

Page 1

EDSMF2192IB
.K:ö
Ä.K:öä
L−force Communication
Communication Manual
EtherCAT®
EMF2192IB
Communication module
Page 2

Contentsi
1 About this documentation 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Document history 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Conventions used 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Terminology used 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Notes used 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Safety instructions 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 General safety information 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Device− and application−specific safety instructions 11 . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Residual hazards 11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Product description 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Application as directed 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Identification 13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Product features 14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Connections and interfaces 15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Technical data 16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 General data and operating conditions 16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Protective insulation 17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Communication time 18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Dimensions 19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Installation 20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Mechanical installation 21 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Electrical installation 22 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1 Wiring according to EMC (CE−typical drive system) 22 . . . . . . . . . . . . . . . . .
5.2.2 Network topology 23 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.3 EtherCAT connection 24 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.4 Specification of the Ethernet cable 25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.5 Voltage supply 27 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.6 Synchronisation of the standard device 29 . . . . . . . . . . . . . . . . . . . . . . . . .
2
EDSMF2192IB EN 3.1
Page 3

Contents i
6 Commissioning 30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Before switching on 30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Configuring the host system (master) 31 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.1 Installing device description files 31 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.2 Automatic device detection 31 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.3 Configuring process data 32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.4 Defining the cycle time 32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.5 Address allocation 32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.6 Specifying the station alias 32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Synchronisation with "Distributed clocks" (DC) 33 . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1 Preparation / installation 34 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.2 DC configuration in the master 34 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.3 DC configuration in the standard device (slave) 34 . . . . . . . . . . . . . . . . . . . .
6.3.4 Behaviour of the Lenze EtherCAT nodes during start−up 35 . . . . . . . . . . . .
6.4 Initial switch−on 36 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Data transfer 37 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1 EtherCAT frame structure 38 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 EtherCAT datagrams 39 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3 EtherCAT state machine 40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Process data transfer 41 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9 Parameter data transfer 42 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1 Connection establishment between master and slave 42 . . . . . . . . . . . . . . . . . . . . . .
9.2 Reading and writing parameters 43 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.1 Reading parameters (expedited upload) 44 . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.2 Writing parameters (expedited download) 48 . . . . . . . . . . . . . . . . . . . . . . .
9.3 SDO abort codes 52 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10 Diagnostics 53 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.1 LED status displays 53 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.2 Emergency requests / emergency messages 54 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11 Appendix 55 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.1 Implemented CoE objects 55 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.2 Codes 57 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.3 Product codes of the Lenze standard devices 61 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12 Index 62 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
EDSMF2192IB EN 3.1
3
Page 4

About this documentation1
0Fig. 0Tab. 0
1 About this documentation
Contents
This documentation only contains descriptions for the EMF2192IB communication
module (EtherCAT).
Note!
This documentation supplements the mounting instructions supplied with the
communication module and the documentations for the standard devices
used.
The mounting instructions contain safety instructions which must be
observed!
The features and functions of the communication module are described in detail.
Examples illustrate typical applications.
Furthermore this documentation contains the following:
ƒ Safety instructions that must be observed.
ƒ Key technical data relating to the communication module
ƒ Information on versions of Lenze standard devices to be used.
ƒ Notes on troubleshooting and fault elimination
The theoretical correlations are only explained in so far as they are necessary for
comprehending the function of the communication module.
This documentation does not describe the software of an original equipment
manufacturer. No responsibility is taken for corresponding information given in this
manual. Information on how to use the software can be obtained from the documents of
the host system (master).
All brand names mentioned in this manual are trademarks of their respective companies.
Tip!
Detailed information on EtherCAT can be found on the website of the
EtherCAT Technology Group:
http://www.EtherCAT.org
4
EDSMF2192IB EN 3.1
Page 5

About this documentation 1
Target group
This documentation is intended for all persons who plan, install, commission and maintain
the networking and remote service of a machine.
Tip!
Information and auxiliary devices related to the Lenze products can be found
in the download area at
http://www.Lenze.com
Validity information
The information given in this documentation is valid for the following devices:
Extension module Type designation From hardware version
EtherCAT communication
module
EMF2192IB VA 1.0
upwards
From software version
upwards
EDSMF2192IB EN 3.1
5
Page 6

1
1.1 Document history
About this documentation
Document history
Version Description
1.0 10/2009 TD17 First edition
2.0 09/2010 TD14 General revision
3.0 06/2011 TD17 General revision
3.1 11/2012 TD17 EtherCAT® is a registered trademark by Beckhoff Automation GmbH,
Your opinion is important to us!
These instructions were created to the best of our knowledge and belief to give you the
best possible support for handling our product.
If you have suggestions for improvement, please e−mail us to:
feedback−docu@Lenze.de
Thank you for your support.
Germany.
Your Lenze documentation team
6
EDSMF2192IB EN 3.1
Page 7

1.2 Conventions used
This documentation uses the following conventions to distinguish between different
types of information:
Type of information Identification Examples/notes
Spelling of numbers
Decimal separator
Decimal Standard notation For example: 1234
Hexadecimal 0x[0 ... 9, A ... F] For example: 0x60F4
Binary
l Nibble
Text
Program name » « PC software
Icons
Page reference Reference to another page with additional
About this documentation
Conventions used
Point In general, the decimal point is used.
For instance: 1234.56
In quotation marks
Point
For example: ´100´
For example: ´0110.0100´
For example: »Engineer«, »Global Drive
Control« (GDC)
information
For instance: 16 = see page 16
1
EDSMF2192IB EN 3.1
7
Page 8
1
About this documentation
Terminology used
1.3 Terminology used
Term Meaning
EtherCAT® EtherCAT® is a real−time capable Ethernet system with top performance.
Standard device
Controller
»Global Drive Control« /
»GDC«
»Engineer«
»PLC Designer«
»TwinCAT« EtherCAT configuration software by Beckhoff Automation GmbH, Germany
Code Parameter used for controller parameterisation or monitoring. The term is usually
Subcode If a code contains several parameters, the individual parameters are stored under
Lenze setting
Basic setting
HW Hardware
SW Software
ESI EtherCAT Slave Information (device description file in XML format)
CoE CANopen over EtherCAT
I−1600.20 CoE index (hexadecimal representation)
DC "Distributed clocks" for EtherCAT synchronisation
PDO Process data object
SDO Service data object
"Hot connect" This feature enables the slave nodes to be coupled/decoupled during operation.
EtherCAT® is a registered trademark and patented technology, licensed by Beckhoff
Automation GmbH, Germany.
Lenze controllers with which the communication module can be used.
12
Lenze PC software which supports you in "engineering" (parameterisation, diagnostics
and configuration) throughout the whole life cycle, i.e. from planning to maintenance
of the commissioned machine.
called "index".
"subcodes".
This manual uses a slash "/" as a separator between code and subcode (e.g. "C118/3").
The term is usually called "subindex".
This setting is the default factory setting of the device.
l In the example: Index 0x1600, subindex 0x20
8
EDSMF2192IB EN 3.1
Page 9

1.4 Notes used
The following pictographs and signal words are used in this documentation to indicate
dangers and important information:
Safety instructions
Structure of safety instructions:
Danger!
(characterises the type and severity of danger)
Note
(describes the danger and gives information about how to prevent dangerous
situations)
Pictograph and signal word Meaning
Danger!
Danger!
Stop!
About this documentation
Notes used
Danger of personal injury through dangerous electrical voltage.
Reference to an imminent danger that may result in death or
serious personal injury if the corresponding measures are not
taken.
Danger of personal injury through a general source of danger.
Reference to an imminent danger that may result in death or
serious personal injury if the corresponding measures are not
taken.
Danger of property damage.
Reference to a possible danger that may result in property
damage if the corresponding measures are not taken.
1
Application notes
Pictograph and signal word Meaning
Note!
Tip!
Important note to ensure troublefree operation
Useful tip for simple handling
Reference to another documentation
EDSMF2192IB EN 3.1
9
Page 10

2
Safety instructions
General safety information
2 Safety instructions
Note!
It is absolutely vital that the stated safety measures are implemented in order
to prevent serious injury to persons and damage to material assets.
Always keep this documentation to hand in the vicinity of the product during
operation.
2.1 General safety information
Danger!
Disregarding the following basic safety measures may lead to severe personal
injury and damage to material assets!
ƒ Lenze drive and automation components ...
... must only be used for the intended purpose.
... must never be operated if damaged.
... must never be subjected to technical modifications.
... must never be operated unless completely assembled.
... must never be operated without the covers/guards.
... can − depending on their degree of protection − have live, movable or rotating parts
during or after operation. Surfaces can be hot.
ƒ For Lenze drive components ...
... only use permitted accessories.
... only use original manufacturer spare parts.
ƒ All specifications of the corresponding enclosed documentation must be observed.
This is vital for a safe and trouble−free operation and for achieving the specified product
features.
The procedural notes and circuit details provided in this document are proposals which
the user must check for suitability for his application. The manufacturer does not
accept any liability for the suitability of the specified procedures and circuit proposals.
ƒ Only qualified skilled personnel are permitted to work with or on Lenze drive and
automation components.
According to IEC 60364 or CENELEC HD 384, these are persons ...
... who are familiar with the installation, assembly, commissioning and operation of
the product,
... possess the appropriate qualifications for their work,
... and are acquainted with and can apply all the accident prevent regulations, directives
and laws applicable at the place of use.
10
EDSMF2192IB EN 3.1
Page 11

