

Page 1

Altivar 71
Variable speed drives for synchronous and
asynchronous motors
Programming manual
Specification 383
Software V3.4
12/2009
AAV49426
www.schneider-electric.com
Page 2

Page 3

Contents
Before you begin______________________________________________________________________________________________ 4
Documentation structure________________________________________________________________________________________ 5
Software enhancements ________________________________________________________________________________________ 6
Steps for setting up___________________________________________________________________________________________ 10
Factory configuration _________________________________________________________________________________________ 11
Application functions__________________________________________________________________________________________ 12
Setup - Preliminary recommendations ____________________________________________________________________________ 16
Graphic display terminal_______________________________________________________________________________________ 18
Description of terminal __________________________________________________________________________________ 18
Description of the graphic screen__________________________________________________________________________ 19
First power-up - [5. LANGUAGE] menu _____________________________________________________________________ 22
Subsequent power ups__________________________________________________________________________________ 23
Programming: Example of accessing a parameter_____________________________________________________________ 24
Quick navigation_______________________________________________________________________________________ 25
Integrated display terminal _______________________________________ ______________________________________________ 28
Functions of the display and the keys_______________________________________________________________________ 28
Accessing menus ______________________________________________________________________________________ 29
Accessing menu parameters _____________________________________________________________________________ 30
[2. ACCESS LEVEL] (LAC-)____________________________________________________________________________________ 31
Structure of parameter tables___________________________________________________________________________________ 34
Interdependence of parameter values ____________________________________________________________________________ 35
Finding a parameter in this document ____________________________________________________________________________ 36
[1.1 SIMPLY START] (SIM-)____________________________________________________________________________________ 37
[1.2 MONITORING] (SUP-) ____________________________________________________________________________________ 45
[1.3 SETTINGS] (SEt-) ________________________________________________________________________________________ 54
[1.4 MOTOR CONTROL] (drC-)_________________________________________________________________________________ 69
[1.5 INPUTS / OUTPUTS CFG] (I-O-) ___________________________________________________________________________ 101
[1.6 COMMAND] (CtL-)_______________________________________________________________________________________ 131
[1.7 APPLICATION FUNCT.] (FUn-) ____________________________________________________________________________ 144
[1.8 FAULT MANAGEMENT] (FLt-) _____________________________________________________________________________ 232
[1.9 COMMUNICATION] (COM-) _______________________________________________________________________________ 257
[1.10 DIAGNOSTICS] ________________________________________________________________________________________ 261
[1.11 IDENTIFICATION]______________________________________________________________________________________ 264
[1.12 FACTORY SETTINGS] (FCS-) ____________________________________________________________________________ 265
[1.13 USER MENU] (USr-)____________________________________________________________________________________ 268
[1.14 PROGRAMMABLE CARD] (PLC-) _________________________________________________________________________ 269
[3. OPEN/SAVE AS]_________________________________________________________________________________________ 270
[4. PASSWORD] (COd-)______________________________________________________________________________________ 272
[6 MONITORING CONFIG.]___________________________________________________________________________________ 274
[7 DISPLAY CONFIG.] _______________________________________________________________________________________ 278
[MULTIPOINT SCREEN] _____________________________________________________________________________________ 283
Maintenance_______________________________________________________________________________________________ 284
Faults - Causes - Remedies_______________________________________________________________ ____________________ 285
User settings tables _________________________________________________________________________________________ 291
Index of functions ___________________________________________________________________________________________ 293
Index of parameter codes_____________________________________________________________________________________ 295
AAV49426 12/2009 3
Page 4
Before you begin
Read and understand these instructions bef ore performing any procedure on this drive.
DANGER
HAZARDOUS VOLTAGE
• Read and understand the Installation Manual before i nstalling or operating the ATV71 drive. Instal lation, adjustment,
repair, and maintenance must be performed by qualified personnel.
• The user is responsible for compliance with all international and national electrical standards in force concerning
protective grounding of all equipment.
• Many parts of this variable speed drive, including the printed circuit boards, operate at the line voltage. DO NOT
TOUCH.
Use only electrically insulated tools.
• DO NOT touch unshielded components or terminal strip screw connections with volta ge present.
• DO NOT short across terminals PA/+ and PC/- or across the DC bus capacitors.
• Install and close all the covers before applying power or starting and stopping the drive.
• Before servicing the variable speed drive
- Disconnect all power.
- Place a “DO NOT TURN ON” label on the variable speed drive disconnect.
- Lock the disconnect in the open position.
• Disconnect all power including external control power that may be present before servicing the drive. WAIT 15
MINUTES to allow the DC bus capacitors to discharge. Then follow the DC bus voltage measurement procedure
given in the Installation Manual to verify that the DC voltage is less than 45 V. The drive LEDs are not accurate
indicators of the absence of DC bus voltage.
Electric shock will result in death or serious injury.
CAUTION
DAMAGED EQUIPMENT
Do not operate or install any drive that appears damaged.
Failure to follow this instruction can result in equipment damage.
4 AAV49426 12/2009
Page 5
Documentation structure
The following Altivar 71 technical documents are available on the Schneider-Electric website (www.schneider-electric.com) as well as on
the CD-ROM supplied with the drive.
Installation Manual
This describes how to assemble and connect the drive.
Programming manual
This describes the functions, parameters and use of the drive terminal (integrated display terminal and graphic display terminal).
The communication functions are not described in this manual, but in the manual for the bus or network used.
Communication Parameters Manual
This manual describes:
• The drive parameters with specific information for use via a bus or communication network.
• The operating modes specific to communication (state chart).
• The interaction between communication and local control.
Manuals for Modbus, CANopen, Ethernet, Profibus, INTERBUS, Uni-Telway, FIPIO
and Modbus Plus, etc.
These manuals describe the assembly, connection to the bus or network, signaling, diagnostics, and configuration of the communicationspecific parameters via the integrated display terminal or the graphic display terminal.
They also describe the communication services of the protocols.
AAV49426 12/2009 5
Page 6
Software enhancements
Since the Altivar ATV 71 was first launched, it has benefited from the addition of several new functions. Software version has now been
updated to V2.8. The new version can be substituted to the previous versions without making any changes.
Although this documentation relates to versi on V2.8, it can st ill be used with previ ous versions, as the update s merely invol ves t he additi on
of new values and parameters. None of the previous versions parameters have been modified or removed.
The software version is indicated on the nameplate attached to the body of the drive.
Enhancements made to version V1.2 in comparison to V1.1
Factory setting
Note 1: In version V1.1, the analog input was 0 ± 10 V. For safety reasons, in the new vers ion this inpu t has been set t o 0 + 10 V.
Note 2: In version V1.1, analog output AO1 was assigned to the motor f requency. In the new version, this output is not assigned
at all.
With the exception of these two parameters, the factory settings of version V1.1 remain the same in the new version. The new functions
are factory-set to disabled.
Motor frequency range
The maximum output frequency has been extended from 1000 to 1600 Hz (depending on the drive rating and control profile).
New parameters and functions
Menu [1.2 MONITORING] (SUP-)
Addition of internal states and values relating to the new functions described below.
Menu [1.3 SETTINGS] (SEt-)
• [High torque thd.] (ttH) page 67.
• [Low torque thd.] (ttL) page 67
• [Pulse warning thd.] (FqL) page 68
• [Freewheel stop Thd.] (FFt) page68
.
.
.
Menu [1.4 MOTOR CONTROL] (drC-)
• [rpm increment] (InSP) page 76.
• Extension of the following configurations to all drive ratings; previously limited to 45 kW (60 HP) for ATV71
(100 HP) for ATV71
[Noise reduction] (nrd) page 95
pppN4:synchronous motor [Sync. mot.] (SYn) page 70, sinus filter [Sinus filter] (OFI) page 72, noise reduction
, braking balance [Braking balance] (bbA) page 98.
Menu [1.5 INPUTS / OUTPUTS CFG] (I-O-)
• Input Al1 can now be configured to 0 +10 V or 0 ± 10 V via [AI1 Type] (AI1t) page 107.
• [AI net. channel] (AIC1) page 111
• New methods of assigning relays and logic outputs page 118
rotation, motor in reverse rotation, measured speed threshold reached, load variation detection.
• Analog output AO1 can now be used as a logic output and assigned to relay functions and logic outputs, page 123
• New method of modifying the scale of analog outputs page 125
max] (ASHx).
• New methods of assigning logic outputs page 126
• New methods of assigning alarm groups page 130
threshold reached, load variation detection.
.
: rope slack, high torque threshold, low torque threshold, motor in forwa rd
using the parameters [Scaling AOx min] (ASLx) and [Scaling AOx
: signed motor torque and measured motor speed.
: rope slack, high torque threshold, low torque threshold, measured speed
pppM3X and to 75 kW
.
6 AAV49426 12/2009
Page 7
Software enhancements
Menu [1.7 APPLICATION FUNCT.] (Fun-)
• The summing, subtraction and multiplication reference fu nctions can now be assigned to virtual input [Network AI] (AIU1) page 151.
• New parameter [Freewheel stop Thd.] (FFt) page 156
or fast stop.
• Brake engage at regulated zero speed [Brake engage at 0] (bECd) page 176
• Weight [Weight sensor ass.] (PES) page 183
• New "rope slack" function page 187
• Use of the ramp [Acceleration 2] (AC2) page 195
• The torque limitation [TORQUE LIMITATION] (tOL-) page 202
increment] (IntP) and assigned to virtual input [Network AI] (AIU1).
• New "stop at distance calculated after deceleratio n limit swi tch" funct ion page 211
linear speed] (nLS) and [Stop corrector] (SFd).
• Positioning by sensors or limit switch [POSITIONING BY SENSORS] (LPO-) page 212
negative logic using [Stop limit config. (SAL) and [Slowdown limit cfg.] (dAL).
• Parameter set switching [PARAM. SET SWITCHING] (MLP-) page 215
[Freq. Th. att.] (FtA) and [Freq. Th. 2 at ta in . ] (F2A).
• New half-floor: [HALF FLOOR] (HFF-) menu page 229
, with the parameters [Rope slack config.] (rSd) and [Rope slack trq level] (rStL).
can now be assigned to virtual input [Network AI] (AIU1).
Menu [1.8 FAULT MANAGEMENT] (FLt)
• Possibility of reinitializing the drive without turning it off, via [Product reset] (rP) page 237.
• Possibility of reinitializing the drive via a logic input without turning it off, using [Product reset assig.] (rPA) page 237
• The possibility of configuring the "output phase loss" fault [Output Phase Loss] (OPL) page 242
extended to all drive ratings (previously limited to45 kW (60 HP) for ATV71
• The external fault [EXTERNAL FAULT] (EtF-) page 245
(LEt).
• New monitoring function based on speed measurement via "Pulse input" page 252
• New function for detecting load variation page 254
• Short-circuit faults on the braking unit can now be configured via [Brake res. fault Mgt] (bUb) page 256
used to set a threshold for switching to freewheel at the end of a stop on ramp
.
when starting and "waking up" the PID function.
can now be configured in whole % or in 0.1% increments using [Torque
, with the parameters [Stop distance] (Std), [Rated
can now be configured in positive logic or
can now be assigned to the frequency thresholds attained
.
.
to [Output cut] (OAC) has been
pppM3X and 75 kW (100HP) for ATV71pppN4).
can now be configured in positive or negat ive logic via [External fault config.]
, via the [FREQUENCY METER] (FqF-) menu.
, via the [DYNAMIC LOAD DETECT] (dLd-) menu.
.
Menu [7 DISPLAY CONFIG.]
In [7.4 KEYPAD PARAMETERS] page 284, the [KEYPAD CONTRAST] and [KEYPAD STAND-BY] parameters to adjust the contrast and
stand-by mode of the graphic display unit.
Enhancements made to version V1.3 (S383) in comparison to V1.2
New parameters and functions
Menu [1.4 MOTOR CONTROL] (drC-)
New option of operating with Closed-loop synchronous motor page 83
• [Angle auto-test] (ASA) page 84
• [Angle offset value] (ASU) page 85
• [Sync.CL] (FSY) assignment page 71 of parameter [Motor control type] (Ctt)
Menu [1.5 INPUTS / OUTPUTS CFG] (I-O-)
• [Resolver Exct. Freq.] (FrES) and [Resolver poles nbr] (rPPn) page 115
Menu [1.7 APPLICATION FUNCT.] (Fun-)
• New "Inspection" function, page 227, with [Inspection] (ISP) and [Inspection speed] (ISrF) parameters.
AAV49426 12/2009 7
Page 8
Software enhancements
Enhancements made to version V1.7 (S383) in comparison to V1.3 (S383)
New parameters and functions
Menu [1.1 SIMPLY START] (SIM-)
• Addition of a [Lift] (LIFt) macro configuration to the [Macro configuration] (CFG) parameter page 41
Menu [1.3 SETTINGS] (SEt-)
New parameters:
• [Fr.Loop.Stab] (StA) page 56
• [FreqLoopGain] (FLG) page 56
Menu [1.4 MOTOR CONTROL] (drC-)
This menu has been reorganized with parameters now appearing in a different order and some grouped under submenus to simplify
configuration.
The new submenus are as follows:
• [ENCODER FEEDBACK] (EnS-) page 75
• [ASYNC. MOTOR] (ASY-) page 76
• [SYNCHRONOUS MOTOR] (SYn-) page 81
• [ANGLE TEST SETTING] (ASA-) page 84
• [FLUXING BY LI] (FLI-) page 86
• [AUTOMATIC TUNE] (tUn-) page 88
• [SPEED LOOP] (SSL-) page 89
New parameters:
• [Boost] (bOO) page 95
• [Action Boost] (FAb) page 95
• [Increment EMF] (IPHS) page 81
• [Read motor param.] (rEqP) page 82
• [Status motor param] (rEtP) page 82
• [Angle setting type] (ASt) pages 84 and 87
• [Angle auto test] (ASL) page 84
• [Angle setting activ.] (AtA) page 85
• [Angle setting status] (AStS) page 85
• [Speed loop type] (SSL) page 89
• [Inertia Mult. Coef.] (JMUL) page 89
• [Estim. app. inertia] (JESt) page 89
• [Application Inertia] (JAPL) page 90
• [Fr.Loop.Stab] (StA) page 90
• [FreqLoopGain] (FLG) page 90
• [Feed forward] (FFP) page 91
• [Bandwidth feedfor.] (FFU) page 91
Parameters moved from menu [1.7 APPLICATION FUNCT.] (Fun-):
• [Motor fluxing] (FLU) page 86
• [Fluxing assignment] (FLI) page 86
• [Auto-tune assign.] (tUL) page 88
Menu [1.5 INPUTS / OUTPUTS CFG] (I-O-)
New encoder parameters:
• [Encoder protocol] (UECP) page 116
• [Encoder supply volt.] (UECU) page 116
• [Sincos lines count] (UELC) page 116
• [SSI pari t y] (SSCP) page 116
• [SSI frame size] (SSFS) page 116
• [Nbr of revolution] (EnMr) page 116
• [Turn bit resolution] (Entr) page 116
• [SSI code type] (SSCd) page 117
• [Encoder filter activ.] (FFA) page 117
• [Encoder filter value] (FFr) page 117
Menu [1.7 APPLICATION FUNCT.] (Fun-)
Removal of the following parameters (now located in the [1.4 MOTOR CONTROL] (drC-) menu):
• [Motor fluxing] (FLU)
• [Fluxing assignment] (FLI)
• [Auto-tune assign.] (tUL)
8 AAV49426 12/2009
Page 9
Software enhancements
Enhancements made to version V1.9 (S383) in comparison to V1.7 (S383)
New parameters and functions
Menu [1.4 MOTOR CONTROL] (drC-)
• New method of assigning [Angle setting type] (ASt) page 87 : optimised measurement (without motion with memorization).
New parameter :
• [App. Inertia Coef.] (JACO) page 89
Removal from the sub-menu [ASYNC. MOTOR] (ASY-) of the following parameters (now located directly in the
[1.4 MOTOR CONTROL] (drC-) menu):
• [Boost] (bOO) page 95
• [Action Boost] (FAb) page 95
.
Menu [1.5 INPUTS / OUTPUTS CFG] (I-O-)
New encoder parameters:
• [Coder rotation inv.] (EnrI) page 114
• [Clock frequency] (EnSP) page 117
Menu [1.7 APPLICATION FUNCT.] (Fun-)
• New method of assigning for the parameters set switching [2 Parameter sets] (CHA1) page 215 and [3 Parameter sets] (CHA2)
page 215
starting of the ramp (useful for lift application).
: switching during braking sequence. This new assignment allo ws to put higher gain when the brak e is open and before the
.
.
.
.
New sub-menu:
• [TOP Z MANAGEMENT] (tOP-) page 231
and if [Encoder type] (EnS) = [AABB] (AAbb).
New encoder parameter:
• [Stop on top Z] (tOSt) page 231
.
(the parameter can be accessed only if an encoder card VW 3A 411 has been inserted
Enhancements made to version V2.4 (S383) in comparison to V1.9 (S383)
New parameters and function
Menu [1.7 APPLICATION FUNCT.] (Fun-)
New sub-menu:
• [ROLLBACK MGT] (rbM-) page 181
- only for ATV71
-if [Motor control type] (Ctt) page 70
-if [Brake assignment] (bLC) page 175
New parameter of [ROLLBACK MGT] function:
• [Rollback MGT] (rbM) page 181
• [Rbk Compensation] (rbC) page 181
• [Rbk Damping] (rbd) page 181
pppM3X drives up to 45 kW and for ATV71pppN4 drives up to 75 kW,
. Menu can be accessed:
= [Sync.CL] (FSY) or [FVC] (FUC),
is assigned.
.
.
.
Enhancements made to version V2.8 (S383) in comparison to V2.4 (S383)
Menu [1.7 APPLICATION FUNCT.] (FUn-)
• The adjustment range [Time to restart] (ttr) page 177 can now be configured to 0 to 15.00 s.
Menu [7 DISPLAY CONFIG.]
•Addition in [7.4 KEYPAD PARAMETERS] page 284 parameter [Power up menu] to choose the menu displayed on the drive on
power up
.
Enhancements made to version V3.4 (S383) in comparison to V2.8 (S383)
[1.7 APPLICATION FUNCT.] (Fun-) menu
New parameters and functions
• New parameter [REGEN CONNECTION] (AFE) page 232, used to connect an active front end
AAV49426 12/2009 9
Page 10
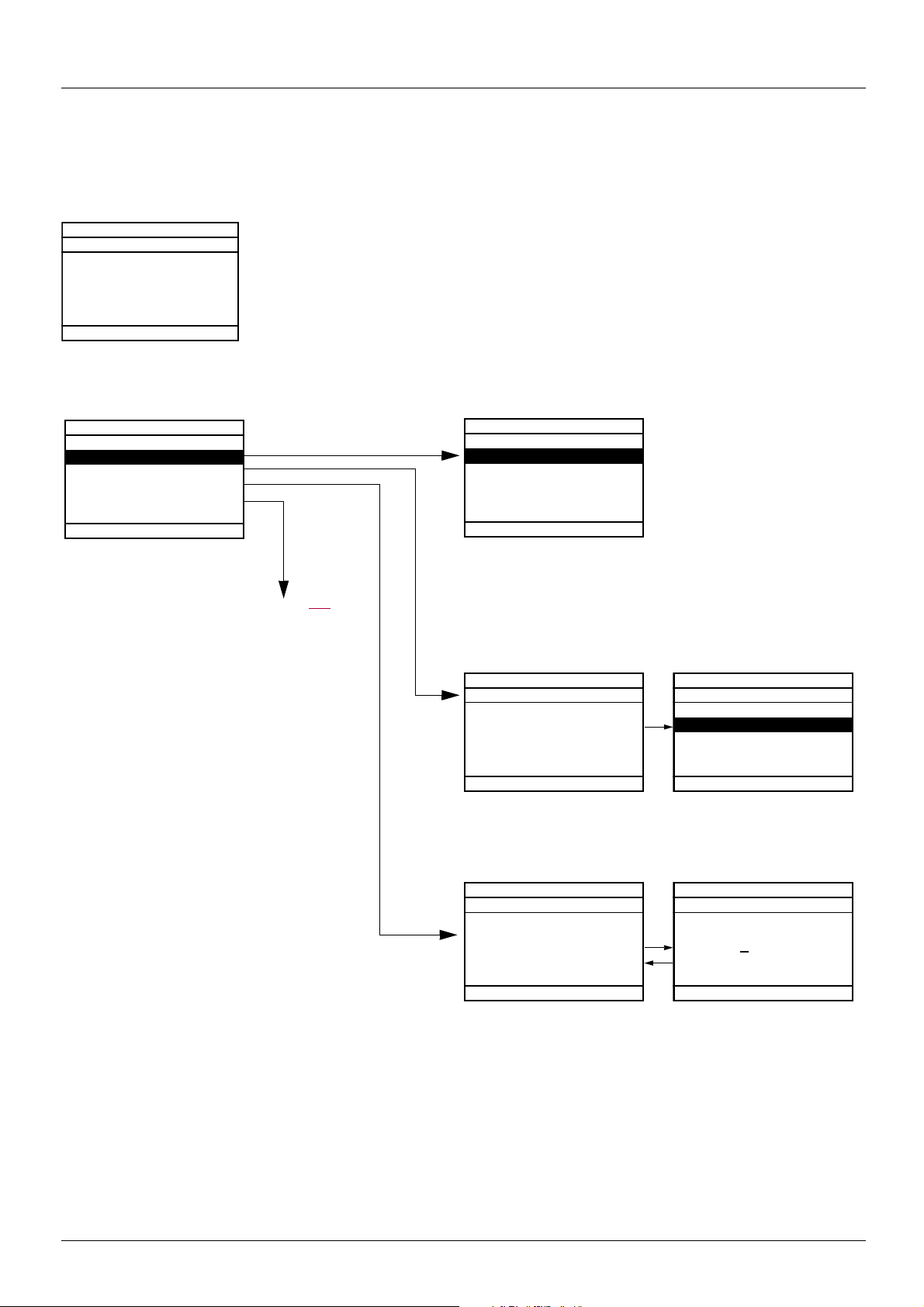
Steps for setting up
INSTALLATION
v 1 Consult the Installation Manual
PROGRAMMING
Procedure applicable if the factory configuration, page 11, and use of the
[SIMPLY START] (SIM-) menu only are sufficient for the application.
b 2 Power up without run command
v If you are using a separate power
supply for the control section, follow
the instructions on page 16.
b 3 Select the language, if the drive
has a graphic display terminal
b 4 Configure the [SIMPLY START]
(SIM-) menu
v 2-wire or 3-wire control
v Macro configuration
v Motor parameters
) Perform an auto-tuning
operation
v Motor thermal current
v Acceleration and deceleration
ramps
v Speed variation range
Tips:
• Before you start programming, complete
the user setting tables, page 293
.
• Perform an auto-tuning operation to
optimize performance, page 43
.
• If you get lost, return to the factory
settings, page 269
.
Note: Check that the wiring of the
drive is compatible with its configuration.
b 5 Start
10 AAV49426 12/2009
Page 11
Factory configuration
Drive factory settings
The Altivar 71 is factory-set for the most common operating conditions:
• Macro configuration: Start/Stop
• Motor frequency: 50 Hz
• Constant torque application with asynchronous motor and sensorless flux vector control
• Normal stop mode on deceleration ramp
• Stop mode in the event of a fault: freewheel
• Linear, acceleration and deceleration ramps: 3 seconds
• Low speed: 0 Hz
• High speed: 50 Hz
• Motor thermal current = rated drive current
• Standstill injection braking current = 0.7 x rated drive current, for 0.5 seconds
• No automatic starts after a fault
• Switching frequency 2.5 kHz or 4 kHz depending on drive rating
• Logic inputs:
- LI1: forward, LI2: Forward (2 operating direction), 2-wire control on transition
- L13, L14, LI5, LI6: inactive (not assigned)
• Analog inputs:
- AI1: speed reference 0 +10 V
- AI2: 0-20 mA, inactive (not assigned)
• Relay R1: The contact opens in the event of a fault (or drive off).
• Relay R2: Inactive (not assigned)
• Analog output AO1: 0-20 mA, inactive (not assigned)
If the above values are compatible with the application, the drive can be used without changing the settings.
Option card factory settings
The option card inputs/outputs are not factory-set.
AAV49426 12/2009 11
Page 12
Application functions
The tables on the following pages show the most common combinations of functions and applications, in order to guide your selection.
The applications in these tables relate to the foll owing machines in particular:
• Hoisting: cranes, overhead cranes, gantries (vertical hoisting, translation, slewing), lifting platforms
• Elevators: elevators in retrofit up to 1.2 m/s
• Handling: palletizers/depalletizers, conveyors, roller tables
• Packing: carton packers, labeling machines
• Textiles: weaving looms, carding frames, washing machines, spinners, drawing frames
• Wood: automatic lathes, saws, milling
• High inertia: centrifuges, mixers, unbalanced machines (beam pumps, presses)
• Process
Each machine has its own special features, and the combinations listed here are neither mandatory nor exhaustive.
Some functions are designed specifically for a particular application. In this case, the application is identified by a tab in the
margin on the relevant programming pages.
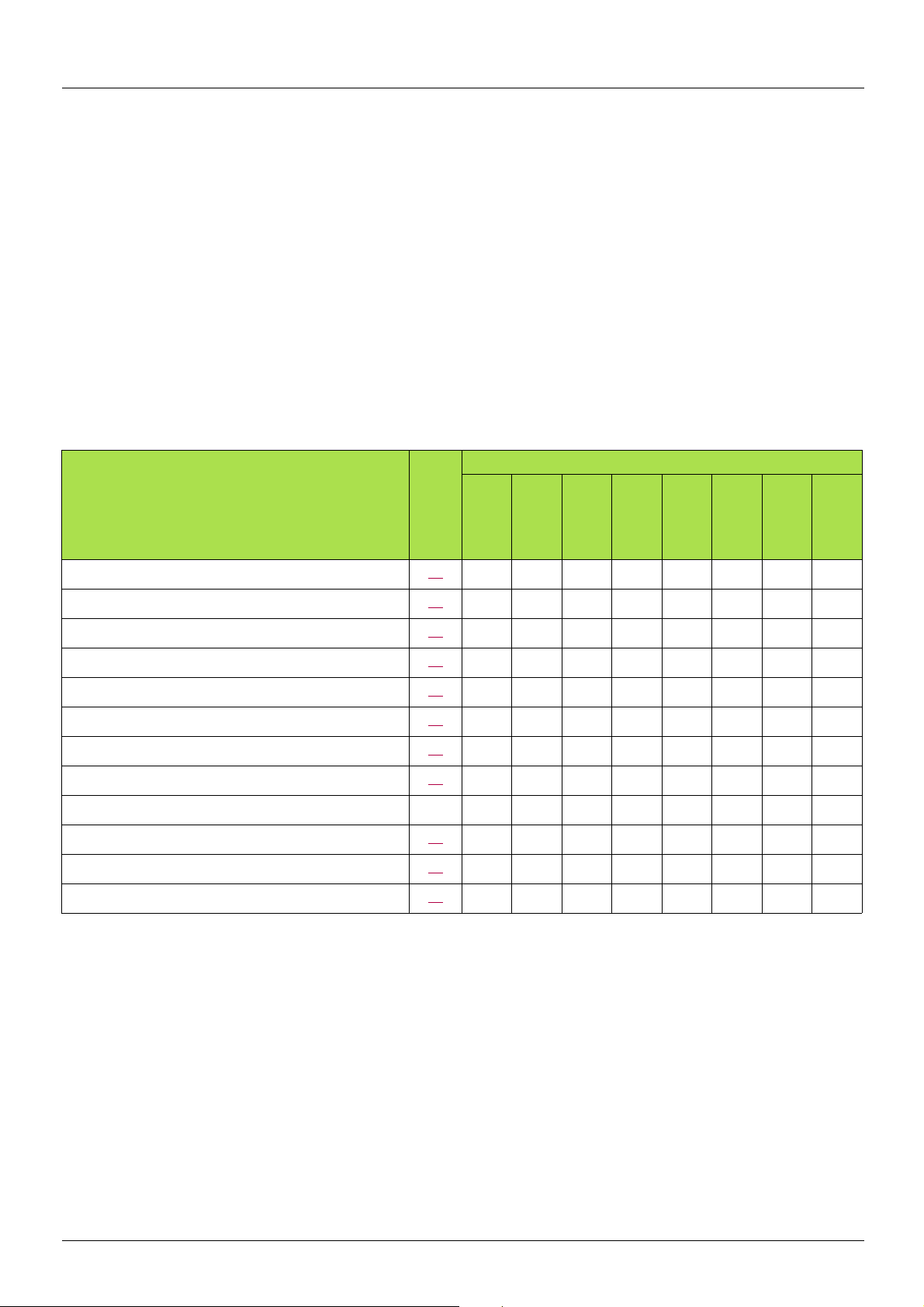
Motor control functions
Applications
Functions Page
V/f ratio
Sensorless flux vector control
Flux vector control with sensor
2-point vector control
Open-loop synchronous motor
Closed-loop synchronous motor
Output frequency of up to 1600 Hz
Motor overvoltage limiting
DC bus connection (see User's Manual)
Motor fluxing using a logic input
Switching frequency of up to 16 kHz
Auto-tuning
70
70
70
70
71
71
76
96
-
86
72
88
Hoisting
Lifts
Handling
Packing
Textiles
Wood
High inertia
Process
bbb
bbbbbbbb
bbbbbbbb
bb
b
bbb
bb
bb
bb
bbb
bbb
bbbbbbbb
12 AAV49426 12/2009
Page 13
Application functions
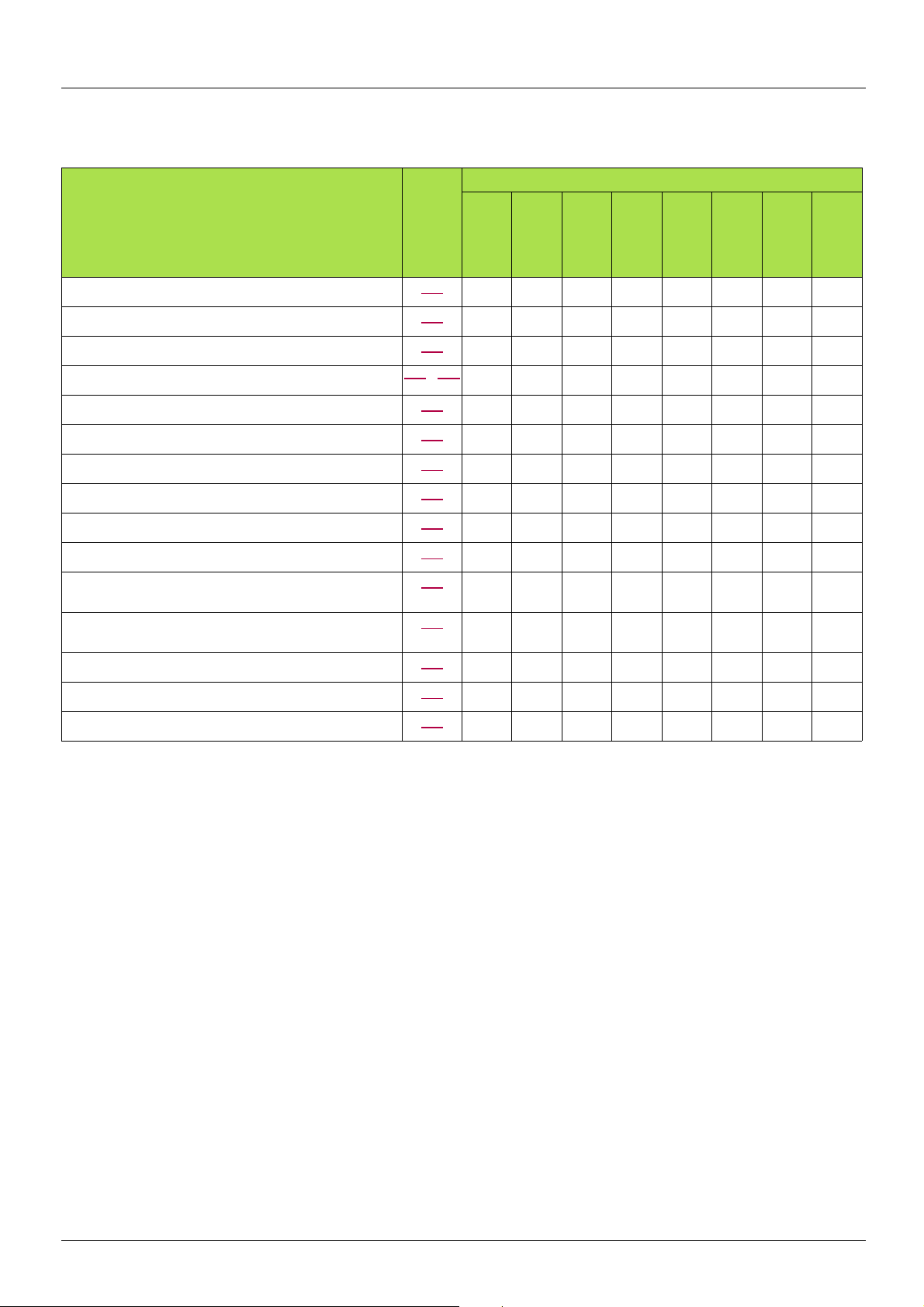
Functions on speed references
Functions Page
Applications
Differential bipolar reference 104
Reference delinearization (magnifying glass effect) 106
Frequency control input 140
- 150
Reference switching
Reference summing 149
Reference subtraction 149
Reference multiplication 149
S ramps 152
Jog operation 160
Preset speeds 161
+ speed/- speed using single action pushbuttons
(1 step)
+ speed/- speed using double action pushbuttons
(2 steps)
+/- speed around a reference 166
Save reference 168
Inspection 227
141
164
164
Hoisting
Lifts
Handling
Packing
Textiles
Wood
High inertia
bbb
bb
bb
b
b
b
b
bbb
bb b
bbbb b
b
bb
b
Process
b
b
AAV49426 12/2009 13
Page 14
Application functions
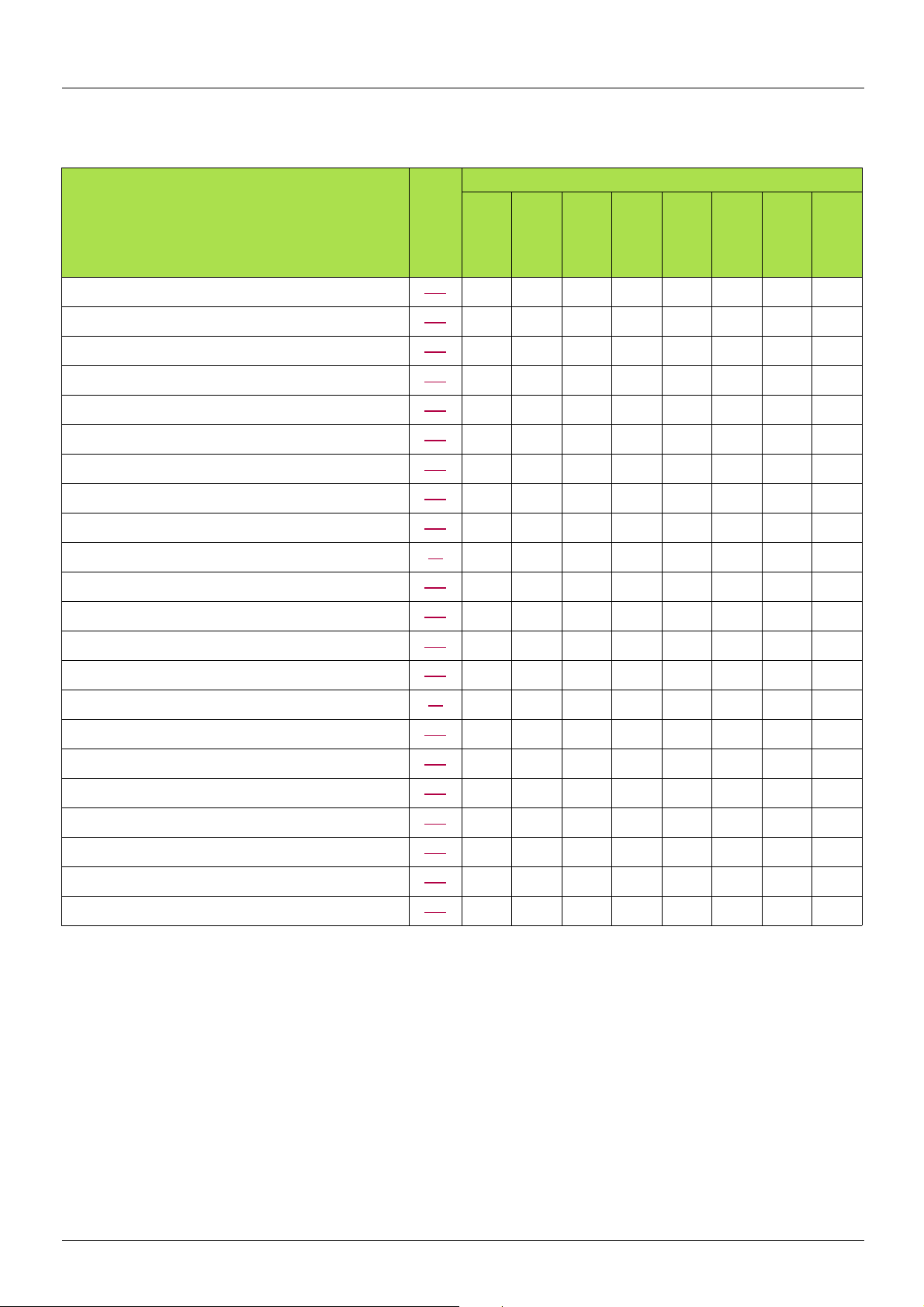
Application-specific functions
Functions Page
Applications
Fast stop 156
Limit switch management 169
Brake control 171
Load measurement 182
High-speed hoisting 184
Rope slack 187
PID regulator 189
Torque monitoring 198
Motor/generator torque limit 201
Load sharing 98
Line contactor control 205
Output contactor control 207
Positioning by limit switches or sensors 209
Stop at distance calculated after deceleration limit switch 211
ENA system (mechanical with unbalanced load) 93
Parameter switching 214
Motor or configuration switching 217
Traverse control 220
Stop configuration 156
Evacuation 229
Half floor 229
Rollback management 181
Hoisting
Lifts
Handling
Packing
Textiles
Wood
High inertia
Process
bb
bbb
bbb
bb
b
b
b
bb b
bbbb
bb
bb b
b
bb
bb
b
bbbbbbbb
bbb
b
bbbb
b
b
b
14 AAV49426 12/2009
Page 15
Application functions
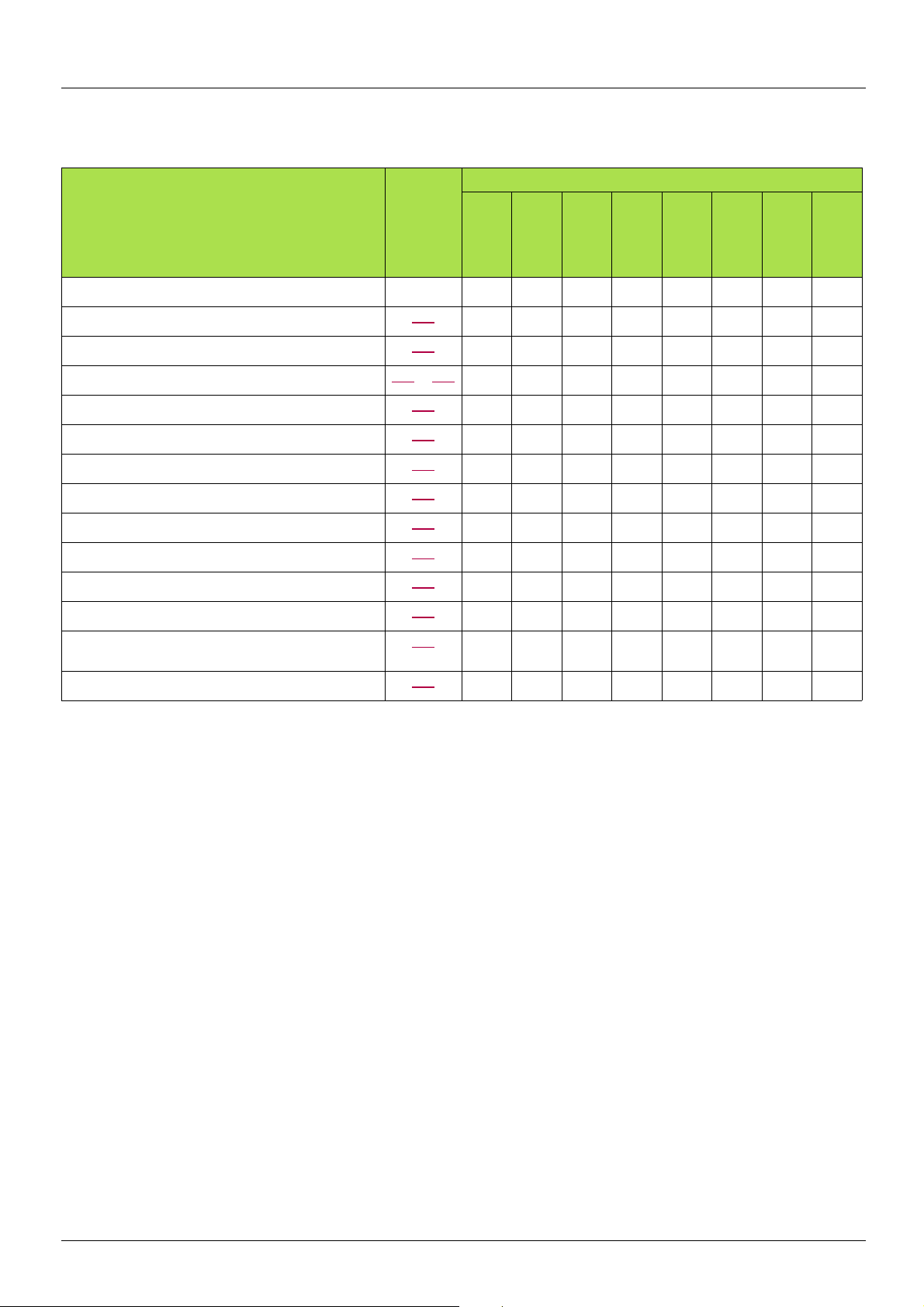
Safety functions/fault management
Functions Page
Applications
Power Removal (safety function, see User's Manual)
Deferred stop on thermal alarm 244
Alarm handling 130
Fault management 235 to 258
IGBT tests 247
Catch a spinning load 239
Braking resistor thermal protection 256
Motor protection with PTC probes 235
Undervoltage management 246
4-20mA loss 248
Uncontrolled output cut (output phase loss) 242
Automatic restart 238
Use of the "Pulse input" input to measure the speed of
rotation of the motor
Load variation detection 254
-
252
Hoisting
Lifts
Handling
Packing
Textiles
Wood
High inertia
Process
bbbbbbbb
b
bbbbbbbb
bbbbbbbb
bbbbbbbb
bbb
bbbb
bbbbbbbb
bbb
bbbbbb
b
b
bbb
b
AAV49426 12/2009 15
Page 16
Setup - Preliminary recommendations
DANGER
UNINTENDED EQUIPMENT OPERATION
• Before turning on and configuring the Altivar 71, check that the PWR (POWER REMOVAL) i nput is deact ivated (at
state 0) in order to prevent unintended operation.
• Before turning on the drive, or when exiting the configuration menus, check that the inputs assigned to the run
command are deactivated (at state 0) since they can cause the motor to start immediately.
Failure to follow these instructions will result in death or serious injury.
CAUTION
INCOMPATIBLE LINE VOLTAGE
Before turning on and configuring the drive, ensure that the li ne voltage is compatible with the sup ply voltage range shown
on the drive nameplate. The drive may be damaged if the line voltage is not compatible.
Failure to follow this instruction can result in equipment damage.
CAUTION
• Avoid operating the contactor frequently (premature ageing of the filter capacitors).
• Cycle times < 60 s may result in damage to the pre-charge resistor.
Failure to follow this instruction can result in equipment damage.
DANGER
UNINTENDED EQUIPMENT OPERATION
• Check that changes made to the settings during operation do not present any danger.
• We recommend stopping the drive before making any changes.
Failure to follow these instructions will result in death or serious injury.
Turning on and configuring the drive
Separate control section power supply
When the drive control section is powered independently of the power section (P24 and 0V terminals), whenever an option card is added
or replaced, only the power section must be supplied with power next time the drive is powered up.
By default the new card would not be recogniz ed and it wo uld be impossi ble to confi gure it, th ereby causing the dri ve to lock in fau lt mode.
Power switching via line contactor
User adjustment and extension of functions
• The display unit and buttons can be used to modify the settings and to extend the functions described in the following pages.
• Return to factory settings is made easy by the [1.12 FACTORY SETTINGS] (FCS-) menu, see page 267
• There are three types of parameter:
- Display: Values displayed by the drive
- Adjustment: Can be changed during operation or when stopped
- Configuration: Can only be modified when stopped and no braking is taking place. Can be displayed during operation.
.
16 AAV49426 12/2009
Page 17
Setup - Preliminary recommendations
CAUTION
• Motor thermal protection will not be provided by the drive if th e motor current is less t han 0.2 times the rate d drive
current. Provide an alternative means of thermal protection.
Failure to follow this instruction can result in equipment damage.
CAUTION
• Motor thermal protection is no longer provided b y the drive. Provide an alternative means of thermal protection on
every motor.
Failure to follow this instruction can result in equipment damage.
Starting
Important:
• In factory settings mode, the motor can only be supplied wit h power once the “forward”, “reverse” an d “DC injection st op” commands
have been reset:
- On power-up or a manual fault reset or after a stop command
If they have not been reset, the drive will display "nSt" but will not start.
• If the automatic restart function has been configured ([Automatic restart] (Atr) parameter in the [1.8-FAULT MANAGEMENT] (FLt-)
menu, see page 238
Test on a low power motor or without a motor
• In factory settings mode, [Output Phase Loss] (OPL) detection page 242 is active (OPL = YES). To check the drive in a test or
maintenance environment without having to switch to a moto r with the same rating as the drive (part icularly useful in the case of high
power drives), deactivate [Output Phase Loss] (OPL = no).
• Configure [Motor control type] (Ctt) = [V/F 2pts] (UF2) or [V/F 5pts] (UF5) ([1.4-MOTOR CONTROL] (drC-) menu, see page 70
), these commands are taken into account without a reset being necessary.
)
Using motors in parallel
• Configure [Motor control type] (Ctt) = [V/F 2pts] (UF2) or [V/F 5pts] (UF5) ([1.4-MOTOR CONTROL] (drC-) menu, see page 70)
AAV49426 12/2009 17
Page 18
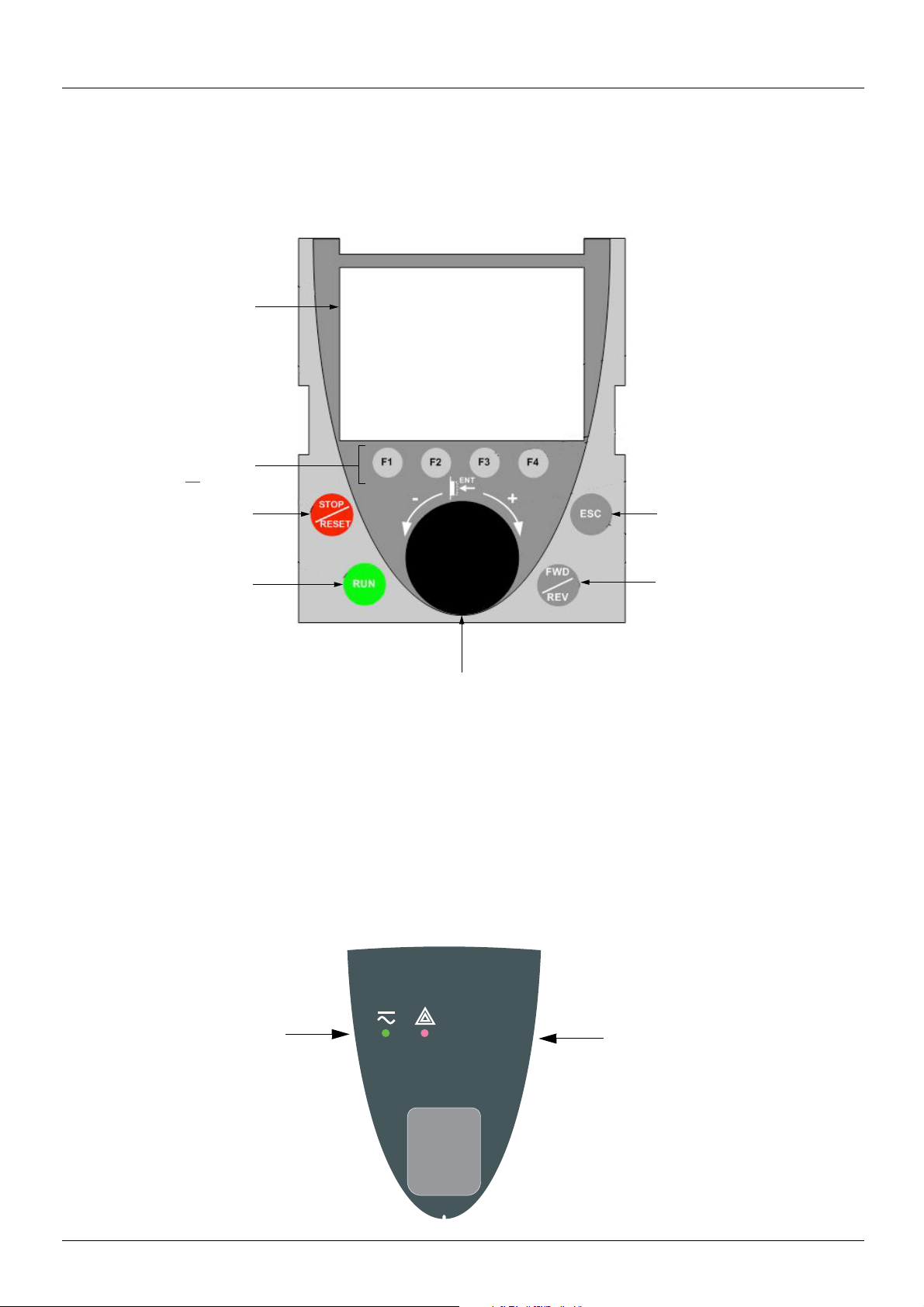
Graphic display terminal
1 Graphic display
2 Function keys
F1, F2, F3, F4,
see page 19
.
3 STOP/RESET
button
4 RUN button
5 Navigation button:
• Press (ENT): - To save the current value
- To enter the selected menu or parameter
• Turn CW/
CCW:
- To increment or decrement a value
- To go to the next or previous line
- To increase or decrease the reference if control via
the terminal is activated
7 ESC key: Aborts a value, a
parameter or a menu to return
to the previous selection
6 Button for reversing the directi on
of rotation of the motor
HMI Modbus
Green LED:
DC bus ON
Red LED:
Fault
Although the graphic display terminal is optional for low-power drives, it is a standard component on high-power drives (see catalog). The
graphic display terminal can be disconnected and connected remotely (on the door of an enclosure for example) using the cables and
accessories available as options (see catalog).
Description of terminal
Note: Buttons 3, 4, 5 and 6 can be used to control the drive directly, if control via the terminal i s ac tivated.
Disconnected terminal
When the terminal is disconnected, 2 LEDs become visible:
18 AAV49426 12/2009
Page 19
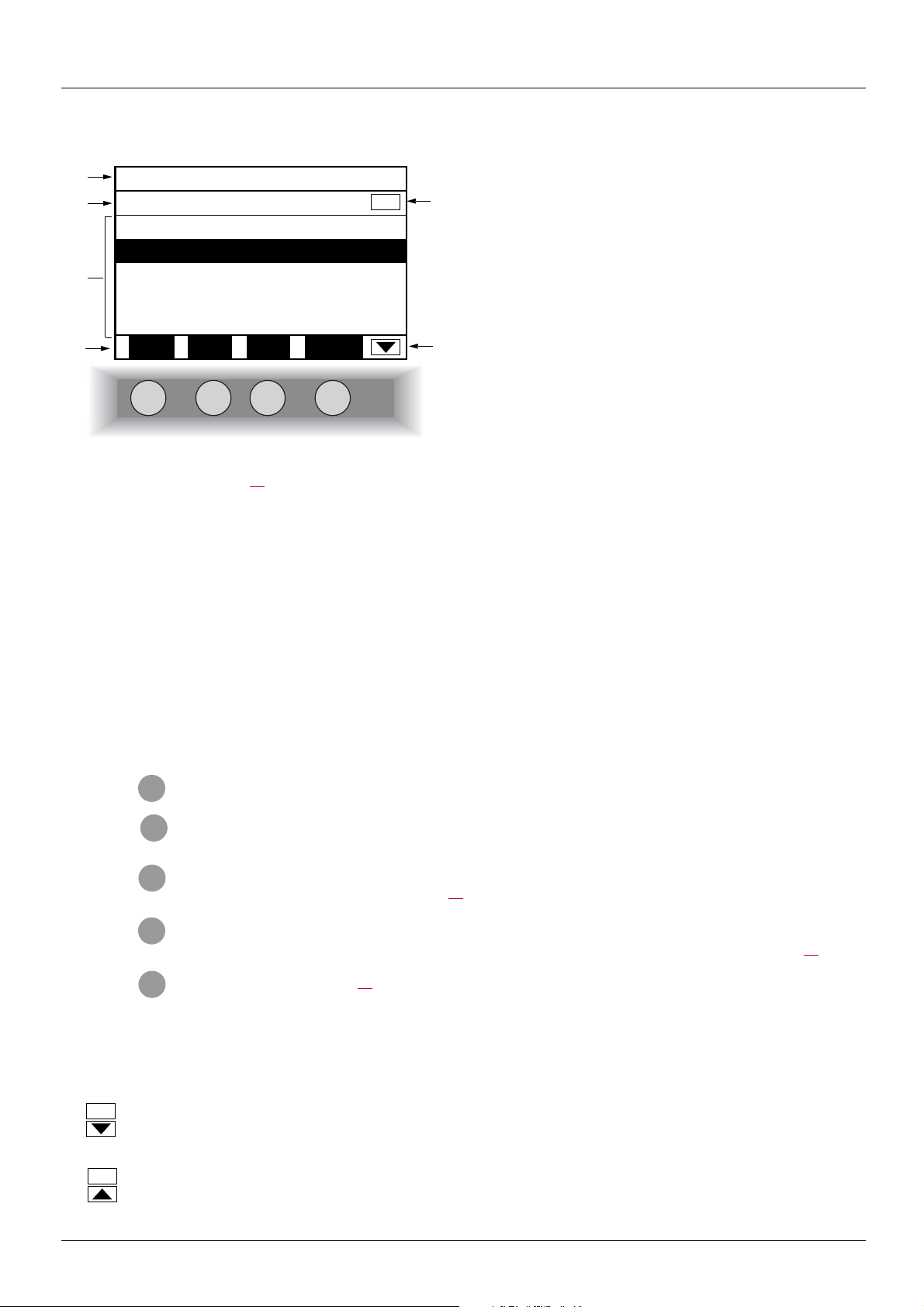
Graphic display terminal
F1 F2 F3 F4
RDY Term +0.00 Hz 0A
1 DRIVE MENU
1.1 SIMPLY START
1.2 MONITORING
1.3 SETTINGS
1.4 MOTOR CONTROL
1.5 INPUTS / OUTPUTS CFG
Code << >> Quick
1
2
3
4
6
5
• Code F1
•HELP F1
• << F2
• >> F3
• Quick F4
Description of the graphic screen
1. Display line. Its content can be configured; the factory settings show:
• The drive state (see page 20
• The active control channel:
- Term: Terminals
- HMI: Graphic display terminal
- MDB: Integrated Modbus
- CAN: Integrated CANopen
- NET: Communication card
- APP: Controller Inside card
• Frequency reference
• Current in the motor
)
2. Menu line. Indicates the name of the current menu or submenu.
3. Menus, submenus, parameters, values, bar charts, etc., are displayed in drop-down window format on a maximum of 5 lines.
The line or value selected by the navigation button is displayed in reverse video.
4. Section displaying the functions assigned to the F1 to F4 keys and aligned with them, for example :
The function keys are dynamic and contextual.
Other functions (application functions) can be assigned to these keys via the [1.6 COMMAND] menu.
If a preset speed is assigned to a function key and i f the f unction he y is pres sed, the mo tor will run at this preset speed u ntil anothe r preset
speed or JOG is pressed, speed reference is changed, or Stop key is pressed.
5. Indicates that there are no more levels below this display window.
Indicates that there are more levels below this display window.
6. Indicates that this display window does not scroll further up.
Indicates that there are more levels above this display window.
: Displays the code of the selected parameter, i.e., the code corresponding to the 7-segment display.
: Contextual help
: Navigate horizontally to the left, or go to previous menu/submenu or, for a val ue, go to the ne xt di git up, di spl ayed
in reverse video (see the example on page 21
: Navigate horizontally to the right or go to next menu/submenu (going to the [2 ACCESS LEVEL] menu in this
example) or, for a value, go to the next digit down, displayed in reverse video (see the example on page 21
: Quick navigation, see page 25.
).
).
AAV49426 12/2009 19
Page 20

