

Page 1

EDK2174DB
.C%5
Montageanleitung
Mounting Instructions
Instructions de montage
CAN
Ä.C%5ä
EMF2174IB
CAN-Adressierungsmodul
CAN addressing module
Module d’adressage CAN
Page 2
Vorwort und Allgemeines
0Abb.0Tab. 0
Diese Anleitung
ƒ beschreibt die Installation und die Handhabung des CAN-Adressierungsmoduls;
ƒ ist nur gültig zusammen mit der Dokumentation des zugehörigen Antriebsreglers;
ƒ ist gültig für das CAN-Adressierungsmodul mit der Typenbezeichnung:
L
Type
Id.-No.
Prod.-No.
Ser.-No.
E82AF000P0B201XX
Typenschlüssel 33.2174IB 1x 11
CAN-Adressierungsmodul Typ 2174
Hardwarestand
Softwarestand
99371BC013
c
Beschreibung
Das CAN-Adressierungsmodul EMF2174IB ermöglicht das Parametrieren der Geräteadresse und der Baudrate von Antriebsreglern in einem CAN-Netzwerk. Die Geräteadresse
(C0350) und die Baudrate (C0351) werdenim CAN-Adressierungsmodul über eine Hardware-Codierung eingestellt. Das CAN-Adressierungsmodul überträgt die Geräteadresse und
dieBaudrate nach der Initialisierung an denAntriebsregler. Anschließend werden alle Parameter nichtflüchtig gespeichert.
Einsatzbereich
Das CAN-Adressierungsmodul EMF2174IB ist einsetzbar mit den Antriebsreglern
ƒ Frequenzumrichter 8200 vector und
ƒ Servo-Umrichter 9300 inkl. aller Technologievarianten.
EDK2174DB DE/EN/FR 3.0
2
Page 3
Vorbereitende Arbeiten
Wichtige Hinweise
Wichtige Hinweise
Es gibt zwei Möglichkeiten der Codierung:
ƒ durch Verbindungen innerhalb eines Sub-D Steckers (4)
ƒ durch Einstellungen an zwei DIP-Schaltern im Inneren des CAN-Adressierungsmoduls
(5)
Hinweis!
ƒ Die Einstellungen im Sub-D Stecker haben gegenüber den Einstellungen an
den DIP-Schaltern die höhere Priorität.
ƒ Im Antriebsregler wird der Fehler ”EER” ausgelöst, wenn
– der Sub-D Stecker während des Betriebes abgezogen wird,
– eine ungültige Geräteadresse codiert wurde,
– eine ungültige Baudrate codiert wurde.
EDK2174DB DE/EN/FR 3.0
3
Page 4
Vorbereitende Arbeiten
Codierung innerhalb des D-Sub Steckers
Codierung innerhalb des D-Sub Steckers
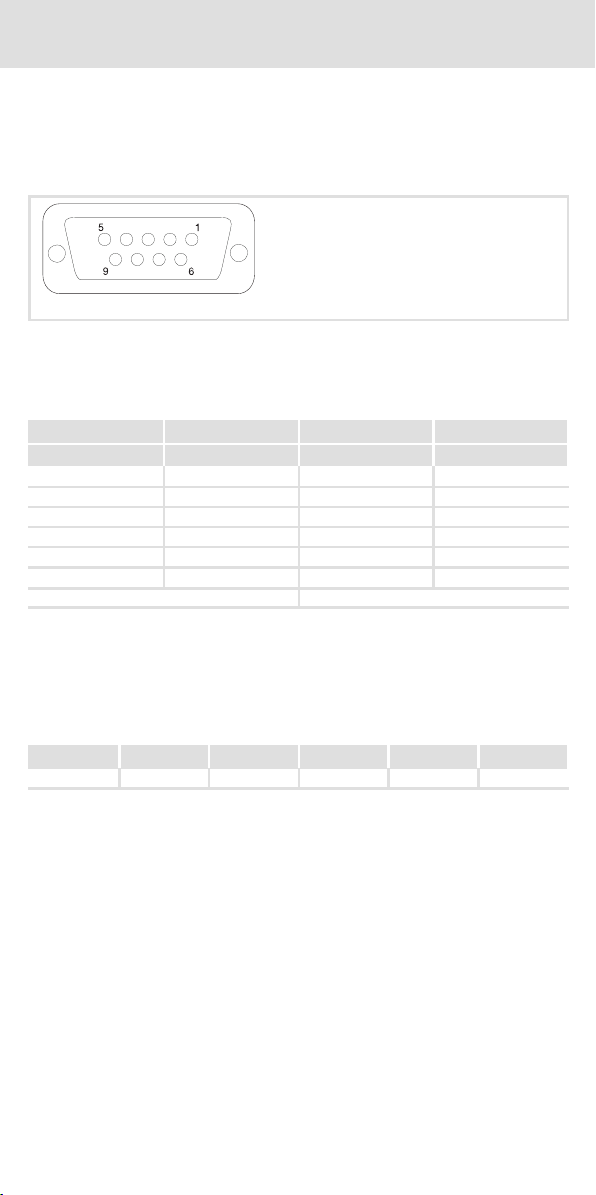
Über die 9 pol. D-Sub Buchse des CAN-Adressierungsmoduls kann ein Codierstecker angeschlossen werden, der die Baudrate und die Geräteadresse des Grundgerätes definiert.
Um die Baudrate und die Geräteadresse im D-Sub Stecker fest einzustellen, müssen Sie bestimmte Verbindungen zwischen den Pins 1 bis 8 mit dem Pin 9 herstellen!
2174CAN004
Codierstecker (Darstellung der Lötseite)
Baudrate einstellen
Die zur Einstellung der Baudrate notwendigen Verbindungen zwischen den Pins 1 bis 3 mit
dem Pin 9 können Sie aus folgender Tabelle ablesen:
Baudrate Pin 1 Pin 2 Pin 3
[kBaud]
500 - - -
250 X - -
125 - X -
50 X X -
1000 - - X
”X” = verbinden mit Pin 9 ”-” = nicht verbinden
Beispiel:
Baudrate auf 50 kBaud einstellen
Ö Löten Sie eine Verbindung von Pin1 zu Pin 9 und eine Verbindung von Pin 2 zu Pin 9.
Geräteadresse einstellen
Die zur Einstellung der Geräteadresse notwendigen Verbindungen zwischen den Pins 4 bis
8 mit dem Pin 9 können Sie an Hand der Wertigkeiten aus folgender Tabelle errechnen:
Pin 4 Pin 5 Pin 6 Pin 7 Pin 8
Wertigkeit 1 2 4 8 16
Beispiel:
Geräteadresse 13 einstellen
DieSummederWertigkeitenderzuverbindendenPinsmuss13ergeben:1+4+8=13
Ö Löten Sie jeweils eine Verbindung von Pin 4, Pin 6 und Pin 7 zu Pin 9.
EDK2174DB DE/EN/FR 3.0
4
Page 5

