

Page 1

FANUC Series 30*-MODEL A
FANUC Series 31*-MODEL A
FANUC Series 32*-MODEL A
PARAMETER MANUAL
B-63950EN/04
Page 2
• No part of this manual may be reproduced in any form.
• All specifications and designs are subject to change without notice.
The products in this manual are controlled based on Japan’s “Foreign Exchange and
Foreign Trade Law”. The export of Series 30i/300i/300is-MODEL A, Series
31i/310i/310is-MODEL A5 from Japan is subject to an export license by the government of
Japan. Other models in this manual may also be subject to export controls.
Further, re-export to another country may be subject to the license of the government of
the country from where the product is re-exported. Furthermore, the product may also be
controlled by re-export regulations of the United States government.
Should you wish to export or re-export these products, please contact FANUC for advice.
In this manual we have tried as much as possible to describe all the various matters.
However, we cannot describe all the matters which must not be done, or which cannot be
done, because there are so many possibilities.
Therefore, matters which are not especially described as possible in this manual should be
regarded as ”impossible”.
Page 3
CHANGE IN CNC MODEL NAMES
CHANGE IN CNC MODEL NAMES
The model names of the following CNCs described in this manual have been changed from those shown
in lower lines to those shown in upper lines in fields of the following table. The model names were
changed, but their specifications remain unchanged. Keep the following in mind when using these
models.
• Replace the old model names in this manual with the corresponding new model names.
• Replace the old model names indicated by the machines with the corresponding new model names.
Table 1 CNC Model Names
Model name Abbreviation
FANUC Series 30i-MODEL A
(Old model name : FANUC Series 300i-MODEL A)
FANUC Series 30i-MODEL A
(Old model name : FANUC Series 300is-MODEL A)
FANUC Series 31i-MODEL A
(Old model name : FANUC Series 310i-MODEL A)
FANUC Series 31i-MODEL A5
(Old model name : FANUC Series 310i-MODEL A5)
FANUC Series 31i-MODEL A
(Old model name : FANUC Series 310is-MODEL A)
FANUC Series 31i-MODEL A5
(Old model name : FANUC Series 310is-MODEL A5)
FANUC Series 32i-MODEL A
(Old model name : FANUC Series 320i-MODEL A)
FANUC Series 32i-MODEL A
(Old model name : FANUC Series 320is-MODEL A)
30i –A
(300i–A)
30i –A
(300is–A)
31i –A
(310i–A)
31i –A5
(310i–A5)
31i –A
(310is–A)
31i –A5
(310is–A5)
32i –A
(320i–A)
32i –A
(320is–A)
Series 30i
(Series 300i)
Series 30i
(Series 300is)
Series 31i
(Series 310i)
Series 31i
(Series 310is)
Series 32i
(Series 320i)
Series 32i
(Series 320is)
Page 4

Page 5
B-63950EN/04 DEFINITION OF WARNING, CAUTION, AND NOTE
DEFINITION OF WARNING, CAUTION, AND NOTE
This manual includes safety precautions for protecting the user and preventing damage to the machine.
Precautions are classified into Warning and Caution according to their bearing on safety. Also,
supplementary information is described as a Note. Read the Warning, Caution, and Note thoroughly
before attempting to use the machine.
WARNING
Applied when there is a danger of the user being injured or when there is a
danger of both the user being injured and the equipment being damaged if the
approved procedure is not observed.
CAUTION
Applied when there is a danger of the equipment being damaged, if the
approved procedure is not observed.
NOTE
The Note is used to indicate supplementary information other than Warning and
Caution.
• Read this manual carefully, and store it in a safe place.
s-1
Page 6

Page 7
B-63950EN/04 PREFACE
PREFACE
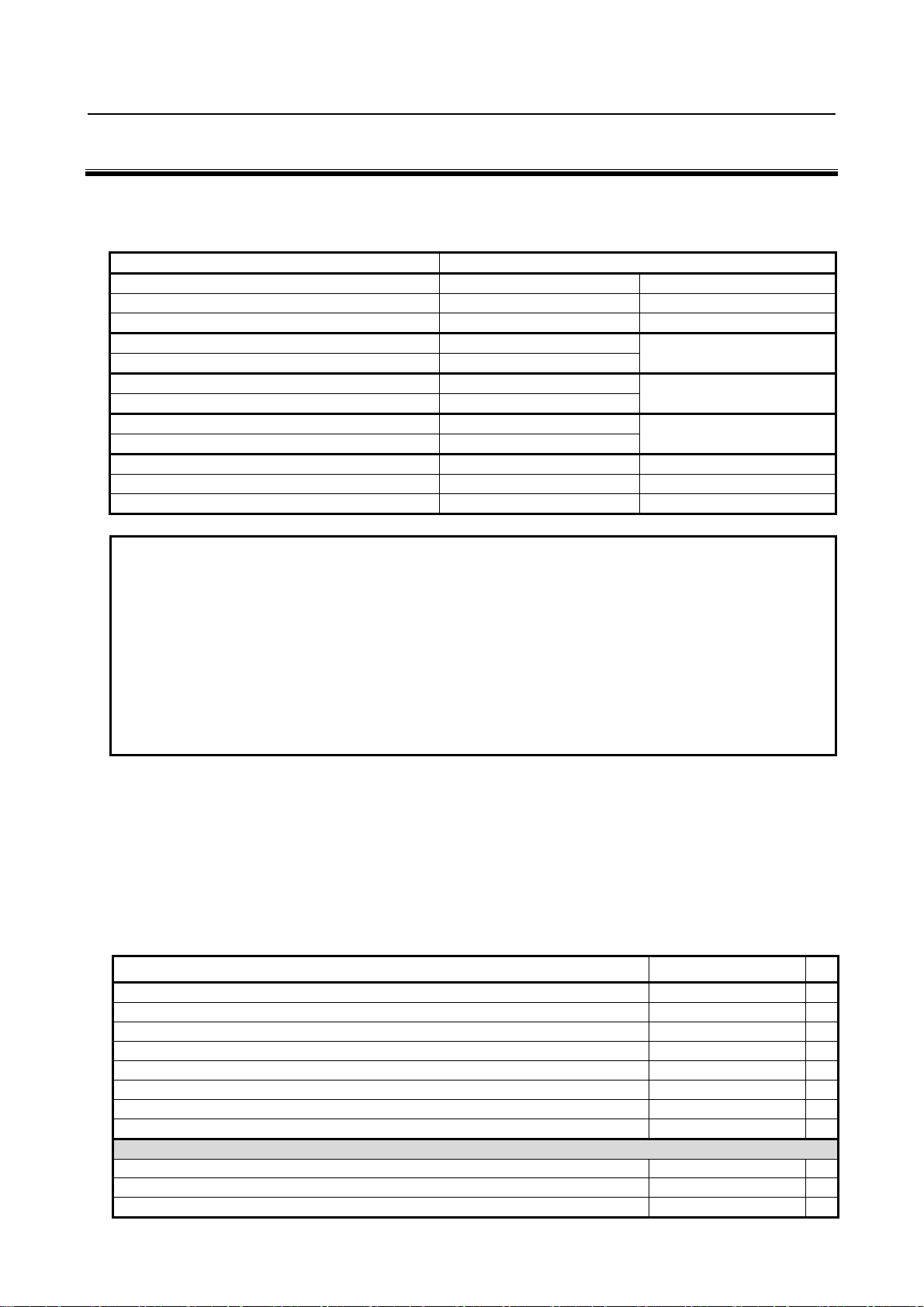
Applicable models
The models covered by this manual, and their abbreviations are :
Model name Abbreviation
FANUC Series 30i –MODEL A 30i –A Series 30i
FANUC Series 300i–MODEL A 300i–A Series 300i
FANUC Series 300is–MODEL A 300is–A Series 300is
FANUC Series 31i –MODEL A 31i –A
FANUC Series 31i –MODEL A5 31i –A5
FANUC Series 310i–MODEL A 310i–A
FANUC Series 310i–MODEL A5 310i–A5
FANUC Series 310is–MODEL A 310is–A
FANUC Series 310is–MODEL A5 310is–A5
FANUC Series 32i –MODEL A 32i –A Series 32i
FANUC Series 320i–MODEL A 320i–A Series 320i
FANUC Series 320is–MODEL A 320is–A Series 320is
NOTE
1 For an explanatory purpose, the following descriptions may be used according to
the types of path control used:
- T series: For the lathe system
- M series: For the machining center system
2 Unless otherwise noted, the model names 31i/310i/310is-A, 31i/310i/310is-A5,
and 32i/320i/320is-A are collectively referred to as 30i/300i/300is. However, this
convention is not necessarily observed when item 3 below is applicable.
3 Some functions described in this manual may not be applied to some products.
For details, refer to the DESCRIPTIONS (B-63942EN).
Related manuals of
Series 30i/300i/300is- MODEL A
Series 31i/310i/310is- MODEL A
Series 32i/320i/320is- MODEL A
The following table lists the manuals related to Series 30i/300i /300is-A, Series 31i/310i /310is-A, Series
32i/320i /320is-A. This manual is indicated by an asterisk(*).
Table 1 Related manuals
Manual name Specification number
DESCRIPTIONS B-63942EN
CONNECTION MANUAL (HARDWARE) B-63943EN
CONNECTION MANUAL (FUNCTION) B-63943EN-1
OPERATOR’S MANUAL (Common to Lathe System/Machining Center System) B-63944EN
OPERATOR’S MANUAL (For Lathe System) B-63944EN-1
OPERATOR’S MANUAL (For Machining Center System) B-63944EN-2
MAINTENANCE MANUAL B-63945EN
PARAMETER MANUAL B-63950EN *
Programming
Macro Executor PROGRAMMING MANUAL B-63943EN-2
Macro Compiler PROGRAMMING MANUAL B-66263EN
C Language Executor PROGRAMMING MANUAL B-63943EN-3
p-1
Series 31i
Series 310i
Series 310is
Page 8
PREFACE B-63950EN/04
Manual name Specification number
PMC
PMC PROGRAMMING MANUAL B-63983EN
Network
PROFIBUS-DP Board CONNECTION MANUAL B-63993EN
Fast Ethernet / Fast Data Server OPERATOR’S MANUAL B-64014EN
DeviceNet Board CONNECTION MANUAL B-64043EN
FL-net Board CONNECTION MANUAL B-64163EN
CC-Link Board CONNECTION MANUAL B-64463EN
Operation guidance function
MANUAL GUIDE i
(Common to Lathe System/Machining Center System) OPERATOR’S MANUAL
MANUAL GUIDE i (For Machining Center System) OPERATOR’S MANUAL
MANUAL GUIDE i (Set-up Guidance Functions)
OPERATOR’S MANUAL
Dual Check Safety
Dual Check Safety CONNECTION MANUAL B-64003EN
B-63874EN
B-63874EN-2
B-63874EN-1
Related manuals of SERVO MOTOR αi/βi series
The following table lists the manuals related to SERVO MOTOR αi/βi series
Table 2 Related manuals
Manual name Specification number
FANUC AC SERVO MOTOR αi series DESCRIPTIONS
FANUC AC SERVO MOTOR αi series / FANUC AC SERVO MOTOR βi series /
FANUC LINEAR MOTOR LiS series /
FANUC SYNCHRONOUS BUILT-IN SERVO MOTOR DiS series
PARAMETER MANUAL
FANUC AC SPINDLE MOTOR αi series DESCRIPTIONS
FANUC AC SPINDLE MOTOR αi/βi series, BUILT-IN SPINDLE MOTOR Bi series
PARAMETER MANUAL
FANUC SERVO AMPLIFIER αi series DESCRIPTIONS
FANUC AC SERVO MOTOR αi series / FANUC AC SPINDLE MOTOR αi series /
FANUC SERVO AMPLIFIER αi series MAINTENANCE MANUAL
CNCs that are described in this manual can be connected to following servo motors and spindle motors.
This manual mainly assumes that the FANUC SERVO MOTOR αi series of servo motor is used. For
servo motor and spindle information, refer to the manuals for the servo motor and spindle that are actually
connected.
B-65262EN
B-65270EN
B-65272EN
B-65280EN
B-65282EN
B-65285EN
p-2
Page 9

B-63950EN/04 TABLE OF CONTENTS
TABLE OF CONTENTS
DEFINITION OF WARNING, CAUTION, AND NOTE.................................s-1
PREFACE....................................................................................................p-2
1 DISPLAYING PARAMETERS.................................................................1
2 SETTING PARAMETERS FROM MDI....................................................2
3 INPUTTING AND OUTPUTTING PARAMETERS THROUGH
THE READER/PUNCHER INTERFACE .................................................4
3.1 OUTPUTTING PARAMETERS THROUGH THE READER/PUNCHER
INTERFACE ..................................................................................................4
3.2 INPUTTING PARAMETERS THROUGH THE READER/PUNCHER
INTERFACE ..................................................................................................5
3.3 I/O FORMATS ...............................................................................................6
3.3.1 Keywords .................................................................................................................6
3.3.2 Inch/Metric Switching..............................................................................................7
3.3.3 Bit Format.................................................................................................................7
3.3.4 Bit Machine Group Format ......................................................................................7
3.3.5 Bit Path Format ........................................................................................................8
3.3.6 Bit Axis Format........................................................................................................8
3.3.7 Bit Spindle Format ...................................................................................................9
3.3.8 Byte/Word/Two-Word Format.................................................................................9
3.3.9 Byte/Word/Two-Word Machine Group Format.......................................................9
3.3.10 Byte/Word/Two-Word Path Format.......................................................................10
3.3.11 Byte/Word/Two-Word Axis Format ......................................................................10
3.3.12 Byte/Word/Two-Word Spindle Format..................................................................11
3.3.13 Real Number Format..............................................................................................11
3.3.14 Real Number Machine Group Format....................................................................12
3.3.15 Real Number Path Format......................................................................................12
3.3.16 Real Number Axis Format......................................................................................13
3.3.17 Real Number Spindle Format.................................................................................13
3.3.18 Start and End of a Record.......................................................................................14
4 DESCRIPTION OF PARAMETERS......................................................15
4.1 DATA TYPE.................................................................................................15
4.2 REPRESENTATION OF PARAMETERS ....................................................16
4.3 STANDARD PARAMETER SETTING TABLES...........................................17
4.4 PARAMETERS OF SETTING......................................................................18
4.5 PARAMETERS OF READER/PUNCHER INTERFACE ..............................21
4.5.1 Parameters Common to All Channels ....................................................................21
4.5.2 Parameters of Channel 1 (I/O CHANNEL=0) .......................................................24
4.5.3 Parameters of Channel 1 (I/O CHANNEL=1) .......................................................25
4.5.4 Parameters of Channel 2 (I/O CHANNEL=2) .......................................................26
4.6 PARAMETERS OF CNC SCREEN DISPLAY FUNCTIONS........................26
4.7 PARAMETERS OF ETHERNET/DATA SERVER FUNCTIONS..................27
4.8 PARAMETERS OF POWER MATE CNC....................................................30
4.9 PARAMETERS OF SYSTEM CONFIGURATION .......................................30
c-1
Page 10

TABLE OF CONTENTS B-63950EN/04
4.10 PARAMETERS OF AXIS CONTROL/INCREMENT SYSTEM (1 OF 3) ......33
4.11 PARAMETERS OF COORDINATE SYSTEM (1 OF 2)...............................44
4.12 PARAMETERS OF STORED STROKE CHECK.........................................51
4.13 PARAMETERS OF THE CHUCK AND TAIL STOCK BARRIER.................56
4.14 PARAMETERS OF FEEDRATE..................................................................61
4.15 PARAMETERS OF ACCELERATION/DECELERATION CONTROL..........75
4.16 PARAMETERS OF SERVO (1 OF 2)..........................................................90
4.17 PARAMETERS OF DI/DO (1 OF 2)...........................................................126
4.18 PARAMETERS OF DISPLAY AND EDIT (1 OF 5)....................................136
4.19 PARAMETERS OF PROGRAMS (1 OF 4)................................................166
4.20 PARAMETERS OF PITCH ERROR COMPENSATION ............................181
4.21 PARAMETERS OF SPINDLE CONTROL .................................................188
4.22 PARAMETERS OF TOOL COMPENSATION (1 OF 3).............................224
4.23 PARAMETERS OF CANNED CYCLES .....................................................245
4.23.1 Parameters of Canned Cycle for Drilling (1 of 2)................................................245
4.23.2 Parameters of Thread Cutting Cycle ....................................................................251
4.23.3 Parameters of Multiple Repetitive Canned Cycle ................................................252
4.23.4 Parameters of Canned Cycle for Drilling (2 of 2)................................................256
4.23.5 Parameters of Canned Cycle for Grinding (for Grinding Machine).....................261
4.24 PARAMETERS OF RIGID TAPPING ........................................................264
4.25 PARAMETERS OF SCALING/COORDINATE ROTATION.......................276
4.26 PARAMETERS OF SINGLE DIRECTION POSITIONING.........................278
4.27 PARAMETERS OF POLAR COORDINATE INTERPOLATION ................279
4.28 PARAMETERS OF NORMAL DIRECTION CONTROL.............................280
4.29 PARAMETERS OF INDEX TABLE INDEXING..........................................282
4.30 PARAMETERS OF INVOLUTE INTERPOLATION ...................................285
4.31 PARAMETERS OF EXPONENTIAL INTERPOLATION ............................285
4.32 PARAMETERS OF FLEXIBLE SYNCHRONOUS CONTROL (1 OF 2) ....286
4.33 PARAMETERS OF STRAIGHTNESS COMPENSATION (1 OF 2)...........289
4.34 PARAMETERS OF INCLINATION COMPENSATION ..............................292
4.35 PARAMETERS OF CUSTOM MACROS...................................................294
4.36 PARAMETERS OF PATTERN DATA INPUT............................................311
4.37 PARAMETERS OF POSITIONING BY OPTIMUM ACCELERATION.......312
4.38 PARAMETERS OF SKIP FUNCTION .......................................................314
4.39 PARAMETERS OF EXTERNAL DATA INPUT/OUTPUT ..........................324
4.40 PARAMETERS OF FINE TORQUE SENSING..........................................327
4.41 PARAMETERS OF MANUAL HANDLE RETRACE (1 OF 2) ....................328
4.42 PARAMETERS OF GRAPHIC DISPLAY (1 OF 5) ....................................333
4.43 PARAMETERS OF SCREEN DISPLAY COLORS (1 OF 2)......................335
4.44 PARAMETERS OF RUN HOUR AND PARTS COUNT DISPLAY.............336
4.45 PARAMETERS OF TOOL MANAGEMENT FUNCTIONS (1 OF 2)...........339
4.46 PARAMETERS OF TOOL LIFE MANAGEMENT (1 OF 2)........................339
4.47 PARAMETERS OF POSITION SWITCH FUNCTIONS.............................348
4.48 PARAMETERS OF MANUAL OPERATION AND AUTOMATIC
OPERATION..............................................................................................350
4.49 PARAMETERS OF MANUAL HANDLE (1 OF 2) ......................................352
c-2
Page 11

B-63950EN/04 TABLE OF CONTENTS
4.50 PARAMETERS OF REFERENCE POSITION WITH MECHANICAL
STOPPER .................................................................................................357
4.51 PARAMETERS OF SOFTWARE OPERATOR'S PANEL..........................358
4.52 PARAMETERS OF PROGRAM RESTART (1 OF 2).................................361
4.53 PARAMETERS OF HIGH-SPEED CYCLE CUTTING...............................362
4.54 PARAMETERS OF ROTARY TABLE DYNAMIC FIXTURE OFFSET.......370
4.55 PARAMETERS OF POLYGON TURNING................................................371
4.56 PARAMETERS OF THE ELECTRONIC GEAR BOX (EGB) .....................378
4.57 PARAMETERS OF AXIS CONTROL BY PMC (1 OF 3) ...........................387
4.58 PARAMETERS OF MULTI-PATH CONTROL...........................................395
4.59 PARAMETERS OF INTERFERENCE CHECK BETWEEN PATHS ..........398
4.60 PARAMETERS OF SYNCHRONOUS/COMPOSITE CONTROL AND
SUPERIMPOSED CONTROL (1 OF 3).....................................................402
4.61 PARAMETERS OF ANGULAR AXIS CONTROL......................................415
4.62 PARAMETERS OF AXIS SYNCHRONOUS CONTROL ...........................417
4.63 PARAMETERS OF SEQUENCE NUMBER COMPARISON AND STOP..425
4.64 PARAMETERS OF CHOPPING................................................................426
4.65 PARAMETERS OF AI CONTOUR CONTROL (1 OF 2)............................428
4.66 PARAMETERS OF HIGH-SPEED POSITION SWITCH (1 OF 2) .............431
4.67 OTHER PARAMETERS ............................................................................435
4.68 PARAMETERS OF MAINTENANCE.........................................................440
4.69 PARAMETERS OF THE INCORRECT OPERATION PREVENTION
FUNCTION................................................................................................441
4.70 PARAMETERS OF AUTOMATIC DATA BACKUP....................................448
4.71 PARAMETERS OF AXIS CONTROL ........................................................449
4.72 PARAMETERS OF PARALLEL AXIS CONTROL .....................................450
4.73 PARAMETERS OF AXIS SWITCHING .....................................................451
4.74 PARAMETERS OF TOOL RETRACT AND RECOVER ............................451
4.75 PARAMETERS OF SCREEN DISPLAY COLORS (2 OF 2)......................451
4.76 PARAMETERS OF SMOOTH TCP...........................................................452
4.77 PARAMETERS OF DUAL CHECK SAFETY (1 OF 2)...............................453
4.78 PARAMETERS OF WAVEFORM DIAGNOSIS.........................................454
4.79 PARAMETERS OF 3-DIMENSIONAL ERROR COMPENSATION ...........454
4.80 PARAMETERS OF 3-DIMENSIONAL MACHINE POSITION
COMPENSATION......................................................................................456
4.81 PARAMETERS OF ROTATION AREA INTERFERENCE CHECK
(1 OF 2).....................................................................................................458
4.82 PARAMETERS OF SPINDLE CONTROL WITH SERVO MOTOR ...........463
4.83 PARAMETERS OF WORKPIECE SETTING ERROR COMPENSATION
(1 OF 2).....................................................................................................469
4.84 PARAMETERS OF LINEAR INCLINATION COMPENSATION
FUNCTION................................................................................................470
4.85 PARAMETERS OF TILTED WORKING PLANE COMMAND ....................471
4.86 PARAMETERS OF AXIS CONTROL/INCREMENT SYSTEM (2 OF 3) ....472
4.87 PARAMETERS OF DI/DO (2 OF 2)...........................................................472
c-3
Page 12
TABLE OF CONTENTS B-63950EN/04
4.88 PARAMETERS OF FEEDRATE CONTROL AND
ACCELERATION/DECELERATION CONTROL........................................473
4.89 PARAMETERS OF PROGRAM RESTART (2 OF 2).................................474
4.90 PARAMETERS OF TOOL CENTER POINT CONTROL...........................475
4.91 PARAMETERS OF COORDINATE SYSTEM (2 OF 2).............................477
4.92 PARAMETERS OF SYNCHRONOUS/COMPOSITE CONTROL AND
SUPERIMPOSED CONTROL (2 OF 3).....................................................478
4.93 PARAMETERS OF PROGRAMS (2 OF 4)................................................478
4.94 PARAMETERS OF DISPLAY AND EDIT (2 OF 5)....................................479
4.95 PARAMETERS OF EMBEDDED MACRO (1 OF 2)..................................485
4.96 PARAMETERS OF DISPLAY AND EDIT (3 OF 5)....................................486
4.97 PARAMETERS OF GRAPHIC DISPLAY (2 OF 5) ....................................488
4.98 PARAMETERS OF DISPLAY AND EDIT (4 OF 5)....................................492
4.99 PARAMETERS OF TOOL COMPENSATION (2 OF 3).............................496
4.100 PARAMETERS OF OPTIMUM TORQUE
ACCELERATION/DECELERATION FOR RIGID TAPPING......................498
4.101 PARAMETERS OF PROGRAMS (3 OF 4)................................................501
4.102 PARAMETERS OF MACHINING QUALITY LEVEL ADJUSTMENT.........505
4.103 PARAMETERS OF WORKPIECE SETTING ERROR COMPENSATION
(2 OF 2).....................................................................................................506
4.104 PARAMETERS OF SERVO (2 OF 2)........................................................508
4.105 PARAMETERS OF AXIS CONTROL BY PMC (2 OF 3) ...........................509
4.106 PARAMETERS OF PMC...........................................................................509
4.107 PARAMETERS OF EMBEDDED MACRO (2 OF 2)..................................518
4.108 PARAMETERS OF HIGH-SPEED POSITION SWITCH (2 OF 2) .............520
4.109 PARAMETERS OF MALFUNCTION PROTECTION.................................521
4.110 PARAMETERS OF MANUAL HANDLE (2 OF 2) ......................................521
4.111 PARAMETERS OF SYNCHRONOUS/COMPOSITE CONTROL AND
SUPERIMPOSED CONTROL (3 OF 3).....................................................528
4.112 PARAMETERS OF AXIS CONTROL BY PMC (3 OF 3) ...........................529
4.113 PARAMETERS OF EXTERNAL DECELERATION POSITIONS
EXPANSION..............................................................................................531
4.114 PARAMETERS OF DISPLAY AND EDIT (5 OF 5)....................................533
4.115 PARAMETERS OF TOOL MANAGEMENT FUNCTIONS (2 OF 2)...........541
4.116 PARAMETERS OF TOOL LIFE MANAGEMENT (2 OF 2)........................552
4.117 PARAMETERS OF STRAIGHTNESS COMPENSATION (2 OF 2)...........553
4.118 PARAMETERS OF FLEXIBLE SYNCHRONOUS CONTROL (2 OF 2) ....554
4.119 PARAMETERS OF PROGRAMS (4 OF 4)................................................557
4.120 PARAMETERS OF MANUAL LINER/CIRCULAR INTERPOLATION........558
4.121 PARAMETERS OF CANNED CYCLES FOR DRILLING M CODE
OUTPUT IMPROVEMENT ........................................................................559
4.122 PARAMETERS OF THE MACHINING CONDITION SELECTION
FUNCTION................................................................................................559
4.123 PARAMETERS OF PARAMETER CHECK SUM FUNCTION...................564
4.124 PARAMETERS OF DUAL CHECK SAFETY (2 OF 2)...............................567
c-4
Page 13

