

Page 1
EDB2102EN
Show/Hide Bookmarks
!POn
Operating Instructions
Ä!POnä
LECOM A/B
Fieldbus module type 2102
RS232, RS485, optical fibre
Page 2
qЬЙлЙ lйЙк~нбеЦ fелнкмЕнбзел ~кЙ о~дбЗ Сзк СбЙдЗДмл гзЗмдЙл пбнЬ нЬЙ СзддзпбеЦ е~гЙйд~нЙлW
Show/Hide Bookmarks
2102 IB. 2x. 3x. V001 (RS232, RS485)
2102 IB. 2x. 3x. V002 (RS485)
2102 IB. 2x. 3x. V003 (Optical fibre)
fе ЕзееЙЕнбзе пбнЬ нЬЙ мебн лЙкбЙл ~л Скзг нЬЙ е~гЙйд~нЙ З~н~W
820X E. 2x. 1x. (8201 - 8204)
820X E./C. 2x. 1x. Vxxx (8201 - 8204)
821X E. 2x. 2x. (8211 - 8218)
821X E./C. 2x. 2x. Vxxx (8211 - 8218)
822X E. 1x. 1x. (8221 - 8225)
822X E. 1x. 1x. Vxxx (8221 - 8227)
824X E. 1x. 1x. (8241 - 8246)
824X E./C. 1x. 1x. Vxxx (8241 - 8246)
82EV VA 0x 8200 vector
82EV 1x 0x 8200 vector
93XX E. 2x. 1x. (9321 - 9333)
93XX E./C. 2x. 1x. Vxxx (9321 - 9333)
Type
Design:
E = Built-in unit IP20
IB = Module
Hardware level and index
Software level and index
Version
Explanation
Important:
These Operating Instructions are only valid together with the corresponding Instructions for
82XX, 8200 vector or 93XX controllers.
Edition of: 01.10.2003
E 2002 Lenze Drive Systems GmbH
Without written approval of Lenze Drive Systems GmbH this documentation or part of it may not be copied or passed on to third parties.
All information given in this documentation have been checked for compliance with the hardware and software described. Nevertheless, deviations and
mistakes cannot be ruled out. We do not take any responsibility or liability for damages which might possibly o ccur. Necessary corrections will be included
in the next edition.
Version 2.0 10/03
Page 3

Contents
Show/Hide Bookmarks
1 Preface and general information 1-1...........................................
1.1 About these Operating Instructions 1-1....................................................
1.1.1 T erminology used 1-1.........................................................
1.1.2 What is new? 1-1............................................................
1.2 Packing list 1-1.....................................................................
1.2.1 Legal regulations 1-2..........................................................
2 Safety information 2-1......................................................
2.1 Persons responsible for safety 2-1.......................................................
2.2 General safety information 2-1..........................................................
2.3 Layout of the safety information 2-2......................................................
3 Technical data 3-1.........................................................
3.1 Features of the 2102 fieldbus module 3-1..................................................
3.2 General data and application conditions 3-1................................................
3.3 Rated data 3-2......................................................................
3.4 Dimensions 3-2.....................................................................
3.5 Communicatio n times 3-3.............................................................
4 Installation 4-1............................................................
4.1 Connections of the 2102 fieldbus module 4-1...............................................
4.1.1 Overview 4-1................................................................
4.1.2 Female plug for 9-pole SubD plug (LECOM-A/B) 4-2...................................
4.1.3 Plug-in terminal for 4-pole male plug (LECOM-B) 4-2..................................
4.1.4 Plug-in terminal for 2-pole male plug (external voltage supply) 4-2........................
4.2 Mechanical installation 4-3.............................................................
4.3 Electrical installation 4-3..............................................................
4.4 Wiring to a host 4-4..................................................................
4.4.1 Wiring via RS232 (LECOM-A) 4-5.................................................
4.4.2 Wiring via RS485 (LECOM-B) 4-6.................................................
4.4.3 Wiring via optical fibres (LECOM-LI) 4-8............................................
L BA2102EN
i
Page 4

Contents
Show/Hide Bookmarks
5 Commissioning 5-1........................................................
6 Parameter setting 6-1......................................................
6.1 Parameter sets 6-1..................................................................
6.1.1 82XX parameter sets 6-1.......................................................
6.1.2 Parameter sets for 8200 vector 6-1...............................................
6.1.3 Parameter sets for 93XX 6-1....................................................
6.2 Meaning of individual parameters 6-2.....................................................
6.2.1 Operating mode 6-2...........................................................
6.2.2 LECOM unit address (C0009) 6-3.................................................
6.3 Special features when using the 82XX controller 6-4..........................................
6.3.1 Start with Ctrl. inhibit instead of QSP 6-4...........................................
6.3.2 Reduction of the response time of the interface 6-4...................................
6.3.3 Communication monitoring 6-4..................................................
6.4 Special features when using the 820X controllers 6-5.........................................
6.4.1 Relative setpoint selection C0141 (parameter channel) 6-5..............................
6.4.2 Special features when using the 820X V1.2 controller 6-5...............................
6.5 Special notes for 821X, 822X, 824X controllers 6-6...........................................
6.6 Special notes when using 8200 vector controllers 6-6.........................................
7 Troubleshooting and fault elimination 7-1.......................................
8 Appendix 8-1.............................................................
8.1 Accessories 8-1.....................................................................
8.1.1 Accessories for a host 8-1......................................................
8.1.2 Accessories for RS232 (LECOM-A) 8-1.............................................
8.1.3 Accessories for RS485 (LECOM-B) 8-2.............................................
8.1.4 Accessories for optical fibres (LECOM-LI) 8-2........................................
8.2 Code table 8-3......................................................................
8.3 LECOM-A/B protocol 8-16..............................................................
8.3.1 General 8-16.................................................................
8.3.2 RECEIVE 8-21................................................................
8.3.3 SEND 8-23..................................................................
8.3.4 BROADCAST / MULTICAST 8-24...................................................
8.3.5 Monitoring of the slave response 8-24..............................................
8.3.6 Transmission faults 8-24........................................................
8.4 Listofabbreviations 8-25...............................................................
8.5 Glossary 8-26.......................................................................
8.6 Index 8-27.........................................................................
ii
BA2102EN
L
Page 5
Preface and general information
sup
plie
dmatchtheaccomp
anyingpapers.Lenzedoesnotacceptany
•
1M3fixingscre
w
suppliedmatchtheaccompanyingpaper
s.Lenzedoesnotacceptany
S
Claim
/
Show/Hide Bookmarks
1 Preface and general information
1.1 About these Operating Instructions
• These Operating Instructions are intended for safety-relevant operations on and with the
2102 fieldbus module. They contain safety information which must be observed.
• All personnel working on and with the 2102 fieldbus module must have these Operating
Instructions available and observe the information and notes relevant for them.
• The Operating Instructions must always be complete and perfectly readable.
These Operating Instructions inform about the most important technical data and the installation of
the 2102 fieldbus module. They are only valid in combination with the Operating Instructions of the
corresponding controller.
1.1.1 Terminology used
Controller In the following, the term ”controller” is used for ”93XX servo inverters” or ”82XX frequency inverters”.
Drive system In the following the term ”drive system” is used for drive systems with fieldbus modules and other Lenze
Fieldbus module In the following text the term ”fieldbus module” is used for ”fieldbus module type 2102 RS232, RS485,
Cxxx/y Subcode y of code Cxxx (e.g. C0410/3 = subcode 3 of code C0410)
L-Cxxx/y Lenze code
Xk/y Terminal strip Xk/terminal y (e.g. X3/28 = terminal 28 on terminal strip X3)
(^xx-yyy) Cross reference (chapter - page)
1.1.2 What is new?
Ident. no. edition of Important Contents
391 845 08/1996 1st edition
394 448 02/1997 replaces 391 845 • extended by 2102.V904, 2102.V905, 2102.V906
404 788 11/1998 replaces 394 448 Format change to DIN A4
417 816 10/2000 replaces 404 788 Adaptation to 8200 vector (all chapters)
474 677 10/2003 replaces 417 816 Change of company name
1.2 Packing list
drive components.
optical fibre”.
• Chapter 6.3
• Editorially reviewed
L _^ONMObk
Packing list Important
• 1 2102 fieldbus module with housing (enclosure IP20)
•
• 1 two-pole male connector for voltage supply
• 1
hort Instructions
After the delivery has received, check immediately whether the items
liability for deficiencies claimed subsequently.
• visible transport damage immediately to the forwarder
• visible deficiencies
representative.
incompleteness immediately to your Lenze
1-1
Page 6
Preface and general information
Labelling
Disposa
l
Show/Hide Bookmarks
1.2.1 Legal regulations
Labelling
Application as
directed
Nameplate CE identification Manufacturer
Lenze 2102 fieldbus modules are
unambiguously identified by their nameplates.
2102 fieldbus module
In compliance with to the EC Low Voltage
Directive
Lenze Drive Systems GmbH
Postfach 10 13 52
D-31763 Hameln
• Operate the fieldbus module only under the conditions prescribed in these Operating Instructions.
• The fieldbus module is an additional module and can be optionally attached to the Lenze controller series 820X, 821X, 822X, 8200 vector
and 93XX. The 2102 fieldbus module links these Lenze controllers to superimposed hosts (PLC or PC) using the Lenze LECOM A/B/LI
fieldbuses.
• The fieldbus module must be attached and electrically connected so that it complies with its function and does not cause any hazards when
attached and operated as instructed.
• Observe all notes given in chapter “Safety information“ (^ 2-1).
• Please observe all information given in these Operating Instructions. This means:
– Read these Operating Instructions carefully before you start to work with the system.
– These Operating Instructions must always be available during operation of the fieldbus module.
Any other use shall be deemed inappropriate!
Liability • The information, data, and notes in these instructions met the state of the art at the time of printing. Claims referring to drive systems
which have already been supplied cannot be derived from the information, illustrations, and descriptions given in these Operating
Instructions.
• The specifications, processes, and circuitry described in these Operating Instructions are for guidance only and must be adapted to your
own specific application. Lenze does not take responsibility for the suitability of the process and circuit proposals.
• The indications given in these Operating Instructions describe the features of the product without warranting them.
• Lenze does not accept any liability for damage and operating interference caused by:
– disregarding t hese Instructions
– unauthorized modifications to the controller
– operating faults
– improper working on and with t he controller
Warranty • Warranty conditions: see Sales and Delivery Conditions of Lenze Drive Systems GmbH.
• Warranty claims must be made immediately after detecting defects or faults.
• The warranty is void in all cases where liability claims cannot be made.
Disposal
Material recycle dispose
Metal D Plastic D Printed-board assemblies - D
Operating Instructions D
1-2
_^ONMObk
L
Page 7

