

Page 1

9400
E94AxHExxxx
Servo Drives 9400 HighLine_ _ _ _ _ _ _ _ _ _ _
Reference manual
EN
Ä.MvGä
13448538
L
Page 2

Overview of technical documentation for Servo Drives 9400
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Project planning, selection & order Legend:
Hardware manual 9400 Printed documentation
Catalogue / electronic catalogue (DSC - Drive Solution Catalogue) Online documentation
(PDF/Engineer online help)
Mounting & wiring Abbreviations used:
MA - 9400 StateLine/HighLine BA Operating instructions
MA - communication module KHB Communication manual
MA - extension module MA Mounting instructions
MA - safety module SW Software Manual
MA - accessories
MA - remote maintenance components
Parameter setting
BA - keypad
SW - Lenze software »Engineer«
SW - controller (9400 StateLine/HighLine/PLC) This documentation
SW - regenerative power supply module
KHB - communication module
SW - extension module
SW - safety module
SW - Lenze technology application
SW - function library 9400
Configuring & programming
SW - Lenze software »Engineer«
SW - Lenze software »PLC Designer«
SW - controller (9400 HighLine/PLC) This documentation
KHB - communication module
SW - extension module
SW - safety module
SW - Lenze technology application
SW - function library 9400
Drive commissioning
Commissioning guide
SW - controller (9400 StateLine/HighLine/PLC) This documentation
Chapter "Commissioning
Chapter "Oscilloscope
Chapter "Diagnostics & fault analysis
Remote maintenance manual
Networking structure
KHB - communication medium used
" ( 22)
" ( 579)
" ( 598)
2 Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 3

Contents
Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
1 About this documentation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 11
1.1 Conventions used _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 12
1.2 Terminology used _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 13
1.3 Definition of notes used _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 14
2Introduction _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 15
2.1 Parameter setting, configuring, or programming? _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 15
2.1.1 Basic functionalities _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 16
2.1.2 Technology applications _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 16
2.2 Communicating with the controller _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 17
2.2.1 Going online via diagnostic adapter _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 17
2.2.2 Going online via system bus (CAN on board) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 20
2.2.3 Use of other communication interfaces _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 20
2.3 Signal types & scaling _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 21
3 Commissioning _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 22
3.1 General information _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 23
3.2 Notes on commissioning using the keypad _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 24
3.3 Initial commissioning _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 25
3.4 Standard set-up _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 26
3.5 Controller replacement _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 27
3.6 Motor replacement _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 27
4 Drive interface _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 28
4.1 Machine parameters _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 29
4.1.1 Mains voltage _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 30
4.1.2 Gearbox ratio _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 31
4.1.3 Motor mounting direction _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 32
4.1.4 Feedback configuration _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 32
4.1.5 Unit/user-defined unit _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 33
4.1.6 Traversing range _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 34
4.1.7 Feed constant _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 36
4.1.8 Resolution of an encoder revolution _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 37
4.1.9 Max. position, speed, and acceleration that can be displayed internally _ _ _ _ _ _ _ _ _ _ 40
4.2 Device commands _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 42
4.2.1 Load Lenze setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 44
4.2.2 Load start parameters _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 45
4.2.3 ENP:Load plant data _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 46
4.2.4 Activate application _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 47
4.2.5 Save selected application _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 48
4.2.6 Save start parameters _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 49
4.2.7 Delete logbook _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 51
4.2.8 Archive logbook _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 52
4.2.9 Start application _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 53
4.2.10 Stop application _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 54
4.2.11 Reset program _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 55
4.2.12 Delete program _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 56
4.2.13 Restart program _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 57
4.2.14 Reset runtime measurement _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 58
4.2.15 Inhibit controller _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 60
4.2.16 Enable controller _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 61
4.2.17 Reset error _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 62
4.2.18 Activate quick stop _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 63
4.2.19 Reset quick stop _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 64
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 3
Page 4

Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.20 Identify pole position (360°) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 65
4.2.21 Identify pole position (min. motion) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 66
4.2.22 Resolver error identification _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 68
4.2.23 Load Lenze INV characteristic _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 69
4.2.24 Calculate inv. characteristic _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 70
4.2.25 Determine motor parameters _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 71
4.2.26 Calculate current controller parameters _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 72
4.2.27 Calculate speed controller parameters _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 74
4.2.28 CAN on board: Reset Node _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 75
4.2.29 CAN module: Reset node _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 76
4.2.30 CAN on board: Pred.Connect.Set _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 77
4.2.31 CAN module: Pred.Connect.Set _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 78
4.2.32 CAN on board: Identify node _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 79
4.2.33 CAN module: Identify node _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 80
4.2.34 Unbind/bind Ethernet module MXI1 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 81
4.2.35 Unbind/bind Ethernet module MXI2 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 82
4.2.36 Activate parameter set 1 ... 4 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 83
4.2.37 Activate parameter set 1 ... 4 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 85
4.2.38 Load cam data _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 87
4.2.39 Save cam data _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 89
4.2.40 Calculate cam data _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 91
4.2.41 Calculate cam data checksum _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 92
4.2.42 Format file system _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 93
4.2.43 Restore file system _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 94
4.2.44 Prepare firmware update _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 95
4.2.45 Restart controller _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 96
4.3 Device states _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 97
4.3.1 "Initialisation active" state _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 99
4.3.2 "Safe torque off active" state _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 100
4.3.3 "Device is ready to switch on" state _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 100
4.3.4 "Device is switched on" state _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 101
4.3.5 "Operation" state _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 101
4.3.6 "Warning active" _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 102
4.3.7 "Warning locked active" _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 102
4.3.8 "Quick stop by trouble active" state _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 102
4.3.9 "Trouble active" state _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 103
4.3.10 "Fault active" state _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 103
4.3.11 "System fault active" state _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 103
4.4 Automatic restart after mains connection/trouble... _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 104
4.5 Behaviour after task overflow _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 106
4.6 Device output power _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 107
4.6.1 Switching frequency _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 107
4.6.2 Monitoring of the device utilisation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 108
4.6.3 Operation with increased continuous power _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 109
4.7 Internal interfaces | "LS_DriveInterface" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 110
4.7.1 Status signals _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 113
4.7.2 Monitoring of external events _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 114
4 Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 5

Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5Motor interface _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 115
5.1 General information _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 117
5.1.1 Reading out motor data from the controller _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 117
5.1.2 Selecting a motor from the motor catalogue in the »Engineer« _ _ _ _ _ _ _ _ _ _ _ _ _ _ 118
5.1.3 Displaying/editing motor data in »Engineer« _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 119
5.2 Select motor control _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 121
5.3 Adjusting motor and controller to each other _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 123
5.3.1 Accepting/adapting plant parameters _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 124
5.3.2 Parameterising motor encoder _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 126
5.3.3 Pole position identification _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 128
5.3.4 Optimising the switching performance of the inverter _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 135
5.3.5 Determining the motor parameters _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 138
5.4 Servo control (SC) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 142
5.4.1 Optimising the control mode _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 143
5.4.2 Signal flow (servo control for synchronous motor) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 159
5.4.3 Signal flow (servo control for asynchronous motor) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 161
5.5 Sensorless vector control (SLVC) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 163
5.5.1 Basic settings _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 164
5.5.2 Optimising motor parameters _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 166
5.5.3 Optimising the control mode _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 172
5.5.4 Signal flow _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 180
5.6 V/f control (VFCplus) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 181
5.6.1 Basic settings _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 181
5.6.2 Optimising the control mode _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 188
5.6.3 Signal flow _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 196
5.7 V/f control (VFCplus) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 197
5.7.1 Signal flow _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 198
5.8 Parameterisable additional functions _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 200
5.8.1 Correction of the stator leakage inductance... _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 201
5.8.2 Field weakening for synchronous machines _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 206
5.8.3 Flying restart function _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 209
5.8.4 DC-injection braking _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 212
5.9 Monitoring _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 214
5.9.1 Signal flow _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 214
5.9.2 Motor monitoring (I
5.9.3 Motor temperature monitoring _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 222
5.9.4 Motor phase failure monitoring _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 226
5.9.5 Maximum current monitoring _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 230
5.10 Internal interfaces | "LS_MotorInterface" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 231
2
xt) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 215
6 Encoder evaluation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 236
6.1 Internal interfaces | "LS_Feedback" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 237
6.1.1 Use of an external position encoder _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 239
6.2 Signal flow _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 240
6.3 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 241
6.3.1 Controller configuration _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 243
6.3.2 System with motor encoder _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 245
6.3.3 System with motor encoder and position encoder _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 246
6.3.4 Position feedback with a linear distance measuring device _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 248
6.3.5 Adaptation of the resolver evaluation dynamics _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 250
6.3.6 Parameterisation of an unknown Hiperface® encoder _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 251
6.3.7 Parameterisation of a Hiperface® encoder with increased initialisation time _ _ _ _ _ _ _ 251
6.3.8 Use of an SSI encoder at X8 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 252
6.3.9 Rotative encoder with SSI protocol _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 258
6.3.10 Provision of the encoder signal of input X8 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 260
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 5
Page 6

Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
6.3.11 Resolver error compensation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 263
6.3.12 Encoder angular drift monitoring _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 264
7 Braking operation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 266
7.1 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 267
7.1.1 Setting the voltage threshold for braking operation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 267
7.2 Monitoring _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 268
7.2.1 Overcurrent protection _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 268
7.2.2 Ixt utilisation - brake transistor _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 269
7.2.3 I2t utilisation - brake resistor _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 270
7.2.4 DC bus overvoltage _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 272
8I/O terminals _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 273
8.1 Overview _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 273
8.2 Analog inputs _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 274
8.2.1 Terminal assignment/electrical data _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 274
8.2.2 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 275
8.2.3 Reconfiguring analog input 1 into current input _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 275
8.2.4 "LS_AnalogInput" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 276
8.3 Analog outputs _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 277
8.3.1 Terminal assignment/electrical data _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 277
8.3.2 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 278
8.3.3 "LS_AnalogOutput" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 278
8.4 Digital inputs _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 279
8.4.1 Terminal assignment/electrical data _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 279
8.4.2 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 279
8.4.3 "LS_DigitalInput" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 280
8.5 Digital outputs _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 281
8.5.1 Terminal assignment/electrical data _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 281
8.5.2 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 281
8.5.3 "LS_DigitalOutput" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 282
8.6 "State bus" monitoring function _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 283
8.6.1 Detecting the current state _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 284
8.6.2 Setting the state bus to the "Error" state _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 284
8.7 Touch probe detection _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 285
8.7.1 Actual value interpolation (principle) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 286
8.7.2 Dead time compensation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 287
8.7.3 "LS_TouchProbe1...8" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 288
8.7.4 "LS_TouchProbeMotor" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 289
8.7.5 "LS_TouchProbeLoad" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 289
8.8 Configure exception handling of the outputs _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 290
6 Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 7

Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
9 "CAN on board" system bus _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 292
9.1 General information _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 293
9.1.1 General data and application conditions _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 294
9.1.2 Supported protocols _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 294
9.1.3 Communication time _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 295
9.2 Possible settings by DIP switch _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 296
9.2.1 Setting the node address _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 296
9.2.2 Setting the baud rate _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 297
9.3 LED status displays for the system bus _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 298
9.4 Structure of the CAN data telegram _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 299
9.4.1 Identifier _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 299
9.4.2 User data _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 301
9.5 Communication phases/network management _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 302
9.5.1 State transitions _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 303
9.5.2 Network management telegram (NMT) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 304
9.5.3 Parameterising the controller as CAN master _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 305
9.6 Process data transfer _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 306
9.6.1 Identifiers of the process data objects _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 307
9.6.2 Transmission type _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 308
9.6.3 Masking of the TPDOs for event control _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 309
9.6.4 Monitoring of the RPDOs for data reception _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 309
9.6.5 Synchronisation of PDOs via sync telegram _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 310
9.7 Parameter data transfer _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 315
9.7.1 Identifiers of the parameter data objects _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 316
9.7.2 User data _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 316
9.7.3 Parameter data telegram examples _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 322
9.8 Diagnostics _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 327
9.9 Monitoring _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 328
9.9.1 Node guarding protocol _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 328
9.9.2 Heartbeat protocol _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 334
9.9.3 Emergency telegram _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 338
9.10 Implemented CANopen objects _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 339
9.11 System block "LS_SyncInput" _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 364
9.11.1 Behaviour of the status signal bSyncInsideWindow _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 365
10 Safety engineering _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 366
10.1 Integration into the application _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 367
10.2 Selecting the required safety module _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 368
10.3 System block "LS_SafetyModuleInterface" _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 368
10.3.1 Status information _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 369
10.3.2 I/O status information _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 370
10.3.3 Control information _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 370
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 7
Page 8

Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11 Basic drive functions _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 372
11.1 General information _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 373
11.1.1 Internal state machine _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 373
11.1.2 Function states _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 375
11.1.3 Interrupting/replacing states _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 377
11.1.4 Priorities _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 378
11.1.5 Requesting control via a basic function _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 379
11.1.6 Start acceleration/acceleration reduction when the basic function changes _ _ _ _ _ _ _ 380
11.1.7 Setting the S-ramp time _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 382
11.2 Stop _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 384
11.2.1 Internal interfaces | "LS_Stop" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 385
11.2.2 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 386
11.2.3 Behaviour of the function (example) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 387
11.3 Quick stop _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 388
11.3.1 Internal interfaces | "LS_Quickstop" system block" _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 388
11.3.2 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 389
11.3.3 Activate/deactivate quick stop _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 391
11.3.4 DC-injection braking _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 392
11.4 Manual jog _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 395
11.4.1 Internal interfaces | "LS_ManualJog" system block" _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 396
11.4.2 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 399
11.4.3 Executing manual jogging _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 401
11.5 Manual job, encoderless _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 407
11.5.1 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 408
11.5.2 Carrying out encoderless manual jogging _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 409
11.5.3 Internal interfaces | "LS_ManualJogOpenLoop" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 414
11.6 Homing _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 416
11.6.1 Internal interfaces | "LS_Homing" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 418
11.6.2 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 420
11.6.3 Overview of the Lenze homing modes _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 427
11.6.4 Overview of DS402 homing modes _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 440
11.6.5 Execute homing _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 471
11.7 Positioning _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 474
11.7.1 Internal interfaces | "LS_Positioner" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 475
11.7.2 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 480
11.7.3 Carrying out positioning _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 482
11.8 Position follower _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 485
11.8.1 Internal interfaces | "LS_PositionFollower" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 486
11.8.2 Signal flow _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 487
11.8.3 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 489
11.8.4 Activating setpoint interface _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 491
11.9 Speed follower _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 492
11.9.1 Internal interfaces | "LS_SpeedFollower" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 492
11.9.2 Signal flow _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 494
11.9.3 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 495
11.9.4 Activating setpoint interface _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 496
11.10 Torque follower _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 497
11.10.1 Internal interfaces | "LS_TorqueFollower" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 498
11.10.2 Signal flow _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 499
11.10.3 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 500
11.10.4 Activating setpoint interface _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 501
11.11 Limiter _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 502
11.11.1 Internal interfaces | "LS_Limiter" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 502
11.11.2 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 507
8 Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 9

Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.12 Brake control _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 517
11.12.1 Internal interfaces | "LS_Brake" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 519
11.12.2 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 521
11.12.3 Mode 0: Brake control is switched off _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 537
11.12.4 Mode 1/11: Direct control of the brake _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 538
11.12.5 Mode 2/12: Automatic control of the brake _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 539
11.12.6 Mode 22: Automatic DC-injection braking _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 544
11.12.7 Grinding the brake _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 547
11.12.8 Carrying out brake test _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 549
11.12.9 Control of two motor holding brakes _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 551
11.13 Cam data management _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 552
11.13.1 "Online" tab for cam data management _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 553
11.13.2 Internal interfaces | "LS_CamInterface" system block _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 558
11.13.3 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 560
11.13.4 Product/track change-over _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 567
11.13.5 Invalid cam data due to changed machine parameters _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 568
11.13.6 Behaviour after mains switching _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 569
11.14 Pole position identification _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 570
11.14.1 Internal interfaces | System block "LS_PolePositionIdentification" _ _ _ _ _ _ _ _ _ _ _ _ _ 571
11.14.2 Parameter setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 573
11.14.3 Execute pole position identification _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 573
11.14.4 Signal characteristics _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 575
11.14.5 Impacts of parameter changes on the signal PPI_bPolePositionAvailable _ _ _ _ _ _ _ _ _ 577
12 Oscilloscope _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 579
12.1 Technical data _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 579
12.2 Functional description _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 580
12.3 User interface _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 581
12.4 Operation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 582
12.4.1 Selecting the variables to be recorded _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 582
12.4.2 Selecting the recording time/sample rate _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 584
12.4.3 Selecting the trigger condition _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 585
12.4.4 Starting recording _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 586
12.4.5 Adjusting the representation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 587
12.4.6 Cursor function: Reading individual measured values _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 589
12.5 Managing oscillograms (measured data records) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 590
12.5.1 Commenting the oscillogram _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 590
12.5.2 Saving the oscillogram _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 591
12.5.3 Loading an oscillogram _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 592
12.5.4 Closing an oscillogram _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 593
12.5.5 Overlay function _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 593
12.5.6 Deleting a data record saved in the project _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 594
12.6 Variables of the motor control (oscilloscope signals) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 595
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 9
Page 10

Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
13 Diagnostics & fault analysis _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 598
13.1 LED status displays _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 598
13.1.1 LED status displays for the device state _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 599
13.2 Drive diagnostics with the »Engineer« _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 600
13.3 Drive diagnostics via keypad/bus system _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 601
13.4 Logbook _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 603
13.4.1 Functional description _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 604
13.4.2 Filtering logbook entries _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 604
13.4.3 Reading out logbook entries _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 605
13.4.4 Export logbook entries to a file _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 606
13.5 Monitoring _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 607
13.5.1 Setting the error response _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 608
13.6 Maloperation of the drive _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 609
13.7 Error messages of the operating system _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 610
13.7.1 Structure of the error number (bit coding) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 610
13.7.2 Reset error message _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 614
13.7.3 Short overview (A-Z) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 615
13.7.4 Cause & possible remedies _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 623
14 Parameter reference _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 713
14.1 Structure of the parameter descriptions _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 714
14.1.1 Data type _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 714
14.1.2 Parameters with read-only access _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 715
14.1.3 Parameters with write access _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 715
14.1.4 Parameter attributes _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 719
14.1.5 Abbreviations used in parameter & selection texts _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 719
14.2 Parameter list _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 720
14.3 Attribute table _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 913
Index _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 927
Your opinion is important to us _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 952
10 Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 11
1 About this documentation
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
1 About this documentation
Danger!
The controller is a source of danger which may cause death or serious personal injury.
In order to ensure protection against this danger, observe the safety instructions before
switching on the controller.
Please read the safety instructions in the mounting instructions and hardware manual
of the Servo-Inverter 9400 HighLine. Both instructions are included in the scope of
supply.
Target group
This documentation addresses to all persons who want to parameterise, configure, and diagnose
the 9400 HighLine controller by means of the engineering software L-force »Engineer« and the
keypad.
Validity
The information in this documentation are valid for the following standard devices:
Product series Type designation from software version
9400 Servo Drives E94AxHExxxx 1.5
Screenshots/application examples
All screenshots in this documentation are application examples. Depending on the firmware
version of the 9400 HighLine and the software version of the engineering tools installed
(»Engineer« or » Easy Starter«), the screenshots in this documentation may deviate from the screen
representation.
Document history
Version Description
10.0 11/2013 TD05 Error corrections; parameter reference V12.00.xx
9.0 12/2012 TD06 Extended by new functions for 9400 HighLine V11
8.0 12/2011 TD06 Extended by new functions for 9400 HighLine V10
7.1 10/2010 TD06 Error corrections & supplements
7.0 04/2010 TD06 Extended by new functions for 9400 HighLine V8
6.1 08/2009 TD05 Error corrections & supplements
6.0 08/2009 TD05 Extended by new functions for 9400 HighLine V7
5.2 01/2009 TD05 Error corrections & supplements
5.1 12/2008 TD05 Error corrections
5.0 11/2008 TD05 Extended by new functions for 9400 HighLine V5
4.1 07/2008 TD05 New main chapter: "CAN on board" system bus
4.0 06/2008 TD05 Supplemented with new functions for 9400 HighLine V4
3.0 11/2007 TD05 Supplemented with new functions for 9400 HighLine V3
2.0 05/2007 TD05 Extended edition
1.0 12/2006 TD05 First edition for 9400 HighLine V1.5
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 11
Page 12
1 About this documentation
1.1 Conventions used
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
1.1 Conventions used
This documentation uses the following conventions to distinguish between different types of
information:
Type of information Writing Examples/notes
Spelling of numbers
Decimal separators Point The decimal point is generally used.
For example: 1234.56
Text
Version information Blue text colour Information that is only valid for or from a certain software
Program name » « The Lenze PC software »PLC Designer«...
Window italics The Message window ... / The Options dialog box...
Variable identifier By setting bEnable to TRUE...
Control element bold The OK button... / The Copy command... / The Properties
Sequence of menu
commands
Shortcut <bold> Press <F1> to open the online help.
Program code Courier
Keyword Courier bold
version of the controller is marked accordingly in this
manual.
Example: This function extension is available from software
version V3.0!
tab... / The Name input field...
If the execution of a function requires several commands,
the individual commands are separated by an arrow: Select
Open to...
File
If a command requires a combination of keys, a "+" is placed
between the key symbols: Use <Shift>+<ESC> to...
IF var1 < var2 THEN
a = a + 1
END IF
Hyperlink Underlined
Icons
Page reference ( 12) Optically highlighted reference to another page. In this
Step-by-step instructions
Optically highlighted reference to another topic. In this
documentation activated by mouse-click.
documentation activated by mouse-click.
Step-by-step instructions are indicated by a pictograph.
12
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 13
1 About this documentation
1.2 Terminology used
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
1.2 Terminology used
Term Meaning
Engineering tools Software solutions for easy engineering in all project stages
»EASY Navigator« – provides a good guide to the user
• All convenient Lenze engineering tools at a glance
• Tools can be selected quickly
• The clear structure simplifies the engineering process from the start
»EASY Starter« – easy-to-use tool for service technicians
• Specially designed for the commissioning and maintenance of Lenze
devices
• Graphical user interface with just a few buttons
• Easy online diagnostics, parameterisation, and commissioning
• No risk of an unintended change in applications
• Loading of ready-to-use applications to the device
»Engineer« – multi-device engineering
• For all products in our L-force portfolio
• Practical user interface
• Graphic interfaces make it easy to navigate
• Can be applied in every phase of a project (project planning,
commissioning, production)
• Parameter setting and configuration
L-force Controller The L-force controller is the central component of the automation system which (by
means of the runtime software) controls the Logic and Motion functionalities.
The L-force Controller uses the fieldbus to communicate with the field devices.
Engineering PC The Engineering PC and the engineering tools installed on it serve to configure and
parameterise the system.
The Engineering PC uses Ethernet to communicate with the L-force Controller.
Code "Container" for one or several parameters used for controller parameter setting or
monitoring.
Subcode If a code contains several parameters, the individual parameters are stored under
"subcodes".
This Manual uses a slash "/" as a separator between code and subcode (e.g. "C00118/3").
Function block editor Graphical interconnection tool which is provided for controllers in the MotionControl
HighLevel and TopLevel license level in the »Engineer« on the FB editor tab and by means
of which the technology applications supplied can also be reconfigured and extended by
individual functions.
Function block A function block (FB) can be compared with an integrated circuit that contains a specific
control logic and delivers one or several values when being executed.
• A n in stan ce ( repro ducti on, co py) of the f unc tion b lock i s alw ays inser ted in the ci rcuit .
• It is also possible to insert several instances of a function block in a circuit.
• Each instance has an unequivocal identifier (the instance name) and a processing
number which defines the position at which the function block is calculated during
the task cycle.
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 13
Page 14
1 About this documentation
1.3 Definition of notes used
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
1.3 Definition of notes used
The following signal words and symbols are used in this documentation to indicate dangers and
important information:
Safety instructions
Layout of the safety instructions:
Danger!
(characterises the type and severity of danger)
Note
(describes the danger and gives information about how to prevent dangerous
situations)
Pictograph Signal word Meaning
Danger! Danger of personal injury through dangerous electrical voltage
Danger! Danger of personal injury through a general source of danger
Stop! Danger of property damage
Application notes
Pictograph Signal word Meaning
Note! Important note to ensure trouble-free operation
Reference to an imminent danger that may result in death or serious personal
injury if the corresponding measures are not taken.
Reference to an imminent danger that may result in death or serious personal
injury if the corresponding measures are not taken.
Reference to a possible danger that may result in property damage if the
corresponding measures are not taken.
Tip! Useful tip for simple handling
Reference to other documentation
14
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 15
2Introduction
2.1 Parameter setting, configuring, or programming?
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
2 Introduction
The basis of every L-force application is an easy and quick parameter setting of prepared technology
applications and solutions*.
This chapter contains basic information on the runtime software model of L-force and on how you
can establish an online connection between the PC and controller for parameter setting with
»Engineer« very easily.
At the end of this chapter you will find an overview of the different signal types & scaling which
serve to process physical values (e.g. a speed or position) within the application.
* In preparation!
2.1 Parameter setting, configuring, or programming?
The graded runtime software model of L-force provides a simple and consistent solution for motion
and process tasks as well as for complex machine functions:
Runtime software
PLC level Programming*
Freely programmable open and closed
loop control functions*
Technology level Configuring
Motion Control TopLevel
Additional motion and process control
modes for complex drive tasks.
Motion Control HighLevel
Individual extensibility of the basic
functions & technology applications by
means of the function block editor and
the comprehensive function library.
Motion Control StateLevel
Parameterisable basic functions &
technology applications.
The HighLevel and TopLevel licenses enable you to
extend the provided technology applications by
individual functions using the graphic function block
editor of »Engineer«. Here you can access the
comprehensive function libraries of Lenze which
among other things contain process controllers,
arithmetic functions, logic blocks, and ramp
generators and integrators.
Parameter setting
The StateLevel license includes a range of technology
applications which can be put into operation easily
with a keypad or via dialogs in »Engineer«.
* In preparation!
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 15
Page 16

2Introduction
2.1 Parameter setting, configuring, or programming?
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
2.1.1 Basic functionalities
Important basic drive functions and further basic functions are implemented in the firmware of the
controller and thus are always provided, irrespective of the runtime software licence available.
Firmware
Motion Control basic drive functions Further basic functionalities
• Stop
• Quick stop
• Manual jog
• Homing
• Positioning
• Position follower
• Speed follower
• Torque follower
• Limiter
• Brake control
• Drive interface
• Motor interface
• Encoder evaluation
• I/O terminals
• Safety engineering
• Logbook
• Oscilloscope
2.1.2 Technology applications
Technology applications (TAs) are applications prepared by Lenze which can serve as a basis for
solving typical applications.
• The technology applications available for the Servo Drives 9400 can be selected in »Engineer«
from the application catalogue.
Runtime software
Technology level Each higher license contains additional technology
Motion Control TopLevel
• TA "Positioning sequence control"
• TA "Electronic cam" *
• TA "Register control" *
•TA "Winding technology" *
Motion Control HighLevel
•TA "Electronic gearbox"
•TA "Synchronism with mark
synchronisation"
Motion Control StateLevel
• TA "Actuator – speed"
• TA "Actuator – torque"
• TA "Table positioning"
applications for further application fields.
16
* In preparation!
Tip!
Detailed information about the individual technology applications can be found in the
corresponding software manuals.
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 17

