

Page 1
INSTALLATION AND OPERATING INSTRUCTIONS
KBPI SERIES
SCR INDEXING & CYCLING CONTROLS
— Designed for Indexing Applications —
FOR PM DC MOTORS RATED
(1/6 – 1 HP @ 90VDC) and (1/3 – 2 HP @ 180VDC)
TM
This control will
not operate
without installing
the correct
armature fuse –
supplied
separately.
See Page 2
This Manual Covers the Following Models
Model No. Operation Part No.
KBPI-240D
KBPI-240DR
Unidirectional
Reversible
TM
8500
8501
See Safety Warning on Page 2
The information contained in this manual is intended to be accurate. However, the manufacturer
retains the right to make changes in design which may not be included herein.
A COMPLETE LINE OF MOTOR DRIVES
© 1998 KB Electronics, Inc.
Page 2
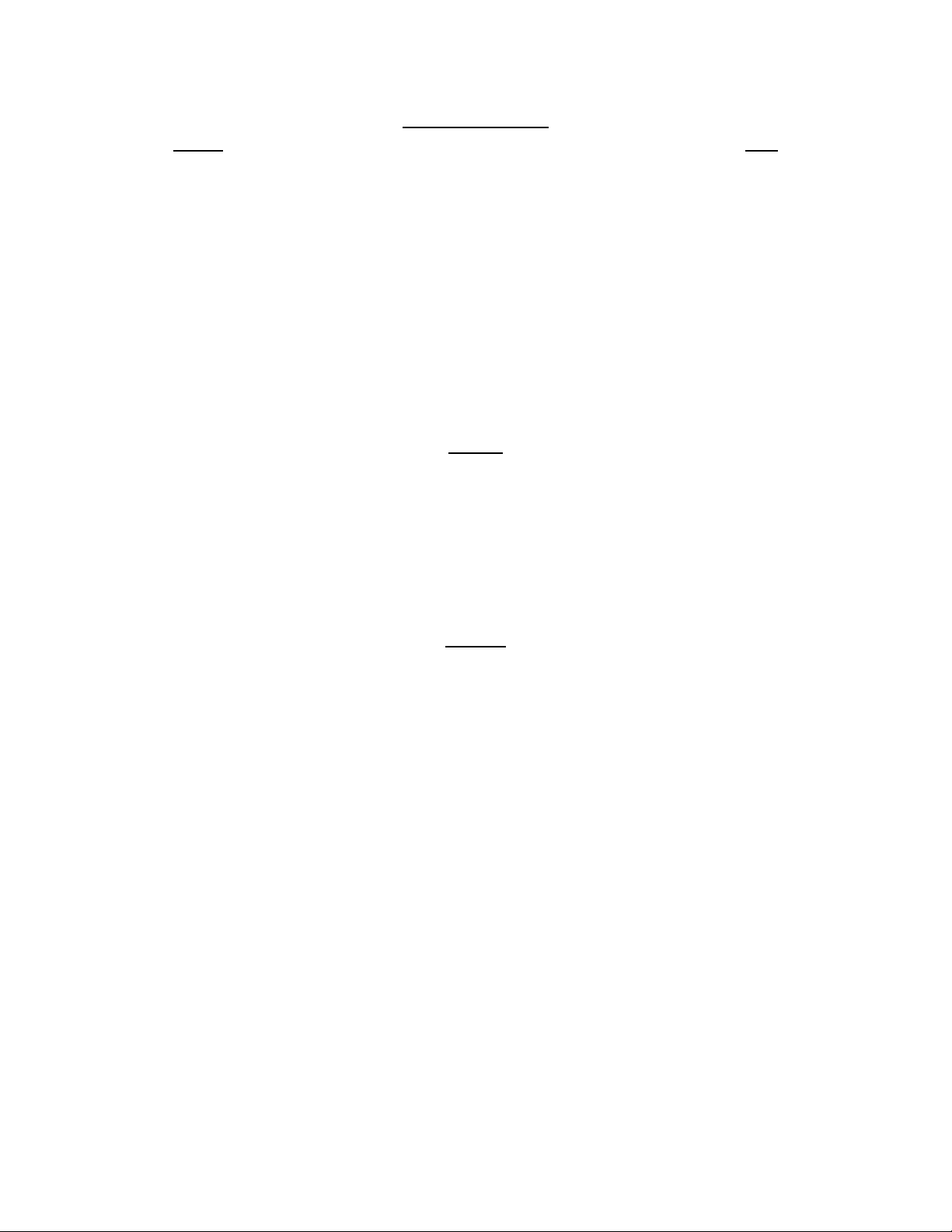
TABLE OF CONTENTS
Section Page
i. Simplified Setup and Operating Procedures ...................................... 1
ii. Safety Warning ............................................................ 2
I. General Information ......................................................... 2
II. Mounting ................................................................. 7
III. Setting AC Line and Motor Voltage ............................................. 9
IV. Setting Motor Current (Jumper J1) ............................................. 9
V. Wiring .................................................................. 10
VI. Fusing .................................................................. 11
VII. Logic Functions and Wiring .................................................. 12
VIII. Application Wiring Diagrams ................................................. 14
IX. Application Wiring Diagrams, Reversible Models ................................. 17
X. Operation ................................................................ 18
XI. Trimpot Adjustments ....................................................... 18
XII. Function Indicator Lamps ................................................... 19
XIII. Troubleshooting Guide ..................................................... 20
XIV. Limited Warranty .......................................................... 30
TABLES
1. Electrical Ratings ........................................................... 3
2. General Performance Specifications ............................................ 6
3. Selectable Jumper Reference Chart ............................................ 7
4. Relationship of AC Line Input and Motor Voltage with Jumper J1
on Logic Board and Jumpers J2 and J3 on Power Board (All Models) .................. 9
5. Jumper J1 Setting vs Motor Horsepower ......................................... 9
6. Terminal Block Wiring Information ............................................ 10
7. Armature Fuse Chart ....................................................... 11
8. Jumper "JW" Operation ..................................................... 13
9. Parts Lists ...................................................... 22, 23, 26, 27
FIGURES
1A. Control Layout (Logic Module) ................................................. 4
1B. Control Layout (Main Board) .................................................. 5
2. Typical Indexing Performance ................................................. 6
3. Mechanical Specifications .................................................... 8
4. AC Line and Motor Connection Diagram ........................................ 10
5. Remote Potentiometer Connection ............................................ 11
6. Analog Voltage Connection .................................................. 11
7. Run Command ............................................................ 12
8. Jog Command ............................................................ 12
9. Jog Command Used as Stop ................................................. 12
10. Stop Command ........................................................... 13
11. Jumper "JR" Operation ..................................................... 14
12. Solid State Switching ....................................................... 14
13. Contact Switching ......................................................... 14
