

Dual Channel, Gain-Ranging
a
FEATURES
Dual IF Inputs, 70 MHz–250 MHz
Diversity or Two Independent IF Signals
Separate Attenuation Paths
Oversample RF Channels
20 MSPS on a Single Carrier
10 MSPS/Channel in Diversity Mode
Total Signal Range 90+ dB
30 dB from Automatic Gain-Ranging (AGC)
60 dB from A/D Converter
Range >100 dB After Processing Gain
Digital Outputs
11-Bit ADC Word
3-Bit RSSI Word
2 Clock, A/B Indicator
Single 5 V Power Supply
Output DVCC 3.3 V or 5 V
775 mW Power Dissipation
APPLICATIONS
Communications Receivers
PCS/Cellular Base Stations
GSM, CDMA, TDMA
Wireless Local Loop, Fixed Access
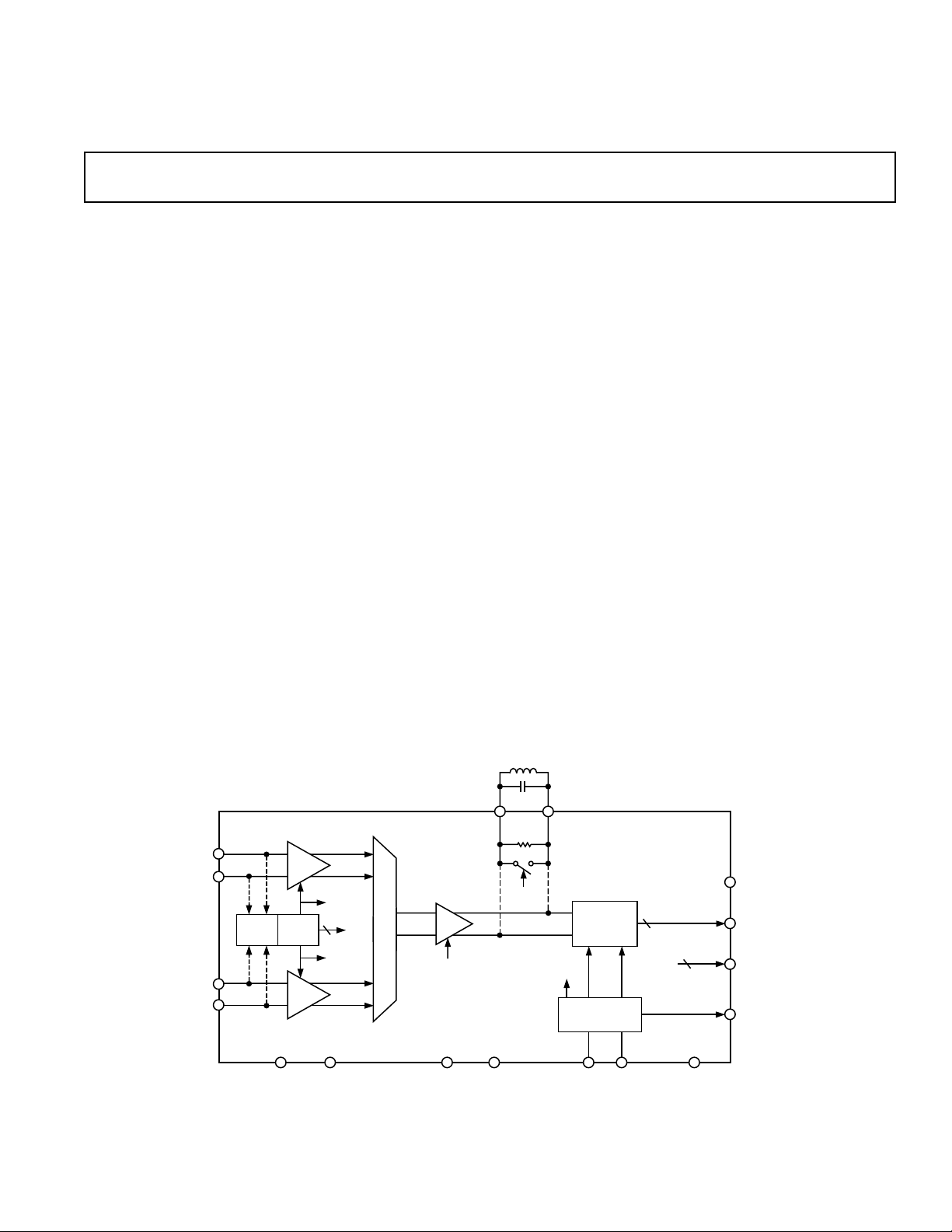
PRODUCT DESCRIPTION
The AD6600 mixed-signal receiver chip directly samples signals
at analog input frequencies up to 250 MHz. The device includes
ADC with RSSI
AD6600
two input channels, each with 1 GHz input amplifiers and
30 dB of automatic gain-ranging circuitry. Both channels are
sampled with a 450 MHz track-and-hold followed by an 11-bit,
20 MSPS analog-to-digital converter. Digital RSSI outputs, an
A/B channel indicator, a 2× Clock output, references, and control circuitry are all on-chip. Digital output signals are two’s
complement, CMOS-compatible and interface directly to
3.3 V or 5 V digital processing chips.
The primary use for the dual analog input structure is sampling
both antennas in a two-antenna diversity receiver. However,
Channels A and B may also be used to sample two independent
IF signals. Diversity, or dual-channel mode, is limited to 10 MSPS
per channel. In single-channel mode, the full clock rate of
20 MSPS may be applied to a single carrier.
The AD6600 may be used as a stand-alone sampling chip, or it
may be combined with the AD6620 Digital Receive Signal Processor. The AD6620 provides 10 dB–25 dB of additional processing gain before passing data to a fixed- or floating-point DSP.
Driving the AD6600 is simplified by using the AD6630 differential IF amplifier. The AD6630 is easily matched to inexpensive
SAW filters from 70 MHz to 250 MHz.
Designed specifically for cellular/PCS receivers, the AD6600
supports GSM, IS-136, CDMA and Wireless LANs, as well as
proprietary air interfaces used in WLL/fixed-access systems.
Units are available in plastic, surface-mount packages (44-lead
LQFP) and specified over the industrial temperature range
(–40°C to +85°C).
FUNCTIONAL BLOCK DIAGRAM
0dB, –12dB, –24dB
AIN
AIN
DETECT
BIN
BIN
ATTEN
SET
PEAK
RSSI
ATTEN
0dB, –12dB, –24dB
GAIN
3
GAIN
RSSI
+12, +18dB
ANALOG MUX
SELECT GAIN
GAIN
AD6600
REV. 0
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
NOISE FILTER
FLT FLT
630
ENCODE
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 World Wide Web Site: http://www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 2000
RESONANT
ENCODE
PORT
A/D
CONVERTER
TIMING
TWO'S
COMPLEMENT
11
3
RSSI
DVCCENCENCGNDAVCCB_SELA_SEL
AB_OUT
D10–D0
RSSI [2:0]
CLK2
AD6600–SPECIFICATIONS
DC SPECIFICATIONS
(AVCC = 5 V, DVCC = 3.3 V; T
= –40C, T
MIN
= +85C unless otherwise noted.)
MAX
Test AD6600AST
Parameter Temp Level Min Typ Max Unit
ANALOG INPUTS (AIN, AIN/BIN, BIN)
Differential Analog Input Voltage Range
Differential Analog Input Resistance
1
2
Full V 2.0 V p-p
Full IV 160 200 240 Ω
Differential Analog Input Capacitance 25°C V 1.5 pF
PEAK DETECTOR (Internal), RSSI
Resolution 3 Bits
RSSI Gain Step Full V 6 dB
RSSI Hysteresis
3
Full V 6 dB
RESONANT PORT (FLT, FLT)
Differential Port Resistance Full V 630 Ω
Differential Port Capacitance Full V 1.75 pF
A/D CONVERTER
Resolution Full IV 11 Bits
ENCODE INPUTS (ENC, ENC)
Differential Input Voltage (AC-Coupled)
4
Full IV 0.4 V p-p
Differential Input Resistance 25°CV 11 kΩ
Differential Input Capacitance 25°C V 2.5 pF
A/B MODE INPUTS (A_SEL, B_SEL)
5
Input High Voltage Range Full IV 4.75 5.25 V
Input Low Voltage Range Full IV 0.0 0.5 V
POWER SUPPLY
Supply Voltages
AVCC Full II 4.75 5.0 5.25 V
DVCC Full IV 3.0 3.3 5.25 V
Supply Current
I
(AVCC = 5.0 V) Full II 145 182 mA
AVCC
I
(DVCC = 3.3 V) Full II 15 20 mA
DVCC
POWER CONSUMPTION
NOTES
1
Analog Input Range is a function of input frequency. See ac specifications for 70 MHz–250 MHz inputs.
2
Analog Input Impedance is a function of input frequency. See ac specifications for 70 MHz–450 MHz inputs.
3
Six dB of digital hysteresis is used to eliminate level uncertainty at the RSSI threshold points due to noise and amplitude variations.
4
Encode inputs should be ac-coupled and driven differentially. See Encoding the AD6600 for details.
5
A_SEL and B_SEL should be tied directly to ground or AVCC.
6
Maximum power consumption is computed as maximum current at nominal supplies.
Specifications subject to change without notice.
6
Full II 775 976 mW
DIGITAL SPECIFICATIONS
(AVCC = 5 V, DVCC = 3.3 V; T
= –40C, T
MIN
= +85C unless otherwise noted.)
MAX
Test AD6600AST
Parameter Temp Level Min Typ Max Unit
LOGIC OUTPUTS (D10–D0, AB_OUT, RSSI2–0)
1
Logic Compatibility CMOS
Logic “1” Voltage (DVCC = 3.3 V) Full II 2.8 DVCC – 0.2 V
Logic “0” Voltage (DVCC = 3.3 V) Full II 0.2 0.5 V
Logic “1” Voltage (DVCC = 5.0 V) Full IV 4.0 DVCC – 0.35 V
Logic “0” Voltage (DVCC = 5.0 V) Full IV 0.35 0.5 V
Output Coding (D10–D0) Two’s Complement
CLK2× OUTPUT
1, 2
Logic “1” Voltage (DVCC = 3.3 V) Full II 2.8 DVCC – 0.2 V
Logic “0” Voltage (DVCC = 3.3 V) Full II 0.2 0.5 V
Logic “1” Voltage (DVCC = 5.0 V) Full IV 4.0 DVCC – 0.3 V
Logic “0” Voltage (DVCC = 5.0 V) Full IV 0.35 0.5 V
NOTES
1
Digital output load is one LCX gate.
2
CLK2× output voltage levels, high and low, tested at switching rate of 10 MHz.
Specifications subject to change without notice.
–2–
REV. 0
AD6600
TIMING REQUIREMENTS AND SWITCHING SPECIFICATIONS
(AVCC = 5 V, DVCC = 3.3 V; ENC and ENC = 20 MSPS; T
Parameter Name Temp Level Min Typ Max Unit
A/D CONVERTER
Conversion Rate f
Maximum Conversion Rate Full II 20 MSPS
Minimum Conversion Rate Full IV 6 MSPS
Aperture Uncertainty t
ENCODE INPUTS (ENC, ENC)
Period t
Pulsewidth High
Pulsewidth Low
3
4
2× CLOCK OUTPUT (CLK2×)
Output Frequency 2× f
Output Period
CLK2× Pulsewidth Low
Output Risetime
Output Falltime
6
6
7
7
OUTPUT RISE/FALL TIMES
2
t
t
5
t
t
t
8
Output Risetime (D10:D0, RSSI2:0) Full V 8 ns
Output Falltime (D10:D0, RSSI2:0) Full V 8.4 ns
Output Risetime (AB_OUT) Full V 6 ns
Output Falltime (AB_OUT) Full V 6.2 ns
NOTES
1
See AD6600 Timing Diagrams.
2
All switching specifications tested by driving ENC and ENC differentially.
3
Several timing specifications are a function of Encode high time, t
should be kept as close to 50% as possible.
4
Encode pulse low directly affects the amount of settling time available at FLT resonant port. See External Analog (Resonant) Filter section for details.
5
The 2× Clock is generated internally, therefore some specifications are functions of encode period and duty cycle. All timing measurements to or from CLK2 × are
referenced to 2.0 V crossing.
6
This specification IS a function of Encode period and duty cycle; reference timing diagrams Figure 8.
7
Output rise time is measured from 20% point to 80% point of total CLK2× voltage swing; output fall time is measured from 80% point to 20% point of total CLK2×
voltage swing.
8
Output rise time is measured from 20% point to 80% point of total data voltage swing; output fall time is measured from 80% point to 20% point of total data voltage
swing. All outputs specified with 10 pF load.
Specifications subject to change without notice.
MIN
ENC
j
ENC
ENCH
ENCL
CLK2×_1
CLK2×_2
CLK2×L
= –40C, T
= +85C unless otherwise noted.)
MAX
Test AD6600AST
25°C V 0.3 ps rms
Full II 50 ns
Full IV 20 ns
Full IV 20 ns
Full V t
Full V t
Full V t
Full V 3 ns
Full V 2.6 ns
; these specifications are shown in the data tables and timing diagrams. Encode duty cycle
ENCH
1
1/(t
) MSPS
ENC
ENC
ENCL
ENCH
/2 ns
ENCH
MSPS
ns
ns
REV. 0 –3–

