


AM 01.1

Certificate Registration No.
12 100/104 4269
Actuator controls
Operation instructions
AUMA MATIC
AM 01.1/ AM 02.1
AMExB 01.1/ AMExC 01.1
Modbus
2
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Modbus Operation instructions
Scope of these instructions: These instructions are valid for multi-turn actuators of type ranges
SA(R) 07.1 – SA(R) 16.1 and SA(R)ExC 07.1 – SA(R)ExC 16.1 and for
part-turn actuators of type ranges SG(R) 05.1 – SG(R) 12.1 and SGExC
05.1 – SGExC 12.1 with the controls AUMA MATIC AM 01.1/ AM 02.1
or AMExB 01.1 and AMExC 01.1 and Modbus interface.
Table of contents Page
1. Safety instructions 4
1.1 Range of application 4
1.2 Commissioning (electrical connection) 4
1.3 Maintenance 4
1.4 Warnings and notes 4
2. Short description 4
3. Transport and storage 5
4. General information about Modbus 5
4.1 Basic characteristics 5
4.2 Modbus Basic functions 6
4.3 Transfer mode 6
4.4 Bus access 6
4.5 Communication 6
4.6 Protection functions 6
4.7 Modbus RTU mode 6
5. Technical data 7
6. Design AUMA MATIC Modbus 10
7. Electrical connection 11
7.1 Power supply (standard) 11
7.2 Bus connection (standard) 12
7.3 Fitting the cover 13
7.4 Remote position transmitter 14
7.5 AUMA MATIC on wall bracket 14
7.6 Test run 14
7.7 Mains and bus connection for Ex-version with plug/ socket connector / terminal board (KP) 15
7.8 Mains and bus connection for Ex-version with plug-in terminal connection (KES) 17
7.9 Redundant bus connection 18
7.10 Bus cables 19
7.11 Setting the Modbus interface 20
7.12 Setting the communication parameter 21
7.13 Setting parameter seating mode in end position CLOSED, parity bits and number of stop bits 21
7.14 Setting the Modbus address: 21
7.15 Setting the baud rate 22
8. Commissioning with controls 23
8.1 Introduction 23
8.2 Overview over the Modbus functions for data transmission 23
8.3 Modbus function and corresponding offset addresses of the AUMA MATIC 23
9. Input data 24
9.1 Reading the actuator signals from the actuator using register functions 24
9.2 Description of the input data 26
9.3 Reading the feedback signals from the actuator using status functions 30
10. Process representation output 32
10.1 Transmitting operation commands to or reading out from the actuator using register functions 32
10.2 Description of the output data 32
10.3 Transmission of operation commands to the actuator using coil functions 33
3
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Operation instructions Modbus
Page
11. Operation parameters of the actuator 34
12. Description of actuator functions 41
12.1 Operation commands for OPEN/ CLOSE operation 41
12.2 Positioner 41
12.3 Stepping mode 42
13. Failure function 43
14. Description Modbus interface 44
14.1 Indication during system start-up: 44
14.1.1 Indications of operation LEDs 7 to 0 44
14.1.2 System displays LEDs L1 to L4 45
14.2 Customer inputs assignment of the Modbus interface (option) 45
14.3 Modbus connection assignment 46
14.4 Assignment positioner connections 46
14.5 Checking/ setting the switches on the logic board 47
15. Troubleshooting and corrective actions 48
15.1 Actuator can not be controlled via Modbus 48
15.2 Position feedback does not function 51
15.3 Actuator is not switched off by the limit switch in direction CLOSE 51
15.4 Actuator stops immediately after having started 51
15.5 Actuator does not signalise reference operation, connection failure position transmitter or
signal interruption position transmitter 51
15.6 Measuring the Modbus signals using an oscilloscope 51
16. Appendix A Standard wiring diagram 52
16.1 Legend for standard wiring diagram 53
16.2 Additional information to the wiring diagram legend 53
17. Appendix B Proposed external wiring diagram 54
18. Appendix C Literature references 57
19. Appendix D Connecting the cable shield for AUMA MATIC AMExB/ AMExC 01.1 57
Index 59
Addresses of AUMA offices and representatives 60
1. Safety instructions
1.1 Range of application AUMA actuators are designed for the operation of industrial valves,
e.g. globe valves, gate valves, butterfly valves and ball valves.
For other applications, please consult us. The manufacturer is not liable for
any possible damage resulting from use in other than the designated appli
cations. Such risk lies entirely with the user.
Observance of these operation instructions is considered as part of the
controls’ designated use.
1.2 Commissioning
(electrical connection)
During electrical operation, certain parts inevitably carry lethal voltages.
Work on the electrical system or equipment must only be carried out by a
skilled electrician himself or by specially instructed personnel under the
control and supervision of such an electrician and in accordance with the
applicable electrical engineering rules.
1.3 Maintenance The maintenance instructions must be strictly observed, otherwise a safe
operation of the multi-turn actuator/ the controls is no longer guaranteed.
1.4 Warnings and notes Non-observance of the warnings and notes may lead to serious injuries or
damage. Qualified personnel must be thoroughly familiar with all warnings
and notes in these operation instructions.
Correct transport, proper storage, mounting and installation, as well as
careful commissioning are essential to ensure a trouble-free and safe operation.
The following references draw special attention to safety-relevant procedures in these operation instructions. Each is marked by the appropriate
pictograph.
This pictograph means: Note!
“Note” marks activities or procedures which have major influence on the
correct operation. Non-observance of these notes may lead to consequential damage.
This pictograph means: Electrostatically endangered parts!
If this pictograph is attached to a printed circuit board, it contains parts
which may be damaged or destroyed by electrostatic discharges. If the
boards need to be touched during setting, measurement, or for exchange, it
must be assured that immediately before a discharge through contact with
an earthed metallic surface (e.g. the housing) has taken place.
This pictograph means: Warning!
“Warning” marks activities or procedures which, if not carried out correctly,
can affect the safety of persons or material.
2. Short description AUMA actuators have a modular design. Motor and gearing are mounted in
a common housing.
The actuators are driven by an electric motor and controlled with the electronic controls AUMA MATIC Modbus. The electronic controls are included
in the scope of delivery.
4
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Modbus Operation instructions

3. Transport and storage
.
Transport to place of installation in sturdy packing.
.
Do not attach ropes or hooks to the handwheel for the purpose of lifting by
hoist.
.
Store in well-ventilated, dry room.
.
Protect against floor dampness by storage on a shelf or on a wooden
pallet.
.
Cover to protect against dust and dirt.
.
Apply suitable corrosion protection agent to bright surfaces.
4. General information about Modbus
For the exchange of information among automation systems and between
automation systems and the connected decentral field devices, serial
fieldbuses are mainly used today as the communication system. Thousands
of applications have proved impressively that cost savings of up to 40 % in
wiring, commissioning, and maintenance are achieved by using fieldbus
technology. Just two wires are needed to transmit all relevant information for
the field devices, such as input and output signals, parameters, and diagnostics data. While in the past the fieldbuses used were often manufacturer
specific and incompatible with other bus systems, the systems employed
today are almost exclusively open and standardized. This means that the
user is independent of individual suppliers and can choose the best product
at the most competitive price.
Modbus is an open international fieldbus system which is also used
successfully throughout the world. The application range includes automation in the areas of manufacturing, processing, and building.
These operation instructions cannot provide a general introduction into
Modbus. For this, please refer to the literature references in appendix C
(page 57).
4.1 Basic characteristics Modbus defines the functional features of a serial fieldbus system with
which distributed digital automation devices can be interconnected. Modbus
distinguishes between master and slave devices.
Master devices control the data traffic on the Bus. A master is allowed to
send messages without an external request.
Slave devices such as AUMA Modbus actuators are peripheral devices.
Typical slave devices are input/ output devices, valves, actuators, and
measuring transmitters. They do not have bus access, i.e. they may only ,at
the request of a master, transmit messages to that master.