14. Correct Keyway Positions for Cam and Limit Switch Assemblies ..................... 15
15. Cycle on Demand Wiring .................................................... 16
16. Sequence of Cycle on Demand Operation ...................................... 16
17. Reversing Logic Wiring Diagrams ............................................. 17
18. Schematics ........................................................ 21, 24, 25
19. Internal Wiring Diagram ..................................................... 28
ii
Page 3
i. SIMPLIFIED SETUP AND OPERATING PROCEDURES
Before operating this control you must read these instructions. They are to be used as a
reference only and are not intended to replace the detailed instructions provided herein. You
must read the Safety Warning before proceeding.
1. AC Power – Be sure jumpers J2A and J2B on power board and jumper ”J1” on logic board
are set to the correct positions to match the AC line input voltage. (See table 4, p. 9.)
Connect AC power to terminal block TB1 terminals L1 and L2. When power is turned on,
LED 1 on main power board will light. . Be sure AC power is disconnected when
making other connections to control. Do not bundle AC power and motor wires with
wires connected to TB3 terminals.
2. Motor Leads – Connect the
motor leads to terminal block
TB2 terminals A1 and A2. Be
sure motor nameplate voltage
rating corresponds to control
output voltage rating. Do not
use control with shunt wound
motors.
3. Motor Current Setting – Be sure
Jumper J1 is set to the approximate rated motor
current (10A, 5A, 3.3A, 2A).
JUMPER J1 SETTING vs MOTOR HORSEPOWER
Jumper J1*
Motor Horsepower Range
90 VDC 180 VDC
10A 3/4 – 1 1 – 2
5A Ω 1
3.3A 1/4 – 1/3 1/2 – 3/4
2A 1/6 1/3
*Note: Jumper J1 is shown in the factory setting.
4. Trimpot Settings – Trimpots should be set to the approximate positon as shown:
5. Main Speed Pot – Turn the main speed pot on the front cover of the control to a 15% or
greater setting.
1
Page 4
ii. SAFETY WARNING! — PLEASE READ CAREFULLY
This product should be installed and serviced by a qualified technician, electrician or
electrical maintenance person familiar with its operation and the hazards involved. Proper
installation, which includes wiring, mounting in proper enclosure, fusing or other overcurrent
protection and grounding, can reduce the chance of electric shocks, fires or explosion in this
product or products used with this product, such as electric motors, switches, coils, solenoids
and/or relays. Eye protection must be worn and insulated adjustment tools must be used when
working with control under power. This product is constructed of materials (plastics, metals,
carbon, silicon, etc.) which may be a potential hazard. Proper shielding, grounding and filtering
of this product can reduce the emission of radio frequency interference (RFI) which may
adversely affect sensitive electronic equipment. If information is required on this product,
contact our factory. It is the responsibility of the equipment manufacturer and individual
installer to supply this safety warning to the ultimate user of this product. (SW effective 11/92)
This control contains Start/Stop and Inhibit circuits that can be used to start and stop the
control. However, these circuits are never to be used as safety disconnects since they are not
fail-safe. Use only the AC line for this purpose.
The potentiometer circuit (P1, P2, P3) of this control is not isolated from AC line. Be sure
to follow all instructions carefully. Fire and/or electrocution can result due to improper
use of this product.
This product complies with all CE directives pertinent at the time of manufacture.
Contact factory for detailed installation instructions and Declaration of
Conformity. Installation of a CE approved RFI filter (KBRF-200A, KB P/N 9945C or
equivalent) is required. Additional shielded motor cable and/or AC line cables may be
required along with a signal isolator (KBSI-240D, KB P/N 9431 or equivalent).
Special Instruction for Cycle on Demand Applications