Codierung durch Einstellungen an den DIP-Schaltern
Vorbereitende Arbeiten
Codierung durch Einstellungen an den DIP-Schaltern
Nehmen Sie die Frontplatte des CAN-Adressierungsmoduls ab, um die Baudrate und Geräteadresse mit den DIP-Schaltern im Inneren des Adressierungsmoduls einzustellen.
Linker DIP-Schalter
(S1L, S2L, S3L, S4L, S5L)
Baudrate einstellen
DieBaudrate stellen Sie mit den Schaltern S1L, S2L und S3L ein. Die zur EinstellungderBaudrate notwendigen Schalterstellungen können Sie aus folgender Tabelle ablesen:
Baudrate S1L S2L S3L
[kBaud]
500 OFF OFF OFF
250 ON OFF OFF
125 OFF ON OFF
50 ON ON OFF
1000 OFF OFF ON
Geräteadresse einstellen
Den Schaltern S4L und S5L sowie den Schaltern S1R bis S4R sind bestimmte Wertigkeiten
zugeordnet:
S4L S5L S1R S2R S3R S4R S5R
Wertigkeit 1 2 4 8 16 32 -
Zur Einstellung der Geräteadresse addieren Sie die Wertigkeiten so, dass die Summe gleich
der Geräteadresse ist. Die Schalter, deren Wertigkeit addiert wurde, stellen Sie dann auf
”ON”.
Beispiel:
Geräteadresse 27 einstellen
DieSummederWertigkeitenmuss27ergeben:1+2+8+16=27
Ö Schalterstellung:
S4L S5L S1R S2R S3R S4R S5R
ON ON OFF ON ON OFF -
Rechter DIP-Schalter
(S1R, S2R, S3R, S4R, S5R)
2174CAN005
BefestigenSienachder Einstellung von Baudrate und Geräteadresse dieFrontplattewieder
am CAN-Adressierungsmodul.
EDK2174DB DE/EN/FR 3.0
5
Page 6