5
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Operation instructions Modbus

4.2 Modbus Basic functions Modbus uses a master-slave technique in which only the master can initiate
a transaction. The slaves respond by supplying the requested data in a reply
or by executing the action requested in the query.
The Modbus telegram from the master contains the slave address, a func
tion code defining the requested action, a data field, and a CRC field. The
Modbus slaves’ response message contains fields confirming the requested
action and possibly the requested data and also a CRC field.
If an error occurs during reception of the telegram or the slave is unable to
perform the requested action, the slave will generate an error telegram and
send it as response to the master.
4.3 Transfer mode
.
RS-485 twisted pair cable or fibre optic cable.
.
AUMA actuators support baud rates up to 38.4 kBit/s
4.4 Bus access
.
Master-slave technique.
.
Mono-master system.
.
Master and slave devices: max. 127 devices at one bus
(the AUMA MATIC supports slave addresses from 1 to 127), without
repeater max. 32 devices.
4.5 Communication
.
Master-slave data exchange via query-response cycle (Polling procedure).
.
Modbus RTU protocol.
4.6 Protection functions
.
Parity check for each telegram byte
.
CRC check for each telegram
.
Watchdog for AUMA actuators with adjustable failure behaviour.
.
Query-response cycle monitoring with configurable timer interval at the
master.
4.7 Modbus RTU mode Data format for a byte.
Coding system:
.
8 bit binary, hexadecimal 0-9, A-F
.
2 hexadecimal characters contained in each 8 bit field of the telegram
Bits per byte:
.
1 start bit
.
8 data bits; least significant bit sent first
.
1 bit for even/ odd parity, no bit for no parity
.
1 stop bit if parity is used, 2 stop bits if no parity is used.
6
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Modbus Operation instructions
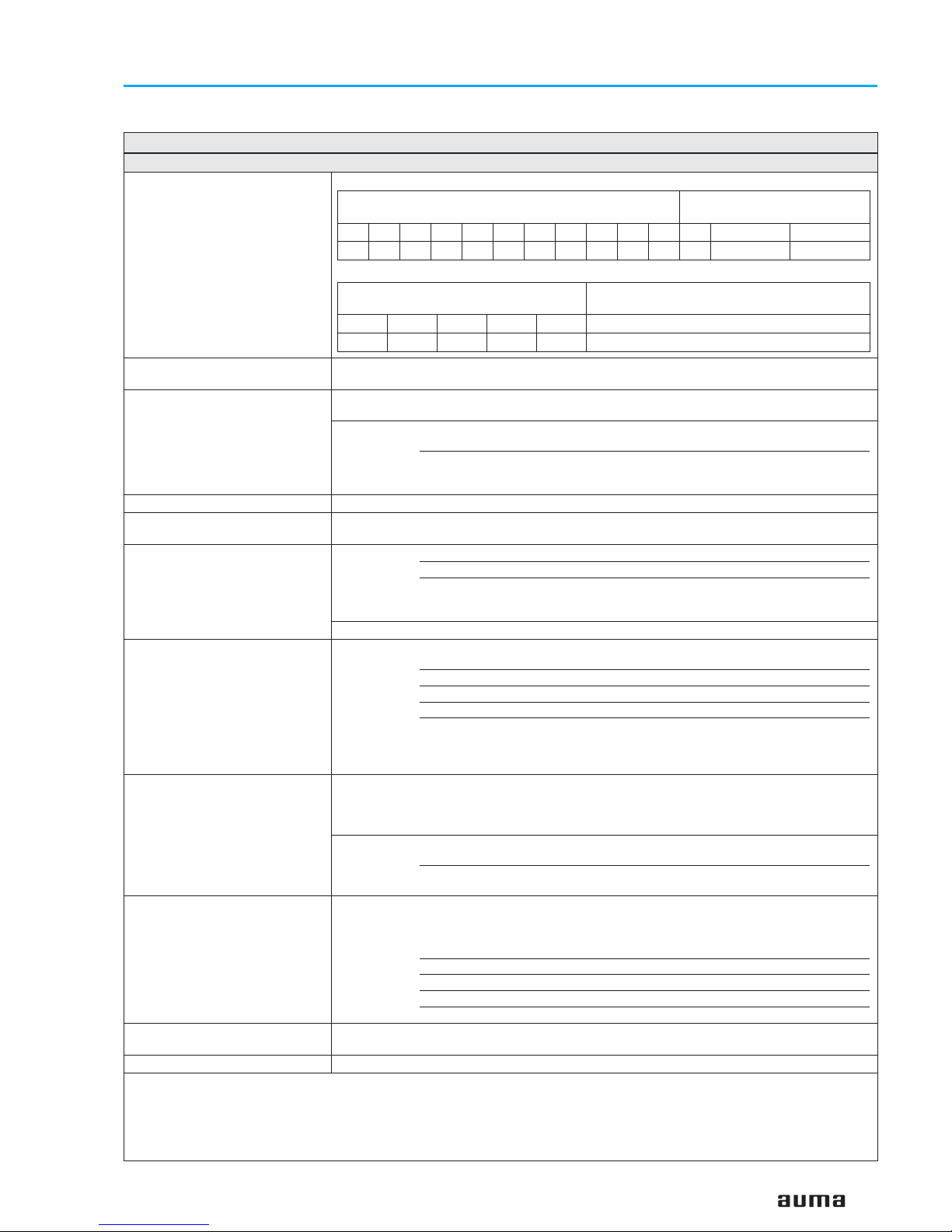
5. Technical data
7
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Operation instructions Modbus
Features and functions
Power supply Standard voltages:
Special voltages:
External supply of the electronics
(option)
24 V DC + 20 % / – 15 %,
Current consumption: Basic version approx. 200 mA, with options up to 500 mA
Switchgear Standard: Reversing contactors
2)
(mechanically and electrically interlocked)
for motor power up to 1.5 kW
Options: Reversing contactors
2)
(mechanically and electrically interlocked)
for motor power up to 7.5 kW
Thyristor unit3)(recommended for modulating actuators)
for motor power up to 1.5 kW, 500 V AC, with internal fuses
for motor power up to 5.5 kW, 500 V AC, external fuses required
Control and output signals via Modbus interface
Modbus interface with additional
inputs (option)
Modbus interface with 4 free 24 V DC inputs and 2 free 0/4 – 20 mA inputs. Signal
transmission vial fieldbus interface.
