically preserved on the CALL/RETURN stack.
Chapter 1: Introduction
If the interrupt input is enabled, an Interrupt Event also preserves the address of the
preempted instruction on the CALL/RETURN stack while the PC is loaded with the
interrupt vector, 3FF hex. Use the RETURNI instruction instead of the RETURN instruction
to return from the interrupt service routine (ISR).
CALL/RETURN Stack
The CALL/RETURN hardware stack stores up to 31 instruction addresses, enabling
nested CALL sequences up to 31 levels deep. Since the stack is also used during an
interrupt operation, at least one of these levels should be reserved when interrupts are
enabled.
The stack is implemented as a separate cyclic buffer. When the stack is full, it overwrites
the oldest value. Consequently, there are no instructions to control the stack or the stack
pointer. No program memory is required for the stack.
Interrupts
The PicoBlaze microcontroller has an optional INTERRUPT input, allowing the PicoBlaze
microcontroller to handle asynchronous external events. In this context, “asynchronous”
relates to interrupts occuring at any time during an instruction cycle. However,
recommended design practice is to synchronize all inputs to the PicoBlaze controller using
the clock input.
The PicoBlaze microcontroller responds to interrupts quickly in just five clock cycles.
See Chapter 4, “Interrupts,” for more information.
Reset
The PicoBlaze microcontroller is automatically reset immediately after the FPGA
configuration process completes. After configuration, the RESET input forces the processor
into the initial state. The PC is reset to address 0, the flags are cleared, interrupts are
disabled, and the CALL/RETURN stack is reset.
14 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 15

