

Page 1

be certain.
m
SWIFT® 45 GLP Sensor
Product Information
Spinning Wheel Integrated Force Transducer
For Medium Trucks
100-214-138 A
Page 2
Copyright information © 2009 MTS Systems Corporation. All rights reserved.
Trademark information MTS, SWIFT, T estStar, TestWare, MTS Remote Parameter Control, and RPC are
registered trademarks of MTS Systems Corporation within the United States.
These trademarks may be protected in other countries.
Microsoft, Windows, Wi ndows for Workgroups, Windows 95, and Windows NT
are registered trademarks of Microsoft Corporation. Apple and Macintosh are
registered trademarks of Apple Computer, Inc. UNIX is a registered trademark of
The Open Group. All other trademarks or service marks are property of their
respective owners.
Proprietary information Software use and license is governed by MTS’s End User License Agreement
which defines all rights retained by MTS and granted to the End User. All
Software is proprietary, confidential, and owned by MTS Systems Corporation
and cannot be copied, reproduced, disassembled, decompiled, reverse
engineered, or distributed without express written consent of MTS.
Software validation and
verification
Publication information
MTS software is developed using established quality practices in accordance
with the requirements detailed in the ISO 9001 standards. Because MTSauthored software is delivered in binary format, it is not user accessible. This
software will not change over time. Many releases are written to be backwards
compatible, creating another form of verification.
The status and validity of MTS’s operating software is also checked during
system verification and routine calibration of MTS hardware. These controlled
calibration processes compare the final test results after statistical analysis
against the predicted response of the calibration standards. With these established
methods, MTS assures its customers that MTS products meet MTS’s exacting
quality standards when initially installed and will continue to perform as intended
over time.
MANUAL PART NUMBER PUBLICATION DATE
100-214-138 A June 2009
Page 3
Contents
Technical Support 5
Preface 9
Conventions 10
Hardware Overview 13
Overview 14
Spinning Applications (Track or Road) 16
Non-Spinning Applications (Laboratory) 17
Construction 18
Design Features 21
Coordinate System 22
Specifications 24
Calibration 28
Installation 31
Hazard Icons 32
Road and Track Vehicles 33
Attaching SWIFT Components to the Vehicle 38
Attaching SWIFT and Wheel Assembly to the Vehicle 41
Collecting Data 48
Road Simulator 51
Attaching SWIFT Components to the Fixturing 54
Analyzing SWIFT Data 59
The Data 60
Fx Data (Longitudinal Force) 61
Fz Data (Vertical Force) 63
Mx Data (Overturning Moment) 64
My Data (Brake Moment) 67
Acceleration and Braking Events Example 68
Slalom Curve Driving Example 70
SWIFT® 45 GLP Sensors
Contents
3
Page 4
Maintenance 71
Transducer 72
Cables 73
Troubleshooting 75
Assembly Drawings 79
Cable Drawings 80
SWIFT 45 GLP Mechanical Drawings 85
4
Contents
SWIFT® 45 GLP Sensors
Page 5
Technical Support
How to Get Technical Support
Start with your
manuals
Technical support
methods
The manuals supplied by MTS provide most of the information you need to use
and maintain your equipment. If your equipment includes software, look for
online help and README files that contain additional product inform ation.
If you cannot find answers to your technical questions from these sources, you
can use the Internet, e-mail, telephone, or fax to contact MTS for assistance.
MTS provides a full range of support services after your system is installed. If
you have any questions about a system or product, contact Technical Support in
one of the following ways.
www.mts.com The web site provides access to our technical support staff by means of an
onlineform:
www.mts.com > Contact MTS > Service & Technical Support button
E-mail tech.support@mts.com
Telephone MTS Call Center 800-328-2255
Weekdays 7:00 A.M. to 5:00 P.M., Central Time
Fax 952-937-4515
Please include “Technical Support” in the subject line.
Outside the U.S. For technical support outside the United States, contact your local sales and
service office. For a list of worldwide sales and service locations and contact
information, use the Global MTS link at the MTS web site:
Before You Contact MTS
Know your site
number and system
number
SWIFT® 45 GLP Sensors
www.mts.com > Global MTS > (choose your region in the right-hand
column) > (choose the location closest to you)
MTS can help you more efficiently if you have the following information
available when you contact us for support.
The site number contains your company number and identifies your equipment
type (such as material testing or simulation). The number is typically written on a
label on your equipment before the system leaves MTS. If you do not know your
MTS site number, contact your sales engineer.
Example site number: 571167
When you have more than one MTS system, the system job number identifies
your system. You can find your job number in your order pape rwork.
Example system number: US1.42460
Technical Support
5
Page 6

Know information from
prior technical
If you have contacted MTS about this problem before, we can recall your file
based on the:
assistance
• MTS notification number
• Name of the person who helped you
Identify the problem Describe the problem and know the answers to the following questions:
• How long and how often has the problem occurred?
• Can you reproduce the problem?
• Were any hardware or software changes made to the system before the
problem started?
• What are the equipment model numbers?
• What is the controller model (if applicable)?
• What is the system configuration?
Know relevant
computer information
Know relevant
software information
For a computer problem, have the following information available:
• Manufacturer’s name and model number
• Operating software type and service patch information
• Amount of system memory
• Amount of free space on the hard drive where the application resides
• Current status of hard-drive fragmentation
• Connection status to a corporate network
For software application problems, have the following information available:
• The software application’s name, version number, build number, and (if
available) software patch number. This information can typically be found
in the About selection in the Help menu.
• The names of other applications on your computer, such as:
– Anti-virus software
– Screen savers
– Keyboard enhancers
– Print spoolers
Technical Support
6
– Messaging applications
SWIFT® 45 GLP Sensors
Page 7

If You Contact MTS by Phone
A Call Center agent registers your call before connecting you with a technical
support specialist. The agent asks you for your:
• Site number
• Name
• Company name
• Company address
• Phone number where you can be reached
If your issue has a notification number, please provide that number. A new issue
will be assigned a unique notification number.
Identify system type To enable the Call Center agent to connect you with the most qualified technical
support specialist available, identify your system as one of the following types:
• Electromechanical material test system
• Hydromechanical material test system
• Vehicle test system
• Vehicle component test system
Be prepared to
troubleshoot
Write down relevant
information
After you call MTS logs and tracks all calls to ensure that you receive assistance for your
• Aero test system
Prepare to perform troubleshooting while on the phone:
• Call from a telephone close to the system so that you can implement
suggestions made over the phone.
• Have the original operating and application software media available.
• If you are not familiar with all aspects of the equipment operation, have an
experienced user nearby to assist you.
In case Technical Support must call you:
• Verify the notification number.
• Record the name of the person who helped you.
• Write down any specific instructions.
problem or request. If you have questions about the status of your problem or
have additional information to report, please contact Technical Support again and
provide your original notification number.
SWIFT® 45 GLP Sensors
Technical Support
7
Page 8

Problem Submittal Form in MTS Manuals
Use the Problem Submittal Form to communicate problems with your software,
hardware, manuals, or service that are not resolved to your satisfaction through
the technical support process. The form includes check boxes that allow you to
indicate the urgency of your problem and your expectation of an acceptable
response time. We guarantee a timely respon se—your feedback is important to
us.
Access the Problem Submittal Form:
• In the back of many MTS manuals (postage paid form to be mailed to MTS)
• www.mts.com > Contact Us > Problem Submittal Form button (electronic
form to be e-mailed to MTS)
Technical Support
8
SWIFT® 45 GLP Sensors
Page 9
Preface
Before You Begin
Safety first! Before you use your MTS product or system, read and understand the Safety
manual and any other safety information provided with your system. Improper
installation, operation, or maintenance can result in hazardous conditions that can
cause severe personal injury or death, or damage to your equipment and
specimen. Again, read and understand the safety information provided with your
system before you continue. It is very important that you remain aware of
hazards that apply to your system.
Other MTS manuals In addition to this manual, you may receive additional manuals in paper or
electronic form.
You may also receive an MTS System Documentation CD. It contains an
electronic copy of the manuals that pertain to your test system, such as:
• Hydraulic and mechanical component manuals
• Assembly drawings
• Parts lists
• Operation manual
• Preventive maintenance manual
Controller and application software manuals are typically included on the
software CD distribution disc(s).
SWIFT® 45 GLP Sensors
Preface
9
Page 10
Conventions
DANGER
WARNING
CAUTION
Conventions
Documentation Conventions
The following paragraphs describe some of the conventions that are used in your
MTS manuals.
Hazard conventions Hazard notices may be embedded in this manual. These notices contain safety
information that is specific to the activity to be performed. Hazard notices
immediately precede the step or procedure that may lead to an associated hazard.
Read all hazard notices carefully and follow all directions and recommendations.
Three different levels of hazard notices may appear in your manuals. Following
are examples of all three levels.
Note For general safety information, see the safety information provided with
your system.
Danger notices indicate the presence of a hazard with a high level of risk which,
if ignored, will result in death, severe personal injury, or substantial property
damage.
Warning notices indicate the presence of a hazard with a medium level of risk
which, if ignored, can result in death, severe personal injury, or substantial
property damage.
Caution notices indicate the presence of a hazard with a low level of risk which,
if ignored, could cause moderate or minor personal injury or equipment damage,
or could endanger test integrity.
Notes Notes provide additional information about operating your system or highlight
easily overlooked items. For example:
Note Resources that are put back on the hardware lists show up at the end of
the list.
Special terms The first occurrence of special terms is shown in italics.
Illustrations Illustrations appear in this manual to clarify text. They are examples only and do
not necessarily represent your actual system configuration, test application, or
software.
Electronic manual
conventions
This manual is available as an electronic document in the Portable Document
File (PDF) format. It can be viewed on any computer that has Adobe Acrobat
Reader installed.
10
Preface
SWIFT® 45 GLP Sensors
Page 11

Conventions
Hypertext links The electronic document has many hypertext links displayed in a blue font. All
blue words in the body text, along with all contents entries and index page
numbers, are hypertext links. When you click a hypertext link, the application
jumps to the corresponding topic.
SWIFT
®
45 GLP Sensors
Preface
11
Page 12

Conventions
12
Preface
SWIFT® 45 GLP Sensors
Page 13
Hardware Overview
Contents Overview 14
Spinning Applications (Track or Road) 16
Non-Spinning Applications (Laborator y) 17
Construction 18
Design Features 21
Coordinate System 22
Specifications 24
Calibration 28
SWIFT® 45 GLP Sensors
Hardware Overview
13
Page 14