The camshaft of the Index drive should be in the middle of its dwell position. This is the position
in which the motor should receive its signal to start. Connect the normally closed side of the cycling
limit switch (LS1) to the control's TB3 terminals STOP (4) and RTN (3). Note: See fig. 14, p. 15
for information regarding the correct dwell position and cycling cam lobe positions.
I. GENERAL INFORMATION.
The KBPI INDEXER controls are packaged in a NEMA 4X enclosure which is ruggedly
constructed of die cast aluminum. The controls are designed specifically for cycling and
indexing applications. A variety of models provide different features and input voltage ratings
(see table 1, p. 3). The controls provide the user with isolated logic functions: STOP, JOG
and RUN. Other functions, such as cycle on demand, can easily be obtained. An important
feature of the control is jumper J1 which is used for DC current selection. It automatically
presets the IR Compensation and Current Limit for safe operation on various motors.
Standard features include built-in armature fusing and an LED indicator array for "power on,"
"stop" and "overload." Part Number 8501 also contain logic input for "Reverse Run" and
"Reverse Jog." The controls contain trimpots that can be used to readjust Minimum and
Maximum speed, Current Limit and IR Compensation. The front panel contains a built-in 5K
ohm speed potentiometer and a Run, Jog/Stop switch. (See table 3, p. 7 for selectable jumper
information.)
2
Page 5
Logic Provided
Type of
Operation
HP, (KW)
Maximum
Horsepower
(DC Amps)
Load Current
Maximum DC
(RMS Amps)
Maximum AC
Load Current
TABLE 1 – ELECTRICAL RATINGS
Fwd Run. Fwd Jog, Stop, Rev
Run, Rev Jog, Rtn
Fwd Run. Fwd Jog, Stop, Rev
Run, Rev Jog, Rtn
Fwd Run. Fwd Jog, Stop, Rev
Run, Rev Jog, Rtn
Motor
Armature
Voltage (VDC)
120 0 – 90 15.0 10.2 1, (.75) Unidirectional Run, Jog, Stop, Rtn
240 0 – 180 15.0 10.2 2, (1.5) Unidirectional Run, Jog, Stop, Rtn
240 0 – 90* 15.0 10.2 1, (.75) Unidirectional Run, Jog, Stop, Rtn
120 0 – 90 15.0 10.2 1, (.75) Reversing
240 0 – 180 15.0 10.2 2, (1.5) Reversing
240 0 – 90* 15.0 10/2 1, (.75) Reversing
Input Line
Voltage (VAC
50/60 Hz ±10%)
Part
Number
Model
Number
IMPORTANT! Control part number and ratings must correspond to the AC Line voltage, motor voltage and type of operation (Unidirectional or Reversing). See table 1.
KBPI-240D 8500
KBPI-240DR 8501
*Denotes step-down operation. A 90 Vdc motor used on a 240 VAC line input.
NOTE: Motor performance and brush life may be affected.
3
Page 6
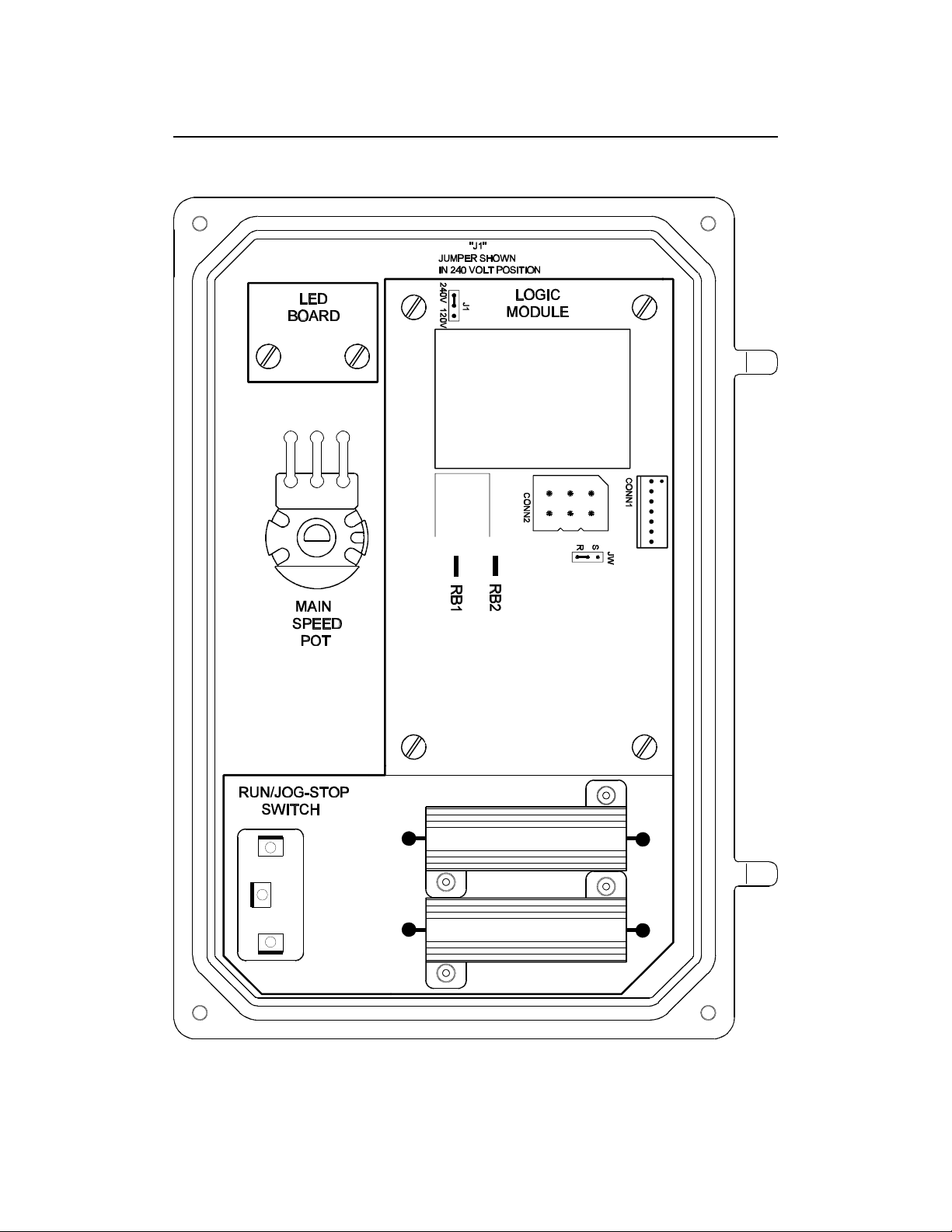
FIG. 1A CONTROL LAYOUT (Logic Module)
4
Page 7
TB3
CONN4
F
O
JR
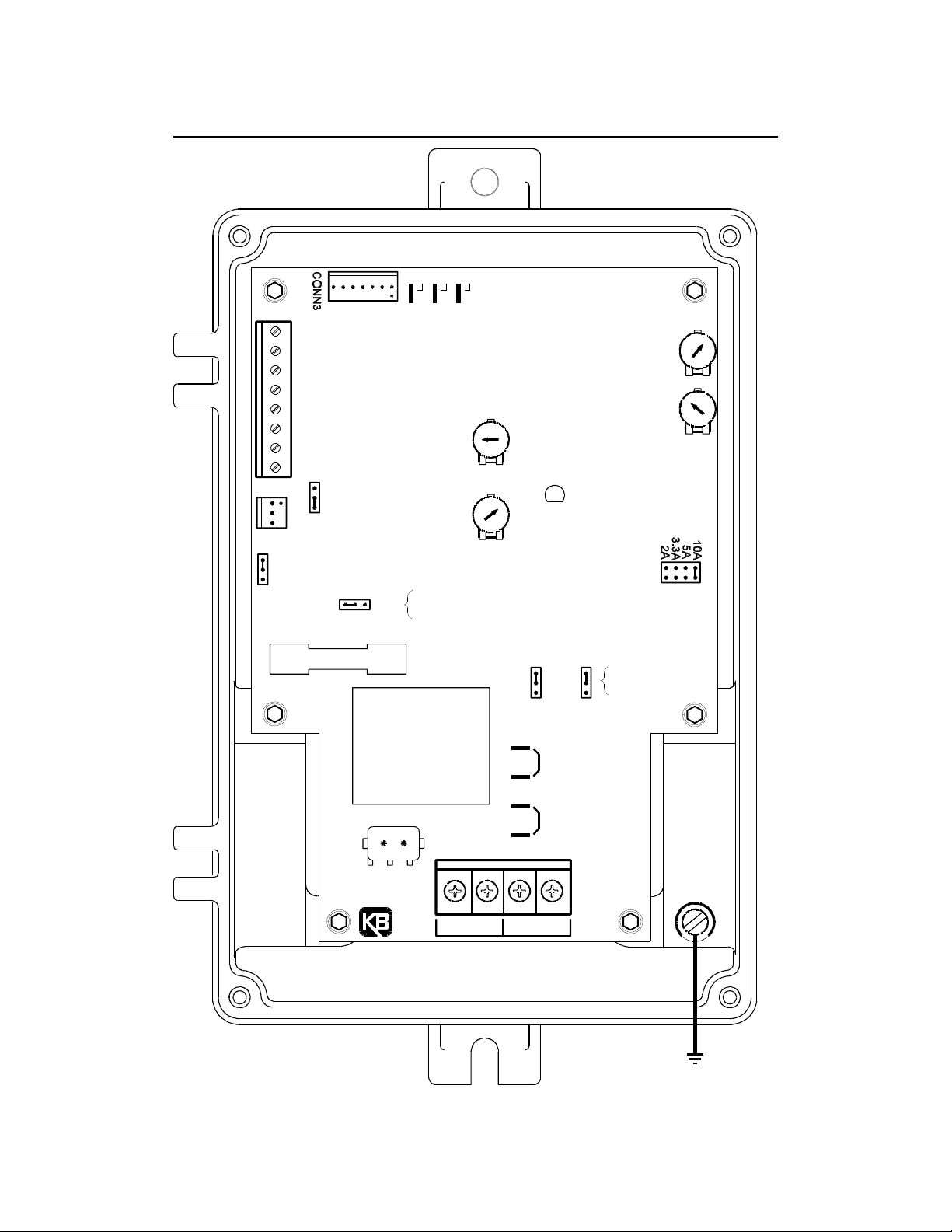
FIG. 1B CONTROL LAYOUT (Main Board)
P3P2P1
RUN REV
(8)
JOG REV
(7)
RUN FWD
(6)
JOG FWD
(5)
STOP
(4)
RTN
(3)
+24V
(2)
COM
(1)
JS
NO
NC
J3
JUMPER SHOWN
90V180V
IN 180VDC POSITION
MIN
MAX
PWR ON
CL
IR
J1
ARM FUSE
F1
T1
KBPI
INDEXER
CONN1
J2A
A1B
J4A
A1A
A2B
J4B
A2A
A1 A2 L1 L2
240V
120V
JUMPER SHOWN
IN 240VAC POSITION
J2B
TB1TB2
GND
(EARTH)
GND
5
Page 8
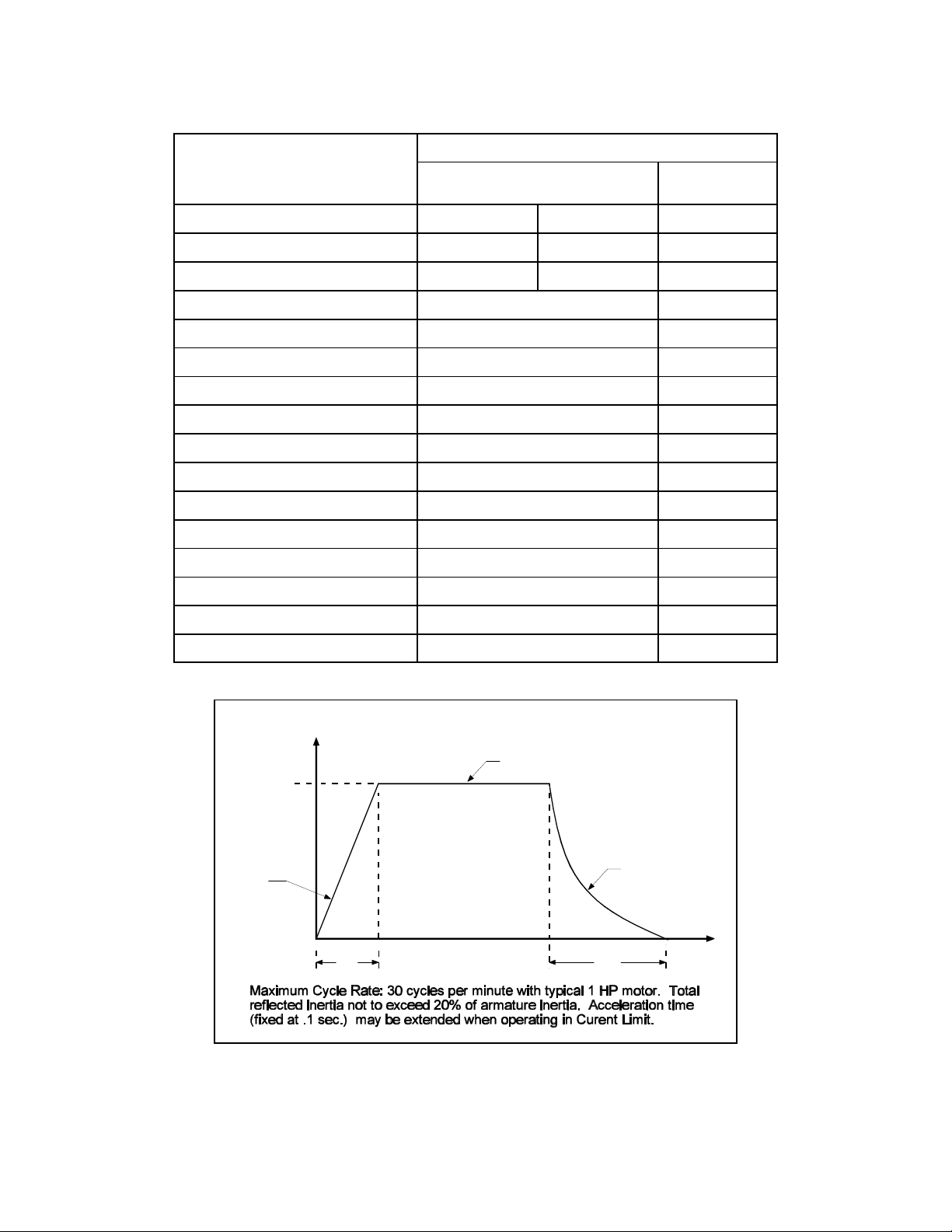
TABLE 2 – GENERAL PERFORMANCE SPECIFICATIONS
Specifications
Parameter (Units)
AC Line Input (VAC ± 10%, 50/60 Hz) 120 240 240
Horsepower Range (HP) [KW] 1/6 - 1, [.12 - .75] 1/3 - 2, [.25 - 1.5] 2, [1.5]
Armature Voltage Range (VDC) 0 – 100 0 – 200 170
Current Ranges (ADC) 2, 3.3, 5, 10 10
CL Trimpot Range (% Range Setting) 0 – 170 150
Min. Speed Trimpot Range (% base spd) 0 – 30 0
Max. Speed Trimpot Range (% base spd) 60 – 120 100
IR Comp Trimpot Range (VDC) 0 – 30 4
Speed Range (Ratio) 50:1 —
AC Line Voltage Regulation (% base spd) ± 0.5 —
Voltage Following Linearity (% base spd) ± 0.5 —
Load Regulation (% base speed) ± 1 —
Ambient Temp Range (°C) 0 – 45 —
Model No. KBPI-240D (P/N 8500)
& Model No. KBPI-240DR (P/N 8501)
Factory Setting
Potentiometer, Front Cover (ohms – watts) 5K – 1/3 —
Maximum Run/Stop Operations (ops/min) 30 —
Enclosure Type (NEMA) 4X —
FIG. 2 – TYPICAL INDEXING PERFORMANCE
SPEED
(rpm)
MOTOR BASE RATED SPEED
1800
FIXED
ACCEL
100
DECEL WITH
DYNAMIC BRAKE
250TIME (msec)
6
Page 9