Local controls Standard: Selector switch LOCAL – OFF – REMOTE (lockable in all three positions)
Push buttons OPEN – STOP – CLOSE
3 indication light:
End position CLOSED (yellow), collective fault signal (red),
End position OPEN (green)
Option: Protection cover, lockable
Functions Standard Switch-off mode, adjustable
Limit or torque seating for end position CLOSED
Overload protection against excessive torque over the whole travel
Phase failure monitoring with automatic phase correction
Push-to-run operation or self-retaining in LOCAL
Positioner4):
Nominal position value via Modbus interface
Adjustable behaviour on loss of signal
Adjustable sensitivity (dead band) and pause time
Motor protection evaluation Standard: For AM: Monitoring of motor temperature in combination with thermoswitches
in actuator motor
For AMExB/ AMExC: Monitoring of the motor temperature with PTC tripping
device in combination with PTC thermistors in the actuator motor
Optionen: Additional thermal overload relay in the controls in combination with
thermoswitches within the actuator
PTC tripping device in combination with PTC thermistors in the actuator
motor
Electrical connection Standard: For AM: AUMA plug/ socket connector with screw type connection
For AMExB/ AMExC: Ex-plug/ socket connector with terminal board
For further options and threads for cable entries, please refer to separate
technical data sheets
Special threads, other than standard mentioned above, possible
Control plug gold plated3)(sockets and pins)
Parking frame for wall mounting of the disconnected plug
Protection cover for plug compartment (when plug is removed)
Overvoltage protection3)(option) Protection of the actuator and controls electronics against overvoltages on the fildbus
cables of up to 4 kV
Wiring diagram (basic version) MSP 1B1-00-7-F18E1 KMS TP102/001
1) AC current only with AM 01.1/ AM 02.1 and AMExC 01.1 in combination with actuator SGExC
2) The lifetime guaranteed by the manufacturer amounts to min. 2 million cycles. If a higher number of switching cycles is to be expected, thyristor units with
virtually unlimited lifetime should be used
3) only in combination with AM 01.1 and AM 02.1
4) Requires position transmitter (potentiometer or RWG) in actuator
Table 1: Modbus interface for actuator controls AM/ AMExB/ AMExC
3-phase AC
voltages/ frequencies
1-phase AC
1)
voltages/ frequencies
Volt 220 230 240 380 400 415 440 460 480 500 Volt 110,115,120 220,230,240
Hz 50 50 50 50 50 50 60 60 60 50 Hz 50/60 50/60
3-phase AC
voltages/ frequencies
1-phase AC
1)
voltages/ frequencies
Volt
525 575 660 690 208
Hz
50 50 50 50 60
8
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Modbus Operation instructions
Settings/ programming of the Modbus interface
Setting of the Modbus interface The setting of baud rate, parity, and Modbus address is realised via the AUMA MATIC
Modbus assembly
Commands and signals of the Modbus interface
Oricess representation output
(command signals)
OPEN, STOP CLOSE, nominal position value
4)
Process representation input
(feedback signals)
End position OPEN, CLOSED
Actual position value
4)
Selector switch in position LOCAL/ REMOTE
Running indication
4)
(directional)
Torque switch OPEN, CLOSED
Limit switch OPEN, CLOSED
Manual operation by handwheel
4)
or local controls
Process representation input
(fault signals)
Motor protection tripped
Torque switch tripped in mid-travel
One phase missing
Behaviour on loss of
communication
The behaviour of the actuator is programmable:
- operation to end position OPEN or CLOSED
- operation to any intermediate position
4)
General Modbus data
Communication protocol Modbus RTU
Network topology Linear (BUS) structure. Active bus termination on both sides.
Coupling and uncoupling of devices during operation without affecting other devices is
possible.
Transmission medium Twisted, shielded copper cable according to EN 50 170
Modbus interface EIA-485 (RS485)
Transmission speed/
cable length
Device types Modbus slave, e.g. devices with digital and/ or analogue inputs and outputs, such as
actuators, sensors
Number of devices 32 devices within each segment without repeater, with repeater expandable up to 127
5)
Bus access Polling between master and slaves (query-response)
Supported Modbus functions
(services)
01 Read Coil Status
02 Read Input Status
03 Read Holding Registers
04 Read Input Registers
05 Force Single Coil
15 (0FHex) Force Multiple Coils
06 Preset Single Register
16 (10Hex) Preset Multiple Registers
07 Read Exception Status
17 (11Hex) Report Slave ID
08 Diagnostics:
00 00 Loopback
00 10 (0AHex) Clear Counters and Diagnostic Register
00 11 (0BHex) Return Bus Message Count
00 12 (0CHex) Return Bus Communication Error Count
00 13 (0DHex) Return Bus Exception Error Count
00 14 (0EHex) Return Slave Message Count
00 15 (0FHex) Return Slave No Response Count
4) Requires position transmitter (potentiometer or RWG) in actuator
5) The highest Modbus address which can be set at the AUMA MATIC is 127
Baud rate (kbit/s) Max. cable length (segment
length) without repeater
Possible cable length with
repeater (total network cable
length)
300
600
1,200
2,400
4,800
9,600
19,200
38,400
1,200 m
1,200 m
1,200 m
1,200 m
1,200 m
1,200 m
1,200 m
1,200 m
approx. 10 km
approx. 10 km
approx. 10 km
approx. 10 km
approx. 10 km
approx. 10 km
approx. 10 km
approx. 10 km
9
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Operation instructions Modbus
Service conditions
Enclosure protection according
to EN 60 529
Standard: IP 67 (when mounted)
Options: IP 68
6)
DS3)Terminal compartment additionally sealed against interior (double
sealed)
Corrosion protection Standard: KN Suitable for installation in industrial units, in water or power plants
with a low pollutant concentration
Optionen: KS Suitable for installation in occasionally or permanently aggressive
atmosphere with a moderate pollutant concentration
(e.g. wastewater treatment plants, chemical industry)
KX Suitable for installation in extremely aggressive atmosphere with
high humidity and high pollutant concentration
KX-G Same as KX, however aluminium-free version (outer parts)
Finish coating Standard: Two-component iron-mica combination
Option: Special primer/special finish coat (customer’s choice)
Colour Standard: Silver-grey (DB 701, similar to RAL 9007)
Option: Other colours than standard colour are possible on request
Ambient temperature AM 01.1/ AM 02.1:
Standard: – 25 °C to + 70 °C
Options: – 40 °C to + 70 °C, low temperature version
– 50 °C to + 70 °C, extreme low temperature version, incl. heating system
– 60 °C to + 70 °C, extreme low temperature version, incl. heating system
AMExB
Standard: – 20 °C to + 40 °C
AMExC:
Standard: – 20 °C to + 40 °C
Options: – 40 °C to + 40 °C, low temperature version
– 50 °C to + 40 °C, extreme low temperature version, incl. heating system
Vibration resistance
7)
according to IEC 60 068-2-6
1 g, for 10 to 200 Hz
(only for actuator with controls. Not valid in combination with gearboxes)
Weight approx. 7 kg (with AUMA plug/ socket connector)
approx. 12 kg (with Ex-plug/ socket connector with terminal board)
Accessories
Wall bracket
8)
AUMA MATIC mounted separately from the actuator, including plug/ socket connector.
Connecting cables on request..
Recommended for high ambient temperatures, difficult access, or in case of heavy
vibrations during service.
Other information
EU Directives Electromagnetic Compatibility (EMC): (89/336/EEC)
Low Voltage Directive: (73/23/EEC)
Machinery Directive: (98/37/EC)
Reference documents Product description “Actuator controls AUMA MATIC”
Dimension sheets “Multi-turn actuators/ part-turn actuators with integral controls AUMA
MATIC”
3) Only in combination with AM 01.1 and AM 02.1
6) For version in enclosure protection IP 68, a higher corrosion protection KS or KX is strongly recommended
7) Resistant to vibrations during start-up or for failures of the plant. However, a fatigue strength may not be derived from this
8) Cable length between actuator and AUMA MATIC max. 100 m. Not suitable for version with potentiometer in the actuator. Instead of the potentiometer, an RWG
has to be used in the actuator.
6. Design AUMA MATIC Modbus
The AUMA MATIC Modbus by AUMA represents the ideal controls for
connecting multi-turn actuators of the SA range and part-turn actuators of
the SG range to Modbus.
The integral controls AUMA MATIC Modbus consist of the following
modules:
.
Modbus interface. The interface links the Modbus data with the internal
electronics.
.
The logic board links the signals of the actuator with the local controls and the
Modbus interface and controls the reversing contactors or the thyristors.
.
Local controls with selector switch, push buttons, and indication lights.
The selector switch is used to select the control devices for the local
control LOCAL – 0 – REMOTE for remote control.
The push buttons (OPEN) – Stop – (CLOSE) are used for the
electric operation of the actuator on site.
.
Plug/ socket connectors for easy mounting of the AUMA MATIC Modbus
on the actuators.
.
Signal and control board with primary fuses, relays for conversion of the
local control commands into electrical signals, and indication lights as an
option.
.
Switchgear: Reversing contactors or thyristors for motor controls.
.
Modbus connection board with terminals for the Modbus cable and the
termination resistor for bus termination.
Actuators which have already been installed can be retrofitted for Modbus
by exchanging the controls AUMA MATIC for controls AUMA MATIC
Modbus.
