

Page 1
DDC-100
Direct-to-Host
Programming Guide
FCD LMAIM4019-00
(Replaces 435-23009)
Network Control Systems
Page 2
Contents
1 Introduction 1
1.1 Premise 1
1.2 Emphasis 1
1.3 Audience 2
2 Direct-to-Host Valve Control 3
2.1 Advantages of Direct-to-Host Control 3
2.2 Deliverables for Successful Direct-to-Host Implementations 4
3 Field Unit Monitoring and Control 5
3.1 Use of Coils and Registers for Monitoring and Control 5
3.2 Modbus 6
3.2.1 Modbus Function Code 01 (Read Coil Status) 7
3.2.2 Modbus Function Code 02 (Read Input Status) 8
3.2.3 Modbus Function Code 03 (Read Holding Register) 11
3.2.4 Modbus Function Code 04 (Read Input Register) 18
3.2.5 Modbus Function Code 05 (Force Single Coil) 18
3.2.6 Modbus Function Code 06 (Preset Single Register) 19
3.2.7 Modbus Function Code 08 (Diagnostics) 23
3.2.8 Modbus Function Code 15 (Force Multiple Coils) 24
3.2.9 Modbus Function Code 16 (Preset Multiple Registers) 24
4 The DDC-100 Network 27
Belden 3074F Specifications 27
Belden 3105A Specifications 28
Belden 9841 Specifications 28
4.1 Field Unit Network Communication Channels 28
4.1.1 Field Unit Network Bypass Relays 29
4.1.2 Field Unit Repeater Circuits 29
4.2 Network Topologies 29
4.2.1 Redundant Loop 29
4.2.2 Single-Ended Loop 31
4.2.3 Single-Line Multi-drop 32
4.3 Network Polling 33
4.3.1 Network Communication Errors 35
4.3.2 Network Communication Examples 36
4.4 Network Control 38
4.4.1 Ladder Logic Routines 38
4.4.2 Software Control Modules (C++ or Visual Basic Program) 38
4.4.3 Personal Computer with a Graphical User-Interface 39
5 Interfacing Hardware for the DDC-100 Network 41
5.1 RS-232 to RS-485 Converters 41
5.1.1 RS-232/RS-485 Control Line Steered Converter (P/N 61-825-0966-4) 43
5.1.2 RS-232/RS-485 Converter with RS-485 Self-Steering (P/N 61-825-1032-4) 45
5.2 RS-485 Connection Direct to the DDC-100 Field Unit 48
6 Programming Recommendations 49
6.1 Monitoring Field Unit Status 49
6.2 Issuing Control Commands 50
A Typical DDC-100 Network Installation Assignments 53
Project supplier responsibilities 53
FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide i
Page 3
Figures
Figure 4.1 – DDC-100 Redundant Loop Network 30
Figure 4.2 – DDC-100 Single-Ended Loop Network 31
Figure 4.3 – DDC-100 Single-Line Multi-Drop Network 33
Figure 5.1 – RS-232/RS-485 Converter Dimensions and Rack Mount Kit 43
Figure 5.2 – RS-232/RS-485 Cable Diagram 43
Figure 5.3 – Front and Back Panels of Steered Converter 44
Figure 5.4 – Front and Back Panels of Self-Steering Converter 46
Tables
Table 3.1 – Field Unit Communication Parameters 5
Table 3.2 – Modbus Function Codes Supported 7
Table 3.3 – DDC-100 Coil Assignments, Modbus Function Code 01 Usage for Digital Outputs 8
Table 3.4 – Status Bit Definitions 8
Table 3.4 – Status Bit Definitions (continued) 9
Table 3.5 – Field Unit Register Definitions 12
Table 3.6 – DDC-100 Coil Assignments Modbus Function Code 05 Usage for Digital Outputs 19
Table 3.7 – Modbus 06 Command and Field Unit Holding Register 40001 20
Table 3.8 – Diagnostic Codes Supported by the DDC-100 Field Unit 23
Table 4.1 – Average Field Unit Response Time 34
Table 4.2 – Average Network Scan Time (seconds) 35
Table 5.1 – RS-232/RS-485 Converter Specifications 42
Table 5.2 – Steered Converter Assembly (P/N 22300-7591) 42
Table 5.3 – Self-Steering Converter Assembly (P/N 22300-7601) 42
Table 5.4 – RS-232/RS-485 Converter (P/N 61-825-0966-4) DIP Switch Functions 44
Table 5.5 – RS-232/RS-485 Converter (P/N 61-825-0966-4) RS-232 Connector 44
Table 5.6 – RS-232/RS-485 Converter (P/N 61-825-0966-4) RS-485 Connector 45
Table 5.7 – RS-232/RS-485 Converter (P/N 61-825-0966-4) Jumpers 45
Table 5.8 – RS-232/RS-485 Converter (P/N 61-825-1032-4) RS-232 Connector 46
Table 5.9 – RS-232/RS-485 Converter (P/N 61-825-1032-4) RS-485 Connector 46
Table 5.10 – RS-232/RS-485 Converter (P/N 61-825-1032-4) Jumpers
Table 6.1 – Sample Tag Table for Direct-to-Host applications 51
1 47
Introduction
1
1.1 Premise
This Programming Guide was written for the user who is connecting Flowserve Limitorque
DDC-100 Network-compatible valve actuators directly to a control system Host computer. These
guidelines provide the information that is necessary to control and monitor the valve actuators
through a serial data communications network.
Your safety and satisfaction are very important to Flowserve. Please follow all instructions carefully
and pay special attention to safety.
1.2 Emphasis
The following methods will be used to emphasize text throughout this manual:
WARNING: Refers to personal safety. This alerts the reader to potential danger or harm.
c
Failure to follow the advice in warning notices could result in personal injury or death.
CAUTION: Directs attention to general precautions, which, if not followed, could result in
a
personal injury and/or equipment damage.
NOTE: Highlights information critical to the understanding or use of these products.
Bold text highlights other important information that is critical to system components.
CAPITALIZED text stresses attention to the details of the procedure.
Underlined text emphasizes crucial words in sentences that could be misunderstood if the word is
not recognized.
The purpose of these emphasized blocks of text is to alert the reader to possible hazards associated
with the equipment and the precautions that can be taken to reduce the risk of personal injury and
damage to the equipment.
Read and become familiar with the material in these guidelines before attempting installation,
operation, or maintenance of the equipment. Failure to observe precautions could result in serious
bodily injury, damage to the equipment, or operational difficulty.
ii DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 1
Page 4

1.3 Audience
These guidelines were written to help you successfully connect Limitorque valve actuators directly
to a control system Host computer. You do not have to be an expert in electronics or digital controls
to utilize this manual. However, this manual assumes that you have a working understanding of
valve actuators and a fundamental understanding of control system programming.
The following manuals should be available before attempting to connect the valve actuators to the
control system:
1) Accutronix Installation and Operation for MX-DDC Field Unit Manual
Bulletin LMAIM1329
2) DDC-100 UEC Field Unit (Modbus®) Installation and Operation Manual
Bulletin LMAIM4029
3) DDC-100 UEC Field Unit Wiring and Startup Guidelines
Bulletin LMAIM4022
4) DDC-100 UEC Field Unit Installation and Commissioning Manual
Bulletin LMAIM4030
5) Modicon Modbus Protocol Reference Guide PI-MODBUS-300 Rev. G
available from Modicon
6) Valve actuator installation manual for the specific model(s) to be installed.
An understanding of valve actuators and digital control systems is beneficial to all system users.
Flowserve assistance and training is available to help you operate your system at top efficiency. It
is recommended that you read this entire manual before attempting to install the valve actuators in
your control system.
Direct-to-Host Valve
2
In this document, Direct-to-Host valve control is defined as the use of a customer-supplied
(possibly pre-existing) Host control system (PLC, DCS, PC, etc.) to directly control the actuation of
valves that are equipped with DDC-100 Network-compatible field units. The field units are microprocessor-based devices that can communicate with the Host and respond to Host commands for
valve motion and status. The DDC-100 Network uses the EIA RS-485 standard for the physical layer
and the A.E.G. Modicon Modbus protocol for the command structure.
The Direct-to-Host solution to valve actuation systems provides distinct advantages for many
users. These benefits range from maximizing system design flexibility to utilizing existing plant
equipment for valve actuator control. The customer can emphasize selecting the best equipment
and software that closely matches the application’s requirements. This solution allows the user to
add valve control while avoiding the need to incorporate new control equipment into the facility.
Direct-to-Host functionality is accomplished through the use of open architecture control and
communications in the valve actuator controls that economically accommodate widely available
interfaces for existing SCADA, PLC, or personal computers.
Control
2.1 Advantages of Direct-to-Host Control
• Freedom to design a valve actuator system to interface directly with customer-preferred supervisory equipment with open-market availability and off-the-shelf components.
• Maximizes valve actuator system exibility by utilizing the industry standard protocol of Modbus,
complemented with the EIA RS-485 electrical standard.
• Increases control room equipment utilization while incorporating a cost savings to the customer
through the elimination of unnecessary hardware.
• Supports the use of control system components familiar to the user and eliminates the requirement to learn third-party interfaces.
• Strengthens control system architecture with components readily available on the open market.
• Encourages parts replacement and support programs favorable to the user.
• Promotes direct downloading of valve actuator data to the supervisory control system without
intervening proprietary hardware or protocols.
2 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 3
Page 5
• Provides a safe and reliable communications path between the supervisory control system and
valve actuator network. This eliminates an unnecessary single point of failure that would exist if
the valve control network required a gateway device.
• Enhances the operational relationship between the customer and the customer’s preferred system
integrator.
2.2 Deliverables for Successful
Direct-to-Host Implementations
Each Direct-to-Host installation requires coordination to ensure that every supplier understands
their deliverable responsibilities. When suppliers understand particular obligations and perform
the tasks in an orderly and timely fashion, the DDC-100 Network installation process will progress
very smoothly. Appendix A outlines a “typical” chart detailing areas of responsibility or supplier
deliverables for installing a DDC-100 system. This appendix is a guideline and may vary from
project to project.
Field Unit
3
Monitoring and
Control
Flowserve Limitorque valve actuators that are DDC-100 Network compatible can be controlled and
monitored by sending queries and receiving responses over a serial data network. The DDC-100
Network uses the non-proprietary Modbus message protocol and EIA RS-485 standard for the
physical communication link.
Table 3.1 – Field Unit Communication Parameters
Parameter Options Default
Message Framing RTU, ASCII RTU
Baud Rate 1200, 2400, 4800, 9600, 19,200 9600
Data Bits 8 8
Stop Bits 1 1
Parity None None
Error Checking CRC-16 (RTU), LRC (ASCII) CRC-16 (RTU)
Field Unit Address Range 1–250 Configurable Configurable
3.1 Use of Coils and Registers
for Monitoring and Control
The material in this section is a brief tutorial and general discussion of the use of Modbus queries
and responses to control valve actuators. The detailed discussion of the commands will be given in
Section 3.2.