Safety information
Show/Hide Bookmarks
2 Safety information
2.1 Persons responsible for safety
Operator
• An operator is any natural or legal person who uses the drive system or on behalf of whom the drive system is used.
• The operator or his safety personnel is obliged
– to ensure the compliance with all relevant regulations, instructions and legislation.
– to ensure that o nly skilled personnel works on and with the2102IB fieldbus module.
– to ensure that the personnel has the Operating Instructions available for all corresponding work.
– to ensure that all unqualified personnel are prohibited from working on and with the drive system.
Qualified personnel
Qualified personnel are persons who - because of their education, experience, instructions, and knowledge about corresponding standards and regulations, rules for
the prevention of accidents, and operating conditions - are authorized by the person responsible for the safety of the plant to perform the required actions and who are
able to recognize potential hazards.
(Definition for qualified personnel to VDE 105 o r IEC 364)
2.2 General safety information
• These safety notes do not claim to be complete. In case of questions and problems please contact your Lenze representative.
• At the time of delivery the fieldbus module meets the state of the art and ensures basically safe operation.
• The indications given in these Operating Instructions refer to the stated hardware and software versions of the fieldbus modules.
• The fieldbus module is hazardous if:
– unqualified personnel works on and with the fieldbus module.
– the fieldbus module is used inappropriately.
• The processing notes and circuit sections shown in these Operating Instructions are proposals which cannot be transferred to other applications without being
tested and checked.
• Ensure by appropriate measures that neither personal injury nor damage to property may occur in the event of failure of the fieldbus module.
• The drive system must only be operated when no faults occur.
• Retrofittings, modifications, or redesigns are basically prohibited.Lenze must be contacted in all cases.
• The fieldbus module is electrical equipment intended for use in industrial high-power plants. The fieldbus module must be tightly screwed to the corresponding
controller during operation. In addition, all measures described in the Operating Instructions of the controller used must be taken. Example: Fasten covers to ensure
protection against contact.
L _^ONMObk
2-1
Page 8
Safety information
Show/Hide Bookmarks
2.3 Layout of the safety information
• All safety information have a uniform layout:
– The icon characterizes the type of danger.
– The signal word characterizes the severity of danger.
– The note text describes the danger and gives information on how to prevent dangerous
situations.
Signal word
Note
Icons used Signal words
Warning of
damage to
persons
Warning of
hazardous electrical
voltage
Danger! Warns of impending danger.
Consequences if disregarded:
Death or severe injuries.
Warning of a general
danger
Warning of
damage to
material
Other notes Tip! This note designates general, useful notes.
Warning! Warns of potential, very hazardous situations.
Possible consequences if disregarded:
Death or severe injuries.
Caution! Warns of potential, hazardous situations.
Possible consequences if disregarded:
Light or minor injuries.
Stop! Warns of potential damage to material.
Possible consequences if disregarded:
Damage of the controller/drive system or its environmentK
If you observe it, handling of the controller/drive system is made
easier.
2-2
_^ONMObk
L
Page 9
3 Technical data
Show/Hide Bookmarks
3.1 Features of the 2102 fieldbus module
The 2102 fieldbus module has the following features:
• Different communication media:
– RS232 (LECOM-A)
– RS485 (LECOM-B)
– Optical fibre (LECOM-LI)
• LECOM protocol V2.0
• The baud rate can be set to 1200, 2400, 4800, 9600 or 19200 baud (bit/s).
• Parameter setting via controller code numbers
• 3 Diagnostic LEDs
• Electrical isolation between control stage and power stage
• Electrical isolation of the I/O terminals of 821X, 8200 vector, 822X and 93XX
• Easy installation
Technical data
3.2 General data and application conditions
Field Values
Communication media RS232 (LECOM-A): copper conductor
Protocol LECOM-A/B V2.0
Character
Format
Baud rate [bits/s] 1200, 2400, 4800, 9600, 19200
Ambient temperature During operation: 0 to +50 °C
Permissible moisture Class 3K3 to EN 50178 (without condensation, average relative humidity 85%)
24-V-DC-
Voltage supply
RS485 (LECOM-B): copper conductor
(LECOM-LI): optical fibre
7 bit ASCII
1Stopbit
1Startbit
1 Parity bit (even)
Transport: –25 to +70
Storage: –25 to +55
• 820X / 8200 vector (observe chapter 4.3): only external supply
• 821X / 822X / 8200 vector (o bser ve chapter 4.3) / 93XX: internal or external supply
°C
°C
L _^ONMObk
3-1
Page 10
Technical data
Show/Hide Bookmarks
3.3 Rated data
2102IB.V001
Communication media RS232 (LECOM-A)
Current consumption 80 mA 60 mA 70 mA
External supply
(terminals 39/59)
V=24VDC
V
RMS
V
RMS
RS485 (LECOM-B)
=15TO30VDC;W=5%
=20TO25VDC;W=48%;V
SS
< 35 V
2102IB.V002 2102IB.V003
RS485 (LECOM-B) Optical fibre
(LECOM-LI)
2102IB.V001 / 2102IB.V002 / 2102IB.V003:
Rated insulation voltage Type of insulation
• to PE 50 V AC no electrical isolation
• for external supply (terminals 39/59) - no electrical isolation
• for power stage
– 820X / 821X 270 V AC basic insulation
– 822X / 8200 vector 270 V AC double basic insulation
– 93XX 270 V AC double basic insulation
Insulation voltages
for bus systems
Degree of pollution VDE 0110 part 2 pollution degree 2
• for control terminals
– 820X / 8200 vector
(with internal supply)
– 8200 vector
(with external supply)
– 821X 50 V AC electrical isolation
– 822X 270 V AC basic insulation
– 93XX 270 V AC basic insulation
- no electrical isolation
100 V AC basic insulation
• for external bus systems 50 V AC electrical isolation
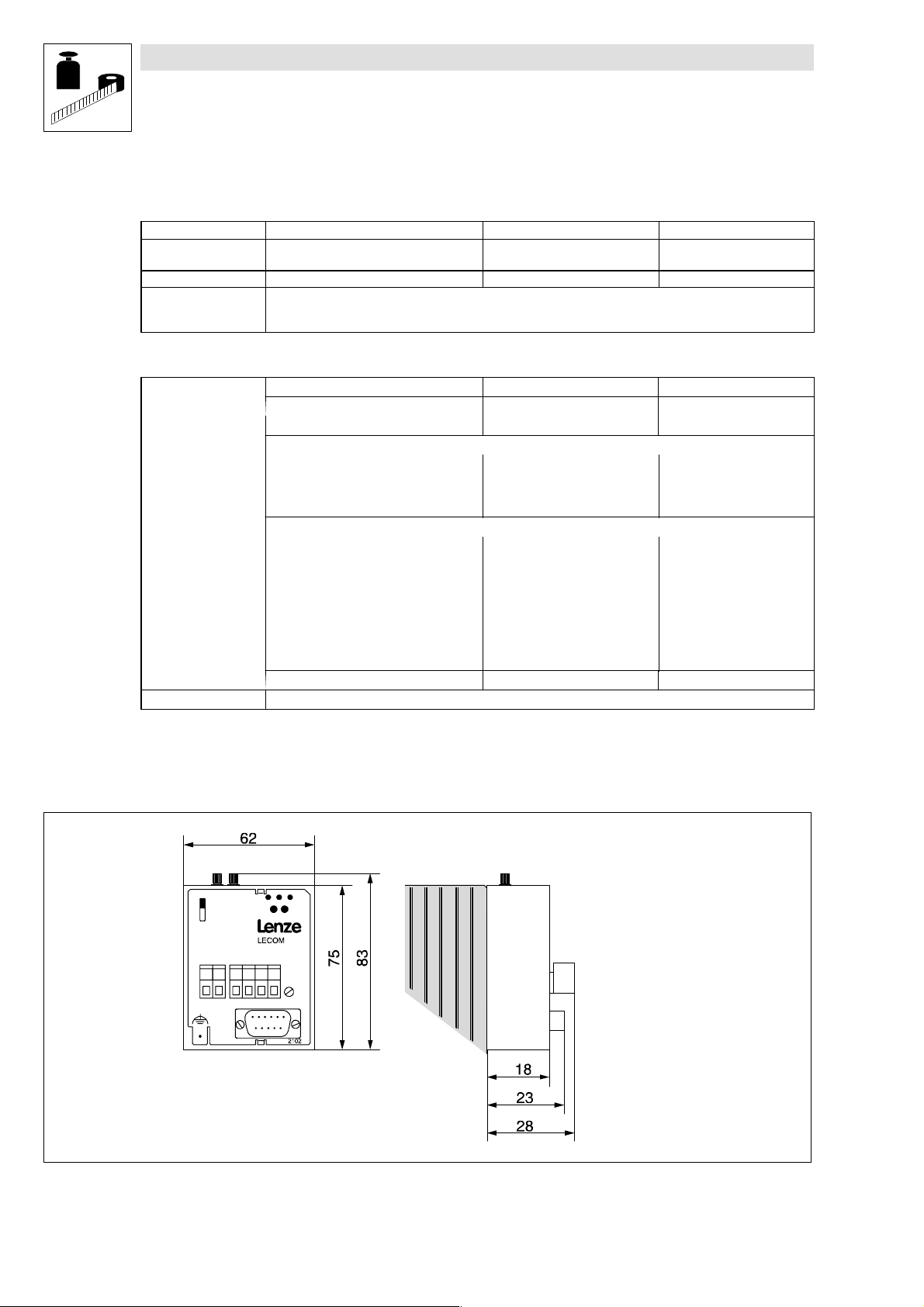
3.4 Dimensions
Fig. 3-1 Dimensions of the 2102 fieldbus module (all dimensions in mm)
3-2
_^ONMObk
L
Page 11
3.5 Communication times
Show/Hide Bookmarks
The time required for communication can be displayed as a sequence of processing steps (with
corresponding times).
Step Explanation
t0 User program in host starts request to the controller (e.g. controller enable with C0040=1)
t1 Software driver (e.g. LECOM-S5) in host converts request data into LECOM-A/B protocol V2.0 and starts the transmission.
t2 Serial data transfer to the controller (telegram time)
t3 Data receipt of the controller: Processing of request and start of response
t4 Response data to host are being transmitted (telegram time)
t5 Software driver in host evaluates the response, i.e. the response is converted into the format of the user program.
t6 Application program in host gets the result
The time sections t2, t4 and t3 are described in detail in the following:
Telegram time (t2 + t4)
The telegram time comprises the serial communic ation from the host to the controller (t2) and the
corresponding response from the controller (t4). The time depends on the telegram type and the
baud rate set under C0125.
Technical data
Baud rate [bits/s] (C0125)
1200 2400 4800 9600 19200
Single character transmission time [ms]
(1 character = 10 bit; see chapter 3.2)
8.4 4.2 2.1 1 0.52
Telegram type SEND (sends data to drive):
Baud rate [bits/s] (C0125)
1200 2400 4800 9600 19200
t2: Standard [ms] (parameter value = 9 characters) 150 75 37.5 18.8 9.4
Addition for extended addressing [ms] 41.6 20.8 10.4 5.2 2.6
Telegram type RECEIVE (reads data from drive):
Baud rate [bits/s]
1200 2400 4800 9600 19200
Standard [= t4]
(Parameter value = 9 characters) [ms]
Addition for extended addressing [ms] 83.3 41.7 20.8 10.4 5.2
166.7 83.3 41.7 20.8 10.4
If more or fewer than 9 characters are transmitted as telegram data, take the corresponding
charac ter-transmission times into account.
L _^ONMObk
3-3
Page 12
Technical data
Show/Hide Bookmarks
Processing time in the controller (t3)
The processing time in the controller depends on the controller type and the code numbers. This is
shown in the following table:
Code numbers Processing time (2102 + controller) [ms]
Series
820X 821X/8200 vector/822X 93XX
C0046, C0135 35
C0050, C0150 35 20 20
C0068 70 30 30
Write other code numbers 230 20
Read other code numbers 55 20 20
1)
35 ms is valid for C0001 = 3. If C0001 = 1 and you write under C0046, access is also possible. However, the processing time is prolonged
to 70 ms.
2)
For immediately following write-access procedures, the response times may be up to 50ms.
3)
The code number C0046 can only be read. Use a free code number (e. g. C0141) to select a setpoint. For this, refer to t he 93XX Manual.
4)
This is a typical value. For some codes, the processing times may be longer. For this, refer to the 93XX Manual.
1)
20 20
2)
3)
4)
20
3-4
_^ONMObk
L
Page 13
4 Installation
Show/Hide Bookmarks
4.1 Connections of the 2102 fieldbus module
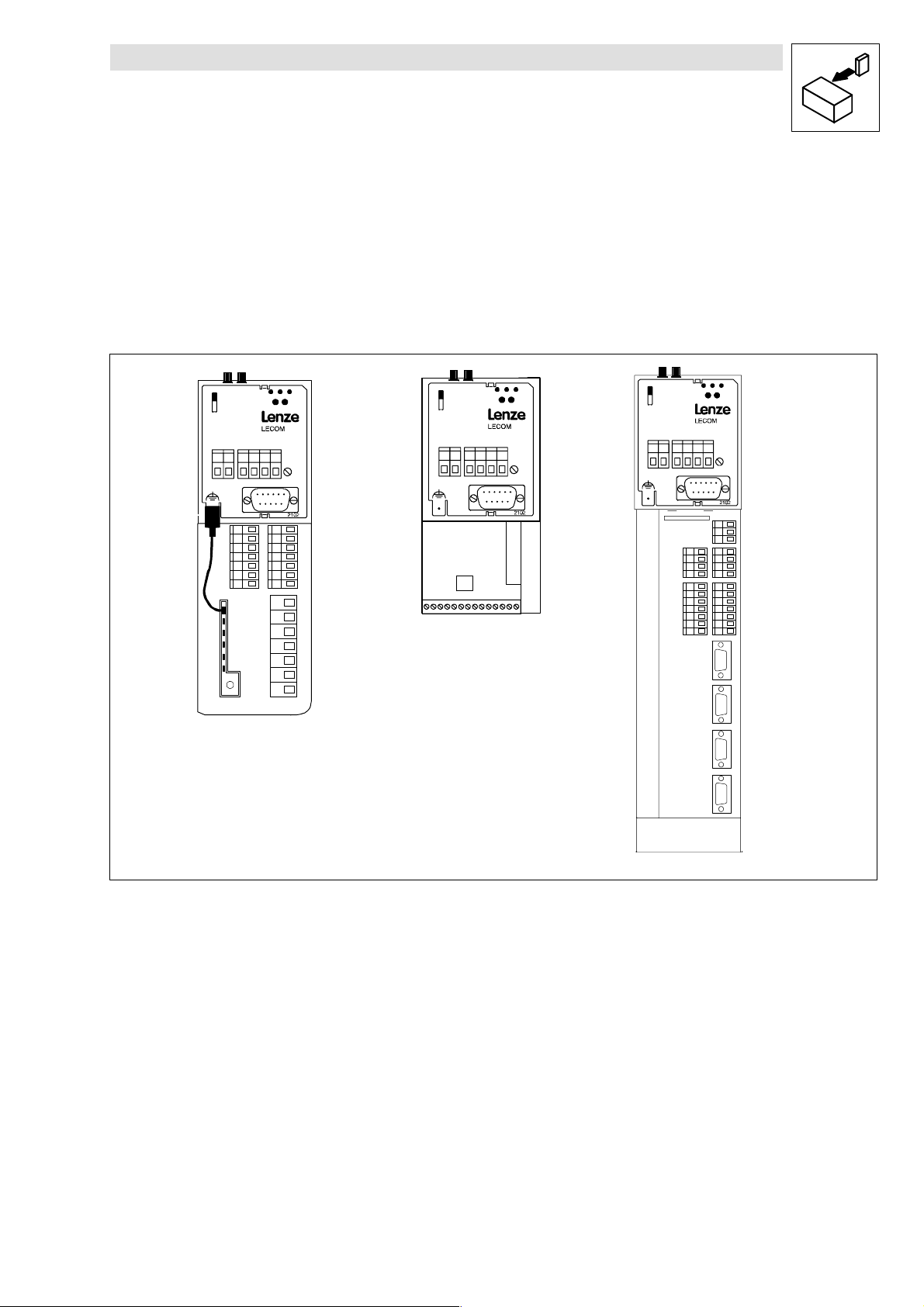
4.1.1 Overview
Installation
UOMM оЙЕнзк
UOuu
Fig. 4-1 82XX, 8200 vec tor and 93XX controllers (with fieldb us module 2102)
VPuu
L _^ONMObk
4-1
Page 14
Installation
Show/Hide Bookmarks
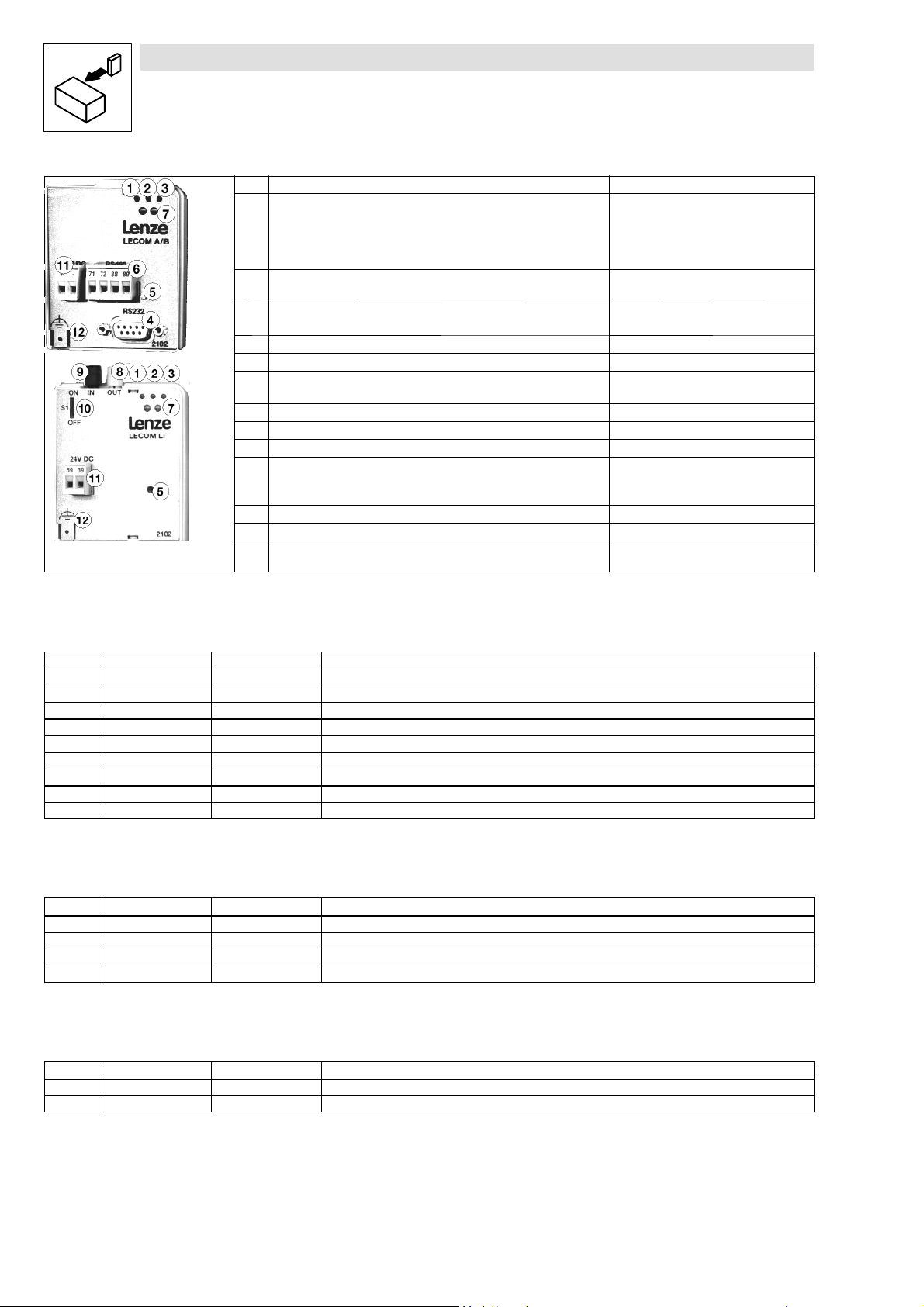
Pos. Name/Meaning Note
1 Green bus LED (voltage supply)
ON: Fieldbus module has connected with the controller.
BLINKING: 2102 fie ldbus module is supplied with voltage but is
not connected to the controller (controller is switched off, in
initialization or not available).
2 Yellow RxD-LED For receiving signal:
BLINKING: Drive unit receives telegram
3 Yellow TxD-LED For sending signal:
BLINKING: Drive unit transmits response
4 9-pole SubD female plug for the RS232/RS485 interface only with 2102IB.V901/2102.V904
5 Fixing screw
6 4-pole clamp-plug connection for RS485 interface only with 2102IB.V901/2102.V904 and
7 Operating status display for the controller
8 Optical-fibre transmitter (white) only with 2102IB.V903/2102.V906
9 Optical-fibre receiver (black) only with 2102IB.V903/2102.V906
10 Switch S1 for optical-fibre transmission rate:
OFF: normal transmission rate (0 to 40m)
ON: = high transmission rate (10 to 66m)
11 Connection for external voltage supply (24 V DC ± 10 %)
12 PE connection (only for 82XX)
Fig. 4- 2 - RS 485 cable (no drawing) only with 2102IB.V901/2102.V904 and
2102IB.V902/2102.V905
only with 2102IB.V903/2102.V906
2102IB.V902/2102.V905
4.1.2 Female plug for 9-pole SubD plug (LECOM-A/B)
Pin Name Input/output Explanation
1 - - Not assigned
2 RxD Input Data receiving wire RS232
3 TxD Output Data transmitting wire RS232
4 DTR Output Transmission control RS232
5 GND - Reference potential
6 DSR Input Not assigned RS232
7 T/R(A) Input/output RS485
8 T/R(B) Input/output RS485
9 Vcc5 Output Supply +5 V / 10 mA
4.1.3 Plug-in terminal for 4-pole male plug (LECOM-B)
Pin Name Input/output Explanation
71 T/R(B) Input/output RS485
72 T/R(A) Input/output RS485
88 S-C - Capacitive screening to PE
89 S - Direct screening to PE
4.1.4 Plug-in terminal for 2-pole male plug (external voltage supply)
Pin Name Input/output Explanation
39/− GND24 - Reference potential for external supply
59/+ Vcc24 Input External supply 15 to 30 V DC (see chapter 4.3)
4-2
_^ONMObk
L
Page 15
4.2 Mechanical installation
Show/Hide Bookmarks
• Remove the keypad from the front of the controller if it is attached.
• Attach the 2101 fieldbus module to the front of the controller. Use the fixing screw, which is
part of the delivery pac kage, to secure the fieldbus module (see Fig. 4-1, pos. 3)
Stop!
Tighten the fixing screw to ensure adequate PE connection of the 2102 fieldbus module.
4.3 Electrical installation
• The communication of controllers 820X and 821X may be disturbed by electromagnetic
radiation. Use an additional PE cable to ensure safe communication (see Fig. 4-1 pos. 13).
This is not necessary with the controllers 822X and 93XX.
Installation
(^ 1-1).
Caution!
The bus system continues operation even if the 2102 fieldbus system is disconnected from the
power supply because of an error.
If this is the case, the controller cannot be reached by the host.
Stop!
The polarity of the voltage supply must not be reversed, otherwise, the 2102 fieldbus module will
be destroyed !
• Voltage supply:
– external 24 V (15 to 30 V) via plug-in connec tors 39 (-) / 59 (+)
or
– internal via the controller (connection by plugging it on).
With 820X it is not possible to have an internal voltage supply via the controller.
L _^ONMObk
4-3
Page 16
Installation
Show/Hide Bookmarks
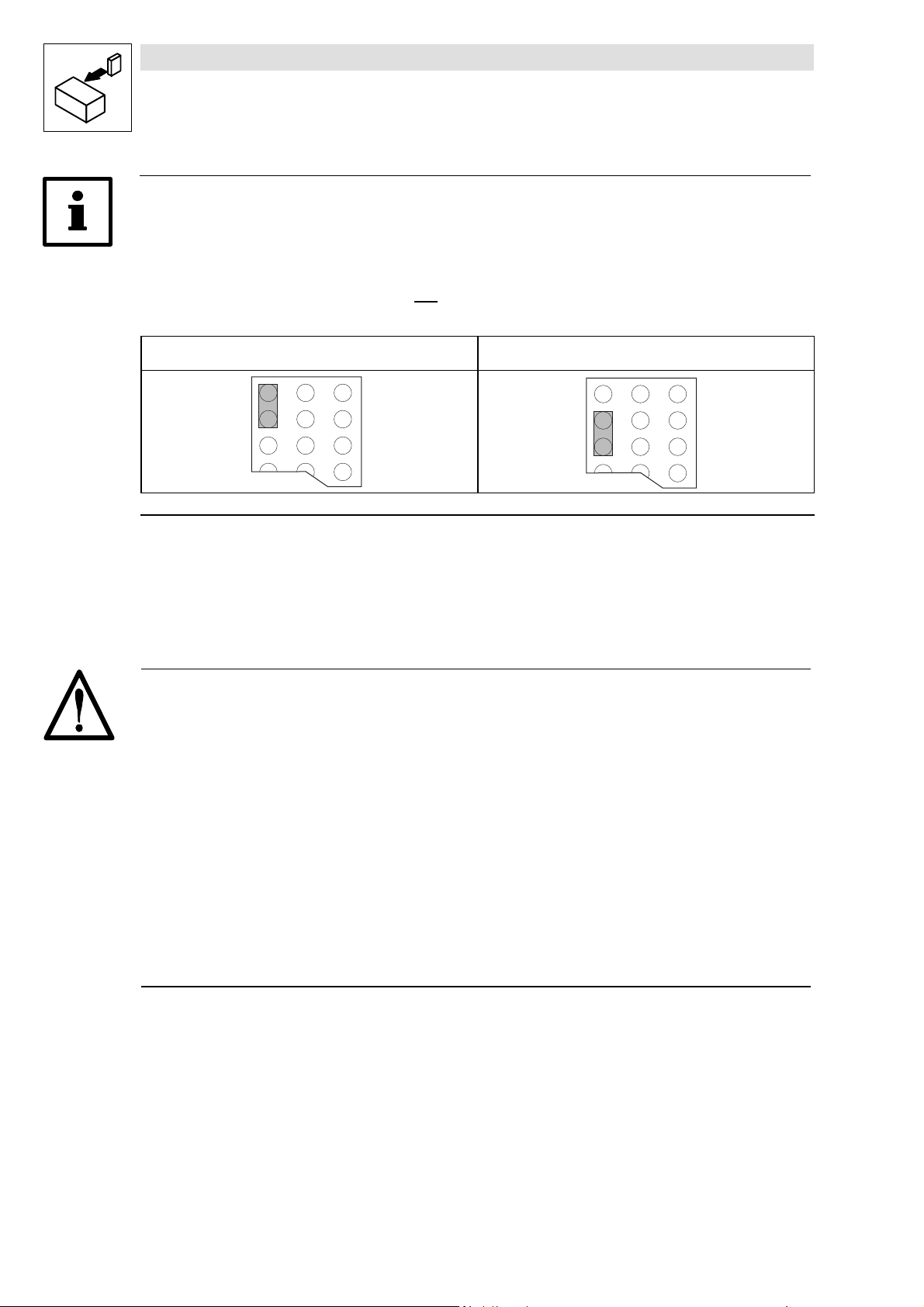
Note!
Internal voltage supply of the fieldbus module connected to a 8200 vector
Controllers with an extended AIF interface (front of the 8200 vector) can be internally supplied. The
part of the drawing highlighted with grey shows the jumper position.
In Lenze setting, the fieldbus module is not
For internal voltage supply, put the jumper in the position indicated below.
internally supplied.
Lenze setting
(only external voltage supply)
4.4 Wiring to a host
This chapter informs you about networking the 2102 fieldbus module using the bus systems RS232
(LECOM-A), RS485 (LECOM-B) or optical fibres (LECOM-LI).
The accessories requires are listed in chapter 8.1.
Danger!
• An additional electrical isolation is required if
– a 820X, 821X or 8200 vector controller will be connected to a host
– a safe electrical isolation (double basic insulation) to VDE 0160 is required.
• Please observe the following:
– RS232:
The electric al isolation of the RS232 interface (LECOM-A) can be achieved by two 2101IB
level converters or another RS232 electrical isolation.
– RS485:
With RS485 (LECOM-B), the 2101IB level converter should be installed to the host if it is
not equipped with an appropriately isolated interface.
– Optical fibres:
If two controllers are connected via optical fibres (LECOM-LI) they are always isolated.
• For wiring, the electrical isolation of the supply voltage must be taken into account.
Internal voltage supply
The controllers 822X and 93XXare equipped with a double basic insulation to VDE 0160, additional
electrical isolation is therefore not necessary.
4-4
_^ONMObk
L
Page 17
4.4.1 Wiring via RS232 (LECOM-A)
Show/Hide Bookmarks
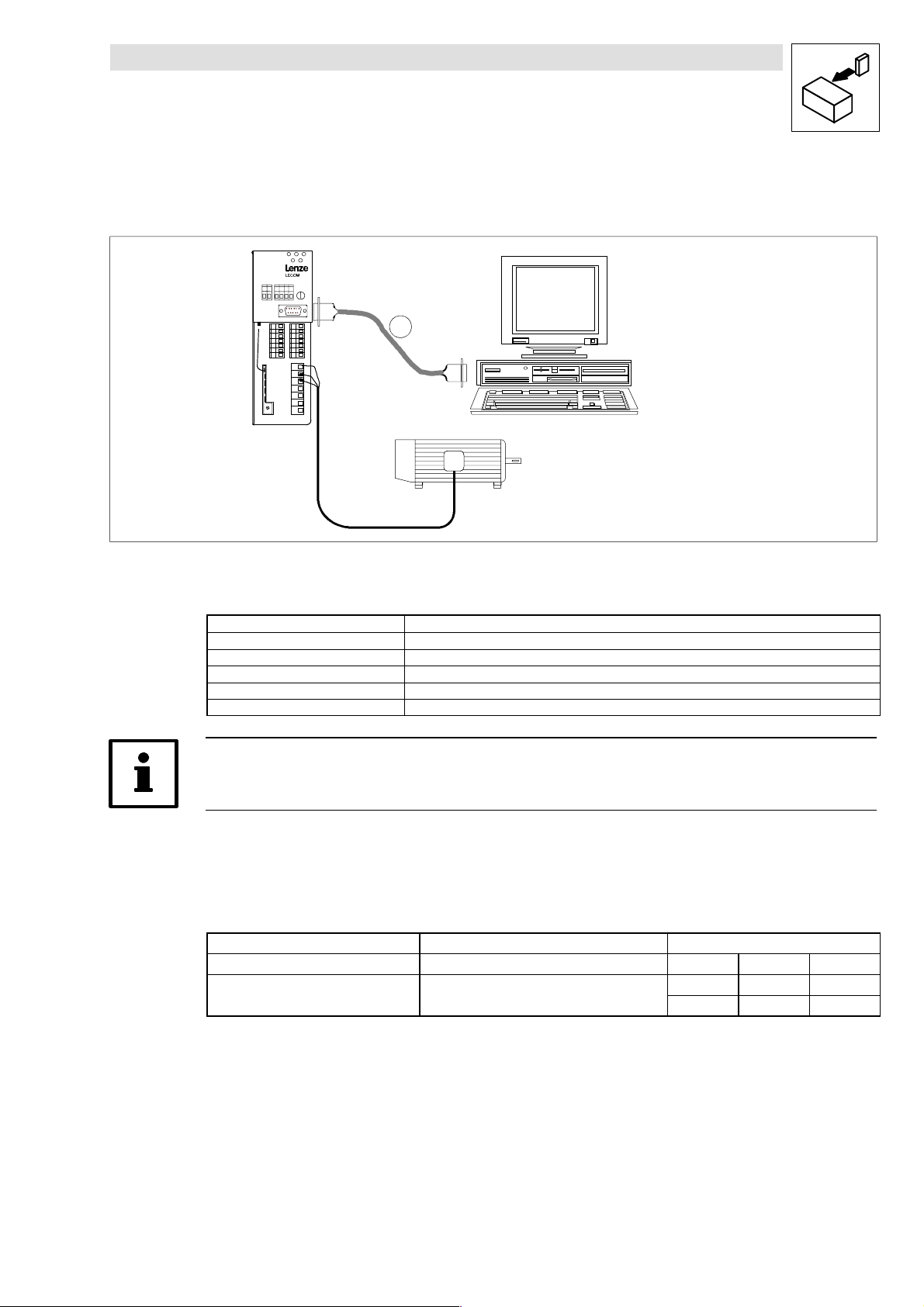
The following figure schematically shows the connection to a host (here: PC)via RS232 (LECOM-A).
S1
1
Installation
LEMOC
PC system cable
Fig. 4-3 Wiring for RS232 (LECOM-A)
Wiring features for RS232 (LECOM-A):
Typ e 2102IB.V001
Communication media RS232
Network topology Point-to-point
Possible number of controllers 1
Maximum cable length 15 m
Maximum baud rate 19200 bit/s
Note!
We recommend the use of ready-made PC system cables for wiring (see chapter 8.1.2).
Wire the PC system cables as described:
1. Use metallic SubD connector shells and connect both ends of the screen to the connector
shells.
2. Connect the pins as follows:
Unit Connection element Pin-No. (name)
2102 fie l dbus module 9-pole SubD plug 2(RxD) 3(TxD) 5 (GND)
Host (PC, PLC, etc.)
9-pole SubD female plug 3(TxD) 2(RxD) 5 (GND)
25-pole SubD female plug. 2(TxD) 3(RxD) 7 (GND)
L _^ONMObk
4-5
Page 18