Inbetriebnahme
Vor dem ersten Einschalten
Hinweis!
ƒ Die Parametrierung entspricht der Lenze-Einstellung
(Übertragungsrate 500 kBit/s, Knotenadresse 1).
ƒ Soll der Antriebsregler in einem CAN-Netzwerk mit einer Übertragungsrate
ungleich 500 kBit/s betrieben werden, darf dieser erst nach einmaliger
Parametrierung über das CAN-Adressierungsmodul mit dem
CAN-Netzwerk verbunden werden. Wegen unterschiedlicher
Übertragungsraten k önnen sonst Störungen während der Initialisierung
des Antriebsreglers im CAN-Netzwerk auftreten.
Inbetriebnahmeschritte
1. Stecken Sie das CAN-Adressierungsmodul auf das Automatisierungsinterface (AIF)
des Antriebsreglers.
2. Nach der Initialisierung des Antriebsreglers überträgt das CAN-Adressierungsmodul
die im Modul codierte Übertragungsrate und die Knotenadresse an den
Antriebsregler.
3. Nach der Übertragung wird automatisch ein Reset-Node (C0358) durchgeführt.
4. Alle Parameter werden im Antriebsregler nichtflüchtig gespeichert (C0003 = 1).
Signalisierung
Die gelbe LED zeigt den Zustand des CAN-Adressierungsmoduls an:
ƒ dunkel: Antriebsregler ohne Netzspannungsversorgung
ƒ blinkt:
– ungültige Knotenadresse codiert und/oder
– ungültige Übertragungsrate codiert
ƒ leuchtet: fehlerfreier Betriebszustand
EDK2174DB DE/EN/FR 3.0
6
Page 7

Preface and general information
0Fig.0Tab. 0
These Instructions
ƒ describe the installation and application of the CAN addressing module;
ƒ are only valid in combination with the Operating Instructions of the corresponding
controller;
ƒ are only valid for the CAN addressing module with the type designation:
L
Type
Id.-No.
Prod.-No.
Ser.-No.
E82AF000P0B201XX
Type code 33.2174IB 1x 11
CAN addressing module type 2174
Hardware version
Software version
99371BC013
c
Description
The CAN addressing module EMF2174IB serves to parameterise address and baud rate of
controllers in a CAN network. The controller address (C0350) and the baud rate (C0351) are
set in the CAN addressing module by hardware coding. The CAN addressing module
transmits the controller address and the baud rate to the controller after initialisation. All
parameters are then permanently stored.
Application range
The CAN addressing module EMF2174IB can be used with the following controllers:
ƒ 8200 vector frequency inverter and
ƒ 9300 servo inverter including all technology variants
EDK2174DB DE/EN/FR 3.0
7
Page 8