The Modbus communications protocol allows for working with two types of information—coils
(or bits) and registers (or 16-bit words). Coils are either ON (1) or OFF (0) and are used in direct
relation to relays (that have coils). For example, in a typical actuator, Coil 1 is energized to CLOSE
the actuator and Coil 2 is energized to OPEN the actuator. Register information is used for control
functions that do not involve coils. An example would be to write a command value to energize the
open or close coil or move the actuator to a position of 0 to 100% of open.
4 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 5
Page 6
Queries are used to send requests from the Modbus master (Host) to the Modbus slave (DDC-100
Field Unit), and the slave must respond with an appropriate response or an error message.
The Modbus function codes that are supported in the DDC-100 Network are a subset of the
complete Modbus function codes and are listed below:
01 Read Coil Status Reads the ON/OFF status of discrete outputs (coils) in the field units.
02 Read Input Status Reads the ON/OFF status of discrete inputs in the field units.
03 Read Holding Registers Reads the binary contents of holding registers in the field units.
04 Read Input Registers Reads the binary contents of the input registers in the field units.
05 Force Single Coil Forces a single coil to either the ON or OFF state.
06 Preset Single Register Presets a value into a single-holding register.
08 Diagnostics Provides communication tests and checks for internal error conditions in the
field units.
Table 3.2 – Modbus Function Codes Supported
Function
Code
Note: MX-DDC does not support Modbus function code 02.
Name
01 Read Coil Status Bit 0,000 - 9,999
02 Read Input Status Bit 10,000 - 19,999
03 Read Holding Register Register 40,000 - 49,999
04 Read Input Register Register 30,000 - 39,999
05 Force Single Coil Bit 0,000 - 9,999
06 Preset Single Register Register 40,000 - 49,999
08 Diagnostics N/A N/A
15 Force Multiple Coils Bit 0,000 - 9,999
16 Preset Multiple Registers Register 40,000 - 49,999
Modbus function codes 15 and 16 are supported in:
UEC-3-DDC Modbus Firmware 2.00 and greater
MX-DDC Firmware 02/01.00 and greater
Bit/Register
Addressing
Extended
Addressing Range
15 Force Multiple Coils Forces multiple coils to either the ON or OFF state.
16 Preset Multiple Registers Presets a value into multiple holding registers.
NOTE: All data in Modbus messages are referenced to zero. The first occurrence of a data item is
addressed as item number zero. This includes Coils, Inputs, and Registers. For example, coils 1-8
would be addressed as 0-7, inputs 1-16 would be addressed as 0-15, and registers 1-16 would be
addressed as 0-15.
3.2 Modbus
The Modbus protocol was developed by A.E.G. Modicon for communicating to various networked
devices. The relationship between these devices and a central controller is called a master-slave
relationship in which the master (Host device) initiates all communications. The slave devices (field
units in the actuators) respond to the queries from the master. Modbus only permits one master to
communicate at any given time (simultaneous communication is prohibited) for assuring process
control integrity.
The controlling device (master) must conform to the Modbus protocol as defined in the Modicon
Modbus Protocol Reference Guide PI-MODBUS-300 Rev. G and support Modbus function codes
01 through 06, 08, 15 and 16. These function codes are a subset of the complete protocol and are
defined in Table 3.2.
The choice of which query to use in a particular situation can significantly affect the efficiency of the
network. As an example, consider the situation where the Host requires the status of the coils, the
status of the digital inputs, the status of the faults, and the status of the timers and analog channels. This information can be obtained by using the 01 - Read Coil Status query, the 02 - Read Input
Status query, and 04 - Read Input Register query. To obtain this information, the Host would have
to send three separate queries, and the field unit would have to respond to each query separately.
A more efficient way to accomplish this same request for information would be through the use of
the 03 - Read Holding Register query. The Host would issue the 03 query (specifying the registers
to read), and the field unit would respond with one response that would contain all of the requested
information. The latter approach would generate considerably less network traffic than the former
approach, improving network capacity and response times.
In the strict sense, all transmissions from the Modbus master are called commands. In this manual,
a request for information, however, may be referred to as a query. Usually the term query will only
be used in conjunction with function codes (01), (02), (03), (04), and (08), which typically request
data. Commands are used in conjunction with function codes (05), (06), (15) and (16), which
typically initiate field unit action.
Examples
• The coil known as “coil 1” in the eld unit is addressed as coil 0000 in the data address eld of a
Modbus message.
• Digital input 129 decimal is addressed as digital input 0080 hex (128 decimal).
• Holding register 40001 is addressed as register 0000 in the data address eld of the message.
The function code field already specifies “holding register” operation. Therefore the reference
“4XXXX” is implicit.
• Holding register 40009 is addressed as register 0008 hex (8 decimal).
3.2.1 Modbus Function Code 01 (Read Coil Status)
This function code is used to read the coil status in the DDC-100 Field Unit. There are nine coils
available to be read on DDC-100 Field Units as shown in Table 3.3. For the MX/DDC or UEC-3-DDC
Field Unit, Coil 1 indicates CLOSE contactor and is interlocked with Coil 2, Coil 2 indicates OPEN
contactor and is interlocked with Coil 1. When the I/O Module is used in non-MOV (motor-operated
valve) mode, relays 1 through 6 or coils 3 through 8 are available for user configuration.
6 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 7
Page 7
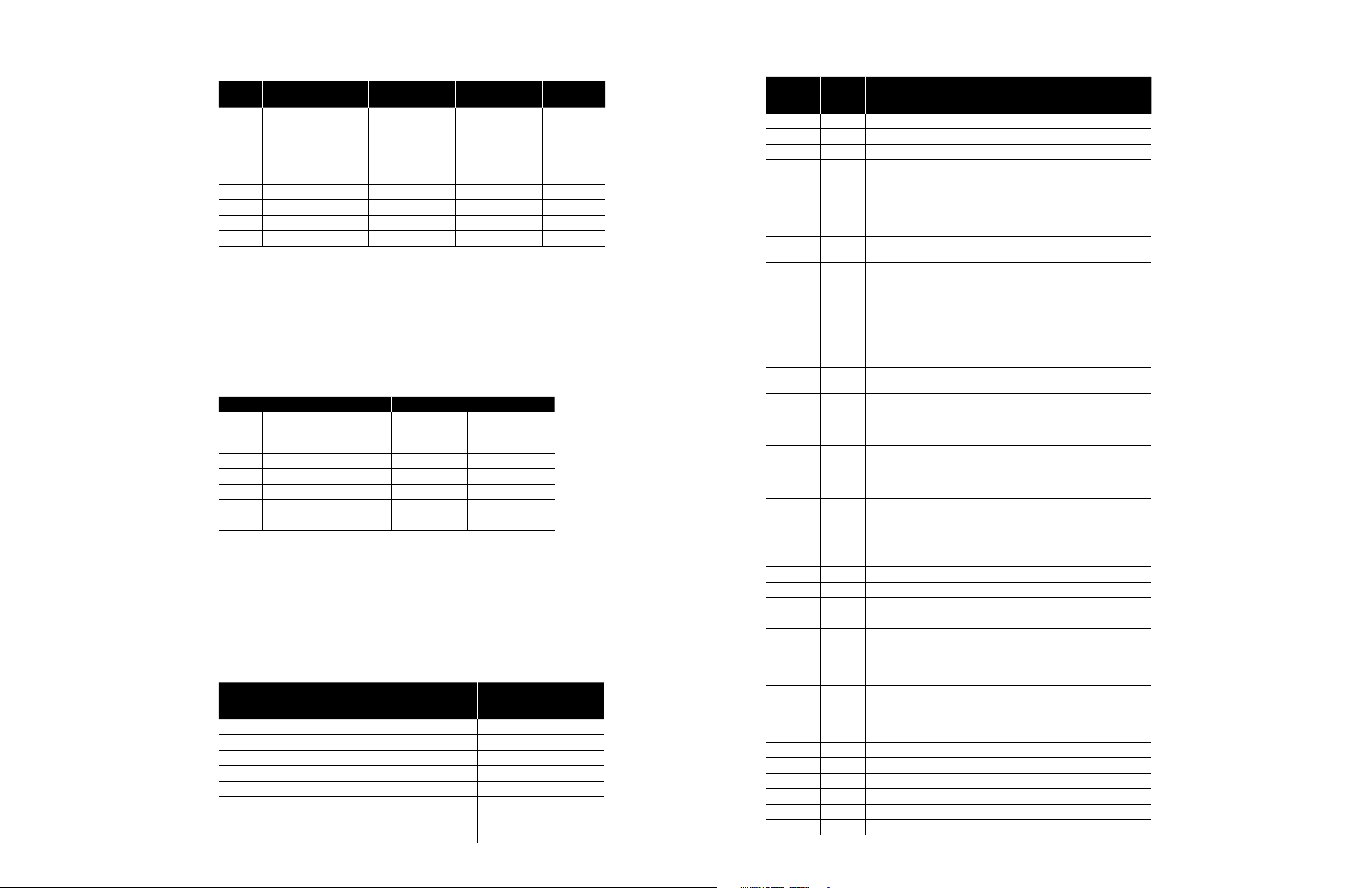
Table 3.3 – DDC-100 Coil Assignments, Modbus Function Code 01 Usage for Digital Outputs
Coil
Number
1 00 Close / Stop Close / Stop Close / Stop Do Not Use
2 01 Open / Stop Open / Stop Close / Stop Do Not Use
3 02 AS-1 Lockout or Relay #3 Lockout or Relay #3 Relay #3
4 03 AS-2 Do Not Use Relay #4 Relay #4
5 04 AS-3 Do Not Use Relay #5 Relay #5
6 05 AS-4 Relay #6 Relay #6 Relay #6
7 06 AR-1 (Opt) Do Not Use Do Not Use Relay #21
8 07 AR-2 (Opt) Do Not Use Do Not Use Relay #12
9 08 AR-3 (Opt) Do Not Use Do Not Use Do Not Use
Note 1: Relay #2 is physical Relay K2.
Note 2: Relay #1 is physical Relay K1.
Bit
Number
MX/DDC UEC-3-DDC DDC-100 Clamshell I/O Module
Example
Poll field unit number 3 for 8 coils starting at coil 1.
Query 0301000000083C2E
Response 03010118503A
Message Breakdown
Query Response
03 Slave (Field Unit) Address 03
01 Function 01 Function
00 Starting Address Hi 01 Byte Count
00 Starting Address Lo 18 1 Data (Coils 8 - 1)
00 No. of Points Hi 503A Error Check (CRC)
08 No. of Points Lo
3C2E Error Check (CRC)
Note 1: 18h equals 00011000 or coils 4 and 5 are ON.
Slave (Field Unit)
Address
3.2.2 Modbus Function Code 02 (Read Input Status)
This function code is used to read the discrete input status bits in the DDC-100 Field Unit. The use
of this function code will provide the user with the input status bits that are used to develop holding
registers 9 through 13. The status bit inputs are contained in locations 10129-10208 for each
DDC-100 Field Unit and are defined in Table 3.4.