Graphic display terminal
Drive state codes:
- ACC: Acceleration
- CLI: Current limit
- CTL: Controlled stop on input phase loss
- DCB: DC injection braking in progress
-DEC: Deceleration
- FLU: Motor fluxing in progress
-FST: Fast stop
- NLP: No line power (no line supply on L1, L2, L3)
- NST: Freewheel stop
- OBR: Auto-adapted deceleration
- PRA: Power Removal function active (drive locked)
- RDY: Drive ready
- RUN: Drive running
- SOC: Controlled output cut in progress
- TUN: Auto-tuning in progress
- USA: Undervoltage alarm
- ASA: Measurement of the phase-shift angle in progress
- ICC: Configuration encoder incorrect
20 AAV49426 12/2009
Page 21
Graphic display terminal
RDY Term +0.00Hz 0A
5 LANGUAGE
English
Français
Deutsch
Español
Italiano
<< >> Quick
Chinese
Turkish
Russian
PARAMETER SELECTION
1.3 SETTINGS
Ramp increment
Acceleration
Deceleration
Acceleration 2
Deceleration 2
Edit
RDY Term +0.00Hz 0A
Acceleration
9.51 s
Min = 0.01 Max = 99.99
<< >> Quick
>>
RDY Term +0.00Hz 0A
Acceleration
951 s
Min = 0.01 Max = 99.99
<< >> Quick
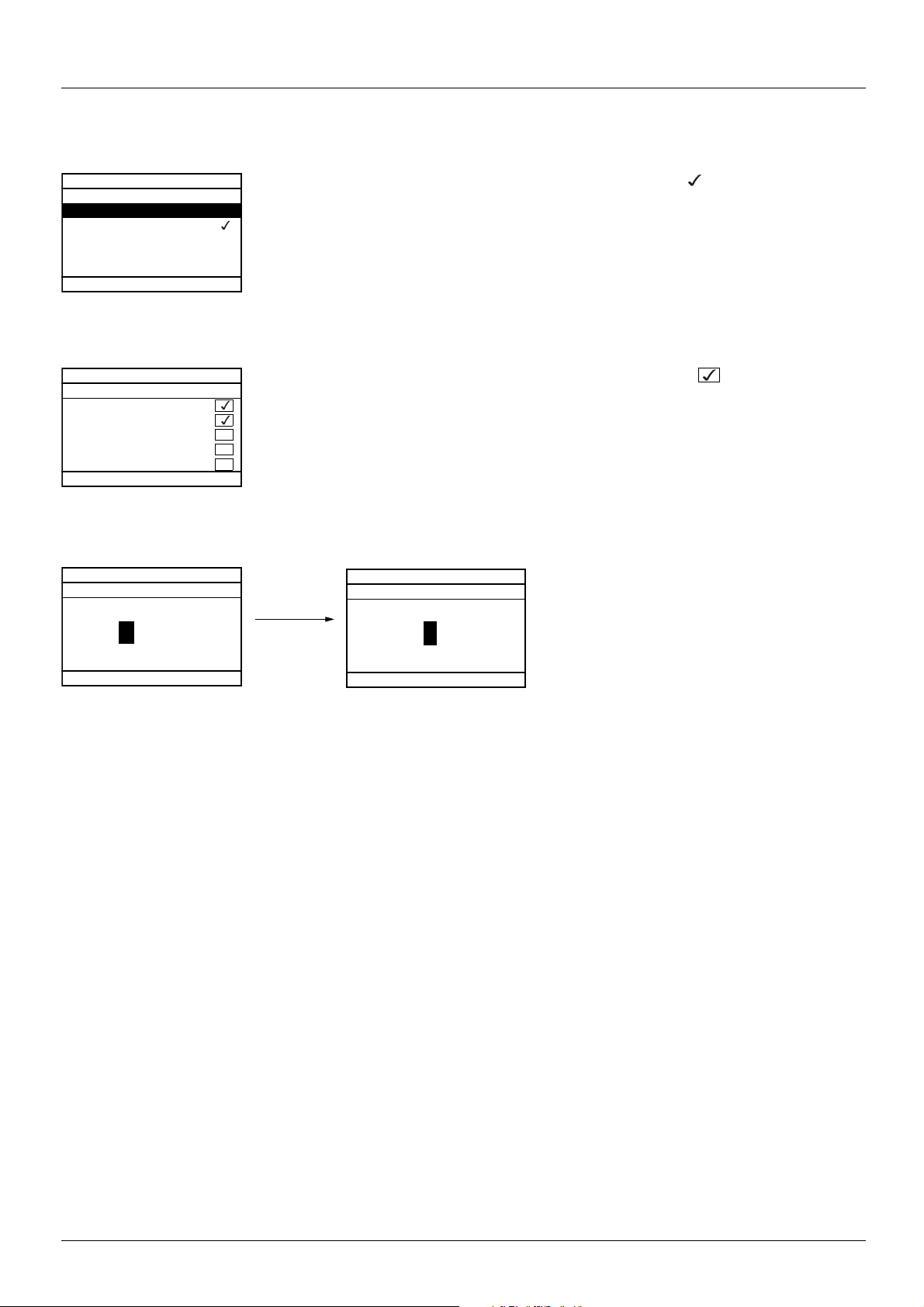
Example configuration windows:
When only one selection is possible, the selection made is indicated by
Example: Only one language can be chosen.
When multiple selection is possible, the selections made are indi cated by
Example: A number of parameters can be chosen to form the [USER MENU].
Example configuration window for one value:
The << and >> arrows (keys F2 and F3) are used to select the digit to be modified, and the navigation button is rotated to increase or
decrease this number.
AAV49426 12/2009 21
Page 22
Graphic display terminal
ATV31HU22N4383
2.2kW/3HP 380/480V
Config. n°1
5 LANGUAGE
English
Français
Deutsch
Español
Italiano
Chinese
RDY Term +0.00Hz 0.0A
2 ACCESS LEVEL
Basic
Standard
Advanced
Expert
RDY Term +0.00Hz 0.0A
1 DRIVE MENU
1.1 SIMPLY START
1.2. MONITORING
1.3. SETTINGS
1.4. MOTOR CONTROL
1.5. INPUTS / OUTPUTS CFG
Code << >> Quick
RDY Term +0.00Hz 0.0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code Quick
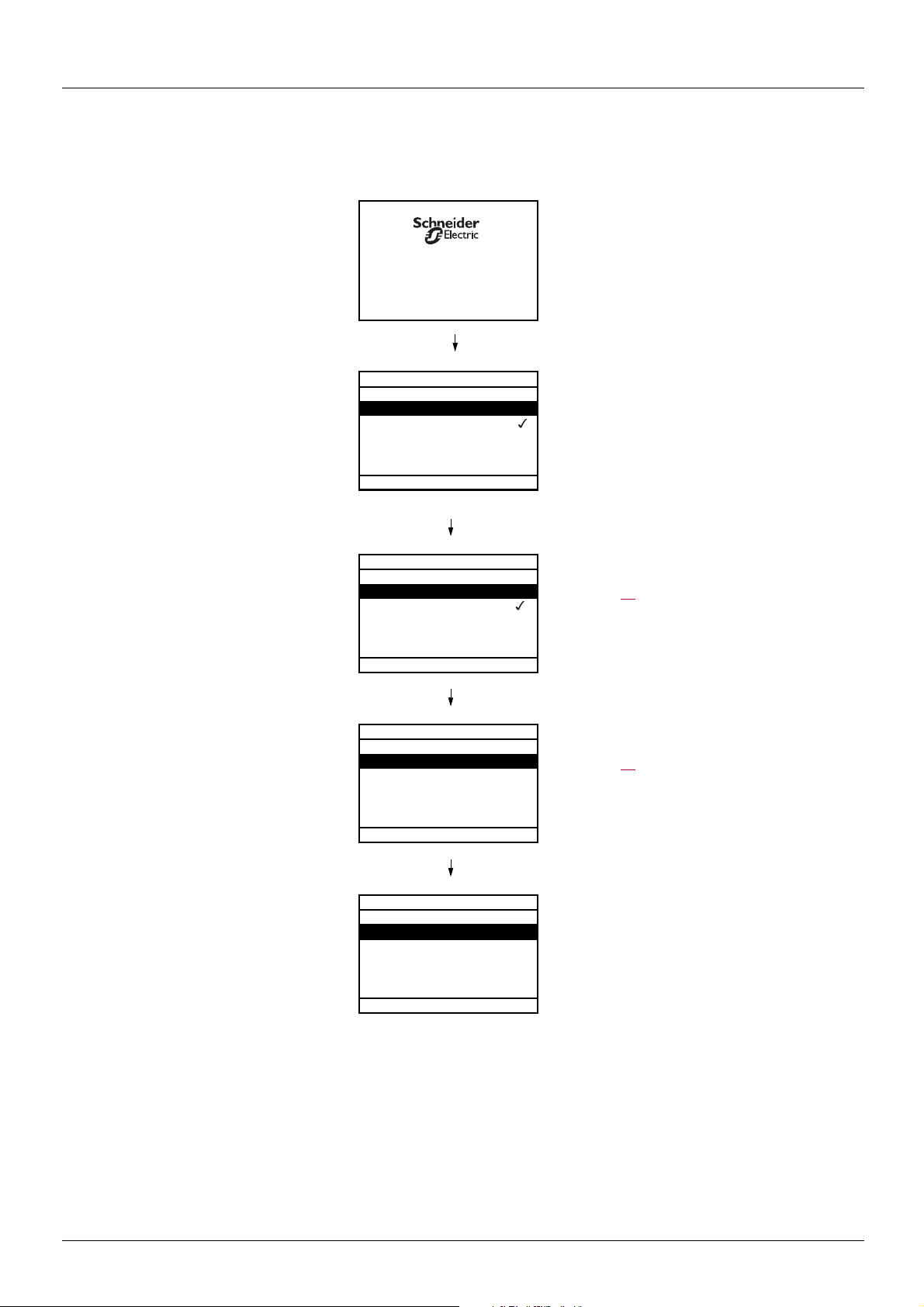
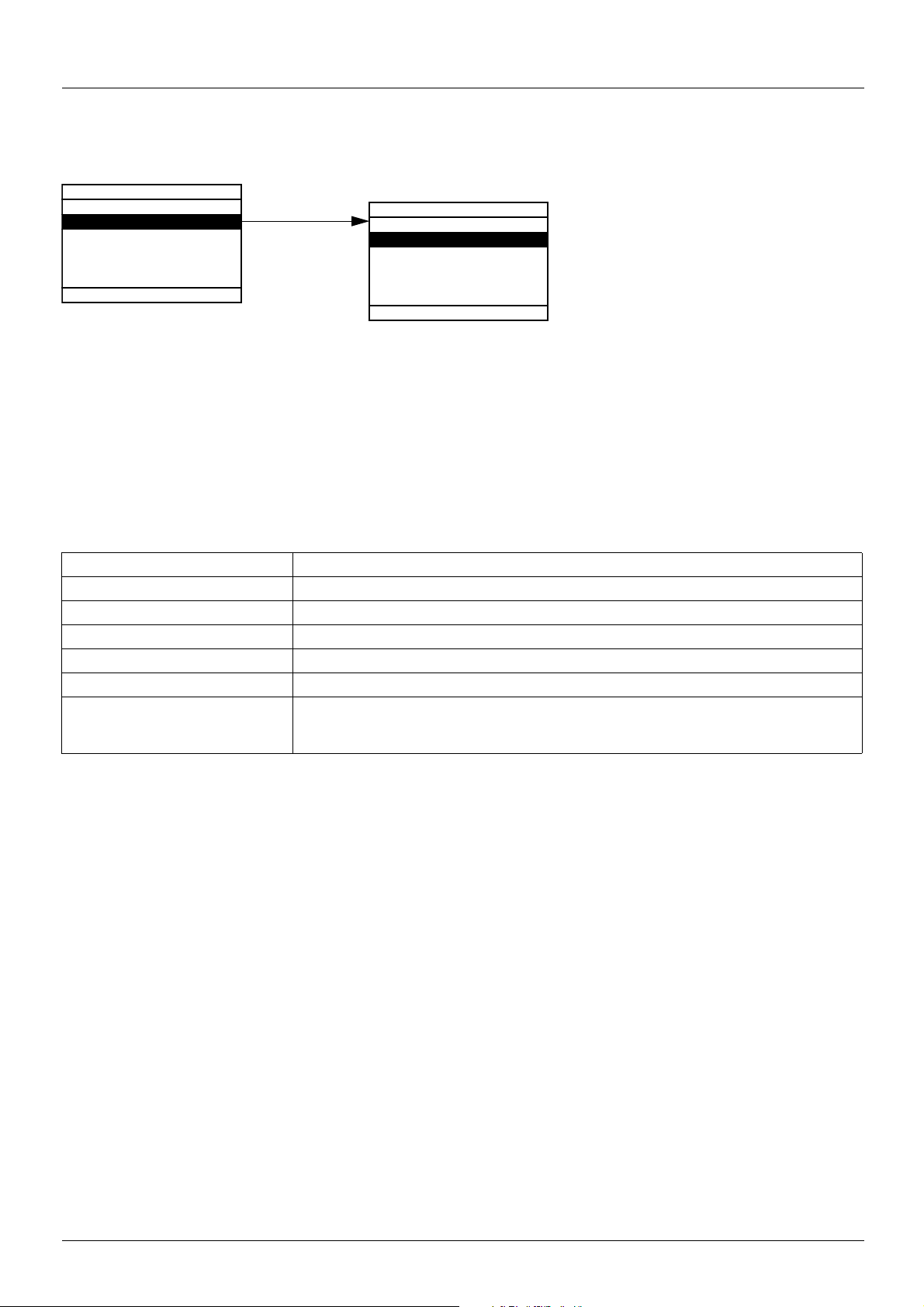
First power-up - [5. LANGUAGE] menu
The first time the drive is powered up, the user will automatically be guided through the menus as far as [1. DRIVE MENU].
The parameters in the [1.1 SIMPLY START] submenu must be configured and auto-tuning performed before the motor is started up.
Display for 3 seconds following power-up
3 seconds
Automatically switches to [5 LANGUAGE]
menu 3 seconds later.
Select the language and press ENT.
ESC
Switches to [2 ACCESS LEVEL] menu
(see page 31
)
Select the access level and press ENT.
Switches to [1 DRIVE MENU]
(see page 27
)
Press ESC to return to [MAIN MENU]
22 AAV49426 12/2009
Page 23
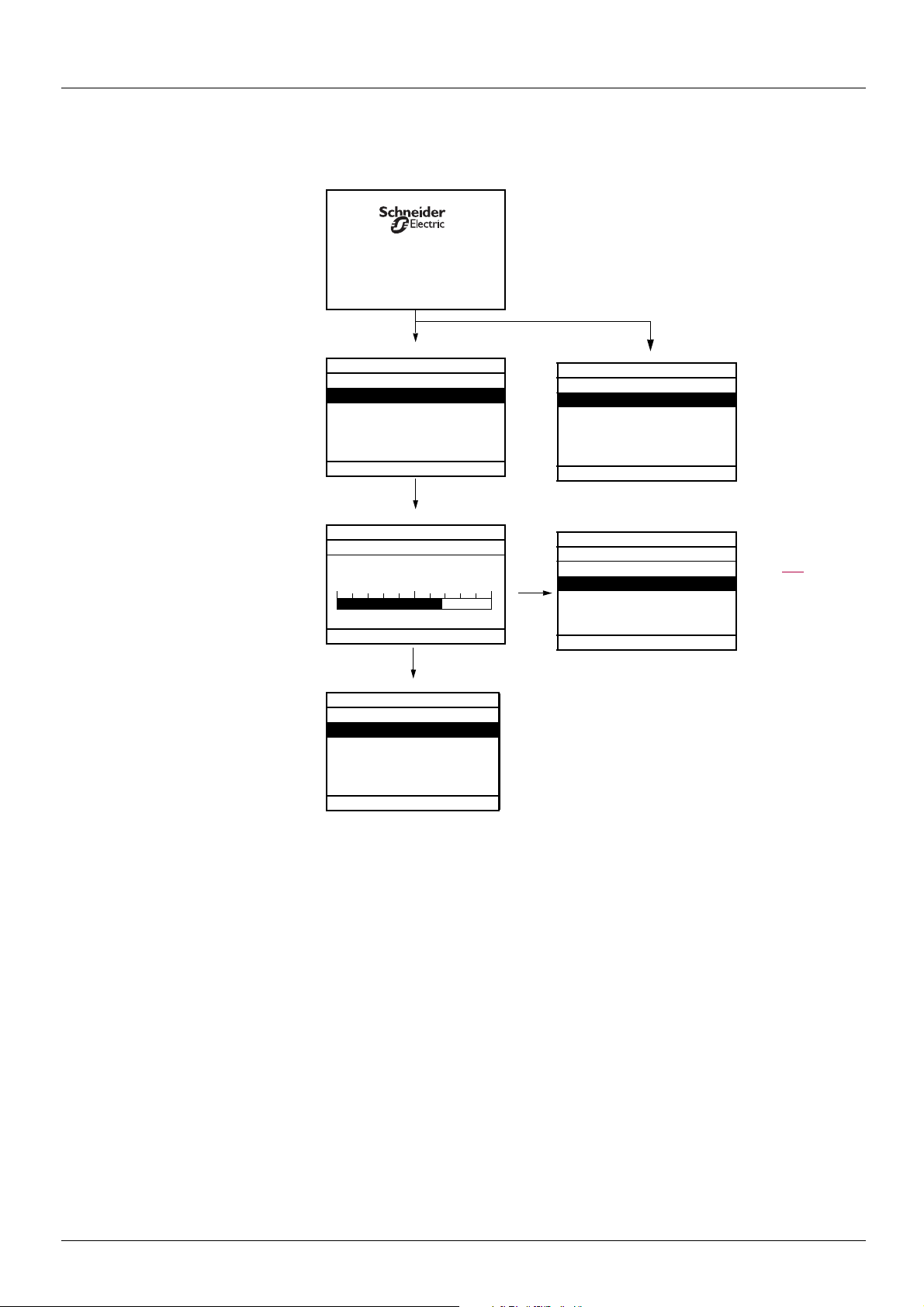
Graphic display terminal
3 seconds later, switches to
[1. DRIVE MENU] or to
[1.14 PROGRAMMABLE CARD].
If no operator inputs are made,
switches to "Display" automatically
10 seconds later (the display will
vary depending on the selected
configuration).
Users can return to [MAIN MENU]
by pressing ENT or ESC.
3 seconds
10 seconds
ESC or ESC
ATV71HU22N4383
2.2kW/3HP 380/480V
Config. n°1
RDY Term +38Hz 0A
1. DRIVE MENU
1.1 SIMPLY START
1.2 MONITORING
1.3 SETTINGS
1.4 MOTOR CONTROL
1.5 INPUTS / OUTPUTS CFG
Code << >> Quick
RDY Term +38Hz 0A
Frequency ref.
Min=0 Max=60
Quick
RDY Term +38Hz 0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code Quick
38 Hz
RDY Term +0.00Hz 0A
1.14 PROGRAMMABLE CARD
Modbus add Prg C. :17
DATE/TIME SETTINGS
<< >> Quick
RDY Term +0.00Hz 0A
1.3 SETTINGS
Ramp increment: 01
Acceleration 9.51 s
Deceleration: 9.67 s
Acceleration 2: 12.58 s
Deceleration 2: 13.45 s
Code << >> Quick
Menu selected in
[Power up menu]
page 284
ENT
or, if the Controller Inside card is present
Subsequent power ups
AAV49426 12/2009 23
Page 24
Graphic display terminal
RDY Term +0.00Hz 0A
1 DRIVE MENU
1.1 SIMPLY START
1.2 MONITORING
1.3 SETTINGS
1.4 MOTOR CONTROL
1.5 INPUTS / OUTPUTS CFG
Code << >> Quick
ENT
ESC
RDY Term +0.00Hz 0A
1.3 SETTINGS
Ramp increment: 01
Acceleration 9.51 s
Deceleration: 9.67 s
Acceleration 2: 12.58 s
Deceleration 2: 13.45 s
Code << >> Quick
ENT
ENT or
ESC
RDY Term +0.00Hz 0A
Acceleration
9.51 s
Min = 0.01 Max = 99.99
<< >> Quick
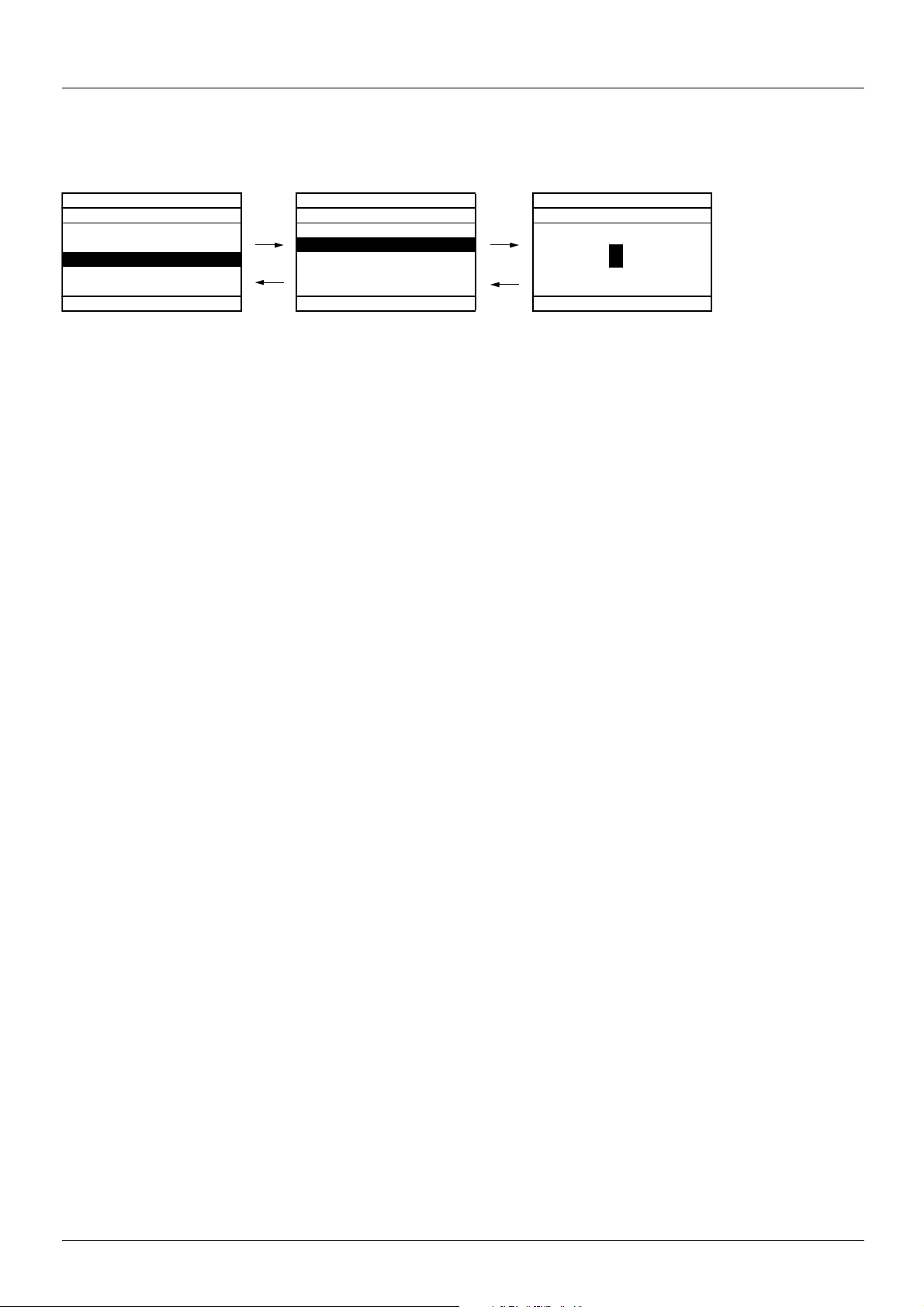
Programming: Example of accessing a parameter
Accessing the acceleration ramp
Note:
• To select a parameter:
- Turn the navigation button to scroll vertically.
• To modify a parameter:
- Use the << and >> keys (F2 and F3) to scroll horizontally and select the digit to be modified (the selected di git chan ges to white
on a black background).
- Turn the navigation button to modify the digit.
• To cancel the modification:
-Press ESC.
• To save the modification:
- Press the navigation button (ENT).
24 AAV49426 12/2009
Page 25
Graphic display terminal
RDY Term +0.00Hz 0A
1.4 MOTOR CONTROL
Standard mot. freq: 5 0Hz IEC
Rated motor power: 0.37 kW (0.5 HP)
Rated motor volt.: 206 V
Rated mot. current: 1.0 A
Rated motor freq.: 50.0 Hz
Code << >> Quick
ENT
RDY Term +0.00Hz 0A
QUICK NAVIGATION
RETURN TO MAIN MENU
DIRECT ACCESS TO...
10 LAST MODIFICATIONS
GOTO MULTIPOINT SCREEN
Code
See page 285
RDY Term +0.00Hz 0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code Quick
RDY Term +0.00Hz 0A
DIRECT ACCESS TO...
1.3
SETTINGS
<< >>
ENT
RDY Term +0.00Hz 0A
1.3 SETTINGS
Ramp increment: 01
Acceleration 9.51 s
Deceleration: 9.67 s
Acceleration 2: 12.58 s
Deceleration 2: 13.45 s
Code << >> Quick
RDY Term +0.00Hz 0A
10 LAST MODIFICATIONS
Acceleration: 10 s
ENA prop.gain: 1.2
Rated mot. current: 15 A
Preset speed 4: 20 Hz
Preset speed 5: 30 Hz
Code
ESC
ENT
RDY Term +0.00Hz 0A
Rated mot. current
15.0 A
<< >>
Quick navigation
If the "Quick" function is displayed above the F4 key, you can gain quick access to a parameter from any screen.
Example:
Press F4 to access the Quick screen, which contains
4 selection options.
• [HOME]: Return to [MAIN MENU].
• [DIRECT ACCESS TO...]: Opens the direct access window, which
will contain the text "1". The function keys << and >> (F2 and F3)
can be used to select each of the numbers and the navigation
button to increment or decrement the numbers: 1.3 in the example
below.
• [10 LAST MODIFICATIONS]: Opens a window in which the l ast 10
parameters modified can be accessed directly.
AAV49426 12/2009 25
Page 26
Graphic display terminal
RDY Term +0.00Hz 0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code Quick
6 MONITORING CONFIG.
7 DISPLAY CONFIG.
RDY Term +0.00Hz 0A
1 DRIVE MENU
1.1 SIMPLY START
1.2 MONITORING
1.3 SETTINGS
1.4 MOTOR CONTROL
1.5 INPUTS / OUTPUTS CFG
Code << >> Quick
1.6 COMMAND
1.7 APPLICATION FUNCT.
1.8 FAULT MANAGEMENT
1.9 COMMUNICATION
1.10 DIAGNOSTICS
1.11 IDENTIFICATION
1.12 FACTORY SETTINGS
1.13 USER MENU
1.14 PROGRAMMABLE CARD
[MAIN MENU] - Menu mapping
Content of [MAIN MENU] menus
[1 DRIVE MENU] See next page
[2 ACCESS LEVEL] Defines which menus can be accessed (level of complexity)
[3 OPEN / SAVE AS] Can be used to save and recover drive configuration files
[4 PASSWORD] Provides password protection for the configuration
[5 LANGUAGE] Language selection
[6 MONITORING CONFIG.] Customization of information displayed on the graphic display terminal during operation
[7 DISPLAY CONFIG.] • Customization of parameters
• Creation of a customized user menu
• Customization of the visibility and protection mechanisms for menus and parameters
26 AAV49426 12/2009
Page 27
Graphic display terminal
[1 DRIVE MENU]
RDY Term +0.00Hz 0A
1.1 SIMPLY START
1.2 MONITORING
1.3 SETTINGS
1.4 MOTOR CONTROL
1.5 INPUTS / OUTPUTS CFG
1.6 COMMAND
1.7 APPLICATION FUNCT.
1.8 FAULT MANAGEMENT
1.9 COMMUNICATION
1.10 DIAGNOSTICS
1.11 IDENTIFICATION
1.12 FACTORY SETTINGS
1.13 USER MENU
1.14 PROGRAMMABLE CARD
1 DRIVE MENU
Code << >> Quick
Content of [1. DRIVE MENU] menus:
[1.1 SIMPLY START]: Simplified menu for a quick start
[1.2 MONITORING]: Visualization of current, motor and input/output values
[1.3 SETTINGS]: Accesses the adjustment parameters, which can be modified during operation
[1.4 MOTOR CONTROL]: Moto r parameters (motor nameplate, auto-tuning, switching frequency, control algorithms, etc.)
[1.5 INPUTS / OUTPUTS CFG]: I/O configuration (scaling, filtering, 2-wire control, 3-wire control, etc.)
[1.6 COMMAND]: Configuration of command and reference channels (graphic displ ay t erminal , t erminals , bu s, e tc.)
[1.7 APPLICATION FUNCT.]: Configuration of application functions (e.g., preset speeds, PID, brake logic con trol, etc.)
[1.8 FAULT MANAGEMENT]: Configuration of fault management
[1.9 COMMUNICATION]: Communication parameters (fieldbus)
[1.10 DIAGNOSTICS]: Motor/drive diagnostics
[1.11 IDENTIFICATION]: Identifies the drive and the internal options
[1.12 FACTORY SETTINGS]: Access to configuration files and return to factory settings
[1.13 USER MENU]: Specific menu set up by t he user in the [7. DISPLAY CONFIG.] menu
[1.14 PROGRAMMABLE CARD]: Configuration of optional Controller Inside card
AAV49426 12/2009 27
Page 28