Overview
S45-001
WARNING
Overview
The MTS Spinning Wheel Integrated Force Transducer (SWIFT) sensor is a
light-weight, easy-to-use transducer that enables you to conduct faster, less
expensive data acquisition and road simulation testing.
The transducer is designed for use on the test track and public roads as well as in
the test laboratory. It attaches to the test vehicle or an MTS Series 329 Road
Simulator using an adapter and a modified wheel rim.
You can achieve excellent data correlation using the same transducer and vehicle
on the test track or public road and on a road simulator. It is available in several
sizes and materials to fit various vehicle and loading requirements.
Parts replacement,
disassembly, and care
Driving a vehicle configured in this way on public roads can pose
unexpected dangers to pedestrians and other vehicle traffic.
Only authorized, licensed drivers, who are experienced driving a vehicle
with SWIFT sensors mounted on it, should be allowed to operate the vehicle
on public roads. Drive the vehicle with the SWIFT sensor attached on closed
courses only until you have proper experience.
Driving a vehicle with SWIFT sensors mounted on it will change the handling
characteristics of the vehicle.
The SWIFT sensor assembly, Transducer Interface box, and the accessory
components have no user serviceable parts. These components should not be
disassembled other than as outlined in “Troubleshooting” beginning on page 75.
Hardware Overview
14
SWIFT® 45 GLP Sensors
Page 15
Overview
CAUTION
Do not disassemble the SWIFT sensor, Transducer Interface (TI) electronics,
and accessory components.
The SWIFT sensor, TI electronics, and accessory components are not
intended to be disassembled, other than as outlined in “Troubleshooting”.
Disassembling or tampering with these components may result in damage to the
sensor, loss of watertight seal, and voiding of the warranty.
• The sensor assembly should be returned to MTS annually for recalibration
and inspection.
• Clean the sensor assembly after each use, as described in Maintenance
beginning on page 71, especially if it is exposed to corrosive or abrasive
material, such as salt or sand.
• Read and follow all warnings and cautions affixed to the transducer and in
this manual especially those warnings and cautions that deal with
installation, use, inspection and maintenance of the transducer.
The SWIFT sensor assembly should not:
• Be bumped into hard surfaces or objects while driving the vehicle.
• Be driven through grass or brush that is taller than the bottom edge of the
sensor.
• Be exposed to loads that exceed the full scale calibrated ranges, as listed in
“Specifications” on page 24.
• Be used if the integrity of the sealed cover has been compromised or the
warning labels removed.
• Be used if the sensor assembly shows indications of damage (such as dents,
bent slip ring bracket arms, a bent anti-rotate assembly, etc.).
• Be used if any part of the assembly has been modified without explicit,
written authorization from MTS.
SWIFT
®
45 GLP Sensors
Hardware Overview
15
Page 16
Spinning Applications (Track or Road)
S45-002
Spinning Applications (Track or Road)
The SWIFT sensor can be used for road load data acquisition (RLDA)
applications:
• Durability
• Noise, Vibration and Harshness (NVH)
• Ride and Handling
• Tire Performance
The transducer is durable enough to withstand harsh road testing and data
acquisition environments. The transducer is splash resistant and suitable for use
in conditions where the test vehicle will encounter occasional standing or running
water, or will be exposed to precipitation. However, it should not be submerged.
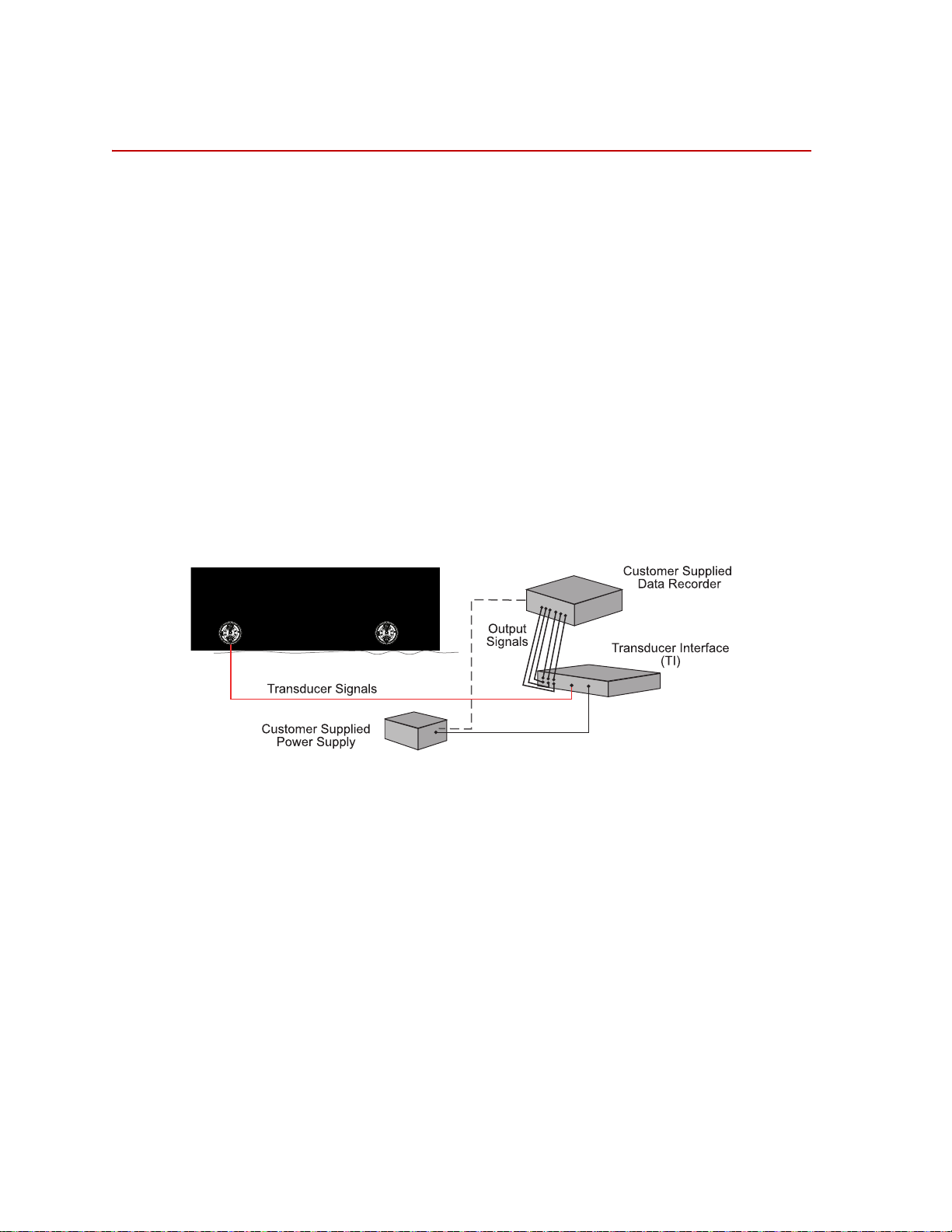
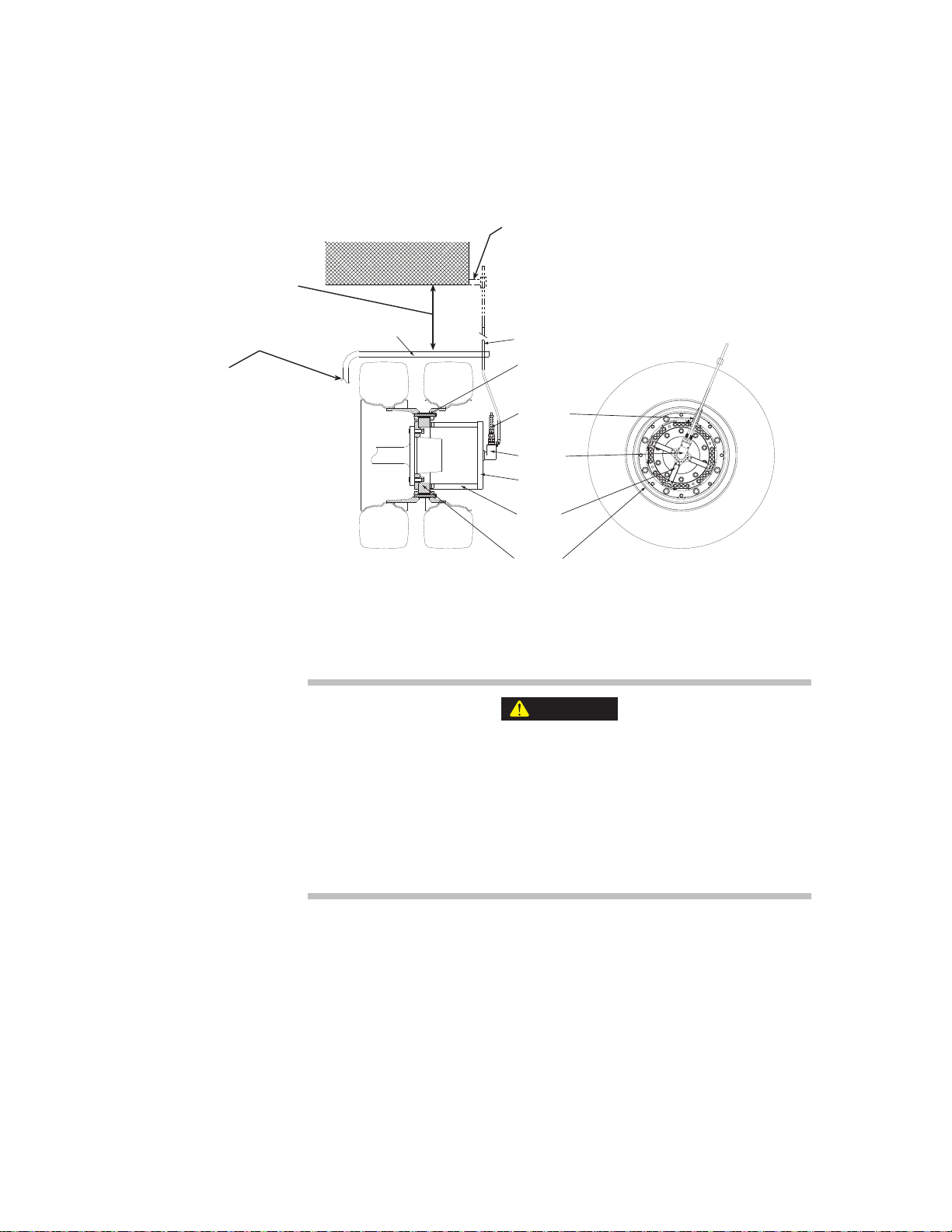
In a typical spinning application, the transducer is mounted on a modified rim of
a tire on a test vehicle, as shown in the following figure. The Transducer
Interface (TI), power supply, and data recorder can be located inside the vehicle
or in the trunk.
Hardware Overview
16
Spinning Application (Track or Road)
SWIFT® 45 GLP Sensors
Page 17
Non-Spinning Applications (Laboratory)
S45-003
Non-Spinning Applications (Laboratory)
The SWIFT sensor can be fully integrated into the simulation process, since it is
an optimal feedback transducer for use with MTS Remote Parameter Control
(RPC) software. The transducer takes data at points where fixturing inputs are
located rather than at traditional instrumentation points along the vehicle’s
suspension. Using the SWIFT sensor saves you instrumentation time, and fewer
iterations are required to achieve good simulation accuracy.
Measuring spindle loads allows engineers to generate generic road profiles.
Generic road profiles are portable across various vehicle models, do not require
new test track load measurements for each vehicle, and eliminate additional
RLDA tasks.
Four of the six loads measured by the transducer directly correlate to the MTS
Model 329 Road Simulator inputs: vertical force, longitudinal force, lateral force,
and braking input.
The same transducers used to collect road data can be mounted directly in the
wheel adapters of the MTS Model 329 Road Simulator. The SWIFT sensor
should then be removed for the durability cycles, to preserve its fatigue life. It
can be replaced by an adapter plate, available from MTS, to duplicate the mass
and center of gravity of the actual SWIFT sensor.
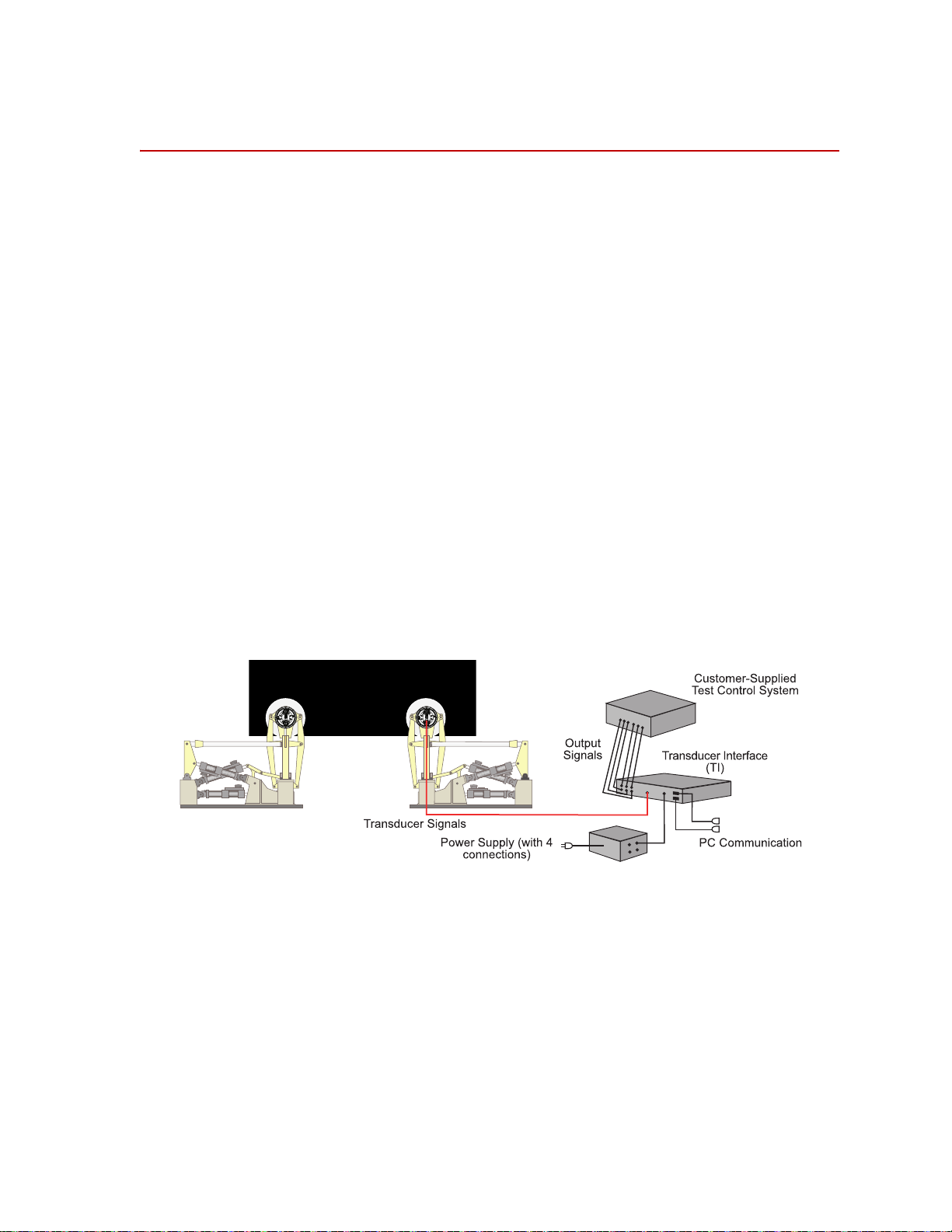
In a typical non-spinning application, a SWIFT sensor is mounted on a road
simulation test fixture, as shown in the following figure.
Non-Spinning Application (Laboratory Simulation)
SWIFT
®
45 GLP Sensors
Hardware Overview
17
Page 18
Construction
Construction
The SWIFT sensor has one-piece construction for outstanding fatigue life, low
hysteresis, and high stiffness. Its compact package has a minimal effect on inertia
calculations, and a minimal dynamic effect on the test vehicle.
The transducer can be used for developing conventional durability tests on the
MTS Model 329 Road Simulator. Normally, the transducer is replaced with an
equivalent wheel adapter after the simulation drive signals are developed and
prior to the start of the test.
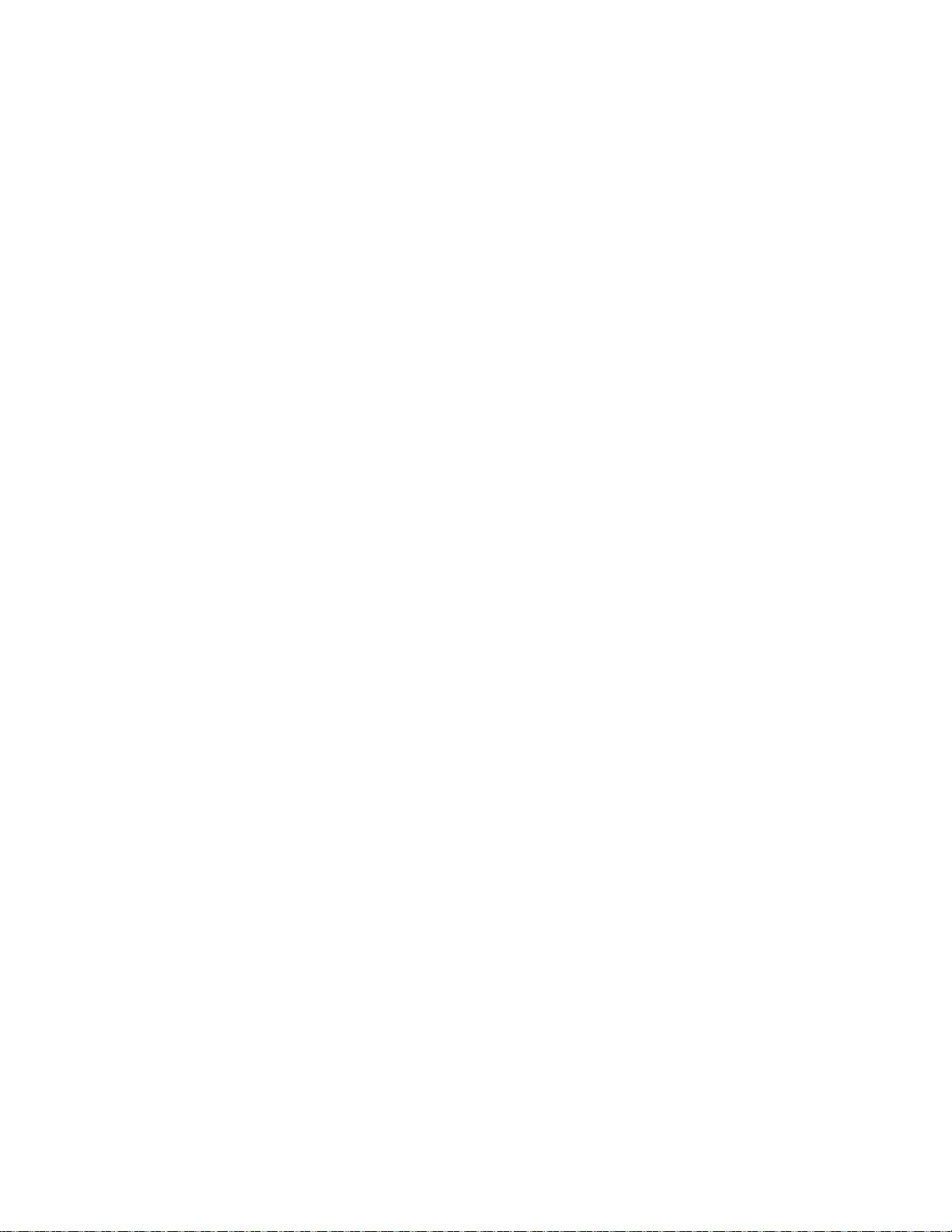
The SWIFT sensor includes several mechanical and electrical components.
Transducer The transducer attaches directly to a modified wheel rim. On the test track
vehicle, it spins with the wheel. It does not spin on a road simulator.
The transducer has four beams with strain gages that measure six orthogonal
outputs:
Fx—longitudinal force
Fy—lateral force
Fz—vertical force
Mx—overturning moment
My—acceleration and brake torque
Mz—steering moment
It has onboard conditioning and amplifiers to improve the signal-to-noise ratio.
Hardware Overview
18
SWIFT® 45 GLP Sensors
Page 19
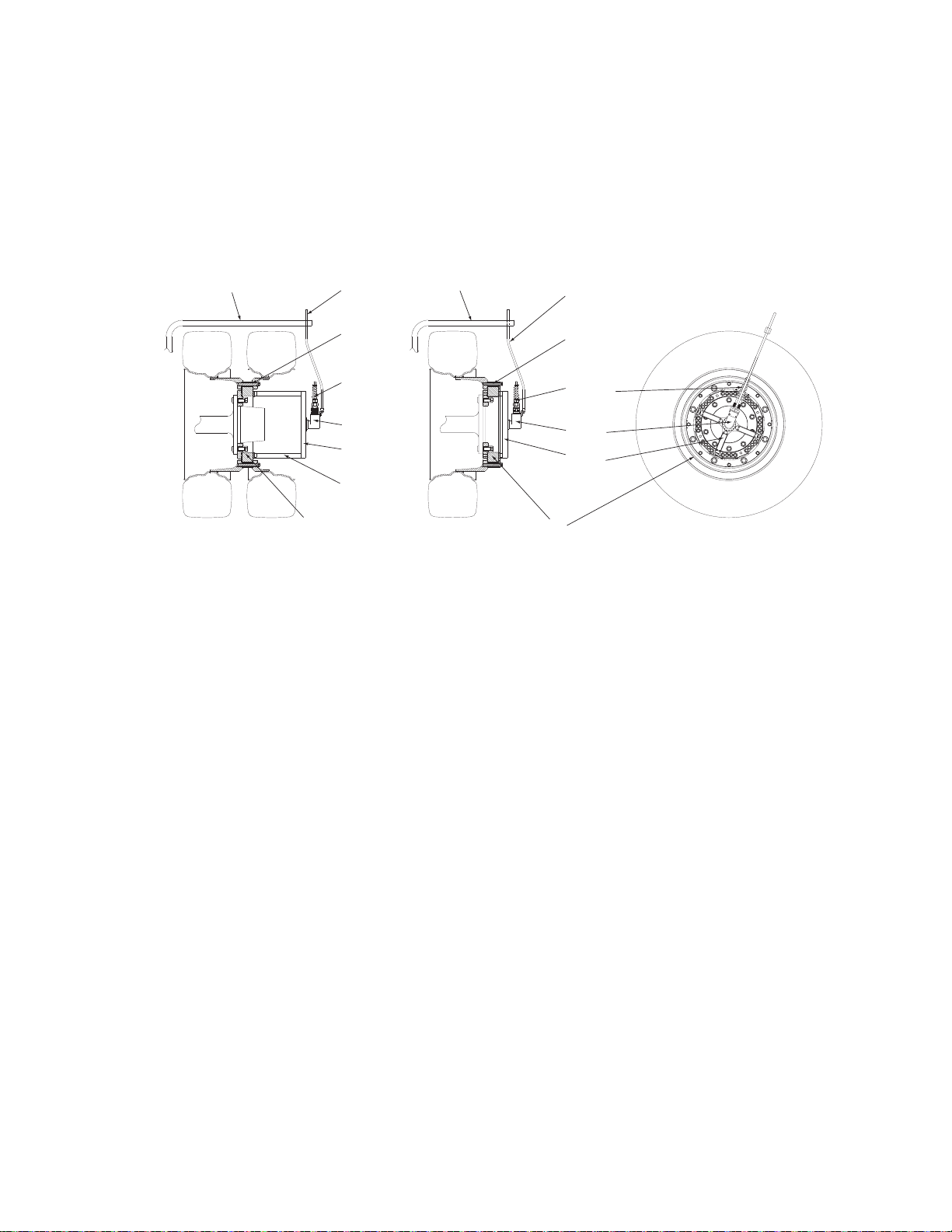
Construction
Anti-Rotate
Mounting Bracket
(customer supplied)
Anti-Rotate
Assembly
Spindle
Adapter
Spacer
Transducer
Interface
Cable
Slip-Ring
Bracket
Slip-Ring
Extension
Bracket
SWIFT 45
Transducer
Slip-Ring
Dual Rim Conguration
Front Rim Conguration
Anti-Rotate
Mounting Bracket
(customer supplied)
Anti-Rotate
Assembly
Spindle
Adapter
Spacer
Transducer
Interface
Cable
Slip-Ring
Bracket
SWIFT 45
Transducer
Slip-Ring
Tire
Tire
Tire
Spindle adapter spacer The spindle adapter spacer attaches to the inner diameter of the transducer,
allowing you to place it at the original position of the spindle face of the vehicle.
The spindle adapter spacer enables you to maintain the original position of the
tire on the vehicle (the tire will not protrude from the vehicle) while the
transducer is attached to the vehicle. In addition, the spindle adapter spacer helps
minimize brake heat from being transferred to the transducer.
Components Set Up for Test Track
Slip-ring bracket The slip-ring bracket is used to attach the slip ring to the transducer. It has
internal wiring that provides excitation power to the strain gage bridges and
brings signals out from the transducer to the slip ring.
Encoder An encoder measures the angular position of the transducer. The SWIFT sensor
uses an optical encoder, integrated into the slip ring assembly, that counts off
“ticks” to measure the angular position as the wheel rotates. It measures 2048
(512 plus quadrature) points per revolution (ppr) with a resolution of 0.18
degrees and an accuracy of 0.18 degrees.
Slip ring The slip ring allows you to output the transducer bridge signals and angular
position to the TI. A transducer data cable attaches from the slip ring to the back
panel of the TI. The slip ring is not used for non-spinning applications.
Anti-rotate device The anti-rotate device is attached to the slip ring and the vehicle’ s suspension (or
®
SWIFT
45 GLP Sensors
other non-rotating point). It is able to move up and down with the vehicle. Its
primary function is to provide a fixed reference point for the optical encoder. Its
secondary function is to prevent the cable from rotating with the wheel and
becoming tangled or breaking.
Hardware Overview
19
Page 20
Construction
The anti-rotate device is mainly used for road data collection. Although it can
also be used for short periods of time on a road simulator. MTS does not
recommend this use. Due to the extreme fatigue loading characteristics of
durability testing on road simulators, we suggest that you either remove the slip
ring assembly before installing the vehicle on a road simulator, or use it only for
iteration passes, then promptly remove it.
The anti-rotate device should be configured such that no loading occurs to the
slip ring throughout all loading and suspension travel. This means that when you
attach the anti-rotate device to the vehicle, you must consider all possible motion
of the suspension. The anti-rotate device should not bump against the wheel well
at any time; any jarring of the anti-rotate arm will damage the slip ring. For
steering axles, the anti-rotate bracket must be mounted to part of the unsprung
suspension that steers with the tire, such as the brake caliper. For additional antirotate device mounting recommendations, refer to the Anti-Rotate Customer/
User Assembly drawing at the back of this manual.
Transducer Interface
(TI)
Additional
components
The TI conditions the power supply and uses previously stored calibration values
to convert the eight bridge outputs and the encoder signal to six non-rotating
analog outputs (Fx, Fy, Fz, Mx, My, Mz) plus an angle output. The force and
moment outputs have a value of 10 V full scale, unless a different full-scale
output is requested by a customer. The angle output is a 0–5 V sawtooth output.
Additional components that are supplied with your SWIFT sensor transducer
data cables, TI power cable, a SWIFT Transducer Interface Utilities CD or disk,
and the calibration file. MTS can also provide a 12 V DC or 24 V DC power
converter for use in the test laboratory.
Hardware Overview
20
SWIFT® 45 GLP Sensors
Page 21

