


A
ltivar 320
NVE50469 01/2017
Altivar 320
Frequenzumrichter
Anleitung für Sicherheitsfunktionen
01/2017
NVE50469.02
www.schneider-electric.com

Die Informationen in der vorliegenden Dokumentation enthalten allgemeine Beschreibungen und/oder
technische Leistungsmerkmale der hier erwähnten Produkte. Diese Dokumentation dient keinesfalls als
Ersatz für die Ermittlung der Eignung oder Verlässlichkeit dieser Produkte für bestimmte Verwendungsbereiche des Benutzers und darf nicht zu diesem Zweck verwendet werden. Jeder Benutzer oder Integrator
ist verpflichtet, angemessene und vollständige Risikoanalysen, Bewertungen und Tests der Produkte im
Hinblick auf deren jeweils spezifischen Verwendungszweck vorzunehmen. Weder Schneider Electric noch
deren Tochtergesellschaften oder verbundene Unternehmen sind für einen Missbrauch der Informationen
in der vorliegenden Dokumentation verantwortlich oder können diesbezüglich haftbar gemacht werden.
Verbesserungs- und Änderungsvorschlage sowie Hinweise auf angetroffene Fehler werden jederzeit gern
entgegengenommen.
Dieses Dokument darf ohne entsprechende vorhergehende, ausdrückliche und schriftliche Genehmigung
durch Schneider Electric weder in Teilen noch als Ganzes in keiner Form und auf keine Weise, weder
anhand elektronischer noch mechanischer Hilfsmittel, reproduziert oder fotokopiert werden.
Bei der Montage und Verwendung dieses Produkts sind alle zutreffenden staatlichen, landesspezifischen,
regionalen und lokalen Sicherheitsbestimmungen zu beachten. Aus Sicherheitsgründen und um die
Übereinstimmung mit dokumentierten Systemdaten besser zu gewährleisten, sollten Reparaturen an
Komponenten nur vom Hersteller vorgenommen werden.
Beim Einsatz von Geräten für Anwendungen mit technischen Sicherheitsanforderungen sind die
relevanten Anweisungen zu beachten.
Die Verwendung anderer Software als der Schneider Electric-eigenen bzw. einer von Schneider Electric
genehmigten Software in Verbindung mit den Hardwareprodukten von Schneider Electric kann Körperverletzung, Schäden oder einen fehlerhaften Betrieb zur Folge haben.
Die Nichtbeachtung dieser Informationen kann Verletzungen oder Materialschäden zur Folge haben!
© 2017 Schneider Electric. Alle Rechte vorbehalten.
2 NVE50469 01/2017

Inhaltsverzeichnis
Sicherheitshinweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Über dieses Buch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Kapitel 1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Zertifizierungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Kapitel 2 Beschreibung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Sicherheitsfunktion „Sicher abgeschaltetes Drehmoment“ (STO, Safe Torque Off) . . . . . . .
Sicherheitsfunktion „Sicherer Stopp 1“ (SS1, Safe Stop 1) . . . . . . . . . . . . . . . . . . . . . . . . . .
Sicherheitsfunktion „Sicher begrenzte Drehzahl“ (SLS, Safely Limited Speed) . . . . . . . . . .
Sicherheitsfunktion SMS (Sichere maximale Drehzahl) . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sicherheitsfunktion GDL (Schutztürverriegelung) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Kapitel 3 Berechnung sicherheitsrelevanter Parameter . . . . . . . . . . . . . . . . . . . . . . 33
SLS-Typ 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SLS-Type 2, Typ 3, Typ 4, Typ 5 und Typ 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SS1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SMS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
GDL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Kapitel 4 Verhalten von Sicherheitsfunktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Einschränkungen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fehlerunterdrückung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Priorität zwischen Sicherheitsfunktionen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Werkseinstellungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Konfigurations-Download . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Priorität zwischen Sicherheitsfunktionen und nicht sicherheitsrelevanten Funktionen . . . . .
Kapitel 5 Darstellung der Sicherheitsfunktion durch HMI . . . . . . . . . . . . . . . . . . . . . 51
Status von Sicherheitsfunktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Spezielle HMI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fehlercodebeschreibung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Kapitel 6 Technische Daten. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Elektrische Daten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Einrichtung und Betrieb der Sicherheitsfunktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Leistungsmerkmale von Sicherheitsfunktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Entprellzeit und Reaktionszeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Kapitel 7 Zertifizierte Architekturen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Mehrfachantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 1. . . . . . . . . . . . .
Mehrfachantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 2. . . . . . . . . . . . .
Mehrfachantrieb ohne Sicherheitsmodul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AV – Fall 1 . . . . . . . . . . . . . . .
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AV – Fall 2 . . . . . . . . . . . . . . .
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 1 . . . . . . . . . . . . . . .
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 2 . . . . . . . . . . . . . . .
Einzelantrieb gemäß IEC 61508 und IEC 60204-1 – Fall 1. . . . . . . . . . . . . . . . . . . . . . . . . .
Einzelantrieb gemäß IEC 61508 und IEC 60204-1 – Fall 2. . . . . . . . . . . . . . . . . . . . . . . . . .
Einzelantrieb gemäß IEC 61508 und IEC 62061 mit der Sicherheitsfunktion GDL. . . . . . . .
12
13
14
18
20
22
29
31
34
36
40
42
43
46
46
46
47
47
48
52
52
53
64
65
66
69
72
73
74
75
76
77
78
79
80
81
82
NVE50469 01/2017 3

Kapitel 8 Inbetriebnahme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Registerkarte „Sicherheitsfunktionen“ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Das Fenster „Konfiguration der Sicherheitsfunktionen“ . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Darstellung und Status von Sicherheitsfunktionen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Kopieren der Sicherheitskonfiguration vom Gerät auf einen PC und umgekehrt. . . . . . . . . .
Gerätesignatur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
85
91
92
95
Kapitel 9 Service und Wartung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Wartung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Austausch von Leistungsteil und Steuerteil (MCU) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Austausch von Maschinenteilen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
98
98
98
4 NVE50469 01/2017

Sicherheitshinweise
Wichtige Informationen
HINWEISE
Lesen Sie sich diese Anweisungen sorgfältig durch und machen Sie sich vor Installation, Betrieb,
Bedienung und Wartung mit dem Gerät vertraut. Die nachstehend aufgeführten Warnhinweise sind in der
gesamten Dokumentation sowie auf dem Gerät selbst zu finden und weisen auf potenzielle Risiken und
Gefahren oder bestimmte Informationen hin, die eine Vorgehensweise verdeutlichen oder vereinfachen.
BITTE BEACHTEN
Elektrische Geräte dürfen nur von Fachpersonal installiert, betrieben, bedient und gewartet werden.
Schneider Electric haftet nicht für Schäden, die durch die Verwendung dieses Materials entstehen.
Als qualifiziertes Fachpersonal gelten Mitarbeiter, die über Fähigkeiten und Kenntnisse hinsichtlich der
Konstruktion und des Betriebs elektrischer Geräte und deren Installation verfügen und eine Schulung zur
Erkennung und Vermeidung möglicher Gefahren absolviert haben.
Qualifikation des Personals
Die Arbeit an und mit diesem Produkt darf nur durch entsprechend geschultes und autorisiertes Personal
erfolgen, das mit dem Inhalt dieses Handbuchs sowie der gesamten zugehörigen Produktdokumentation
vertraut ist. Darüber hinaus muss dieses Personal an einer Sicherheitsschulung zur Erkennung und
Vermeidung der Gefahren teilgenommen haben, die mit der Verwendung dieses Produkts verbunden sind.
Das Personal muss über eine ausreichende technische Ausbildung sowie über Know-how und Erfahrung
verfügen und in der Lage sein, potenzielle Gefahren vorauszusehen und zu identifizieren, die durch die
Verwendung des Produkts, die Änderung von Einstellungen sowie die mechanische, elektrische und
elektronische Ausstattung des gesamten Systems entstehen können. Sämtliches Personal, das an und mit
dem Produkt arbeitet, muss mit allen anwendbaren Standards, Richtlinien und Vorschriften zur Unfallverhütung vertraut sein.
NVE50469 01/2017 5

Vorgesehene Verwendung
Dieses Produkt ist ein Umrichter für dreiphasige Synchron-, Asynchronmotoren und für den industriellen
Einsatz entsprechend den Spezifikationen und Anweisungen in dieser Anleitung konzipiert. Bei der
Nutzung des Produkts sind alle einschlägigen Sicherheitsvorschriften und Richtlinien sowie die
spezifizierten Anforderungen und die technischen Daten einzuhalten. Das Produkt muss außerhalb der
ATEX-Zone installiert werden. Vor der Nutzung muss eine Risikoanalyse im Hinblick auf die vorgesehene
Anwendung durchgeführt werden. Basierend auf den Resultaten dieser Analyse sind geeignete
Sicherheitsmaßnahmen zu implementieren. Da das Produkt als Komponente eines Gesamtsystems
verwendet wird, ist die Personensicherheit durch eine entsprechende Ausführung des Gesamtsystems
(zum Beispiel eine entsprechende Maschinenkonstruktion) zu gewährleisten. Jede andere als die
ausdrücklich zugelassene Verwendung ist untersagt und kann Gefahren bergen. Elektrische Geräte
dürfen nur von Fachpersonal installiert, betrieben, bedient und gewartet werden.
Produktbezogene Informationen
Lesen Sie diese Anweisungen gründlich durch, bevor Sie Arbeiten an und mit diesem Frequenzumrichter
vornehmen.
GEFAHR EINES ELEKTRISCHEN SCHLAGS, EINER EXPLOSION ODER EINES LICHTBOGENS
Die Arbeit an und mit diesem Antriebssystem darf nur durch entsprechend geschultes und
autorisiertes Personal erfolgen, das mit dem Inhalt dieses Handbuchs sowie der gesamten
zugehörigen Produktdokumentation vertraut ist und eine Sicherheitsschulung zur Erkennung und
Vermeidung der involvierten Gefahren absolviert hat. Installation, Einstellung, Reparatur und Wartung
müssen von Fachpersonal durchgeführt werden.
Der Systemintegrator ist für die Einhaltung aller relevanten lokalen und nationalen elektrotechnischen
Anforderungen sowie aller anderen geltenden Bestimmungen bezüglich der Schutzerdung sämtlicher
Geräte verantwortlich.
Zahlreiche Bauteile des Produkts, einschließlich der gedruckten Schaltungen, werden über die
Netzspannung versorgt. Nicht berühren!
Verwenden Sie ausschließlich elektrisch isolierte Werkzeuge und Messgeräte mit der korrekten
Bemessungsspannung
Berühren Sie bei angelegter Spannung keine ungeschirmten Bauteile oder Klemmen.
Motoren können Spannung erzeugen, wenn die Welle gedreht wird. Sichern Sie vor jeglichen Arbeiten
am Antriebssystem die Motorwelle gegen Fremdantrieb.
Bei Wechselspannung kann Spannung an nicht verwendete Leiter im Motorkabel ausgekoppelt
werden. Isolieren Sie nicht verwendete Leiter im Motorkabel an beiden Enden.
Schließen Sie die DC-Bus-Klemmen, die DC-Bus-Kondensatoren oder die Bremswider-
standsklemmen nicht kurz.
Vor der Durchführung von Arbeiten am Antriebssystem:
Trennen Sie jegliche Spannungsversorgung, gegebenenfalls auch die externe Spannung des
Steuerteils.
Bringen Sie ein Schild mit der Aufschrift NICHT EINSCHALTEN an allen mit dem Umrichtersystem
verbundenen Leistungsschaltern an.
Verriegeln Sie alle Leistungsschalter in der geöffneten Stellung.
Warten Sie 15 Minuten, damit sich die DC-Bus-Kondensatoren entladen können.
Befolgen Sie die Anweisungen im Abschnitt „Prüfung auf Spannungsfreiheit“ in der Installationsan-
leitung des Produkts.
Vor Einschalten der Spannungsversorgung des Umrichtersystems:
Vergewissern Sie sich, dass die Arbeiten abgeschlossen sind und keinerlei Gefahren von der
Installation ausgehen.
Falls die Netzeingangsklemmen und die Motorausgangsklemmen geerdet und kurzgeschlossen
sind, heben Sie die Erdung und die Kurzschlüsse an den Netzeingangsklemmen und den
Motorausgangsklemmen auf.
Vergewissern Sie sich, dass sämtliches Geräts ordnungsgemäß geerdet ist.
Vergewissern Sie sich, dass alle Schutzvorrichtungen wie Abdeckungen, Türen und Gitter
installiert bzw. geschlossen sind.
Die Nichtbeachtung dieser Anweisungen führt zu Tod oder schweren Verletzungen.
GEFAHR
6 NVE50469 01/2017

Umrichtersysteme können durch falsche Verdrahtung, falsche Einstellungen, falsche Daten oder aufgrund
anderer Fehler unerwartete Bewegungen verursachen.
WARNUNG
UNERWARTETER BETRIEB DER AUSRÜSTUNG
Bei der Verdrahtung sind alle EMV-Anforderungen strikt einzuhalten.
Das Produkt darf nicht mit unbekannten oder ungeeigneten Einstellungen oder Daten betrieben
werden.
Führen Sie eine umfassende Inbetriebnahmeprüfung durch.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Verletzungen oder Sachschäden zur Folge
haben.
Beschädigte Produkte und Zubehör können einen elektrischen Schlag oder einen unerwarteten Betrieb
der Ausrüstung verursachen.
GEFAHR
ELEKTRISCHER SCHLAG ODER UNERWARTETER BETRIEB DER AUSRÜSTUNG
Beschädigte Produkte oder Zubehörprodukte dürfen nicht verwendet werden.
Die Nichtbeachtung dieser Anweisungen führt zu Tod oder schweren Verletzungen.
Wenden Sie sich im Fall von Beschädigungen an Ihre lokale Vertriebsvertretung von Schneider Electric.
WARNUNG
STEUERUNGSVERLUST
Bei der Entwicklung eines Steuerungsplans müssen mögliche Fehlerzustände der Steuerpfade
berücksichtigt und für bestimmte kritische Steuerfunktionen Mittel bereitgestellt werden, durch die
nach dem Ausfall eines Pfads ein sicherer Zustand erreicht werden kann. Beispiele kritischer
Steuerfunktionen sind Notabschaltung (Not-Aus), Nachlaufstopp, Ausfall der Spannungsversorgung
und Neustart.
Für kritische Steuerfunktionen müssen separate oder redundante Steuerpfade bereitgestellt werden.
Systemsteuerpfade können Kommunikationsverbindungen einschließen. Dabei müssen die
Auswirkungen unvorhergesehener Übertragungsverzögerungen oder Verbindungsstörungen
berücksichtigt werden.
Alle Vorschriften zur Unfallverhütung und lokale Sicherheitsbestimmungen (1) müssen beachtet
werden.
Jede Implementierung des Produkts muss einzeln und sorgfältig auf einwandfreien Betrieb getestet
werden, bevor sie in Betrieb genommen wird.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Verletzungen oder Sachschäden zur Folge
haben.
(1) Für die USA: Weitere Informationen finden Sie in NEMA ICS 1.1 (neueste Ausgabe), Safety Guidelines
for the Application, Installation, and Maintenance of Solid State Control, und in NEMA ICS 7.1 (neueste
Ausgabe), Safety Standards for Construction and Guide for Selection, Installation and Operation of
Adjustable-Speed Drive Systems.
HINWEIS
ZERSTÖRUNG DURCH FALSCHE NETZSPANNUNG
Vor dem Einschalten und Konfigurieren des Produkts ist sicherzustellen, dass es für die vorliegende
Netzspannung zugelassen ist.
Die Nichtbeachtung dieser Anweisungen kann Sachschäden zur Folge haben.
NVE50469 01/2017 7
Die in dieser Anleitung beschriebenen Produkte können im Betrieb über 80 °C heiß werden.
WARNUNG
HEISSE OBERFLÄCHEN
Vermeiden Sie jeglichen Kontakt mit heißen Oberflächen.
Halten Sie brennbare oder hitzeempfindliche Teile aus der unmittelbaren Umgebung heißer Flächen
fern.
Warten Sie vor der Handhabung, bis sich das Produkt ausreichend abgekühlt hat.
Stellen Sie sicher, dass eine ausreichende Wärmeableitung gegeben ist, indem Sie einen Prüflauf bei
maximaler Last durchführen.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Verletzungen oder Sachschäden zur Folge
haben.
Das Produkt ist für den Einsatz außerhalb von Gefahrenbereichen zugelassen. Installieren Sie das Gerät
nur in Bereichen, die frei von gefährlichen Atmosphären sind.
GEFAHR
EXPLOSIONSGEFAHR
Installieren und verwenden Sie dieses Gerät nur außerhalb von Gefahrenbereichen.
Die Nichtbeachtung dieser Anweisungen führt zu Tod oder schweren Verletzungen.
8 NVE50469 01/2017

Über dieses Buch
Auf einen Blick
Ziel dieses Dokuments
Der Zweck dieses Dokument ist Informationen über die Sicherheitsfunktionen in Altivar 320 bereitzustellen. Diese Funktionen ermöglichen Ihnen, Anwendungen zu entwickeln, die sich am Schutz von
Mensch und Maschine orientieren.
FDT/DTM (Field Device Tool/Device Type Manager) ist eine neue Technologie, die bereits von
verschiedenen Unternehmen in der Automationsbranche übernommen wurde.
Für die Installation des Altivar 32 DTM können Sie unser FDT herunterladen und installieren: SoMove lite
on www.schneiderelectric.com. Altivar 320 DTM ist enthalten.
Der Inhalt dieses Handbuchs ist auch über die Online-Hilfe des ATV320 DTM zugänglich.
Gültigkeitsbereich
Original-Anweisungen und -Informationen aus dieser Anleitung wurden in Englisch geschrieben (vor einer
optionalen Übersetzung).
Diese Dokumentation gilt für die Altivar 320 Antriebe (ATV320•••••B) und nur die STO Funktion für
ATV320•••••C.
Die technischen Merkmale der hier beschriebenen Geräte sind auch online abrufbar. So greifen Sie auf
diese Informationen online zu:
Schritt Aktion
1 Gehen Sie zur Homepage von Schneider Electric.
2 Geben Sie im Feld Search die Referenz eines Produkts oder den Namen einer Produktreihe ein.
3 Wenn Sie eine Referenz eingegeben haben, gehen Sie zu den Suchergebnissen für technische
4 Wenn mehrere Referenzen in den Suchergebnissen unter Products angezeigt werden, klicken Sie auf die
5 Je nach der Größe der Anzeige müssen Sie ggf. durch die technischen Daten scrollen, um sie vollständig
6 Um ein Datenblatt als PDF-Datei zu speichern oder zu drucken, klicken Sie auf Download XXX product
Die Referenz bzw. der Name der Produktreihe darf keine Leerstellen enthalten.
Wenn Sie nach Informationen zu verschiedenen vergleichbaren Modulen suchen, können Sie
*
Sternchen (
Produktdatenblätter (Product Datasheets) und klicken Sie auf die Referenz, über die Sie mehr erfahren
möchten.
Wenn Sie den Namen einer Produktreihe eingegeben haben, gehen Sie zu den Suchergebnissen Product
Ranges und klicken Sie auf die Reihe, über die Sie mehr erfahren möchten.
gewünschte Referenz.
einzusehen.
datasheet.
) verwenden.
www.schneider-electric.com
.
Die in diesem Handbuch vorgestellten Merkmale sollten denen entsprechen, die online angezeigt werden.
Im Rahmen unserer Bemühungen um eine ständige Verbesserung werden Inhalte im Laufe der Zeit
möglicherweise überarbeitet, um deren Verständlichkeit und Genauigkeit zu verbessern. Sollten Sie einen
Unterschied zwischen den Informationen im Handbuch und denen online feststellen, nutzen Sie die
Online-Informationen als Referenz.
NVE50469 01/2017 9

Weiterführende Dokumentation
Verwenden Sie Ihren Tablet-PC oder Ihren PC, um schnell auf die detaillierten und umfangreichen
Informationen bei allen Ihren Produkten unter www.schneider-electric-com zuzugreifen.
Das Internet liefert die Informationen, die Sie für Produkte und Lösungen benötigen.
Der Gesamtkatalog für detaillierte Eigenschaften und Auswahlhilfen
Die CAD-Dateien, um Ihnen bei der Planung Ihrer Installation zu helfen, verfügbar in über 20
verschiedenen Dateiformaten
Die gesamte Software und Firmware, um Ihre Installation auf dem neuesten Stand zu halten
Eine große Anzahl an Whitepapers, Umweltdokumenten, Anwendungslösungen, Spezifikationen... Um
ein besseres Verständnis unserer elektrischen Systeme und Geräte bzw. unserer Automation zu
erlangen.
Und letztlich alle unten aufgeführten Benutzerhandbücher in Verbindung mit Ihrem Antrieb:
Titel der Dokumentation Referenz-Nummer
Altivar 320 Erste Schritte
Altivar 320 Getting Started Annex (SCCR)
Altivar 320 Installationshandbuch
Altivar 320 Progammierhandbuch
Altivar 320 Modbus Serial Link manual
Altivar 320 Ethernet IP/Modbus TCP manual
Altivar 320 PROFIBUS DP manual (VW3A3607)
Altivar 320 DeviceNet manual (VW3A3609)
Altivar 320 CANopen manual (VW3A3608, 618, 628)
Altivar 320 POWERLINK Manual - VW3A3619
Altivar 320 EtherCAT manual - VW3A3601
Altivar 320 Communication Parameters
Altivar 320 PROFINET manual
Altivar 320 Safety Functions manual
NVE21763 (English), NVE21771 (French)
NVE21772 (German), NVE21773 (Spanish)
NVE21774 (Italian), NVE21776 (Chinese)
NVE21777 (English)
NVE41289 (English), NVE41290 (French)
NVE41291 (German), NVE41292 (Spanish)
NVE41293 (Italian), NVE41294 (Chinese)
NVE41295 (English), NVE41296 (French)
NVE41297 (German), NVE41298 (Spanish)
NVE41299 (Italian), NVE41300 (Chinese)
NVE41308 (English)
NVE41313 (English)
NVE41310 (English)
NVE41314 (English)
NVE41309 (English)
NVE41312 (English)
NVE41315 (English)
NVE41316 (English)
NVE41311 (English)
NVE50467 (English), NVE50468 (French)
NVE50469 (German), NVE50470 (Spanish)
NVE50472 (Italian), NVE50473 (Chinese)
,
,
,
,
,
,
,
,
Diese technischen Veröffentlichungen sowie andere technische Informationen stehen auf unserer Website
http://www.schneider-electric.com/en/download zum Download bereit.
Terminologie
Die Fachbegriffe, die Terminologie und die entsprechenden Beschreibungen in diesem Handbuch sind an
die Begriffe und Definitionen der einschlägigen Richtlinien angelehnt.
Die technischen Begriffe, die Terminologie und die Beschreibungen entsprechen in der Regel den
Begriffen oder Definitionen in den jeweiligen Normen und Standards.
Es gelten u. a. folgende Richtlinien:
IEC 61800 Serie: „Elektrische Leistungsantriebssysteme mit einstellbarer Drehzahl“
IEC 61508 Version 2 Serie: Funktionale Sicherheit von elektrischen/elektronischen/programmierbaren
Sicherheitssystemen
EN 954-1 Sicherheit von Maschinen – Sicherheitsbezogene Teile von Steuerungen
EN ISO 13849-1 & 2 Sicherheit von Maschinen – Sicherheitsbezogene Teile von Steuerungen
IEC 61158 Serie: Industrielle Kommunikationsnetzwerke – Feldbusse
IEC 61784 Serie: Industrielle Kommunikationsnetzwerke – Profile
IEC 60204-1: Sicherheit von Maschinen: Elektrische Ausrüstungen von Maschinen – Teil 1 Allgemeine
Anforderungen
Darüber hinaus wird der BegriffBetriebszone in Verbindung mit der Beschreibung von bestimmten
Gefahren verwendet, und ist wird so für eineeinen Gefahrenbereich oder Gefahrenzone im EG-Richtlinie
Maschinen (2006/42/EC) und in der ISO 12100-1 definiert.
10 NVE50469 01/2017

A
Inhalt dieses Kapitels
ltivar 320
NVE50469 01/2017
Allgemeines
Kapitel 1
Allgemeines
Dieses Kapitel enthält die folgenden Themen:
Thema Seite
Einführung 12
Zertifizierungen 13
Grundlagen 14
NVE50469 01/2017 11

Einführung
Überblick
Die in den ATV320 integrierten Sicherheitsfunktionen dienen dazu, den sicheren Zustand der Installation
aufrechtzuerhalten oder das Auftreten gefährlicher Zustände in der Installation zu verhindern. In manchen
Fällen können weitere sicherheitsrelevante, vom Frequenzumrichter separate Systeme (z. B. eine
mechanische Bremse) erforderlich sein, um den sicheren Zustand aufrechtzuerhalten, nachdem die
Stromversorgung unterbrochen wurde.
Die Sicherheitsfunktionen werden mit der SoMove-Software konfiguriert.
Die integrierten Sicherheitsfunktionen bieten folgende Vorteile:
Zusätzliche richtlinienkonforme Sicherheitsfunktionen
Keine externen Sicherheitseinrichtungen erforderlich
Reduzierter Verdrahtungsaufwand und Platzbedarf
Geringere Kosten
Die ATV320 Frequenzumrichter entsprechen den Anforderungen der Normen für die Implementierung der
Sicherheitsfunktionen.
Sicherheitsfunktionen gemäß IEC 61800-5-2
Definitionen
Kürzel Beschreibung
STO Sicher abgeschaltetes Drehmoment
SLS Sicher begrenzte Drehzahl
SS1 Sicherer Stopp 1
Es wird keine Leistung auf den Motor übertragen, die eine Drehung oder Krafteinwirkung zur Folge haben
kann.
Die SLS-Funktion verhindert, dass die Motordrehzahl den festgelegten Grenzwert überschreitet. Wenn
die Motordrehzahl den festgelegten Grenzwert überschreitet, wird die Sicherheitsfunktion STO aktiviert.
Initiiert und überwacht die Motorauslaufrate innerhalb festgelegter Grenzen, um den Motor zu
stoppen.
Leitet die Funktion „Sicherer Betriebsstopp“ ein, wenn die Motordrehzahl unter den vorgegebenen
Grenzwert fällt.
Nicht gemäß IEC 61800-5-2 definierte Sicherheitsfunktionen
Definitionen
Kürzel Beschreibung
SMS Sichere maximale Drehzahl
GDL Schutztürverriegelung
Die SMS-Funktion verhindert, dass die Motordrehzahl den festgelegten Grenzwert überschreitet. Wenn
die Motordrehzahl den festgelegten Grenzwert überschreitet, wird die Sicherheitsfunktion STO aktiviert.
Die Funktion SMS kann nur mit der Inbetriebnahmesoftware aktiviert bzw. deaktiviert werden. Wenn die
Funktion aktiviert ist, überwacht sie unabhängig von der Betriebsart kontinuierlich die Statorfrequenz.
Die Funktion GDL ermöglicht die Entriegelung der Schutztür bei abgeschaltetem Motor.
Schreibweisen
Die Menüs des Grafikterminals (separat zu bestellen – Best.-Nr. VW3A1101) werden in eckigen Klammern
angezeigt.
Die Menüs der integrierten 7-stelligen Segment-Anzeige werden in runden Klammern dargestellt.
Die Parameternamen werden am Grafikterminal in eckigen Klammern angezeigt.
Die Parametercodes werden auf der integrierten 7-Segment-Anzeige in runden Klammern dargestellt.
12 NVE50469 01/2017

