

Page 1

Altivar 71
Variateurs de vitesse pour moteurs synchrones
et moteurs asynchrones
Guide de programmation
Spécification 383
Logiciel V3.4
11/2009
AAV49425
www.schneider-electric.com
Page 2

Sommaire
Avant de commencer __________________________________________________________________________________________ 4
Structure documentaire ________________________________________________________________________________________ 5
Evolutions du logiciel __________________________________________________________________________________________ 6
Les étapes de la mise en œuvre ________________________________________________________________________________ 10
Configuration usine___________________________________________________________________________________________ 11
Les fonctions de vos applications________________________________________________________________________________ 12
Mise en service - Recommandations préliminaires __________________________________________________________________ 16
Terminal graphique___________________________________________________________________________________________ 18
Description du terminal__________________________________________________________________________________ 18
Description de l’Ecran graphique __________________________________________________________________________ 19
Première mise sous tension - Menu [5. LANGUE]_____________________________________________________________ 22
Mises sous tension suivantes_____________________________________________________________________________ 23
Programmation : exemple d’accès à un paramètre ____________________________________________________________ 24
Raccourci ____________________________________________________________________________________________ 25
Terminal intégré ___________________________________________________ __________________________________________ 28
Fonctions de l'afficheur et des touches _____________________________________________________________________ 28
Accès aux menus _____________________________________________________________________________________ 29
Accès aux paramètres des menus_________________________________________________________________________ 30
[2. NIVEAU D’ACCES] (LAC-) __________________________________________________________________________________ 31
Structure des tableaux de paramètres ____________________________________________________________________________ 34
Interdépendance des valeurs de paramètres_______________________________________________________________________ 35
Recherche d’un paramètre dans ce document______________________________________________________________________ 36
[1.1 SIMPLY START] (SIM-)____________________________________________________________________________________ 37
[1.2 SURVEILLANCE] (SUP-) __________________________________________________________________________________ 45
[1.3 REGLAGES] (SEt-) ____________________________ ___________________________________________________________ 54
[1.4 CONTRÔLE MOTEUR] (drC-)_______________________________________________________________________________ 69
[1.5 ENTREES / SORTIES] (I-O-) ______________________________________________________________________________ 101
[1.6 COMMANDE] (CtL-) _____________________________________________________________________________________ 131
[1.7 FONCTIONS D’APPLI.] (FUn-) _____________________________________________________________________________ 144
[1.8 GESTION DEFAUTS] (FLt-) _______________________________________________________________________________ 232
[1.9 COMMUNICATION] (COM-) _______________________________________________________________________________ 257
[1.10 DIAGNOSTIC]_________________________________________________________________________________________ 261
[1.11 IDENTIFICATION]______________________________________________________________________________________ 264
[1.12 RÉGLAGES USINE] (FCS-) ______________________________________________________________________________ 265
[1.13 MENU UTILISATEUR] (USr-)_____________________________________________________________________________ 268
[1.14 MENU CONTROL. INSIDE] (PLC-)_________________________________________________________________________ 269
[3. OUVRIR / ENREG. SOUS] _____________________________________________________________ ____________________ 270
[4. MOT DE PASSE] (COd-)___________________________________________________________________________________ 272
[6 ECRAN SURVEILLANCE] __________________________________________________________________________________ 274
[7 CONFIG. AFFICHAGE] ____________________________________________________________________________________ 278
[ECRAN MULTIPOINT] ______________________________________________________________________________________ 283
Maintenance_______________________________________________________________________________________________ 284
Défauts - causes - remèdes ___________________________________________________________________________________ 285
Tableaux des réglages utilisateur_______________________________________________________________________________ 291
Index des fonctions__________________________________________________________________________________________ 293
Index des codes de paramètres________________________________________________________________________________ 295
AAV49425 11/2009 3
Page 3
Avant de commencer
Lire et observer ces instructions avant de commencer toute procédure avec ce variateur.
DANGER
TENSION DANGEREUSE
• Lisez et comprenez le guide d’installation dans son intégra lité avant d’installer et de fai re fonctionner le variateur de
vitesse ATV71. L’installation, le réglage, les réparations doivent être effectués par du personnel qualifié.
• L’utilisateur est responsable de la conformité avec toutes les normes électriques internationales et nationales en
vigueur concernant la mise à la terre de protection de tous les appareils.
• De nombreuses pièces de ce variateur de vitesse, y compris les cart es de circu it imprimé f oncti onnent à la t ension
du réseau. NE LES TOUCHEZ PAS.
N’utilisez que des outils dotés d’une isolation électrique.
• Ne touchez pas les composants non blindés ou les vis des borniers si l’appareil est sous tension.
• Ne court-circuitez pas les bornes PA/+ et PC/- ou les condensateurs du bus DC.
• Installez et fermez tous les couvercles avant de mettre le variateur sous tension.
• Avant tout entretien ou réparation sur le variateur de vitesse
- coupez l’alimentation.
- placez une étiquette "NE METTEZ PAS SOUS TENSION" sur le disjoncteur ou le sectionneur du variateur de
vitesse.
- Verrouillez le disjoncteur ou le sectionneur en position ouverte.
• Avant d’intervenir sur le variateur de vitesse, coupez son alimentation y compris l’alimentation de contrôle externe
si elle est utilisée. ATTENDRE 15 MINUTES pour permettre aux condensateurs du bus DC de se décharger. Suivez
ensuite la procédure de mesure de tension du bus DC ind iquée dans le guide d’i nstallation pour vérifi er si la tension
continue est inférieure à 45 V. Le voyant du variateur de vitesse n’est pas un indicateur précis de l’absence de
tension du bus DC.
Si ces précautions ne sont pas respectées, cela entraînera la mort ou des blessures graves.
ATTENTION
APPAREIL ENDOMMAGE
N’installez pas et ne faites pas fonctionner le variateur s’il semble être endommagé.
Si cette précaution n’est pas respectée, cela peut entraîner des lésions corporelles et/ou des dommages
matériels.
4 AAV49425 11/2009
Page 4

Structure documentaire
Les documents techniques suivants relatifs à l’Altivar 71 sont disponibles sur le site internet www.telemecanique.com et sur le cédérom
fourni avec chaque variateur.
Guide d’installation
Il décrit le montage et le raccordement du variateur.
Guide de programmation
Il décrit les fonctions, les paramètres, l’utilisation du terminal du variateur (terminal intégré et terminal graphique).
Les fonctions de communication ne sont pas détaillées dans ce gui de mais dans le guide du bus ou réseau utilisé.
Guide des paramètres de communication
Ce guide décrit :
• les paramètres du variateur avec des éléments spécifiques pour une utilisation à travers un bus ou un réseau de communication,
• les modes de marche spécifiques à la communication (graphe d’état),
• l’interaction entre la communication et la commande locale.
Guides Modbus, CANopen, Ethernet, Profibus, INTERBUS, Uni-Telway, FIPIO,
Modbus Plus ...
Ces guides décrivent le montage, le raccordemen t au bus ou ré seau, la si gnali satio n, le diagnos tic, la confi guration pa r le termi nal i ntégré
ou par le terminal graphique des paramètres spécifiques à la communication.
Ils détaillent également les services de communication des protocoles.
AAV49425 11/2009 5
Page 5
Evolutions du logiciel
Depuis le début de sa commercialisation l’Altivar ATV 71 a bénéficié de fonctionnali tés supplémentaires. La v ersion du logiciel devient V2.8.
La nouvelle version peut se substituer aux anciennes sans modification.
Cette documentation est relative à la version V2.8, mais elle reste utilisable avec les versions antérieures car les évolutions ne font
qu’ajouter des valeurs et des paramètres sans modifier ni supprimer de paramètres des anciennes versions.
La version du logiciel figure sur l’étiquette signalétique collée sur le flanc du variateur.
Evolutions de la version V1.2 par rapport à V1.1
Réglage usine
Nota 1 : Dans la version V1.1, l’entrée analogique était 0 ± 10 V. Pour des raisons de sécurité, dans la nouvelle version cette
entrée est configurée en 0 +10 V.
Nota 2 : Dans la version V1.1, la sortie analogique AO1 é tait affecté e à la fréquenc e moteur. Dans la nou velle version ce tte sortie
est non affectée.
A l’exception de ces deux paramètres, le réglage usine de la version V1.1 est conservé dans la nouvelle version. Les nouvelles
fonctionnalités sont inactives en réglage usine.
Plage de fréquence moteur
La plage de fréquence de sortie maximale est étendue de 1000 à 1600 Hz (possibilité selon calibre et loi de commande choisie).
Nouveaux paramètres et nouvelles fonctions
Menu [1.2 SURVEILLANCE] (SUP-)
Adjonction des états et valeurs internes relatifs aux nouvell es fonctions décrites ci après.
Menu [1.3 REGLAGES] (SEt-)
• [Seuil couple haut] (ttH) page 67.
• [Seuil couple bas] (ttL) page 67
• [Seuil alarme pulse] (FqL) page 68
• [Seuil arrêt roue lib.] (FFt) page 68
.
.
.
Menu [1.4 CONTRÔLE MOTEUR] (drC-)
• [Incrément Tr/Min] (InSP) page 76.
• Extension à tous les calibres de variateurs des configurations sui vantes, jusqu’alors limitées à 45 kW pour ATV71
pour ATV71
[Réduction bruit] (nrd) page 95
pppN4 : moteur synchrone [Mot. sync.] (SYn) page 70, filtre sinus [Filtre sinus] (OFI) page 72, réduction de bruit
, équilibrage de freinage [Equilibre freinage] (bbA) page 98.
pppM3X et à 75 kW
Menu [1.5 ENTREES / SORTIES] (I-O-)
• L’entrée AI1 devient configurable en 0 +10 V ou 0 ± 10 V par [Type AI1] (AI1t) page 107.
• [Canal AI réseau] (AIC1) page 111
• Nouvelles possibilités d’affectation des relais et sorties logiques page 118
inférieur à seuil bas, moteur en rotation sens avant, moteur en rotation sens arrière, seuil de vitesse mesurée atteint, détection de
variation de charge.
• La sortie analogique AO1 devient utilisable en sortie logiq ue et affectable aux fonctions des relais et sorties logiques, page 123
• Nouvelle possibilité de modifier l’échelle des sorties analogiques page 125
[Echelle max AOx] (ASHx).
• Nouvelles possibilités d’affectation des sorties analogiques page 126
• Nouvelles possibilités d’affectation des g roupes d’ alarme page 130
seuil bas, seuil de vitesse mesurée atteint, détection de variation de charge.
.
: câble détendu, couple supérieur à seuil haut, couple
par les paramètres [Echelle min AOx] (ASLx) et
: couple moteur signé et vitesse moteur mesurée.
: câble détendu, couple supérieur à seuil haut, couple inférieur à
.
6 AAV49425 11/2009
Page 6
Evolutions du logiciel
Menu [1.7 FONCTIONS D’APPLI.] (Fun-)
• Les fonctions référence sommatrice, soustractrice, multiplicat rice deviennent affectable à l’entrée virtuelle [AI réseau] (AIU1) page
151
.
• Nouveau paramètre [Seuil arrêt roue lib.] (FFt) page 156
ou d’arrêt rapide.
• Serrage du frein à vitesse nulle régulée [Fermeture frein à 0] (bECd) page 176
• Le peson [Affectation peson] (PES) page 183
• Nouvelle fonctionnalité "câble détendu" page 187
• Utilisation de la rampe [Accélération 2] (AC2) page 195
• La limitation de couple [LIMITATION DE COUPLE] (tOL-) page 202
et affectable à l’entrée virtuelle [AI réseau] (AIU1).
• Nouvelle fonctionnalité "arrêt à distance calculée après fin de course de ralentissement" page 211
d’arrêt] (Std), [Vitesse linéaire] (nLS) et [Correcteur d'arrêt] (S Fd).
• Le positionnement sur capteur ou fin de course [POSIT. SUR CAPTEURS] (LPO-) page 212
ou négative par [Conf. FdC d'arrêt] (SAL) et [Conf. FdC ralent.] (d A L ).
• La commutation de paramètres [COMMUT. JEUX PARAM.] (MLP-) page 215
[S. fréq. att.] (FtA) et [S. fréq. 2 att.] (F2A).
• Nouvelle fonctionnalité demi-étage: menu [DEMI-ETAGE] (HFF-) page 229
devient affectable à l’entrée virtuelle [AI réseau] (AIU1).
Menu [1.8 GESTION DEFAUTS] (FLt-)
• Possibilité de réinitialiser le variateur sans le mettre hors tensi on, par [Reset produit] (rP) page 237.
• Possibilité de réinitialiser le variateur par entrée logique sans le mettre hors tension, par [Affect reset produit] (rPA) page 237
• La possibilité de configuration du défaut "perte phase moteur" [Perte phase moteur] (OPL) page 242
étendue à tous les calibres de variateurs (jusqu’alors limitée à 45 kW pour ATV71
• Le défaut externe [DEFAUT EXTERNE] (EtF-) page 245
externe] (LEt).
• Nouvelle fonctionnalité de surveillance par mesure de vitesse par l’entrée "Pulse input" page 252
METRE] (FqF-).
• Nouvelle fonctionnalité de détection de variation de charge page 254
• Le défaut de court-circuit de l’unité de freinage devient con figurable par [Gest. déf. unité frein] bUb) page 256
permettant de régler un seuil de passage en roue libre en fin d’arrêt sur rampe
.
, avec les paramètres [Conf. cable déten du] (rSd) et [S. Cple cable déten.] (rStL).
lors des démarrages et des réveils de la fonction PID.
devient configurable en % ou 0,1 % par [Incrément couple] (IntP)
, avec les paramètres [Distance
devient configurable en logique positive
devient affectable à des seuils de fréquence atteints
.
à [Coup. aval] (OAC) est
pppM3X et à 75 kW pour ATV71pppN4).
devient configurable en logique positive ou négative par [Config. défaut
, par le menu [FREQUENCE
, par le menu [DETECT. DELTA CHARGE] (dLd-).
.
.
Menu [7 CONFIG. AFFICHAGE]
• Adjonction dans [7.4 REGLAGE TER MINAL] page 284 des paramètres [Contraste] et [Temps avant veill e] pour régler le contraste et
la mise en veille de l’afficheur graphique.
Evolutions de la version V1.3 (S383) par rapport à V1.2
Nouveaux paramètres et nouvelles fonctions
Menu [1.4 CONTRÔLE MOTEUR] (drC-)
Nouvelle possibilité de fonctionner avec Moteur synchrone en boucle fermée page 83.
• [Auto-test angle] (ASA) page 84
• [Valeur offset angle] (ASU) page 85
• Affectation [Sync.BF] (FSY) page 71
Menu [1.5 ENTREES / SORTIES] (I-O-)
• [Freq.Excit.Resolveur] (FrES) et [Nbr pôles Resolveur] (rPPn) page 115.
Menu [1.7 FONCTIONS D’APPLI.] (Fun-)
• Nouvelle fonctionnalité "Inspection" page 227, avec les paramètres [Inspection] (ISP) et [Vitesse inspection] (ISrF).
.
.
du paramètre [Type cde moteur] (Ctt).
AAV49425 11/2009 7
Page 7
Evolutions du logiciel
Evolutions de la version V1.7 (S383) par rapport à V1.3 (S383)
Nouveaux paramètres et nouvelles fonctions
Menu [1.1 SIMPLY START] (SIM-)
• Ajout d’une macro configuration [Ascenseur] (LIFt) dans le paramètre [Macro configuration] (CFG) page 41.
Menu [1.3 REGLAGES] (SEt-)
Nouveaux paramètres :
• [Stab.Boucle F] (StA) page 56
• [Gain Boucle F] (FLG) page 56
Menu [1.4 CONTRÔLE MOTEUR] (drC-)
Ce menu a été réaménagé, l’ordre des paramètres a été modifé et certains ont été regroupés dans des sous-menus, pour faciliter la
configuration.
Les sous-menus créés sont :
• [RETOUR CODEUR] (EnS-) page 75
• [MOTEUR ASYNCHRONE] (ASY-) page 76
• [MOTEUR SYNCHRONE] (SYn-) page 81
• [ANGLE TEST] (ASA-) page 84
• [FLUXAGE PAR LI] (FLI-) page 86
• [REGLAGES AUTO] (tUn-) page 88
• [BOUCLE DE VITESSE] (SSL-) page 89
Nouveaux paramètres :
• [Boost] (bOO) page 95
• [Action Boost] (FAb) page 95
• [[Incrément FEM] (IPHS) page 81
• [Lect. param moteur] (rEqP) page 82
• [Etat param. moteur] (rEtP) page 82
• [Type d'angle test] (ASt) pages 84
• [Angle test] (ASL) page 84
• [Activa. angle test] (AtA) page 85
• [Etat angle test] (AStS) page 85
• [Type de boucle vit.] (SSL) page 89
• [Coef. mult. inertie] (JMUL) page 89
• [Inertie estimée app.] (JESt) page 89
• [Inertie de l'applicat.] (JAPL) page 90
• [Stab.Boucle F] (StA) page 90
• [Gain Boucle F] (FLG) page 90
• [Feed forward] (FFP) page 91
• [Bandwidth feedfor.] (FFU) page 91
Paramètres déplacés du menu [1.7 FONCTIONS D’APPLI.] (Fun-) :
• [Fluxage moteur] (FLU) page 86
• [Affectation fluxage] (FLI) page 86
• [Affect. auto-réglage] (tUL) page 88
.
.
.
.
.
.
.
.
.
.
.
.
.
.
et 87.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Menu [1.5 ENTREES / SORTIES] (I-O-)
Nouveaux paramètres de codeurs :
• [Protocole codeur] (UECP) page 116
• [Tension codeur] (UECU) page 116
• [Nombre de lignes] (UELC) page 116
• [Parité codeur SSI] (SSCP) page 116
• [Taille trame SSI] (SSFS) page 116
• [Nbr de tour en bits] (EnMr) page 116
• [Nbr de bits par tour] (Entr) page 116
• [Type de code SSI] (SSCd) page 117
• [Filtre codeur] (FFA) page 117
• [Valeur filtre codeur] (FFr) page 117
.
.
.
.
.
.
.
.
.
.
Menu [1.7 FONCTIONS D’APPLI.] (Fun-)
Suppression des paramètres suivants, maintenant placés dans le menu [1.4 CONTRÔLE MOTEUR] (drC-) :
• [Fluxage moteur] (FLU).
• [Affectation fluxage] (FLI).
• [Affect. auto-réglage] (tUL).
8 AAV49425 11/2009
Page 8
Evolutions du logiciel
Evolutions de la version V1.9 (S383) par rapport à V1.7 (S383)
Nouveaux paramètres et nouvelles fonctions
Menu [1.4 CONTRÔLE MOTEUR] (drC-)
• Nouvelle possibilité d’affectation du [Type d’angle test] (ASt) page 87 : mesure optimisée (sans mouvement avec mémorisation).
Nouveau paramètre :
• [Coef. inertie app.] (JACO) page 89
Déplacement des paramètres suivants du sous-menu [MOTEUR ASYNCHRONE] (ASY-), maintenant placés directement dans le menu
[1.4 CONTRÔLE MOTEUR] (drC-) :
• [Boost] (bOO) page 95
• [Action Boost] (FAb) page 95
.
Menu [1.5 ENTREES / SORTIES] (I-O-)
Nouveaux paramètres de codeurs :
• [Inv. Rot. codeur] (EnrI) page 114
• [Fréquence d’horloge] (EnSP) page 117
Menu [1.7 FONCTIONS D’APPLI.] (Fun-)
• Nouvelle possibilité d’affectation pour la commutation de jeux de paramètres [2 jeux paramètres] (CHA1) page 215 et
[3 jeux paramètres] (CHA2) page 215
mettre des gains élevés lors de l’ouverture du frein avant le démarrage de la rampe (utile dans les applications ascenseurs).
.
.
.
.
: commutation pendant la séquence de fre in. Cette nouvelle affect ation pe rmet entre aut re de
Le sous-menu créé est :
• [GESTION DU TOP Z] (tOP-) page 231
[Signaux codeur] (EnS) = [AABB] (AAbb)).
Nouveau paramètre de codeur :
• [Arrêt sur top Z] (tOSt) page 231
(uniquement accessible si une carte VW 3A 411 est présente et si
.
Evolutions de la version V2.4 (S383) par rapport à V1.9 (S383)
Nouveaux paramètres et nouvelle fonction
Menu [1.7 FONCTIONS D’APPLI.] (Fun-)
Le sous-menu créé est :
• [GESTION DU ROLLBACK] (rbM-) page 181
- seulement pour les variateurs jusqu’à 45 kW pour ATV71
-si [Type cde moteur] (Ctt) page 70
- si commande de frein [Affectation frein] (bLC) page 175
Nouveau paramètre de la fonction [GESTION DU ROLLBACK] :
• [Gestion du Rollback] (rbM) page 181
• [Compensation rbk] (rbC) page 181
• [Amortissement rbk] (rbd) page 181
.
.
.
. Ce menu est accessible :
pppM3X et jusqu’à 75 kW pour ATV71pppN4,
= [Sync.BF] (FSY) ou [FVC] (FUC),
est affectée.
Evolutions de la version V2.8 (S383) par rapport à V2.4 (S383)
Menu [1.7 FONCTIONS D’APPLI.] (FUn-)
• La plage de réglage du paramètre [Temps redémar.] (ttr) page 177 passe de 0 à 5.00 s vers 0 à 15.00 s.
Menu [7 CONFIG. AFFICHAGE]
• Adjonction dans [7.4 REGLAGE TERMINAL] page 284 du paramètre [Menu demarrage] pour choisir le menu qui apparait sur le
produit à la mise sous tension.
Evolutions de la version V3.4 (S383) par rapport à V2.8 (S383)
Menu [1.7 FONCTIONS D’APPLI.] (Fun-)
Nouveaux paramètres et nouvelles fonctions
Nouveau paramètre "Active front end" [CONNEXION REGEN] (AFE) page 232 permet de restituer l’énergie électrique du réseau et de
réduire les harmoniques.
AAV49425 11/2009 9
Page 9
Les étapes de la mise en œuvre
INSTALLATION
v 1 Consultez le guide d’installation
PROGRAMMATION
Procédure applicable si la configuration usine page 11 et l’utilisation du seul
menu [SIMPLY START] (SIM-) suffisent à l’application.
b 2 Mettez sous tension sans ordre de
marche
v En cas d’alimentation séparée du
contrôle, respectez la procédure
décrite page 16.
b 3 Choisissez la langue, si le
variateur comporte un terminal
graphique
b 4 Configurez le menu
[SIMPLY START] (SIM-)
v Commande 2 fils ou 3 fils
v Macro configuration
v Paramètres moteur
) Faites un auto-réglage
v Courant thermique moteur
v Rampes d’accélération et de
décélération
v Plage de variation de vitesse
Conseils :
• Préparez la programmation en remplissant
les tableaux des réglages utilisateur, page
293
.
• Effectuez un auto-réglage, qui optimisera
les performances, page 43
.
• Si vous êtes perdu, faites un retour aux
réglages usine, page 269
.
Nota : Assurez- vous que le câblage
du variateur est compatible avec sa
configuration.
b 5 Démarrez
10 AAV49425 11/2009
Page 10

Configuration usine
Préréglages variateur
Nous avons préréglé l’Altivar 71 en usine pour les conditions d'emploi les plus courantes :
• Macro configuration : Start/Stop.
• Fréquence moteur : 50 Hz.
• Application à couple constant, moteur asynchrone, contrô le vectoriel de flux sans capteur.
• Mode d’arrêt normal sur rampe de décélération.
• Mode d’arrêt sur défaut : roue libre.
• Rampes linéaires, accélération et décélération : 3 secondes.
• Petite vitesse : 0 Hz.
• Grande vitesse : 50 Hz.
• Courant thermique moteur = courant nominal variateur.
• Courant de freinage par injection à l'arrêt = 0,7 x courant nominal variateur, pendant 0,5 seconde.
• Pas de redémarrage automatique après un défaut.
• Fréquence de découpage 2,5 kHz ou 4 kHz selon le calibre du variateur.
• Entrées logiques :
- LI1 : marche avant, LI2 : marche arrière (2 sens de marche), commande 2 fils sur transition.
- LI3, LI4, LI5, LI6 : inactives (non affectées).
• Entrées analogiques :
- AI1 : consigne vitesse 0 +10 V.
- AI2 : 0-20 mA, inactive (non affectée).
• Relais R1 : le contact s'ouvre en cas de défaut (ou variateur hors tension)
• Relais R2 : inactif (non affecté).
• Sortie analogique AO1 : 0-20 mA, inactive (non affectée).
Si les valeurs ci-dessus sont compatibles avec votre application, utilisez le variateur sans modification des réglages.
Préréglages cartes options
Les entrées / sorties des cartes options sont non affectées en réglage usine.
AAV49425 11/2009 11
Page 11
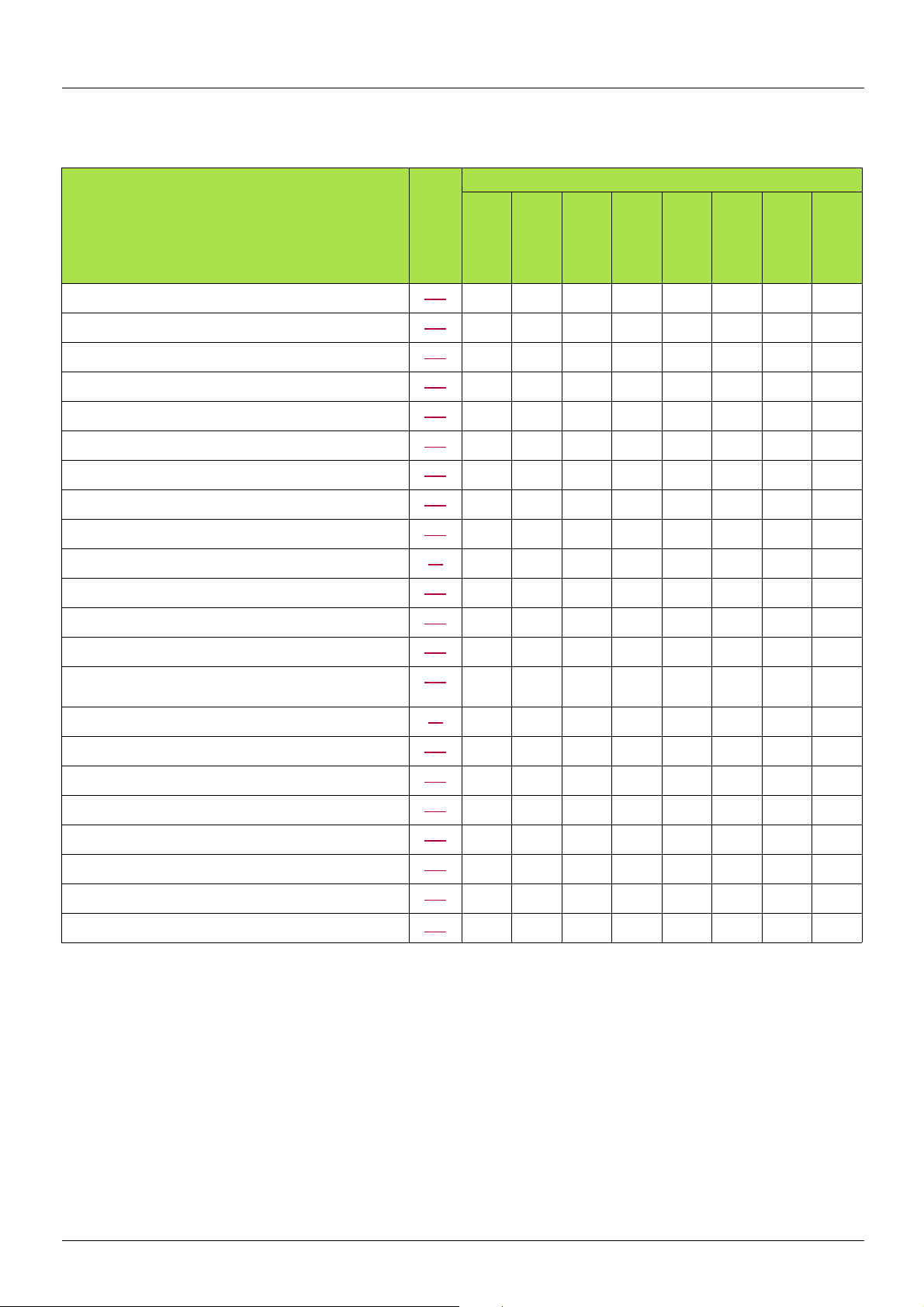
Les fonctions de vos applications
Les tableaux des pages suivantes donnent les associations fonctions/applications les plus courantes, afin de guider votre choix.
Les applications figurant dans ces tableaux concernent not amment les machines suivantes :
• Levage : grues, ponts roulants, portiques (levage vertical, translation, giration), sections élévatrices
• Ascenseurs : ascenseurs de rénovation jusqu'à 1.2 m / s
• Manutention : palettiseurs / dépalettiseurs, convoyeurs, tables à rouleaux
• Emballage : encartonneuses, étiqueteuses
• Textile : métiers à tisser, cardes, machines à laver, fileuses, étireuses
• Bois : tours automatiques, scies, usinage
• Forte inertie : centrifugeuses, mélangeurs, machines à balourd (pompes à balancier, presses)
• Process
Les associations mentionnées ne sont ni obligatoires ni exhaustives, chaque machine ayant ses particularités.
Certaines fonctions sont particulièrement dédiées à une application définie. Dans ce cas, l’application est rappelée sous forme
d’un onglet en marge dans les pages de programmation concernées.
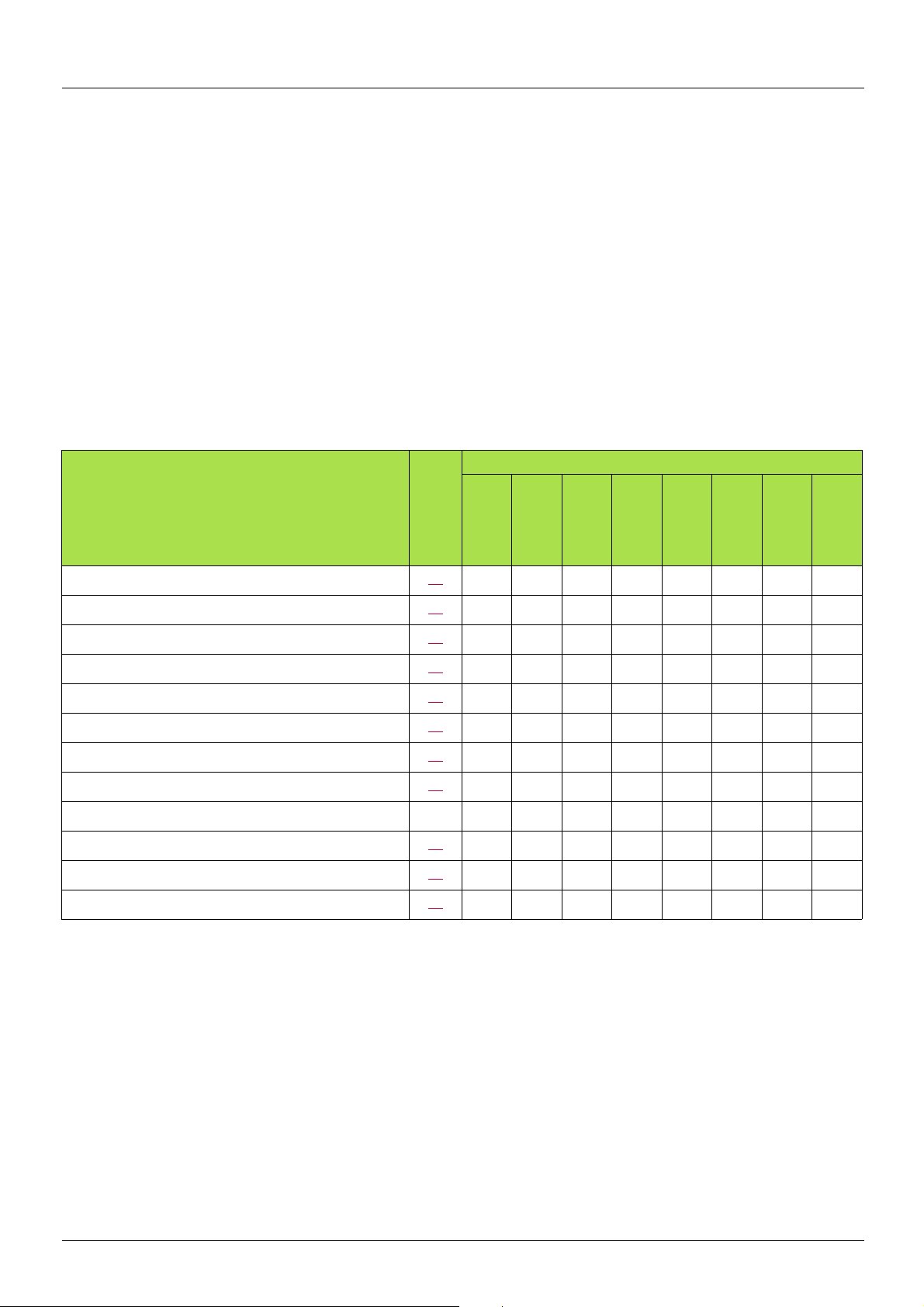
Fonctions de commande moteur
Applications
Fonctions Page
Loi U/F
Contrôle vectoriel de flux sans capteur
Contrôle vectoriel de flux avec capteur
Contrôle vectoriel 2 points
Moteur synchrone en boucle ouverte
Moteur synchrone en boucle fermée
Fréquence de sortie jusqu’à 1600 Hz
Limitation des surtensions moteur
Connexion sur Bus DC (voir guide d’exploitation)
Fluxage moteur par entrée logique
Fréquence de découpage jusqu'à 16kHz
Auto-réglage
70
70
70
70
71
71
76
96
-
86
72
88
Levage
Ascenseurs
Manutention
Emballage
Textile
Bois
Forte inertie
Process
bbb
bbbbbbbb
bbbbbbbb
bb
b
bbb
bb
bb
bb
bbb
bbb
bbbbbbbb
12 AAV49425 11/2009
Page 12
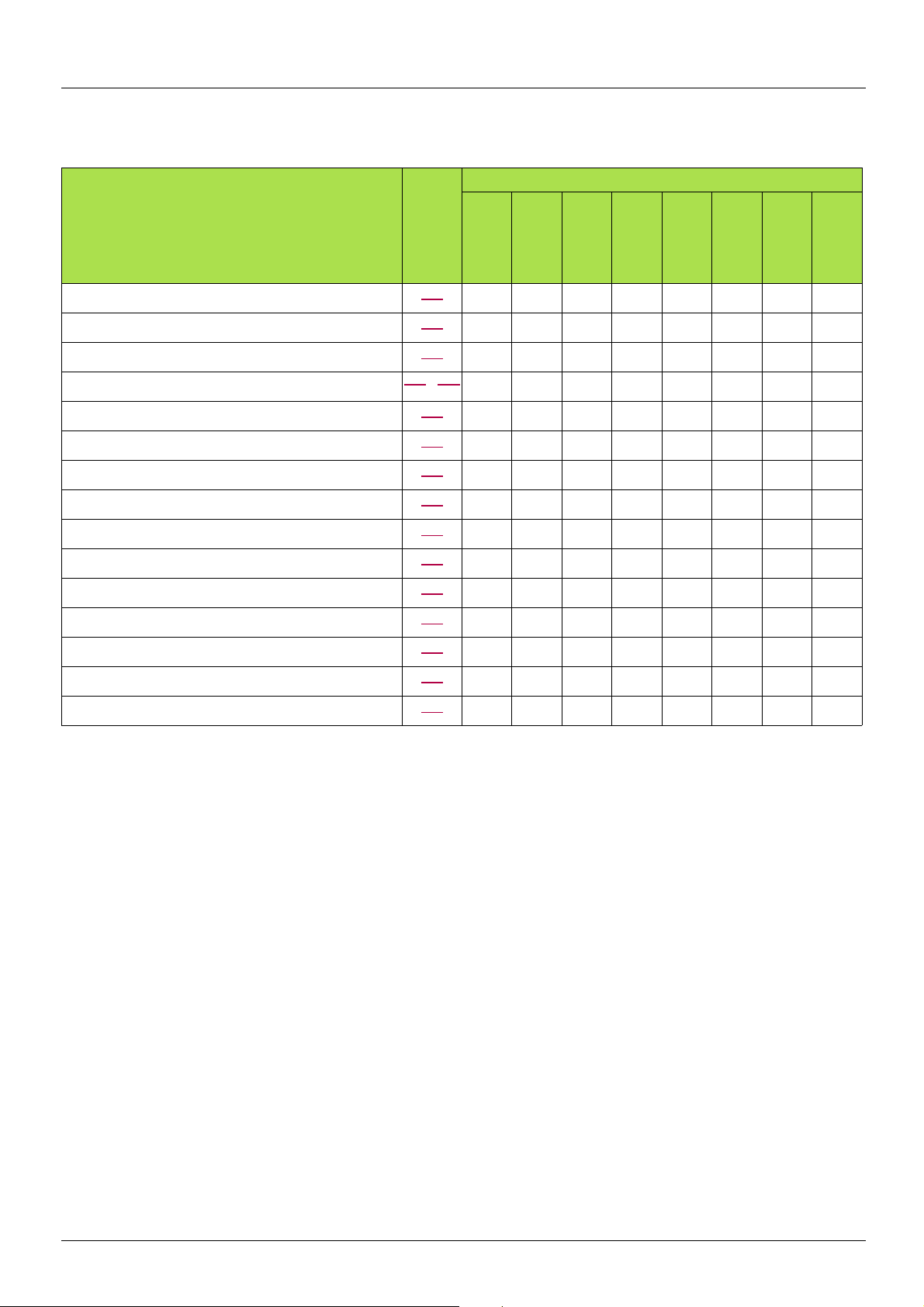
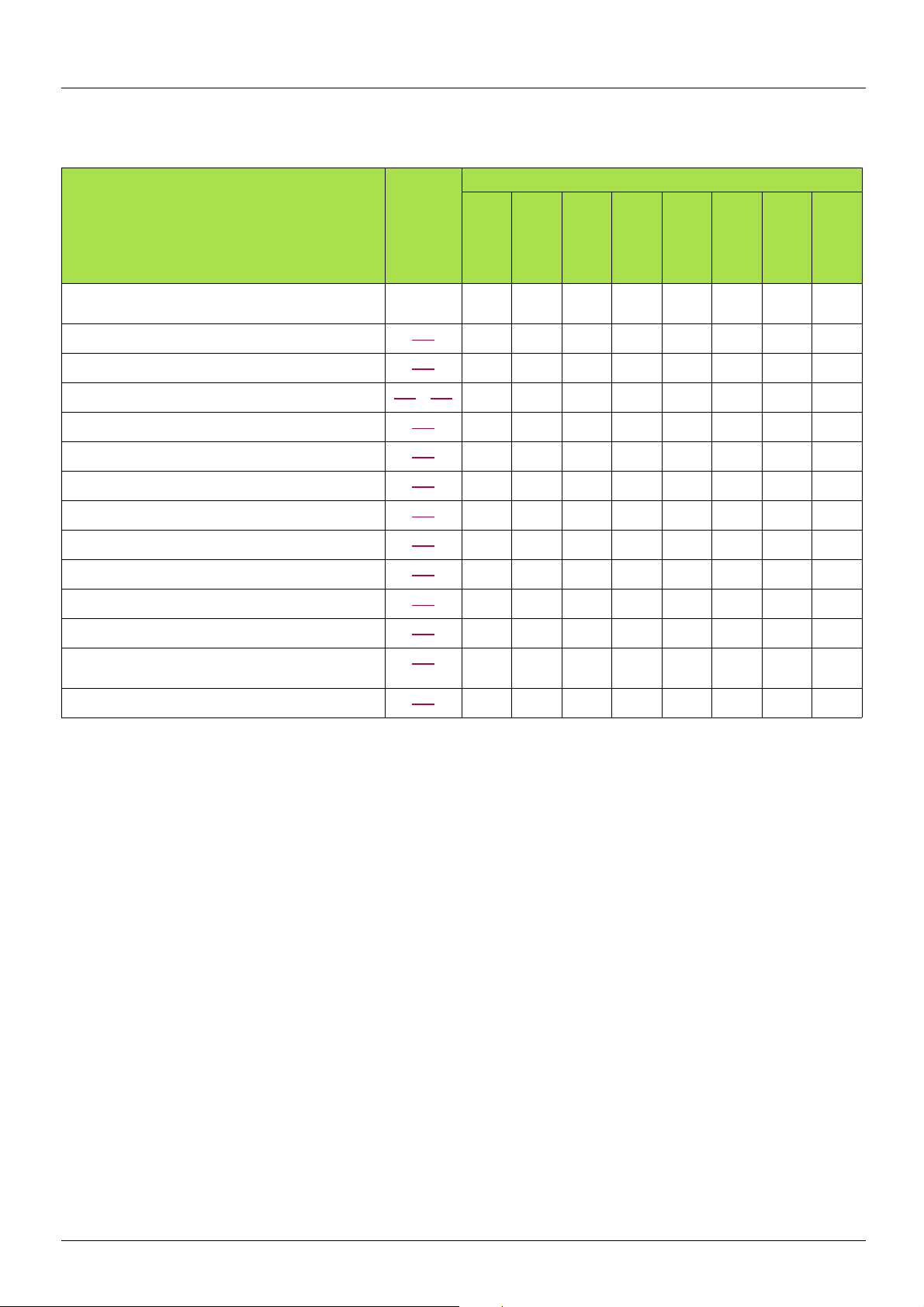
Les fonctions de vos applications
Fonctions sur consignes vitesses
Fonctions Page
Applications
Consigne différentiell e bi p ol a ire 104
Délinéarisation de consigne (effet loupe) 106
Entrée de pilotage en fréquence 140
- 150
Commutation de consignes
Sommation de consignes 149
Soustraction de consignes 149
Multiplication de consignes 149
Rampes en S 152
Marche pas à pas (JOG) 160
Vitesses présélectionnées 161
+vite / - vite par boutons à simple enfoncement (1 cran) 164
+vite / - vite par boutons à double enfo ncements (2 crans) 164
+vite / - vite autour d'une consigne 166
Mémorisation de consigne 168
Inspection 227
141
Levage
Ascenseurs
Manutention
Emballage
Textile
Bois
Forte inertie
bbb
bb
bb
b
b
b
b
bbb
bb b
bbbb b
b
bb
b
Process
b
b
AAV49425 11/2009 13
Page 13
Les fonctions de vos applications
Fonctions spécifiques applicatives
Fonctions Page
Applications
Arrêt rapide 156
Gestion des fins de courses 169
Commande de frein 171
Mesure de charge 182
Levage haute vitesse 184
Câble détendu 187
Régulateur PID 189
Contrôle de couple 198
Limitation de couple moteur / générateur 201
Equilibrage de charge 98
Commande contacteur de ligne 205
Commande contacteur aval 207
Positionnement sur fins de courses ou capteurs 209
Arrêt à distance calculée après fin de course de
ralentissement
ENA system (mécanique avec balourd) 93
Commutation de paramètres 214
Commutation de moteurs ou de configurations 217
Traverse control 220
Configuration des arrêts 156
Evacuation 228
Demi-étage 229
Gestion du Rollback
211
181
Levage
Ascenseurs
Manutention
Emballage
Textile
Bois
Forte inertie
Process
bb
bbb
bbb
bb
b
b
b
bb b
bbbb
bb
bb b
b
bb
bb
b
bbbbbbbb
bbb
b
bbbb
b
b
b
14 AAV49425 11/2009
Page 14
Les fonctions de vos applications
Fonctions sécurités / gestion de défauts
Fonctions Page
Applications
Power Removal (fonction de sécurité, voir guide
d’exploitation)
Arrêt différé en alarme thermique 244
Gestion des alarmes 130
Gestion des défauts 235 à 258
Tests IGBT 247
Reprise à la volée 239
Protection thermique des résistances de freinage 256
Protection moteur par sondes PTC 235
Gestion des sous-tension 246
Perte 4-20mA 248
Coupure aval non contrôlée (perte phase moteur) 242
Redémarrage automatique 238
Mesure de la vitesse de rotation du moteur par
l’entrée Pulse input
Détection de variation de charge 254
-
252
Levage
Ascenseurs
Manutention
Emballage
Textile
Bois
Forte inertie
Process
bbbbbbbb
b
bbbbbbbb
bbbbbbbb
bbbbbbbb
bbb
bbbb
bbbbbbbb
bbb
bbbbbb
b
b
bbb
b
AAV49425 11/2009 15
Page 15

