

Page 1
DRV8824
www.ti.com
SLVSA06B –OCTOBER 2009–REVISED APRIL 2010
STEPPER MOTOR CONTROLLER IC
Check for Samples: DRV8824
1
FEATURES
2
• PWM Microstepping Motor Driver
– Built-In Microstepping Indexer
– Five-Bit Winding Current Control Allows Up
to 32 Current Levels
– Low MOSFET On-Resistance
• 1.6-A Maximum Drive Current at 24 V, 25°C
• Built-In 3.3-V Reference Output
• 8-V to 45-V Operating Supply Voltage Range
• Thermally Enhanced Surface Mount Package
DESCRIPTION
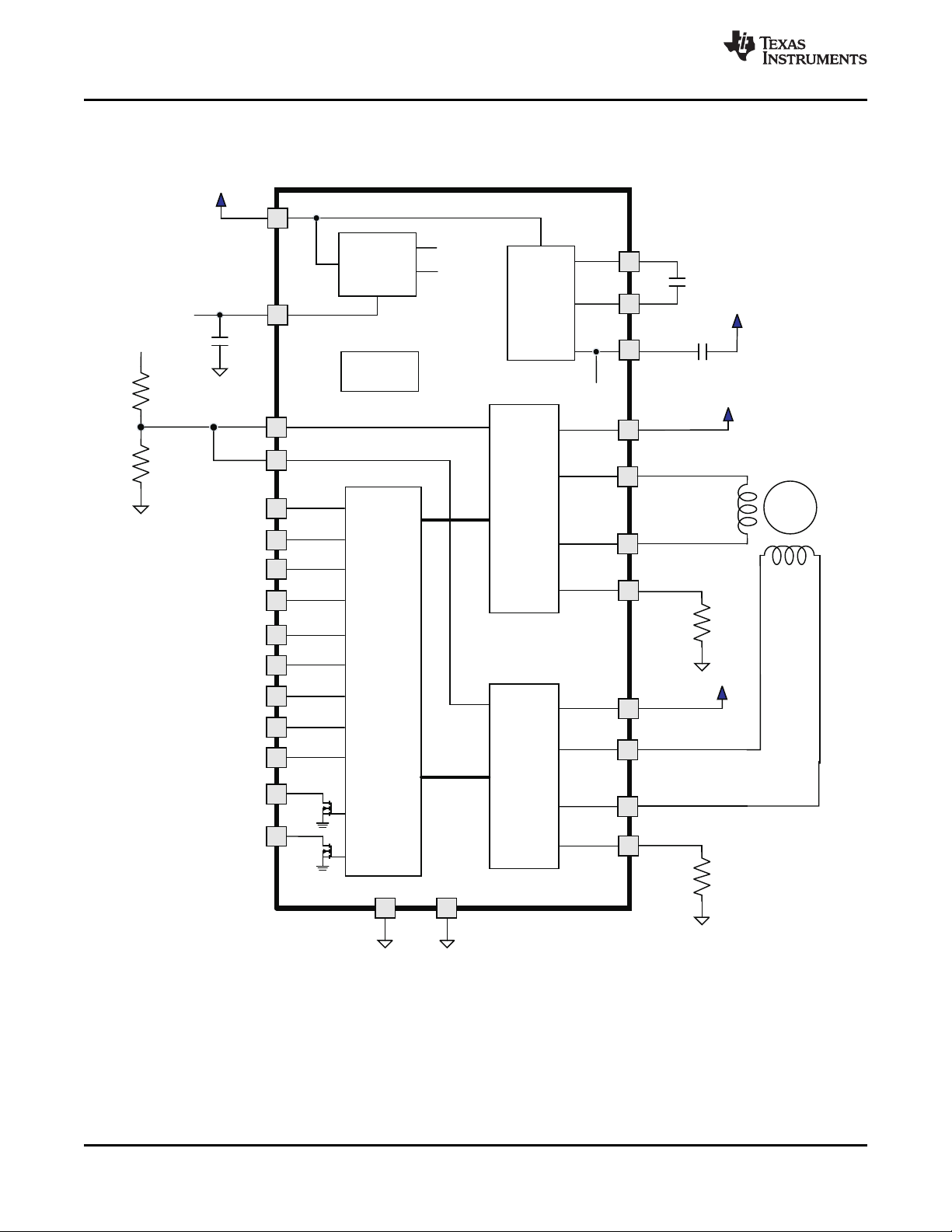
The DRV8824 provides an integrated motor driver solution for printers, scanners, and other automated
equipment applications. The device has two H-bridge drivers and a microstepping indexer, and is intended to
drive a bipolar stepper motor. The output driver block for each consists of N-channel power MOSFET’s
configured as full H-bridges to drive the motor windings. The DRV8824 is capable of driving up to 1.6-A of output
current (with proper heatsinking, at 24 V and 25°C).
A simple step/direction interface allows easy interfacing to controller circuits. Pins allow configuration of the
motor in full-step up to 1/32-step modes. Decay mode is programmable.
Internal shutdown functions are provided for overcurrent protection, short circuit protection, undervoltage lockout
and overtemperature.
The DRV8824 is available in a 28-pin HTSSOP package with PowerPAD™ (Eco-friendly: RoHS & no Sb/Br).
APPLICATIONS
• Automatic Teller Machines
• Money Handling Machines
• Video Security Cameras
• Printers
• Scanners
• Office Automation Machines
• Gaming Machines
• Factory Automation
• Robotics
ORDERING INFORMATION
T
A
–40°C to 85°C PowerPAD™ (HTSSOP) - PWP Reel of 2000 DRV8824PWPR 8824
(1) For the most current packaging and ordering information, see the Package Option Addendum at the end of this document, or see the TI
web site at www.ti.com.
(2) Package drawings, thermal data, and symbolization are available at www.ti.com/packaging.
1
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of Texas
Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
2PowerPAD is a trademark of Texas Instruments.
PRODUCTION DATA information is current as of publication date.
Products conform to specifications per the terms of the Texas
Instruments standard warranty. Production processing does not
necessarily include testingof all parameters.
PACKAGE
(2)
(1)
ORDERABLE PART TOP-SIDE
NUMBER MARKING
Copyright © 2009–2010, Texas Instruments Incorporated
Page 2
Charge
Pump
Thermal
Shut down
AOUT1
AOUT2
BOUT1
BOUT2
GNDGND
0.1uF
0.01uF
VM
Step
Motor
VMA
VMB
CP1
CP2
VCP
ISENA
ISENB
STEP
DIR
MODE1
MODE2
AVREF
HS Gate
Drive
VM
VM
Internal
Reference &
Regs
Int. VCC
Motor
Driver B
nFAULT
Indexer /
Control
Logic
nRESET
Motor
Driver A
nENBL
nSLEEP
VM
V3P3OUT
3.3V
LS Gate
Drive
+
+
-
-
3.3V
BVREF
MODE0
nHOME
VM
DECAY
DRV8824
SLVSA06B –OCTOBER 2009–REVISED APRIL 2010
DEVICE INFORMATION
Functional Block Diagram
www.ti.com
2 Submit Documentation Feedback Copyright © 2009–2010, Texas Instruments Incorporated
Product Folder Link(s): DRV8824
Page 3
DRV8824
www.ti.com
SLVSA06B –OCTOBER 2009–REVISED APRIL 2010
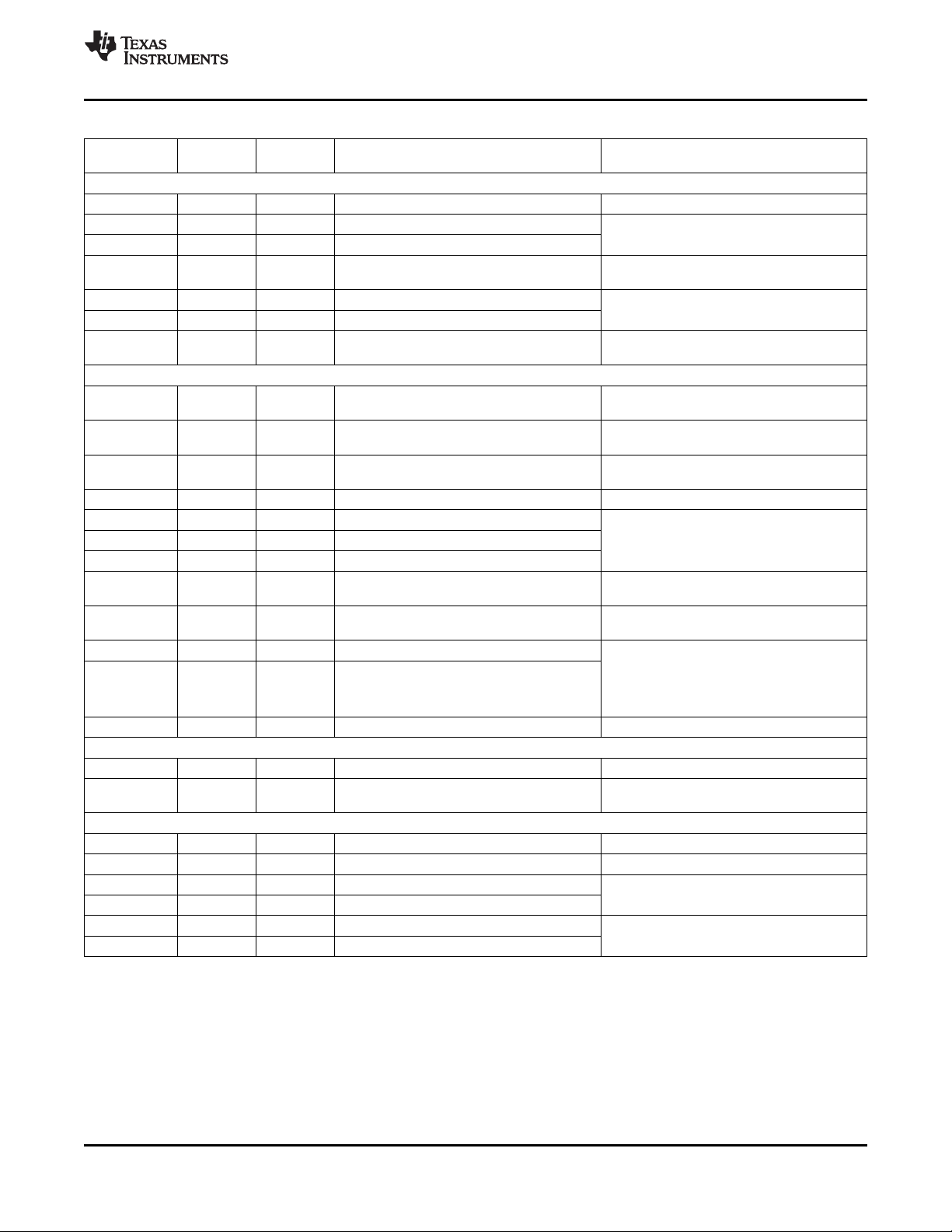
Table 1. TERMINAL FUNCTIONS
NAME PIN I/O
POWER AND GROUND
GND 14, 28 - Device ground
VMA 4 - Bridge A power supply
VMB 11 - Bridge B power supply
V3P3OUT 15 O 3.3-V regulator output
CP1 1 IO Charge pump flying capacitor
CP2 2 IO Charge pump flying capacitor
VCP 3 IO High-side gate drive voltage
CONTROL
nENBL 21 I Enable input
nSLEEP 17 I Sleep mode input
STEP 22 I Step input
DIR 20 I Direction input Level sets the direction of stepping
MODE0 24 I Microstep mode 0
MODE1 25 I Microstep mode 1
MODE2 26 I Microstep mode 2
DECAY 19 I Decay mode
nRESET 16 I Reset input
AVREF 12 I Bridge A current set reference input Reference voltage for winding current set.
BVREF 13 I Bridge B current set reference input
NC 23 No connect Leave this pin unconnected.
STATUS
nHOME 27 OD Home position Logic low when at home state of step table