Integrated display terminal
• Four 7-segment
displays
• Enters a menu or
parameter, or saves the
displayed parameter or
value
• Returns to the previous
menu or parameter, or
increases the
displayed value
• Exits a menu or parameter,
or aborts the displayed
value to return to the
previous value in the
memory
• Goes to the next menu
or parameter, or
decreases the
displayed value
• 2 CANopen status LEDs
• 2 Modbus status LEDs
Note:
Low-power Altivar 71 drives (see catalog) feature an integrated display terminal with a 7-segment 4-digit display. The graphic display
terminal described on the previous pages can also be connected to these drives as an option.
Functions of the display and the keys
• Pressing or does not store the selection.
• Press and hold down (>2 s) or to scroll through the data quickly.
Save and store the selection: ENT
The display flashes when a value is stored.
Normal display, with no fault present and no startup:
- 43.0: Display of the parameter selected in the SUP menu (default selection: motor frequency)
- CLI: Current limit
- CtL: Controlled st op on in pu t phase loss
- dCb: DC injection braking in progress
- FLU: Motor fluxing in progress
- FSt: Fast stop.
- nLP: No line power (no line supply on L1, L2, L3)
- nSt: Freewheel stop
- Obr: Auto-adapted deceleration
- PrA: Power Removal function active (drive locked)
- rdY = Drive ready
- SOC: Controlled output cut in progress
- tUn: Auto-tuning in progress
- USA: Undervoltage alarm
- ASA: Measurement of the phase-shift angle in progress
The display flashes to indicate the presence of a fault.
28 AAV49426 12/2009
Page 29
Integrated display terminal
XXX
CtL-
FUn-
SIM-
I-O-
SEt-
SUP-
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ENT
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
FCS-
LAC-
CON-
FLt-
ESC
ESC
ESC
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
SPL-
ESC
ENT
ESC
drC-
COd-
USr-
ESC
ENT
ESC
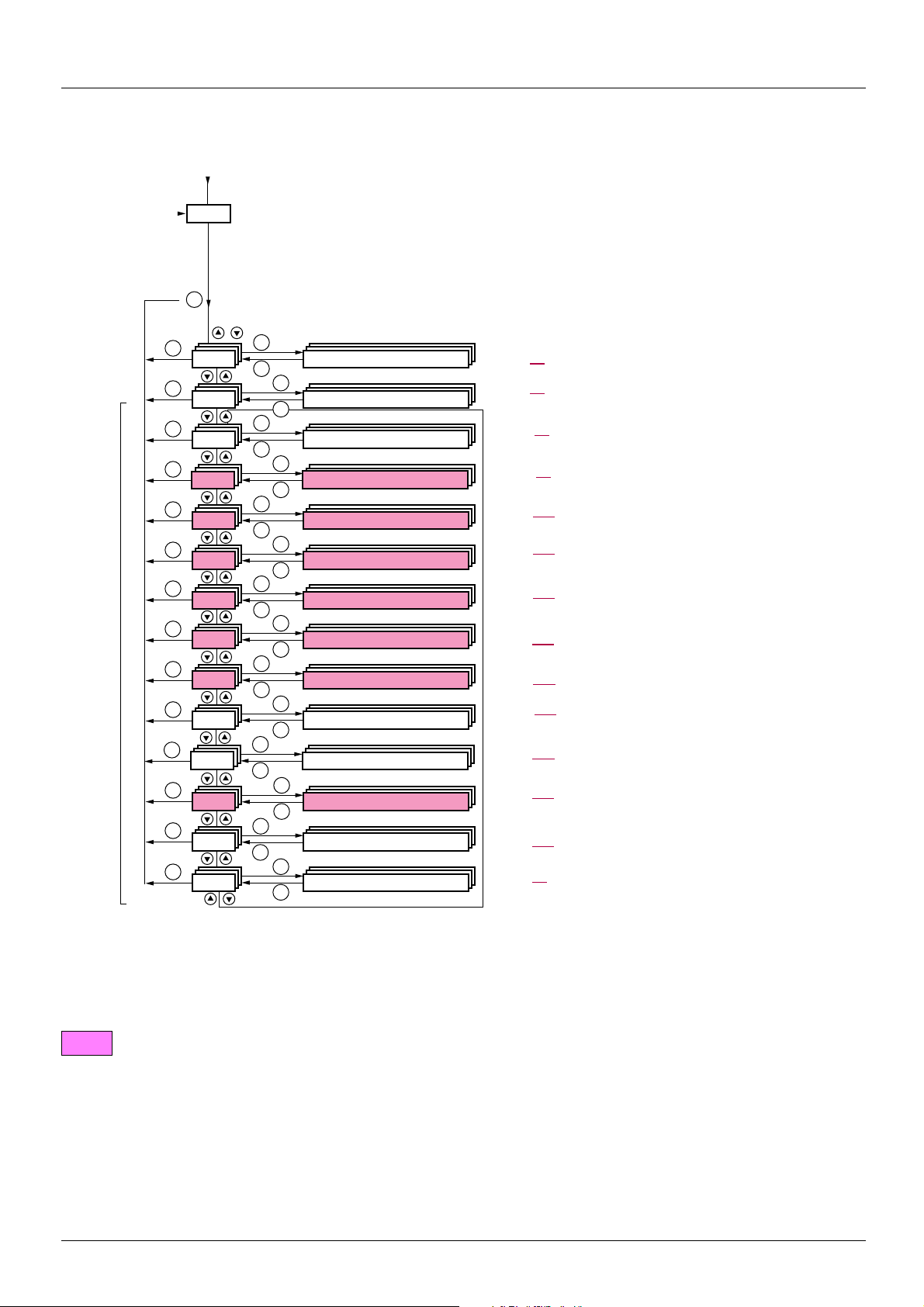
Displays the state of the drive
SETTINGS
APPLICATION FUNCT.
INPUTS / OUTPUTS CFG
FAULT MANAGEMENT
SIMPLY START
Menus
MONITORING
MOTOR CONTROL
COMMAND
Power-up
FACTORY SETTINGS
PASSWORD
ACCESS LEVEL
COMMUNICATION
(page 54) Adjustment parameters, can be modified during
operation
(page 144
)Configuration of application functions (e.g., preset
speeds, PID, brake logic control, etc.)
(page 101
) I/O configuration (scaling, filtering, 2-wire control,
3-wire control, etc.)
(page 234
) Configuration of fault management
(page 37
) Simplified menu for fast startup
(page 45
) Visualization of current, motor and i nput/output values
(page 71
) Motor parameters (motor nameplate, auto-tuning,
switching frequency, control algorithms, etc.)
(page 131
) Configuration of command and reference channels
(graphic display terminal, terminals, bus, etc.)
(page 267
) Access to configuration files and return to factory
settings
(page 274
)
(page 31
)
(page 259
) Communication parameters (fieldbus)
(page 270
) Specific menu, set up by the user using the graphic
display terminal.
USER MENU
PROGRAMMABLE CARD
(page 271
) Menu for the Controller Inside card, if present.
Accessing menus
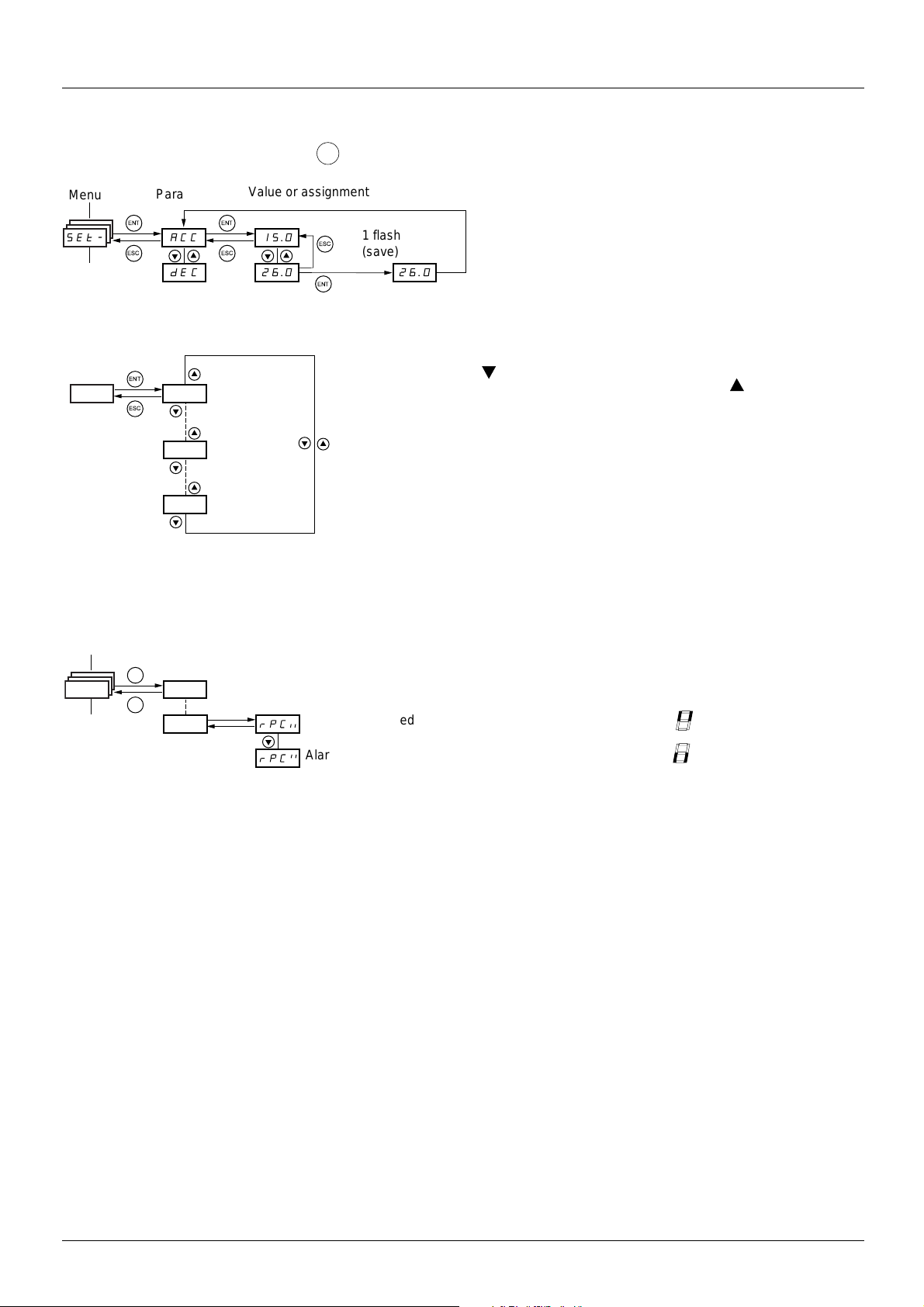
A dash appears after menu and submenu codes to differentiate them from parameter codes.
Examples: FUn- menu, ACC parameter.
AAV49426 12/2009 29
The grayed-out menus may not be accessible depending on the control access (LAC) configuration.
Page 30
Integrated display terminal
ENT
ACC 15.0
ENT
ESC
ENT
ESC
26.0 26.0
ESC
dEC
ENT
SEt-
Menu
Value or assignment
1 flash
(save)
Parameter
(Next parameter)
ENT
ESC
1
st
n
th
last
Menu
ENT
ESC
I-O-
Alarm not selected
Alarm selected
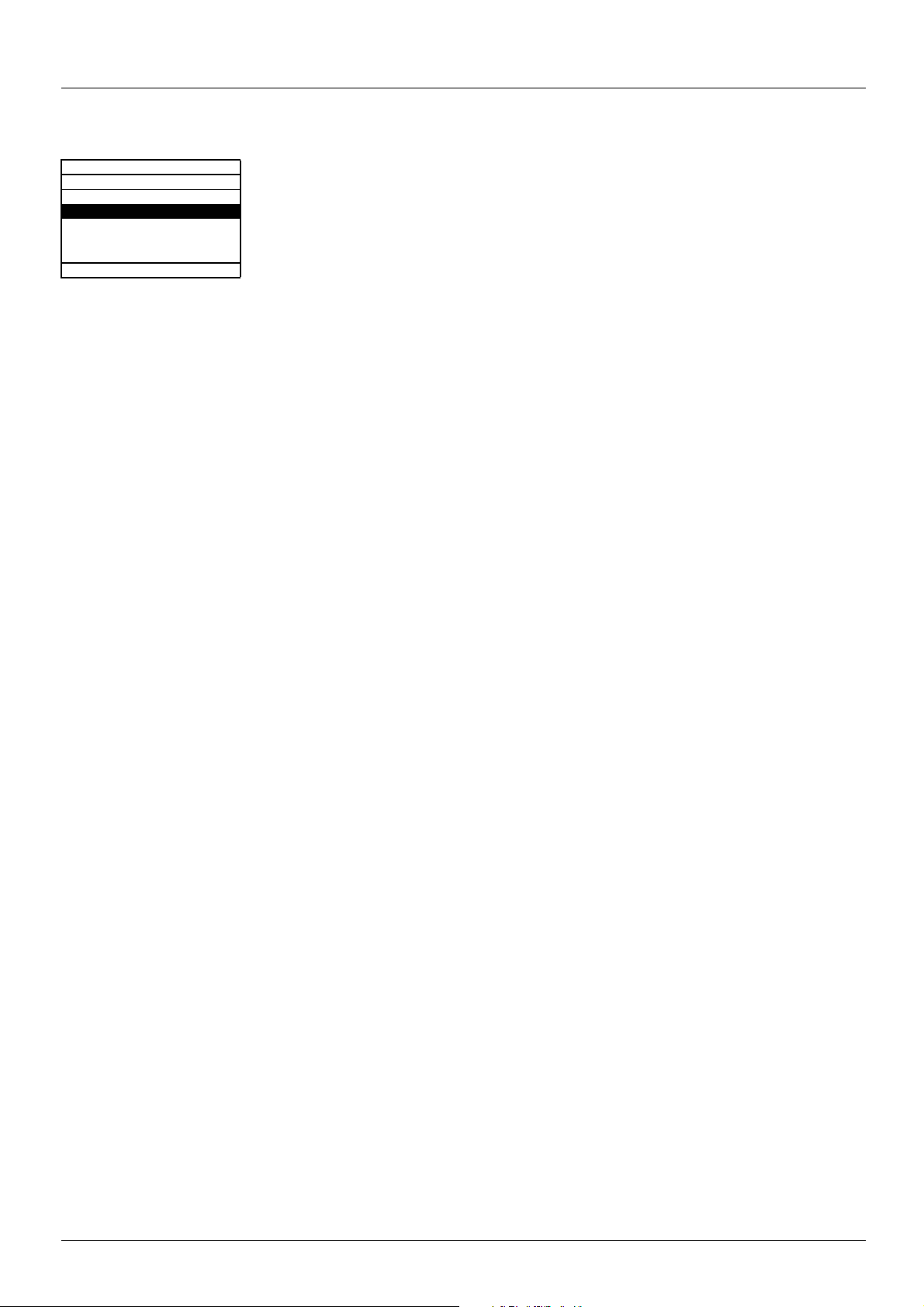
Accessing menu parameters
Save and store the displayed selection :
The display flashes when a value is stored.
All the menus are "drop-down" type menus, which means that after the last pa rameter, if
you continue to press , you will return to the first parameter and, conver sely, you can
switch from the first parameter to the last parameter by pressing .
Selection of multiple assignments for one parameter
Example: List of group 1 alarms in [INPUTS / OUTPUTS CFG]
(I-O-) menu
A number of alarms can be selected by "checking" them as
follows.
The digit on the right indicates: selected
not selected.
The same principle is used for all multiple select ions.
30 AAV49426 12/2009
Page 31

