

L2W L1U V
B+
AC LINEMOTOR
B–
J1
CON3
J2
PWR
ST
50/60Hz
F- S - R
CON2
A/M
J1
P2 P3
CON1
X1 X2
P1
DEC/BMINMAXCL ACC COMP
230V 115V
Installation & Operation Manual
A Complete Line of Motor Drives
KBVF SERIES
Chassis / IP-20 AC Drives
Variable Speed/ Soft-Start
with Electronic Motor Overload Protection*
Rated for 208-230 Volt 50 & 60 Hz
3-Phase & PSC** AC Induction Motors
from Subfractional thru 1
Operates from 115 and 208/230 Volt
50/60 Hz AC Line Input***
See Safety Warning,
on pages 8 and 9.
This manual covers Models
KBVF-21D, 22D, 13, 23, 23D, 14, 24, 24D, 26D
1
⁄2 HP
The drive is factory set for
Note:
****
60 Hz motors. For 50 Hz motors,
see Section 6.2, on page 25.
The information contained in this manual is intended to be accurate. However, the manufacturer retains
the right to make changes in design which may not be included herein.
*UL approved as an electronic overload protector for motors. **Custom software is required for PSC motors. See
PSC Motor Addendum (Part No. A42142). ***Do not use this drive with GFCIs. Special software is required — Contact
our Sales Department. ****Requires CE approved RFI /Filter. See RFI Filters & Chokes Selection Guide D-321
(Part No. A42027) for selection of filters to meet the Industrial or Residential Standard.
© 2006 KB Electronics, Inc.
(see back cover)
TABLE OF CONTENTS
Section Page
1 Quick-Start Instructions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 – 8
2 Safety Warning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 – 9
3 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 – 20
4 Important Application Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 – 22
5 Finger-Safe Cover . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 – 23
6 Setting Selectable Jumpers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 – 27
7 Mounting Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 – 28
8 Recommended High Voltage Dielectric Withstand Testing (Hi-Pot Testing) . . . . . . . . . . . . . . 28 – 30
9 Wiring Instructions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 – 35
10 AC Line Fusing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
11 Drive Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 – 37
12 Diagnostic LEDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37 – 38
13 Trimpot Adjustments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 – 43
Limited Warranty . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Table Page
1 Electrical Ratings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2 General Performance Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Fault Recovery and Resetting the Drive. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4 Drive Operating Condition and Status LED Indicator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Figure Page
1 Quick-Start Connection Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2A Models KBVF-21D, 22D, 13, 23, 23D Mechanical Specifications and Control Layout. . . . . . . . . . 16
2B Models KBVF-21D, 22D, 13, 23, 23D Mechanical Specifications . . . . . . . . . . . . . . . . . . . . . . . . . 17
ii
TABLE OF CONTENTS (Continued)
Figure Page
3A Models KBVF-14, 24, 24D, 26D Mechanical Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3B Models KBVF-14, 24, 24D, 26D Mechanical Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4 Expanded View of Jumpers and Trimpots. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5 Maximum Allowed Motor Torque vs. Speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
6 Open Ventilated Motor with External Cooling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
7 Models KBVF-21D, 22D, 23D, 24D AC Line Input Voltage Selection . . . . . . . . . . . . . . . . . . . . . . 24
8 Model KBVF-26D AC Line Input Voltage Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
9 Removing Jumper J1 on Model KBVF-26D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
10 60 Hz and 50 Hz Motor Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
11 Available Torque vs. Output Frequency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
12 120 Hz and 100 Hz Drive Output Frequency Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
13 Automatic Start . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
14 Forward/Reverse Speed Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
15 Typical Hi-Pot Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
16 AC Line Input, Motor, and Ground Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
17 Main Speed Potentiometer Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
18 Voltage Following Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
19 Manual Start Switch Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
20 Forward-Stop-Reverse Switch Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
21 Enable Switch connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
22 Minimum Speed Trimpot (MIN) Range. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
23 Maximum Speed Trimpot (MAX) Range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
24 Acceleration Trimpot (ACC) Range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
25 Deceleration Trimpot (DEC/B) Range. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
26 Slip Compensation Trimpot (COMP) Range. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
iii
TABLE OF CONTENTS (Continued)
Figure Page
27 Boost Trimpot (DEC/B) Range. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
28 Model KBVF-21D Current Limit Trimpot (CL) Range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
29 Model KBVF-22D Current Limit Trimpot (CL) Range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
30 Models KBVF-13, 23, 23D Current Limit Trimpot (CL) Range . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
31 Models KBVF-14, 24, 24D Current Limit Trimpot (CL) Range . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
32 Model KBVF-26D Current Limit Trimpot (CL) Range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Items Included in this Package:
KBVF Adjustable Frequency Drive, KBVF Series Installation and Operation Manual, Main Speed
Potentiometer Kit with Insulator and Mounting Hardware, Main Speed Potentiometer Terminals
(3 Orange), Motor and AC Line Terminals (5 Blue), 2-Wire and 3-Wire Connector Kit, Status Indicator
Label, Trimpot Adjustment Tool, CE Approved Product Information Card, Warranty Registration Card.
iv
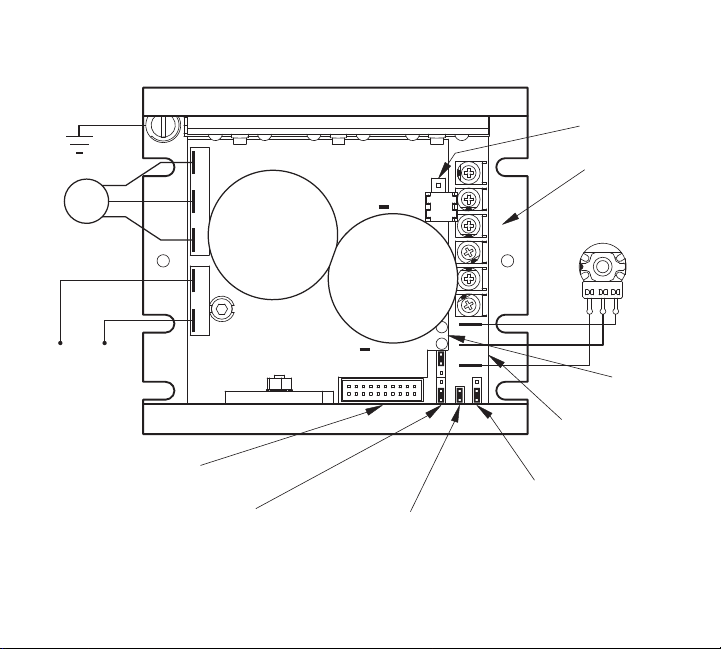
FIGURE 1 – QUICK-START CONNECTION DIAGRAM
L2W L1U V
see Section 3.5, on page 13.
Communication Port for Accessories and Programming:
see Section 9.1,
on page 30.
Single-Phase, 50/60 Hz
AC Line Input:
see Section 9.3,
on page 31.
Motor Connection:
see Section 9.2,
on page 31.
Ground (Earth):
For 60 Hz or 50 Hz Motor Operation:
For Two Times the Rated Motor RPM:
see Section 6.2.1, on page 25.
see Section 6.2.2, on pages 25 and 26.
see Section 6.3, on page 26.
Automatic Start:
see Section 9.6, on page 33.
Manual Start Switch Connection:
Forward/Reverse Speed Selection:
Forward-Stop-Reverse Switch Connection:
Voltage Following Signal Input
in Lieu of Main Speed Potentiometer:
see Section 12, on pages 37 and 38.
see Section 6.4, on page 27.
see Section 9.7, on page 34.
see Section 9.5, on pages 32 and 33.
Diagnostic LEDs:
see Section 9.8, on pages 34 and 35.
Enable Switch Connection,
AC Line Input Voltage Selection
Main Speed Potentiometer (5 KΩ)
see Section 9.4, on pages 31 and 32.
(Supplied) (Front View):
(Dual Voltage Models Only):
see Section 13, on pages 38 – 43.
Adjustable Trimpots:
see Section 6.1, on page 24.
High
Wiper
Low
Chassis
B+
AC LINEMOTOR
B-
J1
CON3
J2
PWR
ST
50/60Hz
F - S - R
CON2
A/M
J1
P2 P3
CON1
X1 X2
P1
DEC/BMINMAXCL ACC COMP
230V 115V
Motor
5
1 QUICK-START INSTRUCTIONS
Important –
are to be used as a reference only and are not intended to replace the details provided herein.
You must read the Safety Warning on, pages 8 and 9, before proceeding.
See Figure 1 on page 5. Also see Section 4 – Important Application Information, on pages 20 – 22.
You must read these simplified instructions before proceeding. These instructions
WARNING! Disconnect main power when making connections to the drive.
1.1 AC Line Connection –
shown in Figure 16, on page 31. See Section 9.1, on pages 30 and 31.
Application Note: Do not wire this drive to a GFCI. If operation with a GFCI is required,
contact our Sales Department.
Models KBVF-13, 14 – Rated for 115 Volt AC line input only.
Models KBVF-23, 24 – Rated for 208/230 Volt AC line input only.
Models KBVF-21D, 22D, 23D, 24D, 26D* – Rated for 208/230 Volt AC line input with
Jumper J1 (on upper PC board) set to the “230V” position (factory setting). Rated for 115 Volt
AC line input with Jumper J1 (on upper PC board) set to the “115V” position ).
*On Model KBVF-26D, Jumper J1 is labeled “115VAC” and “230VAC”.
1.2 Ground Connection – Connect the ground wire (earth) to the ground screw, as shown in
Figure 16, on page 31. See Section 9.2, on page 31.
Note: Model KBVF-21D, due to its double insulated design, does not contain a ground screw.
6
Wire the single-phase AC line input to Terminals “L1” and “L2”, as

