

Page 1

Installation Instructions
Allen-Bradley
1336/1336VT
1336 PLUS/PLUS II/FORCE/IMPACT
Chopper Module
Cat. Nos. 1336 -WA018, WB009 & WC009
-WA070, WB035
-WA115, WB110
Table of Contents
What This Option Provides . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Where This Option is Used . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
What These Instructions Contain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
How Dynamic Braking Works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
How the Chopper Module Works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
How to Select a Chopper Module and Dynamic Brake Resistor. . . . . . . . . . . . . . . . . . . . . . 5
Selecting a Chopper Module and the Dynamic Brake Resistance . . . . . . . . . . . . . . . . . . . 6
Example Calculation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Ordering Resistors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Chopper Module Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Chopper Module Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
WA018, WB009 and WC009 Dimensions and Weights . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
WA070, WB035 and WC035 Dimensions and Weights . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
WA115, WB110 and WC085 Dimensions and Weights . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Installation Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Mounting Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1336 and 1336VT Parameter Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1336IMPACT Parameter Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1336FORCE Parameter Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1336PLUS Parameter Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Brake Fault Contact Monitoring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Brake Fuses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Brake Module Jumper Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
WA018, WB009 and WC009 Terminal Block, Fuse and Jumper Locations . . . . . . . . . . . . 28
WA070, WB035 and WC035 Terminal Block, Fuse and Jumper Locations . . . . . . . . . . . . 29
WA115, WB110 and WC085 Terminal Block, Fuse and Jumper Locations . . . . . . . . . . . . 30
WA018, WB009 and WC009
Single Brake Wiring Scheme 1336F – BRF and 1336S – BRF Drives Only . . . . . . . . . . . . 31
Multiple Brake Wiring Scheme 1336F – BRF and 1336S – BRF Drives Only . . . . . . . . . . 32
WA070, WB035 and WC035 — WA115, WB110 and WC085
Single Brake Wiring Scheme 1336F – BRF Drives Only . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Multiple Brake Wiring Scheme 1336F – BRF Drives Only . . . . . . . . . . . . . . . . . . . . . . . . . 34
WA018, WB009 and WC009
Single Brake Wiring Scheme 1336 (VT, S, F, T, E) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Multiple Brake Wiring Scheme 1336 (VT, S, F, T, E) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
WA070, WB035 and WC035 — WA115, WB110 and WC085
Single Brake Wiring Scheme 1336 (VT, S, F, T, E) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Multiple Brake Wiring Scheme 1336 (VT, S, F, T, E) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
& WC035
& WC085
1336-5.65 — March, 2007
Page 2
Heavy Duty Dynamic Braking
2
What This Option Provides
Where This Option is Used
The brake chopper module is an open style assembly that together with
customer supplied braking resistors can increase the braking torque
capability of a 1336, 1336VT, 1336PLUS, 1336PLUSII, 1336FORCE or
1336IMPACT drive from approximately 10 to 100%.
B003-B250 and C003-C250 1336 Drives.
B003-B250 1336VT Drives.
AQF05-A125, BRF05-B600 and CWF10-C600 1336PLUS and
1336PLUSII Drives.
A001-A125, B001-B600 and C001-C650 1336FORCE and 1336 IMPACT
Drives.
1336 — W
1336
1336VT
1336PLUS
1336PLUS II
1336FORCE
Brake Chopper Module
B 009
Voltage Rating Continuous Amp Rating
A = 230VAC 018 = 375VDC, 18.0ADC
070 = 375VDC, 70.0ADC
115 = 375VDC, 115.0ADC
B = 380/415/460VAC 009 = 750VDC, 9.0ADC
035 = 750VDC, 35.0ADC
110 = 750VDC, 110.0ADC
C = 575VAC 009 = 935VDC, 9.0A DC
035 = 935VDC, 35.0ADC
085 = 935VDC, 85.0ADC
What These Instructions Contain
How Dynamic Braking Works
These instructions contain the necessary information to select, configure
and install dynamic braking. By completing Selecting a Chopper Module
and the Maximum Dynamic Brake Resistance first you will be able to
determine:
1. Whether or not dynamic braking is required for your application.
2. If dynamic braking is required, the rating and quantity of chopper
modules required as well as the size and type of braking resistors
required.
When an induction motor’s rotor is turning slower than the synchronous
speed set by the drive’s output power, the motor is transforming electrical
energy obtained from the drive into mechanical energy available at the drive
shaft of the motor. This process is referred to as motoring. When the rotor
is turning faster than the synchronous speed set by the drive’s output power,
the motor is transforming mechanical energy available at the drive shaft of
the motor into electrical energy that can be transferred back into the utility
grid. This process is referred to as regeneration.
Most AC PWM drives convert AC power from the fixed frequency utility
grid into DC power by means of a diode rectifier bridge or controlled SCR
bridge before it is inverted into variable frequency AC power. Diode and
SCR bridges are cost effective, but can only handle power in the motoring
direction. Therefore, if the motor is regenerating, the bridge cannot conduct
1336-5.65 — March, 2007
Page 3

Heavy Duty Dynamic Braking 3
the necessary negative DC current, the DC bus voltage will increase and
cause a Bus Overvoltage trip at the drive.
Expensive bridge configurations use SCRs or transistors that can transform
DC regenerative electrical energy into fixed frequency utility electrical
energy. A more cost effective solution is to provide a Transistor Chopper
on the DC Bus of the AC PWM drive that feeds a power resistor which
transforms the regenerative electrical energy into thermal energy. This is
generally referred to as Dynamic Braking.
How the Chopper Module Works
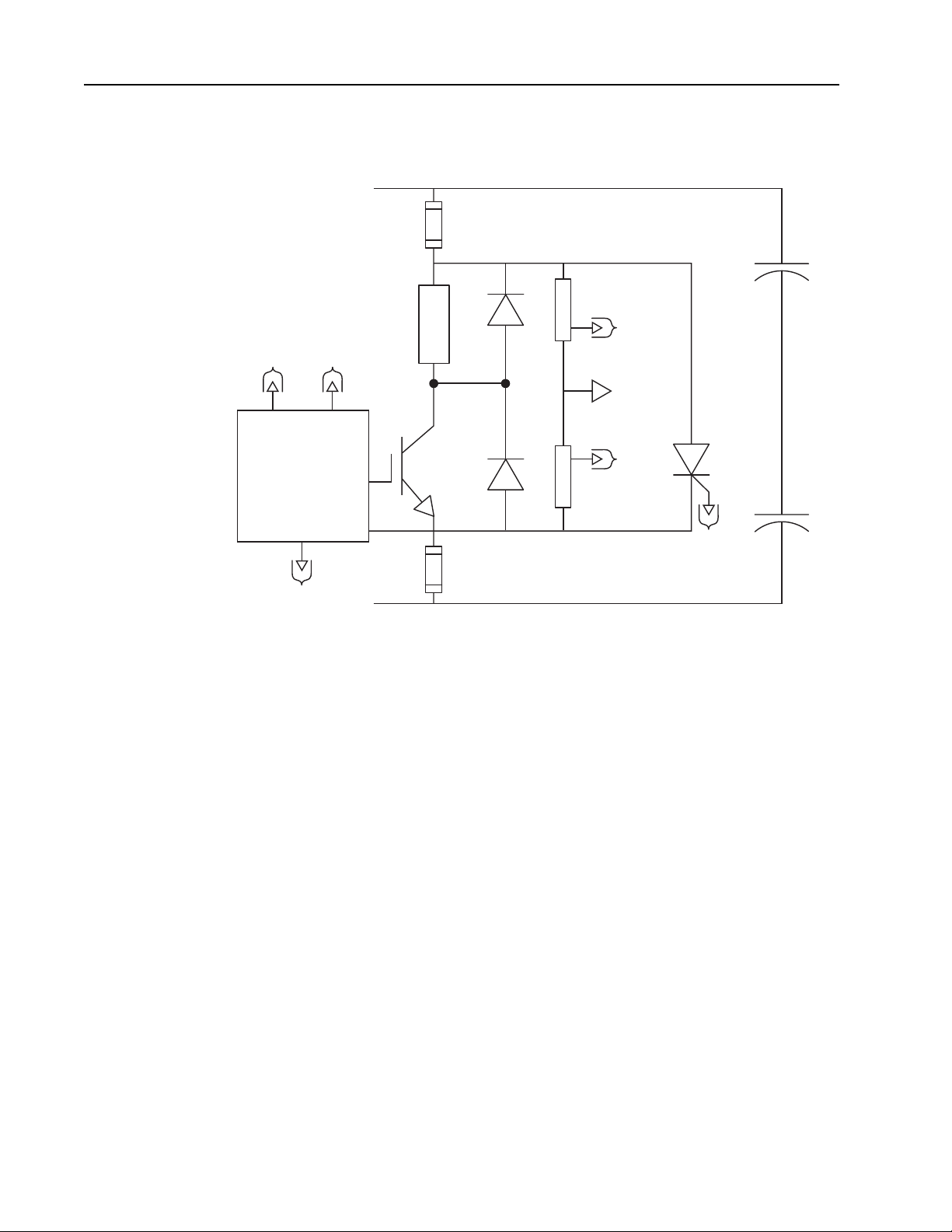
Figure 1 shows a simplified schematic of a Chopper Module with Dynamic
Brake Resistor. The Chopper Module is shown connected to the positive
and negative conductors of an AC PWM Drive. The two series connected
Bus Caps are part of the DC Bus filter of the AC Drive.
A Chopper Module contains five significant power components:
Protective fuses are sized to work in conjunction with a Crowbar SCR.
Sensing circuitry within the Chopper Transistor Voltage Control determines
if an abnormal conditions exist within the Chopper Module, such as a
shorted Chopper Transistor. When an abnormal condition is sensed, the
Chopper Transistor Voltage Control will fire the Crowbar SCR, shorting
the DC Bus, and melting the fuse links. This action isolates the Chopper
Module from the DC Bus until the problem can be resolved.
The Chopper Transistor is an Insulated Gate Bipolar Transistor (IGBT). The
Chopper Transistor is either ON or OFF, connecting the Dynamic Brake
Resistor to the DC Bus and dissipating power, or isolating the resistor from
the DC Bus. There are several transistor ratings that are used in the various
Chopper Module ratings. The most important rating is the collector current
rating of the Chopper Transistor that helps to determine the minimum ohmic
value used for the Dynamic Brake Resistor.
Chopper Transistor Voltage Control (hysteretic voltage comparator)
regulates the voltage of the DC Bus during regeneration. The average values
of DC Bus voltages are:
• 375V DC (for 230V AC input)
• 750V DC (for 460V AC input)
• 937.5V DC (for 575V AC input)
Voltage dividers reduce the DC Bus voltage to a value that is usable in signal
circuit isolation and control. The DC Bus feedback voltage from the voltage
dividers is compared to a reference voltage to actuate the Chopper
Transistor.
The Freewheel Diode (FWD), in parallel with the Dynamic Brake Resistor,
allows any magnetic energy stored in the parasitic inductance of that circuit
to be safely dissipated during turn off of the Chopper Transistor.
1336-5.65 — March, 2007
Page 4
Heavy Duty Dynamic Braking
4
Figure 1
Schematic of Chopper Module and Dynamic Brake Resistor
To
Voltage Dividers
Chopper Transistor
Voltage Control
+ DC Bus
Dynamic
Brake
Resistor
Chopper
Transistor
Fuse
FWD
FWD
Voltage
Divider
Voltage
Divider
To
Voltage
Control
Signal
Common
To
Voltage
Control
Bus Caps
Crowbar
SCR
Bus Caps
To
Crowbar
SCR Gate
Chopper Modules are designed to be applied in parallel if the current rating
is insufficient for the application. One Chopper Module is the designated
Master Chopper Module, while any other Modules are the designated
Follower Modules.
Two lights are provided on the front of the enclosure to indicate operation.
• DC Power light illuminates when DC power has been applied to the
• Brake On light flickers when the Chopper Module is operating
Fuse
– DC Bus
Chopper Module.
(chopping).
To
Voltage
Control
1336-5.65 — March, 2007
Page 5

