

Page 1

Advantys FTB CANopen
IP67 monobloc input/output
splitter box
User guide
1606218 02 eng 3.0
1606218 02
www.telemecanique.com
Page 2

2
1606218 02 08/2006
Page 3

Table of Contents
Safety Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
About the Book . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Chapter 1 Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Presentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Presentation of the CANopen Advantys FTB I/O Splitter Box Range . . . . . . . . . 12
Overview of the Accessories Range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Chapter 2 Installation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Presentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Installing the Unit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Grounding of the Advantys FTB Splitter Box. . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
EMC Compatibility. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Chapter 3 Splitter Box Characteristics and Wiring. . . . . . . . . . . . . . . . . . 27
Presentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Advantys FTB Splitter Box Environment Properties . . . . . . . . . . . . . . . . . . . . . . 28
Electrical Characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Connecting the Actuators and Sensors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Power Supply Connection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Chapter 4 CANopen Network Interface . . . . . . . . . . . . . . . . . . . . . . . . . . .35
Presentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.1 Wiring on the CANopen Bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Presentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Introduction to Wiring on the CANopen Bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Choice of system cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Connecting the Field Bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Configuring the Address and Transmission Speed. . . . . . . . . . . . . . . . . . . . . . . 46
4.2 General Principles. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Presentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
About CANopen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
The Device Profile. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
1606218 02 08/2006 3
Page 4

CANopen "Boot-Up". . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Process Data Object (PDO) Transmission . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Inhibit Time and Event Timer. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Access to Data by Explicit Exchanges (SDO) . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
"Node-Guarding" and "Life-Guarding" Monitoring Protocols. . . . . . . . . . . . . . . . 62
The "Heartbeat" Error Monitoring Protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.3 Behavior of FTB CANopen Splitter boxes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Presentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Behavior at Power-up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Behavior in the Case of Communication Error. . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Saving / Restoring Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
List of Saved Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Chapter 5 Application-Specific Functions . . . . . . . . . . . . . . . . . . . . . . . . 71
Presentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
List of Objects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Description of the Discrete Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Description of Discrete Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Description of Configurable Discrete I/Os . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
List of Advantys FTB 1CN08E08SP0 Splitter Box I/O Objects . . . . . . . . . . . . . . 78
List of Advantys FTB 1CN12E04SP0 Splitter Box I/O Objects . . . . . . . . . . . . . . 81
List of Advantys FTB 1CN16EP0 and FTB 1CN16EM0 Splitter Box I/O Objects 85
List of Advantys FTB 1CN16CP0 and FTB 1CN16CM0 Splitter Box I/O Objects 87
List of Advantys FTB 1CN08E08CM0 Splitter Box I/O Objects . . . . . . . . . . . . . . 91
Chapter 6 Software Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Presentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
6.1 Introduction to Software Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
6.2 Product Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
At A Glance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Characteristics of an EDS File. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Existing EDS File for CANopen Advantys FTB Splitter Box . . . . . . . . . . . . . . . 103
Creating a New EDS and DCF Configuration File . . . . . . . . . . . . . . . . . . . . . . . 104
6.3 Network Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Setting the Network Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
6.4 PLC Programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Presentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Integration and Use under PL7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Examples of SDO Requests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Chapter 7 Diagnostics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Presentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Power Supply Diagnostics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Field Bus Status Diagnostics LED . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
LED Status Diagnostics for I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
4 1606218 02 08/2006
Page 5

CANopen Objects Diagnostics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Behavior in the Event of Short-circuit / Overload / Under-voltage. . . . . . . . . . . 130
Chapter 8 The Object Dictionary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .131
Presentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
8.1 The Object Dictionary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
The Object Dictionary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
8.2 Objects of the Communication Profile 1000H to 1FFFH . . . . . . . . . . . . . . . . . 134
At a Glance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
Object 1000H: Device Type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
Object 1001H: Error Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Object 1002H: Manufacturer Status Register . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Object 1003H: Pre-defined Error Field . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Object 1005H: COB-ID SYNC Message. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
Object 1006H: Communication Cycle Period . . . . . . . . . . . . . . . . . . . . . . . . . . 141
Object 1008H: Manufacturer Device Name. . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
Object 100AH: Manufacturer Software Version (MSV). . . . . . . . . . . . . . . . . . . 143
Object 100CH: Guard Time. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
Object 100DH: Life Time Factor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Object 1010H: Store Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
Object 1011H: Restore Default Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
Object 1014H: COB-ID Emergency Message (EMCY) . . . . . . . . . . . . . . . . . . . 150
Object 1016H: Consumer Heartbeat Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
Object 1017H: Producer Heartbeat Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
Object 1018H: Identity Object . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
Object 1200H: Server SDO Parameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
Object 1400H: 1st Receive PDO Communication Parameter. . . . . . . . . . . . . . 155
Object 1405H: 2nd Receive PDO Communication Parameter . . . . . . . . . . . . . 156
Object 1600H: 1st Receive PDO Mapping Parameter . . . . . . . . . . . . . . . . . . . 157
Object 1605H: 2nd Receive PDO Mapping Parameter. . . . . . . . . . . . . . . . . . . 159
Object 1800H: 1st Transmit PDO Communication Parameter. . . . . . . . . . . . . 161
Object 1805H: 2nd Transmit PDO Communication Parameter . . . . . . . . . . . . 164
Object 1A00H: 1st Transmit PDO Mapping Parameter. . . . . . . . . . . . . . . . . . . 167
Object 1A05H: 2nd Transmit PDO Mapping Parameter . . . . . . . . . . . . . . . . . . 169
8.3 Manufacturer-specific Zone Objects 2000H to 5FFFH . . . . . . . . . . . . . . . . . . . 171
At a Glance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
Object 2000H: Input / Diag Parameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
Object 2001H: Input/Output Parameter. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Object 3000H: Manufacturer Specific Diagnostic . . . . . . . . . . . . . . . . . . . . . . . 174
8.4 Hardware Profile Objects 6000H to 9FFFH . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
At a Glance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
Object 6000H: Read Inputs 8 Bits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
Object 6100H: Read Input 16 Bits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
Object 6102H: Polarity Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
Object 6103H: Filter Constant Input 16 Bits . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
Object 6200H: Write Outputs 8 Bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
1606218 02 08/2006 5
Page 6

Object 6300H: Write Outputs 16 Bits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
Object 6302H: Polarity Outputs 16 Bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
Object 6306H:Fallback Mode 16 Bits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
Object 6307H: Fallback Value 16 Bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
Object 6308H: Filter Mask Output 16 Bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
Appendices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .187
At a Glance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
Appendix A IEC Symbols . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
Glossary of Symbols . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
Glossary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .191
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
6 1606218 02 08/2006
Page 7

Safety Information
§
Important Information
NOTICE Read these instructions carefully, and look at the equipment to become familiar with
the device before trying to install, operate, or maintain it. The following special
messages may appear throughout this documentation or on the equipment to warn
of potential hazards or to call attention to information that clarifies or simplifies a
procedure.
The addition of this symbol to a Danger or Warning safety label indicates
that an electrical hazard exists, which will result in personal injury if the
instructions are not followed.
This is the safety alert symbol. It is used to alert you to potential personal
injury hazards. Obey all safety messages that follow this symbol to avoid
possible injury or death.
DANGER
DANGER indicates an imminently hazardous situation, which, if not avoided,
will result in death or serious injury.
WARNING
WARNING indicates a potentially hazardous situation, which, if not avoided, can
result in death, serious injury, or equipment damage.
CAUTION
CAUTION indicates a potentially hazardous situation, which, if not avoided, can
result in injury or equipment damage.
1606218 02 08/2006 7
Page 8

Safety Information
PLEASE NOTE Electrical equipment should be installed, operated, serviced, and maintained only by
qualified personnel. No responsibility is assumed by Schneider Electric for any
consequences arising out of the use of this material.
© 2006 Schneider Electric. All Rights Reserved.
8
1606218 02 08/2006
Page 9

About the Book
At a Glance
Document Scope This user guide contains the information required to install an Advantys FTB
CANopen monobloc IP67 splitter box.
It has been designed to facilitate rapid familiarization with the system, while
optimizing the system's features for the most advanced technology available.
To install Advantys FTB CANopen splitter boxes, the relevant communication
protocol pre-requisites are necessary, and it should only be installed by qualified
personnel. Special points and warnings regarding safety are highlighted in the
different chapters.
The early chapters provide information for designers and installers on installing the
mechanical and electrical elements of the system.
The following chapters, from the section on "network interface", are specific to the
communication protocol. They contain information on specific wiring for the network
interface and all the necessary information for the software application programmer,
and for the end user (diagnostics).
1606218 02 08/2006 9
Page 10

About the Book
Chapter Subject covered
Introduction General presentation of system components
Installation Dimensions
Safe practice for installation
I/O splitter box characteristics
and wiring
CANopen network interface Wiring the splitter box on the network
Application functions Description of application functions (Advantys FTB
Software implementation Software installation help
Diagnostics Performing diagnostics
Object dictionary Description of the objects accessible for communication
Appendices Presentation
Glossary Acronyms
Physical and electrical characteristics
Wiring information
Reminder on the communication protocol
System behavior
CANopen splitter box I/O functions)
Appendix A: List of IEC symbols
Definitions
Related
Documents
Title of Documentation Reference Number
Instruction sheet 1693627
CANopen hardware installation manual 35010859
User Comments We welcome your comments about this document. You can reach us by e-mail at
techpub@schneider-electric.com
10
1606218 02 08/2006
Page 11
Introduction
1
Presentation
Introduction This chapter provides a general overview of Advantys IP 67 FTB CANopen IP67 I/
O splitter boxes.
Advantys FTB CANopen splitter boxes comply with the following specifications:
CiA DS301 V4.02 (CANopen application layer and communication profile)
CiA DS401 V2.1 (CANopen device profile generic I/O modules) (see CANopen
Profiles, p. 50)
Note: The information in this manual is primarily intended for people with some
practical knowledge of the CANopen standard applied to the CANopen field bus.
CANopen equipment installers and users are advised to read the standard
documentation before any equipment installation or handling. All detailed
CANopen specifications may be found at http://www.can-cia.de.
What's in this
Chapter?
1606218 02 08/2006 11
This chapter contains the following topics:
Topic Page
Presentation of the CANopen Advantys FTB I/O Splitter Box Range 12
Overview of the Accessories Range 13
Page 12

