

Page 1
Bulletin 1329I
Integrated
Drive/Motor
(Series B)
1.0 - 5.0 HP
FRN 3.xx
User Manual
Page 2
•
•
•
Important User Information
Solid state equipment has operational characteristics differing from those of
electromechanical equipment. “ Safety Guidelines for the Application,
Installation and Maintenance of Solid State Controls ” (Publication SGI-1.1)
describes some important differences between solid state equipment and
hard-wired electromechanical devices. Because of this difference, and also
because of the wide variety of uses for solid state equipment, all persons
responsible for applying this equipment must satisfy themselves that each
intended application of this equipment is acceptable.
In no event will the Allen-Bradley Company be responsible or liable for
indirect or consequential damages resulting from the use or application of
this equipment.
The examples and diagrams in this manual are included solely for
illustrative purposes. Because of the many variables and requirements
associated with any particular installation, the Allen-Bradley Company
cannot assume responsibility or liability for actual use based on the
examples and diagrams.
No patent liability is assumed by Allen-Bradley Company with respect to
use of information, circuits, equipment, or software described in this
manual.
Reproduction of the contents of this manual, in whole or in part, without
written permission of the Allen-Bradley Company is prohibited.
Throughout this manual we use notes to make you aware of safety
considerations.
ATTENTION: Identifies information about practices or
circumstances that can lead to personal injury or death, property
damage, or economic loss.
Attentions help you:
identify a hazard
avoid the hazard
recognize the consequences
Important: Identifies information that is especially important for successful
application and understanding of the product.
Shock Hazard labels may be located on or inside the drive to
alert people that dangerous voltage may be present.
DeviceNet is a trademark of the Open DeviceNet Vendor Association.
Page 3

Series B Summary of Changes
• Additional Start Mode Selection Feature
Local operator units can now be controlled from either the operator controls or the
terminal block.
• Terminal Block Stop Input
The terminal block stop input and local operator stop key are now acti v e for all start
mode selections.
• Zero Speed Operation
The minimum speed has been reduced from 90 RPM (3 Hz) to zero.
• Storage Temperature Range Extended
The storage temperature rating has been extended from 70°C to 85°C.
• CE Mark
The unit now conforms to the EMC and LVD directives for CE. An optional line
filter is required.
• CE Line Filter Option
Single and three phase line filters are now available. This option can be mounted
internally or is packaged for external mounting.
• DeviceNet Communication Option
A DeviceNet communication option is now available, which is installed inside the
unit. Refer to the Bulletin 1329I DeviceNet Option User Manual for more
information.
• Drive Parameters Added
The unit now has drive display parameters and drive program parameters. These
parameters can be viewed or changed through a DeviceNet connection. Refer to the
Bulletin 1329I DeviceNet Option User Manual for more information.
Series B Application/Installation Considerations
Keep the following in mind if you are replacing a Bulletin 1329I Series A with a Series
B unit.
Minimum Speed
• The minimum speed has been reduced from 90 RPM (3 Hz) to 0 RPM (0 Hz).
Terminal Block Stop Input
• Terminal block stop input must be present for local operator control units.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 4
Series B Summary of Changes
End of Section
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 5

Installation Checklist
Chapter 1 Step 1 - Identify Your Unit
1.1 1329I Standard Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1.1.1 Standard Unit Display Description . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1.1.2 Standard Unit Reverse LED Description . . . . . . . . . . . . . . . . . . . . 1-2
1.2 1329I Local Operator Control Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
1.2.1 Local Operator Control Unit Key Descriptions . . . . . . . . . . . . . . . . 1-4
1.2.2 Local Operating Control Unit Display Description . . . . . . . . . . . . . 1-4
1.2.3 Local Operating Control Unit Reverse LED Description . . . . . . . . 1-4
1.2.4 Operating the Unit Using the Local Operator Controls . . . . . . . . . . 1-5
Chapter 2 Step 2 - Plan the Installation
2.1 Wire Routing Guidelines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2.2 Handling and Lifting Guidelines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2.3 CE Conformity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2.3.1 Essential Requirements for a Conforming EMC Installation . . . . . 2-4
2.3.2 Low Voltage Directive 73/23/EEC Compliance . . . . . . . . . . . . . . . 2-5
Table of Contents
Chapter 3 Step 3 - Mount the Unit
3.1 Mounting Guidelines for Face-Mounted Motors . . . . . . . . . . . . . . . . . . . . . 3-1
3.2 Mounting Dimensions for NEMA Frames . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
Chapter 4 Step 4 -Install External
Power Components
4.1 Installing an AC Input Disconnect . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4.2 Installing Branch Circuit Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4.3 Installing Input Isolation Transformers . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
Chapter 5 Step 5 -Wire AC Power to the Unit and Ground the Unit
5.1 Grounding the Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
Chapter 6 Step 6 - Install a Hardwired Stop
Chapter 7 Step 7 -Wire the Control Signal Terminal Block
7.1 Wiring Function Loss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-5
7.2 Wiring the Analog Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-5
7.3 Wiring the Relay Control Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-6
7.4 Wiring RPM or Percent Load Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-6
7.5 Wiring the Speed Reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-6
7.5.1 Wiring the Preset Speed Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-7
7.5.2 Wiring the Speed Reference Signal Potentiometer . . . . . . . . . . . . 7-8
7.5.3 Wiring an External Speed Reference . . . . . . . . . . . . . . . . . . . . . . . 7-8
7.6 Wiring Start / Stop Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-9
7.7 Wiring Forward / Reverse Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-10
7.8 Wiring Reset Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-10
Chapter 8 Step 8 -Verify the Setup and Adjust Switches if Required
8.1 Adjusting the Maximum Speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-2
8.2 Adjusting the Acceleration / Deceleration Time . . . . . . . . . . . . . . . . . . . . . 8-3
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 6

ii
8.3 Modifying the Setup Using the Setup DIP Switch . . . . . . . . . . . . . . . . . . . . 8-5
8.3.1 Run On Power Up (Position 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-5
8.3.2 Speed Reference Select (Position 2) . . . . . . . . . . . . . . . . . . . . . . . 8-6
8.3.3 Relay Control Output - Running or Faulted (Position 3) . . . . . . . . .8-6
8.3.4 Auto Restart (Position 4) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-7
8.3.5 Torque Curve (Position 5) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-8
8.3.6 Stop Type (Position 6) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-8
8.3.7 Reverse Disable (Position 7) . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-9
8.3.8 Minimum Speed Select (Position 8) . . . . . . . . . . . . . . . . . . . . . . . . 8-9
8.3.9 Start Mode Select (Position 9) . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-10
8.3.10 Parameter Mode for DeviceNet Option (Position 10) . . . . . . . . . . .8-10
Chapter 9 Step 9 - Check the Installation
9.1 Checking the Installation with the Power Off . . . . . . . . . . . . . . . . . . . . . . . .9-1
9.2 Checking the Direction of Motor Rotation . . . . . . . . . . . . . . . . . . . . . . . . . .9-2
9.3 Attaching the Cover . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9-2
9.3.1 Rotating the Cover . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9-3
9.4 Checking the Speed Reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-4
Chapter 10 Step 10 - Set the Operating Speed
Chapter 11 Diagnostics and Troubleshooting
11.1 Fault Codes and Corrective Actions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-2
11.2 Troubleshooting Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-5
11.3 Replacement Parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-7
Chapter 12 Maintenance Guidelines
12.1 General Unit Maintenance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12-1
12.2 Motor Maintenance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12-1
Appendix A Technical Specifications
Unit Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
Operating Performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .A-3
Operating Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .A-3
Mechanical Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .A-3
Drive Protection/Fault Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .A-5
I/O Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .A-6
Analog inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .A-6
Analog output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-6
Logic inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-6
Relay output (1 form A N.O. contact) Isolated . . . . . . . . . . . . . . . . . . . . . . .A-6
Approvals and Standards Compliance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .A-6
Appendix B Product Features
Appendix C 1329I System Diagram
Appendix D Installation Record
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 7