Zertifizierungen
EG-Konformitätserklärung
Die EG-Konformitätserklärung für die EMV-Richtlinie ist verfügbar unter www.schneider-electric.com.
ATEX-Zertifizierung
Das ATEX-Zertifikat ist verfügbar unter www.schneider-electric.com.
Zertifizierung für funktionale Sicherheit
Die integrierten Sicherheitsfunktionen sind mit folgender Richtlinie konform und gemäß dieser zertifiziert:
IEC 61800-5-2 Ausg. 1 „Elektrische Leistungsantriebssysteme mit einstellbarer Drehzahl“ ‒ Teil 5-2:
Anforderungen an die Sicherheit – Funktionale Sicherheit.
IEC 61800-5-2 als Produktrichtlinie legt sicherheitsrelevante Aspekte für Leistungsantriebssysteme mit
integrierten Sicherheitsfunktionen (PDS (SR)) im Rahmen der Richtlinienreihe IEC 61508 Ausg. 2 fest.
Die Konformität der im Folgenden beschriebenen Sicherheitsfunktionen mit der Richtlinie IEC 61800-5-2
vereinfacht die Integration eines PDS (SR) (für sicherheitsrelevante Anwendungen geeignetes Leistungsantriebssystem) in ein sicherheitsbezogenes Steuerungssystem unter Verwendung der Prinzipien von
IEC 61508 oder IEC 13849-1 sowie von IEC 62061 für Prozesssysteme und Maschinen.
Die definierten Sicherheitsfunktionen sind:
SIL 2- und SIL 3-Fähigkeit unter Einhaltung der Richtlinien IEC 61800-5-2 und IEC 61508 Ausg. 2
Leistungsstufe d und e unter Einhaltung von IEC 13849-1
Konformität mit Kategorie 3 und 4 der europäischen Richtlinie IEC 13849-1 (EN 954-1)
Siehe auch „Leistungsmerkmale von Sicherheitsfunktionen“.
Der Betriebsmodus Sicherheitsanforderung wird gemäß Richtlinie IEC 61800-5-2 bei hoher oder
kontinuierlicher Beanspruchung berücksichtigt.
Das Zertifikat für funktionale Sicherheit ist verfügbar unter www.schneider-electric.com.
NVE50469 01/2017 13
Grundlagen
Funktionssicherheit
Automation und Sicherheitstechnik sind zwei Bereiche, die in der Vergangenheit vollkommen voneinander
getrennt waren, in jüngster Zeit jedoch zunehmend miteinander integriert werden.
Die Entwicklung und Installation komplexer Automationslösungen wird durch integrierte Sicherheitsfunktionen deutlich vereinfacht.
Die Anforderungen an Sicherheitstechnik sind in der Regel anwendungsabhängig.
Der Anforderungs-Level richtet sich nach dem Risiko- und Gefahrenpotenzial der spezifischen
Anwendung.
Richtlinie IEC 61508
Die Richtlinie IEC 61508 „Funktionale Sicherheit von elektrischen/elektronischen/programmierbaren
Sicherheitssystemen“ deckt die sicherheitsbezogenen Funktionen ab.
Anstelle einer Einzelkomponente wird eine vollständige Funktionskette (z. B. von einem Sensor über die
logischen Verarbeitungseinheiten zum Aktuator) als Einheit betrachtet.
Diese Funktionskette muss die Anforderungen des spezifischen Sicherheits-Integritätslevels als Ganzes
erfüllen.
Eine solche Basis ermöglicht die Entwicklung von Systemen und Komponenten, die in verschiedenen
Sicherheitsanwendungen mit vergleichbaren Risikostufen eingesetzt werden können.
SIL – Sicherheits-Integritätslevel
Die Richtlinie IEC 61508 definiert vier Sicherheits-Integritätslevel (SIL) für Sicherheitsfunktionen.
SIL1 ist der niedrigste und SIL4 der höchste Level.
Als Grundlage für die Bestimmung des erforderlichen Sicherheits-Integritätslevels dient eine Gefahren-
und Risikoanalyse.
Anhand dieser Analyse wird entschieden, ob die relevante Funktionskette als Sicherheitsfunktion
betrachtet werden kann und welches Gefahrenpotenzial sie abdecken muss.
PFH – Wahrscheinlichkeit eines gefährlichen Ausfalls pro Stunde
Zur Aufrechterhaltung der Sicherheitsfunktion schreibt die Richtlinie IEC 61508 je nach erforderlichem
Sicherheits-Integritätslevel Maßnahmen unterschiedlichen Umfangs zur Vermeidung und Kontrolle
festgestellter Fehler vor.
Alle Komponenten einer Sicherheitsfunktion müssen einer Wahrscheinlichkeitsbewertung unterzogen
werden, um die Effektivität der Maßnahmen zur Kontrolle festgestellter Fehler zu bestimmen.
Diese Bewertung entscheidet über die PFH (mittlere Häufigkeit eines gefährlichen Ausfalls) eines
Sicherheitssystems.
Dabei handelt es sich um die Wahrscheinlichkeit, dass in einem Sicherheitssystem ein gefährlicher Ausfall
auftritt und die Sicherheitsfunktion nicht korrekt ausgeführt werden kann.
Je nach SIL darf der PFH-Wert gewisse Werte für das gesamte Sicherheitssystem nicht überschreiten.
Hierzu werden die einzelnen PFH-Werte einer Funktionskette addiert. Das Resultat darf nicht die in der
Richtlinie festgelegten Höchstwerte überschreiten.
Performance-Level Mittlere Häufigkeit eines gefährlichen Ausfalls (PFH) bei hoher oder kontinuierlicher
Beanspruchung
4
3
2
1
14 NVE50469 01/2017

PL – Leistungsstufe (Performance Level)
Die Richtlinie ISO 13849-1 definiert fünf Leistungsstufen (PL) für Sicherheitsfunktionen.
„a“ ist die niedrigste und „e“ die höchste Stufe.
Die fünf Stufen (a, b, c, d und e) entsprechen verschiedenen Werten für die mittlere Häufigkeit eines
gefährlichen Ausfalls.
Performance-Level Wahrscheinlichkeit eines gefährlichen Ausfalls pro Stunde
e
d
c
b
a
HFT – Hardware-Fehlertoleranz (Hardware Fault Tolerance) und SFF – Anteil sicherer Ausfälle (Safe Failure Fraction)
Je nach geltendem SIL für das Sicherheitssystem erfordert die Richtlinie IEC 61508 eine spezifische
Toleranz für festgestellte Hardware-Fehler (HFT) in Verbindung mit einem spezifischen Anteil sicherer
Ausfälle (Safe Failure Fraction, SFF).
Die Hardwarefehlertoleranz beschreibt die Fähigkeit des Systems, trotz eines oder mehrerer festgestellter
Hardware-Fehler die erforderliche Sicherheitsfunktion auszuführen.
Der Anteil sicherer Ausfälle (SFF) ist als Rate der sicheren Ausfälle und der erkannten gefährlichen
Zustände im Verhältnis zur Gesamtausfallrate des Systems definiert.
SFF = (Σλ
+ ΣλDd)/(Σλs + ΣλDd + ΣλDu)
s
Laut IEC 61508 wird der maximal erreichbare Sicherheits-Integritätslevel eines Systems teilweise durch
die Hardwarefehlertoleranz (HFT) und den Anteil sicherer Ausfälle (SFF) des Systems bestimmt.
Die Richtlinie IEC 61508 unterscheidet zwei Typen von Subsystemen (Typ-A-Subsystem, Typ-BSubsystem).
Die Spezifizierung dieser Typen erfolgt auf der Basis von Kriterien, die von der Richtlinie für die sicherheitsrelevanten Komponenten definiert werden.
SFF HFT Typ-A-Subsystem HFT Typ-B-Subsystem
012012
SIL1 SIL2 SIL3 ---- SIL1 SIL2
SIL2 SIL3 SIL4 SIL1 SIL2 SIL3
SIL3 SIL4 SIL4 SIL2 SIL3 SIL4
SIL3 SIL4 SIL4 SIL3 SIL4 SIL4
NVE50469 01/2017 15

PFD - Wahrscheinlichkeit eines Versagens bei Anforderung
Die Richtlinie IEC 61508 definiert den SIL anhand von Anforderungen, die in zwei Hauptkategorien
aufgeteilt sind: Sicherheitsintegrität der Hardware und systematische Sicherheitsintegrität. Ein Gerät oder
System muss die Anforderungen beider Kategorien erfüllen, um einen gegebenen SIL zu erreichen.
Die SIL-Anforderungen für die Sicherheitsintegrität der Hardware basieren auf einer Wahrscheinlichkeitsanalyse des Geräts. Zur Erreichung eines gegebenen SIL muss das Gerät die Vorgaben hinsichtlich der
maximalen Wahrscheinlichkeit gefährlicher Ausfälle und des minimalen Anteils sicherer Ausfälle einhalten.
Das Konzept des gefährlichen Ausfalls muss für das betreffende System streng definiert werden. Dies
geschieht normalerweise in Form einschränkender Anforderungen, deren Integrität während der
gesamten Systementwicklung geprüft wird. Die erforderlichen Zielwerte variieren je nach Wahrscheinlichkeit einer Anforderung, der Komplexität des bzw. der Geräte und des verwendeten Redundanztyps.
Die PFD-Werte (Ausfallwahrscheinlichkeit bei Anforderung) und die RRF-Werte (Risikoreduktionsfaktor)
bei Betrieb mit geringer Beanspruchung für verschiedene SIL sind wie folgt in der Richtlinie IEC 61508
definiert:
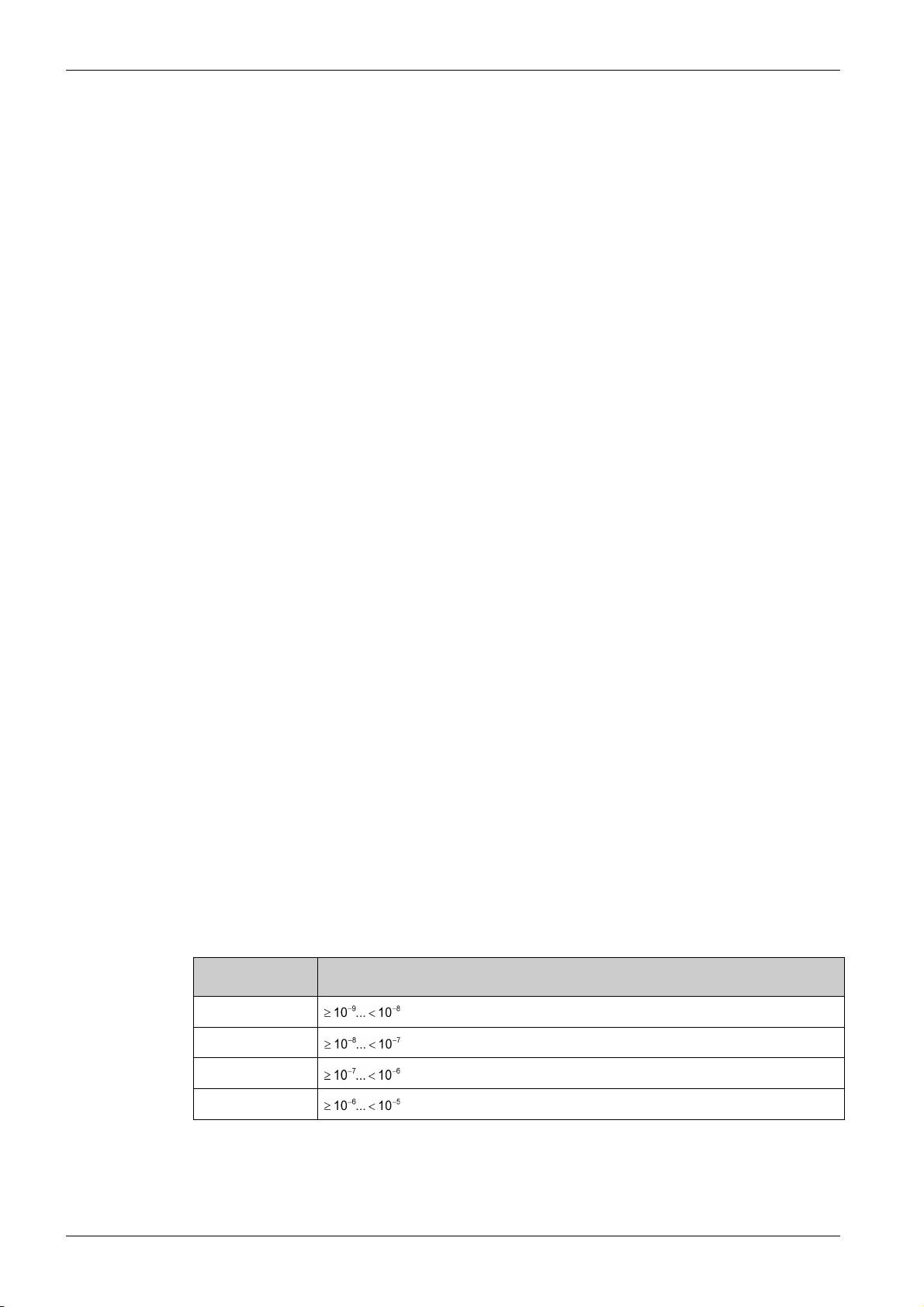
SIL PFD PFD (Leistung) RRF
1 0,1 - 0,01
2 0,01 - 0,001
3 0,001 - 0,0001
4 0,0001 - 0,00001
Für hohe Beanspruchung oder Dauerbetrieb gelten folgende Werte:
SIL PFH PFH (Leistung) RRF
1 0,00001 - 0,000001
2 0,000001 - 0,0000001
3 0,0000001 - 0,00000001
4 0,00000001 - 0,000000001
10
10
10
10
10
10
10
10
-1
-2
-3
-4
-5
-6
-7
-8
- 10
- 10
- 10
- 10
- 10
- 10
- 10
- 10
-2
-3
-4
-5
-6
-7
-8
-9
10 - 100
100 - 1000
1000 - 10.000
10.000 - 100.000
100.000 - 1.000.000
1.000.000 - 10.000.000
1000 - 10.000
100.000.000 - 1.000.0000.000
Die Gefahren eines Steuerungssystems müssen identifiziert und im Rahmen einer Risikoanalyse bewertet
werden. Die Reduzierung dieser Risiken ist fortzuführen, bis ihr Gesamtbeitrag zur Gefahr als akzeptabel
betrachtet wird. Der zulässige Level dieser Risiken wird als Sicherheitsanforderung in Form eines
Zielwerts für die „Wahrscheinlichkeit eines gefährlichen Ausfalls in einem gegebenen Zeitraum“
angegeben: eines diskreten SIL.
Maßnahmen zur Fehlervermeidung
Systematische Fehler in den Spezifikationen, in der Hardware und der Software, sowie Fehler bei Betrieb
und Wartung des Sicherheitssystems sind in höchstmöglichem Maße zu vermeiden. Damit diese
Anforderungen eingehalten werden, spezifiziert die Richtlinie IEC 61508 je nach erforderlichem SIL eine
Reihe von Maßnahmen zur Fehlervermeidung, die implementiert werden müssen. Diese Maßnahmen zur
Fehlervermeidung müssen den gesamten Lebensdauerzyklus des Sicherheitssystems von der
Entwicklung bis hin zur Außerbetriebnahme abdecken.
16 NVE50469 01/2017

A
Inhalt dieses Kapitels
ltivar 320
NVE50469 01/2017
Beschreibung
Kapitel 2
Beschreibung
Dieses Kapitel enthält die folgenden Themen:
Thema Seite
Sicherheitsfunktion „Sicher abgeschaltetes Drehmoment“ (STO, Safe Torque Off) 18
Sicherheitsfunktion „Sicherer Stopp 1“ (SS1, Safe Stop 1) 20
Sicherheitsfunktion „Sicher begrenzte Drehzahl“ (SLS, Safely Limited Speed) 22
Sicherheitsfunktion SMS (Sichere maximale Drehzahl) 29
Sicherheitsfunktion GDL (Schutztürverriegelung) 31
NVE50469 01/2017 17

Sicherheitsfunktion „Sicher abgeschaltetes Drehmoment“ (STO, Safe Torque Off)
Überblick
Die Sicherheitsfunktion ST (Safe Torque Off - sicher abgeschalteter Moment) versetzt den DC-Bus nicht
in den Standby-Modus. Die Sicherheitsfunktion STO setzt nur den Motor in den Standby-Modus. Die DCBus-Spannung und die Netzspannung zum Antrieb sind immer noch vorhanden.
GEFAHR
GEFAHR EINES ELEKTRISCHEN SCHLAGS
Nutzen Sie die Sicherheitsfunktion STO nicht für einen anderen Zweck als für seine vorgesehene
Funktion.
Verwenden Sie einen passenden Schalter, der zum Stromkreise der Sicherheitsfunktion STO gehört,
um den Antrieb von der Netzspannungsversorgung zu trennen.
Die Nichtbeachtung dieser Anweisungen führt zu Tod oder schweren Verletzungen.
Wenn die Sicherheitsfunktion STO ausgelöst wird, wird die Leistungsstufe sofort deaktiviert. Im Falle von
vertikalen Anwendungen oder äußeren Kräften, die auf die Antriebswelle einwirken, müssen Sie unter
Umständen zusätzliche Maßnahmen ergreifen, um den Motor zum Stillstand zu bringen und um ihn im
Stillstand zu halten, wenn die Sicherheitsfunktion STO verwendet wird, z.B., indem Sie Betriebsbremse
betätigen.
WARNUNG
UNZULÄNGLICHE DEKLARATION OR UNBEABSICHTIGTE ANLAGENBEDIENUNG
Stellen Sie sicher, dass die Nutzung der Funktion STO nicht zu unsicheren Bedingungen führt.
Wenn Stillstand bei Ihrer Anwendung erforderlich ist, vergewissern Sie sich, dass der Motor zu einem
sicheren Stillstand kommt, wenn die Sicherheitsfunktion STO verwendet wird.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Verletzungen oder Sachschäden zur Folge
haben.
Diese Funktion bringt den Motor sicher in einen Zustand ohne Drehmoment und/oder verhindert ein
unerwartetes Starten des Motors.
Die Funktion „Sicher abgeschaltetes Drehmoment“ (STO) dient dazu, ein unerwartetes Starten des Motors
effektiv zu verhindern. Dies sorgt für eine sichere Abschaltung, da nur die Leistungsübertragung an den
Motor unterbrochen wird, während die Hauptschaltkreise des Frequenzumrichters weiterhin versorgt
werden.
Die Prinzipien und Anforderungen zur Vermeidung eines unerwarteten Motorstarts sind in der Richtlinie
EN 1037:1995+A1 (deutsche Fassung: DIN EN 1037:2008-11) beschrieben.
Der STO-Logikeingang ist dieser Sicherheitsfunktion zugeordnet und kann nicht geändert werden.
Wenn die Auslösung der Sicherheitsfunktion STO eine zweikanalige Ansteuerung erfordert, kann die
Funktion auch über die sicherheitsbezogenen Logikeingänge aktiviert werden.
Die Sicherheitsfunktion STO wird mit der Inbetriebnahmesoftware konfiguriert.
Der Status der Sicherheitsfunktion STO kann mit der HMI am Frequenzumrichter oder mit der Inbetrieb-
nahmesoftware angezeigt werden.
18 NVE50469 01/2017

Referenzrichtlinien für die Sicherheitsfunktion STO
Die Sicherheitsfunktion STO ist in Abschnitt 4.2.2.2 der Richtlinie IEC 61800-5-2 (Version 1.0 2007.07)
wie folgt definiert:
Es wird keine Leistung auf den Motor übertragen, die eine Drehung (bzw. eine Bewegung bei
Linearmotoren) bewirken kann. Das PDS (SR) (für sicherheitsrelevante Anwendungen geeignetes
Leistungsantriebssystem) sendet keine Energie an den Motor, die Drehmoment (bzw. Kraft bei
Linearmotoren) erzeugen kann.
HINWEIS 1: Diese Sicherheitsfunktion entspricht einem unkontrollierten Stopp der Kategorie 0 gemäß
IEC 60204-1.
HINWEIS 2: Diese Sicherheitsfunktion bietet sich an, wenn eine Trennung der Stromversorgung
erforderlich ist, um einen unerwarteten Start zu verhindern.
HINWEIS 3: Situationen, in denen externe Einflüsse (z. B. das Abstürzen hängender Lasten)
vorhanden sind, erfordern ggf. zusätzliche Maßnahmen (z. B. mechanische Bremsen).
HINWEIS 4: Elektronische Mittel und Schütze sind nicht zum Schutz vor elektrischen Schlägen
geeignet. Eventuell sind zusätzliche Isolierungsmaßnahmen erforderlich.
Sicherheitsfunktionslevel (SF) der Sicherheitsfunktion STO
Notfallfunktionen
Konfiguration SIL
Sicherheitsintegritätslevel gemäß
IEC 61508
STO mit oder ohne Sicherheitsmodul SIL 2 PL d
STO und LI3 mit oder ohne
Sicherheitsmodul
LI3 und LI4 SIL 2 PL d
LI5 und LI6 SIL 2 PL d
SIL 3 PL e
PL
Leistungsstufe gemäß ISO 138491
Die Richtlinie IEC 60204-1 beschreibt zwei Notfallfunktionen:
Not-Aus-Einrichtung:
Für diese Funktion sind externe Schaltkomponenten erforderlich. Sie kann mit frequenzumrichterbasierten Funktionen wie „Sicher abgeschaltetes Drehmoment“ (STO) nicht umgesetzt werden.
Not-Halt-Einrichtung:
Eine Not-Halt-Einrichtung muss so arbeiten, dass bei ihrer Aktivierung die gefährliche Bewegung der
Maschine gestoppt wird und die Maschine unter keinen Umständen wieder anlaufen kann, auch dann
nicht, wenn der Not-Halt aufgehoben wird.
Eine Not-Halt-Einrichtung muss als Stopp der Kategorie 0 oder 1 ausgelegt sein.
Ein Stopp der Kategorie 0 bedeutet, dass die an den Motor übertragene Leistung sofort abgeschaltet
wird. Ein Stopp der Kategorie 0 entspricht der Funktion „Sicher abgeschaltetes Drehmoment“ (STO)
gemäß der Definition in Richtlinie EN 61800-5-2.
Neben den Anforderungen für das Anhalten (siehe IEC 60204-1, Abschnitt 9.2.5.3) gelten für die NotHalt-Einrichtung folgende Bestimmungen:
Sie muss in allen Betriebsarten Vorrang vor allen anderen Funktionen haben.
Eine Rücksetzung darf nur durch eine manuelle Aktion an der Stelle, an der der Befehl initiiert wurde,
möglich sein. Durch die Rücksetzung des Befehls darf die Maschine nicht direkt wieder anlaufen,
sondern lediglich ein Neustart ermöglicht werden.
Bezüglich der Maschinenumgebung (IEC 60204-1 und Maschinenrichtlinie) darf bei Verwendung der
Sicherheitsfunktion STO zur Verwaltung einer Notabschaltung der Kategorie 0 der Motor nicht
automatisch wieder anlaufen, wenn die Sicherheitsfunktion STO ausgelöst und deaktiviert wurde
(mit oder ohne Aus- und Einschalten der Stromversorgung). Aus diesem Grund ist ein zusätzliches
Sicherheitsmodul erforderlich, wenn die Maschine automatisch wieder anläuft, nachdem die
Sicherheitsfunktion STO deaktiviert wurde.
NVE50469 01/2017 19