Installation
Otionalhostconnection
a)directlyRS485
Show/Hide Bookmarks
4.4.2 Wiring via RS485 (LECOM-B)
The following figure schematically shows the connection to a host (PC or PLC) via RS485
(LECO M -B).
RS232
RS485
3
S1
89887271
5939
S1
1
Fig. 4-4 Wiring for RS485 (LECOM-B)
Interface cable RS485
Optional host c onnec tion
a) directly RS485
b) RS232 via interface converter 2101IB
PC system cable
2101IB interface converter
Note!
• We recommend the use of appropriate accessories (see chapter 8.1.3).
• Please do not use any other but a shielded and twisted cable for wiring the RS485 interface
cable.
S1
898872715939
RS485RS485
898872715939
RS485
1
2a
2b
4
2101IB
4-6
Wiring features for RS485 (LECOM-B):
Typ e 2102IB.V002
Communication media RS485 (2 wires)
Network topology Line
Possible number of controllers 31
Maximum cable length 1200 m
Maximum baud rate 19200 bit/s
_^ONMObk
L
Page 19
PC/PLC
Show/Hide Bookmarks
T/R/(A)
T/R/(B)
Installation
PE
71 72 88
2102
89
71 72 88
2102
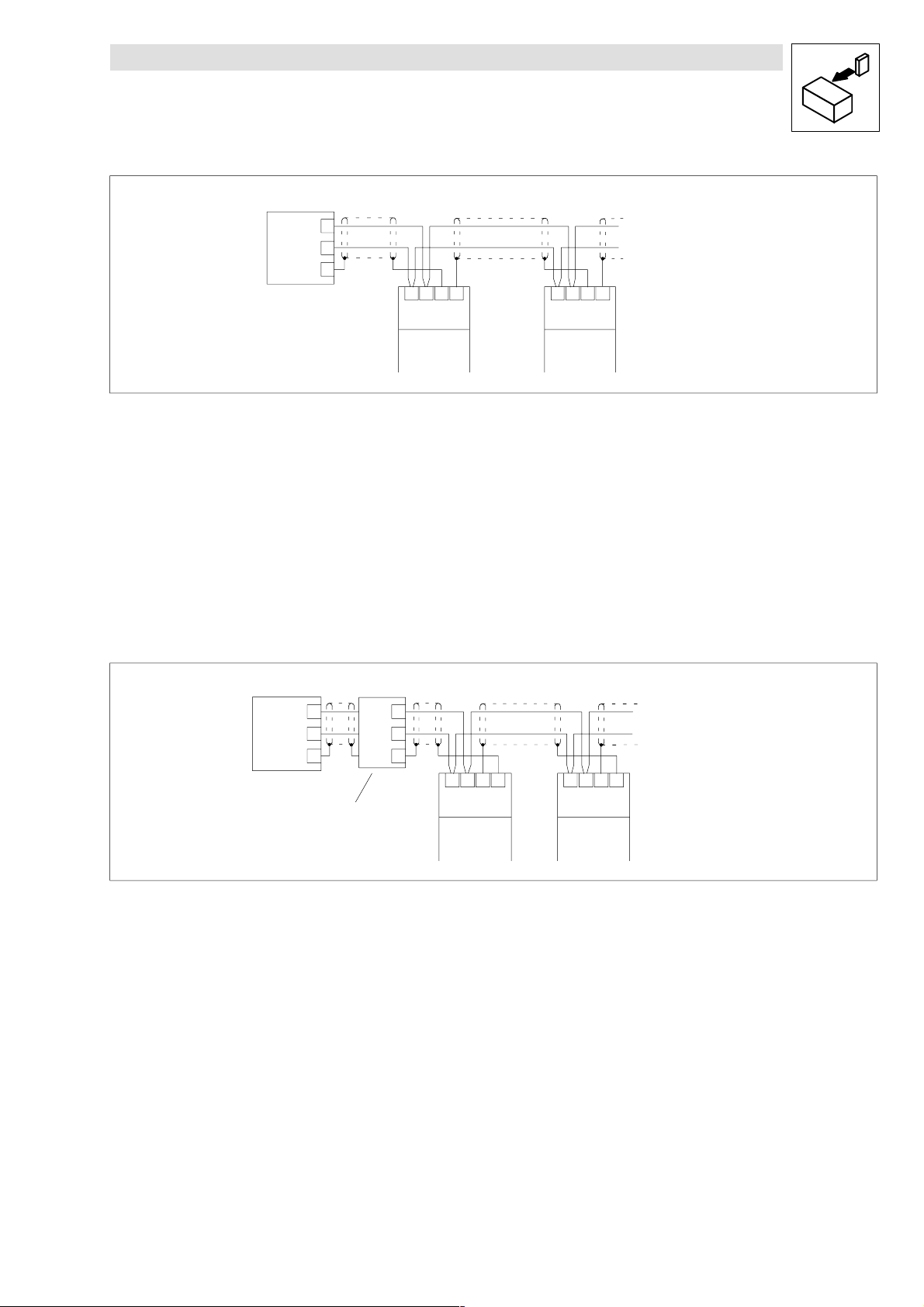
Fig. 4-5 Connection to the host (PC/PLC)
Connection between two controllers (cable 1 in Fig. 4-4):
• Connect the cable shield with terminal 89 (direct PE) of one fieldbus module and terminal 88
(capacitive PE) of the other fieldbus module (Fig. 4-5).
This method prevents currents flowing through the cable screens.
• Connect the terminals 71 and 72 between the fieldbus modules via paired cables (e.B. green
and yellow).
Direct connection to the host (cable 2a in Fig. 4-4)
• Connect the host cable screen to PE and the controller cable screen to terminal 88.
This method prevents currents flowing through the cable screens.
Connection to the 201IB interface converter (cable 2b in Fig. 4-4):
PC/PLC
RxD
TxD
PE
2101IB interface converter
72
71
88
Controller
1
71 72 88
2102
Controller
1
Controller
2
89
71 72 88
2102
Controller
2
89
Fig. 4-6 Connection to the 2101IB interface converter
L _^ONMObk
• Connect the cable shield with terminal 89 (direct PE) of the last controller and terminal 88
(capacitive PE) of the interface converter (Fig. 4-6).
This method prevents currents flowing through the cable screens.
4-7
Page 20