Why the PicoBlaze Microcontroller?
R
The data registers and scratchpad RAM are not affected by Reset.
See “RESET Event” in Appendix C for more information.
Why the PicoBlaze Microcontroller?
There are literally dozens of 8-bit microcontroller architectures and instruction sets.
Modern FPGAs can efficiently implement practically any 8-bit microcontroller, and
available FPGA soft cores support popular instruction sets such as the PIC, 8051, AVR,
6502, 8080, and Z80 microcontrollers. Why use the PicoBlaze microcontroller instead of a
more popular instruction set?
The PicoBlaze microcontroller is specifically designed and optimized for the Spartan-3,
Virtex-II, and Virtex-II Pro FPGA architectures. Its compact yet capable architecture
consumes considerably less FPGA resources than comparable 8-bit microcontroller
architectures within an FPGA. Furthermore, the PicoBlaze microcontroller is provided as a
free, source-level VHDL file with royalty-free re-use within Xilinx FPGAs.
Some standalone microcontroller variants have a notorious reputation for becoming
obsolete. Because it is delivered as VHDL source, the PicoBlaze microcontroller is immune
to product obsolescence as the microcontroller can be retargeted to future generations of
Xilinx FPGAs, exploiting future cost reductions and feature enhancements. Furthermore,
the PicoBlaze microcontroller is expandable and extendable.
Before the advent of the PicoBlaze and MicroBlaze™ embedded processors, the
microcontroller resided externally to the FPGA, limiting the connectivity to other FPGA
functions and restricting overall interface performance. By contrast, the PicoBlaze
microcontroller is fully embedded in the FPGA with flexible, extensive on-chip
connectivity to other FPGA resources. Signals remain within the FPGA, improving overall
performance. The PicoBlaze microcontroller reduces system cost because it is a single-chip
solution, integrated within the FPGA and sometimes only occupying leftover FPGA
resources.
The PicoBlaze microcontroller is resource efficient. Consequently, complex applications are
sometimes best portioned across multiple PicoBlaze microcontrollers with each controller
implementing a particular function, for example, keyboard and display control, or system
management.
Why Use a Microcontroller within an FPGA?
Microcontrollers and FPGAs both successfully implement practically any digital logic
function. However, each has unique advantages in cost, performance, and ease of use.
Microcontrollers are well suited to control applications, especially with widely changing
requirements. The FPGA resources required to implement the microcontroller are
relatively constant. The same FPGA logic is re-used by the various microcontroller
instructions, conserving resources. The program memory requirements grow with
increasing complexity.
Programming control sequences or state machines in assembly code is often easier than
creating similar structures in FPGA logic.
Microcontrollers are typically limited by performance. Each instruction executes
sequentially. As an application increases in complexity, the number of instructions
required to implement the application grows and system performance decreases
accordingly. By contrast, performance in an FPGA is more flexible. For example, an
algorithm can be implemented sequentially or completely in parallel, depending on the
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 15
UG129 (v1.1.2) June 24, 2008
Page 16
Chapter 1: Introduction
R
performance requirements. A completely parallel implementation is faster but consumes
more FPGA resources.
A microcontroller embedded within the FPGA provides the best of both worlds. The
microcontroller implements non-timing crucial complex control functions while timingcritical or data path functions are best implemented using FPGA logic. For example, a
microcontroller cannot respond to events much faster than a few microseconds. The FPGA
logic can respond to multiple, simultaneous events in just a few to tens of nanoseconds.
Conversely, a microcontroller is cost-effective and simple for performing format or
protocol conversions.
Table 1-1: PicoBlaze Microcontroller Embedded within an FPGA Provides the Optimal Balance between
Microcontroller and FPGA Solutions
PicoBlaze Microcontroller FPGA Logic
Strengths
Weaknesses
• Easy to program, excellent for control
and state machine applications
• Resource requirements remain constant
with increasing complexity
• Re-uses logic resources, excellent for
lower-performance functions
• Executes sequentially
• Performance degrades with increasing
complexity
• Program memory requirements
increase with increasing complexity
• Slower response to simultaneous inputs
• Significantly higher performance
• Excellent at parallel operations
• Sequential vs. parallel implementation
trade-offs optimize performance or cost
• Fast response to multiple, simultaneous
inputs
• Control and state machine applications
more difficult to program
• Logic resources grow with increasing
complexity
16 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 17
R
PicoBlaze Interface Signals
INTERRUPT_ACK
WRITE_STROBE
READ_STROBE
PORT_ID[7:0]
OUT_PORT[7:0]IN_PORT[7:0]
INTERRUPT
RESET
CLK
PicoBlaze Microcontroller
UG129_c2_01_052004
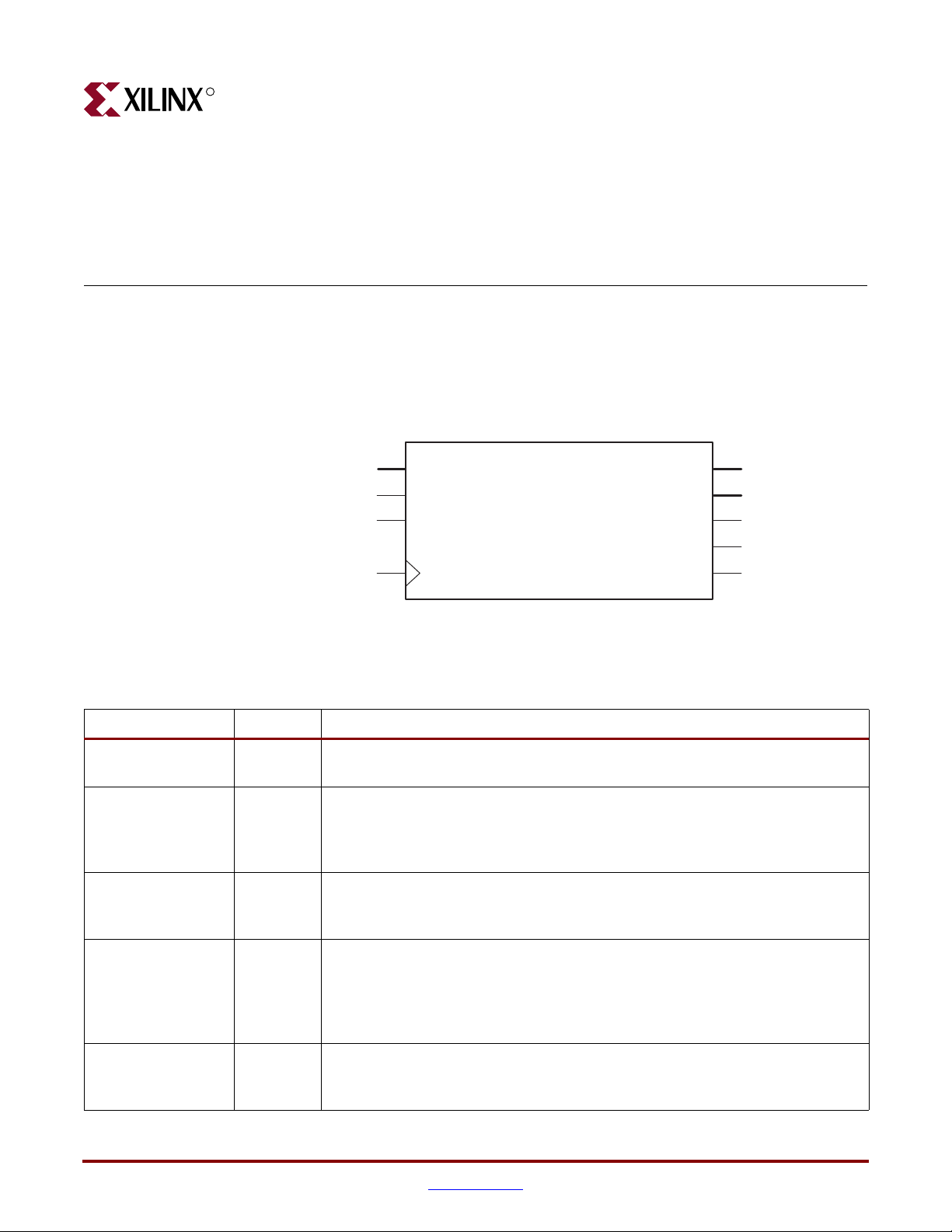
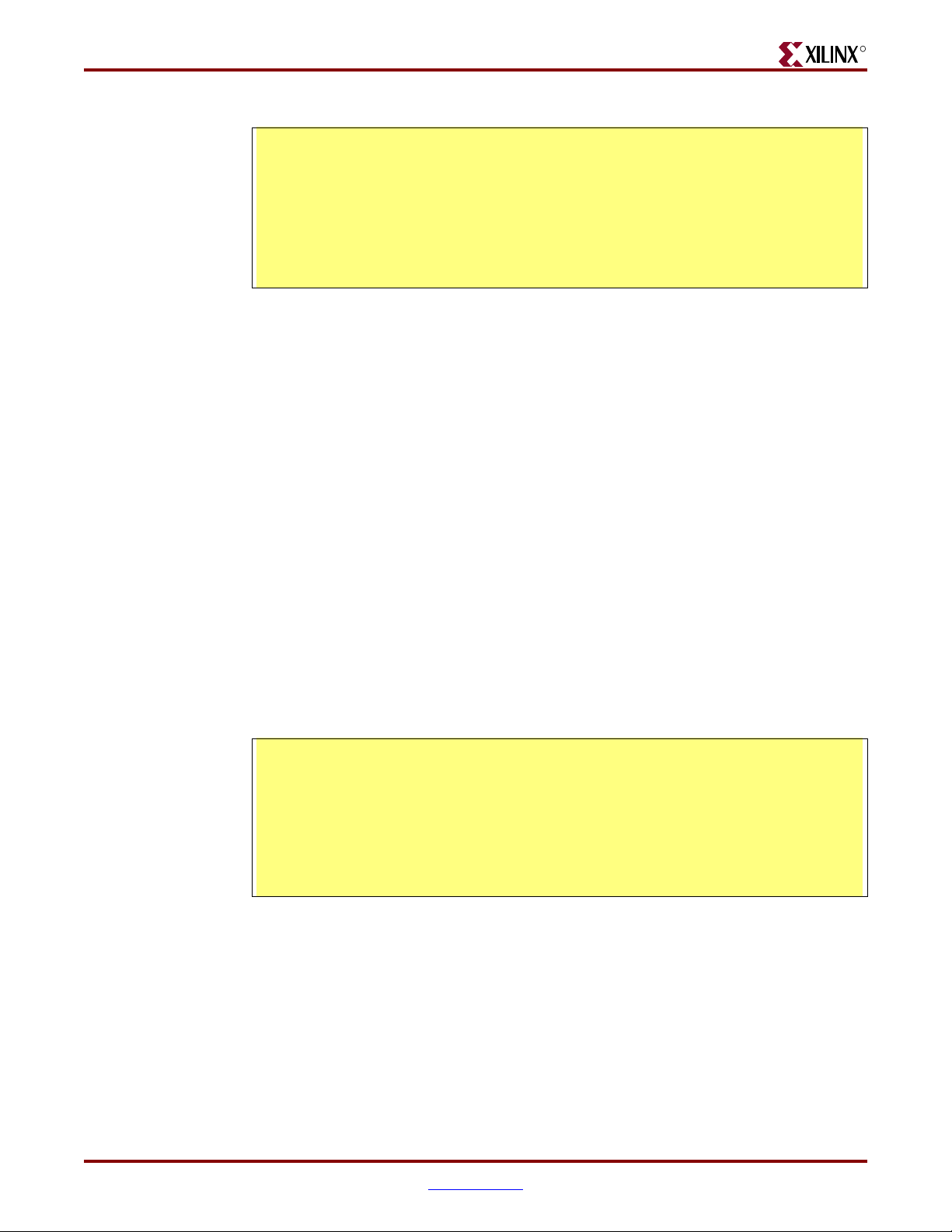
The top-level interface signals to the PicoBlaze™ microcontroller appear in Figure 2-1 and
are described in Table 2 -1 . Figure 7-1 provides additional detail on the internal structure of
the PicoBlaze controller.
Chapter 2
Table 2-1: PicoBlaze Interface Signal Descriptions
IN_PORT[7:0] Input Input Data Port: Present valid input data on this port during an INPUT
INTERRUPT Input Interrupt Input: If the INTERRUPT_ENABLE flag is set by the application
RESET Input Reset Input: To reset the PicoBlaze microcontroller and to generate a RESET
CLK Input Clock Input: The frequency may range from DC to the maximum operating
OUT_PORT[7:0] Output Output Data Port: Output data appears on this port for two CLK cycles during
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 17
UG129 (v1.1.2) June 24, 2008
Figure 2-1: PicoBlaze Interface Connections
Signal Direction Description
instruction. The data is captured on the rising edge of CLK.
code, generate an INTERRUPT Event by asserting this input High for at least
two CLK cycles. If the INTERRUPT_ENABLE flag is cleared, this input is
ignored.
Event, assert this input High for at least one CLK cycle. A Reset Event is
automatically generated immediately following FPGA configuration.
frequency reported by the Xilinx ISE
synchronous elements are clocked from the rising clock edge. There are no
clock duty-cycle requirements beyond the minimum pulse width
requirements of the FPGA.
an OUTPUT instruction. Capture output data within the FPGA at the rising
CLK edge when WRITE_STROBE is High.
®
development software. All PicoBlaze
Page 18
Chapter 2: PicoBlaze Interface Signals
R
Table 2-1: PicoBlaze Interface Signal Descriptions (Continued)
Signal Direction Description
PORT_ID[7:0] Output Port Address: The I/O port address appears on this port for two CLK cycles
during an INPUT or OUTPUT instruction.
READ_STROBE Output Read Strobe: When asserted High, this signal indicates that input data on the
IN_PORT[7:0] port was captured to the specified data register during an
INPUT instruction. This signal is asserted on the second CLK cycle of the twocycle INPUT instruction. This signal is typically used to acknowledge read
operations from FIFOs.
WRITE_STROBE Output Write Strobe: When asserted High, this signal validates the output data on the
OUT_PORT[7:0] port during an OUTPUT instruction. This signal is asserted
on the second CLK cycle of the two-cycle OUTPUT instruction. Capture
output data within the FPGA on the rising CLK edge when WRITE_STROBE
is High.
INTERRUPT_ACK Output Interrupt Acknowledge: When asserted High, this signal acknowledges that
an INTERRUPT Event occurred. This signal is asserted during the second CLK
cycle of the two-cycle INTERRUPT Event. This signal is optionally used to
clear the source of the INTERRUPT input.
18 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 19
R
Chapter 3
PicoBlaze Instruction Set
Ta bl e 3 -1 summarizes the entire PicoBlaze™ processor instruction set, which appears
alphabetically. Instructions are listed using the KCPSM3 syntax. If different, the pBlazIDE
syntax appears in parentheses. Each instruction includes an overview description, a
functional description, and how the ZERO and CARRY flags are affected. For more details
on each instruction, see Appendix C, “PicoBlaze Instruction Set and Event Reference.”
Table 3-1: PicoBlaze Instruction Set (alphabetical listing)
Instruction Description Function ZERO CARRY
ADD sX, kk Add register sX with literal kk sX Å sX + kk ? ?
ADD sX, sY Add register sX with register sY sX Å sX + sY ? ?
ADDCY sX, kk
(ADDC)
ADDCY sX, sY
(ADDC)
AND sX, kk Bitwise AND register sX with literal kk sX Å sX AND kk ? 0
AND sX, sY Bitwise AND register sX with register sY sX Å sX AND sY ? 0
CALL aaa Unconditionally call subroutine at aaa TOS Å PC
CALL C, aaa If CARRY flag set, call subroutine at aaa If CARRY=1, {TOS Å PC,
CALL NC, aaa If CARRY flag not set, call subroutine at
CALL NZ, aaa If ZERO flag not set, call subroutine at aaa If ZERO=0, {TOS Å PC,
CALL Z, aaa If ZERO flag set, call subroutine at aaa If ZERO=1, {TOS Å PC,
COMPARE sX, kk
(COMP)
COMPARE sX, sY
(COMP)
Add register sX with literal kk with
CARRY bit
Add register sX with register sY with
CARRY bit
aaa
Compare register sX with literal kk. Set
CARRY and ZERO flags as appropriate.
Registers are unaffected.
Compare register sX with register sY. Set
CARRY and ZERO flags as appropriate.
Registers are unaffected.
sX Å sX + kk + CARRY ? ?
sX Å sX + sY + CARRY ? ?
--
PC Å aaa
--
PC Å aaa}
If CARRY=0, {TOS Å PC,
PC Å aaa}
PC Å aaa}
PC Å aaa}
If sX=kk, ZERO Å 1
If sX<kk, CARRY Å
If sX=sY, ZERO Å 1
If sX<sY, CARRY Å 1
1
--
--
--
??
??
DISABLE INTERRUPT
(DINT)
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 19
UG129 (v1.1.2) June 24, 2008
Disable interrupt input INTERRUPT_ENABLE Å 0--
Page 20
R
Table 3-1: PicoBlaze Instruction Set (alphabetical listing)
Instruction Description Function ZERO CARRY
Chapter 3: PicoBlaze Instruction Set
ENABLE INTERRUPT
Enable interrupt input INTERRUPT_ENABLE Å 1--
(EINT)
Interrupt Event Asynchronous interrupt input. Preserve
flags and PC. Clear
INTERRUPT_ENABLE flag. Jump to
interrupt vector at address 3FF.
Preserved ZERO Å ZERO
Preserved CARRY Å CARRY
INTERRUPT_ENABLE Å 0
--
TOS Å PC
PC Å 3FF
FETCH sX, (sY)
(FETCH sX, sY)
FETCH sX, ss Read scratchpad RAM location ss into
Read scratchpad RAM location pointed to
by register sY into register sX
sX Å RAM[(sY)] - -
sX Å RAM[ss] - -
register sX
INPUT sX, (sY)
(IN sX, sY)
INPUT sX, pp
(IN)
Read value on input port location pointed
to by register sY into register sX
Read value on input port location pp into
register sX
PORT_ID Å sY
sX Å IN_PORT
PORT_ID Å pp
sX Å IN_PORT
--
--
JUMP aaa Unconditionally jump to aaa PC Å aaa - -
JUMP C, aaa If CARRY flag set, jump to aaa If CARRY=1, PC Å aaa - -
JUMP NC, aaa If CARRY flag not set, jump to aaa If CARRY=0, PC Å aaa - -
JUMP NZ, aaa If ZERO flag not set, jump to aaa If ZERO=0, PC Å aaa - -
JUMP Z, aaa If ZERO flag set, jump to aaa If ZERO=1, PC Å aaa - -
LOAD sX, kk Load register sX with literal kk sX Å kk - -
LOAD sX, sY Load register sX with register sY sX Å sY - -
OR sX, kk Bitwise OR register sX with literal kk sX Å
sX OR kk ? 0
OR sX, sY Bitwise OR register sX with register sY sX Å sX OR sY ? 0
OUTPUT sX, (sY)
(OUT sX, sY)
OUTPUT sX, pp
(OUT sX, pp)
RETURN
Write register sX to output port location
pointed to by register sY
Write register sX to output port location ppPORT_ID Å pp
PORT_ID Å sY
OUT_PORT Å sX
--
--
OUT_PORT Å sX
Unconditionally return from subroutine PC Å TOS+1 - -
(RET)
RETURN C
If CARRY flag set, return from subroutine If CARRY=1, PC Å TOS+1 - -
(RET C)
RETURN NC
(RET NC)
RETURN NZ
(RET NZ)
RETURN Z
If CARRY flag not set, return from
If CARRY=0, PC Å TOS+1 - -
subroutine
If ZERO flag not set, return from
If ZERO=0, PC Å TOS+1 - -
subroutine
If ZERO flag set, return from subroutine If ZERO=1, PC Å TOS+1 - -
(RET Z)
20 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 21
R
Table 3-1: PicoBlaze Instruction Set (alphabetical listing)
Instruction Description Function ZERO CARRY
RETURNI DISABLE
(RETI DISABLE)
Return from interrupt service routine.
Interrupt remains disabled.
PC Å TOS
ZERO Å Preserved ZERO
CARRY Å Preserved CARRY
INTERRUPT_ENABLE Å 0
RETURNI ENABLE
(RETI ENABLE)
Return from interrupt service routine.
Re-enable interrupt.
PC Å TOS
ZERO Å Preserved ZERO
CARRY Å Preserved CARRY
INTERRUPT_ENABLE Å 1
RL sX Rotate register sX left sX Å {sX[6:0],sX[7]}
CARRY Å sX[7]
RR sX Rotate register sX right sX Å {sX[0],sX[7:1]}
CARRY Å sX[0]
SL0 sX Shift register sX left, zero fill sX Å {sX[6:0],0}
CARRY Å sX[7]
SL1 sX Shift register sX left, one fill sX Å {sX[6:0],1}
CARRY Å sX[7]
SLA sX Shift register sX left through all bits,
including CARRY
SLX sX Shift register sX left. Bit sX[0] is
unaffected.
sX Å {sX[6:0],CARRY}
CARRY Å sX[7]
sX Å {sX[6:0],sX[0]}
CARRY Å sX[7]
??
??
??
??
??
0?
??
??
SR0 sX Shift register sX right, zero fill sX Å {0,sX[7:1]}
??
CARRY Å sX[0]
SR1 sX Shift register sX right, one fill sX Å {1,sX[7:1]}
0?
CARRY Å sX[0]
SRA sX Shift register sX right through all bits,
including CARRY
SRX sX Arithmetic shift register sX right. Sign
extend sX. Bit sX[7] Is unaffected.
STORE sX, (sY)
(STORE sX, sY)
Write register sX to scratchpad RAM
location pointed to by register sY
STORE sX, ss Write register sX to scratchpad RAM
sX Å {CARRY,sX[7:1]}
??
CARRY Å sX[0]
sX Å {sX[7],sX[7:1]}
??
CARRY Å sX[0]
RAM[(sY)] Å sX - -
RAM[ss] Å sX - -
location ss
SUB sX, kk Subtract literal kk from register sX sX Å sX – kk ? ?
SUB sX, sY Subtract register sY from register sX sX Å sX – sY ? ?
SUBCY sX, kk
(SUBC)
SUBCY sX, sY
(SUBC)
Subtract literal kk from register sX with
CARRY (borrow)
Subtract register sY from register sX with
CARRY (borrow)
sX Å sX – kk - CARRY ? ?
sX Å sX – sY - CARRY ? ?
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 21
UG129 (v1.1.2) June 24, 2008
Page 22
R
Table 3-1: PicoBlaze Instruction Set (alphabetical listing)
Instruction Description Function ZERO CARRY
Chapter 3: PicoBlaze Instruction Set
TEST sX, kk Test bits in register sX against literal kk.
Update CARRY and ZERO flags. Registers
are unaffected.
TEST sX, sY Test bits in register sX against register sX.
Update CARRY and ZERO flags. Registers
are unaffected.
XOR sX, kk Bitwise XOR register sX with literal kk sX Å sX XOR kk ? 0
XOR sX, sY Bitwise XOR register sX with register sY sX Å sX XOR sY ? 0
sX = One of 16 possible register locations ranging from s0 through sF or specified as a literal
sY = One of 16 possible register locations ranging from s0 through sF or specified as a literal
aaa = 10-bit address, specified either as a literal or a three-digit hexadecimal value ranging from 000 to 3FF or a labeled
location
kk = 8-bit immediate constant, specified either as a literal or a two-digit hexadecimal value ranging from 00 to FF or
specified as a literal
pp = 8-bit port address, specified either as a literal or a two-digit hexadecimal value ranging from 00 to FF or specified
as a literal
ss = 6-bit scratchpad RAM address, specified either as a literal or a two-digit hexadecimal value ranging from 00 to 3F
or specified as a literal
If (sX AND kk) = 0, ZERO Å 1
CARRY Å odd parity of (sX
AND kk)
If (sX AND sY) = 0, ZERO Å 1
CARRY Å odd parity of (sX
AND kk)
??
??
RAM[n] = Contents of scratchpad RAM at location n
TOS = Value stored at Top Of Stack
Address Spaces
As shown in Tab le 3 -2 , the PicoBlaze microcontroller has five distinct address spaces.
Specific instructions operate on each of the address spaces.
22 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 23
Address Spaces
R
Table 3-2: PicoBlaze Address Spaces and Related Instructions
Address Space
Size
(Depth x Width)
Addressing
Modes
Instruction 1Kx18 Direct • JUMP
• CALL
• RETURN
• RETURNI
• INTERRUPT event
• RESET event
All others increment the PC to the next location
Register File 16x8 Direct • LOAD
• AND
• OR
• XOR
• TEST (read only)
• ADD
• ADDCY
• SUB
• SUBCY
• COMPARE (read only)
• SR0
• SR1
• SRX
• SRA
• RR
• SL0
• SL1
• SLX
• SLA
• RL
• INPUT
• OUTPUT (read only)
• STORE (read only)
• FETCH
Instructions that Operate on
Address Space
Scratchpad RAM 64x8 Direct
Indirect
I/O 256x8 Direct
Indirect
• STORE
• FETCH
• INPUT
• OUTPUT
CALL/RETURN Stack 31x10 N/A • CALL
• Enabled INTERRUPT event
• RETURN
• RETURNI
• RESET event
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 23
UG129 (v1.1.2) June 24, 2008
Page 24
R
Processing Data
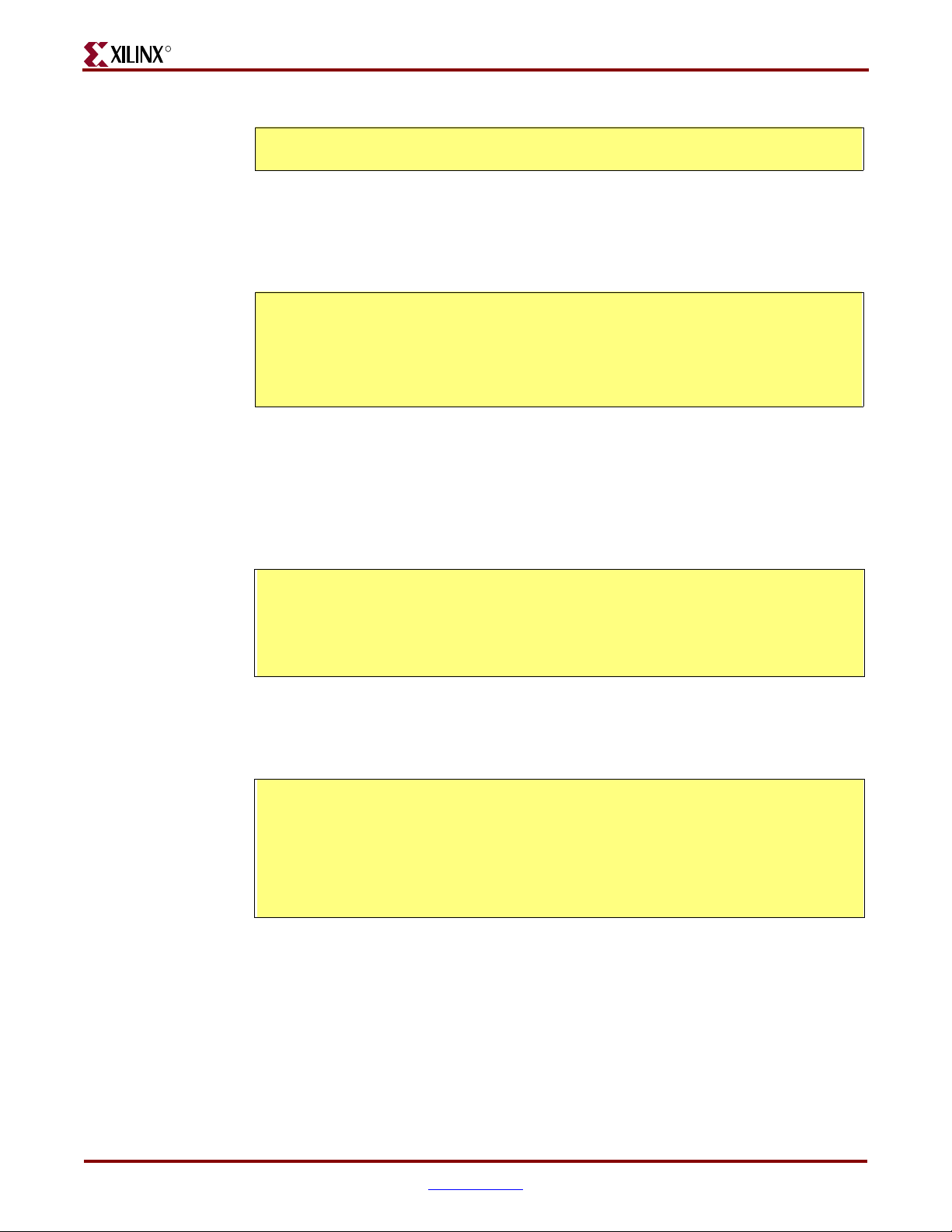
AND sX, sY
AND sX, kk
7 6 5 4 3 2 1 0
7 6 5 4 3 2 1 0
Register sX
Register sY
Literal kk
UG129_c3_01_051204
All data processing instructions operate on any of the 16 general-purpose registers. Only
the data processing instructions modify the ZERO or CARRY flags as appropriate for the
instruction. The data processing instructions consists of the following types:
• Logic instructions
• Arithmetic instructions
• Test and Compare instructions
• Shift and Rotate instructions
Logic Instructions
The logic instructions perform a bitwise logical AND, OR, or XOR between two operands.
The first operand is a register location. The second operand is either a register location or
a literal constant. Besides performing pure AND, OR, and XOR operations, the logic
instructions provide a means to:
• complement or invert a register
• clear a register
• set or clear specific bits within a register
Chapter 3: PicoBlaze Instruction Set
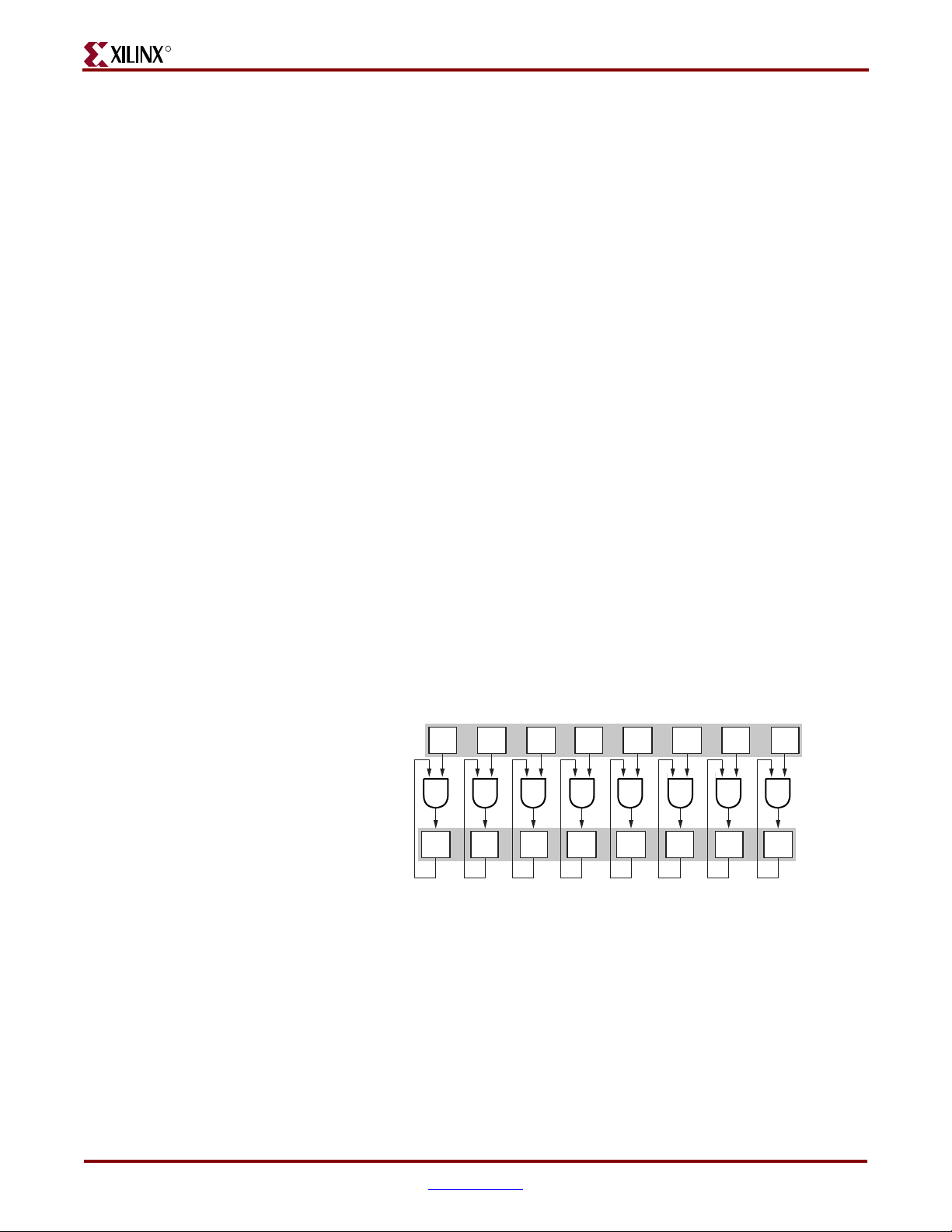
Bitwise AND, OR, XOR
All logic instructions are bitwise operations. The AND operation, illustrated in Figure 3-1,
shows that corresponding bit locations in both operands are logically ANDed together and
the result is placed back into register sX. If the resulting value in register sX is zero, then
the ZERO flag is set. The CARRY flag is always cleared by a logic instruction.
Figure 3-1: Bitwise AND Instruction
The OR and XOR instructions are similar to the AND instruction illustrated in Figure 3-1
except that they perform an OR or XOR logical operation, respectively.
See also:
• “AND sX, Operand — Logical Bitwise AND Register sX with Operand,” page 93
• “OR sX, Operand — Logical Bitwise OR Register sX with Operand,” page 103
24 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
• “XOR sX, Operand — Logical Bitwise XOR Register sX with Operand,” page 118
UG129 (v1.1.2) June 24, 2008
Page 25
Processing Data
R
T
If reading this document in Adobe Acrobat,
use the Select Text tool to select code snippets,
then copy and paste the text into your text editor.
complement:
;
XOR sX, FF invert all bits in register sX, same as one’s complement
LOAD s0, AA ; load register s0 = 10101010
XOR s0, FF ; invert contents s0 = 01010101
toggle_bit:
; XOR sX, <bit_mask>
XOR s0, 01 ; toggle the least-significant bit in register sX
XOR sX, sX ; clear register sX, set ZERO flag
LOAD sX,00 ; clear register sX, ZERO flag unaffected
Complement/Invert Register
The PicoBlaze microcontroller does not have a specific instruction to invert individual bits
within register sX. However, the XOR sX,FF instruction performs the equivalent
operation, as shown in Figure 3-2.
Figure 3-2: Complementing a Register Value
Invert or Toggle Bit
The PicoBlaze microcontroller does not have a specific instruction to invert or toggle an
individual bit or bits within a specific register. However, the XOR instruction performs the
equivalent operation. XORing register sX with a bit mask inverts or toggles specific bits, as
shown in Figure 3-3. A ‘1’ in the bit mask inverts or toggles the corresponding bit in
register sX. A ‘0’ in the bit mask leaves the corresponding bit unchanged.
Figure 3-3: Inverting an Individual Bit Location
Clear Register
The PicoBlaze microcontroller does not have a specific instruction to clear a specific
register. However, the XOR sX,sX instruction performs the equivalent operation. XORing
register sX with itself clears registers sX and sets the ZERO flag, as shown in Figure 3-4.
Figure 3-4: Clearing a Register and Setting the ZERO Flag
The LOAD sX,00 instruction also clears register sX, but it does not affect the ZERO flag, as
shown in Figure 3-5.
Figure 3-5: Clearing a Register without Modifying the ZERO Flag
Set Bit
The PicoBlaze microcontroller does not have a specific instruction to set an individual bit
or bits within a specific register. However, the OR instruction performs the equivalent
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 25
UG129 (v1.1.2) June 24, 2008
Page 26
Chapter 3: PicoBlaze Instruction Set
R
set_bit:
; OR sX, <bit_mask>
OR s0, 01 ; set bit 0 of register s0
clear_bit:
; AND sX, <bit_mask>
AND s0, FE ; clear bit 0 of register s0
operation. ORing register sX with a bit mask sets specific bits, as shown in Figure 3-6. A ‘1’
in the bit mask sets the corresponding bit in register sX. A ‘0’ in the bit mask leaves the
corresponding bit unchanged.
Figure 3-6: 16-Setting a Bit Location
Clear Bit
The PicoBlaze microcontroller does not have a specific instruction to clear an individual bit
or bits within a specific register. However, the AND instruction performs the equivalent
operation. ANDing register sX with a bit mask clears specific bits, as shown in Figure 3-7.
A ‘0’ in the bit mask clears the corresponding bit in register sX. A ‘1’ in the bit mask leaves
the corresponding bit unchanged.
Arithmetic Instructions
The PicoBlaze microcontroller provides basic byte-wide addition and subtraction
instructions. Combinations of instructions perform multi-byte arithmetic plus
multiplication and division operations. If the end application requires significant
arithmetic performance, consider using the 32-bit MicroBlaze RISC processor core for
Xilinx FPGAs (see Reference 4).
ADD and ADDCY Add Instructions
The PicoBlaze microcontroller provides two add instructions, ADD and ADDCY, that
compute the sum of two 8-bit operands, either without or with CARRY, respectively. The
first operand is a register location. The second operand is either a register location or a
literal constant. The resulting operation affects both the CARRY and ZERO flags. If the
resulting sum is greater than 255, then the CARRY flag is set. If the resulting sum is either
0 or 256 (register sX is zero with CARRY set), then the ZERO flag is set.
The ADDCY instruction is an add operation with carry. If the CARRY flag is set, then ADDCY
adds an additional one to the resulting sum.
The ADDCY instruction is commonly used in multi-byte addition. Figure 3-8 demonstrates
a subroutine that adds two 16-bit integers and produces a 16-bit result. The upper byte of
each 16-bit value is labeled as MSB for most-significant byte; the lower byte of each 16-bit
value is labeled LSB for least-significant byte.
Figure 3-7: Clearing a Bit Location
26 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 27
Processing Data
R
ADD16:
NAMEREG s0, a_lsb ; rename register s0 as “a_lsb”
NAMEREG s1, a_msb ; rename register s1 as “a_msb”
NAMEREG s2, b_lsb ; rename register s2 as “b_lsb”
NAMEREG s3, b_msb ; rename register s3 as “b_lsb”
ADD a_lsb, b_lsb ; add LSBs, keep result in a_lsb
ADDCY a_msb, b_msb ; add MSBs, keep result in a_msb
RETURN
SUB16:
NAMEREG s0, a_lsb ; rename register s0 as “a_lsb”
NAMEREG s1, a_msb ; rename register s1 as “a_msb”
NAMEREG s2, b_lsb ; rename register s2 as “b_lsb”
NAMEREG s3, b_msb ; rename register s3 as “b_lsb”
SUB a_lsb, b_lsb ; subtract LSBs, keep result in a_lsb
SUBCY a_msb, b_msb ; subtract MSBs, keep result in a_msb
RETURN
Figure 3-8: 16-Bit Addition Using ADD and ADDCY Instructions
See also:
• “ADD sX, Operand —Add Operand to Register sX,” page 91
• “ADDCY sX, Operand —Add Operand to Register sX with Carry,” page 92
SUB and SUBCY Subtract Instructions
The PicoBlaze microcontroller provides two subtract instructions, SUB and SUBCY, that
compute the difference of two 8-bit operands, either without or with CARRY (borrow),
respectively. The CARRY flag indicates if the subtract operation generates a borrow
condition. The first operand is a register location. The second operand is either a register
location or a literal constant. The resulting operation affects both the CARRY and ZERO
flags. If the resulting difference is less than 0, then the CARRY flag is set. If the resulting
difference is 0 or -256, then the ZERO flag is set.
The SUBCY instruction is a subtract operation with borrow. If the CARRY flag is set, then
SUBCY subtracts an additional one from the resulting difference.
The SUBCY instruction is commonly used in multi-byte subtraction. Figure 3-9
demonstrates a subroutine that subtracts two 16-bit integers and produces a 16-bit
difference. The upper byte of each 16-bit value is labeled as MSB for most-significant byte;
the lower byte of each 16-bit value is labeled LSB for least-significant byte.
Figure 3-9: 16-Bit Subtraction Using SUB and SUBCY Instructions
See also:
• “SUB sX, Operand —Subtract Operand from Register sX,” page 113
• “SUBCY sX, Operand —Subtract Operand from Register sX with Borrow,” page 114
Increment/Decrement
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 27
UG129 (v1.1.2) June 24, 2008
The PicoBlaze microcontroller does not have a dedicated increment or decrement
instruction. However, adding or subtracting one using the ADD or SUB instructions
provides the equivalent operation, as shown in Figure 3-10.
Page 28
Chapter 3: PicoBlaze Instruction Set
R
ADD sX,01 ; increment register sX
SUB sX,01 ; decrement register sX
inc_16:
; increment low byte
ADD lo_byte,01
; increment high byte only if CARRY bit set when incrementing low byte
ADDCY hi_byte,00
Negate:
; invert all bits in the register performing a one’s complement
XOR sX,FF
; add one to sX
ADD sX,01
RETURN
Negate:
NAMEREG sY, value
NAMEREG sX, complement
; Clear ‘complement’ to zero
LOAD complement, 00
; subtract value from 0 to create two’s complement
SUB complement, value
RETURN
Figure 3-10: Incrementing and Decrementing a Register
If incrementing or decrementing a multi-register value—i.e., a 16-bit value—perform the
operation using multiple instructions. Incrementing or decrementing a multi-byte value
requires using the add or subtract instructions with carry, as shown in Figure 3-11.
Figure 3-11: Incrementing a 16-bit Value
Negate
The PicoBlaze microcontroller does not have a dedicated instruction to negate a register
value, taking the two’s complement. However, the instructions in Figure 3-12 provide the
equivalent operation.
Figure 3-12: Destructive Negate (2’s Complement) Function Overwrites Original
Another possible implementation that does not overwrite the value appears in Figure 3-13.
Figure 3-13: Non-destructive Negate Function Preserves Original Value
Multiplication
The PicoBlaze microcontroller core does not have a dedicated hardware multiplier.
However, the PicoBlaze microcontroller performs multiplication using the available
arithmetic and shift instructions. Figure 3-14 demonstrates an 8-bit by 8-bit multiply
routine that produces a 16-bit multiplier product in 50 to 57 instruction cycles, or 100 to 114
28 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
clock cycles. By contrast, the 8051 microcontroller performs the same multiplication in
eight instruction cycles or 96 clock cycles on a the standard 12-cycle 8051.
Value
UG129 (v1.1.2) June 24, 2008
Page 29
Processing Data
R
; Multiplier Routine (8-bit x 8-bit = 16-bit product)
; ==================================================
; Shift and add algorithm
;
mult_8x8:
NAMEREG s0, multiplicand
; preserved
NAMEREG s1, multiplier ; preserved
NAMEREG s2, bit_mask ; modified
NAMEREG s3, result_msb ;
most-significant byte (MSB) of result,
; modified
NAMEREG s4, result_lsb ; least-significant byte (LSB) of result,
; modified
;
LOAD bit_mask, 01 ; start with least-significant bit (lsb)
LOAD result_msb, 00 ; clear product MSB
LOAD result_lsb, 00 ; clear product LSB (not required)
;
; loop through all bits in multiplier
mult_loop: TEST multiplier, bit_mask ; check if bit is set
JUMP Z, no_add ; if bit is not set, skip addition
;
ADD result_msb, multiplicand ; addition only occurs in MSB
;
no_add: SRA result_msb ; shift MSB right, CARRY into bit 7,
; lsb into CARRY
SRA result_lsb ; shift LSB right,
; lsb from result_msb into bit 7
;
SL0 bit_mask ; shift bit_mask left to examine
; next bit in multiplier
;
JUMP NZ, mult_loop ; if all bit examined, then bit_mask = 0,
; loop if not 0
RETURN ; multiplier result now available in
; result_msb and result_lsb
T
If reading this document in Adobe Acrobat,
use the Select Text tool to select code snippets,
then copy and paste the text into your text editor.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 29
UG129 (v1.1.2) June 24, 2008
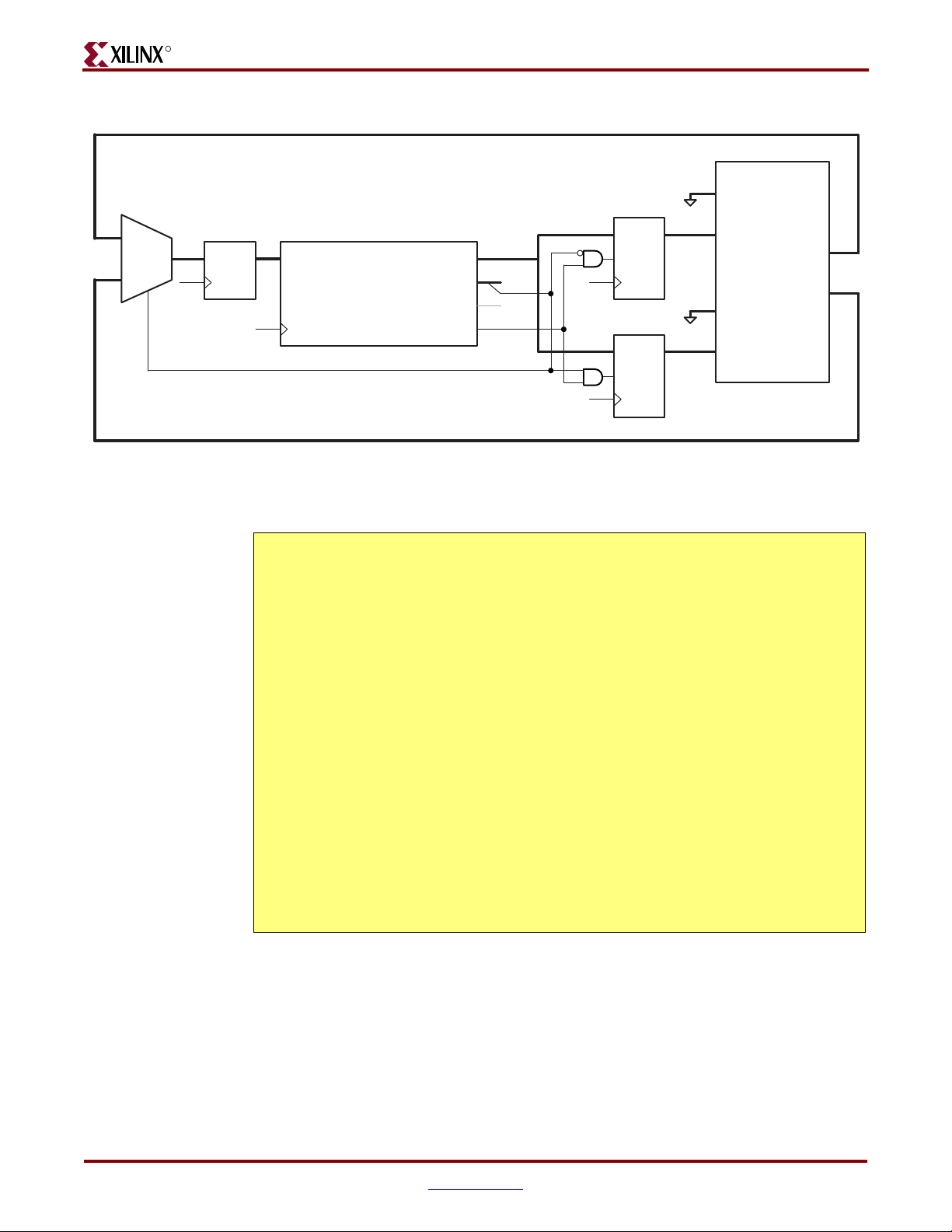
If multiplication performance is important to the application, connect one of the FPGA’s
18x18 hardware multipliers the PicoBlaze I/O ports, as shown in Figure 3-15. The
hardware multiplier computes the 16-bit result in less than one instruction cycle.
Figure 3-16 shows the routine required to multiply two 8-bit values using the hardware
multiplier. This same technique can be expanded to multiply two 16-bit values to produce
a 32-bit result. This example also illustrates how to use FPGA logic attached to the
PicoBlaze microcontroller to accelerate algorithms.
Figure 3-14: 8-bit by 8-bit Multiply Routine Produces a 16-bit Product
Page 30
Chapter 3: PicoBlaze Instruction Set
R
IN_PORT[7:0] OUT_PORT[7:0]
PORT_ID[7:0]
READ_STROBE
WRITE_STROBE
PicoBlaze Microcontroller
[0]
EN
EN
A[7:0]
A[17:8]
B[7:0]
B[17:8]
P[7:0]
P[15:8]
18x18 Multiplier
0
1
SEL
UG129_c3_02_052004
; Multiplier Routine (8-bit x 8-bit = 16-bit product)
; ===================================================
; Connects to embedded 18x18 Hardware Multiplier via ports
;
mult_8x8io:
NAMEREG s0, multiplicand ; preserved
NAMEREG s1, multiplier ; preserved
NAMEREG s3, result_msb ; most-significant byte (MSB) of result, modified
NAMEREG s4, result_lsb ;
least-significant byte (LSB) of result, modified
;
; Define the port ID numbers as constants for better clarity
CONSTANT multiplier_lsb, 00
CONSTANT multiplier_msb, 01
;
;
Output multiplicand and multiplier to FPGA registers connected to the inputs of
; the embedded multiplier.
OUTPUT multiplicand, multiplier_lsb
OUTPUT multiplier, multiplier_msb
;
; Input the resulting product from the embedded multiplier.
INPUT result_lsb, multiplier_lsb
INPUT result_msb, multiplier_msb
;
RETURN ; multiplier result now available in result_msb
; and result_lsb
Figure 3-15: 8-bit by 8-bit Hardware Multiplier Using the FPGA’s 18x18 Multipliers
30 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
Division
The PicoBlaze microcontroller core does not have a dedicated hardware divider. However,
the PicoBlaze microcontroller performs division using the available arithmetic and shift
instructions. Figure 3-17 demonstrates a subroutine that divides an unsigned 8-bit number
by another unsigned 8-bit number to produce an 8-bit quotient and an 8-bit remainder in
60 to 74 instruction cycles, or 120 to 144 clock cycles.
Figure 3-16: 8-bit by 8-bit Multiply Routine Using Hardware Multiplier
UG129 (v1.1.2) June 24, 2008
Page 31