Mise en service - Recommandations préliminaires
DANGER
FONCTIONNEMENT INATTENDU DE L’APPAREIL
• Avant de mettre sous tension et de configurer l’Altivar 71, assurez vou s que l’entrée PWR (POWER REMOVAL) est
désactivée (à l’état 0) afin d’éviter tout redémarrage inattendu.
• Avant de mettre sous tension ou à la sortie des menus de configuration, assurez vous que les entrées affectées à
la commande de marche sont désactivées (à l’état 0) car elles peuvent entraîner immédiatement le démarrage du
moteur.
Si ces précautions ne sont pas respectées, cela entraînera la mort ou des blessures graves.
ATTENTION
TENSION DU RESEAU INCOMPATIBLE
Avant de mettre sous tension et de configurer le variateur, assurez vous que la tension du réseau est compatible avec la
tension d’alimentation du variateur. Le variate ur peut se trouver endommagé si la tension du réseau n ’est pas compatibl e.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
ATTENTION
• Evitez de manœuvrer fréquemment le contacteur (vieillissement prématuré des condens ateurs de filtrage).
• En cas de temps de cycles < 60 s il y a risque de destruction de la résistance de charge.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
DANGER
FONCTIONNEMENT INATTENDU DE L’APPAREIL
• Assurez vous que les changements apportés aux réglages en cours de fonctionnement ne présentent pas de
danger.
• Il est recommandé d'effectuer les changements une fois le variateur arrêté.
Si ces précautions ne sont pas respectées, cela entraînera la mort ou des blessures graves.
Mise sous tension et configuration du variateur
Alimentation séparée du contrôle
Lorsque le contrôle du variateur est alimenté indé pendamment de la pui ssanc e (borne s P2 4 et 0V), après t oute adj onctio n de carte opt i on
et après tout remplacement éventuel de carte, il est nécessaire d’ali menter la puissance à la première mise sous tension seulement.
A défaut la nouvelle carte ne serait pas reconnue, il y aurait i mpossibilité de la configurer et le variateur pourrait se verrouiller en défaut.
Commande de puissance par contacteur de ligne
Réglage utilisateur et extensions de fonctionnalités
• L’afficheur et les boutons permettent la modificatio n des réglages et l'extension des fonctionnalités détaillées dans les pages
suivantes.
• Le retour au réglage usine est possible aisément par le menu [1.12 REGLAGES USINE] (FCS-), voir page 267
• Les paramètres sont de trois types :
- affichage : valeurs affichées par le variateur
- réglage : modifiables en fonctionnement et à l'arrêt
- configuration : seulement modifiables à l'arrêt et hors freinage. Visualisables en fonctionnement.
.
16 AAV49425 11/2009
Page 16
Mise en service - Recommandations préliminaires
ATTENTION
FONCTIONNEMENT INATTENDU DE L’APPAREIL
La protection thermique du moteur n’est pas assurée par le variateur si le co urant moteur est inférieur à 0,2 fois le co urant
nominal variateur. Utilisez alors un autre dispositif de protection thermique.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
ATTENTION
FONCTIONNEMENT INATTENDU DE L’APPAREIL
La protection thermique des moteurs n’est plus assurée par le variateur. Utilisez alors un autre dispositif de protection
thermique, sur chaque moteur.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
Démarrage
Important :
• En configuration usine le moteur ne peut être alimenté qu’après une re mise à zéro préal able des ordres "a vant", "arrièr e", "a rrêt par
injection de courant continu" dans les cas suivants :
- lors d’une mise sous tension ou d’une remise à zéro de défaut manuelle ou après une commande d’arrêt.
A défaut, le variateur affiche "nSt" mais ne démarre pas.
• Si la fonction redémarrage automatique est configurée (paramètre [Redémarrage auto] (Atr) du menu [1.8-GESTION DEFAUTS]
(FLt-) voir page 238
Essai sur moteur de faible puissance ou sans moteur
• En réglage usine, la dé te c ti o n [Perte phase moteur] (OPL) page 242 est active (OPL = YES). Pour vérifier le variateur dans un
environnement de test ou de maintenance, et sans avoir recours à un moteur équivalent au calibre du variateur (en particulier pour
les variateurs de fortes puissances), désactivez la [Perte phase moteur] (OPL = nO).
• Configurez [Type cde moteur] (Ctt) = [U/F 2pts] (UF2) ou [U/F 5pts] (UF5) (menu [1.4-CONTRÔLE MOTEUR] (drC-), voir page 70
), ces ordres sont pris en compte sans remise à zéro préalable.
)
Utilisation de moteurs en parallèle
• Configurez [Type cde moteur] (Ctt) = [U/F 2pts] (UF2) ou [U/F 5pts] (UF5) (menu [1.4-CONTRÔLE MOTEUR] (drC-), voir page 70)
AAV49425 11/2009 17
Page 17
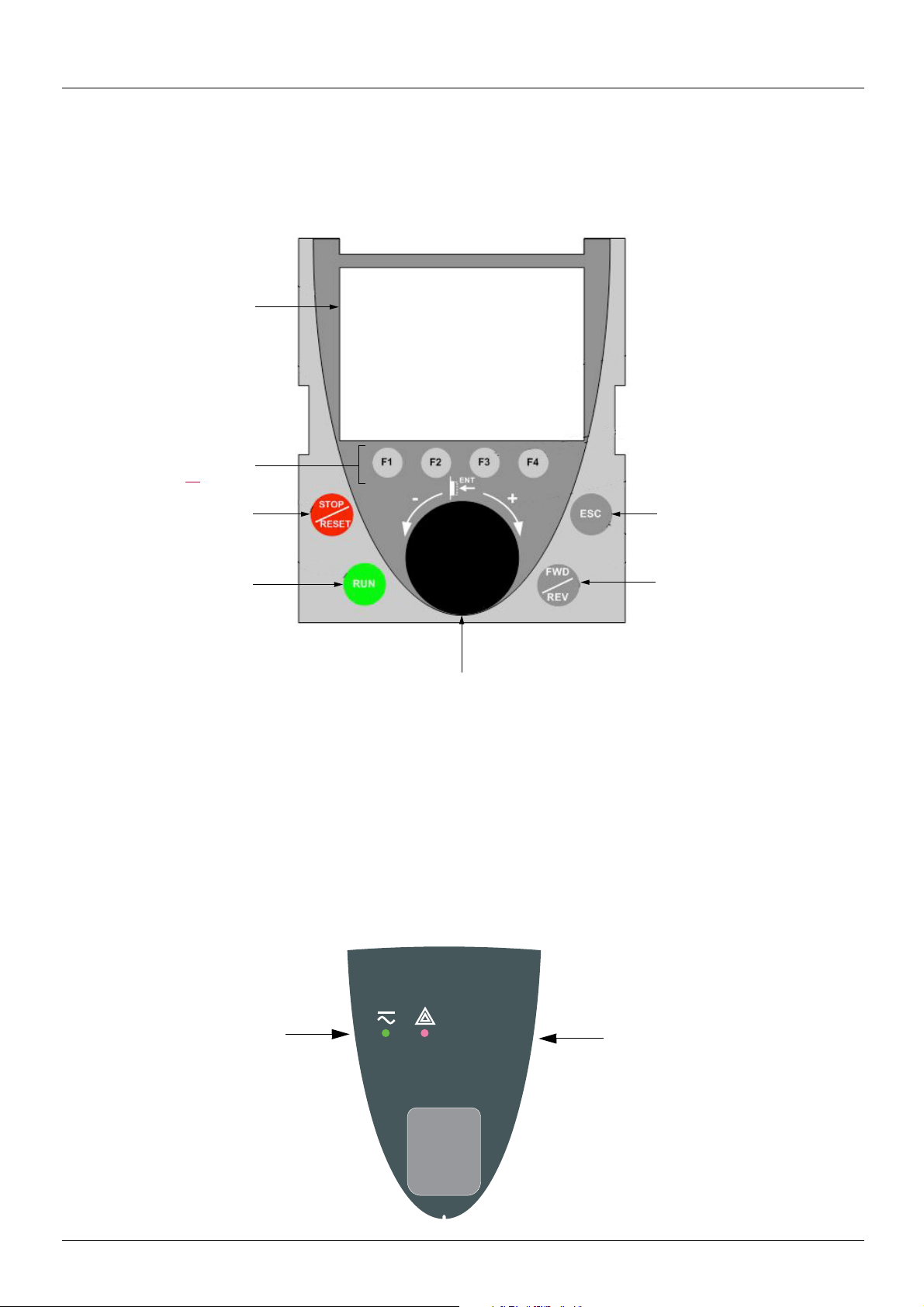
Terminal graphique
1 Afficheur graphique
2 Touches fonctions
F1, F2, F3, F4,
voir page 19
.
3 Touche Arrêt /
Effacement des
défauts
4 Touche Marche
5 Bouton de navigation :
• appui (ENT) : - enregistre la valeur en cours.
- entre dans le menu ou dans le paramètre sélect ionné.
• rotation (+/-) : - incrémente ou décrémente la valeur.
- passe à la ligne suivante ou précédente.
- augmente ou diminue la consigne si la commande par
le terminal est activée.
7 Touche ESC : abandon d’une
valeur, d’un paramètre ou d’un
menu pour revenir au choix
précédent
6 Touche d’inversion du sens de
rotation du moteur
HMI Modbus
Voyant vert :
Bus DC sous tension
Voyant rouge :
Défaut
Le terminal graphique est optionnel pour les petits calibres de variateurs et systématiquement présent sur les calibres supérieurs (voir
catalogue). Ce terminal est débrochable, et peut être déporté, sur une porte d’armoire par exemple, en utilisant les câbles et accessoires
disponibles en option (voir catalogue).
Description du terminal
Nota : Les touches 3, 4, 5 et 6 permettent de commander directement le variateur, si la commande par le terminal est activée.
Terminal débroché
Lorsque le terminal est débroché, on peut voir à sa place 2 voyants de signalisation :
18 AAV49425 11/2009
Page 18
Terminal graphique
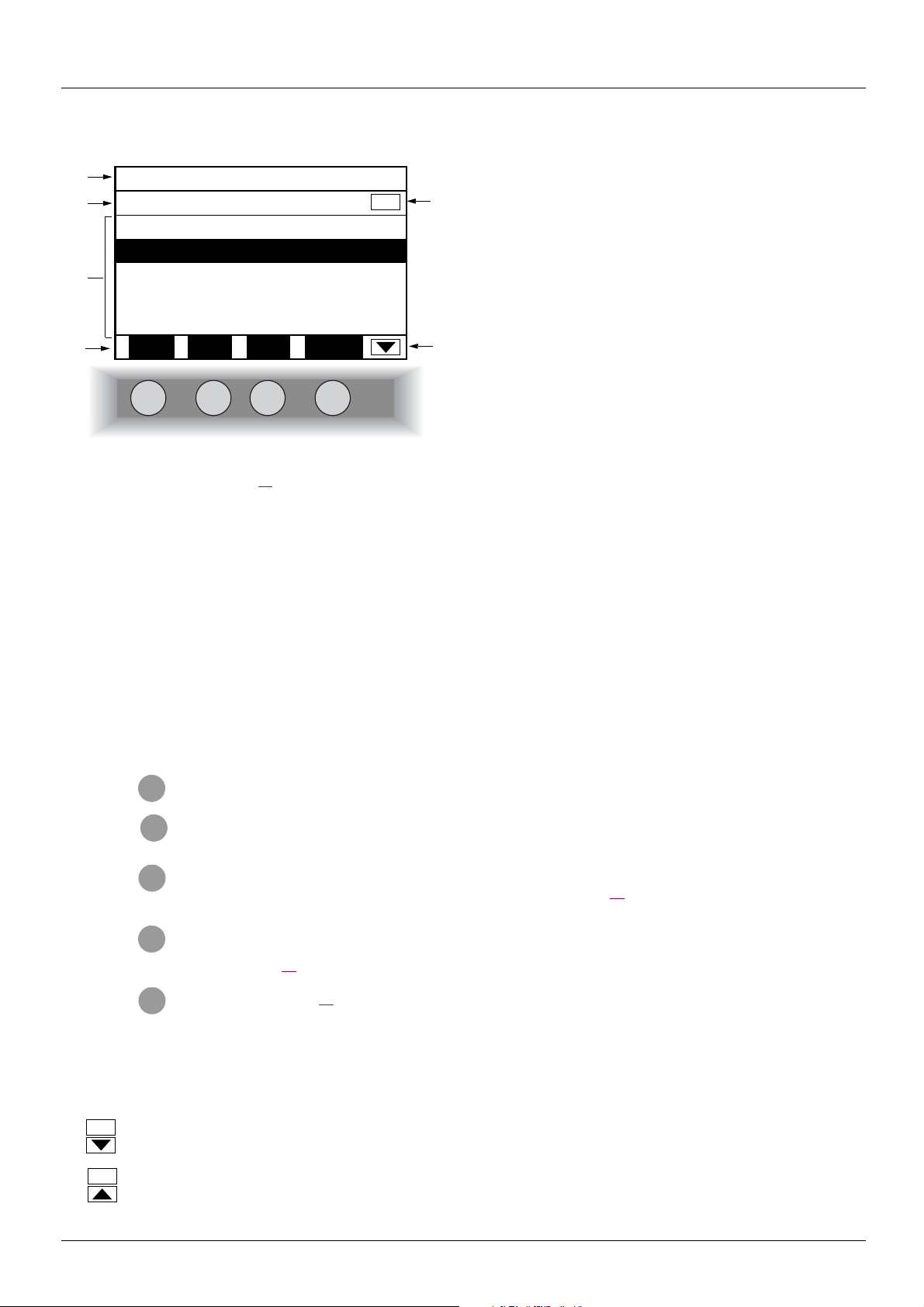
F1 F2 F3 F4
RDY Term +0.00Hz 0A
1 MENU VARIATEUR
1.1 SIMPLY START
1.2 SURVEILLANCE
1.3 REGLAGES
1.4 CONTRÔLE MOTEUR
1.5 ENTREES/SORTIES
Code << >> Quick
1
2
3
4
6
5
• Code F1
•HELP F1
• << F2
• >> F3
• Quick F4
Description de l’Ecran graphique
1. Ligne d’affichage. Son contenu est configurable; en réglage usine elle indique :
• état du variateur (voir page 20
• canal de commande actif :
-Term : Borniers
- HMI : Terminal graphique
- MDB : Modbus intégré
- CAN : CANopen intégré
- NET : Carte communication
- APP : Carte Controller Inside
• référence fréquence
• courant dans le moteur
)
2. Ligne de menu. Indique le nom du menu ou sous-menu en cours
3. Affichage des menus, sous-menus, paramètres, valeurs, bargraphes etc..., sous forme de fenêtre défilante, sur 5 lignes maxi.
La ligne ou la valeur sélectionnée par le bouton de navigation est affichée en vidéo inverse.
4.
5. Affichage des fonctions assignées aux touches F1 à F4, alignées sur celles-ci, par exemple :
Les touches fonctions sont dynamiques et contextuelles.
D’autres fonctions (fonctions d’application) peuvent être affectées à ces touches, par le menu [1.6 COMMANDE].
L’appui sur une touche fonction à laquelle est affectée une vitesse présélectionnée commandera la marche du moteur à cette vitesse
présélectionnée jusqu’à ce que JOG ou une autre vitesse présélectionnée soit choisi es ou jusqu’à ce que la consigne vit esse soit changée
ou en cas d’appui sur la touche Stop.
6. Signifie que cette fenêtre d’affichage ne se poursuit pas plus bas.
Signifie que cette fenêtre d’affichage se poursuit plus bas.
7. Signifie que cette fenêtre d’affichage ne se poursuit pas plus haut.
Signifie que cette fenêtre d’affichage se poursuit plus haut.
: Affichage du code du paramètre sélectionné, ce code étant celui qui correspond à l’afficheur "7 segment".
: Aide contextuelle.
: Navigation horizontale vers la gauche, ou passa ge au menu ou sous menu précéde nt, ou pour une valeur, passag e
au digit de rang supérieur, affiché en vidéo inverse (voir exemple page 21
Navigation horizontale vers la droite, ou passage au menu ou sous menu suivant (passage au menu [2 NIVEAU
:
D’ACCES] sur cet exemple), ou pour une valeur, passage au digit de rang inférieur, affiché en vidéo inverse (voir
exemple page 21
: Raccourci, voir page 25.
).
).
AAV49425 11/2009 19
Page 19

Terminal graphique
Codes d’état du variateur :
- ACC : Accélération
- CLI : Limitation de courant
- CTL : Arrêt contrôlé sur perte phase réseau
- DCB : Freinage par injection de courant continu en cours
- DEC : Décélération
- FLU : Fluxage moteur en cours
- FST : Arrêt rapide
- NLP : Puissance non alimentée (pas de réseau sur L1, L2, L3)
- NST : Arrêt en roue libre
- OBR : Décélération auto adaptée
- PRA : Fonction Power removal active (variateur verrouillé)
- RDY : Variateur prêt
- RUN : Variateur en marche
- SOC : Coupure aval contrôlée en cours
- TUN : Auto-réglage en cours
- USA : Alarme soustension
- ASA : Mesure de l’angle de déphasage en cours
- ICC : Configuration codeur incorrecte.
20 AAV49425 11/2009
Page 20
Terminal graphique
RDY Term +0.00Hz 0A
5 LANGUAGE
English
Français
Deutsch
Espanol
Italiano
<< >> Quick
Chinese
SELECT. PARAMETRES
1.3 REGLAGES
Incrément rampe
Accélération
Décélération
Accélération 2
Décélération 2
Edit
RDY Term +0.00Hz 0A
Accélération
9.51 s
Min = 0,01 Max = 99,99
<< >> Quick
>>
RDY Term +0.00Hz 0A
Accélération
9.51 s
Min = 0,01 Max = 99,99
<< >> Quick
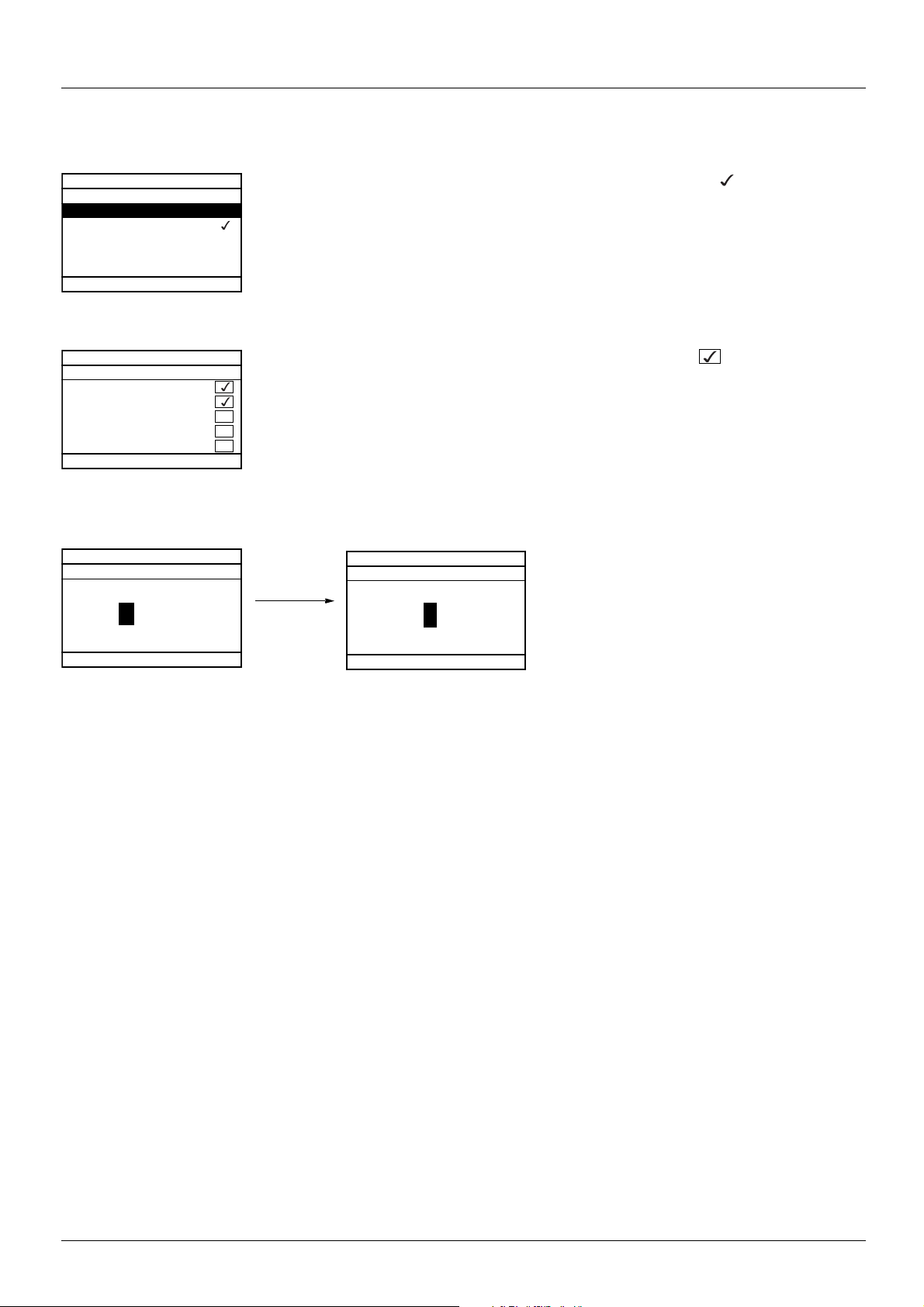
Exemples de fenêtres de configuration :
Lorsqu’un choix unique est possible, le choix effectif est indiqué par le signe .
Exemple : on ne peut choisir qu’une langue.
Lorsqu’un choix multiple est possible, les choix effectifs sont indiqués par
Exemple : on peut choisir plusieurs paramètres pour former le [MENU UTILISATEUR].
Exemple de fenêtre de configuration d’une valeur :
Les flèches << et >> (touches F2 et F3) permettent de sélectionner le chiffre à modifier, la rotation du bouton de navigation permet
d’augmenter ou de diminuer ce chiffre.
AAV49425 11/2009 21
Page 21