Installation
Show/Hide Bookmarks
4.4.3 Wiring via optical fibres (LECOM -LI)
The following figure schematically shows the connection to a host (PC or PLC) via optical fibre
(LECOM-LI).
RS232
1
ON
S1
S1
OFF
5939
ON
S1
S1
OFF
5939
Fig. 4-7 Wiring for optical fibres (LECOM-LI)
RS232/op tic al fib re-c onverter for hosts
Optical-fibre cable
ON
S1
S1
OFF
5939
Opt ical fibre
2
Note!
We recommend the use of appropriate accessories (see chapter 8.1).
Wiring features for optical fibres (LECOM-LI):
Typ e 2102IB.V003
Communication media Optical fibre (plastic)
Network topology Ring
Possible number of controllers 52
Maximum cable length 0 to 40 m for standard transmission rate (S1 = OFF)
Maximum baud rate 19200 bit/s
4-8
10 to 66 m for high transmission rate (S1 = ON)
_^ONMObk
L
Page 21

For wiring, optical-fibre cables must be prepared:
Show/Hide Bookmarks
Installation
Optical-fibre cable
preparation
Installation of
optical-fibre cables
Installation of the
optical-fibre rin g
(Fig. 4-7)
The preparation of the optical-fibre cables does not require special tools.
1. Cut cable to length on a rigid surface, e.g. using a knife.
2. For optical-fibre cables with PUR sheaths (read) remove approx. 20 mm (for cables with PE sheaths, removal is not required).
With unpolished optical-fibre ends, the max. length is reduced by approx. 20 %.
Therefore, polish the cable end of the optical fibre (grain: P1000).
1. Open pinch-screw joint of the plug.
2. Insert the cable end into the optical-fibre connection as far as possible.
3. Tighten the pinch-screw joint.
The bending radius should be at least 30 mm, otherwise the max. optical-fibre cable length will be reduced by typically
50 % per bend.
1. Connect the white optical-fibre connector (transmitter, TxD) on the host to the black optical-fibre connector (receiver, RxD) on the next
controller.
2. Connect the white optical-fibre connector on the controller to the black optical-fibre connector on the next controller.
3. Connect the white optical-fibre connector on the last controller to the black optical-fibre connector on the host.
4. If the optical-fibre cables are longer than 40 m, select the high transmission rate. Switch S1 to ON position. This provides a maximum
cable length of 66 m (with a damping of 150 dB/km).
Note!
Further information on LECOM-LI can be obtained from the Operating Instructions LECOM-LI (see
chapter 8.1.4).
L _^ONMObk
4-9
Page 22

Installation
Show/Hide Bookmarks
4-10
_^ONMObk
L
Page 23

5 Commissioning
Show/Hide Bookmarks
Stop!
Before switching on the mains voltage check the wiring for completeness, short circuit and earth
fault.
When switching on the unit for the first time, observe the following sequence:
1. Switch on the controller and, if necessary, the external supply of the 2102 fieldbus module.
– The operating status display for the controller ((^ 4- 2),Fig.4-2pos.5)mustbeonor
blinking.
– The green LED (
2. The transmission speed or LECOM baud rate (C0125)is factor set to 9600 baud. If you require
a different value, adjust it via the operating unit.
3. Set LECOM unit address (C0009; see description in chapter 6.2.2) via the operating unit or via
the host (default setting: 1).
– If several controllers are interconnected, the addressing via C0009 of the controller must be
different than that of the others. This is the only way for the host to reach a certain
controller.
– The values 00, 10, 20, 30, ¼, 90 must not be set since they are reserved for group
addressing.
(^ 4-2), Fig. 4-2 pos. 8) must be on. If this is not the case, see chapter 7.
Commissioning
Tip!
The code numbers C0009 (LECOM controller address) and C0125 (LECOM baud rate) can also be
input via LECOM. Please observe that the parameters for the host must be adapted. If C0125 is
changed, the host will not recognize the response because the controller already transmits it with
the new baud rate.
Next steps for 82XX / 8200 vector
1. It is now possible to communicate with every controller, i.e. all code numbers can be read
and all writeable codes, except C046 (frequency setpoint) and C0135 (control word) can also
be changed.
If the code numbers C0046 and C0135 are to be preselected as well, set C0001 = 3.
2. If the controller is switched on while the operating mode C0001 = 3 is active and the speed
setpoint is set to =0, QSP (quick stop) is active. Thus, the drive cannot start in an uncontrolled
way. The QSP function can be deactivated by setting bit3 from C0135 to 0.
L BA2102EN
5-1
Page 24

Commissioning
Show/Hide Bookmarks
Next steps for 93XX
1. Now you can communicate with each drive, i.e. you can read all codes and change all
writeable codes.
2. Set the Lenze parameter signal configuration (C0005) to a value xxx1 to control the controller.
For the first commissioning, select the signal configuration 1011 (speed control).
3. Terminal 28 (ctrl. enable=controller enable) is always active and must be on HIGH level during
operation (see Operating Instructions 93XX). Otherwise, the controller cannot be enabled.
– With the signal configuration C0005=1011, the QSP function (quick stop) and the CW/CCW
changeover are assigned to the input terminals E1 and E2, and thus they are always active.
During operation, E1 must be at HIGH level (see Operating Instructions 93XX).
Tip!
With the signal configuration C0005=xx11, terminal A1 is switched as voltage output. Thus, only the
following terminals can be connected via cables:
X5.A1 with X5.28 (ctrl. enable)
X5.A1withX5.E1 (R/QSP)
4. With signal configuration 1011 (speed control), the speed setpoint can be selected in % of
n
under C0141.
max
5-2
BA2102EN
L
Page 25

6 Parameter setting
Show/Hide Bookmarks
The parameter setting for the 2102 fieldbus module comprises:
• Controller parameters which can also be set with the operating units 8201BB or 9371BB.
• 2102 parameters, which can only be accessed via the 2102 fieldbus module.
Only the controller parameters are permanently saved in the corresponding controller.
Only the parameters important for the serial communication are listed in the following and in the
code table (see chapter 8.2). For further information about the parameter setting see the Manual or
the Operating Instructions of the controllers.
6.1 Parameter sets
6.1.1 82XX parameter sets
The 82XXcontroller is equipped with 2 directly addressable parameter sets. They are addressed by
means of a code-digit offset:
• Offset 0 addresses parameter set 1 with the codes C0000 to C1999.
• Offset 2000 addresses parameter set 2 with the codes C2000 to C3999.
If a parameter is only available once (see Operating Instructions 82XX), use the code-digit offset 0.
Example:
C011 = maximum field frequency
C011 in parameter set 1: code number = 11
C011 in parameter set 2: code number = 2011
Changes of the parameters are automatically saved in the controller (see Operating Instructions
82XX).Process data, for instance control words or setpoints are excluded.
Parameter setting
6.1.2 Parameter sets for 8200 vector
The 8200 vector controllers are equipped with 4 directly addressable parameter sets. They are
addressed by means of a code-digit offset:
• Offset 0 addresses parameter set 1 with the codes C0000 to C1999.
• Offset 2000 addresses parameter set 2 with the codes C2000 to C3999.
• Offset 4000 addresses parameter set 1 with the codes C4000 to C5999.
• Offset 6000 addresses parameter set 2 with the codes C6000 to C7999.
If a parameter is only available once (see 8200 vector Operating Instructions), use code offset 0.
Example:
C011 = maximum field frequency
C011 in parameter set 1: code number = 11
C011 in parameter set 2: code number = 2011
C011 in parameter set 3; code number = 4011
C011 in parameter set 4; code number = 6011
Changes of the parameters are automatically saved in the controller (see Operating Instructions
8200 vector). Process data, for instanc e control words or setpoints are excluded.
6.1.3 Parameter sets for 93XX
The 93XX controllers are equipped with 4 parameter sets for non-volatile storage. Another
parameter set is in the user memory of the controller. This is the current parameter set. Only the
current parameter set c an be directly addressed. Codes: See Operating Instructions or Manual
93XX. Changes of the current parameter set will be lost after switching off the controller. Code C0003
is for saving the current parameter set. After switching on the controller, parameter set 1 is
automatically loaded into the current parameter set.
L BA2102EN
6-1
Page 26

Parameter setting
Show/Hide Bookmarks
6.2 Meaning of individual parameters
6.2.1 Operating mode
82XX / 8200 vector controllers
Code C0001 (operating mode) determines the source (terminal, keypad, LECOM) which writes the
frequency setpoint (C0046) and the control word (C0135).
Independently of the selected operating mode C0001, the controller can be inhibited under C0040
via LECOM.
Tip!
Please note that the operating mode C0001 is available in both parameter sets. Thus, C0001 must
be set identically in both parameter sets.
For LECOM control (C0001 = 3), the operating mode in parameter set 1 applies 1. For terminal
control (C0001 <> 3), the operating mode in parameter set 1 and parameter set 2 applies.
93XX controllers
The 93XX controller does not offer an operating mode which can be changed by only one code - as
available in the 82XX controller. The 93XX controller is operated via the so-called ” Control codes”.
If, for instance, the speed setpoint is to be changed via LECOM, it is necessary to define a control
code as source for the speed setpoint input of the speed c ontroller. Select the configuration of the
control code so that you can enter the speed setpoint via the 2102 fieldbus module. For further
information please refer to the Manual 93XX.
6-2
BA2102EN
L
Page 27

6.2.2 LECOM unit address (C0009)
Show/Hide Bookmarks
The LECOM-A/B protocol uses the LECOM unit address to address the controller. The LECOM unit
address is set under code C0009 at the controller. The address must only be used once. Thus, each
controller must get its own LECOM unit address.The values 00, 10, 20, 30, ..., 90 must not be set
since they are reserved for group addressing (see chapter 5).
The LECOM-A/B protocol enables controller groups. This allows a write request to be issued to
several drives at the same time, e.g. to select new setpoints or enable or inhibit the controller. Select
via the following reserved LECOM unit addresses:
Parameter setting
LECOM unit add ress C0009 for
group drives
00 all
10 11 to 19
20 21 to 29
30 31 to 39
40 41 to 49
50 51 to 59
60 61 to 69
70 71 to 79
80 81 to 89
90 91 to 99
LECOM unit addresses of the addresses controllers
Tip!
Please note that with LECOM controller addresses which end with a 0, the controller does not return
an acknowledgement, i.e. the host does not recognize whether the controller received the data
correctly or not.
L BA2102EN
6-3
Page 28

Parameter setting
Show/Hide Bookmarks
6.3 Special features when using the 82XX controller
Tip!
Reading and writing of the parameter C192x of 82XX controllers takes up to 500 ms.
6.3.1 Start with Ctrl. inhibit instead of QSP
• After mains connection with the operating mode C0001 = 3, the drive is in the status QSP.
• With C1920 = 1, the switch-on status is always Ctrl. inhibit, so that the drive can be enabled
by writing C0040 = 1.
Code Name Note
C1920 Start status
(P2102)
0QSP
1 Controller inhibit
LECOM format: VD
6.3.2 Reduction of the response time of the interface
• With active reduced response time, write telegrams (send) are only checked for transmission
errors:
– If the telegram is fault-free, a positive acknowledgement (ACK) is sent, otherwise it is a
negative acknowledgement (NAK).
– Only then the value to be written is transmitted to the controller.
• The module can be readdressed under the following conditions:
– With 820X controllers after approx. 230 ms.
– With 821X/8200vector/822X controllers after approx. 50 ms.
Stop!
The acceptance of the value by the controller cannot be guaranteed.
Code Name Note
C1921 Shortened response time
(P2102)
0Notactive
1active
LECOM format: VD
6.3.3 Communication monitoring
• The fieldbus module can monitor the communication connection to the host.
• If the host does not send a telegram to the fieldbus module within the monitoring time set
under C1923, the measure set under C1922 will be carried out.
Code Name Note
C1922 Monitoring selection
code
(P2102)
C1923 Monitoring time
0Notactive
1 Controller inhibit
2 QSP (quick stop)
LECOM format: VD
50 to 65535ms
6-4
(P2102)
LECOM format: VD
BA2102EN
L
Page 29