Device− and application−specific safety instructions
2.2 Device− and application−specific safety instructions
ƒ During operation, the communication module must be securely connected to the
standard device.
ƒ With external voltage supply, always use a separate power supply unit, safely
separated in accordance with EN 61800−5−1 in every control cabinet ("SELV" /
"PELV").
ƒ Only use cables that comply with the given specifications ( 25).
Documentation for the standard device, control system, system/machine
All the other measures prescribed in this documentation must also be
implemented. Observe the safety instructions and application notes stated in
this manual.
2.3 Residual hazards
Safety instructions
2
Protection of persons
ƒ If the controllers are used on a phase earthed mains with a rated mains voltage
³ 400 V, protection against accidental contact is not ensured without implementing
external measures. (See chapter "4.2", 17)
Device protection
ƒ The module contains electronic components that can be damaged or destroyed by
electrostatic discharge.
EDSMF2192IB EN 3.1
11
Page 12
3
Product description
Application as directed
3 Product description
3.1 Application as directed
The communication module ...
ƒ is a device intended for use in industrial power systems.
ƒ is only to be used in EtherCAT networks.
ƒ can be used in connection with the following standard devices (nameplate data):
Device type Design
82EVxxxxxBxxxXX ³ Vx ³ 1x 8200 vector
82CVxxxxxBxxxXX ³ Vx ³ 1x 8200 vector, cold plate
82DVxxxKxBxxxXX ³ Vx ³ 1x 8200 vector, thermally
EPL 10200 E ³ 1x ³ 1x Drive PLC
33.93xx xE. ³ 2x ³ 1x Vxxx 9321 − 9332 vector
33.938X xE. ³ 1x ³ 0x 9381 − 9383 vector
33.93xx xC. ³ 2x ³ 1x Vxxx 9321 − 9332, vector with cold
33.93xx EI / ET ³ 2x ³ 1x Vxxx 9300 Servo PLC
33.93xx CI / CT ³ 2x ³ 1x Vxxx 9300 Servo PLC, cold plate
ECSxSxxxx4xxxxXX ³ 1A ³ 7.0 ECSxS "Speed & Torque"
ECSxPxxxx4xxxxXX ³ 1A ³ 7.0 ECSxP "Posi & Shaft"
ECSxMxxxx4xxxxXX ³ 1A ³ 7.0 ECSxM "Motion"
ECSxAxxxx4xxxxXX ³ 1A ³ 7.0 ECSxA "Application"
ECSxExxxx4xxxxXX ³ VA ³ 5.0 ECSxE power supply module
1) Operating system software versions of the controllers
Version
HW SW
Variant Explanation
1)
separated
plate design
Any other use shall be deemed inappropriate!
12
EDSMF2192IB EN 3.1
Page 13
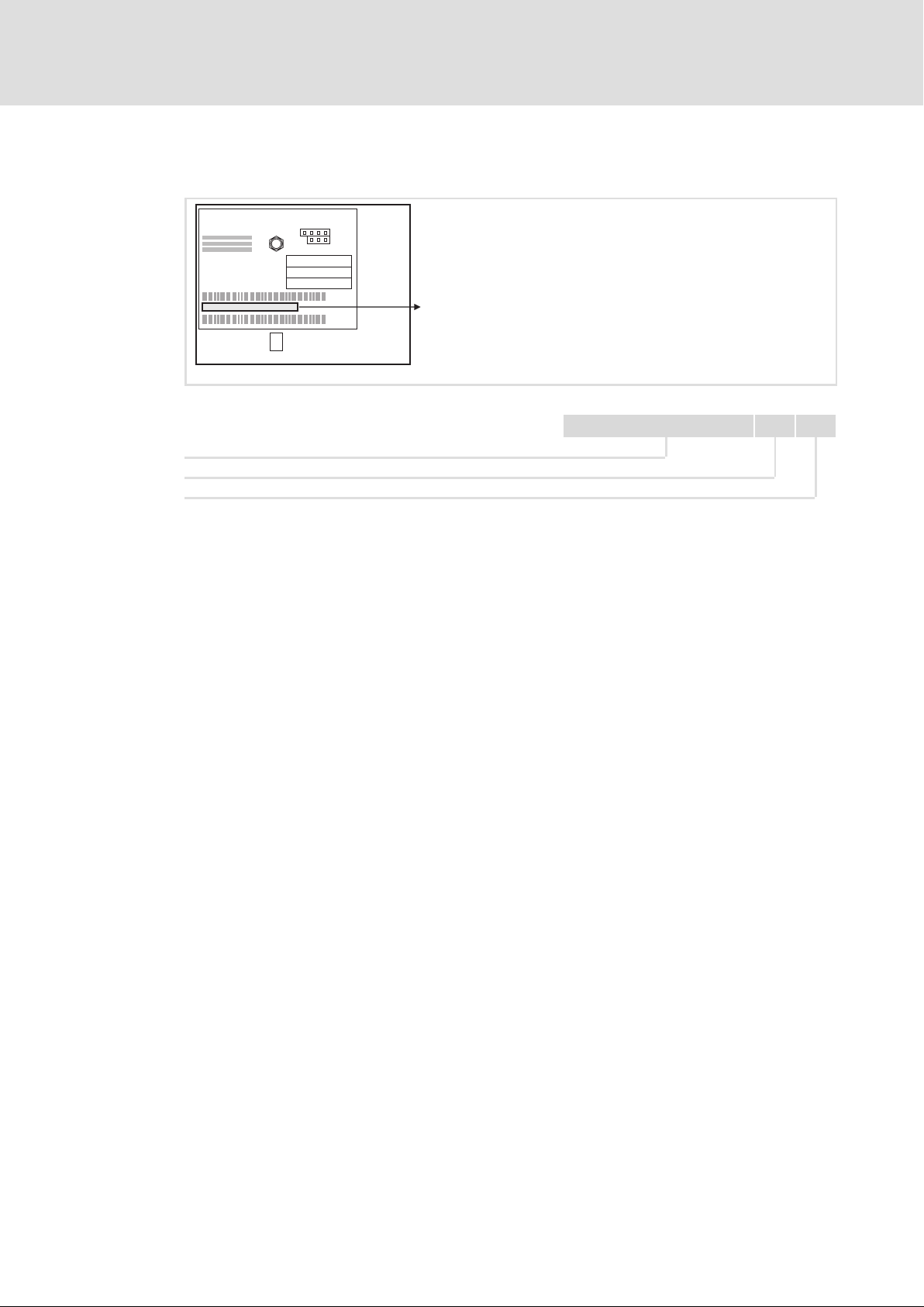
3.2 Identification
L
Type
Id.-No.
Prod.-No.
Product description
Identification
3
E82AF000P0B201XX
Type code 33.2192IB VA 1.0
Device series
Hardware version
Software version
2192ECAT013
EDSMF2192IB EN 3.1
13
Page 14

3
Product description
Product features
3.3 Product features
ƒ Interface module for the EtherCAT communication system to the AIF slots of the
Lenze device series 8200 vector, 9300, and ECS ( 12)
ƒ Support of the EtherCAT slave functionality
ƒ External 24V supply for maintaining the EtherCAT network if the standard device
fails
ƒ Support of the "Distributed clocks" (DC) functionality for synchronisation via the
fieldbus
ƒ PDO transfer with CoE (CANopen over EtherCAT)
ƒ Access to all Lenze parameters with CoE (CANopen over EtherCAT)
Front panel connector elements
ƒ Two sockets (RJ45) for the connection to EtherCAT
ƒ 2−pin plug connector for the external supply of the communication module
ƒ 3−pin plug connector (electrically isolated) for the synchronisation of the standard
device
Front panel LED status displays
ƒ Voltage supply of the communication module
ƒ Connection from the communication module to the EtherCAT bus system
ƒ Connection from the communication module to the standard device
ƒ Bus state according to EtherCAT specification
14
EDSMF2192IB EN 3.1
Page 15

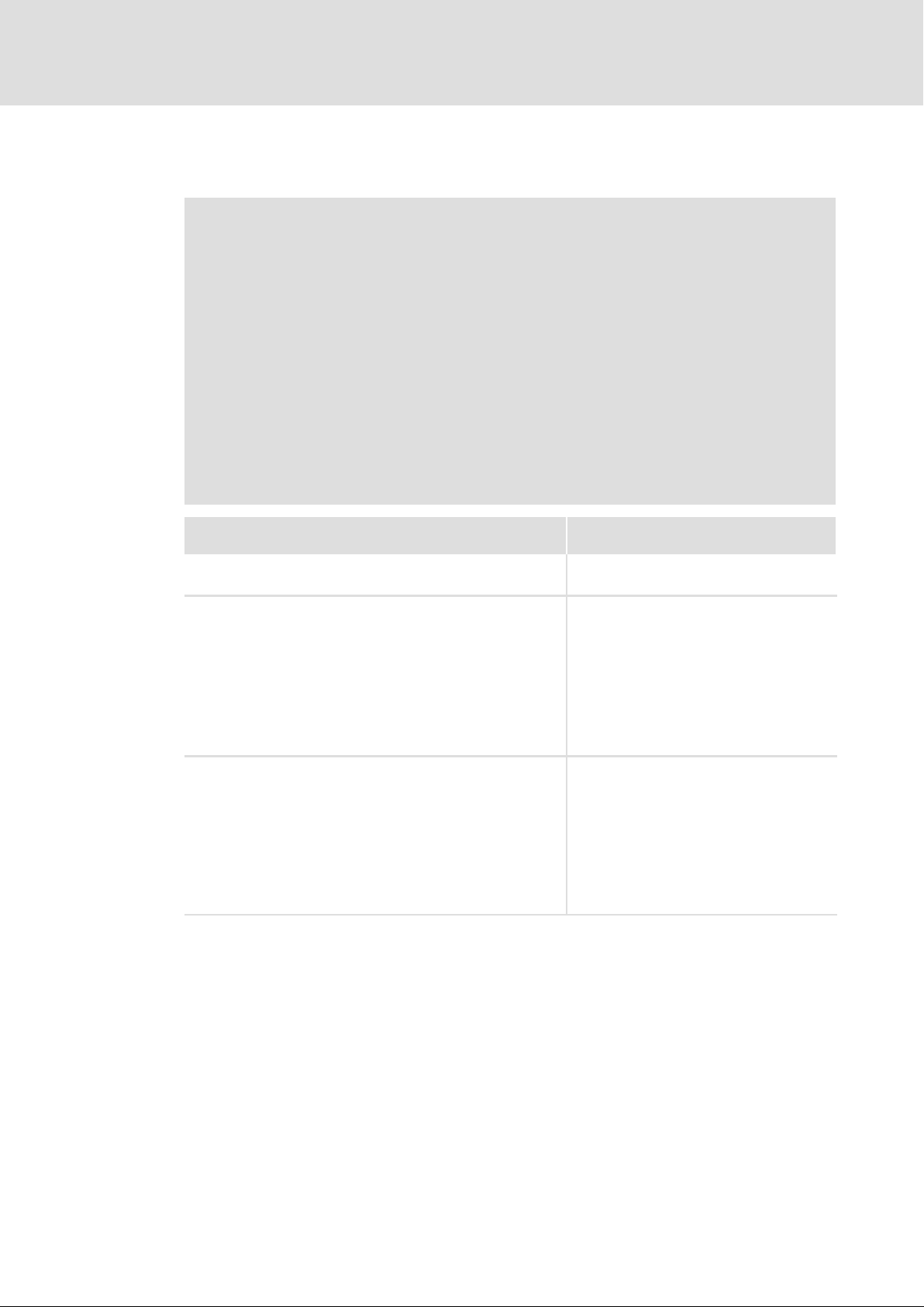
3.4 Connections and interfaces
Fig. 3−1 EMF2192IB (EtherCAT) communication module
Legend for the illustration
Pos. Description
...
LED status displays
53
Connection to the external voltage supply (24 V) of the communication module
l Plug connector with screw connection, 2−pin
27
Connection to EtherCAT synchronisation
l Plug connector with screw connection, 3−pin
29
EtherCAT output (OUT)
l RJ45 socket in accordance with IEC 60603−7
24
EtherCAT input (IN)
l RJ45 socket in accordance with IEC 60603−7
24
Nameplate
13
Product description
Connections and interfaces
3
2192ECAT001B
EDSMF2192IB EN 3.1
15
Page 16