AD6600–SPECIFICATIONS
TIMING REQUIREMENTS AND SWITCHING SPECIFICATIONS
(AVCC = 5 V, DVCC = 3.3 V; ENC and ENC = 20 MSPS, Duty Cycle = 50%; T
Parameter Name Temp Level Min Typ Max Unit
ENCODE/CLK2×
Encode Rising to CLK2× Falling
Encode Rising to CLK2× Rising
3
4
t
CF
t
CR
@ Encode = 13 MSPS, 50% Duty Cycle Full IV 25.7 27.2 28.7 ns
@ Encode = 20 MSPS, 50% Duty Cycle Full IV 19.0 20.5 22.0 ns
CLK2×/DATA (D10:0, RSSI2:0)
CLK2× to DATA Rising Low Delay
CLK2× to DATA Hold Time
CLK2× to DATA Falling Low
CLK2× to DATA Setup Time
@ Encode = 13 MSPS, 50% Duty Cycle Full IV 16.5 23.0 ns
@ Encode = 20 MSPS, 50% Duty Cycle
CLK2×/AB_OUT
5
CLK2× to AB_OUT Rising Low Delay
CLK2× to AB_OUT Hold Time
CLK2× to AB_OUT Falling Low Delay
CLK2× to AB_OUT Setup Time
@ Encode = 13 MSPS, 50% Duty Cycle Full IV 12.5 19.5 ns
@ Encode = 20 MSPS, 50% Duty Cycle
ENCODE/DATA (D10:0, RSSI2:0)
ENCODE to DATA Rising Low Delay
ENCODE to DATA Hold Time
5
3
3
3, 6
4
3
3
3, 6
4
4
4
t
2×_DRL
t
H_D2×
t
2×_DFL
t
S_D2×
6
t
2×_ARL
t
H_A2×
t
2×_AFL
t
S_A2×
6
t
EN_DRL
t
H_DEN
@ Encode = 13 MSPS, 50% Duty Cycle Full IV 28.7 33.7 ns
@ Encode = 20 MSPS, 50% Duty Cycle Full IV 22.0 27.0 ns
ENCODE to DATA Falling Low Delay
ENCODE to DATA Delay (Setup)
@ Encode = 13 MSPS, 50% Duty Cycle Full IV 26.2 34.2 ns
@ Encode = 20 MSPS, 50% Duty Cycle
4
4
t
EN_DFL
t
S_DEN
6
ENCODE/AB_OUT
ENCODE to AB_OUT Rising Low Delay4t
ENCODE to AB_OUT Delay (Hold)
4
EN_ARL
t
H_AEN
@ Encode = 13 MSPS, 50% Duty Cycle Full IV 32.7 38.2 ns
@ Encode = 20 MSPS, 50% Duty Cycle Full IV 26.0 31.5 ns
ENCODE to AB_OUT Falling Low Delay
ENCODE to AB_OUT Delay (Setup)
@ Encode = 13 MSPS, 50% Duty Cycle Full IV 22.2 30.7 ns
@ Encode = 20 MSPS, 50% Duty Cycle
NOTES
1
See AD6600 Timing Diagrams.
2
All switching specifications tested by driving ENC and ENC differentially.
3
This specification IS NOT a function of Encode period and duty cycle.
4
This specification IS a function of Encode period and duty cycle.
5
CLK2× referenced to 2.0 V crossing; digital output levels referenced to 0.8 V and 2.0 V crossings; all outputs with 10 pF load.
6
For these particular specifications, the 25°C specification is valid from 25°C to 85°C. The Full temperature specification includes cold temperature extreme and
covers the entire range, –40°C to +85°C.
Specifications subject to change without notice.
4
t
4
EN_AFL
t
S_AEN
6
= –40C, T
MIN
Test AD6600AST
Full IV 6.5 8.0 9.5 ns
Full IV tCF + (t
Full IV 3.0 6.5 ns
Full IV 3.0 6.5 ns
25°C IV 10.0 15.0 20.0 ns
Full IV 11.0 15.5 22.0 ns
Full IV t
25°C IV 5.0 10.0 ns
Full IV 3.0 9.5 ns
Full IV 7.0 11.0 ns
Full IV 7.0 11.0 ns
25°C IV 12.0 18.0 23.0 ns
Full IV 10.7 19.0 26.0 ns
Full IV t
25°C IV 2.0 7.0 ns
Full IV –1.0 6.0 ns
Full IV tCR + t
Full IV t
Full IV tCR + t
Full IV t
25°C IV 8.0 14.5 ns
Full IV 6.0 14.0 ns
Full IV tCR + t
Full IV t
Full IV tCR + t
Full IV t
25°C IV 5.0 11.5 ns
Full IV 2.0 10.5 ns
1, 2
= +85C unless otherwise noted.)
MAX
ENCH
– t
ENCH
– t
ENCH
EN_DRL
– t
ENC
EN_ARL
– t
ENC
2×_DFL
2×_AFL
2×_DRL
2×_DFL
EN_DFL
2×_ARL
2×_AFL
EN_AFL
)/2 ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
–4–
REV. 0
AD6600
(AVCC = 5 V, DVCC = 3.3 V; ENC and ENC = 20 MSPS, Duty Cycle = 50%; T
AC SPECIFICATIONS
otherwise noted.)
Test AD6600AST
Parameter Temp Level Min Typ Max Unit
ANALOG INPUTS
Analog Input 3 dB Bandwidth
1
2
Full V 450 MHz
Differential Analog Input Voltage Range
70 MHz Full V 2.45 V p-p
150 MHz Full V 2.57 V p-p
200 MHz Full V 2.62 V p-p
250 MHz Full V 2.86 V p-p
Differential Analog Input Impedance
3
70 MHz 25°C V 197–j24 Ω
150 MHz 25°C V 188–j48 Ω
200 MHz 25°C V 175–j57 Ω
250 MHz 25°C V 161–j67 Ω
300 MHz 25°C V 151–j73 Ω
350 MHz 25°C V 140–j80 Ω
400 MHz 25°C V 141–j75 Ω
450 MHz 25°C V 173–j107 Ω
Full-Scale Input Power
70 MHz Full V 5.8 dBm
150 MHz Full V 6.3 dBm
200 MHz Full V 6.7 dBm
250 MHz Full V 7.7 dBm
Full-Scale Gain Tolerance
70 MHz–250 MHz Full V ± 0.5 dB
200 MHz
5
4
25°C I –1.0 ±0.1 +1.0 dB
Gain Error
AIN = 200 MHz
@ –76 dBFS 25°C I –1.5 +1.5 dB
Gain Matching (Input A:B)
70 MHz–250 MHz Full V ± 0.1 dB
200 MHz Full II –0.5 ±0.05 +0.5 dB
Range-to-Range Gain Tolerance
70 MHz–250 MHz Full V ± 0.1 dB
Range-to-Range Phase Tolerance
70 MHz Full V 0.2 Degree
250 MHz Full V 0.5 Degree
Channel Isolation
70 MHz–250 MHz Full IV 45 50 dB
7
Noise
6
Minimum Attenuation Level Full V 34 µV rms
Maximum Attenuation Level Full V 869 µV rms
Attenuator 3OIP
Signal-to-Noise Ratio (SNR)
8
9, 10, 11
Full V +33 dBm
AIN = 70 MHz
@ –1 dBFS 25°CIV5559 dB
@ –6 dBFS 25°C V 54.5 dB
@ –10 dBFS 25°CIV4549 dB
@ –12 dBFS to –42 dBFS 25°C IV 41 48 ±6dB
@ –54 dBFS 25°CIV3134 dB
AIN = 150 MHz
@ –1 dBFS 25°CIV5558 dB
@ –6 dBFS 25°CV 54 dB
@ –10 dBFS 25°CIV4549 dB
@ –12 dBFS to –42 dBFS 25°C IV 41 48 ±6dB
@ –54 dBFS 25°CIV3134 dB
= –40C, T
MIN
= +85C unless
MAX
REV. 0 –5–
AD6600–SPECIFICATIONS
AC SPECIFICATIONS (continued)
Test AD6600AST
Parameter Temp Level Min Typ Max Unit
ANALOG INPUTS (Continued)
Signal-to-Noise Ratio (Continued)
AIN = 200 MHz
@ –1 dBFS 25°C I 55 57.5 dB
@ –6 dBFS 25°C V 53.5 dB
@ –10 dBFS 25°C I 45 49 dB
@ –12 dBFS to –42 dBFS 25°C I 40.5 48 ± 6dB
@ –54 dBFS 25°C I 31 34 dB
AIN = 250 MHz
@ –1 dBFS 25°CIV5256 dB
@ –6 dBFS 25°C V 53.5 dB
@ –10 dBFS 25°CIV4349 dB
@ –12 dBFS to –42 dBFS 25°C IV 40 48 ±6dB
@ –54 dBFS 25°CIV3034 dB
SECOND HARMONIC
AIN = 70 MHz
@ –1 dBFS Full V 69 dBc
@ –6 dBFS Full V 68 dBc
@ –12 dBFS to –42 dBFS Full V 68 ±6 dBc
AIN = 150 MHz
@ –1 dBFS Full V 60 dBc
@ –6 dBFS Full V 59 dBc
@ –12 dBFS to –42 dBFS Full V 67 ±6 dBc
AIN = 200 MHz
@ –1 dBFS 25°C I 50 60 dBc
@ –6 dBFS Full V 56 dBc
@ –10 dBFS 25°C I 48 55 dBc
@ –12 dBFS to –42 dBFS Full V 65 ±6 dBc
@ –54 dBFS Full V 50 dBc
AIN = 250 MHz
@ –1 dBFS Full V 54 dBc
@ –6 dBFS Full V 62 dBc
@ –12 dBFS to –42 dBFS Full V 65 ±6 dBc
THIRD HARMONIC
AIN = 70 MHz
@ –1 dBFS Full V 77 dBc
@ –6 dBFS Full V 76 dBc
@ –12 dBFS to –42 dBFS Full V 67 ±6 dBc
AIN = 150 MHz
@ –1 dBFS Full V 65 dBc
@ –6 dBFS Full V 70 dBc
@ –12 dBFS to –42 dBFS Full V 66 ±6 dBc
AIN = 200 MHz
@ –1 dBFS 25°C I 50 55 dBc
@ –6 dBFS Full V 58 dBc
@ –10 dBFS 25°C I 55 66 dBc
@ –12 dBFS to –42 dBFS Full V 65 ±6 dBc
@ –54 dBFS Full V 62 dBc
AIN = 250 MHz
@ –1 dBFS Full V 50 dBc
@ –6 dBFS Full V 56 dBc
@ –12 dBFS to –42 dBFS Full V 65 ±6 dBc
AIN = 70 MHz–250 MHz
@ –75 dBFS Full IV 28 35 dBc
9, 10, 11
9, 10, 11
–6–
REV. 0
AD6600
AC SPECIFICATIONS (continued)
Test AD6600AST
Parameter Temp Level Min Typ Max Unit
WORST OTHER SPUR (4th or Higher)
AIN = 70 MHz
@ –1 dBFS Full V 74.5 dBc
@ –6 dBFS Full V 71 dBc
@ –12 dBFS to –42 dBFS Full V 68 ±6 dBc
AIN = 150 MHz
@ –1 dBFS Full V 67 dBc
@ –6 dBFS Full V 65 dBc
@ –12 dBFS to –42 dBFS Full V 67 ±6 dBc
AIN = 200 MHz
@ –1 dBFS 25°C I 60 67 dBc
@ –6 dBFS Full V 66 dBc
@ –10 dBFS 25°C I 55 66 dBc
@ –12 dBFS to –42 dBFS Full V 65 ±6 dBc
AIN = 250 MHz
@ –1 dBFS Full V 66.5 dBc
@ –6 dBFS Full V 65 dBc
@ –12 dBFS to –42 dBFS Full V 65 ±6 dBc
NOTES
1
AIN, AIN/BIN, BIN: The AD6600 analog inputs are unconditionally stable and guarantee proper operation over the 70 MHz–250 MHz specified operating range.
Circuit board layout is critical on this device, and proper PCB layout must be employed to achieve specified results.
2
Analog Input 3 dB Bandwidth is determined by internal track-and-hold. The front-end attenuators have a bandwidth of 1 GHz.
3
Measured real and imaginary values using Network Analyzer.
4
Full-scale gain tolerance is the typical variation in gain at a given IF input frequency. The nominal value for full-scale input power is a function of frequency as
shown in previous specification.
5
Full-scale gain tolerance measured at 200 MHz analog input referenced to 6.7 dBm nominal full-scale input power. For the gain measurement test, the input signal
level is set to –6 dBFS. Tuning port bandwidth is set to 50 MHz.
6
Main channel set to full-scale input power. Diversity channel swept from –20 dBFS to –90 dBFS.
7
Measurement includes thermal and quantization noise at 70 MHz analog input. Tuning port bandwidth is set to 50 MHz.
8
Test tones at 160.05 MHz and 170.05 MHz.
9
Measurements at –1 dFBS, –6 dBFS, and –10 dBFS are in highest attenuation mode, RSSI = 101.
10
Each gain-range is checked at ~3 dB from RSSI trip point (not in hysteresis); nominally –16 dBFS (RSSI = 100), –22 dBFS (RSSI = 011), –28 dBFS (RSSI = 010),
–35 dBFS (RSSI = 001).
11
Measurement at –54 dBFS is in the lowest attenuation mode, RSSI = 000.
Specifications subject to change without notice.
REV. 0 –7–
AD6600
WARNING!
ESD SENSITIVE DEVICE
ABSOLUTE MAXIMUM RATINGS
1
Parameter Min Max Unit
ELECTRICAL
AVCC Voltage 0 7 V
DVCC Voltage 0 7 V
Analog Input Voltage
Analog Input Current
Digital Input Voltage
Output Current
Resonant Port Voltage
ENVIRONMENTAL
2
2
3
4
5
6
0 AVCC V
25 mA
0 AVCC V
4mA
0 AVCC V
Operating Temperature Range
(Ambient) –40 +85 °C
Maximum Junction Temperature 150 °C
Lead Temperature (Soldering, 10 sec) 300 °C
Storage Temperature Range (Ambient) –65 +150 °C
NOTES
1
Absolute maximum ratings are limiting values to be applied individually, and
beyond which the serviceability of the circuit may be impaired. Functional
operability is not necessarily implied. Exposure to absolute maximum rating
conditions for an extended period of time may affect device reliability.
2
Pins AIN, AIN, BIN, BIN.
3
Pins ENC, ENC, A_SEL, B_SEL.
4
Pins D10:0, RSSI2:0, AB_OUT, CLK2×.
5
Pins FLT, FLT.
6
Typical thermal impedance (44-lead LQFP); θJC = 16°C/W, θJA = 55°C/W.
EXPLANATION OF TEST LEVELS
Test Level
I. 100% Production Tested.
II. 100% Production Tested at 25°C and guaranteed by design
and characterization at temperature extremes.
IV. Parameter is guaranteed by design and characterization
testing.
V. Parameter is a typical value only.
ORDERING GUIDE
Temperature Package Package
Model Range Description Option
AD6600AST –40°C to 44-Terminal LQFP ST-44
+85°C (Low-Profile Quad
(Ambient) Plastic Flatpack)
AD6600ST/PCB Evaluation Board
with AD6600AST
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection. Although
the AD6600 features proprietary ESD protection circuitry, permanent damage may occur on devices
subjected to high-energy electrostatic discharges. Therefore, proper ESD precautions are recommended to avoid performance degradation or loss of functionality.
–8–
REV. 0

