

Page 1

EDBMF2141
Show/Hide Bookmarks
N\e
Operating Instructions
ÄN\eä
Service
L
LON
24V DC
FTT
2141
Fieldbus module type 2141
LON (Local Operating Network)
Page 2

qЬЙлЙ lйЙк~нбеЦ fелнкмЕнбзел ~кЙ о~дбЗ Сзк СбЙдЗДмл гзЗмдЙл пбнЬ нЬЙ СзддзпбеЦ е~гЙйд~нЙлW
Show/Hide Bookmarks
2141 IB. 0x. 0x. LON
fе ЕзееЙЕнбзе пбнЬ нЬЙ мебн лЙкбЙл ~л Скзг нЬЙ е~гЙйд~нЙ З~н~W
820X E./C. 2x. 1x. (8201 - 8204)
821X E./C. 2x. 2x. (8211 - 8218)
822X E. 1x. 1x. (8221 - 8227)
824X E.C. 1x. 1x. (8241 - 8246)
82EVxxxxxBxxxXX Vx 1x 8200 vector
EPL 10200 I.T. 1x. 1x. (Drive PLC)
93XX E./C. 2x. 1x. (9321 - 9333)
93XX E./C. I.T. 2x. 1x. (9300 Servo PLC)
Type
Design:
E = Built-in unit IP20
IB = Module
Hardware version and index
Software version and index
Variant
Explanation
Important:
These Operating Instructions are only valid together with the corresponding Operating Instruc-
tions for the 82XX, 8200 vector, 93XX and 9300 Servo PLC and Drive PLC.
What is new?
Material no. Version Important Contents
455968 1.0 08/02 TD02 1st edition
E 2002 Lenze Drive Systems GmbH
No part of these Instructions must be copied or given to third parties without written approval of Lenze Drive Systems GmbH.
All information given in this documentation have been checked for compliance with the hardware and software described. Nevertheless, deviations and
mistakes cannot be ruled out. We do not take any responsibility or liability for damages which might possibly occur. Necessary corrections will be included
in the next edition.
Page 3

Contents
Show/Hide Bookmarks
1 Preface and general information 1-1...........................................
1.1 How to use these Operating Instructions 1-1................................................
1.1.1 Terminology used 1-1.........................................................
1.2 Packing list 1-1.....................................................................
1.2.1 Legal regulations 1-2..........................................................
2 Safety information 2-1......................................................
2.1 Persons responsible for the safety 2-1....................................................
2.2 General safety information 2-1..........................................................
2.3 Layout of the safety information 2-2......................................................
3 Technical data 3-1.........................................................
3.1 Features of the 2141 fieldbus module 3-1..................................................
3.2 General data / application conditions 3-1..................................................
3.3 Rated data 3-2......................................................................
3.4 Dimensions 3-2.....................................................................
3.5 Communication times 3-3.............................................................
3.5.1 Processing time in the basic unit 3-3..............................................
3.5.2 Number of devices connected to the bus 3-3........................................
4 Installation 4-1............................................................
4.1 Elements at the front of the 2141 fieldbus module 4-1.........................................
4.1.1 Connection of external voltage supply 4-2..........................................
4.1.2 Connection for LON bus 4-2.....................................................
4.1.3 Data for connection terminals 4-2................................................
4.2 Mechanical installation 4-3.............................................................
4.3 Electrical installation 4-4..............................................................
4.3.1 Wiring to a host 4-4...........................................................
4.3.2 Voltage supply 4-5............................................................
5 Commissioning 5-1........................................................
5.1 First switch-on 5-1...................................................................
5.2 Configure the controller for the communication with the 2141 fieldbus module 5-2....................
5.2.1 Protection against uncontrolled restart 5-2..........................................
L BA2141 EN 1.0
i
Page 4

Contents
Show/Hide Bookmarks
6 Parameter setting 6-1......................................................
6.1 Parameter data channel configuration 6-2..................................................
6.1.1 Parameter data 6-2...........................................................
6.1.2 Network variable for the parameter data channel 6-3..................................
6.1.2.1 Structure of network variables 6-3......................................
6.2 Overview: Network variable and configuration variable 6-1.....................................
6.2.1 Overview: Node Object 6-1.....................................................
6.2.2 Overview: Network variable for VSD control 6-2......................................
6.2.3 Overview: Network variable for AIF-CTRL control 6-2..................................
6.2.4 Overview: Configuration variable for VSD control 6-3...................................
6.3 Node Object 6-4.....................................................................
6.3.1 Inhibit / Enable all objects 6-4...................................................
6.3.2 Status messages 6-4..........................................................
6.4 VSD control VSD 6-5..................................................................
6.4.1 Network variable (VSD) 6-5.....................................................
6.4.1.1 Speed setpoint 6-5..................................................
6.4.1.2 Actual speed value 6-6...............................................
6.4.1.3 Scaling of the speed setpoint 6-7.......................................
6.4.1.4 Motor current 6-8...................................................
6.4.1.5 Motor voltage 6-9...................................................
6.4.1.6 Operating time 6-10..................................................
6.4.2 Configuration variable (VSD) 6-11..................................................
6.4.2.1 Location label 6-11..................................................
6.4.2.2 Receive Heartbeat Time 6-12...........................................
6.4.2.3 Maximum Send Time 6-13.............................................
6.4.2.4 Minimum Send Time 6-14.............................................
6.4.2.5 Maximum speed 6-15.................................................
6.4.2.6 Minimum speed 6-16.................................................
6.4.2.7 Rated speed value 6-17...............................................
6.4.2.8 Rated frequency 6-18.................................................
6.4.2.9 Acceleration time 6-19................................................
6.4.2.10 Deceleration time 6-20................................................
6.4.2.11 Receive heartbeat for AIF-CTRL 6-21.....................................
6.4.2.12 Monitoring reaction for AIF-CTRL 6-22....................................
6.4.2.13 Default value for nviDrvSpeedScale 6-23...................................
6.5 Device control AIF-CTRL 6-24............................................................
6.5.1 General information 6-24........................................................
6.5.1.1 Output variable 6-24..................................................
6.5.1.2 Input variable 6-25...................................................
6.5.2 Network variable for 82XX controllers 6-26...........................................
6.5.2.1 Status word for 82XX 6-27.............................................
6.5.2.2 Control word for 82XX 6-29............................................
6.5.3 Network variable for 8200 vector controllers 6-30......................................
6.5.3.1 Status word for 8200 vector 6-32........................................
6.5.3.2 Control word for 8200 vector 6-33.......................................
6.5.4 Network variable for 93XX controllers 6-35...........................................
6.5.4.1 Status word for 93XX 6-37.............................................
6.5.4.2 Control word for 93XX 6-40............................................
6.5.5 Network variable for 9300 Servo PLC and Drive PLC 6-42...............................
ii
BA2141 EN 1.0
L
Page 5

Contents
Show/Hide Bookmarks
7 Troubleshooting and fault elimination 7-1.......................................
7.1 No communication with the controller. 7-1.................................................
7.2 Controller does not execute write job 7-1..................................................
8 Appendix 8-1.............................................................
8.1 Starting Global Drive Control (GDC) from LONMakert 8-1.......................................
8.1.1 Installation instructions for the plug-In 8-1..........................................
8.1.2 Open GDC from the LONMakert 8-2...............................................
8.2 Configuration of the LON network 8-3.....................................................
8.2.1 Configuration of the LON network 8-3..............................................
8.2.2 Working with network variables 8-5...............................................
8.2.3 Registration of new data types 8-8................................................
8.3 Listofabbreviations 8-9...............................................................
8.4 Glossary 8-10.......................................................................
8.5 More information sources 8-10...........................................................
8.6 Table of keywords 8-11................................................................
L BA2141 EN 1.0
iii
Page 6

Contents
Show/Hide Bookmarks
iv
BA2141 EN 1.0
L
Page 7

Preface and general information
O
Claim
Show/Hide Bookmarks
1 Preface and general information
1.1 How to use these Operating Instructions
• These Operating Instructions are intended for safety-relevant working on and with the 2141
fieldbus module. They contain safety information which must be observed.
• All personnel working on and with the 2141 fieldbus module must have these Operating
Instructions available and observe the information and notes relevant for them.
• The Operating Instructions must always be complete and perfectly readable.
These Operating Instructions contain the most important technical data and describe the
installation of the 2141 fieldbus module. They are only valid in combination with the Operating
Instructions of the corresponding controller.
1.1.1 Terminology used
Controller In the following, the t erm ”controller” is used for ”93XX servo inverters” or ”82XX frequeny inverters”.
Drive system In the following, the term ”drive system” is used for drive systems with fieldbus modules or other Lenze drive
Field bus module In the following text, the term ”fieldbus module” is used for the fieldbus module type 2141 L ON.
Cxxx/y Subcode y of code Cxxx (z.B. C0410/3 = subcode 3 of code C0410)
Xk/y Terminal strip Xk/terminal y (z.B. X3/28 = terminal 28 on terminal strip X3)
(^xx-yyy) Cross reference (chapter - page)
1.2 Packing list
Scope of supply Important
• 1 2141 fieldbus module with housing (enclosure IP20)
• 1M3fixingscrew
• 1 2-pole plug connector for voltage supply
• 1 2-pole plug connector for L
• 1 Mounting Instructions
• 1 floppy
components.
After the delivery has been received, check immediately whether the
items supplied match the accompanying papers. Lenze does not
accept any liability for deficiencies claimed subsequently.
N
• visible transport damage immediately to the forwarder
• visible deficiencies/incompleteness immediately to your Lenze
representative.
L BA2141 EN 1.0
1-1
Page 8

Preface and general information
g
p
Show/Hide Bookmarks
1.2.1 Legal regulations
Labelling
Application as
directed
Nameplate CE mark Manufacturer
Lenze 2141 fieldbus modules are
unambiguously identified by their nameplates.
Fieldbus module 2141
Conforms to the EC Low Voltage Directive Lenze Drive Systems GmbH
Postfach 101352
D-31763 Hameln
• Operate the fieldbus module only under the conditions prescribed in these Operating Instructions.
• The fieldbus module is an additional module and can be optionally attached to the Lenze controller series 820X, 821X, 822X, 8200 vector
and 93XX. The 2141 fieldbus module links these Lenze controllers with the standardized serial communication system LON.
• The fieldbus module must be attached and electrically connected so that it complies with its function and does not cause any hazards when
attached and operated as instructed.
• Observe all notes given in chapter „Safety information“ ^ 2-1.
• Please observe all information given in these Operating Instructions.This means:
– Read these Operating Instructions carefully before you start to work with the system.
– These Operating Instructions must always be available during operation of the fieldbus module.
Any other use shall be deemed as inappropriate!
Liability • The information, data, and notes in these instructions met the state of the art at the time of printing. Claims referring to drive systems
which have already been supplied cannot be derived from the information, illustrations, and descriptions given in these Operating
Instructions.
• The specifications, processes, and circuitry described in these instructions are for guidance only and must be adapted to your own specific
application. Lenze does not take responsibility for the suitability of the process and circuit proposals.
• The specifications in these Instructions describe the product features without guaranteeing them.
• Lenze does not accept any liability for damage and operating interference caused by:
– disregarding these Instructions
– unauthorized modifications to the controller
– operating errors
– improper working on and with the controller
Warranty • Warranty conditions: see Sales and Delivery Conditions of Lenze Drive Systems GmbH.
• Warranty claims must be made to Lenze immediately after detecting the deficiency or fault.
• The warranty is void in all cases where liability claims cannot be made.
Disposal
Material recycle dispose
Metal D Plastic D Assembled PCBs - D
Operating Instructions D
1-2
BA2141 EN 1.0
L
Page 9

Safety information
Show/Hide Bookmarks
2 Safety information
2.1 Persons responsible for the safety
Operator
• An operator is any natural or legal person who uses the drive system or on behalf of whom the drive system is used.
• The operator or his safety personnel is obliged
– to ensure the compliance with all relevant regulations, instructions and legislation.
– to ensure that only skilled personnel works on and with the 2102IB fieldbus module.
– to ensure that the personnel has the Operating Instructions available for all corresponding works.
– to ensure that all unqualified personnel are prohibited from working on and with the drive system.
Qualified personnel
Qualified personnel are persons who - because of their education, experience, instructions and knowledge about corresponding standards and regulations, rules for the
prevention of accidents and operating conditions - are authorized by the person responsible for the safety of the plant to perform the required actionsandwhoare
able to recognize potential hazards.
(Definition for skilled personnel to VDE105 or IEC364)
2.2 General safety information
• These safety notes do not claim to be complete. In case of questions and problems please contact your Lenze representative.
• At the time of delivery the fieldbus module meets the state of the art and ensures basically safe operation.
• The indications given in these Operating Instructions refer to the stated hardware and software versions of the fieldbus modules.
• The fieldbus module is hazardous if:
– unqualified personnel works on and with the fieldbus module.
– the fieldbus module is used inappropriately.
• The processing notes and circuit sections shown in these Operating Instructions are proposals which cannot be transferred to other applications without being
tested and checked.
• Ensure by appropriate measures that neither personal injury nor damage to property may occur in the event of failure of the fieldbus module.
• The drive system must only be operated when no faults occur.
• Retrofittings, modifications or redesigns are basically prohibited. Lenze must be contacted in all cases.
• The fieldbus module is electrical equipment intended for use in industrial high-power plants. The fieldbus module must be tightly screwed to the corresponding
controller during operation. In addition, all measures described in the Operating Instructions of the controller used must be taken. Example: Fastening of covers to
ensure protection against contact.
L BA2141 EN 1.0
2-1
Page 10
Safety information
Show/Hide Bookmarks
Restgefahren, Gestaltung der Sicherheitshinweise
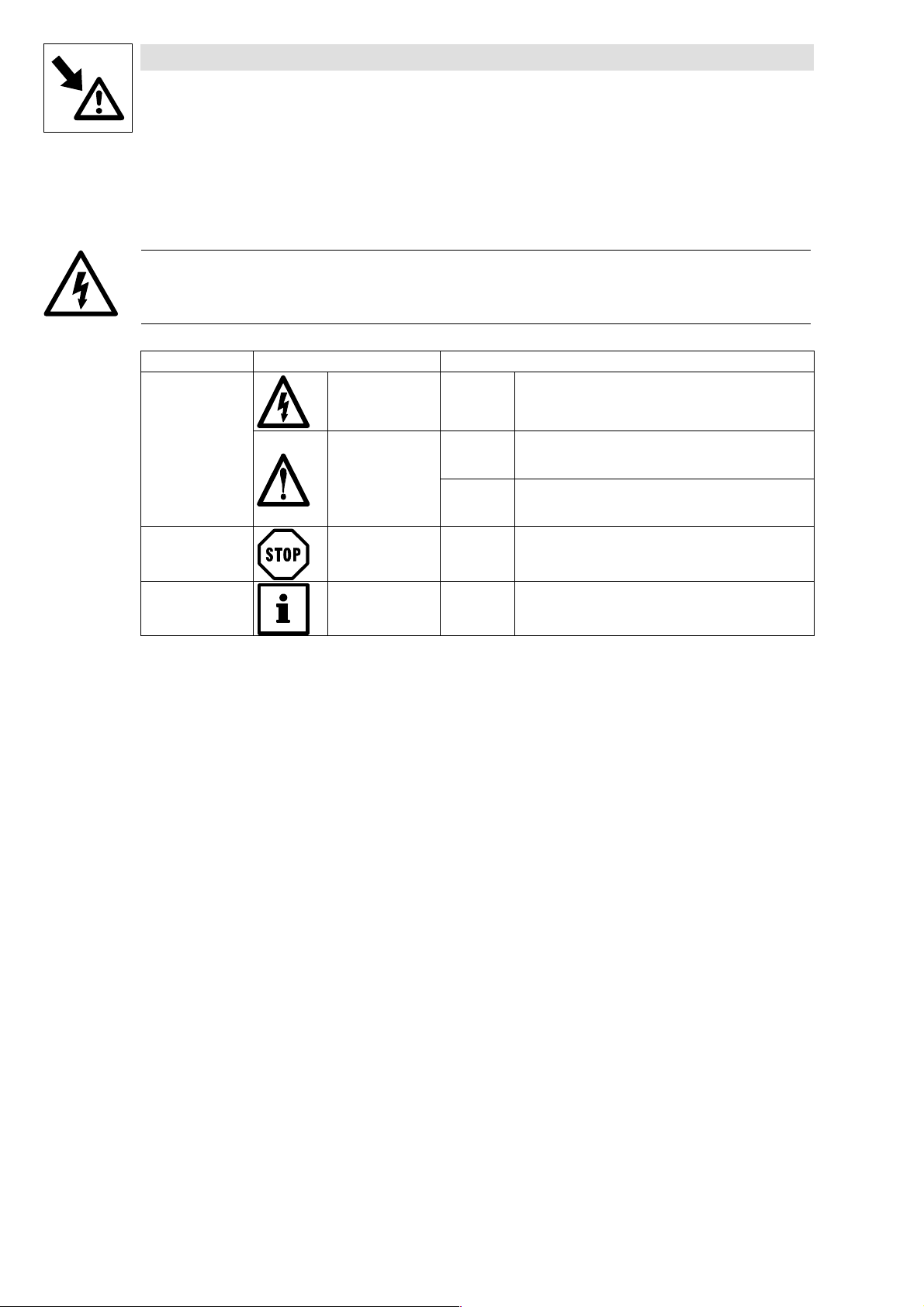
2.3 Layout of the safety information
All safety information given in these Instructions have got the same structure:
Signal word (indicates the severity of danger)
Note (describes the danger and informs the reader how to avoid danger)
Icons used Signal words
Warning of danger
to persons
Warning of hazardous
electrical voltage
Danger! Warns of impending dangerr.
Consequences if disregarded:
Death or severe injuries.
Warning of a general
danger
Warning of damage
to materials
Other notes Tip! It designates general, useful notes.
Warning! Warns of potential, very hazardous situations.
Consequences if disregarded:
Death or severe injuries.
Caution! Warns of potential, hazardous situations.
Consequences if disregarded:
Light or minor injuries.
Stop! Warns of possible damage to material.
Consequences if disregarded:
Damage of the controller/drive system or its environment
If you follow the tip, handling of the controller/drive system
will be easier.
K
2-2
BA2141 EN 1.0
L
Page 11
3 Technical data
Show/Hide Bookmarks
3.1 Features of the 2141 fieldbus module
• Attachable additional module for the following devices:
– 82XX
– 8200 vector
– Drive PLC
– 93XX
– 9300 Servo PLC
• LON connection module with the LONMARK
Drive”
• Access to all Lenze parameters
• Internal and external 24-V-DC voltage supply possible with devices listed above
(exception 820X: only external supply)
®
Functional Profile “Variable Speed Motor
Technical data
3.2 General data / application conditions
Field Values
Order name EMF2141IB
Network topology Free topology (line, tree, star, ring)
Possible number of nodes 64
Max. cable length 2700 m with bus t o pology
Baud rate 78 kBit/s
Ambient temperature during
Permissible humidity Class 3K3 to EN 50178 (without condensation, average relative humidity 85%)
500 m if the topology is mixed
operation:
during
transport:
during storage:
0° C ... 55° C
-25° C ... 70° C
-25° C ... 60 °C
L BA2141 EN 1.0
3-1
Page 12

