

Page 1
TD03D
EN
Operating Instructions
DE
Betriebsanleitung
FR
Instructions de Mise en Service
IT
Istruzioni di funzionamento
ES
Instrucciones de funcionamiento
Tmd001
Tmd - flux vector drive
0.37 kW… 7.5 kW
Page 2

Contents
About these instructions ............................................................2
1 Safety information ................................................................3
1.1 Pictographs used in these instructions .....................................................4
2 Technical data ......................................................................5
2.1 Standards and application conditions ......................................................5
2.2 Ratings ......................................................................................................6
3 Installation ............................................................................7
3.1 Mechanical installation .............................................................................7
3.1.1 Dimensions and mounting ........................................................................7
3.2 Electrical installation .................................................................................8
3.2.1 Installation according to EMC requirements ............................................8
3.2.2 Fuses/cable cross-sections ......................................................................8
3.2.3 Connection diagram .................................................................................9
3.2.4 Control terminals .....................................................................................10
4 Commissioning ..................................................................11
4.1 Parameter setting ....................................................................................11
4.2 Electronic programming module (EPM) .................................................11
4.3 Parameter menu .....................................................................................12
4.4 Vector mode ...........................................................................................20
4.4.1 Vector speed and torque modes ............................................................20
4.4.2 Enhanced V/Hz mode ............................................................................20
5 Troubleshooting and fault elimination .............................21
ENGLISH
1
Page 3
About these instructions
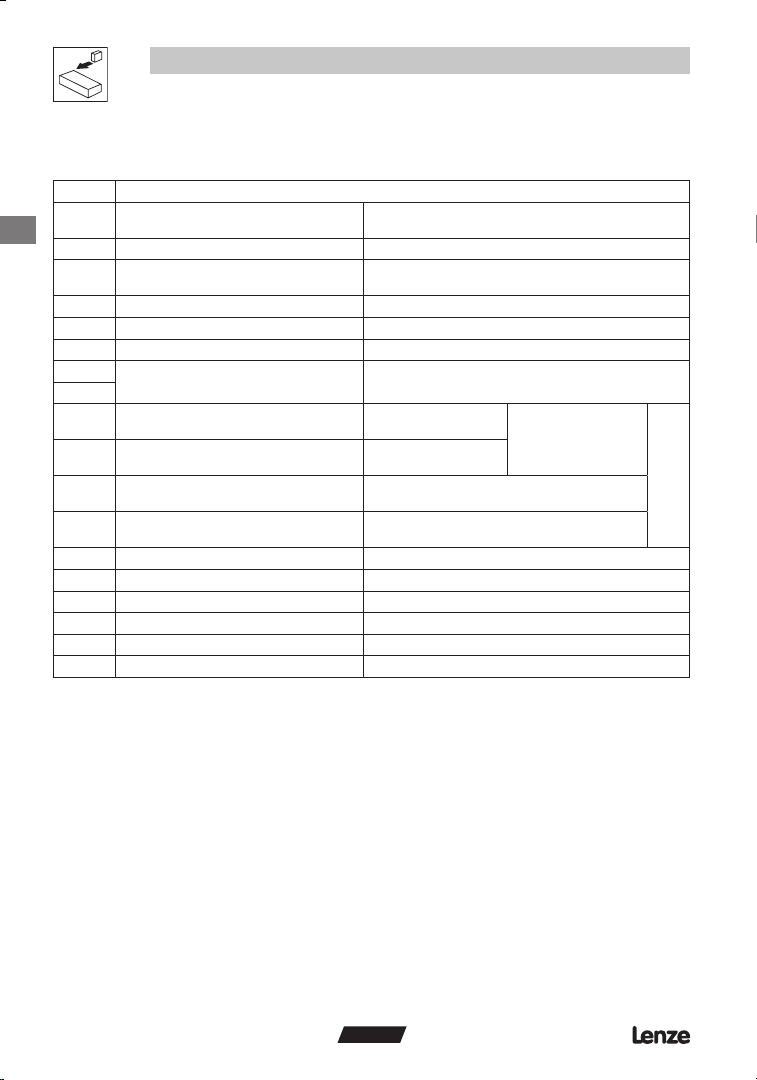
This documentation applies to the Tmd vector frequency inverter, and contains important technical data
and describes installation, operation, and commissioning.
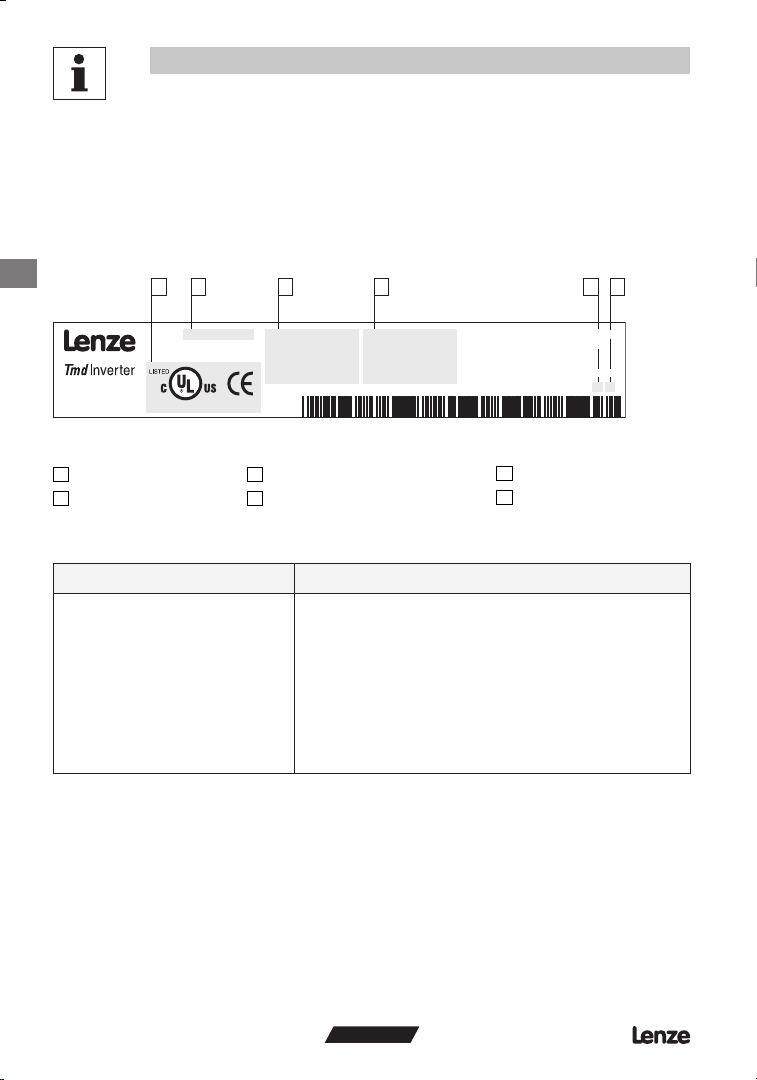
These instructions are only valid for Tmd frequency inverters with software rev 11 (see drive
nameplate).
Please read the instructions before commissioning.
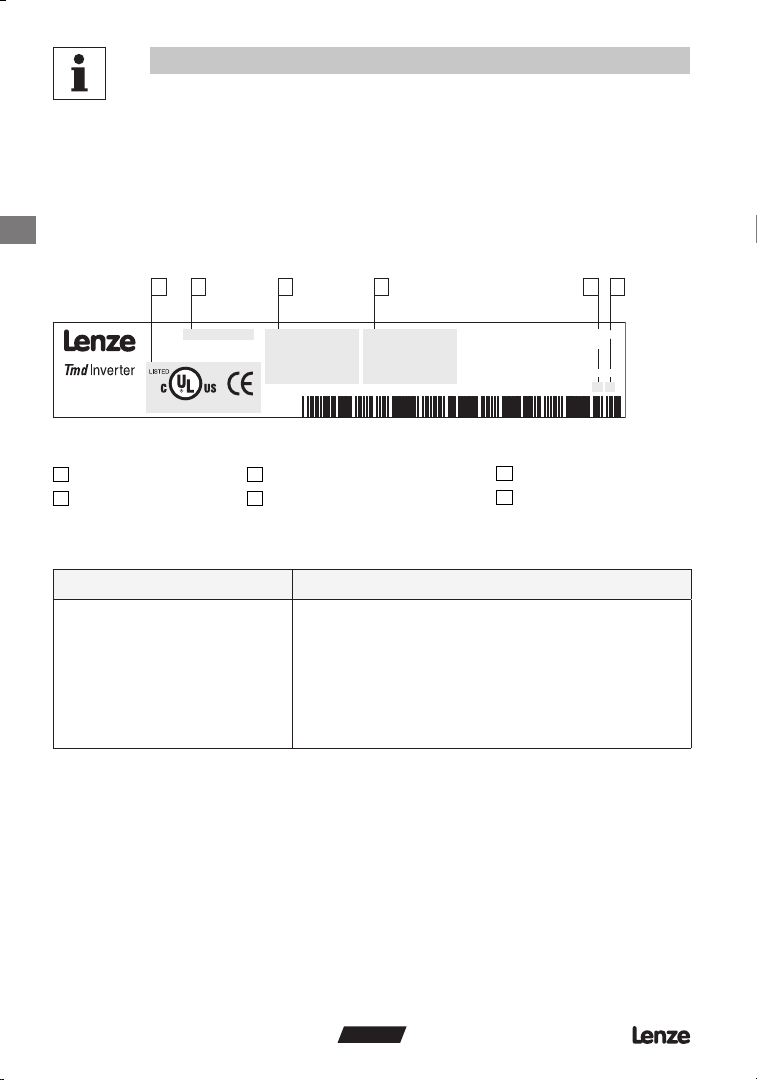
A B C D E F
For detailed information refer to
instruction manual TD03
004605460364930305
ETMD152L4TXA000XXXX
Hardware Version
E
Software Version
F
Tmd011
Made in USA
Certifications
A
Type
B
Type: ETMD152L4TXA
Id-No: 00000 000
IND CONT EQ
Input: Output:
3/PE
AC 400/480 V
4.8 / 4.0 A
50 / 60 Hz
Input Ratings
C
Output Ratings
D
3/PE
AC 400/480 V
4.1 / 3.4 A
1.5 kW
0 - 240 Hz
Scope of delivery Important
• 1 Tmd vector inverter (ETMD...)
with EPM installed (see Section 4.2)
• 1 Operating Instructions
After receipt of the delivery, check immediately whether the items
delivered match the accompanying papers. Lenze does not accept
any liability for deficiencies claimed subsequently.
Claim
• visible transport damage immediately to the forwarder.
• visible deciencies/incompleteness immediately to your Lenze
representative.
© 2004 Lenze AG
No part of this documentation may be copied or made available to third parties without the explicit written approval of
Lenze AG.
All information given in this documentation has been carefully selected and tested for compliance with the hardware and
software described. Nevertheless, discrepancies cannot be ruled out. We do not accept any responsibility nor liability for
damages that may occur. Any necessary corrections will be implemented in subsequent editions.
2
ENGLISH
Page 4