❑
❑
❑
❑
❑
❑
❑
❑
❑
❑
Checklist
Installation Checklist
This manual describes how to install, troubleshoot, and maintain the 1329I unit. Use
the following checklist to guide you through the installation process.
Read Manual
Installation Procedure
Step 1 Identify your unit 1.0
Understand how the standard unit
operates
Understand how the local operator control
unit operates
Step 2 Plan the installation 2.0
Step 3 Mount the unit 3.0
Step 4 Install external components
AC input disconnect
Branch circuit protection
Input isolation transformers
Step 5 Wire AC power to the unit and ground the unit 5.0
Step 6 Install a hardwired stop 6.0
Step 7 Wire the control signal terminal strip 7.0
Step 8 Verify the setup and adjust it if required 8.0
Step 9 Check the installation
Perform power-off checks
Verify the direction of motor rotation
Attach the cover
Check the speed reference
Step 10 Set the operating speed 10.0
Section(s)
1.1
1.2
4.0
4.1
4.2
4.3
9.0
9.1
9.2
9.3
9.4
If problems occur during unit operation, refer to Chapter 11 for troubleshooting
guidelines.
Getting Assistance from Allen-Bradley
If you have any questions or problems with the products described in this instruction
manual, contact your local Allen-Bradley distributor.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 8
Checklist-2
Installation Checklist
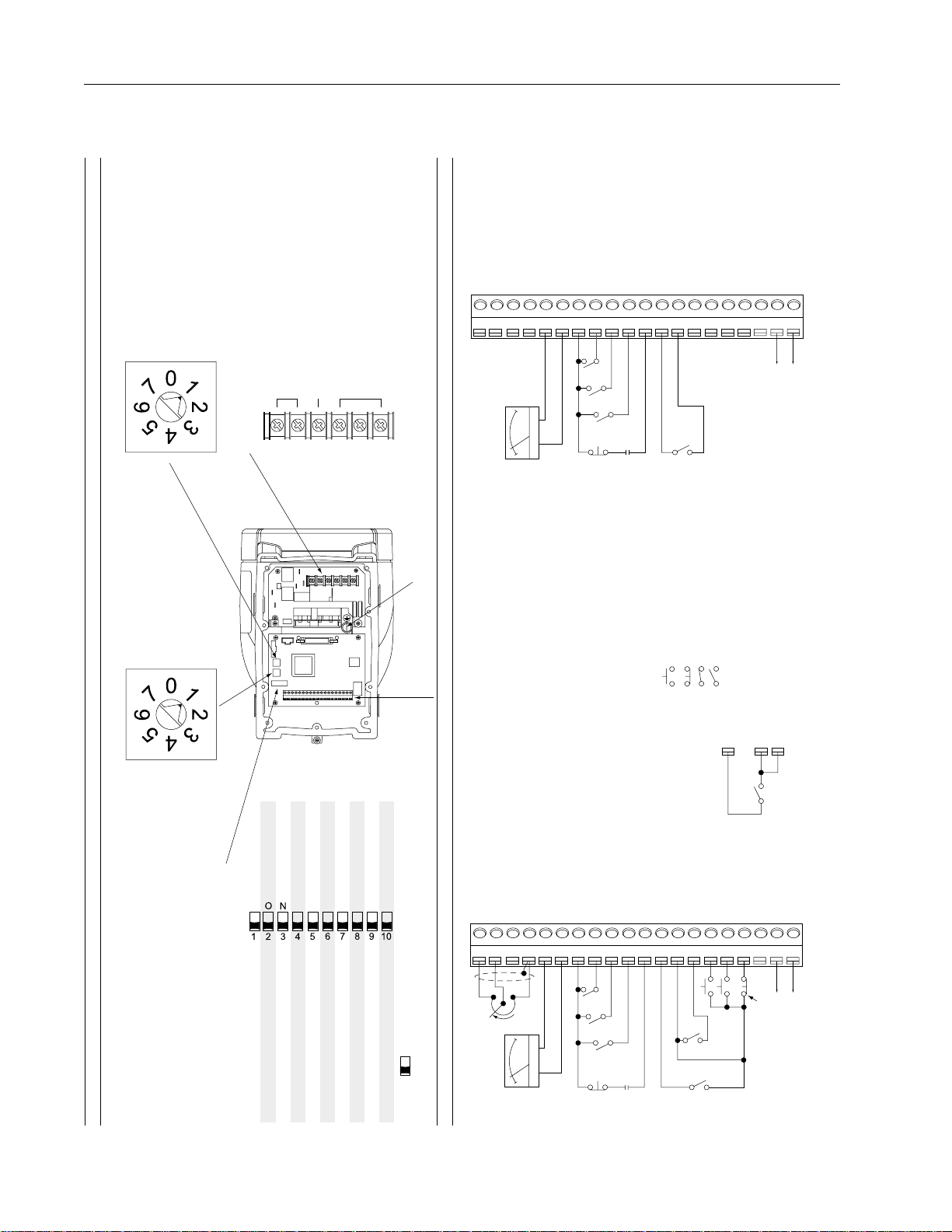
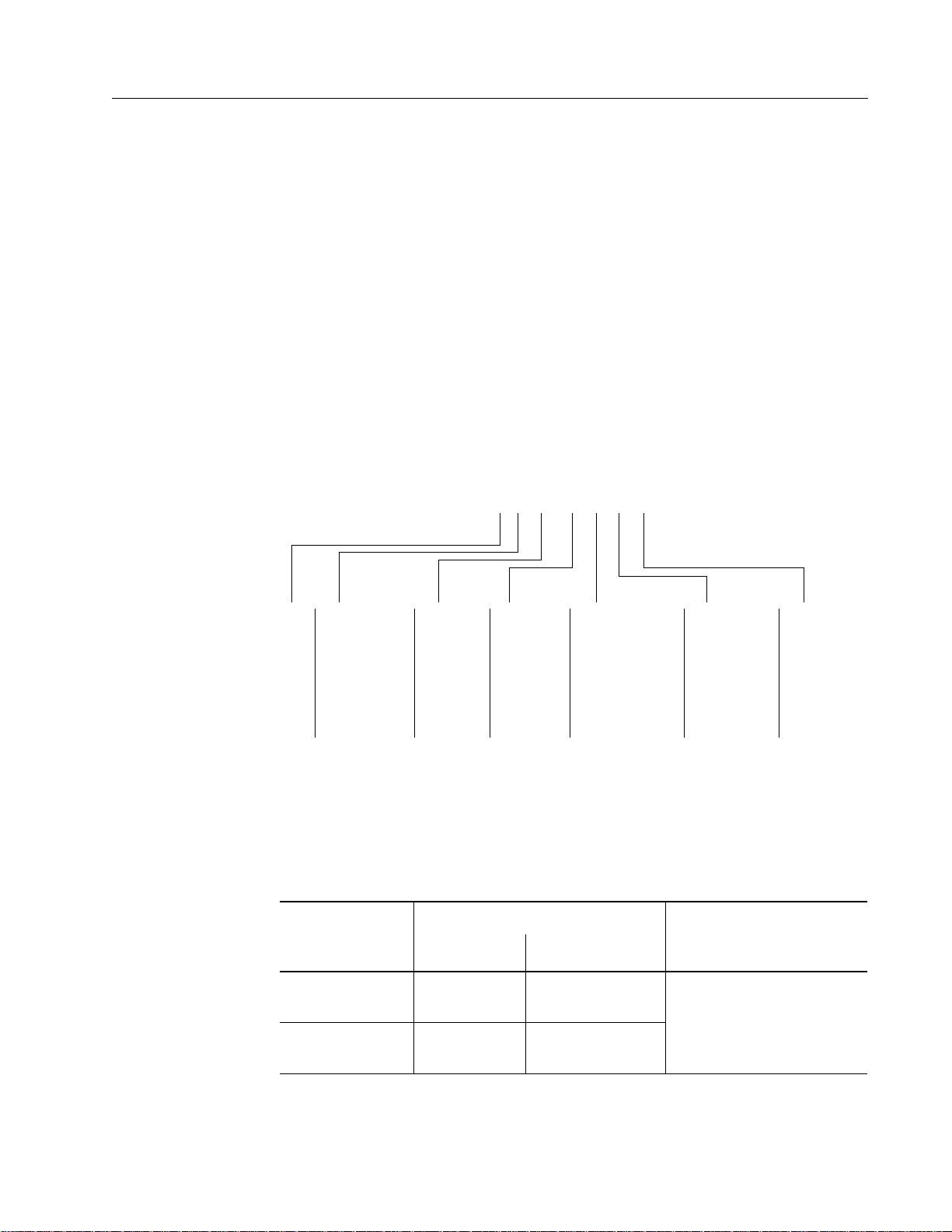
Installation Overview
➌
0 = 1 Second Accel/5 Sec Decel
1 = 5 Seconds (Default)
2 = 10 Seconds
3 = 15 Seconds
0 = 1500 RPM (50 Hz)
1 = 1800 RPM (60 Hz) Default
2 = 2100 RPM (70 Hz)
3 = 2400 RPM (80 Hz)
Selectors and Connectors
Max Speed Switch (SW2) Accel/Decel Switch (SW1)
4 = 20 Seconds
5 = 30 Seconds
6 = 60 Seconds
7 = 90 Seconds
AC Input Power Connections
4 = 2700 RPM (90 Hz)
5 = 3000 RPM (100 Hz)
6 = 3300 RPM (110 Hz)
7 = 3600 RPM (120 Hz)
DC+
DC Bus (Do Not Wire)
DC-
DBR (Do Not Wire)
DBR
10 V olt Reference ➊
0 – 10V DC Speed Reference Input
4 – 20 mA Speed Reference Input
Common
1 2 3 4 5 6 7 8 9 1011121314151617181920
AC Inputs
T/L3
S/L2
R/L1
Ground / Protective Earth
PE
0 – 10 V olt Output
Common
-+
24 Volt DC ➋
Speed Preset 2
Speed Preset 1
RPM/Percent Load Display
Function Loss ➋
Speed Preset 0
= N.O. Momentary Contact
Reset
Start
Forward/Reverse
24 Volt DC
RPM
% Load
= N.C. Momentary Contact
Stop ➌24 V olt DC Common
= Maintained Contact - Closed
= Maintained Contact - Open
N.O. Rela y
Connect to external device.
Relay Common
➌ The jumper between terminals 13 and 17 must be removed when
wiring the Stop input. See Section 7.6 for more information.
Control Signal T erminal Bloc k
13 16 17
Enabled
T erminal Block
Faulted
Enabled
Constant
Ramp-to-Rest
Disabled
From T erminal Block
From T erminal Block
From EEPROM Memory
OFF ON
0 Hz
Variable
Setup DIP Switch (SW3)
Disabled
Operator Controls
Run On Power Up
Speed Reference ➊
Running
Relay Control Output
Disabled
Auto Restart
Coast-to-Rest
T orque Curve
Stop
Enabled
Reverse
Minimum Speed
From Setup Switches
From Operator Controls
Start Mode ➊
Parameter Mode ➋
1329I-5.5 Integrated Drive/Motor — January, 2000
= Default Setting (OFF Position)
➊ Switches 2 and 9 apply to local operator control units only.
10 V olt Reference ➊
0 – 10V DC Speed Reference Input
4 – 20 mA Speed Reference Input
Common
0 – 10 V olt Output
Common
Speed Preset 2
Speed Preset 1
24 Volt DC ➋
1 2 3 4 5 6 7 8 9 1011121314151617181920
Speed Preset 0
Function Loss ➋
Forward/Reverse
24 Volt DC ➌RPM/Percent Load Display
Standard Unit Local Operator Control Unit
5K Ω
+10V DC
➋ Switch 10 applies to the De viceNet Communication option only.
-+
Fwd
RPM
Reset
Rev
% Load
Start
Maintained 2-Wire Start.
Stop ➌24 V olt DC Common
N.O. Rela y
Relay Common
Momentary 3-Wire Start.
Connect to external device.
wiring the Function Loss input. See Section 7.1 for more information.
➋ The jumper between terminals 7 and 11 must be removed when
be connected. See Section 7.5.3 of the User Manual for more inf ormation.
➊ An external 0 to 10 volt or 4 to 20 mA speed reference source can
Page 9
Chapter
1
Step 1 - Identify Your Unit
The 1329I integrated drive/motor is an AC drive integrally mounted with an inverter
duty motor. Each unit consists of a Drive Section and a Motor Section.
The Drive Section is a single- or three-phase input, three-phase output in verter providing
open loop V/Hz re gulation. It houses the PC boards and the blower . The Motor Section
is a four-pole, three-phase induction motor.
The unit’s default setup suits a wide range of applications. Two rotary switches and a
10-position slide switch on the Control board are used to adjust the setup, if required.
1329I units are identified by catalog number. This number appears on the shipping label
and on the unit’s nameplate. Table 1.1 shows the format of this number and what it
indicates.
Table 1.1
Catalog Number Format
1329I – B M 001 18 BC A – A
Speed
Range
B 20:1
Voltage
Rating
J 115V
K 200-230V 1L 200-230V 3M 380-460V
∅
∅
Horsepower
Rating
001 1
002 2
003 3
005 5
Base
Speed
18 1800 RPM
Enclosure
Design
BC Totally Enclosed
Blower Cooled
Motor
Frame Size
(All with C-Face
and Foot Mount)
A 56 Frame
B 140 Frame
C 180 Frame
Display
Options
A Local Control
B Display Only
Standard units, described in Section 1.1, provide remote operator control.
Local operator control units, described in Section 1.2, provide local control.
Table 1.2
Option Kits
Drive Input Rating CE Filter Option Kit DeviceNet Communication
Option Kit
115V, 230V
Internal Mount NEMA 12 Enclosed
1329I-NLF1 1329I-JLF1
Internal Mount
Single Phase
1329I-DN1
230V, 460V
1329I-NLF3 1329I-JLF3
Three Phase
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 10
1-2
Step 1 - Identify Your Unit
1.1 1329I Standard Unit
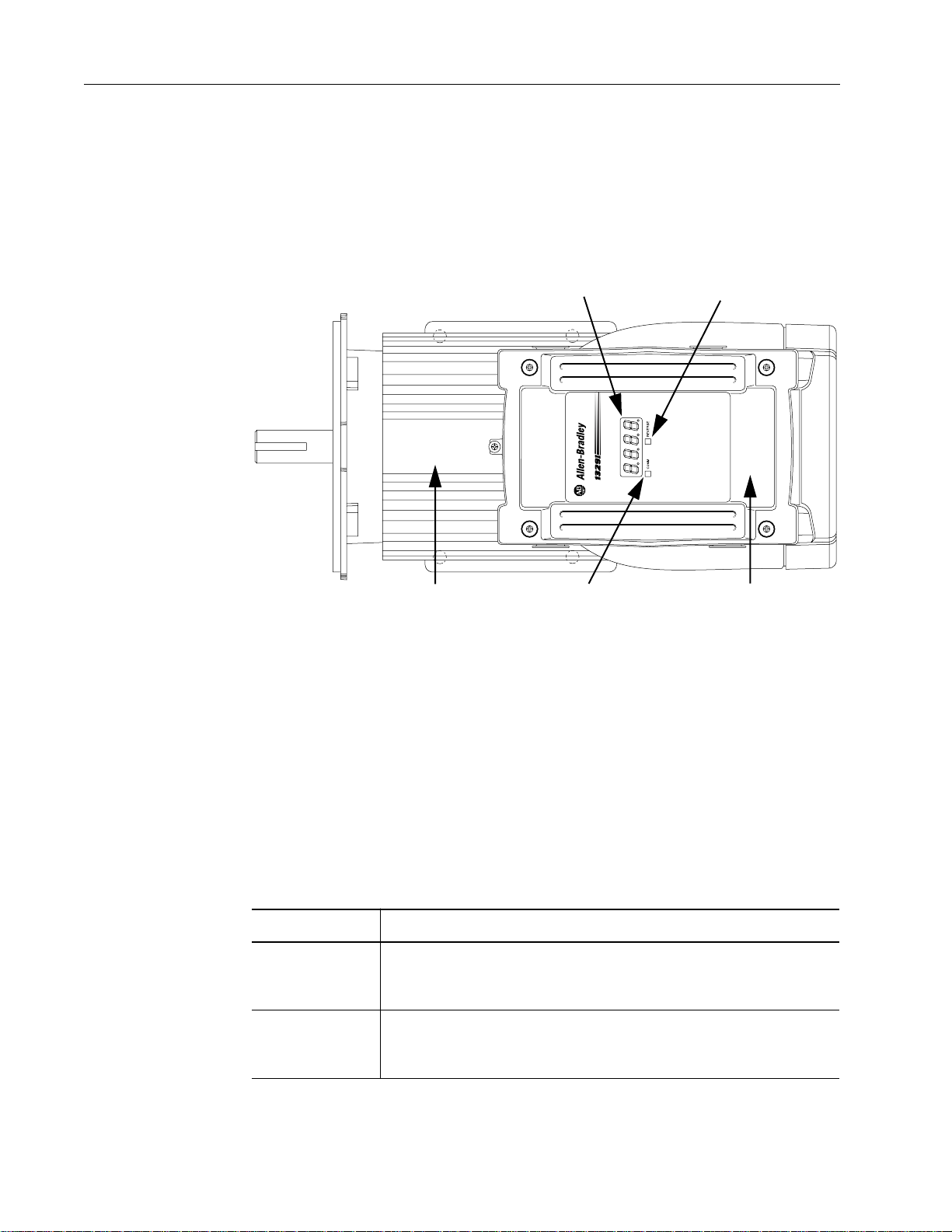
The standard unit, shown in Figure 1.1, provides a local display for speed or percent
load, and diagnostic information. A control signal terminal block in the Drive Section
connects to a user-supplied remote operator control station.
Figure 1.1
1329I Standard Unit
Display
➊
Refer to the
Motor Section
Bulletin 1329I DeviceNet Option User Manual
Communication LED ➊
1.1.1 Standard Unit Display Description
The four-character, seven-segment display shows the drive output speed in RPM or
percent load, and displays active fault codes. Speed in RPM is the default display. To
display percent load, see Section 7.4.
Reverse LED
Drive Section
for a description of the Communication LED .
If a fault occurs, the unit displays the corresponding fault code. Refer to Chapter 11 for
more information about fault codes and corrective actions.
1.1.2 Standard Unit Reverse LED Description
The REVERSE LED indicates the requested direction of motor rotation:
LED Status Definition
OFF The requested direction of motor rotation is forward.
(The 1329I unit is shipped with the forward direction defined as CCW shaft
rotation as viewed from the motor shaft end.)
ON The requested direction of motor rotation is reverse.
(The 1329I unit is shipped with the reverse direction defined as CW shaft
rotation as viewed from the motor shaft end.)
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 11
Step 1 - Identify Your Unit
If the motor is turning and you request a change to motor direction, the LED turns on
or off immediately ev en though it may tak e some time for the motor to decelerate and
begin turning in the opposite direction.
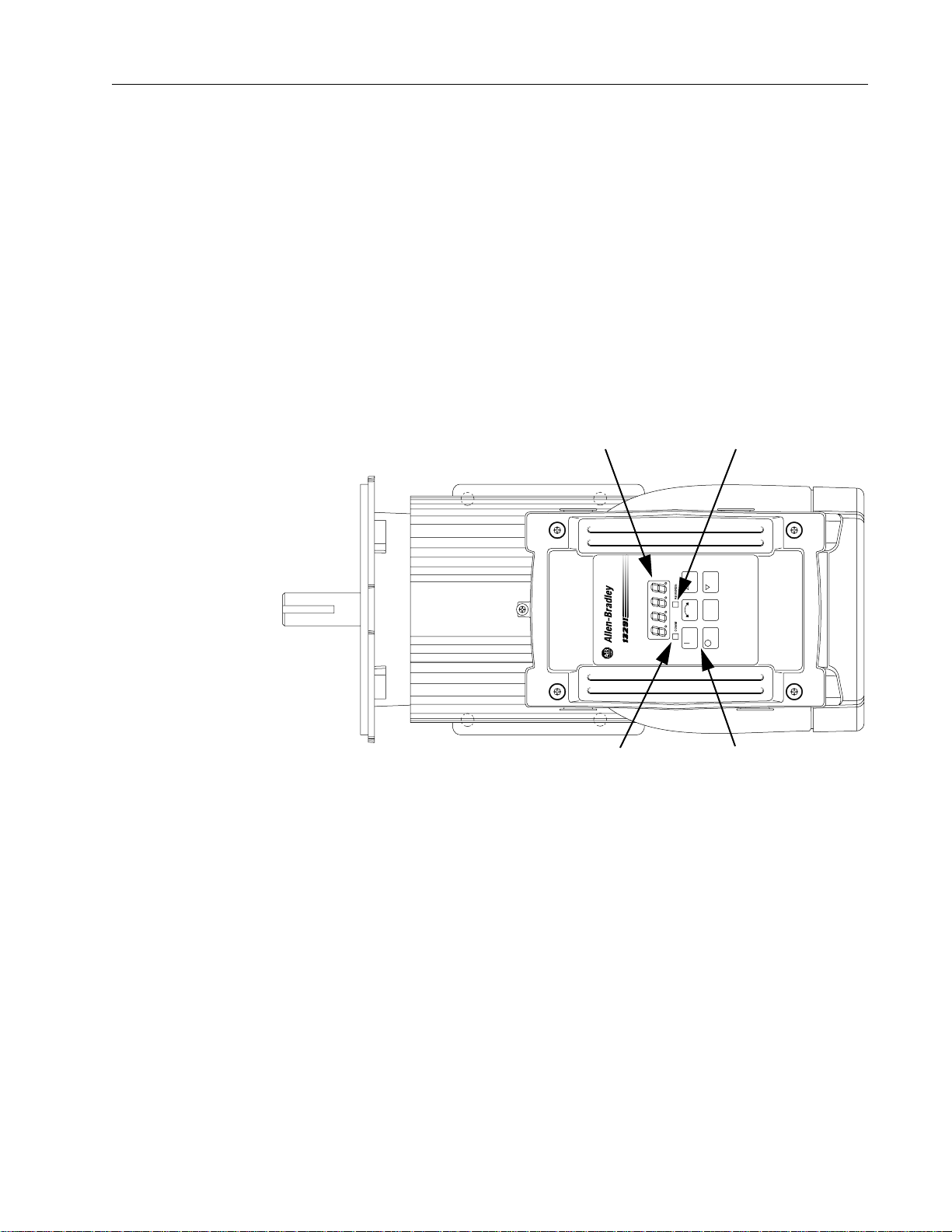
1.2 1329I Local Operator Control Unit
The local operator control unit (see Figure 1.2) provides local start, stop, forward,
reverse, reset, and speed control functions. The controls replace the Start, Stop, Reset,
and Forward / Reverse input signals at the terminal block.
The local operator control unit receives its speed reference from the keypad (default)
or the analog input terminals (user option). Refer to Section 8.3.2 for more information.
Figure 1.2
1329I Local Operator Control Unit
1-3
Display
Communication LED
Reverse LED
RESET
Local Operator
Controls
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 12
1-4
Step 1 - Identify Your Unit
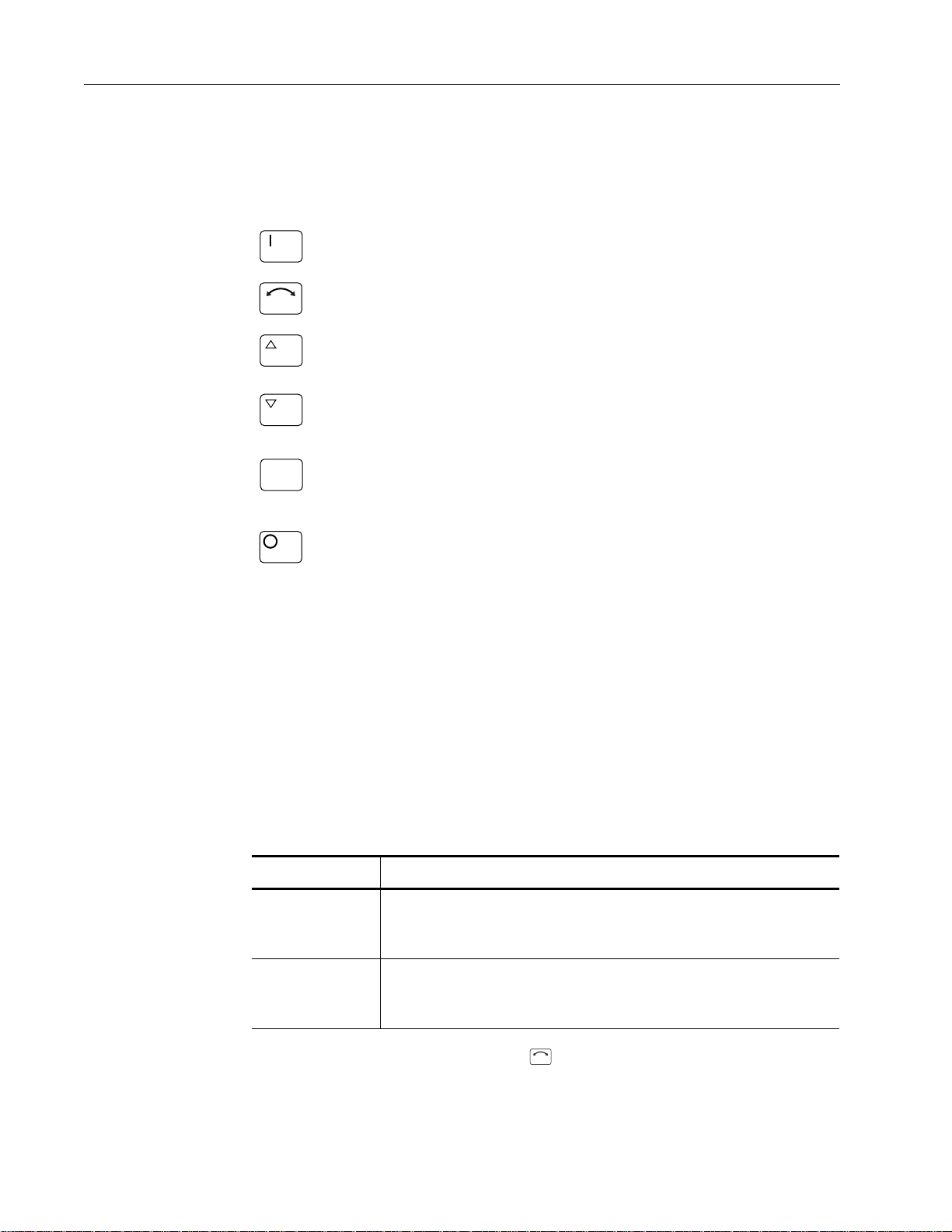
1.2.1 Local Operator Control Unit Key Descriptions
Figure 1.3 shows each key’s function.
Figure 1.3
Local Operator Control Key Functions
The START key applies power to the Motor Section.
The FORWARD/REVERSE key toggles the direction of motor rotation.
Press the UP ARROW key once to display the current speed reference. Hold this
key down to increase the speed reference value. The longer the key is pressed,
the faster the reference value increases.
Press the DOWN ARROW key once to display the current speed reference. Hold
this key down to decrease the speed reference value. The longer the key is
pressed, the faster the reference value decreases.
RESET
The RESET key resets any active faults or aborts an Auto Restart sequence.
See Section 8.3.4 for important information regarding the Auto Restart mode of
operation.
The STOP key interrupts Drive Section output to the Motor Section.
1.2.2 Local Operating Control Unit Display Description
The four-character, se ven-segment display sho ws output speed in RPM or percent load,
the current speed reference, and active fault codes. Speed in RPM is the default display.
To display percent load, see Section 7.4.
If a fault occurs, the unit displays the corresponding fault code. Refer to Chapter 11 for
more information about fault codes and corrective actions.
1.2.3 Local Operating Control Unit Reverse LED Description
The REVERSE LED indicates the requested direction of motor rotation:
LED Status Definition
OFF
The requested direction of motor rotation is forward.
(The 1329I unit is shipped with the forward direction defined as CCW
shaft rotation as viewed from the motor shaft end.)
ON
The requested direction of motor rotation is reverse.
(The 1329I unit is shipped with the reverse direction defined as CW shaft
rotation as viewed from the motor shaft end.)
Note that if the motor is turning and the key is pressed, the LED turns on or off
immediately even though it may take some time for the motor to decelerate and be gin
turning in the opposite direction.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 13
Step 1 - Identify Your Unit
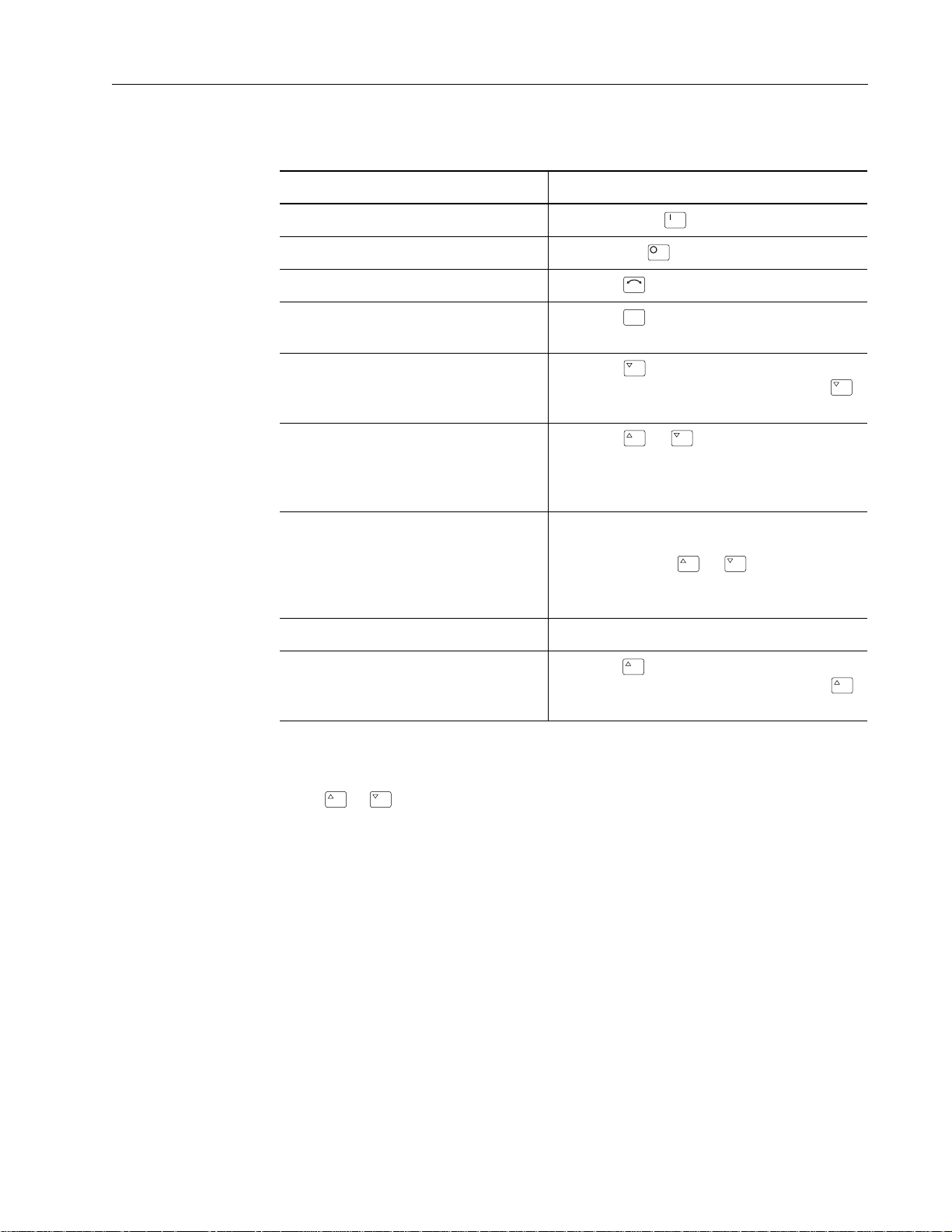
1.2.4 Operating the Unit Using the Local Operator Controls
Desired Action User Steps
1-5
Start the unit.
➊
Stop the unit. Press the red
Change the direction of motor rotation.
Clear faults or abort Auto Restart
Press the green
➊
Press the
Press the
key.
RESET
key.
key.
key.
sequence.
Decrease the speed reference.
➋
Press the
displayed is the desired v alue. The longer the
key until the speed reference
key is held down, the faster the value decreases.
Display the current speed reference.
Press the
or
key once.
➋
The display returns to indicating speed in RPM or
percent load after three to five seconds. Holding
down either key will change the speed ref erence .
Display the speed in RPM No action required; speed in RPM is the default
display based on status of terminal 12 (see
Section 7.4). If the
or
keys are not
pressed for several seconds, the display returns
to indicating actual motor speed in RPM.
Display percent load Close contact on terminal 12 (see Section 7.4)
Increase the speed reference.
➋
Press the
displayed is the desired v alue. The longer the
key until the speed reference
key is held down, the faster the value increases.
➊
These functions are only active when in local operator start mode (see Section 8.3.9).
➋
If the unit is using a terminal block or preset speed reference (see Section 8.3.2), pressing
the
or
key will have no effect on unit operation.
Important: If the local operator controls are disconnected from or connected to the
unit after power up, the unit will stop due to a non-resettable fault. Refer
to Chapter 11 for information about faults.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 14