2Introduction
2.2 Communicating with the controller
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
2.2 Communicating with the controller
The following interfaces/communication modules can be used to establish communication
between the PC and controller:
• Diagnostic interface X6/Going online via diagnostic adapter
• CAN on board interface/Going online via system bus (CAN on board) ( 20)
• Optional interfaces which are provided by corresponding communication modules in the
module slots MXI1/MXI2 of the controller.
Note!
For communication with the controller, at least the control electronics of the controller
must be supplied with 24 V low voltage via plug X2. For detailed information, please see
the Mounting Instructions for the controller.
Stop!
If you change parameters in the »Engineer« while the controller is connected online, the
changes will be directly accepted by the controller!
Tip!
Detailed information about the individual interfaces can be found in the corresponding
Communication Manuals (KHB).
2.2.1 Going online via diagnostic adapter
For initial commissioning of the controller you can for instance use the diagnostic adapter offered
by Lenze:
Note!
Please observe the documentation for the diagnostic adapter!
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 17
Page 18
2Introduction
2.2 Communicating with the controller
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Preconditions:
• The diagnostic adapter is connected to the controller at the diagnostic interface X6 and to the
PC at a free USB port.
• The driver required for the diagnostic adapter is installed.
• The control electronics of the controller is supplied with 24 V low voltage via plug X2.
How to build up an online connection via the diagnostic adapter:
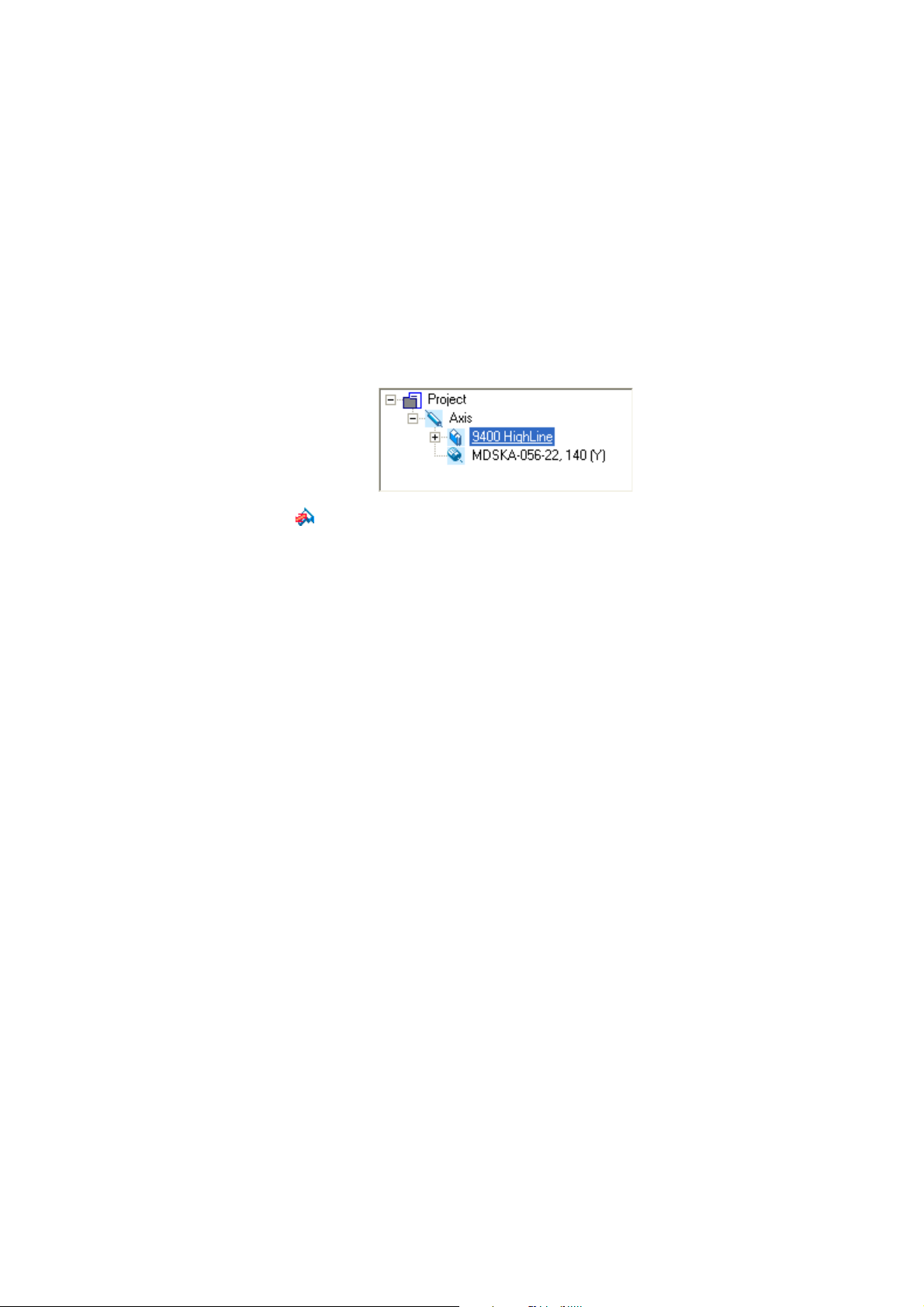
1. Select the 9400 HighLine controller to which you want to build up an online connection in
the Project view of the »Engineer«:
2. Click the icon.
If the changes you have made on the project have not been accepted yet, first a query on
whether an update is to be carried out is effected.
If an update is to be carried out:
•Click on Yes to open the Update project dialog box.
•Press the Create button in the Update project dialog box to update the changed project
elements.
• After the update a note is shown, saying whether the update was carried out
successfully.
18
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 19
2Introduction
2.2 Communicating with the controller
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
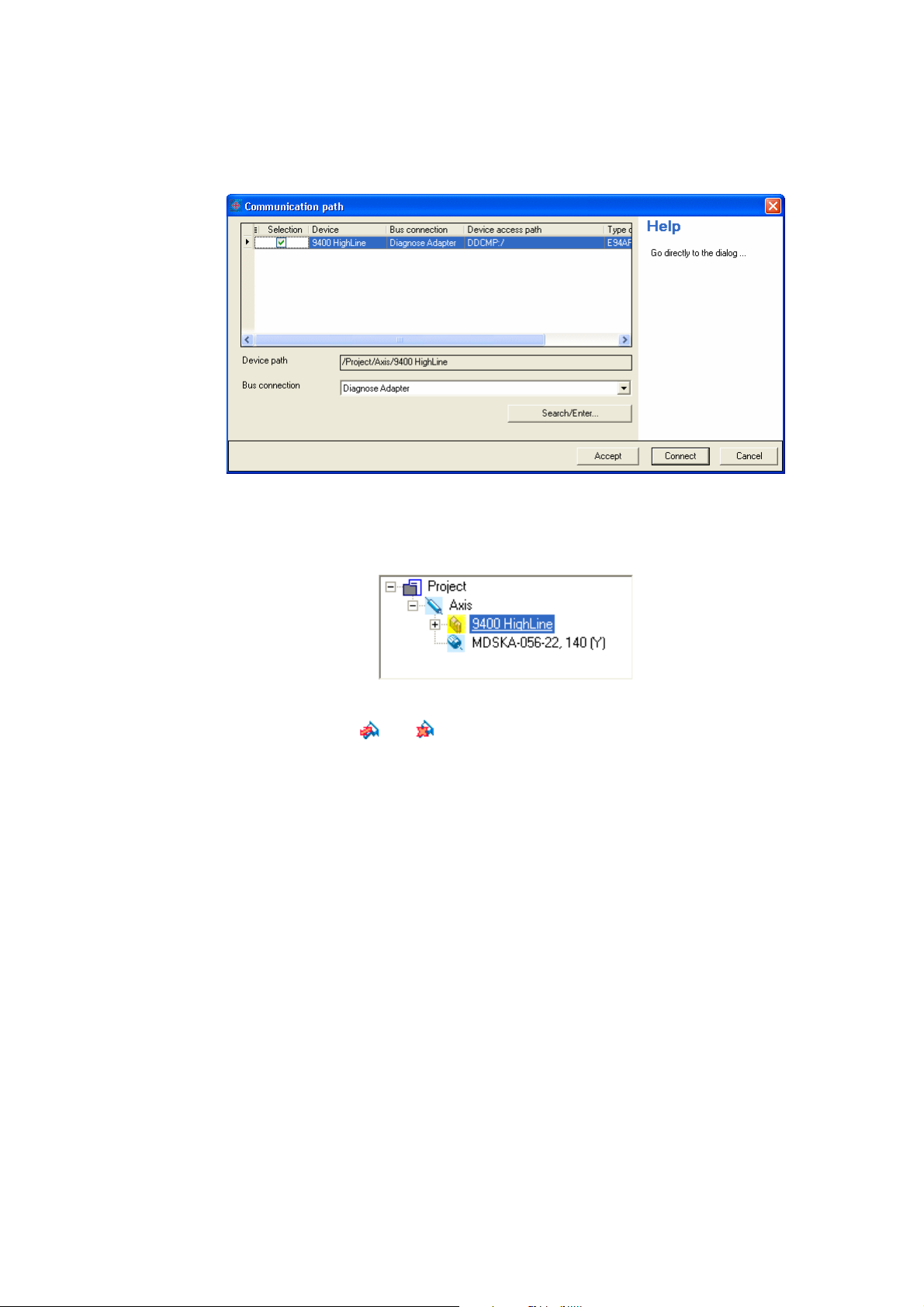
If no communication path was configured yet for the controller selected, the
Communication path dialog box is shown after the update has been carried out:
• The "Diagnostic adapter" bus connection is already preset.
3. Click on Connect.
• The dialog box is closed and the online connection with the controller is built up.
•In the Project view a yellow icon indicates the online connection with the controller:
Now you can use the icons and to easily build up and end a connection with the controller.
The communication settings are only required when communication with a controller is built up for
the first time.
• If you want to change the configured communication path, select the command Online Set
communication path and go online to open the Communication path dialog box and change the
settings.
• When an online connection has been established, the »Engineer« displays the current
parameter settings of the controller with a yellow background colour.
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 19
Page 20
2Introduction
2.2 Communicating with the controller
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
2.2.2 Going online via system bus (CAN on board)
As an alternative to the diagnostic adapter, you can use the integrated system bus interface (CAN on
board, terminal X1) of the controller for communication.
• Lenze offers the following communication accessories for connection to the PC:
Communication accessories PC interface
PC system bus adapter 2173
incl. connection cable and voltage supply adapter
• for DIN keyboard connection (EMF2173IB)
• for PS/2 keyboard connection (EMF2173IBV002)
• for PS/2 keyboard connection with electrical isolation (EMF2173IBV003)
PC system bus adapter 2177
incl. connection cable (EMF2177IB)
Parallel interface
(LPT port)
USB
(Universal Serial Bus)
Note!
• For detailed information about the PC system bus adapter, please see the "CAN
Communication Manual".
• Please observe the documentation for the PC system bus adapter!
• The online connection is established as described in the previous chapter "Going
online via diagnostic adapter", only that this time the entry "CAN system bus" is to be
selected in the Bus connection list field of the Communication path dialog box.
( 18)
2.2.3 Use of other communication interfaces
The controller can be extended by further communication interfaces, if required, e.g. Ethernet,
ETHERNET Powerlink, or PROFIBUS.
• For this the controller is provided with the module slots MXI1 and MXI2 for accepting
communication modules.
• Detailed information on this subject can be found in the Hardware Manual and Communication
Manual for the corresponding communication system.
20
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 21
2Introduction
2.3 Signal types & scaling
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
2.3 Signal types & scaling
It is very helpful for the parameterisation & configuration of the controller to know the signal types
and their scaling listed below, which serve to process physical quantities (e.g. a speed or position)
within the function block interconnection.
Note!
From software version V3.0 the resolution of an encoder revolution can be
parameterised in C00100
(Lenze setting: 16 bits/encoder revolution).
Resolution of an encoder revolution
Signal type (data type)
Scaled (INT) 16 bits ± 199.99 % 2 _a
Scaled (DINT) 32 bits ± 200.00 % 2 _n
Speed (INT) / 16 bits ± 30000.0 rpm 1 _v
Speed (DINT) 32 bits ± 480000.0 rpm 1 _s
Position/angle (DINT) / 32 bits -2
Digital (BOOL) Bit 1 0 ≡ FALSE; 1 ≡ TRUE 0
Acceleration (DINT) 32 bits ± 7.69 * 10
Time 28 bits 0 ... 268435.456 s 3
Other (BYTE) 8 bits 0 ... 255 0
Other (WORD) 16 bits 0 ... 65535 0
Other (DWORD) 32 bits 0 ... 4294967295 0
Other (INT) 16 bits -32768 ... 32767 0
Other (DINT) 32 bits -2147483648 ... 2147483647 0
Connection
symbol in
the FB editor
Resolution
( 37)
Value range (external)
31
... 231-1 increments 3 _p
9
rpm/s 3 _x
Decimal positions/
signal type suffix
in the identifier
Scaling of physical units
Signal type
Scaled (INT) 16 bits 100 % ≡ 2
Scaled (DINT) 32 bits 100 % ≡ 2
Speed (INT) / 16 bits 15000 rpm ≡ 2
Speed (DINT) 32 bits 15000 rpm ≡ 2
Position/angle (DINT) / 32 bits 1 encoder revolution ≡ 2
Acceleration (DINT) 32 bits 15000000 rpm/s ≡ 2
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 21
Connection
symbol in
the FB editor
Resolution
Scaling
External value ≡ internal value
14
≡ 16384
30
≡ 1073741824
14
≡ 16384
26
≡ 67108864
16
increments
22
≡ 4194304
Page 22

3 Commissioning
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3 Commissioning
This documentation contains detailed information on parameter setting and configuration of the
controller. Sequential reading is not required.
In order to obtain the information relevant for initial commissioning, this chapter describes
different commissioning scenarios which can also be used as a guide through this manual:
A. Initial commissioning
• Target: Adapting the controller to the electromechanics and the control system.
B. Standard set-up
• Target: Taking over the application and parameter set of an already preconfigured "Engineer"
project into several controllers.
( 25)
( 26)
C. Controller replacement
• Target: Replacing a controller which has failed in a running system by a replacement device
using the "old" memory module.
D. Motor replacement
• Target: Replacing a motor which has failed in a running system.
( 27)
( 27)
22 Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 23
3 Commissioning
3.1 General information
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
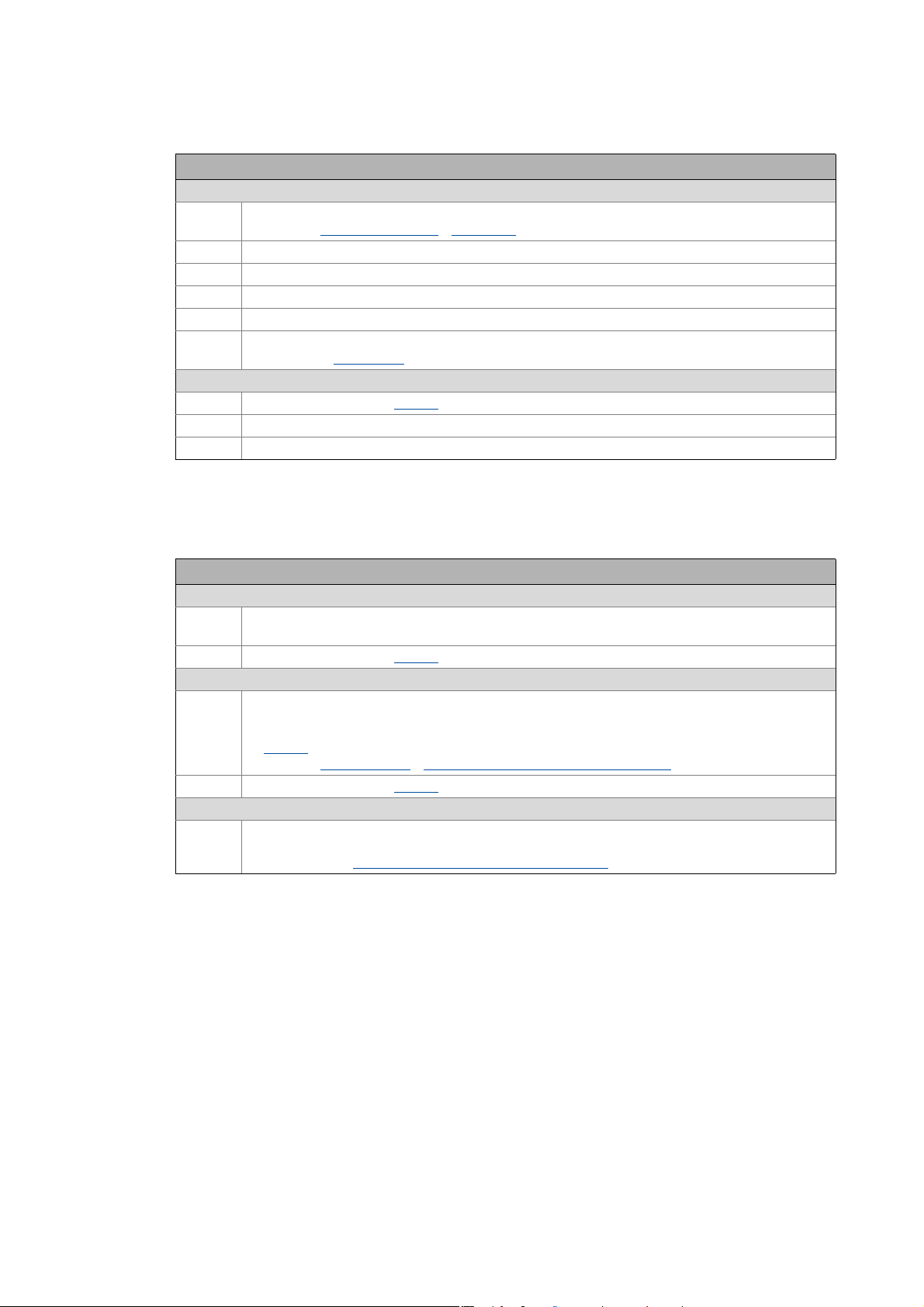
3.1 General information
Note!
Some parameters of the controller have a setting range depending on the device type.
If parameterisation is carried out offline or if the memory module is exchanged between
different 9400 HighLine device types, always check the settings of the parameters listed
in the following table and adapt them, if required, to prevent a parameter error after the
parameter set download or module change!
Parameter Info Lenze setting
C00018
C00022
C00173
C00174
Switching frequency 8 kHz variable
Maximum current
Accepting/adapting plant parameters
Mains voltage and undervoltage threshold (LU)
Machine parameters
( 29)
( 124)
0.00 A
400/415 V, LU = 285 V
Tip!
The rated data of the different device types can be found in the Hardware Manual in the
"Rated data" chapter.
Term definition of "Plant parameters"
The term "plant parameters" which is frequently used in the following chapters summarises all
parameters which result from the combination of motor and load. They characterise the transfer
behaviour of the entire controlled system including the desired monitoring functions. The plant
parameters depend on the application in which the controller and motor are used.
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 23
Page 24
3 Commissioning
3.2 Notes on commissioning using the keypad
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.2 Notes on commissioning using the keypad
For a motor with an electronic nameplate (ENP)
• A display of the plant parameters offered by ENP via keypad is not provided. The plant
parameters must be edited and optimised individually.
• To avoid that the motor starts unintentionally without adjusting the plant parameters, the
maximum current in the Lenze setting is set to "0 A" in C00022
• After setting the plant parameters, they have to be saved on the memory module of the
controller with mains failure protection, just as the motor data that have been read out from
the ENP (C00002
For a motor without an electronic nameplate (ENP)
• The motor data and plant parameters must be edited and set individually.
• To avoid that the motor starts unintentionally without adjusting the plant parameters, the
maximum current is set to "0 A" in C00022
• After setting the motor data and plant parameters, they have to be saved on the memory
module of the controller with mains failure protection (C00002
= "11: Save start parameters").
by the factory.
.
= "11: Save start parameters").
Commissioning of the application
• The application must already be stored on the memory module of the controller. Otherwise
commissioning by only using the keypad is not possible.
• All application parameters which deviate from the factory adjustment have to be edited
individually. For this the project planner has to provide a corresponding list to the commissioner
(including the motor and plant data).
• In the case of a standard set-up, a pole position identification may have to be carried out for
synchronous motors of a third party manufacturer or Lenze synchronous motors with a
Stegmann absolute value encoder.
• After setting the parameters, they have to be saved on the memory module of the controller
with mains failure protection (C00002
= "11: Save start parameters").
Tip!
Detailed information on the individual technology applications can be found in the
corresponding Software Manual for the technology application and the »Engineer« online
help in the chapter "L-force Servo Drives 9400 Technology applications".
24
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 25