Sicherheitsfunktion „Sicherer Stopp 1“ (SS1, Safe Stop 1)
Überblick
Die Sicherheitsfunktion „Sicherer Stopp 1“ (SS1) überwacht den Auslauf gemäß einer spezifischen
Auslauframpe und schaltet das Drehmoment sicher ab, nachdem der Stillstand erreicht wurde.
Wenn die Sicherheitsfunktion SS1 aktiviert wird, erhält sie in allen Betriebsarten Vorrang vor allen anderen
Funktionen (außer der STO-Funktion, die höchste Priorität hat).
Die SS1-Auslauframpe wird in der Einheit Hz/s angegeben. Die Einstellung der Rampe erfolgt anhand von
zwei Parametern:
[SS1-Rampeneinheit] SSrU (Hz/s) zur Festlegung der Einheit für die Rampe in 1 Hz/s, 10 Hz/s und
100 Hz/s
[SS1-Rampenwert] SSrt (0,1) zur Festlegung des Werts für die Rampe
Berechnung der Rampe:
Rampe = SSrU x SSrt
Beispiel: Für SSrU = 10 Hz/s und SSrt = 5,0 lautet der Wert der Auslauframpe 50 Hz/s.
Die Sicherheitsfunktion SS1 wird mit der Inbetriebnahmesoftware konfiguriert. Für weitere Informationen
siehe Commissioning
Der Status der Sicherheitsfunktion SS1 kann mit der HMI am Frequenzumrichter oder mit der Inbetrieb-
nahmesoftware angezeigt werden.
Verhalten bei Aktivierung der SS1-Funktion
Wenn die Sicherheitsfunktion SS1 aktiviert wird, überwacht sie den Auslauf des Motors gemäß der
festgelegten Auslauframpe, bis der Stillstand erreicht ist, und gewährleistet, dass die Motordrehzahl nicht
über einem überwachten Grenzwert liegt, der von der festgelegten Auslauframpe und dem Parameter
[SS1-Abschaltwert] SStt bestimmt wird.
Wenn der festgelegte Grenzwert überschritten wird:
Wird ein Fehler ausgelöst und der Fehlercode [Sicherheitsfehler] SAFF angezeigt
Wird die Sicherheitsfunktion STO aktiviert
Sobald der [Stillstandswert] SSSL erreicht wurde, wird die Sicherheitsfunktion STO aktiviert.
Die SS1-Funktion bleibt weiterhin aktiv, wenn die Anforderung aufgehoben wird, bevor der Stillstand
erreicht wurde.
HINWEIS: Die Fehlererkennung ist von der [Statorfrequenz] StFr abhängig.
(siehe Seite 83)
.
: SS1-Abschaltwert, : SS1-Auslauframpe (dV/dT), : STO-Funktion aktiviert, : Fehler und
STO-Funktion ausgelöst
20 NVE50469 01/2017

Verhalten bei Deaktivierung der SS1-Funktion
Geben Sie nach einem SS1-Stopp einen neuen Fahrbefehl aus (auch wenn der Fahrbefehl als Level
gesetzt ist).
SS1-Referenzrichtlinien
Die SS1-Funktion ist wie folgt in Abschnitt 4.2.2.2 der Norm IEC 61800-5-2 definiert:
Das PDS (SR) (für sicherheitsrelevante Anwendungen geeignetes Leistungsantriebssystem) führt
folgende Aktionen aus:
Es initiiert und steuert die Motorauslaufrate innerhalb festgelegter Grenzen, um den Motor zu stoppen,
und leitet die STO-Funktion (siehe 4.2.2.2) ein, wenn die Motordrehzahl unter einen festgelegten
Grenzwert fällt.
Oder es initiiert und überwacht die Motorauslaufrate innerhalb festgelegter Grenzen, um den Motor zu
stoppen, und leitet die STO-Funktion ein, wenn die Motordrehzahl unter einen festgelegten Grenzwert
fällt.
Oder es initiiert den Motorauslauf und leitet nach Ablauf einer anwendungsspezifischen Zeitverzö-
gerung die STO-Funktion ein.
HINWEIS: Diese Sicherheitsfunktion entspricht einem kontrollierten Stopp der Stoppkategorie 1 gemäß
IEC 60204-1.
Sicherheitsfunktionslevel (SF) der Sicherheitsfunktion SS1
Not-Halt Kategorie 1
Funktion Konfiguration SIL
Sicherheitsintegritätslevel ge
mäß IEC 61508
SS1 Typ C STO mit Preventa-Modul SIL2 PL d
STO und LI3 mit Preventa-Modul SIL 3 PL e
SS1 Typ B LI3 und LI4 SIL 2 PL d
LI5 und LI6 SIL 2 PL d
PL
Leistungsstufe gemäß ISO
13849-1
Eine Not-Halt-Einrichtung muss so arbeiten, dass bei ihrer Aktivierung die gefährliche Bewegung der
Maschine gestoppt wird und die Maschine unter keinen Umständen wieder anlaufen kann, auch dann
nicht, wenn der Not-Halt aufgehoben wird.
Eine Not-Halt-Einrichtung muss als Stopp der Kategorie 0 oder 1 ausgelegt sein.
Ein Stopp der Kategorie 1 ist eine kontrollierte Abschaltung, bei der die Energieversorgung des Motors zur
Ausführung des Abschaltvorgangs aufrechterhalten und erst unterbrochen wird, wenn dieser
abgeschlossen ist.
Ein Stopp der Kategorie 1 entspricht der Funktion [Sicherer Stopp 1] SS1 gemäß der Definition in
Richtlinie EN 61800-5-2.
Neben den Anforderungen für das Anhalten (siehe IEC 60204-1, Abschnitt 9.2.5.3) gelten für die Not-HaltEinrichtung folgende Bestimmungen:
Sie muss in allen Betriebsarten Vorrang vor allen anderen Funktionen haben.
Eine Rücksetzung darf nur durch eine manuelle Aktion an der Stelle, an der der Befehl initiiert wurde,
möglich sein. Durch die Rücksetzung des Befehls darf die Maschine nicht direkt wieder anlaufen,
sondern lediglich ein Neustart ermöglicht werden.
Bezüglich der Maschinenumgebung (IEC 60204-1 und Maschinenrichtlinie) darf bei Verwendung der
Sicherheitsfunktion SS1 zur Verwaltung einer Notabschaltung der Kategorie 1 der Motor nicht automatisch
wieder anlaufen, wenn die Sicherheitsfunktion SS1 ausgelöst und deaktiviert wurde (mit oder ohne Ausund Einschalten der Stromversorgung). Aus diesem Grund ist ein zusätzliches Sicherheitsmodul
erforderlich, wenn die Maschine automatisch wieder anläuft, nachdem die Sicherheitsfunktion SS1
deaktiviert wurde.
NVE50469 01/2017 21

Sicherheitsfunktion „Sicher begrenzte Drehzahl“ (SLS, Safely Limited Speed)
Überblick
Diese Funktion dient zum Begrenzen der Drehzahl eines Motors.
Es werden sechs Typen von SLS-Funktionen unterschieden:
SLS-Typ 1: Begrenzt die Motordrehzahl auf die Ist-Drehzahl.
SLS-Typ 2: Begrenzt die Motordrehzahl auf einen mithilfe eines Parameters eingestellten Wert.
SLS-Typ 3: Entspricht Typ 2, jedoch mit spezifischem Verhalten, wenn die Motordrehzahl den mithilfe
eines Parameters eingestellten Schwellwert übersteigt.
SLS-Typ 4: Begrenzt die Motordrehzahl auf einen mithilfe eines Parameters eingestellten Wert. Die
Drehrichtung kann geändert werden, während die Sicherheitsfunktion aktiv ist.
SLS-Typ 5: Entspricht Typ 4, jedoch mit spezifischem Verhalten, wenn die Motordrehzahl den mithilfe
eines Parameters eingestellten Schwellwert übersteigt.
SLS-Typ 6: Entspricht Typ 4, jedoch mit spezifischem Verhalten, wenn die Motordrehzahl den mithilfe
eines Parameters eingestellten Schwellwert übersteigt.
HINWEIS: Die SLS-Typen 2 und 3 nutzen den Parameter [SLS-Verzögerung] (SLwt), sodass der Motor
für einen bestimmten Zeitraum unter dem [Stillstandswert ] SSSL laufen kann, nachdem die Sicherheits-
funktion SLS aktiviert wurde.
Die Sicherheitsfunktion SLS wird mit der Inbetriebnahmesoftware konfiguriert. Für weitere Informationen
siehe Inbetriebnahme
(siehe Seite 83)
Der Status der Sicherheitsfunktion SLS kann mit der HMI des Frequenzumrichters oder mit der Inbetriebnahmesoftware angezeigt werden.
Verhalten bei Aktivierung der Sicherheitsfunktion SLS Typ 1
.
: Fehler und STO-Funktion ausgelöst, : Oberer Referenzgrenzwert, : STO-Funktion aktiviert
Wenn die Sicherheitsfunktion aktiviert wird:
Wenn die [Statorfrequenz] StFr über dem [SLS-Toleranzwert] SLtt liegt, wird die Sicherheits-
funktion STO aktiviert und ein Fehler mit dem Fehlercode [Sicherheitsfehler] SAFF wird ausgelöst.
Wenn die [Statorfrequenz] StFr unter dem [SLS-Toleranzwert] SLtt liegt, wird die Statorfrequenz
auf die Ist-Statorfrequenz begrenzt. Der Frequenzsollwert variiert nur zwischen diesem Wert und dem
Stillstandswert SSSL.
Während die Funktion aktiviert ist:
Wenn die [Statorfrequenz] StFr sinkt und den [Stillstandswert] SSSL der Frequenz erreicht, wird
die Sicherheitsfunktion STO aktiviert.
Wenn die [Statorfrequenz] StFr steigt und den [SLS-Toleranzwert] SLtt erreicht, wird die
Sicherheitsfunktion STO aktiviert und ein Fehler mit dem Fehlercode [Sicherheitsfehler] SAFF wird
ausgelöst.
22 NVE50469 01/2017

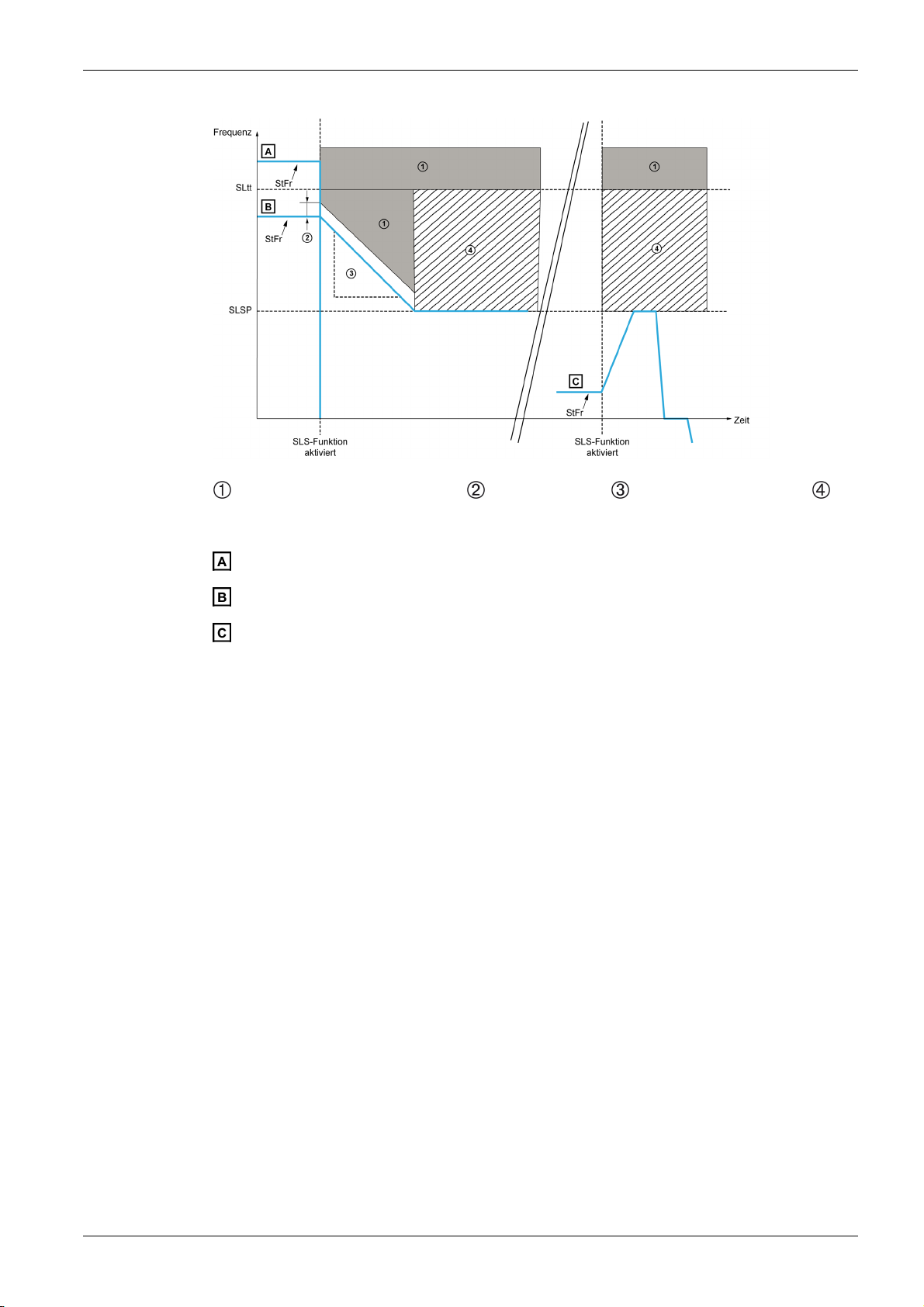
Verhalten bei Aktivierung der Sicherheitsfunktion SLS Typ 2
: SS1-Abschaltwert, : Fehler und STO-Funktion ausgelöst, : Oberer Referenzgrenzwert, :
STO-Funktion aktiviert, : SS1-Auslauframpe (dV/dT), : Zeitraum, den die [Statorfrequenz] StFr
zum Übersteigen des SSSL benötigt
: Die [Statorfrequenz] StFr liegt über dem [Sollwert] SLSP.
: Die [Statorfrequenz] StFr liegt zwischen [Stillstandswert] SSSL und [Sollwert] SLSP.
: Die [Statorfrequenz] StFr liegt unter dem [Stillstandswert] SSSL und der [SLS-Verzögerung]
(SLwt) ≠ 0.
Wenn die Funktion aktiviert wird:
Wenn die [Statorfrequenz ] StFr über dem [Sollwert] SLSP liegt, verzögert der Frequenzumrichter
gemäß der SS1-Auslauframpe, bis der [Sollwert] SLSP erreicht ist (siehe Fall A).
Wenn die [Statorfrequenz] StFr unter dem SLSP liegt, wird der aktuelle Referenzwert nicht
verändert, sondern lediglich auf den [Sollwert] SLSP begrenzt (siehe Fall B).
We nn die [Statorfrequenz] StFr noch immer unter dem [Stillstandswert] SSSL der Frequenz liegt,
nachdem die [SLS-Verzögerung] (SLwt) abgelaufen ist, wird die Sicherheitsfunktion STO aktiviert
(siehe Fall C).
Während die Funktion aktiviert ist:
Der Referenzfrequenzwert kann nur zwischen dem [Sollwert] SLSP und dem Stillstandswert SSSL
variieren.
Wenn die [Statorfrequenz] StFr sinkt und den [Stillstandswert] SSSL der Frequenz erreicht, wird
die Sicherheitsfunktion STO aktiviert.
Wenn die [Statorfrequenz] StFr steigt und den [SLS-Toleranzwert] SLtt erreicht, wird die
Sicherheitsfunktion STO aktiviert und ein Fehler mit dem Fehlercode [Sicherheitsfehler] SAFF wird
ausgelöst.
NVE50469 01/2017 23

Verhalten bei Aktivierung der Sicherheitsfunktion SLS Typ 3
SLS-Typ 3 weist dasselbe Verhalten wie SLS-Typ 2 auf, mit folgender Ausnahme: Wenn die
[Statorfrequenz] StFr über dem [SLS-Toleranzwert] SLtt liegt, wird anstelle einer Verzögerung auf
den [Sollwert] SLSP die Sicherheitsfunktion SS1 aktiviert (siehe Fall A).
: SS1-Abschaltwert, : Fehler und STO-Funktion ausgelöst, : Oberer Referenzgrenzwert, :
STO-Funktion aktiviert, : SS1-Auslauframpe (dV/dT), : Zeitraum, den die [Statorfrequenz] StFr
zum Übersteigen des SSSL benötigt
: Die [Statorfrequenz] StFr liegt über dem [SLS-Toleranzwert] SLtt.
: Die [Statorfrequenz] StFr liegt zwischen [Sollwert] SLSP und [SLS-Toleranzwert] SLtt.
: Die [Statorfrequenz] StFr liegt zwischen [Stillstandswert] SSSL und [Sollwert] SLSP.
: Die [Statorfrequenz] StFr liegt unter dem [Stillstandswert] SSSL und der [SLS-Verzögerung]
(SLwt) ≠ 0.
Wenn die Funktion aktiviert wird:
Wenn die [Statorfrequenz] StFr über dem [SLS-Toleranzwert] SLtt liegt, wird die Sicherheits-
funktion SS1 aktiviert (siehe Fall A).
Wenn die [Statorfrequenz] StFr zwischen [SLS-Toleranzwert] SLtt und [Sollwert] SLSP liegt,
verzögert der Frequenzumrichter gemäß der SS1-Auslauframpe, bis der [Sollwert] SLSP erreicht
wurde (siehe Fall B).
Wenn die [Statorfrequenz] StFr unter dem [Sollwert] SLSP liegt, wird der aktuelle Referenzwert
nicht verändert, sondern lediglich auf den [Sollwert] SLSP begrenzt (siehe Fall C).
Wenn die [Statorfrequenz] StFr noch immer unter dem [Stillstandswert] SSSL der Frequenz liegt,
nachdem die [SLS-Verzögerung] SLwt abgelaufen ist, wird die Sicherheitsfunktion STO aktiviert (siehe
Fall D).
Während die Funktion aktiviert ist:
Der Referenzfrequenzwert kann nur zwischen dem [Sollwert] SLSP und dem [Stillstandswert]
SSSL variieren.
Wenn die [Statorfrequenz] StFr sinkt und den [Stillstandswert] SSSL der Frequenz erreicht, wird
die Sicherheitsfunktion STO aktiviert.
Wenn die [Statorfrequenz] StFr steigt und den [SLS-Toleranzwert] SLtt erreicht, wird die
Sicherheitsfunktion STO aktiviert und ein Fehler mit dem Fehlercode [Sicherheitsfehler] SAFF wird
ausgelöst.
24 NVE50469 01/2017
Verhalten bei Aktivierung der Sicherheitsfunktion SLS Typ 4
Fehler und STO-Funktion ausgelöst, SS1-Abschaltwert, SS1-Auslauframpe (dV/dT),
Oberer Referenzgrenzwert
: Die [Statorfrequenz] StFr liegt über dem [SLS-Toleranzwert] SLtt.
: Die [Statorfrequenz] StFr liegt zwischen [Sollwert] SLSP und [SLS-Toleranzwert] SLtt.
: Die [Statorfrequenz] StFr liegt unter dem [Sollwert] SLSP.
HINWEIS: Wenn SLTT ≤ SLSP für SLS-Typ 4, wird ein SAFF-Fehler ausgelöst.
Wenn die Funktion aktiviert wird:
Wenn die [Statorfrequenz] StFr über dem [SLS-Toleranzwert] SLtt liegt, werden die Sicherheits-
funktion STO und der Fehlercode [Sicherheitsfehler] SAFF aktiviert (siehe Fall A).
Wenn die [Statorfrequenz] StFr zwischen [SLS-Toleranzwert] SLtt und [Sollwert] SLSP liegt,
verzögert der Frequenzumrichter gemäß der SS1-Auslauframpe, bis der [Sollwert] SLSP erreicht
wurde (siehe Fall B).
Wenn die [Statorfrequenz] StFr unter dem [Sollwert] SLSP liegt, wird der aktuelle Referenzwert
nicht verändert, sondern lediglich auf den [Sollwert] SLSP begrenzt (siehe Fall C).
Während die Funktion aktiviert ist:
Der Referenzfrequenzwert kann zwischen dem [Sollwert] SLSP in beide Richtungen variieren.
Wenn die [Statorfrequenz] StFr steigt und den [SLS-Toleranzwert] SLtt erreicht, wird die
Sicherheitsfunktion STO aktiviert und ein Fehler mit dem Fehlercode [Sicherheitsfehler] SAFF wird
ausgelöst.
NVE50469 01/2017 25

Verhalten bei Aktivierung der Sicherheitsfunktion SLS Typ 5
: Fehler und STO-Funktion ausgelöst, : SS1-Abschaltwert, : SS1-Auslauframpe (dV/dT), :
Oberer Referenzgrenzwert
: Die [Statorfrequenz] StFr liegt über dem [SLS-Toleranzwert] SLtt.
: Die [Statorfrequenz] StFr liegt zwischen [Sollwert] SLSP und [SLS-Toleranzwert] SLtt.
: Die [Statorfrequenz] StFr liegt unter dem [Sollwert] SLSP.
Wenn die Funktion aktiviert wird:
Wenn die [Statorfrequenz] StFr über dem [SLS-Toleranzwert] SLtt liegt, verzögert der
Frequenzumrichter gemäß der SS1-Auslauframpe, bis der [Sollwert] SLSP erreicht wurde (siehe
Fall A).
Wenn die [Statorfrequenz] StFr zwischen [SLS-Toleranzwert] SLtt und [Sollwert] SLSP liegt,
verzögert der Frequenzumrichter gemäß der SS1-Auslauframpe, bis der [Sollwert] SLSP erreicht
wurde (siehe Fall B).
Wenn die [Statorfrequenz] StFr unter dem [Sollwert] SLSP liegt, wird der aktuelle Referenzwert
nicht verändert, sondern lediglich auf den [Sollwert] SLSP begrenzt (siehe Fall C).
Während die Funktion aktiviert ist:
Der Referenzfrequenzwert kann zwischen dem [Sollwert] SLSP in beide Richtungen variieren.
Wenn die [Statorfrequenz] StFr steigt und den [SLS-Toleranzwert] SLtt erreicht, wird die
Sicherheitsfunktion STO aktiviert und ein Fehler mit dem Fehlercode [Sicherheitsfehler] SAFF wird
ausgelöst.
26 NVE50469 01/2017

Verhalten bei Aktivierung der Sicherheitsfunktion SLS Typ 6
: Fehler und STO-Funktion ausgelöst, : SS1-Abschaltwert, : SS1-Auslauframpe (dV/dT), :
Oberer Referenzgrenzwert, : STO-Funktion aktiviert
: Die [Statorfrequenz] StFr liegt über dem [SLS-Toleranzwert] SLtt.
: Die [Statorfrequenz] StFr liegt zwischen [Sollwert] SLSP und [SLS-Toleranzwert] SLtt.
: Die [Statorfrequenz] StFr liegt unter dem [Sollwert] SLSP.
Wenn die Funktion aktiviert wird:
Wenn die [Statorfrequenz] StFr über dem [SLS-Toleranzwert] SLtt liegt, verzögert der
Frequenzumrichter gemäß der SS1-Auslauframpe, bis ein Wert von 0 Hz erreicht wurde (siehe Fall A).
Wenn die [Statorfrequenz] StFr zwischen [SLS-Toleranzwert] SLtt und [Sollwert] SLSP liegt,
verzögert der Frequenzumrichter gemäß der SS1-Auslauframpe, bis der [Sollwert] SLSP erreicht
wurde (siehe Fall B).
Wenn die [Statorfrequenz] StFr unter dem [Sollwert] SLSP liegt, wird der aktuelle Referenzwert
nicht verändert, sondern lediglich auf den [Sollwert] SLSP begrenzt (siehe Fall C).
Während die Funktion aktiviert ist:
Der Referenzfrequenzwert kann zwischen dem [Sollwert] SLSP in beide Richtungen variieren.
Wenn die [Statorfrequenz] StFr steigt und den [SLS-Toleranzwert] SLtt erreicht, wird die
Sicherheitsfunktion STO aktiviert und ein Fehler mit dem Fehlercode [Sicherheitsfehler] SAFF wird
ausgelöst.
NVE50469 01/2017 27

Verhalten bei Deaktivierung der Sicherheitsfunktion SLS für alle SLS-Typen
Wenn... Dann...
der Frequenzumrichter bei Deaktivierung der Funktion noch in
Betrieb ist,
die Sicherheitsfunktion STO aktiviert wurde und der
Frequenzumrichter sich nicht in einem Fehlerzustand
befindet,
die Sicherheitsfunktion SLS Typ 2, 3, 4 deaktiviert ist,
während der Frequenzumrichter gemäß SS1-Auslauframpe
auf den [Sollwert] SLSP verzögert,
die Sicherheitsfunktion SLS Typ 3 deaktiviert ist, während die
Sicherheitsfunktion SS1 aktiviert wird,
ein Haltebefehl angewendet wird, bleibt die Sicherheitsfunktion SLS aktiviert und der
ein Fehler festgestellt wird, bleibt die Sicherheitsfunktion SLS aktiv und der
wird der Frequenzsollwert des aktiven Kanals
angewandt.
muss ein neuer Fahrbefehl angewandt werden.
bleibt die Sicherheitsfunktion SLS aktiviert, bis der
[Sollwert] SLSP erreicht wurde.
wird STO aktiviert, wenn der [Stillstandswert] SSSL
erreicht ist, und ein neuer Fahrbefehl muss angewandt
werden.
Frequenzumrichter verzögert, bis der Stillstand
erreicht ist.
wird für SLS-Typ 1, 2 oder 3 die STO-Funktion
aktiviert, wenn die [Statorfrequenz] StFr sinkt und
den [Stillstandswert] SSSL der Frequenz erreicht.
Frequenzumrichter läuft gemäß der konfigurierten
Fehlerantwort aus.
wird für SLS-Typ 1, 2 oder 3 die STO-Funktion
aktiviert, nachdem der [Stillstandswert] SSSL der
Frequenz erreicht wurde. Der Frequenzumrichter
kann zurückgesetzt werden, nachdem die Ursache
behoben wurde.
SLS-Referenzrichtlinien
Die Sicherheitsfunktion SLS ist in Abschnitt 4.2.3.4 der Norm IEC 61800-5-2 wie folgt definiert: Die SLSFunktion hilft zu verhindern, dass die Motordrehzahl den festgelegten Grenzwert überschreitet.
Sicherheitsfunktionslevel (SF) der Sicherheitsfunktion SLS
Konfiguration SIL
Sicherheitsintegritätslevel gemäß IEC 61508PLLeistungsstufe gemäß ISO 13849-1
LI3 und LI4 SIL 2 PL d
LI5 und LI6 SIL 2 PL d
28 NVE50469 01/2017