4
Technical data
General data and operating conditions
4 Technical data
4.1 General data and operating conditions
Area Values
Order designation EMF2192IB
Communication profile EtherCAT
Supported device profile and
mailbox protocol
Communication medium S/FTP (Screened Foiled Twisted Pair, ISO/IEC 11801 or EN 50173), CAT 5e
Interface for communication RJ45, standard Ethernet (acc. to IEEE 802.3), 100Base−TX (Fast Ethernet)
Network topology Line, switch
Node type EtherCAT slave
Number of nodes max. 65535 (in the entire network)
Cable length between two
EtherCAT nodes
Cycle times 1 ms or an integer multiple of 1 ms,
Vendor−ID 0x3B
Product−ID depending on the standard device used
Revision−ID depending on the main software version of the EtherCAT module
Baud rate 100 Mbps, full duplex
Voltage supply
Conformities, approvals
CANopen over EtherCAT (CoE)
max. 100 m (typical)
max. 15 ms when "Distributed clocks" (DC) are used
External supply via separate external power supply unit
l Terminal "+": U = 24VDC(20.4 V − 0%... 28.8 V+ 0%)
l Terminal "−": Reference potential for external voltage supply
CE
I = 140 mA
Documentation for Lenze series of devices 8200 vector, 9300 and ECS
Here you can find the ambient conditions and the electromagnetic
compatibility (EMC) specifications applying to the communication module.
16
EDSMF2192IB EN 3.1
Page 17
4.2 Protective insulation
Danger!
Dangerous electrical voltage
If Lenze controllers are used on a phase earthed mains with a rated mains
voltage ³ 400 V, protection against accidental contact is not ensured without
implementing external measures.
Possible consequences:
ƒ Death or serious injury
Protective measures:
ƒ If protection against accidental contact is required for the control terminals
of the controller and the connections of the plugged device modules, ...
– a double isolating distance must exist.
– the components to be connected must be provided with the second
isolating distance.
Technical data
Protective insulation
4
Insulation between bus and ... Type of insulation
(in accordance with EN 61800−5−1)
l Earth reference / PE Functional insulation
l With external supply Functional insulation
l Power stage
– 8200 vector Reinforced insulation
– 9300 servo inverter Reinforced insulation
– 93xx servo position controller Reinforced insulation
– 93xx servo register control Reinforced insulation
– 93xx servo cam profiler Reinforced insulation
– 9300 vector / Servo PLC Reinforced insulation
– ECS devices Reinforced insulation
l Control terminals
– 8200 vector Functional insulation
– 9300 servo inverter Basic insulation
– 93xx servo position controller Basic insulation
– 93xx servo register control Basic insulation
– 93xx servo cam profiler Basic insulation
– 9300 vector / Servo PLC Basic insulation
– ECS devices Basic insulation
EDSMF2192IB EN 3.1
17
Page 18

4
Technical data
Communication time
4.3 Communication time
Processing times in the controller
The parameter data and process data are independent of each other.
Processing times Parameter data Process data
Processing time within the
controller
Additional times outside
the controller
l Approx. 30 ms + a tolerance of 20 ms
for parameters within the controller
l In the case of some codes the
processing time can be longer. (See
documentation for the controller)
l In the case of ECS devices the
processing time depends on the
application loaded (duration of the
system task).
l Communication transmission times
l Communication processing times of the transmitting node
l Time for 8200 vector: approx. 3 ms +
tolerance of 2 ms
l Time for devices of the 9300 series:
approx. 2 ms + tolerance of 1 ms
(depending on the basic cycle time in
each case)
l Time for ECS devices:
– In synchronous operation a
minimum of 1 ms (AIF
communication) or according to
the fastest task
– Otherwise 1 ms + task cycle time
l A synchronisation depends on the
controller used ( 61) and has to be
configured accordingly ( 33 et
seqq.).
18
EDSMF2192IB EN 3.1
Page 19
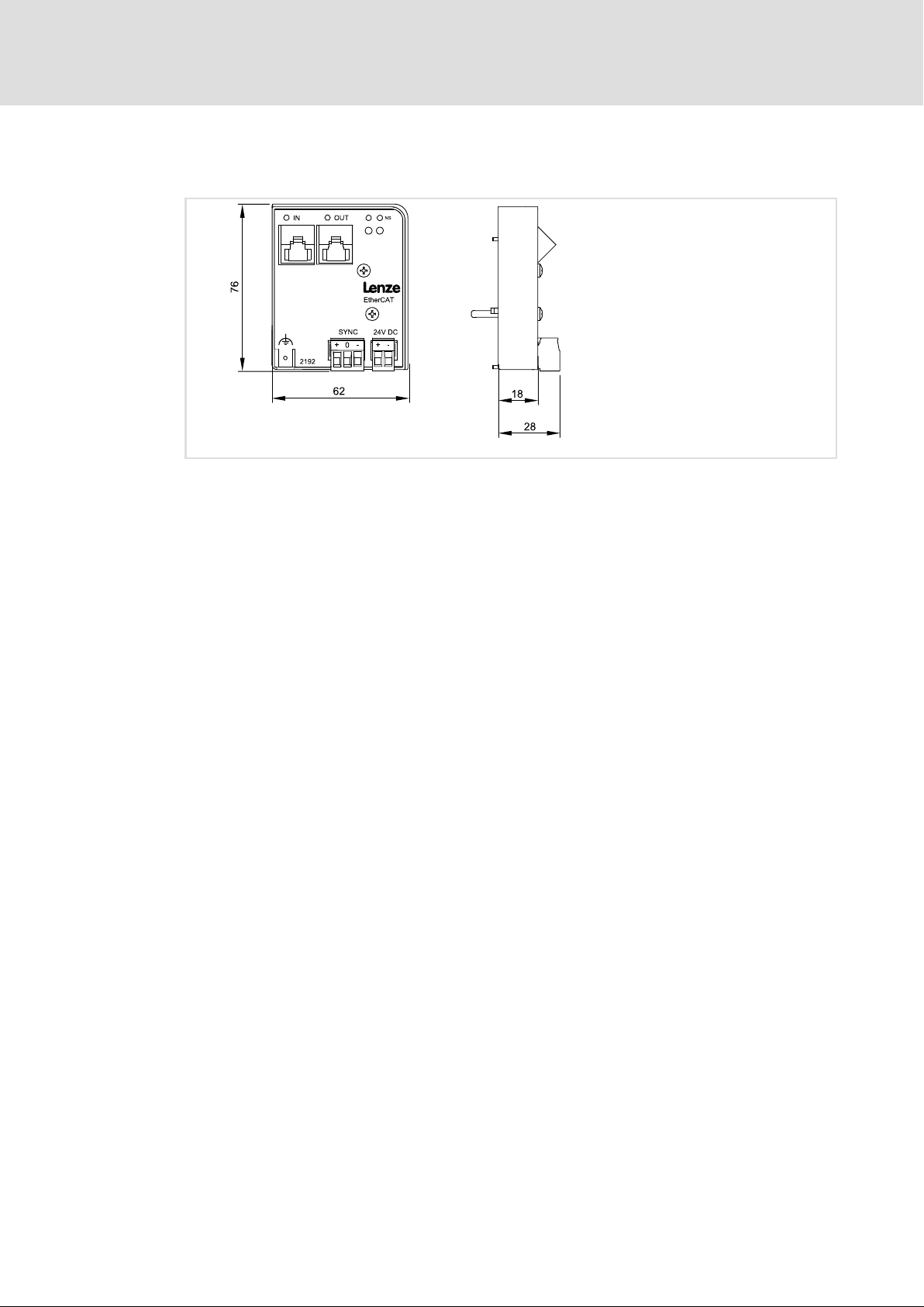
4.4 Dimensions
All dimensions in mm
Technical data
Dimensions
4
2192ECAT001B
EDSMF2192IB EN 3.1
19
Page 20

Installation5
5 Installation
Danger!
Inappropriate handling of the communication module and the standard device
can cause serious personal injury and material damage.
Observe the safety instructions and residual hazards described in the
documentation for the standard device.
Stop!
The device contains components that can be destroyed by electrostatic
discharge!
Before working on the device, the personnel must ensure that they are free of
electrostatic charge by using appropriate measures.
20
EDSMF2192IB EN 3.1
Page 21

5.1 Mechanical installation
Fig. 5−1 Attaching the communication module
ƒ Plug the communication module onto the standard device (here: 8200 vector).
ƒ Tighten the communication module to the standard device using the fixing screw in
order to ensure a good PE connection.
Installation
Mechanical installation
5
2102LEC014
Note!
For the internal supply of the communication module by the 8200 vector
frequency inverter the jumper has to be adjusted within the interface opening
(see illustration above).
Observe the notes ( 27).
EDSMF2192IB EN 3.1
21
Page 22

5
5.2 Electrical installation
5.2.1 Wiring according to EMC (CE−typical drive system)
Installation
Electrical installation
Wiring according to EMC (CE−typical drive system)
For wiring according to EMC requirements observe the following points:
Note!
ƒ Separate control cables/data lines from motor cables.
ƒ Connect the shields of control cables/data lines at both ends in the case of
digital signals.
ƒ Use an equalizing conductor with a cross−section of at least 16mm
(reference:PE) to avoid potential differences between the bus nodes.
ƒ Observe the other notes concerning EMC−compliant wiring given in the
documentation for the standard device.
Wiring procedure
2
1. Comply with bus topology, thus do not use stubs.
2. Observe notes and wiring instructions in the documents for the control system.
3. Only use cables that comply with the given specifications ( 25).
4. Observe notes for the voltage supply of the module ( 27).
22
EDSMF2192IB EN 3.1
Page 23

Installation
Electrical installation
Network topology
5
5.2.2 Network topology
An EtherCAT frame is transmitted by a pair of conductors from the master to the slaves. The
frame is forwarded from slave to slave until it has passed through all devices. Finally the
last slave sends the frame back to the master by a second pair of conductors. Thus,
EtherCAT always creates a logic ring topology, irrespective of the topology selected.
Line topology
Fig. 5−2 Line topology
M Master
SD Slave Device
ƒ The devices are interconnected successively.
ƒ For correct operation it is necessary that the Ethernet sockets IN and OUT are
assigned correctly.
Plug the incoming cable into the IN socket and the ongoing cable into the OUT
socket.
M
IN
SD
INOUT
SD
INOUT
SD
E94AYCET006
ƒ The direction of data transmission is from the master to the slaves.
Tip!
The termination of the last node is effected automatically by the slave.
Switch topology
M
M
IN IN
SD
Fig. 5−3 Switch topology
M Master
S Switch
SD Slave Device
The wiring can also be carried out in a star structure via an appropriate switch. For this,
observe the additional runtimes.
S
SD
E94AYCET007
EDSMF2192IB EN 3.1
23
Page 24