3 Commissioning
3.3 Initial commissioning
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.3 Initial commissioning
Worksteps
Parameterising motor control:
1. Read out the motor data of the controller or select them via the »Engineer« motor catalogue.
• If the motor connected to the controller is provided with an electronic nameplate (ENP), all motor
data are automatically read out from the ENP and a selection in the motor catalogue is not required.
Reading out motor data from the controller
• If a motor without ENP or a motor by a third-party manufacturer is used, the selection is carried out
via the »Engineer« motor catalogue. Selecting a motor from the motor catalogue in the »Engineer«
( 118)
2. Select motor control
• Servo control is preset for the synchronous motor.
3. Adjusting motor and controller to each other
4. Carry out settings for selected motor control.
• For this see description for the corresponding motor control:
• Servo control (SC)
• Sensorless vector control (SLVC) (from software version V3.0)
• V/f control (VFCplus)
• V/f control (VFCplus)
Parameterise/configure application:
5. Load & parameterise technology application.
Detailed information on the individual technology applications can be found in the corresponding
Software Manual for the technology application and the »Engineer« online help in the chapter "L-force
Servo Drives 9400 Technology applications".
6. If required, reconfigure the interconnection of the technology application with the function block editor.
Optimise control mode:
7. Optimise control mode of the selected motor control.
• By means of traversing profile from the application and oscilloscope.
• For this see description for the corresponding motor control:
• Servo control (SC)
• Sensorless vector control (SLVC) (from software version V3.0)
• V/f control (VFCplus)
• V/f control (VFCplus)
Save project and parameter set:
8. Execute device command C00002
9. Save »Engineer« project.
. ( 121)
(from software version V3.0)
(from software version V3.0)
(from software version V3.0)
(from software version V3.0)
= "11: Save start parameters".
( 117)
( 123)
More (optional) worksteps
Worksteps
Establish network:
1. Insert network and machine application into the »Engineer« project.
2. Interconnect port blocks reasonably to each other within the machine application.
3. Configure network (set addresses, baud rate, and process data channels in a reasonable manner).
4. Establish communication with the control system.
5. Establish communication with other drive components (e.g. HMIs, I/O extensions and other controllers).
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 25
Page 26
3 Commissioning
3.4 Standard set-up
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Worksteps
Check & optimise application/DC-bus operation:
1. Traverse axis in manual operation.
•See chap. Basic drive functions
2. Check area boundaries (path, speed, torque).
3. Traverse axis in automatic operation with set-up speed, possibly together with coupled axes.
4. Check coupling with other movements (master/slave axes, tools, …).
5. Optimisation of the process at higher speeds.
6. Recording of typical signal characteristics using the oscilloscope function for the documentation.
•See chapter Oscilloscope
Save & archive project and parameter set:
1. Execute device command C00002
2. Save »Engineer« project.
3. Deposit a backup copy of the »Engineer« project, e.g. on CD ROM, in the control cabinet.
Manual jog ( 395)
( 579)
= "11: Save start parameters".
3.4 Standard set-up
Worksteps
Transfer application and parameter set to the controller:
1. Transfer the application preconfigured in »Engineer« and the corresponding parameter set to the
For a motor with an electronic nameplate (ENP):
For a motor without an electronic nameplate (ENP):
2. Execute device command C00002
3. Restart controller with connected motor to read out the motor data from the electronic nameplate
4. Execute device command C00002
memory module of the controller.
= "11: Save start parameters".
(ENP).
• Either by switching off/switching on again the voltage supply or by means of device command
•See chap. Motor interface
Note:
The motor is operated with the motor data and plant parameters identified during initial
commissioning. Adjusting motor and controller to each other
= "11000: Restart controller".
C00002
Reading out motor data from the controller ( 117)
= "11: Save start parameters".
( 123)
26
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 27
3 Commissioning
3.5 Controller replacement
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.5 Controller replacement
Scenario: The controller has failed in a running system.
Note!
For the procedure described in the following it is assumed that the memory module and
possibly available extension modules in the controller, as well as the motor are not
affected by the failure and that all parameters have been saved with mains failure
protection.
Worksteps
Replacement of the controller:
1. Replace controller.
See Mounting Instructions for the controller!
2. Insert the memory module of the failed controller into the replacement device.
3. If further extension modules are plugged into the failed controller, they must be inserted into the
replacement device as well.
Further steps are not required since all data required are on the memory module.
3.6 Motor replacement
Scenario: The motor has failed in a running system.
Note!
For the procedure described in the following it is assumed that the controller is not
affected by the failure.
Worksteps
Replacement of the motor:
1. Replace the motor.
See Mounting Instructions for the controller!
Note:
The motor connection on the controller is accessible without having to remove the standard device
from the installation backplane.
For a motor with an electronic nameplate (ENP):
2. Restart controller with connected motor to read out the motor data from the electronic nameplate.
• Either by switching off/switching on again the voltage supply or by means of device command
C00002
• See chap. Motor interface
3. Execute device command C00002
For a motor without an electronic nameplate (ENP):
Note:
The motor is operated with the motor data and plant data from the memory module.
= "11000: Restart controller".
Reading out motor data from the controller ( 117)
= "11: Save start parameters".
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 27
Page 28
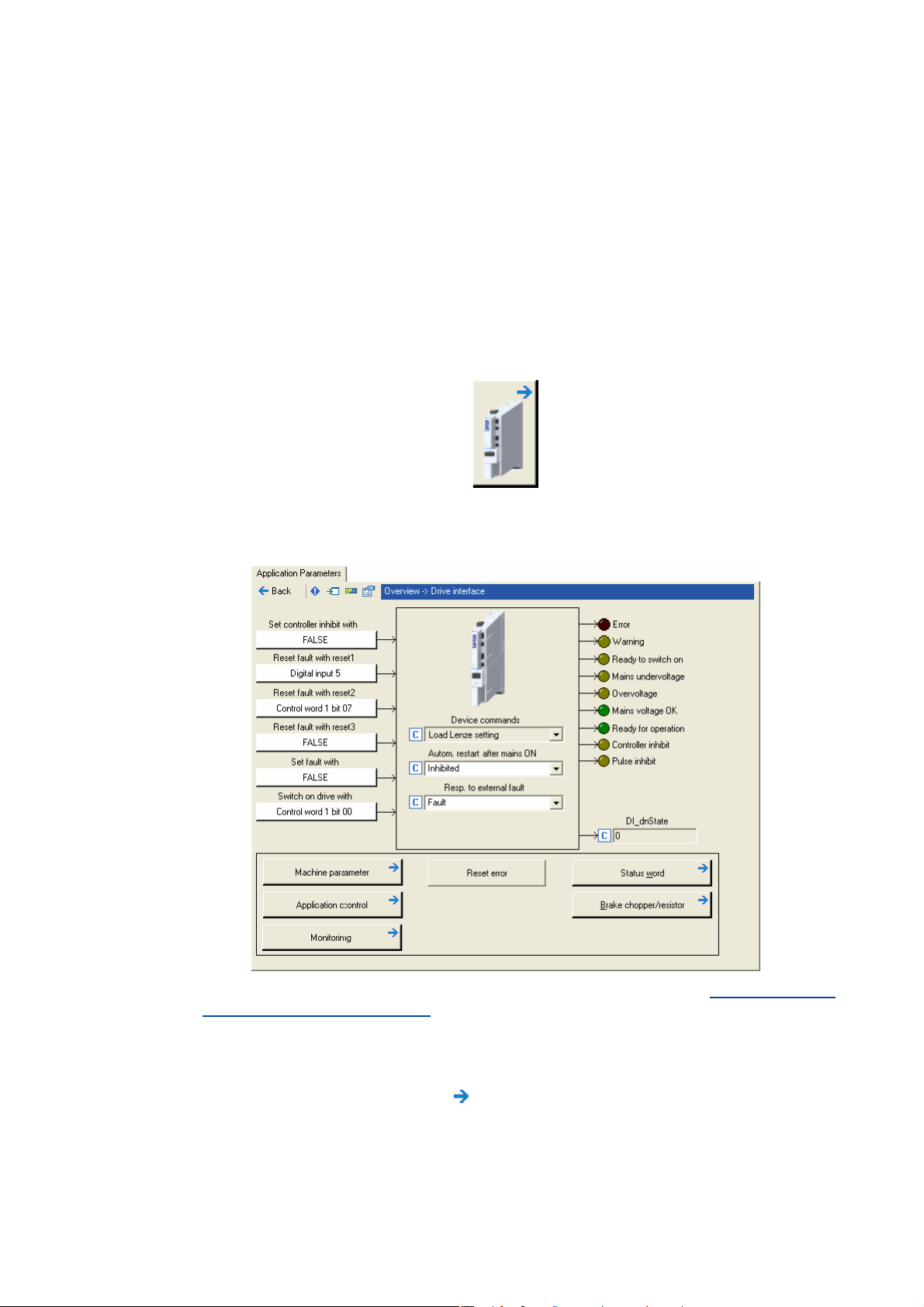
4 Drive interface
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4 Drive interface
This chapter provides you with information on the drive interface via which you can control the
drive controller into specific states and call different pieces of status information of the controller.
Furthermore the machine constants for the motor end are entered via the drive interface.
How to get to the dialog for setting the drive interface parameters:
1. Go to the Project view of the »Engineer« and select the 9400 HighLine controller.
2. Select the Application parameters tab from the Workspace.
3. Click the following button of the Overview dialog level:
Parameterisation dialog in the »Engineer«
• The white buttons indicate the configuration of the drive interface inputs. Internal interfaces
| "LS_DriveInterface" system block ( 110)
• The assignment is predefined by the technology application selected (in the example
"Actuating drive – speed"). If required, this assignment configuration can be changed by
clicking the corresponding buttons.
• If you click a button marked with the symbol, you go one level deeper in the corresponding
parameterisation dialog.
28 Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 29
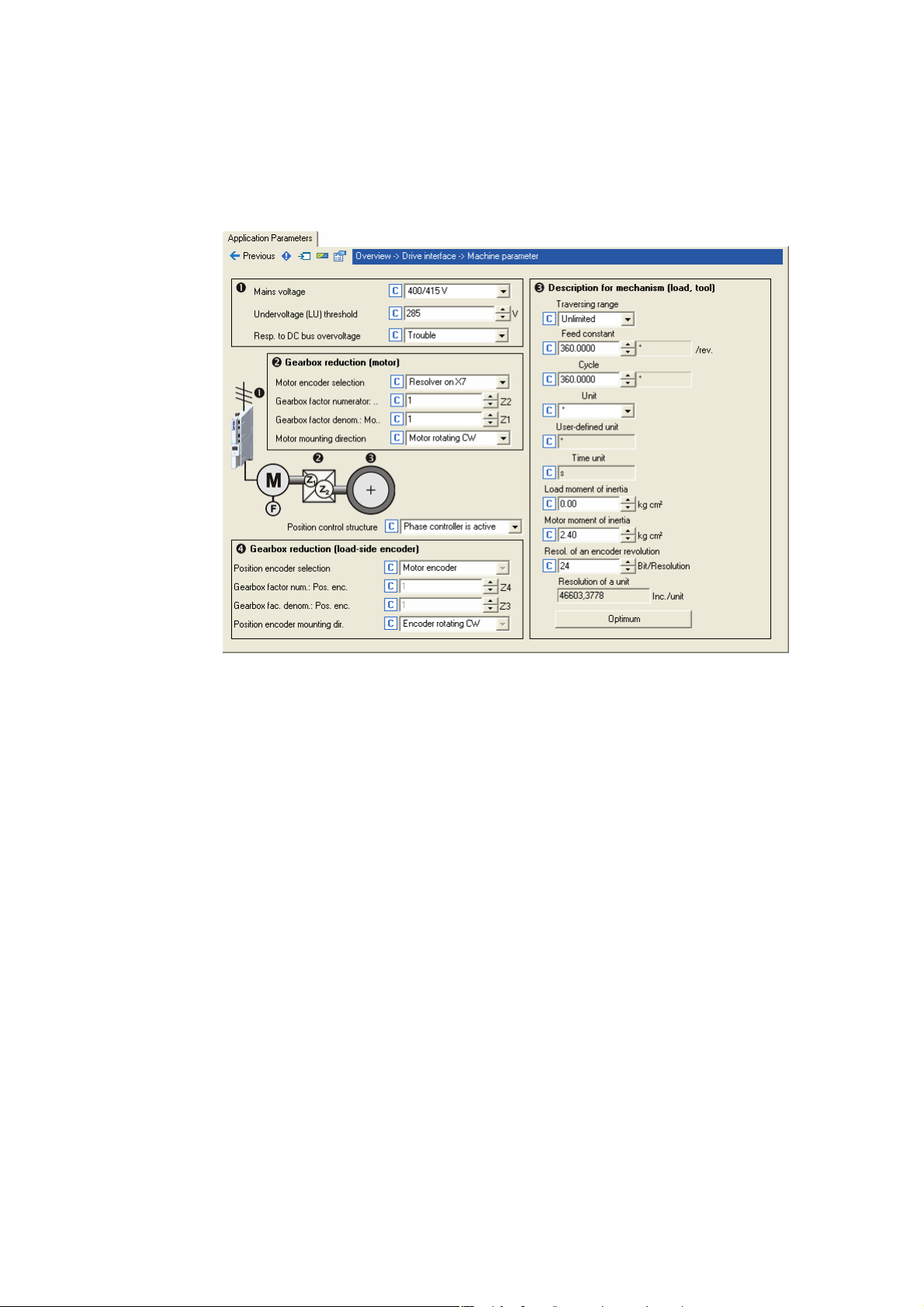
4 Drive interface
4.1 Machine parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.1 Machine parameters
The global machine constants ("machine parameters") are set in the »Engineer» on the Application
parameters tab in the dialog level Overview Drive interface Machine parameters:
Tip!
Detailed information on the different machine parameters can be obtained from the
following subchapters.
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 29
Page 30
4 Drive interface
4.1 Machine parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.1.1 Mains voltage
Via the Mains voltage list field (C00173) the mains voltage for the controller is set.
• If you set a mains voltage with an adjustable threshold for undervoltage ("LU adjustable"), this
undervoltage threshold can be set in the Undervoltage threshold (LU) input field (C00174
•In the Resp. to DC-bus overvoltage list field (C00600
effected when a DC-bus overvoltage occurs.
) you can select the response that is to be
).
Note!
Changing the setting in C00173 also affects the permissible device utilisation!
Tip!
In the chapter "Rated data" of the hardware manual the device types and their permissible
device utilisation at a certain mains voltage and switching frequency are specified.
See also: Monitoring of the device utilisation ( 108)
30
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 31