Safety information
1 Safety information
General
Some parts of Lenze controllers (frequency inverters, servo inverters, DC controllers) can be live,
moving and rotating. Some surfaces can be hot.
Non-authorized removal of the required cover, inappropriate use, and incorrect installation or operation
creates the risk of severe injury to personnel or damage to equipment.
All operations concerning transport, installation, and commissioning as well as maintenance must
be carried out by qualied, skilled personnel (IEC 364 and CENELEC HD 384 or DIN VDE 0100 and
IEC report 664 or DIN VDE0110 and national regulations for the prevention of accidents must be
observed).
According to this basic safety information, qualified skilled personnel are persons who are familiar with
the installation, assembly, commissioning, and operation of the product and who have the qualifications
necessary for their occupation.
Application as directed
Drive controllers are components which are designed for installation in electrical systems or machinery.
They are not to be used as appliances. They are intended exclusively for professional and commercial
purposes according to EN 61000-3-2. The documentation includes information on compliance with
the EN 61000-3-2.
When installing the drive controllers in machines, commissioning (i.e. the starting of operation as
directed) is prohibited until it is proven that the machine complies with the regulations of the EC Directive
98/37/EC (Machinery Directive); EN 60204 must be observed.
Commissioning (i.e. starting of operation as directed) is only allowed when there is compliance with
the EMC Directive (2004/108/EC).
The drive controllers meet the requirements of the Low Voltage Directive 2006/95/EC. The harmonised
standards of the series EN 61800-5-1 / DIN VDE 0160 apply to the controllers.
Note: The availability of controllers is restricted according to EN 61800-3. These products can cause
radio interference in residential areas. In this case, special measures can be necessary.
Installation
Ensure proper handling and avoid excessive mechanical stress. Do not bend any components and
do not change any insulation distances during transport or handling. Do not touch any electronic
components and contacts.
Controllers contain electrostatically sensitive components, which can easily be damaged by inappropriate
handling. Do not damage or destroy any electrical components since this might endanger your
health!
Electrical connection
When working on live drive controllers, applicable national regulations for the prevention of accidents
(e.g. VBG 4) must be observed.
The electrical installation must be carried out according to the appropriate regulations (e.g. cable crosssections, fuses, PE connection). Additional information can be obtained from the documentation.
The documentation contains information about installation in compliance with EMC (shielding, grounding,
filters and cables). These notes must also be observed for CE-marked controllers.
The manufacturer of the system or machine is responsible for compliance with the required limit values
demanded by EMC legislation.
ENGLISH
3
Page 5
Safety information
Operation
Systems including controllers must be equipped with additional monitoring and protection devices according
to the corresponding standards (e.g. technical equipment, regulations for prevention of accidents, etc.).
You are allowed to adapt the controller to your application as described in the documentation.
DANGER!
• After the controller has been disconnected from the supply voltage, live components
and power connection must not be touched immediately, since capacitors could be
charged. Please observe the corresponding notes on the controller.
• Do not continuously cycle input power to the controller more than once every three
minutes.
• Please close all protective covers and doors during operation.
Note for UL approved system with integrated controllers
UL warnings are notes which apply to UL systems. The documentation contains special information
about UL.
• Suitable for use on a circuit capable of delivering not more than 5000 rms
symmetrical amperes, 240 V maximum (240 V devices) or 500 V maximum
(400/500 V devices) respectively
Warnings!
1.1 Pictographs used in these instructions
• Use minimum 75 °C copper wire only.
• Shall be installed in a pollution degree 2 macro-environment.
Pictograph Signal word Meaning Consequences if ignored
DANGER!
WARNING!
NOTE
4
Warning of Hazardous Electrical Voltage.
Impending or possible danger
for persons.
Possible damage to equipment
Useful tip: If observed, it will
make using the drive easier
ENGLISH
Reference to an imminent
danger that may result in death
or serious personal injury if the
corresponding measures are
not taken.
Death or injury.
Damage to drive system or its
surroundings.
Page 6
Technical Data
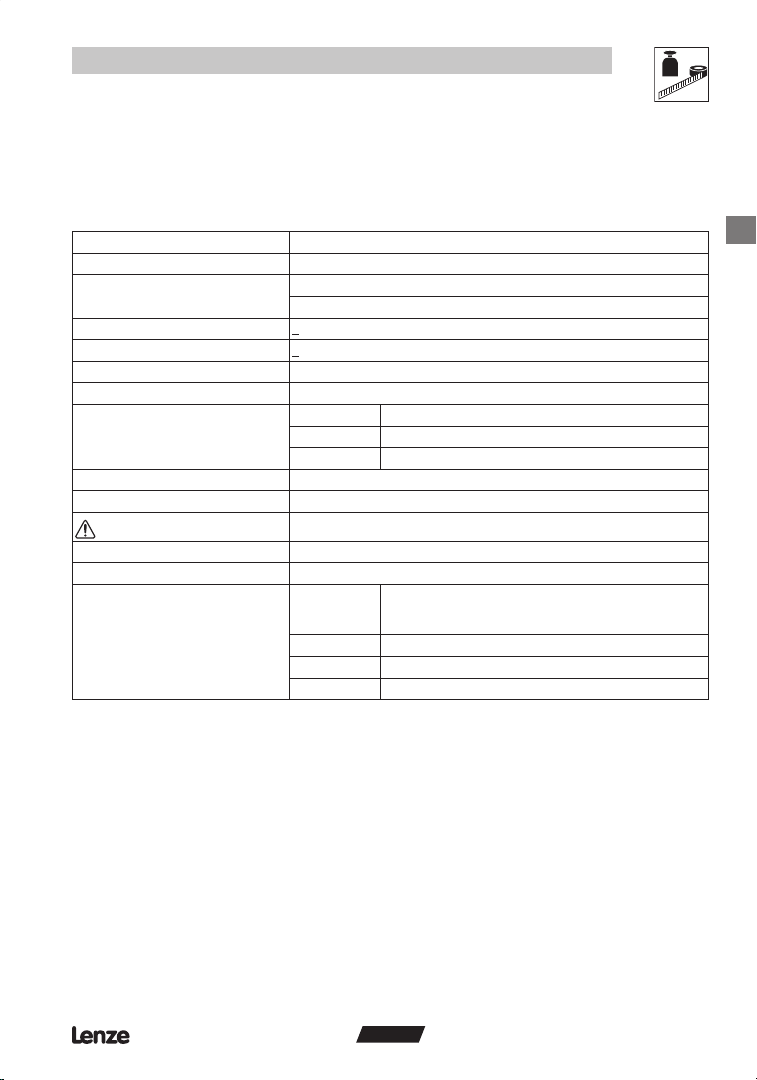
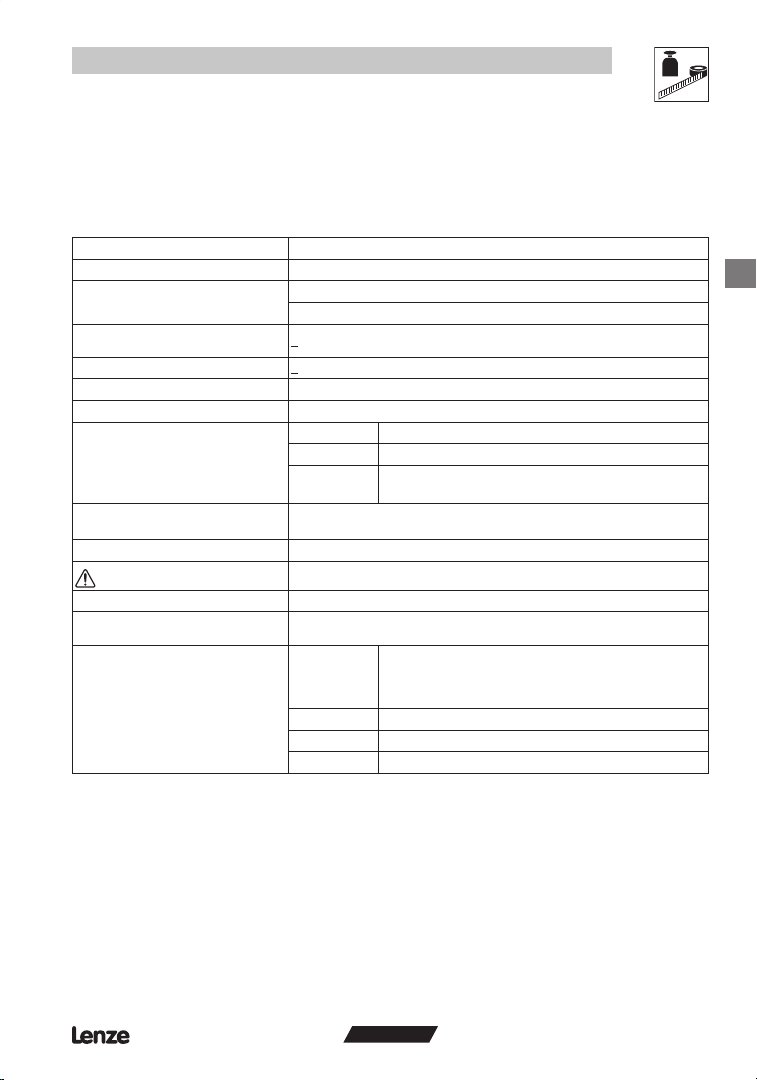
2 Technical data
2.1 Standards and application conditions
Conformity
Approvals
Max. permissible motor cable
(1)
length
Input voltage phase imbalance
Humidity
Output frequency
Environmental conditions
Temperature range
Installation height
Vibration resistance
Earth leakage current
Enclosure (EN 60529)
Protection measures against
Operation in public supply networks
(Limitation of harmonic currents
according to EN 61000-3-2)
(1) For compliance with EMC regulations, the permissible cable lengths may change.
(2) The additional measures described only ensure that the controllers meet the requirements of the EN 61000-3-2.
The machine/system manufacturer is responsible for the compliance with the regulations of the machine!
CE Low Voltage Directive (2006/95/EC)
UL 508C Underwriters Laboratories - Power Conversion Equipment
shielded: 50 m (low-capacitance)
unshielded: 100 m
< 2%
< 95% non-condensing
0...240 Hz
Class 3K3 to EN 50178
Transport -25 … +70 °C
Storage -20 … +70 °C
Operation 0 … +55 °C (with 2.5 %/°C current derating above +40 °C)
0 … 4000 m a.m.s.l. (with 5 %/1000 m current derating above 1000 m a.m.s.l.)
acceleration resistant up to 0.7 g
> 3.5 mA to PE
IP 20
short circuit, earth fault, overvoltage, motor stalling, motor overload
Total power
connected to
the mains
< 0.5 kW With mains choke
0.5 … 1 kW With active filter (in preparation)
> 1 kW Without additional measures
Compliance with the requirements
(2)
ENGLISH
5
Page 7
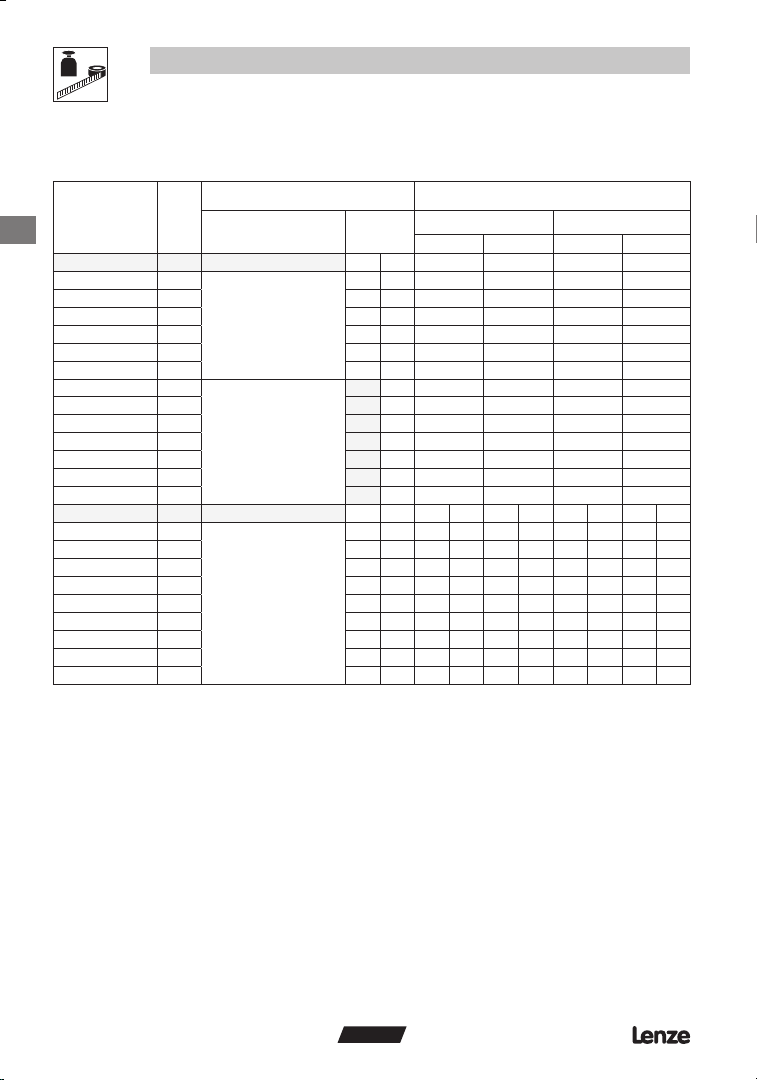
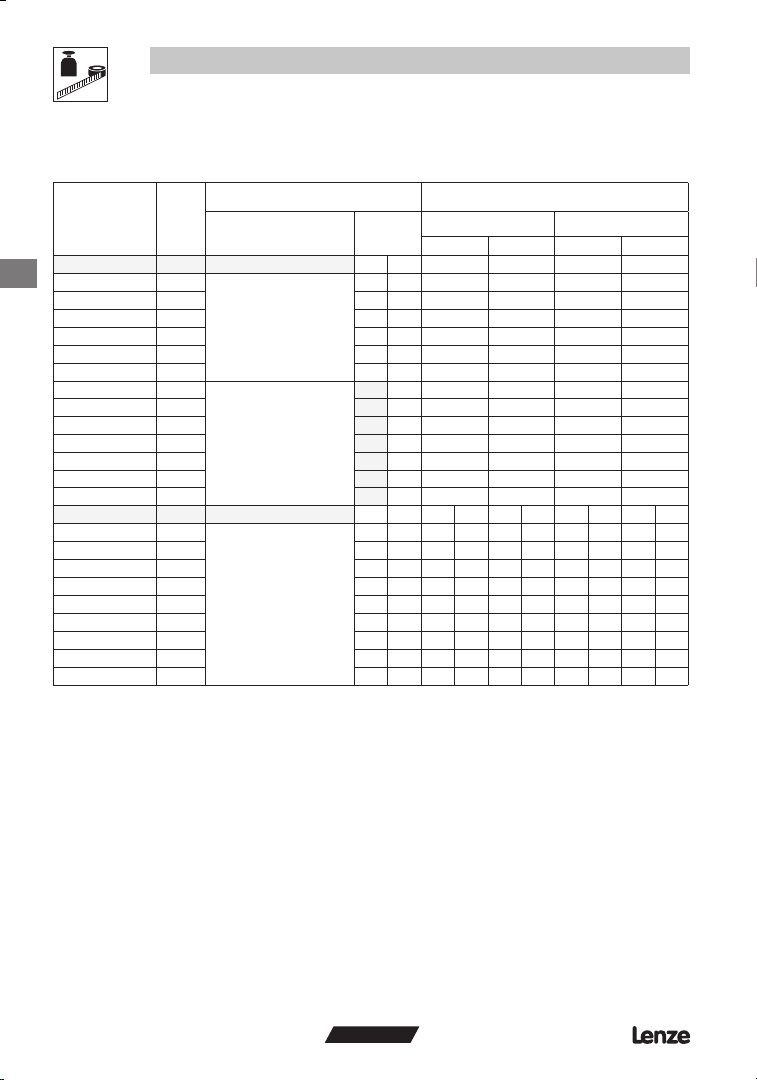
2.2 Ratings
Technical data
Mains
Current
Type
Power
[kW]
Voltage, frequency
1~ 3~ 3~ 3~ 3~ 3~
ETMD371L2YXA
ETMD551L2YXA
ETMD751L2YXA
ETMD112L2YXA
ETMD152L2YXA
ETMD222L2YXA
ETMD751L2TXA
ETMD112L2TXA
ETMD152L2TXA
ETMD222L2TXA
ETMD402L2TXA
ETMD552L2TXA
ETMD752L2TXA
0.37
0.55 6.0 3.9 3.0 2.8 4.5 4.2
0.75 9.2 5.1 4.2 3.9 6.3 5.9
1.1 12.0 6.9 6.0 5.5 9.0 8.3
1.5 12.9 7.9 7.0 6.4 10.5 9.6
2.2 17.1 11.0 9.6 8.8 14.4 13.2
1/N/PE 230 V
OR
3/PE 230 V
(180 V -0%…264 V +0%)
50/60 Hz
(48 Hz -0%…62 Hz +0%)
0.75
1.1 6.9 6.0 5.5 9.0 8.3
1.5 7.9 7.0 6.4 10.5 9.6
2.2 11.0 9.6 8.8 14.4 13.2
4.0 17.1 15.2 14.0 23 21
5.5 25 22 20 33 30
3/PE 230 V
(180 V -0%…264 V +0%)
50/60 Hz
(48 Hz -0%…62 Hz +0%)
7.5 32 28 26 42 39
4.7 2.7 2.4 2.2 3.6 3.3
400V 480V 400V 480V 400V 480V 400V 480V 400V 480V
ETMD371L4TXA
ETMD751L4TXA
ETMD112L4TXA
ETMD152L4TXA
ETMD222L4TXA
ETMD302L4TXA
ETMD402L4TXA
ETMD552L4TXA
ETMD752L4TXA
(1) For rated mains voltage and carrier frequencies 4, 6, and 8 kHz
(2) For rated mains voltage and carrier frequency 10 kHz
(3) Maximum current is a function of setting c73 (input voltage selection)
0.37
0.75 3.0 2.5 2.5 2.1 2.3 1.9 3.8 3.2 3.5 2.9
1.1 4.3 3.6 3.6 3.0 3.3 2.8 5.4 4.5 5.0 4.2
3/PE 400/480 V
1.5 4.8 4.0 4.1 3.4 3.8 3.1 6.2 5.1 5.7 4.7
(320 V -0%…528 V +0%)
2.2 6.4 5.4 5.8 4.8 5.3 4.4 8.7 7.2 8.0 6.6
3.0 8.3 7.0 7.6 6.3 7.0 5.8 11.4 9.5 10.5 8.7
4.0 10.6 8.8 9.4 7.8 8.6 7.2 14.1 11.7 12.9 10.8
50/60 Hz
(48 Hz -0%…62 Hz +0%)
5.5 14.2 12.4 12.6 11.0 11.6 10.1 18.9 16.5 17.4 15.2
7.5 18.1 15.8 16.1 14.0 14.8 12.9 24 21 22 19.4
1.6 1.4 1.3 1.1 1.2 1.0 2.0 1.7 1.8 1.5
[A]
Output Current
I
[A]
N
(1)
[A]
(2)
(3)
[A]
I
(3)
max
(1)
5.1 4.2 3.9 6.3 5.9
for 60 s
[A]
(2)
6
ENGLISH
Page 8
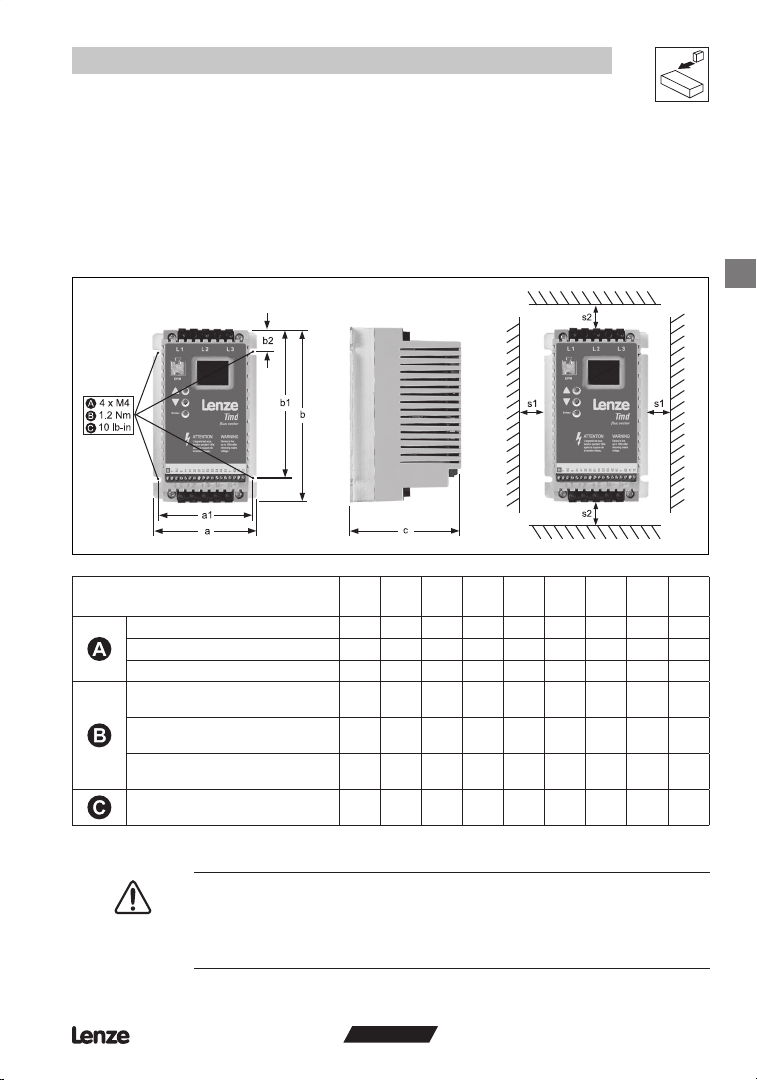
Installation
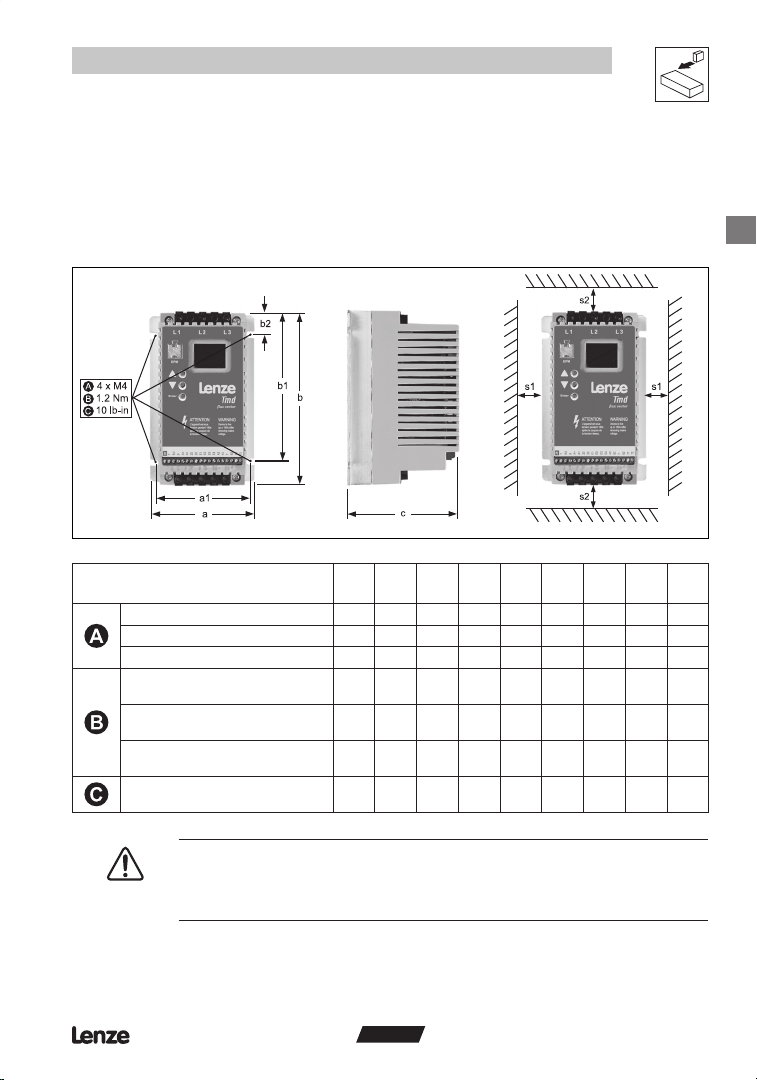
3 Installation
3.1 Mechanical installation
3.1.1 Dimensions and mounting
a
Type
ETMD371L2YXA 93 84 146 128 17 100 15 50 0.6
ETMD551L2YXA, ETMD751L2_XA
ETMD112L2TXA 93 84 146 128 17 146 15 50 1.1
ETMD112L2YXA
ETMD371L4TXA...ETMD112L4TXA
ETMD152L2_XA
ETMD152L4TXA
ETMD222L2_XA
ETMD222L4TXA...ETMD402L4TXA
ETMD552L2TXA, ETMD752L2TXA
ETMD552L4TXA, ETMD752L4TXA
(1) “_” = Y or T; the dimensions are the same for either model.
(1)
(1)
, ETMD402L2TXA
(1)
WARNING!
Drives must not be installed where subjected to adverse environmental conditions
such as: combustible, oily, or hazardous vapors or dust; excessive moisture; excessive
vibration or excessive temperatures. Contact Lenze for more information.
a1
[mm]
[mm]b [mm]b1 [mm]b2 [mm]c [mm]
93 84 146 128 17 120 15 50 0.9
114 105 146 128 17 133 15 50 1.4
114 105 146 128 17 171 15 50 1.9
114 105 146 100 17 171 15 50 2.0
146 137 197 140 17 182 30 100 3.4
Tmd002
s1
[mm]s2 [mm]m [kg]
ENGLISH
7
Page 9
Installation
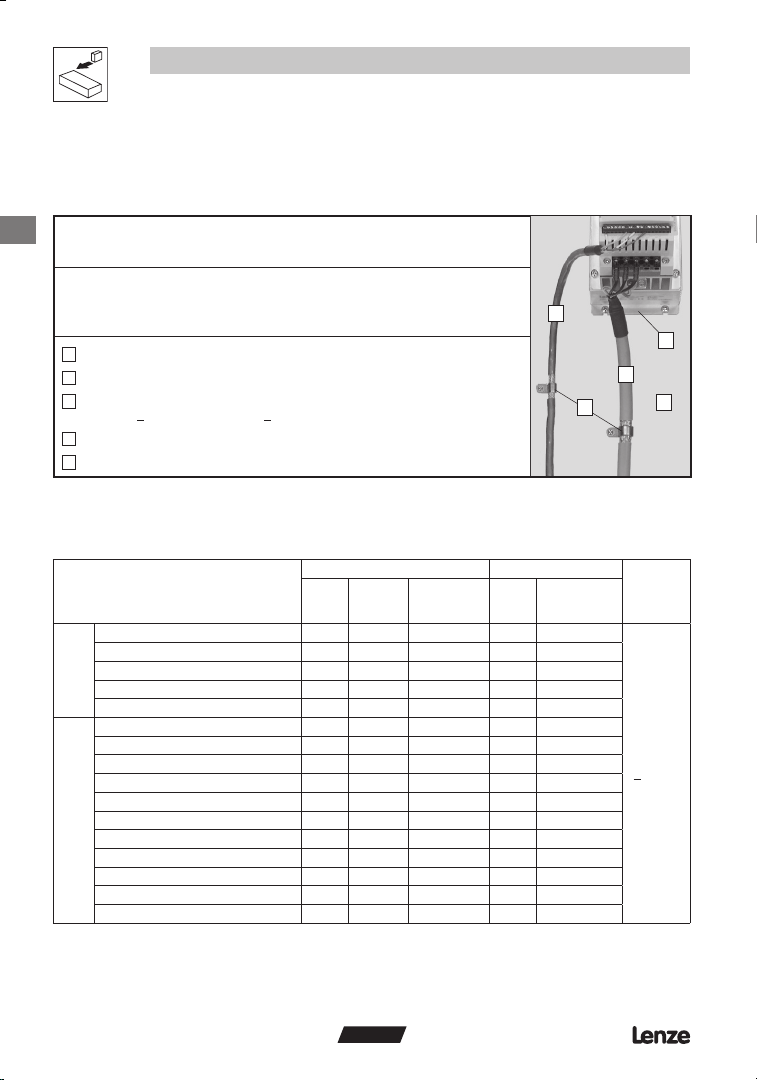
3.2 Electrical installation
3.2.1 Installation according to EMC requirements
EMC
Compliance with EN 61800-3/A11
Noise emission
Compliance with limit value class A according to EN 55011 if installed in a control
cabinet with the appropriate footprint filter and the motor cable length does not exceed
10m
Screen clamps
A
Control cable
B
Low-capacitance motor cable
C
(core/core < 75 pF/m, core/screen < 150 pF/m)
Electrically conductive mounting plate
D
Filter
E
B
E
C
A
D
Tmd005
Miniature
circuit
breaker
ENGLISH
(1)
L1, L2, L3, PE
[mm²]
Fuse
L1, L2, L3, PE
(3)
[AWG]
3.2.2 Fuses/cable cross-sections
Installation to EN 60204-1 Installation to UL
Type
ETMD371L2YXA, ETMD551L2YXA M10 A C10 A 1.5 10 A 14
ETMD751L2YXA M16 A C16 A 2.5 15 A 14
1/N/PE
ETMD112L2YXA M20 A C20 A 2.5 15 A 12
ETMD152L2YXA M25 A C25 A 2.5 20 A 12
ETMD222L2YXA M30 A C30 A 4.0 30 A 10
ETMD371L2YXA...ETMD112L2_XA
ETMD152L2_XA
ETMD222L2_XA
ETMD402L2TXA M25 A C25 A 4.0 25 A 10
ETMD552L2TXA M40 A C40 A 6.0 35 A 8
3/PE
ETMD752L2TXA M50 A C50 A 10 45 A 8
ETMD371L4TXA...ETMD222L4TXA M10 A C10 A 1.5 10 A 14
ETMD302L4TXA M16 A C16 A 1.5 12 A 14
ETMD402L4TXA M16 A C16 A 2.5 15 A 14
ETMD552L4TXA M20 A C20 A 2.5 20 A 12
ETMD752L4TXA M25 A C25 A 4.0 25 A 10
(1) Observe the applicable local regulations
(2) Pulse-current or universal-current sensitive earth leakage circuit breaker
(3) UL Class CC or T fast-acting current-limiting type fuses, 200,000 AIC, required. Bussman KTK-R, JJN, JJS, or equivalent
(4) “_” = Y or T; the ratings are the same for either model with 3/PE input
(4)
(4)
8
Fuse
(4)
M10 A C10 A 1.5 10 A 14
M16 A C16 A 1.5 12 A 14
M16 A C16 A 2.5 15 A 12
E.l.c.b.
> 30 mA
(2)
Page 10
Installation
Observe the following when using E.l.c.b:
• Installation of E.l.c.b only between supplying mains and controller.
• The E.l.c.b can be activated by:
- capacitive leakage currents between the cable screens during operation (especially with long,
screened motor cables)
- connecting several controllers to the mains at the same time
- RFI lters
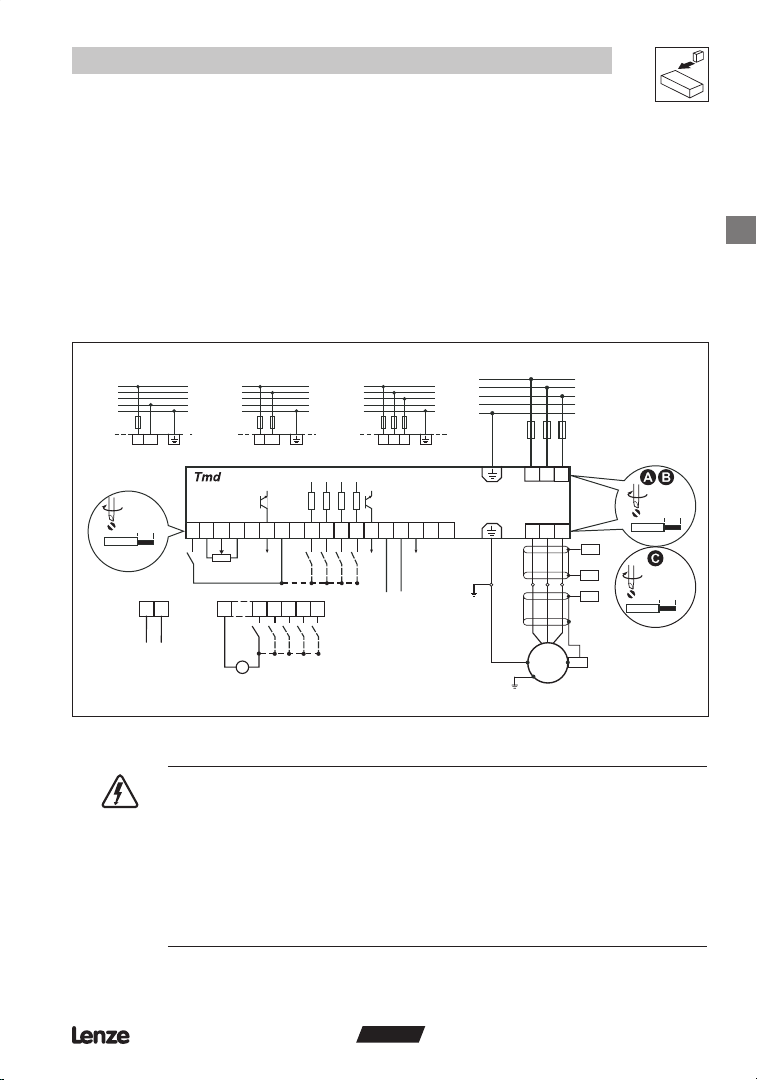
3.2.3 Connection diagram
1/N/PE 180V 0% 264V + 0 %
48 Hz 62 Hz
L1
L2
L3
N
PE
L2/N
L1
0 2 Nm/2 b in
6 mm/0 24 in
< 1mm²/AWG 26 16
8U7
0 … +5 V
0 … +10 V
-10 … +10 V
DANGER!
• Hazard of electrical shock! Circuit potentials are up to 480 VAC above earth ground.
Capacitors retain charge after power is removed. Disconnect power and wait until
the voltage between B+ and B- is 0 VDC before servicing the drive.
• Do not connect mains power to the output terminals (U,V,W)! Severe damage to the
drive will result.
• Do not cycle mains power more than once every three minutes. Damage to the
drive will result.
2/PE 180V 0% 264V + 0 %
AIN
COM
8U
28 7
1k …10k
7
_
+12 V DC - 0 %
+30 V DC + 0 %
L1
L2
L3
N
PE
+10 V
9
A+ A1
…
48 Hz 62 Hz
L2/N
L1
COM
+12 V
+15 V
+15 V
2020
E1 E2 E3 71627 72
DIGOUT
28
E3 E4
E1 E2
+
3/PE 180V 0% 264V + 0 %
48 Hz 62 Hz
L1
L2
L3
N
PE
L3
L1 L2
COM
AIN
COM
E4 A2
8I
AOUT
DIGOUT
0 … 20 mA
4 … 20 mA
3/PE 320V 0 % 528V + 0 %
L1
L2
L3
N
PE
TXB
TXA
PE
48 Hz 62 Hz
PE
L1 L2
U V W
M
3~
L3
0 5 Nm/4 5 lb in
6 mm/0 24 in
PES
PES
1 2 Nm/10 lb n
PES
9 mm/0 35 in
PES
Tmd003
ENGLISH
9
Page 11
Installation
3.2.4 Control terminals
Terminal
Protection against contact
Data for control connections (printed in bold = Lenze setting)
28
Digital input Start/Stop
7
Reference common
Analog input
8U
0 … 10 V (changeable under C34)
9
Internal DC supply for setpoint potentiometer +10 V, max. 10 mA
A+
Internal DC supply for external devices +12 V, max. 50 mA
A1
Digital output congurable with c17 DC 24 V / 50 mA
20
Internal DC supply for digital inputs +15 V, max. 20 mA
20
Digital input configurable with CE1
E1
Activate fixed setpoint 1 (JOG1)
Digital input configurable with CE2
E2
Activate fixed setpoint 2 (JOG2)
Digital input configurable with CE3
E3
Activate DC injection brake (DCB)
Digital input configurable with CE4
E4
Direction of rotation
A2
Digital output congurable with c18 DC 24 V / 50 mA
8I Analog input (changeable under C34) input resistance: 150 Ω
7
Reference common
62
Analog output congurable with c08...c11 0...10 V or 2...10 V, max. 20mA
71
RS-485 serial communication input RXB/TXB (B+)
72
RS-485 serial communication input RXA/TXA (A-)
LOW = Stop; HIGH = Run Enable
input resistance = 3.3 kΩ
input resistance: >40 kΩ
HIGH = JOG1 active
HIGH = JOG2 active
HIGH = DCB active
LOW = CW rotation
HIGH = CCW rotation
Both HIGH = JOG3 active
LOW = 0 … +3 V, HIGH = +12 … +30 V
• All terminals have a basic isolation (single insulating distance)
• Protection against contact can only be ensured by additional measures (i.e. double insulation)
= 3.3 kΩ
i
R
10
ENGLISH
Page 12
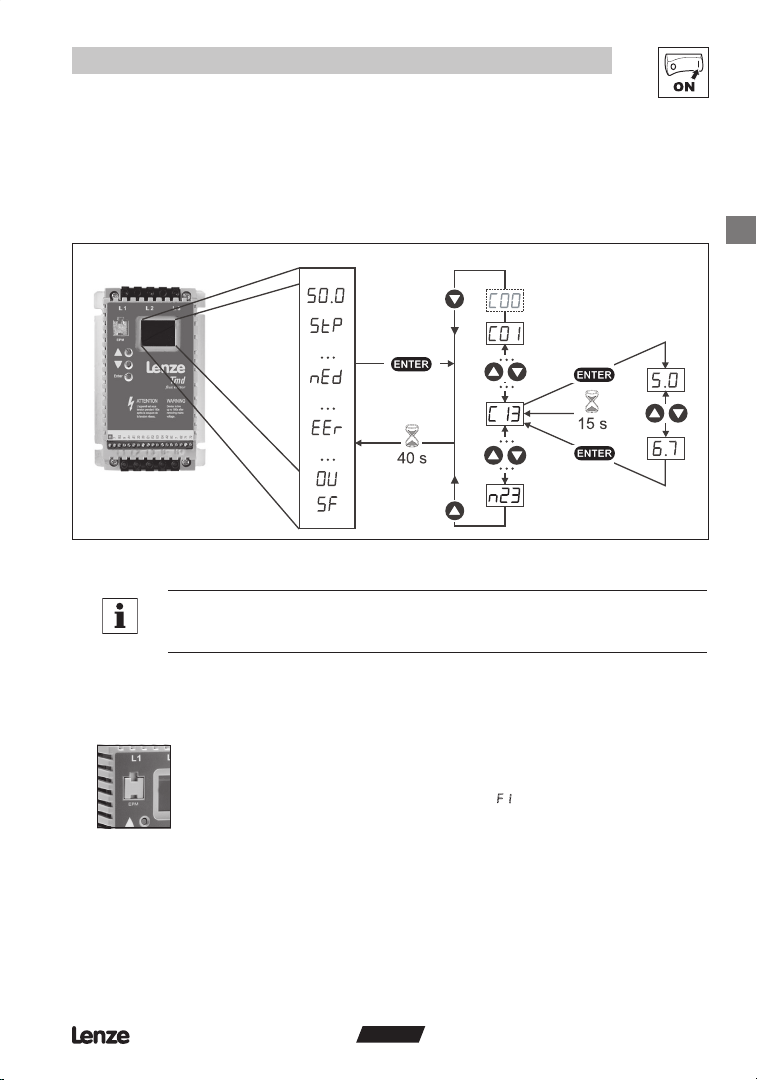
4 Commissioning
4.1 Parameter setting
Status/fault messages Change parameters
Note
If the password function is enabled, the password must be entered into C00 to access
the parameters. C00 will not appear unless the password function is enabled. See C94.
Commissioning
Tmd004
4.2 Electronic programming module (EPM)
The EPM contains the controller’s memory. Whenever parameter settings are changed,
the values are stored in the EPM. It can be removed, but must be installed for the
controller to operate (a missing EPM will trigger an fault). The controller ships with
Tmd007
An optional EPM Programmer (model ESMD01EP; manual EP03) is available that allows: the controller to
be programmed without power; OEM settings to be default settings; fast copying of EPMs when multiple
controllers require identical settings. It can also store up to 60 custom parameter les for even faster
controller programming.
protective tape over the EPM that can be removed after installation.
ENGLISH
11
Page 13
Commissioning
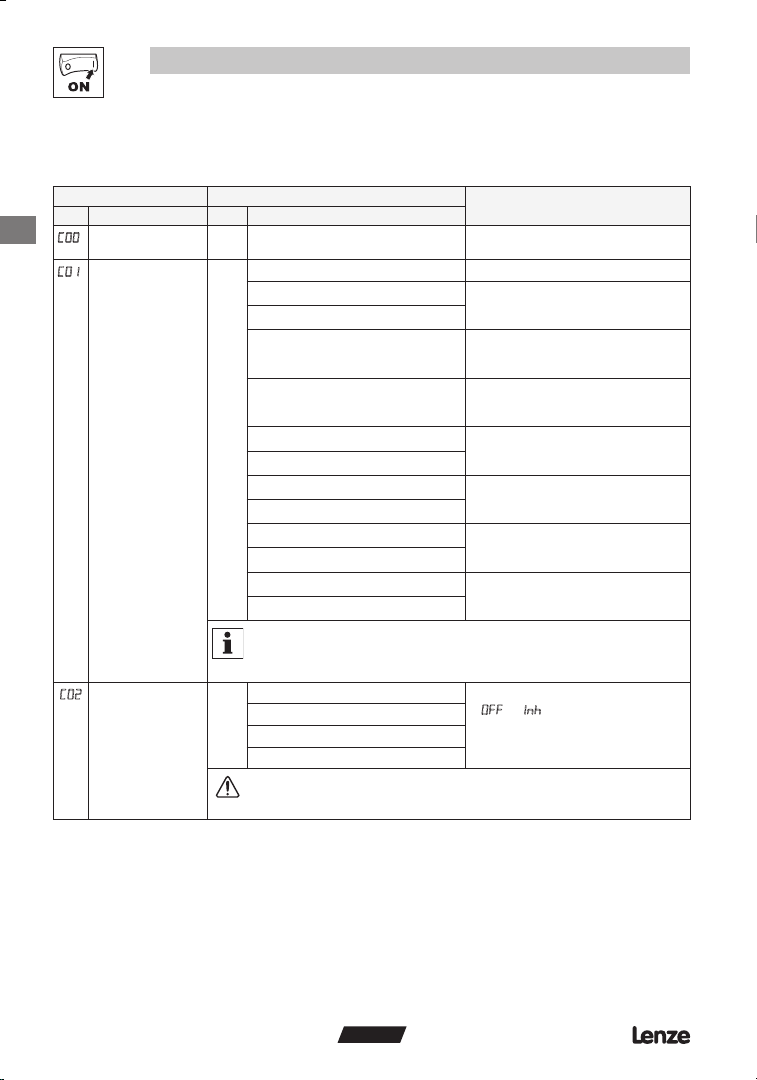
4.3 Parameter menu
Code Possible Settings
No. Name Lenze Selection
Password entry
Setpoint and control
1
source
Load Lenze setting 0 No action/loading complete • C02 = 1, 2, 3 only possible with
0
0 999 Visible only when password is active
0
Setpoint source: Control configuration:
0 Analog input (8U / 8I; see C34) Control = terminals
1 Code c40 / Code C47
2 Analog input (8U / 8I; see C34) Control = terminals
3 LECOM Control = LECOM
4 Analog input (8U / 8I; see C34) Control = terminals
5 Code c40 / Code C47
6 Analog input (8U / 8I; see C34) Control = remote keypad
7 Code c40 / Code C47
8 Analog input (8U / 8I; see C34) Control = terminals
9 Code c40 / Code C47
10 Analog input (8U / 8I; see C34) Control = Modbus
11 Code c40 / Code C47
Note
• When C01 = 1, 5, 7, 9, or 11 and C14 = 0...4, 6, 7, use c40 for speed setpoint
• When C01 = 1, 5, 7, 9, or 11 and C14 = 5, use C47 for torque setpoint
• When C01 = LECOM (3), write speed command to C46 or torque command to C47.
1 Load 50 Hz Lenze settings
2 Load 60 Hz Lenze settings
3 Load OEM settings (if present)
WARNING!
C02 = 1...3 overwrites all settings! TRIP circuitry may be disabled!
Check codes CE1...CE4.
(see C94)
Programming = keypad
Monitoring = LECOM
Programming = LECOM / keypad
Monitoring = LECOM
Programming = LECOM / keypad
Monitoring = LECOM
Programming = remote keypad
Monitoring = remote keypad
Programming = remote keypad
Monitoring = remote keypad
Programming = Modbus / keypad
Monitoring = Modbus
Programming = Modbus / keypad
Monitoring = Modbus
• C02 = 2 : C11, C15 and C89 = 60 Hz
and C87 = 1750RPM
IMPORTANT
or
12
ENGLISH
Page 14
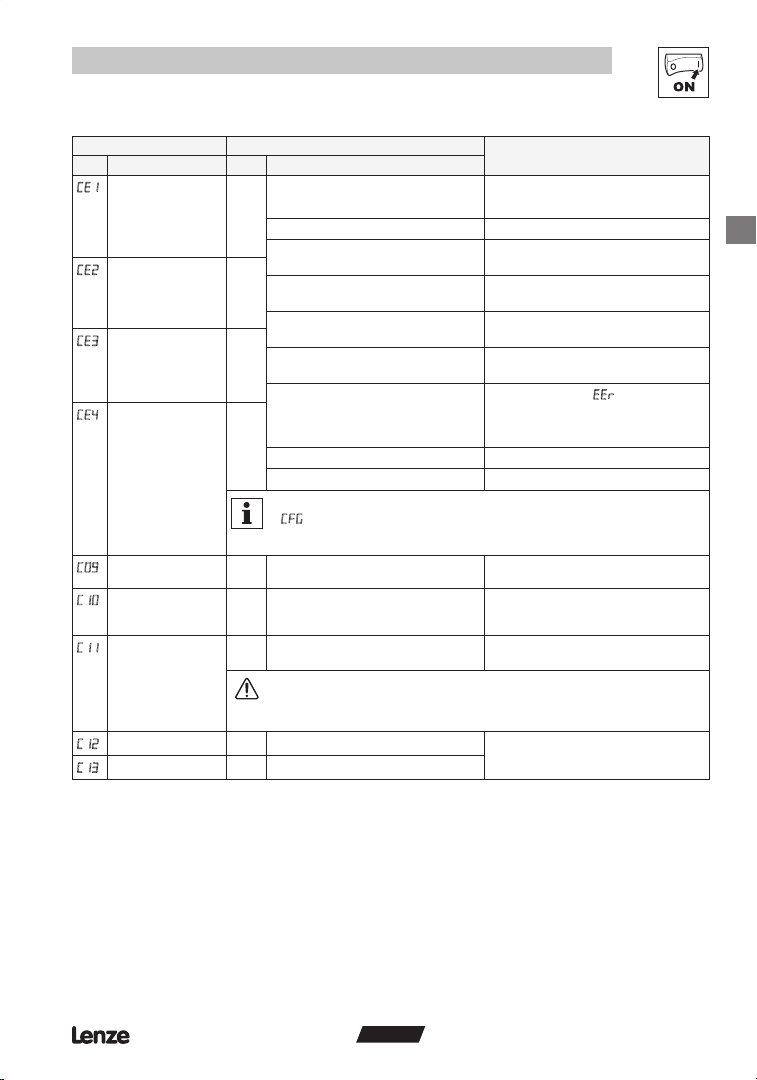
Commissioning
Code Possible Settings
No. Name Lenze Selection
Configuration -
Digital input E1
Configuration -
Digital input E2
Configuration -
Digital input E3
Configuration -
Digital input E4
Network address 1 1 247 Each controller on network must have
Minimum output
C1
frequency
Maximum output
frequency
Acceleration time 1 5.0 0.0 {s} 999 • C12 = frequency change 0 Hz...C11
Deceleration time 1 5.0 0.0 {s} 999
1 1 Activate xed setpoint 1 (JOG1)
2 Activate xed setpoint 2 (JOG2)
3 DC braking (DCB) see also C36
4 Direction of rotation LOW = CW rotation
2
5 Quick stop Controlled deceleration to standstill, active
6 CW rotation
7 CCW rotation
3
8 UP (setpoint ramp-up)
9 DOWN (setpoint ramp-down)
10 TRIP set
4
11 TRIP reset see also c70
12 Accel/decel 2 see c01 and c03
Note
A
fault will occur under the following conditions:
• E1...E4 settings are duplicated (each setting can only be used once)
• One input is set to UP and another is not set to DOWN, or vice-versa
0.0 0.0 {Hz} 240 • Output frequency at 0% analog setpoint
50.0 7.5 {Hz} 240 • Output frequency at 100% analog setpoint
WARNING!
Consult motor/machine manufacturer before operating above rated frequency.
Overspeeding the motor/machine may cause damage to equipment and injury to
personnel!
Activate JOG3: Both terminals = HIGH
HIGH = CCW rotation
LOW; Set decel rate in C13 or c03
CW rotation = LOW and CCW rotation =
LOW: Quick stop; Open-circuit protected
UP = LOW and DOWN = LOW: Quick stop;
Use momentary NC contacts
Active LOW, triggers
standstill)
NOTE: NC thermal contact from the motor
can be used to trigger this input
unique address
• C10 not active for xed setpoints or
setpoint selection via c40
• C11 is never exceeded
• C13 = frequency change C11...0 Hz
• For S-ramp accel/decel, adjust c82
IMPORTANT
(motor coasts to
ENGLISH
13
Page 15
Commissioning
Code Possible Settings
No. Name Lenze Selection
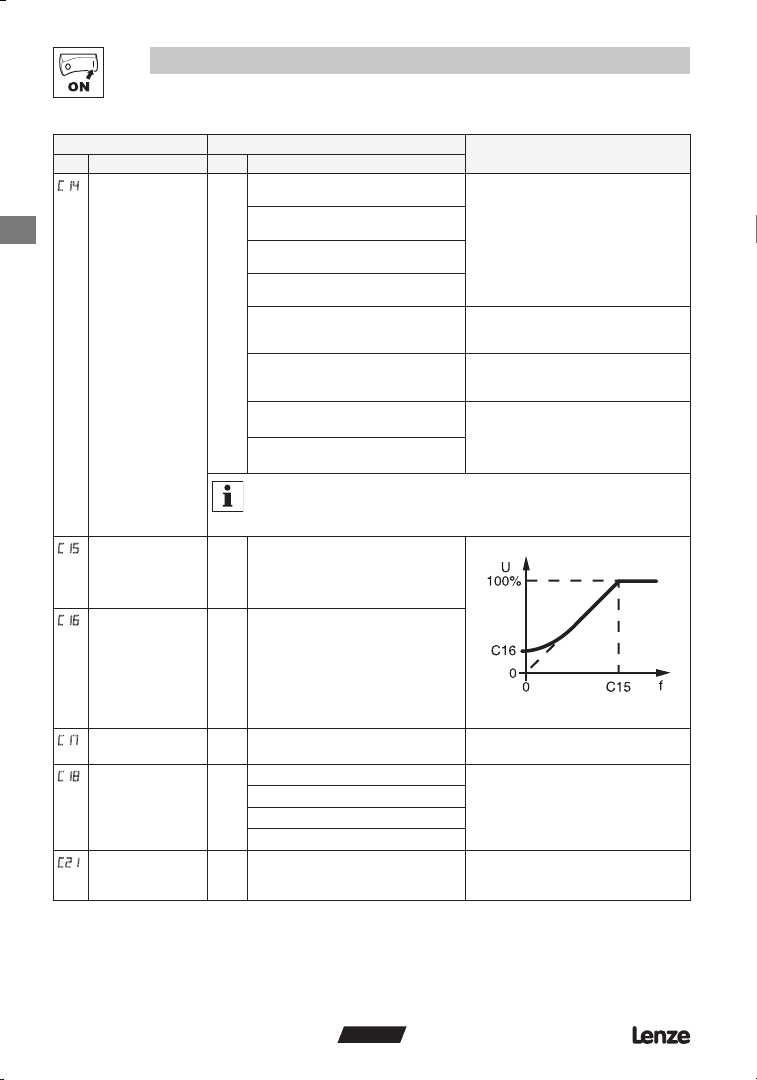
Operating Mode 2 0 Linear characteristic with
V/f reference point 50.0 25.0 {Hz} 999
V
boost
(optimization
min
of torque behavior)
Frequency threshold
C 7
(Q
)
min
Chopper frequency 2 0 4 kHz • As chopper frequency is increased, motor
C
Slip compensation 0.0 0.0 {%} 40.0
1
Auto-Boost
1 Square-law characteristic with
Auto-Boost
2 Linear characteristic with constant
boost
V
min
3 Square-law characteristic with
constant V
4 Vector speed control • Vector speed control: for single-motor
5 Vector torque control • Vector torque control: for single-motor
6 Enhanced linear characteristic
with Auto-Boost
7 Enhanced linear characteristic with
constant V
Note
• Settings 4...7 require Motor Calibration using c48
• Settings 4 and 5 require proper setting of C86...C91 prior to calibration
• Settings 6 and 7 require proper setting of C88...C90 prior to calibration
Set the rated motor frequency
(nameplate) for standard applications
0.0 {%} 40.0
C16 not active in Vector mode (see C14)
Set after commissioning: The unloaded
motor should run at slip frequency (approx.
5 Hz), increase C16 until motor current
(C54) = 0.8 x rated motor current
0.0 0.0 {Hz} 240 See c17 and c18, selection 7
1 6 kHz
2 8 kHz
3 10 kHz
C21 not active in Vector mode (see C14)
min
min
boost
boost
• Linear characteristic: for standard
applications
• Square-law characteristic: for fans and
pumps with square-law load characteristic
• Auto boost: load-dependent output voltage
for low-loss operation
applications requiring higher starting
torque and better speed regulation
applications requiring torque control
independent of speed
• Enhanced: for single or multiple
motor applications that require better
performance than settings 0...3, but
cannot operate in vector mode
noise is decreased
• Observe derating in Section 2.2
• Automatic derating to 4 kHz at 1.2 x Ir
Change C21 until the motor speed no longer
changes between no load and maximum
load
IMPORTANT
smd006
14
ENGLISH
Page 16
Commissioning
Code Possible Settings
No. Name Lenze Selection
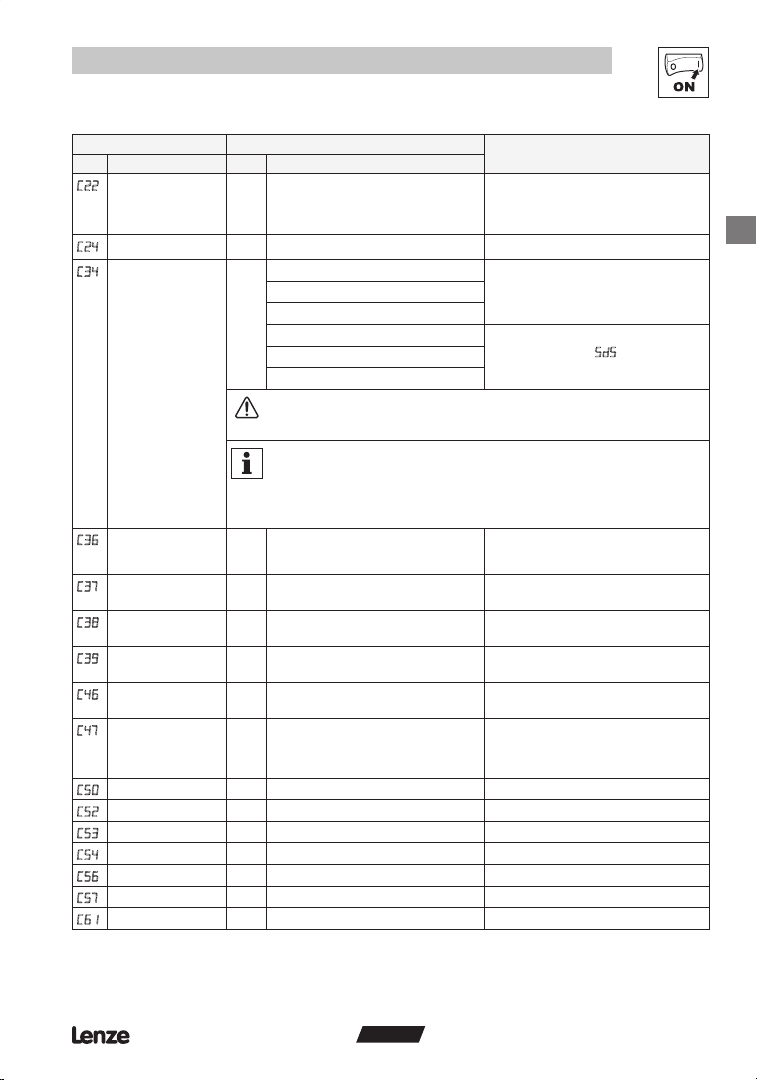
Current limit 200 30 {%} 200
Reference: Tmd rated output current
Accel boost 0.0 0.0 {%} 20.0 Accel boost is only active during acceleration
Configuration -
analog input
Voltage - DC injection
C
brake (DCB)
Fixed setpoint 1
(JOG 1)
Fixed setpoint 2
(JOG 2)
Fixed setpoint 3
(JOG 3)
Frequency setpoint 0.0 {Hz} 240 Display: Setpoint via analog input, function
Torque setpoint/range 100 0 {%} 400 • When C14 = 5 and C01 = 1, 5, 7, 9, 11,
Output frequency 0.0 {Hz} 240 Display
C
Motor voltage 0 {V} 999 Display
DC bus voltage 0 {V} 999 Display
Motor current 0.0 {A} 400 Display
Controller load 0 {%} 255 Display
Motor torque 0 {%} 400 Display: vector mode only (C14 = 4, 5)
C
Heatsink temp 0 {C} 255 Display
0 0 0...10 V • Voltage reference applied to 8U
1 0...5 V
2 -10...+10 V
3 0...20 mA • Current reference applied to 8I
4 4...20 mA
5 4...20 mA monitored
WARNING!
When running with -10...+10V reference (C34=2), a loss of reference will result in 5%
motor speed (0.05xC11).
Note
When C34 = 2:
• Rotation is determined by the polarity of the -10...+10 V signal:
+0.1...+10 V = CW and -0.1...-10 V = CCW (all other rotation commands are disabled)
• C11 sets maximum frequency in both directions (C10 is not active)
• CE1...CE4 = 6 or 7 will only start the controller, not select rotation
4.0 0.0 {%} 50.0 • See CE1...CE4 and c06
20.0 0.0 {Hz} 240 Lenze setting: active at E1 = HIGH
30.0 0.0 {Hz} 240 Lenze setting: active at E2 = HIGH
40.0 0.0 {Hz} 240 Lenze setting: active at E1 = HIGH and E2
• When the limit value is reached, either the
acceleration time increases or the output
frequency decreases
• When c73 = 0, max setting is 167%
• Tmd does not provide -10 V supply for
C34 = 2
• C34 = 2 disabled in vector torque mode
• C34 = 5 will trigger
below 2 mA
• Conrm motor suitability for use with DC
braking
= HIGH
UP/DOWN, or LECOM
sets the torque setpoint
• When C14 = 5 and C01 = 0, 2, 4, 6, 8, 10,
sets the torque range for C34
IMPORTANT
fault if signal falls
ENGLISH
15
Page 17
Commissioning
Code Possible Settings
No. Name Lenze Selection
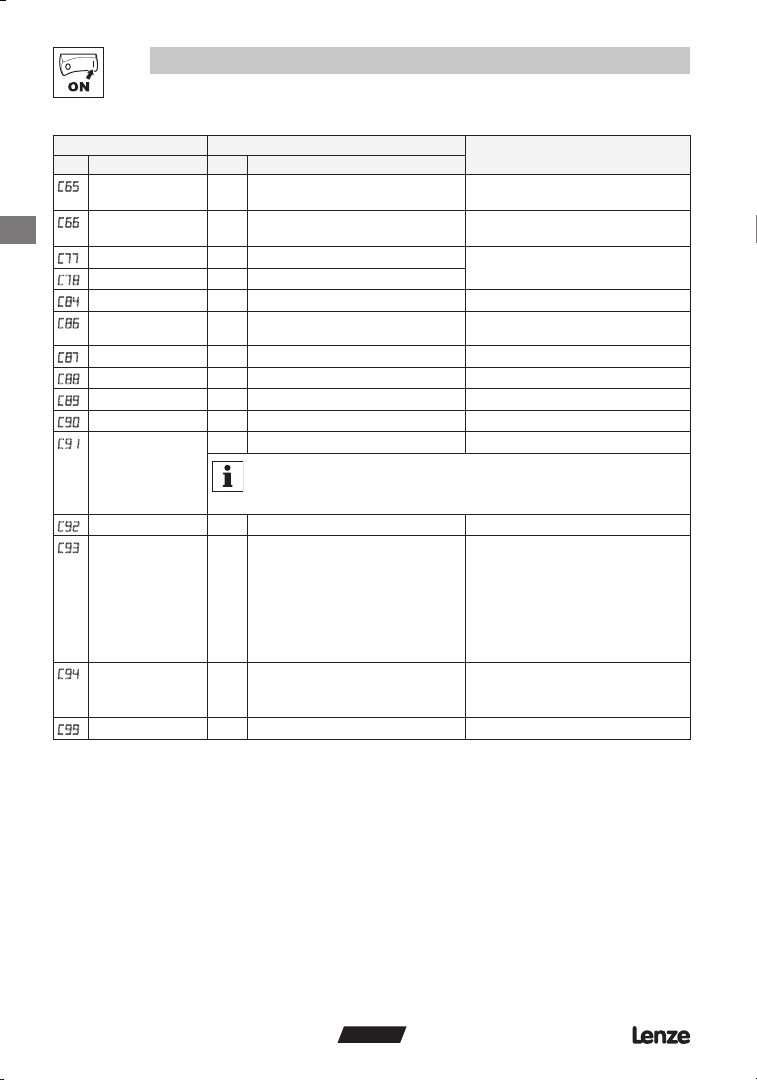
Vector speed control
loop gain
Vector speed stability 30.0 0.0 100 Optimizes steady-state speed stability in
I
gain 0.25 0.00 16.0 For most applications, there is no need to
7
max
Integral action time 65 12 {ms} 9990
Motor stator resistance 0.00 0.00 {Ω} 64.0 Will be automatically programmed by c48
Motor rated power 0.00 {kW} 99.9 • Set to motor nameplate kW
Motor rated speed 1390 300 {RPM} 65000 Set to motor nameplate speed
7
Motor rated current 0.0 0.0 {A} 480 Set to motor nameplate current
Motor rated frequency 50 10 {Hz} 999 Set to motor nameplate frequency
Motor rated voltage 0 0 {V} 600 Set to motor nameplate voltage
Motor cosine phi 0.80 0.40 1.00 Set to motor power factor
1
Motor stator inductance 0.0 0.0 {mH} 2000 Will be automatically programmed by c48
Drive identification
User password 0 0 999
Software version Display, format: x.yz
30.0 0.0 100 Optimizes dynamic performance in vector
Note
If motor power factor is not known, use the following formulas:
cos phi = motor Watts / (motor efciency X C90 X C88 X 1.732)
cos phi = cos [ sin-1 (magnetizing current / motor current) ]
Changing from “0” (no password), value will
start at 763
mode
vector mode
change the Lenze settings
• Lenze setting = Tmd rated kW
• Indicates controller rating, format: xyz,
xy.z, x.yz, or x.y.z
• x. or x = voltage (2. = 200/240V, 1~;
2 = 200/240V, 3~; 4 = 400/480V, 3~)
• yz or y.z = kW rating
Examples:
2.0.3 = 200/240 V, 1~, 0.37 kW
47.5 = 400/480 V, 3~, 7.5 kW
When set to a value other than 0, must enter
password at C00 to access parameters
IMPORTANT
(1)
(1)
(1)
(1) Changing these settings can adversely affect performance. Contact Lenze technical support prior to changing.
16
ENGLISH
Page 18
Commissioning
Code Possible Settings
No. Name Lenze Selection
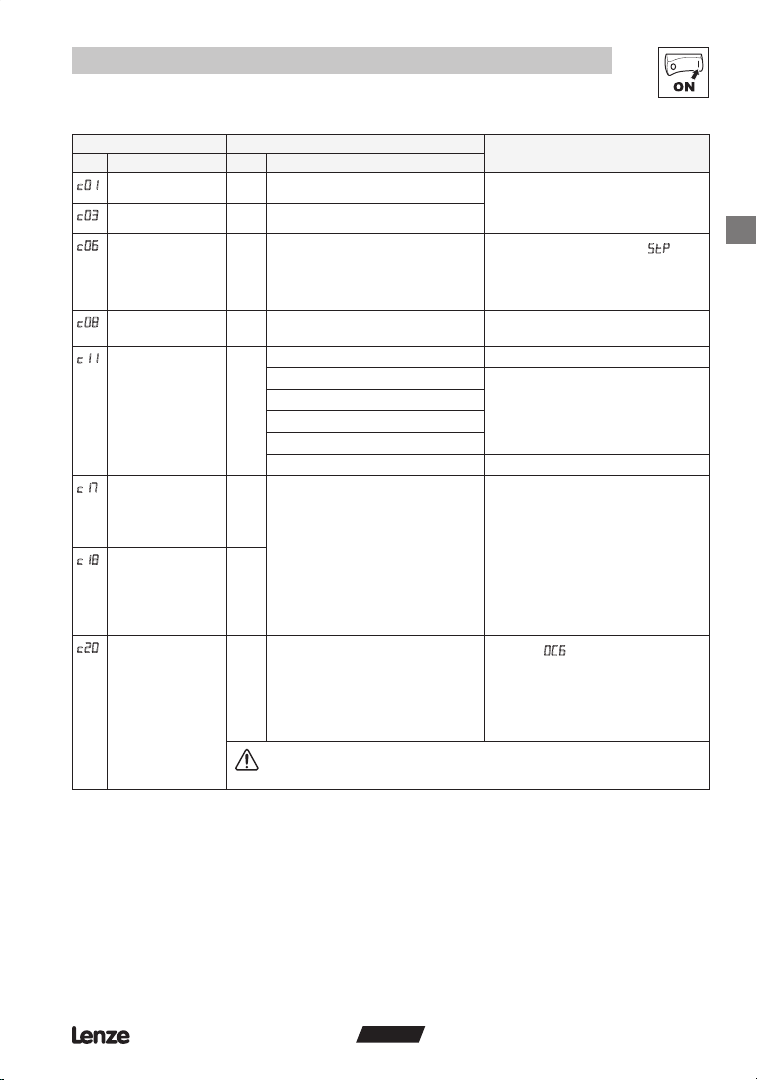
Acceleration time 2 5.0 0.0 {s} 999 • Activated using CE1...CE4
Deceleration time 2 5.0 0.0 {s} 999
Holding time -
automatic DC injection
brake (Auto-DCB)
Analog output scaling 100 0.0 999 When 10 VDC is output at terminal 62, it will
Configuration -
Analog output (62)
Configuration - Digital
output (A1)
Configuration - Digital
output (A2)
I2t switch-off (thermal
motor monitoring)
0.0 0.0 {s} 999
0.0 = not active
999 = continuous brake
0 0 None
1 Output frequency 0-10 VDC Use c08 to scale signal
2 Output frequency 2-10 VDC
3 Load 0-10 VDC
4 Load 2-10 VDC
5 Dynamic braking Only used with DB option
0 Output is energized if
0 Ready
1 Fault
2 Motor is running
3 Motor is running - CW rotation
4 Motor is running - CCW rotation
1
5 Output frequency = 0 Hz
6 Frequency setpoint reached
7 Frequency threshold (C17) exceeded
8 Current limit (motor or generator
mode) reached
100 30 {%} 100
100% = Tmd rated output current
WARNING!
Maximum setting is rated motor current (see nameplate). Does not provide full motor
protection!
• c01 = frequency change 0 Hz...C11
• c03 = frequency change C11...0 Hz
• For S-ramp accel/decel, adjust c82
• Automatic motor braking after by
means of motor DC current for the entire
holding time (afterwards: U, V, W inhibited)
• Conrm motor suitability for use with DC
braking
equal this value (see c11)
Example: c11 = 1 and c08 = 100:
At 50 Hz, terminal 62 = 5 VDC
At 100 Hz, terminal 62 = 10 VDC
• Triggers
exceeds c20 for too long
• Correct setting = (motor nameplate current)
/ (Tmd output current rating) X 100%
• Example: motor = 6.4 amps and
Tmd = 7.0 amps; correct setting = 91%
(6.4 / 7.0 = 0.91 x 100% = 91%)
IMPORTANT
fault when motor current
ENGLISH
17
Page 19
Commissioning
Code Possible Settings
No. Name Lenze Selection
Serial baud rate 0 0 LECOM: 9600 bps
Frequency setpoint via
keys or Modbus
Start condition
(with mains on)
Flying restart selection 0 0 Search range: C11...0 Hz If c42 = 2 or 3, the controller will start the
Motor auto-calibration 0 0 Calibration not done • If C14 = 4...7, motor calibration must
Mode selection for c61 0 0 Monitoring only
6
Present status/error status/error message • Display
1
Last error error message
Last error but one
Last error but two
Modbus: 9600,8,N,2
1 LECOM: 4800 bps
Modbus: 9600,8,N,1
2 LECOM: 2400 bps
Modbus: 9600,8,E,1
3 LECOM: 1200 bps
Modbus: 9600,8,O,1
0.0 0.0 {Hz} 240 Only active if C01 is set properly
1 0 Start after LOW-HIGH
change at terminal 28
1 Auto start if terminal 28 = HIGH
2 Flying restart (auto start disabled)
3 Auto start if terminal 28 = HIGH,
with flying restart
WARNING!
Automatic starting/restarting may cause damage to equipment and/or injury to personnel!
Automatic starting/restarting should only be used on equipment that is inaccessible to
personnel.
1 Search range: last frequency...0 Hz
1 Calibration enabled
2 Calibration complete
1 Monitoring and editing
• See C01
• LECOM if C01 = 0...3
• Modbus if C01 = 8...11
(C01 = 1, 5, 7, 9, 11)
See also c43 and c70
motor speed search at C11, or at the last
output frequency before the fault, depending
on the setting of c43
be performed, but C86...C91 must be
programmed first (see C14)
• If motor calibration is attempted before
programming C86...C91, triggers
fault
c60 = 1 allows the keys
speed setpoint (c40) while monitoring c61
• Refer to Section 5 for explanation of status
and error messages
IMPORTANT
to adjust
18
ENGLISH
Page 20
Commissioning
Code Possible Settings
No. Name Lenze Selection
Conguration TRIP
7
reset (error reset)
Auto-TRIP reset delay 0.0 0.0 {s} 60.0 See c70
7
Input voltage selection 0 Low (for 200 or 400 V input) • Lenze setting depends on C93
7
Operating time counter Display
7
Mains connection time
7
counter
S-ramp integration
time
Skip frequency 1 0.0 0.0 {Hz} 240 • L25 and L26 dene the start of the skip
Skip frequency 2 0.0 0.0 {Hz} 240
Skip frequency
bandwidth
LECOM power up
state
Serial time-out action 0
Serial fault time 50 50 {ms} 65535 Sets the serial timeout length
0 0 TRIP reset after LOW-HIGH change at
terminal 28, mains switching, or after
LOW-HIGH change at digital input
“TRIP reset”
1 Auto-TRIP reset • Auto-TRIP reset after the time set in c71
WARNING!
Automatic starting/restarting may cause damage to equipment and/or injury to personnel!
Automatic starting/restarting should only be used on equipment that is inaccessible to
personnel.
1 High (for 230 or 480 V input)
Total time in status “Start”
Display
Total time of mains = on
0.0 0.0 {s} 50.0 • c82 = 0.0: Linear accel/decel ramp
0.0 0.0 {Hz} 10.0
Note
Bandwidth (Hz) = fs (Hz) + L28 (Hz) fs = L25 or L26
Example: L25 = 18 Hz and L28 = 4 Hz; the bandwidth = 18...22 Hz
0 0 Quick stop
1 Inhibit
0 Not active
1 Inhibit
2 Quick stop
3 Trip fault
• More than 8 errors in 10 minutes will
trigger
• During commissioning, conrm
correct setting based on mains voltage
0...999 h: format xxx
1000...9999 h: format x.xx (x1000)
10000...99999 h: format xx.x (x1000)
• c82 > 0.0: Adjusts S-ramp curve for
smoother ramp
range
• L28 denes the bandwidth of the skip
range
Selects controller reaction to serial timeout
IMPORTANT
S fault
ENGLISH
19
Page 21
Commissioning
4.4 Vector mode
Use the following procedures to select either Vector mode or Enhanced V/Hz mode. Enhanced V/Hz
mode should be used in the following cases:
1. Multiple motor applications
2. Where required motor data is not available (especially C91)
3. Where running in Vector mode causes unstable motor operation
4.4.1 Vector speed and torque modes
1. Connect the controller to the motor according to the diagram in Section 3.2.3.
2. Apply power to the controller.
3. Set C14 to 4 for Vector speed mode, or 5 for Vector torque mode.
4. Set C86...C91 according to the motor’s nameplate data.
5. Set c48 to 1 to enable the motor calibration function.
6. Make sure the motor is cold (rotor and windings are at room temperature of 20º to 25º C), and apply
a HIGH signal at terminal 28. The display will show for about 40 seconds. Once the calibration
is complete, the display will show or . Apply another HIGH signal to terminal 28 to actually
start the motor.
4.4.2 Enhanced V/Hz mode
Follow the procedure in 4.4.1 above, replacing steps 3 and 4 with those below:
3. Set C14 to 6 for Enhanced with Auto-Boost, or 7 for Enhanced with constant boost.
4. Set C88...C90 according to the motor’s nameplate data.
Note
• If the motor is hot when the motor calibration is performed, the controller will not
be able to achieve maximum performance.
• In Vector speed and Vector torque modes, if an attempt is made to start the
controller before performing the motor calibration, the controller will display
and the motor will not operate.
20
ENGLISH
Page 22
Troubleshooting and fault elimination
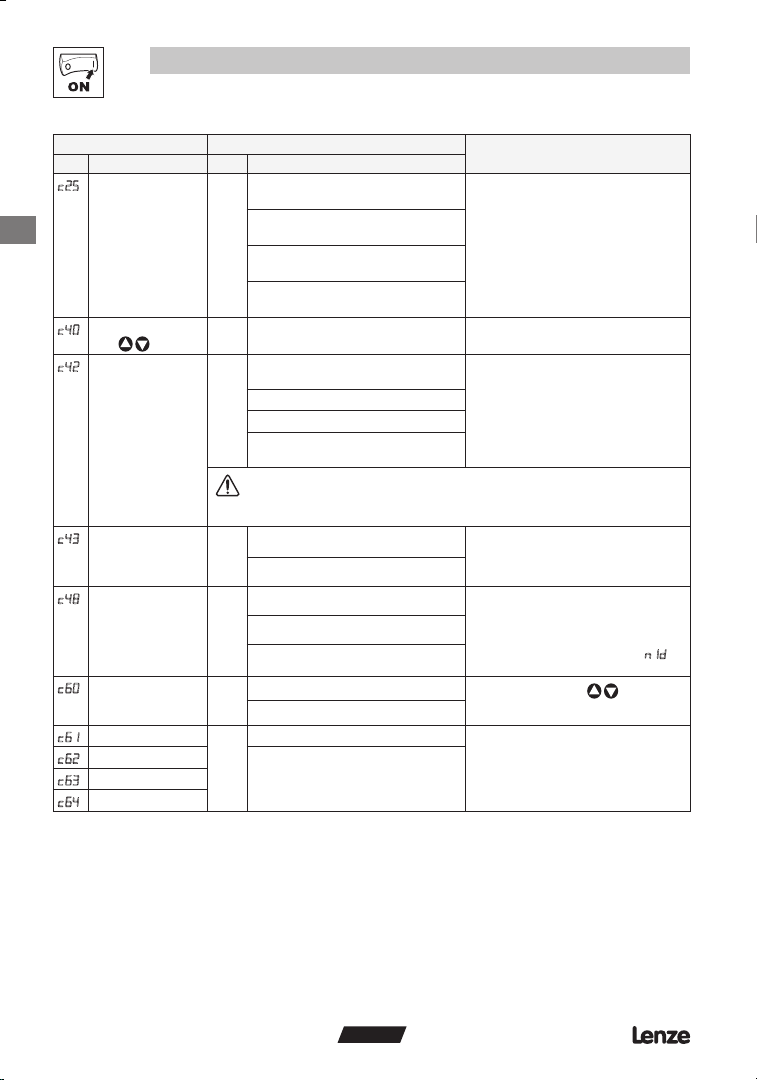
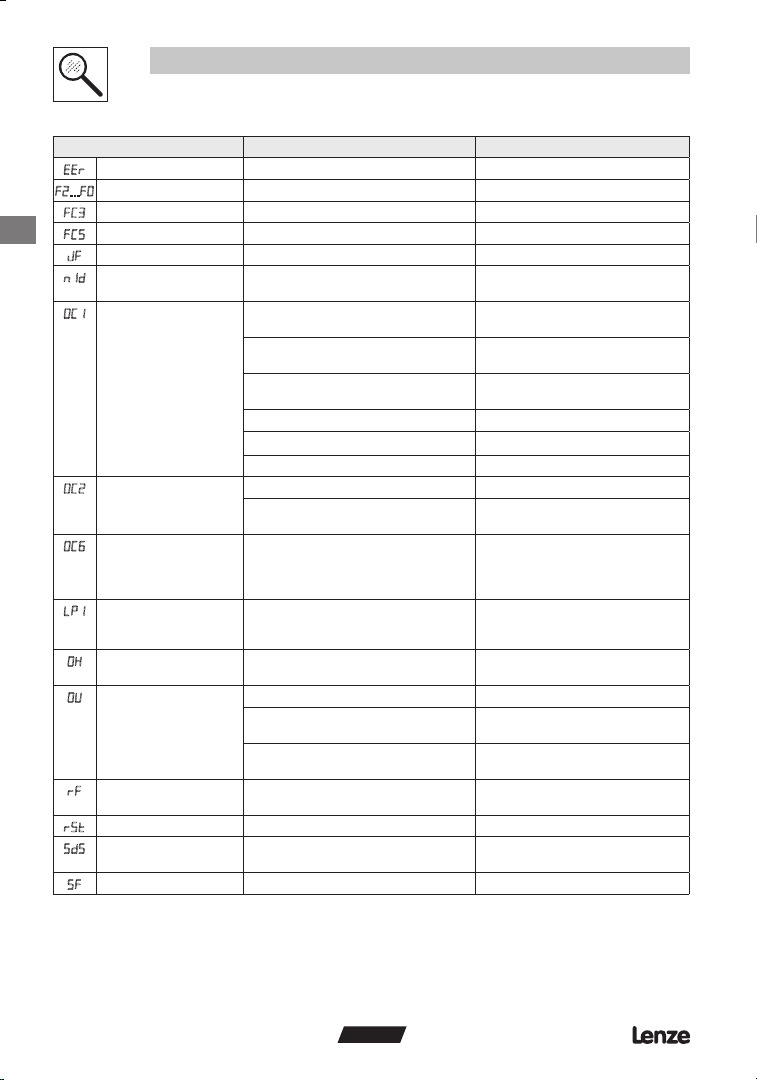
5 Troubleshooting and fault elimination
e.g.
Status Cause Remedy
Present output frequency Trouble free operation
Stop
O
(outputs U, V, W inhibited)
Inhibit
1
(outputs U, V, W inhibited)
Output frequency = 0 Hz
(outputs U, V, W inhibited)
Flying restart attempt c42 = 2, 3
DC-injection brake active DC-injection brake activated
Motor calibration is in process c48 = 1 and terminal 28 = HIGH Only perform the motor calibration
L
Current limit reached Controllable overload Automatically (see C22)
Undervoltage on DC bus Mains voltage too low Check mains voltage
Overvoltage on DC bus during
deceleration (warning)
No access to code Can only be changed when the
Remote keypad is active Attempt to use buttons on front of
Error Cause Remedy
A/D converter error Please contact Lenze
Identication fault C93 value stored on EPM does not match
Data on EPM not valid
Automatic start inhibited c42 = 0, 2 LOW-HIGH signal change at terminal 28
L
EPM error EPM missing or defective Power down and replace EPM
Digital inputs not
uniquely assigned
Dynamic braking fault Dynamic braking resistors are overheating Increase deceleration time
(1) The drive can only be restarted if the error message has been reset; see c70
LOW signal at terminal 28 Set terminal 28 to HIGH
Controller is set up for remote
keypad or serial control (see C01)
Quick stop activated through digital
input or serial link
• via digital input
• automatically
Excessively short deceleration time
(C13, c03)
controller is in or
controller
controller model
Data not valid for controller
Data error
OEM data not valid
E1...E4 assigned with the same digital
signals
Either just “UP” or “DOWN” used Assign the missing digital signal to a
Start the controller via the remote
keypad or serial link
Deactivate Quick stop
Deactivate DC-injection brake
• digital input = LOW
• automatically after holding time c06
has expired
when C14 = 4...7
Automatically if overvoltage
< 1 s, U, if overvoltage > 1 s
Set terminal 28 to LOW or inhibit by
serial link
Buttons on front of controller are
disabled when remote keypad is
• Use EPM providing valid data
• Load Lenze setting
Each digital signal can only be used
once
second terminal
active
(1)
ENGLISH
21
Page 23
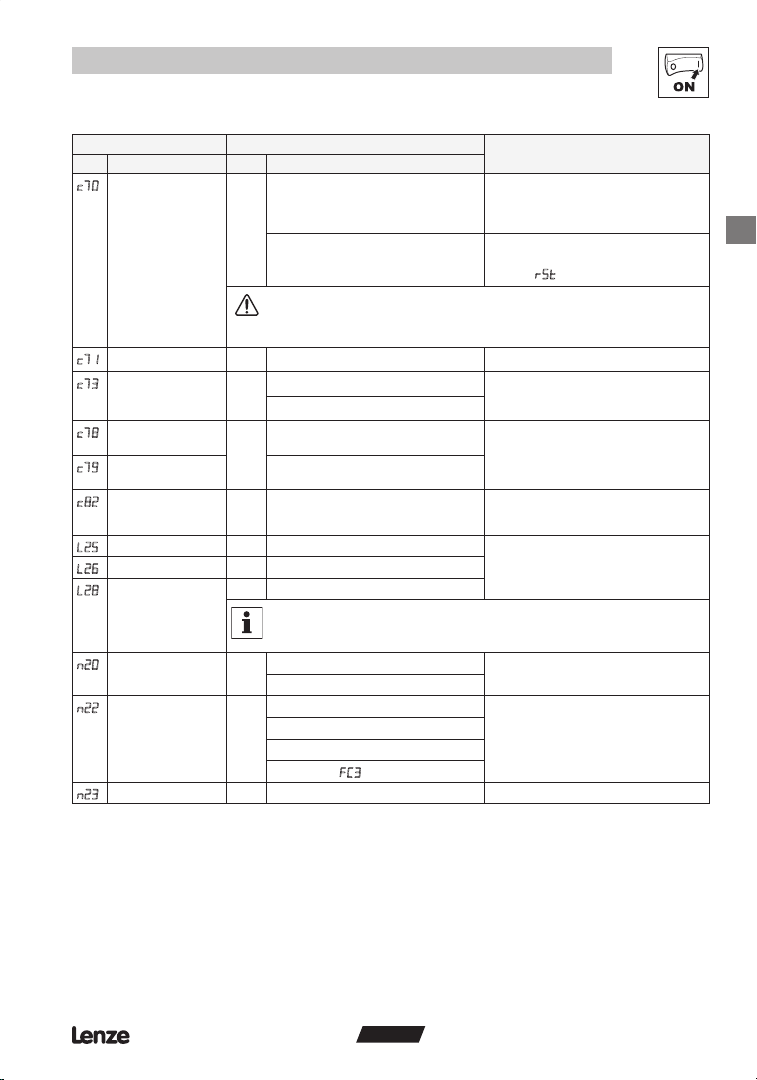
Troubleshooting and fault elimination
Error Cause Remedy
External error Digital input “TRIP set” is active Remove external error
Internal fault Please contact Lenze
0
Communication error Serial timer has timed out Check serial link connections
Communication error Serial communication failure Please contact Lenze
Remote keypad fault Remote keypad disconnected Check remote keypad connections
Drive identification fault Attempt was made to perform motor
1
Short-circuit or overload Short-circuit Find reason for short-circuit; check
1
Earth fault Grounded motor phase Check motor/motor cable
Motor overload (I2t
C
overload)
Loss of motor phase Open-circuit on controller output when in
LP1
Controller
H
overtemperature
Overvoltage on DC bus Mains voltage too high Check mains voltage
U
Flying restart fault Controller was unable to synchronize with
Faulty auto-TRIP reset More than 8 errors in 10 minutes Depends on the error
Loss of 4-20 mA
reference
Single phase fault A mains phase has been lost Check mains voltage
(1) The drive can only be restarted if the error message has been reset; see c70
calibration before setting C86...C91
Excessive capacitive charging
current of the motor cable
Acceleration time (C12, c01) too short • Increase acceleration time
Defective motor cable Check wiring
Internal fault in motor Check motor
Frequent and long overload Check controller selection
Excessive capacitive charging
current of the motor cable
Motor is thermally overloaded, due to:
• impermissable continuous current
• frequent or too long acceleration
processes
vector mode (C14 = 4, 5)
Controller too hot inside • Reduce controller load
Excessively short deceleration time or
motor in generator mode
Earth leakage on the motor side Check motor/motor cable
motor during restart attempt
4-20 mA signal (terminal 8I) is below 2
mA (C34 = 5)
Must set C86...C91 before performing
motor calibration (see c48)
motor cable
Use shorter motor cables with lower
charging current
• Check controller selection
Use shorter motor cables with lower
charging current
• Check controller selection
• Check setting of c20
• Motor must be connected in vector
mode
• Check motor/motor cable
• Improve cooling
Increase deceleration time or use
dynamic braking option
(separate motor from controller)
Check motor/load
Check signal/signal wire
(1)
22
ENGLISH
Page 24