Technical data
Show/Hide Bookmarks
3.3 Rated data
Field Values
Voltage supply 24 V DC ñ 10 %; max. 120 mA
Communication profile LONMARK®Functional Profile “Variable Speed Motor Drive”
Communication medium FTT - 10 A (Free Topology Transceiver)
Insulation voltage between bus and ... Rated insulation voltage Insulation type
• Earth reference / PE 50 V AC Mains isolation
• External supply (terminal 39/59) 50 V AC Mains isolation
• Power stage
– 820X / 821X 270 V AC Basic insulation
– 822X / 8200 vector 270 V AC Double insulation
– 93XX 270 V AC Double insulation
• Control terminals
– 820X / 8200 vector (with internal supply) 0VAC No mains isolation
– 8200 vector (with external supply 100 V AC Basic insulation
– 821X 50 V AC Mains isolation
– 822X 270 V AC Basic insulation
– 93XX 270 V AC Basic insulation
Degree of pollution VDE0110, part 2, pollution degree 2
3.4 Dimensions
Service
L
LON
75
24V DC FTT
2141
62
Fig. 3-1 Dimensions of the 2141 fieldbus module (all dimensions in mm)
18
23
3-2
BA2141 EN 1.0
L
Page 13

3.5 Communication times
g
g
g
p
Show/Hide Bookmarks
The communication times depend on
• the data transmission time which depends on
– the baud rate
– the user-data length
• the processing time in the basic unit (see the following chapter)
Tip!
You will find more information about the data-transfer time in the documentation for your host
system.
3.5.1 Processing time in the basic unit
The processing time in the basic unit starts when a message arrives at the fieldbus module (action)
and ends with the response of the basic unit to this message.
Technical data
Processing time 820X
Action Processing step Max. time required by the controller
• Writing of control word or setpoint, if the
value has changed
• Alternating reading of status word and
actual value
• Processing of parameter access if there
is a service
Tab. 3-1 Processing time: 820X
Processing time: 821X / 8200 vector / 822X
Parameter data and process data are independent of each other.
• Parameter data: 30 ms + 20 ms tolerance
• Process data: approx. 3 ms + 2 ms tolerance
Processing time: 9300 servo inverter
Parameter data and process data are independent of each other.
• Parameter data: approx. 30 ms + 20 ms tolerance (typical)
– The processing time can be longer for some codes
(see 9300 Manual).
• Process data: approx. 3 ms + 2 ms tolerance
Processing time: Drive PLC / 9300 Servo PLC
Parameter data and process data are independent of each other.
• Parameter data: approx. 30 ms + 20 ms tolerance
• Process data depend on the process image.
The process image is an update of process data made after every task cycle.
Writing of status word and actual
value
Control word or setpoint reading 27 ms +48 ms Toleranz
Control word and setpoint reading 54 ms +56 ms tolerance
Read parameter 55 ms +48 ms tolerance
Parameter writing 108 ms +32 ms tolerance
200 ms +40 ms tolerance
3.5.2 Number of devices connected to the bus
L BA2141 EN 1.0
The maximum bus size depends on
• the baud rate used
• the number of repeaters
For more detailed information see the documenation for the control system.
3-3
Page 14

Technical data
Show/Hide Bookmarks
3-4
BA2141 EN 1.0
L
Page 15

Installation
Twopoleplugforexternalvoltagesupplyofthe2141fieldbusmodul
e
6
pg(p)
Show/Hide Bookmarks
4 Installation
4.1 Elements at the front of the 2141 fieldbus module
Fig. 4-1 Front view of the 2141 LON fieldbus module
Pos. Name/meaning
Green bus LED indicates the voltage supply status for the 2141 f ie l dbus module.
ON: 2141 fieldbus module is supplied with voltage and connected to the controller.
OFF: 2141 is not supplied with voltage; controller and external voltage supply are switched off.
0
BLINKING:
2141 fie l dbus module is supplied with voltage but not connected to the controller. Possible reasons: Controller is switched off, in
initialisation or not connected.
Yellow bus LED indicates t he communication status for t he 2141 fieldbus module.
OFF: 2141 fieldbus module has not been initialised yet.
1
BLINKING: LON communication is not active
Green or red DRIVE-LED
2/
Operating status of 82XX, 8200 vector or 93XX (see Operating Instructions f or controller)
3
Service LED
OFF: Normal operating status
4
BLINKING: Fieldbus module not configured yet
ON: No program available in Neuron
Service key
5
e.g. for signing on a fieldbus module with the configuration tool “ LONMaker
Two-pole plug for external voltage supply of the 2141 fieldbus module
+: Input voltage (see chapter: Technical Data)
6
- : Reference potential for external voltage (GND)
Two-pole plug for LON communication
7
Max. cable cross-section: 1.5 mm
Only for 820X, 821X: Additional PE shield cable avoids EMC related communication interference
8
2
2141LON003
t for Windows® “ ^ 8-1
L BA2141 EN 1.0
4-1
Page 16

Installation
Show/Hide Bookmarks
4.1.1 Connection of external voltage supply
Name Explanation
24 V DC /+ External voltage supply +24 V DC/10 %, 120 mA ma x.
24 V DC /- GND; reference for external voltage supply
4.1.2 Connection for LON bus
Name Explanation
FTT / Connection for LON bus, two cores (twisted pair)
4.1.3 Data for connection terminals
Electrical connection Plug connector with threaded terminal end
Possible connections
Tightening torque 0.5 Nm (4.4 lb-in)
Bare end 7mm
rigid: 1.5 mm2(AWG16)
flexible:
without wire crimp cap
1.5 mm2(AWG16)
with wire crimp cap,without plastic sleeve
1.5 mm2(AWG16)
with wirecrimp cap,with plastic sleeve
1.5 mm2(AWG16)
4-2
BA2141 EN 1.0
L
Page 17

4.2 Mechanical installation
Show/Hide Bookmarks
• Plug the fieldbus module onto the controller (here: 8200 vector)
Installation
• Use the fixing screw to mount the fieldbus module.
2141LON001
2141LON002
L BA2141 EN 1.0
4-3
Page 18

Installation
Show/Hide Bookmarks
4.3 Electrical installation
4.3.1 Wiring to a host
Stop!
An additional mains isolation is required, if
• a 820X or 821X controller is connected to a host and
• a safe mains isolation (double basic insulation) to VDE 0160 is necessary.
For this, it is, for instance, possible to use an interface module which provides an additional mains
isolation (see corresponding manufacturer’s data).
For wiring, the electrical isolation of the supply voltage must be taken into account.
Tip!
The communciation of controllers
820X and 821X may be interfered
by electromagnetic radiation. If
necessary, use an additional PE
shield cable .
4-4
BA2141 EN 1.0
L
Page 19

4.3.2 Voltage supply
Show/Hide Bookmarks
• Internal voltage supply
– If possible, use all devices without
reasons.
• External voltage supply (^ 4-1)
– Absolutely required for 820X controllers.
– If the 2141 fieldbus module is to be able to communicate even if the basic device is switch
off.
• If the bus system is distributed over several control cabinets, install a separate power supply
in every control cabinet to supply all devices/fieldbus modules.
Install an equipotential bonding conductor between the control cabinets.
Tip!
Internal voltage supply of the fieldbus module connected to a 8200 vector
Controllers with an extended AIF interface (front of the 8200 vector) can be internally supplied. The
part of the drawing highlighted in grey shows the jumper position.
With Lenze setting, the fieldbus module is not
For internal voltage supply, put the jumper in the position indicated below.
Installation
external voltage supply because of EMC-relevant
internally supplied.
Lenze setting
(only external voltage supply)
Internal voltage supply
L BA2141 EN 1.0
4-5
Page 20

Installation
Show/Hide Bookmarks
4-6
BA2141 EN 1.0
L
Page 21

5 Commissioning
Show/Hide Bookmarks
5.1 First switch-on
Please do not change the switch-on sequence explained below!
Stop!
Prior to first switch-on of the controller, check the wiring for
• Completeness
• Short circuit
• Earth fault
Step Procedure Remarks
1. Connect the basic unit and
if available external supply for the fieldbus
module.
2. Configuration of controllers connected to
the bus
3. It should now be possible to communicate
with the drive.
4. Drive-specific settings à Operating Instructions of the basic unit
5. Enable controller à Terminal controller inhibit (CINH) = HIGH
6. Setpoint selection à The drive should be running now.
Commissioning
• Onle of the two operating status LEDs at the controller, see ^ 4-1, must be on
or blinking.
If this is not the case, see
• The green Vcc display must also be on, see ^ 4-1.
If this is not the case, see
Configure the controllers connected to the bus by means of an appropriate
configuration tool
à e.g. LONMAKERtfor Windows
The yellow bus LED is blinking, see ^ 4-1, when data is exchanged between
the 2141 fieldbus module and other controllers connected to the bus.
^ 7-1
^ 7-1.
®
,see^ 8-1
L BA2141 EN 1.0
5-1
Page 22

Commissioning
Show/Hide Bookmarks
5.2 Configure the controller for the communication with the 2141 fieldbus module
82XX /
8200 vector
93XX 1. If you want to control the drive via LON, configure the Lenze paramete r “Signal configuration” (C0005) for xxx3. This change can be carried out
1. The drive can be controlled through LON, if the Lenze parameter “Operating mode” (C0001) is changed from 0 to 3. This change can be made
by using the keypad or directly via LON.
• Example:
For LON Write (C0001=3), subindex: 0, value = 30000.
Please see the information about how to change parameter values of a code in chapter 6.1.2.1.
2. Terminal 28 (controller enable) is always active
the controller cannot be enabled by the LON.
3. 821X, 8200vector and 822X:
The QSP function (quick stop) is always active
A input terminal configured for QSP (default setting: not assigned) must be HIGH during LON operation (see Operating Instructions for the
controller).
4. The controller now accepts control and parameter-setting data from the LON.
using the 9371BB keypad or the LON. Select the signal configuration 1013 for first commissioning.
• Example:
For LON Write (C0005=1013), subindex: 0, value: 10130000.
Please see the information about how to change parameter values of a code in chapter 6.1.2.1.
2. Set the parameter C0142 to 0.
Please read the next TIP for code C0142.
3. Terminal 28 (RFR = controller enable) is always active
Otherwise, the controller cannot be enabled by the LON.
4. With the signal configuration C0005=1013, the QSP function (quick stop) and the CW/CCW changeover are a ssigned t o the input terminals E1
and E2, and thus they are always active.
E1 must be HIGH for LON operation (see 93XX Operating Instructions).
With the signal configuration C0005=xx13, t erminal A1 is configured as voltage output. Therefore, only the following terminals must be
connected via cables:
• X5.A1 with X5.28 (ctrl. enable)
• X5.A1 with X5.E1 (CW/QSP)
5. The controller now accepts control and parameter-setting data from the LON.
and must be HIGH for LON operation (see the corresponding Operating Instructions). Otherwise,
.
and must be HIGH for LON operation (see Operating Instructions for the controller).
5.2.1 Protection against uncontrolled restart
Tip!
After an error or fault (e.g. short-term mains failure) a restart of the drive is not always wanted.
• The start condition can be changed, i.e. the drive can be inhibited by setting C0142 = 0 for
the event that
– the corresponding controller sets a fault „Message“
– the fault is active for more than 0.5 s
Parameter function:
• C0142 = 0
– Controller remains inhibited (even if the fault is not active any longer)
– The drive restarts in a controlled mode: LOW-HIGH transition at one of the inputs for
„Controller inhibit“ (CHIN, e.g. at terminal X5/28)
• C0142 = 1
– Uncontrolled restart of the controller possible
5-2
BA2141 EN 1.0
L
Page 23