B-63950EN/04 TABLE OF CONTENTS
4.125 PARAMETERS OF PARAMETERS OF AXIS CONTROL/INCREMENT
SYSTEM (3 OF 3)......................................................................................568
4.126 PARAMETERS OF LINEAR SCALE WITH ABSOLUTE ADDRESS
REFERENCE POSITION ..........................................................................568
4.127 PARAMETERS OF PIVOT AXIS CONTROL.............................................569
4.128 PARAMETERS OF FSSB..........................................................................572
4.129 PARAMETERS OF SERVO GUIDE Mate.................................................579
4.130 PARAMETERS OF GRAPHIC DISPLAY (3 OF 5) ....................................579
4.131 PARAMETERS OF EMBEDDED ETHERNET...........................................581
4.132 PARAMETERS OF ROTATION AREA INTERFERENCE CHECK
(2 OF 2).....................................................................................................583
4.133 PARAMETERS OF PERIODICAL SECONDARY PITCH
COMPENSATION......................................................................................600
4.134 PARAMETERS OF MANUAL HANDLE RETRACE (2 OF 2) ....................601
4.135 PARAMETERS OF AI CONTOUR CONTROL (2 OF 2)............................603
4.136 PARAMETERS OF CYLINDRICAL INTERPOLATION..............................604
4.137 PARAMETERS OF OPTIMAL TORQUE
ACCELERATION/DECELERATION..........................................................606
4.138 PARAMETERS OF NANO SMOOTHING..................................................608
4.139 PARAMETERS OF TOOL COMPENSATION (3 OF 3).............................609
4.140 PARAMETERS OF 5-AXIS MACHINING FUNCTION...............................615
4.141 PARAMETERS OF GRAPHIC DISPLAY (4 OF 5) ....................................634
4.142 PARAMETERS OF SPINDLE UNIT COMPENSATION AND NUTATING
ROTARY HEAD TOOL LENGTH COMPENSATION.................................635
4.143 PARAMETERS OF GRAPHIC DISPLAY (5 OF 5) ....................................638
APPENDIX
A CHARACTER CODE LIST..................................................................657
c-5
Page 14

Page 15
B-63950EN/04 1.DISPLAYING PARAMETERS
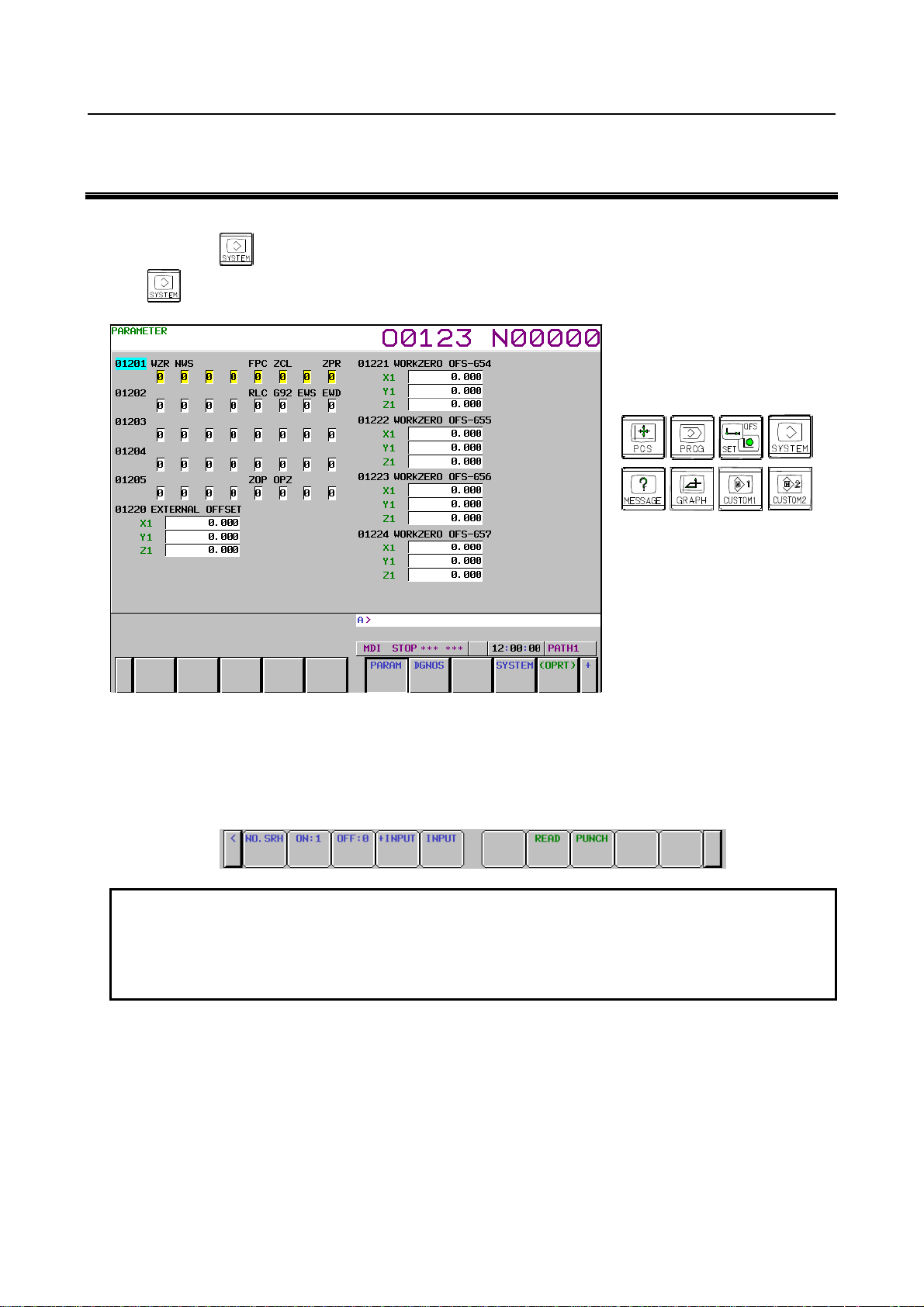
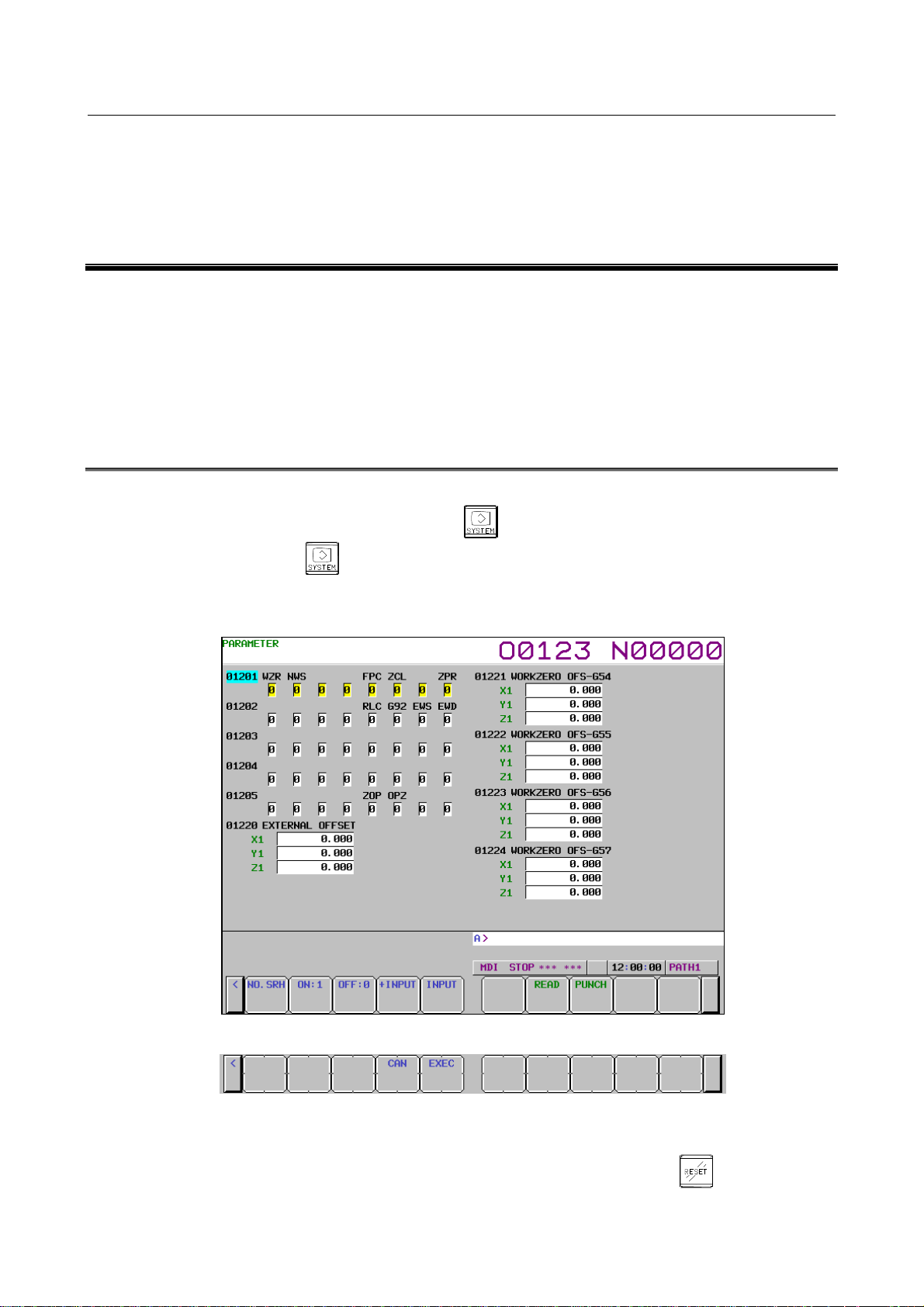
1 DISPLAYING PARAMETERS
Follow the procedure below to display parameters.
1 Press the
function key once, then the [PARAM] section display soft key. The parameter screen is then
selected.
function key on the MDI as many times as required, or alternatively, press the
Function keys
2 The parameter screen consists of multiple pages. Use step (a) or (b) to display the page that contains
the parameter you want to display.
(a) Use the page select key or the cursor move keys to display the desired page.
(b) Enter the data number of the parameter you want to display from the keyboard, then press the
[NO.SRH] soft key. The parameter page containing the specified data number appears with the
cursor positioned at the data number. (The data is displayed in reverse video.)
NOTE
If key entry is started with the section select soft keys displayed, they are
replaced automatically by operation select soft keys including [NO.SRH].
Pressing the [(OPRT)] soft key can also cause the operation select keys to be
displayed.
- 1 -
Page 16
2.SETTING PARAMETERS FROM MDI B-63950EN/04
2 SETTING PARAMETERS FROM MDI
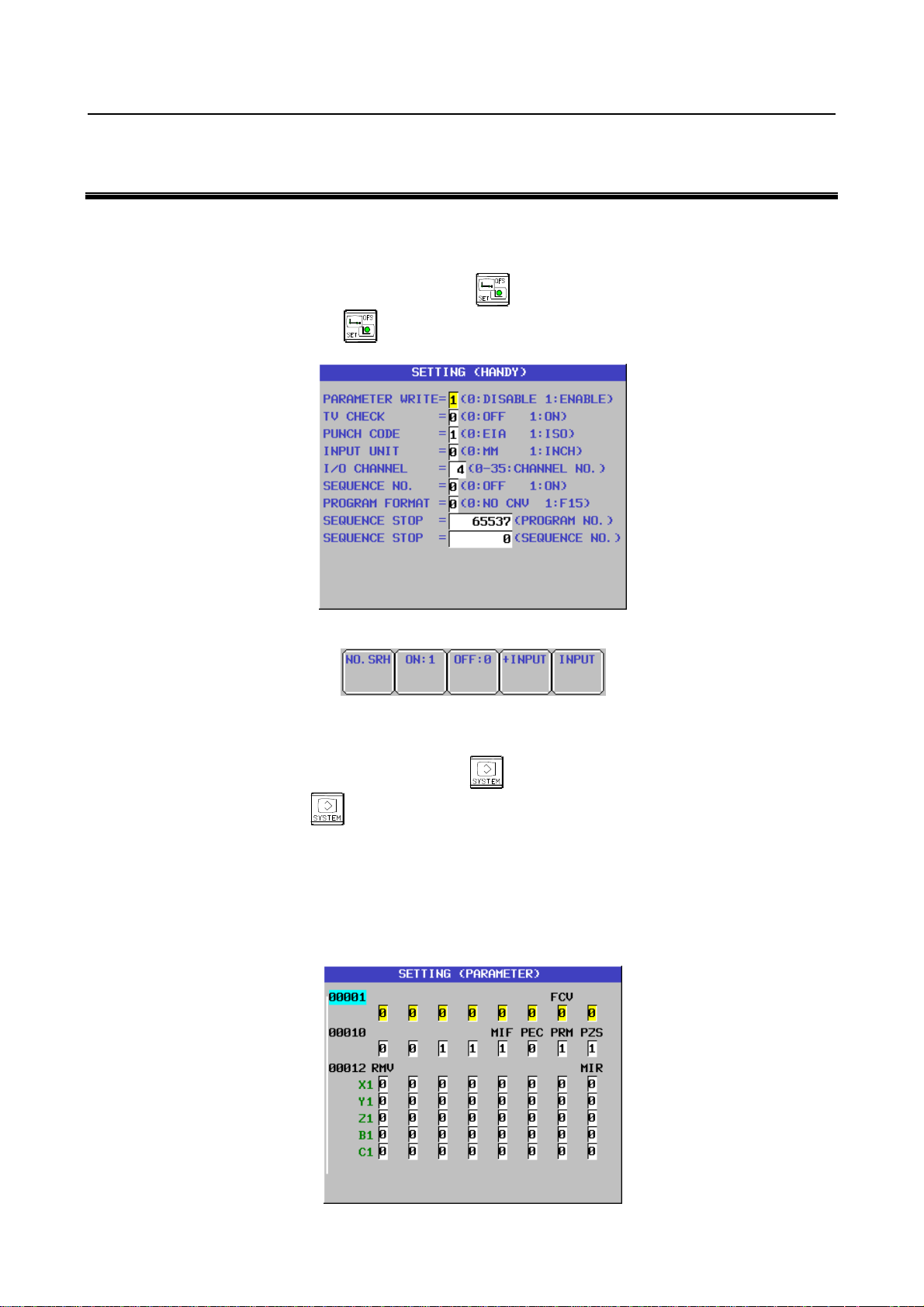
Follow the procedure below to set parameters.
1 Place the NC in the MDI mode or the emergency stop state.
2 Follow the substeps below to enable writing of parameters.
2-1 To display the setting screen, press the
alternatively press the
(The first page of the setting screen appears.)
2-2 Position the cursor on "PARAMETER WRITE" using the cursor move keys.
2-3 Press the [(OPRT)] soft key to display operation select soft keys.
2-4 To set "PARAMETER WRITE=" to 1, press the [ON:1] soft key, or alternatively enter 1 and
press the [INPUT] soft key. From now on, the parameters can be set. At the same time an alarm
condition (SW0100 PARAMETER WRITE ENABLE) occurs in the CNC.
function key once, then the [SETTING] section select soft key.
function key as many times as required, or
3 To display the parameter screen, press the
alternatively press the
Chapter 1, "DISPLAYING PARAMETERS.")
4 Display the page containing the parameter you want to set, and position the cursor on the parameter.
(See Chapter 1, "DISPLAYING PARAMETERS.")
5 Enter data, then press the [INPUT] soft key. The parameter indicated by the cursor is set to the
entered data.
[Example] 12000 [INPUT]
function key once, then the [PARAM] section select soft key. (See
function key as many times as required, or
- 2 -
Page 17