Terminal graphique
ATV71HU22N4383
2.2kW/3HP 380/480V
Config. n°1
5 LANGUAGE
English
Français
Deutsch
Espanol
Italiano
Chinese
RDY Term +0.00Hz 0.0A
2 NIVEAU D’ACCES
Basique
Standard
Avancé
Expert
RDY Term +0.00Hz 0.0A
1 MENU VARIATEUR
1.1 SIMPLY START
1.2. SURVEILLANCE
1.3. REGLAGES
1.4. CONTRÔLE MOTEUR
1.5. ENTREES/SORTIES
Code << >> Quick
RDY Term +0.00Hz 0.0A
MENU GENERAL
1 MENU VARIATEUR
2 NIVEAU D’ACCES
3 OUVRIR / ENREG. SOUS
4 MOT DE PASSE
5 LANGUE
Code Quick
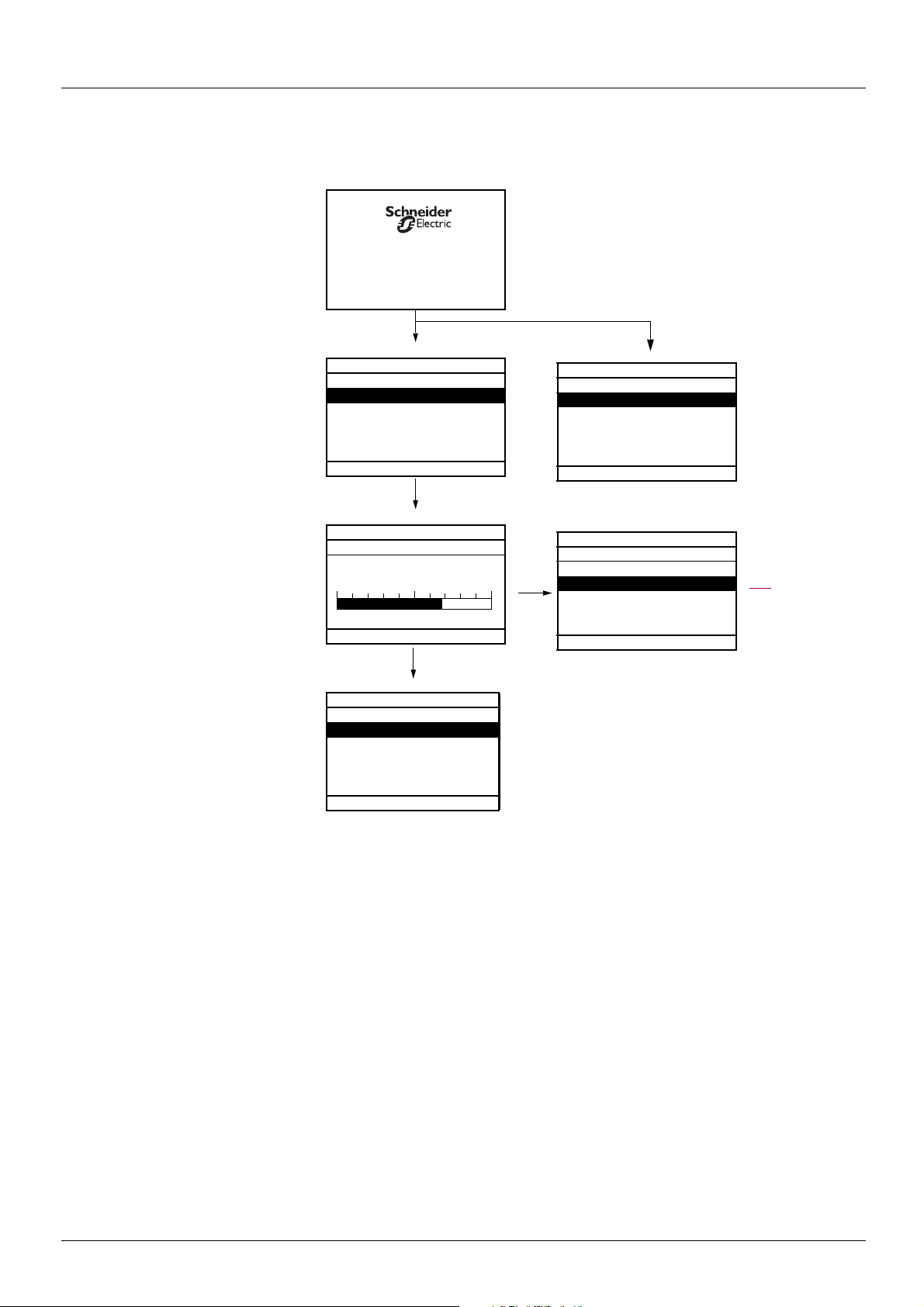
Première mise sous tension - Menu [5. LANGUE]
A la première mise sous tension le cheminement dans les menus est imposé jusqu’au [1. MENU VARIATEUR] afin de guider l’utilisateur.
Les paramètres du sous menu [1.1 SIMPLY START] doivent être configurés et l’auto-réglage effectué impérativement avant de démarrer
le moteur.
Affichage pendant 3 secondes après la mise sous
tension
3 secondes
Passage au menu [5 LANGUAGE]
automatiquement 3 secondes après.
Choisir la langue et appuyer sur ENT.
ESC
Passage au menu [2 NIVEAU D’ACCES]
(voir page 31
)
Choisir le niveau d’accès et appuyer sur ENT.
Passage au [1 MENU VARIATEUR]
(voir page 27
)
Retour au [MENU GENERAL] par ESC
22 AAV49425 11/2009
Page 22
Terminal graphique
Passage au
[1. MENU VARIATEUR]
ou 3 secondes après
[1.14 MENU CONTROL. INSIDE].
Si aucune action, passage à
"Affichage" automatiquement 10
secondes après (affichage selon
configuration choisie).
Retour éventuel au
[MENU GENERAL] par ENT ou
par la touche ESC
3 secondes
10 secondes
ENT ou ESC
ATV71HU22N4383
2.2kW/3HP 380/480V
Config. n°1
RDY Term +38Hz 0A
1. MENU VARIATEUR
1.1 SIMPLY START
1.2 SURVEILLANCE
1.3 REGLAGES
1.4 CONTRÔLE MOTEUR
1.5 ENTREES/SORTIES
Code << >> Quick
RDY Term +38Hz 0A
Référence fréq..
Min=0 Max=60
Quick
RDY Term +38Hz 0A
MENU GENERAL
1 MENU VARIATEUR
2 NIVEAU D’ACCES
3 OUVRIR / ENREG. SOUS
4 MOT DE PASSE
5 LANGUE
Code Quick
38 Hz
RDY Term +0.00Hz 0A
1.14 PROGRAMMABLE CARD
Adresse carte Prog. :17
REGLAGES DATE/HEURE
<< >> Quick
RDY Term +0.00Hz 0A
1.3 REGLAGES
Incrément rampe: 01
Accélération 9,51 s
Décélération: 9,67 s
Accélération 2: 12,58 s
Décélération 2: 13,45 s
Code << >> Quick
Choix du menu
dans [Menu
demarrage] page
284
ENT
Ou, si la carte controller Inside est présente.
Mises sous tension suivantes
AAV49425 11/2009 23
Page 23
Terminal graphique
RDY Term +0.00Hz 0A
1 MENU VARIATEUR
1.1 SIMPLY START
1.2 SURVEILLANCE
1.3 REGLAGES
1.4 CONTRÔLE MOTEUR
1.5 ENTREE/SORTIE
Code << >> Quick
ENT
ESC
RDY Term +0.00Hz 0A
1.3 REGLAGES
Incrément rampe: 01
Accélération 9,51 s
Décélération: 9,67 s
Accélération 2: 12,58 s
Décélération 2: 13,45 s
Code << >> Quick
ENT
ENT ou
ESC
RDY Term +0.00Hz 0A
Accélération
9.51 s
Min = 0,01 Max = 99,99
<< >> Quick
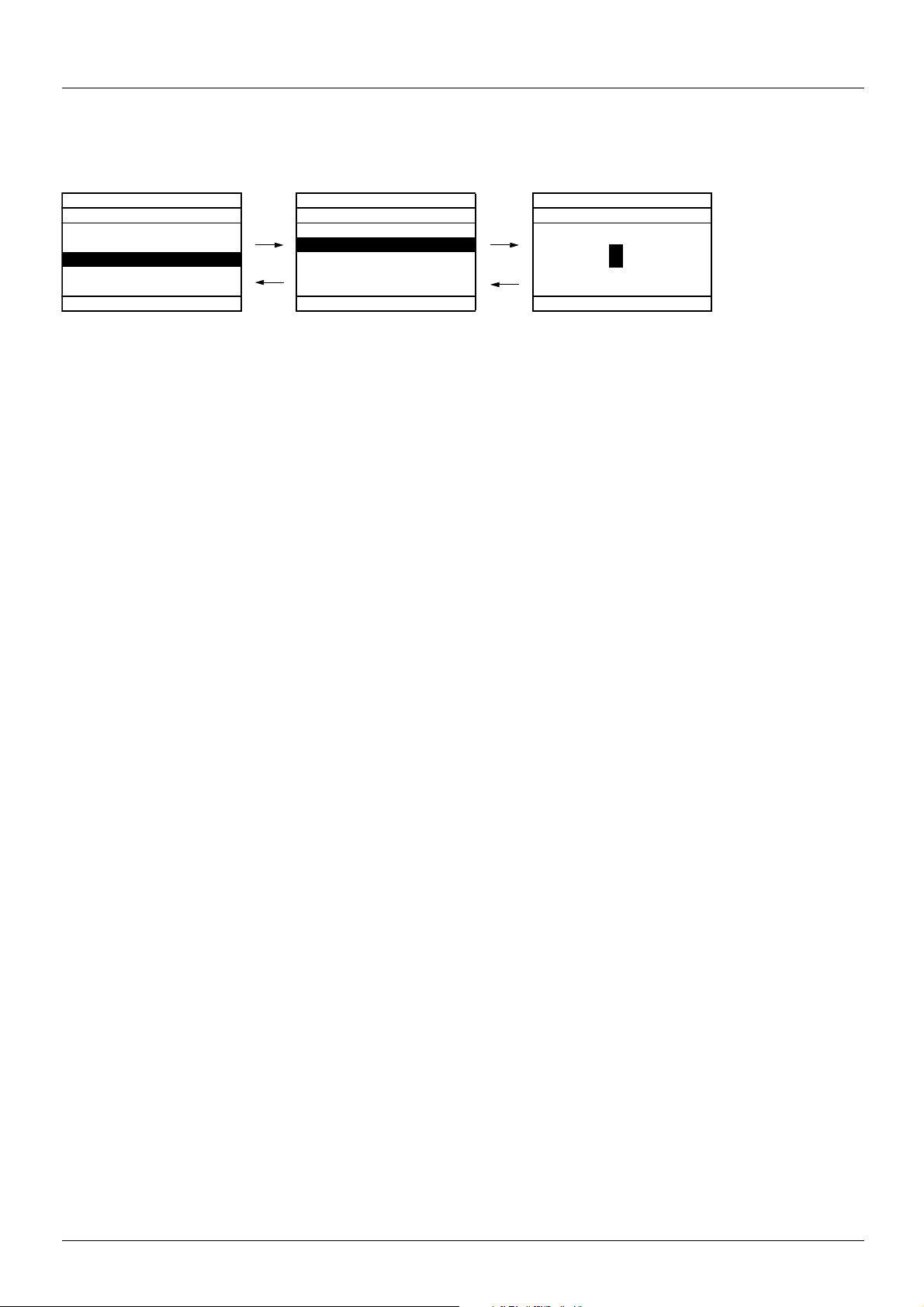
Programmation : exemple d’accès à un paramètre
Accès à la rampe d’accélération
Rappel :
• Sélection du paramètre :
- par rotation du bouton de navigation pour défiler verticalement.
• Modification du paramètre :
- sélection du chiffre à modifier par les touches << et >> (F2 et F3) pour défiler horizontalement (le chiffre sélectionné passe en
blanc sur fond noir),
- modification du chiffre par rotation du bouton de navigation.
• Abandon de la modification :
- par appui de la touche ESC.
• Enregistrement de la modification :
- par appui du bouton de navigation (ENT).
24 AAV49425 11/2009
Page 24
Terminal graphique
RDY Term +0.00Hz 0A
1.4 CONTRÔLE MOTEUR
Standard Fréq. mot : 5 0Hz IEC
Puissance nom. mot : 0,37 kW
Tension nom. mot : 206 V
Courant nom. mot : 1.0 A
Fréq. nom. mot. : 50.0 Hz
Code << >> Quick
ENT
RDY Term +0.00Hz 0A
RACCOURCI
RETOUR MENU GENERAL
ACCES DIRECT A...
10 DERNIERES MODIFS.
RETOUR ECRAN MULTIPOINT
Code
Voir page 285
RDY Term +0.00Hz 0A
MENU GENERAL
1 MENU VARIATEUR
2 NIVEAU D’ACCES
3 OUVRIR / ENREG. SOUS
4 MOT DE PASSE
5 LANGUE
Code Quick
RDY Term +0.00Hz 0A
ACCES DIRECT A...
1.3
REGLAGES
<< >>
ENT
RDY Term +0.00Hz 0A
1.3 REGLAGES
Incrément rampe: 01
Accélération 9,51 s
Décélération: 9,67 s
Accélération 2: 12,58 s
Décélération 2: 13,45 s
Code << >> Quick
RDY Term +0.00Hz 0A
10 DERNIERES MODIFS
Accélération : 10 s
Gain prop. ENA : 1,2
Courant nom. mot. : 15 A
Vit. présélect 4 : 20 Hz
Vit. présélect 5 : 30 Hz
Code
ESC
ENT
RDY Term +0.00Hz 0A
Courant nom.mot.
15.0 A
<< >>
Raccourci
Il est possible d’accéder rapidement à un paramètre depuis n’importe quel écran, lorsque la fonction "Quick" est affichée au dessus de la
touche F4.
Exemple :
L’appui sur la touche F4 ouvre la fenêtre de raccourci, qui offre
4 possibilités.
• [HOME] : Retour au [MENU GENERAL].
• [ACCES DIRECT A...] : Ouverture de la fen ê tre d’ acc è s dir ect,
avec affichage de "1". Les touches fonctions << et >> (F2 et F3)
permettent de sélectionner chacun des numéros, et le bouton de
navigation permet d’incrémenter ou décrémenter les numé ros : 1.3
dans l’exemple ci-dessous.
• [10 DERNIERES MODIFS] : Ouverture d’une fenêtre permettant
d’accéder directement aux 10 derniers paramètres modifiés.
AAV49425 11/2009 25
Page 25
Terminal graphique
RDY Term +0.00Hz 0A
MENU GENERAL
1 MENU VARIATEUR
2 NIVEAU D’ACCES
3 OUVRIR / ENREG. SOUS
4 MOT DE PASSE
5 LANGUE
Code Quick
6.ECRAN SURVEILLANCE
7 CONFIG. AFFICHAGE
RDY Term +0.00Hz 0A
1 MENU VARIATEUR
1.1 SIMPLY START
1.2 SURVEILLANCE
1.3 REGLAGES
1.4 CONTRÔLE MOTEUR
1.5 ENTREES/SORTIES
Code << >> Quick
1.6 COMMANDE
1.7 FONCTIONS D’APPLI.
1.8 GESTION DEFAUTS
1.9 COMMUNICATION
1.10 DIAGNOSTIC
1.11 IDENTIFICATION
1.12 REGLAGES USINE
1.13 MENU UTILISATEUR
1.14 MENU CONTROL. INSIDE
[MENU GENERAL] - Cartographie des menus
Contenu des menus du [MENU GENERAL]
[1 MENU VARIATEUR] Voir page suivante
[2 NIVEAU D’ACCES] Définit l’accessibilité aux menus (niveau de complexité)
[3 OUVRIR / ENREGISTRER SOUS] Permet de sauvegarder et de récupérer des fichiers de configuration du variateur
[4 MOT DE PASSE] Protection de la configuration par mot de passe
[5 LANGUE] Choix de la langue
[6 ECRAN SURVEILLANCE] Personnalisation des informations affichées sur le terminal graphique en fonctionnement
[7 CONFIG. AFFICHAGE] • Personnalisation de paramètres
• Création d’un menu utilisateur personnalisé
• Personnalisation de la visibilité et de la protection des menus et paramètres
26 AAV49425 11/2009
Page 26
Terminal graphique
[1 MENU VARIATEUR]
RDY Term +0.00Hz 0A
1 MENU VARIATEUR
1.1 SIMPLY START
1.2 SURVEILLANCE
1.3 REGLAGES
1.4 CONTRÔLE MOTEUR
1.5 ENTREES/SORTIES
Code << >> Quick
1.6 COMMANDE
1.7 FONCTIONS D’APPLI.
1.8 GESTION DEFAUTS
1.9 COMMUNICATION
1.10 DIAGNOSTIC
1.11 IDENTIFICATION
1.12 REGLAGES USINE
1.13 MENU UTILISATEUR
1.14 MENU CONTROL. INSIDE
Contenu des menus du [1. MENU VARIATEUR] :
[1.1 SIMPLY START] : Menu simplifié pour mise en service rapide
[1.2 SURVEILLANCE] : Visualisation des valeurs courantes, moteur et entrées / sorties
[1.3 REGLAGES] : Paramètres de réglage, modifiables en cours de fonctionnement
[1.4 CONTRÔLE MOTEU R] : Para mètres du m oteur (plaque signalétique moteur, auto réglage, fréquence de découpage,
algorithmes de commande...)
[1.5 ENTREES/SORTIES] : Configuration des entrées / sorties (mise à l’échelle , filtrage, contrôle 2 fils, contrôle 3 fils...)
[1.6 COMMANDE] : Configuration des canaux de commande et de consigne (terminal, borniers, bus...)
[1.7 FONCTIONS D’APPLI.] : Configuration des fonctions d’application (ex : vit esses présél ectionnées, PID, commande de frein.. .)
[1.8 GESTION DEFAUTS] : C onfiguration de la gestion des défauts
[1.9 COMMUNICATION] : Paramètres de communication (bus de terrain)
[1.10 DIAGNOSTIC] : Diagnostic moteur / variateur
[1.11 IDENTIFICATION] : Identification du variateur et des options internes
[1.12 REGLAGES USINE] : Accès aux fichiers de configuration et retour aux réglages usine
[1.13 MENU UTILISATEUR] : Menu spécifique, composé par l’utilisateur dans le menu [7. CONFIG AFFICHAGE]
[1.14 MENU CONTROL. INSIDE] : Configuration de la carte Controller Inside optionnelle
AAV49425 11/2009 27
Page 27

Terminal intégré
• 4 afficheurs "7
segments"
• Entre dans un menu ou
dans un paramètre, ou
enregistre le paramètre ou
la valeur affichée
• Passe au menu ou au
paramètre précédent,
ou augmente la valeur
affichée
• Sort d’un menu ou d’un
paramètre, ou abandonne
la valeur affichée pour
revenir à la valeur
précédente en mémoire
• Passe au menu ou au
paramètre suivant, ou
diminue la valeur
affichée
• 2 voyants d’état CANopen
• 2 voyants d’état
Modbus
Nota :
Les petits calibres d’Altivar 71 (voir catalogue) comportent un terminal intégré avec un afficheur "7 segments" à 4 digits. Ils peuvent aussi
recevoir le terminal graphique décrit pages précédentes, en option.
Fonctions de l'afficheur et des touches
• L'action sur ou ne mémorise pas le choix.
• L’appui prolongé (>2 s) de ou entraîne un défilement rapide.
Mémorisation, enregistrement du choix affiché : ENT
La mémorisation s'accompagne d'un clignotement de l'affichage
Affichage normal hors défaut et hors mise en service :
- 43.0 : Affichage du paramètre sélectionné dans le menu SUP (par défaut : fréquence moteur).
- CLI : Limitation de courant.
- CtL : Arrêt contrôlé sur perte phase réseau.
- dCb : Freinage par injection de courant continu en cours.
- FLU : Fluxage moteur en cours.
- FSt : Arrêt rapide.
- nLP : Puissance non alimentée (pas de réseau sur L1, L2, L3).
- nSt : Arrêt en roue libre.
- Obr : Décélération auto adaptée.
- PrA : Fonction Power removal active (variateur verrouillé).
- rdY : Variateur prêt.
- SOC : Coupure aval contrôlée en cours.
- tUn : Auto-réglage en cours.
- USA : Alarme soustension.
- ASA : Mesure de l’angle de déphasage en cours
En cas de défaut, celui ci est affiché en clignotant.
28 AAV49425 11/2009
Page 28
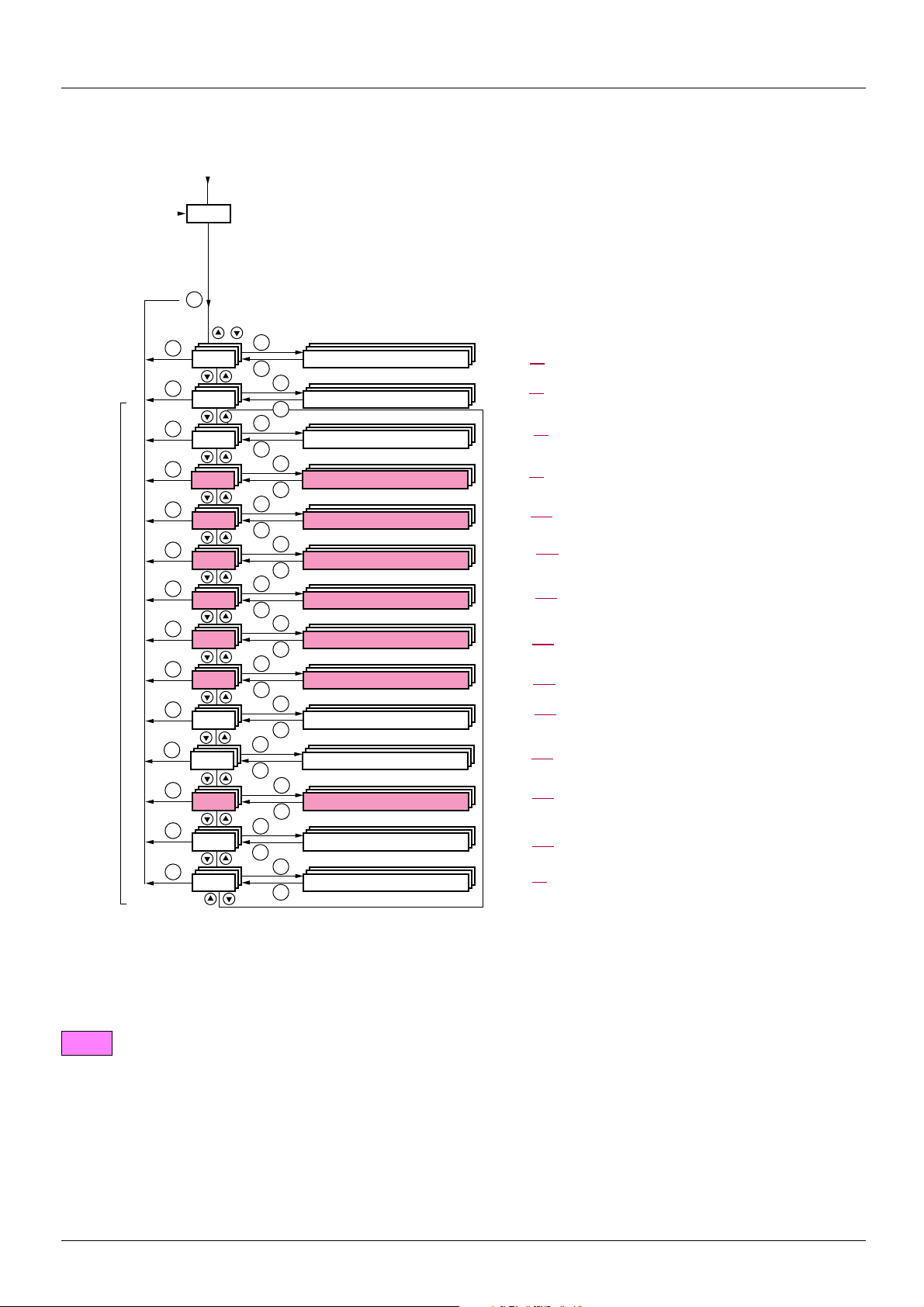
Terminal intégré
XXX
CtL-
FUn-
SIM-
I-O-
SEt-
SUP-
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ENT
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
FCS-
LAC-
CON-
FLt-
ESC
ESC
ESC
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
SPL-
ESC
ENT
ESC
drC-
COd-
USr-
ESC
ENT
ESC
Affiche l’état du variateur
REGLAGES
FONCTIONS D’APPLI
ENTREES/SORTIES
GESTION DEFAUTS
SIMPLY START
Menus
SURVEILLANCE
CONTRÔLE MOTEUR
COMMANDE
Mise sous tension
REGLAGES USINE
MOT DE PASSE
NIVEAU D’ACCES
COMMUNICATION
(page 54) Paramètres de réglage, modifiables en cours de
fonctionnement
(page 144
) Configuration des fonctions d’application (ex :
vitesses présélectionnées, PID, commande de frein...)
(page 101
) Configuration des entrées / sorties (mise à l’échelle,
filtrage, contrôle 2 fils, contrôle 3 fils...)
(page 231
) Configuration de la gestion des défauts
(page 37
) Menu simplifié pour mise en service rapide
(page 45
) Visualisation des valeurs courantes, moteur et e ntrées
/ sorties
(page 69
) Paramètres du moteur (plaque signalétique moteur, auto
réglage, fréquence de découpage, algorithmes de commande...)
(page 131
) Configuration des canaux de commande et de
consigne (terminal, borniers, bus...)
(page 267
) Accès aux fichiers de configuration et retour aux
réglages usine
(page 274
)
(page 31
)
(page 259
) Paramètres de communication (bus de terrain)
(page 270
) Menu spécifique, composé par l’utilisateur à l’aide du
terminal graphique.
MENU UTILISATEUR
MENU CONTROL INSIDE
(page 271
) Menu de la carte Controller Inside, si cette carte est
présente.
Accès aux menus
Les codes des menus et sous-menus sont différenciés des codes de paramètres par un tiret à droite.
Exemples : menu FUn-, paramètre ACC.
AAV49425 11/2009 29
Les menus grisés peuvent ne pas être accessibles selon la configuration du niveau d’accès LAC.
Page 29
Terminal intégré
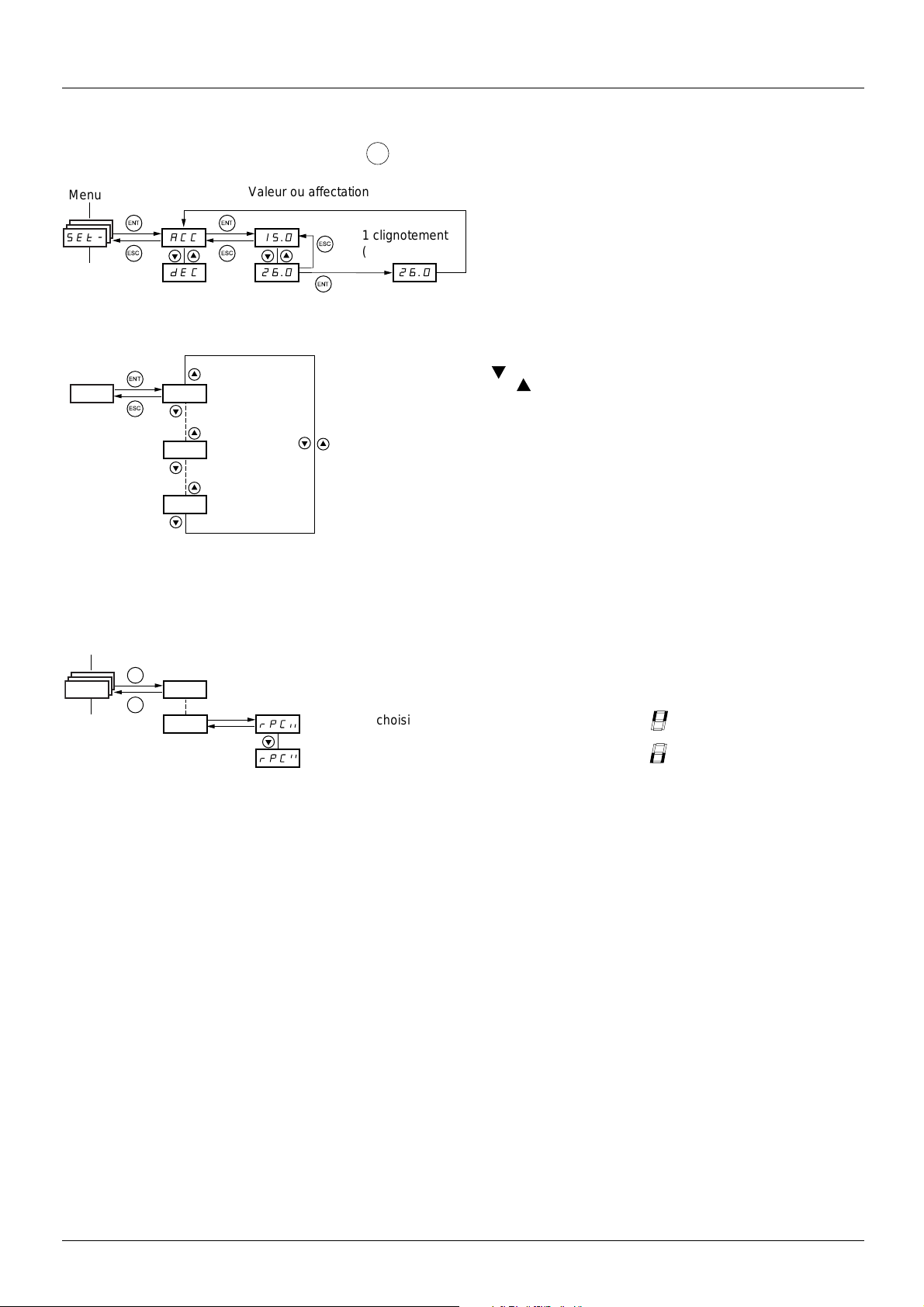
ENT
ACC 15.0
ENT
ESC
ENT
ESC
26.0 26.0
ESC
dEC
ENT
SEt-
Menu
Valeur ou affectation
1 clignotement
(enregistrement)
Paramètre
(Paramètre suivant)
ENT
ESC
1
er
n
ième
dernier
Menu
ENT
ESC
I-O-
Alarme non choisie
Alarme choisie
Accès aux paramètres des menus
Mémorisation, enregistrement du choix affiché :
Tous les menus sont "déroulants", c’est à dire qu’après le dernier paramètre, si on
continue d’appuyer sur , on accède au premier paramètr e, et inversement du premier
au dernier si on appuie sur .
La mémorisation s'accompagne d'un clignotement de l'affichage
Choix d’affectations multiples pour un paramètre
Exemple : liste des alarmes groupe 1 dans le menu [ENTREES/
SORTIES] (I-O-)
On peut sélectionner plusieurs alarmes en les "coch ant" comme
suit.
Le digit de droite indique : choix sélectionné,
choix non sélectionné.
Le même principe est utilisé pour tous les choix multiples.
30 AAV49425 11/2009
Page 30
[2. NIVEAU D’ACCES] (LAC-)
RDY Term +0.00Hz 0A
2 NIVEAU D’ACCES
Basique
Standard
Avancé
Expert
<< >> Quick
RDY Term +0.00Hz 0A
MENU GENERAL
1 MENU VARIATEUR
2 NIVEAU D’ACCES
3 OUVRIR / ENREG. SOUS
4 MOT DE PASSE
5 LANGUE
Code << >> Quick
RDY Term +0.00Hz 0A
1. MENU VARIATEUR
1.1 SIMPLY START
1.2. SURVEILLANCE
1.3. REGLAGES
1.11. IDENTIFICATION
1.12. REGLAGES USINE
Code << >> Quick
1.13 MENU UTILISATEUR
RDY Term +0.00Hz 0A
MENU GENERAL
1 MENU VARIATEUR
2 NIVEAU D’ACCES
3 OUVRIR / ENREG. SOUS
4 MOT DE PASSE
5 LANGUE
Code Quick
6 ECRAN SURVEILLANCE
RDY Term +0.00Hz 0A
1 MENU VARIATEUR
1.1 SIMPLY START
1.2 SURVEILLANCE
1.3 REGLAGES
1.4 CONTRÔLE MOTEUR
1.5 ENTREES/SORTIES
Code << >> Quick
1.6 COMMANDE
1.7 FONCTIONS D’APPLI.
1.8 GESTION DEFAUTS
1.9 COMMUNICATION
1.10 DIAGNOSTIC
1.11 IDENTIFICATION
1.12 REGLAGES USINE
1.13 MENU UTILISATEUR
1.14 MENU CONTROL. INSIDE
RDY Term +0.00Hz 0A
MENU GENERAL
1 MENU VARIATEUR
2 NIVEAU D’ACCES
3 OUVRIR / ENREG. SOUS
4 MOT DE PASSE
5 LANGUE
Code Quick
6 ECRAN SURVEILLANCE
7 CONFIG. AFFICHAGE
RDY Term +0.00Hz 0A
MENU GENERAL
1 MENU VARIATEUR
2 NIVEAU D’ACCES
3 OUVRIR / ENREG. SOUS
4 MOT DE PASSE
5 LANGUE
Code Quick
6 ECRAN SURVEILLANCE
7 CONFIG. AFFICHAGE
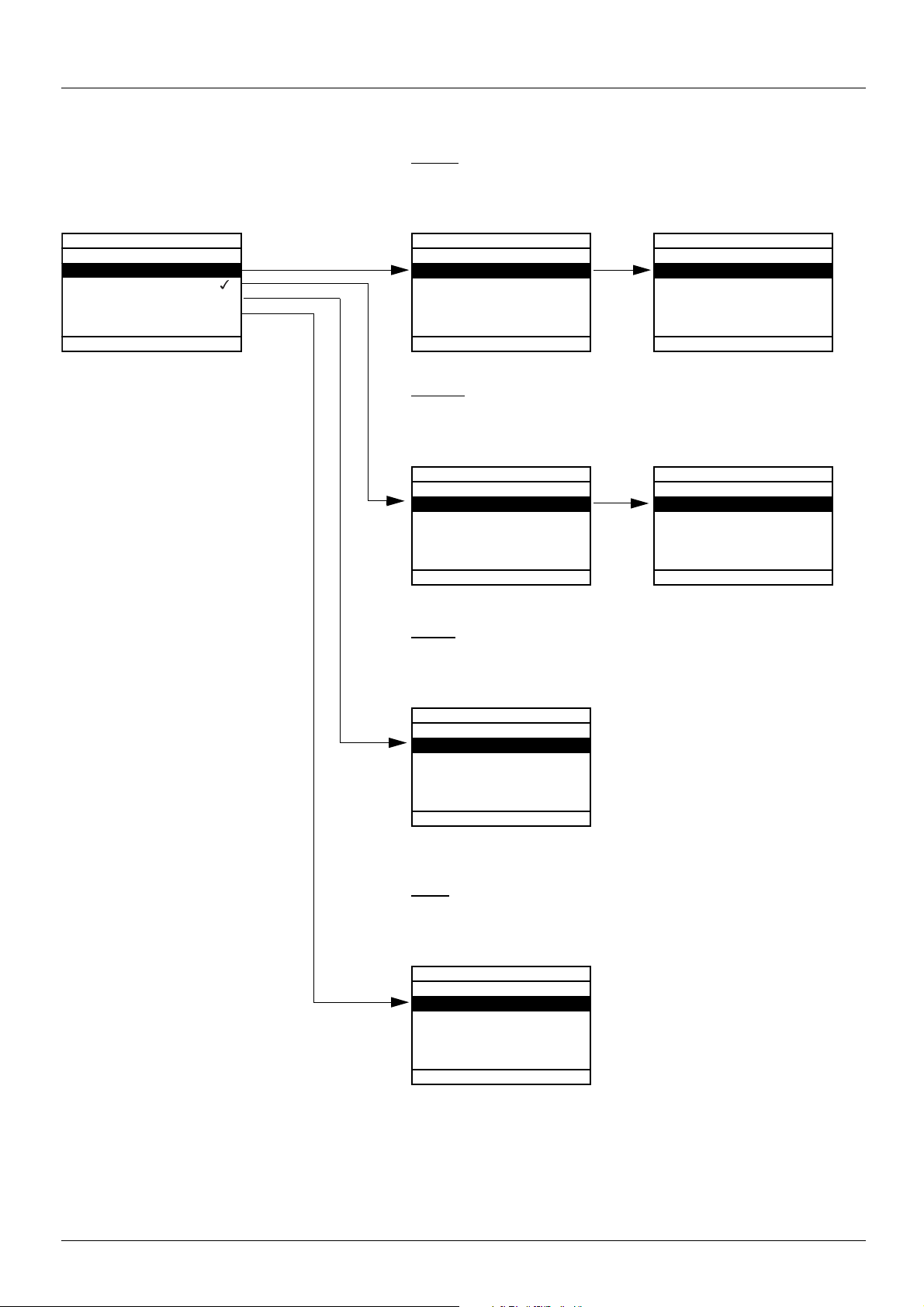
Avec terminal Graphique
Basique
Accès à 5 menus seulement, et accès à 6 sous menus seulement dans
le menu [1. MENU VARIATEUR].
Une seule fonction peut être affectée à chaque entrée.
Standard
C’est le niveau en réglage usine. Accès à 6 menus seulement , et accès à tous
les sous menus dans le menu [1. MENU VARIATEUR].
Une seule fonction peut être affectée à chaque entrée.
AAV49425 11/2009 31
Avancé
Accès à tous les menus et sous menus.
Plusieurs fonctions peuvent être affectées
à chaque entrée.
Expert
Accès à tous les menus et sous menus comme pour le niveau [Avancé], et
accès à des paramètres supplémentaires.
Plusieurs fonctions peuvent être affectées à chaque entrée.
Page 31

[2. NIVEAU D’ACCES] (LAC-)
XXX
SIM-
ESC
ESC
ENT
LAC-
ESC
ENT
ESC
COd-
Affiche l’état du variateur
NIVEAU D’ACCES
Mise sous tension
Avec terminal intégré :
Code Nom / Description Réglage usine
LAC-
bAS
• bAS : Accès limité aux menus SIM, SUP, SEt, FCS, USr, COd et LAC. Une seule fonction peut être affectée à
Std
chaque entrée.
Std
Adu
Epr
• Std : Accès à tous les menus du terminal intégré. Une seule fonction peut être affectée à chaque entrée.
• AdU : Accès à tous les menus du terminal intégré. Plusieurs fonctions peuvent être affectées à chaque entrée.
• EPr : Accès à tous les menus du terminal intégré et accès à des paramètres su pplémentaires. Plusieurs fonct ions
peuvent être affectées à chaque entrée.
32 AAV49425 11/2009
Page 32

[2. NIVEAU D’ACCES] (LAC-)
Comparatif terminal graphique / terminal intégré, menus accessibles
Terminal graphique Terminal intégré Niveaux d’accès
[2 NIVEAU D’ACCES] LAC- (Niveau d’accès)
[3 OUVRIR/ENREG. SOUS] [4 MOT DE PASSE] COd- (Mot de passe)
[5 LANGUE] [1 MENU VARIATEUR] [1.1 SIMPLY START] SIM- (Simply start)
[1.2 SURVEILLANCE] SUP-(Surveillance)
[1.3 REGLAGES] SEt- (Réglages)
[1.11 IDENTIFICATION] [1.12 REGLAGES USINE] FCS- (Réglages usine)
[1.13 MENU UTILISATEUR] USr- (Menu utilisateur)
Une seule fonction peut être affectée à chaque entrée. Une seule fonction peut être
affectée à chaque entrée.
[1.4 CONTRÔLE MOTEUR] drC- (Contrôle moteur)
[1.5 ENTREES/SORTIES] I-O- (Configuration E/S)
[1.6 COMMANDE] CtL- (Commande)
[1.7 FONCTIONS D’APPLI.] FUn- (Fonctions d’application)
[1.8 GESTION DEFAUTS] FLt- (Gestion des défauts)
[1.9 COMMUNICATION] COM- (Communication)
[1.10 DIAGNOSTIC] [1.14 MENU CONTROL. INSI DE] ( 1) PLC- (Carte Controller Inside) (1)
[6 ECRAN SURVEILLANCE] -
Une seule fonction peut être affectée à chaque entrée. Une seule fonction peut être
affectée à chaque entrée.
[7 CONFIG. AFFICHAGE] -
Plusieurs fonctions peuvent être affectées à chaque entrée. Plusieurs fonctions peuvent être
affectées à chaque entrée.
Paramètres expert Paramètres expert
Plusieurs fonctions peuvent être affectées à chaque entrée. Plusieurs fonctions peuvent être
affectées à chaque entrée.
Basique bAS
Standard Std(réglage usine)
Avancé AdU
Expert EPr
(1)Accessible si la carte Controller Inside est présente.
AAV49425 11/2009 33
Page 33