nFAULT 18 OD Fault
OUTPUT
ISENA 6 IO Bridge A ground / Isense Connect to current sense resistor for bridge A.
ISENB 9 IO Bridge B ground / Isense Connect to current sense resistor for bridge B.
AOUT1 5 O Bridge A output 1
AOUT2 7 O Bridge A output 2
BOUT1 10 O Bridge B output 1
BOUT2 8 O Bridge B output 2
(1) Directions: I = input, O = output, OZ = tri-state output, OD = open-drain output, IO = input/output
(1)
DESCRIPTION
Connect to motor supply (8 - 45 V). Both pins
must be connected to same supply.
Bypass to GND with a 0.47-mF 6.3-V ceramic
capacitor. Can be used to supply VREF.
Connect a 0.01-mF 50-V capacitor between
CP1 and CP2.
Connect a 0.1-mF 16-V ceramic capacitor to
VM.
Logic high to disable device outputs and
indexer operation, logic low to enable
Logic high to enable device, logic low to enter
low-power sleep mode
Rising edge causes the indexer to move one
step
MODE0 - MODE2 set the step mode - full,
1/2, 1/4, 1/8/ 1/16, or 1/32 step
Low = slow decay, open = mixed decay, high
= fast decay
Active-low reset input initializes the indexer
logic and disables the H-bridge outputs
Normally AVREF and BVREF are connected
to the same voltage. Can be connected to
V3P3OUT. A 0.01-µF bypass capacitor to
GND is recommended.
Logic low when in fault condition (overtemp,
overcurrent)
Connect to bipolar stepper motor winding A.
Positive current is AOUT1 → AOUT2
Connect to bipolar stepper motor winding B.
Positive current is BOUT1 → BOUT2
EXTERNAL COMPONENTS
OR CONNECTIONS
Copyright © 2009–2010, Texas Instruments Incorporated Submit Documentation Feedback 3
Product Folder Link(s): DRV8824
Page 4
DRV8824
SLVSA06B –OCTOBER 2009–REVISED APRIL 2010
www.ti.com
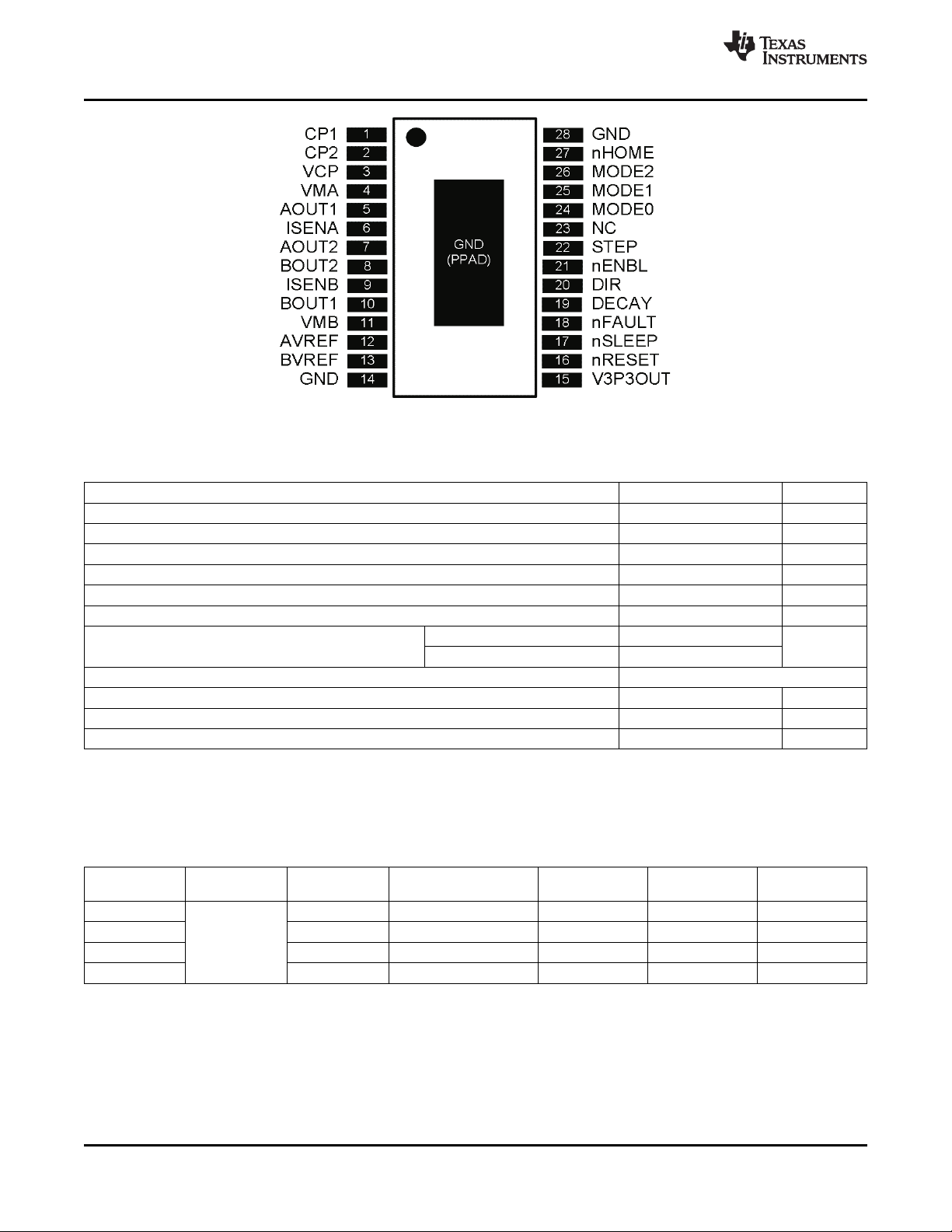
ABSOLUTE MAXIMUM RATINGS
over operating free-air temperature range (unless otherwise noted)
VMx Power supply voltage range –0.3 to 47 V
Digital pin voltage range –0.5 to 7 V
VREF Input voltage –0.3 to 4 V
ISENSEx pin voltage –0.3 to 0.8 V
Peak motor drive output current, t < 1 mS Internally limited A
Continuous motor drive output current
ESD rating V
Continuous total power dissipation See Dissipation Ratings table
T
J
T
A
T
stg
Operating virtual junction temperature range –40 to 150 °C
Operating ambient temperature range –40 to 85 °C
Storage temperature range –60 to 150 °C
(1) Stresses beyond those listed under absolute maximum ratings may cause permanent damage to the device. These are stress ratings
only, and functional operation of the device at these or any other conditions beyond those indicated under recommended operating
conditions is not implied. Exposure to absolute maximum rated conditions for extended periods may affect device reliability.
(2) All voltage values are with respect to network ground terminal.
(3) Power dissipation and thermal limits must be observed.
(3)
HBD (human body model) 2000
CDM (charged device model) 500
(1) (2)
VALUE UNIT
1.6 A
DISSIPATION RATINGS (PRELIMINARY)
BOARD PACKAGE R
(1)
Low-K
(2)
Low-K
High-K
High-K
(3)
(4)
PWP
qJA
67.5°C/W 14.8 mW/°C 1.85 W 1.18 W 0.96 W
39.5°C/W 25.3 mW/°C 3.16 W 2.02 W 1.64 W
33.5°C/W 29.8 mW/°C 3.73 W 2.38 W 1.94 W
28°C/W 35.7 mW/°C 4.46 W 2.85 W 2.32 W
(1) The JEDEC Low-K board used to derive this data was a 76-mm x 114-mm, 2-layer, 1.6-mm thick PCB with no backside copper.
(2) The JEDEC Low-K board used to derive this data was a 76-mm x 114-mm, 2-layer, 1.6-mm thick PCB with 25-cm22-oz copper on back
side.
(3) The JEDEC High-K board used to derive this data was a 76-mm x 114-mm, 4-layer, 1.6-mm thick PCB with no backside copper and
solid 1-oz internal ground plane.
(4) The JEDEC High-K board used to derive this data was a 76-mm x 114-mm, 4-layer, 1.6-mm thick PCB with 25-cm21-oz copper on back
side and solid 1-oz internal ground plane.
4 Submit Documentation Feedback Copyright © 2009–2010, Texas Instruments Incorporated
DERATING FACTOR
ABOVE TA= 25°C
Product Folder Link(s): DRV8824
TA< 25°C TA= 70°C TA= 85°C
Page 5