Parameter setting
Show/Hide Bookmarks
6.4 Special features when using the 820X controllers
• Parameter setting (codes exc ept C0046, C0135) is only possible while the controller is
inhibited. Parameters are accepted during controller enable but not saved.
• The TRIP reset function (fault reset) is executed by setting controller inhibit followed by
controller enable via code C0040 or C0135.
– The TRIP-reset function performs basic initialization of the 820X controller and the 2102
fieldbus module. Therefore, the TRIP reset command is not ac knowledgedto the host, thus
causing its telegram monitoring to react.
6.4.1 Relative setpoint selection C0141 (parameter channel)
• Enter a relative setpoint, which refers to C0011, under C0141.
• Independently of the currently set parameter, C0011 of parameter set 1 is always taken as
reference value.
• The automatic adaption of the relative setpoint in the event of a C0011 change is not
considered because C0011 can only be changed when the controller is inhibited.
Code Name Note
C0141 Frequency setpoint
(P2102)
0 to 100 %
LECOM format: VD
6.4.2 Special features when using the 820X V1.2 controller
Code Name Note
C0120 Code not available
C0181 Window for hysteresis output f
(P2102)
dact=fdset
0to80%
LECOM format: VD
L BA2102EN
6-5
Page 30

Parameter setting
Show/Hide Bookmarks
6.5 Special notes for 821X, 822X, 824X controllers
Relative setpoint selection C0127 (process and parameter channel)
• Absolute setpoint selection
A setpoint is input as absolute Hz value via the process and the parameter channel:
Process channel: Set point absolute ±24000 ≙ 480 Hz
Parameter channel: C046 absolute in Hz
• Normalized setpoint selection
A setpoint is input as absolute C0011 value via the proc ess and parameter channel:
Process channel: Setpoint absolute ±2
Parameter channel: C046 only display absolute in Hz
Code Name Note
C0127 Frequency setpoint selection format
(P2102)
C141 no influence
C141 ±100.00%
14
≙ C011 (fd
≙ C011 (f d
0 Absolute setpoint selection
1 Normalized setpoint selection
LECOM format: VD
max
max
)
)
6.6 Special notes when using 8200 vector controllers
The digital and analog input and output signals can be configured freely (see Operating Instructions
vector; codes C0410, C0412, C0417 and C0421).
6-6
BA2102EN
L
Page 31

Trou bleshooting and fault elimination
controlle
r
Controllerdoe
s
j
Show/Hide Bookmarks
7 Troubleshooting and fault elimination
LED yellow (RxD)
LED yellow (TxD)LED green (Vcc)
Operating-state display of
the controller
Fig. 7-1 LEDs on the fieldbus module 2102IB (see Fig. 4-2 page (^ 4-2) )
Fault Cause Remedy
No
communication
with the
.
controller.
Controller is switched off.
Display:
• none of the operating-state displays is lit-up
and/or
• green Vcc-LED is blinking
2102IB fieldbus module is not supplied with voltage
Display:
green Vcc-LED is not flashing or blinking.
The 2102IB fieldbus module has not been initialized with the controller
Display:
green Vcc-LED is blinking.
The controller does not receive telegrams.
For a test, let the host send telegram cyclically. This happens, f or
instance, with LEMOC2 in online operation.
The yellow RxD-LED must blink when the host sends a telegram.
The controller does not send t elegrams.
For a test, let the host send telegram cyclically. This happens, f or
instance, with LEMOC2 in online operation.
The yellow TxD-LED must blink when the controller send a telegram to
the host.
Supply controller with voltage (see corresponding Operating Instructions)
• With internal supply from the controller, check the connection to the
controller.
• With external supply, check the voltage at terminals 39 and 59.
A voltage between 15 and 30 V must be applied (see chapter 4.3)
• Supply controller with voltage (see corresponding Operating
Instructions)
• Check the connection to the controller.
If the yellow RxD-LED does not blink:
• Check the wiring (see chapter 4.4)
and
• Test whether the host sends telegrams and uses the appropriate
interface.
1. Yellow TxD-LED is not blinking:
Parameter for LECOM unit address (C0009) and LECOM baud rate
(C0125) must be the same at the controller and the host. Check t he
parameters C0009 and C0125 at both units and set them to the same
value if necessary.(Controller-address parameters 00, 10,
not be used.)
¼,90must
Controller does
not execute
write job
2. Yellow TxD-LED is blinking:
• The LECOM unit addresses (C0009) must be differe nt at all
connected controllers. Correct possibly occurring double addressing.
• Check the wiring to your host.
• With self-developed LECOM-A/B software drivers and RS485
operation, observe the transmission control. After transmitting
signals, the host must return to receive mode after approx. 1 ms.
1. Controller sends negative acknowledgement (NAK response):
• The operating mode C0001 is set incorrectly for write a ccess to
codes C0046 and C0135.
• Set parameter 3 for operating mode C0001.
• The code is defined so that it can only be read. • In general, write job not possible.
2. Controller sends positive acknowledgement (ACK response):
• With 820X, parameters can only be changed when the controller is
inhibited (see chapter 6.3).
• Activate controller inhibit
• Controller uses a different parameter set • Changeover of the parameter set; the parameter change is then
activated.
L _^ONMObk
7-1
Page 32

Trou bleshooting and fault elimination
Show/Hide Bookmarks
7-2
_^ONMObk
L
Page 33

Appendix
Show/Hide Bookmarks
8 Appendix
8.1 Accessories
8.1.1 Accessories for a host
In the following you will find the acc essory components for hosts (PC or PLC):
Name Order no. Explanation
LEMOC2 EW00388233 PC program for drive programming;
Operating Instructions
LECOM-S5
LECOM-PC - LECOM-A/B communication driver for PC systems in C/C++ (source code).
LECOM-PN - Driver for PC the visualisation system PROCON produced by gti
B&R
Mitsubishi
Schleicher
Sigmatek
Cotas
AMS
33.2164 Communication processor for Siemens-SIMATIC-S5 AG 115U, 135U, 150U, 155U
- Drivers for various PLC systems.
System requirements: IBM AT compatible
A modification for other target systems can be easily achieved.
Further information on request.
8.1.2 Accessories for RS232 (LECOM-A)
In the following you will find the accessory components for RS232 (LECOM-A):
Name Order no. Explanation
PC system cable 5 m EW00338094 between fieldbus module 2102IB and PC
PC system cable 10 m EW00338095 between fieldbus module 2102IB and PC
Specification for RS232 interface cables
Cable type LIYCY 4 x 0.25 mm2shielded
Cable resistance < 100 Ω/km
Capacitance per unit length < 140 nF/km
Length ≤ 15 m
(9pole socket)
(9pole socket)
L _^ONMObk
8-1
Page 34

Appendix
Show/Hide Bookmarks
8.1.3 Accessories for RS485 (LECOM-B)
In the following you will find the accessory components for RS485 (LECOM-B):
Name Order no. Explanation
Interface converter 2101IB 33.2101IB Le vel converter between RS232 and RS485/RS422 with ele ctrical isolation
PC system cable 5 m EW00338094 System cable between PC (9-pole female connector) and 2101IB interface converter
Specification for RS485-interface cable
withalengthofupto300m:
Cable type LIYCY1x2x0.5mm2shielded
Cable resistance ≤ 40 Ω/km
Capacitance per unit length ≤ 130 nF/km
Length ≤ 300 m
with a length o f up to 1200 m:
Cable type CYPIMF1x2x0.5mm2shielded
Cable resistance ≤ 40 Ω/km
Capacitance per unit length ≤ 60 nF/km
Length ≤ 1200 m
8.1.4 Accessories for optical fibres (LECOM-LI)
In the following you will find the acc essory components for optical fibres (LECOM-LI):
Name Order no. Explanation
2125 33.2125IB Optical fibre/RS232 converter for hosts
2126 33.2126IB Optical fibre/RS232 converter for hosts
Plug-in power supply unit EJ0362016 Plug-in power supply unit 220V/9V DC for 2125 and 2126
Operating Instructions LECOM-LI EDLECOM-LI/D Basics and installation of LECOM-LI
Optical fibre 1ADR with PE sheath EW00359679 (by the meter) Optical-fibre cable with black PE sheath (standard protection)
Optical fibre 1ADR with PUR sheath EW00359681 (by the meter) Optical-fibre cable with red PUR sheath (reinforced protection)
Specification for op t ical fibre cables
Field Values
Min. bending radius 30 mm
Max. tensile force 100 N
Electric strength 110 kV/m
Operating temperature −40 to +80 °C
Wave length 660 nm
Damping 100 to 400 dB/km
Cable length between two participants (cable
damping = 150dB/km)
Fibre core
Material/diameter
Fibre sheath
Material/diameter
Outer sheath
Material/diameter
0to40m(normaltransmissionrate)
10 to 66 m (high transmission rate)
Polymethylmethacrylat (PMMA) / 976 µm
Flurorpolymer / 1000 µm
Thermoplast polyester (PE) / 2.2 mm
normal transmission rate (0 to 40m)
high transmission rate (10 to 66m)
8-2
_^ONMObk
L
Page 35

8.2 Code table
C0001Operatingmodefor
Show/Hide Bookmarks
How to read the code table:
Appendix
Code Code number of the parameter Leading zeros are not required.
Name Name of the parameter
Parameters Contents and meaning of the parameter
Code Name Note
C0001 Operating mode for
• 82XX
• 8200 vector
(P82XX)
values
0 Control (C0135): Terminal
Setpoint (C0046): Terminal
(Lenze setting: 0)
1 Control (C0135): Terminal
Setpoint (C0046): Keypad:
2 Control (C0135): Terminal
Setpoint (C0046): Terminal
3 Control (C0135): LECOM
Setpoint (C0046): LECOM
The operating mode defines the source which
writes on a parameter.
The keypad and LECOM always have the right to
parameterize.
Codes marked with
The text in parenthesis informs whether the codes are available in the fieldbus module or the
controller:
(P2102): Parameter s in the fieldbus module 2102IB
(P820X/P821X/8200 vector/822X):
Parameters in controllers 820X, 821X and 822X.
The parameters can also be set via the 8201BB keypad.
(P93XX):Parameters in the 93XX controller.
The parameters can also be set via the 9371BB keypad.
ParametersprintedinboldaresetbyLenze.
82XX 8200 vector
*
are only available in parameter set 1.
see Operating Instructions ’Vector’
C0009*LECOM controller
C0040*Controller inhibit
C0043*TRIP reset for:
address
(P82XX)
(P93XX)
(P2102)
• 821X
• 8200 vector
• 822X
• 93XX
(P2102)
*
C0046
Frequency setpoint for:
• 820X
(P2102)
Frequency setpoint for:
• 821X
• 8200 vector
• 822X
(P821X/P8200 vector/P822X)
Speed setpoint for 93XX
(C0046 can only be
read.)
LECOM format: VD
1 1to99
Controller address for unique address in a LECOM-A/B/LI network.
Do not set the values 00, 10, ..., 90, since they are reserved for group addressing.
LECOM format: VD
0 Controller inhibited
1 Controller enabled
Parameter C0040 is independent of operating mode C0001.
The controller can also be enable with control word C0135.
LECOM format: VD
0 No actual fault, fault reset by overwriting with
value 0
1Actualfault
Parameter C0043 is independent of o perat ing mode C0001. A TRIP can also be reset using the control word C0135. (TRIP
reset fo r 820X, see chapter 6.4)
LECOM format: VD
0 to 480 Hz
LECOM format: VD
0 to 480 Hz
The value can be changed through the display factor C500/C501 (see Code table included in the Operating Instructions 820X,
821X and 822X).
For 93XX, the free control code C0141 is used as speed setpoint in % of n
LECOM format: VD
if t he basic configuration is C0005=1001.
max
L _^ONMObk
8-3
Page 36

Appendix
C0068Operatingstatusfor
:
93X
X
Show/Hide Bookmarks
Code NoteName
C0068*Operating status for:
• 82XX
• 8200 vector
• 93XX
(P2102)
C0125*LECOM baud rate
(P82XX)
(P93XX)
Bit 82XX 8200 vector 93XX
0-3 Operating fault (TRIP)
The 10th digit of the LECOM fault number (see C0161 t o C0164) is displayed.
Example: TRIP OH = 5 (LECOM no. = 50)
4-7 Last communication error
0= Nofault
1 = Check sum error
2 = Protocol frame error
3= Reserved
4 = Invalid code number
5 = Invalid variable
6 = No access permission
7 = Telegram processing interrupted by a new telegram
15 = General fault
8 Ctrl. enable
0 = no controller enable
1 = Controller enable
9 Qmin (f
10 Direction of rotation
11 IMP (pulse inhibit)
12 QSP (quick stop)
13 I
14 fd=f
15 TRIP (fault)
0 9600 Baud (Factory setting)
1 4800 Baud
2 2400 Baud
3 1200 Baud
4 19200 Baud
≤ f
d
0 = Qmin not active
1= Qminactive
0 = CW rotation
1 = CCW rotation
0 = Pulses to power stages
inhibited
1 = Pulses for power stages
enabled
0 = QSP not active
1= QSPactive
(current limit reached)
max
0 = Current limit not
reached
1 = Current limit reached
dset
Frequency setpoint)
0= f
1= f
0 = No error
1 = Fault occurred
)
dQmin
(Act. frequency =
<> f
d
dset
= f
d
dset
FREE; fig C0150.Bit 5
Default setting: Qmin (f
0 = Qmin not active
1= Qminactive
Reserved
FREE; display of C0150 bit 1
Default setting: IMP (Pulse inhibit)
0 = Pulses to power stages inhibited
1 = Pulses for power stages enabled
Reserved
FREE; display of C0150 bit 2
Default setting: I
0 = Current limit not reached
1 = Current limit reached
FREE; display of C0150 bit 4
RFG on = RFG off
(Ramp-function generator input = ramp-function generator output)
0 = HLG on <> HLG off
1 = RFG on = RFG off
LECOM format: VH
≤ f
d
dQmin
(Current limit reached)
max
)
C0127 Selection Setpoint
selection
(P821X, P822X, P824X)
(P2102)
8-4
Transmission rate for LECOM-A/B/LI in bit/s (= baud).
LECOM format: VD
0 Absolute setpoint selection
1 Normalized setpoint selection
LECOM format: VD
_^ONMObk
L
Page 37

Code NoteName
C0135Controllercontrolwor
d
821
X
1=JOG1(C0037)active
Show/Hide Bookmarks
C0135*Controller control word
(parameter channel) for:
• 820X
• 821X
• 8200 vector
• 822X
(P2102)
Appendix
Bit 820X 821X, 8200 vector, 822X
JOG1, JOG2, JOG3
0
0 = C0046 a cti ve
1 = JOG1 (C0037) active
2 = JOG2 (C0038) active
1
3 = JOG3 (C0039) active
JOG1, JOG2, JOG3
2 CW/CCW (CW rotation/CCW rotation)
0 = CW rotation
1 = CCW rotation
3 QSP (quick stop)
0 = QSP not active
1= QSPactive
4 Reserved RFG stop (stop of the ramp function
5 Reserved RFG zero (deceleration along the T
6 Reserved UP function for motor potentiometer
7 Reserved DOWN function for motor
8 Reserved
9 Ctrl. inhibit (controller inhibit)
0 = No controller inhibit
1 = Controller inhibit
10 Reserved
11 Reserved TRIP reset
12 PAR (parameter set changeover)
13 Reserved
14 DC brake (DC injection brake)
15 Reserved
⇒ 1 (= parameter set 2)
0
⇒ 0 (= parameter set 1)
1
0 = DCB not active
1= DCBactive
The control word controls the controller. It compresses and summarizes control commands in bit commands.
LECOM format: VH
generator)
0 = RFG stop not active
1= RFGstopactive
ramp C0013)
0 = RFG zero not active
1= RFGzeroactive
0= UPnotactive
1= UPactive
potentiometer
0 = DOWN not active
1 = DOWN active
⇒1
0
Edge from 0 to 1 causes TRIP reset
if
L _^ONMObk
8-5
Page 38

