

Page 1
Altivar 71
Paramètres de communication
Guide d’exploitation
Spécification 383
Logiciel V2.8
11/2009
AAV49427
www.schneider-electric.com
Page 2

Page 3

Sommaire
Structure et mode d’emploi des documents _________________________________________________________________________ 5
Présentation _________________________________________________________________________________________________ 6
Evolutions du logiciel __________________________________________________________________________________________ 8
Evolutions de la version V1.2 par rapport à V1.1 ______________________________________________________________ 8
Evolutions de la version V1.3 (S383) par rapport à V1.2 _________________________________________________________ 9
Evolutions de la version V1.7 (S383) par rapport à V1.3 (S383) __________________________________________________ 10
Evolutions de la version V1.9 (S383) par rapport à V1.7 (S383) __________________________________________________ 11
Evolutions de la version V2.4 (S383) par rapport à V1.9 (S383) __________________________________________________ 11
Evolutions de la version V2.8 (S383) par rapport à V2.4 (S383) __________________________________________________ 11
Notations___________________________________________________________________________________________________ 12
Description des paramètres ______________________________________________________________________________ 12
Affichages sur le terminal du variateur _____________________________________________________________________ 12
Profils _____________________________________________________________________________________________________ 13
Qu'est ce qu'un profil ? _________________________________________________________________________________ 13
Profils fonctionnels supportés par l'Altivar 71 ________________________________________________________________ 14
Profil I/O ___________________________________________________________________________________________________ 15
Définition ____________________________________________________________________________________________ 15
Mot de commande - marche sur état [Cde 2 fils] (2C) _________________________________________________________ 17
Mot de commande - marche sur front [Cde 3 fils] (3C) _________________________________________________________ 18
Mot d'état (ETA) _______________________________________________________________________________________ 19
Exemple : Profil I/O avec la fonction positionnement sur capteurs ________________________________________________ 20
Profil CiA402________________________________________________________________________________________________ 22
Description fonctionnelle ________________________________________________________________________________ 22
Graphe d'état CiA402 __________________________________________________________________________________ 23
Description des états ___________________________________________________________________________________ 24
Mot de commande (CMD) _______________________________________________________________________________ 26
Mot d'état (ETA) _______________________________________________________________________________________ 28
Séquence de mise en marche ____________________________________________________________________________ 29
Séquence pour un variateur alimenté par la puissance _________________________________________________________ 30
Séquence pour un variateur en contrôle séparé ______________________________________________________________ 32
Séquence pour un variateur avec commande de contacteur de ligne ______________________________________________ 35
Commutation de la commande / consigne _________________________________________________________________________ 38
Canaux _____________________________________________________________________________________________ 38
Mode non séparé ______________________________________________________________________________________ 39
Mode séparé _________________________________________________________________________________________ 39
Commutation en mode non séparé ________________________________________________________________________ 40
Commutation en mode séparé ___________________________________________________________________________ 40
Commutation des canaux _______________________________________________________________________________ 41
Principe de la commutation de la consigne __________________________________________________________________ 43
Principe de la commutation de la commande ________________________________________________________________ 44
Affectation des bits du mot de commande ___________________________________________________________________ 45
Exemple : Profil I/O avec la fonction positionnement sur capteurs ________________________________________________ 48
Recopie à la commutation _______________________________________________________________________________ 50
Forçage local _______________________________________________________________________________________________ 51
Définition ____________________________________________________________________________________________ 51
Forçage local et la commutation de la consigne ______________________________________________________________ 52
Forçage local et commutation de la commande ______________________________________________________________ 53
Arrêts prioritaires ____________________________________________________________________________________________ 55
Arrêts prioritaires au terminal graphique ____________________________________________________________________ 55
Arrêts prioritaires par le bornier ou par le réseau _____________________________________________________________ 55
Surveillance de la communication _______________________________________________________________________________ 57
Principe _____________________________________________________________________________________________ 57
Critères de surveillance du réseau ________________________________________________________________________ 57
Comportement sur défaut réseau _________________________________________________________________________ 58
Fonctionnement détaillé _________________________________________________________________________________ 59
Affectation des consignes provenant d’un réseau ___________________________________________________________________ 61
Paramètres de consigne ________________________________________________________________________________ 61
Sans régulateur PID ___________________________________________________________________________________ 62
Avec régulateur PID ____________________________________________________________________________________ 63
Mémorisation et commutation de configuration _____________________________________________________________________ 64
Mémorisation de la configuration __________________________________________________________________________ 64
Rappel de la configuration _______________________________________________________________________________ 66
Commutation de configuration par le mot de commande _______________________________________________________ 67
Commutation de configuration par sélection _________________________________________________________________ 71
Commutation de jeu de paramètres ______________________________________________________________________________ 73
Chargement des paramètres du variateur _________________________________________________________________________ 78
Le besoin ____________________________________________________________________________________________ 78
Procédure ___________________________________________________________________________________________ 78
AAV49427 11/2009 3
Page 4

Sommaire
Paramètres de commandes ____________________________________________________________________________________ 80
Paramètres de consignes______________________________________________________________________________________ 83
Paramètres d’états ___________________________________________________________________________________________ 85
Paramètres des valeurs de sortie________________________________________________________________________________ 93
Valeurs de sortie (vitesse) _______________________________________________________________________________ 93
Valeurs de sortie (couple) _______________________________________________________________________________ 94
Valeurs de sortie (moteur) _______________________________________________________________________________ 95
Paramètres des références ____________________________________________________________________________________ 97
Références (vitesse) ___________________________________________________________________________________ 97
Références (couple) ___________________________________________________________________________________ 98
Référence (régulateur) __________________________________________________________________________________ 99
Paramètres de mesures ______________________________________________________________________________________ 100
Mesures d’entrée _____________________________________________________________________________________ 100
Etats thermiques _____________________________________________________________________________________ 100
Temps _____________________________________________________________________________________________ 101
Paramètres d’entrées/sortie ___________________________________________________________________________________ 103
Entrées / sorties logiques ______________________________________________________________________________ 103
Entrées analogiques __________________________________________________________________________________ 104
Sorties analogiques ___________________________________________________________________________________ 105
Codeur _____________________________________________________________________________________________ 106
Paramètres de défaut________________________________________________________________________________________ 107
Paramètres d’historiques _____________________________________________________________________________________ 114
Description de l’historique au dernier défaut ________________________________________________________________ 114
Historique des défauts suivants __________________________________________________________________________ 118
Paramètres d’identification ____________________________________________________________________________________ 122
Paramètres de configuration et réglage du standard CiA402__________________________________________________________ 125
Paramètres de configuration et réglage du standard ODVA __________________________________________________________ 129
Index des codes des paramètres _______________________________________________________________________________ 130
4 AAV49427 11/2009
Page 5

Structure et mode d’emploi des documents
Guide d'installation
Ce guide décrit :
• le montage,
• le raccordement du variateur.
Guide de programmation
Ce guide décrit :
• les fonctions,
• les paramètres,
• l'utilisation du terminal du variateur (terminal intégré et terminal graphique).
Guide des paramètres de communication
Ce guide décrit :
• les modes de marche spécifiques à la communication (graphe d'état),
• l'interaction entre la communication et la commande locale,
• les paramètres de commande, de consigne, et de surveillance, avec des éléments spécifiques pour une utilisation à travers un bus
ou un réseau de communication,
Il ne comporte pas les paramètres de réglage et de configuration du variateur, qui sont contenus dans le fichier "Excel" fourni en
annexe.
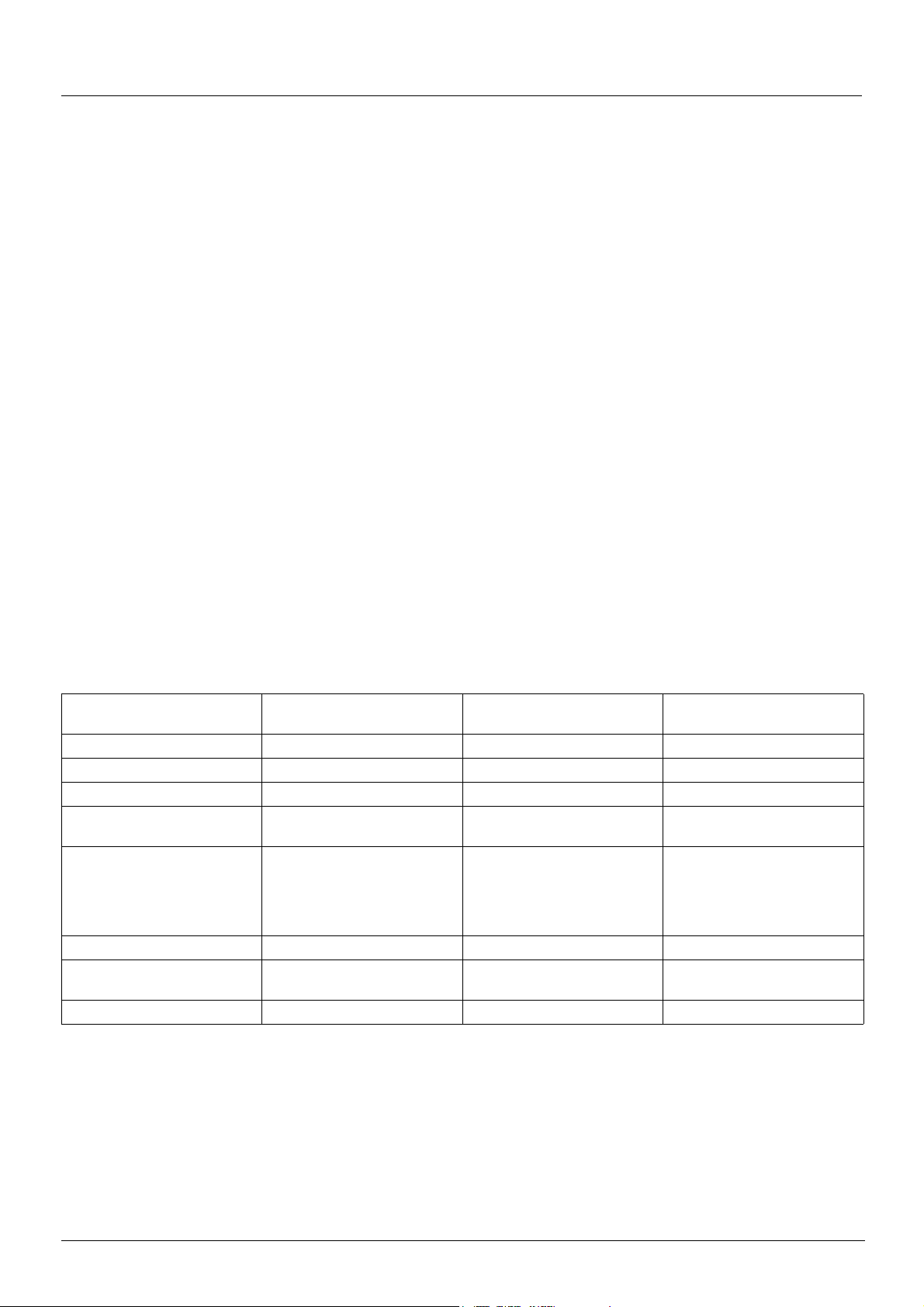
L’ensemble des paramètres est regroupé dans un fichier "Excel" fourni en annexe, avec les données suivantes :
- code,
- nom,
- adresses : logique, CANopen, INTERBUS, DeviceNet,
- catégorie,
- accès en lecture / écriture,
- type : numérique signé, numérique non signé, etc...
- unité,
- réglage usine,
- valeur mini,
- valeur maxi,
- affichage sur terminal graphique et terminal intégré "7 segments",
- menu concerné.
Ce fichier offre la possibilité de trier et de classer les données selon tout critère choisi par l’utilisateur.
Les données sur le fonctionnement, les interdépendances et les limites d’utilisations sont décrites dans le guide de programmation.
Les différents documents sont à utiliser comme suit :
1. étude et programmation du variateur avec le guide de programmation,
2. étude et programmation de la communication avec le guide des paramètres
3. définition des adresses et des valeurs éventuelles des paramètres de réglage et de configuration à modifier par la communication avec
le fichiers des paramètres.
Le chapitre "Chargement des paramètres du variateur" page 78
par la communication.
décrit la procédure recommandée de chargement des paramètres
Guides Modbus, CANopen, Ethernet, Profibus, INTERBUS, Uni-Telway, FIPIO, Modbus Plus, DeviceNet,
etc
Ces guides décrivent :
• le montage,
• le raccordement au bus ou réseau,
• le diagnostic,
• la configuration des paramètres spécifiques à la communication par le terminal intégré ou le terminal graphique.
Ils détaillent les services de communication du protocole.
Guide "Controller Inside"
Ce guide décrit, pour la carte "Controller Inside" :
• le montage,
• le raccordement,
• les fonctions,
• la configuration.
AAV49427 11/2009 5
Page 6
Présentation
2
1
3
1
2
1
3
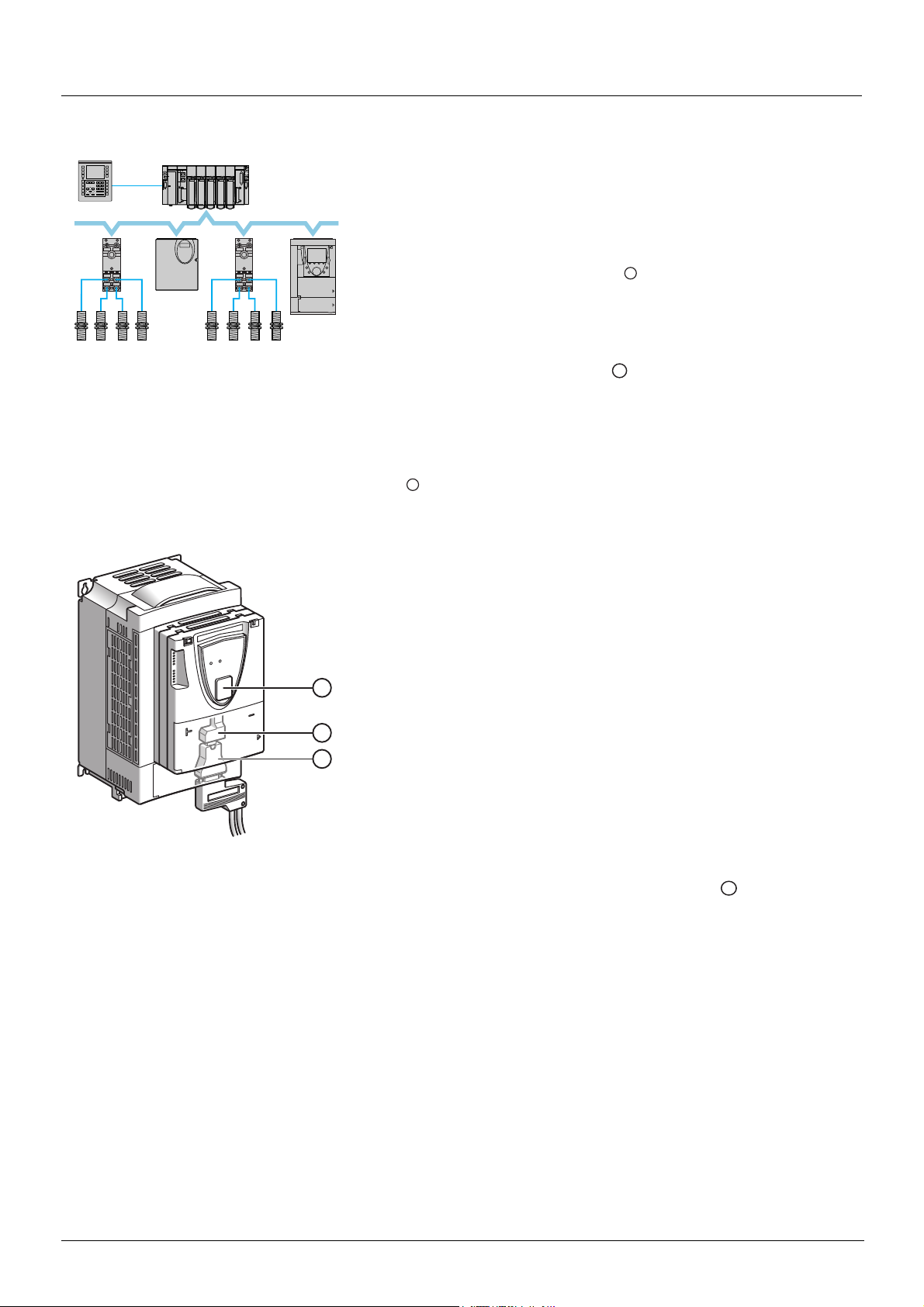
XBT Magelis Premium
FTM FTM
ATV 31
ATV 71
Capteurs Capteurs
Exemple de configuration sur bus CANopen
Le variateur Altivar 71 est conçu pour répondre à toutes les configurations rencontrées
dans les installations industrielles communicantes.
Il intègre en standard les protocoles de communication Modbus et CANopen.
Le protocole Modbus est directement accessible grâce aux 2 ports de communication
intégrés :
• Une prise terminal Modbus de type RJ45 , située sur la face avant du
variateur.
Elle est dédiée à la connexion :
• du terminal graphique déportable,
• d'un terminal de dialogue industriel type Magelis,
• de l'atelier logiciel PowerSuite.
• Une prise réseau Modbus de type RJ45 , située au niveau du bornier contrôle
du variateur. Elle est dédiée au contrôle et à la commande par un automate
programmable ou un autre type de contrôleur.
Elle permet également la connexion d'un terminal ou de l'atelier logiciel
PowerSuite.
Le protocole CANopen est accessible depuis la prise réseau Modbus via l'adaptateur
CANopen (1).
Le variateur Altivar 71 peut également se connecter sur d'autres réseaux et bus de
communication industriels à l'aide d'une des cartes option de communication :
• Ethernet TCP/IP,
• Modbus/Uni-Telway. Cette carte permet d'offrir des fonctionnalités
complémentaires à celles des ports intégrés : Modbus ASCII et RS 485 4 fils,
•Fipio,
• Modbus Plus,
•Profibus DP,
• DeviceNet,
• INTERBUS,
• etc... (consultez notre catalogue).
La possibilité d'alimenter séparément le contrôle permet de maintenir la communication
(surveillance, diagnostic) même si l'alimentation puissance est absente.
Les fonctions principales de communication des variateurs Altivar 58 et Altivar 58F sont
compatibles avec le variateur Altivar 71 :
- le raccordement,
- les services de communication,
- le comportement du variateur (profil),
- les paramètres de commande et de surveillance,
- les paramètres de réglage de base.
(1) Si l’adaptateur CANopen est monté, on ne peut pas utiliser Modbus sur la prise réseau .
6 AAV49427 11/2009
Page 7

Présentation
Toutes les fonctions du variateur sont accessibles par le réseau :
• la commande,
• la surveillance,
• le réglage,
• la configuration.
Lorsque le variateur est équipé de la carte programmable "Controller Inside", ses variables (%MW…) sont accessibles par les ports Modbus
intégrés ou par la carte option Ethernet.
La commande et la consigne de vitesse ou de couple peuvent provenir de différentes sources :
• les borniers d'entrées/sorties,
• le réseau de communication,
• la carte programmable "Controller Inside",
• le terminal graphique déportable,
• l’atelier logiciel PowerSuite (pour la mise en service et la maintenance).
Les fonctions avancées du variateur Altivar 71 permettent de gérer la commutation de ces sources de commande et de consigne suivant
les besoins de l'application.
Il est possible de choisir les variables périodiques de communication par :
• le logiciel de configuration du réseau (Sycon, …) : CANopen, DeviceNet,
• la fonction scanner de communication du variateur Altivar 71 : Profibus DP, Fipio, Modbus Plus,
• la fonction IO Scanner du réseau : Ethernet TCP/IP.
Quel que soit le type de réseau (excepté DeviceNet), le variateur Altivar 71 peut être piloté :
• suivant le profil Drivecom (CANopen CiA DSP 402),
• suivant le profil I/O où la commande est aussi simple et adaptable que la commande par le bornier d'entrées/sorties.
La carte DeviceNet supporte le profil du standard ODVA.
La surveillance de la communication est effectuée sur des critères spécifiques à chaque protocole. Quel que soit le protocole, il est possible
de configurer la réaction du variateur à un défaut de communication :
• défaut variateur avec : arrêt roue libre, arrêt sur rampe, arrêt rapide ou arrêt freiné,
• arrêt sans défaut variateur,
• maintien du dernier ordre reçu,
• position de repli à une vitesse prédéfinie,
• ignorer le défaut.
Une commande venant du bus CANopen est traitée avec la même priorité qu'une entrée du bornier du variateur. Ceci permet d'obtenir de
très bon temps de réponse sur la prise réseau via l'adaptateur CANopen.
AAV49427 11/2009 7
Page 8

Evolutions du logiciel
Depuis le début de sa commercialisation l’Altivar ATV 71 a bénéficié de fonctionnalités supplémentaires. La version du logiciel devient V2.8.
La nouvelle version peut se substituer aux anciennes sans modification.
Cette documentation est relative à la version V2.8, mais elle reste utilisable avec les versions antérieures car les évolutions ne font
qu’ajouter des valeurs et des paramètres sans modifier ni supprimer de paramètres des anciennes versions.
La version du logiciel figure sur l’étiquette signalétique collée sur le flanc du variateur.
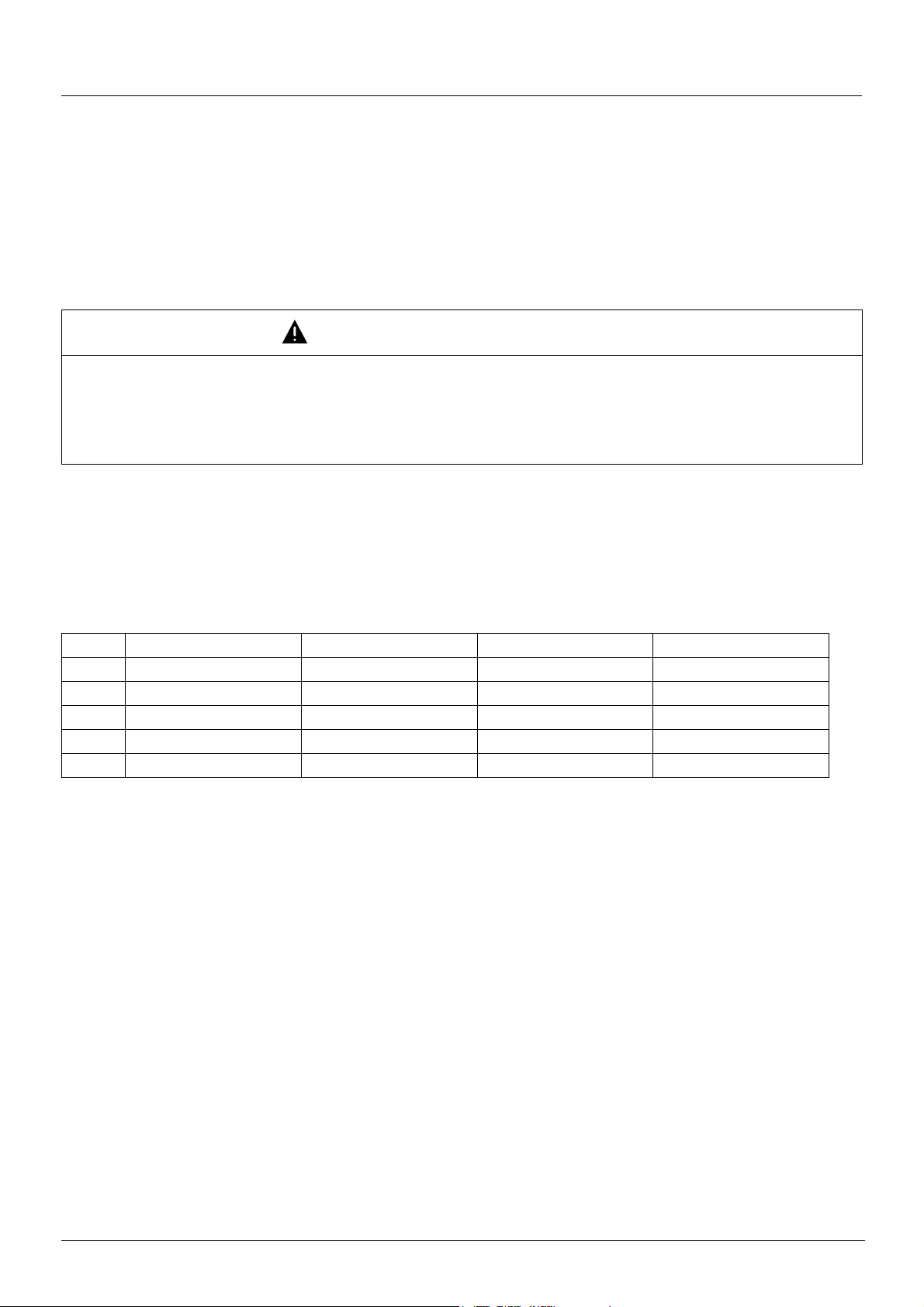
Evolutions de la version V1.2 par rapport à V1.1
Réglage usine
Nota 1 : Dans la version V1.1, l’entrée analogique était 0 ± 10 V. Pour des raisons de sécurité, dans la nouvelle version cette
entrée est configurée en 0 +10 V.
Nota 2 : Dans la version V1.1, la sortie analogique AO1 était affectée à la fréquence moteur. Dans la nouvelle version cette sortie
est non affectée.
A l’exception de ces deux paramètres, le réglage usine de la version V1.1 est conservé dans la nouvelle version. Les nouvelles
fonctionnalités sont inactives en réglage usine.
Plage de fréquence moteur
La plage de fréquence de sortie maximale est étendue de 1000 à 1600 Hz (possibilité selon calibre et loi de commande choisie).
Nouveaux paramètres et nouvelles fonctions
Menu [1.2 SURVEILLANCE] (SUP-)
Adjonction des états et valeurs internes relatifs aux nouvelles fonctions décrites ci après.
Menu [1.3 REGLAGES] (SEt-)
• [Seuil couple haut] (ttH).
• [Seuil couple bas] (ttL).
• [Seuil alarme pulse] (FqL).
• [Seuil arrêt roue lib.] (FFt).
Menu [1.4 CONTRÔLE MOTEUR] (drC-)
• [Incrément Tr/Min] (InSP).
• Extension à tous les calibres de variateurs des configurations suivantes, jusqu’alors limitées à 45 kW pour ATV71
pour ATV71
équilibrage de freinage [Equilibre freinage] (bbA).
pppN4 : moteur synchrone [Mot. sync.] (SYn), filtre sinus [Filtre sinus] (OFI), réduction de bruit [Réduction bruit] (nrd),
pppM3X et à 75 kW
Menu [1.5 ENTREES / SORTIES] (I-O-)
• L’entrée AI1 devient configurable en 0 +10 V ou 0 ± 10 V par [Type AI1] (AI1t).
• [Canal AI réseau] (AIC1).
• Nouvelles possibilités d’affectation des relais et sorties logiques : câble détendu, couple supérieur à seuil haut, couple inférieur à seuil
bas, moteur en rotation sens avant, moteur en rotation sens arrière, seuil de vitesse mesurée atteint, détection de variation de charge.
• La sortie analogique AO1 devient utilisable en sortie logique et affectable aux fonctions des relais et sorties logiques,.
• Nouvelle possibilité de modifier l’échelle des sorties analogiques par les paramètres [Echelle min AOx] (ASLx) et [Echelle max AOx]
(ASHx).
• Nouvelles possibilités d’affectation des sorties analogiques : couple moteur signé et vitesse moteur mesurée.
• Nouvelles possibilités d’affectation des groupes d’alarme : câble détendu, couple supérieur à seuil haut, couple inférieur à seuil bas,
seuil de vitesse mesurée atteint, détection de variation de charge.
8 AAV49427 11/2009
Page 9