Heavy Duty Dynamic Braking 5
How to Select a Chopper Module and Dynamic Brake Resistor
As a rule, a Chopper Module can be specified when regenerative energy is
dissipated on an occasional or periodic basis. In general, the motor power
rating, speed, torque, and details regarding the regenerative mode of
operation will be needed in order to estimate what Chopper Module rating
and Dynamic Brake Resistor value to use. If a drive is consistently operating
in the regenerative mode of operation, serious consideration should be given
to equipment that will transform the electrical energy back to the fixed
frequency utility.
In order to select the appropriate Chopper Module and Dynamic Brake
Resistor for your application, the following data must be calculated.
Peak Regenerative Power of the Drive (Expressed in watts of power.)
This value is used to determine:
• The minimum current rating of the Chopper Module
Choose the actual current rating from the selection tables.
• The estimated maximum ohmic value of the Dynamic Brake Resistor
If this value is greater than the maximum imposed by the peak
regenerative power of the drive, the drive can trip off due to transient
DC Bus overvoltage problems.
Minimum Dynamic Brake Resistance
If a Dynamic Brake Resistance value that is less than the minimum imposed
by the choice of the Chopper Module is applied, damage can occur to the
Chopper Transistor.
Dynamic Brake Resistor’s Allowable Ohmic Value Range
(Use the Chopper Module current rating to determine this range.)
These values range between the minimum value set by the Chopper
Transistor current rating and the maximum value set by the peak
regenerative power developed by the drive in order to decelerate or satisfy
other regenerative applications.
Wattage Rating of the Dynamic Brake Resistor
This rating is estimated by applying what is known about the drive’s
motoring and regenerating modes of operation. The average power
dissipation of the regenerative mode must be estimated and the wattage of
the Dynamic Brake Resistor chosen to be greater than the average
regenerative power dissipation of the drive.
Dynamic Brake Resistors with large thermodynamic heat capacities,
defined as thermal time constants less than 5 seconds, are able to absorb a
large amount of energy without the temperature of the resistor element
exceeding the operational temperature rating. Thermal time constants in
the order of 50 seconds and higher satisfy the criteria of large heat capacities
for these applications. If a resistor has a small heat capacity, the temperature
of the resistor element could exceed maximum temperature limits during
the application of pulse power to the element.
1336-5.65 — March, 2007
Page 6
Heavy Duty Dynamic Braking
6
Selecting a Chopper Module and the Maximum Dynamic Brake Resistance
The following calculations are demonstrated using The International
System of Units (SI).
Gather the following information:
• Power rating from motor nameplate in watts, kilowatts, or horsepower
• Speed rating from motor nameplate in rpm or rps (radians per second)
• Motor inertia and load inertia in kg-m
2
or lb-ft
2
• Gear ratio (GR) if a gear is present between the motor and load
• Motor shaft speed, torque, and power profile of the drive application
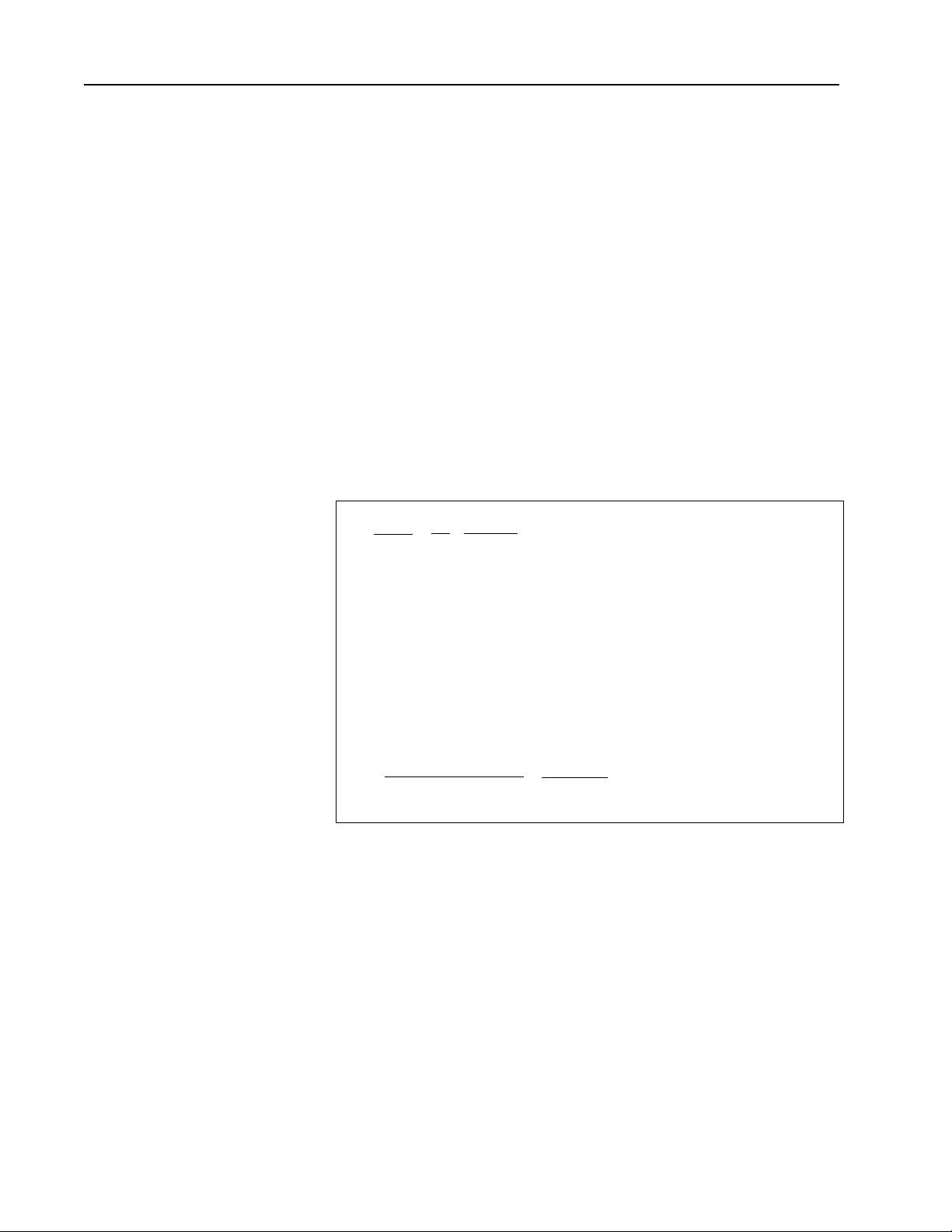
Figure 2 shows the speed, torque, and power profiles of the drive as a
function of time for a particular cyclic application that is periodic over t
4
seconds. The desired time to decelerate is known or calculable and is within
the drive performance limits. In Figure 2, the following variables are
defined:
ω(t) = Motor shaft speed in radians per second (rps)
Rad
ω ✕
N(t) = Motor shaft speed in Revolutions Per Minute (RPM)
2πN
=
60
s
T(t)
= Motor shaft torque in Newton-meters
1.0 lb-ft = 1.355818 N-m
= Motor shaft power in watts
P(t)
1.0 HP = 746 watts
= Motor shaft peak regenerative power in watts
-Pb
1336-5.65 — March, 2007
Page 7
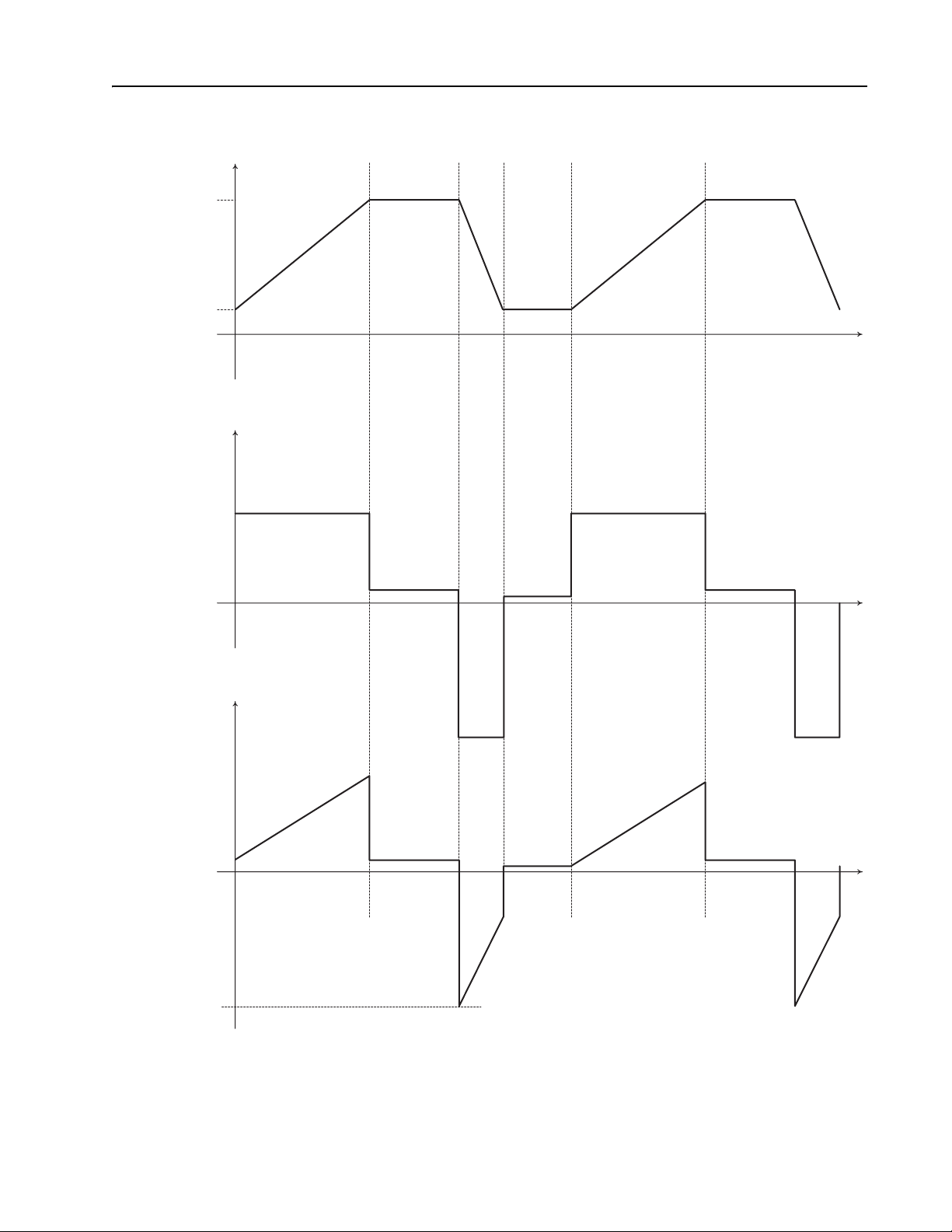
Figure 2
Application Speed, Torque and Power Profiles
ω
(t)
ω
b
ω
o
0t
T(t)
1
t
2
Heavy Duty Dynamic Braking 7
t1 + t
t
3
t
4
4
t
0t
1
t
2
P(t)
0t
1
t
2
-Pb
t1 + t
t1 + t
4
4
t
3
t
3
t
4
t
4
t
t
1336-5.65 — March, 2007
Page 8

Heavy Duty Dynamic Braking
8
Step 1 — Determine Gear Ratio
Step 2 — Determine the Total Inertia
Turns of Load
GR=
Turns of Motor
GR = _________
JT = Jm + GR2 ✕ JL JT= Total inertia reflected to the motor shaft (kg-m2 or lb-ft2)
J
= Motor inertia (kg-m2 or lb-ft2)
m
GR = Gear ratio of any gear between motor and load
(dimensionless)
J
= Load inertia (kg-m2 or lb-ft2)
L
1.0 lb-ft
2
= 0.04214011 kg-m
2
JT = [+] ✕ []
Step 3 — Calculate the Peak Braking Power
J
✕ ωb (ωb - ωo)
T
Pb =
(t
- t2)
3
JT= Total inertia reflected to the motor shaft (kg-m2)
ω
= Rated angular rotational speed (Rad / s = 2πNb / 60)
b
ω
= Angular rotational speed,
o
less than rated speed down to zero (Rad / s)
N
= Rated motor speed (RPM)
b
- t2= Deceleration time from ωb to ωo (seconds)
t
3
= Peak braking power (watts)
P
b
1.0 HP = 746 watts
Pb =
[ ✕ (-)]
[–]
JT = __________ kg-m2 or lb-ft
Pb = __________watts
2
Compare the peak braking power to that of the rated motor power. If the
peak braking power is greater that 1.5 times that of the motor, then the
deceleration time (t
- t2) needs to be increased so that the drive does not
3
go into current limit.
1336-5.65 — March, 2007
Page 9
Heavy Duty Dynamic Braking 9
Step 4 — Calculate the Maximum Dynamic Brake Resistance Value
R
db1 =
2
V
d
P
b
R
= Maximum allowable value for the dynamic brake
db1
resistor (ohms)
= DC Bus voltage the chopper module regulates to
V
d
(375V DC, 750V DC, or 937.5V DC)
P
= Peak braking power calculated in Step 2 (watts)
b
[ ✕ ]
R
db1 =
[]
R
= _________ ohms
db1
The choice of the Dynamic Brake resistance value should be less than the
value calculated in Step 4. If the resistance value is greater than the value
calculated in Step 4, the drive can trip on DC Bus overvoltage.
Step 5 — Calculate the Minimum Chopper Module Current Rating
Id1 =
V
d
R
db1
Id1= Minimum current flow through Chopper Transistor
= Value of DC Bus voltage chosen in Step 3
V
d
= Value of Dynamic Brake Resistor calculated in Step 3
R
db1
[]
Id1 =
[]
The value of I
sets the minimum current rating for the Chopper Module.
d1
Id1 = __________ amps
When choosing a Chopper Module, the current rating for the Chopper
Transistor must be greater than or equal to the value calculated for I
d1
.
Step 6 — Calculate the Minimum Dynamic Brake Resistor Value
R
R
db2 =
R
V
d
0.75 ✕ I
[]
db2 =
[]
d2
= Minimum ohmic value of the Dynamic Brake Resistor
db2
= Value of DC Bus voltage chosen in Step 3
V
d
= Value of Chopper Module current rating
I
d2
R
= __________ ohms
db2
This step calculates the minimum resistance value that the Dynamic Brake
Resistor can have. If a lower resistance were to be used with the Chopper
Module of choice, the IGBT could be damaged from overcurrent.
1336-5.65 — March, 2007
Page 10
Heavy Duty Dynamic Braking10
Step 7 — Choose the Dynamic Brake Resistance Value
Use to Table 1a, 2a, or 3a to choose the correct table based on the Chopper
Module’s regulating voltage.
1. Find the column that lists the value of Dynamic Brake Resistance for
the various Dynamic Brake Resistor assemblies.
2. Choose the resistor value that lies between R
Preferred resistance values are as close R
and R
db1
as possible.
db1
db2
.
Step 8 — Estimate the Minimum Wattage Requirements for the Dynamic
Brake Resistor
It is assumed that the application exhibits a periodic function of acceleration
and deceleration. If (t
deceleration from rated speed to 0 speed, and t
the process repeats itself, then the average duty cycle is (t
- t2) equals the time in seconds necessary for
3
is the time in seconds before
4
- t2)/t4. The
3
power as a function of time is a linearly decreasing function from a value
equal to the peak regenerative power to 0 after (t
The average power regenerated over the interval of (t
The average power in watts regenerated over the period t
P
ωb + ω
b
(
2
- t2= Deceleration time from ωb to ωo (seconds)
3
= Total cycle time or period of process (seconds)
4
= Peak braking power (watts)
b
= Rated motor speed (Rad / s)
b
= A lower motor speed (Rad / s)
o
o
)
ω
b
Pav =
[t
- t2]
3
✕
t
4
Pav= Average dynamic brake resister dissipation (watts)
t
t
P
ω
ω
- t2) seconds have elapsed.
3
- t2) seconds is Pb/2.
3
is:
4
Example Calculation
1336-5.65 — March, 2007
[–]
Pav =
[]
[]
✕
2
Pav = _________ watts
The Dynamic Brake Resistor power rating, in watts, that is chosen should
be equal to or greater than the value calculated in Step 8.
Application Information
A 100 HP, 460 Volt motor and drive is accelerating and decelerating as
depicted in Figure 2.
• Cycle period (t
) is 60 seconds
4
• Rated speed is 1785 RPM
• Deceleration time from rated speed to 0 speed is 6.0 seconds
• Motor load can be considered purely as an inertia
• All power expended or absorbed by the motor is absorbed by the
motor and load inertia
• Load inertia is directly coupled to the motor
• Motor inertia plus load inertia is given as 9.61 kg-m
2
Page 11

Heavy Duty Dynamic Braking 11
Calculate Application Values
Use the Application Information to calculate the necessary values to choose
an acceptable Chopper Module and Dynamic Brake Resistor.
Rated Power of Motor = 100 HP × 746 = 74.6 kW
This information is given and must be known before the calculation process
begins. If this rating is given in horsepower, convert to watts before using
in the equations.
Rated Speed = 1785 RPM = 2π × 1785/60 = 186.93 Rad/s = ω
This information is given and must be known before the calculation process
begins. If this rating is given in RPM, convert to radians per second before
using in the equations.
Total Inertia = 9.61 kg-m2 = J
T
If this value is given in lb-ft2 or Wk2, convert to kg-m2 before using in the
equations. Total inertia is given and does not need further calculations as
outlined in Step 2.
Deceleration Time = 6.0 seconds = (t3 - t2)
Period of Cycle = 60 seconds = t
DC Bus Voltage = 750 Volts = V
4
d
This is known because the drive is rated at 460 Volts rms.
If a drive is rated 230 Volts rms, V
If a drive is rated 575 Volts rms, V
= 375 Volts.
d
= 937.5 Volts.
d
Select the Correct Chopper Module
Peak Braking Power = J
2
ω
/(t3 - t2) = 55.96 kW = P
T
b
This is 75% rated power and is less than the maximum drive limit of 150%
current limit. This calculation is the result of Step 3 and determines the peak
power that must be dissipated by the Dynamic Brake Resistor.
Maximum Dynamic Brake Resistance = V
2
/Pb = 10.5 ohms = R
d
db1
This calculation is the result of Step 4 and determines the maximum ohmic
value of the Dynamic Brake Resistor. Note that a choice of V
= 750 Volts
d
DC was made based on the premise that the drive is rated at 460 Volts.
Minimum Current Flow = V
= 74.62 amps = I
d/Rdb1
d1
This calculation is the result of Step 5. This is the minimum value of current
that will flow through the Dynamic Brake Resistor when the Chopper
Module Transistor is turned on. Refer to Table 2b in the Installation
Instructions for the Brake Chopper Module, Publication 1336-5.65. Choose
the Brake Chopper Module whose peak current capacity is greater than
74.62 amps. The correct choice must be the WB035 Chopper Module
because it has a current rating greater than 74.62 amps.
1336-5.65 — March, 2007
Page 12