B-63950EN/04 2.SETTING PARAMETERS FROM MDI
Data can be entered continuously for parameters, starting at the selected parameter, by separating
each data item with a semicolon (;).
[Example]
Entering 10;20;30;40 and pressing the [INPUT] soft key assigns values 10, 20, 30, and 40 to
parameters in order starting at the parameter indicated by the cursor.
6 Repeat steps (4) and (5) as required.
7 If parameter setting is complete, set "PARAMETER WRITE=" to 0 on the setting screen to disable
further parameter setting.
8 Reset the NC to release the alarm condition (SW0100).
If an alarm condition (PW0000 PLEASE TURN OFF POWER) occurs in the NC, turn it off before
continuing operation.
- 3 -
Page 18
3. INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
B-63950EN/04
3 INPUTTING AND OUTPUTTING
PARAMETERS THROUGH THE
READER/PUNCHER INTERFACE
This section explains the parameter input/output procedures for input/output devices connected to the
reader/puncher interface.
The following description assumes the input/output devices are ready for input/output. It also assumes
parameters peculiar to the input/output devices, such as the baud rate and the number of stop bits, have
been set in advance. (See Section 4.5, “PARAMETERS OF READER/PUNCHER INTERFACE.”)
3.1 OUTPUTTING PARAMETERS THROUGH THE
READER/PUNCHER INTERFACE
1 Select the EDIT mode or set to Emergency stop.
2 To select the parameter screen, press the
alternatively press the
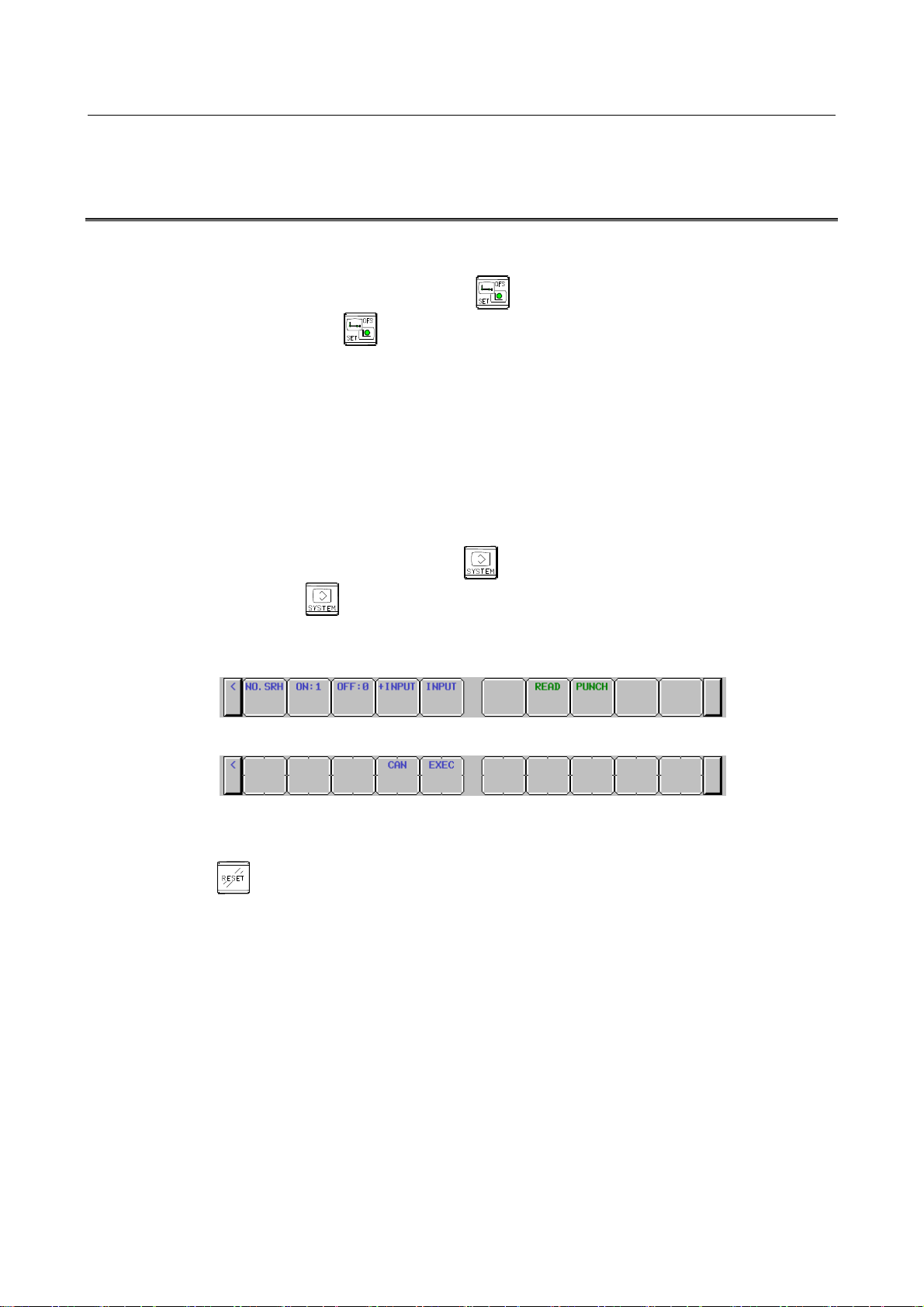
3 Press the [(OPRT)] soft key to display operation select soft keys, then press the forward menu key
located at the right-hand side of the soft keys to display another set of operation select keys
including [PUNCH].
function key once, then the [PARAM] section select soft key.
function key as many times as required, or
4 Pressing the [PUNCH] soft key changes the soft key display as shown below:
5 Press the [EXEC] soft key to start parameter output. When parameters are being output, "OUTPUT"
blinks in the state display field on the lower part of the screen.
6 When parameter output terminates, "OUTPUT" stops blinking. Press the
parameter output.
- 4 -
key to interrupt
Page 19
3. INPUTTING AND OUTPUTTING PARAMETERS
B-63950EN/04
THROUGH THE READER/PUNCHER INTERFACE
3.2 INPUTTING PARAMETERS THROUGH THE
READER/PUNCHER INTERFACE
1 Place the NC in the emergency stop state.
2 Enable parameter writing.
2-1 To display the setting screen, press the
alternatively press the
The first page of the setting screen appears.
2-2 Position the cursor on "PARAMETER WRITE" using the cursor move keys.
2-3 Press the [(OPRT)] soft key to display operation select soft keys.
2-4 To set "PARAMETER WRITE=" to 1, press the [ON:1] soft key, or alternatively enter 1, then
press the [INPUT] soft key. From now on, parameters can be set.
At the same time an alarm condition (SW0100 PARAMETER WRITE ENABLE) occurs in the
NC.
3 To select the parameter screen, press the
alternatively press the
4 Press the [(OPRT)] soft key to display operation select keys, then press the forward menu key
located at the right-hand side of the soft keys to display another set of operation select soft keys
including [READ].
5 Pressing the [READ] soft key changes the soft key display as shown below:
function key once, then the [SETTING] section select soft key.
key once, then [PARAM] soft key.
function key as many times as required, or
function key as many times as required, or
6 Press the [EXEC] soft key to start inputting parameters from the input/output device. When
parameters are being input, "INPUT" blinks in the state display field on the lower part of the screen.
Press the
7 When parameter read terminates, "INPUT" stops blinking, and an alarm condition (PW0100) occurs
in the NC. Turn it off before continuing operation.
key to interrupt parameter input.
- 5 -
Page 20
3. INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
B-63950EN/04
3.3 I/O FORMATS
This section describes the I/O formats of parameters.
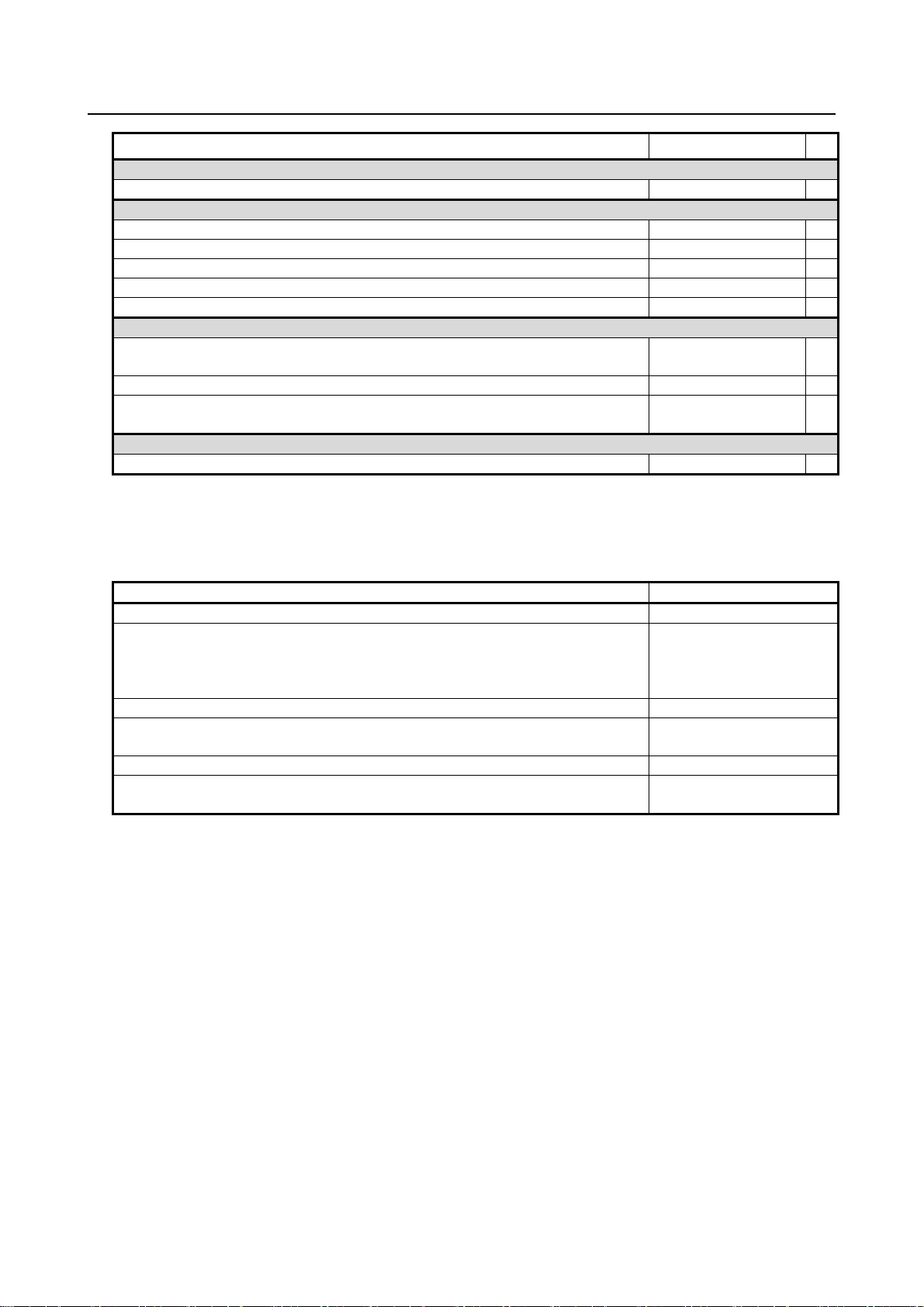
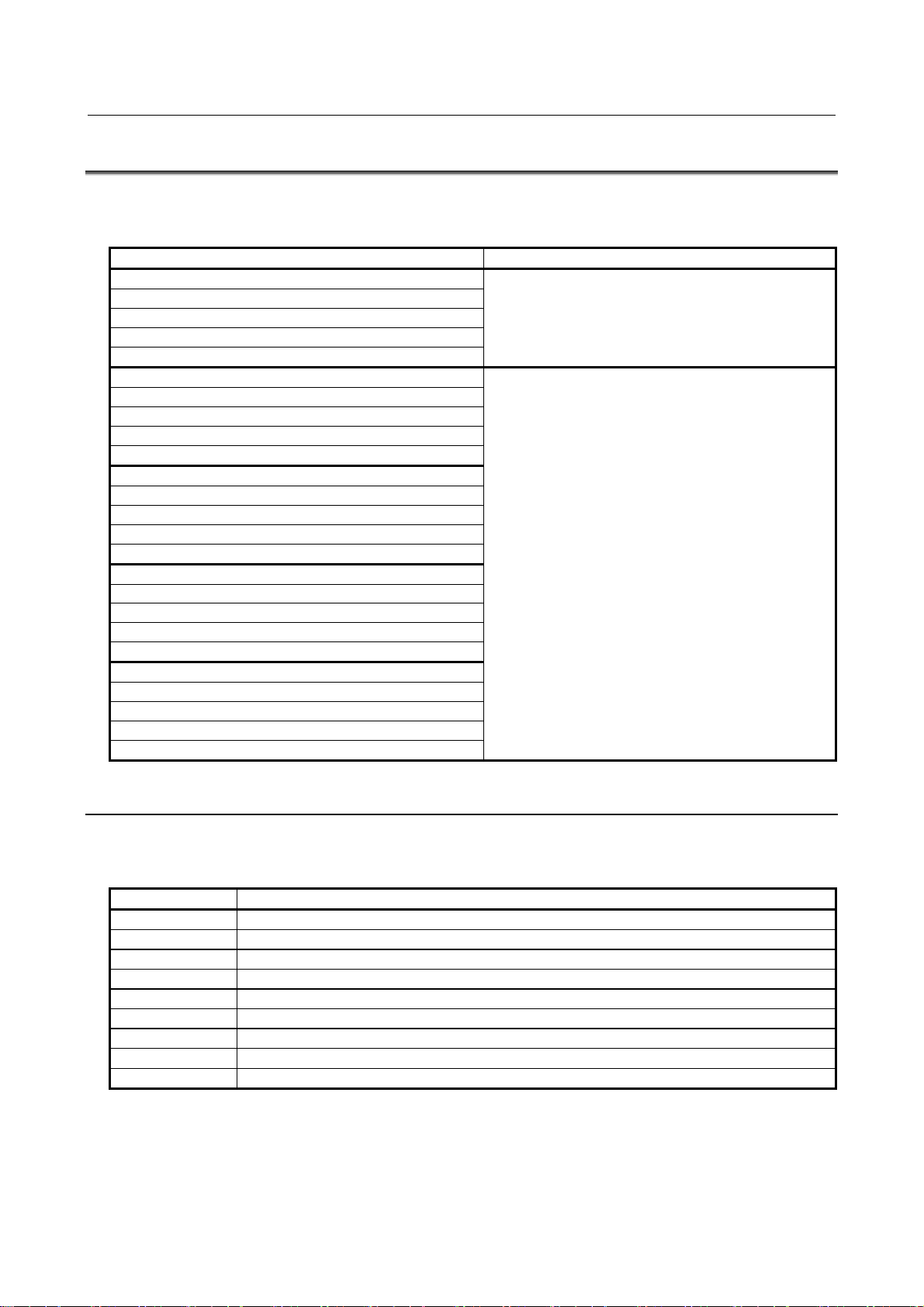
Parameters are classified by data format as follows:
Data format Remarks
Bit
Bit machine group
Bit path
Bit axis
Bit spindle
Byte
Byte machine group
Byte path
Byte axis
Byte spindle
Word
Word machine group
Word path
Word axis
Word spindle
2-word
2-word machine group
2-word path
2-word axis
2-word spindle
Real
Real machine group
Real path
Real axis
Real spindle
Data of these formats is represented by an 8-digit
binary number, with each digit corresponding to a bit.
The setting range of data varies from one parameter
to another.
For details, refer to the description of each parameter.
3.3.1 Keywords
The alphabetic characters listed below are used as keywords.
A numeric value after each keyword has the following meaning:
Keyword Meaning of a numeric value that follows
N Parameter number
Q Data identifier (1: Parameter data, 0: Pitch error compensation data)
T
L
A Controlled axis number (1 and up) of an axis type parameter
S Spindle number (1 and up) of a spindle type parameter
P Value of a parameter independent of inch/metric switching
M Metric input value of a parameter dependent on inch/metric switching
I Inch input value of a parameter dependent on inch/metric switching
Machine group number (1 and up) of a machine group type parameter
Path number (1 and up) of a path type parameter
- 6 -
Page 21
3. INPUTTING AND OUTPUTTING PARAMETERS
B-63950EN/04
THROUGH THE READER/PUNCHER INTERFACE
3.3.2 Inch/Metric Switching
For parameters dependent on inch/metric switching such as those for length and feedrate, whether data is
inch data or metric data is specified by the input mode in the case of input from the MDI panel, or by the
keyword I or M prefixed to the data in the case of input from an external I/O device. The keyword I or M
is added also when data is output from an external I/O device.
If the input mode or keyword differs from the actually used mode as in a case where data input in the inch
mode is used in the metric mode, the CNC performs automatic data conversion. So, data need not be
converted according to a mode change. Moreover, when parameter data is displayed, the data is converted
according to the display mode. However, when data is output from an external I/O device, the original
data is output according to the original keyword.
3.3.3 Bit Format
N ***** Q1 P ******** ;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
An 8-digit binary number after P represents the bit values (0/1) of a parameter, with the first digit
corresponding to bit 0 and the eighth digit corresponding to bit 7.
Leading zeros may not be omitted.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N00010Q1P00000001;
Parameter No. 10
Parameter value Bit 0 is set to 1, and the other bits are set to 0.
3.3.4 Bit Machine Group Format
N ***** Q1 T ** P ******** T ** P ********
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after T represents a machine group number (1 and up).
An 8-digit binary number after P represents the bit values (0/1) of a parameter for each machine group,
with the first digit corresponding to bit 0 and the eighth digit corresponding to bit 7.
Leading zeros may not be omitted.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01005Q1T1P10000001T2P10000001 ;
Parameter No. 1005
Parameter value
1st machine group: Bits 0 and 7 are set to 1, and the other bits are set to 0.
2nd machine group: Bits 0 and 7 are set to 1, and the other bits are set to 0.
・ ・ ・
;
- 7 -
Page 22
3. INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
B-63950EN/04
3.3.5 Bit Path Format
N ***** Q1 L ** P ******** L ** P ********
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after L represents a path number (1 and up).
An 8-digit binary number after P represents the bit values (0/1) of a parameter for each path, with the first
digit corresponding to bit 0 and the eighth digit corresponding to bit 7.
Leading zeros may not be omitted.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
・ ・ ・
Example
N01005Q1L1P10000001L2P10000001.......;
Parameter No. 1005
Parameter value
Path 1: Bits 0 and 7 are set to 1, and the other bits are set to 0.
Path 2: Bits 0 and 7 are set to 1, and the other bits are set to 0.
3.3.6 Bit Axis Format
N ***** Q1 A ** P ******** A ** P ********
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after A represents a controlled axis number (1 and up).
An 8-digit binary number after P represents the bit values (0/1) of a parameter for each controlled axis,
with the first digit corresponding to bit 0 and the eighth digit corresponding to bit 7.
Leading zeros may not be omitted.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01005Q1A1P10000001A2P10000001A3P10000001.......;
Parameter No. 1005
Parameter value
1st axis: Bits 0 and 7 are set to 1, and the other bits are set to 0.
2nd axis: Bits 0 and 7 are set to 1, and the other bits are set to 0.
3rd axis: Bits 0 and 7 are set to 1, and the other bits are set to 0.
▪
・ ・ ・
;
;
- 8 -
Page 23
3. INPUTTING AND OUTPUTTING PARAMETERS
B-63950EN/04
THROUGH THE READER/PUNCHER INTERFACE
3.3.7 Bit Spindle Format
N ***** Q1 S ** P ******** S ** P ********
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after S represents a spindle number (1 and up).
An 8-digit binary number after P represents the bit values (0/1) of a parameter for each spindle, with the
first digit corresponding to bit 0 and the eighth digit corresponding to bit 7.
Leading zeros may not be omitted.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
・ ・ ・
Example
N05603Q1S1P00001000S2P00001000S3P00000000;
Parameter No. 5603
Parameter value
1st spindle: Bit 3 is set to 1, and the other bits are set to 0.
2nd spindle: Bit 3 is set to 1, and the other bits are set to 0.
3rd spindle: All bits are set to 0.
3.3.8 Byte/Word/Two-Word Format
N ***** Q1 P ******** ;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after P represents a parameter value (integer).
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N00100Q1P31515;
Parameter No. 100
Parameter value 31515
;
3.3.9 Byte/Word/Two-Word Machine Group Format
N ***** Q1 T ** P ****** T ** P ******
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after T represents a machine group number (1 and up).
A numeric value after P represents the value (integer) of a parameter for each machine group.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01020Q1T1P88T2P89......;
Parameter No. 1020
Parameter value 1st machine group: 88
2nd machine group: 89
▪
- 9 -
・ ・ ・
;
Page 24
3. INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
B-63950EN/04
3.3.10 Byte/Word/Two-Word Path Format
N ***** Q1 L ** P ****** L ** P ******
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after L represents a path number (1 and up).
A numeric value after P represents the value (integer) of a parameter for each path.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
・ ・ ・
Example
N01020Q1L1P88L2P89L3P90......;
Parameter No. 1020
Parameter value Path 1: 88
Path 2: 89
Path 3: 90
▪
3.3.11 Byte/Word/Two-Word Axis Format
N ***** Q1 A ** P ****** A ** P ******
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after A represents a controlled axis number (1 and up).
A numeric value after P represents the value (integer) of a parameter for each controlled axis.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01020Q1A1P88A2P89A3P90A4P66......;
Parameter No. 1020
Parameter value 1st axis: 88
2nd axis: 89
3rd axis: 90
4th axis: 66
▪
・ ・ ・
;
;
- 10 -
Page 25
3. INPUTTING AND OUTPUTTING PARAMETERS
B-63950EN/04
THROUGH THE READER/PUNCHER INTERFACE
3.3.12 Byte/Word/Two-Word Spindle Format
N ***** Q1 S ** P ****** S ** P ******
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after S represents a spindle number (1 and up).
A numeric value after P represents the value (integer) of a parameter for each spindle.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
・ ・ ・
Example
N05680Q1S1P19S2P19S3P0S4P0;
Parameter No. 5680
Parameter value 1st spindle: 19
2nd spindle: 19
3rd spindle: 0
4th spindle: 0
3.3.13 Real Number Format
N ***** Q1 P ****** ;
N ***** Q1 M ****** ;
N ***** Q1 I ****** ;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after each of P, M, and I represents the value (real number) of a parameter.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01451Q1P5000.0;
Parameter No. 1451
Parameter value 5000.0
;
- 11 -
Page 26
3. INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
B-63950EN/04
3.3.14 Real Number Machine Group Format
N ***** Q1 T ** P ****** T ** P ******
N ***** Q1 T ** M ****** T ** M ******
N ***** Q1 T ** I ****** T ** I ******
・ ・ ・
・ ・ ・
・ ・ ・
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after T represents a machine group number (1 and up).
A numeric value after each of P, M, and I represents the value (real number) of a parameter for each
machine group.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01220Q1T1M50.0T2M60.0........;
Parameter No. 1220
Parameter value 1st machine group: 50.0
2nd machine group: 60.0
▪
3.3.15 Real Number Path Format
;
;
;
N ***** Q1 L ** P ****** L ** P ******
N ***** Q1 L ** M ****** L ** M ******
N ***** Q1 L ** I ****** L ** I ******
・ ・ ・
・ ・ ・
・ ・ ・
;
;
;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after L represents a path number (1 and up).
A numeric value after each of P, M, and I represents the value (real number) of a parameter for each path.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01220Q1L1M50.0L2M60.0L3M70.0 ;
Parameter No. 1220
Parameter value Path 1: 50.0
Path 2: 60.0
Path 3: 70.0
- 12 -
Page 27
3. INPUTTING AND OUTPUTTING PARAMETERS
B-63950EN/04
THROUGH THE READER/PUNCHER INTERFACE
3.3.16 Real Number Axis Format
N ***** Q1 A ** P ****** A ** P ******
N ***** Q1 A ** M ****** A ** M ******
N ***** Q1 A ** I ****** A ** I ******
・ ・ ・
・ ・ ・
・ ・ ・
;
;
;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after A represents a controlled axis number (1 and up).
A numeric value after each of P, M, and I represents the value (real number) of a parameter for each
controlled axis.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01220Q1A1M50.0A2M60.0A3M70.0A4M0.0A5M0.0 ........;
Parameter No. 1220
Parameter value 1st axis: 50.0
2nd axis: 60.0
3rd axis: 70.0
4th axis: 0.0
5th axis: 0.0
▪
3.3.17 Real Number Spindle Format
N ***** Q1 S ** P ****** S ** P ******
N ***** Q1 S ** M ****** S ** M ******
N ***** Q1 S ** I ****** S ** I ******
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after S represents a spindle number (1 and up).
A numeric value after each of P, M, and I represents the value (real number) of a parameter for each
spindle.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N05898Q1S1P30.0S2P30.0S3P0.0S4P0.0;
Parameter No. 5898
Parameter value 1st spindle: 30.0
2nd spindle: 30.0
3rd spindle: 0.0
4th spindle: 0.0
・ ・ ・
・ ・ ・
・ ・ ・
;
;
;
- 13 -
Page 28
3. INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
B-63950EN/04
3.3.18 Start and End of a Record
A parameter record starts with "%" and ends with "%".
Example
%; ......................................... Start of record
N00000Q1P00001100;
N00002Q1P00000000;
▪
▪
N09162Q1P00000000;
N09163Q1P00000000;
% .......................................... End of record
When parameters and pitch error compensation data are included in a single file, the file starts with "%"
and ends with "%".
- 14 -
Page 29
B-63950EN/04 4.DESCRIPTION OF PARAMETERS
4 DESCRIPTION OF PARAMETERS
4.1 DATA TYPE
Parameters are classified by data type as follows:
Data type Valid data range Remarks
Bit
Bit machine group
Bit path
Bit axis
Bit spindle
Byte
Byte machine group
Byte path
Byte axis
Byte spindle
Word
Word machine group
Word path
Word axis
Word spindle
2-word
2-word machine group
2-word path
2-word axis
2-word spindle
Real
Real machine group
Real path
Real axis
Real spindle
See the Standard Parameter
0 or 1
-128 to 127
0 to 255
-32768 to 32767
0 to 65535
0 to ±999999999
Setting Tables.
NOTE
1 Each of the parameters of the bit, bit machine group, bit path, bit axis, and bit
spindle types consists of 8 bits for one data number (parameters with eight
different meanings).
2 For machine group types, parameters corresponding to the maximum number of
machine groups are present, so that independent data can be set for each
machine group.
3 For path types, parameters corresponding to the maximum number of paths are
present, so that independent data can be set for each path.
4 For axis types, parameters corresponding to the maximum number of control
axes are present, so that independent data can be set for each control axis.
5 For spindle types, parameters corresponding to the maximum number of
spindles are present, so that independent data can be set for each spindle axis.
6 The valid data range for each data type indicates a general range. The range
varies according to the parameters. For the valid data range of a specific
parameter, see the explanation of the parameter.
Some parameters handle these types of
data as unsigned data.
Some parameters handle these types of
data as unsigned data.
Some parameters handle these types of
data as unsigned data.
- 15 -
Page 30
4.DESCRIPTION OF PARAMETERS B-63950EN/04
)
4.2 REPRESENTATION OF PARAMETERS
Parameters of the bit type, bit machine group type, bit path type, bit axis type,
and bit spindle type
#7 #6 #5 #4 #3 #2 #1 #0
0000 EIA NCR ISP CTV TVC
Data No. Data (Data #0 to #7 are bit positions.
Parameters other than the bit-type parameters above
1023 Number of the servo axis for each axis
Data No. Data
NOTE
1 The bits left blank in 4. DESCRIPTION OF PARAMETERS and parameter
numbers that appear on the display but are not found in the parameter list are
reserved for future expansion. They must always be 0.
2 A parameter usable with only one path control type, namely, the lathe system (T
series) or the machining center system (M series), is indicated using two rows as
shown below. When a row is blank, the parameter is not usable with the
corresponding series.
[Example 1]
Parameter HTG is a parameter common to the M and T series, but
Parameters RTV and ROC are parameters valid only for the T series.
#7 #6
1403
RTV
[Example 2]
The following parameter is provided only for the M series.
1411
3 When "to" is inserted between two parameter numbers, there are parameters
with successive numbers between the two starting and ending parameter
numbers, but those intermediate parameter numbers are omitted for
convenience.
4 The lower-case letter "x" or "s" following the name of a bit-type parameter
indicates the following:
- ”
x” : Bit axis type parameters
- ” s” : Bit spindle type parameters
#5 #4 #3 #2 #1 #0
ROC
HTG
HTG
Cutting feedrate
T series
M series
T series
M series
- 16 -
Page 31