Design Features
Flexure isolation The SWIFT sensor has a very stiff outer ring and flexured beam isolation which
render it relatively insensitive to stiffness variations in matings with rims and
road simulator fixtures.
Flexure isolation minimizes thermal expansion stresses. With flexure isolation, if
the inner hub experiences thermal expansion the beams are allowed to expand
out, resulting in lower compressive stress on the beams.
Thermal stability The entire outward sensor is machined from a solid, specially forged billet of
high strength titanium. The absence of bolted joints permits an efficient transfer
of heat across the sensor structure, minimizing temperature differentials in the
gaged area.
As mentioned earlier, flexure isolation allows thermal expansion with minimal
stresses.
The transducer is designed to accommodate the high temperature environments
that occur during severe driving and braking events. Individual temperature
compensation of each strain gage bridge minimizes temperature-induced
variations in accuracy. The temperature rating for the SWIFT sensor is 125° C
(257° F) at the spindle hub.
Construction
Temperature compensation is done on each bridge for better performance in
transient or non-uniform temperature occurrences.
Low hysteresis The SWIFT sensor has very low hysteresis, since the sensing structure is
constructed with no bolted joints. Micro slippage in bolted joints contributes
most of the hysteresis in highly stressed structures. Hysteresis errors due to
micro-slip at joints can contribute to unresolvable compounding errors in
coordinate transformation of the rotating sensor.
Low noise The SWIFT sensor uses a slip ring rather than telemetry for the transducer output
signals. On-board amplification of the transducer bridges minimizes any slip ring
noise contribution.
Low cross talk The advanced design of the SWIFT sensor means that it has very low cross talk.
The alignment of the sensing element is precision machined. This alignment is
critical to achieving minimum cross talk error between axes and minimum errors
in coordinate transformation (from a rotating to a non rotating coordinate
system). Linear cross talk is compensated by the TI.
Velocity information Angular output is available from the TI when it is used in the spinning mode with
the encoder. This angular output can be used to calculate wheel velocity. In nonspinning applications, accelerometers can be integrated into the transducer
connector housing.
MTS does not supply any conditioning electronics for accelerometers. Ask your
MTS consultant for more information about this option.
SWIFT
®
45 GLP Sensors
Hardware Overview
21
Page 22
Coordinate System
Coordinate System
In the transducer, independent strain gage bridges measure forces and moments
about three orthogonal axes. The signals are amplified to reduce the signal-tonoise ratio. An encoder signal indicates angular position, which is used to
convert raw force and moment data from the rotating transducer to a vehiclebased coordinate system. The force and moment and encoder information is sent
to the transducer interface (TI).
The TI performs cross talk compensation and converts the rotating force and
moment data to a vehicle coordinate system. The result is six forces and moments
that are measured at the spindle: Fx, Fy, Fz, Mx, My, and Mz. A seventh
(angular) output is available for tire uniformity information, angular position, or
to determine wheel speed (depending on the data acquisition configuration).
The coordinate system shown below was originally loaded into the TI settings by
MTS. It uses the right-hand rule.
Hardware Overview
22
SWIFT® 45 GLP Sensors
Page 23

Coordinate System
The SWIFT coordinate system is transducer-based, with the origin located at the
center of the transducer. Positive loads are defined as applied to the outer ring of
the transducer.
• Vertical force (Fz) is positive up
• Lateral force (Fy) is positive out of the vehicle
• Longitudinal force (Fx) is positive out of the transducer
You can change to the MTS Model 329 Road Simulator convention (lateral load
into the vehicle is always positive) or to any coordinate system by changing the
polarities in the calibration file. For instructions on how to change the coordinate
system polarities, see the chapter, “Setting up the Transducer Interface”.
SWIFT
®
45 GLP Sensors
Hardware Overview
23
Page 24
Specifications
Specifications
MEASURED VALUE UNITS TITANIUM
SWIFT 45T (MT)
Max Calibrated Load Ratings
Fx lb (kN) 26,977 120
Fy lb (kN) 10,791 48
Fz lb (kN) 26,977 120
Mx in-lb (kN-m) 247,820 28
My in-lb (kN-m) 265,522 30
Mz in-lb (kN-m) 247,820 28
Noise Level peak to peak (0-500Hz) N8
Maximum usable RPM RPM 2200
Maximum Speed (15 in. rolling radius) mph (kph) 150 240
Max Operating Temperature
(measured at the spindle hub)
Shock Resistance, Each Axis G50
SWIFT Environmental Protection Rating IP67
Input Voltage Required VDC 10-28
Input Power Required Per Transducer W6
Output Voltage at Full Scale Calibrated Load V±10
SAE J267 Half Axle Rating lb 8000
SAE Bending Moment Seen on Cell in-lb (kN-m) 206,000 23.3
°F (°C) 257 125
Hardware Overview
24
SWIFT® 45 GLP Sensors
Page 25
Specifications
Accuracy
Force
Moment
Hysteresis
Force
Moment
Crosstalk
Force → Force
Force → Moment
Moment → Force
Moment → Moment
Assembly Weight Information
Transducer lb (kg) 23.6 10.7
Washer Plates lb (kg) 9.0 4.1
Slip Ring Assembly lb (kg) 2.0 0.9
% FS 1
% FS 1
% FS 0.5
% FS 0.5
% FS 1
% FS 1
% FS 1.5
% FS 0.5
HD Steel 19.5x6.75 Modified Rim lb (kg) 92.2 41.8
Modified Lug Nuts (qty. 10) lb (kg) 3.0 1.4
Attached Fast en er lb (kg) 6.8 3.1
Total Weight lb (kg) 136.6 62.0
Reference Weight of Standard Unmodified
19.5 X 6.75 X 5.5 Rim and Lug Nuts lb (kg) 61.0 27.7
Differential Weight lb (kg) 75.0 34.0
SWIFT
®
45 GLP Sensors
Hardware Overview
25
Page 26
Specifications
Minimum Rim Size inch 17.5
Typical Lug Nut Bolt Circle Accommodated mm 165 to 225; 8x275
(8x275 pattern accepts 20mm Studs)
Output Connector Type BNC
Auto Shunt Calibration Internal Shunts
Notes:
• Based on loads at center of transducer.
• Each SWIFT 45 sensor will be calibrated on an MTS calibration machine. MTS provides complete
documentation of calibration values for each serial number SWIFT unit. Unique calibration values
are stored electronically and transferred to the transducer interface unit (TI box) shipped with each
SWIFT 45.
• Periodic recalibration services can be provided by MTS.
• Rim design is provided by MTS and tested to SAE J267 criteria.
• Proper rim design is essential for optimum performance.
• For applications involving non-listed wheel sizes, contact your MTS application engineer.
• Reference rim weights based on 19.5x6.75 truck rim with 5.5" offset, 10 hole 225mm bolt circle.
Single wheel configuration.
Hardware Overview
26
SWIFT® 45 GLP Sensors
Page 27
Trans ducer Center-of-Gravity
North American Transducer Center-of-Gravity and Inertia Specifications
ITANIUM
T
Specifications
X
cg
Y
cg
Z
cg
I
xx
I
yy
I
zz
0.0 mm 0.0 in.
26.7 mm 1.05 in.
0.0 mm 0.0 in.
1404 kg·cm2480 lbm·in
2759 kg·cm2943 lbm·in
1404 kg·cm2480 lbm·in
2
2
2
SWIFT
®
45 GLP Sensors
Hardware Overview
27
Page 28
Calibration
Calibration
Each transducer is calibrated by MTS before shipment. The transducer and TI
may be returned to MTS for repair and recalibration as required.
Calibration is performed at MTS on a special fixture that is capable of applying
multiple loads to the transducer. During calibration, raw signals are measured.
The calibration gains and cross talk compensation values are computed from this
raw data. These gains are recorded in a calibration file.
A unique calibration file is supplied for each transducer. The serial number of the
TI associated with the transducer is listed at the top of the calibration file. A label
with the serial number of the TI box (and the SWIFT sensor with which it was
originally calibrated) is attached to the back of each TI box.
The calibration file is loaded into the TI non-volatile RAM by MTS before the
transducer is shipped. A copy of the file is also provided on a diskette.
MTS verifies the calibration by applying loads to the transducer, measuring the
main outputs and checking for accuracy. Final calibration reports are provided
with each transducer.
Shunt calibration At the end of the calibration process, a shunt calibration is performed. During a
shunt calibration, a resistance is introduced into the bridge circuit. The difference
between the shunted and unshunted voltage is the delta shunt reference value for
each bridge. That value is saved in the calibration file, which is downloaded from
a PC or laptop computer and stored in non-volatile memory in the TI.
At any time afterward, pressing the Shunt button on the front of the TI causes
each of the strain gage bridges to be shunted in sequence, and the measured shunt
voltage (delta shunt measured value) is compared to the reference value.
An acceptable tolerance range is also loaded into the TI memory during system
calibration. One tolerance value is used for all bridges. This value is loaded as a
percentage of allowable deviation from the delta shunt values. For example, if the
FX1 bridge has a shunt delta reference value of –3.93, and the tolerance is set at 2
(percent), the acceptable range for the measured value would be –3.85 to –4.01.
Hardware Overview
28
SWIFT® 45 GLP Sensors
Page 29
Calibration
When you press the Shunt button, the associated Shunt LED lights. As the TI
automatically switches through the series of bridges, it verifies that the outputs
are within the accepted tolerance range. If all bridge shunt values fall within the
tolerance range, the Shunt LED on the front panel will go off (after several
seconds). If any bridge fails to fall within the shunt tolerance range, the LED will
blink and error light turns on, indicating that the shunt calibration has failed. For
more information on dealing with shunt calibration failures, see the chapter,
“Troubleshooting.”
ShuntTolerance=2
FX1ShuntDeltaRef=-1.379
FX2ShuntDeltaRef=-1.386
FY1ShuntDeltaRef=-1.381
FY2ShuntDeltaRef=-1.378
FY3ShuntDeltaRef=-1.382
FY4ShuntDeltaRef=-1.381
FZ1ShuntDeltaRef=-1.380
FZ2ShuntDeltaRef=-1.380
FX1ShuntDeltaMeas=-1.378
FX2ShuntDeltaMeas=-1.386
FY1ShuntDeltaMeas=-1.380
FY2ShuntDeltaMeas=-1.379
FY3ShuntDeltaMeas=-1.382
FY4ShuntDeltaMeas=-1.382
FZ1ShuntDeltaMeas=-1.385
FZ2ShuntDeltaMeas=-1.382
Checking the
calibration
Example of Calibration File Shunt Data
The above example shows shunt data from the calibration file. This data may be
transferred, using the TIXFER program, from the transducer interface RAM to a
computer or from a computer to the transducer interface RAM. Note that items
marked ShuntDeltaMeas are uploaded from RAM, but not downloaded from the
computer.
For more information on TIXFER, see the chapter, “Software Utilities”.
You can check the calibration of a transducer at any time by pressing the Shunt
switch. Subsequent shunt commands compare the current feedback values
against those stored in the TI. You may set the tolerance values for each TI by
editing the calibration file. See the chapter, “Setting up the T ransducer Interface”,
for instructions.
If the current feedback values from a shunt calibration are outside the tolerance,
the Shunt LED blinks to indicate a failure.
SWIFT
®
45 GLP Sensors
Hardware Overview
29
Page 30