AD6600
PIN FUNCTION DESCRIPTIONS
Pin Number Name Function
1, 33 DVCC Digital VCC for Digital Outputs. Can be 3.3 V.
2, 5, 13, 19, 21, 24, 30, 32 GND Ground.
3 C1 Internal Bias Point. Bypass by 0.01 µF to GND.
4, 14, 15, 18, 20, 25, 31 AVCC 5 V Power Supply.
6–8 RSSI[2:0] RSSI Digital Output Bits.
9, 10 B_SEL, A_SEL Mode Select Pins for Analog Input Channel A and B Sampling.
11 AIN True Analog Input Channel A.
12 AIN Complementary Analog Input Channel A.
16, 17 FLT, FLT Resonant Filter Pins for External LC Noise Filter.
22 BIN Complementary Analog Input Channel B.
23 BIN True Analog Input Channel B.
26 ENC Complementary Encode Input.
27 ENC True Encode Input.
28 CLK2× 2× Clock Output Used for Clocking Digital Filter Chips.
29 AB_OUT Digital Output Flag Indicating Whether Output Is Input A (High) or B (Low).
34 D0 Digital Data Output Bit (Least Significant Bit)*.
35–43 D1–D9 Digital Data Output Bits*.
44 D10 Digital Data Output Bit (Most Significant Bit)*.
*Digital Outputs (D10:D0) in Two’s Complement Format.
PIN CONFIGURATION
DVCC
GND
AVCC
GND
RSSI2
RSSI1
RSSI0
B_SEL
A_SEL
AIN
D8
D6
D9
GND
D7
40 39 3841424344 36 35 3437
TOP VIEW
(Not to Scale)
AVCC
AVCC
AD6600
FLT
D10 (MSB)
1
PIN 1
IDENTIFIER
2
3
C1
4
5
6
7
8
9
10
11
121314 15 1 6 17 18 192021 22
AIN
D5
FLT
D4
AVCC
D3
GND
D2
AVCC
D1
GND
D0 (LSB)
33
32
31
30
29
28
27
26
25
24
23
BIN
DVCC
GND
AVCC
GND
AB_OUT
CLK2
ENC
ENC
AVCC
GND
BIN
REV. 0 –9–