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
4.3 STANDARD PARAMETER SETTING TABLES
Overview
This section defines the standard minimum data units and valid data ranges of the CNC parameters of the
real type, real machine group type, real path type, real axis type, and real spindle type. The data type and
unit of data of each parameter conform to the specifications of each function.
Explanation
(A) Length and angle parameters (type 1)
Unit of data Increment system Minimum data unit Valid data range
IS-A 0.01 -999999.99 to +999999.99
mm
deg.
inch
(B) Length and angle parameters (type 2)
Unit of data Increment system Minimum data unit Valid data range
mm
deg.
inch
(C) Velocity and angular velocity parameters
Unit of data Increment system Minimum data unit Valid data range
mm/min
degree/min
inch/min
IS-B 0.001 -999999.999 to +999999.999
IS-C 0.0001 -99999.9999 to +99999.9999
IS-D 0.00001 -9999.99999 to +9999.99999
IS-E 0.000001 -999.999999 to +999.999999
IS-A 0.001 -99999.999 to +99999.999
IS-B 0.0001 -99999.9999 to +99999.9999
IS-C 0.00001 -9999.99999 to +9999.99999
IS-D 0.000001 -999.999999 to +999.999999
IS-E 0.0000001 -99.9999999 to +99.9999999
IS-A 0.01 0.00 to +999999.99
IS-B 0.001 0.000 to +999999.999
IS-C 0.0001 0.0000 to +99999.9999
IS-D 0.00001 0.00000 to +9999.99999
IS-E 0.000001 0.000000 to +999.999999
IS-A 0.001 0.000 to +99999.999
IS-B 0.0001 0.0000 to +99999.9999
IS-C 0.00001 0.00000 to +9999.99999
IS-D 0.000001 0.000000 to +999.999999
IS-E 0.0000001 0.0000000 to +99.9999999
IS-A 0.01 0.0 to +999000.00
IS-B 0.001 0.0 to +999000.000
IS-C 0.0001 0.0 to +99999.9999
IS-D 0.00001 0.0 to +9999.99999
IS-E 0.000001 0.0 to +999.999999
IS-A 0.001 0.0 to +96000.000
IS-B 0.0001 0.0 to +9600.0000
IS-C 0.00001 0.0 to +4000.00000
IS-D 0.000001 0.0 to +400.000000
IS-E 0.0000001 0.0 to +40.0000000
- 17 -
Page 32

4.DESCRIPTION OF PARAMETERS B-63950EN/04
If bit 7 (IESP) of parameter No. 1013 is set to 1, the valid data ranges for IS-C, IS-D, and IS-E are
extended as follows:
Unit of data Increment system Minimum data unit Valid data range
mm/min
degree/min
inch/min
IS-C 0.001 0.000 to +999000.000
IS-D 0.0001 0.0000 to +99999.9999
IS-E 0.00001 0.0000 to +99999.9999
IS-C 0.0001 0.0000 to +9600.0000
IS-D 0.00001 0.00000 to +4000.00000
IS-E 0.00001 0.00000 to +4000.00000
(D)Acceleration and angular acceleration parameters
Unit of data Increment system Minimum data unit Valid data range
IS-A 0.01 0.00 to +999999.99
mm/sec2
deg./sec
inch/sec2
2
IS-B 0.001 0.000 to +999999.999
IS-C 0.0001 0.0000 to +99999.9999
IS-D 0.00001 0.00000 to +9999.99999
IS-E 0.000001 0.000000 to +999.999999
IS-A 0.001 0.000 to +99999.999
IS-B 0.0001 0.0000 to +99999.9999
IS-C 0.00001 0.00000 to +9999.99999
IS-D 0.000001 0.000000 to +999.999999
IS-E 0.0000001 0.0000000 to +99.9999999
If bit 7 (IESP) of parameter No. 1013 is set to 1, the valid data ranges for IS-C, IS-D, and IS-E are
extended as follows:
Unit of data Increment system Minimum data unit Valid data range
mm/min
degree/min
inch/min
IS-C 0.001 0.000 to +999999.999
IS-D 0.0001 0.0000 to +99999.9999
IS-E 0.0001 0.0000 to +99999.9999
IS-C 0.0001 0.0000 to +99999.9999
IS-D 0.00001 0.00000 to +9999.99999
IS-E 0.00001 0.00000 to +9999.99999
Notes
(1) Values are rounded up or down to the nearest multiples of the minimum data unit.
(2) A valid data range means data input limits, and may differ from values representing actual
performance.
(3) For information on the ranges of commands to the CNC, refer to Appendix D, "LIST OF
COMMAND RANGES," in the "OPERATOR’S MANUAL" (B-63944EN).
4.4 PARAMETERS OF SETTING
#7 #6 #5 #4 #3 #2 #1 #0
0000 SEQ INI ISO TVC
[Input type] Setting input
[Data type] Bit path
#0 TVC TV check
0: Not performed
1: Performed
- 18 -
Page 33

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
#1 ISO Code used for data output
0: EIA code
1: ISO code
NOTE
ASCII code is used at all times for output to the memory card.
#2 INI Unit of input
0: In metrics
1: In inches
#5 SEQ Automatic insertion of sequence numbers
0: Not performed
1: Performed
#7 #6 #5 #4 #3 #2 #1 #0
0001 FCV
[Input type] Setting input
[Data type] Bit path
#1 FCV Program format
0: Series 16 standard format
1: Series 15 format
NOTE
1 Programs created in the Series 15 program format can be used for
operation on the following functions:
1 Subprogram call M98
2 Thread cutting with equal leads G32 (T series)
3 Canned cycle G90, G92, G94 (T series)
4 Multiple repetitive canned cycle
G71 to G76 (T series) / G71.7 to G71.6 (M series)
5 Drilling canned cycle
G83.1, G80 to G89 (T series) / G73, G74, G76, G80 to G89 (M
series)
2 When the program format used in the Series 15 is used for this
CNC, some limits may add. Refer to the Operator’s Manual.
#7 #6 #5 #4 #3 #2 #1 #0
0002 SJZ
[Input type] Setting input
[Data type] Bit
#7 SJZ On an axis for which bit 3 (HJZx) of parameter No. 1005 is set:
0: If a reference position is not established yet, reference position return is performed
with deceleration dogs.
If a reference position is already established, reference position return is performed
at a parameter-set feedrate without using deceleration dogs.
1: Reference position return is performed with deceleration dogs at all times.
- 19 -
Page 34

4.DESCRIPTION OF PARAMETERS B-63950EN/04
NOTE
SJZ is valid for an axis for which bit 3 (HJZx) of parameter No.
1005 is set to 1. When bit 1 (DLZx) of parameter No. 1005 is set to
1, however, manual reference position return after a reference
position is set is performed at a parameter-set feedrate, regardless
of the setting of SJZ.
#7 #6 #5 #4 #3 #2 #1 #0
0010 PEC PRM PZS
[Input type] Setting input
[Data type] Bit path
#0 PZS When a part program is punched out, the O number is:
0: Not zero-suppressed.
1: Zero-suppressed.
#1 PRM When parameters are output, the parameters whose values are 0 are:
0: Output.
1: Not output.
#2 PEC When pitch error compensation data is output, the data whose value is 0 is:
0: Output.
1: Not output.
NOTE
This parameter is invalid for output of high-precision pitch error
compensation data.
#7 #6 #5 #4 #3 #2 #1 #0
0012 RMVx MIRx
[Input type] Setting input
[Data type] Bit axis
#0 MIRx Mirror image for each axis
0: Mirror image is off. (Normal)
1: Mirror image is on. (Mirror)
#7 RMVx Releasing the assignment of the control axis for each axis
0: Not released
1: Released
(Equivalent to the control axis detachment signals DTCH1, DTCH2, and so forth
<G0124>)
NOTE
RMVx is valid when bit 7 (RMBx) of parameter No. 1005 is set to 1.
- 20 -
Page 35

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
4.5 PARAMETERS OF READER/PUNCHER INTERFACE
To transfer data (programs, parameters, and so forth) to and from an external input/output
device through the I/O device interface (RS-232-C serial interface), the parameters
described below need to be set.
The input/output device connected to a channel (such as RS-232-C serial port 1 and
RS-232-C serial port 2) can be selected by setting I/O CHANNEL (parameter No. 0020).
The specifications (input/output specification number, baud rate, and the number of stop
bits) of an input/output device connected to each channel must be set in the parameters
corresponding to each channel beforehand.
For channel 1, two combinations of parameters to specify the input/output device data are
provided.
The following shows the interrelation between the input/output device interface
parameters for the channels.
I/O CHANNEL
0020
or foreground input
Set channels to be used
for data input/output.
I/O CHANNEL (0 to 5)
=0 : Channel 1
=1 : Channel 1
=2 : Channel 2
=3 : Channel 3
:
:
:
Input/output to and from th e
memory card interface, etc. is also
possible.
When IO4 is set
0021
Foreground output
0022
Background input
0023
Background input
The channel setting is the sa m e as
No.0020.
Input/output channel number (parameter No.0020)
↓
0101 Stop bit and other data
I/O CHANNEL=0 0102 Number specified for the input/output device
(Channel 1)
I/O CHANNEL=1 0112 Number specified for the input/output device
(Channel 1)
I/O CHANNEL=2 0122 Number specified for the input/output device
(Channel 2)
:
:
:
I/O CHANNEL=5
0103 Baud rate
0111 Stop bit and other data
0113 Baud rate
0121 Stop bit and other data
0123 Baud rate
4.5.1 Parameters Common to All Channels
0020 I/O CHANNEL : Input/output device selection, or interface number for a foreground input device
0021 Foreground output device setting
0022 Background input device setting
0023 Background output device setting
[Input type] Setting input
[Data type] Byte
[Valid data range] 0 to 9
The CNC has the following interfaces for transferring data to and from an external
input/output device and the host computer:
- 21 -
Page 36

4.DESCRIPTION OF PARAMETERS B-63950EN/04
Input/output device interface (RS-232-C serial ports 1 and 2)
Memory card interface
Data server interface
Embedded Ethernet interface
By setting bit 0 (IO4) of parameter No. 0110, data input/output can be controlled
separately. When IO4 is not set, data input/output is performed using the channel set in
parameter No. 0020. When IO4 is set, a channel can be assigned to each of foreground
input, foreground output, background input, and background output.
In these parameters, specify the interface connected to each input/output device to and
from which data is to be transferred. See the table below for these settings.
Correspondence between settings and input/output devices
Setting Description
0,1 RS-232-C serial port 1
2 RS-232-C serial port 2
4 Memory card interface
5 Data server interface
9 Embedded Ethernet interface
0024
Setting of communication with the ladder development tool (FANUC LADDER-III, ladder editing
package)
[Input type] Setting input
[Data type] Word
[Valid data range] 0 to 255
This parameter is used to enable or disable the PMC online connection function.
By specifying this parameter, the PMC online connection function can be enabled or
disabled without displaying the PMC online setting screen.
Setting RS-232-C High-speed interface
0 The setting on the PMC online setting screen is not altered.
1 To be used (channel 1) Not to be used
2 To be used (channel 2) Not to be used
10 Not to be used To be used
11 To be used (channel 1) To be used
12 To be used (channel 2) To be used
255 Communication is terminated forcibly (as with the [FORCED STOP] soft key).
NOTE
1 The setting of this parameter becomes valid when the power is
turned on or this parameter is modified. After this parameter is set,
the power need not be turned off then back on.
2 A setting modification made on the PMC online setting screen is
not reflected in this parameter.
3 The communication settings of a baud rate and so forth for using
RS-232-C made on the PMC online setting screen are valid. When
no modification is ever made to the settings on the PMC online
setting screen, the baud rate is 9600, parity is not used, and the
number of stops bits is 2.
4 If you set this parameter to 1, 2, 11, or 12, the PMC online monitor
occupies the specified RS232-C communications port. To use the
communications port for the Handy File, for example, set the
parameter to 255 to prevent the RS232-C port from being used by
the PMC online monitor.
- 22 -
Page 37

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
#7 #6 #5 #4 #3 #2 #1 #0
0100 ENS IOP NCR CRF CTV
[Input type] Setting input
[Data type] Bit
#1 CTV Character counting for TV check in the comment section of a program.
0: Performed
1: Not performed
#2 CRF Output of the end of block (EOB) in ISO code
0: Depends on the setting of bit 3 (NCR) of parameter No. 0100.
1: CR, LF are output.
#3 NCR Output of the end of block (EOB) in ISO code
0: LF, CR, CR are output.
1: Only LF is output.
#6 IOP Stopping a program output or input operation by a reset is:
0: Enabled
1: Disabled
(Stopping a program input/output operation with the soft key [STOP] is enabled at all
times.)
#7 ENS Action taken when a NULL code is found during read of EIA code
0: An alarm is generated.
1: The NULL code is ignored.
#7 #6 #5 #4 #3 #2 #1 #0
0110 IO4
[Input type] Parameter input
[Data type] Bit
NOTE
When this parameter is set, the power must be turned off before
operation is continued.
#0 IO4 Separate control of I/O channel numbers is:
0: Not performed.
1: Performed.
If the I/O channels are not separately controlled, set the input/output device in parameter
No. 0020.
If the I/O channels are separately controlled, set the input device and output device in the
foreground and the input device and output device in the background in parameters No.
0020 to No. 0023 respectively.
Separate control of I/O channels makes it possible to perform background editing,
program input/output, and the like during the DNC operation.
#7 #6 #5 #4 #3 #2 #1 #0
0138 MNC MDP
[Input type] Parameter input
[Data type] Bit
- 23 -
Page 38

4.DESCRIPTION OF PARAMETERS B-63950EN/04
#0 MDP To the extensions of input/output files, a path number is:
0: Not added.
1: Added.
NOTE
If a file name is specified by setting F, this parameter is ignored, and
a path number is not added to the extension.
#7 MNC DNC operation from the memory card and external device subprogram call from the
memory card are:
0: Not performed.
1: Performed.
4.5.2 Parameters of Channel 1 (I/O CHANNEL=0)
#7 #6 #5 #4 #3 #2 #1 #0
0101 NFD ASI SB2
[Input type] Parameter input
[Data type] Bit
#0 SB2 The number of stop bits
0: 1
1: 2
#3 ASI Code used at data input
0: EIA or ISO code (automatically distinguished)
1: ASCII code
#7 NFD Feed before and after the data at data output
0: Output
1: Not output
When input/output devices other than the FANUC PPR are used, set NFD to 1.
0102 Number specified for the input/output device (when the I/O CHANNEL is set to 0)
[Input type] Parameter input
[Data type] Byte
[Valid data range] 0 to 6
Set the specification number of the input/output device corresponding to I/O
CHANNEL=0.
The following table lists the specification numbers and corresponding input/output device
specifications.
Specification numbers and corresponding input/output device specifications
Specification number Input/output device specification
0 RS-232-C (control codes DC1 to DC4 are used)
1 FANUC CASSETTE ADAPTOR 1(FANUC CASSETTE B1/B2)
2 FANUC CASSETTE ADAPTOR 3(FANUC CASSETTE F1)
3
4 RS-232-C (control codes DC1 to DC4 are not used)
FANUC PROGRAM FILE Mate、FANUC FA Card Adaptor,
FANUC FLOPPY CASSETTE ADAPTOR, FANUC Handy File
FANUC SYSTEM P-MODEL H
- 24 -
Page 39

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
Specification number Input/output device specification
5 Portable tape reader
6 FANUC PPR
FANUC SYSTEM P-MODEL G, FANUC SYSTEM P-MODEL H
0103 Baud rate (when I/O CHANNEL is set to 0)
[Input type] Parameter input
[Data type] Byte
[Valid data range] 1 to 12
Set the baud rate of the input/output device corresponding to I/O CHANNEL=0.
When setting this parameter, see the following table:
Baud rates and corresponding settings
Setting Baud rate (bps) Setting Baud rate (bps)
1 50 8 1200
3 110 9 2400
4 150 10 4800
6 300 11 9600
7 600 12 19200
4.5.3 Parameters of Channel 1 (I/O CHANNEL=1)
#7 #6 #5 #4 #3 #2 #1 #0
0111 NFD ASI SB2
[Input type] Parameter input
[Data type] Bit
#0 SB2 The number of stop bits
0: 1
1: 2
#3 ASI Code used at data input
0: EIA or ISO code (automatically distinguished)
1: ASCII code
#7 NFD Feed before and after the data at data output
0: Output
1: Not output
When input/output devices other than the FANUC PPR are used, set NFD to 1.
0112 Number specified for the input/output device (when the I/O CHANNEL is set to 1)
[Input type] Parameter input
[Data type] Byte
[Valid data range] 0 to 6
Set the specification number of the input/output device corresponding to I/O
CHANNEL=1.
0113 Baud rate (when I/O CHANNEL is set to 1)
[Input type] Parameter input
[Data type] Byte
- 25 -
Page 40

4.DESCRIPTION OF PARAMETERS B-63950EN/04
[Valid data range] 1 to 12
Set the baud rate of the input/output device corresponding to I/O CHANNEL=1.
4.5.4 Parameters of Channel 2 (I/O CHANNEL=2)
#7 #6 #5 #4 #3 #2 #1 #0
0121 NFD ASI SB2
[Input type] Parameter input
[Data type] Bit
#0 SB2 The number of stop bits
0: 1
1: 2
#3 ASI Code used at data input
0: EIA or ISO code (automatically distinguished)
1: ASCII code
#7 NFD Feed before and after the data at data output
0: Output
1: Not output
0122 Number specified for the input/output device (when the I/O CHANNEL is set to 2)
[Input type] Parameter input
[Data type] Byte
[Valid data range] 0 to 6
Set the specification number of the input/output device corresponding to I/O
CHANNEL=2.
0123 Baud rate (when I/O CHANNEL is set to 2)
[Input type] Parameter input
[Data type] Byte
[Valid data range] 1 to 12
Set the baud rate of the input/output device corresponding to I/O CHANNEL=2.
4.6 PARAMETERS OF CNC SCREEN DISPLAY FUNCTIONS
#7 #6 #5 #4 #3 #2 #1 #0
0300 PCM
[Input type] Setting input
[Data type] Bit
#0 PCM If the CNC screen display function is enabled, when a memory card interface is provided
on the NC side (For HSSB connection),
0: The memory card interface on the NC side is used.
1: The memory card interface on the PC side is used.
In a system with a built-in PC, the memory card interface on the PC side is used
regardless of the setting of this parameter.
This parameter is valid only while the CNC screen display function is active.
- 26 -
Page 41

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
4.7 PARAMETERS OF ETHERNET/DATA SERVER
FUNCTIONS
#7 #6 #5 #4 #3 #2 #1 #0
0901 EFT
[Input type] Setting input
[Data type] Bit
#1 EFT The FTP file transfer function by the Ethernet function is:
0: Not used.
1: Used.
NOTE
In a multi-path system, the setting of the parameter for path 1 is
used throughout the system.
#7 #6 #5 #4 #3 #2 #1 #0
0904 LCH DHC DNS UNM D1E BWT
[Input type] Setting input
[Data type] Bit
#0 BWT If FTP communication is behind data supply during DNC operation in the buffer mode of
the Data Server function:
0: An error is caused.
1: No error is caused and DNC operation continues after waiting the completion of
FTP communication.
#3 D1E When the DHCP function is used:
0: Default parameters for the FOCAS2/Ethernet functions are set.
Port number (TCP) 8193
Port number (UDP) 0
Time interval 0
1: Default parameters for CIMPLICITY iCELL communication are set.
Port number (TCP) 8193
Port number (UDP) 8192
Time interval 50
#4 UNM The CNC Unsolicited Messaging function is:
0: Not used.
1: Used.
#5 DNS The DNS client function is:
0: Not used.
1: Used.
#6 DHC The DHCP client function is:
0: Not used.
1: Used.
- 27 -
Page 42

4.DESCRIPTION OF PARAMETERS B-63950EN/04
#7 LCH In the LIST-GET service of the Data Server function, when a list file specifies 1025 or
more files:
0: A check for duplicated file names is performed.
1: A check for duplicated file names is not performed.
#7 #6 #5 #4 #3 #2 #1 #0
0905 UNS DSF PCH DNE
[Input type] Setting input
[Data type] Bit
#0 DNE During DNC operation using the FOCAS2/Ethernet functions, the termination of DNC
operation is:
0: Waited.
1: Not waited. (FOCAS2/HSSB compatible specification)
#1 PCH At the start of communication of the Data Server function, FTP file transfer function, or
machine remote diagnosis function, checking for the presence of the server using PING
is:
0: Performed.
1: Not performed.
NOTE
Usually, set 0.
If 1 is set not to check the presence of the server by using PING, it
may take several tens of seconds to recognize an error when the
server is not present in the network.
For mainly security reasons, a personal computer may be set so
that it does not respond to the PING command. To communicate
with such a personal computer, set 1.
#3 DSF When an NC program is stored on the memory card of the Data Server:
0: The file name takes priority.
1: The program name in the NC program takes priority.
NOTE
Even when this parameter is set to 1, an NC program is stored with
a file name, then the name is changed to a program name in the
NC program.
Therefore, if the same file name is already present on the memory
card of the Data Server, an error occurs.
#4 UNS In the CNC Unsolicited Messaging function, when the end of the function is requested by
other than the CNC Unsolicited Messaging server currently connected:
0: The request for the end of the function is rejected.
1: The request for the end of the function is accepted.
0921 Selects the host computer 1 OS.
0922 Selects the host computer 2 OS.
0923 Selects the host computer 3 OS.
[Input type] Parameter input
- 28 -
Page 43

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
[Data type] Word
[Valid data range] 0 to 2
0: Windows95/98/Me/2000/XP.
1: UNIX, VMS.
2: Linux.
NOTE
Some FTP server software products do not depend on the OS. So,
even when the above parameters are set, it is sometimes
impossible to display a list of files properly.
0924 FOCAS2/Ethernet waiting time setting
[Input type] Parameter input
[Data type] Word
[Unit of data] millisecond
[Valid data range] 0 to 32767
When the FOCAS2/Ethernet and Data Server functions are used simultaneously, this
parameter sets the FOCAS2/Ethernet function waiting time in milliseconds.
When a value of 0 is set, the functions operate with assuming that 1 millisecond is
specified.
0929 File attribute specification during FTP server operation
[Input type] Parameter input
[Data type] Word
[Valid data range] 0 to 2
This parameter sets whether to give priority to the file attribute specified in a TYPE
command of FTP during operation as an FTP server.
0: Priority is given to the file attribute specified in a TYPE command from an FTP
client.
1: Text files are always assumed.
2: Binary files are always assumed.
0930
Maximum number of files that can be registered to the memory card of the Data Server and maximum
size per file that can be registered
[Input type] Parameter input
[Data type] Word
[Valid data range] 0, 10 to 15
No. 930 Maximum number of files Maximum size p er file
0 2047 512MB
10 511 2048MB
11 1023 1024MB
12 2047 512MB
13 4095 256MB
14 8191 128MB
15 16383 64MB
NOTE
1 When the memory card is formatted after this parameter is set, the
maximum number of files and maximum size per file are changed.
2 Each folder is counted as one file.
- 29 -
Page 44