1-6 Step 1 - Identify Your Unit
End of Chapter
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 15
Step 2 - Plan the Installation
ATTENTION: Only qualified electrical personnel, familiar with the
construction and operation of this equipment and the hazards involved,
should install, adjust, operate, and/or service this equipment. Read and
understand this instruction manual in its entirety before proceeding.
Failure to observe this precaution could result in sev ere bodily injury or
loss of life.
ATTENTION: This equipment is at line voltage when AC power is
connected. Disconnect and lockout all ungrounded conductors of the AC
power line before working on the unit. Failure to observe these
precautions could result in severe bodily injury or loss of life.
ATTENTION: The user is responsible for conforming with all applicable
local, national, and international codes. Failure to observe this precaution
could result in personal injury and/or damage to, or destruction of, the
equipment.
Chapter
2
It is the user’s responsibility to ensure that this equipment is installed properly according
to this manual and in conformance with all applicable codes. Consult your local
inspecting agency for information about any local, national, or international codes that
may apply.
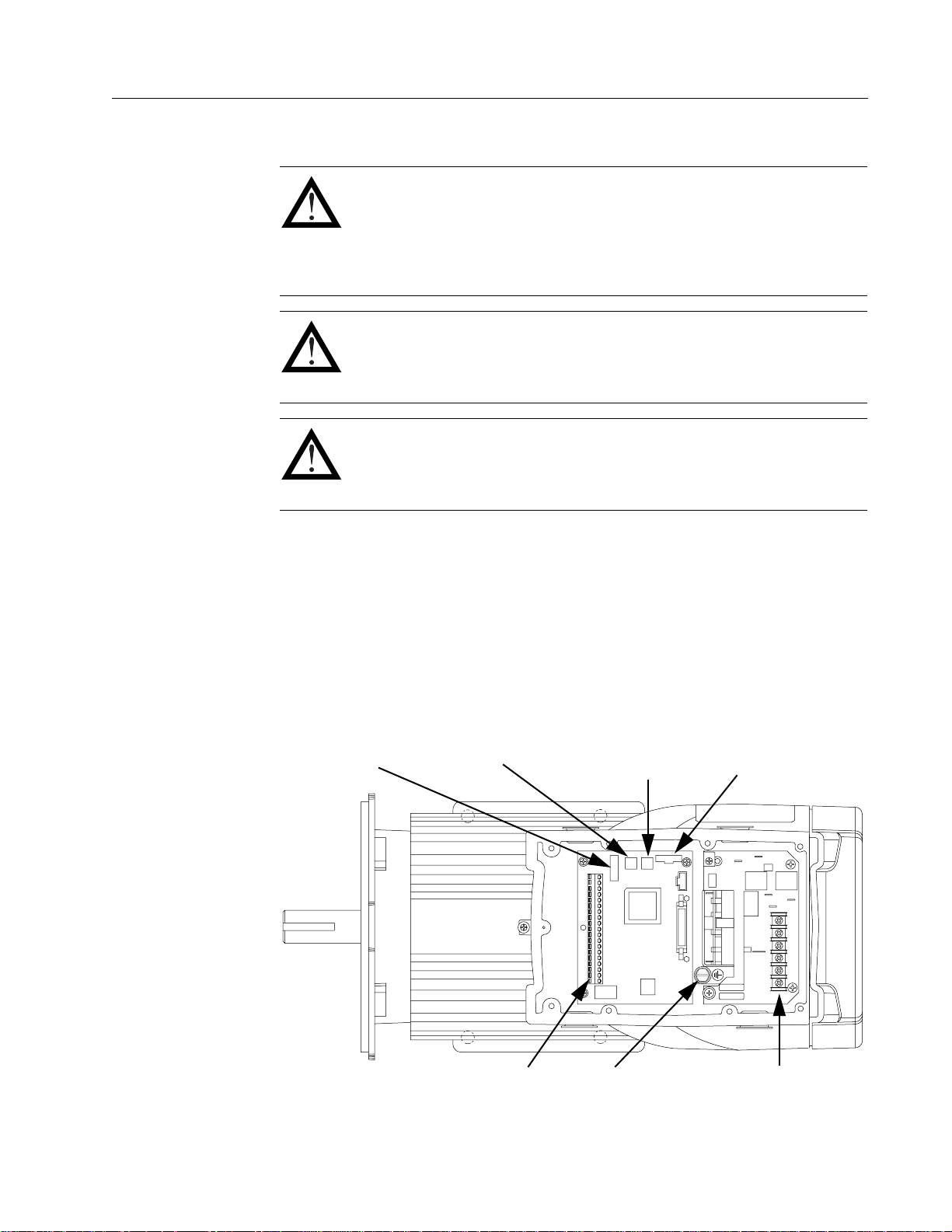
Review all installation and wiring instructions thoroughly before proceeding.
Throughout the installation procedures, use Figure 2.1 to locate wiring termination
points and setup switches.
Figure 2.1
Component Location
Setup DIP
Switches
Max Speed
Switch
Accel/Decel
Switch
PE
Display Board
Connector
DC+
DCDBR
T/L3
S/L2
R/L1
Control Signal
Terminal Block
Ground/
Protective Earth
1329I-5.5 Integrated Drive/Motor — January, 2000
AC Input P o wer
Terminal Block
Page 16
2-2 Step 2 - Plan the Installation
Planning the installation is necessary to ensure you have acceptable en vironmental and
operating conditions for the unit. Read and follow the requirements giv en below before
proceeding with the installation:
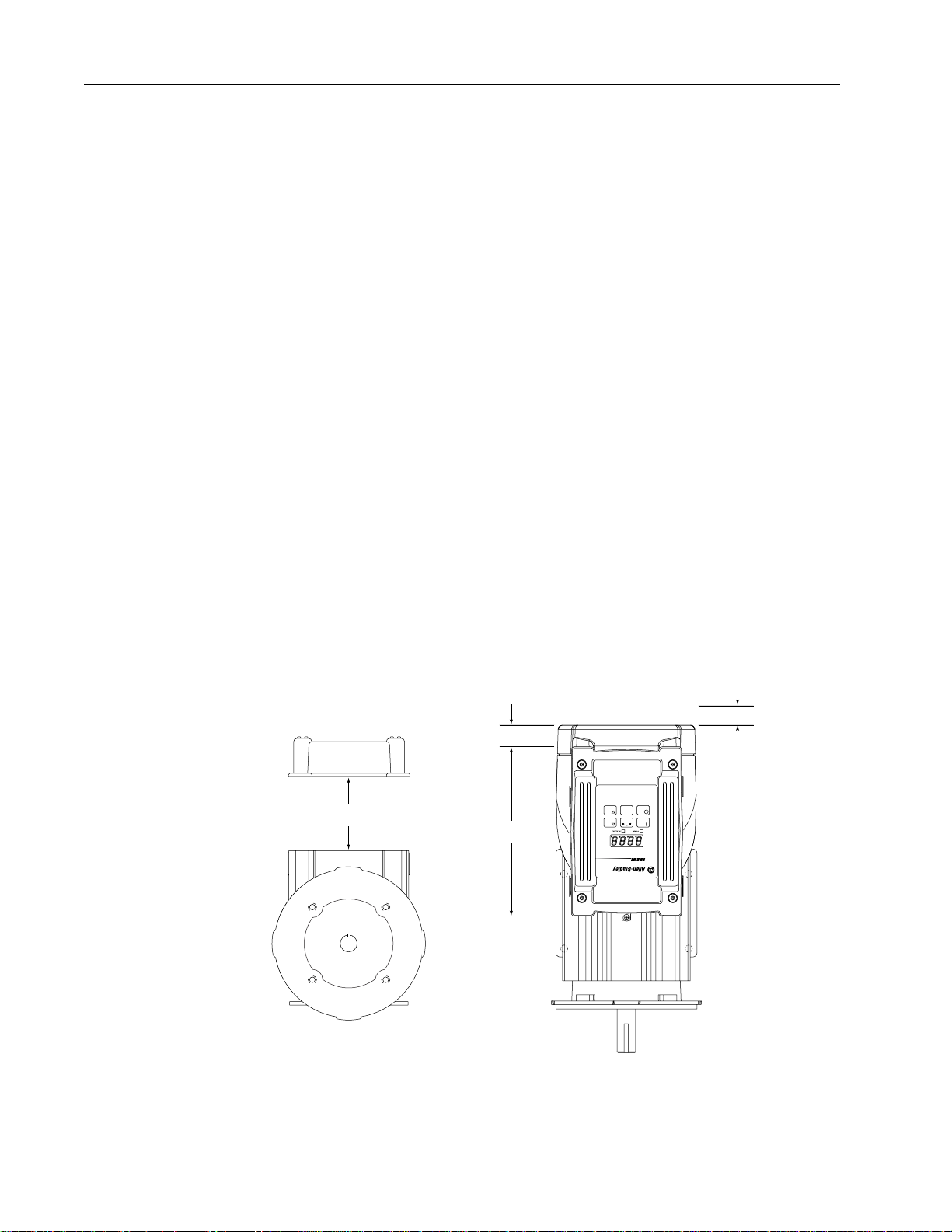
• Locate the unit where it will have unrestricted clearance as shown in Figure 2.2.
• Locate the unit where it will be kept clean (away from oil, coolants, or airborne
contaminants). The 1329I unit has an IP54/NEMA Type 12 rating. An IP rating
designates the enclosure’s level of protection. The first number in the rating (5)
indicates that the 1329I unit is dust-resistant. The second number (4) indicates that
the unit is splashproof.
• Mount the unit on a flat surface.
• Verify that the ambient temperature will remain between 0
104
˚F).
˚C to 40˚C (32˚F to
• Verify that the relative humidity will be between 5 percent and 95 percent,
non-condensing.
• For installations above 1000 meters (3300 feet), refer to Appendix A for derating
guidelines.
• Verify that there will be adequate clearance for opening the cover. See Figure 2.2.
• Verify that there will be adequate clearance for blower intake. See Figure 2.2.
Figure 2.2
Access Clearances
Blower Intake
Cover Clearance
Clearance
1 in
1.3 in
3 in
RESET
10.25 in
Front View
1329I-5.5 Integrated Drive/Motor — January, 2000
Top View
Page 17
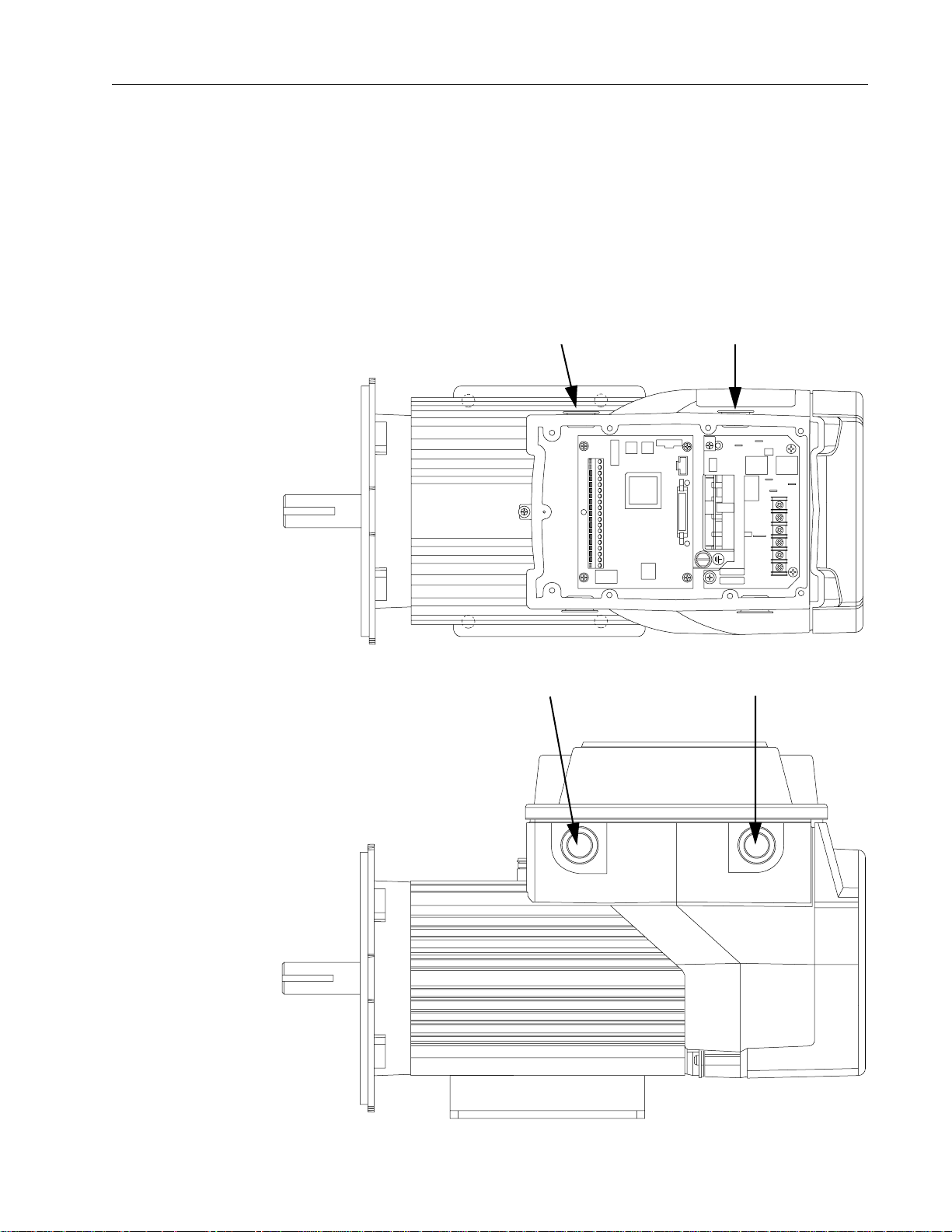
2.1 Wire Routing Guidelines
The 1329I unit is shipped from the factory with plastic conduit plugs installed. These
plugs must be removed. Before wiring, replace these plugs with appropriate 3/4-inch
NPT connectors having a similar enclosure rating. After wiring, seal unused routing
holes using permanent, user-supplied 3/4-inch NPT plugs. Seal all threaded
connections. Route the power and control wiring as shown in Figure 2.3.
Figure 2.3
Wire Entry Locations
Step 2 - Plan the Installation 2-3
Control Signal Wiring
Control Signal Wiring
AC Input Power Wiring
DC+
DC-
PE
DBR
T/L3
S/L2
R/L1
AC Input Power Wiring
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 18