AD6600
DEFINITIONS OF SPECIFICATIONS
Analog Bandwidth
The analog input frequency at which the spectral power of the
fundamental frequency (as determined by the FFT analysis) is
reduced by 3 dB. The bandwidth is determined by the internal
track-and-hold when the filter node is resonated.
Aperture Delay
The delay between the 50% point of the rising edge of the
ENCODE command and the instant at which the analog inputis sampled.
Aperture Uncertainty (Jitter)
The sample-to-sample variation in aperture delay.
Attenuator 3OIP
The third order intercept point of the front end of the AD6600.
It is the point at which the third order products would theoretically intercept the input signal level if the input level could increase
without bounds. This is measured using the ADC within the
AD6600 while the input is stimulated with dual tones in the
minimum attenuation (i.e., maximum gain) range.
Channel Isolation
The amount of signal leakage from one channel to the next
when one channel is driven with a full-scale input, and the other
channel is swept from –20 dBFS to –90 dBFS with a frequency
offset. The leakage is measured on the side with the smaller signal.
Differential Analog Input Resistance, Differential Analog
Input Capacitance and Differential Analog Input Impedance
The real and complex impedances measured at each analog
input port. The resistance is measured statically and the capacitance and differential input impedances are measured with a
network analyzer.
Differential Analog Input Voltage Range
The peak-to-peak differential voltage that must be applied to the
converter to generate a full-scale response. Peak differential
voltage is computed by observing the voltage on a single pin and
subtracting the voltage from the other pin, which is 180 degrees
out of phase. Peak-to-peak differential is computed by rotating
the inputs phase 180 degrees and taking the peak measurement
again. The difference is then computed between both peak
measurements.
Differential Nonlinearity
The deviation of any code width from an ideal 1 LSB step.
Differential Resonant Port Resistance
The resistance shunted across the resonant port (nominally
630 Ω). Used to determine the filter bandwidth and gain of
that stage.
Encode Pulsewidth/Duty Cycle
Pulsewidth high is the minimum amount of time that the
ENCODE pulse should be left in logic “1” state to achieve rated
performance; pulsewidth low is the minimum time ENCODE
pulse should be left in low state. See timing implications of
changing t
in text. At a given clock rate, these specifications
ENCH
define an acceptable Encode duty cycle.
Full-Scale Gain Tolerance
Unit-to-unit variation in full-scale input power.
Full-Scale Input Power
Expressed in dBm. Computed using the following equation:
2
Power
FULL SCALE
Gain Matching (Input A:B)
=
10
log
V
FULL SCALE rms
Z
INPUT
0 001
.
Variation in full-scale power between A and B inputs.
Harmonic Distortion, 2nd
The ratio of the rms signal amplitude to the rms value of the
second harmonic component, reported in dBc.
Harmonic Distortion, 3rd
The ratio of the rms signal amplitude to the rms value of the
third harmonic component, reported in dBc.
Integral Nonlinearity
The deviation of the transfer function from a reference line
measured in fractions of 1 LSB using a “best straight line”
determined by a least square curve fit.
Minimum Conversion Rate
The encode rate at which the SNR of the lowest analog signal frequency drops by no more than 3 dB below the guaranteed limit.
Maximum Conversion Rate
The encode rate at which parametric testing is performed.
Noise (For Any Range Within the ADC)
VZ
=× ×
0 001 10
NOISE
.
−−
FS SNR Signal
dBm dBc dBFS
10
where:
Z is the input impedance,
FS is the full-scale of the device for the frequency in question,
SNR is the value for the particular input level,
Signal is the signal level within the ADC reported in dB below
full scale. This value includes both thermal and quantization noise.
Range-Range Gain Tolerance
The gain error in the RSSI attenuator ladder from one range to
the next.
Range-Range Phase Tolerance
The phase error in the RSSI attenuator ladder from one range
to the next.
Differential Resonant Port Capacitance
The capacitance between the two resonant pins. Used to determine filter bandwidth and resonant frequency.
–10–
REV. 0

AD6600
RSSI Gain Step
The input amplitude span between taps of the RSSI (received
signal strength) attenuator ladder. Ideally each stage should
span 6 dB of input power.
RSSI Hysteresis
The amount of movement in the RSSI switch points, depending
on the direction of approach. Hysteresis prevents unnecessary
RSSI toggling when input signal power is near a threshold.
Signal-to-Noise Ratio (Without Harmonics)
The ratio of the rms signal amplitude (set at 1 dB below full
scale) to the rms value of the sum of all other spectral components, excluding the first five harmonics and dc.
Worst Other Spur
The ratio of the rms signal amplitude to the rms value of the
worst spurious component (excluding the second and third
harmonic) reported in dBc.
AD6600 TRANSFER FUNCTION
60
54
48
42
36
30
SNR – dB
24
18
12
6
0
–100
–80 –70 –60 –50 –40 –30 –20 –10
–90
AIN LEVEL – dBFS
Figure 1. SNR vs. Input Power
0
REV. 0
–11–