4 Drive interface
MM
i = 58.667
L EXTERTAL / Germany
GFL05-2M HCR 080-32 004 B
295 Nm
24/min (50Hz)
i = 58.667
GT/40000027
CLP 460 1196
00500038
GFL 05
i
58.667
z3
9
z112z2
88
z4
72
M
Gearbox factor numerator (C02520) z2 z4× 88 72×==
6336=
Gearbox factor denominator (C02521) z1 z3× 12 9×==
108=
4.1 Machine parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.1.2 Gearbox ratio
The gearbox ratio indicates the number of revolutions of the motor axis it takes for exactly one
revolution of the load axis (e.g. spindle or drive roll) to take place.
[4-1] Schematic diagram of gearbox ratio
• In the example shown in illustration [4-1] one revolution of the spindle is carried out at exactly
58,667 revolutions of the motor axis.
Specification of the gearbox ratio
• The gearbox ratio is to be defined in the form of a quotient (numerator/denominator); the data
required can be found in the technical data for the gearbox:
[4-2] Example: Technical data relating to the gearbox (from gearbox catalogue)
Tip!
In order to specify the gearbox ratio exactly, use the number of teeth indicated on the data
sheet or in the catalogue, if possible, instead of the information on the nameplate (see
following calculation).
In C02531/1
Example calculation on the basis of the technical gearbox data:
[4-3] Calculation example
the gearbox factor is displayed in decimal format.
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 31
Page 32

4 Drive interface
MM
4.1 Machine parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.1.3 Motor mounting direction
Depending on the motor mounting position, you can carry out an inversion of the direction of
rotation via the Motor mounting direction list field (C02527
), if required:
• C02527
• C02527
4.1.4 Feedback configuration
In most cases the system only has one motor encoder, i.e. no separate position encoder is installed
on the load side. The motor position (angle of rotation) and motor speed are detected via the motor
encoder selected in C00495
Motor encoder
[4-4] Schematic diagram - feedback with position encoder = motor encoder
The actual position and speed values on the machine side result from the conversion via the
Gearbox ratio
Tip!
= "0": Clockwise rotating motor ≡ positive machine direction.
= "1": Counter-clockwise rotating motor ≡ positive machine direction.
on the motor side and the Feed constant.
Detailed information on the parameterisation of the feedback systems for the motor
control can be found in the chapter "Encoder evaluation
and converted with regard to the load side.
". ( 236)
32
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 33

4 Drive interface
4.1 Machine parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.1.5 Unit/user-defined unit
Via these machine parameters you define the real unit of the machine in which the feed constant
and the parameters for a travel profile must be specified (e.g. position, speed, acceleration, and
deceleration).
• If you for instance set the unit "mm" for a linear axis, the position must be specified in [mm] and
the speed in [mm/s].
• By means of the user-defined unit, significant production units, like for example "bottles" can
also be set.
• For this, select the "User-defined" entry as unit in C02525
defined unit in C02526
.
and then enter the desired user-
Note!
In this documentation the term "unit" in the parameter unit data only serves as a
wildcard for the real unit of the machine.
Display parameter
Parameter Info
C02534 Time unit used
C02535 Unit used
C02537 Speed unit
C02538 Acceleration unit
Greyed out = display parameter
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 33
Page 34

4 Drive interface
M
M
4.1 Machine parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.1.6 Traversing range
The selection of the traversing range ("Unlimited", "Limited", or "Modulo") in the Traversing range
list field (C02528
) serves to define the machine measuring system.
Note!
A change-over of the traversing range results in a loss of the reference information!
"Unlimited" traversing range
The drive can rotate continuously in one direction.
• By referencing and activating the software limit positions the traversing range can be limited.
• For positioning with absolute travel command the home position must be known.
[4-5] Unlimited traversing range, taking the "feed control tape" as an example
"Limited" traversing range
The travel range is limited by positive and negative position limits (mechanical limits/travel range
limit switches/software limit positions).Limiter
( 502)
• After a defined distance the drive must travel in the opposite direction again.
• For positioning in the limited traversing range the home position must be known.
• The software limit positions are basically monitored with regard to the maximum value range
that can be represented internally (±2
via C02700
• An overflow of the value range results in a loss of the reference information.
[4-6] Example: Limited traversing range - "spindle drive" (linear axis)
.
31
increments), even if monitoring has been deactivated
34
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 35

4 Drive interface
M
j
t
j
t
4.1 Machine parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
"Modulo" traversing range
The measuring system is repeated.
• If the cycle set in C02536
typically corresponds to a revolution or tool distance.
• For positioning in the "Modulo" traversing range the home position must be known.
• Software limit positions are not effective.
• Absolute targets can be approached by exceeding the measuring system limit, e.g. from 10° to
350°.
C02536: Cycle (illustration = 60°)
is exceeded, a defined overflow occurs. In a rotative system, the cycle
[4-7] Example: Modulo traversing range - "rotary table""
Dependencies - traversing range/basic drive functions
• The following table lists the different dependencies between the selected traversing range and
the basic drive functions.
Basic drive function Traversing range
Position data for Encoder evaluation
Position data for Position follower
Positioning modes for Positioning
Restrictions for Homing
Limit positions (Limiter
) Permitted Permitted Not permitted
Unlimited Limited Modulo
Continuously Continuously Clocked
Absolute Absolute Absolute (in time)
1, 2, 5, 6, 7, 8 1, 2, 5, 6, 7, 8 5, 6, 11 ... 16
None None Home position must
be in time
Example 1: Unlimited/limited position display
Reference setting
Position in the machine measuring system
Position in the motor measuring system
Example 2: Modulo position display
Cycle
Position in the machine measuring system
Position in the motor measuring system
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 35
Page 36

4 Drive interface
M
d = 200 mm
Feed constant π d
[unit]
Revolution
--------------------------- -
π 200
mm
Revolution
--------------------------- -
628.3185
mm
Revolution
--------------------------- -
=⋅=⋅=
M
h = 5.023 mm
4.1 Machine parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.1.7 Feed constant
The feed constant corresponds to the movement of the machine during one revolution of the
gearbox output shaft.
• The entry in the Feed constant field (C02524
one revolution.
• In the case of a conveyor drive, the feed constant is obtained from the drive roll's circumference,
which, in the following example, is calculated on the basis of the indicated diameter:
d = diameter
[4-8] Schematic diagram: Feed constant for a conveyor driver
• In the case of a spindle drive (linear axis), the feed constant is derived from the leadscrew pitch.
The feed constant indicates the distance the slide travels during one revolution of the spindle
(in the following example: 5.023 mm).
) is made in the unit defined in C02525 relating to
h = leadscrew pitch (can be obtained from the technical data of the linear axis)
[4-9] Schematic diagram: Feed constant for a spindle drive
• In the case of a rotary table and its specification as an angle, the feed constant is = 360°/
revolution.
36
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 37

4 Drive interface
%LW
%LW
4.1 Machine parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.1.8 Resolution of an encoder revolution
The following applies to software versions lower than V3.0:
The resolution of an encoder revolution and hence of a position value is constantly set to 16 bits/
revolution, which corresponds to 65536 increments/revolution. At this resolution, the traversing
range comprises ±32767 revolutions.
The following applies from software version V3.0:
C00100
Sign bit
Number of revolutions: 15 bits ≡ ±32767 revolutions
Resolution of one encoder revolution: 16 bits ≡ 65536 increments/revolution
serves to adjust the resolution to the application.
• The default resolution of 16 bits/revolution is sufficient for standard applications.
[4-10] Example: standard resolution (16 bits/revolution)
• For more significant applications, a higher resolution of the position values can clearly improve
the control properties and positioning accuracies:
• Finer resolution of the position targets improved positioning accuracy
• Finer quantisation of setpoints and actual values better control quality
• Higher loop gain adjustable less following errors
• However, a higher resolution at the same time causes a restricted number of encoder
revolutions, and only smaller traversing distances can be displayed.
Sign bit
Number of revolutions: 9 bits ≡ ±512 revolutions
Resolution of one encoder revolution: 22 bits ≡ 4194304 increments/revolution
[4-11] Example: Higher resolution (22 bits/revolution) with a restricted traversing range
Tip!
In the following subchapter "Determining the optimum resolution
how you can determine the optimum resolution of the position values.
" ( 39) it is described
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 37
Page 38

4 Drive interface
4.1 Machine parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Note!
The position values (e.g. setpoints, actual values, parameters, …) in the signal flow
always use the resolution set in C00100
resolution is delivered directly by the encoder.
Multi-axis systems
In an interconnection via the electrical shaft, at least two measuring systems (master
and slave) are available in the drive.
• Each measuring system is provided with an individual setting of the resolution.
• The machine parameters (gearbox factors, feed constants, encoder resolution and
cycle) for the master measuring system or master value must be set identically for all
drives in the system.
Technology applications "Electronic gearbox" and "Synchronism"
For these two technology applications the machine parameters of the master measuring
system are defined on the Application parameters tab in the "Master value scaling"
dialog level.
Electronic cam
The machine parameters of the master measuring system for electronic cams can be
defined on the Measuring systems tab for the electrical shaft.
. In this connection it is irrelevant which
38
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 39

4 Drive interface
4.1 Machine parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.1.8.1 Determining the optimum resolution
This function extension is available from software version V3.0!
How to determine the optimum resolution:
In the dialog level Overview Drive interface Machine parameters:
1. Set gearbox factors.
2. Set real unit of the machine.
3. Set feed constant.
4. Press the Optimum positional resolution button.
•The Optimum positional resolution dialog box is displayed:
5. Go to the Max. presentable position input field and enter the highest position which is to
be entered in a parameter during operation.
• If required, set a reserve in the Overshoot input field to take into account possible
following errors (overshoot of actual values).
Then the maximum resolution for the position entered is shown in the Maximum
resolution for encoder revolution field.
6. Click Accept value to accept the displayed resolution in C00100
7. Click Close to close the dialog box again.
.
Tip!
In order to display the position that can be maximally represented for a defined resolution,
activate the second option Determine max. presentable position. Then you can set the
resolution for which the maximally presentable position is to be displayed in the Maximum
resolution for encoder revolution input field.
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 39
Page 40

4 Drive interface
4.1 Machine parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.1.9 Max. position, speed, and acceleration that can be displayed internally
By setting the following machine parameters, the connection between the real units (application
units) of the machine and the internal units in the controller is described:
• Gearbox ratio (C02520
• Feed constant (C02524
• Resolution of an encoder revolution (C00100
Possibly the defined values for position, speed, and acceleration cannot be represented in the
internal units by the numerical 32-bit format used.
• The following display parameters show the values that can be maximally displayed:
Parameter Info Lenze setting
C02539 Max. presentable position - Unit
C02540 Speed that can be maximally displayed - Unit/s
C02541 Acceleration that can be maximally displayed - Unit/s
Greyed out = display parameter
Response if a value that cannot be displayed internally is entered
If a position, speed, or acceleration which cannot be represented internally is defined via
parameters, the value defined is limited to the maximum value that can be represented internally
(±2147483647).
, C02521, C02522, C02523)
)
)
Value Unit
2
40
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 41

4 Drive interface
4.1 Machine parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
The following only applies to software version V3.0:
• If a position, speed, or acceleration which cannot be represented internally is defined via
parameters, the value defined is rejected.
• If an internal counter overflow of a parameter value due to a subsequent change of the machine
parameters for the gearbox ratio, feed constant, or resolution of an encoder revolution is
detected, the "Fault" error response is triggered and a corresponding error message is entered
in the logbook of the controller:
Error number Error message
0x00B8001A Int. overflow C02620
0x00B8001B Int. overflow C02621 (manual speed 2)
0x00B8001C Int. overflow C02622
0x00B8001D Int. overflow C02624
0x00B80020 Int. overflow C02701/1 (positive SW limit position)
0x00B80021 Int. overflow C02701/2
0x00B80022 Int. overflow C02703
0x00B80023 Int. overflow C02705
0x00B80024 Int. overflow C02708/1
0x00B80025 Int. overflow C02708/2
0x00B80026 Int. overflow C02708/3
0x00B80027 Int. overflow C02708/4
0x00B80028 Int. overflow C02710/1
0x00B80029 Int. overflow C02710/2
0x00B8002A Int. overflow C02710/3
0x00B8002B Int. overflow C02710/4
0x00B8002C Int. overflow C02713
0x00B8002D Int. overflow C02642
0x00B8002E Int. overflow C02643
0x00B8002F Int. overflow C02644 (homing: speed 1)
0x00B80030 Int. overflow C02645
0x00B80031 Int. overflow C02646
0x00B80032 Int. overflow C02647 (homing: acceleration 2)
0x00B80033 Int. overflow C02670
(manual speed 1)
(manual acceleration)
(manual deceleration)
(negative SW limit position)
(maximum speed)
(maximum acceleration)
(limited speed 1)
(limited speed 2)
(limited speed 3)
(limited speed 4)
(decel. limited speed 1)
(decel. limited speed 2)
(decel. limited speed 3)
(decel. limited speed 4)
(maximum distance manual jog)
(home position)
(homing: target position)
(homing: acceleration 1)
(homing: speed 2)
(positioning: tolerance for target position)
Tip!
Possible measures for error correction:
• Plausibility check of the machine parameters set for gearbox ratio, feed constant, or
resolution of an encoder revolution.
• Set parameters with a counter overflow to a value which can also be represented
internally.
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 41
Page 42

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2 Device commands
In the following subchapters the device commands of the controller are described, which are
provided in C00002
keypad when an online connection has been established.
and which can be executed by means of the »Engineer« or alternatively with the
Note!
Before switching off the supply voltage after a device command has been executed,
check the successful execution of the device command via the status display in C00003
!
The meaning of the status display in C00003
the corresponding device command.
Activating frequently required device commands via the toolbar
The simplest way to execute the frequently required device commands is directly via the Toolbar of
»Engineer« when an online connection has been established.
Icon Function
Enable controller
Inhibit controller
Start application
Inhibit controller and Stop application
can be obtained from the subchapter for
Note!
Device commands that can be executed via the Toolbar of the »Engineer« always affect
the element currently selected in the Project view including all subelements!
• If no controller but a system module is selected in the Project view, the corresponding
device command will be activated in all lower-level controllers having an online
connection with the »Engineer«.
Before the desired action is carried out, a confirmation prompt appears first, asking
whether the action is really to be carried out.
42
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 43

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Activating device commands via the "Device commands" dialog box
All device commands of the controller are available in »Engineer« in the Device Commands dialog
box:
•The Device commands dialog box can be opened by clicking on the Device commands list field
on the Application parameters tab in the dialog level Overview Drive interface.
•The Device commands dialog box can also be opened by clicking the setting of C00002
parameters tab.
on the All
Note!
If you click a device command in the list field of the Device commands dialog box, the
corresponding device command is executed immediately!
• During and after the execution of the device command, the processing status is displayed in the
Device Commands dialog box:
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 43
Page 44