Introduction
Presentation of the CANopen Advantys FTB I/O Splitter Box Range
The CANopen
Advantys FTB
Product Range
Configurable
Connectors
Splitter Box
Inputs and
Outputs
The splitter boxes in the CANopen Advantys FTB ranges come in the following
forms:
CANopen plastic unit
CANopen metal unit
Each CANopen Advantys FTB splitter box contains eight connectors used to link the
sensors or actuators.
Each of these connectors supports two channels. Depending on the splitter box
reference, and on its configuration, each channel is either:
an input channel,
an output channel,
a DESINA standard diagnostics channel.
The configuration of the I/O connector channels depends on the splitter box model.
The table below shows the I/O connector channels available for each model:
Distribution of available inputs/outputs Unit type Product reference
8 input / diagnostics channels + 8 output
channels
4 input channels + 4 output channels + 8 input
/ diagnostics channels
8 input channels + 8 input / diagnostics
channels
8 input / output channels + 8 input / output /
diagnostics channels
8 input / output channels + 8 input /
diagnostics channels
Plastic FTB 1CN08E08SP0
Plastic FTB 1CN12E04SP0
Plastic
Metal
Plastic
Metal
Metal FTB 1CN08E08CM0
FTB 1CN16EP0
FTB 1CN16EM0
FTB 1CN16CP0
FTB 1CN16CM0
12
1606218 02 08/2006
Page 13
Overview of the Accessories Range
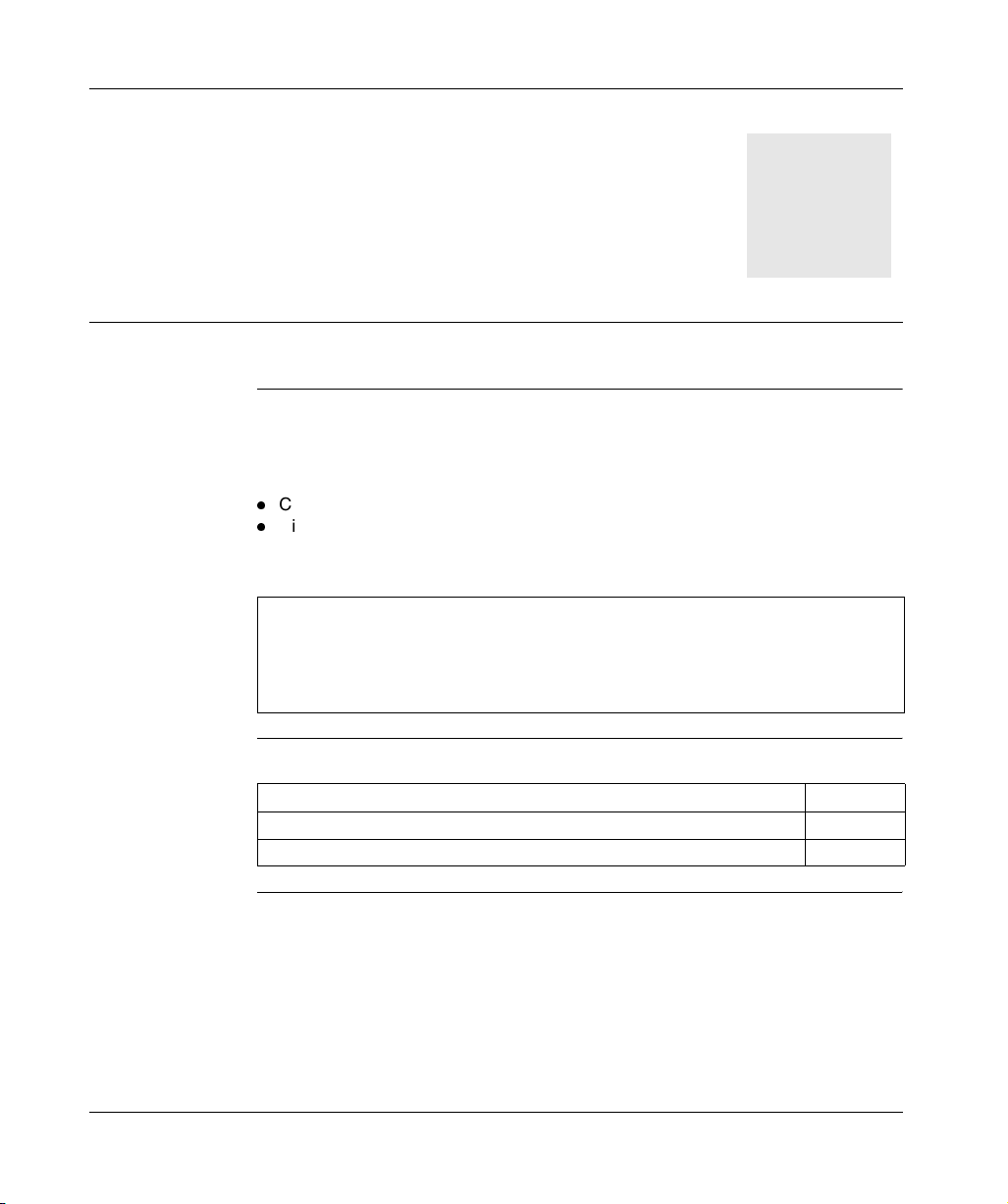
Introduction
Cables for
Connecting the
Bus to the
Splitter Box
Different cables can be used to connect the splitter box to the field bus. These are
available in different lengths.
4
1
6
8
24 V
3 2
5
FTB 1CN
9
Element Reference Function
1 FTX CN3203
FTX CN3206
FTX CN3210
FTX CN3220
FTX CN3230
FTX CN3250
2 FTX DP2206
FTX DP2210
FTX DP2220
FTX DP2250
3 FTX DP2115
FTX DP2130
FTX DP2150
4 FTXCN12M5
FTXCN12F5
5 FTXCNCT1 Connection T fitted with 2 7/8-type connectors, 5 pins, for power supply cables.
6 FTX CNTL12 Line terminators fitted with 1 M12-type connector.
7 FTX CY1208
FTX CY1212
8 FTX C78B Sealing plug for 7/8 connector.
9 FTX CM12B Sealing plugs for M12-type connectors.
Cables fitted with 2 M12-type elbow connectors, 5 pins, at both ends for connecting the
bus between two splitter boxes.
Cables fitted with 2 7/8-type connectors, 5 pins, at both ends for daisy-chaining 24 VDC
supplies to two splitter boxes.
Cables fitted with 1 7/8-type connector, 5 pins, with one free end and the other for
connecting 24 VDC supplies.
Male and female M12-type connectors, 5 pins, for CANopen bus cables (encoding A).
Distribution Y for connecting 2 M8-type connectors to the M12 connector of the splitter
box.
Distribution Y for connecting 2 M12-type connectors to the M12 connector of the splitter
box.
7
1606218 02 08/2006 13
Page 14

Introduction
14
1606218 02 08/2006
Page 15

Installation
2
Presentation
Introduction This chapter provides all required information for installing an FTB splitter box on a
field bus.
Note: The graphic representations of the splitter boxes in this chapter may not
correspond to those really used. However, the dimensions are exact whatever the
case.
What's in this
Chapter?
1606218 02 08/2006 15
This chapter contains the following topics:
Topic Page
Overview 16
Installing the Unit 17
Grounding of the Advantys FTB Splitter Box 21
EMC Compatibility 23
Page 16

Installation
Overview
Introduction This section gives a detailed technical description of the Advantys FTB CANopen
splitter box.
Description The illustrations below show the plastic units (left) and metal units (right) of the
Advantys FTB CANopen splitter.
1
1
2
2
3
3
4
5
6
9
7
8
1
Element Function
1 Mounting holes
2 M12 connector for the inputs and outputs
3 Label
4 Display elements (diagnostics and status LED)
5 Power supply connectors (PWR IN)
6 Power supply distribution connector (PWR OUT)
7 Bus connector (BUS IN)
8 Bus connector (BUS OUT)
9 Transmission speed and addressing rotary selector switch
4
5
6
9
7
8
1
16
1606218 02 08/2006
Page 17

Installation
Installing the Unit
Introduction This section gives a detailed technical description of Advantys FTB splitter boxes.
Description The Advantys FTB splitter box can be mounted directly onto a wall or a machine.
Two mounting holes have been provided for this purpose inside the splitter box.
Note: When mounting the unit, the support must be flat and smooth so as to
prevent any undue stress on the unit, which may lead to a loss of sealing.
Types of Screws
and Tightening
Torques
Plastic unit
The plastic splitter box is mounted using two 4 mm (0.16 in.) diameter screws and
two washers. The tightening torque is 1.5 Nm (13.3 lb-in).
Metal unit
The metal splitter box is mounted using two 6 mm (0.24 in.) diameter screws and
two washers. The tightening torque is 9 Nm (79.7 lb-in).
Note: For metal units, wire the ground terminal before attaching the splitter box to
its support. See Grounding of the Advantys FTB Splitter Box, p. 21.
1606218 02 08/2006 17
Page 18

Installation
Plastic Unit
Dimensions
The dimensions of the plastic unit (front and side views) are given in the following
illustrations:
18
1606218 02 08/2006
Page 19

Installation
Metal Unit
Dimensions
The dimensions of the metal unit (front and side views) are given in the following
illustrations:
1606218 02 08/2006 19
Page 20

Installation
Method Follow the steps below:
Step Action
1 Position the splitter box on the support.
2 Mount the splitter box using the screws and washers.
RISK OF EQUIPMENT DAMAGE AND NON-COMPLIANCE WITH IP67.
Unused connectors must not be left unprotected. If a connector is not correctly
connected to the end of another connector or to a standard cable, fit a sealing plug
in order to ensure that the product is IP67 standard compliant. To ensure the IP67
protection index, check that the cover is screwed onto the base splitter box and that
all connectors are fitted with cables or sealing plugs.
Failure to follow this instruction can result in injury or equipment damage.
CAUTION
20
1606218 02 08/2006
Page 21

Installation
Grounding of the Advantys FTB Splitter Box
Description The ground connection is connected internally to pin 1 of the M12 connector of the
field bus connector.
WARNING
RISK OF UNINTENDED EQUIPMENT OPERATION
Check that the splitter box is correctly connected to the earth in compliance with
the instructions provided in his section. If the splitter box is not grounded, or if the
ground connection is made with an unsuitable cable, the product will be sensitive
to electromagnetic disturbances. See EMC Compatibility, p. 23.
Failure to follow this instruction can result in death, serious injury, or
equipment damage.
Position of the
Ground
Electrode on the
Plastic Unit
The following figure shows the position of the ground electrode on the plastic boxes.
Note: Use a grounding strip or a conductor with a cross-section of 1 to 1.5 mm2
(AWG18, AWG16) and a length of ≤ 3 m (9.84 ft) long. The maximum
recommended length for the grounding strip is 3 m (9.84 ft).
1606218 02 08/2006 21
Page 22

Installation
Method for
Plastic Units
Position of the
Ground
Electrode on the
Metal Unit
Follow the steps below to connect the ground to the unit:
Step Action
1 Remove the label located above the symbol representing the ground.
2 Insert the end of the grounding strip into the grounding terminal of the splitter
box.
3 Screw in the ground connection screw.
The following figure shows the position of the ground electrode on the metal boxes.
Note: Use a grounding strip or a conductor with a cross-section of 1 to 1.5 mm2
(AWG18, AWG16) and a length of ≤ 3 m (9.84 ft) long. The maximum
recommended length for the grounding strip is 3 m (9.84 ft).
Method for Metal
Units
Mounting the
Metal Unit
22
Follow the steps below to connect the unit to the ground electrode:
Step Action
1 Crimp the lug on the ground cable.
2 Screw in the lug with the ground conductor connection screw (supplied with the
product).
Once these steps have all been completed (see table above), the product can be
mounted on its support.
1606218 02 08/2006
Page 23

EMC Compatibility
Installation
Product
Compliance
This product complies with the European directive 89/336/CEE on "electromagnetic
compatibility".
The products described in this manual meet all the conditions regarding
electromagnetic compatibility and are compliant with the applicable standards.
However, this does not mean that the electromagnetic compatibility of your
installation is assured.
This is why it is strongly recommended to follow all indications concerning an EMC
compliant installation. Only in these conditions and thanks to the exclusive use of
CE approved components, will the devices used be deemed as compliant with the
EMC directives.
When handling the products, ensure that all safety measures related to
electromagnetic compatibility and all conditions for the use of the products are
complied with by all persons concerned. This is especially important when handling
products sensitive to electrostatic discharges.
WARNING
RISK OF ELECTROMAGNETIC INTERFERENCE AND UNINTENDED
EQUIPMENT OPERATION
The products described in this manual contain highly complex semiconductors that
can be damaged or destroyed by electrostatic discharges (ESD). If, for example,
they are used within the vicinity of devices rated as class A or B according to IEC
6100-4-4, the level of electromagnetic interference may be enough to cause the
device to operate unexpectedly, and/or to damage it.
Damage may not necessarily cause a failure or malfunction that is immediately
detectable. It may occur sporadically or in a delayed manner.
If there is a risk of electromagnetic interference, the system designer must
implement the necessary protective measures.
Failure to follow this instruction can result in death, serious injury, or
equipment damage.
1606218 02 08/2006 23
Page 24

Installation
Grounding A low impedance connection with a maximum length of 3 m (9.84 ft) must be
installed between the splitter box's ground electrode and the reference ground in
order to discharge the noise voltages. The inductance of standard grounding cables
(PE) presents a risk of high impedance when high frequency noise voltages are
present. It is therefore advisable to use grounding strips. If this solution is not
possible, use a ground conductor with a large cable cross-section and a ground
connection that is as short as possible.
WARNING
RISK OF UNINTENDED EQUIPMENT OPERATION
If the box is not connected to the ground, or if the ground connection is made using
an inappropriate cable, the product will be sensitive to electromagnetic
disturbances. This may lead to unexpected equipment operation.
Failure to follow this instruction can result in death, serious injury, or
equipment damage.
Cable Routing Make sure that the following basic wiring rules are followed:
Keep the data wire and the power cables apart from one another, in so far as is
possible.
Make sure there is a space of at least 10 cm (3.94 inches) between the data wires
and the power cables.
The data wires and power cables must only cross at a right angle to one another.
It is advisable to route the data wires and power cables through separate shielded
ducts.
When laying the cables, the noise voltage from other devices or wires must be
considered. This particularly applies to frequency converters, motors and other
devices or cables generating high frequency disturbances. High frequency
sources and the cables described in this manual must be as far apart from each
other as possible.
24
WARNING
RISK OF UNINTENDED EQUIPMENT OPERATION
Please read and comply with the cabling rules listed above. Failure to comply with
these wiring rules is a common cause of EMC problems! This may lead to
unexpected equipment operation.
Failure to follow this instruction can result in death, serious injury, or
equipment damage.
1606218 02 08/2006
Page 25

Installation
Control of
Inductive Loads
The outputs of the devices described in this manual are equipped with an integrated
protective system against the high noise voltages that may be generated by
inductive loads.
Integrated protective system against the high noise voltages generated by inductive
loads
Varistor
Inductive load
e.g. electromagnetic
valve
The varistor rapidly discharges the energy accumulated in the magnetic field of the
inductive load.
The high voltages arising from the disconnection of inductive loads create large
fields in the wires that may cause disturbances in nearby circuits or devices. It is
advisable to provide an anti-interference device at the load level. In this way, the
voltage peak generated by the inductive load is short-circuited directly at the point
at which it occurs.
1606218 02 08/2006 25
Page 26