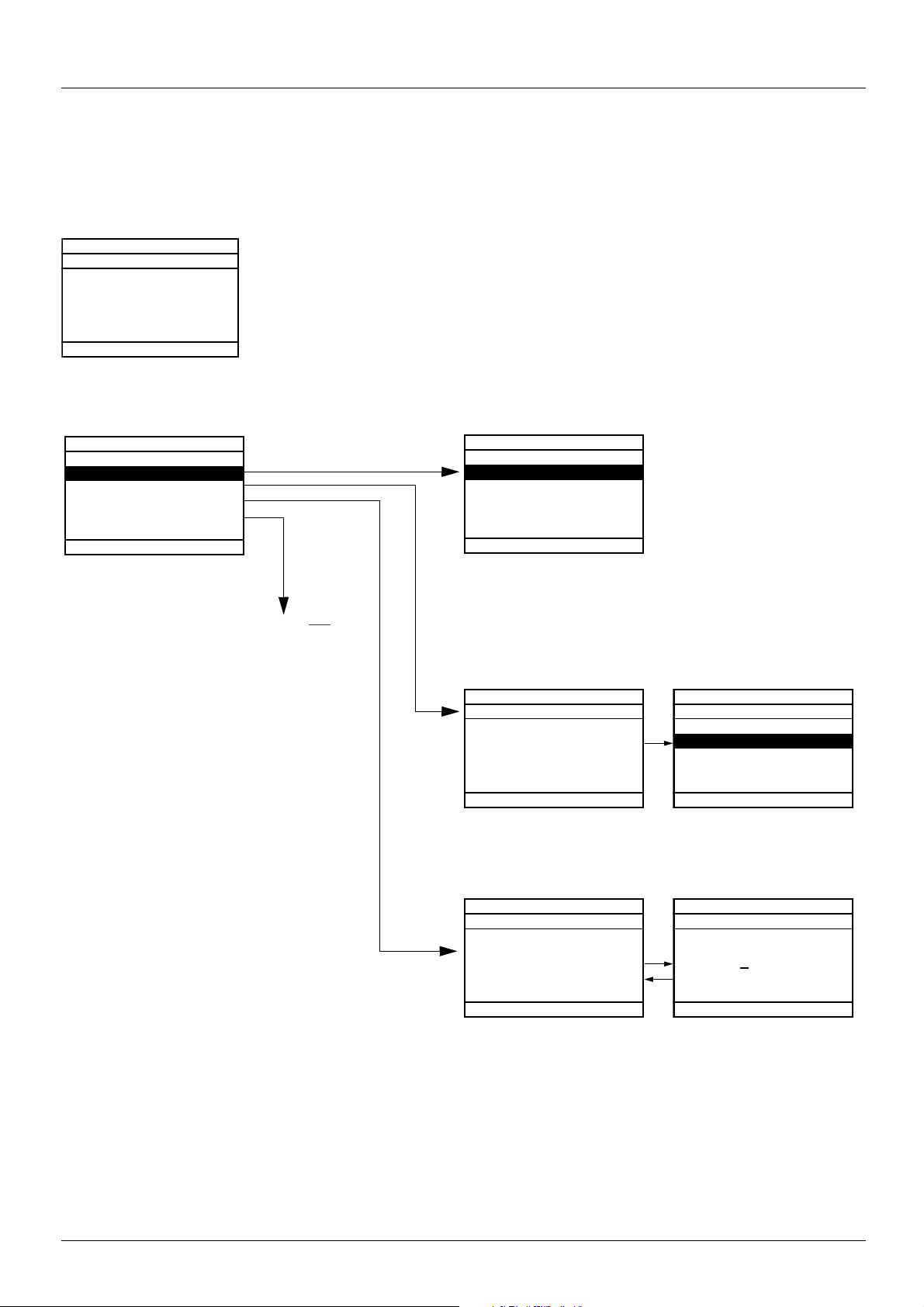
Structure des tableaux de paramètres
5
2
3
1
4
6
8
7
1. Nom du menu sur l’afficheur 4 digits "7 segments".
2. Code du sous-menu sur l’afficheur 4 digits "7 segments".
3. Code du paramètre sur l’afficheur 4 digits "7 segments".
4. Valeur du paramètre sur l’afficheur 4 digits "7 segments".
5. Nom du menu sur le terminal graphique.
6. Nom du sous-menu sur le terminal graphique.
7. Nom du paramètre sur le terminal graphique
8. Valeur du paramètre sur le terminal graphique.
Les tableaux de paramètres contenus dans les descriptions des différents menus sont exploitables aussi bien avec le terminal graphique
qu’avec le terminal intégré. Ils comportent donc les libellés de ces deux terminaux comme décrit ci-dessous.
Exemple :
[1.7 FONCTIONS D’APPLI.] (FUn-)
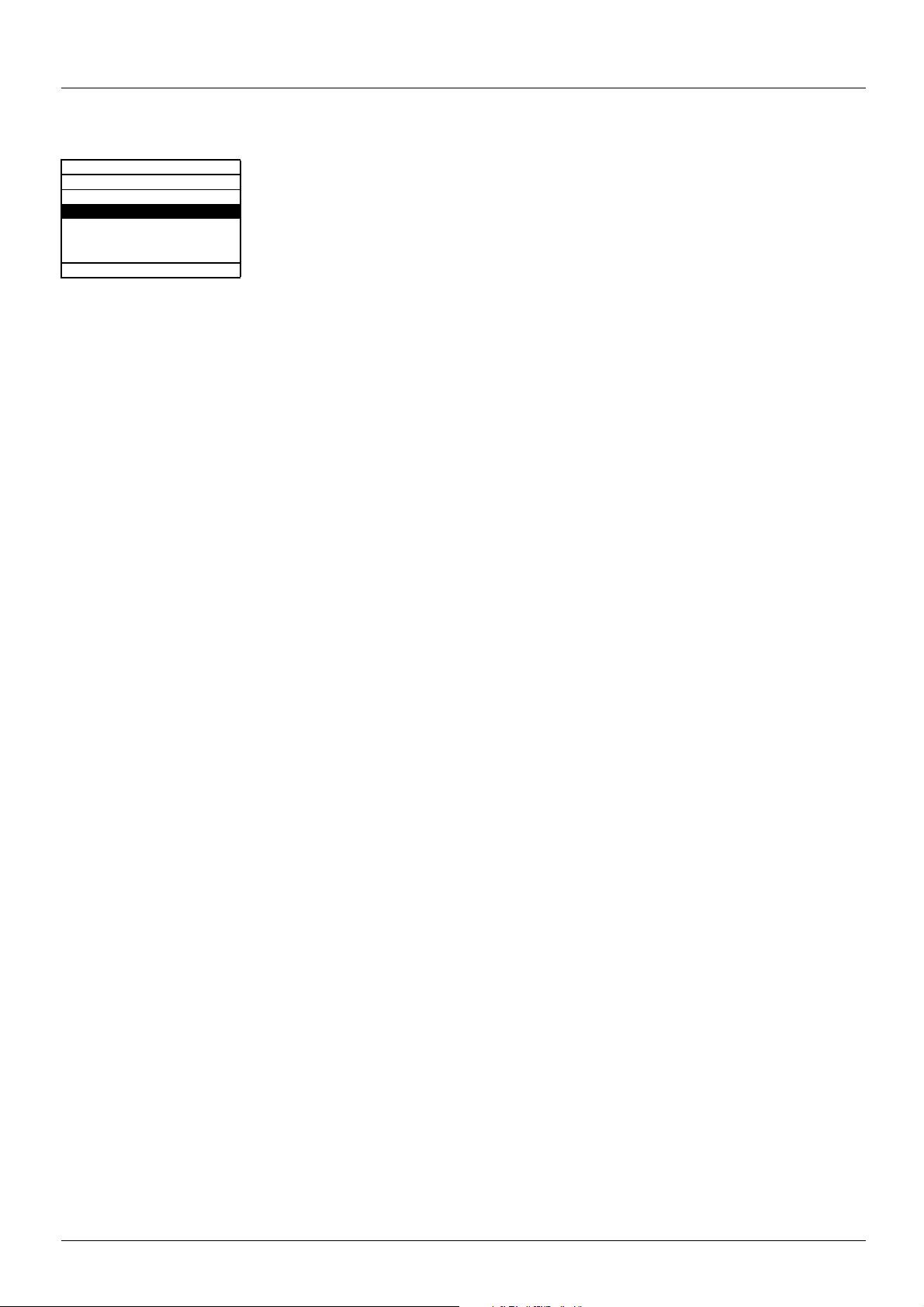
Code Nom / Description Plage de réglage Réglage usine
UPd-
USP
LI1
Nota :
• Les textes entre crochets [ ] correspondent aux affichages du terminal graphique.
• Les réglages usine correspondent à la [Macro configuration] (CFG) = [Start/stop] (StS) qui est la macro configuration en
sortie d’usine.
b [+ VITE / - VITE]
Fonction accessible pour canal de consigne [Canal réf. 2] (Fr2) = [+/- vite] (UPdt) voir page 141
M [Affectation +vite]
no
v [Non] (nO) : Fonction inactive
v [LI1] (LI1)
[Non] (nO)
34 AAV49425 11/2009
Page 34

Interdépendance des valeurs de paramètres
La configuration de certains paramètres modifie la plage de réglage d’autres paramètres, afin de réduire les risques d’erreurs. Cela peut
entraîner la modification d’un réglage usine ou d’une valeur que vous aviez déjà choisie.
Exemple :
1. [Limitation courant] (CLI) page 62 réglé à 1,6 In ou laissé à son réglage usine 1,5 In
2. [Fréquence découp.] (SFr) page 62
3. Si on augmente [Fréquence découp.] (SFr) à 4 kHz, [Limitation courant ] (CLI) n’est pl us écrêté, mais reste à 1,36 In . Si on veut 1, 6 In,
il faut refaire le réglage de [Limitation courant] (CLI).
réglé à 1 kHz (et validé par "ENT") écrête [Limitation courant] (CLI) à 1,36 In
AAV49425 11/2009 35
Page 35

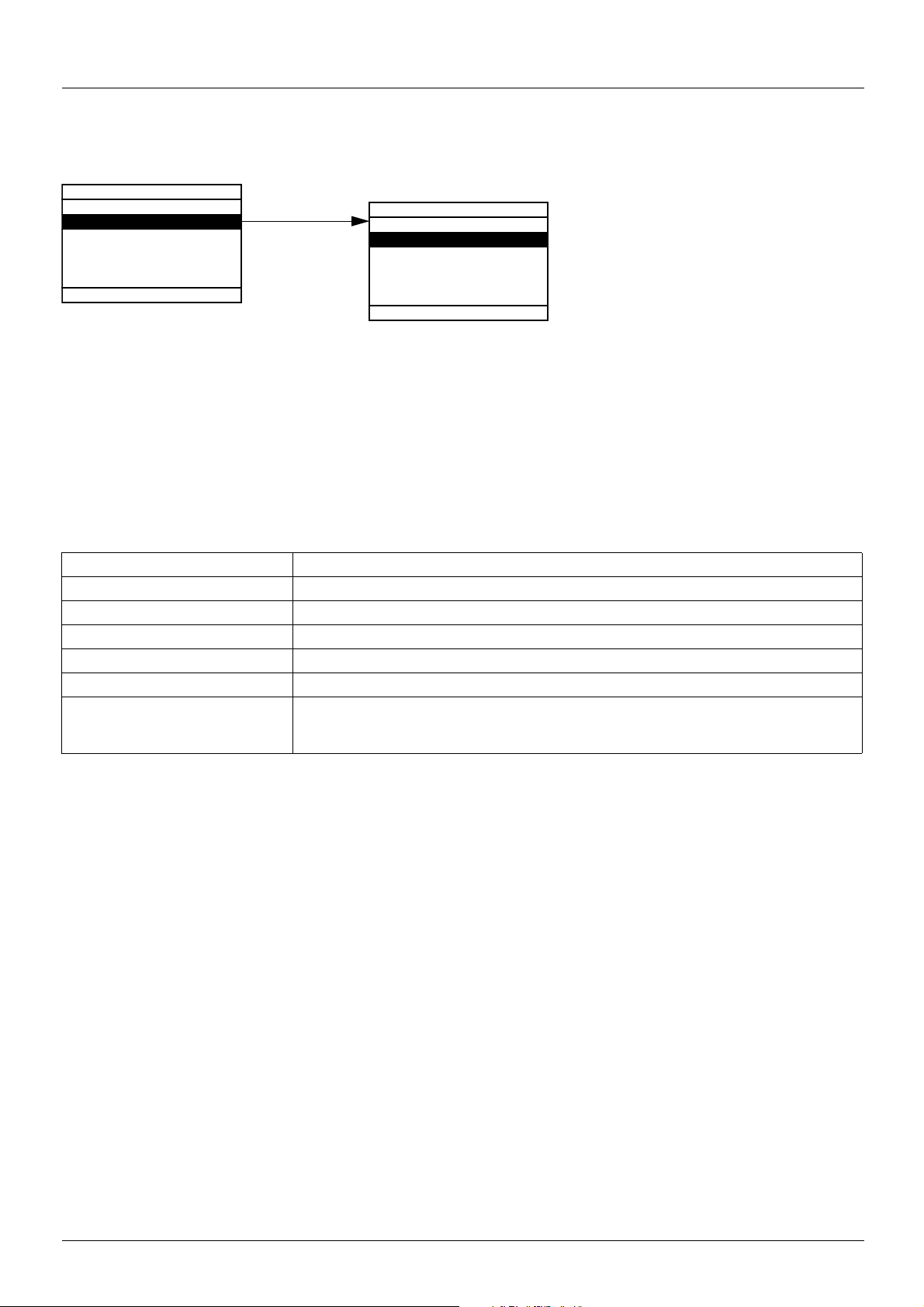
Recherche d’un paramètre dans ce document
F1
RDY Term +0.00Hz 0A
1.3 REGLAGES
Incrément rampe: 01
Accélération 9,51 s
Décélération: 9,67 s
Accélération 2: 12,58 s
Décélération 2: 13,45 s
Code << >> Quick
Code
RDY Term +0.00Hz 0A
1.3 REGLAGES
Incrément rampe: 01
ACC 9,51 s
Décélération: 9,67 s
Accélération 2: 12,58 s
Décélération 2: 13,45 s
Code << >> Quick
La recherche des explications sur un paramètre est facilitée :
• Avec le terminal intégré : Utilisez directement l’index des codes de paramèt res page 297
pour trouver la page où est commenté le
paramètre affiché.
• Avec le terminal graphique : Sélectionnez le paramètre à rechercher, et appuyez sur la touche : [Code]. Le code du paramètre
s’affiche à la place de son nom pendant que la touche reste appuyée.
Exemple : ACC
Utilisez ensuite l’index des codes de paramètres page 297
pour trouver la page où est commenté le paramètre affiché.
36 AAV49425 11/2009
Page 36

[1.1 SIMPLY START] (SIM-)
RDY Term +0.00Hz 0A
MENU GENERAL
1 MENU VARIATEUR
2 NIVEAU D’ACCES
3 OUVRIR / ENREG. SOUS
4 MOT DE PASSE
5 LANGUE
Code Quick
ENT
RDY Term +0.00Hz 0A
1 MENU VARIATEUR
1.1 SIMPLY START
1.2 SURVEILLANCE
1.3 REGLAGES
1.4 CONTRÔLE MOTEUR
1.5 ENTREES/SORTIES
Code << >> Quick
ENT
RUN Term +50.00Hz 80A
1.1 SIMPLY START
Cde 2 fils / 3fils
Macro cpnfiguration
Macro perso.
Standard fréq.mot
Perte phase réseau
Code << >> Quick
XXX
SIM-
SUP-
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
Affiche l’état du variateur
SIMPLY START
Mise sous tension
Avec terminal graphique :
Avec terminal intégré :
Le menu [1.1-SIMPLY START] (SIM-) permet d’effectuer une mise en service rapide, suffisante dans la plupart des applications.
Les paramètres de ce menu ne sont modifiables qu’à l’arrêt sans ordre de marche, à l’ exception :
• de l’auto-réglage qui entraîne la mise sous tension du moteur,
• des paramètres de réglage page 44
Nota : Les paramètres du menu [1.1 SIMPLY START] (SIM-) sont à renseigner dans l’ordre où il s se présentent, car l es premiers
conditionnent les suivants.
Par exemple [Cde 2 fils / 3fils] (tCC) est à configurer avant tout autre.
Le menu [1.1 SIMPLY START] (SIM-) est à configurer seul ou avant les autres menus de configuration du variateur. Si une modifi cati on
a été effectuée préalablement dans l’un d’eux, en particul ier dans [1.4 CONTROLE MOTEUR] (drC-), certains paramètres de [1.1 SIMPLY
START] (SIM-) peuvent être changés, comme par exemple les paramètres du moteur si on a choisi un moteur synchrône. Le retour dans
le menu [1.1 SIMPLY START] (SIM-) après modification d’un autre menu de configuration du variateur n’a pas d’utilit é mais ne représente
aucun risque. Les changements consécutifs à une modific ation d’un autre menu de configurat ion ne sont donc pas décrits, afin de ne pas
compliquer inutilement la lecture de ce chapitre.
Macro configuration
La macro configuration permet la configuration rapide des fonctions pour un domaine d’application spécifique.
8 macro configurations sont disponibles :
• Marche / arrêt (configu r a ti o n s ortie d’usine)
• Manutention
• Usage général
• Levage
• Ascenseurs
• Régulateur PID
• Bus de communica tion
• Maître / esclave
Le choix d’une macro configuration entraîne l’affectation des paramètres de cette macro configuration.
Chaque macro configuration reste modifiable dans les autres menus.
AAV49425 11/2009 37
.
Page 37

[1.1 SIMPLY START] (SIM-)
Paramètres des macro configurations
Affectation des entrées / sorties
Entrée /
sortie
AI1 [Canal réf. 1] [Canal réf. 1] [Canal réf. 1] [Canal réf. 1] [Canal réf. 1] [Canal réf. 1]
AI2 [Non] [Réf.
AO1 [Non] [Non] [Non] [Non] [Non] [Non] [Non] [Non]
R1 [Non défaut] [Non défaut] [Non défaut] [Non défaut] [Non défaut] [Non défaut] [Non défaut] [Non défaut]
R2 [Non] [Non] [Non] [Cmde frein] [Cmde frein] [Non] [Non] [Non]
LI1 (2 fils) [Sens avant] [Sens avant] [Sens avant] [Sens avant] [Sens avant] [Sens avant] [Sens avant] [Sens avant]
LI2 (2 fils) [Sens arrière] [Sens arrière] [Sens arrière] [Sens arrière] [Sens arrière] [Sens arrière] [Sens arrière] [Sens arrière]
LI3 (2 fils) [Non] [2 vitesses
LI4 (2 fils) [Non] [4 vitesses
LI5 (2 fils) [Non] [8 vitesses
LI6 (2 fils) [Non] [Reset
LI1 (3 fils) Stop Stop Stop Stop Stop Stop Stop Stop
LI2 (3 fils) [Sens avant] [Sens avant] [Sens avant] [Sens avant] [Sens avant] [Sens avant] [Sens avant] [Sens avant]
LI3 (3 fils) [Sens arrière] [Sens arrière] [Sens arrière] [Sens arrière] [Sens arrière] [Sens arrière] [Sens arrière] [Sens arrière]
LI4 (3 fils) [Non] [2 vitesses
LI5 (3 fils) [Non] [4 vitesses
LI6 (3 fils) [Non] [8 vitesses
LI7 à LI14 [Non] [Non] [Non] [Non] [Non] [Non] [Non] [Non]
LO1 à LO4 [Non] [Non] [Non] [Non] [Non] [Non] [Non] [Non]
R3 / R4 [Non] [Non] [Non] [Non] [Non] [Non] [Non] [Non]
AI3, AI4 [Non] [Non] [Non] [Non] [Non] [Non] [Non] [Non]
RP [Non] [Non] [Non] [Non] [Non] [Non] [Non] [Non]
AO2 [I moteur] [I moteur] [I moteur] [I moteur] [I moteur] [I moteur] [I moteur] [I moteur]
AO3 [Non] [Couple sig.] [Non] [Couple sig.] [Couple sig.] [Sortie PID] [Non] [Fréq. mot]
Touche F1 [Non] [Non] [Non] [Non] [Non] [Non] Commande
Touches
F2,F3, F4
[Start/stop] [Manut.] [Usage gén.] [Levage] [Ascenseurs] [PID régul.] [Network C.] [Maître/escl.]
[Canal réf. 2]
(Consigne
PID)
[Réf.
sommatrice 2]
présél.]
présél.]
présél.]
défauts]
présél.]
présél.]
présél.]
[Non] [Non] [Non] [Non] [Non] [Non] [Non] [Non]
sommatrice 2]
[Jog] [Reset
[Reset défauts] [Défaut
[Limitation
couple]
[Non] [Non] [Non] [Non] [Non] [Non]
[Jog] [Reset
[Reset défauts] [Défaut
[Limitation
couple]
[Non] [Non] [Retour PID] [Non] [Référence
[2 vitesses
défauts]
externe]
[Non] [Reset défauts] [4 Réf. PID
défauts]
externe]
[Non] [Reset défauts] [4 Réf. PID
Cartes options
Touches du terminal graphique
présél.]
[4 vitesses
présél.]
[2 vitesses
présél.]
[4 vitesses
présél.]
[RAZ intégral
PID]
[2 Réf. PID
présél.]
présél.]
[RAZ intégral
PID]
[2 Réf. PID
présél.]
présél.]
([Canal réf. 1]
= Modbus
intégré) (1)
[Commutation
réf.2]
[Reset
défauts]
[Non] [Non]
[Commutation
réf.2]
[Reset
défauts]
[Non] [Non]
par le terminal
graphique
[Canal réf. 1]
couple]
[Comm.
couple/vit]
[Reset
défauts]
[Comm.
couple/vit]
[Reset
défauts]
[Non]
En commande 3 fils l’affectation des entrées LI1 à LI6 est décalée.
(1) Pour démarrer avec Modbus intégré il est nécessaire de configurer d’abord [Adresse Modbus] (Add) page 261.
Rappel : Ces affectations sont réinitialisées à chaque changement de macro configuration.
38 AAV49425 11/2009
Page 38

[1.1 SIMPLY START] (SIM-)
Paramètres des macro configurations
Autres configurations et réglages
En plus de l’affectation des entrées/sorties, d’autres paramètres sont affectés, uniquement dans les macro configurations Levage,
Ascenseurs et Maître / esclave.
Levage et Ascenseurs :
• [Type mouvement] (bSt) = [Levage] (UEr) page 175
• [Contact de frein] (bCI) = [Non] (nO) page 175
• [Impulsion de frein] (bIP) = [Non] (nO) page 175
• [I ouv. frein montée] (Ibr) = [Courant nom. mot] (nCr) page 175
• [Temps ouv. frein] (brt) = 0,5 s page 176
• [Fréq. ouvert. frein] (bIr) = [Auto] (AUtO) page 176
• [Fréq. ferm. frein] (bEn) = [Auto] (AUto) page 176
• [Temps ferm. frein] (bEt) = 0,5 s page 176
• [Ferm. à l’inversion] (bEd) = [Non] (nO) page 177
• [Saut à l’inversion] (JdC) = [Auto] (AUtO) page 177
• [Temps redémar.] (ttr) = 0 s page177
• [Temps ramp I] (brr) = 0 s page 179
• [Petite vitesse] (LSP) = glissement nominal du moteur calculé par le variateur, page 44
• [Perte phase moteur] (OPL) page 242 = [Oui] (YES), mais il est forcé à [Non] (nO) si [Type cde moteur] (Ctt) page 70 = [Mot. Sync.]
(SYn). Ce paramètre ne peut alors plus être modifié.
• [Reprise à la volée] (FLr) = [Non] (nO) page 239
. Ce paramètre ne peut alors plus être modifié.
Ascenseurs uniquement :
• [Feed forward] (FFP) = 0 % page 91
Maître / Esclave :
• [Type cde moteur] (Ctt) = [SVC I] (CUC) page 70
Rappel : Ces affectations sont forcées à chaque changement de macro configuration, sauf [Type cde moteur] (Ctt) pour la macro
configuration Maître / Esclave, s’il est configuré en [FVC] (FUC).
Retour au réglage usine :
Un retour au réglage usine, avec [Config. source] (FCSI) = [Macro-config.] (InI) page 269
sélectionnée. Le paramètre [Macro configuration] (CFG) reste inchangé, mais [Macro perso.] (CCFG) disparaît.
Nota :
• Les réglages usine qui figurent dans les tableaux de paramètres correspondent à la [Macro configuration] (CFG) = [Start/
stop] (StS) qui est la macro configuration en sortie d’usine.
.
provoque un retour à la macro configuration
AAV49425 11/2009 39
Page 39

[1.1 SIMPLY START] (SIM-)
UWV
L1 L3
ATV71H
KM10
R2A
R2C
L2
M
3
3
2
(1)
AI1
LI1 LI2+24
Frein électromagnétique
Avant
(Montée)
Arrière
(Descente)
UWV
L1 L3
AI1
L2
M1
3
3
COMA01
LI1 LI2+24
COM AI2 UWV
LI1 +24
AI1
LI2
M2
3
LI3 L1 L3L2
3
ATV 71Hpppp
Variateur esclave
ATV 71H
pppp
Variateur maître
CoupleVitesse
ArrièreAvant
ArrièreAvant
Exemples de schémas à associer aux macro configurations
Schéma [Levage] (HSt)
(1)Un contact du module Préventa doit être inséré dans le circuit de commande du frein pour le serrer de façon sûre lors de l’activation de
la fonction de sécurité "Power Removal" (voir schémas de raccordement du guide d’installation).
Schéma [Maître/escl.] (MSL)
Lorsque les deux moteurs sont liés mécaniquement la fermeture du cont act Vitesse/coupl e entraîne le fonct ionnement en Maître / esclave.
Le variateur maître régule la vitesse et commande le variateur esclave en couple afin d’assurer la répartition de la charge.
40 AAV49425 11/2009
Page 40

[1.1 SIMPLY START] (SIM-)
+24 LI1 LIx
ATV 71
+24 LI1 LI2 LIx
ATV 71
AVERTISSEMENT
FONCTIONNEMENT INATTENDU DE L’APPAREIL
Le changement d’affectation de [Cde 2 fils/3fils] (tCC) nécessite un appui prolongé (2 s) de la touche
"ENT".
Il entraîne un retour au réglage usine de la fonction : [Type cde 2 fils] (tCt) page 102
et de toutes les
fonctions affectant des entrées logiques.
Il entraîne également un retour à la macro configuration sélectionnée si celle ci a été personnalisée
(perte des personnalisations).
Assurez vous que ce changement est compatible avec le schéma de câblage utilisé.
Si cette précaution n’est pas respectée, cela pe ut entraîner la mort ou des blessures graves.
AVERTISSEMENT
FONCTIONNEMENT INATTENDU DE L’APPAREIL
Le changement de la [Macro configu rati on] (CFG) nécessite un appui prolongé (2 s) de la touche ENT.
Assurez vous que la macro configuration choisie est compatible avec le schéma de câblage utilisé.
Si cette précaution n’est pas respectée, cela peut entraîner la mort ou des blessures graves.
Code Nom / Descrip tion Plage de réglage Réglage usine
tCC
M [Cde 2 fils / 3fils]
2C
3C
v [Cde 2 fils] (2C)
v [Cde 3 fils] (3C)
Commande 2 fils : C’est l’état (0 ou 1) ou le front (0 à 1 ou 1 à 0) de l’ entrée qui commande la marche ou l’a rrêt.
Exemple de câblage en "source" :
Commande 3 fils (Commande par impulsions) : une impulsion "avant" ou arrière" suffit pour commander le
démarrage, une impulsion "stop" suffit pour commander l’arrêt.
Exemple de câblage en "source" :
[Cde 2 fils] (2C)
LI1 : avant
LIx : arrière
LI1 : stop
LI2 : avant
LIx : arrière
AAV49425 11/2009 41
CFG
StS
HdG
HSt
GEn
PId
nEt
MSL
LIFt
CCFG
YES
M [Macro configuration]
v [Start/stop] (StS) : Marche / arrêt
v [Manut.] (HdG) : Manutention
v [Levage] (HSt) : Levage
v [Usage gén.] (GEn) : Usage général
v [PID régul.] (PId) : Régulation PID
v [Network C.] (nEt) : Bus de communication
v [Maître/escl.] (MSL) : Maître / esclave
v [Ascenseur] (LIFt) : Ascenseurs
M [Macro perso.]
Paramètre en lecture seulement, visible si au moins un paramètre de la macro configuration a été modifié.
v [Oui] (YES)
[Start/Stop] (StS)
Page 41

[1.1 SIMPLY START] (SIM-)
100 - glissement en %
100
50 - glissement en Hz
50
60 - glissement en Hz
60
Code Nom / Descrip tion Plage de réglage Réglage usine
bFr
IPL
nPr
UnS
nCr
FrS
nSP
50
60
nO
YES
M [Standard fréq.mot]
v [50Hz IEC] (50) : IEC
v [60Hz NEMA] (60) : NEMA
Ce paramètre modifie les préréglages des paramètres :[Tension nom. mot.] (UnS) ci dessous, [Grande vitesse]
(HSP) page 44
dessous.
, [Seuil de fréquence] (Ftd) page 68, [Fréq. nom. mot.] (FrS) et [Fréquence maxi.] (tFr) ci
M [Perte phase réseau]
v [Déf. ignoré] (nO) : Défaut ignoré, à utiliser lorsque le variateur est alimenté en monophasé ou par le bus
DC.
v [Roue libre] (YES) : Défaut, avec arrêt roue libre.
Si une phase disparaît, le variateur passe en défaut [Perte Ph. Réseau] (IPL) mais si 2 ou 3 phases
disparaissent, le variateur continue à fonctionner jusqu’à déclencher en défaut de sous-tension.
Ce paramètre n’est accessible dans ce menu que sur les variateurs ATV71 H037M3 à HU75M3 (utilisables
en monophasé).
M [Puissance nom. mot]
Puissance nominale moteur inscrite sur sa plaque signalétiq ue, en kW si [Standard fréq.mot] (bFr) = [50Hz IEC]
(50), en HP si [Standard fréq.mot] (bFr) = [60Hz NEMA] (60).
M [Tension nom. mot.]
Tension nominale moteur inscrite sur sa plaque signalétique.
ATV71
pppM3 : 100 à 240 V
ATV71
pppN4 : 200 à 480 V
M [Courant nom. mot.]
Courant nominal moteur inscrit sur sa plaque signalétique.
M [Fréq. nom. mot.]
Fréquence nominale moteur inscrite sur sa plaque signalétique.
Le réglage usine est 50 Hz, remplacé par un prérégla ge de 60 Hz si [Standard fréq.mot] (bFr) est mis à 60 Hz.
M [Vitesse nom. mot]
Vitesse nominale moteur inscrite sur sa plaque signalétique.
0 à 9999 RPM puis 10.00 à 60.00 kRPM sur l’afficheur intégré.
Si la plaque signalétique n’indique pas la vitesse nominale mais la vitesse de synchronisme et le glissement
en Hz ou en %, calculer la vitesse nominale comme suit :
[50Hz IEC] (50)
selon calibre variateur
selon calibre variateur selon calibre variateur
selon calibre variateur selon calibre variateur
et [Standard fréq.mot]
(bFr)
0,25 à 1,5 In (1) selon calibre variateur
et [Standard fréq.mot]
(bFr)
10 à 500 Hz 50 Hz
0 à 60000 RPM selon calibre variateur
tFr
(1)In correspond au courant nominal variateur indiqué dans le guide d’installation et sur l’étiquette signalétique du variateur.
42 AAV49425 11/2009
• vitesse nominale = vitesse de synchronisme x
ou
• vitesse nominale = vitesse de synchronisme x (moteurs 50 Hz)
ou
• vitesse nominale = vitesse de synchronisme x (moteurs 60 Hz)
M [Fréquence maxi.]
Le réglage usine est 60 Hz, remplacée par un prérégl age à 72 Hz si [Standard fréq.mot] (bFr) est mis à 60 Hz.
La valeur maxi est limitée par les conditions suivantes :
• elle ne peut dépasser 10 fois la valeur de [Fréq. nom. mot.] (FrS)
• elle ne peut dépasser 500 Hz si le variateur est de calibre supérieur à ATV71HD37 (les valeurs de 500 Hz
à 1600 Hz ne sont possibles que pour des puissances limitées à 37 kW).
10 à 1600 Hz 60 Hz
Page 42

[1.1 SIMPLY START] (SIM-)
Code Nom / Description Réglage usine
tUn
dOnE
tUS
PEnd
PrOG
FAIL
dOnE
PHr
nO
YES
tAb
AbC
ACb
M [Auto-réglage]
[Non] (nO)
v [Non] (nO) : Auto-réglage non fait.
v [Oui] (YES) : L’auto-réglage est fait dès que possible, puis le paramètre passe automatiquement à [Fait] (dOnE).
v [Fait] (dOnE) : Utilisation des valeurs données par le précédent auto-réglage.
Attention :
• Il est impératif que tous les paramètres moteurs ([Tension nom. mot.] (UnS), [Fréq. nom. mot.] (Fr S ),
[Courant nom. mot.] (nCr), [Vitesse nom. mot] (nSP), [Puissance nom. mot] (nPr)) soient correctement
configurés avant d’effectuer l’auto-réglage.
Si au moins un de ces paramètres est modifié après que l’auto-réglage a été effectué, [Auto-réglage] (tUn)
repasse à [Non] (nO) et doit être refait.
• L'auto-réglage s'effectue seulement si aucune commande d’arrêt n'est actionnée. Si une fonction "arrêt roue
libre" ou "arrêt rapide" est affectée à une entrée logique, il faut mettre cette entrée à 1 (active à 0).
• L’auto-réglage est prioritaire sur les ordres de marche ou de préfluxage éventuel s qui seront pris en compte
après la séquence d’auto-réglage.
• Si l’auto-réglage échoue le variateur affiche [Non] (nO) et, suivant la configuration de [Gestion défaut tnf]
(tnL) page 256
• L’auto-réglage peut durer 1 à 2 secondes. Ne pas l’interrompre et attendre que l’affichage passe à "[Fait]
(dOnE)" ou à "[Non] (nO)".
Nota : Pendant l’auto-réglage le moteur est parcouru par son courant nominal.
M [Etat auto-réglage]
(information, non paramétrable)
, peut passer en défaut [autoréglage] (tnF).
[Non fait] (tAb)
v [Non fait] (tAb) : La valeur par défaut de résistance du stator est utilisée pour commander le moteur.
v [En attente] (PEnd) : L’auto-réglage a été demandé mai s n'est pas encore effectué.
v [En cours] (PrOG) : auto-réglage en cours.
v [Echec] (FAIL) : L’auto-réglage a échoué.
v [Fait] (dOnE) : La résistance stator mesurée par la fonction auto-réglage est utilisée pour commander le
moteur.
M [Rotation phase]
[ABC] (AbC)
v [ABC] (AbC) : Sens normal,
v [ACB] (ACb) : Sens inverse.
Ce paramètre permet d’inverser le sens de rotation du moteur sans inverser le câblage.
AAV49425 11/2009 43
Page 43

[1.1 SIMPLY START] (SIM-)
ATTENTION
Dans le cas des moteurs synchrones à aimant permanent il ne faut pas dépasser la vitesse maximale
admissible sinon il y a un risque de démagnétisation. Dans tous les cas, il ne faut pas dépasser la vitesse
admissible par le moteur, par la chaîne cinématique, ou par l’application.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
Paramètres modifiables en marche et à l’arrêt
Code Nom / Description Réglage usine
ItH
ACC
dEC
LSP
HSP
M [Courant therm. mot]
Courant de protection thermique du moteur, à régler à l’intensité nominale lue sur sa plaque signalétique.
M [Accélération]
Temps pour accélérer de 0 à la [Fréq. nom. mot.] (FrS) (page 42). S’assurer que cette valeur est compatible
avec l’inertie entraînée.
M [Décélération]
Temps pour décélérer de la [Fréq. nom. mot.] (FrS) (page 42) à 0. S’assurer que cette valeur est compatible
avec l’inertie entraînée.
M [Petite vitesse]
Fréquence moteur à consigne mini, réglage de 0 à [Grande vitesse] (HSP).
M [Grande vitesse]
Fréquence moteur à consigne maxi, réglage de [Petite vitesse] (LSP) à [Fréquence maxi] (t Fr). Le réglage
usine devient 60 Hz si [Standard fréq.mot] (bFr) = [60Hz NEMA] (60)..
0,2 à 1,5 In (1) Selon calibre
variateur
0,1 à 999,9 s 3,0 s
0,1 à 999,9 s 3,0 s
0
50 Hz
(1)In correspond au courant nominal variateur indiqué dans le guide d’installation et sur l’étiquette signalétique du variateur.
44 AAV49425 11/2009
Page 44

[1.2 SURVEILLANCE] (SUP-)
RDY Term +0.00Hz 0A
MENU GENERAL
1 MENU VARIATEUR
2 NIVEAU D’ACCES
3 OUVRIR / ENREG. SOUS
4 MOT DE PASSE
5 LANGUE
Code Quick
ENT
RDY Term +0.00Hz 0A
1 MENU VARIATEUR
1.1 SIMPLY START
1.2 SURVEILLANCE
1.3 REGLAGES
1.4 CONTRÔLE MOTEUR
1.5 ENTREES/SORTIES
Code << >> Quick
ENT
RUN Term +50.00Hz 80A
1.2 SURVEILLANCE
IMAGES E/S
E/S Controller Inside
IMAGES COM.
Groupes alarmes :
Réf. fréquence HMI :
Code << >> Quick
XXX
SIM-
SEt-
SUP-
ESC
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
Affiche l’état du variateur
SURVEILLANCE
Mise sous tension
Avec terminal graphique :
Avec terminal intégré :
AAV49425 11/2009 45
Page 45