Evolutions du logiciel
Menu [1.7 FONCTIONS D’APPLI.] (Fun-)
• Les fonctions référence sommatrice, soustractrice, multiplicatrice deviennent affectable à l’entrée analogique réseau [AI réseau]
(AIU1).
• Nouveau paramètre [Seuil arrêt roue lib.] (FFt) permettant de régler un seuil de passage en roue libre en fin d’arrêt sur rampe ou d’arrêt
rapide.
• Nouveau paramètre : serrage du frein à vitesse nulle régulée [Fermeture frein à 0] (bECd).
• Le peson [Affectation peson] (PES) devient affectable à l’entrée analogique réseau [AI réseau] (AIU1).
• Nouvelle fonctionnalité "câble détendu", avec les paramètres [Conf. cable détendu] (rSd) et [S. Cple cable déten.] (rStL).
• Utilisation de la rampe [Accélération 2] (AC2) lors des démarrages et des réveils de la fonction PID.
• La limitation de couple [LIMITATION DE COUPLE] (tOL-) devient configurable en % ou 0,1 % par [Incrément couple] (IntP) et
affectable à l’entrée analogique réseau [AI réseau] (AIU1).
• Nouvelle fonctionnalité "arrêt à distance calculée après fin de course de ralentissement", avec les paramètres [Distance d’arrêt] (Std),
[Vitesse linéaire] (nLS) et [Correcteur d'arrêt] (SFd).
• Le positionnement sur capteur ou fin de course [POSIT. SUR CAPTEURS] (LPO-) devient configurable en logique positive ou
négative par [Conf. FdC d'arrêt] (SAL) et [Conf. FdC ralent.] (dAL).
• La commutation de paramètres [COMMUT. JEUX PARAM.] (MLP-) devient affectable à des seuils de fréquence atteints [S. fréq. att.]
(FtA) et [S. fréq. 2 att.] (F2A).
• Nouvelle fonctionnalité demi-étage : menu [DEMI-ETAGE] (HFF-).
Menu [1.8 GESTION DEFAUTS] (FLt-)
• Possibilité de réinitialiser le variateur sans le mettre hors tension, par [Reset produit] (rP).
• Possibilité de réinitialiser le variateur par entrée logique sans le mettre hors tension, par [Affect reset produit] (rPA).
• La possibilité de configuration du défaut "perte phase moteur" [Perte phase moteur] (OPL) à [Coup. aval] (OAC) est étendue à tous
les calibres de variateurs (jusqu’alors limitée à 45 kW pour ATV71
• Le défaut externe [DEFAUT EXTERNE] (EtF-) devient configurable en logique positive ou négative par [Config. défaut externe] (LEt).
• Nouvelle fonctionnalité de surveillance par mesure de vitesse par l’entrée "Pulse input", par le menu [FREQUENCE METRE] (FqF-).
• Nouvelle fonctionnalité de détection de variation de charge, par le menu [DETECT. DELTA CHARGE] (dLd-).
• Le défaut de court-circuit de l’unité de freinage devient configurable par [Gest. déf. unité frein] bUb).
pppM3X et à 75 kW pour ATV71pppN4).
Menu [7 CONFIG. AFFICHAGE]
• Adjonction dans [7.4 REGLAGE TERMINAL] des paramètres [CONTRASTE] et [VEILLE] pour régler le contraste et la mise en veille
de l’afficheur graphique.
Evolutions de la version V1.3 (S383) par rapport à V1.2
Nouveaux paramètres et nouvelles fonctions
Menu [1.4 CONTRÔLE MOTEUR] (drC-)
Nouvelle possibilité de fonctionner avec Moteur synchrone en boucle fermée.
• Nouveaux paramètres [Auto-test angle] (ASA) et [Valeur offset angle] (ASU).
• Affectation [Sync.BF] (FSY) du paramètre [Type cde moteur] (Ctt).
Menu [1.5 ENTREES / SORTIES] (I-O-)
• Nouveaux paramètres [Freq.Excit.Resolveur] (FrES) et [Nbr pôles Resolveur] (rPPn).
Menu [1.7 FONCTIONS D’APPLI.] (Fun-)
• Nouvelle fonctionnalité "Inspection", avec les paramètres [Inspection] (ISP) et [Vitesse inspection] (ISrF).
AAV49427 11/2009 9
Page 10

Evolutions du logiciel
Evolutions de la version V1.7 (S383) par rapport à V1.3 (S383)
Nouveaux paramètres et nouvelles fonctions
Menu [1.1 SIMPLY START] (SIM-)
• Ajout d’une macro configuration [Ascenseurs] (LIFt) dans le paramètre [Macro configuration] (CFG).
Menu [1.3 REGLAGES] (SEt-)
Nouveaux paramètres :
• [Stab.Boucle F] (StA).
• [Gain Boucle F] (FLG).
Menu [1.4 CONTRÔLE MOTEUR] (drC-)
Nouveaux paramètres :
• [Boost] (bOO).
• [Action boost] (FAb).
• [[Incrément FEM] (IPHS).
• [Lect. param moteur] (rEqP).
• [Etat param. moteur] (rEtP).
• [Type d'angle test] (ASt).
• [Angle test] (ASL).
• [Activa. angle test] (AtA).
• [Etat angle test] (AStS) .
• [Type de boucle vit.] (SSL).
• [Coef. mult. inertie] (JMUL).
• [Inertie estimée app.] (JESt).
• [Inertie de l'applicat.] (JAPL).
• [Stab.Boucle F] (StA).
• [Gain Boucle F] (FLG).
• [Feed forward] (FFP).
• [Bandwidth feedfor] (FFU).
Paramètres déplacés du menu [1.7 FONCTIONS D’APPLI.] (Fun-) :
• [Fluxage moteur] (FLU).
• [Affectation fluxage] (FLI).
• [Affect. auto-réglage] (tUL).
Menu [1.5 ENTREES / SORTIES] (I-O-)
Nouveaux paramètres de codeurs :
• [Protocole codeur] (UECP).
• [Tension codeur] (UECU).
• [Nombre de lignes] (UELC).
• [Parité codeur SSI] (SSCP).
• [Taille trame SSI] (SSFS).
• [Nbr de tour en bits] (EnMr).
• [Nbr de bits par tour] (Entr).
• [Type de code SSI] (SSCd).
• [Filtre codeur] (FFA).
• [Valeur filtre codeur] (FFr) .
10 AAV49427 11/2009
Page 11

Evolutions du logiciel
Evolutions de la version V1.9 (S383) par rapport à V1.7 (S383)
Nouveaux paramètres et nouvelles fonctions
Menu [1.4 CONTRÔLE MOTEUR] (drC-)
• Nouvelle possibilité d’affectation du [Type d’angle test] (ASt) : mesure optimisée (sans mouvement avec mémorisation).
Nouveau paramètre :
• [Coef. inertie app.] (JACO).
Déplacement des paramètres suivants du sous-menu [MOTEUR ASYNCHRONE] (ASY-), maintenant placés directement dans le menu
[1.4 CONTRÔLE MOTEUR] (drC-) :
• [Boost] (bOO).
• [Action Boost] (FAb).
Menu [1.5 ENTREES / SORTIES] (I-O-)
Nouveaux paramètres de codeurs :
• [Inv. Rot. codeur] (EnrI).
• [Fréquence d’horloge] (EnSP).
Menu [1.7 FONCTIONS D’APPLI.] (Fun-)
• Nouvelle possibilité d’affectation pour la commutation de jeux de paramètres [2 jeux paramètres] (CHA1) et
[3 jeux paramètres] (CHA2) : commutation pendant la séquence de frein. Cette nouvelle affectation permet entre autre de mettre des
gains élevés lors de l’ouverture du frein avant le démarrage de la rampe (utile dans les applications ascenseurs).
Le sous-menu créé est :
• [GESTION DU TOP Z] (tOP-) (uniquement accessible si une carte VW 3A 411 est présente et si [Signaux codeur] (EnS) = [AABB]
(AAbb)).
Nouveau paramètre de codeur :
• [Arrêt sur top Z] (tOSt).
Evolutions de la version V2.4 (S383) par rapport à V1.9 (S383)
Nouveaux paramètres et nouvelle fonction
Menu [1.7 FONCTIONS D’APPLI.] (Fun-)
Le sous-menu créé est :
• [GESTION DU ROLLBACK] (rbM-). Ce menu est accessible :
- seulement pour les variateurs jusqu’à 45 kW pour ATV71
-si [Type cde moteur] (Ctt) = [Sync.BF] (FSY) ou [FVC] (FUC),
- si commande de frein [Affectation frein] (bLC) est affectée.
Nouveau paramètre de la fonction [GESTION DU ROLLBACK] :
• [Gestion du Rollback] (rbM).
• [Compensation rbk] (rbC).
• [Amortissement rbk] (rbd).
pppM3X et jusqu’à 75 kW pour ATV71pppN4,
Evolutions de la version V2.8 (S383) par rapport à V2.4 (S383)
Menu [1.7 FONCTIONS D’APPLI.] (FUn-)
• La plage de réglage du paramètre [Temps redémar.] (ttr) passe de 0 à 5.00 s vers 0 à 15.00 s.
Menu [7 CONFIG. AFFICHAGE]
• Adjonction dans [7.4 REGLAGE TERMINAL] du paramètre [Menu demarrage] pour choisir le menu qui apparait sur le produit à la
mise sous tension
AAV49427 11/2009 11
Page 12

Notations
Description des paramètres
Identification
Un paramètre est défini par différentes chaînes de caractères :
• code : 4 carac
• nom : Description en clair (utilisée par l'atelier logiciel PowerSuite),
• libellé du terminal : Chaîne de caractères entre crochets pour le terminal graphique [Lim. couple géné.].
Adresses
Les adresses des paramètres sont données dans 4 formats :
• Adresse logique : Adresse pour la messagerie Modbus (RS485 et Ethernet TCI/IP) et les variables périodiques indexées PKW (Fipio,
Profibus DP), en décimal et hexadécimal (précédé de 16#).
Pour optimiser les performances de la messagerie Modbus, 2 adresses sont données pour le mot de commande et pour le mot d'état.
Les adresses annotées "speed" sont pour utilisation en tr/min, les adresses annotées "frequency" sont pour utilisation en Hz.
• Index CANopen : Index / sous-index CANopen en hexadécimal, à utiliser pour l'affectation variable des PDO et la messagerie SDO.
• Index INTERBUS : index / sous-index en hexadécimal pour la messagerie PCP.
• Path DeviceNet : Classe / instance / attribut en hexadécimal.
Lecture / écriture
• R : Lecture seule,
• R/W : Lecture et écriture,
• R/WS : Lecture et écriture, mais écriture moteur à l'arrêt seulement.
tères maximum. Le code permet d'identifier le paramètre sur le terminal 7 segments intégré (Exemples :
brt, tLIG
),
Type
• WORD (registre de bits) : Mot dont chaque bit représente une information de commande, de surveillance ou de configuration,
• WORD (énumération) : Mot dont chaque valeur représente un choix possible pour une configuration ou un état,
• INT : Entier signé,
• UINT : Entier non signé,
• DINT : Entier double signé,
• UDINT : Entier double non signé.
Format
Les valeurs en hexadécimal sont notées : 16#pppp.
Affichages sur le terminal du variateur
Les menus affichés sur le terminal graphique sont notés entre crochets.
Exemple : [1.9 COMMUNICATION].
Les menus affichés sur le terminal 7 segments intégré sont toujours terminés par un tiret et notés entre parenthèses.
Exemple : (COM-).
Les désignations des paramètres affichés sur le terminal graphique déportable sont notées entre crochets.
Exemple : [Vitesse de repli].
Les codes des paramètres affichés sur le terminal 7 segments intégré sont notés entre parenthèses.
Exemple : (LFF).
12 AAV49427 11/2009
Page 13

Profils
Qu'est ce qu'un profil ?
Il y a 3 types de profils :
• les profils de communication,
• les profils fonctionnels,
• les profils d'application.
Profils de communication
Un profil de communication décrit les caractéristiques du bus ou réseau :
• câbles,
• connecteurs,
• caractéristiques électriques,
• protocole d'accès,
• système d'adressage,
• service d'échange périodiques,
• service de messagerie;
•...
Un profil de communication est unique pour un type de réseau (Fipio, Profibus DP, ...) et s'adresse à différents types d'appareils.
Profils fonctionnels,
Un profil fonctionnel décrit le comportement d'un type d'appareil, il définit :
• les fonctions,
• les paramètres (nom, format, unité, type ...),
• les variables périodiques d'entrée - sortie,
• un (ou des) diagramme(s) d'état
•...
Un profil fonctionnel est générique à une famille d'appareils (variateur de vitesse, codeurs, module d'entrées - sorties, afficheurs ...).
Dans l'idéal, les profils fonctionnels devraient être indépendants des réseaux mais dans la réalité ils ne le sont pas. Ils peuvent avoir des
parties communes ou similaires. Les profils fonctionnels normalisés (IEC 61800-7) des variateurs de vitesse sont :
• CiA402,
• PROFIDRIVE,
•CIP.
DRIVECOM a été publié à partir de 1991.
CiA402 "Device profile for drives and motion control" est une évolution de ce standard maintenu par l'organisation Can In Automation.
Certains protocoles supportent aussi le profil ODVA (Open DeviceNet Vendor Association).
Profils d'application.
Les profils d'application définissent complètement les services à assurer par les appareils d'une machine. Exemple : profil pour ascenseurs
"CiA DSP 417-2 V 1.01 part 2: CANopen application profile for lift control systems - virtual device definitions".
Interchangeabilité
L'objectif des profils de communication et des profils fonctionnels est l’interchangeabilité des appareils connectés sur les réseaux.
Bien que cet objectif ne soit pas toujours atteint, les profils facilitent la libre concurrence.
AAV49427 11/2009 13
Page 14

Profils
Profils fonctionnels supportés par l'Altivar 71
Profil I/O
L'utilisation du profil I/O simplifie la programmation des automates.
Lorsqu’on commande par le bornier ou le terminal, on utilise sans le savoir le profil I/O.
Avec un Altivar 71, lorsqu'on commande par un réseau, on peut aussi utiliser le profil I/O.
Le variateur démarre dès qu'on applique l'ordre de marche.
Les 16 bits du mot de commande peuvent être affectés à une fonction comme une entrée du bornier.
Dans une utilisation évoluée, on peut commander le variateur simultanément par :
•le bornier,
• le mot de commande Modbus,
• le mot de commande CANopen,
• le mot de commande de la carte réseau,
• le mot de commande de la carte "Controller Inside".
Le profil I/O est supporté par le variateur lui-même donc par tous les ports de communication (Modbus intégré, CANopen et les cartes de
communication Ethernet, Fipio, ModbusPlus, Modbus, Uni-Telway, Profibus DP, DeviceNet, INTERBUS).
Profil CiA402
Le variateur ne démarre qu'après une séquence de commandes.
Le mot de commande est standardisé.
5 bits (bits 11 à 15) du mot de commande peuvent être affectés à une fonction comme une entrée du bornier.
Le profil CiA402 est supporté par le variateur lui-même donc par tous les ports de communication (Modbus intégré, CANopen et les cartes
de communication Ethernet, Fipio, ModbusPlus, Modbus, Uni-Telway, Profibus DP, DeviceNet, INTERBUS).
Le variateur Altivar 71 supporte le mode "Velocity mode" du profil CiA402.
Dans le profil CiA402, il existe 2 modes spécifiques à l'Altivar 71 et qui caractérisent la gestion de la commande et de la consigne (voir le
chapitre "Commutation de la commande / consigne", page 38
• mode séparé [Séparés] (SEP),
• mode non séparé [Non séparé] (SIM).
):
Profil ODVA
Le variateur démarre dès qu'on applique l'ordre de marche.
Le mot de commande est standardisé.
Le profil ODVA est supporté par la carte de communication DeviceNet.
14 AAV49427 11/2009
Page 15

Profil I/O
C201
C202
bit 9
bit 8
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 1
bit 0
bit 2
bit 1
bit 0
bit 11
bit 10
bit 13
bit 12
bit 15
bit 14
A
B
Mot de commande CANopen
Fonction
C201
C202
bit 9
bit 8
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 1
bit 0
bit 2
bit 1
bit 0
bit 11
bit 10
bit 13
bit 12
bit 15
bit 14
A
B
LI2
LI10
LI9
LI8
LI7
LI6
LI5
LI4
LI3
LI2
LI1
LI12
LI11
LI14
LI13
C
Mot de commande CANopen
Bornier
Fonction
Définition
Le variateur se comporte de la même manière par le réseau que par le bornier.
On obtient le profil I/O par la configuration :
Menu Paramètre Valeur
[1.6 - COMMANDE] (CtL-) [Profil] (CHCF) [Profil IO] (IO)
Comme sur les entrées logiques du bornier, on peut affecter les fonctions du variateur sur les bits du mot de commande.
Une entrée de fonction peut être affectée à :
• une entrée du bornier (LI2 à LI14),
• un bit de mot de commande de Modbus (C101 à C115),
• un bit de mot de commande de CANopen (C201 à C215),
• un bit de mot de commande de la carte réseau (C301 à C315),
• un bit de mot de commande du controller inside (C401 à C415),
• un bit commuté (Cd00 à Cd15) : voir chapitre "Commutation de la commande / consigne".
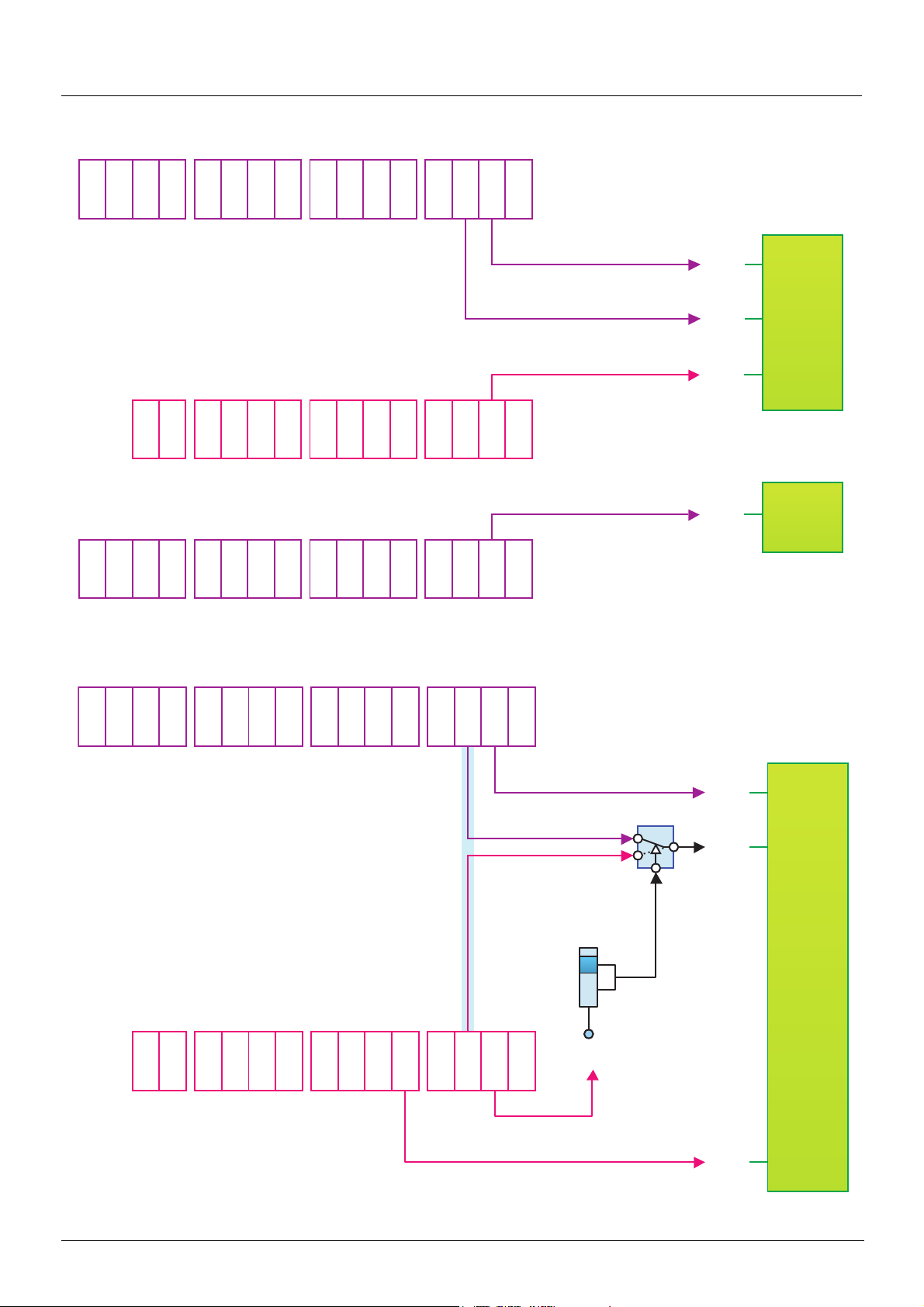
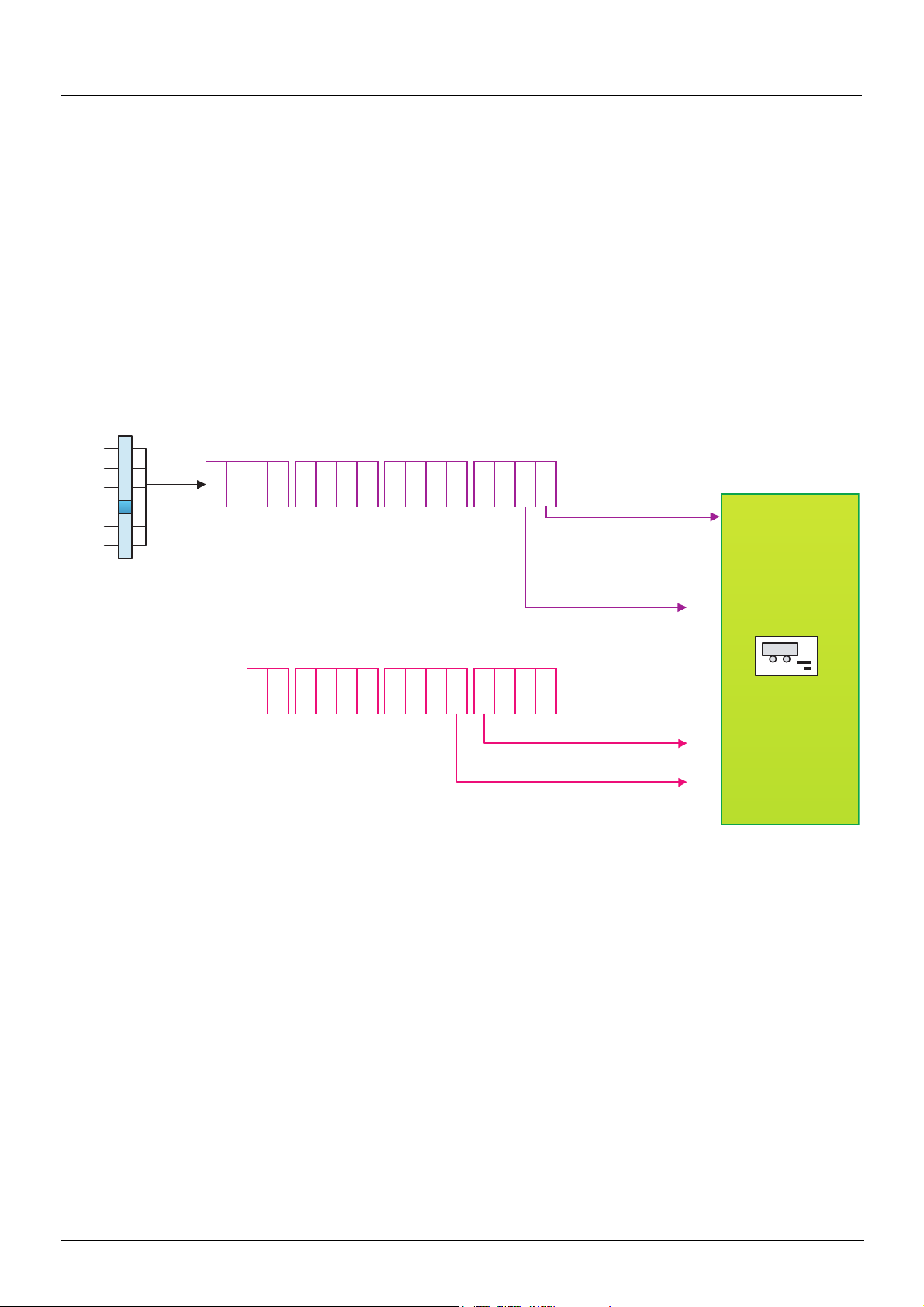
Schémas de principe :
Affectation fixe sur CANopen :
Affectation fixe au bornier et sur CANopen :
AAV49427 11/2009 15
Page 16
Profil I/O
C201
C202
C401
bit 9
bit 8
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 1
bit 0
bit 2
bit 1
bit 0
bit 11
bit 10
bit 13
bit 12
bit 15
bit 14
bit 9
bit 8
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 1
bit 0
bit 2
bit 1
bit 0
bit 11
bit 10
bit 13
bit 12
bit 15
bit 14
A
B
LI2
LI10
LI9
LI8
LI7
LI6
LI5
LI4
LI3
LI2
LI1
LI12
LI11
LI14
LI13
C
Stop
Mot de commande CANopen
Bornier
Fonction
Mot de commande "Controller Inside"
Arrêt rapide
C201
Cd02
LI5
LI10
LI9
LI8
LI7
LI6
LI5
LI4
LI3
LI2
LI1
LI12
LI11
LI14
LI13
bit 9
bit 8
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 1
bit 0
bit 2
bit 1
bit 0
bit 11
bit 10
bit 13
bit 12
bit 15
bit 14
LI2
A
B
C
Mot de commande CANopen
Bornier
Fonction
CANopen
Bornier
Commutation
de commande
CCS
Affectation fixe au bornier, sur CANopen et sur la carte "Controller Inside" :
Affectation fixe au bornier et sur CANopen et commutation d’une commande :
16 AAV49427 11/2009
Page 17
Profil I/O
Mot de commande - marche sur état [Cde 2 fils] (2C)
Consulter le guide de programmation au chapitre [1.5 ENTREES / SORTIES] (I-O-).
La commande de marche avant est systématiquement affectée à l'entrée LI1 et au bit 0 des différents mots de commande.
Cette affectation ne peut pas être modifiée.
La commande de marche est active sur l'état 1 :
• de l'entrée LI1, si le bornier est actif,
• du bit 0 du mot de commande, si le réseau est actif.
Les bits 1 à 15 des mots de commande peuvent être affectés à des fonctions du variateur.
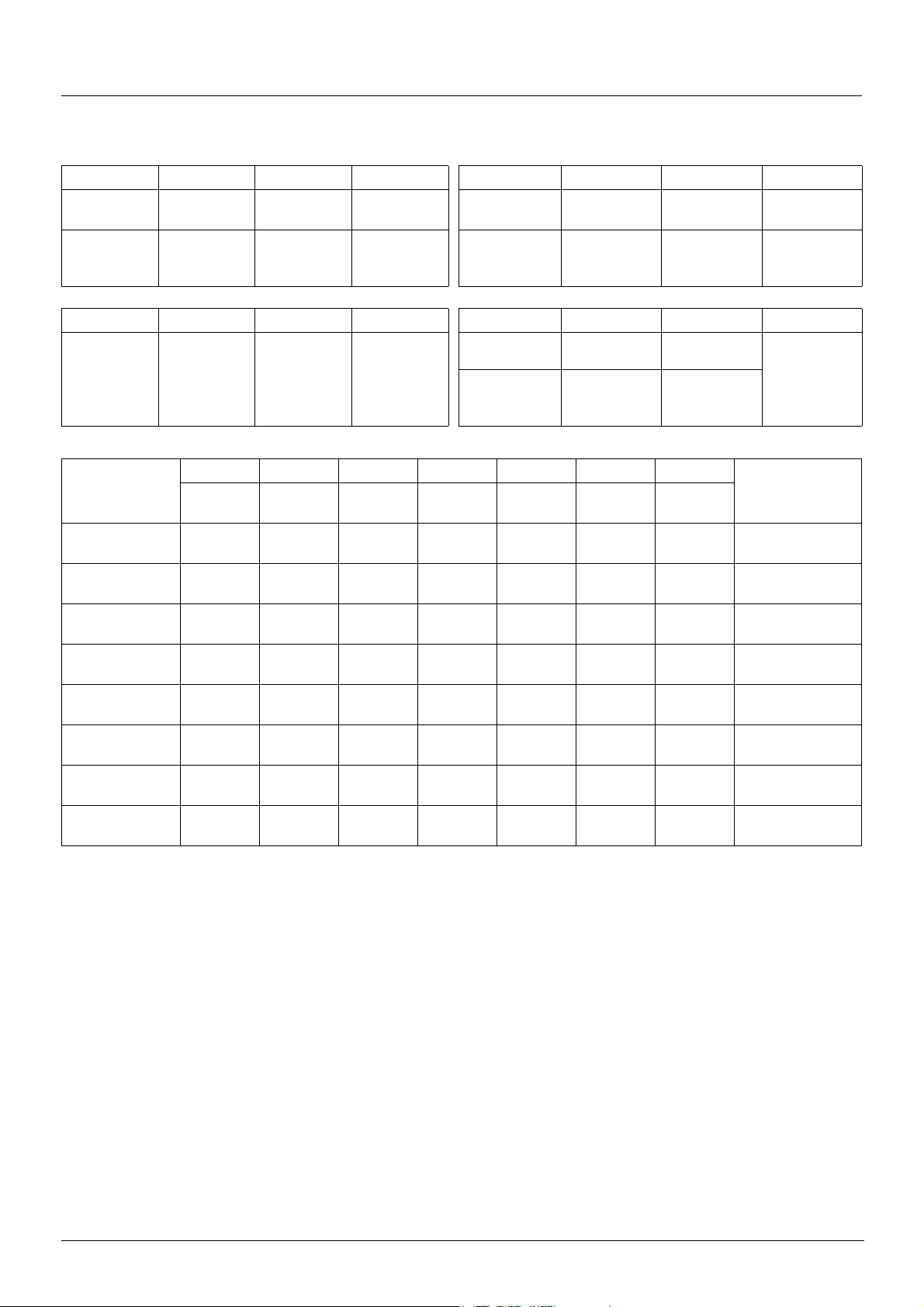
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
Configurable Configurable Configurable Configurable Configurable Configurable Configurable Marche avant
bit 15 bit 14 bit 13 bit 12 bit 11 bit 10 bit 9 bit 8
Configurable Configurable Configurable Configurable Configurable Configurable Configurable Configurable
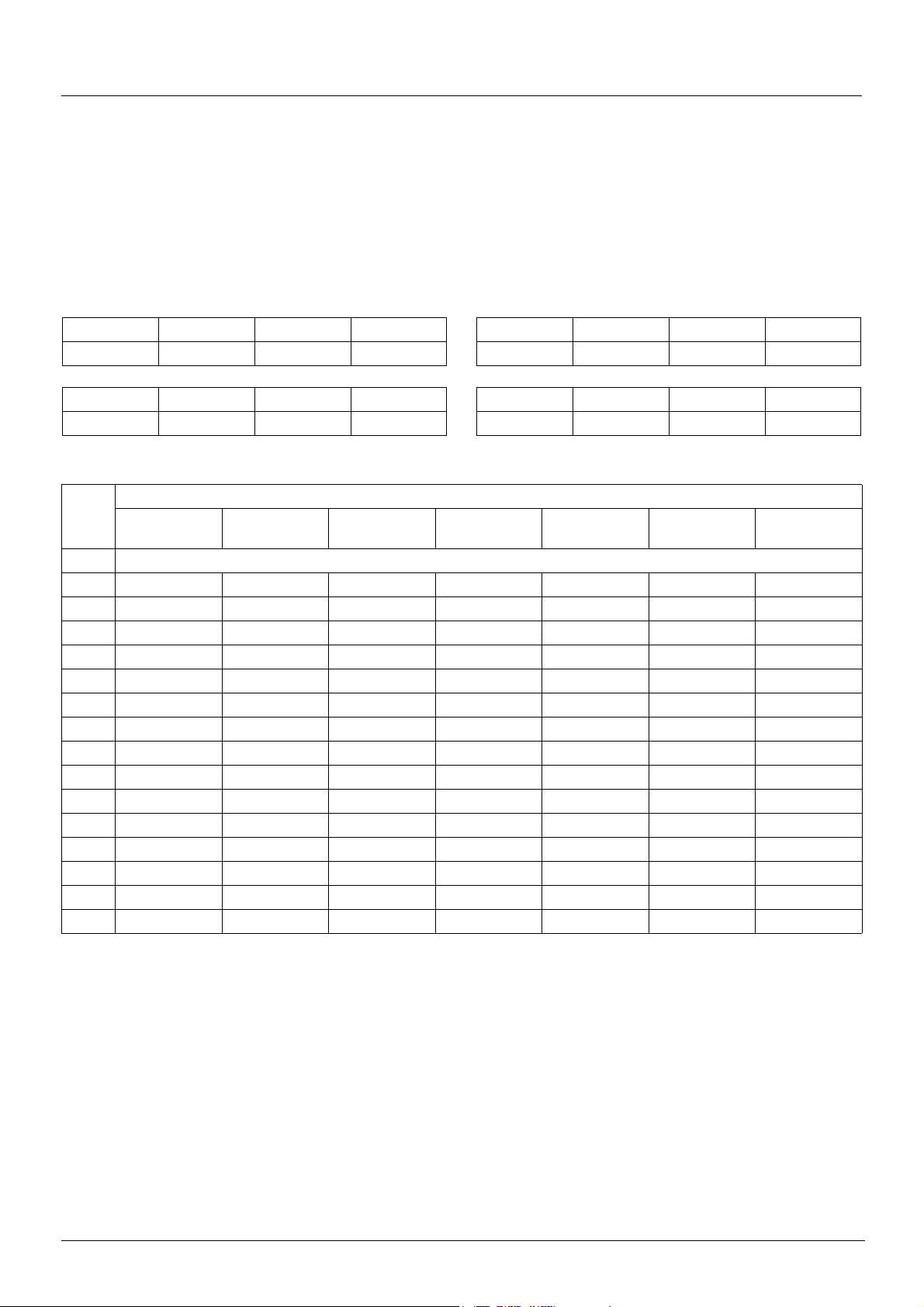
En commande de marche sur état [Cde 2 fils] (2C) et profil I/O, on peut affecter de façon fixe une entrée de fonction en utilisant les codes :
Affectations fixes
Bit
bit 0 Marche avant
bit 1 LI2 --C101 C201 C301 C401
bit 2 LI3 --C102 C202 C302 C402
bit 3 LI4 --C103 C203 C303 C403
bit 4 LI5 --C104 C204 C304 C404
bit 5 LI6 --C105 C205 C305 C405
bit 6 - LI7 - C106 C206 C306 C406
bit 7 - LI8 - C107 C207 C307 C407
bit 8 - LI9 - C108 C208 C308 C408
bit 9 - LI10 - C109 C209 C309 C409
bit 10 - - LI11 C110 C210 C310 C410
bit 11 - - LI12 C111 C211 C311 C411
bit 12 - - LI13 C112 C212 C312 C412
bit 13 - - LI14 C113 C213 C313 C413
bit14---C114 C214 C314 C414
bit15---C115 C215 C315 C415
Bornier
variateur
Carte E/S
logiques
Carte E/S
étendues
Modbus CANopen Carte réseau
Carte "Controller
Inside"
Par exemple, pour affecter la commande de sens de marche au bit 1 de CANopen, il suffit de configurer le paramètre [Aff. sens arrière]
(rrS) à la valeur [C201] (C201).
AAV49427 11/2009 17
Page 18
Profil I/O
Mot de commande - marche sur front [Cde 3 fils] (3C)
Consulter le guide de programmation au chapitre [1.5 ENTREES / SORTIES] (I-O-).
La commande de stop est systématiquement affectée à l'entrée LI1 et au bit 0 des mots de commande.
Cette affectation ne peut pas être modifiée.
Cette commande autorise la marche sur l'état 1 :
• de l'entrée LI1, si le bornier est actif,
• du bit 0 du mot de commande, si le réseau est actif.
La commande de marche avant est systématiquement affectée à l'entrée LI2 et au bit 1 des mots de commande.
Cette affectation ne peut pas être modifiée.
La commande de marche avant est active si la commande de stop est à 1 et sur un front montant (0 V 1) :
• de l'entrée LI2, si le bornier est actif,
• du bit 1 du mot de commande, si le réseau est actif.
Les bits 2 à 15 des mots de commande peuvent être affectés à des fonctions du variateur.
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
Configurable Configurable Configurable Configurable Configurable Configurable Marche avant Stop
bit 15 bit 14 bit 13 bit 12 bit 11 bit 10 bit 9 bit 8
Configurable Configurable Configurable Configurable Configurable Configurable Configurable Configurable
En commande de marche sur état [Cde 3 fils] (3C) et profil I/O, on peut affecter de façon fixe une entrée de fonction en utilisant les codes :
Affectations fixes
Bit
bit 0 Autorisation de marche (Stop)
bit 1
bit 2 LI3 --C102 C202 C302 C402
bit 3 LI4 --C103 C203 C303 C403
bit 4 LI5 --C104 C204 C304 C404
bit 5 LI6 --C105 C205 C305 C405
bit 6 - LI7 - C106 C206 C306 C406
bit 7 - LI8 - C107 C207 C307 C407
bit 8 - LI9 - C108 C208 C308 C408
bit 9 - LI10 - C109 C209 C309 C409
bit 10 - - LI11 C110 C210 C310 C410
bit 11 - - LI12 C111 C211 C311 C411
bit 12 - - LI13 C112 C212 C312 C412
bit 13 - - LI14 C113 C213 C313 C413
bit14---C114 C214 C314 C414
bit15---C115 C215 C315 C415
Bornier
variateur
Carte E/S
logiques
Carte E/S
étendues
Modbus CANopen Carte réseau
Marche avant
Carte "Controller
Inside"
Par exemple, pour affecter la commande de sens de marche au bit 2 de CANopen, il suffit de configurer le paramètre [Aff. sens arrière]
(rrS) à la valeur [C202] (C202).
18 AAV49427 11/2009
Page 19
Profil I/O
Mot d'état (ETA)
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
Alarme
bit 15 bit 14 bit 13 bit 12 bit 11 bit 10 bit 9 bit 8
Sens de
rotation
Réservé
(= 0 ou 1)
Arrêt touche
stop
Réservé (=1)
Réservé (=0) Réservé (=0)
Alimentation
puissance
présente
Défaut En marche Prêt
Consigne hors
bornes
Consigne
atteinte
Commande ou
consigne par
le réseau
Réservé
(= 0 ou 1)
Réservé (=0)
Le mot d’état est identique dans le profil I/O et le profil CiA402. Pour obtenir plus de détail, reportez-vous au chapitre
“CiA402 profile”, page
22.
AAV49427 11/2009 19
Page 20
Profil I/O
tEr
LCC
CAn
Mdb
nEt
APP
tEr
LCC
CAn
Mdb
nEt
APP
bit 9
bit 8
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 1
bit 0
bit 2
bit 1
bit 0
C201
LI4
LI6
LI5
LI8
LI10
LI9
LI8
LI7
LI6
LI5
LI4
LI3
LI2
LI1
LI12
LI11
bit 11
bit 10
bit 13
bit 12
bit 15
bit 14
LI14
LI13
Mot de commande CANopen
Bornier
Canal de commande 1
Cd1
Marche avant
Positionnement
sur capteurs
Marche arrière
Inhibition capteurs
Capteur arrêt avant
Capteur arrêt arrière
Capteur ralenti avant
Capteur ralenti arrière
Exemple : Profil I/O avec la fonction positionnement sur capteurs
Consulter le guide de programmation au chapitre [1.7 FONCTIONS D'APPLI.] (FUn-) au chapitre "Positionnement sur capteurs".
Dans cet exemple, un automate commande le transfert de pièces sur un convoyeur constitué de tables de transfert. Chaque table est pilotée
par un variateur de vitesse. L'automate et les variateurs sont raccordés sur un réseau CANopen.
L'automate commande la marche de l'installation via le bus CANopen.
Le variateur emmène la pièce sur le capteur d'arrêt si la table suivante est occupée. Dans ce cas, l'automate valide les capteurs.
Si la table suivante est libre, le variateur entraîne la pièce sans arrêt. Dans ce cas, l'automate inhibe les capteurs.
Le capteur d'arrêt est directement raccordé sur le bornier du variateur.
Le capteur de ralentissement, lui aussi directement raccordé, sur le variateur permet un arrêt plus précis.
Schéma de principe de la configuration :
20 AAV49427 11/2009
Page 21
Profil I/O
Configurer les paramètres suivants :
Paramètre Valeur Commentaire
Type de commande Sur état (2 fils) La commande de marche est obtenue par le bit 0 du mot de
Profil Profil IO
Configuration consigne 1 CANopen La consigne vient de la carte CANopen.
Configuration commande 1 CANopen La commande vient de la carte CANopen.
Affectation du capteur d'arrêt Entrée LI4
Affectation du capteur de ralentissement Entrée LI5
Affectation de la commande d'inhibition
des capteurs
Configuration par le terminal graphique déportable :
Menu Paramètre Valeur
[1.5 ENTREES / SORTIES] (I-O-) [Cde 2 fils / 3fils] (tCC) [Cde 2 fils] (2C)
[1.6 - COMMANDE] (CtL-) [Profil] (CHCF) [Profil IO] (IO)
[1.7 FONCTIONS D'APPLI.] (FUn-)
[POSIT. SUR CAPTEURS] (LPO-)
Bit 1 du mot de commande
CANopen
[Canal réf. 1] (Fr1) [CANopen] (CAn)
[Canal cde 1] (Cd1) [CANopen] (CAn)
[FdC arrêt avant] (SAF) [LI4] (LI4)
[FdC ralent. avant] (dAF) [LI5] (LI5)
[Désactiv. FdC] (CLS) [C201] (C201)
commande CANopen.
Remarque : En commande sur état [Cde 2 fils] (2C), la commande marche avant est automatiquement affectée au bit 0 du mot de
commande CANopen.
AAV49427 11/2009 21
Page 22

