

Page 1

J7 Drive
Technical Manual
Models: JD and CIMR-J7AM Document Number: TM.J7.01
Page 2
Note 1: Factory setting differs depending on drive capacity. See Appendix 3-1.
QUICK REFERENCE – J7 PARAMETERS
PARA- FACTORY USER
METERS SETTING SETTING
n01 1
n02 1
n03 2
n04 0
n05 0
n06 0
n07 0
n08 0
n09 60.0
n10 230/460
n11 60.0
n12 1.5
n13 12/24
n14 1.5
n15 12/24
n16 10.0
n17 10.0
n18 10.0
n19 10.0
n20 0
n21 6.0
n22 0.0
n23 0.0
n24 0.0
n25 0.0
n26 0.0
n27 0.0
n28 0.0
n29 6.0
n30 100
n31 0
n32 Note 1
n33 0
n34 8
n35 0
n36 2 (2)
n37 5 (0)
n38 3 (3)
n39 6 (6)
n40 1
PARA- FACTORY USER
METERS SETTING SETTING
n41 100
n42 0
n43 0.10
n44 0
n45 1.00
n46 3
n47 0
n48 0
n49 0.00
n50 0.00
n51 0.0
n52 50
n53 0.0
n54 0.0
n55 0
n56 170
n57 160
n58 0.0
n59 0
n60 160
n61 0.1
n62 0
n63 1.0
n64 Note 1
n65 Note 1
n66 0.0
n67 2.0
n68 0
n69 0
n70 0
n71 2
n72 2
n73 10
n74 0
n75 0
n76 rdy
n77 0
n78 N/A
n79 012 N/A
Page 3
- i -
CURRENT RATINGS & HORSEPOWER RANGE
RATED CURRENT NOMINAL OLD DRIVE
NEW DRIVE
INPUT RATING (AMPS) HORSEPOWER MODEL NO.
MODEL NO.
CIMR-J7AM
0.8 1/8 JDA001 20P10
1.6 1/4 JDA002 20P20
2
3.0 1/2 JDA003 20P40
3
5.0 3/4 & 1 JDA005 20P70
0
8.0 2 JDA008 21P50
V
11.0 3 JDA011 22P20
17.5 5 JDA017 23P70
1.2 1/2 JDB001 40P20
4
1.8 3/4 JDB002 40P40
6
3.4 1 & 2 JDB003 40P70
0
4.8 3 JDB005 41P50
V
5.5 3 – 42P20
7.2 3 – 43P00
8.6 5 JDB009 43P70
WARNING
Do not touch circuit components until main input power has been turned OFF.
Status indicator LEDs and Digital Operator display will be extinguished when
the DC bus voltage is below 50 VDC. Wait at least one additional minute.
Do not connect or disconnect wires and connectors while the main input
power is turned on.
CAUTION
The drive leaves the factory with parameters initialized for 2-Wire control
(when using external Run/Stop signals). Before using the initialization
function of constant n01 , know your control wiring configuration:
10 = Factory 2-Wire Control Initialization (Maintained RUN Contact)
11 = Factory 3-Wire Control Initialization (Momentary START/STOP Contact)
Entering either Initialization code resets all parameters to factory settings, and
automatically returns parameter n001 setting to “ 1 ”. If the drive is
connected for 3-Wire control and this parameter is set to “ 10 ” (2-Wire Control
Initialization), the motor may run in reverse direction WITHOUT A RUN
COMMAND APPLIED. Equipment damage or personal injury may result.
Page 4
- ii -
CAUTION
Parameter n10 must be set to proper motor voltage.
CAUTION
Always ground the drive using its ground terminal ( ) (near the main
circuit output terminals). See paragraph 1.4A,“Grounding”.
Never connect main circuit output terminals T1 (U),T2 (V) & T3 (W) to AC
main circuit power supply.
CAUTION
When drive is programmed for auto-restart ( n48 = " 1 " thru " 10 "), the
motor may restart unexpectedly — personal injury may result.
IMPORTANT
Wiring should be performed only by qualified personnel.
Always ground the drive using ground terminal ( ). See paragraph 1.4C, “Grounding”.
Verify that the rated voltage of the drive matches the voltage of the incoming power.
Never connect main circuit output terminals T1, T2, and T3 to AC main circuit power supply.
All parameters have been factory set. Do not change their settings unnecessarily.
Do not perform a “HIPOT” or withstand voltage test on any part of the drive. Equipment uses semiconductors and is vulnerable to high voltage.
The Control PCB employs CMOS ICs which are easily damaged by static electricity. Use proper
electrostatic discharge (ESD) procedures when handling the Control PCB. Never touch the printed
control board (PCB) while the main input power is turned on.
Any modification of the product by the user is not the responsibility of Yaskawa, and will void the
warranty.
Do not remove the Digital Operator or change dipswitch SW8 or rotary switch SW7 unless the main
input power is turned OFF..
This drive is not suitable for use on a circuit capable of delivering more than 18,000 RMS symmetrical
amperes at either 250 volts maximum or 480 volts maximum.
Page 5

J7 Simplified Startup Procedure
- iii -
This procedure is a simplified step by step guide to installing, programming, and using the J7
drive. It highlights several common installation configurations. Detailed information on
all features of this drive can be found in the Technical Manual.
INSTALLATION
1. Be certain your input voltage source, motor and drive nameplates are all marked either
230V or 460V. Other voltages can be used, but require additional programming, see
technical manual. CAUTION: Verify that the input voltage matches the Drive’s
nameplate BEFORE applying power or severe damage will result.
2. Mount Drive on a vertical surface with adequate space for air circulation (4.7” above and
below, 1.2” on each side).
3. Remove front cover using the screw in the lower left corner, then connect power and
ground wires as shown.
CAUTION: BE CERTAIN YOU CONNECT INPUT POWER TO TERMINALS L1, L2,
AND L3 ONLY, OR SERIOUS DAMAGE WILL RESULT. CONNECT MOTOR TO
TERMINALS T1, T2, AND T3 ONLY.
4. Replace cover and apply input power –
digital operator shows “0.0”; The FREF
LED is on and the RUN LED is flashing.
Press the DSPL key until the LO/RE LED
is on. Press the UP ARROW button until
the display shows “Lo”, then press the
DSPL button until the FREF LED is on.
Rotate the potentiometer on the front of
the digital operator until the display shows
“6.0”. Press the RUN button and note the
direction of motor rotation. If rotation is
incorrect, remove power, wait for the
display lights to go out, then switch wires
between terminals T1 and T2. Replace
the front cover and apply input power.
Page 6

- iv -
5. Digital Operator
The DSPL button cycles through all of the quick start LEDs.
To access a parameter, press the DSPL button until the PRGM LED is on. Use the UP
and DOWN keys until the desired parameter number is displayed, then press ENTER.
Use the UP and DOWN keys to adjust the value then press ENTER then DSPL.
Before the drive will accept a RUN command, one of the following LEDs must be on:
FREF, FOUT, IOUT, MNTR, or F/R. For more specific information on the digital
operator, see the Tech. Manual, Section 4.
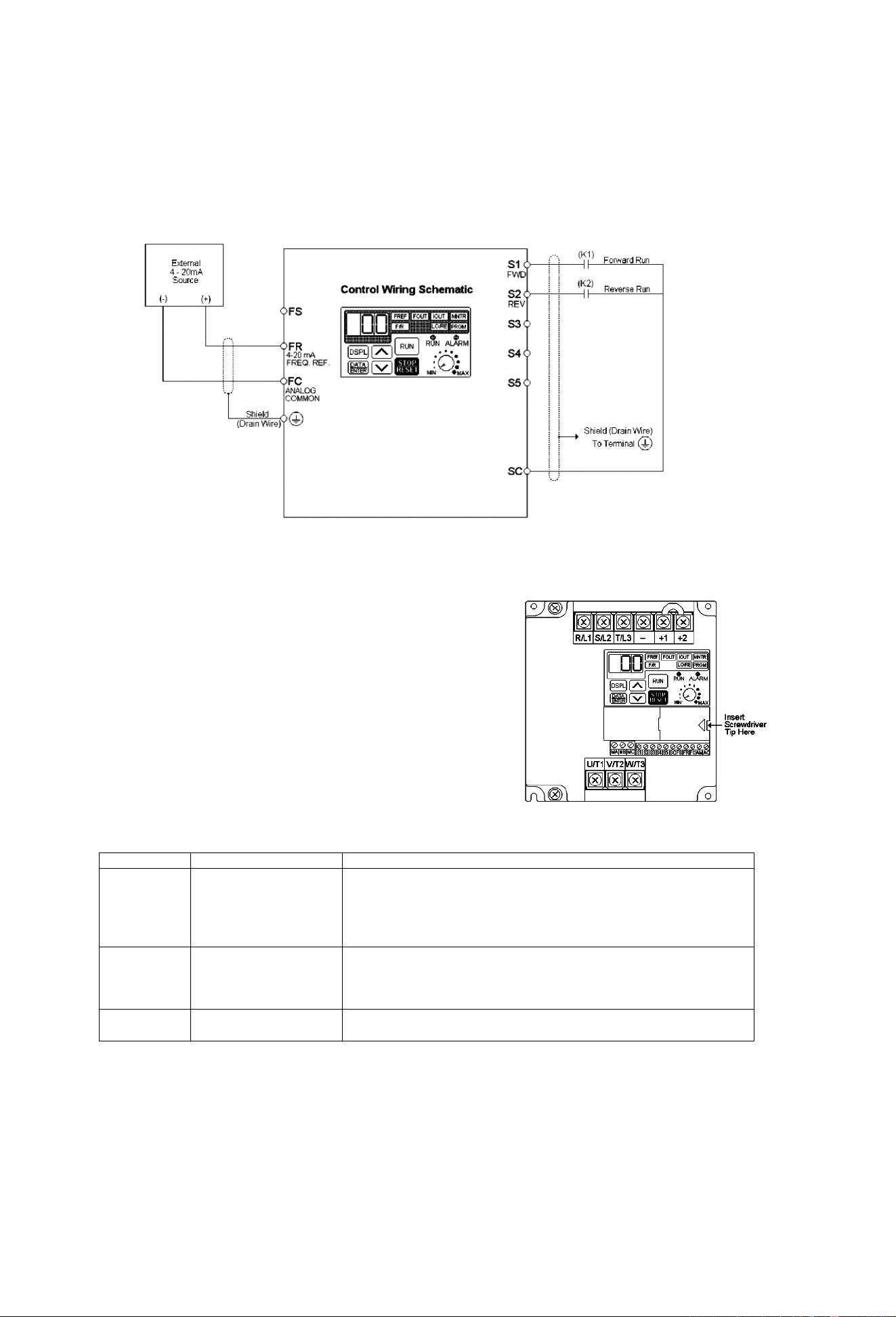
6. Choose a configuration from Table 1 below. Each example listed below contains a
control wiring diagram, operation explanation, and all necessary programming. The
drive can be controlled in many more ways than is described in these examples.
Table 1: Drive Configuration Examples
Sequence*
Source
(Run / Stop)
Digital Operator Digital Operator This method requires no control wiring connections to the drive. It is
2-wire
Reference*
Source
(Motor Speed)
4-20 mA
Description
most often used during startup of the drive.
With this method the drive can be started and stopped from a remote
source, and the reference comes from a remote 4 – 20 mA source
such as a PLC.
3-wire
Speed
Potentiometer
With this method, remote pushbuttons start and stop the drive and the
reference comes from a speed control (potentiometer).
7. Control Terminal Wiring – Remove power and wait for all LEDs to go out before
making control terminal connections.
Control wiring should be sized 16 to 20
AWG. Control wiring should be shielded,
with the shield wire connected to the ground
terminal
, which is located towards the left
side of the aluminum heat sink.
Page 7

Example 1: Sequence & Reference From The Digital Operator
- v -
When the Drive is set up with the sequence and the reference coming from the digital operator, it is in “Local”
control. Local control is often used during startup to verify motor operation, rotation, etc. The Drive can be
temporarily placed in “Local” control simply by using the LO/RE quick start LED. If power is removed and then
restored, the Drive will come up in the “Remote” mode.
The Drive can be programmed so that even if power is lost, the drive will come up in the local mode (see Table
2 below).
OPERATION:
•
The frequency reference comes from the digital operator pot.
•
The drive can be started by pressing the
•
The drive can be stopped by pressing the
•
The direction of the motor can be changed regardless of motor speed by using F/R quick start LED.
Table 2: Programming required for “Local” mode
Parameter Display Description
n02 0 This parameter sets the sequence (start/stop) to “Local” mode.
n03 0 This parameter sets the reference (motor speed) to come from the
n32 Set Motor F.L.A. Enter the motor’s full load amps (as shown on the motor
Quick Start
LED
RUN
key on the digital operator.
STOP
key on the digital operator.
digital operator potentiometer (local).
nameplate).
F/R The motor direction can be changed regardless of motor speed
using this quick start LED.
Page 8
Example 2: Remote Sequence (2-Wire) & Remote Reference
- vi -
(4 – 20 mA)
This configuration is used when the start & stop signals and the frequency reference come from a remote
source, such as a PLC. It can also be used with a maintained switch when it is desirable to have the Drive
restart on restoration of power. It should not be used where safety of attending personnel might be threatened
by a restart.
OPERATION:
•
Close (K1) to Run Forward.
•
Close (K2) to Run Reverse.
•
If both (K1) & (K2) are closed, the drive stops and displays the
error message: “EF”.
•
Frequency reference is proportional to the signal level at
Terminal FI. 4mA = 0 Hz, 12mA = 30 Hz, & 20mA = 60 Hz.
•
If the drive is put in the “Local” mode using the LO/RE quick
start LED, the drive will behave the same as illustrated in
Example 1.
Table 3: Programming Required For Remote 2-wire Sequence & Remote (4-20 mA) Reference
Parameter Display Description
n01
n03
n32 Set Motor FLA
Password
10
3
The drive will perform a 2-wire reset.
CAUTION:
original factory settings (all previous adjustments will be lost)
When the drive completes the reset, this parameter returns to a
value of 1.
This parameter sets terminal FR to be a 4-20mA input. NOTE:
Switch (SW8) must be closed (“on”). Prying off the cover using a
small screwdriver as shown in the diagram above allows access to
switch (SW8).
Enter the motor’s full load amps (as shown on the motor
nameplate).
Setting this value will reset all parameters to their
Page 9
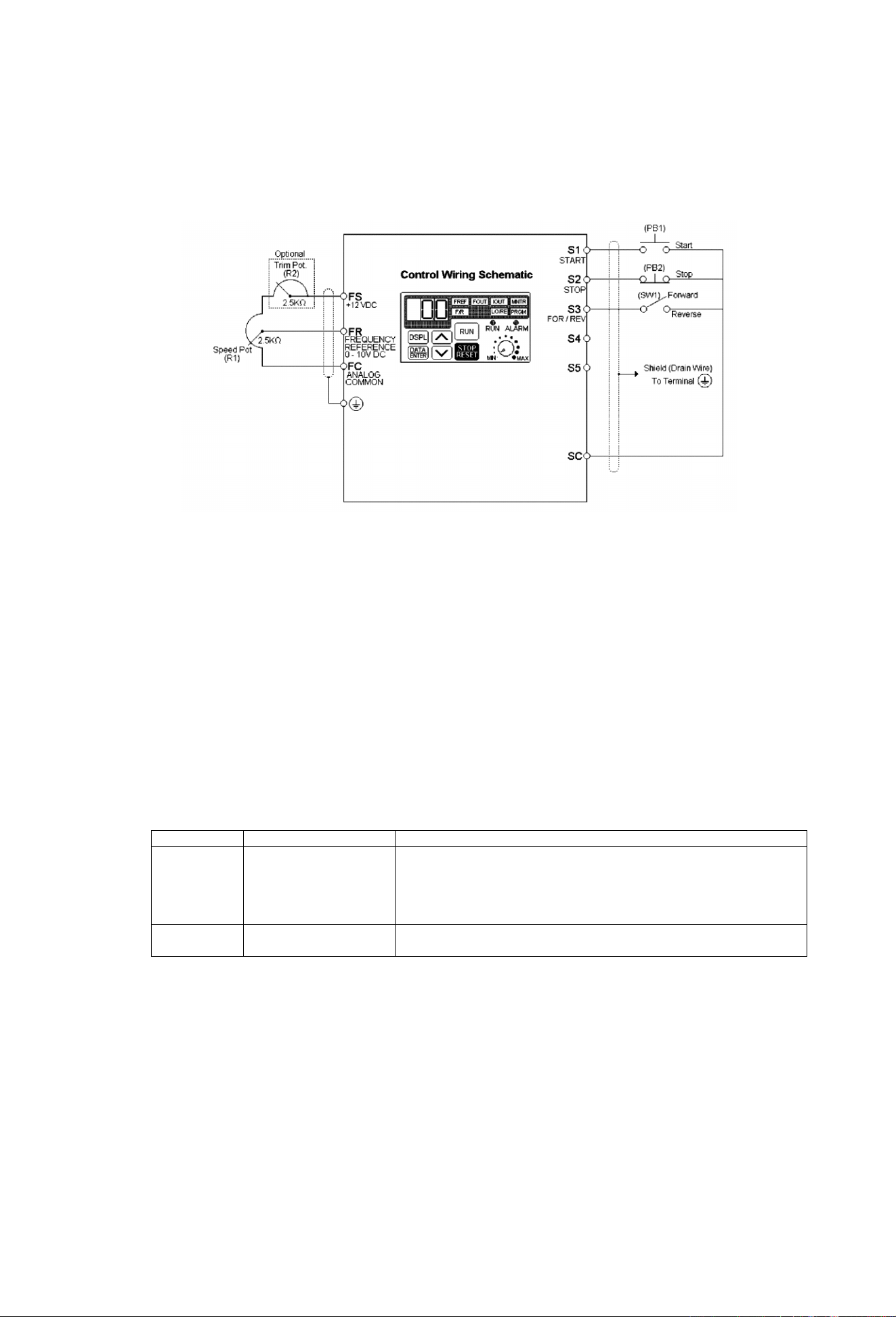
Example 3: Remote Sequence (3-Wire) & Speed Potentiometer
- vii -
This configuration is best when a person rather than an external controller (PLC, relay, etc.) controls the Drive.
Both potentiometers ((R1) & (R2)) should have a resistance value between 2000Ω and 3000Ω and be rated for
at least 1 Watt. The trim pot is optional, but without it the manual speed pot will output 10V (60 Hz) at just
three-quarters of its rotation.
OPERATION:
•
Close pushbutton (PB1) momentarily while pushbutton (PB2) is closed and the drive will start.
Pushbutton (PB1) does
•
Open pushbutton (PB2) at any time and the drive will stop.
•
If switch (SW1) is open the drive will run in the forward direction. If switch (SW1) is closed, the drive will
run in the reverse direction. Switch (SW1) can be operated with the drive running at any speed.
•
Frequency reference is proportional to the signal level at Terminal FV.
0V = 0 Hz, 5V = 30 Hz, & 10V = 60 Hz.
•
If the drive is put in the “Local” mode using the LO/RE quick start LED, the drive will behave the same as
illustrated in Example 1.
Table 4: Programming Required For Remote 3-wire Sequence & Speed Pot Reference
Parameter Display Description
n01
n32 Set Motor FLA
After the programming is complete, the trim pot needs to be calibrated. Press
LED is illuminated. Turn the Speed Pot (R1) all the way up. Adjust the trim pot (R2) so that the “FREF”
display is just flickering between 59.9 Hz and 60.0 Hz. This completes the trim pot calibration.
NOT
need to be maintained.
11
The drive will perform a 3-wire reset.
CAUTION:
original factory settings (all previous adjustments will be lost)
When the drive completes the reset, this parameter returns to a
value of 1.
Enter the motor’s full load amps (as shown on the motor
nameplate).
Setting this value will reset all parameters to their
DSPL
until the FREF quick start
Page 10
Sequence and Reference Explained
- viii -
Sequence – refers to how the Drive is started, stopped, and told which direction to run.
When the sequence comes from the digital operator (local), the drive is started and stopped
using the “RUN” and “STOP” keys on the digital operator, and direction is given via the
“FWD/REV” key. Sequence can also come from the Drive’s control terminals (remote)
using either two-wire or three–wire control. The sequence inputs to the Drive do NOT
require any outside voltages to activate them. Instead, contact closures (either from
switches, relay contacts or open collector circuits) activate the sequence inputs. Other
sequence sources are available, consult the Technical Manual for details.
Two-wire sequence – utilizes a “maintained” switch or relay contact. It is used on
applications where it is desirable to have the Drive restart on restoration of power. It
should not be used where safety of attending personnel might be threatened by a
restart. This method is generally restricted to unattended fans & pumps, or where
another controller is entrusted with the decision to restart. Direction is controlled by
maintaining either a forward run or a reverse run command.
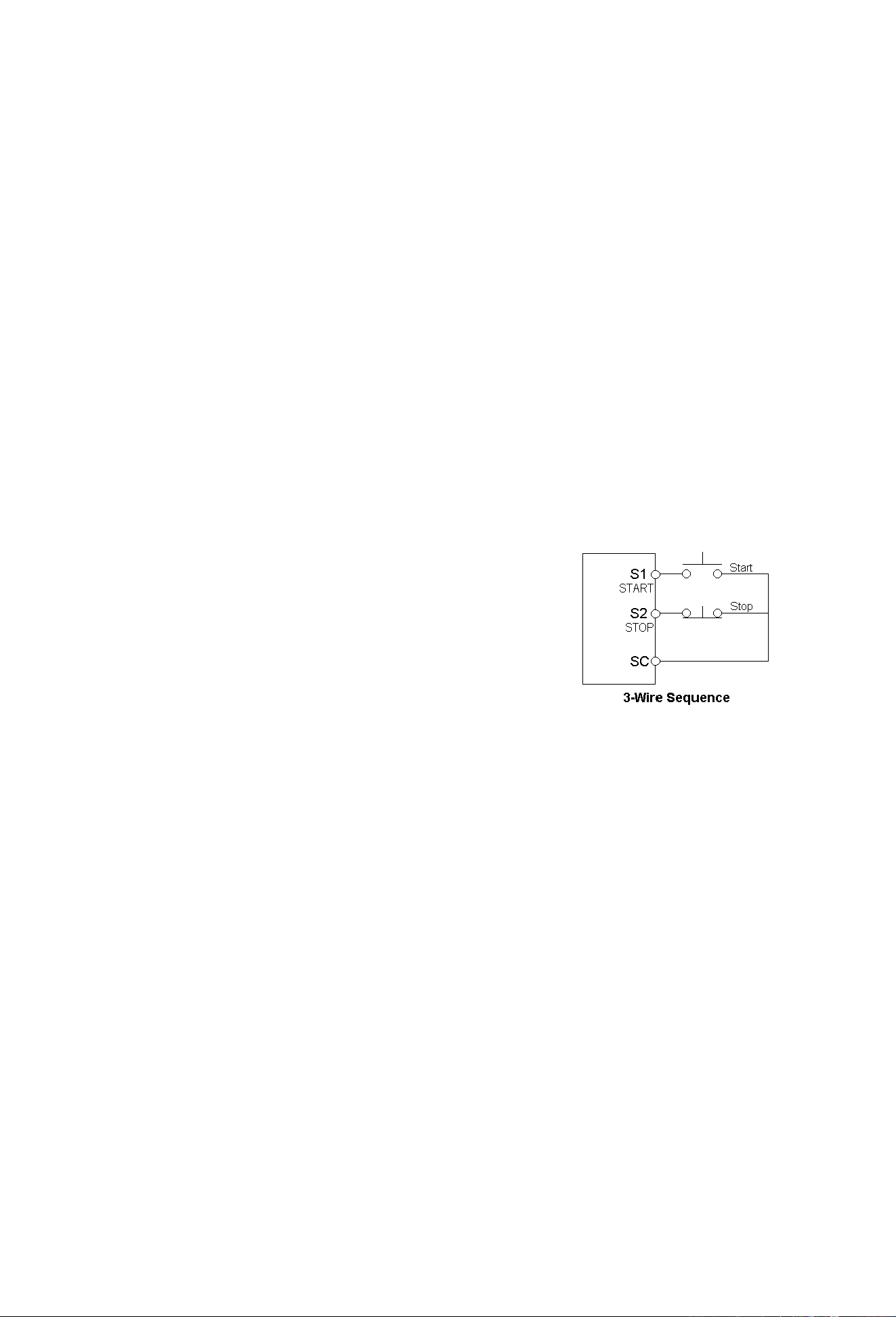
Three-wire sequence – utilizes “momentary” buttons or switches. This control
scheme emulates the traditional 3-wire motor starter control. A momentary closure of
a normally open run switch latches the drive in the RUN
mode (STOP switch must be closed or the drive will not
accept the momentary RUN command). A momentary
opening of the normally closed STOP switch unlatches
RUN mode bringing the drive to a stop. The three-wire
sequence is used where it would be dangerous for the
Drive to restart after a power outage. This method
requires an intentional restart, as the RUN command is
unlatched immediately on loss of power. Direction is
determined by another maintained contact closure (closed = reverse).
Reference - The frequency reference tells the Drive how fast to run the motor. There are
several source options for the frequency reference. First, the frequency reference can come
from the digital operator (local). Simply put, the motor speed can be entered into the
keypad. Second, the frequency reference can come from an analog signal (remote), such
as 0 to 10 Volts DC. When 0 Volts is applied to the Drive, the Drive will run at zero speed.
When 10V is applied to the Drive, it will run at full speed. Apply anything in between and the
Drive will run at that corresponding frequency (2.5VDC = 25% speed = 15 Hz). Other
reference sources are available, consult the Technical Manual for details.
Local Control – is when the sequence and/or reference comes from the digital operator
Remote Control – is when the sequence and/or reference comes from the control
terminals.
Page 11

QUICK REFERENCE FOR PARAMETERS ................................Inside Cover
CURRENT RATINGS AND HORSEPOWER RANGE ........................... i
WARNINGS & CAUTIONS .................................................................... ii
SIMPLIFIED STARTUP PROCEDURE ................................................. iii
1 RECEIVING / INSTALLATION ............................................................ 1-1
1.1 General ................................................................................................ 1-1
1.2 Receiving ............................................................................................. 1-1
1.3 Physical Installation ............................................................................. 1-1
1.4 Electrical Installation ............................................................................ 1-4
2INITIAL START-UP .............................................................................. 2-1
2.1 Pre-Power Checks ............................................................................... 2-1
2.2 Startup Procedure ............................................................................... 2-2
3 OPERATION AT LOAD ....................................................................... 3-1
4 DIGITAL OPERATOR .......................................................................... 4-1
4.1 General ................................................................................................ 4-1
4.2 Digital Operator .................................................................................... 4-1
4.3 Status Indicator LEDs .......................................................................... 4-3
4.4 Monitor Displays .................................................................................. 4-3
5PROGRAMMABLE FEATURES ......................................................... 5-1
5.1 General ................................................................................................ 5-1
5.2 Accel/Decel Time ................................................................................. 5-2
5.3 Accel/Decel: S-Curve Characteristics .................................................. 5-3
5.4 Auto-Restart ......................................................................................... 5-4
5.5 Carrier Frequency ................................................................................ 5-5
5.6 Critical Frequency Rejection ................................................................ 5-6
5.7 DC Injection Braking ............................................................................ 5-7
5.8 Frequency Reference Bias/Gain (Analog) ........................................... 5-8
5.9 Frequency Reference Upper and Lower Limits ................................... 5-9
5.10 Frequency Reference Retention .......................................................... 5-9
5.11 Frequency Reference Selection ......................................................... 5-10
5.12 Jog Reference .................................................................................... 5-12
5.13 Local/Remote Reference and Sequence Selection ............................ 5-13
5.14 Modbus Control (Optional)................................................................... 5-15
5.15 Momentary Power Loss Ride-Thru ..................................................... 5-19
5.16 Multi-Function Analog Monitor Output (Term. AM and AC) ................ 5-19
5.17 Multi-Function Input Terminals (Term. S1-S5) .................................... 5-20
5.18 Multi-Function Output Terminals (Term. MA, MB, MC) ....................... 5-26
5.19 Overtorque Detection ......................................................................... 5-28
- ix -
TABLE OF CONTENTS
SUBJECT
PARAGRAPH PAGE
6/01/2003
Page 12