Installation
26
1606218 02 08/2006
Page 27

Splitter Box Characteristics and Wiring
3
Presentation
Introduction This chapter provides an overall description of all Advantys FTB splitter boxes.
Note: The "-" in the tables corresponds to values that are not applicable.
What's in this
Chapter?
This chapter contains the following topics:
Topic Page
Advantys FTB Splitter Box Environment Properties 28
Electrical Characteristics 29
Connecting the Actuators and Sensors 30
Power Supply Connection 32
1606218 02 08/2006 27
Page 28

Splitter Box Characteristics and Wiring
Advantys FTB Splitter Box Environment Properties
Environment
Properties
Characteristic Description Reference standard
Product certification cULus -
Operating temperature -20°C...+60°C (-4°F...+140°F) -
Storage temperature -25°C...+70°C (-13°F...+158°F) -
Degree of protection IP67 According to IEC 60529
Altitude 0m 2,000 m (6,561 ft) -
Vibration withstand capacity
for plastic units
Constant amplitude: 0.35 mm (0.0138 in)
10 Hz≤ f ≤ 57 Hz
Constant acceleration: 5.0 gn
57 Hz≤ f ≤ 150 Hz
Vibration resistance capacity
for metal units
Constant amplitude: 1.5 mm (0.06 in)
5 Hz ≤ f ≤ 70 Hz
Constant acceleration: 15 gn
70 Hz ≤ f ≤ 500 Hz
Shock resistance capacity for
30 gn, duration: 11 ms According to IEC 68-2-27, Fc
plastic units
Shock withstand capacity for
50 gn, duration: 11 ms -
metal units
Resistance capacity for
electrostatic discharges
Withstand capacity for
Contact: +/- 4 kV
Air: +/- 8kV
10 V/m (3.05 V/ft) According to IEC 61000-4-3
radiated fields
Withstand capacity for fast
transients
Withstand capacity for surge
Withstand capacity for duct
Power supply: +/- 2 kV
Signal: +/- 2 kV
Power supply:
symmetrical: +/-500VDC
asymmetrical: +/-1,000 VDC
Signals:
symmetrical: +/-500VDC
asymmetrical: +/-1,000 VDC
Ground : +/-500VDC
10 Vrms According to IEC 61000-4-6
fields
Withstand capacity for 50 Hz
30 A/m (9.15 A/ft) According to IEC 61000-4-8
magnetic fields
Mounting In all positions -
According to IEC 68-2-6, Fc
test
According to IEC 68-2-6, Fc
test
test
According to IEC 61000-4-2
According to IEC 61000-4-4
According to IEC 61000-4-5
28
1606218 02 08/2006
Page 29

Electrical Characteristics
Splitter Box Characteristics and Wiring
Splitter Box
Characteristics
Input
Characteristics
Output
characteristics
Characteristic Description
Splitter box's internal consumption 120 mA
Splitter power supply voltage 18...30VDC
Splitter and sensor supply current ≤ 8 A
Actuator supply current ≤ 8 A
Under-voltage detection yes
Characteristic Description
Compliance with IEC 1131-2 Type 2
Compliance with 2-wire/3-wire sensor Yes
Rated power voltage 24 VDC
Maximum current 200 mA (for 2 diagnostics input channels)
Logic Positive PNP Sink
Filtering input 1 ms
Protection against reverse polarity and shortcircuit in sensor power supply
Overload and over-voltage protection Yes
Characteristic Description
Output type Transistors
Output voltage 24 VDC
Output current 1.6 A
Over-voltage protection Yes (transient diode)
Maximum switching cycle 20 Hz
Maximum lamp load 10 W
Connection for outputs / cable lengths
Protection against short-circuits yes
Yes
0.75mm2: 10 m maximum (AWG 19 / 32.8 ft)
0.34 mm2: 5 m maximum (AWG 23 / 16.4 ft)
1606218 02 08/2006 29
Page 30

Splitter Box Characteristics and Wiring
Connecting the Actuators and Sensors
Description The actuators and sensors are connected to the FTB splitter box using M12-type
connectors.
Characteristics
of the
Connections
Assignment of
M12 Connector
Pins
The maximum admissible load for the FTB splitter boxes is limited to:
1.6 A per output (actuator current),
200 mA for both inputs (sensor current).
WARNING
RISK OF EQUIPMENT DAMAGE AND NON-COMPLIANCE WITH IP67
Unused M12 connectors must not be left unprotected. If an M12 connector is not
correctly connected to the end of another connector or standard cable, fit a sealing
plug in order to ensure that the product is IP67 standard compliant. To ensure the
IP67 protection index, check that the cover is screwed onto the base splitter box
and that all connectors are fitted with cables or sealing plugs.
Failure to follow this instruction can result in death, serious injury, or
equipment damage.
The following diagram shows the front view of a 5-pin M12 connector and the
convention for numbering the pins:
Pin Assignment
1 +24 VDC
2 Channel 10 to 17: diagnostics input or functional input or output
30 VDC
4 Channel 00 to 07: functional input or output
5 Ground
30
1606218 02 08/2006
Page 31

Splitter Box Characteristics and Wiring
Allocation of the
M12 Connectors
to the I/Os
The following table shows the assignment of the M12 connector pins to the marking
of the splitter box's Inputs, Outputs and diagnostics:
Connector
number
0 Channel 00 Channel 10
1 Channel 01 Channel 11
2 Channel 02 Channel 12
3 Channel 03 Channel 13
4 Channel 04 Channel 14
5 Channel 05 Channel 15
6 Channel 06 Channel 16
7 Channel 07 Channel 17
Pin 4 Pin 2
1606218 02 08/2006 31
Page 32

Splitter Box Characteristics and Wiring
Power Supply Connection
Description For the FTB splitter boxes, the power supply is linked using a Mini-Style 7/8" 5-pole
connector.
The FTB splitter boxes require a 24 VDC power supply.
Calculation of
the Power
Supply Cable
Cross-Section
Assembling the
Power Supply
Cable
Calculations to find cable cross-sections are made according to the system's own
configuration data and remain the full responsibility of the user.
CAUTION
RISK OF EQUIPMENT DAMAGE
There are two kinds of risk of damage to equipment:
The 7/8" connector is sized for a maximum current of 8 A per pin. The pins of
the 7/8" connector must be provided with adequate protection to prevent an
overload of more than 8 A.
Reversed polarity connections in the power supply may damage the FTB splitter
box.
Failure to follow this instruction can result in injury or equipment damage.
The following diagram gives a view of the shape and size of the connection cable
connector:
32
1606218 02 08/2006
Page 33

Splitter Box Characteristics and Wiring
Pin Assignment The following diagram shows a front view of the PWR IN and PWR OUT connectors:
Pin Assignment
10 VDC
20 VDC
3Ground
4 Splitter box sensor and power supply
5 Actuator power supply
Recommendations for the
Power Supply to
the Sensors,
Actuators and
We recommend the use of 2 independent power supplies so as to separate the
power supply to the splitter boxes / sensors from the power supply to the actuators.
This configuration provides maximum protection against any disturbance on the
outputs (short circuits).
Splitter Boxes
Emergency Stop Separating the splitter box/sensor (pin 4) power supplies means that the emergency
stop can be connected to the actuator power supply (pin 5 of the 7/8" connector).
WARNING
RISK OF UNINTENDED EQUIPMENT OPERATION
Do not connect pin 4 of the power supply connector to the emergency stop circuit
of the system. Interrupting the power supply to this pin, will deactivate the I/O
channels of the splitter box, which can result in an unintended equipment
operation.
Failure to follow this instruction can result in death, serious injury, or
equipment damage.
1606218 02 08/2006 33
Page 34

Splitter Box Characteristics and Wiring
Method Follow the steps below:
Step Action
1 Disconnect all power to the system.
2 On the PWR IN connector:
If the splitter box is the first in the chain, connect a cable with a female
connector and free wires.
If the splitter box is the last in the chain, connect a connection cable.
3 On the PWR OUT connector:
If the splitter box is in the middle of the chain, connect a power supply
connection cable.
If the splitter box is at the end of the chain, fit a sealing plug.
Phaseo Power
Supply
A switch mode power supply such as Phaseo (ABL 7•••) is particularly well-suited to
supply automation systems. It is therefore highly recommended for use with
Advantys FTB splitter boxes.
34
1606218 02 08/2006
Page 35

CANopen Network Interface
4
Presentation
Introduction This section describes how to connect the Advantys FTB CANopen splitter box to
the CANopen network.
What's in this
Chapter?
This chapter contains the following sections:
Section Topic Page
4.1 Wiring on the CANopen Bus 37
4.2 General Principles 48
4.3 Behavior of FTB CANopen Splitter boxes 66
1606218 02 08/2006 35
Page 36

CANopen Network Interface
36
1606218 02 08/2006
Page 37

CANopen Network Interface
4.1 Wiring on the CANopen Bus
Presentation
Introduction The following section describes wiring on the CANopen bus.
What's in this
Section?
This section contains the following topics:
Topic Page
Introduction to Wiring on the CANopen Bus 38
Topology 39
Choice of system cables 42
Connecting the Field Bus 44
Configuring the Address and Transmission Speed 46
1606218 02 08/2006 37
Page 38

CANopen Network Interface
Introduction to Wiring on the CANopen Bus
Introduction The physical characteristics necessary for CANopen bus operation are given in the
following illustration (plastic units on the left and metal units on the right):
1
2
3
4
5
6
Description Function See
1 7/8" connector Power supply connection (PWR IN) Power Supply
2 7/8" connector Power supply connection (PWR OUT)
3 Rotary switch Selecting transmission speed Configuring the
4 Rotary switches Selecting the splitter box address
5 M12 Connector CANopen bus connector (Bus OUT) Connecting the
6 M12 Connector CANopen bus connector (Bus IN)
1
2
3
4
5
6
Connection, p. 32
Address and
Transmission
Speed, p. 46
Field Bus, p. 44
38
1606218 02 08/2006
Page 39

CANopen Network Interface
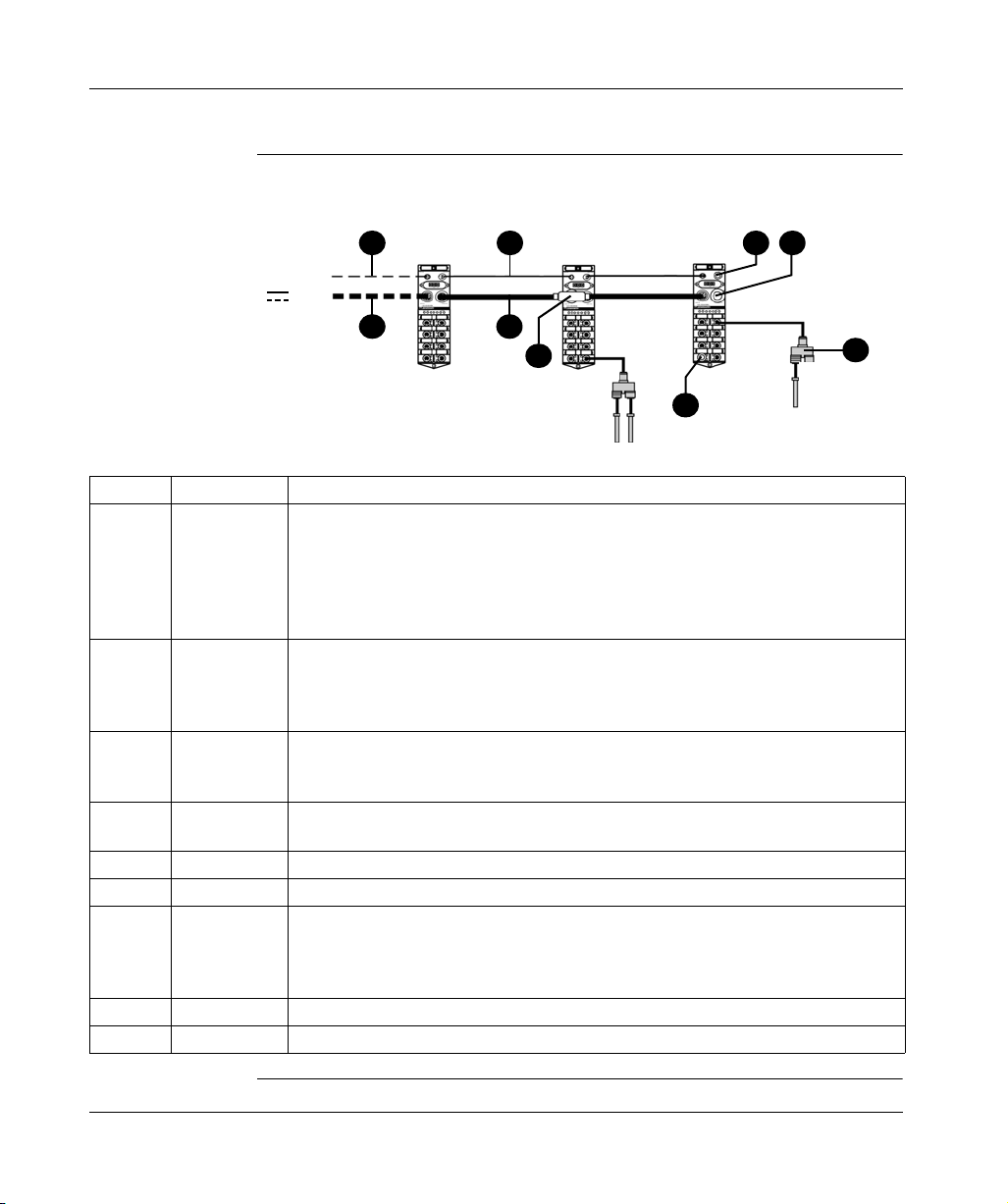
Topology
Architecture The CANopen network architecture must comply with the following limitations:
bus length / transmission speed (See Transmission Speed, p. 42),
number of connected devices (See Number of Connected Devices, p. 41),
length of the taps and the space between two taps (See Tap Length, p. 40),
line terminator (See Line Terminator Resistance, p. 43).
The connections to the CANopen bus may be of the chaining or tap type.
The following is an illustration of a CANopen network architecture:
2
1
7
6
5
6 6
8
The table below describes the components of a CANopen network:
Number Description
1 CANopen devices connected by chaining
2 CANopen devices connected by tap
3 Drop cables (tap junction box / device)
4 Tap junction boxes
5 Chaining cables
6 Line terminator
7 Repeater (identical arbitration on the different bus segments)
or Bridge (different arbitration on the different bus segments)
8 CANopen bus segment
3
Lmax
4 4
Min. interval
8
5
3
6
Note: A single line architecture is recommended to reduce signal reflection. Avoid
using star-type architecture.
1606218 02 08/2006 39
Page 40