6 Parameter setting
Show/Hide Bookmarks
General information on parameter setting
Two different data types are transferred by the 2141 fieldbus module:
• Parameter data
• Process data,
Different communication channels are assigned to parameter and process data:
Telegram type Communication channel
Parameter data These are, for instance,
• Operationg parameters
• diagnostics information
• motor data
In general, the parameter transfer is not as
time-critical as the tranfer of process data.
Process data These are, for instance,
• Setpoints
• Actual values
Exchange between host and controller
required as fast as possible. Small amounts
of data, which are transferred cyclically.
Parameter setting
Parameter data channel
(chapter 6.1)
Process-data channel
(chapter 6.2)
• Enables the access to all Lenze codes.
• Parameter changes are normally saved in
the controller (observe C0003).
• If the parameter channel is active, it
assigns 4 words of the input and output
process data.
• The controller can be controlled using the
process data.
^ 6-7 ).
(
• The host has direct access to the process
data.
In the PLC, for instance, the data are
directly assigned to the I/O area.
• Process data are
– not stored in the controller.
– cyclically transferred between the host
and the controller (continuous
exchange of current input and output
data).
^ 6-2 )
Tab. 6-1 Division of parameter data and process data into different communication channels
The communication protocol is only described as much as it is needed for building up the network
with Lenze controllers.
L BA2141 EN 1.0
6-1
Page 24
Parameter setting
currentparameterset
g
Changesofthecurrentparametersetwill
p
Show/Hide Bookmarks
6.1 Parameter data channel configuration
6.1.1 Parameter data
Parameter data are addressed through Lenze codes. You find a code table in the Operating
Instructions for your controller.
Lenze parameter sets
Parameter sets are for special code saving which is necessary because of different configurations
for different application processes.
The following table informs about the number of parameter sets and how to address them.
82XX 8200 vector
82XX and 8200 vector controllers have 2 and 4 parameter sets. They can be directly addressed
through LON.
They are addressed by means of a code-digit offset:
• Offset 0 addesses parameter set 1 with Lenze codes C0000 to C1999
• Offset 2000 addresses parameter set 2 with Lenze codes C2000 to C3999
• Offset 4000 addresses parameter set 3 with the
No additional parameter sets available.
If a parameter is available only once (see Operating Instructions for 82XX or 8200 vector), use t he
code digit offset 0.
Example for C0011 (maximum field frequency):
C0011 in parameter set 1: Lenze code = 11
C0011 in parameter set 2: Lenze code = 2011
-
Parameter changes
Automatic saving in the controller Automatic saving (can be switched off under C0003) Changes must be saved in code C0003.
Process data changes
No automatic saving No automatic saving No automatic saving
Lenze codes C4000 to C5999
• Offset 6000 addresses parameter set 4 with the
Lenze codes C6000 to C7999
C0011 in parameter set 3: Lenze code = 4011
C0011 in parameter set 4: Lenze code = 6011
93XX controllers have 4 parameter sets
(depending on the variant) for non-volatile
saving.
Another parameter set is in the user
memory of the controller. This is the
After switching on the controller,
parameter set 1 is automatically loaded
into the current parameter set.
es of the currentparameter set will
Chan
be lost after switching off the controller.
The current parameter set is stored in
code C0003.
Only the current parameter set can be
directly addressed through LON.
The 93XX codes are listed in the
Operating Instructions and the Manual.
All changes made without storing them will
be lost after the controller is switched off.
93XX
.
Stop!
• For 8200 vector
– Please note that it is not allowed to write parameter data to the EEPROM.
– If you want to cyclically change parameter data, the code must be configured as follows
after every mains switching: C0003 = 0.
• For 82XX
– Please note that it is not allowed to cyclically write parameter data to the EEPROM.
6-2
BA2141 EN 1.0
L
Page 25

Parameter setting
L
hcode
cod
e
SubcodeS
Detailsaboutthe
Show/Hide Bookmarks
6.1.2 Network variable for the parameter data channel
The network variables nviParamReq, nvoParamRes and nvoLongRes
• enable parameter setting and diagnostics.
• allow access to all Lenze parameters (codes).
The input network variable nviParamReq allows to send a read or write request to the drive.
With parameters with a length of up to 4 bytes, the response is output through the output network
variable nvoParamRes.
With parameters bigger than 4 bytes, the response to a read request is output through the network
variable nvoLongRes.
6.1.2.1 Structure of network variables
Tip!
User data are displayed in left-justified Motorola format.
High byte or high word are shown before low byte or low word (see
Calculation examples
(^ 6-6) ).
Details about the
parameter data
telegram:
Details about the
parameter data
telegram:
Details about the
parameter data
telegram:
The structure of nviParamReq and nvoParamRes is defined as follows:
1st byte 2nd byte 3rd byte 4th byte 5th byte 6th byte 7th byte 8th byte 9th byte
engt
code code
High byte
Low byte
ervice
Data 4 Data 3 Data2 Data1
The structure of nvoLongRes is defined as follows:
1st byte 2nd byte 3rd byte 4th byte 5th byte 6th byte .... 28th byte
Length
1st byte
Length
code
High byte
code
Low byte
Subcode Service Data 1 .... Data23
Indicates the length of the following byte for write orders. Value range: 1, 2 or 4.
2nd byte 3rd byte
code
High byte
code
Low byte
Byte2andbyte3containthecodetobeused.
4th byte
Subcode
Error code
L BA2141 EN 1.0
Byte4containsthesubcodetobeused.
• The series 82XX do not have codes with subindex, the value is always 0.
• Many codes of 93XX and 8200 vector controllers require additional addressing via a
subindex.
Example for 9300 servo inverters:
Code C0039 / subcode 3 addresses ” NSET JOG” (50% = default setting)
6-3
Page 26

Parameter setting
Show/Hide Bookmarks
Details about the
parameter data
telegram:
Details about the
parameter data
telegram:
5th byte
Service
Order type
1 = Read
2=Write
Data contents
• Response ok
– Read: 1
–Write:2
• Faulty response
(80
(80
hex
hex
+1)
+2)
– Read: 81
–Write:82
6th byte 7th byte 8th byte 9th byte
Data 4 Data 3 Data 2 Data 1
hex
hex
Bytes 6 to 9 contain the data to be written.
Bytes 6 to 9 are not relevant for reading orders.
The parameters of the corresponding code are changed by multiplying the parameter value with
10000 (the result is an integer value). Lenze parameters are mainly in the fixed-point format ,data
type Integer32, with four decimal codes.
Tip!
Please see the Operating Instructions for your controller for the value range of Lenze codes.
Lenze parameters dec hex
Example: Set C0039 (JOG) = 150.4 Hz 150.4 x 10000 = 1504000 = 0016F300
The parameter value needs 1 to 4 bytes depending on the data format (see “Attribute table” in the
Operating Instructions for your controller)
6th byte 7th byte 8th byte 9th byte
Data 4 Data 3 Data 2 Data 1
High byte Low byte High byte Low byte
High word Low word
Double word
Assignment of bytes 6 to 9 with parameter value of different lengths
6th byte 7th byte 8th byte 9th byte
00 00 00 Parameter value (length 1)
00 00 Parameter value (length 2)
Parameter value (length 4)
6-4
BA2141 EN 1.0
L
Page 27

Parameter setting
Show/Hide Bookmarks
Details about the
parameter data
telegram:
6th byte 7th byte 8th byte 9th byte
Error code
If processing the order is completed correctly, the variable nvoParamRes contains the read data
or a copy of the written data.
If an error occurs in the network variable nvoParamRes the error code will be entered in byte 9.
Theerrorcodecanbereadfrombyte9if
• the value of byte 1 = 1 and
• bit7issetinbyte5(i.e.thevalueofbyte5=80
, see example below).
hex
Tip!
Strings and data blocks cannot be written.
The following table explains the error codes.
Error code
dec hex
01 01 Service-ID invalid
02 02 Caller-ID invalid
03 03 Data type invalid
04 04 Subcode-No. invalid
05 05 Code-No. invalid
06 06 Parameter invalid, general
07 07 No access authorisation because of operating status
08 08 No access authorisation because of operating mode
09 09 No access authorisation because parameter can only be read
10 A No access authorisation
11 B Data block too long
12 C Collision with other parameter values
14 D Quit value range
15 I General limit value exceeding
32 20 General
33 21 Time limit exceeded
34 22 Frame error
35 23 Parity error
36 24 Overflow
Meaning of error message
L BA2141 EN 1.0
Example:
The brake opening time, code C0196 (C4
), is wrong.
hex
Error code 14, ’Parameter value exceeds the max. permissible value’.
1st byte 2nd byte 3rd byte 4th byte 5th byte 6th byte 7th byte 8th byte 9th byte
01 00 C4 00 80 00 00 00 0E
6-5
Page 28

Parameter setting
Show/Hide Bookmarks
Example 1: Read parameter
The heat sink temperature
(Here: J =43° C)
• Byte 1: Length
– 4(datalength4bytes)
• Byte 2 and byte 3: Code
– C0061: 61 = 3D
hex
• Byte 4: Subcode
– Subindex = 0, as there is not subindex under code C0061.
• Byte 5: Service
– Service=1(Read)
• Byte 6 ... 9: Data (part of the response of nvoParamRes)
– Data1todata4=43[° C] x 10000 = 430000 = 00 06 8F B0
Result:
Byte1 Byte 2 + byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8 Byte 9
Lengt
h
Request telegram from master to drive
Hex: 04 003D 00 01 00 00 00 00
Wait for response identification with code = 003D and subcode 0
Response telegram from drive t o master (for faulty execution)
Hex: 04 003D 00 01 00 06 8F B0
Tab. 6-2 Telegram exchange in LON parameter data channel
code Lenze subcode Service Parameter value
of the controller is to be read
hex
(C0061)
.
Example 2: Write parameter
The acceleration time
(C0012)
of the controller is to be set to Tir=20s.
• Byte 1: Length
– 4(datalength4bytes)
• Byte 2 and byte 3: Code
– C0012: 12 = 0C
hex
• Byte 4: Subcode
– Subindex = 0, as there is not subindex under code C0061.
• Byte 5: Service
– Service=2(Write)
• Byte 6 ... 9: Data (part of the response of nvoParamRes)
– Data 1 to data 4 = 20 [s] x 10000 = 200000 = 00 03 0D 40
Result:
Byte1 Byte 2 + byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8 Byte 9
Lengt
h
Request telegram from master to drive
hex: 04 000C 00 02 00 03 0D 40
Wait for response identification with code = 00C and subcode 0
Response telegram from drive t o master (for faulty execution)
hex: 04 000C 00 02 00 00 00 00
code Lenze subcode Service Parameter value
hex
Tab. 6-3 Telegram exchange in LON parameter data channel
6-6
BA2141 EN 1.0
L
Page 29

Parameter setting
Show/Hide Bookmarks
6.2 Overview: Network variable and configuration variable
Communication with 2141 fieldbus module via network variable.
The control Variable Speed Motor Drive (VSD) is the part of the network variable defined in the
LonMark
The Lenze control AIF-CTRL is the manufacturer-related part of the network variable. Lenze drives
are parameterised and controlled by AIF-CTRL.
The changeover between the two controls is automatic.
• VSDisactiveifoneofthevariablesnviDriveSpeedStpt or nviDriveSpeedScale gets a
• AIF-CTRL is active if one of the variables nviAIFIn1 to nviAIFIn3 or nviAIFStw gets
The network variable Node Object accesses the entire node.
6.2.1 Overview: Node Object
®
Functional Profile.
new value.
a new value.
• Required network variable
nvi00Request
SNVT_obj_request
• Selectable network variable
• Configuration variable
• Manufacturer-related part
Fig. 6-1 NodeObject, described in chapter 6.3
nvo00State
SNVT_obj_status
nciLocation
SNVT_str_asc
L
BA2141 EN 1.0
6-7
Page 30

Parameter setting
Show/Hide Bookmarks
6.2.2 Overview: Network variable for VSD control
• Required network variable
Speed setpoint
nviDrvSpeedStpt
SNVT_switch
• Selectable network variable
Scaling v
set
nviDrvSpeedScale
SNVT_lev_percent
^ 6-11
^ 6-13
Actual speed value
nvoDriveSpeed
SNVT_lev_percent
Motor current
nvoDriveCurnt
SNVT_amp
Motor voltage
nvoDrvVolt
SNVT_volt
Operating time
nvoDrvRunHours
SNVT_time_hour
^ 6-12
^ 6-14
^ 6-15
^ 6-16
Fig. 6-2 Network variable VSD, described in chapter 6.4
6.2.3 Overview: Network variable for AIF-CTRL control
• Manufacturer-related network variable
Process data input
nviAIFStw
SNVT_count
Process data input
nviAIFIn1
SNVT_count
Process data input
nviAIFIn2
SNVT_count
Process data input
nviAIFIn3
SNVT_count
nviParamReq
ParamType
^ 6-31
^ 6-31
^ 6-31
^ 6-31
^ 6-3
Process data output
nvoAIFStatus
SNVT_count
Process data output
nvoAIFOut1
SNVT_count
Process data output
nvoAIFOut2
SNVT_count
Process data output
nvoAIFOut3
SNVT_count
nvoParamRes
ParamType
nvoLongRes
ParamType
^ 6-30
^ 6-30
^ 6-30
^ 6-30
^ 6-3
^ 6-3
Fig. 6-3 Network variable AIF-CTRL, described in chapter 6.5
6-8
BA2141 EN 1.0
L
Page 31

Parameter setting
Show/Hide Bookmarks
6.2.4 Overview: Configuration variable for VSD control
nciLocation (O)
nciRcvHrtBt (O)
nciSndHrtBt (O)
nciMinOutTm (O)
nciMaxSpeed (M)
nciMinSpeed (M)
nciNmlSpeed (M)
nciNmlFreq (M)
nciRampUpTm (M)
nciRampDownTm (M)
nciDrvSpeedScale (O)
nciAIFRecHrtBt
nciAIFDefStw
Fig. 6-4 Configuration variable VSD, described in chapter 6.4.2
^ 6-17
^ 6-18
^ 6-19
^ 6-20
^ 6-21
^ 6-22
^ 6-23
^ 6-24
^ 6-25
^ 6-26
^ 6-29
^ 6-27
^ 6-28
L
BA2141 EN 1.0
6-9
Page 32

Parameter setting
Show/Hide Bookmarks
6.3 Node Object
6.3.1 Inhibit / Enable all objects
All objects can be inhibited or enabled via the network variable nvi00Request:
• Inhibit: nvi00Request.object_id =Objectno.
nvi00Request.object_request = 1 (RQ_DISABLED)
• Enable: nvi00Request.object_id =Objectno.
nvi00Request.object_request =7(RQ_ENABLED)
6.3.2 Status messages
In the event of a communication error between the LON interface module and the basic unit the bit
comm_failure will be set under nvo00State.
Structure Type Definition:
typedef struct {
} SNVT_obj_status;
unsigned long object_id;
unsigned invalid_id : 1;
unsigned invalid_ request : 1;
unsigned disabled : 1;
unsigned out_of_limits : 1;
unsigned open_circuits : 1;
unsigned out_of_service : 1;
unsigned mechanical fault : 1;
unsigned feedback_failure : 1;
unsigned over_range : 1;
unsigned under_range : 1;
unsigned electrical_fault : 1;
unsigned unable_to_measure : 1;
unsigned comm_failure : 1;
unsigned fail_self_test : 1;
unsigned self_test_in_progress : 1;
unsigned locked_out : 1;
unsigned manual_control: 1;
unsigned in_alarm: 1;
unsigned in_override: 1;
unsigned report_mask: 1;
unsigned programming_mode: 1;
unsigned programming_fail: 1;
unsigned alarm_notify_ disabled: 1;
unsigned reserved1: 1;
unsigned reserved1: 8;
6-10
BA2141 EN 1.0
L
Page 33