Inhalt
Info zu diesen Anweisungen ......................................................2
1 Sicherheitsinformationen ....................................................3
1.1 In diesen Anweisungen verwendete Piktogramme ..................................4
2 Technische Daten .................................................................5
2.1 Normen und Anwendungsbedingungen ..................................................5
2.2 Bemessungsdaten ....................................................................................6
3 Installation ............................................................................7
3.1 Mechanische Installation ..........................................................................7
3.1.1 Abmessungen und Montage ....................................................................7
3.2 Elektroinstallation ......................................................................................8
3.2.1 Installation gemäß EMV-Richtlinien ...........................................................8
3.2.2 Sicherungen/Leitungsquerschnitte ..........................................................8
3.2.3 Schaltplan .................................................................................................9
3.2.4 Steuerungsklemmen ...............................................................................10
4 Inbetriebnahme ...................................................................11
4.1 Parametrierung .......................................................................................11
4.2 Elektronisches Programmiermodul (EPM) ..............................................11
4.3 Parametermenü ......................................................................................12
4.4 Vektorbetrieb ..........................................................................................20
4.4.1 Drehzahl- und Drehmomentregelung im Vektorbetrieb ..........................20
4.4.2 Erweiterter U/f-Betrieb ............................................................................20
5 Fehlersuche und -behebung .............................................21
DEUTSCH
1
Page 25
Info zu diesen Anweisungen
Diese Dokumentation gilt für den vektorgeregelten Frequenzumrichter Tmd. Sie beinhaltet wichtige
technische Daten und beschreibt die Installation, die Inbetriebnahme sowie den Betrieb.
Diese Anweisungen gelten ausschließlich für Frequenzumrichter Tmd mit der Softwareversion 11 (siehe
Typenschild des Antriebs).
Bitte lesen Sie vor der Inbetriebnahme die Anweisungen.
A B C D E F
For detailed information refer to
instruction manual TD03
004605460364930305
ETMD152L4TXA000XXXX
Hardwarestand
E
Softwarestand
F
Tmd011
Made in USA
Approbationen
A
Typ
B
Type: ETMD152L4TXA
Id-No: 00000 000
IND CONT EQ
Input: Output:
3/PE
AC 400/480 V
4.8 / 4.0 A
50 / 60 Hz
Eingangsbemessungsdaten
C
Ausgangsbemessugsdaten
D
3/PE
AC 400/480 V
4.1 / 3.4 A
1.5 kW
0 - 240 Hz
Lieferumfang Wichtig
• 1 Frequenzumrichter Tmd Vector
control (ETMD...)
mit installiertem EPM (siehe Abschnitt
4.2)
• 1 Betriebsanleitung
© 2004 Lenze AG
Diese Dokumentation darf ohne ausdrückliche schriftliche Genehmigung der Lenze AG weder ganz noch auszugsweise
kopiert oder Dritten zur Verfügung gestellt werden.
Alle in dieser Dokumentation enthaltenen Informationen wurden sorgfältig ausgewählt und auf Übereinstimmung mit der
beschriebenen Hardware und Software hin getestet. Fehler können jedoch nicht vollkommen ausgeschlossen werden.
Wir übernehmen keinerlei Verantwortung für eventuell auftretende Schäden. Erforderliche Korrekturen werden in folgende
Ausgaben dieser Dokumentation aufgenommen.
Prüfen Sie unmittelbar nach Erhalt der Lieferung, ob alle gelieferten Objekte den Angaben auf den beiliegenden Unterlagen entsprechen. Lenze haftet nicht für im Nachhinein gemeldete Mängel.
Melden Sie
• erkennbare Transportschäden umgehend dem
Transportunternehmen.
• erkennbare Mängel/unvollständige Lieferungen umgehend
Ihrem Lenze-Vertreter.
2
DEUTSCH
Page 26