[2. ACCESS LEVEL] (LAC-)
RDY Term +0.00Hz 0A
2 ACCESS LEVEL
Basic
Standard
Advanced
Expert
<< >> Quick
RDY Term +0.00Hz 0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code << >> Quick
RDY Term +0.00Hz 0A
1. DRIVE MENU
1.1 SIMPLY START
1.2. MONITORING
1.3. SETTINGS
1.11. IDENTIFICATION
1.12. FACTORY SETTINGS
Code << >> Quick
1.13 USER MENU
RDY Term +0.00Hz 0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code Quick
6 MONITORING CONFIG.
RDY Term +0.00Hz 0A
1 DRIVE MENU
1.1 SIMPLY START
1.2 MONITORING
1.3 SETTINGS
1.4 MOTOR CONTROL
1.5 INPUTS / OUTPUTS CFG
Code << >> Quick
1.6 COMMAND
1.7 APPLICATION FUNCT.
1.8 FAULT MANAGEMENT
1.9 COMMUNICATION
1.10 DIAGNOSTICS
1.11 IDENTIFICATION
1.12 FACTORY SETTINGS
1.13 USER MENU
1.14 PROGRAMMABLE CARD
RDY Term +0.00Hz 0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code Quick
6 MONITORING CONFIG.
7 DISPLAY CONFIG.
RDY Term +0.00Hz 0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code Quick
6 MONITORING CONFIG.
7 DISPLAY CONFIG.
With graphic display terminal
Basic
Access to 5 menus only, and access to 6 submenus only in the
[1. DRIVE MENU] menu.
A single function can be assigned to each input.
Standard
This is the factory-set level. Access to 6 menus only, and access to all
submenus in the [1. DRIVE MENU] menu.
A single function can be assigned to each input.
AAV49426 12/2009 31
Advanced
Access to all menus and submenus.
Several functions can be assigned to
each input.
Expert
Access to all menus and submenus as for [Advanced] level, and access to
additional parameters.
Several functions can be assigned to each input.
Page 32

[2. ACCESS LEVEL] (LAC-)
XXX
SIM-
ESC
ESC
ENT
LAC-
ESC
ENT
ESC
COd-
Displays the state of the drive
ACCESS LEVEL
Power-up
With integrated display terminal:
Code Name/Description Factory setting
LAC-
bAS
• bAS: Limited access to SIM, SUP, SEt, FCS, USr, COd and LAC menus. Only one function can be assigned to
Std
each input.
Std
Adu
Epr
• Std: Access to all menus on the integrated display terminal. Only one function can be assigned to each input.
• AdU: Access to all menus on the integrated display terminal. Several functions can be assigned to each input.
• EPr: Access to all menus on the integrated display te rminal and access to additional p arameters. Several functions
can be assigned to each input.
32 AAV49426 12/2009
Page 33

[2. ACCESS LEVEL] (LAC-)
Comparison of the menus that can be accessed on the graphic display terminal/
integrated display terminal
Graphic display terminal Integrated display terminal Access level
[2 ACCESS LEVEL] LAC- (Access level)
[3 OPEN/SAVE AS] [4 PASSWORD] COd- (Password)
[5 LANGUAGE] [1 DRIVE MENU] [1.1 SIMPLY START] SIM- (Simply start)
[1.2 MONITORING] SUP- (Monitoring)
[1.3 SETTINGS] SEt- (Settings)
[1.11 IDENTIFICATION] [1.12 FACTORY SETTINGS] FCS- (Factory settings)
[1.13 USER MENU] USr- (User menu)
A single function can be assigned to each input. A single function can be assigned to
each input.
[1.4 MOTOR CONTROL] drC- (Motor control)
[1.5 INPUTS / OUTPUTS CFG] I-O- (I/O configuration)
[1.6 COMMAND] CtL- (Command)
[1.7 APPLICATION FUNCT.] FUn- (Application functions)
[1.8 FAULT MANAGEMENT] FLt- (Fault management)
[1.9 COMMUNICATION] COM- (Communication)
[1.10 DIAGNOSTICS] [1.14 PROGRAMMABLE CARD] (1) PLC- (Controller Inside card) (1)
[6 MONITORING CONFIG.] -
A single function can be assigned to each input. A single function can be assigned to
each input.
[7 DISPLAY CONFIG.] -
Several functions can be assigned to each input. Several functions can be assigned
to each input.
Expert parameters Expert parameters
Several functions can be assigned to each input. Several functions can be assigned
to each input.
Basic bAS
Advanced AdU
Standard Std(factory setting)
Expert EPr
(1)Can be accessed if the Controller Inside card is present.
AAV49426 12/2009 33
Page 34

Structure of parameter tables
5
2
3
1
4
6
8
7
1. Name of menu on 4-digit 7-segment display.
2. Submenu code on 4-digit 7-segment display.
3. Parameter code on 4-digit 7-segment display.
4. Parameter value on 4-digit 7-segment display.
5. Name of menu on graphic display terminal.
6. Name of submenu on graphic display terminal.
7. Name of parameter on graphic display terminal.
8. Value of parameter on graphic display terminal.
The parameter tables in the descriptio ns of the various menus can be used wit h both the graphi c display terminal an d the integrated display
terminal. They, therefore, contain information for these two terminals in accordance with the description below.
Example:
[1.7 APPLICATION FUNCT.] (FUn-)
Code Name/Description Adju s t ment rang e Factory setting
UPd-
USP
LI1
Note:
• The text in square brackets [ ] indicates what you will see on the graphic display terminal.
• The factory settings correspond to [Macro configuration] (CFG) = [Start/Stop] (StS). This is the macro configuration set at
the factory.
b [+/- SPEED]
Function can be accessed for reference channel [Ref.2 channel] (Fr2) = [+/- speed] (UPdt) ,
see page 141
M [+ speed assignment]
no
v [No] (nO): function inactive
v [LI1] (LI1)
[No] (nO)
34 AAV49426 12/2009
Page 35

Interdependence of parameter values
The configuration of certain parameters modifies the a dju stment ra nge of ot her p aramet ers, in order to redu ce t he risk of error s. This may
result in the modification of a factory setting or a value you have already selected.
Example:
1. [Current Limitation] (CLI) page 62 set to 1.6 In or left at its factory setting, 1.5 In
2. [Switching freq.] (SFr) page 62
3. If [Switching freq.] (SFr) is increased to 4 kHz, [Current limitation] (CLI) is no longer restricted, but remains at 1.36 In. If you require
1.6 In, you must reset [Current Limitation] (CLI).
set to 1 kHz (and confirmed with "ENT") restricts [Current Limitation] (CLI) to 1.36 In
AAV49426 12/2009 35
Page 36

Finding a parameter in this document
F1
RDY Term +0.00Hz 0A
1.3 SETTINGS
Ramp increment: 01
Acceleration 9.51 s
Deceleration: 9.67 s
Acceleration 2: 12.58 s
Deceleration 2: 13.45 s
Code << >> Quick
Code
RDY Term +0.00Hz 0A
1.3 SETTINGS
Ramp increment: 01
ACC 9.51 s
Deceleration: 9.67 s
Acceleration 2: 12.58 s
Deceleration 2: 13.45 s
Code << >> Quick
The following assistance with finding explanations on a parameter is provided:
• With the integrated display terminal: Direct use of the parameter code index, page 297
, to find the page giving details of the
displayed parameter.
• With the graphic display terminal: Select the required p arameter and press : [Code]. The parameter code is displayed instead
of its name while the key is held down.
Example: ACC
Then use the parameter code index, page 297
, to find the page giving details of the displayed parameter.
36 AAV49426 12/2009
Page 37

[1.1 SIMPLY START] (SIM-)
RDY Term +0.00Hz 0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code Quick
ENT
RDY Term +0.00Hz 0A
1 DRIVE MENU
1.1 SIMPLY START
1.2 MONITORING
1.3 SETTINGS
1.4 MOTOR CONTROL
1.5 INPUTS / OUTPUTS CFG
Code << >> Quick
ENT
RUN Term +50.00Hz 80A
1.1 SIMPLY START
2/3 wire control
Macro configuration
Customized macro
Standard mot. freq
Input phase loss
Code << >> Quick
XXX
SIM-
SUP-
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
Displays the state of the drive
SIMPLY START
Power-up
With graphic display terminal:
With integrated display terminal:
The [1.1-SIMPLY START] (SIM-) menu can be used for fast startup, which is sufficient for the majority of applications.
The parameters in this menu can only be modified when the d rive is stopped a nd no run command is present, with the f ollowing exceptions:
• Auto-tuning, which causes the motor to start up
• The adjustment parameters on page 44
Note: The parameters of the [1.1 SIMPLY START] (SIM-) menu must be entered in the order in which they appear, as the later
ones are dependent on the first ones.
For example [2/3 wire control] (tCC) must be configured before any other parameters.
The [1.1 SIMPLY START] (SIM-) menu should be configured on its own or before the other drive configuration menus. If a modification
has previously been made to any of them, in particular in [1.4 MOTOR CONTROL] (drC-), some [1.1 SIMPLY START] (SIM-) parameters
may be changed, for example, the motor parameters, if a synchronous motor has been selected. Returning to the [1.1 SIMPLY START]
(SIM-) menu after modifying another drive configuration menu is unneces sary but does not pose any risk. Changes fol lowing modificat ion
of another configuration menu are not described, to avoid unnecessary complication in this section.
Macro configuration
Macro configuration provides a means of speeding up the configuration of functions for a specific field of application.
8 macro configurations are available:
• Start/stop (factory configuration)
• Handling
• General use
•Hoisting
•Lifts
• PID regulator
• Communication bus
•Master/slave
Selecting a macro configuration assigns the parameters in this macro configuration.
Each macro configuration can still be modified in the other menus.
AAV49426 12/2009 37
Page 38

[1.1 SIMPLY START] (SIM-)
Macro configuration parameters
Assignment of the inputs/outputs
Input/
output
AI1 [Ref.1
AI2 [No] [Summing ref. 2][Summing ref. 2][No]
AO1 [No] [No] [No] [No]
R1 [No drive flt] [No drive flt] [No drive flt] [No drive flt]
R2 [No] [No] [No] [Brk control]
LI1 (2-wire) [Forward] [Forward] [Forward] [Forward]
LI2 (2-wire) [Reverse] [Reverse] [Reverse] [Reverse]
LI3 (2-wire) [No] [2 preset
LI4 (2-wire) [No] [4 preset
LI5 (2-wire) [No] [8 preset
LI6 (2-wire) [No] [Fault reset] [No] [No]
LI1 (3-wire) Stop Stop Stop Stop
LI2 (3-wire) [Forward] [Forward] [Forward] [Forward]
LI3 (3-wire) [Reverse] [Reverse] [Reverse] [Reverse]
LI4 (3-wire) [No] [2 preset
LI5 (3-wire) [No] [4 preset
LI6 (3-wire) [No] [8 preset
LI7 to LI14 [No] [No] [No] [No]
LO1 to LO4 [No] [No] [No] [No]
R3/R4 [No] [No] [No] [No]
AI3, AI4 [No] [No] [No] [No]
RP [No] [No] [No] [No]
AO2 [I motor] [I motor] [I motor] [I motor]
AO3 [No] [Sign. torque] [No] [Sign. torque]
F1 key [No] [No] [No] [No]
F2, F3, F4
keys
[Start/Stop] [M. handling] [Gen. Use] [Hoisting]
[Ref.1
channel]
[No] [No] [No] [No]
channel]
speeds]
speeds]
speeds]
speeds]
speeds]
speeds]
[Ref.1
channel]
[Jog] [Fault reset]
[Fault reset] [External fault]
[Torque
limitation]
[Jog] [Fault reset]
[Fault reset] [External fault]
[Torque
limitation]
[Ref.1
channel]
[No]
[No]
Option cards
Graphic display terminal keys
[Lift]
[Ref.1
channel]
[No]
[No]
[No drive flt]
[Brk control]
[Forward]
[Reverse]
[2 preset
speeds]
[4 preset
speeds]
[Fault reset]
[No]
Stop
[Forward]
[Reverse]
[2 preset
speeds]
[4 preset
speeds]
[Fault reset]
[No]
[No]
[No]
[No]
[No]
[I motor]
[Sign. torque]
[No]
[No]
[PID regul.] [Network C.] [Mast./slave]
[Ref.1 channel]
(PID reference)
[PID feedback] [No] [Torque
[No] [No] [No]
[No drive flt] [No drive flt] [No drive flt]
[No] [No] [No]
[Forward] [Forward] [Forward]
[Reverse] [Reverse] [Reverse]
[PID integral
reset]
[2 preset PID
ref.]
[4 preset PID
ref.]
[No] [No] [No]
Stop Stop Stop
[Forward] [Forward] [Forward]
[Reverse] [Reverse] [Reverse]
[PID integral
reset]
[2 preset PID
ref.]
[4 preset PID
ref.]
[No] [No] [No]
[No] [No] [No]
[No] [No] [No]
[No] [No] [No]
[No] [No] [No]
[I motor] [I motor] [I motor]
[PID Output] [No] [Motor freq.]
[No] Control
[No] [No] [No]
[Ref.2 channel]
([Ref.1 channel]
= integrated
Modbus) (1)
[Ref. 2
switching]
[Fault reset] [Fault reset]
[No] [No]
[Ref. 2
switching]
[Fault reset] [Fault reset]
[No] [No]
via graphic
display terminal
[Ref.1
channel]
reference]
[Trq/spd
switching]
[Trq/spd
switching]
[No]
In 3-wire control, the assignment of inputs LI1 to LI6 shifts.
(1) To start up with integrated Modbus, [Modbus Address] (Add) must first be configured, page 261.
Note: These assignments are reinitialized every time the macro configuration changes.
38 AAV49426 12/2009
Page 39

[1.1 SIMPLY START] (SIM-)
Macro configuration parameters
Other configurations and settings
In addition to the assignment of I/O, other parameters are assigned only in the Hoisting, Lift and Mast./slave macro configurations.
Hoisting and lift:
• [Movement type] (bSt) = [Hoisting] (UEr) page 175
• [Brake contact] (bCI) = [No] (nO) page 175
• [Brake impulse] (bIP) = [No] (nO) page 175
• [Brake release I FW] (Ibr) = [Rated mot. current] (nCr) page 175
• [Brake Release time] (brt) = 0.5 s page 176
• [Brake release freq] (bIr) = [Auto] (AUtO) page 176
• [Brake engage freq] (bEn) = [Auto] (AUto) page 176
• [Brake engage time] (bEt) = 0.5 s page 176
• [Engage at reversal] (bEd) = [No] (nO) page 177
• [Jump at reversal] (JdC) = [Auto] (AUtO) page 177
• [Time to restart] (ttr) = 0 s page177
• [Current ramp time] (brr) = 0 s page 179
• [Low speed] (LSP) = Rated motor slip calculated by the drive, page 44
• [Output Phase Loss] (OPL) page 242 = [Yes] (YES), but it is forced to [No] (nO) if [Motor control type] (Ctt) page 70 = [Sync. mot.]
(SYn). No further modifications can be made to this parameter.
• [Catch on the fly] (FLr) = [No] (nO) page 239
Lift:
• [Feed forward] (FFP) = 0 % page 91
. No further modifications can be made to this parameter.
Mast./slave:
• [Motor control type] (Ctt) = [SVC I] (CUC) page 70
Note: These assignments are forced every time the macro configuration changes, except for [Motor control type] (Ctt) for the Mast./slave
macro configuration, if it is configured in [FVC] (FUC).
Return to factory settings:
Returning to factory settings with [Config. Source] (FCSI) = [Macro-Conf] (InI) page 269
configuration. The [Macro configuration] (CFG) parameter does not change, although [Customized macro] (CCFG) disappears.
Note:
• The factory settings that appear in the parameter tables correspond to [Macro con figuration] (CFG) = [Start/Stop] (StS).
This is the macro configuration set at the factory.
will return the drive to the selected macro
AAV49426 12/2009 39
Page 40

[1.1 SIMPLY START] (SIM-)
UWV
L1 L3
ATV71H
KM10
R2A
R2C
L2
M
3
3
2
(1)
AI1
LI1 LI2+24
Electromagnetic brake
Forward
(Ascend)
Reverse
(Descend)
UWV
L1 L3
AI1
L2
M1
3
3
COMA01
LI1 LI2+24
COM AI2 UWV
LI1 +24
AI1
LI2
M2
3
LI3 L1 L3L2
3
ATV 71Hpppp
Slave drive
ATV 71H
pppp
Master drive
TorqueSpeed
ReverseForward
Reverse
Forward
Example diagrams for use with the macro configurations
[Hoisting] (HSt) diagram
(1) A contact on the Preventa module must be inserted in the brake control circuit to engage it safely when the "Power Removal" safety
function is activated (see connection diagrams in the Installation Manual).
[Mast./slave] (MSL) diagram
When the two motors are mechanically connected, the Speed/torque contact closing results in operation in Mast./slave mode. The master
drive regulates the speed and controls the slave drive in torque mode to ensure distribution of the load.
40 AAV49426 12/2009
Page 41

[1.1 SIMPLY START] (SIM-)
+24 LI1 LIx
ATV 71
+24 LI1 LI2 LIx
ATV 71
WARNING
UNINTENDED EQUIPMENT OPERATION
To change the assignment of [2/3 wire control] (tCC) press and hold down the “ENT” key for 2 s.
The following function will be returned to factory settings: [2 wire type] (tCt) page 102
as will all
functions which assign logic inputs.
The macro configuration selected will also be reset it if h as been customized (loss of custom settings).
Check that this change is compatible with the wiring diagram used.
Failure to follow these instructions can result in death or serious injury.
WARNING
UNINTENDED EQUIPMENT OPERATION
To change the assignment of [Macro configuration ] (CFG) press and hold down the “ENT” key for 2 s.
Check that the selected macro configuration is compatible with the wiring diagram used.
Failure to follow these instructions can result in death or serious injury.
Code Name/Description Adjustment range Factory setting
tCC
M [2/3 wire control]
2C
3C
v [2 wire] (2C)
v [3 wire] (3C)
2-wire control: This is the input state (0 or 1) or edge (0 to 1 or 1 to 0), which controls running or stopping.
Example of "source" wiring:
3-wire control (pulse commands): A "forward" or "reverse" pulse is sufficient to command starting, a "stop"
pulse is sufficient to command stopping.
Example of "source" wiring:
[2 wire] (2C)
LI1: forward
LIx: reverse
LI1: stop
LI2: forward
LIx: reverse
AAV49426 12/2009 41
CFG
StS
HdG
HSt
GEn
PId
nEt
MSL
LIFt
CCFG
YES
M [Macro configuration]
v [Start/Stop] (StS): Start/stop
v [M. handling] (HdG): Handling
v [Hoisting] (HSt): Hoisting
v [Gen. Use] (GEn): General use
v [PID regul.] (PId): PID regulation
v [Network C.] (nEt): Communication bus
v [Mast./slave] (MSL): Master/slave
v [Lift] (LIFt): Lifts
M [Customized macro]
Read-only parameter, only visible if at least one macro configuration parameter has been modified.
v [Yes] (YES)
[Start/Stop] (StS)
Page 42

[1.1 SIMPLY START] (SIM-)
100 - slip as a %
100
50 - slip in Hz
50
60 - slip in Hz
60
Code Name/Description Adjustment range Factory setting
bFr
IPL
nPr
UnS
nCr
FrS
nSP
50
60
nO
YES
M [Standard mot. freq]
v [50Hz IEC] (50): IEC
v [60Hz NEMA] (60): NEMA
This parameter modifies the presets of the following parameters:[Rated mo tor volt.] (UnS) below, [High speed]
(HSP) page 44
, [Freq. threshold] (Ftd) page 68, [Rated motor freq.] (FrS ) and [Max frequency] (tFr) .
M [Input phase loss]
v [Ignore] (nO): Fault ignored, to be used when the drive is supplied via a sin gle-phase supply or by the
DC bus.
v [Freewheel] (YES): Fault, with freewheel stop.
If one phase disappears, the drive switches to fault mode [Input phase loss] (IPL), but if 2 or 3 phases
disappear, the drive continues to operate until it trips on an undervoltage fault.
This parameter is only accessible in this menu on ATV71H037M3 to HU75M3 drives (used with a single
phase supply).
M [Rated motor power]
Rated motor power given on the nameplate, in kW if [Standard mot. freq] (bFr) = [50Hz IEC] (50), in HP if
[Standard mot. freq] (bFr) = [60Hz NEMA] (60).
M [Rated motor volt.]
Rated motor voltage given on the nameplate.
ATV71
pppM3: 100 to 240 V
ATV71
pppN4: 200 to 480 V
M [Rated mot. current]
Rated motor current given on the nameplate.
M [Rated motor freq.]
Rated motor frequency given on the nameplate.
The factory setting is 50 Hz, or preset to 60 Hz if [Standard mot. freq] (bFr) is set to 60 Hz.
M [Rated motor speed]
Rated motor speed given on the nameplate.
0 to 9999 rpm then 10.00 to 60.00 krpm on the integrated display terminal.
If, rather than the rated speed, the nameplate indicates the synchronous speed and the slip in Hz or as a %,
calculate the rated speed as follows:
[50Hz IEC] (50)
According to drive
rating
According to drive
rating
According to drive
rating
0.25 to 1.5 In (1) According to drive
10 to 500 Hz 50 Hz
0 to 60000 RPM According to drive
According to drive
rating
According to drive
rating and [Standard
mot. freq] (bFr)
rating and [Standard
mot. freq] (bFr)
rating
• Nominal speed = Synchronous speed x
or
• Nominal speed = Synchronous speed x (50 Hz motors)
or
• Nominal speed = Synchronous speed x (60 Hz motors)
tFr
(1)In corresponds to the rated drive current indicated in the Installation Manual and on the drive nameplate.
42 AAV49426 12/2009
M [Max frequency]
The factory setting is 60 Hz, or preset to 72 Hz if [Standard mot. freq] (bFr) is set to 60 Hz.
The maximum value is limited by the following conditions:
• It must not exceed 10 times the value of [Rated motor freq.] (FrS)
• It must not exceed 500 Hz if the drive rating is higher than ATV71HD37 (values between 500 Hz and 1600Hz
are only possible for powers limite d to 37 kW (50 HP).
10 to 1600 Hz 60 Hz
Page 43

[1.1 SIMPLY START] (SIM-)
Code Name/Description Factory setting
tUn
dOnE
tUS
PEnd
PrOG
FAIL
dOnE
PHr
nO
YES
tAb
AbC
ACb
M [Auto tuning]
[No] (nO)
v [No] (nO): Auto-tuning not performed.
v [Yes] (YES): Auto-tuning is performed as soon as possible, then the parameter automatically changes to [Done]
(dOnE).
v [Done] (dOnE): Use of the values given the last time auto-tuning was performed.
Caution:
• It is essential that all motor parameters ([Rated motor volt.] (UnS), [Rated motor freq.] (FrS), [Rated mot.
current] (nCr), [Rated motor speed] (nSP), [Rated motor power] (nPr)) are configured correctly before
starting auto-tuning.
If at least one of these parameters is modified after auto-t uning has been performed, [Auto tuning] (tUn ) will
return to [No] (nO) and must be repeated.
• Auto-tuning is only performed if no stop command has been activated. If a "freewheel stop" or "fast stop"
function has been assigned to a logic input, this input must be set to 1 (active at 0).
• Auto-tuning takes priority over any run or prefluxing commands, which will be taken into account after the
auto-tuning sequence.
• If auto-tuning fails, the drive displays [No] (nO) and, depending on the configuration of [Autotune faul t mgt]
(tnL) page 256
• Auto-tuning may last for 1 to 2 seconds. Do not interrupt the process. Wait for the display to change to
"[Done] (dOnE)" or "[No] (nO)".
Note: During auto-tuning the motor operates at rated current.
M [Auto tuning status]
(for information only, cannot be modified)
, may switch to [Auto-tuning] (tnF) fault mode.
[Not done] (tAb)
v [Not done] (tAb): The default stator resistance value is used to control the motor.
v [Pending] (PEnd): Auto-tuning has been requested but no t yet performed.
v [In Progress] (PrOG): Auto-tuning in progress.
v [Failed] (FAIL): Auto-tuning has failed.
v [Done] (dOnE): The stator resistance measured by the auto-tuning function is used to control the motor.
M [Output Ph rotation]
[ABC] (AbC)
v [ABC] (AbC): Forward
v [ACB] (ACb): Reverse
This parameter can be used to reverse the direction of rotation of the motor without reversing the wiring.
AAV49426 12/2009 43
Page 44