6.4 VSD control VSD
Show/Hide Bookmarks
6.4.1 Network variable (VSD)
6.4.1.1 Speed setpoint
network input SNVT_switch nviDrvSpeedStpt;
The input network variable offers the following:
• Motor start/stop option
• Speed selection in percent
(resolution = 0.5% ref. to value selected under nciMaxSpeed)
Input range
Status Value Command Explanation
0(FALSE) NA Stop
1(TRUE) 0 0%
1(TRUE) 1 to 200 0.5% to 100.0%
1(TRUE) 201 to 255 100.0%
jFF
hex
NA AUTO (invalid) Standard value.
Parameter setting
This value will be set after a reset or if the time set under
nciRcvHrtBt expires with an update of the variables.
AUTO has the same function as stop, but is also used to check whether
the “Receive Heartbeat Time” has expired.
Function
The speed setpoint for the controller is calculated as follows:
n
nviDrvSpeedStpt.value × nviDrvSpeedScale
=
soll
100
The result is used as setpoint preselection in per cent. The setpoint selection is mapped to the AIF
input data word 1 of the process data channel. Since 82XX and 93XX controllers expect different
values here, the setpoints are converted in two different ways.
82XX controllers
use a setpoint in Hz and a factor of 50 (24000 = 480Hz).
The value for AIF data word 1 is calculated as follows:
AIFIn.W1 =
nviDrvSpeedStPt.value
100[%] × 2[
NVfactor
]
nviDrvSpeedScale
×
100[%] × 200 [
NVfactor
nciNmlFreq
×
]
10 [
NVfactor
× 50 [
]
AIFfactor
]
93XX servos use a setpoint in % and a factor of 163.83 (16383 = 100%).
The value for AIF input data word 1 results from the following:
AIFIn.W1 =
nviDrvSpeedStPt.value
100[%] × 2[
NVfactor
]
nviDrvSpeedScale
×
100[%] × 200 [
NVfactor
× 16383 [
]
AIFfactor
]
L
Iftheresultof thecalculationis anegativevalue,thedirectionof rotationwillbe reversed.Thisisdone
by setting bit 2 in the AIF control word.
BA2141 EN 1.0
6-11
Page 34

Parameter setting
Show/Hide Bookmarks
6.4.1.2 Actual speed value
network output SNVT_lev_percent nvoDrvSpeed;
The output network variable indicates the current speed as proportion of the rated value. Display
value in [%].
Output range
The possible bandwidth for the output variables is between –163.840% and 163.830%. Resolution:
0.005%.
The value +163.835% (7FFF
Update rate
) is assumed to be wrong.
hex
The variable is sent if the value changes or if the time set under
Maximum Send Time
(nciSndHrtBt)
has expired.
The variable value will not be sent quicker than set in
Minimum Send Time
(nciNinOutTm).
Standard Service Type
The Standard Service Type is acknowledged.
Function
The value of nvoDrvSpeed results from the AIF output data word 1 of the process data channel.
Since 82XX and 93XX send different value, the actual speed values are converted in different ways.
82XX controllers
send actual values in [Hz] and a factor of 50 (24000 = 480Hz).
The value for nvoDrvSpeed results from:
nvoDrvSpeed =
nciNmlFreq
10 [
NVfactor
AIFOut.W1
× 50[
AIFfactor
]
× 100[%] × 200 [
]
NVfactor
]
93XX controllers send actual values in [%] and a factor of 163.83 (16383 = 100%).
The value for nvoDrvSpeed results from:
6-12
nvoDrvSpeed =
AIFOut.W1
16383 [
NVfactor
BA2141 EN 1.0
× 100[%] × 200 [
]
NVfactor
]
L
Page 35

6.4.1.3 Scaling of the speed setpoint
Show/Hide Bookmarks
network input SNVT_lev_percent nviDrvSpeedScale;
The setpoint can be scaled through this input network variable (nviDrvSpeedStPt).
Negative values result in the opposite direction of rotation.
Actual speed setpoint = nviDrvSpeedStpt × nviDrvSpeedScale
Example:
• nviDrvSpeedStpt.value = 50%
• nviDrvSpeedScale = –150%
The actual speed setpoint is –75% of the rated value.
Input range
Parameter setting
The possible bandwidth for the input variables is between –163.840% and 163.830% . Resolution
0.005%.
The value +163.835% (7FFF
) is assumed to be wrong.
hex
Standard value
The standard value is determined by the “Configuration Property” nciDrvSpeedScale.
This value will be set after a reset or if the time set under nciRcvHrtBt passes without an update
of the variable.
Function
The value of nviDrvSpeedStPt.value is multiplied with the value of nviDrvSpeedScale and
divided by 100.
The result is used as setpoint preselection in per cent. The setpoint selection is mapped to the AIF
input data word 1 of the process data channel. Since 82XX and 93XX controllers expect different
values here, the setpoints are converted in two different ways.
82XXcontroller
expect the setpoint in [Hz] and afactor of 50 (24000 = 480Hz). The value for AIFdata
word 1 is calculated as follows:
AIFIn.W1 =
nviDrvSpeedStPt.value
100[%] × 2[
NVfactor
]
nviDrvSpeedScale
×
100[%] × 200 [
NVfactor
nciNmlFreq
×
]
10 [
NVfactor
× 50 [
]
AIFfactor
]
L
93XXcontrollers expect the setpoint in [%] and a factor of 163.83(16383 = 100%). The value for AIF
input data word 1 results from the following:
AIFIn.W1 =
nviDrvSpeedStPt.value
100[%] × 2[
NVfactor
]
nviDrvSpeedScale
×
100[%] × 200 [
NVfactor
× 16383 [
]
AIFfactor
]
Iftheresultof thecalculationis anegativevalue,thedirectionof rotationwillbe reversed.Thisisdone
by setting bit 2 in the AIF control word.
BA2141 EN 1.0
6-13
Page 36

Parameter setting
Show/Hide Bookmarks
6.4.1.4 Motor current
network output SNVT_amp nvoDriveCurnt;
This network variable outputs the actual output current in Ampere.
Output range
The possible bandwidth for the output variable is between –3276.8 A and +3276.6 A. Resolution 0.1
A.
The value +3276.7 A (7FFF
Update rate
) is assumed to be wrong.
hex
The variable is sent if the valuehas changed or if the time set under
Send Time
The variable value will not be sent quicker than set in
(nciMinOutTm).
Standard Service Type
The Standard Service Type is acknowledged.
Function
The output current is cyclically read from the drive
(code 0054, subcode 00). The value is calculated as follows:
If an error occurs during the query,
(nciSndHrtBt) has expired.
nvoDriveCurnt =
nvoDriveCurnt
SDF.LW
10000 [
Configuration Property Minimum Send Time
AIFfactor
will be set to 7FFFhex.
× 10 [
]
Configuration Property Maximum
NVfactor
]
6-14
BA2141 EN 1.0
L
Page 37

6.4.1.5 Motor voltage
Show/Hide Bookmarks
network output SNVT_volt nvoDrvVolt;
The output network variable indicates the current output voltage in [Volt].
Output range
The possible bandwidth for the output variable is between –3276.8 V and +3276.6 V.
Resolution 0.1 V.
The value +3276.7 V (7FFF
The typical output range is between 0 V and 700 V.
Update rate
The variable is sent if the value has changed.
The variable is sent as heart beat if the time set under
(nciSndHrtBt) has expired.
The variable value will not be sent quicker than set in
(nciMinOutTm).
) is assumed to be wrong.
hex
Parameter setting
Configuration Property Maximum Send Time
Configuration Property Minimum Send Time
Function
The current output voltage is cyclically read by the drive (code 0052, subcode 00). The value is
calculated as follows:
nvoDriveVolt =
If an error occurs during the query, nvoDrvVolt is set to 7FFF
Standard Service Type
The Standard Service Type is acknowledged.
SDF.LW
10000 [
AIFfactor
× 10 [
]
NVfactor
.
hex
]
L
BA2141 EN 1.0
6-15
Page 38

Parameter setting
Show/Hide Bookmarks
6.4.1.6 Operating time
network output SNVT_time_hour nvoDrvRunHours;
This network variable output the entire operating time in hours.
Output range
The possible bandwidth for the output variable is between 0 and 65534 hours. Resolution: 1 hour.
The value of 65535 hours (FFFF
Update rate
The variable is sent if the value has changed.
The variable value will not be sent quicker than set im
(nciMinOutTm).
Standard Service Type
The Standard Service Type is acknowledged.
) is assumed to be wrong.
hex
Configuration Property Minimum Send Time
Function
The operating time is cyclically read by the drive (code 0174, subcode 00).
82XX controllers
send the operating time in hours with the AIF factor 10000 (30000 = 3 hours).
The value is calculated as follows:
nvoDriveRunHours =
SDF.LW
10000 [
AIFfactor
× 1[
]
NVfactor
93XX controllers send the operating time in seconds without AIF factor.
The value is calculated as follows:
nvoDriveRunHours =
If an error occurs during the query, nvoDrvRunHours is set to FFFF
SDF.LW
3600 [
seconds
hour
× 1[
]
NVfactor
hex
]
.
]
6-16
BA2141 EN 1.0
L
Page 39

6.4.2 Configuration variable (VSD)
Show/Hide Bookmarks
6.4.2.1 Location label
network input config SNVT_str_asc nciLocation;
This configuration variable can be used to store a 31-byte string.
Input range
A ZERO terminated string of max. 31 byte
Standard value
ZERO
SCPT Reference
SCPT_location (17)
Parameter setting
L
BA2141 EN 1.0
6-17
Page 40

Parameter setting
Show/Hide Bookmarks
6.4.2.2 Receive Heartbeat Time
network input config SNVT_time_sec nciRcvHrtBt;
This configuration variable is used to store the time expected for an update, if this time expires
without anupdate, the values for the following network variables will bereset to their default settings:
nviDrvSpeedStpt
nviDrvSpeedScale (^ 6-13)
It is also used to monitor the variables configured in nciAIFRecHrtBt (^ 6-27).Thevariablesare:
nviAIFStw, nviAIFIn1, nviAIFIn2, nviAIFIn3.
Input range
Thepossible bandwidth for the configuration variableis between 0.0 and 6553.4seconds (resolution
0.1 seconds)
Standard value
(^ 6-11)
0.0 (no monitoring)
SCPT Reference
SCPTmaxRcvTime (48)
6-18
BA2141 EN 1.0
L
Page 41

6.4.2.3 Maximum Send Time
Show/Hide Bookmarks
network input config SNVT_time_sec nciSndHrtBt;
This configuration variable stores the time needed before the following network variables will be
updated:
nvoDrvSpeed
nvoDrvCurnt
nvoDrvVolt
nvoAIFStw
nvoAIFOut1
nvoAIFOut2
Parameter setting
nvoAIFOut3
Input range
Thepossible bandwidth for the configuration variableis between 0.0 and 6553.4seconds (resolution
0.1 seconds)
Standard value
0.0 (no automatic update)
SCPT Reference
SCPTmaxSendTime(49)
L
BA2141 EN 1.0
6-19
Page 42

Parameter setting
Show/Hide Bookmarks
6.4.2.4 Minimum Send Time
network input config SNVT_time_sec nciMinOutTm;
Here you store the time needed before an output network variable can be updated.
Input range
Thepossible bandwidth for the configuration variableis between 0.1 and 6553.4seconds (resolution
0.1 seconds)
Standard value
0.5 seconds
SCPT Reference
SCPTminSendTime (52)
6-20
BA2141 EN 1.0
L
Page 43

6.4.2.5 Maximum speed
Show/Hide Bookmarks
network input config SNVT_lev_percent nciMaxSpeed;
The configuration variable contains the maximum motor speed. The value is indicated as percentage
of the rated value (NciNmlSpeed).
Input range
The possible bandwidth for the configuration variable is between –163.840% and 163.830%
(resolution 0.005% ). The value +163.835% (7FFF
The entered value will be checked by means of the following formula:
–163.840% ≤ Minimum speed £ Maximum speed ≤ 163.830%
If the result is wrong, the lower value is taken as maximum speed.
Parameter setting
) is assumed to be wrong.
hex
Standard value
100.000 %
Function
After a change of the maximum speed, the value will be sent to the drive via the parameter channel
(code 0011, subcode 00).
SCPT Reference
SCPTmaxSetpoint (50)
L
BA2141 EN 1.0
6-21
Page 44

Parameter setting
Show/Hide Bookmarks
6.4.2.6 Minimum speed
network input config SNVT_lev_percent nciMinSpeed;
The configuration variable contains the minimum motor speed. The value is indicated as percentage
of the rated value (nciNmlSpeed).
Input range
The possible bandwidth for the configuration variable is between –163.840% and 163.830%
(resolution 0.005% ). The value +163.835% (7FFF
The entered value will be checked by means of the following formula:
–163.840% ≤ Minimum speed £ Maximum speed ≤ 163.830%
If the result is wrong, the lower value is taken as minimum speed.
) is assumed to be wrong.
hex
Standard value
0.000 %
Function
After a change of the minimum speed, the value will be sent to the drive via the parameter channel
(code 0010, subcode 00).
SCPT Reference
SCPTminSetpoint (53)
6-22
BA2141 EN 1.0
L
Page 45

6.4.2.7 Rated speed value
Show/Hide Bookmarks
network input config SNVT_rpm nciNmlSpeed;
This configuration variable contains the rated motor speed in rpm.
Input range
The possible bandwidth for the configuration variable is between 0 and 65534 rpm (resolution 1 rpm)
Standard value
3000 rpm
Function
After a change of the rated speed, the value will be sent to the drive viathe parameter channel (code
0087, subcode 00).
SCPT Reference
SCPTnomRPM (158)
Parameter setting
L
BA2141 EN 1.0
6-23
Page 46

Parameter setting
Show/Hide Bookmarks
6.4.2.8 Rated frequency
network input config SNVT_freq_hz nciNmlFreq;
This configuration variable contains the rated motor frequency in Hz.
Input range
The possible bandwidth for the configuration variable is between 0 and 6553,4 Hz (resolution 0,1 Hz)
Standard value
50 Hz
Function
After a change of the rated frequency, the value will be sent to the drive via the parameter channel
(code 0089, subcode 00).
SCPT Reference
SCPTnomFreq (159)
6-24
BA2141 EN 1.0
L
Page 47

6.4.2.9 Acceleration time
Show/Hide Bookmarks
network input config SNVT_time_sec nciRampUpTm;
This configuration variable indicates the acceleration time of the motor.
Input range
The possible bandwidth for the configuration variable is between 0 and 6553.4 seconds (resolution
0,1 Sekunden)
Standard value
5seconds
Function
After a changeof the acceleration time, thevalue will be sent to thedrivevia theparameterchannel
(code 0012, subcode 00).
SCPT Reference
Parameter setting
SCPTrampUpTm (160)
L
BA2141 EN 1.0
6-25
Page 48

Parameter setting
Show/Hide Bookmarks
6.4.2.10 Deceleration time
network input config SNVT_time_sec nciRampDownTm;
This configuration variable indicates the deceleration time of the motor.
Input range
The possible bandwidth for the configuration variable is between 0 and 6553.4 seconds (resolution
0,1 Sekunden)
Standard value
5seconds
Function
After a change of the deceleration time, the value will be sent to the drive via the parameter channel
(code 0013, subcode 00).
SCPT Reference
SCPTrampDownTm (161)
6-26
BA2141 EN 1.0
L
Page 49