Processing Data
R
; Divide Routine (8-bit / 8-bit = 8-bit result, remainder)
; ==================================================
; Shift and subtract algorithm
;
div_8by8:
NAMEREG s0, dividend ; preserved
NAMEREG s1, divisor ; preserved
NAMEREG s2, quotient ; preserved
NAMEREG s3, remainder ; modified
NAMEREG s4, bit_mask ; used to test bits in dividend,
; one-hot encoded, modified
;
LOAD remainder, 00 ; clear remainder
LOAD bit_mask, 80 ; start with most-significant bit (msb)
div_loop:
TEST dividend, bit_mask ; test bit, set CARRY if bit is '1'
SLA remainder ; shift CARRY into lsb of remainder
SL0 quotient ; shift quotient left (multiply by 2)
;
COMPARE remainder, divisor ; is remainder > divisor?
JUMP C, no_sub ; if divisor is greater, continue to next bit
SUB remainder, divisor ; if remainder > divisor, then subtract
ADD quotient, 01 ; add one to quotient
no_sub:
SR0 bit_mask ; shift to examine next bit position
JUMP NZ, div_loop ; if bit_mask=0, then all bits examined
; otherwise, examine next bit
RETURN
T
If reading this document in Adobe Acrobat,
use the Select Text tool to select code snippets,
then copy and paste the text into your text editor.
nop:
LOAD sX, sX
Figure 3-17: 8-bit Divided by 8-bit Routine
No Operation (NOP)
The PicoBlaze instruction set does not have a specific NOP instruction. Typically, a NOP
instruction is completely benign, does not affect register contents or flags, and performs no
operation other than requiring an instruction cycle to execute. A NOP instruction is
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 31
UG129 (v1.1.2) June 24, 2008
therefore sometimes useful to balance code trees for more predictable execution timing.
There are a few possible implementations of an equivalent NOP operation, as shown in
Figure 3-18 and Figure 3-19. Loading a register with itself does not affect the register value
or the status flags.
Figure 3-18: Loading a Register with Itself Acts as a NOP Instruction
Page 32

R
A similar NOP technique is to simply jump to the next instruction, which is equivalent to
JUMP next
next: <next instruction>
clear_carry_bit:
AND sX, sX ; register sX unaffected, CARRY flag cleared
set_carry:
LOAD sX, 00
COMPARE sX, 01 ; set CARRY flag and reset ZERO flag
the default program flow. The JUMP instruction consumes an instruction cycle (two clock
cycles) without affecting register contents.
Figure 3-19: Alternative NOP Method Using JUMP Instructions
Setting and Clearing CARRY Flag
Sometimes, application programs need to specifically set or clear the CARRY flag, as
shown in the following examples.
Clear CARRY Flag
ANDing a register with itself clears the CARRY flag without affecting the register contents,
as shown in Figure 3-20.
Chapter 3: PicoBlaze Instruction Set
Figure 3-20: ANDing a Register with Itself Clears the CARRY Flag
Set CARRY Flag
There are various methods for setting the CARRY flag, one of which appears in
Figure 3-21. Generally, these methods affect a register location.
Test and Compare
The PicoBlaze microcontroller introduces two new instructions not available on previous
PicoBlaze variants. The PicoBlaze microcontroller provides the ability to test individual
bits within a register and the ability to compare a register value against another register or
an immediate constant. The TEST or COMPARE instructions only affect the ZERO and
CARRY flags; neither instruction affects register contents.
Te st
The TEST instruction performs bit testing via a bitwise logical AND operation between
two operands. Unlike the AND instruction, only the ZERO and CARRY flags are affected;
no registers are modified. The ZERO flag is set if all the bitwise AND results are Low, as
shown in Figure 3-22.
Figure 3-21: Example Operation that Sets the CARRY Flag
32 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 33

Processing Data
R
7 6 5 4 3 2 1 0
7 6 5 4 3 2 1 0Register sX
Register sY
Literal kk
Bitwise AND
ZERO
If all bit results are zero,
set ZERO flag.
UG129_c3_03_051404
LOAD s0, 05 ; s0 = 00000101
TEST s0, 04 ; mask = 00000100
; CARRY = 1, ZERO = 0
7 6 5 4 3 2 1 0
7 6 5 4 3 2 1 0Register sX
Register sY
Literal kk
CARRY
UG129_c3_04_051404
Mask out unwanted bits.
0=mask bit, 1=include bit
Generate odd parity
(XOR) from bit results.
Figure 3-22: The TEST Instruction Affects the ZERO Flag
Each bit of register sX is logically ANDed with either the contents of register sY or a literal
constant, kk. The operation sets the ZERO flag if the result of all bitwise AND operations
is zero.
If the second operand contains a single ‘1’ bit, then the CARRY flag tests if the
corresponding bit in register sX is ‘1’ as shown in the example in Figure 3-23.
Figure 3-23: Generate Parity for a Register Using the TEST Instruction
In a broader application, the CARRY bit generates the odd parity for the included bits in
register sX, as shown in Figure 3-24. The second operand acts as a mask. If a bit in the
second operand is ‘0’, then the corresponding bit in register sX is not included in the
generated parity value. If a bit in the second operand is ‘1’, then the corresponding bit in
register sX is included in the final parity value.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 33
UG129 (v1.1.2) June 24, 2008
Figure 3-24: The TEST Instruction Affects the CARRY Flag
Page 34

Chapter 3: PicoBlaze Instruction Set
R
generate_parity:
TEST sX, FF ; include all bits in parity generation
The example in Figure 3-25 demonstrates how to generate parity for all eight bits in a
register.
Figure 3-25: Generate Parity for a Register Using the TEST Instruction
See also “TEST sX, Operand — Test Bit Location in Register sX, Generate Odd Parity,” page
116.
Compare
The COMPARE instruction performs an 8-bit subtraction of two operands but only affects
the ZERO and CARRY flags, as shown in Ta b le 3 -3 . No registers are modified.
The ZERO flag is set when both input operands are identical. When set, the CARRY flag
indicates that the second operand is greater than the first operand.
Table 3-3: COMPARE Instruction Flag Operations
Flag When Flag=0 When Flag=1
ZERO Operand_1 ≠ Operand_2 Operand_1 = Operand_2
CARRY Operand_1 >
See also “COMPARE sX, Operand — Compare Operand with Register sX,” page 96.
Shift and Rotate Instructions
Shift
The PicoBlaze microcontroller supports a rich set of shift instructions, summarized in
Ta bl e 3 -4 , that modify the contents of a single register. All shift instructions affect the
CARRY and ZERO flags.
The SL0 sX instruction shift the contents of register sX left by one bit position. The mostsignificant bit, bit 7, shifts into the CARRY flag. The least-significant bit position is filled
with a ‘0’. The SR0 instruction is similar except the least-significant bit, bit 0, shifts into the
CARRY flag and the most-significant bit is filled with a ‘0’.
The SL1 and SR1 shift instructions are similar to SL0 and SR0 except that the empty bit
location is filled with a ‘1’. The ZERO flag is always ‘0’ when using SL1 and SR1 because
there is always a ‘1’ shifted into the affected register, making the register non-zero.
The SRX sX instruction performs an arithmetic shift right operation and sign extends
register sX, preserving the sign bit. The most-significant bit, bit 7, is unaffected during the
shift operation and is copied back into bit 7. The SLX sX instruction is similar but shifts the
register sX contents to the left, replicating bit 0 and filling the register with the bit 0 value.
Operand_2 Operand_1 < Operand_2
The SLA sX instruction left shifts the contents of register sX through the CARRY bit, the
CARRY bit feeding back into the least-significant bit, bit 0, of register sX. The SRA sX
instruction is similar to SLA but with a right shift.
34 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 35