TABLE 3 – SELECTABLE JUMPER REFERENCE CHART
Jumper Location* Description Factory Setting
J1 1
J2A, J2B 1
J3 1
JR 1
JS 1
J1 2
Establishes the range of maximum
armature current.
Sets the AC input line voltage (120/240
VAC) for the main PC Board.
Sets the DC output voltage range to
motor (90V/180V).
Used to activate the return (RTN) circuit.
"F" position – RTN is jumpered to
common.
"O" position – RTN used as logic
disable. See sec. VII, D, p. 13.
Used to set the STOP function
operation.
"NC" position – Use a normally closed
contact for open to stop operation.
"NO" position – Use a normally open
contact for "close to stop" operation.
Sets the operating AC line voltage for
the logic module. (120/240 VAC.)
See sec. IV, p. 9.
Set according to
model part numbers.
See table 1, p. 3.
Set according to
model part numbers.
See table 1, p. 3.
Set to "F" position.
Set to "NC" position.
Set according to
model part numbers.
See table 1, p. 3.
JW 2
Determines the priority of the Run and
Stop logic commands.
See table 8, p. 13.
Set to "R" position for
"cycle on demand".
*Notes: 1) Main Printed Circuit Board. (fig. 1B, p. 5)
2) Logic PC board. (fig. 1A, p. 4)
II. MOUNTING.
Mount the control in a vertical position on a flat surface. Be sure to leave enough room below
the bottom of the control to allow for the AC line and motor connections and other wiring that
may be necessary. Care should be taken to avoid extreme hazardous locations where physical
damage can occur. Note: Do not use this control in an explosion proof application. If the
control is mounted in a closed, unventilated cabinet, remember to allow for proper heat
dissipation. If full rating is required, a minimum enclosure size of 12" W x 24" H x 12" D should
be used.
Front Cover – The KBPI case is designed with a hinge so that when the front cover is open,
all wiring stays intact. To open the cover, the four cover screws must be loosened, so they no
longer are engaged in the case bottom. Note that these screws are captive and the front cover
holes are threaded. After mounting and wiring, close the front cover, making sure all wires
are contained within the enclosure and the gasket is in place around the cover lip.
Tighten all four cover screws so that the gasket is slightly compressed. Do not overtighten.
7
Page 10