1.3 AC Line Fusing – It is recommended that a fuse(s) or circuit breaker be installed in the AC
line. Fuse each conductor that is not at ground potential. For the recommended fuse size, see
Table 1, on page 14. Also see Section 10, on page 35.
1.4 Motor Connection – Wire the motor to quick-connect Terminals “U”, “V”, “W”, as shown in
Figure 16, on page 31. (Special reactors may be required for cable lengths over 100 ft. (30 m)
– consult our Sales Department.) See Section 9.3, on page 31.
Note: The drive is programmed to operate 3-phase AC induction motors. For PSC motors,
optional software is required – contact our Sales Department.
1.5 60 Hz and 50 Hz Motor Operation (Jumpers J1 and J2 On the Lower PC Board) – The
drive is factory set for 60 Hz motor operation (Jumper J1 set to the “60Hz” position and
Jumper J2 set to the “X1” position). For 50 Hz motor operation, set Jumper J1 to the “50Hz”
position and be sure Jumper J2 is set to the “X1” position. See Section 6.2.1, on page 26.
1.6 Trimpot Settings – All trimpots have been factory set for most applications, as shown in
Figure 4, on page 20. Some applications require adjustment of the trimpots in order to tailor
the drive for a specific requirement. See Section 13, on pages 38 – 43.
1.7 Main Speed Potentiometer Connection – For unidirectional speed operation, wire the 5 kΩ
potentiometer (supplied) to Terminals “P1” (low), “P2” (wiper), “P3” (high). See Section 9.4, on
pages 31 and 32.
1.8 Voltage Following – An isolated* 0 – 5 Volt DC analog signal input can be used to control
motor speed in lieu of the Main Speed Potentiometer. The drive output will linearly follow the
analog signal input. Connect the signal input positive lead (+) to Terminal “P2” and the negative lead (–) to Terminal “P1”. See Section 9.5, on pages 32 and 33.
*If a non-isolated signal is used, install the SIVFR — Signal Isolator (Part No. 9597). The SIVFR
accepts voltage (0 to ±2.5 thru 0 to ±25 Volts DC) or current (4 – 20 mA DC) signal inputs.
See Section 3.5, on page 13.
7
Note: For signal following operation, the Minimum Speed Trimpot (MIN) must be set fully
counterclockwise.
WARNING! The signal input must be isolated from the AC line. Earth grounding
signal wiring will damage the drive and void the warranty. It is recommended that
the SIVFR — Signal Isolator and Run/Fault Relay (Part No. 9597) be installed when
using signal following.
2 SAFETY WARNING
Definition of Safety Warning Symbols
Electrical Hazard Warning Symbol –
shock or electrocution.
Operational Hazard Warning Symbol – Failure to observe this warning could result in
serious injury or death.
8
Failure to observe this warning could result in electrical
This product should be installed and serviced by a qualified technician, electrician, or
electrical maintenance person familiar with its operation and the hazards involved.
Proper installation, which includes installation of the Finger-Safe Cover, wiring, mounting in proper
enclosure, fusing or other current protection, and grounding can reduce the chance of electrical
shocks, fires, or explosion in this product or products used with this product, such as electric
motors, switches, coils, solenoids, and/or relays. Eye protection must be worn and insulated
adjustment tools must be used when working with drive under power. This product is constructed
of materials (plastics, metals, carbon, silicon, etc.) which may be a potential hazard. Proper shielding, grounding, and filtering of this product can reduce the emission of radio frequency interference
(RFI) which may adversely affect sensitive electronic equipment. It is the responsibility of the equipment manufacturer and individual installer to supply this Safety Warning to the ultimate end user of
this product. (SW/FSC 5/2005) Be sure to follow all instructions carefully. Fire and/or electrocution
can result due to improper use of this product.
This product complies with all CE directives pertinent at the time of manufacture. Contact
our Sales Department for Declaration of Conformity. Installation of a CE approved RFI filter is
required. See RFI Filters & Chokes Selection Guide D-321 (Part No. A42027) for selection of filters
to meet the Industrial or Residential Standard. Additional shielded cable and/or AC line cables may
be required along with a signal isolator (SIVFR (Part No. 9597)).
3 INTRODUCTION
Thank you for purchasing the KBVF Adjustable Frequency Drive. KB Electronics, Inc. is committed
to providing total customer satisfaction by producing quality products that are easy to install and
operate. The KBVF is manufactured with surface mount components incorporating advanced
circuitry and technology. A Finger-Safe Cover is included for added liability protection.
9
The KBVF Adjustable Frequency Drives provide variable speed control for standard 3-phase and
Permanent Split Capacitor (PSC)
1
AC induction motors from subfractional thru 11⁄2 HP. This manual
covers models with single-phase AC line input only. The sine wave coded Pulse Width Modulated
(PWM) output operates at a carrier frequency of 16 kHz, which provides high motor efficiency and
low noise. Adjustable linear acceleration and deceleration are provided, making the drive suitable for
soft-start applications.
Due to its user-friendly design, the KBVF AC drive is easy to install and operate. Tailoring to specific
applications is accomplished with selectable jumpers and trimpots, which eliminate the computerlike programming required on other drives. However, for most applications no adjustments are necessary. For more advanced programming, PC based Drive-Link™ software is available.
2
Main features include adjustable RMS Current Limit and I
t Motor Overload Protection.2In addition,
Adjustable Slip Compensation with Static Auto-Tune and Boost provides high torque and excellent
load regulation over a wide speed range. Power Start™ delivers over 200% motor torque to ensure
startup of high frictional loads. Electronic Inrush Current Limit (EICL™) eliminates harmful AC line
inrush current.
3
The drive is suitable for machine or variable torque (HVAC) applications. With option-
al Drive-Link™ software, the drive can be programmed for DC Injection Braking.
For AC line and motor wiring, quick-connect terminals are provided. Other features include:
adjustable trimpots (MIN, MAX, ACC, DEC/B
4
, COMP CL), customer selectable jumpers (AutomaticManual Start, Motor Frequency, Frequency Multiplier, Forward/Reverse, and Line Voltage (dual voltage models only)). Diagnostic LEDs are provided for power (PWR) and drive status (ST). A 5 k
Main Speed Potentiometer is also included.
A Signal Isolator is optional on all models, which can be used for single-ended or bidirectional speed
control and accepts voltage or current signal input. Other optional accessories include: Class “A”
and “B” AC Line Filters, Dynamic Brake Module, Multi-Speed Board, Programming Kit, and Modbus
Communication Module. A connector is provided for easy installation of accessories.
10
Ω