Heavy Duty Dynamic Braking12
Ordering Resistors
Minimum Dynamic Brake Resistance = Vd/Id2 = 10 ohms = R
db2
This is the result of Step 6 and is also included as a value in Table 2b.
Choose the 10.4 ohms resistor, type T10F4R2K97, rated at 2.97 kW from
Tabl e 2 a.
Average Power Dissipation = [(t3 - t2)/t4]Pb/2 = 2.8 kW = P
av
This is the result of calculating the average power dissipation as outlined
in Step 8. Verify that the power rating of the Dynamic Brake Resistor chosen
in Step 7 is greater than the value calculated in Step 8. Note that the actual
resistor wattage rating is much greater than what is needed. The type
T10F4R2K97 assembly is the best choice based on resistance and wattage
values.
Resistor assemblies listed are manufactured by IPC Power Resistors
International Incorporated and Powerohm Resistors Incorporated and have
been tested with Allen-Bradley Chopper Modules.
Available resistor assembly options include an overtemperature switch (see
Wiring Schemes), auxiliary terminal blocks and custom enclosures.
For purchase information, contact:
IPC Power Resistors International Inc.
167 Gap Way
Erlanger, KY 41018
Tel. 859-282-2900 Fax. (859) 282-2904
www.ipcresistors.com
Powerohm Resistors Inc.
5713 13th Street
Katy, TX 77493
Tel. 800-838-4694 Fax. (859) 384-8099
www.powerohm.com
1336-5.65 — March, 2007
Page 13
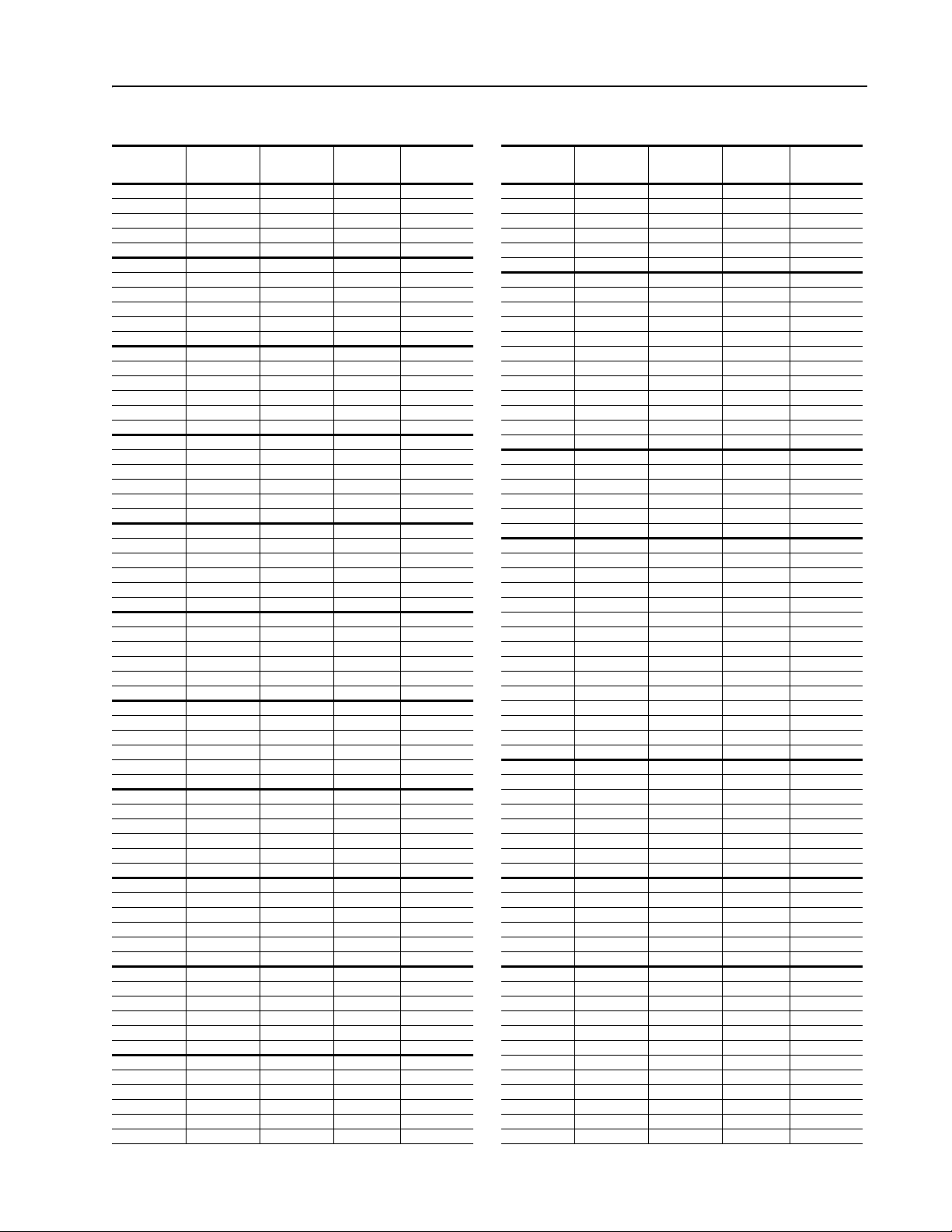
Chopper Module Selection
Heavy Duty Dynamic Braking 13
Ohms Watts Catalog
956 242 552-1 4225 IPC
956 400 555-1A 6260 IPC
956 597 550-1A 6260 IPC
956 605 555-1 6260 IPC
956 915 550-1 6260 IPC
695 248 552-2A 4929 IPC
695 333 552-2 4929 IPC
695 553 555-2A 7981 IPC
695 825 550-2A 7981 IPC
695 832 555-2 7981 IPC
695 1258 550-2 15258 IPC
615 180 442-1A 4225 IPC
615 242 442-1 4225 IPC
615 404 445-1A 4225 IPC
615 602 440-1A 13302 IPC
615 605 445-1 13615 IPC
615 915 440-1 13302 IPC
546 316 552-3A 5634 IPC
546 424 552-3 12050 IPC
546 707 555-3A 12050 IPC
546 1055 550-3A 23004 IPC
546 1059 555-3 23004 IPC
546 1601 550-3 36619 IPC
439 254 442-2A 2973 IPC
439 339 442-2 2973 IPC
439 568 445-2A 2973 IPC
439 847 445-2 11267 IPC
439 848 440-2A 9389 IPC
439 1281 440-2 24647 IPC
364 477 552-4A 3990 IPC
364 635 552-4 15336 IPC
364 1065 555-4A 24412 IPC
364 1588 555-4 38496 IPC
364 1590 550-4A 38496 IPC
364 2402 550-4 39514 IPC
342 329 442-3A 3677 IPC
342 435 442-3 3677 IPC
342 734 445-3A 14397 IPC
342 1088 445-3 23473 IPC
342 1096 440-3A 22534 IPC
342 1645 440-3 36306 IPC
283 614 552-5A 19092 IPC
283 817 552-5 19092 IPC
283 1372 555-5A 30046 IPC
283 2043 555-5 48120 IPC
283 2048 550-5A 47338 IPC
283 3089 550-5 76680 IPC
237 473 442-4A 5321 IPC
237 628 442-4 15649 IPC
237 1057 445-4A 25351 IPC
237 1570 445-4 38496 IPC
237 1577 440-4A 39748 IPC
237 2373 440-4 61422 IPC
196 890 552-6A 20970 IPC
196 1180 552-6 33567 IPC
196 1987 555-6A 53519 IPC
196 2950 555-6 83096 IPC
196 2965 550-6A 83096 IPC
196 4460 550-6 130669 IPC
181 620 442-5A 19248 IPC
181 822 442-5 19248 IPC
181 1385 445-5A 30985 IPC
181 2055 445-5 77853 IPC
181 2068 440-5A 77853 IPC
181 3108 440-5 77775 IPC
Watt
Seconds
Manufacturer
Ohms Watts Catalog
154 182 222-1A 6416 IPC
154 242 222-1 6416 IPC
154 408 225-1A 6416 IPC
154 604 225-1 16431 IPC
154 610 220-1A 16431 IPC
154 913 220-1 16431 IPC
150 400 PF150R400W 7700 Powerohm
150 800 PF150R800W 12100 Powerohm
150 1200 PF150R1K20 30000 Powerohm
150 1600 PF150R1K60 54200 Powerohm
150 2000 PF150R2K00 53500 Powerohm
150 2400 PF150R2K40 82500 Powerohm
150 2800 PF150R2K80 132000 Powerohm
150 3200 PF150R3K20 136500 Powerohm
150 3600 PF150R3K60 196200 Powerohm
150 4000 PF150R4K00 192400 Powerohm
150 5200 PF150R5K20 333400 Powerohm
150 5600 PF150R5K60 329100 Powerohm
128 874 442-6A 22065 IPC
128 1162 442-6 32863 IPC
128 1951 445-6A 55397 IPC
128 2906 445-6 86382 IPC
128 2912 440-6A 82626 IPC
128 4395 440-6 138024 IPC
125 400 PF125R400W 6500 Powerohm
125 800 PF125R800W 18300 Powerohm
125 1200 PF125R1K20 25200 Powerohm
125 1386 552-7A 32863 IPC
125 1600 PF125R1K60 44200 Powerohm
125 1850 552-7 51954 IPC
125 2000 PF125R2K00 68700 Powerohm
125 3095 555-7A 130903 IPC
125 3600 PF125R3K60 161600 Powerohm
125 4000 PF125R4K00 277800 Powerohm
125 4620 550-7A 208131 IPC
125 4625 555-7 208131 IPC
125 6994 550-7 212513 IPC
125 7200 PF125R7K20 341300 Powerohm
125 7600 PF125R7K60 344600 Powerohm
117 300 T117R300W 7950 IPC
117 600 T117R600W 10100 IPC
117 900 T117R900W 10600 IPC
117 1200 T117R1K2 12500 IPC
117 1500 T117R1K5 15800 IPC
117 2100 T117R2K1 18600 IPC
117 2700 T117R2K7 14300 IPC
117 3000 T117R3K0 20800 IPC
110 255 222-2A 7511 IPC
110 338 222-2 7511 IPC
110 570 225-2A 18779 IPC
110 845 225-2 18779 IPC
110 850 220-2A 18779 IPC
110 1278 220-2 46947 IPC
100 400 PF100R400W 5200 Powerohm
100 800 PF100R800W 20000 Powerohm
100 1200 PF100R1K20 35300 Powerohm
100 1600 PF100R1K60 55000 Powerohm
100 2000 PF100R2K00 89800 Powerohm
100 2400 PF100R2K40 130800 Powerohm
100 2800 PF100R2K80 125700 Powerohm
100 3600 PF100R3K60 211600 Powerohm
100 4000 PF100R4K00 205200 Powerohm
100 4800 PF100R4K80 285500 Powerohm
100 5200 PF100R5K20 275000 Powerohm
100 5600 PF100R5K60 273100 Powerohm
Watt
Seconds
Manufacturer
1336-5.65 — March, 2007
Page 14