Processing Data
R
7 6 5 4 3 2 1 0
Register sXCARRY
‘0’
7 6 5 4 3 2 1 0
Register sX CARRY
‘0’
7 6 5 4 3 2 1 0
Register sXCARRY
‘1’
7 6 5 4 3 2 1 0
CARRYRegister sX
‘1’
7 6 5 4 3 2 1 0
Register sXCARRY
7 6 5 4 3 2 1 0
CARRYRegister sX
7 6 5 4 3 2 1 0
Register sXCARRY
7 6 5 4 3 2 1 0
CARRYRegister sX
7 6 5 4 3 2 1 0
Register sXCARRY
7 6 5 4 3 2 1 0
CARRYRegister sX
Table 3-4: PicoBlaze Shift Instructions
Shift Left Shift Right
SL0
SL1
SLX
SLA
Shift Left with ‘0’ fill. SR0 Shift Right with ‘0’ fill.
Shift Left with ‘1’ fill. SR1 Shift Right with ‘1’ fill.
Shift Left, eXtend bit 0. SRX Shift Right, sign eXtend.
Shift Left through All bits, including CARRY. SRA Shift Right through All bits, including CARRY.
See also:
• “SL[ 0 | 1 | X | A ] sX — Shift Left Register sX,” page 109
• “SR[ 0 | 1 | X | A ] sX — Shift Right Register sX,” page 110
Rotate
The rotate instructions, shown in Table 3- 5, rotate the contents of the specified register left
or right. The RL sX instruction shifts the contents of register sX left with the mostsignificant bit, bit 7, feeding the least-significant bit, bit 0. The most-significant bit, bit 7,
also shifts into the CARRY flag. The RR sX instruction is similar but shifts the contents of
register sX to the right and copies the least-significant bit, bit 0, into the CARRY flag.
Table 3-5: PicoBlaze Rotate Instructions
Rotate Left
RL RR
See also:
• “RL sX — Rotate Left Register sX,” page 108
• “RR sX — Rotate Right Register sX,” page 108
Rotate Right
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 35
UG129 (v1.1.2) June 24, 2008
Page 36

R
Moving Data
Registers
LOAD sX, sY
Scratchpad RAM
FETCHSTORE
IN_PORT
INPUT
OUT_PORT
OUTPUT
PORT_ID
Instruction
Store
LOAD sX, kk
INPUT sX, (sY)
OUTPUT sX, (sY)
INPUT sX, kk
OUTPUT sX, kk
UG129_c3_05_060404
Chapter 3: PicoBlaze Instruction Set
Data movement between various resources is an essential microcontroller function.
Figure 3-26 shows the various PicoBlaze instructions to move data.
The LOAD sX,sY instruction moves data between two PicoBlaze registers; Register sX
receives the data. The LOAD sX,kk instruction loads an immediate byte-wide constant into
the specified register. See also “LOAD sX, Operand — Load Register sX with Operand,”
page 102. The LOAD instructions do not affect the CARRY or ZERO flags.
The STORE and FETCH instructions move data between the register file and the scratchpad
RAM. See “Chapter 5, “Scratchpad RAM,” for more information.
During an INPUT operation, data from the IN_PO RT input port is always read to one of the
registers. Likewise, during an OUTPUT instruction, data written to the OUT_PORT output
port always originates from one of the registers. The input/output address, provided on
the PORT_ID output, originates either from one of the registers or as a literal constant from
the instruction store. See Chapter 6, “Input and Output Ports,” for more information.
Program Flow Control
The Program Counter (PC) points to the next instruction to be executed and directly
controls the PicoBlaze program flow. By default, the PicoBlaze microcontroller proceeds to
the next instruction in the instruction store (PC=PC+1). The PC cannot be directly accessed.
However, three different PicoBlaze instructions, JUMP and the CALL/RETURN pair
potentially modify the default program flow by loading the PC with a different value. An
enabled interrupt event also modifies program flow but this case is described in Chapter 4,
“Interrupts.” Likewise, a Reset Event resets the PC to zero, restarting program execution.
Figure 3-26: Data Movement Instructions
36 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 37

Program Flow Control
R
JUMP
The JUMP, CALL, and RETURN instructions are all conditionally executed, depending if a
condition is specified and specifically whether the CARRY or ZERO flags are set or cleared.
Ta bl e 3 -6 summarizes the possible conditions. The condition is specified as an instruction
operand. The instruction is unconditionally executed if no condition is specified.
Table 3-6: Instruction Conditional Execution
Condition Description
<none> Always true. Execute instruction unconditionally.
C CARRY = 1. Execute instruction if CARRY flag is set.
NC CARRY = 0. Execute instruction if CARRY flag is cleared.
Z ZERO = 1. Execute instruction if ZERO flag is set.
NZ ZERO = 0. Execute instruction if ZERO flag is cleared.
The JUMP instruction is conditional and executes only if the specified condition, listed in
Ta bl e 3 -6 , is met. If the condition is false, then the conditional JUMP instruction has no
effect other than requiring two clock cycles to execute. No registers or flags are affected.
If the conditional JUMP instruction is executed, then the PC is loaded with the address of
the specified label, which is computed and assigned by the assembler. The PicoBlaze
processor then executes the instruction at the specified label.
The JUMP instruction does not interact with the CALL/RETURN stack.
Arrow ‘A’ in Figure 3-27 illustrates the program flow during a JUMP instruction. When the
PicoBlaze microcontroller executes the JUMP C, skip_over instruction, it first checks if
the CARRY bit is set. If the CARRY bit is set, then the address of the skip_over label is
loaded into the PC. The PicoBlaze microcontroller then jumps to and executes the
instruction located at that address. Program flow continues normally from that point.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 37
UG129 (v1.1.2) June 24, 2008
Page 38

Chapter 3: PicoBlaze Instruction Set
R
If CARRY is set, load the PC with the
address of the label skip_over.
Call my_subroutine. Save
the current PC to top of CALL/
RETURN stack. Load the PC with
the address of my_subroutine.
Return from my_subroutine.
Load the PC with the top of the CALL/
RETURN stack plus 1. Execute the
instruction immediately following
the associated CALL instruction.
ADDRESS 000
main:
ADD s0, s1
skip_over:
JUMP main
my_subroutine:
RETURN
2
3
1
A
JUMP C, skip_over
CALL my_subroutine
UG129_c3_06_051404
CALL/RETURN
Figure 3-27: Example JUMP and CALL/RETURN Procedures
The JUMP instruction does not affect the ZERO and CARRY flags. All jumps are absolute;
there are no relative jumps. Likewise, computed jumps are not supported.
See also “JUMP [Condition,] Address — Jump to Specified Address, Possibly with
Conditions,” page 101.
The CALL instruction differs from the JUMP instruction in that program flow temporarily
jumps to a subroutine function and then returns to the instruction following the CALL
instruction, as shown in Figure 3-27. The CALL instruction is conditional and executes only
if the specified condition, listed in Ta bl e 3- 6, is met. If the condition is false, then the
conditional CALL instruction has no effect other than requiring two clock cycles to execute.
No registers or flags are affected.
If the conditional CALL instruction is executed, then the current PC value is pushed on top
of the CALL/RETURN stack. The address of the specified label, which is computed and
assigned by the assembler, is loaded into the PC. The PicoBlaze microcontroller then
executes the instruction at the specified label. See arrow ‘1’ in Figure 3-27.
The PicoBlaze microcontroller continues executing instructions in the subroutine call until
it encounters a RETURN instruction. See arrow ‘2’ in Figure 3-27.
Every CALL instruction should have a corresponding RETURN instruction. The RETURN
instruction is also conditional and executes only if the specified condition, listed in
Ta bl e 3 -6 , is met. The RETURN instruction terminates the subroutine call, pops the top of
the CALL/RETURN stack, increments the value, and loads the value into the PC, which
returns the program flow to the instruction immediately following the original CALL
instruction. See arrow ‘3’ in Figure 3-27.
If the conditional CALL instruction is executed, the ZERO and CARRY flags are potentially
modified by the instructions within the called subroutine, but not directly by the CALL or
38 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 39

Program Flow Control
R
RETURN instructions themselves. If the CALL instruction is not executed, then the flags are
unaffected.
See also:
• “CALL [Condition,] Address — Call Subroutine at Specified Address, Possibly with
Conditions,” page 94“
• “RETURN [Condition] — Return from Subroutine Call, Possibly with Conditions,”
page 106
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 39
UG129 (v1.1.2) June 24, 2008
Page 40

Chapter 3: PicoBlaze Instruction Set
R
40 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 41

R
Interrupts
DQ
SET
RST
Interrupt signal
INTERRUPT
INTERRUPT_ACK
PicoBlaze Microcontroller
2
3
UG129_c4_01_060404
The PicoBlaze™ processor provides a single interrupt input signal. If the application
requires multiple interrupt signals, combine the signals using simple FPGA logic to form a
single INTERRUPT input signal. After reset, the INTERRUPT input is disabled and must
be enabled via the ENABLE INTERRUPT instruction. To disable interrupts at any point in
the program, issue a DISABLE INTERRUPT instruction.
Chapter 4
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 41
UG129 (v1.1.2) June 24, 2008
Figure 4-1: Simple Interrupt Logic
Once enabled, the INTERRUPT input signal must be applied for at least two clock cycles to
guarantee that it is recognized, generating an INTERRUPT Event.
An active interrupt forces the PicoBlaze processor to immediately execute the CALL 3FF
instruction immediately after completing the instruction currently executing. The CALL
3FF instruction is a subroutine call to the last program memory location. The instruction in
the last location defines how the application code should handle the interrupt. Typically,
the instruction at location 3FF is a jump location to an interrupt service routine (ISR).
The PicoBlaze microcontroller automatically performs other functions. The interrupt
process preserves the current ZERO and CARRY flag contents and disables any further
interrupts. Likewise, the current program counter (PC) value is pushed onto the
CALL/RETURN stack. Interrupts must remain disabled throughout the interrupt
handling process.
As shown in Figure 4-3, the PicoBlaze microcontroller asserts its INTERRUPT_ACK signal
during the second cycle of the two-cycle Interrupt Event to indicate that the interrupt was
recognized. The INTERRUPT_ACK signal may be used to clear external interrupts, as
shown in Figure 4-1.
Page 42

R
A special RETURNI command ensures that the end of an interrupt service routine restores
The interrupt input is not
recognized until the
INTERRUPT_ENABLE flag is set.
In timing-critical functions or areas
where absolute predictability is
required, temporarily disable the
interrupt. Re-enable the interrupt
input when the time-critical function
is complete.
Always return from a sub-routine
call with the RETURN instruction.
The interrupt vector is always
located at the most-significant
memory location, where all the
address bits are ones. Jump to the
interrupt service routine.
The interrupt input is automatically
disabled.
Use the RETURNI instruction to
return from an interrupt.
INTERRUPT
input
asserted.
ADDRESS 000
main:
ENABLE INTERRUPT
INPUT s0, 00
INPUT s1, 01
ADD s0, s1
OUTPUT s0, 00
CALL critical_timing
JUMP main
critical_timing: DISABLE INTERRUPT
ENABLE INTERRUPT
RETURN
isr: TEST s7, 02
RETURNI ENABLE
ADDRESS 3FF
JUMP isr
2
1
6
3
4
5
UG129_c4_02_051404
the status of the flags and controls the enable of future interrupts. When the RETURNI
instruction is executed, the PC values saved onto the CALL/RETURN stack is
automatically reloaded to the PC register. Likewise, the ZERO and CARRY flags are
restored and program flow returns to the instruction following the instruction where the
interrupt occurred.
If the application does not require an interrupt, tie the INTERRUPT signal Low.
Consequently, all 1,024 instruction locations are available.
Example Interrupt Flow
Chapter 4: Interrupts
Figure 4-2 shows an example program flow during an interrupt event.
1. By default, the INTERRUPT input is disabled. The ENABLE INTERRUPT instruction
2. In this example, interrupts are enabled and the PicoBlaze microcontroller is executing
Figure 4-2: Example Interrupt Flow
must execute before the interrupt is recognized.
the INPUT s1,01 instruction. Simultaneously to executing this instruction, an
interrupt arrives on the INTERRUPT input. The PicoBlaze microcontroller does not act
on the interrupt until it finishes executing the INPUT s1, 01 instruction.
42 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 43

Example Interrupt Flow
R
ADD s0,s1INPUT s1,01 JUMP isr TEST s7,02
3FF isr
Address of
ADD s0,s1
...
Interrupt
recognized
Call to interrupt
vector, assert
INTERRUPT_ACK
Jump to interrupt
service routine
ADD s0,s1 instruction
pre-empted. PC saved to
stack. Flags preserved.
Interrupt disabled.
Begin executing
interrupt service
routine
5 clock cycles
CLK
INSTRUCTION
ADDRESS[9:0]
INTERRUPT
INTERRUPT_ACK
PREEMPTED
CALL/RETURN
Stack
Preserved
ZERO Flag
ZERO
Flag
Preserved
CARRY Flag
CARRY
Flag
INTERRUPT_ENABLE
1
0
UG129_c4_03_051404
2
3 4
3. The PicoBlaze microcontroller recognizes the interrupt and preempts the ADD s0,s1
instruction. The current PC, which points to the ADD s0 s1 instruction, is pushed
onto the CALL/RETURN stack. Likewise, the ZERO and CARRY flags are preserved.
Furthermore, the INTERRUPT_ENABLE flag is cleared disabling any further
interrupts. Finally, the PC is loaded with all ones (3FF) and the PicoBlaze
microcontroller performs an interrupt service routine call to the last location in the
instruction store. If using a 1Kx18 block RAM for instruction store, the last location is
3FF. If using a smaller instruction store, then the interrupt vector is still located in the
last instruction location. The PicoBlaze microcontroller also asserts the
INTERRUPT_ACK output, indicating that the interrupt is being acknowledged.
4. The interrupt vector is always located in the last location in the instruction store. In this
example, the program jumps to the interrupt service routine (ISR) via the JUMP isr
instruction.
5. When completed, exit the interrupt service routine (ISR) using the special RETURNI
instruction. Do not use the RETURN instruction, which is used with normal subroutine
calls. The RETURNI ENABLE instruction returns from the interrupt service routine and
re-enables the INTERRUPT input, which was automatically disabled when the
interrupt was recognized. Using RETURNI DISABLE also returns from the interrupt
service routine but leaves the INTERRUPT input disabled.
6. The RETURNI instruction restores the preserved ZERO and CARRY flags saved
during Step (3). Likewise, the RETURNI instruction pops the top of the
CALL/RETURN stack into the PC, which causes the PicoBlaze microcontroller to
resume program executing the instruction that was preempted by the interrupt, ADD
s0,s1 in this example.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 43
UG129 (v1.1.2) June 24, 2008
Figure 4-3: Interrupt Timing Diagram
Page 44

Chapter 4: Interrupts
R
Figure 4-3 shows the same interrupt procedure but as a timing diagram. With the interrupt
enabled, the INTERRUPT input is recognized at Step (2), the same clock cycle where the
ADDRESS bus changes value. The address for the instruction ADD s0,s1 appears on the
ADDRESS bus and is pushed onto the CALL/RETURN stack. Simultaneously, the
interrupt is disabled and the ZERO and CARRY flags are preserved. The ADD s0, s1
instruction is preempted and does not yet execute. Instead, the PicoBlaze microcontroller
performs a call to the interrupt vector at location 0x3FF.
An interrupt is undesirable in timing-critical procedures or when predictable timing is a
must. Temporarily disable the INTERRUPT input using the DISABLE INTERRUPT
instruction, as demonstrated in the critical_timing subroutine in Figure 4-2. Once the
critical procedure completes, re-enable the INTERRUPT input with the ENABLE
INTERRUPT instruction.
44 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 45

R
Scratchpad RAM
scratchpad_transfers:
STORE sX, 04 ; Write register sX to RAM location 04
FETCH sX, 04 ; Read RAM location 04 into register sX
The PicoBlaze™ microcontroller contains a 64-byte scratchpad RAM. Two instructions,
STORE and FETCH, move data between any data register and the scratchpad RAM. Both
direct and indirect addressing are supported. The scratchpad RAM is only supported on
PicoBlaze microcontrollers for Spartan
The scratchpad RAM is unaffected by a RESET Event.
Address Modes
The STORE and FETCH instructions support both direct and indirect addressing modes to
access scratchpad RAM data.
Direct Addressing
Chapter 5
®
-3, Virtex®-II, and Virtex-II Pro FPGAs.
An immediate constant value directly addresses a specific scratchpad RAM location. In the
example in Figure 5-1, register sX directly writes to and reads from scratchpad RAM
location 04.
Indirect Addressing
Using indirect address, the actual RAM address is the value contained in a specified
register. Whereas direct addressing requires the RAM address to be known before
assembly, indirect addressing provides additional program flexibility. The application
code can compute or modify the RAM address based on other program data. The code in
Figure 5-2, for example, initializes all the scratchpad RAM locations to 0 using a simple
loop.
Figure 5-1: Directly Addressing Scratchpad RAM Locations
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 45
UG129 (v1.1.2) June 24, 2008
Page 46

R
Figure 5-2: Indirect Addressing Initializes All of RAM with a Simple Subroutine
NAMEREG s0, ram_data
NAMEREG s1, ram_address
CONSTANT ram_locations, 40 ; there are 64 locations
CONSTANT initial_value, 00 ; initialize to zero
LOAD ram_data, initial_value ; load initial value
LOAD ram_address, ram_locations ; fill from top to bottom
ram_fill: SUB ram_address, 01 ; decrement address
STORE ram_data, (ram_address) ; initialize location
JUMP NZ, ram_fill ; if not address 0, goto
; ram_fill
CONSTANT switches, 00 ; read switch values at port 0
CONSTANT LEDs, 01 ; write 7-seg LED at port 1
; Define 7-segment LED pattern {dp,g,f,e,d,c,b,a}
CONSTANT LED_0, C0 ; display '0' on 7-segment display
CONSTANT LED_1, F9 ; display '1' on 7-segment display
;
CONSTANT LED_F, 8E ; display 'F' on 7-segment display
NAMEREG s0, switch_value ; read switches into register s0
NAMEREG s1, LED_output ; load LED output data in register s1
; Load 7-segment LED patterns into scratchpad RAM
LOAD LED_output, LED_0 ; grab LED pattern for switches = 0000
STORE LED_output, 00 ; store in RAM[0]
LOAD LED_output, LED_1 ; grab LED pattern for switches = 0001
STORE LED_output, 01 ; store in RAM[1]
;
LOAD LED_output, LED_F ; grab LED pattern for switches = 1111
STORE LED_output, 0F ; store in RAM[F]
; Read switch values and display value on 7-segment LED
loop: INPUT switch_value, switches ; read value on switches
AND switch_value, F0 ; mask upper bits to guarantee < 15
FETCH LED_output, (switch_value) ; look up LED pattern in RAM
OUTPUT LED_output, LEDs ; display switch value on 7-segment LED
JUMP loop
Implementing a Look-Up Table
The next few examples demonstrate both the flexibility of the scratchpad RAM and
indirect addressing. The example code in Figure 5-3 uses Scratchpad RAM as a look-up
table (LUT) to convert four binary inputs to the equivalent hexadecimal character display
on a 7-segment LED. The code reads four external switches, resulting in a binary value
between 0000 and 1111. The PicoBlaze microcontroller converts each four-bit switch value
into the equivalent hexadecimal character as displayed on a 7-segment LED. The
scratchpad RAM holds the LED output patterns in the first 16 locations. The input switch
value is the address input to the RAM.
Chapter 5: Scratchpad RAM
46 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
Figure 5-3: Using Scratchpad RAM as a Look-Up Table
UG129 (v1.1.2) June 24, 2008
Page 47