10
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Modbus Operation instructions
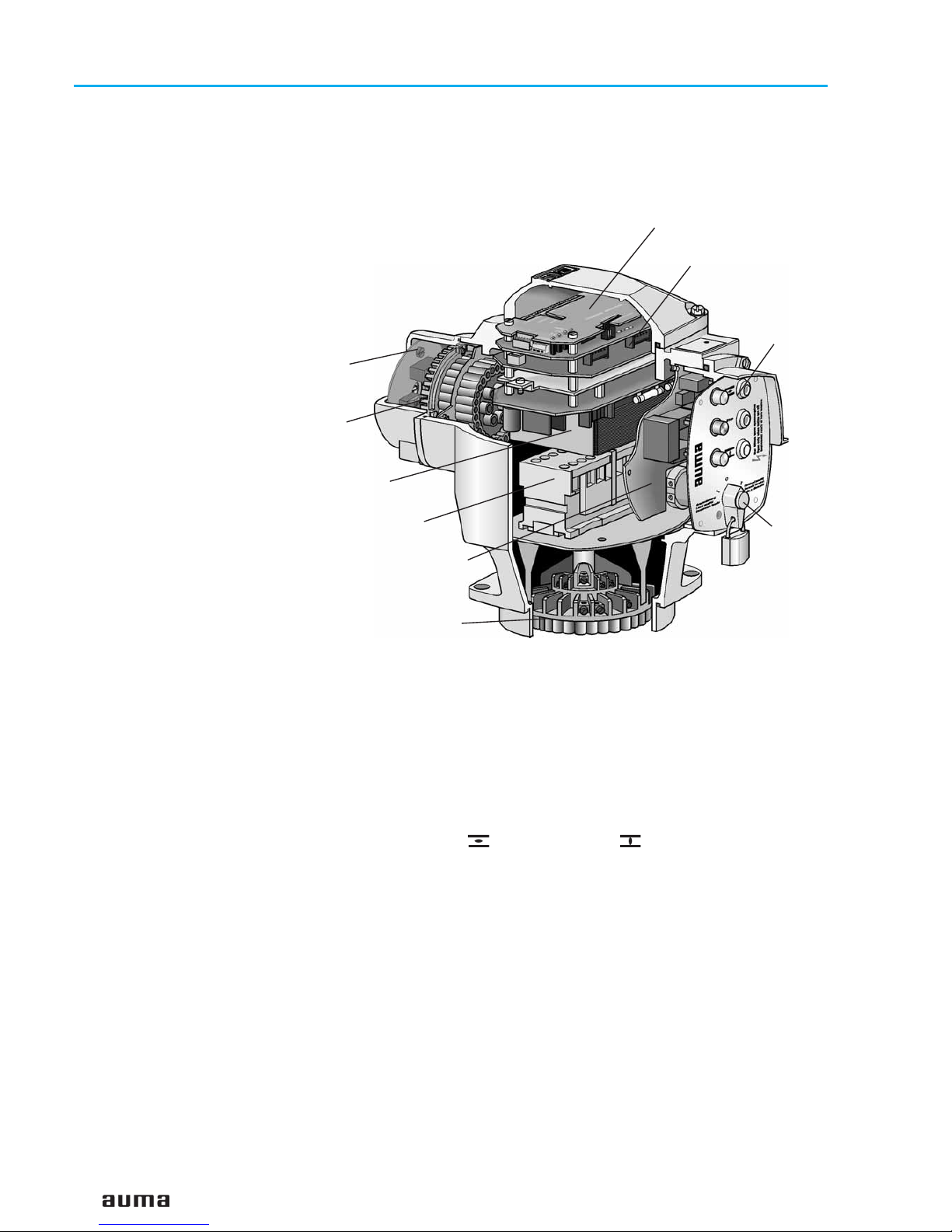
Figure A: AUMA MATIC Modbus
Switchgear
Power supply unit
Logic board
Modbus interface
Plug/ socket connector
to actuator
Local controls
Selector switch
Signal and control board
Modbus
connection board
Electrical connection
with AUMA plug/ socket connector
7. Electrical connection
.
Work on the electrical system or equipment must only be
carried out by a skilled electrician himself or by specially
instructed personnel under the control and supervision of
such an electrician and in accordance with the applicable
electrical engineering rules.
.
Installation regulations for Modbus must be observed for
the wiring.
(For literature references, please refer to appendix C)
Make sure to respect electromagnetic compatibility (EMC) when installing
cables:
Signal and bus cables are susceptible to interference.
Electric power cables are interference sources.
.
Lay cables being susceptible to inferference or sources of interference at
the highest possible distance from each other.
.
The interference immunity of signal and bus cables increases if the cables
are laid close to the ground potential.
.
Avoid long cables, if possible, or make sure that they are laid in locations
with low susceptibility to interference.
.
Avoid long parallel paths with cables being either interference sources or
susceptible to interference.
7.1 Power supply (standard) For explosion-proof version (type designation: AMExB/ AMExC), please
refer to page 15 or page 17.
.
Check whether type of current, supply voltage, and frequency comply with
motor data (refer to name plate at motor).
.
Loosen bolts (50.01) (figure B-1) and remove connection housing.
.
Loosen screws (51.01) and remove socket carrier (51.0) from plug cover
(50.0).
.
Insert cable glands suitable for connecting cables.
(The enclosure protection stated on the name plate is only ensured if suitable cable glands are used).
.
Seal cable entries which are not used with suitable plugs.
.
Connect cables according to order-related wiring diagram.
The wiring diagram applicable to the actuator is attached to the
handwheel in a weather-proof bag, together with the operation instructions. In case the wiring diagram is not available, it can be obtained from
AUMA (state commission no., refer to name plate) or downloaded directly
from the Internet (www.auma.com).
A special parking frame (figure B-2) for protection against touching the bare
contacts and against environmental influences, in case the electrical
connection has been removed, is available.