Table 3.4 – Status Bit Definitions
Bit Number
129 128 Opened Not Used
130 129 Closed Not Used
131 130 Stopped Not Used
132 131 Opening Not Used
133 132 Closing Not Used
134 133 Valve jammed Not Used
135 134 Actuator switched to local mode Not Used
136 135 Combined fault Not Used
Modbus
Bit
Address
UEC-3-DDC and DDC-100 Clamshell I/O Module
Table 3.4 – Status Bit Definitions (continued)
Bit Number
137 136 Over-temperature fault Not Used
138 137 Actuator failing to de-energize Not Used
139 138 Channel A fault Channel A fault
140 139 Channel B fault Channel B fault
141 140 Open torque switch fault Not Used
142 141 Close torque switch fault Not Used
143 142 Valve operated manually fault Not Used
144 143 Phase error Not Used
145 144
146 145
147 146
148 147
149 148
150 149
151 150
152 151
153 152
154 153
155 154
156 155 Local emergency shutdown is active Not Used
157 156
158 157 Wrong rotation Not Used
159 158 Opening in local mode Not Used
160 159 Closing in local mode Not Used
161 160 Close contactor (interlocked) Not Used
162 161 Open contactor (interlocked) Not Used
163 162 Lockout or user, Relay 3 Relay 3
164 163
165 164
166 165 User, Relay 6 Relay 6
167 166 Close contactor (non-interlocked) Relay 2 (K2)
168 167 Open contactor (non-interlocked) Relay 1 (K1)
169 168 Field unit software vs. ID Field unit software vs. ID
170 169 Field unit software vs. ID Field unit software vs. ID
171-176 170-175 Field unit software vs. ID Field unit software vs. ID
177 176 Remote switch User Input 8
178 177 Thermal overload User Input 9
Modbus
Bit
Address
UEC-3-DDC and DDC-100 Clamshell I/O Module
Input “open verify” is not active after open
command is initiated
Input “close verify” is not active after close
command is initiated
Input “open verify” is active after open
command is de-energized
Input “close verify” is active after close
command is de-energized
“Ph_det” (Phase Detect) input is active.
One or more phases is missing
“Ph_seq” (Phase Sequence) input is active.
Reverse phase sequence is occurring
Valve manually moved from mid-travel to
open
Valve manually moved from open to
mid-travel
Valve manually moved from mid-travel to
close
Valve manually moved from close to
mid-travel
Network emergency shutdown (ESD) is
active
Field unit microprocessor has reset since
the last poll
Local pushbutton switch LED (UEC-3)
Relay 4 (Clamshell)
Local pushbutton switch LED (UEC-3)
Relay 5 (Clamshell)
Not Used
Not Used
Not Used
Not Used
Not Used
Not Used
Not Used
Not Used
Not Used
Not Used
Not Used
Relay 4
Relay 5
8 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 9
Page 8
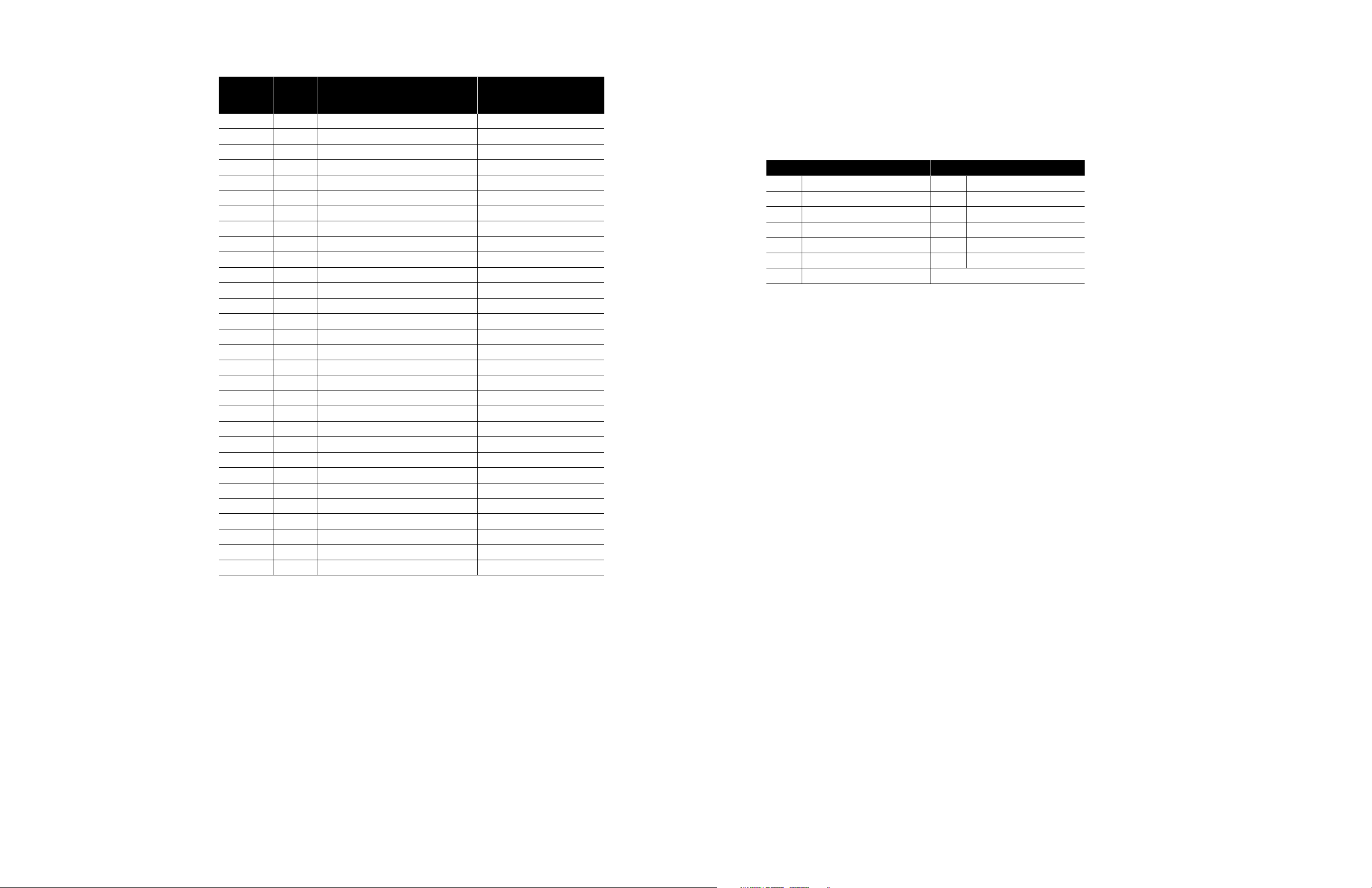
Table 3.4 – Status Bit Definitions (continued)
Bit Number
179 178 Open torque switch User Input 10
180 179 Open limit switch User Input 11
181 180 Close torque switch User Input 12
182 181 Close limit switch User Input 13
183 182 Aux. Open Input User Input 14
184 183 Aux. Close Input User Input 15
185 184 User Input 0 User Input 0
186 185 User Input 1 User Input 1
187 186 User Input 2 User Input 2
188 187 User Input 3 User Input 3
189 188 User Input 4 User Input 4
190 189 User Input 5 User Input 5
191 190 Input 6 User Input 6
192 191 Input 7 User Input 7
193 192 Analog Input 1 lost Analog Input 1 lost
194 193 Analog Input 2 lost Analog Input 2 lost
195 194 Analog Input 3 lost Analog Input 3 lost
196 195 Analog Input 4 lost Analog Input 4 lost
197 196 Network Channels A/B timed out Network Channels A/B timed out
198 197 Reserved Reserved
199 198 Reserved Reserved
200 199 Reserved Reserved
201 200 Reserved Reserved
202 201 Reserved Reserved
203 202 Reserved Reserved
204 203 Reserved Reserved
205 204 Lost Phase Input User Input 18
206 205 Phase Reverse Input User Input 19
207 206 Input 8 User Input 16
208 207 Input 9 User Input 17
Modbus
Bit
Address
UEC-3-DDC and DDC-100 Clamshell I/O Module
Example
Poll field unit number 22 for 16 inputs starting at input 129 with the actuator opening.
Query 1602008000107B09
Response 1602020108CDED
Message Breakdown
Query Response
16 Slave (Field Unit) Address 16 Slave (Field Unit) Address
02 Function 02 Function
00 Starting Address Hi 02 Byte Count
1
80 Starting Address Lo 01
00 No. of Points Hi 08
10 No. of Points Lo CDED Error Check (CRC)
7B09 Error Check (CRC)
Note 1: 01h equals 0000 0001 (actuator open input bit is ON).
Note 2: 08h equals 0000 1000 (actuator Channel B Fail bit is ON).
Data (Inputs 10136 - 10129)
2
Data (Inputs 10144 - 10137)
3.2.3 Modbus Function Code 03 (Read Holding Register)
This function code is used to read the binary contents of holding registers in the DDC-100 Field
Unit. This function code is typically used during the network polling cycle. A network poll should
consist of field unit registers 9 (Status) and 10 (Fault) as a minimum. Holding register 8 should
also be polled when the actuator is configured for the analog feedback option or position control.
See Table 3.5 for a complete listing of the holding registers.
10 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 11
Page 9

Table 3.5 – Field Unit Register Definitions
Register
Number
Register Name MX/DDC Meaning UEC-3-DDC Meaning
1 Command
2 Argument
3 Analog Output
4 Analog Output
5 Analog Input Main Power Value (Volts) Analog Input 4
6 Analog Input
7 Analog Input
8 Position
Status Register
(Field Units as
9
MOV - MotorOperated Valve)
Status Register
I/O Module only
9
(Non-Valve
Service)
Registers 1 and 2 are write-only
registers used for Modbus Function
Code 06
Registers 1 and 2 are write-only
registers used for Modbus Function
Code 06
APT Scaled Output Value
(Default 0-100)
ATT Scaled Output Value1
(Default 0-100)
Analog Input 1 (Default 0-100) User
4-20 mA Input (Heavy Smoothing)
Analog Input 2 (Default 0-100) User
4-20 mA Input
Valve Position, Scaled Value (Default
0-100) (0-100, 2-255, 0-4095)2
16 Bits of Field Unit Status 16 Bits of Field Unit Status
Bit 0 Opened Bit 0 Opened
Bit 1 Closed Bit 1 Closed
Bit 2 Stopped Bit 2 Stopped
Bit 3 Opening Bit 3 Opening
Bit 4 Closing Bit 4 Closing
Bit 5 Valve jammed Bit 5 Valve jammed
Bit 6 Actuator switched to local
mode1
Bit 7 Combined fault3 Bit 7 Combined fault3
Bit 8 Over-temperature fault Bit 8 Over-temperature fault
Bit 9 Future Implementation
Bit 10 Network Channel A fault4 Bit 10 Network Channel A fault
Bit 11 Network Channel B fault4 Bit 11 Network Channel B fault
Bit 12 Open torque switch fault Bit 12 Open torque switch fault
Bit 13 Close torque switch fault Bit 13 Close torque switch fault
Bit 14 Valve-operated manually
fault
Bit 15 Phase error Bit 15 Phase error
N/A
Registers 1 and 2 are write-only
registers used for Modbus Function
Code 06
Registers 1 and 2 are write-only
registers used for Modbus Function
Code 06
N/A
Average Torque
(version 2.00 and greater)
Analog Input 3
Analog Input 2
Valve Position, Scaled Value (Default
0-100) OR Analog Input 1
Bit 6 Actuator switched to local
Bit 9 Actuator failing to de-ener-
Bit 14 Valve-operated manually
16 Bits of Field Unit Status
Bits 0-9 Not Used
Bit 10 Network Channel A fault
Bit 11 Network Channel B Fault
Bits 12-15 Not Used
mode
gize
fault
Table 3.5 – Field Unit Register Definitions (continued)
Register
Number
Register Name MX/DDC Meaning UEC-3-DDC Meaning
16 Bits of Field Status 16 Bits of Field Status
Bits 0-3 Not Used
Bit 4 One or more phases are
missing
Bit 5 Reverse phase sequence is
occurring
Bits 6-9 Not Used
Bit 10 Network emergency
shutdown is active
Bit 11 Local PB emergency
shutdown is active
Bit 12 MX microprocessor has
reset since the last poll
Bit 13 Local Stop
Bit 14 Opening in local mode
Bit 15 Closing in local mode
10
Fault Register
(Not Used for I/O
Module)
Bit 0 Input “open verify” is not
active after open command
is initiated
Bit 1 Input “close verify” is not
active after close command
is initiated
Bit 2 Input “open verify” is active
after open command is
de-energized
Bit 3 Input “close verify” is active
after close command is
de-energized
Bit 4 “Ph_det” input is active. One
or more phases are missing
Bit 5 “Ph_seq” input is active.