Stack Operations
R
NAMEREG sF, stack_ptr ; reserve register sF for the stack pointer
; Initialize stack pointer to location 32 in the scratchpad RAM
LOAD sF, 20
my_subroutine:
; preserve register s0
CALL push_s0
; *** remainder of subroutine algorithm ***
; restore register s0
CALL pop_s0
RETURN
push_s0:
STORE s0, stack_ptr ; preserve register s0 onto “stack”
ADD stack_ptr, 01 ; increment stack pointer
RETURN
pop_s0:
SUB stack_ptr, 01 ; decrement stack pointer
FETCH s0, stack_ptr ; restore register s0 from “stack”
RETURN
Stack Operations
Although the PicoBlaze microcontroller has a CALL/RETURN stack, it does not have a
dedicated data stack. In some controller architectures, register values are preserved during
subroutine calls or interrupts by pushing them or popping them onto a data stack. The
equivalent operation is possible in the PicoBlaze microcontroller by reserving some
locations in scratchpad RAM.
In the example shown in Figure 5-4, the my_subroutine function uses register s0. The
value of register s0 is preserved onto a “stack”, which is emulated using scratchpad RAM.
When the my_subroutine function completes, the preserved value of register s0 is
restored from the stack.
Figure 5-4: Use Scratchpad RAM to Emulate PUSH and POP Stack Operations
FIFO Operations
In a similar vein, FIFOs can be created using two separate pointers into scratchpad RAM.
One pointer tracks data being written into RAM; the other tracks data being read from
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 47
UG129 (v1.1.2) June 24, 2008
RAM.
See also:
• “STORE sX, Operand — Write Register sX Value to Scratchpad RAM Location,” page
112.
• “FETCH sX, Operand — Read Scratchpad RAM Location to Register sX,” page 98.
Page 48

Chapter 5: Scratchpad RAM
R
48 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 49

R
Input and Output Ports
The PicoBlaze™ microcontroller supports up to 256 input ports and 256 output ports that
can also be combined to create input/output ports. The interface signals from Figure 2-1
involved in INPUT and OUTPUT operations are described below.
• The PORT_ID[7:0] output port presents the port identifier number or port address for
both INPUT and OUTPUT operations.
• The IN_PORT[7:0] input port captures input data during INPUT operations.
• The OUT_PORT[7:0] output port presents output data during OUTPUT operations.
• The READ_STROBE output is asserted High during the second cycle of the two-cycle
INPUT operation.
• The WRITE_STROBE output is asserted High during the second cycle of the two-cycle
OUTPUT operation.
In timing critical designs, set timing constraints for the PORT_ID and data paths allowing
two clock cycles. Only the read and write strobes need to be constrained to a single clock
cycle. For maximum performance and to simplify timing constraints, insert a pipeline
register where possible, as described in the following sections.
Chapter 6
PORT_ID Port
Thought-out design keeps the interface logic compact with good performance. The
following diagrams show circuits suitable for output ports, input ports, and for connecting
memory. When using a logic synthesis tool, check that the source code is not describing a
circuit that is more complex than is actually required and that the synthesis tool is
implementing the intended logic.
The 8-bit PORT_ID port supplies the port identifier or port address for the associated
INPUT or OUTPUT operation. The PORT_ID port is valid for two clock cycles, allowing
sufficient time for any interface decoding logic and for connections to asynchronous RAM.
Similarly, the two-cycle operation allows read operations from synchronous RAM, such as
block RAM.
INPUT and OUTPUT operations support both direct and indirect addressing. The port
address is supplied as either as an 8-bit immediate constant or specified indirectly as the
contents of any of the 16 data registers. Indirect addressing is ideal when accessing a block
of memory, either a peripheral at contiguous port addresses or some form of block or
distributed memory within or external to the FPGA.
Adding external peripherals to the PicoBlaze microcontroller is relatively straightforward.
The only challenge is decoding the PORT_ID value using the minimum required logic for
the application. The decoding challenge depends on the number of input, output, or
bidirectional ports, as described in Table 6- 1 and subsequent text.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 49
UG129 (v1.1.2) June 24, 2008
Page 50

Chapter 6: Input and Output Ports
R
n
READ_STROBE
PORT_ID[7:0]
8
Register sY or
Literal kk
Register sX IN_PORT[7:0]
8
FPGA Logic
DQ
m
PicoBlaze Microcontroller
UG129_c6_01_052004
Table 6-1: Decoding PORT_ID Depending on Number of Ports
Number of Ports INPUT OUTPUT
0 to 1 No multiplexing required No decoding required
INPUT Operations
An INPUT operation transfers the data supplied on the IN_PORT input port to any one of
the 16 data registers, defined by register sX, as shown in Figure 6-1. The PORT_ID output
port, defined either by register sY or an 8-bit immediate constant, selects the desired input
source. Input sources are generally selected via a multiplexer, using a portion of the bits
from the PORT_ID output port to select a specific source. The size of the multiplexer is
proportional to the number of possible input sources, which has direct implications on
performance.
2 to 8 Single input multiplexer
Binary encode PORT_ID
9 to 256 Cascaded multiplexer tree
Binary encode PORT_ID
“One hot” encode PORT_ID
Binary encode PORT_ID
Hybrid “one hot”/binary encoded
Figure 6-1: INPUT Operation and FPGA Interface Logic
The INPUT operation asserts the associated READ_STROBE output pulse on the second
cycle of the two-cycle INPUT cycle, as shown in Figure 6-2. The READ_STROBE signal is
seldom used in applications but it indicates that the PicoBlaze microcontroller has
acquired the data. READ_STROBE is critical when reading data from a FIFO,
acknowledging receipt of data as shown in Figure 6-4.
50 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 51

INPUT Operations
R
INPUT s0,(s7)
Contents of
register s7
CLK
PORT_ID[7:0]
IN_PORT[7:0]
READ_STROBE
INSTRUCTION[17:0]
Register s0
Captured Value from
IN_PORT[7:0]
The PicoBlaze microcontroller
captures the value on IN_PORT[7:0] into
register s0 on this clock edge.
UG129_c6_02_060404
0
123
4
Figure 6-2: Port Timing for INPUT Instruction
In this example, the PicoBlaze microcontroller is reading data from the port address
defined by the contents of register s7. The read data is captured in register s0. When the
instruction executes, the contents of register S7 appear on the PORT_ID port. The
PORT_ID is then decoded by FPGA logic external to the PicoBlaze microcontroller and the
requested data is eventually presented on the IN_PORT port. The READ_STROBE signal
goes High during the second clock cycle of the instruction, although the READ_STROBE
signal is primarily used only by FIFOs so that the FIFO can update its read pointer. The
data presented on the IN_PORT port is captured on rising clock edge 2, marking the end of
the INPUT instruction. Data needs only be present with sufficient setup time to this clock
edge. After rising clock edge 2, the data on the IN_PORT port is captured and available in
the target register, register s0 in this case.
Because the PORT_ID is valid for two clock cycles, the input data multiplexer can be
registered to maintain performance, as shown in Figure 6-3. In most applications, the
actual clock cycle when the PicoBlaze microcontroller reads an input is not critical.
Therefore the paths from the various sources can typically be registered. For example,
signals arriving from the FPGA pins can be captured using input flip-flops. Registering the
input path simplifies timing specifications, avoids reports of ‘false paths’ and leads to more
reliable designs.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 51
UG129 (v1.1.2) June 24, 2008
Page 52

Chapter 6: Input and Output Ports
R
IN_PORT[7:0] OUT_PORT[7:0]
PORT_ID[7:0]
READ_STROBE
WRITE_STROBE
PicoBlaze Microcontroller
1 1
1 0
0 1
0 0
S1
S0
PORT_ID[0]
PORT_ID[1]
IN_D
Registering the multiplexer output is
allowed because PORT_ID is
asserted for two clock cycles.
Registering improves performance.
IN_C
IN_B
IN_A
UG129_c6_03_060404
Figure 6-3: Multiplex Multiple Input Sources to Form a Single IN_PORT Port
Failure to include a register anywhere in the path from PORT_ID to IN_PORT is the most
common reason for decreased system clock rates. Consequently, make sure that this path is
registered at some point.
Applications with Few Input Sources
If the application has 32 or less input ports, then a single multiplexer is ideal to connect the
various input signals to the IN_PORT input port, as shown in Figure 6-3. Check the results
of synthesis to ensure that the special MUXF5, MUXF6, MUXF7, and MUXF8 are being
employed to make the most efficient multiplexer structure.
Refer to UG331 Chapter 8: Using Dedicated Multiplexers (see Reference 5).
READ_STROBE Interaction with FIFOs
Occasionally, the circuit providing data to the PicoBlaze microcontroller needs to know
that it was successfully read. Figure 6-4 shows an example using a FIFO buffer. The FIFO
only updates its read pointer once the PicoBlaze microcontroller successfully captures
data, indicated by the READ_STROBE signal.
52 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 53

OUTPUT Operations
R
IN_PORT[7:0] OUT_PORT[7:0]
PORT_ID[7:0]
READ_STROBE
WRITE_STROBE
PicoBlaze Microcontroller
0 1
0 0
S1
S0
PORT_ID[0]
PORT_ID[1]
READ DATA_OUT
FIFO
READ_STROBE
If performance is adequate,
remove the flip-flip and combine
the READ_STROBE and
PORT_ID decode logic.
UG129_c6_04_060404
m
EN
D Q
FPGA Logic
n
WRITE_STROBE
OUT_PORT[7:0]
PORT_ID[7:0]
PicoBlaze Microcontroller
8
8
Register sY or
Literal kk
Register sX
UG129_c6_05_052004
Figure 6-4: READ_STROBE Indicates a Successful INPUT Operation
OUTPUT Operations
As shown in Figure 6-5, an OUTPUT operation presents the contents of any of the 16
registers to the OUT_PORT output port. The PORT_ID output port, defined either by
register sY or an 8-bit immediate constant, selects the desired output destination. The
WRITE_STROBE output pulse indicates that data on the OUT_PORT port is valid and
ready for capture. Typically, the WRITE_STROBE signal, combined with the decoded
PORT_ID port, is used as either a clock enable or a write enable signal to other FPGA logic
that captures the output data.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 53
UG129 (v1.1.2) June 24, 2008
The OUTPUT operation asserts the associated WRITE_STROBE output pulse beginning on
rising CLK edge 1 of the two-cycle OUTPUT instruction , as shown in Figure 6-6. In this
particular example, the PicoBlaze microcontroller writes the contents of register s0 to
hexadecimal port address 65. The contents of register s0 appear on the OUT_PORT port;
the port address appears on the PORT_ID port. The WRITE_STROBE goes High on the
second clock cycle to indicate that data is valid.
Figure 6-5: OUTPUT Operation and FPGA Interface
Page 54

Chapter 6: Input and Output Ports
R
Use WRITE_STROBE as the clock
enable to capture output values
in FPGA logic.
OUTPUT s0, 65
CLK
PORT_ID[7:0]
OUT_PORT[7:0]
WRITE_STROBE
INSTRUCTION[17:0]
FPGA Register
Captured Value from
OUT_PORT[7:0]
65
Contents of
Register s0
UG129_c6_06_060404
0
123
4
Figure 6-6: Port Timing for OUTPUT Instruction
Simple Output Structure for Few Output Destinations
For eight or less simple output ports, use “one-hot” port addresses and only decode the
appropriate PORT_ID signal, as shown in Figure 6-7. This technique greatly reduces the
address decode logic which lowers cost and maximizes performance. This approach also
reduces the loading on the PORT_ID bus, which is often critical to overall system
performance.
If the number of decoded PORT_ID bits is three or less, then the decode logic fits in a single
level of FPGA logic, maximizing performance.
54 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 55

OUTPUT Operations
R
IN_PORT[7:0] OUT_PORT[7:0]
PORT_ID[7:0]
READ_STROBE
WRITE_STROBE
PicoBlaze Microcontroller
[0]
EN
DQ
PORT_A
[1]
EN
DQ
PORT_B
[2]
EN
DQ
PORT_C
UG129_c6_07_052004
; Use CONSTANT declarations to define output port addresses
CONSTANT Port_A, 01
CONSTANT Port_B, 02
CONSTANT Port_C, 04
CONSTANT Port_D, 08
CONSTANT Broadcast, FF
;
; Use assigned port names for better readability
OUTPUT s0, Port_A
OUTPUT s1, Port_B
OUTPUT s2, Port_C
OUTPUT s4, Port_D
;
; Send broadcast message to all addresses to clear all output registers
LOAD s0, 00
OUTPUT s0, Broadcast
Figure 6-7: Simple Address Decoding for Designs with Few Output Destinations
As shown in Figure 6-8, use CONSTANT directives in the program make the code readable
and help ensure that the correct ports are decoded. Because the PORT_ID addresses use
“one-hot” encoding, it is also possible to create a single address that incorporates all the
individual addresses. This way, the PicoBlaze microcontroller can send a broadcast
message to all of the output destinations—in this case, a single instruction clears all
destinations.
Figure 6-8: Use CONSTANT Directives to Declare Output Port Addresses
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 55
UG129 (v1.1.2) June 24, 2008
Page 56

R
Pipelining for Maximum Performance
IN_PORT[7:0] OUT_PORT[7:0]
PORT_ID[7:0]
READ_STROBE
WRITE_STROBE
PicoBlaze Microcontroller
EN
DQ
WE
D SPO
A[4:0]
RAM16X1D (x8)
DPO
DPRA[4:0]
WE
DO
A[4:0]
RAM32X1S (x8)
Clock Cycle 1
Decode Address
Clock Cycle 2
Qualify with WRITE_STROBE
DECODE
DECODE
DECODE
UG129_c6_08_052004
In most applications, the PicoBlaze microcontroller has more than sufficient performance
to meet application requirements. However, PicoBlaze designs attached to multiple
memory blocks or that have many simple ports may end up using most, if not all, of the 256
available port addresses. Decoding and routing all 256 locations complicates the overall
design, especially for designs requiring maximum performance.
Pipelining the PORT_ID decoding function improves overall system performance. During
an OUTPUT operation, both the PORT_ID and OUT_PORT ports are valid for two clock
cycles while the WRITE_STROBE output is only active during the second of the two cycles,
as shown Figure 6-6.
One approach to improving interface performance is to pipeline the PORT_ID decoding
logic, as illustrated in Figure 6-9. In designs with many ports, the fanout and loading on
the PORT_ID bus limits maximum performance. Fortunately, because the PORT_ID port is
active for two clock cycles, the PORT_ID logic can be pipelined. Each decoded PORT_ID
value is then captured in a flip-flop. Each pipelined decode value is qualified using the
WRITE_STROBE signal during the next clock cycle to actually capture the OUT_PORT
data.
Chapter 6: Input and Output Ports
56 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
Figure 6-9: Pipelining the PORT_ID Decoding Improves Performance
UG129 (v1.1.2) June 24, 2008
Page 57

Pipelining for Maximum Performance
R
IN_PORT[7:0] OUT_PORT[7:0]
PORT_ID[7:0]
READ_STROBE
WRITE_STROBE
PicoBlaze Microcontroller
WE
D SPO
A[4:0]
RAM16X1D (x8)
0 0
0 1
1 0
S1
S0
DPO
DPRA[4:0]
1 1
A
B
UG129_c6_09_052004
The pipelining registers on the OUT_PORT and PORT_ID signals, shaded in Figure 6-9, are
optional. Both OUT_PORT and PORT_ID are valid for two clock cycles. However,
pipelining them decreases the initial fanout and reduces the routing distance, both of
which improve performance.
During OUTPUT operations, the PicoBlaze microcontroller has no data dependencies and
consequently no dependencies on the FPGA interface logic. If data takes longer than the
two-clock instruction cycle to be captured by the FPGA logic, so be it. The PicoBlaze
microcontroller initiates the OUTPUT operation but does not need to wait while the FPGA
logic captures the data in its ultimate location as long as data is not lost. However,
pipelining INPUT operations can be more complicated. During an INPUT operation, the
PicoBlaze microcontroller requests data from the FPGA logic and must receive the data to
successfully complete the instruction.
Figure 6-10 illustrates the dependency, where the critical timing path is blue. In this
example, the PicoBlaze microcontroller is reading data from a dual-port RAM. This
example assumes that some other function within the FPGA writes data into the dual-port
RAM. When the PicoBlaze microcontroller reads data from the dual-port RAM, the read
address appears on the PORT_ID port. The critical path is the delay from the PORT_ID
port, through the dual-port RAM read path, through the input select multiplexer, to the
setup on the pipelining register. If this path limits performance, add a pipelining register to
improve performance. However, where is the best position for the pipeline register, Point
A or Point B?
Figure 6-10: Without Pipelining, the Full Read Path Delay Can Reduce Performance
From Figure 6-2, the read data for INPUT operations must be presented and valid on the
IN_PORT port by the end of the second clock cycle. There is already one layer of pipelining
immediately following the input select multiplexer feeding the IN_PORT port. Adding a
pipelining register at Point A or Point B delays data by an additional clock cycle, too late to
meet the PicoBlaze microcontroller’s requirements.
The best place to position the pipeline register is at Point B, which splits the read path
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 57
UG129 (v1.1.2) June 24, 2008
roughly in half. However, the input select multiplexer structure must be modified to
accommodate the extra register layer, as shown in Figure 6-11.
Page 58

Chapter 6: Input and Output Ports
R
PicoBlaze Microcontroller
UG129_c6_10_060404
0
1
S2
Figure 6-11: Effective Pipelining Improves Read Performance
Repartitioning the Design for Maximum Performance
Another approach to maximizing performance is to re-evaluate the system requirements. If
the number of I/O ports is the bottleneck in the system, ask if all the ports are actually
required as part of a single application or whether a single PicoBlaze microcontroller is
performing multiple tasks. If multiple tasks share a single PicoBlaze core, consider
partitioning the design into multiple PicoBlaze applications, each with a reduced number
of I/O ports. Partitioning the design may have additional benefits such as simplifying the
application code and reducing resource requirements.
58 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 59

R
Chapter 7
INSTRUCTION[17:0]
ADDRESS[9:0]
INTERRUPT_ACK
WRITE_STROBE
READ_STROBE
PORT_ID[7:0]
OUT_PORT[7:0]IN_PORT[7:0]
INTERRUPT
RESET
KCPSM3
ADDR[9:0]
OUT[17:0]
Instruction ROM
(Block RAM)
WE
18
10
UG129_c7_01_051504
Instruction Storage Configurations
The PicoBlaze™ microcontroller executes code from memory resources embedded within
the FPGA. Figure 7-1 shows that the PicoBlaze microcontroller actually consists of two
subfunctions. The KCPSM3 module contains the PicoBlaze ALU, register file, scratchpad
RAM, etc. Some form of internal memory, typically a block RAM, provides the PicoBlaze
instruction store. To effective create an on-chip ROM, the block RAM’s write enable pin,
WE, is held Low, disabling any potential write operations.
However, the PicoBlaze microcontroller supports other implementations that have
advantages for specific applications as described below. Many of these alternate
implementations leverage the extra port provided by the dual-port block RAM on
Spartan
®
-3, Virtex®-II, and Virtex-II Pro FPGAs.
Figure 7-1: Standard Implementation using a Single 1Kx18 Block RAM as the Instruction Store
Standard Configuration – Single 1Kx18 Block RAM
In most applications, PicoBlaze instructions are stored in a single FPGA block RAM,
configured as a 1Kx18 ROM shown in Figure 7-2. The application code is assembled and
ultimately compiled as part of the FPGA design. The instruction store is automatically
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 59
UG129 (v1.1.2) June 24, 2008
loaded into the attached block RAM during the FPGA configuration process.
Page 60