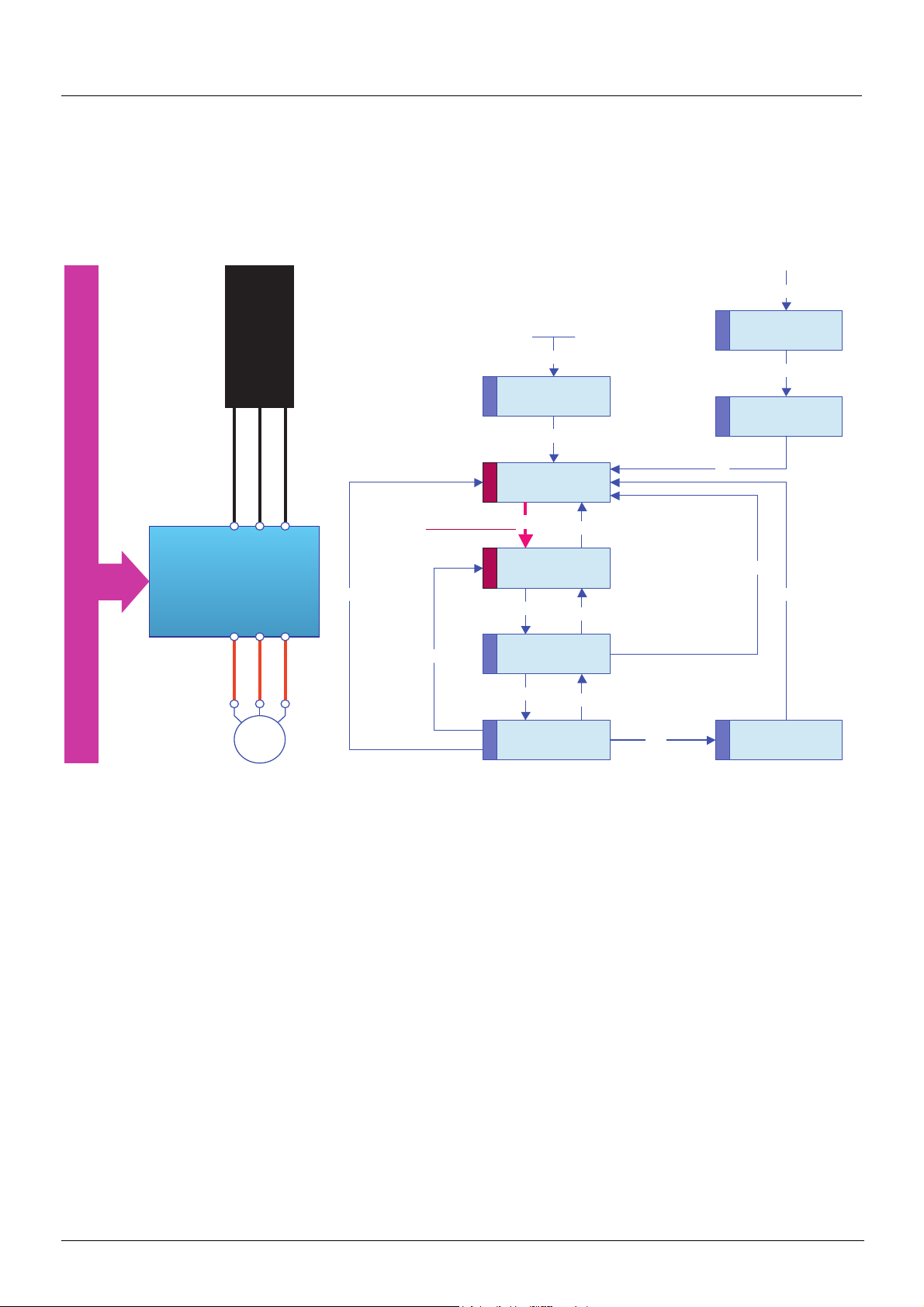
Profil CiA402
controlword
(6040)
statusword
(6041)
Statemachine
M
3
vl_target_velocity
(6042)
vl_velocity_demand
(6043)
Limit Ramp
Power
device
vl_velocity_acceleration (6048)
vl_velocity_acceleration (6049)
vl_velocity_min_max amount (6046)
vl_control_effort
(6044)
Mot de commande
(CMD)
Mot d'état
(ETA)
Machine d'état
M
3
Consigne de vitesse
(LFRD)
Référence de vitesse
après rampe
(FRHD)
Limitation de référence Rampe
Module
de
puissance
Accélération - Delta vitesse (SPAL)
Accélération - Delta temps (SPAT)
Décélération - Delta vitesse (SPDL)
Décélération - Delta temps (SPDT)
vitesse mini (SMIL)
vitesse maxi (SMAL)
Vitesse de sortie
(RFRD)
Description fonctionnelle
b Le fonctionnement du variateur est résumé par 2 fonctions principales, décrites par les 2 diagrammes suivants (les valeurs entre
parenthèses sont les adresses CANopen des paramètres) :
• Diagramme de commande :
• Diagramme simplifié de la commande de vitesse en mode "Velocity" :
b Les principaux paramètres sont indiqués avec leur nom CiA402 et leur index CiA402 / Drivecom (les valeurs entre parenthèses sont les
codes des paramètres).
Ces diagrammes sont traduits dans le système Altivar :
• Diagramme de commande :
• Diagramme simplifié de la régulation de vitesse en mode "Velocity" :
22 AAV49427 11/2009
Page 23

Profil CiA402
Défaut
Alimentation puissance présente ou absente
Alimentation puissance présente
Condition de transition
avec un exemple de commande
Valeur du
mot d'état
Puissance
absente
Puissance
présente
Affichage de l'état sur
le terminal graphique
Nom de l'état
Légende :
Exemples :
ETA=16#0637 : Arrêt ou marche sens avant, vitesse atteinte
ETA=16#8637 : Arrêt ou marche sens arrière, vitesse atteinte
ETA=16#0237 : Marche sens avant en accélération ou décélération
ETA=16#8237 : Marche sens arrière en accélération ou décélération
Enable
operation
CMD=16#xxxF
Switched on
Ready to switch on
ou
Switched on
Operation enabled
Puissance absente
ou présente
Enable
operation
CMD=16#xxxF
Disable
operation
CMD=16#0007
ou
arrêt rapide
Quick stop
CMD=16#0002
Quick stop active
Switch on
CMD=16#xxxF
Shutdown
CMD=16#0006
Switch on
CMD=16#0007
Shutdown
CMD=16#0006
Disable
voltage
CMD=16#0000
ou
Quick stop
CMD=16#0002
ou
touche STOP
ou
arrêt
roue libre
au bornier
ou
modification
d’un paramètre
de configuration
Si Quick stop option
code = 2 ou 3:
transition après l’arrêt.
Si Quick stop option
code = 6 :
Disable voltage
CMD=16#0000
ou
touche STOP
ou
arrêt roue libre au
bornier
Disable
voltage
CMD=16#0000
ou
Quick stop
CMD=16#0002
ou
touche STOP
Shutdown
CMD=16#0006
Disable voltage
CMD=16#0000
ou
touche STOP
ou
arrêt roue libre au
bornier
ou
Power Removal
ou
Switch on disabled
Défaut disparu
et remise à zéro
des défauts
CMD=16#0080
Not ready to switch on
Entrée dans
le graphe d’état
Fault reaction active
De tous les états
Défaut
Fault
Graphe d'état CiA402
AAV49427 11/2009 23
Page 24

Profil CiA402
Description des états
Chaque état représente un comportement interne du variateur.
Le graphe évolue en fonction de l'envoi du mot de commande (
L'identification de l'état du variateur est donnée par la valeur du mot d'état (
1 - Not ready to switch on
L'initialisation se déroule. C'est un état transitoire invisible par le réseau de communication.
2 - Switch on disabled
Le variateur est inactif.
Le variateur est verrouillé, le moteur n'est pas alimenté.
En contrôle séparé, l'alimentation puissance n'est pas nécessaire.
En contrôle séparé avec contacteur de ligne, le contacteur n'est pas commandé.
Les paramètres de configuration et de réglage peuvent être modifiés.
3 - Ready to switch on
Attente de l'alimentation puissance.
En contrôle séparé, l'alimentation puissance n'est pas nécessaire mais on l'attend pour passer dans l'état "4 - Switch on".
En contrôle séparé avec contacteur de ligne, le contacteur n'est pas encore commandé.
CMD) ou par l'apparition d'un événement (exemple : défaut).
ETA).
Le variateur est verrouillé, le moteur n'est pas alimenté.
Les paramètres de configuration et de réglage peuvent être modifiés.
4 - Switched on
Le variateur est sous tension à l'arrêt.
En contrôle séparé, l'alimentation puissance est nécessairement présente.
En contrôle séparé avec contacteur de ligne, le contacteur est commandé.
Le variateur est verrouillé, le moteur n'est pas alimenté.
L'étage puissance du variateur est prêt à fonctionner, mais la tension n'est pas appliquée en sortie.
Les paramètres de réglage peuvent être modifiés.
La modification d'un paramètre de configuration provoque le retour à l'état "2 - Switch on disabled".
5 - Operation enabled
Le variateur est en marche.
En contrôle séparé, l'alimentation puissance est nécessairement présente.
En contrôle séparé avec contacteur de ligne, le contacteur est commandé.
Le variateur est déverrouillé, le moteur est alimenté.
Les fonctions d'entraînement du variateur sont activées, la tension est appliquée aux bornes du moteur.
Cependant, pour un variateur en boucle ouverte, si la consigne est nulle ou si la commande "Halt" est appliquée, le moteur est hors tension
sans couple appliqué.
L'autoréglage (tUn) nécessite une injection de courant dans le moteur, on doit donc être dans l'état "5 - Operation enabled" pour cette
commande.
Les paramètres de réglage peuvent être modifiés.
Les paramètres de configuration ne peuvent pas être modifiés.
Nota : La commande "4 - Enable operation" doit être prise en compte seulement si le canal est valide (voir Surveillance de la
communication page 57
qu’après la première réception de la consigne.
Nota : Le variateur doit être dans l'état "5 - Operation enabled" pour pouvoir effectuer une mesure d’angle ([Auto-test angle] (ASA)).
La réaction du variateur à une commande "Disable operation" dépend de la valeur du paramètre "Disable operation option code" (DOTD) :
• si le paramètre "Disable operation option code" a la valeur 0, le variateur transite en "4 - Switched on" et s’arrête en roue libre.
• si le paramètre "Disable operation option code" a la valeur 1, le variateur s’arrête suivant la rampe puis transite en "4 - Switched on".
24 AAV49427 11/2009
). En particulier, si le canal participe à la commande et à la consigne, la transition 4 ne sera effectuée
Page 25
Profil CiA402
6 - Quick stop active
Arrêt d'urgence.
Le variateur effectue un arrêt rapide, ensuite le redémarrage n'est possible qu'après passage dans l'état "Switch on disabled".
Pendant l'arrêt rapide, le variateur est déverrouillé et le moteur est alimenté.
Les paramètres de configuration ne peuvent pas être modifiés.
La condition de transition 12 vers l’état "2 - Switch on disabled" dépend de la valeur du paramètre "Quick stop option code" (QSTD):
• si le paramètre "Quick stop option code" a la valeur 2, le variateur effectue l’arrêt suivant la rampe d’arrêt rapide puis va dans l’état
"2 - Switch on disabled".
• si le paramètre "Quick stop option code" a la valeur 3, le variateur effectue un arrêt en limitation de courant (rampe nulle) puis va dans
l’état "2 - Switch on disabled".
• si le paramètre "Quick stop option code" a la valeur 6, le variateur effectue l’arrêt suivant la rampe d’arrêt rapide puis reste dans l’état
"6 - Quick stop active" jusqu’à :
- réception d’une commande "Disable voltage",
- ou appui de la touche STOP,
- ou commande d’arrêt roue libre par le bornier.
7 - Fault reaction active
Etat transitoire où le variateur exécute une action appropriée au type de défaut.
La fonction d'entraînement est activée ou désactivée suivant le type de réaction configurée dans les paramètres de gestion des défauts.
8 - Fault
Variateur en défaut.
Le variateur est verrouillé, le moteur n'est pas alimenté.
Synthèse
Etat
1 - Not ready to switch on Pas nécessaire Non Oui
2 - Switch on disabled Pas nécessaire Non Oui
3 - Ready to switch on Pas nécessaire Non Oui
4 - Switched on Nécessaire Non
5 - Operation enabled Nécessaire
6 - Quick stop active Nécessaire Oui, pendant l'arrêt rapide Non
7 - Fault reaction active
8 - Fault Pas nécessaire Non Oui
Alimentation puissance en
contrôle séparé
Dépend de la configuration de la
gestion des défauts
Moteur sous tension
Oui, sauf pour un variateur en
boucle ouverte avec une
consigne nulle ou lors d'une
commande "Halt" pour un
variateur en boucle ouverte.
Dépend de la configuration de la
gestion des défauts
Modification des paramètres de
Oui, retour à l’état " 2 - Switch
configuration
on disabled"
Non
-
AAV49427 11/2009 25
Page 26

Profil CiA402
Mot de commande (CMD)
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
Fault reset
Réservé (=0) Réservé (=0) Réservé (=0)
nt
Acquitt
Affectable Affectable Affectable Affectable
défaut
bit 15 bit 14 bit 13 bit 12 bit 11 bit 10 bit 9 bit 8
Enable operation
Commande de
marche
Par défaut,
commande du sens
de rotation.
Affectable.
Quick stop Enable voltage
Arrêt urgent
Réservé (=0) Réservé (=0)
Permission
d’alimenter
Switch on
Commande
contacteur
Halt
Halte
Commande
Shutdown 2, 6, 8
Switch on 3 4 - Switched on x x 1 1 1 16#0007
Enable
operation
Disable
operation
Disable voltage 7, 9, 10, 12
Quick stop
Fault reset 15
x : valeur non significative pour cette commande.
0 V 1 : commande sur front montant.
Repère
transition
4
5 4 - Switched on x 0 1 1 1 16#0007
11
7, 10
Etat final
3 - Ready to
switch on
5 - Operation
enabled
2-Switch on
disabled
6 - Quick stop
active
2-Switch on
disabled
2-Switch on
disabled
bit7 bit3 bit2 bit1 bit0
Fault
reset
x x 1 1 0 16#0006
x 1 1 1 1 16#000F
x x x 0 x 16#0000
x x 0 1 x 16#0002
0 V 1 x x x x 16#0080
Enable
operation
Quick
stop
Enable
voltage
Switch on
Exemple de valeur
26 AAV49427 11/2009
Page 27
Profil CiA402
Commandes d’arrêt :
La commande "Halt" permet de suspendre le mouvement sans quitter l'état "5 - Operation enabled". L’arrêt se fait selon le paramètre
[Type d’arrêt] (Stt).
Pour un variateur en boucle ouverte, si la commande "Halt" est appliquée, le moteur est hors tension sans couple appliqué.
Pour un variateur en boucle fermée, si la commande "Halt" est appliquée, le moteur reste sous tension, couple à l'arrêt appliqué.
Quelle que soit l’affectation du paramètre [Type d’arrêt] (Stt) ([Arrêt rapide] (FSt), [arrêt rampe] (rMP), [Roue libre] (nSt), [Inject. DC] (dCI)),
le variateur reste dans l’état "5 - Operation enabled".
AVERTISSEMENT
RISQUES DE DOMMAGES MATERIEL
Lorsque la séquence de frein est configurée, il est nécessaire d’utiliser la commande "Halt" (bit 8 du mot de commande CMD) pour
s’arrêter.
Le non-respect de cette directive peut entraîner la mort, des lésions corporelles graves ou des dommages matériels.
Nota :
Une commande d’arrêt rapide au bornier ou par un bit du mot de commande affecté à l’arrêt rapide provoque un passage dans l’état "4 Switched on". Une commande "Halt" ne provoque pas cette transition.
Une commande d’arrêt roue libre au bornier ou par un bit du mot de commande affecté à l’arrêt roue libre provoque un passage dans l’état
"2 - Switch on disabled".
Affectation des bits du mot de commande
En profil CiA402, on peut affecter de façon fixe une entrée de fonction en utilisant les codes :
Bit Modbus intégré CANopen Carte réseau Carte "Controller Inside"
bit 11 C111 C211 C311 C411
bit 12 C112 C212 C312 C412
bit 13 C113 C213 C313 C413
bit 14 C114 C214 C314 C414
bit 15 C115 C215 C315 C415
Par exemple, pour affecter le freinage par injection de courant continu au bit 13 de CANopen, il suffit de configurer le paramètre
[Affect. inject. DC] (dCI) à la valeur [C213] (C213).
Le bit 11 est affecté par défaut à la commande du sens de marche [Aff. sens arrière] (rrS).
AAV49427 11/2009 27
Page 28
Profil CiA402
Mot d'état (ETA)
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
Warning
Alarme
Switch on
disabled
Alimentation
puissance
verrouillée
Quick stop
En arrêt
urgent
Voltage
enabled
Alimentation
puissance
présente
Fault
Défaut
bit 15 bit 14 bit 13 bit 12 bit 11 bit 10 bit 9 bit 8
Internal limit
Sens de
rotatio
Arrêt touche
n
stop
Réservé (=0) Réservé (=0)
active
Consigne hors
bornes
Operation
enabled
Switched on
En marche Prêt
Target reached Remote
Consigne
atteinte
Commande ou
consigne par le
réseau
Ready to
switch on
Attente
alimentation
puissance
Réservé (=0)
Etat
1-Not ready to
switch on
2 - Switch on
disabled
3 - Ready to
switch on
bit6 bit5 bit4 bit3 bit2 bit1 bit0
Switch on
disabled
Quick
stop
Voltage
enabled
Fault
Operation
enabled
Switched onReady to
switch on
0xx0000 -
1 x x 0 0 0 0 16#0040
0 1 x 0 0 0 1 16#0021
ETA
masqué par
16#006F
4 - Switched on 0 1 1 0 0 1 1 16#0023
5 - Operation
enabled
6 - Quick stop
active
7 - Fault reaction
active
8-Fault 0xx1000
0 1 1 0 1 1 1 16#0027
0 0 1 0 1 1 1 16#0007
0xx1111 -
16#0008
ou 16#0028
x : Dans cet état, la valeur du bit peut être 0 ou 1.
(1)
Ce masque peut être utilisé par le programme automate pour tester l’état du graphe.
(1)
(2)
(2)
Défaut après l’état "6 - Quick stop active".
28 AAV49427 11/2009
Page 29
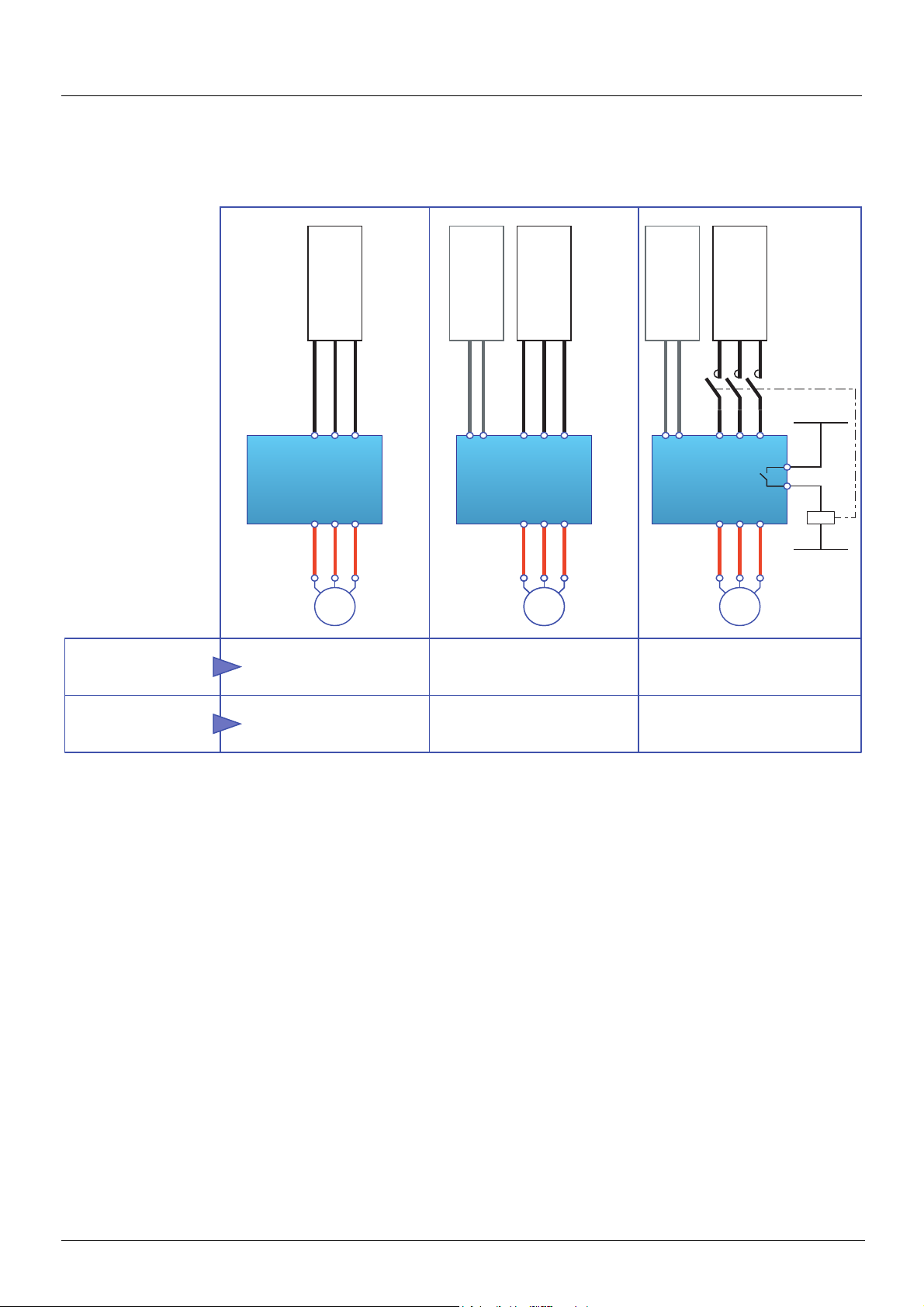
Profil CiA402
M MM M
Alimentation
de la puissance
Alimentation
puissance
Alimentation
du contrôle
Directe
Non séparé
(1)
Directe
Séparée
Contacteur de ligne
commandé
par le variateur
Séparée
VARIATEUR VARIATEUR VARIATEUR
Alimentation
puissance
Alimentation
puissance
Alimentation
contrôle
Alimentation
contrôle
Séquence de mise en marche
La séquence de commande dans le graphe d'état dépend de l'alimentation du variateur.
Trois cas sont possibles :
(1)
La section puissance alimente la section contrôle.
AAV49427 11/2009 29
Page 30
Profil CiA402
M
2
3
4
5
6
7
1
11
9
8
12
10
15
14
13
0
1
2
3
4
5 6
8
7
Alimentation
puissance
bus ou réseau
VARIATEUR
Not ready to
switch on
Entrée dans le graphe d’état
Switch on
disabled
Ready to
switch on
Switched on
Operation
enabled
Quick stop
active
Fault
Fault reaction
active
De tous les états
Shutdown
Disable voltage
or Quick stop
Shutdown
Disable
operation
Disable
voltage
Enable
operation
Shutdown
Switch on
Disable voltage
or Quick stop
Quick stop
Séquence pour un variateur alimenté par la puissance
La section puissance et la section contrôle sont alimentées par l'alimentation puissance.
Si le contrôle est alimenté, la puissance l'est nécessairement.
On doit appliquer la séquence :
b Etape 1
• Envoyer la commande "2 - Shutdown"
30 AAV49427 11/2009
Page 31