[mm]
INCHES
FIG. 3 – MECHANICAL SPECIFICATIONS
8
TM
TM
Page 11

III. SETTING AC LINE AND MOTOR VOLTAGE.
The KBPI is factory set to operate with a 230VAC - 50/60 Hz AC line input and a 180-VDC PM
motor. By utilizing jumpers J2A, J2B and J3 on the main PC board and Jumper J1 on the
logic PC board, different AC line voltage/motor voltage combinations can be achieved.
A. FACTORY SETTING: 240 VOLTS AC LINE INPUT WITH 0-180 VDC OUTPUT:
Jumpers J2A, J2B on main PC board set to “240”
Jumper J3 on main PC board set to “240”
Jumper J1 on logic PC board set to “240”
B. 120 VOLTS AC LINE INPUT WITH 0-90 VDC OUTPUT:
Jumpers J2A, J2B on main PC board set to “120”
Jumper J3 on main PC board set to “120”
Jumper J1 on logic PC board set to “120”
C. 240 VOLTS AC LINE INPUT WITH 0-180 VDC OUTPUT (STEP-DOWN):
Jumpers J2A, J2B on main PC board set to “240”
Jumper J3 on main PC board set to “120”
Jumper J1 on logic PC board set to “240”
The above information is summarized in table 4.
TABLE 4 – Relationship of AC Line Input and Motor Voltage with Jumper J1
on Logic Board and Jumpers J2 and J3 on Power Board (All Models)
AC Line
Voltage
(VAC
–50/60Hz)
120 120V 120V, 120V 90V 90V*
J1 Position
Logic Board
J2A, J2B Position Power
Board
Motor
Voltage
(VDC)
J3 Position on
Power Board
240 240V 240V, 240V 180V 180V
240 240V 240V, 240V 90V* 90V
*Denotes step-down operation. A 90 VDC motor used on a 240 VAC line input.
Note: Motor performance and brush life may be affected.
IV. SETTING MOTOR CURRENT (JUMPER J1)
Jumper J1 is used to set the range of armature current which can be further modified with the
current limit (CL) trimpot. The factory setting of J1 is 10 amps. The CL trimpot is factory set
to provide 150% of the J1 setting. For example, when J1 is in the 10 amp position, the actual
armature current is 15 amps. When J1 is in the 5 amp position, the control provides a
maximum armature current of 7.5 amps. The position of J1 should be set to the approximate
DC motor current rating. Table 5 is provided as a reference. (See fig. 1b, p. 5 for location of
jumper J1.)
TABLE 5 – JUMPER J1 SETTING vs MOTOR HORSEPOWER
Jumper J1*
10A 3/4 – 1 1 – 2
5A Ω 1
3.3A 1/4 – 1/3 1/2 – 3/4
2A 1/6 1/3
Motor Horsepower Range
90 VDC 180 VDC
*Note: Jumper J1 is shown in the factory setting.
9
Page 12

V. WIRING
WARNING! Read Safety Warning on page 2 before attempting to use this control.
Wire control in accordance with the National Electric Code requirements and other
codes that apply. Be sure to fuse each conductor which is not at ground potential. Failure to
follow the Safety Warning Instructions may result in electric shock, fire or explosion. Do not
fuse neutral or grounded conductors. Note: See sec. VI, p.11 Fusing. A separate AC line
switch, or contactor, must be wired as a disconnect switch, so that the contacts open each
ungrounded conductor. (See fig. 4 for AC Line and Armature connection.) Note: Do not
bundle AC or motor leads with logic leads or erratic operation may occur.
1. Twist logic wires (speed adjustment potentiometer or voltage signal input wires) to avoid
picking up electrical noise. If wires are longer than 18,” use shielded cable.
2. You may have to earth ground the shielded cable. If noise is coming from devices other
than the drive, ground the shield at the drive end (ground screw in enclosure). If noise
is generated by a device on the drive, ground the shield at the end away from the drive.
Do not ground both ends of the shield.
3. Do not bundle logic wires with power carrying wires or other sources of electrical noise.
Never run speed adjustment potentiometer or voltage signal input wires in the same
conduit as motor or AC line voltage wires.
4. Connect earth ground to the earth ground screw provided in the enclosure. (See fig. 1B,
p. 5 for ground screw location.)
Two .875" (22.2 mm) knockout holes are provided for a standard 1/2" knockout
connector (not supplied) for wiring. A plug is provided if only one knockout is required.
Be sure to use suitable connectors and wiring that are appropriate for the application.
A. AC Line – Connect AC Line to terminals L1
and L2. (Be sure jumper J1 on the Logic
FIG. 4 – AC LINE AND MOTOR
CONNECTION DIAGRAM
Board and jumpers J2A and J2B on the Power
Board are set to the correct position to match
the AC Line input voltage. (See table 4 p. 9.)
B. Motor Armature – Connect motor armature to
terminals A1 (+) and A2 (-). (Be sure jumper
J3 on the Power Board is set to the correct
position 90V, 180V to match the motor
voltage. (See table 4, p. 9.)
WARNING! Do not wire switches or relays in
series with the armature. Armature
switching can cause catastrophic failure of
motor and/or control. Do not bundle AC
line and motor wires with other wires (e.g.:
potentiometer, analog input, Run, Jog, Stop, etc.) since erratic operation may
occur. Do not use this control on shunt wound motors.
TABLE 6 – TERMINAL BLOCK WIRING INFORMATION
Terminal Block
Designation
TB1 L1, L2 22 12 12
TB2 A1, A2 22 12 12
TB3 Logic Connections 24 14 3.5
Connection
Designation
Supply Wire Gauge*
MINIMUM MAXIMUM
Maximum Tightening
Torque ( in – lbs)
*Use Cu wire only (AWG)
10
Page 13