DRV8824
www.ti.com
RECOMMENDED OPERATING CONDITIONS
over operating free-air temperature range (unless otherwise noted)
V
V
I
V3P3
M
REF
Motor power supply voltage range
VREF input voltage
(2)
V3P3OUT load current 1 mA
(1) All VMpins must be connected to the same supply voltage.
(2) Operational at VREF between 0 V and 1 V, but accuracy is degraded.
(1)
ELECTRICAL CHARACTERISTICS
over operating free-air temperature range (unless otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
POWER SUPPLIES
I
VM
I
VMQ
V
UVLO
V3P3OUT REGULATOR
V
3P3
LOGIC-LEVEL INPUTS
V
IL
V
IH
V
HYS
I
IL
I
IH
nHOME, nFAULT OUTPUTS (OPEN-DRAIN OUTPUTS)
V
OL
I
OH
DECAY INPUT
V
IL
V
IH
I
IN
H-BRIDGE FETS
R
DS(ON)
R
DS(ON)
I
OFF
MOTOR DRIVER
f
PWM
t
BLANK
t
R
t
F
t
DEAD
PROTECTION CIRCUITS
I
OCP
t
TSD
VM operating supply current VM= 24 V, f
< 50 kHz 5 8 mA
PWM
VM sleep mode supply current VM= 24 V 10 20 mA
VM undervoltage lockout voltage VMrising 7.8 8.2 V
V3P3OUT voltage IOUT = 0 to 1 mA 3.2 3.3 3.4 V
Input low voltage 0.6 0.7 V
Input high voltage 2 5.25 V
Input hysteresis 0.45 V
Input low current VIN = 0 –20 20 mA
Input high current VIN = 3.3 V 100 mA
Output low voltage IO= 5 mA 0.5 V
Output high leakage current VO= 3.3 V 1 mA
Input low threshold voltage For slow decay mode 0.8 V
Input high threshold voltage For fast decay mode 2 V
Input current ±40 µA
HS FET on resistance Ω
LS FET on resistance Ω
VM= 24 V, IO= 1 A, TJ= 25°C 0.63
VM= 24 V, IO= 1 A, TJ= 85°C 0.76 0.90
VM= 24 V, IO= 1 A, TJ= 25°C 0.65
VM= 24 V, IO= 1 A, TJ= 85°C 0.78 0.90
Off-state leakage current –20 20 mA
Internal PWM frequency 37 50 63 kHz
Current sense blanking time 3.75 ms
Rise time VM= 24 V 100 360 ns
Fall time VM= 24 V 80 250 ns
Dead time 400 ns
Overcurrent protection trip level 1.8 5 A
Thermal shutdown temperature Die temperature 150 160 180 °C
SLVSA06B –OCTOBER 2009–REVISED APRIL 2010
MIN NOM MAX UNIT
8.2 45 V
1 3.5 V
Copyright © 2009–2010, Texas Instruments Incorporated Submit Documentation Feedback 5
Product Folder Link(s): DRV8824
Page 6
DRV8824
SLVSA06B –OCTOBER 2009–REVISED APRIL 2010
ELECTRICAL CHARACTERISTICS (continued)
over operating free-air temperature range (unless otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
CURRENT CONTROL
I
REF
V
TRIP
ΔI
TRIP
A
ISENSE
xVREF input current xVREF = 3.3 V –3 3 mA
xISENSE trip voltage xVREF = 3.3 V, 100% current setting 635 660 685 mV
xVREF = 3.3 V , 5% current setting –25 25
xVREF = 3.3 V , 10% - 34% current
Current trip accuracy
(relative to programmed value)
setting
xVREF = 3.3 V, 38% - 67% current
setting
xVREF = 3.3 V, 71% - 100% current
setting
Current sense amplifier gain Reference only 5 V/V
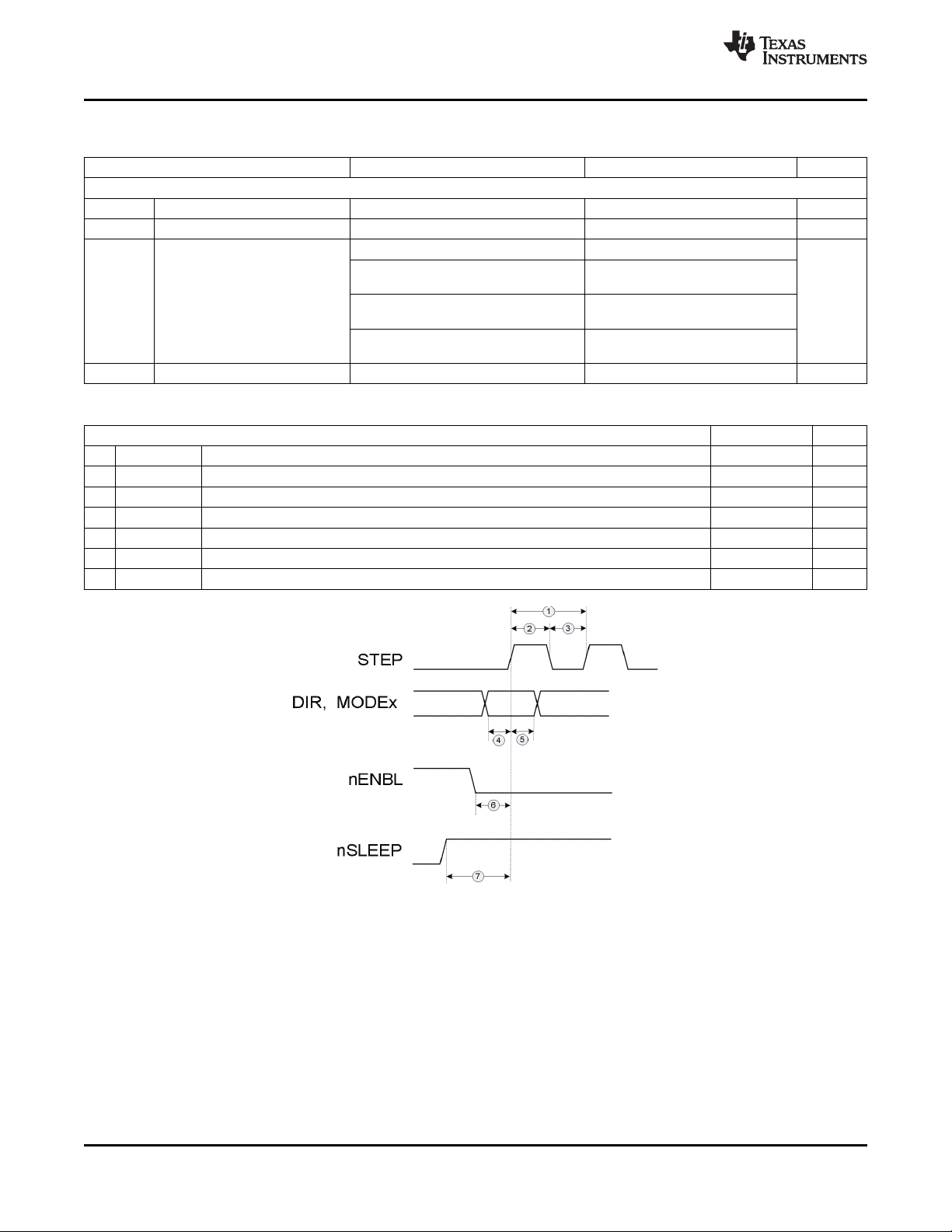
TIMING REQUIREMENTS
1 f
2 t
3 t
4 t
5 t
6 t
7 t
STEP
WH(STEP)
WL(STEP)
SU(STEP)
H(STEP)
ENBL
WAKE
Step frequency 250 kHz
Pulse duration, STEP high 1.9 ms
Pulse duration, STEP low 1.9 ms
Setup time, command to STEP rising 200 ns
Hold time, command to STEP rising 200 ns
Enable time, nENBL active to STEP 200 ns
Wakeup time, nSLEEP inactive to STEP 1 mS
–15 15
–10 10
–5 5
MIN MAX UNIT
www.ti.com
%
Figure 1. Timing Diagram
6 Submit Documentation Feedback Copyright © 2009–2010, Texas Instruments Incorporated
Product Folder Link(s): DRV8824
Page 7
DRV8824
www.ti.com
SLVSA06B –OCTOBER 2009–REVISED APRIL 2010
FUNCTIONAL DESCRIPTION
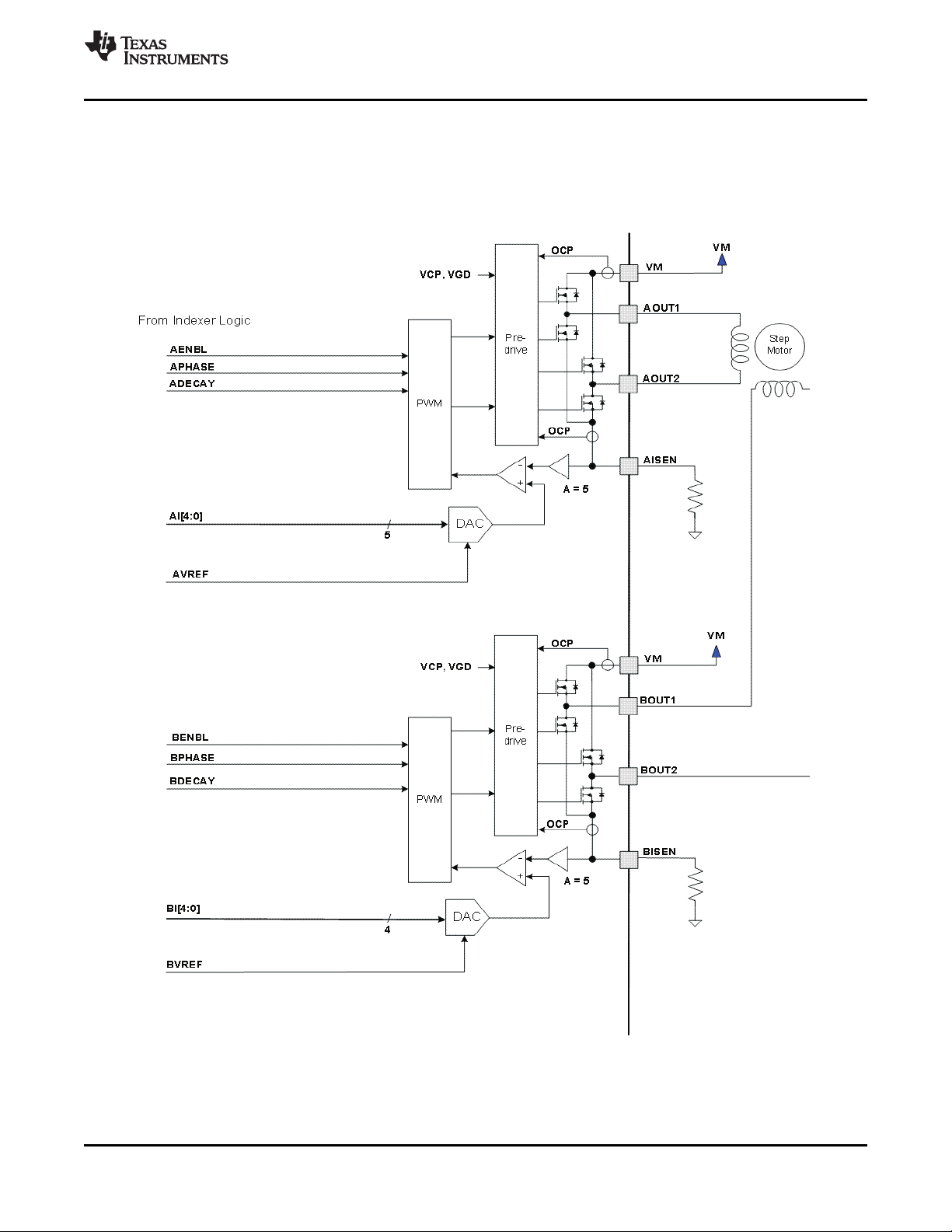
PWM Motor Drivers
The DRV8824 contains two H-bridge motor drivers with current-control PWM circuitry. A block diagram of the
motor control circuitry is shown in Figure 2.
Figure 2. Motor Control Circuitry
Note that there are multiple VM motor power supply pins. All VM pins must be connected together to the motor
supply voltage.
Copyright © 2009–2010, Texas Instruments Incorporated Submit Documentation Feedback 7
Product Folder Link(s): DRV8824
Page 8