5
Installation
Electrical installation
EtherCAT connection
5.2.3 EtherCAT connection
You can use a standard Ethernet patch cable for connection to the communication module
(see "Ethernet cable specifications" ( 25)).
Note!
Plug/remove the Ethernet cable plug vertically into/from the socket to make
sure that the RJ45 socket will not be damaged.
Pin assignment
RJ45 socket PIN Signal
E94AYCXX004C
1 Tx +
2 Tx −
3 Rx +
4 −
5 −
6 Rx −
7 −
8 −
Tip!
The EtherCAT interfaces are equipped with an auto−MDIX function. This
function adapts the polarity of the RJ45 interfaces such that independently of
the polarity of the opposite EtherCAT interface and the cable type used
(standard patch cable or crossover cable) a connection is established.
24
EDSMF2192IB EN 3.1
Page 25

Installation
Electrical installation
Specification of the Ethernet cable
5
5.2.4 Specification of the Ethernet cable
Note!
Only use cables complying with the below specifications.
Specification of the Ethernet cable
Ethernet standard Standard Ethernet (in accordance with IEEE 802.3), 100Base−TX (Fast
Cable type S/FTP (Screened Foiled Twisted Pair, ISO/IEC 11801 or EN 50173), CAT 5e
Damping 23.2 dB (at 100 MHz and per 100 m)
Crosstalk damping 24 dB (at 100 MHz and per 100 m)
Return loss 10 dB (per 100 m)
Surge impedance 100 W
Design of the Ethernet cable
Ethernet)
Fig. 5−4 Design of the Ethernet cable (S/FTP, CAT 5e)
A Cable insulation
B Braid
C Foil shielding of the core pairs
TP1 ... TP4 Twisted core pairs 1 ... 4
E94YCEP016
EDSMF2192IB EN 3.1
25
Page 26

5
Installation
Electrical installation
Specification of the Ethernet cable
Colour code of Ethernet cable
Note!
Wiring and colour code are standardised in EIA/TIA 568A/568B.
You can use 4−pin Ethernet cables in accordance with the industrial standard.
The cable type only connects the assigned pins 1, 2, 3 and 6 with each other.
Fig. 5−5 Ethernet plug in accordance with EIA/TIA 568A/568B
Pair Pin Signal EIA/TIA 568A EIA/TIA 568B
3
2 3 Rx + White/orange White/green
1
2 6 Rx − Orange Green
4
1
2 Tx − Green Orange
4 Not assigned Blue Blue
5 Not assigned White/blue Blue/white
7 Not assigned White/brown White/brown
8 Not assigned Brown Brown
Tx + White/green White/orange
E94YCEI004A
26
EDSMF2192IB EN 3.1
Page 27

Installation
Electrical installation
Voltage supply
5
5.2.5 Voltage supply
Internal voltage supply
Note!
Internal voltage supply has been selected in the case of standard devices with
an extended AIF interface opening (e.g. front of 8200 vector). The area shown
on a grey background in the graphic marks the jumper position.
ƒ By default, this is not supplied internally in the standard device.
ƒ For internal voltage supply place the jumper on the position indicated
below.
In the case of all other device series (9300, ECS), voltage is always supplied
from the standard device.
(Only external voltage supply possible.)
Lenze setting
Internal voltage supply
External voltage supply
Note!
Always use a separate power supply unit in every control cabinet and safely
separate it according to EN 61800−5−1 ("SELV"/"PELV") in the case of external
voltage supply and larger distances between the control cabinets.
The external voltage supply of the communication module ...
ƒ is required if communication via the fieldbus is to be continued when the supply of
the device fails.
ƒ is provided via the 2−pin terminal strip with screw−type connection (24 V DC):
Terminal Description
+ External voltage supply
U = 24VDC(20.4 V − 0%... 28.8 V +0%)
I = 85 mA
− Reference potential for external voltage supply
ƒ The parameters of a standard device disconnected from the mains cannot be
accessed.
EDSMF2192IB EN 3.1
27
Page 28

5
Installation
Electrical installation
Voltage supply
Terminal data
Area Values
Electrical connection Plug connector with screw connection
Possible connections
Tightening torque 0.5 ... 0.6 Nm (4.4 ... 5.3 lb−in)
Stripping length 6 mm
rigid:
flexible:
2
1.5 mm
without wire end ferrule
1.5 mm
with wire end ferrule, without plastic sleeve
1.5 mm
with wire end ferrule, with plastic sleeve
1.5 mm
(AWG 16)
2
(AWG 16)
2
(AWG 16)
2
(AWG 16)
28
EDSMF2192IB EN 3.1
Page 29

Installation
Electrical installation
Synchronisation of the standard device
5
5.2.6 Synchronisation of the standard device
The synchronisation of the standard device via the EtherCAT fieldbus ˘ if it is supported ˘
can be carried out via the 3−pin plug connector with screw connection (sync).
Note!
ECS servo system
ƒ For the ECS axis modules, a synchronisation with operating system software
version ³ 8.3 is possible.
ƒ For the ECS power supply module a synchronisation is not supported.
Wire ...
ƒ terminal "0" to the corresponding sync input of the standard device (see
documentation of the standard device).
ƒ the sync supply to the 24V supply of the communication module or the standard
device.
EtherCAT-
Sync
W
Opto
0
2192ECAT002
Terminal Description
+ External sync supply (SELV/PELV)
U = 24VDC(20.4 V − 0%... 28.8 V +0%)
0 Sync output
(t = 150 ms, I
− Reference potential for external sync supply
= 10 mA at 24 V)
max
On 61 you’ll find an overview of the Lenze standard devices which support a
synchronisation.
EDSMF2192IB EN 3.1
29
Page 30

6
Commissioning
Before switching on
6 Commissioning
During commissioning, system−dependent data as e.g. motor parameters, operating
parameters, responses and parameters for fieldbus communication are selected for the
controller.
In Lenze devices, this is done via codes. The codes are stored in numerically ascending order
in the Lenze controllers and in the plugged−in communication/function modules.
In addition to these configuration codes, there are codes for diagnosing and monitoring
the bus devices.
6.1 Before switching on
Stop!
Before switching on the standard device with the communication module for
the first time, check the entire wiring for completeness, short circuit and earth
fault.
30
EDSMF2192IB EN 3.1
Page 31

6.2 Configuring the host system (master)
For communication with the communication module, first the host system (master) must
be configured.
For configuring EtherCAT networks. a configuration software is always required for the
host system (master), e.g.:
ƒ Lenze »PLC Designer«
ƒ »TwinCAT« by the company Beckhoff
These are software systems for programming control programs, EtherCAT configuration,
real−time execution and diagnostics.
ƒ The basic parameters of the communication module are stored in the internal
configuration memory and can be used by the master for the node detection.
ƒ During the search for nodes (fieldbus scan) the corresponding device descriptions of
the Lenze device family are used.
Commissioning
Configuring the host system (master)
Installing device description files
6
6.2.1 Installing device description files
The current XML device description file Lenze_AIF−Vxzz−ddmmyy.xmlrequired for the
EMF2192IB (EtherCAT) communication module can be found on the in the download area
under:
http://www.Lenze.com
Wildcard in the file name "Lenze_AIF−Vxzz−ddmmyy.xml"
x Major version of the XML device description file used
zz Minor version of the XML device description file used
dd Day
mm Month
yy Year
6.2.2 Automatic device detection
ƒ For an error−free integration of the EtherCAT slaves into a master configuration it is
required to select the correct Lenze device in the EtherCAT configuration software.
ƒ An EtherCAT node is clearly identified via the configuration software by the product
code (identical with the CoE object I−1018.2), the manufacturer’s identification mark
(0x3B) and the main software version of the communication module.
EDSMF2192IB EN 3.1
ƒ In order that the configuration software selects the configuration from the device
description file specific to the Ether−CAT nodes, the product code is automatically set
in the identity object and updated after switch−on or each application download.
ƒ During the initialisation, the product code is transmitted to the EtherCAT master.
With this identification, the master can adopt the corresponding settings from the
device description.
31
Page 32

6
6.2.3 Configuring process data
6.2.4 Defining the cycle time
6.2.5 Address allocation
Commissioning
Configuring the host system (master)
Configuring process data
ƒ The process data configuration is defined during the initialisation phase of the
master (PDO mapping).
ƒ The process data configuration predefined application−specifically in the device
description files and can be adapted by the user if required.
The process data objects (PDO) are transmitted cyclically between the EtherCAT master
and the slaves (controllers). The cycle time is set using the EtherCAT configuration
software.
Usually, the EtherCAT nodes are addressed via a permanent 16−bit address defined by the
EtherCAT master. At the start, this address is assigned to each node by the master
depending on the physical sequence in the EtherCAT network. The address is not saved and
gets lost after the device is switched off.
Additionally there is the possibility of allocating a fixed station alias address
(chapter 6.2.6).
6.2.6 Specifying the station alias
By means of the station alias, a permanent address is assigned to the EtherCAT slave.
ƒ For this, carry out the setting via the 0x58C5 object or code C1850 > 0.
ƒ In addition, specify the use of the fixed addressing on the master.
Note!
ƒ The station alias must only be set if the node is a member of a "hot connect"
group.
ƒ The station alias must be non−ambiguous and may only be assigned once in
the EtherCAT network.
ƒ Use the same station alias in the EtherCAT master and the slave.
32
EDSMF2192IB EN 3.1
Page 33
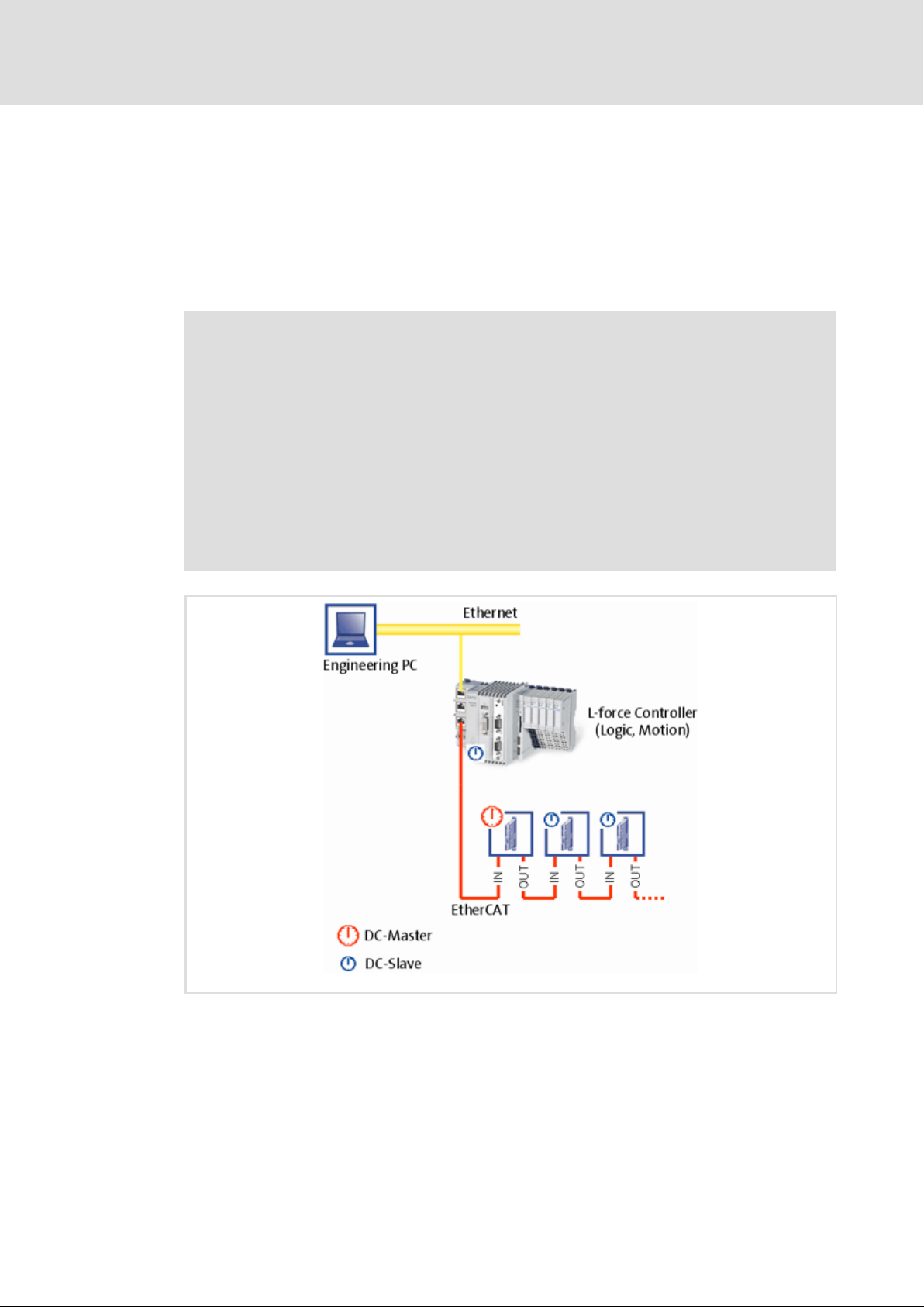
Synchronisation with "Distributed clocks" (DC)
6.3 Synchronisation with "Distributed clocks" (DC)
The "Distributed clocks" (DC) functionality enables an exact time adjustment for
applications where several auxiliary axes carry out a coordinated movement at the same
time. The data is accepted synchronously with the PLC program. With the DC
synchronisation, all slaves are synchronised with a reference clock, the so−called "DC
master".
Note!
ƒ Motion applications always require DC synchronisation.
ƒ DC synchronisation can also be used for logic applications.
ƒ Some slaves do not support the DC functionality.
– In order to be able to use the DC functionality, the first slave connected to
the EtherCAT master (e.g. L−force Controller) must be DC master−capable.
– In the arrangement of the slaves following then, DC−capable and
non−DC−capable devices can be mixed.
ƒ The first EtherCAT node after the EtherCAT master must be the DC master
which provides the exact time to the other EtherCAT nodes (incl. EtherCAT
master).
Commissioning
6
2192ECAT020
Fig. 6−1 Distributed clocks (DC)
The settings for DC synchronisation are made using the EtherCAT configuration software.
( 31).
EDSMF2192IB EN 3.1
33
Page 34