Calibration
Hardware Overview
30
SWIFT® 45 GLP Sensors
Page 31
Installation
Contents Hazard Icons 32
The SWIFT sensor can be installed on a vehicle at the test track or on an MTS
Series 329 Road Simulator in the test laboratory.
Road and Track Vehicles 33
Attaching SWIFT Components to the Vehicle 38
Attaching SWIFT and Wheel Assembly to the Vehicle 41
Collecting Data 48
Road Simulator 51
Attaching SWIFT Components to the Fixturing 54
SWIFT® 45 GLP Sensors
Installation
31
Page 32

Hazard Icons
Hazard Icons
Read, understand, and
follow the instructions
in the manual
The following hazard icon is part of the label affixed to the side of the SWIFT 45
GLP Sensor.
32
Installation
SWIFT® 45 GLP Sensors
Page 33

Road and Track Vehicles
Road and Track Vehicles
Equipment required This procedure requires two people. To install the SWIFT 45 GLP sensor, you
will need the following equipment:
• Hub adapter
• Modified rim (see next figure)
• Anti-rotate assembly (including customer-supplied mounting arm)
• Small set of metric hex-head wrenches
• Tube bender for the restraint tube
• Tube cutter
• Metric socket head drive set (up to 17 mm) with extension
• Molykote g-n paste, 2.8 oz. tube (MTS part number 011-010-217)
• Nikal based anti-galling compound (MTS part number 011-354-902)
• Transducer mounting bolts (per transducer)
– M20 x 1.5 mm (quantity 8)
– M12 x 1.75 mm (quantity 8; length is dependant on the thickness of the
rim flange)
– M12 x 1.75 mm (quantity 32; length is dependant on the thickness of
the spindle adapter spacer)
– lug nuts, shim washers, and washer plates
• For dual rims
– M20 x 1.5 mm (quantity 8)
– M12 x 1.75 mm (quantity 8; length is dependant on the thickness of the
rim flange)
– M12 x 1.75 mm (quantity 32; length is dependant on the thickness of
the spindle adapter spacer)
– lug nuts, shim washers, and washer plates
– slip ring extension assembly
– M12 x 1.75 mm x 30 mm long bolts (quantity 4)
• Slip ring assembly fasteners
SWIFT
®
45 GLP Sensors
– M5 x0.8 mm bolts (quantity 8)
• Torque wrenches, capable of the following ranges:
– 2.3–23 N·m (20–200 lbf·in)
– 24–74 N·m (18–55 lbf·ft),
Installation
33
Page 34

Road and Track Vehicles
– 203–815 N·m (150-600 lbf·ft);
– 108–325 N·m (80–240 lbf ·ft)
– 93 N·m (69 lbf·ft)
• Cables (transducer and BNC, plus customer-supplied from transducer
interface to data recorder)
• Tie wr aps
• Data recorder
• Power supply–10 to 28 V DC
34
Installation
Installation Components (Test Track–Front)
SWIFT® 45 GLP Sensors
Page 35

Installation Components (Test Track–Duals)
CAUTION
Road and Track Vehicles
Importance of bolts Bolts provide exceptional clamp force at the transducer to rim/spindle interface.
• Bolts on the inner hub secure the hub adapter to the SWIFT sensor.
• Bolts on the outer ring secure the SWIFT sensor to the wheel rim (or road
simulator spindle adapter).
Note Make sure all bolts are in place and fully torqued during all tests. Correct
use of bolts reduces the safety hazard and ensures optimal transducer
performance.
Before you begin Observe the following safety conditions while you are attaching the SWIFT
sensor and components to the vehicle.
Using strong cleaners or solvents can damage the RTV seal and may void
the warranty.
Pressure-washing the transducer or cleaning it with solvents can damage it
or degrade the silastic seal and may void the warranty.
Do not pressure-wash the transducer or clean it with solvents. Use only a soft
sponge or brush with non-metal bristles and a gentle detergent (such as dish
soap) to wash the transducer.
SWIFT
®
45 GLP Sensors
Installation
35
Page 36

Road and Track Vehicles
CAUTION
CAUTION
WARNING
CAUTION
Do not use high-pressure air to clean debris from around the transducer
connectors.
High-pressure air can damage the silastic seals and may void the warranty.
Use a brush with fine, non-metal bristles and low air-pressure [0.07 MPa (10 psi)]
to clean debris from around the transducer connectors.
Do not lay the wheel down on top of the transducer without proper padding.
If the wheel is laid down with the transducer under it, the transducer could
be scratched and the connectors damaged.
Always hold the wheel upright when the transducer is attached to it. If needed,
have another person hold the wheel upright while you tighten the bolts, if laying
the wheel down cannot be avoided, place the wheel on a layer of foam or a pad to
protect the connectors.
Do not under-torque the lug nuts.
Lug nuts that are not properly tightened can become loose during testing.
Loss of a wheel can cause damage to the test vehicle and transducer and
result in serious injury, death, or property damage.
Always tighten the lug nuts to the torque rating recommended for the vehicle/
wheel. Recheck the torque daily and/or before each testing session.
Do not drop the slip-ring bracket.
Dropping the slip-ring bracket can damage the slip ring or a connector.
Always use care when you handle the slip-ring bracket.
36
Installation
SWIFT® 45 GLP Sensors
Page 37

Road and Track Vehicles
CAUTION
Do not allow the mounting arm or anti-rotate arm to bump against any
portion of the wheel or wheel well.
Any jarring of the mounting arm or anti-rotate arm will damage the slip ring
and/or the encoder.
Position the mounting arm and anti-rotate assembly so that full suspension travel
will not cause interference with the wheel well or any other part of the vehicle.
SWIFT
®
45 GLP Sensors
Installation
37
Page 38

Road and Track Vehicles
Attaching SWIFT Components to the Vehicle
SWIFT 45 GLP
Fasteners
M20 X 1.5 mm
M12 X 1.75 mm
M12 X 1.75 mm
MTS modified lug nuts and shim washers
* The length of these fasteners is dependant on the thickness of the rim
flange. The fastener length should ensure a minimum thread
engagement of 30 mm (1.18 in).
† The length of these fasteners is dependant on the thickness of the rim
flange. The fastener length should ensure a minimum thread
engagement of 18 mm (0.71 in).
‡ These fasteners secure the spindle adapter spacer to the transducer.
The length of these fasteners is dependant on the thickness of the
spindle adapter spacer which is a functio n of the customer wheel
geometry. The fastener length should ensure a minimum thread
engagement of 18 mm (0.71 in).
*
†
‡
Material required: • Molykote g-n paste (MTS part number 011-010-217).
• Nikal based anti-galling compound (MTS part number 011-354-902)
Procedure 1. Remove the current wheel from the test vehicle.
2. Clean all surfaces of the vehicle tire(s) and the modified rim(s). It is critical
that all surfaces be free of stones, burrs, and grease. Use a mild detergent
such as dish soap.
Important It is imperative that the mounting surfaces of the transducer be
protected from getting scratched. Any wheel components and work
surfaces that might come in contact with the transducer must be
clean, smooth, and free of debris.
Mount the tire(s) on the modified rim(s).
3. Wipe the unpainted mating surfaces of the modified rim, the spindle adapter
spacer and the transducer with a clean dry cloth.
4. Generally it is easier to attach the SWIFT sensor to the hub adapter first.
Attach the hub adapter to the SWIFT sensor using the 32 M12 x 1.75 mm
fasteners provided. Be sure to use the supplied 4-hole washer plates.
Ensure the pilot surface of the hub adapter spacer is facing the transducer.
Lubricate the threads and under the head of each fastener with Molykote g-n
paste and torque to 32.5 N·m (24 lbf-ft). They will be tightened to final
torque later.
38
Installation
SWIFT® 45 GLP Sensors
Page 39

Road and Track Vehicles
Modified
lug nuts
Transducer
Spindle
adapter
spacer
8 M12 rim
fasteners
A-H
8 M20 rim
fasteners
1-8
32 M12 hub
fasteners
1-32
5. Attach the transducer to the modified wheel rim using the fasteners provided
(see the previous table). Hand tighten the bolts.
If environmental conditions warrant, coat each fastener with Birchwood
Casey Sheath RB1 rust preventative (or equivalent).
Lubricate the threads and under the head of each fastener with Molykote g-n
paste.
Bolt Torque Sequence
6. Tighten the M12 mounting bolts.
A. Following the sequence shown in the previous figure, torq ue the eigh t
M12 bolts (A through H) to the value for the first increment shown in
the following table.
B. Repeat Step 6A for the second increment.
SWIFT
®
45 GLP Sensors
Installation
39
Page 40

Road and Track Vehicles
C. Repeat Step 6A for the final torque.
7. Tighten the M20 mounting bolts.
A. Following the sequence shown in the previous figure, torq ue the eigh t
M20 bolts (1 through 8) to the value for the first increment shown in
the following table.
B. Repeat Step 7A for the second increment.
C. Repeat Step 7A for the final torque.
8. Refer to Step 4. Finish tightening the 32 hub adapter bolts.
A. Following the sequence shown in the previous figure, torq ue the 32
M12 bolts (1 through 32) to the value for the first increment shown in
the following table.
B. Repeat Step 8A for the second increment.
C. Repeat Step 8A for the final torque.
Note To minimize negative clamping effects, you must torque the bolts in the
sequence shown.
BOLT SIZE
TORQUE INCREMENT M12 M20
1st Increment 32.5 N·m (24 lbf·ft) 168.1 N·m (124 lbf·ft)
2nd Increment 65 N·m (48 lbf·ft) 336.2 N·m (248 lbf·ft)
Final Torque 97.6 N·m (72 lbf·ft) 501.6 N·m (370 lbf·ft)
40
Installation
SWIFT® 45 GLP Sensors
Page 41

Road and Track Vehicles
Anti-rotate
assembly
Cable
conduit
bracket
Slip ring
Slip ring
bracket
Transducer
Anti-rotate bracket
(customer supplied)
For front or
steering axles,
anti-rotate arm
must be
mounted to a
part of the
unsprung
suspension
that steers with
the tire, such
as the brake
caliper.
Attaching SWIFT and Wheel Assembly to the Vehicle
1. Before installing the SWIFT and wheel assembly, attach the anti-rotate
bracket (customer supplied) to the vehicle.
Because the bracket is unique to each vehicle the anti-rotate bracket must be
provided by the customer. The following are guidelines for manufacturing
and locating the bracket. See the next two figures.
• The bracket must be stiff, preferably steel or stainless steel tubing, so as
not to move or rotate when connected to an unsprung mass or spindle
which will allow the slip ring assembly to move with the tire as the
vehicle is moving or testing.
• The bracket must be positioned so as not to hit the fender at the
extreme end of the suspension travel.
• The bracket must maintain a minimum clearance from the tire so as not
to hit the tire when it is loaded and rotating.
SWIFT
®
45 GLP Sensors
Installation
41
Page 42
Road and Track Vehicles
CAUTION
Ensure bracket will not hit
body parts during vehicle
testing or suspension travel.
For dual or nonsteering axles, the
anti-rotate arm must be
mounted to the unsprung mass
or suspension, or possibly the
fender or trailer (less desirable).
If the arm is mounted to the
fender or trailer, the assembly
must have a close-tting hole
that will accommodate the
suspension travel.
The bracket can be attached to
the brake caliper if the wheel
hub assembly is equipped with
a disc braking system.
Anti-Rotate
Mounting Bracket
(customer supplied)
Tire
Tire
Dual Wheel Slip Ring and Anti Rotate Assembly
If the anti-rotate bracket is
fender or trailer-mounted, it
must be in a vertical orientation
so that when suspension travel
occurs, the anti-rotate are does
not rotate and cause errors in
the data or bend the rod.
The anti-rotate arm must be
long enough to accommodate
vehicle suspension travel.
Anti-Rotate
Assembly
Spindle
Adapter
Spacer
Transducer
Interface
Cable
Slip-Ring
Slip-Ring
Bracket
Slip-Ring
Extension
Bracket
SWIFT 45
Transducer
2. Attach the wheel/transducer to the test vehicle.
Installing the lug bolts directly against the transducer face, without the antigalling compound and the shim washers, can cause galling of the
transducer face.
Galling of the transducer face can result in uneven torquing (and possible
over-torquing) of the lug bolts.
To prevent galling, always use the shim washers provided. Always lubricate the
bolts and shim washers as described below.
Lubricate the lug bolt threads, under the bolt head, and both faces of the
shim washers with the Nikal based anti-galling compound.
Tighten the lug nuts in three increments up to the specified torque, in the
sequence shown in the next figure to the torque rating recommended for the
wheel.
Important Do not exceed maximum specified lug-nut torque.
42
Installation
SWIFT® 45 GLP Sensors
Page 43
Road and Track Vehicles
3. If necessary, assemble the hinge base with anti-rotate tube onto the slip ring.
See the next figure.
Note Typically this step is only required for new slip rings. After the assembly
is complete, there should be no need to disassemble it except if a
component becomes damaged.
A. Connect the cable to the slip ring.
B. Wrap the slip-ring connector and cable connector with butyl rubber
shrink tape (MTS part number 100-175-781 or equivalent).
Cut approximately 150 mm (6 in) of tape from the roll.
Remove the backing from the tape.
Stretch the tape until it is approximately 1/2 of its original width.
Begin by putting two wraps of tape tightly around the slip ring
connector and cable connector.
Continue wrapping up the connector and cable approximately 150 mm
(6 in). Overlap the tape by approximately 1/2 of its width.
C. Measure, making bends as necessary, and cut the aluminum tube to
size.
MTS provides an extra long tube with a hinge welded at one end. After
fitting the tube to your test vehicle, cut off the excess length.
D. Tap the end of the aluminum tube 5/16-18 UNC X 1.00 inch deep.
E. Insert the low-head cap screw through the delrin ball.
F. Insert the aluminum tube into the steel sleeve.
SWIFT
®
45 GLP Sensors
Installation
43
Page 44

Road and Track Vehicles
G. Tighten the screws that attach the hinge joint to the slip ring assembly.
4. Attach the transducer output cable to the slip ring encoder connector and the
Slip Ring D-connector on the rear of the TI.
5. Secure the cable along its length so that ot will not become damaged during
data collection. (For example, tape it to the external mirror.)
Be sure to leave enough slack in the cable to allow for the full range of
suspension travel.
44
Installation
SWIFT® 45 GLP Sensors
Page 45

Road and Track Vehicles
Anti-rotate
assembly
Cable
conduit
bracket
Slip ring
Slip ring
bracket
Transducer
Anti-rotate bracket
(customer supplied)
For front or
steering axles,
anti-rotate arm
must be
mounted to a
part of the
unsprung
suspension
that steers with
the tire, such
as the brake
caliper.
6. For front rim configurations (see the next figure): Attach the slip-ring
bracket with the slip ring, conduit bracket, and restraint tube to the
transducer.
A. The slip-ring bracket fits over the circular connectors on the front of
the transducer at the four locations. The slip-ring bracket is similarly
labeled to prevent connecting it the wrong way.
Note Use care when installing the slip-ring bracket. The circular connectors
are keyed. The slip-ring bracket should be fitted on straight (without
bending or angling it) to make sure it engages all four connectors
simultaneously and evenly.
B. Lubricate the threads and under the bolt heads of the eight
M5 X 0.8 mm bolts with Molykote g-n paste. Insert them through the
mounting hole in the slip-ring bracket and thread them into the
transducer. Torque each to 6.8 N·m (5 lbf·ft).
SWIFT
®
45 GLP Sensors
7. For dual rim configurations (see the next figure): Attach the extension
assembly and slip-ring bracket with slip ring to the transducer.
A. Thread the standoffs, with the M12 threaded studs, into the four M12
threaded holes in the face of the transducer.
Lubricate the threads on each threaded stud with Molykote g-n paste
and torque to 93 N·m (69 lbf·ft).
B. Attach the four extension brackets.
C. Place the top plate, with extensions attached, over the standoffs.
Orient the top plate such that the Board 1 extension (see the labeling
on the top plate) is aligned with the Board 1 connector on the
transducer.
Installation
45
Page 46