[1.1 SIMPLY START] (SIM-)
CAUTION
For permanent magnet synchronous motors, the maximum permissible speed must not be exceeded,
otherwise demagnetization may occur. The maximum speed pe rmitted by the mot or, drive ch ain or ap plicati on
must not be exceeded at any time.
Failure to follow this instruction can result in equipment damage.
Parameters that can be changed during operation or when stopped
Code Name/Description Factory setting
ItH
ACC
dEC
LSP
HSP
M [Mot. therm. current]
Motor thermal protection current, to be set to the rated current indicated on the nameplate.
M [Acceleration]
Time to accelerate from 0 to the [Rated motor freq.] (FrS) (page 42). Make sure that this value is compatible
with the inertia being driven.
M [Deceleration]
Time to decelerate from the [Rated motor freq.] (FrS) (page 42) to 0. Make sure that this value is compatible
with the inertia being driven.
M [Low speed]
Motor frequency at minimum reference, can be set between 0 and [High speed] (HSP).
M [High speed]
Motor frequency at maximum reference, can be set bet ween [Low speed] (LSP) and [Max frequency] (tFr). The
factory setting changes to 60 Hz if [Standard mot. freq] (bFr) = [60Hz NEMA] (60).
0.2 to 1.5 In (1) According to drive
rating
0.1 to 999.9 s 3.0 s
0.1 to 999.9 s 3.0 s
0
50 Hz
(1)In corresponds to the rated drive current indicated in the Installation Manual and on the drive nameplate.
44 AAV49426 12/2009
Page 45

[1.2 MONITORING] (SUP-)
RDY Term +0.00Hz 0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code Quick
ENT
RDY Term +0.00Hz 0A
1 DRIVE MENU
1.1 SIMPLY START
1.2 MONITORING
1.3 SETTINGS
1.4 MOTOR CONTROL
1.5 INPUTS / OUTPUTS CFG
Code << >> Quick
ENT
RUN Term +50.00 Hz 80A
1.2 MONITORING
I/O MAP
PROG. CARD I/O MAP
COMMUNICATION MAP
Alarm groups :
HMI Frequency ref. :
Code << >> Quick
XXX
SIM-
SEt-
SUP-
ESC
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
Displays the state of the drive
MONITORING
Power-up
With graphic display terminal:
With integrated display terminal:
AAV49426 12/2009 45
Page 46

[1.2 MONITORING] (SUP-)
I/O
I/O of the Controller Inside card if it is present
Communication data and values
Drive internal drive states and values (see page 51
)
ENT
ENT
ENT
ENT
1
0
1
0
With graphic display terminal
This menu can be used to display the inputs/outputs, the drive internal states and values, and the communication data and values.
RUN Term +50.00Hz 80A
I/O MAP
PROG. CARD I/O MAP
COMMUNICATION MAP
Alarm groups:
HMI Frequency ref.:
1.2 MONITORING
Code << >> Quick
I/O
RUN Term +50.00Hz 80A
LOGIC INPUT MAP
ANALOG INPUTS IMAGE
LOGIC OUTPUT MAP
ANALOG OUTPUTS IMAGE
FREQ. SIGNAL IMAGE
Code Quick
State 0
State 1
RUN Term +50.00Hz 80A
LOGIC INPUT MAP LI1 assignment
PR LI1 LI2 LI3 LI4 LI5 LI6 LI7 Forward
LI8 LI9 LI10 LI11 LI12 LI13 LI14 LI1 On Delay : 0 ms
<< >> Quick << >> Quick
I/O MAP
Move from one screen to another
(from LOGIC INPUT MAP
to FREQ. SIGNAL IMAGE)
by turning the navigation button
Access to the selected input or
output configuration:
Press ENT.
RUN Term +50.00Hz 80A
Pre Fluxing
State 0
State 1
RUN Term +50.00Hz 80A RUN Term +50.00Hz 80A
ANALOG INPUTS IMAGE AI1 assignment
AI1 : 9.87 V Ref.1 channel
AI2 : 2.35 mA Forced local
Torque reference
AI1 min value: 0.0 V
AI1 max value: 10.0 V
Code << >> Quick Quick
RUN Term +50.00Hz 80A RUN Term +50.00Hz 80A
LOGIC OUTPUT MAP LO1 assignment
R1 R2 LO No
LO1 delay time : 0 ms
LO1 active at : 1
LOA: 0000000000000010b LO1 holding time : 0 ms
<< >> Quick << >> Quick
RUN Term +50.00Hz 80A RUN Term +50.00Hz 80A
ANALOG OUTPUTS IMAGE AO1 assignment
AO1 : 9.87 V Motor freq.
AO1 min output : 4 mA
AO1 max output : 20 mA
AO1 Filter : 10 ms
Code << >> Quick Quick
RUN Term +50.00Hz 80A RUN Term +50.00Hz 80A
FREQ. SIGNAL IMAGE RP assignment
RP input : 25.45 kHz Frequency ref.
Encoder : 225 kHz RP min value : 2 kHz
RP max value : 50 kHz
RP filter : 0 ms
Code << >> Quick Quick
46 AAV49426 12/2009
Page 47

[1.2 MONITORING] (SUP-)
ENT
ENT
1
0
1
0
1
0
With graphic display terminal
Controller Inside card I/O
State 0
State 1
State 0
State 1
RUN Term +50.00Hz 80A
PROG. CARD I/O MAP
PROG CARD LI MAP
PROG. CARD AI MAP
PROG CARD LO MAP
PROG. CARD AO MAP
Code Quick
RUN Term +50.00Hz 80A
PROG CARD LI MAP
LI51 LI52 LI53 LI54 LI55 LI56 LI57 LI58
LI59 LI60
<< >> Quick
RUN Term +50.00Hz 80A RUN Term +50.00Hz 80A
PROG CARD AI MAP AI51
AI51 : 0.000 mA
AI52 : 9.87 V
Move from one screen to another
(from PROG CARD LI MAP
to PROG. CARD AO MAP)
by turning the navigation button
0 mA
Code << >> Quick << >> Quick
RUN Term +50.00Hz 80A
PROG CARD LO MAP
LO51 LO52 LO53 LO54 LO55 LO56
Min = 0.001 Max = 20,000
<< >> Quick
RUN Term +50.00Hz 80A RUN Term +50.00Hz 80A
PROG. CARD AO MAP AO51
AO51 : 0.000 mA
AO52 : 9.87 V
0 mA
Code << >> Quick << >> Quick
Min = 0.001 Max = 20,000
AAV49426 12/2009 47
Page 48

[1.2 MONITORING] (SUP-)
RUN Term +50.00Hz 80A
COMMUNICATION MAP
Command Channel: Modbus
Cmd value: ABCD Hex
Active ref. channel: CANopen
Frequency ref.: -12.5 Hz
ETA state word: 2153 Hex
Code Quick
W3141 : F230 Hex
W2050 : F230 Hex
W4325 : F230 Hex
W0894 : F230 Hex
COM. SCANNER INPUT MAP
COM SCAN OUTPUT MAP
CMD. WORD IMAGE
FREQ. REF. WORD MAP
MODBUS NETWORK DIAG
MODBUS HMI DIAG
CANopen MAP
PROG. CARD SCANNER
RUN Term +50.00Hz 80A
COM. SCANNER INPUT MAP
Com Scan In1 val.: 0
Com Scan In2 val.: 0
Com Scan In3 val.: 0
Com Scan In4 val.: 0
Com Scan In5 val.: 0
Code Quick
Com Scan In6 val.: 0
Com Scan In7 val.: 0
Com Scan In8 val.: 0
RUN Term +50.00Hz 80A
COM SCAN OUTPUT MAP
Com Scan Out1 val.: 0
Com Scan Out2 val.: 0
Com Scan Out3 val.: 0
Com Scan Out4 val.: 0
Com Scan Out5 val.: 0
Code Quick
Com Scan Out6 val.: 0
Com Scan Out7 val.: 0
Com Scan Out8 val.: 0
RUN Term +50.00Hz 80A
CMD. WORD IMAGE
Modbus cmd.: 0000 Hex.
CANopen cmd.: 0000 Hex.
COM. card cmd.: 0000 Hex.
Prog. card cmd: 0000 Hex.
Code Quick
RUN Term +50.00Hz 80A
FREQ. REF. WORD MAP
Ref. Modbus: 0.0 Hz
Ref. CANopen: 0.0 Hz
Com. card ref.: 0.0 Hz
Prog. Card ref: 0.0 Hz
Code Quick
With graphic display terminal
Communication
[COMMUNICATION MAP] indicates the types of bus used for control or reference, the
corresponding command and reference values, the status word, the words selected in
the [DISPLAY CONFIG.] menu, etc.
The display format (hexadecimal or decimal) can be configured in the [DISPLAY
CONFIG.] menu.
[COM. SCANNER INPUT MAP] and [COM SCAN OUTPUT MAP]:
Visualization of registers exchanged periodically (8 input and 8 output) for integrated Modbus and for fieldbus cards.
48 AAV49426 12/2009
Page 49

[1.2 MONITORING] (SUP-)
RUN Term +50.00Hz 80A
COMMUNICATION MAP
Command Channel: Modbus
Cmd value: ABCD Hex
Active ref. channel: CANopen
Frequency ref.: -12.5 Hz
ETA state word: 2153 Hex
Code Quick
W3141 : F230 Hex
W2050 : F230 Hex
W4325 : F230 Hex
W0894 : F230 Hex
COM. SCANNER INPUT MAP
COM SCAN OUTPUT MAP
CMD. WORD IMAGE
FREQ. REF. WORD MAP
MODBUS NETWORK DIAG
MODBUS HMI DIAG
CANopen MAP
PROG. CARD SCANNER
Communication via Modbus
RUN Term +50.00Hz 80A
MODBUS NETWORK DIAG
COM LED :
Mb NET frames nb.
Mb NET CRC errors
Code Quick
Communication via the graphic display terminal
RUN Term +50.00Hz 80A
MODBUS HMI DIAG
COM LED :
Mb HMI frames nb.
Mb HMI CRC errors
Code Quick
PDO configuration using
the network tool.
Some PDOs cannot be
used.
RUN Term +50.00Hz 80A
PDO1 IMAGE
Received PDO1-1 : FDBA Hex
Received PDO1-2
Received PDO1-3
Received PDO1-4
Transmit PDO1-1 : FDBA Hex
Code Quick
Transmit PDO1-2
Transmit PDO1-3
Transmit PDO1-4
RUN Term +50.00Hz 80A
PDO2 IMAGE
Received PDO2-1 : FDBA Hex
Received PDO2-2
Received PDO2-3
Received PDO2-4
Transmit PDO2-1 : FDBA Hex
Code Quick
Transmit PDO2-2
Transmit PDO2-3
Transmit PDO2-4
RUN Term +50.00Hz 80A
PDO3 IMAGE
Received PDO3-1 : FDBA Hex
Received PDO3-2
Received PDO3-3
Received PDO3-4
Transmit PDO3-1 : FDBA Hex
Code Quick
Transmit PDO3-2
Transmit PDO3-3
Transmit PDO3-4
Communication via CANopen
PDO images are only visible if
CANopen has been enabled
(address other than OFF) and if
the PDOs are active.
RUN Term +50.00Hz 80A
CANopen MAP
RUN LED:
ERR LED:
PDO1 IMAGE
PDO2 IMAGE
PDO3 IMAGE
Code Quick
Canopen NMT state
Number of TX PDO 0
Number of RX PDO 0
Error code 0
RX Error Counter 0
TX Error Counter 0
With graphic display terminal
Communication (continued)
The state of the LEDs, the periodic data, the address, the speed, and the
format, etc,. is given for each bus.
LED off
LED on
AAV49426 12/2009 49
Page 50

[1.2 MONITORING] (SUP-)
RUN Term +50.00Hz 80A
COMMUNICATION MAP
Command Channel: Modbus
Cmd value: ABCD Hex
Active ref. channel: CANopen
Frequency ref.: -12.5 Hz
ETA state word: 2153 Hex
Code Quick
W3141 : F230 Hex
W2050 : F230 Hex
W4325 : F230 Hex
W0894 : F230 Hex
COM. SCANNER INPUT MAP
COM SCAN OUTPUT MAP
CMD. WORD IMAGE
FREQ. REF. WORD MAP
MODBUS NETWORK DIAG
MODBUS HMI DIAG
CANopen MAP
PROG. CARD SCANNER
Controller Inside card
RUN Term +50.00Hz 80A
PROG. CARD SCANNER
Input scanner
Output scanner
Code Quick
RUN Term +50.00Hz 80A
Input scanner
Prg.card. scan in1: 0
Prg.card. scan in2: 0
Prg.card. scan in3: 0
Prg.card. scan in4: 0
Prg.card. scan in5: 0
Code Quick
Prg.card scan in6: 0
Prg.card scan in7: 0
Prg.card scan in8: 0
RUN Term +50.00Hz 80A
Output scanner
PLC card.scan Out1: 0
PLC card.scan Out2: 0
PLC card.scan Out3: 0
PLC card.scan Out4: 0
PLC card.scan Out5: 0
Code Quick
PLC card.scan Out6: 0
PLC card.scan Out7: 0
PLC card.scan Out8: 0
With graphic display terminal
Communication (continued)
[Input scanner] and [Output scanner]:
Visualization of registers exchanged periodically (8 input and 8 output).
50 AAV49426 12/2009
Page 51

[1.2 MONITORING] (SUP-)
With graphic display terminal: Drive-internal states and values
Name/Description
[Alarm groups] (ALGr)
[HMI Frequency ref.] (LFr)
[Internal PID ref.] (rPI)
[HMI torque ref.] (Ltr)
[Multiplying coeff.] (MFr)
[Frequency ref.] (FrH)
[Torque reference] (trr)
[Output frequency] (rFr)
[Measured output fr.] (MMF)
[Pulse in. work. freq.] (FqS)
[Motor current] (LCr)
[ENA avg speed] (AUS)
[Motor speed] (SPd)
[Motor voltage] (UOP)
[Motor power] (OPr)
[Motor torque] (Otr)
[Mains voltage] (ULn)
[Motor thermal state] (tHr)
[Drv.thermal state] (tHd)
[DBR thermal state] (tHb)
[Consumption] (APH)
[Run time] (rtH)
[Power on time] (PtH)
[IGBT alarm counter] (tAC)
[PID reference] (rPC)
[PID feedback] (rPF)
[PID error] (rPE)
[PID Output] (rPO)
[Date/Time] (CLO)
[- - - - -] (o02)
to
[- - - - -] (o06)
[Config. active] (CnFS)
[Utilised param. set] (CFPS)
[ALARMS] (ALr-)
[OTHER STATE] (SSt-)
Current alarm group numbers
in Hz. Frequency reference via the graphic display terminal (can be accessed if the function has been
configured).
as a process value. PID reference via graphic display terminal (can be accessed if the function has been
configured).
as a % of the rated torque. Torque reference via graphic display terminal.
as a % (can be accessed if [Multiplier ref. -] (MA2,MA3) page 151
in Hz
as a % of the rated torque (can be accessed if the function has been configured)
in Hz
in Hz: The measured motor speed is displayed if an encoder card has been inserted, oth erwise 0 appears.
in Hz: Frequency of the "Pulse input" input used by the [FREQUENCY METER] (FqF-) function, page 253
in A
in Hz: The parameter can be accessed if [ENA system] (EnA) = [Yes] (YES) (see page 94
in rpm
in V
as a % of the rated power
as a % of the rated torque
in V. Line voltage from the point of view of the DC bus, motor running or stopped.
as a %
as a %
as a % (can only be accessed on high rating drives)
in Wh, kWh or MWh (accumulated consumption)
in seconds, minutes or hours (length of time the motor has been switched on)
in seconds, minutes or hours (length of time the drive has been switched on)
in seconds (length of time the "IGBT temperature" alarm has been active)
as a process value (can be accessed if the PID function has been configured)
as a process value (can be accessed if the PID function has been configured)
as a process value (can be accessed if the PID function has been configured)
in Hz (can be accessed if the PID function has been configured)
Current date and time generated by the Controller Inside card (can be accessed if the card has been
inserted)
Words generated by the Controller Inside card (can be accessed if the card has been inserted)
Active configuration [Config. n°0, 1 or 2]
[Set n°1, 2 or 3] (can be accessed if parameter switching has been enabled, see page 215
List of current alarms. If an alarm is present, a appears.
List of secondary states:
- [In motor fluxing] (FLX): In motor fluxing
- [PTC1 alarm] (PtC1): Probe alarm 1
- [PTC2 alarm] (PtC2): Probe alarm 2
- [LI6=PTC alarm] (PtC3): LI6 = PTC probe alarm
- [Fast stop in prog.] (FSt): Fast stop in progress
- [Current Th. attained] (CtA): Current threshold
attained ([Current threshold] (Ctd) page 67
- [Freq. Th. attained] (FtA): Frequency threshold
attained ([Freq. threshold] (Ftd) page 68
- [Freq. Th. 2 attained] (F2A): 2
attained ([Freq. threshold 2] (F2d) page 68
- [Frequency ref. att.] (SrA): Frequency reference
attained
- [Motor th. state att.] (tSA): Motor 1 thermal state
attained
- [External fault alarm] (EtF): External fault alarm
- [Auto restart] (AUtO): Automatic restart in progress
- [Remote] (FtL): Line mode control
- [Auto-tuning] (tUn): Performing auto-tuning
- [Undervoltage] (USA): Undervoltage alarm
- [Cnfg.1 act.] (CnF1): Configuration 1 active
- [Cnfg.2 act.] (CnF2): Configuration 2 active
nd
frequency threshold
)
)
)
- [HSP attained] (FLA): High speed attained
- [Load slipping] (AnA): Slipping alarm
- [Set 1 active] (CFP1): Parameter set 1
- [Set 2 active] (CFP2): Parameter set 2
- [Set 3 active] (CFP3): Parameter set 3
- [In braking] (brS): Drive braking
- [DC bus loading] (dbL): DC bus loading
- [Forward] (MFrd): Motor running forward
- [Reverse] (MrrS): Motor running in reverse
- [High torque alarm] (ttHA): Motor torque
- [Low torque alarm] (ttLA): Motor torque
- [Freq. meter Alarm] (FqLA): Measured
has been assigned)
)
)
active
active
active
overshooting high threshold [High torque
thd.] (ttH) page 67
undershooting low threshold [Low torque
thd.] (ttL) page 67
speed threshold attained: [Pulse warning
thd.] (FqL) page 68
.
.
.
.
AAV49426 12/2009 51
Page 52

[1.2 MONITORING] (SUP-)
State 1
State 0
LI1 LI2 LI3 LI4 LI5 LI6 LI7 LI8
State 1
State 0
LI9 LI10 LI11 LI12 LI13 LI14 PR
With integrated display terminal
This menu can be used to display the drive inputs, states and internal values.
Code Name/Description Adjustment range Factory setting
IOM-
LIA-
L1A
to
L14A
LIS1
LIS2
I/O MAP
b Logic input functions
Can be used to display the functions assigned to each input. If no functions have been assigned, nO is
displayed.
Use the and arrows to scroll through the functions. If a number of functions have been assigned
to the same input, check that they are compatible.
b State of logic inputs LI1 to LI8
Can be used to visualize the state of logic inputs LI1 to LI8
(display segment assignment: high = 1, low = 0)
Example above: LI1 and LI6 are at 1; LI2 to LI5, LI7 and LI8 are at 0.
b State of logic inputs LI9 to LI14 and Power Removal
Can be used to visualize the state of logic inputs LI9 to LI14 and PR (Power Removal)
(display segment assignment: high = 1, low = 0)
AIA-
AI1A
AI2A
AI3A
AI4A
Example above: LI9 and LI14 are at 1, LI10 to LI13 are at 0 and PR (Power Removal) is at 1.
b Analog input functions
Can be used to display the functions assigned to each input. If no functions have been assigned, nO is
displayed. Use the and arrows to scroll through the functions. If a number of functions h ave been
assigned to the same input, check that they are compatible.
52 AAV49426 12/2009
Page 53

[1.2 MONITORING] (SUP-)
With integrated display terminal: Drive-internal states and values
Code Name/Description Unit
ALGr
rPI
MFr
FrH
trr
rFr
MMF
FqS
LCr
AUS
SPd
UOP
OPr
Otr
ULn
tHr
tHd
tHb
APH
rtH
PtH
tAC
rPC
rPF
rPE
rPO
CLO-
o02
o03
o04
o05
o06
CnFS
CFPS
Alarm groups: Current alarm group numbers
Internal PID reference: PID reference via graphic display terminal (can be accessed if the func tion has been
configured).
Multiplication coefficient (can be accessed if [Multiplier ref. -] (MA2,MA3) page 151
Frequency ref. Hz
Torque reference: Can be accessed if the function has been configured %.
Output frequency Hz
The measured motor speed is displayed if an encoder card has been inserted, otherwise 0 appears. Hz
Frequency of the "Pulse input" input used by the [FREQUENCY METER] (FqF-) function, page 253
Motor current A
ENA avg
Motor speed rpm
Motor voltage V
Motor power %
Motor torque %
Line voltage: Line voltage from the point of view of the DC bus, motor running or stopped. V
Motor thermal state %
Drv thermal state %
DBR thermal state: Can be accessed on high rating drives only. %
Power consumption Wh, kWh or
Run time: Length of time the motor has been turned on seconds,
Power on time: Length of time the drive has been turned on
IGBT alarm counter: Length of time the "IGBT temperature" alarm has been active seconds
PID reference: Can be accessed if the PID function has been configured as a process
PID feedback: Can be accessed if the PID function has been configured
PID error: Can be accessed if the PID function has been configured
PID Output: Can be accessed if the PID function has been configured Hz
tIME, dAY: Current date and time generated by the Controller Inside card (can be accessed if the card has
been inserted)
Word generated by the Controller Inside card (can be accessed if the card has been inserted)
Word generated by the Controller Inside card (can be accessed if the card has been inserted)
Word generated by the Controller Inside card (can be accessed if the card has been inserted)
Word generated by the Controller Inside card (can be accessed if the card has been inserted)
Word generated by the Controller Inside card (can be accessed if the card has been inserted)
Config. active: CnF0, 1 or 2 (can be accessed if motor or configuration switching has been enabled, see
page 219
Utilised param. set: CFP1, 2 or 3 (can be accessed if parameter switching has been enabled, see page 215
SPEED: The parameter can be accessed if EnA = YES (see page 94)Hz
)
has been assigned) %
as a process
value
.Hz
MWh
minutes or
hours
value
)
AAV49426 12/2009 53
Page 54

[1.3 SETTINGS] (SEt-)
RDY Term +0.00Hz 0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code Quick
ENT
RDY Term +0.00Hz 0A
1 DRIVE MENU
1.1 SIMPLY START
1.2 MONITORING
1.3 SETTINGS
1.4 MOTOR CONTROL
1.5 INPUTS / OUTPUTS CFG
Code << >> Quick
ENT
RUN Term +50.00Hz 80A
1.3 SETTINGS
Ramp increment
Acceleration
Deceleration
Acceleration 2
Deceleration 2
Code << >> Quick
XXX
SIM-
SEt-
ESC
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
drC-
Displays the state of the drive
ADJUST
Power-up
With graphic display terminal:
With integrated display terminal:
54 AAV49426 12/2009
Page 55

[1.3 SETTINGS] (SEt-)
DANGER
UNINTENDED EQUIPMENT OPERATION
• Check that changes made to the settings during operation do not present any danger.
• We recommend stopping the drive before making any changes.
Failure to follow these instructions will result in death or serious injury.
The adjustment parameters can be modified with the drive running or stopped.
Code Name/Description Adjustment range Factory setting
Inr
0.01
ACC
dEC
AC2
g
dE2
g
tA1
g
tA2
g
tA3
g
0.1
M [Ramp increment]
v [0,01]: ramp up to 99.99 seconds
v [0,1]: ramp up to 999.9 seconds
1
v [1]: ramp up to 6000 seconds
This parameter is valid for [Acceleration] (ACC), [Deceleration] (dEC), [Acceleration 2] (AC2) and
[Deceleration 2] (dE2).
M [Acceleration]
Time to accelerate from 0 to the [Rated motor freq.] (FrS) (page 76). Make sure that this value is compatible
with the inertia being driven.
M [Deceleration]
Time to decelerate from the [Rated motor freq.] (FrS) (page 76) to 0. Make sure that this value is compatible
with the inertia being driven.
M [Acceleration 2]
See page 154
Time to accelerate from 0 to the [Rated motor freq.] (FrS). Make sure that this value is compatible with the
inertia being driven.
M [Deceleration 2]
See page 154
Time to decelerate from the [Rated motor freq.] (FrS) to 0. Make sure that this value is compatible with the
inertia being driven.
M [Begin Acc round]
See page 153
Rounding of start of acceleration ramp as a % of the [Acceleration] (ACC) or [Acceleration 2] (AC2) ramp time.
M [End Acc round]
See page 153
- Rounding of end of acceleration ramp as a % of the [Acceleration] (ACC) or [Acceleration 2] (AC2) ramp
time.
- Can be set between 0 and (100% - [Begin Acc round] (tA1))
M Begin Dec round]
See page 153
Rounding of start of deceleration ramp as a % of the [Deceleration] (dEC) or [Deceleration 2] (dE2) ramp time.
0,01 - 0,1 - 1 0,1
0.01 to 6000 s (1) 3.0 s
0.01 to 6000 s (1) 3.0 s
0.01 to 6000 s (1) 5.0 s
0.01 to 6000 s (1) 5.0 s
0 to 100% 10%
10%
0 to 100% 10%
(1)Range 0.01 to 99.99 s or 0.1 to 999.9 s or 1 to 6000 s according to [Ramp increment] (Inr).
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
g
also be accessed and adjusted from within the confi guration menu for t he correspondin g function, thei r description is deta iled
in these menus, on the pages indicated, to aid progra mming.
AAV49426 12/2009 55
Page 56

[1.3 SETTINGS] (SEt-)
CAUTION
For permanent magnet synchronous motors, the maximum permissible speed must not be exceeded,
otherwise demagnetization may occur. The maximum spee d permit ted by the motor, drive cha in or ap plicati on
must not be exceeded at any time.
Failure to follow this instruction can result in equipment damage.
Code Name/Description Adjustment range Factory setting
tA4
g
M [End Dec round]
See page 153
- Rounding of end of deceleration ramp as a % of the [Deceleration] (dEC) or [Deceleration 2] (dE2) ramp
time.
- Can be set between 0 and (100% - [Begin Dec round] (tA3))
10%
LSP
HSP
ItH
SPG
g
SIt
g
SFC
g
StA
g
FLG
g
M [Low speed]
Motor frequency at minimum reference, can be set between 0 and [High speed] (HSP).
M [High speed]
Motor frequency at maximum reference, can be set bet ween [Low speed] (LSP) and [Max frequency] (tFr). The
factory setting changes to 60 Hz if [Standard mot. freq] (bFr) = [60Hz NEMA] (60).
M [Mot. therm. current]
Motor thermal protection current, to be set to the rated current indicated on the nameplate.
M [Speed prop. gain]
This parameter can be accessed if [Speed loop type] (SSL) page 89 = [Standard] (Std).
Speed loop proportional gain.
M [Speed time integral]
This parameter can be accessed if [Speed loop type] (SSL) page 89 = [Standard] (Std).
Speed loop integral time constant.
M [K speed loop filter]
This parameter can be accessed if [Speed loop type] (SSL) page 89 = [Standard] (Std).
Speed loop filter coefficient.
M [Fr.Loop.Stab]
This parameter can be accessed if [Speed loop type] (SSL) page 89 = [High perfor.] (HPF).
Stability: Used to adapt the return to steady state after a speed transient, according to the dynamics of the
machine. Gradually increase the stability to incre ase control loo p attenu at ion and thus re duce any overspe ed.
M [FreqLoopGain]
This parameter can be accessed if [Speed loop type] (SSL) page 89 = [High perfor.] (HPF).
Frequency loop gain: Used to adapt the response of the machine speed accordin g to the dynamics. Gradua lly
increase the gain to increase the control loop passband.
0 Hz
50 Hz
0.2 to 1.5 In (1) According to drive
rating
0 to 1000% 40%
1 to 1000% 100%
0 to 100% 0
0 to 100% 20%
0 to 100% 20%
(1)In corresponds to the rated drive current indicated in the Installation Manual or on the drive nameplate.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
g
also be accessed and adjusted from within the confi guration menu for t he correspondin g function, thei r description is deta iled
in these menus, on the pages indicated, to aid progra mming.
56 AAV49426 12/2009
Page 57

[1.3 SETTINGS] (SEt-)
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Reference division
Time in ms
Standard speed loop - Parameter settings for [K speed loop filter] (SFC),
[Speed prop. gain] (SPG) and [Speed time integral] (SIt)
• The following parameters can only be accessed in vector control profil es: [Motor control type] (Ctt), page 70 = [SVC U] (UUC), [SVC I]
(CUC), [FVC] (FUC), [Sync. mot.] (SYn) or [Sync.CL] (FSY) if [Speed loop type](SSL) page 89
(EnA) page 94
= [Non] (nO).
• The factory settings are suitable for most applications.
General case: Setting for [K speed loop filter] (SFC) = 0
The regulator is an "IP" type with filtering of the speed reference, for applications requiring flexibility and stability (hoisting or high inertia,
for example).
• [Speed prop. gain] (SPG) affects excessive speed.
• [Speed time integral] (SIt) affects the passband and response time.
Initial response Reduction in SIT Reduction in SIT
= [Standard] (Std) and if [ENA system]
Initial response Increase in SPG Increase in SPG
AAV49426 12/2009 57
Page 58

[1.3 SETTINGS] (SEt-)
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Reference division
Time in ms
Special case: Parameter [K speed loop filter] (SFC) not 0
This parameter must be reserved for specific applications that require a short response time (trajectory positioning or servo control).
- When set to 100 as described above the regulator is a “PI” type, without filtering of the speed reference.
- Settings between 0 and 100 will obtain an intermediate function between the settings below and those on the previous page.
Example: Setting for [K speed loop filter] (SFC) = 100
• [Speed prop. gain] (SPG) affects the passband and response time.
• [Speed time integral] (SIt) affects excessive speed.
Initial response Reduction in SIT Reduction in SIT
Initial response Increase in SPG Increase in SPG
58 AAV49426 12/2009
Page 59