5.20 Reset Codes: 2-Wire, 3-Wire Initialization .......................................... 5-30
5.21 Slip Compensation ............................................................................. 5-31
5.22 Stall Prevention ................................................................................... 5-32
5.23 Stopping Method ................................................................................ 5-33
5.24 Thermal Overload Protection .............................................................. 5-34
5.25 Torque Compensation ......................................................................... 5-35
5.26 V/f Pattern ........................................................................................... 5-36
5.27 Copy Function...................................................................................... 5-38
6FAULT DIAGNOSIS AND CORRECTIVE ACTIONS ........................... 6-1
6.1 General ................................................................................................. 6-1
Appendix
1LISTING OF PARAMETERS .............................................................. A1-1
Appendix
2 SPECIFICATIONS .............................................................................. A2-1
Appendix
3 CAPACITY RELATED PARAMETERS .............................................. A3-1
Appendix
4 PERIPHERAL DEVICES .................................................................... A4-1
Appendix
5 J7 DIMENSIONS ................................................................................ A5-1
Index
.............................................................................................................. I-1
- x -
SUBJECT
PAGE
CONTENTS – Continued
PARAGRAPH
Page 13
1-1
The J7 drive is a pulse width modulated general purpose AC drive which generates an adjustable
voltage/frequency, three phase output for speed control of most conventional squirrel cage induction
motors. Automatic stall prevention and voltage boost prevents nuisance tripping during load or line
side transient conditions. The Drive will not induce any voltage line notching distortion back to the
utility line and maintains a displacement power factor of not less than 0.98 throughout its speed
range.
When properly installed, operated and maintained, the Drive will provide a lifetime of service. It is
mandatory that the person who operates, inspects, or maintains this equipment thoroughly read and
understand this manual before proceeding.
The Drive is thoroughly tested at the factory. After unpacking, verify the part numbers with the
purchase order (invoice). Any damages or shortages evident when the equipment is received must
be reported immediately to the commercial carrier who transported the equipment. Assistance, if
required, is available from your sales representative.
If the Drive will be stored after receiving, keep it in its original packaging and store according to
storage temperature specifications in Appendix 2.
Location of the Drive is important to achieve proper performance and normal operating life. The
Drive should be installed in an area where it will be protected from:
• Direct sunlight, rain or moisture.
• Corrosive gases or liquids.
• Vibration, airborne dust or metallic particles.
When preparing to mount the Drive, lift it by its base, never by the front cover. For effective cooling,
as well as proper maintenance, the Drive must be installed on a flat, non-flammable vertical surface
(wall or panel) using four mounting screws. There MUST be a MINIMUM 3.9 in. clearance above
and below the Drive to allow air flow over the heat sink fins. A minimum 1.2 in. clearance is required
on each side on the Drive.
Make sure air entering the Drive is below 122°F (50°C) by adding a fan or other cooling device, if
needed. See environmental specifications in Appendix 2.
Section 1. RECEIVING AND INSTALLATION
1.1 GENERAL
1.2 RECEIVING
1.3 PHYSICAL INSTALLATION
Page 14
1-2
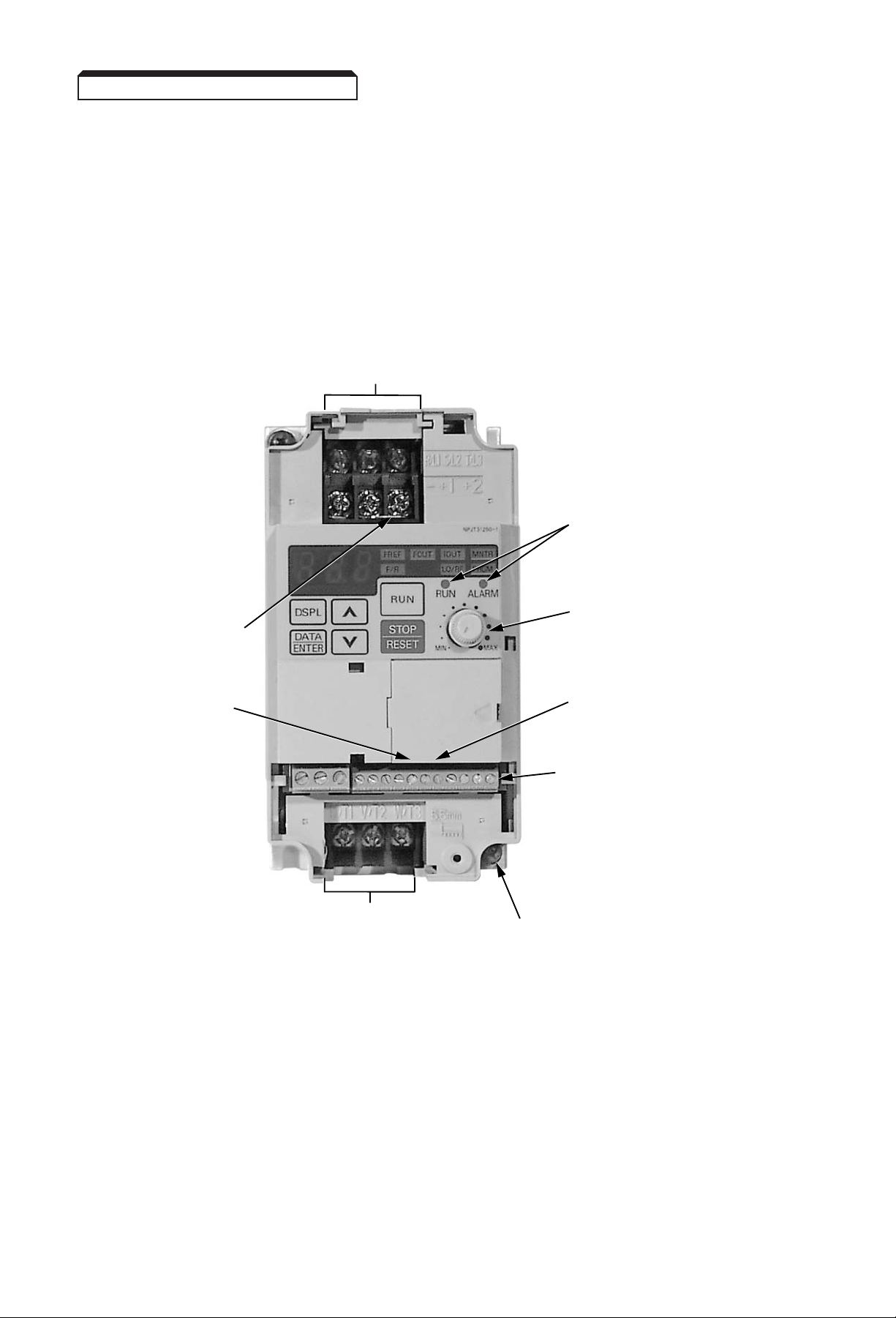
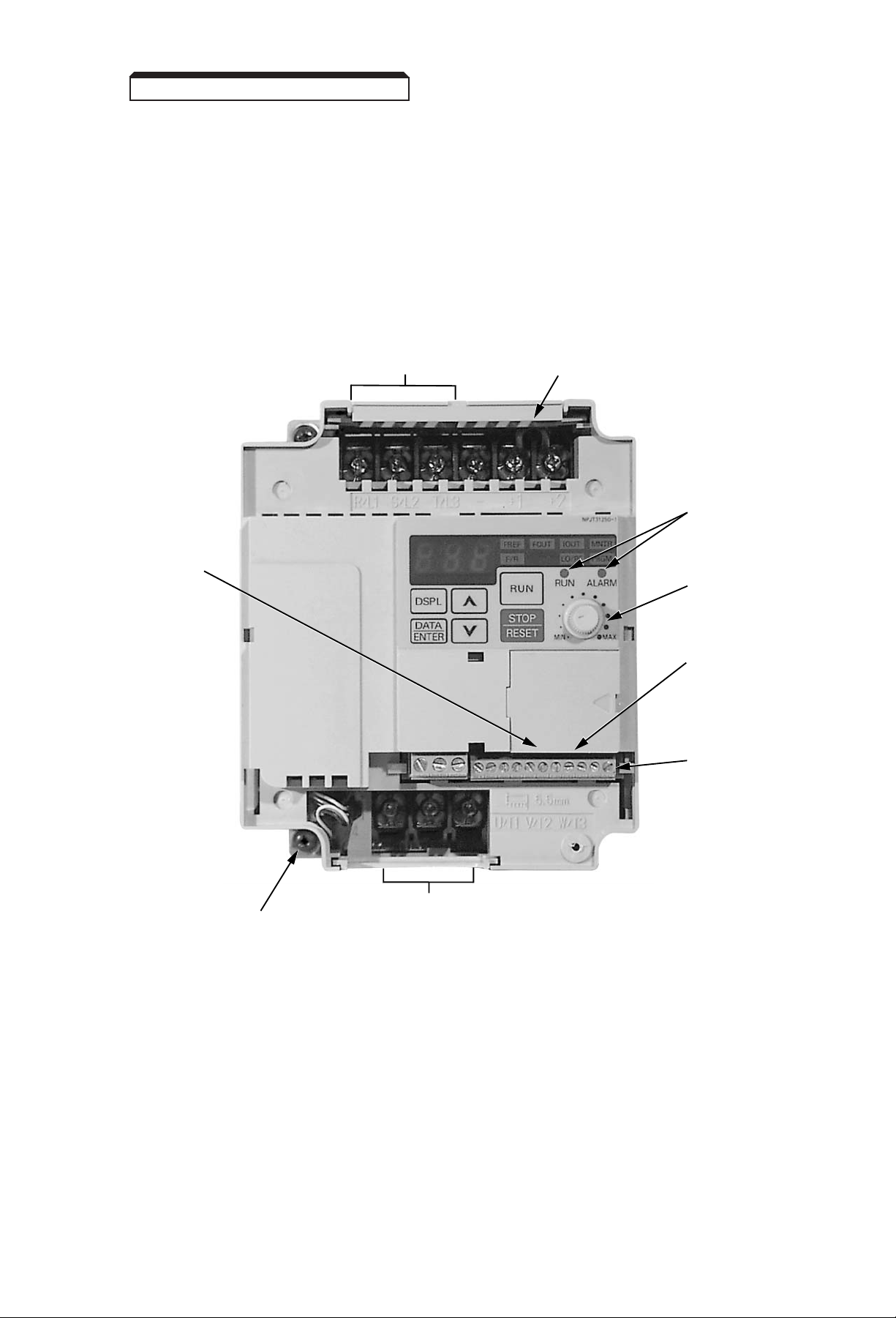
Figure 1-1. Component Identification (Sheet 1 of 2)
Continued
1.3 PHYSICAL INSTALLATION
Main Circuit Input
Terminal Block
Shorting Bar
(Remove when
DC Reactor
is installed)
SW7 Digital
Input Type
Main Circuit Output
Terminal Block
Status Indicator
LEDs
Digital Operator
Speed Pot
SW8
Analog Input
Current/Voltage
Selector
Control Circuit Block
Ground Terminal
Page 15
1-3
Figure 1-1. Component Identification (Sheet 2 of 2)
Continued
1.3 PHYSICAL INSTALLATION
SW7
Digital
Input Type
Main Circuit Input
Terminal Block
Shorting Bar (Remove when
DC Reactor is installed)
Status
Indicator
LEDs
Digital
Operator
Speed Pot
SW8
Analog Input
Current/Voltage
Selector
Control Circuit
Block
Ground Terminal
Main Circuit
Output Terminal Block
Page 16
1-4
The Drive leaves the factory with all parameters set for 2-Wire external reference control. Figure 1-5
must be used for all external connections.
To use the Drive in a 3-Wire application, Drive parameters n01, n02, and n03 must be
reprogrammed, using the Digital Operator. Figure 1-6 must then be used for all external connections.
A. Main Circuit Input/Output
Complete wire interconnections according to Tables 1-1 and 1-2; observe the following:
• Use 600 V vinyl-sheathed wire (75°C copper) or equivalent. Wire size should be determined
considering voltage drop of leads.
• NEVER connect AC main power to output terminals T1 ( U ), T2 ( V ), and T3 ( W ).
• NEVER allow wire leads to contact metal surfaces. Short-circuit may result.
• NEVER connect power factor correction capacitors or noise filters to Drive output.
• SIZE OF WIRE MUST BE SUITABLE FOR CLASS I CIRCUITS.
• Use only factory supplied installation instructions to install optional dynamic braking resistors.
Failure to do so may cause equipment damage or personal injury.
• Motor lead length should NOT EXCEED 164 feet (50 meters), and motor wiring should be run in
a separate conduit from the power wiring. If lead length must exceed this distance, reduce
carrier frequency and consult factory for proper installation procedures.
• Use UL listed closed loop connectors or CSA certified ring connectors sized for the selected wire
gauge. Install using the correct crimp tool recommended by the connector manufacturer.
1.4 ELECTRICAL INSTALLATION
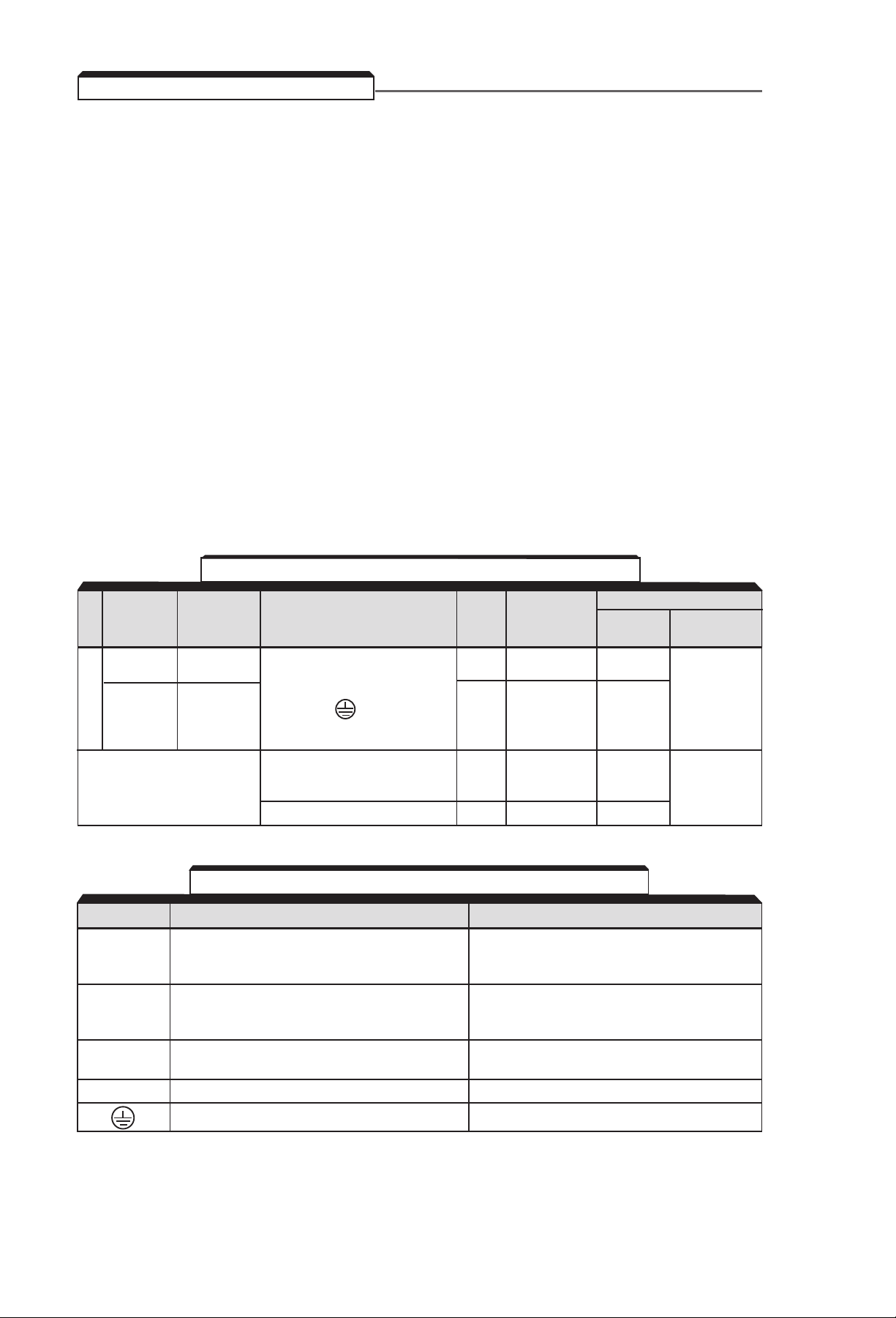
Table 1-1. Wire and Terminal Screw Sizes
Old Drive
New Drive
Terminal Symbol Screw
Max. Torque
Wire
Model No.
Model No.
lb-ft Size AWG Type
CIMR-J7AM
JDA001- 20P10-
M3.5 0.7 18 to 14
JDA005 20P70
JDA008- 21P50- L1, L2, L3, B1, B2, –, +1, +2
JDA017; 23P70; T1, T2, T3,
M4 1.1 14 to 10
600V
JDB001- 40P20JDB009 43P70
Control S1–S5, SC, FS, FR,
Circuit FC, AM, AC,
M2 0.2 20 to 16 Shielded wire
(All)
with Class 1
MA, MB, MC M3 0.4 20 to 16
wiring
TERMINAL FUNCTION VOLTAGE / SIGNAL LEVEL
L1 (R)
L2 (S) Main circuit input power supply
230V Drive: 200 / 208 / 220 / 230V at 50/60 Hz
L3 (T)
460V Drive: 420 / 440 / 460 / 480V at 50/60 Hz
T1 (U)
T2 (V) Main circuit output
230V Drive: 0 - 200 / 208 / 220 / 230V
T3 (W)
460V Drive: 0 - 400 / 440 / 460 / 480V
+1
DC Reactor terminals
+2
– DC Bus terminals (+1 & –)
Ground terminal (100 ohms or less) – – – –
Table 1-2. Main Circuit Terminal Functions and Voltages
Main Circuit
Page 17
1-5
B. Control Circuit
All basic control circuit (signal) interconnections are shown in the appropriate diagram:
• Interconnections for external two-wire control in combination with the Digital Operator are
shown in Figure 1-5 (for 230V or 460V rated drives).
• Interconnections for external three-wire control in combination with the Digital Operator are
shown in Figure 1-6 (for 230V or 460V rated drives).
Make wiring connections according to Figures 1-1 thru 1-6 and Table 1-3, observing the following :
• Signal Leads : Terminals S1-S5 & SC; FS, FR, & FC; and AM & AC.
• Control Leads : Terminals MA, MB & MC.
•Power Leads : Input Terminals L1 (R), L2 (S), and L3 (T), and Output Terminals T1 (U), T2
(V), and T3 (W).
• Use twisted shielded or twisted-pair shielded wire (20-16 AWG (0.5-1.25mm
2
)) for control
and signal circuit leads. Use twisted shielded or twisted-pair shielded wire (20-14 AWG
(0.5-2mm
2
)) for shield sheath terminal (terminal ). When using shielded wire, the
shield sheath MUST be connected at the Drive ONLY (terminal ). The other end
should be dressed neatly and left unconnected (floating). See Figure 1-2.
• Signal leads (see above) must be separated from control leads, main circuit leads L1 (R),
L2 (S), L3 (T), T1 (U), T2 (V), T3 (W), and any other power cables, to prevent erroneous
operation caused by noise interference.
• Lead length should NOT EXCEED 164 feet (50 meters). Wire sizes should be determined
considering the voltage drop.
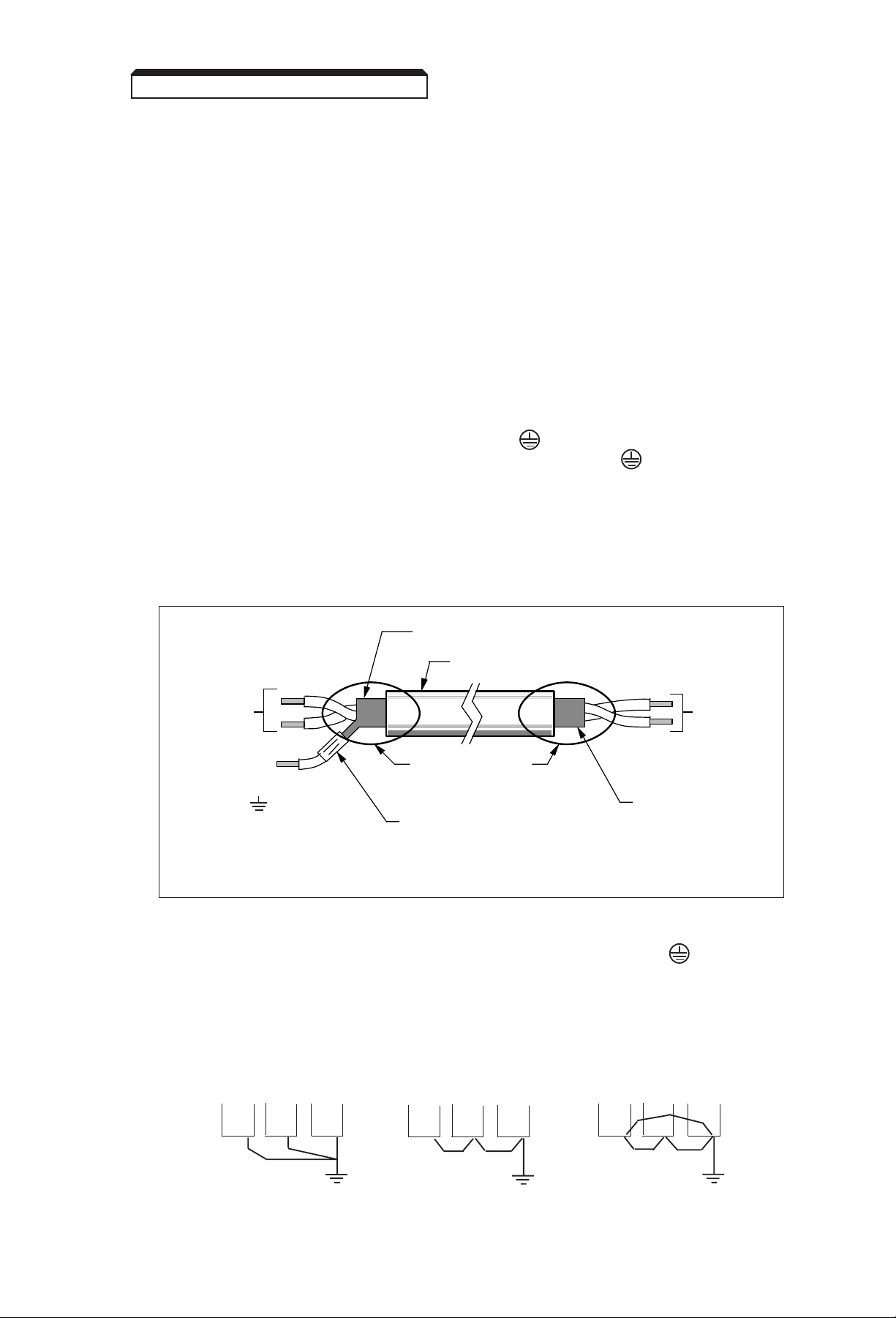
Figure 1-2. Shielded Sheath Termination
Continued
1.4 ELECTRICAL INSTALLATION
•• •
•
•• •
•• •
CORRECT CORRECT NOT
ACCEPTABLE
C. Grounding
• The Drive must be solidly grounded using main circuit ground terminal .
Ground resistance should be 100 ohms or less. Select lead size suitable for size
of terminal screw. Make the length as short as possible.
• NEVER ground the Drive in common with welding machines, motors, or
other large-current electrical equipment.
• Where several Drives are used, ground each directly or daisy-chain to the
ground pole(s). DO NOT FORM A LOOP WITH THE GROUND LEADS.
SHIELD SHEATH
OUTER JACKET
TO GPD 305
SIGNAL
TERMINALS
TO SHIELD
SHEATH
TERMINAL
(TERM. )
WRAP BOTH ENDS
OF SHEATH WITH
INSULATING TAPE
CRIMP
CONNECTION
DO NOT
CONNECT
TO
EXTERNAL
CIRCUIT
Page 18
1-6
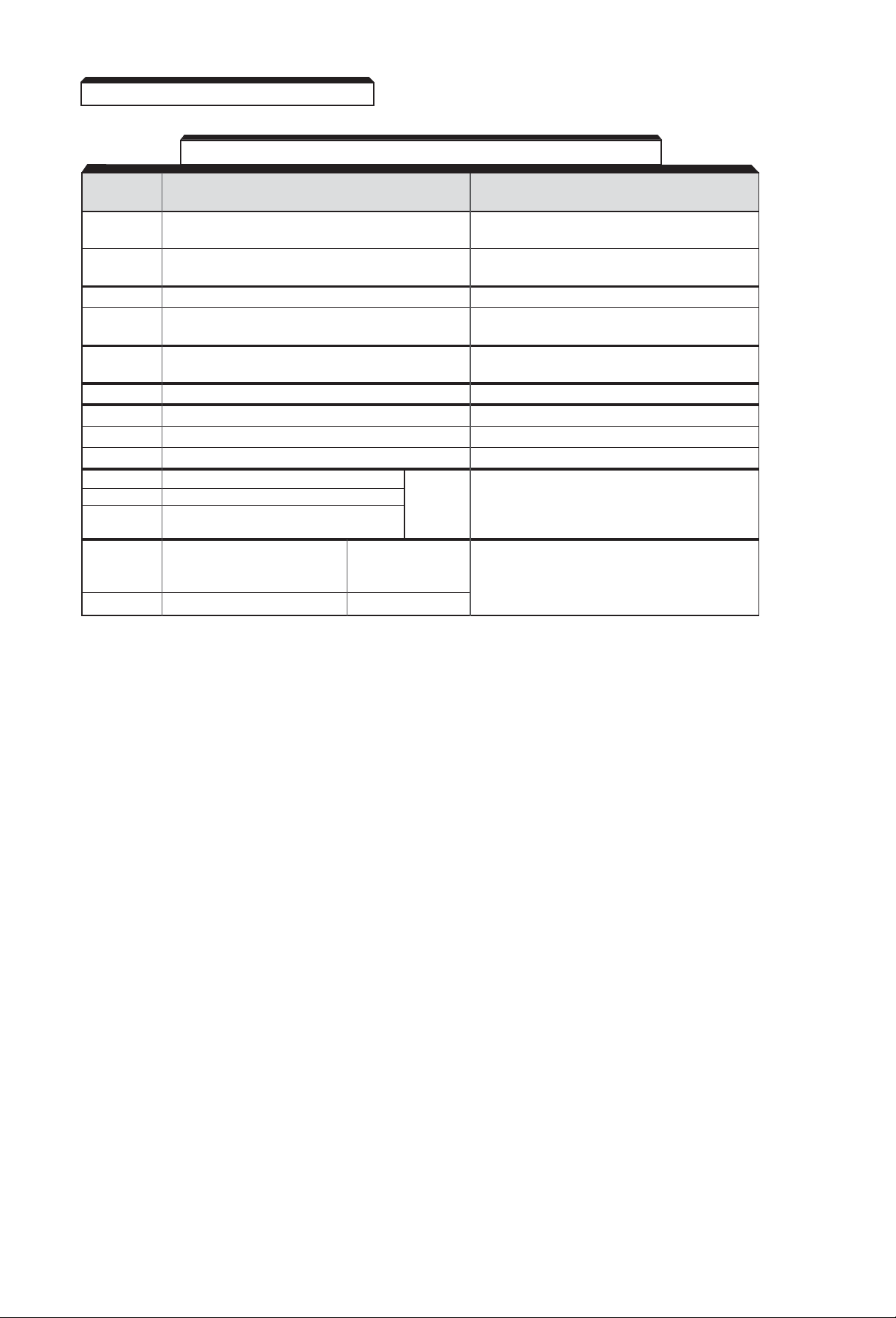
DATA FUNCTION DESCRIPTION*
S1 Input 1 Factory setting is " Forward Run/Stop " (1).
(Forward run when closed, stop when open)
S2 Multi-Function-Input 2 Factory setting is " Reverse Run/Stop " (1).
(Reverse Run when closed, stop when open)
S3 Multi-Function-Input 3 Factory setting is " Fault Reset " (1).
S4 Multi-Function-Input 4 Factory setting is "External Fault
(NO contact) " (1).
S5 Multi-Function-Input 5 Factory setting is " Multi-step Speed
Reference 1 " (1).
SC Sequence common for terminals S1-S5. Common terminal for sequence inputs.
FS Frequency reference power supply +12 VDC
FR Frequency reference input 0 to +10V/100% (20K ohms) or 4-20 mA (250 Ω)
FC Frequency reference input common 0 V
MA Multi-function contact output – NO contact Factory Contact capacity:
MB Multi-function contact output – NC contact Setting 250 Vac at 1A or below
MC Multi-function contact output – Common is "Drive 30 Vdc at 1A or below
Running"
AM Multi-function analog monitor (+) Factory setting is
" Output frequency "
0-10V = 0-100% Monitor output: 0 to +10V; 2 mA maximum.
AC Analog monitor common 0 V
Table 1-3. Terminal Functions and Signals of Control Circuit
NOTES:
1. These inputs have factory settings based on 2-wire reset. For 3-wire reset definitions, see Figure 1-6.
Continued
1.4 ELECTRICAL INSTALLATION
Page 19
1-7
Continued
1.4 ELECTRICAL INSTALLATION
D.
Auxiliary Input and Output Power Option Devices
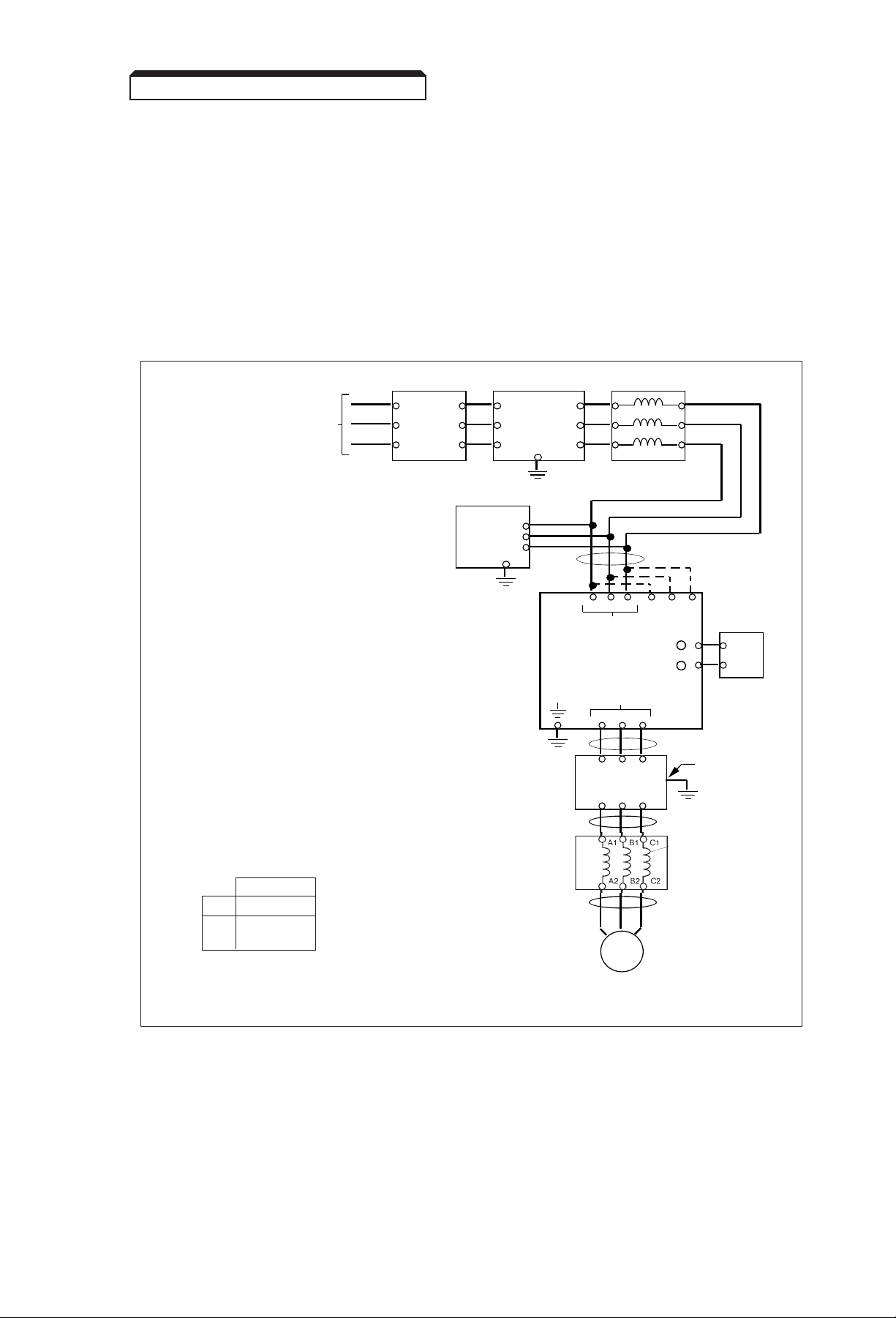
Figure 1-3 is a factory guideline for proper wiring practices and relative locations within the electrical
path from the line to the load. It does not imply what devices are needed for a particular application,
nor does it show what devices were shipped with a particular order. Therefore, disregard those
items in the diagram which are not being used in your installation. However, it is recommended that
an input or DC reactor be used with all ratings when wired to a source of 600 KVA or greater. Mount
all power option devices as close to the Drive, and keep electrical connections as short as possible.
DO NOT run input and output wiring in the same conduit.
Figure 1-3. Customer Connection Diagram For Isolation Transformers, Input Reactors,
Input RFI Filters, DC Reactors, Output Reactors and Output RFI FIlters
NOTES
1. Connect drive ground terminal or panel to
earth ground. Always use low impedance
paths and connections.
2. Mount input and output RFI filters
physically
as close to the drive as possible (on the same
panel, if possible). Filters should have a solid
connection from filter case or ground terminal
to drive panel or ground terminal (conduit with
good bare metal to bare metal connections
may serve as the path). If multiple input or
output RFI filters are used, they must be
wired in parallel.
3. Shield conductors with metallic conduit.
4. Connect output conduit in a manner that
allows it to act as an unbroken shield from the
drive panel to the motor casing.
5. RF noise filter (different from RFI filter) part
no. 05P00325-0023 is a delta wye capacitor
network which is wired in parallel with the
drive input terminals. On the smaller drives
with die cast chassis, it must be mounted
externally. On the larger drives with sheet
metal chassis, it may be mounted inside the
area where the input power wiring enters the
drive. On units equipped with bypass, it may
be wired to the primary side of the circuit
breaker and mounted to the bypass panel or
sidewall.
6. Connection points:
Drive
Input
L1, L2, L3
Output
T1, T2, T3
CUSTOMER'S
3Ø A.C. LINE
POWER
SUPPLY
L3
L2
L1
TRANSFORMER
H3
H2
H1
X3
X2
X1
EARTH GROUND
RFI FILTER
C1(L3)
B1(L2)
A1(L1)
RF NOISE
FILTER
SEE NOTE 2
EARTH GROUND
SEE NOTE 1
INPUT
(L3)C2
L
L
O
I
(L2)B2
A
N
D
E
(L1)A2
(G)
EARTH GROUND
SEE NOTE 2
SEE NOTE 5
OUTPUT
RFI FILTER
OUTPUT
REACTOR
A.C. MOTOR
INPUT
REACTOR
C1
B1
A1
L3L2L1
INPUT
DRIVE
SEE NOTE 6
OUTPUT
T2T1
123
IN
OUT
456
C2
B2
A2
SEE NOTE 3
L31L21L11
+ 1
+ 2
SEE NOTES 3, 4
SEE NOTES 3, 4
C1B1A1
C2B2A2
T3T2T1
REACTOR
TO CASE
DC
Page 20
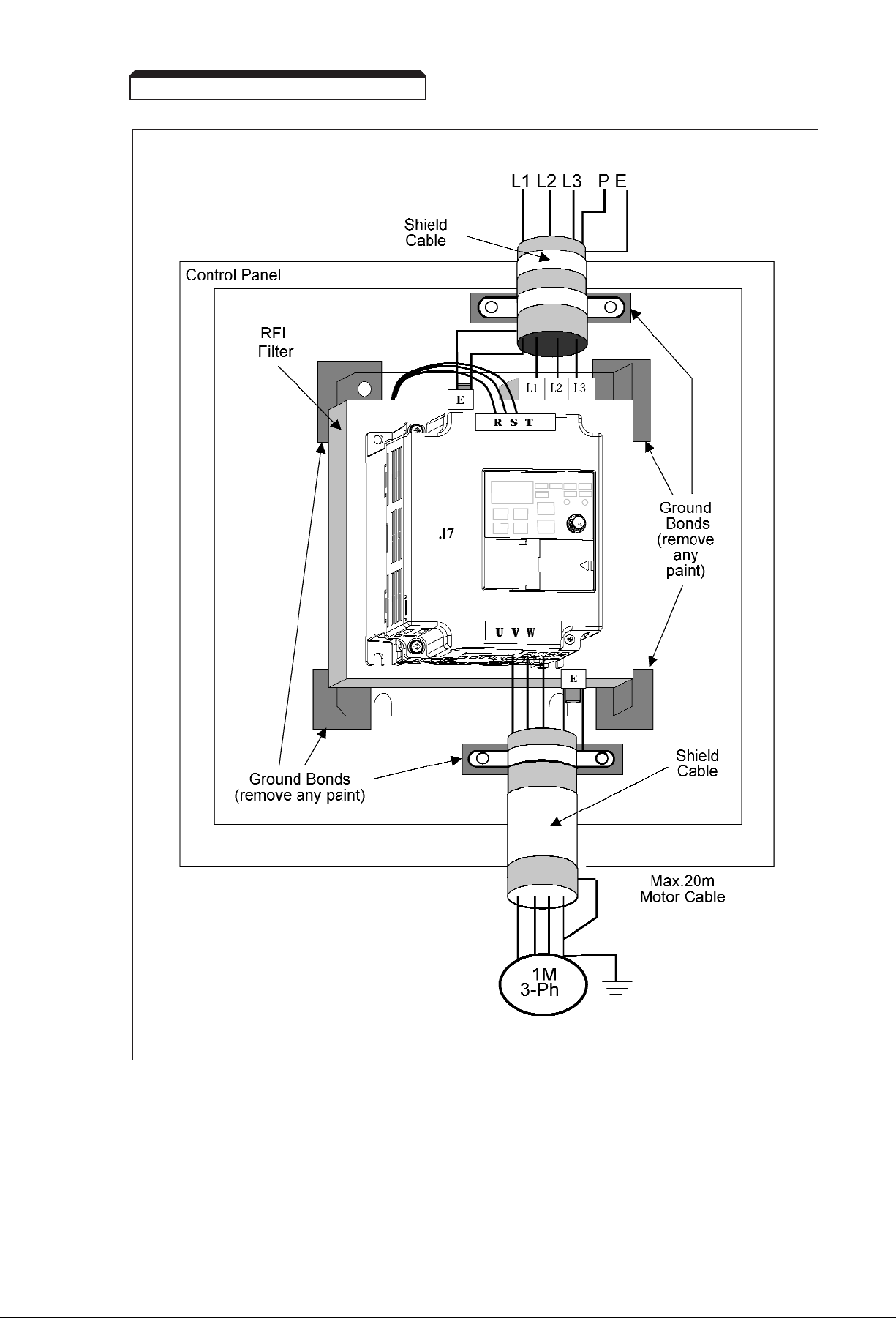
E. Conformance to European EMC Directive
In order to conform to EMC standards, the following methods are required for line filter application,
cable shielding and Drive installation.
The line filter and Drive must be mounted on the same metal plate. The filter should be mounted as
close to the Drive as practical. The cable must be kept as short as possible and the metal plate
should be securely grounded. The ground of the line filter and the Drive must be bonded to the
metal plate with as much bare-metal contact as possible.
For main circuit input cables, a screened cable is recommended within the panel and is also
suggested for external connections. The screen of the cable should be connected to a solid ground.
For the motor cables, a screened cable (max. 20 m) must be used and the screen of the motor cable
should be connected to ground at both ends by a short connection, again using as much bare-metal
contact as practical.
For a more detailed explanation, refer to Yaskawa document TD 4077, “Installation Guidelines For
EMC Directive using Yaskawa AC Drive Products.”
Ta ble 1-4 and Figure 1-4 show the line filter list for EMC standards and the installation/wiring of the
Drive and line filter.
1-8
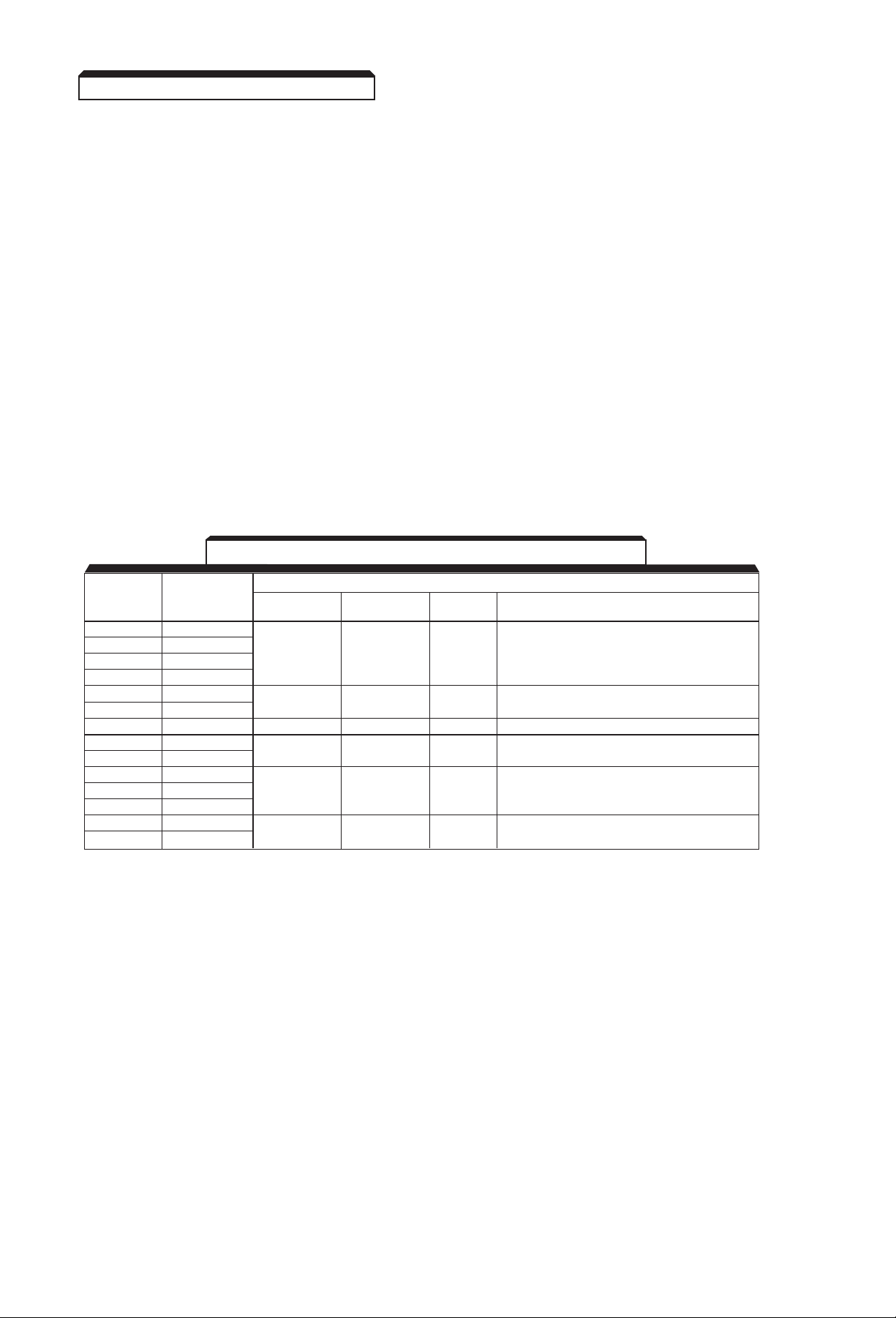
New Drive
Line Filter
Old Drive
Model No. Part Number Rated Mass Dimensions in in. (mm)
Model No.
CIMR-J7AM FIL00 Current (A) lbs. (kg) L x W x D
(1)
JDA001 20P10
JDA002 20P20
JDA003 20P40
1093 10 1.8 (0.8) 7.64 (194) x 3.23 (82) x 1.97 (50)
JDA005 20P70
JDA008 21P50
JDA011 22P20
1094 16 2.2 (1.0) 6.65 (169) x 4.37 (111) x 1.97 (50)
JDA017 23P70 1102 26 2.4 (1.1) 6.85 (174) x 5.67 (144) x 1.97 (50)
JDB001 40P20
JDB002 40P40
1103 5 2.2 (1.0) 6.65 (169) x 4.37 (111) x 1.77 (45)
JDB003 40P70
JDB005 41P50 1104 10 2.2 (1.0) 6.65 (169) x 4.37 (111) x 1.77 (45)
_
42P20
– 43P00
JDB009 43P70
1105 20 2.4 (1.1) 6.85 (174) x 5.67 (144) x 1.97 (50)
(1)
D is the distance the filter will extend outward from the surface of the metal plate.
Continued
1.4 ELECTRICAL INSTALLATION
Table 1-4. Line Filters for EMC Standards
Page 21
1-9
Continued
1.4 ELECTRICAL INSTALLATION
Figure 1-4. Installation of Line Filter and Drive
Page 22
1-10
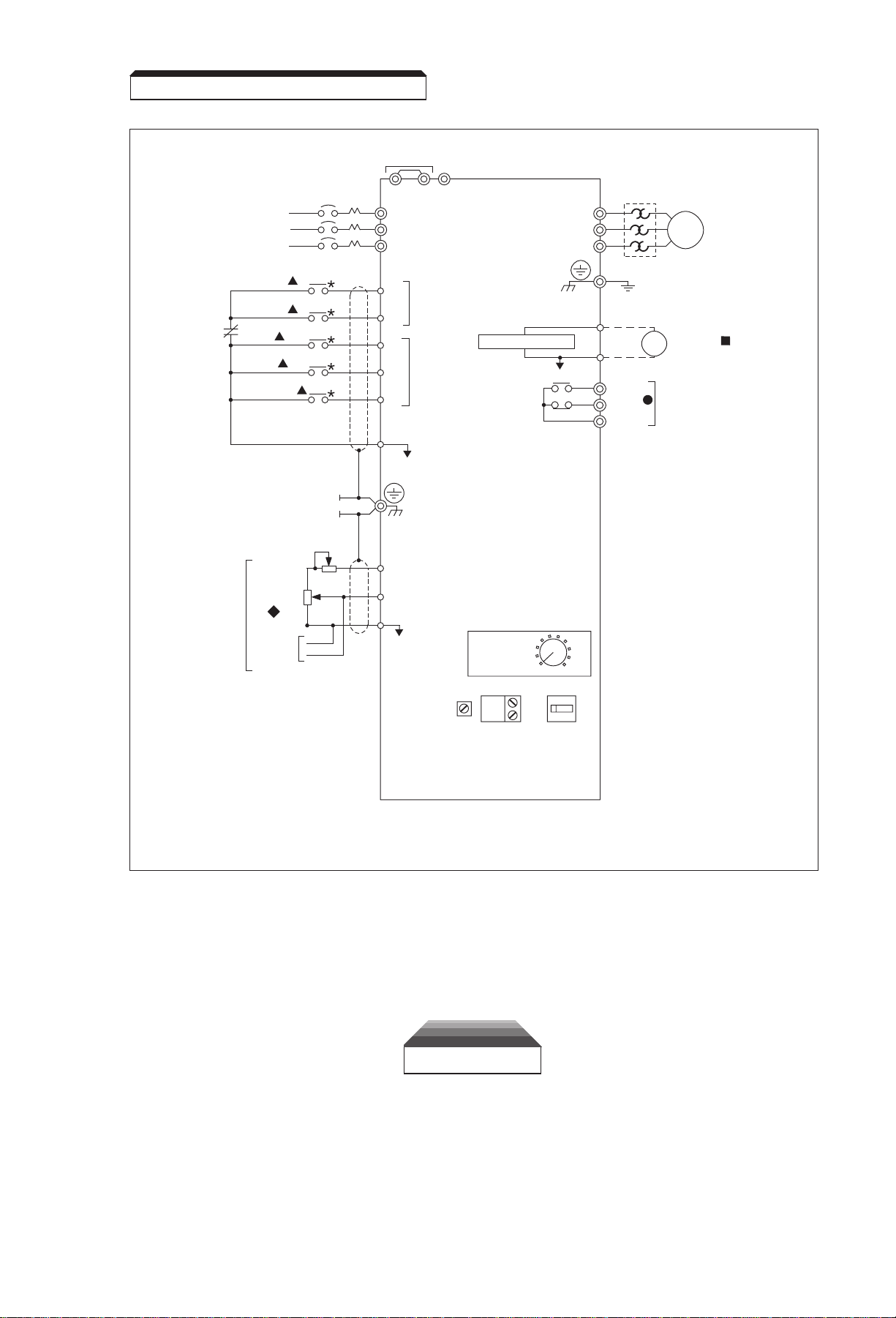
NOTES FOR FIGURE 1-5
✱ – Indicates components not supplied.
– Main circuit terminal.
– Indicates control circuit terminal.
( ) – Indicates alternate terminal marking, i.e., (R) and L1.
▲ – Function labels shown for these terminals are determined by factory settings of n36
through n39 (see paragraph 5.17).
● – Function labels shown for these terminals are determined by factory setting of n40
(see paragraph 5.18).
♦ – Function label shown for this terminal is determined by factory setting of n03 (see paragraph 5.11A).
■ – Function labels shown for these terminals are determined by factory setting of n44 (see paragraph 5.16).
1. Insulated twisted shielded wire is required.
2-conductor #18 GA. (Belden #8760 or equivalent).
3-conductor #18 GA. (Belden #8770 of equivalent).
Connect shield ONLY AT Drive END (ground terminal ). Stub and isolate other end.
2. +12V voltage output current capacity of control terminal FS is 20mA max.
3. The Drive does not include overload 1OL; it is a separate item. If local code requires separate mechanical overload
protection, an overload relay should be installed, interlocked with the Drive as shown. It should be the manual reset
type to prevent automatic restart following a motor fault and subsequent contact reclosure after cool down. For
Canadian installations, overload 1OL is to be provided in accordance with the Canadian Electrical Code, part 1 and
NEC.
4. Customer to connect terminal to earth ground.
5. If the Digital Operator is used, remote operators, which duplicate functions of its command keys may not be
required. See Figure 4-1.
6. An optional DC reactor may be added for harmonic attenuation, if needed. See separate instruction sheet for wiring.
7. If application does not allow reverse operation, parameter n05 , Reverse Run Prohibit Selection, should be set to
“ 1 ” (Reverse Run Disabled), and the Reverse Run/Stop input can be eliminated.
F. Interconnection - 2 Wire
Continued
1.4 ELECTRICAL INSTALLATION
Page 23
1-11
Continued
1.4 ELECTRICAL INSTALLATION
Figure 1-5. Standard Connections (2-Wire Control)
(Parameter n01 set to “10”)
H. Inspection. After wiring is complete, verify that:
All wiring is correctly installed.
Excess screws and wire clippings are removed from inside of unit.
Screws are securely tightened.
Exposed wire does not contact other wiring or terminals.
CAUTION
If a FWD or REV run command is given from the control
circuit terminal when the operation method selection
function ( n02 ) is set to “ 1 ” and the “LO/RE” selection
is set to “RE”, the motor will start automatically as soon
as power is applied to the main circuit.
FOR DC REACTOR
(See Note 6)
3-PHASE
POWER SUPPLY
(Use L1 (R)
and L2 (S) for
single-phase input)
(Note that drive must
be derated by 50%)
FORWARD
RUN/STOP
REVERSE
RUN/STOP
*
1OL
See
Note 3)
FREQUENCY
REF.
(See Note 5)
FAULT
RESET
EXTERNAL
FAULT
MULTI-STEP
SPEED REF A
L1
L2
L3
(See Note 1)
1RH
*
MANUAL
SPEED
2KΩ
0-10VDC
4-20mA
MCCB
(See Note 7)
–
or
+
*
L1 ( R )
L2 ( S )
L3 ( T )
S1
S2
S3
S4
S5
SC
1R
*
2KΩ
FS
FR
FC
–+2+1
(See Note 5)
ANALOG MONITOR
MULTI-FUNCTION
CONTACT INPUT
LOGIC
COMMON
TERMINAL
SHIELD
CONNECTION
FREQUENCY
SETTING POWER SUPPLY
(+12V, 20mA) (See Note 2)
REFERENCE
(0 to 10V, 20KΩ /
4 to 20mA, 250Ω)
OV
FREQUENCY
SETTING
POT
MIN
SW7 SW8
PNP
NPN
V
T1 ( U )
T2 ( V )
T3 ( W )
MA
MB
MC
MAX
AM
AC
I
1OL (See Note 3)
*
AC
*
MOTOR
(See Note 4)
ANALOG OUTPUT
MONITOR 0 to +10VDC, 2mA (8 Bits)
*
FM
OUTPUT
FREQUENCY
MULTI-FUNCTION
FAULT
OUTPUT CONTACT
250VAC, 1A OR LESS
30VDC, 1A OR LESS
FIG. 1-5 (305)
Page 24
1-12
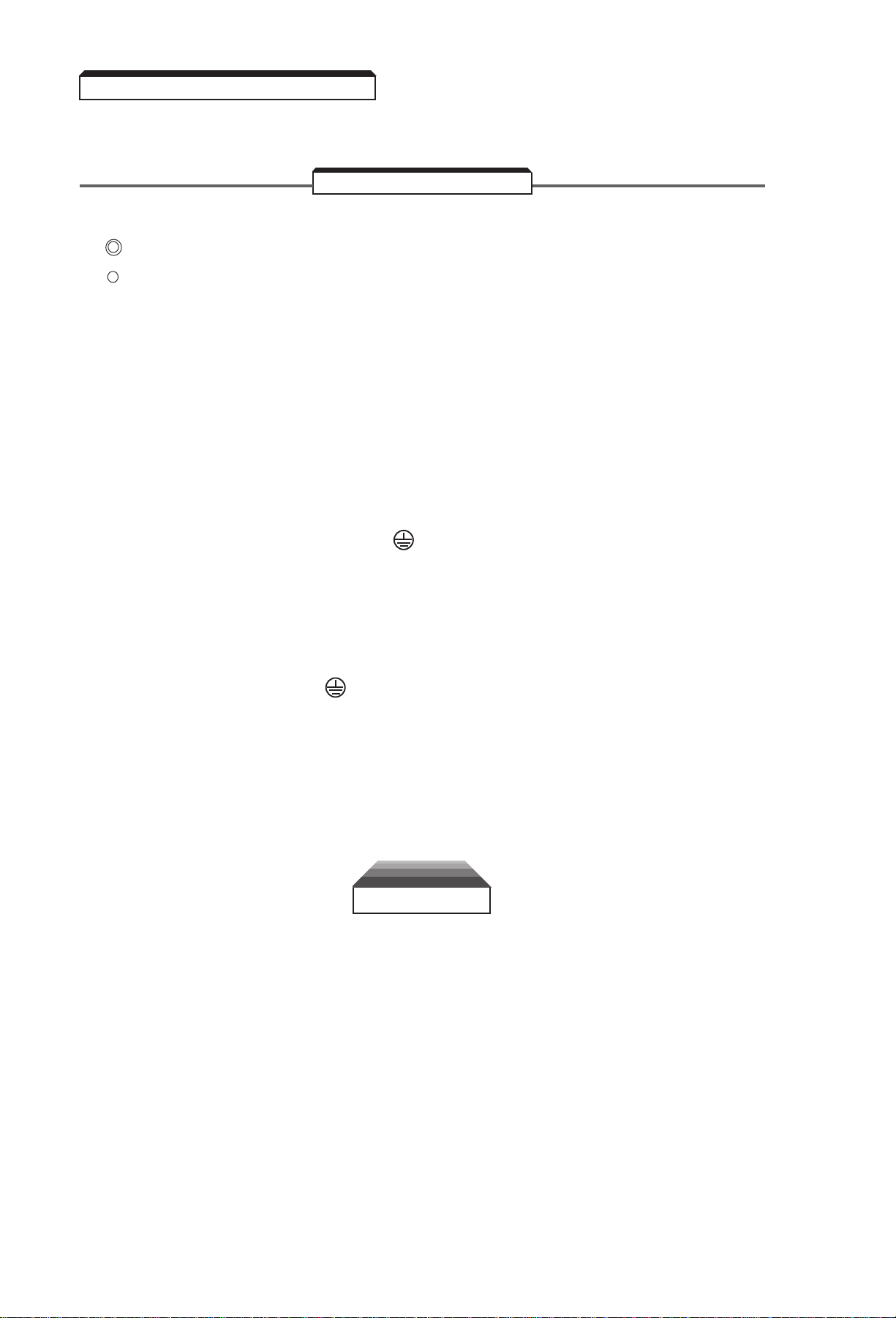
NOTES FOR FIGURE 1-6
✱ – Indicates components not supplied.
– Main circuit terminal.
– Indicates control circuit terminal.
( ) – Indicates alternate terminal marking, i.e., (R) and L1.
▲ – Function labels shown for these terminals are determined by factory settings of n36
through n39 (see paragraph 5.17).
● – Function labels shown for these terminals are determined by factory setting of n40
(see paragraph 5.18).
♦ – Function label shown for this terminal is determined by factory setting of n03 (see paragraph 5.11A).
■ – Function labels shown for these terminals are determined by factory setting of n44 (see paragraph 5.16).
1. Insulated twisted shielded wire is required.
2-conductor #18 GA. (Belden #8760 or equivalent)
3-conductor #18 GA. (Belden #8770 or equivalent)
Connect shield only at drive end (ground terminal ( ) ). Stub and isolate other end.
2. +12V voltage output current capacity of control terminal FS is 20mA max.
3. The Drive does not include overload 1OL; it is a separate item. It may not be required; see page 5.34. The contact
from the separately supplied overload relay should be interlocked with the Drive as shown. It should be the manual
reset type to prevent automatic restart following a motor fault and subsequent contact reclosure after cool down. For
Canadian installations, overload 1OL is to be provided in accordance with the Canadian Electrical Code, Part 1 and
NEC.
4. Customer to connect ground terminal ( ) to earth ground.
5. If Digital Operator is used, remote operators which duplicate functions of its command keys (see Figure 4-1) may not
be required.
6. An optional DC reactor may be added for harmonic attenuation, if needed; see separate instruction sheet for wiring.
7. If application does not allow reverse operation, parameter n05 , Reverse Run Prohibit Selection, should be set to “ 1 ”
(Reverse Run Disabled) and Fwd/Rev input can be eliminated.
CAUTION
Parameter n37 must be set to “ 0 ”, AND parameter
n01 must be set to “ 11 ”. Resetting drive parameter
n01 to “ 10 ” may cause the motor to run in reverse
direction WITHOUT A RUN COMMAND, and possibly
result in equipment damage or personal injury.
G. Interconnection - 3 Wire
Continued
1.4 ELECTRICAL INSTALLATION
Page 25
1-13
Continued
1.4 ELECTRICAL INSTALLATION
Figure 1-6. Standard Connections (3-Wire Control)
(Parameter n01 set to “11”)
H. Inspection. After wiring is complete, verify that:
All wiring is correctly installed.
Excess screws and wire clippings are removed from inside of unit.
Screws are securely tightened.
Exposed wire does not contact other wiring or terminals.
CAUTION
If a FWD or REV run command is given from the control
circuit terminal when the operation method selection
function ( n02 ) is set to “ 1 ” and the “LO/RE” selection
is set to “RE”, the motor will start automatically as soon
as power is applied to the main circuit.
FOR DC REACTOR
(See Note 6)
3-PHASE
POWER SUPPLY
(Use L1 (R) and
L2 (S) for
single-phase input)
(Note that drive must
be derated by 50%)
RUN
STOP
*
1OL
See
Note 3)
FREQUENCY
REF.
(See Note 5)
FORWARD/
REVERSE
EXTERNAL
FAULT
MULTI-STEP
SPEED REF A
L1
L2
L3
(See Note 7)
(See Note 1)
1RH
*
MANUAL
SPEED
2KΩ
0-10VDC
4-20mA
MCCB
*
1R
*
2KΩ
–
or
L1 ( R )
L2 ( S )
L3 ( T )
S1
S2
S3
S4
S5
SC
FS
FR
FC
+
–+2+1
(See Note 5)
ANALOG MONITOR
MULTI-FUNCTION
CONTACT INPUT
LOGIC
COMMON
TERMINAL
SHIELD
CONNECTION
FREQUENCY
SETTING POWER SUPPLY
(+12V, 20mA) (See Note 2)
REFERENCE
(0 to 10V, 20KΩ /
4 to 20mA, 250Ω)
OV
FREQUENCY
SETTING
POT
MIN
SW7 SW8
PNP
NPN
V
T1 ( U )
T2 ( V )
T3 ( W )
MA
MB
MC
MAX
AM
AC
I
1OL (See Note 3)
*
AC
*
MOTOR
(See Note 4)
ANALOG OUTPUT
MONITOR 0 to +10VDC, 2mA (8 Bits)
*
FM OUTPUT
FREQUENCY
MULTI-FUNCTION
FAULT
OUTPUT CONTACT
250VAC, 1A OR LESS
30VDC, 1A OR LESS
FIG. 1-6 (305)
Page 26