2-4 Step 2 - Plan the Installation
2.2 Handling and Lifting Guidelines
Follow these handling and lifting guidelines:
• In the case of assemblies on a common base, carefully lift the assembly by a sling
around the base or by other lifting means on the base.
• When designing the lifting means, take care to assure lifting in the intended
direction.
• Do not lift the unit by the plastic blower cover.
• Do not use any lifting means under the Drive Section.
• Do not lift attached equipment by lifting the motor.
• Do not use the 1329I unit as a step.
2.3 CE Conformity
This drive is a component intended for implementation in machines or systems for the
industrial environment. It is CE marked for conformity to the Low Voltage (LV)
Directive 73/23/EEC when installed as described. It also has been tested to meet the
Council Directive 89/336 Electromagnetic Compatibility (EMC). The standards used
for this testing are, LV: EN50178, EN60204-1, EMC: EN61800-3, EN50081-1,
EN50082-2.
Important: The conformity of the drive and filter to any standard does not guarantee
that the entire installation will conform. Many other factors can influence
the total installation and only direct measurements can verify total
conformity . It is therefore the responsibility of the machine manufacturer,
to ensure, that the conformity is met.
A copy of the Declaration of Conformity (DOC) is available from your local Rockwell
Automation Sales Office.
2.3.1 Essential Requirements for a Conforming EMC Installation
The following three items are required for CE Conformance:
1. A CE filter option (see Chapter 1) must be installed to reduce conducted
emissions.
2. Grounding of equipment and cable shields must be solid, with low impedance
connections.
3. All control and signal wiring must use shielded cable or be in grounded metal
conduit.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 19
Step 2 - Plan the Installation 2-5
2.3.2 Low Voltage Directive 73/23/EEC Compliance
This product complies with Low Voltage Directive 72/23/EEC when conforming with
the following installation requirements:
• Review ATTENTION statements throughout this manual prior to installing the
product.
• The product is intended to be installed with a fixed connection to the earth. The use
of residual-current-operated protective de vices (RCDs) or ground fault indicators is
not recommended. If unavoidable, the Bulletin 1329I is compatible with type B
RCDs only.
• The product should be installed in an appropriate or suitable enclosure.
Important: The conformity of this drive and filter to any standard does not guarantee
that the entire installation will conform. Many factors can influence the
total installation and only direct measurements can verify total
conformity.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 20

2-6 Step 2 - Plan the Installation
End of Chapter
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 21

Chapter
Step 3 - Mount the Unit
Mount the unit on a foundation sufficiently rigid to guard against excessive vibration.
The unit may be mounted at any orientation. After carefully aligning the 1329I unit with
the driven machinery, bolt securely in place.
When the unit is mounted vertically, it may be necessary to use additional guards to
prevent foreign objects from falling into the motor fan openings and striking rotating
parts.
Mounting dimensions are provided on the following pages of this chapter.
3.1 Mounting Guidelines for Face-Mounted Motors
Use the following guidelines when mounting 56C and 140C face-mounted motors:
• Before mounting a C-face motor to the mating flange, be sure both surfaces and all
mounting holes are smooth and free of debris.
• When mounting into a quill-type reducer, make sure the input and output shafts are
coated with an anti-seize compound suitable for the application.
3
• When mounting through a flexible coupling, make sure that there is adequate
clearance between the driven equipment shaft, the coupling interface, and the motor
shaft. Insufficient clearance may result in binding of the shafting and premature
bearing failure.
• Always slide the motor tenon into the mating flange to its full depth before
tightening the mounting bolts. Do not allow the motor to hang by the shaft
extension while assembling it to the driven equipment (for example, a quill input
gear case) as this may bend or crease the shaft and damage any seals that are
present.
• Make sure to use the proper mounting bolts. For 56C and 140C motors, these
should be 9.5 mm (0.375 in, 16 threads per inch) and sized for length such that
engagement into the motor flange does not exceed 14.3 mm (0.563 in).
For example, a gearcase with a 9.5 mm (0.38 in) flange thickness requires a bolt
that is 9.5 mm (0.38 in) + 14.3 mm (0.56 in). That is, 23.8 mm (0.94 in) should be
the maximum bolt length. Since 23.8 mm (0.94 in) is not a standard bolt length, a
22.2 mm (0.88 in) bolt or a 25.4 mm (1.0 in) bolt with a lock washer can be used.
Important: Using a bolt that is too long may cause damage to the motor resulting in
premature failure and/or a loose assembly.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 22
3-2 Step 3 - Mount the Unit
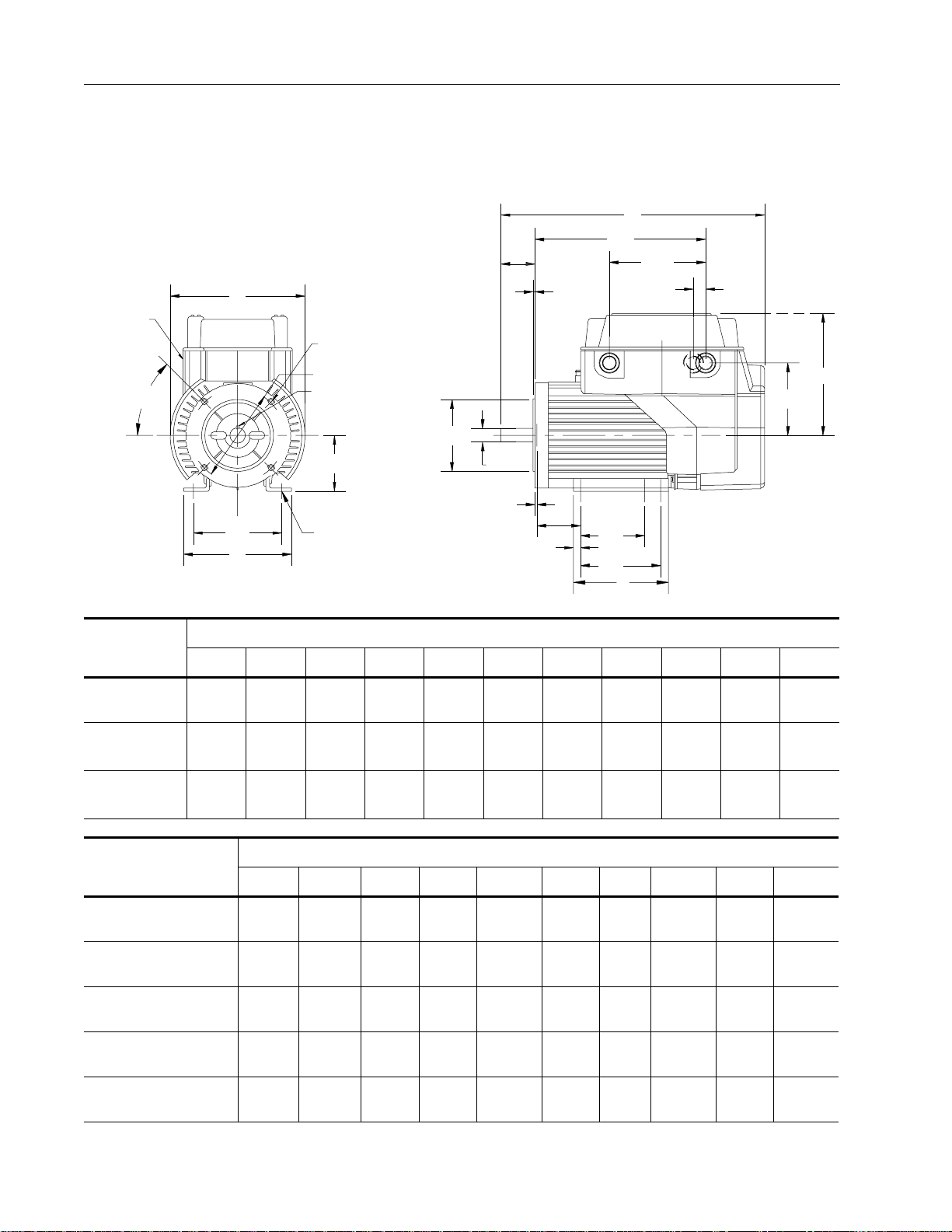
3.2 Mounting Dimensions for NEMA Frames
Figure 3.1
NEMA Frame Mounting Dimensions
P
3/4 Conduit
Both Sides
BF
AH
BB
C
BV
*
6.00
**
.75
AJ
45
°
2E
A
Face Runout and Eccentricity .004 Max. T.I.R.
Shaft Runout .002 Max. T.I.R.
S - Key Width/Height
ES - Key Length
AK
D
H - Diameter Through
* Denotes Control Wiring Ports
** Denotes Input Power Port Opposite Side
U
BC
BA
EV
2F 1
2F 2
Frame Size Dimensions in millimeters (inches)
A2EH DBFAJAKUAHSES
56C
143TC
145TC
182TC
184TC
170
(6.71)
170
(6.71)
216
(8.50)
140
(5.50)
140
(5.50)
191
(7.50)
8.6
(0.34)89(3.50)
8.6
(0.34)89(3.50)
8.6
(0.34)
114
(4.50)
16-3/8 149
(5.88)
16-3/8 149
(5.88)
13-1/2 184
(7.25)
114
(4.50)
114
(4.50)
216
(8.50)
B
15.9
(0.625)52(2.06)
22.3
(0.875)54(2.12)
28.6
(1.125)67(2.62)
8.01
4.50
4.8
(.19 SQ)32(1.25)
4.8
(.19 SQ)32(1.25)
6.4
(.25 SQ)38(1.50)
Frame Size Dimensions in millimeters (inches)
BC BB BA B 2F 1 2F 2 EV C P BV
56C
4.8
(0.19)
143TC
3.0
(0.12)
145TC
3.0
(0.12)
182TC
3.0
(0.12)
184TC
3.0
(0.12)
1329I-5.5 Integrated Drive/Motor — January, 2000
3.0
(0.12)70(2.75)
3.0
(0.12)70(2.75)
3.0
(0.12)70(2.75)
6.4
(0.25)89(3.50)
6.4
(0.25)89(3.50)
165
(6.50)76(3.00)
165
(6.50)
165
(6.50)
165
(6.50)
165
(6.50)
102
(4.00)
102
(4.00)
114
(4.50)
114
(4.50)
127
(5.00)12(0.47)
127
(5.00)12(0.47)
127
(5.00)12(0.47)
140
(5.50)13(0.50)
140
(5.50)13(0.50)
404
(15.90)
418
(16.46)
405
(15.96)
476
(18.75)
502
(19.75)
213
(8.38)
213
(8.38)
213
(8.38)
224
(8.80)
224
(8.80)
258
(10.14)
258
(10.14)
270
(10.64)
315
(12.39)
340
(13.39)
Page 23
Step 4 - Install External
Power Components
Install external power components using the guidelines in the following sections.
4.1 Installing an AC Input Disconnect
ATTENTION: Local codes and la ws require that an input disconnect be
provided in the incoming power lines. Failure to observ e this precaution
could result in severe bodily injury or loss of life.
An A C input disconnect must be provided in the incoming AC power lines in accordance
with local codes and laws.
4.2 Installing Branch Circuit Protection
ATTENTION: Local codes and laws require that AC branch circuit
protection be provided to protect input power wiring. The input fuse
ratings listed in Table 4.1 are applicable for one 1329I unit per branch
circuit. No other load can be applied to that fused branch circuit. Failure
to observe this precaution could result in severe bodily injury or loss of
life.
Chapter
4
Install the required, user-supplied branch circuit protection fuses according to Local
codes and laws. Refer to Table 4.1 for recommended fuse ratings.
Table 4.1
Required AC Branch Circuit Protection
NEC Amps Input
Input Voltage Unit HP Input Current Fuse Rating
460 VAC 1 HP 2.3 A 3.5 A
460 VAC 2 HP 3.7 A 6.0 A
460 VAC 3 HP 5.7 A 9.0 A
460 VAC 5 HP 9.0 A 15.0 A
230 VAC 1 HP 4.5 A 7.0 A
230 VAC 2 HP 7.6 A 12.0 A
230 VAC (1-Phase) 1 HP 5.8 A 9.0 A
230 VAC (1-Phase) 2 HP 14.0 A 20.0 A
115 VAC 1 HP 14.0 A 20.0 A
➊
➊
Recommended fuse type: UL Class J or CC, 600V, time delay.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 24
4-2 Step 4 - Install External Power Components
4.3 Installing Input Isolation Transformers
ATTENTION: Distribution system capacity above the maximum
recommended system KVA (100 KVA for 460 VAC three-phase, 5%
impedance) requires using an isolation transformer, a line reactor , or other
means of adding similar impedance. Failure to observe this precaution
could result in damage to, or destruction of, the equipment.
Depending upon the requirements of the application, the 1329I unit may require input
isolation transformers to help eliminate the following:
• Damaging AC line voltage transients from reaching the 1329I unit.
• Line noise from the 1329I unit being fed back to the incoming power source.
An isolation transformer or line reactors of 3% drive input impedance should be used
between the distribution source and the 1329I unit in situations such as the following:
• The power distribution system feeding the 1329I unit contains power factor
correction capacitors.
• The power distribution system feeding the 1329I unit connects with heavy
industrial equipment that causes instantaneous line distribution shorts such as arc
welders, line-commutated thyristor converters, or line-started AC induction motors
greater than 50 HP (37 KVA).
• The distribution transformer is rated more than 100 KVA for 460 VAC with less
than 5% impedance.
• The distribution system is prone to frequent power outages or transient power
interruptions or significant voltage spikes.
Refer to Table 4.2 for the appropriate line reactor for your unit.
Table 4.2
Input Line Reactors
1329I Unit Input Line Reactor
HP Input Voltage Inductance Rated Amps Part No.
1 460V, 3-Phase 6.5 mH 4.0 1321-3RA4-B
2 460V, 3-Phase 3.0 mH 8.0 1321-3RA8-B
3 460V, 3-Phase 2.5 mH 12.0 1321-3RA12-B
5 460V, 3-Phase 1.5 mH 18.0 1321-3RA18-B
1 230V, 3-Phase 1.5 mH 8.0 1321-3RA8-A
2 230V, 3-Phase 0.8 mH 18.0 1321-3RA18-A
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 25