Notes: 1. Optional software is required for PSC motors — contact our Sales Department. 2. UL
approved as an electronic overload protector for motors.
lieu of EICL™.
4. In 50 Hz Mode, the DEC/B Trimpot automatically becomes Adjustable Boost.
3. Models KBVF-21D, 22D contain ICL in
3.1 Standard Features
• Simple to Operate –
Does not require programming. Uses trimpots and jumpers, which are
factory set for most applications.
• Diagnostic LEDs – Power on (PWR) and drive status (ST). See Sec. 12, on pgs. 37 & 38.
• Jumper Selection of Drive Output Frequency – Increases the motor speed up to two
times the rated RPM. See Section 6.2, on pages 25 and 26.
• Industry Standard Mounting. See Section 7, on pages 27 and 28.
• Finger-Safe Cover – Meets IP-20 standard. See Section 5, on pages 22 and 23.
Note: GFCI Operation – This control can operate with GFCIs (optional software required).
3.2 Performance Features
• Power Start™ –
Provides more than 200% starting torque which ensures startup of high
frictional loads.
• Slip Compensation with Static Auto-Tune and Boost – Provides excellent load
regulation over a wide speed range.
• Speed Range – 60:1
3.3 Protection Features
2
• Motor Overload (I
t) with RMS Current Limit – Provides motor overload protection which
prevents motor burnout and eliminates nuisance trips. UL approved as an electronic overload protector for motors. See Section 4.2, on pg. 22, and Section 13.7, on pgs. 42 & 43.
• Electronic Inrush Current Limit (EICL™) – Eliminates harmful inrush AC line current
during startup. Models KBVF-21D, 22D contain ICL in lieu of EICL™.
11
• Short Circuit – Prevents drive failure if a short circuit occurs at the motor (phase-to-phase).
• Motor Filter – Reduces harmful voltage spikes to the motor.
• Regeneration – Eliminates nuisance tripping due to bus overvoltage caused by rapid decel-
eration of high inertial loads.
• Undervoltage and Overvoltage – Shuts down the drive if the AC line input voltage goes
above or below the operating range.
• MOV Input Transient Suppression.
• Microcontroller Self Monitoring and Auto-Reboot.
3.4 Trimpot Adjustments
• Minimum Speed (MIN) –
• Maximum Speed (MAX) – Sets the maximum speed of the motor. See Sec. 13.2, on pg. 39.
• Acceleration (ACC) – Sets the amount of time for the motor to accelerate from zero speed
to full speed. See Section 13.3, on page 39.
• Deceleration (DEC/B) – Sets the amount of time for the motor to decelerate from full speed
to zero speed. See Section 13.4, on pages 39 and 40.
• Slip Compensation (COMP) – Maintains set motor speed under varying loads. See Section
13.5, on pages 40 and 41.
• Boost (DEC/B) – In 50 Hz mode, the trimpot automatically becomes Adjustable Boost,
which can be used to set the Volts/Hz Curve for 50 Hz motors to obtain maximum performance. In 50 Hz Mode, the deceleration time is automatically set to the same as the acceleration time. See Section 13.6, on pages 41 and 42.
• Current Limit (CL) – Sets the current limit (overload) which limits the maximum current
(torque) to the motor. See Section 13.7, on pages 42 and 43.
12
Sets the minimum speed of the motor. See Sec. 13.1, on pg. 39.

3.5 Optional Accessories
• SIVFR — Signal Isolator and Run/Fault Relay (Part No. 9597) –
between a non-isolated signal voltage (0 to ±2.5 thru 0 to ±25 Volts DC) or current source
(4 – 20 mA DC) and the drive. Can be used in single-ended or bidirectional mode. Run/Fault
Relay Output Contacts are also provided, which can be used to turn on or off equipment or
to signal a warning if the drive is put into the Stop Mode or a fault has occurred. Mounts on
the end of the drive.
• DBVF — Dynamic Brake Module (Part No. 9598) – Provides up to 25% continuous
braking and 200% instantaneous braking torque (maximum 1 HP (.75 kW)).
• Multi-Speed Board (Part No. 9503) – Provides multi-speed operation using external
contacts or a PLC. Mounts on the end of the drive.
• Programming Kit (Part No. 9582) – Includes DownLoad Module™ (DLM) handheld
programming device which uploads and downloads drive programs, PC to DLM serial communication cable, DLM to inverter communication cable, and PC Windows® based DriveLink™ communication software.
• DIVF — Modbus Communication Module (Part No. 9568) – Allows the drive to communi-
cate with PLCs, PCs, and HMIs with Modbus RTU protocol utilizing a serial communication
cable. If a USB communication cable is required, purchase Part No. 19008.
• RFI Filters and Chokes – Provide RFI and EMI Suppression. They comply with CE Council
Directive 89/336/EEC relating to the Class A Industrial and Class B Residential Standards.
See RFI Filters and Chokes Selection Guide Publication No. D-321 (Part No. A42027).
• Custom Software – All models can be factory programmed for applications that require
special switching, timing, PLC functions, and GFCI operation — contact our Sales
Department.
Provides isolation
13
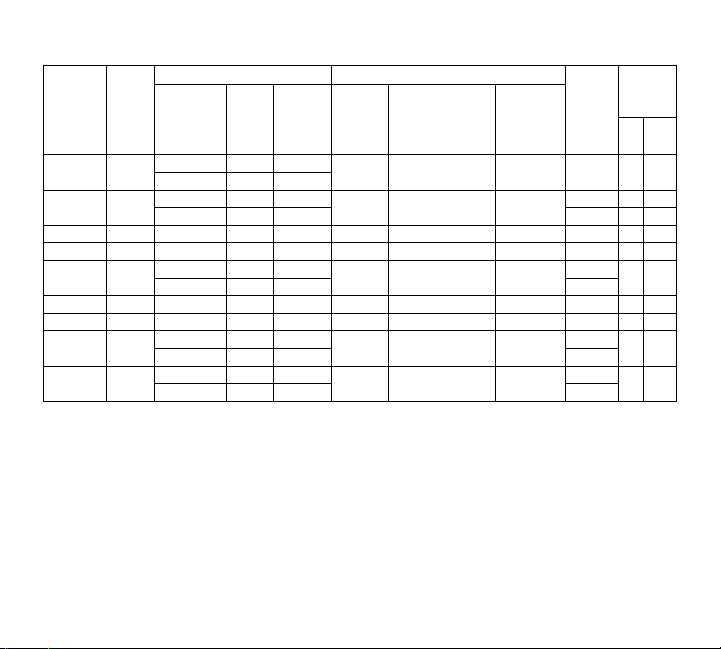
TABLE 1 – ELECTRICAL RATINGS
AC Line Input Drive Output
Maximum
Part
Model
KBVF-21D 9581
KBVF-22D 9572
KBVF-13 9957 115 1 11.0 0 – 230 2.4 1/2 (.37) 15 1.3 0.6
KBVF-23 9958 208/230 1 7.0 0 – 230 2.4 1/2 (.37) 10 1.3 0.6
KBVF-23D 9959
KBVF-14 9977 115 1 16.0 0 – 230 4.0 1 (.75) 20 2.2 1.0
KBVF-24 9978 208/230 1 10.0 0 – 230 4.0 1 (.75) 15 2.2 1.0
KBVF-24D 9979
KBVF-26D* 9496
*Model KBVF-26D is rated 2 HP (1.5 kW) for most Premium Efficient motors.
Note: All models contain Motor Filter and Quick-Connect Terminals for AC line and motor wiring. The Signal Isolator and Run/Fault Relay is optional
on all models.
Volts AC
No.
(50/60 Hz)
208/230 1 2.5
208/230 1 3.8 5
208/230 1 7.0 10
208/230 1 10.0 15
208/230 1 14.0 15
Phase
(φ)
(Amps AC)
115 1 4.0
115 1 6.0
115 1 11.0
115 1 16.0
115 1 22.0
Voltage
Current
Range
(Nominal)
(Volts AC)
0 – 230 1.0 1/10 (.07) 5 0.7 0.3
0 – 230 1.5 1/4 (.18)
0 – 230 2.4 1/2 (.37)
0 – 230 4.0 1 (.75)
0 – 230 5.5 11⁄2 (1.13)
Maximum
Continuous
Load Current
(RMS Amps/Phase)
Maximum
Horsepower
(HP (kW)) lbs kg
Fuse or
Circuit
Breaker
Rating
(Amps)
10 1.3 0.6
15
1.3 0.6
20
2.2 1.0
25
2.9 1.3
Net Wt.
14