2-1
• Verify wires are properly connected and no erroneous grounds exist.
• Remove all debris from the enclosure, such as loose wire clippings, metal shavings, etc.
• Verify all mechanical connections are tight.
• Verify motor is not connected to load.
• Apply input power only after the front cover is in place. DO NOT remove the front cover or Digital
Operator while input power is on.
2.1 PRE-POWER CHECKS
Section 2. INITIAL START-UP
Page 27
2-2
IMPORTANT: 2-wire or 3-wire sequence selection must be made prior to any other adjustments
(Parameter n01).
2.2 STARTUP PROCEDURE
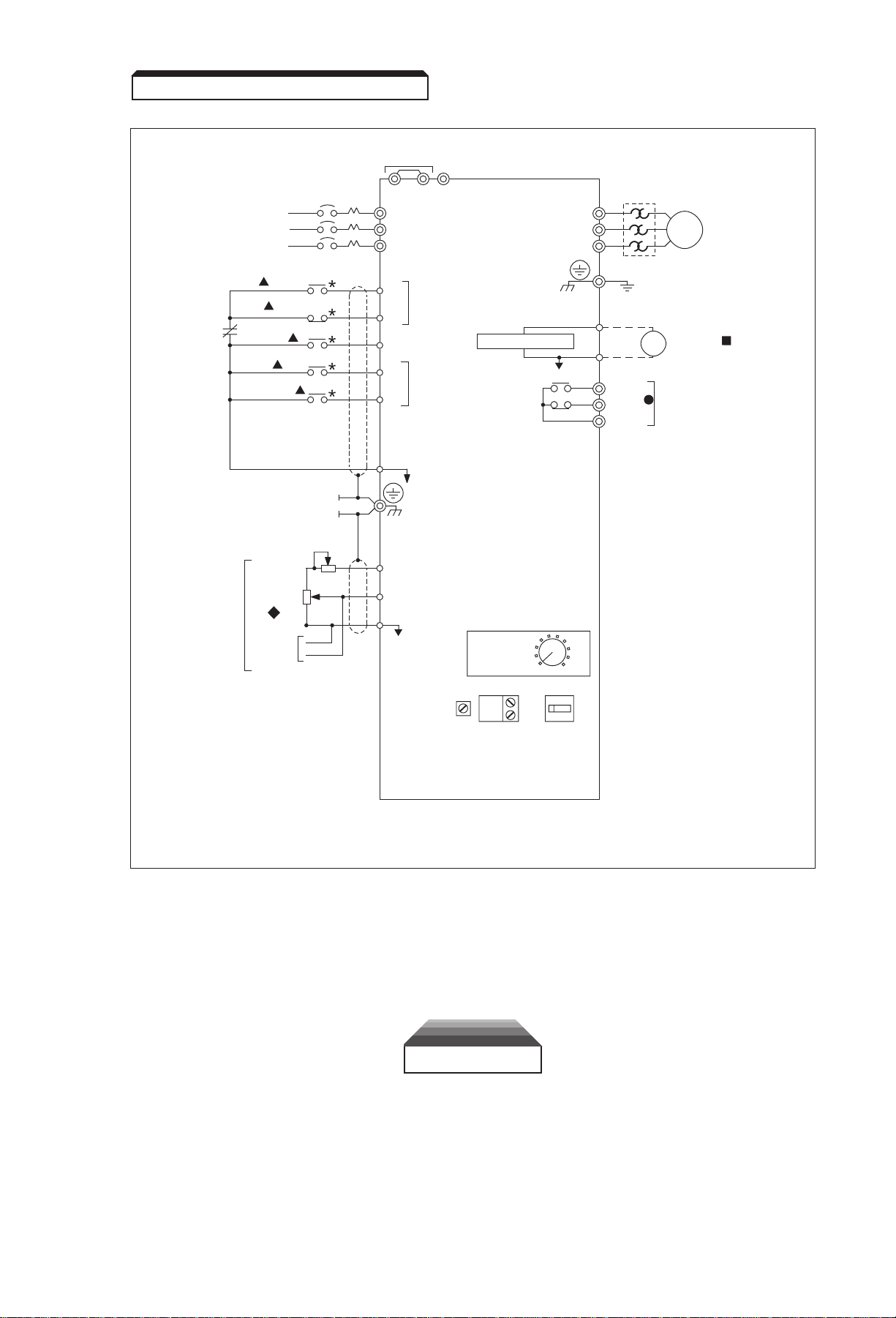
DIGITAL OPERATOR
DESCRIPTION KEY SEQUENCE DISPLAY
Table 2-1. Startup Procedure
Set motor rated current.
(This can be obtained from
the nameplate of the motor.)
Press key until the LED is lit
on the digital operator.
Press and hold until n32 is
displayed on the digital operator.
Then press .
Use the & keys until the
number in the display matches the motor
rated current.
Then press .
DATA
ENTER
V
V
DATA
ENTER
V
PRGM
DSPL
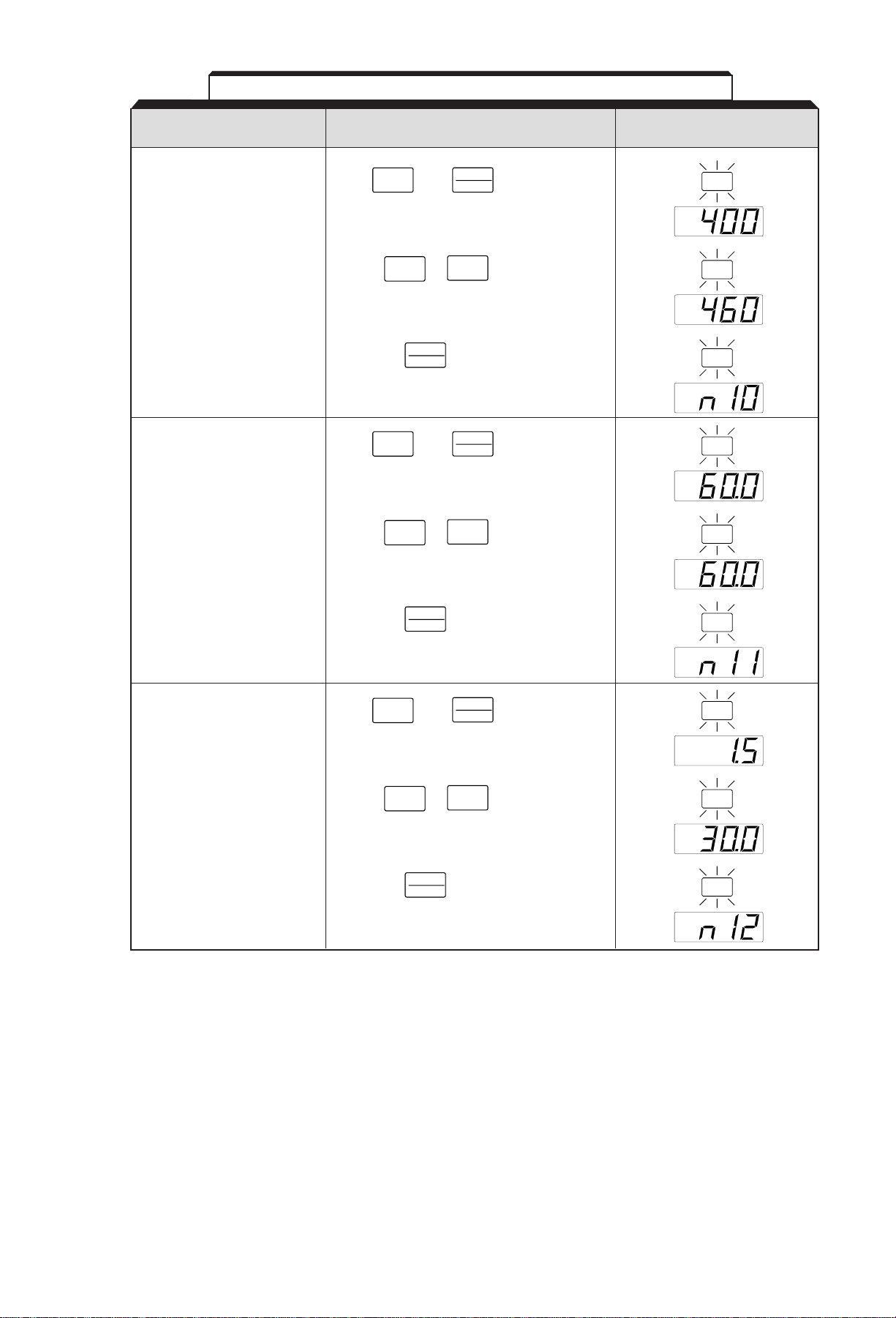
Set the V/f pattern.
Parameters n09 through n15
set the V/f pattern. Table 5-4
in section 5.26 lists
recommended V/f patterns.
The numbers in parentheses
shown in the example below
are for a 460V / 60 Hz
variable torque application
(fan or pump).
Set Parameter n09-
Maximum output frequency.
(60.0 Hz)
Press and hold until n09 is displayed
on the digital operator.
V
PRGM
PRGM
PRGM
PRGM
PRGM
Then press .
DATA
ENTER
Then press .
DATA
ENTER
Use the & keys until the
desired number is in the display.
V
V
(1)
(1)
(1)
PRGM
Page 28
2-3
DIGITAL OPERATOR
DESCRIPTION KEY SEQUENCE DISPLAY
Table 2-1. Startup Procedure - Continued
Set Parameter n10-
Voltage Max.
(460 V)
Press then .
DATA
ENTER
V
Set Parameter n12-
Frequency - Midpoint
(30.0 Hz)
Press then .
DATA
ENTER
V
Set Parameter n11-
Frequency at max. voltage
point (motor rated frequency)
(60.0 Hz)
Press then .
DATA
ENTER
V
PRGM
PRGM
PRGM
PRGM
PRGM
PRGM
PRGM
PRGM
PRGM
(1)
Then press .
DATA
ENTER
Use the & keys until the
desired number is in the display.
V
V
Then press .
DATA
ENTER
Use the & keys until the
desired number is in the display.
V
V
Then press .
DATA
ENTER
Use the & keys until the
desired number is in the display.
V
V
(1)
(1)
(1)
(1)
(1)
Page 29
2-4
DIGITAL OPERATOR
DESCRIPTION KEY SEQUENCE DISPLAY
Table 2-1. Startup Procedure - Continued
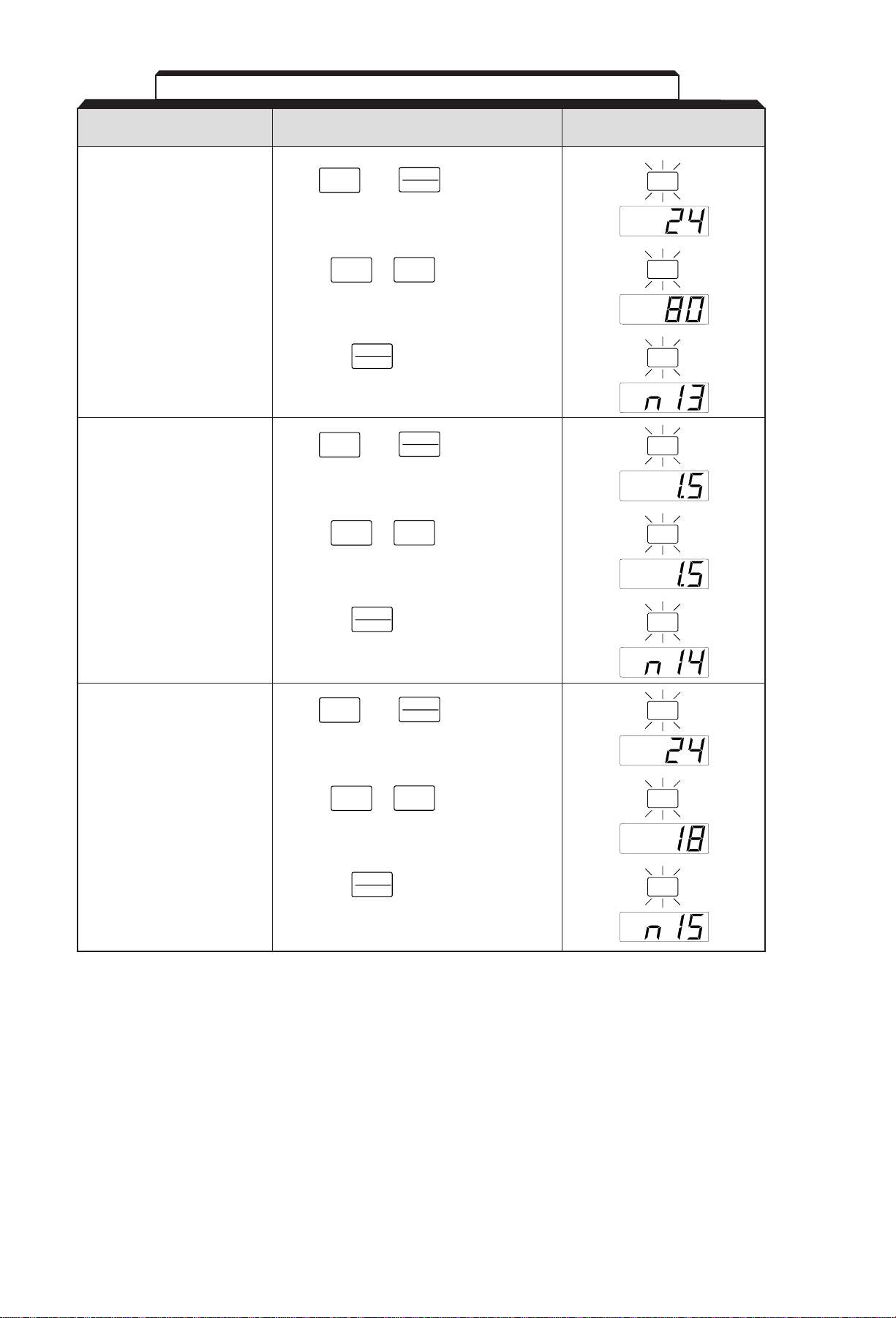
Set Parameter n13-
Voltage - Midpoint
(80 V)
Press then .
DATA
ENTER
V
Set Parameter n15-
Voltage - Minimum
(18 V)
Press then .
DATA
ENTER
V
Set Parameter n14-
Frequency - Minimum
(1.5 Hz)
Press then .
DATA
ENTER
V
PRGM
PRGM
PRGM
PRGM
PRGM
PRGM
PRGM
PRGM
PRGM
(1)
(1)
(1)
(1)
(1)
(1)
Then press .
DATA
ENTER
Use the & keys until the
desired number is in the display.
V
V
Then press .
DATA
ENTER
Use the & keys until the
desired number is in the display.
V
V
Then press .
DATA
ENTER
Use the & keys until the
desired number is in the display.
V
V
Page 30