Chapter
5
Step 5 - Wire AC Power to the Unit
and Ground the Unit
ATTENTION: If the distribution system capacity exceeds the unit’s
maximum symmetrical fault short-circuit current of 10,000 amps,
additional impedance should be added to the AC line supplying the unit
to limit available current in the event of a fault. Failure to observe this
precaution could result in severe bodily injury or loss of life.
ATTENTION: The dri ve is intended to be commanded by control input
signals that will start and stop the motor. A device that routinely
disconnects then reapplies input power to the drive for the purpose of
starting and stopping the motor should not be used. If it is necessary to
use this method for starting and stopping, or if frequent cycling of power
is unavoidable, make sure that it does not occur more than once a minute.
Observe the following guidelines when wiring AC power:
• The terminal block accepts up to 3.31 mm
• The recommended tightening torque is 1.3 newton-meters (12 in-lb).
• Verify that the input power to the unit corresponds to the unit v oltage and frequency
and that the input supply is of sufficient capacity to support the input current
requirements. Refer to Appendix A, Technical Specifications.
• Size the AC line conductors for the unit rating and in accordance with all applicable
local, national, and international codes.
Use the following procedure to wire AC power to the unit. Grounding instructions are
provided in Section 5.1.
Remove the cover by loosening the four cover screws. Note that the keypad/display
ribbon cable is designed to disconnect from the main unit when the cover is removed
as shown in Figure 5.1.
Figure 5.1
Removing the Cover
Four Cover Screws
2
(12 AWG) wire.
Keypad/Display Board
Ribbon Cable Connector
(Side View of Cover)
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 26

5-2 Step 5 - Wire AC Power to the Unit and Ground the Unit
• Connect the incoming three phase AC line to terminals R, S, and T, as shown in
Figure 5.2.
• Connect the incoming single phase AC line to any two of the terminals R, S, and T,
as shown in Figure 5.2.
Figure 5.2
Grounding the Unit
AC Input Terminal
PE
PE
Ground/Protective Earth
5.1 Grounding the Unit
ATTENTION: The user is responsible for conforming with all local,
national, and international codes applicable to the grounding of this
equipment. Failure to observe this precaution could result in sev ere bodily
injury or loss of life.
DC+
DC-
DBR
T/L3
S/L2
R/L1
DC+
DC-
DBR
T/L3
S/L2
R/L1
DC Bus
(Do not wire.)
Not Used
AC Inputs
Connect the ground wire brought in with the incoming A C power to the unit’ s grounding
screw ➊ (see Figure 5.2). This grounding conductor must run unbroken from the unit
to earth ground.
➊
Recommended tightening torque is 2.6 N-m (32 lb.-in.).
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 27

Chapter
6
Step 6 - Install a Hardwired Stop
ATTENTION: The user must provide an external, hardwired stop circuit
outside of the 1329I unit circuitry. This circuit must disable the system
in case of improper operation. Uncontrolled machine operation may result
if this procedure is not followed. Failure to observe this precaution could
result in bodily injury.
Depending upon the requirements of the application, the 1329I unit can be set up to
provide either a coast-to-rest (default) or a ramp-to-rest (user option) operational stop.
The unit’s Function Loss input provides an additional coast-to-rest operational stop.
In addition to the operational stop, the user must provide a hardwired stop external to
the unit. The hardwired stop circuit must contain only hardwired electromechanical
components. Operation of the hardwired stop must not depend on electronic logic
(hardware or software) or on the communication of commands over an electronic
network or link.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 28

6-2 Step 6 - Install a Hardwired Stop
End of Chapter
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 29

Chapter
7
Step 7 - Wire the Control Signal
Terminal Block
The following sections describe how to wire the control signal terminal block shown
in Figure 7.1.
Refer to either Figure 7.2 (standard units) or Figure 7.3 (local operator control units)
before you begin wiring. These figures show typical wiring connections and the sections
in this chapter where the signals are described in detail.
Note the following when wiring the terminal block:
• The terminal block is isolated from the input power.
• Route the control wires separately from the power wires.
• The terminal block accepts 0.326 mm
wire.
• The maximum lead length is 300 meters (1000 ft).
• The maximum tightening torque is 0.8 Nm (7 in-lb).
2
(22 AWG) through 3.31 mm2 (12 AWG)
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 30

7-2 Step 7 - Wire the Control Signal Terminal Block
Figure 7.1
Control Signal Terminal Block
1 2 3 4 5 6 7 8 9 1011121314151617181920
Table 7.1
Terminal Functions
Terminal Number Terminal Function
1 10 Volt Reference
2 0 – 10 Volt Speed Reference Input
3 4 – 20 mA Speed Reference Input
4 Common
5 0 – 10 Volt Output
6 Common
7 24 Volt DC
8 Speed Preset 2
9 Speed Preset 1
10 Speed Preset 0
11 Function Loss
12 RPM/Percent Load Display
13 24 Volt DC
14 Forward/Rev erse
15 Reset
16 Start
17 Stop
18 24 Volt DC Common
19 N.O. Relay
20 Relay Common
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 31

Step 7 - Wire the Control Signal Terminal Block 7-3
Figure 7.2
Typical Control Signal Connections for Standard Units
% Load
-+
RPM
+10V DC
Fwd
Rev
5K Ω
1 2 3 4 5 6 7 8 9 1011121314151617181920
10 Volt Reference
0 – 10V DC Speed Reference Input
4 – 20 mA Speed Reference Input
Common
0 – 10 Volt Output
Common
24 V olt DC
Speed Preset 2
Speed Preset 1
Speed Preset 0
Function Loss
RPM/Percent Load Displa y
24 V olt DC ➌
Forward/Re verse
Reset
Start
Stop ➌
24 Volt DC Common
N.O. Rela y
Relay Common
➊
➋
➋
Table 7.2
User Wiring for Standard Units
Signal Refer to Section
Function Loss 7.1
Analog Output 7.2
Relay Control Output 7.3
RPM/Percent Load Display 7.4
Speed Reference (select one)
Preset Speed 7.5.1
Speed Potentiometer 7.5.2
External Speed Reference (0 – 10V DC or 4 – 20 mA) 7.5.3
Start 7.6
Stop 7.6
Forward/Reverse 7.7
Reset 7.8
➊
An external 0 to 10 volt DC or 4 to 20 mA speed reference source can be connected. See Section 7.5.3
for more information.
➋
The jumper between terminals 7 and 11 must be removed when wiring the Function Loss input. See
Section 7.1 for more information.
➋
The jumper between terminals 13 and 17 must be removed when wiring the Stop input. See Section
7.6 for more information.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 32

7-4 Step 7 - Wire the Control Signal Terminal Block
Figure 7.3
Typical Control Signal Connections for Local Operator Control Units
% Load
-+
RPM
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
10 V olt Reference ➊
0 – 10V DC Speed Reference Input
4 – 20 mA Speed Reference Input
Common
0 – 10 Volt Output
Common
24 V olt DC ➋
Speed Preset 2
Speed Preset 1
Speed Preset 0
Function Loss ➋
RPM/Percent Load Displa y
24 V olt DC ➌
Forward/Re verse
Reset
Start
Stop ➌
24 Volt DC Common
N.O. Rela y
Relay Common
Table 7.3
User Wiring for Local Operator Control Units
Signal Refer to Section
Function Loss 7.1
Analog Output 7.2
Relay Control Output 7.3
RPM/Percent Load Display 7.4
Speed Reference (select one)
Preset Speed 7.5.1
Speed Potentiometer 7.5.2
External Speed Reference (0 – 10V DC or 4 – 20 mA) 7.5.3
➊
An external 0 to 10 volt DC or 4 to 20 mA speed reference source can be connected. See Section 7.5.3
for more information.
➋
The jumper between terminals 7 and 11 must be removed when wiring the Function Loss input. See
Section 7.1 for more information.
➌
The jumper between terminals 13 and 17 must be removed when wiring the Stop input. See Section
7.6 for more information.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 33

Step 7 - Wire the Control Signal Terminal Block 7-5
7.1 Wiring Function Loss
For the unit to run, you must maintain a signal at the Function Loss input (the connection
between control terminals 7 and 11). If the Function Loss signal is not present, the unit
turns off the power devices and coasts to rest. To restart the unit, you must restore the
Function Loss signal, clear any faults, and reassert the Start command.
The unit ships from the factory with a jumper between terminals 7 and 11 which provides
the Function Loss signal. The Function Loss input should be wired in series with the
drive’ s external interlocks as shown in Figure 7.4. In this case, remov e the jumper before
making the connections.
Function Loss provides an operational stop. It does not fulfill the requirements of a
hardwired stop. Refer to Chapter 6 for information regarding hardwired stop
requirements.
Figure 7.4
Function Loss Control Wiring
User-supplied
Function Loss
Pushbutton
User-supplied
Safety Interlocks
7891011
7.2 Wiring the Analog Output
The analog output provides a 0 to 10 VDC signal to a user-supplied metering device.
This output indicates speed (default) or percent load (user option), based on the status
of input terminal 12.
If you select speed indication, 0 to 10 V = 0 to the maximum speed as defined by the
maximum speed rotary switch. (Refer to Chapter 8 for a description of the rotary switch.)
If you select percent load indication, 0 to 10 V = 0 to 200percent load.
Wire to the analog output as shown in Figure 7.5.
Figure 7.5
Analog Output Wiring
24 V olt DC
Function Loss
-+
4567
0 – 10 Volt Output
Common
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 34

7-6 Step 7 - Wire the Control Signal Terminal Block
7.3 Wiring the Relay Control Output
A single form A relay on the terminal block can be used to indicate the unit is running
(default) or has faulted (user option) based on the setup DIP switch setting. Refer to the
setup DIP switch description in Chapter 8.
Figure 7.6
Relay Control Output Wiring
Connect to external device
such as PLC input.
7.4 Wiring RPM or Percent Load Display
The RPM or Percent Load Display input (control terminal 12) selects the type of
information displayed by the analog output and the built-in display, speed in RPM or
percent load. W ire a switch between control terminals 12 and 13 as shown in Figure 7.7.
17 18 19 20
N.O. Rela y
Relay Common
Figure 7.7
RPM or Percent Load Display Wiring
11 12 13 14
RPM
% Load
RPM or Percent Load Displa y
24V DC
7.5 Wiring the Speed Reference
The standard 1329I unit provides two motor speed reference options:
• Seven preset speeds
• An external 0 to 10 VDC or 4 to 20 mA speed reference source
The 1329I unit with local provides three motor speed reference options:
• The local operator controls (using the keys)
• Seven preset speeds (the keys are not used)
• An external 0 to 10 VDC or 4 to 20 mA speed reference source (the keys
are not used)
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 35

Step 7 - Wire the Control Signal Terminal Block 7-7
Select the option that is the most suitable for your application. The following sections
provide wiring information for each option except the local operator controls. Refer to
Section 1.2 for information on the local operator controls.
7.5.1 Wiring the Preset Speed Inputs
Control terminals 8, 9, and 10 select seven preset speeds as shown in Table 7.4. Note
that if you select a preset speed that is greater than the maximum speed setting (based
on the rotary switch setting), the unit uses the maximum speed setting value.
Important: DIP switch position 8 defines whether terminals 8, 9, and 10 are used as
presets (default) or to define the unit’s minimum speed (user option).
Refer to Section 8.3.8 for information about using terminals 8, 9, and 10
to select minimum speed.
Table 7.4
Fixed Preset Speed Selections
Selected Speed Reference
Terminal 8
Status
Open Open Open Analog speed reference Local operator control
Open Open Closed Preset 1 - 300 RPM (10 Hz)
Open Closed Open Preset 2 - 600 RPM (20 Hz)
Open Closed Closed Preset 3 - 900 RPM (30 Hz)
Closed Open Open Preset 4 - 1200 RPM (40 Hz)
Closed Open Closed Preset 5 - 1500 RPM (50 Hz)
Closed Closed Open Preset 6 - 1800 RPM (60 Hz)
Closed Closed Closed Preset 7 - 2100 RPM (70 Hz)
Terminal 9
Status
Terminal 10
Status
Standard Unit Local Operator
Control Unit
To use the preset speeds to set the speed reference, wire to terminals 8, 9, and 10 as
shown in Figure 7.8.
Figure 7.8
Preset Speed Input Wiring
687 9 10 11
24 V olt DC
Speed Preset 2
Speed Preset 1
Speed Preset 0
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 36

7-8 Step 7 - Wire the Control Signal Terminal Block
7.5.2 Wiring the Speed Reference Signal Potentiometer
Control terminal 1 provides a 10 VDC reference for use with the user-supplied 5 kΩ
potentiometer. Perform the follo wing procedure to wire the potentiometer as the speed
reference (refer to Figure 7.9):
1. Mount the speed reference potentiometer at an appropriate operator-accessible
location, less than 300 meters (1000 feet) from the 1329I unit.
2. Connect one end of the potentiometer to control terminal 1 (10V reference) and
the other end to control terminal 4 (signal common).
3. Connect the potentiometer’s wiper to control terminal 2 (speed reference input).
Figure 7.9
Speed Reference Potentiometer Wiring
Shield
+10V DC
12345
10 V olt Reference
0 – 10 Volt Speed Reference Input
5K Ω
(Drive end only)
Common
7.5.3 Wiring an External Speed Reference (0 to 10 VDC or 4 to 20 mA)
The terminal block provides both 0 to 10 VDC and 4 to 20 mA inputs. Use only one of
these inputs for the external speed reference. The other input must remain unconnected.
0 to 10 VDC External Speed Reference
To use an external 0 to 10 VDC signal to set the speed reference, connect the signal
leads as shown in Figure 7.10. 0 to 10 VDC = minimum speed to maximum speed.
Figure 7.10
0 to 10 VDC External Speed Reference Wiring
Shield
+
–
12345
0 – 10 Volt Speed Reference Input
Common
1329I-5.5 Integrated Drive/Motor — January, 2000
(Drive end only)
Page 37

Step 7 - Wire the Control Signal Terminal Block 7-9
4 to 20 mA External Speed Reference
T o use an external 4 to 20 mA signal to set the speed reference, connect the signal leads
as shown in Figure 7.11. 4 to 20 mA = minimum speed to maximum speed.
Figure 7.11
4 to 20 mA External Speed Reference Wiring
12345
Shield
4 – 20 mA Speed Reference Input
Common
(Drive end only)
7.6 Wiring Start / Stop Control
Important: The terminal block start function is only active when in terminal block
start mode.
The system looks for an open-to-closed transition at the Start input before starting the
unit unless you have the Run on Power Up switch (setup DIP switch 1, see Section
8.3.1) set to ON. If you use a maintained start device and power to the unit is lost, you
must open and reclose the start device before the unit will start again. Both the Stop and
the Function Loss input signals must be present and there must be no active faults for
the unit to start.
In order for the unit to run, you must maintain a signal at the Stop input. If the signal
is interrupted, the unit coasts to rest (default) or ramps to rest (user option). To restart
the unit, you must restore the signal and reassert the Start input.
Figure 7.12 illustrates wiring for a maintained 2-wire and for a momentary 3-wire
Start / Stop control
Figure 7.12
Start / Stop Control Wiring
12 13 14 15 16 17 18
24 V olt DC ➊
Start
Stop ➊ ➋
12 13 14 15 16 17 18
24 V olt DC ➊
Start
Stop ➊ ➋
Maintained 2-Wire Momentary 3-Wire
➊
The jumper between terminals 13 and 17 must be removed when wiring the Stop input.
➋
Refer to Chapter 8 to select a stop method via SW3 Selector Switch.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 38