TABLE 2 – GENERAL PERFORMANCE SPECIFICATIONS
Description Specification
115 Volt AC Line Input Voltage Operating Range (Volts AC) 115 (±15%) —
208/230 Volt AC Line Input Voltage Operating Range (Volts AC) 208 (–15%) / 230 (+15%) —
Maximum Load (% Current Overload for 2 Minutes) 150 —
Carrier, Switching Frequency (kHz) 16, 8 —
Signal Following Input Voltage Range1(Volts DC)
Output Frequency Resolution (Bits, Hz) 10, .06 —
0 – 5 —
Minimum Speed Trimpot (MIN) Range (% Frequency Setting) 0 – 40 0
Maximum Speed Trimpot (MAX) Range (% Frequency Setting) 70 – 110 100
Acceleration Trimpot (ACC) and Deceleration Trimpot (DEC/B) Range (Seconds) .3 – 20 1.5
Boost Trimpot (DEC/B) Range (50 Hz Only) (Volts/Hz) 0 – 30 5
Slip Compensation Trimpot (COMP) Range at Drive Rating (Volts/Hz) 0 – 3 1.5
Current Limit Trimpot (CL) Range (Amps AC): KBVF-21D .65 – 1.8 1.6
KBVF-22D 1.0 – 2.8 2.4
KBVF-13, 23, 23D 1.5 – 4.5 3.8
KBVF-14, 24, 24D 2.5 – 7.5 6.4
KBVF-26D 3.5 – 10.5 8.8
Motor Frequency Setting (Hz) (Jumper J1) 50, 60 60
Output Frequency Multiplier (X1, X2) (Jumper J2)
2
1, 2 1
Minimum Operating Frequency at Motor (Hz) 1 —
Speed Range (Ratio) 60:1 —
Speed Regulation (30:1 Speed Range, 0 – Full Load) (% Base Speed)
Overload Protector Trip Time for Stalled Motor (Seconds) 6 —
AC Line Input Undervoltage/Overvoltage Trip Points for 115 Volt AC Line (±5%) (Volts AC)
AC Line Input Undervoltage/Overvoltage Trip Points for 208/230 Volt AC Line (±5%) (Volts AC)
3
4
4
2.5 —
76 – 141 —
151 – 282 —
Operating Temperature Range (°C / ºF) 0 – 45 / 32 – 113 —
Notes: 1. If a non-isolated signal is used, install the SIVFR – Signal Isolator (Part No. 9597). 2. Allows the motor to operate up to two times the
rated RPM. Constant motor horsepower will result when operating the drive in the “X2” mode above the motor rated frequency. 3. Dependent on
motor performance.
4. Do not operate the drive outside the specified AC line input voltage operating range.
Factory
Setting
15

Top View Shown without Finger-Safe Cover Installed
L2W L1UV
B+
AC LINEMOTOR
B-
J1
CON3
J2
PWR
ST
50/60Hz
F - S - R
CON2
A/M
J1
P2 P3
CON1
X1 X2
P1
DEC/BMINMAXCL ACC COMP
230V 115V
1.25
31.8
(2 Places)
0.5
12.7
0.25
6.4
(10 Places)
0.2
5.1
3.00
76.2
99.0
3.90
3.80
96.5
4.30
109
16
FIGURE 2A – MODELS KBVF-21D, 22D, 13, 23, 23D MECHANICAL SPECIFICATIONS &
CONTROL LAYOUT (Inches/mm) – (Model KBVF-22D Shown)
(See Figure 4, On Page 20, for Expanded View of Jumpers and Trimpots)

0.2
(2 Places)
24.1
0.95
5.1
See
Chart
Models KBVF-22D, 13, 23, 23D
* Model KBVF-21D contains internal retaining clips.
Model KBVF-21D
Side View Shown with Finger-Safe Cover Installed
Maximum Height
59
2.30
70
2.75
3.80
96.5
FINGER-SAFE COVER RETAINING CLIPS*
FIGURE 2B – MODELS KBVF-21D, 22D, 13, 23, 23D MECHANICAL SPECIFICATIONS
(Inches/mm) – (Model KBVF-22D Shown)
(See Figure 4, On Page 20, for Expanded View of Jumpers and Trimpots)
17

3.90
99.0
RETAINING CLIPS
DO NOT USE
THESE FOUR
FINGER-SAFE COVER RETAINING CLIPS
FINGER-SAFE COVER RETAINING CLIPS
0.2
5.1
(6 Places)
0.4
10.2
33.5
1.32
3.82
97.0
See
Chart A
on page 19
77.9
3.07
(2 Places)
0.08
2.0
(2 Places)
FIGURE 3A – MODELS KBVF-14, 24, 24D, 26D MECHANICAL SPECIFICATIONS (INCHES/MM)
(Model KBVF-26D Shown with Finger-Safe Cover Installed)
(See Figure 4, On Page 20, for Expanded View of Jumpers and Trimpots)
18

FINGER-SAFE COVER RETAINING CLIPS
109
4.30
Models KBVF-14, 24, 24D
Chart A - Maximum Length
5.70
145
Model KBVF-26D Model KBVF-26D
Chart B - Maximum Height
4.505.00
127 114
Models KBVF-14, 24, 24D
Chart B
See
119
4.70
112
4.40
FIGURE 3B – MODELS KBVF-14, 24, 24D, 26D MECHANICAL SPECIFICATIONS (INCHES/MM)
(Model KBVF-26D Shown with Finger-Safe Cover Installed)
(See Figure 4, On Page 20, for Expanded View of Jumpers and Trimpots)
19

FIGURE 4 – EXPANDED VIEW OF JUMPERS AND TRIMPOTS
J1
CON3
J2
PWR
ST
50/60Hz
F - S - R
CON2
A/M
J1
P2 P3
CON1
X1 X2
P1
DEC/BMINMAXCL ACC COMP
230V 115V
(Models KBVF-21D, 22D, 23D, 24D, 26D Only)
Jumpers and Trimpots
(Located on Lower PC Board)
Line Voltage Selection Jumper J1
(Located on Upper PC Board)(Shown in Factory Setting)
4 IMPORTANT APPLICATION INFORMATION
4.1 Motor with External Fan Cooling –
ventilated 3-phase AC induction motors will overheat if used beyond a limited speed range at
full torque. Therefore, it is necessary to reduce motor load as speed is decreased.
Note: Some fan-cooled motors can be used over a wider speed range. Consult the motor
20
manufacturer for details.
WARNING! Some motors have low speed characteristics which cause overheating and
winding failure under light load or no load conditions. If the motor is operated in this
manner for an extended period of time, it is recommended that the unloaded motor current be
checked from 2–15 Hz (60 – 450 RPM) to ensure motor current does not exceed the nameplate rating.
Do not use motor if the motor current exceeds the nameplate rating.
Most totally enclosed fan-cooled (TEFC) and open

It is recommended
20
Maximum Allowed
Motor Speed (%)
10 20
0
040
5030 807060 10090
80
60
40
100
Motor Torque (%)
TEFC and Open Ventilated Motors
and TENV Motors
Inverter Duty
Fan Cooled
Open Ventilated Motor
(100 CFM Min.)
Fan or Blower
Airflow
that the drive be
used with Inverter Duty
or TENV motors.
Inverter duty and most
totally enclosed nonventilated (TENV) motors
can provide full rated
torque over an extended
speed range without
overheating. See Figure 5.
If external fan cooling is
provided, open ventilated
motors can also achieve
an extended speed range
at full rated torque. A box
fan or blower with a minimum of 100 CFM is recommended. Mount the
fan or blower so the
motor is surrounded by
the airflow. See Figure 6.
FIGURE 5 – MAXIMUM ALLOWED MOTOR TORQUE VS. SPEED
FIGURE 6 – OPEN VENTILATED MOTOR WITH EXTERNAL COOLING
21