Sicherheitsfunktion SMS (Sichere maximale Drehzahl)
Überblick
Diese Funktion verhindert, dass die Motordrehzahl den festgelegten Grenzwert für die sichere maximale
Drehzahl überschreitet.
Die Sicherheitsfunktion SMS wird mithilfe der Inbetriebnahmesoftware konfiguriert; siehe Inbetriebnahme
(siehe Seite 83)
Der Parameter [SMS-Aktivierung] SMSA dient zur Aktivierung bzw. Deaktivierung der SMS-Funktion.
Mit den folgenden Parametern können zwei Drehzahlgrenzwerte festgelegt werden:
[SMS-Untergrenze] SMLL: Dient zur Auswahl der Drehzahl-Untergrenze.
[SMS-Obergrenze] SMLH: Dient zur Auswahl der Drehzahl-Obergrenze.
Je nach Einstellung von [SMS-Zuweisung] SMLS gilt [SMS-Untergrenze] SMLL oder [SMSObergrenze] SMLH als Grenzwert für die sichere maximale Drehzahl.
Wenn [SMS-Zuweisung] SMLS auf L34 oder L56 gesetzt ist (Logikeingang 3 und 4 oder Logikeingang 5
und 6), gilt Folgendes:
Wenn sich die Logikeingänge im Low-Status (0) befinden, gilt [SMS-Untergrenze] SMLL als
Grenzwert für die sichere maximale Drehzahl.
Wenn sich die Logikeingänge im High-Status (1) befinden, gilt [SMS-Obergrenze] SMLH als
Grenzwert für die sichere maximale Drehzahl.
Wenn [SMS-Zuweisung] SMLS auf NEIN gesetzt ist, gilt [SMS-Untergrenze] SMLL als Grenzwert für
die sichere maximale Drehzahl.
HINWEIS:
Die SMS-Funktion dient nicht zur Einstellung des Drehzahlsollwerts.
Die Einstellung des Drehzahlsollwerts sollte über einen aktiven Drehzahlsollwert-Kanal entsprechend
der Einstellung für [SMS-Untergrenze] SMLL bzw. [SMS-Obergrenze] SMLH erfolgen.
Der Status der Sicherheitsfunktion SMS wird am Grafikterminal des Frequenzumrichters sowie in der
Registerkarte Überwachung der Inbetriebnahmesoftware angezeigt.
für Details.
NVE50469 01/2017 29
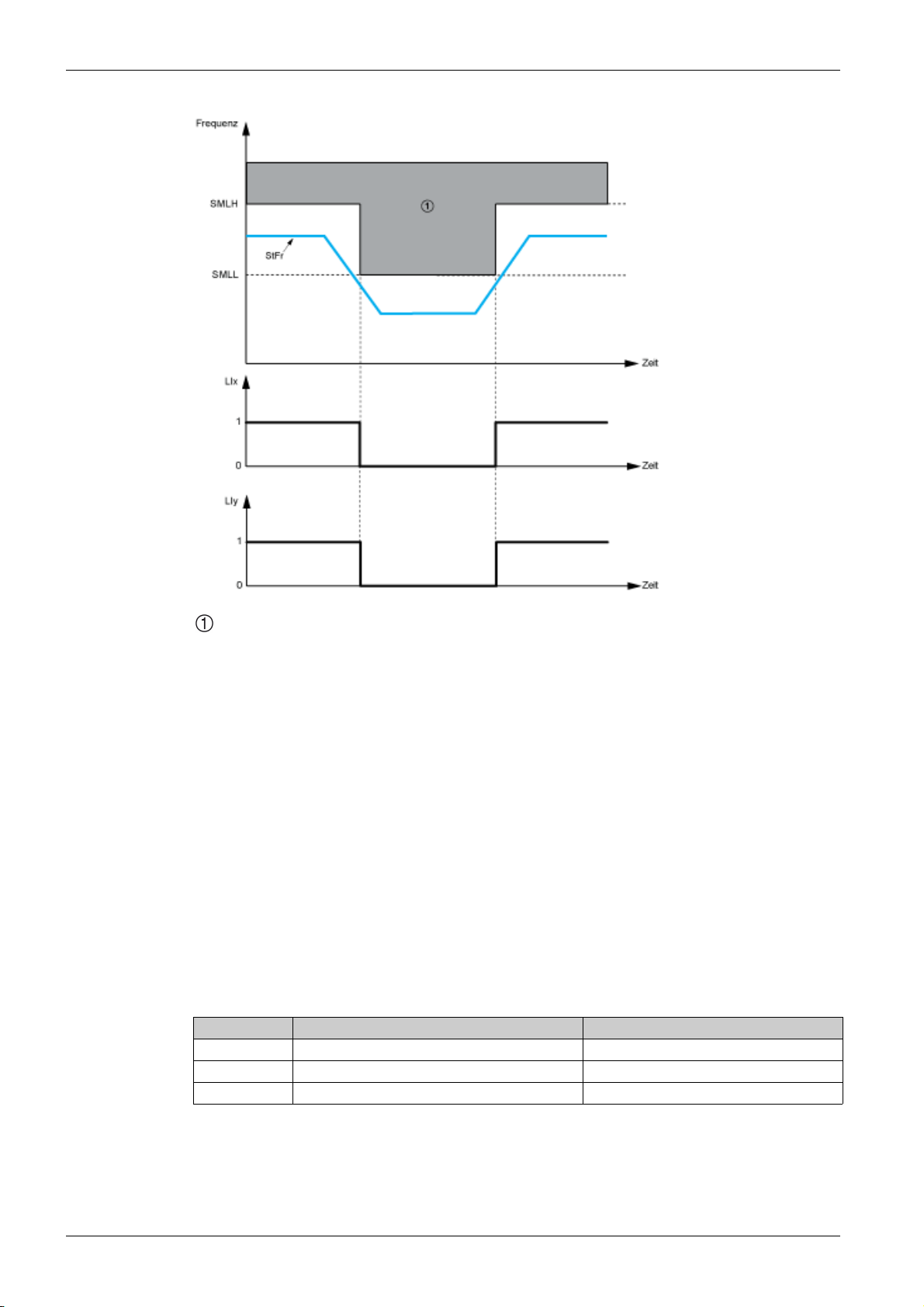
Verhalten bei Aktivierung der Sicherheitsfunktion SMS
Fehler und STO-Funktion ausgelöst
Während die Funktion aktiviert ist, gilt Folgendes:
Wenn sich die Logikeingänge (LIx und LIy) im Low-Status (0) befinden und die [Statorfrequenz] StFR
ansteigt und die [SMS-Untergrenze] SMLL erreicht, wird die Funktion STO ausgelöst und es wird ein
Fehler mit dem Fehlercode [Sicherheitsfehler] SAFF angezeigt.
Wenn sich die Logikeingänge (LIx und LIy) im High-Status (1) befinden und die [Statorfrequenz]
StFR ansteigt und die [SMS-Obergrenze] SMLH erreicht, wird die Funktion STO ausgelöst und es
wird ein Fehler mit dem Fehlercode [Sicherheitsfehler] SAFF angezeigt.
Wenn die Logikeingänge (LIx und LIy) nicht zugewiesen sind und die [Statorfrequenz] StFR ansteigt
und die [SMS-Untergrenze] SMLL erreicht, wird die Funktion STO ausgelöst und es wird ein Fehler
mit dem Fehlercode [Sicherheitsfehler] SAFF angezeigt.
Referenzrichtlinien für die Funktion SMS
Die Sicherheitsfunktion SMS ist nicht in der Richtlinie IEC 61800-5-2 definiert. Die Funktion SMS
verhindert, dass die Motordrehzahl die vorgegebene Drehzahlgrenze überschreitet. Wenn die
Motordrehzahl den festgelegten Grenzwert überschreitet, wird die Sicherheitsfunktion STO aktiviert. Die
Funktion SMS kann nur mit der Inbetriebnahmesoftware aktiviert bzw. deaktiviert werden. Wenn die
Funktion aktiviert ist, überwacht sie unabhängig von der Betriebsart kontinuierlich die Statorfrequenz.
Sicherheitsfunktionslevel (SF) der Sicherheitsfunktion SMS
Konfiguration Sicherheitsintegritätslevel (SIL) gemäß IEC 61508 Leistungsstufe (PL) gemäß ISO 13849-1
LI3 und LI4 SIL 2 PL d
LI5 und LI6 SIL 2 PL d
Nein SIL 2 PL d
30 NVE50469 01/2017

Sicherheitsfunktion GDL (Schutztürverriegelung)
Überblick
Diese Funktion ermöglicht bei abgeschaltetem Motor nach einer vorgegebenen Verzögerung die
Entriegelung der Schutztür. Die Fronttür der Maschine lässt sich nur öffnen, wenn zuvor der Motor
abgeschaltet wurde. Diese Funktion soll dazu beitragen, die Sicherheit des Bedieners zu garantieren.
Für Details zum zertifizierten Verdrahtungsschema siehe Einzelantrieb gemäß IEC 61508 und IEC 62061
für die GDL-Funktion
Der Parameter [GDL-Zuweisung] GDLA dient zur Aktivierung bzw. Deaktivierung der GDL-Funktion.
Die GDL-Funktion verwendet den Parameter LO1.
Mithilfe der folgenden Parameter können zwei Verzögerungen konfiguriert werden.
[Schutztürverriegelung lange Verzögerung] GLLD: Lange Verzögerung nach einem beliebigen
Stoppbefehl (z. B. STO, Stopprampe, Gleichstrombremsung, usw.) außer SS1-Stopp, um sicherzustellen, dass die Maschine gestoppt ist.
[Schutztürverriegelung kurze Verzögerung] GLSD: Kurze Verzögerung nach SS1-Rampe, um
sicherzustellen, dass die Maschine gestoppt ist.
HINWEIS: [Schutztürverriegelung lange Verzögerung] GLLD und [Schutztürverriegelung kurze
Verzögerung] GLSD werden auf Basis der Kenndaten und Anforderungen der Maschine definiert.
Die Sicherheitsfunktion GDL wird mithilfe der Inbetriebnahmesoftware konfiguriert; siehe Inbetriebnahme
(siehe Seite 83)
Das Status der Sicherheitsfunktion GDL wird am Grafikterminal des Frequenzumrichters sowie in der
Registerkarte Überwachung der Inbetriebnahmesoftware angezeigt.
(siehe Seite 82)
für Details.
.
Verhalten bei Aktivierung der Sicherheitsfunktion GDL
SS1-Stopp, Stopp mit freiem Auslauf, Rampenstopp, STO-Funktion ausgelöst
Während die Funktion aktiviert ist, gilt Folgendes:
Wenn die Sicherheitsfunktion SS1 ausgelöst wird, wechselt der Logikausgang (LO) nach Ablauf von
[GDL kurze Verzögerung] GLSD in den High-Status (1) und die Schutztür wird entriegelt.
Wenn ein Stopp mit freiem Auslauf oder die Sicherheitsfunktion STO ausgelöst wird, wechselt der
Logikausgang (LO) nach Ablauf von [GDL lange Verzögerung] GLLD in den High-Status (1) und die
Schutztür wird entriegelt.
Wenn ein Rampenstopp ausgelöst wird, wechselt der Logikausgang (LO) nach Ablauf von [GDL lange
Verzögerung] GLLD in den High-Status (1) und die Schutztür wird entriegelt.
Referenzrichtlinien für die Funktion GDL
Die Sicherheitsfunktion GDL ist nicht in der Richtlinie IEC-61800-5-2 definiert. Die Funktion GDL
ermöglicht die Entriegelung der Schutztür bei abgeschaltetem Motor.
Sicherheitsfunktionslevel (SF) der Sicherheitsfunktion GDL
Konfiguration Sicherheitsintegritätslevel (SIL) gemäß IEC
61508
STO mit Sicherheitsmodul SIL 1 PL c
NVE50469 01/2017 31
Leistungsstufe (PL) gemäß ISO
13849-1

32 NVE50469 01/2017

A
Inhalt dieses Kapitels
ltivar 320
NVE50469 01/2017
Berechnung sicherheitsrelevanter Parameter
Kapitel 3
Berechnung sicherheitsrelevanter Parameter
Dieses Kapitel enthält die folgenden Themen:
Thema Seite
SLS-Typ 1 34
SLS-Type 2, Typ 3, Typ 4, Typ 5 und Typ 6 36
SS1 40
SMS 42
GDL 43
NVE50469 01/2017 33

SLS-Typ 1
Anwendungsdaten erfassen
Bevor Sie mit der Konfiguration der SLS-Funktion beginnen, müssen Sie folgende Daten erfassen:
Code Beschreibung Einheit Anmerkung
FrS
nSp
ppn Anzahl Motorpolpaare – Siehe Motortypenschild.
Max. Freq HSP Maximale Motorfrequenz im
Berechnung des Nennwerts der Schlupfkompensation Fslip (Hz) des Motors:
Konfiguration der Funktion
Übersichtsdiagramm
[Nennfrequ. Motor] Hz Siehe Motortypenschild.
[Motornenndrehzahl] U/min Siehe Motortypenschild.
Hz Dieser Wert ist gleich oder kleiner
Normalbetrieb
dem Wert [Hohe Drehzahl] HSP.
: Fehler und STO-Funktion ausgelöst, : Oberer Referenzgrenzwert, : STO-Funktion aktiviert
Stillstandswert
Der empfohlene Stillstandswert lautet:
SSSL = Fslip
Wenn die Anwendung einen anderen Stillstandswert erfordert, kann dieser gemäß dem SSSL-Parameter
eingestellt werden.
Schwellwert der Motorfrequenz
Der empfohlene Wert des Parameters ist
34 NVE50469 01/2017
SLtt = 1,2 x Max. Freq HSP + Fslip
.

Konfiguration testen und einstellen
Überprüfen Sie nach erfolgter Konfiguration, ob sich die SLS-Funktion verhält wie erwartet.
Wenn ein Fehler mit dem Fehlercode [Sicherheitsfehler] SAFF ausgelöst wird, befolgen Sie die
nachfolgend aufgeführten Maßnahmen zur Fehlerbehebung.
Kontext Umrichterstatus Einstellung
SLS aktiviert und Motor läuft
bei eingefrorener
Sollfrequenz
Beispiel
Code Beschreibung Einheit
FrS
nSp
ppn Anzahl Motorpolpaare 2
Max. Freq HSP Maximale Motorfrequenz im Normalbetrieb Dieser Wert ist im
Mit diesen numerischen Werten lautet die Konfiguration von SLS-Typ 1 wie folgt:
SAFF-Fehlercode
SFFE.7 = 1
[Nennfrequ. Motor] 50 Hz
[Motornenndrehzahl] 1350 U/min
Allgemeinen gleich oder kleiner dem Wert [Hohe Drehzahl] HSP.
Die Motorfrequenz hat ihren Schwellwert erreicht.
Der Grund für den Fehler kann eine Frequenzinstabilität
sein. Prüfen und beheben Sie die Ursache. Der Wert von
SLtt lässt sich ändern, um den Toleranzwert
entsprechend der Instabilität des Antriebssystems zu
erhöhen.
50 Hz
SSSL = Fslip =
1,2 x
SLtt =
Max. Freq HSP
5
Hz
+
Fslip
= 1,2 x 50 + 5 = 65
Hz
NVE50469 01/2017 35

SLS-Type 2, Typ 3, Typ 4, Typ 5 und Typ 6
Anwendungsdaten erfassen
Bevor Sie mit der Konfiguration der SLS-Funktion beginnen, müssen Sie folgende Daten erfassen:
Code Beschreibung Einheit Anmerkung
FrS
nSp
ppn Anzahl Motorpolpaare – Siehe Motortypenschild.
Max. Freq HSP Maximale Motorfrequenz im
SS1-Auslauframpe Anzuwendende
Berechnung des Nennwerts der Schlupfkompensation Fslip (Hz) des Motors:
Konfiguration der Funktion
Übersichtsdiagramm
[Nennfrequ. Motor] Hz Siehe Motortypenschild.
[Motornenndrehzahl] U/min Siehe Motortypenschild.
Normalbetrieb
Auslauframpe, wenn SS1Rampe ausgelöst wird
Hz Dieser Wert ist gleich oder kleiner dem Wert [Hohe
Drehzahl] HSP.
Hz –
: SS1-Abschaltwert, : Fehler und STO-Funktion ausgelöst, : Oberer Referenzgrenzwert, : STO-
Funktion aktiviert, : SS1-Auslauframpe (dV/dT), : Zeitraum, den die [Statorfrequenz ] StFr zum
Übersteigen des SSSL benötigt
: Die [Statorfrequenz] StFr liegt über dem [Sollwert] SLSP.
: Die [Statorfrequenz] StFr liegt zwischen [Stillstandswert] SSSL und [Sollwert] SLSP.
: Die [Statorfrequenz] StFr liegt unter dem [Stillstandswert] SSSL und der [SLS-Verzögerung]
(SLwt) ≠ 0.
Stillstandswert
Der empfohlene Stillstandswert lautet:
SSSL = Fslip
Wenn die Anwendung einen anderen Stillstandswert erfordert, kann dieser gemäß dem SSSL-Parameter
eingestellt werden.
36 NVE50469 01/2017

Rampenwert und Rampeneinheit
Legen Sie die Parameter SSrt (Rampenwert) und SSrU (Rampeneinheit) gemäß der Auslauframpe fest,
die anzuwenden ist, wenn die Sicherheitsfunktion SS1 aktiviert wird.
Berechnung der Rampe: Rampe = SSrU x SSrt
Beispiel 1: Für SSrU = 1 Hz/s und SSrt = 500,0 lautet der Wert der Auslauframpe 500,0 Hz/s bei einer
Genauigkeit von 0,1 Hz.
Beispiel 2: Für SSrU = 10 Hz/s und SSrt = 50,0 lautet der Wert der Auslauframpe 500 Hz/s bei einer
Genauigkeit von 1 Hz.
Verwenden Sie die Tabelle, um die richtige Genauigkeit gemäß der Auslauframpe festzulegen, die
anzuwenden ist, wenn die Sicherheitsfunktion SS1 aktiviert wird.
Min. Max. Genauigkeit SSrt SSrU
0,1 Hz/s 599 Hz/s 0,1 Hz/s 1 Hz/s SS1-Auslauframpe
599 Hz/s 5990 Hz/s 1 Hz/s 10 Hz/s SS1-Auslauframpe/10
5990 Hz/s 59900 Hz/s 10 Hz/s 100 Hz/s SS1-Auslauframpe/100
SLS-Sollwert
Setzen Sie den Parameter SLS-Sollwert (SLSP) auf:
SLSP= Fsetpoint (SLS)
Schwellwert von Motorfrequenz und Rampe
Der empfohlene Schwellwert der Motorfrequenz ist
der SS1-Rampe ist
SStt = 0,2 x Max. Freq HSP.
SLtt = 1,2 x SLSP + Fslip
, der empfohlene Schwellwert
SLS-Verzögerung
Stellen Sie die [SLS-Verzögerung] (SLwt) auf einen Wert über 0 ms ein, sodass der Motor für einen
bestimmten Zeitraum unter dem [Stillstandswert] SSSL laufen kann, nachdem die Sicherheitsfunktion
SLS aktiviert wurde.
HINWEIS: Wenn SLS-Typ 4 konfiguriert ist, muss die [SLS-Verzögerung] (SLwt) auf 0 eingestellt werden,
da sonst ein Fehler ausgelöst und der Fehlercode [Sicherheitsfehler] SAFF angezeigt wird.
NVE50469 01/2017 37

Konfiguration testen und einstellen
Überprüfen Sie nach erfolgter Konfiguration, ob sich die SLS-Funktion verhält wie erwartet.
Wenn ein Fehler mit dem Fehlercode [Sicherheitsfehler] SAFF ausgelöst wird, befolgen Sie die
nachfolgend aufgeführten Maßnahmen zur Fehlerbehebung.
Kontext Umrichterstatus Einstellung
SLS aktiviert
und
Auslauframpe
läuft
SLS aktiviert
und
Rampenende
bei SLSPFrequenz
SAFF-
Fehlercode
SFFE.3 = 1
SAFF-
Fehlercode
SFFE.3 = 1
oder
SFFE.7 = 1
Die Motorfrequenz hat ihren Schwellwert erreicht.
Der Grund für den Fehler kann eine Frequenzinstabilität sein. Prüfen und
beheben Sie die Ursache. Der Wert von SLtt lässt sich ändern, um den
Toleranzwert entsprechend der Instabilität des Antriebssystems zu erhöhen.
Die Stabilisierung der Motorfrequenz bei SLSP dauert zu lange; die
Fehlererkennungsbedingung der Sicherheitsfunktion wurde erreicht.
: Fehlererkennung der Sicherheitsfunktion, Tosc: T oscillation, F: Frequenz
Die Schwankungen müssen unter SLtt liegen, bevor der Zeitraum T(oscillation)
abgelaufen ist.
Wenn die Bedingung nicht aufgehoben wird, wird ein Fehler ausgelöst und der
Fehlercode [Sicherheitsfehler] SAFF angezeigt.
Die Beziehung zwischen SStt und T(oscillation) lautet wie folgt:
SLS ist
aktiviert und
Motor läuft mit
SLSPFrequenz
SAFF-
Fehlercode
SFFE.7 = 1
Die Motorfrequenz hat ihren Schwellwert erreicht.
Der Grund für den Fehler kann eine Frequenzinstabilität sein. Prüfen und
beheben Sie die Ursache. Der Wert von SStt lässt sich ändern, um den
Toleranzwert entsprechend den Schwankungen des Antriebssystems zu
erhöhen.
Die Motorfrequenz hat ihren Schwellwert erreicht.
Der Grund für den Fehler kann eine Frequenzinstabilität sein. Prüfen und
beheben Sie die Ursache. Der Wert von SLtt lässt sich ändern, um den
Toleranzwert entsprechend der Instabilität des Antriebssystems zu erhöhen.
38 NVE50469 01/2017

Beispiel
Code Beschreibung Einheit
FrS
nSp
ppn Anzahl Motorpolpaare 2
Max. Freq HSP Maximale Motorfrequenz im Normalbetrieb Dieser Wert ist gleich oder
Fsetpoint(SLS) Motorfrequenz-Sollwert 15 Hz
SS1-Auslauframpe Anzuwendende Auslauframpe, wenn SS1 ausgelöst wird 20 Hz/s
Motornennfrequenz 50 Hz
Motornenndrehzahl 1.350 U/min
50 Hz
kleiner dem Wert [Hohe Drehzahl] HSP.
Mit diesen numerischen Werten lautet die Konfiguration der SLS-Typen 2, 3 und 4 wie folgt:
SSSL = Fslip =
SSrU
= 1 Hz/s und
SLSP = Fsetpoint(SLS)
SLtt =
1,2 x
SStt =
0,2 x Max. Freq HSP = 0,2 x 50 = 10 Hz
5 Hz
SLSP
SSrt
= 20,0 wenn SS1-Auslauframpe = 20 Hz/s (Genauigkeit: 0,1 Hz)
= 15 Hz
+
Fslip
= 1,2 x 15 + 5 = 23 Hz
In diesem Beispiel dürfen die Frequenzschwankungen 350 ms lang über SLtt liegen.
NVE50469 01/2017 39

SS1
Anwendungsdaten erfassen
Bevor Sie die SS1-Funktion konfigurieren, müssen Sie folgende Daten erfassen:
Code Beschreibung Einheit Anmerkung
FrS
nSp
ppn Anzahl Motorpolpaare – Vom Motor
Max. Freq HSP Maximale Motorfrequenz im
Berechnung des Nennwerts der Schlupfkompensation Fslip (Hz) des Motors:
Konfiguration der Funktion
Übersichtsdiagramm
Motornennfrequenz Hz Vom Motor
Motornenndrehzahl U/min Vom Motor
Hz Dieser Wert ist gleich oder kleiner dem Wert [Hohe
Normalbetrieb
Drehzahl] HSP.
: SS1-Abschaltwert, : SS1-Auslauframpe (dV/dT), : STO-Funktion aktiviert, : Fehler und STOFunktion ausgelöst
Stillstandswert
Der empfohlene Stillstandswert lautet:
SSSL = Fslip
Wenn die Anwendung einen anderen Stillstandswert erfordert, kann dieser gemäß dem SSSL-Parameter
eingestellt werden.
Rampenwert und Rampeneinheit
Legen Sie die Parameter SSrt (Rampenwert) und SSrU (Rampeneinheit) gemäß der Auslauframpe fest,
die anzuwenden ist, wenn die Sicherheitsfunktion SS1 aktiviert wird.
Berechnung der Rampe: Rampe = SSrU x SSrt
Beispiel 1: Für SSrU = 1 Hz/s und SSrt = 500,0 lautet der Wert der Auslauframpe 500,0 Hz/s bei einer
Genauigkeit von 0,1 Hz.
Beispiel 2: Für SSrU = 10 Hz/s und SSrt = 50,0 lautet der Wert der Auslauframpe 500 Hz/s bei einer
Genauigkeit von 1 Hz.
40 NVE50469 01/2017

Verwenden Sie die Tabelle, um die richtige Genauigkeit gemäß der Auslauframpe festzulegen, die
anzuwenden ist, wenn die Sicherheitsfunktion SS1 aktiviert wird.
Min. Max. Genauigkeit SSrU SSrt
0,1 Hz/s 599 Hz/s 0,1 Hz/s 1 Hz/s SS1-Auslauframpe
599 Hz/s 5990 Hz/s 1 Hz/s 10 Hz/s SS1-Auslauframpe/10
5990 Hz/s 59900 Hz/s 10 Hz/s 100 Hz/s SS1-Auslauframpe/100
Schwellwert der Rampe
Der Grenzwert für die SS1 Rampenauslösung wird wie folgt berechnet:
Dieser Wert ist gleich oder kleiner dem Wert [Hohe Drehzahl] HSP.
Konfiguration testen und einstellen
Überprüfen Sie nach erfolgter Konfiguration, ob sich die Sicherheitsfunktion SS1 verhält wie erwartet.
Wenn ein Fehler mit dem Fehlercode [Sicherheitsfehler] SAFF ausgelöst wird, befolgen Sie die
nachfolgend aufgeführten Maßnahmen zur Fehlerbehebung.
Kontext Umrichterstatus Einstellung
SS1 aktiviert und
der
[Stillstandswert]
SSSL wurde
noch nicht erreicht
SAFF-Fehlercode
SFFE.3 = 1
SStt = 0,2 x Max. Freq HSP
Die Motorfrequenz hat ihren Schwellwert erreicht.
Der Grund für den Fehler kann eine Frequenzinstabilität sein.
Prüfen und beheben Sie die Ursache. Der Wert von SStt lässt sich
ändern, um den Toleranzwert entsprechend der Instabilität des
Antriebssystems zu erhöhen.
Beispiel
Code Beschreibung Einheit
FrS
nSp
ppn Anzahl Motorpolpaare 2
Max. Freq HSP Maximale Motorfrequenz im Normalbetrieb 50 Hz
SS1-Auslauframpe Anzuwendende Auslauframpe, wenn SS1 ausgelöst wird 20 Hz/s
Motornennfrequenz 50 Hz
Motornenndrehzahl 1.350 U/min
Mit diesen numerischen Werten lautet die Konfiguration von SS1 wie folgt:
SSSL = Fslip =
SSrU
= 1 Hz/s und
SStt =
0,2 x
5 Hz
SSrt
= 20,0 wenn SS1-Auslauframpe = 20 Hz/s (Genauigkeit: 0,1 Hz)
Max. Freq HSP
=0,2x50=10
Hz
NVE50469 01/2017 41