6.4.2.11 Receive heartbeat for AIF-CTRL
Show/Hide Bookmarks
network input config SNVT_state nciAIFRecHrtBt;
Here you can select the manufacturer-specific network variables (nviAIFStw, nviAIFIn1,
nviAIFIn2, nviAIFIn3)whicharetobemonitoredwitha
nciAIFRecHrtBt.bit0 =0– No timeout monitoring for nviAIFStw
nciAIFRecHrtBt.bit0 =1– Timeout monitoring for nviAIFStw
nciAIFRecHrtBt.bit1 =0– No timeout monitoring for nviAIFIn1
nciAIFRecHrtBt.bit1 =1– Timeout monitoring for nviAIFIn1
nciAIFRecHrtBt.bit2 =0– No timeout monitoring for nviAIFIn2
nciAIFRecHrtBt.bit2 =1– Timeout monitoring for nviAIFIn2
nciAIFRecHrtBt.bit3 =0– No timeout monitoring for nviAIFIn3
nciAIFRecHrtBt.bit3 =1– Timeout monitoring for nviAIFIn3
If one of the monitored variables gets a
nciAIFDefStw will be carried out.
Parameter setting
Receive Timeout
Receive Heartbeat Timeout
.
, the function selected in
Input range
The possible range for the input variable is 0 or 1 for every bit.
Only bits 0 and 3 will be evaluated.
Standard value
0
L
BA2141 EN 1.0
6-27
Page 50

Parameter setting
Show/Hide Bookmarks
6.4.2.12 Monitoring reaction for AIF-CTRL
network input config SNVT_state nciAIFDefStw;
If one of the monitored variables of the AIF-CTRL gets a Receive Heartbeat Timeout
function selected in nciAIFDefStw will be carried out.
The quick stop functions sets bit 3 in the AIF control word, the controller inhibit function sets bit 9 in
the AIF control word.
(^ 6-30),the
Tip!
The functions quick stop and controller inhibit will only be reset after all monitored variables have
been updated within the Receive Heartbeat Timeout.
Input range
The possible bandwidth for the configuration variables is 0, 1 oooder 2
nciAIFDefStw =0– No reaction
nciAIFDefStw =1– Quick stop
nciAIFDefStw =2– Controller inhibit
Standard value
0
6-28
BA2141 EN 1.0
L
Page 51

6.4.2.13 Default value for nviDrvSpeedScale
Show/Hide Bookmarks
network input config_lev_percent nciDrvSpeedScale;
This value determines the default setting for nciDrvSpeedScale. The current configuration
variable nciDrvSpeedScale is overwritten with the default value
• after a reset or
• if the time from nciRcvHrtBt passes without an update of the variable nciDrvSpeedScale.
Input range
The possible bandwidth for the input variable is between -163.840 % and 163.830 % (resolution
0.005 %).
The value +163.835 % (7FFF
Standard value
0
) is assumed to be wrong.
hex
Parameter setting
SCPT Reference
SCPTdefScale (162)
L
BA2141 EN 1.0
6-29
Page 52

Parameter setting
Show/Hide Bookmarks
6.5 Device control AIF-CTRL
6.5.1 General information
6.5.1.1 Output variable
network output SNVT_count nvoAIFStatus;
network output SNVT_count nvoAIFOut1;
network output SNVT_count nvoAIFOut2;
network output SNVT_count nvoAIFOut3;
The output network variable nvoAIFStatus is directly taken from the AIFstatus word.
The output network variables nvoAIFOut1 to nvoAIFOut3 are directly taken from the
corresponding AIFdata words.
Output range
The possible bandwidth for the output variable is between 0 and 65535.
Update range
The variables are sent if the value changes or if the time set under
Send Time
The variable value will not be sent quicker than set in
(nciMinOutTm).
Standard Service Type
The Standard Service Type is acknowledged.
(nciSndHrtBt) has expired.
Configuration Property Minimum Send Time
Configuration Property Maximum
6-30
BA2141 EN 1.0
L
Page 53

6.5.1.2 Input variable
Show/Hide Bookmarks
network input SNVT_count nviAIFStw;
network input SNVT_count nviAIFIn1;
network input SNVT_count nviAIFIn2;
network input SNVT_count nviAIFIn3;
The input network variable nviAIFStw is directly accepted by the AIF control word.
The input network variables nviAIFIn1 to nviAIFIn3 are directly accepted by the corresponding
AIF input data words.
1Input range
The possible bandwidth for the output variable is between 0 and 65535.
Parameter setting
Standard value
The standard value after a reset is 0 for all four variables.
The standard value for nviAIFStw is determined by the configuration properties nciAIFDefStw
and nciAIFRecHrtBt. nciAIFDefStw indicates the function to be executed in the event of a
Receive Heartbeat Timeout
Heartbeat
nciAIFRecHrtBt.bit0 =1– Timeout monitoring for nviAIFStw
nciAIFRecHrtBt.bit1 =1– Timeout monitoring for nviAIFIn1
nciAIFRecHrtBt.bit2 =1– Timeout monitoring for nviAIFIn2
nciAIFRecHrtBt.bit3 =1– Timeout monitoring for nviAIFIn3
nciAIFStw =0– No reaction
nciAIFStw =1– Quick stop
nciAIFStw =2– Controller inhibit
If one of the monitored variables gets a
nciAIFDefStw will be carried out.
The quick stop functions sets bit 3 in the AIF control word, the controller inhibit function sets bit 9 in
the AIF control word. The functions quick stop and controller inhibit will only be reset after all
monitored variables have been updated within the Receive Timeouts.
.
and nciAIFRecHrtBt indicates the variables monitored by a
Receive Heartbeat Timeout
, the function selected in
Receive
L
BA2141 EN 1.0
6-31
Page 54

Parameter setting
Show/Hide Bookmarks
6.5.2 Network variable for 82XX controllers
Setpoint source selection
The setpoint source for these controllers is selected under code C0001. An evaluation of process
data is only possible if code C0001 is set to ” 3” when the controller is operated together with the
fieldbus module.
Therefore the process data channel serves as setpoint source, describing the frequency setpoint
(C0046) and the control word (parameter channel, C0135) (see Operating Instructions 82XX).
Tip!
Please observe that code C0001 is available in all parameter sets.
Network variable from drive
• nvoAIFStatus reads the status word (^ 6-38)
Status word
LOW byte HIGH byte
Bits 0 to 7 of the status word (code C0150) are
entered here.
Bits 8 to 15 of the status word (code C0150) are
entered here.
• nvoAifOut1 reads the actual frequency value
LOW byte HIGH byte
The actual frequency value is read from code C0050. The actual frequency value with the signed
normalisation 24000 = 480 Hz is provided here.
Network variable to drive
Actual frequency value
• nviAIFStw writes the control word (^ 6-39)
Control word
LOW byte HIGH byte
Bits 0 to 7 of the control word (code C0135) are
entered here.
Bits 8 to 15 of the control word (code C0135) are
entered here.
• nviAIFIn1 writes the frequency setpoint
Frequency setpoint
LOW byte HIGH byte
The frequency setpoint (code C0046 via parameter data channel) is selected as process data word.
The normalization differs from the setting under C0046. It is a signed value, 24000 = 480 Hz.
6-32
BA2141 EN 1.0
L
Page 55

6.5.2.1 Status word for 82XX
Show/Hide Bookmarks
Bit 820X 821x,822x
00 Actual parameter set
01 IMP (pulse inhibit)
02 I
03 not assigned fd=f
04 fd=f
05 Qmin (fd≤ f
06 fd= 0 (act. frequency = 0)
07 Ctrl. inhibit (controller inhibit)
08...11 Controller status
0=Parameterset1or3active
1=Parameterset2or4active
0 = Pulses for power stage enabled
1 = Pulses for power stage inhibited
(current limit reached)
max
0 = Current limit not reached
1 = current limit reached
dset
0: fd≠ f
dset
1: fd=f
dset
)
0 = Qmin not active
1=Qminactive
0: f
1: f
0 = controller not inhibited
1 = controller inhibited
0 = Controller initialization
8 = Error active
dQmin
≠ 0
d
>0
d
Parameter setting
Actual parameter set
0=Parameterset1or3active
1=Parameterset2or4active
IMP (pulse inhibit)
0 = Pulses for power stage enabled
1 = Pulses for power stage inhibited
I
(current limit reached)
max
0 = Current limit not reached
1 = current limit reached
dset
0=fd≠ f
dset
1=fd=f
dset
RFG on = RFG off
0=RFGon≠ RFG off
1 = RFG on = RFG out
Qmin (fd≤ f
0 = Qmin not active
1=Qminactive
fd> 0 (actual frequency value = 0)
0=f
≠ 0
d
>0
1=f
d
Ctrl. inhibit (controller inhibit)
0 = controller not inhibited
1 = controller inhibited
Controller status
0 = Controller initialization
1 = Switch on inhibit
3 = Operation inhibited
4 = Flying-restart circuit active
5 = DC brake active
6 = Operation enabled
7 = Message active
8 = Error active
dQmin
)
12 Overtemperature warning
13 U
14 Direction of rotation
15 Ready
0=Nowarning
1=Warning
(DC-bus overvoltage)
Gmax
0 = No overvoltage
1 = overvoltage
0 = CW rotation
1 = CCW rotation
0 = not ready for operation
1 = ready for operation
Overtemperature warning
0=Nowarning
1=Warning
U
(DC-bus overvoltage)
Gmax
0 = No overvoltage
1 = overvoltage
Direction of rotation
0 = CW rotation
1 = CCW rotation
Ready
0 = not ready for operation
1 = ready for operation
L
BA2141 EN 1.0
6-33
Page 56

Parameter setting
Show/Hide Bookmarks
.B0
.B1
.B2
.B3
.B4
.B5
.B6
.B7
.B8
.B9
.B10
.B11
.B12
.B13
.B14
.B15
16 Bit
16 Bit
- / fd=fdsoll
fd=fdsoll / HLG
B11 B10 B9 B8
0
0
0
1
0
0
1
0
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
PAR
IMP
Imax
Qmin
fd>0
RSP
STAT
0
0
2
0
3
1
.
.
.
.
.
.
Ugmax
RDY
C0050
.
.
.
.
.
.
T
R/L
ü
Fig. 6-5 Read access to status word and actual frequency in 82XX (fixed assignment)
AIF
2141LON012
6-34
BA2141 EN 1.0
L
Page 57

6.5.2.2 Control word for 82XX
Bit820X821x,822
x
00,
01JOG1activeinC0037
Show/Hide Bookmarks
Bit 820X 821x,822x
Parameter setting
00 = C0046 active
00,
01
01 = JOG1 active in C0037
10 = JOG2 active in C0038
11 = JOG3 active in C0039
02 CW/CCW (CW rotation/CCW rota tion)
0 = CW rotation
1 = CCW rotation
03 QSP (quick stop)
0 = QSP not active
1=QSPactive
00 = C0046 active
01 = JOG1 active in C0037
10 = JOG2 active in C0038
11 = JOG3 active in C0039
CW/CCW (CW rota tion/CCW rotation)
0 = CW rotation
1 = CCW rotation
QSP (quick stop)
0 = QSP not active
1=QSPactive
04 Reserved RFG stop (stop of the ramp function generator)
0 = RFG stop not active
1=RFGstopactive
05 Reserved RFG zero (deceleration along the Tiframp C0013)
0 = RFG zero not active
1=RFGzeroactive
06 Reserved UP function for motor potentiometer
0=UPnotactive
1=UPactive
07 Reserved DOWN function for motor potentiometer
0 = DOWN not active
1 = DOWN active
08 Reserved Reserved
09 Ctrl. inhibit (controller inhibit)
0 = controller not inhibited
1 = controller inhibited
Ctrl. inhibit (controller inhibit)
0 = controller not inhibited
1 = controller inhibited
10 Reserved Reserved
11 Reserved TRIP reset
0 -> 1 = Edge from 0 to 1
12 PAR1 (Parameter set changeover)
0 -> 1 = Parameter set
1 -> 0 = Parameter set
PAR1 (Parameter set changeover)
0 -> 1 = Parameter set
1 -> 0 = Parameter set
13 Reserved Reserved
14 DC brake (DC injection brake)
0 = DC brake not active
1 = DC brake active
DC brake (DC injection brake)
0 = DC brake not active
1 = DC brake active
15 Reserved Reserved
Fig. 6-6 Access to control word and actual frequency in 82XX (fixed assignment)
L
AIF
.B0
.B1
.B2
.B3
.B4
.B8
16 Bit
16 Bit
.B9
.B10
.B11
.B12
.B13
.B14
.B15
BA2141 EN 1.0
0
011
JOG/
C046
0101
QSP
...
...
...
CINH
TRIP-SET
TRIP-RESET
C0046
R/L
PAR
GSB
2141LON010
6-35
Page 58

Parameter setting
Show/Hide Bookmarks
6.5.3 Network variable for 8200 vector controllers
Setpoint source selection
The setpoint source for these controllers is selected under code C0001. An evaluation of process
data is only possible if code C0001 is set to ” 3” when the controller is operated together with the
fieldbus module. (Selection: process data channel of a fieldbus module AIF-IN.W1 or AIF-IN.W2).
The process data channel which describes the frequency setpoint (C0046) and the control word
(parameter channel, C0135)is the setpoint source
Check under C0412/x whether the setpoint source is assigned to the signal wanted.
Tip!
Please ensure that code C0001 or C0410 is the same for all parameter sets.
Digital and analog input and output signals can be freely configured (see Operating Instructions for
8200 vector; codes C0410, C0412, C0417 and C0421)The change of the code C0001 to 3 starts the
preconfiguration of the process data words in the controller.
(see 8200 vector Operating Instructions).
6-36
BA2141 EN 1.0
L
Page 59

Parameter setting
Show/Hide Bookmarks
Network variable from drive (see function block AIF-OUT (^ 6-38) )
• nvoAIFStatus reads bits B0 ... B15 of the status word AIF-STAT (^ 6-38)
Status word AIF-STAT
LOW byte HIGH byte
Bits 0 to 7 of the status word will be entered here. Bits 8 to 15 of the status words will be entered here.
• nvoAifOut1 reads the output word AIF-OUT.W1
Actual value
LOW byte HIGH byte
The actual frequency value with the signed normalisation 24000 = 480 Hz is provided here.
Torque values are normalised with 16384 = 100%. AIF-OUT.W1 see C0421/1, (Operating Instructions for 8200 vector)
• nvoAifOut2 reads the output word AIF-OUT.W2
Actual value
LOW byte HIGH byte
The actual frequency value with the signed normalisation 24000 = 480 Hz is provided here.
Torque values are normalised with 16384 = 100%. AIF-OUT.W2 see C0421/2, (Operating Instructions for 8200 vector)
Network variable to drive (see function block AIF-IN (^ 6-40))
• nviAIFStw writes bits B0 ... B15 in the control word AIF-CTRL (^ 6-39)
LOW byte HIGH byte
Bits 0 to 7 of the control word will be entered here. Bits 8 to 15 of the control word will be entered here.
Control word AIF-CTRL
• nviAIFIn1 writes the input word AIF-IN.W1
AIF-IN.W1
LOW byte HIGH byte
The frequency setpoint is preselected as process data word. The normalisation differs from the setting under C0046. It is a signed value, 24000
= 480 Hz. AIF-IN.W1 see C0412/x, Wert “10” (Operating Instructions for 8200 vector)
• nviAIFIn2 writes the input word AIF-IN.W2
AIF-IN.W2
LOW byte HIGH byte
The frequency setpoint is preselected as process data word.
The normalisation differs from the setting under C0046. It is a signed value, 24000 = 480 Hz.
AIF-IN.W2 see C0412/x, Wert “11” (Operating Instructions for 8200 vector)
L
BA2141 EN 1.0
6-37
Page 60