4.DESCRIPTION OF PARAMETERS B-63950EN/04
4.8 PARAMETERS OF POWER MATE CNC
#7 #6 #5 #4 #3 #2 #1 #0
0960 PPE PMN MD2 MD1
[Input type] Parameter input
[Data type] Bit path
# 1, 2 MD1,MD2 These parameters set a slave parameter input/output destination.
Parameter MD2 Parameter MD1 I/O destination
0 0 Program memory
0 1 Memory card
NOTE
The output destination depends on the setting for path 1.
#3 PMN The Power Mate CNC manager function is:
0: Enabled.
1: Disabled.
When priority is to be given to commands to slaves by a ladder (communication by the
Power Mate CNC manager function is to be stopped) after necessary data setting and
checking for each of the connected slaves are completed, set this bit to 1 for every path.
#4 PPE
0: The Power Mate CNC manager can set slave parameters at all times.
1: Slave parameter setting by the Power Mate CNC manager follows the setting of
PWE for the host CNC. When PWE = 0, the setting of the I/O LINK β parameter is
prohibited.
#7 #6 #5 #4 #3 #2 #1 #0
0961 PMO
[Input type] Parameter input
[Data type] Bit
#3 PMO The O number of a program for saving and restoring the I/O LINK β parameter is set
based on:
0: Group number and channel number
1: Group number only
4.9 PARAMETERS OF SYSTEM CONFIGURATION
0980 Machine group number to which each path belongs
NOTE
When this parameter is set, the power must be turned off before
operation is continued.
[Input type] Parameter input
[Data type] Byte path
[Valid data range] 1 to 3
- 30 -
Page 45

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
Set the machine group number to which each path belongs.
NOTE
When 0 is set, each path is assumed to belong to machine group 1.
0981 Absolute path number to which each axis belongs
NOTE
When this parameter is set, the power must be turned off before
operation is continued.
[Input type] Parameter input
[Data type] Byte axis
[Valid data range] 1 to 10
Set the path to which each axis belongs.
NOTE
When 0 is set, each axis is assumed to belong to path 1.
0982 Absolute path number to which each spindle belongs
NOTE
When this parameter is set, the power must be turned off before
operation is continued.
[Input type] Parameter input
[Data type] Byte spindle
[Valid data range] 1 to 10
Set the path to which each spindle belongs.
NOTE
When 0 is set, each spindle is assumed to belong to path 1.
0983 Path control type of each path
NOTE
When this parameter is set, the power must be turned off before
operation is continued.
[Input type] Parameter input
[Data type] Byte path
[Valid data range] 0 to 1
Set the path control type of each path.
The following two path control types are available:
T series (lathe system) : 0
M series (machining system) : 1
#7 #6 #5 #4 #3 #2 #1 #0
0984 LCP
[Input type] Parameter input
[Data type] Bit path
- 31 -
Page 46

4.DESCRIPTION OF PARAMETERS B-63950EN/04
NOTE
When this parameter is set, the power must be turned off before
operation is continued.
#0 LCP Set whether the path is a loader control path.
0: The path is not a loader control path.
1: The path is a loader control path.
- 32 -
Page 47

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
4.10 PARAMETERS OF AXIS CONTROL/INCREMENT SYSTEM
(1 OF 3)
#7 #6 #5 #4 #3 #2 #1 #0
1000 EEA
[Input type] Parameter input
[Data type] Bit
#0 EEA An extended axis name and extended spindle name are:
0: Invalid
1: Valid
#7 #6 #5 #4 #3 #2 #1 #0
1001 INM
[Input type] Parameter input
[Data type] Bit path
NOTE
When this parameter is set, the power must be turned off before
operation is continued.
#0 INM Least command increment on the linear axis
0: In mm (metric system machine)
1: In inches (inch system machine)
#7 #6 #5 #4 #3 #2 #1 #0
1002 IDG XIK AZR JAX
[Input type] Parameter input
[Data type] Bit path
#0 JAX Number of axes controlled simultaneously in jog feed, manual rapid traverse and manual
reference position return
0: 1 axis
1: 3 axes
#3 AZR When no reference position is set, the G28 command causes:
0: Reference position return using deceleration dogs (as during manual reference
position return) to be executed.
1: Alarm PS0304, "G28 IS COMMANDED WITHOUT ZERO RETURN" to be
displayed.
NOTE
When reference position return without dogs is specified, (when bit 1
(DLZ) of parameter No. 1005 is set to 1) the G28 command specified
before a reference position is set causes an alarm PS0304 to be
issued, regardless of the setting of AZR.
- 33 -
Page 48

4.DESCRIPTION OF PARAMETERS B-63950EN/04
#4 XIK When bit 1 (LRP) of parameter No. 1401 is set to 0, namely, when positioning is
performed using non-linear type positioning, if an interlock is applied to the machine
along one of axes in positioning,
0: The machine stops moving along the axis for which the interlock is applied and
continues to move along the other axes.
1: The machine stops moving along all the axes.
#7 IDG When the reference position is set without dogs, automatic setting of the bit 0 (IDGx) of
parameter No. 1012 to prevent the reference position from being set again is:
0: Not performed.
1: Performed.
NOTE
When this parameter is set to 0, bit 0 (IDGx) of parameter No. 1012
is invalid.
#7 #6 #5 #4 #3 #2 #1 #0
1004 IPR
[Input type] Parameter input
[Data type] Bit path
#7 IPR When a number with no decimal point is specified, the least input increment of each axis
is:
0: Not 10 times greater than the least command increment
1: 10 times greater than the least command increment
When the increment system is IS-A, and bit 0 (DPI) of parameter No. 3401 is set to 1
(pocket calculator type decimal point programming), the least input increment cannot be
10 times greater than the least command increment.
#7 #6 #5 #4 #3 #2 #1 #0
1005 RMBx MCCx EDMx EDPx HJZx DLZx ZRNx
[Input type] Parameter input
[Data type] Bit axis
#0 ZRNx If a move command other than G28 is specified by automatic operation when no
reference position return is performed yet after the power is turned on:
0: The alarm PS0224, "PERFORM REFERENCE POSITION RETURN." is issued.
1: Operation is performed without issuing an alarm.
NOTE
1 The state in which a reference position has not been established
refers to the following state:
- When an absolute position detector is not used and reference
position return has not been performed even once after power-up
- When an absolute position detector is used and the association of
the machine position with the position detected with the absolute
position detector has not been completed (See the description of
bit 4 (APZx) of parameter No. 1815.)
2 When the Cs axis coordinates are to be set up, set ZRN to 0.
- 34 -
Page 49

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
#1 DLZx Function for setting the reference position without dogs
0: Disabled
1: Enabled
#3 HJZx When a reference position is already set:
0: Manual reference position return is performed with deceleration dogs.
1: Manual reference position return is performed using rapid traverse without
deceleration dogs, or manual reference position return is performed with
deceleration dogs, depending on the setting of bit 7 (SJZ) of parameter No.0002.
When the function for setting the reference position without dogs (see the description of
bit 1 (DLZx) of parameter No. 1005) is used, manual reference position return after a
reference position is set is always performed at a parameter-set feedrate, regardless of the
setting of HJZ.
#4 EDPx In cutting feed, an external deceleration signal in the + direction for each axis is:
0: Invalid
1: Valid
#5 EDMx In cutting feed, an external deceleration signal in the - direction for each axis is:
0: Invalid
1: Valid
#6 MCCx If a multi-axis amplifier is used, and another axis of the same amplifier is placed in the
control axis detach state, the MCC signal of the servo amplifier is:
0: Turned off.
1: Not turned off.
NOTE
This parameter can be set for a control axis.
WARNING
When the servo motor of a controlled axis to be detached is
connected to a multi-axis amplifier such as a two-axis amplifier,
placing the axis in the control axis detach state causes the
activating current in the amplifier to drop. As a result, alarm
SV0401, "V READY OFF" is issued in the other axes. This alarm
can be suppressed by setting this parameter bit.
With this method, however, the target axis for the control axis
detach operation is placed in the servo off state (the amplifier
remains on, but no current flows through the motor). The torque of
the target axis becomes 0, so care should be taken. For a vertical
axis, in particular, it is necessary to prepare a sequence that starts
operating the mechanical brake before the control axis detach
operation. When this method is applied to a vertical axis, special
care should be taken.
Even when a controlled axis has been detached, detaching a cable
(a command cable or feedback cable) of the axis causes an alarm.
In such applications, it is impossible to perform a control axis
detach operation with a multi-axis amplifier by setting this
parameter bit. (Prepare a single-axis amplifier.)
- 35 -
Page 50

4.DESCRIPTION OF PARAMETERS B-63950EN/04
#7 RMBx The control axis detachment signal for each axis and the setting input bit 7 (RMV) of
parameter No. 0012 are:
0: Invalid
1: Valid
#7 #6 #5 #4 #3 #2 #1 #0
1006
ZMIx DIAx ROSx ROTx
ZMIx TCHx DIAx ROSx ROTx
[Input type] Parameter input
[Data type] Bit axis
NOTE
When at least one of these parameters is set, the power must be
turned off before operation is continued.
ROTx, ROSx Setting linear or rotary axis.
ROSx ROTx Meaning
0 0 Linear axis
(1) Inch/metric conversion is done.
(2) All coordinate values are linear axis type. (Is not rounded in 0 to 360°)
(3) Stored pitch error compensation is linear axis type (Refer to parameter No.
3624)
0 1 Rotary axis (A type)
(1) Inch/metric conversion is not done.
(2) Machine coordinate values are rounded in 0 to 360°. Absolute coordinate
values are rounded or not rounded by bits 0 (ROAx) and 2 (RRLx) of
parameter No. 1008.
(3) Stored pitch error compensation is the rotation type. (Refer to parameter
No. 3624)
(4) Automatic reference position return (G28, G30) is done in the reference
position return direction and the move amount does not exceed one
rotation.
1 1 Rotary axis (B type)
(1) Inch/metric conversion is not done.
(2) Machine coordinate values, absolute coordinate values and relative
coordinate values are linear axis type. (Is not rounded in 0 to 360°).
(3) Stored pitch error compensation is linear axis type (Refer to parameter No.
3624)
(4) Cannot be used with the rotary axis roll-over function and the index table
indexing function (M series)
Except for the
above.
#3 DIAx The move command for each axis is based on:
0: Radius specification
1: Diameter specification
#4 TCHx Specify whether each axis is a torch swing control axis for gas cutting machine or not.:
0: Not the torch swing control axis for gas cutting machine.
1: The torch swing control axis for gas cutting machine.
#5 ZMIx The direction of manual reference position return is:
0: + direction
1: - direction
Setting is invalid (unused)
- 36 -
Page 51

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
#7 #6 #5 #4 #3 #2 #1 #0
1007 G90x GRDx RAAx ALZx RTLx
[Input type] Parameter input
[Data type] Bit axis
#0 RTLx When manual reference position return is performed on a rotary axis (A type) with the
deceleration dog pressed before a reference position is established:
0: A movement is made at the reference position return feedrate FL.
1: Until a servo motor grid is established, a movement is not made at the reference
position return feedrate FL even if the deceleration dog is pressed, but a movement
is made at the rapid traverse rate.
If the deceleration dog is released after a movement at the rapid traverse rate and the
deceleration dog is then pressed again and released after the rotary axis makes one
revolution, reference position return operation is completed.
When this parameter is set to 0, the alarm PS0090, "REFERENCE POSITION RETURN
FAILURE" is issued if the deceleration dog is released before a servo motor grid is
established.
If this alarm is issued, start manual reference position return at a position sufficiently far
away from the reference position.
#1 ALZx In automatic reference position return (G28):
0: Reference position return is performed by positioning (rapid traverse).
If no reference position return is performed after the power is turned on, however,
reference position return is performed using the same sequence as for manual
reference position return.
1: Reference position return is performed using the same sequence as for manual
reference position return.
#3 RAAx Rotary axis control is:
0: Not performed.
1: Performed.
When an absolute programming is specified, the rotary axis control function determines
the direction of rotation from the sign of the command value and determines an end
coordinate from the absolute value of the command value.
NOTE
RAA is valid when bit 0 (ROA) of parameter No. 1008 is set to 1
and bit 1 (RAB) of parameter No. 1008 is set to 0.
To use this function, the option for rotary axis control is required.
#4 GRDx When absolute position detection is performed for an axis and the correspondence
between the machine position and the position on the absolute-position detector has not
yet been established for the axis, reference position setting without digs is:
0: Not performed more than once.
1: Performed more than once.
#5 G90x A command for a rotary axis control is:
0: Regarded as an absolute/incremental programming according to the G90/G91 mode
setting.
1: Regarded as an absolute programming at all times.
- 37 -
Page 52

4.DESCRIPTION OF PARAMETERS B-63950EN/04
#7 #6 #5 #4 #3 #2 #1 #0
1008 RRFx RMCx SFDx RRLx RABx ROAx
[Input type] Parameter input
[Data type] Bit axis
NOTE
When at least one of these parameters is set, the power must be
turned off before operation is continued.
#0 ROAx The rotary axis roll-over is
0: Invalid
1: Valid
NOTE
ROAx specifies the function only for a rotary axis (for which bit 0
(ROTx) of parameter No. 1006 is set to 1)
#1 RABx In the absolute programming, the axis rotates in the direction
0: In which the distance to the target is shorter.
1: Specified by the sign of command value.
NOTE
RABx is valid only when ROAx is 1.
#2 RRLx Relative coordinates are
0: Not rounded by the amount of the shift per one rotation
1: Rounded by the amount of the shift per one rotation
NOTE
1 RRLx is valid only when ROAx is 1.
2 Assign the amount of the shift per one rotation in parameter No.
1260.
#4 SFDx In reference position return based on the grid method, the reference position shift function
is:
0: Disabled
1: Enabled
#5 RMCx When machine coordinate system selection (G53) is specified, bit 1 (RABx) of parameter
No. 1008 for determining the rotation direction of an absolute programming for the rotary
axis roll-over function, and bit 3 (RAAx) of parameter No. 1007 for rotary axis control
are:
0: Invalid
1: Valid
#6 RRFx When a reference position return command (G28) is specified, the rotation direction of an
absolute command for the rotary axis roll-over function follows:
0: Up to the middle point, it depends on the setting of bit 1 (RAB) of parameter No.
1008. From the middle point to the origin, it depends on the setting of bit 5 (ZMI) of
parameter No. 1006.
1: It depends on the setting of bit 1 (RAB) of parameter No. 1008.
- 38 -
Page 53

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
When bit 1 (ALZ) of parameter No. 1007 is 1, reference position return is performed
using the same sequence as for manual reference position return.
NOTE
The setting of bit 6 (RRF) of parameter No. 1008 to 1 is valid when
all of the following conditions are met:
Rotary axis (A type) (Bit 0 (ROT) of parameter No. 1006 = 1, bit
•
1 (ROS) of parameter No. 1006 = 0)
Roll-over is enabled (Bit 0 (ROA) of parameter No. 1008 = 1)
•
The reference position has been established.
•
#7 #6 #5 #4 #3 #2 #1 #0
1012 IDGx
[Input type] Parameter input
[Data type] Bit axis
#0 IDGx The function for setting the reference position again, without dogs, is:
0: Not inhibited.
1: Inhibited.
(The alarm PS0301, “RESETTING OF REFERENCE RETURN IS INHIBITED” is
issued.)
NOTE
IDGx is enabled when the bit 7 (IDG) of parameter No. 1002 is 1.
If the function for setting the reference position without dogs is
used, and the reference position is lost in absolute position
detection for a cause, the alarm DS0300, “APC ALARM: NEED
REF RETURN” is issued when the power is turned on again.
If the operator performs reference position return, as a result of
mistakenly identifying the alarm as that requesting the operator to
perform a normal reference position return, an invalid reference
position may be set. To prevent such an operator error, the IDGx
parameter is provided to prevent the reference position from being
set again without dogs.
(1) If the bit 7 (IDG) of parameter No. 1002 is set to 1, the bit 0
(IDGx) of parameter No. 1012 is automatically set to 1 when
the reference position is set using the function for setting the
reference position without dogs. This prevents the reference
position from being set again without dogs.
(2) Once the reference position is prevented from being set for an
axis again, without dogs, any attempt to set the reference
position for the axis without dogs results in the output of an
alarm PS0301.
(3) When the reference position must be set again without dogs,
set bit 0 (IDGx) of parameter No. 1012 to 0 before setting the
reference position.
- 39 -
Page 54

4.DESCRIPTION OF PARAMETERS B-63950EN/04
#7 #6 #5 #4 #3 #2 #1 #0
1013 IESPx ISEx ISDx ISCx ISAx
[Input type] Parameter input
[Data type] Bit axis
NOTE
When at least one of these parameters is set, the power must be
turned off before operation is continued.
#0 ISAx
#1 ISCx
#2 ISDx
#3 ISEx Increment system of each axis
Increment system Bit 3 (ISE) Bit 2 (ISD) Bit 1 (ISC) Bit 0 (ISA)
IS-A 0 0 0 1
IS-B 0 0 0 0
IS-C 0 0 1 0
IS-D 0 1 0 0
IS-E 1 0 0 0
#7 IESPx When the least input increment is C (IS-C), D(IS-D), or E(IS-E), the function to allow to
set the larger value to the parameter of the speed and the acceleration:
0: Not used.
1: Used.
As for the axis which set this parameter when the least input increment is C (IS-C), D
(IS-D), or E (IS-E), the larger value can be set to the parameter of the speed and the
acceleration.
The valid data ranges of these parameters are indicated in the table of velocity and
angular velocity parameters in (C) of the standard parameter setting tables and the table
of acceleration and angular acceleration parameters in (D).
When this function is made effective, the digit number below the decimal point of the
parameter on input screen is changed. The digit number below the decimal point
decreases by one digit in case of the least input increment C (IS-C) or D (IS-D), and it
decreases by two digits in case of the least input increment E (IS-E).
#7 #6 #5 #4 #3 #2 #1 #0
1014 CDMx
[Input type] Parameter input
[Data type] Bit axis
NOTE
When this parameter is set, the power must be turned off before
operation is continued.
#7 CDMx The Cs contour control axis is:
0: Not a virtual Cs axis
1: Virtual Cs axis
- 40 -
Page 55

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
#7 #6 #5 #4 #3 #2 #1 #0
1015 DWT WIC ZRL
[Input type] Parameter input
[Data type] Bit path
#4 ZRL When a reference position is established, the tool path from the middle point to the
reference position and machine coordinate positioning (G53) in automatic reference
position return (G28) or 2nd/3rd/4th reference position return (G30) are based on:
0: Positioning of nonlinear interpolation type
1: Positioning of linear interpolation type
NOTE
This parameter is valid when bit 1 (LRP) of parameter No. 1401 is
set to 1.
#6 WIC Workpiece origin offset measurement value direct input is:
0: (M series) Performed without considering the external workpiece origin offset value.
(T series) Valid only in the currently selected workpiece coordinate system.
1: (M series) Performed considering the external workpiece origin offset value.
(T series) Valid in all coordinate systems.
NOTE
In the T series, if this parameter bit is set to 0, workpiece origin
offset measurement value direct input is enabled only in the
currently selected workpiece coordinate system or an external
workpiece coordinate system. If an attempt is made to perform
workpiece origin offset measurement value direct input in a
workpiece coordinate system other than these workpiece
coordinate systems, warning "WRITE PROTECTED" is displayed.
#7 DWT When time for dwell per second is specified by P, the increment system:
0: Depends on the increment system
1: Does not depend on the increment system (1 ms)
1020 Program axis name for each axis
[Input type] Parameter input
[Data type] Byte axis
[Valid data range] 65 to 67, 85 to 90
An axis name (axis name 1: parameter No. 1020) can be arbitrarily selected from A, B, C,
U, V, W, X, Y, and Z. (When G code system A is used with the lathe system, however, U,
V, and W are not selectable.) When bit 0 (EEA) of parameter No. 1000 is set to 1, the
length of an axis name can be extended to three characters by setting axis name 2
(parameter No. 1025) and axis name 3 (parameter No. 1026) (extended axis name).
For axis names 2 and 3, a character from 0 to 9 and A to Z of ASCII code can be
arbitrarily selected. However, the setting of axis name 3 for each axis is invalid if axis
name 2 is not set. Moreover, if a character from 0 to 9 is set as axis name 2, do not use a
character from A to Z as axis name 3.
- 41 -
Page 56

4.DESCRIPTION OF PARAMETERS B-63950EN/04
(Tip) ASCII code
Axis name
Setting
X Y Z A B C U V W
88 89 90 65 66 67 85 86 87
When G code system A is used with the lathe system, and the character X, Y, Z, or C is
used as axis name 1 of an axis, a command with U, V, W, or H specified for axis name 1
represents an incremental programming for the axis.
NOTE
1 When a multiple repetitive canned cycle for turning is used, no
character other than X, Y, and Z can be used as the address of the
axis.
2 An address other than addresses A, B, and C cannot be used as
the address of a rotary axis used for the function for tool length
compensation in a specified direction or the tool center point
control function.
3 When the custom macro function is enabled, the same extended
axis name as a reserved word cannot be used. Such an extended
axis name is regarded as a reserved word.
Because of reserved words of custom macros, extended axis
names that start with the following two characters cannot be used:
AB, AC, AD, AN, AS, AT, AX, BC, BI, BP, CA, CL, CO, US, WH,
WR, XO, ZD, ZE, ZO, ZW
4 In a macro call, no extended axis name can be used as an
argument.
1022 Setting of each axis in the basic coordinate system
[Input type] Parameter input
[Data type] Byte axis
[Valid data range] 0 to 7
To determine a plane for circular interpolation, cutter compensation, and so forth (G17:
Xp-Yp plane, G18: Zp-Xp plane, G19: Yp-Zp plane) and a 3-dimensional tool
compensation space (XpYpZp), specify which of the basic three axes (X, Y, and Z) is
used for each control axis, or a parallel axis of which basic axis is used for each control
axis.
A basic axis (X, Y, or Z) can be specified only for one control axis.
Two or more control axes can be set as parallel axes for the same basic axis.
Setting Meaning
0 Rotary axis (Neither the basic three axes nor a parallel axis )
1 X axis of the basic three axes
2 Y axis of the basic three axes
3 Z axis of the basic three axes
5 Axis parallel to the X axis
6 Axis parallel to the Y axis
7 Axis parallel to the Z axis
In general, the increment system and diameter/radius specification of an axis set as a
parallel axis are to be set in the same way as for the basic three axes.
- 42 -
Page 57

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
1023 Number of the servo axis for each axis
NOTE
When this parameter is set, the power must be turned off before
operation is continued.
[Input type] Parameter input
[Data type] Byte axis
[Valid data range] 0 to Number of controlled axes
Set the servo axis for each control axis.
Usually set to same number as the control axis number.
The control axis number is the order number that is used for setting the axis-type
parameters or axis-type machine signals
• With an axis for which Cs contour control/spindle positioning is to be performed, set
-(spindle number) as the servo axis number.
Example)
When exercising Cs contour control on the fourth controlled axis by using the
first spindle, set -1.
• For tandem controlled axes or electronic gear box (EGB) controlled axes, two axes
need to be specified as one pair. So, make a setting as described below.
Tandem axis: For a master axis, set an odd (1, 3, 5, 7, ...) servo axis number. For a
slave axis to be paired, set a value obtained by adding 1 to the value
set for the master axis.
EGB axis: For a slave axis, set an odd (1, 3, 5, 7, ...) servo axis number. For a
dummy axis to be paired, set a value obtained by adding 1 to the value
set for the slave axis.
1025 Program axis name 2 for each axis
1026 Program axis name 3 for each axis
[Input type] Parameter input
[Data type] Byte axis
[Valid data range] 48 to 57, 65 to 90
When axis name extension is enabled (when bit 0 (EEA) of parameter No. 1000 is set to
1), the length of an axis name can be extended to a maximum of three characters by
setting axis name 2 and axis name 3.
NOTE
If program axis name 2 is not set, program axis name 3 is invalid.
1031 Reference axis
[Input type] Parameter input
[Data type] Byte path
[Valid data range] 1 to Number of controlled axes
The unit of some parameters common to all axes such as those for dry run feedrate and
single-digit F1 feedrate may vary according to the increment system. An increment
system can be selected by a parameter on an axis-by-axis basis. So, the unit of those
parameters is to match the increment system of a reference axis. Set which axis to use as a
reference axis.
Among the basic three axes, the axis with the finest increment system is generally
selected as a reference axis.
- 43 -
Page 58