2-5
DIGITAL OPERATOR
DESCRIPTION KEY SEQUENCE DISPLAY
Table 2-1. Startup Procedure - Continued
Test run the drive from the
Digital Operator
WARNING:The next key press will cause
the motor to turn! Take appropriate safety
precautions!
Press the key then slowly turn the
Digital Operator Pot to the right about 1/4 of a
turn. The display on the drive will show the
actual motor amps.
Operation checkpoints:
• Motor rotates smoothly
• Motor rotates in correct direction. (If motor
does not rotate in the proper direction,
stop the motor and remove power from the
Drive. Switch motor connections T1 (U)
and T2 (V) at the Drive to change
direction).
• Motor has no abnormal vibration or noise.
• Acceleration and deceleration are smooth.
• Unit is not overloaded. (Displayed current
does not exceed drive rated current).
Press the key.
STOP
RESET
RUN
This completes the startup.
Make further programming
changes as required.
(1)
The number in the display may be different than shown.
Prepare to test run the
drive from the Digital
Operator. Motor should be
disconnected from the load.
This will set the drive into the
“Local” mode, and bring up
the motor current display.
Press several times until the “LO/RE”
LED is lit.
DSPL
LO/RE
LO/RE
IOUT
Display the drive’s output current by pressing
four times. Turn the Digital Operator
Pot all the way to the left (counter-clockwise).
DSPL
Press the key once.
V
IOUT
(1)
Page 31

3-1
After completing the start-up, and programming of constants, turn off the AC main circuit power.
Make additional wiring connections required for the external control functions selected by the
constant programming. Connect the driven machine to the motor. Verify that the driven machine is
in running condition, and that no dangerous conditions exist around the Drive system.
OPERATING PRECAUTIONS
• Before applying a RUN command, verify that the motor is stopped.
• NEVER use a motor whose full-load amps exceeds the Drive rating.
• When starting and stopping the motor, use the operation signals (RUN/STOP, FWD/REV),
NOT a magnetic contactor on the power supply side.
Run the motor under load with control by the Digital Operator using the same procedure as for the
Initial Start-up. If the Digital Operator is used in combination with external commands or external
commands only are used, the procedure must be altered accordingly.
Section 3. OPERATION AT LOAD
Page 32

4-1
All functions of the Drive are accessed using the Digital Operator. In addition to controlling motor
operation, the operator can enter information into the Drive memory to configure the Drive to the
application, by using the Function LEDs.
A. Digital Operator Description
The Digital Operator has a 3-digit LED display. Both numeric and alpha-numeric data can appear on
the display.
Indicators and keys on the Digital Operator are described in Figure 4-1.
4.1 GENERAL
4.2 DIGITAL OPERATOR
Section 4. DIGITAL OPERATOR
Figure 4-1. Digital Operator
Display section
Data display
section
Press to switch
between function
LED’s.
Displays data
to be changed
and enters new
data.
Press to increase
parameter no./data
value.
FREF FOUT IOUT MNTR
F/R LO/RE PRGM
RUN
DSPL
DATA
ENTER
Press to decrease
parameter no./data
value.
STOP
RESET
RUN ALARM
MIN MAX
Press to run the motor.
Press to stop the motor,
or reset a drive fault
Digital Operator
Potentiometer
(Pot)
Function
LED’s
Status
indicators
GPD 305 Digital Op
Page 33