Heavy Duty Dynamic Braking14
Ohms Watts Catalog
100 6800 PF100R6K80 450100 Powerohm
100 8000 PF100R8K00 692400 Powerohm
100 9200 PF100R9K20 676300 Powerohm
97 300 T97R300W 10300 IPC
97 600 T97R600W 13400 IPC
97 900 T97R900W 13800 IPC
97 1200 T97R1K2 16500 IPC
97 1500 T97R1K5 20800 IPC
97 2100 T97R2K1 15400 IPC
97 2700 T97R2K7 19100 IPC
97 3000 T97R3K0 16800 IPC
97 3600 T97R3K6 22400 IPC
97 4200 T97R4K2 19100 IPC
85 326 222-3A 9076 IPC
85 400 PF85R400W 6900 Powerohm
85 438 222-3 9076 IPC
85 730 225-3A 23004 IPC
85 800 PF85R800W 17200 Powerohm
85 1089 220-3A 36384 IPC
85 1094 225-3 36384 IPC
85 1200 PF85R1K20 46200 Powerohm
85 1600 PF85R1K60 75400 Powerohm
85 1654 220-3 57901 IPC
85 2000 PF85R2K00 109000 Powerohm
85 2056 552-8A 57588 IPC
85 2720 552-8 92016 IPC
85 2800 PF85R2K80 179500 Powerohm
85 3600 PF85R3K60 173600 Powerohm
85 4592 555-8A 233795 IPC
85 5200 PF85R5K20 379200 Powerohm
85 5600 PF85R5K60 383300 Powerohm
85 6800 PF85R6K80 588500 Powerohm
85 6801 555-8 231135 IPC
85 6854 550-8A 231135 IPC
85 7200 PF85R7K20 578500 Powerohm
85 10000 PF85R10K0 934100 Powerohm
85 10285 550-8 361490 IPC
85 11200 PF85R11K2 923100 Powerohm
81 1389 442-7A 34975 IPC
81 1837 442-7 55084 IPC
81 3102 445-7A 55319 IPC
81 4592 445-7 224640 IPC
81 4629 440-7A 221432 IPC
81 6944 440-7 221276 IPC
80 300 T80R300W 8530 IPC
80 400 PF80R400W 6500 Powerohm
80 600 T80R600W 10900 IPC
80 800 PF80R800W 16000 Powerohm
80 900 T80R900W 18500 IPC
80 1200 T80R1K2 13700 IPC
80 1200 PF80R1K20 44600 Powerohm
80 1500 T80R1K5 17500 IPC
80 2000 PF80R2K00 102600 Powerohm
80 2100 T80R2K1 19100 IPC
80 2700 T80R2K7 24600 IPC
80 3000 T80R3K0 22100 IPC
80 3600 T80R3K6 18500 IPC
80 4000 PF80R4K00 229300 Powerohm
80 4200 T80R4K2 25100 IPC
80 4500 T80R4K5 23300 IPC
80 5700 T80R5K7 29400 IPC
80 7600 PF80R7K60 545700 Powerohm
80 8000 PF80R8K00 897500 Powerohm
80 9000 T80R9K0 209000 IPC
80 9300 T80R9K3 230000 IPC
77 300 T77R300W 8210 IPC
77 600 T77R600W 10600 IPC
Watt
Seconds
Manufacturer
Ohms Watts Catalog
77 900 T77R900W 17900 IPC
77 1200 T77R1K2 20800 IPC
77 1500 T77R1K5 16400 IPC
77 2100 T77R2K1 19100 IPC
77 2700 T77R2K7 23800 IPC
77 3000 T77R3K0 21300 IPC
77 3600 T77R3K6 28100 IPC
77 4200 T77R4K2 24200 IPC
77 4500 T77R4K5 22400 IPC
77 5700 T77R5K7 28700 IPC
77 9000 T77R9K0 209000 IPC
77 9300 T77R9K3 230000 IPC
70 400 PF70R400W 5700 Powerohm
70 800 PF70R800W 25000 Powerohm
70 1200 PF70R1K20 62000 Powerohm
70 2400 PF70R2K40 153900 Powerohm
70 2527 552-9A 76680 IPC
70 3303 552-9 144048 IPC
70 4800 PF70R4K80 308300 Powerohm
70 5643 555-9A 189665 IPC
70 8258 555-9 297173 IPC
70 8424 550-9A 295765 IPC
70 9600 PF70R9K60 1249300 Powerohm
70 12489 550-9 482144 IPC
65 400 PF65R400W 9500 Powerohm
65 800 PF65R800W 23600 Powerohm
65 1200 PF65R1K20 59300 Powerohm
65 2000 PF65R2K00 138900 Powerohm
65 2400 PF65R2K40 141100 Powerohm
65 3600 PF65R3K60 178100 Powerohm
65 4000 PF65R4K00 291700 Powerohm
65 7200 PF65R7K20 712100 Powerohm
65 7600 PF65R7K60 709900 Powerohm
65 16640 PF65R16K6 690800 Powerohm
60 300 T60R300W 10300 IPC
60 400 PF60R400W 8700 Powerohm
60 600 T60R600W 13000 IPC
60 800 PF60R800W 21400 Powerohm
60 900 T60R900W 13700 IPC
60 1200 T60R1K2 16400 IPC
60 1500 T60R1K5 20800 IPC
60 2000 PF60R2K00 128300 Powerohm
60 2700 T60R2K7 18500 IPC
60 3600 T60R3K6 22000 IPC
60 4000 PF60R4K00 269300 Powerohm
60 4500 T60R4K5 28000 IPC
60 6900 T60R6K9 164000 IPC
60 8000 PF60R8K00 659400 Powerohm
60 11000 T60R11K0 448000 IPC
60 15896 PF60R15K8 690800 Powerohm
59 473 222-4A 10094 IPC
59 631 222-4 25038 IPC
59 1056 225-4A 39201 IPC
59 1576 225-4 64161 IPC
59 1577 220-4A 64161 IPC
59 2384 220-4 99762 IPC
56 2010 442-8A 61344 IPC
56 2657 442-8 154455 IPC
56 4490 445-8A 245062 IPC
56 6642 445-8 245375 IPC
56 6702 440-8A 245375 IPC
56 10045 440-8 388094 IPC
55 400 PF55R400W 8000 Powerohm
55 800 PF55R800W 30800 Powerohm
52 400 PF52R400W 10400 Powerohm
52 800 PF52R800W 28600 Powerohm
52 1200 PF52R1K20 65400 Powerohm
Watt
Seconds
Manufacturer
1336-5.65 — March, 2007
Page 15

Heavy Duty Dynamic Braking 15
Ohms Watts Catalog
52 1600 PF52R1K60 111200 Powerohm
52 2400 PF52R2K40 149600 Powerohm
52 2800 PF52R2K80 142400 Powerohm
52 3200 PF52R3K20 233400 Powerohm
52 4800 PF52R4K80 352900 Powerohm
52 5600 PF52R5K60 569300 Powerohm
52 6000 PF52R6K00 577000 Powerohm
52 9600 PF52R9K60 598400 Powerohm
52 13312 PF52R13K3 621800 Powerohm
52 18625 PF52R18K6 583500 Powerohm
48 300 T48R300W 13100 IPC
48 400 PF48R400W 9600 Powerohm
48 600 T48R600W 16500 IPC
48 800 PF48R800W 26400 Powerohm
48 900 T48R900W 17500 IPC
48 1200 T48R1K2 20800 IPC
48 1200 PF48R1K20 61600 Powerohm
48 1500 T48R1K5 16600 IPC
48 2000 PF48R2K00 98500 Powerohm
48 2700 T48R2K7 23300 IPC
48 3000 T48R3K0 21100 IPC
48 3600 T48R3K6 28000 IPC
48 3600 PF48R3K60 86200 Powerohm
48 4200 T48R4K2 23800 IPC
48 5670 T48R5K67 131000 IPC
48 6600 T48R6K6 131000 IPC
48 12600 T48R12K6 359000 IPC
48 19100 T48R19K1 656000 IPC
48 20400 T48R20K4 716000 IPC
45 300 T45R300W 12300 IPC
45 600 T45R600W 15800 IPC
45 617 222-5A 30828 IPC
45 827 222-5 30828 IPC
45 1200 T45R1K2 19100 IPC
45 1378 225-5A 49529 IPC
45 1500 T45R1K5 24900 IPC
45 2056 220-5A 124800 IPC
45 2066 225-5 124800 IPC
45 2100 T45R2K1 28100 IPC
45 2700 T45R2K7 22000 IPC
45 3000 T45R3K0 19800 IPC
45 3125 220-5 197177 IPC
45 3600 T45R3K6 26600 IPC
45 3883 552-10A 120810 IPC
45 5138 552-10 308128 IPC
45 6000 T45R6K0 125000 IPC
45 8672 555-10A 370410 IPC
45 12600 T45R12K6 359000 IPC
45 12846 555-10 409420 IPC
45 12943 550-10A 409420 IPC
45 19100 T45R19K1 656000 IPC
45 19427 550-10 563362 IPC
44 400 PF44R400W 8800 Powerohm
44 800 PF44R800W 39500 Powerohm
44 1200 PF44R1K20 57700 Powerohm
44 2000 PF44R2K00 126100 Powerohm
44 2561 442-9A 121670 IPC
44 2800 PF44R2K80 197900 Powerohm
44 3381 442-9 190604 IPC
44 3600 PF44R3K60 79000 Powerohm
44 4000 PF44R4K00 300900 Powerohm
44 5600 PF44R5K60 477000 Powerohm
44 5720 445-9A 184031 IPC
44 7200 PF44R7K20 793400 Powerohm
44 7600 PF44R7K60 775400 Powerohm
44 8454 445-9 305624 IPC
44 8537 440-9A 302807 IPC
Watt
Seconds
Manufacturer
Ohms Watts Catalog
44 11264 PF44R11K2 483600 Powerohm
44 12784 440-9 369388 IPC
44 15000 PF44R15K0 495000 Powerohm
44 23276 PF44R23K2 1263600 Powerohm
40 300 T40R300W 10900 IPC
40 400 PF40R400W 8000 Powerohm
40 800 PF40R800W 35900 Powerohm
40 900 T40R900W 14300 IPC
40 1200 T40R1K2 17300 IPC
40 1200 PF40R1K20 83400 Powerohm
40 1800 T40R1K8 18500 IPC
40 2000 PF40R2K00 114700 Powerohm
40 3200 PF40R3K20 277000 Powerohm
40 4000 T40R4K0 105000 IPC
40 4000 PF40R4K00 448800 Powerohm
40 6000 PF40R6K00 727000 Powerohm
40 10000 T40R10K0 309000 IPC
40 10240 PF40R10K2 414500 Powerohm
40 11000 T40R11K0 333000 IPC
40 11429 PF40R11K4 440000 Powerohm
40 16000 T40R16K0 521000 IPC
40 16000 PF40R16K0 638700 Powerohm
40 17000 T40R17K0 574000 IPC
40 19000 T40R19K0 568000 IPC
40 22000 T40R22K0 1202000 IPC
40 22858 PF40R22K8 1130600 Powerohm
36 400 PF36R400W 12900 Powerohm
36 800 PF36R800W 32400 Powerohm
36 1200 PF36R1K20 77000 Powerohm
36 1600 PF36R1K60 103200 Powerohm
36 2000 PF36R2K00 99000 Powerohm
36 2400 PF36R2K40 79200 Powerohm
36 4000 PF36R4K00 395700 Powerohm
36 4400 PF36R4K40 399000 Powerohm
36 9216 PF36R9K21 414500 Powerohm
36 11298 555-11A 316618 IPC
36 16517 555-11 449907 IPC
36 16863 550-11A 449907 IPC
36 19044 PF36R19K0 1064100 Powerohm
36 24978 550-11 1321116 IPC
35 5058 552-11A 157272 IPC
35 6423 552-11 249757 IPC
34 300 T34R300W 14700 IPC
34 900 T34R900W 19100 IPC
34 1800 T34R1K8 25100 IPC
34 2400 T34R2K4 30100 IPC
34 3600 T34R3K6 93000 IPC
34 4000 T34R4K0 98600 IPC
34 8000 T34R8K0 262000 IPC
34 9000 T34R9K0 285000 IPC
34 13000 T34R13K0 456000 IPC
34 15000 T34R15K0 456000 IPC
34 17000 T34R17K0 990000 IPC
34 18000 T34R18K0 1017000 IPC
34 19000 T34R19K0 1048000 IPC
34 26000 T34R26K0 1591000 IPC
32 300 T32R300W 13800 IPC
32 400 PF32R400W 11400 Powerohm
32 600 T32R600W 17500 IPC
32 800 PF32R800W 41100 Powerohm
32 875 222-6A 35054 IPC
32 900 T32R900W 19100 IPC
32 1162 222-6 55162 IPC
32 1200 PF32R1K20 70600 Powerohm
32 1500 T32R1K5 28100 IPC
32 1600 PF32R1K60 91800 Powerohm
32 1955 225-6A 88573 IPC
Watt
Seconds
Manufacturer
1336-5.65 — March, 2007
Page 16

Heavy Duty Dynamic Braking16
Ohms Watts Catalog
32 2000 PF32R2K00 143600 Powerohm
32 2100 T32R2K1 20200 IPC
32 2400 PF32R2K40 113100 Powerohm
32 2700 T32R2K7 25200 IPC
32 2800 PF32R2K80 220200 Powerohm
32 2906 225-6 82626 IPC
32 2918 220-6A 82626 IPC
32 3600 PF32R3K60 102600 Powerohm
32 4000 T32R4K0 83300 IPC
32 4395 220-6 222215 IPC
32 4500 T32R4K5 105000 IPC
32 4800 PF32R4K80 581600 Powerohm
32 5200 PF32R5K20 583400 Powerohm
32 8420 T32R8K42 246000 IPC
32 9144 PF32R9K14 345400 Powerohm
32 10368 PF32R10K3 385000 Powerohm
32 12700 T32R12K7 410000 IPC
32 13545 PF32R13K5 511000 Powerohm
32 17100 T32R17K1 931000 IPC
32 18000 T32R18K0 1017000 IPC
32 18286 PF32R18K2 931100 Powerohm
32 21632 PF32R21K6 1203600 Powerohm
32 26000 T32R26K0 1591000 IPC
32 27090 PF32R27K0 2541900 Powerohm
32 28000 T32R28K0 2304000 IPC
29 3800 442-10A 127069 IPC
29 5130 442-10 199993 IPC
29 8487 445-10A 253840 IPC
29 12667 440-10A 359925 IPC
29 12826 445-10 359925 IPC
29 19396 440-10 615920 IPC
28 400 PF28R400W 15400 Powerohm
28 800 PF28R800W 35900 Powerohm
28 1200 PF28R1K20 57300 Powerohm
28 1600 PF28R1K60 77000 Powerohm
28 2000 PF28R2K00 124100 Powerohm
28 2800 PF28R2K80 314200 Powerohm
28 4000 PF28R4K00 502600 Powerohm
28 4400 PF28R4K40 493600 Powerohm
28 5600 PF28R5K60 320400 Powerohm
28 6096 552-12A 299521 IPC
28 7501 PF28R7K50 345400 Powerohm
28 8258 552-12 237463 IPC
28 9072 PF28R9K07 330000 Powerohm
28 11200 PF28R11K2 447100 Powerohm
28 13615 555-12A 359925 IPC
28 15001 PF28R15K0 846300 Powerohm
28 18928 PF28R18K9 1132800 Powerohm
28 20321 550-12A 1100930 IPC
28 20646 555-12 1033301 IPC
28 23548 PF28R23K5 2224200 Powerohm
28 30001 PF28R30K0 3042600 Powerohm
28 30492 550-12 2138364 IPC
28 36288 PF28R36K2 4610000 Powerohm
27 300 T27R300W 18500 IPC
27 600 T27R600W 15400 IPC
27 900 T27R900W 24900 IPC
27 1200 T27R1K2 18800 IPC
27 1500 T27R1K5 23700 IPC
27 2100 T27R2K1 27300 IPC
27 3300 T27R3K3 73900 IPC
27 8420 T27R8K42 358000 IPC
27 11500 T27R11K5 391000 IPC
27 15000 T27R15K0 931000 IPC
27 21600 T27R21K6 1346000 IPC
27 27400 T27R27K4 2075000 IPC
25 300 T25R300W 17200 IPC
Watt
Seconds
Manufacturer
Ohms Watts Catalog
25 400 PF25R400W 13800 Powerohm
25 600 T25R600W 14300 IPC
25 800 PF25R800W 55600 Powerohm
25 900 T25R900W 23000 IPC
25 1200 T25R1K2 27700 IPC
25 1200 PF25R1K20 71400 Powerohm
25 1500 T25R1K5 22000 IPC
25 1600 PF25R1K60 55000 Powerohm
25 2000 PF25R2K00 173100 Powerohm
25 2400 PF25R2K40 130800 Powerohm
25 2800 PF25R2K80 277000 Powerohm
25 3200 PF25R3K20 272600 Powerohm
25 3300 T25R3K3 73900 IPC
25 3900 T25R3K9 190000 IPC
25 6876 PF25R6K87 276400 Powerohm
25 8420 T25R8K42 328000 IPC
25 10158 PF25R10K1 383200 Powerohm
25 13751 PF25R13K7 752200 Powerohm
25 21025 PF25R21K0 2012300 Powerohm
25 25600 PF25R25K6 2789000 Powerohm
25 32400 PF25R32K4 4149000 Powerohm
25 40632 PF25R40K6 1445600 Powerohm
25 55001 PF25R55K0 2926300 Powerohm
24 7340 552-13A 211079 IPC
24 9635 552-13 299938 IPC
24 16393 555-13A 533797 IPC
24 24086 555-13 1173670 IPC
24 24468 550-13A 1871068 IPC
24 36710 550-13 844315 IPC
23 300 T23R300W 15800 IPC
23 600 T23R600W 20800 IPC
23 800 PF23R800W 51300 Powerohm
23 900 T23R900W 21300 IPC
23 1200 PF23R1K20 63500 Powerohm
23 1500 T23R1K5 20200 IPC
23 1600 PF23R1K60 82600 Powerohm
23 2000 PF23R2K00 157300 Powerohm
23 2100 T23R2K1 23100 IPC
23 3600 PF23R3K60 185800 Powerohm
23 4982 442-11A 254295 IPC
23 6310 T23R6K31 179000 IPC
23 6469 442-11 399830 IPC
23 7452 PF23R7K45 275000 Powerohm
23 7490 T23R7K49 328000 IPC
23 10200 T23R10K2 310000 IPC
23 11125 445-11A 492736 IPC
23 15548 PF23R15K5 900900 Powerohm
23 16172 445-11 825698 IPC
23 29808 PF23R29K8 3841600 Powerohm
21 400 PF21R400W 18900 Powerohm
21 800 PF21R800W 47100 Powerohm
21 1200 PF21R1K20 57700 Powerohm
21 1600 PF21R1K60 75400 Powerohm
21 2000 PF21R2K00 143600 Powerohm
21 2400 PF21R2K40 107700 Powerohm
21 3200 PF21R3K20 373400 Powerohm
21 4000 PF21R4K00 240800 Powerohm
21 5626 PF21R5K62 236100 Powerohm
21 7426 PF21R7K42 234800 Powerohm
21 8400 PF21R8K40 319400 Powerohm
21 11251 PF21R11K2 564200 Powerohm
21 17661 PF21R17K6 1694600 Powerohm
21 22501 PF21R22K5 2282000 Powerohm
21 33600 PF21R33K6 5992900 Powerohm
21 45001 PF21R45K0 2394200 Powerohm
21 70644 PF21R70K6 6778300 Powerohm
20 300 T20R300W 13700 IPC
Watt
Seconds
Manufacturer
1336-5.65 — March, 2007
Page 17