4 Drive interface
Application 3
PS
Application 2
PS
Memory module MM
PS
9400
PS
RAM
Firmware Application 1Application
PS
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.1 Load Lenze setting
The C00002 = "0: Load Lenze setting" device command is used to reset the parameters of the active
application to the Lenze setting, which is stored in the controller firmware:
[4-12] "Load Lenze setting" function
• Only possible when the application has stopped and the controller is inhibited.
• All parameter changes made since the last saving of the parameter set will get lost!
• This device command only affects the settings of the operating system, application and module
parameters, the active application or the configuration selected with the function block editor
remains unchanged.
Possible status displays for this device command
Status (C00003) Meaning
34050 Device command in process
0 Device command executed successfully
1 General fault
39424 CAN fault
... ...
39679 CAN fault
Related device commands
Load start parameters
Save start parameters
( 45)
( 49)
44
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 45

4 Drive interface
PS
9400
RAM
Firmware Application 1*
PS
Application 3
PS
Application 2
PS
Memory module MM
PS
Application 1*
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.2 Load start parameters
Via C00002 = "1: Load start parameters" the start parameters of the active application can be
reloaded from the memory module to the controller:
* In this example, application 1 is the active application
[4-13] "Load start parameters" function
• Only possible when the application has stopped and the controller is inhibited.
• All parameter changes made since the last saving of the parameter set will get lost!
• This device command only affects the settings of the operating system, application and module
parameters, the active application or the configuration selected with the function block editor
remains unchanged.
Possible status displays for this device command
Status (C00003) Meaning
99586 Device command in process
65536 Device command executed successfully
65537 General fault
99371 Fault while reading the parameter set partition
99374 No memory module available
104960 CAN fault
... ...
105215 CAN fault
Related device commands
Save start parameters
Load Lenze setting
( 49)
( 44)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 45
Page 46

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.3 ENP:Load plant data
If the Lenze motor connected to the controller is provided with an electronic nameplate (ENP), all
motor data are automatically read out from the electronic nameplate of the motor when the
controller is switched on for the first time and are temporarily stored in the controller at first.
With the device command C00002
the electronic nameplate (ENP) of the motor.
• Only possible when the application has stopped and the controller is inhibited.
• For a permanent acceptance of the motor data, the parameter set must be saved.Save start
parameters ( 49)
• The following plant data are read out from the ENP:
Parameter Info
C00022
C00070 Speed controller gain
C00071
C00596
Maximum current
Speed controller reset time
Threshold max. speed reached
= "2: ENP: Load plant data" the motor data can be reread from
Note!
The two pieces of plant data C00011 and C00497 listed in the following table are not
read out from the ENP and thus have to be checked and, if required, set manually after
this device command has been executed!
Parameter Info
C00011
C00497
Motor reference speed
Speed act. val. time const.
Possible status displays for this device command
Status (C00003) Meaning
165122 Device command in process
131072 Device command executed successfully
131073 General fault
46
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 47

4 Drive interface
PS
9400
RAM
Firmware Application
PS
Application 3
Memory module MM
Application 1
Application 2*
PS
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.4 Activate application
If several applications are available on the memory module, the C00002 = "5: Activate application"
device command can be used to activate the application the number of which has been set in
C00005
* In this example, application selection "2" is set in C00005
[4-14] "Activate application" function
.
• Only possible when the application has stopped and the controller is inhibited.
• Whether the application is started at the same time, depends on the auto-start setting selected
in C02104
.
• After mains switching, the preset application will be loaded into the controller.
• If after mains switching another application than the one preset by Lenze is to be loaded, it must
be activated first and then the selected application must be saved with the device command
"Save selected application
• The number of the currently active application is displayed in C00007
". ( 48).
.
Note!
When the application is activated, the corresponding start parameter set is loaded
automatically and parameter settings executed before will get lost unless the parameter
set was saved before!
Possible status displays for this device command
Status (C00003) Meaning
361730 Device command in process
327680 Device command executed successfully
327681 General fault
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 47
Related device commands
Save selected application
Start application
( 53) / Stop application ( 54)
( 48)
Page 48

4 Drive interface
PS
9400
RAM
Firmware Application 2*
PS
Application 3
Memory module MM
Application 1
Application 2*
PS
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.5 Save selected application
After mains switching the controller always loads the preset start application from the memory
module, even if a different application has been active before.
With the device command C00002
= "7: Save selected application" the active application can be
defined as start application.
* In this example, the active application 2 is defined as start application
[4-15] "Save selected application" function
• When this device command is executed, the parameter set is also saved automatically.
• The number of the currently active application is displayed in C00007
.
Possible status displays for this device command
Status (C00003) Meaning
492802 Device command in process
458752 Device command executed successfully
458753 General fault
Related device commands
Activate application
Start application
Stop application
( 47)
( 53)
( 54)
48
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 49

4 Drive interface
PS
9400
RAM
Firmware Application 1*
PS
Application 3
PS
Application 2
PS
Memory module MM
PS
Application 1*
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.6 Save start parameters
Controller parameter changes made via »Engineer« or keypad will get lost after mains switching of
the controller or loading of another application unless the settings have been explicitly saved.
With the device command C00002
the active application can be saved with mains failure protection in the memory module of the
controller:
* In this example, application 1 is the active application
[4-16] "Save start parameters" function
= "11: Save start parameters" the current parameter settings of
Tip!
With the keypad this device command can be executed via the left function key if it is
currently assigned with the function.
Note!
The saving process can take several seconds. Before you switch off the supply voltage
after having executed this device command, therefore be absolutely sure to check via
the status display in C00003
successfully!
Saving of the cam data
whether the device command has been executed
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 49
From software version V4.0, this device command also includes the powerfail-proof
saving of the cam data on the memory module.
• The saving process is only carried out if the cam data in the controller and the memory
module differ from each other (based on the time stamp/GUID of the cam data).
• For saving the cam data, you do not need to enter a possibly existing user password
(C02900
•The C00002
data ( 89)
).
= "502: Save Cam Data" device command remains available.Save cam
Page 50

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Possible status displays for this device command
Status (C00003) Meaning
754946 Device command in process
720896 Device command executed successfully
720897 General fault
754718 Fault while writing into a file
754734 No memory module available
761857 Access to file has been denied since the file is already accessed from another position
761861 I/O fault when accessing the file system
761868 RAM is full
761869 Access authorisation denied
761884 No free memory on the memory module
Related device commands
Load start parameters
( 45)
50
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 51

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.7 Delete logbook
The C00002 = "20: Delete logbook" device command is used to delete all entries in the logbook.
Tip!
To display the logbook in the »Engineer«, click the Logbook button on the Diagnostics tab.
In the Logbook dialog box, it is also possible to delete all logbook entries by clicking the
Delete button.
Further information on the logbook can be found in the chapter "Diagnostics & fault
analysis". ( 598)
Possible status displays for this device command
Status (C00003) Meaning
1344770 Device command in process
1310720 Device command executed successfully
1310721 General fault
Related device commands
Archive logbook
( 52)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 51
Page 52

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.8 Archive logbook
The C00002 = "21: Archive logbook" device command is used to archive the entries in the logbook.
Tip!
To display the logbook in the »Engineer«, click the Logbook button on the Diagnostics tab.
You can also export all entries available in the logbook into a file (*.log) by clicking the
Export button in the Logbook dialog box.
Further information on the logbook can be found in the chapter "Diagnostics & fault
analysis". ( 598)
Possible status displays for this device command
Status (C00003) Meaning
1410306 Device command in process
1376256 Device command executed successfully
1376257 General fault
Related device commands
Delete logbook
( 51)
52
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 53

4 Drive interface
Memory module MM
9400
RAM
Firmware Application 1Application
Application 2
Application 3
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.9 Start application
The C00002 = "31: Start application" device command is used to start the active application in the
controller.
[4-17] "Start application" function
• The number of the currently active application is displayed in C00007.
• The current program status is displayed in C02108
• The active function state of the application is displayed in C02530
.
.
Tip!
This device command can also be activated via the icon in the Toolbar.
Possible status displays for this device command
Status (C00003) Meaning
2065666 Device command in process
2031616 Device command executed successfully
2031617 General fault
Related device commands
Stop application
Activate application
Save selected application
( 54)
( 47)
( 48)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 53
Page 54

4 Drive interface
Memory module MM
9400
RAM
Firmware Application 1Application
Application 2
Application 3
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.10 Stop application
The C00002 = "32: Stop application" device command can be used to stop the application started in
the controller again.
[4-18] "Stop application" function
• Only possible when the controller is inhibited.
Tip!
Via the icon in the Toolbar the controller can be inhibited, and at the same time the
application in the controller can be stopped.
Possible status displays for this device command
Status (C00003) Meaning
2131202 Device command in process
2097152 Device command executed successfully
2097153 General fault
Related device commands
Start application
Inhibit controller
Activate application
Save selected application
( 53)
( 60)
( 47)
( 48)
54
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 55

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.11 Reset program
The C00002 = "33: Reset program" device command is used to reset the application program in the
controller.
• All variables are reset to their initialisation value.
• The situation corresponds to the start of a new program loaded into the control (cold start).
Possible status displays for this device command
Status (C00003) Meaning
2196738 Device command in process
2162688 Device command executed successfully
2162689 General fault
Related device commands
Delete program
Restart program
( 56)
( 57)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 55
Page 56

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.12 Delete program
The C00002 = "34: Delete program" device command is used to delete the application program in
the controller and reset the controller to its original state.
• All variables are reset to their initialisation value.
Possible status displays for this device command
Status (C00003) Meaning
2262274 Device command in process
2228224 Device command executed successfully
2228225 General fault
Related device commands
Reset program
Restart program
( 55)
( 57)
56
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 57

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.13 Restart program
The C00002 = "35: Restart program" device command is used to restart the application program in
the controller.
• All variables except the RETAIN variables are reset to their initialisation value.
• The situation corresponds to a power failure or switching the controller off/on (warm start)
while the program is running.
Possible status displays for this device command
Status (C00003) Meaning
2327810 Device command in process
2293760 Device command executed successfully
2293761 General fault
Related device commands
Reset program
Delete program
( 55)
( 56)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 57
Page 58

4 Drive interface
0 1 ms 4 ms
T1
T2 T2
T1 T1 T1 T1T1
T3
1
0
2
3
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.14 Reset runtime measurement
When the application is started, the controller continuously carries out a runtime measurement for
the interval-controlled application task, the interval-controlled user task, and the free-running idle
task and displays the current and maximum task runtimes via parameters.
The C00002
measurement, i.e. the memory for the maximum values is reset to "0".
Possible status displays for this device command
Status (C00003) Meaning
= "36: Reset runtime measurement" device command is used to reset the runtime
2393346 Device command in process
2359296 Device command executed successfully
2359297 General fault
Note!
The runtime measurement is also reset by the following actions:
• Start application
• Reset/delete/restart program
Example for runtime measurement
System task
Application task (here: task interval = 1 ms)
User task (here: task interval = 4 ms)
Free-running idle task
[4-19] Example: Runtimes of the different tasks
58
T1 = runtime of the application task
T2 = runtime of the user task
T3 = runtime of the idle task
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 59

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Display parameter
Parameter Info Lenze setting
Value Unit
C02121/1 Current runtime - application task - μs
C02121/2 Maximum runtime - application task - μs
C02122/1 Current runtime - user task - μs
C02122/2 Maximum runtime - user task - μs
C02123/1 Current runtime - idle task - μs
C02123/2 Maximum runtime - idle task - μs
Greyed out = display parameter
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 59
Page 60

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.15 Inhibit controller
The C00002 = "41: Inhibit controller" device command is used to inhibit the controller ("controller
inhibit"), i.e. the power output stages in the controller are inhibited and the speed/current and
position controllers of the motor control are reset. The motor becomes torqueless and coasts unless
it is already at standstill.
• The controller can also be inhibited by other sources, e.g. via the digital input RFR or through the
application.
• C00158
provides a bit coded representation of all active sources/triggers of a controller inhibit.
Note!
This device command has no status display in C00003, i.e. the display remains
unchanged showing the previous device command status.
Tip!
This device command can also be activated via the icon in the Toolbar.
Related device commands
Enable controller
( 61)
60
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 61

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.16 Enable controller
The C00002 = "42: Enable controller" device command is used to re-enable an inhibited controller.
Note!
Please note that the controller will only be enabled if all sources for controller inhibit are
reset!
• C00158
controller inhibit.
provides a bit coded representation of all active sources/triggers of a
This device command has no status display in C00003
unchanged showing the previous device command status.
Tip!
This device command can also be activated via the icon in the Toolbar.
Related device commands
Inhibit controller
( 60)
, i.e. the display remains
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 61
Page 62

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.17 Reset error
The C00002 = "43: Reset error" device command is used to acknowledge an error message if the
error cause has been eliminated and the error is thus no longer pending.
Tip!
An error message can also be acknowledged by activating the Reset error button in the
Diagnostics tab.
Further information on error messages can be found in the chapter "Diagnostics & fault
analysis". ( 598)
Note!
This device command has no status display in C00003, i.e. the display remains
unchanged showing the previous device command status.
62
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 63

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.18 Activate quick stop
The C00002 = "45: Activate quick stop" device command is used to activate the basic function
"Quick stop", i. e. the drive is brought to standstill within the deceleration time set, irrespective of
the setpoint defined.
• Quick stop can also be activated by other sources, e.g. by the application.
• C00159
displays a bit code of active sources/causes for the quick stop.
Note!
The activation of quick stop may cause following errors in superimposed controls (e.g.
synchronous or position control). If several drives execute a coordinated movement, the
quick stop function should therefore only be used for the motion master (master drive)
in order to maintain the coordination.
This device command has no status display in C00003
unchanged showing the previous device command status.
, i.e. the display remains
Tip!
In contrast to the "stop" function, quick stop is required for a stop in the event of an error.
Thus, quick stop can also be set as an error response ("quick stop by trouble) for many
monitoring functions. Detailed information on this can be found in the chapter
"Diagnostics & fault analysis
Related device commands
Reset quick stop
( 64)
". ( 598)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 63
Page 64

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.19 Reset quick stop
The C00002 = "46: Reset quick stop" device command is used to exit an active quick stop again.
Note!
Please note that the quick stop is only exited if all sources for quick stop are reset!
• C00159
This device command has no status display in C00003
unchanged showing the previous device command status.
Related device commands
Activate quick stop
displays a bit code of active sources/causes for the quick stop.
, i.e. the display remains
( 63)
64
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 65

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.20 Identify pole position (360°)
If no absolute value encoder is connected, or a synchronous motor of a third-party manufacturer is
driven by the controller, the C00002
determine the pole position with regard to the motor encoder currently activated in C00495
• The function can only be activated if the controller is inhibited. Then the execution of the
function starts automatically as soon as the controller inhibit is deactivated again.
• During the pole position identification, the motor carries out one electrical revolution. This
leads to a mechanical rotation of the motor shaft.
• The determined pole position is indicated under code C00058
= "51: Identify pole position (360°)" device command is used to
.
.
Note!
From software version V4.0 the response parameterised in C00640 (Lenze setting:
"Fault") is triggered and the error message "Pole position identification cancelled" is
entered in the logbook of the controller if the pole position identification process is
aborted.
Tip!
Detailed information on the pole position identification can be found in the chapter "Motor
interface", subchapter "Pole position identification
Possible status displays for this device command
Status (C00003) Meaning
3376386 Device command in process
3342336 Device command executed successfully
3342337 General fault
3382023 Pole position identification cannot be executed because of wrong motor type (asynchronous
motor).
3382024 Pole position identification has been aborted
3382025 Pole position identification cannot be executed because another identification is already
active.
3382026 Identification of pole position cannot be executed because U-rotation or I-rotation test
mode is active.
3382027 Identification of pole position cannot be executed because current controller optimisation
mode is active.
3382033 Pole position identification cannot be executed because the motor is blocked (e.g. by a
mechanical brake), a motor phase is not connected, or a phase shifter is in the motor cable.
3382047 Pole position identification cannot be executed because an error or trouble is active.
3382065 Pole position identification cannot be executed because either the entire motor or a motor
phase is not connected.
• This error message is only available from software version V3.0 onwards.
". ( 128)
Related device commands
Identify pole position (min. motion)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 65
( 66)
Page 66