4-2
Continued
B. Description of Function LEDs
By pressing the DSPL key on the Digital Operator, the operator can step to each of the seven
Function LEDs and its associated display/setting function:
— Frequency Reference Setting
Sets/Displays the drive operation speed (Hz).
— Output Frequency Monitor
Displays the output frequency (Hz) at which the drive is currently
operating. This is a monitor only function; the operator cannot
change the displayed value by use of the keypad.
— Output Current Monitor
Displays the level of output current (Amps) that the drive is
currently producing. This is a monitor only function; the operator
cannot change the displayed value by use of the keypad.
— Monitor Selection
Pressing ENTER allows access to the various Monitor parameters,
U-01 through U-10 and U-15. These are monitor only functions; the operator
cannot change the displayed value. Accessible during run command.
See section 4.4. for complete listing of all monitor parameters.
— FWD/REV Run Selection
Sets the rotation direction of the motor when a Run command is
given by the Digital Operator keypad. Display of For = forward run,
rEu = reverse run.
— Local / Remote Selection
This toggles between the Local (Digital Operator) and Remote (set by
parameters n02 & n03) modes of operation. This affects both the
start/stop functions, as well as the frequency reference. Local / Remote
status cannot be changed using this LED when a multi-function input
terminal is set for Local/Remote (n36 through n39 set for “17”).
— Parameter Programming
Selects or reads data using parameter number (nXX). Data is
displayed by pressing the ENTER key, and can be changed by
pressing the “up arrow” or “down arrow” keys. Any changes can be
saved by again pressing the ENTER key. Pressing the DSPL key
exits the Programming mode.
PRGM
LO/RE
F/R
MNTR
IOUT
FOUT
FREF
FREF FOUT
IOUT
Press
DSPL
Press
DSPL
MNTR
Press
DSPL
Press
DSPL
F/R LO/RE
PRGM
Press
DSPL
Press
DSPL
Press
DSPL
4.2 DIGITAL OPERATOR
Page 34

4-3
There are two indicator LEDs on the front of the Drive. The Drive status is indicated by various
combinations of ON, Blinking, and OFF conditions of these two LEDs:
For details of how the status indicator LEDs function during a drive fault, refer to the
“TROUBLESHOOTING” section.
4.3 STATUS INDICATOR LEDs
When using the Monitor Function, a variety of information will appear on the Digital Operator
display when each of the U-XX (display only) parameters is selected.
CONSTANT DISPLAY
Un- MONITORED ITEM EXAMPLE
01 Frequency reference (Hz) 60.0
02 Output frequency (Hz) 60.0
03 Output current (A) 12.5
04 AC output voltage (V) 230
05 DC Bus voltage ( VPN ) 325
06 Input terminal status
IIIIII
(1)
07 Output terminal status IIIIII
(2)
09 Fault record (last record faults)
(3)
oC
10 Software number 013
XXX
15 Data reception error 0
PARAMETER DISPLAY
U - MONITORED ITEM EXAMPLE
4.4 MONITOR DISPLAYS
(1)
Actual display appearance:
(2)
Actual display appearance:
(3)
See section 6 for viewing
of fault log contents.
Te rm. S5 input OPEN
Not used
Te rm. S1 input OPEN
Te rm. S2 input CLOSED
Te rm. S3 input OPEN
Te rm. S4 input CLOSED
MA-MC CLOSED
Not used
{
(Green) (Red)
CONDITION RUN ALARM
Operation Ready (during stop) Blinking Off
Ramp to Stop (during decel) Long Blinking Off
Normal Operation (running) On Off
Alarm Blinking or ON Blinking
Fault Off On
Page 35

4-4
Fault record display
When U-09 is selected, a three-digit box is displayed.
• Example
...... 3-digit numbers
:Fault description
“---” is displayed if there is no fault.
(Refer to section 6 for details of fault.)
• Viewing fault record
Press the
or key to examine the complete fault record.
• Clearing fault record
Set parameter n01 to “6” to clear the fault record. Display returns to “n01” after completion of 6
setting.
NOTE: Parameter initializing (n01=10 or 11) also clears the fault record.
<
>
Page 36

5-1
This section describes features of the Drive which are defined by programmed settings in the various
parameters in memory. Since most features use more than one parameter, the descriptions appear
in alphabetical order by the function name. In Table 5-1, the functions are grouped into operational
categories. To cross reference a particular parameter to the features to which it applies, see the
listings in Appendix 1.
Table 5-1. List of Features Defined By Parameters
Section 5. PROGRAMMABLE FEATURES
5.1 GENERAL
PARAGRAPH
FUNCTION REFERENCE PARAMETER(S)
SET-UP
Initialization (Reset), 2-Wire or 3-Wire 5.20 n01
Volts/Hertz Patterns 5.26 n09 - n15
Thermal Motor Overload Protection 5.24 n32, n33
Copy Function 5.27 n76, n77
STARTING
Accel Time 5.2 n16, n18
S-Curve Characteristics 5.3 n20
DC Injection Braking at Start 5.7 n52, n54
STOPPING
Stopping Method 5.23 n04
Decel Time 5.2 n17, n19
DC Injection Braking at Stop 5.7 n52, n53
SPEED CONTROL
Frequency Reference, Upper & Lower Limits 5.9 n30, n31
Jog Reference 5.12 n29, n36 - n39
Frequency Reference Selection 5.11 n03, n07, n08
Multi-step Speed Setting 5.11 n03, n21 - n28, n36 - n39
Up/Down Frequency Setting 5.17E n39
Modbus Control 5.14 n02, n03, n68 - n74
REVERSE
Reverse Run Disabled Table A1-1 n05
Critical Frequency Rejection 5.6 n49 - n51
Carrier Frequency 5.5 n46
Speed Search 5.17D n36 - n39
Speed Coincidence 5.18 n40, n58
Slip Compensation 5.21 n32, n64- n67
RUNNING IMPROVEMENTS
Torque Compensation 5.25 n63
Stall Prevention 5.22 n55 - n57
PROTECTIVE FEATURES
Momentary Power Loss Ride-thru 5.15 n47
Auto Restart 5.4 n48
Overtorque/Undertorque Detection 5.19 n40, n59 - n61
DRIVE CONTROLS, INPUT
Analog Frequency Reference Bias and Gain 5.8 n41, n42
Multi-function Input Terminals 5.17 n36 - n39
External Fault Terminals 5.17 n36 - n39
DRIVE OUTPUT
Multi-function Output Terminals 5.18 n40
Analog Monitor Output (Multi-function) 5.16 n44, n45
Page 37

5-2
A.
n16
: Accel Time 1 Factory setting (each):
10.0
seconds
n17
: Decel Time 1
Range (each): 0.0 to 999 seconds
n18
: Accel Time 2 Factory setting (each):
10.0
seconds
n19
: Decel Time 2
Range (each): 0.0 to 999 seconds
The Drive incorporates two sets of individually programmable acceleration and deceleration times.
Setting resolution is 0.1 seconds when set to less than 100 seconds; resolution is 1 second when set
to 100 seconds or more.
B.
n36
thru
n39
: Multi- Data
11
: Accel/Decel Time Selection
function Inputs (Term. S1 thru S5)
By programming data " 11 " into one of the multifunction parameters (
n36
thru
n39
), one of the multifunction input terminals (S2 thru S5) becomes a time
selection input. When the input terminal (i.e. external
contact) is open, Time 1 (
n16/ n17
) is selected. When
the input terminal is closed, Time 2 (
n18/ n19
) is
selected.
TIME 1 o
oo
TIME 2
S5
SC
0V
5.2 ACCEL/DECEL TIME
Page 38

5-3
n020 : S-Curve Selection
Factory setting: 0
Range: 0 to 3
Setting of this parameter
determines the S-curve
(starting) characteristics
of the acceleration ramp.
0 = S-curve disabled
1 = S-curve
of 0.2 seconds
2 = S-curve time
of 0.5 seconds
3 = S-curve time
of 1.0 seconds
The following figure shows FWD/REV switching and acceleration & deceleration to a stop with
S-curve active.
RUN
FREQ
COMMAND
0
TIME
S-Curve Characteristics
Time (T
SC)
OUTPUT
FREQUENCY
Accel ramp per
selected Accel Time
(n16 or n18 )
5.3 ACCEL/DECEL: S-CURVE CHARACTERISTICS
FORWARD RUN COMMAND
= S-CURVE CHARACTERISTIC
MIN. OUTPUT
FREQUENCY
n14
DC INJECTION
TIME AT STOP
n53
DECELERATION
DECELERATION
REVERSE RUN COMMAND
OUTPUT FREQUENCY
ACCELERATION
ACCELERATION
n14
Page 39

5-4
A. n48 : Number of Auto-Restart Attempts Factory setting: 0
Range: 0 to 10
When a fault occurs during operation, the Drive can be programmed for an auto-restart operation to
automatically reset the fault. Auto-restart operation will use the number of reset attempts set in this
parameter, up to the maximum of 10. When set to " 0 ", no auto-restarts will be attempted.
• The following faults can be automatically reset:
oC: Overcurrent
ou: Overvoltage (OV)
GF: Ground Fault
• The number of restart attempts available will be reset to the n48 setting when:
1. 10 minutes has elapsed without a fault occurring.
2. The RESET key, or external Fault Reset push button, is pressed.
3. Power is removed from the Drive.
5.4 AUTO-RESTART
Page 40

5-5
n46
CARRIER FREQUENCY(kHz) SLOPE OUTPUT FREQUENCY(Hz)
MODE
SETTING Maximum(FcMAX) Minimum(FcMIN)
(=Fc)
Fo
F1 F2
1 2.5 2.5 0 NA NA CONSTANT
2 5.0 5.0 0 NA NA
3 7.5 7.5 0 NA NA
4 10.0 10.0 0 NA NA
7 2.5 1.0 12 83.3 208.3
SYNCHRONOUS
8 2.5 1.0 24 41.6 104.1
9 2.5 1.0 36 27.7 69.4
n46 : Carrier Frequency Upper Limit Factory Setting: 3 or 4 (see table below)
Range: 1 to 4; 7 to 9
The relationship between output frequency and carrier frequency is determined from the set value
of n46 .
(a) For constant carrier frequency, set to " 1 ", " 2 ", " 3 ", " 4 ".
(b) For synchronous mode, set n46 to " 7 ", " 8 ", or " 9 ". These setting values
establish carrier frequencies of 12f, 24f, or 36f, respectively.
Fc
MAX
CARRIER
FREQUENCY
SLOPE
Fc
MIN
0F1 F2
OUTPUT FREQUENCY
5.5 CARRIER FREQUENCY
Carrier frequency should be decreased as the distance between the Drive and the motor increases,
to reduce capacitive coupling in the motor leads.
• For wiring distances greater than 100m (328 ft.), n46 should be set to 2.5 kHz (data " 1 " )
or less.
Setting carrier frequency to a value higher than its factory setting requires derating of the drive’s
output current - refer to the following table:
Rated
Input
Old Drive
Model No.
New Drive
Model No.
CIMR-J7AM
Rated
Output
Current (A)
n46 Derated
Output
Current (A)
(1)
Factory
Setting
Frequency
(kHz)
JDA001
JDA002
JDA003
JDA005
JDA008
JDA011
JDA017
JDB001
JDB002
JDB003
JDB005
–
–
JDB009
20P10
20P20
20P40
20P70
21P50
22P20
23P70
40P20
40P40
40P70
41P50
42P20
43P00
43P70
0.8
1.6
3.0
5.0
8.0
11.0
17.5
1.2
1.8
3.4
4.8
5.5
7.2
8.6
4
4
4
4
3
3
3
3
3
3
3
3
3
3
10
10
10
10
7.5
7.5
7.5
7.5
7.5
7.5
7.5
7.5
7.5
7.5
No
Derate
Required
7.0
10.0
16.5
1.0
1.6
3.0
4.0
4.8
6.3
7.6
230V
460V
(1) Derated Output Current values are the maximum currents available with a
carrier frequency n46 setting of “4” (10kHz).
Page 41

5-6
A. n49 : Prohibited Frequency 1 Factory setting (each): 0.0
n50 : Prohibited Frequency 2
Range (each): 0.0 to 400 Hz
These parameters allow programming of up to three prohibited frequency points for eliminating
problems with resonant vibration of the motor/machine. This feature does not actually eliminate the
selected frequency values, but will accelerate and decelerate the motor through the prohibited
bandwidth.
B. n51 : Prohibited Frequency Deadband Factory setting: 0.0
Range: 0.0 to 25.5 Hz
This parameter determines the width of the deadband around each selected prohibited frequency
point. The factory setting is " 1.0 ", which establishes a deadband of ± 1.0 Hz.
EXAMPLE:
Vibration encountered between 30.0 and 36.0 Hz.
SOLUTION: Set n49 to " 33.0 ". This is the center of the problem
frequency band.
Set n51 to " 3.0 ". This will cause the Drive to reject all
frequency command values between 30.0 and 36.0 Hz.
A frequency command in the deadband will be converted to the bottom
value of the deadband, e.g. a command of 33 Hz would result in a run
frequency of 30 Hz.
NOTE: n49 > n50 - The highest prohibit frequency required needs to be in n49 and the
lowest prohibit frequency needs to be in n50.
FREQ. CMD
36 Hz
n49 = 33 Hz
30 Hz
0
Total Deadband = 6.0 Hz
± n51 (3.0 Hz)
OUTPUT FREQUENCY (Hz)
5.6 CRITICAL FREQUENCY REJECTION
Page 42

5-7
n14 : Minimum Frequency Range: 0.1 to 10.0 Hz
n52 : DC Injection Braking Current Factory setting: 50 %
(% of Drive Rated Current)
Range: 0 to 100 %
n53 : DC Injection Time at Stop Factory setting: 0.5 sec
Range: 0.0 to 25.5 sec
n54 : DC Injection Time at Start Factory setting: 0.0 sec
Range: 0.0 to 25.5 sec
DC injection can be used to stop a motor whose rotational direction is uncertain at start-up, or to
help stop a coasting motor.
With ramp to stop enabled (n04 = " 0 " ), after a STOP command is received the Drive controls
motor deceleration according to the Decel Time setting, until output frequency reaches the DC
injection braking start frequency (or Minimum Frequency, n14 ). Then the Drive output is turned off
and DC injection current is applied to the motor. The effective DC injection time and current should
be set to provide adequate stopping without excessive motor heating. The DC injection voltage is
determined by the DC injection braking current and motor impedance.
DC Braking Sequence
5.7 DC INJECTION BRAKING
RUN COMMAND
OUTPUT FREQUENCY
STOP
RAMP TO STOP
DC DC
DC INJECTION TIME AT
START (n54 )
MINIMUM
FREQUENCY (n14 )
DC INJECTION TIME AT
STOP (n53 )
Page 43

5-8
ADJUSTMENT PROCEDURE:
1. With no input, adjust Bias (n42 setting) until an output of
0.0 Hz is obtained.
2. With full scale input, adjust Gain (n41 setting) until an output
of 60.0 Hz (or other desired max. output frequency) is obtained.
NOTE: Follow the same adjustment procedure for other desired frequency setpoints.
n41 : Analog Frequency Reference Gain Factory setting: 100 %
Range: 0 to 255 %
Sets the auto-speed frequency command gain,
in increments of 1%.
n42 : Analog Frequency Reference Bias Factory setting: 0 %
Range: -99 to 99 %
10V
FREQ. REF.
INPUT (V)
FREQ.
REF.
(%)
BIAS
(+)
(–)
0V
100%
0%
–100%
BIAS
5.8 FREQUENCY REFERENCE BIAS/GAIN (ANALOG)
For inverse-acting frequency reference
1. Begin with n41 & n42 settings as shown below.
2. Fine tune as indicated above.
n41 n42
= 100 0
= 0 99
100%
FREQ
REF.
0%
0V 10V
INPUT VOLTAGE (TERM. FR)
FREQ. REF.
INPUT (V)
FREQ.
REF.
(%)
GAIN
110
100
90
10V
0V
100%
0%
(+)
(–)
GAIN
99%
–99%
Page 44

5-9
n30 : Frequency Reference Upper Limit Factory setting: 100 %
Range: 0 to 110 %
n31 : Frequency Reference Lower Limit Factory setting: 0 %
Range: 0 to 110 %
These two parameters set the range for the frequency command signal. Each is set, in increments
of 1%, as a percentage of maximum frequency (Fmax; n09 ) as established by either the selected
standard V/f pattern or custom V/f pattern.
NOTE: All references are affected by the upper and lower limit points.
EXAMPLE:
n09 = " 60 " Hz (100%)
n30 = " 80 " % = 48Hz – Max. speed
n31 = " 10 " % = 6Hz – Min. speed
NOTE: n30 must be set to a higher value than n31.
100%
n30 80%
OUTPUT
FREQ.
( % )
n31 10%
2.5%
t
5.9 FREQUENCY REFERENCE UPPER AND LOWER LIMITS
n62 : Up/Down Hold Memory Factory setting: 0
Range: 0 or 1
Used with the Up/Down command. To retain the held frequency reference when a stop command is
issued or when power is removed, set n62 to " 1 ".
SETTING DESCRIPTION
0 Not retained
1 Held reference retained
Note: Frequency reference value must
remain unchanged for a minimum of 5
seconds to be retained.
5.10 FREQUENCY REFERENCE RETENTION
Page 45

5-10
The Drive allows selection of up to eleven frequency references. One is an analog input (terminal
FR), eight are digital presets (selected with multi-function inputs), one is a jog input, and one is via
serial communications (MODBUS).
A. Frequency Reference via Analog Input
In order to set the Drive so the frequency reference comes from the analog input, set parameter
n03 as shown in the table below:
(1)
SW8 can be found just above the control circuit terminals. The switch connects a 250 Ω resistor from terminal FR to FC
when set to the “I” position (to the right). NOTE: All power must be removed from the Drive before SW8 can be set.
B. Frequency Reference via Digital Presets
In order to set the Drive so the frequency reference comes from the digital presets, the following
parameters need to be set:
Depending upon how many preset references are required determines the actual settings of n36
thru n39.Several examples are listed below.
PARAMETER SETTING DESCRIPTION
n21
User
thru
Set
Eight Frequency References, plus jog Frequency
n29
n36
6, 7, Sets the multi-function inputs so selection of the various references is
thru
and/or 8 possible with contact closures.
n39
PARAMETER SETTING DESCRIPTION
2 Sets terminal FR for a voltage input (0 to 10V) Set SW8 to “V” (Off)
(1)
n03 3 Sets terminal FR for a current input (4 to 20mA) Set SW8 to “I”
(1)
4 Sets terminal FR for a current input (0 to 20mA) Set SW8 to “I”
(1)
5.11 FREQUENCY REFERENCE SELECTION
Page 46

5-11
Continued
Example 2 - Eight preset ref
erences
Programming: n37 = 6, n38 = 7 and n39 = 8
DIGITAL PRESET S5 S4 S3
Selectable Reference
(2)
Open Open Open
n22 Open Open Closed
n23 Open Closed Open
n24 Open Closed Closed
n25 Closed Open Open
n26 Closed Open Closed
n27 Closed Closed Open
n28 Closed Closed Closed
5.11 FREQUENCY REFERENCE SELECTION
Example 1 - Four preset references
Programming: n38 = 6 and n39 = 7
DIGITAL PRESET S5 S4
Selectable Reference
(2)
Open Open
n22 Open Closed
n23 Closed Open
n24 Closed Closed
(2)
The Selectable Reference is chosen from the following
list:
C. Jog Reference - See paragraph 5.12
D. Frequency Reference via Serial
Communications - See paragraph 5.14
REFERENCE SOURCE PROGRAMMING
Digital Operator Speed Pot n03 = 0
Digital Preset Reference parameter n21 n03 = 1
Analog Input Terminal FR n03 = 2, 3, or 4
Serial Communications n03 = 6
Page 47

5-12
n29 : Jog Reference Factory setting: 6.0 Hz
Range: 0.0 to 400``````````` Hz
n36 thru n39 : Multi-function Inputs Data 10 : Jog Selection
(Term. S1 - S5)
When jog operation is selected (by external Jog and Run signals), the Drive output will ramp to the
output level set by this parameter.
When an external Jog signal is present, it will override the existing operation mode and the Drive
will ramp to the level set by this parameter.
EXAMPLE:
OPERATION BY REMOTE SIGNAL INPUT (RUN & JOG)
Also see descriptions of MULTI-FUNCTION INPUT TERMINALS, paragraph 5.17.
5.12 JOG REFERENCE
FREQ. CMD
n29 JOG
REF.
0
FREQ. CMD
n29 JOG
REF.
0
*
Or FWD
RUN *
(Term. S1-S5) JOG
RUN
*
(Term. S1-S5) JOG
Page 48

5-13
The Drive has the ability to have either a local or a remote reference and sequence selection.
Local - Run and stop functions are controlled by the buttons on the digital operator (n06). The
frequency reference can come from a digital preset reference (n21 & n08) or the
digital operator pot (n07).
Remote - Run and stop functions are determined by parameter n02. The frequency reference is
determined by parameter n03.
Switching between local and remote is accomplished either by the LO/RE LED on the digital operator
or by the use of a multi-function input terminal programmed to data “17” (see paragraph 5.17A).
n02 :Operation Method Selection Factory setting: 1
n03 : Reference Selection Factory setting: 2
n06 : Stop Key Function Factory setting: 0
Range: 0 or 1
SETTING DESCRIPTION
0
Run and stop is controlled by the and buttons on the digital operator.
Run and stop is controlled by the multi-function input terminals
2-Wire control - Run Forward (n36 thru n39 is set to a data of “1”)
Run Reverse (n36 thru n39 is set to a data of “2”)
1 3-Wire control - Parameter n37 needs to be set to a data of “0”
Run is controlled by a momentary closure on terminal S1
Stop is controlled by a momentary open on terminal S2
Forward/Reverse is controlled by terminal S3
2 Run and stop is controlled by serial communications
STOP
RESET
RUN
SETTING DESCRIPTION
0 Frequency reference is controlled by the digital operator potentiometer.
1 Frequency reference is controlled by a digital preset speed (n21) and is affected by n08.
2 Frequency reference is controlled by the analog input terminal FR and is 0 - 10V DC
3 Frequency reference is controlled by the analog input terminals FR and is 4 - 20mA
4 Frequency reference is controlled by the analog input terminal FR and is 0 - 20mA
6 Frequency reference is controlled by serial communications.
SETTING DESCRIPTION
0 key is effective at all times, regardless of programming of n02
1 key is effective only when the run/stop command is from the digital operator (n02 = 0)
STOP
RESET
STOP
RESET
5.13 LOCAL/REMOTE REFERENCE AND SEQUENCE SELECTION
Page 49

5-14
Continued
n07 : Reference Selection - Digital Operator Factory setting: 0
Range: 0 or 1
This parameter is only effective when the Drive is in the local mode.
n08 :Frequency Reference Setting Factory setting: 0
Method From Digital Operator Range: 0 or 1
This parameter is only effective when the frequency reference is controlled by a digital preset (n21).
SETTING DESCRIPTION
0 Frequency reference is controlled by the digital operator potentiometer
1 Frequency reference is controlled by a digital preset speed (n21) and is affected by n08.
SETTING DESCRIPTION
0
key must be pressed in order for the Drive to accept the frequency reference.
1 key does not have to be pressed.
The Drive responds immediately to the and keys.
DATA
ENTER
DATA
ENTER
5.13 LOCAL/REMOTE REFERENCE AND SEQUENCE SELECTION
Page 50

5-15
The Drive can perform serial communication by using a programmable controller (PLC), MODBUS
protocol, and by installing an optional RS-232 or RS-485/422 interface card. MODBUS is composed
of one master PLC and 1 to 31 (maximum) slave units (Drives). In serial communication between
the master and slaves, the master always starts transmission and the slaves respond to it.
The master communicates with one slave at a time. Address numbers are assigned to each slave in
advance, and the master specifies an address to communicate with. The slave which receives the
command from the master executes the function, and then responds to the master.
A. Communication Specifications
• Interface : RS-485 & RS-422, or RS-232
• Synchronization : Asynchronous
• Transmission parameters : Baud rate — Selectable from 2400, 4800,
9600, 19,200 BPS (n71)
Data length — Fixed to 8 bits
Parity —Parity / no parity, even / odd
selectable (n72 )
Stop bit — Fixed to 1 bit
• Protocol : MODBUS RTU
• Maximum number to units
to be connected : 31 units
B.1. Connecting MODBUS - RS-485/422 Interface Option (Model No. RS-485/J7)
Te r minals S+, S-, R+, and R- are used for Modbus communications. A terminating resistor can be
enabled between R+ and R- by setting SW1 to “ON.” SW1 is found on the optional interface, SI485/J7, and turns the terminating resistor on and off.
The terminating resistor should only be enabled on the drive farthest away from the master.
B.2. Connecting MODBUS - RS-232 Interface Option (Model No. RS-232/J7)
Cable must be assembled per pin-out diagram shown below.
5.14 MODBUS CONTROL (OPTIONAL)
FACE PLATE
CONNECTOR
RS-422A
or RS-485
TERMINAL RESISTOR (1/2W, 120Ω)
S+
S–
R+
R–
S- S+ SG R- R+
SW1
SW1
Page 51

5-16
Continued
C. Sending/Receiving Data
Data that can be sent and received are run/stop commands, frequency reference, fault reset, Drive
status, and setting and reading of parameters.
n02 : Operation Method Selection Factory setting: 0
Range: 0 to 2
Parameter n02 selects where the run/stop commands (sequence) will come from. To be able to
provide a run command over the Modbus serial communications link, set this to a data of “2.”
n03 : Reference Selection Factory setting: 0
Range: 0 to 6
Parameter n03 selects where the frequency reference will come from. To be able to provide a
frequency reference over the Modbus serial communications link, set this to a data of “6.”
n36 thru n39 : Multi-function Inputs Data 18: Serial communication/
(Term. S2-S5)
Digital Operator
Selects operation by serial communication or by external terminal. If the status of this command input
is changed while the Drive is running, the selection is ignored until the next time the Drive is stopped.
Open : Run according to the setting of Operation Method Selection (n02) and
Reference Selection (n03).
Closed : Run by frequency reference and run command from serial
communication.
EXAMPLE: n02 setting is " 1 ", and n03 setting is " 2 ".
n39 = 18.
TERMINAL S5 Open: Frequency reference from control circuit terminal FR
and run command from control circuit terminals S1, S2.
TERMINAL S5 Closed: Frequency reference and run command from serial
communication.
5.14 MODBUS CONTROL
Page 52

5-17
Continued
n69
: Modbus Frequency Resolution Factory setting:
0
Range: 0 to 3
The frequency resolution from the PLC and in the frequency reference and output
frequency monitor (by communication) are selected with this parameter. The output
frequency resolution of the Drive is 0.1 Hz. Even if the Modbus resolution is
changed to 0.01 Hz in
n69
, the value in the hundredths digit of 0.01 Hz of the
received frequency reference is rounded off internally. When 30,000/100% in units
of 0.1% is selected, the value is also rounded off.
n70
: Modbus Slave Address Factory setting:
0
Range: 0 to 31
Each slave Drive on the same transmission line must be given a unique address.
n71
: Modbus Baud Rate Factory setting:
2
Range: 0 to 3
Selects the baud rate, as indicated by the following table:
Setting Baud Rate (BPS)
0 2400
1 4800
2 9600
3 19,200
n72
: Modbus Parity Selection Factory setting:
2
Range: 0 to 2
Selects the parity, as indicated by the following table:
Setting Parity
0 Even
1Odd
2 None
NOTE: To change the values set in
n70
thru
n72
and enable the new
settings, it is necessary to turn OFF power to the Drive, then turn it ON again.
5.14 MODBUS CONTROL
Page 53