4.2 Electronic Motor Overload Protection – The drive contains Modified I2t Overload
Protection.* Part of this function consists of a Current Limit (CL) circuit, which limits the drive
current to a factory preset level of 160% of the rated drive current. The CL Trimpot is used to
recalibrate the drive current from 60% thru 200%. The Power Start™ circuit provides an overshoot function that allows most motors to develop more than 200% of starting torque and
breakdown torque.
2
Standard I
t is undesirable because it causes nuisance tripping. It allows a very high motor
current to develop and will turn the drive off after a short period of time. KB’s RMS Current
Limit Circuit avoids this nuisance tripping while providing maximum motor protection.
If the motor is overloaded to 120% of full load (75% of the CL setting), the I
2
t Timer starts. If
the motor continues to be overloaded at the 120% level, the timer will shut down the drive
after 30 minutes. If the motor is overloaded to 160% of full load, the drive will trip in 6 seconds.
*UL approved as an overload protector for motors.
5 FINGER-SAFE COVER
The drive is designed with an IP-20 Finger-Safe Cover which provides protection against accidental
contact with high voltage.
WARNING! Disconnect main power when removing or installing the Finger-Safe Cover.
WARNING! To prevent accidental contact with high voltage, it is required that the
Finger-Safe Cover be properly installed onto the drive after all wiring and setup is
complete. It offers protection against electric shock which limits the potential liability to the
equipment manufacturer and installer.
22

5.1 Removing the Finger-Safe Cover – The Finger-Safe Cover may have to be removed before
wiring the drive or setting selectable jumpers. All trimpots can be readjusted with the FingerSafe Cover installed. Notice the orientation of the Finger-Safe Cover before removing it.
Note: The Finger-Safe Cover (except that of the KBVF-21D) is designed with a removable
panel (on the trimpots side) which must be removed for installation of optional accessories
SIVFR Signal Isolator and Run/Fault Relay (Part No. 9597) or Multi-Speed Board (Part No.
9503). Complete instructions are provided with the accessories.
Model KBVF-21D – Designed with three “push-ins” (instead of retainer clips) located where
the Finger-Safe Cover aligns with the base. To remove the cover, gently press at the three
push-ins until the cover disengages from the base.
Models KBVF-22D, 13, 23, 23D, 14, 24, 24D, 26D – To remove the Finger-Safe Cover, gently lift up on the four retainer clips until the cover disengages from the base. See Figures 2B
and 3A, on pages 17 and 18.
Note: On Model KBVF-26D, the inner bus capacitor support bracket should not be removed.
5.2 Installing the Finger-Safe Cover – To install the Finger-Safe Cover, be sure to properly align
the retainer clips or push-ins. Gently push the Finger-Safe Cover onto the base until the
retainer clips or push-ins are fully engaged with the base.
6 SETTING SELECTABLE JUMPERS
The drive has customer selectable jumpers which must be set before the drive can be used. For the
location of jumpers, see Figure 4, on page 20.
23

6.1 AC Line Input Voltage Selection
J1
230V 115V
230V 115V
J1
install it onto the "115VAC" position.
For 115 Volt AC Line Input,
remove this terminal and
this terminal.
Do not remove
115VAC
J1
230VAC
115VAC
230VAC
J1
(Jumper J1 (Models KBVF-21D,
22D, 23D, 24D, 26D Only)) –
Jumper J1 is factory set to the
“230V” position for 208/230 Volt
AC line input. For 115 Volt AC line
input, set Jumper J1 to the
“115V” position. Jumper J1 is
located on the upper PC board.
See Figures 7 and 8.
For 115 Volt AC line input, on
Model KBVF-26D, the jumper
must be removed and
installed onto the
“115VAC” position. Using
pliers, gently rock the
female terminal back and
forth vertically while
pulling it upward. See
Figure 9, on page 25.
24
FIGURE 7 – MODELS KBVF-21D, 22D, 23D, 24D
AC LINE INPUT VOLTAGE SELECTION
230 Volt AC Line Input
(Factory Setting)
(J1 Installed in “230V” Position)
115 Volt AC Line Input
(J1 Installed in “115V” Position)
FIGURE 8 – MODEL KBVF-26D AC LINE INPUT VOLTAGE SELECTION
230 Volt AC Line Input
(Factory Setting)
(J1 Installed in “230VAC” Position)
115 Volt AC Line Input
(J1 Installed in “115VAC” Position)

6.2 60Hz and 50 Hz Motor Operation and Drive
Installed
Terminal
Removed
Terminal
J2J150/60Hz
X1 X2J2J1
50/60Hz
X1 X2
Output Frequency Selection (Jumpers J1 and
J2) –
Both jumpers must be set for the appropriate
motor nameplate frequency rating. Jumpers J1
and J2 are located on the lower PC board.
6.2.1 Setting the Drive for 60 Hz or 50 Hz
Motor Operation –
The drive is factory set
to operate 60 Hz motors. Jumper J1 is factory set to the “60Hz” position and Jumper
J2 is factory set to the “X1” position. For 50
Hz motors, set Jumper J1 to the “50Hz”
position, and be sure Jumper J2 is set to
the “X1” position. Jumpers J1 and J2 are
located on the lower PC board. See
Figure 10.
6.2.2 Setting the Drive for Two
Times the Rated Motor
The drive can also
RPM –
be used to operate the
motor up to two times the
rated RPM. However, constant horsepower will result
when operating the drive in
the “X2” mode above the
motor rated frequency. See
Figure 11, on page 26.
FIGURE 9 – REMOVING JUMPER J1
ON MODEL KBVF-26D
FIGURE 10 – 60 Hz & 50 Hz MOTOR SELECTION
60 Hz Motor Operation
(Factory Setting)
(J1 Installed in “60Hz” Position)
(J2 Installed in “X1” Position)
50 Hz Motor Operation
(J1 Installed in “50Hz” Position)
(J2 Installed in “X1” Position)
25

6.3 Automatic Start (CON1) –
J2J150/60Hz
X1 X2J2J1
50/60Hz
X1 X2
50/60
Output Frequency (Hz)
% Torque
0
02
50
100
100/120
The drive is factory set for
Automatic Start (jumper
installed onto CON1), as
shown in Figure 13, on page
27. CON1 is located on the
lower PC board. The drive will
automatically start when power
is applied and a run command is
given. The drive will automatically restart after a
due to undervoltage, overvoltage, or short circuit.
26
For 120 Hz output with
60 Hz motor, be sure
Jumper J1 is set to the
“60Hz” position and set
Jumper J2 to the “X2”
position. For 100 Hz
output with 50 Hz
motor, set Jumper J1 to
the “50Hz” position and
set Jumper J2 to the
“X2” position. See
Figure 12.
recovered fault
FIGURE 11 – AVAILABLE TORQUE vs. OUTPUT FREQUENCY
FIGURE 12 – 120 Hz & 100 Hz
DRIVE OUTPUT FREQUENCY SELECTION
120 Hz Output with 60 Hz Motor
(J1 Installed in “60Hz” Position)
(J2 Installed in “X2” Position)
100 Hz Output with 50 Hz Motor
(J1 Installed in “50Hz” Position)
(J2 Installed in “X2” Position)

For an I2t Trip, due to a prolonged overload, the drive must
A/M
CON1
F - S - R
CON2
F - S - R
CON2
be
manually restarted. See Section 11.2, on page 36. Also
FIGURE 13 – AUTOMATIC START
(Jumper Installed)
see Section 12.2, on pages 37 and 38.
Manual Start, a momentary contact must be installed
For
onto CON1, as described in Section 9.6, on pages 33 and 34.
6.4 Forward/Reverse Speed
Selection (CON2) –
The drive is
factory set for Forward Speed
Operation (jumper installed in the
“F” position of CON2). CON2 is
FIGURE 14 – FORWARD/REVERSE SPEED SELECTION
Forward Speed Operation
(Factory Setting)
(Jumper Installed in “F” Position)
Reverse Speed Operation
(Jumper Installed in “R” Position)
located on the lower PC board.
For Reverse Speed Operation,
install the jumper in the “R”
position. See Figure 14.
To wire a
Forward-Stop-Reverse Switch, see Section 9.7, on page 34.
7 MOUNTING INSTRUCTIONS
WARNING! This drive must be mounted in an enclosure. Care should be taken
to avoid extreme hazardous locations where physical damage to the drive can
occur due to moisture, metal chips, dust, and other contamination, including corrosive
atmosphere that may be harmful. See Safety Warning on pages 8 and 9. To prevent accidental contact with high voltage, it is required that the Finger-Safe Cover be properly installed
onto the drive after all wiring and set up is complete. Do not use this drive in an explosionproof application.
27