AD6600
EQUIVALENT CIRCUITS
AVCC
AIN
GND
AVCC
AIN
GND
ATTENUATOR STAGE
EQUIVALENT INPUT R
SHOWN ONLY
100
BUF GAINBUF
100
4/8 GAIN STAGE
V
REF
Figure 2. Analog Input Stage (Channel A Shown;
Channel B Is Equivalent)
AVCC
AVCC
A_SEL
GND
ISEL_A ISEL_B
BIAS
AVCC
B_SEL
GND
AVCC
GND
GND
AVCC
AVCC
GND
FROM
GAIN STAGE
EXTERNAL LC FILTER
FLT FLT
315 315
Figure 5. Resonant (LC Noise Filter) Port
AVCC
AVCC
R1
17k
1/2
ENCODE ENCODE
8k
1/2
R2
TIMING
CIRCUITS
R1
17k
1/2
R2
8k
1/2
AVCC
TO T/H
GND
Figure 3. A_SEL, B_SEL Input Mode Pins
DVCC
CURRENT
MIRROR
DVCC
V
CURRENT
MIRROR
REF
500
D10–D0
RSSI [2:0]
Figure 4. Digital Outputs
Figure 6. Encode Inputs
DVCC
CURRENT
MIRROR
DVCC
V
CURRENT
MIRROR
REF
CLK2
AB_OUT
Figure 7. CLK2⫻, AB_OUT Outputs
–12–
REV. 0

AD6600 TIMING DIAGRAMS
AD6600
ENCODE
CLK2
D [10:0]
RSSI [2:0]
AB_OUT
ENCODE
t
ENCH
t
CR1
t
t
CLK2L
CF1
CLK22 CLK21 CLK22 CLK21 CLK22
t
t
21_DRL
21_DFL
t
21_ARL
t
ENCL
t
CR2
t
t
CLK2L
CF2
t
CLK2H2
t
CLK22
t
ENC
t
CLK2H1
t
21_AFL
t
CLK21
Figure 8. Encode to CLK2⫻ Delays and CLK2⫻ Propagation Delays
t
ENCH
t
CR1
t
t
CLK2L
CF1
t
ENCL
t
CR2
t
t
CLK2L
CF2
t
CLK2H2
t
CLK22
t
ENC
t
CLK2H1
t
CLK21
CLK2
D [10:0]
RSSI [2:0]
AB_OUT
ENCODE
CLK2
D [10:0]
RSSI [2:0]
AB_OUT
CLK22 CLK21 CLK22 CLK21 CLK22
t
H_D2
t
H_A2
t
S_D2
t
S_A2
t
H_D2
t
H_A2
t
S_D2
t
S_A2
Figure 9. CLK2⫻ Setup-and-Hold Time Characteristics
t
ENCH
ENCODE ENCODE ENCODE
t
CR1
t
t
CLK22 CLK21 CLK22 CLK21 CLK22
CF1
CLK2L
t
EN_DRL
t
t
EN_DFL
EN_ARL
t
ENCL
t
CR2
t
t
CF2
CLK2L
t
CLK2H2
t
CLK22
t
EN_AFL
t
ENC
t
CLK2H1
t
CLK21
REV. 0
Figure 10. Encode to CLK2⫻ Delays and Encode Propagation Delays
–13–

AD6600
ENCODE
CLK2
D [10:0]
RSSI [2:0]
AB_OUT
t
ENCH
ENCODE ENCODE ENCODE
t
CR1
CF1
t
CLK2L
t
H_DEN
t
H_AEN
t
CLK22 CLK21 CLK22 CLK21 CLK22
t
ENCL
t
CR2
t
t
CF2
CLK2L
t
S_DEN
t
S_AEN
t
CLK2H2
t
CLK22
t
H_DEN
t
H_AEN
t
ENC
t
CLK2H1
t
CLK21
t
S_DEN
t
S_AEN
Figure 11. Encode Setup-and-Hold Time Characteristics
3 2.6
CLK2
8 8.4
D [10:0]
RSSI [2:0]
ENCODE
CLK2
ENCODE
CLK2
AB_OUT
Figure 12. Typical Output Rise and Fall Times
20 30 50
40%
8 8
Figure 13. Encode = 20 MSPS, Duty Cycle = 40%
60%
8 8
6
2030 50
2323
20 30
6.2
20301818
Figure 14. Encode = 20 MSPS, Duty Cycle = 60%
–14–
REV. 0

AIN
SNR – dB
–12
–48
24
28
AIN – dBFS
32 36 40 44 48 52 56 60
–18
–42
–54
–30
–36
–60
–24
–66
–72
–78
–84
–90
–96
0
–90
201612840
12dB SNR WINDOW
101
100
011
010
001
000
101
100
011
010
001
000
AIN
BIN
BIN
0dB, –12dB, –24dB
ATTEN
DETECT
SET
PEAK
RSSI
ATTEN
0dB, –12dB, –24dB
GAIN
3
GAIN
RSSI
+12, +18dB
ANALOG MUX
SELECT GAIN
FLT FLT
GAIN
AD6600
NOISE FILTER
630
ENCODE
RESONANT
ENCODE
PORT
A/D
CONVERTER
TIMING
TWO'S
COMPLEMENT
11
RSSI
AD6600
AB_OUT
D10–D0
3
RSSI [2:0]
CLK2
B_SELA_SEL
AVCC
Figure 15. Functional Block Diagram
THEORY OF OPERATION
The AD6600, dual-channel, gain-ranging ADC integrates analog IF circuitry with high speed data conversion. Each analog
input stage is a 1 GHz, 0 dB to –24 dB, phase-compensated step
attenuator; the step size in each attenuator is 12 dB. Both input
stages drive an analog multiplex function followed by a 12 dB/
18 dB gain amplifier. A simple LC noise filter at the output of
the gain amplifier is required to resonate at the desired IF. This
resonant filter port precedes a wide input bandwidth (450 MHz)
track-and-hold followed by an 11-bit analog-to-digital converter
(ADC). A high speed synchronous peak detector monitors signal strength at both input channels. The peak detector drives
RSSI circuitry that automatically adjusts attenuation and gain
on a clock-by-clock basis. The three RSSI indicator bits and the
eleven ADC bits are available at the output providing an exponent
and mantissa data format. Together these integrated components
form an IF sampling, high dynamic range ADC system.
It is helpful to view this device as a stand-alone ADC using
automatic gain control. The gain control referred to in this data
sheet as “gain-ranging” works to maintain a constant SNR over
as wide a range as possible.
As stated previously, the AD6600 has a floating-point output:
eleven mantissa bits and three exponent bits. As shown in Figure 16, at the lowest input levels SNR increases 1 dB for a 1 dB
increase in input power. In this range, the AD6600 is set for
maximum gain. However, when the input signal level reaches
–15–
the gain-ranging section (approximately –42 dBFS), the SNR is
contained between about 50 dB and 56 dB or between 44 dB and
56 dB including the effects of hysteresis. Although Figure 16
does not indicate so, there are slight differences between the
SNR from one gain range to the next as the gain amp switches
between 12 dB and 18 dB. Once the final RSSI range has been
exceeded (approximately –12 dBFS), SNR again increases 1 dB
per 1 dB input power increase until converter full scale is reached.
Again, this performance is very much like the effects of a typical
analog AGC loop.
REV. 0
ENC
ENCGND
DVCC
Figure 16. SNR for Gain-Ranging ADC
AD6600 SUBCIRCUITS
Input Step Attenuator and Gain Stage
The AD6600 has two identical input attenuators, Channel A
and Channel B. These dual inputs are typically used as diversity
channels but may also process two independent IF signals. For
maximum oversampling the device is used in single channel mode;
in this case only one input channel is required. The attenuator
steps are 0 dB, –12 dB and –24 dB. The attenuator settings are
based on the decisions of the RSSI stage (see Peak Detector/
RSSI section). The outputs of the attenuators connect to an
analog multiplexer that selects either Channel A or B for subsequent processing (see Input Mode). The selected signal drives
a dual-gain amplifier set to either 12 dB or 18 dB; the selected
gain is also determined by the RSSI stage. Therefore, based on
all possible combinations of attenuation and gain, the input
signal receives –12 dB to +18 dB of voltage gain in 6 dB steps
(Table I). Overall gain-matching is typically within 0.1 dB. With
a bandwidth of 1 GHz, the phase delay through the front-end
ranges from 0.2 degrees to 0.5 degrees, depending on input
frequency. Additionally, the input impedance does not change
with attenuator settings so there is no AM-to-PM distortion.