Road and Track Vehicles
Note Use care when installing the top plate and extensions. The 9-pin
connectors are keyed. The top plate and extensions should be fitted on
straight (without bending or angling it) to make sure they engage the four
connectors simultaneously and evenly.
46
Installation
D. Secure the top plate to the st andoffs using the four M12 bolts and
washers.
Lubricate the threads with Molykote g-n paste and torque to 93 N·m
(69 lbf·ft).
E. Install the slip-ring bracket with the slip ring and restraint tube.
Slide the restraint tube through the hole in the anti-rotate bracket
(installed earlier) as far as necessary to align the slip-ring bracket to the
connectors on the top plate.
The slip-ring bracket fits over the circular connectors on the top plate at
the locations labeled Board 1. The slip-ring bracket is similarly labeled
to prevent connecting it the wrong way.
SWIFT® 45 GLP Sensors
Page 47

Road and Track Vehicles
Note Use care when installing the slip-ring bracket. The circular connectors
are keyed. The slip-ring bracket should be fitted on straight (without
bending or angling it) to make sure it engages both connectors
simultaneously and evenly.
F. Lubricate the threads and under the bolt heads of the eight
M5 X 0.8 mm bolts with Molykote g-n paste. Insert them through the
mounting holes in the slip-ring bracket and thread them into the
transducer. Torque them to 6.8 N·m (5 lbf·ft).
8. Secure the cable along the restraint tube, as necessary, to prevent it from
rubbing against the tire.
9. Secure the cable along the remainder of its length so that it will not become
damaged during data collection. (For example, tape it to the fender or
frame.)
Important Be sure to leave enough slack in the cable to allow for the full
range of wheel travel so the cable does not become stretched or
damaged during testing.
SWIFT
®
45 GLP Sensors
Installation
47
Page 48

Road and Track Vehicles
Collecting Data
After you zero the TI, you are ready to collect data.
Note If you turn off power to the TI boxes, the zero values will remain valid, but
the encoder will need to find the index pulse to properly convert the
rotating coordinates to stationary coordinates. The transducer outputs
will not be correct until this happens.
To reset the encoder, roll the vehicle either forward or backward so that
the tire completes at least one revolution. This can be accomplished
while driving to the test area, or if the vehicle is on a lift in the garage
area, rotate the tire manually.
1. Spin the wheel twice to ensure that the encoder tick is correct.
Spinning the wheel after you have completed the zero process will ensure
that the encoder is correctly referenced to the index pulse. Otherwise, the
data collected during the first revolution will be flawed.
2. Remove the vehicle from the lift or jacks.
3. Secure the connector that attaches the signal cable to the top of the slip ring
with butyl rubber shrink tape.
This will prevent dust, dirt, and water from entering the connector and
causing wear on the pins and sockets.
4. Perform a final inspection of the SWIFT sensor and the electronics to ensure
that everything is secure and the TI is on.
The zero data is saved at the end of each completed procedure. If the TI is
off, the zero data will not be lost. However, due to thermal conditions that
could affect your data, if the TI is powered off for an extended period of
time (such as over night), repeat the zero process.
Note Rezeroing the transducer is good practice when thermal changes occur.
Rezeroing the transducer at conditions and temperatures closest to the
test conditions will provide a more accurate zero and reduce thermal
errors.
5. Turn on the data recorder.
6. Start data collection.
Important Before beginning data collection, read the cautions on the next
page.
48
Installation
SWIFT® 45 GLP Sensors
Page 49

Road and Track Vehicles
CAUTION
CAUTION
WARNING
The SWIFT assembly will protrude approximately 130 mm (5 in) from the
side of the vehicle.
Bumping the SWIFT assembly into hard surfaces such as garage doors,
ramps and railings, or objects such as rocks, stumps, and earth, can
damage the anti-rotate device, cable, slip ring, slip ring bracket (spider), and
transducer.
Do not allow the SWIFT assembly to bump into any hard surfaces or objects while
you are driving the vehicle. Remember to allow extra space on each side of the
test vehicle when driving through areas with possible hazards.
Tall grass and brush can damage the sensor components.
Driving through grass and brush that is higher than the bottom edge of the
transducer can damage the cable and tear off the slip ring.
Avoid driving in any areas with tall grass and brush.
Driving a vehicle with SWIFT sensors mounted on it will change the
handling characteristics of the vehicle.
Driving a vehicle configured in this way on public roads can pose
unexpected dangers to pedestrians and other vehicle traffic.
Only authorized, licensed drivers, who are experienced driving a vehicle with
SWIFT sensors mounted on it, should be allowed to operate the vehicle on public
roads. Drive the vehicle with the SWIFT sensor attached on closed courses only
until you have proper experience.
SWIFT
®
45 GLP Sensors
Installation
49
Page 50

Road and Track Vehicles
WARNING
The SWIFT sensor can be exposed to load cycles that exceed the full scale
calibrated ranges listed in, “Specifications,” on page 24.
Excessive loading or load cycles could cause a fracture of the transducer,
wheel rim, hub adapter, or fasteners and can result in serious injury, death
or property damage.
Do not use the SWIFT sensor if it has been exposed to load cycles that exceed
the full scale calibrated ranges listed in, “Specifications,” on page 24. Always be
aware of the maximum full scale loads appropriate for your transducer. If the
prescribed limit for any axis of the transducer has been exceeded, contact MTS
for an evaluation. If necessary, arrange for the return of the transducer with the
recorded load cycles to MTS for physical inspection and analysis of the load cycle
history.
50
Installation
SWIFT® 45 GLP Sensors
Page 51
Road Simulator
CAUTION
CAUTION
WARNING
Before you begin Angular correction is required on the test track only. If you are using the same
transducer(s) for non-spinning simulation testing you must load the correct
software into the TI.
The SWIFT sensor must be attached to the test fixture before the vehicle is
mounted.
Clean all surfaces. It is critical that all surfaces be free of stones, burrs, and
grease.
Do not pressure-wash the transducer or clean it with solvents.
Pressure-washing the transducer or cleaning it with solvents can damage it
or degrade the silastic seal and may void the warranty.
Road Simulator
Using strong cleaners or solvents can damage the RTV seal and may void
the warranty.
Use only a soft sponge or brush with non-metal bristles and a gentle detergent
(such as dish soap) to wash the transducer.
Do not use high-pressure air to clean debris from around the transducer
connectors.
High-pressure air can damage the silastic seals and may void the warranty.
Use a brush with fine, non-metal bristles and low air-pressure [0.07 MPa (10 psi)]
to clean debris from around the transducer connectors.
Do not under-torque the lug nuts.
Lug nuts that are not properly tightened can become loose during testing.
Loss of a wheel can cause damage to the test vehicle and transducer and
result in serious injury, death, or property damage.
SWIFT
®
45 GLP Sensors
Always tighten the lug nuts to the torque rating recommended for the vehicle/
wheel. Recheck the torque daily and/or before each testing session.
Installation
51
Page 52

Road Simulator
Equipment required This procedure requires one person. To install the transducer, you will need the
following equipment:
• Hub adapter
• Adapter to 329 simulator
• Anti-rotate assembly (including customer-supplied mounting arm)
• Small set of metric hex-head wrenches
• Tube bender for the restraint tube
• Tube cutter
• Metric socket head drive set (up to 14 mm) with extension
• Molykote g-n paste, 2.8 oz. tube (MTS part number 011-010-217)
• Nikal based anti-galling compound (MTS part number 011-354-902)
• Transducer mounting bolts (per transducer)
– M20 x 1.5 mm (quantity 8)
– M12 x 1.75 mm (quantity 8; length is dependant on the thickness of the
rim flange)
– M12 x 1.75 mm (quantity 32; length is dependant on the thickness of
the spindle adapter spacer)
– lug nuts, shim washers, and washer plates
• For dual rims
– M20 x 1.5 mm (quantity 8)
– M12 x 1.75 mm (quantity 8; length is dependant on the thickness of the
rim flange)
– M12 x 1.75 mm (quantity 32; length is dependant on the thickness of
the spindle adapter spacer)
– lug nuts, shim washers, and washer plates
– slip ring extension assembly
– M12 x 1.75 mm x 30 mm long bolts (quantity 4)
• Slip ring assembly fasteners
– M5 x0.8 mm bolts (quantity 8)
• Torque wrenches, capable of the following ranges:
52
Installation
– 24–74 N·m (18–55 lbf·ft),
– 203–815 N·m (150-600 lbf·ft);
– 108–325 N·m (80–240 lbf ·ft)
– 93 N·m (69 lbf·ft)
SWIFT® 45 GLP Sensors
Page 53

Road Simulator
• Cables (transducer and BNC, plus customer-supplied from transducer
interface to data recorder)
• Tie wr aps
• Data recorder
• Power supply–10 to 28 V DC
SWIFT
®
45 GLP Sensors
Installation
53
Page 54

Road Simulator
Attaching SWIFT Components to the Fixturing
Note Install the transducer in so that the orientation labeling is consistent with
the reference orientation. In most cases, this means installing it so the
labels are upright. If an additional angle correction is required after
installation, you will need to measure the angle from zero, and then enter
a new offset value for the AngleOffset in the TI calibration file (see
earlier instructions, “Edit the Calibration File,” on page 66).
SWIFT 45 GLP
Fasteners
M20 X 1.5 mm
*
M12 X 1.75 mm
M12 X 1.75 mm
MTS modified lug nuts and shim washers
* The length of these fasteners is dependant on the thickness of the rim
flange. The fastener length should ensure a minimum thread
engagement of 30 mm (1.18 in).
† The length of these fasteners is dependant on the thickness of the rim
flange. The fastener length should ensure a minimum thread
engagement of 18 mm (0.71 in).
‡ These fasteners secure the spindle adapter spacer to the transducer.
The length of these fasteners is dependant on the thickness of the
spindle adapter spacer which is a functio n of the customer wheel
geometry. The fastener length should ensure a minimum thread
engagement of 18 mm (0.71 in).
†
‡
Material required: • Molykote g-n paste (MTS part number 011-010-217).
• Nikal based anti-galling compound (MTS part number 011-354-902)
Procedure 1. Clean all surfaces with a mild detergent such as dish soap. It is critical that
all surfaces be free of stones, burrs, and grease.
Important It is imperative that the mounting surfaces of the transducer be
protected from getting scratched. Any wheel components and work
surfaces that might come in contact with the transducer must be
clean, smooth, and free of debris.
54
Installation
2. Ensure the pilot surface of the hub adapter spacer is facing the transducer.
Lubricate the threads and under the head of each fastener with Molykote g-n
paste and torque to 32.5 N·m (24 lbf-ft). They will be tightened to final
torque later.
SWIFT® 45 GLP Sensors
Page 55

Road Simulator
3. Tighten the 32 hub adapter bolts.
A. Following the sequence shown in the following figure, torque the 32
M12 bolts (1 through 32) to the value for the first increment shown in
the following table.
B. Repeat Step 3A for the second increment.
C. Repeat Step 3A for the final torque.
4. Tighten the M12 mounting bolts.
A. Following the sequence shown in the following figure, torque the eight
M12 bolts (A through H) to the value for the first increment shown in
the following table.
B. Repeat Step 4A for the second increment.
C. Repeat Step 4A for the final torque.
5. Tighten the M20 mounting bolts to the rim simulator.
A. Following the sequence shown in the following figure, torque the eight
M20 bolts (1 through 8) to the value for the first increment shown in
the following table.
B. Repeat Step 5A for the second increment.
C. Repeat Step 5A for the final torque.
Note To minimize negative clamping effects, you must torque the bolts in the
sequence shown.
OLT SIZE
B
TORQUE INCREMENT M12 M20
1st Increment 32.5 N·m (24 lbf·ft) 168.1 N·m (124 lbf·ft)
2nd Increment 65 N·m (48 lbf·ft) 336.2 N·m (248 lbf·ft)
Final Torque 97.6 N·m (72 lbf·ft) 501.6 N·m (370 lbf·ft)
6. Bolt the transducer/hub adapter to the road simulator fixture using the
modified lug nuts and shim washers provided.
SWIFT
®
45 GLP Sensors
Installation
55
Page 56

Road Simulator
CAUTION
8 M12 rim
fasteners
A-H
8 M20 rim
fasteners
1-8
32 M12 hub
fasteners
1-32
Installing the lug bolts directly against the transducer face, without the antigalling compound and the shim washers, can cause galling of the
transducer face.
Galling of the transducer face can result in uneven torquing (and possible
over-torquing) of the lug bolts.
To prevent galling, always use the shim washers provided. Always lubricate the
bolts and shim washers as described below.
Lubricate the lug bolt threads, under the bolt head, and both faces of the
shim washers with the Nikal based anti-galling compound.
Tighten the lug nuts in three increments up to the specified torque, in the
sequence shown in the next figure to the torque rating recommended for the
wheel.
Important Do not exceed maximum specified lug-nut torque.
OLT SIZE
B
TORQUE INCREMENT M12 M20
1st Increment 32.5 N·m (24 lbf·ft) 168.1 N·m (124 lbf·ft)
2nd Increment 65 N·m (48 lbf·ft) 336.2 N·m (248 lbf·ft)
Final Torque 97.6 N·m (72 lbf·ft) 501.6 N·m (370 lbf·ft)
56
Installation
Bolt Torque Sequence
7. Install the vehicle on the road simulator.
Refer to the instructions in your road simulator operation manual.
SWIFT® 45 GLP Sensors
Page 57

Road Simulator
8. Attach the connector housing (or the slip ring bracket and slip ring) to each
transducer.
9. Attach the appropriate cables from the connector housing or one cable from
the slip ring to the TI or data acquisition.
A. Secure the cables to the lateral strut of the road simulator so that it will
not become damaged during testing.
Be sure to leave enough slack for the full range of movement of the
simulation fixture.
10. Connect the power supply to the TI.
You might need to first convert from 120 or 240 V AC to 10–28 V DC.
11. Connect the six data cables from the TI to the data recorder or your test
control system.
There is one cable per channel of data from the TI to the data recorder.
SWIFT
®
45 GLP Sensors
Installation
57
Page 58

Road Simulator
58
Installation
SWIFT® 45 GLP Sensors
Page 59
Analyzing SWIFT Data
Overview This chapter contains examples of data collected from SWIFT installations, and
explains how the data can be analyzed.
Contents The Data 60
Fx Data (Longitudinal Force) 61
Fz Data (Vertical Force) 63
Mx Data (Overturning Moment) 64
My Data (Brake Moment) 67
Acceleration and Braking Events Example 68
Slalom Curve Driving Example 70
SWIFT® 45 GLP Sensors
Analyzing SWIFT Data
59
Page 60