11
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Operation instructions Modbus
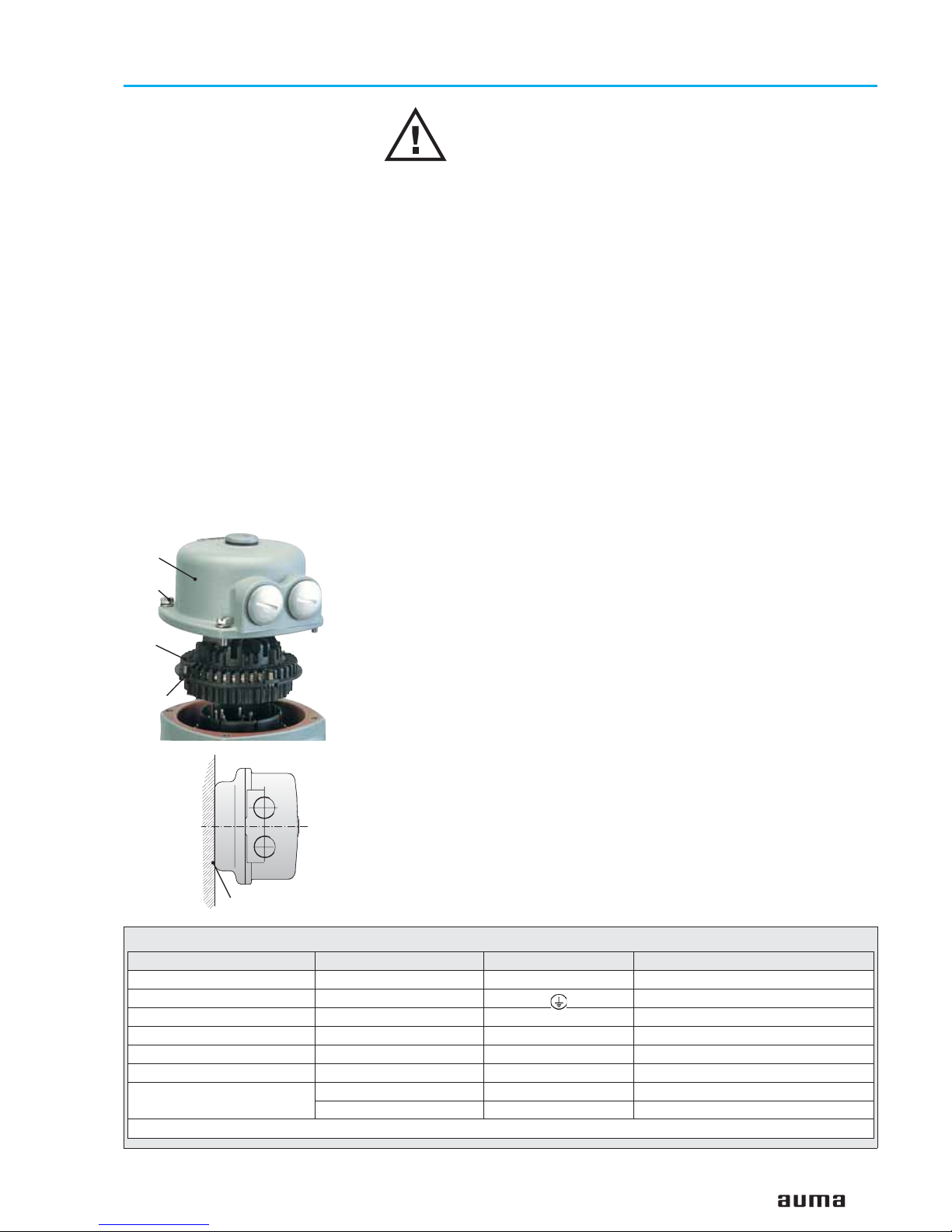
Figure B-1: Connection
50.0
50.01
51.0
51.01
Parking frame
Technical data Motor power connections1)Protective earth Control terminals
No. of contacts max. 6 (3 are used) 1 (leading contact) 50 pins / sockets
Marking U1, V1, W1, U2, V2, W2 1 to 50
Connecting voltage max. 750 V – 250 V
Nominal current max. 25 A –
16 A
Type of customer connection Screws Screw for ring lug Screws
Cross section max. 6 mm
2
6 mm
2
2.5 mm
2
Material: Pin/ socket carrier Polyamide
Polyamide Polyamide
Contacts Brass (Ms)
Brass (Ms)
Brass, tin plated or gold plated (option)
1)Suitable for copper wires. For aluminium wires, please contact AUMA
Table 2: Technical data AUMA plug/ socket connector for bus connection
Figure B-2: Parking frame (accessory)
7.2 Bus connection (standard) For explosion-proof version (type designation: AMExB/ AMExC), please
refer to page 15 or page 17.
For version with FO (fibre optics), refer to separate operation instructions
“AUMA MATIC AM 01.1/ AM 02.1 FO connection”.
.
Connect bus cable. Refer to figures C-1 and C-4.
The termination resistors for channel 1 and channel 2 are switched in via
switches (S1) and (S2). Both switches are supplied in position ‘OFF’.
Only switch on the termination resistors (position ‘ON’) if the
actuator is the final device in the Modbus segment.
12
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Modbus Operation instructions
S1
ON Bus termination channel 1 ON
OFF Bus termination channel 1 OFF
S2
ON Bus termination channel 2 ON (option)
OFF Bus termination channel 2 OFF (option)
Table 3: Switch positions of S1 and S2
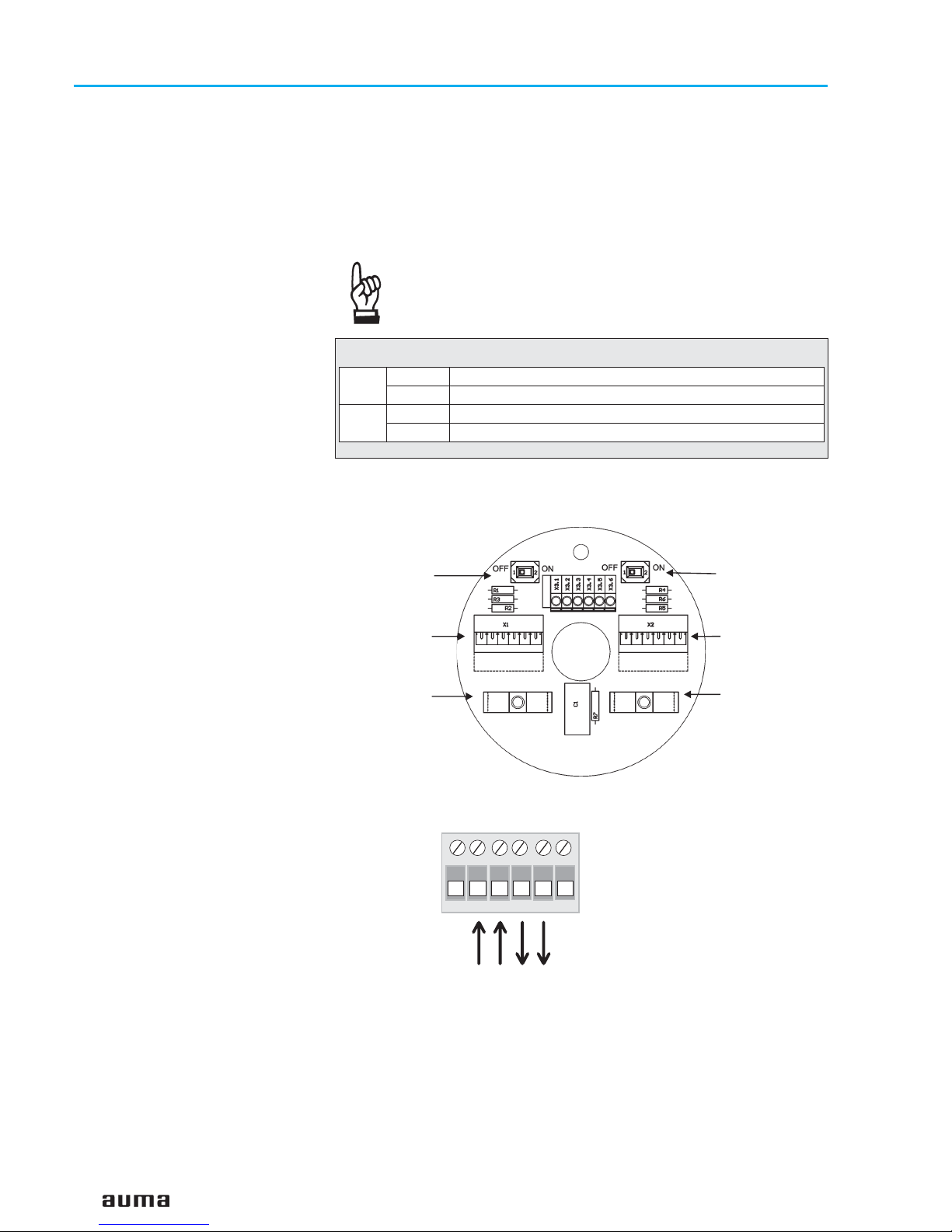
Figure C-1: Connection board (standard)
S1
Bus termination
channel 1
Connection
channel 1
Screening
S2
Bus termination
channel 2
(ption)
Connection
channel 2
(redundant)
Screening
X1
P/B
N/A
N/A
5V
P/B
GND
B
A
B
Figure C-2: Connection (standard)
from previous / to next
Modbus device
channel 1
7.3 Fitting the cover After connection:
.
Insert the socket carrier (51.0) into the plug cover (50.0) and fasten it with
screws (51.01).
.
Clean sealing faces at the plug cover and the housing.
.
Check whether O-ring is in good condition.
.
Apply a thin film of non-acidic grease (e.g. Vaseline) to the sealing faces.