I =
CHOP
V
REFX
5 · R
ISENSE
¾
DRV8824
SLVSA06B –OCTOBER 2009–REVISED APRIL 2010
www.ti.com
Current Regulation
The current through the motor windings is regulated by a fixed-frequency PWM current regulation, or current
chopping. When an H-bridge is enabled, current rises through the winding at a rate dependent on the DC voltage
and inductance of the winding. Once the current hits the current chopping threshold, the bridge disables the
current until the beginning of the next PWM cycle.
In stepping motors, current regulation is used to vary the current in the two windings in a semi-sinusoidal fashion
to provide smooth motion.
The PWM chopping current is set by a comparator which compares the voltage across a current sense resistor
connected to the xISEN pins, multiplied by a factor of 5, with a reference voltage. The reference voltage is input
from the xVREF pins.
The full-scale (100%) chopping current is calculated in Equation 1.
(1)
Example:
If a 0.5-Ω sense resistor is used and the VREFx pin is 3.3 V, the full-scale (100%) chopping current will be
3.3 V / (5 x 0.5 Ω) = 1.32 A.
The reference voltage is scaled by an internal DAC that allows fractional stepping of a bipolar stepper motor, as
described in the microstepping indexer section below.
Decay Mode
During PWM current chopping, the H-bridge is enabled to drive current through the motor winding until the PWM
current chopping threshold is reached. This is shown in Figure 3 as case 1. The current flow direction shown
indicates positive current flow.
Once the chopping current threshold is reached, the H-bridge can operate in two different states, fast decay or
slow decay.
In fast decay mode, once the PWM chopping current level has been reached, the H-bridge reverses state to
allow winding current to flow in a reverse direction. As the winding current approaches zero, the bridge is
disabled to prevent any reverse current flow. Fast decay mode is shown in Figure 3 as case 2.
In slow decay mode, winding current is re-circulated by enabling both of the low-side FETs in the bridge. This is
shown in Figure 3 as case 3.
8 Submit Documentation Feedback Copyright © 2009–2010, Texas Instruments Incorporated
Product Folder Link(s): DRV8824
Page 9