Appendix
(parameterchannel)for
:
93XXdefaultsettin
g
ofn
max
)active
C0005=4xx
1
(P2102)
activ
e
2JOG2(C0039.2)activ
e
Show/Hide Bookmarks
Code NoteName
C0135*Controller control word
(parameter channel) for:
• 93XX general
• 93XX default setting
for
– C0005 = 1xx1
– C0005 = 4xx1
(P2102)
Bit General structure 1xx1
0 FREE 0 (free access)
1 FREE 1 (free access)
2 FREE 2 (free access)
3 QSP (quick stop)
0 = QSP not active
1= QSPactive
4 (free access) NSET-RFG-STOP (stop of the ramp function generator)
5 (free access) NSET-FRG-0 (deceleration at the Tif ramp C0013)
6 FREE 6 (free access)
7 FREE 7 (free access)
8 Reserved
9 Ctrl. inhibit (controller inhibit)
0 = No controller inhibit
1 = Controller inhibit
10 Reserved
11 TRIP reset
⇒1
0
Edge from 0 to 1 causes TRIP reset
12 (free access) PAR*1 (parameter set changeover)
13 (free access) PAR-SET
14 (free access)
15 (free access)
The control word controls the controller. It includes the control commands in a compressed bit format.
LECOM format: VH
JOG1, JOG2, JOG3
0 = C0141 (speed setpoint in %
1 = JOG1 (C0039.1) active
2 = JOG2 (C0039.2) active
3 = JOG3 (C0039.3) active
0 = NSET-RFG-STOP not active
1 = NSET-RFG-STOP active
0 = NSET-RFG-O not active
1 = NSET-RFG-O active
0= PS2/4
1 = PS 1/3)
Activate parameter set changeover
Ti1,Ti2,T
0 = C0012/C0013 acti ve
1=T
active
2=Ti2, (C0102.1/C0103.1)
active
3=T
active
Speed control
)active
of n
max
i3
, (C0102.1/C0103.1)
i1
, (C0102.1/C0103.1)
i3
FREE 0 (free access)
FREE 1 (free access)
JOG1, JOG2, JOG3
0=NoactiveJOG
1 = JOG1 (C0039.1) active
2 = JOG2 (C0039.2) active
3 = JOG3 (C0039.3) active
4xx1
Torque control
8-6
_^ONMObk
L
Page 39

Code NoteName
(parameterchannel)for
:
for
ofn
max
)active
C0005=7xx
1
(P2102)
Show/Hide Bookmarks
C0135*Controller control word
(parameter channel) for:
• 93XX default setting
for
– C0005 = 5xx1
– C0005 = 6xx1
– C0005 = 7xx1
(P2102)
C0141 Setpoint
Appropriately
selected
Configuration
Appendix
Bit 5xx1
0
1
2 FREE 2 (free access)
3 QSP (quick stop)
4 NSET-RFG-STOP (stop of the ramp function generator)
5 NSET-FRG-0 (deceleration at the Tif ramp C0013)
6 FREE 6 (free access)
7 FREE 7 (free access)
8 Reserved
9 Ctrl. inhibit (controller inhibit)
10 Reserved
11 TRIP reset
12 PAR*1 (parameter set changeover)
13 PAR-SET
14 REF-ON
15 T
The control word controls the controller. It includes the control commands in a compressed bit format.
LECOM format: VH
Signal configuration Signal Meaning
1xx1 (Speed control) NSET-N Speed setpoint in % of n
4xx1 (Torque control) MCTRL-M-ADD Torque setpoint in %
5xx1 (Master frequency) NSET-N Speed setpoint in % of n
6xx1 (Master frequency - slave bus) NSET-N Speed setpoint in % of n
7xx1 (Master frequency - slave cascade) NSET-N Speed setpoint in % of n
Digital frequency master
JOG1, JOG2, JOG3
0 = C0141 (speed setpoint in %
1 = JOG1 (C0039.1) active
2 = JOG2 (C0039.2) active
3 = JOG3 (C0039.3) active
0 = QSP not active
1= QSPactive
0 = NSET-RFG-STOP not active
1 = NSET-RFG-STOP active
0 = NSET-RFG-O not active
1 = NSET-RFG-O active
0 = No controller inhibit
1 = Controller inhibit
⇒1
0
Edge from 0 to 1 causes TRIP reset
0= PS2/4
1 = PS 1/3)
Activate parameter set changeover
Start homing f unction
i1
0 = C0012/C0013 acti ve
1=T
active
)active
of n
max
(C0102.1/C0103.1)
i1
FREE 0 (free access)
FREE 1 (free access)
FREE 15 (free access)
6xx1
LF slave bus
LF slav e cascade
max
max
max
max
7xx1
L _^ONMObk
8-7
Page 40

Appendix
(parameterchannel)for
:
FreeconfigurationviaC0417
(se
e
820
X
Show/Hide Bookmarks
Code NoteName
C0150*Controller status word
(parameter channel) for:
• 820X
• 821X
• 8200 vector
• 822X
(P2102)
Bit 820X 821X, 822X 8200 vector
Free configuration via C0417 (see
Operating Instructions for 8200
0 Reserved Actual parameter set
FREE 0 (free access)
0= PS1active
1= PS2active
1 IMP (pulse inhibit)
0 = Pulses for power stage enabled
1 = Pulses for power stage inhibited
2 I
(current limit reached)
max
0 = Current limit not reached
FREE 2 (free access)
1 = Current limit reached
3 Reserved f
4 f
= f
min(fd
(Act. frequency =
dset
<> f
d
f
≤
dQmin
min
min
dset
dset
)
not active
active
d
Frequency setpoint)
0= f
1= fd=f
5 Q
0= Q
1= Q
= f
(Act. frequency =
d
dset
Frequency setpoint)
<> f
0=f
d
1=fd=f
dset
dset
RFG on = RFG off
(RFG input = RFG output)
0 = RFG in < > RFG out
1 = RFG on = RFG off
FREE 3 (free access)
FREE 4 (free access)
FREE 5 (free access)
6 fd= 0 (act. frequency = 0)
0= f
1= f
<>0
d
=0
d
7 Ctrl. inhibit (controller inhibit)
0 = No controller inhibit
1 = Controller inhibit
8-11 Controller status
0 = No error
1 = Error
Controller status
0 = Unit initialisation
1 = Autostart lock
3 = Operation inhibited
4 = Flying-restart circuit active
5 = DC injection braking active
6 = Operation enable
7 = Message active (dynamically
set pulse inhibit, e.g. at OU)
Controller status
0 = Unit initialisation
1 = Autostart lock
3 = Operation inhibited
6 = Operation enable
7 = Message active (dynamically
set pulse inhibit, e.g. at OU)
8=Faultactive
9=Poweroff
8=Faultactive
12 Overtemperature warning ( J
0 = No controller inhibit
1 = Controller inhibit
13 U
(DC-bus overvoltage)
Gmax
0 = No overvoltage
1 = Overvoltage
14 Direction of rotation
max
-10°C)
Warning
0=Nowarning
1=Warning
Message
0 = No message
1 = Message
FREE 14 (free access)
0 = CW rotation
1 = CCW rotation
15 Ready for operation (no error, over voltage or undervoltage)
FREE 15 (free access)
0 = Not ready for operation
1 = Ready for operation
The status word contains the most important status information in a compressed form.
LECOM format: VH
vector)
8-8
_^ONMObk
L
Page 41

Code NoteName
(parameterchannel)for
:
g
Show/Hide Bookmarks
C0150*Controller status word
(parameter channel) for:
• 93XX general
• 93XX default setting
for
– C0005 = 1xx1
– C0005 = 4xx1
(P2102)
Appendix
Bit General structure 1xx1
0 (free access) Actual parameter set
1 IMP (pulse inhibit)
0 = Pulses for power stage enabled
1 = Pulses for power stage inhibited
2 (free access) I
3 FREE 3
(free access)
4 (free access) RFG on = RFG off
5 (free access) Q
6 fd= 0 (act. frequency = 0)
0= f
1= f
7 Ctrl. inhibit (controller inhibit)
0 = No controller inhibit
1 = Controller inhibit
8-11 Controller status
0 = Unit initialisation
1 = Switch-on inhibit
3 = Operation inhibited
6 = Operation enable
7 = Message active
8 = Active fault
9= Poweroff
12 Warning
0= Nowarning
1= Warning
13 Message
0= Nowarning
1= Warning
14 FREE 14 (free access)
15 (free access) Ready for operation (no error, over voltage or undervoltage)
The status word contains the most important status information in compressed form.
On the following pages you will find the assignment of the freely combineable bits for the predefined signal configuration of
the controller.
LECOM format: VH
<>0
d
=0
d
0= PS2/4active
1= PS1/3active
max
0 = Current limit not reached
1 = Current limit reached
(RFG input = RFG output)
0 = RFG in < > RFG out
1 = RFG on = RFG off
0= Q
1= Q
n = 0 (actual speed value = 0)
0 = n<>0
1= n=0
0 = Not ready for operation
1 = Ready for operation
Speed control
(current limit reached)
f
≤
min(fd
dQmin
min
min
)
not active
active
4xx1
Torque control
L _^ONMObk
8-9
Page 42

Appendix
(parameterchannel)for
:
Show/Hide Bookmarks
Code NoteName
C0150*Controller status word
(parameter channel) for:
• 93XX default setting
for
– C0005 = 5xx1
– C0005 = 6xx1
– C0005 = 7xx1
(P2102)
Bit 5xx1
0 Actual parameter set
1 IMP (pulse inhibit)
2 REF-OK
3 M
4 RFG on = RFG off
5 REF-BUSY
6 n = 0 (actual speed value = 0)
7 Ctrl. inhibit (controller inhibit)
8-11 Controller status
12 Warning
13 Message
14 FREE 14 (free access)
15 Ready for operation (no error, over voltage or undervoltage)
The status word contains the most important status information in compressed form.
On the following pages you will find the assignment of the freely combineable bits for the predefined signal configuration of
the controller.
LECOM format: VH
Digital frequency master
0= PS2/4active
1= PS1/3active
0 = Pulses for power stage enabled
1 = Pulses for power stage inhibited
0 = Homing function not ok
1 = Homing function ok
(torque limit reached)
max
0 = torque limit not reached
1 = torque limit reached
(RFG input = RFG output)
0 = RFG in < > RFG out
1 = RFG on = RFG off
0 = Homing function not active
1 = Homing function active
0 = n<>0
1= n=0
0 = No controller inhibit
1 = Controller inhibit
0 = Unit initialisation
1 = Switch-on inhibit
3 = Operation inhibited
6 = Operation enable
7 = Message active
8 = Active fault
9= Poweroff
0= Nowarning
1= Warning
0= Nowarning
1= Warning
0 = Not ready for operation
1 = Ready for operation
NOT1-OUT
0 = torque limit reached
1 = torque limit not reached
6xx1
LF slave bus
7xx1
LF slav e cascade
8-10
_^ONMObk
L
Page 43

Appendix
ccr
71Systemerror
C0164
*
themotorwiththecorrespondingpoweror
0
(onl
1
OC1
11shortcircui
t
2
OC2
12Earthfaul
t
accelerationorshort
overload)
Show/Hide Bookmarks
Code Name
*
C0161
*
C0162
*
*
C0163
*
Fault
memory
(P82XX)
Keypad PC
--ccr
ce0
ce1
ce2
ce3
ce4
ce5
EEr
H05
id1
105 Internal fault Contact Lenze
140 Faulty parameter
LP1
182 Fault in motor phase
LU
103
OC
OC
OC3
OC4
OC5
OC6
1)
0 No error - -
71 System error
61 Communication error to
AIF
62 Communication error to
CAN-IN1 with sync
control
63 Communication error to
CAN-IN2
64 Communication error to
CAN-IN1 with event or
time control
65 BUS-OFF
(many communication
errors occurred)
66 CAN Time-Out
91 External fault (TRIP-Set) A digital signal assigned to TRIP set has
identification
32 Fault in motor phase
(TRIP)
(warning)
DC-bus undervoltage
TRIP)
11 short-circuit
12 Earth fault
13 Overload inverter during
acceleration or short
circuit
14 Overload controller during
deceleration
15 Controller overload in
stationary operation
16 Motor overload (I2xt
overload)
Error Cause
Strong interference on control cables Shield control cables
Ground or earth loops in the wiring
Faulty transmission of control commands
via AIF
CAN-IN1-object receives faulty data or
communication is interrupted
CAN-IN2-object receives faulty data or
communication is interrupted
CAN-IN1-object receives faulty data or
communication is interrupted
Controller has received too many incorrect
telegrams via the system bus and has
been disconnected
For remote parameter setting via system
bus (C0370):
Slave does not answer. Communication
monitoring time exceeded.
For operation with module in FIF:
Internal fault
been activated
Motor not connected Connect motor
Failure of one/several motor phase(s)
Motor current too low
y message without
Mains voltage too low Check mains voltage
DC-bus voltage too low Check supply cable
short-circuit Find reason for short-circuit; check motor cable
Excessive capacitive charging current of
the motor cable
Grounded motor phase Check motor, check motor cable
Excessive capacitive charging current of
the motor cable
Acceleration time too short (C0012) • Increase acceleration time
Defective motor cable Check wiring
Interturn fault in the motor Check motor
Deceleration time set too short (C0013) • Increase deceleration time
Frequent and long overload Check drive dimensioning
Motor is thermally overloaded, for
instance, because of
• impermissible continuous current • Check drive dimensioning
• frequent or too long acceleration
processes
Remedy
Insert the communication module into the hand
terminal
Plug-in connection - bus module ó Check FIF
Check transmitter
Increase monitoring time under C0357/1 if
necessary
Plug-in connection - bus module ó Check FIF
Check transmitter
Increase monitoring time under C0357/2 if
necessary
Plug-in connection - bus module ó Check FIF
Check transmitter
Increase monitoring time under C0357/3 if
necessary
Check whether bus terminator available
Shield control of the cables
Check PE connection
Check bus load, if necessary, reduce the baud
rate
Check system bus wiring
Check system bus configuration
Contact Lenze
Check external encoder
Check motor cables,check V
the motor with the corresponding power or
adapt it under C0599.
Use shorter motor cables with lower charging
current
Use shorter motor cables with lower charging
current
boost, connect
min
• Check drive dimensioning
• Check size of external brake resistor
• Check setting of C0120
L _^ONMObk
8-11
Page 44

Appendix
O
U
1020DCbusovervoltag
e
transferorloadtheLenzesettingbefore
Show/Hide Bookmarks
Code Remedy
Name
Keypad
OH
OH3
OH51
OU
Pr
Pr1
Pr2
Pr3
Pr4
Pt5
rSt
sd5
1)
LECOM fault numbers
1)
50 Heat sink temperature
exceeds the value
entered for the controller
53 PTC monitoring (TRIP) Motor too hot because of excessive
203 PTC monitoring (warning) PTC not connected Connect PTC or switch off monitoring
102 DC-bus overvoltage
(only message without
TRIP)
75 Faulty parameter transfer
when using the keypad
72 Wrong PAR1 transfer
when using the keypad.
73 Wrong PAR2 transfer
when using the keypad.
77 Wrong PAR3 transfer
when using the keypad.
78 Wrong PAR4 transfer
when using the keypad.
81 Time error during
parameter set transfer
76 Faulty auto-TRIP reset More than 8 fault messages in 10 minutes Depends on the fault message
85 Opencircuitatanalog
input
Ambient temperature T
Heat sink very dirty Clean heat sink
Impermissibly high currents or too
frequent and too long acceleration
current, or acceleration is too frequent
and too long
Mains voltage too high Check voltage supply
Braking operation • Prolong deceleration times.
Earth leakage on the motor side Check motor cable and motor for earth fault
All parameter sets are defective
PAR1 is defective.
PAR2 is defective.
PAR3 is defective
PAR4 is defective
Data flow from keypad or PC interrupted,
e. g. keypad was disconnected during
transmission
Current at analog input < 4 mA Close circuit at analog input
CauseErrorPC
>+60°C • Allow controller to cool and ensure better
amb
ventilation
• Check ambient temperature
• Check drive selection
• Check load, if necessary, replace defective
bearings
Check drive dimensioning
• For operation with brake transistor:
– Check the selection and connection of the
brake resistor
– Increase the deceleration times
(disconnect motor from inverter)
It is absolutely necessary to repeat the data
transfer or load the Lenze setting before
enabling the controller.
8-12
_^ONMObk
L
Page 45