CANopen Network Interface
Tap Length A tap creates a signal reflection and thus its length must be limited to the following
parameters:
Lmax is the maximum length of a tap.
ΣLImax is the maximum value of the sum of all taps on the same tap junction box.
Min interval is the minimum distance necessary between two taps.
ΣLGmaxis the maximum value of the sum of all taps on the segment.
The values to use are given in the following table:
Speed Lmax ΣLImax Min. interval
0.6xΣL local
1 Mbits/s 0.3 m (0.98 ft) 0.6 m (1.96 ft) 1.5 m (4.9 ft)
800 Kbits/s 3 m (9.8 ft) 6 m (19.6 ft) 3.6 m (11.8 ft)(*) 15 m (49 ft)
500 Kbits/s 5 m (16.4 ft) 10 m (32.80 ft) 6 m (19.6 ft)(*) 30 m (98.4 ft)
250 Kbits/s 5 m (16.4 ft) 10 m (32.80 ft) 6 m (19.6 ft)(*) 60 m (196.8 ft)
125 Kbits/s 5 m (16.4 ft) 10 m (32.80 ft) 6 m (19.6 ft)(*) 120 m (393.6 ft)
50 Kbits/s 60 m (196.8 ft) 120 m (393.6 ft) 72 m (236 ft)(*) 300 m (984 ft)
20 Kbits/s 150 m (492 ft) 300 m (984 ft) 180 m (590.5 ft)(*) 750 m (2 460.6 ft)
10 Kbits/s 300 m (984 ft) 600 m (1 968.4 ft) 360 m (1 181 ft)(*) 1 500 m (4 921 ft)
Legend:
(*) The minimum cable length between two consecutive tap junction boxes must be greater than 60% of the largest
of the two sums of the lengths of taps on each of the two boxes.
ΣLGmax
40
1606218 02 08/2006
Page 41

CANopen Network Interface
Example The following illustration shows the calculation of the length of a cable located
between two tap junction boxes.
1
Number of
Connected
Devices
2
1 m
(3 ft)
3
1 m
(3 ft)
ΣL=5 m (16 ft)
3 m
(10 ft)
1 m
(3 ft)
3 m
(10 ft)
ΣL=7 m (23 ft)
3 m
(10 ft)
4
Min interval > 0.6 * 7 m (23 ft)
Min interval > 4.2 m (13.8 ft)
The table below describes the components of a CANopen network:
Number Description
1 Connected CANopen devices
2 Drop cables (tap junction box / device)
3 Tap junction boxes
4 Connection cables (tap junction box / tap junction box)
In this example, we have two tap junction boxes and 6 devices. We start by
calculating the sum of the lengths of cables for each tap junction box, and we obtain
5m (16 ft) and 7 m (23 ft). We keep the longest length, i.e. 7 m (23 ft). The minimum
length of the cable between the two tap junction boxes is equal to 60% of 7 m, i.e.
4.2 m (13.8 ft).
In addition to the length limitations over the whole of the CANopen bus, the following
limitations apply:
Whatever the case, no more than 64 devices may be connected on the same
segment.
1606218 02 08/2006 41
Page 42

CANopen Network Interface
Choice of system cables
Transmission
Speed
Specific
The maximum allowable transmission speeds are given in the following table:
Transmission speed
(kBit/s)
1000 30 m (98 ft)
800 50 m (164 ft)
500 100 m (328 ft)
250 250 m (820 ft)
125 350 m (1 148 ft)
100 500 m (1 640 ft)
50 1 000 m (3 280 ft)
20 2 500 m (8 202 ft)
10 5 000 m (16 404 ft)
Cable length
The specific resistances and AWG cable sections are shown in the following table:
Resistance
Maximum speed Cable length Specific resistance of
cables
Ω
Kbits/s m ft mΩ/m m
1000 for 40 m
(131 ft)
500 for 100 m
(328 ft)
100 for 500 m
(1640 ft)
50 for 1000 m
(3,280 ft)
0 ... 40 0...131 70 21.34 0.25...0.34 AWG24, AWG22
40 ... 300 131...984 < 60 < 18.29 0.34...0.6 AWG22, AWG20
300 ... 600 984...1968 < 40 < 12.19 0.5...0.6 AWG20
600 ... 1000 1968...3280 < 26 < 7.92 0.75...0.8 AWG18
/ft
Cable sections
2
mm
AWG
42
Note: The parameters shown in the above table must be considered for networks
complying with the standard ISO11898-2.
1606218 02 08/2006
Page 43

CANopen Network Interface
Line Terminator
Resistance
What types of
cables can be
used?
To minimize the voltage drop in the connection, it is advisable to use a higher line
terminator resistance for high length cables than that specified by the standard
ISO11898-2. When configuring the system, the connector resistances must also be
taken into consideration. For each connector, 5 mΩ to 20 mΩ must be added to the
terminator resistance.
WARNING
RISK OF UNINTENDED EQUIPMENT OPERATION
The potential difference at the CAN_GND connections of all the CANopen bus
items must not be greater than 2 VDC. The connectors have a standard DC of
5mΩ to 20 mΩ. It is important to connect a 120 Ω line terminator between CAN_H
and CAN_L at the line end (see Physical Layer, p. 49).
Failure to follow this instruction can result in death, serious injury, or
equipment damage.
Pre-assembled cables make installing the system considerably easier. Cabling
errors are avoided and implementation is achieved more rapidly. Schneider Electric
offers a full range of products such as field bus links, power supply cables and
cables for detectors, together with accessories such as line terminators. Connectors
and cables for assembly are also available.
1606218 02 08/2006 43
Page 44

CANopen Network Interface
Connecting the Field Bus
Description The splitter box can either be in the middle of the chain connection or at line end.
The field bus is connected via a 5-pin M12 connector.
Illustration of the
Connection
Cable Connector
Bus Connector
Pin Assignment
The following diagram shows the characteristics of the connection cable connector:
The BUS IN connector is a 5-pin M12 male connector.
The BUS OUT connector is a 5-pin M12 female connector.
The following diagram shows a front view of the bus connectors:
32
BUS
IN
5
14
14
32
5
BUS
OUT
The following table gives the assignments of the bus connector pins:
Pin Signal Meaning
1 (CAN_SHLD) Optional CAN shielding
2 (CAN_V+) NC (not connected)
3 CAN_GND 0 V
4 CAN_H CAN_H bus line
5 CAN_L CAN_L bus line
44
Note: Pin 1 is connected to the ground connection terminal of the splitter box.
1606218 02 08/2006
Page 45

CANopen Network Interface
CAUTION
RISK OF EQUIPMENT DAMAGE AND NON-COMPLIANCE WITH STANDARD
IP67
Unused M12 connectors must not be left unprotected.
If an M12 connector is not fitted with a line terminator or connected to a standard
cable, fit a sealing plug so as to guarantee the product’s IP67 protection.
Failure to follow this instruction can result in injury or equipment damage.
Correspondence
between 9-pin
SUB-D
Connectors and
M12 5-pin
The bus connector on IP20 products is a 9-pin SUB-D connector (e.g. Advantys
OTB CANopen).
The following table shows the correspondence between pins on 9-pin SUB-D
connectors and on 5-pin M12 connectors:
Connectors
9-pin SUB-D
connector
1 - Reserved -
1
6
2
7
3
8
4
9
5
SUB-D
pin
2 CAN_L CAN_L bus line 5
3 CAN_GND 0 V 3
4 - Reserved -
5 (CAN_SHLD) Optional CAN shielding 1
6 (GND) Optional CAN_V- -
7 CAN_H CAN_H bus line 4
8 - Reserved -
9 (CAN_V+) Optional power supply -
Signal Meaning M12 pin 5-pin M12
Method Follow the steps below:
Step Action
1 Connect the connection cable for chaining to the BUS IN connector.
2 If the splitter box is at the end of the line, connect a line terminator resistor to
the BUS OUT connector.
Otherwise, connect a connection cable to the BUS OUT connector.
connector
32
5
14
1606218 02 08/2006 45
Page 46

CANopen Network Interface
Configuring the Address and Transmission Speed
Method Follow the steps below:
Step Action
1 Switch off the power supply to the splitter box.
2 Unscrew both screws on the transparent cover.
3 Set the communication speed.
4 Set the splitter box address.
5 Screw the transparent cover back on.
6 Power up the splitter box.
Illustration of the
Rotary Switches
Assignment of
the Address on
the Network
DATA
NODE ADDRESS
RATE
1
0
9
8
7
6
5
X10 X1
0
1
1
2
8
3
4
9
9
2
8
3
7
7
4
6
6
5
5
2 3
0
1
2
3
4
Element Function
1 Sets the transmission speed
2 Node-ID x 10
3 Node-ID x 1
The CANopen address is configured using two specially designed rotary switches.
Addresses can be configured from 1 to 99. Address zero (0) cannot be used.
Note: When assigning the addresses, ensure that each splitter box is assigned to
a single address.
A configured address is registered at power up. It cannot be changed if you do not
remove the cover.
46
1606218 02 08/2006
Page 47

CANopen Network Interface
Adjustment of
the
Transmission
Speed
The transmission speed is configured using a rotary switch.
The following transmission speeds are possible:
Switch position Transmission speed
0 Automatic recognition
1 10 Kbits/s
2 20 Kbits/s
3 50 Kbits/s
4 100 Kbits/s
5 125 Kbits/s
6 250 Kbits/s
7 500 Kbits/s
8 800 Kbits/s
9 1 Mbits/s
Note: Two different operating modes are possible:
With a set speed of (10 Kbit/s to 1 Mbits/s), the transmission speed of the splitter
box must be the same as that of the other devices on the network.
In automatic recognition mode, at least one of the slaves on the network must
be configured to the speed of the Master.
For each case, if the required condition is not observed, the splitter box will not be
recognized by the network ( it will remain in the "Init" state).
1606218 02 08/2006 47
Page 48

CANopen Network Interface
4.2 General Principles
Presentation
Introduction This section addresses the general principles for operating and using the CANopen
network.
What's in this
Section?
This section contains the following topics:
Topic Page
About CANopen 49
The Device Profile 52
CANopen "Boot-Up" 53
Process Data Object (PDO) Transmission 56
Inhibit Time and Event Timer 60
Access to Data by Explicit Exchanges (SDO) 61
"Node-Guarding" and "Life-Guarding" Monitoring Protocols 62
The "Heartbeat" Error Monitoring Protocol 65
48
1606218 02 08/2006
Page 49

CANopen Network Interface
About CANopen
Introduction CANopen is a standard fieldbus protocol for industrial control systems. It is
particularly well suited to real-time PLCs, as it provides an effective, low-cost
solution for industrial applications.
The CANopen
Protocol
The CANopen protocol was created as a subset of CAL (CAN Application Layer). By
defining profiles, it is able to be even more specifically adapted to use with standard
industrial components. CANopen is a CiA standard (CAN in Automation) that was
very quickly adopted by users when it was put on the market. In Europe, CANopen
is now recognized as the industry standard for industrial systems based on a CAN
design.
Physical Layer CAN uses a differentially driven two-wire bus line (common return). A CAN signal is
the difference between the voltage levels of the CAN_H and CAN_L wires. (See
figure below.)
The following diagram shows the components of the physical layer of a two-wire
CAN bus:
555
1
3
44
2
1 CAN_H wire
2 CAN_L wire
3 Potential difference between CAN-H/CAN-L signals
4 Line terminator 120 Ω
5 Connected devices,
The bus wires can be routed in parallel, twisted or shielded form in accordance with
electromagnetic compatibility requirements.
1606218 02 08/2006 49
Page 50