Reverse phase sequence is
occurring
Bit 6 Valve manually moved from
mid-travel to open
Bit 7 Valve manually moved from
open to mid-travel
Bit 8 Valve manually moved from
mid-travel to close
Bit 9 Valve manually moved from
close to mid-travel
Bit 10 Network emergency
shutdown is active
Bit 11 Local emergency shutdown
is active
Bit 12 Field Unit microprocessor
has reset since the last poll
Bit 13 Wrong rotation
Bit 14 Opening in local mode
Bit 15 Closing in local mode
12 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 13
Page 10
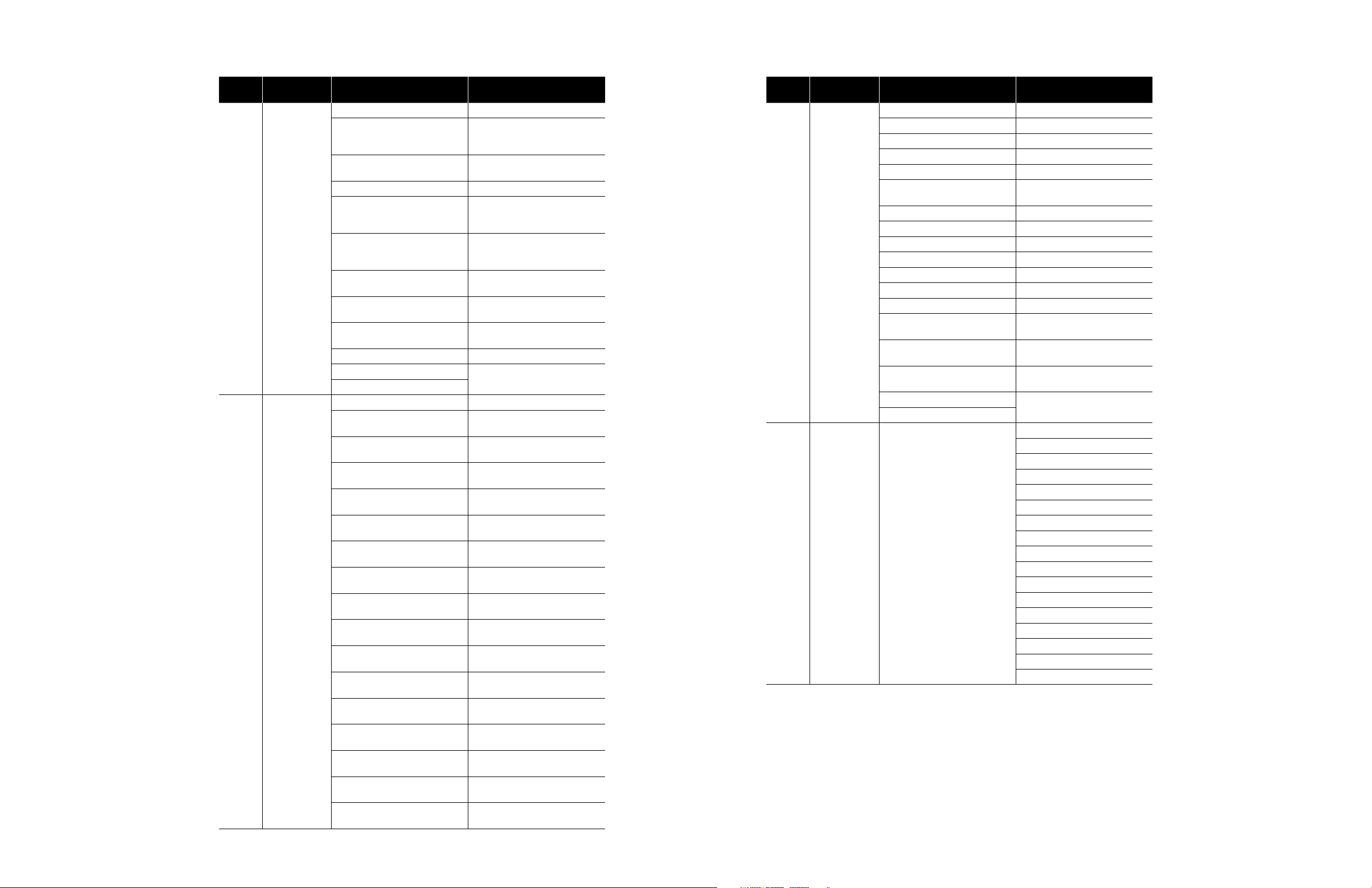
Table 3.5 – Field Unit Register Definitions (continued)
Register
Number
Register Name MX/DDC Meaning UEC-3-DDC Meaning
Value of 16 Digital Outputs Value of 16 Digital Outputs
Bit 0 Close contactor (interlocked)
Bit 1 Open contactor (interlocked)
Bit 2 AS-1 Bit 2 Lockout or User Relay 3
Bit 3 AS-2
11 Digital Outputs
12 Digital Inputs 1
Bit 4 AS-3
Bit 5 AS-4
Bit 6 AR-1 (Opt)
Bit 7 AR-2 (Opt)
Bit 8 AR-3 (Opt) Bits 8-15 Field Unit Software vs. ID
Bit 9 Network Relay
Bits 10-15 Not Used
Value of 16 Digital Inputs Value of 16 Digital Inputs
Bit 0 Remote Switch
Bit 1 Thermal Overload
Bit 2 Open Torque Switch
Bit 3 Open Limit Switch
Bit 4 Close Torque Switch
Bit 5 Close Limit Switch
Bit 6 Not Used
Bit 7 Not Used
Bit 8 User Input 0, terminal 21
Bit 9 User Input 1, terminal 10
Bit 10 User Input 2, terminal 9
Bit 11 User Input 3, terminal 6
Bit 12 User Input 4, terminal 7
Bit 13 User Input 5, terminal 5
Bit 14 Opt User Input 6,
terminal 23
Bit 15 Opt User Input 7,
terminal 24
Bit 0 Close contactor (interlocked),
I/O Module as MOV (MotorOperated Valve)
Bit 1 Open contactor (interlocked),
I/O Module as MOV
Bit 3 UEC-3-DDC Local push-
button switch LED, Relay 4
Clamshell and I/O Module
Bit 4 UEC-3-DDC Local push-
button switch LED, Relay 5
Clamshell and I/O Module
Bit 5 Relay 6 Clamshell and I/O
Module
Bit 6 Relay 2 (K2), I/O Module
(non-interlocked)
Bit 7 Relay 1 (K1), I/O Module
(non-interlocked)
Bit 0 Remote Switch, I/O Module
Input 8
Bit 1 Thermal Overload, I/O
Module Input 9
Bit 2 Open Torque Switch, I/O
Module Input 10
Bit 3 Open Limit Switch, I/O
Module Input 11
Bit 4 Close Torque Switch, I/O
Module Input 12
Bit 5 Close Limit Switch, I/O
Module Input 13
Bit 6 Aux. Open Input, I/O Module
Input 14
Bit 7 Aux. Close Input, I/O Module
Input 15
Bit 8 User Input 0, I/O Module
Input 0
Bit 9 User Input 1, I/O Module
Input 1
Bit 10 User Input 2, I/O Module
Input 2
Bit 11 User Input 3, I/O Module
Input 3
Bit 12 User Input 4, I/O Module
Input 4
Bit 13 User Input 5, I/O Module
Input 5
Bit 14 Input 6, I/O Module Input 6
Bit 15 Input 7, I/O Module Input 7
Table 3.5 – Field Unit Register Definitions (continued)
Register
Number
Register Name MX/DDC Meaning UEC-3-DDC Meaning
Value of 16 Digital Inputs Value of 16 Digital Inputs
Bit 0 Not Used Bit 0 Analog Input 1 lost
Bit 1 Not Used Bit 1 Analog Input 2 lost
Bit 2 Analog input 1 lost Bit 2 Analog Input 3 lost
Bit 3 Analog input 2 lost Bit 3 Analog Input 4 lost
Bit 4 Network Channels A/B
timed out
Bit 5 Not Used Bit 5 Reserved
Bit 6 DDC board present Bit 6 Reserved
Bit 7 I/O option board present Bit 7 Reserved
13 Digital Inputs 2
Timers and
14
Analog Channels
Bit 8 Not Used Bit 8 Reserved
Bit 9 Not Used Bit 9 Reserved
Bit 10 Not Used Bit 10 Reserved
Bit 11 Not Used Bit 11 Reserved
Bit 12 Phase lost
Bit 13 Phase reverse
Bit 14 Opt User Input 8,
terminal 25
Bit 15 Not Used
Bit 15 Input 9, I/O Module Input 17
Bits 0-15 – Not Used
Bit 4 Network Channels A/B
timed out
Bit 12 Phase lost input, I/O Module
Input 18
Bit 13 Phase reverse input, I/O
Module Input 19
Bit 14 Input 8, I/O Module Input 16
Value of 16 Bits
Bit 0 Analog Channel 1 Low
Bit 1 Analog Channel 2 Low
Bit 2 Analog Channel 3 Low
Bit 3 Analog Channel 4 Low
Bit 4 Analog Channel 1 High
Bit 5 Analog Channel 2 High
Bit 6 Analog Channel 3 High
Bit 7 Analog Channel 4 High
Bit 8 Open reversal time-out
Bit 9 Close reversal time-out
Bit 10 Jammed valve time-out
Bit 11 Network Channel A time-out
Bit 12 Network Channel B time-out
Bit 13 User 1 time-out
Bit 14 User 2 time-out
Bit 15 User 3 time-out
14 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 15
Page 11

Table 3.5 – Field Unit Register Definitions (continued)
Register
Number
24-44 Reserved Special Applications Only Special Applications Only
45-47 Not Named Special Applications Only Special Applications Only
Register Name MX/DDC Meaning UEC-3-DDC Meaning
Value of 16 Bits
Bit 0 User Fault 0
Bit 1 User Fault 1
Bit 2 User Fault 2
Bit 3 User Fault 3
15 User Faults Bits 1-15 – Not Used
16 Current State Bits 0-15 – Not Used
Field Unit
17
Holding Register
Field Unit
18
Holding Register
Field Unit
19
Holding Register
Field Unit
20
Holding Register
Field Unit
21
Holding Register
Field Unit
22
Holding Register
Field Unit
23
Holding Register
TP_START_
48
POSITION
TP_STOP_POSI-
49
TION
50 TP_SAMPLE Special Applications Only Special Applications Only
51 TP_MID_T_HIGH Special Applications Only Special Applications Only
52 TP_MID_T_POS Special Applications Only Special Applications Only
Special Applications Only Special Applications Only
Special Applications Only Special Applications Only
Special Applications Only Special Applications Only
Special Applications Only Special Applications Only
Special Applications Only Special Applications Only
Special Applications Only Special Applications Only
Special Applications Only Special Applications Only
Special Applications Only Special Applications Only
Special Applications Only Special Applications Only
Bit 4 User Fault 4
Bit 5 User Fault 5
Bit 6 User Fault 6
Bit 7 User Fault 7
Bit 8 User Fault 8
Bit 9 User Fault 9
Bits 10-15 Reserved
Value of 16 Bits
Bit 0 Waiting to Open
Bit 1 Waiting to Close
Bit 2 Running Backward
Bit 3 Invalid Configuration
Bit 4 Reverse Switches
Bit 5 OK to Modulate
Bits 6-15 Reserved
Table 3.5 – Field Unit Register Definitions (continued)
Register
Number
Note 1: Torque will be expressed proportionally as a reference only from 40-100% inclusive. Initial indication
may read 0% until torque exceeds 40% minimum.