Sicherheitsinformationen
1 Sicherheitsinformationen
Allgemeine Informationen
Einige Bauteile in Lenze-Reglern (Frequenzumrichter, Servoumrichter, DC-Steuerungen) können
stromführend sein, sich bewegen oder rotieren. Einige Oberflächen können heiß werden.
Unbefugtes Entfernen der erforderlichen Abdeckung, unsachgemäße Verwendung und nicht
vorschriftsmäßige Installation oder Bedienung können schwere Personen- oder Sachschäden
verursachen.
Sämtliche Tätigkeiten bei Transport, Installation und Inbetriebnahme sowie Wartungsarbeiten
müssen von qualifiziertem und geschultem Fachpersonal durchgeführt werden (IEC 364 und
CENELEC HD 384 oder DIN VDE 0100 und IEC-Report 664 oder DIN VDE 0110 sowie nationale
Unfallverhütungsvorschriften müssen beachtet werden).
Gemäß diesen grundlegenden Sicherheitsinformationen handelt es sich bei qualifiziertem und
geschultem Fachpersonal um Personen, die mit der Installation, der Montage, der Inbetriebnahme und
dem Betrieb des Produkts vertraut sind und die über die für ihre Tätigkeit erforderlichen Qualifikationen
verfügen.
Anwendung wie vorgeschrieben
Antriebsregler sind Bauteile, die für die Installation in elektrischen Systemen oder Maschinen vorgesehen
sind. Sie dürfen nicht als separate Geräte verwendet werden. Sie sind ausschließlich für professionelle
und kommerzielle Zwecke gemäß EN 61000-3-2 gedacht. Die Dokumentation enthält Informationen zur
Einhaltung der Norm EN 61000-3-2.
Bei der Installation der Antriebsregler in Maschinen ist die Inbetriebnahme (d. h. der Start des Betriebs
wie vorgeschrieben) untersagt, bis nachgewiesen wurde, dass die Maschine den Bestimmungen
der EG-Richtlinie 98/37/EG (Maschinenrichtlinie) entspricht und die harmonisierte Norm EN 60204
eingehalten wird.
Die Inbetriebnahme (d. h. der Start des Betriebs wie vorgeschrieben) ist nur dann zulässig, wenn die
EMV-Richtlinie 2004/108/EWG eingehalten wird.
Die Antriebsregler genügen den Anforderungen der Niederspannungsrichtlinie 2006/95/EWG. Für die
Regler gelten die harmonisierten Normen der Serie EN 61800-5-1 / DIN VDE 0160.
Hinweis: Die Verfügbarkeit von Reglern ist gemäß Norm EN 61800-3 eingeschränkt. Diese Produkte
können in Wohngebieten Funkstörungen verursachen. In diesem Fall sind eventuell besondere
Vorkehrungen zu treffen.
Installation
Sorgen Sie für sachgemäßen Umgang und vermeiden Sie übermäßige mechanische Beanspruchung.
Vermeiden Sie ein Verbiegen von Bauteilen und das Ändern von Isolationsabständen beim Transport
oder dem Umgang mit der Einheit. Berühren Sie keine elektronischen Bauteile und Kontakte.
Regler enthalten elektrostatisch empfindliche Bauteile, die bei unsachgemäßem Umgang leicht beschädigt
werden können. Beschädigen oder zerstören Sie keine elektrischen Bauteile, da dadurch Ihre Gesundheit
gefährdet werden könnte!
Elektrische Anschlüsse
Wenn Arbeiten an stromführenden Antriebsreglern durchgeführt werden, müssen die geltenden nationalen
Unfallverhütungsvorschriften (z. B. VBG 4) eingehalten werden.
Die Elektroinstallation muss im Sinne der geltenden Bestimmungen (z. B. Leitungsquerschnitte,
Sicherungen, PE-Anschlüsse) durchgeführt werden. Zusätzliche Informationen können der
Dokumentation entnommen werden.
Die Dokumentation enthält Informationen über die Installation gemäß den EMV-Richtlinien
(Abschirmung, Erdung, Filter und Leitungen). Diese Hinweise gelten auch für mit dem CE-Zeichen
gekennzeichnete Regler.
Der Hersteller des Systems oder der Maschine ist für die Einhaltung der erforderlichen Grenzwerte
gemäß den EMV-Richtlinien verantwortlich.
DEUTSCH
3
Page 27
SicherheitsinformationenSicherheitsinformationen
Betrieb
Systeme mit Reglern müssen mit zusätzlichen Überwa chungs- und Schutzvorr ichtungen
ausgerüstet werden, die den geltenden Normen (z. B. Normen für technische Einrichtungen,
Unfallverhütungsvorschriften usw.) entsprechen. Der Regler darf wie in der Dokumentation beschrieben
für Ihre Anwendung angepasst werden.
GEFAHR!
• Nachdem die Stromversorgung des Reglers unterbrochen wurde, dürfen
stromführende Bauteile und Netzverbindungen nicht sofort berührt werden,
da Kondensatoren noch geladen sein können. Beachten Sie hierzu die
entsprechenden Hinweise auf dem Regler.
• Schalten Sie den Regler nicht öfter als einmal alle drei Minuten ein und wieder
aus.
• Schließen Sie beim Betrieb alle Schutzabdeckungen und -türen.
Hinweis für UL-zugelassene Systeme mit integrierten Reglern
UL-Warnungen sind Hinweise, die für UL-Systeme gelten. Die Dokumentation enthält spezielle Informationen
über UL.
• Geeignet für die Anwendung in Stromkreisen mit maximal 5000 A effektiv
Dauerkurzschlussstrom und maximal 240 V (240 V-Geräte) bzw. maximal 500 V
(400/500 V-Geräte) Betriebsspannung.
WARNUNG!
1.1 In diesen Anweisungen verwendete Piktogramme
• Verwenden Sie ausschließlich minimale 75 °C-Kupferdraht.
• Vorgesehen für Umgebungen mit Verunreinigungsgrad 2.
Piktogramm Signalwort Bedeutung Folgen bei Missachtung
GEFAHR!
WARNUNG!
Hinweis
4
Gefar von Personenschäden
durch gefährliche elektriche
Spannung
Mögliche drohende
Personenschäden
Mögliche Sachschäden
Nützlicher Tipp: Das Befolgen
dieser Tipps vereinfacht den
Umgang mit dem Antrieb.
DEUTSCH
Hinweis auf eine unmittelbar
drohende Gefahr, die den Tod
oder schwere Verletzungen
zur Folge haben kann, wenn
nicht die entsprechenden Maßnahmen getroffen werden.
Tod oder Verletzungen
Schäden am Antriebssystem
oder seiner Umgebung
Page 28
Technische Daten
2 Technische Daten
2.1 Normen und Anwendungsbedingungen
Konformität
Zulassungen
Max. zulässige Motorleitungslänge
Phasenabweichung
Eingangsspannung
Feuchtigkeit
Ausgangsfrequenz
Umgebungsbedingungen
Temperaturbereich
Installationshöhe
Vibrationsfestigkeit
Ableitstrom
Schutzart durch Gehäuse (EN 60529)
Schutzmaßnahmen gegen
Betrieb am öffentlichen
Versorgungsnetz
(Einschränkung harmonischer
Ströme gemäß EN 61000-3-2)
(1) Zur Einhaltung der EMV-Richtlinien können die zulässigen Leitungslängen geändert werden.
(2) Die beschriebenen zusätzlichen Maßnahmen stellen lediglich sicher, dass die Regler den Anforderungen gemäß EN 61000-3-2
entsprechen. Der Hersteller der Maschine/des Systems ist verantwortlich für die Einhaltung der für die Maschine/das System
geltenden Anforderungen!
CE Niedrigspannungsrichtlinie (2006/95/EWG)
UL 508C Underwriters Laboratories - Power Conversion Equipment
Geschirmt: 50 m (niedrige Kapazität)
(1)
Ungeschirmt: 100 m
< 2%
< 95% (ohne Betauung)
0...240 Hz
Klasse 3K3 nach EN 50178
Transport -25 … +70 °C
Lagerung -20 … +70 °C
Betrieb
0 … 4000 m üNN (über 1000 m üNN Ausgangsbemessungsstrom um 5 %/1000
m reduzieren)
Beschleunigungsfest bis 0,7 g
> 3,5 mA gegen PE
IP 20
Kurzschluss, Erdschluss, Überspannung, Abwürgen des Motors, Überlastung
des Motors
Gesamtleistung
an Hauptver-
sorgung
< 0,5 kW mit Netzdrossel
0,5 … 1 kW mit aktivem Filter (in Vorbereitung)
> 1 kW ohne zusätzliche Maßnahmen
0 … +55 °C (über +40 °C Ausgangsbemessungsstrom um
2,5 %/°C
Einhaltung der Anforderungen
(2)
DEUTSCH
5
Page 29
Technische Daten
2.2 Bemessungsdaten
Typ
ETMD371L2YXA
ETMD551L2YXA
ETMD751L2YXA
ETMD112L2YXA
ETMD152L2YXA
ETMD222L2YXA
ETMD751L2TXA
ETMD112L2TXA
ETMD152L2TXA
ETMD222L2TXA
ETMD402L2TXA
ETMD552L2TXA
ETMD752L2TXA
ETMD371L4TXA
ETMD751L4TXA
ETMD112L4TXA
ETMD152L4TXA
ETMD222L4TXA
ETMD302L4TXA
ETMD402L4TXA
ETMD552L4TXA
ETMD752L4TXA
(1) Für Netznennspannung und Trägerfrequenzen von 4, 6 und 8 kHz
(2) Für Netznennspannung und eine Trägerfrequenz von 10 kHz
(3) Die maximale Stromstärke ist eine Funktion der Einstellung c73 (Auswahl der Eingangsspannung).
Leistung
[kW]
0,37
0,55 6,0 3,9 3,0 2,8 4,5 4,2
0,75 9,2 5,1 4,2 3,9 6,3 5,9
1,1 12,0 6,9 6,0 5,5 9,0 8,3
1,5 12,9 7,9 7,0 6,4 10,5 9,6
2,2 17,1 11,0 9,6 8,8 14,4 13,2
0,75
1,1 6,9 6,0 5,5 9,0 8,3
1,5 7,9 7,0 6,4 10,5 9,6
2,2 11,0 9,6 8,8 14,4 13,2
4,0 17,1 15,2 14,0 23 21
5,5 25 22 20 33 30
7,5 32 28 26 42 39
0,37
0,75 3,0 2,5 2,5 2,1 2,3 1,9 3,8 3,2 3,5 2,9
1,1 4,3 3,6 3,6 3,0 3,3 2,8 5,4 4,5 5,0 4,2
1,5 4,8 4,0 4,1 3,4 3,8 3,1 6,2 5,1 5,7 4,7
2,2 6,4 5,4 5,8 4,8 5,3 4,4 8,7 7,2 8,0 6,6
3,0 8,3 7,0 7,6 6,3 7,0 5,8 11,4 9,5 10,5 8,7
4,0 10,6 8,8 9,4 7,8 8,6 7,2 14,1 11,7 12,9 10,8
5,5 14,2 12,4 12,6 11,0 11,6 10,1 18,9 16,5 17,4 15,2
7,5 18,1 15,8 16,1 14,0 14,8 12,9 24 21 22 19,4
Hauptversorgungsnetz Ausgangsstrom
Spannung, Frequenz
1/N/PE 230 V
ODER
3/PE 230 V
(180 V -0%…264 V +0%)
50/60 Hz
(48 Hz -0%…62 Hz +0%)
3/PE 230 V
(180 V -0%…264 V +0%)
50/60 Hz
(48 Hz -0%…62 Hz +0%)
3/PE 400/480 V
(320 V -0%…528 V +0%)
50/60 Hz
(48 Hz -0%…62 Hz +0%)
Strom
(3)
[A]
1~ 3~ 3~ 3~ 3~ 3~
4,7 2,7 2,4 2,2 3,6 3,3
5,1 4,2 3,9 6,3 5,9
400V 480V 400V 480V 400V 480V 400V 480V 400V 480V
1,6 1,4 1,3 1,1 1,2 1,0 2,0 1,7 1,8 1,5
[A]
I
N
(1)
[A]
(3)
I
für 60 s
[A]
max
(1)
[A]
(2)
(2)
6
DEUTSCH
Page 30
3 Installation
3.1 Mechanische Installation
3.1.1 Abmessungen und Montage
a
Typ
ETMD371L2YXA 93 84 146 128 17 100 15 50 0,6
ETMD551L2YXA, ETMD751L2_XA
ETMD112L2TXA 93 84 146 128 17 146 15 50 1,1
ETMD112L2YXA
ETMD371L4TXA...ETMD112L4TXA
ETMD152L2_XA
ETMD152L4TXA
ETMD222L2_XA
ETMD222L4TXA...ETMD402L4TXA
ETMD552L2TXA, ETMD752L2TXA
ETMD552L4TXA, ETMD752L4TXA
(1) „_“ = Y oder T; die Abmessungen sind für beide Modelle identisch.
(1)
(1)
, ETMD402L2TXA
(1)
a1
[mm]
[mm]b [mm]b1 [mm]b2 [mm]c [mm]
93 84 146 128 17 120 15 50 0,9
114 105 146 128 17 133 15 50 1,4
114 105 146 128 17 171 15 50 1,9
114 105 146 100 17 171 15 50 2,0
146 137 197 140 17 182 30 100 3,4
Installation
Tmd002
s1
[mm]s2 [mm]m [kg]
WARNUNG!
Die Antriebe dürfen nicht an Orten installiert werden, an denen sie ungünstigen
Umgebungsbedingungen ausgesetzt sind. Hierzu gehören: brennbare, ölige oder
schädliche Dämpfe oder Staub; übermäßige Feuchtigkeit; extreme Vibrationen oder
Temperaturen. Für zusätzliche Informationen wenden Sie sich bitte direkt an Lenze.
DEUTSCH
7
Page 31

Installation
3.2 Elektroinstallation
3.2.1 Installation gemäß EMV-Richtlinien
EMV
Einhaltung von EN 61800-3/A11
Geräuschemission
Einhaltung der Grenzwerte Klasse A gemäß EN 55011 bei Installation in einem
Schaltschrank mit entsprechendem Unterbau-Filter und Motorleitungslängen unter 10
m.
Abschirmungsklemmen
A
Steuerleitung
B
Motorleitung mit niedriger Kapazität
C
(Kern/Kern < 75 pF/m, Kern/Abschirmung < 150 pF/m)
Elektrisch leitende Montageplatte
D
Filter
E
3.2.2 Sicherungen/Leitungsquerschnitte
Installation gemäß EN 60204-1 Installation gemäß UL
Typ
ETMD371L2YXA, ETMD551L2YXA M10 A C10 A 1,5 10 A 14
ETMD751L2YXA M16 A C16 A 2,5 15 A 14
1/N/PE
ETMD112L2YXA M20 A C20 A 2,5 15 A 12
ETMD152L2YXA M25 A C25 A 2,5 20 A 12
ETMD222L2YXA M30 A C30 A 4,0 30 A 10
ETMD371L2YXA...ETMD112L2_XA
ETMD152L2_XA
ETMD222L2_XA
ETMD402L2TXA M25 A C25 A 4,0 25 A 10
ETMD552L2TXA M40 A C40 A 6,0 35 A 8
3/PE
ETMD752L2TXA M50 A C50 A 10 45 A 8
ETMD371L4TXA...ETMD222L4TXA M10 A C10 A 1,5 10 A 14
ETMD302L4TXA M16 A C16 A 1,5 12 A 14
ETMD402L4TXA M16 A C16 A 2,5 15 A 14
ETMD552L4TXA M20 A C20 A 2,5 20 A 12
ETMD752L4TXA M25 A C25 A 4,0 25 A 10
(1) Beachten Sie die geltenden örtlichen Vorschriften.
(2) FI-Schutzschalter für Impulsstrom oder Dauerstrom
(3) Schnelle Strombegrenzungssicherungen gemäß UL, Klasse CC oder T, 200.000 AIC erforderlich. Bussmann KTK-R, JJN, JJS, oder entspr.
(4) „_“ = Y oder T; die Bemessungsdaten sind für beide Modelle mit 3/PE-Eingang identisch.
(4)
(4)
(4)
Sicherungs-
Sicherung
automat
M10 A C10 A 1,5 10 A 14
M16 A C16 A 1,5 12 A 14
M16 A C16 A 2,5 15 A 12
(1)
L1, L2, L3, PE
[mm²]
Sicherung
(3)
B
E
C
D
Tmd005
FI-
Schutz-
schalter
> 30 mA
A
L1, L2,
L3, PE
[AWG]
2)
8
DEUTSCH
Page 32

Installation
Beachten Sie bei der Verwendung von FI-Schutzschaltern Folgendes:
• Der FI-Schutzschalter darf nur zwischen dem Hauptversorgungsnetz und dem Regler installiert
werden.
• Der FI-Schutzschalter kann folgendermaßen ausgelöst werden:
- durch kapazitive Ableitströme zwischen den Leitungsabschirmungen im Betrieb (besonders bei langen,
abgeschirmten Motorleitungen),
- durch gleichzeitiges Anschließen mehrerer Regler an das Hauptversorgungsnetz,
- durch EMV-Filter.
3.2.3 Schaltplan
1/N/PE 180V 0% 264V + 0 %
48 Hz 62 Hz
L1
L2
L3
N
PE
L2/N
L1
0 2 Nm/2 lb in
6 mm/0 24 in
< 1mm²/AWG 26 16
8U7
0 … +5 V
0 … +10 V
-10 … +10 V
2/PE 180V 0% 264V + 0 %
AIN
COM
8U
28 7
L1
L2
L3
N
PE
+10 V
9
A+ A1
48 Hz 62 Hz
L2/N
L1
COM
+12 V
+15 V
+15 V
2020
E1 E2 E3 71627 72
3/PE 180V 0% 264V + 0 %
48 Hz 62 Hz
L1
L2
L3
N
PE
L3
L1 L2
COM
AIN
COM
E4 A2
8I
3/PE 320V 0 % 528V + 0 %
L1
L2
L3
N
PE
TXB
TXA
48 Hz 62 Hz
L1 L2
U V W
L3
0 5 Nm/4 5 lb in
6 mm/0 24 in
PES
1k …10k
7
_
+12 V DC - 0 %
…
+30 V DC + 0 %
DIGOUT
28
E3 E4
E1 E2
+
DIGOUT
0 … 20 mA
4 … 20 mA
AOUT
PES
PE
M
PES
3~
PE
PES
1 2 Nm/10 lb in
9 mm/0 35 in
GEFAHR!
• Gefahr durch Stromschlag! Die Potenziale im Stromkreis liegen bis zu 480
VAC über dem Erdungspotenzial. Die Kondensatoren können auch nach
dem Abschalten der Netzspannung noch geladen sein. Schalten Sie die
Stromversorgung ab und warten Sie, bis die Spannung zwischen B+ und B- 0
VDC beträgt, bevor Sie mit den Wartungsarbeiten am Antrieb beginnen.
• Schließen Sie die Hauptstromversorgung nicht an die Ausgänge (U, V, W) an!
Dies würde zu schweren Schäden am Antrieb führen.
• Ändern Sie die Hauptstromversorgung nicht mehr als einmal alle drei Minuten.
Dies führt zu Schäden am Antrieb.
Tmd003
DEUTSCH
9
Page 33

Installation
3.2.4 Steuerungsklemmen
Klemme
Schutz vor Berührung
Daten für Steuerungsanschlüsse (fett = Lenze-Einstellung)
28
Digitaleingang, Start/Stopp
7
Referenz (allgemein)
Analogeingang
8U
0 … 10 V (änderbar unter C34)
9
Interne DC-Versorgung für Sollwertpotentiometer +10 V, max. 10 mA
A+
Interne DC-Versorgung für externe Geräte +12 V, max. 50 mA
A1
Digitalausgang, kongurierbar über c17 DC 24 V/50 mA
20
Interne DC-Versorgung für Digitalausgänge +15 V, max. 20 mA
20
Digitaleingang, konfigurierbar über CE1
E1
Aktivierung fester Sollwert 1 (JOG1)
Digitaleingang, konfigurierbar über CE2
E2
Aktivierung fester Sollwert 2 (JOG2)
Digitaleingang, konfigurierbar über CE3
E3
Aktivierung Gleichstrombremse (DCB)
Digitaler Eingang, konfigurierbar über CE4
E4
Rotationsrichtung
A2
Digitalausgang, konfigurierbar über c18 DC 24 V / 50 mA
8I
Analogeingang (änderbar unter C34) Eingangswiderstand: 150 Ω
7
Referenz (allgemein)
62
Analogausgang, konfigurierbar über c08 ... c11 0 ... 10 V oder 2 ... 10 V, max. 20 mA
71
RS-485 serieller Kommunikationseingang RXB/TXB (B+)
72
RS-485 serieller Kommunikationseingang RXA/TXA (A-)
LOW = Stopp; HIGH = Betrieb aktivieren
Eingangswiderstand = 3,3 kΩ
Eingangswiderstand: >40 kΩ
HIGH = JOG1 aktiv
HIGH = JOG2 aktiv
HIGH = Gleichstrombremse aktiv
LOW = Rechtslauf
HIGH = Linkslauf
LOW = 0 … +3 V, HIGH = +12 … +30 V
Beide HIGH = JOG3 aktiv
• Alle Klemmen sind mit einer einfachen Isolierung ausgestattet (einfacher Isolierungsabstand).
• Der Schutz vor Berührung kann nur durch zusätzliche Maßnahmen sichergestellt werden
(d. h. durch doppelte Isolierung).
= 3,3 kΩ
i
R
10
DEUTSCH
Page 34

4 Inbetriebnahme
4.1 Parametrierung
Status-/Störungsmeldungen Parameter ändern
Hinweis
Falls die Passwortfunktion aktiviert ist, muss das Passwort unter C00 eingegeben
werden, um auf die Parameter zugreifen zu können. C00 wird nicht angezeigt,
wenn die Passwortfunktion deaktiviert ist (siehe C94).
Inbetriebnahme
Tmd004
4.2 Elektronisches Programmiermodul (EPM)
Das EPM enthält den Speicher des Reglers. Bei jeder Parameteränderung werden
die neuen Werte im EPM gespeichert. Es kann zwar ausgebaut werden, muss jedoch
für den Betrieb des Reglers installiert sein (bei fehlendem EPM wird eine -Störung
Tmd007
Für das EPM ist optional ein Programmiergerät (Modell ESMD01EP; Handbuch EP03) erhältlich. Dieses
Gerät verfügt über folgende Funktionen: Programmieren des Reglers ohne Stromversorgung; Festlegen
der Einstellungen des Maschinenherstellers als Standardeinstellungen; schnelles Kopieren der im EPM
gespeicherten Werte, wenn für mehrere Regler identische Werte erforderlich sind. Darüber hinaus kann das
EPM bis zu 60 benutzerdefinierte Parameterdateien speichern, um eine noch schnellere Programmierung
des Reglers zu ermöglichen.
ausgelöst). Beim Versand des Reglers ist das EPM mit einem Schutzband versehen,
das nach der Installation entfernt werden kann.
DEUTSCH
11
Page 35

Inbetriebnahme
4.3 Parametermenü
Code Mögliche Einstellungen
Nr. Benennung Lenze Auswahl
Passworteingabe 0 0 999 Nur bei aktiviertem Passwort sichtbar
Sollwert- und
1
Steuerungsquelle
Lenze-Einstellungen
2
laden
0 Sollwertquelle: Steuerungskonfiguration:
0 Analogeingang
(Klemme 8U/8I; siehe C34)
1 Code c40 / Code C47
2 Analogeingang (Klemme 8U/8I; siehe
C34)
3 LECOM Steuerung = LECOM
4 Analogeingang
(Klemme 8U/8I; siehe C34)
5 Code c40 / Code C47
6 Analogeingang
(Klemme 8U/8I; siehe C34)
7 Code c40 / Code C47
8 Analogeingang
(Klemme 8U/8I; siehe C34)
9 Code c40 / Code C47
10 Analogeingang
(Klemme 8U/8I; siehe C34)
11 Code c40 / Code C47
Hinweis
• Wenn C01 = 1, 5, 7, 9 oder 11 und C14 = 0 ... 4, 6, 7, dann c40 für Drehzahl-
Sollwertvorgabe verwenden
• Wenn C01 = 1, 5, 7, 9 oder 11 und C14 = 5, dann C47 für Drehmoment-
Sollwertvorgabe verwenden
• Wenn C01 = LECOM (3), dann Drehzahlbefehl an C46 oder Drehmomentbefehl an C47
0 Keine Aktion/Laden abgeschlossen
1 Lenze-Einstellungen für 50 Hz laden
2 Lenze-Einstellungen für 60 Hz laden
3 OEM-Einstellungen laden
(falls verfügbar)
WARNUNG!
C02 = 1...3 überschreibt sämtliche Einstellungen! TRIP-Schaltkreis wird eventuell
deaktiviert! Parameter CE1…CE4 prüfen.
(siehe C94).
Steuerung = Klemmen
Programmierung = Keypad
Überwachung = LECOM
Steuerung = Klemmen
Programmierung = LECOM/Keypad
Überwachung = LECOM
Programmierung = LECOM/Keypad
Überwachung = LECOM
Steuerung = Klemmen
Programmierung = Remote-Keypad
Überwachung = Remote-Keypad
Steuerung = Remote-Keypad
Programmierung = Remote-Keypad
Überwachung = Remote-Keypad
Steuerung = Klemmen
Programmierung = Modbus/Keypad
Überwachung = Modbus
Steuerung = Modbus
Programmierung = Modbus/Keypad
Überwachung = Modbus
• C02 = 1, 2, 3 nur bei
möglich
• C02 = 2 : C11, C15 and C89 = 60 Hz
and C87 = 1750 rpm
WICHTIG
oder1
12
DEUTSCH
Page 36

Inbetriebnahme
Code Mögliche Einstellungen
Nr. Benennung Lenze Auswahl
C
Konfiguration Digitaleingang E1
Konfiguration Digitaleingang E2
Konfiguration Digitaleingang E3
Konfiguration Digitaleingang E4
1 1 Aktivierung fester Sollwert 1 (JOG1)
2 Aktivierung fester Sollwert 2 (JOG2)
3 Gleichstrombremse (DCB) siehe auch C36
4 Drehrichtung LOW = Rechtslauf
2
5 Quickstop Gesteuerter Ablauf bis Stillstand, LOW aktiv;
6 Rechtslauf
7 Linkslauf
3
8 UP (Sollwert hochlaufen)
9 DOWN (Sollwert ablaufen)
10 TRIP set
4
11 TRIP reset siehe auch c70
12 Hochlauf/Ablauf 2 siehe c01 und c03
Aktivierung JOG3: Beide Klemmen = HIGH
HIGH = Linkslauf
Ablauframpe unter C13 oder c03 festlegen
Rechtslauf = LOW und Linkslauf = LOW:
Quickstop; Drahtbruchschutz
UP = LOW und DOWN = LOW: Quickstop;
aktuelle NC-Kontakte verwenden
LOW aktiv, löst
Stillstand aus)
HINWEIS: Der Thermokontakt (Öffner) des
Motors kann zum Auslösen dieser Eingabe
verwendet werden
WICHTIG
aus (Motor läuft in
Hinweis
Unter folgenden Bedingungen tritt ein -Fehler auf:
• Einstellungen E1 … E4 werden zweimal verwendet (jede der Einstellungen kann nur
einmal verwendet werden)
• Für einen Eingang ist UP festgelegt, für einen anderen aber nicht DOWN (oder
Netzwerkadresse 1 1 247 Jedem Regler im Netzwerk muss eine
C
Minimale
C
Ausgangsfrequenz
Maximale
Ausgangsfrequenz
Hochlaufzeit 1 5,0 0,0 {s} 999 • C12 = Frequenzänderung 0 Hz ... C11
Ablaufzeit 1 5,0 0,0 {s} 999
umgekehrt)
eindeutige Busadresse zugewiesen sein.
0,0 0,0 {Hz} 240 • Ausgangsfrequenz bei 0% des analogen
50,0 7,5 {Hz} 240 • Ausgangsfrequenz bei 100 % des
WARNUNG!
Wenden Sie sich an den Hersteller des Motors/der Maschine, bevor Sie den Antrieb
mit höheren Frequenzen als der Nennfrequenz betreiben. Überdrehzahlen können zu
Sachschäden oder Verletzungen von Personen führen.
Sollwerts
• C10 nicht aktiv für feste Sollwerte oder
Sollwertvorgabe über c40
analogen Sollwerts
• C11 wird nie überschritten
• C13 = Frequenzänderung C11 ... 0 Hz
• Für Hochlauf/Ablauf S-Rampe c82
einstellen
DEUTSCH
13
Page 37

Inbetriebnahme
Code Mögliche Einstellungen
Nr. Benennung Lenze Auswahl
Betriebsart
U/f-Nennfrequenz
U
-Anhebung
min
(optimiertes
Drehmomentverhalten)
Frequenzschwelle
7
(Q
)
min
Schaltfrequenz
Schlupfkompensation
1
0 Lineare U/f Kennlinie mit
2
automatischer U
1 Quadratische U/f Kennlinie mit
automatischer U
2 Lineare U/f Kennlinie mit konstanter
Umin Anhebung
3 Quadratische Kennlinie mit konstanter
-Anhebung
U
min
4 Drehzahlregelung im Vektorbetrieb • Drehzahlregelung im Vektorbetrieb: für
5 Drehmomentregelung im Vektorbetrieb • Drehmomentregelung im Vektorbetrieb:
6 Erweiterte lineare U/f Kennlinie
mit automatischer U
7 Erweiterte lineare Kennlinie mit
konstanter U
Hinweis
• Einstellungen 4 ... 7 erfordern Motorabgleich über c48.
• Einstellungen 4 und 5 erfordern vor Abgleich exakte Einstellung von C86 ... C91.
• Einstellungen 6 und 7 erfordern vor Abgleich exakte Einstellung von C88 ... C90.
25,0 {Hz} 999
50,0
Stellen Sie für Standardanwendungen die
Nennfrequenz (Typenschild) des Motors ein.
0,0 {%} 40,0
C16 ist im Vektorbetrieb nicht aktiv (siehe
C14).
Einstellungen nach der Inbetriebnahme:
Den Motor im Leerlauf bei Schlupffrequenz
(ca. 5 Hz) betreiben, C16 erhöhen, bis
Motorstrom (C54) = 0,8 x Motornennstrom
0,0 {Hz} 240 Siehe c17 und c18, Auswahl 7
0,0
0 4 kHz • Höhere Schaltfrequenzen senken das
2
1 6 kHz
2 8 kHz
3 10 kHz
0,0 {%} 40,0
0,0
C21 ist im Vektorbetrieb nicht aktiv
(siehe C14).
min
min
-Anhebung
min
-Anhebung
-Anhebung
-Anhebung
min
WICHTIG
• Lineare Kennlinie: für
Standardanwendungen
• Quadratische Kennlinie: für Lüfter und
Pumpen mit quadratischer Lastkennlinie
• Automatische Anhebung: lastabhängige
Ausgangsspannung für verlustarmen
Betrieb
Anwendungen mit nur einem Antrieb,
für die ein höheres Anlaufmoment und
bessere Drehzahlregelung erforderlich
sind
für Anwendungen mit nur einem Antrieb,
für die unabhängig von der Drehzahl eine
Drehmomentregelung erforderlich sind
• Erweitert: für Anwendungen mit nur
einem oder mit mehreren Antrieben, für
die bessere Leistungswerte als unter
den Einstellungen 0…3 angegeben
erforderlich sind, die jedoch nicht im
Vektorbetrieb betrieben werden können
smd006
Motorengeräusch.
• Bemessung in Abschnitt 2.2 beachten
• Automatische Bemessung auf 4 kHz bei
1,2 x Ir
C21 ändern, bis sich die Motordrehzahl
zwischen Leerlauf und maximaler Last nicht
mehr ändert
14
DEUTSCH
Page 38

Inbetriebnahme
Code Mögliche Einstellungen
Nr. Benennung Lenze Auswahl
Stromgrenze 200 30 {%} 200
Referenz: Nennausgangsstrom Tmd
Anhebung Hochlauf 0,0 0,0 {%} 20,0 Nur beim Hochlaufen aktiv
Konfiguration Analogeingang
Spannung -
Gleichstrombremse
(GSB)
Fester Sollwert 1
(JOG 1)
Fester Sollwert 2
(JOG 2)
Fester Sollwert 3
C
(JOG 3)
Frequenzsollwert 0,0 {Hz} 240 Anzeige: Sollwert über Analogeingang,
Drehmomen-
tsollwert/-bereich
Ausgangsfrequenz 0,0 {Hz} 240 Anzeige
Motorspannung 0 {V} 999 Anzeige
Zwischenkreisspannung
Motorstrom 0,0 {A} 400 Anzeige
Reglerauslastung 0 {%} 255 Anzeige
C
Motordrehmoment 0 {%} 400 Anzeige: nur Vektorbetrieb (C14 = 4, 5)
0 0 0...10 V • Spannungsreferenz an Klemme 8U
1 0...5 V
2 -10...+10 V
3 0...20 mA • Stromreferenz an Klemme 8I
4 4...20 mA
5 4...20 mA (überwacht)
WARNUNG!
Bei Verwendung einer Referenzspannung von -10 bis +10 V (C34 = 2), führt eine
Abnahme an Referenzspannung zu einer Motorgeschwindigkeit von 5 % (0,05 x C11).
Hinweis
Wenn C34 = 2:
• Drehrichtung wird durch Polarität des -10…+10 V-Signals festgelegt:
+0,1 ... +10 V = Rechtslauf und -0,1 ... -10 V = Linkslauf (alle anderen
Drehrichtungbefehlesind deaktiviert)
• C11 legt max. Frequenz in beide Richtungen fest (C10 ist nicht aktiv)
• CE1 ... CE4 = 6 oder 7 startet nur den Regler und bestimmt nicht die Drehrichtung
4,0 0,0 {%} 50,0 • Siehe CE1…CE4 und c06
20,0 0,0 {Hz} 240 Lenze-Einstellung: aktiv bei E1 = HIGH
30,0 0,0 {Hz} 240 Lenze-Einstellung: aktiv bei E2 = HIGH
40,0 0,0 {Hz} 240 Lenze-Einstellung: aktiv bei E1 = HIGH und
100 0 {%} 400 • Wenn C14 = 5 und C01 = 1, 5, 7, 9 oder
0 {V} 999 Anzeige
• Bei Erreichen des Grenzwerts nimmt
entweder die Hochlaufzeit zu oder die
Ausgangsfrequenz ab.
• Wenn c73 = 0, dann ist max. Einstellung
167 %
• Tmd liefert keine -10 V für C34 = 2
• C34 = 2 bei Drehmomentregelung im
Vektorbetrieb deaktiviert
• C34 = 5 löst
unter 2 mA abfällt
• Tauglichkeit des Motors für
Gleichstrombremsung überprüfen
E2 = HIGH
Funktion UP/DOWN oder LECOM
11, den Drehmomentsollwert festlegen
• Wenn C14 = 5 und C01 = 0, 2, 4, 6, 8
oder 10, den Drehmomentbereich für C34
festlegen
WICHTIG
-Fehler aus, wenn Signal
DEUTSCH
15
Page 39

Inbetriebnahme
Code Mögliche Einstellungen
Nr. Benennung Lenze Auswahl
Temperatur Kühlkörper 0 {C} 255 Anzeige
1
Verstärkung der
vektorgeregelten
Drehzahlregelung
Drehzahlstabilität im
Vektorbetrieb
Verstärkung I
7
Nachstellzeit 65 12 {ms} 9990
Statorwiderstand
Motor
Motornennleistung 0,00 {kW} 99,9 • Einstellung laut Typenschild des Motors
Motornenndrehzahl 1390 300 {RPM} 65000 Einstellung laut Typenschild des Motors
7
Motornennstrom 0,0 0,0 {A} 480 Einstellung laut Typenschild des Motors
Motornennfrequenz 50 10 {Hz} 999 Einstellung laut Typenschild des Motors
Motornennspannung 0 0 {V} 600 Einstellung laut Typenschild des Motors
Motor cos phi 0,80 0,40 1,00 Einstellung laut Typenschild des Motors
1
Statorinduktivität Motor 0,0 0,0 {mH} 2000 Wird über c48
Antriebskennung • Gibt Bemessung des Reglers an; Format:
Benutzerpasswort 0 0 999
C
Softwareversion
30,0 0,0 100 Optimierung der dynamischen Leistung im
30,0 0,0 100 Optimierung der statischen
0,25 0,00 16,0 Für die meisten Anwendungen besteht
max
0,00 0,00 {Ω} 64,0 Wird über c48
Hinweis
Falls der Leistungsfaktor des Motors nicht bekannt ist, verwenden Sie folgende Formeln:
cos phi = Motorleistung/(Wirkungsgrad des Motors X C90 X C88 X 1,732)
cos phi = cos [ sin-1 (Magnetisierungsstrom/Motorstrom) ]
Bei Änderungen von „0“ (kein Passwort)
beginnt der Wert bei 763.
Vektorbetrieb
Drehzahlstabilität im Vektorbetrieb
kein Anlass, die Lenze-Einstellungen zu
ändern
• Lenze-Einstellung = Nennleistung Tmd
xyz, xy.z, x.yz oder x.y.z
• x. oder x = Spannung (2. = 200/240V, 1~;
2 = 200/240V, 3~; 4 = 400/480V, 3~)
• yz oder y.z = kW-Bemessung
Beispiele:
2.0.3 = 200/240 V, 1~, 0,37 kW
47.5 = 400/480 V, 3~, 7,5 kW
Wenn ein anderer Wert als 0 eingestellt ist,
muss das Passwort unter C00 eingegeben
werden, um auf die Parameter zugreifen
zu können.
Anzeige; Format: x.yz
WICHTIG
(1)
(1)
automatisch programmiert.
(1)
automatisch programmiert.
(1) Eine Änderung dieser Einstellungen kann sich nachteilig auf die Leistung auswirken. Wenden Sie sich an den technischen Support von
Lenze, bevor Sie Änderungen vornehmen.
16
DEUTSCH
Page 40

Inbetriebnahme
Code Mögliche Einstellungen
Nr. Benennung Lenze Auswahl
Hochlaufzeit 2 5,0 0,0 {s} 999 • Aktivierung über CE1 ... CE4
Ablaufzeit 2 5,0 0,0 {s} 999
Haltezeit -
automatische
Gleichstrombremse
Abgleich
Analogausgang
Konfiguration Analogausgang (62)
Konfiguration Digitalausgang (A1)
Konfiguration -
Digitalausgang (A2)
I2t Abschaltung
(Überwachung
Motorerwärmung)
Serieller baudrate 0 0 LECOM: 9600 bps
0,0 0,0 {s} 999
0,0 = nicht aktiv
999 = ständiges Bremsen
100 0,0 999 Wenn an Klemme 62 10 VDC ausgegeben
0 0 Keiner
1 Ausgangsfrequenz 0-10 VDC Für Abgleich des Signals c08 verwenden
2 Ausgangsfrequenz 2-10 VDC
3 Last 0-10 VDC
4 Last 2-10 VDC
5 Dynamische Bremsung Verwendung nur mit DB-Option
0 Ausgang ist stromführend, falls
0 Bereit
1 Störung
2 Motor läuft
3 Motor läuft - Rechtslauf
1
4 Motor läuft - Linkslauf
5 Ausgangsfrequenz = 0 Hz
6 Frequenzsollwert erreicht
7 Frequenzschwelle (C17) überschritten
8 Stromgrenze (Motor- oder Generator betrieb) erreicht
100 30 {%} 100
100 % = Nennausgangsstrom Tmd
WARNUNG!
Die max. Einstellung ist der Motornennstrom (siehe Typenschild). Voller Motorschutz ist
nicht gegeben!
Modbus: 9600,8,N,2
1 LECOM: 4800 bps
Modbus: 9600,8,N,1
2 LECOM: 2400 bps
Modbus: 9600,8,E,1
3 LECOM: 1200 bps
Modbus: 9600,8,O,1
• c01 = Frequenzänderung 0 Hz ... C11
• c03 = Frequenzänderung C11 ... 0 Hz
• Für Hochlauf/Ablauf S-Rampe c82
einstellen
• Automatisches Abbremsen des Motors
nach
durch Motorgleichstrom
während gesamter Haltezeit
(anschließend: U, V, W gesperrt)
• Tauglichkeit des Motors für
Gleichstrombremsung überprüfen
werden, entspricht der Abgleich diesem
Wert (siehe c11).
Beispiel: c11 = 1 und c08 = 100:
Bei 50 Hz Klemme 62 = 5 VDC
Bei 100 Hz Klemme 62 = 10 VDC
• Wird dieser Wert über längere Zeit
überschritten schaltet der Antriebsregler
mit dem Fehler
• Korrekte Einstellung = (Stromangabe
Motortypenschild)/(Nennausgangsstrom
Tmd) X 100 %
• Beispiel: Motor = 6,4 Amp. und Tmd =
7,0 Amp.; korrekte Einstellung = 91 %
(6,4/7,0 = 0,91 x 100 % = 91 %)(6,4 / 7,0
= 0,91 x 100% = 91%)
• Siehe C01
• LECOM falls C01 = 0...3
• Modbus falls C01 = 8...11
DEUTSCH
WICHTIG
ab.
17
Page 41