Profil CiA402
M
2
3
5
6
7
1
11
9
8
12
10
15
14
13
0
1
2
3
4
5
6
8
7
4
Not ready to
switch on
Entrée dans le graphe détat
Switch on
disabled
Ready to
switch on
Switched on
Operation
enabled
Quick stop
active
Fault
Fault reaction
active
De tous les états
Switch on
Disable voltage
or Quick stop
Shutdown
Disable
operation
Disable
voltage
Enable
operation
Shutdown
Switch on
Disable voltage
or Quick stop
Quick stop
Alimentation
puissance
bus ou réseau
VARIATEUR
b Etape 2
• Vérifier que le variateur est dans l'état "3 - Ready to switch on".
• Puis envoyer la commande "4 - Enable operation".
• Le moteur peut être commandé (envoyer une consigne non nulle).
Nota : Il est possible, mais pas nécessaire, d’envoyer la commande "3 - Switch on" puis la commande "4 - Enable Operation" pour passer
de successivement dans les états "3 - Ready to Switch on", "4 - Switched on" puis "5 - Operation Enabled".
La commande "4 - Enable operation" suffit.
AAV49427 11/2009 31
Page 32

Profil CiA402
M
2
3
4
5
6
7
1
11
9
8
12
10
15
14
13
0
1
2
3
4
5 6
8
7
Alimentation
puissance
bus ou réseau
VARIATEUR
Alimentation
contrôle
Not ready to
switch on
Entrée dans le graphe d’état
Switch on
disabled
Ready to
switch on
Switched on
Operation
enabled
Quick stop
active
Fault
Fault reaction
active
Shutdown
Disable voltage
or Quick stop
Shutdown
Disable
operation
Disable
voltage
Enable
operation
Shutdown
Switch on
Disable voltage
or Quick stop
Quick stop
De tous les états
Séquence pour un variateur en contrôle séparé
La section puissance et la section contrôle sont alimentées séparément.
Si le contrôle est alimenté, la puissance ne l'est pas nécessairement.
On doit appliquer la séquence :
b Etape 1
• L'alimentation puissance n'est pas nécessairement présente.
• Envoyer la commande "2 - Shutdown".
32 AAV49427 11/2009
Page 33

Profil CiA402
M
2
3
4
5
6
7
1
11
9
8
12
10
15
14
13
0
1
2
3
4
5 6
8
7
Alimentation
puissance
bus ou réseau
VARIATEUR
Alimentation
contrôle
Not ready to
switch on
Entrée dans le graphe d’état
Switch on
disabled
Ready to
switch on
Switched on
Operation
enabled
Quick stop
active
Fault
Fault reaction
active
De tous les états
Shutdown Disable voltage
or Quick stop
Shutdown
Disable
operation
Disable
voltage
Enable
operation
Shutdown
Switch on
Disable voltage
or Quick stop
Quick stop
b Etape 2
• Vérifier que le variateur est dans l'état "3 - Ready to switch on".
• Vérifier la présence de l’alimentation puissance ("Voltage enbled" du mot d’état).
Alimentation puissance Affichage terminal Mot d’état
Absente nLP 16#pp21
Présente rdY 16#pp31
• Envoyer la commande "3 - Switch on".
AAV49427 11/2009 33
Page 34

Profil CiA402
M
2
3
4
5
6
7
1
11
9
8
12
10
15
14
13
0
1
2
3
4
5 6
8
7
Alimentation
puissance
bus ou réseau
VARIATEUR
Alimentation
contrôle
Not ready to
switch on
Entrée dans le graphe d’état
Switch on
disabled
Ready to
switch on
Switched on
Operation
enabled
Quick stop
active
Fault
Fault reaction
active
De tous les états
Shutdown Disable voltage
or Quick stop
Shutdown
Disable
operation
Disable
voltage
Enable
operation
Shutdown
Switch on
Disable voltage
or Quick stop
Quick stop
b Etape 3
• Vérifier que le variateur est dans l'état"4 - Switched on".
• Puis envoyer la commande"4 - Enable operation".
• Le moteur peut être commandé (envoyer une consigne non nulle).
• Si, dans l'état "4 - Switched on", l'alimentation puissance n'est pas présente après un temps [Time out U ligne] (LCt), le variateur
déclenche en défaut (LCF).
34 AAV49427 11/2009
Page 35

Profil CiA402
M
2
3
4
5
6
7
1
11
9
8
12
10
15
14
13
0
1
2
3
4
5 6
8
7
Alimentation
puissance
bus ou réseau
VARIATEUR
Alimentation
contrôle
Not ready to
switch on
Entrée dans le graphe d’état
Switch on
disabled
Ready to
switch on
Switched on
Operation
enabled
Quick stop
active
Fault
Fault reaction
active
Shutdown
Disable voltage
or Quick stop
Shutdown
Disable
operation
Disable
voltage
Enable
operation
Shutdown
Switch on
Disable voltage
or Quick stop
Quick stop
De tous les états
Séquence pour un variateur avec commande de contacteur de ligne
La section puissance et la section contrôle sont alimentées séparément.
Si le contrôle est alimenté, la puissance ne l'est pas nécessairement. Le variateur commande le contacteur de ligne.
On doit appliquer la séquence :
b Etape 1
• L'alimentation puissance n'est pas présente car le contacteur de ligne n'est pas commandé.
• Envoyer la commande "2 - Shutdown".
AAV49427 11/2009 35
Page 36

Profil CiA402
M
2
3
4
5
6
7
1
11
9
8
12
10
15
14
13
0
1
2
3
4
5 6
8
7
Alimentation
puissance
bus ou réseau
VARIATEUR
Alimentation
contrôle
Not ready to
switch on
Entrée dans le graphe d’état
Switch on
disabled
Ready to
switch on
Switched on
Operation
enabled
Quick stop
active
Fault
Fault reaction
active
De tous les états
Shutdown
Disable voltage
or Quick stop
Shutdown
Disable
operation
Disable
voltage
Enable
operation
Shutdown
Switch on
Disable voltage
or Quick stop
Quick stop
b Etape 2
• Vérifier que le variateur est dans l'état "3 - Ready to switch on",
• Envoyer la commande "3 - Switch on", ce qui doit provoquer la fermeture du contacteur de ligne et l'alimentation de la puissance.
36 AAV49427 11/2009
Page 37

Profil CiA402
M
2
3
4
5
6
7
1
11
9
8
12
10
15
14
13
0
1
2
3
4
5 6
8
7
Alimentation
puissance
bus ou réseau
VARIATEUR
Alimentation
contrôle
Not ready to
switch on
Entrée dans le graphe d’état
Switch on
disabled
Ready to
switch on
Switched on
Operation
enabled
Quick stop
active
Fault
Fault reaction
active
De tous les états
Shutdown
Disable voltage
or Quick stop
Shutdown
Disable
operation
Disable
voltage
Enable
operation
Shutdown
Switch on
Disable voltage
or Quick stop
Quick stop
b Etape 3
• Vérifier que le variateur est dans l'état "4 - Switched on".
• Puis envoyer la commande "4 - Enable operation".
• Le moteur peut être commandé (envoyer une consigne non nulle).
• Si, dans l'état "4 - Switched on", l'alimentation puissance n'est pas présente après un temps [Time out U ligne] (LCt), le variateur
déclenche en défaut (LCF).
AAV49427 11/2009 37
Page 38

Commutation de la commande / consigne
Canaux
On appelle un canal la source d'une commande ou d'une consigne.
Les 6 canaux de l'Altivar 71 sont :
•le bornier,
• le terminal graphique,
• les ports Modbus intégrés,
• le port CANopen intégré,
• une carte réseau,
• la carte Controller Inside.
Le variateur Altivar 71 est équipé de 2 prises Modbus intégrées. Physiquement ces 2 prises sont indépendantes mais elles ne constituent
qu'un seul canal logique.
Les commandes et les consignes qui proviennent de la prise Modbus réseau ou de la prise Modbus HMI ne sont pas distinguées par le
variateur.
Avec le variateur Altivar 71, il est possible de choisir le canal actif de commande et le canal actif de consigne :
• par configuration,
• par commutation au bornier ou par un réseau de communication.
Commandes et consignes des canaux
Tous les paramètres de commande et de consigne du variateur sont gérés canal par canal.
Seuls le mot de commande (CMd), la consigne de vitesse (LFrd) et la consigne de fréquence (LFr) sont commutés.
Pour chaque canal et chaque paramètre de commande ou de consigne, on peut connaître la dernière valeur écrite :
Nom du paramètre Code du paramètre
Pris en compte
par le variateur
Mot de commande CMd CMd1 CMd2 CMd3 CMd4
Mot de commande étendu CMI CMI1 CMI2 CMI3 CMI4
Consigne de vitesse (rpm) LFrd LFd1 LFd2 LFd3 LFd4
Consigne de fréquence (0,1 Hz) LFr LFr1 LFr2 LFr3 LFr4
Consigne de couple Ltr Ltr1Ltr2Ltr3Ltr4
Consigne du régulateur PID PISP PIr1 PIr2 PIr3 PIr4
Multiplieur de consigne MFr MFr1 MFr2 MFr3 MFr4
Modbus CANopen
Carte de
communication
Controller
inside
38 AAV49427 11/2009
Page 39

Commutation de la commande / consigne
-10V
+10V
BORNIER
ConsigneCommande
Consigne
numérique
BORNIER
ConsigneCommande
CANopen
CANopen
Mode non séparé
Commande et consigne proviennent du même canal.
En profil CiA402, le mode non séparé est obtenu par la configuration par le terminal :
Menu Paramètre Valeur
[1.6 - COMMANDE] (CtL-) [Profil] (CHCF) [Non séparé] (SIM)
Mode séparé
Commande et consigne peuvent provenir de canaux différents.
En profil CiA402, le mode séparé est obtenu par la configuration par le terminal :
Menu Paramètre Valeur
[1.6 - COMMANDE] (CtL-) [Profil] (CHCF) [Séparés] (SEP)
En profil I/O, le variateur est automatiquement en mode séparé.
Menu Paramètre Valeur
[1.6 - COMMANDE] (CtL-) [Profil] (CHCF) [Profil IO] (IO)
AAV49427 11/2009 39
Page 40

Commutation de la commande / consigne
-10V
+10v
CANopen
CANopen
Registre commande
BORNIER
ConsigneCommande
Consigne numérique
BORNIER
ConsigneCommande
CANopen
CANopen
Consigne numérique
-10V
+10V
Commutation en mode non séparé
La commutation a lieu entre 2 canaux simultanément pour la consigne et la commande.
Dans cet exemple, la commande et la consigne proviennent soit de CANopen, soit du bornier.
Commutation en mode séparé
La commutation peut avoir lieu entre 2 canaux indépendamment pour la consigne et la commande.
Dans cet exemple, la commande provient toujours du bornier, la consigne peut provenir soit de CANopen, soit du bornier.
40 AAV49427 11/2009
Page 41

Commutation de la commande / consigne
Commutation des canaux
Configuration des canaux de consigne
La configuration des canaux de consigne permet de prédéfinir des sources de consigne que l'on peut ensuite modifier ou commuter par
une commande.
Il y a 3 canaux de consigne prédéfinis :
• le canal de consigne 1,
• le canal de consigne 1B,
• le canal de consigne 2.
Les canaux de consigne 1 et 1B sont utilisés pour les fonctions d'application du variateur.
Le canal de consigne 2 est connecté directement sur la fonction de limitation de référence en court-circuitant les fonctions d'application.
Les canaux de consigne prédéfinis sont affectés par les paramètres de configuration [Canal réf. 1] (Fr1), [Canal réf. 1B] (Fr1b) et
[Canal réf. 2] (Fr2) qui peuvent prendre les valeurs suivantes :
• [Non] (nO) : Non affecté,
• [AI1] (AI1) : Entrée analogique AI1,
• [AI2] (AI2) : Entrée analogique AI2,
• [AI3] (AI3) : Entrée analogique AI3 (si carte d'extension présente),
• [AI4] (AI4) : Entrée analogique AI4 (si carte d'extension présente),
• [HMI] (LCC) : Terminal graphique,
• [Modbus] (Mdb) : Modbus intégré,
• [CANopen] (CAn) : CANopen intégré,
• [Carte com.] (nEt) : Carte de communication (si présente),
• [Carte prog.] (APP) : Carte Controller Inside (si présente),
• [RP] (PI) : Entrée en fréquence (si carte présente),
• [Codeur] (PG) : Entrée codeur (si carte présente).
Remarque : La fonction "Plus vite / Moins vite" est sur le canal de consigne 2. Voir le guide de programmation pour plus de détails.
Configuration des canaux de commande
La configuration des canaux de commande permet de prédéfinir les sources de commande que l'on peut ensuite modifier ou commuter par
une commande.
Il y a 2 canaux de consigne prédéfinis :
• Le canal de commande 1,
• Le canal de commande 2.
Les canaux de commande prédéfinis sont affectés par les paramètres de configuration [Canal Cde 1] (Cd1) et [Canal Cde 2] (Cd2) qui
peuvent prendre les valeurs suivantes :
• [Borniers] (tEr) : Borniers,
• [HMI] (LCC) : Terminal graphique,
• [Modbus] (Mdb) : Modbus intégré,
• [CANopen] (CAn) : CANopen intégré,
• [Carte com.] (nEt) : Carte de communication (si présente),
• [Carte prog.] (APP) : Carte Controller Inside (si présente).
AAV49427 11/2009 41
Page 42

Commutation de la commande / consigne
V
V
V
V
V
V
V
V
V
V
Commutateurs
Un commutateur de canaux est un aiguillage sur les canaux prédéfinis.
Il peut être :
• figé par configuration,
• actionné soit par une entrée (bornier) ou un bit de mot de commande (réseau),
• écrit par un réseau pendant le fonctionnement (modification d’un paramètre de configuration).
Les valeurs possibles pour les commutateurs sont :
Commutation de
consigne fonction
[Commut. réf. 1B] (rCb)
Canal 1 Fr1 Fr1 Cd1
Canal 1B Fr1b
Canal 2
Entrée du variateur LI1
Entrée de carte I/O logique LI7
Entrée de carte I/O étendue LI11
Bit de commande Modbus
Bit de commande CANopen
Bit de commande réseau
Bit de commande Controller Inside
Les valeurs Fr1, Fr1b, Fr2, Cd1 et Cd2 sont soit configurées, soit écrites par le réseau pendant le fonctionnement.
En profil I/O et CiA402 séparé, on peut commuter indépendamment :
Type Canal 1 Canal 2 Commutation
Consigne fonction 1
[Canal réf. 1] (Fr1)
Consigne
Commande
Consigne fonction 1 ou 1B
[Canal réf. 1] (Fr1)
[Canal réf. 1B] (Fr1b)
Commande 1
[Canal Cde 1] (Cd1)
-
Consigne fonction 1B
[Canal réf. 1B] (Fr1b)
Consigne directe 2
[Canal réf. 2] (Fr2)
Commande 2
[Canal Cde 2] (Cd2)
Commutation de
consigne directe
[Commutation réf.2] (rFC)
--
Fr2 Cd2
... LI6
... LI10
... LI14
bit 0 = C100 ... bit 15 = C115
bit 0 = C200 ... bit 15 = C215
bit 0 = C300 ... bit 15 = C315
bit 0 = C400 ... bit 15 = C415
Commutation de consigne fonction
[Commut. réf. 1B] (rCb)
Commutation de consigne directe
[Commutation réf.2] (rFC)
Commutation de commande
[Commutation cmd] (CCS)
Commutation de
commande
[Commutation cmd] (CCS)
En profil CiA402 non séparé, on commute simultanément :
Type Canal 1 Canal 2 Commutation
Consigne fonction 1 ou 1B
Consigne et
Commande
42 AAV49427 11/2009
[Canal réf. 1] (Fr1)
[Canal réf. 1B] (Fr1b)
Commande 1
[Canal Cde 1] (Cd1)
Consigne directe 2
[Canal réf. 2] (Fr2)
Commande 2
[Canal Cde 2] (Cd2)
Commutation de consigne directe
[Commutation réf.2] (rFC)
Page 43

Commutation de la commande / consigne
rCb
rFC
Fr1
Fr2
LIpp
C1pp
C2pp
C3pp
C4pp
Fr1
Fr1b
LIpp
C1pp
C2pp
C3pp
C4pp
Fr1
CANopen
RØseau
AI1C
AI2C
LFr1
LFr2
LFr3
AI2
Modbus
AI1
TerminalLFr
Controller
LFr4
Fr1
AI1C
AI2C AI2
AI1
LFr
Fr1b
AI1C
AI2C
LFr1
LFr2
LFr3
AI1
AI2
LFr
LFr4
Fr2
AI1C
AI2C
LFr1
LFr2
LFr3
AI1
AI2
LFr
LFr4
Canal de consigne 1
Terminal
Modbus
CANopen
Réseau
Controller
Canal de consigne 1B
Terminal
Modbus
CANopen
Réseau
Controller
Canal de consigne 2
Terminal
Modbus
CANopen
Réseau
Controller
Commutation
de consigne
fonction
Référence
en sortie de
fonction
application
Consigne 2
directe
Commutation
de consigne
directe
Limitation
de référence
Rampe
Fonction
Principe de la commutation de la consigne
La description détaillée est donnée dans le guide de programmation.
Ce diagramme présente la commutation de consigne valable dans tous les modes :
• profil I/O,
• profil CiA402 et mode séparé,
• profil CiA402 et mode non séparé.
AAV49427 11/2009 43
Page 44

Commutation de la commande / consigne
CCS
Cd1
Cd2
LIpp
C1pp
C2pp
C3pp
C4pp
Cd1
RUN/ STOP
FWD/REV
CANopen
RØseau
LIx
CMD 1
CMD 2
CMD 3
Terminal
Modbus
ControllerCMD 4
Cd2
RUN/ STOP
FWD/REV
LIx
CMD 1
CMD 2
CMD 3
Terminal
ControllerCMD 4
Borni er
Canal de commande 1
Commutation
de commande
Canal de commande 2
Marche
Arrêt
Avant
Arrière
Bornier
Terminal
Modbus
CANopen
Réseau
Controller
Bornier
Terminal
Modbus
CANopen
Réseau
Controller
rFC
Fr1
LIx
AI1
AI2
RUN/ STOP
FWD/REV
CMD 1
CMD 2
CMD 3
CMD 4
LIx
Fr2
LIx
RUN/ STOP
FWD/REV
CMD 1
CMD 2
CMD 3
CMD 4
Fr1
Fr2
LIpp
C111 ... C115
C211 ... C215
C311 ... C315
C411 ... C415
AI1
AI2
Canal de consigne 1
(1)
Commutation
de consigne
directe
(1)
Canal de consigne 2
(1)
Marche
Arrêt
Avant
Arrière
Terminal
Modbus
CANopen
Réseau
Controller
Terminal
Modbus
CANopen
Réseau
Controller
Principe de la commutation de la commande
La description détaillée est donnée dans le guide de programmation.
Profil I/O ou profil CiA402 / mode séparé
Profil CiA402 / mode non séparé
(1)En mode séparé, la commutation de la commande suit la commutation de la consigne. C’est donc bien la commutation de consigne qui
commute la commande.
44 AAV49427 11/2009
Page 45

Commutation de la commande / consigne
C201
Cd02
LI5
LI10
LI9
LI8
LI7
LI6
LI5
LI4
LI3
LI2
LI1
LI12
LI11
LI14
LI13
bit 9
bit 8
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 1
bit 0
bit 2
bit 1
bit 0
bit 11
bit 10
bit 13
bit 12
bit 15
bit 14
LI2
A
C
B
Mot de commande CANopen
Bornier
Fonction
CANopen
Bornier
Commutation
de commande
CCS
Affectation des bits du mot de commande
Profil I/O
Le profil I/O est très souple pour l'affectation et la commutation des 16 bits du mot de commande.
Pour commuter un bit de mot de commande avec :
• une entrée du bornier,
• un bit de mot de commande d'un autre canal de communication,
il suffit de donner une affectation commutée à l'entrée de la fonction (CDpp), au lieu d’une affectation fixe (Cppp).
Les entrées et les bits de même rang sont commutés.
On peut commuter avec les entrées LI1 à LI6 du bornier du variateur les bits du mot de commande de 0 à 5.
Avec une carte d'entrées / sorties logiques LI7 à LI10, on peut commuter en plus les bits du mot de commande de 6 à 9.
Avec une carte d'entrées / sorties étendues LI11 à LI14, on peut commuter en plus les bits du mot de commande de 10 à 13.
Lorsque qu'un rang a été affecté à une affectation commutable, il ne peut plus être affecté à une affectation fixe et inversement.
Exemple : Si une entrée de fonction a été affectée à CD04, alors on ne peut plus affecter LI5, C104, C204, C304 ni C404.
Exemple
L'entrée A de la fonction est toujours commandée par le bit 1 du mot de commande de CANopen.
L'entrée B de la fonction est toujours commandée par l'entrée LI5 du bornier.
En fonction de la valeur de LI2, l'entrée C de la fonction est commandée :
• soit par l'entrée LI3 du bornier,
• soit par le bit 2 du mot de commande de CANopen.
AAV49427 11/2009 45
Page 46

Commutation de la commande / consigne
Les tables ci-dessous donnent les affectations en fonction de l'entrée ou du bit.
En commande de marche sur état [Cde 2 fils] (2C) :
Dans toutes les macro configurations, le bit 1 est affecté par défaut à la commande du sens de marche [Aff. sens arrière] (rrS)
Affectations fixes
Affectation
Bit
commutée
bit 0
bit 1 Cd01 LI2
bit 2 Cd02 LI3
bit 3 Cd03 LI4
bit 4 Cd04 LI5
bit 5 Cd05 LI6
bit 6 Cd06
bit 7 Cd07
bit 8 Cd08
bit 9 Cd09
bit 10 Cd10
bit 11 Cd11
bit 12 Cd12
bit 13 Cd13
bit 14 Cd14
bit 15 Cd15
Bornier
variateur
-
-
-
-
--
--
--
--
---
---
Carte E/S
logiques
--
--
--
--
--
LI7
LI8
LI9
LI10
Carte E/S
étendues
Marche avant
-
-
-
-
LI11 C110 C210 C310 C410
LI12 C111 C211 C311 C411
LI13 C112 C212 C312 C412
LI14 C113 C213 C313 C413
Modbus
intégré
CANopen Carte réseau
"Controller
Inside"
C101 C201 C301 C401
C102 C202 C302 C402
C103 C203 C303 C403
C104 C204 C304 C404
C105 C205 C305 C405
C106 C206 C306 C406
C107 C207 C307 C407
C108 C208 C308 C408
C109 C209 C309 C409
C114 C214 C314 C414
C115 C215 C315 C415
Carte
En commande de marche sur front [Cde 3 fils] (3C) :
Dans toutes les macro configurations, le bit 2 est affecté par défaut à la commande du sens de marche [Aff. sens arrière] (rrS)
Affectations fixes
Affectation
Bit
commutée
bit 0
bit 1
bit 2 Cd02 LI3
bit 3 Cd03 LI4
bit 4 Cd04 LI5
bit 5 Cd05 LI6
bit 6 Cd06
bit 7 Cd07
bit 8 Cd08
bit 9 Cd09
bit 10 Cd10
bit 11 Cd11
bit 12 Cd12
bit 13 Cd13
bit 14 Cd14
bit 15 Cd15
Bornier
variateur
-
-
-
-
--
--
--
--
---
---
Carte E/S
logiques
--
--
--
--
LI7
LI8
LI9
LI10
Carte E/S
étendues
Autorisation de marche
Marche avant
-
-
-
-
LI11 C110 C210 C310 C410
LI12 C111 C211 C311 C411
LI13 C112 C212 C312 C412
LI14 C113 C213 C313 C413
Modbus
intégré
CANopen Carte réseau
"Controller
C102 C202 C302 C402
C103 C203 C303 C403
C104 C204 C304 C404
C105 C205 C305 C405
C106 C206 C306 C406
C107 C207 C307 C407
C108 C208 C308 C408
C109 C209 C309 C409
C114 C214 C314 C414
C115 C215 C315 C415
Carte
Inside"
46 AAV49427 11/2009
Page 47

Commutation de la commande / consigne
Profil CiA402
Les bits de mot de commande de même rang sont commutés si on affecte l'entrée des fonctions à des bits commutables.
On peut éventuellement commuter avec les entrées LI12, LI13 ou LI14 d'une carte d'entrées / sorties étendues.
Lorsque qu'un rang a été affecté à une affectation commutable, il ne peut plus être affecté à une affectation fixe et inversement.
Exemple : si une entrée de fonction a été affectée à Cd04, alors on ne peut plus affecter LI5, C104, C204, C304 ni C404.
La table ci-dessous donne les affectations en fonction de l'entrée ou du bit.
Affectations fixes
Affectation
Bit
commutée
bit 0
bit 1
bit 2
bit 3
bit 4
bit 5
bit 6
bit 7
bit 8
bit 9
bit 10
-
-
-
-
-
-
--
--
--
--
-- -
bit 11 Cd11
bit 12 Cd12
bit 13 Cd13
bit 14 Cd14
bit 15 Cd15
Bornier
variateur
LI1
LI2
LI3
LI4
LI5
LI6
Carte E/S
logiques
---- - -
---- - -
---- - -
---- - -
---- - -
---- - -
LI7
LI8
LI9
LI10
Carte E/S
étendues
--- - -
--- - -
--- - -
--- - -
LI11
--
--
--
---
---
LI12 C111 C211 C311 C411
LI13 C112 C212 C312 C412
LI14 C113 C213 C313 C413
Modbus
intégré
-- - -
CANopen Carte réseau
"Controller
C114 C214 C314 C414
C115 C215 C315 C415
Carte
Inside"
AAV49427 11/2009 47
Page 48