Parameter setting
Show/Hide Bookmarks
6.5.3.1 Status word for 8200 vector
Bit 8200vector default setting
00 DCTRL-PAR-B0
01 DCTRL1-IMP
02 MCTRL1-IMAX
03 MCTRL1-RFG1=NOUT
04 NSET1-RFG1-I=0
05 PCTRL1-QMIN
06 DCTRL1-NOUT=0
07 DCTRL1-CINH
08...11 Controller status
12 DCTRL1-OH-WARN
13 DCTRL1-OV
14 DCTRL1-CCW
15 DCTRL1-RDY
0 = Controller initialization
1 = Switch-on inhibit
3 = Operation inhibited
4 = Flying-restart circuit active
5 = DC brake active
6 = Operation enabled
7 = Message active
8 = Error active
DCTRL1-NOUT=0
DCTRL1-STAT*1
DCTRL1-STAT*2
DCTRL1-STAT*4
DCTRL1-STAT*8
DCTRL1-OH-WARN
C0421/1
C0421/2
Fig. 6-7 Function block AIF-OUT in 8200 vector
C0417/1
DCTRL1-IMP
C0417/3
C0417/4
C0417/5
C0417/6
DCTRL1-CINH
DCTRL1-OV
C0417/15
C0417/16
STAT1
AIF-OUT.W1
AIF-OUT.W2
.B2
.B3
.B4
.B5
.B10
.B11
.B12
.B13
.B14
.B15
.B0
.B1
.B6
.B7
.B8
.B9
.B0
.B1
.B2
.B3
.B4
.B5
.B6
.B7
.B8
.B9
.B10
.B11
.B12
.B13
.B14
.B15
AIF-OUT
AIF-STAT
16 Bit
16 Bit
16 Bit
AIF
2141LON013
6-38
BA2141 EN 1.0
L
Page 61

6.5.3.2 Control word for 8200 vector
Bit
00,
01NSET1JOG1(C0037)activ
e
ygy
Show/Hide Bookmarks
Parameter setting
Bit
Default setting:
C0001=3 if C0007 < 52
00 = C0046 active
00,
01
02 DCTRL1-CW/CCW
03 AIF-CTRL-QSP
04 NSET1-RFG1-STOP
05 NSET1-RFG1-0
06 MPOT1-UP
07 MPOT1-DOWN
08 Freely configurable by user
09 AIF-CTRL-CINH
10 AIF-CTRL-TRIP-SET
11 AIF-CTRL-TRIP-RESET
12 DCTRL1-PAR2/4
13 DCTRL1-PAR3/4
14 MCTRL1-DCB
15 Freely configurable by user
01 = NSET1-JOG1 (C0037) active
10 = NSET1-JOG2 (C0038) active
11 = NSET1-JOG3 (C0039) active
0=notactive
1=active
0=notactive
1=active
0=notactive
1=active
0=notactive
1=active
0=notactive
1=active
0=notactive
1=active
0=notactive
1=active
0=notactive
1=active
0=notactive
1=active
0=notactive
1=active
8200vector
0=notactive
1=active
0 -> 1 = Edge from 0 to 1
Default setting:
C0001=3 if C0007 > 51
Freely configurable by user
Freely configurable by user
Freely configurable by user
L
BA2141 EN 1.0
6-39
Page 62

Parameter setting
Show/Hide Bookmarks
AIF
Fig. 6-8 Function block AIF-IN in 8200 vector
AIF-CTRL
16 Bit
16 Bit
16 Bit
.B0
.B2
.B3
.B4
.B8
.B9
.B10
.B11
.B12
.B15
.B1
AIF-IN
DCTRL
QSP
...
...
...
...
...
...
...
...
...
DCTRL
CINH
TRIP-SET
TRIP-RESET
...
...
...
AIF-IN.W1
AIF-IN.W2
2141LON011
6-40
BA2141 EN 1.0
L
Page 63

6.5.4 Network variable for 93XX controllers
Show/Hide Bookmarks
Setpoint source selection
With 93XX controllers it is not possible to select a setpoint source by means of one code only. It is
however easy to adapt the controller to the drive task because it is working with preconfigured
function blocks which only have to be connected. For this it is not necessary to have special
programming skills.
The user himself can link the function blocks. It is however easier to use Lenze preconfigurations
which are already stored in the controller ROM. The Lenze preconfigurations (see code C0005)
determine the source (terminal, keypad, fieldbus module) which describes the frequency setpoint
and the control word.
Thevalue in code C0005 must beset to ”xxx3” for LON bus operation (x= selected preconfiguration).
Fore more information please see the corresponding Manual and Operating Instructions for the
controller.
With the 93XXcontroller the process data assignment can be changed by reconfiguring the function
blocks AIF-IN and AIF-OUT.
Parameter setting
Network variable from
drive
• nvoAIFStatus = STAT.B0 ... STAT.B15 (status word)
Status word
LOW byte HIGH byte
Bits 0 to 7 of the status word will be entered here. Bits 8 to 15 of the status word will be entered here (see chapter
6.5.4.1). The description of the bits can be obtained from the Code
Tab l e .
• nvoAifOut1 =AIF-OUT.W1
• nvoAifOut2 =AIF-OUT.W2
• nvoAifOut3 =AIF-OUT.W3
AIF-OUT.Wx
LOW byte HIGH byte
The actual frequency value with the signed normalisation 24000 = 480 Hz is provided here.
AIF-OUT.W1 to AIF-OUT.W3 depend on the signal configuration selected under L-C0005. For
detailed description of the 93XX signal configuration see the Operating Instructions for 93XX (only
the main configurations: 1000, 4000, 5000, etc.) or the Manual 93XX.
In the controller, other signals can be assigned to AIF-OUT.W1 to AIF-OUT.W3. For this, the
function-block configuration - described in the Manual 93XX - is used.
The function block AIF-OUT determines the controller output data as data interface for the 2141
fieldbus module.
L
BA2141 EN 1.0
6-41
Page 64

Parameter setting
Show/Hide Bookmarks
Signal configuration (L-C0005) AIF-OUT.W1 AIF-OUT.W2 AIF-OUT.W3 AIF-OUT.D1
MCTRL-NACT
Speed control 1003/1013/1113
Torque control 4003/4013/4113
DF master 5003/5013/5113
DF-slave bus 6003/6013/6113
DF-slave cascade 7003/7013/7113
Cam profiler 1xxx3
Positioning 2xxx3
vector control
vector control
vector control 110x3 not assigned not assigned not assigned
1xx3/4xx3/5xx3/
10xx3
6xx3/7xx3/8xx3/
9xx3
Actual speed
100 % = 16383
MCTRL-MSET2
Torque display
100 % = 16383
MCTRL-NACT
Actual speed
100 % = 16383
MCTRL-NACT
Actual speed
100 % = 16383
MCTRL-NACT
Actual speed
100 % = 16383
MCTRL-NACT
Actual speed
100 % = 16383
MCTRL-NACT
Actual speed
100 % = 16383
MCTRL-NACT
Actual speed
100 % = 16383
MCTRL-NACT
Actual speed
100 % = 16383
MCTRL-MSET2
Torque display
100 % = 16383
MCTRL-NACT
Act. speed in %
100 % = 16383
MCTRL-MSET2
Torque display
100 % = 16383
MCTRL-PHI-ACT
Actual phase
MCTRL-PHI-ACT
Actual phase
not assigned not assigned
not assigned not assigned
MCTRL-IACT
MCTRL-PHI-ANA
MCTRL-NSET2
Speed controller input
100 % = 16383
MCTRL-NSET2
Speed controller input
100 % = 16383
MCTRL-NSET2
Speed controller input
100 % = 16383
MCTRL-MSET2
Torque setpoint in %
100 % = 16383
MCTRL-MSET2
Torque setpoint in %
100 % = 16383
MCTRL-NSET2
Speed controller input
100 % = 16383
MCTRL-MSET2
Torque setpoint in %
100 % = 16383
not assigned
For more detailed information about the function block AIF-OUT see the Manual 93XX.
6-42
BA2141 EN 1.0
L
Page 65

6.5.4.1 Status word for 93XX
8...1
1
Show/Hide Bookmarks
Parameter setting
9300 Servo Servo
C0005 1xx3 4xx3 5xx3 6xx3,7xx3 2xxx3 1xxx3 xxx, 2xxx,
0 DCTRL-PAR1-0 DCTRL-PAR1-0 DCTRL-PAR1-0 DCTRL-PAR1-0 not assigned CERR1-ERR DCTRL-PAR1-0 DCTRL-PAR1-0 DCTRL-PAR1-0
1 DCTRL-IMP DCTRL-IMP DCTRL-IMP DCTRL-IMP DCTRL-IMP DCTRL-IMP DCTRL-IMP DCTRL-IMP DCTRL-IMP
2 MCTRL-IMAX MCTRL-IMAX REF-OK REF-OK POS-REF-OK MCTRL-IMAX MCTRL-IMAX MCTRL-IMAX MCTRL-IMAX
3 MCTRL-MMAX not assigned MCTRL-MMAX not assigned not assigned MCTRL-MMAX MCTRL-MMAX MCTRL-IMAX
4 NSET-RFG-I =0 MCTRL-IMAX
negated
5 QMIN QMIN REF-BUSY REF-BUSY POS-IN-TARGETCDATA-X0 QMIN QMIN QMIN
6 DCTRL-NACT=0DCTRL-NACT=0DCTRL-NACT=0DCTRL-NACT=0DCTRL-NACT=0DCTRL-NACT=0DCTRL-NACT=0DCTRL-NACT=0DCTRL-NACT=
7 DCTRL-CINH DCTRL-CINH DCTRL-CINH DCTRL-CINH DCTRL-CINH DCTRL-CINH DCTRL-CINH DCTRL-CINH DCTRL-CINH
8 ... 11
12 DCTRL-WARN DCTRL-WARN DCTRL-WARN DCTRL-WARN DCTRL-WARN DCTRL-WARN DCTRL-WARN DCTRL-WARN DCTRL-WARN
13 DCTRL-MESS DCTRL-MESS DCTRL-MESS DCTRL-MESS DCTRL-MESS DCTRL-MESS DCTRL-MESS DCTRL-MESS DCTRL-MESS
14 DCTRL-CW/CCWDCTRL-CW/CCWDCTRL-CW/CCWnot assigned DCTRL-AIFL-QSPDCTRL-CW/CCWDCTRL-CW/CCWDCTRL-CW/CCWDCTRL-CW/CC
15 DCTRL-RDY DCTRL-RDY DCTRL-RDY DCTRL-RDY DCTRL-RDY DCTRL-RDY DCTRL-RDY DCTRL-RDY DCTRL-RDY
NSET-RFG-I=0 MCTRL-IMAX
negated
positioning
controller
MCTRL-MMAX
negated
Controller status:
0=
Unit initialisation
1=
Switch-on inhibit
3=
Operation i nhibited
4=
Flying-restart circuit active
5=
DC injection braking active
6=
Operation enabled
7=
Message active
8=
Fault active
10 =
Fail-QSP (only 9300 servo positioning controller)
Servo cam
profiler
3xxx, 5xxx,
10xxx, 11xxx
DCTRL-TRIP NSET-RFG-I=0 NSET-RFG-I=0 NSET-QSP-OUT
vector
4xxx 6xxx, 7xxx,
8xxx, 9xxx
MCTRL-MMAX
negated
0
W
L
BA2141 EN 1.0
6-43
Page 66

Parameter setting
Show/Hide Bookmarks
S T A T
S T A T . B 0
C 0 1 5 6 / 1
D C T R L - I M P
C 0 1 5 6 / 6
C 0 1 5 6 / 7
C 0 8 5 0 / 1
C 0 8 5 0 / 2
C 0 8 5 0 / 3
C 0 1 1 6 / 1
C 0 1 1 6 / 1 6
C 0 1 1 6 / 1 7
C 0 1 1 6 / 3 2
C 0 8 5 1
S T A T . B 1 4
S T A T . B 1 5
C 0 8 5 8 / 1
C 0 8 5 8 / 2
C 0 8 5 8 / 3
F D O - 0
. . .
F D O - 1 5
F D O - 1 6
. . .
F D O - 3 1
A I F - O U T . D 1
C 0 8 5 9
. . .
F D O
1 6 B i t
A I F - O U T . W 1
A I F - O U T . W 2
A I F - O U T . W 3
1 6 B i t
L o w W o r d
1 6 B i t
H i g h W o r d
1 6 B i t
L o w W o r d
1 6 B i t
H i g h W o r d
C 0 8 5 2
0
1
2
C 0 8 5 3
0
1
2
A I F - O U T
B i t 0
B i t 1 5
B i t 0
B i t 1 5
B i t 0
B i t 3 1
)
A I F - O U T *
S T A T
S T A T . B 0
C 0 1 5 6 / 1
D C T R L - I M P
. . .
S T A T . B 1 4
C 0 1 5 6 / 6
S T A T . B 1 5
S t a t u s w o r d
B y t e 3 , 4
X 1
B y t e 5 , 6
B y t e 7 , 8
C 0 1 5 6 / 7
C 1 1 9 5
C 0 8 5 0 / 1
C 0 8 5 0 / 2
C 0 8 5 0 / 3
C 0 1 1 6 / 1
C 0 1 1 6 / 1 6
C 0 1 1 6 / 1 7
C 0 1 1 6 / 3 2
C 0 8 5 1
A I F - O U T . D 2
C 1 1 9 6
A I F - O U T . W 1
C 0 8 5 8 / 1
C 0 8 5 8 / 2
C 0 8 5 8 / 3
F D O - 0
. . .
F D O - 1 5
F D O - 1 6
. . .
F D O - 3 1
A I F - O U T . D 1
C 0 8 5 9
F D O
1 6 B i t
1 6 B i t
L o w W o r d
1 6 B i t
H i g h W o r d
A I F - O U T . W 2
A I F - O U T . W 3
1 6 B i t
L o w W o r d
1 6 B i t
H i g h W o r d
1 6 B i t
L o w W o r d
1 6 B i t
H i g h W o r d
C 0 8 5 4
0
3
C 0 8 5 2
0
1
2
3
C 0 8 5 3
0
1
2
B i t 1 5
B i t 1 5
B i t 0
B i t 0
S t a t u s w o r d
B i t 0
B y t e 3 , 4
X 1
B y t e 5 , 6
B y t e 7 , 8
B i t 3 1
Fig. 6-9 Function block AIF-OUTand AIF-OUT
AIF-OUT*)is available for the 9300 technology variants: servo, positioning controller and cam profiler as of software
version 2.0 . AIF-OUT.D2 is new.
2111IBU002
*)
6-44
BA2141 EN 1.0
L
Page 67

Parameter setting
d
Show/Hide Bookmarks
Network variable to drive
The function block AIF-IN determines the input data of the controller as data interface for the 2141
fieldbus module. For more detailed information about the function block AIF-IN, see the Manual
93XX.
AIF-IN.W1 to AIF-IN.W3 depend on the signal configuration selected under C0005.
Speed setpoint: 100 %= 16383
• nviAIFStw = AIF-CTRL.B0 ... AIF-CTRL.B15 (control word)
LOW byte HIGH byte
Bits 0 to 7 of the control word will be entered here. Bits 8 to 15 of the control word will be entered here (see chapter
• nviAIFIn1 =AIF-IN.W1
• nviAIFIn2 =AIF-IN.W2
• nviAIFIn3 =AIF-IN.W3
LOW byte HIGH byte
Control word
6.5.4.2)
The description of the bits can be obtained from the Code Table.
AIF-IN.Wx
Signal configuration (L-C0005) AIF-IN.W1 AIF-IN.W2 AIF-IN.W3 AIF-IN.D1
Speed control 1003 / 1013 /
1113
Torque control 4003 / 4013 /
4113
DF master 5003 / 5013 /
5113
DF-slave bus 6003 / 6013 /
6113
DF-slave cascade 7003 / 7013 /
7113
Cam profiler 1xxx3 NSET1-FACT
Positioning 2xxx3 not assigned
vector control 1xx3 / 2xx3 / 3xx3
/ 5xx3 / 100x3
vector control 4xx3 NCTRL-MADD
vector control 6xx3 DFSET-A-TRIM DFSET-N-TRIM
vector control 7xx3 / 8xx3 / 9xx3 DFSET-VP-DIV DFSET-A-TRIM
vector control 100x3 NLIM-IN1
vector control 110x3 not assigned
NSET-N
Speed setpoint
100 % = 16383
MCTRL-MADD
Torque setpoint
100 % = 16383
NSET-N
Speed setpoint
100 % = 16383
DFSET-A-TRIM
Phase trimming
DFSET-VP-DIV
DF factor
NLIM-IN1
not assigned
DFSET-N-TRIM
Speed trimming
DFSET-A-TRIM
Phase trimming
not assigned
notassigne
not assigned not assigned
L
BA2141 EN 1.0
6-45
Page 68