Note 2: Default value is scaled 0-100 of span. Changes made to “Scale Analog” affect Analog registers (3, 4,
6, 7, 8) and “move-to” commands.
Note 3: Combined Fault bit is a value of 1 or true when bit 5 or 8 or 9 or 15 or (bits 10 and 11) is a value of 1
or true.
Note 4: Channel A is physical connection A1. Channel B is physical connection A2.
MX/DDC actuators shipped prior to 2nd QTR, 1999, have the following definition for Register 9 bit 6. When
this bit has a value of 1 or true, the actuator selector switch is in LOCAL mode. This bit does not indicate
STOP or REMOTE. The actuator selector switch in REMOTE (available for network control) is indicated by
Register 12 bit 00 having a value of 1 or true. Register 9 bit 6 value 0 (zero) or false AND Register 12 bit 00
value 0 (zero) or false indicates selector switch is in the STOP position.
MX/DDC actuators shipped after 2nd QTR, 1999, have the following definition of Register 9 bit 6. When this
bit has a value of 1 or true, the actuator is in LOCAL or STOP (unavailable for network control). The actuator
selector switch in REMOTE (available for network control) is indicated by Register 12 bit 00 having value
of 1 or true.
IMPORTANT: Verify Host program when installing an MX/DDC actuator shipped after 2nd QTR, 1999, on a
network commissioned before 2nd QTR, 1999, for indication of selector switch values. Proper selector switch
indication at the Host will ensure safe conditions at the facility.
Register Name MX/DDC Meaning UEC-3-DDC Meaning
TP_MID_T_AV_
53
VAL
54 TP_STOP_VAL Special Applications Only Special Applications Only
TP_BEFORE
55
MID_T_HIGH_
TP_AFTER
56
MID_T_HIGH
Special Applications Only Special Applications Only
Special Applications Only Special Applications Only
Special Applications Only Special Applications Only
Example
Poll field unit number 125 for 3 registers starting at register 8 with the actuator stopped between
the limits and in local mode.
Query 7D0300070003BFF6
Response 7D0306003D084400003E07
Message Breakdown
Query Response
7D Slave (Field Unit) Address 7D Slave (Field Unit) Address
03 Function 03 Function
00 Starting Address Hi 06 Byte Count
07 Starting Address Lo 00 Data Hi (Register 40008)
00 No. of Points Hi 3D
03 No. of Points Lo 08 Data Hi (Register 40009)
BFF6 Error Check (CRC) 44
Note 1: 003Dh equals 61 Decimal (actuator Analog Input 1 in percent format).
Note 2: 0844h equals 2116 Decimal or 0000 1000 0100 0100 Binary (actuator stopped between limits, local
mode, and Channel B Fail bit is ON).
1
2
00 Data Hi (Register 40010)
00 Data Lo (Register 40010)
3E07 Error Check (CRC)
Data Lo (Register 40008)
Data Lo (Register 40009)
16 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 17
Page 12

3.2.4 Modbus Function Code 04 (Read Input Register)
This function code is used to read the binary contents of input registers in the DDC-100 Field
Unit. The typical use of this function code is to read the analog input registers. If the field unit is
configured for scaled analog data, the register information will be returned as a percent from 0 to
100 (see NOTE below). The first analog input register (Analog 4) will start at register 30005 through
(Analog 1) Input Register 30008.
This function code may also be used to read the information available in registers 9 through 16.
NOTE: Limitorque field units can be configured to report analog data in several formats. See the
appropriate field unit manual for details.
Example
Poll field unit number 70 for 4 registers starting at register 5 (Analog Input Registers 1-4).
(This example assumes that the field unit is configured for scaled analog data.)
Table 3.6 – DDC-100 Coil Assignments Modbus Function Code 05 Usage for Digital Outputs
Coil
Number
1 00 Close / Stop Close / Stop Close / Stop Do Not Use
2 01 Open / Stop Open / Stop Open / Stop Do Not Use
3 02 AS-1 Lockout or Relay #3 Lockout or Relay #3 Relay #3
4 03 AS-2 Do Not Use Relay #4 Relay #4
5 04 AS-3 Do Not Use Relay #5 Relay #5
6 05 AS-4 Relay #6 Relay #6 Relay #6
7 06 AR-1 (Opt) Do Not Use Do Not Use Relay #21
8 07 AR-2 (Opt) Do Not Use Do Not Use Relay #12
9 08 AR-3 (Opt) Do Not Use Do Not Use Do Not Use
Note 1: Relay #2 is physical Relay K2.
Note 2: Relay #1 is physical Relay K1.
Bit
Number
MX/DDC UEC-3-DDC DDC-100 Clamshell I/O Module
Query 460400040004BF7F
Response 460408FFFFFFFF002B001EDBA8
Message Breakdown
Query Response
46 Slave (Field Unit) Address 46 Slave (Field Unit) Address
04 Function 04 Function
00 Starting Address Hi 08 Byte Count
04 Starting Address Lo FF Data Hi (Register 40005)
1
00 No. of Points Hi FF
04 No. of Points Lo FF Data Hi (Register 40006)
BF7F Error Check (CRC) FF
00 Data Hi (Register 40007)
2B
00 Data Hi (Register 40008)
1E
DBA8 Error Check (CRC)
Note 1: FFFFh equals 65535 Decimal (actuator Analog Input 4 value).
Note 2: FFFFh equals 65535 Decimal (actuator Analog Input 3 value).
Note 3: 002Bh equals 43 Decimal (actuator Analog Input 2 value).
Note 4: 001Eh equals 30 Decimal (actuator Analog Input 1 in percent format).
Data Lo (Register 40005)
2
Data Lo (Register 40006)
3
Data Lo (Register 40007)
4
Data Lo (Register 40008)
The normal response to the (05) command is an echo of the command.
Example of force coil command
Force coil 1 of field unit 49 ON. This will CLOSE the valve controlled by field unit 49.
Query 31050000FF0089CA
Response 31050000FF0089CA
Message Breakdown
Query Response
31 Slave (Field Unit) Address 31
05 Function 05 Function
00 Coil Address Hi 00 Coil Address Hi
001 Coil Address Lo 00 Coil Address Lo
FF Force Data Hi FF Force Data Hi
002 Force Data Lo 00 Force Data Lo
89CA Error Check (CRC) 89CA Error Check (CRC)
Note 1: 0000h equals Coil Address 00000001 (field unit coil 1).
0001h equals Coil Address 00000010 (field unit coil 2).
Note 2: FF00h requests the coil to be ON. (0000h requests the coil to be OFF)
Slave (Field Unit)
Address
3.2.5 Modbus Function Code 05 (Force Single Coil)
This function code is used to force a single coil in the DDC-100 Field Unit. Forcing the individual coil
either ON (1) or OFF (0) will energize or de-energize a coil (digital output) in the field unit. Coil 1 in
the field unit closes the actuator and Coil 2 opens the actuator. If the actuator is opening or closing,
changing the status of coil 1 or 2 from a value of 1 to 0 will stop the actuator (the coil will automatically be set to zero when the actuator reaches the full open or full close position).
Available digital outputs for DDC-100 Field Units are listed in Table 3.6. Force-coil commands
should be issued only once for the desired field unit control. Repeated issuance of an acknowledged command will degrade network performance.
3.2.6 Modbus Function Code 06 (Preset Single Register)
This function code is used to preset a single register in the field unit. The function code is typically
used to command the DDC-100 Field Unit by writing values to the 40001 and 40002 registers. A
predetermined value may be used to open/stop/close the actuator, move the actuator to a preset
position, activate/deactivate network ESD, reset the field unit, etc.
The Modbus function code 06 is also used to command a throttling actuator to “move-to” a position of 0-100% of open. The field unit will compare the new position value with the current position
and open or close the valve to meet the new position requirement. This is a two-step command: the
first step is to write the desired position value to the field unit register 40002, then write the value
of 6656 to field unit register 40001. This sequence of commands loads the desired position, then
NOTE: See Bulletin LMAIM1329, Accutronix Installation and Operation for MX-DDC Field Unit to
instructs the field unit to execute the command.
configure AS and AR Relays for DDC control.
For UEC-3-DDC field units containing Modbus Firmware 2.00 or greater and MX-DDC field units
containing Firmware 02/01.00 or greater, the “move-to” command may be executed with a one-step
command.
18 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 19
Page 13

Modbus function code 06 command values for controlling the DDC-100 Field Unit are given in Table
3.7. Each command should be issued only one time for the desired field unit control. Repeated
issuance of an acknowledged command will degrade network performance.
Example of Field Unit Command
Write the command to open an actuator (actuator open) to field unit number 179. This corresponds to writing the value 256 into field unit register 40001.
The normal response to the (06) command is an echo of the command.
NOTE:
1) Only use values listed in table 3.7 For field unit register 40001.
2) Field Unit Register 40002 should only be used for “move-to” position input.
3) The Host MUST issue “move-to” commands in the proper sequence. Failure to issue this
two-step command in the correct sequence will result in the field unit waiting for the proper
command sequence execution before performing the “move-to” function.
4) The “move-to” command should only be used with field units that include the position control
option.