Inbetriebnahme
Code Mögliche Einstellungen
Nr. Benennung Lenze Auswahl
Frequenzsollwert über
Tasten oder
Modbus
Startzustand
(Netz eingeschaltet)
Auswahl
Fangschaltung
Autom. Motorabgleich
Modusauswahl für c61 0 0 Nur Überwachung
Aktueller Status/
1
Störung
Letzte Störung Störungsmeldung
Vorletzte Störung
Drittletzte Störung
Konfiguration TRIPReset (StörungsReset)
Verzögerung für Auto-
1
TRIP-Reset
0,0 {Hz} 240 Nur aktiv, falls C01 korrekt eingestellt
0,0
1 0 Start nach LOW-HIGH-Änderung an
Klemme 28
1 Autostart, falls Klemme 28 = HIGH
2 Fangschaltung (Autostart deaktiviert)
3 Autostart, falls Klemme 28 = HIGH,
mit Fangschaltung
WARNUNG!
Automatisches Starten/Neustarten kann zu Sachschäden und/oder Verletzungen von
Personen führen. Ein automatischer Start/Neustart sollte nur bei Geräten verwendet
werden, die für Personen nicht zugänglich sind.
0 0 Suchbereich: C11 ... 0 Hz Falls c42 = 2 oder 3, startet der Regler die
1 Suchbereich: letzte Frequenz ... 0 Hz
0 0 Abgleich nicht durchgeführt • Falls C14 = 4 ... 7, muss ein Motorabgleich
1 Abgleich aktiviert
2 Abgleich abgeschlossen
1 Überwachen und bearbeiten
Status-/Störungsmeldung • Anzeige
0 0 TRIP-Reset nach LOW-HIGH
Änderung an Klemme 28, nach
Netzschalten oder nach LOW-HIGH
-Änderung am Digitalausgang „TRIP-
Reset“
1 Auto-TRIP-Reset • Auto-TRIP-Reset nach der unter c71
WARNUNG!
Automatisches Starten/Neustarten kann zu Sachschäden und/oder Verletzungen von
Personen führen. Ein automatischer Start/Neustart sollte nur bei Geräten verwendet
werden, die für Personen nicht zugänglich sind.
0,0 0,0 {s} 60,0 siehe c70
WICHTIG
(C01 = 1, 5, 7, 9 oder 11)
Siehe auch c43 und c70
Drehzahlsuche bei C11 oder bei der letzten
Ausgangsfrequenz vor der Störung (je nach
Einstellung von c43).
durchgeführt werden. Vorher müssen
jedoch C86 ... C91 programmiert werden
(siehe C14).
• Falls der Motorabgleich vor der
Programmierung von C86 ... C91
versucht wird, wird eine 1 Störung
ausgelöst.
c60 = 1 ermöglicht über Tasten
Einstellung des Drehzahlsollwerts (c40),
während c61 überwacht wird.
• Siehe Abschnitt 5 für Erklärungen zu
Status- und Störungsmeldungen.
angegebenen Zeit
• Mehr als 8 Fehler in 10 Minuten lösen
-Fehler aus.
die
18
DEUTSCH
Page 42

Inbetriebnahme
Code Mögliche Einstellungen
Nr. Benennung Lenze Auswahl
Auswahl
7
Eingangsspannung
Betriebsstundenzähler Anzeige Gesamtzeit bei Status „Start“ 0...999 h: Format xxx
7
Zähler
7
Netzanschlussdauer
Integrationszeit
S-Rampe
Frequenz 1
überspringen
Frequenz 2
überspringen
Ausblendbandbreite
Sperrfrequenzen
LECOM wird
eingeschaltet
Serieller Timeout
Dauer serielle
Störung
0 0 Niedrig (für 200 oder 400 V
Eingangsspannung)
1 Hoch (für 230 oder 480 V
Eingangsspannung)
Anzeige Gesamtzeit Netz = ein
0,0 0,0 {s} 50,0 • c82 = 0,0: Lineare Hochlauf-/Ablauframpe
0,0 0,0 {Hz} 240
0,0 0,0 {Hz} 240
0,0 0,0 {Hz} 10,0
Hinweis
Bandbreite (Hz) = fs (Hz) + L28 (Hz) fs = L25 oder L26
Beispiel: L25 = 18 Hz und L28 = 4 Hz; Bandbreite = 18 ... 22 Hz
0 Quickstop
0
1 Reglersperre
0 Nicht aktiv
0
1 Reglersperre
2 Quickstop
Störung auslösen
3
50 {ms} 65535
50
• Lenze-Einstellung ist abhängig von C93.
• Bei Inbetriebnahme die korrekte
Einstellung basierend auf der
Netzspannung bestätigen
1000...9999 h: Format x.xx (x1000)
10000...99999 h: Format xx.x (x1000)
• c82 > 0,0: Passt Kurve der S-Rampe an
für glattere Rampe
• L25 und L26 legen den Beginn der
Sperrfrequenz fest.
• L28 leget die Ausblendbandbreite der
Sperrfrequenz fest.
Legt Reglerreaktion bei seriellem
Timeout fest.
Legt Dauer für seriellen Timeout fest.
WICHTIG
DEUTSCH
19
Page 43

Inbetriebnahme
4.4 Vektorbetrieb
Verwenden Sie die folgenden Verfahren, um entweder Vektorbetrieb oder erweiterten U/f-Betrieb
auszuwählen. In folgenden Fällen sollte der erweiterte U/f-Betrieb verwendet werden:
1. Anwendungen mit mehreren Motoren
2. Erforderliche Motordaten sind nicht verfügbar (speziell C91)
3. Vektorbetrieb verursacht instabilen Motorbetrieb
4.4.1 Drehzahl- und Drehmomentregelung im Vektorbetrieb
1. Schließen Sie den Regler gemäß dem Schaltbild in Abschnitt 3.2.3 an den Motor an.
2. Schalten Sie die Stromversorgung des Reglers ein.
3. Stellen Sie C14 auf 4 für Drehzahlregelung oder auf 5 für Drehmomentregelung.
4. Stellen Sie C86…C91 gemäß dem Typenschild des Motors ein.
5. Stellen Sie C48 auf 1, um die Abgleichfunktion des Motors zu aktivieren.
6. Vergewissern Sie sich, dass der Motor kalt ist (Rotor und Wicklungen haben Zimmertemperatur, also
etwa 20-25°C), und legen Sie an Klemme 28 ein HIGH-Signal an. Auf dem Display wird für etwa 40
Sekunden
an. Legen Sie an Klemme 28 ein weiteres HIGH-Signal an, um den Motor zu starten.
4.4.2 Erweiterter U/f-Betrieb
Halten Sie sich an die unter 4.4.1 beschriebene Vorgehensweise und ersetzen Sie die Schritte 3. und
4. durch folgende Schritte:
3. Stellen Sie C14 auf 6 für erweiterten Betrieb mit automatischer Umim Anhebung oder auf 7 für
erweiterten Betrieb mit konstanter Umim Anhebung.
4. Stellen Sie C88…C90 gemäß dem Typenschild des Motors ein.
L angezeigt. Sobald der Abgleich abgeschlossen ist, zeigt das Display oder .
20
Hinweis
• Falls der Motor beim Abgleich des Motors heiß ist, kann der Regler nicht seine
maximale Leistung bringen.
• Falls bei Drehzahl- und Drehmomentregelung im Vektorbetrieb versucht wird,
den Regler vor dem Motorabgleich zu starten, zeigt der Regler
Motor läuft nicht.
1 an und der
DEUTSCH
Page 44

Fehlersuche und -behebung
5 Fehlersuche und -behebung
z. B.
L
L
Status Ursache Abhilfe
Aktuelle Ausgangsfrequenz Störungsfreier Betrieb
0
Stopp (Ausgänge U, V, W
gesperrt)
Hemmen (Ausgänge U, V,
h
W gesperrt)
Ausgangsfrequenz = 0 Hz
P
(Ausgänge U, V, W
gehemmt)
Fangschaltung c42 = 2, 3
Gleichstrombremse aktiv Gleichstrombremse ist aktiviert
Motorabgleich wird durchgeführt.
Stromgrenze wurde erreicht.
Unterspannung im Zwischenkreis
Überspannung im Zwischenkreis während Ablauf
(Warnung)
Kein Zugriff auf Code
Fernbedienung ist aktiv. Es wurde versucht, die Tasten an der
LOW-Signal an Klemme 28 Klemme 28 auf HIGH setzen
Regler ist für Remote-Keypad
oder serielle Steuerung eingerichtet
(siehe C01).
Quickstop über Digitaleingang oder
serielle Verbindung aktiviert.
• über Digitaleingang
• automatisch
c48 = 1 und Klemme 28 = HIGH Motorabgleich nur bei
Regelbare Überlast Automatisch (siehe C22)
Netzspannung zu niedrig Netzspannung prüfen
Extrem kurze Ablaufzeit (C13, c03) Automatisch, falls Überspannung
Nur änderbar, wenn Regler auf
oder h
Reglervorderseite zu verwenden.
Regler über das Remote-Keypad oder
die serielle Verbindung starten
Quickstop deaktivieren
Gleichstrombremse deaktivieren
• Digitaleingang = LOW
• automatisch nach Ablauf der
Haltezeit c06
C14 = 4 … 7 durchführen
< 1 s, , falls Überspannung > 1 s
Klemme 28 auf LOW setzen oder durch
O
serielle Verbindung hemmen
Die Tasten an die Reglervorderseite sind
deaktiviert, wenn die Fernbedienung
aktiviert ist.
Fehler Ursache Abhilfe
Fehler A/D-Konverter Wenden Sie sich an Lenze.
Kennungsfehler Im EPM gespeicherter Wert für C93
Daten im EPM sind ungültig.
Automatischer Start gesperrt c42 = 0, 2 LOW-HIGH-Signaländerung an
L
EPM-Fehler EPM fehlt oder ist beschädigt. Abschalten und EPM ersetzen
Digitaleingang nicht
eindeutig zugewiesen
(1) Der Antrieb kann nur dann wieder gestartet werden, wenn die Fehlermeldung zurückgesetzt wurde (siehe c70).
entspricht nicht dem Reglermodell.
Daten sind für Regler nicht gültig.
Datenfehler
OEM-Daten sind ungültig.
E1 … E4 wurden dieselben digitalen
Signale zugewiesen.
Entweder nur „UP“ oder nur „DOWN“
verwendet
• EPM mit gültigen Daten verwenden
• Lenze-Einstellung laden
Klemme 28
Jedes digitale Signal darf nur einmal
verwendet werden.
Einer zweiten Klemme das fehlende
digitale Signal zuweisen
DEUTSCH
(1)
21
Page 45

Fehlersuche und -behebung
Fehler Ursache Abhilfe
Fehler Bremschopper Bremswiderstände sind überhitzt Ablaufzeit erhöhen
d
Externe Störung Ein mit „TRIP-Set“ belegter
Interne Störung Wenden Sie sich an Lenze.
F F
Kommunikationsfehler Timeout serieller Timer Anschlüsse der seriellen Verbindung
F
Kommunikationsfehler Fehler serielle Kommunikation Wenden Sie sich an Lenze.
F
Fehler Fernbedienung Fernbedienung nicht angeschlossen Anschlüsse der Fernbedienung prüfen
J
Fehler Antriebskennung Motorabgleich wurde vor Einstellung
Kurzschluss oder Überlast Kurzschluss Kurzschlussursache suchen, Leitung
0
Erdschluss Motorphase mit Erdkontakt Motor/Motorleitung prüfen
0
Motorüberlast (I2t-Überlast) Motor thermisch überlastet durch:
0
Verlust der Motorphase Leerlauf am Reglerausgang im
Übertemperatur Regler Innenraum des Reglers zu heiß • Reglerlast reduzieren
Überspannung im
Zwischenkreis
Fehler Fangschaltung Synchronisierung von Regler und
Auto-TRIP-Reset fehlerhaft Mehr als 8 Fehler in 10 Minuten Fehlerabhängig
Verlust der 4-20 mA-
Referenz
Einzelphasenfehler Netzphase ist verloren gegangen Netzspannung prüfen
(1) Der Antrieb kann nur dann wieder gestartet werden, wenn die Fehlermeldung zurückgesetzt wurde (siehe c70).
Digitaleingang ist aktiv.
von C86 … C91 versucht.
Zu hoher kapazitiver Ladestrom der
Motorleitung
Hochlaufzeit (C12, c01) zu kurz • Hochlaufzeit erhöhen
Beschädigte Motorleitung Überprüfen Sie die Motorleitung
Interne Störung im Motor Motor prüfen
Häufige und lange Überlast Reglerauslegung prüfen
Zu hoher kapazitiver Ladestrom der
Motorleitung
• unzulässigen Dauerstrom
• häuge oder zu lange
Beschleunigungsvorgänge
Vektorbetrieb (C14 = 4, 5)
Netzspannung zu hoch Netzspannung prüfen
Extrem kurze Ablaufzeit oder Motor im
Generatorbetrieb
Motorseitiger Erdschluss Motor/Motorleitung prüfen
Motor während Neustartversuch war
nicht möglich
4-20 mA-Signal (Klemme 8I) liegt unter
2 mA (C34 = 5)
Externe Störung beheben
prüfen
C86 … C91 müssen vor Motorabgleich
eingestellt werden (siehe c48).
prüfen
Kürzere Motorleitungen mit
niedrigerem Ladestrom verwenden
• Reglerauslegung prüfen
Kürzere Motorleitungen mit
niedrigerem Ladestrom verwenden
• Reglerauslegung prüfen
• Einstellung von c20 prüfen
• Motor muss im Vektorbetrieb
angeschlossen sein
• Motor/Motorleitung prüfen
• Kühlung verbessern
Ablaufzeit erhöhen oder Option für
dynamische Bremsung verwenden
(Motor vom Regler trennen)
Motor/Last prüfen
Signal/Signalleitung prüfen
(1)
22
DEUTSCH
Page 46

Table des matières
À propos de ces instructions .....................................................2
1 Informations de sécurité ......................................................3
1.1 Pictogrammes utilisés dans ces instructions.............................................4
2 Caractéristiques techniques ...............................................5
2.1 Normes et conditions d’application ...........................................................5
2.2 Caractéristiques nominales .......................................................................6
3 Installation ............................................................................7
3.1 Installation mécanique ............................................................................... 7
3.1.1 Dimensions et montage .............................................................................7
3.2 Installation électrique ................................................................................. 8
3.2.1 Installation conforme aux directives CEM .................................................8
3.2.2 Fusibles/section des câbles ......................................................................8
3.2.3 Schéma de câblage ..................................................................................9
3.2.4 Bornier de commande .............................................................................10
4 Mise en service ...................................................................11
4.1 Configuration des paramètres .................................................................11
4.2 Module de programmation électronique (EPM) ......................................11
4.3 Menu de configuration ............................................................................. 12
4.4 Modes Vectoriels .....................................................................................20
4.4.1 Modes de régulation vectorielle de vitesse ou vectorielle de couple .....20
4.4.2 Mode U/f amélioré ...................................................................................20
5 Détection et élimination des défauts ................................21
FRANÇAIS
1
Page 47

À propos de ces instructions
Cette documentation s’applique au convertisseur de fréquence vectoriel Tmd et contient des données
techniques importantes ainsi qu’une description de son installation, de son fonctionnement et de sa mise
en service.
Les présentes instructions ne sont valables que pour les convertisseurs de fréquence Tmd équipés de
la version 11 du logiciel (voir la plaque signalétique du convertisseur de fréquence).
Veuillez lire les instructions avant de procéder à la mise en service
A B C D E F
For detailed information refer to
instruction manual TD03
004605460364930305
ETMD152L4TXA000XXXX
Version du matériel
E
Version du logiciel
F
Tmd011
Made in USA
Certifications
A
Type
B
Type: ETMD152L4TXA
Id-No: 00000 000
IND CONT EQ
Input: Output:
3/PE
AC 400/480 V
4.8 / 4.0 A
50 / 60 Hz
Caractéristiques d’entrée
C
Caractéristiques de sortie
D
3/PE
AC 400/480 V
4.1 / 3.4 A
1.5 kW
0 - 240 Hz
Contenu de la livraison Important
• 1 Convertisseur de fréquence
vectoriel Tmd (ETMD...)
avec module EPM enfiché
(voir paragraphe 4.2)
• 1 Instructions de Mise en Service
© 2004 Lenze AG
Toute représentation ou reproduction intégrale ou partielle faite par quelque procédé que ce soit est illicite sans l’autorisation
préalable écrite de Lenze AG
Toutes les informations fournies dans cette documentation ont été soigneusement sélectionnées et vérifiées afin
d’assurer leur conformité aux produits et logiciels décrits. Leur exactitude n’est néanmoins pas garantie. Lenze AG
décline toute responsabilité en cas d’éventuels dégâts. Toutes les corrections nécessaires seront apportées dans les
éditions ultérieures.
Dès la réception de la livraison, vérifiez si les produits livrés
correspondent aux documents d’accompagnement. Lenze décline
toute responsabilité pour les réclamations effectuées par la suite.
Réclamations
• En cas de dégâts de transport visibles, adressez immédiatement
vos réclamations au transporteur.
• En cas de défaut visible ou de livraison incomplète, adressez
immédiatement vos réclamations à votre représentant Lenze.
2
FRANÇAIS
Page 48

Informations de sécurité
1 Informations de sécurité
Généralités
Certains composants des variateurs Lenze (convertisseurs de fréquence, servovariateurs, variateurs
CC) peuvent être sous tension, éventuellement en mouvement ou en rotation. Certaines surfaces
peuvent être chaudes.
Le retrait non autorisé du couvercle de protection, une utilisation inappropriée et une installation ou
une exploitation incorrecte peuvent entraîner un risque de blessure grave pour le personnel ou un
endommagement du matériel.
Toutes les opérations liées au transport, à l’installation et à la mise en service ainsi qu’à l’entretien
doivent être effectuées par du personnel qualié et compétent (les normes CEI 364 et CENELEC HD
384 ou DIN VDE 0100 et le rapport CEI 664 ou DIN VDE0110 ainsi que la réglementation nationale
en matière de prévention des accidents doivent être respectés).
Au sens des présentes informations de sécurité élémentaires, on entend par personnel qualifié toutes
les personnes compétentes qui maîtrisent l’installation, l’assemblage, la mise en service et l’utilisation
du produit et qui ont les qualifications requises par leur fonction.
Utilisation conforme
Les variateurs de vitesse sont des composants conçus pour être installés dans des systèmes ou des
installations électriques. Ils ne doivent pas être utilisés comme appareils électriques indépendants.
Ils sont destinés exclusivement à une utilisation professionnelle et commerciale conformément à la
norme EN 61000-3-2. Cette documentation comprend des informations sur la conformité à la norme
EN 61000-3-2.
Lors de l’installation des variateurs de vitesse dans des machines, la mise en service (c’est-à-dire
leur mise en fonctionnement conforme) est interdite jusqu’à ce qu’il soit démontré que la machine est
conforme aux dispositions de la directive européenne 98/37/CE (directive Machines). La norme EN
60204 doit également être respectée.
La mise en service (c’est-à-dire leur mise en fonctionnement conforme) n’est autorisée qu’en cas de
conformité avec la directive CEM 2004/108/CEE.
Les variateurs de vitesse sont conformes aux exigences de la directive basse tension 2006/95/CEE. Les
normes harmonisées de la série EN 61800-5-1 / DIN VDE 0160 s’appliquent aux variateurs de vitesse.
Remarque : L’utilisation des variateurs est déni, conformément à la norme EN 61800-3. Ces produits
peuvent provoquer des interférences radio dans les zones résidentielles. Dans ce cas, des mesures
spéciales peuvent s’avérer nécessaires.
Installation
Assurez-vous que les produits soient installés de façon correcte et évitez les efforts mécaniques
excessifs. Ne pliez pas les composants et ne modiez pas les distances d’isolation au cours du transport
ou de la manipulation. Ne touchez pas les composants ou les contacts électroniques.
Les variateurs comportent des composants sensibles à l’électricité statique qui peuvent être endommagés
aisément en cas de manipulation incorrecte. N’endommagez ni ne détruisez les composants électriques
: vous pourriez mettre votre santé en danger !
Raccordement électrique
Lors d’opérations effectuées sur des variateurs de vitesse sous tension, la réglementation nationale en
vigueur en matière de prévention des accidents (par exemple VBG 4) doit être respectée.
L’installation électrique doit être effectuée conformément à la réglementation en vigueur (par exemple,
section des câbles, fusibles, raccordement PE). Des informations supplémentaires figurent dans cette
documentation.
Cette documentation inclus également des informations sur l’installation conformément aux directives
CEM (blindage, mise à la terre, filtres et câbles). Ces remarques doivent être respectées pour les
variateurs marqués CE. Le fabricant du système ou de la machine est responsable de sa conformité
aux valeurs limites imposées par les directives CEM.
FRANÇAIS
3
Page 49

Informations de sécurité
Fonctionnement
Les systèmes comprenant des variateurs doivent être équipés de dispositifs de surveillance et de protection
supplémentaires, conformément aux normes correspondantes (par exemple, équipements techniques,
réglementation de prévention des accidents, etc.). Vous êtes autorisé à adapter le variateur à votre application,
comme indiqué dans la documentation.
DANGER!
• Une fois le variateur débranché de l’alimentation, ne touchez pas immédiatement
les composants sous tension et le câble d’alimentation car les condensateurs
peuvent être chargés. Veuillez observer les remarques correspondantes indiquées
sur le variateur.
• N’alternez pas la mise sous et hors tension du variateur plus d’une fois toutes les
trois minutes.
• Assurez-vous que tous les capots et toutes les portes de protection soient fermées
pendant le fonctionnement.
Remarque concernant les systèmes approuvés UL
Les avertissements UL sont des remarques qui s’appliquent aux systèmes UL. La documentation
contient des informations spéciales relatives aux systèmes UL.
• Adapté à une utilisation dans un circuit capable de produire au maximum 5 000
ampères symétriques efcaces, pour une tension maximale de 240 V (appareils 240 V)
ou de 500 V (appareils 400/500 V).
Avertissements !
1.1 Pictogrammes utilisés dans ces instructions
• Utilisez des ls en cuivre minimum 75 °C uniquement.
• Doit être installé dans un macro-environnement de degré de pollution 2.
Pictogramme Mot associé Signification Risques encourus si
DANGER!
AVERTISSEMENT!
Remarque
4
Situation dangereuse pour
les personnes en raison
d’une tension électrique
élevée.
Mise en danger imminente
ou possible des personnes.
Risque d’endommagement
du matériel.
Conseil utile : suivez-le pour
une utilisation plus facile du
variateur.
FRANÇAIS
aucune prise en compte
Indication d’un danger
imminent qui peut avoir
pour conséquences des
blessuresmortelles ou très
graves en cas de non-
respect des consignes de
sécurité correspondantes
Mort ou blessures.
Endommagement du
système d’entraînement ou
de son environnement.
Page 50

Caractéristiques techniques
2 Caractéristiques techniques
2.1 Normes et conditions d’application
Conformité
Homologations
Longueur de câble maxi
(1)
autorisée
Déséquilibre de phase de tension
d’entrée
Humidité
Fréquence de sortie
Conditions climatiques
Plages de température autorisées
Altitude d’implantation admissible
Résistance aux chocs (vibrations)
Courant de fuite à la terre
Enveloppe (EN 60529)
Mesures de protection contre
Fonctionnement sur réseaux publics
(Limitation des courants
harmoniques, conformément à EN
61000-3-2)
(1) Pour des raisons de conformité à la réglementation CEM, les longueurs de câble autorisées peuvent changer.
(2) Les mesures supplémentaires décrites garantissent uniquement que les variateurs répondent aux exigences de la norme
Le fabricant de la machine ou du système est responsable de la conformité à la réglementation correspondante !
CE Directive basse tension (2006/95/CEE)
UL 508C Underwriters Laboratories - Power Conversion Equipment
blindé : 50 m (à faible capacité)
non blindé : 100 m
< 2%
< 95 % sans condensation
0 à 240 Hz
Classe 3K3 à EN 50178
Transport -25 à +70 °C
Stockage -20 à +70 °C
Fonctionnement
0 à 4 000 m au-dessus du niveau de la mer (avec 5 %/1 000 m de
déclassement d’intensité au-dessus de 1 000 m au-dessus du niveau de la mer)
résistance à l’accélération jusqu’à 0,7 g
> 3,5 mA à PE
IP 20
court-circuit, défaut à la terre, surtension, décrochage du moteur, surcharge
du moteur
Puissance totale
reliée au réseau
< 0,5 kW Avec self réseau
0,5 à 1 kW Avec filtre actif (en cours de préparation)
> 1 kW Sans mesures supplémentaires
0 à + 55 °C
(avec 2,5 %/°C de déclassement de Inominal > +40 °C)
Conformité aux exigences
(2)
EN 61000-3-2.
FRANÇAIS
5
Page 51

Caractéristiques techniques
2.2 Caractéristiques nominales
Réseau
Courant
(3)
[A]
[A]
(1)
Type
Puis-
sance
[kW]
Tension, fréquence
1~ 3~ 3~ 3~ 3~ 3~
ETMD371L2YXA
ETMD551L2YXA
ETMD751L2YXA
ETMD112L2YXA
ETMD152L2YXA
ETMD222L2YXA
ETMD751L2TXA
ETMD112L2TXA
ETMD152L2TXA
ETMD222L2TXA
ETMD402L2TXA
ETMD552L2TXA
ETMD752L2TXA
0,37
0,55 6,0 3,9 3,0 2,8 4,5 4,2
0,75 9,2 5,1 4,2 3,9 6,3 5,9
1,1 12,0 6,9 6,0 5,5 9,0 8,3
1,5 12,9 7,9 7,0 6,4 10,5 9,6
2,2 17,1 11,0 9,6 8,8 14,4 13,2
1/N/PE 230 V
OU
3/PE 230 V
(180 V -0%…264 V +0%)
50/60 Hz
(48 Hz -0%…62 Hz +0%)
0,75
1,1 6,9 6,0 5,5 9,0 8,3
1,5 7,9 7,0 6,4 10,5 9,6
2,2 11,0 9,6 8,8 14,4 13,2
4,0 17,1 15,2 14,0 23 21
5,5 25 22 20 33 30
3/PE 230 V
(180 V -0%…264 V +0%)
50/60 Hz
(48 Hz -0%…62 Hz +0%)
7,5 32 28 26 42 39
4,7 2,7 2,4 2,2 3,6 3,3
5,1 4,2 3,9 6,3 5,9
400V 480V 400V 480V 400V 480V 400V 480V 400V 480V
ETMD371L4TXA
ETMD751L4TXA
ETMD112L4TXA
ETMD152L4TXA
ETMD222L4TXA
ETMD302L4TXA
ETMD402L4TXA
ETMD552L4TXA
ETMD752L4TXA
(1) Pour une tension d’alimentation nominale et des fréquences de découpage de 4, 6 et 8 kHz
(2) Pour une tension d’alimentation nominale et une fréquence de découpage de 10 kHz
(3) Le courant maximal est fonction du code c73 (sélection de la tension d’entrée)
0,37
0,75 3,0 2,5 2,5 2,1 2,3 1,9 3,8 3,2 3,5 2,9
1,1 4,3 3,6 3,6 3,0 3,3 2,8 5,4 4,5 5,0 4,2
3/PE 400/480 V
1,5 4,8 4,0 4,1 3,4 3,8 3,1 6,2 5,1 5,7 4,7
(320 V -0%…528 V +0%)
2,2 6,4 5,4 5,8 4,8 5,3 4,4 8,7 7,2 8,0 6,6
3,0 8,3 7,0 7,6 6,3 7,0 5,8 11,4 9,5 10,5 8,7
4,0 10,6 8,8 9,4 7,8 8,6 7,2 14,1 11,7 12,9 10,8
50/60 Hz
(48 Hz -0%…62 Hz +0%)
5,5 14,2 12,4 12,6 11,0 11,6 10,1 18,9 16,5 17,4 15,2
7,5 18,1 15,8 16,1 14,0 14,8 12,9 24 21 22 19,4
1,6 1,4 1,3 1,1 1,2 1,0 2,0 1,7 1,8 1,5
Courant de sortie
I
N
(2)
[A]
[A]
I
max
(3)
(1)
for 60 s
[A]
(2)
6
FRANÇAIS
Page 52

3 Installation
3.1 Installation mécanique
3.1.1 Dimensions et montage
a
Type
ETMD371L2YXA 93 84 146 128 17 100 15 50 0,6
ETMD551L2YXA, ETMD751L2_XA
ETMD112L2TXA 93 84 146 128 17 146 15 50 1,1
ETMD112L2YXA
ETMD371L4TXA...ETMD112L4TXA
ETMD152L2_XA
ETMD152L4TXA
ETMD222L2_XA
ETMD222L4TXA...ETMD402L4TXA
ETMD552L2TXA, ETMD752L2TXA
ETMD552L4TXA, ETMD752L4TXA
(1) « _ » = Y ou T ; les dimensions sont identiques pour les deux modèles.
(1)
(1)
, ETMD402L2TXA
(1)
a1
[mm]
[mm]b [mm]b1 [mm]b2 [mm]c [mm]
93 84 146 128 17 120 15 50 0,9
114 105 146 128 17 133 15 50 1,4
114 105 146 128 17 171 15 50 1,9
114 105 146 100 17 171 15 50 2,0
146 137 197 140 17 182 30 100 3,4
Installation
Tmd002
s1
[mm]s2 [mm]m [kg]
AVERTISSEMENT !
Les variateurs ne doivent pas être exposés à des environnements défavorables,
comme des vapeurs ou poussières inflammables, huileuses ou dangereuses, une
humidité excessive, des vibrations excessives ou des températures excessives.
Pour plus d’informations, contactez Lenze.
FRANÇAIS
7
Page 53

Installation
3.2 Installation électrique
3.2.1 Installation conforme aux directives CEM
CEM
Conforme à la norme EN 61800-3/A11
Perturbations radio-électriques : émission
Conforme à la valeur limite de la Classe A de la norme EN 55011 avec installation
dans un coffret électrique avec filtre “montage arrière” approprié et avec câble moteur
de 10m maxi.
Colliers de blindage
A
Câble de commande
B
Câble moteur de faible capacité
C
(brin/brin < 75 pF/m, brin/blindage < 150 pF/m)
Plaque de montage conductrice
D
Filtre
E
B
E
C
A
D
Tmd005
FRANÇAIS
(1)
L1, L2, L3, PE
[mm²]
Fusible
L1, L2, L3, PE
(3)
[AWG]
3.2.2 Fusibles/section des câbles
Installation selon EN 60204-1 Installation selon UL
Type
ETMD371L2YXA, ETMD551L2YXA M10 A C10 A 1,5 10 A 14
ETMD751L2YXA M16 A C16 A 2,5 15 A 14
1/N/PE
ETMD112L2YXA M20 A C20 A 2,5 15 A 12
ETMD152L2YXA M25 A C25 A 2,5 20 A 12
ETMD222L2YXA M30 A C30 A 4,0 30 A 10
ETMD371L2YXA...ETMD112L2_XA
ETMD152L2_XA
ETMD222L2_XA
ETMD402L2TXA M25 A C25 A 4,0 25 A 10
ETMD552L2TXA M40 A C40 A 6,0 35 A 8
3/PE
ETMD752L2TXA M50 A C50 A 10 45 A 8
ETMD371L4TXA...ETMD222L4TXA M10 A C10 A 1,5 10 A 14
ETMD302L4TXA M16 A C16 A 1,5 12 A 14
ETMD402L4TXA M16 A C16 A 2,5 15 A 14
ETMD552L4TXA M20 A C20 A 2,5 20 A 12
ETMD752L4TXA M25 A C25 A 4,0 25 A 10
(1) Respectez la réglementation locale en vigueur.
(2) Disjoncteur différentiel courant impulsionnel ou disjoncteur différentiel sensitif tout courant.
(3) Fusibles rapides de type UL Classe CC ou T limiteur de courant, 200 000 AIC, requis. Bussman KTK-R, JJN, JJS, ou équivalent.
(4) « _ » = Y ou T ; les caractéristiques sont identiques pour les deux modèles avec une entrée 3/PE.
(4)
(4)
8
Fusible Disjoncteur
(4)
M10 A C10 A 1,5 10 A 14
M16 A C16 A 1,5 12 A 14
M16 A C16 A 2,5 15 A 12
(2)
DD
> 30 mA
Page 54

Installation
Respectez les points suivants lors de l’installation du Disjoncteur Différentiel :
• Installez le Disjoncteur Différentiel uniquement entre l’alimentation réseau et le variateur.
• Le Disjoncteur Différentiel peut être activé par :
- des courants de fuites capacitifs entre les câbles blindés pendant le fonctionnement (notamment
avec de longs câbles blindés)
- Le raccordement simultané de plusieurs variateurs à l’alimentation réseau
- des ltres antiparasites
3.2.3 Schéma de câblage
1/N/PE 180V 0% 264V + 0 %
48 Hz 62 Hz
L1
L2
L3
N
PE
L2/N
L1
0 2 Nm/2 lb in
6 mm/0 24 in
< 1mm²/AWG 26 16
8U7
0 … +5 V
0 … +10 V
-10 … +10 V
2/PE 180V 0% 264V + 0 %
AIN
COM
8U
28 7
L1
L2
L3
N
PE
+10 V
9
A+ A1
48 Hz 62 Hz
L2/N
L1
COM
+12 V
+15 V
+15 V
2020
E1 E2 E3 71627 72
3/PE 180V 0% 264V + 0 %
48 Hz 62 Hz
L1
L2
L3
N
PE
L3
L1 L2
COM
AIN
COM
E4 A2
8I
3/PE 320V 0 % 528V + 0 %
L1
L2
L3
N
PE
TXB
TXA
48 Hz 62 Hz
L1 L2
U V W
L3
0 5 Nm/4 5 b in
6 mm/0 24 n
PES
1k …10k
7
_
+12 V DC - 0 %
…
+30 V DC + 0 %
DIGOUT
28
E3 E4
E1 E2
+
DIGOUT
0 … 20 mA
4 … 20 mA
AOUT
PES
PE
M
PES
3~
PE
PES
1 2 Nm/10 lb in
9 mm/0 35 in
Tmd003
DANGER!
• Risque de choc électrique ! La tension du circuit peut atteindre 480 Vac au-dessus
de la terre. Les condensateurs conservent leur charge après la mise hors tension.
Débranchez l’alimentation et attendez que la tension entre B+ et B- soit de 0 Vcc
avant d’effectuer la vérification du variateur.
• Ne branchez pas l’alimentation réseau aux bornes de sortie (U, V, W) ! Vous
risqueriez d’endommager gravement le variateur.
• N’alternez pas la mise sous tension et mise hors tension plus d’une fois toutes
les trois minutes. Vous risqueriez d’endommager le variateur.
FRANÇAIS
9
Page 55

Installation
3.2.4 Bornier de commande
Borne
Données de câblage de la commande (données en gras = réglage Lenze)
28
Entrée numérique Marche/Arrêt roue libre
7
Potentiel de référence commune
Entrée analogique
8U
0 à 10 V (modifiable en C34)
Alimentation CC interne pour potentiomètre de
9
valeur de consigne
A+
Alimentation CC interne pour appareils externes +12 V, maxi 50 mA
A1
Sortie numérique congurable en c17 24 Vcc / 50 mA
20
Alimentation CC interne pour entrées numériques +15 V, maxi 20 mA
20
Entrée numérique configurable en CE1
E1
Activation de la fréquence fixe 1 (JOG1)
Entrée numérique configurable en CE2
E2
Activation de la fréquence fixe 2 (JOG2)
Entrée numérique configurable en CE3
E3
Activation du freinage par injection de CC (FCC)
Entrée numérique configurable en CE4
E4
Sens de rotation
A2
Sortie numérique congurable en c18 24 Vcc / 50 mA
8I Entrée analogique (modifiable en C34) résistance d’entrée : 150 Ω
7
Potentiel de référence commune
62
Sortie analogique congurable en c08 et c11 0 à 10 V ou 2 à 10 V, maxi 20 mA
71
Entrée de communication série RS-485 RXB/TXB (B+)
72
Entrée de communication série RS-485 RXA/TXA (A-)
Protection contre des contacts accidentels
•
Toutes les bornes disposent d’une isolation de base (distance isolante simple).
•
La protection contre des contacts accidentels ne peut être assuré que par des mesures supplémentaires
(Ex. double isolation).
BAS = arrêt ; HAUT = fonctionnement activé
résistance d’entrée = 3,3 kΩ
résistance d’entrée : > 40 kΩ
+10 V, maxi 10 mA
HAUT = JOG1 activé
HAUT = JOG2 activé
HAUT = FCC activé
BAS = rotation horaire
HAUT = rotation antihoraire
E1 et E2 HAUT =
JOG3 activé
BAS = 0 à +3 V, HAUT = +12 à +30 VV
= 3,3 kΩ
i
R
10
FRANÇAIS
Page 56