Code Name Note
OH353
OH8582058
Pr075
Pr377
EEr9120911091
Show/Hide Bookmarks
C0067
C0161
C0168
[1...8]
Fault memory
*
(P93XX)
Fault abbreviations LECOM fault numbers
TRIP Warning Message
--- 0
OC1 11
OC2 12
OC5 15
OU 1020
LU 1030
LP1 OH 50
OH4 2054
OH7 2057
OH8 58 2058
CE0 61 2061
CE1 62 2062
CE2 63 2063
CE3 64 2064
U15 70
CCr 71
Pr1 72
Pr2 73
Pr3 77
Pr4 78
PEr 74
PI 79
Sd2 82 2082
Sd3 83 2083
Sd6 86 2086
Appendix
C0248*LECOM input
selection
(P2102)
P03 153 2153
P13 163
NMAX 200
H05 105
H07 107
H10 110
H11 111
The individual faults are described in the Operating Instructions of the controller.
LECOM format: VD
0 0 to 255
The parameter LECOM input selection ensures the compatibility with previous master-system drivers according to the LECOM-A/B
specification V1.0. This code is only fully used with 93XX, since this series uses the so-called array parameters, i. e. a code
consists of several parameters (e.g. C0039 = JOG with 15 values). Code C0248 determines the array element to be accessed. The
functionality of the input selection is simulated (before e.g. C0038).
This input is valid for all LECOM accesses; i.e. the access of a standard parameter with a LECOM input selection that is not 0
results in a fault because the addressed value does not exist.
The array element can be directly addressed via a LECOM-A/B driver as from specification V2.0. This parameter should therefore
not be used any longer.
C0248 is included in ever y LECOM code bank (see C0249).
The parameter value is always set to 0 when switching on.
LECOM format: VD
L _^ONMObk
8-13
Page 46

Appendix
Show/Hide Bookmarks
Code NoteName
C0249*LECOM code bank
Code bank Code number
(P2102)
C1810*SW labelling
(P2102)
C1811*SW generation
0 0 to 255 (Factory setting)
1 250 t o 505
2 500 t o 755
3 750 t o 1005
4 1000 to 1255
5 1250 to 1505
6 1500 to 1755
7 1750 to 2005
8 2000 to 2255
9 2250 to 2505
10 2500 to 2755
11 2750 to 3005
12 3000 to 3255
13 3250 to 3505
14 3500 to 3755
15 3750 to 4005
The LECOM code bank ensures the compatibility with the master-system drivers according to the LECOM-A/B specification V1.0.
The maximum code number is 255. With the code bank, an offset of 250 is added to the code number.
The code bank addressing is not effective with extended code addressing (LECOM-A/B specification).
The parameter value is always set to 0 when switching on.
LECOM format: VD
33S2102I_xy000
Software labelling of t he 2102IB fieldbus modules
x = main SW version y = SW subversion
LECOM format: VS
Software generation of the 2102IB fieldbus module
(P2102)
C1920 Start status
(P2102)
C1922 Monitoring selection
code
(P2102)
C1921 Shortened response
time
(P2102)
C1923 Monitoring time
(P2102)
C1962 Extended code No. See fault table
LECOM format: VS
0QSP
1 Controller inhibit
LECOM format: VD
0Notactive
1 Controller inhibit
2 QSP (quick stop)
LECOM format: VD
0Notactive
1active
LECOM format: VD
50 to 65535ms
LECOM format: VD
8-14
_^ONMObk
L
Page 47

Appendix
Show/Hide Bookmarks
The following list shows the fault numbers which can be read under C1962:
Fault n o. Meaning Classification
0 No fault
1 Invalid service designation Internal fault
2 Invalid call recognition Internal fault
3 Invalid data type Application error in the host
4 Invalid subcode number Application error in the host
5 Invalid code number Application error in the host
6 Invalid general parameter Application error in the host
7 Access error: operating status, e.g. controller inhibit Access error
8 Access error: because operati ng mode C0001 Access error
9 Access error: parameter only readable Access error
10 Access error: general Access error
11 Data block too long Limit value exceeded
12 Collision with other parameter values Limit value exceeded
13 Leave value range Limit value exceeded
14 General limit value exceeding Limit value exceeded
17 General internal fault Internal fault
32 General Communication fault 2102IB <-> controller
33 Time limit exceeded Communication fault 2102IB <-> controller
34 Frame error Communication fault 2102IB <-> controller
35 Parity error Communication fault 2102IB <-> controller
36 Overflow Communication fault 2102IB <-> controller
37 Handshake Communication fault 2102IB <-> controller
38 Block memor y overflow Communication fault 2102IB <-> controller
208 Frame e rror Communication fault controller <-> 2102IB
209 Overflow error Communication fault controller <-> 2102IB
210 Check-sum fault in the 2102IB fieldbus module detected Communication fault controller <-> 2102IB
211 Telegram interruption Communication fault controller <-> 2102IB
212 Invalid data Communication fault controller <- > 2102IB
213 Invalid service Communication fault controller <-> 2102IB
214 Parity error Communication fault controller <-> 2102IB
L _^ONMObk
8-15
Page 48

Appendix
Show/Hide Bookmarks
8.3 LECOM-A/B protocol
The LECOM-A/B protocol is used to exchange data between Lenze controllers and a host. The
LECOM-A/B protocol is based on DIN 66019, ISO 1745 and ANSI X3.28 (category 2.5 and A2, A4).
These standards are similar to each other and desc ribe the control mode of a transmission section
of a transmission system.
The host, which is the master, can communicate with a slave (Lenze controller) in three modes:
• RECEIVE (see page 8-21)
• SEND (see page 8-23)
• BROADCAST/ MULTICAST (see page 8-24)
8.3.1 General
The controllers communicate by means of the ASCII code:
0 1 2 3 4 5 6 7 8 9 O B C D I F
0 NUL SOH STX ETX EOT ENQ ACK BEL BS HT LF VT jFF CR SO SI
1 DLE DC1 DC2 DC3 DC4 NAK SYN ETB CAN EM SUB ESC FS GS RS US
2 ÚÛ Ú>Û ÚÒÛ Ú@Û ÚAÛ ÚBÛ ÚCÛ ÚÛÛ ÚEÛ ÚFÛ ÚGÛ ÚHÛ ÚIÛ ÚJÛ ÚKÛ ÚLÛ
3 ÚMÛ ÚNÛ ÚOÛ ÚPÛ ÚQÛ ÚRÛ ÚSÛ ÚTÛ ÚUÛ ÚVÛ ÚWÛ ÚXÛ ÚYÛ ÚZÛ Ú[Û Ú\Û
4 Ú]Û Ú^Û Ú_Û Ú`Û ÚaÛ ÚbÛ ÚcÛ ÚdÛ ÚeÛ ÚfÛ ÚgÛ ÚhÛ ÚiÛ ÚjÛ ÚkÛ ÚlÛ
5 ÚmÛ ÚnÛ ÚoÛ ÚpÛ ÚqÛ ÚrÛ ÚsÛ ÚtÛ ÚuÛ ÚvÛ ÚwÛ ÚxÛ ÚyÛ ÚzÛ Ú{Û Ú|Û
6 ÚÚÛ Ú~Û ÚÄÛ ÚÅÛ ÚÇÛ ÚÉÛ ÚÑÛ ÚÖÛ ÚÜÛ ÚáÛ ÚàÛ ÚâÛ ÚäÛ ÚãÛ ÚåÛ ÚçÛ
7 ÚéÛ ÚèÛ ÚêÛ ÚëÛ ÚíÛ ÚìÛ ÚîÛ ÚïÛ ÚñÛ ÚóÛ ÚòÛ ÚôÛ ÚöÛ ÚõÛ ÚúÛ
Example:
”EOT” =02
Character ”1” =31
hex=2dec
=49
hex
dec
Code number (C1, C2)
Standard addressing
The meaning of the code numbers and the assigned parameters can be obtained from the code
table (see chapter 8.2). When transmitting data, the code number are coded as follows:
The following calculation determines the two ASCII digits from the code number (value range: 0 ¼
6229) (value range: 48
C1 = INTEGER((REMAINDER(code number/790))/10)+48
dec
¼ 127
dec
):
dec
C2 = REMAINDER(REMAINDER(code number/790)/10) +
INTEGER(code number/790) x 10 + 48
dec
The INTEGER is the digit before the decimal point, the REMAINDER is an integer.
Example: 13/5 = 2 remainder 3
INTEGER(13/ 5) = 2
REMAINDER(13/5) = 3
Example:
Convert code number 1002 in ASCII code C1 and C2:
C1
= INTEGER((REMAINDER(1002/790))/10) + 48 =
ASCII
INTEGER(212/10) + 48 =
C2
21 + 48 = 69 = 45
= REMAINDER(REMAINDER(1002/ 790)/10) +
ASCII
hex
= ”E”
ASCII
INTEGER(1002/790) x 10 + 48 =
REMAINDER(212/10) + 1 x 10 + 48 =
2+10+48=60=3C
hex
= ”<”
ASCII
8-16
_^ONMObk
L
Page 49

Appendix
Show/Hide Bookmarks
The code number C1002 is converted into the ASCII string ” E<” , if they are transmitted to the
controller by a host.
Addressing via code bank
With previous LECOM-A/B drivers, only code numbers in the range from 0 to 255 could have been
addressed, since these drivers used only one byte as code number. To achieve the addressing of
the wider code-number range with these drivers, use the code banking.The code-number range 0
¼ 255 is displayed as a window over the whole code-number range. This is controlled via the code
C0249 (code bank). Code C0249 can always be accessed via number 249, independent of the
currently set code bank.
Assignment:
Code bank Code offset Code-number range
0 0 0 ¼ 255
1 250 250 ¼ 505
2 500 500 ¼ 755
3 750 750 ¼ 1005
4 1000 1000 ¼ 1255
5 1250 1250 ¼ 1505
6 1500 1500 ¼ 1755
7 1750 1750 ¼ 2005
Note:
Code banking is only active when the standard addressing is being used. If the selected code
numbers are higher than 255, the code-number range increases correspondingly. Only the
corresponding code-number offset is selected by means of the code bank.
Example:
Set the code bank INTEGER (1002/250) =4 in C0249 to address the code number 1002. C1002 is
then accessed via the code number C02.
Addressing via input selection
Simple LECOM-A/B drivers, which only use the standard addressing, cannot address subcodes.
The input selection C0248 has been developed to offer the possibility of addressing the subcodes.
When using the standard addressing, the value entered in C0248 is always considered as the
subcode. The code C0248 can always be accessed via number 248, independent of the currently
set code bank and the subcode used.
Example:
Enter value 1 in C0248 to address the JOG value 1 in subcode 1. Now subelement 1 is always
addressed when acc essing C39.
Tip!
After a subelement has been accessed through C0248, C0248 should be reset to 0 to avoid the
addressing of a subelement ” by accident” when acc essing a code.
L _^ONMObk
8-17
Page 50

Appendix
Show/Hide Bookmarks
Extended addressing
Another possibility is the direct addressing of parameters by means of expanded addressing.
! CH1 CH2 CH3 CH4 SC1 SC2
The abbreviations have the following meanings:
! The ASCII character ” !” =21
hex
=33
that the expanded addressing is used.
CH1 to CH4 Code number in hexadecimal code:
each character corresponds to a nibble of the
code numbers (CH1 is the highest,
CH4 is the lowest nibble).
SC1, SC2 Subcode number in hexadecimal code:
Each character corresponds to a nibble of the
code number word (SC1 is the highestand SC2 the lowest nibble).
The following characters can be displayed in the ASCII code:
ASCII 0 1 2 3 4 5 6 7 8 9 O B C D I F
dec 48 49 50 51 52 53 54 55 56 57 65 66 67 68 69 70
hex 30 31 32 33 34 35 36 37 38 39 41 42 43 44 45 46
dec
shows
A code number range from 0to 65535 can be addressed by means of these characters. Amaximum
of 255 subelements (field elements) can be accessed via one subcode number of each code.
Example:
1002 = ”!03EA00”
Parameter value (V1 to Vn)
Parameter values can be transmitted in four different formats with the following structures:
• ASCII decimal format (VD)
- VK1 VK2 VK3 VK4 VK5 VK6 . NK1 NK2 NK3 NK4
• ASCII hexadecimal format (VH)
H VH1 VH2 VH3 VH4 VH5 VH6 VH7 VH8
• String format (VS)
S VS1 VS2 VS3 VS4 VS5 VS6 ... VS240
• Octet string format for data blocks (VO)
O VO1 VO2 VO3 VO4 VO5 VO6 ... VO240
8-18
_^ONMObk
L
Page 51

Appendix
Show/Hide Bookmarks
The abbreviations have the following meanings:
VK1 t o VK6 Int egers
. Decimal point (if required)
NK1 to NK4 Decimal codes (if required)
”H” (4 8
VH1 to VH8 1 to 8 hexadecimal characters each
”S” (53
VS1 to VS240 1 to 12 visible ASCII characters each
”O” (4F
VO1 to VO240 Data block in hexadecimal code;
Parameter value in the ASCII decimal format (VD)
The ASCII decimal format (VD) is most often used. The values consist of the following:
1 leading negative sign (if required)
6 digits before the decimal point (VK1 to VK6)
1 decimal point (if required)
4 digits after the decimal point (NK1 to NK4) (if required)
Values from -214748.3648 to 214748.3647 can be displayed.
) Character [H], transfer of parameter values
hex
hex
hex
in the ASCII hexadecimal format
[0 to 9; A to F]
) Character [S], transfer of parameter values
in the string format
(no control characters)
) Character [O], transfer of parameter values
in the octett string format
Each character corresponds to a nibble of the
data block
Tip!
In the ASCII decimal format (VD), the decimal point must not be transmitted if the value does not
have digits after the decimal point.
Parameter value in ASCII hexadecimal format (VH)
The LECOM-A/B protocol supports the transmission of hexadecimal parameter values with a length
of:
• 2 characters (byte value)
• 4 characters (wort/integer value)
• 8 characters (double word/long integer)
In the ASCII hexadecimal format, VH1 is the most significant and VH8 the least significant
hexadecimal character.
Parameter value in the string format (VS)
By means of the string format (VS) of the protocol it is possible to transmit strings with max. 20
charac ters in both directions.
The Lenze controller c an only send the string parameters (e. g. C200).
Parameter values in the octett string format (VO)
The LECOM-A/B protocol includes the octett string format (VO) with which it is possible to transfer
data blocks.
The character sequence corresponds to the filing in the memory (ascending order), i. e. the
charac ter transmitted first is the data block nibble with the lowest address. The data structure of the
data block corresponds to the Intel-memory format with the following definition:
BYTE: 1st high nibble
2nd low nibble
WORD: 1st high BYTE
2nd low BYTE
DWORD: 1st high WORD
2nd low WORD
L _^ONMObk
8-19
Page 52