[1.3 SETTINGS] (SEt-)
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Reference division
Time in ms
High performance speed loop - Parameter settings for [FreqLoopGain] (FLG) and
[
Fr.Loop.Stab] (StA)
These parameters can only be accessed if [Speed loop type] (SSL) page 89 = [High perf.] (HPF).
Inertia
The [Estim. app. inertia] (JESt) parameter, page 89, is the default value of the inertia being driven, estimated by the drive based on the
motor parameters. Speed loop default settings are determined by the drive from this inertia.
The value of the actual inertia being driven must be entered in the [Application Inertia] (JAPL) parameter, page 90
used by the drive to optimize speed loop settings, thus achiev ing the best results (provided that the exact value has been entered).
The [App. Inertia Coef.] (JACO) parameter, page 89
, is used to fix the ratio between [Estim. app. inertia] (JESt) page 89 and
[Application Inertia] (JAPL).
Gains
These parameters are used to adjust the response of the speed loop obtained from the inertia, in particular when this is not known.
• [Fr.Loop.Stab] (StA): Used to adapt the return to steady state after a speed transient, according to the dynamics of the machine.
Gradually increase the stability to increase control loop attenuation and thus reduce any overspeed.
• [FreqLoopGain] (FLG): Used to adapt the response of the machine speed transients according to the dynamics (passband). For
machines with high resistive torque, high inertia or fast cycles, increas e the gain gradually.
. This value is then
Initial response Increase in StA Increase in StA
Initial response Increase in FLG Increase in FLG
Expert parameters
Two parameters from the [1.4 MOTOR CONTROL] (drC-) menu are accessible at Expert level and can be used to boost dynamics if
necessary. See page 90
AAV49426 12/2009 59
.
Page 60

[1.3 SETTINGS] (SEt-)
CAUTION
Check that the motor will withstand this current without overheating.
Failure to follow this instruction can result in equipment damage.
CAUTION
Check that the motor will withstand this current without overheating.
Failure to follow this instruction can result in equipment damage.
Code Name/Description Adjustment range Factory setting
GPE
g
GIE
g
UFr
g
SLP
g
dCF
g
IdC
g
M [ENA prop.gain]
See page 94
M [ENA integral gain]
See page 94
M [IR compensation]
See page 95
M [Slip compensation]
See page 78
M [Ramp divider]
See page 156
M [DC inject. level 1]
See page 157
Level of DC injection braking current activated via logic input or selected as stop mode.
1 to 9999 250
0 to 9999 100
25 to 200% 100%
0 to 300% 100%
0 to 10 4
0.1 to 1.41 In (1) 0.64 In (1)
tdI
g
IdC2
g
tdC
g
(1)In corresponds to the rated drive current indicated in the Installation Manual or on the drive nameplate.
g
M [DC injection time 1]
See page 157
Maximum current injection time [DC inject. level 1] (IdC). After this time the injection current becomes
[DC inject. level 2] (IdC2).
M [DC inject. level 2]
See page 157
Injection current activated by logic input or selected as stop mode, once period of time [DC injection time 1] (tdI)
has elapsed.
M [DC injection time 2]
See page 157
Maximum injection time [DC inject. level 2] (IdC2) for injection selected as stop mode only.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and adjusted from within the confi guration menu for t he correspondin g function, thei r description is deta iled
in these menus, on the pages indicated, to aid progra mming.
0.1 to 30 s 0.5 s
0.1 In (2) to [DC inject.
level 1] (IdC)
0.1 to 30 s 0.5 s
0.5 In (1)
60 AAV49426 12/2009
Page 61

[1.3 SETTINGS] (SEt-)
CAUTION
Check that the motor will withstand this current without overheating.
Failure to follow this instruction can res u lt in equ ip m en t da m a ge .
CAUTION
Check that the motor will withstand this current without overheating.
Failure to follow this instruction can res u lt in equ ip m en t da m a ge .
AdC SdC2 Operation
YES x
Ct
≠ 0
Ct = 0
Run command
Speed
t
SdC1
SdC2
tdC1 tdC1 + tdC2
I
t
SdC1
I
t
SdC1
SdC2
tdC1
I
t
0
t
1
0
Code Name/Description Adjustment range Factory setting
SdC1
g
M [Auto DC inj. level 1]
Level of standstill DC injection current. This parameter can be accessed if [Auto DC injection] (AdC) pa ge 158
is not [No] (nO)
This parameter is forced to 0 if [Motor control type] (Ctt) page 70
0 to 1.2 In (1) 0.7 In (1)
= [Sync. mot.] (SYn) or [Sync.CL] (FSY).
tdCI
g
SdC2
g
tdC2
g
M [Auto DC inj. time 1]
Standstill injection time. This para meter can be accessed if [Auto DC injection] (AdC) page 158 is not [No] (nO)
If [Motor control type] (Ctt) page 70
corresponds to the zero speed maintenance time.
M [Auto DC inj. level 2]
2nd level of standstill DC injection current.
This parameter can be accessed if [Auto DC injection] (AdC) page 158
This parameter is forced to 0 if [Motor control type] (Ctt) page 70
M [Auto DC inj. time 2]
2nd standstill injection time.
This parameter can be accessed if [Auto DC injection] (AdC) page 158
0.1 to 30 s 0.5 s
= [FVC] (FUC) or [Sync. mot.] (SYn) or [Sync.CL] (FSY) this time
0 to 1.2 In (1) 0.5 In (1)
is not [No] (nO)
= [Sync. mot.] (SYn) or [Sync.CL] (FSY).
0 to 30 s 0 s
= [Yes] (YES)
Note: When [Moto r control type] (Ctt) page 70
= [FVC] (FUC) or [Sync.CL] (FSY):
[Auto DC inj. level 1] (SdC1), [Auto DC inj.
level 2] (SdC2) and [Auto DC inj. time 2]
(tdC2) are not accessible. Only [Auto DC inj.
time 1] (tdC1) can be accessed. This then
corresponds to a zero speed maintenance
time.
(1)In corresponds to the rated drive current indicated in the Installation Manual or on the drive nameplate.
AAV49426 12/2009 61
Page 62

[1.3 SETTINGS] (SEt-)
CAUTION
On ATV71p075N4 to U40N4, drives, if the RFI fi lters are disconnected (operation on a n IT system), the drive's
switching frequency must not exceed 4 kHz.
Failure to follow this instruction can result in equipment damage.
CAUTION
Check that the motor will withstand this current, particularly in the case of permanent magnet synchronous
motors, which are susceptible to demagnetization.
Failure to follow this instruction can result in equipment damage.
CAUTION
Check that the motor will withstand this current, particularly in the case of permanent magnet synchronous
motors, which are susceptible to demagnetization.
Failure to follow this instruction can result in equipment damage.
Code Name/Description Adjustment range Factory setting
SFr
M [Switching freq.]
Switching frequency setting.
Adjustment range: This can vary between 1 and 16 kHz, but the minimum and maximum values, as well as
the factory setting, can be limited in accordance with the type of drive (ATV71H or W), the rating and the
configuration of the [Sinus filter] (OFI) and [Motor surge limit] (SUL) parameters, page 96
According to rating According to rating
.
CLI
If the value is less than 2 kHz, [Current Limitation] (CLI) and [I Limit. 2 value] (CL2) page 62
1.36 In.
Adjustment with drive running:
- If the initial value is less than 2 kHz, it is not possible to increase it above 1.9 kHz while running.
- If the initial value is greater than or equal to 2 kHz, a minimum of 2 kHz must be maintained while running.
Adjustment with the drive stopped: No restrictions.
Note: In the event of excessive temperature rise, the drive will automatically reduce the switching
frequency and reset it once the temperature returns to normal.
Note: If [Motor control type] (Ctt) page 70
setting the switching frequency to a value less than 2 kHz (in order to avoid speed instability).
.
M [Current Limitation]
Used to limit the motor current.
The adjustment range is limited to 1.36 In if [Switching freq.] (SFr) page 62
Note: If the setting is less than 0.25 In, the drive may lo ck in [Output Phase Loss ] (OPF) fault mode if
this has been enabled (see page 242
has any effect..
are limited to
= [FVC] (FUC) or [Sync.CL] (FSY) we do not recommend
0 to 1.65 In (1) 1.5 In (1)
is less than 2 kHz.
). If it is less than the no-load motor c urrent, the limitation no longer
CL2
M [I Limit. 2 value]
See page 204
The adjustment range is limited to 1.36 In if [Switching freq.] (SFr) page 62 is less than 2 kHz.
Note: If the setting is less than 0.25 In, the drive may lo ck in [Output Phase Loss ] (OPF) fault mode if
this has been enabled (see page 242
has any effect..
). If it is less than the no-load motor c urrent, the limitation no longer
0 to 1.65 In (1) 1.5 In (1)
g
(1)In corresponds to the rated drive current indicated in the Installation Manual or on the drive nameplate.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
g
62 AAV49426 12/2009
also be accessed and adjusted from within the confi guration menu for t he correspondin g function, thei r description is deta iled
in these menus, on the pages indicated, to aid progra mming.
Page 63

[1.3 SETTINGS] (SEt-)
CAUTION
Check that the motor will withstand this current without overheating.
Failure to follow this instruction can result in equipment damage.
Code Name/Description Adjustment range Factory setting
FLU
FnC
FCt
FnO
M [Motor fluxing]
v [Not cont.] (FnC): Non-continuous mode
v [Continuous] (FCt): Continuous mode. This option is not poss ibl e i f [ Angl e s ett i ng type] (ASt) page 84 or 87 is
[With load] (brC) or if [Auto DC injection] (AdC) page 158
[Freewheel] (nSt).
is [Yes] (YES) or if [Type of stop] (Stt) page 156 is
v [No] (FnO): Function inactive. This option is not possible if [Motor control type] (Ctt) page 70 = [SVC I] (CUC)
or [FVC] (FUC).
If [Motor control type] (Ctt) page 70
replaced by [Not cont.] (FnC).
= [SVC I] (CUC), [FVC] (FUC) or [Sync. mot.] (SYn), the factory setting i s
v If [Motor control ty pe] (Ctt) page 70 = [SVC V] (UUC), the factory setting is replaced by [Not cont.] (FnC) at and
above 55 kW (75 HP) for ATV71
If [Motor control type] (Ctt) page 70
In order to obtain rapid high torque on startup, magnetic flux needs to already have been established in the
motor.
•In [Continuous] (FCt) mode, the drive automatically builds up flux when it is powered up.
•In [Not cont.] (FnC) mode, fluxing occurs when the motor starts up.
The flux current is greater than nCr (configured rated motor current) when the flux is established and is then
adjusted to the motor magnetizing current.
ppppM3X and at and above 90 kW (120 HP) for ATV71ppppN4.
= [Sync.CL] (FSY), [Motor fluxing] (FLU) is forced to [No] (FnO).
[No] (FnO)
If [Motor control type] (Ctt) page 70
([No] (FnO) is not permitted); this parameter causes rotor angle detection or alignment (depending on the
configuration of [Angle setting type] (ASt) page 84
• If [Brake assignment] (bLC) page 175
Note: If [Angle setting type] (ASt) = [W/o load] (nLd), the motor may rotate one full revolution during
measurement.
tLS
JGF
g
JGt
g
(1)In corresponds to the rated drive current indicated in the Installation Manual or on the drive nameplate.
M [Low speed time out]
Maximum operating time at [Low speed] (LSP) (see page 44)
Following operation at LSP for a defined period, a mot or stop is requested automatically. The motor wi ll restart
if the reference is greater than LSP and if a run comman d is still present.
Caution: A value of 0 indicates an unlimited period of time.
Note: If [Low speed time out]
(only if a ramp stop can be configured).
M [Jog frequency]
See page 160
Reference in jog operation
M [Jog delay]
See page 160
Anti-repeat delay between 2 consecutive jog operations.
= [Sync. mot.] (SYn), the [Motor fluxing] (FLU) parameter MUST be active
) and not fluxing.
is not [No] (nO), the [Motor fluxing] (FLU) parameter has no effect.
0 to 999.9 s 0 s
(tLS) is not 0, [Type of stop] (Stt) page 156 is forced to [Ramp stop] (rMP)
0 to 10 Hz 10 Hz
0 to 2.0 s 0.5 s
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
g
also be accessed and adjusted from within the confi guration menu for t he correspondin g function, thei r description is deta iled
in these menus, on the pages indicated, to aid progra mming.
AAV49426 12/2009 63
Page 64

[1.3 SETTINGS] (SEt-)
Code Name/Description Adjustment range Factory setting
SP2
g
SP3
g
SP4
g
SP5
g
SP6
g
SP7
g
SP8
g
SP9
g
SP10
g
SP11
g
SP12
g
SP13
g
SP14
g
M [Preset speed 2]
See page 163
Preset speed 2
M [Preset speed 3]
See page 163
Preset speed 3
M [Preset speed 4]
See page 163
Preset speed 4
M [Preset speed 5]
See page 163
Preset speed 5
M [Preset speed 6]
See page 163
Preset speed 6
M [Preset speed 7]
See page 163
Preset speed 7
M [Preset speed 8]
See page 163
Preset speed 8
M [Preset speed 9]
See page 163
Preset speed 9
M [Preset speed 10]
See page 163
Preset speed 10
M [Preset speed 11]
See page 163
Preset speed 11
M [Preset speed 12]
See page 163
Preset speed 12
M [Preset speed 13]
See page 163
Preset speed 13
M [Preset speed 14]
See page 163
Preset speed 14
0 to 1600 Hz 10 Hz
0 to 1600 Hz 15 Hz
0 to 1600 Hz 20 Hz
0 to 1600 Hz 25 Hz
0 to 1600 Hz 30 Hz
0 to 1600 Hz 35 Hz
0 to 1600 Hz 40 Hz
0 to 1600 Hz 45 Hz
0 to 1600 Hz 50 Hz
0 to 1600 Hz 55 Hz
0 to 1600 Hz 60 Hz
0 to 1600 Hz 70 Hz
0 to 1600 Hz 80 Hz
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
g
64 AAV49426 12/2009
also be accessed and adjusted from within the confi guration menu for t he correspondin g function, thei r description is deta iled
in these menus, on the pages indicated, to aid progra mming.
Page 65

[1.3 SETTINGS] (SEt-)
Code Name/Description Adjustment range Factory setting
SP15
g
SP16
g
MFr
SrP
g
rPG
g
rIG
g
rdG
g
PrP
g
POL
g
POH
g
PAL
g
PAH
g
M [Preset speed 15]
See page 163
Preset speed 15
M [Preset speed 16]
See page 163
Preset speed 16
M [Multiplying coeff.]
Multiplying coefficient, can be accessed if [Multiplier ref.-] (MA2,MA3) page 151 has been assigned to the
graphic terminal
M [+/-Speed limitation]
See page 167
Limitation of +/- speed variation
M [PID prop. gain]
See page 193
Proportional gain
M [PID integral gain]
See page 194
Integral gain
M [PID derivative gain]
See page 194
Derivative gain
M [PID ramp]
See page 194
PID acceleration/deceleration ramp, defined to go from [Min PID reference] (PIP1) to [Max PID reference]
(PIP2) and vice versa.
M [Min PID output]
See page 194
Minimum value of regulator output in Hz
M [Max PID output]
See page 194
Maximum value of regulator output in Hz
M [Min fbk alarm]
See page 194
Minimum monitoring threshold for regulator feedback
M [Max fbk alarm]
See page 194
Maximum monitoring threshold for regulator feedback
0 to 1600 Hz 90 Hz
0 to 1600 Hz 100 Hz
0 to 100% 100%
0 to 50% 10%
0.01 to 100 1
0.01 to 100 1
0.00 to 100 0
0 to 99.9 s 0
- 500 to 500 or -1600
to 1600 according to
rating
0 to 500 or 1600
according to rating
See page 194 (1) 100
See page 194 (1) 1000
0 Hz
60 Hz
(1)If a graphic display terminal is not in use, values greater than 9999 will be displayed on the 4-digit display with a period mark after the
thousand digit, e.g., 15.65 for 15650.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
g
AAV49426 12/2009 65
also be accessed and adjusted from within the confi guration menu for t he correspondin g function, thei r description is deta iled
in these menus, on the pages indicated, to aid progra mming.
Page 66

[1.3 SETTINGS] (SEt-)
Code Name/Description Adjustment range Factory setting
PEr
g
PSr
g
rP2
g
rP3
g
rP4
g
Ibr
g
Ird
g
brt
g
bIr
g
bEn
g
tbE
g
M [PID error Alarm]
See page 194
Regulator error monitoring threshold
M [Speed input %]
See page 195
Multiplying coefficient for predictive speed input.
M [Preset ref. PID 2]
See page 197
Preset PID reference
M [Preset ref. PID 3]
See page 197
Preset PID reference
M [Preset ref. PID 4]
See page 197
Preset PID reference
M [Brake release I FW]
See page 175
Brake release current threshold for lifting or forward movement
M [Brake release I Rev]
See page 175
Brake release current threshold for lowering or reverse movement
M [Brake Release time]
See page 176
Brake release time dela y
M [Brake release freq]
See page 176
Brake release frequency threshold
M [Brake engage freq]
See page 176
Brake engage frequency threshold
M [Brake engage delay]
See page 176
Time delay before request to engage brake. To delay the engaging of the brake, for horizontal movement only, if
you wish the brake to engage when the drive comes to a complete stop.
0 to 65535 (1) 100
1 to 100% 100%
See page 197 (1) 300
See page 197 (1) 600
See page 197 (1) 900
0 to 1.32 In (2) 0
0 to 1.32 In (2) 0
0 to 5.00 s 0 s
[Auto] (AUtO)
0 to 10 Hz
[Auto] (AUtO)
0 to 10 Hz
0 to 5.00 s 0 s
[Auto] (AUtO)
[Auto] (AUtO)
(1)If a graphic display terminal is not in use, values greater than 9999 will be displayed on the 4-digit display with a period mark after the
thousand digit, e.g., 15.65 for 15650.
(2)In corresponds to the rated drive current indicated in the Installation Manual or on the drive nameplate.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
g
66 AAV49426 12/2009
also be accessed and adjusted from within the confi guration menu for t he correspondin g function, thei r description is deta iled
in these menus, on the pages indicated, to aid progra mming.
Page 67

[1.3 SETTINGS] (SEt-)
Code Name/Description Adjustment range Factory setting
bEt
g
JdC
g
ttr
g
tLIM
g
tLIG
g
trH
g
M [Brake engage time]
See page 176
Brake engage time (brake response time)
M [Jump at reversal]
See page 177
M [Time to restart]
See page 177
Time between the end of a brake engage sequence and the start of a brake release sequence
M [Motoring torque lim]
See page 202
Torque limitation in generator mode, as a % or in 0.1% incremen ts of the rate d torq ue in accorda nce with the
[Torque increment] (IntP) parameter, page 202
M [Gen. torque lim]
See page 202
Torque limitation in generator mode, as a % or in 0.1% increments of the rated torque in accordance with the
[Torque increment] (IntP) parameter, page 202
M [Traverse freq. high]
See page 225
0 to 5.00 s 0 s
[Auto] (AUtO)
0 to 10 Hz
0 to 15.00 s 0 s
0 to 300% 100%
.
0 to 300% 100%
.
0 to 10 Hz 4 Hz
[Auto] (AUtO)
trL
g
qSH
g
qSL
g
Ctd
ttH
ttL
(1)In corresponds to the rated drive current indicated in the Installation Manual or on the drive nameplate.
M [Traverse freq. low]
See page 225
M [Quick step High]
See page 225
M [Quick step Low]
See page 225
M [Current threshold]
Current threshold for [I attained] (CtA) function assigned to a relay or a logic output (see page 118).
M [High torque thd.]
High current threshold for [High tq. att.] (ttHA) function assigned to a relay or a logic output (see page 118), as
a % of the rated motor torque.
M [Low torque thd.]
Low current threshold for [Low tq. att.] (ttLA) function assigned to a relay or a logic output (see page 118), as
a % of the rated motor torque.
0 to 10 Hz 4 Hz
0 to [Traverse freq.
high] (trH)
0 to [Traverse freq.
low] (trL)
0 to 1.5 In (1) In (1)
-300% to +300% 100%
-300% to +300% 50%
0 Hz
0 Hz
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
g
AAV49426 12/2009 67
also be accessed and adjusted from within the confi guration menu for t he correspondin g function, thei r description is deta iled
in these menus, on the pages indicated, to aid progra mming.
Page 68

[1.3 SETTINGS] (SEt-)
Code Name/Description Adjustment range Factory setting
FqL
g
Ftd
F2d
FFt
g
ttd
g
M [Pulse warning thd.]
Speed threshold measured by the FREQUENCY METER] FqF-) function, page 253, assigned to a relay or a
logic output (see page 118
M [Freq. threshold]
Frequency threshold for [Freq.Th.att.] (FtA) function assigned to a relay or a logic output (see page 118), or
used by the [PARAM. SET SWITCHING] (MLP-) function, page 215
M [Freq. threshold 2]
Frequency threshold for [Freq. Th. 2 at tain.] (F2A) function assigned to a relay or a logic output (see page 118),
or used by the [PARAM. SET SWITCHING] (MLP-) function, page 215
M [Freewheel stop Thd]
See page 156
This parameter supports switching from a ramp stop or a fast stop to a freewheel stop below a low speed
threshold.
It can be accessed if [Type of stop] (Stt) = [Fast stop] (FSt) or [Ramp stop] (rMP).
v 0.0: Does not switch to freewheel stop.
v 0,1 to 1600 Hz: Speed threshold below which the motor will switch to freewheel stop.
M [Motor therm. level]
See page 241
Trip threshold for motor thermal alarm (logic output or relay)
0 Hz to 30.00 kHz 0 Hz
).
0.0 to 1600 Hz [High speed] (HSP)
.
0.0 to 1600 Hz [High speed] (HSP)
.
0.0 to 1600 Hz 0.0 Hz
0 to 118% 100%
LbC
g
M [Load correction]
g
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and adjusted from within the confi guration menu for t he correspondin g function, thei r description is deta iled
in these menus, on the pages indicated, to aid progra mming.
See page 98
Rated correction in Hz.
0 to 1000 Hz 0
68 AAV49426 12/2009
Page 69

[1.4 MOTOR CONTROL] (drC-)
RDY Term +0.00Hz 0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code Quick
ENT
RDY Term +0.00Hz 0A
1 DRIVE MENU
1.1 SIMPLY START
1.2 MONITORING
1.3 SETTINGS
1.4 MOTOR CONTROL
1.5 INPUTS / OUTPUTS CFG
Code << >> Quick
ENT
RUN Term +50.00Hz 80A
1.4 MOTOR CONTROL
Standard mot. freq
Motor control type
Max frequency
Output Ph rotation
Sinus filter
Code << >> Quick
XXX
SIM-
I-O-
ESC
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
drC-
Displays the state of the drive
MOTOR CONTROL
Power-up
With graphic display terminal:
With integrated display terminal:
AAV49426 12/2009 69
Page 70

[1.4 MOTOR CONTROL] (drC-)
Voltage
Frequency
FrS
UnS
U0
The profile is defined by
the values of parameters
UnS, FrS and U0.
The parameters in the [1.4 MOTOR CONTROL] (drC-) menu can only be modified when the drive is stopped and no run command is
present, with the following exceptions:
• [Auto tuning] (tUn) page 88
• Parameters containing the sign
Code Name/Description Adjustment range Factory setting
and [Angle auto-test] (ASA) page 84, which can cause the motor to start up.
Tin the code column, which can be modified with the drive running or stopped.
bFr
Ctt
50
60
UUC
CUC
FUC
UF2
M [Standard mot. freq]
v [50Hz IEC] (50): IEC
v [60Hz NEMA] (60): NEMA
This parameter modifies the presets of the following para meters: [High speed] (HSP) page 56
(Ftd) page 68
page 71
, [Rated motor volt.] (UnS) page 76, [Rated motor freq.] (FrS) page 76 and [Max frequency] (tFr)
.
M [Motor control type]
, [Freq. threshold]
[SVC V] (UUC)
v [SVC V] (UUC): Open-loop voltage flux vector control with automatic s lip c ompensat ion accordi ng to the load .
This type of control is recommended when replacing an ATV58. It supports operation wit h a number of motors
connected in parallel on the same drive (if the motors are identical).
v [SVC I] (CUC): Open-loop current flux vector control. This type of control is recommended when replacing an
ATV58F used in an open-loop configuration. It does not support operation with a numbe r of motors connected
in parallel on the same drive.
v [FVC] (FUC): Closed-loop current flux vector control for motor with encoder. This selection is only possible if
an encoder card has been inserted. This function i s not possible, however, when using an incremental encoder
that generates signal "A" only.
This type of control is recommended when replacing an ATV58F used in a closed-loop configuration. It provi des
better performance in terms of speed and torque accuracy and enables torque to be obtained at zero speed. It
does not support operation with a number of motors connected in parallel on the same drive.
It is essential that the encoder check detailed on page 74
selecting [FVC] (FUC).
is performed successfully before
v [V/F 2pts] (UF2): Simple V/F profile without slip compensation. It supports operation with:
- Special motors (wound rotor, tapered rotor, etc.)
- A number of motors in parallel on the same drive
- High-speed motors
- Motors with a low power rating in comparison to that of the drive
70 AAV49426 12/2009
Page 71

[1.4 MOTOR CONTROL] (drC-)
Voltage
Frequency
FrS
UnS
U5
U4
U3
U1
U2
U0
F1 F2
F3
F4 F5
FrS > F5 > F4 > F3 > F2 > F1
The profile is defined
by the values of
parameters UnS, FrS,
U0 to U5 and F0 to F5.
Code Name/Description Adjustment range Factory setting
Ctt
UF5
SYn
M [Motor control type] (continued)
v [V/F 5pts] (UF5): 5-segment V/F profile: Similar to V/F 2 pts profile but also supports the avoidance of
resonance (saturation).
v [Sync. mot.] (SYn): For permanent magnet synchronous motors with sinusoidal electromotive force (EMF) only.
This selection makes the asynchronous motor parameters inaccessible, and the synchron ous motor
parameters accessible.
tFr
PHr
FSY
AbC
ACb
v [Sync.CL] (FSY): Closed-loop synchronous motor. For permanent magnet synchronous motors with sinusoidal
electromotive force (EMF) only, with encoder. This selection is only possible if an encoder card has been
inserted. It makes the asynchronous motor parameters inaccessible, and the synchronous motor parameters
accessible.
This function is not possible, however, when using an incremental encoder that generates signal "A" only.
It is essential that the encoder check detailed on page 74
selecting [Sync.CL] (FSY).
M [Max frequency]
The factory setting is 60 Hz, or preset to 72 Hz if [Standard mot. freq] (bFr) is set to 60 Hz.
The maximum value is limited by the following conditions:
• It must not exceed 10 times the value of [Rated motor freq.] (FrS) page 76
[Nominal freq sync.] (FrSS) page 82
• It must not exceed 500 Hz if [Motor cont rol ty pe] (Ctt) (page 70
ATV71HD37.
Values between 500 Hz and 1600 Hz are only possible in V/F control and for powers limited to 37 kW
(50 HP). In this case, configure [Motor control type] (Ctt) before [Max frequency] (tFr).
M [Output Ph rotation]
for a synchronous motor.
is performed successfully before
10 to 1600 Hz
for an asynchronous motor or
) is not V/F or if the drive rating is higher than
[ABC] (AbC)
v [ABC] (AbC): Forward
v [ACB] (ACb): Reverse
This parameter can be used to reverse the direction of rotation of the motor without reversing the wiring.
Do not modify the [Output Ph rotation] (PHr) parameter when [Motor control type] (Ctt) page
70
= [FVC] (FUC) or [Sync.CL] (FSY). The direction of rotation must be modifi ed, if required, before
or during the encoder check procedure detailed on page 74
[FVC] (FUC) or [Sync.CL] (FSY). Otherwise, checking and measuring procedures must be performed
again ([Angle auto-test] (ASA) and [Angle offset value] (ASU) return to [No] (nO)).
, when [Motor control type] (Ctt) is not
AAV49426 12/2009 71
Page 72

[1.4 MOTOR CONTROL] (drC-)
CAUTION
If [Sinus filter] (OFI) = [Yes] (YES):
• [Max frequency] (tFr) page 42
must not exceed 100 Hz.
•Up to 45 kW (60 HP) for ATV71
pppM3X and 75 kW (100 HP) for ATV71pppN4 [Motor control type] (Ctt)
page 70
must be [V/F 2pts] (UF2), [V/F 5pts] (UF5), or [SVC V] (UUC) only.
• At and above 55 kW (75 HP) for ATV71
pppM3X and 90 kW (120 HP) for ATV71pppN4 [Motor control type]
(Ctt) page 70
must be [V/F 2pts] (UF2) or [V/F 5pts] (UF5) only.
Failure to follow this instruction can result in equipment damage.
CAUTION
On ATV71p075N4 to U40N4 drives, if the RFI filters are disconnected (operation on an IT system), the drive's
switching frequency must not exceed 4 kHz.
Failure to follow this instruction can res u lt in equ ip m en t da m a ge .
Code Name/Description Adjustment range Factory setting
OFI
SFr
T
nO
YES
M [Sinus filter]
[No] (nO)
v [No] (nO): No sinus filter
v [Yes] (YES): Use of a sinus filter, to limit overvoltages on the motor and reduce the ground fault leakage current.
[Sinus filter] (OFI) is forced to [No] (nO) on ATV71
Note: The sett ings for [Current Limitation] (CL I) and [I Limit. 2 value] (CL2) page 62
[Sinus filter] (OFI) has been set to [Yes] (YES) and [Motor control type] (Ctt) page 70
[V/F 2pts] (UF2) or [V/F 5pts] (UF5). This is due to the fact that for certain ratings, this configuration will
result in a reduced factory setting (1.36 In) for current limitations.
M [Switching freq.]
Switching frequency setting.
Adjustment range: This can vary between 1 and 16 kHz, but the minimum and maximum values, as well as
the factory setting, can be limited in accordance with the type of drive (ATV71H or W), the rating and the
configuration of the [Sinus filter] (OFI) and [Motor surge limit.] (SUL) parameters, page 96
If the value is less than 2 kHz, [Current Limitation] (CLI) and [I Limit. 2 value] (CL2) page 62
1.36 In.
Adjustment with drive running:
- If the initial value is less than 2 kHz, it is not possible to increase it above 1.9 kHz while running.
- If the initial value is greater than or equal to 2 kHz, a minimum of 2 kHz must be maintained while running.
Adjustment with the drive stopped: No restrictions.
Note: In the event of excessive temperature rise, the drive will automatically reduce the switching
frequency and reset it once the temperature returns to normal.
Note: If [Motor control type] (Ctt) page 70
setting the switching frequency to a value less than 2 kHz as this can cause speed instability.
p037M3 and ATV71p075N4.
must be made once
has been set to
(1) According to rating According to rating
.
are limited to
= [FVC] (FUC) or [Sync.CL] (FSY) we do not recommend
(1)Parameter can also be acce s se d in the [1.3 SETTINGS] (SEt-) menu.
I
T
Parameter that can be modified during operation or when stopped
72 AAV49426 12/2009
Page 73

[1.4 MOTOR CONTROL] (drC-)
CAUTION
Check that the motor will withstand this current, particularly in the case of permanent magnet synchronous
motors, which are susceptible to demagnetization.
Failure to follow this instruction can result in equipment damage.
Code Name/Description Adjustment range Factory setting
CLI
T
(1)Parameter can also be acce s se d in the [1.3 SETTINGS] (SEt-) menu.
(2)In corresponds to the rated drive current indicated in the Installation Manual and on the drive nameplate.
T
M [Current Limitation]
Used to limit the motor current.
The adjustment range is limited to 1.36 In if [Switching freq.] (SFr) is less than 2 kHz.
Note: If the setting is less than 0.25 In, the drive may lo ck in [Output Phase Loss ] (OPF) fault mode if
this has been enabled (see page 242
has any effect.
Parameter that can be modified during operation or when stopped
(1) 0 to 1.65 In (2) 1.5 In (2)
). If it is less than the no-load motor c urrent, the limitation no longer
AAV49426 12/2009 73
Page 74