Application Note – The enclosure should be large enough to allow for proper heat dissipation so
that the ambient temperature does not exceed 45 °C (113 °F). Leave enough room to allow for
AC line, motor connection, and other wiring that is required. See Figures 2A, 2B, 3A and 3B, on
pages 16 –19.
When mounting the Main Speed Potentiometer, be sure to install the insulating disc between the
potentiometer and the panel.
8 RECOMMENDED HIGH VOLTAGE DIELECTRIC WITHSTAND TESTING (HI-POT TESTING)
Testing agencies such as UL, CSA, etc., usually require that equipment undergo a hi-pot test. In
order to prevent catastrophic damage to the drive, which has been installed in the equipment, the
following procedure is recommended. A typical hi-pot test setup is shown in Figure 15, on page 29.
All drives have been factory hi-pot tested in accordance with UL requirements.
Warning! All equipment AC line inputs must be disconnected from the AC power.
Connect all equipment AC power input lines together and connect them to the H.V. lead of
8.1
the Hi-Pot Tester. Connect the RETURN of the Hi-Pot Tester to the frame on which the drive
and other auxiliary equipment are mounted.
8.2 The Hi-Pot Tester must have an automatic ramp-up to the test voltage and an automatic
ramp-down to zero voltage.
Note: If the Hi-Pot Tester does not have automatic ramping, then the hi-pot output must be
manually increased to the test voltage and then manually reduced to zero. This procedure
must be followed for each machine being tested. A suggested Hi-Pot Tester is Slaughter
Model 2550.
CAUTION! Instantly applying the hi-pot voltage will cause irreversible damage to the drive,
28
which will void the warranty.

P2
P3
P1
Chassis
Adjustable Frequency Drive
Signal Inputs
L2
L1
W
V
U
High Voltage Dielectric Withstand Tester (Hi-Pot Tester)
10mA0mA
LEAKAGE
ACKILOVOLTS
RESET
TEST
ZERO
MAX
VOLTAGE
0
2
1
3
to Both AC Line Inputs
(Main Power Disconnected)
Connect Hi-Pot
AC Line Input
H. V.
RETURN
Machine Equipment or Frame
L2
L1
Auxiliary Equipment
Chassis
Connect All Drive Terminals Together
Motor Wires
Frame
(Main Power Disconnected)
FIGURE 15 – TYPICAL HI-POT SETUP
29

9 WIRING INSTRUCTIONS
WARNING! Read Safety Warning, on pages 8 and 9, before using the drive.
Disconnect main power when making connections to the drive. To avoid electric
shock, be sure to properly ground the drive.
Application Note –
other or with wires from signal following, start/stop contacts, or any other signal wires. Also, do not
bundle motor wires from multiple drives in the same conduit. Use shielded cables on all signal wiring
over 12” (30 cm). The shield should be earth grounded on the drive side only. Wire the drive in
accordance with the National Electrical Code requirements and other local codes that may apply.
Be sure to properly fuse each AC line conductor that is not at ground potential. Do not fuse neutral
or grounded conductors. A separate AC line switch or contactor must be wired as a disconnect so
that each ungrounded conductor is opened. For fuse or circuit breaker selection, see Table 1, on
page 14. Also see section 10, on page 35.
9.1 AC Line Connection – Wire the single-phase AC line input to Terminals “L1” and “L2”. The
terminals are located on the upper PC board. See Figure 16, on page 31.
GFCI Operation – Do not connect this drive to an AC power source controlled by a
Ground Fault Circuit Interrupter. Special software is available for GFCI operation —
contact our Sales Department.
Models KBVF-13, 14 – Rated for 115 Volt AC line input only.
Models KBVF-23, 24 – Rated for 208/230 Volt AC line input only.
Models KBVF-21D, 22D, 23D, 24D, 26D* – Rated for 208/230 Volt AC line input with
Jumper J1 set to the “230V” position (factory setting). Rated for 115 Volt AC line input with
Jumper J1 set to the “115V” position . Jumper J1 is located on the upper PC board.
30
Note: Be sure Jumper J1 is set to the correct AC line input voltage.
To avoid erratic operation, do not bundle the AC line and motor wires with each

Ground (Earth)
Chassis
Motor
Single-Phase, 50/60 Hz
115, 208/230 Volt *
AC Line Input
U V
MOTOR
W
AC LINE
L1 L2
*Note: On Model
KBVF-26D, Jumper J1 is
labeled “115VAC” and
“230VAC”.
9.2 Ground Connection –
Connect the ground wire
(earth) to the green
ground screw. The
ground screw is located
on the heat sink. See
Figure 16.
Note: Model KBVF-21D,
due to its double insulated design, does not contain a ground screw.
9.3 Motor Connection – Wire the motor to Terminals “U”, “V”, “W”. The terminals are located on
the upper PC board. See Figure 16. Motor cable length should not exceed 100 ft. (30 m) –
special reactors may be required – consult our Sales Department.
Note: The drive is programmed to operate 3-phase AC induction motors. For PSC motors,
optional software is required – contact our Sales Department.
9.4 Main Speed Potentiometer Connection – The drive is supplied with a 5 kΩ Main Speed
Potentiometer to control motor speed. Wire the Main Speed Potentiometer to Terminals “P1”
(low), “P2” (wiper), “P3” (high). The terminals are located on the lower PC board. See Figure
17, on page 32.
FIGURE 16 – AC LINE INPUT, MOTOR, & GROUND CONNECTIONS
31

Speed Potentiometer terminals.
Wiper
Low
High
P1
(Supplied) (Front View)
Main Speed Potentiometer
P3P2
Note: When mounting the Main
Speed Potentiometer, be sure to
install the insulating disc (supplied)
between the potentiometer and the
panel.
9.5 Voltage Following Connection –
An isolated* 0 – 5 Volt DC analog
signal input can be used to control
motor speed in lieu of the Main
Speed Potentiometer. The drive
output will linearly follow the analog
signal input. Connect the signal input positive lead (+) to Terminal “P2” and the negative lead
(–) to Terminal “P1”. The terminals are located on the lower PC board. With external circuitry, a
0 – 10 Volt DC analog signal can also be used. See Figure 18, on page 33.
*If a non-isolated signal is used, install the SIVFR — Signal Isolator (Part No. 9597). The SIVFR
accepts voltage (0 to ±2.5 thru 0 to ±25 Volts DC) or current (4 – 20 mA DC) signal inputs.
See Section 3.5, on page 13.
Note: For signal following operation, the Minimum Speed Trimpot (MIN) must be set fully
counterclockwise.
WARNING! Do not
earth ground any Main
FIGURE 17 – MAIN SPEED POTENTIOMETER CONNECTION
32

the SIVFR — Signal Isolator and Run/Fault Relay (Part No. 9597) be installed when
P1 P2 P3
0 - 5
Volts DC
+
-
V
P1 P2 P3
0 - 10
Volts DC
V
+
-
10k
10k
using signal following.
9.6 Manual Start Switch
Connection (CON1) –
Manual Start Mode is used to
manually start the drive or
restart the drive (reset) if a fault
has occurred. To operate the
drive in the Manual Start Mode,
remove the factory installed
jumper on CON1 and install the
2-wire connector (supplied).
CON1 is located on the lower
PC board. The connector must be wired to a momentary switch or contact, as shown in
Figure 19, on page 34.
In the Manual Start Mode, the drive will trip due to all faults (Overvoltage, Undervoltage, Short
Circuit, and I
switch or contact must be manually closed. Also, the drive must be restarted each time the
AC line is interrupted.
For
Notes: 1. See Section 11.2, on page 36. Also see Section 12.2, on pages 37 and 38. 2. The
drive can be factory programmed for Run/Stop operation with momentary contacts.
WARNING! The signal input must be isolated from the AC line. Earth grounding
signal wiring will damage the drive and void the warranty. It is recommended that
FIGURE 18 – VOLTAGE FOLLOWING CONNECTION
The
2
t) and remain tripped even when the fault is cleared. To Start/Reset the drive, the
0 – 5 Volts DC (Isolated) 0 – 10 Volts DC (Isolated)
Automatic Start, see Section 6.3, on pages 26 and 27.
33