DRV8824
www.ti.com
SLVSA06B –OCTOBER 2009–REVISED APRIL 2010
Figure 3. Decay Mode
The DRV8824 supports fast decay, slow decay and a mixed decay mode. Slow, fast, or mixed decay mode is
selected by the state of the DECAY pin - logic low selects slow decay, open selects mixed decay operation, and
logic high sets fast decay mode.
Mixed decay mode begins as fast decay, but at a fixed period of time (75% of the PWM cycle) switches to slow
decay mode for the remainder of the fixed PWM period. This occurs only if the current through the winding is
decreasing (per the indexer step table); if the current is increasing, then slow decay is used.
Blanking Time
After the current is enabled in an H-bridge, the voltage on the xISEN pin is ignored for a fixed period of time
before enabling the current sense circuitry. This blanking time is fixed at 3.75 ms. Note that the blanking time also
sets the minimum on time of the PWM.
Microstepping Indexer
Built-in indexer logic in the DRV8824 allows a number of different stepping configurations. The MODE0 - MODE2
pins are used to configure the stepping format as shown in Table 2.
Table 2. Stepping Format
MODE2 MODE1 MODE0 STEP MODE
0 0 0 Full step (2-phase excitation) with 71% current
0 0 1 1/2 step (1-2 phase excitation)
0 1 0 1/4 step (W1-2 phase excitation)
0 1 1 8 microsteps / step
1 0 0 16 microsteps / step
1 0 1 32 microsteps / step
1 1 0 32 microsteps / step
1 1 1 32 microsteps / step
Copyright © 2009–2010, Texas Instruments Incorporated Submit Documentation Feedback 9
Product Folder Link(s): DRV8824
Page 10