AD6600
Table I. Attenuator and Gain Settings
Attenuator Gain Amp Total RSSI Word
0 dB +18 dB +18 dB 000
0 dB +12 dB +12 dB 001
–12 dB +18 dB +6 dB 010
–12 dB +12 dB 0 dB 011
–24 dB +18 dB –6 dB 100
–24 dB +12 dB –12 dB 101
High-Speed Peak Detector and RSSI Circuitry
The peak detector along with the attenuator and dual gain
amplifier form the control loop within the AD6600.
The peak detector is designed to follow the analog input one clock
cycle before the conversion is actually made. Therefore, while the
converter section of the AD6600 is converting sample “n,” the
peak detector is already looking at sample “n+1.” While looking at the “n+1” sample (the calibration period), the peak detector examines the envelope of the input signal. The more of an
envelope that is tracked, the more accurate the gain setting. At
the very least, the peak detector must be presented either a positive
or negative sinusoidal peak, which represents about one-half of a
sine wave cycle. Since the peak detector works for a complete cycle
prior to conversion, the absolute minimum IF frequency that can
be determined is twice the sample rate per channel. Therefore,
at 15 MSPS, the minimum IF frequency that can be sampled
would be 30 MHz.
Note that the more cycles of the input that are monitored by the
peak detector, the more accurate the gain setting will be. Therefore, the actual minimum IF frequency recommended is higher
than this. The minimum specified frequency is 70 MHz. Since the
RSSI control loop is performed on a sample-by-sample basis,
the AD6600 very accurately follows the signals into and out of a
deep fade.
Hysteresis
The AD6600 employs hysteresis to prevent the gain-ranging from
unnecessarily changing when the signal envelope is near an RSSI
threshold. The hysteresis is digital and will account for exactly
6 dB of shift, depending on whether the signal is increasing or
decreasing. This effect is shown in the dashed lines of the overall transfer function, Figure 16.
External LC Noise Filter, Resonant Port
The output of the attenuator/gain stage drives the wide bandwidth
track-and-hold (T/H), followed by the ADC encoder. Because the
attenuator/gain stage has a very wide bandwidth (~1 GHz), an
LC filter or “resonant port” is provided to limit the amount of
wideband noise delivered to the ADC. The simple LC filter does
not provide signal selectivity and should typically be 35 MHz to
50 MHz wide. However, because the ADC’s track-and-hold itself
has a wide bandwidth (~450 MHz), this noise-limiting filter is
critical to meeting overall sensitivity. Specific details on selecting components for the resonant port are provided later in the
text (Understanding the External Analog Filter).
ADC Encoder
After the calibration period is complete (one clock cycle), the
appropriate gain and attenuator settings are determined and set.
Once settled, the internal track-and-hold freezes the input signal
so that the ADC encoder may digitize the signal. During digitization, the peak detector/RSSI circuitry is already looking at the
next sample. When the AD6600 is in dual channel mode, the
process is interleaved: while Channel B is monitored for signal
strength, Channel A is digitized. This allows the RSSI to update
on a clock-by-clock basis.
ENCODE
IF INPUT
INTERNAL
2 CLOCK
RSSI
CALIBRATION
AMPLIFIER
CONTROL
T/H INPUT
DIGITIZE
OLD DATA
T-AND-H HOLD
RSSI
CAL.
NOISE FILTER
DISCHARGE
4/8 AMP
CLAMPED
T-AND-H TRACK
RSSI SET
NOISE FILTER
SETTLING
NOISE FILTER
SETTLING
ADC DIGITIZE
T-AND-H HOLD
Figure 17. Internal Timing
Figure 17 shows the internal timing of the chip. The encode
applied to the device initiates several actions. The first and most
important is that the track-and-hold is placed in hold, thus
sampling the analog input at that instant. The second action is that
the peak detector of the RSSI circuitry is initialized. During this
period, the analog input envelope is monitored to determine signal
power. The AD6600 is in calibration mode for about onequarter of the encode period.
While the AD6600 is in calibration, the external noise filter is
discharged and the amplifier driving the filter disabled. Since this
filter is shared between the two input channels in dual channel
mode, this greatly reduces the feedthrough between the channels
that would otherwise exist. One-quarter of an encode period after
the calibration is complete, the amplifier is re-enabled and allowed
to settle to its new signal conditions for sampling by the wideband
T/H on the next encode signal. The final action is that the signal
on the resonant port is sampled by the track-and-hold. This
happens on the next rising edge of the encode.
Input Mode Select
The AD6600 has two operating modes: single channel and dual
channel. In single channel mode, the ADC always samples Channel A or always samples Channel B. In dual channel mode, the
ADC converter is sampling Channel A and Channel B on alternating Encode cycles. Two control pins are provided to select
the desired mode of operation. A_SEL and B_SEL arbitrate the
selection of how these input channels are connected to the output. Table II shows the truth table for selection of the input.
–16–
REV. 0

AD6600
Table II. Selecting AD6600 Operating Mode
Output vs. Encode Clock
Mode A_SEL B_SEL n n+1 n+2 n+3
Dual: A/B 1 1 A B A B
Single: A 1 0 A A A A
Single: B 0 1 B B B B
Not Valid 00–– – –
RSSI 11-Bit Word Format Shift Right of
101 DATA DATA× 32 5
100 DATA DATA× 16 4
011 DATA DATA× 83
010 DATA DATA× 42
001 DATA DATA× 21
A_SEL and B_SEL are not logic inputs and should be tied
000 DATA DATA× 10
directly to ground or analog VCC (5 V analog).
In dual channel mode, the AB_OUT signal indicates which
input is currently available on the digital output. When the
AB_OUT is 1, the digital output is the digitized version of
Channel A. Likewise, when AB_OUT is 0, the Channel B is
available on the digital output (Table III).
Table III. AB_OUT for Dual Channel Operation
Output Data vs. Encode Clock
A_SEL and B_SEL = 1 n n+1 n+2 n+3
D[10:0], RSSI[2:0] A B A B
AB_OUT 1010
Data Output Stage
The output stage provides data in the form of mantissa, D[10:0],
and exponent, RSSI[2:0], where D[10:0] represents the output
of the 11-bit ADC coded as two’s complement, and RSSI[2:0]
represents the gain-range setting coded in offset binary. Table
IV shows the nominal gain-ranges for a nominal 2 V p-p differential full-scale input. Keep in mind that the actual full-scale
input voltage and power will vary with input frequency.
When mated with the AD6620, Digital Receive Processor Chip,
the AD6600 floating point data (mantissa + exponent) is automatically converted to 16-bit two’s complement format by the AD6620.
APPLYING THE AD6600
Encoding the AD6600
The AD6600 encode signal must be a high quality, extremely
low phase noise source to prevent degradation of performance.
Digitizing high frequency signals (IF range 70 MHz–250 MHz)
places a premium on encode clock phase noise. SNR performance can easily degrade by 3 dB–4 dB with 70 MHz input
signals when using a high-jitter clock source. At higher IFs (up
to 250 MHz), and with high-jitter clock sources, the higher
slew rates of the input signals reduce performance even further.
See AN-501, Aperture Uncertainty and ADC System Performance
for complete details.
For optimum performance, the AD6600 must be clocked differentially. The encode signal is usually ac-coupled into the ENC
and ENC pins via a transformer or capacitors. These pins are
biased internally and require no additional bias.
Figure 18 shows one preferred method for clocking the AD6600.
The sine source (low jitter) is converted from single-ended to
Table IV. Interpreting the RSSI Bits
Differential RSSI [2:0]
Analog Input Voltage Decimal Attenuation
(V p-p) Binary Equiv. or Gain (dB)
0.5 < V
IN
0.25 < V
0.125 < V
< 0.5 100 4 –6
IN
IN
0.0625 < V
0.03125 < V
< 0.25 011 3 0
< 0.125 010 2 +6
IN
< 0.0625 001 1 +12
IN
101 5 –12
differential using an RF transformer. The back-to-back Schottky
diodes across the transformer secondary limit clock excursions
into the AD6600 to approximately 0.8 V p-p differential. This
helps prevent the larger voltage swings of the clock from feeding
through to other portions of the AD6600, and limits the noise
presented to the encode inputs. A crystal clock oscillator can
also be used to drive the RF transformer if an appropriate
limiting resistor (typically 100 Ω) is placed in the series with
the primary.
VIN < 0.03125 000 0 +18
The digital processing chip which follows the AD6600 can combine the 11 bits of two’s complement data with the 3 RSSI bits
to form a 16-bit equivalent output word. Table V explains how
the RSSI data can be interpreted when using a PLD or ASIC.
Basically, the circuit performs right shifts of the data depending
on the RSSI word. This can also be performed in software using
the following pseudo code fragment:
r0 = dm (rssi);
r2 = 5;
r0 = r2–r0;
r1 = dm (adc); (11 bits, MSB justified into DSP word)
rshift r1, r0; (arithmetic shift to extend the sign bit)
The result of the shifted data is a 16-bit fixed-point word that
can be used as any normal 16-bit word.
Table V. 16-Bit, Fixed-Point Data Format
16-Bit Data Corresponds to a
SINE
SOURCE
5082–2810
DIODES
ENCODE
AD6600
ENCODE
T1–1T
100
Figure 18. Transformer-Coupled Sine Source
REV. 0
–17–