Preliminary works
Important notes
Important notes
Two codings are possible:
ƒ by connections within a Sub-D plug (
ƒ by setting two DIP switches inside the CAN addressing module (
9)
Note!
ƒ The Sub-D plug settings have a higher priority than the DIP switch settings.
ƒ ”EER” trip is released in the controller if
– the Sub-D plug is removed during operation,
– an invalid controller address has been coded,
– an invalid baud rate has been coded.
10)
EDK2174DB DE/EN/FR 3.0
8
Page 9

Preliminary works
Coding within the Sub-D plug
Coding within the Sub-D plug
Via the 9-pin Sub-D socket of the CAN addressing module you can connect a coding plug
which defines baud rate and controller address of the basic controller.
In order to permanently set baud rate and controller address in the Sub-D plug, connectthe
pins 1 to 8 to pin 9 in a certain way!
2174CAN004
Coding plug (view of the soldering side)
Setting the baud rate
Baud rate Pin 1 Pin 2 Pin 3
[kbaud]
500 - - -
250 X - -
125 - X -
50 X X -
1000 - - X
”X” = connect to pin 9 ”-” = do not connect
Example:
Setting the baud rate to 50 kbaud
Ö Connect pin 1 to pin 9 and pin 2 to pin 9 by soldering.
Setting the controller address
You can calculate the connections between the pins4 to 8 and pin 9 required for setting the
controller address by using the values of the following table:
Pin 4 Pin 5 Pin 6 Pin 7 Pin 8
Value 1 2 4 8 16
Example:
Setting controller address 13
Thesumofthevalueshastoequal13:1+4+8=13
Ö Connect pins 4, 6 and 7 to pin 9 by soldering.
EDK2174DB DE/EN/FR 3.0
9
Page 10

Preliminary works
Coding by setting the DIP switches
Coding by setting the DIP switches
Remove the front plate of the CAN addressing module in order to set the baud rate and the
controller address in its interior with DIP switches.
Left DIP switch
(S1L, S2L, S3L, S4L, S5L)
Setting the baud rate
SetthebaudratewiththeswitchesS1L,S2LandS3L.Theswitch settings required for setting
the baud rate are represented in the following table:
Baud rate S1L S2L S3L
[kbaud]
500 OFF OFF OFF
250 ON OFF OFF
125 OFF ON OFF
50 ON ON OFF
1000 OFF OFF ON
Setting the controller address
The switches S4L and S5L as well as the switches S1R to S4R correspond to certain values:
S4L S5L S1R S2R S3R S4R S5R
Value 1 2 4 8 16 32 -
In order to set the controller address, add up the values in a way that their sum equals the
controller address. Then set those switches to ”ON” whose values you have added up.
Example:
Setting the controller address 27
Thesumofthevalueshastoequal27:1+2+8+16=27
Ö Switch setting:
S4L S5L S1R S2R S3R S4R S5R
ON ON OFF ON ON OFF -
Right DIP switch
(S1R, S2R, S3R, S4R, S5R)
2174CAN005
Having set baud rate and controller address, fasten the front plate to the CAN addressing
module.
EDK2174DB DE/EN/FR 3.0
10
Page 11

Commissioning
Please note when switching on a controller for the first time:
Note!
ƒ The parameter setting corresponds to the factory setting (baud
rate 500 kbaud, node address 1).
ƒ If the controller is to operate with a baud rate other than 500 kbaud in a
CAN network, it may only be connected to the CAN network after having
been parameterised once with the help of the CAN addressing module.
Otherwise faults could occur during the initialisation of the controller in
the CAN network due to different baud rates.
Commissioning
1. Plug the CAN addressing module onto the automation interface (AIF) of the
controller.
2. After the initialisation of the controller, the CAN addressing module transmits the
coded baud rate and the controller address to the controller.
3. After the transmission, Reset Node (C0358) is automatically executed.
4. All parameters are permanently stored in the controller (C0003 = 1).
Operating states
The yellow LED indicates the state of the CAN addressing module:
ƒ OFF:
– The controller is not supplied with mains voltage.
ƒBLINKING:
– An invalid controller address and/or
– baud rate has been coded.
ƒON:
– Error-free operating state
EDK2174DB DE/EN/FR 3.0
11
Page 12