DRV8824
SLVSA06B –OCTOBER 2009–REVISED APRIL 2010
www.ti.com
Table 3 shows the relative current and step directions for different settings of MODEx. At each rising edge of the
STEP input, the indexer travels to the next state in the table. The direction is shown with the DIR pin high; if the
DIR pin is low the sequence is reversed. Positive current is defined as xOUT1 = positive with respect to xOUT2.
Note that if the step mode is changed while stepping, the indexer will advance to the next valid state for the new
MODEx setting at the rising edge of STEP.
The home state is 45°. This state is entered at power-up or application of nRESET. This is shown in Table 3 by
the shaded cells.
Table 3. Relative Current and Step Directions
1/32 STEP 1/16 STEP 1/8 STEP 1/4 STEP 1/2 STEP STEP CURRENT CURRENT
FULL WINDING WINDING
70% A B
1 1 1 1 1 100% 0% 0
2 100% 5% 3
3 2 100% 10% 6
4 99% 15% 8
5 3 2 98% 20% 11
6 97% 24% 14
7 4 96% 29% 17
8 94% 34% 20
9 5 3 2 92% 38% 23
10 90% 43% 25
11 6 88% 47% 28
12 86% 51% 31
13 7 4 83% 56% 34
14 80% 60% 37
15 8 77% 63% 39
16 74% 67% 42
17 9 5 3 2 1 71% 71% 45
18 67% 74% 48
19 10 63% 77% 51
20 60% 80% 53
21 11 6 56% 83% 56
22 51% 86% 59
23 12 47% 88% 62
24 43% 90% 65
25 13 7 4 38% 92% 68
26 34% 94% 70
27 14 29% 96% 73
28 24% 97% 76
29 15 8 20% 98% 79
30 15% 99% 82
31 16 10% 100% 84
32 5% 100% 87
33 17 9 5 3 0% 100% 90
34 –5% 100% 93
35 18 –10% 100% 96
36 –15% 99% 98
37 19 10 –20% 98% 101
38 –24% 97% 104
ELECTRICAL
ANGLE
10 Submit Documentation Feedback Copyright © 2009–2010, Texas Instruments Incorporated
Product Folder Link(s): DRV8824
Page 11

DRV8824
www.ti.com
SLVSA06B –OCTOBER 2009–REVISED APRIL 2010
Table 3. Relative Current and Step Directions (continued)
1/32 STEP 1/16 STEP 1/8 STEP 1/4 STEP 1/2 STEP STEP CURRENT CURRENT
39 20 –29% 96% 107
40 –34% 94% 110
41 21 11 6 –38% 92% 113
42 –43% 90% 115
43 22 –47% 88% 118
44 –51% 86% 121
45 23 12 –56% 83% 124
46 –60% 80% 127
47 24 –63% 77% 129
48 –67% 74% 132
49 25 13 7 4 2 –71% 71% 135
50 –74% 67% 138
51 26 –77% 63% 141
52 –80% 60% 143
53 27 14 –83% 56% 146
54 –86% 51% 149
55 28 –88% 47% 152
56 –90% 43% 155
57 29 15 8 –92% 38% 158
58 –94% 34% 160
59 30 –96% 29% 163
60 –97% 24% 166
61 31 16 –98% 20% 169
62 –99% 15% 172
63 32 –100% 10% 174
64 –100% 5% 177
65 33 17 9 5 –100% 0% 180
66 –100% –5% 183
67 34 –100% –10% 186
68 –99% –15% 188
69 35 18 –98% –20% 191
70 –97% –24% 194
71 36 –96% –29% 197
72 –94% –34% 200
73 37 19 10 –92% –38% 203
74 –90% –43% 205
75 38 –88% –47% 208
76 –86% –51% 211
77 39 20 –83% –56% 214
78 –80% –60% 217
79 40 –77% –63% 219
80 –74% –67% 222
81 41 21 11 6 3 –71% –71% 225
82 –67% –74% 228
83 42 –63% –77% 231
84 –60% –80% 233
FULL WINDING WINDING
70% A B
ELECTRICAL
ANGLE
Copyright © 2009–2010, Texas Instruments Incorporated Submit Documentation Feedback 11
Product Folder Link(s): DRV8824
Page 12