Chapter 7: Instruction Storage Configurations
R
KCPSM3
ADDRESS[9:0]
INSTRUCTION[17:0]
ADDR[9:0]
DOP[1:0]
DO[15:0]
18
10
Block RAM
(1Kx18)
UG129_c7_02_051504
KCPSM3
ADDRESS[9:0]
INSTRUCTION[17:0]
ADDRB[9:0]
DOPB[1:0]
DOB[15:0]
18
10
DIPA[1:0]
DIA[15:0]
ADDRA[9:0]
WEA
18
10
UART or
JTAG Programmer Block RAM
(1Kx18)
UG129_c7_03_051504
10
18
10
Block RAM
ADDRB[9:0]
DOPB[1:0]
DOB[15:0]
DOPA[1:0]
DOA[15:0]
ADDRA[9:0]
KCPSM3
ADDRESS[9:0]
INSTRUCTION[17:0]
KCPSM3
ADDRESS[9:0]
INSTRUCTION[17:0]
18
(1Kx18)
UG129_c7_04_051804
Figure 7-2: Standard Configuration using a Single 1Kx18 Block RAM
Standard Configuration with UART or JTAG Programming Interface
The second read/write port on the block RAM provides a convenient means to update the
PicoBlaze instruction store without recompiling the entire FPGA design. While the
processor is halted, application code can be updated via a simple UART or via the FPGA’s
JTAG port, as shown in Figure 7-3.
Figure 7-3: Standard Configuration with UART or JTAG Program Loader
Two PicoBlaze Microcontrollers Share a 1Kx18 Code Image
As shown in Figure 7-4, two PicoBlaze microcontrollers can share a single dual-port block
RAM to store a common or mostly common code image. The two microcontrollers operate
entirely independently of one another although they each independently execute the same
or mostly the same code. The clock input, I/O ports, and interrupt input are unique to each
microcontroller.
Figure 7-4: Two PicoBlaze Microcontrollers Sharing a Common Code Image
60 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 61

Two PicoBlaze Microcontrollers with Separate 512x18 Code Images in a Block RAM
R
18
9
18
9
Block RAM
ADDRB[8:0]
DOPB[1:0]
DOB[15:0]
DOPA[1:0]
DOA[15:0]
ADDRA[8:0]
KCPSM3
ADDRESS[8:0]
INSTRUCTION[17:0]
KCPSM3
ADDRESS[8:0]
INSTRUCTION[17:0]
ADDRESS[9] ADDRA[9]
ADDRB[9] ADDRESS[9]
(512x18) (512x18)
UG129_c7_05_051504
KCPSM3
ADDRESS[5:0]
INSTRUCTION[17:0]
6
ADDRESS[9:6]
1818
Distributed ROM
ADDR[5:0]
O[17:0]
(<128x18)
Flip-flops to match
block RAM timing
UG129_c7_06_060404
Two PicoBlaze Microcontrollers with Separate 512x18 Code
Images in a Block RAM
Two PicoBlaze microcontrollers can also share a single dual-port RAM but each with a
separate 512-instruction area, as shown in Figure 7-5. The most-significant address bit of
one block RAM port is tied Low while the other same bit on the other port is tied High.
This limits each port to half of the 1Kx18 memory, or 512x18. The two microcontrollers
operate independently.
Figure 7-5: Two PicoBlaze Microcontrollers with Separate 512-Instruction Memory in one Block RAM
Despite that both PicoBlaze microcontrollers use half the normal instruction store, the
interrupt vectors for both remain the same. When an interrupt occurs, the associated
KCPSM3 block presents all ones on the ADDRESS bus, which is truncated to the last
memory location in its half of the block RAM memory (address 1FF hexadecimal).
Figure 7-5 shows the block RAM split into two equal halves. If one microcontroller requires
more than the other, then tie the upper address lines as appropriate. Practically any
partition is allowed as long as the combined code size is 1,024x18 or less.
Distributed ROM Instead of Block RAM
Block RAM is the most efficient method to store PicoBlaze application code. However, if all
the block RAM within the FPGA is already committed to other functions then the
PicoBlaze code can be stored within the FPGAs Configurable Logic Blocks (CLBs), as
shown in Figure 7-6.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 61
UG129 (v1.1.2) June 24, 2008
Figure 7-6: Using Distributed ROM for Instruction Memory
This technique is only roughly efficient if the program size is 128 instructions or less.
Although larger instruction stores are possible, they quickly consume CLB logic. Table 7 -1
shows the number of FPGA slices required for various instruction stores. Distributed ROM
essentially uses the Look-Up Tables (LUTs) within its FPGA logic block as a small ROM
instead of for logic.
Page 62

Chapter 7: Instruction Storage Configurations
R
To maintain compatibility with block RAM, the distributed ROM must have a registered
output using CLB flip-flops.
Table 7-1: Slices Required when Using CLBs for ROM
Instructions ROM Slices
<
16 9
32 18
<
<
64 36
<
128 72
256 144
<
<
512 297
1,024 594
<
The CORE Generator software can create all of the above distributed ROM functions using
the coefficients file generated by the PicoBlaze assembler.
62 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 63

R
Performance
Input Clock Frequency
Chapter 8
Ta bl e 8 -1 shows the maximum available performance for the PicoBlaze™ microcontroller
using various FPGA families and speed grades. The Virtex
families are optimized for maximum performance. The Spartan
optimized for lowest cost.
Table 8-1: PicoBlaze Performance Using Slowest Speed Grade
FPGA Family
(Speed Grade)
Spartan-3 (-4) FPGA 88 MHz 44 MIPS
Virtex-II (-6) FPGA 152 MHz 76 MIPS
Virtex-II Pro (-7) FPGA 200 MHz 100 MIPS
Unless the end application requires absolute performance, there is no need to operate the
PicoBlaze microcontroller at its maximum clock frequency. In fact, operating slower is
advantageous. Often, the PicoBlaze microcontroller is managing slower peripheral
operations like serial communications or monitoring keyboard buttons, neither of which
stresses the FPGA’s performance. A lower clock frequency reduces the number of idle
instruction cycles and reduces total system power consumption.
The PicoBlaze microcontroller is a fully static design and operates down to DC (0 MHz).
Maximum Clock
Frequency
®
-II and Virtex-II Pro FPGA
®
-3 FPGA family is
Maximum Execution
Performance
Predicting Executing Performance
All instructions always execute in two clock cycles, resulting in predictable execution
performance. In real-time applications, a constant execution rate simplifies calculating
program execution times.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 63
UG129 (v1.1.2) June 24, 2008
Page 64

Chapter 8: Performance
R
64 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 65

R
PicoBlaze Development Tools
There are three primary development environments for creating PicoBlaze™ processor
application code, as summarized in Table 9-1. Xilinx offers two PicoBlaze environments.
The PicoBlaze reference design includes the KCPSM3 command-line assembler that
executes in a Windows DOS box or command window. The Xilinx System Generator for
DSP development environment includes both a PicoBlaze assembler and a simulation
model for the Math Works MATLAB/Simulink environment. The Mediatronix pBlazIDE
software is a graphical development environment including an assembler and fullfeatured instruction-set simulator (ISS).
Table 9-1: PicoBlaze Development Environments
Xilinx KCPSM3 Mediatronix pBlazIDE Xilinx System Generator
Chapter 9
Platform Support Windows Windows 98, Windows
2000, Windows NT,
Windows ME, Windows
XP
Assembler Command-line in DOS
window
Instruction Syntax KCPSM3 PBlazIDE KCPSM3
Instruction Set Simulator Facilities provided for
VHDL simulation
Simulator Breakpoints N/A Ye s Yes
Register Viewer N/A Yes Ye s
Memory Viewer N/A Ye s Ye s
Graphical Command-line within
Graphical/Interactive Graphical/Interactive
Windows 2000, Windows
XP
System Generator
KCPSM3
Assembler
The KCPSM3 Assembler is provided as a simple DOS executable file together with three
template files. Copy all the files KCPSM3.EXE, ROM_form.vhd, ROM_form.v, and
ROM_form.coe into your working directory.
Programs are best written with either the standard Notepad or Wordpad tools available on
most Windows computers. However, any PC-format text editor is sufficient. Save the
PicoBlaze assembly program with a PSM file extension (eight-character name limit).
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 65
UG129 (v1.1.2) June 24, 2008
Page 66

R
Open a DOS box and navigate to the working directory. To assemble the PicoBlaze
<filename>.vhd
<filename>.v
<filename>.coe
<filename>.m
<filename>.hex
<filename>.dec
PicoBlaze source program
KCPSM3.EXE
Assembled PicoBlaze
code, formatted to initialize
a block RAM for a variety
of design flows
Assembled PicoBlaze
code, formatted for other
utilities
ROM_form.vhd
ROM_form.v
ROM_form.coe
Block RAM
initialization
templates for a
variety of design
flows
pass1.dat
pass2.dat
pass3.dat
pass4.dat
pass5.dat
Assembler intermediate
processing files (possibly
useful for debugging
assembly errors)
<filename>.log
constants.txt
labels.txt
<filename>.fmt
Assembler report files
Formatted version of input
source program
<filename>.psm
UG129_c10_01_052004
program, type:
kcpsm3 <filename>[.psm]
Assembly Errors
The assembler halts as soon as an error is detected. A short message indicates the reason
for any error. The assembler also displays the line that it was analyzing when it detected
the problem. Fix each reported problem in turn and re-execute the assembler.
Since the execution of the assembler is very fast, it is unlikely that you will be able to ‘see’
it making progress, and the display will appear to be immediate. To review everything that
the assembler has written to the screen, the DOS output can be redirected to a text file
using:
kcpsm3 <filename>[.psm] > screen_dump.txt
Input and Output Files
The KCPSM3 assembler reads four input files and creates 15 output files as shown in
Figure 9-1. The KCPSM3 assembler reads the PicoBlaze source program,
<filename>.psm, and three template files that instantiate and initialize a block RAM in
various design flows, ROM_form.*.
Chapter 9: PicoBlaze Development Tools
66 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
Figure 9-1: KCPSM3 Assembler Files
All five assembler passes are recorded in the pass*.dat output files. Should an error
occur during assembly, these files may contain additional details on the error.
If the source program is free of errors, the KCPSM3 assembler generates an object code
output, formatted for a variety of design flows, based on the initial template files. These
output files generate the code ROM, instantiated as a block RAM, and properly initialized
with the PicoBlaze object code. The assembler also generates equivalent raw decimal and
hexadecimal output files for other utilities.
UG129 (v1.1.2) June 24, 2008
Page 67

Mediatronix pBlazIDE
R
pBlaze IDE
File Edit View Help
1
2
3
4
5
a_lsb EQU
switch_lsb DSIN
LOAD
Settings
Settings
Picoblaze I
Picoblaze II
Picoblaze CR
Picoblaze 3
UG129_c10_02_051504
The assembler also produces a log file plus files that show the assignments for various
labels and constants found in the source code. The log file shows the instruction address,
the opcode for each instruction, and the source code instruction and comments for the
associated instruction address. The assigned values for register names, labels, and
constants appear immediately following the associated symbolic name.
Finally, the KCPSM3 assembler generates a formatted version of the source program
(“pretty print” output). The formatted output file formats all labels and comments,
converts all commands and hexadecimal constants to upper case, and consistently spaces
operands.
Mediatronix pBlazIDE
The Mediatronix pBlazIDE software, shown in Figure 12-1, page 83, is a free, graphical,
integrated development environment for Windows-based computers. Its features are as
follows:
• Syntax color highlighting
• Instruction set simulator (ISS)
♦ Breakpoints
♦ Register display
♦ Memory display
• Source code formatter (“pretty print”)
• KCPSM3-to-pBlazIDE import function/syntax conversion
• HTML output, including color highlighting
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 67
UG129 (v1.1.2) June 24, 2008
Download the pBlazIDE software directly from the Mediatronix website:
http://www.mediatronix.com/pBlazeIDE.htm
Configuring pBlazIDE for the PicoBlaze Microcontroller
The pBlazIDE development software supports all four variants of the PicoBlaze
architecture. To use the PicoBlaze microcontroller for Spartan
Pro FPGAs, choose Settings Æ Picoblaze 3 from the pBlazIDE menu, as shown in
Figure 9-2.
Figure 9-2: Configuring pBlazIDE to Support the PicoBlaze Microcontroller
®
-3, Virtex®-II, or Virtex-II
Page 68

R
Importing KCPSM3 Code into pBlazIDE
pBlaze IDE
File Edit View
New
Open ...
Recent Files
Ctrl+N
Ctrl+O
Export HTML
Import
UG129_c10_03_051504
CONSTANT myconstant, A5
NAMEREG s0, count16_lsb
NAMEREG s1, count16_msb
ADDRESS 000
main:
; initialize 16-bit counter, enable interrupts
LOAD count16_lsb, myconstant
ENABLE INTERRUPT
loop:
; continuously increment 16-bit counter
CALL increment_count
JUMP loop
end_main:
increment_count:
; add 1 to LSB of 16-bit counter
ADD count16_lsb, 01
; only add one to MSB if carry generated by LSB
ADDCY count16_msb, 00
RETURN
isr:
; decrement 16-bit counter by one on interrupt
; subtract 1 from LSB of 16-bit counter
SUB count16_lsb, 01
; only subtract one from MSB if borrow
; generated by LSB
SUBCY count16_msb, 00
RETURNI ENABLE
; interrupt vector is always in last memory location
ADDRESS 3FF
; jump to interrupt service routing (ISR)
JUMP isr
myconstant EQU $A5
count16_lsb EQU s0
count16_msb EQU s1
ORG 0
main:
; initialize 16-bit counter, enable interrupts
LOAD count16_lsb, myconstant
EINT
loop:
; continuously increment 16-bit counter
CALL increment_count
JUMP loop
end_main:
increment_count:
; add 1 to LSB of 16-bit counter
ADD count16_lsb, 1
; only add one to MSB if carry generated by LSB
ADDC count16_msb, 0
RET
isr:
; decrement 16-bit counter by one on interrupt
; subtract 1 from LSB of 16-bit counter
SUB count16_lsb, 1
; only subtract one from MSB if borrow
; generated by LSB
SUBC count16_msb, 0
RETI ENABLE
; interrupt vector is always in last memory location
ORG $3FF
; jump to interrupt service routing (ISR)
JUMP isr
KCMPSM Source Code Code Imported/Converted into pBlaze IDE
UG129_c10_04_052004
The pBlazIDE syntax and instruction mnemonics are different than the Xilinx KCPSM3
syntax. The pBlazIDE software provides an import function to convert KCPSM3 code to
the pBlazIDE syntax.
From the pBlazIDE menu, choose File Æ Import, then select the KCPSM3-format *.psm
file, as shown in Figure 9-3. The pBlazIDE software automatically translates and formats
the source code, as shown in Figure 9-4.
Chapter 9: PicoBlaze Development Tools
Figure 9-3: Converting Xilinx Syntax PicoBlaze Source Code to pBlazIDE Syntax
68 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
Figure 9-4: Example of How KCPSM Source Code Converts to pBlazIDE Code
UG129 (v1.1.2) June 24, 2008
Page 69

Differences Between the KCPSM3 Assembler and pBlazIDE
R
Differences Between the KCPSM3 Assembler and pBlazIDE
Ta bl e 9 -2 details the differences between the KCPSM3 and pBlazIDE instruction
mnemonics.
Table 9-2: Instruction Mnemonic Differences between KCPSM3 and pBlazIDE
KCPSM3 Instruction pBlazIDE Instruction
RETURN RET
RETURN C RET C
RETURN NC RET NC
RETURN Z RET Z
RETURN NZ RET NZ
RETURNI ENABLE RETI ENABLE
RETURNI DISABLE RETI DISABLE
ADDCY ADDC
SUBCY SUBC
Directives
Table 9-3: Directives
Function KCPSM3 Directive PBlazIDE Directive
INPUT sX, (sY) IN sX, sY
(no parentheses)
INPUT sX, kk IN sX, kk
OUTPUT sX, (sY) OUT sX, sY
(no parentheses)
OUTPUT sX, kk OUT sX, kk
ENABLE INTERRUPT EINT
DISABLE INTERRUPT DINT
COMPARE COMP
STORE sX, (sY) STORE sX, sY
(no parentheses)
FETCH sX, (sY) FETCH sX, sY
(no parentheses)
Ta bl e 9 -3 lists the KCPSM3 and PBlazIDE directives for various functions.
Locating Code ADDRESS 3FF ORG $3FF
Aliasing Register Names NAMEREG s5, myregname myregname EQU s5
Declaring Constants CONSTANT myconstant, 80 myconstant EQU $80
Naming the program ROM file Named using the same base filename
as the assembler source file
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 69
UG129 (v1.1.2) June 24, 2008
VHDL "template.vhd",
"target.vhd", "entity_name"
Page 70

Chapter 9: PicoBlaze Development Tools
R
70 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 71

R
Chapter 10
component KCPSM3
port (
address : out std_logic_vector( 9 downto 0);
instruction : in std_logic_vector(17 downto 0);
port_id : out std_logic_vector( 7 downto 0);
write_strobe : out std_logic;
out_port : out std_logic_vector( 7 downto 0);
read_strobe : out std_logic;
in_port : in std_logic_vector( 7 downto 0);
interrupt : in std_logic;
interrupt_ack : out std_logic;
reset : in std_logic;
clk : in std_logic
);
end component;
Using the PicoBlaze Microcontroller in an FPGA Design
The PicoBlaze™ microcontroller is primarily designed for use in a VHDL design flow.
However, both Verilog and black box instantiation are also supported, as described below.
Similarly, Xilinx XST/ISE
both VHDL and Verilog can be mixed in a single project. There is also support for the Xilinx
System Generator design environment.
VHDL Design Flow
®
6.2i and later versions support mixed language support where
The PicoBlaze microcontroller is supplied as a VHDL source file, called KCPSM3.vhd,
which is optimized for efficient and predictable implementation in a Spartan
II, or Virtex-II Pro FPGA. The code is suitable for both synthesis and simulation and was
developed and tested using the Xilinx Synthesis Tool (XST) for logic synthesis and
ModelSim for simulation. Designers have also successfully used other logic synthesis and
simulation tools. The VHDL source code must not be modified in any way.
KCPSM3 Module
The KCPSM3 module contains the PicoBlaze ALU, register file, scratchpad, RAM, etc. The
only function not included is the instruction store. The component declaration for the
KCPSM3 module appears in Figure 10-1. Figure 10-2 lists the KCPSM3 component
instantiation.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 71
UG129 (v1.1.2) June 24, 2008
Figure 10-1: VHDL Component Declaration of KCPSM3
®
-3, Virtex®-
Page 72

Chapter 10: Using the PicoBlaze Microcontroller in an FPGA Design
R
processor: kcpsm3
port map(
address => address_signal,
instruction => instruction_signal,
port_id => port_id_signal,
write_strobe => write_strobe_signal,
out_port => out_port_signal,
read_strobe => read_strobe_signal,
in_port => in_port_signal,
interrupt => interrupt_signal,
interrupt_ack => interrupt_ack_signal,
reset => reset_signal,
clk => clk_signal
);
component prog_rom
port (
address : in std_logic_vector( 9 downto 0);
instruction : out std_logic_vector(17 downto 0);
clk : in std_logic
);
end component;
program: prog_rom
port map( address => address_signal,
instruction => instruction_signal,
clk => clk_signal
);
Figure 10-2: VHDL Component Instantiation of the KCPSM3
Connecting the Program ROM
The PicoBlaze program ROM is used within a VHDL design flow. The PicoBlaze assembler
generates a VHDL file in which a block RAM and its initial contents are defined. This
VHDL file can be used for both logic synthesis and simulation of the processor.
Figure 10-3 shows the component declaration for the program ROM, and Figure 10-4
shows the component instantiation. The name of the program ROM, shown as "prog_rom"
in the following figures, is derived from the name of the PicoBlaze assembler source file.
For example, if the assembler source file is named phone.psm, then the assembler
generates a program ROM definition file called phone.vhd.
Figure 10-3: VHDL Component Declaration of Program ROM
Figure 10-4: VHDL Component Instantiation of Program ROM
To speed development, a VHDL file called embedded_KCPSM3.vhd is provided. In this
72 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
file, the PicoBlaze macro is connected to its associated block RAM program ROM. This
entire module can be embedded in the design application, or simply used to cut and paste
the component declaration and instantiation information into the user’s design files.
UG129 (v1.1.2) June 24, 2008
Page 73