Commutation de la commande / consigne
tEr
LCC
CAn
Mdb
nEt
APP
tEr
LCC
CAn
Mdb
nEt
APP
bit 9
bit 8
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 1
bit 0
bit 2
bit 1
bit 0
C201
LI4
LI6
LI5
LI8
LI10
LI9
LI8
LI7
LI6
LI5
LI4
LI3
LI2
LI1
LI12
LI11
bit 11
bit 10
bit 13
bit 12
bit 15
bit 14
LI14
LI13
Mot de commande CANopen
Bornier
Canal de commande 1
Cd1
Marche avant
Positionnement
sur capteurs
Marche arrière
Inhibition capteurs
Capteur arrêt avant
Capteur arrêt arrière
Capteur ralenti avant
Capteur ralenti arrière
tEr
LCC
CAn
Mdb
nEt
APP
bit 9
bit 8
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 1
bit 0
bit 2
bit 1
bit 0
CD01
LI4
LI5
LI10
LI9
LI8
LI7
LI6
LI5
LI4
LI3
LI2
LI1
LI12
LI11
bit 11
bit 10
bit 13
bit 12
bit 15
bit 14
tEr
LCC
CAn
Mdb
nEt
APP
LI8LI8
LI14
LI13
Mot de commande CANopen
Bornier
Canal de commande 1
Cd1
Marche avant
Positionnement
sur capteurs
Marche arrière
Inhibition capteurs
Capteur arrêt avant
Capteur arrêt arrière
Capteur ralenti avant
Capteur ralenti arrière
Commutation
de commande
CCS
Canal de commande 2
Cd2
Exemple : Profil I/O avec la fonction positionnement sur capteurs
Reprenons l'exemple du chapitre "Profil I/O".
Dans le schéma ci-dessous, la commande provient uniquement de CANopen :
Pour une autre application, il est nécessaire de prévoir la possibilité de commuter les ordres de marche, l'inhibition des capteurs et la
consigne au bornier.
Le nouveau schéma devient :
48 AAV49427 11/2009
Page 49

Commutation de la commande / consigne
Configurer les paramètres suivants :
Paramètre Valeur Commentaire
Type de commande Sur état (2 fils) La commande de marche est obtenue par le bit 0 du mot de commande
Profil Profil IO
Configuration consigne 1 CANopen La consigne 1 vient de la carte CANopen.
Configuration commande 1 CANopen La commande 1 vient de la carte CANopen.
Configuration consigne 1B AI1 La consigne 1B vient de l'entrée analogique 1. On doit prendre la
Configuration commande 2 Bornier La commande 2 vient du bornier.
Affectation du capteur d'arrêt Entrée LI4 Les entrées capteur ne sont pas commutées.
Affectation du capteur de
ralentissement
Affectation de la commande
d'inhibition des capteurs
Affectation du commutateur de
commande
Affectation du commutateur de
consigne application 1/1B
Entrée LI5
Bit 1 commuté.
Entrée LI8 L'entrées LI8 permet de commuter la commande et la consigne
Entrée LI8
CANopen.
consigne 1b et non la consigne 2 car on veut utiliser la fonction
positionnement.
Configuration par le terminal graphique :
Menu / sous menu Paramètre Valeur
[1.5 ENTREES / SORTIES] (I-O-) [Cde 2 fils / 3fils] (tCC) [Cde 2 fils] (2C)
[1.6 - COMMANDE] (CtL-) [Profil] (CHCF) [Profil IO] (IO)
[Canal réf. 1] (Fr1) [CANopen] (CAn)
[Canal cde 1] (Cd1) [CANopen] (CAn)
[Canal cde 2] (Cd2) [Borniers] (tEr)
[Commutation cmd] (CCS) [LI8] (LI8)
[1.7 FONCTIONS D'APPLI.] (FUn-)
[POSIT. SUR CAPTEURS] (LPO-)
[FdC arrêt avant] (SAF) [LI4] (LI4)
[FdC ralent. avant] (dAF) [LI5] (LI5)
[Désactiv. FdC] (CLS) [Cd01] (Cd01)
[Canal réf. 1B] (Fr1b) [Réf. AI1] (AI1)
[Commut. réf. 1B] (rCb) [LI8] (LI8)
AAV49427 11/2009 49
Page 50

Commutation de la commande / consigne
Recopie à la commutation
Lors d'une commutation de canal, on peut copier la consigne ou la commande du canal fonction1 vers le canal direct 2.
Menu Sous menu
[1.6 COMMANDE] (CtL-)
Paramètre Valeurs possibles
[Copie Canal 1 --> 2] Pas de copie.
[Non] (nO)
Copie de la consigne
[Référence] (SP)
Copie de la commande
[Commande] (Cd)
Copie de la commande et de la consigne
[Cmd + réf] (ALL)
Lorsqu'il n'y a pas de copie, le variateur s'arrête sur le type d'arrêt configuré [Type d'arrêt] (Stt) jusqu'à ce qu'il reçoive le premier ordre de
commande et de consigne.
La consigne avant rampe (FrH) est copiée, sauf si la consigne du canal direct 2 est par plus vite / moins vite.
Si la consigne du canal direct 2 est par plus vite / moins vite, la consigne après rampe (rFr) est copiée.
Si la commande du canal direct 2 est par le bornier, la commande du canal fonction 1 n'est pas copiée, même en commande sur impulsion
(3 fils) [Cde 3 fils] (3C)
Si la consigne du canal direct 2 est par AI1, AI2, AI3, AI4, l'entrée codeur ou l'entrée fréquence, la consigne du canal fonction 1 n'est pas
copiée.
.
50 AAV49427 11/2009
Page 51

Forçage local
Définition
Le forçage local permet de commuter vers le bornier ou le terminal.
Cette fonction est complémentaire de la commutation de canal et permet de retrouver un fonctionnement existant sur la gamme Altivar 58.
Le forçage local n’existe qu’en profil CiA402 et pas en profil I/O.
Le forçage local intervient en aval de toute autre commutation.
La configuration du forçage local peut-être effectuée par le terminal :
Menu Sous menu
[1.9 COMMUNICATION] (COM-) [FORCAGE LOCAL] (LCF-)
Paramètre Valeurs possibles
Commutateur de forçage local
[affect. forçage loc] (FLO)
Canal de forçage local
[Réf. forçage local] (FLOC)
Fonction inactive :
[Non] (nO)
Affectation sur une entrée logique LI1 ... LI14 :
[LI1] (LI1) ... [LI14]
Le forçage local est actif à l'état 1 de l'entrée.
Forçage à l'arrêt.
[Non] (nO)
Affectation de la commande au bornier et de la consigne à une entrée analogique AI1 ... AI4,
[Réf. AI2] (AI2), [Réf. AI3] (AI3), [Réf. AI4] (AI4)
Affectation de la commande au bornier et de la consigne à l'entrée en fréquence, si carte présente
[Pulse In.] (PI)
Affectation de la consigne [Réf. fréquence HMI] (LFr) et de la commande
(boutons RUN / STOP / FWD / REV) au terminal graphique
[HMI] (LCC)
(LI14)
Dans l'état "forçage local" :
• Toute écriture de paramètre via l'un de ces canaux est refusée (ni la commande, ni la consigne, ni les réglages).
• En revanche, la lecture des paramètres est possible.
• Aucun défaut de communication n'est pris en compte par le variateur.
En sortie du mode "forçage local" :
• Le variateur recopie les ordres de marche, la direction et la consigne du forçage local vers le canal actif (maintien),
• La surveillance des canaux de commande et de consigne actifs reprend après une temporisation [Time-out forc. local] (FLOt).
• Le contrôle du variateur ne devient effectif qu'après la réception par le variateur de la consigne et
La temporisation [Time-out forc. local] (FLOt) (valeur par défaut = 10 s) peut être configurée par le terminal graphique déportable :
Menu Sous menu Paramètre
[1.9 COMMUNICATION] (COM-) [FORCAGE LOCAL] (LCF-) [Time-out forc. local] (FLOt)
de la commande.
AAV49427 11/2009 51
Page 52

Forçage local
AI1C
AI2C
LFr1
LFr2
LFr3
AI2
AI1
LFr
LFr4
AI2
AI1
AI1C
AI2C
LFr1
LFr2
LFr3
AI1
AI2
LFr
LFr4
AI1C
AI2C
LFr1
LFr2
LFr3
AI1
AI2
LFr
LFr4
LI1
...
LI14
AI1C
AI2C
AI4C
LFr
AI3C
AI1
AI2
AI4
AI3
AI1
AI2
AI4
AI3
Fr1
Fr1b
LIpp
C111 ... C115
C211 ... C215
C311 ... C315
C411 ... C415
Fr1
Fr2
LIpp
C111 ... C115
C211 ... C215
C311 ... C315
C411 ... C415
Canal de consigne 1
Fr1
Terminal
Modbus
CANopen
Réseau
Controller
Canal de consigne 1B
Fr1B
Terminal
Modbus
CANopen
Réseau
Controller
Canal de consigne 2
Fr2
Terminal
Modbus
CANopen
Réseau
Controller
Commutation
de consigne
fonction
rCB
Référence
en sortie de
fonction
application
Consigne 2
directe
Commutation
de consigne
directe
rFC
Limitation
de référence
Rampe
Fonction
Commutation
forçage
local
FLO
Terminal
Canal de forçage local
FLOC
Forçage local et la commutation de la consigne
La description détaillée est donnée dans le guide de programmation.
Ce diagramme présente la commutation de consigne valable dans les modes :
• profil CiA402 et mode séparé,
• profil CiA402 et mode non séparé.
52 AAV49427 11/2009
Page 53

Forçage local
RUN/STOP
FWD/REV
LIx
CMD 1
CMD 2
CMD 3
CMD 4
RUN/STOP
FWD/REV
LIx
CMD 1
CMD 2
CMD 3
CMD 4
LIx
RUN/STOP
FWD/REV
AI1
AI2
AI4
AI3
LI1 ... LI14
Cd1
Cd2
LIpp
C111 ... C115
C211 ... C215
C311 ... C315
C411 ... C415
Canal de commande 1
Cd1
Commutation
de commande
CCS
Canal de commande 2
Cd2
Marche
Arrêt
Avant
Arrière
Bornier
Terminal
Modbus
CANopen
Réseau
Controller
Bornier
Terminal
Modbus
CANopen
Réseau
Controller
Canal de forçage local
FLOC
Commutation
forçage
local
FLO
Terminal
Forçage local et commutation de la commande
La description détaillée est donnée dans le guide de programmation.
Profil CiA402 / mode séparé.
AAV49427 11/2009 53
Page 54

Forçage local
LIx
RUN/STOP
FWD/REV
AI1
AI2
AI4
AI3
LI1
...
LI14
LIx
AI1
AI2
RUN/STOP
FWD/REV
CMD 1
CMD 2
CMD 3
CMD 4
LIx
LIx
RUN/STOP
FWD/REV
CMD 1
CMD 2
CMD 3
CMD 4
AI1
AI2
Fr1
Fr2
LIpp
C111 ... C115
C211 ... C215
C311 ... C315
C411 ... C415
Canal de consigne 1 (1)
Fr1
Commutation
de consigne
directe
rFC
Canal de consigne 2 (1)
Fr2
Marche
Arrêt
Avant
Arrière
Terminal
Modbus
CANopen
Réseau
Controller
Terminal
Modbus
CANopen
Réseau
Controller
Canal de forçage local
FLOC
Commutation
forçage
local
FLO
Terminal
Profil CiA402 / mode non séparé.
(1)En mode séparé, la commutation de la commande suit la commutation de la consigne. C’est donc bien la commutation de consigne qui
54 AAV49427 11/2009
commute la commande.
Page 55

Arrêts prioritaires
Arrêts prioritaires au terminal graphique
Si le terminal graphique n'est pas le canal de commande actif, l'appui sur la touche STOP du terminal graphique provoque un arrêt roue
libre si :
• dans le menu
Si le terminal graphique est le canal de commande actif, la touche STOP provoque un arrêt suivant le type d'arrêt configuré dans le
paramètre [Type d'arrêt] (Stt), quel que soit la valeur du paramètre [Priorité STOP] (PSt).
L'influence du terminal graphique ne dépend pas du profil.
Arrêts prioritaires par le bornier ou par le réseau
Profil I/O
Dans le profil I/O :
Les commandes d'arrêts et de défaut, configurées en affectation fixe (LIpp, C1pp, C2pp, C3pp, C4pp), sur des entrées du bornier ou
des bits du mot de commande, sont prioritaires même si le canal n'est pas actif.
Les commandes, configurées en affectation commutée (Cd00 ... Cd15), sont actives si et seulement si le canal est actif.
[1.6 - COMMANDE]
(CtL-), le paramètre
[Priorité STOP]
(PSt) est configuré à
[Oui]
(YES) (réglage usine).
Les affectations fixes sont configurées par les valeurs :
Canal
Bornier du variateur LI2 ... LI6 LI3 ... LI6
Carte d'entrées - sorties logiques LI7 ... LI10
Carte d'entrées - sorties étendues LI11 ... LI14
Modbus intégré C101 ... C115 C102 ... C115
CANopen C201 ... C215 C202 ... C215
Carte de communication C301 ... C315 C302 ... C315
Carte "Controller Inside" C401 ... C415 C402 ... C415
Commande Configuration = 0 = 1
Arrêt roue libre [Affect. roue libre] (nSt) arrêt pas d'arrêt 1
Arrêt rapide [Affect. arrêt rapide] (FSt) arrêt pas d'arrêt 1
Freinage par injection DC [Affect. inject. DC] (dCI) pas de freinage freinage 0
Défaut externe [Affect. défaut ext] (EtF) pas de défaut défaut 0
(1)
Si l'affectation est fixe, valeur nécessaire pour démarrer, même si un autre canal est actif.
En commande de marche sur front, configurée par [Cde 3 fils] (3C) :
la commande de stop (validation de marche) est affectée par construction au rang 0 commuté (équivalent à Cd00):
• elle est active au bornier (LI1) seulement si le bornier est actif,
• elle est active par le réseau (bit 0) seulement si le réseau est actif.
Commande de marche sur état
[Cde 2 fils] (2C)
Commande de marche sur front
[Cde 3 fils] (3C)
Valeur pour
démarrer
(1)
AAV49427 11/2009 55
Page 56

Arrêts prioritaires
Profil CiA402
Dans le profil CiA402, mode séparé ou non séparé :
Les commandes d'arrêts et de défaut externe, configurées en affectation fixe (LIpp, C1pp, C2pp, C3pp, C4pp), sur des entrées du
bornier ou des bits du mot de commande, sont prioritaires même si le canal n'est pas actif.
Les commandes, configurées en affectation commutée (Cd11 ... Cd15), sont actives si et seulement si le canal est actif.
Les affectations fixes sont configurées par les valeurs :
Canal
Bornier du variateur LI2 ... LI6 LI3 ... LI6
Carte d'entrées - sorties logiques LI7 ... LI10
Carte d'entrées - sorties étendues LI11 ... LI14
Modbus intégré C111 ... C115
CANopen C211 ... C215
Carte de communication C311 ... C315
Carte "Controller Inside" C411 ... C415
Cp11 est affecté par défaut à la commande de sens arrière [Aff. sens arrière] (rrS).
Commande de marche sur état
[Cde 2 fils] (2C)
Commande de marche sur front
[Cde 3 fils] (3C)
Au bornier :
Commande Configuration = 0 = 1
Arrêt roue libre [Affect. roue libre] (nSt) arrêt pas d'arrêt 1 2-Switch on disabled
Arrêt rapide [Affect. arrêt rapide] (FSt) arrêt pas d'arrêt 1 4-Switched on
Freinage par injection DC [Affect. inject. DC] (dCI) pas de freinage freinage 0 5-Operation enabled
Défaut externe [Affect. défaut ext] (EtF) pas de défaut défaut 0 8-Fault
(1)
Si l'affectation est fixe, valeur nécessaire pour démarrer, même si un autre canal est actif.
En commande de marche sur front, configurée par [Cde 3 fils] (3C), la commande de stop (validation de marche) est affectée par
construction à LI1. Cette commande est active même si le bornier n'est pas le canal actif.
Par le réseau :
Commande Configuration = 0 = 1
Arrêt rapide [Affect. arrêt rapide] (FSt) pas d'arrêt arrêt 0 4-Switched on
Freinage par injection DC [Affect. inject. DC] (dCI) pas de freinage freinage 0 5-Operation enabled
Défaut externe [Affect. défaut ext] (EtF) pas de défaut défaut 0 8-Fault
(1)
Si l'affectation est fixe, valeur nécessaire pour démarrer, même si un autre canal est actif.
Dans le profil CiA402, on ne peut pas affecter la commande d'arrêt roue libre [Affect. roue libre] (nSt) sur le mot de commande. L'arrêt
roue libre est obtenu par la commande "5-Disable operation" ou "Halt" avec le paramètre type d'arrêt [Type d'arrêt] (Stt) configuré à
[Roue libre] (nSt).
Valeur pour
démarrer
Valeur pour
démarrer
Etat atteint depuis
(1)
5-Operation enabled
Etat atteint depuis
(1)
5-Operation enabled
56 AAV49427 11/2009
Page 57

Surveillance de la communication
Le variateur Altivar 71 intègre des mécanismes de surveillance de la communication.
Principe
Après l'initialisation (mise sous tension), le variateur attend qu'au moins un des paramètres de commande ou de consigne ait été écrit une
première fois par le réseau.
Ensuite, le réseau est surveillé et si un défaut réseau apparaît, le variateur réagit suivant la configuration (défaut ignoré, arrêt en défaut
variateur, maintien de la vitesse, vitesse de repli, ou arrêt sans défaut).
Le variateur peut démarrer uniquement lorsque tous les paramètres de commande et de consigne du réseau actif ont été écrits.
Critères de surveillance du réseau
Le réseau est surveillé suivant des critères propres au protocole, ils sont résumés dans le tableau ci-dessous et sont précisés dans le guide
du protocole correspondant.
Protocole Anomalie réseau Défaut variateur associé (1)
Ports Modbus intégrés • Time out réglable sur les requêtes reçues à destination du variateur. [Com. Modbus] (SLF1)
• Bus off,
• Life Guarding,
Port CANopen intégré
Carte Ethernet Modbus
TCP/IP
Carte Fipio
Carte Modbus Plus
Carte Modbus
Carte Uni-Telway • Time out fixe (10 s) sur le polling du maître.
Carte Profibus DP
Carte INTERBUS
Carte DeviceNet
• CANoverrun,
• Heartbeat,
• Transition machine d'état NMT.
Défaut de gestion de réseau :
• Défaut FDR,
• Défaut duplication d'adresse IP.
Défaut de communication :
• Time out réglable sur le mot de commande reçu (I/O Scanning ou
messagerie),
• Surcharge réseau.
• Time out non réglable sur les variables périodiques reçues à
destination du variateur.
• Time out réglable :
• soit sur les variables périodiques (Peer cop) reçues à
destination du variateur,
• soit sur la messagerie Modbus à destination du variateur, si pas
de périodiques (Peer cop) configurés.
• Time out fixe (10 s) sur les requêtes reçues à destination du variateur.
• Time out réglable (par le logiciel de configuration du réseau) sur les
variables périodiques (PZD et PKW) reçues à destination du variateur.
• Time out sur les variables périodiques reçues à destination du variateur.
Défaut de communication :
• Time out réglable :
• soit sur les variables périodiques (Polling et COS) reçues à
destination du variateur,
• soit sur l'activité du réseau si pas de périodiques configurés.
Défaut de configuration :
• la configuration du variateur est incompatible avec les assembly
sélectionnés
[Com. CANopen] (COF)
[Externe Via Com.]
[Réseau com.] (CnF)
[Externe Via Com.]
(EPF2)
(EPF2)
(1) Si le variateur est configuré pour déclencher en défaut en cas de défaut réseau.
Si une anomalie est détectée, le port ou la carte réseau signale un défaut réseau.
AAV49427 11/2009 57
Page 58

Surveillance de la communication
Comportement sur défaut réseau
Lorsqu'un défaut réseau apparaît (sur un canal surveillé), le variateur réagit comme spécifié dans le menu
menu
[GESTION DEFAUT COM.]
•
[Gestion déf. Mdb]
•
[Gest. déf. CANopen]
•
[Gest. Déf Network]
La carte Ethernet Modbus TCP/IP peut aussi générer un défaut externe (en cas de défaut FDR ou défaut duplication d'adresse IP), le
variateur réagit comme spécifié dans le menu
[Gestion défaut ext]
5 types de comportements sont possibles :
1. Défaut variateur
[Roue libre] (YES) : Arrêt en roue libre (réglage usine).
[arrêt rampe] (rMP) : Arrêt sur rampe.
[Arrêt rapide] (FSt) : Arrêt rapide.
[Injection DC] (dCI) : Arrêt par injection de courant continu.
le défaut affiché dépend de l’origine du défaut de communication
•
[Com. Modbus]
•
[Com. CANopen]
•
[Réseau com.]
•
[Externe Via Com.]
Le graphe d’état CiA402 évolue vers l’état "7 - Fault reaction active" puis "8 - fault".
2. Arrêt sans défaut
(EPL).
(SLF1) pour Modbus intégré,
(COF) pour CANopen,
(CnF) pour une carte réseau.
(CLL-) par les paramètres :
(SLL) pour Modbus intégré,
(COL) pour CANopen,
(CLL) pour une carte réseau.
[1.8 - GESTION DEFAUTS]
(EPF2) pour les défauts FDR et IP de la carte Ethernet.
(FLt-), sous-menu
[1.8 - GESTION DEFAUTS]
[DEFAUT EXTERNE]
(FLt-), sous-
(EtF-), par le paramètre
[Selon STT] (Stt) : Arrêt selon la configuration de [Type d'arrêt] (Stt).
Il n'y a pas de défaut variateur.
Si le graphe d’état CiA402 est dans l'état "5-Operation enabled", il évolue dans l'état "4-Switched on" après l'arrêt.
3. Défaut ignoré
[Déf. ignoré] (nO) : Défaut ignoré.
4. Maintien de la vitesse
[Maintien vit] (rLS) : Le variateur conserve la vitesse en cours au moment du défaut, tant que le défaut est présent et que l'ordre de
marche n'est pas supprimé.
Il n'y a pas de défaut variateur.
Si le graphe d’état CiA402 est dans l'état "5-Operation enabled", il y reste.
5. Vitesse de repli
[Vit.repli] (LFF) : Passage à la vitesse de repli, conservée tant que le défaut est présent et que l'ordre de marche n'est pas supprimé.
Il n'y a pas de défaut variateur.
Si le graphe d’état CiA402 est dans l'état "5-Operation enabled", il y reste.
La vitesse de repli peut être configurée dans le menu [1.8 - GESTION DEFAUTS] (FLt-) par le paramètre [Vitesse de repli] (LFF).
Nota : Le variateur ne démarre pas spontanément à la vitesse de repli. En cas de perte de communication, le variateur est à la vitesse de
repli si et seulement si la commande de marche était présente au moment du défaut de communication.
Dans un système de régulation pour assurer le passage dans un état de sécurité active en cas de perte de communication : il faut toujours
laisser les variateurs arrêtés dans l’état de marche (5 - Operation enabled) avec consigne nulle pour assurer le passage en vitesse de repli.
58 AAV49427 11/2009
Page 59

Surveillance de la communication
Fonctionnement détaillé
Surveillance des canaux de communication
• Le variateur surveille tous ses canaux de communication.
• Les anomalies de communication sont indiquées sur les leds de la carte ou du variateur ou sur le terminal graphique. Par contre une
anomalie ne déclenche pas toujours un défaut réseau ni un défaut variateur.
- Exemple :
Si un variateur est piloté par des entrées-sorties et uniquement surveillé via un réseau Ethernet, une anomalie de communication
sur Ethernet ne provoque pas de défaut.
• Dès qu'un paramètre de commande ou de consigne a été écrit une première fois sur un canal de communication, ce canal est dit
connecté.
• Un canal est dit participant s'il transmet un paramètre de commande ou de consigne nécessaire pour piloter le variateur (voir la liste
dans le tableau ci-dessous).
Etat du canal Paramètre Affectation
Si le canal est le canal de
commande actif.
Si le canal est le canal de
consigne actif. Consigne de fréquence (LFr) ou de vitesse (LFrd)
Quel que soit l’état du canal.
Mot de commande (CMd)
Mot de commande (CMd) contenant un commutateur de
commande ou de consigne
Consigne de fréquence (LFr) ou de vitesse (LFrd) sommatrice
ou soustractrice
Consigne de couple (Ltr) [Canal réf. de couple] (Tr1)
Consigne du régulateur PID (PISP) [Canal réf. 1] (Fr1)
Entrée analogique réseau [AI réseau] (AIU1)
Coefficient multiplicateur de consigne (MFr)
[Canal Cde 1] (Cd1)
ou [Canal Cde 2] (Cd2)
[Canal réf. 1] (Fr1)
ou [Canal réf. 1B] (Fr1b)
ou [Canal réf. 2] (Fr2)
[Commutation cmd]
ou
[Commut. réf. 1B]
ou
[Commutation réf.2]
[Réf. sommatrice 2] (SA2)
ou [Réf. sommatrice 3] (SA3)
ou [Réf. soustract. 2] (dA2)
ou [Réf. soustract. 3] (dA3)
[Affect. retour PID] (PIF)
ou [Canal AI réseau] (AIC1)
[Réf. multiplic. 2] (MA2)
ou [Réf. multiplic. 3] (MA3)
(CCS)
(rCb)
(rFC)
- Exemple :
Si la fonction opération sur consignes [OPERATIONS SUR REF.] (OAI-) est activée et qu'une consigne sommatrice [Réf.
sommatrice 2] (SA2) est affectée à [Modbus] (Mdb), la consigne Modbus participe.
• Si une anomalie de communication apparaît sur un canal participant et connecté, alors le variateur provoque un défaut réseau.
Le variateur réagit suivant la configuration du défaut réseau (défaut variateur, arrêt sans défaut, défaut ignoré, maintien de vitesse
ou vitesse de repli).
• Si une anomalie de communication se produit sur un canal non participant ou déconnecté, le variateur ne provoque pas de défaut
réseau ni de défaut variateur. Ceci évite en particulier d'avoir des défauts intempestifs à la mise sous tension des installations.
- Exemple :
Un variateur est piloté par CANopen, il est sous tension.
L'automate est mis sous tension mais pas en RUN. Le réseau est opérationnel mais aucun paramètre n'est encore envoyé au
variateur. Si on débranche le variateur du réseau CANopen, une anomalie de communication apparaît, mais pas de défaut.
• Le canal se déconnecte en cas d'anomalie de communication.
Nota : Un mot de commande (CMd) d'un canal autre que le canal actif avec des affectations de bits en fixe, autres que les commutateurs
de canal (arrêt rapide, vitesses présélectionnées...) n'est pas considéré comme participant. Une anomalie de communication ne
provoquera pas de défaut réseau.
- Exemple :
Un variateur est équipé d'une carte "Controller Inside" et d'une carte Ethernet.
La carte "Controller Inside" pilote le variateur (commande et consigne).
Un bit du mot de commande Ethernet est affecté à "arrêt rapide".
Si on déconnecte le variateur du réseau Ethernet, il n'est plus possible d'arrêter le variateur par Ethernet, pourtant le défaut
variateur ne se produit pas.
AAV49427 11/2009 59
Page 60

Surveillance de la communication
4
1
2
=1
7
6
5
3
canal déconnecté
canal connecté
non valide
canal valide
défaut réseau
anomalie de
communication
et canal non
participant
anomalie de
communication
et canal non
participant
un paramètre
de commande
ou de consigne
reçu
tous paramètres
affectés à des fonctions
du variateur sont reçus
anomalie de
communication
et canal
participant
anomalie de
communication
et canal
participant
Validation des canaux de communication
• Un canal de communication est valide si tous ses paramètres affectés à des fonctions du variateur ont été reçus.
- Exemple :
Un variateur est dans le profil I/O en commande de vitesse. Modbus est le canal de commande et de consigne.
Le canal Modbus sera validé dès que le mot de commande et la consigne de vitesse auront été reçus.
• Le variateur ne peut démarrer que si tous les canaux participants sont valides.
- Exemple 1 :
Un variateur dans le profil CiA402 est connecté sur Modbus qui est le canal actif.
On ne peut pas aller en état "5-Operation enabled", même si on envoie la commande "4-Enable operation" tant que la consigne
n'aura pas été écrite au moins une fois.
- Exemple 2 :
Un variateur est connecté sur Modbus.
Le canal de consigne et de commande est le bornier.
La fonction opération sur consignes [OPERATIONS SUR REF.] (OAI-) est activée et l'entrée sommatrice 2 est affectée à
Modbus.
Le variateur ne démarre pas tant que la consigne n'a pas été fournie par Modbus.
- Exemple 3 :
Un variateur est configuré pour commuter entre le bornier et CANopen.
Si le commutateur de commande est affecté sur la carte Ethernet, on ne pourra démarrer que lorsque le canal Ethernet sera
valide.
• Une anomalie de communication invalide un canal de communication.
• Lorsqu'on commute d'un canal valide vers un canal non valide, le variateur provoque immédiatement un défaut réseau.
Cas particulier de la carte Ethernet Modbus TCP/IP
• La carte Ethernet peut générer 2 types de défauts réseau : défaut de gestion de réseau et défaut de communication.
• Si un défaut de gestion de réseau (défaut FDR ou duplication d'adresse IP) apparaît, un défaut variateur est généré quel que soit
l'état (actif, participant, ...) de ce canal.
60 AAV49427 11/2009
Page 61