6
Commissioning
Synchronisation with "Distributed clocks" (DC)
Preparation / installation
" EtherCAT control technology" communication manual
Here you’ll find detailed information on the EtherCAT configuration and
commissioning of Lenze devices in the EtherCAT network.
6.3.1 Preparation / installation
Note!
Lenze devices without an external sync terminal input do not support DC
synchronisation.
Connect the sync terminal block of the EtherCAT communication module to the voltage
supply and the corresponding input terminal of the standard device (see 29 and the
documentation for the standard device).
6.3.2 DC configuration in the master
ƒ The use of the DC synchronisation is deactivated in the device description ( 31) by
default.
ƒ Parameterise the DC synchronisation in the EtherCAT configuration software.
ƒ Specify the synchronisation cycle time in the master. It significantly complies with
the processing time of the master and slaves.
6.3.3 DC configuration in the standard device (slave)
ƒ In order to be able to use the DC synchronisation via EtherCAT in the standard
device, select the "AIF" sync source with standard device code C1120.
ƒ Set the cycle time of the standard device in milliseconds with code C1121.
ƒ Depending on the standard device, it may be required to also select a corresponding
operating mode and control interface for EtherCAT communication via code.
Information on this can be found in the documentation for the standard device.
34
EDSMF2192IB EN 3.1
Page 35

Synchronisation with "Distributed clocks" (DC)
Behaviour of the Lenze EtherCAT nodes during start−up
6.3.4 Behaviour of the Lenze EtherCAT nodes during start−up
If the DC synchronisation is used, the communication module first changes to the
"Operational" state if the standard device has adapted its phase position to the DC signal.
This process can take several seconds.
Note!
ƒ If the communication module does not change to "Operational", there
possibly is an error in the configuration or the EtherCAT wiring.
ƒ The communication module compares the cycle time specified by the
EtherCAT master to the cycle time of the standard device set in C1121. The
synchronisation cycle time in the master has to be equal to the cycle time of
the standard device.
ƒ Moreover it is checked whether the selection of the sync source in the
standard device code C01120 is correct.
ƒ Further information can be gathered from the master as status information
or an emergency message.
Commissioning
6
EDSMF2192IB EN 3.1
35
Page 36

6
Commissioning
Initial switch−on
6.4 Initial switch−on
Switch on the drive and check its readiness for operation by means of the diagnostic LEDs
on the front of the communication module.
ƒ Red diagnostic LEDs must not be lit.
ƒ The following signalling should show:
LED
Pos. Colour Status
green
green on
green
blinking
on
The EtherCAT state machine controls the LED.
blinking
on
Description
l The EtherCAT connection has been established.
l Data communication of the EtherCAT connection is active.
The communication module is supplied with voltage and is connected to the
standard device.
"Pre−operational" or "Safe−operational" state active.
The communication module is in the "Operational" status.
36
EDSMF2192IB EN 3.1
Page 37

7 Data transfer
With EtherCAT, data is transmitted in "EtherCAT frames". The EtherCAT nodes only take
the data determined for them while the EtherCAT frame passes through the device.
Output data are entered in the frame the same way during the passage. Read and write
accesses are only executed in a small section of the total EtherCAT frame, the datagrams.
Thus, a frame does not need to be received completely before being processed. Processing
starts as early as possible.
EtherCAT transmits process data, parameter data, configuration data and diagnostic data
between the host system (master) and the controllers connected to the fieldbus (slaves).
The data is transmitted via corresponding communication channels depending on their
time−critical behaviour
(see chapter "Process data transfer" ( 41) and chapter "Parameter data
transfer" ( 42).
Data transfer 7
EDSMF2192IB EN 3.1
37
Page 38

7
Data transfer
EtherCAT frame structure
7.1 EtherCAT frame structure
EtherCAT frames have the following structure:
Ethernet header Ethernet data FCS
48 bits 48 bits 16 bits 11 bits 1 bit 4 bits 48 ... 1498 bytes 32 bits
Destination Source EtherType
Ethernet header
The Ethernet header contains the following information:
ƒ Target address of the EtherCAT frame (destination)
ƒ Source address of the EtherCAT frame (source)
ƒ Type of EtherCAT frame (EtherType = 0x88A4)
Ethernet data
Frame header
Length Reserved Type
Datagrams
The Ethernet data contain the following information:
ƒ Length of the datagrams within the EtherCAT frame (length)
ƒ A reserved bit (reserved)
ƒ Type of datagrams within the EtherCAT frames (type)
ƒ EtherCAT datagrams (datagrams)
FCS
ƒ Checksum of the EtherCAT frame
38
EDSMF2192IB EN 3.1
Page 39

7.2 EtherCAT datagrams
EtherCAT datagrams have the following structure:
Data transfer
EtherCAT datagrams
7
EtherCAT
Command header
10 bytes Max. 1486 bytes 2 bytes
EtherCAT command header
The EtherCAT command header contains the following information:
Command to be executed
Addressing information
Length of the data area (Data)
Interrupt field
Data
The data area contains the data of the command to be executed.
WKC
The working counter is evaluated by the master for monitoring the execution of the
command.
Data WKC
EDSMF2192IB EN 3.1
39
Page 40

7
Data transfer
EtherCAT state machine
7.3 EtherCAT state machine
Before communication via EtherCAT is possible, the fieldbus passes through the EtherCAT
status machine during power−up. The following illustration shows the possible state
changes from an EtherCAT slave view:
Init
Pre-Operational
Safe-Operational
Operational
E94AYCET009
Fig. 7−1 EtherCAT state machine
Status Description
Init l Initialisation phase
l No SDO/PDO communication with the slaves
l The device detection is provided by a fieldbus scan.
Pre−operational l The fieldbus is active.
l The SDO communication (mailbox communication) is possible.
l No PDO communication
Safe−operational l The SDO communication (mailbox communication) is possible.
l PDO communication:
– The input data is transmitted to the master and evaluated.
– The output data is the "Safe" status. They will not be transmitted to the standard
device.
Operational l Normal operation:
– SDO communication
– PDO communication
– Fieldbus synchronisation successful (if used)
40
EDSMF2192IB EN 3.1
Page 41

8 Process data transfer
ƒ The process data are transmitted by means of "EtherCAT datagrams" ( 39) via the
CoE process data channel.
ƒ By means of the process data the controller is operated.
ƒ The transmission of process data is time−critical.
ƒ Process data are transmitted cyclically between the host system (master) and the
controllers (slaves) (permanent exchange of current input and output data).
ƒ The master can directly access the process data. In the PLC for instance, the data are
directly stored in the I/O area.
ƒ Process data are not stored in the controller.
ƒ Process data, for instance, are setpoints, actual values, control words and status
words.
Process data transfer 8
EDSMF2192IB EN 3.1
41
Page 42

9
Parameter data transfer
Connection establishment between master and slave
9 Parameter data transfer
Parameter data are transmitted via the fieldbus as SDOs (Service Data Objects). The SDO
services allow for the writing and reading access to the object directory.
ƒ Via the SDO channel, access to all implemented CoE objects ( 55) and Lenze codes
( 57) is enabled with the CoE protocol.
ƒ When a "CiA402" technology application is used in the controller, the access to all
implemented CANopen CiA402 objects is enabled.
ƒ The transmission of parameter data usually is not time−critical.
ƒ Parameter data for instance are operating parameters, diagnostic information,
motor data.
9.1 Connection establishment between master and slave
Basically a master can always request parameter requests from a slave if the slave is at
least in the "Pre−operational" state.
E94AYCET008
Fig. 9−1 Data communication via the SDO channel
42
EDSMF2192IB EN 3.1
Page 43