Heavy Duty Dynamic Braking 17
Ohms Watts Catalog
20 600 T20R600W 17300 IPC
20 900 T20R900W 18500 IPC
20 1372 222-7A 87086 IPC
20 1500 T20R1K5 28000 IPC
20 1860 222-7 55084 IPC
20 3063 225-7A 138493 IPC
20 4572 220-7A 222215 IPC
20 4650 225-7 221432 IPC
20 5940 T20R5K94 260000 IPC
20 7031 220-7 169227 IPC
20 8920 T20R8K92 267000 IPC
20 10700 T20R10K7 582000 IPC
20 15200 T20R15K2 924000 IPC
20 16605 440-11A 825698 IPC
20 20600 T20R20K6 1602000 IPC
20 24910 440-11 1781970 IPC
20 28400 T20R28K4 1066000 IPC
20 34600 T20R34K6 1148000 IPC
19 400 PF19R400W 17100 Powerohm
19 800 PF19R800W 39000 Powerohm
19 1200 PF19R1K20 84900 Powerohm
19 1600 PF19R1K60 68300 Powerohm
19 2000 PF19R2K00 213200 Powerohm
19 2800 PF19R2K80 339300 Powerohm
19 3200 PF19R3K20 344700 Powerohm
19 4864 PF19R4K86 207300 Powerohm
19 6716 PF19R6K71 220000 Powerohm
19 8213 PF19R8K21 272600 Powerohm
19 9540 552-14A 410613 IPC
19 10051 PF19R10K0 564200 Powerohm
19 12170 552-14 410613 IPC
19 13613 PF19R13K6 700700 Powerohm
19 16425 PF19R16K4 1497400 Powerohm
19 19456 PF19R19K4 2155200 Powerohm
19 21305 555-14A 1514674 IPC
19 30400 PF19R30K4 5393600 Powerohm
19 31798 550-14A 3029900 IPC
19 31965 555-14 2913365 IPC
19 40204 PF19R40K2 2128200 Powerohm
19 47709 550-14 5953399 IPC
19 63916 PF19R63K9 6142800 Powerohm
19 77824 PF19R77K8 8113500 Powerohm
18 6184 442-12A 152850 IPC
18 8266 442-12 234734 IPC
18 13810 445-12A 660558 IPC
18 20612 440-12A 1336477 IPC
18 20664 445-12 1336477 IPC
18 30910 440-12 899814 IPC
15.4 800 PF15F4R800W 42400 Powerohm
15.4 1200 PF15F4R1K20 106000 Powerohm
15.4 2400 PF15F4R2K40 123100 Powerohm
15.4 5063 PF15F4R5K06 165000 Powerohm
15.4 10410 PF15F4R10K4 600600 Powerohm
15.4 20251 PF15F4R20K2 2612300 Powerohm
15.4 41642 PF15F4R41K6 2407200 Powerohm
15 300 T15R300W 16400 IPC
15 600 T15R600W 20800 IPC
15 900 T15R900W 22000 IPC
15 1500 T15R1K5 38800 IPC
15 4210 T15R4K21 143000 IPC
15 6160 T15R6K16 232000 IPC
15 7132 442-13A 179963 IPC
15 8570 T15R8K57 466000 IPC
15 9919 442-13 328491 IPC
15 11400 T15R11K4 734000 IPC
15 12112 552-15A 550465 IPC
15 15927 445-13A 1158280 IPC
Watt
Seconds
Manufacturer
Ohms Watts Catalog
15 18173 552-15 1158280 IPC
15 23772 440-13A 719851 IPC
15 23894 445-13 719851 IPC
15 27060 555-15A 719851 IPC
15 35663 440-13 1313963 IPC
15 40388 550-15A 1300276 IPC
15 40587 555-15 1313963 IPC
15 60579 550-15 7591398 IPC
14 300 T14R300W 15400 IPC
14 600 T14R600W 19400 IPC
14 900 T14R900W 20700 IPC
14 1200 T14R1K2 24500 IPC
14 1800 T14R1K8 27800 IPC
14 2012 222-8A 61344 IPC
14 2657 222-8 154455 IPC
14 4495 225-8A 117367 IPC
14 6160 T14R6K16 232000 IPC
14 6642 225-8 172138 IPC
14 6708 220-8A 172138 IPC
14 10045 220-8 523728 IPC
14 11400 T14R11K4 734000 IPC
14 12700 T14R12K7 1038000 IPC
13 800 PF13R800W 58400 Powerohm
13 1600 PF13R1K60 111200 Powerohm
13 2800 PF13R2K80 238800 Powerohm
13 5457 PF13R5K45 191600 Powerohm
13 11000 PF13R11K0 1048200 Powerohm
12 9641 442-14A 440372 IPC
12 12398 442-14 890985 IPC
12 13780 552-16A 890985 IPC
12 20673 552-16 599876 IPC
12 21531 445-14A 1924486 IPC
12 30776 555-16A 1040221 IPC
12 32136 440-14A 1040221 IPC
12 32297 445-14 1040221 IPC
12 45934 550-16A 2387466 IPC
12 46170 555-16 2247026 IPC
12 48204 440-14 1314510 IPC
12 68911 550-16 10015318 IPC
11.5 400 PF11F5R400W 25700 Powerohm
11.5 800 PF11F5R800W 41300 Powerohm
11.5 1600 PF11F5R1K60 102600 Powerohm
11.5 2000 PF11F5R2K00 206500 Powerohm
11.5 2944 PF11F5R2K94 146900 Powerohm
11.5 3726 PF11F5R3K72 140900 Powerohm
11.5 4600 PF11F5R4K60 191600 Powerohm
11.5 6083 PF11F5R6K08 321100 Powerohm
11.5 7774 PF11F5R7K77 500500 Powerohm
11.5 9671 PF11F5R9K67 898500 Powerohm
11.5 11776 PF11F5R11K7 1254700 Powerohm
11.5 14904 PF11F5R14K9 1955300 Powerohm
11.5 18400 PF11F5R18K4 3196300 Powerohm
11.5 24334 PF11F5R24K3 1330100 Powerohm
11.5 31096 PF11F5R31K0 1840800 Powerohm
11.5 59616 PF11F5R59K6 7683200 Powerohm
11.5 110001 PF11F5R110K0 11663100 Powerohm
11 2561 222-9A 121123 IPC
11 3381 222-9 100080 IPC
11 5720 225-9A 237243 IPC
11 8454 225-9 407344 IPC
11 8537 220-9A 407344 IPC
11 12784 220-9 890985 IPC
10.4 300 T10F4R300W 17300 IPC
10.4 600 T10F4R600W 22900 IPC
10.4 900 T10F4R900W 24500 IPC
10.4 1500 T10F4R1K5 25400 IPC
10.4 2970 T10F4R2K97 95100 IPC
Watt
Seconds
Manufacturer
1336-5.65 — March, 2007
Page 18

Heavy Duty Dynamic Braking18
Ohms Watts Catalog
10.4 5360 T10F4R5K36 329000 IPC
10.4 6040 T10F4R6K4 489000 IPC
10.4 8890 T10F4R8K89 801000 IPC
10.4 11000 T10F4R11K0 359000 IPC
10.4 15500 T10F4R15K5 1742000 IPC
10.4 18900 T10F4R18K9 1991000 IPC
10.4 26000 T10F4R26K0 2002000 IPC
10.4 35600 T10F4R35K6 1230000 IPC
10.4 43900 T10F4R43K9 1367000 IPC
10.4 72300 T10F4R72K3 4620000 IPC
10.1 400 PF10F1R400W 20600 Powerohm
10.1 800 PF10F1R800W 35900 Powerohm
10.1 1200 PF10F1R1K20 112100 Powerohm
10 17713 552-17A 479901 IPC
10 26569 552-17 903350 IPC
10 39559 555-17A 1956117 IPC
10 59043 550-17A 1950414 IPC
10 59339 555-17 1950414 IPC
9.5 11926 442-15A 316618 IPC
9.5 17890 442-15 479901 IPC
9.5 26636 445-15A 3000513 IPC
9.5 39755 440-15A 2851152 IPC
9.5 39955 445-15 1079776 IPC
9.5 59635 440-15 1820386 IPC
9.2 400 PF9F2R400W 18900 Powerohm
9.2 800 PF9F2R800W 32400 Powerohm
9.2 1200 PF9F2R1K20 102200 Powerohm
9.2 1600 PF9F2R1K60 75500 Powerohm
9.2 2000 PF9F2R2K00 161600 Powerohm
9.2 2355 PF9F2R2K35 98000 Powerohm
9.2 2981 PF9F2R2K98 116700 Powerohm
9.2 3751 PF9F2R3K75 135600 Powerohm
9.2 4867 PF9F2R4K86 282100 Powerohm
9.2 6601 PF9F2R6K60 341800 Powerohm
9.2 7737 PF9F2R7K73 748700 Powerohm
9.2 9421 PF9F2R9K42 1075400 Powerohm
9.2 11923 PF9F2R11K9 1520800 Powerohm
9.2 15001 PF9F2R15K0 545200 Powerohm
9.2 19467 PF9F2R19K4 1064100 Powerohm
9.2 24876 PF9F2R24K8 1416000 Powerohm
9.2 30948 PF9F2R30K9 2965500 Powerohm
9.2 37683 PF9F2R37K6 4056800 Powerohm
9.2 47693 PF9F2R47K6 6146600 Powerohm
9.2 58880 PF9F2R58K8 10387700 Powerohm
9.2 69635 PF9F2R69K6 6672400 Powerohm
9.2 90001 PF9F2R90K0 9127700 Powerohm
9.2 132480 PF9F2R132K2 23372300 Powerohm
8 14093 442-16A 401656 IPC
8 21143 442-16 693480 IPC
8 23427 552-18A 1211023 IPC
8 31474 445-16A 1564893 IPC
8 35138 552-18 2494758 IPC
8 46977 440-16A 2966898 IPC
8 47219 445-16 1560331 IPC
8 52321 555-18A 1559677 IPC
8 70477 440-16 3325398 IPC
8 78475 555-18 5345909 IPC
7.3 3826 222-10A 164245 IPC
7.3 5095 222-10 267369 IPC
7.3 8545 225-10A 566990 IPC
7.3 12738 225-10 359925 IPC
7.3 12754 220-10A 359925 IPC
7.3 19264 220-10 656981 IPC
7 400 PF7R400W 19300 Powerohm
7 800 PF7R800W 35900 Powerohm
7 1200 PF7R1K20 123900 Powerohm
7 1600 PF7R1K60 77000 Powerohm
Watt
Seconds
Manufacturer
Ohms Watts Catalog
7 2268 PF7R2K26 77800 Powerohm
7 2800 PF7R2K80 107500 Powerohm
7 3703 PF7R3K70 199600 Powerohm
7 4732 PF7R4K73 300300 Powerohm
7 6240 PF7R6K23 599000 Powerohm
7 7383 PF7R7K38 765100 Powerohm
7 9307 PF7R9K30 1303500 Powerohm
7 11251 PF7R11K2 436200 Powerohm
7 14812 PF7R14K8 802700 Powerohm
7 18928 PF7R18K9 1132800 Powerohm
7 23548 PF7R23K5 2330100 Powerohm
7 28672 PF7R28K6 3042600 Powerohm
7 36912 PF7R36K9 4610000 Powerohm
7 45001 PF7R45K0 7990600 Powerohm
7 55001 PF7R55K0 5083700 Powerohm
7 64512 PF7R64K5 6845800 Powerohm
7 81648 PF7R81K6 10141900 Powerohm
7 110001 PF7R110K0 17978700 Powerohm
7 127575 PF7R127K7 21021300 Powerohm
7 157500 PF7R157K7 34493700 Powerohm
6.5 2106 PF6F5R2K10 92600 Powerohm
6.5 2600 PF6F5R2K60 90400 Powerohm
6.5 3438 PF6F5R3K43 188100 Powerohm
6.5 4394 PF6F5R4K39 256400 Powerohm
6.5 5466 PF6F5R5K46 599000 Powerohm
6.5 6656 PF6F5R6K65 717000 Powerohm
6.5 8424 PF6F5R8K42 1086300 Powerohm
6.4 17529 442-17A 574859 IPC
6.4 26292 442-17 719851 IPC
6.4 39148 445-17A 1231840 IPC
6.4 58430 440-17A 4818224 IPC
6.4 58718 445-17 4929414 IPC
6 28008 552-19A 1960167 IPC
6 42015 552-19 1981674 IPC
6 62551 555-19A 2135190 IPC
5.7 4938 222-11A 260816 IPC
5.7 6525 222-11 421193 IPC
5.7 11029 225-11A 905640 IPC
5.7 16314 225-11 880744 IPC
5.7 16461 220-11A 880744 IPC
5.7 24694 220-11 1781970 IPC
5.4 1670 T5F4R1K67 55700 IPC
5.4 2680 T5F4R2K68 185000 IPC
5.4 5080 T5F4R5K8 401000 IPC
5.4 5780 T5F4R5K78 169000 IPC
5.4 7280 T5F4R7K28 328000 IPC
5.4 12000 T5F4R12K0 699000 IPC
5.4 20300 T5F4R20K3 738000 IPC
5.4 22000 T5F4R22K0 717000 IPC
5.4 37700 T5F4R37K7 2310000 IPC
5.4 48100 T5F4R48K1 1845000 IPC
5.4 51900 T5F4R51K9 1953000 IPC
5.4 104000 T5F4R104K0 3444000 IPC
5.1 400 PF5F1R400W 35400 Powerohm
5.1 800 PF5F1R800W 41100 Powerohm
5.1 1600 PF5F1R1K60 141300 Powerohm
5.1 2704 PF5F1R2K70 158300 Powerohm
5.1 3448 PF5F1R3K44 212400 Powerohm
5.1 4290 PF5F1R4K29 449300 Powerohm
5.1 5408 PF5F1R5K40 537700 Powerohm
5.1 6610 PF5F1R6K60 869000 Powerohm
5.1 8160 PF5F1R8K16 1412200 Powerohm
5.1 10791 PF5F1R10K7 564200 Powerohm
5.1 13790 PF5F1R13K7 800800 Powerohm
5.1 17156 PF5F1R17K1 1694600 Powerohm
5.1 27501 PF5F1R27K5 3380700 Powerohm
5.1 32640 PF5F1R32K6 5992900 Powerohm
Watt
Seconds
Manufacturer
1336-5.65 — March, 2007
Page 19