[1.4 MOTOR CONTROL] (drC-)
Selecting the encoder
Follow the recommendations in the catalog and the Installat ion Manual.
Note 1: When an encoder is used with a VW3 A3 408 or VW3 A3 409 card, i t is onl y po ssib le to conf ig ure the "en code r" i npu t f or
speed feedback. Functions can only be configured as references or inputs with a VW3 A3 401 to 407 and VW3 A3 411 card.
Note 2: When an encoder is used with a VW3 A3 409 card, the drive remains locked in stop mode (and displays nSt) if the encoder
is not fully configured.
Encoder check procedure
This procedure applies to all types of encoder.
1. Configure the parameters of the encoder used, pages 114
2. Set [Motor control type] (Ctt) to a value other than [FVC] (FUC) and [Sync.CL] (FSY), even if it is the requ ired configuration. For example,
use [SVC V] (UUC) for an asynchronous motor and [Sync. mot.] (SYn) for a synchronous motor.
3. Configure the motor parameters in accordance with the specifications on the rating plate.
• Asynchronous motor (see page 76
freq.] (FrS), [Rated motor speed] (nSP).
• Synchronous motor (see page 81
(PHS), [Autotune L d-axis] (LdS), [IAutotune L q-axis] (LqS), [Cust. stator R syn] (rSAS). [Current Limitation] (CLI) must not exceed
the maximum motor current, otherwise demagnetization may occur.
4. Set [Encoder usage] (EnU) = [No] (nO).
5. Perform auto-tuning.
6. Set [Encoder check] (EnC) = [Yes] (YES).
7. Check that the rotation of the motor is safe.
8. Set the motor rotating at stabilized speed
to monitor its behavior.
9. If it trips on an [Encoder fault] (EnF), [Encoder check] (EnC) returns to [No] (nO).
- Check the parameter settings and perform auto-tuning again (see steps 1 to 5 above).
- Check that the mechanical and electrical operation of the encoder, its power supply and connections are all OK.
- Reverse the direction of rotation of the motor ([Output Ph rotation] (PHr) parameter page 71
): [Rated motor power] (nPr), [Rated motor volt.] (UnS), [Rated mot. current] (nCr), [Rated motor
): [Nominal I sync] (nCrS), [Nom motor spdsync] (nSPS), [Pole pairs.] (PPnS), [Syn. EMF constant]
≈ 15% of the rated speed for at least 3 seconds, and use the [1.2-MONITORING] (SUP-) menu
to 117.
) or the encoder signals.
10. Repeat the operations from step 6 onwards until [Enco der check] (EnC) changes to [Done] (dOnE).
11. If necessary, change [Motor control type] (Ctt) to [FVC] (FUC) or [Sync.CL] (FSY). In the case of [Sync.CL] (FSY), go on to perform the
"Procedure for measuring the phase-shift angle between the motor and the encoder" page 83
74 AAV49426 12/2009
.
Page 75

[1.4 MOTOR CONTROL] (drC-)
Code Name/Description Adjustment range Factory setting
EnS-
EnC
EnU
nO
YES
dOnE
nO
SEC
rEG
PGr
b [ENCODER FEEDBACK]
Can only be accessed if an encoder card has been inserted.
M [Encoder check]
Check encoder feedback. See procedure on previous page.
This parameter can be accessed if an encoder card has been inserted (1).
v [Not done] (nO): Check not performed.
v [Yes] (YES): Activates monitoring of the encoder.
v [Done] (dOnE): Check performed successfully.
The check procedure checks:
- The direction of rotation of the encoder/motor
- The presence of signals (wiring continuity)
- The number of pulses/revolution
If a fault is detected, the drive locks in [Encoder fault] (EnF) fault mode.
M [Encoder usage]
This parameter can be accessed if an encoder card has been inserted (1).
v [No] (nO): Function inactive.
v [Fdbk monit.] (SEC): The encoder provides sp eed feedback for monitoring only.
v [Spd fdk reg.] (rEG): The encoder provides speed feedback for regulation and monitoring. This configurati on is
automatic if the drive is configured for closed-loop operation ([Motor control type] (Ctt) = [FVC] (FUC) or
[Sync.CL] (FSY). If [Motor control type] (Ctt) = [SVC V] (UUC) t he encoder operates in speed feedbac k mode
and enables static correction of the speed to be performe d. This configuration is not accessibl e for other [Motor
control type] (Ctt) values.
v [Speed ref.] (PGr): The encoder provides a reference. Can only be selected wit h an incremental e ncoder card.
[Not done] (nO)
[No] (nO)
(1)The encoder parameters can only be accessed if the encoder card has been inserted, and the available selections will depend on the
type of encoder card used. The encoder configuration can also be accessed in the [1.5 - INPUTS / OUTPUTS CFG] (I/O) menu.
AAV49426 12/2009 75
Page 76

[1.4 MOTOR CONTROL] (drC-)
100 - slip as a %
100
50 - slip in Hz
50
60 - slip in Hz
60
Asynchronous motor parameters:
These parameters can be accessed if [Motor control type] (Ctt) page 70 = [SVC V] (UUC), [S VC I] (CUC), [FVC] (FUC), [V/F 2pts] (UF2) or
[V/F 5pts] (UF5). In this case, the synchronous motor parameters cannot be accessed.
Code Name/Description Adjustment range
ASY-
nPr
UnS
nCr
FrS
InSP
b [ASYNC. MOTOR]
Can only be accessed if [Motor control type] (Ctt) page 70 = [SVC V] (UUC), [SVC I] (CUC), [FVC] (FU C ),
[V/F 2pts] (UF2), or [V/F 5pts] (UF5).
M [Rated motor power]
Rated motor power given on the nameplate, in kW if [Standard mot. freq] (bFr) = [50Hz IEC] (50), in HP if
[Standard mot. freq] (bFr) = [60Hz NEMA] (60).
M [Rated motor volt.]
Rated motor voltage given on the nameplate.
ATV71
pppM3X: 100 to 240 V, ATV71pppN4: 200 to 480 V
M [Rated mot. current]
Rated motor current given on the nameplate.
M [Rated motor freq.]
Rated motor frequency given on the nameplate.
The factory setting is 50 Hz, or preset to 60 Hz if [Standard mot. freq] (bFr) is set to 60 Hz.
The maximum value is limited to 500 Hz if [Motor co ntrol type] (Ctt ) (page 70
higher than ATV71HD37.
Values between 500 Hz and 1600 Hz are only possible in V/F control and for powers limited to 37 kW (50 HP).
In this case, configure [Motor control type] (Ctt) before [Rated motor freq.] (FrS).
M [rpm increment]
Increment of parameter [Rated motor speed] (nSP).
1
10
v [x1 rpm] (1): Increment of 1 rpm, to be used if [Rated motor speed] (nSP) does not exceed 65535 rpm.
v [x10 rpm] (10): Increment of 10 rpm, to be used if [Rated motor speed] (nSP) exceeds 65535 rpm.
Acc. to drive rating
Acc. to drive rating
0.25 to 1.5 In (1)
10 to 1600 Hz
) is not V/F or if the drive rating is
Note: Changing [rpm increment] (InSP) will restore [Rated motor speed] (nSP) to its factory setting.
nSP
(1)In corresponds to the rated drive current indicated in the Installation Manual and on the drive nameplate.
M [Rated motor speed]
Rated motor speed given on the nameplate. Adjustable between 0 and 65535 rpm if [rpm increment] (InSP) =
[x1 rpm] (1) or between 0.00 and 96.00 krpm if [rpm increment] (InSP) = [x10 rpm] (10).
0 to 9999 rpm then 10.00 to 65.53 or 96.00 krpm on the integrated display terminal.
If, rather than the rated speed, the nameplate indicates the synchronous speed and the slip in Hz or as a %,
calculate the rated speed as follows:
• Rated speed = Synchronous speed x
or
• Rated speed = Synchronous speed x (50 Hz motors)
or
• Rated speed = Synchronous speed x (60 Hz motors)
0 to 96000 rpm
76 AAV49426 12/2009
Page 77

[1.4 MOTOR CONTROL] (drC-)
Code Name/Description Adjustment range Factory setting
ASY-
U0
U1
F1
U2
F2
U3
F3
U4
F4
U5
F5
b [ASYNC. MOTOR] (continued)
M [U0]
V/F profile setting. This parameter can be accessed if [Motor control type] (Ctt) = [V/F 2pts] (UF2) or
[V/F 5pts] (UF5)
M [U1]
V/F profile setting. This parameter can be accessed if [Motor control type] (Ctt) = [V/F 5pts] (UF5)
M [F1]
V/F profile setting. This parameter can be accessed if [Motor control type] (Ctt) = [V/F 5pts] (UF5)
M [U2]
V/F profile setting. This parameter can be accessed if [Motor control type] (Ctt) = [V/F 5pts] (UF5)
M [F2]
V/F profile setting. This parameter can be accessed if [Motor control type] (Ctt) = [V/F 5pts] (UF5)
M [U3]
V/F profile setting. This parameter can be accessed if [Motor control type] (Ctt) = [V/F 5pts] (UF5)
M [F3]
V/F profile setting. This parameter can be accessed if [Motor control type] (Ctt) = [V/F 5pts] (UF5)
M [U4]
V/F profile setting. This parameter can be accessed if [Motor control type] (Ctt) = [V/F 5pts] (UF5)
M [F4]
V/F profile setting. This parameter can be accessed if [Motor control type] (Ctt) = [V/F 5pts] (UF5)
M [U5]
V/F profile setting. This parameter can be accessed if [Motor control type] (Ctt) = [V/F 5pts] (UF5)
M [F5]
V/F profile setting. This parameter can be accessed if [Motor control type] (Ctt) = [V/F 5pts] (UF5)
0 to 600 or 1000 V
according to rating
0 to 600 or 1000 V
according to rating
0 to 1600 Hz 0
0 to 600 or 1000 V
according to rating
0 to 1600 Hz 0
0 to 600 or 1000 V
according to rating
0 to 1600 Hz 0
0 to 600 or 1000 V
according to rating
0 to 1600 Hz 0
0 to 600 or 1000 V
according to rating
0 to 1600 Hz 0
0
0
0
0
0
0
AAV49426 12/2009 77
Page 78

[1.4 MOTOR CONTROL] (drC-)
Motor voltage
Frequency
Rated motor freq. FrS
Max. voltage UCP
Freq. Const Power FCP
Rated motor volt. UnS
Code Name/Description Adjustment range Factory setting
ASY-
UC2
UCP
FCP
nO
YES
b [ASYNC. MOTOR] (continued)
M [Vector Control 2pt]
v [No] (nO): Function inactive.
v [Yes] (YES): Function active.
Used in applications in which the motor rated speed and frequency nee d to be exceeded in order to optimize
operation at constant power, or when the maximum voltage of the motor needs to be limited to a value below
the line voltage.
The voltage/frequency profile must then be adapted in accordance with the motor's capabilities to operate at
maximum voltage UCP and maximum frequency FCP.
M [V. constant power]
This parameter can be accessed if [Vector Control 2pt] (UC2) = [Yes] (YES)
M [Freq. Const Power]
This parameter can be accessed if [Vector Control 2pt] (UC2) = [Yes] (YES)
According to drive
rating
According to drive
rating and [Rated
motor freq.] (FrS)
[No] (nO)
According to drive
rating and [Standard
mot. freq] (bFr)
= [Standard mot. freq]
(bFr)
SLP
T
(1)Parameter can also be acce s se d in the [1.3 SETTINGS] (SEt-) menu.
T
M [Slip compensation]
This parameter can be accessed if [Motor control type] (Ctt) is not [V/F 2pts] (UF2) or [V/F 5pts] (UF5).
Adjusts the slip compensation around the value set by the rated motor speed.
The speeds given on motor nameplates are not necessarily exact.
• If slip setting < actual slip: The motor is not rotating at the correct speed in steady state, but at a speed lower
than the reference.
• If slip setting > actual slip: The motor is overcompensated and the speed is unstable.
Parameter that can be modified during operation or when stopped
(1) 0 to 300% 100%
78 AAV49426 12/2009
Page 79

[1.4 MOTOR CONTROL] (drC-)
Asynchronous motor parameters that can be accessed in [Expert] mode
These include:
• Special parameters.
• Parameters calculated by the drive during auto-tuning, in read-only mode. For example, R1r, calculated cold stator resistance.
• The possibility of replacing some of these calculated parameters with ot her val ues, if nece ssary. For exa mple , R1w, measured cold
stator resistance.
When a parameter Xyw is modified by the user, the drive uses it in place of the calculated parameter Xyr.
If auto-tuning is performed or if one of the motor parameters on which auto-tuning depends is modified ([Rated motor volt.] (UnS), [Rated
motor freq.] (FrS), [Rated mot. current] (nCr), [Rated motor speed] (nSP), [Rated motor power] (nPr)), parameters Xyw return to their factory
setting.
Code Name/Description Adjustment range Factory setting
ASY-
rSM M [Stator R measured]
IdM M [Idr]
LFM M [Lfr]
trM M [T2r]
nSL M [Nominal motor slip]
PPn M [Poles pair number]
b [ASYNC. MOTOR] (continued)
Cold stator resistance, calculated by the drive, in read-only mode. Value in milliohms (mΩ) up to 75 kW
(100 HP), and in hundredths of milliohms (m
Magnetizing current in A, calculated by the drive, in read-only mode.
Leakage inductance in mH, calculated by the drive, in read-only mode.
Rotor time constant in mS, calculated by the drive, in read-only mode.
Nominal slip in Hz, calculated by the drive, in read-only mode.
To modify the nominal slip, modify the [Rated motor speed] (nSP) (page 76
Number of pairs of poles, calculated by the drive, in read-only mode.
Ω/100) above 75 kW (100 HP).
).
AAV49426 12/2009 79
Page 80

[1.4 MOTOR CONTROL] (drC-)
Asynchronous motor parameters that can be accessed in [Expert] mode, continued
Code Name/Description
ASY-
rSA M [Cust stator resist.]
IdA M [Idw]
LFA M [Lfw]
trA M [Cust. rotor t const.]
b [ASYNC. MOTOR] (continued)
Cold state stator resistance (per winding), modifiable value. In milliohms (mΩ) up to 75 kW (100 HP), and
in hundredths of milliohms (m
10.00 to 65.53 (10000 to 65536).
Magnetizing current in A, modifiable value.
Leakage inductance in mH, modifiable value.
Rotor time constant in mS, modifiable value.
Ω/100) above 75 kW (100 HP). On the integrated display unit: 0 to 9999 then
80 AAV49426 12/2009
Page 81

[1.4 MOTOR CONTROL] (drC-)
CAUTION
Check that the motor will withstand this current, particularly in the case of permanent magnet synchronous motors, which
are susceptible to demagnetization.
Failure to follow this instruction can result in equipment damage.
Synchronous motor parameters:
These parameters can be accessed if [Motor control type] (Ctt) page 70 = [Sync. mot.] (SYn) or [Sync.CL] (FSY). In this case, the
asynchronous motor parameters cannot be accessed.
Important: For synchronous motors, it is crucial to set the current limit. See [Current Limitation] (CLI) page 73
Code Name/Description Adjustment range Factory setting
SYn-
nCrS
nSPS
PPnS
IPHS
0.1
PHS
LdS
LqS
rSAS
b [SYNCHRONOUS MOTOR]
Can only be accessed if [Motor control type] (Ctt) page 70 = [Sync.CL] (FSY) or [Sync. mo t.] (SYn).
M [Nominal I sync.]
Rated synchronous motor current given on the nameplate.
M [Nom motor spdsync]
Rated synchronous motor speed given on the nameplate.
On the integrated display unit: 0 to 9999 rpm then 10.00 to 60.00 krpm.
M [Pole pairs]
Number of pairs of poles on the synchronous motor.
M [Increment EMF]
Increment for the [Syn. EMF constant] (PHS) parameter.
v [0.1mV/rpm] (0.1): 0.1 mV per rpm
1
v [1 mV/rpm] (1): 1mV per rpm
M [Syn. EMF constant]
Synchronous motor EMF constant, in 0.1 mV per rpm or 1 mV pe r rpm (peak v oltage per ph ase), according to
the value of [Increment EMF] (IPHS).
On the integrated display unit: 0 to 9999 then 10.00 to 65.53 (10000 to 65536).
M [Autotune L d-axis]
Axis "d" stator inductance in mH (per phase).
On motors with smooth poles [Autotune L d-axis] (LdS) = [Autotune L q-axis] (LqS) = Stator inductance L.
M [Autotune L q-axis]
Axis "q" stator inductance in mH (per phase).
On motors with smooth poles [Autotune L d-axis] (LdS) = [Autotune L q-axis] (LqS) = Stator inductance L.
M [Cust. stator R syn]
Cold state stator resistance (per winding) The factory setting is replaced by the result of the auto-tuning
operation, if it has been performed.
The value can be entered by the user, if he knows it.
Value in milliohms (m
On the integrated display unit: 0 to 9999 then 10.00 to 65.53 (10000 to 65536).
Ω) up to 75 kW (100 HP), and in hundredths of milliohms (mΩ/100) above 75 kW (100 HP).
0.25 to 1.5 In (1) Acc. to drive rating
0 to 60000 rpm Acc. to drive rating
1 to 50 Acc. to drive rating
0 to 65535 Acc. to drive rating
0 to 655.3 Acc. to drive rating
0 to 655.3 Acc. to drive rating
Acc. to drive rating Acc. to drive rating
.
[0.1mV/rpm] (0.1)
(1)In corresponds to the rated drive current indicated in the Installation Manual and on the drive nameplate.
AAV49426 12/2009 81
Page 82

[1.4 MOTOR CONTROL] (drC-)
Code Name/Description
SYn-
rEqP
rEtP
nO
YES
dOnE
tAb
PrOG
FAIL
dOnE
CUS
b [SYNCHRONOUS MOTOR] (continued)
M [Read motor param.]
This parameter can only be used with BDH, BRH and BSH type motors from the SchneiderElectric range.
Can only be accessed if [Encoder protocol] (UECP) page 116
Request to load motor parameters from the encoder EEPROM memory.
v [No] (nO): Loading not performed or has failed.
v [Yes] (YES): Loading is performed as soon as possible, then the parameter automatically changes to
[Done] (dOnE).
v [Done] (dOnE): Loading done.
The following parameters are loaded: [Angle offset value] (ASU) page 85
page 81
page 81
(LqS) page 81
M [Status motor param]
Can only be accessed if [Encoder protocol] (UECP) page 116 = [Hiperface] (SCHP).
Information on the request to load motor parameters from the en coder EEPROM memory (not modifiable).
v [Not done] (tAb): Loading has not been performed, default motor parameters will be used.
v [In Progress] (PrOG): Loading in progress.
v [Failed] (FAIL): Loading has failed.
v [Done] (dOnE): Loading completed successfully.
v [Customized] (CUS): Loading completed successfully but one or more motor parameters have
subsequently been modified by the user via the display terminal or serial link, or auto-tuning has been
performed by [Auto-tuning] (tUn).
, [Nominal I sync.] (nCrS) page 81, [Pole pairs] (PPnS) page 81, [Syn. EMF constant] (PHS)
, [Cust. stator R syn] (rSAS) page 81, [Autotune L d-axis] (LdS) page 81, and [Autot une L q-axis]
.
Note:
• During loading the drive is in "Freewheel Stop" state wi th the motor turned off.
• If a "line contactor" or "output contactor" function has been configured, the contactor closes
during loading.
[No] (nO)
= [Hiperface] (SCHP).
, [Nom motor spdsync] (nSPS)
[Not done] (tAb)
Synchronous motor parameters that can be accessed in [Expert] mode
Code Name/Description
SYn-
rSMS M [R1rS]
FrSS M [Nominal freq sync.]
(1)Parameter can also be acce s se d in the [1.3 SETTINGS] (SEt-) menu.
(2)In corresponds to the rated drive current indicated in the Installation Manual and on the drive nameplate.
T
b [SYNCHRONOUS MOTOR] (continued)
Cold state stator resistance (per winding), in read-only mode. This is the drive factory setting or the result
of the auto-tuning operation, if it has been performed.
Value in milliohms (m
(100 HP).
On the integrated display unit: 0 to 9999 then 10.00 to 65.53 (10000 to 65536).
Motor frequency at rated speed in Hz, calculated by the drive (rated motor frequency), in read-only mode.
Parameter that can be modified during operation or when stopped
Ω) up to 75 kW (100 HP), and in hundredths of milliohms (mΩ/100) above 75 kW
82 AAV49426 12/2009
Page 83

[1.4 MOTOR CONTROL] (drC-)
WARNING
UNINTENDED EQUIPMENT OPERATION
Check that the rotation of the motor will not cause any dange rous movements.
Failure to follow this instruction can result in death or serious injury.
Closed-loop synchronous motor
Operation on a synchronous motor in a closed loop configuration requires an encoder providing the exact position of the motor rotor. The
phase-shift angle of the encoder in relation to the rotor must therefore be determined. The drive can perform this measurement
automatically.
Selecting a resolver type encoder
The number of poles on the motor must be a whole multiple of the number of poles on the resolver. For example, a 6-pole
resolver will not operate with an 8-pole motor.
To obtain the best resolution, we recommend selec ting a resolver with the same number of poles as the motor.
Procedure for measuring the phase-shift angle between the motor and the encoder
Preliminary remarks:
Select the [Angle setting type] (ASt) measuring mode according to the type of machine being driven:
• [Angle setting type] (ASt) = [W/o load] (nLd): Measurement with motion, if the rotation of the motor is free (no load, brake released)
and safe. During measurement current flows through the motor, which may cause it to rotate one full revolution.
• [Angle setting type] (ASt) = [With load] (brC): Measurement without motion, motor with or without load, brake engaged or released.
This mode is recommended for a lift, for example. You must adhere to the following instructions:
- The motor rotor must not move during measurement, otherwise the result will be incorrect.
- In some cases, the measurement current can cause tripping on an [Overcurrent] (OCF) fault; if so, use [W/o load] (nLd) mode.
This occurs when using low-inductance motors, high-speed motors, or motors in which the rat ed voltage is well bel ow the supply
voltage of the drive.
- In some cases, the measurement can cause tripping on an [Angle error] (ASF) fault. This occurs if the motor rotor has moved
during measurement (only detected in closed-loop mode), a motor phase is disconnected or if the motor inductance is too high,
thus limiting the measurement current (in this case, use [W/o load] (nLd) mode).
• [Angle setting type] (ASt) = [Optimised] (brCO): measurement without motion, possible with or without load, brake engaged or
released. Optimization of the angle detection time starting from the second detection request, even after a power off of the product.
1. First, follow the "Encoder check procedure" on page 74
2. Set [Motor control type] (Ctt) = [Sync.CL] (FSY).
3. If you have selected [Angle setting type] (ASt) = [W/o load] (nLd): measurement without motion, check that the mot or i s runn ing safel y
and can turn freely without resistive or driving torque. If these conditions are not met, the resulting measurement will be
inaccurate.
4. Set [Angle auto-test] (ASA) = [Yes] (YES). The measurement is performed and [Angle auto-test] (ASA) changes to [Done] (dOnE).
The [Angle offset value] (ASU) parameter changes from [No] (nO) to a numerical value proportional to the electrical angle measured
(8191 = 360°).
5. If required, configure automatic measurements using [Angle setting activ.] (AtA). If [Angle setting type] (ASt) = [W/o load] (nLd), ensure
that the safety conditions outlined earlier are met at all ti mes.
If using a relative encoder (incremental or SinCos), it is recommended that you set [Angle setting activ.] (AtA) = [Power On] (POn) or
[Run order] (AUtO).
.
6. If an [Angle error] (ASF) fault occurs, [Angle auto-test] (ASA) returns to [No] (nO).
- Check that the parameters and instructions relating to this procedure have been carried out correctly and perform the
measurement again.
Comments
The phase-shift angle must be re-measured each time:
• The motor is changed
• The encoder is changed
• The coupling between the motor and encoder is removed
•The [Output Ph rotation] (PHr) parameter is modified
•The [Coder rotation inv.] (EnRI) parameter is modified
If a relative encoder (incremental or SinCos) is used, measurement must be repeated each time the motor is turned off/on. It is therefore
recommended that you set [Angle setting activ.] (AtA) = [Power On] (POn) or [Run order] (AUtO).
AAV49426 12/2009 83
Page 84

[1.4 MOTOR CONTROL] (drC-)
Code Name/Description Adjustment range
ASA-
ASt
ASA
brC
nLd
brCO
nO
YES
dOnE
b [ANGLE TEST SETTING]
Can only be accessed if [Motor control type] (Ctt) page 70 = [Sync.CL] (FSY)
M [Angle setting type]
Mode for measuring the phase-shift angle between the motor and the encoder.
v [With load] (brC): Measurement without motion , possible with or without load, brake engaged or released.
v [W/o load] (nLd): Measurement with motion, only for free motors (brake released), without load.
v [Optimised] (brCO): Measurement without motion, possi ble with or without load, brake engaged or released.
Optimization of the angle detection time starting from the second detection request, even after a power off of
the product.
Note 1: If [Angle setting type] (ASt) = [W/o load] (nLd), the motor may rotat e one f ul l rev oluti on d uring
measurement.
Note 2: If [Motor control type] (Ctt) = [Sync. mot.] (SYn) or [Sync.CL] (FSY) then [Angle setti ng t yp e]
(ASt) = [Optimised] (brCO)
M [Angle auto-test]
Measurement of the phase-shift angle between the motor and the encoder.
v [No] (nO): Measurement not performed or has failed, or [Output Ph rotation] (PHr) has been modified, or
[Coder rotation inv.] (EnRI) parameter has been modified.
v [Yes] (YES): Measurement is performed as soon as possible, then the parameter automatically changes to
[Done] (dOnE).
v [Done] (dOnE): Use of the value given the last time the measurement was performed.
Important:
• It is essential that all the motor parameters are configured correctly before performing measurements:
- [Nominal I sync] (nCrS), [Current Limitation] (CLI), [Nom motor spdsync] (nSPS), [Pole pairs.] (PPnS),
[Syn. EMF constant] (PHS), [Autotune L d-axis] (LdS), [IAutotune L q-axis] (LqS), [Cust. stator R syn]
(rSAS).
• Measurement is only performed if no stop command has been activated. If a "freewheel sto p" or "fast st op"
function has been assigned to a logic input, this input must be set to 1 (active at 0).
• Measurement takes priority over any run commands, which will be taken into account after the measuremen t
sequence.
• If measurement fails, the drive displays [No] (nO) and changes to [Angle Error] (ASF) fault mode.
• Measurement may take several seconds. Do not interrupt the process. Wait for the display to change to
"[Done] (dOnE)" or "[No] (nO)".
[With load] (brC)
[No] (nO)
ASL
nO
LI1
Note: If a "line contactor" or "output contactor" function has been configured, the contactor closes
during measurement.
M [Angle auto test]
Measurement of the phase-shift angle between the motor and the encoder by means of a logic input or
command bit.
v [No] (nO): Not assigned
v [LI1] (LI1)
-
-
-
:
:
v [...] (...): See the assignment conditions on page 139.
Measurement is performed when the assigned bit or input changes to 1.
Note: If a "line contactor" or "output contactor" function has been configured, the contactor closes
during measurement.
[No] (nO)
84 AAV49426 12/2009
Page 85

[1.4 MOTOR CONTROL] (drC-)
Code Name/Description Adjustment range
ASA-
AtA
ASU
AStS
nO
POn
AUtO
nO
tAb
PEnd
PrOG
FAIL
dOnE
CUS
b [ANGLE TEST SETTING] (continued)
M [Angle setting activ.]
Activation of automatic measurement of the phase-shift angle between the motor and encoder when using a
relative encoder (incremental or SinCos).
v [No] (nO): Function inactive.
v [Power On] (POn): Measurement is performed on each power-up (1).
v [Run order] (AUtO): Measurement is performed on each run command if necessary, i.e., if parameter [Angle
offset value] (ASU) is set to [No] (nO).
This option is recommended for use with a VW3 A3 401 to 407 card or with VW3 A3 411 card, when the "line
contactor" function has been configured (loss of angle on each stop) (1).
If [Angle setting activ.] (AtA) = [Power On] (POn) or [Run order] (AUtO), it is advisable to set [Angle setting type]
(ASt) = [With load] (brC).
Note: If a "line contactor" or "output contactor" function has been configured, the contactor closes
during measurement.
M [Angle offset value]
Phase-shift angle between the motor and the encoder.
v [No] (nO): Measurement has not been perfo rmed or has failed, or [Output Ph rotation] (PHr) has been modified,
or measurement has been lost due to powering down (1).
-
v 0 to 8191: Phase-shift angle. 8191 corresponds to 360°.
M [Angle setting status]
Information on the phase-shift angle measurement between the motor and the encoder (cannot be modified).
v [Not done] (tAb): Phase-shift angle not defined.
v [Pending] (PEnd): Measurement requested but not yet performed.
v [In Progress] (PrOG): Measurement in progress.
v [Failed] (FAIL): Measurement failed.
v [Done] (dOnE): Measurement performed successfully.
v [Customized] (CUS): The phase-shift angle value has been entered by the user via the disp lay terminal or serial
link.
[No] (nO)
[No] (nO)
[Not done] (tAb)
(1)Powering down causes a loss of measurement data in the following cases:
• With a VW3 A3 401 to 407 card:
- Every time the power section is turned off, even if the drive con trol secti on has a sep arate power supply (for ex ample, if the "l ine
contactor" function has been configured).
• With a VW3 A3 409 card and a SinCos encoder:
- Every time the power section is turned off, if the drive control section does not have a separate power supply.
- Only when the drive control section is turned off (if it has a separate power supply via the 0 and P24 terminals).
- If the number of poles of the resolver is not a multiple of the number of poles of the motor.
AAV49426 12/2009 85
Page 86

[1.4 MOTOR CONTROL] (drC-)
CAUTION
Check that the motor will withstand this current without overheating.
Failure to follow this instruction can result in equipment damage.
Code Name/Description Adjustment range Factory setting
FLI-
FLU
T
FnC
FCt
FnO
b [FLUXING BY LI]
Cannot be accessed if [Motor control type] (Ctt) page 70 = [Sync.CL] (FSY).
M [Motor fluxing]
v [Not cont.] (FnC): Non-continuous mode
v [Continuous] (FCt): Continuous mode. This option is not possible if [Angle setting type] (ASt) page 87 is
[With load] (brC) or if [Auto DC injection] (AdC) page 158
is [Freewheel] (nSt).
v [No] (FnO): Function inactive. This option is not possible if [Motor control type] (Ct t) page 70 = [SVC I] (CUC)
or [FVC] (FUC).
If [Motor control type] (Ctt) page 70
is replaced by [Not cont.] (FnC).
If [Motor control type] (Ctt) page 70
and above 55 kW (75 HP) for ATV71
In order to obtain rapid high torque on startup, ma gnetic flux needs t o already have been esta blished in the
motor.
•In [Continuous] (FCt) mode, the drive automatically builds up flux when it is powered up.
•In [Not cont.] (FnC) mode, fluxing occurs when the motor starts up .
The flux current is greater than nCr (configured rated motor current) when t he flux is established and is then
adjusted to the motor magnetizing current.
(1) [No] (FnO)
is [Yes] (YES) or if [Type of stop] (Stt) page 156
= [SVC I] (CUC), [FVC] (FUC) or [Sync. mot.] (SYn), the factory setting
= [SVC V] (UUC), the factory setting is replaced by [Not cont.] (FnC) at
ppppM3X and at and above 90 kW (120 HP) for ATV71ppppN4.
If [Motor control type] (Ctt) page 70
active ([No] (FnO) is not permitted); this parameter causes rotor angle detection or alignment (according
to the configuration of [Angle setting type] (ASt) page 87
If [Brake assignment] (bLC) page 175
FLI
nO
LI1
-
-
-
(1)Parameter can also be acce s se d in the [1.3 SETTINGS] (SEt-) menu.
T
Parameter that can be modified during operation or when stopped
M [Fluxing assignment]
v [No] (nO): Function inactive
v [LI1] (LI1)
:
:
v [...] (...): See the assignment conditions on page 139.
Assignment is only pos s ib l e if [Motor fluxing] (FLU) = [Not cont.] (FnC):
- If an LI or a bit is assigned to the motor fluxing command, flux is built up when the assigned input or bit
is at 1.
- If an LI or a bit has not been assigned, or i f t he assi gned LI or bit i s at 0 when a run comman d i s s ent ,
fluxing occurs when the motor starts.
= [Sync. mot.] (SYn), the [Motor fluxing] (FLU) parameter must be
is not [No] (nO), the [Motor fluxing] (FLU) parameter has no effect.
) and not fluxing.
[No] (nO)
86 AAV49426 12/2009
Page 87