SMS
Anwendungsdaten erfassen
Bevor Sie mit der Konfiguration der SMS-Funktion beginnen, müssen Sie folgende Daten erfassen:
Code Beschreibung Einheit Anmerkung
PPn Anzahl Motorpolpaare – Siehe Motortypenschild.
Max. Ausgangsfrequenz in Hz = ((Max. Drehzahl in U/Min)/60)* PPn
Konfiguration der Funktion
Fehler und STO-Funktion ausgelöst
SMLL > Max. Ausgangsfrequenz
SMLH > Max. Ausgangsfrequenz
42 NVE50469 01/2017

GDL
Anwendungsdaten erfassen
Bevor Sie mit der Konfiguration der GDL-Funktion beginnen, müssen Sie folgende Daten erfassen:
Code Beschreibung Einheit Anmerkung
GLSD
GLLD
Konfiguration der Funktion
[GDL kurze Verzögerung] s Maximale Verzögerung nach der SS1-Rampe
zum Stoppen der Maschine.
[GDL lange Verzögerung] s Maximale Verzögerung nach Aktivierung der
STO-Funktion oder nach einem normalen
Auslauframpen-Befehl zum Stoppen der
Maschine.
SS1-Stopp, Stopp mit freiem Auslauf, Rampenstopp, STO-Funktion ausgelöst
Konfiguration testen und einstellen
Nach Abschluss der Konfiguration von GDL:
Aktivieren Sie die Sicherheitsfunktion SS1 und prüfen Sie, ob der Logikausgang beim Stoppen der
Maschine in den High-Status (1) wechselt.
Aktivieren Sie die Sicherheitsfunktion STO und prüfen Sie, ob der Logikausgang beim Stoppen der
Maschine in den High-Status (1) wechselt.
NVE50469 01/2017 43

44 NVE50469 01/2017

A
Inhalt dieses Kapitels
ltivar 320
NVE50469 01/2017
Verhalten von Sicherheit sfunktionen
Kapitel 4
Verhalten von Sicherheitsfunktionen
Dieses Kapitel enthält die folgenden Themen:
Thema Seite
Einschränkungen 46
Fehlerunterdrückung 46
Priorität zwischen Sicherheitsfunktionen 46
Werkseinstellungen 47
Konfigurations-Download 47
Priorität zwischen Sicherheitsfunktionen und nicht sicherheitsrelevanten Funktionen 48
NVE50469 01/2017 45

Einschränkungen
Motortyp
Die Sicherheitsfunktionen SLS, SS1 und SMS des ATV320 sind nur für Asynchronmotoren im offenen
Regelkreis anwendbar.
Die Sicherheitsfunktionen STO und GDL können mit Synchron- und Asynchronmotoren verwendet
werden.
Voraussetzungen für die Verwendung von Sicherheitsfunktionen
Für den störungsfreien Betrieb müssen folgende Bedingungen erfüllt sein:
Der Motor ist für diese Applikation dimensioniert und liegt nicht im Grenzbereich der Kapazität.
Der Frequenzumrichter wurde unter Berücksichtigung der elektrischen Daten wie z. B. Netzspannung,
Sequenz und Motor sowie den Bedingungen der Anwendung ausreichend dimensioniert und liegt nicht
im Grenzbereich seiner Kapazität.
Bei Bedarf werden die geeigneten Optionen verwendet.
Beispiel: Bremswiderstand oder Motordrossel.
Der Umrichter wurde gut auf die Drehzahl und Drehmomentanforderungen der Anwendung eingestellt;
das auf den Frequenzumrichter-Regelkreis angewandte Frequenzsollwert-Profil wird befolgt.
Anforderungen an Logikeingängen
Der Modus „Sink“ wird nicht gemeinsam mit der Sicherheitsfunktion verwendet. Wenn Sie die
Sicherheitsfunktion verwenden, müssen Sie die Logikeingänge im „Source“-Modus verdrahten.
PTC an LI6 ist nicht mit der an diesem Eingang eingerichteten Sicherheitsfunktion kompatibel. Wenn
Sie die Sicherheitsfunktion an LI6 verwenden, stellen Sie den PTC-Schalter nicht auf PTC.
Wenn Sie den Impulseingang verwenden, können Sie die Sicherheitsfunktion nicht gleichzeitig an LI5
setzen.
Fehlerunterdrückung
Wenn eine Sicherheitsfunktion konfiguriert wurde, kann der Fehler [Sicherheitsfehler] SAFF nicht durch
die Funktion [Zuord. Fehlerunterdr. unterdrückt werden.] InH
Priorität zwischen Sicherheitsfunktionen
1. Die Sicherheitsfunktion STO hat die höchste Priorität. Wenn die Sicherheitsfunktion STO ausgelöst
wird, erfolgt unabhängig von den anderen aktiven Funktionen eine Abschaltung mit sicherem
Drehmoment.
2. Die Sicherheitsfunktion SS1 hat mittlere Priorität gegenüber den anderen Sicherheitsfunktionen.
3. Die Sicherheitsfunktionen SLS und GDL haben die niedrigste Priorität.
46 NVE50469 01/2017

Werkseinstellungen
Wenn die Sicherheitsfunktionen konfiguriert sind und Sie die Werkseinstellungen wiederherstellen,
werden nur die Parameter auf die Werkseinstellungen zurückgesetzt, die nicht sicherheitsrelevant sind.
Die Einstellungen sicherheitsrelevanter Parameter können nur mit der Inbetriebnahmesoftware
zurückgesetzt werden. Für weitere Informationen siehe Commissioning
Konfigurations-Download
Sie können eine Konfiguration in allen Situationen übertragen. Wenn eine Sicherheitsfunktion konfiguriert
wurde, sind die Funktionen, die dieselben Logikeingänge verwenden, nicht konfiguriert.
Beispiel: Wenn die heruntergeladene Konfiguration über Funktionen (Vorwahlfrequenz usw.) an LI3-4-5-6
verfügt und an diesen Logikeingängen eine Sicherheitsfunktion des Frequenzumrichters konfiguriert ist,
wird die Sicherheitsfunktion nicht gelöscht. Die Funktionen mit denselben Logikeingängen wie Sicherheitsfunktionen werden nicht übertragen. Die Modi „Mehrfachkonfiguration/Multi-Motor“ und
„Makrokonfiguration“ unterliegen denselben Regeln.
(siehe Seite 83)
.
NVE50469 01/2017 47

Priorität zwischen Sicherheitsfunktionen und nicht sicherheitsrelevanten Funktionen
Prioritätentabelle
o: Kompatible Funktionen
x: Inkompatible Funktionen
: Die mit dem Pfeil gekennzeichnete Funktion hat Vorrang vor der anderen Funktion.
Funktion des Frequenzumrichters SLS SS1 STO SMS
[HUBW HSP OPTIM] HSH-
[+/- DREHZAHL] UPd-
[Sprungfrequenz] JPF oo
[Timeout Drehz nied.] tLS oo o
[MULTI MOTOR] MMC- Die Konfiguration muss mit den 3 Motoren
[VOREING. DREHZAHLEN]
PSS-
[PID-REGLER] PId- oo
Profil [RAMPE] rPt- o
[Freier Auslauf ]nSt o
[Zuord. Schnellhalt] FSt
[STRG. TRAVERSE] tr0-
[EXTERER FEHLER] EtF-
[AUTOM. NEUSTART] Atr-
[FEHLERRESET] rSt-
[JOG] JOG-
konsistent sein.
: SLS-Rampe
: SLS stabil
: NST
x: DCI
: Schnell, Rampe,
Fallback, Beibehaltung
o
: NST
x: DCI
: Schnell,
Rampe,
Fallback,
Beibehaltung
oDie
: NST
: DCI
: Schnell,
Rampe,
Fallback,
Beibehaltung
Konfiguration
muss mit den 3
Motoren
konsistent sein.
o
: NST
x: DCI
: Schnell,
Rampe,
Fallback,
Beibehaltung
[KONFIGURATION STOPP] Stt-
[Stopp Rampe] rMP
[Schnellhalt] FSt
[DC-Bremsung] dCI xx x
[+/- DREHZ. UM SOLLW.]
SrE-
[POSITION ÜB. SENSOR]
LPO-
[Kundsp. Filt RP Ref] PFrC o: wenn die
[Unterlast Prozess] ULF
[Überlast Prozess] OLC
48 NVE50469 01/2017
: SLS-Rampe
: SLS stabil
: SLS-Rampe
: SLS stabil
: SLS-Rampe
& Position nicht eingehalten
Sicherheitsfunktion nicht LI5
zugewiesen ist
: Position nicht
eingehalten
o: wenn die
Sicherheitsfunkt
ion nicht LI5
zugewiesen ist
o: wenn die
Sicherheitsfunk
tion nicht LI5
zugewiesen ist
o: wenn die
Sicherheitsfunk
tion nicht LI5
zugewiesen ist

Funktion des Frequenzumrichters SLS SS1 STO SMS
[Konfig. Schlaffseil] rSd xxxx
[Vermeidung Untersp.] StP xx
[AUTO. DC-BREMSUNGN]
xx x
AdC-
[Zuord. DC-Brems.] dCI xx x
[Lastverteilung] LbA o: Wenn der Wert von
[Stator Frequenz] StFr
über dem Schwellwert der
Motorfrequenz liegt, wird
der Fehler SAFF ausgelöst.
[Regelungsart Motor] Ctt
[Standard] Std xxox
[SVC V] UUC oooo
[Quadr. U/F] UFq xxox
[Energieeinspar.] nLd xxox
[Motorsynchr.] SYn xxox
[U/F 5 Pkte] UF5 xxox
[VERLUST MOTORPHASE]
OPL
x: Die Sicherheitsfunktion
hat einen
Motorphasenverlust
festgestellt.
x: Die
Sicherheitsfunkt
ion hat einen
Motorphasenve
rlust
festgestellt.
ox: Die
Sicherheitsfunk
tion hat einen
Motorphasenve
rlust
festgestellt.
[Absch. Ausgang] OAC xxxx
[Anp. Auslauframpe] brA o: der Wert von [Stator
Frequenz] StFr über
dem Schwellwert der
Motorfrequenz liegt, wird
der Fehler SAFF ausgelöst.
o: der Wert von
[Stator
Frequenz]
StFr über
dem
o
Schwellwert der
Motorfrequenz
liegt, wird der
Fehler SAFF
ausgelöst.
[REF. OPERATIONEN] OAI- o
[2-Draht-Strg.] 2C o: Fahrbefehl bei Übergang
Fahrbefehl auf Level ist
nicht kompatibel.
[PTC-MANAGEMENT] PtC- o: inaktiv, wenn die
Sicherheitsfunktion nicht LI6
zugewiesen ist
o: Fahrbefehl
bei Übergang
Fahrbefehl
auf Level ist
nicht
kompatibel.
o: inaktiv, wenn
die
Sicherheitsfunkt
ion nicht LI6
zugewiesen ist
o: Fahrbefehl
bei Übergang
Fahrbefehl
auf Level ist
nicht
kompatibel.
o: inaktiv, wenn
die
Sicherheitsfunk
tion nicht LI6
zugewiesen ist
o: Fahrbefehl
bei Übergang
Fahrbefehl
auf Level ist
nicht
kompatibel.
o: inaktiv, wenn
die
Sicherheitsfunk
tion nicht LI6
zugewiesen ist
[FORCED LOKAL] LCF- o
[LI-Konfiguration] o: inaktiv, wenn die
Sicherheitsfunktion keinem
Logikeingang zugewiesen
ist
[KONFIG MULTIMOTOREN].
MMC-
o: außer
sicherheitsrelevante
Parameter
o: inaktiv, wenn
die
Sicherheitsfunkt
ion keinem
Logikeingang
zugewiesen ist
o: außer
sicherheitsrelev
ante Parameter
o: inaktiv, wenn
die
Sicherheitsfunk
tion keinem
Logikeingang
zugewiesen ist
o: außer
sicherheitsrele
vante
Parameter
o: inaktiv, wenn
die
Sicherheitsfunk
tion keinem
Logikeingang
zugewiesen ist
o: außer
sicherheitsrele
vante
Parameter
[FEHLERUNTERDR.] InH xxxx
NVE50469 01/2017 49

Funktion des Frequenzumrichters SLS SS1 STO SMS
[Profil] CHCF Der von einer
Sicherheitsfunktion
verwendete Logikeingang
kann nicht geändert werden.
[Makrokonfiguration] CFG
[Kurzschluss Motor] SCF1 o
[Kurzschluss Erde] SCF3 o
[Überdrehz.] SOF o
: Die Makrokonfiguration
könnte überlappt werden,
wenn die
Sicherheitsfunktion einen
von der Makrokonfiguration
angeforderten Logikeingang
verwendet.
Der von einer
Sicherheitsfunkt
ion verwendete
Logikeingang
kann nicht
geändert
werden.
: Die
Makrokonfigura
tion könnte
überlappt
werden, wenn
die
Sicherheitsfunkt
ion einen von
der
Makrokonfigura
tion
angeforderten
Logikeingang
verwendet.
Der von einer
Sicherheitsfunk
tion
verwendete
Logikeingang
kann nicht
geändert
werden.
: Die
Makrokonfigura
tion könnte
überlappt
werden, wenn
die
Sicherheitsfunk
tion einen von
der
Makrokonfigura
tion
angeforderten
Logikeingang
verwendet.
Der von einer
Sicherheitsfunk
tion
verwendete
Logikeingang
kann nicht
geändert
werden.
: Die
Makrokonfigura
tion könnte
überlappt
werden, wenn
die
Sicherheitsfunk
tion einen von
der
Makrokonfigura
tion
angeforderten
Logikeingang
verwendet.
[Motorsynchr.] SYn xxox
[Konfigurationsübertr.] o: außer
[Energieeinspar.] nLd
sicherheitsrelevante
Parameter
xxox
o: außer
sicherheitsrelev
ante Parameter
o: außer
sicherheitsrele
vante
Parameter
o: außer
sicherheitsrele
vante
Parameter
Für weitere Informationen über diese Funktionen siehe die Programmieranleitung.
50 NVE50469 01/2017

A
Inhalt dieses Kapitels
ltivar 320
NVE50469 01/2017
Darstellung der Sicherheitsfunkt ion durch HMI
Kapitel 5
Darstellung der Sicherheitsfunktion durch HMI
Dieses Kapitel enthält die folgenden Themen:
Thema Seite
Status von Sicherheitsfunktionen 52
Spezielle HMI 52
Fehlercodebeschreibung 53
NVE50469 01/2017 51

Status von Sicherheitsfunktionen
Beschreibung
Der Status der Sicherheitsfunktionen kann mit der HMI des Frequenzumrichters oder mit der Inbetriebnahmesoftware angezeigt werden. Die HMI des Frequenzumrichters kann die lokale HMI am Produkt, das
Grafikterminal oder das externe Bedienterminal sein. Für jede Sicherheitsfunktion gibt es ein Register.
Siehe Einführung
(siehe Seite 12)
So greifen Sie mit einer HMI auf diese Register zu: [2 ÜBERWACHUNG] MOn- --> [ÜBERW.
SICHERHEIT] SAF-
[STO-Status] StOS: Status der Sicherheitsfunktion STO (Sicher abgeschaltetes Drehmoment)
[SLS-Status] SLSS: Status der Sicherheitsfunktion SLS (Sicher begrenzte Drehzahl)
[SS1-Status] SS1S: Status der Sicherheitsfunktion SS1 (Sicherer Stopp 1)
[SMS-Status] SMSS: Status der Sicherheitsfunktion SMS (Sichere maximale Drehzahl)
[GDL-Status] GDLS: Status der Sicherheitsfunktion GDL (Schutztürverriegelung)
Die Statusregister sind für keinerlei sicherheitsrelevante Nutzung zugelassen.
Für weitere Informationen über diese Register siehe ATV320 Visualization and Status of Safety Functions
(siehe Seite 91)
(Darstellung und Status von Sicherheitsfunktionen) auf www.schneider-electric.com.
Spezielle HMI
für weitere Informationen über die Sicherheitsfunktionen.
Beschreibung
Wenn eine Sicherheitsfunktion ausgelöst wurde, werden einige Informationen angezeigt.
Beispiel anhand der lokalen HMI des Produkts bei Auslösung der Sicherheitsfunktion SS1:
: Es werden abwechselnd der Name der Sicherheitsfunktion (SS1) und der aktuelle Anzeigeparameter
angezeigt, solange der Motor gemäß der festgelegten Auslauframpe ausläuft und bis er zum Stillstand
gekommen ist, . Nachdem der [Stillstandswert] SSSL erreicht wurde, wird die Sicherheitsfunktion
STO aktiviert und angezeigt.
52 NVE50469 01/2017

Fehlercodebeschreibung
Beschreibung
Wenn eine Sicherheitsfunktion einen Fehler erkennt, zeigt der Frequenzumrichter [Sicherheitsfehler]
(SAFF) an. Dieser erkannte Fehler kann erst nach Aus- und Wiedereinschalten des Frequenzumrichters
zurückgesetzt werden.
Wenn Sie mögliche Ursachen für die Fehlerauslösung anzeigen möchten, können Sie auf die Register
zugreifen.
Diese Register können am Grafikterminal oder mit der Inbetriebnahmesoftware angezeigt werden.
[UMRICHTERMENÜ] --> [ÜBERWACHUNG] --> [DIAGNOSE] --> [ERGÄNZ. FEHLERINFO]
SFFE [Fehlerregister Sicherheitsfunktion]
Bit Beschreibung
Bit0=1 Timeout beim Entprellen der Logikeingänge (Prüfen Sie den Wert für die Entprellzeit LIDT
Bit1 Reserviert
Bit2=1 Motordrehzahlvorzeichen während SS1-Rampe geändert
Bit3=1 Motorfrequenz hat während SS1-Rampe ihren Schwellwert erreicht.
Bit4 Reserviert
Bit5 Reserviert
Bit6=1 Motordrehzahlvorzeichen während SLS-Sicherheitsbegrenzung geändert
Bit7=1 Motorfrequenz hat während SLS ihren Schwellwert erreicht.
Bit8 Reserviert
Bit9 Reserviert
Bit10 Reserviert
Bit11 Reserviert
Bit12 Reserviert
Bit13=1 Messung der Motordrehzahl nicht möglich. (Prüfen Sie die Motorverdrahtung.)
Bit14=1 Erdschluss Motor erkannt. (Prüfen Sie die Motorverdrahtung.)
Bit15=1 Kurzschluss Motor erkannt. (Prüfen Sie die Motorverdrahtung.)
gemäß der Anwendung.)
Dieses Register wird nach Aus- und Wiedereinschalten der Spannungsversorgung zurückgesetzt.
Auf dieses Register können Sie auch zugreifen unter [UMRICHTERMENÜ] --> [ÜBERWACHUNG] -->
[ÜBERW.].[ SICHERHEIT]
NVE50469 01/2017 53

SAF1 [Sicherheitsfehlerregister 1]
Dies ist ein Fehlerregister der Anwendungssteuerung.
Bit Beschreibung
Bit0=1 Fehler bei PWRM-Konsistenz erkannt
Bit1=1 Fehler in Parametern von Sicherheitsfunktionen erkannt
Bit2=1 Der automatische Test der Anwendung hat einen Fehler erkannt.
Bit3=1 Die Diagnoseüberprüfung der Sicherheitsfunktion hat einen Fehler erkannt.
Bit4=1 Die Diagnosefunktion der Logikeingänge hat einen Fehler erkannt.
Bit5=1 Die Sicherheitsfunktion SMS oder GDL hat einen Fehler erkannt. Siehe { SF04}
Bit6=1 Anwendungs-Watchdog-Management aktiv
Bit7=1 Fehler in Motorsteuerung erkannt
Bit8=1 Fehler in interner serieller Verbindung erkannt
Bit9=1 Fehler bei Aktivierung der Logikeingänge erkannt
Bit10=1 Die Funktion „Sicher abgeschaltetes Drehmoment“ hat einen Fehler ausgelöst.
Bit11=1 Die Anwendungsschnittstelle hat einen Fehler der Sicherheitsfunktionen erkannt.
Bit12=1 Die Funktion „Sicherer Stopp 1“ hat einen Fehler der Sicherheitsfunktionen erkannt.
Bit13=1 Die Funktion „Sicher begrenzte Drehzahl“ hat einen Fehler ausgelöst.
Bit14=1 Die Motordaten sind beschädigt.
Bit15=1 Fehler im Datenfluss der internen seriellen Verbindung erkannt
Sicherheitsfehler-Unterregister 04
(siehe Seite 57)
für Details.
Dieses Register wird nach Aus- und Wiedereinschalten der Spannungsversorgung zurückgesetzt.
SAF2 [Sicherheitsfehlerregister 2]
Dies ist ein Fehlerregister der Motorsteuerung.
Bit Beschreibung
Bit0=1 Die Konsistenzüberprüfung der Statorfrequenz hat einen Fehler erkannt.
Bit1=1 Fehler in Statorfrequenzberechnung erkannt
Bit2=1 Motorsteuerungs-Watchdog-Management ist aktiv
Bit3=1 Motorsteuerungs-Hardware-Watchdog ist aktiv
Bit4=1 Der automatische Test der Motorsteuerung hat einen Fehler erkannt.
Bit5=1 Fehler beim Kettentest erkannt
Bit6=1 Fehler in interner serieller Verbindung erkannt
Bit7=1 Fehler durch direkten Kurzschluss erkannt
Bit8=1 Fehler in PWM des Frequenzumrichters erkannt
Bit9=1 Interner Fehler der Sicherheitsfunktion GDL
Bit10 Reserviert
Bit11=1 Die Anwendungsschnittstelle hat einen Fehler der Sicherheitsfunktionen erkannt.
Bit12 Reserviert
Bit13 Reserviert
Bit14=1 Die Motordaten sind beschädigt.
Bit15=1 Fehler im Datenfluss der internen seriellen Verbindung erkannt
Dieses Register wird nach Aus- und Wiedereinschalten der Spannungsversorgung zurückgesetzt.
54 NVE50469 01/2017

SF00 [Sicherheitsfehler-Unterregister 00]
Dies ist ein Fehlerregister des automatischen Tests der Anwendung.
Bit Beschreibung
Bit0 Reserviert
Bit1=1 RAM-Stapelüberlauf
Bit2=1 Fehler in Integrität der RAM-Adresse erkannt
Bit3=1 Fehler beim Zugriff auf RAM-Daten erkannt
Bit4=1 Fehler in Flash-Prüfsumme erkannt
Bit5 Reserviert
Bit6 Reserviert
Bit7 Reserviert
Bit8 Reserviert
Bit9=1 Fasttask-Überlauf
Bit10=1 Slowtask-Überlauf
Bit11=1 Application Task-Überlauf
Bit12 Reserviert
Bit13 Reserviert
Bit14=1 Die PWRM-Zeile wird während der Initialisierungsphase nicht aktiviert.
Bit15=1 Anwendungs-Hardware-Watchdog wird nach der Initialisierungsphase nicht ausgeführt.
Dieses Register wird nach Aus- und Wiedereinschalten der Spannungsversorgung zurückgesetzt.
NVE50469 01/2017 55

SF01 [Sicherheitsfehler-Unterregister 01]
Dies ist ein Diagnosefehlerregister für Logikeingänge.
Bit Beschreibung
Bit0=1 Management – Fehler in Zustandsmaschine erkannt
Bit1=1 Zur Testverwaltung erforderliche Daten sind beschädigt.
Bit2=1 Fehler bei der Kanalauswahl erkannt
Bit3=1 Test – Fehler in Zustandsmaschine erkannt
Bit4=1 Testanforderung ist beschädigt.
Bit5=1 Zeiger für das Prüfverfahren ist beschädigt.
Bit6=1 Falsche Testaktion bereitgestellt
Bit7=1 Fehler beim Sammeln der Ergebnisse erkannt
Bit8=1 Fehler an LI3 erkannt; Sicherheitsfunktion kann nicht aktiviert werden.
Bit9=1 Fehler an LI4 erkannt; Sicherheitsfunktion kann nicht aktiviert werden.
Bit10=1 Fehler an LI5 erkannt; Sicherheitsfunktion kann nicht aktiviert werden.
Bit11=1 Fehler an LI6 erkannt; Sicherheitsfunktion kann nicht aktiviert werden.
Bit12=1 Die Testsequenz wurde während laufender Diagnose aktualisiert.
Bit13=1 Fehler in Testtypmanagement erkannt
Bit14 Reserviert
Bit15 Reserviert
Dieses Register wird nach Aus- und Wiedereinschalten der Spannungsversorgung zurückgesetzt.
SF02 [Sicherheitsfehler-Unterregister 02]
Dies ist ein Register für erkannte Fehler des Anwendungs-Watchdog-Managements.
Bit Beschreibung
Bit0=1 Fehler in Fasttask erkannt
Bit1=1 Fehler in Slowtask erkannt
Bit2=1 Fehler in Application Task erkannt
Bit3=1 Fehler in Background Task erkannt
Bit4=1 Fehler in Fasttask/Eingang der Sicherheitsfunktion erkannt
Bit5=1 Fehler in Slowtask/Eingang der Sicherheitsfunktion erkannt
Bit6=1 Fehler in Application Task/Eingängen der Sicherheitsfunktion erkannt
Bit7=1 Fehler in Application Task/Behandlung der Sicherheitsfunktion erkannt
Bit8=1 Fehler in Background Task der Sicherheitsfunktion erkannt
Bit9 Reserviert
Bit10 Reserviert
Bit11 Reserviert
Bit12 Reserviert
Bit13 Reserviert
Bit14 Reserviert
Bit15 Reserviert
Dieses Register wird nach Aus- und Wiedereinschalten der Spannungsversorgung zurückgesetzt.
56 NVE50469 01/2017