The Data
The Data
The following figure shows handling data taken on a flat, winding surface, using
a SWIFT sensor and SOMAT software. The driving speed was between 30 and
100 kph (18–62 mph).
Analyzing SWIFT Data
60
SWIFT® 45 GLP Sensors
Page 61
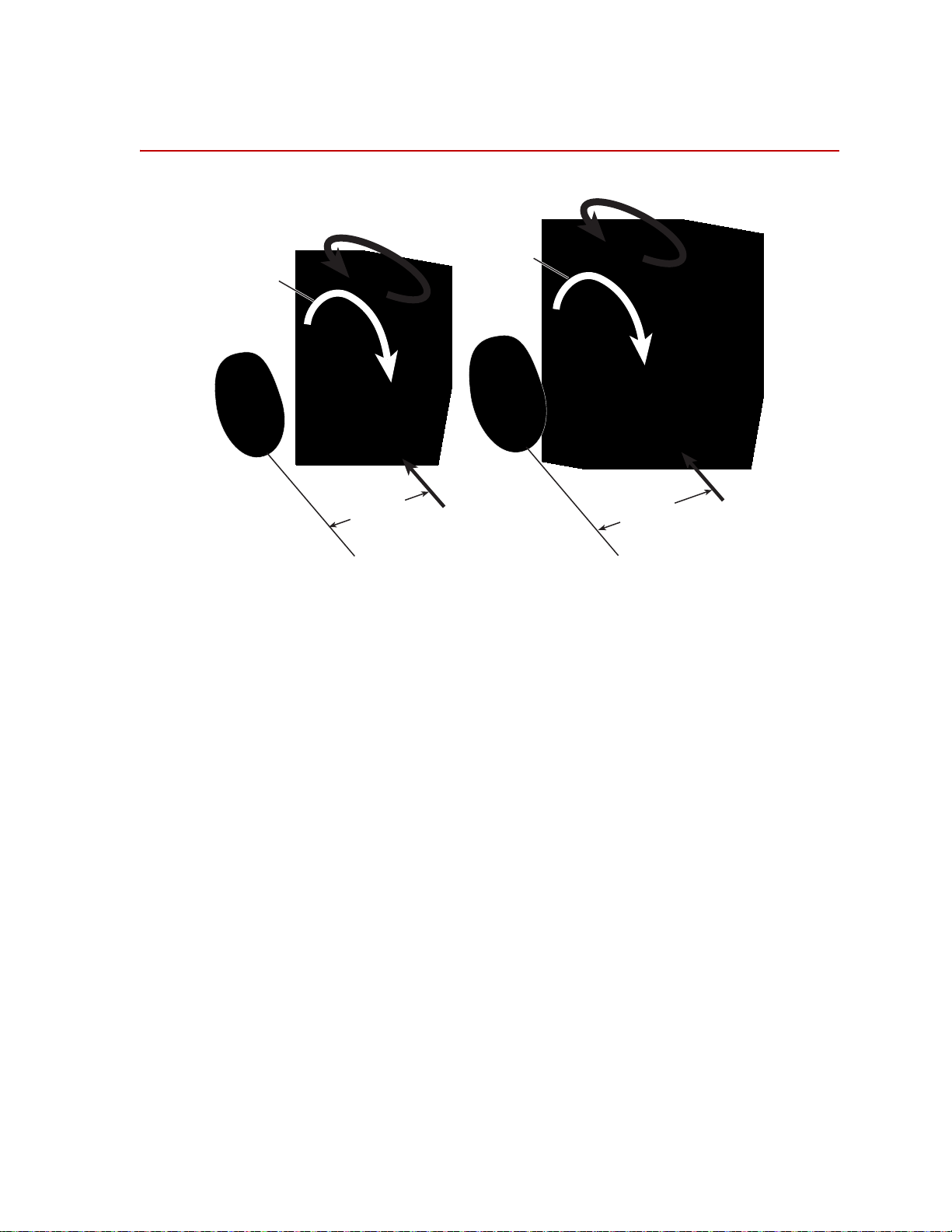
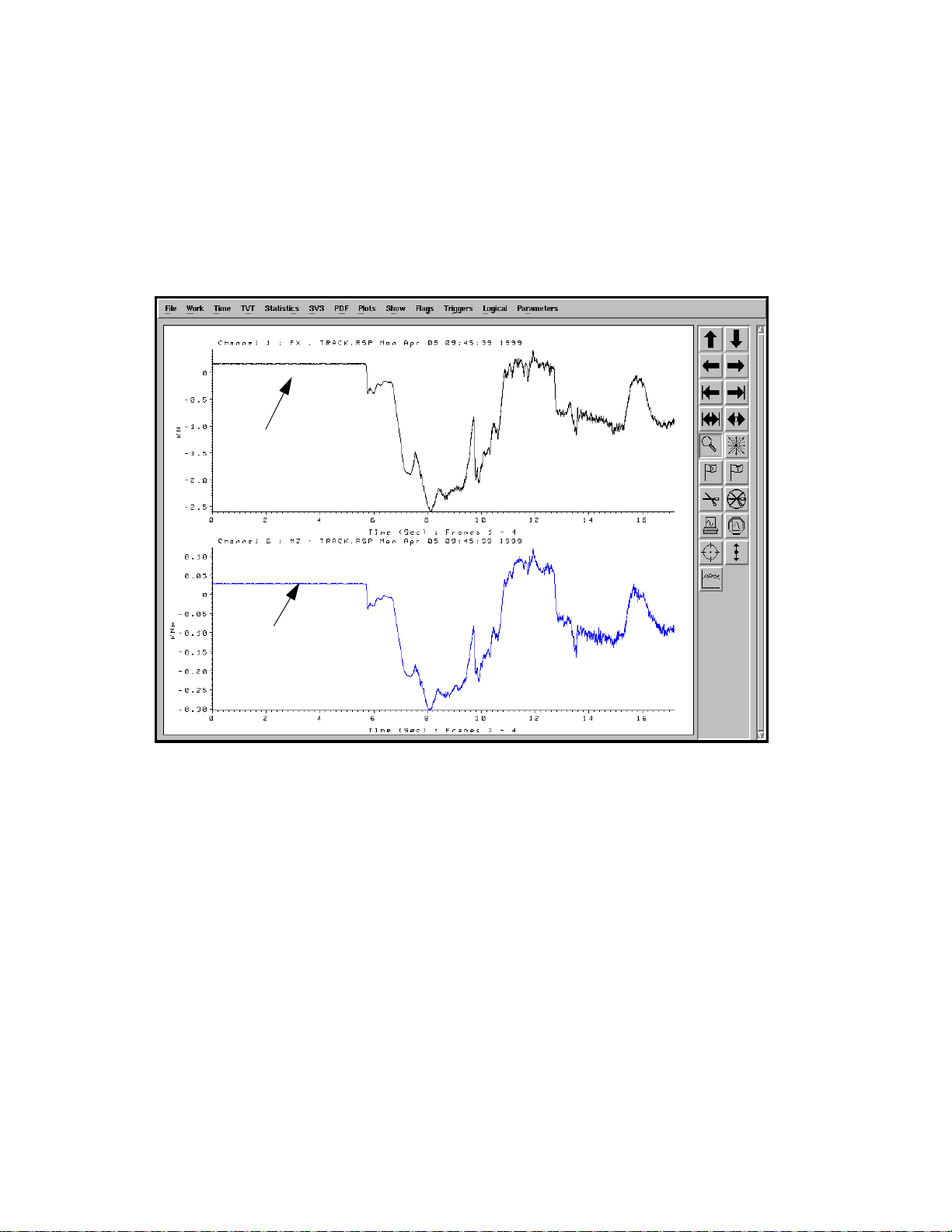
Fx Data (Longitudinal Force)
Mz+
Distance
Fx+
S50-016
Direction
of Motion
Distance
Fx+
S50-015
Mz+
Direction
of Motion
Fx Data (Longitudinal Force)
This figure shows the Fx (longitudinal force) data.
• The offset in Fx after zeroing the SWIFT sensor is due to frictional force
and rolling resistance on a flat road.
• There is a strong similarity between Fx and Mz, due to the SWIFT sensor
measurement characteristics. That is, the SWIFT sensor measures at the
transducer centerline. As a result, any Fx load results in an additional Mz
output:
Mz due to Fx loading = Fx load x Distance
SWIFT
®
45 GLP Sensors
Analyzing SWIFT Data
61
Page 62
Fx Data (Longitudinal Force)
Friction/Rolling
resistance Offset
Fx Offset=165N
Mz Offset due to
Fx=28Nm
The following figure illustrates the relationship between Fx and Mz, for this test
case, which had a 170 mm (6.7 inch) offset from the tire centerline to the SWIFT
sensor centerline:
Fx = 165 N observed
Distance = 170 mm
Mz = Fx x Distance = 165 N x 170 mm = 28 N•m
Analyzing SWIFT Data
62
SWIFT® 45 GLP Sensors
Page 63
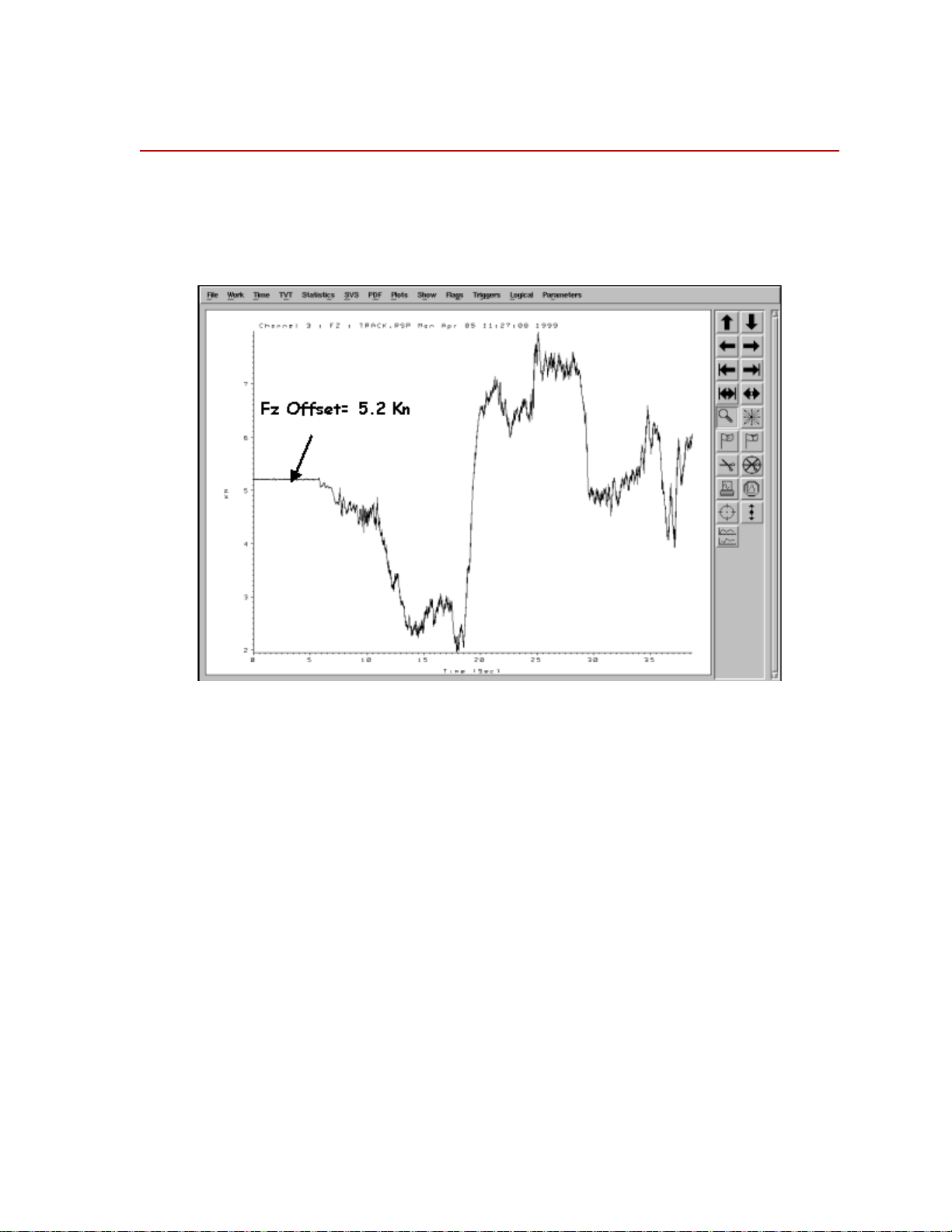
Fz Data (Vertical Force)
The offset force in the Z direction is the combined weight of the car, equipment,
and driver at that corner.
5.2 kN = 530 kg (force) = 1169 lb for this vehicle at static loading.
Fz Data (Vertical Force)
SWIFT
®
45 GLP Sensors
Analyzing SWIFT Data
63
Page 64

Mx Data (Overturning Moment)
S50-018
Fz
Distance Y
Distance Z
S50-017
Fz
Distance Z
Distance Y
Mx
Mx Data (Overturning Moment)
The moment Mx is the resultant of the forces Fz and Fy, and their respective
distances to the center of the SWIFT sensor.
After zeroing the SWIFT sensor, with the wheel off the ground, there will always
be a small moment Mx present. This is due to the offset of the tire assembly
center of gravity from the SWIFT sensor centerline.
Analyzing SWIFT Data
64
SWIFT® 45 GLP Sensors
Page 65

Mx Data (Overturning Moment)
Fy
Fz
Mx
Channel 4 Mx Data The following figure shows the relationship between Mx, Fz, and Fy, during a
cornering event. Fz decreases as the vertical force is shifted to the opposite
wheel. Fy, the lateral force, increases to prevent side slip resulting in an increase
in the overturning moment, Mx.
1
Mx = Fy x Distance Z +
Fz x Distance Y
After zeroing the SWIFT sensor with the wheel off the ground, a moment Mx
will still be present, as the following figure shows.
1. Actual polarities depend upon how the polarity for each signal is set in the TI.
(See “OutputPolarities” in, “Setting up the Transducer Interface.”)
SWIFT
®
45 GLP Sensors
Analyzing SWIFT Data
65
Page 66

Mx Data (Overturning Moment)
Fz
CG
x
Fz
CG
x
Mx offset with
the wheel off
the ground
Mx offset with
the wheel off
the ground
Mx (wheel off ground) = Fz (active weight of the tire and rim outside the
transducer) x Distance (CG to SWIFT sensor centerline)
Analyzing SWIFT Data
66
SWIFT® 45 GLP Sensors
Page 67

My Data (Brake Moment)
S50-020
My
Distance Y
Distance Z
My
Fx
Distance Z
S50-019
Fx
My
My
Distance Y
The moment My should show strong similarities with the force Fx and is
calculated by the SWIFT sensor using the distance Z.
My Data (Brake Moment)
∝ Fx x Distance Z
My
The relationship between Fx and My is shown in the following time history plot:
SWIFT
®
45 GLP Sensors
Analyzing SWIFT Data
67
Page 68

Acceleration and Braking Events Example
Acceleration and Braking Events
-2000
-1500
-1000
-500
0
500
1000
1500
2000
0 2 4 6 8 10 12 14
time in seconds
Output - Lbs
-15000
-10000
-5000
0
5000
10000
15000
Output- In-Lbs
Fx (trac t i ve force) - Lbs
Fy ( l ateral force) - Lbs
Fz (nor m a l force) - Lbs
n
My (wheel torque) - In-Lbs
Mz (aligni ng torque) -In-Lbs
Acceleration and Braking Events Example
Shown below is actual road data taken with the MTS SWIFT Sensor, located at
the front passenger side of a mid-size passenger vehicle. Data shown is postprocessed to translate the forces and moments from the center of the transducer to
the center of the tire.
Mx (overturning mom e nt) - I
The outputs from this acceleration and braking event are shown above. It should
be noted that output fluctuations are primarily due to actual road surface
irregularities.
Time 0 to 3.8 seconds: The car is at rest, with the brakes applied; no motion. The
vertical force of the vehicle on this wheel is noted as slightly over 1000 lb.
Time 3.8 to 4.3 seconds: The brake pedal is released with the transmission
engaged. Note the forces generated from the slight drive torque of the idle in this
automatic transmission vehicle.
Time 4.3 to 6 seconds: Acceleration begins and transient forces and moments
are shown.
Fx: Slightly less than 1000 lb of tractive force is reacting at the tire patch.
Fy: Minimal Fy force is noted as the steering angle is maintained roughly
straight. Slight variations are noted with steering angle and vehicle suspension
toe-in geometry effects.
Fz: The normal force is the result of weight transfer from the front wheel to the
rear of the vehicle, and the anti-squat forces present in this front wheel drive
vehicle.
Mx: The Mx output noted is corrected to give the overturning moment at the
Analyzing SWIFT Data
68
center of the tire. Minimal Mx moments are generated during these acceleration
and braking events.
My: The acceleration torque of roughly 12000 in
directly measured.
·lb acting on the vehicle is
SWIFT® 45 GLP Sensors
Page 69

Acceleration and Braking Events Example
Mz: The Mz output noted is corrected to give the aligning moment at the center
of the tire. Minimal Mz moments are generated during these straight line
acceleration and braking events.
Time 6 to 10 seconds: During the relatively steady state acceleration of the
vehicle, note the forces recorded.
Fz: Approximately 100 lb of the weight of the vehicle can be seen transferring
from each front wheel to the rear of the vehicle during steady state acceleration.
Time 10 to 13 seconds: During the braking, many of the acceleration forces and
moments described above are reversed.
SWIFT
®
45 GLP Sensors
Analyzing SWIFT Data
69
Page 70

Slalom Curve Driving Example
Slalom Curve Driving
-2000
-1500
-1000
-500
0
500
1000
1500
2000
0 2 4 6 8 10 12 14
tim e i n se conds
Output - Lbs
-8000
-6000
-4000
-2000
0
2000
4000
6000
8000
Output- In-Lbs
Fx (t ractive force) - Lbs
Fy ( l ateral force) - Lbs
Fz (normal force) - Lbs
-
My (wh eel torque) - In-L bs
Mz (ali gni ng t orque ) -In-Lbs
Slalom Curve Driving Example
Shown below is actual road data taken with the MTS SWIFT Sensor, located at
the front passenger side of a mid-size passenger vehicle. Data shown is corrected
to translate the forces and moments from the center of the transducer to the center
of the tire.
Mx (overturning mom ent ) - In
The outputs from slalom (side to side steering) curve driving can be noted in the
graph above:
Time 4 to 12 seconds shows the steering maneuvers. All other times show
straight driving on an average road surface.
Fx: The tractive force remains relatively constant since no acceleration nor
deceleration is occurring during these driving maneuvers.
Fy: The lateral force can be seen alternating from positive to negative with an
amplitude of roughly 500 lb force as the vehicle changes directions with steering
maneuvers.
Fz: The side to side weight distribution of the vehicle during these steering
maneuvers can be noted in the vertical force outputs. The stationary vertical force
of slightly over 1000 lb as noted above is seen to vary by nearly 400 lb.
Mx: The Mx output noted is corrected to give the overturning moment at the
center of the tire, primarily caused by the lateral force Fy at the rolling radius of
the tire.
My: There is little acceleration or brake torque applied during the steering
maneuvers, as noted in the My output.
Mz: The aligning moments generated from the steering maneuvers can be noted
to be in the order of 1000 in
·lb for this particular test.
Analyzing SWIFT Data
70
SWIFT® 45 GLP Sensors
Page 71