7-10 Step 7 - Wire the Control Signal Terminal Block
7.7 Wiring Forward / Reverse Control
Important: The terminal block forward/reverse functions are only active when in
terminal block start mode.
The Forward / Rev erse input (the connection between terminals 13 and 14) defines the
requested direction of motor rotation. If the input is open, the requested direction is
forward. Switching the Forward / Reverse input causes the motor to ramp to rest and
then accelerate in the opposite direction. Note that the 1329I unit is shipped with the
forward direction defined as CCW shaft rotation as viewed from the motor shaft end.
Figure 7.13 shows the Forward / Re verse control wiring for the 1329I unit. If you disable
(lock out) reverse using the setup DIP switch, do not wire to this input because the dri ve
ignores any transition on this input. Refer to the setup DIP switch description in
Chapter 8
Figure 7.13
Forward / Reverse Control Wiring
12 13 14 15
Rev
Fwd
7.8 Wiring Reset Control
An open-to-closed transition at the Reset input (control terminal 15) clears a fault once
the appropriate corrective action has been taken. After clearing the fault, you must
reassert the Start command in order to restart the unit.
Wire a normally-open (N.O.) push-button between control terminals 15 and 13 as sho wn
in Figure 7.14. Refer to Chapter 11, Diagnostics and Troubleshooting, for more
information on faults.
Figure 7.14
Reset Control Wiring
24 V olts DC
Forward/Re verse
12 13 14 15 16
24 V olt DC
1329I-5.5 Integrated Drive/Motor — January, 2000
Reset
Page 39

Chapter
8
Step 8 - V erify the Setup and Adjust
Switches if Required
The 1329I unit is set up using two rotary switches and a 10-position DIP switch mounted
on the printed circuit board as shown in Figure 8.1. Figure 8.1 shows the setting
selections and the factory defaults. Normally, no adjustments will be needed to the
factory settings.
If your application requires adjustment to these settings, refer to the following sections
in this chapter. If no adjustment is needed, go to Chapter 9 to complete the installation
procedure.
ATTENTION: Only qualified personnel familiar with the construction
and operation of this equipment and the hazards involv ed should install,
adjust, operate, and/or service this equipment. Read and understand this
instruction manual in its entirety before proceeding. Failure to observe
this precaution could result in severe bodily injury or loss of life.
ATTENTION: All adjustments to these components should be made
with power removed. Failure to observe this precaution could result in
severe bodily injury or loss of life.
ATTENTION: After disconnecting input power wait five minutes and
check with a voltmeter to assure that DC bus capacitors are discharged.
The voltmeter should read zero volts. Failure to observe this precaution
could result in severe bodily injury or loss of life.
ATTENTION: The cov er scre ws must be securely tightened in order to
properly ground the cover . V erify that all four cover scre ws are tight before
applying power to the unit. Failure to observe this precaution could result
in severe bodily injury or loss of life.
Review all setup instructions thoroughly before making any adjustments or applying
power to the unit.
After changing the setup, go to Chapter 9 to complete the installation.
Before making any adjustments to the unit, be sure to take the following precautions:
1. Turn off, lockout, and tag AC input power to the unit.
2. Wait five minutes. Then remove the cover and use a voltmeter to verify that the
DC bus capacitors are discharged. The voltmeter should read zero volts. Refer to
Figure 5.2 for the DC bus test points.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 40

8-2 Step 8 - Verify the Setup and Adjust Switches if Required
Figure 8.1
Rotary Switches and Setup DIP Switch Locations
Setup DIP Switch
(SW3)
Max Speed Switch
(SW2)
Accel/Decel Switch
(SW1)
OFF ON
PE
8.1 Adjusting the Maximum Speed
DC+
DCDBR
T/L3
S/L2
R/L1
ATTENTION: The user is responsible for ensuring that driven
machinery and all drive-train mechanisms are capable of safe operation
at maximum speed. Failure to observe this precaution could result in
severe bodily injury or loss of life.
The maximum speed rotary switch limits the speed reference to the unit. Regardless of
what speed reference is supplied, the unit will not command a speed greater than value
selected by this rotary switch.
Figure 8.2
Maximum Speed Rotary Switch Settings
0 = 1500 RPM (50 Hz)
1 = 1800 RPM (60 Hz) Default
2 = 2100 RPM (70 Hz)
3 = 2400 RPM (80 Hz)
4 = 2700 RPM (90 Hz)
5 = 3000 RPM (100 Hz)
6 = 3300 RPM (110 Hz)
7 = 3600 RPM (120 Hz)
Range: 1500 RPM (50 Hz) to 3600 RPM (120 Hz)
Default: 1800 RPM (60 Hz)
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 41

Step 8 - Verify the Setup and Adjust Switches if Required 8-3
To set the maximum speed:
1. To increase the maximum speed, turn the maximum speed rotary switch to a higher
position number.
-orTo decrease the maximum speed, turn the maximum speed rotary switch to a lower
position number.
2. Connect the display board ribbon cable and replace the cover. Verify that all four
cover screws are in place and tightened.
3. Apply AC input power.
4. Set the operator’s speed reference signal to maximum.
Standard units: Use the speed potentiometer or other user-supplied external speed
reference device.
Local operator control units: Use the key to increase the speed reference and the
key to decrease the speed reference.
5. Use a hand held tachometer to monitor motor speed.
6. Repeat the adjustment procedure until the desired maximum speed is obtained.
Note that changes to the maximum speed setting are recognized only while the
drive is stopped.
Important: If speed is erratic or not as expected, verify that only one of the speed reference
inputs (0 to 10 VDC or 4 to 20 mA) has been wired.
8.2 Adjusting the Acceleration / Deceleration Time
The acceleration / deceleration time is the amount of time it takes the motor to ramp
from stop to the maximum speed setting of the unit. This is also the amount of time it
takes the motor to ramp from the maximum speed setting to stop. For all settings except
Setting 0, Acceleration time is equal to Deceleration time.
Figure 8.3
Acceleration/Deceleration Rotary Switch
0 = 1 Second Accel/5 Sec Decel
1 = 5 Seconds (Default)
2 = 10 Seconds
3 = 15 Seconds
4 = 20 Seconds
5 = 30 Seconds
6 = 60 Seconds
7 = 90 Seconds
Range: 1, 5, 10, 15, 20, 30, 60, 90 seconds
Default: 5 seconds
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 42

8-4 Step 8 - Verify the Setup and Adjust Switches if Required
Note that if the operator speed reference setting is less than the maximum speed value,
the acceleration / deceleration ramp time is proportionately less than the acceleration /
deceleration setting.
Example
1800 RPM
900 RPM
Assume:
Max Speed = 1800 RPM
Operating Speed = 900 RPM
Accel/Decel Time Setting = 30 Seconds
Use this formula:
Operating Speed
Max Speed
x Accel/Decel Time Setting = Time to Operating Speed
SPEED
TIME
15 Sec 30 Sec
900
x 30 = 15
1800
It will take 15 seconds to ramp from stop to 900 RPM.
To adjust the acceleration / deceleration time:
1. To increase the acceleration / deceleration time, turn the accel / decel rotary switch to a
higher position number.
-or-
To decrease the acceleration / deceleration time, turn the accel / decel rotary switch to a
lower position number .
2. Connect the display board ribbon cable and replace the cover. Verify that all four
cover screws are in place and tightened.
3. Apply AC input power.
4. Set the desired operating speed.
5. Standard units: Use the speed potentiometer or other user-supplied external
speed reference device.
6. Local operator control units: Use the key to increase the speed reference
and the key to decrease the speed reference.
7. Repeat the adjustment procedure until the desired acceleration / deceleration time
is obtained. Note that changes to the acceleration / deceleration time are recognized only while the drive is stopped.
Important: If speed is erratic or not as expected, verify that only one of the speed
reference inputs (0 to 10 VDC or 4 to mA) has been wired.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 43

Step 8 - Verify the Setup and Adjust Switches if Required 8-5
8.3 Modifying the Setup Using the Setup DIP Switch
The switches in the 10-position setup DIP switch define the characteristics of the 1329I
unit as shown in Figure 8.4. The switches are preset at the factory to suit a wide range
of applications and normally do not need to be changed. The following sections describe
how to modify the setup to suit your specific application, if required.
Important: Changes to the DIP switch settings are recognized only while the drive is
stopped.
Figure 8.4
Setup DIP Switch Selections
OFF (Factory Default) ONOFF ON
Run On Pow er Up
Speed Reference ➊
Relay Control Output
Auto Restart
T orque Curve
Stop
Reverse
Minimum Speed
Start Mode ➊
Parameter Mode ➋
Disabled
From Operator Controls
Running
Disabled
Variable
Coast-to-Rest
Enabled
0 Hz
From Operator Controls
From Setup Switches
Enabled
From Terminal Block
Faulted
Enabled
Constant
Ramp-to-Rest
Disabled (Rev erse Lockout)
From Terminal Block
From Terminal Block
From EEPROM Memory
➊
Switches 2 and 9 apply to local operator control units only.
➋
Switch 10 applies to the DeviceNet Communication option only.
8.3.1 Run On Power Up (Position 1)
Enabling this feature causes output power to be applied to the Motor Section
automatically at drive power up.
ATTENTION: When this feature is enabled, the drive may start at any
moment. This feature may only be used as outlined in NFPA79, Under
Voltage Protection for specialized applications. Equipment damage
and/or personal injury or loss of life may result if this feature is used in
an inappropriate application.
Important: If AC power is lost, the drive will restart if the unit is wired for 2-wire
control.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 44

8-6 Step 8 - Verify the Setup and Adjust Switches if Required
The switch at position 1 enables or disables the run on power up function. When this
function is enabled, output power is applied to the Motor Section automatically at power
up if all run on power up permissive conditions are met. These conditions are:
• No faults are active.
• The terminal strip function loss input is closed.
• In terminal block start mode: In addition to the start permissive conditions listed
above, the terminal strip Start and Stop inputs must be closed.
• In operator control start mode: The unit will simulate a start signal edge; you do
not have to press the green key.
Settings (Position 1):
OFF position (Default) = Run On Power Up Disabled
ON position = Run On Power Up Enabled
8.3.2 Speed Reference Select (Position 2)
Important: This applies only to local operator control units.
The switch at position 2 is used to select whether the unit gets its speed reference from
the operator controls or from the analog input terminals. If this switch is set to the OFF
position, the speed reference will come from the operator controls. If this switch is set
to the ON position, the speed reference will come from the analog input terminals, and
the and keys are not functional.
Settings (Position 2):
OFF position (Default) = Speed Reference from Operator Controls
ON position = Speed Reference from Analog Input Terminals
8.3.3 Relay Control Output - Running or Faulted (Position 3)
The switch at position 3 specifies the type of status indication provided by the normally
open (N.O.) relay control output (control terminals 19 and 20). See Section 7.3 for a
description of control terminals 19 and 20. The relay can be used to indicate that the
unit is running (power is applied to the Motor Section) or has faulted (an active drive
fault exists).
Relay Control
Switch 3 Position State of Unit
OFF (Unit running indication selected)
ON (Unit faulted indication selected)
Running Closed
Stopped Open
No Faults Closed
Active Fault Open
Output Status
Settings (Position 3):
OFF position = Unit Running Indication (Default)
ON position = Unit Faulted Indication
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 45

Step 8 - Verify the Setup and Adjust Switches if Required 8-7
8.3.4 Auto Restart (Position 4)
ATTENTION: When this feature is enabled, the Drive Section will
restart automatically after an auto-restartable fault occurs (see T able 8.1).
This feature may only be used as outlined in NFPA79, Under Voltage
Protection for specialized applications. Equipment damage and/or
personal injury or loss of life may result if this feature is used in an
inappropriate application. An auto-restart can be canceled by pressing the
RESET
key or remote Reset device.
The switch at position 4 enables or disables the auto-restart function. If the auto-restart
function is enabled, the unit shuts down as usual upon the detection of a fault, waits five
seconds, and attempts to start automatically. If the fault reoccurs, the Drive Section
again waits five seconds before trying to start, up to a maximum of four attempts within
a five minute period. If the Drive Section f ails all these attempts, it remains in the faulted
state and displays the fault it is attempting to clear.
Auto Restart Countdown
As a precaution, the drive will visually count do wn for 5 seconds prior to an auto restart
attempt. The following character groups are displayed in sequence to indicate that the
countdown is in progress.
... ... ... ...
Table 8.1
Auto-Restartable Faults
Fault Code Description
Overcurrent
Overload
High bus voltage
Low bus voltage
Overtemperature
Settings (Position 4):
OFF position (Default) = Auto-Restart Disabled
ON position = Auto-Restart Enabled
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 46

8-8 Step 8 - Verify the Setup and Adjust Switches if Required
8.3.5 Torque Curve (Position 5)
The switch at position 5 selects either a variable torque curve or a constant torque curve.
The variable torque selection provides a squared V/Hz curve and 110% electronic
thermal overload and 110% current limit for one minute. The constant torque selection
provides a linear V/Hz curv e and 150% electronic thermal ov erload and 150% current
limit for one minute.
Figure 8.5
Torque Curve
Output
Voltage
Settings (Position 5):
OFF position (Default) = Variable Torque Curve
ON position = Constant Torque Curve
8.3.6 Stop Type (Position 6)
The switch at position 6 selects how the motor will stop when the Stop input is asserted
(or the red key is pressed). A coast-to-rest stop turns off the transistor po wer device
drivers. A ramp-to-rest stop continues to switch the transistor power de vice drivers until
the output frequency equals 0 Hz (decelerating the motor at a rate based on the accel /
decel switch setting), and then turns off the power device drivers.
Settings (Position 6):
CT
Hz
VT
Base
Frequency
OFF position = Coast-to-Rest (Default)
ON position = Ramp-to-Rest
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 47

Step 8 - Verify the Setup and Adjust Switches if Required 8-9
8.3.7 Reverse Disable (Position 7)
The switch at position 7 enables or disables reverse rotation of the motor . It is factory-set
to enable a forward-to-reverse change of motor direction. If this switch is in the ON
position, the reverse direction is disabled (locked out). In other words, the motor can
run in the forward direction only.
Settings (Position 7):
OFF position = Reverse Enabled (Forward/reverse change allowed; default)
ON position = Reverse Disabled (Reverse direction prohibited)
8.3.8 Minimum Speed Select (Position 8)
The switch at position 8 is used to select whether the minimum speed will be 0 RPM
(0 Hz) or will be determined by the preset inputs (terminals 8, 9, and 10 on the control
terminal block).
Important: DIP switch position 8 defines whether terminals 8, 9, and 10 are used as
presets (default) or to define the unit’ s minimum speed (user option). If
you select the ON position (Minimum Speed from the Control Signal
T erminal Block), you cannot use the speed reference presets. See Section
7.5.1 for information about the preset speed inputs.
Settings (Position 8):
OFF position (Default) = 0 RPM (0 Hz) Minimum Speed
ON position = Minimum Speed from the Control Terminal Block
When the switch in position 8 is ON, the minimum speed will be determined as shown
in the following table:
Control Terminal Block DIP Switch Position 8 = ON
Terminal 8
Status
Open Open Open 0 RPM (0 Hz)
Open Open Closed 150 RPM (5 Hz)
Open Closed Open 300 RPM (10 Hz)
Open Closed Closed 600 RPM (20 Hz)
Closed Open Open 900 RPM (30 Hz)
Closed Open Closed 1200 RPM (40 Hz)
Closed Closed Open 1500 RPM (50 Hz)
Terminal 9
Status
Terminal 10
Status Minimum Speed Setting
Closed Closed Closed 1800 RPM (60 Hz)
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 48