Mise en service
4 Mise en service
4.1 Configuration des paramètres
Messages d’état/messages défault Modification des paramètres
Remarque
Si la fonction Mot de passe est activée, le mot de passe doit être entré dans le code
C00 pour accéder aux autres paramètres. Le code C00 apparaît uniquement si la
fonction Mot de passe est activée. Voir code C94.
Tmd004
4.2 Module de programmation électronique (EPM)
L’EPM contient la mémoire du variateur. Lorsque la configuration des paramètres est
modiée, les valeurs sont enregistrées dans l’EPM. Il peut être retiré mais doit être
installé pour que le variateur fonctionne (l’absence de l’EPM déclenche un défaut de
type 1). Lors de la livraison du variateur, l’EPM est protégé par un ruban adhésif qui
Tmd007
Un programmateur d’EPM (modèle ESMD01EP ; manuel EP03) est disponible en option et permet
d’effectuer les opérations suivantes : programmer le variateur hors tension ; dénir les réglages du
constructeur en tant que réglages par défaut ; effectuer des copies rapides d’EPMs lorsque plusieurs
variateur nécessitent un paramétrage identique. Il permet également de stocker jusqu’à 60 chiers de
configuration personnalisés pour une programmation encore plus rapide des variateurs.
peut être retiré une fois l’installation terminée.
FRANÇAIS
11
Page 57

Mise en service
4.3 Menu de configuration
Code Réglages possibles
o
Nom Lenze Sélection
N
Saisie du mot de
passe
Type et origine de la
1
consigne d’entrée
Chargement d’un
C 2
réglage Lenze
0 0 999 Visible uniquement lorsque le mot de passe
0
Type et origine de la consigne :
0 Entrée analogique
(8U / 8I ; voir code C34)
1 Code c40 / Code C47
2 Entrée analogique (8U / 8I ; voir code
c34)
3 LECOM Commande = LECOM
4 Entrée analogique
(8U / 8I ; voir code c34)
5 Code c40 / Code C47
6 Entrée analogique
(8U / 8I ; voir code c34)
7 Code c40 / Code C47
8 Entrée analogique
(8U / 8I ; voir code C34)
9 Code c40 / Code C47
10 Entrée analogique
(8U / 8I ; voir code C34)
11 Code c40 / Code C47
Remarque
• Lorsque C01 = 1, 5, 7, 9 ou 11 et C14 = 0 à 4, 6 ou 7, utilisez c40 pour la valeur de
consigne de vitesse.
• Lorsque C01 = 1, 5, 7, 9 ou 11 et C14 = 5, utilisez C47 pour la consigne de couple.
• Lorsque C01 = LECOM (3), entrez la consigne de vitesse par C46 ou la consigne de
couple par C47.
0 Aucune action/chargement terminé • C02 = 1, 2, 3 possible uniquement si
1 Charger les réglages Lenze 50 Hz
2 Charger les réglages Lenze 60 Hz
3 Charger les réglages OEM
(si présents)
AVERTISSEMENT !
C02 = 1 à 3 remplace tous les réglages ! Les câblages avec mise en défaut (TRIP set)
peuvent être désactivés ! Vérifiez les paramètres CE1 à CE4.
IMPORTANT
est activé (voir code C94)
Configuration de la commande :
Commande = bornier
Paramétrage = clavier
Surveillance = LECOM
Commande = bornier
Paramétrage = LECOM / clavier
Surveillance = LECOM
Paramétrage = LECOM / clavier
Surveillance = LECOM
Commande = bornier
Paramétrage = clavier déporté
Surveillance = clavier déporté
Commande = clavier déporté
Paramétrage = clavier déporté
Surveillance = clavier déporté
Commande = bornier
Paramétrage = Modbus / clavier
Surveillance = Modbus
Commande = Modbus
Paramétrage = Modbus / clavier
Surveillance = Modbus
O ou est affiché.
• C02 = 2 : C11, C15 and C89 = 60 Hz
and C87 = 1750RPM
12
FRANÇAIS
Page 58

Mise en service
Code Réglages possibles
o
Nom Lenze Sélection
N
Conguration -
Entrée numérique E1
Conguration -
Entrée numérique E2
Conguration -
C
Entrée numérique E3
Conguration -
Entrée numérique E4
Adresse 1 1 247 Chaque appareil du bus doit avoir une
Fréquence de sortie
minimum
Fréquence de sortie
maximum
Temps
d’accélération 1
Temps
de décélération 1
1 1 Activation de la fréquence fixe 1
(JOG1)
2 Activation de la fréquence fixe 2
(JOG2)
3 Freinage CC (FCC) voir aussi code C36
4 Sens de rotation BAS = rotation horaire
2
5 Arrêt rapide Décélération contrôlée jusqu’à l’arrêt, BAS
6 Rotation horaire
7 Rotation antihoraire
3
8 +vite consigne d’accélération
9 -vite consigne de décélération
10 Mise en Défaut (TRIP set)
4
11 Réarmement Défaut (TRIP reset) voir aussi code c70
12 2nde rampe d’accélération/
décélération
Remarque
Un défaut G se produit dans les conditions suivantes :
• réglages E1 à E4 dupliqués (chaque réglage ne peut être utilisé qu’une fois)
• une entrée paramétrée sur +vite et une autre non paramétrée sur -vite, ou vice versa
0,0 0,0 {Hz} 240 • Fréquence de sortie à 0% de la valeur de
50,0 7,5 {Hz} 240 • Fréquence de sortie à 100% de la valeur
AVERTISSEMENT !
Consultez le fabricant du moteur ou de la machine avant toute utilisation au-dessus de la
fréquence nominale. Toute survitesse du moteur ou de la machine peut endommager le
matériel et blesser des personnes !
5,0 0,0 {s} 999 • C12 = variation de fréquence 0 Hz à C11
5,0 0,0 {s} 999
Activer JOG3 : les deux bornes = HAUT
HAUT = rotation antihoraire
activé ; réglez le temps de décélération en
C13 ou c03.
Rotation horaire = BAS et rotation
antihoraire = BAS : Arrêt rapide ; avec
protection contre rupture de fil
+vite = BAS et -vite = BAS : Arrêt rapide
utilisez des contacts NF (Normalement
Fermés au repos).
BAS activé, déclenche
en roue libre et s’arrête).
REMARQUE : Le contact thermique NF du
moteur peut servir à déclencher cette entrée.
voir codes c01 et c03
adresse unique.
consigne analogique.
• C10 désactivé pour les fréquences xes
ou une consigne via le code c40.
de consigne analogique.
• C11 n’est jamais dépassé.
• C13 = variation de fréquence C11 à 0 Hz
• Pour une accél./décél. en rampe en S,
paramétrez le code c82.
IMPORTANT
;
EEr (moteur ralentit
FRANÇAIS
13
Page 59

Mise en service
Code Réglages possibles
o
Nom Lenze Sélection
N
Mode de
fonctionnement
0 Caractéristique linéaire U/f avec
2
accroissement U
1 Caractéristique quadratique U/f² avec
accroissement U
2 Caractéristique linéaire U/f avec
accroissement U
3 Caractéristique quadratique U/f
accroissement U
4 Régulation vectorielle de vitesse • Régulation vectorielle de vitesse :
5 Régulation vectorielle de couple • Régulation vectorielle de couple :
6 Caractéristique linéaire améliorée U/f
avec accroissement U
7 Caractéristique linéaire améliorée U/f
avec accroissement U
Remarque
•
Les réglages 4 à 7 nécessitent un calibrage du moteur à l’aide du code c48.
•
Les réglages 4 et 5 nécessitent un réglage correct des codes C86 à C91 avant calibrage.
•
Les réglages 6 et 7 nécessitent un réglage correct des codes C88 à C90 avant calibrage.
Fréquence nominale
U/f
Accroissement U
(optimisation du
comportement du
couple)
Seuil de fréquence
7
(Q
)
min
Fréquence de
découpage
50,0 25,0 {Hz} 999
Paramétrez la fréquence nominale du
moteur (plaque signalétique) pour les
applications standard.
min
0,0 {%} 40,0
Le code C16 est désactivé en mode
Vectoriel (voir code C14).
Paramétrez ce code après la mise en
service : faire tourner le moteur à vide à la
fréquence de glissement (environ 5 Hz),
augmentez la valeur de C16 jusqu’à ce que
l’intensité moteur (C54) = 0,8 x intensité
moteur nominale
0,0 0,0 {Hz} 240 Voir codes c17 et c18, sélection 7
0 4 kHz • Lorsque la fréquence de découpage
2
1 6 kHz
2 8 kHz
3 10 kHz
Compensation de
1
glissement
Limitation de courant
Imax
0,0 0,0 {%} 40,0
Le code C21 est désactivé en mode
Vectoriel (voir code C14).
200
30 {%} 200
Référence : courant de sortie nominal
du Tmd
automatique
min
automatique
min
constant
min
constante
min
min
min
2
avec
automatique
constant
IMPORTANT
• Caractéristique linéaire : pour applications
standard.
• Caractéristique quadratique : pour
ventilateurs et pompes à caractéristique
de charge quadratique.
• Accroissement Umin automatique :
accroissement automatique de la tension
moteur en fonction de la charge
pour applications avec un seul moteur
nécessitant un couple de démarrage plus
élevé et une meilleure régulation de la
vitesse.
pour applications avec un seul moteur
nécessitant une régulation du couple
indépendante de la vitesse.
• U/f amélioré : pour applications avec un
ou plusieurs moteurs nécessitant des
performances supérieures à celles des
réglages 0 à 3 mais ne pouvant pas
fonctionner en mode vectoriel.
smd006
augmente, le bruit du moteur diminue.
• Tenez compte du déclassement au
paragraphe 2.2.
•
Déclassement automatique à 4 kHz à 1,2 x I
Modifiez le code C21 jusqu’à ce que la
vitesse du moteur ne change plus entre une
charge nulle et la charge maximale.
• Lorsque la valeur limite est atteinte, le
temps d’accélération augmente ou la
fréquence de sortie diminue.
• Lorsque c73 = 0, réglage maxi de 167 %.
N
14
FRANÇAIS
Page 60

Mise en service
Code Réglages possibles
o
Nom Lenze Sélection
N
Accroissement Umin
d’accélération
Conguration -
Entrée analogique
Tension de Freinage
par injection de CC
(FCC)
Fréquence
xe 1 (JOG 1)
Fréquence
xe 2 (JOG 2)
Fréquence
xe 3 (JOG 3)
Consigne de
fréquence
Consigne de
couple / Plage
de couple
Fréquence de sortie 0,0 {Hz} 240 Affichage : fréquence sans le glissement
Tension moteur 0 {V} 999 Affichage
Tension du bus CC 0 {V} 999 Affichage
Courant moteur 0,0 {A} 400 Affichage : courant moteur apparent
Charge variateur 0 {%} 255 Affichage : courant moteur actif
Couple moteur 0 {%} 400 Affichage : mode vectoriel uniquement
Température du
radiateur
Gain de la boucle
de vitesse en mode
vectoriel
Stabilité de la vitesse
en mode vectoriel
0,0 0,0 {%} 20,0 L’accroissement Umin d’accélération n’est
0 0 0 à 10 V • Consigne de tension appliquée à 8U
1 0 à 5 V
2 -10 à +10 V
3 0 à 20 mA • Consigne de courant appliquée à 8I
4 4 à 20 mA
5 4 à 20 mA surveillé
AVERTISSMENT !
Dans le cas d’un fonctionnement avec une référence de -10...+10 V (C34 = 2), une
perte de référence entraîne une accélération du moteur de 5 % (0,05 x C11).
Remarque
Lorsque C34 = 2 :
• La rotation est déterminée par la polarité du signal -10 à +10 V : +0,1 à +10 V = horaire et
-0,1 à -10 V = antihoraire (toutes les autres commandes de rotation sont désactivées)
• C11 xe la fréquence maximale dans les deux sens (C10 est désactivé)
• CE1 à CE4 = 6 ou 7 démarre le variateur mais ne sélectionne pas le sens de rotation
4,0 0,0 {%} 50,0
20,0 0,0 {Hz} 240 Réglage Lenze : activé pour E1 = HAUT
30,0 0,0 {Hz} 240 Réglage Lenze : activé pour E2 = HAUT
40,0 0,0 {Hz} 240 Réglage Lenze : activé pour E1 = HAUT et
0,0 {Hz} 240 Affichage : Valeur de consigne via l’entrée
100 0 {%} 400
Référence : couple nominal moteur
déterminé par le calibrage.
Voir paragraphe 4.4
0 {C} 255 Affichage
30,0 0,0 100 Optimise les performances dynamiques en
30,0 0,0 100 Optimise la stabilité de la vitesse en régime
activée que pendant l’accélération.
• Le Tmd ne fournit pas d’alimentation
-10 V pour C34 = 2
• C34 = 2 désactivé en mode Couple
vectoriel
• C34 = 5 déclenche une erreur
signal chute en dessous de 2 mA
• Voir codes CE1 à CE4 et c06
• Assurez-vous que le moteur est
adapté à l’utilisation du freinage CC.
E2 = HAUT
analogique, fonction +vite/-vite ou LECOM
• Lorsque C14 = 5 et C01 = 1, 5, 7, 9 ou 11,
fixe la valeur de consigne de couple.
• Lorsque C14 = 5 et C01 = 0, 2, 4, 6, 8 ou
10, fixe la plage de couple pour C34.
(C14 = 4 ou 5)
mode vectoriel.
permanent en mode vectoriel.
IMPORTANT
si le
FRANÇAIS
15
Page 61

Mise en service
Code Réglages possibles
o
Nom Lenze Sélection
N
Gain de I
C 7
Constante de temps
d’intégration de Imax
Résistance du stator
du moteur
Puissance nominale
du moteur
Vitesse nominale du
7
moteur
Courant nominal du
moteur
Fréquence nominale
du moteur
Tension nominale du
moteur
Cosinus phi du moteur 0,80 0,40 1,00 Paramétrez au facteur de puissance indiqué
1
Inductance du stator
du moteur
Identication de
l’appareil
Mot de passe
utilisateur
Version du logiciel
Temps d’accélération
1
nº 2
Temps de décélération
nº 2
Temps de maintien -
Freinage automatique
par injection de
courant continu
Gain de la sortie
analogique
(1) La modification de ces réglages peut nuire aux performances. Contactez l’assistance technique de Lenze avant toute modification.
16
0,25 0,00 16,0 Pour la plupart des applications, il est inutile
max
65 12 {ms} 9990
0,00 0,00 {Ω} 64,0 Réglé automatiquement par le code c48
0,00 {kW} 99,9 • Paramétrez selon la puissance indiquée
1390 300 {RPM} 65000 Paramétrez selon la vitesse indiquée sur la
0,0 0,0 {A} 480 Paramétrez selon le courant indiqué sur la
50 10 {Hz} 999 Paramétrez selon fréquence indiquée sur la
0 0 {V} 600 Paramétrez à la tension indiquée sur la
Remarque
Si le facteur de puissance est inconnu, utilisez les formules suivantes :
cos phi = Watts moteur / (rendement moteur X C90 X C88 X 1,732)
cos phi = cos [ sin-1 (courant magnétisant / courant moteur) ]
0,0 0,0 {mH} 2000 Réglé automatiquement par le code c48
0 0 999
Différent « 0 » (pas de mot de passe), la
valeur commence à 763.
5,0 0,0 {s} 999 • Activé via les codes CE1 à CE4
5,0 0,0 {s} 999
0,0 0,0 {s} 999
0,0 = désactivé
999 = freinage permanent
100 0,0 999 Lorsque la borne 62 fournit une tension
de modifier les réglages Lenze
sur la plaque signalétique du moteur.
•
Réglage Lenze = puissance nominale Tmd
plaque signalétique du moteur.
plaque signalétique du moteur.
plaque signalétique du moteur.
plaque signalétique du moteur.
sur la plaque signalétique du moteur.
• Indique les caractéristiques de l’appareil,
au format : xyz, xy.z, x.yz ou x.y.z.
• x. ou x = tension (2. = 200/240 V, 1~ ;
2 = 200/240 V, 3~ ; 4 = 400/480 V, 3~)
• yz ou y.z = puissance (kW)
Exemples :
2.0.3 = 200/240 V, 1~, 0,37 kW
47.5 = 400/480 V, 3~, 7,5 kW
Lorsque la valeur est différente de 0, vous
devez saisir le mot de passe dans le code
C00 pour accéder aux paramètres.
Affichage, au format : x.yz
• c01 = variation de fréquence 0 Hz à C11
• c03 = variation de fréquence C11 à 0 Hz
• Pour une accél./décél. en rampe en S,
paramétrez le code c82.
• Freinage moteur automatique ensuite
dans le moteur pendant le temps de
maintien (ensuite : U, V, W inhibées).
• Assurez-vous que le moteur est adapté à
l’utilisation du freinage CC.
de 10 Vcc, la fréquence sera égale à cette
valeur (voir code c11).
FRANÇAIS
IMPORTANT
(1)
par injection de Courant Continu
(1)
(1)
Page 62

Mise en service
Code Réglages possibles
o
Nom Lenze Sélection
N
Conguration Sortie analogique
(Borne 62)
Conguration Sortie numérique
(Borne A1)
Conguration Sortie numérique
(Borne A2)
Coupure i²t
(Surveillance
thermique du
moteur)
Vitesse de
transmission série
Valeur de consigne de
fréquence via le clavier
ou Modbus
0 0 Aucune
1 0-10 Vcc : Fréquence de sortie Utilisez le code c08 pour adapter le signal.
2 2-10 Vcc : Fréquence de sortie
3 0-10 Vcc : Charge
4 2-10 Vcc : Charge
5 Freinage dynamique Utilisé uniquement avec l’option FD.
0 La sortie est alimentée si :
0 Prêt à fonctionner
1 Défaut
2 Le moteur tourne
3 Le moteur tourne en sens horaire
4 Le moteur tourne en sens anti-horaire
1
5 Fréquence de sortie = 0 Hz
6 Valeur de consigne de fréquence
atteinte
7 Seuil de fréquence Qmin (C17)
dépassé
8 Imax réglé en C22 atteint
(mode moteur ou générateur)
C14=5 : consigne de couple atteinte
100 30 {%} 100
100 % = Courant de sortie nominal du Tmd
AVERTISSEMENT !
Le réglage maximum correspond au courant moteur nominal (voir plaque
signalétique). Ce réglage n’offre pas une protection totale du moteur !
0 0 LECOM: 9600 bps
Modbus: 9600,8,N,2
1 LECOM: 4800 bps
Modbus: 9600,8,N,1
2 LECOM: 2400 bps
Modbus: 9600,8,E,1
3 LECOM: 1200 bps
Modbus: 9600,8,O,1
0,0 0,0 {Hz} 240 Activé uniquement si C01 est réglé
IMPORTANT
Exemple: c11 = 1 et c08 = 100 :
À 50 Hz, la borne 62 = 5 Vcc
À 100 Hz, la borne 62 = 10 Vcc
• Déclenche une un défaut
le courant moteur dépasse c20 trop
longtemps.(voir code C54)
• Réglage correct = (courant moteur de la
plaque signalétique) / (courant de sortie
nominale Tmd) X 100 %
• Exemple : moteur = 6,4 A et Tmd = 7,0 A ;
réglage correct = 91 %
(6,4 / 7,0 = 0,91 x 100 % = 91 %)
• Voir C01
• LECOM si C01 = 0...3
• Modbus si C01 = 8...11
correctement (C01 = 1, 5, 7, 9 ou 11).
lorsque
FRANÇAIS
17
Page 63

Mise en service
Code Réglages possibles
o
Nom Lenze Sélection
N
Condition de
démarrage
(réseau branché)
Sélection du
redémarrage à la volée
Autocalibrage
du moteur
Sélection du mode
pour c61
État/défaut actuel Message de défaut. • Affichage
1
Dernier défaut Message de défaut.
Avant-dernier défaut
Avant-avant-dernier
défaut
Configuration
Réarmement Défaut
(TRIP reset)
Temporisation de
1
réarmement auto. du
défaut
Sélection de la tension
d’entrée
18
1 0 Démarrage après changement
BAS-HAUT sur la borne 28.
1 Démarrage auto si borne 28 = HAUT
2 Redémarrage à la volée actif aprés
changement BAS-HAUT sur la borne 28
3 Démarrage auto si borne 28 = HAUT
avec redémarrage à la volée actif
AVERTISSEMENT !
Un démarrage/redémarrage automatique peut endommager le matériel et blesser des
personnes ! Le démarrage/redémarrage automatique doit être utilisé uniquement pour les
équipements auxquels personne n’a accès.
0 0 Rechercher dans la plage : C11 à 0 Hz Si c42 = 2 ou 3, le variateur démarre la
1 Rechercher dans la plage : dernière
fréquence de sortie à 0 Hz
0 0 Calibrage non effectué. • Si C14 = 4 à 7, le calibrage du moteur
1 Calibrage activé.
2 Calibrage terminé.
0 Surveillance uniquement.
0
1 Surveillance et modication.
0 0 Réarmement Défaut après
changement BAS-HAUT sur la borne
28, mise hors et sous tension ou après
changement BAS-HAUT sur l’entrée
numérique « Réarmement Défaut ».
1 Réarmement automatique du Défaut. • Réarmement automatique du Défaut
AVERTISSEMENT !
Un démarrage/redémarrage automatique peut endommager le matériel et blesser des
personnes ! Le démarrage/redémarrage automatique doit être utilisé uniquement pour
les équipements auxquels personne n’a accès.
0,0 0,0 {s} 60,0 Voir code c70.
0 0 Basse
(pour une entrée de 200 ou 400 V).
1 Haute
(pour une entrée de 230 ou 480 V).
FRANÇAIS
IMPORTANT
• Le variateur ne redémarre qu’après
annulation du défaut
• Voir aussi les codes c43 et c70.
recherche de la vitesse du moteur au code
C11 ou à la dernière fréquence avant défaut,
en fonction du réglage du code c43.
doit être effectué, mais les codes C86 à
C91 doivent d’abord être définis (voir code
C14).
• Si le calibrage du moteur est lancé avant
la dénition des codes C86 à C91, un
défaut
se produit.
c60 = 1 permet d’utiliser les touches
pour régler la valeur de consigne de vitesse
(c40) tout en surveillant le code c61.
• Voir le chapitre 5 pour la présentation des
messages d’état et de défaut.
après le délai indiqué au code c71.
• Un défaut
8 défauts se produisent en 10 minutes.
• Le réglage Lenze dépend du code C93.
• Lors de la mise en service, assurez-vous
que le réglage soit correct par rapport à la
tension réseau.
se déclenche si plus de
Page 64

Mise en service
Code Réglages possibles
o
Nom Lenze Sélection
N
Nombre d’heures de
7
fonctionnement
Nombre d’heures de
7
mise sous tension
Temps d’intégration
pour rampe en S
Saut de fréquence 1 0,0 0,0 {Hz} 240 • L25 et L26 dénissent le début de la plage
Saut de fréquence 2 0,0 0,0 {Hz} 240
Amplitude de saut de
fréquence
Choix d’état de
démarrage LECOM
Choix d’état en cas
de dépassement
de temps de la
communication série
Temps de surveillance
de la communication
série
Affichage Durée totale dans l’état
borne 28 = HAUT
Affichage Durée totale sous tension
0,0 0,0 {s} 50,0 • c82 = 0,0: Rampe d’accél./décél. linéaire
0,0 0,0 {Hz} 10,0
Remarque
Amplitude (Hz) = fs (Hz) + L28 (Hz) fs = L25 ou L26
Exemple : L25 = 18Hz et L28 = 4 Hz ; l’amplitude de la plage est de 18 à 22 Hz.
0 Arrêt rapide
0
1 Blocage variateur
0 Désactivé
0
1 Blocage variateur
2 Arrêt rapide
3 Déclencher erreur
50 50 {ms} 65535 Définit le temps d’attente de la
0 à 999 h : au format xxx
1 000 à 9 999 h : au format x.xx (x1 000)
10 000 à 99 999 h : au format xx.x (x1 000)
• c82 > 0.0 : Règle la courbe de vitesse S
pour une vitesse plus fluide
de saut de fréquence.
• L28 dénit l’amplitude de la plage de saut
de fréquence
Définissez la réaction du variateur en cas de
dépassement de temps de surveillance de la
communication série.
communication série
IMPORTANT
FRANÇAIS
19
Page 65

Mise en service
4.4 Modes Vectoriels
Utilisez les procédures suivantes pour choisir un des modes Vectoriels ou le mode U/f amélioré. Le
mode U/f amélioré peut être utilisé dans les cas suivants :
1. Applications à plusieurs moteurs
2. Lorsque certaines données moteur requises sont indisponibles (en particulier le code C91)
3. Lorsque l’utilisation du mode Vectoriel rend le fonctionnement du moteur instable.
4.4.1 Modes de régulation vectorielle de vitesse ou vectorielle
de couple
1. Reliez le variateur au moteur, conformément au schéma du paragraphe 3.2.3.
Ne reliez PAS le moteur à la charge.
2. Mettez le variateur sous tension.
3. Paramétrez le code C14 sur 4 pour sélectionner le mode vectoriel de vitesse ou sur 5 pour le mode
vectoriel de couple.
4. Paramétrez les codes C86 à C91 conformément aux données de la plaque signalétique du moteur.
5. Paramétrez le code c48 sur 1 pour activer la fonction de calibrage du moteur.
6. Assurez-vous que le moteur est froid (rotor et enroulements à température ambiante de 20 à
25 ºC) et appliquez un signal HAUT à la borne 28. L’écran afche
secondes. Une fois le calibrage terminé, l’écran affiche ou . Appliquez de nouveau un
signal HAUT à la borne 28 pour démarrer vraiment le moteur.
4.4.2 Mode U/f amélioré
Suivez la procédure indiquée au paragraphe 4.4.1 ci-dessus, en remplaçant les étapes 3 et 4 par celles
indiquées ci-dessous :
3. Paramétrez le code C14 sur 6 pour sélectionner le mode Amélioré avec accroissement Umin
automatique ou sur 7 pour le mode Amélioré avec accroissement Umin constant.
4. Paramétrez les codes C88 à C90, conformément aux données de la plaque signalétique du moteur.
pendant environ 40
20
Remarque
• Si le moteur est chaud lors du calibrage du moteur, le variateur ne fournira pas
sa performance maximum.
• En modes vectoriels de vitesse ou de couple, si un démarrage de l’entraînement
est réalisé avant le calibrage du moteur, le variateur affichera un défaut
moteur ne fonctionnera pas.
et le
FRANÇAIS
Page 66

Dépannage et correction des erreurs
5 Détection et élimination des défauts
ex.
L
L
C
État Cause Solution
Fréquence de sortie actuelle Fonctionnement normal
Arrêt (sorties U, V, W inhibées) Signal BAS sur la borne 28
Inhibé (sorties U, V, W inhibées) Commande configurée pour une
Fréquence de sortie = 0 Hz
(sorties U, V, W inhibées)
Tentative de redémarrage à la
volée
Freinage par injection CC activé Freinage par injection CC activé
Calibrage du moteur en cours c48 = 1 et borne 28 = HAUT Effectuez le calibrage du moteur
Courant Limit atteint Surcharge voir code C22
Sous-tension sur le bus CC Tension réseau trop faible Vérifiez la tension du réseau
Surtension sur le bus CC en
cours de décélération
(avertissement)
Pas d’accès au code Peut être modifié uniquement lorsque
Clavier déporté activé Tentative d’utilisation des boutons
utilisation par clavier dép. ou liaison
série (code C01)
Arrêt rapide activé via l’entrée numérique ou via la liason série
c42 = 2, 3
(FCC)
• via l’entrée numérique
• automatiquement
Temps de décélération C13 ou c03
trop court
le variateur est à l’état ou .
situés sur la face avant du variateur
Démarrez le variateur via le clavier
déporté ou via la liaison série.
Désactivez l’arrêt rapide.
Désactivez le freinage par injection
CC
• entrée numérique = BAS
• automatiquement après expiration
du temps de maintien c06
uniquement lorsque C14 = 4 à 7.
Automatiquement si surtension < 1s,
U, si surtension > 1 s
Appliquez un signal BAS sur la borne
28 ou inhibez-le via la liaison série.
Les boutons situés sur la face avant
du variateur sont désactivés lorsque
le clavier déporté est actif.
FRANÇAIS
21
Page 67

Dépannage et correction des erreurs
Défaut/Erreur
Défaut du convertisseur A/C Veuillez contacter Lenze.
d
Erreur d’identification La valeur du code C93 stockée dans
Données EPM non valides
Démarrage automatique
L
inhibé
Défaut d’EPM EPM absent ou défectueux. Mettez hors tension et remplacez l’
1
Entrées numériques
mal configurées
Défaut de freinage dynamique
Défaut externe (TRIP set) Entrée numérique affectée “Mise en
Défaut interne Veuillez contacter Lenze.
0
Erreur de communication Dépassement du temps de surveillance Vérifiez la liaison série.
Erreur de communication Défaut de communication série. Veuillez contacter Lenze.
C
Défaut du clavier déporté Clavier déporté débranché. Vérifiez le câblage du clavier déporté.
Défaut d’autocalibrage du
1
moteur.
Court-circuit ou surcharge
en phase d’accélération
Mise à la terre Phase moteur mise à la terre. Vérifiez le moteur et le câble moteur.
(1) Le variateur peut être redémarré uniquement si le message de défaut a été effacé. (voir code c70).
l’EPM ne correspond pas au type de
l’appareil.
Données non valides pour la commande.
Erreur de données.
Données OEM non valides.
c42 = 0, 2 Appliquez un signal BAS-HAUT sur 28.
E1 à E4 affectées avec les mêmes
fonctions.
Utilisation uniquement de la fonction
“+vite” ou “-vite”
Les résistances de freinage dynamique
sont en surchauffe.
Défaut”, active
Tentative de calibrage du moteur avant
paramétrage des codes C86 à C91.
Court-circuit. Cherchez la raison du court-circuit ;
Courant de charge capacitif du
câble moteur trop élevé.
Temps d’accélération (C12, c01) trop
court.
Câble moteur défectueux. Changez de câble moteur
Défaut interne dans le moteur Vérifiez le câblage
Surcharge fréquente et longue. Vérifiez le dimensionnement
Courant de charge capacitif du
câble moteur trop élevé.
Cause Solution
• Utilisez un EPM ayant des données
valides.
• Chargez les réglages Lenze.
EPM.
Chaque fonction ne peut être utilisé
qu’une fois.
Attribuez la fonction manquante à une
deuxième borne.
Augmentez le temps de décélération en
C13 ou c03.
Éliminez le defaut externe.
Vous devez régler les codes C86 à C91
avant d’effectuer le calibrage du moteur
(voir code c48).
vérifiez le câble moteur.
Utilisez des câbles moteur plus courts
ou avec une capacité de charge plus
faible.
• Augmentez le temps d’accélération.
• Vériez le dimensionnement
Utilisez des câbles moteur plus courts
ou avec une capacité de charge plus
faible
(1)
22
FRANÇAIS
Page 68

Dépannage et correction des erreurs
Défaut/Erreur
Surcharge moteur
(surcharge I2t)
Défaut phase moteur Circuit ouvert sur la sortie du variateur
Surtempérature du
variateur
Surtension sur le bus CC Tension réseau trop élevée. Vérifiez la tension du réseau.
Défaut de redémarrage à
la volée
Défaut réarmement
automatique du défaut
(TRIP reset)
Défaut de consigne 4-20 mASignal 4-20 mA (borne 8I) en dessous
Défaut de phase réseau Perte d’une phase du réseau. Vérifiez la tension du réseau.
(1) Le variateur peut être redémarré uniquement si le message de défaut a été effacé. (voir code c70).
Moteur en surcharge thermique, pour
l’une des raisons suivantes :
• courant permanent inadmissible
• accélérations fréquentes ou trop
longues
ou courant moteur trop faible (C14 =
4 ou 5).
Température interne du variateur trop
élevée
Temps de décélération excessivement
court ou moteur en mode générateur.
Mise à la terre côté moteur. Vérifiez le moteur et le câble moteur
Variateur incapable de se synchroniser
avec le moteur au cours de la tentative
de redémarrage.
Plus de 8 erreurs en 10 minutes. Dépend du défaut.
de 2 mA (C34 = 5).
Cause Solution
• Vériez le dimensionnement de
l’entraînement
• Vériez le réglage du code c20.
• Raccordez un moteur à la bonne
puissance
• Vériez le moteur et le câble moteur.
• Réduisez la charge du variateur
• Améliorez le refroidissement
Nettoyez le radiateur.
Augmentez le temps de décélération ou
utilisez l’option freinage dynamique.
débranchez le moteur du variateur.
Vérifiez le moteur et la charge.
Vérifiez le signal et le fil du signal.
(1)
FRANÇAIS
23
Page 69

Notes
24
FRANÇAIS
Page 70

Indice
Osservazioni su queste istruzioni .............................................2
1 Informazioni di sicurezza .....................................................3
1.1 Pittogrammi utilizzati in queste istruzioni ..................................................4
2 Dati tecnici ............................................................................5
2.1 Standard e condizioni di applicazione .....................................................5
2.2 Classi ................................................................................................... 6
3 Installazione ..........................................................................7
3.1 Installazione meccanica ...........................................................................7
3.1.1 Dimensioni e montaggio ...........................................................................7
3.2 Installazione elettrica ................................................................................8
3.2.1 Installazione secondo i requisiti EMC .......................................................8
3.2.2 Fusibili/sezione dei cavi ...........................................................................8
3.2.3 Diagramma cablaggi ................................................................................9
3.2.4 Terminali di controllo ...............................................................................10
4 Messa in servizio ................................................................11
4.1 Impostazione dei parametri ....................................................................11
4.2 Modulo elettronico di programmazione (EPM) .......................................11
4.3 Menu parametri .......................................................................................12
4.4 Modalità vettoriale ...................................................................................20
4.4.1 Modalità velocità e coppia vettoriale ......................................................20
4.4.2 Modalità V/F avanzata ............................................................................20
5
Risoluzione dei problemi ed eliminazione dei guasti .........21
ITALIANO
1
Page 71

Osservazioni su queste istruzioni
Questa documentazione si riferisce all’inverter vettoriale Tmd, contiene informazioni tecniche importanti
e descrive installazione, funzionamento e messa in servizio.
Queste istruzioni sono valide solo per gli inverter Tmd con software rev 11 (consultare la targhetta
dell’azionamento).
Leggere le istruzioni prima della messa in servizio.
A B C D E F
For detailed information refer to
instruction manual TD03
004605460364930305
ETMD152L4TXA000XXXX
Versione Di Materiale
E
Versione Di Software
F
Tmd011
Made in USA
Certificazioni
A
Tipo
B
Type: ETMD152L4TXA
Id-No: 00000 000
IND CONT EQ
Input: Output:
3/PE
AC 400/480 V
4.8 / 4.0 A
50 / 60 Hz
Classi di rete elettrica
C
Classi di uscita
D
3/PE
AC 400/480 V
4.1 / 3.4 A
1.5 kW
0 - 240 Hz
Oggetto della spedizione Importante
• 1 Inverter vettoriale Tmd (ETMD...) con
EPM installato (vedere Sezione 4.2)
• 1 Istruzioni di funzionamento
Dopo il ricevimento della merce, controllare immediatamente se
gli articoli inviati sono conformi ai documenti di accompagnamento. Lenze non accetta alcuna responsabilità per mancanze
rivendicate in un secondo tempo.
Reclami
• immediata restituzione allo spedizioniere in presenza di danni
da trasporto visibili.
• immediata restituzione al rappresentante Lenze in caso di
mancanze/imperfezioni.
© 2004 Lenze AG
Nessuna parte di questa documentazione può essere riprodotta o resa disponibile per terze parti senza l’esplicita
autorizzazione scritta di Lenze AG.
Tutte le informazioni fornite in questa documentazione sono state attentamente selezionate e controllate per quanto
riguarda la conformità all’hardware e al software descritto. Non sono tuttavia da escludere discrepanze. Noi non assumiamo
alcuna responsabilità né alcun obbligo per eventuali danni. Tutte le necessarie correzioni saranno implementate nelle
seguenti edizioni.
2
ITALIANO
Page 72