Black Box Instantiation of KCPSM3 using KCPSM3.ngc
R
Black Box Instantiation of KCPSM3 using KCPSM3.ngc
The Xilinx NGC file included with the reference design was generated by synthesizing the
KCPSM3.vhd file using the Xilinx Synthesis Tool (XST), without inserting I/O buffers.
When used as a “black box” in a Spartan-3, Virtex-II or Virtex-II Pro FPGA design, the
PicoBlaze microcontroller is merged with the remainder of the FPGA design during the
translate phase (ngdbuild).
Note that buses are defined in the style IN_PORT<7:0> with individual signals defined as
in_port_0 through in_port_7.
Generating the Program ROM using prog_rom.coe
The KCPSM assembler generates a memory coefficients file (*.coe). Using the Xilinx
CORE Generator™ system, create a block ROM using the *.coe file.
The file defines the initial contents of a block ROM. The output files created by the CORE
Generator system can then be used in the normal design flow and connected to the
PicoBlaze “black box” instantiation of the KCPSM3 module.
Generating an ESC Schematic Symbol
To generate an ESC schematic symbol, use the embedded_KCPSM3.vhd file.
Verilog Design Flow
Beginning with XST/ISE 6.2i, the Xilinx development software allows mixed-language
design projects using both VHDL and Verilog. Consequently, the KCPSM3 VHDL source
can be included within a Verilog project. The KCPSM3 assembler generates a Verilog file
named <filename>.v that defines the initial contents (see assembler notes for more
detail). This Verilog file is used to implement and simulate the PicoBlaze instruction store.
The details of mixed VHDL and Verilog language support in the Xilinx ISE software is
described in detail in Chapter 8, “Mixed Language Support”, in the XST User Guide.
• XST User Guide
http://toolbox.xilinx.com/docsan/xilinx10/books/docs/xst/xst.pdf
Black-box instantiation is an alternative Verilog design approach. Instantiate the
kcspm3.ngc black box file within the Verilog design to define the remainder of the
processor.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 73
UG129 (v1.1.2) June 24, 2008
Page 74

Chapter 10: Using the PicoBlaze Microcontroller in an FPGA Design
R
74 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 75

R
Assembler Directives
Both the KCPSM3 and pBlazIDE assemblers include directives that provide advanced
control.
Locating Code at a Specific Address
In some cases, application code must be assigned to a specific instruction address.
Examples include the code located at the reset vector, 0, and the interrupt vector, 3FF.
As an example, Ta bl e 11 -1 shows the PicoBlaze™ processor assembler directive to locate
code at the interrupt vector for both the KCPSM3 and pBlazIDE formats.
Table 11-1: Assembler Directives to Locate Code
KCPSM3 pBlazIDE
Chapter 11
ADDRESS 3FF ORG $3FF
Naming or Aliasing Registers
The PicoBlaze microcontroller has 16 general-purpose registers named s0 through sF. To
improve code clarity and to enable easy code re-use, re-name or alias the PicoBlaze register
with a variable name. Naming registers also prevents unintended use of a register and the
associated data corruption, both improving code quality and reducing debugging efforts.
Ta bl e 11 -2 shows how to alias a register, s5 in this case, to a variable name, myregname.
Both KCPSM3 and pBlazIDE formats are shown.
Table 11-2: Assembler Directives to Name or Alias Registers
KCPSM3 pBlazIDE
NAMEREG s5, myregname myregname EQU s5
In the KCPSM3 assembler, the NAMEREG directive is applied in-line with the code. Before
the NAMEREG directive, the register is named using the ‘sX’ style. Following the directive,
only the new name applies. It is also possible to rename a register again (i.e., NAMEREG
old_regname, new_regname) and only the new name applies in the subsequent
program lines.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 75
UG129 (v1.1.2) June 24, 2008
Page 76

R
Defining Constants
VHDL "template.vhd", "target.vhd", "entity_name"
Similar to renaming registers, assign names to constant values. By defining names for
constants , it is easier to understand and document the PicoBla ze code rather tha n usin g the
constant values in the code. Similarly, assigning names to registers and constants
simplifies code maintenance. Updating the value assigned to a constant is easier if the
constant is declared just once rather than searching for each occurrence in the application
code.
Ta bl e 11 -3 shows how to define a constant called myconstant and assign the value 80
hexadecimal. Both KCPSM3 and pBlazIDE formats are shown.
Table 11-3: Assembler Directives to Name or Alias Registers
KCPSM3 pBlazIDE
CONSTANT myconstant, 80 myconstant EQU $80
Naming the Program ROM Output File
The PicoBlaze assembler generates object code and formats the results for some form of
internal memory within the FPGA. In general, the internal memory is block RAM, as
described in Chapter 7, “Instruction Storage Configurations.”
Chapter 11: Assembler Directives
KCPSM3
The output files from the KCPSM3 assembler are always named according to the source
program name. For example, an assembly program named myprog.psm produces output
files called myprog.vhd, myprog.v, etc. for the various output formats.
pBlazIDE
The pBlazIDE assembler provides a directive, using the keyword VHDL, to explicitly name
the target output file and the VHDL entity name, as shown in Figure 11-1. The
template.vhd file contains the VHDL template for the program ROM. The target.vhd
file is the output VHDL file, derived from the template.vhd file, which contains the
initialization values created by assembling the PicoBlaze code. Finally, entity_name is
the VHDL entity name used to name program ROM.
Figure 11-1: pBlazIDE Directive to Name the VHDL Output File
Defining I/O Ports (pBlazIDE)
To aid modeling and debugging of the interaction between the PicoBlaze microcontroller
and the remainder of the FPGA, the pBlazIDE assembler supports some additional
directives to describe and define I/O ports. These directives are particularly useful during
instruction set simulation, as shown in Figure 12-1.
76 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 77

Defining I/O Ports (pBlazIDE)
R
; pBlazIDE syntax to define an input port
; input_port_name DSIN <port_id#>[, “<input_file_name>”]
;
switches DSIN $00, “switch_inputs.txt”
readport DSIN $1F
$FF
01
02
03
$A5
$5A
$FF
76543210
$27
input_port_name
Current port value.
Double-click to edit
byte value.
User-defined
input port name.
Port address
(Port ID #)
Check or uncheck to
set or clear a bit.
UG129_c11_01_051404
Input Ports
The DSIN directive defines the name and the port address (or port identification number)
for a read-only input port. The DSIN directive models an input port that only connects to
the PicoBlaze microcontroller’s IN_PORT port. An optional field specifies a text file
containing input values used during instruction set simulation. Figure 11-2 provides an
example.
As shown in Figure 11-3, the stimulus contained in the specified switch_inputs.txt is
rather simple. Each line defines the data for an input (read) operation from the specified
port address. Each line represents a single port input operation. Data is specified as
decimal, unless prepended with a dollar sign ($), which indicates the data is hexadecimal.
If the simulation reads through all the values provided, the last value is persistent until the
end of simulation.
Figure 11-2: Example of pBlazIDE DSIN Directive
Figure 11-3: Example File (switch_inputs.txt) to Describe Input Values for
During instruction set simulation, pBlazIDE displays the input port as shown in
Figure 11-4. Edit the input port values during simulation by checking the individual bit
values or, to modify the entire byte value, double-click the current port value.
Figure 11-4: The pBlazIDE DSIN Directive Defines an Input Port
Output Ports
The DSOUT directive defines the name and the port address (or port identification
number) for a write-only output port. The DSOUT directive models an output port that
only connects to the PicoBlaze microcontroller’s OUT_PORT port. An optional field
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 77
UG129 (v1.1.2) June 24, 2008
Simulation
Page 78

Chapter 11: Assembler Directives
R
; pBlazIDE syntax to define a write-only output port
; output_port_name DSOUT <port_id#>[, “<output_file_name>”]
;
LEDs DSOUT $01, “output_values.txt”
writeport DSOUT $1E
; pBlazIDE syntax to define a readable output port
; input_output_port_name DSIO <port_id#>[“<output_file_name>”]
mailbox DSIO $02, “mailbox_out.txt”
readwrite DSIO $1D
specifies a text file that records the result of any output operations to this during
instruction set simulation. Figure 11-5 provides an example.
Figure 11-5: Example of pBlazIDE DSOUT Directive
The values recorded in the optional output file are always written as hexadecimal values.
During instruction set simulation, pBlazIDE displays the write-only output port as shown
in Figure 11-6. Output ports are write-only and cannot be modified from the graphical
interface.
Figure 11-6: The pBlazIDE DSOUT Directive Defines an Output Port
The DSOUT directive is also useful to create stimulus files later read using DSIN directives
in another pBlazIDE application program. For example, to create a stimulus input file
containing incrementing data values, create a quick pBlazIDE program that increments a
value and writes the value to an output port declared using a DSOUT directive, complete
with file specification. Once the program completes, this resulting file can be read by
another pBlazIDE program during instruction set simulation using the DSIN directive.
Input/Output Ports
The DSIO directive defines the name and the port address (or port identification number)
for an output port. However, the DSIO directive differs from the DSOUT directive in that
the PicoBlaze microcontroller can also read DSIO output values. The DSIO directive
models an output port that connects to both the PicoBlaze microcontroller’s IN_PORT and
OUT_PORT ports and has the same port address for input and output operations. An
optional field specifies a text file that records the result of any output operations to this
during instruction set simulation. Figure 11-7 provides an example.
Figure 11-7: Example of pBlazIDE DSIO Directive
The values recorded in the optional output file are always written as hexadecimal values.
78 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 79

Custom Instruction Op-Codes
R
$02
76543210
$F0
input_output_port_name
User-defined input/
output port name.
Port address
(Port ID #)
Current port value.
Double-click to edit.
UG129_c11_03_060404
Click LED to set or
clear bit for input.
During instruction set simulation, pBlazIDE displays the readable output port as shown in
Figure 11-8. The port value can be modified from the graphical interface.
Figure 11-8: The pBlazIDE DSIO Directive Defines an Output Port That Can Be
Custom Instruction Op-Codes
The pBlazIDE environment supports the INST directive to force the assembler to generate
a custom in-line instruction op-code. The INST directive is used when adding custom
capabilities to the PicoBlaze reference design. However, adding custom capabilities
requires modifications to PicoBlaze hardware.
Read Back
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 79
UG129 (v1.1.2) June 24, 2008
Page 80

Chapter 11: Assembler Directives
R
80 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 81

R
Chapter 12
Simulating PicoBlaze Code
Various tools support PicoBlaze code simulation, each with distinct strengths and
weaknesses as described in Table 12-1. For example, the pBlazIDE Instruction Set
Simulator (ISS) is best for simulating PicoBlaze operation during code development. As
shown in Figure 12-1, the pBlazIDE ISS provides a seamless development environment
where assembly code can be quickly tested with full observability. Registers, flags, and
memory values appear on the graphical display. Likewise, each of these resources can be
modified to enhance testing.
Table 12-1: PicoBlaze Code Simulation Options
Verification Tool Strengths Weaknesses
pBlazIDE • Ideal for rapid code development
• Cycle-accurate Instruction Set
Simulation (ISS)
• Single-step
• Breakpoints
• Intimate interaction with PicoBlaze
registers, flags, and memory values
• Code coverage indicator
• Software timing
• Basic system-level simulation via file
I/O functions
• Free!
ModelSim • Holistic simulation of PicoBlaze
microcontroller with associated FPGA
logic
• VHDL and Verilog logic and timing
simulation
• Cycle and timing accurate with FPGA
hardware
• No modeling of custom logic attached to
the PicoBlaze microcontroller
• Requires simulator setup and stimulus
files
• Digital simulator, not an ideal Instruction
Set Simulation environment
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 81
UG129 (v1.1.2) June 24, 2008
Page 82

Chapter 12: Simulating PicoBlaze Code
R
Table 12-1: PicoBlaze Code Simulation Options
Verification Tool Strengths Weaknesses
Xilinx System
Generator
• Full PicoBlaze system-level simulation
with the System Generator environment
• Cycle-accurate Instruction Set
Simulation (ISS)
• Single-step
• Breakpoints
• Register and memory viewer
In-system on FPGA • Fast, real-time performance
• Ideal for complex interactions
• Integrated with peripherals, displays,
UARTs, etc.
Furthermore, the pBlazIDE ISS offers full single-step and breakpoint support while
viewing the PicoBlaze assembly source code. Evaluate the software timing for end
application. Observe code coverage. Simulate basic FPGA interaction using the pBlazIDE
DSIN, DSOUT, and DSIO directives (see “Defining I/O Ports (pBlazIDE),” page 76 for
more information).
Best of all, the pBlazIDE graphical development environment is free! Download the latest
version directly from the Mediatronix website:
http://www.mediatronix.com/pBlazeIDE.htm
The pBlazIDE ISS does not support full simulation of the PicoBlaze microcontroller
embedded with all the other FPGA logic. Fortunately, the PicoBlaze core source files
support both VHDL and Verilog simulation using the ModelSim simulator. ModelSim
allows the entire design to be simulated, including accurate timing information and textual
disassembly features.
• Primarily only useful is already using
Xilinx System Generator
• Poor visibility of register contents
If using the Xilinx System Generator software, there is full development and system-level
simulation support for the PicoBlaze microcontroller. Refer to “Designing PicoBlaze
Microcontroller Application” in the Xilinx System Generator User Guide (see Reference 3) for
more information.
Instruction Set Simulation with pBlazIDE
The Mediatronix pBlazIDE instruction set simulator (ISS), shown in Figure 12-1, provides
complete internal observability during code development. Begin simulation by clicking
Assemble, as shown in Ta bl e 12-2. The pBlazIDE ISS also provides instruction
breakpoints, single-stepping, register and RAM observation, code coverage, and software
timing.
82 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 83

Instruction Set Simulation with pBlazIDE
R
pBlaze IDE
File Edit View Settings Help
Status
Zero
Carry
Enable
Interrupt
Steady
Edge
Timer
50
Registers
00 8
00
9
000
00
1
00
A
00 B
00
2
273
00
C
00 D
F0
4
005
00
E
00
F
00
6
00
7
$00
$10
$20
$30
00 00 00 00
00 00 00 00
00 00 00 00
00 00 00 00
00 00 00 00
00 00 00 00
00 00 00 00
00 00 00 00
00 00 00 00
00 00 00 00
00 00 00 00
00 00 00 00
00 00 00 00
00 00 00 00
00 00 00 00
00 00 00 00
0123456789ABCDEF
Scratchpad RAM
$00
76543210
$27
switches
$02
76543210
$F0
mailbox
$00
$01
$02
s3
s4
$80
$000
$000 $3C001
$001 $04300
$002 $14380
$003 $31806
$004 $2C401
$005 $34001
$006 $04402
$007 $2C401
Assembler Phase 3: building simulation objects
Program is Reset
Mode: PicoBlaze-3 26: 1 Modified Instructions: 4 Time: 95 ns PC: $006
switches
DSIN
0
LEDs
DSOUT
1
mailbox
DSIO
2
input_value
EQU
s3
LED_output
EQU
s4
threshold_value
EQU
$80
ORG
0
start :
EINT ; enable interrup
poll_loop :
IN input_value , swit
COMP input_value , thre
CALL C , process_input
OUT LED_output , LEDs
JUMP poll_loop
process_input : IN LED_output , mailb
OUT LED_output , LEDs
SP: 1 ($01) Stack: $04
Simulation control
buttons
Status
flags
Constant
declaration
Data
registers
Scratchpad RAM display
only appears if STORE or
FETCH instructions
appear in application
code
Status
window
Register
aliasing
Defined start
address
Instruction
address
Interrupt
control for
simulation
Instruction
code
Code coverage indicator.
Also, click to set or
remove breakpoint
Next instruction
to be executed
Breakpoint set at
this instruction
Input, output, and I/O displays
and controls defined by DSIN,
DSOUT, and DSIO directives
Cursor row and
column
position
Number of instructions
already executed up to
current code position
Execution time at
specified clock
frequency
Current Program
Counter
Current Stack
Pointer
Stack values
Syntax-highlighted
assembly code
$01
76543210
$A5
LEDs
Port ID
Number
Por t
Value
UG129_c12_01_051604
Table 12-2: pBlazIDE Simulator Control Buttons
Simulator Control Buttons
Button Function
Assemble Assemble the open document. If no errors are encountered, the simulator is invoked and
Edit Leave simulator and return to editor. All the simulation control buttons are disabled.
Figure 12-1: The pBlazIDE Instruction Set Simulator (ISS)
Ta bl e 1 2- 2 shows the various pBlazIDE control buttons and describes their functions.
the other simulation control buttons are enabled.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 83
UG129 (v1.1.2) June 24, 2008
Page 84

R
Table 12-2: pBlazIDE Simulator Control Buttons (Continued)
Button Function
Reset Reset the simulator. Reset the Program Counter (PC) and Stack Pointer (SP). Register and
RAM values are not reset.
Run Run the program. The program continues running until an active breakpoint is
encountered or if the Reset or Pause button is pressed.
Execute a single instruction. The active register, memory, and I/O displays are updated
Single Step
and the cursor arrow advances to the next instruction. The next instruction to be executed
is highlighted in blue and a blue arrow appears to the left of the instruction line. After
executing an instruction, the code coverage indicator changes from blue to green. If
executing a valid CALL instruction, the program steps into the subroutine function.
Chapter 12: Simulating PicoBlaze Code
Step Over
Behaves like the Single Step button except that the simulator does not step into CALL
instructions. If executing a valid CALL instruction, the program executes the entire
subroutine and the display advances to the instruction following the CALL instruction.
Run to Cursor Run the program until the program advances to the current cursor location.
Pause Pause a running simulation and display the current state of the PicoBlaze microcontroller.
Continue the simulation using any of the green action buttons.
Set or remove a breakpoint on the instruction at the current cursor location. The instruction
Toggle Breakpoint
line is highlighted in red and a breakpoint indicator appears to the left of the line. Multiple
breakpoints may be simultaneously active. If the simulation reaches an instruction with an
active breakpoint, the simulation automatically pauses.
Remove All
Clear all active breakpoints.
Breakpoints
Using the pBlazIDE Instruction Set Simulator with KCPSM3 Programs
The pBlazIDE software primarily supports only a VHDL design flow, which is sufficient
for many applications. The KCPSM3 assembler supports Verilog, black box, and Xilinx
System Generator design flows in addition to the VHDL flow.
Fortunately, pBlazIDE has an import function that translates a KCPSM3-syntax program
into the pBlazIDE syntax. Consequently, it is possible to use the pBlazIDE instruction set
simulator to simulate KCPSM3 programs.
Simulating FPGA Interaction with the pBlazIDE Instruction Set Simulator
Although pBlazIDE does not simulate FPGA logic, it does provide basic capabilities to test
the PicoBlaze INPUT and OUTPUT operations that connect to FPGA logic. The DSIN,
DSOUT, and DSIO directives declare input and output ports, and also provide simple file
I/O functions. A stimulus file associated with a DSIN statement simulates data reads
during a PicoBlaze INPUT operation. Similarly, the DSOUT statement specifies an output
file where PicoBlaze OUTPUT operations are recorded.
84 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 85

Turbocharging Simulation using FPGAs!
R
Turbocharging Simulation using FPGAs!
Hardware simulators track results with picosecond or nanosecond resolution. In contrast,
the PicoBlaze microcontroller is often employed in applications that are less time critical or
deliberately slow. For example, a real-time clock is impractical to simulate using a
hardware or software simulator. Even UART-based communication is desperately slow
relative to a 50 MHz system clock. Likewise, VHDL and Verilog simulation requires
accurate stimulus to drive the application.
In test cases, the solution is to simply use the FPGA hardware directly as the testing and
debugging medium. While in-system “simulation” is not a replacement for worst-case
timing analysis or code-coverage testing, it is possible to recompile a small design in less
than a minute and make iterative changes to code and hardware. Usign the download
interface described in “Standard Configuration with UART or JTAG Programming
Interface” in Chapter 7, rapid code changes can be quickly downloaded into the FPGA
without recompiling the FPGA hardware design. Likewise, testing happens in the actual
environment, along with the other support circuitry, which reduces the burden to create
detailed and accurate stimulus models. For example, UART interaction can be tested using
the HyperTerminal program on the PC, not just simulated using a VHDL model.
Furthermore, the PicoBlaze microcontroller itself is ideal for an internal test pattern
generator, either to test another PicoBlaze core or to test integrated FPGA logic. The
PicoBlaze microcontroller can output a test vector, calculate the result expected back from
the FPGA, read the actual value from the FPGA, and verify that the actual and expected
values match.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 85
UG129 (v1.1.2) June 24, 2008
Page 86