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.21 Identify pole position (min. motion)
If no absolute value encoder is connected, or a synchronous motor of a third-party manufacturer is
driven by the controller, the C00002
used to determine the pole position with respect to the motor encoder currently activated in
C00495
.
• The function can only be activated if the controller is inhibited. Then the execution of the
function starts automatically as soon as the controller inhibit is deactivated again.
• During the pole position identification, the rotor aligns itself. This is compensated by a position
control.
= "52: Identify pole position (min. motion)" device command is
• The determined pole position is indicated under code C00058
.
Note!
From software version V4.0 the response parameterised in C00640 (Lenze setting:
"Fault") is triggered and the error message "Pole position identification cancelled" is
entered in the logbook of the controller if the pole position identification process is
aborted.
Tip!
Detailed information on the pole position identification can be found in the chapter "Motor
interface", subchapter "Pole position identification
Possible status displays for this device command
Status (C00003) Meaning
3441922 Device command in process
3407872 Device command executed successfully
". ( 128)
66
3407873 General fault
3447559 Pole position identification cannot be executed because of wrong motor type (asynchronous
motor).
3447560 Pole position identification has been aborted
3447561 Pole position identification cannot be executed because another identification is already
active.
3447562 Identification of pole position cannot be executed because U-rotation or I-rotation test
mode is active.
3447563 Identification of pole position cannot be executed because current controller optimisation
mode is active.
3447569 Pole position identification cannot be executed because the motor is blocked (e.g. by a
mechanical brake), a motor phase is not connected, or a phase shifter is in the motor cable.
• This error message is only available from software version V4.0 onwards.
3447583 Pole position identification cannot be executed because an error or trouble is active.
3447597 Identification of pole position cannot be executed because the rotor has moved too strongly.
3447601 Pole position identification cannot be executed because either the entire motor or a motor
phase is not connected.
• This error message is only available from software version V3.0 onwards.
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 67

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Related device commands
Identify pole position (360°)
( 65)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 67
Page 68

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.22 Resolver error identification
This function extension is available from software version V7.0!
The C00002
which are caused when sine and cosine tracks do not magnetise orthogonally. The identified
resolver errors serve to compensate the resolver errors.
• Only possible with servo control.
= "59: Resolver error identification" device command serves to detect resolver errors
Tip!
Detailed information on the resolver error compensation can be found in the chapter
"Encoder evaluation" in the subchapter "Resolver error compensation
Possible status displays for this device command
Status (C00003) Meaning
3900674 Device command in process
3866624 Device command executed successfully
3866625 General fault
3906358 Resolver error identification cannot be executed since the wrong control type is active (no
3906359 Resolver error identification cannot be executed since an error or trouble is active.
3906360 Resolver error identification cannot be executed because another identification is already
3906361 Resolver error identification cannot be executed because of too small speed (< 500 rpm).
servo control).
active.
". ( 263)
68
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 69

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.23 Load Lenze INV characteristic
This function extension is available from software version V4.0!
If determination of the so-called "inverter error characteristic" is not possible with the device
command "Calculate inv. characteristic
C00002
the device in question.
= "70: Load Lenze INV characteristic" can be used to load a characteristic which is typical of
• Only possible when the controller is inhibited.
" or leads to incorrect results, the device command
Tip!
Detailed information about the determination of the inverter error characteristic can be
found in the chapter "Motor interface" in the subchapter "Optimising the switching
performance of the inverter". ( 135)
Possible status displays for this device command
Status (C00003) Meaning
4621570 Device command in process
4587520 Device command executed successfully
4587521 General fault
Related device commands
Calculate inv. characteristic
( 70)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 69
Page 70

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.24 Calculate inv. characteristic
If a motor of a third-party manufacturer with unknown motor parameters is driven by the
controller, the C00002
determine the so-called "Inverter error characteristic" for optimising the inverter switching
performance.
= "71: Determine inverter characteristic" device command can be used to
Tip!
Detailed information about the determination of the inverter error characteristic can be
found in the chapter "Motor interface" in the subchapter "Optimising the switching
performance of the inverter". ( 135)
From software version V4.0: If the inverter error characteristic cannot be determined by
means of this device command, or if the results of the determination are incorrect, the
device command "Load Lenze INV characteristic
of the device.
( 69)
" can be used to load a characteristic typical
Possible status displays for this device command
Status (C00003) Meaning
4687106 Device command in process
4653056 Device command executed successfully
Related device commands
4653057 General fault
4692754 The calculation of the inverter characteristic cannot be started since the current controller
test mode is active.
4692755 The calculation of the inverter characteristic cannot be started since the V/f test mode is
active.
4692756 The calculation of the inverter characteristic cannot be started since the pole position
identification is active.
4692757 Calculation of the inverter characteristic has been aborted.
4692758 Calculation of the inverter characteristic has been interrupted by error.
4692789 Determined inverter error characteristic exceeds internal limits.
• This situation can for instance occur if the motor power is very much lower than the
device power.
• This error message is only available from software version V5.0 onwards.
70
Load Lenze INV characteristic
( 69)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 71

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.25 Determine motor parameters
The C00002 = "72: Determine motor parameters" device command is used to automatically
determine the motor parameters for a third-party motor that are listed in the following table – if
they are not known:
Parameter Info ASM SM
C00079
C00082
C00084
C00085
C00091
C00092
Mutual motor inductance
Motor rotor resistance
Motor stator resistance
Motor stator leakage inductance
Motor cosine phi
Motor magnetising current
Tip!
Detailed information about the automatic determination of the motor parameters can be
found in the chapter "Motor interface" in the subchapter "Determining the motor
parameters". ( 138)
Possible status displays for this device command
Status (C00003) Meaning
4752642 Device command in process
4718592 Device command executed successfully
4718593 General fault
4758290 Motor identification cannot be started since the current controller test mode is active.
4758291 Motor identification cannot be started since the V/f test mode is active.
4758292 Motor identification cannot be started because pole position identification is active.
4758293 Motor identification has been aborted.
4758294 Motor identification has been aborted by fault.
4758332 Motor identification aborted due to inconsistent motor parameters.
• This error message is only available from software version V7.0 onwards.
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 71
Page 72

4 Drive interface
Gain
Stator leakage inductance
340 μs
-------------------------------------------------------------------=
Reset time
Stator leakage inductance
Stator resistance
-------------------------------------------------------------------=
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.26 Calculate current controller parameters
This function extension is available from software version V5.0 onwards!
The device command C00002
the gain and the reset time of the current controller for a third-party motor.
Precondition:
inductance" (C00085
information before, or have been determined automatically via the device command "Determine
motor parameters".
The two motor parameters "stator resistance" (C00084) and "stator leakage
) either have been parameterised manually on the basis of the manufacturer
= "77: Calculate current controller parameters" is used to calculate
Note!
For a Lenze motor the calculation and the subsequent optimisation of the current
controller parameters is not
accepted from »Engineer« motor catalogue.
The device command is no
controller parameters!
• The calculation is carried out according to the following formulas:
required, as the correct current controller parameters are
identification procedure for determining the current
• After the device command has been executed successfully (see status in C00003
calculated values are set in C00075
optimisation of the current controller in the test mode.
• In the event of an error, codes C00075
and C00076. They serve as starting values for a subsequent
and C00076 are not altered.
Tip!
Detailed information on the optimisation of the current controller in the test mode can be
found in the chapter "Motor interface" in the subchapter for the respective motor control:
•Servo control (SC)Optimising the current controller
• Sensorless vector control (SLVC)Optimising the current controller
• V/f control (VFCplus) Optimising the current controller
( 144)
( 178)
( 193)
), the two
72
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 73

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Possible status displays for this device command
Status (C00003) Meaning
5080322 Device command in process
5046272 Device command executed successfully
5046273 General fault
5086002 At least one calculated value is outside the valid setting range.
5086003 Stator resistance (C00084
Related device commands
) too small (zero).
Determine motor parameters
Calculate speed controller parameters
( 71)
( 74)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 73
Page 74

4 Drive interface
Gain
Moment of inertia of motor+load
4 Actual speed value filter time constant 500 μ s+()⋅
-----------------------------------------------------------------------------------------------------------------------------------------
2π
60
------
⋅=
Reset time 4
2
Actual speed value filter time constant 500 μ s+()⋅=
Rate time 0 ms=
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.27 Calculate speed controller parameters
This function extension is available from software version V5.0 onwards!
The device command C00002
gain, reset time, and rate time of the speed controller.
Precondition:
parameterised correctly before.
The moments of inertia for the motor (C00273/1) and load (C00273/2) have been
= "78: Calculate speed controller parameters" is used to calculate the
Note!
The device command is no identification procedure for determining the speed controller
parameters!
• The calculation is carried out according to the following formulas, taking the actual speed value
filter time constant into consideration (C00497
• After the device command has been executed successfully (see status in C00003
values are set in the corresponding codes:
• C00070
• C00071
• C00072
• In the event of an error, these codes are not altered.
: Speed controller gain
: Speed controller reset time
: Speed controller rate time
):
), the calculated
74
Possible status displays for this device command
Status (C00003) Meaning
5145858 Device command in process
5111808 Device command executed successfully
5111809 General fault
5151540 At least one calculated value is outside the valid setting range.
Related device commands
Calculate current controller parameters
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
( 72)
Page 75

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.28 CAN on board: Reset Node
The C00002 = "91: CAN on board: reset node" device command is used to reinitialise the CANopen
system bus interface of the controller ("CAN on board"), which is required, for instance, after the
data transfer rate, node address, or identifiers have been changed.
Tip!
For detailed information about the "CAN on board" CANopen system bus interface, please
see the "CAN" Communication Manual.
Possible status displays for this device command
Status (C00003) Meaning
5997826 Device command in process
5963776 Device command executed successfully
5963777 General fault
6003200 CAN fault
... ...
6003455 CAN fault
Related device commands
CAN on board: Pred.Connect.Set
CAN on board: Identify node
( 79)
( 77)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 75
Page 76

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.29 CAN module: Reset node
The C00002 = "92: CAN module: reset node" device command is used to reinitialise the CANopen
interface of a CANopen communication module in module slot MXI1 or MXI2, which is required, for
instance, after the data transfer rate, node address, or identifiers have been changed.
Tip!
Detailed information on the CANopen communication module (E94AYCCA) can be found in
the "CAN" Communication Manual.
Possible status displays for this device command
Status (C00003) Meaning
6063362 Device command in process
6029312 Device command executed successfully
6029313 General fault
6068736 CAN fault
...
6068991 CAN fault
Related device commands
CAN module: Pred.Connect.Set
CAN module: Identify node
( 80)
( 78)
76
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 77

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.30 CAN on board: Pred.Connect.Set
The C00002 = "93: CAN on board: Pred.Connect.Set" device command is used to set the basic
identifiers for the CANopen system bus interface of the controller ("CAN on board") according to the
"Predefined Connection Set" (DS301V402).
Tip!
For detailed information about the "CAN on board" CANopen system bus interface, please
see the "CAN" Communication Manual.
Possible status displays for this device command
Status (C00003) Meaning
6128898 Device command in process
6094848 Device command executed successfully
6094849 General fault
Related device commands
CAN on board: Reset Node
CAN on board: Identify node
( 75)
( 79)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 77
Page 78

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.31 CAN module: Pred.Connect.Set
The C00002 = "94: CAN module: pred.connect.set" device command is used to set the basic
identifiers for the CANopen system bus interface of a CANopen communication module in module
slot MXI1 or MXI2 according to the "Predefined Connection Set" (DS301V402).
Tip!
Detailed information on the CANopen communication module (E94AYCCA) can be found in
the "CAN" Communication Manual.
Possible status displays for this device command
Status (C00003) Meaning
6194434 Device command in process
6160384 Device command executed successfully
6160385 General fault
Related device commands
CAN module: Reset node
CAN module: Identify node
( 76)
( 80)
78
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 79

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.32 CAN on board: Identify node
The C00002 = "95: CAN on board: identify node" device command is used to determine the nodes
connected to the CANopen system bus interface of the controller ("CAN on board").
• The result of the CAN bus scan is displayed in C00393
Tip!
For detailed information about the "CAN on board" CANopen system bus interface, please
see the "CAN" Communication Manual.
Possible status displays for this device command
Status (C00003) Meaning
6259970 Device command in process
6225920 Device command executed successfully
6225921 General fault
Related device commands
CAN on board: Reset Node
CAN on board: Pred.Connect.Set
( 75)
( 77)
.
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 79
Page 80

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.33 CAN module: Identify node
The C00002 = "96: CAN module: identify node" device command is used to determine the nodes
connected to the CANopen system bus interface of a CANopen communication module in module
slot MXI1 or MXI2.
• The result of the CAN bus scan is displayed in C13393 (for MXI1) or in C14393 (for MXI2).
Tip!
Detailed information on the CANopen communication module (E94AYCCA) can be found in
the "CAN" Communication Manual.
Possible status displays for this device command
Status (C00003) Meaning
6325506 Device command in process
6291456 Device command executed successfully
6291457 General fault
Related device commands
CAN module: Reset node
CAN module: Pred.Connect.Set
( 76)
( 78)
80
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 81

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.34 Unbind/bind Ethernet module MXI1
The C00002 = "101: Unbind/bind Ethernet module: MXI1" device command is used to reinitialise
the Ethernet interface of an Ethernet communication module in module slot MXI1, e. g. to accept a
newly set IP or gateway address without mains switching.
Tip!
Detailed information on the Ethernet communication module (E94AYCEN) can be found in
the "Ethernet" Communication Manual.
Possible status displays for this device command
Status (C00003) Meaning
6653186 Device command in process
6619136 Device command executed successfully
6619137 General fault
Related device commands
Unbind/bind Ethernet module MXI2
( 82)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 81
Page 82

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.35 Unbind/bind Ethernet module MXI2
The C00002 = "102: Unbind/bind Ethernet module: MXI2" device command is used to reinitialise
the Ethernet interface of an Ethernet communication module in module slot MXI2, e. g. to accept a
newly set IP or gateway address without mains switching.
Tip!
Detailed information on the Ethernet communication module (E94AYCEN) can be found in
the "Ethernet" Communication Manual.
Possible status displays for this device command
Status (C00003) Meaning
6718722 Device command in process
6684672 Device command executed successfully
6684673 General fault
Related device commands
Unbind/bind Ethernet module MXI1
( 81)
82
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 83

4 Drive interface
PS 4
PS 3
PS 2
Application 2
PS 1
PS
PS 4
PS 3
PS 2
Memory module MM
PS
9400
PS
RAM
Firmware Application 1*Application 1*
PS
PS 1
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.36 Activate parameter set 1 ... 4
In addition to the start parameters, up to four further parameter sets can be stored in the memory
module for each application. Like this you can for instance define different controller settings for an
application, which are then simply activated via device command, if required.
The following device commands can be used to activate the parameter set 1 ... 4 for the active
application (if available on the memory module):
C00002
C00002
= "201: Activate parameter set 1"
= "202: Activate parameter set 2"
C00002
C00002
* In this example, application 1 is the active application
[4-20] Example: "Activate parameter set 1" function
= "203: Activate parameter set 3"
= "204: Activate parameter set 4"
• Only possible when the application has stopped and the controller is inhibited.
• All parameter changes of the previously active parameter set carried out since the last saving
will get lost!
• These device commands only affect the settings of the operating system, application, and
module parameters; the active application, or a configuration selected with the function block
editor remain unchanged.
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 83
Page 84