9.7 Forward-Stop-Reverse
CON1
A/M
Manual Start Switch
(Momentary Contacts)
(Push to Run)
White
Black
CON1
CON2
F - S - R
Forward-Stop-Reverse
Black
White
CON2
Red
Stop
Forward
Reverse
Switch
Switch Connection
(CON2) –
drive using a ForwardStop-Reverse Switch,
remove the factory
installed jumper on CON2
and install the 3-wire connector (supplied). CON2
is located on the lower
PC board. The connector
must be wired to a “maintained” switch or contact.
See Figure 20. Also see
Forward/Reverse Speed
Selection
on page 27.
Note: The drive can be
factory programmed for
momentary contact
operation.
9.8 Enable Switch
Connection (CON2) –
The drive can be started and stopped with an Enable Switch (close to run, open to stop).
Remove the factory installed jumper on CON2 and install the 3-wire connector (supplied).
CON2 is located on the lower PC board. The connector must be wired to a “maintained”
switch or contact. See Figure 21, on page 35.
34
To operate the
, in Section 6.4,
FIGURE 19 – MANUAL START SWITCH CONNECTION
Jumper Removed
Connector Installed for
Manual Start Switch
FIGURE 20 – FORWARD-STOP-REVERSE SWITCH CONNECTION
Jumper Removed
Connector Installed for
Forward-Stop-Reverse Switch

Forward Enable Operation, wire the switch to the white and black wires. For Reverse
CON2
F - S - R
(Close to Run)
Red *
(Open to Stop)
Black
White
Enable Switch
CON2
Forward
(Close to Run)
Red
(Open to Stop)
Black
White*
Enable Switch
CON2
Reverse
For
Enable Operation
, wire the switch to the red and black wires. When the switch is closed, the
drive will run. When the switch is opened, the drive will stop.
FIGURE 21 – ENABLE SWITCH CONNECTION
Jumper Removed
*For Forward Enable Switch connection, the red wire is not used. For Reverse Enable Switch connection, the white wire is
not used. The unused wire must be insulated or it may be cut off at the connector.
Connector Installed for
Forward Enable Switch
Connector Installed for
Reverse Enable Switch
10 AC LINE FUSING
This drive does not contain AC line fuses. Most electrical codes require that each ungrounded conductor contain circuit protection.
Do not fuse neutral or ground connections. It is recommended
to install a fuse (Littelfuse 326, Buss ABC, or equivalent) or a circuit breaker in series with each
ungrounded conductor.
Do not fuse motor leads. For the recommended fuse size, see Table 1,
on page 14. Wire the drive in accordance with the National Electrical Code requirements and other
local codes that may apply to the application.
35

11 DRIVE OPERATION
11.1 Start-Up Procedure –
After the drive has been properly setup (jumpers and trimpots set to
the desired positions) and wiring completed, the startup procedure can begin. If the AC power
has been properly brought to the drive, the power (PWR) LED will be illuminated green. The
status (ST) LED will indicate drive status, as described in Section 11.2. To remove and install
the Finger-Safe Cover, see Section 5, on pages 22 and 23.
11.2 Fault Recovery – The drive monitors four faults (Undervoltage, Overvoltage, Short Circuit at
the motor (phase-to-phase), I
2
t). Table 3, describes how the drive will automatically start (fac-
tory setting) after the fault has cleared.
Application Note: In Manual Start Mode, the drive must be manually reset for any fault.
Use the Manual Start Switch, as described in Section 9.6, on pages 33 and 34. Also see
Section 12.2, on pages 37 and 38.
TABLE 3 – FAULT RECOVERY AND RESETTING THE DRIVE*
Fault Automatic Start Mode (Factory Setting)
Undervoltage
Drive will automatically start after the bus voltage returns to the operational level or when the
drive is first turned on (power up).
Overvoltage Drive will automatically start after the bus voltage returns to the operational level.
Short Circuit Drive will automatically start after the short circuit is removed.
I2t
*The fault must be cleared before the drive can be reset.
Drive must be manually restarted.
36

11.3 Restarting the Drive After an I2t Fault Has Cleared – The drive can be restarted after an I2t
Fault has cleared by any of the following methods.
Note: If an I2t Fault occurs, the motor may be overloaded. Check the motor current with an
AC RMS responding ammeter. Also, the CL setting may be set too low. See Section 13.7, on
pages 42 and 43.
1 Disconnect and reconnect the AC power (approximately 15 seconds). The “ST” LED must
change from quick flashing red to flashing red/yellow.
2 Set the Main Speed Potentiometer to zero (fully counterclockwise).
Note: In order to be able to reset the drive by setting the Main Speed Potentiometer to zero,
it is necessary to have the MIN Trimpot set to zero (fully counterclockwise).
3 Open and close the Enable switch or contact. See Section 9.8, on pages 34 and 35.
12 DIAGNOSTIC LEDS
The drive contains two diagnostic LEDs to display the drive’s operational status. See Figure 4, on
page 20, for the location of the “PWR” and “ST” LEDs.
12.1 Power On (PWR) – The “PWR” LED will illuminate green when the AC line is applied to the
drive.
12.2 Status LED (ST) – The “ST” LED is a tricolor LED which provides indication of a fault or
abnormal condition. The information provided can be used to diagnose an installation problem
such as incorrect input voltage, overload condition, and drive output miswiring. It also provides a signal which informs the user that all drive and microcontroller operating parameters
are normal. Table 4, on page 38, summarizes the “ST” LED functions.
37

TABLE 4 – DRIVE OPERATING CONDITION & STATUS LED INDICATOR
Note: The drive is
factory set to the
Automatic Start Mode.
For Manual Start/Rest,
see Section 9.6, on
pages 33 and 34.
Drive Operating Condition
Flash Rate1and LED Color
Normal Operation Slow Flash Green
Overload (120% – 160% Full Load)
I2t (Drive Timed Out)
2
Steady Red
Quick Flash Red
Short Circuit Slow Flash Red
13 TRIMPOT ADJUSTMENTS
The drive contains trimpots
which are factory set for
most applications. See
Undervoltage
Overvoltage
Quick Flash Red / Yellow
Slow Flash Red / Yellow
Stop Steady Yellow
Figure 4, on page 20, for the
location of the trimpots and
their approximate factory
calibrated positions. Some
applications may require
readjustment of the trimpots
Notes: 1. Slow Flash = 1 second on and 1 second off. Quick Flash = 0.25
second on and 0.25 second off. 2. In Manual Start Mode, when the Overload
is removed, before the I2t times out and trips the drive, the “ST” LED will flash
green. 3. In Manual Start Mode, when the Undervoltage or Overvoltage
condition is corrected, the “ST” LED will flash Red / Yellow / Green.
in order to tailor the drive for
a specific requirement. The trimpots may be readjusted as described below.
WARNING! If possible, do not adjust trimpots with the main power applied. If
adjustments are made with the main power applied, an insulated adjustment tool
must be used and safety glasses must be worn. High voltage exists in this drive. Fire and/or
electrocution can result if caution is not exercised. Safety Warning, on pages 8 and 9, must
be read and understood before proceeding.
38
3
3