9.2 Reading and writing parameters
Parameters ...
ƒ are set, for instance, for one−time system settings or if materials are changed within
a machine.
ƒ are transmitted with a low priority.
In the case of Lenze controllers, the parameters to be changed are contained in codes or in
the case of the CANopen device profile "CiA402" as device profile objects.
Indexing of the Lenze codes
If they are accessed via a communication module, the codes of the controller are addressed
by the index.
The index for Lenze codes is settled in the manufacturer−specific range of the object
directory between 8192 (0x2000) and 24575 (0x5FFF).
The index number for a code results as follows:
Parameter data transfer
Reading and writing parameters
9
Conversion formula
Index (dec) Index (hex)
24575 − Lenze code 0x5FFF − (Lenze code)
hex
Example for C0001 (operating mode):
Index (dec) Index (hex)
24575 − 1 = 24574 0x5FFF − 0x0001 = 0x5FFE
Structure of a mailbox datagram
In a datagram, mailbox data are transferred within an EtherCAT frame. The data area of the
mailbox datagram has the following structure:
Mailbox
Header
6 bytes 2 bytes 1 byte 2 bytes 1 byte 4 bytes 1 ... n bytes
CoE
Header
SDO control
byte
Index Subindex
Data Data
EDSMF2192IB EN 3.1
43
Page 44

9
Parameter data transfer
Reading and writing parameters
Reading parameters (expedited upload)
9.2.1 Reading parameters (expedited upload)
1. The master transmits "Initiate Domain Upload Request".
2. The slave acknowledges the request with a positive response ("Initiate Domain
Upload Response").
In the event of an error the slave responds with "Abort Domain Transfer".
Note!
In the case of jobs for the controller, please make sure that you convert the
code into an index ( 43).
SDO Upload Request
Detailed breakdown of the data for an "SDO Upload Request":
SDO frame
area
Mailbox Header
CANopen Header
SDO
Data field Data type / length Value / description
Length
Address WORD 2 bytes Station address of the source if an EtherCAT master is the instructing
Channel
Priority 2 bits (6, 7) 0x00: Lowest priority
Type 4 bits (8 ... 11) 0x03: CANopen over EtherCAT (CoE)
Reserved 4 bits (12 ... 15) 0x00
Number
Reserved 3 bits (9 ... 11) 0x00
Service 4 bits (12 ... 15) 0x02: SDO Request
Reserved
Complete access 1 bit (4) 0x00: The entry addressed with index and subindex is read.
Command specifier 3 bits (5 ... 7) 0x02: Upload Request
Index WORD 2 bytes Index of the object
Subindex BYTE 1 byte Subindex of the object
Reserved DWORD 4 bytes 0x00
WORD 2 bytes 0x0: Length of the mailbox service data
WORD
WORD
BYTE
party.
Station address of the target if an EtherCAT slave is the instructing
party.
6 bits (0 ... 5) 0x00: Reserved
...
0x03: Highest priority
9 bits (0 ... 8) 0x00
4 bits (0 ... 3) 0x00
0x01: The complete object is read.
0x00 or 0x01 if "complete access" = 0x01.
44
EDSMF2192IB EN 3.1
Page 45
Parameter data transfer
Reading and writing parameters
Reading parameters (expedited upload)
SDO Upload Expedited Response
An "SDO Upload Expedited Response" takes place if the data length of the parameter data
to be read amounts to up to 4 bytes.
Detailed breakdown of the data for an "SDO Upload Expedited Response":
9
SDO frame
area
Mailbox Header
CANopen Header
SDO
Data field Data type / length Value / description
Length
Address WORD 2 bytes Station address of the source if an EtherCAT master is the instructing
Channel
Priority 2 bits (6, 7) 0x00: Lowest priority
Type 4 bits (8 ... 11) 0x03: CANopen over EtherCAT (CoE)
Reserved 4 bits (12 ... 15) 0x00
Number
Reserved 3 bits (9 ... 11) 0x00
Service 4 bits (12 ... 15) 0x03: SDO Response
Size indicator
Transfer type 1 bit (1) 0x01: Expedited transfer
Data set size 2 bits (2, 3) 0x00: 4 bytes data
Complete access 1 bit (4) 0x00: The entry addressed with index and subindex is read.
Command specifier 3 bits (5 ... 7) 0x02: Upload Response
Index WORD 2 bytes Index of the object
Subindex BYTE 1 byte Subindex of the object
Data DWORD 4 bytes Data of the object
WORD 2 bytes 0x0A: Length of the mailbox service data
party.
Station address of the target if an EtherCAT slave is the instructing
party.
WORD
WORD
BYTE
6 bits (0 ... 5) 0x00: Reserved
...
0x03: Highest priority
9 bits (0 ... 8) 0x00
1 bit (0) 0x01: Size of the data in "data set size"
0x01: 3 bytes data
0x02: 2 bytes data
0x03: 1 byte data
0x01: The complete object is read.
0x00 or 0x01 if "complete access" = 0x01.
EDSMF2192IB EN 3.1
45
Page 46

9
Parameter data transfer
Reading and writing parameters
Reading parameters (expedited upload)
SDO Upload Normal Response
An "SDO Upload Normal" takes place if the data length of the parameter data to be read
amounts to ³ 4 bytes.
Detailed breakdown of the data for an "SDO Upload Normal Response":
SDO frame
area
Mailbox Header
CANopen Header
SDO
Data field Data type / length Value [hex] / description
Length
Address WORD 2 bytes Station address of the source if an EtherCAT master is the instructing
Channel
Priority 2 bits (6, 7) 0x00: Lowest priority
Type 4 bits (8 ... 11) 0x03: CANopen over EtherCAT (CoE)
Reserved 4 bits (12 ... 15) 0x00
Number
Reserved 3 bits (9 ... 11) 0x00
Service 4 bits (12 ... 15) 0x03: SDO Response
Size indicator
Transfer type 1 bit (1) 0x00: Normal transfer
Data set size 2 bits (2, 3) 0x00
Complete access 1 bit (4) 0x00: The entry addressed with index and subindex is read.
Command specifier 3 bits (5 ... 7) 0x02: Upload Response
Index WORD 2 bytes Index of the object
Subindex BYTE 1 byte Subindex of the object
Complete size DWORD 4 bytes Total data length of the object
Data BYTE n − 10 bytes Data of the object
WORD 2 bytes n ³ 0x0A: Length of the mailbox service data
party.
Station address of the target if an EtherCAT slave is the instructing
party.
WORD
WORD
BYTE
6 bits (0 ... 5) 0x00: Reserved
...
0x03: Highest priority
9 bits (0 ... 8) 0x00
1 bit (0) 0x01
0x01: The complete object is read.
0x00 or 0x01 if "complete access" = 0x01.
46
EDSMF2192IB EN 3.1
Page 47

Parameter data transfer
Reading and writing parameters
Reading parameters (expedited upload)
Example
The transmitted response structure in case of an upload to the index 0x5FD8 (standard
value of C00039/1 = 0x0FA0) contains the following data:
9
SDO frame
area
Mailbox Header
CANopen Header
SDO
Data field Data type / length Value [hex] / description
Length
Address WORD 2 bytes 0x00
Channel
Priority 2 bits (6, 7) 0x00: Lowest priority
Type 4 bits (8 ... 11) 0x03: CANopen over EtherCAT (CoE)
Reserved 4 bits (12 ... 15) 0x00
Number
Reserved 3 bits (9 ... 11) 0x00
Service 4 bits (12 ... 15) 0x03: SDO Response
Size indicator
Transfer type 1 bit (1) 0x01: Expedited transfer
Data set size 2 bits (2, 3) 0x02: 2 bytes data
Complete access 1 bit (4) 0x00: The entry addressed with index and subindex is read.
Command specifier 3 bits (5 ... 7) 0x02: Upload Response
Index WORD 2 bytes 0xD8: Index low byte of the object
Subindex BYTE 1 byte 0x01
Data DWORD 2 bytes 0x0FA0
WORD 2 bytes 0x0A: Length of the mailbox service data
WORD
WORD
BYTE
6 bits (0 ... 5) 0x00: Reserved
9 bits (0 ... 8) 0x00
1 bit (0) 0x01: Length of the data in "Data set size"
0x5F: Index high byte of the object
EDSMF2192IB EN 3.1
47
Page 48

9
Parameter data transfer
Reading and writing parameters
Writing parameters (expedited download)
9.2.2 Writing parameters (expedited download)
1. The master transmits "Initiate Domain Download Request".
2. The slave acknowledges the request with a positive response ("Initiate Domain
Download Response").
In the event of an error the slave responds with "Abort Domain Transfer".
Note!
In the case of jobs for the controller, please make sure that you convert the
code into an index ( 43).
SDO Download Expedited Request
A "SDO Download Expedited Request" takes place if the data length of the parameter data
to be written amounts to up to 4 bytes.
Detailed breakdown of the data for an "SDO Download Expedited Request":
SDO frame
area
Mailbox Header
CANopen Header
SDO
Data field Data type / length Value / description
Length
Address WORD 2 bytes Station address of the source if an EtherCAT master is the instructing
Channel
Priority 2 bits (6, 7) 0x00: Lowest priority
Type 4 bits (8 ... 11) 0x03: CANopen over EtherCAT (CoE)
Reserved 4 bits (12 ... 15) 0x00
Number
Reserved 3 bits (9 ... 11) 0x00
Service 4 bits (12 ... 15) 0x02: SDO Request
Size indicator
Transfer type 1 bit (1) 0x01: Expedited transfer
Data set size 2 bits (2, 3) 0x00: 4 bytes data
Complete access 1 bit (4) 0x00: The entry addressed with index and subindex is written.
Command specifier 3 bits (5 ... 7) 0x01: Download Request
Index WORD 2 bytes Index of the object
Subindex BYTE 1 byte Subindex of the object
Data DWORD 4 bytes Data of the object
WORD 2 bytes 0x0A: Length of the mailbox service data
WORD
WORD
BYTE
party.
Station address of the target if an EtherCAT slave is the instructing
party.
6 bits (0 ... 5) 0x00: Reserved
...
0x03: Highest priority
9 bits (0 ... 8) 0x00
1 bit (0) 0x01: Size of the data in "data set size"
0x01: 3 bytes data
0x02: 2 bytes data
0x03: 1 byte data
0x01: The complete object is written.
0x00 or 0x01 if "complete access" = 0x01.
48
EDSMF2192IB EN 3.1
Page 49