5-18
Continued
n68 : Modbus Time Out Detection Factory setting: 1
Range: 0 to 4
If time between Modbus messages exceeds 2.0 seconds, the Drive will respond
according to the table below. A setting of " 4 " disables this fault condition.
If communications error exists, Drive will respond according to the following table:
Setting Description
0 Coast to Stop (fault)
1 Ramp to Stop using n17 (fault)
2 Ramp to Stop using n19 (fault)
3 Continue Operation (Alarm)
4 Disabled
D. Loop Test
The Drive has the ability to perform a serial communications self-check, in the form of a loop test.
Use the following steps to perform a loop test.
1. With power applied to the Drive set parameter n39 = 35.
2. Remove power from the Drive and wait for the charge light to go off.
3. Disconnect all wiring terminals R+, R-, S+, S- & S5.
4. Install the following wires:
connect S+ to R+
connect S- to Rconnect S5 to SC
5. Apply power to the Drive.
If the Drive displays a normal frequency reference, the loop test was successful.
If the Drive displays “CE” on the digital operator, the loop test failed and the serial
communications hardware is not functioning correctly. Remove power and recheck all of the
above connections. Re-apply power. If the Drive still displays “CE”, the unit will need to be
replaced.
6. Remove power from the Drive.
7. Disconnect the wires installed in step 4.
8. Re-apply power and program n39 to its previous setting. NOTE: the factory setting of
n39 = 6.
5.14 MODBUS CONTROL
Page 54

5-19
n47 : Momentary Power Loss Ride-thru 0 = Disabled (Factory setting)
Protection 1 = Enabled – 2 sec. power loss
ride-thru
2 = Enabled – indefinite power loss
ride-thru, provided control
power is maintained
The setting of this parameter either enables or disables the ride-thru feature of the Drive. If
disabled, the unit will stop immediately whenever a power loss occurs. If enabled, the Drive will
continue to operate during a momentary power loss of up to 80%, but if the loss exceeds the
identified time period, the Drive will stop.
5.15 MOMENTARY POWER LOSS RIDE-THRU
n44 : Multi-function Analog Output Factory setting: 0
The monitor output provides a 0-10 Vdc signal
proportional to either output frequency or output current
between terminals AM & AC:
0 = 0-10 Vdc proportional
to output frequency
1 = 0-10 Vdc proportional
to output current
n45 : Analog Monitor Gain Factory Setting: 1.00
Range: 0.01 to 2.00
This constant is used to calibrate the meter connected to terminals AM & AC.
Drive
AM
Analog
output
AC
(0-10 Vdc)
MULTIFUNCTION
MONITOR
OUTPUT
+ –
FREQUENCY/ CURRENT
METER
(1mA FULL SCALE)
5.16 MULTI-FUNCTION ANALOG MONITOR OUTPUT (Term. AM and AC)
n45 = 0.30
100%
MAX. OUTPUT
FREQUENCY Factory Setting
OR CURRENT. (n45 = 1.00)
03 V 10 V
ANALOG OUTPUT
Page 55

5-20
The multi-function input terminals can be activated in one of two ways:
The multi-function inputs are configured using rotary switch SW7, which is located above the upper
row of control circuit terminals and can be set with a small screwdriver.
NOTE: All power must be removed from the Drive before SW7 can be set.
(1)
Customer supplied component
Factory settings:
2-Wire control 3-Wire control
n36 : Te r minal S2 Function n36 22
n37 : Te r minal S3 Function n37 50
n38 : Te r minal S4 Function n38 33
n39 : Te r minal S5 Function n39 66
These seven parameters select the input signal function for terminals S1 thru S5, and can be
independently set.
Parameter settings are checked whenever the enter key is pressed. A parameter set failure (Err) will
occur if any of the following conditions are detected:
•Two parameters contain the same value (n36 thru n39).
• Both the Accel/Decel Hold (data 16) and the Up/Down (data 34) functions have been selected.
Ta ble 5-2 lists the possible data setting values and their descriptions for these parameters.
5.17 MULTI-FUNCTION INPUT TERMINALS (Term. S1-S5)
Type of input Description
NPN A contact closure must be made between a multi-function terminal (S1 to S5) and SC in order
(Factory Setting) to activate that input.
PNP
A DC voltage (+24) must be present on a multi-function input terminal (S1 to S5) in order
to activate that input. NOTE: The minus (-) side of the 24 VDC supply must be connected to SC.
External
Contacts
S1
S2 n36
S3 n37
S4 n38
S5 n39
Drive
+24VDC
Power Supply
(–) (+)
(1)
External
Contacts
Drive
S1
S2 n36
S3 n37
S4 n38
S5 n39
SW7 set
SC
External wiring for NPN inputs
to NPN
External wiring for PNP inputs
SW7 set
SC
to PNP
Page 56

5-21
Continued
5.17 MULTI-FUNCTION INPUT TERMINALS (Term. S1-S5)
DATA FUNCTION DESCRIPTION*
FWD/REV selection (for MUST BE SET ONLY IN n37 . Redefines terminals:
0 3-wire control) S1 = Run; S2 = Stop;
S3 = FWD/REV select
2
Reverse Run/Stop command Closed = Run Reverse (2-wire control)
(for 2-wire control) Open = Stop
Drive trips; Digital Operator displays " EFX ",
3 External fault (N.O. contact input)
where X is 2-5, corresponding to the terminal,
4 External fault (N.C. contact input)
S2-S5, which is receiving the fault input signal
5 Fault Reset Resets fault, only if RUN command is not present
6 Multi-step frequency ref. select A
7 Multi-step frequency ref. select B See paragraph 5.11B
8 Multi-step frequency ref. select C
10 Jog selection Closed = Jog selected See paragraph 5.12
11
Accel/decel time selection Open = Accel/decel by n16 / n17
Closed = Accel/decel by n18 /n19
See paragraph 5.2
12 External base block Closed = Shuts off Drive output
(N.O. contact input) (frequency command is held)
13 External base block See paragraphs 5.17B, 5.17C
(N.C. contact input)
14
Speed Search 1 Closed * = Speed Search operation from
maximum frequency
See paragraph 5.17D
15
Speed Search 2 Closed * = Speed Search operation from set frequency
See paragraph 5.17D
16 Accel/Decel Hold See paragraph 5.17F
17 Remote/Local selection See paragraph 5.17A
Drive operation & reference/ Open = Operates according to setting of n003 & n004
18 serial communication selection Closed = Operates from serial communication
See paragraph 5.13
Fast Stop - Fault Open = No effect
19 (Normally Open Contact) Closed = If n04 = 0, ramp to stop using n19
Closed = If n04 = 1, coast to stop
Fast Stop - Alarm Open = No effect
20 (Normally Open Contact) Closed = If n04 = 0, ramp to stop using n19
Closed = If n04 = 1, coast to stop
Fast Stop - Fault Open = If n04 = 0, ramp to stop using n19
21 (Normally Closed Contact) Open = If n04 = 1, coast to stop
Closed = No effect
Fast Stop - Alarm Open = If n04 = 0, ramp to stop using n19
22 (Normally Closed Contact) Open = If n04 = 1, coast to stop
Closed = No effect
34 Up/Down function See paragraph 5.17E (can only be set in n39)
35
Loop Test (Serial Communications) See paragraph 5.14D
Can only be set in n39
Table 5-2. n36 thru n39 Data Settings
* All contact closures must be maintained, except for speed search, which may
be momentary (see paragraph 5.17D).
Page 57

5-22
Continued
5.17 MULTI-FUNCTION INPUT TERMINALS (Term. S1-S5)
A. Data 17 : Remote/Local
The use of a Remote/Local command input allows switching between the Digital Operator control
and the external terminal input signals or serial communications, without the need to re-program
n02 or n03. If the status of the Remote/Local command input is changed while the Drive is running,
the Remote/Local operation selection is not completed until the next time the Drive is stopped.
Closed = Controlled locally (Digital Operator)
NOTE: Parameter n07 determines if the frequency reference will come from the digital
operator potentiometer or parameter n21.
Open = Controlled remotely (external terminal inputs, for Start/Stop and
frequency reference, or serial communications).
NOTE: When a multi-function input terminal is programmed for Local/Remote, the LO/RE LED will
only display local or remote status. Local/Remote cannot be adjusted from the digital operator.
B. Data 12 : External Base Block by N.O. Contact
• When either the Forward Run command or
Reverse Run command is present, and the
external Base Block command is applied
(i.e. contact closed), coast stop is accomplished (after a 20 msec delay), while the
frequency command is maintained.
When the Base Block command is removed,
the Drive will recover in a manner similar
to that of Speed Search operation.
• When both the Forward Run command and
Reverse Run command are open, and the
external Base Block command is applied (i.e. contact closed), coast stop is accomplished and after a 20 msec delay the frequency command is changed to 0Hz.
When the Base Block command is removed, the Drive will remain in stopped
condition until Forward Run command or Reverse Run command is again applied.
• When external Base Block command is active, a blinking “ b b ” will be displayed
on the Digital Operator.
Drive
S5
S
C
0V
EXTERNAL
BASE BLOCK
o o
RUN RUN
Freq. Cmd Freq. Cmd
00
Base Block Base Block
V out V out
00
20msec 20msec
(A) Base Block With Run Active (B) Base Block After Stop Command
Page 58

5-23
Continued
C. Data 13 : External Base Block by N.C. Contact
Base block operation is the same as described above, except that the Base Block contact must be
open to be recognized.
D. Data 14 : Speed Search From Max Frequency
Data 15 : Speed Search From Set Frequency
A multi-function input terminal is utilized to activate speed search. When the external speed search
command is closed, the base is blocked for the min. base block time, then the speed search is
made. The operation depends on the set value.
IMPORTANT
Set values 14 and 15 CANNOT be selected in combination.
• When 14 is set, the speed search begins with the maximum frequency.
• When 15 is set, the speed search begins with the frequency command
command that has been set after the search command was received.
RUN
SIGNAL
SPEED SEARCH
MAX FREQ., OR FREQ.
REF. WHEN SPEED
SEARCH IS INPUTTED
OUTPUT FREQUENCY
VOLTAGE AT
SPEED SEARCH
OUTPUT VOLTAGE
MIN.
BASE
BLOCK
TIME
SPEED SEARCH
OPERATION
WITHIN 0.5 SEC
NOTE: When continuous operation mode at momentary stop function is selected,
the Speed Search command must be enabled.
Speed Search Operation Timing
SPEED COINCIDENCE
POINT
RETURN TO
NORMAL V/f
OUTPUT
5.17 MULTI-FUNCTION INPUT TERMINALS (Term. S1-S5)
Page 59

5-24
Continued
E. Data 34 : Up/Down Function
Programming data " 34 " for n39 (multi-function input terminal) allows the S4 / S5 inputs to be used
for Up/Down frequency setting.
NOTES:
1. Parameter n38 will not be valid when n39 is set to " 34 ".
2. Jog has priority over Up/Down.
3. Up/Down has priority over Multi-step Frequency inputs.
4. Upper limit speed is set by the formula:
n09 (Fmax) x
n30 (Freq. Ref. Upper Limit)
100
5. Lower limit speed is from n31 , Frequency Reference Lower Limit.
6. See section 5.10 for information on the Up/Down hold memory.
EXAMPLE:
n39 Data 34: Up/Down function
DRIVE
S4 UP
S5 DOWN
S
C
0V
UP
o o
DOWN
o o
INPUT SIGNAL
Te rm. S4 Term. S5 FUNCTION
UP DOWN
Open Open HOLD
Closed Open UP (Frequency command approaches frequency
command upper limit)
Open Closed DOWN (Frequency command approaches minimum
output frequency or frequency command lower limit,
whichever is larger)
Closed Closed HOLD
5.17 MULTI-FUNCTION INPUT TERMINALS (Term. S1-S5)
Page 60

5-25
Continued
FWD RUN
(S4) UP
COMMAND
(S5) DOWN
COMMAND
UPPER
LIMIT SPEED
LOWER
LIMIT SPEED
OUTPUT
FREQUENCY*
"SPEED AT SET
FREQUENCY"
SIGNAL
* U = UP (Accel) status; D = DOWN (Decel) status; H = HOLD (constant speed) status;
U1 = At Upper Limit Speed; D1 = At Lower Limit Speed
Up/Down Frequency Setting Timing
D1 D D DHH H HHH HU1UU
U
D1 D1
5.17 MULTI-FUNCTION INPUT TERMINALS (Term. S1-S5)
F. Data 16 : Accel/Decel Hold
By programming data " 16 " into one of the multifunction input parameters ( n36 thru n39 ), one of
the multi-function input terminals (S1 thru S5) becomes a HOLD command input. As long as the
HOLD command is present, accel and decel are in a prohibit state, and the output speed is held at
the level it was at the time the HOLD command was input. When the HOLD command is removed
while the system is still in Run condition, accel or decel will again become active to allow output to
reach set speed. If Stop is initiated while the HOLD command is present, the prohibit state is
cancelled and the system enters stop operation.
HOLD Function Timing
FWD RUN
HOLD CMD
SPEED REF.
OUTPUT SPEED
Page 61

5-26
Table 5-3. Multi-function Output Terminals
Set
Description
Value Condition
Signal Level
0 Fault Closed = Drive fault has occurred (except CPF0, CPF1)
1 During operation Closed = Drive is operating
2 Speed at set frequency Closed = Frequency Reference = output frequency
See paragraph 5.18A
3 Zero Speed Closed = Drive is at zero Hz.
4 Frequency detection - low Closed = Output frequency ≤ n58.
See paragraph 5.18B
5 Frequency detection - high Closed = Output frequency ≥ n58.
See paragraph 5.18C
6 Overtorque detection Closed = Overtorque detected
(N.O. contact) See paragraph 5.19
7 Overtorque detection Open = Overtorque detected
(N.C. contact) See paragraph 5.19
10 Alarm (minor fault) Closed = Alarm condition is present
11 During coast to stop Closed = Drive output base block is active; motor is coasting
12 Local/Remote Open = Frequency and Run Command by ext. input;
Closed = Frequency and Run Command by Digital Operator
13 Operation ready Closed = Drive is ready for operation (not faulted)
14 Auto-restart Closed = During auto-restart operation
15 During Undervoltage Closed = Drive has an undervoltage fault or warning
16 During Reverse run Closed = Drive operation in reverse
17 During Speed Search Closed = Drive performing a speed search
18 Serial communication Closed = Command from serial communication
n40 : Contact Output (external
terminals MA, MB, & MC)
A contact can be programmed to change states
during any of the conditions indicated in
Ta ble 5-3.
5.18 MULTI-FUNCTION OUTPUT TERMINALS (Term. MA, MB, MC)
MULTI-FUNCTION
CONTACT OUTPUT
250Vac 1A OR LESS
30Vdc 1A OR LESS
(FACTORY SETTING
IS FOR SIGNAL
DURING OPERATION)
DRIVE
MA
MB
MC
o o
o o
Page 62

5-27
Continued
n58 : Speed Coincidence Frequency / Frequency Factory setting: 0.0 Hz
Detection Level
Range: 0.0 to 400 Hz
Speed coincidence is used to control an output contact at terminals MA or MB (with respect to
terminal MC), or terminals P1, P2 & PC, when selected by n40.
n40 : Multi-function Output Selection Data 2, 4 or 5
The output contact will close, dependent upon the data programmed into n40. See the appropriate
figure below for operation.
A. Speed at Set Frequency B. Frequency Detection – Low
(setting: n40 = " 2 ") (setting: n40 = " 4 ")
C. Frequency Detection – High
(setting: n40 = " 5 ")
5.18 MULTI-FUNCTION OUTPUT TERMINALS
FREQUENCY
AGREED
SIGNAL
OUTPUT
FREQUENCY
ON
Frequency
Reference
DETECTION WIDTH
±2Hz
RELEASE WIDTH
±4Hz
(n58)
RELEASE WIDTH
–2HZ
OUTPUT
FREQUENCY
FREQUENCY
DETECTION
SIGNAL
ON ON
FREQUENCY
DETECTION
LEVEL (Hz)
(n58)
Page 63

Overtorque detection is used to compare Drive rated output current/torque with the overtorque
detection level. When the output current is equal to or greater than the defined level, an overtorque
condition exists. This will be indicated as an oL3 fault on the Digital Operator. This feature can be
selected to operate over a wide range of conditions.
A. n59 : Overtorque Detection Factory setting: 0
Range: 0 to 4
This constant determines whether the overtorque detection function of the Drive is enabled, under
what conditions it will detect for overtorque, and what operation it will perform after detecting an
overtorque.
Overtorque / Operation
Undertorque After Detection
Setting Disabled Detection Condition
0 Disabled —— ——
1Overtorque Continues Only at set frequency
2Overtorque Coast to stop Only at set frequency
3Overtorque Continues At all times except during
stopping or DC injection braking
4Overtorque Coast to stop At all times except during
stopping or DC injection braking
—For overtorque detection during accel or decel, set to " 3 " or " 4 ".
—For continuous operation after overtorque detection, set to " 1 " or " 3 ". During detection, the Digital Operator
displays and “ oL3 ” alarm (blinking).
—To stop the Drive at an overtorque detection fault, set to " 2 " or " 4 ". At detection, the Digital Operator displays an
" oL3 " fault.
—To output an overtorque detection signal, set output terminal function selection (n40 ) to " 6 " or " 7 ".
B. n60 : Overtorque Detection Level Factory setting: 160 %
Range: 30 to 200 %
This is the reference point for determining that an overtorque condition exists. Set as a percent of
Drive rated current or as a percent of motor rated torque.
C. n61 : Overtorque / Undertorque Detection Time Factory setting: 0.1 sec.
Range: 0.1 to 10.0 seconds
Determines how long an overtorque condition must exist before another event will occur, e.g. coast
to stop, multi-function output change of state, or
oL3 warning or fault display.
5-28
5.19 OVERTORQUE DETECTION
Page 64

5-29
Continued
E. n40 : Multi-function Output 1 Data 6 or 7 :Overtorque
(terminals MA, MB & MC) Detection
The Form-C contact, or an open collector output, can be programmed to change states during an
overtorque detection condition.
EXAMPLE OF OVERTORQUE DETECTION
n59 setting: 2 — Overtorque enabled, only at set frequency, coast to stop
n40 setting: 6 — Output contact programmed for overtorque detection
n60 setting: 110 %— Level at which overtorque is sensed
n61 setting: 1.0 s— Time delay before overtorque event occurs
Detection level
(n60 )
Detection
110% time
OUTPUT 100% (n61)
CURRENT/
TORQUE
0
100% Coast
MOTOR stop
SPEED
0
RUN
SIGNAL
FAULT
SIGNAL
CONTACT
OUTPUT
(OVERTORQUE
DETECTION)
TERM. MA & MC)
Overtorque Detection Timing Diagram
5.19 OVERTORQUE DETECTION
Page 65

5-30
n01 : Parameter Selection / Initialization Factory setting: 1
Range: 0 to 9
The following table shows which parameters can be programmed (displayed & changed) or only
displayed when n001 is selected.
WARNING
By entering an “10” or a “11” into n01, all parameters in the Drive
will return to their factory settings.
Factory Configuration for
P
arameter Terminal 2-Wire Control 3-Wire Control
———— S1 = Forward Run = Start
n36 S2 2 = Reverse Run 2 = Stop
n37 S3 5 = Fault Reset 0 = Fwd/Rev Command
n38 S4 3 = External Fault (N.O.) 3 = External Fault (N.O.)
n39 S5 6 = Multi Step Ref. Cmd. A 6 = Multi Step Ref. Cmd. A
CAUTION
Know your application before using either Initialization function of n01 .
This parameter must be set to " 0 " or " 1 " for operation.
" 10 " =Factory 2-Wire Control Initialization (Maintained RUN Contact)
" 11 " =Factory 3-Wire Control Initialization (Momentary ST AR T/ST OP Contact)
Entering either Initialization code resets all parameters to factory settings, and
automatically returns n01 setting to " 1 ". If the Drive is connected for 3-Wire
control and this parameter is set to " 10 " (2-Wire Control Initialization), the motor
may run in reverse direction WITHOUT A RUN COMMAND APPLIED. Equipment
damage or personal injury may result.
IMPORTANT
After " 10 " or " 11 " has been entered in n01 , the Motor Rated Current (n32 )
MUST BE REPROGRAMMED to the correct setting for the application.
5.20 RESET CODES: 2-WIRE, 3-WIRE INITIALIZATION
Setting Function
0 n01 can be read and set;
n02 - n79 read only
1 n01 - n79 can be read and set
2-5 Not Used
6 Clear Fault Record Only
7-9 Not Used
10 Initialization: 2-Wire control
11 Initialization: 3-Wire control
Page 66

5-31
n65 : Motor No-Load Current Factory setting: See Table A3-1
Range: 0 to 99%
Motor no-load current (n65 ) is set as a percentage of motor full-load current (n32 ). It is used as
shown in the slip compensation equation.
n67 : Slip Compensation Primary Delay Factory setting: 2.0 sec.
Time Constant
Range: 0.0 to 25.5 sec.
Parameter n67 can be increased to improve stability or decreased to improve response to load
changes.
5.21 SLIP COMPENSATION
V
f
46.35 Hz actual output
1.35 H
frequency boost
corresponding
voltage boost
45 Hz command
n66 : Slip Compensation Gain Factory setting: 0.0
Range: 0.0 to 2.5
Slip compensation is used to increase motor speed to account for slip; the Drive accomplishes this
by automatically boosting output frequency, with a corresponding boost in output voltage.
The slip compensation gain (n66) determines how much compensation frequency is added. If using
the Drive in Open Loop Vector, typically no adjustment is necessary. The equation below illustrates
how the compensation frequency is generated.
NOTE: A slip compensation gain setting of 0.0 disables slip compensation.
(n65 * n32)
Compensation Frequency =
Output Current –
100
* n64 * n66
n32 – (n65 * n32)
100
Slip Compensation Equation
Page 67

A. n55 : Stall Prevention During Deceleration Factory setting: 0
Range: 0 to 1
Setting Function
0 Stall prevention during deceleration enabled
1 Stall prevention during deceleration disabled
Stall prevention during deceleration
automatically adjusts the deceleration rate
while monitoring the DC bus voltage to
prevent overvoltage during deceleration.
When the motor load is large or decel
time is short, actual decel time may be longer
than the set value because of stall prevention.
B. n56 : Stall Prevention Level During Factory setting: 170%
Acceleration
Range: 30 - 200 %
This parameter determines the actual Drive output current level during an acceleration condition.
Set in percent of Drive rated output current.
A setting of " 200 " disables stall
prevention during acceleration.
During acceleration, if the output
current exceeds the value in n56 ,
acceleration stops and frequency is
maintained. When the output current
goes below the value set in n56 ,
acceleration resumes.
In the constant horsepower region
[actual output frequency ≥ max.
voltage frequency (n11 )], the stall
prevention level during acceleration is
changed by the following formula:
Stall prevention level during
= Stall prevention level during accel x
Max. voltage frequency
accel (constant horsepower) Actual output frequency
5.22 STALL PREVENTION
TIME
FREQUENCY
SET
DECEL
TIME
Controls the
deceleration
time needed to
prevent overvoltage fault.
C. n57 : Stall Prevention Level At Set Speed Factory setting: 160%
Range: 30 - 200 %
This parameter determines the actual Drive output current level while operating at set speed
(frequency). Set in percent of Drive rated output current (see Appendix 2).
A setting of " 200 " disables stall
prevention at set speed. During
running at set speed, if the output
current exceeds the value set in n57 ,
the Drive will begin to decelerate.
When the output current goes below
the value set in n57 , acceleration
begins, up to the set frequency.
t
t
MOTOR
CURRENT
OUTPUT
FREQ.
Constant
n074
setting
Parameter
n57
Setting
t
t
MOTOR
CURRENT
OUTPUT
FREQ.
Constant
n073
setting
Parameter
n56
Setting
5-32
Page 68

5-33
n04 : Stopping Method Factory setting: 0
Range: 0 to 1
Selects the stopping method suitable for the application.
Setting Description
0 Deceleration (ramp) to stop
1 Coast to stop
A. Data 0 : Deceleration to Stop
Upon removal of the FWD (REV) Run
command, the motor decelerates at the
deceleration rate determined by the time
set in Decel Time 1 (n17 ), and DC
injection braking is applied immediately
before stop. If the decel time is too short
or the load inertia is too large, an
overvoltage (OV) fault may occur on a
stop command — the decel time must be
increased.
B. Data 1 : Coast to Stop
Upon removal of the FWD (REV) Run command, the motor coasts to rest.
5.23 STOPPING METHOD
Output Frequency
Run Command
ON OFF
Decel Time 1
(n17 )
Min. Output Frequency
(Frequency at DC Injection
Braking Start) (n14 )
DC Injection Braking
Time at Stop (n53 )
(Factory setting: 0.5 s)
Output Frequency
Run Command
ON
OFF
Drive output is shut OFF
when stop command is input
Page 69

5-34
n32 : Motor Rated Current Factory setting: See Table A3-1
Range: see description
This parameter should be set, in increments of 0.1 A, to the rated current (FLA) value shown on the
motor nameplate; this value MUST BE between 0% and 120% of the drive rated current. If the motor
FLA does not fall within this range, a different Model No. drive must be used.
NOTE: Setting n32 to " 0.0 " disables the motor overload protection
function, regardless of the setting of n33 or n34.
n33 : Electronic Thermal Motor Protection Factory setting: 0
Range: 0 to 2
Setting Electronic Thermal Characteristics
0 General Purpose Motor with limited speed range
1 Special Purpose Motor with wide speed range (10.1 or greater)
2 Electronic thermal overload protection disabled
n34 : Electronic Thermal Overload Protection Factory setting: 8
Time Constant
Range: 1 to 60 min.
This parameter sets the electronic thermal overload relay protection time when 150% of overload is
applied after the motor is operated continuously at rated current.
The Drive protects against motor overload with a UL-recognized, built-in electronic thermal overload
relay.
The electronic thermal overload function estimates motor temperature, based on Drive output current
and time, to protect the motor from overheating. When the electronic thermal overload trips, an
“ oL1 ” error occurs, shutting OFF the Drive output and preventing excessive overheating of the motor.
When operating with one Drive connected to only one motor, an external thermal relay is not needed
provided n33 = 2. When operating several motors with one Drive, install a thermal overload relay on
each motor and disable the Drive's Motor Protection by setting n33 = 2.
5.24 THERMAL OVERLOAD PROTECTION
Electronic Thermal
Cooling Effect Current Characteristics Overload
Effective when
operated at 60Hz
from a commercial
power supply
“
oL 1 ” error (motor
overload protection)
occurs when
continuously operated
at less than 60Hz at
100% load.
Base Frequency
60Hz
(V/f for 60Hz,
230V Input Voltage)
0
38
55
80
100
TORQUE
(%)
140
155
180
320 60 120
60 SEC
SHORT TERM
CONTINUOUS
RATING
OPERATION FREQUENCY (Hz)
Effective when
operated at low
speed (approx. 6Hz)
Electronic thermal
overload protection not
activated even when
continuously operated
at less than 60Hz at
100% load.
0
38
55
100
TORQUE
(%)
150
180
660120
OPERATION FREQUENCY (Hz)
60 SEC
SHORT TERM
CONTINUOUS
RATING
Short Term RatingStandard Rating
Base Frequency
60Hz
(V/f for 60Hz,
230V Input Voltage)
Page 70