Affectation des consignes provenant d’un réseau
Paramètres de consigne
L'Altivar 71 supporte plusieurs paramètres de consignes qu'il faut sélectionner suivant les fonctions utilisées dans le variateur.
Fonction utilisée Entrée à affecter Valeur Consigne à envoyer par le réseau
Consigne de vitesse
(rpm)
Consigne de fréquence
(0,1 Hz ou haute
résolution)
Somme [Réf. sommatrice 2] (SA2)
Soustraction [Réf. soustract. 2] (dA2)
Multiplication [Réf. multiplic. 2] (MA2)
Régulateur PID [Canal réf.1] (Fr1)
Contrôle de couple
[Canal réf.1] (Fr1)
[Canal réf.2] (Fr2)
[Canal réf.1b] (Fr1b)
[Canal réf.1] (Fr1)
[Canal réf.2] (Fr2)
[Canal réf.1b] (Fr1b)
[Réf. sommatrice 3] (SA3)
[Réf. soustract. 3] (dA3)
[Réf. multiplic. 3] (MA3)
[Canal réf.1b] (Fr1b)
[Affect. retour PID] (PIF) [AI réseau] (AIU1) Retour du régulateur PID (AIU1)
[Canal AI réseau] (AIC1) [Modbus] (Mdb) ou
[Canal réf. de couple]
(Tr1)
[Modbus] (Mdb) ou
[CANopen] (CAn) ou
[Carte com.] (nEt)
[Modbus]
[CANopen] (CAn) ou
[Carte com.] (nEt)
[Modbus] (Mdb) ou
[CANopen] (CAn) ou
[Carte com.] (nEt) ou
[AI réseau] (AIU1)
[Modbus] (Mdb) ou
[CANopen] (CAn) ou
[Carte com.] (nEt) ou
[AI réseau] (AIU1)
[Modbus] (Mdb) ou
[CANopen] (CAn) ou
[Carte com.] (nEt) ou
[AI réseau] (AIU1)
[Modbus] (Mdb) ou
[CANopen] (CAn) ou
[Carte com.] (nEt)
[CANopen] (CAn) ou
[Carte com.] (nEt)
[Modbus] (Mdb) ou
[CANopen] (CAn) ou
[Carte com.] (nEt)
(Mdb) ou
Consigne de vitesse (LFRD)
Consigne de fréquence (LFR)
Consigne de vitesse (LFRD) ou Consigne de fréquence (LFR)
Consigne de vitesse (LFRD) ou Consigne de fréquence (LFR)
[Coeff.multiplicat.] (MFr)
Consigne du régulateur PID (PISP)
Consigne de couple (LTR)
Exemple 1 :
On veut commander le variateur en envoyant la consigne de vitesse au régulateur PID par CANopen. Aucune fonction d'application n'est utilisée.
Il faut affecter : [Canal réf.1] (Fr1) = [CANopen] (CAn).
Il faut envoyer : Consigne de vitesse (LFRD).
Exemple 2 :
On veut commander le variateur en envoyant la consigne du régulateur PID par Modbus.
Il faut affecter : [Canal réf.1] (Fr1) = [Modbus] (Mdb).
Il faut envoyer : Consigne du régulateur PID (PISP).
Exemple 3 :
On veut commander le variateur en envoyant la consigne du régulateur PID et le retour par la carte Ethernet.
Il faut affecter :
- [Canal réf.1] (Fr1) = [Carte com.] (nEt),
- [Affect. retour PID] (PIF) = [AI réseau] (AIU1),
- [Canal AI réseau] (AIC1) = [Carte com.] (nEt).
Il faut envoyer :
- Consigne du régulateur PID (PISP),
- Retour du régulateur PID (AIU1).
AAV49427 11/2009 61
Page 62

Affectation des consignes provenant d’un réseau
H/>
72H
279/
:52
H2/
2H%
279
;-%
;-&
@-%
@-&
8-%
8-&
2H$
2H$>
Plus vite / Moins vite autour
d’une référence
Vitesses
présélectionnées
Marche
pas à pas
JOG
PID non affecté
Terminal
graphique
Forçage local
Rampes
Paramètre :
Le rectangle noir représente
l’affectation en réglage usine
Légende :
Canal 1
Canal 2
[Commut. réf.1b]
[Canal réf.1]
[Canal réf.1b]
[Réf. sommatrice 2]
[Réf. sommatrice 3]
[Réf. soustract. 2]
[Réf. soustract. 3]
[Réf. multiplic. 2]
[Petite vitesse]
[Réf. multiplic. 3]
[REGULATEUR PID]
AI1
[Canal réf. 2]
[Commutation réf.2]
(FRA + SA2 + SA3 - dA2 - dA3) x MA2 x MA3
(SP1)
SP2
SP16
LI
LCC
FRA
nO
[Grande
vitesse]
nO
nO
nO
nO
FrH
AI2
AI3
HSP
LSP
ACC DEC
AC2 DE2
LI
AI4
nO
0V
Nota : Le forçage local est inactif en
[Profil I/O].
FrO
FrOd
Etage
puissance
M
rFr
rFrd
FrHd
Consignes réseau
Fr1, Fr1b, Fr2 :
•LFr ou LFrd
SA2, SA3, dA2, dA3 :
• LFr, LFrd, ou AIU1
MA2, MA3 :
• MFr ou AIU1
Sans régulateur PID
62 AAV49427 11/2009
Page 63

Affectation des consignes provenant d’un réseau
H/>
72H
279/
H2/
2H%
279
;-%
;-&
@-%
@-&
2H$
2H$>
Terminal
graphique
Rampes (1)
Canal 1
Canal 2
PID
Voir diagramme
ci-dessous
A
Forçage local
[Commut. réf.1b]
[Canal réf.1]
[Canal réf.1b]
[Réf. sommatrice 2]
[Réf. sommatrice 3]
[Réf. soustract. 2]
[Réf. soustract. 3]
[Petite vitesse]
AI1
[Canal réf. 2]
[Commutation réf.2]
FRA + SA2 + SA3 - dA2 - dA3
B
LCC
PIP1
[Grande
vitesse]
nO
FrH
FrO
AI2
AI3
HSP
LSP
ACC DEC
AC2 DE2
LI
AI4
nO
0V
Nota : Le forçage local est inactif en
[Profil I/O].
FrHd
FrOd
Etage
puissance
M
rFr
rFrd
PIP2
Consignes réseau
Fr1, Fr1b :
•PISP
SA2, SA3, dA2, dA3 :
• LFr, LFrd, ou AIU1
Fr2, FPI :
• LFr ou LFrd
Retour réseau
•AIU1
PAU
(manu)
Pr2
Pr4
nO
+
-
rP2
rP3
rP4
rIG
rPG
PIF
PIN
0
tLS
rSL
PIF1 / PIF2
PIP1 / PIP2
x(-1)
nO
nO
YES
PIC
nO
AI1
.....
AI4
LI
+
+
POH
POL
rdG
ACC DEC
FPI
x PSr
PII
SP2
SP16
rPI
A
B
nO
YES
PrP
AC2
(1)
Consigne
interne
Retour
PID
Consignes PID
présélectionnées
Inversion
d’erreur
Seuil d’erreur
de redémarrage
(réveil)
Gains
Rampes
Paramètre :
Le rectangle noir
représente l’affectation
en réglage usine
Légende :
Rampe
Consignes manuelles présélectionnées
Mise à l’échelle
[RP] (PI)
[Codeur] (PG)
[AI réseau] (AIU1)
Consigne
vitesse
prédictive
Consigne
manuelle
Auto/
Manuel
rPC
rPF
rPO
rPE
Avec régulateur PID
(1)La rampe AC2 est active uniquement au démarrage de la fonction PID et lors des "réveils" du PID.
AAV49427 11/2009 63
Page 64

Mémorisation et commutation de configuration
Terminal
Configuration
courante
(RAM)
Configuration 0
(EEPROM)
Configuration 1
(EEPROM)
Configuration 2
(EEPROM)
Réglages usine
Terminal
Configuration 0
(EEPROM)
Configuration 1
(EEPROM)
Configuration 2
(EEPROM)
Réglages usine
Configuration
courante
(RAM)
Non
Terminal
de dialogue
industriel
Automate
Modbus
CANopen
Réseau
Mémorisation de la configuration
Lorsqu'un paramètre est modifié par le terminal intégré ou le terminal graphique du variateur, ce paramètre est automatiquement mémorisé
en mémoire non volatile EEPROM.
Lorsqu'un paramètre est modifié par un automate ou un terminal de dialogue via un réseau (Modbus, CANopen ou une carte réseau), ce
paramètre est écrit dans la configuration courante en mémoire volatile RAM. Il n'est pas mémorisé en mémoire non volatile EEPROM. Si une
coupure de tension de contrôle du variateur intervient, à la remise sous tension, le paramètre reprend la valeur initiale, le réglage est perdu.
64 AAV49427 11/2009
Page 65

Mémorisation et commutation de configuration
Terminal
Configuration 0
(EEPROM)
Configuration 1
(EEPROM)
Configuration 2
(EEPROM)
Réglages usine
Terminal
de dialogue
industriel
Automate
Modbus
CANopen
Réseau
Configuration
courante
(RAM)
Mot de commande étendu :
Mémorisation (CMI,1)
Mettre à 1
Pour sauvegarder le paramètre, il faut exécuter une commande de mémorisation par le bit 1 du mot de commande étendu (CMI).
La commande de mémorisation n'est active que si le variateur est à l'arrêt, hors de l'état "5-Operation enabled".
AAV49427 11/2009 65
Page 66

Mémorisation et commutation de configuration
Terminal
Configuration 0
(EEPROM)
Configuration 1
(EEPROM)
Configuration 2
(EEPROM)
Réglages usine
Terminal
de dialogue
industriel
Automate
Modbus
CANopen
Réseau
Configuration
courante
(RAM)
Mot de commande étendu :
Rappel configuration (CMI,2)
Mettre à 1
Terminal
Configuration 0
(EEPROM)
Configuration 1
(EEPROM)
Configuration 2
(EEPROM)
Réglages usine
Terminal
de dialogue
industriel
Automate
Modbus
CANopen
Réseau
Configuration
courante
(RAM)
Mot de commande étendu :
Réglage usine (CMI,0)
Mettre à 1
[Macroconfiguration]
(CFG)
Rappel de la configuration
La commande de rappel de configuration s'effectue par le bit 2 du mot de commande étendu (CMI).
La commande de retour aux réglages usine s'effectue par le bit 0 du mot de commande étendu (CMI). Le type de réglage est déterminé
par la macro - configuration active : paramètre [Macroconfiguration] (CFG) et par le paramètre [GROUPES PARAMETRES] (FrY) qui
définit les groupes de paramètres concernés.
La commande de rappel n'est active que si le variateur est à l'arrêt, hors de l'état "5-Operation enabled".
66 AAV49427 11/2009
Page 67

Mémorisation et commutation de configuration
Terminal
Configuration 0
(EEPROM)
Configuration 1
(EEPROM)
Configuration 2
(EEPROM)
Réglages usine
Configuration
courante
(RAM)
Commutation de configuration
[2 configurations](CnF1)
[3 configurations](CnF2)
Configuration
active
(CNFS)
Bornier
00 01
10
11
Terminal
Configuration 0
(EEPROM)
Configuration 1
(EEPROM)
Configuration 2
(EEPROM)
Réglages usine
Configuration
courante
(RAM)
Mot de commande :
Commutation de configuration
[2 configurations](CnF1)
[3 configurations](CnF2)
Configuration
active
(CNFS)
00 01
10
11
Terminal
de dialogue
industriel
Automate
Modbus
CANopen
Réseau
Mettre à 0/1
Commutation de configuration par le mot de commande
La fonction de commutation de configuration ou de moteur (voir le guide de programmation) peut être utilisée par le réseau comme par le bornier.
Pour utiliser cette fonction par un réseau, il suffit d'affecter un ou deux bits du mot de commande à la commutation de moteur ou de
configuration par les paramètres [2 configurations] (CnF1) et [3 configurations] (CnF2).
La configuration active peut-être lue dans le paramètre [Config. active] (CNFS).
AAV49427 11/2009 67
Page 68

Mémorisation et commutation de configuration
Terminal
Configuration 0
(EEPROM)
Configuration 1
(EEPROM)
Configuration 2
(EEPROM)
Réglages usine
Configuration
courante
(RAM)
Mot de commande étendu :
Mémorisation configuration (CMI,1)
Configuration
active
(CNFS)
Terminal
de dialogue
industriel
Automate
Modbus
CANopen
Réseau
Mettre à 1
1 2 3
Terminal
Configuration 0
(EEPROM)
Configuration 1
(EEPROM)
Configuration 2
(EEPROM)
Réglages usine
Configuration
courante
(RAM)
Mot de commande étendu :
Rappel configuration (CMI,2)
Configuration
active
(CNFS)
Terminal
de dialogue
industriel
Automate
Modbus
CANopen
Réseau
Mettre à 1
1 2 3
Lorsque la fonction commutation de configuration ou de moteur est configurée sur des entrées ou des bits de mot de commande, si l'on
veut mémoriser une configuration déjà active, il faut mettre à 1 le bit 1 du mot de commande étendu (CMI).
Lorsque la fonction commutation de configuration ou de moteur est configurée sur des entrées ou des bits de mot de commande, il faut
mettre à 1 le bit 2 du mot de commande étendu (CMI).
Les commandes de commutation de configuration ne sont actives que si le variateur est à l'arrêt, hors de l'état "5-Operation enabled".
68 AAV49427 11/2009
Page 69

Mémorisation et commutation de configuration
Paramètres de la fonction
Code Description
CNF1
CNF2
CNFS
Nom du paramètre : Affectation pour 2 configurations
Affichage sur le terminal : [2 configurations]
Adresse logique : 8021 = 16#1F55 Type : WORD (énumération)
Index CANopen : 2032/16 Lecture / écriture : R/WS
Index INTERBUS : 5FBC/9C Réglage usine : 0
Path DeviceNet : 9C/01/9C
Voir page suivante.
Nom du paramètre : Affectation pour 3 configurations
Affichage sur le terminal : [3 configurations]
Adresse logique : 8022 = 16#1F56 Type : WORD (énumération)
Index CANopen : 2032/17 Lecture / écriture : R/WS
Index INTERBUS : 5FBC/9D Réglage usine : 0
Path DeviceNet : 9C/01/9D
Voir page suivante.
Nom du paramètre : Configuration active
Affichage sur le terminal : [Config. active]
Adresse logique : 8020 = 16#1F54 Type : WORD (énumération)
Index CANopen : 2032/15 Lecture / écriture : R
Index INTERBUS : 5FB9/CD
Path DeviceNet : 89/01/15
0 = La fonction commutation de jeu de paramètres n'est pas configurée,
1=(CNF0) : Configuration n° 0 active,
2=(CNF1) : Configuration n° 1 active,
3=(CNF2) : Configuration n° 2 active.
Valeur du bit de commande affecté par [2 configurations] (CnF1) 0101
Valeur du bit de commande affecté par [3 configurations] (CnF2) 0011
Valeur de [Config. active] (CnFS) 1233
Configuration active 0122
AAV49427 11/2009 69
Page 70

Mémorisation et commutation de configuration
Affectation des entrées logiques et des bits de commande pour CNF1 et CNF2
Valeur Affectation Description / Condition
0 Non affecté
129
à
134
135
à
138
139
à
142
187
à
191
203
à
207
219
à
223
235
à
239
[LI1] (LI1)
à
[LI6] (LI6)
[LI7] (LI7)
à
[LI10] (LI10)
[LI11] (LI11)
à
[LI14] (LI14)
[C111] (C111)
à
[C115] (C115)
[C211] (C211)
à
[C215] (C215)
[C311] (C311)
à
[C315] (C315)
[C411] (C411)
à
[C415] (C415)
Entrées logiques
Variateur avec ou sans option
Entrées logiques
Avec carte entrées/sorties logiques VW3A3201
Entrées logiques
Avec carte entrées/sorties étendues VW3A3202
Bit de commande
Avec Modbus intégré quel que soit le profil
Bit de commande
Avec CANopen intégré quel que soit le profil
Bit de commande
Avec une carte de communication quel que soit le profil
Bit de commande
Avec carte Controller Inside quel que soit le profil
Nota : En profil [Profil I/O] (IO), LI1 est inaccessible et si [Cde 2 fils/3fils] (tCC) = [Cde 3 fils] (3C), LI2 est inaccessible aussi.
70 AAV49427 11/2009
Page 71

Mémorisation et commutation de configuration
Terminal
Configuration 0
(EEPROM)
Configuration 1
(EEPROM)
Configuration 2
(EEPROM)
Réglages usine
Configuration
courante
(RAM)
Mémorisation de configuration
(SCS)
Terminal
de dialogue
industriel
Automate
Modbus
CANopen
Réseau
Écrire
1 2 3
Terminal
Configuration 0
(EEPROM)
Configuration 1
(EEPROM)
Configuration 2
(EEPROM)
Réglages usine
Configuration
courante
(RAM)
Rappel de configuration
(FCS)
Terminal
de dialogue
industriel
Automate
Modbus
CANopen
Réseau
Écrire
1 2 3 64
[Macroconfiguration]
(CFG)
Commutation de configuration par sélection
La mémorisation de la configuration courante dans une des 3 configurations non volatiles en EEPROM peut être obtenus en utilisant le
paramètre "Mémorisation de configuration" (SCS). Dans ce cas, il n'est pas nécessaire d'affecter de fonction dans le mot de commande.
Le rappel d'une des 3 configurations non volatiles en EEPROM dans la configuration courante peut être obtenus en utilisant le paramètre
"Rappel de configuration" (FCS).
Nota : La valeur 64, permet de commander le retour aux réglages usine.
Les commandes de commutation de configuration ne sont actives que si le variateur est à l'arrêt, hors de l'état "5-Operation enabled".
AAV49427 11/2009 71
Page 72

Mémorisation et commutation de configuration
Paramètres de la fonction
Code Description
SCS
FCS
FrY
Nom du paramètre : Mémorisation de configuration
Adresse logique : 8001 = 16#1F41 Type : WORD (énumération)
Index CANopen : 2032/2 Lecture / écriture : R/WS
Index INTERBUS : 5FBC/9A
Path DeviceNet : 9C/01/9A
0 = Pas de mémorisation,
1 = Mémorisation dans la configuration n° 0,
2 = Mémorisation dans la configuration n° 1,
3 = Mémorisation dans la configuration n° 2.
Nom du paramètre : Rappel de configuration
Adresse logique : 8002 = 16#1F42 Type : WORD (énumération)
Index CANopen : 2032/3 Lecture / écriture : R/WS
Index INTERBUS : 5FBC/9B
Path DeviceNet : 9C/01/9B
0 = Pas de rappel,
1 = Rappel de la configuration n° 0,
2 = Rappel de la configuration n° 1,
3 = Rappel de la configuration n° 2,
64 = Réglage usine.
Nom du paramètre : Groupes de paramètres
Affichage sur le terminal : [GROUPES PARAMETRES]
Adresse logique : 3022 = 16#OBCE Type : WORD (registre de bits)
Index CANopen : 2000/17 Lecture / écriture : R/WS
Index INTERBUS : 5FBC/06 Réglage usine : 0
Path DeviceNet : 70/01/17
Choix des menus à charger.
bit 0 : =1 : [Tous] (ALL) : tous les paramètres.
bit 1 : =1 : [Config. var.] (drM) : le menu [1 MENU VARIATEUR] sans [1.9 COMMUNICATION] ni [1.14 MENU
CONTROL INSIDE]. Dans le menu [7 CONFIG. AFFICHAGE], [Retour nom std] repasse à [Non].
bit 2 : =1 : [Réglages] (SEt) : le menu [1.3 REGLAGES] sans les paramètres [Compensation RI] (UFr), [Comp.
glissement] (SLP) et [Courant therm. mot] (ItH)
bit 3 : =1 : [Param. moteur] (MOt) : paramètres moteur :
[Puissance nom. mot] (nPr) - [Tension nom. mot.] (UnS) - [Courant nom. mot.] (nCr) - [Fréq. nom. mot.] (FrS) -
[Vitesse nom. mot] (nSP) - [Auto-réglage] (tUn) - [Etat auto-réglage] (tUS) - [U0] (U0) à [U5] (U5) - [F1] (F1) à
[F5] (F5) - [U Puissance Cste] (UCP) - [Fréq. Puiss. Cste] (FCP) - [Courant nom. syn.] (nCrS) - [Vitesse nom.
syn.] (nSPS) - [Paires pôles syn.] (PPnS) - [Constante FEM syn.] (PHS) - [Inductance axe d] (LdS) - [Inductance
axe q] (LqS) - [Résist. stator syn.] (rSAS) - [Compensation RI] (UFr) - [Comp. glissement] (SLP) - les paramètres
moteurs accessibles en mode [Expert].
Les choix suivants ne sont accessibles que si [Config. source] (FCSI) =
bit 4 : =1 : [Menu COMM] (COM) : le menu [1.9 COMMUNICATION] sans [Adr. Scan. In1] (nMA1) à [Adr. Scan. In8]
(nMA8) ni [Adr. Scan. Out1] (nCA1) à [Adr. Scan. Out] (nCA8).
bit 5 : =1 : [Menu control Inside] (PLC) : le menu [1.14 MENU CONTROL INSIDE].
bit 6 : =1 : [Ecran surveillance] (MOn) : le menu [6 ECRAN SURVEILLANCE].
bit 7 : =1 : [Config. affichage] (dIS) : le menu [7 CONFIG. AFFICHAGE].
bit 8 à bit 15 : Réservés (=0 ou 1).
[Macro-config.] (InI) :
72 AAV49427 11/2009
Page 73

Commutation de jeu de paramètres
La fonction de commutation de jeu de paramètres (voir le guide de programmation) peut être utilisée par le réseau comme par le bornier.
Pour utiliser cette fonction par un réseau, il suffit d'affecter un ou deux bits du mot de commande à la commutation de jeux de paramètres
par les paramètres [2 jeux paramètres] (CHA1) et [3 jeux paramètres] (CHA2).
Le jeu actif active peut-être lu dans le paramètre "Jeu de paramètres actif" (CFPS).
On peut écrire par un réseau les jeux de paramètres.
La commutation des jeux de paramètres peut se faire moteur tournant.
Paramètres de la fonction
Code Description
CHA1
CHA2
CFPS
Nom du paramètre : Affectation pour 2 jeux
Affichage sur le terminal : [2 jeux paramètres]
Adresse logique : 12902 = 16#3266 Type : WORD (énumération)
Index CANopen : 2063/3 Lecture / écriture : R/WS
Index INTERBUS : 5FBD/54 Réglage usine : 0
Path DeviceNet : A1/01/67
Voir page suivante.
Nom du paramètre : Affectation pour 3 jeux
Affichage sur le terminal : [3 jeux paramètres]
Adresse logique : 12903 = 16#3267 Type : WORD (énumération)
Index CANopen : 2063/4 Lecture / écriture : R/WS
Index INTERBUS : 5FBD/55 Réglage usine : 0
Path DeviceNet : A1/01/68
Voir page suivante.
Nom du paramètre : Jeu de paramètres actif
Adresse logique : 12900 = 16#3264 Type : WORD (énumération)
Index CANopen : 2063/1 Lecture / écriture : R
Index INTERBUS : 5FB9/EC
Path DeviceNet : A1/01/65
0 = La fonction commutation de jeu de paramètres n'est pas configurée,
1=[Jeu 1 actif] (CFP1) : Jeu de paramètres n° 1 actif,
2=[Jeu 2 actif] (CFP2) : Jeu de paramètres n° 2 actif,
3=[Jeu 3 actif] (CFP3) : Jeu de paramètres n° 3 actif.
Valeur du bit de commande affecté par [2 jeux paramètres] (CHA1) 0101
Valeur du bit de commande affecté par [3 jeux paramètres] (CHA2) 0011
Valeur de "Jeu de paramètres actif" (CFPS) 1233
Jeu de paramètres actif 1233
AAV49427 11/2009 73
Page 74

Commutation de jeu de paramètres
Valeurs d’affectation de CHA1 et CHA2
Valeur Affectation Description / Condition
0 [Non]
4 [S. fréq. att.] (FtA) Commutation par [Seuil de fréquence] (Ftd).
13 [S. fréq. 2 att.] (F2A) Commutation par [Seuil fréquence 2] (F2d).
86 [Mode ramp] (tAP) Commutation pendant la séquence de frein.
129
à
134
135
à
138
139
à
142
160
à
170
171
à
175
177
à
186
187
à
191
193
à
202
203
à
207
209
à
218
219
à
223
225
à
234
235
à
239
(nO) Non affecté
[LI1] (LI1)
à
[LI6] (LI6)
[LI7] (LI7)
à
[LI10] (LI10)
[LI11] (LI11)
à
[LI14] (LI14)
[CD00] (Cd00)
à
[CD10] (Cd10)
[CD11] (Cd11)
à
[CD15] (Cd15)
[C101] (C101)
à
[C110] (C110)
[C111] (C111)
à
[C115] (C115)
[C201] (C201)
à
[C210]
(C210)
[C211] (C211)
à
[C215] (C215)
[C301] (C301)
à
[C310] (C310)
[C311] (C311)
à
[C315] (C315)
[C401] (C401)
à
[C410] (C410)
[C411] (C411)
à
[C415] (C415)
Entrées logiques
Variateur avec ou sans option
Entrées logiques
Avec carte entrées/sorties logiques VW3A3201
Entrées logiques
Avec carte entrées/sorties étendues VW3A3202
Bit commutable
En profil [Profil I/O] (IO)
Bit commutable
Quel que soit le profil
Bit de commande
Avec Modbus intégré en profil [Profil I/O] (IO)
Bit de commande
Avec Modbus intégré quel que soit le profil
Bit de commande
Avec CANopen intégré en profil [Profil I/O] (IO)
Bit de commande
Avec CANopen intégré quel que soit le profil
Bit de commande
Avec une carte de communication en profil [Profil I/O] (IO)
Bit de commande
Avec une carte de communication quel que soit le profil
Bit de commande
Avec carte Controller Inside en profil [Profil I/O] (IO)
Bit de commande
Avec carte Controller Inside quel que soit le profil
Nota : En profil [Profil I/O] (IO), LI1 est inaccessible et si [Cde 2 fils/3fils] (tCC) = [Cde 3 fils] (3C), LI2, C101, C201, C301 et C401
sont inaccessibles aussi.
74 AAV49427 11/2009
Page 75

Commutation de jeu de paramètres
Le chargement des jeux de paramètres peut se faire par les paramètres :
Tableau des adresses :
N° Code Adresse logique : Index CANopen : Index INTERBUS : Path DeviceNet :
1 AD01 12911 = 16#326F 2063/C 5FBF/8C 9F/01/8C
2 AD02 12912 = 16#3270 2063/D 5FBF/8D 9F/01/8D
3 AD03 12913 = 16#3271 2063/E 5FBF/8E 9F/01/8E
4 AD04 12914 = 16#3272 2063/F 5FBF/8F 9F/01/8F
5 AD05 12915 = 16#3273 2063/10 5FBF/90 9F/01/90
6 AD06 12916 = 16#3274 2063/11 5FBF/91 9F/01/91
7 AD07 12917 = 16#3275 2063/12 5FBF/92 9F/01/92
8 AD08 12918 = 16#3276 2063/13 5FBF/93 9F/01/93
9 AD09 12919 = 16#3277 2063/14 5FBF/94 9F/01/94
10 AD10 12920 = 16#3278 2063/15 5FBF/95 9F/01/95
11 AD11 12921 = 16#3279 2063/16 5FBF/96 9F/01/96
12 AD12 12922 = 16#327A 2063/17 5FBF/97 9F/01/97
13 AD13 12923 = 16#327B 2063/18 5FBF/98 9F/01/98
14 AD14 12924 = 16#327C 2063/19 5FBF/99 9F/01/99
15 AD15 12925 = 16#327D 2063/1A 5FBF/9A 9F/01/9A
Tableau des valeurs du jeu n°1 :
N° Code Adresse logique : Index CANopen : Index INTERBUS : Path DeviceNet :
1 S101 12931 = 16#3283 2063/20 5FBF/9B 9F/01/9B
2 S102 12932 = 16#3284 2063/21 5FBF/9C 9F/01/9C
3 S103 12933 = 16#3285 2063/22 5FBF/9D 9F/01/9D
4 S104 12934 = 16#3286 2063/23 5FBF/9E 9F/01/9E
5 S105 12935 = 16#3287 2063/24 5FBF/9F 9F/01/9F
6 S106 12936 = 16#3288 2063/25 5FBF/A0 9F/01/A0
7 S107 12937 = 16#3289 2063/26 5FBF/A1 9F/01/A1
8 S108 12938 = 16#328A 2063/27 5FBF/A2 9F/01/A2
9 S109 12939 = 16#328B 2063/28 5FBF/A3 9F/01/A3
10 S110 12940 = 16#328C 2063/29 5FBF/A4 9F/01/A4
11 S111 12941 = 16#328D 2063/2A 5FBF/A5 9F/01/A5
12 S112 12942 = 16#328E 2063/2B 5FBF/A6 9F/01/A6
13 S113 12943 = 16#328F 2063/2C 5FBF/A7 9F/01/A7
14 S114 12944 = 16#3290 2063/2D 5FBF/A8 9F/01/A8
15 S115 12945 = 16#3291 2063/2E 5FBF/A9 9F/01/A9
AAV49427 11/2009 75
Page 76