4.DESCRIPTION OF PARAMETERS B-63950EN/04
4.11 PARAMETERS OF COORDINATE SYSTEM (1 OF 2)
#7 #6 #5 #4 #3 #2 #1 #0
1201
[Input type] Parameter input
[Data type] Bit path
#0 ZPR Automatic setting of a coordinate system when the manual reference position return is
#2 ZCL Local coordinate system when the manual reference position return is performed
#3 FPC When a floating reference position is set with a soft key, the relative position indication
#6 NWS The workpiece coordinate system shift amount setting screen is:
#7 WZR If the CNC is reset by the RESET key on the MDI panel, external reset signal, reset and
WZR NWS FPC ZCL ZPR
WZR FPC ZCL ZPR
performed
0: Not set automatically
1: Set automatically
NOTE
ZPR is valid while a workpiece coordinate system function is not
provided. If a workpiece coordinate system function is provided,
making a manual reference position return always causes the
workpiece coordinate system to be established on the basis of the
workpiece zero point offset (parameters Nos. 1220 to 1226),
irrespective of this parameter setting.
0: The local coordinate system is not canceled.
1: The local coordinate system is canceled.
NOTE
ZCL is valid when the workpiece coordinate system option is
specified. In order to use the local coordinate system (G52), the
workpiece coordinate system option is required.
is:
0: Not preset to 0 (The relative position indication remains unchanged.)
1: Preset to 0.
0: Displayed
1: Not displayed
NOTE
When the workpiece coordinate shift amount setting screen is not
displayed, a workpiece coordinate system shift amount modification
using G10P0 cannot be made.
rewind signal, or emergency stop signal when bit 6 (CLR) of parameter No. 3402 is set to
0, the G code of group number 14 (workpiece coordinate system) is:
0: Placed in the reset state (not returned to G54).
1: Placed in the cleared state (returned to G54).
- 44 -
Page 59

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
NOTE
1 When the 3-dimensional conversion mode is set, and bit 2 (D3R) of
parameter No. 5400 is set to 1, the G code is placed in the reset
state, regardless of the setting of this parameter.
2 When bit 6 (CLR) of parameter No. 3402 is set to 1, whether to
place the G code in the reset state depends on bit 6 (C14) of
parameter No. 3407.
#7 #6 #5 #4 #3 #2 #1 #0
1202
[Input type] Parameter input
[Data type] Bit path
#0 EWD The shift direction of the workpiece coordinate system is:
#1 EWS The external workpiece zero point offset is made:
RLC G92 EWS EWD
RLC G92 EWD
0: The direction specified by the external workpiece zero point offset value
1: In the opposite direction to that specified by the external workpiece zero point offset
value
0: Valid
1: Invalid
NOTE
When the external workpiece zero point offset is made invalid, the
following operation results:
1 As the external workpiece zero point offset on the workpiece
zero point offset setting screen, a workpiece coordinate system
shift amount is displayed.
2 Data keyed through the MDI panel for the workpiece coordinate
system shift amount and external workpiece zero point offset is
loaded into the memory for the workpiece coordinate system
shift amount.
3 A write to or read from the workpiece coordinate system shift
amount and external workpiece zero point offset with a macro
variable is performed using the respective memory.
4 A write to or read from the workpiece coordinate system shift
amount and external workpiece zero point offset with the window
function is performed using the respective memory.
#2 G92 When the CNC has commands G52 to G59 specifying workpiece coordinate systems
(optional function), if the G command for setting a coordinate system (G92 for M series,
G50 for T series (or the G92 command in G command system B or C)) is specified,
0: G command is executed and no alarm is issued.
1: G command is not executed and an alarm PS0010, “IMPROPER G-CODE” is
issued.
#3 RLC Local coordinate system is
0: Not cancelled by reset
1: Cancelled by reset
- 45 -
Page 60

4.DESCRIPTION OF PARAMETERS B-63950EN/04
NOTE
1 When bit 6 (CLR) of parameter No. 3402 is set to 0, and bit 7
(WZR) of parameter No. 1201 is set to 1, the local coordinate
system is cancelled, regardless of the setting of this parameter.
2 When bit 6 (CLR) of parameter No. 3402 is set to 1, and bit 6 (C14)
of parameter No. 3407 is set to 0, the local coordinate system is
cancelled, regardless of the setting of this parameter.
3 When the 3-dimensional coordinate system conversion mode is
set, and bit 2 (D3R) of parameter No. 5400 is set to 1, the local
coordinate system is not cancelled, regardless of the setting of this
parameter.
#7 #6 #5 #4 #3 #2 #1 #0
1203 EMS
[Input type] Parameter input
[Data type] Bit path
#0 EMS The extended external machine zero point shift function is:
0: Disabled.
1: Enabled.
NOTE
1 To use the extended external machine zero point shift function, the
external machine zero point shift function or the external data input
function is required.
2 When the extended external machine zero point shift function is
enabled, the conventional external machine zero point shift function
is disabled.
#7 #6 #5 #4 #3 #2 #1 #0
1205 WTC 3TW R2O R1O
[Input type] Parameter input
[Data type] Bit path
#4 R1O The output of the signal for the reference position is:
0: Disabled.
1: Enabled.
#5 R2O The output of the signal for the second reference position is:
0: Disabled.
1: Enabled.
#6 3TW When workpiece coordinate system selection is specified with G code in tilted working
plane command mode:
0: The alarm PS5462, "ILLEGAL COMMAND (G68.2/G69)" is issued.
1: Workpiece coordinate system selection is executed.
- 46 -
Page 61

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
p
CAUTION
When this parameter is 1, only G54 to G59 or G54.1 can be
specified. Specifying G52 or G92 causes alarm PS5462. Specifying
G54 to G59 or G54.1 suppresses buffering.
Feature coordinate
system (G68.2)
Feature coordinate
system (G68.2)
Coordinate
system zero
point shift
Coordinate
system zero
point shift
amount
Feature coordinate
system (G68.2)
amount
G54
Feature coordinate
system (G68.2)
Coordinate
system zero
point shift
amount
G55
Coordinate
system zero
point shift
amount
Machine
oint
zero
G56
G57
Program example
G90 G17
G54
G68.2 X_Y_Z_ I_ J_ K_
G53.1
X_Y_Z_: Coordinate system zero point shift amount
G43H_
G55 X_Y_Z_
G56 X_Y_Z_
G57 X_Y_Z_
G49
G69
#7 WTC When workpiece coordinate system preset is done, actual tool length offset is:
0: Not considered.
1: Considered.
When this parameter is set 1, it is possible to preset the workpiece coordinate system by
G-code, MDI operation or the workpiece coordinate system preset signal without
canceling the tool length compensation modes.
The compensation vector is kept as the below figure when the workpiece coordinate
system preset is done to the coordinate shifted by amount of movement during manual
intervention.
- 47 -
Page 62

4.DESCRIPTION OF PARAMETERS B-63950EN/04
A
G54 workpiece coordinate
System before manual
intervention
Po
WZo
G54 workpiece coordinate
system after manual
intervention
Machine zero point
Tool length offset value
mount of movement
during manual intervention
Pn
WZn
Tool length offset value
#7 #6 #5 #4 #3 #2 #1 #0
1206 HZP
[Input type] Parameter input
[Data type] Bit path
#1 HZP At high-speed manual reference position return, presetting the coordinate system is:
0: Performed.
1: Not performed.
NOTE
This parameter is valid when no workpiece coordinate system
exists with bit 0 (ZPR) of parameter No. 1201 set to 0.
#7 #6 #5 #4 #3 #2 #1 #0
1207 WOL
[Input type] Parameter input
[Data type] Bit path
#0 WOL The calculation method for workpiece origin offset measurement value direct input is as
follows:
0: In a machine that requires that the difference from the reference tool be set as the
tool length compensation amount, the workpiece origin offset is measured and set
with the reference tool mounted on the machine.
(The tool length of the reference tool is assumed to be 0.)
1: In a machine that requires that the tool length itself be set as the tool length
compensation amount, the workpiece origin offset is measured and set considering
the tool length when the tool length compensation for the mounted tool is enabled.
- 48 -
Page 63

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
NOTE
The setting of this parameter is valid only when the system used is
the M series and bit 6 (DAL) of parameter No. 3104 is set to 1. If
this parameter is set to 1 in other than the above conditions, the
system operates as if this parameter bit were set to 0.
1220 External workpiece zero point offset value in each axis
[Input type] Setting input
[Data type] Real axis
[Unit of data] mm, inch, degree (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 9 digit of minimum unit of data (refer to standard parameter setting table (A))
(When the increment system is IS-B, -999999.999 to +999999.999)
This is one of the parameters that give the position of the zero point of workpiece
coordinate system (G54 to G59). It gives an offset of the workpiece zero point common
to all workpiece coordinate systems. In general, the offset varies depending on the
workpiece coordinate systems. The value can be set from the PMC using the external data
input function.
1221 Workpiece zero point offset value in workpiece coordinate system 1 (G54)
1222 Workpiece zero point offset value in workpiece coordinate system 2(G55)
1223 Workpiece zero point offset value in workpiece coordinate system 3(G56)
1224 Workpiece zero point offset value in workpiece coordinate system 4 (G57)
1225 Workpiece zero point offset value in workpiece coordinate system 5 (G58)
1226 Workpiece zero point offset value in workpiece coordinate system 6 (G59)
[Input type] Setting input
[Data type] Real axis
[Unit of data] mm, inch, degree (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 9 digit of minimum unit of data (refer to standard parameter setting table (A))
(When the increment system is IS-B, -999999.999 to +999999.999)
The workpiece zero point offset values in workpiece coordinate systems 1 to 6 (G54 to
G59) are set.
1240 Coordinate value of the reference position in the machine coordinate system
NOTE
When this parameter is set, the power must be turned off before
operation is continued.
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm, inch, degree (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 9 digit of minimum unit of data (refer to standard parameter setting table (A))
(When the increment system is IS-B, -999999.999 to +999999.999)
Set the coordinate values of the reference position in the machine coordinate system.
- 49 -
Page 64

4.DESCRIPTION OF PARAMETERS B-63950EN/04
1241 Coordinate value of the second reference position in the machine coordinate system
1242 Coordinate value of the third reference position in the machine coordinate system
1243 Coordinate value of the fourth reference position in the machine coordinate system
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm, inch, degree (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 9 digit of minimum unit of data (refer to standard parameter setting table (A))
(When the increment system is IS-B, -999999.999 to +999999.999)
Set the coordinate values of the second to fourth reference positions in the machine
coordinate system.
1244 Coordinate value of the floating reference position in the machine coordinate system
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm, inch, degree (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 9 digit of minimum unit of data (refer to standard parameter setting table (A))
(When the increment system is IS-B, -999999.999 to +999999.999)
Set the coordinate values of the floating reference position in the machine coordinate
system.
1250
Coordinate system of the reference position used when automatic coordinate system setting is
performed
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm, inch, degree (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 9 digit of minimum unit of data (refer to standard parameter setting table (A))
(When the increment system is IS-B, -999999.999 to +999999.999)
Set the coordinate system of the reference position on each axis to be used for performing
automatic coordinate system setting.
1260 The shift amount per one rotation of a rotary axis
NOTE
When this parameter is set, the power must be turned off before
operation is continued.
[Input type] Parameter input
[Data type] Real axis
[Unit of data] Degree
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 0 or positive 9 digit of minimum unit of data (refer to the standard parameter setting table
(B))
(When the increment system is IS-B, 0.0 to +999999.999)
Set the shift amount per one rotation of a rotary axis.
For the rotary axis used for cylindrical interpolation, set the standard value.
- 50 -
Page 65

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
1280 Start address of signals used with the extended external machine zero point shift function
[Input type] Parameter input
[Data type] Word path
[Valid data range] Even number from 0 to 32767
Set the start address of signals used with the extended external machine zero point shift
function. If a nonexistent address value is specified, this function is disabled.
If 100 is set, for example, this function uses R100 and up. The last R address to be used
depends on the number of controlled axes. When eight controlled axes are used, R100 to
R115 are used.
NOTE
If a nonexistent R address or an address in the system area is set,
this function is disabled.
1290
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] 0 or positive 9 digit of minimum unit of data (refer to the standard parameter setting table
Distance between two opposite tool posts in mirror image
(B))
(When the increment system is IS-B, 0.0 to +999999.999)
Set the distance between two opposite tool posts in mirror image.
4.12 PARAMETERS OF STORED STROKE CHECK
#7 #6 #5 #4 #3 #2 #1 #0
1300 BFA LZR RL3 LMS NAL OUT
[Input type] Setting input
[Data type] Bit path
#0 OUT The area inside or outside of the stored stroke check 2 is set as an inhibition area
0: Inside
1: Outside
#1 NAL When the tool enters the inhibition area of stored stroke limit 1:
0: The overtravel alarm signal is not output.
1: The overtravel alarm signal is output, and the tool is decelerated to a stop.
If manual operation is in progress at this time, the alarm is not output.
NOTE
When this parameter is set to 1, the alarm is issued if the tool
enters stored stroke limit 1 during automatic operation.
#2 LMS The stored stroke check 1 select signal (EXLM3, EXLM2, or EXLM when stored stroke
check 1 area expansion is used) for switching stored stroke check
0: Disabled
1: Enabled
- 51 -
Page 66

4.DESCRIPTION OF PARAMETERS B-63950EN/04
NOTE
When bit 0 (DLM) of parameter No. 1301 is set to 1, the stored
stroke check 1 select signal EXLM <Gn007.6> (EXLM3
<Gn531.7>, EXLM2 <Gn531.6>, or EXLM <Gn007.6> when stored
stroke check 1 area expansion is used) is made invalid.
#5 RL3 Stored stroke check 3 release signal RLSOT3 is
0: Disabled
1: Enabled
#6 LZR When the stored stroke check immediately after power-on is enabled (bit 0 (DOT) of
parameter No. 1311 is set to 1), the stored stroke check is:
0: Performed even before a manual reference position return is made.
1: Not performed until a manual reference position return is made.
#7 BFA When the stored stroke check 1, 2, or 3 alarm is issued, an interference alarm is issued
with the inter-path interference check function (T series), or a chuck/tail stock barrier (T
series) alarm is issued:
0: The tool stops after entering the prohibited area.
1: The tool stops before the prohibited area.
#7 #6 #5 #4 #3 #2 #1 #0
1301 PLC OTS OF1 NPC LMA DLM
[Input type] Setting input
[Data type] Bit path
#0 DLM The axis direction dependent stored stroke check 1 switch signal +EXLx <G104> and
–EXLx <G105> are:
0: Disabled.
1: Enabled.
When this parameter is set to 1, the stored stroke check 1 select signal EXLM <G007.6>
is made invalid.
#1 LMA When the stored stroke check 1 select signal EXLM <G007.6> is 1 with bit 2 (LMS) of
parameter No. 1300 set to 1, the movable area for stored stroke check 1 is:
0: The inside area set for stored stroke check 1-II.
1: The inside area set for stored stroke check 1-I and the inside area set for stored
stroke check 1-II as well.
#2 NPC As part of the stroke limit check performed before movement, the movement specified in
G31 (skip) and G37 (automatic tool length measurement) blocks is:
0: Checked
1: Not checked
NOTE
This parameter is valid only when the option for stroke limit check
before movement is selected.
- 52 -
Page 67

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
#4 OF1 If the tool is moved into the range allowed on the axis after an alarm is raised by stored
stroke check 1,
0: The alarm is not canceled before a reset is made.
1: The OT alarm is immediately canceled.
NOTE
In the cases below, the automatic release function is disabled. To
release an alarm, a reset operation is required.
1 When a setting is made to issue an alarm before a stored stroke
limit is exceeded (bit 7 (BFA) of parameter No. 1300 is set to 1)
2 When an another overtravel alarm (such as stored stroke check
2, stored stroke check 3, and interference check) is already
issued
3 When an overtravel alarm is already issued with the chopping
function
#6 OTS When the overtravel alarm is issued:
0: The overtravel alarm signal is not output to the PMC.
1: The overtravel alarm signal is output to the PMC.
#7 PLC Stroke check before movement is:
0: Not performed
1: Performed
NOTE
This parameter is valid only when the option for stroke limit check
before movement is selected.
#7 #6 #5 #4 #3 #2 #1 #0
1310 OT3x OT2x
[Input type] Setting input
[Data type] Bit axis
#0 OT2x Stored stroke check 2 for each axis is :
0: Disabled
1: Enabled
#1 OT3x Stored stroke check 3 for each axis is :
0: Disabled
1: Enabled
#7 #6 #5 #4 #3 #2 #1 #0
1311 DOTx
[Input type] Parameter input
[Data type] Bit axis
NOTE
When this parameter is set, the power must be turned off before
operation is continued.
- 53 -
Page 68

4.DESCRIPTION OF PARAMETERS B-63950EN/04
#0 DOTx Stored stroke limit check immediately after power-on is:
0: Disabled.
1: Enabled.
If the stored stroke check is enabled, the machine coordinate value present immediately
before the power is turned off is stored.
The machine coordinate value is set immediately after the power is turned on.
Based on the machine coordinate value, absolute coordinate and relative coordinate
values are set.
NOTE
Because this function uses software to store machine coordinates,
the function puts an extra load on the system. So, this function
should not be set for axes that do not require this function. The
amount of a movement made while the power is off is not reflected
in machine coordinates immediately after the power is turned on.
1312 SLM
#7 #6 #5 #4 #3 #2 #1 #0
[Input type] Parameter input
[Data type] Bit
#0 SLM The stroke limit area changing function is:
0: Disabled.
1: Enabled.
1320 Coordinate value I of stored stroke check 1 in the positive direction on each axis
1321 Coordinate value I of stored stroke check 1 in the negative direction on each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm, inch, degree (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 9 digit of minimum unit of data (refer to standard parameter setting table (A))
(When the increment system is IS-B, -999999.999 to +999999.999)
Set the coordinate value of stored stroke check 1 on each axis in the + or - direction in the
machine coordinate system.
NOTE
1 Specify diameter values for any axes for which diameter
programming is specified.
2 The area outside the area set by parameters Nos. 1320 and 1321
is a prohibited area.
1322 Coordinate value of stored stroke check 2 in the positive direction on each axis
1323 Coordinate value of stored stroke check 2 in the negative direction on each axis
[Input type] Setting input
[Data type] Real axis
[Unit of data] mm, inch, degree (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
- 54 -
Page 69

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
[Valid data range] 9 digit of minimum unit of data (refer to standard parameter setting table (A))
(When the increment system is IS-B, -999999.999 to +999999.999)
Set the coordinate value of stored stroke check 2 on each axis in the + or - direction in the
machine coordinate system.
NOTE
1 Specify diameter values for any axes for which diameter
programming is specified.
2 Whether the inside area or outside area is a prohibited area is set
using bit 0 (OUT) of parameter No. 1300.
1324 Coordinate value of stored stroke check 3 in the positive direction on each axis
1325 Coordinate value of stored stroke check 3 in the negative direction on each axis
[Input type] Setting input
[Data type] Real axis
[Unit of data] mm, inch, degree (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 9 digit of minimum unit of data (refer to standard parameter setting table (A))
(When the increment system is IS-B, -999999.999 to +999999.999)
Set the coordinate value of stored stroke check 3 on each axis in the + or - direction in the
machine coordinate system.
NOTE
1 Specify diameter values for any axes for which diameter
programming is specified.
2 The area inside the area set by parameters Nos. 1324 and 1325 is
a prohibited area.
1326 Coordinate value II of stored stroke check 1 in the positive direction on each axis
1327 Coordinate value II of stored stroke check 1 in the negative direction on each axis
1350 Coordinate value III of stored stroke check 1 in the positive direction on each axis
1351 Coordinate value III of stored stroke check 1 in the negative direction on each axis
1352 Coordinate value IV of stored stroke check 1 in the positive direction on each axis
1353 Coordinate value IV of stored stroke check 1 in the negative direction on each axis
1354 Coordinate value V of stored stroke check 1 in the positive direction on each axis
1355 Coordinate value V of stored stroke check 1 in the negative direction on each axis
1356 Coordinate value VI of stored stroke check 1 in the positive direction on each axis
1357 Coordinate value VI of stored stroke check 1 in the negative direction on each axis
1358 Coordinate value VII of stored stroke check 1 in the positive direction on each axis
1359 Coordinate value VII of stored stroke check 1 in the negative direction on each axis
1360 Coordinate value VIII of stored stroke check 1 in the positive direction on each axis
1361 Coordinate value VIII of stored stroke check 1 in the negative direction on each axis
- 55 -
Page 70

4.DESCRIPTION OF PARAMETERS B-63950EN/04
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm, inch, degree (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 9 digit of minimum unit of data (refer to standard parameter setting table (A))
(When the increment system is IS-B, -999999.999 to +999999.999)
Set the coordinate value of stored stroke check 1 on each axis in the + or - direction in the
machine coordinate system.
The stored stroke check 1 select signal (EXLM3, EXLM2, EXLM) and the stroke
parameter to be selected have the following relationships:
EXLM3 EXLM2 EXLM Stroke parameter to be selected
0 0 0 Coordinate value I (No. 1320 / No. 1321)
0 0 1 Coordinate value II (No. 1326 / No. 1327)
0 1 0 Coordinate value III (No. 1350 / No. 1351)
0 1 1 Coordinate value IV (No. 1352 / No. 1353)
1 0 0 Coordinate value V (No. 1354 / No. 1355)
1 0 1 Coordinate value VI (No. 1356 / No. 1357)
1 1 0 Coordinate value VII (No. 1358 / No. 1359)
1 1 1 Coordinate value VIII (No. 1360 / No. 1361)
NOTE
1 Specify diameter values for any axes for which diameter
programming is specified.
2 The outside of the area set with each parameter is treated as the
inhibition area.
3 The stored stroke check 1 select signal (EXLM3, EXLM2, EXLM) is
valid only when bit 2 (LMS) of parameter No. 1300 is 1.
4 When axis direction dependent stored stroke check 1 is enabled
(with bit 0 (DLM) of parameter No. 1301 set to 1), stroke parameter
switching by the stored stroke check 1 select signal (EXLM3,
EXLM2, EXLM) is disabled.
4.13 PARAMETERS OF THE CHUCK AND TAIL STOCK
BARRIER
1330
[Input type] Parameter input
[Data type] Byte path
[Valid data range] 0 to 1
1331
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
Profile of a chuck
Select a chuck figure.
0 : Chuck which holds a workpiece on the inner surface
1 : Chuck which holds a workpiece on the outer surface
Dimensions of the claw of a chuck (L)
- 56 -
Page 71