.
Replace plug cover (50.0) and fasten bolts (50.01) evenly crosswise.
.
Fasten cable glands with the specified torque to ensure the required
enclosure protection.
13
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Operation instructions Modbus
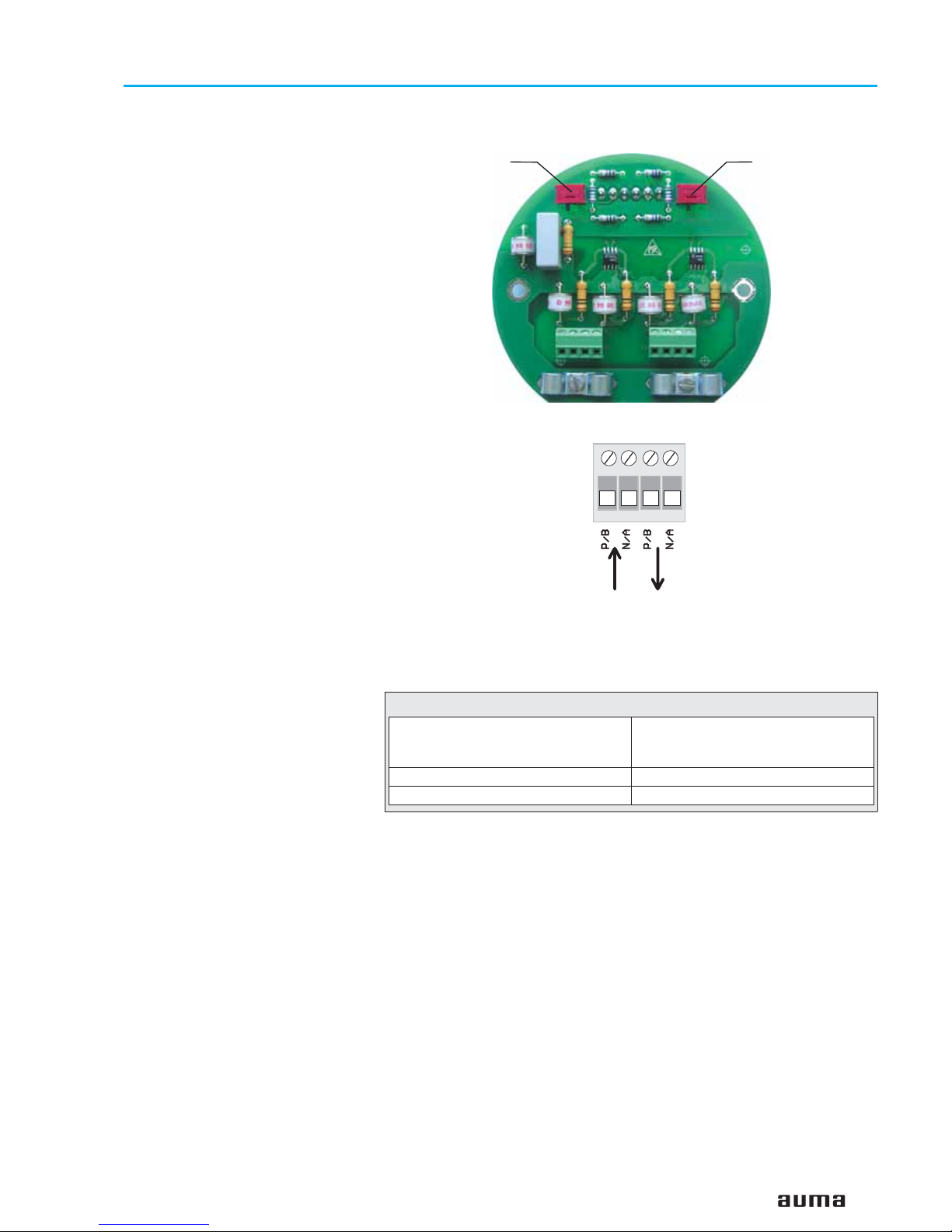
Figure C-3: Connection board (for overvoltage protection)
S1
Bus termination
channel 1
S2
Bus termination
channel 2
X1
1234
Figure C-4: Connection for overvoltage protection
Modbus
cable
AUMA
labelling at the
connection
A N/A
B P/B
Table 4: Assignment of Modbus cable
from previous / to next
Modbus device
channel 1
7.4 Remote position transmitter For the connection of remote position transmitters (potentiometer, RWG)
screened cables must be used.
7.5 AUMA MATIC on wall bracket The AUMA MATIC can also be mounted separately from the actuator on a
wall bracket.
.
For the connection of actuator and AUMA MATIC on wall bracket, use suitable flexible and screened connecting cables.
(Preconfectioned cables can be obtained from AUMA on request)
.
Permissible cable distance between actuator and AUMA MATIC amounts
to a max. of 100 m.
.
Versions with potentiometer in the actuator are not suitable. Instead of the
potentiometer, an RWG has to be used in the actuator.
.
Connect the wires in correct phase sequence.
Check direction of rotation before switching on.
The plug connection on the wall bracket is made as crimp version.
Use a suitable four indent crimp tool for crimping.
Cross sections for flexible wires:
Control cables: max. 0.75 to 1.5 mm²
Power supply: max. 2.5 to 4 mm²
The connector at the actuator is equipped with screw type connections.
Wire end sleeves have to be used.
7.6 Test run Perform test run. Please refer to the operation instructions pertaining to the
actuator (multi-turn actuator SA(R) ... / part-turn actuator SG ...).
Check limit and torque switching:
Check limit and torque switching, electronic position transmitter RWG or
potentiometer (option) and re-set where appropriate.
The settings are described in the operation instructions pertaining to the
actuator (multi-turn actuator SA(R) ... part-turn actuator SG ... ).
For actuators with feedback signal (RWG, potentiometer), a reference operation has to be performed after having changed the setting.
Perform reference operation:
.
Operate actuator electrically (via the push buttons OPEN and CLOSE of
the local controls) once to the end position OPEN and once to the end
position CLOSED.
.
If no reference operation is performed after changing the limit switching,
the feedback signal via the bus is not correct. The bus signals the missing
reference operation as warning (see page 28).