SF03 [Sicherheitsfehler-Unterregister 03]
Bit Beschreibung
Bit0=1 Timeout beim Entprellen
Bit1=1 Eingang nicht konsistent
Bit2=1 Konsistenzüberprüfung – Fehler in Statusmaschine erkannt
Bit3=1 Konsistenzüberprüfung – Entprell-Timeout beschädigt
Bit4=1 Fehler in Reaktionszeitdaten erkannt
Bit5=1 Reaktionszeit beschädigt
Bit6=1 Nicht definierter Consumer abgefragt
Bit7=1 Fehler in Konfiguration erkannt
Bit8=1 Die Eingänge befinden sich nicht im Nennmodus.
Bit9 Reserviert
Bit10 Reserviert
Bit11 Reserviert
Bit12 Reserviert
Bit13 Reserviert
Bit14 Reserviert
Bit15 Reserviert
Dieses Register wird nach Aus- und Wiedereinschalten der Spannungsversorgung zurückgesetzt.
SF04 [Sicherheitsfehler-Unterregister 04]
Dies ist ein Register für erkannte Fehler zur Funktion [Sicher abgeschaltetes Drehmoment] STO.
Bit Beschreibung
Bit0=1 Kein Signal konfiguriert
Bit1=1 Fehler in Statusmaschine erkannt
Bit2=1 Fehler in internen Daten erkannt
Bit3 Reserviert
Bit4 Reserviert
Bit5 Reserviert
Bit6 Reserviert
Bit7 Reserviert
Bit8=1 SMS-Überdrehzahlfehler erkannt
Bit9=1 SMS-interner Fehler erkannt
Bit10 Reserviert
Bit11 Reserviert
Bit12=1 GDL-interner Fehler erkannt 1
Bit13=1 GDL-interner Fehler erkannt 2
Bit14 Reserviert
Bit15 Reserviert
Dieses Register wird nach Aus- und Wiedereinschalten der Spannungsversorgung zurückgesetzt.
NVE50469 01/2017 57

SF05 [Sicherheitsfehler-Unterregister 05]
Dies ist ein Register für erkannte Fehler zur Funktion [Sicherer Stopp 1] SS1.
Bit Beschreibung
Bit0=1 Fehler in Statusmaschine erkannt
Bit1=1 Motordrehzahlvorzeichen während Halt geändert
Bit2=1 Die Motordrehzahl hat den Schwellwert Motorfrequenz erreicht.
Bit3=1 Theoretische Motordrehzahl beschädigt
Bit4=1 Nicht autorisierte Konfiguration
Bit5=1 Fehler in Berechnung der theoretischen Motordrehzahl erkannt
Bit6 Reserviert
Bit7=1 Überprüfung des Drehzahlvorzeichens: Fehler bei Konsistenz erkannt
Bit8=1 Interne SS1-Anfrage beschädigt
Bit9 Reserviert
Bit10 Reserviert
Bit11 Reserviert
Bit12 Reserviert
Bit13 Reserviert
Bit14 Reserviert
Bit15 Reserviert
Dieses Register wird nach Aus- und Wiedereinschalten der Spannungsversorgung zurückgesetzt.
SF06 [Sicherheitsfehler-Unterregister 06]
Dies ist ein Register für erkannte Fehler zur Funktion [Sicher begrenzte Drehzahl] SLS.
Bit Beschreibung
Bit0=1 Fehler in Statusmaschine erkannt
Bit1=1 Motordrehzahlvorzeichen während Begrenzung geändert
Bit2=1 Die Motordrehzahl hat den Schwellwert Motorfrequenz erreicht.
Bit3=1 Daten beschädigt
Bit4 Reserviert
Bit5 Reserviert
Bit6 Reserviert
Bit7 Reserviert
Bit8 Reserviert
Bit9 Reserviert
Bit10 Reserviert
Bit11 Reserviert
Bit12 Reserviert
Bit13 Reserviert
Bit14 Reserviert
Bit15 Reserviert
Dieses Register wird nach Aus- und Wiedereinschalten der Spannungsversorgung zurückgesetzt.
58 NVE50469 01/2017

SF07 [Sicherheitsfehler-Unterregister 07]
Dies ist ein Register für erkannte Fehler des Anwendungs-Watchdog-Managements.
Bit Beschreibung
Bit0 Reserviert
Bit1 Reserviert
Bit2 Reserviert
Bit3 Reserviert
Bit4 Reserviert
Bit5 Reserviert
Bit6 Reserviert
Bit7 Reserviert
Bit8 Reserviert
Bit9 Reserviert
Bit10 Reserviert
Bit11 Reserviert
Bit12 Reserviert
Bit13 Reserviert
Bit14 Reserviert
Bit15 Reserviert
Dieses Register wird nach Aus- und Wiedereinschalten der Spannungsversorgung zurückgesetzt.
SF08 [Sicherheitsfehler-Unterregister 08]
Dies ist ein Register für erkannte Fehler des Anwendungs-Watchdog-Managements.
Bit Beschreibung
Bit0=1 Fehler in PWM Task erkannt
Bit1=1 Fehler in Fixed Task erkannt
Bit2=1 Fehler in ATMC-Watchdog erkannt
Bit3=1 Fehler in DYNFCT-Watchdog erkannt
Bit4 Reserviert
Bit5 Reserviert
Bit6 Reserviert
Bit7 Reserviert
Bit8 Reserviert
Bit9 Reserviert
Bit10 Reserviert
Bit11 Reserviert
Bit12 Reserviert
Bit13 Reserviert
Bit14 Reserviert
Bit15 Reserviert
Dieses Register wird nach Aus- und Wiedereinschalten der Spannungsversorgung zurückgesetzt.
NVE50469 01/2017 59

SF09 Sicherheitsfehler-Unterregister 09
Dies ist ein Register für erkannte Fehler des automatischen Tests der Motorsteuerung.
Bit Beschreibung
Bit0 Reserviert
Bit1=1 RAM-Stapelüberlauf
Bit2=1 Fehler in Integrität der RAM-Adresse erkannt
Bit3=1 Fehler beim Zugriff auf RAM-Daten erkannt
Bit4=1 Fehler in Flash-Prüfsumme
Bit5 Reserviert
Bit6 Reserviert
Bit7 Reserviert
Bit8 Reserviert
Bit9=1 Task-Überlauf 1 ms
Bit10=1 PWM Task-Überlauf
Bit11=1 Fixed Task-Überlauf
Bit12 Reserviert
Bit13 Reserviert
Bit14=1 Unbeabsichtigte Unterbrechung
Bit15=1 Hardware-Watchdog wird nach der Initialisierungsphase nicht ausgeführt.
Dieses Register wird nach Aus- und Wiedereinschalten der Spannungsversorgung zurückgesetzt.
SF10 [Sicherheitsfehler-Unterregister 10]
Dies ist ein Register für erkannte Fehler durch direkten Kurzschluss der Motorsteuerung.
Bit Beschreibung
Bit0=1 Erdschluss – Fehler in Konfiguration erkannt
Bit1=1 Kurzschluss – Fehler in Konfiguration erkannt
Bit2=1 Erdschluss
Bit3=1 Kurzschluss
Bit4 Reserviert
Bit5 Reserviert
Bit6 Reserviert
Bit7 Reserviert
Bit8 Reserviert
Bit9 Reserviert
Bit10 Reserviert
Bit11 Reserviert
Bit12 Reserviert
Bit13 Reserviert
Bit14 Reserviert
Bit15 Reserviert
Dieses Register wird nach Aus- und Wiedereinschalten der Spannungsversorgung zurückgesetzt.
60 NVE50469 01/2017
SF11 [Sicherheitsfehler-Unterregister 11]
Dies ist ein Register für erkannte Fehler der dynamischen Aktivitätsüberprüfung der Motorsteuerung.
Bit Beschreibung
Bit0=1 Die Anwendung hat eine Diagnose des direkten Kurzschlusses angefordert.
Bit1=1 Die Anwendung hat eine Konsistenzprüfung der Statorfrequenzberechnung (Spannung und
Bit2=1 Die Anwendung hat eine Diagnose der von der Motorsteuerung gelieferten Drehzahlstatistik
Bit3 Reserviert
Bit4 Reserviert
Bit5 Reserviert
Bit6 Reserviert
Bit7 Reserviert
Bit8=1 Die Motorsteuerungsdiagnose des direkten Kurzschlusses ist aktiviert.
Bit9=1 Die Motorsteuerungs-Konsistenzüberprüfung der Statorfrequenzberechnung ist aktiviert.
Bit10=1 Die Motorsteuerungsdiagnose der von der Motorsteuerung gelieferten Drehzahlstatistik ist
Bit11 Reserviert
Bit12 Reserviert
Bit13 Reserviert
Bit14 Reserviert
Bit15 Reserviert
Strom) angefordert.
angefordert.
aktiviert.
Dieses Register wird nach Aus- und Wiedereinschalten der Spannungsversorgung zurückgesetzt.
NVE50469 01/2017 61

62 NVE50469 01/2017

A
Inhalt dieses Kapitels
ltivar 320
NVE50469 01/2017
Technische Daten
Kapitel 6
Technische Daten
Dieses Kapitel enthält die folgenden Themen:
Thema Seite
Elektrische Daten 64
Einrichtung und Betrieb der Sicherheitsfunktion 65
Leistungsmerkmale von Sicherheitsfunktionen 66
Entprellzeit und Reaktionszeit 69
NVE50469 01/2017 63

Elektrische Daten
Logiktyp
Verdrahtungsschema
Die Logikeingänge und -ausgänge des Frequenzumrichters können für Logiktyp 1 oder Logiktyp 2
verdrahtet werden.
Logiktyp Aktiver Status
1 Ausgang zieht Strom (Sink = Senke)
Strom fließt zum Eingang
2 Ausgangsversorgung erfolgt durch Eingangsstrom
Strom (Source = Quelle)
Sicherheitsfunktionen dürfen nur im „Source“-Modus verwendet werden.
Die Signaleingänge sind vor Verpolung geschützt, die Ausgänge vor Kurzschlüssen. Die Ein- und
Ausgänge sind galvanisch getrennt.
64 NVE50469 01/2017

Einrichtung und Betrieb der Sicherheitsfunktion
Logikeingang
Allgemeine logische Eingänge können zur Auslösung einer Sicherheitsfunktion verwendet werden.
Logikeingänge müssen paarweise kombiniert werden, um eine redundante Anforderung zu erhalten. Nur
vier allgemeine logische Eingänge sind mit Sicherheitsfunktionen verknüpfbar: LI3, LI4, LI5, LI6. Die
Logikeingangs-Paare sind wie folgt festgelegt:
LI3 und LI4
LI5 und LI6
Eine weitere Kombination ist nur für die STO-Funktion zulässig: LI3 und STO.
Logikeingangs-Paare sind erst dann zuweisbar, wenn sie mit einer Sicherheitsfunktion verknüpft sind.
Wenn Sie eine Sicherheitsfunktion an einem Logikeingang einrichten, können Sie an diesem Logikeingang
keine andere Funktion (sicherheitsrelevant oder nicht) einrichten. Wenn Sie eine nicht sicherheitsrelevante
Funktion an einem Logikeingang einrichten, können Sie an diesem Logikeingang keine Sicherheitsfunktion einrichten.
SISTEMA-Software
Die SISTEMA-Software ermöglicht Maschinenentwicklern und Prüfern sicherheitsrelevanter Maschinensteuerungen die Bewertung des Sicherheitsstandards bzw. der Sicherheitsstufe ihrer Maschine gemäß
IEC 13849-1. Mit diesem Tool können Sie auf Basis der Zielarchitekturen die Struktur der sicherheitsrelevanten Steuerungskomponenten modellieren. Dies ermöglicht die automatische Berechnung der
Zuverlässigkeitsstandards mit unterschiedlicher Detailtreue, einschließlich der Leistungsstufe
(Performance Level, PL).
Die ATV320 Bibliotheken sind unter www.schneider-electric.com verfügbar.
Preventa Sicherheitsrelais
Diese Sicherheitsrelais kommen bei der Einrichtung komplexer Sicherheitsfunktionen in Maschinen zum
Einsatz, wo sie zur Verwaltung der E/A sowie zum Schutz von Bediener und Maschine dienen.
Die Preventa Produktfamilie nutzt Mikroprozessor-basierte Technologie, die nach dem Prinzip der
Redundanz funktioniert, und ist für den sicheren Betrieb gefährlicher Maschinen unverzichtbar.
NVE50469 01/2017 65

Leistungsmerkmale von Sicherheitsfunktionen
Die Sicherheitsfunktionen von PDS (SR) sind Teil eines globalen Systems.
Wenn die durch die Endanwendung vorgegebenen qualitativen und quantitativen Ziele Einstellungen
erfordern, um die Sicherheitsfunktionen auf sichere Weise ausführen zu können, dann liegt die
Verantwortung für diese zusätzlichen Entwicklungselemente (z. B. Management der mechanischen
Motorbremse) beim Integrator des BDM (Basic Drive Module, grundlegendes Frequenzumrichtermodul).
Zudem werden die bei der Verwendung von Sicherheitsfunktionen erzeugten Ausgabedaten (Fehlerrelaisaktivierung, Anzeige von Fehlercodes oder -informationen usw.) nicht als Sicherheitsinformationen
betrachtet.
Konfiguration der Maschinenanwendung
STO SS1-Typ C (5) SLS-/STO-
STO STO und LI3 STO mit Preventa
IEC 61800-5-2 /
IEC 61508 /
IEC 62061 (1) SIL2 SIL3 CL SIL2 CL SIL3 CL SIL2 CL
IEC 62061 (2) Kategorie 3 Kategorie 4 Kategorie 3 Kategorie 4 Kategorie 3
Standard
ISO 13849-1 (3) PL d PL e PL d PL e PL d
IEC 60204-1 (4) Stoppkategorie 0 Stoppkategorie 0 Stoppkategorie 1 Stoppkategorie 1
SIL2 SIL3 SIL2 SIL3 SIL2
XPS ATE oder
XPS AV oder
äquivalent
STO und LI3 mit
Preventa
XPS AV oder
äquivalent
/SS1-/SMSTyp B (6)
LI3
LI5
LI4
LI6
(1) Da es sich bei der Richtlinie IEC 62061 um einen Integrationsstandard handelt, unterscheidet die
Richtlinie zwischen der globalen Sicherheitsfunktion (d.h. Klassifizierung gemäß SIL2 oder SIL3 für
ATV320) gemäß den Diagrammen Prozesssystem SF - Fall 1 und Prozesssystem SF - Fall 2) und
Komponenten, welche die Sicherheitsfunktion darstellen (d.h. Klassifizierung gemäß SIL2 CL oder SIL3
CL für ATV320).
(2) Gemäß Tabelle 6 der Richtlinie IEC 62061 (2005).
(3) Gemäß Tabelle 4 der Richtlinie EN 13849-1 (2008).
(4) Wenn ein Schutz vor Ausfall der Spannungsversorgung oder Spannungsreduzierung und anschlie-
ßender Wiederherstellung gemäß IEC 60204-1 erforderlich ist, muss ein Sicherheitsmodul des Typs
Preventa XPS AF oder äquivalent verwendet werden.
(5) SS1-Typ C: Das Leistungsantriebssystem initiiert den Motorauslauf und leitet nach Ablauf einer
anwendungsspezifischen Zeitverzögerung die STO-Funktion ein.
(6) SS1-Typ B: Das Leistungsantriebssystem initiiert und überwacht die Motorauslaufrate innerhalb
festgelegter Grenzen, um den Motor zu stoppen, und leitet die STO-Funktion ein, wenn die Motordrehzahl
unter einen festgelegten Grenzwert fällt.
66 NVE50469 01/2017

Konfiguration der Prozessanwendung
IEC 61800-5-2
IEC 61508
IEC 62061 (1) SIL2 CL SIL3 CL SIL2 CL SIL3 CL SIL2 CL
Standard
(1) Da es sich bei der Richtlinie IEC 62061 um einen Integrationsstandard handelt, unterscheidet die
Richtlinie zwischen der globalen Sicherheitsfunktion (d.h. Klassifizierung gemäß SIL2 oder SIL3 für
ATV320) gemäß den Diagrammen FALL 1 und FALL 2 und Komponenten, welche die Sicherheitsfunktion
darstellen (d.h. Klassifizierung gemäß SIL2 CL oder SIL3 CL für ATV320).
(2) SS1-Typ C: Das Leistungsantriebssystem initiiert den Motorauslauf und leitet nach Ablauf einer
anwendungsspezifischen Zeitverzögerung die STO-Funktion ein.
(3) SS1-Typ B: Das Leistungsantriebssystem initiiert und überwacht die Motorauslaufrate innerhalb
festgelegter Grenzen, um den Motor zu stoppen, und leitet die STO-Funktion ein, wenn die Motordrehzahl
unter einen festgelegten Grenzwert fällt.
Eingangssignale der Sicherheitsfunktionen
Eingangssignale der Sicherheitsfunktionen Einheiten Wert für LI3 bis LI6 Wert für STO
Logik 0 (Ulow) V < 5 < 2
Logik 1 (Uhigh) V > 11 > 17
Impedanz (24V) kΩ 3,5 1,5
Entprellzeit ms < 1 < 1
Reaktionszeit der Sicherheitsfunktion ms < 10 < 10
STO SS1-Typ C (2) SLS-/STO-/SS1-/SMS-
Typ B (3)
STO STO und LI3 STO mit Preventa
XPS ATE oder XPS
AV oder äquivalent
SIL2 SIL3 SIL2 SIL3 SIL2
STO und LI3
mit Preventa
XPS AV oder
äquivalent
LI3 LI4 LI5 LI6
NVE50469 01/2017 67

Synthese der Machbarkeitsstudie
Funktion Standard Eingang STO-
Eingang
STO-Eingang &
LI3
LI3 & LI4 oder LI5 & LI6
STO IEC 61508 Ausg. 2SFF 96,7% 96% 94,8%
PFD
PFD
PFH
10y
1y
equ_1y
7,26.10-4 4,00.10-4
7,18.10-5 3,92.10-5
2,44.10
2,33.10
8,20 FIT (1) 4,47 FIT (1) 26,6 FIT (1)
Typ B B B
HFT 1 1 0
DC 93,1% 91,5% 90%
SIL-Fähigkeit 2 3 2
IEC 62061 (1) SIL CL-Fähigkeit 2 3 2
IEC 62061 (3) Kategorie 3 4 3
ISO 13849-1 (4) PL d e d
SS1 Typ B
SLS
SMS
3
in Jahren
MTTFd
IEC 61508 Ausg. 2SFF 93,3%
PFD
10y
PFH
equ_10y
13900 L1 3850L2 29300 4290
2,72.10
31.1 FIT (1)
Typ B
HFT 0
DC 78,7%
SIL-Fähigkeit 2
IEC 62061 (2) SIL CL-Fähigkeit 2
IEC 62061 (3) Kategorie 3
ISO 13849-1 (4) PL d
MTTFd
3
in Jahren
3670
-3
-4
-3
Funktion Standard Eingang STO-
Eingang
STO-Eingang &
LI3
LO1
GDL IEC 61508 Ausg. 2SFF 85%
PFD
PFD
equ1y
equ10y
8,2.10
8,2.10
-4
-3
PFH 187 FIT (1)
Typ B
HFT 0
DC 71%
SIL-Fähigkeit 1
IEC 62061 (2) SIL CL-Fähigkeit 1
IEC 62061 (3) Kategorie 2
ISO 13849-1 (4) PL c
MTTFd
(1) FIT: Ausfälle über die Zeit = 10
3
in Jahren
-9
Ausfälle pro Stunde.
609
(2) Da es sich bei der Richtlinie IEC 62061 um einen Integrationsstandard handelt, unterscheidet die
Richtlinie zwischen der globalen Sicherheitsfunktion (d.h. Klassifizierung gemäß SIL2 oder SIL3 für
ATV320) gemäß den Diagrammen Prozesssystem SF - Fall 1 und Prozesssystem SF - Fall 2) und
Komponenten, welche die Sicherheitsfunktion darstellen (d.h. Klassifizierung gemäß SIL2 CL oder SIL3
CL für ATV320).
(3) Gemäß Tabelle 6 der Richtlinie IEC 62061 (2005).
(4) Gemäß Tabelle 4 der Richtlinie EN 13849-1 (2008).
68 NVE50469 01/2017

Eine vorbeugende jährliche Aktivierung der Sicherheitsfunktion wird empfohlen.
Die Sicherheitsstufen werden jedoch mit geringeren Margen ohne jährliche Aktivierung erreicht.
Die Maschinenumgebung erfordert das Sicherheitsmodul für die STO-Funktion.
Um die Verwendung eines Sicherheitsmoduls zu vermeiden, müssen die Parameter der Funktion
„Neustart“ Teil der Sicherheitsfunktion sein.
Siehe Details zur Zweckmäßigkeit des Sicherheitsmoduls.
HINWEIS: Die obige Tabelle reicht nicht für die Bewertung der Leistungsstufe (PL) eines PDS aus. Die PL-
Bewertung muss auf Systemebene erfolgen. Der Installateur oder Integrator des BDM (Basic Drive
Module, grundlegendes Frequenzumrichtermodul) muss bei der Bewertung der System-PL Sensordaten
mit Zahlen aus der obigen Tabelle mit einbeziehen.
Entprellzeit und Reaktionszeit
Beschreibung
Im ATV320 dienen zwei Parameter zur Konfiguration von Logikeingängen für Sicherheitsfunktionen (LI3,
LI4, LI5, LI6).
Die Konsistenz der einzelnen Logikeingangspaare wird kontinuierlich geprüft.
[LI-Entprellzeit] LIdt: Zwischen LI3/LI4 oder LI5/LI6 ist für die Dauer der Entprellzeit ein unterschied-
licher logischer Status erlaubt. Ansonsten wird ein Fehler aktiviert.
[LI-Reaktionszeit] LIrt: Die Logikeingang-Reaktionszeit steuert die Verzögerung bis zur Aktivierung
der Sicherheitsfunktion.
: Logikeingang-Reaktionszeit
: Logikeingang-Entprellzeit
NVE50469 01/2017 69

70 NVE50469 01/2017

A
Inhalt dieses Kapitels
ltivar 320
NVE50469 01/2017
Zertifizierte Architekturen
Kapitel 7
Zertifizierte Architekturen
Dieses Kapitel enthält die folgenden Themen:
Thema Seite
Einführung 72
Mehrfachantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 1 73
Mehrfachantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 2 74
Mehrfachantrieb ohne Sicherheitsmodul 75
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AV – Fall 1 76
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AV – Fall 2 77
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 1 78
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 2 79
Einzelantrieb gemäß IEC 61508 und IEC 60204-1 – Fall 1 80
Einzelantrieb gemäß IEC 61508 und IEC 60204-1 – Fall 2 81
Einzelantrieb gemäß IEC 61508 und IEC 62061 mit der Sicherheitsfunktion GDL 82
NVE50469 01/2017 71

Einführung
Zertifizierte Architekturen
HINWEIS: Für die Zertifizierung hinsichtlich funktionaler Aspekte wird nur das PDS (SR) (für sicherheitsrelevante Anwendungen geeignetes Leistungsantriebssystem) berücksichtigt, nicht jedoch das komplette
System, in das es integriert wird, um dazu beizutragen, die funktionale Sicherheit einer Maschine bzw.
eines Systems/Prozesses zu gewährleisten.
Nachfolgend sind die zertifizierten Architekturen aufgeführt:
Mehrfachantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 1
Mehrfachantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 2
Mehrfachantrieb ohne Sicherheitsmodul
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AV – Fall 1
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AV – Fall 2
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 1
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 2
Einzelantrieb gemäß IEC 61508 und IEC 60204-1 – Fall 1
Einzelantrieb gemäß IEC 61508 und IEC 60204-1 – Fall 2
Die Sicherheitsfunktionen des PDS (SR) sind Teil eines globalen Systems.
Wenn die durch die Endanwendung vorgegebenen qualitativen und quantitativen sicherheitsrelevanten
Ziele Einstellungen erfordern, um die Sicherheitsfunktionen auf sichere Weise ausführen zu können, dann
liegt die Verantwortung für diese zusätzlichen Entwicklungselemente (z. B. Management der
mechanischen Motorbremse) beim Integrator des BDM (Basic Drive Module, grundlegendes
Frequenzumrichtermodul).
Zudem werden die bei der Verwendung von Sicherheitsfunktionen erzeugten Ausgabedaten (Fehlerrelaisaktivierung, Anzeige von Fehlercodes oder -informationen usw.) nicht als Sicherheitsinformationen
betrachtet.
72 NVE50469 01/2017

Mehrfachantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 1
Mehrfachantrieb mit Sicherheitsmodul des Typs Preventa XPS AF gemäß EN 954-1, IEC 13849-1 und IEC 60204-1
(Maschine)
Die folgenden Konfigurationen entsprechen dem Schaltschema unten:
Maschine mit STO-Kategorie 4, PL e/ SIL3 mit Sicherheitsmodul des Typs Preventa XPS AF oder
äquivalent und LI3 auf STO gesetzt.
SLS-Kategorie 3, PL d/SIL2 oder SS1 Typ B Kategorie 3 an LI5/LI6.
Oder
Maschine mit STO-Kategorie 4, PL e/ SIL3 mit Sicherheitsmodul des Typs Preventa XPS AF oder
äquivalent und LI3 auf STO gesetzt.
LI4 und LI5/LI6 sind nicht auf eine Sicherheitsfunktion eingestellt.
(1) Bremswiderstand (sofern verwendet), (2) Standardisiertes Koaxial-Kabel, Typ RG174/U gemäß MILC17 oder KX3B gemäß NF C 93-550, Außendurchmesser 2,54 mm, maximale Länge 15 m. Die
Kabelschirmung muss geerdet sein. (3) Netzdrossel (sofern verwendet), (4) Mehrfach-Antrieb ist mit einem
anderen Frequenzrichter möglich (Beispiel: ATV71 mit PWR-Anschluss oder Lexium Servoverstärker).
HINWEIS: Weitere Informationen über die Merkmale der Steuerklemme entnehmen Sie bitte der
Installationsanleitung.
NVE50469 01/2017 73

Mehrfachantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 2
Mehrfachantrieb mit Sicherheitsmodul des Typs Preventa XPS AF gemäß EN 954-1, IEC 13849-1 und IEC 60204-1
(Maschine)
Die folgenden Konfigurationen entsprechen dem Schaltschema unten:
Maschine mit STO-Kategorie 3, PL d/SIL3 mit Sicherheitsmodul des Typs Preventa XPS AF oder
äquivalent.
SLS-Kategorie 3, PL d/SIL2 oder SS1 Typ B Kategorie 3 an LI3/LI4 oder LI5/LI6.
(1) Bremswiderstand (sofern verwendet), (2) Standardisiertes Koaxial-Kabel, Typ RG174/U gemäß MILC17 oder KX3B gemäß NF C 93-550, Außendurchmesser 2,54 mm, maximale Länge 15 m. Die
Kabelschirmung muss geerdet sein. (3) Netzdrossel (sofern verwendet), (4) Mehrfach-Antrieb ist mit einem
anderen Frequenzrichter möglich (Beispiel: ATV71 mit PWR-Anschluss oder Lexium Servoverstärker).
HINWEIS: Weitere Informationen über die Merkmale der Steuerklemme entnehmen Sie bitte der
Installationsanleitung.
74 NVE50469 01/2017
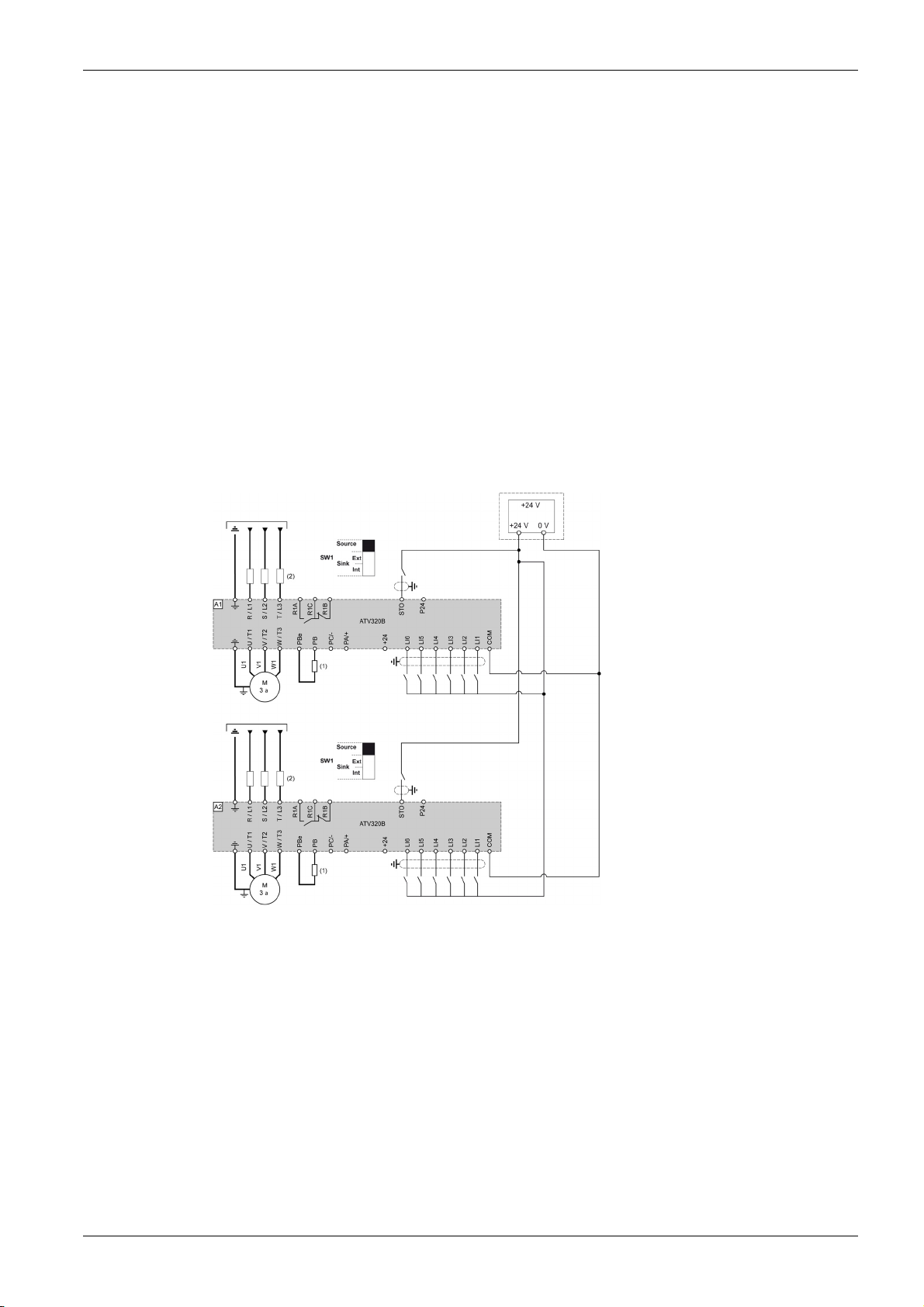
Mehrfachantrieb ohne Sicherheitsmodul
Mehrfachantrieb ohne Sicherheitsmodul des Typs Preventa XPS AF gemäß IEC 61508
Die folgenden Konfigurationen entsprechen dem Schaltschema unten:
STO SIL2 an STO.
SLS SIL2 oder SS1 Typ B SIL2 an LI3/LI4 oder LI5/LI6.
Oder
STO SIL2 an STO.
SLS oder SS1 Typ B an LI3/LI4
LI5/LI6 ist nicht auf eine Sicherheitsfunktion eingestellt.
Oder
STO SIL2 an STO.
LI3/LI4 und LI5/LI6 sind nicht auf eine Sicherheitsfunktion eingestellt.
Oder
STO SIL3 an STO und LI3.
SLS SIL2 oder SS1 Typ B SIL2 an LI5/LI6.
LI4 ist nicht auf eine Sicherheitsfunktion eingestellt.
Oder
STO SIL3 an STO und LI3.
LI4 und LI5/LI6 sind nicht auf eine Sicherheitsfunktion eingestellt.
(1) Bremswiderstand (sofern verwendet), (2) Netzdrosseln (sofern verwendet).
HINWEIS: Weitere Informationen über die Merkmale der Steuerklemme entnehmen Sie bitte der
Installationsanleitung.
NVE50469 01/2017 75

Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AV – Fall 1
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AV gemäß EN 954-1, IEC 13849-1 und IEC 60204-1 (Maschine)
Die folgenden Konfigurationen entsprechen dem Schaltschema unten:
SS1 Typ C Kategorie 3, PL d/ SIL2 an STO mit Sicherheitsmodul des Typs Preventa XPS AV oder
äquivalent.
Oder
SS1 Typ C Kategorie 3, PL d/ SIL2 an STO mit Sicherheitsmodul des Typs Preventa XPS AV oder
äquivalent.
SLS-Kategorie 3, PL d/SIL2 oder SS1 Typ B Kategorie 3 an LI3/LI4.
LI5/LI6 ist nicht auf eine Sicherheitsfunktion eingestellt.
Oder
SS1 Typ C Kategorie 3, PL d/SIL2 an STO und LI3 mit Sicherheitsmodul des Typs Preventa XPS AV
oder äquivalent.
LI3/LI4 und LI5/LI6 sind nicht auf eine Sicherheitsfunktion eingestellt.
(1) Logik Kanal, (2) Logik Kanal 2, (3) Ausgang 1, (4) Ausgang 2, (5) Not-Aus, (6) Start, (7) Zeitverzögerung Stopp, (8) Bremswiderstand (sofern verwendet), (9) Netzdrosseln (sofern verwendet).
HINWEIS: Weitere Informationen über die Merkmale der Steuerklemme entnehmen Sie bitte der
Installationsanleitung.
76 NVE50469 01/2017
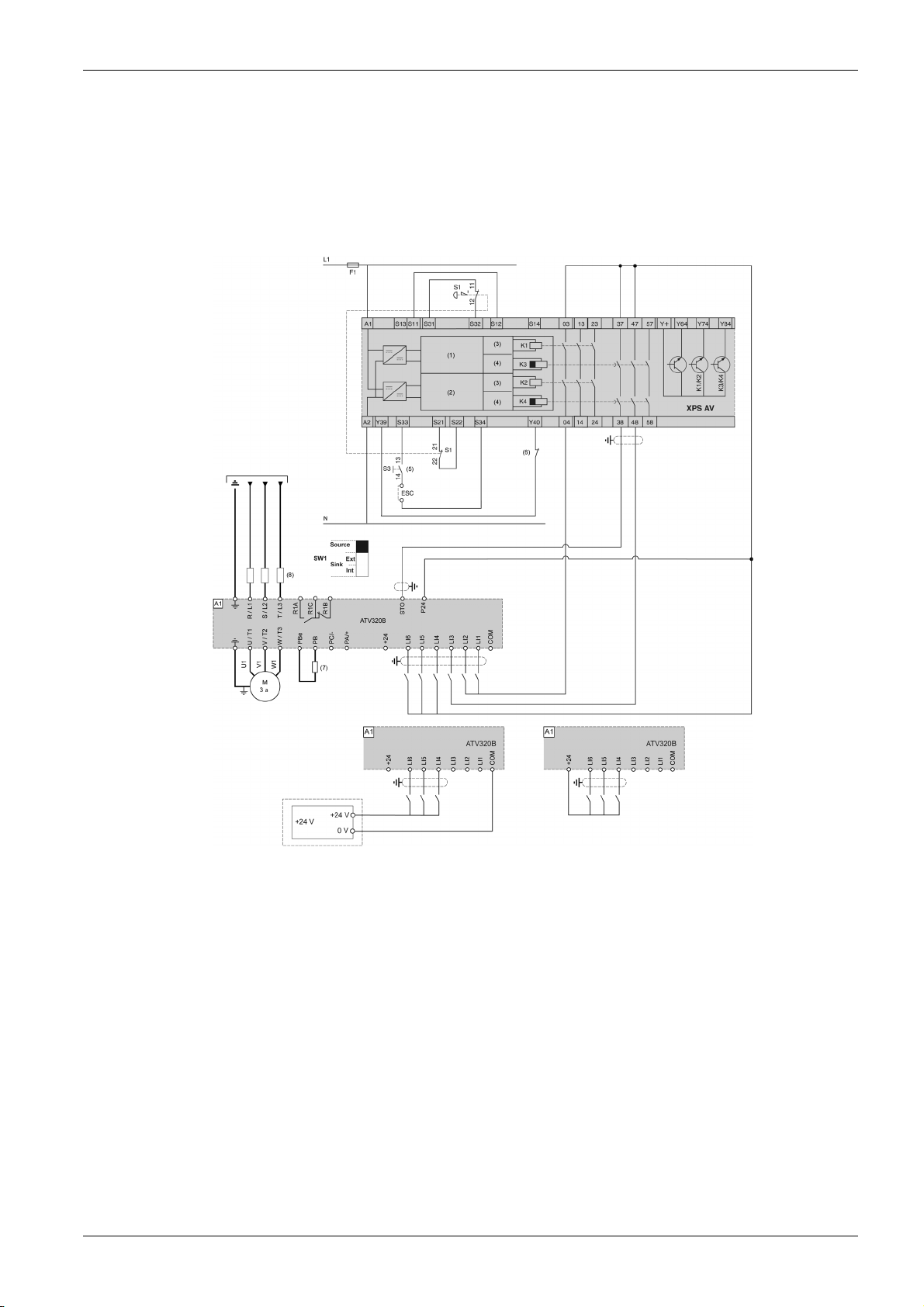
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AV – Fall 2
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AV gemäß EN 954-1, IEC 13849-1 und IEC 60204-1 (Maschine)
Die folgenden Konfigurationen entsprechen dem Schaltschema unten:
SS1 Typ C Kategorie 4, PL e/SIL3 an STO und LI3 mit Sicherheitsmodul des Typs Preventa XPS AV
oder äquivalent.
SLS-Kategorie 3, PL d/SIL2 oder SS1 Typ B Kategorie 3 PL d/SIL2 an LI5/LI6.
LI4 ist nicht auf eine Sicherheitsfunktion eingestellt.
(1) Logik Kanal, (2) Logik Kanal 2, (3) Ausgang 1, (4) Ausgang 2, (5) Not-Aus, (6) Zeitverzögerung Stopp,
(7) Bremswiderstand (sofern verwendet), (8) Netzdrosseln (sofern verwendet).
HINWEIS: Weitere Informationen über die Merkmale der Steuerklemme entnehmen Sie bitte der
Installationsanleitung.
NVE50469 01/2017 77

Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 1
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AF gemäß EN 954-1, IEC 13849-1, IEC 62061 und IEC 60204-1
(Maschine)
Die folgenden Konfigurationen entsprechen dem Schaltschema unten:
STO-Kategorie 3, PL d/SIL2 an STO mit Sicherheitsmodul des Typs Preventa XPS AF oder äquivalent.
SLS-Kategorie 3, PL d/SIL2 oder SS1 Typ B Kategorie 3 an LI3/LI4 oder LI5/LI6.
Oder
STO-Kategorie 3, PL d/SIL2 an STO mit Sicherheitsmodul des Typs Preventa XPS AF oder äquivalent.
SLS-Kategorie 3, PL d/SIL2 oder SS1 Typ B Kategorie 3 an LI3/LI4.
LI5/LI6 ist nicht auf eine Sicherheitsfunktion eingestellt.
Oder
STO-Kategorie 3, PL d/SIL2 an STO mit Sicherheitsmodul des Typs Preventa XPS AF oder äquivalent.
LI3/LI4 und LI5/LI6 sind nicht auf eine Sicherheitsfunktion eingestellt.
(1) Bremswiderstand (sofern verwendet), (2) Netzdrosseln (sofern verwendet).
HINWEIS: Weitere Informationen über die Merkmale der Steuerklemme entnehmen Sie bitte der
Installationsanleitung.
78 NVE50469 01/2017

Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AF – Fall 2
Einzelantrieb mit Sicherheitsmodul des Typs Preventa XPS AF gemäß EN 954-1, IEC 13849-1, IEC 62061 und IEC 60204-1
(Maschine)
Die folgenden Konfigurationen entsprechen dem Schaltschema unten:
STO-Kategorie 4, PL e/SIL3 an STO mit Sicherheitssteuerungsmodul des Typs Preventa XPS AF oder
äquivalent und LI3 auf STO gesetzt.
SLS-Kategorie 3, PL d/SIL2 oder SS1 Typ B Kategorie 3 an LI5/LI6.
LI4 ist nicht auf eine Sicherheitsfunktion eingestellt.
(1) Start, (2) Bremswiderstand (sofern verwendet), (3) Netzdrosseln (sofern verwendet).
HINWEIS: Weitere Informationen über die Merkmale der Steuerklemme entnehmen Sie bitte der
Installationsanleitung.
NVE50469 01/2017 79

Einzelantrieb gemäß IEC 61508 und IEC 60204-1 – Fall 1
Einzelantrieb gemäß IEC 61508 und IEC 60204-1 ohne Schutz vor Unterbrechung der Spannungsversorgung oder
Spannungsreduzierung und anschließender Rotation
Die folgenden Konfigurationen entsprechen dem Schaltschema unten:
STO SIL2 an STO.
STO oder SLS SIL2 oder SS1 Typ B SIL2 an LI3/LI4 oder LI5/LI6.
Oder
STO SIL2 an STO.
STO oder SLS oder SS1 Typ B an LI3/LI4.
LI5/LI6 ist nicht auf eine Sicherheitsfunktion eingestellt.
Oder
STO SIL2 an STO.
LI3/LI4 und LI5/LI6 sind nicht auf eine Sicherheitsfunktion eingestellt.
Oder
STO SIL3 an STO und LI3.
SLS SIL2 oder SS1 Typ B SIL2 an LI5/LI6.
LI4 ist nicht auf eine Sicherheitsfunktion eingestellt.
Oder
STO SIL3 an STO und LI3.
LI4 und LI5/LI6 sind nicht auf eine Sicherheitsfunktion eingestellt.
(1) Bremswiderstand (sofern verwendet), (2) Netzdrosseln (sofern verwendet).
HINWEIS: Weitere Informationen über die Merkmale der Steuerklemme entnehmen Sie bitte der
Installationsanleitung.
80 NVE50469 01/2017

Einzelantrieb gemäß IEC 61508 und IEC 60204-1 – Fall 2
Einzelantrieb gemäß IEC 61508 und IEC 60204-1 ohne Schutz vor Unterbrechung der Spannungsversorgung oder
Spannungsreduzierung und anschließender Rotation
Die folgenden Konfigurationen entsprechen dem Schaltschema unten:
STO SIL2 an LI3 und LI4.
SLS SIL2 oder SS1 Typ B SIL2 an LI5/LI6.
Oder
STO SIL2 an LI3 und LI4.
LI5/LI6 ist nicht auf eine Sicherheitsfunktion eingestellt.
Verdrahtungsschema
(1) Bremswiderstand (sofern verwendet), (2) Netzdrosseln (sofern verwendet).
HINWEIS: Weitere Informationen über die Merkmale der Steuerklemme entnehmen Sie bitte der
Installationsanleitung.
NVE50469 01/2017 81

Einzelantrieb gemäß IEC 61508 und IEC 62061 mit der Sicherheitsfunktion GDL
Zertifiziertes Verdrahtungsschema
GDL Kategorie 2, PL c/SIL1 ist auf das folgende Verdrahtungsschema anwendbar.
(1) Standardisiertes Koaxialkabel, Typ RG174/U gemäß MIL-C17 oder KX3B gemäß NF C 93-550. Außendurchmesser
maximal 2,54 mm, Länge maximal 15 m. Die Kabelschirmung muss geerdet werden.
(2) Schutztürverriegelung
82 NVE50469 01/2017

A
Inhalt dieses Kapitels
ltivar 320
NVE50469 01/2017
Inbetriebnahme
Kapitel 8
Inbetriebnahme
Dieses Kapitel enthält die folgenden Themen:
Thema Seite
Registerkarte „Sicherheitsfunktionen“ 84
Das Fenster „Konfiguration der Sicherheitsfunktionen“ 85
Darstellung und Status von Sicherheitsfunktionen 91
Kopieren der Sicherheitskonfiguration vom Gerät auf einen PC und umgekehrt 92
Gerätesignatur 95
NVE50469 01/2017 83

Registerkarte „Sicherheitsfunktionen“
Einführung
Klicken Sie auf die Registerkarte Sicherheitsfunktionen, um auf die Sicherheitsfunktionen zuzugreifen. In
diesem schreibgeschützten Bildschirm werden alle aktuellen Konfigurationen von Sicherheitsfunktionen
angezeigt.
Die Registerkarte Sicherheitsfunktionen bietet Zugriff auf:
eine Übersicht der im ATV320 (online/offline zugänglich)
den Status aller E/A im Modus „Verbunden“
allgemeine Informationen über die Maschine (online/offline)
Zudem sind folgende Dialogfelder zugänglich:
Konfiguration
Konfigurieren (nur im verbundenen Modus verfügbar)
Konfiguration zurücksetzen
Vom GERÄT auf einen PC kopieren
Vom PC auf das GERÄT kopieren
Passwortkonfiguration
Passwort ändern
Passwort zurücksetzen
Vorbedingung
Vor der Konfiguration der sicherheitsrelevanten Parameter stellen Sie sicher, dass die Geräte-Firmware
und die DTM-Version gleich sind.
Schritte zur Konfiguration der Sicherheitsfunktionen
Wenn... Dann...
Sie sich nicht im Online-Modus
befinden,
Sie sich im Online-Modus
befinden,
Sobald Sie verbunden sind:
Schritt Aktion Anmerkung
1 Klicken Sie auf die Schaltfläche
Konfigurieren in der Registerkarte
Sicherheitsfunktionen.
Klicken Sie in der Menüleiste auf Kommunikation → Mit Gerät verbinden oder auf
das Symbol Mit Gerät verbinden.
Klicken Sie auf die Schaltfläche Konfigurieren in der Registerkarte
Sicherheitsfunktionen.
Das Dialogfeld Konfigurationspasswort festlegen wird angezeigt:
Geben Sie das neue Konfigurationspasswort in das Feld Neues
Passwort eingeben ein.
Geben Sie im Feld Neues Passwort bestätigen das Passwort
erneut ein.
Klicken Sie auf OK.
HINWEIS:
Ihr Passwort:
Muss aus einem numerischen Wert zwischen 1 und 9999
bestehen.
Darf nicht länger als vier Zeichen sein.
Darf nicht den Wert 0 haben.
Resultat: Das Fenster Konfiguration der Sicherheitsfunktionen
wird geöffnet.
Wenn... Dann...
Sie bereits ein Passwort
festgelegt haben,
geben Sie Ihr Konfigurationspasswort für die Sicherheitsfunktionen in das Dialogfeld
Konfigurationspasswort eingeben ein und klicken Sie auf OK.
Resultat: Das Fenster Konfiguration der Sicherheitsfunktionen wird geöffnet.
84 NVE50469 01/2017

Das Fenster „Konfiguration der Sicherheitsfunktionen“
Überblick
Das Fenster Konfiguration der Sicherheitsfunktionen beinhaltet die Registerkarten Information, STO, SLS,
SS1, SMS, GDL und Ein-/Ausgang.
Registerkarte Information
Auf der Registerkarte Information können Sie Produktsysteminformationen festlegen und anzeigen.
Folgende Daten werden von SoMove automatisch eingegeben:
Datum (Format ist von den lokalen Optionen und der Spracheinstellung des PCs abhängig)
Gerätetyp
Bestellnummer des Umrichters
Folgende Daten sind manuell einzugeben:
Seriennummer des Geräts (Zahlenwert)
Name des Geräts
Firmenname
Name des Endbenutzers
Kommentare
Registerkarte STO (Sicher abgeschaltetes Drehmoment)
Für weitere Informationen über die STO-Funktion siehe Beschreibung von STO
Für diese Funktion darf nur der verknüpfte Satz Eingänge im Feld gewählt werden. Der zu verwaltende
Parameter lautet: STOA
Code Name/Beschreibung Werkseinst
StO
StOA
L3PW
[Sicher abgeschaltetes Drehmoment]
[STO-Funktion aktiviert] [Nein]
nO
[Nein: Nicht zugeordnet]
L34
[LI3 und LI4]: LI3/4 Low-Status
L56
[LI5 und LI6]: LI5/6 Low-Status
[LI3 und STO]: LI3/STO Low-Status
Dieser Parameter dient zur Konfiguration des Kanals, über den die STO-Funktion ausgelöst wird.
Wenn Sie STOA=Nein setzen, ist die STO-Funktion immer aktiv, allerdings nur am STO-Eingang.
(siehe Seite 18)
ellung
.
NVE50469 01/2017 85

Registerkarte SLS (Sicher begrenzte Drehzahl)
Für weitere Informationen über die SLS-Funktion siehe Beschreibung von SLS
(siehe Seite 22)
.
Code Name/Beschreibung Einstell-
bereich
SLS
SLSA
nO
L34
L56
SLt
tYp1
tYp2
tYp3
tYp4
SLSP
SLtt
SLwt Parameter [SLS-Verzögerung] 0...5000 ms 0 Hz
SSrt
SSrU
1H
10H
100H
SStt
SSSL
[Sicher begrenzte Drehzahl]
[SLS-Funktion aktiviert] [Nein]
[Nein]: Nicht zugeordnet
[LI3 und LI4]: LI3/4 Low-Status
[LI5 und LI6]: LI5/6 Low-Status
Dieser Parameter dient zur Konfiguration des Kanals, über den die SLS-Funktion ausgelöst wird.
[Sicher begrenzte Drehzahl Typ Element] [Typ1]
Dieser Parameter dient zur Wahl des SLS-Typs.
[Typ1] : SLS-Typ 1
[Typ2] : SLS-Typ 2
[Typ3] : SLS-Typ 3
[Typ4] : SLS-Typ 4
Informationen über das Verhalten der verschiedenen Typen finden Sie in der Funktionsbeschreibung.
Parameter [SLS-Sollwert] 0...599 Hz 0 Hz
Dieser Parameter ist nur sichtbar, wenn SLT = Typ2 oder SLT = Typ3 oder SLT = Typ4.
SLSP dient zur Einstellung der maximalen Drehzahl.
Parameter [SLS-Toleranzwert] 0...599 Hz 0 Hz
Das Verhalten dieses Parameters ist von dem Wert für SLT abhängig; siehe oben.
Dieser Parameter dient zum Einstellen der Höchstzeit, sodass die StFr über dem SSSL liegt.
Wenn SLwt erreicht wurde, wird die Sicherheitsfunktion STO aktiviert.
Die Einheit dieses Parameters ist 1 ms.
Beispiel:
Wenn der Wert auf 2000 Einheiten festgelegt ist, beträgt die SLS-Verzögerung in Sekunden:
2000 x 1 ms = 2 s
Dieser Parameter kann nur geändert werden, wenn SLT = Typ2 oder SLT = Typ3
Für SLS = Typ1 und SLS = Typ4 wird SLwt immer auf 0 festgelegt.
Parameter [SS1-Rampenwert] 1 bis 5990 1
Die Einheit ist vom SSRU-Parameter abhängig. Verwenden Sie diesen Parameter, um den Wert der
SS1-Auslauframpe einzustellen.
SS1-Rampe = SSRT x SSRU; Beispiel: Wenn SSRT = 250 und SSRU = 1 Hz/s, dann ist die
Auslauframpe = 250 Hz/s.
Dieser Parameter ähnelt der Sicherheitsfunktion SS1. Für weitere Informationen siehe SS1
(siehe Seite 40)
Parameter [SS1-Rampeneinheit] [1 Hz/s]
[1 Hz/s]
[10 Hz/s]
[100 Hz/s]
Dieser Parameter dient zum Einstellen der SSrt-Einheit.
Dieser Parameter ähnelt der Konfiguration von Sicherheitsfunktion SS1. Für weitere Informationen
siehe SS1
[SS1-Abschaltwert] 0...599 Hz 0 Hz
Dieser Parameter legt den Toleranzbereich um die Auslauframpe fest, innerhalb dessen die Frequenz
variieren kann.
Er ähnelt der in einer anderen Registerkarte konfigurierten SS1-Sicherheitsfunktion.
Parameter [Stillstandswert SLS/SS1] 0...599 Hz 0 Hz
Dieser Parameter legt die Frequenz fest, bei welcher der Frequenzumrichter am Ende der Rampe SS1
in den Status STO wechseln soll.
Er ähnelt der in einer anderen Registerkarte konfigurierten SS1-Sicherheitsfunktion.
.
(siehe Seite 40)
.
Werkseinst
ellung
86 NVE50469 01/2017