Maintenance
Overview This chapter contains scheduling guidelines and detailed instructions for
performing preventive maintenance. Preventive maintenance is a set of routine
procedures that allow you to extend the operating life of your transducer and the
transducer interface electronics. You can prevent excessive wear or possible
component failure through regular inspections and simple procedures.
The information provided in this chapter is a recommendation only. The actual
time intervals will depend on the operating conditions at your facility.
Maintenance Schedule
A
CTIVITY CUSTOMER PREVENTIVE MAINTENANCE CONTACT MTS
CALENDAR TIME AS REQUIRED 1 DAY 1 WEEK 1 MONTH 1 YEAR SUGGESTED
Clean and Inspect Transducer X
Inspect electrical cables X
Calibrate the Transducer X
Contents Transducer 72
Cables 73
SWIFT® 45 GLP Sensors
Maintenance
71
Page 72

Transducer
CAUTION
CAUTION
The transducer requires a minimum amount of maintenance.
Do not pressure-wash the transducer or clean it with solvents.
Pressure-washing the transducer or cleaning it with solvents can damage it
or degrade the silastic seal and may void the warranty.
Using strong cleaners or solvents can damage the RTV seal and may void
the warranty .
Use only a soft sponge or brush with non-metal bristles and a gentle detergent
(such as dish soap) to wash the transducer.
Do not use high-pressure air to clean debris from around the transducer
connectors.
High-pressure air can damage the silastic seals and may void the warranty.
Use a brush with fine, non-metal bristles and low air-pressure [0.07 MPa (10 psi)]
to clean debris from around the transducer connectors.
As required 1. Inspect the transducer daily and/or after each testing session for any cracks
that may indicate fatigue, or physical damage that may indicate the
transducer has struck a hard surface or object. If the buildup of debris
prevents adequate inspection, perform Steps 2 and 3 as necessary, then
repeat this step.
Do not use a transducer if you determine that there are indications of fatigue
or other damage. Contact MTS.
2. Clean the transducer of debris after each testing session.
Carefully remove any debris (such as dust or gravel) that may be on the
transducer. If necessary use low-pressure-air (see the caution above).Do not
use a screwdriver or other rigid tool to pry out the debris. Prying may
damage the transducer.
3. Hand wash the transducer after each testing session (especially if the
transducer was exposed to corrosive and abrasive materials, such as salt or
sand) with a gentle detergent, such as dish soap, and a soft sponge or brush
with non-metal bristles. Be very careful when cleaning around areas where
RTV is used to seal the transducer so as not to break the seal.
72
Maintenance
4. Inspect the label affixed to the side of the transducer. Replace the label if it
becomes loose, has been lost or is unreadable.
SWIFT® 45 GLP Sensors
Page 73

Cables
Monthly Inspect all electrical cables monthly, or after every 160 hours of operation.
Always turn off the electrical power before you disconnect, repair, or replace a
cable.
1. Check the condition of the cables for cuts, exposed wires, or other types of
damage, loose connectors, and cracked or worn cable covers. Tighten any
loose connectors. Replace any cracked or worn cables.
2. Ensure that cable connectors are securely plugged into their respective
receptacles.
3. Ensure that all cables have appropriate strain relief devices installed.
4. Protect cables from being stepped on. In the test lab, elevate and cover all
cables to protect them from exposure to spilled hydraulic fluid.
5. Ensure that all cables are supported every 1.2 m (4 ft). Cables should also be
supported near a motion joint.
6. Check that path ways of moving cables are clear of obstructions. Prevent
cables from moving or rubbing against sharp corners.
SWIFT® 45 GLP Sensors
Maintenance
73
Page 74

74
Maintenance
SWIFT® 45 GLP Sensors
Page 75
Troubleshooting
CAUTION
This chapter covers basic set-up related troubleshooting tips. Please read this
section to investigate problems that you observe. In many cases, these problems
will be setup related and can be corrected as described in this section.
Important In the event that these troubleshooting tips indicate that there is a
Do not disassemble the SWIFT sensor, Transducer Interface (TI) electronics,
and accessory components.
The SWIFT sensor, TI electronics, and accessory components are not
intended to be disassembled, other than as outl ined in this section.
Disassembling or tampering with these components may result in damage to the
sensor, loss of watertight seal, and voiding of the warranty.
component failure, or the correction tips do not correct the problem,
contact MTS.
SWIFT® 45 GLP Sensors
Troubleshooting
75
Page 76

Troubleshooting Guide (part 1 of 3)
YMPTOM POSSIBLE CAUSES SOLUTION
S
Spinning Application:
Vehicle Coordinate System
Outputs have unusual or
incorrect waveform shapes
to them.
A one-time-per-revolution
of tire signal appears while
the vehicle is driving
straight on a flat surface.
Mean level of the FZ output
is roughly equal to the
weight of the vehicle on that
corner.
A two-time-per-revolution
of tire signal is showing up
when the vehicle is driving
straight on a flat surface.
Temperature Effects: The SWIFT transducer
is temperature compensated to reduce
temperature induced errors, but any significant
changes in temperature will induce zero shifts.
In the spinning application, these bridge zero
shifts will result in a one-time-per rev
modulation error. For best results, zeroing
should occur at the conditions closest to those of
the test conditions.
Incorrect Bridge Zero: An incorrect bridge
zero, in the spinning application, will result in a
one-time-per-rev modulation error. See “Zero
Offset” earlier in this Troubleshooting Guide.
Gain settings: Verify that the TI electronics
calibration file gain settings have not been
modified. Using the TIXFER utility, upload the
current TI settings and compare them to the
original gain setting on the disk provided.
Bridge Failure: If a single bridge is failing due
to overstress, overload induced crack, and so on,
the results could appear as this type of output.
To verify that this is the cause, use the TIXFER
utility to upload the current TI settings after a
zeroing procedure, and record all bridge zeros.
Load the transducer for several cycles, without
inducing heat (drive vehicle for a few cycles but
do not use excessive brake heating). Rezero the
TI electronics. Use TIXFER to upload the new
zero values. Compare them to the previously
recorded zero values. These values should not
change by more than 0.01 to 0.03 for two zeroes
done at the same conditions, on the same
transducer. If the changes are much larger,
remove the transducer from vehicle and contact
MTS.
Troubleshooting
76
SWIFT® 45 GLP Sensors
Page 77
Troubleshooting Guide (part 2 of 3)
S
YMPTOM POSSIBLE CAUSES SOLUTION
Spinning Application:
Vehicle Coordinate System
Outputs have unusual or
incorrect waveform shapes
to them. (Continued)
A one-time-per-revolution
of tire signal appears while
the vehicle is driving
straight on a flat surface.
Mean level of the FZ output
is roughly equal to the
weight of the vehicle on that
corner.
A two-time-per-revolution
of tire signal is showing up
when the vehicle is driving
straight on a flat surface.
Temperature Effects: The SWIFT transducer
is temperature compensated to reduce
temperature induced errors, but any significant
changes in temperature will induce zero shifts.
In the spinning application, these bridge zero
shifts will result in a one-time-per rev
modulation error. For best results, zeroing
should occur at the conditions closest to those of
the test conditions.
Incorrect Bridge Zero: An incorrect bridge
zero, in the spinning application, will result in a
one-time-per-rev modulation error. See “Zero
Offset” earlier in this Troubleshooting Guide.
Gain settings: Verify that the TI electronics
calibration file gain settings have not been
modified. Using the TIXFER utility, upload the
current TI settings and compare them to the
original gain setting on the disk provided.
Bridge Failure: If a single bridge is failing due
to overstress, overload induced crack, and so on,
the results could appear as this type of output.
To verify that this is the cause, use the TIXFER
utility to upload the current TI settings after a
zeroing procedure, and record all bridge zeros.
Load the transducer for several cycles, without
inducing heat (drive vehicle for a few cycles but
do not use excessive brake heating). Rezero the
TI electronics. Use TIXFER to upload the new
zero values. Compare them to the previously
recorded zero values. These values should not
change by more than 0.01 to 0.03 for two zeroes
done at the same conditions, on the same
transducer. If the changes are much larger,
remove the transducer from vehicle and contact
MTS.
SWIFT® 45 GLP Sensors
Troubleshooting
77
Page 78
Troubleshooting Guide (part 3 of 3)
S
YMPTOM POSSIBLE CAUSES SOLUTION
Spinning Application:
Vehicle Coordinate System
Outputs have unusual or
incorrect waveform shapes
to them. (Continued)
Angular Output
A four-time-per-revolution
of tire signal is showing up
when the vehicle is driving
straight on a flat surface.
There is no angular output
while the transducer and slip
ring are spinning.
Wheel force transducers often have a
modulation error with a cyclic frequency equal
to the number of beams on the transducer. The
SWIFT transducer has four beams, and will
inherently have some level of four times per
revolution modulation. This level will vary from
±0.5% to as high as ±5% of the equivalent radial
load.
For example, a 4000 N mean level vertical Fz
load (and negligible Fx loading) will result in a
±20 N to ±200 N error on the vertical Fz and Fx
channels.
The magnitude of this modulation error is based
on the geometries and stiffnesses of the
components in the assembly.
A SWIFT 45 on a steel rim will have lower
modulation than a SWIFT 45 on a very
lightweight stainless steel rim. The trade-offs
between lower added mass, load capacity
requirements, and desired modulation should all
be considered in choosing components for the
wheel force transducer assembly.
Check that all power and signal cables are
connected, and that the antirotate device is
securely attached. The angular output should be
0 to 5 V sawtooth output per revolution of the
tire.
Check that the encoder output is present. The
angle output signal from the TI should be a 0 to
5 volt sawtooth output while the transducer is
spinning at a constant velocity.
If this signal is not present, check that the slip
ring/encoder assembly has not been damaged. If
you suspect encoder damage, swap the slip ring
assembly with a known functioning unit to
verify it. If the slip ring/encoder assembly is
damaged, call MTS or replace it with a spare
slip ring assembly.
Troubleshooting
78
SWIFT® 45 GLP Sensors
Page 79
Assembly Drawings
This chapter contains the assembly drawings and parts lists relevant to the
SWIFT 45 GLP transducers.
Contents Cable Drawings 80
SWIFT 45 GLP Mechanical Drawings 85
SWIFT® 45 GLP Sensors
Assembly Drawings
79
Page 80

Cable Drawings
Cable Drawings
ART NUMBER CABLE DESCRIPTION
P
Cable Drawings
572029-XX
572129-XX
572143-XX
100-179-353
Cable Assy - SWIFT Mini Transducer Interface
Cable Assy - SWIFT Mini TI, Power w/PT
Cable Assy - SWIFT Mini TI Power w/lug
Cable Assy - SWIFT mini TI, Monitor
Assembly Drawings
80
SWIFT® 45 GLP Sensors
Page 81

Page 82

Page 83

Page 84

Page 85
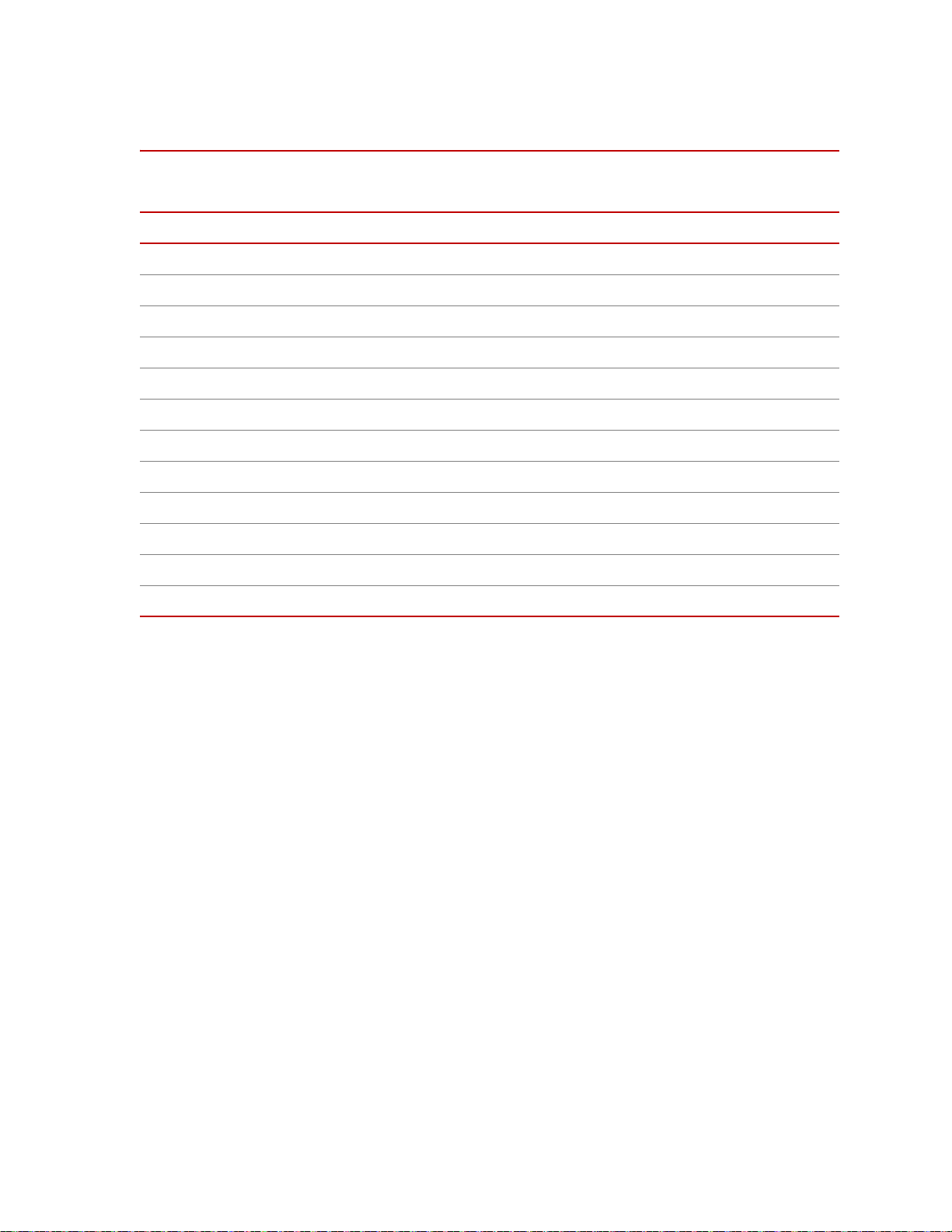
SWIFT 45 GLP Mechanical Drawings
SWIFT 45 GLP Mechanical Drawings
SWIFT 50 GLPS Mechanical Drawings
ART NUMBER PART DESCRIPTION
P
700-004-835
700-002-218
700-002-219
700-004-834
100-213-964
700-004-846
700-004-754
700-004-853
700-004-837
100-204-920
100-204-921
545211-XX
REFERENCE DIMENSION ASSY-SWIFT 45
DISK RIM (FRT) CUSTOMER DIMENSIONAL DWG.
DISK RIM (REAR) CUSTOMER DIMENSIONAL DWG
BOLT TORQUE SEQUENCE-REFERENCE, SWIFT 45
ANTI-ROTATE ASSY-CUSTOMER/USER, SWIFT 45
ANTI-ROTATE BRACKET-REFERENCE, SWIFT 45
LEVEL ASSY-REFERENCE,SWIFT 45 TRANSDUCER
EXTENSION ASSY-REFERENCE, SWIFT 45
ADAPTER-REFERENCE, HUB, INNER, SWIFT 45
PLATE-WASHER, OUTER HUB, SWIFT 45
PLATE-WASHER, INNER HUB, SWIFT 45
SCREW-MODIFIED, (SOCKET HEAD)-SW
SWIFT
®
45 GLP Sensors
Assembly Drawings
85
Page 86