8-10 Step 8 - Verify the Setup and Adjust Switches if Required
Figure 8.6
Wiring Minimum Speed
8.3.9 Start Mode Select (Position 9)
Important: This applies only to the local operator control units.
The switch at position 9 is used to select whether the unit gets its control from the
operator controls or from the terminal block. If this switch is set to the OFF position,
the control will come from the operator controls. If this switch is set to the ON position,
the control will come from the terminal block and the operator controls are not
functional.
687 9 10 11
24 V olt DC
Min Speed 2
Min Speed 1
Min Speed 0
Settings (Position 9):
OFF position (Default) = Control from the Operator Controls
ON position = Control from the terminal block
Important: The drive will not start when po wer is applied after changing this setting.
The Start command must be reasserted in order to start the drive.
8.3.10 Parameter Mode for DeviceNet Option (Position 10)
Important: This applies only to the DeviceNet Communication Option.
The switch at position 10 is used to select whether the unit gets its parameter settings
from the rotary switches and setup DIP switch (SW1, SW2, and SW3) or from the
EEPROM memory . If this switch is set to the OFF position, the settings will come from
the rotary switches and setup DIP switch (SW1, SW2, and SW3). If this switch is set
to the ON position, the settings will come from the EEPROM memory. Refer to the
Bulletin 1329I DeviceNet Option User Manual for information on installing and
configuring the DeviceNet Communication Option.
Settings (Position 10):
OFF position (Default) = Parameter settings from the rotary switches and setup DIP
switches (SW1, SW2, and SW3)
ON position = Parameter settings from the EEPROM memory
This switch setting is read when power is applied.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 49

Chapter
Step 9 - Check the Installation
ATTENTION: Only qualified electrical personnel, familiar with the
construction and operation of this equipment and the hazards involved,
should install, adjust, operate, and/or service this equipment. Read and
understand this manual in its entirety before proceeding. Failure to
observe these precautions could result in severe bodily injury or loss of
life.
T o ensure safe operation, check the installation with the po wer off before operating the
unit. When power is first applied, the direction of rotation, operator speed reference,
and operation under load should be tested.
9.1 Checking the Installation with the Power Off
ATTENTION: After disconnecting input power wait five minutes and
check with a voltmeter to assure that DC bus capacitors are discharged
(DC+, DC-). The voltmeter should read zero volts. Failure to observe
these precautions could result in severe bodily injury or loss of life.
9
Perform the following checks of the unit installation with the power off:
1. Turn off, lockout, and tag AC input power to the unit.
2. If an input disconnect is installed, make sure it is in the OFF position.
3. Wait five minutes after disconnecting power and verify that the DC bus has
discharged to zero volts. See Figure 5.2 for the test points used to measure DC bus
voltage.
4. Check that any interlocks installed around the driven machine are operational.
5. Check that there is adequate clearance around the unit. Refer to Figure 2.2.
6. Check that the wiring to the control signal terminal strip and to the power
terminals is correct (Figures 5.2 and 7.1 through 7.14).
7. Check that the setup DIP switches and the rotary switches are set correctly.
8. Check that user-supplied branch circuit protection is properly installed and
correctly rated.
9. Check that incoming AC power is correctly rated.
10. Check that the rating of the transformer (if used) matches the unit requirements
and that the transformer is connected for the proper voltage.
11. Check that a properly sized ground wire is installed and that a suitable earth
ground is used. Verify that all ground leads are run unbroken.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 50

9-2 Step 9 - Check the Installation
DC+
W/T3
U/T1
V/T2
9.2 Checking the Direction of Motor Rotation
The 1329I unit is shipped with the forward direction defined as counterclockwise
(CCW) shaft rotation as viewed from the motor shaft end. If this is appropriate for your
application, go to Section 9.3, Attaching the Cover.
If this is not appropriate for your application, do one of the following:
Change the direction by using the Forward / Rev erse input to select the appropriate
direction.
-orChange the definition of forward and reverse by swapping the U/T1 and W/T3
connectors as shown in Figure 9.1.
Figure 9.1
Changing the Definition of Forward and Reverse
9.3 Attaching the Cover
ATTENTION: The cov er scre ws must be securely tightened in order to
properly ground the cover . V erify that all four cover scre ws are tight before
applying power to the unit. Failure to observe this precaution could result
in severe bodily injury or loss of life.
The cover can be rotated 180° to allow the display and local operator controls to be in
the correct orientation regardless of the mounting position. Before attaching the cover ,
determine the proper cover orientation. If the cov er must be rotated, follow the procedure
in Section 9.3.1.
Before reattaching the cover, be sure the display board ribbon cable is securely
connected, then position the cover and tighten the screws. The tightening torque limit
for the cover screws is 1.3 - 1.7 Nm (11 - 15 in-lb). V erify that all four screws are securely
tightened before applying power.
DC+
DC-
DBR
PE
T/L3
S/L2
R/L1
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 51

9.3.1 Rotating the Cover
Before rotating the cover, take the following precautions:
1. Turn off, lockout, and tag AC input power to the drive.
2. Remove the cover by loosening the four co ver screws. Note that the display board
ribbon cable is designed to disconnect when the cover is removed.
3. Wait five minutes after disconnecting power and verify that DC bus voltage is
zero. See Figure 5.1 for the location of the DC bus test points.
4. Refer to Figure 9.2 and use the following procedure to rotate the cover:
5. Remove the display board ribbon cable from the display board. You will need to
insert a small screwdriver into the cable latch to release it from the board.
6. Insert the display board ribbon cable into the opposite side of the display board.
Push the cable in until it clicks. Verify the connection by lightly tugging on the
cable.
7. Rotate the cover.
8. Connect the display board ribbon cable together.
Step 9 - Check the Installation 9-3
Position the cover and tighten the four cov er screws. The tightening torque limit for the
cover screws is 1.3 - 1.7 Nm (11 - 15 in-lb). Verify that all four screws are securely
tightened before applying power.
Figure 9.2
Rotating the Cover
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 52

9-4 Step 9 - Check the Installation
9.4 Checking the Speed Reference
ATTENTION: The following procedures require rotating parts and/or
electrical circuits to be exposed. Stay clear if the unit must be running.
Disconnect, lockout, and tag the power source if contact must be made.
Failure to observe these precautions could result in severe bodily injury
or loss of life.
Use the following procedure to check the speed reference:
1. Uncouple the driven equipment from the Motor Section, if possible.
2. Turn power on to the unit.
3. Set the operator speed reference signal to zero. Note that when the unit is powered
up the first time, it uses the factory-set minimum speed setting as the speed
reference.
4. For terminal block speed reference: Use the speed potentiometer or other
user-supplied external speed reference device.
5. For operator control speed reference: Use the key to decrease the speed
reference.
6. Press the user-installed Start button (Section 7.6) or the green key on local
operator control units.
7. Vary the speed reference while running the motor unloaded across the speed
range. Use a handheld tachometer to check the speed.
8. If the motor operates satisfactorily, proceed to Step 10.
If the motor does not operate satisfactorily, continue with Step 9.
9. If the motor does not operate satisfactorily:
a. Check that the speed reference is wired correctly. See Section 7.5, Wiring
the Speed Reference.
b. If the speed reference is correct, and the motor does not operate
satisfactorily, refer to Chapter 8, Verify the Setup and Adjust the Switches
if Required.
10. If the motor operates satisfactorily:
a. Press the user-installed Stop button (Section 7.6) on standard units or the
red key on the local operator control units.
b. Remove power from the unit.
c. Couple the driven equipment to the Motor Section.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 53

Chapter
10
Step 10 - Set the Operating Speed
Before starting the unit, set the operating speed as follows:
Standard units: Use the speed potentiometer or other user-supplied external speed
reference device.
Local operator control units: As shipped from the f actory, the unit receives its speed
reference from the keypad. Use the key to increase the speed reference and the
key to decrease the speed reference.
To use the analog input terminals for the speed reference, setup switch 2 (Speed
Reference Select) must be in the ON position. In this case, the keys are not
used. Refer to Section 8.3.2 for more information.
Important: At subsequent power ups, the unit will use the last speed reference setting
selected before power was removed.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 54

10-2 Step 10 - Set the Operating Speed
End of Chapter
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 55

Chapter
Diagnostics and Troubleshooting
ATTENTION: Only qualified personnel familiar with the construction
and operation of this equipment and the hazards involv ed should install,
adjust, operate, and/or service this equipment. Read and understand this
instruction manual in its entirety before proceeding. Failure to observe
this precaution could result in severe bodily injury or loss of life.
ATTENTION: After disconnecting input power, wait five minutes and
check with a voltmeter to assure that DC bus capacitors are discharged.
The voltmeter should read zero volts. Failure to observ e these precautions
could result in severe bodily injury or loss of life.
ATTENTION: If a megohmmeter (megger) is used, make certain that
all leads are disconnected between the motor and the drive. This will
prevent damage to electronic circuitry due to high voltage generated by
the megger . Use three wires to megger to ground. F ailure to observe this
precaution could result in damage to, or destruction of, the equipment.
11
Use the following flowchart to troubleshoot the unit.
Is display on?
Yes
Is fault displayed?
Yes
See Section 11.1
No
No
Motor will not start.
See Table 11.3 in
Section 11.2
Motor rotates
to full speed.
See Table 11.4 in
Section 11.2
See Table 11.2 in
Section 11.2
Define nature
of problem.
but does not
accelerate
Motor stops
while running.
See Table 11.5 in
Section 11.2
Motor runs, but
not with expected
performance.
See Table 11.6 in
Section 11.2
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 56

11-2 Diagnostics and Troubleshooting
Observe the following precautions when troubleshooting the unit:
• Stop the unit using either the Stop input or Function Loss input.
• Disconnect, tag, and lockout AC power before working on the unit.
• Verify that there is no voltage present at AC input terminals R/L1, S/L2, and T/L3.
Refer to Figure 5.2 for the location of the terminals.
• Wait five minutes and verify that the DC bus has discharged to zero volts. See
Figure 5.2 for the location of the DC bus test points.
11.1 Fault Codes and Corrective Actions
The following table describes normal operational faults that may be corrected by the
user. F or standard units, the correcti ve action assumes that a Reset pushb utton is wired
between control terminals 15 and 13, as described in Section 7.8.
If a fault occurs, do the following:
1. Try to clear the fault first by pressing the Reset pushbutton (or key on local
operator control units). If the fault reoccurs, continue with Step 2.
RESET
2. Refer to Table 11.1 to identify the fault code and the possible causes.
3. Perform the corrective action(s).
4. Clear the fault by pressing the Reset pushbutton (or key).
RESET
Table 11.1
Fault Codes and Corrective Actions
Code Fault Description Fault Cause Corrective Action
Communication Loss Communication cable between
the DeviceNet option and the drive
disconnected or opened.
Remove power from the unit. Chec k
cable connection between the
regulator board and the DeviceNet
option. Reapply power to the unit.
Keypad Disconnected K eypad cab le disconnected while
unit under power.
Remove power from the unit. Chec k
the keypad cable connection.
Reapply power to the unit.
Parameter Checksum Contents of the EEPROM is
corrupted.
Keypad Fixed Pattern Keypad cable connected while unit
under power.
Reset parameters to default v alues
and cycle power.
Remove power from the unit. Chec k
the keypad cable connection.
Reapply power to the unit.
DeviceNet Communication Fault
X
where
X
= E, F, L, P, or U.
Keypad Connect Keypad cable connected while unit
under power.
1329I-5.5 Integrated Drive/Motor — January, 2000
Refer to the
DeviceNet User Manual
Bulletin 1329I
.
Remove power from the unit. Chec k
the keypad cable connection.
Reapply power to the unit.
Page 57

Diagnostics and Troubleshooting 11-3
Code Fault Description Fault Cause Corrective Action
Keypad Redundant Start Ke ypad hardware malfunction. Remov e power from the unit. Check
the keypad cable connection.
Reapply power to the unit.
Function Loss Open connection on Function
Loss control terminal block inputs
(terminals 7 and 11).
Check and restore the Function
Loss connection on the control
terminal block (see Section 7.1).
Check the external sensors wired
into the Function Loss string.
Overvoltage High AC input line.
Check input line to verify voltage is
within operating specifications.
Deceleration time too fast or
overhauling load.
EEPROM Drive ID Contents of the EEPROM is
corrupted.
Undervoltage Low AC nput line or temporary
loss of AC input line.
Overcurrent
(Current exceeded 200% of
rated current.)
Shaft rotation blocked.
Excessive driven load.
Input power is not correctly
wired to the unit.
Motor Section ground fault.
Increase deceleration time using the
accel/decel rotary switch (see
Section 8.2).
Reset parameters to default
values and cycle power.
If fault persists, replace unit.
Check input line to verify voltage
is within operating
specifications.
Check for obstructions to shaft
rotation.
Reduce excessive load.
Increase accel / decel time
using the accel/decel rotary
switch (see Section 8.2).
Verify input wiring is correctly
connected (see Section 5.0).
Ohm out Motor Section to check
for ground f ault. Replace unit if a
ground fault is detected
.
Overtemperature Operating environment is too
hot.
Blower is blocked or not
operating.
Excessive driven load.
Check the application site and
verify the ambient temperature
is within the operating
specification.
Check for blower obstruction.
Replace blower if required.
Reduce load or make sure unit
matches the application
requirement.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 58

11-4 Diagnostics and Troubleshooting
Code Fault Description Fault Cause Corrective Action
Electronic Thermal Overload
The electronic thermal
overload will trip when the
current to the motor has
exceeded either 110%
(variable torque V/Hz curve
selected) or 150% (constant
torque V/Hz curve selected)
of the motor rated current for
60 seconds.
TB Redundant Start
Internal Fault
(NNN = a number from 0 to
999)
The display flashes the fault
code on and off at 1/2
second intervals to indicate
an internal fault.
Excessive current to the motor
for an extended time due to
excessive load or short circuit.
Regulator board
Control board
malfunction
malfunction
.
.
Check for obstruction to shaft
rotation.
Reduce the driven load.
Verify input wiring is correctly
connected (see Section 5.0).
Check for blower obstruction.
Replace blower if required.
Remove power from unit. Check
the keypad cable connection.
Reapply power to the unit.
Replace Control board.
Internal faults cannot be reset.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 59

Diagnostics and Troubleshooting 11-5
11.2 T roubleshooting T ables
Use the following tables to troubleshoot the unit. If you cannot resolve the problem
using these tables, systematically replace the Drive Section and the Motor Section one
at a time with a corresponding Drive Section or motor kno wn to be operating correctly .
If the problem is not corrected, contact Allen-Bradley distributor.
Table 11.2
Display Not On
Possible Cause Corrective Action
Unit is not receiving input power. Check input power wiring and connections (see Section 5.0).
Check main power supply.
Keypad/displa y ribbon cable is not connected securely. Remove power from the unit. Open the cov er and v erify the
cable connection by lightly tugging on the cable at each end.
If the cable is disconnected, push the cable in until it clicks .
Reapply power to the unit.
Table 11.3
Motor Will Not Start
Possible Cause Corrective Action
Drive Section has faulted. See Section 11.1.
Unit is not receiving input power. Check input power wiring and connections (see Section 5.0).
Check main power supply.
Start input is not asserted. Check terminal board wiring. Assert Start input on standard
unit (see Section 7.6) or press green
key on local
operator control unit.
Function Loss input wiring is missing or incorrectly wired. Check Function Loss wiring (see Section 7.1).
Stop input is open. Close terminal block Stop input.
Faults have not been cleared. Fault code is displayed. Assuming fault situation has been corrected, clear the faults
by pressing the Reset pushbutton (wired between control
terminals 13 and 15, see Section 7.8) on standard units or
pressing the
RESET
key on local operator control units.
Table 11.4
Motor Rotates but Does Not Accelerate to Full Speed
Possible Cause Corrective Action
Maximum speed is set too low. Increase maximum speed by turning the maximum speed
rotary switch to a higher position (see Section 8.1).
Unit is receiving incorrect speed reference. Verify speed reference wiring (see Section 7.5).
Excessive load Reduce load; make sure the unit matches the application
requirement.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 60

11-6 Diagnostics and Troubleshooting
Table 11.5
Motor Stops While Running
Possible Cause Corrective Action
Drive Section has faulted. See Section 11.1.
Table 11.6
Motor Runs, But Not with Expected Performance
Symptom Corrective Action
Motor accelerates too slowly. Check accel / decel switch setting (see Section 8.2).
Verify applied voltage.
Verify input wiring.
Reduce load.
Motor accelerates too quickly. Check accel / decel switch setting (see Section 8.2).
Motor acceleration / deceleration is not smooth Check the motor coupling to load.
Motor stops too slowly or too quickly. Check Stop Type slide switch selection (see Section 8.3.6).
Check accel / decel switch setting (see Section 8.2)
Blower does not operate. Check wiring.
Verify that blower can rotate freely.
Verify that AC input voltage is correct.
Replace blower.
High amps; %load indicates > 100% Verify load is not excessive.
Verify input line voltages.
Runs hot Clean unit.
Check input power connections (see Section 5.0).
Check input power phases.
Check input fuses.
Check power supply (24V DC).
Check blower.
Noisy Check bearings; replace if necessary.
Check unit mounting (alignment, etc.).
Runs in wrong direction Refer to Section 9.3 (Checking the Direction of Motor
Rotation).
Erratic speed Verify ground connection (see Section 5.1).
Verify that only one of the speed reference inputs
(0-10 VDC or 0-20 mA) has been wired (see Section 7.5.3).
Check for noise on the analog reference signal.
Check the speed reference setting and wiring.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 61