Heavy Duty Dynamic Braking 19
Ohms Watts Catalog
5.1 59486 PF5F1R59K4 7375900 Powerohm
5.1 114750 PF5F1R114K4 25239300 Powerohm
5 22848 442-18A 1603773 IPC
5 30978 552-20A 1651395 IPC
5 34269 442-18 959801 IPC
5 46464 552-20 3891643 IPC
5 51028 445-18A 1733701 IPC
5 76534 445-18 3651418 IPC
4.8 2580 T4F8R2K58 185000 IPC
4.8 4590 T4F8R4K59 401000 IPC
4.8 5490 T4F8R5K49 169000 IPC
4.8 8880 T4F8R8K88 260000 IPC
4.8 10900 T4F8R10K9 359000 IPC
4.8 19200 T4F8R19K2 586000 IPC
4.8 25800 T4F8R25K8 984000 IPC
4.8 34600 T4F8R34K6 2310000 IPC
4.8 58200 T4F8R58K2 3696000 IPC
4.8 61000 T4F8R61K0 3916000 IPC
4.8 99300 T4F8R99K3 6159000 IPC
4.8 132000 T4F8R132K0 8077000 IPC
4.6 400 PF4F6R400W 16200 Powerohm
4.6 800 PF4F6R800W 37800 Powerohm
4.6 1200 PF4F6R1K20 53900 Powerohm
4.6 1600 PF4F6R1K60 125900 Powerohm
4.6 1630 PF4F6R1K62 61800 Powerohm
4.6 1801 PF4F6R1K80 71700 Powerohm
4.6 2433 PF4F6R2K43 133100 Powerohm
4.6 3120 PF4F6R3K12 168500 Powerohm
4.6 3869 PF4F6R3K86 383500 Powerohm
4.6 4710 PF4F6R4K71 537700 Powerohm
4.6 7360 PF4F6R7K36 1412200 Powerohm
4.6 9733 PF4F6R9K73 564200 Powerohm
4.6 12438 PF4F6R12K4 683600 Powerohm
4.6 15600 PF4F6R15K6 1497400 Powerohm
4.6 18841 PF4F6R18K8 2028400 Powerohm
4.6 23846 PF4F6R23K8 3073300 Powerohm
4.6 34817 PF4F6R34K8 3495100 Powerohm
4.6 66240 PF4F6R66K2 11386500 Powerohm
4.6 149040 PF4F6R149K9 37346900 Powerohm
4.5 6184 222-12A 152850 IPC
4.5 8266 222-12 239950 IPC
4.5 13810 225-12A 660558 IPC
4.5 20612 220-12A 1425576 IPC
4.5 20715 225-12 1425576 IPC
4.5 30918 220-12 1486256 IPC
4 28207 442-19A 1321116 IPC
4 42308 442-19 1386961 IPC
4 44057 552-21A 3441020 IPC
4 66084 552-21 1799627 IPC
3.9 32736 442-20A 2405659 IPC
3.9 49108 442-20 3246136 IPC
3.9 62996 445-19A 8013142 IPC
3.8 7227 222-13A 182571 IPC
3.8 9788 222-13 328491 IPC
3.8 16139 225-13A 430346 IPC
3.8 24089 220-13A 751149 IPC
Watt
Seconds
Manufacturer
Ohms Watts Catalog
3.8 24212 225-13 1321116 IPC
3.8 36138 220-13 2672955 IPC
3.3 1200 PF3F3R1K20 61000 Powerohm
3.3 1876 PF3F3R1K87 105500 Powerohm
3.3 2230 PF3F3R2K23 124600 Powerohm
3.3 2775 PF3F3R2K77 317800 Powerohm
3.3 3379 PF3F3R3K37 380400 Powerohm
3.3 4299 PF3F3R4K29 556400 Powerohm
3.3 6982 PF3F3R6K98 376100 Powerohm
3.3 9251 PF3F3R9K25 512700 Powerohm
3.3 11101 PF3F3R11K1 1197900 Powerohm
3.3 13516 PF3F3R13K5 1530100 Powerohm
3.3 21489 PF3F3R21K4 3595800 Powerohm
3.3 24977 PF3F3R24K9 2541900 Powerohm
3.3 38491 PF3F3R38K4 5071000 Powerohm
3.3 47520 PF3F3R47K5 8390100 Powerohm
3.3 75001 PF3F3R75K0 15984900 Powerohm
3.3 106920 PF3F3R106K6 26362500 Powerohm
3.3 150001 PF3F3R150K0 41191400 Powerohm
3.3 214582 PF3F3R214K4 70836500 Powerohm
2.7 10500 222-14A 521631 IPC
2.7 15750 222-14 520110 IPC
2.7 23452 225-14A 1173670 IPC
2.7 35003 220-14A 2164091 IPC
2.7 35178 225-14 2187360 IPC
2.6 44505 442-21A 1126723 IPC
2.3 800 PF2F3R800W 63000 Powerohm
2.3 1200 PF2F3R1K20 56900 Powerohm
2.3 1600 PF2F3R1K60 165200 Powerohm
2.3 1664 PF2F3R1K66 112400 Powerohm
2.3 1934 PF2F3R1K93 211900 Powerohm
2.3 2356 PF2F3R2K35 253600 Powerohm
2.3 2980 PF2F3R2K98 365700 Powerohm
2.3 3680 PF2F3R3K68 723300 Powerohm
2.3 7737 PF2F3R7K73 767000 Powerohm
2.3 9420 PF2F3R9K42 1075400 Powerohm
2.3 14720 PF2F3R14K7 2824300 Powerohm
2.3 17408 PF2F3R17K4 1588700 Powerohm
2.3 27501 PF2F3R27K5 3688000 Powerohm
2.3 33273 PF2F3R33K2 5992900 Powerohm
2.3 55001 PF2F3R55K0 11778400 Powerohm
2.3 74520 PF2F3R74K5 18673500 Powerohm
2.2 13370 222-15A 316618 IPC
2.2 20053 222-15 1603773 IPC
2.2 29860 225-15A 1685270 IPC
2.2 44785 225-15 1724576 IPC
2.1 1200 PF2F1R1K20 84900 Powerohm
2.1 1420 PF2F1R1K42 83100 Powerohm
2.1 1767 PF2F1R1K76 168000 Powerohm
2.1 2151 PF2F1R2K15 253600 Powerohm
2.1 2722 PF2F1R2K72 365700 Powerohm
2.1 3361 PF2F1R3K36 599300 Powerohm
2.1 4443 PF2F1R4K44 266100 Powerohm
1.88 15350 222-16A 782447 IPC
1.88 23026 222-16 1570711 IPC
1.88 34281 225-16A 2138364 IPC
1.5 19884 222-17A 1308926 IPC
Watt
Seconds
Manufacturer
1336-5.65 — March, 2007
Page 20

2
0
Heavy Duty Dynamic Braking
Chopper Module Characteristics
Drive Voltage
(Volts AC)
Turn - O n Voltage
(Volts DC) Catalog Number
230 375
460 750
575 935
Chopper Peak Transistor
Current Rating (Amps)
WA115 400 1.25
WA070 200 2.3
WA018 50 9.0
WB110 400 2.5
WB035 100 9.0
WB009 25 37.0
WC085 400 3.0
WC035 75 15.5
WC009 25 46.0
Minimum Dynamic Brake
Resistance Value (Ohms)
1336-5.65 — March, 2007
Page 21

WA018, WB009 and WC009 Dimensions and Weights
Heavy Duty Dynamic Braking 21
BULLETIN 1336 BRAKING CHOPPER
CAT
INPUT 750 VDC 9.0 ADC (RMS)
FOR USE WITH 460 VAC A.F. DRIVES
R1 (4 places)
A
1336-WB009 SER A
(Front)
E
B
A–B P\N 74101-778-XX REV
DC POWER
BRAKE ON
R2
D
C
(Side)
MADE IN U.S.A.
GND
(Bottom)
Dimensions and Weights in Millimeters (Inches) and Kilograms (Pounds)
Chopper Module A B C D E R1 Dia. R2 Weight
WA018
WB009
WC009
241.3
(9.50)
230.1
(9.06)
177.8
(7.00)
203.2
(8.00)
104.4
(4.11)
5.6
(0.22)
12.7
(0.50)
3.18
(7.0)
1336-5.65 — March, 2007
Page 22

2
2
Heavy Duty Dynamic Braking
WA070, WB035 and WC035 Dimensions and Weights
BULLETIN 1336 BRAKING CHOPPER
1336-WB035 SER A
CAT
INPUT 750 VDC 35.0 ADC (RMS)
FOR USE WITH 460 VAC A.F. DRIVES
R1 (4 places)
A
B
1
E11
(Front)
E
A–B P\N 151076 REV 01
DC POWER
BRAKE ON
MADE IN U.S.A.
GND
2
5
3
4
6
E12
C
R2
D
(Side)
(Bottom)
Dimensions and Weights in Millimeters (Inches) and Kilograms (Pounds)
Chopper Module A B C D E R1 Dia. R2 Weight
WA070
WB035
WC035
1336-5.65 — March, 2007
241.3
(9.50)
230.1
(9.06)
177.8
(7.00)
203.2
(8.00)
123.4
(4.86)
5.6
(0.22)
12.7
(0.50)
4.08
(9.0)
Page 23

WA115, WB110 and WC085 Dimensions and Weights
Heavy Duty Dynamic Braking 23
R1 (4 places)
A
B
(Front)
BULLETIN 1336 BRAKING CHOPPER
CAT
1336-WB110 SER A
INPUT 750 VDC 110.0 ADC (RMS)
FOR USE WITH 460 VAC A.F. DRIVES
DC POWER
BRAKE ON
E
A–B P\N 151076 REV 01
MADE IN U.S.A.
D
C
R2
(Side)
(Bottom)
Dimensions and Weights in Millimeters (Inches) and Kilograms (Pounds)
Chopper Module A B C D E R1 Dia. R2 Weight
WA115
WB110
WC085
290.6
(11.44)
279.4
(11.00)
228.6
(9.00)
304.8
(12.00)
239.8
(9.44)
5.6
(0.22)
38.1
(1.50)
1336-5.65 — March, 2007
(25.0)
11.34
Page 24

2
4
Heavy Duty Dynamic Braking
Specifications
Braking Torque &
Duty Cycle
Input Power DC power supplied from DC Bus.
Brake Fault
Contact
Operating
Temperature
Storage
Temperature
Humidity 5% to 95% non-condensing.
Atmosphere Noncorrosive/nonhazardous dust, vapor or gas.
Altitude Derating 1,000 meters (3,300 feet) maximum without derating.
Enclosure Type IP00 (Open)
(Refer to pages 5-10)
(1) N.C. contact, TTL compatible, closed when power is applied to the
brake module, open when a brake fault or loss of power occurs.
UL/CSA Rating: 1.0 Amps, 125VAC.
1.0 Amps, 110VAC.
2.0 Amps, 30VDC.
CE Certification: Low Voltage EN 60204-1.
PREN 50178.
Initial Contact Resistance: 100mOhms maximum.
Chopper: -10°C to 40°C (14°F to 104°F).
Resistors: -10°C to 50°C (14°F to 122°F).
Chopper: -40°C to 70°C (-40°F to 158°F).
Resistors: -40°C to 70°C (-40°F to 158°F).
Installation Requirements
WA018, WB009, WC009:75W at 100% Duty Cycle
Watts Dissipated
Minimum
Brake Resistance
1
Watts Dissipated at 100% (Continuous Duty Cycle) are approximately equal to the average watts
dissipated at 20 and 50% Duty Cycles.
1
WA070, WB035, WC035:115W at 100% Duty Cycle
WA115, WB110, WC085:190W at 100% Duty Cycle
WA018 = 9.0 Ohms WB009 = 37.0 Ohms WC009 = 46.0 Ohms
WA070 = 2.5 Ohms WB035 = 9.0 Ohms WC035 = 15.5 Ohms
WA115 = 1.25 Ohms WB110 = 2.5 Ohms WC085 = 3.0 Ohms
ATTENTION: Electric Shock can cause injury or death.
Remove all power before working on this product.
!
For all chopper module ratings, DC brake power is supplied
from the drive DC Bus.
Hazards of electrical shock exist if accidental contact is made
with parts carrying bus voltage. A DC power indicator on the
brake enclosures provides visual indication that bus voltage
is present. Before proceeding with any installation or
troubleshooting activity, allow at least one minute after input
power has been removed for the bus circuit to discharge. Bus
voltage should be verified by using a voltmeter to measure
the voltage between the +DC and -DC terminals on the drive
power terminal block. Do not attempt any servicing until the
DC power indicating light has extinguished and bus voltage
has been verified to be zero volts.
1336-5.65 — March, 2007
Page 25

Mounting Requirements
IMPORTANT: The National Electrical Code (NEC) and
local regulations govern the installation and wiring of the
brake chopper modules, dynamic braking resistors and
enclosure selection. DC power wiring, AC power wiring,
control wiring and conduit must be chosen, sized and
installed in accordance with these codes and the
information supplied on the following pages.
Brake chopper modules must only be installed in the
vertical position. Select an enclosure and a location using
the guidelines below and on the following page.
Heavy Duty Dynamic Braking 25
Air Flow
(Front)
1. Allow a minimum clearance of 152.4 mm
(6 in.) Between brake modules inside an
enclosure and all other equipment including
the drive. All brake resistor banks should be
mounted external to the enclosure on a non
combustible surface.
2. If more than one module is required, all
modules must be mounted within 3.0 m (10 ft.)
of the drive. The wires used to connect each
module to the drive must be the same length.
Resistors must be located within 30 m (100 ft.)
of the chopper module. The minimum distance
between each resistor bank and all other
enclosures or equipment is application
dependent and must be determined by the user.
152.4 mm
(6 in.)
Minimum
Drive
152.4 mm
(6 in.)
Minimum
(Front)
(Front)
152.4 mm
(6 in.)
Minimum
3.0 m
(10 ft.)
Maximum
152.4 mm
(6 in.)
Minimum
GND
152.4 mm
(6 in.)
Minimum
(Bottom)
152.4 mm
(6 in.)
Minimum
(Bottom)
30 m
(100 ft.)
Maximum
30 m
(100 ft.)
Maximum
152.4 mm
(6 in.)
Minimum
Resistor
Bank
Resistor
Bank
Each of these wires must
be of equal length.
Resistor
30 m
(100 ft.)
Maximum
1336-5.65 — March, 2007
Bank
Page 26