[1.2 SURVEILLANCE] (SUP-)
Entrées / sorties
Entrées / sorties de la carte Controller Inside, si elle est présente
Données et valeurs de communication
États et valeurs internes du variateur (voir page 51
)
ENT
ENT
ENT
ENT
1
0
1
0
Avec terminal graphique
Ce menu permet de visualiser les entrées / sorties, les états et valeurs internes du variateur, les données et valeurs de communication.
RUN Term +50.00Hz 80A
1.2 SURVEILLANCE
IMAGES E/S
E/S Controller Inside
IMAGES COM.
Groupes alarmes :
Réf. fréquence HMI :
Code << >> Quick
Entrées / Sorties
état 0
état 1
état 0
état 1
RUN Term +50.00Hz 80A
IMAGE ENTREES LOGIQUES
IMAGE ENTREES ANALOG.
IMAGE SORTIES LOGIQUES
IMAGE SORTIES ANALOG.
IMAGE SIGNAUX FREQ.
Code Quick
RUN Term +50.00Hz 80A
RUN Term +50.00Hz 80A RUN Term +50.00Hz 80A
AI1 : 9,87 V Canal Réf. 1
AI2 : 2,35 mA Canal Forc. local
Code << >> Quick Quick
IMAGES E/S
IMAGE ENTREES LOGIQUES Affectation LI1
PR LI1 LI2 LI3 LI4 LI5 LI6 LI7 Sens avant
LI8 LI9 LI10 LI11 LI12 LI13 LI14 Retard 0 ->1 LI1 : 0 ms
<< >> Quick << >> Quick
IMAGE ENTREES ANALOG. Affectation AI1
Déplacement d’un écran à un autre
(de IMAGE ENTREES LOGIQUES
à IMAGE SIGNAUX FREQ.)
par rotation du bouton de
navigation
Accès à la configuration de l’entrée
ou de la sortie sélectionnée :
appui sur la touche ENT
RUN Term +50.00Hz 80A
Fluxage
Référence couple
Valeur mini AI1 : 0.0 V
Valeur maxi AI1 : 10.0 V
RUN Term +50.00Hz 80A RUN Term +50.00Hz 80A
IMAGE SORTIES LOGIQUES Affectation LO1
R1 R2 LO Non
LOA : 0000000000000010b Maintien LO1 : 0 ms
Retard LO1 : 0 ms
LO1 actif à : 1
<< >> Quick << >> Quick
RUN Term +50.00Hz 80A RUN Term +50.00Hz 80A
IMAGE SORTIES ANALOG. Affectation AO1
AO1 : 9.87 V Fréq. mot
Code << >> Quick Quick
Valeur mini AO1 : 4 mA
Valeur maxi AO1 : 20 mA
Filtre de AO1 : 10 ms
RUN Term +50.00Hz 80A RUN Term +50.00Hz 80A
IMAGE SIGNAUX FREQ.. Affectation RP
Entrée RP : 25,45 kHz Référence fréq.
Codeur : 225 kHz Valeur mini RP : 2 kHz
Code << >> Quick Quick
Valeur maxi RP : 50 kHz
Filtre de RP : 0 ms
46 AAV49425 11/2009
Page 46

[1.2 SURVEILLANCE] (SUP-)
ENT
ENT
1
0
1
0
1
0
Avec terminal graphique
Entrées / Sorties de la carte Controller Inside
état 0
état 1
état 0
état 1
RUN Term +50.00Hz 80A
E/S Controller Inside
IMAGE LI CARTE C.INSIDE
IMAGE AI Control. Inside
IMAGE LO Control. INSIDE
Image AO Control. Inside
Code Quick
RUN Term +50.00Hz 80A
IMAGE LI CARTE C.INSIDE
LI51 LI52 LI53 LI54 LI55 LI56 LI57 LI58
LI59 LI60
<< >> Quick
RUN Term +50.00Hz 80A RUN Term +50.00Hz 80A
IMAGE AI Control. Inside. AI51
AI51 : 0.000 mA
AI52 : 9,87 V
Déplacement d’un écran à un autre
(de IMAGE LI CARTE C.INSIDE
à Image AO Control. Inside)
par rotation du bouton de
navigation
0.000 mA
Code << >> Quick << >> Quick
RUN Term +50.00Hz 80A
IMAGE LO Control. INSIDE
LO51 LO52 LO53 LO54 LO55 LO56
Min = 0,001 Max = 20.000
<< >> Quick
RUN Term +50.00Hz 80A RUN Term +50.00Hz 80A
Image AO Control. Inside AO51
AO51 : 0.000 mA
AO52 : 9,87 V
0.000 mA
Code << >> Quick << >> Quick
Min = 0,001 Max = 20.000
AAV49425 11/2009 47
Page 47

[1.2 SURVEILLANCE] (SUP-)
RUN Term +50.00Hz 80A
IMAGES COM.
Canal cmd. : Modbus
Valeur Cmd. : ABCD Hex
Canal réf. actif : CANopen
Référence fréq. : - 12,5 Hz
Mot d’état ETA : 2153 Hex
Code Quick
W3141 : F230 Hex
W2050 : F230 Hex
W4325 : F230 Hex
W0894 : F230 Hex
COM. SCANNER IN
COM SCANNER OUT
IMAGE MOT CMD.
IMAGE REF. FREQ.
DIAG MODBUS RESEAU
DIAG MODBUS HMI
IMAGE CANopen
SCANNER CARTE PLC
RUN Term +50.00Hz 80A
COM. SCANNER IN
Val Com Scan In1 : 0
Val Com Scan In2 : 0
Val Com Scan In3 : 0
Val Com Scan In4 : 0
Val Com Scan In5 : 0
Code Quick
Val Com Scan In6 : 0
Val Com Scan In7 : 0
Val Com Scan In8 : 0
RUN Term +50.00Hz 80A
COM SCANNER OUT
Val Com Scan out1 : 0
Val Com Scan out2 : 0
Val Com Scan out3 : 0
Val Com Scan out4 : 0
Val Com Scan out5 : 0
Code Quick
Val Com Scan out6 : 0
Val Com Scan out7 : 0
Val Com Scan out8 : 0
RUN Term +50.00Hz 80A
IMAGE MOT CMD.
Cmd. Modbus : 0000 Hex.
Cmd. CANopen : 0000 Hex.
Cmd. Carte COM. : 0000 Hex.
Cmd. Carte C Inside: 0000 Hex.
Code Quick
RUN Term +50.00Hz 80A
IMAGE REF. FREQ.
Réf. Modbus : 0.0 Hz
Réf. CANopen : 0.0 Hz
Réf. Carte COM. : 0.0 Hz
Réf. Carte C. Inside : 0.0 Hz
Code Quick
Avec terminal Graphique
Communication
[IMAGES COM.] donne le type des bus utilisés en commande ou consigne, les val eurs
de commande et de consigne correspondantes, le mot d’état, les mots sélectionnés
dans le menu [CONFIG. AFFICHAGE] etc...
L’affichage en hexadécimal ou décimal est configurable dans le menu [CONFIG.
AFFICHAGE]
[COM. SCANNER IN] et [COM SCANNER OUT] :
Visualisation de registres échangés périodiquement (8 en en trée et 8 en so rti e) pour Mod bus i ntégré e t pour le s cart es des bus de terrain.
48 AAV49425 11/2009
Page 48

[1.2 SURVEILLANCE] (SUP-)
RUN Term +50.00Hz 80A
IMAGES COM.
Canal cmd. : Modbus
Valeur Cmd. : ABCD Hex
Canal réf. actif : CANopen
Référence fréq. : - 12,5 Hz
Mot d’état ETA : 2153 Hex
Code Quick
W3141 : F230 Hex
W2050 : F230 Hex
W4325 : F230 Hex
W0894 : F230 Hex
COM. SCANNER IN
COM SCANNER OUT
IMAGE MOT CMD.
IMAGE REF. FREQ.
DIAG MODBUS RESEAU
DIAG MODBUS HMI
IMAGE CANopen
SCANNER CARTE PLC
Communication par Modbus
RUN Term +50.00Hz 80A
DIAG MODBUS RESEAU
LED COM :
Nb trames Mb NET
Nb err. CRC Mb NET
Code Quick
Communication par le terminal graphique
RUN Term +50.00Hz 80A
DIAG MODBUS HMI
LED COM :
Nb trames Mb HMI
Nb err. CRC Mb HMI
Code Quick
Configuration des PDO par
l’outil réseau.
Certains PDO peuvent ne pas
être utilisés
RUN Term +50.00Hz 80A
IMAGE PDO1
Received PDO1-1 : FDBA Hex
Received PDO1-2
Received PDO1-3
Received PDO1-4
Transmit PDO1-1 : FDBA Hex
Code Quick
Transmit PDO1-2
Transmit PDO1-3
Transmit PDO1-4
RUN Term +50.00Hz 80A
IMAGE PDO2
Received PDO2-1 : FDBA Hex
Received PDO2-2
Received PDO2-3
Received PDO2-4
Transmit PDO2-1 : FDBA Hex
Code Quick
Transmit PDO2-2
Transmit PDO2-3
Transmit PDO2-4
RUN Term +50.00Hz 80A
IMAGE PDO3
Received PDO3-1 : FDBA Hex
Received PDO3-2
Received PDO3-3
Received PDO3-4
Transmit PDO3-1 : FDBA Hex
Code Quick
Transmit PDO3-2
Transmit PDO3-3
Transmit PDO3-4
Communication par CANopen
Les images PDO- ne sont
visibles que si CANopen a été
validé (adresse différente de
OFF) et si les PDO- sont
activés.
RUN Term +50.00Hz 80A
IMAGE CANopen
LED RUN :
LED ERR :
IMAGE PDO 1
IMAGE PDO 2
IMAGE PDO 3
Code Quick
Etat NMT esclave
Nombre de PDO Tx 0
Nombre de PDO Rx 0
Code d’erreur 0
Compt. erreurs Rx 0
Compt. erreurs Tx 0
Avec terminal Graphique
Communication (suite)
Pour chaque bus on trouve l’état des DELs, les données périodiques, l’adresse,
la vitesse, le format, etc...
LED éteinte
LED allumée
AAV49425 11/2009 49
Page 49

[1.2 SURVEILLANCE] (SUP-)
RUN Term +50.00Hz 80A
IMAGES COM.
Canal cmd. : Modbus
Valeur Cmd. : ABCD Hex
Canal réf. actif : CANopen
Référence fréq. : - 12,5 Hz
Mot d’état ETA : 2153 Hex
Code Quick
W3141 : F230 Hex
W2050 : F230 Hex
W4325 : F230 Hex
W0894 : F230 Hex
COM. SCANNER IN
COM SCANNER OUT
IMAGE MOT CMD.
IMAGE REF. FREQ.
DIAG MODBUS RESEAU
DIAG MODBUS HMI
IMAGE CANopen
SCANNER CARTE PLC
Carte Controller Inside
RUN Term +50.00Hz 80A
SCANNER CARTE PLC
Input scanner
Output scanner
Code Quick
RUN Term +50.00Hz 80A
Input scanner
Prg.card. scan in 1 : 0
Prg.card. scan in 2 : 0
Prg.card. scan in 3 : 0
Prg.card. scan in 4 : 0
Prg.card. scan in 5 : 0
Code Quick
Prg.card. scan in 6 : 0
Prg.card. scan in 7 : 0
Prg.card. scan in 8 : 0
RUN Term +50.00Hz 80A
Output scanner
Prog.card.scan Out1 : 0
Prog.card.scan Out2 : 0
Prog.card.scan Out3 : 0
Prog.card.scan Out4 : 0
Prog.card.scan Out5 : 0
Code Quick
Prog.card.scan Out6 : 0
Prog.card.scan Out7 : 0
Prog.card.scan Out8 : 0
Avec terminal Graphique
Communication (suite)
[Input scanner] et [Output scanner] :
Visualisation de registres échangés périodiquement (8 en entrée et 8 en sortie).
50 AAV49425 11/2009
Page 50

[1.2 SURVEILLANCE] (SUP-)
Avec terminal graphique : États et valeurs internes du variateur
Nom / Description
[Groupes alarmes] (ALGr)
[Réf. fréquence HMI] (LFr)
[Réf. interne PID] (rP I )
[Réf. couple HMI] (Ltr)
[Coeff. multiplicat.] (MFr)
[Référence fréq.] (FrH)
[Référence couple] (trr)
[Fréquence sortie] (rFr)
[Frq. sortie mesurée] (MMF)
[Freq.travail pulse in] (FqS)
[Courant moteur] (LCr)
[Vitesse moy. ENA] (AUS)
[Vitesse moteur] (SPd)
[Tension moteur] (UOP)
[Puissance moteur] (OPr)
[Couple moteur] (Otr)
[Tension réseau] (ULn)
[Etat therm moteur] (tHr )
[Etat therm. var.] (tHd)
[Etat therm. résist.] (tHb)
[Consommation] (APH)
[Temps en marche] (rtH)
[Temps var. ON] (PtH)
[Temps alarm.IGBT] (tAC)
[Référence PID] (rPC)
[Retour PID] (rPF)
[Erreur PID] (rPE)
[Sortie PID] (rPO)
[Date / heure] (CLO)
[- - - - -] (o02)
à
[- - - - -] (o06)
[Config. active] (CnFS)
[Jeu param. utilisé] (CFPS)
[ALARMES] (ALr-)
[AUTRES STATUS] (SSt-)
Numéros de groupe des alarmes présentes
en Hz. Référence fréquence par le terminal graphique (accessible si la fonction a été configurée).
en valeur process. Référence PID par le terminal graphique (accessible si la fonction a été configurée).
en % du couple nominal. Référence de couple par le terminal graphique.
en % (accessible si [Réf. multipli.-] (MA2,MA3) page 151
en Hz
en % du couple nominal (accessible si la fonction est confi gurée)
en Hz
en Hz : vitesse moteur mesurée signée si une carte codeur est présente, sinon affichage 0.
en Hz : fréquence de l’entrée "Pulse input" utilisée par la fo nction [FREQUENCE METRE] (FqF-) page 253
en A
en Hz : paramètre accessible si [ENA Système] (EnA) = [Oui] (YES) (voir page 94
en RPM
en V
en % de la puissance nominale
en % du couple nominal
en V. Tension réseau vue du bus DC en régime moteur ou à l’arrêt.
en %
en %
en % (accessible sur forts calibres de variateurs seulement)
en Wh, kWh ou MWh (consommation cumulée)
en secondes, minutes ou heures (temps de mise sous tension moteur)
en secondes, minutes ou heures (temps de mise sous tension variateur)
en secondes (temps de mise en alarme "température IGBT")
en valeur process (accessible si le PID est configuré)
en valeur process (accessible si le PID est configuré)
en valeur process (accessible si le PID est configuré)
en Hz (accessible si le PID est configuré)
Date et heure actuelles, générées par la carte Controller Inside (accessible si la cart e est présente)
Mots générés par la carte Controller Inside (accessibles si la carte est présente)
Configuration active [Config. n° 0, 1 ou 2]
[Jeu n°1, 2 ou 3] (accessible si la commutation de paramètres est valide, voir page 215
Liste des alarmes présentes. Si une alarme est présente un est affiché.
Liste des status secondaires :
- [En fluxage moteur] (FLX) : En fluxage moteur
- [Alarme ptc1] (PtC1) : Alarme sondes 1
- [Alarme ptc2] (PtC2) : Alarme sondes 2
- [Alarme LI6 =PTC] (PtC3) : Alarme sondes LI6 =
PTC
- [En arrêt rapide] (FSt) : En arrêt rapide
- [Seuil I atteint] (CtA) : Seuil de courant atteint ([Seuil
de courant] (Ctd) page 67
- [Seuil fréq. atteint] (FtA) : Seuil de fréquence atteint
([Seuil de fréquence] (Ftd) page 68
- [Seuil fréq. 2 atteint] (F2A) : 2
atteint ([Seuil fréquence 2] (F2d) page 68
- [Réf. fréq. atte in te ] (SrA) : Référence fréquence
atteinte
- [Etat th. mot. atteint] (tSA) : Etat thermique moteur 1
atteint
- [Alarme déf. externe] (EtF) : Alarme défaut externe
- [En redém. auto] (AUtO) : En redémarrage
automatique
- [Remote] (FtL) : Commande en ligne
- [En auto-réglage] (tUn) : En auto-réglag e
- [Soustension] (USA) : Alarme soustension
- [Conf.1 act.] (CnF1) : Configuration 1 active
- [Conf.2 act.] (CnF2) : Configuration 2 active
)
)
ème
seuil de fréquence
)
est affectée)
- [HSP atteinte] (FLA) : Grande vitesse
- [Dévirage charge] (AnA) : Alarme dévirage
- [Jeu 1 actif] (CFP1) : Jeu 1 de paramètres
- [Jeu 2 actif] (CFP2) : Jeu 2 de paramètres
- [Jeu 3 actif] (CFP3) : Jeu 3 de paramètres
- [En freinage] (brS) : Variateur en freinage
- [En charge bus DC] (dbL) : Bus DC en
- [Sens Avant] (MFrd) : Moteur en rotation
- [Sens Arrièr.] (MrrS) : Moteur en rotation
- [Couple haut atteint] (ttHA) : Couple
- [Couple bas atteint] (ttLA) : Couple moteur
- [Alarme Fr eq . m è tre ] (FqLA) : Seuil de
)
)
atteinte
actif
actif
actif
charge
dans le sens avant
dans le sens arrière
moteur supérieur au seuil haut [Seuil
couple haut] (ttH) page 67
inférieur au seuil bas [Seuil couple bas]
(ttL) page 67
vitesse mesurée atteint : [Seuil alarme
pulse] (FqL) page 68
.
.
.
.
AAV49425 11/2009 51
Page 51

[1.2 SURVEILLANCE] (SUP-)
état 1
état 0
LI1 LI2 LI3 LI4 LI5 LI6 LI7 LI8
état 1
état 0
LI9 LI10 LI11 LI12 LI13 LI14 PR
Avec terminal intégré
Ce menu permet de visualiser les entrées et les états et valeurs internes du variateur.
Code Nom / Descrip tion Plage de réglage Réglage usine
IOM-
LIA-
L1A
à
L14A
LIS1
LIS2
IMAGE DES ENTREES
b Fonctions des entrées logiques
Permet de visualiser les fonctions affectées à chaque entrée. Si aucune fonction n’ est affectée, l’ affichage
est nO.
Les flèches et permettent de scruter toutes les fonctions. Si plusieurs fonctions sont affectées à
une même entrée, s’assurer qu’elles sont compatibles.
b Etat des entrées logiques LI1 à LI8
Permet de visualiser l’état des entrées logiques LI1 à LI8
(utilisation des segments de l’afficheur : haut = 1, bas = 0)
Exemple ci dessus : LI1 et LI6 sont à 1, LI2 à LI5, LI7 et LI8 sont à 0.
b Etat des entrées logiques LI9 à LI14 et power removal
Permet de visualiser l’état des entrées logiques LI9 à LI14 et PR (power removal)
(utilisation des segments de l’afficheur : haut = 1, bas = 0)
AIA-
AI1A
AI2A
AI3A
AI4A
Exemple ci dessus : LI9 et LI14 sont à 1, LI10 à LI13 sont à 0 et PR (power removal) est à 1.
b Fonctions des entrées analogiques
Permet de visualiser les fonctions affect ées à cha que entré e. Si aucune fon ction n’est affi chée, l’a ffic hage
est nO. Les flèches et permettent de scruter toutes les fonctions. Si plusieurs fonctions sont
affectées à une même entrée, s’assurer qu’elles sont compatibles.
52 AAV49425 11/2009
Page 52

[1.2 SURVEILLANCE] (SUP-)
Avec terminal intégré : États et valeurs internes du variateur
Code Nom / Description Unité
ALGr
rPI
MFr
FrH
trr
rFr
MMF
FqS
LCr
AUS
SPd
UOP
OPr
Otr
ULn
tHr
tHd
tHb
APH
rtH
PtH
tAC
rPC
rPF
rPE
rPO
CLO-
o02
o03
o04
o05
o06
CnFS
CFPS
Groupes alarmes : Numéros de groupe des alarmes présentes
Référence interne PID : Référence PID par le terminal graphique (accessible si la fonction a été configurée). en valeur
process
Coefficient multiplicateur (accessible si [Réf. multipli.-] (MA2,MA3) page 151
Référence fréq. Hz
Référence couple : Accessible si la fonction est configurée %.
Fréquence Sortie Hz
Vitesse moteur mesurée signée si une carte codeur est présente, sinon affichage 0. Hz
Fréquence de l’entrée "Pulse input" utilisée par la fonction [FREQUENCE METRE] (FqF-) page 253
Courant moteur A
Vitesse moyenne ENA : Paramètre accessible si EnA = YES (voir page 94
Vitesse moteur RPM
Tension moteur V
Puissance moteur %
Couple moteur %
Tension réseau : Tension réseau vue du bus DC en régime moteur ou à l’arrêt. V
Etat therm moteur %
Etat therm. var. %
Etat thermique résistance de freinage : Accessible sur forts calibres de variateurs seulement. %
Consommation Wh, kWh ou
Temps de marche : Temps de mise sous tension moteur secondes,
Temps var. ON : Temps de mise sous tension variateur
T. alarme IGBT : Temps de mise en alarme "températ ure IGBT" secondes
Référence PID : Accessible si le PID est configuré en valeur
Retour PID : Accessible si le PID est configuré
Erreur PID : Accessible si le PID est configuré
Sortie PID : Accessible si le PID est configuré Hz
tIME, dAY : Date et heure actuelles, générées par la carte Controlle r Insi de, acc essi ble s si ell e est présente
Mot généré par la carte Controller Inside, accessible si elle est présente
Mot généré par la carte Controller Inside, accessible si elle est présente
Mot généré par la carte Controller Inside, accessible si elle est présente
Mot généré par la carte Controller Inside, accessible si elle est présente
Mot généré par la carte Controller Inside, accessible si elle est présente
Config. active : CnF0, 1 ou 2 (accessible si la commutat ion de moteurs ou de configurat ions est valide, voi r
page 219
Jeu param Utilisé : CFP1, 2 ou 3 (accessible si la commutation de paramètres est valide, voir page 215
)
est affectée) %
.Hz
)Hz
MWh
minutes ou
heures
process
)
AAV49425 11/2009 53
Page 53

[1.3 REGLAGES] (SEt-)
RDY Term +0.00Hz 0A
MENU GENERAL
1 MENU VARIATEUR
2 NIVEAU D’ACCES
3 OUVRIR / ENREG. SOUS
4 MOT DE PASSE
5 LANGUE
Code Quick
ENT
RDY Term +0.00Hz 0A
1 MENU VARIATEUR
1.1 SIMPLY START
1.2 SURVEILLANCE
1.3 REGLAGES
1.4 CONTRÔLE MOTEUR
1.5 ENTREES/SORTIES
Code << >> Quick
ENT
RUN Term +50.00Hz 80A
1.3 REGLAGES
incrément rampe
Accélération
Décélération
Accélération 2
Décélération 2
Code << >> Quick
XXX
SIM-
SEt-
ESC
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
drC-
Affiche l’état du variateur
REGLAGES
Mise sous tension
Avec terminal graphique :
Avec terminal intégré :
54 AAV49425 11/2009
Page 54

[1.3 REGLAGES] (SEt-)
DANGER
FONCTIONNEMENT INATTENDU DE L’APPAREIL
• Assurez-vous que les changements apportés aux réglages en cours de fonctionnement ne présentent pas de
danger.
• Il est recommandé d'effectuer les changements une fois le variateur arrêté
Si ces précautions ne sont pas respectées, cela entraînera la mort ou des blessures graves.
Les paramètres de réglage sont mo difiables en marche et à l’arrêt.
Code Nom / Descrip tion Plage de réglage Réglage usine
Inr
0.01
ACC
dEC
AC2
g
dE2
g
tA1
g
tA2
g
tA3
g
0.1
M [incrément rampe]
v [0,01] : rampe jusqu’à 99,99 secondes
v [0,1] : rampe jusqu’à 999,9 secondes
1
v [1] : rampe jusqu’à 6000 secondes
Ce paramètre s’applique à [Accélération] (ACC), [Décélération] (dEC), [Accélération2] (AC2) et [Décélération2]
(dE2).
M [Accélération]
Temps pour accélérer de 0 à la [Fréq. nom. mot.] (FrS) (page 76). S’assurer que cette valeur est compatible
avec l’inertie entraînée
M [Décélération]
Temps pour décélérer de la [Fréq. nom. mot.] (FrS) (page 76) à 0. S’assurer que cette valeur est compatible
avec l’inertie entraînée.
M [Accélération 2]
Voir page 154
Temps pour accélérer de 0 à la [Fréq. nom. mot.] (FrS). S’assurer que cette valeur est compatible avec l’inertie
entraînée.
M [Décélération 2]
Voir page 154
Temps pour décélérer de la [Fréq. nom. mot.] (FrS) à 0. S’assurer que cette valeur est compatibl e avec l’inertie
entraînée.
M [Arrondi déb. Acc]
Voir page 153
Arrondi de début de rampe d’accélération en % du temps de rampe [Accélération] (ACC) ou [Accélération 2]
(AC2).
M [Arrondi fin Acc]
Voir page 153
- Arrondi de fin de rampe d’accélération en % du temps de rampe [Accélération] (ACC) ou [Accélération 2]
(AC2).
- Réglable de 0 à (1 0 0% - [arrondi 1 déb. Acc] (tA1))
M [Arrondi déb. Déc]
Voir page 153
Arrondi de début de rampe de décélération en % du temps de rampe [Décélération] (dEC) ou [Décélération 2]
(dE2).
0,01 - 0,1 - 1 0,1
0,01 à 6000 s (1) 3,0 s
0,01 à 6000 s (1) 3,0 s
0,01 à 6000 s (1) 5,0 s
0,01 à 6000 s (1) 5,0 s
0 à 100 % 10 %
10 %
0 à 100 % 10 %
(1)Plage 0,01 à 99,99 s ou 0,1 à 999,9 s ou 1 à 6000 s selon [Incrément rampe] (Inr).
Ces paramètres n’apparaissent que si la fonction correspondante a été sélectionnée dans un autre menu. Lorsqu’ils sont
g
AAV49425 11/2009 55
également accessibles et réglables depuis le menu de configuratio n de la fonction corresponda nte, pour une programmation
plus aisée, leur description est détaillée dans ces menus, aux pages indiquées.
Page 55

[1.3 REGLAGES] (SEt-)
ATTENTION
Dans le cas des moteurs synchrones à aimant permanent il ne faut pas dépasser la vitesse maximale
admissible sinon il y a un risque de démagnétisation. Dans tous les cas, il ne faut pas dépasser la vitesse
admissible par le moteur, par la chaîne cinématique, ou par l’application.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
Code Nom / Descrip tion Plage de réglage Réglage usine
tA4
g
M [Arrondi fin Déc]
Voir page 153
- Arrondi de fin de rampe de décélération en % du temps de rampe [Décélération] (dEC) ou [Décélération
2] (dE2).
- Réglable de 0 à (1 0 0% - [Arrondi déb. Déc] (tA3))
10 %
LSP
HSP
ItH
SPG
g
SIt
g
SFC
g
StA
g
FLG
g
M [Petite vitesse]
Fréquence moteur à consigne mini, réglage de 0 à [Grande vitesse] (HSP).
M [Grande vitesse]
Fréquence moteur à consigne maxi, réglage de [Petite vitesse] (LSP) à [Fréquence maxi] (t Fr). Le réglage
usine devient 60 Hz si [Standard fréq.mot] (bFr) = [60Hz NEMA] (60)..
M [Courant therm. mot]
Courant de protection thermique du moteur, à régler à l’intensité nominale lue sur sa plaque signalétique.
M [Gain prop. vit.]
Paramètre accessible si [Type de boucle vit.] (SSL) page 89 = [Standard] (Std).
Gain proportionnel de la boucle de vitesse.
M [Temps integr. vit.]
Paramètre accessible si [Type de boucle vit.] (SSL) page 89 = [Standard] (Std).
Constante de temps de l’intégrale de la boucle de vitesse.
M [K filtre boucle vit.]
Paramètre accessible si [Type de boucle vit.] (SSL) page 89 = [Standard] (Std).
Coefficient de filtrage de la boucle de vitesse.
M [Stab.Boucle F]
Paramètre accessible si [Type de boucle vit.] (SSL) page 89 = [Haute perf.] (HPF ) .
Stabilité : permet d’adapter l’atteinte du régime établi après un transitoire de vitesse en fonction de la
cinématique de la machine. Augmenter progressivement la stabili té pour augmenter l'atté nuation de la boucl e
de régulation afin de réduire les dépassements en vitesse.
M [Gain Boucle F]
Paramètre accessible si [Type de boucle vit.] (SSL) page 89 = [Haute perf.] (HPF ) .
Gain de la boucle fréquence : permet d’adap ter la rapidité des t ransitoires de vitesse de la machine en fonction
de la cinématique. Augmenter progressivement le gain pour augmenter la bande passante de la boucle de
régulation.
0 Hz
50 Hz
0,2 à 1,5 In (1) Selon calibre
variateur
0 à 1000 % 40 %
1 à 1000 % 100 %
0 à 100 0
0 à 100 % 20 %
0 à 100 % 20 %
(1)In correspond au courant nominal variateur indiqué dans le guide d’installation ou sur la plaque signalétique du variateur.
Ces paramètres n’apparaissent que si la fonction correspondante a été sélectionnée dans un autre menu. Lorsqu’ils sont
g
56 AAV49425 11/2009
également accessibles et réglables depuis le menu de configuratio n de la fonction corresponda nte, pour une programmation
plus aisée, leur description est détaillée dans ces menus, aux pages indiquées.
Page 56

[1.3 REGLAGES] (SEt-)
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
Boucle de vitesse standard - Réglage des paramètres [K filtre boucle vit.] (SFC),
[Gain prop. vit.] (SPG) et [Temps intégr. vit.] (SIt)
• Ces paramètres ne sont accessibles qu’en lois à contrôle vectoriel : [Type cde moteur] (Ctt) page 70 = [SVC U] (UUC), [SVC I] (CUC),
[FVC] (FUC), [Mot. sync.] (SYn) ou [Sync.BF] (FSY), si [Type de boucle vit.](SSL) page 89
(EnA) page 94
= [Non] (nO).
• Les réglages usine conviennent à la plupart des applications.
Cas général : réglage avec [K filtre boucle vit.] (SFC) = 0
Le régulateur est du type "IP", avec un filtrage de la consigne de vitesse, pour des applications nécessitant souplesse et stabilité (Levage
ou forte inertie par exemple).
• [Gain prop. vit.] (SPG) agit sur le dépassement en vitesse.
• [Temps integr. vit.] (SIt) agit sur la bande passante et le temps de réponse.
Réponse initiale Diminution de SIT Diminution de SIT
= [Standard] (Std) et si [ENA system]
Réponse initiale Augmentation de SPG Augmentation de SPG
AAV49425 11/2009 57
Page 57

[1.3 REGLAGES] (SEt-)
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
Cas particulier : paramètre [K filtre boucle vit.] (SFC) différent de 0
Ce paramètre doit être réservé à des applications particulières nécessitant un temps de répon se court (Positionnement ou asservissement
de trajectoire par exemple).
- Réglé à 100 comme décrit ci dessous, le régulateur est du type "PI", sans filtrage de la consigne de vi tesse.
- Réglé entre 0 et 100, le fonctionnement obtenu est intermédiaire entre les réglages ci dessous et ceux de la page précédente.
Exemple : réglage avec [K filtre boucle vit.] (SFC) = 100
• [Gain prop. vit.] (SPG) agit sur la bande passante et le temps de réponse.
• [Temps integr. vit.] (SIt) agit sur le dépassement en vitesse.
Réponse initiale Diminution de SIT Diminution de SIT
Réponse initiale Augmentation de SPG Augmentation de SPG
58 AAV49425 11/2009
Page 58

[1.3 REGLAGES] (SEt-)
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
Boucle de vitesse haute performance - Réglage des paramètres [Gain Boucle F] (FLG)
et [
Stab.Boucle F] (StA)
Ces paramètres ne sont accessibles que si [Type de boucle vit.] (SSL) page 89 = [Haute perf.] (HPF).
Inertie
Le paramètre [Inertie estimée app.] (JESt) page 89 est la valeur par défaut de l’inertie entraînée, estimée par le variateur en fonction des
paramètres moteur. Les réglages par défaut de la boucle vitesse sont déterminés par le variateur à partir de cette inertie.
La valeur de l’inertie réelle entraînée doit être saisie dans le paramètre [Inertie de l'applicat.] (JAPL) page 90
utilisée par le variateur pour optimiser les réglages de la boucle vitesse. C’est ainsi que les meilleurs résultats seront obtenus, si la valeur
saisie est exacte.
Le paramètre [Coef. inertie app.] (JACO) page 89
[Inertie de l'applicat.] (JAPL) page 90
.
sert à déterminer le ration par défaut entre [Inertie estimée app.] (JESt) page 89 et
Gains
Ces paramètres permettent d’ajuster la réponse de la boucle vitesse obtenue à partir de l’inertie, en particulier si celle-ci est mal connue.
• [Stab.Boucle F] (StA) : permet d’adapter l’atteinte du régime établi après un t ransitoire de vitesse en fo nction de la cinématique de la
machine. Augmenter progressivement la stabilité pour augmenter l'atténuation de la boucle de régulation afin de réduire les
dépassements en vitesse.
• [Gain Boucle F] (FLG) : permet d’adapter la rapidité des transitoires de vitesse de la machine en fonction de la cinématique (bande
passante). Pour les machines à fort couple résistant ou à inertie importante et à cycles rapi des, augmente r progressi vement le gain.
. Cette valeur est alors
Réponse initiale Augmentation de StA Augmentation de StA
Réponse initiale Augmentation de FLG Augmentation de FLG
Paramètres expert
Deux paramètres du menu [1.4 CONTROLE MOTEUR] (drC-) accessibles en niveau "expert" permettent d’obtenir une dynamique accrue,
si nécessaire. Voir page 90
AAV49425 11/2009 59
.
Page 59

[1.3 REGLAGES] (SEt-)
ATTENTION
Assurez vous que le moteur supporte ce courant sans surchauffe.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
ATTENTION
Assurez vous que le moteur supporte ce courant sans surchauffe.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
Code Nom / Descrip tion Plage de réglage Réglage usine
GPE
g
GIE
g
UFr
g
SLP
g
dCF
g
IdC
g
M [Gain prop. ENA]
Voir page 94
M [Gain intégral ENA]
Voir page 94
M [Compensation RI]
Voir page 95
M [Comp. glissement]
Voir page 78
M [Diviseur rampe]
Voir page 156
M [I injection DC 1]
Voir page 157
Intensité du courant de freinage par injection de courant continu activé par entrée logique ou choisi comme
mode d'arrêt.
1 à 9999 250
0 à 9999 100
25 à 200 % 100 %
0 à 300 % 100 %
0 à 10 4
0,1 à 1,41 In (1) 0,64 In (1)
tdI
g
IdC2
g
tdC
g
(1)In correspond au courant nominal variateur indiqué dans le guide d’installation ou sur la plaque signalétique du variateur.
g
M [Temps inj. DC 1]
Voir page 157
Durée maxi d'injection du courant [I injection DC 1] (IdC). Passé ce temps le courant d'injection devient
[I injection DC 2] (IdC2).
M [I injection DC 2]
Voir page 157
Courant d'injection activé par entrée logique ou choisi comme mode d’arrêt, après écoulement du temps [Temps
inj. DC 1] (tdI).
M [Temps inj. DC 2]
Voir page 157
Durée maxi d'injection [I injection DC 2] (IdC2) pour injection choisi comme mode d’arrêt seulement.
Ces paramètres n’apparaissent que si la fonction correspondante a été sélectionnée dans un autre menu. Lorsqu’ils sont
également accessibles et réglables depuis le menu de configuratio n de la fonction corresponda nte, pour une programmation
plus aisée, leur description est détaillée dans ces menus, aux pages indiquées.
0,1 à 30 s 0,5 s
0,1 In (2) à [I injection
DC 1] (IdC)
0,1 à 30 s 0,5 s
0,5 In (1)
60 AAV49425 11/2009
Page 60