14
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Modbus Operation instructions
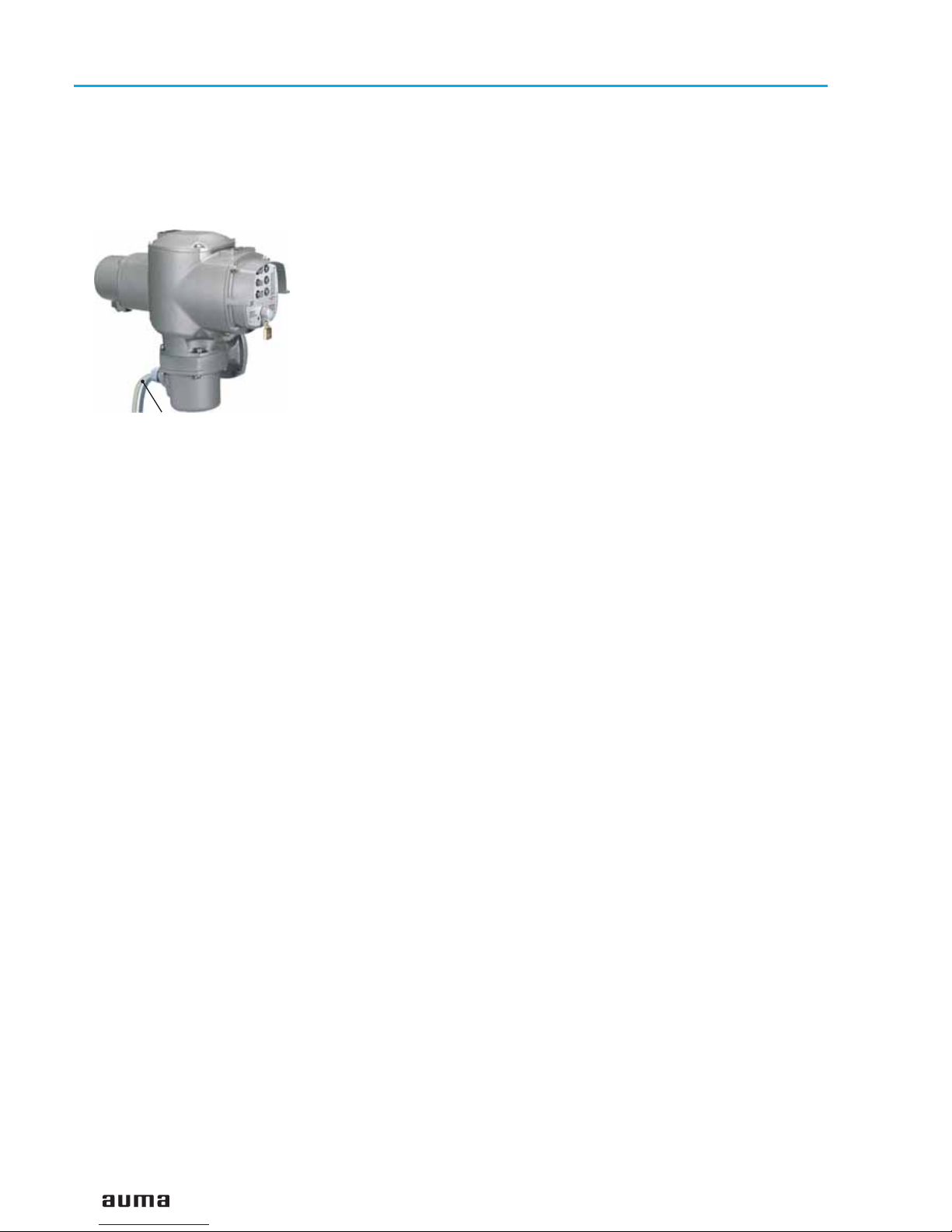
Figure C-5: AM on wall bracket
Connecting cable to actuator
7.7 Mains and bus connection for Ex-version with plug/ socket connector / terminal board (KP)
When working in potentially explosive areas, observe the
European Standards EN 60079-14 “Electrical installations in
hazardous areas” and EN 60079-17 “Inspection and maintenance of electrical installations in hazardous areas”.
For the Ex-plug/ socket connector (figure D-1), the electrical mains connection is made after removing the plug cover (50.0) at the EEx e terminals of
the terminal board (51.0). The flameproof compartment (type of protection
EEx d) remains hereby closed.
.
Check whether type of current, supply voltage, and frequency correspond
to motor data (refer to name plate at motor).
.
Loosen bolts (50.01) (figure D-1) and remove plug cover.
.
Insert cable glands with “EEx e” approval and of size suitable for connecting cables. For the recommended cable
glands refer to appendix D, page 57.
(The enclosure protection stated on the name plate is only
ensured if suitable cable glands are used).
.
Seal cable entries which are not used with suitable plugs.
.
No more than max. 2 wires with the same cross section
may be connected to one terminal.
.
Remove cable sheathing in a length of 120 – 140 mm.
Strip wires: Controls max. 8 mm, motor max. 12 mm.
For stranded wires use end-sleeves according to DIN 46228.
.
Connect bus cable. Refer to figure (D-3).
The termination resistor for channel 1 is connected through linking the
terminals 1 – 4 and 3 – 2 (standard).
.
Only connect the termination resistor if the actuator is the final device in
the Modbus segment.
.
Connect screen largely to the cable glands. For the recommended cable
glands refer to appendix D, page 57.
If the actuator must be taken from the valve, e.g. for service purposes, it can
be separated from the mains without having to remove the wiring
(figure D-2). For this purpose, the screws (51.02) are removed and the plug/
socket connector is pulled off. Plug cover (50.0) and terminal board (51.0)
remain together.
Flameproof enclosure! Before opening, ensure that no
explosive gas and no voltage is present.
A special parking frame (figure D-2) for protection against touching the bare
contacts and against environmental influences is available.
15
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Operation instructions Modbus
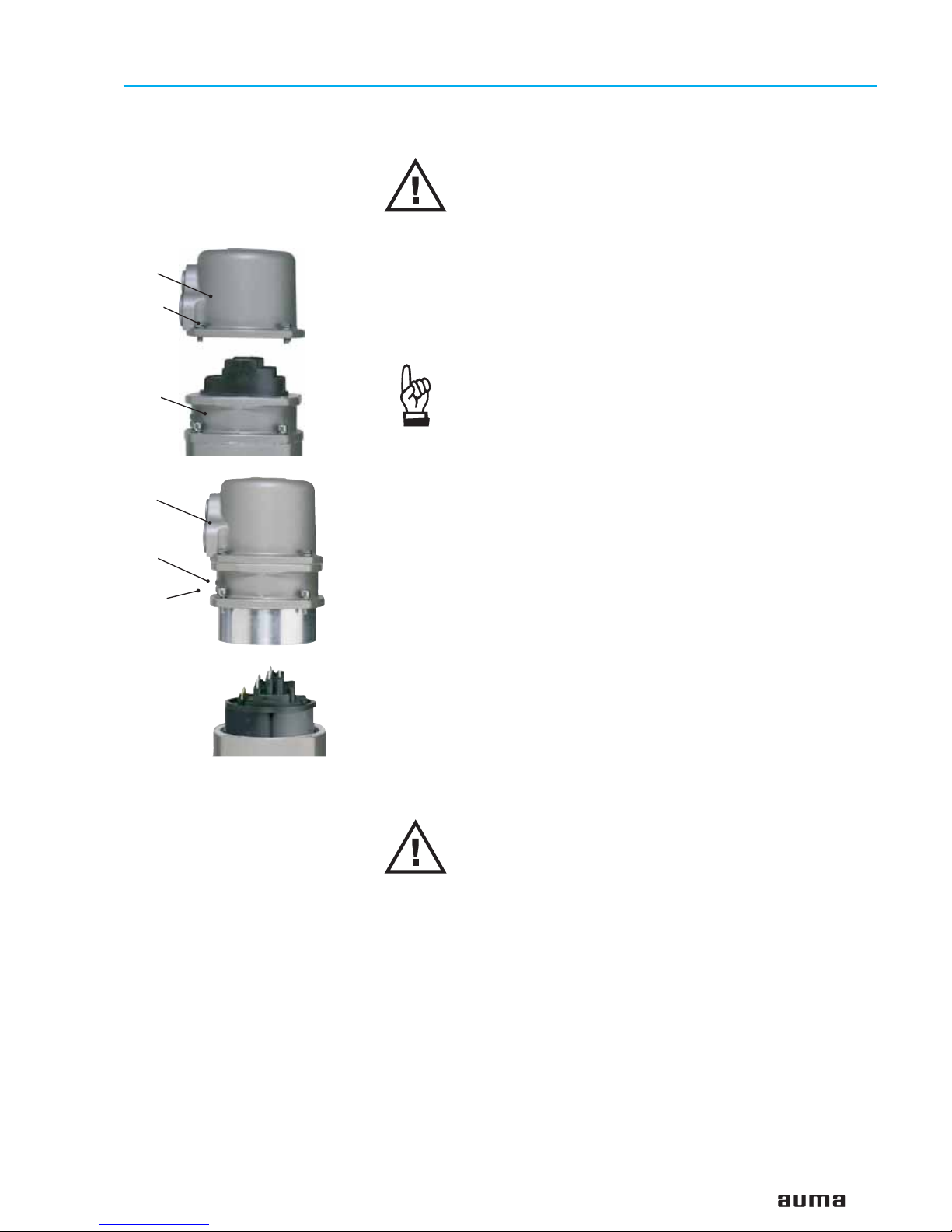
Figure D-1: Connection
50.0
50.01
51.0
Figure D-2: Disconnection from the mains
50.0
51.0
51.02
16
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Modbus Operation instructions
Figure D-3: Bus connection for channel 1 (standard)
Another bus device follows the actuator
Actuator is final bus device
from previous
Modbus device
channel 1
to next
Modbus device
channel 1
Technical data Motor power connections
1)
Protective earth Control terminals
No. of contacts max. 3 1 (leading contact) 38 pins/ sockets
Marking U1, V1, W1 1 to 24, 31 to 50
Connecting voltage max. 550 V – 250 V
Nominal current max. 25 A – 10 A
Type of customer connection Screws Screws Screws
Cross section max. 6 mm
2
6 mm
2
1.5 mm
2
Material: Pin/ socket carrier Araldite/ Polyamide Araldite/ Polyamide Araldite/ Polyamide
Contacts Brass (Ms) Brass (Ms) Brass (Ms) tin-plated