5) Do not write to Field Unit Registers 5-16.
Table 3.7 – Modbus 06 Command and Field Unit Holding Register 40001
Host Commands to
Field Unit Register 1
Null Command 0 Yes Yes Yes Yes
Open 256 Yes Yes Yes Do Not Use
Stop 512 Yes Yes Yes Do Not Use
Close 768 Yes Yes Ye s Do Not Use
Start Network ESD 1280 Yes Yes Ye s Do Not Use
Stop Network ESD 1536 Yes Yes Yes Do Not Use
Engage Relay #1 2304 Yes (AS-1) Do Not Use Do Not Use Yes, K21
Engage Relay #2 2560 Yes (AS-2) Do Not Use Do Not Use Yes, K12
Engage Relay #3 2816 Yes (AS-3) Yes Yes Yes
Engage Relay #4 3072 Yes (AS-4) Do Not Use Yes Ye s
Engage Relay #5 3328 Yes (AR-1) Do Not Use Yes Yes
Engage Relay #6 3584 Yes (AR-2) Yes Ye s Yes
Engage Relay #7 3840 Yes (AR-3) Do Not Use Do Not Use Do Not Use
Disengage Relay #1 4352 Yes (AS-1) Do Not Use Do Not Use Yes, K21
Disengage Relay #2 4608 Yes (AS-2) Do Not Use Do Not Use Yes, K12
Disengage Relay #3 4864 Yes (AS-3) Yes Yes Yes
Disengage Relay #4 5120 Yes (AS-4) Do Not Use Yes Ye s
Disengage Relay #5 5376 Yes (AR-1) Do Not Use Yes Yes
Disengage Relay #6 5632 Yes (AR-2) Ye s Yes Ye s
Disengage Relay #7 5888 Yes (AR-3) Do Not Use Do Not Use Do Not Use
Move-To (enable) 6656 Yes Yes Ye s Do Not Use
Note 1: Engage and disengage Relay #1 control physical Relay K2.
Note 2: Engage and disengage Relay #2 control physical Relay K1.
Do Not Use–This command is not intended for use in this configuration.
Other registers may also be preset to control or change other functions but care must always be taken to
properly change these values. An improper value written to a register can cause undesirable actions from the
DDC-100 Field Unit.
NOTE: Null Command–The field unit takes no action when this command is received. This command is
typically used by a Host to reset the Host output register when required.
Value
(dec.)
MX-DDC UEC-3-DDC DDC-100
Clamshell
I/O Module
Query: B306000001009388
Response: B306000001009388
Message Breakdown
Query Response
B3 Slave (Field Unit) Address B3
06 Function 06 Function
00 Register Address Hi 00 Register Address Hi
001 Register Address Lo 00 Register Address Lo
01 Force Data Hi 01 Preset Data Hi
002 Force Data Lo 00 Preset Data Lo
9388 Error Check (CRC) 9388 Error Check (CRC)
Note 1: 0000h equals Register Address 40001 (field unit register 1, command register).
Note 2: 0100h requests the register to be preset with 256 Decimal (engage open contactor).
Slave (Field Unit)
Address
Example of “Move-To” Command
Move an actuator at address 179 to 42% of open by first writing the value of 42 to the field unit
40002 register. After receiving a response from the field unit, write the value of 6656 to the field
unit 40001 register. The actuator will then move to a position of 42% of open.
First Command
Query: B3060001002A4207
Response: B3060001002A4207
First Command Message Breakdown
Query Response
B3 Slave (Field Unit) Address B3
06 Function 06 Function
00 Register Address Hi 00 Register Address Hi
011 Register Address Lo 01 Register Address Lo
00 Force Data Hi 00 Preset Data Hi
2A2 Force Data Lo 2A Preset Data Lo
4207 Error Check (CRC) 4207 Error Check (CRC)
Note 1: 001h equals Register Address 40002 (field unit register 2, argument register).
Note 2: 002Ah equals 42.
Slave (Field Unit)
Address
20 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 21
Page 14

Second Command
Query B30600001A009978
Response B30600001A009978
Second Command Message Breakdown
Query Response
B3 Slave (Field Unit) Address B3
06 Function 06 Function
00 Register Address Hi 00 Register Address Hi
1
00
1A Force Data Hi 1A Preset Data Hi
2
00
9978 Error Check (CRC) 9978 Error Check (CRC)
Note 1: 0000h equals Register Address 40001 (field unit register 1, command register).
Note 2: 1A00h equals 6656.
Register Address Lo 00 Register Address Lo
Force Data Lo 00 Preset Data Lo
Slave (Field Unit)
Address
Example of single register write “move-to” command
This command allows a Host to issue the “move-to” command with a single write utilizing the
Modbus function code 06. Register 1 will be used to complete this command.
Message Breakdown
Query Response
01 Slave Address 01 Slave Address
06 Function 06 Function
00 Starting Address Hi 00 Starting Address Hi
00 Starting Address Lo 00 Starting Address Lo
4B Preset Data Hi 4B Preset Data Hi
32 Preset Data Lo 32 Preset Data Lo
3EEF Error Check (LRC or CRC) 3EEF Error Check (LRC or CRC)
3.2.7 Modbus Function Code 08 (Diagnostics)
This function code provides a series of tests for checking the communication system between
the Host and field units (slaves), or for checking various error conditions within the field unit.
This function code uses a two-byte subfunction code field in the query to define the type of test
to be performed. The field unit echoes both the function code and subfunction code in a normal
response. It does not affect the field unit in any way. If this exchange is successful, then the
communication is successful.
A listing of the supported diagnostic two-byte subfunction codes is given in Table 3.8.
Rules for utilizing this command:
• Field unit scaling must be congured for 0-100.
• To use the hexadecimal method of determining a single write “move-to” command, 0x4B is
always placed into the Hi Byte of Register 1.
• The desired position value is always placed into the Lo Byte of Register 1.
To move the actuator to a position of 50%, place the value 0x4B in the high byte and the value of
0x32 (50 decimal) into the low byte.
Example:
Hex format: 0x4B32
To use the decimal method of determining a single write “move-to” command, add the desired
position value to 19200.
Example:
Desired position: 50%
19200 + 50 = 19250
Example of single write “move-to” command
Move an actuator at address 1 to 50% of open by writing the value of 19250 (0x4B32) to the field
unit 40001 register. The actuator will then move to a position of 50% open.
Example
Query: 010600004B323EEF
Response: 010600004B323EEF
Example
Request a loopback (return query data) from the field unit at network address 3.
Query 030800000000E1E9
Response 030800000000E1E9
Message Breakdown
Query Response
03 Slave (Field Unit) Address 03 Slave (Field Unit) Address
08 Function 08 Function
00 Subfunction Hi 00 Subfunction Hi
00 Subfunction Lo 00 Subfunction Lo
00 Data Hi 00 Data Hi
00 Data Lo 00 Data Lo
E1E9 Error Check (CRC) E1E9 Error Check (CRC)
Table 3.8 – Diagnostic Codes Supported by the DDC-100 Field Unit
Code Name
00 Return Query Data
01 Restart Communication Option
02 Return Diagnostic Register1
03 Change ASCII Input Delimiter
04 Force Listen-Only Mode
10 (0A Hex) Clear Counters and Diagnostics Register
11 (0B Hex) Return Bus Message Count
12 (0C Hex) Return Bus Communication Error Count
13 (0D Hex) Return Bus Exception Error Count
14 (0E Hex) Return Slave Message Count
Note 1: Contains DDC-100 Field Unit diagnostic information. For engineering use only.
22 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 23
Page 15

3.2.8 Modbus Function Code 15 (Force Multiple Coils)
This function code allows the user to force multiple coils with a single command and uses the same
coil assignments as the function code 05.
It should be noted that the coils are operated from the lowest coil number to the highest. Forcing
coil 1 or 2 OFF (0) is considered a stop command, sending a 15 command to force two coils
starting with coil 1, with coil 1 ON and coil 2 OFF, would result in the unit stopping, since coil 2 is
forced OFF after coil 1 is forced ON.
To prevent inadvertent Stop commands from being issued, it is recommended to force one coil at a
time.
Available digital outputs for DDC-100 Field Units are listed in Table 3.6. Force multiple coil
commands should be issued only once for the desired field unit control. Repeated issuance of an
acknowledged command will degrade network performance.
NOTE: This function code is implemented in UEC-3-DDC Modbus Firmware 2.00 and greater and
MX-DDC Firmware 02/01.00 and greater
Example of force coil command
Force coil 1 of field unit 1 ON. This will CLOSE the valve controlled by field unit 1.
Query: 010F000000010101EF57
Response: 010F00000001940B
Message Breakdown
Query Response
01 Slave Address 01 Slave Address
0F Function 0F Function
00 Coil Address Hi 00 Coil Address Hi
00 Coil Address Lo 00 Coil Address Lo
00 Quantity of Coils Hi 00 Quantity of Coils Hi
01 Quantity of Coils Lo 01 Quantity of Coils Lo
01 Byte Count 940B Error Check (LRC or CRC)
01 Force Data Lo
EF57 Error Check (LRC or CRC)
Note: 000000010101h equals Coil Address 00000001 (field unit coil 1)
000100010101h equals Coil Address 00000010 (field unit coil 2)
3.2.9 Modbus Function Code 16 (Preset Multiple Registers)
This function code is used to preset single or multiple registers in the field unit and uses the same
predetermined register values as the function code 06. This function code is typically used to
command the DDC-100 Field Unit by writing values to the 40001 and/or 40002 registers.
Modbus function code 16 command values for controlling the DDC-100 Field Unit are given in Table
3.7. Each command should be issued only one time for the desired field unit control. Repeated
issuance of an acknowledged command will degrade network performance.
Example of Field Unit Command
Write the command to open an actuator (actuator open) to field unit number 1. This corresponds to
writing the value 256 into field unit register 40001.
Query: 011000000001020100A7C0
Response: 01100000000101C9
Message Breakdown
Query Response
01 Slave Address 01 Slave Address
10 Function 10 Function
00 Starting Address Hi 00 Starting Address Hi
00 Starting Address Lo 00 Starting Address Lo
00 Number of Registers Hi 00 Number of Registers Hi
01 Number of Registers Lo 01 Number of Registers Lo
02 Byte Count 01C9 Error Check (LRC or CRC)
01 Preset Data Hi
00 Preset Data Lo
A7C0 Error Check (LRC or CRC)
Example of “Move-To” Command
Move an actuator at address 1 to 50% of open by presetting registers 40001 with the value 6656,
and register 40002 with the value 50 in a single write command. The actuator will receive this
message and move to a position of 50% open.
Query: 011000000002041A0000327562
Response: 01100000000241C8
Message Breakdown
Query Response
01 Slave Address 01 Slave Address
10 Function 10 Function
00 Starting Address Hi 00 Starting Address Hi
00 Starting Address Lo 00 Starting Address Lo
00 No. of Registers Hi 00 No. of Registers Hi
02 No. of Registers Lo 02 No. of Registers Lo
04 Byte Count 41C8 Error Check (LRC or CRC)
1A Preset Data Hi
00 Preset Data Lo
00 Preset Data Hi
32 Preset Data Lo
7562 Error Check (LRC or CRC)
Note: The single register write “Move-to” command may also be used with the function code
16. This function code may also utilize the Single Register write “move-to” command.
The normal response returns the slave address, function code, starting address, and quantity of
registers preset.