AD6600
If a low jitter ECL/PECL clock is available, another option is to
ac-couple a differential ECL/PECL signal to the encode input
pins as shown in Figure 19.
VT
ECL/
PECL
0.1F
0.1F
VT
ENCODE
AD6600
ENCODE
Figure 19. AC-Coupled ECL/PECL Encode
Driving the Analog Inputs
As with most new high-speed, high dynamic range analog-to-digital
converters, the analog input to the AD6600 is differential. Differential inputs allow much improvement in performance on-chip
as IF signals are processed through attenuation and gain stages.
Most of the improvement is a result of differential analog stages
having high rejection of even-order harmonics. There are also
benefits at the PCB level. First, differential inputs have high
common-mode rejection to stray signals such as ground and
power noise. They also provide good rejection to common-mode
signals such as local oscillator feedthrough.
Driving a differential analog input introduces some new challenges. Most RF/IF amplifiers are single-ended and may not
obviously interface to the AD6600. However, using simple
techniques, a clean interface is possible. The recommended
method to drive the analog input port is shown in Figure 20.
The AD6600 input is actually designed to match easily to a
SAW filter such as SAWTEK 855297. This allows the SAW
filter to be used in a differential mode, which often improves the
operations of a SAW filter. Using network analyzer data for
both the SAW filter output and the AD6600 input ports (see
data tables for AD6600 S
data), a conjugate match can be
11
used for maximum power transfer. Often an adequate match
can be achieved simply by using a shunt inductor to make the
port look real (Figure 20). For more details on how to exactly
match networks, see RF Circuit Design by Chris Bowick, ISBN:
0-672-21868-2.
FROM
MIXER
OUTPUT
SAW #1
AD6630
SAW #2
AD6600
ADC
Figure 20. Cascaded SAW Filters with AD6630
Where gain is required, the AD6630 differential, low noise, IF
gain block is recommended. This amplifier provides 24 dB of
gain and provides limiting to prevent damage to the SAW filter
and AD6600. The AD6630 is designed to reside between two
SAW filters. This low noise device is ideally suited to many
applications of the AD6600. For more information on the
AD6630, reference the AD6630 data sheet.
When general purpose gain blocks are used, matching can easily
be achieved using a transformer. Most gain blocks are available
with 50 Ω input and output ports. Thus matching to the 200 Ω
impedance of the AD6600 requires only a 1:4 (impedance ratio)
transformer as shown in Figure 21.
FROM
MIXER
OUTPUT
50 GAIN
BLOCK
AD6600
ADC
Figure 21. Transformer-Coupled Gain Block
In the rare case that better matching is required, a conjugate
match between the amplifier selected and the transformercoupled analog input can be achieved by placing the matching
network between the amplifier and the transformer (Figure 22).
For more details on matching, see the reference mentioned
previously for more details.
FROM
MIXER
OUTPUT
50 GAIN
BLOCK
MATCHING
NETWORK
AD6600
ADC
Figure 22. Gain Block and Matching Network
Understanding the External Analog Filter
Two primary trade-offs must be made when designing the external resonant filter. The obvious one is the bandwidth of the
filter. The second, not so obvious, trade-off is settling time of
the filter nodes.
Resonant Filter Bandwidth determines the amount of noise that
is limited at the center frequency chosen. If the resonant filter is
too wide, little noise improvement is seen. If the resonant filter
is too narrow, amplitude variation can be seen due to the tolerance of filter components. If the narrow filter is off center due to
these tolerances (or drift), the 4×/8× signal will fall on the transition band of the filter. An optimum starting point for this filter
is approximately 50 MHz.
Resonant Filter Settling limits the amount of capacitance of this
filter. The output of the 4×/8× amplifier is clamped when the
ADC is processing its input (encode high time). This prevents the
amp output from feeding through to the ADC (T/H) and corrupting the ADC results. But, upon the falling edge of encode,
the amp must now come out of clamp and present an accurate
signal to the ADC T/H. The RC of the external filter determines the settling of the amp. If the amp output does not settle,
the ADC sees an attenuated signal. So obviously, a narrow
bandwidth is desired to improve noise performance; but if the
filter is too narrow, the amp will not settle and the ADC will see
an attenuated signal.
Figure 23 shows a simplified model of the 4×/8× amplifier. A
key point to note is that the resistor values in the collector legs
are 315 Ω nominal with a tolerance of ±20%. The filter perfor-
mance is determined by these values in conjunction with the
internal parasitic capacitance, board parasitics and the external
filter components.
–18–
REV. 0

AD6600
AVCC
ENCODE
RESONANT
FILTER PORT
CLAMP
FLT
FLT
FROM
GAIN STAGE
315 315
GND
Figure 23. 4 ×/8× Amplifier Clamp Circuitry
Figure 24 shows why settling is important for this circuit. If the
4×/8× amp does not settle (come out of clamp), the amplitude
presented to the ADC will be decreased. This results in decreased
gain when the filter capacitance is too high.
ENCODE
RESONANT
FILTER
HOLD TRACK HOLD
CLAMPED
SETTLING
Figure 24. 4 ×/8× Amplifier Settling
This explains why the total capacitance allowed for the external
filter varies depending on the clock rate (actually encode clock
high time). If the encode is 13 MSPS and the duty cycle is 50%,
the allowable settling time is 38.5 ns (1/2 of the encode time).
Our assumption is that the amp should be allowed to settle to
1/4 LSB in this time period. This has been proven with both
simulation and empirical analysis. If the settling is assumed to
be an RC circuit, then:
T = RC; t = time; n = number of bits
tT
/
1
()
ntT
/
21
tT
e
1
/
tT
1
n
2
/
()
/
t
n
2
()
ns
38 5
=
315 8192
.
ln
×
Ω
()
=
13 6
.
pF
C
TOTAL
=
In this case, C
VAe
=−
O
−=−
AA A e
1
−=−
1
n
2
1
=
e
n
2
t
=
ln
T
=
T
ln
T
()
ENCODE
Rln
TOTAL
×
05
.
8192
×
()
includes all parasitics and external capaci-
tance. R is nominally 315 Ω. The 8192 is (4 × 2048), which is
1/4 LSB of the converter (11 bits, 2048).
So for settling purposes, with 13 MSPS encode and 50% duty
cycle, the maximum allowable capacitance for proper settling is
C
= 13.6 pF.
TOTAL
As stated above, this C
includes the external capacitors,
TOTAL
the board parasitics, and the AD6600 parasitics. The parasitics
of the AD6600 (lead, internal bond pad and internal connections) at FLT and FLT are 1.75 pF ±0.35 pF (differential).
If the resistors are at maximum value (315 + 20%), the maximum allowable capacitance is C
= 11.3 pF. If the duty
TOTAL
cycle is less than 50%, the maximum allowable capacitance is
further decreased to allow for settling.
Power Supplies
Care should be taken when selecting a power source. Linear
supplies are strongly recommended. Switching supplies tend to
have radiated components that may be “received” by the AD6600.
Each of the power supply pins should be decoupled as closely to
the package as possible using 0.1 µF chip capacitors.
The AD6600 has separate digital and analog power supply pins.
The analog supplies are denoted AVCC and the digital supply
pins are denoted DVCC. Although analog and digital supplies
may be tied together, best performance is achieved when the
supplies are separate. This is because the fast digital output
swings can couple switching current back into the analog supplies. Note that AVCC must be held within 5% of 5 Volts; however, the DVCC supply may be varied according to output
digital logic family. The AD6600 is specified for DVCC = 3.3 V
as this is a common supply for digital ASICS.
Output Loading
Care must be taken when designing the data receivers for the
AD6600. Note from the equivalent circuits shown earlier (see
Equivalent Circuits) that D[10:0] and RSSI[2:0] contain a
500 Ω output series resistor. To minimize capacitive loading,
there should only be one gate on each output pin. Extra capacitive loading will increase output timing and invalidate timing
specifications. CLK2× and AB_OUT do not contain the output
series resistors. Testing for digital output timing is performed
with 10 pF loads.
Layout Information
The schematic of the evaluation board (Figure 25) represents a
typical implementation of the AD6600. A multilayer board is
recommended to achieve best results. It is highly recommended
that high quality, ceramic chip capacitors be used to decouple
each supply pin to ground directly at the device. The pinout of
the AD6600 facilitates ease of use in the implementation of high
frequency, high resolution design practices. All of the digital
outputs are segregated to two sides of the chip, with the inputs
on the opposite side for isolation purposes.
Care should be taken when routing the digital output traces. To
prevent coupling through the digital outputs into the analog
portion of the AD6600, minimal capacitive loading should be
placed on these outputs. It is recommended that a fanout of
only one be used for all AD6600 digital outputs.
The layout of the analog inputs and the external resonant filter
are critical. No digital traces must be routed near, under, or
above these portions of the circuit. The transformers used for
coupling into the analog inputs must be located as close as
possible to the analog inputs of the AD6600. The external resonant filter components must be physically close to the filterinput pins, yet separated from the analog inputs.
REV. 0
–19–