11.3 Replacement Parts
Tables 11.7 and 11.8 list the replacement parts for the 1329I unit.
Table 11.7
Replacement Parts for the 1329I
Description Catalog Number
Diagnostics and Troubleshooting 11-7
Blower Assembly 1 – 2 HP (All Voltages)
Blower Assembly 3 – 5 HP (460V Only)
Cover with Display and Operator Controls
Cover with Display Only
Control Board (All Units)
Table 11.8
Replacement Bearings
Motor Frame Part Number Quantity Description
56 or 140 416821-56-F 2
180 416821-56F
416821-56G
1
1
6205 ball bearings; double seals with
Chevron SRI #2 grease; ABEC 1 tolerances;
AFBMA-3 internal tolerances.
Table 11.9
Replacement Part Compatibility
1329I-RFKS
1329I-RFKL
1329I-OKP
1329I-DKP
1329I-CBK
Integrated Drive/Motor
Description Series
Series A Series B
Control Board Replacement Kit
Cover with Display Only
Cover with Display and Operator
Controls
➊
The DeviceNet Communication LED is not present on the Series A cover assembly.
➋
The DeviceNet Communication LED will be illuminated while the unit is powered.
A Compatible Not Compatible
B Not Compatible Compatible
A Compatible Compatible
B Compatible
A Compatible Compatible
B Compatible
1329I-5.5 Integrated Drive/Motor — January, 2000
➋
➋
➊
Compatible
➊
Compatible
Page 62

11-8 Diagnostics and Troubleshooting
End of Chapter
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 63

Maintenance Guidelines
ATTENTION: Only qualified personnel familiar with the construction
and operation of this equipment and the hazards involv ed should install,
adjust, operate, and/or service this equipment. Read and understand this
instruction manual in its entirety before proceeding. Failure to observe
this precaution could result in severe bodily injury or loss of life.
ATTENTION: After disconnecting input power, wait five minutes and
check with a voltmeter to assure that DC bus capacitors are discharged.
The voltmeter should read zero volts. Failure to observ e these precautions
could result in severe bodily injury or loss of life.
ATTENTION: To insure that the driven equipment is not une xpectedly
started, turn off, lockout, and tag power source before proceeding. F ailure
to observe this precaution could result in bodily injury.
ATTENTION: The surface temperatures of the drive and motor may
become hot, which may cause injury.
Chapter
12
Use the guidelines in this chapter to maintain the unit.
12.1 General Unit Maintenance
Check the following at regular intervals:
• Make sure the exterior is kept dry and free of dust, grease, oil, and dirt.
• Make sure the electrical terminal connections, assembly screws, bolts, and nuts are
tight.
• Make sure the unit is securely mounted to minimize vibration.
12.2 Motor Maintenance
Enclosed motors require minimal attention. At re gular intervals, v erify that external air
passages of the motor do not become clogged with foreign material that will restrict the
flow of air.
The ball bearings are deep-grooved, double-shielded bearings with sufficient lubricant
packed into the bearings. You do not need to re-lubricate the bearings.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 64

12-2 Maintenance Guidelines
End of Chapter
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 65

Technical Specifications
Unit Ratings
Input Ratings
AC line voltage:
• 380 to 460 VAC, 3-phase
• 200 to 230 VAC, 3-phase
• 200 to 230 VAC, 1-phase
• 115 VAC, 1-phase
AC line frequency:
• 48 to 62 Hz
AC line voltage variation:
• +/-10%
AC line current:
Appendix
A
Input Voltage Unit HP Input Current
460 VAC 1 HP 2.3 A rms continuous
460 VAC 2 HP 3.7 A rms continuous
460 VAC 3 HP 5.7 A rms continuous
460 VAC 5 HP 9.0 A rms continuous
230 VAC 1 HP 4.5 A rms continuous
230 VAC 2 HP 7.6 A rms continuous
230 VAC, 1-phase 1 HP 5.8 A rms continuous
230 VAC, 1-phase 2 HP 14 A rms continuous
115 VAC 1 HP 14 A rms continuous
Max allowable AC line distribution KVA:
• 100 KVA maximum for 115 VAC to 460 VAC input.
Output Ratings
Horsepower ratings:
• 1, 2, 3 and 5 HP at 460 VAC
• 1, 2 HP at 230 VAC
• 1 HP at 115 VAC
Output voltage:
• 380 to 460 VAC, 3-phase
• 200 to 230 VAC, 3-phase
• 115 VAC, 3-phase
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 66

A-2 Technical Specifications
Maximum continuous output current:
Input V oltage Unit HP
460 VAC 1 HP 1.7 A
460 VAC 2 HP 3.2A
460 VAC 3 HP 4.5 A
460 VAC 5 HP 6.9 A
230 VAC 1 HP 3.4 A
230 VAC 2 HP 6.4 A
230 VAC, 1-phase 1 HP 3.4 A
230 VAC, 1-phase 2 HP 6.4 A
115 VAC 1 HP 6.8 A
Maximum output current:
Output Current
(Motor Rated Amps)
Maximum Output Current
Input V oltage Unit HP
460 VAC 1 HP 2.55 A
460 VAC 2 HP 4.8 A
460 VAC 3 HP 6.75 A
460 VAC 5 HP 10.35 A
230 VAC 1 HP 5.1 A
230 VAC 2 HP 9.6 A
230 VAC, 1-phase 1 HP 5.1 A
230 VAC, 1-phase 2 HP 9.6 A
115 VAC 1 HP 10.2 A
(150% Rated Amps)
Important: Maximum current ratings above are for the CT rating. When VT is
selected, the maximum output current will be limited to 110%.
Output frequency:
• 0 to 120 Hz
Carrier frequency:
• 8 kHz
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 67

Technical Specifications A-3
Operating Performance
Frequency regulation:
• 1% (1% of base speed, 180 to 1800 RPM, constant torque)
Speed range:
• 20:1 (90 to 1800 RPM, constant torque)
Voltage regulation:
• 3% of maximum rated voltage
Input power dip ride-through time:
• 500 msec minimum
Drive efficiency:
• >95% (at rated amps, 115-460 V, 60 Hz)
Operating Specifications
Operating temperature:
• 0 to 40˚C (32˚F to 104˚F) ambient
Storage temperature:
• -40˚C to 85˚C (-40˚F to 185˚F)
Altitude:
• 1000 meters (3300 feet maximum) without derating. For every 91.4 meters
(300 feet) above 1000 meters, derate the current by 1%. Above 3000 meters
(10,000 feet), consult your Allen-Bradley Sales Office
Humidity:
• 5% to 95%, non-condensing
Service factor:
• 1.0
Mechanical Specifications
Motor enclosure type:
• Totally enclosed, 24 VDC blower cooled (TEBC)
Required airflow:
• Required clearance for blower intake = 1 in
Protection rating:
• Drive Section is NEMA Type 12, motor is IEC IP54
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 68

A-4 Technical Specifications
Nominal power dissipation for motor and drive combined:
Input V oltage Unit HP Nominal Watts Loss
230 VAC, 1-phase 1 HP 150 W
230 VAC, 1-phase 2 HP 260 W
115 VAC, 1-phase 1 HP 180 W
Weight:
Input V oltage Unit HP Weight
230 VAC, 1-phase 1 HP 38 lbs.
230 VAC, 1-phase 2 HP 49 lbs.
115 VAC, 1-phase 1 HP 38 lbs.
460 V AC 1 HP 150 W
460 V AC 2 HP 250 W
460 V AC 3 HP 350 W
460 V AC 5 HP 550 W
230 V AC 1 HP 150 W
230 V AC 2 HP 250 W
460 VAC 1 HP 38 lbs.
460 VAC 2 HP 49 lbs.
460 VAC 3 HP 59 lbs.
460 VAC 5 HP 69 lbs.
230 VAC 1 HP 38 lbs.
230 VAC 2 HP 49 lbs.
Shock:
• 15 G Operational, 30 G Non-Operational
Vibration:
• 1.0 G Operational, 2.5 G Non-Operational
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 69

Technical Specifications A-5
Drive Protection/Fault Detection
Output overcurrent:
• Trip level = 200% of max peak rated current
Output ground fault:
• Trip level = 200% of max peak rated current
Communication fault (DeviceNet option):
• Trip on communication loss or malfunction
DC bus overvoltage:
Line V oltage Trip Level
460 V AC 830 VDC
230 V AC 415 VDC
115 V AC 208 VDC
Motor thermal overload:
• Trip time = 1 minute at 150% of rated current (CT)
• Trip time = 1 minute at 110% of rated current (VT)
DC bus undervoltage:
Line V oltage Trip Level
460 V AC 435 VDC
380 V AC 358 VDC
230 V AC 218 VDC
115 V AC 109 VDC
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 70

A-6 Technical Specifications
I/O Specifications
Important: All signals are isolated from the incoming line power.
Analog inputs
0 to 10 V
Input impedance: 50 kΩ
Resolution: 0.11%
4 to 20 mA
Input impedance: 250 Ω
Resolution: 0.14%
Analog output
0 to 10 V
Minimum load resistance: 2 kΩ
Resolution: 0.4%
Logic inputs (Stop, Start, Reset, Fwd/Rev, RPM/%Load, Function
Loss, Preset Speed)
24 VDC sourcing inputs
Maximum input voltage: 28.8 VDC
Input current @ 24 VDC: 10 mA
Maximum OFF state voltage: 5 VDC
Minimum ON state voltage: 15 VDC
Relay output (1 form A N.O. contact) Isolated
Maximum current (resistive or inductive): 1 A
Minimum current: 10 mA
Maximum voltage: 28 VDC, 250 VAC
Approvals and Standards Compliance
Approvals:
D
9
E
6
T
6
S
X
I
L
U
UL508C
L
®
I
N
Q
D
E
C
T
O
N
1329I-5.5 Integrated Drive/Motor — January, 2000
C
I
D
9
E
6
T
6
S
X
I
L
U
L
®
N
Q
D
E
C
T
O
N
CSA 22.2
EMC Directive 89/336
LV: EN 50178, EN 60204
EMC: EN 61800-3, EN 50081-1, EN 50082-2
Page 71

Appendix
Product Features
The following features are standard on every 1329I unit:
• T otally enclosed standard NEMA frame sizes with C-face and foot mounting are
available.
• PWM (pulse-width modulated) Drive Section with a microprocessor-based
V/Hz regulator.
• Design B inverter-duty Motor Section:
- Class F non-hygroscopic insulation system resists heat, oil, and water.
- Double-shielded bearings.
• Four-character, seven-segment LED display to indicate speed, %load, and
diagnostic information.
• 0 to 10 VDC or 4 to 20 mA analog input for remote speed reference from a PLC
or process controller.
• 0 to 10 VDC analog output to provide remote speed or %load indication.
B
• Seven selectable preset speeds.
• Form A contact output to indicate drive running or drive faulted condition.
• 500 ms power dip ride-through time.
• Protection features, including sensing for overtemperature, overcurrent, high
DC bus voltage, low DC bus voltage, and surge suppression.
• Conduit cover can be rotated 180° to provide the appropriate display view in
each application.
• User-selectable coast-to-rest (default) or ramp-to-rest (user option) stop.
• User-selectable variable torque (default) or constant torque (user option)
operation.
• 8 kHz carrier frequency for quiet operation.
• Complies with UL 1995.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 72

B-2 Product Features
End of Appendix
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 73

1329I System Diagram
Appendix
C
To Motor
Blower
(24V DC)
Terminal Board
+DC
R/L1
S/L2
T/L3
-DC
U/T1
V/T2
M
W/T3
J7
MOVs
Current
Sensors
Precharge
Converter Inverter
12
+
Bus
Cap
Bank
+
Power Board
Power
Supply
DB
(Not Used)
Regulator Board
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 74

C-2 1329I System Diagram
End of Appendix
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 75

Installation Record
Catalog Number:
Record the switch settings for your setup in the diagrams below.
Appendix
D
Max Speed Switch
Run On Pow er Up
Speed Reference ➊
Relay Control Output
Auto Restart
Torque Curve
Stop
Reverse
Minimum Speed
Start Mode ➊
Parameter Mode ➋
(SW2)
0 = 1500 RPM (50 Hz)
1 = 1800 RPM (60 Hz) Default
2 = 2100 RPM (70 Hz)
3 = 2400 RPM (80 Hz)
4 = 2700 RPM (90 Hz)
5 = 3000 RPM (100 Hz)
6 = 3300 RPM (110 Hz)
7 = 3600 RPM (120 Hz)
Setup DIP Switch
Disabled
Operator Controls
Running
Disabled
V ariable
Coast-to-Rest
Enabled
0 Hz
Operator Controls
Setup Switches
Accel/Decel Switch
(SW1)
0 = 1 Second Accel/5 Sec Decel
1 = 5 Seconds (Default)
2 = 10 Seconds
3 = 15 Seconds
4 = 20 Seconds
5 = 30 Seconds
6 = 60 Seconds
7 = 90 Seconds
(SW3)
OFF ON
Enabled
Terminal Block
Faulted
Enabled
Constant
Ramp-to-Rest
Disabled
From T erminal Block
From T erminal Block
From EEPROM Memory
➊ Switches 2 and 9 apply to local operator control units only .
➋ Switch 10 applies to the DeviceNet Communication option only.
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 76

D-2 Installation Record
End of Appendix
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 77

A
acceleration/deceleration time adjustment,
access clearances,
analog inputs/outputs,
analog output wiring,
approvals,
A-6
2-2
A-6
7-5
8-3
display codes
features,
B-1
forward/reverse control wiring,
function loss wiring,
fuse ratings,
4-1
11-2
7-5
to
11-4
7-10
Index
B
branch circuit protection,
4-1
C
CE Conformity
compliance,
component location,
control keys,
2-4
A-6
2-1
1-4
control signal terminal block
functions,
7-2
local operator control unit connections,
standard unit connections,
7-3
cover
attaching,
rotating,
9-2
9-3
D
DeviceNet,
8-10
DIP switch selections
auto restart,
minimum speed select,
relay control output,
run on power up,
speed reference select,
stop type,
torque curve,
8-7
8-9
8-6
8-5
8-6
8-8
8-8
display
local operator control unit,
standard unit,
1-2
1-3
E
EMC requirements
external speed reference wiring,
2-4
7-8
F
faults
clearing,
descriptions and corrective actions,
1-5
11-2
7-4
G
grounding,
5-2
H
hardwire stop installation,
6-1
I
input isolation transformers,
input ratings,
A-1
4-2
installation
CE Conformity
2-4
checking direction of motor rotation,
checking with power off,
clearances,
2-2
handling and lifting,
precautions,
record settings,
wire routing,
2-1
D-1
2-3
9-1
2-4
K
key descriptions,
keypad, using to operate unit,
1-4
1-5
L
2-4
lifting,
line reactors,
logic inputs,
4-2
A-6
M
maintenance,
maximum speed adjustment,
12-1
8-2
motor rotation
check direction,
reversing,
9-2
1-5, 9-2
mounting
dimensions (NEMA frames),
face-mount motors,
3-1
3-2
9-2
1329I-5.5 Integrated Drive/Motor — January, 2000
Page 78

Index-2
N
nameplate information
catalog number explained,
1-1
O
operating from keypad,
operating speed, setting,
output ratings,
A-1
overcurrent/overvoltage protection,
1-5
10-1
A-5
P
power wiring
grounding,
guidelines,
preset speed inputs wiring,
5-2
5-1
7-7
R
ratings
A-1
input,
output,
performance,
record application settings,
relay control output wiring,
replacement parts,
reset control wiring,
A-1
A-3
D-1
7-6
11-7
7-10
reverse motor rotation
LED description,
reverse/forward control wiring,
reversing motor rotation,
RPM or percent load display wiring,
1-2, 1-4
7-10
1-5, 9-2
7-6
wiring,
7-6
start/stop
control wiring,
from keypad,
hardwire stop,
system diagram,
7-9
1-5
6-1
C-1
T
thermal overload protection,
troubleshooting tables,
troubleshooting,
11-1
A-5
11-5
W
see also
wiring
analog output,
control signal terminal block,
external speed reference,
forward/reverse control,
function loss,
preset speed inputs,
relay control output,
reset control,
RPM or percent load,
power wiring
7-5
7-1
7-8
7-10
7-5
7-7
7-6
7-10
7-6
speed reference signal potentiometer,
speed reference,
start/stop control,
7-6
7-9
7-8
S
setup
acceleration/deceleration,
maximum speed,
precautions,
switch locations,
8-2
8-1
8-2
8-3
specifications
mechanical,
operating,
specifications,
A-3
A-3
A-1
to
A-6
speed reference
checking,
increase, decrease, display,
signal potentiometer wiring,
1329I-5.5 Integrated Drive/Motor — January, 2000
9-4
1-5
7-8
Page 79

Page 80

Publication 1329I-5.5 – March, 2000 P/N 194419 (01)
Supersedes 1329I-5.5 – January, 2000 Copyright 2000 Rockwell International Corporation. All rights reserved. Printed in USA.
 Loading...
Loading...