NOTE: This function code is implemented in UEC-3-DDC Modbus Firmware 2.00 and greater and
MX-DDC Firmware 02/01.00 and greater.
24 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 25
Page 16

This page is intentionally blank.
The DDC-100
4
The Flowserve Limitorque DDC-100 Network is a digital communications network based on
non-proprietary hardware and protocols. This network is capable of maintaining up to 250 valve
actuators or other devices over a simple shielded, twisted-pair connection. The network consists
of a master (Host PLC, Host Computer, Limitorque Master Station, or some other Master-capable
device) and a number (up to 250) of field units. The EIA RS-485 standard is used for the physical
interface between devices to provide reliable communications over long distances.
Two protocols are supported by Limitorque Field Units—Modbus® and BITBUS®. The protocol
must be specified when the units are ordered; however, the protocol may be changed in the field
(requires new EPROM). The Modbus protocol was developed by AEG Modicon and the BITBUS
protocol was developed by the Intel Corp. Modbus protocol is more widely used, has a simpler
implementation, and satisfies most applications that are not extremely time-critical. Therefore, this
document addresses only the Modbus protocol. BITBUS protocol information is available upon
request.
Network
NOTE: The MX-DDC does not support Bitbus protocol.
The network cable connects the field unit to the Host System. Belden 3074F, 3105A, and 9841
shielded, twisted-pair cable should be used. The use of other cables may result in a reduction of
internodal distances or increased error rate. Other individually shielded, twisted-pair cables with
electrical properties within 5% of the recommended Belden cables may be used but have not been
performance-tested with the DDC-100 Network.
Belden 3074F Specifications
• Total cable length between repeaters or nodes with repeaters: up to 19.2 kbps: 5000' (1.52 km)
For loop mode, this is the total length between operating field units. If a field unit loses power,
relays internal to the field unit connect the A1 Channel to the A2 Channel, which effectively doubles
the length of the cable (assuming a single field unit fails). If you need to assure operation within
specifications in the event of power failure to field units, then this consideration must be added.
Example: To assure operation within specification when any two consecutive field units lose power,
then the maximum length on cable up to 19.2 kbps: 5000' (1.52 km) per every four eld units.
26 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 27
Page 17

Key Specs
• Resistance/1000 ft = 18 AWG (7x26)
6.92 ohms each conductor (13.84 ohms for the pair)
• Capacitance/ft = 14 pF (conductor-to-conductor)
• Capacitance/ft = 14 pF (conductor-to-shield)
Belden 3105A Specifications
• Total cable length between repeaters or nodes with repeaters: up to 19.2 kbps: 4500' (1.37 km)
For loop mode, this is the total length between operating field units. If a field unit loses power,
relays internal to the field unit connect the A1 Channel to the A2 Channel, which effectively doubles
the length of the cable (assuming a single field unit fails). If you need to assure operation within
specifications in the event of power failure to field units, then this consideration must be added.
Example: To assure operation within specification when any two consecutive field units lose power,
then the maximum length on cable up to 19.2 kbps: 4500' (1.37 km) per every four eld units.
Key Specs
• Resistance/1000 ft = 22 AWG (7x30)
14.7 ohms each conductor (29.4 ohms for the pair)
• Capacitance/ft = 11.0 pF (conductor-to-conductor)
• Capacitance/ft = 20.0 pF (conductor-to-shield)
The optional channel, Channel B, is used in network topologies that feature dual redundant
communication paths. Please contact Flowserve for further information about dual redundant
communication paths with the DDC-100 Network.
4.1.1 Field Unit Network Bypass Relays
Every Limitorque DDC-100 Field Unit is equipped with a set of network bypass relays designed
to isolate the individual field unit from the network in the event of a field unit power failure. These
normally closed relays are energized on field unit power-up allowing the network data transmissions to enter the field unit repeater circuitry and UART (Universal Asynchronous Receive Transmit
circuit). When the field unit power is turned off, these relays close, shorting the signal through the
field unit network board so the signal may pass to the next field unit. This isolates the powereddown field unit from the network while allowing the remainder of the network to function normally.
Care must be taken in the design of the DDC-100 network cable routing. This is necessary so
maintenance programs or other group power outage conditions do not add more physical cable
distance between two functional field units than the RS-485 electrical signal can support.
NOTE: The MX-DDC Field Unit will not energize the network bypass relays until the field unit is fully
operational and ready to communicate. UEC-3-DDC Field Units revision 1.57 and greater will “fast
start” the UART, preventing network communication disruption during the field unit reboot cycle.
4.1.2 Field Unit Repeater Circuits
Belden 9841 Specifications
• Total cable length between repeaters or nodes with repeaters: up to 19.2 kbps: 3500' (1 km)
For loop mode, this is the total length between operating field units. If a field unit loses power,
relays internal to the field unit connect the A1 Channel to the A2 Channel, which effectively doubles
the length of the cable (assuming a single field unit fails). If you need to assure operation within
specifications in the event of power failure to field units, then this consideration must be added.
Example: To assure operation within specification when any two consecutive field units lose power,
then the maximum length on cable up to 19.2 kbps: 3500’ (1 km) per every four field units.
Key Specs
• Resistance/1000 ft = 24 AWG (7x32)
24 ohms each conductor (48 ohms for the pair)
• Capacitance/ft = 12.8 pF (conductor-to-conductor)
• Capacitance/ft = 23 pF (conductor-to-shield)
4.1 Field Unit Network Communication Channels
Before proceeding with discussions of network polling, network error monitoring, and network
control, it is necessary to explain some network terminology with respect to field unit communication channels, ports, and hardware features.
All Limitorque DDC-100 Field Units are provided with a dual port network communication channel.
This channel is designated Channel A and the ports are designated ports A1 and A2. Both ports are
capable of bi-directional serial communications and comply with the EIA RS-485 standard.
In addition, some field units can optionally be ordered or retrofitted with a second dual port network
communication channel. This channel is designated Channel B and the ports are designated ports
B1 and B2. Channel B is implemented by adding a Granddaughter Board and an additional Network
Board to the standard field unit (not available with MX-DDC).
Every Limitorque DDC-100 Field Unit communications channel contains a repeater circuit that
recenters, reclocks, and amplifies the incoming signal and sends it out the opposite port. The circuit
is bi-directional, so it will repeat the received signals from port A1 out A2 or from port A2 out A1.
When the optional Granddaughter Board (not available with the MX-DDC) is added, the repeater
also recenters, reclocks, and amplifies the incoming signal received from B1 out B2 or from B2 out
B1. Although the circuit resends the entire message, there is less than a one-bit time delay before
retransmission out the corresponding port.
4.2 Network Topologies
Three network topologies are commonly used and supported by Limitorque—redundant loop,
single-ended loop (or half loop), and single-line multi-drop. The recommended cable types for
all three topologies are Belden 3074F, Belden 3105A, or Belden 9841. Other individually shielded,
twisted-pair cables with electrical properties within 5% of Belden 3074F, Belden 3105A, or Belden
9841 may be used but have not been performance-tested with the DDC-100 Network.
4.2.1 Redundant Loop
The redundant loop topology requires two serial communication ports on the Host device.
Because each field unit can be accessed by two ports, redundant access paths are supported. The
connections from the serial ports to the field units and between field units are made with shielded,
twisted-pair cable in a loop configuration. This topology tolerates a single-line break or short
while maintaining communications to all field units. Figure 4.1 shows the redundant loop network
topology.
With redundant loop topology, serial data is transmitted from Host port 1 through an RS-232 to
RS-485 converter to port A1 of the first field unit. The field unit passes the data that comes in
port A1 out through port A2 to the next field unit A1 port. Each subsequent field unit receives data
through its A1 port then passes the data out through its A2 port to the next field unit. The looped
communication continues in this manner until the last field unit port A2 relays the serial data to port
28 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 29
Page 18

2 on the Host. The Host is not required to act on the data received at the second port. Note that,
because of the bi-directional nature of the serial ports, the direction of data flow can be reversed.
Communications can be initiated by port 2 of the Host to port A2 of the first field unit. This data is
then transmitted out port A1 to port A2 of the next field unit. The data then continues in this direction until it reaches port 1 of the Host. In either direction, the signal is regenerated in each field unit
to permit longer-distance communications with reduced noise sensitivity and improved reliability.
Figure 4.1 – DDC-100 Redundant Loop Network
Legend
MOV
- Motor-Operated Valve
16
- Data A1
- Data A1*
15
- Data A2
41
29
- Data A2*
D-M
- Data A1 (UEC-3-DDC)
- Data A1*(UEC-3-DDC)
D-M*
D-S
- Data A2 (UEC-3-DDC)
- Data A2* (UEC-3-DDC)
D-S*
- Shield
N/C
- No Connection
Data terminal is positive with respect to data* terminal
MOV-2
TB3
A1
D-M
A1*
D-M*
TB5
See Note 5
N/C
TB4
A2
D-S
A2*
D-S*
MOV-3
See Note 5
A1*
29
41
15
16A2A1
A2*
RS-232
RS-232 to RS-485
converter with
surge suppression
Data 1
Data* 2
Ground 3
RS-485
N/C
Earth Ground
(See Note 4)
Host
RS-232
PORT 1
Network Port A
MOV-1
See Note 5
A1*
29
41
Network Port B
15
16A2A1
A2*
RS-232
PORT 2
N/C
4.2.2 Single-Ended Loop
The single-ended loop topology is the loop topology described above except that only one end of
the loop is connected to the Host as shown in Figure 4.2. The single-ended loop is wired by cabling
from the Host port to the first field unit port A1. Port A2 of this field unit is then connected to port
A1 of the next field unit. This continues until the last field unit is connected. (If a stub cable is run
from port A2 of the last field unit to a planned field unit location, or the last field unit is disconnected, the end of the cable must be terminated with a 120 ohm resistor to prevent unacceptable
signal reflections.) The connection of the single-ended loop is identical to the redundant loop except
that in the single-ended loop the connection from the last field unit to port 2 of the Host is omitted.
The single-ended loop topology utilizes the field unit repeater circuitry that maximizes the number
of field units and distance inherent with the loop topology. The single-ended loop is inherently less
reliable than the redundant loop topology because the Host can only reach the field units from one
direction. It is, however, more reliable than the single-line multi-drop because a break or a short will
only prevent communication with the field units beyond the break or short.
Figure 4.2 – DDC-100 Single-Ended Loop Network
Legend
MOV
- Motor-Operated Valve
16
- Data A1
- Data A1*
Host
RS-232
PORT 1
N/C
Network Port A
15
- Data A2
41
29
- Data A2*
D-M
- Data A1 (UEC-3-DDC)
- Data A1*(UEC-3-DDC)
D-M*
D-S
- Data A2 (UEC-3-DDC)
- Data A2* (UEC-3-DDC)
D-S*
- Shield
N/C
- No Connection
Data terminal is positive with respect to data* terminal
RS-232 to RS-485
converter with
surge suppression
RS-232
Data 1
Data* 2
Ground 3
RS-485
Earth Ground
(See Note 4)
N/C
TB4
A2
D-S
A2*
D-S*
Notes:
1) Belden 3074F, 3105A, or 9841 shielded cable is recommended.