5-35
n63 : Torque Compensation Gain (KT)Factory setting: 1.0
Range: 0.0 to 2.5
Torque Compensation Gain (n63) adjusts how
much the output voltage is boosted when motor
load increases. It is used to compensate for
resistive losses in the motor and the wiring
between the drive and the motor. Torque
compensation is only active when the Drive is in
the V/f control mode.
Example of Torque Compensation
Operation
5.25 TORQUE COMPENSATION
460
AUTO TORQUE BOOST
345
V/F PATTERN
( VAC )
230
OUTPUT VOLTAGE
PROGRAMMED V/F PATTERN
(NO LOAD)
30 60
OUTPUT FREQUENCY
( HZ )
14 V
115
0
0
1.5 HZ
Page 71

5-36
5.26 V/f PATTERN
The V/f pattern can be tailored to suit your specific application and load characteristics by adjusting
parameters n09 to n15 (see the V/f characteristics figure on the following page).
NOTES:
1
VT = Variable Torque, typically used for blowers, centrifugal pumps, and fans.
CT = Constant Torque, most other applications. Consult Yaskawa for further assistance.
The following conditions must be considered when selecting a V/f pattern:
- Pattern matches the voltage-frequency characteristics of the motor.
- Maximum motor speed.
2
V/f pattern for high starting torque should be selected for:
- Long wiring distance.
- Large voltage drop at start
- AC reactor connected to Drive input or output.
- Use of motor rated below Drive max. output.
3
Voltages shown are for 230V motors; for other motor voltages, multiply all voltage (V) values by (Vmtr/230).
i.e., for a 460V motor, multiply by 460/230 = 2.
Max. Starting Load n09 n10 n11 n12 n13 n14 n15
Freq. Torque Type
1
(Hz) (V)
3
(Hz) (Hz) (V)
3
(Hz) (V)
3
50 Normal VT 50.0 230 50.0 25.0 40 1.3 9
50 High
2
VT 50.0 230 50.0 25.0 57 1.3 12
60 Normal VT 60.0 230 60.0 30.0 40 1.5 9
60 High
2
VT 60.0 230 60.0 30.0 57 1.5 12
50 Normal CT 50.0 230 50.0 3.0 17 1.5 12
50 Medium CT 50.0 230 50.0 2.5 23 1.3 13
50 High
2
CT 50.0 230 50.0 2.5 28 1.3 16
60 Normal CT 60.0 230 60.0 1.5 12 1.5 12
60 Medium CT 60.0 230 60.0 3.0 20 1.5 13
60 High
2
CT 60.0 230 60.0 3.0 28 1.5 23
72 Normal CT 72.0 230 60.0 3.0 17 1.5 12
90 Normal CT 90.0 230 60.0 3.0 17 1.5 12
120 Normal CT 120 230 60.0 3.0 17 1.5 12
180 Normal CT 180 230 60.0 3.0 17 1.5 12
Table 5-4. Recommended V/f Patterns
Page 72

5-37
Continued
n09 : Frequency – Max. (Fmax)
n10 : Voltage – Max. (Vmax)
n11 : Frequency – Max. Voltage point (F
A)
n12 : Frequency – Midpoint (F
B)
n13 : Voltage – Midpoint (V
C)
n14 : Frequency – Min. (Fmin)
n15 : Voltage – Min. (Vmin)
These seven parameters define the V/f pattern. The illustration below shows how these constants
relate to each other in establishing the custom V/f pattern.
NOTE: To establish a V/f pattern with a straight line from Fmin to F
A, set
F
B = Fmin. The setting of VC is then disregarded and does not affect the
V/f pattern.
IMPORTANT
The V/f parameter settings are checked each time the ENTER key is
pressed while programming the V/f parameters. A parameter set value
failure (Err ) will occur if any part of the following relationships among
n09 thru n15 is not TRUE:
(a) Fmax ≥ F
A ≥ FB ≥ Fmin
(b) Vmax ≥ V
C ≥ Vmin
5.26 V/f PATTERN
V/f Characteristics Set by n09 thru n15
Vmax
(n10 )
OUTPUT
VOLTAGE V
C
(n13 )
Vmin
(n15 )
Fmin F
B F
A Fmax
(n14 )(n12 )(n11 )(n09 )
OUTPUT FREQUENCY
Page 73

5-38
The optional Remote Digital Operator can be used to store (upload) parameters from a drive, which
can then be copied (downloaded) to another drive. These parameters are stored in EEPROM in the
Digital Operator. The Copy Function is possible only for drives of the same type (i.e. from one J7 to
another, but not from a J7 to a V7 or vice versa), and voltage rating (230V drive or 460V drive). In
addition, the following parameters cannot be copied:
5.27 COPY FUNCTION
Parameter No. Parameter Name
n09 to n15 V/f Settings
n32 Motor Rated Current
n46 Carrier Frequency
n64 Motor Rated Slip
n65 Motor No-load Current
n76 : Parameter Copy Function Selection Ex : Factory Setting: rdy
Setting Description
rdy Drive is ready to use Copy Function
rEd Read (or upload) all parameters from the drive and store them in the Digital Operator
Cpy Copy (or download) all parameters stored in the Digital Operator to the drive
vFy Verify that parameters stored in the Digital Operator and the drive are the same
vA Displays the voltage and kW rating of the drive whose parameters are stored in the
Digital Operator
Sno Displays the software number of the drive whose parameters are stored in the
Digital Operator
n77 : Parameter Copy Access Selection Factory Setting: 0
Range: 0 or 1
Setting Description
0 Copying Disabled
1 Copying Allowed
The Copy Function can be enabled or disabled using parameter n77 – parameters cannot be
uploaded or downloaded when this parameter is disabled (n77 = 0), preventing the accidental
overwriting of parameters stored in either the Digital Operator or the Drive.
If n77 = 0 and an upload or download is attempted (n76 = rEd or Cpy), a “PrE” error message will
blink on the Digital Operator display – press DSPL or DATA/ENTER to clear the message.
For more detailed information on the use of the Copy Function, please visit our website at
www.drives.com.
Page 74

6-1
This section describes the alarm and fault displays, explanations for fault conditions and corrective
actions to be taken if the Drive malfunctions.
A failure in the Drive can fall into one of two categories, Alarm or Fault.
A blinking “Alarm” indication is a warning that a trouble condition will soon occur, or that a
programming error has been made. The Drive will continue to operate during an “Alarm” indication.
A blinking “Minor Fault” indication is displayed during less serious faults, or when a problem exists in
the external circuitry. The Drive will continue to operate, and a “Minor Fault” contact will be closed if a
multi-function output is programmed for the condition.
A steady “Major Fault” indication is displayed when the Fault relay has tripped. The motor coasts to a
stop, and a fault signal output is present at control circuit terminals MA, MB and MC.
Section 6. FAULT DIAGNOSIS AND CORRECTIVE ACTIONS
6.1 GENERAL
Alarm Display
Digital RUN (Green)
Drive
Explanation
Causes and
Operator ALARM (Red)
Status Corrective Actions
UV (Main circuit low voltage) Check the following:
Main circuit DC voltage • Power supply voltage
drops below the low-voltage • Main circuit power
detection level while the supply wiring is
drive output is OFF. connected.
230V: Stops at main circuit • Terminal screws are
DC voltage below securely tightened.
Blinking approx. 200V
(160V for singlephase)
460V: Stops at main circuit
DC voltage below
approx. 400 V
OV (Main circuit overvoltage) Check the power supply
Warning
Main circuit DC voltage voltage.
only.
exceeds the over voltage
Fault
detection level while the
Blinking
contacts
drive output is OFF.
do not
Detection level: approx.
change
410V or more (approx.
state.
820V for 460V class).
OH (Cooling fin overheat) Check the intake air
Intake air temperature temperature.
Blinking
rises while the drive
output is OFF.
CAL (MODBUS Check communication
communications waiting) devices, and transmission
Correct data has not been signals.
received from the PLC
when the parameter
n02 (operation command
Blinking selection) is 2 or
n03 (frequency reference
selection) is 6,
and power is turned ON.
Table 6-1. Alarm Displays and Corrective Actions
:ON:BLINKING : OFF
Page 75

6-2
Alarm Display
Digital RUN (Green)
Drive
Explanation
Causes and
Operator ALARM (Red)
Status Corrective Actions
OP (Parameter setting Check the setting values.
error when the parameter
setting is performed
through the MODBUS
communications)
OP1: Two or more values
are set for multifunction input
selection.
(parameters n36 to
n39)
OP2: Relationship among
V / f parameters is not
correct.
(parameters n09,
n11, n12, n14)
Blinking OP3: Setting value of
electronic thermal
standard current
exceeds 150% of
drive rated current.
Warning (parameter n32)
only. OP4: Upper / lower limit
Fault of frequency
contacts reference is reversed.
do not (parameters n32,
change n33)
state. OP5: (parameters n49 and
n50)
OP9: Carrier frequency
setting is incorrect.
(parameter n46)
OL 3 (Overtorque Reduce the load, and
detection) increase the accel / decel
Motor current exceeded time.
the preset value in
Blinking parameter n60.
SEr (Sequence error) Check the external circuit
Drive receives (sequence).
LOCAL / REMOTE select
command or
Blinking communication / control
circuit terminal changing
signals from the multifunction terminal while the
drive output is ON.
Table 6-1. Alarm Displays and Corrective Actions
- Continued
Page 76

6-3
Alarm Display
Digital RUN (Green)
Drive
Explanation
Causes and
Operator ALARM (Red)
Status Corrective Actions
BB (External baseblock) Check the external circuit
Baseblock command at (sequence).
multi-function terminal is
active, the drive output
Blinking is shut OFF (motor coasting).
Temporary condition is
cleared when input command
is removed.
EF (Simultaneous FWD/ Check the external circuit
REV run commands) (sequence).
When FWD and REV
run commands are
Blinking simultaneously input
for over 500ms, the
drive stops according
Warning
to parameter n04.
only. STP (Operator function Open FWD/REV
Fault stop) is pressed command of control
contacts during running by the circuit terminals.
do not control circuit terminals
change FWD / REV command.
state. The drive stops according
Blinking to parameter n04.
STP (Emergency stop) Check the external circuit
Blinking Drive receives emergency (sequence).
stop alarm signal.
Drive stops according
to parameter n04.
FAN (Cooling fan fault) Check the following:
Cooling fan is locked. • Cooling fan
• Cooling fan wiring is not
Blinking connected.
Table 6-1. Alarm Displays and Corrective Actions
- Continued
or
Page 77

6-4
Fault Display
Digital RUN (Green)
Drive
Explanation
Causes and
Operator ALARM (Red)
Status Corrective Actions
OC (Overcurrent) • Short circuit or
Drive output current grounding at drive
momentarily exceeds output side
approx. 200% of rated • Excessive load inertia
current. • Extremely rapid accel/
decel time
(parameters n16 to n19)
• Special motor used
• Starting motor during
coasting
• Motor of a capacity
greater than the drive
rating has been started.
• Magnetic contactor
open/closed at the
drive output side
OV (Main circuit over- • Insufficient decel time
Protective voltage) parameters n17 and n19)
Operation. Main circuit DC voltage • Lowering of minus load
Output is exceeds the overvoltage (elevator, etc.)
shut OFF detection level because
and motor of excessive regenerative
coasts to energy from the motor. • Increase decel time.
a stop. Detection level: • Connect optional dynamic
230V: Stops at main circuit braking resistor.
DC voltage below
approx. 410V
460V: Stops at main circuit
DC voltage
approx. 820V or more
UV1 (Main circuit low • Reduction of input
voltage) power supply voltage
Main circuit DC voltage • Open phase of input supply
drops below the low- • Occurrence of momen-
voltage detection level tary power loss
while the drive output
is ON.
230V: Stops at main circuit Check the following:
DC voltage below • Power supply voltage
approx. 200V • Main circuit power
supply wiring is
460V: Stops at main circuit connected.
DC voltage • Terminal screws are
approx. 400V or more securely tightened.
GF (Ground Fault) Check motor insulation and
Ground current exceeded wiring between drive and
drive rated current. motor for damage.
Table 6-2. Fault Displays and Corrective Actions
Page 78

6-5
Fault Display
Digital RUN (Green)
Drive
Explanation
Causes and
Operator ALARM (Red)
Status Corrective Actions
UV2 (Control power Cycle power.
supply fault) If the fault remains.
Voltage fault of control replace the drive.
power supply is detected.
OH (Cooling fin overheat) • Excessive load
Temperature rise • Improper V/f pattern
because of drive setting
overload operation or • Insufficient accel time
intake air temperature if the fault occurs
rise. during acceleration
• Intake air temperature
exceeding 122°F (50°C)
Check the following:
• Load size
•V/f pattern setting
(parameters n09 to n15)
• Intake air temperature.
OL1 (Motor overload) • Check the load size or
Protective Motor overload V/f pattern setting
Operation. protection operates by (parameters n09 to n15)
Output is built-in electronic thermal • Set the motor rated
shut OFF overload relay. current shown on the
and motor nameplate in parameter
coasts to n32.
a stop.
OL2 (Drive overload) • Check the load size or
Drive overload V/f pattern setting
protection operates by (parameters n09 to n15)
built-in electronic thermal • Check the drive
overload relay. capacity.
OL3 (Overtorque detection) Check the driven
Drive output current machine and correct the
exceeded the preset value in cause of the fault, or
parameter n60. increase the value of
parameter n60 up to the
When overtorque is highest value allowed for
detected, drive performs the machine.
operation according to the
preset setting of parameter
n59.
Table 6-2. Fault Displays and Corrective Actions
- Continued
Page 79

6-6
Fault Display
Digital RUN (Green)
Drive
Explanation
Causes and
Operator ALARM (Red)
Status Corrective Actions
EF Check the external circuit
(External fault) (sequence).
Drive receives an
external fault input from
control circuit terminal.
EF0: External fault
reference through
MODBUS
communications
EF2: External fault input
command from control
circuit terminal S2
EF3: External fault input
command from control
circuit terminal S3
EF4: External fault input
command from control
Protective
circuit terminal S4
Operation.
EF5: External fault input
Output is
command from control
shut OFF
circuit terminal S5
and motor CPF-00 Cycle power after checking
coasts to Drive cannot the digital operator is
a stop. communicate with the digital securely mounted.
operator for 5 sec. or If the fault remains,
more when power is replace the digital operator
turned ON. or drive.
CPF-01 Cycle power after checking
Tr ansmission fault the digital operator is
occurred for 5 sec or more securely mounted.
when transmission starts If the fault remains,
with the digital operator. replace the digital operator
or drive.
CPF-04 • Record all parameter
EEPROM fault of drive data and initialize the
control circuit is detected. constants. (Refer to
paragraph 5.20 for
parameter initialization.)
• Cycle power.
If the fault remains,
replace the drive.
Table 6-2. Fault Displays and Corrective Actions
- Continued
Page 80

6-7
Fault Display
Digital RUN (Green)
Drive
Explanation
Causes and
Operator ALARM (Red)
Status Corrective Actions
CPF-05 Cycle power.
A/D converter fault is If the fault remains,
detected. replace the drive.
CPF-06 Remove power to the
Option card connecting fault drive.
Check the connection
Protective
of the digital operator.
Operation. CPF-07 Cycle power after checking
Output is Operator control circuit the digital operator is
shut OFF (EEPROM or A/D securely mounted.
and motor converter) fault If the fault remains,
coasts to replace the digital operator
a stop. or drive.
OPR (Operator Cycle power.
connecting fault) If the fault remains,
replace the drive.
CE (MODBUS Check the communication
communications fault) devices or communication
signals.
STP (Fast stop) Check the external circuit
The drive stops (sequence).
according to parameter
n04 after receiving the
emergency stop fault
signal.
Stops
according to
• Insufficient power Check the following:
parameter.
supply voltage • Power supply voltage
• Control power supply • Main circuit power
fault supply wiring is
• Hardware fault connected.
• Terminal screws are
securely tightened.
• Control sequence.
Replace the drive.
Table 6-2. Fault Displays and Corrective Actions
- Continued
For display/clear of fault history, refer to page 4-4.
or
__
(OFF)
Page 81

6-8
Constant
No.
Name Description
U-01
Frequency reference
Hz
Frequency reference can be monitored.
(FREF) (Same as FREF)
U-02
Output frequency
Hz
Output frequency can be monitored.
(FOUT) (Same as FOUT)
U-03
Output current
Hz
Output current can be monitored.
(IOUT) (Same as IOUT)
U-04 Output voltage V Output voltage can be monitored.
U-05 DC voltage V Main circuit DC voltage can be monitored.
U-06 Input terminal status — Input terminal status can be monitored.
(see paragraph 4.4)
U-07 Output terminal status — Output terminal status can be monitored.
(see paragraph 4.4)
U-09
Fault history
—
Last four fault history is displayed.
(last 4 faults) (see paragraph 4.4)
U-10 Software No. — Software No. can be checked.
U-15 Data reception error — See Table below
• Monitoring
Following items can be monitored by U-constants
U-15
Description
Data
0 CRC Error
1 Data Length Error
2 Not Used
3Parity Error
4Overrun Error
5Framing Error
6 Time out Error
Page 82

A1-1
The Drive control circuits use various parameters to select functions and characteristics of the Drive.
Changing of parameter settings must be done in the Program mode, or by use of the Function
LEDs, if available (see Section 4).
The following table lists all parameters in numerical order. For each parameter, reference
paragraph(s) in Section 5 are listed (if applicable) where the features of the Drive affected by that
parameter are described.
Table A1-1. J7 Parameters
Appendix 1. LISTING OF PARAMETERS
PARAM- SETTING RANGE SETTING FACTORY USER PARA.
ETER NAME (AND UNITS) INCREMENT SETTING SETTING REF.
0: n01 can be read and set;
n02 - n79 read only
1: n01 - n79 can be read and set
2-5: Not Used 1 1 5.20
n01
Parameter Selection / 6: Clear Fault History Only
Initialization 7: Not Used
10: 2 wire initialization (USA Spec)
11: 3 wire initialization (USA Spec.)
0: Digital Operator
n02 Operation Method Selection 1: Terminal 1 1 5.13
2: Serial Communication (Modbus)
0: Digital Operator Pot
1: Digital Operator
2: Voltage Reference (0 to 10V)
3: Current Reference (4 to 20 mA)
n03 Reference Selection
4: Current Reference (0 to 20 mA)
5: Serial Communications (Modbus) 1 2 5.13
n04 Stop Method
0: Ramp to stop
1 0 5.23
1: Coast to stop
n05 Reverse Prohibit
0: Reverse Run enabled
10
1: Reverse Run disabled
0: STOP key is effective regardless of
programming of n02
n06 STOP Key Function
1: STOP key is effective only when sequence
1 0 5.13
command (per n02) is from Digital Operator
0: Frequency Reference from digital
n07
Reference Selection -
operator pot 1 0 5.13
Digital Operator
1: Frequency Reference from n21
0: ENTER key must be pressed to write-in
n08
Frequency Reference Setting new value
1 0 5.13
Method From Digital Operator 1: ENTER key does not have to be pressed
to write-in new value
n09 Frequency - Max. 50.0 to 400.0 0.1 (Hz) 60.0
n10
Voltage - Max.
0.1 to 255.0 (230V drive)
0.1 (V)
230
0.2 to 510.0 (460V drive) 460
n11
Frequency - Max.
0.2 to 400.0 0.1 (Hz) 60.0
Voltage Point
n12 Frequency - Midpoint 0.1 to 399.9 0.1 (Hz) 1.5 5.26
n13
Voltage - Midpoint
0.1 to 255.0 (230V drive)
0.1 (V) 12
0.2 to 510.0 (460V drive)
n14 Frequency - Min. 0.1 to 10.0 0.1 (Hz) 1.5
n15
Voltage - Min.
0.1 to 50.0 (230V drive)
0.1 (V) 12
0.2 to 100.0 (460V drive)
n16 Acceleration Time 1 0.1 (sec) 10.0
n17 Deceleration Time 1
(<100 sec.)
5.2
n18 Acceleration Time 2
0.0 to 999
1 (sec)
n19 Deceleration Time 2 (≥100 sec.)
0: No S-curve
n20 S-curve Selection
1: 0.2 second
10 5.3
2: 0.5 second
3: 1.0 second
Page 83

A1-2
Table A1-1. J7 Parameters - Continued
PARAM- SETTING RANGE SETTING FACTORY USER PARA.
ETER NAME (AND UNITS) INCREMENT SETTING SETTING REF.
n21 Frequency Reference 1 6.0
n22 Frequency Reference 2 0.0
n23 Frequency Reference 3 0.1 (Hz) 0.0
n24 Frequency Reference 4 0.0 to 400 (< 100 Hz) 0.0
n25 Frequency Reference 5 or 0.0 5.11
n26 Frequency Reference 6 1 (Hz) 0.0
n27 Frequency Reference 7 (≥ 100 Hz) 0.0
n28 Frequency Reference 8 0.0
n29 Jog Frequency Reference 6.0 5.12
n30
Frequency Reference Upper
0 to 110
1 (%) 100
Limit
5.9
n31
Frequency Reference Lower
0 to 110
1 (%) 0
Limit
0.0 to 49.5
n32 Motor Rated Current (Up to 120% of inverter rated current) 0.1 (A) Note 1
5.24
0: Standard Motor
n33
Electronic Thermal Overload
1: Standard Motor - Short Term 1 0
Protection (for OL1 fault)
2: Disabled 5.24
n34
Electronic Thermal Overload
1 to 60
1 (min) 8
Protection Time Constant
0: Operates only when drive is running
n35
Cooling Fan Operation (continues operation for 1 minute after
10
Selection drive is stopped)
1: Operates with power applied to drive
0: Fwd / Rev command (3 wire control) 1 2
n36
Multi-function Input
[can only be set in n37] (2)
Selection 2 (Terminal S2)
2: Reverse run (2 wire control)
3: External Fault (N.O.)
n37
Multi-function Input
4: External Fault (N.C.)
15
Selection 3 (Terminal S3)
5: Fault Reset
(0)
6: Multi-step speed ref. cmd. A
n38
Multi-function Input
7: Multi-step speed ref. cmd. B
13
Selection 4 (Terminal S4)
8: Multi-step speed ref. cmd. C
(3)
10: JOG Selection
n39
Multi-function Input
11: Accel/Decel time change cmd.
16
Selection 5 (Terminal S5)
12: External Base Block (N.O.)
(6)
5.17
13: External Base Block (N.C.)
14: Speed search from max. freq.
15: Speed search from set freq.
16: Accel/Decel hold command
17: Remote/Local selection
18: Serial Communication / control ckt.
selection
19: Fast Stop - Fault (N.O.)
20: Fast Stop - Alarm (N.O.)
21: Fast Stop - Fault (N.C.)
22: Fast Stop - Alarm (N.C.)
34: Up / Down command
35: Loop Test [can only be set in n39]
Multi-Function Output
0: Fault
n40 Selection
1: During running 1 1 5.18
(Terminals MA, MB & MC)
2: Speed Agree
3: Zero Speed
4: Frequency detection 1
5: Frequency detection 2
6: Overtorque detection (N.O.)
7: Overtorque detection (N.C.)
10: Minor Fault
11: During Base Block
12: Local / Remote
13: Ready
14: During auto restart
15: During undervoltage
16: During reverse run
17: During speed search
18: Serial Comm. Controlled
Page 84

PARAM- SETTING RANGE SETTING FACTORY USER PARA.
ETER NAME (AND UNITS) INCREMENT SETTING SETTING REF.
n41
Analog Frequency Reference
0 to 255 1 (%) 100
Gain
5.8
n42
Analog Frequency Reference
-100 to 100 1 (%) 0
Bias
n43
Analog frequency reference
0.00 to 2.00 0.01 (sec) 0.10
filter time constant
0: Output frequency
1: Output Current
2: DC Bus Voltage
n44
Multi-function Analog Output (10V / 400 VDC [800 VDC])
(Terminals AM & AC) 3: Motor Torque 1 0 5.16
(10V / Motor rated torque)
4: Output Power
(10V / Drive Capacity kW)
n45 Analog Monitor Gain 0.00 to 2.00 0.01 1.00
n46 Carrier Frequency
1 to 4 (x 2.5 kHz)
14 5.5
7 to 9 (synchronous)
0: Not Provided
1: Continuous operation after power
n47
Momentary Power Loss recovery within 2 sec.
Ride-through Method 2: Continuous operation after power 1 0 5.15
recovery within control logic time
(no fault output)
n48
Number of auto restarts
0 to 10 1 0
attempts
n49 Prohibit Frequency 1 0.00 to 400.0
0.01 (Hz)
0.00
or 0.1 (Hz)
n50 Prohibit Frequency 2 0.00 to 400.0
0.01 (Hz)
0.00 5.6
or 0.1 (Hz)
n51 Prohibit Frequency Deadband 0.0 to 25.5 0.01 (Hz) 0.00
n52 DC Injection Current 0 to 100 1 (%) 50
n53 DC Injection Time at stop 0.0 to 25.5 0.1 (sec) 0.0 5.7
n54 DC Injection Time at start 0.0 to 25.5 0.1 (sec) 0.0
n55
Stall Prevention During 0: Enabled
10
Deceleration 1: Disabled
n56
Stall Prevention During
30 to 200 1 (%) 170 5.22
Acceleration
n57
Stall Prevention Level During
30 to 200 1 (%) 160
Running
n58 Frequency Detection Level 0.00 to 400.0
0.01 (Hz)
0.0 5.18
or 0.1 (Hz)
0: Detection Disabled
1: Detect only at set frequency;
operation continues
2: Detect only at set frequency;
n59 Overtorque Detection (OL3) coast to stop 1 0
3: Detect during all frequency conditions; 5.19
operation continues
4: Detect during all frequency conditions;
coast to stop
n60
Overtorque Detection
Level (OL3)
30 to 200 1 (%) 160
n61
Overtorque Detection
Delay Time (OL3)
0.1 to 10.0 0.1 (sec) 0.1
n62
Up/Down Hold 0: Disabled
Memory 1: Enabled
10 5.10
n63 Torque Compensation Gain 0.0 to 2.5 0.1 1.0 5.25
n64 Motor Rated Slip 0.0 to 20.0 0.1 (Hz) Note 1 5.21
n65 Motor No-load Current 0 to 99 1 (%) Note 1
n66 Slip Compensation Gain 0.0 to 2.5 0.1 0.0
n67
Slip Compensation Primary
0.0 to 25.5 0.1 (sec) 2.0
5.21
Delay Time
0: Fault - Coast to stop
1: Fault - Ramp to stop (n17)
n68
Modbus Time Out
2: Fault - Ramp to stop (n19)10
Detection
3: Alarm - operation continues
4: Disabled
0: 0.1 Hz 5.14
n69
Modbus Frequency 1: 0.01 Hz
Reference Unit 2: 100% / 30000
10
3: 0.1 %
n70 Modbus Slave Address 0 to 32 1 0
A1-3
Table A1-1. J7 Parameters - Continued
Page 85