Commutation de jeu de paramètres
Tableau des valeurs du jeu n°2 :
N° Code Adresse logique : Index CANopen : Index INTERBUS : Path DeviceNet :
1 S201 12951 = 16#3297 2063/34 5FBF/AA 9F/01/AA
2 S202 12952 = 16#3298 2063/35 5FBF/AB 9F/01/AB
3 S203 12953 = 16#3299 2063/36 5FBF/AC 9F/01/AC
4 S204 12954 = 16#329A 2063/37 5FBF/AD 9F/01/AD
5 S205 12955 = 16#329B 2063/38 5FBF/AE 9F/01/AE
6 S206 12956 = 16#329C 2063/39 5FBF/AF 9F/01/AF
7 S207 12957 = 16#329D 2063/3A 5FBF/B0 9F/01/B0
8 S208 12958 = 16#329E 2063/3B 5FBF/B1 9F/01/B1
9 S209 12959 = 16#329F 2063/3C 5FBF/B2 9F/01/B2
10 S210 12960 = 16#32A0 2063/3D 5FBF/B3 9F/01/B3
11 S211 12961 = 16#32A1 2063/3E 5FBF/B4 9F/01/B4
12 S212 12962 = 16#32A2 2063/3F 5FBF/B5 9F/01/B5
13 S213 12963 = 16#32A3 2063/40 5FBF/B6 9F/01/B6
14 S214 12964 = 16#32A4 2063/41 5FBF/B7 9F/01/B7
15 S215 12965 = 16#32A5 2063/42 5FBF/B8 9F/01/B8
Tableau des valeurs du jeu n°3 :
N° Code Adresse logique : Index CANopen : Index INTERBUS : Path DeviceNet :
1 S301 12971 = 16#32AB 2063/48 5FBF/B9 9F/01/B9
2 S302 12972 = 16#32AC 2063/49 5FBF/BA 9F/01/BA
3 S303 12973 = 16#32AD 2063/4A 5FBF/BB 9F/01/BB
4 S304 12974 = 16#32AE 2063/4B 5FBF/BC 9F/01/BC
5 S305 12975 = 16#32AF 2063/4C 5FBF/BD 9F/01/BD
6 S306 12976 = 16#32B0 2063/4D 5FBF/BE 9F/01/BE
7 S307 12977 = 16#32B1 2063/4E 5FBF/BF 9F/01/BF
8 S308 12978 = 16#32B2 2063/4F 5FBF/C0 9F/01/C0
9 S309 12979 = 16#32B3 2063/50 5FBF/C1 9F/01/C1
10 S310 12980 = 16#32B4 2063/51 5FBF/C2 9F/01/C2
11 S311 12981 = 16#32B5 2063/52 5FBF/C3 9F/01/C3
12 S312 12982 = 16#32B6 2063/53 5FBF/C4 9F/01/C4
13 S313 12983 = 16#32B7 2063/54 5FBF/C5 9F/01/C5
14 S314 12984 = 16#32B8 2063/55 5FBF/C6 9F/01/C6
15 S315 12985 = 16#32B9 2063/56 5FBF/C7 9F/01/C7
76 AAV49427 11/2009
Page 77

Commutation de jeu de paramètres
Code Description
VAL
Nom du paramètre : Commande de chargement du jeu de paramètres
Adresse logique : 12901 = 16#3265 Type : WORD (énumération)
Index CANopen : 2063/02 Lecture / écriture : R/W
Index INTERBUS :
Path DeviceNet : A1/01/66
0 = Fonction inutilisée ou un nouveau jeu de paramètres a été pris en compte,
1 = Demande d'écriture d'un nouveau jeu de paramètres,
2 = Un nouveau jeu de paramètres est en cours d'écriture.
Procédure :
• Ecrire les adresses et valeurs des jeux,
• Mettre VAL à 1,
• Lorsque les nouveaux jeux ont été pris en compte, le variateur remet (VAL) à 0.
AAV49427 11/2009 77
Page 78

Chargement des paramètres du variateur
Le besoin
Certaines applications nécessitent un téléchargement des paramètres :
• au démarrage de l'installation,
• lors du changement de la gamme de fabrication,
• lors du remplacement d'un appareil défectueux.
Les ports intégrés ou les cartes réseau du variateur n'offrent pas de procédure de chargement de fichier de paramètres (sauf le mécanisme
de remplacement d'un appareil défaillant "FDR" de la carte Ethernet TCP/IP Modbus VW3 A3 310).
Le chargement des paramètres est donc basé sur des requêtes d'écriture qui doivent être programmées dans le contrôleur (automate...).
Si le contrôleur se borne à écrire séquentiellement les paramètres, la configuration finale risque de ne pas être identique à celle souhaitée.
Les différences entre la configuration à charger et la configuration réelle proviennent du contrôle de cohérence des paramètres du variateur.
Le variateur vérifie des relations entre les paramètres, et si elles ne sont pas correctes :
• il modifie automatiquement un paramètre qui est proposé à l'écriture (écrêtage, épiétage) ou
• il rejette l'écriture du paramètre.
Des exemples qui illustrent ce problème sont cités page 79
Le contrôleur doit donc respecter une procédure qui comporte une phase d'invalidation de la fonction de contrôle de cohérence.
Procédure
.
Toutes les opérations décrites ci-après doivent être effectuées moteur à l’arrêt, sans ordre de marche au variateur.
Sauvegarder la configuration de référence
1. Identifier les paramètres du variateur de référence qui sont différents du réglage usine. Le logiciel PowerSuite permet d'identifier
facilement ces paramètres (affichage de la liste des paramètres).
2. Réserver dans le contrôleur (automate...) une table de paramètres image. Cette table image est une suite d'adresses et de valeurs. Le
dernier paramètre à charger est identifié par une adresse égale à -1.
3. Saisir dans la table image du contrôleur les adresses des paramètres modifiés en recopiant la liste donnée par le logiciel PowerSuite.
4. Initialiser les valeurs de la table image. Deux méthodes sont possibles :
- Saisir les valeurs manuellement.
- Programmer dans le contrôleur une fonction de lecture automatique. Connecter le contrôleur au variateur de référence.
Sauvegarder la configuration de référence dans la table image.
Charger la configuration
Le programme du contrôleur (automate...) doit exécuter les opérations suivantes :
1. Commander un réglage usine du variateur :
Ecrire la valeur 16#0001 dans le Mot de commande étendu (8504-CMI).
2. Invalider la fonction de contrôle de cohérence des paramètres :
Ecrire la valeur 16#8000 dans le Mot de commande étendu (8504-CMI).
3. Charger la configuration :
Ecrire les paramètres les uns après les autres en utilisant la table image.
4. Valider la fonction de contrôle de cohérence des paramètres :
Ecrire la valeur 16#0000 dans le Mot de commande étendu (8504-CMI).
5. Vérifier la configuration du variateur :
Lire et comparer les paramètres les uns après les autres suivant la table image.
78 AAV49427 11/2009
Page 79

Chargement des paramètres du variateur
Exemples d'incohérence
Les 2 paramètres de réglages [Petite vitesse] (3105-LSP) et [Grande vitesse] (3104-HSP) respectent la règle de cohérence :
0
y [Petite vitesse] (3105-LSP) y [Grande vitesse] (3104-HSP) y 10000.
Exemple 1
Configuration initiale V Configuration à charger :
[Grande vitesse] (3104-HSP) = 30Hz
[Petite vitesse] (3105-LSP) = 20Hz
• "Requête n : Demande d'écriture de [Petite vitesse] (3105-LSP) à 40Hz.
• "Contrôle de cohérence : La règle de cohérence [Petite vitesse] (3105-LSP)
- Le paramètre [Petite vitesse] (3105-LSP) réellement écrit dans le variateur est 30Hz.
• "Requête n+1 : Demande d'écriture de [Grande vitesse] (3104-HSP) = 60Hz,
• "Contrôle de cohérence : Les règles de cohérence sont respectées,
- Le paramètre [Grande vitesse] (3104-HSP) est bien écrit à 60Hz dans le variateur.
La configuration chargée diffère de la configuration à charger :
[Petite vitesse] (3105-LSP) = 30Hz au lieu de [Petite vitesse] (3105-LSP) = 40Hz.
Le variateur pourra fonctionner entre 30 et 40Hz, ce qui n'est pas souhaité.
Exemple 2
Configuration initiale V Configuration à charger :
[Grande vitesse] (3104-HSP) = 60Hz
[Petite vitesse] (3105-LSP) = 40Hz
V [Grande vitesse] (3104-HSP) = 60Hz,
V [Petite vitesse] (3105-LSP) = 40Hz.
y [Grande vitesse] (3104-HSP) n'est pas respectée :
V [Grande vitesse] (3104-HSP) = 30Hz,
V [Petite vitesse] (3105-LSP) = 0Hz.
• "Requête n : Demande d'écriture de [Grande vitesse] (3104-HSP) à 30Hz.
• "Contrôle de cohérence : La règle de cohérence [Petite vitesse] (3105-LSP)
- Le paramètre [Grande vitesse] (3104-HSP) réellement écrit dans le variateur est 40Hz.
• "Requête n+1 : Demande d'écriture de [Petite vitesse] (3105-LSP) = 0Hz.
• "Contrôle de cohérence : Les règles de cohérence sont respectées,
- Le paramètre [Petite vitesse] (3104-HSP) est bien écrit à 0Hz dans le variateur.
La configuration chargée diffère de la configuration à charger :
[Grande vitesse] (3104-HSP) = 40Hz au lieu de [Grande vitesse] (3104-HSP) = 30Hz,
Le variateur pourra fonctionner entre 30 et 40Hz, ce qui n'est pas souhaité.
y [Grande vitesse] (3104-HSP) n'est pas respectée :
AAV49427 11/2009 79
Page 80

Paramètres de commandes
Code Description
CMd
Nom du paramètre : Mot de commande
Affichage sur le terminal : [Valeur Cmd]
Nom selon CiA402 : controlword
Nom selon DRIVECOM : Control word
Adresse logique : 8601 = 16#2199
ou 8501 = 16#2135 (1)
Index CANopen : 6040/0 Lecture / écriture : R/W
Index INTERBUS : 6040/0
Path DeviceNet : B7/01/01
(1)Nota : Ce paramètre est disponible à 2 adresses logiques pour optimiser les échanges par messagerie Modbus (fonction
Modbus 16 = 16#10 Write Multiple Registers) :
- Si on doit piloter le variateur en vitesse, il est préférable d’utiliser l’adresse 8601 car la consigne de vitesse est à
l’adresse 8602.
- Si on doit piloter le variateur en fréquence il est préférable d’utiliser l’adresse 8501 car la consigne de fréquence
est à l’adresse 8502.
Paramètre conforme au profil CiA402
Valeurs possibles dans le profil IO
Commande sur état [Cde 2 fils] (2C)
bit 0 : Commande de marche avant (sur état)
= 0 : Pas de commande de marche avant,
= 1 : Commande de marche avant.
Type : WORD (registre de bits)
Commande sur front [Cde 3 fils] (3C)
bit 0 : Stop (autorisation de marche)
= 0 : Stop.
= 1 : La marche est autorisée, sur une commande
de marche avant ou arrière.
bit 1 : Commande de marche avant (sur front montant
0 V 1)
L'affectation du bit 0 ne peut pas être modifiée. Elle
correspond à l'affectation du bornier. Elle est commutable. Le
bit 0 (Cd00) n'est actif que si le canal de ce mot de
commande est actif.
Les bits 1 à 15 peuvent être affectés à des commandes. Les bits 2 à 15 peuvent être affectés à des commandes.
Par exemple, pour changer de sens de marche grâce au bit 2 du mot de commande du canal actif, il suffit de configurer le
paramètre [Aff. sens arrière] (rrS) :
• à la valeur [C102] (C102) ... [C402] (C402) pour une affectation fixe,
• à la valeur [CD02] (Cd02) pour une affectation commutée.
Les ordres d'arrêts :
• arrêt roue libre [Affect. roue libre] (nSt),
• arrêt rapide [Affect. arrêt rapide] (FSt), sont actifs sur la valeur 0, comme au bornier.
=0 : arrêt,
=1 : pas de commande d'arrêt.
Le freinage par injection de courant continu [Affect. inject. DC] (dCI), est actif sur la valeur 1, comme au bornier.
=0 : pas de commande de freinage,
=1 : freinage.
Si une affectation fixe est réalisée [C101] (C101) à [C115] (C115) ... [C401] (C401) à [C415] (C415), les commandes arrêt
roue libre, arrêt rapide et freinage par injection de courant continu sont toujours actives, même si le canal n'est pas actif. Si
ces commandes sont configurées en fixe, pour démarrer, même si un autre canal est actif, il faut :
• arrêt roue libre = 1,
• arrêt rapide = 1,
• freinage par injection de courant continu = 0.
L'affectation des bits 0 et 1 ne peut pas être modifiée. Elle
correspond à l'affectation du bornier. Elle est commutable.
Les bits 0 (Cd00) et 1 (Cd01) ne sont actifs que si le canal de
ce mot de commande est actif.
Si une affectation commutée est réalisée [CD00] (Cd00) à [Cd15] (Cd15), les commandes arrêt roue libre, arrêt rapide et
freinage par injection de courant continu sont ne sont actives que si le canal est actif.
80 AAV49427 11/2009
Page 81

Paramètres de commandes
Code Description
Valeurs possibles dans le profil CiA402, mode séparé ou non séparé
bit 0 : "Switch on"/Commande contacteur
bit 1 : "Disable voltage"/Permission d'alimenter
bit 2 : "Quick stop"/Arrêt urgent
bit 3 : "Enable operation"/Commande de marche
bit 4 : Réservé (mettre à 0)
bit 5 : Réservé (mettre à 0)
bit 6 : Réservé (mettre à 0)
bit 7 : "Fault reset"/Acquittement des défauts actif sur front montant 0 V 1
bit 8 : "Halt"/Halte. Arrêt selon le paramètre [Type d’arrêt] (Stt) sans quitter l’état 5 - Operation enabled.
bit 9 : Réservé (mettre à 0)
bit 10 : Réservé (mettre à 0)
bit 11 : Commande du sens de rotation. Affectation par défaut, ce bit est affectable à une autre commande.
=0 : Sens de rotation direct,
=1 : Sens de rotation inverse.
bit 12 : Affectable à une commande.
bit 13 : Affectable à une commande.
bit 14 : Affectable à une commande.
bit 15 : Affectable à une commande.
Pour la description des bits de 0, 1, 2, 3, 7 et 8 voir le chapitre "Profil CiA402".
Le standard CiA402 permet au constructeur du variateur de faire une utilisation spécifique des bits 11 à 15. Dans l'Altivar 71,
ils peuvent être affectés à des commandes de fonctions. Le bit 11 est affecté par défaut pour commander le sens de rotation,
il peut être affecté à une autre commande. Une nouvelle affectation supprime l'affectation à la commande du sens de
rotation. Les bits 12 à 15 ne sont pas affectés par défaut. Par exemple, pour commander le freinage par injection de courant
continu, grâce au bit 12 du mot de commande de Modbus, il suffit de configurer le paramètre [Affect. inject. DC] (dCI)) à la
valeur [C212] (C212).
La commande d'arrêt rapide configurée par [Affect. arrêt rapide] (FSt) est active à 1 :
=0 : pas de commande d'arrêt,
=1 : arrêt.
La commande de freinage par injection de courant continu configurée par [Affect. inject. DC] (dCI) est active à 1 :
=0 : pas de commande de freinage,
=1 : freinage.
En affectation fixe ([C1
continu sont des arrêts prioritaires, même si le canal n'est pas actif. Si ces commandes sont configurées en affectation fixe,
pour démarrer, même si un autre canal est actif, il faut :
• commande d'arrêt rapide = 0,
• commande de freinage par injection de courant continu = 0.
En affectation commutée ([Cd
seulement si le canal est actif.
La commande d'arrêt roue libre [Affect. roue libre] (nSt) ne peut pas être affectée en profil CiA402.
pp], [C2pp], [C3pp] ou [C4pp]), les commandes d'arrêt rapide et de freinage par injection de courant
pp]), les commandes d'arrêt rapide et de freinage par injection de courant continu agissent,
AAV49427 11/2009 81
Page 82

Paramètres de commandes
Code Description
CMI Nom du paramètre : Mot de commande étendu
Adresse logique : 8504 = 16#2138 Type : WORD (registre de bits)
Index CANopen : 2037/5 Lecture / écriture : R/W
Index INTERBUS : 5FB6/1E
Path DeviceNet : 8B/01/69
bit 0 : Commande de réglage usine de la RAM selon le paramètre [GROUPES PARAMETRES] (FrY) (actif à 1). Si on
veut également faire un réglage usine de l’EEPROM, on doit mettre aussi le bit 1 à 1 (les deux commandes peuvent
être exécutées simultanément).
bit 1 : Commande de mémorisation de la configuration en mémoire non volatile EEPROM (actif à 1).
Ce bit repasse automatiquement à 0 après la prise en compte de la demande. La commande n'est active que si
le variateur est à l'arrêt, hors de l'état "5-Operation enabled".
Nota : si CMI est une variable périodique du réseau, le programme automate doit l'écrire à 0 après prise en compte
de la première demande, la durée de vie de la mémoire EEPROM est limitée à 100000 écritures.
Nota : si la fonction commutation de moteur ou de configuration est active, la configuration en RAM est mémorisée
EEPROM dans la configuration désignée par [Config. Active] (CnFS).
bit 2 : Commande de rappel de la configuration en mémoire non volatile EEPROM (actif sur front montant 0 à 1).
Ce bit repasse automatiquement à 0 après la prise en compte de la demande.
La commande n'est active que si le variateur est à l'arrêt, hors de l'état "5-Operation enabled".
Nota : si CMI est une variable périodique du réseau, le programme automate doit l'écrire à 0 après prise en compte
de la première demande.
Cela ne nuit pas à la longévité de mémoire EEPROM, mais recopie en permanence la configuration en
mémoire dans la configuration courante.
Nota : si la fonction commutation de moteur ou de configuration est active, la configuration en EEPROM désignée
par [Config. Active] (CnFS) est copiée en RAM.
bit 3 : Réservé (=0).
bit 4 : Réservé (=0).
bit 5 : Réservé (=0).
bit 6 : Réservé (=0).
bit 7 : Réservé (=0).
bit 8 : Réservé (=0).
bit 9 : Définition de l'unité de la consigne de fréquence (LFr) et de la fréquence de sortie (rFr) :
=0 : 0,1Hz.
=1 : Valeur normée 16 bits signés sur la fréquence maximum. La valeur 32767 correspond à [Fréquence maxi.] (tFr).
La valeur par défaut de [Fréquence maxi.] (tFr) est 60Hz, la résolution est alors d'environ 0,0018Hz.
Cette fonction n'a pas d'influence sur la consigne de vitesse (LFrd) ni sur la vitesse de sortie (rFrd).
bit 10 : Commande d'arrêt rapide (actif à 1).
bit 11 : Commande de freinage par injection de courant continu (actif à 1). Cette commande ne doit pas être utilisée
lorsque [Type cde moteur] (ctt) = [Mot.Sync.] (SYn).
bit 12 : Commande du sens de rotation.
= 0 : sens direct.
= 1 : sens inverse.
bit 13 : Réservé (=0).
bit 14 : Réservé (=0).
bit 15 : Contrôle de la cohérence des paramètres.
= 0 : Le contrôle est activé. A chaque écriture de paramètre, le variateur contrôle que les relations entre le paramètre
écrit et la configuration présente dans le variateur. Par exemple, le paramètre [Grande vitesse] (HSP) doit être
inférieur au paramètre [Fréquence maxi.] (tFr). Si on tente d'écrire le paramètre [Grande vitesse] (HSP) à une
valeur supérieure au paramètre [Fréquence maxi.] (tFr), l'écriture est acceptée mais la valeur est écrêtée à la
valeur de [Fréquence maxi.] (tFr).
= 1 : Le contrôle est désactivé. Le variateur est verrouillé à l'arrêt. Dans cet état du variateur, on peut écrire la
configuration paramètre par paramètre et le variateur ne modifie pas les valeurs écrites.
1
V0 : Le passage de 1 à 0 provoque un calcul de la cohérence de la configuration. Certains paramètres peuvent être
modifiés automatiquement par le variateur.
82 AAV49427 11/2009
Page 83

Paramètres de consignes
Voir chapitre "Affectation des consignes provenant d’un réseau", page 61
Code Description
LFRD
LFR
Nom du paramètre : Consigne de vitesse
Nom selon CiA402 : vl target velocity
Nom selon DRIVECOM : Speed-Setpoint
Adresse logique : 8602 = 16#219A Type : INT
Index CANopen : 6042/0 Lecture / écriture : R/W
Index INTERBUS : 6042/0 Unité : rpm
Path DeviceNet : 2A/01/08 (1)
8C/01/03 (2)
Paramètre conforme aux profils CiA402 et ODVA
Valeur signée. Ce paramètre change le sens de marche selon son signe.
Nom du paramètre : Consigne de fréquence
Affichage sur le terminal : [Référence fréq.]
Adresse logique : 8502 = 16#2136 Type : INT
Index CANopen : 2037/3 Lecture / écriture : R/W
Index INTERBUS : 5FB6/1C Unité : 0,1 Hz ou normée 16 bits
Path DeviceNet : 8B/01/67
Valeur signée.
L'unité dépend de la valeur du bit 9 du mot de commande étendu (CMI) :
= 0 : 0,1Hz.
= 1 : Haute résolution : Valeur normée à la fréquence maximale sur 16 bits signés. La valeur 32767 = 16 # 7FFF
correspond à [Fréquence maxi.] (tFr). La valeur par défaut de [Fréquence maxi.] (tFr) est 60Hz, la résolution est
alors d'environ 0,0018Hz.
signés sur la fréquence
maximum (TFR)
LTR
(1) path standard ODVA. Il peut être utilisé pour explicit messaging. Ne pas l'utiliser pour configurer un assembly.
(2) path Altivar. Evitez de l'utiliser pour l'explicit messaging, pour assurer une meilleure interchangeabilté. C'est ce path qui doit être utilisé
pour configurer un assembly.
Nom du paramètre : Consigne de couple
Affichage sur le terminal : [Réf. couple HMI]
Nom selon CiA402 : Target torque
Nom selon DRIVECOM : Torque-Setpoint-External
Adresse logique : 8505 = 16#2139 Type : INT
Index CANopen : 6071/0 Lecture / écriture : R/W
Index INTERBUS : 5FB6/1F Unité :
Path DeviceNet : 8B/01/6A
Paramètre conforme au profil CiA402
Valeur signée.
Le "Couple nominal moteur" n'est pas accessible en tant que paramètre du variateur. Il résulte d'un calcul sur les autres
caractéristiques.
0,001 "Couple nominal moteur"
AAV49427 11/2009 83
Page 84

Paramètres de consignes
Code Description
Int Nom du paramètre : Unité de couple
Adresse logique : 9260 = 16#242C Type : WORD (énumération)
Index CANopen : 203E/3D Lecture / écriture : R/WS
Index INTERBUS : 5FBF/35 Réglage usine : Selon calibre variateur
Path DeviceNet : 8F/01/3D
0 = 0,01 Nm
1 = 0,1 Nm
2=1 Nm
3 = 10 Nm
Ce paramètre n’est utilisé et configurable qu’avec DeviceNet, il fixe l’unité des paramètres LTCR et OTRN .
LtCr
PISP Nom du paramètre : Consigne du régulateur PID
AIU1
Nom du paramètre : Consigne de couple (Nm)
Adresse logique : 9261 = 16#242D Type : INT
Index CANopen : 203E/3E Lecture / écriture : R/W
Index INTERBUS : 5FB6/3D Unité : 0,01 - 0,1 - 1 - 10 Nm
Path DeviceNet : 2A/01/0C
Adresse logique : 8503 = 16#2137 Type : INT
Index CANopen : 2037/4 Lecture / écriture : R/W
Index INTERBUS : 5FB6/1D Unité : 1
Path DeviceNet : 8B/01/68
Valeur signée.
Si on veut piloter le régulateur PID par un réseau, il faut écrire cette consigne, selon le protocole :
• soit par la messagerie,
• soit en affectant ce paramètre dans les variables périodiques.
Nom du paramètre : Entrée analogique réseau
Affichage sur le terminal : [AI réseau]
Adresse logique : 5281 = 16 #14A1 Type : INT
Index CANopen : 2016/52 Lecture / écriture : R/W
Selon Int page 84
Index INTERBUS : 5FB9/40 Unité : 1
Path DeviceNet : 7B/01/52
MFr Nom du paramètre : Coefficient multiplicateur
Affichage sur le terminal : [Coeff. multiplicat.]
Adresse logique : 11831 = 16#2E37 Type : UINT
Index CANopen : 2058/20 Lecture / écriture : R/W
Index INTERBUS : 5FB6/3E Unité : 1 %
Path DeviceNet : 9C/01/20
84 AAV49427 11/2009
Page 85

Paramètres d’états
Code Description
ETA
Nom du paramètre : Mot d'état
Nom selon CiA402 : Statusword
Nom selon DRIVECOM : Statusword
Adresse logique : 8603 = 16#219B
ou 3201 = 16#0C81 (1)
Index CANopen : 6041/0 Lecture / écriture : R
Index INTERBUS : 6041/0
Path DeviceNet : 71/01/02
(1)Nota : Ce paramètre est disponible à 2 adresses logiques pour optimiser les échanges par messagerie Modbus (fonction
Modbus 4 = 16#04 Read Input Registers) :
- Si on doit surveiller le variateur en vitesse, il est préférable d’utiliser l’adresse 8603 car la vitesse de sortie est à
l’adresse 8604.
- Si on doit surveiller le variateur en fréquence il est préférable d’utiliser l’adresse 3201 car la fréquence de sortie
est à l’adresse 3202.
Paramètre conforme au profil CiA402
Valeurs possibles dans le profil IO
Nota : La valeur est identique dans le profil CiA402 et dans le profil I/O. Dans le profil I/O, la description des valeurs est
simplifiée et ne fait pas référence au graphe d'état CiA402 (Drivecom).
bit 0 : Réservé (= 0 ou 1).
bit 1 : Prêt.
=0 : Pas prêt, =1 : Prêt.
bit 2 : En marche.
=0 : Le variateur ne démarre pas si on applique une consigne non nulle,
=1 : En marche, si une consigne non nulle est appliquée le variateur peut démarrer.
bit 3 : Défaut.
=0 : Pas de défaut, =1 : Défaut.
Type : WORD (registre de bits)
bit 4 : Alimentation puissante présente.
=0 : L'alimentation puissance est absente, =1 : L'alimentation puissance est présente.
bit 5 : Réservé (= 1).
bit 6 : Réservé (= 0 ou 1).
bit 7 : Alarme.
=0 : Pas d'alarme, =1 : Alarme.
bit 8 : Réservé (= 0).
bit 9 : Commande par un réseau.
=0 : Commande par le bornier ou le terminal graphique, =1 : Commande par un réseau.
Nota : Le réseau peut être Modbus intégré, CANopen, une carte de communication ou la carte Contrller Inside. Ce n’est pas
nécessairement le réseau par lequel est lu le mot d’état. Ainsi si la commande provient de CANopen (CANopen canal de
commande actif) et que l’on lit le Mot d’état (ETA) via une carte Ethernet, l’information "Commande par un réseau" = 1. Cela
ne signifie pas que l’on peut commander par la carte Ethernet. Pour plus de détails voir les paramètres "Canal de commande
actif" (CCC) et "Canal de consigne actif" (CRC).
bit 10 : Consigne atteinte.
=0 : La consigne n'est pas atteinte, =1 : La consigne est atteinte.
bit 11 : Consigne hors bornes.
=0 : La consigne est entre les bornes, =1 : La consigne n'est pas dans les bornes.
Lorsque le variateur est en mode vitesse, les bornes sont définies par les paramètres "Petite vitesse (LSP)" et
"Grande vitesse (HSP)". Lorsque la fonction couple est activée, consultez la description de cette fonction (voir le
guide de programmation).
bits 12 et 13 : Réservés (= 0).
bit 14 : Arrêt touche STOP.
=0 : Pas d'action sur la touche STOP, =1 : Arrêt provoqué par la touche STOP du terminal graphique.
bit 15 : Sens de rotation.
=0 : Sens de rotation direct en sortie, =1 : Sens de rotation inverse en sortie.
AAV49427 11/2009 85
Page 86

Paramètres d’états
Code Description
Valeurs possibles dans le profil CiA402
bit 0 : "Ready to switch on", attente alimentation puissance.
bit 1 : "Switched on", prêt.
bit 2 : "Operation enabled", en marche.
bit 3 : "Fault", défaut.
=0 : Pas de défaut,
=1 : Défaut.
bit 4 : "Voltage enabled", alimentation puissante présente.
=0 : L'alimentation puissance est absente,
=1 : L'alimentation puissance est présente.
Lorsque le variateur est alimenté par la puissance uniquement; ce bit est toujours à 1.
bit 5 : "Quick Stop", en arrêt urgent
bit 6 : "Switched on disabled", alimentation puissance verrouillée.
bit 7 : "Warning", alarme.
=0 : Pas d'alarme,
=1 : Alarme.
bit 8 : Réservé (= 0)
bit 9 : "Remote", commande ou consigne par le réseau.
=0 : Commande ou consigne par le bornier,
=1 : Commande ou consigne par le réseau.
bit 10 : "Target reached", consigne atteinte.
=0 : La consigne n'est pas atteinte,
=1 : La consigne est atteinte.
Lorsque le variateur est en mode vitesse, il s'agit de la consigne de vitesse. Lorsque la fonction couple est activée,
consultez la description de cette fonction (voir le guide de programmation). A l'arrêt, la consigne est atteinte.
bit 11 : "Internal limit active", consigne hors bornes.
=0 : La consigne est entre les bornes,
=1 : La consigne n'est pas dans les bornes.
Lorsque le variateur est en mode vitesse, les bornes sont définies par les paramètres "Petite vitesse (LSP)" et
"Grande vitesse (HSP)". Lorsque la fonction couple est activée, consultez la description de cette fonction (voir le
guide de programmation).
bit 12 : Réservé (= 0)
bit 13 : Réservé (= 0)
bit 14 : "Stop key", arrêt touche STOP.
=0 : Pas d'action sur la touche STOP,
=1 : Arrêt provoqué par la touche STOP du terminal graphique.
bit 15 :"Direction", sens de rotation.
=0 : Sens de rotation direct en sortie,
=1 : Sens de rotation inverse en sortie.
La combinaison des bits 0, 1, 2, 4, 5 et 6 définit l'état dans le graphe d'état DSP 402 (voir le chapitre Profil CiA402).
86 AAV49427 11/2009
Page 87