Informazioni di sicurezza
1 Informazioni di sicurezza
Norme generali
Alcuni regolatori Lenze (inverter, servo-inverter, azionamenti in CC) durante il funzionamento possono
presentare parti sotto tensione o parti in movimento e in rotazione. Alcune parti possono essere
roventi.
La rimozione non autorizzata della necessaria copertura, l’utilizzo, l’installazione o la messa in esercizio
errati, generano rischi per gravi danni a cose e/o persone.
Tutte le operazioni che riguardano il trasporto, l’installazione e la messa in servizio, come pure la
manutenzione, devono essere eseguite da personale qualificato e competente (è necessario rispettare le
norme IEC 364 e CENELEC HD 384 o DIN VDE 0100 e IEC report 664 o DIN VDE0110 e le normative
nazionali in materia di prevenzione degli infortuni).
Secondo queste normative sulla sicurezza, il personale qualificato e competente è costituito da soggetti
che conoscono tutti gli aspetti d’installazione, di montaggio, di messa in servizio e di funzionamento del
prodotto e che hanno le qualifiche professionali necessarie per la propria professione.
Applicazione
Gli azionamenti sono componenti progettati per l’installazione in sistemi o macchinari elettrici.
Non vanno utilizzati in applicazioni domestiche Essi vanno utilizzati solo per scopi professionali e
commerciali secondo EN 61000-3-2. La documentazione include informazioni sulla conformità con
EN 61000-3-2.
Installando gli azionamenti all’interno di macchinari, la messa in servizio (ovvero l’avvio di un’operazione
indicata) è vietata salvo che il macchinario sia del tutto conforme alla Direttiva 98/37/EC (Direttiva
macchine); è necessario osservare anche la normativa EN 60204.
La messa in servizio (ovvero l’avvio di un’operazione indicata) è consentita solo in caso di conformità
alla direttiva EMC (2004/108/EEC).
Gli azionamenti soddisfano i requisiti della Direttiva Bassa Tensione 2006/95/EEC. Gli standard
armonizzati delle serie EN 61800-5-1 / DIN VDE 0160 si applicano ai regolatori.
Nota: La disponibilità dei regolatori è limitata secondo EN 61800-3. Questi prodotti possono causare
interferenze radio nelle zone residenziali. In questo caso può essere necessario adottare provvedimenti
speciali.
Installazione
Maneggiare correttamente il dispositivo ed evitare sollecitazioni meccaniche eccessive. Non piegare i
componenti e non variare le distanze di isolamento durante il trasporto o la manipolazione. Non toccare
i componenti elettronici e i contatti.
I regolatori contengono componenti sensibili alle cariche elettrostatiche, i quali possono essere facilmente
danneggiati da una manipolazione non appropriata. Non danneggiare o rovinare i componenti elettrici
perché ciò può mettere in pericolo l’incolumità personale!
Collegamenti elettrici
Operando su azionamenti sotto tensione, è necessario osservare le norme nazionali applicabili in tema
di prevenzione degli infortuni (ad es. VBG 4).
L’installazione elettrica va eseguita secondo le norme appropriate (ad es. sezione dei cavi, fusibili,
collegamento PE). È possibile ottenere ulteriori informazioni dalla documentazione che contiene dati
sull’installazione in conformità con alle norme EMC (schermatura, messa a terra, filtri e cavi). Queste
indicazioni vanno rispettate anche nel caso di regolatori marcati CE.
Il produttore dell’impianto o del macchinario è responsabile per l’osservanza dei valori limite obbligatori
richiesti dalla normativa EMC.
ITALIANO
3
Page 73

Informazioni di sicurezza
Funzionamento
I sistemi che includono i regolatori devono essere muniti di ulteriori dispositivi di sorveglianza e protezione
secondo gli standard corrispondenti (ad es. apparecchiature tecniche, norme per la prevenzione degli
infortuni, ecc.). È possibile adattare il regolatore alle proprie necessità secondo quanto descritto nella
documentazione.
PERICOLO!
• Dopo aver scollegato l’azionamento dalla tensione di alimentazione, è necessario
attendere un certo tempo prima di toccare i componenti sotto tensione e i collegamenti
dell’alimentazione, poiché i condensatori possono essere ancora carichi. Osservare
le indicazioni riportate sul regolatore.
• Non fornire potenza d’ingresso a ciclo continuo al regolatore per più di una volta ogni
tre minuti.
• Chiudere le protezioni e le ante dei quadri durante il funzionamento del
dispositivo.
Nota per sistemi omologati UL con regolatori integrati
Le avvertenze UL sono note relative ai sistemi UL. La documentazione contiene informazioni particolari
relative a UL.
• Adatto per l’uso su circuiti capaci di fornire non più di 5000 rms ampere
simmetrici, 240 V massimi (dispositivi da 240 V) o, rispettivamente, 500 V
massimi (dispositivi da 400/500 V)
Avvertenze!
1.1 Pittogrammi utilizzati in queste istruzioni
• Usare solamente lo di rame a minima 75 °C.
• Installare in macro-ambiente inquinamento Livello 2.
Pittogramma Espressione di
avvertimento
PERICOLO!
ATTENZIONE!
Nota
4
Espressione di avvertimento Conseguenze se ignorata
Pericolo di danni alle persone
dovuti a tensione elettrica
pericolosa.
Pericolo imminente o potenziale
per le persone
Possibili danni alle
apparecchiature
Suggerimento utile: se
osservato, faciliterà l’uso
dell’azionamento
Segnala un pericolo imminente, che può provocare
morte o gravi lesioni se non
vengono osservate le necessariemisure precauzionali.
Morte o lesioni
Danni all’azionamento o alle
apparecchiature circostanti
ITALIANO
Page 74

Dati tecnici
2 Dati tecnici
2.1 Standard e condizioni di applicazione
Conformità
Omologazioni
Lunghezza massima consentita cavo
(1)
motore
Squilibrio di fase tensione d’ingresso
Umidità
Frequenza di uscita
Condizioni ambientali
Intervallo di temperatura
Altitudine di installazione
Resistenza alle vibrazioni
Corrente di dispersione a terra
Allegato (EN 60529)
Misure di protezione contro
Funzionamento in reti elettriche
pubbliche
(Limitazione delle correnti armoniche
secondo EN 61000-3-2)
(1) In conformità alle norme EMC, la lunghezza consentita del cavo può variare.
(2) Le misure aggiuntive qui descritte garantiscono solo che i regolatori soddisfano i requisiti della EN 61000-3-2.
Il produttore dell’impianto o del macchinario è responsabile per l’osservanza della normativa che riguarda la macchina!
CE Direttiva Bassa Tensione (2006/95/UE)
UL 508C Underwriters Laboratories – Power Conversion Equipment
schermato: 50 m (bassa capacità)
non schermato: 100 m
< 2%
< 95% senza condensa
0...240 Hz
Classe 3K3 secondo EN 50178
Trasporto -25 … +70 °C
Stoccaggio -20 … +70 °C
Funzionamento
0 … 4000 m sul livello medio del mare (con riduzione di corrente del 5 % ogni
1000 m, oltre 1000 m sul livello medio del mare)
resistente all’accelerazione no a 0,7 g
> 3,5 mA su PE
IP 20
corto circuito, dispersione a terra, sovratensione, stallo motore o sovraccarico
motore
Potenza totale
collegata alla
< 0,5 kW Con induttanza di rete
0,5 … 1 kW Con filtro attivo (in preparazione)
> 1 kW Senza ulteriori misure
0 … +55 °C (con riduzione di corrente del 2,5 °C ogni 1°C
oltre +40 °C)
rete
Conformità ai requisiti
(2)
ITALIANO
5
Page 75

2.2 Classi
Dati tecnici
Rete elettrica
Tensione, frequenza
Corrente
(3)
[A]
Tipo
Alimentazione
[kW]
1~ 3~ 3~ 3~ 3~ 3~
ETMD371L2YXA
ETMD551L2YXA
ETMD751L2YXA
ETMD112L2YXA
ETMD152L2YXA
ETMD222L2YXA
ETMD751L2TXA
ETMD112L2TXA
ETMD152L2TXA
ETMD222L2TXA
ETMD402L2TXA
ETMD552L2TXA
ETMD752L2TXA
0,37
0,55 6,0 3,9 3,0 2,8 4,5 4,2
0,75 9,2 5,1 4,2 3,9 6,3 5,9
1,1 12,0 6,9 6,0 5,5 9,0 8,3
1,5 12,9 7,9 7,0 6,4 10,5 9,6
2,2 17,1 11,0 9,6 8,8 14,4 13,2
1/N/PE 230 V
o
3/PE 230 V
(180 V -0%…264 V +0%)
50/60 Hz
(48 Hz -0%…62 Hz +0%)
0,75
1,1 6,9 6,0 5,5 9,0 8,3
1,5 7,9 7,0 6,4 10,5 9,6
2,2 11,0 9,6 8,8 14,4 13,2
4,0 17,1 15,2 14,0 23 21
5,5 25 22 20 33 30
3/PE 230 V
(180 V -0%…264 V +0%)
50/60 Hz
(48 Hz -0%…62 Hz +0%)
7,5 32 28 26 42 39
4,7 2,7 2,4 2,2 3,6 3,3
5,1 4,2 3,9 6,3 5,9
400V 480V 400V 480V 400V 480V 400V 480V 400V 480V
ETMD371L4TXA
ETMD751L4TXA
ETMD112L4TXA
ETMD152L4TXA
ETMD222L4TXA
ETMD302L4TXA
ETMD402L4TXA
ETMD552L4TXA
ETMD752L4TXA
(1) Per tensione di rete nominale e frequenza portante di 4, 6 e 8 kHz
(2) Per tensione di rete nominale e frequenza portante di 10 kHz
(3) La corrente massima è funzione dell’impostazione c73 (scelta tensione d’ingresso)
0,37
0,75 3,0 2,5 2,5 2,1 2,3 1,9 3,8 3,2 3,5 2,9
1,1 4,3 3,6 3,6 3,0 3,3 2,8 5,4 4,5 5,0 4,2
3/PE 400/480 V
1,5 4,8 4,0 4,1 3,4 3,8 3,1 6,2 5,1 5,7 4,7
(320 V -0%…528 V +0%)
2,2 6,4 5,4 5,8 4,8 5,3 4,4 8,7 7,2 8,0 6,6
3,0 8,3 7,0 7,6 6,3 7,0 5,8 11,4 9,5 10,5 8,7
4,0 10,6 8,8 9,4 7,8 8,6 7,2 14,1 11,7 12,9 10,8
50/60 Hz
(48 Hz -0%…62 Hz +0%)
5,5 14,2 12,4 12,6 11,0 11,6 10,1 18,9 16,5 17,4 15,2
7,5 18,1 15,8 16,1 14,0 14,8 12,9 24 21 22 19,4
1,6 1,4 1,3 1,1 1,2 1,0 2,0 1,7 1,8 1,5
[A]
I
N
(1)
Corrente d’uscita
(2)
[A]
[A]
I
max
(1)
(3)
per 60 s
[A]
(2)
6
ITALIANO
Page 76

Installazione
3 Installazione
3.1 Installazione meccanica
3.1.1 Dimensioni e montaggio
a
Tipo
ETMD371L2YXA 93 84 146 128 17 100 15 50 0,6
ETMD551L2YXA, ETMD751L2_XA
ETMD112L2TXA 93 84 146 128 17 146 15 50 1,1
ETMD112L2YXA
ETMD371L4TXA...ETMD112L4TXA
ETMD152L2_XA
ETMD152L4TXA
ETMD222L2_XA
ETMD222L4TXA...ETMD402L4TXA
ETMD552L2TXA, ETMD752L2TXA
ETMD552L4TXA, ETMD752L4TXA
(1) “_” = Y o T; le dimensioni sono le stesse per entrambi i modelli
(1)
(1)
, ETMD402L2TXA
(1)
a1
[mm]
[mm]b [mm]b1 [mm]b2 [mm]c [mm]
93 84 146 128 17 120 15 50 0,9
114 105 146 128 17 133 15 50 1,4
114 105 146 128 17 171 15 50 1,9
114 105 146 100 17 171 15 50 2,0
146 137 197 140 17 182 30 100 3,4
Tmd002
s1
[mm]s2 [mm]m [kg]
ATTENZIONE!
Gli azionamenti non vanno installati in condizioni ambientali sfavorevoli quali:
presenza di combustibili, oli, vapori o polveri pericolose; umidità eccessiva; vibrazioni
o temperature superiori alla norma. Contattare Lenze per altre informazioni.
ITALIANO
7
Page 77

Installazione
3.2 Installazione elettrica
3.2.1 Installazione secondo i requisiti EMC
EMC
Conforme a EN 61800-3/A11
Emissione disturbi
La conformità ai valori limite della classe A secondo EN 55011 è garantita se il dispositivo è installato in un armadio di controllo con filtro footprint appropriato e cavo motore
non superiore a 10 m.
Morsetti per schermatura
A
Cavo di comando
B
Cavo motore a bassa capacità
C
(conduttore/conduttore < 75 pF/m, conduttore/schermatura < 150 pF/m)
Piastra di montaggio elettricamente conduttiva
D
Filtro
E
3.2.2 Fusibili/sezione dei cavi
Tipo
ETMD371L2YXA, ETMD551L2YXA M10 A C10 A 1,5 10 A 14
ETMD751L2YXA M16 A C16 A 2,5 15 A 14
1/PE
ETMD112L2YXA M20 A C20 A 2,5 15 A 12
ETMD152L2YXA M25 A C25 A 2,5 20 A 12
ETMD222L2YXA M30 A C30 A 4,0 30 A 10
ETMD371L2YXA...ETMD112L2_XA
ETMD152L2_XA
ETMD222L2_XA
ETMD402L2TXA M25 A C25 A 4,0 25 A 10
ETMD552L2TXA M40 A C40 A 6,0 35 A 8
3/PE
ETMD752L2TXA M50 A C50 A 10 45 A 8
ETMD371L4TXA...ETMD222L4TXA M10 A C10 A 1,5 10 A 14
ETMD302L4TXA M16 A C16 A 1,5 12 A 14
ETMD402L4TXA M16 A C16 A 2,5 15 A 14
ETMD552L4TXA M20 A C20 A 2,5 20 A 12
ETMD752L4TXA M25 A C25 A 4,0 25 A 10
(1) Osservare le norme locali applicabili
(2) Interruttore automatico per dispersione a terra sensibile a corrente di picco o corrente totale
(3) Sono necessari fusibili UL, classe CC o T, a rapido intervento per la limitazione di corrente, dimensionati a 200.000 AIC. Bussman
KTK-R, JJN, JJS, o equivalenti
(4) “_” = Y or T; le classi sono le stesse per entrambi i modelli con ingresso 3/PE
(4)
(4)
(4)
(1)
Installazione secondo EN 60204-1
Interruttore
Fusibile
automatico
in miniatura
M10 A C10 A 1,5 10 A 14
M16 A C16 A 1,5 12 A 14
M16 A C16 A 2,5 15 A 12
L1, L2,
L3, PE
[mm2]
Installazione secondo
Fusibile
B
C
A
UL
Interruttore
L1, L2,
(3)
L3, PE
[AWG]
differenziale
> 30 mA
E
D
Tmd005
(2)
8
ITALIANO
Page 78

Installazione
Utilizzando un interruttore differenziale osservare ciò che segue:
• Installare l’interruttore differenziale solo fra la rete di alimentazione e il regolatore.
• L’interruttore differenziale può essere attivato da:
- correnti di dispersione capacitiva tra le schermature dei cavi che si creano durante il funzionamento (soprattutto in caso di cavi motore lunghi e schermati)
- collegamento all’alimentazione di numerosi regolatori allo stesso tempo
- Filtri RFI
3.2.3 Diagramma cablaggi
1/N/PE 180V 0% 264V + 0 %
48 Hz 62 Hz
L1
L2
L3
N
PE
L2/N
L1
0 2 Nm/2 lb in
6 mm/0 24 in
< 1mm²/AWG 26 16
8U7
0 … +5 V
0 … +10 V
-10 … +10 V
PERICOLO!
• Rischio di scossa elettrica! I potenziali di circuito arrivano no a 480 VCA sulla massa
• Non collegare l’alimentazione di rete ai terminali di uscita (U,V,W)! Ciò può
• Non fornire alimentazione di rete in modo ciclico più di una volta ogni tre minuti. Ciò
2/PE 180V 0% 264V + 0 %
AIN
COM
8U
28 7
L1
L2
L3
N
PE
+10 V
9
A+ A1
48 Hz 62 Hz
L2/N
L1
COM
+12 V
+15 V
+15 V
2020
E1 E2 E3 71627 72
3/PE 180V 0% 264V + 0 %
48 Hz 62 Hz
L1
L2
L3
N
PE
L3
L1 L2
COM
AIN
COM
E4 A2
8I
3/PE 320V 0 % 528V + 0 %
L1
L2
L3
N
PE
TXB
TXA
48 Hz 62 Hz
L1 L2
U V W
L3
0 5 Nm/4 5 lb in
6 mm/0 24 in
PES
1k …10k
7
_
+12 V DC - 0 %
…
+30 V DC + 0 %
DIGOUT
28
E3 E4
E1 E2
+
DIGOUT
0 … 20 mA
4 … 20 mA
AOUT
PES
PE
M
PES
3~
PE
PES
1 2 Nm/10 lb in
9 mm/0 35 in
Tmd003
di terra. I condensatori restano carichi dopo aver tolto l’alimentazione. Togliere
l’alimentazione e attendere nché la tensione fra B+ e B- si riduce a 0 VCC prima
di intervenire sull’azionamento.
determinare gravi danni all’azionamento.
può danneggiare l’azionamento..
ITALIANO
9
Page 79

Installazione
3.2.4 Terminali di controllo
Terminale
Protezione dal contatto
Informazioni sui collegamenti di comando (caratteri in grassetto = impostazioni Lenze)
28
Ingresso digitale Abilitazione/disabilitazione
7
Riferimento comune
Ingresso analogico
8U
0 … 10 V (variabile secondo C34)
9
Alimentazione interna in CC per i dispositivi esterni +10 V, max 10 mA
A+
Uscita digitale congurabile con c17 +12 V, max 50 mA
A1
Alimentazione interna in CC per gli ingressi digitali 24 V CC / 50 mA
20
Alimentazione interna in CC per gli ingressi digitali +15 V, max 20 mA
20
Ingresso digitale congurabile con CE1
E1
Attivare velocità fissa 1 (JOG1)
Ingresso digitale congurabile con CE2
E2
Attivare velocità fissa 2 (JOG2)
Ingresso digitale congurabile con CE3
E3
Attivazione freno ad iniezione in CC (DCB)
Ingresso digitale congurabile con CE4
E4
Direzione di rotazione
A2
Uscita digitale congurabile con c18 24 V CC / 50 mA
8I Ingresso analogico (variabile secondo C34) resistenza d’ingresso: 150 Ω
7
Riferimento comune
62
Uscita analogica congurabile con c08...c11 0...10 V o 2...10 V, max. 20mA
71
Ingresso comunicazione seriale RS-485 RXB/TXB (B+)
72
Ingresso comunicazione seriale RS-485 RXA/TXA (A-)
BASSO = Disabilitato; ALTO = Abilitato
Resistenza d’ingresso = 3,3kΩ
resistenza d’ingresso: >40 kΩ
ALTO = JOG1 attivo
ALTO = JOG2 attivo
ALTO = DCB attivo
BASSO = rotazione senso orario
ALTO = rotazione senso antiorario
BASSO = 0 … +3 V, ALTO = +12 … +30 V
Entrambi ALTO =
JOG3 attivo
• Tutti i terminali possiedono un isolamento di base (distanza di isolamento singola)
• La protezione contro il contatto può essere garantita solo grazie a misure aggiuntive come
ad es. il doppio isolamento
= 3,3 kΩ
i
R
10
ITALIANO
Page 80

Messa in servizio
4 Messa in servizio
4.1 Impostazione dei parametri
Messaggi di stato/guasto Modificare i parametri
Nota
Se la funzione password è abilitata, è necessario immeterla in C00 per
accedere ai parametri. C00 non appare a meno che la funzione password
non sia abilitata. Vedere C94.
Tmd004
4.2 Modulo elettronico di programmazione (EPM)
L’EPM contiene la memoria del regolatore. Tutte le variazioni di impostazione dei
parametri sono memorizzate nell’EPM. Il modulo può essere rimosso, ma la sua
assenza impedisce il funzionamento del regolatore (la mancanza dell’EPM fa scattare
Tmd007
È disponibile su richiesta un programmatore EPM (modello ESMD01EP; manuale EP03) che consente
di: programmare il regolatore senza fornirgli alimentazione; rendere predefinite le impostazioni OEM;
copiare rapidamente le impostazioni dell’EPM quando più regolatori richiedono le stesse impostazioni.
Esso può anche conservare no a 60 le di parametri personalizzati per programmare più velocemente
i regolatori.
un errore ). Il regolatore viene spedito con l’EPM protetto da un nastro adesivo da
rimuovere dopo l’installazione.
ITALIANO
11
Page 81

Messa in servizio
4.3 Menu parametri
Codice Impostazioni possibili
No. Nome Lenze Selezione
Immettere password 0 0 999 Visibile solo quando la password è attiva
Origine setpoint e
1
controllo
Caricare impostazioni
2
Lenze
0 Origine velocità/coppia: Controllo configurazione:
0 Ingresso analogico
(8U o 8I; vedere C34)
1 Codice c40 / Codice C47
2 Ingresso analogico
(8U o 8I; vedere C34)
3 LECOM Controllo = LECOM
4 Ingresso analogico
(8U o 8I; vedere C34)
5 Codice c40 / Codice C47
6 Ingresso analogico
(8U o 8I; vedere C34)
7 Codice c40 / Codice C47
8 Ingresso analogico (8U o 8I; vedere
C34)
9 Codice c40 / Codice C47
10 Ingresso analogico
(8U o 8I; vedere C34)
11 Codice c40 / Codice C47
Nota
• Quando C01 = 1, 5, 7, 9, o 11 e C14 = 0...4, 6, 7, usare c40 per setpoint velocità
• Quando C01 = 1, 5, 7, 9, o 11 e C14 = 5, usare C47 per setpoint coppia
• Quando origine velocità/coppia = LECOM (3), impostare comando di velocità a C46 o
comando di coppia a C47.
0 Nessuna azione/caricamento completo • C02 = 1, 2, 3 possibile solo con
1 Caricare le impostazioni Lenze 50Hz
2 Caricare le impostazioni Lenze 60Hz
3 Caricare le impostazioni OEM
(se presenti)
ATTENZIONE!
C02 = 1...3 sovrascrive tutte le impostazioni! L’elettronica TRIP può essere disabilitata!
Controllare i parametri CE1 ... CE4.
(vedere C94)
Controllo = terminali
Programmazione = tastierino
Monitoraggio = LECOM
Controllo = terminali
Programmazione = LECOM/tastierino
Monitoraggio = LECOM
Programmazione = LECOM/tastierino
Monitoraggio = LECOM
Controllo = terminali
Programmazione = teletastierino
Monitoraggio = teletastierino
Controllo = teletastierino
Programmazione = teletastierino
Monitoraggio = teletastierino
Controllo = terminali
Programmazione = Modbus/tastierino
Monitoraggio = Modbus
Controllo = Modbus
Programmazione = Modbus/tastierino
Monitoraggio = Modbus
• C02 = 2: C11, C15 and C89 = 60 Hz
IMPORTANTE
o
and C87 = 1750RPM
12
ITALIANO
Page 82

Messa in servizio
Codice Impostazioni possibili
No. Nome Lenze Selezione
Configurazione -
Ingresso digitale E1
Configurazione -
Ingresso digitale E2
Configurazione -
Ingresso digitale E3
Configurazione -
Ingresso digitale E4
Indirizzo rete 1 1 247 Ogni regolatore sulla rete deve avere un
Frequenza minima
di uscita
Frequenza massima
C
di uscita
Tempo di
accelerazione 1
Tempo di
decelerazione 1
1 1 Attivare velocità fissa 1 (JOG1)
2 Attivare velocità fissa 2 (JOG2)
3 Frenatura in CC (DCB) vedere anche C36
4 Direzione di rotazione BASSO = rotazione senso orario
2
5 Arresto rapido Decelerazione controllata fino all’arresto,
6 Rotazione senso orario
7 Rotazione senso antiorario
3
8 UP (alza setpoint)
9 DOWN (cala setpoint)
10 Impostazione TRIP
4
11 Ripristino TRIP vedere anche c70
12 Accel/decel 2 vedere c01 e c03
Nota
Nelle seguenti condizioni si avrà un errore
• Le impostazioni E1...E4 sono duplicate (ogni impostazione può essere usata una volta
sola)
• Un ingresso è impostato ALTO e un altro non è impostato BASSO o viceversa
0,0 0,0 {Hz} 240 • Frequenza di uscita al setpoint analogico
50,0 7,5 {Hz} 240 • Frequenza di uscita al setpoint analogico
ATTENZIONE!
Consultare il produttore dell’impianto o del macchinario prima di agire sulla frequenza
nominale suindicata Una velocità superiore alla norma del motore/macchinario può
causare danni all’apparecchiatura e lesioni al personale!
5,0 0,0 {s} 999 • C12 = variazione della frequenza da 0 Hz
5,0 0,0 {s} 999
Attivare JOG3: Entrambi i terminali = ALTO
ALTO = rotazione senso antiorario
attivo BASSO; impostare tasso di
decelerazione in C13
Rotazione senso orario = BASSO e
rotazione senso antiorario = BASSO: Arresto
rapido; protetta contro circuito aperto
UP = BASSO e DOWN = BASSO: Arresto
rapido; usa il contatto NC (normalmente
chiuso) temporaneo
Attivare BASSO, innesca
(Il motore decelera ino all’arresto)
NOTA: Il contatto termico NC dal motore
può essere utilizzato per attivare questo
ingresso
:
indirizzo univoco
0%
• C10 non attivo per le velocità sse o per la
scelta del setpoint tramite c40
100%
• C11 non è mai superato
a C11
• C13 = variazione della frequenza da
C11 a 0 Hz
• Per accel./decel. rampa S, regolare c82
IMPORTANTE
ITALIANO
13
Page 83

Messa in servizio
Codice Impostazioni possibili
No. Nome Lenze Selezione
Modalità operativa 2 0 Caratteristica lineare con
Punto di riferimento V/f 50,0 25,0 {Hz} 999
Boost V
min
(ottimizzazione del
comportamento di
coppia)
Valore soglia di
7
frequenza (Q
Frequenza di chopper 2 0 4 kHz • Man mano che la frequenza di chopper
)
min
Auto-boost
1 Caratteristica quadratica con
Auto-boost
2 Caratteristica lineare con boost
costante
V
min
3 Caratteristica quadratica con boost
costante
V
min
4 Controllo di velocità vettoriale • Controllo di velocità vettoriale: per
5 Controllo di coppia vettoriale • Controllo di coppia vettoriale: per
6 Caratteristica lineare avanzata con
Auto-boost
7 Caratteristica lineare avanzata con
Nota
• Impostazioni 4...7 richiedono la calibrazione del motore con c48
• Le impostazioni 4 e 5 richiedono la corretta impostazione di C87...C91 prima della
calibrazione
• Le impostazioni 6 e 7 richiedono la corretta impostazione di C88...C90 prima della
calibrazione
Impostare la frequenza nominale del
motore (targhetta) per applicazioni
standard
0,0 {%} 40,0
C16 non attivo nella modalità vettoriale
(vedere C14)
Impostare dopo messa in servizio: il motore
senza carico deve girare alla frequenza di
scorrimento (circa 5 Hz), aumentare C16
nché la corrente motore (C54) = 0,8 x
corrente nominale motore
0,0 0,0 {Hz} 240
1 6 kHz
2 8 kHz
3 10 kHz
boost V
costante
min
• Caratteristica lineare: per applicazioni
• Caratteristica quadratica: per ventilatori
• Auto boost: tensione di uscita dipendente
• Per applicazioni a motore singolo o
Vedere c17 w c18, scelta 7
• Osservare la riduzione nella Sezione 2.2
• Riduzione automatica a 4 kHz a 1,2 x I
IMPORTANTE
standard
e pompe con caratteristica di carico
quadratica
dal carico per attività a bassa perdita
applicazioni a motore singolo che
richiedono coppia di avvio più alta e
regolazione migliore della velocità
applicazioni a motore singolo che
richiedono controlli di coppia e di velocità
indipendenti
multiplo che richiedono prestazioni migliori
rispetto alle impostazioni 0...3, ma che
non possono operare nella modalità
vettoriale
aumenta, diminuisce l’emissione disturbi
del motore
smd006
r
14
ITALIANO
Page 84

Messa in servizio
Codice Impostazioni possibili
No. Nome Lenze Selezione
Compensazione di
scorrimento
Limite di corrente 200 30 {%} 200
Boost accel. 0,0 0,0 {%} 20,0 Boost accel. è attivo solo durante
Configurazione -
Ingresso analogico
Tensione - Freno ad
iniezione in CC (DCB)
Velocità fissa 1
(JOG 1)
Velocità fissa 2
(JOG 2)
Velocità fissa 3
(JOG 3)
Setpoint frequenza 0,0 {Hz} 240 Schermo: Setpoint tramite ingresso
Limite/setpoint di
C
coppia
Frequenza di uscita 0,0 {Hz} 240 Schermo
Tensione del motore 0 {V} 999 Schermo
Tensione stadio in CC 0 {V} 999 Schermo
Coppia del motore 0,0 {A} 400 Schermo
0,0 0,0 {%} 40,0
C21 non attivo nella modalità vettoriale
(vedere C14)
Riferimento: corrente di uscita nominale Tmd
0 0 0...10 V • Riferimento tensione applicato a 8U
1 0...5 V
2 -10...+10 V
3 0...20 mA • Riferimento di corrente applicato a 8I
4 4...20 mA
5 4...20 mA monitorato
ATTENZIONE!
Un calo nella tensione di riferimento può ridurre la velocità del motore del 5% (0.05xC11),
se si utilizza un riferimento di 10...+10V (C34=2).
Nota
Quando C34 = 2:
• La rotazione è determinata dalla polarità del segnale -10...+10 V:
+0.1...+10 V = CW e -0.1...-10 V = CCW (tutti gli altri comandi sono disabilitati)
• C11 imposta la frequenza massima in entrambe le direzioni (C10 non è attivo)
• CE1...CE4 = 6 o 7 avvierà solo il regolatore, senza selezionare la rotazione
4,0 0,0 {%} 50,0 • Vedere CE1...CE4 e c06
20,0 0,0 {Hz} 240 Impostazione Lenze: attivo a E1 = ALTO
30,0 0,0 {Hz} 240 Impostazione Lenze: attivo a E2 = ALTO
40,0 0,0 {Hz} 240 Impostazione Lenze: attivo a E1 = ALTO e
100 0 {%} 400 • Quando C14 = 5 e C01 = 1, 5, 7, 9, 11,
Variare C21 finché la velocità del motore
non cambia più tra nessun carico e carico
massimo
• Quando viene raggiunto il valore limite
aumenta il tempo di accelerazione oppure
diminuisce la frequenza di uscita.
• Quando c73 = 0, impostazione max è
167%
l’accelerazione
• Tmd non fornisce - alimentazione 10 V
per C34 = 2
• C34 = 2 disabled in vector torque mode
• C34 = 5 attiverà un errore
segnale scende sotto 2 mA
• Confermare l’idoneità del motore per l’uso
con frenatura in CC
E2 = ALTO
analogico, funzione ALTO/BASSO o LECOM
impostare l’intervallo setpoint
• Quando C14 = 5 e C01 = 0, 2, 4, 6, 8, 10,
impostare l’intervallo di coppia per C34
IMPORTANTE
se il
ITALIANO
15
Page 85

Messa in servizio
Codice Impostazioni possibili
No. Nome Lenze Selezione
Carico del regolatore 0 {%} 255 Schermo
Coppia di torsione Del
7
Motore
Temperatura del
1
dissipatore
Guadagno di anello
controllo di velocità
vettoriale
Stabilità velocità
vettoriale
Guadagno I
7
7
1
(1) Modificare queste impostazioni può influenzare in modo negativo le prestazioni. Contattare l’assistenza tecnica Lenze prima di eseguire
delle modifiche.
max
Tempo di azione
completo
Resistenza statore del
motore
Motor rated power 0,00 {kW} 99,9 • Impostare secondo i kW del motore
Velocità nominale del
motore
Corrente nominale del
motore
Frequenza nominale
del motore
Tensione nominale del
motore
Coseno fi del motore 0,80 0,40 1,00 Impostare secondo il fattore di potenza del
Induttanza dello
statore del motore
Identicazione
dell’azionamento
0 {%} 400 Schermo: solo modalità vettoriale
0 {C} 255 Schermo
30,0 0,0 100 Ottimizza le prestazioni dinamiche nella
30,0 0,0 100 Ottimizza la stabilità della velocità a regime
0,25 0,00 16,0 Per la maggior parte delle applicazioni, non
65 12 {ms} 9.990
0,00 0,00 {Ω} 64,0 Sarà automaticamente programmata da
1390 300 {RPM} 65.000 Impostare secondo la velocità indicata del
0,0 0,0 {A} 480 Impostare secondo la corrente del motore
50 10 {Hz} 999 Impostare secondo la frequenza del motore
0 0 {V} 600 Impostare secondo la tensione del motore
Nota
Se il fattore di potenza del motore è sconosciuto, usare la seguente formula:
coseno = Watts motore / (efcienza motore X C90 X C88 X 1,732)
cos phi = cos [ sin
0,0 0,0 {mH} 2000 Sarà automaticamente programmata da
1
(corrente magnetizzante / corrente motore) ]
(C14 = 4, 5)
modalità vettoriale
in modalità vettoriale
c’è necessità di modificare le impostazioni
Lenze (1)
c48
• Impostazione Lenze = kW nominali = Tmd
motore riportata in targhetta
riportata in targhetta
riportata in targhetta
riportata in targhetta
motore
c48 (1)
• indica la classe del regolatore, nel
• x o x. = tensione (2. = 1/PE 200/240 V;
• yz o y.z = classe kW
Esempi:
2.0.3 = 200/240 V, 1~, 0,37 kW
47,5 = 400/480 V, 3~, 7,5 kW
IMPORTANTE
(1)
riportati in targhetta
formato: xyz, xy.z, x.yz, o x.y.z
2 = 3/PE 200/240 V; 4 = 3/PE 400/480 V)
16
ITALIANO
Page 86