1)Suitable for copper wires. For aluminium wires, please contact AUMA
Table 5: Technical data Ex plug/ socket connector with terminal board for explosion-proof actuators

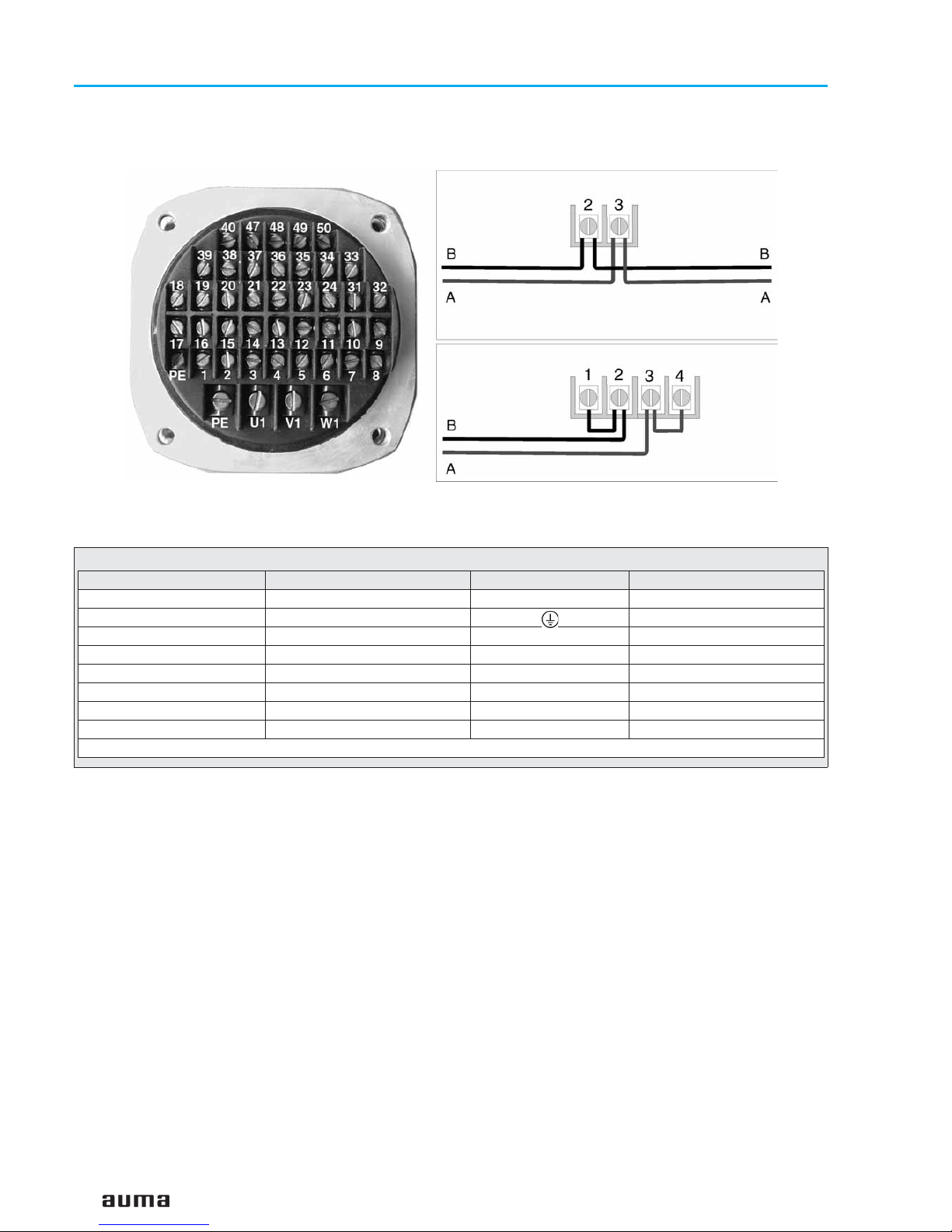
7.8 Mains and bus connection for Ex-version with plug-in terminal connection (KES)
When working in potentially explosive areas, observe the
European Standards EN 60079-14 “Electrical installations in
hazardous areas” and EN 60079-17 “Inspection and maintenance of electrical installations in hazardous areas”.
The bus connection is realised via terminals (figure E-1) The terminal
compartment is designed for explosion protection “EEx e” (increased
safety). The controls AUMA MATIC (type of protection EEx d) remain closed.
.
Loosen bolts (1) (figure E-1) and remove terminal cover.
.
Insert cable glands with “EEx e” approval and of size suitable for connecting cables. For the recommended cable
glands refer to appendix D, page 57.
(The enclosure protection stated on the name plate is only
ensured if suitable cable glands are used).
.
Seal cable entries which are not used with suitable plugs.
Cross sections for connection:
Control cables: max. 2.5 mm
2
Motor connection: max. 10 mm2,
Suitable bus cables, see page 19.
.
Connect bus cable to channel 1 according to configuration of the terminals (figure E-2).
The termination resistor for channel 1 is connected through linking the
terminals 1 – 2 and 3 – 4.
.
Only connect the termination resistors if the actuator is the final device in
the Modbus segment.
17
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Operation instructions Modbus
Figure E-1: Plug-in terminal
connection
Terminal
cover
Terminals
Terminal
board
Figure E-2: Terminal configuration for Ex connection (KES)
Another bus device
follows the actuator
Previous Next
Modbus device Modbus device
Actuator is last
bus device
Previous
Modbus device

7.9 Redundant bus connection AUMA Modbus devices can be connected with a second (redundant)
Modbus cable. If the bus on channel 1 fails, e. g. through cable break, the
slave automatically switches to channel 2 after a waiting time.
Thus, the change-over is realised with a time delay (see parameter 5
“Time for channel changing in 0.1s”, page 35).
Additionally, the communication cannot be carried out on both channels
simultaneously.
If the redundancy is activated (see parameter 4 “Redundancy”, page 34),
the AUMA MATIC transmits its data using both channels but receives the
data only using the active channel.
This cable redundancy may only be applied after previous
integration test using the desired process control system!
.
For versions with AUMA plug/ socket connector (subclause 7.2):
Connect redundant bus cable to channel 2 in the same way as channel 1
(figure C-2).
.
For Ex-version with plug/ socket connector / terminal board (KP)
(subclause 7.7):
Connect cable B to terminal 6, cable A to terminal 7.
The termination resistor for channel 2 is connected through linking the
terminals 5 – 6 and 7 – 8.
.
For Ex-version with plug-in terminal connection (KES)
(subclause 7.8):
Connect cable B to terminal 6, cable A to terminal 7 (figure E-2).
The termination resistor for channel 2 is connected through linking the
terminals 5 – 6 and 7 – 8.
The setting of the redundant bus connection is realised via the parameters
4 and 5 (refert to pages 34, 35).
18
Actuator controls AUMA MATIC AM/ AMExB/ AMExC
Modbus Operation instructions
 Loading...
Loading...