A1-4
Table A1-1. J7 Parameters - Continued
PARAM- SETTING RANGE SETTING FACTORY USER PARA.
ETER NAME (AND UNITS) INCREMENT SETTING SETTING REF.
0: 2400 bps
n71 Modbus Baud Rate
1: 4800 bps
2: 9600 bps
12
3: 19200 bps 5.14
0: even parity
n72 Modbus Parity Selection 1: odd parity 1 2
2: no parity
n73 Modbus Send Waiting Time 10 to 65 1 (msec) 10
0: RTS control enabled
n74 Modbus RTS control 1: RTS control disabled 1 0
(RS-422A 1 to 1 communication)
n75 Reduce Carrier
0: Disabled
at low speed selection
1: Carrier Frequency reduced to 2.5kHz 1 0
when Fout <= 5Hz & Iout >= 110%
rdy : READY status rdy
rEd: READ executes rEd
n76
Digital Operator Parameter Cpy: COPY executes Cpy
rdy
Copy Function Selection vFy: VERIFY executes vFy
vA: Inverter capacity display vA
Sno: Software No. display Sno
n77
Digital Operator
0: Copying disabled
Parameter Copy
1: Copying allowed
10
Access Selection
n78 Fault History Note 2 N/A N/A
n79 Software Number Note 2 013
Note 1: Factory setting differs depending on capacity. See Appendix 3-1.
Note 2: n78 and n79 are display only parameters, which are not settable.
Page 86

A2-1
(table continued on next page)
Appendix 2. SPECIFICATIONS
See notes at end of table.
SECTION A.
Model No. Related Specifications
Old Model No. JDA001 JDA002 JDA003 JDA005 JDA008 JDA011 JDA017
New Model No. CIMR-J7AM 20P10 20P20 20P40 20P70 21P50 22P20 23P70
Max. applicable motor output
1/8 1/4 1/2 1 2 3 5
HP (1)
Drive capacity (kVA) 0.3 0.6 1.1 1.9 3.0 4.2 6.7
Rated Output Current (A) 0.8 1.6 3.0 5.0 8.0 11.0 17.5
Rated Input Current (A) 1.1 1.8 3.9 6.4 11.0 15.1 24.0
Max. Output Voltage (V) 200V to 230V (proportional to input voltage)
Max. Output Frequency (Hz) 400 Hz (programmable)
Rated Input Voltage and
three-phase. 200 to 230 V, 50/60 Hz
Frequency
Allowable voltage fluctuation -15% to +10%
Allowable frequency fluctuation ±5%
Old Model No. JDB001 JDB002 JDB003 JDB005 -- -- JDB009
New Model No. CIMR-J7AM 40P20 40P40 40P70 41P50 42P20 43P00 43P70
Max. applicable motor
output HP (1)
1/2 3/4 2 3 3 3 5
Drive capacity (kVA) 0.9 1.4 2.6 3.7 4.2 5.5 7
Rated Output Current (A) 1.2 1.8 3.4 4.8 5.5 7.2 8.6
Rated Input Current (A) 1.6 2.4 4.7 7.0 8.1 10.3 12.0
Max. Output Voltage (V) 380 to 460V (proportional to input voltage)
Max. Output Frequency (Hz) 400 Hz (programmable)
Rated Input Voltage and
three-phase. 380 to 460 V, 50/60 Hz
Frequency
Allowable voltage fluctuation -15% to +10%
Allowable frequency fluctuation ±5%
SECTION B.
All Models
Control method Sine wave PWM (V/f Control)
Frequency control range 0.1 to 400 Hz
Frequency accuracy Digital command: ±0.01% (14 to 122°F, -10 to +50°C)
(temperature change) Analog command: ±0.5% (77°F ± 18°F, 25°C ± 10°C)
Digital Operator reference: 0.1 Hz (< 100Hz)
Frequency setting resolution 1 Hz (100Hz or more)
Analog reference: 0.06Hz/60Hz (1/1000)
Output frequency resolution 0.01 Hz
Overload capacity 150% of rated output current for 1 minute
0 to 10VDC (20kΩ), 4 to 20mA (250Ω), 0 to 20mA (250Ω) pulse train input,
Frequency Reference Signal
Digital Operator Pot
0.01 to 6000 sec.
Accel/Decel Time
(accel/decel time are independently programmed)
Short-term average deceleration torque (2)
0.2kW: 150%
0.75kW: 100%
Braking Torque
1.5kW: 50%
2.2kW or more: 20%
Continuous regenerative torque: Approx. 20%
V/f characteristics Custom V/f pattern
Table A2-1. Standard Specifications
Output
Characteristics
Powe r
Supply
Output
Characteristics
Control Characteristics
Powe r
Supply
230 VA C
3-Phase
460 VA C
3-Phase
Page 87

A2-2
NOTES:
(1)
Based on an N.E.C. standard 4-pole motor for max. applicable motor output.
(2)
Shows deceleration torque for an uncoupled motor decelerating from 60 Hz in 0.1 seconds.
(3)
Contact your Yaskawa representative for wiring distances greater than 328 ft. (100 m).
(4)
Temperature during shipping (for short periods of time).
SECTION B.
All Models (Continued)
Motor overload protection Electronic thermal overload protection
Motor coasts to stop at approx. 200%
Instantaneous overcurrent
of drive current
Motor coasts to stop after 1 min. at 150% of
Overload
drive rated current
Motor coasts to stop if DC bus voltage exceeds
Overvoltage
410VDC (230V), 820VDC (460V)
Motor coasts to stop when DC bus voltage is
Undervoltage
210VDC or less (230V), 400VDC or less (460V)
The following operations are selectable:
Momentary Power Loss
• Not provided (stops if power loss is 15 ms or longer)
• Automatic restart at recovery from 0.5 sec. power loss
• Automatic restart
Heatsink overheat Protected by electronic circuit
Independently programmable during accel and
Stall prevention level
constant-speed running. Selectable during decel.
Ground fault Protected by electronic circuit (overcurrent level)
ON until the DC bus voltage becomes 50V or less.
Power charge indication RUN lamp says ON or digital operator LED stays ON.
(Charge LED is Provided for 400V)
Cooling Fan Fault Protected by electronic circuit
Run/stop input 2-Wire or 3-Wire
Seven of the following input signals are selectable:
Forward/reverse run (3-Wire sequence), fault reset,
external fault (NO/NC contact input), multi-step speed operation,
Multi-function input
Jog command, accel/decel time select,
external baseblock (NO/NC contact input, speed search command,
accel/decel hold command, LOCAL/REMOTE selection,
communication/control circuit terminal selection,
emergency stop fault emergency stop alarm
Following output signals are selectable
(1 NO/NC contact output):
Fault, running, zero speed, at frequency, frequency detection
Multi-function output (output frequency ≤ or ≥ set value), during overtorque detection,
during undervoltage detection, minor error, during baseblock, operation mode,
inverter run ready, during fault retry, during UV, during speed search,
data output through communication
Analog monitor 0 to +10VDC output, programmable for output frequency or output current
Full-range automatic torque boost, auto restart,
upper/lower frequency limit, DC injection braking current/time at start/stop,
Standard functions
frequency reference gain/bias, prohibited frequencies,
analog meter calibrating gain, S-curve accel/decel, slip compensation,
MODBUS communications optional (RS232 or RS485/422, Max. 19.2K bps),
frequency reference from digital operator pot
Status indicator LEDs RUN and ALARM LEDs provided as standard
Digital Operator
Monitors frequency reference, output frequency,
output current, FWD/REF selection
Terminals Screw terminals for both main circuit and control circuit
Wiring distance between
drive and motor
328 ft (100 m) or less
(3)
Enclosure Protected chassis (IP 20)
Cooling method Self-cooling/cooling fan
Ambient temperature 14 to 122°F (-10 to 50°C)
Humidity 95% RH or less (non-condensing)
Storage temperature
(4)
-4 to 140°F (-20 to 60°C)
Location Indoor (free from corrosive gases or dust)
Elevation 3,280 feet (1,000 m), higher altitudes by derate
Vibration
Up to 1G, at less than 20 Hz;
up to 0.2G, at 20 to 50 Hz
Table A2-1. Standard Specifications (Continued)
Protective Functions
Environmental
conditions
Other Functions
Input signalsOutput signals
Display
Page 88

A3-1
The factory setting of certain parameters change with drive rating and control method selected. The
following two tables list the parameters and how they change.
Appendix 3. CAPACITY RELATED PARAMETERS
Old Drive New Drive
Model No. Model No. n32 n64 n65 n46
CIMR-J7AM
JDA001 20P10 0.6 2.5 72 4
JDA002 20P20 1.1 2.6 73 4
JDA003 20P40 1.9 2.9 62 4
JDA005 20P70 3.3 2.5 55 4
JDA008 21P50 6.2 2.6 45 3
JDA011 22P20 8.5 2.9 35 3
JDA017 23P70 14.1 3.3 32 3
JDB001 40P20 0.6 2.5 73 3
JDB002 40P40 1.0 2.7 63 3
JDB003 40P70 1.6 2.6 52 3
JDB005 41P50 3.1 2.5 45 3
– 42P20 4.2 3.0 35 3
– 43P00 7.0 3.2 33 3
JDB009 43P70 7.0 3.2 33 3
Table A3-1. Parameters Related to Capacity
Page 89

230 V Old Drive Model No. JDA001 JDA002 JDA003 JDA005 JDA008 JDA011 JDA017
New Drive Model No. CIMR-J7AM 20P10 20P20 20P40 20P70 21P50 22P20 23P70
Capacity (kVA) 0.3 0.6 1.1 1.9 3 4.2 6.7
Rated output current (A)0.8 1.6 3 5 8 11 17.5
Rated input current (A) 1.1 1.9 3.9 6.4 11 15.5 24
Max. MCCB rating (A) 15 15 15 15 20 30 40
Max. Time Delay Fuse Rating (A)
(1)
1.8 3.2 6.25 10 17.5 20 25
Max. Non-Time Delay Fuse Rating (A)
(2)
3 5 10 20 30 45 45
A4-1
Appendix 4. PERIPHERAL DEVICES
The following peripheral devices may be required to be mounted between the AC main circuit power
supply and the Drive input terminals L1 (R), L2 (S) and L3 (T).
CAUTION
Never connect a general LC/RC noise filter to the drive output circuit.
Never connect a phase-advancing capacitor to the input/output sides or a
surge suppressor to the output side of the drive.
When a magnetic contactor is installed between the drive and the motor,
never turn it on or off during operation.
For more details on peripheral devices, contact your Yaskawa representative.
Recommended Branch Circuit Short Circuit Protection Peripheral Devices
All models have UL evaluated motor overload protection built in. Motor over protection is also provided in
accordance with the NEC and CEC. Additional branch circuit overload protection is not required.
• Molded-case circuit breaker (MCCB) & Fusing
Notes:
(1)
Apply UL designated Class RK5 fuses.
(2)
Apply UL designated Class CC or T non-time delay fuses.
Input fuse sizes are determined by NEC guidelines, and should not exceed the ratings shown in the table.
Fuse Ratings are based upon 250V fuses for 230V Drives, and 600V for 460V Drives.
Fuse Manufacturer's Designators: Class CC; KTK, FNQ or equivalent
Class RK5; FRN, FRS or equivalent
Class T; JJS, JJN or equivalent
• Magnetic contactor
Mount a surge protector on the coil. When using a magnetic contactor to start and stop the drive, do
not exceed one start per hour.
• Ground fault interrupter
Select a ground fault interrupter not affected by high frequencies. To prevent malfunctions, the
current should be 200mA or more and the operating time 0.1 second or more.
• AC and DC reactor
Install a reactor to connect to a power supply transformer of large capacity (600 kVA or more) or to
improve the power factor on the power supply side.
• Noise filter
Use a noise filter exclusively for the drive if radio noise generated from the drive causes other
control devices to malfunction.
460 V Old Drive Model No. JDB001 JDB002 JDB003 JDB005 – – JDB009
New Drive Model No. CIMR-J7AM 40P20 40P40 40P70 41P50 42P20 43P00 43P70
Capacity (kVA) 0.9 1.4 2.6 3.7 4.2 5.5 7
Rated output current (A)1.2 1.8 3.4 4.8 5.5 7.2 8.6
Rated input current (A) 1.6 2.4 4.7 7 8.1 10.3 12
Max. MCCB rating (A) 15 15 15 15 10 20 20
Max. Time Delay Fuse Rating (A)
(1)
2.84 812– – 20
Max. Non-Time Delay Fuse Rating (A)
(2)
5 7 12 20 – – 35
Page 90

A5-1
Appendix 5. J7 DIMENSIONS
Weight
Lbs.
Old Drive
Model No.
Dimensions in Inches
Horse-
Power
1/8
1/4
1/2
3/4 & 1
1/2
3/4
1 & 2
3
3
JDA001
JDA002
JDA003
JDA005
JDB001
JDB002
JDB003
JDB005
–
1.3
1.3
2.0
2.4
2.2
2.4
3.3
3.3
3.3
2.68
4.25
2.76
2.76
4.02
4.80
3.19
3.90
5.08
6.06
6.06
2.20
2.20
2.20
2.20
3.78
3.78
3.78
3.78
3.78
13.0
18.0
28.1
45.1
23.1
30.1
54.9
75.7
83.0
Rated
Input
W
H
D
460V
3-Phase
230V
3-Phase
H1
W1
Heat loss
(Watts)
New Drive
Model No.
CIMR-J7AM
20P10
20P20
20P40
20P70
40P20
40P40
40P70
41P50
42P20
5.04
5.04
4.65
4.65
FREF FOUT IOUT MNTR
F/R LO/RE PRGM
RUN ALARM
DSPL
DATA
ENTER
RUN
STOP
RESET
MIN MAX
W1
W D
0.20
H
H1
0.33
Page 91

A5-2
W1
H1
H
W D
0.20
0.33
MIN MAX
FREF FOUT IOUT MNTR
F/R LO/RE PRGM
RUN
RUN ALARM
DSPL
DATA
ENTER
STOP
RESET
Old Drive
Model No.
Dimensions in Inches
HorsePower
2
3
5
3
5
JDA008
JDA011
JDA017
–
JDB009
3.1
3.3
4.6
4.6
4.25
4.25
5.51
5.51
5.08
6.06
6.34
6.34
3.78
3.78
5.04
5.04
72.8
94.8
149.1
95.8
117.9
Rated
Input
H
W1
D
230V
3-Phase
460V
3-Phase
W
Weight
Lbs.
Heat loss
(Watts)
5.04
5.04
H1
New Drive
Model No.
CIMR-J7AM
21P50
22P20
23P70
43P00
43P70
4.65
4.65
Page 92

I-1
- A -
Acceleration :
Accel time 1 ........................................... 5-2
Accel time 2 ........................................... 5-2
Hold ..................................................... 5-25
S-curve .................................................. 5-3
Time setting unit .................................... 5-2
Analog monitor output,
multi-function ....................................... 5-19
Auto restart ............................................... 5-4
- B -
Braking :
DC injection ........................................... 5-7
- C -
Carrier frequency ...................................... 5-5
Conformance to European
EMC Directive .................................. 1-8
Contactors –– see
Peripheral Devices
Control circuit :
Te r minals .............................................. 1-6
Wiring ................................................... 1-5
Critical frequency
rejection .................................................. 5-6
Current :
Limit — see Stall Prevention
Motor ..................................................... 2-7
Output (IOUT)........................................ 4-2
Output (monitor) .....................................4-4
- D -
DATA/ENTER key ..................................... 4-1
DC injection :
Time at start ......................................... 5-7
Time at stop .......................................... 5-7
Deadband, prohibited
frequency ......................................... 5-6
Deceleration :
Decel time 1 ......................................... 5-2
Decel time 2 ......................................... 5-2
S-curve ................................................. 5-3
Time setting unit ................................... 5-2
Decrease ( ) key .................................. 4-1
Diagnostics — see
Troubleshooting
Digital operator ......................................... 4-1
Dimensions ................................... A5-1, A5-2
DSPL key .................................................. 4-1
- E -
EMC Directive, European,
Conformance to ............................... 1-9
Enclosure ............................................... A2-2
Environment .................................... 1-1, A2-2
External base block ................................ 5-23
- F -
F/R LED .................................................... 4-2
Fault displays ............................................ 6-4
Fault history .................................. 5-31, A1-5
Faults :
Restart attempts ................................... 5-4
FOUT LED ................................................ 4-2
FREF LED ................................................ 4-2
Frequency :
Detection ............................................ 5-28
Max. output ........................................ A2-1
Output (FOUT) ..................................... 4-2
Output (monitor) ................................... 4-4
Frequency reference :
Bias (analog) ........................................ 5-8
Gain (analog) ....................................... 5-8
Jog ...................................................... 5-12
Limits .................................................... 5-9
Retention (Up/Down) ................................ 5-9
Selection ................................................. 5-10
- G -
Gain :
Analog monitor ................................... 5-19
Frequency reference (analog) .............. 5-8
Torque compensation ......................... 5-35
Grounding ................................................. 1-5
- H -
Heat loss (watts) ........................... A5-1, A5-2
Hold :
Accel/decel ................................ 5-21, 5-25
Frequency ref. (retention) ..................... 5-9
- I -
Increase ( ) key ........................................ 4-1
Initialize parameters ................................ 5-30
Inputs, multi-function ............................... 5-20
Inspection (receiving) ............................... 1-1
Installation:
Electrical ............................................... 1-4
Physical ................................................ 1-1
IOUT LED ................................................. 4-2
INDEX
<
>
Page 93

I-2
INDEX (Continued)
- J -
Jog reference .......................................... 5-12
- K -
Keypad — see Digital Operator
- L -
LEDs :
Function ................................................ 4-2
Status Indicator .................................... 4-3
Local/Remote reference and
sequence selection ........................ 5-13
LO/RE LED ............................................... 4-2
- M -
Main circuit :
Te r minals .............................................. 1-4
Wiring ................................................... 1-4
Mechanical resonance —
see Critical Frequency Rejection
MNTR LED ............................................... 4-2
MODBUS control .................................... 5-15
Model Number ........................................ A2-1
Momentary power loss ride-through ....... 5-19
Monitor displays ........................................ 4-4
Motor :
No-load current .................................... 5-31
Protection ........................................... 5-34
Rated current ..................................... 5-32
Switching — see Speed Search
Wiring ................................................... 1-4
Mounting :
Clearances ........................................... 1-1
Dimensions .............................. A5-1, A5-2
European EMC
conformance .................................... 1-8
Location ...................................... 1-1, A2-2
Multi-function analog
monitor output ................................ 5-19
Multi-function input
terminals ........................................ 5-20
Multi-function output
terminals ........................................ 5-26
- N -
Nameplate, motor ..................................... 2-7
- O -
Operation at load ...................................... 3-1
Operation mode ...................................... 5-13
Operator display ....................................... 4-1
Options — see Peripheral
Devices
Outputs :
Analog ................................................ 5-19
Contact ............................................... 5-26
Multi-function ...................................... 5-26
Open collector .................................... 5-26
Overtorque detection .............................. 5-29
- P -
Parameters :
Capacity and control
method related .............................. A3-1
Listing of ............................................ A1-1
Reset (initialize) .................................. 5-30
Peripheral devices :
AC and DC reactor ............................ A4-1
Ground fault interrupter ...................... A4-1
Magnetic contactor ............................ A4-1
Molded-case circuit
breaker (MCCB) ............................... A4-1
Noise filter .......................................... A4-1
Potentiometer ............................................ 4-1
Power loss ride-through .......................... 5-28
Power supply .......................................... A2-1
Pre-power checks ..................................... 2-1
Preset speeds — see
Multi-step speeds
PRGM LED ............................................... 4-2
Prohibited frequency
deadband ................................................ 5-6
Protection :
Overcurrent ........................................ 5-32
Overheat (drive) ................................. A2-1
Overtorque ......................................... 5-29
Overvoltage (decel) ............................ 5-32
Thermal overload (mtr) ....................... 5-34
Undervoltage ...................................... A2-2
Protective functions,
miscellaneous ................................ 5-19
- R -
Rated current, motor ........................................... 5-34
Ratings ................................................ i, A2-1
Receiving .................................................. 1-1
Remote reference — see
Local/Remote
Reset codes ............................................ 5-22
Reverse prohibit ............................ 1-10, 1-12
Ride-through ........................................... 5-19
RUNkey .................................................... 4-1
- S -
S-curve ..................................................... 5-3
Shock resistance –– see
S-curve
Page 94

I-3
Slip compensation .................................. 5-31
Soft start — see S-cur ve
Specifications ......................................... A2-1
Speed :
Coincidence ........................................ 5-27
Search ................................................ 5-22
Stall prevention :
Accel ................................................... 5-32
Decel .................................................. 5-32
During running .................................... 5-32
Start-up Procedure ................................... 2-2
STOP/RESET key ........................... 4-1, 5-13
Stopping method selection ..................... 5-33
Switches, internal :
SW1 .................................................... 5-20
SW8 .................................................... 5-10
Switching frequency — see
Carrier frequency
- T -
Temperature :
Ambient .............................................. A2-2
Storage .............................................. A2-2
Te r minals :
Functions ...................................... 1-4, 1-6
Screw sizes .......................................... 1-3
Thermal overload protection ..................... 5-34
Torque boost ........................................... 5-35
Torque compensation
gain (V/F control) ................................ 5-35
Torque detection ..................................... 5-29
Troubleshooting.......................................... 6-1
- U -
Up/down function .................................... 5-25
- V -
V/f pattern ............................................... 5-40
Voltage :
DC bus (monitor) .................................. 4-4
DC bus (stall prev.) ............................. 5-32
Max. output ........................................ A2-1
Output (monitor) ................................... 4-4
- W -
Weight ........................................... A5-1, A5-2
Wiring :
2-Wire control ....................................... 1-4
3-Wire control ....................................... 1-4
Auxiliary input and output
power option devices ....................... 1-7
Conduit ..................................................1-7
Control circuit ....................................... 1-5
Diagrams ................................... 1-11, 1-13
Distances ..................... 1-4, 1-5, 1-8, A2-2
Main circuit ........................................... 1-4
INDEX (Continued)
Page 95

It is important to Yaskawa that
users of our products have a
totally satisfying ownership
experience.
Tr aining is one of the most
effective ways to ensure that
satisfaction. Because of this
conviction, Yaskawa has
operated a full-time professional
training department since 1965.
Yaskawa trainers are full-time
instructors, with a wealth of
“real-life” product experience
gained through field service at
customer facilities. This
experience, combined with
backgrounds in engineering and education, has earned national recognition for Yaskawa’s
technical training programs.
Courses are conducted at the headquarters training facility, in selected cities, and at customer
sites. Courses are available to cover all the issues of concern to product users: application,
theory of operation, troubleshooting and repair, adjustment and startup, operation,
programming, network communication, and optimizing the functions of Yaskawa drives.
We work hard to make all of our products user-friendly, and our owner manuals easy to use.
In spite of that, the simple fact is that you will learn better and faster in a class environment
combined with hands-on practice, than by self-teaching when under the stress of a
maintenance or operations problem.
On-Site Training and Customized Courses
Tr aining courses are also provided at the user’s site. Course content can be customized to
the specific installation and application if requested. For further information about on-site
training and courses specific to your installation and application, visit our website at
www.drives.com.
Product T raining
Product T raining
Page 96

J7 Drive
YASKAWA ELECTRIC AMERICA, INC.
Drives Division
16555 W. Ryerson Rd., New Berlin, WI 53151, U.S.A.
Phone: (800) YASKAWA (800-927-5292) Fax: (262) 782-3418
Internet: http://www.drives.com
YASKAWA ELECTRIC AMERICA, INC.
Chicago-Corporate Headquarters
2121 Norman Drive South, Waukegan, IL 60085, U.S.A.
Phone: (800) YASKAWA (800-927-5292) Fax: (847) 887-7310
Internet: http://www.yaskawa.com
MOTOMAN INC.
805 Liberty Lane, West Carrollton, OH 45449, U.S.A.
Phone: (937) 847-6200 Fax: (937) 847-6277
Internet: http://www.motoman.com
YASKAWA ELECTRIC CORPORATION
New Pier Takeshiba South Tower, 1-16-1, Kaigan, Minatoku, Tokyo, 105-0022, Japan
Phone: 81-3-5402-4511 Fax: 81-3-5402-4580
Internet: http://www.yaskawa.co.jp
YASKAWA ELETRICO DO BRASIL COMERCIO LTDA.
Avenida Fagundes Filho, 620 Bairro Saude Sao Paolo-SP, Brasil
CEP: 04304-000
Phone: 55-11-5071-2552 Fax: 55-11-5581-8795
Internet: http://www.yaskawa.com.br
YASKAWA ELECTRIC EUROPE GmbH
Am Kronberger Hang 2, 65824 Schwalbach, Germany
Phone: 49-6196-569-300 Fax: 49-6196-888-301
MOTOMAN ROBOTICS AB
Box 504 S38525, Torsas, Sweden
Phone: 46-486-48800 Fax: 46-486-41410
MOTOMAN ROBOTEC GmbH
Kammerfeldstrabe 1, 85391 Allershausen, Germany
Phone: 49-8166-900 Fax: 49-8166-9039
YASKAWA ELECTRIC UK LTD.
1 Hunt Hill Orchardton Woods Cumbernauld,
G68 9LF, Scotland, United Kingdom
Phone: 44-12-3673-5000 Fax: 44-12-3645-8182
YASKAWA ELECTRIC KOREA CORPORATION
Paik Nam Bldg. 901 188-3, 1-Ga Euljiro, Joong-Gu, Seoul, Korea
Phone: 82-2-776-7844 Fax: 82-2-753-2639
YASKAWA ELECTRIC (SINGAPORE) PTE. LTD.
Head Office: 151 Lorong Chuan, #04-01, New Tech Park Singapore 556741, Singapore
Phone: 65-282-3003 Fax: 65-289-3003
TAIPEI OFFICE (AND YATEC ENGINEERING CORPORATION)
10F 146 Sung Chiang Road, Taipei, Taiwan
Phone: 886-2-2563-0010 Fax: 886-2-2567-4677
YASKAWA JASON (HK) COMPANY LIMITED
Rm. 2909-10, Hong Kong Plaza, 186-191 Connaught Road West,
Hong Kong
Phone: 852-2803-2385 Fax: 852-2547-5773
BEIJING OFFICE
Room No. 301 Office Building of Beijing International Club,
21 Jianguomanwai Avenue, Beijing 100020, China
Phone: 86-10-6532-1850 Fax: 86-10-6532-1851
SHANGHAI OFFICE
27 Hui He Road Shanghai 200437 China
Phone: 86-21-6553-6600 Fax: 86-21-6531-4242
SHANGHAI YASKAWA-TONJI M & E CO., LTD.
27 Hui He Road Shanghai 200437 China
Phone: 86-21-6533-2828 Fax: 86-21-6553-6677
BEIJING YASKAWA BEIKE AUTOMATION ENGINEERING CO., LTD.
30 Xue Yuan Road, Haidian, Beijing 100083 China
Phone: 86-10-6232-9943 Fax: 86-10-6234-5002
SHOUGANG MOTOMAN ROBOT CO., LTD.
7, Yongchang-North Street, Beijing Economic & Technological Development Area,
Beijing 100076 China
Phone: 86-10-6788-0551 Fax: 86-10-6788-2878
YEA, TAICHUNG OFFICE IN TAIWAIN
B1, 6F, No.51, Section 2, Kung-Yi Road, Taichung City, Taiwan, R.O.C.
Phone: 886-4-2320-2227 Fax:886-4-2320-2239
Document Number: TM.J7.01 (Supercedes TM 4305 and YEA-TOA-S606-12.1) 4/1/07 Software Version: 013 Rev: 07-04
Data subject to change without notice.
 Loading...
Loading...