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 0 or positive 9 digit of minimum unit of data (refer to the standard parameter setting table
(B))
(When the increment system is IS-B, 0.0 to +999999.999)
Set the length (L) of the claw of the chuck.
NOTE
Whether to specify this parameter by using a diameter value or
radius value depends on whether the corresponding axis is based
on diameter specification or radius specification.
1332
Dimensions of the claw of a chuck (W)
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 0 or positive 9 digit of minimum unit of data (refer to the standard parameter setting table
(B))
(When the increment system is IS-B, 0.0 to +999999.999)
Set the width (W) of the claw of the chuck.
NOTE
Specify this parameter by using a radius value at all times.
1333
Dimensions of the claw of a chuck (L1)
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 0 or positive 9 digit of minimum unit of data (refer to the standard parameter setting table
(B))
(When the increment system is IS-B, 0.0 to +999999.999)
Set the length (L1) of the claw of the chuck.
NOTE
Whether to specify this parameter by using a diameter value or
radius value depends on whether the corresponding axis is based
on diameter specification or radius specification.
1334
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 0 or positive 9 digit of minimum unit of data (refer to the standard parameter setting table
Dimensions of the claw of a chuck (W1)
(B))
(When the increment system is IS-B, 0.0 to +999999.999)
- 57 -
Page 72

4.DESCRIPTION OF PARAMETERS B-63950EN/04
Set the width (W1) of the claw of the chuck.
NOTE
Specify this parameter by using a radius value at all times.
1335
X coordinate of a chuck (CX)
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 9 digit of minimum unit of data (refer to standard parameter setting table (A))
(When the increment system is IS-B, -999999.999 to +999999.999)
Set the chuck position (X coordinate) in the workpiece coordinate system.
NOTE
Whether to specify this parameter by using a diameter value or
radius value depends on whether the corresponding axis is based
on diameter specification or radius specification.
1336
Z coordinate of a chuck (CZ)
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 9 digit of minimum unit of data (refer to standard parameter setting table (A))
(When the increment system is IS-B, -999999.999 to +999999.999)
Set the chuck position (Z coordinate) in the workpiece coordinate system.
NOTE
Whether to specify this parameter by using a diameter value or
radius value depends on whether the corresponding axis is based
on diameter specification or radius specification.
1341
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 0 or positive 9 digit of minimum unit of data (refer to the standard parameter setting table
Length of a tail stock (L)
(B))
(When the increment system is IS-B, 0.0 to +999999.999)
Set the length (L) of the tail stock.
- 58 -
Page 73

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
NOTE
Whether to specify this parameter by using a diameter value or
radius value depends on whether the corresponding axis is based
on diameter specification or radius specification.
1342
Diameter of a tail stock (D)
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 0 or positive 9 digit of minimum unit of data (refer to the standard parameter setting table
(B))
(When the increment system is IS-B, 0.0 to +999999.999)
Set the diameter (D) of the tail stock.
NOTE
Specify this parameter by using a diameter value at all times.
1343
Length of a tail stock (L1)
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 0 or positive 9 digit of minimum unit of data (refer to the standard parameter setting table
(B))
(When the increment system is IS-B, 0.0 to +999999.999)
Set the length (L1) of the tail stock.
NOTE
Whether to specify this parameter by using a diameter value or
radius value depends on whether the corresponding axis is based
on diameter specification or radius specification.
1344
Diameter of a tail stock (D1)
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 0 or positive 9 digit of minimum unit of data (refer to the standard parameter setting table
(B))
(When the increment system is IS-B, 0.0 to +999999.999)
Set the diameter (D1) of the tail stock.
NOTE
Specify this parameter by using a diameter value at all times.
- 59 -
Page 74

4.DESCRIPTION OF PARAMETERS B-63950EN/04
1345
Length of a tail stock (L2)
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 0 or positive 9 digit of minimum unit of data (refer to the standard parameter setting table
(B))
(When the increment system is IS-B, 0.0 to +999999.999)
Set the length (L2) of the tail stock.
NOTE
Whether to specify this parameter by using a diameter value or
radius value depends on whether the corresponding axis is based
on diameter specification or radius specification.
1346
Diameter of a tail stock (D2)
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 0 or positive 9 digit of minimum unit of data (refer to the standard parameter setting table
(B))
(When the increment system is IS-B, 0.0 to +999999.999)
Set the diameter (D2) of the tail stock.
NOTE
Specify this parameter by using a diameter value at all times.
1347
Diameter of a tail stock (D3)
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 0 or positive 9 digit of minimum unit of data (refer to the standard parameter setting table
(B))
(When the increment system is IS-B, 0.0 to +999999.999)
Set the diameter (D3) of the tail stock.
NOTE
Specify this parameter by using a diameter value at all times.
1348
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
Z coordinate of a tail stock (TZ)
- 60 -
Page 75

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] 9 digit of minimum unit of data (refer to standard parameter setting table (A))
(When the increment system is IS-B, -999999.999 to +999999.999)
Set the tail stock position (Z coordinate) in the workpiece coordinate system.
NOTE
Whether to specify this parameter by using a diameter value or
radius value depends on whether the corresponding axis is based
on diameter specification or radius specification.
4.14 PARAMETERS OF FEEDRATE
#7 #6 #5 #4 #3 #2 #1 #0
1401 RDR TDR RF0 JZR LRP RPD
[Input type] Parameter input
[Data type] Bit path
#0 RPD Manual rapid traverse during the period from power-on time to the completion of the
reference position return.
0: Disabled (Jog feed is performed.)
1: Enabled
#1 LRP Positioning (G00)
0: Positioning is performed with non-linear type positioning so that the tool moves
along each axis independently at rapid traverse.
1: Positioning is performed with linear interpolation so that the tool moves in a straight
line.
When using 3-dimensional coordinate system conversion, set this parameter to 1.
#2 JZR The manual reference position return at jog feedrate
0: Not performed
1: Performed
#4 RF0 When cutting feedrate override is 0% during rapid traverse,
0: The machine tool does not stop moving.
1: The machine tool stops moving.
#5 TDR Dry run during threading or tapping (tapping cycle G74 or G84, rigid tapping)
0: Enabled
1: Disabled
#6 RDR Dry run for rapid traverse command
0: Disabled
1: Enabled
#7 #6 #5 #4 #3 #2 #1 #0
1402 JRV OV2 JOV NPC
[Input type] Parameter input
[Data type] Bit path
- 61 -
Page 76

4.DESCRIPTION OF PARAMETERS B-63950EN/04
#0 NPC Feed per revolution without the position coder (function for converting feed per
revolution F to feed per minute F in the feed per revolution mode (G95)) is:
0: Not used
1: Used
#1 JOV Jog override is:
0: Enabled
1: Disabled (tied to 100%)
#3 OV2 Signals used for 2nd feedrate override are
0: *AFV0 to AFV7 <G013> (specified every 1%)
1: *APF00 to *APF15 <G094, G095> (specified every 0.01%)
#4 JRV Jog feed or incremental feed is
0: Performed at feed per minute.
1: Performed at feed per rotation.
NOTE
1 Specify a feedrate in parameter No. 1423.
2 For the machining center system, the option for
threading/synchronous feed is required.
#7 #6 #5 #4 #3 #2 #1 #0
1403
[Input type] Parameter input
[Data type] Bit path
#3 EDT The function for corner control by feedrate (for a gas cutting machine) is:
#4 ROC In the threading cycles G92 (T series), G76 (T series), and G76.7 (M series), rapid
#5 HTG The feedrate for helical interpolation/helical involute interpolation/3-dimensional circular
#7 RTV Rapid traverse override while the tool is retracting in threading
RTV HTG ROC
RTV HTG ROC EDT
0: Disabled.
1: Enabled.
When the feedrate has reduced to the feedrate set in parameter No. 1474, from which the
system regards the number of accumulated pulses as being 0, the next block is executed.
traverse override for retraction after threading is finished is:
0: Effective
1: Not effective (Override of 100%)
interpolation is:
0: Specified using the feedrate along the tangent to an arc/involute curve/3-dimensional
arc
1: Specified using the feedrate along axes including a linear axis (specified axes other
than the circular interpolation axis in the case of 3-dimensional circular
interpolation)
0: Rapid traverse override is effective.
1: Rapid traverse override is not effective.
- 62 -
Page 77

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
#7 #6 #5 #4 #3 #2 #1 #0
1404
FC0 FM3 DLF
FC0 DLF
[Input type] Parameter input
[Data type] Bit path
#1 DLF After a reference position is set, manual reference position return performed at:
0: Rapid traverse rate (parameter No. 1420)
1: Manual rapid traverse rate (parameter No. 1424)
NOTE
This parameter selects a feedrate for reference position return
performed without dogs. This parameter also selects a feedrate
when manual reference position return is performed according to
bit 7 (SJZ) of parameter No.0002 using rapid traverse without
deceleration dogs after a reference position is set.
#2 FM3 The increment system of an F command without a decimal point in feed per minute is:
0: 1 mm/min (0.01 inch/min for inch input)
1: 0.001 mm/min (0.00001 inch/min for inch input)
#7 FC0 Specifies the behavior of the machine tool when a block (G01, G02, G03, etc.) containing
a feedrate command (F command) that is 0 is issued during automatic operation, as
follows:
0: An alarm PS0011, “FEED ZERO (COMMAND)” occurs.
1: An alarm PS0011 does not occur, and the block is executed.
NOTE
1 In inverse time feed (G93) mode, the alarm PS1202, "NO F
COMMAND AT G93" is issued irrespective of the setting of this
parameter.
2 This parameter is set from 1 to 0, if a bit 6 (CLR) of parameter No.
3402 is 1, reset the CNC. Or if CLR is 0, turn off and on the CNC.
#7 #6 #5 #4 #3 #2 #1 #0
1405
[Input type] Parameter input
[Data type] Bit path
#1 FR3 The increment system of an F command without a decimal point in feed per revolution is:
#2 PCL The function for constant surface speed control without the position coder is:
EDR HFR PCL
EDR HFR PCL FR3
0: 0.01 mm/rev (0.0001 inch/rev for inch input)
1: 0.001 mm/rev (0.00001 inch/rev for inch input)
0: Not used.
1: Used.
- 63 -
Page 78

4.DESCRIPTION OF PARAMETERS B-63950EN/04
NOTE
The option for constant surface speed control without the position
coder is required.
#3 HFR Feedrate command in rapid traverse is:
0: A value of set in parameter.
1: Synchronized with handle pulse by the handle-synchronous feed function.
NOTE
This parameter is available when the handle-synchronous feed
function is available.
#5 EDR As the external deceleration rate for positioning of linear interpolation type:
0: The external deceleration rate for cutting feed is used.
1: The external deceleration rate in rapid traverse for the first axis of path 1 is used.
Let us use external deceleration 1 as an example.
When this parameter bit is set to 0, the value of parameter No. 1426 is used as the
external deceleration rate for external deceleration 1.
When this parameter bit is set to 1, the value of axis 1 of parameter No. 1427 is used as
the external deceleration rate for external deceleration 1.
#7 #6 #5 #4 #3 #2 #1 #0
1406
EX3 EX2
F1O EX3 EX2
[Input type] Parameter input
[Data type] Bit path
#0 EX2 External deceleration function setting 2 is:
0: Invalid
1: Valid
#1 EX3 External deceleration function setting 3 is:
0: Invalid
1: Valid
#7 F1O For the cutting feedrate specified by a single-digit F code (F1 to F9), feedrate override,
second feedrate override, and override cancellation are:
0: Disabled.
1: Enabled.
NOTE
For the F0 feedrate, rapid traverse override is enabled regardless
of the setting of this parameter.
#7 #6 #5 #4 #3 #2 #1 #0
1408 IRCx RFDx
[Input type] Parameter input
[Data type] Bit axis
- 64 -
Page 79

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
#0 RFDx Feedrate control on a rotary axis is exercised using:
0: Conventional method
1: Method that specifies a feedrate on the virtual circle of the rotary axis
#3 IRCx The least input increment of the maximum cutting feedrates set in parameter Nos. 1430
and 1432 is:
0: Not multiplied by ten.
1: Multiplied by ten.
Set this parameter for the following axes, which are operated by the following functions:
• Spindle control axis by servo motor
• Tool rotary axis in the polygon turning function
• Tool rotary axis in interpolation type rigid tapping
If a rotation speed of 1000 (1/min) (=360000 (deg/min)) is to be used when this
parameter is set to 1, set 36000.0 in parameter No. 1430/1432.
1410 Dry run rate
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set the dry run rate at the 100% position on the jog feedrate specification dial. The unit of
data depends on the increment system of the reference axis.
1411
Cutting feedrate
NOTE
When this parameter is set, the power must be turned off before
operation is continued.
[Input type] Setting input
[Data type] Real path
[Unit of data] mm/min, inch/min, degree/min (input unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
A cutting feedrate can be specified with this parameter for a machine which does not have
to change the cutting feedrate frequently during machining. This eliminates the need to
specify a cutting feedrate (F code) in the NC program.
1414
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] Refer to the standard parameter setting table (C)
Feedrate for retrace
(When the increment system is IS-B, 0.0 to +999000.0)
- 65 -
Page 80

4.DESCRIPTION OF PARAMETERS B-63950EN/04
Set a cutting feedrate for retrace operation. When 0 is set, a retrace operation is performed
at a programmed feedrate.
1415 Manual synchronous feedrate for manual linear/circular interpolation continuous feed at override 100%
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
NOTE
This parameter is valid only when bit 4 (JRV) of parameter No.
1402 is 1 (manual per revolution feed is enabled). If manual per
revolution feed is disabled, the manual linear/circular interpolation
continuous feedrate follows the dry run rate (parameter No. 1410).
For a machining center system, the manual linear/circular
interpolation continuous feedrate follows the dry run rate
(parameter No. 1410) (feed per minute) even though bit 4 (JRV) of
parameter No. 1402 is set to 1 when the threading/synchronous
feed option is not specified.
1420 Rapid traverse rate for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set the rapid traverse rate when the rapid traverse override is 100% for each axis.
1421 F0 rate of rapid traverse override for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set the F0 rate of the rapid traverse override for each axis.
1423 Feedrate in manual continuous feed (jog feed) for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
(1) When bit 4 (JRV) of parameter No. 1402 is set to 0 (feed per minute), specify a jog
feedrate (feed per minute) under an override of 100%.
- 66 -
Page 81

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
(2) When bit 4 (JRV) of parameter No. 1402 is set to 1 (feed per revolution), specify a
jog feedrate (feed per revolution) under an override of 100%.
NOTE
This parameter is clamped to the axis-by-axis manual rapid traverse
rate (parameter No. 1424).
1424 Manual rapid traverse rate for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set the rate of manual rapid traverse when the rapid traverse override is 100% for each
axis.
NOTE
1 If 0 is set, the rate set in parameter No. 1420 (rapid traverse rate for
each axis) is assumed.
2 When manual rapid traverse is selected (bit 0 (RPD) of parameter
No. 1401 is set to 1), manual feed is performed at the feedrate set in
this parameter, regardless of the setting of bit 4 (JRV) of parameter
No. 1402.
1425 FL rate of the reference position return for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set feedrate (FL rate) after deceleration when the reference position return is performed
for each axis.
1426 External deceleration rate of cutting feed
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set an external deceleration rate for cutting feed or positioning of linear interpolation type
(G00).
1427 External deceleration rate of rapid traverse for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
- 67 -
Page 82

4.DESCRIPTION OF PARAMETERS B-63950EN/04
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set the external deceleration rate of rapid traverse for each axis.
1428 Reference position return feedrate for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
This parameter sets a rapid traverse rate for reference position return operation using
deceleration dogs, or for reference position return operation before a reference position is
set.
This parameter is also used to set a feedrate for the rapid traverse command (G00) in
automatic operation before a reference position is set.
- 68 -
Page 83

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
NOTE
1 To this feedrate setting 100%, a rapid traverse override (F0, 25, 50, or
100%) is applicable.
2 For automatic return after completion of reference position return and
machine coordinate system establishment, the normal rapid traverse rate is
used.
3 As a manual rapid traverse rate before machine coordinate system
establishment by reference position return, the jog feedrate or manual rapid
traverse rate can be selected with bit 0 (RPD) of parameter No. 1401.
Automatic reference position return (G28) No. 1428 No. 1420
Automatic rapid traverse (G00) No. 1428 No. 1420
Manual reference position return *1 No. 1428 No. 1428 *3
Manual rapid traverse No. 1423 *2 No. 1424
Before coordinate
system establishment
After coordinate
system establishment
4 When parameter No. 1428 is set to 0, the following parameter-set
feedrates are applied.
Automatic reference position return (G28) No. 1420 No. 1420
Automatic rapid traverse (G00) No. 1420 No. 1420
Manual reference position return *1 No. 1424 No. 1424 *3
Manual rapid traverse No. 1423 *2 No. 1424
Before coordinate
system establishment
After coordinate
system establishment
No. 1420: Rapid traverse rate
No. 1423: Jog feedrate
No. 1424: Manual rapid traverse rate
*1 : By using bit 2 (JZR) of parameter No. 1401, the jog feedrate can be
used for manual reference position return at all times.
*2 : When bit 0 (RPD) of parameter No. 1401 is set to 1, the setting of
parameter No. 1424 is used.
*3 : When rapid traverse is used for reference position return without dogs
or manual reference position return after reference position
establishment, regardless of the deceleration dog, the feedrate for
manual reference position return based on these functions is used (the
setting of bit 1 (DLF) of parameter No. 1404 is followed).
1430 Maximum cutting feedrate for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Specify the maximum cutting feedrate for each axis.
1432 Maximum cutting feedrate for all axes in the acceleration/deceleration before interpolation
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
- 69 -
Page 84

4.DESCRIPTION OF PARAMETERS B-63950EN/04
Set a maximum cutting feedrate for each axis in the acceleration/deceleration before
interpolation mode such as AI contour control. When the acceleration/deceleration before
interpolation mode is not set, the maximum cutting feedrate set in parameter No. 1430 is
used.
1434 Maximum manual handle feedrate for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set a maximum manual handle feedrate for each axis in case of maximum manual handle
feedrate switch signal HNDLF<Gn023.3>=”1”.
1440 External deceleration rate setting 2 in cutting feed
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set external deceleration rate 2 for cutting feed or positioning of linear interpolation type
(G00).
1441 External deceleration rate setting 2 for each axis in rapid traverse
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set external deceleration rate 2 for each axis in rapid traverse.
1442 Maximum manual handle feedrate setting 2 for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set a maximum manual handle feedrate 2 for each axis.
1443 External deceleration rate setting 3 in cutting feed
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
- 70 -
Page 85

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
Set external deceleration rate 3 for cutting feed or positioning of linear interpolation type
(G00).
1444 External deceleration rate setting 3 for each axis in rapid traverse
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set external deceleration rate 3 for each axis in rapid traverse.
1445 Maximum manual handle feedrate setting 3 for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set a maximum manual handle feedrate 3 for each axis.
1446
Adjusting parameter 1 for threading start position compensation in changing spindle speed function
(multiplier)
[Data type] Word path
[Unit of data] 1/10000
[Valid data range] -32768 to 32767 (Assumed to be 10000 when the setting is 0.)
This parameter sets a multiplier for finely adjusting the NC-calculated offset value
(NC-internal delay of acceleration/deceleration after interpolation).
1448
Adjusting parameter 2 for threading start position compensation in changing spindle speed function
(multiplier)
[Data type] Word path
[Unit of data] 1/10000
[Valid data range] -32768 to 32767 (Assumed to be 10000 when the setting is 0.)
This parameter sets a multiplier for finely adjusting the NC-calculated offset value (servo
delay).
1449
Adjusting parameter 3 for threading start position compensation in changing spindle speed function
(multiplier)
[Data type] Word path
[Unit of data] 1/10000
[Valid data range] -32768 to 32767 (Assumed to be 10000 when the setting is 0.)
This parameter sets a multiplier for finely adjusting the NC-calculated offset value (delay
in one-rotation signal detection).
When the NC-calculated offset value is 1280, the multiplier is assumed to be 10000 if this
parameter is set to 0, where 1280*10000/10000=1280 leads to a shift of
1280/4096*360=112.500[deg]. If the parameter is set to 12000, however,
1280*12000/10000=1536 leads to a shift of 1536/4096*360=135.000[deg].
- 71 -
Page 86

4.DESCRIPTION OF PARAMETERS B-63950EN/04
1450
Change of feedrate for one graduation on the manual pulse generator during one-digit F feed code
[Input type] Parameter input
[Data type] Byte path
[Valid data range] 1 to 127
Set the constant that determines the change in feedrate as the manual pulse generator is
rotated one graduation during one-digit F feed code.
iF
max
F
=Δ
100
(where, i=1 or 2)
n
In the above equation, set n. That is, the number of revolutions
of the manual pulse generator, required to reach feedrate Fmaxi is obtained. Fmaxi refers
to the upper limit of the feedrate for a one-digit F code feed command, and set it in
parameter No. 1460 or 1461.
Fmax1: Upper limit of the feedrate for F1 to F4 (parameter No. 1460)
Fmax2: Upper limit of the feedrate for F5 to F9 (parameter No. 1461)
1451
to to
1459
Feedrate for F1
Feedrate for F9
[Input type] Setting input
[Data type] Real path
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
These parameters set the feedrates for one-digit F code feed commands F1 to F9. When a
one-digit F code feed command is specified, and the feedrate is changed by turning the
manual pulse generator, the parameter-set value also changes accordingly.
1460
Upper limit of feedrate for F1 to F4
1461
Upper limit of feedrate for F5 to F9
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set the upper limit of feedrate for the one-digit F code feed command.
As the feedrate increases by turning the manual pulse generator, the feedrate is clamped
when it reaches the upper limit set. If a one-digit F feed command F1 to F4 is executed,
the upper limit is that set in parameter No. 1460. If a one-digit F code feed command F5
to F9 is executed, the upper limit is that set in parameter No. 1461.
1465 Radius of a virtual circle when a feedrate is specified on the virtual circle of a rotary axis
[Input type] Parameter input
[Data type] Real axis
- 72 -
Page 87

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (B)
Set the radius of a virtual circle when a feedrate on the virtual circle of a rotary axis is
specified.
If 0 is set for a rotary axis, the axis is excluded from feedrate calculation.
If the input unit is the inch, enter a value in inches.
The data is then converted to a millimeter value and displayed.
1466
Feedrate for retraction in threading cycle G92 or G76
Feedrate for retraction in threading cycle G76.7
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm/min, inch/min (machine unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
When threading cycle G92, G76 or G76.7 is specified, retraction is performed after
threading. Set a feedrate for this retraction.
NOTE
When this parameter is set to 0 or bit 1 (CFR) of parameter No.
1611 is set to 1, the rapid traverse rate set in parameter No. 1420
is used.
1474
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, deg/min (machine unit)
[Valid data range] 0 to 32767
#7 #6 #5 #4 #3 #2 #1 #0
1490 PGF LMV TOV
[Input type] Parameter input
[Data type] Bit path
#1 TOV The threading start position compensation in changing spindle speed function is:
#2 LMV The offset value for Z-axis threading start position at a spindle speed change is set:
Feedrate regarded as accumulated pulse 0. (corner control by feedrate (for gas cutting machine))
When a cutting feed block (block A) is followed by another cutting feed block (block B),
execution proceeds to block B if the feedrate in the automatic acceleration/deceleration
circuit for each axis is reduced to the setting of this parameter, and the number of
accumulated pulses in the automatic acceleration/deceleration circuit is assumed to be 0.
This setting is used for corner control by feedrate (for a gas cutting machine).
0: Disabled.
1: Enabled.
0: By spindle resolution (lead/4096).
1: In Z-axis least command increments.
- 73 -
Page 88