[1.3 REGLAGES] (SEt-)
ATTENTION
Assurez vous que le moteur supporte ce courant sans surchauffe.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
ATTENTION
Assurez vous que le moteur supporte ce courant sans surchauffe.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
AdC SdC2 Fonctionnement
YES x
Ct
≠ 0
Ct = 0
Ordre de marche
Vitesse
t
SdC1
SdC2
tdC1 tdC1 + tdC2
I
t
SdC1
I
t
SdC1
SdC2
tdC1
I
t
0
t
1
0
Code Nom / Descrip tion Plage de réglage Réglage usine
SdC1
g
tdCI
g
SdC2
g
M [I inject. DC auto 1]
Intensité du courant d’injection à l’arrêt. Paramètre accessible si [Injection DC auto] (AdC) page 158 est
différent de [Non] (nO)
Ce paramètre est forcé à 0 si [Type cde moteur] (Ctt) page 70
M [Tps inj. DC auto 1]
Temps d’injection à l’arrêt. Paramètre accessible si [Injection DC auto] (AdC) page 158 est différent de [Non]
(nO)
Si [Type cde moteur] (Ctt) page 70
correspond au temps de maintien de la vitesse nulle.
M [I inject. DC auto 2]
2e intensité du courant d’injection à l’arrêt.
Paramètre accessible si [Injection DC auto] (AdC) page 158
Ce paramètre est forcé à 0 si [Type cde moteur] (Ctt) page 70
0 à 1,2 In (1) 0,7 In (1)
= [Mot. sync.] (SYn) ou [Sync.BF] (FSY).
0,1 à 30 s 0,5 s
= [FVC] (FUC) ou [Mot. sync.] (SYn) ou [Sync.BF] (FSY) ce temps
0 à 1,2 In (1) 0,5 In (1)
est différent de [Non] (nO)
= [Mot. sync.] (SYn) ou [Sync.BF] (FSY).
tdC2
M [Tps inj. DC auto 2]
g
(1)In correspond au courant nominal variateur indiqué dans le guide d’installation ou sur la plaque signalétique du variateur.
2e temps d’injection à l’arrêt.
Paramètre accessible si [Injection DC auto] (AdC) page 158
0 à 30 s 0 s
= [Oui] (YES)
Remarque : Quand [Type cde moteur] (Ctt)
page 70
[I inject. DC auto 1] (SdC1), [I inject. DC
auto 2] (SdC2) et [Tps inj. DC auto 2] (tdC2)
ne sont pas accessibles, seul [Tps inj. DC
auto 1] (tdC1) est accessible, il correspond
alors à un temps de maintien de la vitesse
nulle.
= [FVC] (FUC) ou [Sync.BF] (FSY) :
AAV49425 11/2009 61
Page 61

[1.3 REGLAGES] (SEt-)
ATTENTION
Sur les variateurs ATV71p075N4 à U40N4, si les filtres RFI sont déconnectés (utilisation su r réseau IT), la
fréquence de découpage du variateur ne doit pas dépasser 4 kHz.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
ATTENTION
Assurez vous que le moteur supporte ce courant, en particulier s’il s’agit d’un moteur synchrone à aimants
permanents pour lequel il y a risque de démagnétisation.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
ATTENTION
Assurez vous que le moteur supporte ce courant, en particulier s’il s’agit d’un moteur synchrone à aimants
permanents pour lequel il y a risque de démagnétisation.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
Code Nom / Descrip tion Plage de réglage Réglage usine
SFr
M [Fréquence découp.]
Réglage de la fréquence de découpage.
Plage de réglage : elle peut varier de 1 à 16 kHz, mais le mini et le maxi ainsi que le réglage usine peuvent
être limités selon le type de variateur (ATV71H ou W), selon le cali bre et selon la conf iguration des paramètres
[Filtre sinus] (OFI) et [Lim. surt en s. m o t.] (SUL) page 96
selon calibre selon calibre
.
CLI
Si la valeur est inférieure à 2 kHz, [Limitation courant] (CLI) et [Valeur I limit. 2] (CL2) page 62
1,36 In.
Réglage en marche :
- Si la valeur initiale est inférieure à 2 kHz, on ne peut aller au dessus de 1,9 kHz en marc he.
- Si la valeur initiale est supérieure ou égale à 2 kHz, on ne peut aller au dessous de 2 kHz en marche.
Réglage à l’arrêt : Sans contrainte.
Nota : En cas d’échauffement excessif le variateur diminue automatiquement la fréquence de
découpage et la rétablit lorsque la température est redevenue normal e.
Nota : Si [Type cde moteur] (Ctt) page 70
la fréquence de découpage à une valeur inférieure à 2 kHz, cela peut entraî ner des instabilités de
vitesse..
M [Limitation courant]
Permet de limiter le courant du moteur.
La plage de réglage est limitée à 1,36 In si [Fréquence découp.] (SFr) page 62
Nota : Si le réglage est inférieur à 0,25 In, i l y a risqu e de verrouill age en déf aut [ Perte phase mot eur]
(OPF) si celui ci est validé (voir page 242
plus.
sont limités à
= [FVC] (FUC) ou [Sync.BF] (FSY) il est déconseillé de régler
0 à 1,65 In (1) 1,5 In (1)
est inférieure à 2 kHz.
). S’il est inférieur au courant moteur à vid e la limitat ion n’agit
CL2
g
(1)In correspond au courant nominal variateur indiqué dans le guide d’installation ou sur la plaque signalétique du variateur.
g
62 AAV49425 11/2009
M [Valeur I limit. 2]
Voir page 204
La plage de réglage est limitée à 1,36 In si [Fréquence découp.] (SFr) page 62 est inférieure à 2 kHz.
Nota : Si le réglage est inférieur à 0,25 In, i l y a risqu e de verrouill age en déf aut [ Perte phase mot eur]
(OPF) si celui ci est validé (voir page 242
plus.
Ces paramètres n’apparaissent que si la fonction correspondante a été sélectionnée dans un autre menu. Lorsqu’ils sont
également accessibles et réglables depuis le menu de configuratio n de la fonction corresponda nte, pour une programmation
plus aisée, leur description est détaillée dans ces menus, aux pages indiquées.
). S’il est inférieur au courant moteur à vid e la limitat ion n’agit
0 à 1,65 In (1) 1,5 In (1)
Page 62

[1.3 REGLAGES] (SEt-)
ATTENTION
Assurez vous que le moteur supporte ce courant sans surchauffe.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
Code Nom / Descrip tion Plage de réglage Réglage usine
FLU
FnC
FCt
FnO
M [Fluxage moteur]
v [Non Continu] (FnC) : Mode Non Continu
v [Continu] (FCt) : Mode Continu. Ce choix est impossible si [Type d'angle test] (ASt) pages 84 ou 87 est [Avc
charge] (brC) ou si [Injection DC auto] (AdC) page 158
[Roue libre] (nSt).
est [Oui] (YES) ou si [Type d’arrêt] (Stt) page 156 est
v [Non] (FnO) : Fonction inactive. Ce choix est impossible si [Typ e cde moteur] (Ctt) page 70 = [SVC I] (CUC) ou
[FVC] (FUC).
Si [Type cde moteur] (Ctt) page 70
remplacé par [Non Continu] (FnC).
Si [Type cde moteur] (Ctt) page 70
partir de 55 kW pour ATV71
Si [Type cde moteur] (Ctt) page 70
Afin d’obtenir rapidement un couple important au démarrage, il est nécessaire d’établir préalablement le flux
magnétique dans le moteur.
• En mode [Continu] (FCt) le variateur établit le flux de manière automatique à partir de la mise sous tension.
• En mode [Non Continu] (FnC) le fluxage se fait au démarrage du moteur.
La valeur du courant de fluxage est supérieure à nCr (courant no minal moteur configuré) lors de l’établisse ment
du flux puis est régulée à la valeur du courant magnétisant moteur...
= [SVC I] (CUC), [FVC] (FUC) ou [Mot. sync.] (SYn ) , le réglage usine est
= [SVC U] (UUC), le réglage usine est remplacé par [ Non Continu] (FnC) à
ppppM3X et à partir de 90 kW pour ATV71ppppN4.
= [Sync.BF] (FSY), [Fluxage moteur] (FLU) est forcé à [Non] (FnO).
[Non] (FnO)
tLS
JGF
g
JGt
g
Si [Type cde moteur] (Ctt) page 70
impérativement être actif ([Non] (FnO) interdit) : il entraîne l'aligneme nt ou la détection d'angle du rotor (selon
la configuration de [Type d'angle test] (ASt) page 84
•Si [Affectation frein] (bLC) page 175
sans effet.
Nota : Si [Type d'angle test] (ASt) = [Sns charge] (nLd), pendant la mesure le moteur peut effectuer
une rotation d’un tour.
M [Temps petite vit.]
Temps maxi de fonctionnement en [Petite vitesse] (LSP) (voir page 44)
Suite à un fonctionnement en LSP pendant le temps défini, l’arrêt du moteur est demandé automatiquement.
Le moteur redémarre si la référence est supérieure à LSP et si un ordre de marche est toujours présent.
Attention, la valeur 0 correspond à un temps non limité.
Nota : Si [Temps petite vit.]
à [arrêt rampe] (rMP) (seul l'arrêt sur rampe est configurable).
M [Fréquence JOG]
Voir page 160
Consigne en marche par impulsion
M [Tempo. JOG]
Voir page 160
Temporisation d’antipianotage entre 2 marches pas à pas (JOG) consécutives.
= [Mot. sync.] (SYn), le paramètre [Fluxage moteur] (FLU) doit
) et non le fluxage.
est différent de [Non] (nO), le paramètre [Fluxage moteur] (FLU) est
0 à 999,9 s 0 s
(tLS) est différent de 0, le paramètre [Type d’arrêt] (Stt) page 156 est forcé
0 à 10 Hz 10 Hz
0 à 2,0 s 0,5 s
(1)In correspond au courant nominal variateur indiqué dans le guide d’installation ou sur la plaque signalétique du variateur.
Ces paramètres n’apparaissent que si la fonction correspondante a été sélectionnée dans un autre menu. Lorsqu’ils sont
g
également accessibles et réglables depuis le menu de configuratio n de la fonction corresponda nte, pour une programmation
plus aisée, leur description est détaillée dans ces menus, aux pages indiquées.
AAV49425 11/2009 63
Page 63

[1.3 REGLAGES] (SEt-)
Code Nom / Descrip tion Plage de réglage Réglage usine
SP2
g
SP3
g
SP4
g
SP5
g
SP6
g
SP7
g
SP8
g
SP9
g
SP10
g
SP11
g
SP12
g
SP13
g
SP14
g
M [Vit. présélect. 2]
Voir page 163
Vitesse présélectionnée 2
M [Vit. présélect. 3]
Voir page 163
Vitesse présélectionnée 3
M [Vit. présélect. 4]
Voir page 163
Vitesse présélectionnée 4
M [Vit. présélect. 5]
Voir page 163
Vitesse présélectionnée 5
M [Vit. présélect. 6]
Voir page 163
Vitesse présélectionnée 6
M [Vit. présélect. 7]
Voir page 163
Vitesse présélectionnée 7
M [Vit. présélect. 8]
Voir page 163
Vitesse présélectionnée 8
M [Vit. présélect. 9]
Voir page 163
Vitesse présélectionnée 9
M [Vit. présélect. 10]
Voir page 163
Vitesse présélectionnée 10
M [Vit. présélect. 11]
Voir page 163
Vitesse présélectionnée 11
M [Vit. présélect. 12]
Voir page 163
Vitesse présélectionnée 12
M [Vit. présélect. 13]
Voir page 163
Vitesse présélectionnée 13
M [Vit. présélect. 14]
Voir page 163
Vitesse présélectionnée 14
0 à 1600 Hz 10 Hz
0 à 1600 Hz 15 Hz
0 à 1600 Hz 20 Hz
0 à 1600 Hz 25 Hz
0 à 1600 Hz 30 Hz
0 à 1600 Hz 35 Hz
0 à 1600 Hz 40 Hz
0 à 1600 Hz 45 Hz
0 à 1600 Hz 50 Hz
0 à 1600 Hz 55 Hz
0 à 1600 Hz 60 Hz
0 à 1600 Hz 70 Hz
0 à 1600 Hz 80 Hz
Ces paramètres n’apparaissent que si la fonction correspondante a été sélectionnée dans un autre menu. Lorsqu’ils sont
g
64 AAV49425 11/2009
également accessibles et réglables depuis le menu de configuratio n de la fonction corresponda nte, pour une programmation
plus aisée, leur description est détaillée dans ces menus, aux pages indiquées.
Page 64

[1.3 REGLAGES] (SEt-)
Code Nom / Descrip tion Plage de réglage Réglage usine
SP15
g
SP16
g
MFr
SrP
g
rPG
g
rIG
g
rdG
g
PrP
g
POL
g
POH
g
PAL
g
PAH
g
M [Vit. présélect. 15]
Voir page 163
Vitesse présélectionnée 15
M [Vit. présélect. 16]
Voir page 163
Vitesse présélectionnée 16
M [Coeff. multiplicat.]
Coefficient multiplicateur, accessible si [Réf. multipli.-] (MA2,MA3) page 151 est affectée au terminal graphique
M [Limit. +/- vite]
Voir page 167
Limitation de la variation + / - vite.
M [Gain prop. PID]
Voir page 193
Gain proportionnel
M [Gain intégral PID]
Voir page 194
Gain intégral
M [Gain dérivé PID]
Voir page 194
Gain dérivé
M [Rampe PID]
Voir page 194
Rampe accélération/décélération du PID, définie pour al ler de [Réf. PID mini] (PIP1) à [Réf. PID maxi] (PIP2)
et inversement.
M [Sortie PID mini]
Voir page 194
Valeur minimale de la sortie du régulateur, en Hz.
M [Sortie PID maxi]
Voir page 194
Valeur maximale de la sortie du régulateur, en Hz.
M [Alarme retour mini]
Voir page 194
Seuil de surveillance mini du retour du régulateur.
M [Alarme retour maxi]
Voir page 194
Seuil de surveillance maxi du retour du régulateur.
0 à 1600 Hz 90 Hz
0 à 1600 Hz 100 Hz
0 à 100 % 100 %
0 à 50 % 10 %
0,01 à 100 1
0,01 à 100 1
0,00 à 100 0
0 à 99,9 s 0
- 500 à 500 ou -1600 à
1600 selon calibre
0 à 500 ou 1600 selon
calibre
Voir page 194 (1) 100
Voir page 194 (1) 1000
0 Hz
60 Hz
(1)En absence de terminal graphique, sur l’afficheur à 4 digits, les valeurs supéri eures à 9999 s’ affichent a vec un point après le chiffre des
milliers, exemple15.65 pour 15650.
Ces paramètres n’apparaissent que si la fonction correspondante a été sélectionnée dans un autre menu. Lorsqu’ils sont
g
AAV49425 11/2009 65
également accessibles et réglables depuis le menu de configuratio n de la fonction corresponda nte, pour une programmation
plus aisée, leur description est détaillée dans ces menus, aux pages indiquées.
Page 65

[1.3 REGLAGES] (SEt-)
Code Nom / Description Plage de réglage Réglage usine
PEr
g
PSr
g
rP2
g
rP3
g
rP4
g
Ibr
g
Ird
g
brt
g
bIr
g
bEn
g
tbE
g
M [Alarme erreur PID]
Voir page 194
Seuil de surveillance de l’erreur du régulateur.
M [% Réf. Vitesse]
Voir page 195
Coefficient multiplicateur de l’entrée vitesse prédictive.
M [Réf. présél. PID 2]
Voir page 197
Référence PID présélectionnée.
M [Réf. présél. PID 3]
Voir page 197
Référence PID présélectionnée.
M [Réf. présél. PID 4]
Voir page 197
Référence PID présélectionnée.
M [I ouv. frein montée]
Voir page 175
Seuil de courant de desserrage de frein pour le sens Montée ou Avant
M [I ouv. frein desc.]
Voir page 175
Seuil de courant de desserrage de frein pour le sens Descente ou Arrière
M [Temps ouv. frein]
Voir page 176
Temporisation de desserra ge de frein.
M [Fréq. ouvert. frein]
Voir page 176
Seuil de fréquence de desserrage du frein.
M [Fréq. ferm. frein]
Voir page 176
Seuil de fréquence de serrage du frein
M [Délai ferm. frein]
Voir page 176
Temporisation avant demande de serrage du frein. Pour retarder le serrage du frein, pour mouvement horizontal
seulement, si on veut que le frein se serre à l’arrêt complet.
0 à 65535 (1) 100
1à 100 % 100 %
Voir page 197 (1) 300
Voir page 197 (1) 600
Voir page 197 (1) 900
0 à 1,32 In (2) 0
0 à 1,32 In (2) 0
0 à 5,00 s 0 s
[Auto] (AUtO)
0 à 10 Hz
[Auto] (AUtO)
0 à 10 Hz
0 à 5,00 s 0 s
[Auto] (AUtO)
[Auto] (AUtO)
(1)En absence de terminal graphique, sur l’afficheur à 4 digits, les valeurs supéri eures à 9999 s’ affichent a vec un point après le chiffre des
milliers, exemple15.65 pour 15650.
(2)In correspond au courant nominal variateur indiqué dans le guide d’installation ou sur la plaque signalétique du variateur.
Ces paramètres n’apparaissent que si la fonction correspondante a été sélectionnée dans un autre menu. Lorsqu’ils sont
g
66 AAV49425 11/2009
également accessibles et réglables depuis le menu de configuratio n de la fonction corresponda nte, pour une programmation
plus aisée, leur description est détaillée dans ces menus, aux pages indiquées.
Page 66

[1.3 REGLAGES] (SEt-)
Code Nom / Description Plage de réglage Réglage usine
bEt
g
JdC
g
ttr
g
tLIM
g
tLIG
g
trH
g
M [Temps ferm. frein]
Voir page 176
Temps de serrage du frein (temps de réponse du frein)
M [Saut à l’inversion]
Voir page 177
M [Temps redémar.]
Voir page 177
Temporisation entre la fin d’une séquence de serrage de frein et le début d’une séquence de desserrage.
M [Lim. couple moteur]
Voir page 202
Limitation du couple en régime générateur, en % ou en 0,1 % du couple nominal se lon le paramètre [Incrément
couple] (IntP) page 202
.
M [Lim. couple géné.]
Voir page 202
Limitation du couple en régime générateur, en % ou en 0,1 % du couple nominal se lon le paramètre [Incrément
couple] (IntP) page 202
.
M [Traverse freq. high]
Voir page 225
0 à 5,00 s 0 s
[Auto] (AUtO)
0 à 10 Hz
0 à 15,00 s 0 s
0 à 300 % 100 %
0 à 300 % 100 %
0 à 10 Hz 4 Hz
[Auto] (AUtO)
trL
g
qSH
g
qSL
g
Ctd
ttH
ttL
(1)In correspond au courant nominal variateur indiqué dans le guide d’installation ou sur la plaque signalétique du variateur.
M [Traverse freq. low]
Voir page 225
M [Quick step high]
Voir page 225
M [Quick step low]
Voir page 225
M [Seuil de courant]
Seuil de courant de la fonction [Seuil I att] (CtA) affectée à un relai s ou une sortie logique (voir page 118).
M [Seuil couple haut]
Seuil de couple haut de la fonction [Cpl.haut att] (ttHA) affectée à un relais ou une sortie logique (voir page
118
), en % du couple nominal du moteur.
M [Seuil couple bas]
Seuil de couple bas de la fonction [Cpl. bas att.] (ttLA) affectée à un relais ou une sortie logique (voir page 118),
en % du couple nominal du moteur.
0 à 10 Hz 4 Hz
0 à [Traverse freq.
high] (trH)
0 à [Traverse freq.
low] (trL)
0 à 1,5 In (1) In (1)
- 300% à + 300 % 100 %
- 300% à + 300 % 50 %
0 Hz
0 Hz
Ces paramètres n’apparaissent que si la fonction correspondante a été sélectionnée dans un autre menu. Lorsqu’ils sont
g
AAV49425 11/2009 67
également accessibles et réglables depuis le menu de configuratio n de la fonction corresponda nte, pour une programmation
plus aisée, leur description est détaillée dans ces menus, aux pages indiquées.
Page 67

[1.3 REGLAGES] (SEt-)
Code Nom / Description Plage de réglage Réglage usine
FqL
g
Ftd
F2d
FFt
g
ttd
g
M [Seuil alarme pulse]
Seuil de vitesse mesurée par la fonction [FREQUENCE METRE] (FqF-) page 253, affecté à un relais ou une
sortie logique (voir page 118
M [Seuil de fréquence]
Seuil de fréquence de la fonction [S. fréq. att.] (FtA) affectée à un relais ou un e sortie logiq ue (voir page 118),
ou utilisé par la fonction [COMMUT. JEUX PARAM.] (MLP-) page 215
M [Seuil fréquence 2]
Seuil de fréquence de la fonction [S. f réq. 2 att.] (F2A) affectée à un relais ou une sortie logique (voir page 118),
ou utilisé par la fonction [COMMUT. JEUX PARAM.] (MLP-) page 215
M [Seuil arrêt roue lib.]
Voir page 156
Passage d’arrêt sur rampe ou d’arrêt rapide à arrêt roue libre sous un seuil de vitesse basse.
Paramètre accessible si [Type d'arrêt] (Stt) = [Arrêt rapide] (FSt) ou [arrêt rampe] (rMP).
v 0,0 : Pas de passage en roue libre.
v 0,1 à 1600 Hz : Seuil de vitesse sous lequel le moteur passe en arrêt roue libre.
M [Dét. therm. mot.]
Voir page 241
Seuil de déclenchement de l’alarme thermique moteur (sortie logique ou relais).
0 Hz à 30,00 kHz 0 Hz
).
0,0 à 1600 Hz [Grande vitesse]
(HSP)
.
0,0 à 1600 Hz [Grande vitesse]
(HSP)
.
0,0 à 1600 Hz 0,0
0 à 118 % 100 %
LbC
g
M [Correction charge]
g
Ces paramètres n’apparaissent que si la fonction correspondante a été sélectionnée dans un autre menu. Lorsqu’ils sont
également accessibles et réglables depuis le menu de configuratio n de la fonction corresponda nte, pour une programmation
plus aisée, leur description est détaillée dans ces menus, aux pages indiquées.
Voir page 98
Correction nominale en Hz.
0 à 1000 Hz 0
68 AAV49425 11/2009
Page 68

[1.4 CONTRÔLE MOTEUR] (drC-)
RDY Term +0.00Hz 0A
MENU GENERAL
1 MENU VARIATEUR
2 NIVEAU D’ACCES
3 OUVRIR / ENREG. SOUS
4 MOT DE PASSE
5 LANGUE
Code Quick
ENT
RDY Term +0.00Hz 0A
1 MENU VARIATEUR
1.1 SIMPLY START
1.2 SURVEILLANCE
1.3 REGLAGES
1.4 CONTRÔLE MOTEUR
1.5 ENTREES/SORTIES
Code << >> Quick
ENT
RUN Term +50.00Hz 80A
1.4 CONTRÔLE MOTEUR
Standard fréq. mot
Type cde moteur
Fréquence maxi
Rotation phase
Filtre sinus
Code << >> Quick
XXX
SIM-
I-O-
ESC
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
drC-
Affiche l’état du variateur
CONTRÔLE MOTEUR
Mise sous tension
Avec terminal graphique :
Avec terminal intégré :
AAV49425 11/2009 69
Page 69

[1.4 CONTRÔLE MOTEUR] (drC-)
Tension
Fréquence
FrS
UnS
U0
La loi est définie par les
valeurs des paramètres
UnS, FrS et U0.
Les paramètres du menu [1.4 CONTROLE MOTEUR] (drC-) ne sont modifiables qu’à l’arrêt sans ordre de marche à l’exception de :
• [Auto-réglage] (tUn) page 88
• Les paramètres comportant le signe
Code Nom / Description Plage de réglage Réglage usine
et [Auto-test angle] (ASA) page 84 qui entraînent la mise sous tension du moteur.
Tdans la colonne code, qui sont modifiables en marche et à l’arrêt.
bFr
Ctt
50
60
UUC
CUC
FUC
M [Standard fréq.mot]
v [50Hz IEC] (50) : IEC
v [60Hz NEMA] (60) : NEMA
Ce paramètre modifie les préréglages des paramètres : [Grande vitesse] (HSP) page 56
(Ftd) page 68
page 71
, [Tension nom. mot.] (UnS) page 76, [Fréq. nom. mot.] (Fr S) page 76 et [Fréquence maxi. ] (tFr)
.
M [Type cde moteur]
, [Seuil de fréquence]
[SVC U] (UUC)
v [SVC U] (UUC) : Contrôle vectoriel de flux en tension, en boucle ouverte , avec compensat ion au tomatique du
glissement en fonction de la charge. Ce type de commande est recommandé en cas de substitution d’un
ATV58. Il permet la marche avec plusieurs moteurs raccordés en parallèle sur un même variateur, s’ils sont
identiques.
v [SVC I] (CUC) : Contrôle vectoriel de flux en courant, en boucle ouverte. Ce type de commande est
recommandé en cas de substitution d’un ATV58F utilisé en boucle ouverte. Il ne permet pas la marche avec
plusieurs moteurs raccordés en parallèle sur un même variateur.
v [FVC] (FUC) : Contrôle vectoriel de flux en coura nt, e n boucle f ermée pou r moteur avec codeur. Ce c hoix est
possible seulement si une carte codeur est présente. L’util isation d’un codeur i ncrémental délivrant seulement
un signal "A" ne permet pas ce fonctionnement.
Ce type de commande est recommandé en cas de subst itution d’un ATV58F util isé en boucle fe rmée. C’est le
plus performant en précision de vitesse et de couple, il permet l’obtention du couple à vitesse nulle. Il ne permet
pas la marche avec plusieurs moteurs raccordés en parallèle sur un même variateur.
Il est impératif que la vérification du codeur page 74
sélectionner [FVC] (FUC).
soit effectuée avec succès avant de
UF2
v [U/F 2pts] (UF2) : Loi U/F simple, sans compensation de glissement. Il permet la marche avec :
- des moteurs spéciaux (rotor bobiné, rotor conique...)
- plusieurs moteurs en parallèle sur un même variateur.
- moteurs haute vitesse
- moteurs de faible puissance par rapport à celle du variateur.
70 AAV49425 11/2009
Page 70

[1.4 CONTRÔLE MOTEUR] (drC-)
Tension
Fréquence
FrS
UnS
U5
U4
U3
U1
U2
U0
F1 F2
F3
F4 F5
FrS > F5 > F4 > F3 > F2 > F1
La loi est définie par
les valeurs des
paramètres UnS, FrS,
U0 à U5 et F0 à F5.
Code Nom / Description Plage de réglage Réglage usine
Ctt
UF5
SYn
M [Type cde moteur] (suite)
v [U/F 5pts] (UF5) : Loi U/F à 5 segments : comme la loi U/F 2 pts, mais permet en plus d’éviter les phé nomènes
de résonnances (saturation).
v [Mot. sync.] (SYn) : Pour moteurs synchrones à aimant permanent à force électromotrice FEM sinusoïdale
uniquement. Ce choix rend inaccessibles les paramètres de moteurs asynchrones et rend accessibles les
paramètres de moteurs synchrones.
tFr
PHr
FSY
AbC
ACb
v [Sync.BF] (FSY) : Moteur synchrone en boucle fermée. Pour mot eurs synchrones à aimant permanent à force
électromotrice FEM sinusoïdale uniquement, avec codeur. Ce choix est possible seulement si une carte
codeur est présente, il rend inaccessibles les paramètres de moteurs asynchrones et rend accessibles les
paramètres de moteurs synchrones.
L’utilisation d’un codeur incrémental délivrant seulement un signal "A" ne permet pas ce fonctionnement.
Il est impératif que la vérification du codeur page 74
sélectionner [Sync.BF] (FSY).
M [Fréquence maxi.]
Le réglage usine est 60 Hz, remplacée par un prérégl age à 72 Hz si [Standard fréq.mot] (bFr) est mis à 60 Hz.
La valeur maxi est limitée par les conditions suivantes :
• elle ne peut dépasser 10 fois la valeur de : [Fréq. nom. mot.] (F rS) page 76
[Fréq. nom. syn.] (FrSS) page 82
• elle ne peut dépasser 500 Hz si le [Type cde moteur] (Ctt) (page 70
est de calibre supérieur à ATV71HD37.
Les valeurs de 500 Hz à 1600 Hz ne so nt pos sibles qu’en co mmande U / F et pou r des puiss ances l imitées
à 37 kW. Dans ce cas configurer le [Type cde moteur] (Ctt ) avant [Fréquence maxi.] (tFr).
M [Rotation phase]
pour un moteur synchrone.
soit effectuée avec succès avant de
10 à 1600 Hz
pour un moteur asynchrone ou
) est différent de U / F ou si le variateur
[ABC] (AbC)
v [ABC] (AbC) : Sens normal,
v [ACB] (ACb) : Sens inverse.
Ce paramètre permet d’inverser le sens de rotation du moteur sans inverser le câblage.
Ne pas modifier le paramètre [Rotation phase] (PHr) quand [Type cde moteur] (Ctt) page 70
[FVC] (FUC) ou [Sync.BF] (FSY). Dans ce cas le sens de rotation doit être éventuellement modifié
avant ou pendant la procédure de vérification du codeur page 74
est différent de [FVC] (FUC) ou [Sync.BF] (FSY). Dans le cas contraire les procédures de vérification
et de mesure seraient à refaire ([Auto-test angle] (ASA) et [Valeur offset angle] (ASU) repassent à
[Non] (nO)).
alors que [Type cde moteur] (Ctt)
=
AAV49425 11/2009 71
Page 71

[1.4 CONTRÔLE MOTEUR] (drC-)
ATTENTION
Si [Filtre sinus] (OFI) = [Oui] (YES) :
• [Fréquence maxi] (tFr) page 42
ne doit pas dépasser 100 Hz.
• Jusqu’à 45 kW pour ATV71
pppM3X et 75 kW pour ATV71pppN4 [Type cde moteur] (Ctt) page 70 doi t
être uniquement [U/F 2pts] (UF2), [U/F 5pts] (UF5), ou [SVC U] (UUC).
• A partir de 55 kW pour ATV71
pppM3X et de 90 kW pour ATV71pppN4 [Type cde moteur] (Ctt) page 70
doit être uniquement [U/F 2pts] (UF2), ou [U/F 5pts] (UF5).
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
ATTENTION
Sur les variateurs ATV71p075N4 à U40N4, si les filtres RFI sont déconnectés (utilisation sur réseau IT), la
fréquence de découpage du variateur ne doit pas dépasser 4 kHz.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
Code Nom / Description Plage de réglage Réglage usine
OFI
SFr
T
nO
YES
M [Filtre sinus]
[Non] (nO)
v [Non] (nO) : pas de filtre sinus
v [Oui] (YES) : utilisation d’un filtre sinus, pour limiter les surtensions sur le moteur et diminuer le courant de fuite
à la terre.
[Filtre sinus] (OFI) est forcé à [Non] (nO) sur les calibres ATV71
Nota : Les réglages de [Limitation courant] (CLI) et [Valeur I limit. 2] (CL2) page 62
effectués après configuration de [Filtre sinus] (OFI) = [Oui] (YES) et [Type cde moteur] (Ctt) page 70
[U/F 2pts] (UF2) ou [U/F 5pts] (UF5), car pour certains calibres cette configuration provoque un régl age
usine réduit (1,36 In) des limitations de courant..
M [Fréquence découp]
Réglage de la fréquence de découpage.
Plage de réglage : elle peut varier de 1 à 16 kHz, mais le mini et le maxi ainsi que le réglage usine peuvent
être limités selon le type de variateur (ATV71H ou W), selon le cali bre et selon la conf iguration des paramètres
[Filtre sinus] (OFI) et [Lim. surt en s. m o t.] (SUL) page 96
Si la valeur est inférieure à 2 kHz, [Limitation courant] (CLI) et [Valeur I limit. 2] (CL2) page 62
1,36 In.
Réglage en marche :
- Si la valeur initiale est inférieure à 2 kHz, on ne peut aller au dessus de 1,9 kHz en marc he.
- Si la valeur initiale est supérieure ou égale à 2 kHz, on ne peut aller au dessous de 2 kHz en marche.
Réglage à l’arrêt : Sans contrainte.
Nota : En cas d’échauffement excessif le variateur diminue automatiquement la fréquence de
découpage et la rétablit lorsque la température est redevenue normal e.
Nota : Si [Type cde moteur] (Ctt) page 70
la fréquence de découpage à une valeur inférieure à 2 kHz, cela peut entraî ner des instabilités de
vitesse.
(1) selon calibre selon calibre
= [FVC] (FUC) ou [Sync.BF] (FSY) il est déconseillé de régl er
p037M3 et ATV71p075N4.
doivent être
.
sont limités à
=
(1)Paramètre également accessible dans le menu [1.3 REGLAGES] (SEt-).
I
T
Paramètre modifiable en marche et à l’arrêt.
72 AAV49425 11/2009
Page 72

[1.4 CONTRÔLE MOTEUR] (drC-)
ATTENTION
Assurez vous que le moteur supporte ce courant, en particulier s’il s’agit d’un moteur synchrone à aimants
permanents pour lequel il y a risque de démagnétisation.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
Code Nom / Description Plage de réglage Réglage usine
CLI
T
(1)Paramètre également accessible dans le menu [1.3 REGLAGES] (SEt-).
(2)In correspond au courant nominal variateur indiqué dans le guide d’installation et sur l’étiquette signalétique du variateur.
T
M [Limitation courant]
Permet de limiter le courant du moteur.
La plage de réglage est limitée à 1,36 In si [Fréquence découp.] (SFr) est inférieure à 2 kHz.
Nota : Si le réglage est inférieur à 0,25 In, il y a risque de verrouillage en défaut perte phase moteur
(OPF) si celui ci est validé (voir page 242
plus.
Paramètre modifiable en marche et à l’arrêt.
(1) 0 à 1,65 In (2) 1,5 In (2)
). S’il est inférieur au courant moteur à vid e la limitat ion n’agit
AAV49425 11/2009 73
Page 73

[1.4 CONTRÔLE MOTEUR] (drC-)
Choix du codeur
Respectez les recommandations du catalogue et du guide d’installation.
Nota 1 : L’utilisation d’un codeur avec une carte VW3 A3 408 ou VW3 A3 409, ne permet de configurer l’entrée "codeur" qu’en
retour vitesse. Les configurations en consigne ou en entrée de fo nction ne sont possibles q u’avec une cart e VW3 A3 401 à 407 et
VW3 A3 411.
Nota 2 : En cas d’utilisation d’un codeur avec une carte VW3 A3 409, tant que le codeur n’est pas complètement configuré le
variateur reste bloqué à l’arrêt (affichage nSt).
Procédure de vérification du codeur
Cette procédure est applicable à tous types de codeurs.
1. Configurez les paramètres du codeur utilisé, pages 114
2. Configurez le [Type Cde Moteur] (Ctt) différent de [FVC] (FUC) et de [Sync.BF] (FSY) même si c’est la configuration recherchée.
Utilisez, par exemple [SVC U] (UUC) pour un moteur asynchrone et [Mot. sync.] (SYn) pour un moteur synchrone.
3. Configurez les paramètres du moteur conformément à sa plaque signalétique
• Moteur asynchrone (voir page 76
mot.] (FrS), [Vitesse nom. mot] (nSP).
• Moteur synchrone (voir page 81
FEM syn.] (PHS), [Ind uctance axe d] (LdS), [Inductance axe q] (LqS), [Résist. stator syn.] (rSAS). La [Limitation courant] (CLI) ne doit
pas excéder le courant maxi du moteur, sinon il y a risque de démagnétisation.
4. Configurez [Utilisation codeur] (EnU) = [Non] (nO).
5. Effectuez un auto-réglage.
6. Configurez [Vérification codeur] (EnC) = [Oui] (YES).
7. Assurez-vous que la rotation du moteur est sans danger.
8. Commandez la rotation du moteur à vitesse stabilisé e
[1.2-SURVEILLANCE] (SUP-) pour surveiller le comportement.
9. En cas de déclenchement en [Défaut codeur] (EnF), [Verification codeur] (EnC) repasse à [Non] (nO).
- vérifiez la configuration des paramètres et effectuez de nouveau un auto-réglage (voir 1 à 5 ci-dessus).
- vérifiez le bon fonctionnement mécanique et électrique du codeur, son alimentation et son raccordement.
- inversez le sens de rotation du moteur (paramètre [Rotation phase] (PHr) page 71
) : [Puissance nom. mot] (nPr), [Tension nom. mot.] (UnS), [Courant nom. mot.] (nCr), [Fréq. nom.
) : [Courant nom. syn.] (nCrS), [Vitesse nom. syn.] (nSPS), [Paires pôle syn.] (PPnS), [Constante
à 117.
≈ 15 % de la vitesse nominale pendant au moins 3 secondes, et uti lisez le menu
) ou les signaux du codeur.
10. Recommencez les opérations à partir de 6 jusqu’à ce que [Vérification codeur] (EnC) passe à [Fait] (dOnE).
11. Reconfigurer le [Type Cde Moteur] (Ctt) s’il doit être [FVC] (FUC) ou [Sync.BF] (FSY). Dans le cas de [Sync.BF] (FSY), effectuez
ensuite la "Procédure de mesure de l’angle de déphasage entre le moteur et le codeur" page 83
74 AAV49425 11/2009
.
Page 74