CANopen Network Interface
CANopen
Profiles
Device
Configuration via
the CAN Bus
General
Specifications
for CANopen
Profiles
The communication profile
The CANopen communication protocol is based on a "communication profile", which
specifies the main communication mechanisms and their description (DS301).
The device profile
The most important types of devices used in industrial automation are described in
the "Device profiles". They also define device functionalities.
Here are some examples of standard devices:
Discrete and analog input/output splitter boxes (DS401)
Motors (DS402)
Control devices (DSP403)
Closed loop controllers (DSP404)
PLCs (DS405)
Encoders (DS406)
The possibility of configuring devices via the CANopen bus is one of the basic
principles of the autonomy required by manufacturers (for each profile family).
CANopen is a set of profiles for CAN systems with the following specifications:
An open bus system
Real-time data exchange without protocol overload
A modular design with the possibility of resizing
Interoperability and interchangeability of devices
Support guaranteed by a large number of international manufacturers
A standardized network configuration
Access to all device parameters
Synchronization and circulation of cyclical process data and/or event-driven data
(possibility of short system response times).
CANopen
Product
Certification
50
All manufacturers offering CANopen-certified products on the market are members
of the CiA (CAN in Automation) industrial consortium. As an active member of the
CiA consortium, Schneider Electric develops its products in compliance with
standard recommendations recognized internationally by the CiA consortium.
1606218 02 08/2006
Page 51

CANopen Network Interface
CAN Standards CANopen specifications are defined by the CiA group and can be accessed (subject
to some restrictions) on the group site at www.can-cia.de. The source codes for
master and slave devices are available from the various suppliers.
Note: To find out more about CANopen standard specifications and mechanisms,
please visit the CiA home page (http//www.can-cia.de).
Communication
on a CANopen
Network
The communication profile is based on CAL (CAN Application Layer) services and
protocols.
It provides the user with access to two types of exchange: SDO and PDO.
On power up, the device enters an initialization phase then goes into "Preoperational" state. At this stage, only SDO communication is authorized. After
receiving a startup command, the device switches to the "Operational" state. PDO
and SDO communications are both authorized when the device is in the
"Operational" state.
1606218 02 08/2006 51
Page 52

CANopen Network Interface
The Device Profile
List of Functions The list of functions supported and their coding are given in the following table:
Function Function code
(binary)
NMT 0000 0 0
SYNC 0001 80 128
EMERGENCY 0001 81 - FF 129 - 255
TPDO (tx) 0011 181- 1FF 385 - 511
RPDO (rx) 0100 201- 27F 513 - 639
TPDO (tx) 0101 281 - 2FF 641 - 767
RPDO (rx) 0110 301 - 37F 769 - 895
TPDO (tx) 0111 381 - 3FF 897 - 1023
RPDO (rx) 1000 401 - 47F 1025 - 1151
TPDO (tx) 1001 481 - 4FF 1153 - 1279
RPDO (rx) 1010 501 - 57F 1281 - 1407
SDO (tx) 1011 581 - 5FF 1409 - 1535
SDO (rx) 1100 601 - 67F 1537 - 1663
Node-Guarding 1110 701 - 77F 1793 - 1919
Resulting COB-ID
(Hex)
Resulting COB-ID
(Dec)
52
1606218 02 08/2006
Page 53

CANopen "Boot-Up"
CANopen Network Interface
Procedure for
"Boot-Up"
The minimum configuration of the equipment specifies a shortened boot procedure.
This procedure is illustrated in the following diagram:
1
Initialisation
Reset Application
Reset Communication
Init
2
7
7
Pre-Operational
433
Operational
5
4
5
Stopped
6
6
6
Legend
Number Description
1 Device power-up
2 After initialization, the device automatically goes into the PRE-OPERATIONAL
state
3 NMT service indication: START REMOTE NODE
4 NMT service indication: ENTER PRE-OPERATIONAL
5 NMT service indication: STOP REMOTE NODE
6 NMT service indication: RESET NODE
7 NMT service indication: RESET COMMUNICATION
NMT : Network Management Telegram
1606218 02 08/2006 53
Page 54

CANopen Network Interface
Active CANopen
Objects
depending on
State Machine
"Reset
Application"
"Reset
Communication"
The crosses in the table below indicate which CANopen objects are active for which
states of the state machine:
Initialisation Pre-Operational Operational Stopped
PDO object: X
SDO object: X X
Emergency X X
Boot-Up X
NMT X X X
The device goes into the "Reset Application" state:
after the device starts up or,
by "RESET NODE" (NMT service,Network Management Telegram).
In this state, the device profile is initialized, and all the device profile information is
reset to default values. When initialization is complete, the device automatically
goes into the state "Reset Communication".
The device goes into the "Reset Communication" state:
after the "Reset Application" state,
by "RESET COMMUNICATION" (NMT service).
In this state, all the parameters (standard value, depending on the device
configuration) of the supported communication objects (1000H - 1FFFH) are saved
in the object directory. The device then automatically goes into the "Init" state.
"Init" The device goes into "Init" mode after being in the "Reset Communication" state.
This state enables you to:
define the required communication objects (SDO, PDO, Sync, Emergency),
install the corresponding CAL services
configure the CAN-Controller.
Initialization of the device is complete and the device automatically goes into the
"Pre-Operational" state and sends a "Boot-Up" message.
54
1606218 02 08/2006
Page 55

CANopen Network Interface
"PreOperational"
The device goes into the "Pre-Operational" state:
after the "Init" state,
on receiving the NMT "ENTER PRE-OPERATIONAL" indication if it was in the
"Operational" or "Stopped" state.
When the device is in this state, its configuration can be modified. However, only
SDOs can be used to read or write device-related data.
When configuration is complete, the device goes into one of the following states on
receiving the corresponding indication:
"Stopped" on receiving the NMT "STOP REMOTE NODE" indication.
"Operational" on receiving the NMT "START REMOTE NODE" indication.
"Stopped" The device goes into the "Stopped" state on receiving the "STOP REMOTE NODE"
indication (NMT service) if it was in "Pre-Operational" or "Operational" state.
In this state, the device cannot be configured. No service is available to read and
write device-related data (SDO). Only the slave monitoring function ("NodeGuarding" or "Heartbeat") remains active.
"Operational" The device goes into the "Operational" state if it was in the "Pre-Operational" or
"Stopped" state on receiving "START REMOTE NODE" indication.
When the CANopen network is started using the NMT "START REMOTE NODE"
services, all device functionalities can be used. Communication can be carried out
via PDOs or SDOs.
WARNING
RISK OF UNINTENDED DEVICE OPERATION
Do not change the device configuration when it is in "Operational" state. Changing
the equipment configuration while it is in the "Operational" state may result in the
device behaving in an unexpected manner and/or in equipment damage or injury
to personnel. If the device needs to be reconfigured, put it in the "Pre-Operational"
state and check that this has been done correctly before proceeding to modify the
configuration.
Failure to follow this instruction can result in death, serious injury, or
equipment damage.
1606218 02 08/2006 55
Page 56

CANopen Network Interface
Process Data Object (PDO) Transmission
Definition of PDO PDOs are objects which provide the communication interface with process data and
enable them to be exchanged in real time. A CANopen device's PDO set describes
the implicit exchanges between this device and its communication partners on the
network.
The exchange of PDOs is authorized when the device is in "Operational" mode.
Types of PDO There are two types of PDO:
PDOs transmitted by the device ("Transmit PDO", "TPDO")
PDOs received by the device ("Receive PDO", "RPDO")
PDO Consumer/
Producer
PDOs are based on the "Producer / consumer" model ("Producer" / "Consumer").
The device which sends out a PDO is called the producer, while the device receiving
it is known as the consumer.
PDO
Transmission
Modes
Transfer code Transmission mode Notes
Dec. Hex. Cyclic Acyclic Synchron
0 0 x x Send PDO on first SYNC
1 to 240 1 to F0 x x Send PDO every x SYNC
241 to 251 F1 to FB Reserved -
252 FC x x Receive SYNC message
253 FD x x Update data and send
254 to 255 FE to FF x Send PDO on event
In addition to data to be transported, it is possible to configure the type of exchange
for each PDO.
The PDO transmission mode can be configured as described in the table below.
ous
Asynchro
nous
only RTR
message following an
event
messages
and send PDO on
Remote Request
PDO on Remote Request
(Change of state mode)
56
1606218 02 08/2006
Page 57

CANopen Network Interface
Change of state
Remote Transmission
Request
Synchronous object
(cyclic, acyclic)
Producer
Consumer(s)
Remote frame
Producer
Consumer(s)
Synchronous object
Producer
Consumer(s)
1606218 02 08/2006 57
Page 58

CANopen Network Interface
Synchronous
(mode 0 to 240)
For certain applications, synchronization between scanning of the inputs and
activation of the outputs may be necessary.
For this reason, CANopen provides the "SYNC" object, a high-priority CAN message
without any working data, which, when it is received by the synchronized devices is
used to trigger the reading of inputs or activation of outputs (Trigger).
The following diagram shows the time data for synchronized PDO transmission.
Communication cycle
SYNC SYNC SYNC
Current input data
Set point
Output
Data
Input search in each SYNC
message
Actuation based on outputs
at next SYNC message
Synchronous
window length
Synchronous
RTR (mode 252)
Asynchronous
RTR (mode 253)
58
Aside from polling by request ("timing-related polling"), the slaves can also be polled
by the master by using data request messages ("Remote-Frames", known as RTR
messages).
In mode 252, the device uses the synchronization message to trigger transmission
of the PDO once it has received the RTR message.
In mode 253, the TPDOs are transmitted once the RTR message is received.
1606218 02 08/2006
Page 59

CANopen Network Interface
"Change of
state" (modes
254 and 255)
The asynchronous exchange of PDO in "Change of state" mode enables the rapid
modification of an input value, followed by immediate confirmation of the change of
value. This avoids the need to wait for the master to send a request.
A high priority bus status is assigned to the "Change of state" mode and only the
updated input value is returned, not the image of the full process, thus considerably
reducing traffic on the bus.
"Change of state" corresponds to the modification of the input value (event control).
WARNING
RISK OF UNINTENDED DEVICE OPERATION
The "Change of State" mode must not be used for inputs/outputs whose state
changes continuously (such as analog inputs). The continual modification of I/Os
using the "Change of State" mode may block the transmission of other crucial
commands, resulting in the unintended operation of the device.
Failure to follow this instruction can result in death, serious injury, or
equipment damage.
1606218 02 08/2006 59
Page 60

CANopen Network Interface
Inhibit Time and Event Timer
Inhibit Time In event transmission mode, the Inhibit Time utility is used to define a minimum time
delay before transmission of a new PDO. This avoids overloading the bus where a
significant number of events occur in rapid succession.
The Inhibit Time is expressed in multiple of 100 μs.
Values (hex.) Values (dec.) Actual values (ms)
0000H 0 0000
000AH 10 1
0064H 100 10
03E8H 1000 100
2710H 10 000 1000
FFFFH 65 535 6553.5
Event Timer In event transmission mode, the Event Timer is used to define an expiry time delay
where transmission of a PDO will be forced, even if there has been no change in
status .
The Event Timer is expressed in milliseconds.
Values (hex.) Values (dec.) Actual values (ms)
0000H 0 0 (deactivated)
000AH 10 10
0064H 100 100
01F4H 500 500
03E8H 1000 1000
1388H 5000 5000
2710H 10 000 10 000
60
1606218 02 08/2006
Page 61

CANopen Network Interface
Access to Data by Explicit Exchanges (SDO)
What is an SDO? An SDO allows a device's data to be accessed by using explicit requests.
The SDO service is available when the device is in "Operational" or "PreOperational" state.
Types of SDO There are two types of SDO:
Read SDOs (Download SDO)
Write SDOs (Upload SDO)
The Producer/
Consumer Model
The SDO protocol is based on a 'Producer/Consumer' model.
For a Download SDO
The client sends a request indicating the object to be read.
The server returns the data contained within the object.
For an Upload SDO
The client sends a request indicating the object to be written to and the desired
value.
After the object has been updated, the server returns a confirmation message.
For an unprocessed SDO
In both cases, if an SDO was not able to be processed, the server returns an error
code (abort code).
1606218 02 08/2006 61
Page 62