Parameter data transfer
Reading and writing parameters
Writing parameters (expedited download)
SDO Download Normal Request
An "SDO Download Normal Request" takes place if the data length of the parameter data
to be written amounts to ³ 4 bytes.
Detailed breakdown of the data for an "SDO Download Normal Request":
9
SDO frame
area
Mailbox Header
CANopen Header
SDO
Data field Data type / length Value / description
Length
Address WORD 2 bytes Station address of the source if an EtherCAT master is the instructing
Channel
Priority 2 bits (6, 7) 0x00: Lowest priority
Type 4 bits (8 ... 11) 0x03: CANopen over EtherCAT (CoE)
Reserved 4 bits (12 ... 15) 0x00
Number
Reserved 3 bits (9 ... 11) 0x00
Service 4 bits (12 ... 15) 0x02: SDO Request
Size indicator
Transfer type 1 bit (1) 0x00: Normal transfer
Data set size 2 bits (2, 3) 0x0
Complete access 1 bit (4) 0x00: The entry addressed with index and subindex is written.
Command specifier 3 bits (5 ... 7) 0x01: Download Request
Index WORD 2 bytes Index of the object
Subindex BYTE 1 byte Subindex of the object
Complete size DWORD 4 bytes Total data length of the object
Data BYTE n − 10 bytes Data of the object
WORD 2 bytes 0x0A: Length of the mailbox service data
party.
Station address of the target if an EtherCAT slave is the instructing
party.
WORD
WORD
BYTE
6 bits (0 ... 5) 0x00: Reserved
...
0x03: Highest priority
9 bits (0 ... 8) 0x00
1 bit (0) 0x01
0x01: The complete object is written.
0x00 or 0x01 if "complete access" = 0x01.
EDSMF2192IB EN 3.1
49
Page 50

9
Parameter data transfer
Reading and writing parameters
Writing parameters (expedited download)
SDO Download Response
Detailed breakdown of the data for an "SDO Download Response":
SDO frame
area
Mailbox Header
CANopen Header
SDO
Data field Data type / length Value / description
Length
Address WORD 2 bytes Station address of the source if an EtherCAT master is the instructing
Channel
Priority 2 bits (6, 7) 0x00: Lowest priority
Type 4 bits (8 ... 11) 0x03: CANopen over EtherCAT (CoE)
Reserved 4 bits (12 ... 15) 0x00
Number
Reserved 3 bits (9 ... 11) 0x00
Service 4 bits (12 ... 15) 0x03: SDO Response
Size indicator
Transfer type 1 bit (1) 0x00
Data set size 2 bits (2, 3) 0x00
Complete access 1 bit (4) 0x00: The entry addressed with index and subindex is read.
Command specifier 3 bits (5 ... 7) 0x3: Download Response
Index WORD 2 bytes Index of the object
Subindex BYTE 1 byte Subindex of the object
Reserved DWORD 4 bytes 0x00
WORD 2 bytes 0x0A: Length of the mailbox service data
party.
Station address of the target if an EtherCAT slave is the instructing
party.
WORD
WORD
BYTE
6 bits (0 ... 5) 0x00: Reserved
...
0x03: Highest priority
9 bits (0 ... 8) 0x00
1 bit (0) 0x00
0x01: The complete object is read.
0x00 or 0x01 if "complete access" = 0x01.
50
EDSMF2192IB EN 3.1
Page 51
Parameter data transfer
Reading and writing parameters
Writing parameters (expedited download)
Example
The transmitted request structure in case of a download from the index 0x1600 contains
the following data:
9
SDO frame
area
Mailbox Header
CANopen Header
SDO
Data field Data type / length Value [hex] / description
Length
Address WORD 2 bytes 0x0
Channel
Priority 2 bits (6, 7) 0x0: Lowest priority
Type 4 bits (8 ... 11) 0x3: CANopen over EtherCAT (CoE)
Reserved 4 bits (12 ... 15) 0x0
Number
Reserved 3 bits (9... 11) 0x0
Service 4 bits (12 ... 15) 0x2: SDO request
Size indicator
Transfer type 1 bit (1) 0x01: Expedited transfer
Data set size 2 bits (2, 3) 0x00: 4 bytes data
Complete access 1 bit (4) 0x00: The entry addressed with index and subindex is written.
Command specifier 3 bits (5 ... 7) 0x01: Download Request
Index WORD 2 bytes 0x00: Index low byte of the object
Subindex BYTE 1 byte 0x01: Subindex of the object
Data DWORD 4 bytes 0x5C930110
WORD 2 bytes 0xA: Length of the mailbox service data
WORD
WORD
BYTE
6 bits (0 ... 5) 0x0: Reserved
9 bits (0 ...8) 0x0
1 bit (0) 0x01: Size of the data in "data set size"
0x16: Index high byte of the object
EDSMF2192IB EN 3.1
51
Page 52

9
Parameter data transfer
Reading and writing parameters
SDO abort codes
9.3 SDO abort codes
If an SDO request is evaluated negatively, a corresponding error code is output.
Index [hex] Description
0x00000000 No error
0x05030000 The status of the toggle bit has not changed.
0x05040000 SDO protocol time−out
0x05040001 Invalid or unknown specification symbol for the client/server command
0x05040002 The data block length is too great.
0x05040005 The space in the main memory is not sufficient.
0x06010000 Access to object not supported
0x06010001 Read access to a write−protected object
0x06010002 Write access to a write−protected object
0x06020000 Object is not listed in the object directory.
0x06040041 An object cannot be mapped into the PDO.
0x06040042 The number and/or length of the mapped objects would exceed the PDO length.
0x06040043 General parameter incompatibility
0x06040047 General internal device incompatibility
0x06060000 Access has failed because of hardware errors.
0x06070010 Wrong data type or parameter length.
0x06070012 Incorrect data type (The parameter length is too big)
0x06070013 Wrong data type (parameter length is too small).
0x06090011 Subindex does not exist.
0x06090030 The value range for parameters is too large (only for write access).
0x06090031 The parameter value is too high.
0x06090032 The parameter value is too low.
0x06090036 The maximum value is lower than the minimum value.
0x08000000 General error
0x08000020 Data cannot be transferred to the application or stored in the application.
0x08000021 Due to local control, data cannot be transferred to the application or stored in the
0x08000022 Data cannot be transferred to or saved in the application because of current device state.
0x08000023 Dynamic object directory generation has failed or no object directory available.
application.
52
EDSMF2192IB EN 3.1
Page 53

10 Diagnostics
The LEDs on the front are provided to the communication module for the purpose of fault
diagnostics.
10.1 LED status displays
Diagnostics
LED status displays
10
Fig. 10−1 LEDs of the communication module
LED
Pos. Colour Status
green
green
green
red on
red
green
blinking
on
off The communication module is not supplied with voltage.
blinking
on
The EtherCAT state machine controls the two−colored LED (red/green):
l Status messages are shown in green.
l Error messages are shown in red.
off The communication module is not active on the fieldbus or is in the "Init"
blinking
on
Description
l The EtherCAT connection has been established.
l Data communication of the EtherCAT connection is active.
The communication module is supplied with voltage, but has no connection to
the standard device (standard device is switched off, in the initialisation
phase, or not available.)
The communication module is supplied with voltage and is connected to the
standard device.
status.
"Pre−operational" or "Safe−operational" state active.
The communication module is in the "Operational" status.
An error has occurred in the communication module.
The red and green drive LED indicates the operating status of the standard
device (see operating instructions of the standard device).
2192ECAT001B
EDSMF2192IB EN 3.1
53
Page 54

10
Diagnostics
Emergency requests / emergency messages
10.2 Emergency requests / emergency messages
Emergency messages are sent once to the EtherCAT master if the error status of the
controller/communication module changes, i.e. ...
ƒ if an error of the controller/communication module occurs;
ƒ if an error of the controller/communication module is omitted.
An "Emergency Request" on the fieldbus consists of the "Mailbox Header", "CANopen
Header" and the Emergency message:
Mailbox Header CANopen
Header
6 bytes 2 bytes 8 bytes
Emergency Message
Structure of the emergency message
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Emergency
error code
Low Byte High Byte Low Byte High Byte
Error
register
(I−1001)
Reserved error code
(Device)
Low Word High Word
Low Byte High Byte Low Byte High Byte
Example: The AIF connection to the standard device has been lost (error code "0x31").
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Emergency
error code
0x00 0x10 0x01 0x00 0x00 0x00 0x00 0x31
ƒ Bytes 1 and 2 indicate that an error has occurred.
ƒ Byte 3 indicates the contents of the error register (I−1001).
ƒ Bytes 5 ... 8 indicate the corresponding error code.
Error
register
(I−1001)
Reserved Error code
(Device)
Possible error codes (overview)
54
No.
(Byte 8)
0x10 EMCY_BAD_SYNC_INPUT The sync source specified in code C1121 of the standard
0x11 EMCY_BAD_SYNC_CYCLETIME The sync cycle time specified by the master cannot be used.
0x12 EMCY_BAD_SYNC_CYCLE_GG The specified sync cycle time from code C1122 of the
0x13 EMCY_CANT_SYNC Synchronisation of the standard device is not possible.
0x14 EMCY_SYNC_LOST EtherCAT has lost the synchronisation.
0x31 EMCY_AIF_LOST The AIF connection to the standard device has been lost.
0x32 EMCY_AIF_UNKNOWN_GG The standard device is unknown.
Designation Meaning
device is incorrect.
standard device cannot be used.
EDSMF2192IB EN 3.1
Page 55

11 Appendix
11.1 Implemented CoE objects
Lenze devices can be parameterised with Lenze codes and with the
manufacturer−independent "CoE objects". In order to obtain a complete
EtherCAT−compliant communication, only the CoE objects may be used for
parameterisation. The CoE objects described in this documentation are defined in the
"EtherCAT Specification, Part 6 ˘ Application Layer Protocol Specification".
Appendix
Implemented CoE objects
11
EDSMF2192IB EN 3.1
55
Page 56

11
Appendix
Implemented CoE objects
Index Index name Subindex Subindex name Data type Bits Access
0x1000 Device type − − UDINT 32 R
0x1008 Device name − − STRING(30) 240 R
0x1009 Hardware version − − STRING(2) 16 R
0x100A Software version − − STRING(30) 240 R
0x1018 Identity 0 Number of elements USINT 8 R
1 Vendor ID UDINT 32 R
2 Product code UDINT 32 R
3 Revision number UDINT 32 R
4 Serial number UDINT 32 R
0x1600 IO Outputs 0 Number of elements USINT 8 RW
1 … 32 Output Object 1 … 32 UDINT 32 RW
0x1800 IO Inputs 0 Number of elements USINT 8 RW
7 TxPDO−State BOOL 1 R
9 TxPDO−Toggle BOOL 1 R
0x1A00 IO Inputs 0 Number of elements USINT 8 RW
1 … 12 Input Object 1 … 12 UDINT 32 RW
0x1C00 Sync Man Communication
0x1C12 RxPDO Assignment 0 Number of elements USINT 8 R
0x1C13 TxPDO Assignment 0 Number of elements USINT 8 R
0x1C32 SM output parameter 0 Number of elements USINT 8 RW
0x1C33 SM input parameter 0 Number of elements USINT 8 RW
R: Read access only
RW: Read and write access
type
0 Number of elements USINT 8 R
1 Elements UDINT 32 R
1 Elements UDINT 32 R
1 Elements UDINT 32 R
1 Synchronization type UINT 16 RW
2 Cycle time / ns UDINT 32 RW
3 Shift time / ns UDINT 32 RW
4 Sync types supported UINT 16 R
5 Minimum cycle time / ns UDINT 32 R
6 Minimum shift time / ns UDINT 32 R
1 Synchronization type UINT 16 RW
2 Cycle time / ns UDINT 32 RW
3 Shift time / ns UDINT 32 RW
4 Sync types supported UINT 16 R
5 Minimum cycle time / ns UDINT 32 R
6 Minimum shift time / ns UDINT 32 R
56
EDSMF2192IB EN 3.1
Page 57