4.DESCRIPTION OF PARAMETERS B-63950EN/04
#7 PGF The feedrate specified for circular interpolation, involute interpolation, spiral/conical
interpolation, and NURBS interpolation in the high-speed program check mode is:
0: The dry run feedrate.
At this time, manual feedrate override signals *JV0 to *JV15 <Gn010 to Gn011>
can be used.
1: The maximum feedrate specified by the CNC.
CAUTION
If this parameter is set to 1, feedrate clamp, override, and dry run
for circular interpolation, involute interpolation, spiral/conical
interpolation, and NURBS interpolation are disabled. If a movement
around a stroke limit is specified, therefore, a stroke limit check
cannot sometimes be made correctly.
1495
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] Refer to the standard parameter setting table (C)
1496
[Input type] Parameter input
[Data type] Word path
[Unit of data] degree
[Valid data range] 0 to 179
Set the critical internal angle of a corner in 1-degree steps to cause an exact stop in the
1497
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] 0 or positive 9 digit of minimum unit of data (Refer to the standard parameter setting
Set the amount of Minute block movement of automatic exact stop check. If the amounts
Torch swing feedrate of the torch control axis for gas cutting machine
(When the increment system is IS-B, 0.0 to +999000.0)
Set the swing feedrate of the torch control axis for gas cutting machine.
Critical angle of automatic exact stop check
automatic exact stop check. If 0 is set, the automatic exact stop check is disabled.
The amount of Minute block movement of automatic exact stop check
table (B))
(When the increment system is IS-B, 0.0 to +999999.999)
of movements along the two axes of the currently selected plane in a specified block are
both smaller than the setting of this parameter, the automatic exact stop check for that
block is disabled.
- 74 -
Page 89

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
4.15 PARAMETERS OF ACCELERATION/DECELERATION
CONTROL
#7 #6 #5 #4 #3 #2 #1 #0
1601 NCI RTO
[Input type] Parameter input
[Data type] Bit path
#4 RTO Block overlap in rapid traverse
0: Blocks are not overlapped in rapid traverse.
1: Blocks are overlapped in rapid traverse.
#5 NCI An in-position check:
0: Confirms that the specified feedrate becomes 0 (the acceleration/deceleration delay
becomes 0) at deceleration time and that the machine position has reached a
specified position (the servo positional deviation is within the in-position width set
by parameter No. 1826).
1: Confirms only that the specified feedrate becomes 0 (the acceleration/deceleration
delay becomes 0) at deceleration time.
#7 #6 #5 #4 #3 #2 #1 #0
1602 LS2 BS2
[Input type] Parameter input
[Data type] Bit path
#3 BS2 Acceleration/deceleration in a mode of acceleration/deceleration before look-ahead
interpolation such as the AI contour control mode:
0: Exponential acceleration/deceleration or linear acceleration/ deceleration is used.
(The setting of bit 6 (LS2) of parameter No. 1602 is followed.)
1: Bell-shaped acceleration/deceleration is used.
#6 LS2 Acceleration/deceleration in a mode of acceleration/deceleration before interpolation such
as the AI contour control mode:
0: Exponential acceleration/deceleration is used.
1: Linear acceleration/deceleration is used.
#7 #6 #5 #4 #3 #2 #1 #0
1603 PRT
[Input type] Parameter input
[Data type] Bit path
#4 PRT For positioning of linear interpolation type:
0: Acceleration/deceleration of acceleration fixed type is used.
1: Acceleration/deceleration of time fixed type is used.
#7 #6 #5 #4 #3 #2 #1 #0
1604 SHP
[Input type] Parameter input
[Data type] Bit path
- 75 -
Page 90

4.DESCRIPTION OF PARAMETERS B-63950EN/04
#0 SHP When automatic operation is started, the state equivalent to the specification of G5.1Q1
for AI contour control is:
0: Not set
1: Set
Upon reset, the state where G5.1Q1 is specified is set.
#7 #6 #5 #4 #3 #2 #1 #0
1605 EST
[Input type] Parameter input
[Data type] Bit path
NOTE
When this parameter is set, the power must be turned off before
operation is continued.
#2 EST Axis immediate stop function is:
0: Disabled.
1: Enabled.
#7 #6 #5 #4 #3 #2 #1 #0
1606 MNJx
[Input type] Parameter input
[Data type] Bit axis
#0 MNJx In manual handle interrupt or automatic manual simultaneous operation (interrupt type):
0: Only cutting feed acceleration/deceleration is enabled, and jog feed
acceleration/deceleration is disabled.
1: Both cutting feed acceleration/deceleration and jog feed acceleration/deceleration
are applied.
#7 #6 #5 #4 #3 #2 #1 #0
1610 THLx JGLx CTBx CTLx
[Input type] Parameter input
[Data type] Bit axis
#0 CTLx Acceleration/deceleration in cutting feed or dry run during cutting feed
0: Exponential acceleration/deceleration is applied.
1: Linear acceleration/deceleration after interpolation is applied.
#1 CTBx Acceleration/deceleration in cutting feed or dry run during cutting feed
0: Exponential acceleration/deceleration or linear acceleration/ deceleration is applied.
(depending on the setting in bit 0 (CTLx) of parameter No. 1610)
1: Bell-shaped acceleration/deceleration is applied.
#4 JGLx Acceleration/deceleration in jog feed
0: Exponential acceleration/deceleration is applied.
1: The same acceleration/deceleration as for cutting feedrate is applied.
(Depending on the settings of bits 1 (CTBx) and 0 (CTLx) of parameter No. 1610)
- 76 -
Page 91

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
#5 THLx Acceleration/deceleration in threading cycles
0: Exponential acceleration/deceleration is applied.
1: The same acceleration/deceleration as for cutting feedrate is applied.
(Depending on the settings of bits 1 (CTBx) and 0 (CTLx) of parameter No. 1610)
As the time constant and FL rate, however, the settings of parameters Nos. 1626 and
1627 for threading cycles are used.
#7 #6 #5 #4 #3 #2 #1 #0
1611 TCO AOFF THA CFR
[Input type] Parameter input
[Data type] Bit path
#0 CFR For retraction after threading in the threading cycles G92 (T series), G76 (T series), and
G76.7 (M series):
0: The type of acceleration/deceleration after interpolation for threading is used
together with the threading time constant (parameter No. 1626) and FL rate
(parameter No. 1627).
1: The type of acceleration/deceleration after interpolation for rapid traverse is used
together with the rapid traverse time constant.
NOTE
If this parameter is set to 1, a check is made before a retraction to
see that the specified feedrate has become 0 (the delay in
acceleration/deceleration has become 0). For retraction, the rapid
traverse rate (parameter No. 1420) is used, regardless of the
setting of parameter No. 1466. When this parameter is set to 0,
parameter No. 1466 is used as the feedrate for retraction. As
acceleration/deceleration used for retraction, only
acceleration/deceleration after interpolation is used. Rapid traverse
before look-ahead interpolation and optimum torque
acceleration/deceleration are disabled.
#1 THA When a threading command is specified in AI contour control mode:
0: An alarm is issued.
1: AI contour control mode is temporarily canceled and the command is executed.
NOTE
If acceleration/deceleration before interpolation is enabled by the
command following or followed by a threading command with this
parameter set to 1, the tool is decelerated to a stop at the joint of
the relevant block.
#2 AOFF When AI contour control mode is off and the parameter of the advanced-preview feed
forward function is valid, the advanced-preview feed forward function is:
0: Enabled.
1: Disabled.
NOTE
This parameter is valid when bit 0 (SHP) of parameter No. 1604 is
0 with none of G05.1Q1, G05P10000, and G08P1 specified.
- 77 -
Page 92

4.DESCRIPTION OF PARAMETERS B-63950EN/04
#3 TCO Blocks in a threading cycle are:
0: Not overlapped in rapid traverse.
1: Overlapped in rapid traverse.
In a threading cycle that is a turning canned cycle, the rapid traverse overlap function can
perform rapid traverse overlap between a retract operation and return operation and
between a return operation and a positioning operation for the next threading cycle.
The rapid traverse deceleration ratio in an overlap between blocks is set in parameter No.
1726.
NOTE
When this function is used, threading cycle retraction is disabled.
#7 #6 #5 #4 #3 #2 #1 #0
1612 AIR PRO
[Input type] Parameter input
[Data type] Bit path
#0 PRO The feedrate reduction ratio for rapid traverse overlap is specified by :
0: The parameter No. 1722
1: The system variables #100851[#_ROVLP[1]]-#100874[#_ROVLP[24]]
This function is available in following conditions.
Rapid traverse block overlap disable signal ROVLP<Gn053.5>=”0” and bit 4 (RTO) of
parameter No. 1601=1(Blocks are overlapped in rapid traverse).
#1 AIR The status display and mode signal in AI contour control mode is:
0: Enabled only when the conditions for executing AI contour control are satisfied.
1: Enabled always in AI contour control mode.
If this parameter is set to 1, in-mode blinking display and the AI contour control mode
signal AICC <Fn062.0> remain enabled in the AI contour control mode.
NOTE
The parameter is invalid during a stop on feed hold or a
single-block stop.
1620
[Input type] Parameter input
[Data type] Word axis
[Unit of data] msec
[Valid data range] 0 to 4000
Time constant T or T1 used for linear acceleration/deceleration or bell-shaped
acceleration/deceleration in rapid traverse for each axis
Specify a time constant used for acceleration/deceleration in rapid traverse.
- 78 -
Page 93

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
[Example]
For linear acceleration/deceleration
Speed
T : Setting of parameter No. 1620
For bell-shaped acceleration/deceleration
Speed
T
2
T
1
T
: Setting of parameter No. 1620
1
: Setting of parameter No. 1621
T
2
(However, T
Total acceleration (deceleration) time : T
Time for linear portion : T
Time for curve portion : T
1621 Time constant T2 used for bell-shaped acceleration/deceleration in rapid traverse for each axis
[Input type] Parameter input
[Data type] Word axis
[Unit of data] msec
[Valid data range] 0 to 1000
Specify time constant T
for each axis.
1622 Time constant of acceleration/deceleration in cutting feed for each axis
[Input type] Parameter input
[Data type] Word axis
[Unit of data] msec
[Valid data range] 0 to 4000
Rapid traverse rate
(Parameter No. 1420)
TT
Rapid traverse rate
(Parameter No. 1420)
T
T
1
+ T2
1
1‐T2
× 2
2
2
T
2
≥ T2 must be satisfied.)
1
used for bell-shaped acceleration/ deceleration in rapid traverse
2
T
2
Time
Time
- 79 -
Page 94

4.DESCRIPTION OF PARAMETERS B-63950EN/04
Set the time constant used for exponential acceleration/deceleration in cutting feed,
bell-shaped acceleration/deceleration after interpolation or linear
acceleration/deceleration after interpolation in cutting feed for each axis. Which type to
use is selected with bits 1 (CTBx) and 0 (CTLx) of parameter No. 1610. Except for
special applications, the same time constant must be set for all axes in this parameter. If
the time constants set for the axes differ from each other, proper straight lines and arcs
cannot be obtained.
1623 FL rate of exponential acceleration/deceleration in cutting feed for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set the lower limit (FL rate) of exponential acceleration/deceleration in cutting feed for
each axis.
1624 Time constant of acceleration/deceleration in jog feed for each axis.
[Input type] Parameter input
[Data type] Word axis
[Unit of data] msec
[Valid data range] 0 to 4000
Set the time constant used for acceleration/deceleration in jog feed for each axis.
1625 FL rate of exponential acceleration/deceleration in jog feed for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set the FL rate of exponential acceleration/deceleration in jog feed for each axis.
This parameter allows only the exponential type.
1626 Acceleration/deceleration time constant in threading cycles for each axis
[Input type] Parameter input
[Data type] Word axis
[Unit of data] msec
[Valid data range] 0 to 4000
Set a time constant for acceleration/deceleration after interpolation in the threading cycles
G92 (T series), G76 (T series), and G76.7 (M series) for each axis.
1627 FL rate for acceleration/deceleration in threading cycles for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
- 80 -
Page 95

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
Set an FL rate for acceleration/deceleration after interpolation in the threading cycles G92
(T series), G76 (T series), and G76.7 (M series) for each axis. Set 0 at all times except in
a special case.
1650
Timer for the acceleration/deceleration signal
[Input type] Parameter input
[Data type] Word path
[Unit of data] msec
[Valid data range] 0 to 32767
Set the output duration of the acceleration/deceleration signal.
1660 Maximum allowable acceleration rate in acceleration/deceleration before interpolation for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/sec
2
, inch/sec2, degree/sec2 (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (D)
(When the machine system is metric system, 0.0 to +100000.0. When the machine system
is inch system, machine, 0.0 to +10000.0.)
Set a maximum allowable acceleration rate in acceleration/ deceleration before
interpolation for each axis.
If a value greater than 100000.0 is set, the value is clamped to 100000.0.
If 0 is set, the specification of 100000.0 is assumed. If 0 is set for all axes, however,
acceleration/deceleration before interpolation is not performed.
If a maximum allowable acceleration rate set for one axis is greater than a maximum
allowable acceleration rate set for another axis by a factor or 2 or more, the feedrate at a
corner where the direction of travel abruptly changes can decrease temporarily.
1671
Maximum allowable acceleration rate in acceleration/deceleration before interpolation for linear rapid
traverse for each axis, or maximum allowable reference acceleration rate in optimum torque
acceleration/deceleration
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/sec
2
, inch/sec2, degree/sec2 (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (D)
(When the machine system is metric system, 0.0 to +100000.0. When the machine system
is inch system, machine, 0.0 to +10000.0.)
(1) Set a maximum allowable acceleration rate in acceleration/ deceleration before
interpolation for linear rapid traverse.
If a value greater than 100000.0, the value is clamped to 100000.0.
If 0 is set, the specification of the following is assumed:
1000.0 mm/sec
100.0 inch/sec
100.0 degrees/sec
2
2
2
If 0 is specified for all axes, however, acceleration/deceleration before interpolation
is not performed.
(2) Maximum allowable reference acceleration rate in optimum torque
acceleration/deceleration
- 81 -
Page 96

4.DESCRIPTION OF PARAMETERS B-63950EN/04
1672
Acceleration change time of bell-shaped acceleration/deceleration before interpolation for linear rapid
traverse, or acceleration change time of bell-shaped acceleration/deceleration in optimum torque
[Input type] Parameter input
[Data type] 2-word path
[Unit of data] msec
[Valid data range] 0 to 200
(1) Set an acceleration change time of bell-shaped acceleration/ deceleration for linear
rapid traverse (time for changing from the state of constant feedrate (A) to the state
of constant acceleration/deceleration (C) at the acceleration rate calculated from the
acceleration rate set in parameter No. 1671: time of (B) in the figure below).
(2) Set an acceleration change time of bell-shaped acceleration/ deceleration in optimum
torque acceleration/deceleration (time for changing from the state of constant
feedrate (A) to the state of acceleration/deceleration (C) at the acceleration rate
calculated from optimum torque acceleration/deceleration: time of (B) in the figure).
Feedrate in tangent direction
acceleration/deceleration
Maximum acceleration rate not exceeding
maximum allowable acceleration rate set by
parameter No. 1671 for each axis is
automa t ic a lly c a lc u la t e d .
(A) (B ) (B) (B) (B)(A) (A)(C) (C )
Time s e t by param e ter N o . 167 2
1673 Maximum allowable acceleration rate in tangent direction at axis immediate stop
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm/sec/sec, inch/sec/sec, degree/sec/sec (machine unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] Refer to the standard parameter setting table (D)
(When the machine system is metric system, 0.0 to +100000.0. When the machine system
is inch system, machine, 0.0 to +10000.0.)
This parameter sets the maximum allowable acceleration rate in the tangent direction for
acceleration/deceleration before interpolation at a feed axis immediate stop.
If the parameter is set to a value equal to or greater than 100000.0, the value is clamped to
100000.0.
If a value lower than the acceleration of acceleration/deceleration before interpolation is
set, the tool stops by using the current setting without making the following changes:
• Change to the acceleration of acceleration/deceleration before interpolation.
• Change to the acceleration/deceleration type from bell-shaped acceleration/decele-
ration before interpolation to linear acceleration/deceleration before interpolation.
1710
Minimum deceleration ratio (MDR) for inner circular cutting feedrate change by automatic corner
override
[Input type] Parameter input
[Data type] Byte path
[Unit of data] %
[Valid data range] 0 to 100
- 82 -
Page 97

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
Set a minimum deceleration ratio (MDR) for an inner circular cutting feedrate change by
automatic corner override.
In the case of circular cutting offset inward, the actual feedrate is determined by a
specified feedrate (F) as follows:
Rc
F ×
Rp
Rc: Radius of tool center path
Rp: Programmed radius
Thus, the feedrate along the programmed path satisfies the specified value of F.
Programmed path
Rc
Tool center path
Rp
However, if Rc is too small when compared with Rp, Rc/Rp 0 results to stop the tool.
So, a minimum deceleration ratio (MDR) is set, and the feedrate of the tool is set to
F×(MDR) when Rc/Rp ≤ MDR.
When this parameter is 0, the minimum deceleration ratio (MDR) is 100%.
1711
Inner determination angle (θp) for inner corner override
[Input type] Parameter input
[Data type] Real path
[Unit of data] deg
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] 2 to 178
Set an inner determination angle for inner corner override in automatic corner overriding.
1712 Override value for inner corner override
[Input type] Parameter input
[Data type] Byte path
[Unit of data] %
[Valid data range] 1 to 100
Set an inner corner override value in automatic corner overriding.
1713 Start distance (Le) for inner corner override
[Input type] Setting input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] 9 digit of minimum unit of data (refer to standard parameter setting table (A))
(When the increment system is IS-B, -999999.999 to +999999.999)
Set a start distance for inner corner override in automatic corner overriding.
- 83 -
Page 98

4.DESCRIPTION OF PARAMETERS B-63950EN/04
A
1714 End distance (Ls) for inner corner override
[Input type] Setting input
[Data type] Real path
[Unit of data] mm, inch (input unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] 9 digit of minimum unit of data (refer to standard parameter setting table (A))
(When the increment system is IS-B, -999999.999 to +999999.999)
Set an end distance for inner corner override in automatic corner overriding.
When θ ≤ θp, an inner corner is assumed. (Parameter No. 1711 is used to set θp.)
When a corner is determined to be an inner corner, an override is applied to the feedrate
in the range of Le in the previous block from the intersection of the corner and in the
range of Ls in the next block from the intersection of the corner.
Distances Le and Ls represent linear distances from the intersection of a corner to points
on the tool center path.
Le and Ls are set in parameters Nos. 1713 and 1714.
Programmed path
Tool center path
n override is applied to the range from point a to point b.
1722 Rapid traverse feedrate reduction ratio for overlapping rapid traverse blocks
[Input type] Parameter input
[Data type] Byte axis
[Unit of data] %
[Valid data range] 0 to 100
This parameter is used when rapid traverse blocks are arranged successively, or when a
rapid traverse block is followed by a block that does not cause, movement. When the
feedrate for each axis of a block is reduced to the ratio set in this parameter, the execution
of the next block is started.
NOTE
The parameter No. 1722 is effective when bit 4 (RTO) of parameter
No. 1601 is set to 1.
1726 Rapid traverse rate reduction ratio for overlapping threading cycle blocks
[Input type] Parameter input
[Data type] Byte axis
[Unit of data] %
[Valid data range] 0 to 100
In a threading cycle that is a turning canned cycle, when the feedrate for each axis is
reduced to the deceleration ratio set in this parameter between a retraction and a return to
the cycle start point or between a return to the cycle start point and a movement to the
threading start point, the execution of the next block is started.
- 84 -
Page 99

B-63950EN/04 4.DESCRIPTION OF PARAMETERS
NOTE
The parameter No. 1726 is valid when bit 3 (TCO) of parameter
No. 1611 is set to 1.
1732
Minimum allowable feedrate for the deceleration function based on acceleration in circular
interpolation
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
With the deceleration function based on acceleration in circular interpolation, an optimum
feedrate is automatically calculated so that acceleration produced by changing the move
direction in circular interpolation does not exceed the maximum allowable acceleration
rate specified in parameter No. 1735.
If the radius of an arc is very small, a calculated feedrate may become too low.
In such a case, the feedrate is prevented from decreasing below the value specified in this
parameter.
NOTE
During involute interpolation, the minimum allowable feedrate of
"clamping of acceleration near a basic circle" in involute
interpolation automatic feedrate control is used.
1735
Maximum allowable acceleration rate for the deceleration function based on acceleration in circular
interpolation for each axis
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/sec
2
, inch/sec2, degree/sec2 (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (D)
(When the machine system is metric system, 0.0 to +100000.0. When the machine system
is inch system, machine, 0.0 to +10000.0.)
Set a maximum allowable acceleration rate for the deceleration function based on
acceleration in circular interpolation.
Feedrate is controlled so that acceleration produced by changing the move direction in
circular interpolation does not exceed the value specified in this parameter.
For an axis with 0 set in this parameter, the deceleration function based on acceleration is
disabled.
If a different value is set in this parameter for each axis, a feedrate is determined from the
smaller of the acceleration rates specified for the two circular axes.
NOTE
During involute interpolation, the minimum allowable feedrate of
"clamping of acceleration near a basic circle" in involute
interpolation automatic feedrate control is used.
1737
[Input type] Parameter input
Maximum allowable acceleration rate for the deceleration function based on acceleration in AI contour
control for each axis
- 85 -
Page 100

4.DESCRIPTION OF PARAMETERS B-63950EN/04
[Data type] Real axis
[Unit of data] mm/sec
2
, inch/sec2, degree/sec2 (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (D)
(When the machine system is metric system, 0.0 to +100000.0. When the machine system
is inch system, machine, 0.0 to +10000.0.)
Set a maximum allowable acceleration rate produced by changing the tool move
direction.
For an axis with 0 set in this parameter, the deceleration function based on acceleration is
disabled. If 0 is set for all axes, the deceleration function based on acceleration is not
performed.
In circular interpolation, however, the deceleration function based on feedrate control
using acceleration in circular interpolation (parameter No. 1735) is enabled.
1738 Minimum allowable feedrate for the deceleration function based on acceleration in AI contour control
[Input type] Parameter input
[Data type] Real path
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the reference axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
With the deceleration function based on acceleration in AI contour control, a feedrate
most suitable for a desired figure is automatically calculated.
Depending on the figure, however, the calculated feedrate may become too low.
In such a case, the feedrate is prevented from decreasing below the value specified in this
parameter.
If overriding using the deceleration function based on cutting load is enabled, a feedrate
lower than the minimum allowable feedrate may be used.
1763
FL rate for acceleration/deceleration after cutting feed interpolation for each axis in the
acceleration/deceleration before interpolation mode
[Input type] Parameter input
[Data type] Real axis
[Unit of data] mm/min, inch/min, degree/min (machine unit)
[Min. unit of data] Depend on the increment system of the applied axis
[Valid data range] Refer to the standard parameter setting table (C)
(When the increment system is IS-B, 0.0 to +999000.0)
Set a minimum allowable feedrate (FL rate) for acceleration/ deceleration after cutting
feed interpolation in acceleration/deceleration before interpolation as in AI contour
control.
1769
Time constant for acceleration/deceleration after cutting feed interpolation in the
acceleration/deceleration before interpolation mode
[Input type] Parameter input
[Data type] Word axis
[Unit of data] msec
[Valid data range] 0 to 4000
In the acceleration/deceleration before interpolation mode as in AI contour control, not
the ordinary time constant (parameter No. 1622) but the value of this parameter is used.
Be sure to specify the same time constant value for all axes except for a special
application. If different values are set, correct linear and circular figures cannot be
obtained.
- 86 -
 Loading...
Loading...