13.1 Minimum Speed (MIN) – Sets the minimum speed of the
% Frequency Setting
(Shown Factory Set to 0%)
0
15
40
35
30
(Shown Factory Set to 100%)
% Frequency Setting
70
75
100
110
90
80
10
(Shown Factory Set to 1.5 Seconds)
Seconds
1.5
.3
3
20
17
motor. The MIN Trimpot is factory set to 0% of frequency setting. For a higher minimum speed setting, rotate the MIN
Trimpot clockwise. See Figure 22.
13.2 Maximum Speed (MAX) – Sets the maximum speed of the
motor. The MAX Trimpot is factory set to 100% of frequency
setting. For a higher maximum speed setting, rotate the MAX
Trimpot clockwise. For a lower maximum speed setting, rotate
the MAX Trimpot counterclockwise. See Figure 23.
13.3 Acceleration (ACC) – Sets the amount of time for the motor
to accelerate from zero speed to full speed. The ACC Trimpot
is factory set to 1.5 seconds. For longer acceleration time,
rotate the ACC Trimpot clockwise. For more rapid acceleration,
rotate the ACC Trimpot counterclockwise. See Figure 24.
Note: Rapid acceleration settings may cause the current limit
circuit to activate, which will extend the acceleration time.
13.4 Deceleration (DEC/B) – Sets the amount of time for the motor
to decelerate from full speed to zero speed. The DEC/B
Trimpot is factory set to 1.5 seconds. For longer deceleration
time, rotate the DEC/B Trimpot clockwise. For more rapid
deceleration, rotate the DEC/B Trimpot counterclockwise. See
Figure 25, on page 40.
FIGURE 22 – MINIMUM SPEED
TRIMPOT (MIN) RANGE
FIGURE 23 – MAXIMUM SPEED
TRIMPOT (MAX) RANGE
FIGURE 24 – ACCELERATION
TRIMPOT (ACC) RANGE
39

Application Note – On applications with high inertial loads, the
173
(Shown Factory Set to 1.5 Seconds)
Seconds
.3
1.5
20
10
2.3.8
(Shown Factory Set to 1.5 Volts/Hz)
Volts/Hz
0
3
1.5
(Shown Factory Set to 5 Volts/Hz)
5
Volts/Hz
0
30
8
15
23
deceleration may automatically increase in time. This will slow
down the rate of speed of decrease to prevent the bus voltage
from rising to the Overvoltage Trip point. This function is called
Regeneration Protection.
high inertial loads that both the ACC and DEC/B Trimpots
should be set to greater than 10 seconds.
For rapid stopping, install the optional DBVF — Dynamic Brake
Module (Part No. 9598). See Section 3.5, on page 13.
13.5 Slip Compensation (COMP) – Sets the amount of Volts/Hz to
maintain set motor speed under varying loads. The COMP
Trimpot is factory set to 1.5 Volts/Hz, which provides excellent
speed regulation for most motors. To increase the slip compensation, rotate the COMP Trimpot clockwise. To decrease
the slip compensation, rotate the COMP Trimpot counterclockwise. See Figure 26.
The slip compensation may be adjusted as follows:
Wire an AC RMS ammeter in series with one motor phase.
1.
2. Run the motor and set the unloaded speed to approximately
50% (900 RPM on 4-pole 1500/1725 RPM motors).
3. Using a tachometer, record the unloaded speed.
4. Load the motor to the nameplate rated current (Amps AC).
40
FIGURE 25 – DECELERATION
TRIMPOT (DEC/B) RANGE
It is recommended that for very
FIGURE 26 – SLIP COMPENSATION
TRIMPOT (COMP) RANGE
FIGURE 27 – BOOST TRIMPOT
(DEC/B) RANGE

5. Adjust the COMP Trimpot until the loaded RPM is equal to the unloaded RPM.
6. The motor is now compensated to provide constant speed under varying loads.
13.6 Boost (DEC/B) – When the drive is set for 50 Hz Motor Operation (Jumper J1 installed in the
“50Hz” position), the DEC/B Trimpot automatically becomes the adjustable BOOST Trimpot.
Most 60 Hz motors conforming to NEMA standards can operate from a preset Volts/Hz curve.
50 Hz motors, however, generally differ widely in their characteristics. Therefore, it is necessary to have adjustable Boost to obtain maximum motor performance.
To increase the boost, rotate the BOOST Trimpot clockwise. To decrease the boost, rotate the
BOOST Trimpot counterclockwise. See Figure 27, on page 40.
In order for the 50 Hz motor to run properly, the boost must be adjusted. If the application
does not require full torque below 10 Hz, the Boost (DEC/B) Trimpot can be conservatively set
at 8% (9 o’clock position).
Note: In 50 Hz motor operation, the deceleration time is automatically set to the same as the
Acceleration Trimpot (ACC) setting.
WARNING! To avoid motor winding heating and failure, do not overboost
the motor.
The Boost (DEC/B)T
1.
Wire an AC RMS ammeter in series with one motor phase.
2. Run the motor unloaded at approximately 4 Hz (or 120 RPM).
Note: An unloaded motor with excessive boost will draw more current than a partially
loaded motor.
rimpot may be adjusted as follows:
41

3. Increase the boost until the ammeter reaches the nameplate rated current (Amps AC).
4. Using the Main Speed Potentiometer, slowly adjust the motor speed over a 0 – 15 Hz
(0 – 450 RPM) range. If the motor current exceeds the nameplate rating, decrease the
boost setting.
13.7 Motor Overload (I2t) with RMS Current Limit (CL)* – Sets the current limit (overload), which
limits the maximum current to the motor, prevents motor burnout, and eliminates nuisance
trips. The CL Trimpot is factory set to 160% of the drive rating. To increase the current limit,
rotate the CL Trimpot clockwise. To decrease the current limit, rotate the CL Trimpot counterclockwise. See Figures 28 – 32, on page 43.
*UL approved as an electronic overload protector for motors.
In order to ensure that the motor is properly protected with the I2t feature, it is required
that the CL Trimpot be set for 160% of the motor nameplate rating. This is accomplished as follows:
Note: This adjustment must be made within 6 seconds or the I2t Trip will occur.
1. Wire an AC RMS ammeter in series with one motor phase.
2. Set the CL Trimpot fully counterclockwise.
3. Adjust the speed setting to 30% of full speed.
4. Lock the motor shaft and adjust the CL Trimpot to 160% of the motor nameplate rating.
Example: A 1/2 HP motor has a full load current rating of 1.8 Amps. Set the CL Trimpot to
1.8 X 160% = 2.9 Amps.
42

(Shown Factory Set to 6.4 Amps)
3.8
2.5
Amps AC
5
7.5
6.4
5.3
(Shown Factory Set to 8.8 Amps)
3.5
Amps AC
10.5
7
8.8
Amps AC
(Shown Factory Set to 2.4 Amps)
1
1.5
2.8
2.4
1.9
(Shown Factory Set to 3.8 Amps)
1.5
2.3
Amps AC
4.5
3.8
3
1.6.95
(Shown Factory Set to 1.6 Amps)
Amps AC
.65 1.8
1.3
FIGURE 28 – MODEL KBVF-21D
CURRENT LIMIT TRIMPOT (CL) RANGE
FIGURE 29 – MODEL KBVF-22D
CURRENT LIMIT TRIMPOT (CL) RANGE
FIGURE 30 – MODELS KBVF-13, 23, 23D
CURRENT LIMIT TRIMPOT (CL) RANGE
FIGURE 32 – MODEL KBVF-26D
CURRENT LIMIT TRIMPOT (CL) RANGE
FIGURE 31 – MODELS KBVF-14, 24, 24D
CURRENT LIMIT TRIMPOT (CL) RANGE
43

LIMITED WARRANTY
For a period of 18 months from the date of original purchase, KB Electronics, Inc. will repair or
replace without charge, devices which our examination proves to be defective in material or workmanship. This warranty is valid if the unit has not been tampered with by unauthorized persons,
misused, abused, or improperly installed and has been used in accordance with the instructions
and/or ratings supplied. The foregoing is in lieu of any other warranty or guarantee, expressed or
implied. KB Electronics, Inc. is not responsible for any expense, including installation and removal,
inconvenience, or consequential damage, including injury to any person, caused by items of our
manufacture or sale. Some states do not allow certain exclusions or limitations found in this
warranty and therefore they may not apply to you. In any event, the total liability of KB Electronics,
Inc. under any circumstance, shall not exceed the full purchase price of this product. (rev 2/2000)
COPYRIGHT © 2005 KB Electronics, Inc.
All rights reserved. In accordance with the United States Copyright Act of 1976, no part of this publication may be reproduced in any form or by any means without permission in writing from KB
Electronics, Inc. (8/2002)
KB ELECTRONICS, INC.
12095 NW 39th Street, Coral Springs, FL 33065-2516 • (954) 346-4900 • FAX (954) 346-3377
Outside Florida Call Toll Free (800) 221-6570 • info@kbelectronics.com
www.kbelectronics.com
(A40288) – Rev. G – 7/2006
Print Code
 Loading...
Loading...