AD6600
The layout of the Encode circuit is equally critical. Any noise
received on this circuitry will result in corruption in the digitization process and lower overall performance. The Encode clock
must be isolated from the digital outputs and the analog inputs.
Evaluation Board
The evaluation board for the AD6600 is straightforward, containing all required circuitry for evaluating the device. The only
external connections required are power supplies, clock and the
analog inputs. The evaluation board includes the option for an
on-board, clock oscillator for encode.
Power to the analog supply pins of the AD6600 is connected via
the power terminal block (TB1). Power for the digital interface
is supplied via Pin 1 of J201, or the VDD e-hole located adjacent to J201. The VDD supply can vary between 3.3 V to 5.0 V
and sets the level for the output digital data (J201). The J201
connector mates directly with the AD6620 (Receive Signal
Processor) evaluation board, Part # AD6620S/PCB, allowing
complete evaluation of system performance.
The two analog inputs are connected via SMA connectors
AIN and BIN, which are transformer-coupled to the AD6600
inputs. The transformers have a turns-ratio of 1:4 to match
the input resistance of the AD6600 (200 Ω) to 50 Ω at the
SMA connectors.
Table VI. AD6600ST/PCB Bill of Material
The Encode signal may be generated using an on-board crystal
oscillator, U100. If an on-board crystal is used, R104 must be
removed from the board to prevent loading of the oscillator’s
output. The on-board oscillator may be replaced by an external
encode source via the SMA connector labeled ENCODE. If an
external source is used, it must be a high quality and very low
phase noise source. The high IF range of the AD6600 (70 MHz
–250 MHz) demands that the Encode clock be sufficiently pure
to maintain performance.
The AD6600 output data is latched using 74LCX574 (U201,
U202) latches. The clock for these latches is determined by
jumper selection on header J1. The clock can be a delayed version of the encode clock (CLKA, CLKB), or the CLK2× generated by the AD6600. A clock is also distributed with the output
data (J201) that is labeled CLKX (Pin 11, J201). The CLK× is
selected with jumpers on header J1 and can be CLKA, CLKB,
or CLK2×.
The resonant LC filter components (SEL2, C2 and C3) are
omitted. The user must install proper values based on the IF
chosen. See Understanding the External Analog Filter section of
the data sheet for guidelines on selecting these components.
Item Quantity Reference Description
1 3 AIN, BIN, ENCODE SMA Connector
2 14 C1, C102–108, C114, C117–118, Ceramic Chip Capacitor 1206, 0.1 µF
C120–121, C299
3 2 C100–101 Tantalum Chip Capacitor, 10 µF
4 1 C111 Ceramic Chip Capacitor 0805, 0.1 µF
54C112–C113, C115–116 Ceramic Chip Capacitor 0508, 0.1 µF
6 2 CR1–2 1N2810 Schottky Diode
7 1 DUT AD6600AST
8 1 J1 20-Pin Double Row Male Header
9 1 J201 50-Pin Double Row Male Header, Right Angle
10 2 R1–2 Omitted
11 2 R100–R101 Surface Mount Resistor 1206, 10 kΩ
12 1 R103 Surface Mount Resistor 1206, 100 Ω
13 1 R104 Surface Mount Resistor 1206, 50 Ω
14 2 R298–R299 Surface Mount Resistor 1206, 2 kΩ
15 3 T1–T2, T4 Surface Mount Transformer Mini-Circuits T4–1T
16 1 TB1 PCTB2 Terminal Block
17 2 U201–U202 74LCX574 Octal Latch
18 1 U204 74LVQ00 Two Input NAND Gate
–20–
REV. 0

J201
H50DM
DD
V
501
GND
249
GND
GND
348
BIT9
BIT10
GND
447
546
BIT8
GND
BIT7
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
645
744
843
942
10411140123913381437153616351734183319322031213022292328242725
CLK
BIT6
BIT5
BIT4
BIT3
BIT2
BIT1
BIT0
GND
CLKX
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
RSSIB2
RSSIB1
A/B
GND
26
REMOVE 21 AND 30
CLK
GND
RSSIB0
AD6600
R101
10k
B
A
R100
10k
VCC
VCC
CLKA
6
11
GND
GND
201918171615141312
J1
123456789
H20DM
A
B
CR2
CR1
C1
0.1F
R1 R2
2
3
T4
TI–4T
4
CLKREF
U100
VCC
14
CLKX
CLKA
CLKB
11
10
CLKA
CLKB
CLK_2X
CLK
D10D9D8D7D6D5D4D3D2D1D0
1N2810
1N2810
C113
0.01F
1
1:4
6
C114
0.1F
R103
100
8
CC
OUT
V
VEE
K1115
7
SMA
ENCODE
R104
A/B
BIT0
BIT1
BIT2
BIT3
BIT4
BIT5
BIT6
12131415161718
8D 8Q
7D 7Q
74LCX574
9876543
D0D1D2D3D4D5D6
RSSI2
A/B A/B
40 39 3841
42
4344 36 35 3437
6D 6Q
D0
D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
C111
U201
RSSI0
RSSI1
50
5D 5Q
(LSB)
(MSB)
0.1F
4D 4Q
3D 3Q
VDD
33
DVCC
DVCC
1
VDD
C112
2D 2Q
GND
32
GND
GND
2
GND
0.01F
19
2
1D 1Q
VCC
31
AVCC
C1
3
OE
CK
GND
30
AVCC
4
VCC
11 1
29
GND
AB_OUT
AD6600AST
GND
567
GND
BIT7
BIT8
12131415161718
8D 8Q
7D 7Q
U202
74LCX574
9876543
D7D8D9
2CLK
CLK_2
VCC
27
2825262324
ENC
ENC
RSSI1
RSSI0
8
AVCC
B_SEL
9
B
CLK2X
RSSI2
BIT9
BIT10
6D 6Q
D10
GND
GND
A_SEL
10
A
RSSIB2
5D 5Q
4D 4Q
RSSI2
BIN
AIN
11
T1
RSSIB1
3D 3Q
RSSI1
RSSI0
3
TI–4T
4
RSSIB0
19
2D 2Q
1D 1Q
2
GND
T2
T1–4T
BIN
GND
AVCC
GND
AVCC
FLT
FLT
AVCC
AVCC
GND
AIN
2
AIN
SMA
CK
12 13 14 15 16 17 18 19 20 21 22
OE
3
U204
5
2
CLKREF
TB1
VCC
U204
2k
PCTB2
74LVQ00
13
12
GND
8
74LVQ00
9
10
GND
VCC
C100 C102 C104 C106 C108 C120 C121
+
1
2
VDD
C101 C103 C105 C107 C117 C118
+
GND
GND
U204
74LVQ00
4
11 1
C116
1
2
4
6
BIN
SMA
GND
VCC
GND
VCC
VCC
VCC
GND
C115
0.01F
1
1:4
6
0.01F
DD
V
U204
1:4
SEL2
3
74LVQ00
1
R2982R299
C299
0.1F
C3
SEL
C2
SEL
REV. 0
Figure 25. AD6600ST/PCB Schematic Diagram
–21–

AD6600
Figure 26. AD6600ST/PCB Top Side Silk Screen
Figure 27. AD6600ST/PCB Top Side Copper
Figure 28. AD6600ST/PCB Bottom Side Copper
Figure 29. AD6600ST/PCB Power Supply Layer (Negative)
Figure 30. AD6600ST/PCB Ground Layer (Negative)
–22–
REV. 0

AD6600
Connecting the AD6600 with the AD6620
The AD6600 interfaces directly to the AD6620 Digital Receive
Signal Processor as shown in Figure 31. No additional external
components are required. Note that the layout requirements discussed previously do apply and deviations can result in degraded
performance. The digital outputs of the AD6600 must connect
directly to the AD6620 inputs with no additional fanout. Additional loading on the outputs will compromise timing performance.
ENC
ENC
(MSB) D10
AD6600
D9
D8
D7
D6
D5
D4
D3
D2
D1
(LSB) D0
RSSI2
RSSI1
RSSI0
AB_OUT
CLK2
IN15
IN14
IN13
IN12
IN11
IN10
IN9
IN8
IN7
IN6
IN5
IN4
IN3
IN2
IN1
IN0
EXP2
EXP1
EXP0
A/B
CLK
AD6620
Figure 31. AD6600/AD6620 Connections
Figure 32 shows the timing details between the AD6600 and the
AD6620. On Clock 1, D[10:0], RSSI[2:0], and AB_OUT are
captured by the AD6620. Since AB_OUT has changed state from
the previous clock, the D[10:0] and RSSI[2:0] are processed by
the AD6620. This clock allows adequate setup and hold time
for AB_OUT, D[10:0], and RSSI[2:0] to be captured by the
AD6620.
On Clock2, D[10:0], RSSI[2:0], and AB_OUT are captured
by the AD6620. Since AB_OUT has not changed from the
previous clock, the D[10:0] and RSSI[2:0] are ignored by the
AD6620. This clock is concerned only with the AB_OUT setupand-hold time.
CLK2
D [10:0]
RSSI [2:0]
AB_OUT
38.5 38.5
CLOCK1 CLOCK2
3.0 16.5
7.0
Figure 32. AD6600 to AD6620 Timing at 13 MSPS
3.0 16.5
12.5
REV. 0
–23–

AD6600
OUTLINE DIMENSIONS
Dimensions shown in inches and (mm).
44-Terminal LQFP (Low-Profile Quad Plastic Flatpack)
(ST-44)
0.063 (1.60)
0.030 (0.75)
0.018 (0.45)
SEATING
PLANE
MAX
33
34
0.472 (12.00) SQ
TOP VIEW
(PINS DOWN)
23
22
0.394
(10.0)
SQ
C00966–2.5–7/00 (rev. 0)
0.006 (0.15)
0.002 (0.05)
0.057 (1.45)
0.053 (1.35)
44
1
0.031 (0.80)
BSC
12
11
0.018 (0.45)
0.012 (0.30)
–24–
PRINTED IN U.S.A.
REV. 0
 Loading...
Loading...