[1.4 MOTOR CONTROL] (drC-)
Code Name/Description Adjustment range Factory setting
FLI-
ASt
brC
nLd
brCO
b [FLUXING BY LI] (continued)
M [Angle setting type]
Rotor angle alignment or detection mode can be accessed if
[Motor control type] (Ctt) page 70
Mode for measuring the phase-shift angle between the motor and the encoder.
v [With load] (brC): Detection of angle without motion, possible with or without load, brake engaged or
released.
v [W/o load] (nLd): Alignment with motion, only for free motors (brake released), without load.
v [Optimised] (brCO): Measurement without motion, possible with or without load, brake engaged or released.
Optimization of the angle detection time sta rting f rom the second detect ion reque st, eve n after a powe r off
of the product.
Note 1: If [Angle setting type] (ASt) = [W/o load] (nLd), the motor may rotate one full revolution
during measurement.
Nota 2: If [Motor control type] (Ctt) = [Sync. mot.] (SYn) or [Sync.CL] (FSY) then [Angle setting
type] (ASt) = [Optimised] (brCO)
[With load] (brC)
= [Sync. mot.] (SYn).
AAV49426 12/2009 87
Page 88

[1.4 MOTOR CONTROL] (drC-)
Code Name/Description Adjustment range
tUn-
tUn
AUt
nO
YES
dOnE
nO
YES
b [AUTOMATIC TUNE]
M [Auto tuning]
v [No] (nO): Auto-tuning not performed.
v [Yes] (YES): Auto-tuning is performed as soon as possible, then the parameter automatically changes to [Done]
(dOnE).
v [Done] (dOnE): Use of the values given the last time auto-tuning was performed.
Important:
• It is essential that all the motor parameters are correctly configured before starting auto-tuning.
- Asynchronous motor: [Rated motor volt.] (UnS) , [Rated motor freq.] (FrS), [Rated mot. current] (nCr),
[Rated motor speed] (nSP), [Rated motor power] (nPr) page 76
- Synchronous motor: [Nominal I sync.] (nCrS), [Nom motor spdsync] (nSPS), [Pole pairs] (PPnS), [Syn.
EMF constant] (PHS), [Autotune L d-axis] (LdS), [Autotune L q-axis] (LqS) page 81
If at least one of these parameters (except [Syn. EMF constant] (PHS), [ Autotune L d-axis] (LdS), [Autotune L
q-axis] (LqS)) is modified after auto-tuning has been performed, [Auto tuning] (tUn) will return to [No] (nO) and
must be repeated.
• Auto-tuning is only performed if no stop command has been activated. If a "freewheel stop" or "fast stop"
function has been assigned to a logic input, this input must be set to 1 (active at 0).
• Auto-tuning takes priority over any run or prefluxing commands, which will be taken into account after the
auto-tuning sequence.
• If auto-tuning fails, the drive displays [No] (nO) and, depending on the configuration of [Autotune faul t mgt]
(tnL) page 256
• Auto-tuning may last for 1 to 2 seconds. Do not interrupt the process. Wait for the display to change to
"[Done] (dOnE)" or "[No] (nO)".
Note:
• During auto-tuning the motor operates at rated current.
• If the "line contactor" or "output contactor" f unctio n has been confi gured, the co nta ctor clo ses d uring
auto-tuning.
, may switch to [Auto-tuning] (tnF) fault mode.
M [Automatic autotune]
v [No] (nO): Function inactive.
v [Yes] (YES): Auto-tuning is performed on every power-up.
Important: Same comments as for [Auto tuning] (tUn) above.
[No] (nO)
[No] (nO)
tUL
tUS
PEnd
PrOG
FAIL
dOnE
nO
LI1
tAb
CUS
M [Auto-tune assign.]
Assignment of auto-tuning to a logic input or control bit.
v [No] (nO): Not assigned
v [LI1] (LI1)
-
-
-
:
:
v [...] (...): See the assignment conditions on page 139.
Auto-tuning is performed when the assigned bit or input changes to 1.
Important: Same comments as for [Auto tuning] (tUn) above.
M [Auto tuning state]
For information only, cannot be modified.
v [Not done] (tAb): The default stator resistance value is used to control the motor.
v [Pending] (PEnd): Auto-tuning has been requested but not yet performed.
v [In Progress] (PrOG): Auto-tuning in progress.
v [Failed] (FAIL): Auto-tuning has failed.
v [Done] (dOnE): The stator resistance measured by the auto-tuning function is used to control the motor.
v [Customized] (CUS): Auto-tuning has been performed, but at least one parameter set by this auto-tuning
operation has subsequently been modified. The [Auto tuning] (tUn) parameter then returns to [No] (nO). The
following auto-tuning parameters are affected:
• [Cust stator resist.] (rSA), [Idw] (IdA), [Lfw] (LFA) and [Cust. rotor t const.] (trA) page 80
motors
• [Cust. stator R syn] (rSAS) page 81
[Not done] (tAb)
for asynchronous
for synchronous motors
88 AAV49426 12/2009
Page 89

[1.4 MOTOR CONTROL] (drC-)
Code Name/Description Adjustment range Factory setting
SSL-
SSL
SPG
T
SIt
T
SFC
T
JMUL
JESt
Std
HPF
b [SPEED LOOP]
Cannot be accessed if [Motor control type] (Ctt) page 70 = [V/F 2pts] (UF2) or [V/F 5pts] (UF5).
M [Speed loop type]
Selection of speed loop type
v [Standard] (Std): Standard speed loop
v [High perfor.] (HPF): High-pe rformance speed loop. We advise to deactivate [Dec ramp adapt.] (brA) =
[No] (nO) (see page 155
M [Speed prop. gain]
This parameter can be accessed if [Speed loop type] (SSL) = [Standard] (Std).
Speed loop proportional gain.
M [Speed time integral]
This parameter can be accessed if [Speed loop type] (SSL) = [Standard] (Std).
Speed loop integral time constant.
M [K speed loop filter]
This parameter can be accessed if [Speed loop type] (SSL) = [Standard] (Std).
Speed loop filter coefficient.
)
(1)
(1)
(1)
0 to 1000% 40%
1 to 1000% 100%
0 to 100 0
M [Inertia Mult. Coef.]
This parameter can be accessed if [Speed loop type] (SSL) = [High perfor.] (HPF).
Increment for [Application Inertia] (JAPL) and [Estim. app. inertia] (JESt) parameters, calculated by the drive,
in read-only mode:
- 0.1 gm
M [Estim. app. inertia]
This parameter can be accessed if [Speed loop type] (SSL) = [High perfor.] (HPF).
The inertia being driven is estimated by the drive according to the motor parameters, i n read-only mode. Speed
loop default settings are determined by the drive from this inertia.
Increment given by [Inertia Mult. Coef.] (JMUL):
- 0.1 gm
2
, 1 gm2, 10 gm2, 100 gm2, 1000 gm
2
, 1 gm2, 10 gm2, 100 gm2 or 1000 gm
2
1 to 9999 -
2
[Standard] (Std)
JACO
(1)Parameter can also be accessed in t he [1.3 SETTINGS] (SEt-) menu. Advice on setting the parameters in this menu can be found
on pages 57
T
M [App. Inertia Coef.]
This parameter can be accessed if [Speed loop type] (SSL) = [High perfor.] (HPF).
Coefficient which fix the ratio between [Estim. app. inertia ] (JESt) and [App lication Inertia] (JAPL) parameters.
The default value is equal to 1 or 30 if [Macro configuration] (CFG) page 41
type] (Ctt) page 70
[Application Inertia] (JAPL) = [Estim. app. inertia] (JESt) x [App. Inertia Coef.] (JACO).
to 59.
Parameter that can be modified during operation or when stopped
= [Sync. mot.] (SYn) or [Sync.CL] (FSY).
0.10 to 100 -
= [Lift] (LIFt) and [Motor control
AAV49426 12/2009 89
Page 90

[1.4 MOTOR CONTROL] (drC-)
DANGER
UNINTENDED EQUIPMENT OPERATION
• If an incorrect value is entered in the [Application Inertia] (JAPL)parameter, it can cause speed
instability and loss of motor control, which could lead to a sudden drop (in hoisting and lift
applications, for example). The inertia may vary significantly according to the application; in
general, it is very high for lifts. As such, the default value does not guarantee correct operation.
• It is essential to determine and enter the exact inertia value in high performance speed loop mode.
Failure to follow these instructions will result in death or serious injury.
Code Name/Description Adjustment range Factory setting
SSL-
JAPL
b [SPEED LOOP] (continued)
M [Application Inertia]
This parameter can be accessed if [Speed loop type] (SSL) = [High perfor.] (HPF).
The value of the actual inertia being driven must be entered in this parameter. This value is then used by
the drive to optimize speed loop settings, thus achieving t he best results (provided that the exact value has
been entered).
[Application Inertia] (JAPL) = [Estim. app. inertia] (JESt) x [App. Inertia Coef.] (JACO), with [App. Inertia Coef.]
(JACO) = 1 or 30 if [Macro configuration] (CFG) page 41
[Sync. mot.] (SYn) or [Sync.CL] (FSY).
Increment given by [Inertia Mult. Coef.] (JMUL):
• 0.1 gm
2
, 1 gm2, 10 gm2, 100 gm2 or 1000 gm
Note: If a motor parameter is modified, the estimated inertia is recalc ulate d and upd ate d (p arameters
[Estim. app. inertia] (JESt) and [Inertia Mult. Coef.] (JMUL)). [Application Inerti a] (JAPL) is also returned
to its default value according to the new value of [Estim. app. inertia] (JESt).
1 to 9999 -
= [Lift] (LIFt) and [Motor control type] (Ctt) page 70 =
2
StA
T
FLG
T
(1)Parameter can also be accessed in t he [1.3 SETTINGS] (SEt-) menu. Advice on setting the parameters in this menu can be found
on pages 57
T
M [Fr.Loop.Stab]
This parameter can be accessed if [Speed loop type] (SSL) = [High perfor.] (HPF).
Stability: Used to adapt the return to steady state after a speed transient, according to the dynamics of the
machine. Gradually increase the stability t o increase control loop atten uation an d thus reduce any overspeed.
M [FreqLoopGain]
This parameter can be accessed if [Speed loop type] (SSL) = [High perfor.] (HPF).
Frequency loop gain: Used to adapt the respons e of the machine sp eed transients according to th e dynamics.
For machines with high resistive torque, high inertia or fast cycles, increase the gain gradually.
to 59.
Parameter that can be modified during operation or when stopped
(1) 0 to 100% 20%
(1)
0 to 100%
20%
90 AAV49426 12/2009
Page 91

[1.4 MOTOR CONTROL] (drC-)
Parameters that can be accessed in [Expert] mode
Code Name/Description Adjustment range Factory setting
SSL-
FFP
T
FFU
T
T
b [SPEED LOOP] (continued)
M [Feed forward]
This parameter can be accessed if [Speed loop type] (SSL) = [High perfor.] (HPF).
Percentage of the high-performance regulator feedforward term. 100% corresponds to the term calculated
using the value of [Application Inertia] (JAPL) page 90
M [Bandwidth feedfor.]
This parameter can be accessed if [Speed loop type] (SSL) = [High perfor.] (HPF).
Bandwidth of the high-performance speed loop feedforward term, as a percentage of the predefined value.
Parameter that can be modified during operation or when stopped
0 to 200% 100%
.
20 to 500% 100%
Recommended procedure for setting the high-performance speed loop
1. Enter the motor parameters. If you subsequently modify one of these, you will have to perform this whole procedure again.
2. The value of the actual inertia being driven must be entered in the [Application Inertia] (JAPL) parameter, page 90
Note: If a motor parameter is modified, the estimated inertia is recalculated and updated (parameters [Estim. app. inertia] (JESt) and
[Inertia Mult. Coef.] (JMUL)). [Application Inertia] (JAPL) is also returned to its default value accordi ng to the new value of [Estim. app.
inertia] (JESt).
3. Check the speed loop response time by first setting [Feed forward] (FFP) to 0 (see graphs on next page).
4. If necessary, adjust the bandwidth and stability using parameters [Fr.Loop.Stab] (StA) and [FreqLoopGain] (FLG) (see page 59
5. To optimize ramp following, increase the feedforward parameter [Feed forward] (FFP) as indicated on the next page until th e best result
is obtained.
6. Under exceptional circumstances, the feedforward term bandwidth can be adjust ed (as shown on the next page) to further improve ramp
following or to reduce the speed reference's sensitivity to noise.
.
).
DANGER
UNINTENDED EQUIPMENT OPERATION
• If an incorrect value is entered in the [Application Inertia] (JAPL) parameter, page 90, it can cause speed instability and loss of
motor control, which could lead to a sudd en drop (in hoisting and lif t applications, f or example). The inertia may vary signi ficantly
according to the application; in general, it is very high for lifts. As such, the default value does not guarantee correct operation.
• It is essential to determine and enter the exact inertia value in high perf ormance speed loop mode.
Failure to follow these instructions will result in death or serious injury.
AAV49426 12/2009 91
Page 92

[1.4 MOTOR CONTROL] (drC-)
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Reference division
Time in ms
0 50045040035030025020015010050
0
1
1,2
0,8
0,6
0,4
0,2
Reference division
Time in ms
High-performance speed loop - Setting the [Feed forward] (FFP) and [Bandwidth
feedfor.] (FFU) parameters
[Feed forward] (FFP)
This is used to adjust the level of dynamic torque feedforward required for accelerating and decelerating the inertia. The effect of this
parameter on ramp following is illustrated below. Increasing the value of FFP allows the ramp to be followed more closely. However, if the
value is too high, overspeed occurs. The optimum setting is obtained when the speed follows the ramp precisely; this depends on the
accuracy of the [Application Inertia] (JAPL) parameter, page 90
Initial response with FFP = 0 Increase in FFP Increase in FFP
, and the [Encoder filter value] (FFr) parameter setting, page 117.
Increase in FFP
[Bandwidth feedfor.] (FFU)
This is used to adjust the bandwidth of the dynamic torque feedforward term. The effect of this parameter on ramp following is illustrated
below. Decreasing the value of FFU reduces the effect of noise on the speed reference (torque ripple). However, too great a decrease in
relation to the ramp settings (o n short ramps) cause s a del ay, and ramp fol lowing is advers ely affe cted. Increasi ng the v alue o f FFU allows
the ramp to be followed more closely, but also hei ghtens noise sensitivity. The o ptimum setting is obtained by reaching the best compromise
between ramp following and the existing noise sensitivity.
Initial response with FFU = 100% Reduction in FFU Increase in FFU
92 AAV49426 12/2009
Page 93

[1.4 MOTOR CONTROL] (drC-)
Beam pumps
[ENA SYSTEM]
ENA SYSTEM is a control profile designed for rotating machines with unbalanced load. It only applies to asynchronous motors.
It is used primarily for oil pumps. The operating principle applied:
- Allows operation without a braking resistor
- Reduces mechanical stress on the rod
- Reduces line current fluctuations
- Reduces energy consumption by improving the electric power/current ratio
[ENA prop.gain]
This setting is used to achieve a compromise between the reduced energy consumption (and/or line current fluctuations) and the
mechanical stress to which the rod is subject.
Energy is saved by reducing current fluctuations and increasing the current while retaining the same average speed.
[ENA integral gain]
This setting is used to smooth the DC bus voltage.
Start up the machine with a low integral and proportional gain (proportional 25% and integral 10%) in order to avoid an overvoltage trip in
the absence of a braking resistor. See if these settings are suitable.
Recommended adjustments to be made during operation:
• To eliminate the braking resistor and, therefore, the increase in the DC bus voltage:
Display the machine speed on the graphic display terminal.
Reduce the integral gain value until the machine speed dr ops. When this point is reached, increase the i ntegral gain until the machine
speed stabilizes.
Use the graphic display terminal or an oscilloscope to check that the DC bus voltage is stable.
• To save energy:
Reducing the proportional gain (gradually) may increase energy savings by reduci ng the maximum value of the line current, but it will
increase speed variations and, therefore, mechanical stress.
The aim is to identify settings that will enable energy to be saved and minimize mechanical stress.
When reducing the proportional gain, it may be necessary to readjust the integral gain in order to avoid an overvoltage trip.
Note: Once the adjustments are complete, check that t he pump starts up correctly. I f the ENA inte gral gain sett ing is to o low, this may lead
to insufficient torque on startup.
[Reduction ratio]
This setting corresponds to the motor speed ahead of gearbox/speed after gearbox ratio. This parameter is used to display the average
speed in Hz and the machine speed in customer units (e.g., i n strokes pe r minut e) on the graphi c displa y terminal . In order t o be displayed
on the graphic display terminal, these values must be selected in the [1.2 MONITORING] (SUP-) menu.
Adjustment recommendations for prevention of tripping on an [Overspeed] (SOF) fault
ENA SYSTEM authorizes overspeed, which can trigger an [Overspeed] (SOF) fault. To avoid this occurring, it is advisable to increase the
value of the following parameters slightly:
• [Max frequency] (tFr) page 71
• [Overspd. pulse thd.] (FqA) page 253, if the "frequency meter" function is configured
AAV49426 12/2009 93
Page 94

[1.4 MOTOR CONTROL] (drC-)
Beam pumps
Code Name/Description Adjustment range Factory setting
SSL-
EnA
YES
GPE
T
GIE
T
rAP
T
(1)Parameter can also be acce s se d in the [1.3 SETTINGS] (SEt-) menu.
T
b [SPEED LOOP] (continued)
M [ENA system]
This parameter can be accessed if [Motor control type] (Ctt) = [SVC V] (UUC), see page 70.
nO
Parameter that can be modified during operation or when stopped
v [No] (nO): Function inactive
v [Yes] (YES): Function active
M [ENA prop.gain]
This parameter can be accessed if [ENA system] (EnA) = [Yes] (YES)
M [ENA integral gain]
This parameter can be accessed if [ENA system] (EnA) = [Yes] (YES)
M [Reduction ratio]
This parameter can be accessed if [ENA system] (EnA) = [Yes] (YES)
[No] (nO)
(1) 1 to 9999 250
(1) 0 to 9999 100
(1) 10.0 to 999.9 10
94 AAV49426 12/2009
Page 95

[1.4 MOTOR CONTROL] (drC-)
0
Rated magnetizing current
Positive [Boost] (bOO)
Negative [Boost] (bOO)
[Action Boost] (FAb)
Magnetizing current
Frequency
Code Name/Description Adjustment range Factory setting
bOO M [Boost]
The parameter can be accessed if [ACCESS LEVEL] = [Expert] and if [Motor control type] (Ctt) page 70 is
different from [Sync.CL] (FSY).
Adjustment of the motor magnetizing current at low speed, as a % of the rated magnetizing current. This
parameter is used to increase or reduce the time taken t o establish the torque . It allows gradual adjus tment up
to the frequency set by [Action Boost] (FAb). Negative values apply particularly to tapered rotor motors.
FAb M [Action Boost]
The parameter can be accessed if [ACCESS LEVEL] = [Expert] and if [Motor control type] (Ctt) page 70 is
different from [Sync.CL] (FSY).
Frequency above which the magnetizing current is not longer affected by [Boost] (b OO).
UFr
T
M [IR compensation]
This parameter can be accessed if [Motor control type] (Ctt) page 70 is not [V/F 2pts] (UF2) or [V/F 5pts] (UF5).
Used to optimize the torque at very low speed (increase [IR compensation] (UFr) if the torque is insufficient).
Check that the [IR compensation] (UFr) value is not to o high when t he motor is warm (risk of i nstability).
-100% to 100% 0
0 to 500 Hz
(1) 25 to 200% 100%
0
nrd
YES
(1)Parameter can also be acce s se d in the [1.3 SETTINGS] (SEt-) menu.
T
M [Noise reduction]
nO
v [No] (nO): Fixed frequency. Factory setting at and above 55 kW (75 HP) fo r ATV71 pppM3X an d at and above
90 kW (120 HP) for ATV71
pppN4.
v [Yes] (YES): Frequency with random modulation. Factory setting u p t o 45 kW (60 HP) f or ATV7 1pppM3X and
up to 75 kW (100 HP) for the ATV71
Random frequency modulation prevents any resonance, which may occur at a fixed frequency.
Parameter that can be modified during operation or when stopped
pppN4.
According to rating
AAV49426 12/2009 95
Page 96

[1.4 MOTOR CONTROL] (drC-)
Code Name/Description Adjustment range Factory setting
SUL
YES
SOP
The value of the "SOP" parameter corresponds to the attenuation time of the cable used. It is defined to prevent the superimposition of
voltage wave reflections resulting from long cable lengths. It limits overvoltages to twice the DC bus rated voltage.
The tables on the following page give examples of correspo ndence be tween th e "SOP" parameter and the l ength o f the cabl e between the
drive and the motor. For longer cable lengths, a sinus filter or a dV/dt prot ection filter must be used.
• For motors in parallel, the sum of all the cable lengths must be taken into consideration. Compare the length given in the table row
corresponding to the power for one motor with that corresponding to th e total power, and select the shorter length. Example: Two
7.5 kW (10 HP) motors - take the lengths on the 15 kW (20 HP) table row, which are shorter than those on the 7.5 kW (10 HP) row,
and divide by the number of motors to obtain t he length per motor (with unshielded "GORSE" cable and SOP = 6, the result is 40/2=
20 m maximum for each 7.5 kW (10 HP) motor).
M [Motor surge limit.]
This function limits motor overvoltages and is useful in the followi ng applications:
-NEMA motors
- Japanese motors
- Spindle motors
- Rewound motors
nO
v [No] (nO): Function inactive
v [Yes] (YES): Function active
This parameter is forced to [No] (nO) if [Sinus filter] (OFI) page 72
This parameter can remain = [No] (nO) for 230/40 0 V motors used at 2 30 V, or if the length of cable between
the drive and the motor does not exceed:
- 4 m with unshielded cables
- 10 m with shielded cables
M [Volt surge limit. opt]
Optimization parameter for transient overvoltages at the motor terminals. Accessible if [Motor surge limit.]
(SUL) = [Yes] (YES).
Set to 6, 8, or 10
= [Yes] (YES).
μs, according to the following table.
[No] (nO)
10 μs
In special cases (for example, different types of cable, different motor powers in parallel, different cable lengths in parallel, etc.), we
recommend using an oscilloscope to check the overvoltage values obtained at the motor terminals.
To retain the overall drive performance, do not increase the SOP value unnecessarily.
96 AAV49426 12/2009
Page 97

[1.4 MOTOR CONTROL] (drC-)
Tables giving the correspondence between the SOP parameter and the cable length,
for 400 V line supply
Altivar 71 Motor Cable cross-section Maximum cable length in meters
Reference Power Unshielded "GORSE" cable
kW HP in mm
ATV71H075N4 0.75 1 1.5 14 109.36 yd 76.55 yd 49.21 yd 114.83 yd 92.96 yd 71.08 yd
ATV71HU15N4 1.5 2 1.5 14 109.36 yd 76.55 yd 49.21 yd 114.83 yd 92.96 yd 71.08 yd
ATV71HU22N4 2.2 3 1.5 14 120.30 yd 71.08 yd 49.21 yd 114.83 yd 92.96 yd 71.08 yd
ATV71HU30N4 3- 1.5 14 120.30 yd 71.08 yd 49.21 yd 114.83 yd 92.96 yd 71.08 yd
ATV71HU40N4 451.5 14 120.30 yd 71.08 yd 49.21 yd 114.83 yd 92.96 yd 71.08 yd
ATV71HU55N4 5.5 7.5 2.5 14 131.23 yd 71.08 yd 49.21 yd 114.83 yd 92.96 yd 71.08 yd
ATV71HU75N4 7.5 10 2.5 14 131.23 yd 71.08 yd 49.21 yd 114.83 yd 92.96 yd 71.08 yd
ATV71HD11N4 11 15 6 10 125.77 yd 65.62 yd 49.21 yd 109.36 yd 82.02 yd 60.15 yd
ATV71HD15N4 15 20 10 8 114.83 yd 65.62 yd 43.74 yd 109.36 yd 76.55 yd 54.68 yd
ATV71HD18N4 18.5 25 10 8 125.77 yd 65.62 yd 38.28 yd 164.04 yd 82.02 yd 54.68 yd
ATV71HD22N4 22 30 16 6 164.04 yd 65.62 yd 43.74 yd 164.04 yd 76.55 yd 54.68 yd
ATV71HD30N4 30 40 25 4 164.04 yd 60.15 yd 38.28 yd 164.04 yd 76.55 yd 54.68 yd
ATV71HD37N4 37 50 35 5 218.72 yd 71.08 yd 54.68 yd 164.04 yd 76.55 yd 54.68 yd
ATV71HD45N4 45 60 50 0 218.72 yd 60.15 yd 32.81 yd 164.04 yd 65.62 yd 43.74 yd
ATV71HD55N4 55 75 70 2/0 218.72 yd 54.68 yd 27.34 yd 164.04 yd 60.15 yd 32.81 yd
ATV71HD75N4 75 100 95 4/0 218.72 yd 49.21 yd 27.34 yd 164.04 yd 60.15 yd 32.81 yd
2
AWG SOP = 10 SOP = 8 SOP = 6 SOP = 10 SOP = 8 SOP = 6
Type H07 RN-F 4Gxx
Shielded "GORSE" cable
Type GVCSTV-LS/LH
Altivar 71 Motor Cable cross-section Maximum cable length in meters
Reference Power Shielded "BELDEN" cable
kW HP in mm
ATV71H075N4 0.75 1 1.5 14 54.68 yd 43.74 yd 32.81 yd
ATV71HU15N4 1.5 2 1.5 14 54.68 yd 43.74 yd 32.81 yd
ATV71HU22N4 2.2 3 1.5 14 54.68 yd 43.74 yd 32.81 yd
ATV71HU30N4 3- 1.5 14 54.68 yd 43.74 yd 32.81 yd
ATV71HU40N4 451.5 14 54.68 yd 43.74 yd 32.81 yd
ATV71HU55N4 5.5 7.5 2.5 14 54.68 yd 43.74 yd 32.81 yd
ATV71HU75N4 7.5 10 2.5 14 54.68 yd 43.74 yd 32.81 yd
ATV71HD11N4 11 15 6 10 54.68 yd 43.74 yd 32.81 yd
ATV71HD15N4 15 20 10 8 54.68 yd 43.74 yd 32.81 yd
ATV71HD18N4 18.5 25 10 8 54.68 yd 43.74 yd 32.81 yd
ATV71HD22N4 22 30 16 6 82.02 yd 43.74 yd 27.34 yd
ATV71HD30N4 30 40 25 4 82.02 yd 43.74 yd 27.34 yd
ATV71HD37N4 37 50 35 5 82.02 yd 43.74 yd 27.34 yd
ATV71HD45N4 45 60 50 0 82.02 yd 43.74 yd 27.34 yd
ATV71HD55N4 55 75 70 2/0 82.02 yd 32.81 yd 16.40 yd
ATV71HD75N4 75 100 95 4/0 82.02 yd 32.81 yd 16.40 yd
For 230/400 V motors used at 230 V, the [Motor surge limit.] (SUL) parameter can remain = [No] (nO).
2
AWG SOP = 10 SOP = 8 SOP = 6 SOP = 10 SOP = 8 SOP = 6
Type 2950x
Shielded "PROTOFLEX" cable
Type EMV 2YSLCY-J
AAV49426 12/2009 97
Page 98

[1.4 MOTOR CONTROL] (drC-)
LbC
LbC
Torque
Nominal torque
Nominal torque
Frequency
0
Code Name/Description Adjustment range Factory setting
Ubr
T
bbA
nO
YES
M [Braking level]
DC bus voltage threshold above which the braking transistor cuts in to limit this voltage.
ATV71
ppppM3p: factory setting 395 V.
ATV71
ppppN4: factory setting 785 V.
The adjustment range depends on the voltage rating of the drive and the [Mains voltage] (UrES) parameter,
page 246
.
M [Braking balance]
v [No] (nO): Function inactive
v [Yes] (YES): Function active, to be used on dri ves conn ected in pa rallel via thei r DC b us. Us ed to bala nce the
braking power between the drives. The [Braking level] (Ubr) parameter must be set to the same value on the
various drives.
The value[Yes] (YES) is possible only if [Dec ramp adapt.] (brA) = [No] (nO) (see page 155
According to drive
voltage rating
[No] (nO)
)
LbA
LbC
T
nO
YES
M [Load sharing]
When 2 motors are connected mechanically and therefor e at the same speed, and each is controlled by a drive,
this function can be used to improve torque distri bution between the two mo tors. To do this, it varies the speed
based on the torque.
v [No] (nO): Function inactive
v [Yes] (YES): Function active
The parameter can only be accessed if [Motor control type] (Ctt) page 70
(UF5).
M [Load correction]
Rated correction in Hz.
The parameter can be accessed if [Load sharing] (LbA) = [Yes] (YES)
[No] (nO)
is not [V/F 2pts] (UF2) or [V/F 5pts]
(1) 0 to 1000 Hz 0
(1)The parameter can also be accessed in the [1.3 SETTINGS] (SEt-) menu.
98 AAV49426 12/2009
T
Parameter that can be modified during operation or when stopped.
Page 99

[1.4 MOTOR CONTROL] (drC-)
+
-
Reference
Speed
Ramp
Speed loop
Balancing
K
Filter
Torque reference
LBC
LBC1
LBC2
LBC3
LBF
K1
Speed
LBC1 LBC2
1
K2
Torque
LBC3
LBC3
Rated
torque x (1 + LBC3)
LBC
LBC
Load sharing, parameters that can be accessed at expert level
Principle
The load sharing factor K is determined by the torque and speed, with two factors K1 and K2 (K = K1 x K2).
AAV49426 12/2009 99
Page 100

[1.4 MOTOR CONTROL] (drC-)
Code Name/Description Adjustment range Factory setting
LbC1
T
LbC2
T
LbC3
T
LbF
T
T
M [Correction min spd]
The parameter can be accessed if [Load sharing] (LbA) = [Yes] (YES)
Minimum speed for load correction in Hz. Below this threshold, no corrections are made. Used to prevent
correction at very low speed if this would hamper rotation of the motor.
M [Correction max spd]
The parameter can be accessed if [Load sharing] (LbA) = [Yes] (YES)
Speed threshold in Hz above which maximum load correction is applied.
M [Torque offset]
The parameter can be accessed if [Load sharing] (LbA) = [Yes] (YES)
Minimum torque for load correction as a % of th e rated t orque. Below thi s threshold, no c orrections are made.
Used to avoid torque instabilities when the torque direction is not constant.
M [Sharing filter]
The parameter can be accessed if [Load sharing] (LbA) = [Yes] (YES)
Time constant (filter) for correction in ms. Used in the even t of flexible mechanical coupling in order to avoid
instabilities.
Parameter that can be modified during operation or when stopped.
0 to 999.9 Hz 0
[Correction min spd]
(LbC1) + 0.1
at 1000 Hz
0 to 300% 0%
100 ms to 20 s 100 ms
0,1
100 AAV49426 12/2009
 Loading...
Loading...