CANopen Network Interface
"Node-Guarding" and "Life-Guarding" Monitoring Protocols
Introduction Error monitoring protocols are used to detect communication errors on the network.
The default monitoring method, "Node-Guarding", consists in the master controlling
the slaves. It is possible to add "Life-Guarding" control of the master by the slaves.
Note: The simultaneous use of both monitoring methods, "Guarding" and
"Heartbeat", is impossible. Should both methods be activated at once, the
equipment will only use the "Heartbeat" monitoring method.
Definition of
"Life-Time"
Activation of
Monitoring
Reliable
Operation
The "Life-Time" parameter is calculated as follows:
"Life-Time"= "Guard-Time" x "Life-Time-Factor"
The object 100CH contains the ''Guard-Time'' parameter expressed in milliseconds.
The object 100DH contains the ''Life-Time-Factor" parameter.
When one of the two parameters "Life-Time-Factor" or "Guard-Time" is set to "0"
(default configuration), the device does not perform monitoring (no "Life-Guarding").
To activate monitoring over time, you must enter a value (minimum 1) in the object
100DH and specify a time in ms in the object 100CH.
Common typical values for the "Guard-Time" parameter lie between 250 ms and 2 s.
To enable reliable and secure operation, the user must enter a "Life-Time-Factor"
with a minimum value of 2.
When the value 1 is used, should a delay occur due to the processing of high priority
messages or internal processing on the "Node-Guarding" master, the device
switches back to the "Pre-Operational" default state without generating any errors.
WARNING
RISK OF UNINTENDED DEVICE OPERATION
Set the "Life-Time-Factor" (object 100DH) to a minimum value of 2 to prevent any
inadvertent change of state to "Pre-Operational" state. Depending on the I/O
configuration, an inadvertent change of state may result in unintended device
operation.
Failure to follow this instruction can result in death, serious injury, or
equipment damage.
62
1606218 02 08/2006
Page 63

CANopen Network Interface
Importance of
Monitoring
These two monitoring mechanisms are especially important in the CANopen
system. Devices connected to the bus do not regularly indicate their presence in
operating mode, commanded by "Event".
Slave Monitoring Monitoring is performed in the following way:
Phase Description
1 The master sets "Remote-Frames" (or "Remote-Transmit-Request" request
messages) on the "Guarding-CobID" of the slaves to be monitored.
2 The slaves concerned respond by sending the "Guarding" message. This
message contains the "Status-Code" of the slave and the "Toggle-Bit", which
changes after each message.
3 The NMT (Network Management Telegram) master compares the "Status"and
"Toggle-Bit" information:
If they are not in the expected state or if no response is received, the NMT
master considers that an error has occurred on the slave.
1606218 02 08/2006 63
Page 64

CANopen Network Interface
Master
Monitoring
If the master requests "Guarding" messages on a strictly cyclical basis, the slave
can detect a master failure.
If the slave does not receive a request from the master within the defined "Life-Time"
interval ("Guarding" error), it considers that a master failure has occurred
("Watchdog" function).
In this case, the corresponding outputs go into fallback mode and the slave switches
back into "Pre-Operational" mode.
WARNING
RISK OF UNINTENDED DEVICE OPERATION
An unexpected change in state to "Pre-Operational" mode may occur when the
slave does not successfully detect the master’s request even though a slavemaster communication monitoring protocol is used.
Depending on the configuration of the slave’s inputs and outputs, this change in
state may result in unintended device operation or in bodily injury or equipment
damage. The person in charge of configuring the system is fully responsible for the
configuration of the slave inputs/outputs and must ensure secure fallback
operations in the event of a loss of master/slave communication. The person in
charge of the configuration must also take all necessary steps to ensure equipment
and personnel safety should it prove impossible to secure the fallback operations.
Failure to follow this instruction can result in death, serious injury, or
equipment damage.
Note: Even if the monitoring function over time is disabled ("Guard-Time" and "Life-
Time-Factor" registers set to 0), the slave will respond to a remote request from the
master.
"Guarding"
Protocol
64
The initial value of the ''Toggle-Bit'' sent in the first ''Guarding'" message is ''0''.
Then, the ''Toggle'' bit changes in each subsequent ''Guarding'' message, which
makes it possible to indicate if a message has been lost.
The network state of the device is indicated in the seven remaining bits:
Network state Response in hex.
Stopped 04H or 84H
Pre-operational 7FH or FFH
Operational 05H or 85H
1606218 02 08/2006
Page 65

The "Heartbeat" Error Monitoring Protocol
CANopen Network Interface
Operation of
"Heartbeat"
Mechanism
Meaning of
Possible Values
The default monitoring method is "Node-Guarding". If a non-zero value is written in
the object 1017H, the "Heartbeat" mechanism is used.
If the Heartbeat error monitoring protocol is selected, the producer transmits a
"Heartbeat" message periodically, depending on the "Producer Hearbeat Time"
parameter.
The devices responsible for monitoring this message ("Heartbeat Consumer")
generate a "HeartBeat" event if the message is not received in the configured time
("Consumer Heartbeat Time").
Note: The simultaneous use of both monitoring methods, "Guarding" and
"Heartbeat", is impossible. Should both methods be activated at once, the
equipment will only use the "Heartbeat" monitoring method.
The "Heartbeat" message indicates that the device status is one byte long and is
formatted as follows:
The most significant bit is reserved and always has a value of 0
The 7 least significant bits provide the status for the device producing the
"Heartbeat" message.
The possible values are as follows:
Status of the "Heartbeat
Producer"
Boot-Up 0
Stopped 4
Operational 5
Pre-Operational 127
Value (Decimal)
1606218 02 08/2006 65
Page 66

CANopen Network Interface
4.3 Behavior of FTB CANopen Splitter boxes
Presentation
Introduction This section addresses the different behavior patterns of the Advantys FTB
CANopen IP67 splitter and the saving of different parameters.
What's in this
Section?
This section contains the following topics:
Topic Page
Behavior at Power-up 67
Behavior in the Case of Communication Error 68
Saving / Restoring Parameters 69
List of Saved Parameters 70
66
1606218 02 08/2006
Page 67

CANopen Network Interface
Behavior at Power-up
Description The behavior of the Advantys FTB 1CN splitter box at power-up is in compliance
with the "CANOPEN BOOT-UP (see CANopen "Boot-Up", p. 53)" Diagram.
If a back-up configuration exists
Where a save has been carried out, the saved parameters are applied prior to
switching to "Pre-Operational" status.
If a back-up configuration does not exist
If there is no back-up configuration, the Advantys FTB splitter box initializes the
CANopen data with the default parameters.
1606218 02 08/2006 67
Page 68

CANopen Network Interface
Behavior in the Case of Communication Error
Description In the event of a communication error detected by one of the error monitoring
protocols ("Node-Guarding" or "Heartbeat"), fallback values are applied physically
on the outputs until the next write of the output command object and when the
communication error has disappeared.
68
1606218 02 08/2006
Page 69

Saving / Restoring Parameters
CANopen Network Interface
Management of
Saved
Parameters
Updating Default
Parameters
Saving and
Resetting
Parameters
Recommendations to Avoid
Data Losses
During initial power up, the Advantys splitter box is initialized with the default
parameters. During subsequent power ups, it is initialized with the saved
parameters.
Note: When the master detects the presence of the splitter box on the network, the
parameters of the splitter box that are re-defined in the master's configuration tool
are overwritten.
Saved parameters are only applied once the speed on the Advantys splitter box has
been detected.
The back-up of parameters is performed by writing a signature to the object 1010H
(see Object 1010H: Store Parameters, p. 146) These parameters will be used during
the next start-ups.
Saved parameters are reset with the default values by writing a signature in the
object 1011H (see Object 1011H: Restore Default Parameters, p. 148).
While writing or deleting saved parameters, the slave no longer processes
communications received via the CANopen bus. During this operation, none of the
messages transmitted to the slave are taken into account (this includes SDO or
Node-Guarding messages).
In order to avoid equipment damage or injury to personnel as well as any losses of
data, it is not advisable to initiate parameter saves or restitution when the equipment
is in "Operational" mode.
WARNING
RISK OF UNINTENDED EQUIPMENT OPERATION
The splitter box must be switched to the "Pre-Operational" state to save its
configuration. The saving process takes 1 to 2 seconds. If the save takes place in
the "Operational" state, the outputs will not be updated during the saving process.
Failure to follow this instruction can result in death, serious injury, or
equipment damage.
1606218 02 08/2006 69
Page 70

CANopen Network Interface
List of Saved Parameters
Communication
Profile Objects
Discrete I/O
Configuration
Objects
The objects that are saved or reused on start-up are as follows:
1005H : COB-ID SYNC Message
1006H : Communication Cycle Period
100CH : Guard Time
100DH : Life Time Factor
1014H : COB-ID Emergency Message (EMCY)
1016H : Consumer Heartbeat Time
1017H : Producer Heartbeat Time
1400H...1405H : Receive PDO Communication Parameters
1600H...1605H : Receive PDO Mapping Parameters
1800H...1805H : Transmit PDO Communication Parameters
1A00H...1A05H : Transmit PDO Mapping Parameters
The discrete I/Os configuration objects are as follows:
2000H : Input / Diag Parameter
2001H : Input / Output Parameter
6102H : Polarity Inputs
6103H : Filter Constant Input 16 Bits
6200H : Write Outputs 8 Bits
6300H : Write Outputs 16 Bits
6302H : Polarity Outputs 16 Bits
6306H : Fallback Mode 16 Bits
6307H : Fallback Value 16 Bits
6308H : Filter Mask Outputs 16 Bits
70
DANGER
RISK OF UNINTENDED EQUIPMENT OPERATION
Check the contents of objects 6200H and 6300H before switching the product in
"Operational" state. Output write objects 6200H and 6300H are saved. Following
power up, the switch to "Operational" state will apply to the saved output values.
Failure to follow this instruction will result in death or serious injury.
1606218 02 08/2006
Page 71

Application-Specific Functions
5
Presentation
Introduction The FTB splitter box offers discrete input, output and diagnostics channels and
configurable input or output channels, depending on its version. This following
chapter describes the operating modes for these different channels.
What's in this
Chapter?
This chapter contains the following topics:
Topic Page
List of Objects 72
Description of the Discrete Inputs 74
Description of Discrete Outputs 75
Description of Configurable Discrete I/Os 76
List of Advantys FTB 1CN08E08SP0 Splitter Box I/O Objects 78
List of Advantys FTB 1CN12E04SP0 Splitter Box I/O Objects 81
List of Advantys FTB 1CN16EP0 and FTB 1CN16EM0 Splitter Box I/O Objects 85
List of Advantys FTB 1CN16CP0 and FTB 1CN16CM0 Splitter Box I/O
Objects
List of Advantys FTB 1CN08E08CM0 Splitter Box I/O Objects 91
87
1606218 02 08/2006 71
Page 72

Application-Specific Functions
List of Objects
List of
Communication
Objects
The communication objects are listed in the following table:
Object
Object 1000H: Device Type, p. 135
Object 1001H: Error Register, p. 136
Object 1002H: Manufacturer Status Register, p. 137
Object 1003H: Pre-defined Error Field , p. 138
Object 1005H: COB-ID SYNC Message, p. 140
Object 1006H: Communication Cycle Period, p. 141
Object 1008H: Manufacturer Device Name, p. 142
Object 100AH: Manufacturer Software Version (MSV), p. 143
Object 100CH: Guard Time, p. 144
Object 100DH: Life Time Factor, p. 145
Object 1010H: Store Parameters, p. 146
Object 1011H: Restore Default Parameters, p. 148
Object 1014H: COB-ID Emergency Message (EMCY), p. 150
Object 1016H: Consumer Heartbeat Time, p. 151
Object 1017H: Producer Heartbeat Time, p. 152
Object 1018H: Identity Object, p. 153
Object 1200H: Server SDO Parameter, p. 154
Object 1400H: 1st Receive PDO Communication Parameter, p. 155
Object 1405H: 2nd Receive PDO Communication Parameter, p. 156
Object 1600H: 1st Receive PDO Mapping Parameter, p. 157
Object 1605H: 2nd Receive PDO Mapping Parameter, p. 159
Object 1800H: 1st Transmit PDO Communication Parameter, p. 161
Object 1805H: 2nd Transmit PDO Communication Parameter, p. 164
Object 1A00H: 1st Transmit PDO Mapping Parameter, p. 167
Object 1A05H: 2nd Transmit PDO Mapping Parameter, p. 169
72
1606218 02 08/2006
Page 73

Application-Specific Functions
List of
Manufacturerspecific Profile
Objects
List of Device
Profile Objects
The manufacturer-specific profile objects are listed in the following table:
Object
Object 2000H: Input / Diag Parameter, p. 172
Object 2001H: Input/Output Parameter, p. 173
Object 3000H: Manufacturer Specific Diagnostic, p. 174
The device profile objects are listed in the following table:
Object
Object 6000H: Read Inputs 8 Bits, p. 176
Object 6100H: Read Input 16 Bits, p. 177
Object 6102H: Polarity Input, p. 178
Object 6103H: Filter Constant Input 16 Bits, p. 179
Object 6200H: Write Outputs 8 Bits, p. 180
Object 6300H: Write Outputs 16 Bits, p. 181
Object 6302H: Polarity Outputs 16 Bits, p. 182
Object 6306H:Fallback Mode 16 Bits, p. 183
Object 6307H: Fallback Value 16 Bits, p. 184
Object 6308H: Filter Mask Output 16 Bits , p. 185
1606218 02 08/2006 73
Page 74