Appendix
Show/Hide Bookmarks
Controller address (AD1, AD2)
One or more bus devices (slaves) can be selected by means of the controller address which is 2
bytes (AD1, AD2) long. The LECOM-A/B protocol supports the broadcast telegrams, i.e. a telegram
is sent to a group or all other bus devices. For this, controller addresses are reserved (see
BROADCAST, page 8-24). Controller addresses have the following structure:
AD1 AD2
The abbreviations have the following meanings:
AD1 ASCII ten-digit of the slave address (0 ¼ 9; 30 ¼ 39
AD2 ASCII one-digit of the slave address (0 ¼ 9; 30 ¼ 39
Block-check character (BCC)
The block-check character (BCC) is used to store the transmitted data and is generated according
to DIN 66219 (chapter 3).
Because of the program, the block-check character is generated by a XOR link from the following
digits of the SEND telegram:
• it starts with the character directly after the STX control character
• it ends directly after the ETX control character
– BCC can accept the value 00 ¼ FF
EOT AD1 AD2 STX C1 C2 V1 ... Vn ETX BCC
.
hex
<——————— BCC ———————>
hex
hex
)
)
or with the expanded addressing:
STX ”!” CH1 CH2 ... SC2 ETX BCC
<—————————— BCC —————————>
Telegram response
The Lenze controller must return an acknowledgement to the host. The only exception is the
broadcast telegram. This telegram does not require an acknowledgement.
The Lenze controller sends two types of acknowledgements:
• Positive acknowledgement (ACK = 06
hex
), if:
– no faults occur during the block storage (longitudinal and lateral parity)
– a valid command (variable address) has been recognized
– the variable value is within the permissible range
– the variable value could have been changed
• negative acknowledgement (NAK = 15
hex
), if:
– one of the above listed conditions cannot be met.
• No acknowledgement, if:
– a broadcast telegram is send
– the controller address is not correct
8-20
_^ONMObk
L
Page 53

8.3.2 RECEIVE
Show/Hide Bookmarks
The command RECEIVE is to request parameter values of the Lenze controllers. The code numbers
of the requested parameter are transmitted via the RECEIVE telegram using the following structure:
EOT AD1 AD2 C1 C2 ENQ
The abbreviations have the following meanings:
EOT (04
AD1, AD2 Logic unit address of the slave to be addressed
C1, C2 Code number (two ASCII characters)
ENQ (05
Structure and meaning of the code numbers (C1, C2) and the controller address (AD1, AD2) are
described in the corresponding paragraphs of the chapter SEND (see page 8-23).
Telegram response
The Lenze controller addressed via a RECEIVE telegram generates one of the following responses:
• The controller could decode the request and is now sending the requested parameter value
hex
hex
to the host.
Appendix
) End of the (previous) transmission
or extended addressing
) Station request
STX C1 C2 V1 ... Vn ETX BCC
• The controller could decode the request, however, a check-sum fault (parity fault) occurred
during transmission.
STX C1 C2 ? ETX BCC
• The controller could not process the request because the requested code number does not
exist.
STX C1 C2 EOT
The abbreviations have the following meanings:
STX (02
C1, C2 Code number (two ASCII characters)
V1 to Vn Parameter value (n ASCII characters)
ETX (03
BCC Block-check character (00 ¼ FF
?(3F
EOT (04
Structure and meaning of the block-check character (BCC) are described in the corresponding
paragraph of the chapter SEND (see page 8-20).
) Start of text
hex
or extended addressing
)Endoftext
hex
) ASCII character ”?”
hex
) End of the (previous) transmission
hex
hex
)
L _^ONMObk
8-21
Page 54

Appendix
Show/Hide Bookmarks
Examples for a RECEIVE telegram
Example 1
The current speed setpoint (code number C46) is to be read with the bus address 01at the controller.
The host sends the following RECEIVE telegram
EOT 0 1 4 6 ENQ
The controller can respond in three different ways:
STX 4 6 3 5 . 4 ETX BCC
Valid request: The current value of the parameter C46 is 35.4 (Hz)
or
STX 4 6 ? ETX BCC
Invalid request: A check-sum fault (parity fault) occurred during data transmission
or
STX 4 6 EOT
Invalid request: Parameter C46 does not exist in this controller.
Example 2
The current operating status (code number C68) is to be read with the bus address 25 for the
controller.
The operating status is bit-coded and transmitted in the hexadecimal format.
The host sends the following RECEIVE telegram
EOT 2 5 6 8 ENQ
The controller’s response:
STX 6 8 H 0 9 0 0 ETX BCC
Valid request: The current value of the parameter C68 is ”0900” . This means:
TRIP status not active
Maximum current not reached
Quick stop not active
Pulse inhibit status free
Display of the direction of rotation CW rotation
Q
status not active
min
Controller enable enabled
Operating fault did not occur
Communication error did not occur
8-22
_^ONMObk
L
Page 55

8.3.3 SEND
Show/Hide Bookmarks
The command SEND is to transmit data from the master to the slave. The master then sends a
telegram with the following structure:
EOT AD1 AD2 STX C1 C2 V1 ... Vn ETX BCC
The abbreviations have the following meanings:
EOT (04
AD1, AD2 Logic unit address of the slave to be addressed
STX (02
C1, C2 Code number (two ASCII characters)
V1 to Vn Parameter value (n ASCII characters)
ETX (03
BCC Block-check character (00 ¼ FF
In the text section of the telegram, which is embedded between the control characters STXand ETX,
the code number (C1, C2) and the corresponding parameter value (V1 to Vn) are transmitted to the
slave.
) End of the (previous) transmission
hex
Slaves
) Start of text
hex
)Endoftext
hex
hex
Appendix
)
Example for a SEND telegram
The maximum speed (code number C11) is to be set to the value 95.2 Hz via the bus address 34 at
the controller.
The host must send the following SEND telegram:
EOT 3 4 STX 1 1 9 5 . 2 ETX BCC
The controller can respond with two different acknowledgements:
ACK
The command could not be processed correctly. The current value of the parameter C11 is 95.2 Hz
or
NAK
The request could not been processed correctly. The parameter value was not changed.
L _^ONMObk
8-23
Page 56

Appendix
Show/Hide Bookmarks
8.3.4 BROADCAST / MULTICAST
In a bus network, the command BROADCAST is to address all devices or a group of devices
(multicast) at the same time. The structure of the BROADCAST telegram is similar to the structure
of the SEND telegram. The only exception is that it does not return an acknowledgement.
The devices can be selected via their controller addresses. The following controller addresses are
reserved for a BROADCAST telegram:
controller addresses controller address of
groups
(reserved)
00 all ”0” ”0”
10 11 to 19 ”1” ”0”
20 21 to 29 ”2” ”0”
30 31 to 39 ”3” ”0”
40 41 to 49 ”4” ”0”
50 51 to 59 ”5” ”0”
60 61 to 69 ”6” ”0”
70 71 to 79 ”7” ”0”
80 81 to 89 ”8” ”0”
90 91 to 99 ”9” ”0”
ASCII character
AD1 AD2
Example for a BROADCAST telegram
All controllers are to be stopped when setting controller enable (code number C40 = 0).
The host send the following BROADCAST telegram:
EOT 0 0 STX 4 0 0 ETX BCC
The controllers do not return an acknowledgement.
8.3.5 Monitoring of the slave response
The master monitors the selected slave. The slave must return a response within a defined
time.Under the following circumstances the slave does not return a response to the master (time
out):
• The controller address could not be recognized
• A fault (e.g. parity fault) had been detected in one or several characters, including the
charac ter ”ENQ”
• The transmission path is faulty
• A BROADCAST telegram had been sent
• The hardware does not work properly
If the master does not receive a response within a defined period of time, the transmission is tried
again. The number of repetitions is limited.
The monitoring time in the master should be approx. twice as long as the maximum response time.
8.3.6 Transmission faults
After a transmission fault, the master can read C0068 and evaluate the communication error in bit
4¼7.
8-24
_^ONMObk
L
Page 57

8.4 List of abbreviations
Show/Hide Bookmarks
Abbreviation Meaning
ACK Response for positive acknowledgement of the controller
ASCII American Standard Code for Information Interchange: 7 bit code with one free parity bit
Ctrl. enable Controller enable
Ctrl. inhibit Controller inhibit
DCB DC-injection brake
EMC Electromagnetic Compatibility
f
dmin;fdmax
I
max
IMP Pulse inhibit
JOG (JOG1, JOG2, JOG3) Fixed speed or input for activation of the fixed speed
LECOM Lenze communication
LECOM-A Communication medium via RS232 interface and LECOM protocol
LECOM-B Communication medium via RS485 interface and LECOM protocol
LECOM-LI Communication medium via optical fibre and LECOM protocol
LEMOC PC program (for IBM compatible PCs) for drive programming
NAK Response for negative acknowledgement of the controller
Optical fibre Optical fibre
PAR Parameter set changeover
PC Personal computer
PLC Programmable logic controller, e. g. SIMATIC S5, SIEMENS
Qmin Frequency threshold
QSP Quick stop
RFG Ramp-function generator; setpoint integrator
RS232 Interface standard
RS485 Interface standard
RxD Pin name LED (receive display)
SW Software
TRIP Operation fault
TxD Pin name LED (transmission display)
U
Gmax
VD LECOM f ormat
VH LECOM format
VS LECOM format
Minimum/maximum field frequency
Current limit
DC-bus overvoltage
Appendix
L _^ONMObk
8-25
Page 58
Appendix
Show/Hide Bookmarks
8.5 Glossary
Technical term Meaning
Baud rate Transmission speed of data in bit/s
Broadcast Message to all controllers
Code For input and display (access) of parameter values.
Code number Addressing of variables according to the format „code-subcode“ (Cxxxx-xx). All variables can be accessed via the code names.
Fieldbus For data exchange between superimposed controls and positioning controls.
Host PC or PLC
Icon Sign or symbol with an unambiguous message.
Interface converter Additional module to adapt data transmissions via RS232 interface cables to RS485 (and vice versa)
LEMOC PC program (for IBM compatible PCs) for drive
Multicast Message to certain controller groups
Nibble One byte consists of two nibbles:
Protocol LECOM-A/B protocol
Pulse inhibit The output of the power stage is inhibited because the controller is inhibited, the fault message TRIP is displayed or an overvoltage or
Remaining hazards Hazards which cannot be eliminated by design
Subcode Defines the table position of a code
Table position Some variables may consist of more than one value. If this is the case, the values are entered subsequently. They are accessed by
programming
• LOW nibble (bit 0 to 3)
• HIGH nibble (bit 4 to 7)
undervoltage is applied.
means of the same code name via the subcode.
8-26
_^ONMObk
L
Page 59

8.6 Index
Show/Hide Bookmarks
Contents
A
Accessories, 8-1
for a host, 8-1
for optical fibres (LECOM-LI), 8-2
for RS232 (LECOM-A), 8-1
for RS485 (LECOM-B), 8-2
Acknowledgement, 8-20
negative, 7-1
positive, 7-1
TRIP reset, 6-5
Addressing
Code bank addressing, 8-17
Extended addressing, 8-18
Standard addressing, 8-16
Via input selection, 8-17
Appendix, 8-1
Application as directed, 1-2
C
Cable, Optical fibre, 4-9
Character format, 3-1
Code bank, 8-14, 8-17
Code table, 8-3
Commissioning, 5-1
Communication media, 3-1, 3-2
Communication monitoring, 6-4
Communication times, 3-3
Connection
9-pole SubD female plug, 4-2
Connections of the fieldbus module, 4-1
Plug-in terminal (2-pole), 4-2
Plug-in terminal (4-pole), 4-2
Control word, 6-2, 8-5, 8-6, 8-7, 8-8, 8-9, 8-10
Controller
Application as directed, 1-2
Group formation, 6-3
Labelling, 1-2
Controller address, 5-1, 6-3, 8-3, 8-20
Controller inhibit, 6-2, 6-5, 8-3
Current consumption, 3-2
Application conditions, 3-1
B
Basic insulation, 4-4
Baudrate,3-1,5-1
See Baud rate
BCC, 8-20
Block-check character, 8-20
BROADCAST, 8-24
Example, 8-24
D
Dimensions, 3-2
E
Electrical data. See Ratings
Electrical installation, 4-3
Electrical isolation, 4-4
Extended addressing, 8-18
External supply, 3-2
F
Fault elimination, 7-1
Fault memory, 8-11
Fault numbers, 8-15
Frequency setpoint, 6-2, 8-3
L BA2102EN
8-27
Page 60

Contents
Show/Hide Bookmarks
G
Glossary, 8-26
Group addressing, 5-1
Group formation, of controllers, 6-3
I
Index, 8-27
Initial switch-on. See Installation
Input selection, 8-13, 8-17
Installation
Electrical, 4-3
Mechanical, 4-3
of optical-fibre cables, 4-9
Wiringtoahost, 4-4
Wiring via optical fibre (LECOM-LI), 4-8
Wiring viaRS232 (LECOM-A), 4-5
Wiring viaRS485 (LECOM-B), 4-6
Interface, Reduce response time, 6-4
Interface converter, 8-2
L
Labelling, Controller, 1-2
LECOM, Protocol, 8-16
LECOM baud rate. See Baud rate
LECOM code bank. See Code bank
LECOM controller address. See Controller address
LECOM input selection. See Input selection
LECOM-A/B protocol, 6-3, 8-16
Legal regulations, 1-2
Liability, 1-2
List
Abbreviations, 8-25
Technical term. See Glossary
List of abbreviations, 8-25
M
Manufacturer, 1-2
Monitoring of the slave response, 8-24
MULTICAST, 8-24
N
Network topology
Line, 4-6
Point-to-point, 4-5
Ring, 4-8
O
Operating mode, 6-2, 8-3
Operating status, 8-4
Operator, 2-1
Optical fibre
Cable, 4-9
Installation of the optical-fibre ring, 4-9
Optical fibre (LECOM-LI), Features, 4-8
Optical f ibre/RS232 converter , 8-2
Optical-fibre cable
Bending radius, 4-9
Installation of the optical-fibre ring, 4-9
Preparation, 4-9
preparation, 4-9
Specification, 8-2
8-28
BA2102EN
L
Page 61

Contents
Show/Hide Bookmarks
P
Packing list, 1-1
Parameter sets, 6-1
Parameter setting, 6-1
Special fea t ures, 820X, 6-5
Parameter value, 8-18
in the ASCII decimal format, 8-19
in the ASCII hexadecimal format, 8-19
in the octett string format, 8-19
in the string f ormat, 8-19
Parameters
Control word (C0135), 6-2
Controller inhibit (C040), 6-2
Frequency setpoint (C0046), 6-2
Meaning of individual, 6-2
Operating mode (C0001), 6-2
Unit address (C0009), 6-3
parameters, Name, 8-3
PC system cable, 8-1
Personnel, qualified, 2-1
Plug-in terminal for external supply, Connections, 4-2
Plug-in terminal for LECOM-B, Connections, 4-2
Processing time, 3-4
Protocol, 8-16
See LECOM-A/B protocol
Code numbers, 8-16
Q
Quick stop, 5-1
S
Safety information, 2-1
Layout, 2-2
Other notes, 2-2
Warning of damage to material, 2-2
Warning of damage to persons, 2-2
SEND, 8-23
Example, 8-23
Slave response, 8-24
Software driver, 3-3
Special features, Parameter setting, 820X, 6-5
Standard addressing, 8-16
SubD male plug (9-pole), Connections, 4-2
Supply voltage
External, 4-3
Internal, 4-3
T
Technical data, 3-1
Dimensions, 3-2
General data/Application conditions, 3-1
Module features, 3-1
Ratings, 3-2
Telegram response, 8-20
Tel eg r am t i m e, 3 - 3
Transmission faults, 8-24
TRIP reset, 6-5, 8-3
Troubleshooting, 7-1
R
Ratings, 3-2
RECEIVE, 8-21
Examples, 8-22
Telegram response, 8-21
RS232 (LECOM-A), Features, 4-5
RS485 (LECOM-B), Features, 4-6
L BA2102EN
W
Warranty, 1-2
Waste disposal, 1-2
Wiring
toahost, 4-4
via optical fibres (LECOM-LI), 4-8
via RS232 (LECOM-A), 4-5
via RS485 (LECOM-B), 4-6
8-29
Page 62

Contents
Show/Hide Bookmarks
8-30
BA2102EN
L
 Loading...
Loading...