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Possible status displays for these device commands
Status (C00003) Meaning
for command
201
13206786 13272322 13337858 13403394 Device command in process
13172736 13238272 13303808 13369344 Device command executed successfully
13172731 13238273 13303809 13369345 General fault
13206532 13272068 13337604 13403140 File could not be opened.
13206557 13272093 13337629 13403165 Fault while reading out of a file.
13206558 13272094 13337630 13403166 Fault while writing into a file.
13206559 13272095 13337631 13403167 Invalid file type.
13206560 13272096 13337632 13403168 Unexpected end of file.
13206562 13272098 13337634 13403170 Checksum error
13212160 13277696 13343232 13408768 CAN fault
13212415 13277951 13343487 13409023 CAN fault
13213697 13279233 13344769 13410305 Access to file has been denied since the file is
13213701 13279237 13344773 13410309 I/O fault when accessing the file system
13213708 13279244 13344780 13410316 RAM is full
13213709 13279245 13344781 13410317 Access authorisation denied
13213724 13279260 13344796 13410332 No free memory on the memory module
for command
202
... ... ... ... ...
for command
203
for command
204
already accessed from another position
Related device commands
Activate parameter set 1 ... 4
( 85)
84
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 85

4 Drive interface
PS 4
PS 3
PS 2
Application 2
PS 1
PS
PS 4
PS 3
PS 2
Memory module MM
PS
9400
PS
RAM
Firmware Application 1*Application 1*
PS
PS 1
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.37 Activate parameter set 1 ... 4
In addition to the start parameters, up to four further parameter sets can be stored in the memory
module for each application. Like this you can for instance define different controller settings for an
application, which are then simply activated via device command, if required.
The following device commands are used to archive the current parameter settings of the controller
for the active application in the memory module as parameter set 1 ... 4:
C00002
C00002
= "301: Archive parameter set 1"
= "302: Archive parameter set 2"
C00002
C00002
* In this example, application 1 is the active application
[4-21] Example: "Archive parameter set 1" function
= "303: Archive parameter set 3"
= "304: Archive parameter set 4"
• Previously archived parameter settings will be overwritten with the current parameter settings!
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 85
Page 86

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Possible status displays for these device commands
Status (C00003) Meaning
for command
301
19760386 19825922 19891458 19956994 Device command in process
19726336 19791872 19857408 19922944 Device command executed successfully
19726337 19791873 19857409 19922945 General fault
19760132 19825668 19891204 19956740 File could not be opened.
19760157 19825693 19891229 19956765 Fault while reading out of a file.
19760158 19825694 19891230 19956766 Fault while writing into a file.
19760160 19825696 19891232 19956768 Unexpected end of file.
19767297 19832833 19898369 19963905 Access to file has been denied since the file is
19767301 19832837 19898373 19963909 I/O fault when accessing the file system
19767308 19832844 19898380 19963916 RAM is full
19767309 19832845 19898381 19963917 Access authorisation denied
19767324 19832860 19898396 19963932 No free memory on the memory module
for command
302
for command
303
for command
304
already accessed from another position
Related device commands
Activate parameter set 1 ... 4
( 83)
86
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 87

4 Drive interface
9400
RAM Memory module MM
Cam dataCam data
Cam application
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.38 Load cam data
This function extension is available from software version V3.0!
The C00002
module into the controller.
= "501: Load cam data" device command serves to reload cam data from the memory
Note!
If you transfer the parameter set or the application from »Engineer« to the controller,
the cam data are also transferred automatically to the controller.
• The new/altered cam data are accepted in the controller according to the online
change mode set.
• Thus, normally this device command does not need to be executed manually.
[4-22] "Load cam data" function
• Only possible when the application has stopped and the controller is inhibited.
• If the cam data are provided with an access protection, the user password has to be entered in
C02900
first.
Tip!
Detailed information on the online change mode and the access protection can be found in
the chapter "Basic drive functions", subchapter "Cam data management
Sequence
1. The cam data are completely loaded from the memory module into the main memory of the
controller.
2. The present cam data in the application unit are converted to the internal unit [increments] and
are reorganised.
3. The processed cam data are stored in a separate main memory that can be accessed by the cam
application.
". ( 552)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 87
Page 88

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Possible status displays for this device command
Status (C00003) Meaning
32867586 Device command in process
32833536 Device command executed successfully
32833537 General fault
32875521 No cam data available on the memory module
32875523 Loading of the cam data failed
32875525 Checksum error
32875542 Wrong password entered
32875545 The cam functionality is deactivated
Related device commands
Save cam data
Calculate cam data
Calculate cam data checksum
( 89)
( 91)
( 92)
88
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 89

4 Drive interface
9400
RAM Memory module MM
Cam dataCam data
Cam application
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.39 Save cam data
This function extension is available from software version V3.0!
The C00002
main memory of the controller with mains failure protection in the memory module.
[4-23] "Save cam data" function
• This function is executed in the background and is also possible when the controller is enabled
and the application is running.
• However, this function is only executed if valid cam data are available.
• Th e cam dat a can also be sav ed if previousl y no cam data have be en available on the mem ory
• While the function is executed, no online change and no change of the cam data via parameters
can be carried out.
For software versions lower than V4.0 the following applies:
• If the cam data are provided with an access protection, the user password has to be entered in
C02900
The following applies from software version V4.0:
= "502: Save cam data" device command serves to save the cam data available in the
module.
first.
• For saving the cam data, you do not need to enter a possibly existing user password (C02900
Tip!
Detailed information on the access protection can be found in the chapter "Basic drive
functions", subchapter "Cam data management
).
". ( 552)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 89
Page 90

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Possible status displays for this device command
Status (C00003) Meaning
32933122 Device command in process
32899072 Device command executed successfully
32899073 General fault
32941057 No cam data to be saved are available in the RAM of the controller
32941060 Saving of the cam data failed
32941078 Wrong password entered
32941081 The cam functionality is deactivated
Related device commands
Load cam data
Calculate cam data
( 87)
( 91)
Calculate cam data checksum
( 92)
90
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 91

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.40 Calculate cam data
This function extension is available from software version V3.0!
The C00002
memory of the controller to the internal format and makes them available to the application. This,
for instance, is necessary if one or more machine parameters affecting the internal scaling of cam
data have been changed.
• The status signal bNewDataAvailable of the basic drive function "Cam data management
(LS_CamInterface system block) is set to TRUE and the cam data are accepted automatically or
manually depending on the online change mode set. After successful data acceptance, the
status signal bNewDataAvailable is automatically reset to FALSE.
• The user password does not have to be entered in C02900
• While the function is executed, no online change and no change of the cam data via parameters
can be carried out.
• This function is executed in the background and can also be activated when the controller is
enabled and the application is running.
= "503: Calculate cam data" device command converts the cam data stored in the main
"
.
Tip!
Detailed information on the cam functionality can be found in the chapter "Basic drive
functions", subchapter "Cam data management
Possible status displays for this device command
Status (C00003) Meaning
32998658 Device command in process
". ( 552)
32964608 Device command executed successfully
32964609 General fault
33006617 The cam functionality is deactivated
Related device commands
Load cam data
Save cam data
Calculate cam data checksum
( 87)
( 89)
( 92)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 91
Page 92

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.41 Calculate cam data checksum
This function extension is available from software version V3.0!
The C00002
checksum of the cam data available in the main memory of the controller. This is required if the cam
data in the main memory of the controller have been changed via parameters. Afterwards the cam
data can be converted to the internal format using the "503: Calculate cam data" device command,
or they can be saved with mains failure protection in the memory module using the "502: Save cam
data" device command.
• The user password does not have to be entered in C02900
• This function is executed in the background and can also be activated when the controller is
enabled and the application is running.
= "504: Calculate cam data checksum" device command is used to recalculate the
.
Tip!
Detailed information on the cam functionality can be found in the chapter "Basic drive
functions", subchapter "Cam data management
Possible status displays for this device command
Status (C00003) Meaning
33064194 Device command in process
33030144 Device command executed successfully
". ( 552)
33030145 General fault
33072153 The cam functionality is deactivated
Related device commands
Load cam data
Save cam data
Calculate cam data
( 87)
( 89)
( 91)
92
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 93

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.42 Format file system
The C00002 = "1030: Format file system" device command is used to format the file system in the
memory module.
Note!
By means of this device command all folders and files in the file system of the memory
module are irrevocably deleted!
The application has to be downloaded again with »Engineer«.
Possible status displays for this device command
Status (C00003) Meaning
67536130 Device command in process
67502080 Device command executed successfully
67502081 General fault
Related device commands
Restore file system
( 94)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 93
Page 94

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.43 Restore file system
The C00002 = "1040: Restore file system" device command is used to execute a low level formatting
of the file system in the memory module.
Note!
By means of this device command all folders and files in the file system of the memory
module and all pieces of internal information for the management of the file system are
irrevocably deleted!
This device command has no status display in C00003
unchanged showing the previous device command status.
, i.e. the display remains
Stop!
The low level formatting of the file system by the user is only intended for the
exceptional case when the standard formatting of the file system via the
C00002
damaged internal management information.
= "1030: Format file system" device command is no longer possible, e.g. due to
Related device commands
Format file system
( 93)
94
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 95

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.44 Prepare firmware update
Note!
For Lenze service only!
The C00002
controller to the firmware update mode to update the firmware, if required, using the
corresponding software.
• Only possible when the application has stopped and the controller is inhibited.
Possible status displays for this device command
Status (C00003) Meaning
655394050 Device command in process
= "10000: Prepare firmware update" device command is used to set the
655360000 Device command executed successfully
655360001 General fault
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 95
Page 96

4 Drive interface
4.2 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.45 Restart controller
The C00002 = "11000: Restart controller" device command is used to restart the controller via
parameter setting.
• Only possible when the application has stopped and the controller is inhibited.
Possible status displays for this device command
Status (C00003) Meaning
720930050 Device command in process
720896001 General fault
Note!
Due to the restart at the successful execution of the device command, this status is no
longer displayed in
If this device command is used, the message "Undervoltage in the DC bus (0x007b000f)"
may appear in the logbook.
C00003.
96
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 97

4 Drive interface
Controller inhibit
2
Ready to
switch on
Initialisation
active
Switched
on
Operation
Trouble
active
Quick stop
by trouble
active
Power on
0
1
System fault
active
Fault
active
Safe
torque off
active
Warning/
Warning locked
active
4.3 Device states
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.3 Device states
The state control of the drive is controlled internally via a state machine which can adopt the
following "device states":
, From all states
[4-24] Device state machine
"Warning active" or "Warning locked active" contradicts the definition of a device status. It is a message
which is intended to draw attention to a device status for which there is a reason for a warning.
"Warning active"/"Warning locked active" can occur simultaneously with other states.
Note!
The device states of the controller must not be confused with the function states of the
Basic drive functions
• In the device state "Operation" the Basic drive functions
the drive.
. ( 372)
define the motion control of
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 97
Page 98

4 Drive interface
4.3 Device states
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Display parameters for diagnostic purposes
•In C00183
•In C00150
the current device state is shown.
(status word 1) the current device state is shown in a bit coded manner via
bits 8 ... 11:
Bit 11 Bit 10 Bit 9 Bit 8 Meaning
0000"Initialisation active" state
0001"Device is ready to switch on" state
0010-
0011"Device is switched on" state
0100-
0101-
0110"Operation" state
0111"Trouble active" state
1000-
1001-
1010"Quick stop by trouble active" state
1011"Safe torque off active" state
Observe LED on the safety module!
1100"Fault active" state
1101-
1110-
1111-
xxxxDisplayed message "Warning active"
The displayed message can occur at the same time as the device
states "Device is ready to switch on", "Device is switched on" and
"Operation", if a monitoring component responds for which the error
response "Warning" has been parameterised.
or "Warning locked active"
• C02530
displays the active function state.
LED status displays
The control of the two LEDs "DRIVE READY" and "DRIVE ERROR" in the middle of the controller's front
panel depends on the device state. LED status displays for the device state
( 599)
98
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
Page 99

4 Drive interface
4.3 Device states
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Influence of the status signals of the SB LS_DriveInterface by the device state
Status signals
Device status
Initialisation active
Safe torque off active
Device is ready to switch on
Device is switched on
Operation
Warning active
Warning locked active
Quick stop by trouble active
Trouble active
Fault active
System fault active
(Outputs of the SB LS_DriveInterface
DI_bReady DI_bFail
FALSE FALSE TRUE TRUE FALSE FALSE FALSE
FALSE FALSE TRUE TRUE TRUE/FALSE FALSE FALSE
FALSE FALSE TRUE TRUE TRUE/FALSE TRUE FALSE
TRUE FALSE TRUE TRUE TRUE/FALSE FALSE FALSE
TRUE FALSE FALSE FALSE TRUE/FALSE FALSE TRUE
TRUE/FALSE TRUE/FALSE TRUE/FALSE TRUE/FALSE TRUE TRUE/FALSE TRUE/FALSE
TRUE/FALSE TRUE/FALSE TRUE/FALSE TRUE/FALSE TRUE TRUE/FALSE TRUE/FALSE
FALSE TRUE FALSE FALSE TRUE/FALSE FALSE FALSE
FALSE FALSE TRUE TRUE TRUE/FALSE FALSE FALSE
FALSE TRUE TRUE TRUE TRUE/FALSE FALSE FALSE
FALSE TRUE TRUE TRUE TRUE/FALSE FALSE FALSE
Active
DI_bImp
Active
DI_bCInh
Active
DI_bWarning
Active
)
DI_bReady
ToSwitchOn
DI_bOperation
Enabled
Internal interfaces | "LS_DriveInterface" system block
4.3.1 "Initialisation active" state
LED DRIVE READY LED DRIVE ERROR Display in C00183
OFF OFF 10: Initialisation active
This is the controller's state directly after switching on the supply voltage.
• In this device state the operating system is initialised.
• The monitoring functions are not active yet.
• Communication is not possible yet.
• The controller cannot be parameterised yet and no device commands can be executed.
• When the device initialisation is completed, the device state is automatically changed to "Safe
torque off active".
( 110)
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06 99
Page 100

4 Drive interface
4.3 Device states
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.3.2 "Safe torque off active" state
LED DRIVE READY LED DRIVE ERROR Display in C00183
OFF 101: Safe torque off active
This device state becomes active if the controller receives the "Safe torque off" request by the safety
module.
• "Drive is torqueless" (0x00750003) is entered in the logbook.
• If no corresponding request by the safety module is available, a change to the subsequent state
"Device is ready to switch on" is effected.
Note!
The "Safe torque off active" status is also passed through after an error has been
acknowledged (see illustration [4-24]
).
4.3.3 "Device is ready to switch on" state
LED DRIVE READY LED DRIVE ERROR Display in C00183
OFF "Device is ready to switch on"
This is the device state of the controller directly after the initialisation has been completed and
where no DC-bus voltage is applied yet.
• The bus systems are running and the terminals and encoders are evaluated.
• The monitoring functions are active.
• The controller can be parameterised and device commands can be executed to a limited extent.
• The functions of the user task can be used.
• Precondition: The application has started (status display in C02108
• The basic drive functions cannot be used yet.
Note!
The "Device is ready to switch on" status is not only activated after mains connection but
also after reset of "Trouble", "Fault", or "Safe torque off active".
• In order to change from the "Device is ready to switch on" to the "Device is switched
on" status when C00142
must be active.
• When C00142
changes to the "Device is switched on" status.
= "1: Enabled", the "Device is ready to switch on" status directly
).
= "0: inhibited", at least one of the controller inhibit sources
100
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
 Loading...
Loading...