Application-Specific Functions
Description of the Discrete Inputs
Discrete Inputs Input reading made per byte. Each input byte is contained in the sub-index of object
6000H.
For each input, the following parameters may be modified:
Polarity (object 6102H)
Filtering constant (object 6103H)
The 2000H object is used to configure inputs 10 to 17 as a discrete input or a
diagnostics input.
The state displayed on the inputs is determined by the configuration registers as
described below:
2000H
Single
Digital
Input
Diag
Input
{OH,1H}
SWITCH
IF 1H
{OH,1H}
{OH,1H}
6102H
Polarity Input
OPTIO-
NAL
FILTER
{EH,DH}
CHANGE
POLAR-
ITY
Filter
Constant
6103H
{OH,1H}
ENTRY
into
6000H
6100H
74
1606218 02 08/2006
Page 75

Application-Specific Functions
Description of Discrete Outputs
Discrete Outputs The discrete outputs are controlled by a command in the sub-index of object 6200H.
For each output, the following parameters may be modified:
Polarity (object 6302H)
Filter mask (object 6308H)
In the event of an error (loss of communication with the master for example), the
fallback mode is applied.
The state of the output is determined by the configuration registers as described
below:
Change
Polarity
6302H 6308H
Filter
Mask
Fallback Mode
6306H
{OH,1H}
Fallback Value
6307H
{O,1}
ENTRY
into 6200H
6300H
SWITCH
IF 0H
{O,1}
Switch if
Device
Failure
{O,1}
{E,D}
CHANGE
POLAR-
ITY
{O,1}
{E,D}
OPTIO-
NAL
FILTER
{O,1}
Single
Digital
Output
1606218 02 08/2006 75
Page 76

Application-Specific Functions
Description of Configurable Discrete I/Os
Configurable
Splitters
Channel
Configured for
Discrete Output
The configurable splitter boxes are as follows:
FTB 1CN16CP0
FTB 1CN16CM0
FTB 1CN08E08CM0
Write outputs are per word. Each output word is contained in the sub-index of object
6200H.
For each output, the following parameters may be modified:
Polarity (object 6302H)
Filter mask (object 6308H)
In the event of an error (loss of communication with the master for example), the
fallback mode is applied.
The state applied to the output is determined by the configuration registers as
described below:
Filter
Mask
{E,D}
OPTIO-
NAL
FILTER
{O,1}
Single
Digital
Output
Fallback Mode
6306H
{OH,1H}
Fallback Value
6307H
{O,1}
ENTRY
into 6200H
6300H
SWITCH
IF 0H
{O,1}
Switch if
Device
Failure
Change
Polarity
6302H 6308H
{E,D}
CHANGE
{O,1}
POLAR-
ITY
{O,1}
76
1606218 02 08/2006
Page 77

Application-Specific Functions
Channel
Configured for
Discrete Input
Input reading made per byte. Each input byte is contained in the sub-index of object
6000H.
For each input, the following parameters may be modified:
Polarity (object 6102H)
Filtering constant (object 6103H)
The 2000H object is used to configure inputs 10 to 17 as a discrete input or a
diagnostics input.
The state displayed on the inputs is defined by the configuration registers as
described below:
2000H
{OH,1H}
Single
Digital
Input
Diag
Input
SWITCH
IF 1H
{OH,1H}
Polarity Input
OPTIONAL
{OH,1H}
6102H
FILTER
{EH,DH}
CHANGE
POLARITY
Filter
Constant
6103H
{OH,1H}
ENTRY into
6000H
6100H
1606218 02 08/2006 77
Page 78

Application-Specific Functions
List of Advantys FTB 1CN08E08SP0 Splitter Box I/O Objects
List of FTB
1CN08E08SPO
Input Objects
The list of input objects for the Advantys FTB 1CN08E08SP0 splitter box is given in
the following table:
Object Sub-
index
2000H 1 Bit 0 Choice between the "input" function and the "diagnostics input"
6000H 1 Bit 0 Not assigned
2 Bit 0 Reading of channel 10 input
6100H 1 Bit 0 Not assigned
6102H 1 Bit 0 Not assigned
6103H 1 Bit 0 Not assigned
Bit Description
function for channel 10
... ...
Bit 7 Choice between the "input" function and the "diagnostics input"
function for channel 17
... ...
Bit 7 Not assigned
... ...
Bit 7 Reading of channel 17 input
... ...
Bit 7 Not assigned
Bit 8 Reading of channel 10 input
... ...
Bit 15 Reading of channel 17 input
... ...
Bit 7 Not assigned
Bit 8 Polarity of channel 10
... ...
Bit 15 Polarity of channel 17
... ...
Bit 7 Not assigned
Bit 8 Channel 10 masking
... ...
Bit 15 Channel 17 masking
78
1606218 02 08/2006
Page 79

Application-Specific Functions
Note: All the objects are 16-bit word tables except for 2000H and 6000H.
Sub-index 1 of object 6000H corresponds to the 6100H (pin 4) object's least
significant byte
Sub-index 2 of object 6000H corresponds to the 6300H (pin 2) object's most
significant byte.
Object 2000H, read by byte, concerns channels 10 to 17 only (pin 2).
List of FTB
1CN08E08SP0
Output Objects
The list of output objects for the Advantys FTB 1CN08E08SP0 splitter box is given
in the following table:
Object Sub-
index
6200H 1 Bit 0 Writing of channel 0 output
6300H 1 Bit 0 Writing of channel 0 output
6302H 1 Bit 0 Polarity of channel 0 output
6306H 1 Bit 0 Fallback mode of channel 0 output
Bit Description
... ...
Bit 7 Writing of channel 7 output
... ...
Bit 7 Writing of channel 7 output
Bit 8 Not assigned
... ...
Bit 15 Not assigned
... ...
Bit 7 Polarity of channel 7 output
Bit 8 Not assigned
... ...
Bit 15 Not assigned
... ...
Bit 7 Fallback mode of channel 7 output
Bit 8 Not assigned
... ...
Bit 15 Not assigned
1606218 02 08/2006 79
Page 80

Application-Specific Functions
Object Sub-
index
6307H 1 Bit 0 Fallback value of channel 0 output
6308H 1 Bit 0 Masking of channel 0 output
Bit Description
... ...
Bit 7 Fallback value of channel 7 output
Bit 8 Not assigned
... ...
Bit 15 Not assigned
... ...
Bit 7 Masking of channel 7 output
Bit 8 Not assigned
... ...
Bit 15 Not assigned
Note: All the objects are 16-bit word tables except for 6200H. Sub-index 1 of object
6200H corresponds to the 6300H object's least significant byte.
80
1606218 02 08/2006
Page 81

List of Advantys FTB 1CN12E04SP0 Splitter Box I/O Objects
Application-Specific Functions
List of FTB
1CN12E04SP0
Input Objects
The list of input objects for the Advantys FTB 1CN12E04SP0 splitter box is given in
the following table:
Object Sub-
index
2000H 1 Bit 0 Choice between the "input" function and the "diagnostics
6000H 1 Bit 0 Reading of channel 0 input
2 Bit 8 Reading of channel 10 input
6100H 1 Bit 0 Reading of channel 0 input
Bit Description
input" function for channel 10
... ...
Bit 7 Choice between the "input" function and the "diagnostics
input" function for channel 17
... ...
Bit 3 Reading of channel 3 input
Bit 4 Not assigned
... ...
Bit 7 Not assigned
... ...
Bit 15 Reading of channel 17 input
... ...
Bit 3 Reading of channel 3 input
Bit 4 Not assigned
... ...
Bit 7 Not assigned
Bit 8 Reading of channel 10 input
... ...
Bit 15 Reading of channel 17 input
1606218 02 08/2006 81
Page 82

Application-Specific Functions
Object Sub-
index
6102H 1 Bit 0 Polarity of channel 0
6103H 1 Bit 0 Channel 0 masking
Bit Description
... ...
Bit 3 Polarity of channel 3
Bit 4 Not assigned
... ...
Bit 7 Not assigned
Bit 8 Polarity of channel 10
... ...
Bit 15 Polarity of channel 17
... ...
Bit 3 Channel 3 masking
Bit 4 Not assigned
... ...
Bit 7 Not assigned
Bit 8 Channel 10 masking
... ...
Bit 15 Channel 17 masking
82
Note: All the objects are 16-bit word tables except for 2000H and 6000H.
Sub-index 1 of object 6000H corresponds to the 6100H (pin 4) object's least
significant byte
Sub-index 2 of object 6000H corresponds to the 6300H (pin 2) object's most
significant byte.
Object 2000H, read by byte, concerns channels 10 to 17 only (pin 2).
1606218 02 08/2006
Page 83

Application-Specific Functions
List of FTB
1CN12E04SP0
Output Objects
The list of output objects for the Advantys FTB 1CN12E04SP0 splitter box is given
in the following table:
Object Sub-
index
6200H 1 Bit 0 Not assigned
2 Bit 0 Not assigned
6300H 1 Bit 0 Not assigned
6302H 1 Bit 0 Not assigned
Bit Description
... ...
Bit 3 Not assigned
Bit 4 Writing of channel 4 output
... ...
Bit 7 Writing of channel 7 output
... ...
Bit 7 Not assigned
... ...
Bit 3 Not assigned
Bit 4 Writing of channel 4 output
... ...
Bit 7 Writing of channel 7 output
Bit 8 Not assigned
... ...
Bit 15 Not assigned
... ...
Bit 3 Not assigned
Bit 4 Polarity of channel 4 output
... ...
Bit 7 Polarity of channel 7 output
Bit 8 Not assigned
... ...
Bit 15 Not assigned
1606218 02 08/2006 83
Page 84

Application-Specific Functions
Object Sub-
index
6306H 1 Bit 0 Not assigned
6307H 1 Bit 0 Not assigned
6308H 1 Bit 0 Not assigned
Bit Description
... ...
Bit 3 Not assigned
Bit 4 Fallback mode of channel 4 output
... ...
Bit 7 Fallback mode of channel 7 output
Bit 8 Not assigned
... ...
Bit 15 Not assigned
... ...
Bit 3 Not assigned
Bit 4 Fallback value of channel 4 output
... ...
Bit 7 Fallback value of channel 7 output
Bit 8 Not assigned
... ...
Bit 15 Not assigned
... ...
Bit 3 Not assigned
Bit 4 Masking of channel 4 output
... ...
Bit 7 Masking of channel 7 output
Bit 8 Not assigned
... ...
Bit 15 Not assigned
84
Note: All the objects are 16-bit word tables except for 6200H. Sub-index 1 of object
6200H corresponds to the 6300H object's least significant byte.
1606218 02 08/2006
Page 85

Application-Specific Functions
List of Advantys FTB 1CN16EP0 and FTB 1CN16EM0 Splitter Box I/O Objects
List of
FTB 1CN16EP0
and
FTB 1CN16EM0
Input Objects
The list of input objects for the Advantys FTB 1CN16EP0 and FTB 1CN16EM0
splitter boxes is given in the following table:
Object Sub-
index
2000H 1 Bit 0 Choice between the "input" function and the "diagnostics input"
6000H 1 Bit 0 Reading of channel 0 input
2 Bit 0 Reading of channel 10 input
6100H 1 Bit 0 Reading of channel 0 input
6102H 1 Bit 0 Polarity of channel 0
6103H 1 Bit 0 Channel 0 masking
Bit Description
function for channel 10
... ...
Bit 7 Choice between the "input" function and the "diagnostics input"
function for channel 17
... ...
Bit 7 Reading of channel 7 input
... ...
Bit 7 Reading of channel 17 input
... ...
Bit 15 Reading of channel 17 input
... ...
Bit 15 Polarity of channel 17
... ...
Bit 15 Channel 17 masking
Note: All the objects are 16-bit word tables except for 2000H and 6000H.
Sub-index 1 of object 6000H corresponds to the 6100H (pin 4) object's least
significant byte
Sub-index 2 of object 6000H corresponds to the 6300H (pin 2) object's most
significant byte.
Object 2000H, read by byte, concerns channels 10 to 17 only (pin 2).
1606218 02 08/2006 85
Page 86

Application-Specific Functions
List of
FTB 1CN16EP0
and
FTB 1CN16EM0
Output Objects
The Advantys FTB 1CN16EP0 and FTB 1CN16EM0 splitter boxes have no outputs.
86
1606218 02 08/2006
Page 87

Application-Specific Functions
List of Advantys FTB 1CN16CP0 and FTB 1CN16CM0 Splitter Box I/O Objects
Configuration
Object 2001H
Object 2001H is used to select the "input" and "output" functions for the 00 to 17
channels as an input or output. Object 2001H: Input/Output Parameter, p. 173.
The table below presents the mapping of object 2001H:
Object Sub-index Bit Description
2001H 1 Bit 0 Choice between the "input" function and the "output"
function for channel 0
... ...
Bit 7 Choice between the "input" function and the "output"
function for channel 7
2 Bit 8 Choice between the "input" function and the "output"
function for channel 10
... ...
Bit 15 Choice between the "input" function and the "output"
function for channel 17
Note: All objects are read by bytes.
1606218 02 08/2006 87
Page 88