DRV8824
SLVSA06B –OCTOBER 2009–REVISED APRIL 2010
Table 3. Relative Current and Step Directions (continued)
FULL WINDING WINDING
1/32 STEP 1/16 STEP 1/8 STEP 1/4 STEP 1/2 STEP STEP CURRENT CURRENT
70% A B
85 43 22 –56% –83% 236
86 –51% –86% 239
87 44 –47% –88% 242
88 –43% –90% 245
89 45 23 12 –38% –92% 248
90 –34% –94% 250
91 46 –29% –96% 253
92 –24% –97% 256
93 47 24 –20% –98% 259
94 –15% –99% 262
95 48 –10% –100% 264
96 –5% –100% 267
97 49 25 13 7 0% –100% 270
98 5% –100% 273
99 50 10% –100% 276
100 15% –99% 278
101 51 26 20% –98% 281
102 24% –97% 284
103 52 29% –96% 287
104 34% –94% 290
105 53 27 14 38% –92% 293
106 43% –90% 295
107 54 47% –88% 298
108 51% –86% 301
109 55 28 56% –83% 304
110 60% –80% 307
111 56 63% –77% 309
112 67% –74% 312
113 57 29 15 8 4 71% –71% 315
114 74% –67% 318
115 58 77% –63% 321
116 80% –60% 323
117 59 30 83% –56% 326
118 86% –51% 329
119 60 88% –47% 332
120 90% –43% 335
121 61 31 16 92% –38% 338
122 94% –34% 340
123 62 96% –29% 343
124 97% –24% 346
125 63 32 98% –20% 349
126 99% –15% 352
127 64 100% –10% 354
128 100% –5% 357
www.ti.com
ELECTRICAL
ANGLE
12 Submit Documentation Feedback Copyright © 2009–2010, Texas Instruments Incorporated
Product Folder Link(s): DRV8824
Page 13

DRV8824
www.ti.com
SLVSA06B –OCTOBER 2009–REVISED APRIL 2010
nRESET, nENBLE and nSLEEP Operation
The nRESET pin, when driven active low, resets internal logic, and resets the step table to the home position. It
also disables the H-bridge drivers. The STEP input is ignored while nRESET is active.
The nENBL pin is used to control the output drivers and enable/disable operation of the indexer. When nENBL is
low, the output H-bridges are enabled, and rising edges on the STEP pin are recognized. When nENBL is high,
the H-bridges are disabled, the outputs are in a high-impedance state, and the STEP input is ignored.
Driving nSLEEP low will put the device into a low power sleep state. In this state, the H-bridges are disabled, the
gate drive charge pump is stopped, the V3P3OUT regulator is disabled, and all internal clocks are stopped. In
this state all inputs are ignored until nSLEEP returns inactive high. When returning from sleep mode, some time
(approximately 1 ms) needs to pass before applying a STEP input, to allow the internal circuitry to stabilize.
Protection Circuits
The DRV8824 is fully protected against undervoltage, overcurrent and overtemperature events.
Overcurrent Protection (OCP)
An analog current limit circuit on each FET limits the current through the FET by removing the gate drive. If this
analog current limit persists for longer than the OCP time, all FETs in the H-bridge will be disabled and the
nFAULT pin will be driven low. The device will remain disabled until either nRESET pin is applied, or VM is
removed and re-applied.
Overcurrent conditions on both high and low side devices; i.e., a short to ground, supply, or across the motor
winding will all result in an overcurrent shutdown. Note that overcurrent protection does not use the current sense
circuitry used for PWM current control, and is independent of the I
resistor value or VREF voltage.
SENSE
Thermal Shutdown (TSD)
If the die temperature exceeds safe limits, all FETs in the H-bridge will be disabled and the nFAULT pin will be
driven low. Once the die temperature has fallen to a safe level operation will automatically resume.
Undervoltage Lockout (UVLO)
If at any time the voltage on the VM pins falls below the undervoltage lockout threshold voltage, all circuitry in the
device will be disabled and internal logic will be reset. Operation will resume when VMrises above the UVLO
threshold.
Copyright © 2009–2010, Texas Instruments Incorporated Submit Documentation Feedback 13
Product Folder Link(s): DRV8824
Page 14

P = R (I )
TOT DS(ON) OUT(RMS)
4
2
· ·
DRV8824
SLVSA06B –OCTOBER 2009–REVISED APRIL 2010
www.ti.com
THERMAL INFORMATION
Thermal Protection
The DRV8824 has thermal shutdown (TSD) as described above. If the die temperature exceeds approximately
150°C, the device will be disabled until the temperature drops to a safe level.
Any tendency of the device to enter TSD is an indication of either excessive power dissipation, insufficient
heatsinking, or too high an ambient temperature.
Power Dissipation
Power dissipation in the DRV8824 is dominated by the power dissipated in the output FET resistance, or R
Average power dissipation when running a stepper motor can be roughly estimated by Equation 2.
where P
current being applied to each winding. I
is the total power dissipation, R
TOT
DS(ON)
OUT(RMS)
is the resistance of each FET, and I
OUT(RMS)
is the RMS output
is equal to the approximately 0.7x the full-scale output current
setting. The factor of 4 comes from the fact that there are two motor windings, and at any instant two FETs are
conducting winding current for each winding (one high-side and one low-side).
The maximum amount of power that can be dissipated in the device is dependent on ambient temperature and
heatsinking.
Note that R
increases with temperature, so as the device heats, the power dissipation increases. This must
DS(ON)
be taken into consideration when sizing the heatsink.
DS(ON)
(2)
.
Heatsinking
The PowerPAD™ package uses an exposed pad to remove heat from the device. For proper operation, this pad
must be thermally connected to copper on the PCB to dissipate heat. On a multi-layer PCB with a ground plane,
this can be accomplished by adding a number of vias to connect the thermal pad to the ground plane. On PCBs
without internal planes, copper area can be added on either side of the PCB to dissipate heat. If the copper area
is on the opposite side of the PCB from the device, thermal vias are used to transfer the heat between top and
bottom layers.
For details about how to design the PCB, refer to TI application report SLMA002, " PowerPAD™ Thermally
Enhanced Package" and TI application brief SLMA004, " PowerPAD™ Made Easy", available at www.ti.com.
In general, the more copper area that can be provided, the more power can be dissipated. It can be seen that the
heatsink effectiveness increases rapidly to about 20 cm2, then levels off somewhat for larger areas.
14 Submit Documentation Feedback Copyright © 2009–2010, Texas Instruments Incorporated
Product Folder Link(s): DRV8824
Page 15