Registerkarte Sicherer Stopp 1 (SS1)
Für weitere Informationen über die SS1-Funktion siehe Beschreibung von SS1
(siehe Seite 20)
.
Code Name/Beschreibung Einstell-
bereich
SS1
SS1A
SSrt
SSrU
100H
SStt
SSSL
[Sicherer Stopp 1]
[Sicherer Stopp 1 Aktivierung] [Nein]
nO
[Nein]: Nicht zugeordnet
L34
[LI3 und LI4]: LI3/4 Low-Status
L56
[LI5 und LI6]: LI5/6 Low-Status
Diese Parameter dienen zur Konfiguration des Kanals, über den die SS1-Funktion ausgelöst wird.
[SS1-Rampenwert] 1 bis 800 1
Die Einheit ist vom SSRU-Parameter abhängig. Verwenden Sie diesen Parameter, um den Wert der
SS1-Auslauframpe einzustellen.
SS1-Rampe = SSRT x SSRU; Beispiel: Wenn SSRT = 250 und SSRU = 1 Hz/s, dann ist die
Auslauframpe = 250 Hz/s.
Dieser Parameter ähnelt der in einer anderen Registerkarte konfigurierten SLS-Sicherheitsfunktion.
[SS1-Rampeneinheit] [1 Hz/s]
1H
[1 Hz/s]
10H
[10 Hz/s]
[100 Hz/s]
Dieser Parameter dient zum Einstellen der SSrt-Einheit.
Er ähnelt der in einer anderen Registerkarte konfigurierten SLS-Sicherheitsfunktion.
Parameter [SS1-Abschaltwert] 0...599 Hz 0 Hz
Dieser Parameter legt den Toleranzbereich um die Auslauframpe fest, innerhalb dessen die Frequenz
variieren kann.
Er ähnelt der Konfiguration der SLS-Sicherheitsfunktion.
Parameter [Stillstandswert SLS/SS1] 0...599 Hz 0 Hz
Dieser Parameter legt die Frequenz fest, bei welcher der Frequenzumrichter am Ende der Rampe SS1
in den Status STO wechseln soll.
Er ähnelt der in einer anderen Registerkarte konfigurierten SLS-Sicherheitsfunktion.
Werkseinst
ellung
NVE50469 01/2017 87

Registerkarte SMS (Sichere maximale Drehzahl)
Für weitere Informationen über die SMS-Funktion siehe Beschreibung von SMS
(siehe Seite 29)
.
Code Name/Beschreibung Einstell-
bereich
SMS
SMSA
SMLS
SMLL
SMLH
[Sichere maximale Drehzahl]
[SMS-Aktivierung] [Nein]
NO
[Nein]: Die Funktion SMS ist nicht aktiv.
Yes
[Ja]: Die Funktion SMS ist aktiv.
Dieser Parameter dient zur Konfiguration des Kanals, über den die SMS-Funktion ausgelöst wird.
[SMS-Zuweisung]
Dieser Parameter dient zur Auswahl des Grenzwerts für die sichere
maximale Drehzahl.
NO
[Nein]: [SMS-Untergrenze] SMLL ist als Grenzwert für die sichere maximale Drehzahl gewählt.
L34
[LI3 und LI4]
Wenn sich die Logikeingänge 3/4 im Low-Status (0) befinden, ist [SMS-Untergrenze] SMLL als
Grenzwert für die sichere maximale Drehzahl gewählt.
Wenn sich die Logikeingänge 3/4 im High-Status (1) befinden, ist [SMS-Obergrenze] SMLH als
Grenzwert für die sichere maximale Drehzahl gewählt.
L56
[LI5 und LI6]
Wenn sich die Logikeingänge 5/6 im Low-Status (0) befinden, ist [SMS-Untergrenze] SMLL als
Grenzwert für die sichere maximale Drehzahl gewählt.
Wenn sich die Logikeingänge 5/6 im High-Status (1) befinden, ist [SMS-Obergrenze] SMLH als
Grenzwert für die sichere maximale Drehzahl gewählt.
[SMS-Untergrenze] 0...599 Hz 0 Hz
Dieser Parameter dient zum Einstellen des unteren Drehzahlgrenzwerts.
[SMS-Obergrenze] 0...599 Hz 0 Hz
Dieser Parameter dient zum Einstellen des oberen Drehzahlgrenzwerts.
Werkseinst
ellung
[NEIN]
Registerkarte „Schutztürverriegelung“ (GDL)
Für weitere Informationen über die GDL-Funktion siehe Beschreibung von GDL
Code Name/Beschreibung Einstell-
GDL
GDLA
[Schutztürverriegelung]
[GDL-Zuweisung] [Nein]
nO
[Nein]: Die Schutztürverriegelung ist nicht zugewiesen.
Yes
[Ja]: Die Schutztürverriegelung ist zugewiesen.
HINWEIS: GDLA kann nur auf [JA] gesetzt werden, wenn der Parameter LO1 auf [NEIN] gesetzt ist.
Dieser Parameter dient zur Konfiguration des Kanals, über den die GDL-Funktion ausgelöst wird.
GLLD
[GDL lange Verzögerung] 1...3600s 1s
Dieser Parameter dient zur Einstellung der langen Verzögerung für die Auslösung der
Sicherheitsfunktion GDL.
Maximale Verzögerung nach Aktivierung der STO-Funktion oder nach einem normalen
Auslauframpen-Befehl zum Stoppen der Maschine.
HINWEIS: Der Wert für „GDL lange Verzögerung“ muss höher sein als der Wert für „GDL kurze
Verzögerung“.
GLSD
[GDL kurze Verzögerung] 1...3600s 1s
Dieser Parameter dient zur Einstellung der kurzen Verzögerung für die Auslösung der
Sicherheitsfunktion GDL.
Maximale Verzögerung nach der SS1-Rampe zum Stoppen der Maschine.
(siehe Seite 31)
Werkseinst
bereich
ellung
.
88 NVE50469 01/2017

Ein-/Ausgangskonfiguration
In der Abbildung ist die Registerkarte Ein-/Ausgang dargestellt.
Code Name/Beschreibung Einstell-
bereich
IO
LIdt
LIrt
[Ein-/Ausgang]
[LI-Entprellzeit] 0...2000 ms 50
In den meisten Fällen sind die beiden Logikeingänge eines für Sicherheitsfunktionen verwendeten
Logikeingangspaares (LI3-LI4 oder LI5-LI6 oder STO-LI3) nicht zu 100 % synchronisiert. Sie ändern
ihren Status nicht gleichzeitig, sondern es liegt eine geringfügige Verzögerung zwischen beiden
Logikeingangsübergängen.
LIdt ist der Parameter, der zur Einstellung dieser Verzögerung dient. Wenn die beiden
Logikeingänge den Zustand mit einer Verzögerung unter der LIdt wechseln, wird dies als
simultaner Übergang der Logikeingänge betrachtet. Wenn die Verzögerung länger als die LIdt
dauert, betrachtet der Frequenzumrichter die Logikeingänge als nicht mehr synchronisiert und löst
einen Fehler aus.
[LI-Reaktionszeit] 0...50 ms 0
Dieser Parameter dient zur Filterung kurzer Impulse am Logikeingang (nur für LI3-LI4 oder LI5-LI6;
STO ist nicht betroffen). Einige Anwendungen senden kurze Impulse, um die Leitung zu testen. Der
Parameter wird verwendet, um diese kurzen Impulse auszufiltern. Befehle werden nur berücksichtigt,
wenn die Impulsdauer die LIrt übersteigt.
Liegt die Dauer unter diesem Wert, geht der Frequenzumrichter davon aus, dass kein Befehl anliegt:
Der Befehl wird ausgefiltert.
Werksein
stellung
NVE50469 01/2017 89

Passwortkonfiguration – Passwort ändern
Mit dieser Funktion können Sie das Konfigurationspasswort im Frequenzumrichter ändern.
So ändern Sie das Konfigurationspasswort
Schritt Aktion
1 Klicken Sie auf der Registerkarte Sicherheitsfunktionen auf die Schaltfläche Passwort ändern.
2 Im Dialogfeld Konfigurationspasswort ändern:
Resultat: Das Dialogfeld Konfigurationspasswort ändern wird angezeigt.
Geben Sie das bestehende Konfigurationspasswort in das Feld Aktuelles Passwort eingeben ein.
Geben Sie das neue Konfigurationspasswort in das Feld Neues Passwort eingeben ein.
Geben Sie im Feld Neues Passwort bestätigen das Passwort erneut ein.
Klicken Sie auf OK.
HINWEIS: Sie müssen in die Felder Neues Passwort eingeben und Neues Passwort bestätigen jeweils
dasselbe Passwort eingeben.
HINWEIS:
Ihr Passwort:
Muss aus einem numerischen Wert zwischen 1 und 9999 bestehen.
Darf nicht länger als vier Zeichen sein.
Darf nicht den Wert 0 haben.
Resultat: Das Konfigurationspasswort wird geändert.
Passwortkonfiguration – Passwort zurücksetzen
Diese Funktion ist für den Fall gedacht, dass Sie das im Frequenzumrichter festgelegte Konfigurationspasswort vergessen. Zum Rücksetzen des Frequenzumrichters ist das universelle Passwort erforderlich.
Sie erhalten dieses Passwort von der Schneider Electric Support-Abteilung.
Nach Ausführung dieser Aktion kehrt das Gerät zum undefinierten Konfigurationspasswort zurück und die
Sitzung wird automatisch geschlossen.
Die Funktionskonfiguration bleibt jedoch unverändert.
Konfiguration zurücksetzen
Diese Funktion dient zum Rücksetzen der Konfiguration der Sicherheitsfunktion auf die
Werkseinstellungen.
Klicken Sie auf der Registerkarte Sicherheitsfunktionen auf die Schaltfläche Konfiguration zurücksetzen.
Geben Sie zunächst das Passwort ein und bestätigen Sie dann Ihre Auswahl.
Nach dieser Aktion werden alle sicherheitsrelevanten Parameter auf die Werkseinstellungen
zurückgesetzt.
90 NVE50469 01/2017

Darstellung und Status von Sicherheitsfunktionen
Code Name/Beschreibung
SAF-
StFr
StOS
IdLE
SLSS
IdLE
WAIt
Strt
SMSS
GDLS
SS1S
IdLE
SAF-
SFtY
IStd
SAFE
Menü [ÜBERW. SICHERHEIT] – In SoMove und am Grafikterminal sichtbar
[Statorfrequenz]
Zeigt die berechnete Statorfrequenz in Hz an.
[STO-Status]
Status der STO-Sicherheitsfunktion (Sicher abgeschaltetes Drehmoment)
[IdLE]: STO wird nicht ausgeführt
StO
[Sicher abgeschaltetes Drehmoment]: STO wird ausgeführt
FLt
[Fehler]: Fehler in STO erkannt
[SLS-Status]
Status der SLS-Sicherheitsfunktion (Sicher begrenzte Drehzahl)
nO
[Nicht konfig.]: SLS nicht konfiguriert
[IdLE]: SLS wird nicht ausgeführt
SSI
[Sicherer Stopp 1]: SLS-Rampe wird ausgeführt
StO
[Sicher abgeschaltetes Drehmoment]: SLS-Anforderung für Sicher abgeschaltetes Drehmoment wird
FLt
ausgeführt
[Fehler]: Fehler in SLS erkannt
[WARTEN]: SLS wartet auf Aktivierung.
[Gestartet]: SLS im temporären Betrieb
[SMS-Status]
Status der SMS-Sicherheitsfunktion (Sichere maximale Drehzahl)
nO
[Nicht konfig.]: SMS ist nicht konfiguriert.
SMS
[Aktiv]: SMS befindet sich im aktiven Status.
FTI
[Int. Fehler]: SMS-interner Fehler erkannt
FTO
[Max. Drehz.]: SMS-Überdrehzahlfehler erkannt
[GDL-Status]
Status der GDL-Sicherheitsfunktion (Schutztürverriegelung)
nO
[Nicht konfig.]: GDL ist nicht konfiguriert.
OFF
[Inaktiv]: GDL befindet sich im inaktiven Status.
STD
[Kurze Verzögerung]: GDL befindet sich im Status „Kurze Verzögerung“.
LGD
[Lange Verzögerung]: GDL befindet sich im Status „Lange Verzögerung“.
ON
[Aktiv]: GDL befindet sich im aktiven Status.
FLT
[Int. Fehler]: GDL-interner Fehler erkannt
[SS1-Status]
Status der Sicherheitsfunktion „Sicherer Stopp 1“
nO
[Nicht konfig.]: SS1 nicht konfiguriert
[IdLE]: SS1 wird nicht ausgeführt
SSI
[Sicherer Stopp 1]: SS1-Rampe wird ausgeführt
StO
[Sicher abgeschaltetes Drehmoment]: SS1-Anforderung für „Sicher abgeschaltetes Drehmoment“
FLt
wird ausgeführt.
[Fehler]: Fehler in SS1 erkannt
Menü [ÜBERW. SICHERHEIT] – NUR in SoMove sichtbar
[Umrichtersicherheitsstatus]
Sicherheitsfunktionsstatus des Frequenzumrichters
[Standardumrichter]: Standardprodukt ohne konfigurierte Sicherheitsfunktion
[Sicherer Umrichter]: Produkt mit mindestens einer konfigurierten Sicherheitsfunktion
NVE50469 01/2017 91

Kopieren der Sicherheitskonfiguration vom Gerät auf einen PC und umgekehrt
Überblick
Diese Funktion dient dazu, die geprüfte Sicherheitskonfiguration unterschiedlicher Frequenzumrichter zu
kopieren und in ein anderes Gerät desselben Typs einzufügen.
Mit dieser Funktion können Sie:
die eindeutige Sicherheitskonfiguration auf dem Frequenzumrichter identifizieren
die Sicherheitskonfigurationsdatei vom Frequenzumrichter auf einen PC kopieren
die Sicherheitskonfigurationsdatei vom PC auf Frequenzumrichter kopieren
Architektur
Die Abbildung zeigt die Architektur zum Kopieren der Sicherheitskonfiguration vom Gerät auf einen PC
und umgekehrt:
92 NVE50469 01/2017

Identifizierung der eindeutigen Sicherheitskonfiguration
Die Identifizierung der Sicherheitskonfiguration erfolgt mithilfe von CRC. Für die Berechnung werden alle
sicherheitsrelevanten Parameter verwendet.
Den CRC-Wert können Sie von der Registerkarte Mein Gerät abrufen. Notieren Sie sich den CRC-Wert,
nachdem der Frequenzumrichter vollständig getestet wurde.
Vom Gerät auf einen PC kopieren
So kopieren Sie eine Konfigurationsdatei vom Gerät auf einen PC:
Schritt Aktion
1 Klicken Sie auf der Registerkarte Sicherheitsfunktionen auf die Schaltfläche Vom GERÄT auf
einen PC kopieren
Ergebnis: öffnet das Dialogfeld Kopie vom Gerät auf den PC.
2 Geben Sie das Konfigurationspasswort in das Dialogfeld Konfigurationspasswort eingeben ein
und klicken Sie auf OK.
Resultat: Der CRC1-Wert wird angezeigt.
3 Notieren Sie den CRC1-Wert und klicken Sie auf Speichern.
Ergebnis:Das Fenster Datei speichern wird geöffnet.
4 Im Fenster Datei speichern :
Wählen Sie folgenden Ordner aus bzw. erstellen Sie ihn:
Geben Sie den Namen der Datei in das Feld Dateiname ein.
Klicken Sie auf Speichern.
Resultat: Die Meldung Sicherheitsrelevante Parameter erfolgreich gespeichert wird auf dem
Bildschirm angezeigt. Damit wird bestätigt, dass die Datei erfolgreich unter dem gewünschten
Pfad gespeichert wurde.
HINWEIS:
Sie können die Konfigurationsdatei nicht vom Gerät auf einen PC kopieren, wenn:
der Motor eingeschaltet ist
ein Funktionsbaustein sich im Betriebsstatus (Betrieb) befindet
die Funktion Erzw. lokal aktiv ist
eine Sicherheitsfunktion aktiviert wird
NVE50469 01/2017 93

Vom PC auf das Gerät kopieren
UNBEABSICHTIGTER BETRIEB DES GERÄTS
Schließen Sie das Gerät über eine Punkt-zu-Punkt-Verbindung an den PC an.
Die Aktion Vom PC auf das GERÄT kopieren darf gemäß IEC 61800-5-2 nur von Fachpersonal
durchgeführt werden.
Überprüfen Sie die Konfiguration der Sicherheitsfunktionen, nachdem Sie sie vom PC auf das Gerät
kopiert haben.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Verletzungen oder Sachschäden zur Folge
haben.
So kopieren Sie eine Datei vom PC auf das Gerät:
Schritt Aktion
1 Klicken Sie auf der Registerkarte Sicherheitsfunktionen auf die Schaltfläche Vom PC auf das GERÄT
WARNUNG
kopieren
Resultat: Eine Warnmeldung (Warnung) wird angezeigt. Lesen Sie die Anweisungen, bevor Sie mit dem
Kopiervorgang fortfahren.
2
Klicken Sie auf OK.
Resultat: Das Fenster Datei öffnen wird geöffnet.
3 Im Fenster Datei öffnen :
Wählen Sie eine .sfty-Datei aus.
Klicken Sie auf Öffnen.
Resultat: Der CRC1-Wert wird angezeigt.
4 Überprüfen Sie, ob der CRC1-Wert demjenigen entspricht, den Sie beim Kopieren der Konfiguration vom
Gerät auf den PC notiert haben. Wenn die beiden Werte gleich sind, klicken Sie auf Fortfahren.
Resultat: Das Dialogfeld Vom PC auf das GERÄT kopieren wird geöffnet.
5 Geben Sie das Passwort (49157) in das Dialogfeld Kopierpasswort eingeben ein und klicken Sie auf OK.
Resultat: Die Konfiguration wurde erfolgreich vom PC auf das Gerät kopiert. Es muss ein
Inbetriebnahmetest der Sicherheitsfunktionen durchgeführt werden.
HINWEIS:
Sie können die Konfigurationsdatei nicht vom PC auf das Gerät kopieren, wenn:
der Motor eingeschaltet ist
ein Funktionsbaustein sich im Betriebsstatus (Betrieb) befindet
die Funktion Erzw. lokal aktiv ist
die Konfiguration der Sicherheitsfunktion bereits auf dem Gerät vorhanden ist
94 NVE50469 01/2017

Gerätesignatur
Überblick
Ziel der Prüfung ist es, die korrekte Konfiguration der definierten Sicherheitsfunktionen und von
Testmechanismen zu bestätigen und das Ansprechverhalten spezifischer Überwachungsfunktionen auf
die explizite Eingabe von Werten außerhalb der Toleranzgrenzen zu untersuchen.
Die Prüfung muss alle umrichterspezifischen Überwachungsfunktionen sowie alle globalen integrierten
Sicherheitsfunktionen des ATV320.
Voraussetzungen für die Abnahmeprüfung
Die Maschine ist korrekt verdrahtet.
Alle sicherheitsrelevanten Vorrichtungen wie z. B. Überwachungsgeräte für Schutztüren,
Lichtschranken oder Not-Aus-Schalter sind angeschlossen und betriebsbereit.
Alle Motor- und Befehlsparameter sind korrekt im Umrichter konfiguriert.
Verfahren zur Abnahmeprüfung
Die Konfiguration der Abnahmeprüfung erfolgt mit der SoMove-Software.
Schritt Aktion Anmerkung
1 Wählen Sie die Option Gerät → Sicherheitsfunktion
→ Gerätesignatur und führen Sie die folgenden fünf
Schritte aus.
2 Allgemeine Information
Um diesen Schritt zum abschließenden Bericht
hinzuzufügen, wählen Sie Zu Gerätesignatur
hinzufügen.
Klicken Sie auf Weiter.
3 Funktionszusammenfassung
Um eine Funktion zum abschließenden Bericht
hinzuzufügen, wählen Sie Zu Gerätesignatur
hinzufügen.
Klicken Sie auf Weiter.
4 E/A-Zusammenfassung
Um eine Funktion zum abschließenden Bericht
hinzuzufügen, wählen Sie Zu Gerätesignatur
hinzufügen.
Klicken Sie auf Weiter.
5 Test
Um eine Funktion zum abschließenden Bericht
hinzuzufügen, wählen Sie Zu Gerätesignatur
hinzufügen.
Klicken Sie auf Weiter.
6 Schlüssel
Klicken Sie auf Fertigstellen, um den Bericht zu
erstellen.
Die hier angezeigten Informationen entsprechen
dem Abschnitt Identifizierung der Registerkarte
Sicherheitsfunktionen.
Dieser Schritt ist in Zwischenschritte unterteilt.
Jeder Zwischenschritt ist eine Sicherheitsfunktion:
STO
SLS
SS1
In einem Zwischenschritt für eine Funktion werden
das Funktionsdiagramm und die Parameterwerte
angezeigt.
In einem Textfeld können Sie weitere Kommentare
einfügen.
Die hier angezeigten Informationen entsprechen
dem Abschnitt Übersicht der Logikeingänge der
Registerkarte Sicherheitsfunktionen:
Der einer Sicherheitsfunktion zugewiesene
Logikeingang ist rot dargestellt und zeigt die
zugehörige Sicherheitsfunktion an.
Logikeingänge, die keiner Sicherheitsfunktion
zugewiesen sind, werden grün angezeigt und
geben keine Zuweisung an.
Aktivieren Sie in diesem Schritt das
Kontrollkästchen, wenn Sie die Prüfung Ihrer
Sicherheitsfunktionen durchgeführt haben, um zu
bestätigen, dass die Funktionen für die gesamte
Ausrüstung das korrekte Verhalten aufweisen.
Die Prüfsumme der sicherheitsrelevanten
Konfiguration wird wie berechnet angezeigt und bei
Anklicken von Übernehmen in dieser Form an das
verbundene Gerät gesendet.
So können Sie den Wert der Prüfsumme mit dem
Wert vergleichen, der im Identifikationsmenü des
Grafikterminals angezeigt wird.
NVE50469 01/2017 95

Abnahmebericht
SoMove erstellt den Abnahmebericht.
Diese Funktion liefert einen abschließenden Bericht, wenn eine oder mehrere Sicherheitsfunktionen
konfiguriert und überprüft wurden. Der Bericht gilt als Gerätesignatur und zertifiziert, dass alle Sicherheitsfunktionen einsatzbereit sind. Der Abnahmebericht kann als Zusatzdokument ausgedruckt oder im PDFFormat gespeichert werden.
Bei einer Änderung der Umrichterkonfiguration (nicht nur sicherheitsrelevante Parameter) müssen Sie die
Abnahmeprüfung erneut durchführen.
96 NVE50469 01/2017

A
Inhalt dieses Kapitels
ltivar 320
NVE50469 01/2017
Service und Wartung
Kapitel 9
Service und Wartung
Dieses Kapitel enthält die folgenden Themen:
Thema Seite
Wartung 98
Austausch von Leistungsteil und Steuerteil (MCU) 98
Austausch von Maschinenteilen 98
NVE50469 01/2017 97

Wartung
Überblick
Im Rahmen der vorbeugenden Wartung müssen die Sicherheitsfunktionen mindestens ein Mal pro Jahr
aktiviert werden. Vor dieser vorbeugenden Wartungsaktion muss die Spannungsversorgung zum
Frequenzumrichter aus- und wiedereingeschaltet werden. Die Logikausgangssignale des Frequenzumrichters können nicht als sicherheitsrelevante Signale betrachtet werden. Alle induktiven Komponenten,
die sich in der Nähe des Umrichters befinden oder mit diesem galvanisch gekoppelt sind, müssen entstört
werden (z.B. Relais, Schaltschütze, Magnetventile).
HINWEIS: Weitere Produktinformationen finden Sie in der Installationsanleitung und der Programmieranleitung unter www.schneider-electric.com.
Austausch von Leistungsteil und Steuerteil (MCU)
Überblick
Sie können die MCU (Steuerteil) (APP + HMI-Karte) und den Leistungsteil austauschen.
Je nach Konfiguration (Sicherheitsfunktion oder nicht) kann das Verhalten des Frequenzumrichters
unterschiedlich sein.
Wenn Sie den Leistungsteil austauschen und die MCU beibehalten, verlieren Sie zwar nicht die
Konfiguration der Sicherheitsfunktionen, müssen aber die Abnahmeprüfung wiederholen, um eine
fehlerhafte Verdrahtung oder ein Fehlverhalten der Sicherheitsfunktion zu vermeiden.
Bei einem Austausch der MCU verlieren Sie die Sicherheitskonfiguration. Sie müssen erneut die
Konfiguration in der neuen MCU vornehmen und anschließend die Abnahmeprüfung wiederholen.
HINWEIS: Weitere Produktinformationen finden Sie in der Installationsanleitung und der Programmieranleitung unter www.schneider-electric.com.
Austausch von Maschinenteilen
Überblick
Wenn Sie Bauteile des Umrichter-Systems (Motor, Not-Halt usw.) austauschen, müssen Sie die
Abnahmeprüfung wiederholen.
HINWEIS: Weitere Produktinformationen finden Sie in der Installationsanleitung und der Programmieranleitung unter www.schneider-electric.com.
98 NVE50469 01/2017


ATV320_Safety_Function_manual_DE_NVE50469_02
01/2017
 Loading...
Loading...