Messa in servizio
Codice Impostazioni possibili
No. Nome Lenze Selezione
Password utente 0 0 999
Versione del software
Tempo di
accelerazione 2
Tempo di
decelerazione 2
Tempo di tenuta
- freno ad iniezione
in CC automatico
(Auto-DCB)
Scalatura uscita
analogica
Configurazione - uscita
analogica (62)
Configurazione Uscita digitale (A1)
Configurazione Uscita digitale (A2)
Cambiando da “0” (nessuna password), il
valore partirà da 763
5,0 0,0 {s} 999 • Attivato con CE1...CE4
5,0 0,0 {s} 999
0,0 0,0 {s} 999
0,0 = non attivo
999 = frenatura costante
100 0,0 999 Quando l’uscita al terminale 62 è pari a
0 0 Nulla
1 Frequenza di uscita 0-10 VCC Usare c08 per scalare il segnale
2 Frequenza di uscita 2-10 VCC
3 Carico 0-10 VCC
4 Carico 2-10 VCC
5 Frenatura dinamica Usata solo con l’opzione DB
0
L’uscita è sotto tensione se
0 Pronto
1 Guasto
2 Motore avviato
3 Motore avviato - Rotazione senso
orario
1
4 Motore avviato - Rotazione senso
antiorario
5 Frequenza di uscita = 0 Hz
6 Setpoint frequenza raggiunto
7 Valore soglia di frequenza (C17)
superato
8 Limite di corrente (modalità motore o
generatore) raggiunto
IMPORTANTE
Quando il valore impostato è diverso da 0, è
necessario inserire una password a C00 per
accedere ai parametri
Schermo, formato: x.yz
• c01 = variazione della frequenza da 0 Hz
a C11
• c03 = variazione della frequenza da C11 a
0 Hz
• Per accel./decel. rampa S, regolare c82
• Frenatura automatica del motore dopo
tramite corrente motore in CC per
tutto il tempo di tenuta (in seguito: U, V, W
inibite)
• Confermare l’idoneità del motore per l’uso
con frenatura in CC
10 VCC, essa sarà pari a questo valore
(vedere c11)
Esempio: c11 = 1 e c08 = 100:
A 50 Hz, terminale 62 = 5 VCC
A 100 Hz, terminale 62 = 10 VCC
ITALIANO
17
Page 87

Messa in servizio
Codice Impostazioni possibili
No. Nome Lenze Selezione
I2t disattivato
(monitoraggio termico
del motore)
Velocità trasmissione
dati seriale
Setpoint frequenza
tramite tasti
o Modbus
Condizione di avvio
(con alimentazione
fornita)
Scelta riavvio al volo 0 0 Intervallo di ricerca: C11...0 Hz Se c42 = 2 o 3, il regolatore avvierà la
Auto-calibrazione del
motore
Selezione modalità
6
per c61
100
30 {%} 100
100% = corrente di uscita nominale Tmd
ATTENZIONE!
L’impostazione massima corrisponde alla corrente nominale del motore (consultare la
targhetta). Non fornisce completa protezione al motore!
0 0 LECOM: 9600 bps
Modbus: 9600,8,N,2
1 LECOM: 4800 bps
Modbus: 9600,8,N,1
2 LECOM: 2400 bps
Modbus: 9600,8,E,1
3 LECOM: 1200 bps
Modbus: 9600,8,O,1
0,0 0,0 {Hz} 240 Attivo solo se C01 è correttamente
1 0 Avvio dopo variazione BASSO-ALTO
al terminale 28
1 Avvio automatico se il terminale 28 =
ALTO
2 Riavvio al volo (avvio automatico
disabilitato)
3 Avvio automatico se il terminale
28 = ALTO, con riavvio al volo
ATTENZIONE!
L’avvio/riavvio automatico può causare danni alle apparecchiature e/o lesioni al
personale! L’avvio/riavvio automatico deve essere utilizzato solo su apparecchiature
inaccessibili al personale.
1 Intervallo di ricerca: ultima
frequenza...0 Hz
0 0 Calibrazione non effettuata • Se C14 = 4...7, la calibrazione del
1 Calibrazione abilitata
2 Calibrazione completa
0 0 Solo monitoraggio c60 = 1 consente la regolazione del setpoint
1 Monitoraggio e modifica
• Attiva un errore
• Impostazione attuale = (corrente del
• Esempio: 6,4 A e Tmd = 7 A;
• Vedere C01
• LECOM se C01 = 0 a 3
• Modbus se C01 = 8 a 11
impostato (C01 = 1,5,7,9,11)
Vedere anche c43 e c70
ricerca di velocità del motore a C11 o
almeno all’ultima frequenza di uscita prima
del guasto, secondo l’impostazione di c43
• Se si tenta di calibrare il motore prima
velocità (c40) tramite i tasti , durante il
monitoraggio di c61
IMPORTANTE
del motore supera questo valore troppo a
lungo
motore riportata in targhetta) / (corrente di
uscita nominale Tmd ) X 100%
impostazione corretta = 91%
(6,4 / 7 = 0,91 x 100% = 91%)
motore va eseguita, ma è necessario
programmare prima C87...C91 (vedere
C14)
di programmare C87...C91, si attiva un
errore
0 quando la corrente
18
ITALIANO
Page 88

Messa in servizio
Codice Impostazioni possibili
No. Nome Lenze Selezione
Stato/errore attuale messaggio di stato/errore • Schermo
Ultimo errore messaggio d’errore
Penultimo errore
Terzultimo errore
Configurazione
7
ripristino TRIP
(azzeramento errore)
Ritardo su ripristino
7
TRIP automatico
Scelta tensione di
7
ingresso
Contatore tempo
7
operativo
Istruzioni di
7
funzionamento
Tempo di integrazione
rampa S
Frequenza di salto 1 0,0 0,0 {Hz} 240 • L25 e L26 deniscono l’avvio
Frequenza di salto 2 0,0 0,0 {Hz} 240
Larghezza di banda
della frequenza di
salto
Stato di accensione
LECOM
Azione a seguito
di time-out
comunicazione seriale
Tempo di errore seriale 50 50 {ms} 65535 Imposta la lunghezza di sospensione seriale
0 0 Ripristino TRIP dopo variazione
BASSO-ALTO al terminale 28,
commutazione della rete, o dopo
variazione BASSO-ALTO all’ingresso
digitale “Ripristino TRIP”
1 Ripristino TRIP automatico • Ripristino TRIP automatico dopo il tempo
ATTENZIONE!
L’avvio/riavvio automatico può causare danni alle apparecchiature e/o lesioni al
personale! L’avvio/riavvio automatico deve essere utilizzato solo su apparecchiature
inaccessibili al personale.
0,0 0,0 {s} 60,0 Vedere c70
0 0 Bassa (per tensione di ingresso di
200 V o 400 V)
1 Alta (per tensione di ingresso di
230 V o 480 V)
Schermo
Tempo totale in stato di “Avvio”
Schermo
Tempo totale di rete = collegata
0,0 0,0 {s} 50,0 • c82 = 0: Rampa lineare accel./decel.
0,0 0,0 {Hz} 10,0
Nota
Larghezza di banda (Hz) = fs (Hz) + L28 (Hz) fs = L25 o L26
Esempio: L25 = 18 Hz e L28 = 4 Hz; larghezza di banda = 18...22 Hz
0 Arresto rapido
0
1 Inibizione
0 Non attivo
0
1 Inibizione
2 Arresto rapido
3 Errore Trip
• Consultare la Sezione 5 per la
spiegazione dei messaggi di stato e di
errore
impostato in c71
• Più di 8 errori in 10 minuti attiveranno un
errore
• Le impostazioni Lenze dipendono da C93
• Durante la messa in servizio, confermare
l’impostazione corretta secondo la
tensione di rete
0…999 ore: formato xxx
1000…9999 ore: formato x.xx (x1000)
10000…99999 ore: formato xx.x (x1000
• c82 > 0,0: regola la curva della rampa a S
per ottenere una rampa più dolce
dell’intervallo di salto
• L28 denisce la larghezza di banda
dell’intervallo di salto
Seleziona la reazione del regolatore alla
sospensione seriale
IMPORTANTE
t
ITALIANO
19
Page 89

Messa in servizio
4.4 Modalità vettoriale
Usare le seguenti procedure per selezionare la modalità vettoriale o la modalità V/F avanzata. La
modalità V/F avanzata dev’essere utilizzata nei seguenti casi:
1. Applicazioni con più motori
2. Informazioni richieste sul motore non disponibili (soprattutto C91)
3. Modalità vettoriale che causa funzionamento instabile del motore
4.4.1 Modalità velocità e coppia vettoriale
1. Collegare il regolatore al motore secondo il diagramma nella Sezione 3.2.3.
2. Fornire alimentazione al regolatore.
3. Impostare C14 a 4 per la modalità velocità vettoriale oppure a 5 per la modalità coppia vettoriale.
4. Impostare C87...C91 secondo i dati riportati sulla targhetta del motore.
5. Impostare C48 per abilitare la funzione di calibrazione del motore.
6. Vericare che il motore sia freddo (il rotore e gli avvolgimenti sono alla temperatura ambiente di
20-25°C) e applicare un segnale ALTO al terminale 28. Lo schermo mostrerà la scritta L per
circa 40 secondi. Una volta ultimata la calibrazione, lo schermo mostrerà la scritta oppure .
Applicare un altro segnale ALTO al terminale 28 per avviare realmente il motore.
4.4.2 Modalità V/F avanzata
Seguire la procedura succitata in 4.4.1, sostituendo le fasi 3 e 4 con quelle seguenti:
3. Impostare C14 a 6 per avanzata con auto-boost oppure a 7 per avanzata con boost costante.
4. Impostare C88...C90 secondo i dati riportati sulla targhetta del motore.
Nota
• Se il motore è rovente dopo la calibrazione, il regolatore non sarà in grado di
raggiungere le prestazioni massime.
• Nelle modalità velocita e coppia vettoriale, se si tenta di avviare il regolatore prima
di eseguire la calibrazione del motore, il regolatore visualizzerà la scritta
motore non entrerà in funzione.
1 e il
20
ITALIANO
Page 90

Risoluzione dei problemi ed eliminazione dei guasti
5
1
d
(1) Il regolatore può essere riavviato solo dopo l’azzeramento del messaggio d’errore; vedere c70
Risoluzione dei problemi ed eliminazione dei guasti
e.g.
L
L
F
Stato Causa Rimedio
Frequenza di uscita attuale Funzionamento privo di anomalie
Arresto (uscite U, V, W inibite) Segnale BASSO al terminale 28 Impostare il terminale 28 su ALTO
Inibito (uscite U, V, W inibite) Il regolatore è impostato per i comandi
Frequenza di uscita = 0 Hz
(uscite U, V, W inibite)
Tentativo di Riavvio al volo c42 = 2, 3
Freno ad iniezione in CC
attivo
Calibrazione del motore in
corso
Limite di corrente raggiunto Sovraccarico regolabile Automaticamente (vedere C22)
Sottotensione sullo stadio
in CC
Sovratensione sullo stadio in
CC durante la decelerazione
(attenzione)
Nessun accesso al codice Può essere modificato solo quando il
Teletastierino attivo Tentativo di usare i tasti sul pannello
Errore Causa Rimedio
Errore convertitore A/D Contattare Lenze
Errore di identificazione Il valore C93 memorizzato sull’EPM
Dati non validi su EPM
(modulo elettronico programmabile)
Avvio automatico inibito c42 = 0, 2 Variazione del segnale BASSO-ALTO
Errore EPM EPM mancante o difettoso Spegnere e sostituire l’EPM
Ingressi digitali non
assegnati in modo univoco
Guasto frenatura dinamica Le resistenze della frenatura dinamica
da teletastierino o da controllo seriale
(vedere C01)
Arresto rapido attivato tramite ingresso
digitale o collegamento seriale
Freno ad iniezione in CC attivato
• tramite ingresso digitale
• automaticamente
c48 = 1 e terminale 28 = ALTO Eseguire la calibrazione del motore
Tensione di rete troppo bassa Controllare la tensione di rete
Tempo di decelerazione troppo breve
(C13, c03)
regolatore è o
frontale del regolatore
non è coerente con il modello di
regolatore
Dati non validi per il regolatore
Errore nei dati
Dati OEM non validi
E1...E4 hanno ricevuto gli stessi
segnali digitali
“UP” e “DOWN” usati contemporaneamente
si stanno surriscaldando
Avviare il regolatore tramite teletastierino o collegamento seriale
Disattivare arresto rapido
Disattivare freno ad iniezione in CC
• Ingresso digitale = BASSO
• automaticamente dopo la ne del
tempo di tenuta c06
solo quando C14 = 4...7
Automaticamente se la sovratensione è
< 1 s, , se la sovratensione è > 1 s
Impostare il terminale 28 su BASSO
o inibire tramite collegamento seriale
I tasti sul pannello frontale del
regolatore sono disabilitati quando il
teletastierino è attivo
• Usare EPM con dati validi
• Caricare impostazioni Lenze
al terminale 28
Ogni segnale digitale può essere usato
una volta sola
Assegnare il segnale digitale
mancante ad un secondo terminale
Aumentare il tempo di decelerazione
ITALIANO
(1)
21
Page 91

Risoluzione dei problemi ed eliminazione dei guasti
Errore Causa Rimedio
Errore esterno Ingresso digitale “Impostazione TRIP”
EEr
Guasto interno Contattare Lenze
F2...F0
Errore di comunicazione Temporizzatore seriale messo in
FC3
Errore di comunicazione Errore della comunicazione seriale Contattare Lenze
FC5
Guasto del teletastierino Teletastierino scollegato Controllare il collegamento del
JF
Errore di identificazione
n1d
azionamento
Corto circuito o sovraccarico Corto circuito Trovare la causa del corto circuito;
0C1
Dispersione a terra Fase motore a terra Controllare motore e relativo cavo
0C2
Sovraccarico del motore
0C6
(sovraccarico I2t)
Perdita di fase motore Circuito aperto sull‘uscita del
LP1
Surriscaldamento del
0H
regolatore
Sovratensione sullo stadio
OU
in CC
Errore riavvio al volo Il regolatore non è stato in grado di
rF
Errore Azzeramento TRIP
rSt
automatico
Perdita del riferimento di
Sd5
4-20 mA
Guasto su fase singola Persa una fase di rete Controllare la tensione di rete
SF
(1) Il regolatore può essere riavviato solo dopo l’azzeramento del messaggio d’errore; vedere c70
22
attivo
sospensione
Tentativo di eseguire la calibrazione del
motore prima di impostare C87...C91
Eccessiva corrente di carica capacitica
sul cavo motore
Tempo di accelerazione (C12, c01)
troppo breve
Cavo motore difettoso Controllare i collegamenti
Difetto interno in motore Controllare il motore
Sovraccarico frequente e di lunga durata
Eccessiva corrente di carica capacitica
sul cavo motore
Sovraccarico termico del motore
dovuto a:
• corrente continua inammissibile
• procedure di accelerazione frequenti
o troppo prolungate
regolatore in modalità vettoriale
(C14 = 4, 5)
Temperatura interna del regolatore
troppo elevata
Tensione di rete troppo elevata Controllare la tensione di rete
Tempo di decelerazione troppo breve o
motore in modalità generatore
Dispersione a terra sul lato motore Controllare motore e relativo cavo
sincronizzarsi col motore durante il
tentativo di riavvio
Più di 8 errori in 10 minuti Dipende dall’errore
Segnale da 4-20 mA (terminale 8I)
inferiore a 2 mA (C34 = 5)
ITALIANO
Rimuovere errore esterno
Controllare le connessioni del
collegamento seriale
teletastierino
È necessario impostare C87...C91
prima di eseguire la calibrazione del
motore (vedere c48)
controllare il cavo motore
Utilizzare cavi motore più corti, con
corrente di carica inferiore
• Aumentare il tempo di accelerazione
• Controllare la scelta del regolatore
Controllare la scelta del regolatore
Utilizzare cavi motore più corti, con
corrente di carica inferiore
• Controllare la scelta del regolatore
• Controllare l’impostazione di c20
• Il motore va collegato in modalità
vettoriale
• Controllare motore e relativo cavo
• Ridurre il carico del regolatore
• Migliorare il raffreddamento
Aumentare il tempo di decelerazione o
usare l’opzione frenatura dinamica
(separare il motore dal regolatore)
Controllare il motore/carico
Controllare il segnale e il relativo
conduttore
(1)
Page 92

Contenido
Acerca de estas instrucciones ...................................................2
1 Información de seguridad ...................................................3
1.1 Pictogramas utilizados en estas instrucciones .........................................4
2 Datos técnicos ......................................................................5
2.1 Normas y condiciones de aplicación .......................................................5
2.2 Regímenes ................................................................................................6
3 Instalación .............................................................................7
3.1 Instalación mecánica ................................................................................7
3.1.1 Dimensiones y montaje .............................................................................7
3.2 Instalación eléctrica ..................................................................................8
3.2.1 Instalación según los requisitos EMC .......................................................8
3.2.2 Secciones de fusibles/cables ...................................................................8
3.2.3 Diagrama de conexión .............................................................................9
3.2.4 Terminales de control .............................................................................10
4 Puesta en servicio ..............................................................11
4.1 Ajuste de los parámetros ........................................................................11
4.2 Módulo de programación electrónico (MPE) ..........................................11
4.3 Menú de parámetros ..............................................................................12
4.4 Modo Vector ...........................................................................................20
4.4.1 Modos Velocidad de vector y Par de vector ..........................................20
4.4.2 Modo V/Hz mejorado ..............................................................................20
5 Solución de problemas y eliminación de fallos ..............21
ESPANOL
1
Page 93

Acerca de estas instrucciones
Esta documentación se aplica al convertidores de frecuencia de vectorial Tmd, y contiene importantes
datos técnicos y describe la instalación, el funcionamiento y la puesta en servicio.
Estas instrucciones sólo son válidas para inversores de frecuencia Tmd con software rev 11
(véase la placa del controlador).
Lea las instrucciones antes de la puesta en servicio del producto.
A B C D E F
For detailed information refer to
instruction manual TD03
004605460364930305
ETMD152L4TXA000XXXX
Versión de Hardware
E
Versión de Software
F
Tmd011
Made in USA
Certificaciones
A
Tipo
B
Type: ETMD152L4TXA
Id-No: 00000 000
IND CONT EQ
C
D
Input: Output:
3/PE
AC 400/480 V
4.8 / 4.0 A
50 / 60 Hz
3/PE
AC 400/480 V
4.1 / 3.4 A
1.5 kW
0 - 240 Hz
Valores nominales de entrada
Valores nominales de salida
Contenido de la entrega Importante
• 1 convertidor vectorial Tmd (ETMD...)
con MPE instalado (véase la sección
4.2)
• 1 manual de instrucciones de
funcionamiento
© 2004 Lenze AG
Queda prohibida la copia o transmisión a terceros de ninguna parte de esta documentación sin la aprobación explícita
por escrito de Lenze AG.
Toda la información proporcionada en esta documentación ha sido cuidadosamente seleccionada y comprobada conforme al
hardware y software descritos. Sin embargo, no se pueden descartar discrepancias. No aceptamos ninguna responsabilidad
por daños que puedan producirse. En ediciones posteriores se realizará cualquier corrección necesaria.
Tras recibir la entrega, compruebe inmediatamente si los
elementos entregados coinciden con la documentación adjunta.
Lenze no acepta ninguna responsabilidad por deficiencias
reclamadas posteriormente.
Reclamación
• comunique cualquier daño de transporte visible
inmediatamente a la empresa de transporte.
• comunique cualquier deciencia/falta de componentes
inmediatamente al representante de Lenze.
2
ESPANOL
Page 94

Información de seguridad
1 Información de seguridad
General
Algunas piezas de los controladores Lenze (convertidores de frecuencia, servo-convertidores,
controladores de CC) pueden estar alimentadas, en movimiento o girando. Algunas superficies pueden
estar calientes.
La retirada no autorizada de la cubierta necesaria, el uso inadecuado y la instalación o utilización
incorrectas representa un riesgo de lesiones graves para el personal o daños en el equipo.
Todas las operaciones relacionadas con el transporte, la instalación y la puesta en servicio, así como
el mantenimiento, deben ser realizadas por personal cualificado experto (se deben cumplir las normas
IEC 364 y CENELEC HD 384 o DIN VDE 0100 y el informe IEC 664 o DIN VDE0110 y las normas
nacionales sobre la prevención de accidentes).
De acuerdo con esta información de seguridad básica, el personal cualificado experto está formado por
personas que están familiarizadas con la instalación, el montaje, la puesta en servicio y el funcionamiento
del producto, y que tienen las cualificaciones necesarias para su puesto.
Aplicación específica
Los controladores de transmisión son componentes diseñados para la instalación en sistemas eléctricos
o maquinaria. No están destinados a ser utilizados como aparatos. Están dirigidos exclusivamente a
fines profesionales y comerciales según la norma EN 61000-3-2. La documentación incluye información
sobre el cumplimiento de la norma EN 61000-3-2.
Cuando instale los controladores de transmisión en máquinas, está prohibido poner en servicio (es
decir, el inicio del funcionamiento de la forma indicada) la máquina hasta que se demuestre que la
máquina cumple las normas de la Directiva de la CE 98/37/EC (Directiva de maquinaria); se debe
cumplir la norma EN 60204.
Sólo se permite la puesta en servicio (es decir, el inicio del funcionamiento de la forma indicada) cuando
se cumpla la Directiva (2004/108/EEC).
Los controladores de transmisión cumplen los requisitos de la Directiva de bajo voltaje 2006/95/EEC.
Las normas armonizadas de la serie EN 61800-5-1 / DIN VDE 0160 se aplican a los controladores.
Nota: La disponibilidad de controladores está restringida conforme a la norma EN 61800-3. Estos
productos pueden provocar interferencias de radio en áreas residenciales. En este caso, puede que
sea necesario tomar medidas especiales.
Instalación
Garantice un manejo adecuado y evite una tensión mecánica excesiva. No doble ningún componente
ni cambie ninguna distancia de aislamiento durante el transporte o el manejo. No toque ningún
componente electrónico ni ningún contacto.
Los controladores contienen componentes sensibles a la electricidad estática, que pueden resultar
fácilmente dañados si se manejan de forma inadecuada. No dañe ni destruya ningún componente
eléctrico, ya que esto puede poner en peligro su salud.
Conexión eléctrica
Cuando se trabaje con controladores alimentados, se deben cumplir las normas nacionales aplicables
para la prevención de accidentes (p. ej. VBG 4).
La instalación eléctrica debe realizarse de acuerdo con las normas adecuadas (p. ej. secciones
transversales de cables, fusibles, conex ión PE). Encontrará infor mación adicional en la
documentación.
La documentación contiene información sobre la instalación conforme a la norma EMC (revestimiento,
conexión a tierra, filtros y cables). Estas notas también se deben cumplir para los controladores con
la marca CE.
El fabricante del sistema o la máquina es responsable del cumplimiento de los valores límite que
requiere la legislación EMC.
ESPANOL
3
Page 95

Información de seguridad
Funcionamiento
Los sistemas que incluyen controladores deben estar equipados con dispositivos de seguimiento y
protección adicionales conforme a las normas correspondientes (p. ej. equipamiento técnico, normas
sobre prevención de accidentes, etc.). Puede adaptar el controlador a su aplicación según se describe
en la documentación.
¡PELIGRO!
• Una vez que se ha desconectado el controlador de la tensión de suministro,
no se deben tocar los componentes cargados ni la conexión de alimentación
inmediatamente, ya que los capacitores podrían estar cargados. Siga las notas
correspondientes sobre el controlador.
• No conecte y desconecte de forma continuada la alimentación del controlador
más de una vez cada tres minutos.
• Cierre todas las cubiertas protectoras y puertas durante el funcionamiento.
Nota para el sistema aprobado UL con controladores integrados
Las advertencias UL son notas que se aplican a sistemas UL. La documentación contiene información
especial sobre UL.
• Adecuado para el uso en un circuito capaz de suministrar un máximo de 5.000
amperios simétricos rms, un máximo de 240 V (dispositivos de 240 V) o un máximo
de 500 V (dispositivos de 400/500 V) resp.
¡Advertencias!
1.1 Pictogramas utilizados en estas instrucciones
• Utilice únicamente cable de cobre de minima 75 °C.
• Deberá instalarse en un macro-entorno con un grado de contaminación 2.
Pictograma Palabra de
aviso
¡PELIGRO!
¡AVISO!
Nota
4
Significado Consecuencias si no se
Indica un peligro inminente
Riesgo de daños personales
por voltaje eléctrico.
Peligro inminente o posible
para las personas
Daños posibles al equipo
Consejo útil: si se sigue,
facilitará el uso de la
transmisión
que puede causar lamuerte
o lesiones graves si no se
tomanmedidas adecuadas.
Muerte o lesión
Daños al sistema de
transmisión o a su entorno
ESPANOL
hace caso
Page 96

Datos técnicos
2 Datos técnicos
2.1 Normas y condiciones de aplicación
Conformidad
Aprobaciones
Longitud máx. permitida del cable
(1)
del motor
Desequilibrio de fase de tensión
de entrada
Humedad
Frecuencia de salida
Condiciones medioambientales
Intervalo de temperatura
Altura de la instalación
Resistencia a la vibración
Corriente de fuga de tierra
Cubierta (EN 60529)
Medidas de protección contra
Funcionamiento en redes de
suministro públicos
(Limitación de corrientes
armónicas conforme a
EN 61000-3-2)
(1) Para el cumplimiento de las normas EMC, las longitudes de cable permitidas pueden cambiar.
(2) Las medidas adicionales descritas sólo garantizan que los controladores cumplen los requisitos de la norma EN 61000-3-2.
El fabricante de la máquina/sistema es responsable del cumplimiento de las normativas de la máquina.
CE Directiva de bajo voltaje (2006/95/EEC)
UL 508C Underwriters Laboratories – Power Conversion Equipment
blindado: 50 m (baja capacitancia)
sin blindar: 100 m
< 2%
< 95% sin condensación
0...240 Hz
Clase 3K3 según EN 50178
Transporte -25 … +70 °C
Almacenamiento -20 … +70 °C
Funcionamiento
0 … 4000 sobre el nivel del mar (con una reducción del 5 %/1000 m de los valores
de corriente por encima de 1000 sobre el nivel del mar)
aceleración resistente hasta 0,7 g
> 3,5 mA hasta PE
IP 20
cortocircuitos, fuga a tierra, sobretensión, parada del motor, sobrecarga del motor
Potencia total
conectada a la
red de suministro
< 0,5 kW Con reductor de red de suministro
0,5 … 1 kW Con filtro activo (en preparación)
> 1 kW Sin medidas adicionales
0 … +55 °C (con una reducción del 2,5 %/°C de los valores de
corriente especicados por encima de +40 °C)
Cumplimiento de los requisitos
(2)
ESPANOL
5
Page 97

Technical data
2.2 Regímenes
Red de suministro Corriente de salida
Tensión, frecuencia
Corriente
(3)
[A]
[A]
(1)
Tipo
Poten-
cia
[kW]
1~ 3~ 3~ 3~ 3~ 3~
ETMD371L2YXA
ETMD551L2YXA
ETMD751L2YXA
ETMD112L2YXA
ETMD152L2YXA
ETMD222L2YXA
ETMD751L2TXA
ETMD112L2TXA
ETMD152L2TXA
ETMD222L2TXA
ETMD402L2TXA
ETMD552L2TXA
ETMD752L2TXA
0,37
0,55 6,0 3,9 3,0 2,8 4,5 4,2
0,75 9,2 5,1 4,2 3,9 6,3 5,9
1,1 12,0 6,9 6,0 5,5 9,0 8,3
1,5 12,9 7,9 7,0 6,4 10,5 9,6
2,2 17,1 11,0 9,6 8,8 14,4 13,2
1/N/PE 230 V
O
3/PE 230 V
(180 V -0%…264 V +0%)
50/60 Hz
(48 Hz -0%…62 Hz +0%)
0,75
1,1 6.9 6,0 5,5 9,0 8,3
1,5 7.9 7,0 6,4 10,5 9,6
2,2 11.0 9,6 8,8 14,4 13,2
4,0 17.1 15,2 14,0 23 21
5,5 25 22 20 33 30
3/PE 230 V
(180 V -0%…264 V +0%)
50/60 Hz
(48 Hz -0%…62 Hz +0%)
7,5 32 28 26 42 39
4,7 2,7 2,4 2,2 3,6 3,3
5.1 4,2 3,9 6,3 5,9
400V 480V 400V 480V 400V 480V 400V 480V 400V 480V
ETMD371L4TXA
ETMD751L4TXA
ETMD112L4TXA
ETMD152L4TXA
ETMD222L4TXA
ETMD302L4TXA
ETMD402L4TXA
ETMD552L4TXA
ETMD752L4TXA
(1) Para una tensión de suministro de red nominal y frecuencias de chopeado de 4,6 y 8 kHz
(2) Para una tensión de suministro de red nominal y una frecuencia de chopeado de 10 kHz
(3) La corriente máxima es una función del ajuste c73 (selección de tensión de entrada)
0,37
0,75 3,0 2,5 2,5 2,1 2,3 1,9 3,8 3,2 3.5 2,9
1,1 4,3 3,6 3,6 3,0 3,3 2,8 5,4 4,5 5.0 4,2
3/PE 400/480 V
1,5 4,8 4,0 4,1 3,4 3,8 3,1 6,2 5,1 5.7 4,7
(320 V -0%…528 V +0%)
2,2 6,4 5,4 5,8 4,8 5,3 4,4 8,7 7,2 8,0 6,6
3,0 8,3 7,0 7,6 6,3 7,0 5,8 11,4 9,5 10,5 8,7
4,0 10,6 8,8 9,4 7,8 8,6 7,2 14,1 11,7 12,9 10,8
50/60 Hz
(48 Hz -0%…62 Hz +0%)
5,5 14,2 12,4 12,6 11,0 11,6 10,1 18,9 16,5 17,4 15,2
7,5 18,1 15,8 16,1 14,0 14,8 12,9 24 21 22 19,4
1,6 1,4 1,3 1,1 1,2 1,0 2,0 1,7 1,8 1,5
(3)
I
N
[A]
I
60 s
(2)
máx para
(1)
[A]
[A]
(2)
6
ESPANOL
Page 98

Instalación
3 Instalación
3.1 Instalación mecánica
3.1.1 Dimensiones y montaje
a
Tipo
ETMD371L2YXA 93 84 146 128 17 100 15 50 0,6
ETMD551L2YXA, ETMD751L2_XA
ETMD112L2TXA 93 84 146 128 17 146 15 50 1,1
ETMD112L2YXA
ETMD371L4TXA...ETMD112L4TXA
ETMD152L2_XA
ETMD152L4TXA
ETMD222L2_XA
ETMD222L4TXA...ETMD402L4TXA
ETMD552L2TXA, ETMD752L2TXA
ETMD552L4TXA, ETMD752L4TXA
(1) “_” = Y o T; los dimensiones son los mismos para cualquier modelo
(1)
(1)
, ETMD402L2TXA
(1)
a1
[mm]
[mm]b [mm]b1 [mm]b2 [mm]c [mm]
93 84 146 128 17 120 15 50 0,9
114 105 146 128 17 133 15 50 1,4
114 105 146 128 17 171 15 50 1,9
114 105 146 100 17 171 15 50 2,0
146 137 197 140 17 182 30 100 3,4
Tmd002
s1
[mm]s2 [mm]m [kg]
¡AVISO!
Los convertidores no se deben instalar en lugares en los que se vean sometidas a
condiciones medioambientales adversas, como, por ejemplo: combustible, petróleo,
vapores peligrosos o polvo; humedad excesiva; vibración excesiva o temperaturas
excesivas. Póngase en contacto con Lenze para obtener más información.
ESPANOL
7
Page 99

Instalación
3.2 Instalación eléctrica
3.2.1 Instalación según los requisitos EMC
EMC
Cumplimiento de la norma EN 61800-3/A11
Emisión de ruidos
Cumplimiento del valor límite de clase A conforme a la norma EN 55011 si se instala
en un armario de control con el filtro adecuado y la longitud del cable no supera los
10 m
Abrazaderas de blindaje
A
Cable de control
B
Cable del motor de baja capacitancia
C
(núcleo/núcleo < 75 pF/m, núcleo/blindaje < 150 pF/m)
Placa de montaje conductora
D
Filtro
E
Fusible
automático
(1)
L1, L2, L3, PE
[mm2]
Fusible
3.2.2 Secciones de fusibles/cables
Instalación conforme a EN 60204-1 Instalación conforme a UL
Tipo
ETMD371L2YXA, ETMD551L2YXA M10 A C10 A 1,5 10 A 14
ETMD751L2YXA M16 A C16 A 2,5 15 A 14
1/N/PE
ETMD112L2YXA M20 A C20 A 2,5 15 A 12
ETMD152L2YXA M25 A C25 A 2,5 20 A 12
ETMD222L2YXA M30 A C30 A 4,0 30 A 10
ETMD371L2YXA...ETMD112L2_XA
ETMD152L2_XA
ETMD222L2_XA
ETMD402L2TXA M25 A C25 A 4,0 25 A 10
ETMD552L2TXA M40 A C40 A 6,0 35 A 8
3/PE
ETMD752L2TXA M50 A C50 A 10 45 A 8
ETMD371L4TXA...ETMD222L4TXA M10 A C10 A 1,5 10 A 14
ETMD302L4TXA M16 A C16 A 1,5 12 A 14
ETMD402L4TXA M16 A C16 A 2,5 15 A 14
ETMD552L4TXA M20 A C20 A 2,5 20 A 12
ETMD752L4TXA M25 A C25 A 4,0 25 A 10
(1) Cumpla las normas locales aplicables
(2) Disyuntor de fuga a tierra sensible a la corriente por impulsos o a la corriente universal
(3) Fusibles de limitación de corriente que actúan rápido de clase CC o T de UL, 200,000 AIC, necesarios.
Bussman KTK-R, JJN, JJS, o equivalente
(4) “_” = Y o T; los regímenes son los mismos para cualquier modelo con entrada 3/PE
(4)
(4)
Fusible
(4)
M10 A C10 A 1,5 10 A 14
M16 A C16 A 1,5 12 A 14
M16 A C16 A 2,5 15 A 12
B
A
L1, L2, L3, PE
(3)
[AWG]
C
E
D
Tmd005
DPT
> 30 mA
(2)
.
8
ESPANOL
Page 100

Instalación
Tenga en cuenta lo siguiente cuando utilice el disyuntor de pérdida a tierra:
• Instalación del disyuntor de fuga a tierra únicamente entre la red de suministro y el controlador.
• El disyuntor de fuga a tierra se puede activar mediante:
- corrientes de fuga capacitiva entre los blindajes de cable durante el funcionamiento (especialmente con largos cables de motor blindados)
- la conexión de varios controladores a la red de suministro al mismo tiempo
- filtros RFI
3.2.3 Diagrama de conexión
1/N/PE 180V 0% 264V + 0 %
48 Hz 62 Hz
L1
L2
L3
N
PE
L2/N
L1
0 2 Nm/2 lb in
6 mm/0 24 in
< 1mm²/AWG 26 16
8U7
0 … +5 V
0 … +10 V
-10 … +10 V
2/PE 180V 0% 264V + 0 %
AIN
COM
8U
28 7
L1
L2
L3
N
PE
+10 V
9
A+ A1
48 Hz 62 Hz
L2/N
L1
COM
+12 V
+15 V
+15 V
2020
E1 E2 E3 71627 72
3/PE 180V 0% 264V + 0 %
48 Hz 62 Hz
L1
L2
L3
N
PE
L3
L1 L2
COM
AIN
COM
E4 A2
8I
3/PE 320V 0 % 528V + 0 %
L1
L2
L3
N
PE
TXB
TXA
48 Hz 62 Hz
L1 L2
U V W
L3
0 5 Nm/4 5 lb in
6 mm/0 24 in
PES
1k …10k
7
_
+12 V DC - 0 %
…
+30 V DC + 0 %
DIGOUT
28
E3 E4
E1 E2
+
DIGOUT
0 … 20 mA
4 … 20 mA
AOUT
PES
PE
M
PES
3~
PE
PES
1 2 Nm/10 lb in
9 mm/0 35 n
¡PELIGRO!
• Peligro de descarga eléctrica. El potencial eléctrico del circuito puede alcanzar
los 480 VAC sobre la conexión a tierra. Los capacitores conservan la carga
después de desconectar el suministro de corriente. Desconecte el suministro de
corriente y espere hasta que la tensión entre B+ y B- sea 0 VDC antes de revisar
la transmisión.
• No conecte los terminales de salida (U,V,W) a la red de suministro. La transmisión
puede resultar gravemente dañada.
• No conecte y desconecte la corriente de la red de suministro más de una vez
cada tres minutos. Dañará la transmisión.
Tmd003
ESPANOL
9
 Loading...
Loading...