Application-Specific Functions
List of
FTB 1CN16CP0
and
FTB 1CN16CM0
Input Objects
The list of input objects for the Advantys FTB 1CN16CP0 and FTB 1CN16CM0
splitter boxes is given in the following table:
Object Sub-
2000H 1 Bit 0 Choice between the "input" function and the "diagnostics input"
6000H 1 Bit 0
6100H 1 Bit 0
Bit Description
index
function for channel 10
... ...
Bit 7 Choice between the "input" function and the "diagnostics input"
function for channel 17
Channel 0 input reading if channel 0 configured for input
Not assigned if channel 0 configured for output
... ...
Bit 7
2Bit 0
Channel 7 input reading if channel 7 configured for input
Not assigned if channel 7 configured for output
Channel 10 input reading if channel 10 configured for input
Channel 10 diagnostics input reading if channel 10 configured
for diagnostics input
Not assigned if channel 10 configured for output
... ...
Bit 7
Channel 17 input reading if channel 17 configured for input
Channel 17 diagnostics input reading if channel 17 configured
for diagnostics input
Not assigned if channel 17 configured for output
Channel 0 input reading if channel 0 configured for input
Not assigned if channel 0 configured for output
... ...
Bit 7
Bit 8
Channel 7 input reading if channel 7 configured for input
Not assigned if channel 7 configured for output
Channel 10 input reading if channel 10 configured for input
Channel 10 diagnostics input reading if channel 10 configured
for diagnostics input
Not assigned if channel 10 configured for output
... ...
Bit 15
Channel 17 input reading if channel 17 configured for input
Channel 17 diagnostics input reading if channel 17 configured
for diagnostics input
Not assigned if channel 17 configured for output
88
1606218 02 08/2006
Page 89

Application-Specific Functions
List of
FTB 1CN16CP0
and
FTB 1CN16CM0
Output Objects
Object Sub-
Bit Description
index
6102H 1 Bit 0
Channel 0 polarity if channel 0 configured for input
Not assigned if channel 0 configured for output
... ...
Bit 15
6103H 1 Bit 0
Channel 17 polarity if channel 17 configured for input
Not assigned if channel 17 configured for output
Channel 0 masking if channel 0 configured for input
Not assigned if channel 0 configured for output
... ...
Bit 15
Channel 17 masking if channel 17 configured for input
Not assigned if channel 17 configured for output
Note: All the objects are 16-bit word tables except for 2000H and 6000H.
Sub-index 1 of object 6000H corresponds to the 6100H (pin 4) object's least
significant byte
Object 2000H, read by byte, concerns channels 10 to 17 only (pin 2).
The list of output objects for the Advantys FTB 1CN16CP0 and FTB 1CN16CM0
splitter boxes is given in the following table:
Object Sub-
6200H 1 Bit 0
6300H 1 Bit 0
Bit Description
index
... ...
Bit 7
2Bit 0
... ...
Bit 7
... ...
Bit 15
Channel 0 output writing if channel 0 configured for output
Not assigned if channel 0 configured for input
Channel 7 output writing if channel 7 configured for output
Not assigned if channel 7 configured for input
Channel 10 output writing if channel 10 configured for output
Not assigned if channel 10 configured for input
Channel 17 output writing if channel 17 configured for output
Not assigned if channel 17 configured for input
Channel 0 output writing if channel 0 configured for output
Not assigned if channel 0 configured for input
Channel 17 output writing if channel 17 configured for output
Not assigned if channel 17 configured for input
1606218 02 08/2006 89
Page 90

Application-Specific Functions
Object Sub-
Bit Description
index
6302H 1 Bit 0
... ...
Bit 15
6306H 1 Bit 0
... ...
Bit 15
6307H 1 Bit 0
... ...
Bit 15
6308H 1 Bit 0
... ...
Bit 15
Channel 0 output polarity if channel 0 configured for output
Not assigned if channel 0 configured for input
Channel 17 output polarity if channel 17 configured for output
Not assigned if channel 17 configured for input
Channel 0 output fallback mode if channel 0 configured for
output
Not assigned if channel 0 configured for input
Channel 17 output fallback mode if channel 17 configured for
output
Not assigned if channel 17 configured for input
Channel 0 output fallback value if channel 0 configured for
output
Not assigned if channel 0 configured for input
Channel 17 output fallback value if channel 17 configured for
output
Not assigned if channel 17 configured for input
Channel 0 output masking if channel 0 configured for output
Not assigned if channel 0 configured for input
Channel 17 output masking if channel 17 configured for output
Not assigned if channel 17 configured for input
90
Note: All the objects are 16-bit word tables except for 6200H.
For object 6200H:
Sub-index 1 corresponds to the 6300H (pin 4) object's least significant byte
Sub-index 2 corresponds to the 6300H (pin 2) object's most significant byte
1606218 02 08/2006
Page 91

Application-Specific Functions
List of Advantys FTB 1CN08E08CM0 Splitter Box I/O Objects
Configuration
Object 2001H
Object 2001H is used to select the "input" and "output" functions for channels 00 to
17 as an input or output. Object 2001H: Input/Output Parameter, p. 173.
The table below presents the mapping of object 2001H:
Object Sub-index Bit Description
2001H 1 Bit 0 Choice between the "input" function and the "output"
function for channel 0
... ...
Bit 7 Choice between the "input" function and the "output"
function for channel 7
2 Bit 8 Not assigned
... ...
Bit 15 Not assigned
Note: All objects are read by bytes.
1606218 02 08/2006 91
Page 92

Application-Specific Functions
List of FTB
1CN08E08CM0
Input Objects
The list of input objects for the Advantys FTB 1CN08E08CM0 splitter box is given in
the following table:
Object Sub-
2000H 1 Bit 0 Choice between the "input" function and the "diagnostics input"
6000H 1 Bit 0
6100H 1 Bit 0
Bit Description
index
function for channel 10
... ...
Bit 7 Choice between the "input" function and the "diagnostics input"
function for channel 17
Channel 0 input reading if channel 0 configured for input
Not assigned if channel 0 configured for output
... ...
Bit 7
2Bit 0
Channel 7 input reading if channel 7 configured for input
Not assigned if channel 7 configured for output
Channel 10 input reading if channel 10 configured for input
Channel 10 diagnostics input reading if channel 10 configured
for diagnostics input
... ...
Bit 7
Channel 17 input reading if channel 17 configured for input
Channel 17 diagnostics input reading if channel 17 configured
for diagnostics input
Channel 0 input reading if channel 0 configured for input
Not assigned if channel 0 configured for output
... ...
Bit 7
Bit 8
Channel 7 input reading if channel 7 configured for input
Not assigned if channel 7 configured for output
Channel 10 input reading if channel 10 configured for input
Channel 10 diagnostics input reading if channel 10 configured
for diagnostics input
... ...
Bit 15
Channel 17 input reading if channel 17 configured for input
Channel 17 diagnostics input reading if channel 17 configured
for diagnostics input
92
1606218 02 08/2006
Page 93

Application-Specific Functions
Object Sub-
Bit Description
index
6102H 1 Bit 0
... ...
Bit 7
Bit 8
... ...
Bit 15
6103H 1 Bit 0
... ...
Bit 7
Bit 8
... ...
Bit 15
Channel 0 input polarity if channel 0 configured for input
Not assigned if channel 0 configured for output
Channel 7 input polarity if channel 7 configured for input
Not assigned if channel 7 configured for output
Channel 10 input polarity if channel 10 configured for input
Channel 10 diagnostics input polarity if channel 10 configured
for diagnostics input
Channel 17 input polarity if channel 17 configured for input
Channel 17 diagnostics input reading if channel 17 configured
for diagnostics input
Channel 0 input masking if channel 0 configured for input
Not assigned if channel 0 configured for output
Channel 7 input masking if channel 7 configured for input
Not assigned if channel 7 configured for output
Channel 10 input masking if channel 10 configured for input
Channel 10 diagnostics input masking if channel 10
configured for diagnostics input
Channel 17 input masking if channel 17 configured for input
Channel 17 diagnostics input masking if channel 17
configured for diagnostics input
Note: All the objects are 16-bit word tables except for 2000H and 6000H.
Sub-index 1 of object 6000H corresponds to the 6100H (pin 4) object's least
significant byte
Object 2000H, read by byte, concerns channels 10 to 17 only (pin 2).
1606218 02 08/2006 93
Page 94

Application-Specific Functions
List of FTB
1CN08E08CM0
Output Objects
The list of output objects for the Advantys FTB 1CN08E08CM0 splitter box is given
in the following table:
Object Sub-
6200H 1 Bit 0
6300H 1 Bit 0
6302H 1 Bit 0
6306H 1 Bit 0
Bit Description
index
Channel 0 output writing if channel 0 configured for output
Not assigned if channel 0 configured for input
... ...
Bit 7
Channel 7 output writing if channel 7 configured for output
Not assigned if channel 7 configured for input
2 Bit 8 Not assigned
... ...
Bit 15 Not assigned
Channel 0 output writing if channel 0 configured for output
Not assigned if channel 0 configured for input
... ...
Bit 7
Channel 7 output writing if channel 7 configured for output
Not assigned if channel 7 configured for input
Bit 8 Not assigned
... ...
Bit 15 Not assigned
Channel 0 output polarity if channel 0 configured for output
Not assigned if channel 0 configured for input
... ...
Bit 7
Channel 7 output polarity if channel 7 configured for output
Not assigned if channel 7 configured for input
Bit 8 Not assigned
... ...
Bit 15 Not assigned
Channel 0 output fallback mode if channel 0 configured for
output
Not assigned if channel 0 configured for input
... ...
Bit 7
Channel 7 output fallback mode if channel 7 configured for
output
Not assigned if channel 7 configured for input
Bit 8 Not assigned
... ...
Bit 15 Not assigned
94
1606218 02 08/2006
Page 95

Application-Specific Functions
Object Sub-
Bit Description
index
6307H 1 Bit 0
Channel 0 output fallback value if channel 0 configured for
output
Not assigned if channel 0 configured for input
... ...
Bit 7
Channel 7 output fallback value if channel 7 configured for
output
Not assigned if channel 7 configured for input
Bit 8 Not assigned
... ...
Bit 15 Not assigned
6308H 1 Bit 0
Channel 0 output masking if channel 0 configured for output
Not assigned if channel 0 configured for input
... ...
Bit 7
Channel 7 output masking if channel 7 configured for output
Not assigned if channel 7 configured for input
Bit 8 Not assigned
... ...
Bit 15 Not assigned
Note: All the objects are 16-bit word tables except for 6200H.
For object 6200H:
Sub-index 1 corresponds to the 6300H (pin 4) object's least significant byte
Sub-index 2 corresponds to the 6300H (pin 2) object's most significant byte
1606218 02 08/2006 95
Page 96

Application-Specific Functions
96
1606218 02 08/2006
Page 97

Software Tools
6
Presentation
Introduction This chapter deals with Advantys FTB CANopen splitter software installation.
What's in this
Chapter?
This chapter contains the following sections:
Section Topic Page
6.1 Introduction to Software Tools 99
6.2 Product Configuration 101
6.3 Network Configuration 107
6.4 PLC Programming 114
1606218 02 08/2006 97
Page 98

Software Tools
98
1606218 02 08/2006
Page 99

Software Tools
6.1 Introduction to Software Tools
Introduction
General The products in the Advantys range must be configured to be able to operate
correctly on the network. There are three stages in the configuration process:
Configuration of the Advantys devices and the desired parameters.
Configuration of the network (master and slaves).
PLC setup and programming: I/O, startup of the network and subsequent use.
Note: For more information, please consult the appropriate documentation for the
other network devices that may be required, the Advantys Configuration Tool
online help (FTX ES 0•), the PLC manual etc.
Software Tools The software to be used depends on the PLC software workshop. Certain PLC
software workshops can configure the network. The following diagram shows the
software to be used for three Telemecanique PLC software workshops:
M340 Premium Twido
Device
Configuration
Network
Configuration
Advantys
Configuration
Tool
Unity
Advantys
Configuration
Tool
SyCon Twido Suite
Advantys
Configuration
Tool
PLC setup and
programming
Unity Twido SuitePL7 / Unity
Note: With Twido Suite, Advantys Configuration Tool is run directly by Twido Suite
to create or modify an island.
1606218 02 08/2006 99
Page 100

Software Tools
Advantys Device
Configuration
Configuration
Files
Network
Configuration
PLC Setup and
Programming
Software
Installation
The first phase is accomplished by using the Advantys Configuration Tool
(FTX ES 0•). This tool is used to define each Advantys device, to set the parameters
and the functions of the inputs/outputs and to generate the configuration files
required to integrate each device into the master.
There are two types of configuration file:
EDS (Electronic Data Sheet) files, which define the structure of the data available
in a splitter box (see the object dictionary).
DCF (Device Configuration File) files which, in addition to the information
contained in an EDS file, also contain settings data (Cf. CiA CAN standard
DS 306).
Note: For further information on EDS file creation, please refer to the user manual
or to the Advantys Configuration Tool online help.
This phase may be carried out by a specific software application (e.g. SyCon) or by
certain PLC software workshops (e.g. Unity, Twido Suite...). This phase involves
integrating all devices into the network, and defining the network (master
configuration) so as to create a functional network.
This phase is carried out by the operator, via the PLC software workshop.
Before installing the software, please refer to the relevant manuals.
100
1606218 02 08/2006
 Loading...
Loading...