C. Ground – Be sure to ground (earth) the
control by connecting a ground wire to the
FIG. 5 – REMOTE POTENTIOMETER
CONNECTION
Green Ground Screw located to the right of
the terminal block. Do not connect
ground wire to any other terminals on
control.
D. Main Potentiometer – The control is
supplied with the main potentiometer
prewired. However, the control can also be
operated from a remote potentiometer, or
from an isolated analog voltage for voltage
following. To operate from an external
FIG. 6 – ANALOG VOLTAGE
CONNECTION
source remove white, orange and violet
potentiometer leads from terminals P1, P2
and P3. The leads may be taped and left
in the control. The potentiometer itself may
be removed, if a seal is used to cover the
hole in the front cover. Note: Use
shielded cable on all connections to P1,
P2, or P3 over 12" (30cm) in length. Do
not ground shield.
1. Remote Potentiometer. Connect remote potentiometer wires to terminals P1, P2 and
P3, so that the "high" side of the potentiometer connects to P3, the "wiper" to P2 and
the "low" side to P1. (See fig. 5.)
2. Analog Input. An isolated 0-10VDC analog voltage can also be used to drive the
control. Note: If an isolated signal voltage is not available, an optional signal
isolator (KB P/N 9431) should be used. Connect the isolated input voltage to
terminal P2 (positive) and P1 (negative). (See fig. 6.) Adjust the MIN trimpot clockwise
to achieve a 0+ output voltage.
VI. FUSING.
A. AC Line Fusing – Most electrical codes require that each ungrounded conductor contain
fusing. Separate branch circuit fusing or circuit breaker may be required. Check all
electrical codes that may apply to the installation. This control does not contain AC line
fuses. A 20 amp rated fuse or circuit breaker can be used.
B. Armature Fusing – The control contains a built in armature fuse holder. An armature
fuse rated 1.5 times higher than the full load of the motor, must be installed before
operating the control. This fuse should not blow unless the motor is shorted or another
catastrophic failure occurs. An armature fuse replacement such as Littelfuse 326 or Buss
ABC ceramic fuse or equivalent can be used. Fuse supplied separately from your
distributor. See table 7 for armature fuse chart.
TABLE 7 – ARMATURE FUSE CHART
Motor Horsepower
90VDC 180VDC
1/6 1/3 1.7 2
1/4 1/2 2.5 4
1/3 3/4 3.3 5
1/2 1 5.0 8
3/4 1 7.5 12
1 2 10.0 20
Approx. DC Motor
Current Amps
Fuse Rating
(AC Amps)
Note: Armature fuse is not supplied and must be installed for control to operate.
11
Page 14

VII. LOGIC FUNCTIONS AND WIRING.
Warning! Do not use any of the logic functions (STP, RTN) as an emergency
stop since they are not fail safe. Use only an AC line (L1, L2) disconnect for
that purpose. To prevent erratic operation, do not bundle logic wiring with AC line
and motor wires. Use shielded cables on logic wiring over 12" (30 cm) in length. Do
not ground or common shield.
The control contains several logic functions which are described in detail below. All
connections are made to terminal block TB3. (See fig. 1B, p. 5 for TB3 location.)
A. "RUN" – A momentary contact closure between terminals "RUN" and "RTN" latches the
control into a continuous run mode. To stop the control, the stop circuit must be activated
by opening the contact between the "STP" and "RTN" terminals. Note: All momentary
closures must be present for no less then 50 milliseconds and a normally closed
(NC) contact must be maintained between the "STP" and "RTN" terminals in order
for the drive to run.
FIG. 7 – RUN COMMAND
B. "JOG" (Stop) – A maintained contact closure between terminals "JOG" and "RTN" will
cause the control to run continuously. This is not a latching function. The drive will run
only as long as the contact is closed and stop when it is opened. (See fig. 8.)
FIG. 8 – JOG COMMAND FIG. 9 – JOG COMMAND USED AS STOP
Application Note:
The "JOG" can also be used as a normally open (NO) STOP command. When the control is
started with the momentary "RUN" command, it can be stopped by connecting a momentary
contact between the "JOG" and the "RTN" terminals. See fig. 9. (Note: The control can also
be stopped by opening the "STP" contact.)
12
Page 15

FIG. 10 – STOP COMMANDC. "STOP" (STP) — Use
a nor-mally closed
(NC) contact between
terminals "STP" and
"RTN." Opening the
contact activates the
control’s Dynamic
Brake producing a
rapid stop. (Note: A
normally open (NO)
limit switch or contact
can also be used to
activate the stop command. To use a (NO)
contact move jumper
JS to the "NO" position). (See table 3, p. 7.)
Application Note:
The setting of jumper "JW" establishes the priority a "STOP" command has over a "RUN"
command. If jumper "JW" is placed in position "S," the "STOP" command has priority over
the "RUN". If the "STOP" is activated (contact open), the control cannot be started with the
"START" command. If jumper "JW" is in the "R" position (factory setting), the "RUN"
command has priority over the "STOP." In this mode of operation the control can be
started with the "RUN" command even though the "STOP" is activated (contact open).
This setting of jumper JW in the "R" position is used for cycle on demand applications.
See table 8 for detailed information of jumper "JW" operation. Warning! Do not use as
safety stop. See Safety Warning on page 2.
TABLE 8 – JUMPER "JW" OPERATION
JUMPER "JW" SETTING DESCRIPTION CIRCUIT OPERATION
“R”
(Factory
Setting)
“S”
"Run" has priority
over "Stop." Control
will run even if stop
contact is open.
*(Use this setting for
"Cycle on Demand "
operation.)
"Stop" has priority
over "Run." Control
will run only when
“STP” contact is
closed.
When start contact
is made, control
will run with “STP”
open. If “STP” is
closed and then
reopened, control
will stop.
When start contact
is made, “STP”
contact must be
closed for control
to run.
D. "RETURN" (RTN) – When Jumper "JR" is moved to position "O" from the factory
setting "F" it disables all of the command functions (Run, Jog, Stop, etc.). To enable
these functions a contact must be placed between the "RTN" and "COM" terminals.
Note: Opening the return control will not stop the indexer, if opened while indexer is
running.
Warning! Do not use as emergency or safety stop. See Safety Warning on page
2. See fig. 11, p. 14, for jumper "JR" operation. Failure to follow the Safety
Warning Instructions may result in electric shock, fire or explosion.
13
Page 16