[1.4 CONTRÔLE MOTEUR] (drC-)
Code Nom / Description Plage de réglage Réglage usine
EnS-
EnC
EnU
nO
YES
dOnE
nO
SEC
rEG
PGr
b [RETOUR CODEUR]
Accessible seulement si une carte codeur est présente.
M [Vérification codeur]
Vérification du retour codeur. Voir procédure page précédente.
Paramètre accessible si une carte codeur est présente (1).
v [Non fait] (nO) : Vérification non faite.
v [Oui] (YES) : Active la surveillance du codeur.
v [Fait] (dOnE) : Vérification effectuée avec succès.
La procédure de vérification contrôle :
- le sens de rotation codeur / moteur,
- la présence des signaux (continuité de câblage),
- le nombre d’impulsions / tour.
En cas de défaut le variateur se verrouille en [Défaut codeur] (EnF).
M [Utilisation codeur]
Paramètre accessible si une carte codeur est présente (1).
v [Non] (nO) : Fonction inactive.
v [Sécurité] (SEC) : Le codeur est utilisé comme retour vitesse pour la surveillance uniquement.
v [régul.et séc] (rEG) : Le codeur est utilisé comme retour vi tesse pour la régulation et pour la surveillance. Cette
configuration est automatique si le variateur est configuré en boucle fermée ([Type cde moteur] (Ctt) = [FVC]
(FUC) ou [Sync.BF] (FSY). Si [Type cde moteur] (Ctt) = [SVC U] (UUC) le codeur agit en retour vitesse et
permet une correction statique de la vitesse. Pour les autre s v aleurs de [Type cde moteur] (Ctt) cette
configuration n’est pas accessible.
v [Référence] (PGr) : Le codeur est utilisé comme consigne. Choix possible uniquement avec carte p our codeur
incrémental.
[Non fait] (nO)
[Non] (nO)
(1)Les paramètres relatifs au codeur ne sont accessibles que si la carte codeur est présente, et les choix proposés dépendent du type de
carte codeur utilisé. La configuration du codeur est également accessible dans le menu [1.5- ENTREES/SORTIES] (I/O).
AAV49425 11/2009 75
Page 75

[1.4 CONTRÔLE MOTEUR] (drC-)
100 - glissement en %
100
50 - glissement en Hz
50
60 - glissement en Hz
60
Paramètres de moteurs asynchrones :
Ces paramètres sont accessibles si [Type cde moteur] (Ctt) page 70 = [SVC U] (UUC), [SVC I] (CUC), [FVC] (FUC), [U/F 2pts] (UF2) ou
[U/F 5pts] (UF5). Dans ce cas les paramètres de moteurs synchrones sont inaccessibles.
Code Nom / Description Plage de réglage
ASY-
nPr
UnS
nCr
FrS
InSP
b [MOTEUR ASYNCHRONE]
Accessible seulement si [Type cde moteur] (Ctt) page 70 = [SVC U] (UUC), [SVC I] (CUC), [FVC] (FUC) ,
[U/F 2pts] (UF2) ou [U/F 5pts] (UF5).
M [Puissance nom. mot]
Puissance nominale moteur inscrite sur sa plaque signalétiq ue, en kW si [Standard fréq.mot] (bFr) = [50Hz IEC]
(50), en HP si [Standard fréq.mot] (bFr) = [60Hz NEMA] (60).
M [Tension nom. mot.]
Tension nominale moteur inscrite sur sa plaque signalétique.
ATV71
pppM3X : 100 à 240 V, ATV71pppN4 : 200 à 480 V
M [Courant nom. mot.]
Courant nominal moteur inscrit sur sa plaque signalétique.
M [Fréq. nom. mot.]
Fréquence nominale moteur inscrite sur sa plaque signalétique.
Le réglage usine est 50 Hz, remplacé par un préréglage de 60 Hz si [Standard fréq. mot] (bFr) est mis à 60 Hz.
La valeur maxi est limitée à 500 Hz si [Type cd e moteur] (Ctt) (page 70
est de calibre supérieur à ATV71HD37.
Les valeurs de 500 Hz à 1600 Hz ne sont possibl es qu’en c ommand e U / F et po ur de s pu issances li mi tée s à
37 kW. Dans ce cas configurer le [Type cde moteur] (Ctt) avant [Fréq.nom. mot.] (FrS).
M [Incrément Tr/Min]
Incrément du paramètre [Vitesse nom. mot] (nSP).
1
10
v [x1 tr/mn] (1) : incrément de 1 RPM, à utiliser si [Vitesse nom. mot] (nSP) ne dépasse pas 65535 RPM.
v [x10 tr/mn] (10) : incrément de 10 RPM, à utiliser si [Vitesse nom. mot] (nSP) dépasse 65535 RPM.
selon calibre variateur
selon calibre variateur
0,25 à 1,5 In (1)
10 à 1600 Hz
) est différent de U / F ou si le v ariateur
Nota : Tout changement de [Incrément Tr/Min] (InSP) fait repasser [Vitesse nom. mot] (nSP) à son
réglage usine.
nSP
(1)In correspond au Courant nominal variateur indiqué dans le guide d’installation et sur l’étiquette signalétique du variateur.
M [Vitesse nom. mot]
Vitesse nominale moteur inscrite sur sa plaque signalétique. Réglable de 0 à 65535 RPM si [Incrément Tr/
Min] (InSP) = [x1 tr/mn] (1) ou de 0.00 à 96.00 kRPM si [Incrément Tr/Min] (InSP) = [x10 tr/mn] (10).
0 à 9999 RPM puis 10.00 à 65.53 ou 96.00 kRPM sur l’afficheur intégré.
Si la plaque signalétique n’indique pas la vitesse nominale mais la vitesse de synchronisme et le glissement
en Hz ou en %, calculer la vitesse nominale comme suit :
• vitesse nominale = vitesse de synchronisme x
ou
• vitesse nominale = vitesse de synchronisme x (moteurs 50 Hz)
ou
• vitesse nominale = vitesse de synchronisme x (moteurs 60 Hz)
0 à 96000 RPM
76 AAV49425 11/2009
Page 76

[1.4 CONTRÔLE MOTEUR] (drC-)
Code Nom / Description Plage de réglage Réglage usine
ASY-
U0
U1
F1
U2
F2
U3
F3
U4
F4
U5
F5
b [MOTEUR ASYNCHRONE] (suite)
M [U0]
Réglage loi U/F. Paramètre accessible si [Type cde moteur] (Ctt) = [U/F 2pts] (UF2) ou [U/F 5pts] (UF5)
M [U1]
Réglage loi U/F. Paramètre accessible si [Type cde moteur] (Ctt) = [U/F 5pts] (UF5)
M [F1]
Réglage loi U/F. Paramètre accessible si [Type cde moteur] (Ctt) = [U/F 5pts] (UF5)
M [U2]
Réglage loi U/F. Paramètre accessible si [Type cde moteur] (Ctt) = [U/F 5pts] (UF5)
M [F2]
Réglage loi U/F. Paramètre accessible si [Type cde moteur] (Ctt) = [U/F 5pts] (UF5)
M [U3]
Réglage loi U/F. Paramètre accessible si [Type cde moteur] (Ctt) = [U/F 5pts] (UF5)
M [F3]
Réglage loi U/F. Paramètre accessible si [Type cde moteur] (Ctt) = [U/F 5pts] (UF5)
M [U4]
Réglage loi U/F. Paramètre accessible si [Type cde moteur] (Ctt) = [U/F 5pts] (UF5)
M [F4]
Réglage loi U/F. Paramètre accessible si [Type cde moteur] (Ctt) = [U/F 5pts] (UF5)
M [U5]
Réglage loi U/F. Paramètre accessible si [Type cde moteur] (Ctt) = [U/F 5pts] (UF5)
M [F5]
Réglage loi U/F. Paramètre accessible si [Type cde moteur] (Ctt) = [U/F 5pts] (UF5)
0 à 600 ou 1000 V
selon calibre
0 à 600 ou 1000 V
selon calibre
0 à 1600 Hz 0
0 à 600 ou 1000 V
selon calibre
0 à 1600 Hz 0
0 à 600 ou 1000 V
selon calibre
0 à 1600 Hz 0
0 à 600 ou 1000 V
selon calibre
0 à 1600 Hz 0
0 à 600 ou 1000 V
selon calibre
0 à 1600 Hz 0
0
0
0
0
0
0
AAV49425 11/2009 77
Page 77

[1.4 CONTRÔLE MOTEUR] (drC-)
Tension moteur
Fréquence
Fréquence nominale FrS
Tension maxi UCP
Fréquence maxi FCP
Tension nominale UnS
Code Nom / Description Plage de réglage Réglage usine
ASY-
UC2
UCP
FCP
nO
YES
b [MOTEUR ASYNCHRONE] (suite)
M [Contrôle vect. 2pt]
v [Non] (nO) : Fonction inactive.
v [Oui] (YES) : Fonction active.
Utilisé dans les applications où on veut dé passe r la vitess e et l a fr équence n omin al e du moteur de mani ère à
optimiser le fonctionnement à puissance constant e, ou lorsque l’on veut limiter la tension maxi du moteur à une
valeur inférieure à la tension du réseau.
La loi tension fréquence doit alors être adaptée aux possibilités du moteur à fonctionner sous la tension maxi
UCP et à la fréquence maxi FCP.
M [U Puissance Cste]
Paramètre accessible si [Contrôle vect. 2 pt] (UC2) = [Oui] (YES)
M [Fréq. Puiss. Cste]
Paramètre accessible si [Contrôle vect. 2 pt] (UC2) = [Oui] (YES)
Selon calibre
variateur
Selon calibre
variateur et [Fréq.
nom. mot.] (FrS)
[Non] (nO)
selon calibre variateur
et [Standard fréq.mot]
(bFr)
= [Standard fréq.mot]
(bFr)
SLP
T
(1)Paramètre également accessible dans le menu [1.3 REGLAGES] (SEt-).
T
M [Comp. glissement]
Paramètre accessible si [Type cde moteur] (Ctt) est différent de [U/F 2pts] (UF2) et de [U/F 5pts] (UF5).
Permet d’ajuster la compensation de glissement autour de la valeur fixée par la vitesse nominale moteur.
Sur les plaques moteurs, les indications de vitesse ne sont pas forcément exactes.
• Si le glissement réglé est < glissement réel : le moteur ne tourne pas à la bonne vitesse en régime établi,
mais à une vitesse inférieure à la consigne.
• Si le glissement réglé est > glissement réel : le moteur est surcompensé et la vitesse est instable.
Paramètre modifiable en marche et à l’arrêt.
(1) 0 à 300% 100%
78 AAV49425 11/2009
Page 78

[1.4 CONTRÔLE MOTEUR] (drC-)
Paramètres moteurs asynchrones accessibles en mode [Expert].
On retrouve ici :
• Des paramètres spéciaux.
• Les paramètres calculés par le variateur lors de l’autoréglage, en lecture seule. Par exemple [Résist. stator mes.](rSM), résistance
statorique à froid calculée.
• La possibilité de remplacer certains de ces paramètres calculés par d’autres valeurs si nécessaire. Par exemple [Réglage R.
stator.](rSA), résistance statorique à froid mesurée.
Lorsqu’un paramètre est modifié par l’utilisateur, le variateur l’utilise à la place du paramètre calculé.
Si un auto-réglage est effectué ou si un de s paramètre s moteur condi tionnant l ’auto-ré glage est modifié ( [Tensio n nom. mot. ] (UnS), [Fréq.
nom. mot.] (FrS), [Courant nom. mot.] (nCr), [Vitesse nom. mot] (nSP), [Puiss ance n om. mo t] (nPr)), les paramètres modifiés repass ent en
réglage usine.
Code Nom / Description Plage de réglage Réglage usine
ASY-
rSM M [Résist. stator mes.]
IdM M [Idr]
LFM M [Lfr]
trM M [T2r]
nSL M [Gliss. nom. Moteur]
PPn M [Nbre paire de pôles]
b [MOTEUR ASYNCHRONE] (suite)
Résistance statorique à froid, calculée par le variateur, en lecture seulement. Valeur en milliohms (mΩ)
jusqu’à 75 kW, en centièmes de milliohms (m
Courant magnétisant en A, calculé par le variateur, en lecture seulement.
Inductance de fuite en mH, calculée par le variateur, en lecture seulement.
Constante de temps rotorique en mS, calculée par le variateur, en lecture seulement .
Glissement nominal en Hz, calculé par le variateur, en lecture seulement.
Pour modifier le glissement nominal, modifier la [Vitesse nom. mot] (nSP) (page 76
Nombre de paires de pôles, calculé par le variateur, en lecture seulement.
Ω/100) au dessus de 75 kW.
).
AAV49425 11/2009 79
Page 79

[1.4 CONTRÔLE MOTEUR] (drC-)
Paramètres moteurs asynchrones accessibles en mode [Expert], suite.
Code Nom / Description
ASY-
rSA M [Réglage R. stator.]
IdA M [Idw]
LFA M [Lfw]
trA M [Rég.const. tps rotor ]
b [MOTEUR ASYNCHRONE] (suite)
Résistance statorique à froid (par enroulement), valeur modifiable. En milliohms (mΩ) jusqu’à 75 kW, en
centièmes de milliohms (m
(10000 à 65536).
Courant magnétisant en A, valeur modifiable.
Inductance de fuite en mH , v al e ur modifiable.
Constante de temps rotorique en mS, valeur modifiable.
Ω/100) au dessus de 75 kW. Sur l’afficheur intégré 0 à 9999 puis 10.00 à 65.53
80 AAV49425 11/2009
Page 80

[1.4 CONTRÔLE MOTEUR] (drC-)
ATTENTION
Assurez vous que le moteur supporte ce courant , en particulie r s’il s’agit d’un moteur sy nchrone à aimants perman ents pour
lequel il y a risque de démagnétisation.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
Paramètres de moteur synchrones :
Ces paramètres sont accessibles si [Type cde moteur] (Ctt) page 70 = [Mot. sync.] (SYn) ou [Sync.BF] (FSY). Dans ce cas les paramètres
de moteurs asynchrones sont inaccessibles.
Important : Pour les moteurs synchrones le réglage du courant de limitation est vital. Voir [Limitation courant] (CLI) page 73
Code Nom / Description Plage de réglage Réglage usine
SYn-
nCrS
nSPS
PPnS
IPHS
0.1
PHS
LdS
LqS
rSAS
b [MOTEUR SYNCHRONE]
Accessible seulement si [Type cde moteur] (Ctt) page 70 = [Sync.BF] (FSY) ou [Mot. sync.] (SYn).
M [Courant nom. syn.]
Courant nominal du moteur synchrone inscrit sur sa plaque signalétique.
M [Vitesse nom. syn.]
Vitesse nominale du moteur synchrone inscrite sur sa plaque signalétique.
Sur l’afficheur intégré 0 à 9999 RPM puis 10.00 à 60.00 kRPM.
M [Paires pôles syn.]
Nombre de paires de pôles du moteur synchrone.
M [Incrément FEM]
Incrément du paramètre [Constante FEM syn.] (PHS).
v [0,1 mV/rpm] (0.1) : 0,1mV par RPM.
1
v [1 mV/rpm] (1) : 1 mV par RPM.
M [Constante FEM syn.]
Constante de FEM du moteur synchrone, en 0,1mV par RPM ou 1mV par RPM (tension crête par pha se), selon
la valeur de [Incrément FEM] IPHS).
Sur l’afficheur intégré 0 à 9999 puis 10.00 à 65.53 (10000 à 65536).
M [Inductance axe d]
Inductance statorique axe "d" en mH (par phase).
Sur les moteurs à pôles lisses [Inductance axe d] (LdS) = [Inductance axe q] (LqS) = Inductance statorique L.
M [Inductance axe q]
Inductance statorique axe "q" en mH (par phase).
Sur les moteurs à pôles lisses [Inductance axe d] (LdS) = [Inductance axe q] (LqS) = Inductance statorique L.
M [Résist. stator syn.]
Résistance statorique à froid (par enroulement). Le réglage usine est rempl acé par le résultat de l’auto-réglage
si celui ci est effectué.
La valeur peut être renseignée par l’utilisateur s’il la connaît.
Valeur en milliohms (m
Sur l’afficheur intégré 0 à 9999 puis 10.00 à 65.53 (10000 à 65536).
Ω) jusqu’à 75 kW, en centièmes de milliohms (mΩ/100) au dessus de 75 kW.
0,25 à 1,5 In (1) Selon calibre variateur
0 à 60000 RPM Selon calibre variateur
1 à 50 Selon calibre variateur
[0,1 mV/rpm] (0.1)
0 à 65535 Selon calibre variateur
0 à 655,3 Selon calibre variateur
0 à 655,3 Selon calibre variateur
Selon calibre variateur Selon calibre variateur
.
(1)In correspond au Courant nominal variateur indiqué dans le guide d’installation et sur l’étiquette signalétique du variateur.
AAV49425 11/2009 81
Page 81

[1.4 CONTRÔLE MOTEUR] (drC-)
Code Nom / Description
SYn-
rEqP
rEtP
nO
YES
dOnE
tAb
PrOG
FAIL
dOnE
CUS
b [MOTEUR SYNCHRONE] (suite)
M [Lect. param moteur]
Ce paramètre ne fonctionne qu’avec l’utilisation des moteurs de types BDH, BRH et BSH de la
gamme Telemecanique.
Accessible seulement si [Protocole codeur] (UECP) page 116
Requête de chargement des paramètres moteur depuis la mémoire EEPROM du codeur.
v [Non] (nO) : Le chargement n’a pas été fait ou a échoué.
v [Oui] (YES) : Le chargement est fait dès que possible, puis le paramètre passe automatiquement à
[Fait] (dOnE).
v [Fait] (dOnE) : Le chargement a été fait.
Les paramètres chargés sont : [Valeur offset angle] (ASU) page 85
[Courant nom. syn.] (nCrS) page 81
page 81
(LqS) page 81
, [Résist. stator syn.] (rSAS) page 81, [Inductance axe d] (LdS) page 81, et [Inductance axe q]
.
Nota :
• Pendant le chargement le variateur est dans l’état "arrêt roue libre", moteur hors ten sion.
• Si une fonction "contacteur de ligne" ou "contacteur aval" est configurée, le contacteu r se ferme
pendant le chargement.
M [Etat param. moteur]
Accessible seulement si [Protocole codeur] (UECP) page 116 = [Hiperface] (SCHP).
Information sur la requête de chargement des p aramètres moteur depuis la mémoire EEPROM du cod eur
(non paramétrable).
v [Non fait] (tAb) : Le chargement n’a pas été fait, les paramètres moteur par défaut seront utilisés.
v [En cours] (PrOG) : Le chargement est en cours.
v [Echec] (FAIL) : Le chargement a échoué.
v [Fait] (dOnE) : Le chargement a été effectué avec succès.
v [Perso.] (CUS) : Le chargement a été effectué avec succè s, mais ensu ite au moins un paramètre mot eur
a été modifié par l’utilisateur v ia le termin al ou l a lia iso n s érie, ou bie n u n a uto -régla ge a é té eff ect ué par
[Auto-réglage] (tUn).
, [paires pôles syn.] (PPnS) page 81, [Constante FEM syn.] (PHS)
[Non] (nO)
= [Hiperface] (SCHP).
, [Vitesse nom. syn.] (nSPS) page 81,
[Non fait] (tAb)
Paramètres moteurs synchrones accessibles en mode [Expert].
Code Nom / Description
SYn-
rSMS M [R1rS]
FrSS M [Fréq. nom. syn.]
(1)Paramètre également accessible dans le menu [1.3 REGLAGES] (SEt-).
(2)In correspond au courant nominal variateur indiqué dans le guide d’installation et sur l’étiquette signalétique du variateur.
T
b [MOTEUR SYNCHRONE] (suite)
Résistance statorique à froid (par enroulement), en lecture seulement. C’est le réglage usine du variateur
ou le résultat de l’auto-réglage s’il a été effectué.
Valeur en milliohms (m
Sur l’afficheur intégré 0 à 9999 puis 10.00 à 65.53 (10000 à 65536).
Fréquence moteur à vitesse nominale en Hz, calculée par le variateur (fréquence nominale moteur), en
lecture seulement..
Paramètre modifiable en marche et à l’arrêt.
Ω) jusqu’à 75 kW, en centièmes de milliohms (mΩ/100) au dessus de 75 kW.
82 AAV49425 11/2009
Page 82

[1.4 CONTRÔLE MOTEUR] (drC-)
AVERTISSEMENT
FONCTIONNEMENT INATTENDU DE L’APPAREIL
Assurez-vous que la rotation du moteur ne peut jamais entraîner un mouvement dangereux.
Si cette précaution n’est pas respectée, cela peut entraîner la mort ou des blessures graves.
Moteur synchrone en boucle fermée
Le fonctionnement sur moteur synchrone en boucle fermée nécessite un codeur donna nt la posit ion précise du rot or du moteur. Pour cela
il faut connaître l’angle de déphasage du codeur par rapport au rotor. Le variateur offre la possibilité d’effectuer automatiquement cette
mesure.
Choix d’un codeur de type résolveur
ISi le nombre de pôles du moteur n’est pas un mul tiple entier du nombr e de pôles du résol veur , l e rés olv eur est un co deur
relatif et non plus absolu. Il faut donc configurer le paramètre [Activa. angle test] (AtA) = [Oui] (POn) ou [Ord.marche] (AUtO).
Procédure de mesure de l’angle de déphasage entre le moteur et le codeur
Précautions préalables :
Choisir le mode de mesure [Type d'angle test] (ASt) en fonction du type de machine entraînée :
• [Type d'angle test] (ASt) = [Sns charge] (nLd) : mesure avec mouvement, si la rotation du moteur est libre (sans ch arge, frein éventuel
desserré) et sans danger. Pendant la mesure le moteur est parcouru par un courant et peut effectuer une rotation d’un tour.
• [Type d'angle test] (ASt) = [Avc charge] (brC) : mesure sans mouvement, moteur avec ou sans charge, frein éventuel serré ou
desserré. Ce mode est recommandé pour un ascenseur par exemple. Il nécessite d’observer les précautions suivantes :
- le rotor du moteur ne doit pas bouger pendant la mesure, sinon celle-ci sera erronée.
- dans certains cas le courant de mesure peut entraîner un déclenchement en défaut [Surintensité] (OCF), utilisez alors le mode
[Sns charge] (nLd). Cela survient avec des moteurs à faible inductance, des moteurs à grande vitesse, ou des moteurs dont la
tension nominale est beaucoup plus faible que la tension d’alimentation du variateur.
- dans certains cas la mesure peut entraîner un déclenchement en défaut [Erreur angle] (ASF). Cela survient si le rotor du moteur
a bougé pendant la mesure (détecté seulement en boucle fermée), si une phase du moteur est déconnectée ou si l’inductance
du moteur est trop élevée, limitant ainsi le courant de mesure (utilise z alors le mode [Sns charge] (nLd)).
• [Type d'angle test] (ASt) = [Optimisé] (brCO) : mesure sans mouvement, possible avec ou sans charge, frein éventuel serré ou
deserré. Optimisation du temps de détecti on angle à partir d e la seconde demande de dé tection, même après une mise hors ten sion
du produit.
1. Effectuez préalablement la "Procédure de vérification du codeur" page 74
2. Configurez [Type Cde Moteur] (Ctt) = [Sync.BF] (FSY).
3. Si vous avez choisi [Type d'angle test] (ASt) = [Sns charge] (nLd) : mesure avec mouvement, assurez-vous que la rotation du moteur
est sans danger et qu’il peut tourner librement sans couple résistant ou entraînant. Si ces conditions ne sont pas respectées la
mesure sera fausse.
4. Configurez [Auto-test angle] (ASA) = Oui] (YES). La mesure s’effectue et [Auto-test angle] (ASA) passe à [Fait] (dOnE). Le paramètre
[Valeur offset angle] (ASU) passe de [Non] (nO) à une valeur numérique proportionnelle à l’angle électrique mesuré (8191 = 360 °).
5. Configurez éventuellement la mesure automatique par [Activa. angle test] (AtA). Si [Type d'angle test] (ASt) = [Sns charge] (nLd),
assurez vous que les conditions de sécurité mentionnées dans les précautions préalables seront toujours respectées.
Dans le cas d’utilisation d’un codeur relatif (incrémental ou SinCos), il est recommandé de configurer [Activa. angle test] (AtA) = [Oui]
(POn) ou [Ord.marche] (AUtO).
.
6. En cas de déclenchement en défaut [Erreur angle] (ASF), [Auto-test angle] (ASA) repasse à [Non] (nO).
- vérifiez que les paramètres et précautions décrits dans cette procédure sont bien respectés et recommencer la mesure.
Remarques
La mesure de l’angle de déphasage doit être refaite chaque fois que :
• le moteur est changé
• le codeur est changé
• l’accouplement entre le moteur et le codeur est démonté
• le paramètre [Rotation phase] (PHr) est modifié
•le paramètre [Inv. Rot.codeur] (EnRI) est modifié.
Dans le cas d’utilisation d’un codeur relatif (incrémental ou SinCos), la mesure doit être refaite à chaque mise hors tension / sous tension.
Il est alors recommandé de configurer [Activa. angle test] (AtA) = [Oui] (POn) ou [Ord.marche] (AUtO).
AAV49425 11/2009 83
Page 83

[1.4 CONTRÔLE MOTEUR] (drC-)
Code Nom / Description Plage de réglage
ASA-
ASt
ASA
brC
nLd
brCO
nO
YES
dOnE
b [ANGLE TEST]
Accessible seulement si [Type cde moteur] (Ctt) page 70 = [Sync.BF] (FSY)
M [Type d'angle test]
Mode de mesure de l’angle de déphasage entre le moteur et le codeur.
v [Avc charge] (brC) : Mesure sans mouvement, possib le avec ou sans charge, frein éve ntuel serré ou desserré.
v [Sns charge] (nLd) : Mesure avec mouvement, uniquement avec moteur libre (frein éventuel desserré), sans
charge.
v [Optimisé] (brCO) : Mesure sans mouvement, possible avec ou sans charge, frein éventuel serré ou deserré.
Optimisation du temps de détection angle à partir de la seconde demande de dét ection , même après une mise
hors tension du produit.
Nota 1: Si [Type d'angle test] (ASt) = [Sns charge] (nLd), pendan t la me sure le mo teu r pe ut ef fect uer
une rotation d’un tour.
Nota 2: Si [Type cde moteur] (Ctt) = [Mot. sync.] (SYn) ou [Sync.BF] (FSY) alors [Type d'angle test]
(ASt) = [Optimisé] (brCO)
M [Auto-test angle]
Mesure de l’angle de déphasage entre le moteur et le codeur.
v [Non] (nO) : La mesure n’a pas été faite ou a échoué, ou [Rotation phase] (PHr) a été modifié, ou
[Inv. Rot.codeur] (EnRI) a été modifié.
v [Oui] (YES) : La mesure est faite dès que possible, puis le paramètre passe automatiquement à [Fait] (dOnE).
v [Fait] (dOnE) : Utilisation de la valeur donnée par la mesure précédente.
Important :
• Il est impératif que tous les paramètres moteurs so ient correctement configuré s avant d’effectuer la mesu re :
- [Courant nom. syn.] (nCrS), [Limitation courant] (CLI), [Vitesse nom. syn.] (nSPS), [Paires pôle syn.]
(PPnS), [Constante FEM syn.] (PHS), [Inductance axe d] (LdS), [Inductance axe q] (LqS), [Résist. stator
syn.] (rSAS).
• La mesure s'effectue seulement si aucune commande d’arrêt n'est actionnée. Si une fonction "arrêt roue
libre" ou "arrêt rapide" est affectée à une entrée logique, il faut mettre cette entrée à 1 (active à 0).
• La mesure est prioritaire sur les ordres de marche éventuels qui seront pris en compte après la séquence
de mesure.
• Si la mesure échoue le variateur affiche [Non] (nO) et passe en défaut [Erreur angle] (ASF).
• La mesure peut durer quelques secondes. Ne pas l’interrompre et attendre que l’affi chage passe à "[Fait]
(dOnE)" ou à "[Non] (nO)".
[Avc charge] (brC)
[Non] (nO)
ASL
nO
LI1
M [Angle test]
Mesure de l’angle de déphasage entre le moteur et le codeur par entrée logique ou bit de commande.
v [Non] (nO) : Non affecté
v [LI1] (LI1)
-
-
-
:
:
v [...] (...) : Voir conditions d’affectation page 139.
La mesure est effectuée lorsque l’entrée ou le bit affecté passe à 1
Nota : Si une fonction "contacteur de ligne" ou "contacteur aval" est configurée, le contacteur se ferme
pendant la mesure.
[Non] (nO)
Nota : Si une fonction "contacteur de ligne" ou "contacteur aval" est configurée, le contacteur se ferme
pendant la mesure.
84 AAV49425 11/2009
Page 84

[1.4 CONTRÔLE MOTEUR] (drC-)
Code Nom / Description Plage de réglage
ASA-
AtA
ASU
AStS
nO
POn
AUtO
nO
tAb
PEnd
PrOG
FAIL
dOnE
CUS
b [ANGLE TEST] (suite)
M [Activa. angle test]
Activation de la mesure automatique de l’angle de déphasage entre le moteur et le codeur dans le cas
d’utilisation d’un codeur relatif (incrémental ou SinCos).
v [Non] (nO) : Fonction inactive.
v [Oui] (POn) : La mesure est faite à chaque mise sous tension (1).
v [Ord.marche] (AUtO) : La mesure est faite à chaque ordre de marche si cela est nécessaire, c’est à dire si le
paramètre [Valeur offset angle] (ASU) est à [Non] (nO).
Ce choix est préconisé avec une carte VW3 A3 401 à 407, ainsi qu’avec la carte VW3 A3 411 lorsque la
fonction "contacteur de ligne" est configurée (perte de l’angle à chaque arrêt) (1).
Si [Activa. angle test] (AtA) = [Oui] (POn) ou [Ord.marche] (AUtO), il est conseillé de configurer [Type d'angle
test] (ASt) = [Avc charge] (brC).
Nota : Si une fonction "contacteur de ligne" ou "contacteur aval" est configurée, le contacteur se ferme
pendant la mesure.
M [Valeur offset angle]
Angle de déphasage entre le moteur et le codeur.
v [Non] (nO) : La mesure n’a pas été faite ou a échoué, ou [R otation phase] (PHr) a été modifié, ou la mesure a
été perdue par mise hors tension (1), ou [Inv. Rot.codeur] (EnRI) a été modifié.
-
v 0 à 8191 : Angle de déphasage. 8191 correspond à 360°.
M [Etat angle test]
Information sur la mesure de l’angle de déphasage entre le moteur et le codeur (non paramétrable).
v [Non fait] (tAb) : Angle de déphasage non défini.
v [En attente] (PEnd) : La mesure a été demandée mais n'est pas encore effectuée.
v [En cours] (PrOG) : La mesure est en cours.
v [Echec] (FAIL) : La mesure a échoué.
v [Fait] (dOnE) : La mesure a été effectuée avec succès.
v [Perso.] (CUS) : La valeur de l’angle de déphasage a été saisie par l’utilisateur via le te rminal ou la liaison série.
[Non] (nO)
[Non] (nO)
[Non fait] (tAb)
(1)La perte de mesure par mise hors tension survient :
• avec une carte VW3 A3 401 à 407 et VW3 A3 411 :
- à chaque mise hors tension de la puissance, même si le contrôle du variateur est aliment é séparément, par exemple si la foncti on
"contacteur de ligne" est configurée.
• avec une carte VW3 A3 409 et un codeur SinCos :
- à chaque mise hors tension de la puissance, si le contrôle du variateur n’est pas alimenté séparément.
- seulement à chaque mise hors tension du contrôle du variateur si celui- ci est alimenté séparément par les bornes 0 et P24.
- si le résolveur a un nombre de poles qui n’est pas un multiple du nombre de poles moteur.
AAV49425 11/2009 85
Page 85

[1.4 CONTRÔLE MOTEUR] (drC-)
ATTENTION
Assurez vous que le moteur supporte ce courant sans surchauffe.
Si cette précaution n’est pas respectée, cela peut entraîner des dommages matériels.
Code Nom / Description Plage de réglage Réglage usine
FLI-
FLU
T
FnC
FCt
FnO
b [FLUXAGE PAR LI]
Non accessible si [Type cde moteur] (Ctt) page 70 = [Sync.BF] (FSY).
M [Fluxage moteur]
v [Non Continu] (FnC) : Mode Non Continu
v [Continu] (FCt) : Mode Continu. Ce choix est impossible si [Type d'angle t est] (ASt) page 87 est [Avc charge]
(brC) ou si [Injection DC auto] (AdC) page 158
libre] (nSt).
v [Non] (FnO) : Fonction inactive. Ce choix est impossible si [T ype cde moteur] (Ctt) page 70 = [SVC I] (CUC)
ou [FVC] (FUC).
Si [Type cde moteur] (Ctt) page 70
est remplacé par [Non Continu] (FnC).
Si [Type cde moteur] (Ctt) page 70
à partir de 55 kW pour ATV71
Afin d’obtenir rapidement un couple important au démarrage, il est nécessaire d’établir préalablement le
flux magnétique dans le moteur.
• En mode [Continu] (FCt) le variateur établit le flux de manière automatique à partir de la mise sous
tension.
• En mode [Non Continu] (FnC) le fluxage se fait au démarrage du moteur.
La valeur du courant de fluxage est supérieure à nCr (courant nominal moteur configuré) lors de
l’établissement du flux puis est régulée à la valeur du courant magnétisant moteur.
(1) [Non] (FnO)
est [Oui] (YES) ou si [Type d’arrêt] (Stt) page 156 est [Roue
= [SVC I] (CUC), [FVC] (FUC) ou [Mot. sync.] (SYn), le réglage usine
= [SVC U] (UUC), le réglage usine est remplac é par [Non Continu] (FnC)
ppppM3X et à partir de 90 kW pour ATV71ppppN4.
Si [Type cde moteur] (Ctt) page 70
impérativement être actif ([Non] (FnO) interdit) : il entraîne l'alignement ou la détection d'angle du rotor
(selon la configuration de [Type d'angle test] (ASt) page 87
Si [Affectation frein] (bLC) page 175
sans effet.
FLI
nO
LI1
-
-
-
(1)Paramètre également accessible dans le menu [1.3 REGLAGES] (SEt-).
T
Paramètre modifiable en marche et à l’arrêt.
M [Affectation fluxage]
v [Non] (nO) : Fonction inactive
v [LI1] (LI1)
:
:
v [...] (...) : Voir conditions d’affectation page 139.
Affectation possible seulement si [Fluxage moteur] (FLU) = [Non Continu] (FnC) :
- Si une LI ou un bit est affecté à la commande du flux moteur, le flux est établi à l’état 1 de l’entrée ou
du bit affecté.
- S’il n’a pas été affecté de LI ou de bit ou si la LI ou le bit affecté est à l’é tat 0 lors d’un ordre de marche,
le fluxage se fait au démarrage du moteur.
= [Mot. sync.] (SYn), le paramètre [Fluxage moteur] (FLU) doit
est différent de [Non] (nO), le paramètre [Fluxage moteur] (FLU) est
) et non le fluxage.
[Non] (nO)
86 AAV49425 11/2009
Page 86