2
6
Setup
Heavy Duty Dynamic Braking
1336 and 1336VT Parameter Settings
Parameter 11 — Decel Frequency Hold — must be set to OFF when
dynamic braking is installed. Refer to your 1336 or 1336VT Programming
Manual for programming procedures and record the changes for future
reference.
ATTENTION: Each brake chopper module contains a
thermostat to guard against overheating and component
!
damage.
If the duty cycle, torque setting and/or ambient temperature
exceeds the specifications listed in this publication, the
thermostat is designed to trip and disable the brake modules
until components cool to rated temperature. During the
cooling period, only 10% braking torque will be available to
the motor.
If reduced braking torque represents a potential hazard to
personnel, auxiliary stopping methods must be considered
in the machine and/or control circuit design.
1336IMPACT Parameter Settings
When dynamic braking is installed:
• Parameter 76 [Regen Power Lim] typically should be set to its factory default
of “-200.0%”. A lower Regen Power Lim may be required to protect the
load during decel.
• Set Bit 10 of Parameter 13 [Bus Options].
Refer to your 1336IMPACT User Manual for programming procedures and
record the changes for future reference.
1336FORCE Parameter Settings
When dynamic braking is installed:
•A lower Regen Power Lim may be required to protect the load during decel.
Parameter 178 [Regen Power Lim] typically should be set to the required
negative % of torque.
• Clear Bit 11 of Parameter 88 [VP Flt/Warn Cfg].
Refer to your 1336FORCE User Manual for programming procedures and
record the changes for future reference.
1336PLUS and 1336PLUSII Parameter Settings
When dynamic braking is installed:
• Parameter 11 [Bus Limit En] must be set to “Disabled”.
• Braking for deceleration requires that the drive be programmed for
“Ramp-to-Stop”. Braking for overhauling loads may or may not be stop
mode specific. Program Parameters 10 and 52 per the application.
Refer to your 1336PLUS User Manual for programming procedures and
record the changes for future reference.
1336-5.65 — March, 2007
Page 27

Heavy Duty Dynamic Braking 27
Brake Fault Contact Monitoring
Brake Fuses
Brake Module Jumper Settings
For all brake module ratings a fault contact has been provided to provide a
remote output signal. Should a brake fuse fail or the brake thermostat trip,
the brake fault contact will open. Interconnection wiring for remote brake
monitoring is provided in the Wiring Schemes section.
All brake modules are internally fused to protect brake components. When
replacing brake fuses, use only the type and size specified below.
Dynamic Brake Fuse Fuse Type Rating
WA018
WB009
WC009
WA070
WB035
WC035
WA115
WB110
WC085
F1
F1
F1
F1
F1
F1
F1
F1
F1
& F2
& F2
& F2
& F2
& F2
& F2
& F2
& F2
& F2
Ferraz Shawmut A60Q or Equivalent
A60Q or Equivalent
A60Q or Equivalent
Ferraz Shawmut A70QS or Equivalent
A70QS or Equivalent
A70QS or Equivalent
Ferraz Shawmut A70QS or Equivalent
A70QS or Equivalent
A70QS or Equivalent
30A, 600V
15A, 600V
15A, 600V
125A, 700V
60A, 700V
60A, 700V
200A, 700V
200A, 700V
200A, 700V
For the Mounting Requirements shown previously as well as the Wiring Schemes,
there can be only one master brake module to control dynamic braking. When
multiple brake modules are used, only one brake module can serve as the master
brake to control the remaining slave brake modules.
Slave/Master Jumper Set to Master
BRAKE MODE
MASTER SLAVE
W1
1 (2)(3)
Cat. No.
WA018
WB009
WC009
Slave/Master Jumper Set to Slave
BRAKE MODE
MASTER SLAVE
W1
1 (2)(3)
Cat. No.
WA018
WB009
WC009
Input Voltage Jumper Set to 460V
VOLTAGE SELECT
380V 460V
W2
(2)(3)
1
Cat. No.
WB009
BRAKE MODE
SLAVE MASTER
W1
(2)(3)
1
Cat. No.
WA0 70
WB035
WC035
BRAKE MODE
SLAVE MASTER
W1
(2)(3)
1
Cat. No.
WA070
WB035
WC035
VOLT SELECT
W2
(2)
(3)
(1)
380V 460V
Cat. No.
WB035
WB110
Master Brake Module
BRAKE MODE
W1
(2)
(3)
(1)
SLAVE MASTER
Cat. No.
WA1 15
WB110
WC085
Jumper Settings
For the master brake module,
leave slave/master jumper W1
factory set to master (jumper
positions 1
& 2).
Slave Brake Module
BRAKE MODE
W1
(2)
(3)
(1)
SLAVE MASTER
Cat. No.
WA1 15
WB110
WC085
Jumper Settings
For each slave module, reset
jumper W1 to slave (jumper
positions 2
& 3).
Input Voltage Jumper Settings
Set jumper W2 on 460V models to
correspond to the nominal drive input
voltage. Setting the jumper between
positions 1
& 2 will select an input voltage of
415/460 volts. Setting the jumper between
positions 2
& 3 will select an input voltage of
380 volts. Only models WB009, WB035
& WB110 have input voltage jumpers.
1336-5.65 — March, 2007
Page 28

2
8
Heavy Duty Dynamic Braking
WA018, WB009 and WC009 Terminal Block, Fuse and Jumper Locations
BRAKE MODE
MASTER SLAVE
W1
1
Fuse F2
Fuse F1
Slave/Master Jumper W1
F2
Input Voltage Select Jumper W2
VOLTAGE SELECT
380V 460V
W2
1
DS1
DC Power ON Light
BRAKE MODE
MASTER SLAVE
W1
1
VOLTAGE SELECT
380V 460V
W2
1
Brake ON Light
DS1
DS2
DS2
Brake Module Board
BARCODE
F1
1
2
3
5
4
6
7
9
8
10
GND
Brake Frame Ground
(Connect to Earth Ground)
1
Terminal Block TB1
Max/Min Wire Size = 13.3
/ 0.5 mm
Max Torque = 2.26 N-m (20 lb.-in.)
2
3
2
(6 / 20 AWG)
5
4
6
7
9
8
10
1336-5.65 — March, 2007
Page 29

Heavy Duty Dynamic Braking 29
WA070, WB035 and WC035 Terminal Block, Fuse and Jumper Locations
Slave/Master
Jumper W1
Fuse F1
BRAKE MODE
SLAVE MASTER
W1
1
VOLT SELECT
380V 460V
W2
1
BRAKE MODE
SLAVE MASTER
W1
Input Voltage Select
Jumper W2
(WB035 Units Only)
VOLT SELECT
380V 460V
W2
1
DS1
DC Power ON Light
Brake ON Light
DS1
DS2
DS2
Brake Module Board
1
BARCODE
Brake Frame Ground
(Connect to Earth Ground)
GND
Fuse F2
E9
E10
Terminals E9-E12
Max/Min Wire Size = 33.6 / 2.1 mm
Max Torque = 3.96 N-m (35 lb.-in.) for 5.3-2.1 mm
4.52 N-m (40 lb.-in.) for 8.4 mm
5.09 N-m (45 lb.-in.) for 21.2-13.3 mm
5.65 N-m (50 lb.-in.) for 33.6 mm
2
/ 14 AWG)
(2
2
(10-14 AWG)
2
(8 AWG)
2
(4-6 AWG)
2
(2 AWG)
1
2
3
E11
5
4
E12
6
Terminal Block TB1
Max/Min Wire Size = 8.4 / 0.8 mm2 (8 / 18 AWG)
Max Torque = 1.81 N-m (16 lb.-in.)
1336-5.65 — March, 2007
Page 30

3
0
n
8
Heavy Duty Dynamic Braking
WA115, WB110 and WC085 Terminal Block, Fuse and Jumper Locations
Fuse F1
Brake Module Board
BRAKE MODE
W1
SLAVE MASTER
BARCODE
Slave/Master
Jumper W1
BRAKE MODE
W1
SLAVE MASTER
VOLT SELECT
380V 460V
VOLT SELECT
380V 460V
W2
DS1
DS2
Input Voltage Select
W2
Jumper W2
(WB110 Units Only)
DC Power ON Light
Brake ON Light
Brake Frame Ground
(Connect to Earth Grou
GND
DS1
DS2
Fuse F2
E9
Terminals E9-E12
Max/Min Wire Size = 67.4 / 21.2 mm
Max Torque = 14.13 N-m (125 lb.-in.) for 42.4-21.2 mm
16.95 N-m (150 lb.-in.) for 67.4-21.1 mm
E10
(E10)
2
/
(2
0 / 4 AWG)
2
(1-4 AWG)
2
/
(2
0-1 AWG)
1
E11
(E11)(E9)
3
2
56
4
E12
(E12)
Terminal Block TB1
Max/Min Wire Size = 8.4
Max Torque = 1.81 N-m (16 lb.-in.)
/ 0.8 mm
2
(8 / 1
1336-5.65 — March, 2007
Page 31

WA018, WB009 and WC009 Single Brake Wiring Scheme
For Drive Catalog
Numbers:
1336F –
BRF75
BRF100
115V AC
1336S –
BRF75
BRF100
START
AT TE NT I ON :
Damage to drives
!
can result from
improper wiring.
Read drive
nameplate to
confirm catalog
number and rating
code to determine
correct wiring
diagram.
STOP
CUSTOMER
ENABLE
L1
TB1
Drive
➊
L2L3+DC -DC
MOD-L6 or MOD-L3
Option
19 START
TB3
20 STOP
21 COM
22
23
24
25
COM
26
27
28
COM
29
30 ENABLE
-BRK
Heavy Duty Dynamic Braking 31
TB1 Master Brake
1 (–) DC BUS
2 (+) DC BUS
3 (–) SLAVE IN
4 (+) SLAVE IN
5 EXT RESISTORS
6 EXT RESISTORS
7 (+) MASTER OUT
➋
8 (–) MASTER OUT
9 AUX CONT
10 AUX CONT
➌
➎
➍
-DC Brake Power Wiring
+DC Brake Power Wiring
Brake Resistor Wiring
All Brake Power and Brake Resistor
Wiring must be twisted wire run in conduit
separate from Control Wiring. Size wire
according to NEC and local guidelines.
Control Wiring
All Control Wiring must be twisted wire run in
conduit separate from DC Brake Power Wiring.
Interconnection Control Wiring between the brake
terminals must be twisted pair, 1
minimum.
Typical Brake Fault Contact Wiring
➊
Connect to AUX at TB3 — Terminal 24 for L6 Option
— Terminal 28 for L3 Option.
MASTER OUT terminals are factory jumpered and must
➋
remain jumpered for single brake applications. For
multiple brake applications, remove the jumpers in all
but the last enclosure.
Contact is shown in a de-energized state. Contact is closed
➌
when power is applied and relay is energized. Loss of power or
a brake malfunction will open contact.
Connect the brake frame to earth ground. Refer to the connected drive's User Manual for grounding instructions.
➍
Optional overtemperature switch.
➎
mm2 (18 AWG)
1336-5.65 — March, 2007
Page 32

3
2
Heavy Duty Dynamic Braking
WA018, WB009 and WC009 Multiple Brake Wiring Scheme
For Drive Catalog
Numbers:
1336F –
BRF75
BRF100
115V AC
1336S –
BRF75
BRF100
START
ATTENTION:
Damage to drives
!
can result from
improper wiring.
Read drive
nameplate to
confirm catalog
number and rating
code to determine
correct wiring
diagram.
STOP
CUSTOMER
ENABLE
L1
L2L3+DC -DC
-BRK
TB1
Drive
MOD-L6 or MOD-L3
Option
19 START
TB3
20 STOP
21 COM
22
23
24
25
➊
-DC Brake Power Wiring
+DC Brake Power Wiring
Brake Resistor Wiring
All Brake Power and Brake Resistor
Wiring must be twisted wire run in conduit
separate from Control Wiring. Size wire
according to NEC and local guidelines.
Control Wiring
All Control Wiring must be twisted wire run in
conduit separate from DC Brake Power Wiring.
Interconnection Control Wiring between the brake
terminals must be twisted pair, 1
minimum.
Typical Brake Fault Contact Wiring
➊
Connect to AUX at TB3 — Terminal 24 for L6 Option
— Terminal 28 for L3 Option.
MASTER OUT terminals are factory jumpered and must
➋
remain jumpered for single brake applications. For
multiple brake applications, remove the jumpers in all
but the last enclosure.
Contact is shown in a de-energized state. Contact is closed
➌
when power is applied and relay is energized. Loss of power or
a brake malfunction will open contact.
COM
26
27
28
COM
29
30 ENABLE
mm2 (18 AWG)
➋
TB1 Master Brake
1 (–) DC BUS
2 (+) DC BUS
3 (–) SLAVE IN
4 (+) SLAVE IN
5 EXT RESISTORS
6 EXT RESISTORS
7 (+) MASTER OUT
➋
8 (–) MASTER OUT
9 AUX CONT
10 AUX CONT
➍
TB1 Slave Brake
1 (–) DC BUS
2 (+) DC BUS
3 (–) SLAVE IN
4 (+) SLAVE IN
5 EXT RESISTORS
6 EXT RESISTORS
7 (+) MASTER OUT
➋
8 (–) MASTER OUT
9 AUX CONT
10 AUX CONT
➍
TB1 Slave Brake
1 (–) DC BUS
2 (+) DC BUS
3 (–) SLAVE IN
4 (+) SLAVE IN
5 EXT RESISTORS
6 EXT RESISTORS
7 (+) MASTER OUT
8 (–) MASTER OUT
9 AUX CONT
10 AUX CONT
➍
➌
➌
➌
➎
➎
➎
Connect the brake frame to earth ground. Refer to the connected drive's User Manual for grounding instructions.
➍
Optional overtemperature switch.
➎
1336-5.65 — March, 2007
Page 33