Parameter setting
Show/Hide Bookmarks
6.5.4.2 Control word for 93XX
9300 9300 Servo 9300
C0005 1xx3 4xx3 5xx3 6xx3,7xx3 2xxx3 xxx3 1xxx, 2xxx,
0 NSET-JOG*1 not assigned NSET-JOG*1 not assigned not assigned CSEL1-CAM*1 NSET-JOG*1 not assigned not assigned
1 NSET-JOG*2 not assigned NSET-JOG*2 not assigned not assigned CSEL1-CAM*2 NSET-JOG*2 not assigned not assigned
2 NSET-N-INV NSET-N-INV NSET-N-INV NSET-N-INV not assigned CSEL1-CAM*4 NSET-N-INV not assigned not assigned
3 AIF-CTRL.QSP AIF-CTRL.QSP AIF-CTRL.QSP AIF-CTRL.QSP AIF-CTRL.QSP AIF-CTRL.QSP AIF-CTRL.QSP AIF-CTRL.QSP AIF-CTRL.QSP
4 NSET-RFG-
STOP
5 NSET-RFG-0 NSET-RFG-0 NSET-RFG-0 NSET-RFG-0 POS-PRG-STOP CDATA-CYCLE NSET-RFG-0 NSET-RFG-0 not assigned
6 not assigned not assigned not assigned not assigned not assigned CSEL1-LOAD not assigned not assigned not assigned
7 not assigned not assigned not assigned not assigned POS-PRG-RESET CSEL1-LOAD not assigned not assigned not assigned
8 not assigned not assigned not assigned not assigned not assigned not assigned not assigned not assigned not assigned
9 AIF-CTRL.CINH AIF-CTRL.CINH AIF-CTRL.CINH AIF-CTRL.CINH AIF-CTRL.CINH AIF-CTRL.CINH AIF-CTRL.CINH AIF-CTRL.CINH AIF-CTRL.CINH
10 AIF-CTRL.TRIP-
SET
11 AIF-CTRL.TRIP-
RESET
12 DCTRL-PAR*1 DCTRL-PAR*1 DCTRL-PAR*1 DCTRL-PAR*1 POS-PS-CANCEL not assigned DCTRL-PAR*1 DCTRL-PAR*1 DCTRL-PAR*1
13 DCTLR-PAR-
LOAD
14 NSET-Ti*1 NSET-JOG*1 REF-ON REF-ON POS-LOOP-ONH not assigned NSET-Ti*1 NSET-JOG*1 not assigned
15 NSET-Ti*2 NSET-JOG*2 NSET-Ti*1 not assigned POS-STBY-STP not assigned NSET-Ti*2 NSET-JOG*2 not assigned
NSET-RFGSTOP
AIF-CTRL.TRIPSET
AIF-CTRL.TRIPRESET
DCTLR-PARLOAD
NSET-RFGSTOP
AIF-CTRL.TRIPSET
AIF-CTRL.TRIPRESET
DCTLR-PARLOAD
NSET-RFGSTOP
AIF-CTRL.TRIPSET
AIF-CTRL.TRIPRESET
DCTLR-PARLOAD
Positioning
controller
POS-PRG-START CSEL1-EVENT NSET-RFG-
AIF-CTRL.TRIPSET
AIF-CTRL.TRIP-RE
SET
POS-PARAM-RD not assigned DCTLR-PAR-
9300
Cam profiler
AIF-CTRL.TRIPSET
AIF-CTRL.TRIP-RE
SET
3xxx, 5xxx,
10xxx, 11xxx
STOP
AIF-CTRL.TRIPSET
AIF-CTRL.TRIPRESET
LOAD
9300 Vector
4xx3 6xx3,7xx3
NSET-RFGSTOP
AIF-CTRL.TRIPSET
AIF-CTRL.TRIPRESET
DCTLR-PARLOAD
not assigned
AIF-CTRL.TRIPSET
AIF-CTRL.TRIPRESET
DCTLR-PARLOAD
Tip!
The single bit control commands of the control word depend on other bit positions.
6-46
BA2141 EN 1.0
L
Page 69

Parameter setting
. . .. . .
. . .. . .
Show/Hide Bookmarks
A I F - I N *
)
A I F - C T R L . B 3
A I F - C T R L . B 8
A I F - C T R L . B 9
A I F - C T R L . B 1 0
A I F - C T R L . B 1 1
B i t 0
1 6 B i t
S t e u e r w o r t
B i t 1 5
B y t e 3 , 4
X 1
B y t e 5 , 6
B y t e 7 , 8
1 6 B i t
1 6 B i t
1 6 B i t
C 0 8 5 5 / 1
1 6 B i n ä r s i g n a l e
C 0 8 5 5 / 2
1 6 B i n ä r s i g n a l e
1 6 B i t
L o w W o r d
1 6 B i t
H i g h W o r d
C 0 8 5 6 / 1
C 0 8 5 6 / 2
C 0 8 5 6 / 3
C 0 8 5 7
Fig. 6-10 Function block AIF-IN and AIF-IN
AIF-IN*)is available for the 9300 technology variants: servo, positioning controller and cam profiler as of software version
2.0.AIF-IN.D2isnew.
Q S P
D I S A B L E
C I N H
T R I P - S E T
T R I P - R E S E T
A I F - C T R L . B 0
A I F - C T R L . B 1
A I F - C T R L . B 2
A I F - C T R L . B 4
A I F - C T R L . B 5
A I F - C T R L . B 6
A I F - C T R L . B 7
A I F - C T R L . B 1 2
A I F - C T R L . B 1 3
A I F - C T R L . B 1 4
A I F - C T R L . B 1 5
A I F - I N . W 1
A I F - I N . W 2
A I F - I N . W 3
A I F - I N . B 0
A I F - I N . B 2
A I F - I N . B 1 4
A I F - I N . B 1 5
A I F - I N . B 1 6
A I F - I N . B 1 7
A I F - I N . B 3 0
A I F - I N . B 3 1
A I F - I N . D 1
*)
A I F - I N
D C T R L
A I F - C T R L . B 3
A I F - C T R L . B 8
A I F - C T R L . B 9
A I F - C T R L . B 1 0
A I F - C T R L . B 1 1
B i t 0
1 6 B i t
S t e u e r w o r t
B i t 1 5
C 0 1 3 6 / 3
B y t e 3 , 4B y t e 5 , 6
X 1
B y t e 7 , 8
1 6 B i t
1 6 B i t
1 6 B i t
C 0 8 5 5 / 1
1 6 B i n ä r s i g n a l e
C 0 8 5 5 / 2
1 6 B i n ä r s i g n a l e
1 6 B i t
L o w W o r d
1 6 B i t
H i g h W o r d
1 6 B i t
L o w W o r d
1 6 B i t
H i g h W o r d
C 0 8 5 6 / 1
C 1 1 9 7
C 0 8 5 6 / 2
C 0 8 5 6 / 3
C 0 8 5 7
D C T R L
Q S P
D I S A B L E
C I N H
T R I P - S E T
T R I P - R E S E T
A I F - C T R L . B 0
A I F - C T R L . B 1
A I F - C T R L . B 2
A I F - C T R L . B 4
A I F - C T R L . B 5
A I F - C T R L . B 6
A I F - C T R L . B 7
A I F - C T R L . B 1 2
A I F - C T R L . B 1 3
A I F - C T R L . B 1 4
A I F - C T R L . B 1 5
A I F - I N . W 1
A I F - I N . D 2
A I F - I N . W 2
A I F - I N . W 3
A I F - I N . B 0
A I F - I N . B 2
A I F - I N . B 1 4
A I F - I N . B 1 5
A I F - I N . B 1 6
A I F - I N . B 1 7
A I F - I N . B 3 0
A I F - I N . B 3 1
A I F - I N . D 1
2111IBU003
L
BA2141 EN 1.0
6-47
Page 70

Parameter setting
Show/Hide Bookmarks
6.5.5 Network variable for 9300 Servo PLC and Drive PLC
Setpoint source selection
Communication via an AIF fieldbus module (e.g. 2141 LON) requires that AIF-IN 1 ... 3 or AIF-OUT
... 3 and if available
the AIFmanagement arepart of the control configuration of the IEC1131 project.
Process data telegram from
drive
Following data can be assigned to PI data:
Name/variable name Explanation
Device status word (AIF1_DctrlStat)
AIF_nOutW1_a AIF word 1
AIF_nOutW2_a AIF word 2
AIF_nOutW3_a AIF word 3
AIF2_nOutW1_a AIF word 4
AIF2_nOutW2_a AIF word 5
AIF2_nOutW3_a AIF word 6
AIF2_nOutW4_a AIF word 7
AIF3_nOutW1_a AIF word 8
AIF3_nOutW2_a AIF word 9
AIF3_nOutW3_a AIF word 10
AIF3_nOutW4_a AIF word 11
AIF1_dnOutD1_p AIFdoubleword1
Tip!
9300 Servo PLC
Link the following in the PLC program of the controller:
AIF1_wDctrlCtrl W DCTRL_wAIF1Ctrl
DCTRL_wStat W AIF1_wDctrlStat
Drive PLC
It is absolutely necessary to use the device control for the Drive PLC.
6-48
BA2141 EN 1.0
L
Page 71

Parameter setting
Show/Hide Bookmarks
AIF1_wDctrlStat
AIF1_nOutW1_a
AIF1_nOutW2__a
AIF1_bFDO0_b
…
AIF1_bFDO15_b
AIF1_nOutW3_a
AIF1_bFDO16_b
…
AIF1_bFDO31_b
AIF1_dnOutD1_p
C0858/1
C0858/2
C0858/3
C0859
16 Bit
16 Bit
16 Bit
C0151/4
16 binary
signals
16 Bit
C0151/4
16 binary
signals
16 Bit
LowWord
16 Bit
HighWord
Outputs_AIF1
Byte
Byte
Byte
Byte
Byte
Byte
Byte
Byte
AIF2_nOutW1_a
1
2
3
4
5
6
7
8
Automation
Interface
AIF2_bFDO0_b
...
AIF2_bFDO15_b
AIF2_nOutW2_a
AIF2_bFDO16_b
...
AIF2_bFDO31_b
AIF2_dnOutD1_p
AIF2_nOutW3_a
AIF2_nOutW4_a
16 Bit
16 binary
signals
16 Bit
16 binary
signals
16 Bit
LowWord
16 Bit
HighWord
16 Bit
16 Bit
Byte
Byte
Byte
Byte
Byte
Byte
Byte
Byte
1
2
3
4
5
6
7
8
Automation
Interface
Outputs_AIF3
Outputs_AIF2
AIF3_nOutW1_a
AIF3_bFDO0_b
...
AIF3_bFDO15_b
AIF3_nOutW2_a
AIF3_bFDO16_b
...
AIF3_bFDO31_b
AIF3_dnOutD1_p
AIF3_nOutW3_a
AIF3_nOutW4_a
16 Bit
16 binary
signals
16 Bit
16 binary
signals
16 Bit
LowWord
16 Bit
HighWord
16 Bit
16 Bit
Byte
Byte
Byte
Byte
Byte
Byte
Byte
Byte
1
2
3
4
5
6
7
8
Automation
Interface
Fig. 6-11 Function blocks AIF-OUT1, AIF-OUT2 and AIF-OUT3
L
BA2141 EN 1.0
6-49
Page 72

Parameter setting
Show/Hide Bookmarks
Process data telegram to drive
Following data can be assigned to PO data:
Name/variable name Explanation
Control word (AIF1_wDctrlCtrl)
AIF1_nInW1_a AIF word 1
AIF1_nInW2_a AIF word 2
AIF1_nInW3_a AIF word 3
AIF2_nInW1_a AIF word 4
AIF2_nInW2_a AIF word 5
AIF2_nInW3_a AIF word 6
AIF2_nInW4_a AIF word 7
AIF3_nInW1_a AIF word 8
AIF3_nInW2_a AIF word 9
AIF3_nInW3_a AIF word 10
AIF3_nInW4_a AIF word 11
AIF1_dnInD1_p AIFdoubleword1
Tip!
9300 Servo PLC
Link the following in the PLC program of the controller:
AIF1_wDctrlCtrl W DCTRL_wAIF1Ctrl
DCTRL_wStat W AIF1_wDctrlStat
Drive PLC
It is absolutely necessary to use the device control for the Drive PLC.
6-50
BA2141 EN 1.0
L
Page 73

Parameter setting
Show/Hide Bookmarks
Automation
Interface
Inputs_AIF1
Byte
1
Controlword
Byte
2
Byte
3
Byte
4
Byte
5
Byte
6
Byte
7
Byte
8
16 Bit
16 binary
signals
16 Bit
16 Bit
C0855/1
16 binary
signals
16 Bit
C0855/2
16 binary
signals
16 Bit
LowWord
16 Bit
HighWord
C0856/1
C0856/2
C0856/3
C0857
AIF1_wDctrlCtrl
AIF1_bCtrlB0_b
AIF1_bCtrlB1_b
AIF1_bCtrlB2_b
AIF1_bCtrlQuickstop_b
AIF1_bCtrlB4_b
AIF1_bCtrlB5_b
AIF1_bCtrlB6_b
AIF1_bCtrlB7_b
AIF1_bCtrlDisable_b
AIF1_bCtrlCInhibit_b
AIF1_bCtrlTripSet_b
AIF1_bCtrlTripReset_b
AIF1_bCtrlB12_b
AIF1_bCtrlB13_b
AIF1_bCtrlB14_b
AIF1_bCtrlB15_b
AIF1_nInW1_a
AIF1_nInW2_a
AIF1_bInB0_b
…
AIF1_bInB15_b
AIF1_nInW3_a
AIF1_bIn16_b
…
AIF1_bIn31_b
AIF1_dnInD1_p
Automation
Interface
Automation
Interface
Inputs_AIF2
Byte
1
Byte
2
Byte
3
Byte
4
Byte
5
Byte
6
Byte
7
Byte
8
Inputs_AIF3
Byte
1
Byte
2
Byte
3
Byte
4
Byte
5
Byte
6
Byte
7
Byte
8
16 Bit
16 binary
signals
16 Bit
16 binary
signals
16 Bit
LowWord
16 Bit
HighWord
16 Bit
16 Bit
16 Bit
16 binary
signals
16 Bit
16 binary
signals
16 Bit
LowWord
16 Bit
HighWord
16 Bit
16 Bit
AIF2_nInW1_a
AIF2_bInB0_b
...
AIF2_bInB15_b
AIF2_nInW2_a
AIF2_bInB16_b
...
AIF2_bInB31_b
AIF2_dnInD1_p
AIF2_nInW3_a
AIF2_nInW4_a
AIF3_nInW1_a
AIF3_bInB0_b
...
AIF3_bInB15_b
AIF3_nInW2_a
AIF3_bInB16_b
...
AIF3_bInB31_b
AIF3_dnInD1_p
AIF3_nInW3_a
AIF3_nInW4_a
Fig. 6-12 Function blocks AIF-IN1, AIF-IN2 and AIF-IN3
L
BA2141 EN 1.0
6-51
Page 74