PACKAGE OPTION ADDENDUM
www.ti.com 16-Apr-2010
PACKAGING INFORMATION
Orderable Device Status
(1)
Package
Type
Package
Drawing
Pins Package
Qty
Eco Plan
DRV8824PWP ACTIVE HTSSOP PWP 28 50 Green (RoHS &
(2)
Lead/Ball Finish MSL Peak Temp
CU NIPDAU Level-1-260C-UNLIM
(3)
no Sb/Br)
DRV8824PWPR ACTIVE HTSSOP PWP 28 2000 Green (RoHS &
CU NIPDAU Level-1-260C-UNLIM
no Sb/Br)
(1)
The marketing status values are defined as follows:
ACTIVE: Product device recommended for new designs.
LIFEBUY: TI has announced that the device will be discontinued, and a lifetime-buy period is in effect.
NRND: Not recommended for new designs. Device is in production to support existing customers, but TI does not recommend using this part in
a new design.
PREVIEW: Device has been announced but is not in production. Samples may or may not be available.
OBSOLETE: TI has discontinued the production of the device.
(2)
Eco Plan - The planned eco-friendly classification: Pb-Free (RoHS), Pb-Free (RoHS Exempt), or Green (RoHS & no Sb/Br) - please check
http://www.ti.com/productcontent for the latest availability information and additional product content details.
TBD: The Pb-Free/Green conversion plan has not been defined.
Pb-Free (RoHS): TI's terms "Lead-Free" or "Pb-Free" mean semiconductor products that are compatible with the current RoHS requirements
for all 6 substances, including the requirement that lead not exceed 0.1% by weight in homogeneous materials. Where designed to be soldered
at high temperatures, TI Pb-Free products are suitable for use in specified lead-free processes.
Pb-Free (RoHS Exempt): This component has a RoHS exemption for either 1) lead-based flip-chip solder bumps used between the die and
package, or 2) lead-based die adhesive used between the die and leadframe. The component is otherwise considered Pb-Free (RoHS
compatible) as defined above.
Green (RoHS & no Sb/Br): TI defines "Green" to mean Pb-Free (RoHS compatible), and free of Bromine (Br) and Antimony (Sb) based flame
retardants (Br or Sb do not exceed 0.1% by weight in homogeneous material)
(3)
MSL, Peak Temp. -- The Moisture Sensitivity Level rating according to the JEDEC industry standard classifications, and peak solder
temperature.
Important Information and Disclaimer:The information provided on this page represents TI's knowledge and belief as of the date that it is
provided. TI bases its knowledge and belief on information provided by third parties, and makes no representation or warranty as to the
accuracy of such information. Efforts are underway to better integrate information from third parties. TI has taken and continues to take
reasonable steps to provide representative and accurate information but may not have conducted destructive testing or chemical analysis on
incoming materials and chemicals. TI and TI suppliers consider certain information to be proprietary, and thus CAS numbers and other limited
information may not be available for release.
In no event shall TI's liability arising out of such information exceed the total purchase price of the TI part(s) at issue in this document sold by TI
to Customer on an annual basis.
Addendum-Page 1
Page 16

PACKAGE MATERIALS INFORMATION
www.ti.com 20-Jul-2010
TAPE AND REEL INFORMATION
*All dimensions are nominal
Device Package
DRV8824PWPR HTSSOP PWP 28 2000 330.0 16.4 6.9 10.2 1.8 12.0 16.0 Q1
Type
Package
Drawing
Pins SPQ Reel
Diameter
(mm)
Reel
Width
W1 (mm)
A0
(mm)B0(mm)K0(mm)P1(mm)W(mm)
Pin1
Quadrant
Pack Materials-Page 1
Page 17

PACKAGE MATERIALS INFORMATION
www.ti.com 20-Jul-2010
*All dimensions are nominal
Device Package Type Package Drawing Pins SPQ Length (mm) Width (mm) Height (mm)
DRV8824PWPR HTSSOP PWP 28 2000 346.0 346.0 33.0
Pack Materials-Page 2
Page 18

Page 19

Page 20

Page 21

IMPORTANT NOTICE
Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements, improvements,
and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should
obtain the latest relevant information before placing orders and should verify that such information is current and complete. All products are
sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.
TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard
warranty. Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty. Except where
mandated by government requirements, testing of all parameters of each product is not necessarily performed.
TI assumes no liability for applications assistance or customer product design. Customers are responsible for their products and
applications using TI components. To minimize the risks associated with customer products and applications, customers should provide
adequate design and operating safeguards.
TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right, copyright, mask work right,
or other TI intellectual property right relating to any combination, machine, or process in which TI products or services are used. Information
published by TI regarding third-party products or services does not constitute a license from TI to use such products or services or a
warranty or endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual
property of the third party, or a license from TI under the patents or other intellectual property of TI.
Reproduction of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied
by all associated warranties, conditions, limitations, and notices. Reproduction of this information with alteration is an unfair and deceptive
business practice. TI is not responsible or liable for such altered documentation. Information of third parties may be subject to additional
restrictions.
Resale of TI products or services with statements different from or beyond the parameters stated by TI for that product or service voids all
express and any implied warranties for the associated TI product or service and is an unfair and deceptive business practice. TI is not
responsible or liable for any such statements.
TI products are not authorized for use in safety-critical applications (such as life support) where a failure of the TI product would reasonably
be expected to cause severe personal injury or death, unless officers of the parties have executed an agreement specifically governing
such use. Buyers represent that they have all necessary expertise in the safety and regulatory ramifications of their applications, and
acknowledge and agree that they are solely responsible for all legal, regulatory and safety-related requirements concerning their products
and any use of TI products in such safety-critical applications, notwithstanding any applications-related information or support that may be
provided by TI. Further, Buyers must fully indemnify TI and its representatives against any damages arising out of the use of TI products in
such safety-critical applications.
TI products are neither designed nor intended for use in military/aerospace applications or environments unless the TI products are
specifically designated by TI as military-grade or "enhanced plastic." Only products designated by TI as military-grade meet military
specifications. Buyers acknowledge and agree that any such use of TI products which TI has not designated as military-grade is solely at
the Buyer's risk, and that they are solely responsible for compliance with all legal and regulatory requirements in connection with such use.
TI products are neither designed nor intended for use in automotive applications or environments unless the specific TI products are
designated by TI as compliant with ISO/TS 16949 requirements. Buyers acknowledge and agree that, if they use any non-designated
products in automotive applications, TI will not be responsible for any failure to meet such requirements.
Following are URLs where you can obtain information on other Texas Instruments products and application solutions:
Products Applications
Amplifiers amplifier.ti.com Audio www.ti.com/audio
Data Converters dataconverter.ti.com Automotive www.ti.com/automotive
DLP® Products www.dlp.com Communications and www.ti.com/communications
DSP dsp.ti.com Computers and www.ti.com/computers
Clocks and Timers www.ti.com/clocks Consumer Electronics www.ti.com/consumer-apps
Interface interface.ti.com Energy www.ti.com/energy
Logic logic.ti.com Industrial www.ti.com/industrial
Power Mgmt power.ti.com Medical www.ti.com/medical
Microcontrollers microcontroller.ti.com Security www.ti.com/security
RFID www.ti-rfid.com Space, Avionics & www.ti.com/space-avionics-defense
RF/IF and ZigBee® Solutions www.ti.com/lprf Video and Imaging www.ti.com/video
Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265
Copyright © 2010, Texas Instruments Incorporated
Telecom
Peripherals
Defense
Wireless www.ti.com/wireless-apps
 Loading...
Loading...