FIG. 11 – JUMPER “JR” OPERATION
Jumper "JR" in "F" position (factory setting)
connects "RTN" to "COM"
Jumper "JR" in "O" position opens the
"RTN" to "COM" circuit allowing the use of
an external disable contact. This will not
stop indexer in run mode.
E. +24 VDC SUPPLY – The +24V terminal provides a nominal1 24 VDC @ 12 mA output for
use with an external load such as one solid-state 3-wire proximity switch.
F. Common "COM" — This terminal is referenced to all logic signals (RUN, JOG, STOP)
through the Return ("RTN") terminal. The control is factory supplied with jumper "JR" in
the "F" position which connects the "RTN" and "COM" terminals together.
Note: Control will not operate unless jumper "JR" is in the "F" position.
VIII. APPLICATION WIRING DIAGRAMS.
Example 1:
Solid-state switching devices, such as NPN transistors or proximity switches, may be used for
logic commands if they meet the following criteria:
Must be capable of switching 30 VDC, at 24 mA, with an off-state leakage current of less than
1 mA. (See fig. 12.) Warning! Do not ground or short +24V to com or return on TB3. Do not
use +24V for other than open collector sensors. (See fig. 12.)
Example 2: For optimum operation, contacts used on logic inputs should be rated for lowlevel logic switching (i.e. gold contacts). (See fig 13.)
14
FIG. 12 – SOLID STATE SWITCHING FIG. 13 – CONTACT SWITCHING
1
Output voltage provided can vary between 20 and 24VDC
Page 17

Example 3: “Cycle on Demand” – Important Information
In a “Cycle on Demand” application, the Indexer Drive will make one complete cycle of
movement of table or conveyor and then dwell until it receives an external signal from the
machine's controller or operator to start again. If motor receives a signal to start while the
Indexer Drive is in its dwell position, the motor will accelerate from a paused position to full
speed during one half of the dwell of the main indexer cam. When the motor has reached
its maximum speed and is no longer accelerating, the motion of the Indexer Drive can start.
As the Indexer re-enters its dwell portion of the main cam, the signal cam located on the
camshaft of the Indexer Drive will actuate the limit switch to signal a stop (Note: Due to time
delays, the signal cam may have to signal a stop some degrees before the indexer
drive actually enters the dwell.) It is important that the motor is made to stop while in the
dwell of the main cam. Stopping in any other position could damage the control or the Indexer
Drive! (See fig. 14A, 14B and 14C on page 15.)
FIG. 14 – CORRECT KEYWAY POSITION
FOR CAM AND LIMIT SWITCH ASSEMBLIES
A standard Roller Gear unit with
the CAM & Limit Switch mounted
on the correct keyway position
directly opposite of the output
shaft, 90° (clockwise) from the
CAM Lobe. The CAM & Limit
Switch may also be mounted on
the reducer. *If the unit has a
“Type II” motion, a special Limit
Switch CAM is needed with one
extra Lobe, 180° from the first Lobe
(as shown).
FIG. 14B – RIGHT ANGLE UNIT
FIG. 14A – ROLLER GEAR UNIT
A standard right angle unit with the CAM & Limit Switch
mounted on the housing has a correct keyway position directly
opposite of the CAM Lobe. CAM & Limit Switch may also be
mounted on the reducer.
FIG. 14C – PARALLEL UNIT
A standard parallel unit with the
CAM & Limit Switch mounted on
the housing has a correct keyway
position directly opposite of the
output shaft, 90° (clockwise) from
the CAM Lobe. CAM & Limit Switch may also be mounted on the reducer.
15
Page 18

FIG. 15 – CYCLE ON DEMAND WIRINGThe "Cycle on Demand" function is required for most
indexing table applications. The control can be
easily set for this operation as follows:
TB3
1. Jumper "JW" must be in the "R" position
(factory setting) see table 8, p. 13.
2. Jumper "JR" must be in the "F" position (factory
setting) see sec. VII, D, p. 13.
3. Wire limit switch LS1 (normally closed) and
start switch (normally open) as shown.
The "Cycle on Demand Operation" begins with limit
switch LS1 riding on the cam lobe. (Since LS1 is a
normally closed switch, it will be open when riding on
the lobe.) The cycle is initiated by momentarily
closing the start switch. The drive will start even
though LS1 is open (Jumper JW is in the "R" position
MOMENTARY
START
SWITCH
(N/O)
LS1 (N/C)
Shield
(Do not ground)
6 RUN
5
JOG
4
STOP
3
RTN
2
+24V
1
COM
giving priority to the start switch which overrides the
stop.) As the cam shaft rotates it moves off LS1
which closes. When the lobe rotates around back to LS1, LS1 now opens and the drive stops. The
drive is now ready to repeat the cycle by initiating another start command. See fig. 16.
Note: A normally open (NO) STOP contact can also be used. To convert to a normally open
STOP, move jumper JS from the factory position "NC" to position "NO."
FIG. 16 – SEQUENCE OF CYCLE ON DEMAND OPERATION
16
Page 19

IX. APPLICATION WIRING DIAGRAMS
Reversible Model KBPI-240DR (120/240 VAC)
Reversing models carry out the same functions as the unidirectional models except they can
be made to index in both the forward and reverse direction. A special circuit APRM® provides
a lockout feature that prevents catastrophic damage to the drive if a "Reverse" command is
given during "Forward" operation (and vice versa). The reversing drives contain two additional
positions on the terminal block: "Run Rev" and "Jog Rev." The stop logic command is made
with a normally closed (NC) contact.
Note: The sense of the stop logic can be changed from normally closed (NC) to
normally open (NO) by placing jumper JS in the "NO" position.
The following wiring diagrams illustrate typical logic circuits. Many other configurations are
possible. Consult factory if help is needed.
FIG. 17 – SEQUENCE OF CYCLE ON DEMAND OPERATION
FIG. 17A – GENERAL
CONNECTION DIAGRAM
8 RUN REV
JOG REV7
6 RUN FWD
5
JOG FWD
4
LS1
STOP
3
RTN
2
+24V
1
COM
FIG. 17C – CYCLE ON DEMAND
WITH REVERSE
FIG. 17B – REVERSING
USING EXTERNAL CONTACTS
FIG. 17D – FORWARD AND REVERSE
CYCLE ON DEMAND
17
Page 20