Chapter 12: Simulating PicoBlaze Code
R
86 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 87

R
Appendix A
Related Materials and References
This appendix provides links to additional information relevant to a PicoBlaze™ processor
design.
1. PicoBlaze 8-bit Embedded Microcontroller
Download PicoBlaze reference designs and additional files.
http://www.xilinx.com/ipcenter/processor_central/picoblaze
2. Mediatronix pBlazIDE Integrated Development Environment for PicoBlaze
http://www.mediatronix.com/pBlazeIDE.htm
3. Xilinx System Generator User Guide: “Designing PicoBlaze Microcontroller
Applications”
http://www.xilinx.com/support/sw_manuals/sysgen_ug.pdf
4. MicroBlaze 32-bit Soft Processor Core
http://www.xilinx.com/microblaze
5. UG331: Spartan-3 Generation FPGA User Guide: Chapter 8, “Using Dedicated
Multiplexers”
http://www.xilinx.com/support/documentation/user_guides/ug331.pdf
6. XST User Guide: Chapter 9, “Mixed Language Support”
http://toolbox.xilinx.com/docsan/xilinx10/books/docs/xst/xst.pdf
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 87
UG129 (v1.1.2) June 24, 2008
Page 88

Chapter : Related Materials and References
R
88 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 89

R
Example Program Templates
T
If reading this document in Adobe Acrobat,
use the Select Text tool to select code snippets,
then copy and paste the text into your text editor.
NAMEREG sX, <name> ; Rename register sX with <name>
CONSTANT <name>, 00 ; Define constant <name>, assign value
; ROM output file is always called
; <filename>.vhd
ADDRESS 000 ; Programs always start at reset vector 0
ENABLE INTERRUPT ; If using interrupts, be sure to enable
; the INTERRUPT input
BEGIN:
; <<< your code here >>>
JUMP BEGIN ; Embedded applications never end
ISR: ; An Interrupt Service Routine (ISR) is
; required if using interrupts
; Interrupts are automatically disabled
; when an interrupt is recognized
; Never re-enable interrupts during the ISR
RETURNI ENABLE ; Return from interrupt service routine
; Use RETURNI DISABLE to leave interrupts
; disabled
ADDRESS 3FF ; Interrupt vector is located at highest
; instruction address
JUMP ISR ; Jump to interrupt service routine, ISR
The following code templates provide the basic recommended structure for PicoBlaze™
processor application programs. Both KCPSM3 and pBlazIDE templates are provided.
KCPSM3 Syntax
Figure B-1 provides a code template for creating PicoBlaze applications using the KCPSM3
assembler.
Appendix B
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 89
UG129 (v1.1.2) June 24, 2008
Figure B-1: PicoBlaze Application Program Template for KCPSM3 Assembler
Page 90

R
pBlazIDE Syntax
<name> EQU sX ; Rename register sX with <name>
<name> EQU $00 ; Define constant <name>, assign value
; name ROM output file generated by pBlazIDE assembler
VHDL “template.vhd”, “target.vhd”, “entity_name”
<name> DSIN <port_id> ; Create input port, assign port address
<name> DSOUT <port_id>; Create output port, assign port address
<name> DSIO <port_id> ; Create readable output port,
; assign port address
ORG 0; Programs always start at reset vector 0
EINT ; If using interrupts, be sure to enable
; the INTERRUPT input
BEGIN:
; <<< your code here >>>
JUMP BEGIN ; Embedded applications never end
ISR: ; An Interrupt Service Routine (ISR) is
; required if using interrupts
; Interrupts are automatically disabled
; when an interrupt is recognized
; Never re-enable interrupts during the ISR
RETI ENABLE ; Return from interrupt service routine
; Use RETURNI DISABLE to leave interrupts
; disabled
ORG $3FF ; Interrupt vector is located at highest
; instruction address
JUMP ISR ; Jump to interrupt service routine, ISR
Figure B-2 provides a code template for creating PicoBlaze applications using the
pBlazIDE assembler.
Appendix : Example Program Templates
Figure B-2: PicoBlaze Application Program Template for KCPSM3 Assembler
90 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 91

R
Appendix C
Register sX
Register sY or
Literal kk
CARRY
Carry Out
UG129_aC_01_051604
PicoBlaze Instruction Set and Event Reference
This appendix provides a detailed operational description of each PicoBlaze™ processor
instruction and the Interrupt and Reset events, including pseudocode for each instruction.
The pseudocode assumes that all variable to the right of an assignment symbol (
the original value before the instruction is executed. The values for variables to the left of
an assignment symbol are assigned at the end of the instruction and all assignments occur
in parallel, similar to VHDL.
ADD sX, Operand —Add Operand to Register sX
The ADD instruction performs an 8-bit addition of two operands, as shown in Figure C-1.
The first operand is any register, which also receives the result of the operation. A second
operand is also any register or an 8-bit constant value. The ADD instruction does not use the
CARRY as an input, and hence, there is no need to condition the flags before use. Flags are
affected by this operation.
Å) have
Figure C-1: ADD Operation
Example
Operand is a register location, sY, or an immediate byte-wide constant, kk.
ADD sX, sY; Add register. sX = sX + sY.
ADD sX, kk; Add immediate. sX = sX + kk.
Description
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 91
UG129 (v1.1.2) June 24, 2008
Operand is added to register sX. The ZERO and CARRY flags are set appropriately.
Page 92

Appendix : PicoBlaze Instruction Set and Event Reference
R
Register sX
Register sY or
Literal kk
CARRY
Carry Out Carry In
UG129_aC_02_051604
Pseudocode
sX Å (sX + Operand) mod 256; always an 8-bit result
if ( (sX + Operand) > 255 ) then
CARRY Å 1
else
CARRY Å 0
endif
if ( ((sX + Operand) = 0) or ((sX + Operand) = 256) ) then
ZERO Å 1
else
ZERO Å 0
endif
PC Å PC + 1
Registers/Flags Altered
Registers: sX, PC
Flags: CARRY, ZERO
ADDCY sX, Operand —Add Operand to Register sX with Carry
The ADDCY instruction performs an addition of two 8-bit operands and adds an additional
‘1’ if the CARRY flag was set by a previous instruction, as shown in Figure C-2. The first
operand is any register, which also receives the result of the operation. A second operand
is also any register or an 8-bit constant value. Flags are affected by this operation.
Figure C-2: ADDCY Instruction
Example
Operand is a register location, sY, or an immediate byte-wide constant, kk.
Description
Operand and CARRY flag are added to register sX. The ZERO and CARRY flags are set
92 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
appropriately.
ADDCY sX, sY; Add register. sX = sX + sY + CARRY
ADDCY sX, kk; Add immediate. sX = sX + kk + CARRY
UG129 (v1.1.2) June 24, 2008
Page 93

AND sX, Operand — Logical Bitwise AND Register sX with Operand
R
7 6 5 4 3 2 1 0
7 6 5 4 3 2 1 0
Register sX
Register sY
Literal kk
UG129_aC_06_051604
Pseudocode
if (CARRY = 1) then
sX Å (sX + Operand + 1) mod 256; always an 8-bit result
else
sX Å (sX + Operand) mod 256 ; always an 8-bit result
end if
if ( (sX + Operand + CARRY) > 255 ) then
CARRY Å 1
else
CARRY Å 0
endif
if ( ((sX + Operand + CARRY) = 0) or ((sX + Operand + CARRY) = 256) )
then
ZERO Å 1
else
ZERO Å 0
endif
PC Å PC + 1
Registers/Flags Altered
Registers: sX, PC
Flags: CARRY, ZERO
Notes
pBlazIDE Equivalent: ADDC
AND sX, Operand — Logical Bitwise AND Register sX with
Operand
The AND instruction performs a bitwise logical AND operation between two operands, as
shown in Figure C-3. The first operand is any register, which also receives the result of the
operation. A second operand is also any register or an 8-bit immediate constant. The ZERO
flag is set if the resulting value is zero. The CARRY flag is always cleared by an AND
instruction.
Figure C-3: AND Operation
The AND operation can be used to perform tests on the contents of a register. The status of
the ZERO flag then controls the flow of the program.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 93
UG129 (v1.1.2) June 24, 2008
Page 94

Appendix : PicoBlaze Instruction Set and Event Reference
R
Examples
AND sX, sY ; Logically AND the individual bits of register sX with
; the corresponding bits in register sY
AND sX, kk ; Logically AND the individual bits of register sX with
; the corresponding bits in the immediate constant kk
Pseudocode
; logically AND the corresponding bits in sX and the Operand
for (i=0; i<= 7; i=i+1)
{
sX(i) Å sX(i) AND Operand(i)
}
CARRY Å 0
if (sX = 0) then
ZERO Å 1
else
ZERO Å 0
end if
PC Å PC + 1
Registers/Flags Altered
Registers: sX, PC
Flags: ZERO, CARRY is always 0
CALL [Condition,] Address — Call Subroutine at Specified
Address, Possibly with Conditions
The CALL instruction modifies the normal program execution sequence by jumping to a
specified program address. Each CALL instruction must specify the 10-bit address as a
three-digit hexadecimal value or a label that the assembler resolves to a three-digit
hexadecimal value.
The CALL instruction has both conditional and unconditional variants. A conditional
CALL is only performed if a test performed against either the ZERO flag or CARRY flag is
true. If unconditional or if the condition is true, the CALL instruction pushes the current
value the PC to the top of the CALL/RETURN stack. Simultaneously, the specified CALL
location is loaded into the PC.
A subroutine function must exist at the specified address. The subroutine function requires
a RETURN instruction to return from the subroutine.
The CALL instruction does not affect the ZERO or CARRY flags. However, if a CALL is
performed, the resulting subroutine instructions may modify the flags.
Examples
CALL MYSUB; Unconditionally call MYSUB subroutine
CALL C, MYSUB; If CARRY flag set, call MYSUB subroutine
CALL NC, MYSUB; If CARRY flag not set, call MYSUB subroutine
CALL Z, MYSUB; If ZERO flag set, call MYSUB subroutine
CALL NZ, MYSUB; If ZERO flag not set, call MYSUB subroutine
94 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
Page 95

CALL [Condition,] Address — Call Subroutine at Specified Address, Possibly with Conditions
R
Condition
Depending on the specified Condition, the program calls the subroutine beginning at the
specified Address. If the specified Condition is not met, the program continues to the next
instruction.
Tabl e C - 1: CALL Instruction Conditions
Condition Description
<none> Always true. Call subroutine unconditionally.
C CARRY = 1. Call subroutine if CARRY flag is set.
NC CARRY = 0. Call subroutine if CARRY flag is cleared.
Z ZERO = 1. Call subroutine if ZERO flag is set.
NZ ZERO = 0. Call subroutine if ZERO flag is cleared.
Pseudocode
if (Condition = TRUE) then
; push current PC onto top of the CALL/RETURN stack
; TOS = Top of Stack
TOS Å PC
; load PC with specified Address
PC Å Address
else
PC Å PC + 1
endif
Registers/Flags Altered
Registers: PC, CALL/RETURN stack
Flags: Not affected
Notes
The maximum number of nested subroutine calls is 31 levels, due to the depth of the
CALL/RETURN stack.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 95
UG129 (v1.1.2) June 24, 2008
Page 96

Appendix : PicoBlaze Instruction Set and Event Reference
R
A=B?
AB
B>A?
AB
CARRYZERO
Register sX
Register sY or
Literal kk
UG129_aC_05_051604
COMPARE sX, Operand — Compare Operand with Register sX
The COMPARE instruction performs an 8-bit comparison of two operands, as shown in
Figure C-4. The first operand, sX, is any register and this register is NOT affected by the
COMPARE operation. The second operand is also any register or an 8-bit immediate
constant value. Only the flags are affected by this operation.
Figure C-4: COMPARE Operation
Register sX is compared against Operand. The ZERO flag is set when Register sX and
Operand are identical. The CARRY flag is set when Operand is larger than Register sX,
where both Operand and Register sX are evaluated as unsigned integers.
Example
Operand is a register location, sY, or an immediate byte-wide constant, kk.
COMPARE sX, sY; Compare sX against sY.
COMPARE sX, kk; Compare sX against immediate constant, kk.
Pseudocode
if ( Operand > sX ) then
CARRY Å 1
else
CARRY Å 0
endif
if ( sX = Operand ) then
ZERO Å 1
else
ZERO Å 0
endif
PC Å PC + 1
Registers/Flags Altered
Registers: PC only. No data registers affected.
Flags: CARRY, ZERO
Notes
pBlazIDE Equivalent: COMP
The COMPARE instruction is only supported on PicoBlaze microcontrollers for Spartan
®
96 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
Virtex
-II, and Virtex-II Pro FPGAs.
UG129 (v1.1.2) June 24, 2008
®
-3,
Page 97

DISABLE INTERRUPT — Disable External Interrupt Input
R
DISABLE INTERRUPT — Disable External Interrupt Input
The DISABLE INTERRUPT instruction clears the interrupt enable (IE) flag. Consequently,
the PicoBlaze microcontroller ignores the INTERRUPT input. Use this instruction to
temporarily disable interrupts during timing-critical code segments. Use the ENABLE
INTERRUPT instruction to re-enable interrupts.
Example
DISABLE INTERRUPT; Disable interrupts
Pseudocode
INTERRUPT_ENABLE Å 0
PC Å PC + 1
Registers/Flags Altered
Registers: PC
Flags: INTERRUPT_ENABLE
Notes
PBlazIDE Equivalent: DINT
ENABLE INTERRUPT — Enable External Interrupt Input
The ENABLE INTERRUPT instruction sets the interrupt enable (IE) flag. Consequently, the
PicoBlaze microcontroller recognizes the INTERRUPT input. Before using this instruction,
a suitable interrupt service routine (ISR) must be associated with the interrupt vector
address, 3FF.
Never issue the ENABLE INTERRUPT instruction from within an ISR.
Example
ENABLE INTERRUPT; Enable interrupts
Pseudocode
INTERRUPT_ENABLE Å 1
PC Å PC + 1
Registers/Flags Altered
Registers: PC
Flags: INTERRUPT_ENABLE
Notes
PBlazIDE Equivalent: EINT
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 97
UG129 (v1.1.2) June 24, 2008
Page 98

Appendix : PicoBlaze Instruction Set and Event Reference
R
Register sY or
Literal kk
Register sX
DATA_IN[7:0]
ADDRESS[5:0]
DATA_OUT[7:0]
64-Byte Scratchpad RAM
WRITE_ENABLEFALSE
[5:0]
[7]
[6]
UG129_aC_11_051604
FETCH sX, Operand — Read Scratchpad RAM Location to Register
sX
The FETCH instruction reads scratchpad RAM location specified by Operand into register
sX, as shown in Figure C-5. There are 64 scratchpad RAM locations. The two most-
significant bits of Operand, bits 7 and 6, are discarded and the RAM address is truncated to
the least-significant six bits of Operand, bits 5 to bit 0. Consequently, a FETCH operation
from address FF is equivalent to a FETCH operation from address 3F.
Figure C-5: FETCH Operation
Examples
FETCH sX, (sY) ; Read scratchpad RAM location specified by the
; contents of register sY into register sX
FETCH sX, kk ; Read scratchpad RAM location specified by the
; immediate constant kk into register sX
Pseudocode
sX Å Scratchpad_RAM [Operand[5:0]]
PC Å PC + 1
Registers/Flags Altered
Registers: PC
Flags: None
Notes
pBlazIDE Equivalent: The instruction mnemonic, FETCH, is the same for both KCPSM3
and pBlazIDE. However, the instruction syntax for indirect addressing is slightly different.
The KCPSM3 syntax places parentheses around the indirect address while the pBlazIDE
syntax uses no parentheses.
98 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
KCPSM3 Instruction PBlazIDE Instruction
FETCH sX, (sY) FETCH sX, sY
The FETCH instruction is only supported on PicoBlaze microcontrollers for Spartan-3,
Virtex-II, and Virtex-II Pro FPGAs.
UG129 (v1.1.2) June 24, 2008
Page 99

INPUT sX, Operand — Set PORT_ID to Operand, Read value on IN_PORT into Register sX
R
INPUT sX, Operand — Set PORT_ID to Operand, Read value on
IN_PORT into Register sX
The INPUT instruction sets the PORT_ID output port to either the value specified by
register sY or by the immediate constant kk. The instruction then reads the value on the
IN_PORT input port into register sX. Flags are not affected by this operation.
Interface logic decodes the PORT_ID address to provide the correct value on IN_PORT.
Examples
INPUT sX, sY ; Read the value on IN_PORT into register sX, set PORT_ID
; to the contents of sY
INPUT sX, kk ; Read the value on IN_PORT into register sX, set PORT_ID
; to the immediate constant kk
Pseudocode
PORT_ID Å Operand
sX Å IN_PORT
PC Å PC + 1
Registers/Flags Altered
Registers: sX, PC
Flags: None
Notes
pBlazIDE Equivalent: IN
The READ_STROBE output is asserted during the second CLK cycle of the two-cycle
INPUT operation.
PicoBlaze 8-bit Embedded Microcontroller www.xilinx.com 99
UG129 (v1.1.2) June 24, 2008
Page 100

Appendix : PicoBlaze Instruction Set and Event Reference
R
INTERRUPT Event, When Enabled
The interrupt event is not an instruction but the response of the PicoBlaze microcontroller
to an external interrupt input. If the INTERRUPT_ENABLE flag is set, then a recognized
logic level on the INTERRUPT input generates an Interrupt Event. The action essentially
generates a subroutine CALL to the most-significant instruction address, location 1023
($3FF). The currently executing instruction is allowed to complete. Once the PicoBlaze
microcontroller recognizes the interrupt input, the INTERRUPT_ENABLE flag is
automatically reset. The next instruction in the normal program flow is preempted by the
Interrupt Event and the current PC is pushed onto the CALL/RETURN stack. The PC is
loaded with all ones and the program calls the instruction at the most-significant address.
The instruction at the most-significant address must jump to the interrupt service routine
(ISR).
Pseudocode
; only respond to INTERRUPT input if INTERRUPT_ENABLE flag is set
if ( (INTERRUPT_ENABLE = 1)and (INTERRUPT input = High) ) then
; clear the INTERRUPT_ENABLE flag
INTERRUPT_ENABLE Å 0
; push the current program counter (PC) to the stack
; TOS = Top of Stack
TOS Å PC
; preserve the current CARRY and ZERO flags
PRESERVED_CARRY Å CARRY
PRESERVED_ZERO Å ZERO
; load program counter (PC) with interrupt vector ($3FF)
PC Å $3FF
endif
Registers/Flags Altered
Registers: PC, CALL/RETURN stack
Flags: CARRY, ZERO, INTERRUPT_ENABLE
Notes
The PicoBlaze microcontroller asserts the INTERRUPT_ACK output on the second CLK
cycle of the two-cycle Interrupt Event, as shown in Figure 4-3, page 43. This signal is
optionally used to clear any hardware interrupt flags.
The programmer must ensure that a RETURNI instruction is only performed in response to
a previous interrupt. Otherwise, the PC stack may not contain a valid return address.
Do not use the RETURNI instruction to return from a subroutine CALL. Instead, use the
RETURN instruction.
Because an interrupt event may happen at any time, the values of the CARRY and ZERO
flags cannot be predetermined. Consequently, the corresponding Interrupt Service Routine
(ISR) must not depend on specific values for the CARRY and ZERO flags.
100 www.xilinx.com PicoBlaze 8-bit Embedded Microcontroller
UG129 (v1.1.2) June 24, 2008
 Loading...
Loading...