Page 87

Page 88

Page 89

Page 90
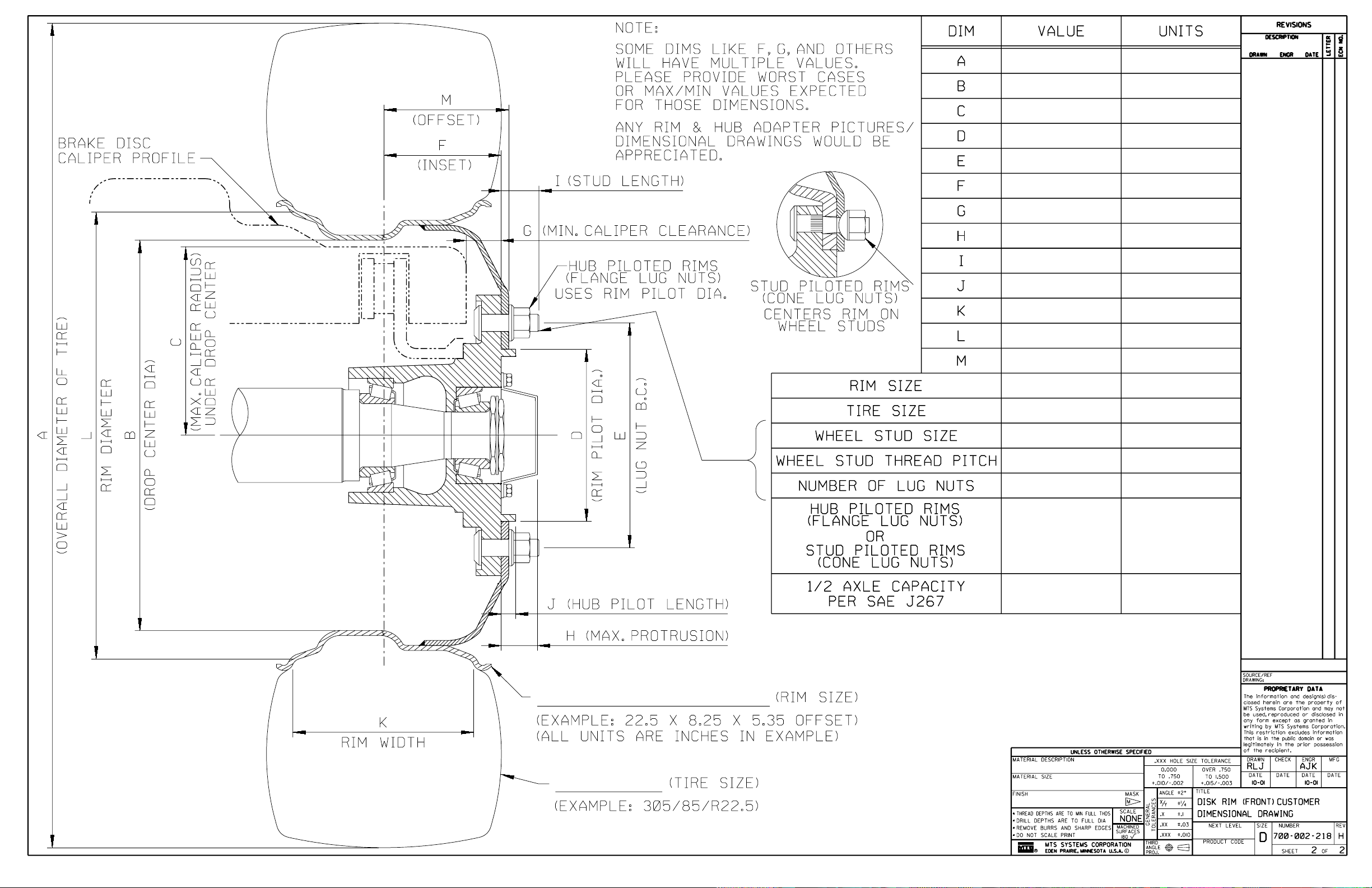
Page 91

Page 92

Page 93
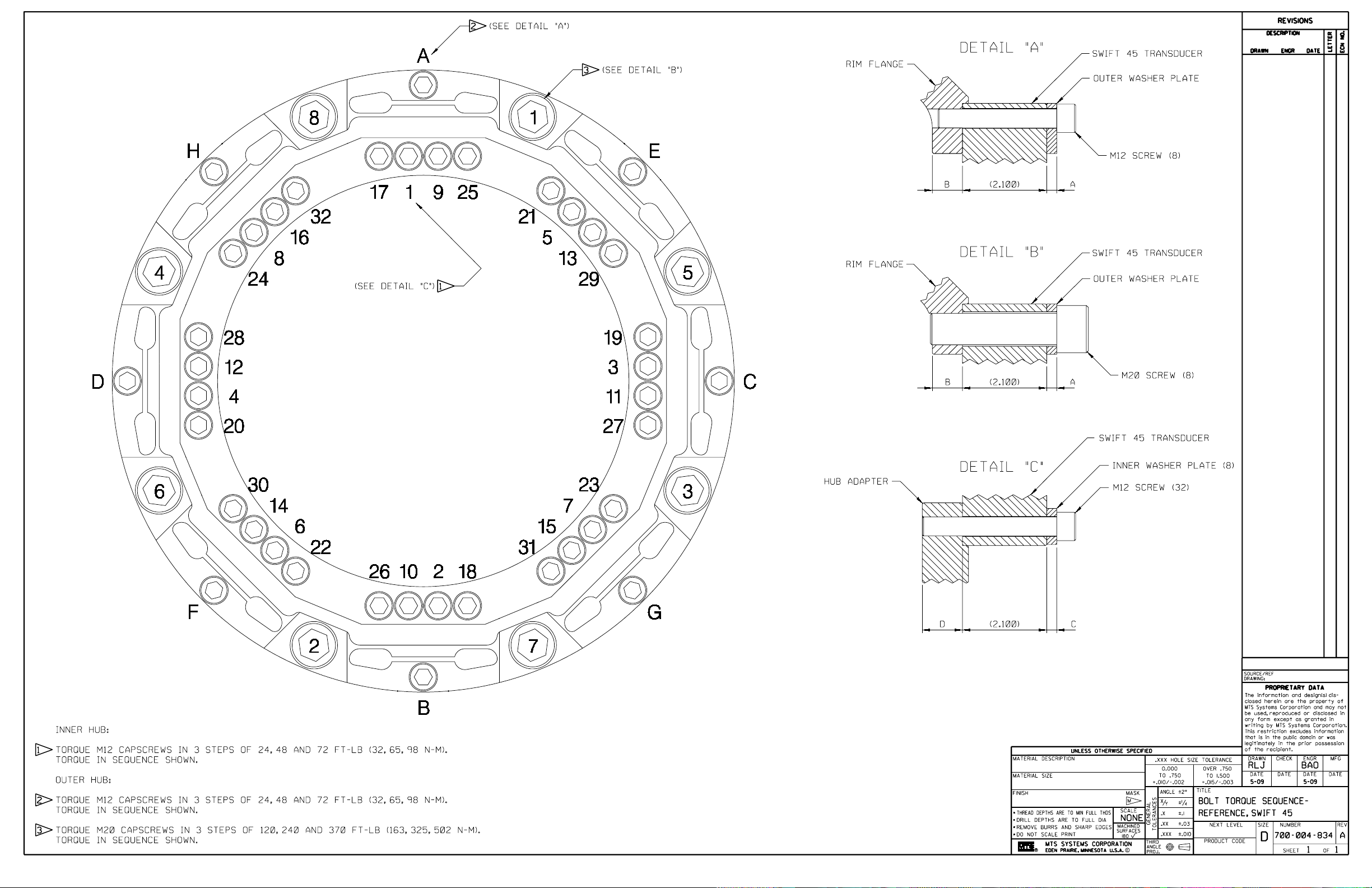
Page 94
Page 95
Page 96

Page 97

EAM 1
B
LOCATION
USE SERIAL NUMBER
S REFERENCE TO
A
LOCATE BEAM 1
REVISIONS
DESCRIPTION
ECN NO
DATE
LETTER
GR
EN
DRAWN
WITH DIGITAL LEVEL CENTERED
N SLIP RING LEVEL PLATE, THE
O
LEVEL SHOULD READ 0
BEAM 1 IS LOCATED AT VERTICAL ZERO
LEVEL BRACKET
(P/N 100-211-570)
X
X
X
X
X
X
X
WHEN
MATERIAL DESCRIPTION
-----
MATERIAL SIZE
-----
FINISH
-----
THREAD DEPTHS ARE TO MIN FULL TH DS
DRILL DEPTHS ARE TO FULL DIA
REMOVE BURRS AND SHARP EDGES
DO NOT SCALE PRINT
MTS SYSTEMS CORPORATION
m
E
UNLESS OTHERWISE SPECIFIED
DEN PRAIRIE, MINNESOTA U.S.A.
MASK
M
SCALE
1/2
MACHINED
SURFACES
180
C
.XXX HOLE SIZE TOLERANCE
0.000
TO .750
+.010/-.002
GENERAL
TOLERANCES
THIRD
ANGLE
PROJ
X
.X
.XX
.XXX
OVER .750
TO 1.500
+.015/-.003
TITLE
2ANGLE
1/4
Y
LEVEL ASSEMBLY-REFERENCE,
.1
.03
NEXT LEVEL
.010
PRODUCT CODE
SOURCE/REF
DR
HE INFORMATION AND DESIGN(S)
T
DISCLOSED HEREIN ARE CONFIDENTIAL
AND THE PROPERTY OF MTS SYSTEMS
CORPORATION AND MAY NOT BE USED,
REPRODUCED OR DISCLOSED IN ANY
FORM EXCEPT AS GRANTED IN WRITING
BY MTS SYSTEMS CORPORATION. THIS
RESTRICTION EXCLUDES INFORMATION
THAT IS IN THE PUBLIC DOMAIN OR
WAS LEGITIMATELY IN THE PRIOR
POSSESSION OF THE RECIPIENT.
DRAWN
3-26-09 -
-
-
AWING
PROPRIETARY DATA
ENGR
HECK
C
DJO
-
LJ
R
DATE
DATEDATE
3-09 -
SWIFT 45 TRANSDUCER
NUMBER
SIZE
-
-
700-004-754
D
SHEET OF
1
MFG
DATE
-
REV
A
1
Page 98

STANDOFF W/EXTERNAL
INTERNAL M12 X 1.75MM
&
1
4
THREADED ENDS (4)
SWIFT 45 TRANSDUCER
DRAWN
REVISIONS
DESCRIPTION
GR
EN
DATE
ECN NO
LETTER
TOP ADAPTER PLATE
24
12 X 1.75MM SOCKET HEAD
M
SCREW W/FLAT WASHER (8)
CONNECTOR EXTENSION LEG (4)
5 X .8MM SOCKET HEAD CAPSCREWS (8)
M
5
3
SSEMBLY NOTES:
A
ATTACH STANDOFFS TO SWIFT 45 TRANSDUCER. APPLY MOLYKOTE GN PASTE TO
1
M12 X 1.75MM THREADED STUD AND USING A 27MM SOCKET, TORQUE STANDOFF
TO 69 FT-LB (93 N-M).
ATTACH CONNECTOR EXTENSION LEGS TO TOP PLATE. ALIGN EACH LEG, SO THAT
2
THE KEYWAYS ARE ORIENTED AS SHOWN ON SHEET 2.
APPLY MOLYKOTE GN PASTE AND TORQUE M5 X .8MM SOCKET HEAD CAPSCREWS
3
TO 58 IN-LB (6.5 N-M).
ATTACH TOP PLATE TO STANDOFFS, WHILE ALSO PROPERLY ENGAGING CONNECTORS
4
TO THEIR RESPECTIVE MATING CONNECTOR ON SWIFT TRANSDUCER.
APPLY MOLYKOTE GN PASTE AND TORQUE M12 X 1.75MM SOCKET HEAD CAPSCREWS
5
TO 69 FT-LB (93 N-M).
ATTACH SLIP RING ASSEMBLY TO EXTENSION ASSY, USING M5 X .8MM SOCKET HEAD
6
CAPSCREWS, AT THE LOCATIONS SHOWN ON SHEET 2.
2
-
-
AWING
PROPRIETARY DATA
ENGR
HECK
C
BAO
-
RLJ
SIZE
D
DATE
DATEDATE
6-09 -
NUMBER
700-004-853
SHEET OF
1
MFG
DATE
-
REV
A
2
MATERIAL DESCRIPTION
-----
MATERIAL SIZE
-----
FINISH
-----
THREAD DEPTHS ARE TO MIN FULL TH DS
DRILL DEPTHS ARE TO FULL DIA
REMOVE BURRS AND SHARP EDGES
DO NOT SCALE PRINT
MTS SYSTEMS CORPORATION
m
E
UNLESS OTHERWISE SPECIFIED
DEN PRAIRIE, MINNESOTA U.S.A.
MASK
M
SCALE
NONE
MACHINED
SURFACES
180
C
.XXX HOLE SIZE TOLERANCE
0.000
TO .750
+.010/-.002
GENERAL
TOLERANCES
THIRD
ANGLE
PROJ
X
.X
.XX
.XXX
OVER .750
TO 1.500
+.015/-.003
TITLE
2ANGLE
1/4
Y
.1
.03
NEXT LEVEL
.010
PRODUCT CODE
SOURCE/REF
DR
HE INFORMATION AND DESIGN(S)
T
DISCLOSED HEREIN ARE CONFIDENTIAL
AND THE PROPERTY OF MTS SYSTEMS
CORPORATION AND MAY NOT BE USED,
REPRODUCED OR DISCLOSED IN ANY
FORM EXCEPT AS GRANTED IN WRITING
BY MTS SYSTEMS CORPORATION. THIS
RESTRICTION EXCLUDES INFORMATION
THAT IS IN THE PUBLIC DOMAIN OR
WAS LEGITIMATELY IN THE PRIOR
POSSESSION OF THE RECIPIENT.
DRAWN
6-1-09 -
EXT ASSY-REFERENCE,
UST/USER, SWIFT 45
C
-
-
Page 99

WIDE KEYWAY
2
WIDE KEYWAY
2
M5 X .8MM HOLE (8),
OR ATTACHMENT OF
F
SLIP RING ASSEMBLY
REVISIONS
DESCRIPTION
ECN NO
DRAWN
GR
EN
DATE
LETTER
6
WIDE KEYWAY
2
WIDE KEYWAY
2
MATERIAL DESCRIPTION
-----
MATERIAL SIZE
--
---
FINISH
-----
THREAD DEPTHS ARE TO MIN FULL TH DS
DRILL DEPTHS ARE TO FULL DIA
REMOVE BURRS AND SHARP EDGES
DO NOT SCALE PRINT
MTS SYSTEMS CORPORATION
m
E
DEN PRAIRIE, MINNESOTA U.S.A.
UNLESS OTHERWISE SPECIFIED
MASK
M
SCALE
NONE
MACHINED
SURFACES
180
THIRD
ANGLE
C
PROJ
.XXX HOLE SIZE TOLERANCE
0.000
TO .750
+.010/-.002
GENERAL
TOLERANCES
X
.X
.XX
.XXX
OVER .750
TO 1.500
+.015/-.003
TITLE
2ANGLE
1/4
Y
.1
.03
NEXT LEVEL
.010
PRODUCT CODE
SOURCE/REF
DR
HE INFORMATION AND DESIGN(S)
T
DISCLOSED HEREIN ARE CONFIDENTIAL
AND THE PROPERTY OF MTS SYSTEMS
CORPORATION AND MAY NOT BE USED,
REPRODUCED OR DISCLOSED IN ANY
FORM EXCEPT AS GRANTED IN WRITING
BY MTS SYSTEMS CORPORATION. THIS
RESTRICTION EXCLUDES INFORMATION
THAT IS IN THE PUBLIC DOMAIN OR
WAS LEGITIMATELY IN THE PRIOR
POSSESSION OF THE RECIPIENT.
DRAWN
6-1-09 -
EXT ASSY-REFERENCE,
CUST/USER, SWIFT 45
-
-
-
-
AWING
PROPRIETARY DATA
ENGR
HECK
RLJ
C
SIZE
D
AO
B
-
DATE
DATEDATE
6-09 -
NUMBER
700-004-853
SHEET OF
2
MFG
DATE
-
REV
1
2
Page 100

 Loading...
Loading...