Avant-propos et généralités
0Fig.0Tab. 0
Le présent fascicule
ƒ décrit la procédure d’installation et la manipulation du module d’adressage CAN ;
ƒ est valable uniquement avec la documentation du variateur sélectionné ;
ƒ concernelemoduled’adressageCANdutypesuivant:
L
Type
Id.-No.
Prod.-No.
Ser.-No.
E82AF000P0B201XX
Codification des types 33.2174IB 1x 11
Module d’adressage CAN de type 2174
Version du matériel
Version du logiciel
99371BC013
c
Description
Lemoduled’adressage CAN EMF2174IB permet de définir l’adresse physique et la vitessede
transmission des variateurs d’un réseau CAN. L’adresse physique (C0350) et la vitesse de
transmission (C0351) sont réglées sur le module d’adressage CAN via une clé matérielle. Le
module d’adressage CAN transmet l’adresse et la vitesse de transmission aux variateurs
après initialisation, après quoi tous les paramètres sont enregistrés dans une partie non
volatile de la mémoire.
Domaine d’application
Le module d’adressage CAN EMF2174IB peut être utilisé avec les appareils suivants :
ƒ Convertisseurs de fréquence 8200 vector et
ƒ Servovariateurs 9300, toutes variantes comprises.
EDK2174DB DE/EN/FR 3.0
12
Page 13
Préparatifs
Remarques importantes
Remarques importantes
Il existe deux possibilités de codage :
ƒ par liaisons au sein d’une prise Sub-D (
ƒ à l’aide des deux commutateurs DIP situés à l’intérieur du module d’adressage CAN
(
15)
14)
Remarque importante !
ƒ Les réglages avec prise Sub-D doivent être privilégiés aux réglages avec
commutateurs DIP.
ƒ Le variateur déclenche l’erreur ”EER” dans les cas suivants :
– Retrait de la prise Sub-D pendant le fonctionnement ;
– Adressage erroné ;
– Codage d’une vitesse de transmission erronée.
EDK2174DB DE/EN/FR 3.0
13
Page 14

Adressage à l’aide d’une prise Sub-D
Préparatifs
Adressage à l’aide d’une prise Sub-D
La prise Sub-D à 9 broches du module d’adressage CAN permet le raccordement d’une fiche
de codage définissant la vitesse de transmission et l’adresse physique de l’appareil debase.
Pour régler la vitesse de transmission et l’adresse définitives à l’aide de la prise Sub-D, des
liaisons précises doivent être établies entre les broches 1 à 8 et la broche 9 !
2174CAN004
Fiche de codage (partie soudée)
Réglage de la vitesse de transmission
Les liaisons devant être établies entre les broches 1 à 3 et la broche 9 pour régler la vitesse
de transmission sont représentées dans le tableau ci-dessous :
Vitesse de transmission Broche 1 Broche 2 Broche 3
[kbauds]
500 - - -
250 X - -
125 - X -
50 X X -
1000 - - X
”X” = relier avec broche 9 ”-” = ne pas relier
Exemple :
Réglaged’unevitessedetransmissionde50kbauds
Ö Relier les broches 1 et 9, ainsi que les broches 2 et 9.
Adressage
Les liaisons devant être établies entre les broches 4 à 8 et la broche 9 pour procéder à
l’adressage sont représentées dans le tableau ci-dessous :
Broche 4 Broche 5 Broche 6 Broche 7 Broche 8
Valeur 1 2 4 8 16
Exemple :
Adresse 13
Lasommedesvaleursdesbrochesàrelierdoitêtreégaleà13:1+4+8=13
Ö Relier les broches 4, 6 et 7 à la broche 9.
EDK2174DB DE/EN/FR 3.0
14
Page 15