[1.4 CONTRÔLE MOTEUR] (drC-)
Code Nom / Description Plage de réglage Réglage usine
FLI-
ASt
brC
nLd
brCO
b [FLUXAGE PAR LI] (suite)
M [Type d'angle test]
Accessible seulement si [Type cde moteur] (Ctt) page 70 = [Mot. sync.] (SYn)
Mode de mesure de l’angle de déphasage entre le moteur et le codeur.
v [Avc charge] (brC) : Mesure sans mouvement, possible avec ou sans charge, frei n éventuel serré ou
desserré.
v [Sns charge] (nLd) : Mesure avec mouvement, uniquement avec moteur libre (frein éventuel desserré),
sans charge.
v [Optimisé] (brCO) : Mesure sans mouvement, possible avec ou sans charge, frein éventuel serré ou
deserré. Optimisation du temps de détection angle à partir de la seconde demande de détection , même
après une mise hors tension du produit.
Nota 1: Si [Type d'angle test] (ASt) = [Sns charge] (nLd), pendant la mesure le moteur peut
effectuer une rotation d’un tour.
Nota 2 : Si [Type cde moteur] (Ctt) = [Mot. sync.] (SYn) ou [Sync.BF] (FSY) alors [Type d'angle
test] (ASt) = [Optimisé] (brCO)
[Avc charge] (brC)
AAV49425 11/2009 87
Page 87

[1.4 CONTRÔLE MOTEUR] (drC-)
Code Nom / Description Plage de réglage
tUn-
tUn
AUt
nO
YES
dOnE
nO
YES
b [REGLAGES AUTO]
M [Auto-réglage]
v [Non] (nO) : Auto-réglage non fait.
v [Oui] (YES) : L’auto-réglage est fait dès que possible, puis le paramètre passe automatiquement à [Fait] (dOnE).
v [Fait] (dOnE) : Utilisation des valeurs données par le précédent auto-réglage.
Important :
• Il est impératif que tous les paramètres moteurs soient correctement configurés avant d’effectuer l’autoréglage.
- moteur asynchrone : [Tension nom. mot.] (UnS), [Fréq. nom. mot.] (FrS), [Courant nom. mot.] (nCr),
[Vitesse nom. mot] (nSP), [Puissance nom. mot] (nPr) page 76
- moteur synchrone : [Courant nom. syn.] (nCrS), [Vitesse nom. syn.] (nSPS), [Paires pôle syn.] (PPnS),
[Constante FEM syn.] (PHS), [Inductance axe d] (LdS), [Inductance axe q] (LqS) page 81
Si au moins un de ces paramètres (sauf [Constante FEM syn.] (PHS), [Inductance axe d] (LdS), [Inductance
axe q] (LqS)) est modifié après que l’auto-réglage a été effectué, [Auto-réglage] (tUn) repa sse à [Non] (nO) et
doit être refait.
• L'auto-réglage s'effectue seulement si aucune co mmande d’arrêt n'est actionnée. Si une fonction "arrêt roue
libre" ou "arrêt rapide" est affectée à une entrée logique, il faut mettre cette entrée à 1 (active à 0).
• L’auto-réglage est prioritaire sur les ordres de marche ou de préfluxage éventuel s qui seront pris en compte
après la séquence d’auto-réglage.
• Si l’auto-réglage échoue le variateur affiche [Non] (nO) et, suivant la configuration de [Gestion défaut tnf]
(tnL) page 256
• L’auto-réglage peut durer 1 à 2 secondes. Ne pas l’interrompre et attendre que l’affichage passe à "[Fait]
(dOnE)" ou à "[Non] (nO)".
Nota :
• Pendant l’auto-réglage le moteur est parcouru par son courant nominal.
• Si une fonction "contacteur de ligne" ou "contacteur aval" est configurée, le contacteur se ferme
pendant l’auto-réglage.
, peut passer en défaut [autoréglage] (tnF).
.
M [Auto-réglage auto]
v [Non] (nO) : Fonction inactive.
v [Oui] (YES) : L’auto-réglage est fait à chaque mise sous tension.
Important : mêmes remarques que pour [Auto-réglage] (tUn) ci dessus.
[Non] (nO)
.
[Non] (nO)
tUL
tUS
PEnd
PrOG
FAIL
dOnE
nO
LI1
tAb
CUS
M [Affect. auto-réglage]
Affectation de l’auto-réglage à une entrée logique ou un bit de commande.
v [Non] (nO) : Non affecté
v [LI1] (LI1)
-
-
-
:
:
v [...] (...) : Voir conditions d’affectation page 139.
L’auto-réglage est effectué lorsque l’entrée ou le bit aff ecté passe à 1.
Important : mêmes remarques que pour [Auto-réglage] (tUn) ci dessus.
M [Etat auto-réglage]
Information, non paramétrable.
v [Non fait] (tAb) : La valeur par défaut de résistance du stator est utilisée pour commander le moteur.
v [En attente] (PEnd) : L’auto-réglage a été demandé mai s n'est pas encore effectué.
v [En cours] (PrOG) : Auto-réglage en cours.
v [Echec] (FAIL) : L’auto-réglage a échoué.
v [Fait] (dOnE) : La résistance stator mesurée par la fonction auto-réglage est utilisée pour commander le
moteur.
v [Perso.] (CUS) : L’auto-réglage a été effectué mais au moins un paramètre fixé par cet auto-réglage a été
ensuite modifié. Le paramètre [Auto-réglage] (tUn) est alors repassé à [Non] (nO). Les paramètres d’autoréglage concernés sont :
• [Réglage R. stator.] (rSA), [Idw] (IdA), [LFw] (LFA) et [Rég.const. tps rotor ] (trA) page 80
asynchrones.
• [Résist. stator syn.] (rSAS) page 81
[Non fait] (tAb)
pour les moteurs
pour les moteurs synchrones.
88 AAV49425 11/2009
Page 88

[1.4 CONTRÔLE MOTEUR] (drC-)
Code Nom / Description Plage de réglage Réglage usine
SSL-
SSL
SPG
T
SIt
T
SFC
T
JMUL
JESt
Std
HPF
b [BOUCLE DE VITESSE]
Non accessible si [Type cde moteur] (Ctt) page 70 = [U/F 2pts] (UF2) ou [U/F 5pts] (UF5).
M [Type de boucle vit.]
Choix du type de boucle vitesse
v [Standard] (Std) : Boucle vitesse standard.
v [Haute perf.] (HPF) :Boucle vitesse hautes performances. Il est recommandé de désactiver [Adapt. rampe déc]
(brA) = [Non] (nO) (voir page 155
M [Gain prop. vit.]
Paramètre accessible si [Type de boucle vit.] (SSL) = [Standard] (Std).
Gain proportionnel de la boucle de vitesse.
M [Temps integr. vit.]
Paramètre accessible si [Type de boucle vit.] (SSL) = [Standard] (Std).
Constante de temps de l’intégrale de la boucle de vitesse.
M [K filtre boucle vit.]
Paramètre accessible si [Type de boucle vit.] (SSL) = [Standard] (Std).
Coefficient de filtrage de la boucle de vitesse.
).
(1)
(1)
(1)
0 à 1000 % 40 %
1 à 1000 % 100 %
0 à 100 0
M [Coef. mult. inertie]
Paramètre accessible si [Type de boucle vit.] (SSL) = [Haute perf.] (HPF).
Incrément des paramètres [Inertie de l'applicat.] (JAPL) et [Inertie estimée app.] (JESt), calculé par le
variateur, en lecture seulement :
- 0,1 gm
M [Inertie estimée app.]
Paramètre accessible si [Type de boucle vit.] (SSL) = [Haute perf.] (HPF).
Inertie entraînée, estimée par le variateur en fonction des paramètr es moteur, en lecture seulement. Les
réglages par défaut de la boucle vitesse sont déterminés par le variateur à partir de cette inertie.
Incrément donné par [Coef. mult. inertie] (JMUL) :
- 0,1 gm
2
, 1 gm2, 10 gm2, 100 gm2, 1000 gm2.
1 à 9999 -
2
, 1 gm2, 10 gm2, 100 gm2 ou 1000 gm2.
-Nota : En cas de modification d'un paramètre moteur, l'inertie estimé e est réévaluée et mise à jou r
(paramètres [Inert ie estimée app.] (JESt) et [Coef. mult. inertie] (JMUL)) . [Inertie de l'applicat.] (JAPL)
est remis également à sa valeur par défaut en fo nction de la nouvelle valeur de [Ine rtie es timée a pp.]
(JESt).
[Standard] (Std)
JACO
(1)Paramètre également accessible dans le menu [1.3 REGLAGES] (SEt-). Les conseils de réglage de ces paramètres sont
développés dans ce menu pages 57
T
AAV49425 11/2009 89
M [Coef. inertie app.]
Paramètre accessible si [Type de boucle vit.] (SSL) = [Haute perf.] (HPF).
Coefficient déterminant le ratio entre [Inertie esti mée app.]
La valeur par défaut est égale à 1 ou à 30 si [Macro configuration] (CFG) page 41
[Type cde moteur] (Ctt) page 70
[Inertie de l'applicat.] (JAPL) = [Inertie estimée app.] (JESt) x [Coef. inertie app.] (JACO)
à 59.
Paramètre modifiable en marche et à l’arrêt.
= [Mot. sync.] (SYn) ou [Sync.BF] (FSY).
0.10 à 100 -
(JESt) et [Inertie de l’applicat.] (JAPL).
= [Ascenseur] (LIFt) et
Page 89

[1.4 CONTRÔLE MOTEUR] (drC-)
DANGER
FONCTIONNEMENT INATTENDU DE L’APPAREIL
• Si une valeur erronée est saisie dans le paramètre [Inertie de l'applicat.] (JAPL), cela peut
entraîner une instabilité de vitesse et une perte de contrôle du moteur, avec possibilité de chute,
par exemple dans les applications levages et ascenseurs. L’inertie peut varier considérablement
selon l’application, elle est généralement très élevée pour le s ascenseurs. La valeur par défaut ne
garantit donc pas un bon fonctionnement.
• Il est impératif de déterminer et de saisir la valeur exacte de l’inertie en boucle vitesse haute
performance.
Si ces précautions ne sont pas respectées, cela entraînera la mort ou des blessures graves.
Code Nom / Description Plage de réglage Réglage usine
SSL-
JAPL
b [BOUCLE DE VITESSE] (suite)
M [Inertie de l'applicat.]
Paramètre accessible si [Type de boucle vit.] (SSL) = [Haute perf.] (HPF).
La valeur de l’inertie réelle entraînée doit être saisie dans ce pa ramètre. Cette va leur est alors ut ilisée pa r
le variateur pour optimiser les réglages de la boucle vitesse. C’est ainsi que les meilleurs résultats seront
obtenus, si la valeur saisie est exacte.
[Inertie de l'applicat.] (JAPL) = [Inertie estimée app.] (JESt) x [Coef. inertie app.] (JACO) avec par défau t
[Coef. inertie app.] (JACO) = 1 ou 30 si [Macro configuration] (CFG) page 41
[Type cde moteur] (Ctt) page 70
Incrément donné par [Coef. mult. inertie] (JMUL) :
• 0,1 gm
2
, 1 gm2, 10 gm2, 100 gm2 ou 1000 gm2.
Nota : En cas de modification d'un paramètre moteur, l'inertie estimée est réévaluée et mise à jour
(paramètres [Inertie estimée app.] (JESt) et [Coef. mult. i nertie] (JMUL)) . [Inertie d e l'applicat.] (JAPL)
est remis également à sa valeur par défaut en fonction de la nouvelle valeur de [Inertie estimée app.]
(JESt).
= [Mot. sync.] (SYn) ou [Sync.BF] (FSY).
1 à 9999 -
= [Ascenseur] (LIFt) et
StA
T
FLG
T
(1)Paramètre également accessible dans le menu [1.3 REGLAGES] (SEt-). Les conseils de réglage de ces paramètres sont
développés dans ce menu pages 57
T
M [Stab.Boucle F]
Paramètre accessible si [Type de boucle vit.] (SSL) = [Haute perf.] (HPF).
Stabilité : permet d’adapter l’atteinte du régime établi après un transitoire de vitesse en fonction de la
cinématique de la machine. Augmenter progressivement la sta bilité pour augmenter l'atténu ation de la boucle
de régulation afin de réduire les dépassements en vitesse.
M [Gain Boucle F]
Paramètre accessible si [Type de boucle vit.] (SSL) = [Haute perf.] (HPF).
Gain de la boucle fréquence : permet d’adap ter la rapidité des t ransitoires de vitesse de la machine en fonction
de la cinématique. Pour les machines à fort couple résistant ou à inertie importante et à cycles rapides,
augmenter progressivement le gain.
à 59.
Paramètre modifiable en marche et à l’arrêt.
(1) 0 à 100 % 20 %
(1)
0 à 100 %
20 %
90 AAV49425 11/2009
Page 90

[1.4 CONTRÔLE MOTEUR] (drC-)
Paramètres accessibles en mode [Expert].
Code Nom / Description Plage de réglage Réglage usine
SSL-
FFP
T
FFU
T
T
b [BOUCLE DE VITESSE] (suite)
M [Feed forward]
Paramètre accessible si [Type de boucle vit.] (SSL) = [Haute perf.] (HPF).
Pourcentage du terme d'anticipation du régulateur haute performance. 100% correspond au terme calculé à
partir de la valeur de [Inertie de l'applicat.] (JAPL) page 90
M [Bandwidth feedfor.]
Paramètre accessible si [Type de boucle vit.] (SSL) = [Haute perf.] (HPF).
Bande passante du terme d'anticipation de la boucle de vitesse haute performance, en pourcentage de la
valeur prédéfinie
Paramètre modifiable en marche et à l’arrêt.
0 à 200 % 100 %
.
20 à 500 % 100 %
Procédure recommandée pour le réglage de la boucle vitesse haute performance
1. Saisissez les paramètres moteur. Si vous en modifiez un ensuite, il faudra refaire toute cette procédure.
2. La valeur de l’inertie réelle entraînée doit être saisie dans le paramètre [Inertie de l'applicat.] (JAPL) page 90
Nota : En cas de modification d'un paramètre moteur, l'i nertie estimée est rééval uée et mise à jour (paramètre s [Inerti e estimée app.]
(JESt) et [Coef. mult. inertie] (JMUL)). Le paramètre [Inertie de l'applicat.] (JAPL) est remis égale ment à sa valeur par défaut en fo nction
de la nouvelle valeur de [Inertie estimée app.] (JESt).
3. Contrôlez la réponse de la boucle vitesse en mettant préalablement l e paramètre [Feed forward] (FFP) à 0 (voir courbes page suivante).
4. Si nécessaire ajuster la bande passante et la stabil ité par les paramè tres [Stab. Boucle F] (StA) et [Gain Boucle F] (FLG) (voir page 59
5. Pour optimiser le suivi des rampes, augmenter le paramètre d’a nticipati on [Feed fo rward] (FFP) comme indiqué page suivante jusqu’à
obtenir le meilleur résultat.
6. Exceptionnellement la bande passante du terme d'anticipation peut être ajustée comme indiqué page suivante pour améliorer encore
le suivi des rampes ou pour réduire la sensibilité au bruit éventuel de la référence vitesse.
.
).
DANGER
FONCTIONNEMENT INATTENDU DE L’APPAREIL
• Si une valeur erronée est saisie dans le paramètre [Inertie de l'applicat.] (JAPL) page 90 cela peut entraîner une instabilité de
vitesse et une perte de contrôle du moteur, avec possib ilité de chute, pa r exemple dans les applic ations levages et ascenseurs.
L’inertie peut varier considérablement selon l’application, elle est généralement très élevée pour les ascenseurs. La valeur par
défaut ne garantit donc pas un bon fonctionnement.
• Il est impératif de déterminer et de saisir la valeur exacte de l’inertie en boucle vitesse haute performance.
Si ces précautions ne sont pas respectées, cela entraînera la mort ou des blessures graves.
AAV49425 11/2009 91
Page 91

[1.4 CONTRÔLE MOTEUR] (drC-)
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Echelon de consigne
Temps en ms
Boucle de vitesse haute performance - Réglage des paramètres [Feed forward] (FFP)
et [
Bandwidth feedfor.] (FFU)
[Feed forward] (FFP)
Il permet d’ajuster le niveau d’anticipation de couple dynamique nécessaire à l’accélération et à la décélération de l’inertie. L’effet de ce
paramètre sur le suivi de la rampe est illustré dans les figures ci-dessous. Son accroissement entraîne un suivi de rampe au plus près. Si
sa valeur est trop importante, il y a dépassement de vitesse. Le régla ge optimal est obtenu qua nd la vite sse suit parf aite ment la rampe, ce
qui dépend de l’exactitude du paramètre [Inerti e de l'ap plicat. ] (JAPL) page 90
117
.
Réponse initiale avec FFP = 0 Augmentation de FFP Augmentation de FFP
et du réglage du paramètre [Valeur filtre codeur] (FFr) page
Augmentation de FFP
[Bandwidth feedfor.] (FFU)
Il permet d’ajuster la bande passante du terme d'anticipation de couple dynamique. L’effet de ce paramètre sur le suivi de la rampe est
illustré dans les figures ci-dessous. Sa diminution réduit les effets de bruit dans la référence de vitesse (ondulations de couple). Une
diminution trop forte par rapport aux réglages de rampes (rampes courtes) entraîne une détérioration du suivi de rampe à cause du retard
engendré. Son accroissement entraîne un suivi de rampe au plus près, au prix d’une plus grande sensibilité au bruit. Le réglage optimal
est obtenu par le meilleur compromis entre le suivi de rampe et la sensibilité au bruit existant.
Réponse initiale avec FFU = 100 % Diminution de FFU Augmentation de FFU
92 AAV49425 11/2009
Page 92

[1.4 CONTRÔLE MOTEUR] (drC-)
Pompes à balancier
[ENA SYSTEM]
ENA SYSTEM est une loi de commande destinée aux machines tournantes avec balourd. Elle s’applique uniquement aux moteurs
asynchrones.
L’application principale est la pompe à pétrole. Le principe de fonctionnement retenu permet :
- de fonctionner sans résistance de freinage,
- de réduire les contraintes mécaniques sur la tige,
- de réduire les fluctuations de courant ligne,
- de réaliser des économies d’énergie en améliorant le rapport puissance électrique / débi t.
[Gain prop. ENA]
Ce réglage est effectué de manière à obtenir un compromis entre l’éco nomie d’énergie réalis ée (et / ou les fluctuat ions du courant de l igne)
et les contraintes mécaniques imposées sur la tige.
L’économie d’énergie est réalisée grâce à la diminution de fluctuation de courant et grâce à un débit plus fort pour une même vitesse
moyenne.
[Gain intégral ENA]
Ce réglage permet de lisser la tension bus continu.
Démarrer la machine avec un gain intégral et proportionnel faible (proportionnel 25 % et intégral 10 %) afin d’éviter de déclencher en
surtension en l’absence de résistance de freinage. Regarder si ces réglages conviennent.
Conseil de réglage à réaliser en cours de fonctionnement :
• Pour éliminer la résistance de freinage et donc l’élévation de tension au niveau du bus continu :
Visualiser la vitesse machine par le biais du terminal graphique.
Diminuer la valeur de gain intégral jusqu’à ce que la vitesse machine chute. Lorsque ce point est trouvé, augmenter le gain intégral
de nouveau jusqu’à retrouver une vitesse machine stable.
Via le terminal graphique ou un oscilloscope, vérifier que la tension du bus continu est stable.
• Pour réaliser des économies d’énergie :
Le fait de diminuer le gain prop ortionnel (de manière progressive) peu t permettre d’augmenter les économies d’énergi e en diminuant
la valeur maximale du courant de ligne mais en augmentant les variations de vitesse et donc les contraintes mécaniques.
L’objectif est de trouver les réglages qui permettront de réaliser des écono mies d’énergi e en minimisan t les cont raintes mécaniques.
Lorsque le gain proportionnel est diminué, il peut être nécessaire de réajuster le gain intégral afin d’éviter de déclencher en
surtension.
Remarque : lorsque les réglages sont terminés, il convient de vérifier que le démarrage de la pompe s’e ffectue correct ement. Un manque
de couple au démarrage peut provenir d’un réglage de gain intégral ENA trop faible.
[Rapport réduction]
Ce réglage correspond au rapport vitesse moteur avant réducteur / vitess e après réducteur. Ce paramètre sert à l’affi chage sur le terminal
graphique de la vitesse moyenne en Hz et de la vitesse machine en unités clients (exemple : en coups par minute). Pour être visualisées
sur le terminal graphique, ces grandeurs doivent être sélectionnées dans le menu [1.2 SURVEILLANCE] (SUP-).
Conseils de réglage pour éviter les déclenchements en défaut [Survitesse] (SOF)
ENA SYSTEM autorise des dépassements de vitesse pouvant conduire à des déclenchements en défaut [Survitesse] (SOF). Pour éviter
cela il est conseillé d’augmenter raisonnablement la valeur des paramètres :
• [Fréquence maxi] (tFr) page 71
• [Seuil survit. pulse] (FqA) page 253
.
si la fonction "fréquencemètre est configurée.
AAV49425 11/2009 93
Page 93

[1.4 CONTRÔLE MOTEUR] (drC-)
Pompes à balancier
Code Nom / Description Plage de réglage Réglage usine
SSL-
EnA
YES
GPE
T
GIE
T
rAP
T
(1)Paramètre également accessible dans le menu [1.3 REGLAGES] (SEt-).
T
b [BOUCLE DE VITESSE] (suite)
M [ENA system]
Paramètre accessible si [Type cde moteur] (Ctt) = [SVC U] (UUC), voir page 70.
nO
Paramètre modifiable en marche et à l’arrêt.
v [Non] (nO) : Fonction inactive
v [Oui] (YES) : Fonction active.
M [Gain prop. ENA]
Paramètre accessible si [ENA system] (EnA) = [Oui] (YES)
M [Gain intégral ENA]
Paramètre accessible si [ENA system] (EnA) = [Oui] (YES)
M [Rapport réduction]
Paramètre accessible si [ENA system] (EnA) = [Oui] (YES)
[Non] (nO)
(1) 1 à 9999 250
(1) 0 à 9999 100
(1) 10,0 à 999,9 10
94 AAV49425 11/2009
Page 94

[1.4 CONTRÔLE MOTEUR] (drC-)
0
Courant magnétisant nominal
[Boost] (bOO) positif
[Boost] (bOO) négatif
[Action Boost] (FAb)
Courant magnétisant
Fréquence
Code Nom / Description Plage de réglage Réglage usine
bOO
M [Boost]
Paramètre accessible si [NIVEAU D’ACCES] = [Expert] et si [Type cde moteur] (Ctt) page 70 est différent de
[Sync.BF] (FSY) .
Réglage du courant magnétisant du moteur à basse vitesse, en % du courant magnétisant nominal. Il permet
d’augmenter ou de diminuer le temps d’établissement du couple. Son eff et s’atténue progressiveme nt jusqu’à
la fréquence réglée par [Action Boost] (FAb). Les valeurs négatives sont plus particulièrement destinées aux
moteurs à rotors côniques.
(1)
- 100% à 100 % 0
FAb
UFr
T
nrd
YES
(1)Ces deux paramètres ne sont pas accessibles en loi Synchrone boucle fermée [Sync.BF] (FSY).
(2)Paramètre également accessible dans le menu [1.3 REGLAGES] (SEt-).
T
M [Action Boost]
Paramètre accessible si [NIVEAU D’ACCES] = [Expert] et si [Type cde moteur] (Ctt) page 70 est différent de
[Sync.BF] (FSY) .
Fréquence à partir de laquelle le courant magnétisant n’est plus influencé par [Boost] (bOO).
M [Compensation RI]
Paramètre accessible si [Type cde moteur] (Ctt) page 70 est différent de [U/F 2pts] (UF2) et de [U/F 5pts] (UF5).
Permet d’optimiser le couple à très basse vitesse (augmenter la [Compensation RI] (UFr) s’il y a manque de
couple).
S’assurer que la valeur de la [Compensation RI] (UFr) n’est pas trop élevée moteur à chaud (risque d’instabilité).
M [Réduction bruit]
nO
v [Non] (nO) : Fréquence fixe. Réglage usine à partir de 55 kW pour ATV71pppM3X et à partir de 90 kW pour
ATV71
pppN4.
v [Oui] (YES) : Fréquence avec modulation aléatoire. Réglage usine jusqu’à 45 kW pour ATV71pppM3X et
jusqu’à 75 kW pour ATV71
La modulation de fréquence aléatoire évite les bruits de résonance éventuels qui pourraient survenir à une
fréquence fixe.
Paramètre modifiable en marche et à l’arrêt.
pppN4.
(1) 0 à 500 Hz
(2)
25 à 200% 100%
0
selon calibre
AAV49425 11/2009 95
Page 95

[1.4 CONTRÔLE MOTEUR] (drC-)
Code Nom / Description Plage de réglage Réglage usine
SUL
YES
SOP
La valeur du paramètre "SOP" correspond au temps d’atténuation du câble utilisé. Elle est définie pour empêcher la superposition des
réflexions d’ondes de tension dues aux grandes longueurs de câbles. El le limite le dépassement à 2 fois la tension nominale du bus DC.
Les tableaux page suivante donnent des exemples de correspondance du paramètre "SOP" avec la longueur de câble entre le vari ateur et
le moteur. Pour des longueurs supérieures il faut utiliser un filtre sinus ou un filtre de protection contre les dV/dt.
• Dans le cas de moteurs en parallèle la longueur de câble à prendre en compte est la somme de toutes les longueurs. Il faut alors
comparer la longueur donnée par la ligne du table au correspondant à la puissance d’un moteur à celle corre spondant à la pui ssance
totale et prendre la longueur la plus petite. Exemple : 2 moteurs de 7,5 kW - prendre les longueurs de la ligne 15 kW du tableau,
inférieures à celles de la ligne 7,5 kW, diviser par le nombre de moteurs pour obtenir la longueur par moteur (Avec câble "GORSE"
non blindé et SOP = 6 le résultat est 40/2 = 20 m maxi pour chaque moteur de 7,5 kW).
M [Lim. surtens. mot]
Cette fonction limite les surtensions moteurs, elle est utile dans les cas suivants :
- moteurs NEMA
- moteurs japonais
- moteurs de broches
- moteurs rebobinés.
nO
v [Non] (nO) : Fonction inactive
v [Oui] (YES) : Fonction active
Ce paramètre est forcé à [Non] (nO) si [Filtre sinus] (OFI) page 72
Ce paramètre peut rester = [Non] (nO) pour les moteurs 230 / 400 V utilisés en 230 V, ou si la longueur de
câble entre le variateur et le moteur ne dépasse pas :
- 4 m avec câbles non blindés
- 10 m avec câbles blindés.
M [Optim. lim surtens]
Paramètre d’optimisation des surtensions transitoir es aux bornes du moteur, a ccessible si [Lim. surtens. mot.]
(SUL) = [Oui] (YES).
Réglage à 6, 8, ou 10
= [Oui] (YES).
μs, suivant le tableau ci après.
[Non] (nO)
10 μs
Dans les cas particuliers (par exemple autres types de câbles, moteurs de puissances différentes en parallèle, longueurs de câbles
différentes en parallèle, etc), il est conseillé de vérifier avec un oscilloscope les valeurs de surtensions obtenues aux bornes des moteurs.
Il n’est pas conseillé d’augmenter inutilement la valeur de SOP, afin de conserver toutes les performances du variateur.
96 AAV49425 11/2009
Page 96

[1.4 CONTRÔLE MOTEUR] (drC-)
Tableaux de correspondance du paramètre SOP avec la longueur de câble, pour réseau 400 V
Altivar 71 Moteur Section de câble Longueur de câble maxi en mètres
Référence Puissance Câble "GORSE" non blindé
kW HP en mm
ATV71H075N4 0,75 1 1,5 14 100 m 70 m 45 m 105 m 85 m 65 m
ATV71HU15N4 1,5 2 1,5 14 100 m 70 m 45 m 105 m 85 m 65 m
ATV71HU22N4 2,2 3 1,5 14 110 m 65 m 45 m 105 m 85 m 65 m
ATV71HU30N4 3- 1,5 14 110 m 65 m 45 m 105 m 85 m 65 m
ATV71HU40N4 451,5 14 110 m 65 m 45 m 105 m 85 m 65 m
ATV71HU55N4 5,5 7,5 2,5 14 120 m 65 m 45 m 105 m 85 m 65 m
ATV71HU75N4 7,5 10 2,5 14 120 m 65 m 45 m 105 m 85 m 65 m
ATV71HD11N4 11 15 6 10 115 m 60 m 45 m 100 m 75 m 55 m
ATV71HD15N4 15 20 10 8 105 m 60 m 40 m 100 m 70 m 50 m
ATV71HD18N4 18,5 25 10 8 115 m 60 m 35 m 150 m 75 m 50 m
ATV71HD22N4 22 30 16 6 150 m 60 m 40 m 150 m 70 m 50 m
ATV71HD30N4 30 40 25 4 150 m 55 m 35 m 150 m 70 m 50 m
ATV71HD37N4 37 50 35 5 200 m 65 m 50 m 150 m 70 m 50 m
ATV71HD45N4 45 60 50 0 200 m 55 m 30 m 150 m 60 m 40 m
ATV71HD55N4 55 75 70 2/0 200 m 50 m 25 m 150 m 55 m 30 m
ATV71HD75N4 75 100 95 4/0 200 m 45 m 25 m 150 m 55 m 30 m
2
AWG SOP = 10 SOP = 8 SOP = 6 SOP = 10 SOP = 8 SOP = 6
Type H07 RN-F 4Gxx
Câble "GORSE" blindé
Type GVCSTV-LS/LH
Altivar 71 Moteur Section de câble Longueur de câble maxi en mètres
Référence Puissance Câble "BELDEN" blindé
kW HP en mm
ATV71H075N4 0,75 1 1,5 14 50 m 40 m 30 m
ATV71HU15N4 1,5 2 1,5 14 50 m 40 m 30 m
ATV71HU22N4 2,2 3 1,5 14 50 m 40 m 30 m
ATV71HU30N4 3- 1,5 14 50 m 40 m 30 m
ATV71HU40N4 451,5 14 50 m 40 m 30 m
ATV71HU55N4 5,5 7,5 2,5 14 50 m 40 m 30 m
ATV71HU75N4 7,5 10 2,5 14 50 m 40 m 30 m
ATV71HD11N4 11 15 6 10 50 m 40 m 30 m
ATV71HD15N4 15 20 10 8 50 m 40 m 30 m
ATV71HD18N4 18,5 25 10 8 50 m 40 m 30 m
ATV71HD22N4 22 30 16 6 75 m 40 m 25 m
ATV71HD30N4 30 40 25 4 75 m 40 m 25 m
ATV71HD37N4 37 50 35 5 75 m 40 m 25 m
ATV71HD45N4 45 60 50 0 75 m 40 m 25 m
ATV71HD55N4 55 75 70 2/0 75 m 30 m 15 m
ATV71HD75N4 75 100 95 4/0 75 m 30 m 15 m
Pour les moteurs 230 / 400 V utilisés en 230 V, le paramètre [Lim. surtens. mot.] (SUL) peut rester = [Non] (nO).
2
AWG SOP = 10 SOP = 8 SOP = 6 SOP = 10 SOP = 8 SOP = 6
Type 2950x
Câble "PROTOFLEX" blindé
Type EMV 2YSLCY-J
AAV49425 11/2009 97
Page 97

[1.4 CONTRÔLE MOTEUR] (drC-)
LbC
LbC
Couple
Couple nominal
Couple nominal
Fréquence
0
Code Nom / Description Plage de réglage Réglage usine
Ubr
T
bbA
nO
YES
M [Seuil freinage]
Seuil de tension du bus DC au-delà duquel le transistor de freinage agit et limite cette tension.
ATV71
ppppM3p : réglage usine 395 V.
ATV71
ppppN4 : réglage usine 785 V.
ATV71
ppppS6x : réglage usine 980 V
La plage de réglage dépend du calibre en tension d u variateur et du paramètre [Tension rése au] (UrES) page
246
.
M [Equilibre freinage]
v [Non] (nO) : Fonction inactive
v [Oui] (YES) : Fonction active, à utiliser sur des variateurs reliés en parallèle par leur bus DC. Elle permet
d’équilibrer la puissance de freinage entre les variateurs. Le paramètre [Seuil freinage] (Ubr) doit être réglé à
la même valeur sur les différents variateurs
La valeur [Oui] (YES) est possible seulement si [Adapt. rampe déc] (brA) = [Non] (nO) (voir page 155
Selon calibre tension
du variateur
[Non] (nO)
)
LbA
LbC
T
nO
YES
M [Equilibrage charge]
Lorsque 2 moteurs sont liés mécaniquement donc forcément à la même vitesse et qu’ils son t contrôlés chacun
par un variateur, cette fonction permet de mieux réparti r le couple entre les deux moteurs. Pour cela, elle donne
une variation de vitesse en fonction du couple.
v [Non] (nO) : Fonction inactive
v [Oui] (YES) : Fonction active
Ce paramètre est accessible seulement si [Type cde moteur] (Ctt) page 70
[U/F 5pts] (UF5).
M [Correction charge]
Correction nominale en Hz.
Paramètre accessible si [Equilibrage charge] (LbA) = [Oui] (YES)
[Non] (nO)
est différent de [U/F 2pts] (UF2) ou
(1) 0 à 1000 Hz 0
(1)Paramètre également accessible dans le menu [1.3 REGLAGES] (SEt-).
T
98 AAV49425 11/2009
Paramètre modifiable en marche et à l’arrêt.
Page 98

[1.4 CONTRÔLE MOTEUR] (drC-)
+
-
Consigne
Vitesse
Rampe
Boucle de vitesse
Equilibrage
K
Filtre
Référence couple
LBC
LBC1
LBC2
LBC3
LBF
K1
Vitesse
LBC1 LBC2
1
K2
Couple
LBC3
LBC3
Couple
nominal x (1 + LBC3)
LBC
LBC
Equilibrage de charge, paramètres accessibles en niveau expert
Principe
Le facteur d’équilibrage K dépend du couple et de la vitesse, avec deux facteurs K1 et K2 (K = K1 x K2)
AAV49425 11/2009 99
Page 99

[1.4 CONTRÔLE MOTEUR] (drC-)
Code Nom / Description Plage de réglage Réglage usine
LbC1
T
LbC2
T
LbC3
T
LbF
T
T
M [Correction basse]
Paramètre accessible si [Equilibrage charge] (LbA) = [Oui] (YES)
Vitesse minimale pour la correction de charge en Hz. En dessous de ce seuil aucune correction n’est
appliquée. Utilisé pour inhiber la correction à très basse vitesse si elle gêne la rotation du moteur.
M [Correction haute]
Paramètre accessible si [Equilibrage charge] (LbA) = [Oui] (YES)
Seuil de vitesse en Hz au delà duquel la correction de charge est maximale.
M [Offset sur couple]
Paramètre accessible si [Equilibrage charge] (LbA) = [Oui] (YES)
Couple minimal pour la correction de charge, en % du couple nominal. En dessous de ce seuil aucune
correction n’est appliquée. Utilisé pour éviter des instabilités lorsque le sens du couple est changeant.
M [Filtre équilibrage]
Paramètre accessible si [Equilibrage charge] (LbA) = [Oui] (YES)
Constante de temps (filtre) pour la correction, en ms. Utilisé en cas d’accoup lement mécanique élas tique pour
éviter les instabilités.
Paramètre modifiable en marche et à l’arrêt.
0 à 999,9 Hz 0
[Correction basse]
(LbC1) + 0,1
à 1000 Hz
0 à 300 % 0 %
100 ms à 20 s 100 ms
0,1
100 AAV49425 11/2009
Page 100

[1.5 ENTREES / SORTIES] (I-O-)
RDY Term +0.00Hz 0A
MENU GENERAL
1 MENU VARIATEUR
2 NIVEAU D’ACCES
3 OUVRIR / ENREG. SOUS
4 MOT DE PASSE
5 LANGUE
Code Quick
ENT
RDY Term +0.00Hz 0A
1 MENU VARIATEUR
1.1 SIMPLY START
1.2 SURVEILLANCE
1.3 REGLAGES
1.4 CONTRÔLE MOTEUR
1.5 ENTREES/SORTIES
Code << >> Quick
ENT
RUN Term +50.00Hz 80A
1.5 ENTREES/SORTIES
Cde 2 fils / 3 fils
Type cde 2 fils
Aff. sens arrière
CONFIGURATION LI1
CONFIGURATION LIx
Code << >> Quick
XXX
CtL-
SIM-
I-O-
ESC
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
Affiche l’état du variateur
ENTREES/SORTIES
Mise sous tension
Avec terminal graphique :
Avec terminal intégré :
AAV49425 11/2009 101
 Loading...
Loading...