Paramètres d’états
Code Description
ETI Nom du paramètre : Mot d'état étendu
Adresse logique : 3206 = 16#0C86 Type : WORD (registre de bits)
Index CANopen : 2002/7 Lecture / écriture : R
Index INTERBUS : 5FB9/08
Path DeviceNet : 71/01/07
bit 0 : =1 : Accès en cours à la mémoire non volatile EEPROM.
bit 1 : =0 : Pas de contrôle de cohérence des paramètres,
=1 : Contrôle de cohérence des paramètres.
bit 2 : =0 : Le variateur n'est pas dans l'état défaut ou un défaut est présent,
=1 : Le variateur est dans l'état défaut mais le défaut n'est plus présent (pas acquitté).
bit 3 : Réservé (= 0).
bit 4 : =1 : Variateur en régulation de vitesse.
bit 5 : =1 : Freinage par injection de courant continu (identique à LSR4, bit 11).
bit 6 : =0 : Variateur en régime établi,
=1 : Variateur en régime transitoire.
bit 7 : =1 : Seuil d'état thermique moteur atteint pour le moteur actif.
LRS1
bit 8 : =1 : Le freinage excessif (identique à LSR5, bit 1).
bit 9 : =1 : Accélération en cours (identique à LSR4, bit 13).
bit 10 : =1 : Décélération en cours (identique à LSR4, bit 14).
bit 11 : =1 : Limitation de courant ou de couple en cours.
bit 12 : =1 : Arrêt rapide en cours (identique à LSR4, bit 15).
bit 13 : bit 13 =0 et bit 14 =0 : Commande par le bornier,
bit 14 : bit 13 =1 et bit 14 =0 : Commande par le terminal graphique,
bit 13 =0 et bit 14 =1 : Commande par Modbus,
bit 13 =1 et bit 14 =1 : Commande par CANopen, la carte réseau ou la carte "Controller Inside".
bit 15 : =0 : Marche sens direct appliquée avant la rampe,
=1 : Marche sens inverse appliquée avant la rampe.
Nom du paramètre : Mot d'état étendu 1
Adresse logique : 3250 = 16#0CB2 Type : WORD (registre de bits)
Index CANopen : 2002/33 Lecture / écriture : R
Index INTERBUS : 5FB9/1C
Path DeviceNet : 71/01/33
bit 0 : Réservé (=0).
bit 1 : =1 : Le variateur est dans l'état défaut.
bit 2 : =0 : Le variateur est verrouillé, le moteur n'est pas alimenté.
=1 : Le variateur est déverrouillé, le moteur peut être alimenté (état RUN).
bit 3 : =1 : Le contacteur aval est commandé.
bit 4 : =1 : Le seuil de fréquence (ftd) est atteint : [Seuil fréq. atteint] (FtA).
bit 5 : =1 : La grande vitesse (HSP) est atteinte : [HSP atteinte] (FLA).
bit 6 : =1 : Le seuil de courant (Ctd) est atteint : [Seuil I atteint] (CtA).
bit 7 : =1 : La consigne de fréquence est atteinte : [Réf. fréq. atteinte] (SrA).
bit 8 : =1 : Le seuil d'état thermique moteur 1 [Dét. therm. mot.] (ttd) est atteint : [Etat th. mot. atteint] (tSA).
bit 9 : =1 : Commande du contacteur de frein [Affectation frein] (bLC) active.
bit 10 : =1 : Alarme erreur du régulateur PID : [Al. err. PID] (PEE).
bit 11 : =1 : Alarme retour du régulateur PID : [Alarme retour PID] (PFA).
bit 12 : =1 : Alarme 4-20mA sur l'entrée analogique AI2 : [Perte 4-20 mA AI2] (LFF2).
bit 13 : =1 : Le second seuil de fréquence (ftd) est atteint : [Seuil fréq. 2 atteint] (FA2).
bit 14 : =1 : Le seuil d'état thermique variateur [Seuil th. var. att.] (tHA) est atteint : [Th. var. att.] (tAd).
bit 15 : =1 : La fonction "traverse control" est active.
AAV49427 11/2009 87
Page 88

Paramètres d’états
Code Description
LRS2 Nom du paramètre : Mot d'état étendu 2
Adresse logique : 3251 = 16#0CB3 Type : WORD (registre de bits)
Index CANopen : 2002/34 Lecture / écriture : R
Index INTERBUS : 5FB9/1D
Path DeviceNet : 71/01/34
bit 0 à bit 10 : Réservés (=0).
bit 11 : = 1 : Câble détendu (voir paramètre [Conf. cable détendu] (rSd)).
bit 12 : = 1 : [Couple haut atteint] (ttHA) : Couple moteur supérieur au seuil haut [Seuil couple haut] (ttH).
bit 13 : = 1 : [Couple bas atteint] (ttLA) : Couple moteur inférieur au seuil bas [Seuil couple bas] (ttL).
bit 14 : = 1 : [Sens Avant] (MFrd) : Moteur en rotation dans le sens avant.
bit 15 : = 1 : [Sens Arrièr.] (MrrS) : Moteur en rotation dans le sens arrière.
LRS3
Nom du paramètre : Mot d'état étendu 3
Adresse logique : 3252 = 16#0CB4 Type : WORD (registre de bits)
Index CANopen : 2002/35 Lecture / écriture : R
Index INTERBUS : 5FB9/1E
Path DeviceNet : 71/01/35
bit 0 : =0 : Le canal de consigne 1 ou 1B (Fr1) ou (Fr1b) est actif.
=1 : Le canal de consigne 2 (Fr2) est actif.
bit 1 : =0 : Le canal de commande 1 (Cd1) est actif.
=1 : Le canal de commande 2 (Cd2) est actif.
bit 2 : =0 : Jeu de rampes 1 (ACC) et (dEC).
=1 : Jeu de rampes 2 (AC2) et (dE2).
bit 3 : =0 : La limitation de courant 1 (CLI) est active.
=1 : La limitation de courant 2 (CL2) est active.
bit 4 : Réservé (=0).
bit 5 : =1 : Le seuil d'état thermique moteur 2 [Dét. therm. mot.2] (ttd2) est atteint : [Th.mot2 att] (tS2).
bit 6 : =1 : Le seuil d'état thermique moteur 3 [Dét. therm. mot.3] (ttd3) est atteint : [Th.mot3 att] (tS3).
bit 7 : Réservé (=0).
bit 8 : =1 : L'alimentation 24VDC externe est présente.
bit 9 : =1 : Arrêt sur fonction limitation de temps en petite vitesse [Temps petite vit.] (tLS).
bit 10 : Réservé (=0).
bit 11 : Réservé (=0).
bit 12 : Réservé (=0).
bit 13 : Réservé (=0).
bit 14 : Réservé (=0).
bit 15 : =0 : Le couple de sortie est positif (sens direct).
=1 : Le couple de sortie est négatif (sens indirect)
88 AAV49427 11/2009
Page 89

Paramètres d’états
Code Description
LRS4 Nom du paramètre : Mot d'état étendu 4
Adresse logique : 3253 = 16#0CB5 Type : WORD (registre de bits)
Index CANopen : 2002/36 Lecture / écriture : R
Index INTERBUS : 5FB9/1F
Path DeviceNet : 71/01/36
bit 0 : =1 : la configuration 0 est active.
bit 1 : =1 : la configuration 1 est active [Conf.1 act.] (CnF1).
bit 2 : =1 : la configuration 2 est active [Conf.2 act.] (CnF2).
bit 3 : Réservé (=0).
bit 4 : =1 : Le jeu de paramètres 1 est actif : [Jeu 1 actif] (CFP1).
bit 5 : =1 : Le jeu de paramètres 2 est actif : [Jeu 2 actif] (CFP2).
bit 6 : =1 : Le jeu de paramètres 3 est actif : [Jeu 3 actif] (CFP3).
bit 7 : Réservé (=0).
bit 8 : =0 : L'alimentation puissance est présente.
=1 : L'alimentation puissance est absente.
bit 9 : =1 : Le "fluxage" du moteur en cours : [En fluxage moteur] (FLX).
bit 10 : =1 : Le moteur est "fluxé".
bit 11 : =1 : Freinage par infection de courant continu (identique à ETI, bit 5).
LRS5
bit 12 : =1 : Limitation de courant en cours.
bit 13 : =1 : Accélération en cours (identique à ETI, bit 9).
bit 14 : =1 : Décélération en cours (identique à ETI, bit 10).
bit 15 : =1 : Arrêt rapide en cours : [En arrêt rapide] (FSt) (identique à ETI, bit 12).
Nom du paramètre : Mot d'état étendu 5
Adresse logique : 3254 = 16#0CB6 Type : WORD (registre de bits)
Index CANopen : 2002/37 Lecture / écriture : R
Index INTERBUS : 5FB9/20
Path DeviceNet : 71/01/37
bit 0 : =1 : Le bus continu du variateur est chargé : [En charge bus DC] (dbL).
bit 1 : =1 : Variateur en freinage [En freinage] (brS).
bit 2 : =1 : La fonction "Power removal" est activée.
bit 3 : =1 : Des tentatives de redémarrage automatique sont en cours : [En redém. auto] (AUtO).
bit 4 : =1 : "Autotun" en cours : [En auto-réglage] (tUn).
bit 5 : =1 : Arrêt contrôlé après perte de l'alimentation puissance en cours (CTL).
bit 6 : =1 : Le variateur ne peut pas suivre la rampe de décélération paramétrée, décélération auto adaptée (OBR).
bit 7 : =1 : Coupure aval contrôlée en cours (SOC).
bit 8 : =1 : [Alarme Freq. mètre] (FqLA) : Seuil de vitesse mesurée atteint : [Seuil alarme pulse] (FqL).
bit 9 : =1 : Le contacteur de ligne est activé.
bit 10 : Réservé (=0 ou 1).
bit 11 : Réservé (=0 ou 1).
bit 12 : Réservé (=0 ou 1).
bit 13 : =1 : Présence de courant dans le moteur (MCP).
bit 14 : =1 : Dans le cas où la fonction "gestion de fins de course" [FINS DE COURSES] est activée. Les butées [FdC
arrêt avant] ou [FdC arrêt arrière] sont atteintes.
bit 15 : =1 : [Alar. variat. charge] (dLdA) : Détection de variation de charge (voir [DETECT. DELTA CHARGE] (dLd-)).
AAV49427 11/2009 89
Page 90

Paramètres d’états
Code Description
LRS6 Nom du paramètre : Mot d'état étendu 6
Adresse logique : 3255 = 16#0CB7 Type : WORD (registre de bits)
Index CANopen : 2002/38 Lecture / écriture : R
Index INTERBUS : 5FB9/21
Path DeviceNet : 71/01/38
bit 0 : =1 : Le groupe d'alarme 1 est activé.
bit 1 : =1 : Le groupe d'alarme 2 est activé.
bit 2 : =1 : Le groupe d'alarme 3 est activé.
bit 3 : =1 : Alarme sonde 1 : [Alarme ptc1] (PtC1).
bit 4 : =1 : Alarme sonde 2 : [Alarme ptc2] (PtC2).
bit 5 : =1 : Alarme sonde PTC LI6 : [Alarme LI6 =PTC] (PtC3).
bit 6 : Réservé (=0).
bit 7 : =1 : Défaut externe [Alarme déf. externe] (EtF).
bit 8 : =1 : Alarme sous-tension [Soustension] (USA).
bit 9 : =1 : Le seuil de détection de perte de l'alimentation puissance pour un arrêt contrôlé est atteint (prévention de
soustension).
bit 10 : =1 : Alarme dévirage : [Dévirage charge] (AnA).
bit 11 : =1 : Alarme surchauffe variateur (tHA).
LRS7
bit 12 : Réservé (=0).
bit 13 : =1 : Alarme vitesse dans la séquence de frein (BSA).
bit 14 : =1 : Alarme contact de frein dans la séquence de frein (BCA).
bit 15 : =1 : Alarme en limitation de courant ou de couple après la temporisation [Time out limit. I] (StO).
Nom du paramètre : Mot d'état étendu 7
Adresse logique : 3256 = 16#0CB8 Type : WORD (registre de bits)
Index CANopen : 2002/39 Lecture / écriture : R
Index INTERBUS : 5FB9/22
Path DeviceNet : 71/01/39
bit 0 : =1 : Le canal de consigne 1 ou 1B (Fr1) ou (Fr1b) est actif.
bit 1 : =1 : Le canal de consigne 2 (Fr2) est actif.
bit 2 : =1 : Le canal de commande 1 (Cd1) est actif.
bit 3 : =1 : Le canal de commande 2 (Cd2) est actif.
bit 4 : =1 : Le canal de consigne 1B (Fr1b) est actif.
bit 5 : =1 : Fin de la bobine (fonction "traverse control").
bit 6 : =1 : Synchronisation maître - esclave (fonction "traverse control").
bit 7 : =1 : Alarme régulation de couple.
bit 8 : =1 : Alarme état thermique des IGBT.
bit 9 : =1 : Alarme surcharge de la résistance de freinage.
bit 10 : =1 : Alarme émise par la carte "Controller Inside".
bit 11 : =1 : Alarme 4-20mA sur l'entrée analogique AI3 : [Perte 4-20 mA AI3] (LFF3).
bit 12 : =1 : Alarme 4-20mA sur l'entrée analogique AI4 : [Perte 4-20 mA AI4] (LFF4).
bit 13 : =1 : Contacteur de précharge bus DC commandé (DC0).
bit 14 : Réservé (=0).
bit 15 : Réservé (=0).
90 AAV49427 11/2009
Page 91

Paramètres d’états
Code Description
LRS8 Nom du paramètre : Mot d'état étendu 8
Adresse logique : 3257 = 16#0CB9 Type : WORD (registre de bits)
Index CANopen : 2002/3A Lecture / écriture : R
Index INTERBUS : 5FB9/23
Path DeviceNet : 71/01/3A
bit 0 : Réservé (=0).
bit 1 : Réservé (=0).
bit 2 : Réservé (=0).
bit 3 : Réservé (=0).
bit 4 : Réservé (=0).
bit 5 : Réservé (=0).
bit 6 : Réservé (=0).
bit 7 : Réservé (=0).
bit 8 : Réservé (=0).
bit 9 : Réservé (=0).
bit 10 : Réservé (=0).
bit 11 : Réservé (=0).
CRC
bit 12 : Réservé (=0).
bit 13 : Réservé (=0).
bit 14 : Réservé (=0).
bit 15 : =1 : Variateur prêt (rdY).
Nom du paramètre : Canal de consigne actif
Adresse logique : 8441 = 16#20F9 Type : WORD (registre de bits)
Index CANopen : 2036/2A Lecture / écriture : R
Index INTERBUS : 5FB9/CE
Path DeviceNet : 8B/01/2A
bit 0 : =1 : Le bornier est le canal de consigne actif par une entrée analogique.
bit 1 : Réservé (=0).
bit 2 : =1 : Le terminal graphique est le canal de consigne actif.
bit 3 : =1 : Modbus est le canal de consigne actif.
bit 4 : Réservé (=0).
bit 5 : Réservé (=0).
bit 6 : =1 : CANopen est le canal de consigne actif.
bit 7 : =1 : Le bornier est le canal de consigne actif en plus vite/moins vite.
bit 8 : =1 : Le terminal graphique est le canal de consigne actif en plus vite/moins vite.
bit 9 : =1 : La carte réseau est le canal de consigne actif.
bit 10 : =1 : La carte "Controller Inside" est le canal de consigne actif.
bit 11 : Réservé (=0).
bit 12 : Réservé (=0).
bit 13 : Réservé (=0).
bit 14 : Réservé (=0).
bit 15 : =1 : L'atelier logiciel PowerSuite est le canal de consigne actif.
AAV49427 11/2009 91
Page 92

Paramètres d’états
Code Description
CCC Nom du paramètre : Canal de commande actif
Adresse logique : 8442 = 16#20FA Type : WORD (registre de bits)
Index CANopen : 2036/2B Lecture / écriture : R
Index INTERBUS : 5FB9/CF
Path DeviceNet : 8B/01/2B
bit 0 : =1 : Le bornier est le canal de commande actif.
bit 1 : Réservé (=0).
bit 2 : =1 : Le terminal graphique est le canal de commande actif.
bit 3 : =1 : Modbus est le canal de commande actif.
bit 4 : Réservé (=0).
bit 5 : Réservé (=0).
bit 6 : =1 : CANopen est le canal de commande actif.
bit 7 : =1 : Le bornier est le canal de commande actif en plus vite/moins vite.
bit 8 : =1 : Le terminal graphique est le canal de commande actif en plus vite/moins vite.
bit 10 : =1 : La carte "Controller Inside" est le canal de commande actif.
bit 11 : Réservé (=0).
CFPS
CNFS
bit 12 : Réservé (=0).
bit 13 : Réservé (=0).
bit 14 : Réservé (=0).
bit 15 : =1 : L'atelier logiciel PowerSuite est le canal de commande actif.
Nom du paramètre : Jeu de paramètres actif
Adresse logique : 12900 = 16#3264 Type : WORD (énumération)
Index CANopen : 2063/01 Lecture / écriture : R
Index INTERBUS : 5FB9/EC
Path DeviceNet : A1/01/65
0 : La fonction commutation de jeu de paramètres n'est pas configurée.
1 = [Jeu 1 actif] (CFP1) : Jeu de paramètres n° 1 actif.
2 = [Jeu 2 actif] (CFP2) : Jeu de paramètres n° 2 actif.
3 = [Jeu 3 actif] (CFP3) : Jeu de paramètres n° 3 actif.
Nom du paramètre : Configuration active
Affichage sur le terminal : [Config. Active]
Adresse logique : 8020 = 16#1F54 Type : WORD (énumération)
Index CANopen : 2032/15 Lecture / écriture : R
Index INTERBUS : 5FB9/CD
Path DeviceNet : 89/01/15
0 : La fonction commutation de moteur ou de configuration n'est pas configurée.
1 = (CNF0) : Configuration n° 0 active.
2 = (CNF1) : Configuration n° 1 active.
3 = (CNF2) : Configuration n° 2 active.
92 AAV49427 11/2009
Page 93

Paramètres des valeurs de sortie
Valeurs de sortie (vitesse)
Code Description
rFrd
rFr Nom du paramètre : Fréquence de sortie
Nom du paramètre : Vitesse de sortie
Nom selon CiA402 : vl control effort
Nom selon DRIVECOM : Speed-Actual-Value
Adresse logique : 8604 = 16#219C Type : INT
Index CANopen : 6044/0 Lecture / écriture : R
Index INTERBUS : 6044/0 Unité : rpm
Path DeviceNet : 2A/01/07 (1)
8C/01/05 (2)
Paramètre conforme aux profils CiA402 et ODVA
Valeur signée.
Si le variateur est en boucle ouverte, la valeur de la vitesse est estimée.
Si le variateur est en boucle fermée, la valeur de la vitesse est celle mesurée sur le capteur.
Ce paramètre est relié au paramètre "Fréquence de sortie" (rFr) dont l'unité est 0,1 Hz.
Affichage sur le terminal : [Fréquence sortie]
Adresse logique : 3202 = 16#C82 Type : INT
Index CANopen : 2002/3 Lecture / écriture : R
Index INTERBUS : 5FB9/04 Unité : 0,1 Hz ou normée 16 bits
Path DeviceNet : 71/01/03
signés sur la fréquence
maximum (TFR)
Valeur signée.
L'unité dépend de la valeur du bit 9 du mot de commande étendu :
=0 : 0,1Hz.
=1 : Valeur normée sur 16 bits signés à la fréquence maximum. La valeur 32767 correspond à [Fréquence maxi.] (TFR).
La valeur par défaut de [Fréquence maxi.] (TFR) est 60Hz, la résolution est alors d'environ 0,0018Hz.
(1) path standard ODVA. Il peut être utilisé pour explicit messaging. Ne pas l'utiliser pour configurer un assembly.
(2) path Altivar. Evitez de l'utiliser pour l'explicit messaging, pour assurer une meilleure interchangeabilté. C'est ce path qui doit être utilisé
pour configurer un assembly.
AAV49427 11/2009 93
Page 94

Paramètres des valeurs de sortie
Valeurs de sortie (couple)
Code Description
Otr
Otrn
Nom du paramètre : Couple de sortie
Affichage sur le terminal : [Couple Moteur]
Nom selon CiA402 : Torque actual value
Nom selon DRIVECOM : Torque-Actual-Value
Adresse logique : 3205 = 16#0C85 Type : INT
Index CANopen : 6077/0 Lecture / écriture : R
Index INTERBUS : 5FB9/07 Unité :
Path DeviceNet : 71/01/06
Paramètre conforme au profil CiA402
Valeur signée.
Le "Couple nominal moteur" n'est pas accessible en tant que paramètre du variateur. Il résulte des autres caractéristiques.
Nom du paramètre : Couple de sortie (mN)
Adresse logique : 3216 = 16#0C90 Type : INT
Index CANopen : 2002/11 Lecture / écriture : R
Index INTERBUS : 5FB9/10 Unité : 0,01 - 0,1 - 1 - 10 Nm
Path DeviceNet : 2A/01/0B
0,001 "Couple nominal moteur"
Selon Int page 84
94 AAV49427 11/2009
Page 95

Paramètres des valeurs de sortie
Valeurs de sortie (moteur)
Code Description
LCr
UOP
OPr Nom du paramètre : Puissance moteur
Nom du paramètre : Courant moteur
Affichage sur le terminal : [Courant moteur]
Adresse logique : 3204 = 16#0C84 Type : UINT
Index CANopen : 2002/5 Lecture / écriture : R
Index INTERBUS : 5FB9/06 Unité : 0,1 A
Path DeviceNet : 2A/01/09 (1)
71/01/05 (2)
Paramètre conforme au profil ODVA
Nom du paramètre : Tension moteur
Affichage sur le terminal : [Tension moteur]
Adresse logique : 3208 = 16#0C88 Type : UINT
Index CANopen : 2002/9 Lecture / écriture : R
Index INTERBUS : 5FB9/0A Unité : 1 V
Path DeviceNet : 71/01/09
Affichage sur le terminal : [Puissance moteur]
Adresse logique : 3211 = 16#0C8B Type : INT
Index CANopen : 2002/C Lecture / écriture : R
Index INTERBUS : 5FB9/0C Unité : 1 %
Path DeviceNet : 71/01/0C
UNT Nom du paramètre : Unités des paramètres APH, PTH, et RTH
Adresse logique : 3234 = 16#0CA2 Type : WORD (registre de bits)
Index CANopen : 2002/23 Lecture / écriture : R
Index INTERBUS : 5FB9/19
Path DeviceNet : 71/01/23
L’unité change automatiquement lorsque la valeur atteint le format maxi du paramètre.
bit 0 + bit 1 = unité de APH.: 0 = Wh, 1 = kWh, 2 = MWh
bit 2 + bit 3 = unité de PTH.: 0 = secondes, 1 = minutes, 2 = heures
bit 4 + bit 5 = unité de RTH.: 0 = secondes, 1 = minutes, 2 = heures
bit 6 à bit 15 :Réservés.
(1) path standard ODVA. Il peut être utilisé pour explicit messaging. Ne pas l'utiliser pour configurer un assembly.
(2) path Altivar. Evitez de l'utiliser pour l'explicit messaging, pour assurer une meilleure interchangeabilté. C'est ce path qui doit être utilisé
pour configurer un assembly.
AAV49427 11/2009 95
Page 96

Paramètres des valeurs de sortie
Code Description
APH
AUS Nom du paramètre : Vitesse moyenne ENA
Nom du paramètre : Consommation d’énergie moteur
Affichage sur le terminal : [Consommation]
Adresse logique : 3230 = 16#0C9E Type : UINT
Index CANopen : 2002/1F Lecture / écriture : R
Index INTERBUS : 5FB9/15 Unité : Selon le paramètre UNT
Path DeviceNet : 71/01/1F
Affichage sur le terminal : [Vitesse moy. ENA]
Adresse logique : 12102 = 16#2F46 Type : INT
Index CANopen : 205B/3 Lecture / écriture : R
Index INTERBUS : 5FB9/EA Unité : 0,1 Hz
Path DeviceNet : 9D/01/67
précédent
96 AAV49427 11/2009
Page 97

Paramètres des références
Références (vitesse)
Code Description
FrHd
FrOd Nom du paramètre : Référence de vitesse après la rampe
Nom du paramètre : Référence de vitesse avant la rampe
Adresse logique : 8605 = 16#219D Type : INT
Index CANopen : 2038/6 Lecture / écriture : R
Index INTERBUS : 6043/0 Unité : rpm
Path DeviceNet : 8C/01/06 Réglage usine :
Plage de réglage :
Affichage sur le terminal :
Nom selon CiA402 : vl velocity demand
Nom selon DRIVECOM : Speed-Reference-Variable
Adresse logique : 8641 = 16#21C1 Type : INT
Index CANopen : 6043/0 Lecture / écriture : R
Index INTERBUS : 5FB9/D8 Unité : rpm
Path DeviceNet : 8C/01/2A Réglage usine :
Plage de réglage :
Paramètre conforme au profil CiA402
Valeur signée.
Ce paramètre est relié à paramètre "Fréquence après rampe" (FRO) dont l'unité est 0,1 Hz.
FrH
FrO Nom du paramètre : Référence de fréquence après la rampe
Nom du paramètre : Référence de fréquence avant la rampe
Affichage sur le terminal : [Référence fréq.]
Adresse logique : 3203 = 16#0C83 Type : INT
Index CANopen : 2002/4 Lecture / écriture : R
Index INTERBUS : 5FB9/05 Unité : 0,1 Hz
Path DeviceNet : 71/01/04
Adresse logique : 9021 = 16#233D Type : INT
Index CANopen : 203C/16 Lecture / écriture : R
Index INTERBUS : 5FB9/D9 Unité : 0,1 Hz
Path DeviceNet : 8E/01/16
AAV49427 11/2009 97
Page 98

Paramètres des références
Références (couple)
Code Description
trr
trO Nom du paramètre : Référence de couple après la rampe
Nom du paramètre : Référence de couple avant la rampe
Affichage sur le terminal : [Référence couple]
Adresse logique : 9231 = 16#240F Type : INT
Index CANopen : 203E/20 Lecture / écriture : R
Index INTERBUS : 5FB9/DB Unité : 0,1 %
Path DeviceNet : 8F/01/20
Torque demand value Torque demand value
Torque-Command-Variable Torque-Command-Variable
Adresse logique : 9232 = 16#2410 Type : INT
Index CANopen : 203E/21 Lecture / écriture : R
Index INTERBUS : 5FB9/DC Unité : 0,001 "Couple nominal
Path DeviceNet : 8F/01/21
Paramètre conforme au profil CiA402
Valeur signée.
Le "Couple nominal moteur" n'est pas accessible en tant que paramètre du variateur. Il résulte des autres caractéristiques.
moteur"
98 AAV49427 11/2009
Page 99

Paramètres des références
Référence (régulateur)
Voir chapitre "Affectation des consignes provenant d’un réseau", page 61.
Code Description
rPC
rPF Nom du paramètre : Référence de retour du régulateur PID
rPE Nom du paramètre : Ecart du régulateur PID
Nom du paramètre : Référence PDI après la rampe
Affichage sur le terminal : [Référence PID]
Adresse logique : 11982 = 16#2ECE Type : UINT
Index CANopen : 2059/53 Lecture / écriture : R
Index INTERBUS : 5FB9/E7 Unité : 1
Path DeviceNet : 9C/01/B7
Affichage sur le terminal : [Retour PID]
Adresse logique : 11981 = 16#2ECD Type : UINT
Index CANopen : 2059/52 Lecture / écriture : R
Index INTERBUS : 5FB9/E6 Unité : 1
Path DeviceNet : 9C/01/B6
Affichage sur le terminal : [Erreur PID]
Adresse logique : 11980 = 16#2ECC Type : INT
Index CANopen : 2059/51 Lecture / écriture : R
Index INTERBUS : 5FB9/E5 Unité : 1
Path DeviceNet : 9C/01/B5
rPO Nom du paramètre : Référence en sortie de limitation du régulateur PID
Affichage sur le terminal : [Sortie PID]
Adresse logique : 11983 = 16#2ECF Type : INT
Index CANopen : 2059/54 Lecture / écriture : R
Index INTERBUS : 5FB9/E8 Unité : 0,1 Hz
Path DeviceNet : 9C/01/B8
AAV49427 11/2009 99
Page 100

Paramètres de mesures
Mesures d’entrée
Code Description
ULn
Nom du paramètre : Tension d’alimentation puissance
Affichage sur le terminal : [Tension réseau]
Adresse logique : 3207 = 16#0C87 Type : UINT
Index CANopen : 2002/8 Lecture / écriture : R
Index INTERBUS : 5FB9/09 Unité : 0,1V
Path DeviceNet : 71/01/08
Etats thermiques
Code Description
tHd
tHr Nom du paramètre : Etat thermique moteur
Nom du paramètre : Etat thermique variateur
Affichage sur le terminal : [Etat therm var]
Adresse logique : 3209 = 16#0C89 Type : UINT
Index CANopen : 2002/A Lecture / écriture : R
Index INTERBUS : 5FB9/0B Unité : 1 %
Path DeviceNet : 71/01/0A
Affichage sur le terminal : [Etat therm moteur]
Adresse logique : 9630 = 16#259E Type : UINT
Index CANopen : 2042/1F Lecture / écriture : R
Index INTERBUS : 5FB9/DE Unité : 1 %
Path DeviceNet : 91/01/1F
tHb Nom du paramètre : Etat thermique résistance de freinage
Affichage sur le terminal : [Etat therm résist.]
Adresse logique : 14114 = 16#3722 Type : UINT
Index CANopen : 206F/F Lecture / écriture : R
Index INTERBUS : 5FBD/7F Unité : 1 %
Path DeviceNet : A7/01/73
100 AAV49427 11/2009
 Loading...
Loading...