Adressageàl’aidedecommutateursDIP
Préparatifs
Adressageàl’aidedecommutateursDIP
Retirer la partie frontale du module d’adressage CAN pour régler la vitesse de transmission
et l’adresse des abonnés à l’aide des commutateurs DIP situés à l’intérieur du module.
Commutateur DIP de gauche
(S1L, S2L, S3L, S4L, S5L)
Réglage de la vitesse de transmission
La vitesse de transmission est réglée à l’aide des commutateurs S1L, S2L et S3L. Pour
connaître la position requise des commutateurs, voir le tableau ci-dessous :
Vitesse de transmission S1L S2L S3L
[kbauds]
500 OFF OFF OFF
250 ON OFF OFF
125 OFF ON OFF
50 ON ON OFF
1000 OFF OFF ON
Adressage
Différentes valeurs sont affectées aux commutateurs S4L et S5L, ainsi que S1R à S4R :
S4L S5L S1R S2R S3R S4R S5R
Valeurs 1 2 4 8 16 32 -
Pourprocéderàl’adressage,additionnerlesvaleursdefaçonà ce que la somme corresponde
à l’adresse de l’appareil. Les commutateurs dont la valeur a été additionnée doivent alors
être en position ”ON”.
Exemple :
Adresse 27
Lasommedesvaleursdoitêtreégaleà27:1+2+8+16=27
Ö Position des commutateurs :
S4L S5L S1R S2R S3R S4R S5R
ON ON OFF ON ON OFF -
Commutateur DIP de droite
(S1R, S2R, S3R, S4R, S5R)
2174CAN005
Unefois la vitesse de transmission réglée et l’adressageeffectué,remettre en place la partie
frontale du module CAN.
EDK2174DB DE/EN/FR 3.0
15
Page 16

Mise en service
Lors de la première mise en service du variateur, vérifier les points suivants :
Remarque importante !
ƒ LeparamétragedoitcorrespondreauréglageLenze(vitessede
transmission 500 kbauds, adresse 1).
ƒ Si le variateur doit fonctionner au sein d’un réseau CAN selon une vitesse
de transmission différente de 500 kbauds, il ne doit être relié au réseau
CAN qu’après un paramétrage unique via le module d’adressage CAN. La
présence de différentes vitesses de transmission peut entraîner des
dysfonctionnements lors de l’initialisation du variateur dans le réseau CAN.
Mise en service
1. Enficher le module d’adressage CAN sur l’interface d’automatisation (AIF) du
variateur.
2. Après l’initialisation, le module d’adressage CAN transmet au variateur la vitesse de
transmission et l’adresse paramétrées dans le module.
3. Ensuite, un code de réinitialisation (C0358) est automatiquement exécuté.
4. Tous les paramètres sont enregistrés dans une partie non volatile de la mémoire du
variateur (C0003 = 1).
Etats de fonctionnement
La DEL jaune indique l’état du module d’adressage CAN :
ƒ DEL éteinte :
– Le variateur n’est pas alimenté par le réseau.
ƒ DEL clignotante :
– Adressage erroné et/ou
– Codagedelavitessedetransmissionerroné.
ƒ DEL allumée :
– Aucun problème à signaler.
EDK2174DB DE/EN/FR 3.0
16
Page 17

© 06/2010
Lenze Automation GmbH
)
Hans-Lenze-Str. 1
D-31855 Aerzen
Germany
+49 (0)51 54 / 82-0
¬
+49(0)5154/82-2800
|
Lenze@Lenze.de
Þ
www.Lenze.com
Service Lenze Service GmbH
Breslauer Straße 3
D-32699 Extertal
Germany
00 80 00 / 24 4 68 77 (24 h helpline)
¬
+49 (0)51 54 / 82-11 12
|
Service@Lenze.de
EDK2174DB.C%5DE/EN/FR3.0TD00
10987654321
 Loading...
Loading...