X. OPERATION.
WARNING! Read Safety Warning on page 2 before attempting to operate the
control or severe injury or death can result. Failure to follow the Safety
Warning Instructions may result in electric shock, fire or explosion.
After the control has been set up properly (the jumpers set to the desired positions and the
wiring completed), the start-up procedure can begin. If AC power has been properly brought
to the control, the "ON" and the "STOP" indicators will be lighted. Before starting control, be
sure the main potentiometer is set to approximately 15% rotation. To start the control, move
the Run - Jog/Stop toggle to the "Run" position and release. The "Stop" indicator should
extinguish and the motor should rotate. The motor will increase in speed as the potentiometer
knob is rotated clockwise.
Note: If the motor rotates in the wrong direction, it will be necessary to disconnect the
main AC power and reverse the armature wires. To stop the motor, move the Stop
toggle to the Stop position. If power is lost the control will not restart, unless the RunJog/Stop toggle is moved to the "Run" position.
XI. TRIMPOT ADJUSTMENTS.
The control contains trimpots which have been factory adjusted for most applications. Figure
1B on page 5, illustrates the location of the trimpots and their approximate adjustment
positions. Some applications may require readjustment of the trimpots in order to tailor the
control to exact requirements. (See table 2, p. 6 for range and factory setting of trimpots.)
Readjust trimpots as follows:
WARNING! Do not adjust trimpots with main power on if possible. If
adjustments are made with power on, insulated adjustment tools must be
used and safety glasses must be worn. High voltage exists in this control.
Electrocution and/or fire can result if caution is not exercised. Safety Warning on page
2 must be read and understood before proceeding. Failure to follow the Safety Warning
Instructions may result in electric shock, fire or explosion.
A. Minimum Speed (MIN) – The MIN trimpot is used to set the minimum voltage of the drive.
This sets the minimum speed of the motor. Adjust the MIN trimpot as follows:
1. Rotate Main Potentiometer to minimum speed position (full counterclockwise).
2. Increase setting of MIN trimpot so that motor runs at desired minimum speed.
B. Maximum Speed (MAX) – The MAX trimpot is used to set the maximum voltage of the
drive. Adjust the MAX trimpot as follows:
1. Rotate Main Potentiometer to maximum speed position (full clockwise).
2. Adjust MAX trimpot setting to desired setting of motor speed.
C. Current Limit (CL) – This trimpot is used to set the maximum amount of DC current that
the motor can draw. The amount of DC current determines the amount of motor torque.
The CL trimpot is factory set at 150% of the current established by the jumper J1
selection. Readjust the CL trimpot as follows:
1. Turn CL trimpot to minimum (CCW) position. Be sure jumper J1 is in proper position
approximately equal to the motor DC ampere rating. (See sec. IV, p. 9.)
2. Set the main potentiometer at approximately 30 – 50% rotation.
3. Wire in a DC ammeter in series with armature lead. Lock shaft of motor.
4. Apply power. Rotate CL trimpot CW until desired CL setting is reached (factory setting
is 1.5 times rated motor current).
18
Page 21

CAUTION:
1. Adjusting the CL above 150% of motor rating can cause overheating and
demagnetization of some PM motors. Consult motor manufacturer.
2. Do not leave the motor in a locked condition for more than a few seconds since
armature damage may occur.
D. IR Compensation (IR) – The IR Comp circuit is used to stabilize motor speed under
varying loads. Readjust the IR trimpot as follows:
1. Run the motor at approximately 30-50% of rated speed under no load and measure
actual speed.
2. Load the motor to rated current. Rotate IR trimpot so that the loaded speed is the
same as the unloaded speed measured in 1.
Control is now compensated so that minimal speed change will occur over a wide range of
motor load. [Note: Too much IR Comp will cause unstable (oscillatory) operation.]
XII. FUNCTION INDICATOR LAMPS.
The control contains three LED Indicator Lamps on the front cover that reflect its operational
status.
A. Power On Indicator (ON) – This lamp will glow GREEN when the AC line is connected
to the control. (Note: As a convenience, an additional power on indicator (Green) is
located on the main printed circuit board.)
B. Stop Indicator (STOP) – This lamp will glow YELLOW when the control is placed in the
STOP mode with the Run, Jog/Stop Switch or logic contact.
C. Overload Indicator (OL) – When the motor is loaded to the current limit setpoint (CL
setpoint is established by the setting of jumper J1 and the CL trimpot) this lamp will glow
RED. If the OL indicator remains lit during control operation, a fault condition may exist.
Possible causes for this condition are as follows:
1. Motor is overloaded - check motor amps with DC ammeter in series with armature.
2. Motor may be defective - check motor for shorts or grounds.
3. The CL may be set too low - check position of jumper J1 and CL trimpot.
Note: In some applications, especially those requiring the motor to cycle on and off
or from one speed to another, the OL indicator may blink indicating a transient
overload. This is a normal condition for the application.
19
Page 22

XIII – TROUBLESHOOTING GUIDE
MOTOR WILL NOT RUN:
1. Check control operation by placing RUN - JOG/STOP in RUN position.
2. Make sure disconnect fuses or circuit breaker in AC line are okay.
3. Check fuse on PC board and if open, replace.
4. Check logic. See Start-up Procedures and Application Section.
5. Be sure speed pot is not set at zero.
6. Unit is in current limit – See if "OL" indicator is lighted. Check position of jumper J1.
(See table 5, p. 9) and CL trimpot setting.
7. With power removed from unit and motor leads disconnected, check motor for worn or
improperly seated brushes.
8. Check for locked motor shaft.
9. Contact Factory.
FUSE BLOWING:
1. Improper wiring – check AC line and motor wiring. Be sure ground wire is connected
only to the Green ground screw.
2. Improper AC line voltage. Be sure 120VAC is connected to 120VAC rated controls and
240VAC is connected to 240VAC rated controls.
3. Motor brushes worn or improperly seated.
4. Motor load is too heavy. Check for machine "jam-up" or excessive load. ("OL" LED is
continuously lighted.)
5. Contact Factory.
BRAKING NON-FUNCTIONAL (control may not stop):
1. Improper logic wiring.
2. Motor brushes worn or improperly seated.
3. Contact Factory.
NO SPEED CONTROL:
1. Speed pot miswired or wiring defective.
2. Control not set up properly (see Application Section).
3. Contact Factory.
MOTOR WILL NOT RUN AT 1725 RPM:
1. Improper setting of Max Speed trimpot – rotate pot clockwise to increase speed.
2. Unit is in current limit ("OL" LED is lighted). (See sec. XI, C, p. 18.)
3. Low line voltage. Check AC line voltage: 115VAC ±10% or 230VAC ±10%.
4. Verify motor nameplate voltage complies with control output voltage rating.
5. Contact Factory.
20
Page 23

21
Page 24

XIV – LIMITED WARRANTY
For a period of 18 months from date of original purchase, KB will repair or replace without
charge devices which our examination proves to be defective in material or workmanship.
This warranty is valid if the unit has not been tampered with by unauthorized persons,
misused, abused, or improperly installed and has been used in accordance with the
instructions and/or ratings supplied. The foregoing is in lieu of any other warranty or
guarantee, expressed or implied, and we are not responsible for any expense, including
installation and removal, inconvenience, or consequential damage, including injury to any
person, caused by items of our manufacture or sale. Some states do not allow certain
exclusions or limitations found in this warranty so that they may not apply to you. In any
event, KB's total liability, under all circumstances, shall not exceed the full purchase price
of this unit. (rev 4/88)
KB ELECTRONICS, INC.
12095 NW 39th Street, Coral Springs, FL 33065 • (954) 346-4900 • Fax (954) 346-3377
Outside Florida Call TOLL FREE (800) 221-6570 • E-mail – info@kbelectronics.com
www.kbelectronics.com
(A40285) – Rev. E – 1/99
 Loading...
Loading...