WA070, WB035 and WC035 WA115, WB110 and WC085 Single Brake Wiring Scheme
For Drive Catalog
Numbers:
1336F –
BRF150
BRF200
ATTENTION:
Damage to drives
!
can result from
improper wiring.
Read drive
nameplate to
confirm catalog
number and rating
code to determine
correct wiring
diagram.
CUSTOMER
ENABLE
115V AC
START
STOP
L1
TB1
Drive
MOD-L6 or MOD-L3
Option
➊
L2L3+DC -DC
19 START
TB3
20 STOP
21 COM
22
23
24
25
COM
26
27
28
COM
29
30
ENABLE
-BRK
Heavy Duty Dynamic Braking 33
Master Brake
E9 (+) DC BUS
E10 (–) DC BUS
1 AUX CONT
2 AUX CONT
3 (–) SLAVE IN
4 (+) SLAVE IN
5 (–) MASTER OUT
➋
6 (+) MASTER OUT
E11 EXT RESISTORS
E12 EXT RESISTORS
TB1
➌
➎
➍
-DC Brake Power Wiring
+DC Brake Power Wiring
Brake Resistor Wiring
All Brake Power and Brake Resistor
Wiring must be twisted wire run in conduit
separate from Control Wiring. Size wire
according to NEC and local guidelines.
Control Wiring
All Control Wiring must be twisted wire run in
conduit separate from DC Brake Power Wiring.
Interconnection Control Wiring between the brake
terminals must be twisted pair, 1
minimum.
Typical Brake Fault Contact Wiring
➊
Connect to AUX at TB3 — Terminal 24 for
L6 Option — Terminal 28 for L3 Option.
➋
MASTER OUT terminals are factory jumpered and
must remain jumpered for single brake applications.
For multiple brake applications, remove the jumpers
in all but the last enclosure.
➌
Contact is shown in a de-energized state. Contact is closed
when power is applied and relay is energized. Loss of power or
a brake malfunction will open contact.
➍
Connect the brake frame to earth ground. Refer to the connected drive's User Manual for grounding instructions.
Optional overtemperature switch.
➎
mm2 (18 AWG)
1336-5.65 — March, 2007
Page 34

3
4
Heavy Duty Dynamic Braking
WA070, WB035 and WC035 WA115, WB110 and WC085 Multiple Brake Wiring Scheme
For Drive Catalog
Numbers:
1336F –
BRF150
115V AC
BRF200
START
ATTENTION:
Damage to drives
!
can result from
improper wiring.
Read drive
nameplate to
confirm catalog
number and rating
code to determine
correct wiring
diagram.
STOP
CUSTOMER
ENABLE
L1
L2L3+DC -DC
-BRK
TB1
Drive
MOD-L6 or MOD-L3
Option
19 START
TB3
20 STOP
21 COM
22
23
24
25
➊
-DC Brake Power Wiring
+DC Brake Power Wiring
Brake Resistor Wiring
All Brake Power and Brake Resistor
Wiring must be twisted wire run in conduit
separate from Control Wiring. Size wire
according to NEC and local guidelines.
Control Wiring
All Control Wiring must be twisted wire run in
conduit separate from DC Brake Power Wiring.
Interconnection Control Wiring between the brake
terminals must be twisted pair, 1
minimum.
Typical Brake Fault Contact Wiring
Connect to AUX at TB3 — Terminal 24 for
➊
L6 Option — Terminal 28 for L3 Option.
MASTER OUT terminals are factory jumpered and
➋
must remain jumpered for single brake applications.
For multiple brake applications, remove the jumpers
in all but the last enclosure.
Contact is shown in a de-energized state. Contact is closed
➌
when power is applied and relay is energized. Loss of power or
a brake malfunction will open contact.
COM
26
27
28
COM
29
30 ENABLE
mm2 (18 AWG)
Master Brake
E9 (+) DC BUS
E10 (–) DC BUS
1 AUX CONT
2 AUX CONT
3 (–) SLAVE IN
4 (+) SLAVE IN
5 (–) MASTER OUT
➋
6 (+) MASTER OUT
E11 EXT RESISTORS
E12 EXT RESISTORS
Slave Brake
E9 (+) DC BUS
E10
1 AUX CONT
2 AUX CONT
3 (–) SLAVE IN
4 (+) SLAVE IN
5 (–) MASTER OUT
➋
6 (+) MASTER OUT
E11 EXT RESISTORS
E12 EXT RESISTORS
Slave Brake
E9 (+) DC BUS
E10 (–) DC BUS
1 AUX CONT
2 AUX CONT
3 (–) SLAVE IN
4 (+) SLAVE IN
5 (–) MASTER OUT
➋
6 (+) MASTER OUT
E11 EXT RESISTORS
E12 EXT RESISTORS
(–) DC BUS
TB1
TB1
TB1
➌
➎
➍
➌
➎
➍
➌
➎
➍
➍
Connect the brake frame to earth ground. Refer to the connected drive's User Manual for grounding instructions.
Optional overtemperature switch.
➎
1336-5.65 — March, 2007
Page 35

WA018, WB009 and WC009 Single Brake Wiring Scheme
For Drive Catalog
Numbers:
1336
1336VT
1336S
115V AC
1336F
1336T
1336E
START
ATTENTION:
Damage to drives
!
can result from
improper wiring.
Read drive
nameplate to
confirm catalog
number and rating
code to determine
correct wiring
diagram.
STOP
CUSTOMER
ENABLE
L1
TB1
Drive
➊
L2L3+DC -DC
MOD-L6 or MOD-L3
Option
19 START
TB3
20 STOP
21 COM
22
23
24
25
COM
26
27
28
COM
29
30 ENABLE
Heavy Duty Dynamic Braking 35
TB1 Master Brake
1 (–) DC BUS
2 (+) DC BUS
3 (–) SLAVE IN
4 (+) SLAVE IN
5 EXT RESISTORS
6 EXT RESISTORS
7 (+) MASTER OUT
➋
8 (–) MASTER OUT
9 AUX CONT
10 AUX CONT
➌
➎
➍
-DC Brake Power Wiring
+DC Brake Power Wiring
Brake Resistor Wiring
All Brake Power and Brake Resistor
Wiring must be twisted wire run in conduit
separate from Control Wiring. Size wire
according to NEC and local guidelines.
Control Wiring
All Control Wiring must be twisted wire run in
conduit separate from DC Brake Power Wiring.
Interconnection Control Wiring between the brake
terminals must be twisted pair, 1
minimum.
Typical Brake Fault Contact Wiring
➊
Connect to AUX at TB3 — Terminal 24 for L6 Option
— Terminal 28 for L3 Option.
MASTER OUT terminals are factory jumpered and must
➋
remain jumpered for single brake applications. For
multiple brake applications, remove the jumpers in all
but the last enclosure.
Contact is shown in a de-energized state. Contact is closed
➌
when power is applied and relay is energized. Loss of power or
a brake malfunction will open contact.
Connect the brake frame to earth ground. Refer to the connected drive's User Manual for grounding instructions.
➍
Optional overtemperature switch.
➎
mm2 (18 AWG)
1336-5.65 — March, 2007
Page 36

3
6
Heavy Duty Dynamic Braking
WA018, WB009 and WC009 Multiple Brake Wiring Scheme
For Drive Catalog
Numbers:
1336
1336VT
1336S
115V AC
1336F
1336T
1336E
START
ATTENTION:
Damage to drives
!
can result from
improper wiring.
Read drive
nameplate to
confirm catalog
number and rating
code to determine
correct wiring
diagram.
STOP
CUSTOMER
ENABLE
L1
L2L3+DC -DC
TB1
Drive
MOD-L6 or MOD-L3
Option
19 START
TB3
20 STOP
21 COM
22
23
24
25
➊
-DC Brake Power Wiring
+DC Brake Power Wiring
Brake Resistor Wiring
All Brake Power and Brake Resistor
Wiring must be twisted wire run in conduit
separate from Control Wiring. Size wire
according to NEC and local guidelines.
Control Wiring
All Control Wiring must be twisted wire run in
conduit separate from DC Brake Power Wiring.
Interconnection Control Wiring between the brake
terminals must be twisted pair, 1
minimum.
Typical Brake Fault Contact Wiring
➊
Connect to AUX at TB3 — Terminal 24 for L6 Option
— Terminal 28 for L3 Option.
MASTER OUT terminals are factory jumpered and must
➋
remain jumpered for single brake applications. For
multiple brake applications, remove the jumpers in all
but the last enclosure.
Contact is shown in a de-energized state. Contact is closed
➌
when power is applied and relay is energized. Loss of power or
a brake malfunction will open contact.
COM
26
27
28
COM
29
30 ENABLE
mm2 (18 AWG)
➋
TB1 Master Brake
1 (–) DC BUS
2 (+) DC BUS
3 (–) SLAVE IN
4 (+) SLAVE IN
5 EXT RESISTORS
6 EXT RESISTORS
7 (+) MASTER OUT
➋
8 (–) MASTER OUT
9 AUX CONT
10 AUX CONT
➍
TB1 Slave Brake
1 (–) DC BUS
2 (+) DC BUS
3 (–) SLAVE IN
4 (+) SLAVE IN
5 EXT RESISTORS
6 EXT RESISTORS
7 (+) MASTER OUT
➋
8 (–) MASTER OUT
9 AUX CONT
10 AUX CONT
➍
TB1 Slave Brake
1 (–) DC BUS
2 (+) DC BUS
3 (–) SLAVE IN
4 (+) SLAVE IN
5 EXT RESISTORS
6 EXT RESISTORS
7 (+) MASTER OUT
8 (–) MASTER OUT
9 AUX CONT
10 AUX CONT
➍
➌
➌
➌
➎
➎
➎
Connect the brake frame to earth ground. Refer to the connected drive's User Manual for grounding instructions.
➍
Optional overtemperature switch.
➎
1336-5.65 — March, 2007
Page 37

WA070, WB035 and WC035 WA115, WB110 and WC085 Single Brake Wiring Scheme
For Drive Catalog
Numbers:
1336
1336VT
115V AC
1336S
1336F
1336T
1336E
START
STOP
ATTENTION:
Damage to drives
!
can result from
improper wiring.
Read drive
nameplate to
confirm catalog
number and rating
code to determine
correct wiring
diagram.
CUSTOMER
ENABLE
L1
TB1
Drive
MOD-L6 or MOD-L3
Option
➊
L2L3+DC -DC
19 START
TB3
20 STOP
21 COM
22
23
24
25
COM
26
27
28
COM
29
30
ENABLE
Heavy Duty Dynamic Braking 37
Master Brake
E9 (+) DC BUS
E10 (–) DC BUS
1 AUX CONT
2 AUX CONT
3 (–) SLAVE IN
4 (+) SLAVE IN
5 (–) MASTER OUT
➋
6 (+) MASTER OUT
E11 EXT RESISTORS
E12 EXT RESISTORS
TB1
➌
➎
➍
-DC Brake Power Wiring
+DC Brake Power Wiring
Brake Resistor Wiring
All Brake Power and Brake Resistor
Wiring must be twisted wire run in conduit
separate from Control Wiring. Size wire
according to NEC and local guidelines.
Control Wiring
All Control Wiring must be twisted wire run in
conduit separate from DC Brake Power Wiring.
Interconnection Control Wiring between the brake
terminals must be twisted pair, 1
minimum.
Typical Brake Fault Contact Wiring
➊
Connect to AUX at TB3 — Terminal 24 for
L6 Option — Terminal 28 for L3 Option.
➋
MASTER OUT terminals are factory jumpered and
must remain jumpered for single brake applications.
For multiple brake applications, remove the jumpers
in all but the last enclosure.
➌
Contact is shown in a de-energized state. Contact is closed
when power is applied and relay is energized. Loss of power or
a brake malfunction will open contact.
➍
Connect the brake frame to earth ground. Refer to the connected drive's User Manual for grounding instructions.
Optional overtemperature switch.
➎
mm2 (18 AWG)
1336-5.65 — March, 2007
Page 38

3
8
Heavy Duty Dynamic Braking
WA070, WB035 and WC035 WA115, WB110 and WC085 Multiple Brake Wiring Scheme
For Drive Catalog
Numbers:
1336
1336VT
115V AC
1336S
1336F
1336T
1336E
START
STOP
ATTENTION:
Damage to drives
!
can result from
improper wiring.
Read drive
nameplate to
confirm catalog
number and rating
code to
determine
correct wiring
CUSTOMER
ENABLE
L1
L2L3+DC -DC
TB1
Drive
MOD-L6 or MOD-L3
Option
19 START
TB3
20 STOP
21 COM
22
23
24
25
➊
-DC Brake Power Wiring
+DC Brake Power Wiring
Brake Resistor Wiring
All Brake Power and Brake Resistor
Wiring must be twisted wire run in conduit
separate from Control Wiring. Size wire
according to NEC and local guidelines.
Control Wiring
All Control Wiring must be twisted wire run in
conduit separate from DC Brake Power Wiring.
Interconnection Control Wiring between the brake
terminals must be twisted pair, 1
minimum.
Typical Brake Fault Contact Wiring
Connect to AUX at TB3 — Terminal 24 for
➊
L6 Option — Terminal 28 for L3 Option.
MASTER OUT terminals are factory jumpered and
➋
must remain jumpered for single brake applications.
For multiple brake applications, remove the jumpers
in all but the last enclosure.
Contact is shown in a de-energized state. Contact is closed
➌
when power is applied and relay is energized. Loss of power or
a brake malfunction will open contact.
COM
26
27
28
COM
29
30 ENABLE
mm2 (18 AWG)
Master Brake
E9 (+) DC BUS
E10 (–) DC BUS
1 AUX CONT
2 AUX CONT
3 (–) SLAVE IN
4 (+) SLAVE IN
5 (–) MASTER OUT
➋
6 (+) MASTER OUT
E11 EXT RESISTORS
E12 EXT RESISTORS
Slave Brake
E9 (+) DC BUS
E10
1 AUX CONT
2 AUX CONT
3 (–) SLAVE IN
4 (+) SLAVE IN
5 (–) MASTER OUT
➋
6 (+) MASTER OUT
E11 EXT RESISTORS
E12 EXT RESISTORS
Slave Brake
E9 (+) DC BUS
E10 (–) DC BUS
1 AUX CONT
2 AUX CONT
3 (–) SLAVE IN
4 (+) SLAVE IN
5 (–) MASTER OUT
➋
6 (+) MASTER OUT
E11 EXT RESISTORS
E12 EXT RESISTORS
(–) DC BUS
TB1
TB1
TB1
➌
➎
➍
➌
➎
➍
➌
➎
➍
➍
Connect the brake frame to earth ground. Refer to the connected drive's User Manual for grounding instructions.
Optional overtemperature switch.
➎
1336-5.65 — March, 2007
Page 39

NOTES
Heavy Duty Dynamic Braking 39
1336-5.65 — March, 2007
Page 40

A
www.rockwellautomation.com
Power, Control and Information Solutions Headquarters
Americas: Rockwell Automation, 1201 South Second Street,
/
Middle East/Africa: Rockwell Automati
Europe
Asia Pacific: Rockwell Automation, Level 14, Core F, Cyberport 3, 100 Cyberport Road, Hong Kong, Tel: (852) 2887 4788, Fax: (852) 2508 1846
on,
Publication 1336-5.65 — March, 2007 P/N 163435 (10)
Supersedes February, 2007 Copyright © 2007 Rockwell Automation, Inc. All rights reserved. Printed in US
Milwaukee, WI 53204-2496 USA,
Pegasus Park, De Kleetlaan 12a,
Tel:
(1) 414.382.2000, Fax: (1) 414.382.4444
1831 Diegem, Belgium,
Tel: (32) 2 663 0600, Fax: (32) 2 663 0640
 Loading...
Loading...