Parameter setting
Show/Hide Bookmarks
6-52
BA2141 EN 1.0
L
Page 75

Trou bleshooting and fault elimination
ggg
Show/Hide Bookmarks
7 Troubleshooting and fault elimination
7.1 No communication with the controller.
Possible causes Diagnostics Remedy
Is the controller switched on? One of the LED for the operating status must
Is the fieldbus module supplied with
voltage?
Does the controller receive
telegrams?
^ 4-1 .
be on.
The green bus LED on the fieldbus module
^ 4-1 on or blinking
must be
The yellow bus LED on the fieldbus module
^ 4-1 must be blinking when a telegram is
received correctly.
For testing, send telegrams cyclically from
the master.
Controller supply (see Operating Instructions for controller)
With internal supply, check the connection to the controller.
With external supply, check the corresponding terminals for a 24-V voltage: A
voltage of 24 V
The fieldbus module has not been initialised with the controller yet.
Possibility 1: Controller not switched on
Possibility 2: Check controller connection
Check the wiring.
Check whether host sends telegrams and uses the appropriate interface.
The LON address can be set differently for controller and host. Ensure that
the addresses are identical.
The addresses for all connected controllers must be unambiguous. If
necessary, correct addresses.
Check wiring to the host.
±10 % must be applied.
7.2 Controller does not execute write job
Possible causes Diagnostics Remedy
Does the controller send a negative
acknowledgement?
Does the controller send a positive
acknowledgement?
ACK response from the controller.
Operating mode L-C0001: The operating mode C0001 does not match when
L-C046 or L-C0135 are being addressed.
Set L-C0001 = 3.
Please see the corresponding information given in chapter ”Parameter setting”,
^ 6-1
This parameter can only be read. See the corresponding Operating Instructions.
82XX parameters can only be changed when the controller is inhibited.
Please see the corresponding information given in chapter ”Parameter setting”,
^ 6-1
The controller uses a different parameter set. The parameter change will become
active after the parameter set has been changed.
L _^ONQN bk NKM
7-1
Page 76

Trou bleshooting and fault elimination
Show/Hide Bookmarks
7-2
_^ONQN bk NKM
L
Page 77

Appendix
Show/Hide Bookmarks
8 Appendix
8.1 Starting Global Drive Control (GDC) from LONMakert
Global Drive Control (GDC) can be directly started from LONMakert for Windows
plug-in.
Software requirements:
• LONMakert for Windows
®
as of version 3.00.66
• “Global Drive Control easy” or “Global Drive Control, both as of version 4.4
8.1.1 Installation instructions for the plug-In
1. Copy the files “ LONMaker2GDC.exe” and “GDCWrapper.exe” from the floppy (included in the
delivery package) to the harddisk.
2. Register these fieles in the system
• using the following commands under DOS for Windows
– LONMaker2GDC.exe /regserver
– GDCWrapper.exe / regplugin
• As alternative, the “GDCWrapper” can also be opened in Windows (e.g. double click the file
’GDCWrapper.exe’ in the Windows Explorer). The following dialog box comes up:
®
by means of a
®
3. Copy the file “2141.XIF” to the directory “...\Lonworks\Import”.
4. Registration of the plug-In in LONMakert for Windows
®
.
2141LON005
2141LON006
L _^ONQN bk NKM
8-1
Page 78

Appendix
Show/Hide Bookmarks
8.1.2 Open GDC from the LONMakert
Global Drive Control (GDC) is automatically opened through the installed plug-in if you select the
following from the shown context menu (right mouse key in the working area of LONMakert):
• Start GDC directly under Configure...
• or start GDC indirectly through Plug-Ins....
Activate the ’GDCWrapper’ in the selection box that will open.
Go to GDC and press the function key F2 (
connection with the connected controller is necessary.
Find drive
) to set the parameters for the drive. An online
2141LON007
2141LON008
8-2
_^ONQN bk NKM
L
Page 79

8.2 Configuration of the LON network
Show/Hide Bookmarks
Appendix
The LONMakert for Windows®helps to configure your drive. We use the software version 3.00.66
of LONMakert for Windows
Thewindows can be installed under Windows95
is explained by examples
®
which is only available in English at the time of this print.
but only as much as needed for the operation of Lenze controllers.
8.2.1 Configuration of the LON network
1. Insert new device connected to the network
Click the symbol “Device” and 0 shift it to where you need it.
0
2. Go to the dialog box
Commission Device
Device Name
.
and enter the name of the device. Highlight the function
®
,Windows98®orWindowsNT®. Theconfiguration
2141LON105
L _^ONQN bk NKM
2141LON106
3. Assignment of interface specification of the connected device
After the device name has been entered (see figure above), it must be linked with the device
connected to the network.
Tip!
This link is necessary no matter whether you want to use a different device later or load a new
application to the device.
8-3
Page 80

Appendix
Show/Hide Bookmarks
Thespecificationcanbemadeonlineandoffline.
• OFFLINE (”Load XIF”, 0): The specification is read from the file 2141.XIF.
• ONLINE (“Upload from Device”, 1): The specification is read from the module. Please see
steps 4. and 5.
0
1
4. Select the function
5. Press the Service key 5 at the front of the 2141 fieldbus module.
All configuration features of the device are automatically loaded by using the service PIN.
Auto-Detect
(only possible with online connection)
2141LON108/111
2141LON107
8-4
_^ONQN bk NKM
L
Page 81

8.2.2 Working with network variables
Show/Hide Bookmarks
Insertion of function blocks
Click the “Functional Block” symbol and 0 shift it to where you need it.
0
Appendix
2141LON114
L _^ONQN bk NKM
2141LON116
8-5
Page 82

Appendix
Show/Hide Bookmarks
Insertion of network variables
Input Network Variable
Click
0
Highlight the network variables needed at the input.
and shift it to the function block (”Func Block 1”).
2141LON120
2141LON123
Repeat the same procedure for the output variables. The function block will be represented as
follows:
2141LON122
8-6
_^ONQN bk NKM
L
Page 83

Editing network variables with a browser
Show/Hide Bookmarks
Appendix
Change of variable format
2141LON141/125
2141LON142/143
L _^ONQN bk NKM
8-7
Page 84

Appendix
Show/Hide Bookmarks
8.2.3 Registration of new data types
If you use these files, you will get more information and have higher configuration friendliness for the
LON network with LONMakertfor Windows
Copy files to hard disk.
Start “LNS Resource File Catalog Utility“
®
.
2141LON150
Select Resource File Catalog directory
2141LON151/152
2141LON153/154
8-8
_^ONQN bk NKM
L
Page 85

Add new type directory
Show/Hide Bookmarks
Appendix
Click the buttons “ Add a new directory” and “Refresh Now” .
8.3 List of abbreviations
Abbreviation Meaning
AIF Automation Interface; interface between controller and automation or fieldbus modules. It also includes defined process data.
EMC Electromagnetic Compatibility
DCB DC-injection brake
hex Display of values in the hexadecimal character format (0, ¼,9,A,B,¼,F).
RFG Ramp-function generator; setpoint integrator
Imax Current limit
IMP Pulse inhibit
JOG Fixed speed or input for activation of the fixed speed
CRL Communication reference list
LSB Least Significant Bit; low-weighting bits of a binary value
Max-PDU Maximum Process Data Unit
MSB Most Significant Bit; high-weighting bits of a binary value
PO-data Process-output data
PC Personal Computer
PI-data Process-input data
PE Protective earth
PCD Process data,
QSP Quick stop
Ctrl. enable Controller enable
RS232 Interface standard
RS485 Interface standard with difference signals
Ctrl. inhibit Controller inhibit
TRIP Operation fault
Vcc Controlled constant voltage supply
2141LON155/154
L _^ONQN bk NKM
8-9
Page 86

Appendix
Show/Hide Bookmarks
8.4 Glossary
Technical term Meaning
Controller General term for servo drives, frequency inverters and DC drives
Baud rate Transmission speed of data in bit/s
Bus terminal Network node between long-distance and peripheral bus
Bus devices Unit which communicates with the host via the bus
code For input and display (access) of parameter values.
Code number/code Clear labelling of a parameter, e.g. C0106. For calculation information see Lenze code addressing in chapter
Fieldbus For the exchange of data between higher-level controls (hosts) and positioning controls (e. g. controllers).
FTT Free Topology Transceiver.
Handshake Stipulated data-transfer method (here implemented by software).
Host PC or PLC
Master see host/host system
LON Logical Operating Network
Network topology Design and structure of a network: e.g. point-to-point network, line network, ring network)
Parameters Adjustable controller variables and values addressable via codes
Peripheral-bus module Bus participant in the peripheral bus
Peripheral-bus station Consists of bus terminal, peripheral-bus module and long-distance bus controller.
Icon Sign or symbol with an unambiguous message.
Process data, Small amounts of data for fast and cyclic transmission; e.g. setpoints and actual values
Process-data channel
(PCD channel)
Acknowledgement Acknowledgement of a setting or change (e. g. of parameters))
Slave Bus participant which is only allowed to transmit data after a request by a master. For instance, controllers
Application as directed:
Cycle time The cycle time of the communication system is the time required for the exchange of all process data
„Parameter setting“,
Communication channel f or fast and cyclic transmission of process data
are slaves. (See Host/host system)
Appropriate use of the machine according to the manufacturer’s information or to common use because of its
design and function.
inappropriate
The use of the machine which does not comply with the manufacturer’s declaration.
between the host and the field units (e.g. controllers).
8.5 More information sources
No. Titel Published by
1 Engineering Bulletin 170, LonTalk Response Time Measurements Echelon Corporation
2 LonMarkâFunctional Profile: Variable Speed Motor Drive LONMARK Interoperability A ssociation
3 LonWorksâFTT-10A Free Topology Transceiver User’s Guide Echelon Corporation
4 LonMakerÔ for WindowsâUser’s Guide Echelon Corporation
8-10
_^ONQN bk NKM
L
Page 87

8.6 Table of keywords
Show/Hide Bookmarks
Appendix
A
Acceleration time, 6-19
Actual speed value, 6-6
AIF-CTRL, Device control, 6-2, 6-24
AIF-IN, Function block, 6-41
AIF-OUT, Function block, 6-38
Appendix, 8-1
Application as directed, 1-2
Application conditions, 3-1
B
Basic insulation, 4-4
C
Commissioning, 5-1
Communication interference, 4-4
Communication medium, 3-2
Communication times, 3-3
Configuration variable
Acceleration time, 6-19
Deceleration time, 6-20
Description , 6-11
Location label, 6-11
Maximum Send Time, 6-13
Maximum speed, 6-15
Minimum Send Time, 6-14
Minimum speed, 6-16
Overview, 6-3
Rated frequency, 6-18
Rated speed value, 6-17
Receive heartbeat for manufacturer-specific network variables,
6-21
Receive Heartbeat Time, 6-12
Connection
External supply, 4-2
Plug connector (2-pole), 4-2
Connection terminals, 4-2
Connector plug, LON bus, 4-2
Control word
8200 vector, 6-30, 6-33
82XX, 6-26, 6-29
93XX, 6-37, 6-40
Controller
Application as directed, 1-2
Labelling, 1-2
Controller configuration , 5-2
L _^ONQN bk NKM
8-11
Page 88

Appendix
Show/Hide Bookmarks
D
Data types, Registration, 8-8
Deceleration time, 6-20
Definitions, 1-1
Description , Configuration variable VSD, 6-11
Device control
AIF-CTRL, 6-24
Monitoring reaction, 6-22
VSD, 6-5
Dimensions, 3-2
Disposal, 1-2
E
Electrical data. Siehe Ratings
F
Fault elimination, 7-1
Fieldbus module, Order name, 3-1
First switch-on, 5-1
Frequency setpoint
8200 vector, 6-30
82XX, 6-26
Front view of the fieldbus module, 4-1
FTT, 3-2
Function module PROFIBUS-DP
Lenze parameters, 6-4
Parameters, Transmission, 6-1
Process data,, Transmission, 6-1
G
GDCWrapper.exe, 8-1
Glossary, 8-10
Siehe auch Glossary
I
Installation
Electrical, 4-4
Mechanical, 4-3
Wiringtoahost, 4-4
L
Labelling, Controller, 1-2
Legal regulations, 1-2
Lenze parameter sets, 6-2
Lenze parameters, Function module PROFIBUS-DP, 6-4
Liability, 1-2
List
Abbreviations, 8-9
Technical term. Siehe Glossary
List of abbreviations, 8-9
Location label, 6-11
LON network, Configuration, 8-3
LONMaker, Automatic GDC start, 8-1
LONMaker2GDC.exe, 8-1
M
Mains isolation, 4-4
Manufacturer, 1-2
Maximum Send Time, 6-13
Maximum speed, 6-15
Minimum Send Time, 6-14
Minimum speed, 6-16
Monitoring reaction, AIF-CTRL, 6-22
Motor current, 6-8
Motor voltage, 6-9
N
Network variable, 8-5
AIF-CTRL
8200 vector, 6-30
82XX, 6-26
9300 Se rvo PL C, 6- 42
93XX, 6-35
Drive PLC, 6-42
Input variables, 6-25
Output variables, 6-24
Overview, 6-2
VSD
Actual speed value, 6-6
Motor current, 6-8
Motor voltage, 6-9
Operating time, 6-10
Scaling of the speed setpoint, 6-7
Speed setpoint, 6-5
Node Object, 6-1
Number of devices connected to the bus, 3-3
8-12
_^ONQN bk NKM
L
Page 89

Appendix
Show/Hide Bookmarks
O
Operating time, 6-10
Operator, 2-1
Overview
Configuration variable, 6-1, 6-3
Network variable, 6-1
AIF-CTRL, 6-2
VSD, 6-2
Node Object, 6-1
P
Parameter data channel, configuration, 6-2
Parameter sets, 6-2
Parameter setting, 6-1
Parameters
Control word (C0135)
8200 vector, 6-30
82XX, 6-26
Frequency setpoint (C0046)
8200 vector, 6-30
82XX, 6-26
L-C0142, 5-2
PE shield cable, 4-4
S
Safety information, 2-1
Layout, 2-2
Other notes, 2-2
Warning of material damage, 2-2
Warning of personal damage, 2-2
Safetyinformation, Operating Instructions, 1-1
Scaling of the speed setpoint, 6-7
Scope ofsupply, 1-1
Service key, 4-1
Service LED, 4-1
Speed
Maximum, 6-15
Minimum, 6-16
Speed setpoint, 6-5
Scaling, 6-7
Starting GDC, from LONMaker, 8-1
Status word, 82XX, 6-27
Switch-on sequence, First switch-on, 5-1
T
Technical data, 3-1
Technicaldata
Communication times, 3-3
Dimensions, 3-2
Features of the fieldbus module, 3-1
General data/Application conditions, 3-1
Ratings, 3-2
Troubleshooting, 7-1
Personnel, Qualified, 2-1
Processing time in the basic unit, 3-3
R
Rated frequency, 6-18
Rated speed value, 6-17
Ratings, 3-2
Receive Heartbeat Time, 6-12
Registration, of data types, 8-8
L _^ONQN bk NKM
U
Use, as directed, 1-2
V
Voltage supply, 4-5
Voltage supply, external, 4-2
VSD, Device control, 6-2, 6-5
W
Warranty, 1-2
Wiring, to a host, 4-4
Write parameter (example), 6-6
8-13
Page 90

Appendix
Show/Hide Bookmarks
8-14
_^ONQN bk NKM
L
 Loading...
Loading...