11.2 Codes
The objects specified in the table can be accessed via EtherCAT fieldbus. The objects are
implemented in the Lenze code structure. Writable codes are stored permanently and are
maintained after the communication module is switched off.
Tip!
Appendix
11
Codes
The codes are visible in the object directory of the EtherCAT configuration tool.
Object
Index
[hex]
0x58ED − C1810 − Software identification of the module R
0x58EC C1811 − Software creation date R
0x58E1 1 ... n C1822 1 ... n AIF input words (to the standard device) R
0x58E0 1 ... n C1823 1 ... n AIF output words (from the standard device) R
0x58DF 1 ... n C1824 1 ... n AIF input double words (to the standard device) R
0x58DE 1 ... n C1825 1 ... n AIF output double words (from the standard device) R
0x58D9 − C1830 − Bus status R
0x58C5 − C1850 − Station alias address RW
0x58A5 − C1882 − Response when exiting "Operational" RW
0x58A4 − C1883 − Monitoring time when exiting "Operational" RW
R: Read access only
RW: Read and write access
Subindex
Code Subcode Designation Access Information
58
58
58
58
58
59
59
59
59
60
EDSMF2192IB EN 3.1
57
Page 58

11
Appendix
Codes
Code description
Parameter
C1810
Name
Software identification of the module
The software ID of the communication module is shown here.
Display: "33S2192I_xy000" (xy = version x.y)
Parameter
C1811
Name
Software creation date
The software creation date ("mm dd yyyy") and the time ("hh:mm:ss") are shown here.
Example: "FEB 06 2008 09:23"
Parameter
C1822
Name
AIF input words (to the standard device)
Display of the process input data
Display area (min. value | unit | max. value)
0x0000 0xFFFF
Subcodes Information
C1822/1
...
C1822/n
Parameter
C1823
Name
AIF output words (from the standard device)
Display of the process output data
Display area (min. value | unit | max. value)
0x0000 0xFFFF
Subcodes Information
C1823/1
...
C1823/n
Data type: STRING (30)
Index: 22765
Data type: STRING (30)
Index: 22764
Index: 22753
Index: 22752
= 58ED
dec
dec
Data type: UINT16
= 58E1
dec
Data type: UINT16
= 58E0
dec
= 58EC
hex
ex
hex
hex
58
Parameter
C1824
Name
AIF input double words (to the standard device)
Display of the process input data
Display area
(min. value | unit | max. value)
0x00000000 0xFFFFFFFF
Subcodes Information
C1824/1
...
C1824/n
Data type: UINT32
Index: 22751
EDSMF2192IB EN 3.1
dec
= 58DF
hex
Page 59

Appendix
Codes
11
Parameter
C1825
Name
AIF output double words (from the standard device)
Display of the process output data
Display area
(min. value | unit | max. value)
0x00000000 0xFFFFFFFF
Subcodes Information
C1825/1
...
C1825/n
Parameter
C1830
Name
Bus status
Bit−coded display of the current bus status
40
Display area (min. value | unit | max. value)
0x00000000 0xFFFFFFFF
Bits (read only) Information
EtherCAT bus status in accordance
Bit 0
with CiA DS301
...
0: Unknown
1: Init
2: Pre−operational
3: Bootstrap
Bit 7
4: Safe−operational
8: Operational
Not assigned
Bit 8
...
Bit 12
Bit 13 SYNC_bProcessDataExpected New process data were expected during the
application cycle.
Bit 14 SYNC_bProcessDataInvalid New/last process data are invalid.
l Checksum error
l No telegram received
Bit 15 EtherCAT error flag
Data type: UINT32
Index: 22750
Data type: FIX32
Index: 22745
dec
dec
= 58DE
= 58D9
hex
hex
EDSMF2192IB EN 3.1
Parameter
C1850
Name
Station alias address
Specification of the station address if the master is used to address the alias
l 0: no alias address
l 65535: Alias address preselection in the slave
Setting range (min. value | unit | max. value) Lenze setting
0 65535 0
Parameter
C1882
Name
Response when exiting "Operational"
Adjustable response for the process data monitoring
Selection list (Lenze setting printed in bold) Information
0 No response
1 Error (TRIP)
2 Controller inhibit (CINH)
3 Quick stop (QSP)
Data type: FIX32
Index: 22725
Data type: FIX32
Index: 22693
dec
dec
= 58C5
= 58A5
hex
hex
59
Page 60

11
Appendix
Codes
Parameter
C1883
If the "Operational" status is exited, the response parameterised with C1882 occurs after the time set here has
elapsed.
l With the value = 65535 monitoring is deactivated.
l With the value = 0 the immediate response is effected after the internal bus status watchdog time has
elapsed
l A change in monitoring is effective immediately.
Setting range (min. value | unit | max. value) Lenze setting
0 ms 65535 65535 ms
Name
Monitoring time when exiting "Operational"
Data type: FIX32
Index: 22692
dec
= 58A4
hex
60
EDSMF2192IB EN 3.1
Page 61

Product codes of the Lenze standard devices
11.3 Product codes of the Lenze standard devices
Appendix
11
Product code
[decimal]
21920000 Generic − − −
21920100 8200 vector − 3 −
21920101 8200 vector
in combination with an application
I/O function module
21920102 8200 vector
in combination with a
DeviceNet/CANopen function
module
21920103 8200 vector
in combination with an INTERBUS
function module
21920104 8200 vector
in combination with a LECOM−B
function module
21920105 8200 vector
in combination with a PROFIBUS I/O
function module
21920106 8200 vector
in combination with a PROFIBUS
function module
21920107 8200 vector
in combination with a CANopen
function module
21920108 8200 vector
in combination with a DeviceNet
function module
21920200 9300 servo inverter ü 4 −
21920202 93xx servo position controller ü 4 −
21920204 93xx servo register control ü 4 −
21920206 93xx servo cam profiler ü 4 −
21920301 9300 hoist − 4 −
21920400 9300 vector − 4 −
21920500 9300 Servo PLC ü 12 ü
21920600 Drive PLC ü 12 ü
21920700 ECSxA axis module "Application" ü 12 ü
21920701 ECSxM axis module "Motion" ü 12 ü
21920702 ECSxP axis module "Posi & Shaft" ü 12 ü
21920703 ECSxS axis module "Speed &
Torque"
21920711 ECSxE power supply module − 3 −
Meaning Sync
support
− 3 −
− 3 −
− 3 −
− 3 −
− 3 −
− 3 −
− 3 −
− 3 −
ü 12 ü
Number
Process data
words
AIF status/
control word
EDSMF2192IB EN 3.1
Note!
ECS servo system
From operating system software version 8.3 onwards, a synchronisation is
possible for the ECS axis modules.
61
Page 62

Index12
12 Index
A
Abort codes, 52
Address allocation, 32
Application as directed, 12
Approvals, 16
Automatic device detection, 31
B
Baud rate, 16
Behaviour of the Lenze EtherCAT nodes during start−up,
35
C
Cable length, 16
Cable specification, 25
CE−typical drive system, 22
Code description, 58
Codes, 57
CoE objects, 55
Colour code of Ethernet cable, 26
Command header, 39
Commissioning, 30
− Initial switch−on, 36
Communication medium, 16
Communication profile, 16
Communication time, 18
Configuring process data, 32
Conformities, 16
Connection establishment between master and slave, 42
Connections, 15
Cycle time (C1121), 34
Cycle times, 16
Definition of notes used, 9
Definitions, 8
Design of the Ethernet cable, 25
Device detection, 31
Device profile, 16
Device protection, 11 , 20
Diagnostics, 53
Distributed clocks (DC), synchronisation, 33
E
Electrical installation, 22
Emergency message (structure), 54
Emergency requests / emergency messages, 54
Error codes, 54
EtherCAT datagrams, 39
EtherCAT frame structure, 38
EtherCAT state machine, 40
Ethernet cable specification, 25
Ethernet cable, colour code , 26
Ethernet cable, design, 25
Ethernet connection, 24
Ethernet data, 38
Ethernet header, 38
External voltage supply, 27
F
FCS, 38
Frame structure, 38
H
Hardware version, type code, 13
D
Data, 39
Data transfer, 37
Datagrams, 39
DC configuration in the master, 34
DC configuration in the standard device (slave), 34
Defining the cycle time, 32
62
I
Identification, 13
Implemented CoE objects, 55
Indexing of the Lenze codes, 43
Initial switch−on, 36
Installation, 20
− electrical, 22
− mechanical, 21
EDSMF2192IB EN 3.1
Page 63

Index 12
Installing device description files, 31
Interface for communication, 16
Interfaces, 15
Internal voltage supply, 27
L
LED status displays, 53
LEDs, 53
Line topology, 23
M
Mailbox datagram, 43
Mailbox protocol, 16
Mechanical installation, 21
N
Nameplate, 13
Network topology, 16
Node type, 16
Notes, definition, 9
Number of nodes, 16
R
Reading and writing parameters, 43
Reading parameters (expedited upload), 44
Residual hazards, 11
Revision−ID, 16
S
Safety instructions, 10
− Application as directed, 12
− definition, 9
− device− and application−specific, 11
− layout, 9
SDO abort codes, 52
Software version, type code, 13
Specification of the Ethernet cable, 25
Specifying the station alias, 32
State machine, 40
Status displays, 53
Switch on, initial, 36
Switch topology, 23
Synchronisation of the standard device, 29
Synchronisation with "Distributed clocks" (DC), 33
O
Order designation, 16
P
Parameter data transfer, 42
PLC Designer, 31
Process data transfer, 41
Processing time, 18
Product codes of the Lenze standard devices, 61
Product description, 12
− Application as directed, 12
Product features, 14
Product features of the communication module, 14
Product−ID, 16
Protection of persons, 11
Protective insulation, 17
T
Technical data, 16
Terminal data, 28
TwinCAT, 31
Type code, 13
− finding, 13
V
Validity of the documentation, 5
Vendor−ID, 16
Voltage supply, 27
− internal, 27
Voltage supply: external, 27
W
Wiring according to EMC, 22
Working Counter (WKC), 39
Writing parameters (expedited download), 48
EDSMF2192IB EN 3.1
63
Page 64

F
(
Ê
ü
© 11/2012
Lenze Automation GmbH
Hans−Lenze−Str. 1
D−31855 Aerzen
Germany
+49(0)51 54 /82−0
+49(0)51 54 /82 − 28 00
Lenze@Lenze.de
www.Lenze.com
Service Lenze Service GmbH
Breslauer Straße 3
D−32699 Extertal
Germany
(
Ê
008000/ 2446877 (24 h helpline)
+49(0)5154/ 82−11 12
Service@Lenze.de
EDSMF2192IB § .K:ö § EN § 3.1 § TD17
10987654321
 Loading...
Loading...