2) Correct polarity for field unit and network controller
connection is necessary for proper operation.
3) Connections shown are typical. The number of
MOVs shown may not indicate true system size.
4) Earth ground: ground rod
5) Earth ground: ground rod or lug in
actuator if actuator is grounded.
MOV-250
TB5
See Note 5
MOV-249
See Note 5
TB3
A1
D-M
A1*
D-M*
N/C
15
A1*
16A2A1
29
A2*
41
Diagnostic Note:
Polarity and level of the network’s data connection can
be checked by measuring voltage between data and
data* terminals. This voltage should be greater than
+200 mVDC with network controller network ports
disconnected.
Earth Ground Note:
If low impedance earth ground is not available at
each actuator, contact engineering for alternative
earth ground surge protection strategies.
MOV-248
N/C
TB4
TB3
TB5
See Note 5
A1
D-M
A1*
D-M*
Notes:
1) Belden 3074F, 3105A, or 9841 shielded cable is recommended.
2) Correct polarity for field unit and network controller
connection is necessary for proper operation.
3) Connections shown are typical. The number of
MOVs shown may not indicate true system size.
4) Earth ground: ground rod
5) Earth ground: ground rod or lug in
RS-232 to RS-485
converter with
surge suppression
RS-232
Data 1
Data* 2
Ground 3
RS-485
actuator if actuator is grounded.
N/C
Earth Ground
(See Note 4)
TB4
D-S
D-S*
MOV-1
See Note 5
A1*
29
41
MOV-250
TB5
See Note 5
MOV-3
MOV-2
15
16A2A1
A2*
N/C
TB3
A1
D-M
A1*
D-M*
TB3
A1
D-M
A1*
D-M*
TB5
See Note 5
MOV-249
See Note 5
15
A1*
16A2A1
29
N/C
A2*
41
N/C
TB4
A2
D-S
A2*
D-S*
See Note 5
15
A1*
16A2A1
29
A2*
41
MOV-248
N/C
TB4
A2
D-S
A2*
D-S*
TB5
See Note 5
N/C
TB3
A1
D-M
A1*
D-M*
Diagnostic Note:
Polarity and level of the network’s data connection can
be checked by measuring voltage between data and
data* terminals. This voltage should be greater than
+200 mVDC with network controller network ports
disconnected.
Earth Ground Note:
If low impedance earth ground is not available at
each actuator, contact engineering for alternative
earth ground surge protection strategies.
A2
D-S
A2*
D-S*
30 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 31
Page 19

4.2.3 Single-Line Multi-drop
The single-line multi-drop topology is shown in Figure 4.3. Single-line multi-drop is wired by
cabling from the Host and connecting to the first field unit port A1. The cable to the next field unit
is attached to the same terminals on the first field unit and then run to port A1 on the second field
unit. This continues until the last field unit is connected.
A single-line multi-drop topology can simplify installation (especially when pre-existing wiring
is used), but it does not offer the extra reliability of a looped communication path. A line break
prevents communication with field units beyond the break, and a line short will cause a loss of
communication with all field units.
The maximum number of field units that can be accommodated by the single-line multi-drop
network is 28 units and the maximum distance between the Host and the last field unit is 1800
feet (550 m) without the use of repeaters. Note that all Limitorque field units can be wired to act as
repeaters by using ports A1 and A2.
Flowserve recommends use of the single-ended loop topology in lieu of single-line, multi-drop for
the MX-DDC.
NOTE: The single-line multi-drop topology requires the removal of termination resistors and bias
voltage jumpers from all but the last field unit. See the appropriate field unit manual or contact
Flowserve for assistance.
Figure 4.3 – DDC-100 Single-Line Multi-Drop Network
Host
RS-232
PORT 1
Network Port A
RS-232 to RS-485
converter with
RS-232
surge suppression
Data 1
Data* 2
Ground 3
RS-485
Earth Ground
(See Note 4)
N/C
MOV-1
TB3
D-M
D-M*
A1
A1*
See Note 5
TB4
TB5
A1
A1*
Legend
MOV
- Motor-Operated Valve
D-M
- Data A1 (UEC-3-DDC)
- Data A1*(UEC-3-DDC)
D-M*
D-S
- Data A2 (UEC-3-DDC)
- Data A2* (UEC-3-DDC)
D-S*
- Shield
N/C
- No Connection
Data terminal is positive with respect to data* terminal
MOV-2
N/C
TB3
D-M
D-M*
A1
A1*
See Note 5
TB4
TB5
A1
A1*
MOV-3
N/C
TB3
D-M
D-M*
A1
A1*
See Note 5
TB4
TB5
A1
A1*
TB4
D-S
D-S*
Notes:
1) Belden 3074F, 3105A, or 9841 shielded cable is recommended.
2) Correct polarity for field unit and network controller
connection is necessary for proper operation.
3) Connections shown are typical. The number of
MOVs shown may not indicate true system size.
4) Earth ground: ground rod
5) Earth ground: ground rod or lug in
actuator if actuator is grounded.
MOV-28
TB5
See Note 5
MOV-27
TB3
TB3
A1
D-M
A1*
D-M*
A1
A1*
N/C
D-M
D-M*
A1
A1*
See Note 5
TB4
N/C
TB5
Diagnostic Note:
Polarity and level of the network’s data connection can
be checked by measuring voltage between data and
data* terminals. This voltage should be greater than
+200 mVDC with network controller network ports
disconnected.
Earth Ground Note:
If low impedance earth ground is not available at
each actuator, contact engineering for alternative
earth ground surge protection strategies.
TB4
MOV-26
TB5
See Note 5
TB3
A1
A1
D-M
A1*
A1*
D-M*
4.3 Network Polling
Network polling is a Host-generated systematic request for information from each field unit on
the serial communication network. This systematic process updates the Host Data Table (Poll
Table) with each complete network scan. By utilizing this sequential update sequence, the Host can
operate more efficiently because the Data Table always contains up-to-date information.
In systems in which there is no up-to-date Data Table, the Host must check the status of a field unit
every time it needs to actuate a valve. This check is required to determine if the actuator is capable
of movement prior to the issuance of the command to move. The continuous poll process should
be enabled at all times to allow peak network performance.
N/C
Safeguards are built into the Limitorque field units that operate in the event of a disruption in the
polling process. The field unit network watchdog timer will start a field unit reset process if the field
unit does not recognize that it has been polled in a specified time interval (default 60 seconds). This
field unit reset process is designed to clear any errors in the field unit that may prevent successful
communication to a Host device.
32 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 33
Page 20

Causes of inability to communicate (fail to respond within the watchdog timer interval) can range
from faulty network wiring, receipt of garbled or poorly constructed messages, multiple simultaneous Host queries, Host queries faster than field unit responses, or Host shutdown. In a normally
functioning actuator network, the field unit reset process will not be activated.
The UEC-3-DDC factory default setting (changeable through field unit Register 112) for the network
watchdog timer is 60 seconds. If the field unit is not polled within this time interval, the field unit
will reset its UART in an attempt to re-establish communication with the Host. This process of
waiting for a poll and UART resets will occur a total of three times. After three cycles, the field unit
microprocessor CPU will be reset. The field unit will then remain inactive and wait for network
communication without further resetting. If a valid query is received, the network watchdog timer is
restarted.
The MX-DDC does not perform a complete field unit reset. After 60 seconds without communication, the MX-DDC Field Unit will set the appropriate bit and indicate a communication loss on
Channel A1 (Channel A) or A2 (Channel B) or both.
Table 4.2 – Average Network Scan Time (seconds)
Number of
Field Units
10 .40 .94 .50 1.4 .61 1.9
20 .80 1.9 .98 2.8 1.3 3.8
40 1.6 3.9 2.0 5.6 2.5 7.6
50 2.3 5.0 2.9 7 3.8 9.6
100 4.6 11 6 15 6.5 20
200 9.2 24 10 32 13 43
250 11.5 32 12 42 16 56
Note 1: Network Protocol - Modbus RTU
Communication Settings - 9600 baud, parity - none, data bits = 8, stop bits = 1
Network Cable - Belden 3074F, 3105A, and 9841
Scan Time 1 Register
per Field Unit
MX-DDC UEC-3-DDC MX-DDC UEC-3-DDC MX-DDC UEC-3-DDC
Scan Time 5 Registers
per Field Unit
Scan Time 10 Registers
per Field Unit
NOTE: Each field unit reset (UART or CPU) may take 10 to 15 seconds to perform, during which
Host communications, queries, and commands are not accepted.
Four other important points concerning network polling
1) The information that is requested from each field unit can be the same for every field unit, or
each field unit may be requested to return a unique set of information.
2) When sending commands to the field units, the Host should always wait until a command is
acknowledged before sending another command. This will prevent communication collisions
on the network.
3) The network can have only one Master device at a time. Simultaneous Masters are not
permitted.
4) Host time-out should be greater than 200 ms.
The network scan time for a Modbus Network depends on the number of registers requested
from each device and the number of devices attached to the network. Tables 4.1 and 4.2 provide
guidelines for calculating average field unit poll times and average network scan times. The Modbus
function code 03 was used to obtain this information.
Tables 4.1 and 4.2 do not include Host delay between each poll. Host delays between each poll are
variable for each Host. The Host turn-time from receipt of poll to issuance of next poll should be
greater than 20 ms and less than 50 ms.
Table 4.1 – Average Field Unit Response Time
Number of MX-DDC Query Send/ UEC-3-DDC Query Send/
Registers Receive Time (ms) Receive Time (ms)
1 40 71
5 50 109
10 62 162
Note 1: Network Protocol - Modbus RTU
Communication Settings - 9600 baud, parity - none, data bits = 8, stop bits = 1
Network Cable - Belden 3074F, 3105A, and 9841
Example
An MX-DDC Network with 20 field units with 5 registers per field unit being polled will have an
average total network scan time of .98 seconds. Host message turn-time per
field unit must be added to this number. (Typical open/close or close/open operating times for
motor-operated valves is 30 to 90 seconds.)
4.3.1 Network Communication Errors
In understanding how network communication errors should be handled, a brief discussion
defining the difference between field unit communication fault status and Host communication fault
status should be helpful. In a typical Limitorque DDC-100 Network, there are two levels of Channel
A and Channel B fault.
The first level is the field unit level. In each DDC-100 Field Unit, there are Channel A/B Fault bits
located in Register 9, bits 10 and 11 respectively. These bits are set by the field unit as a result of
successful communication with the Host over the network.
For UEC-3-DDC and I/O module-based field units, the Channel A bit monitors the standard
communication Channel A (ports A1 and A2) for redundant loop communications. The Channel B
bit monitors the optional Channel B (ports B1 and B2). Channel B is a second port that is used for
dual redundant loop communications.
In a redundant loop network with no faults, the UEC-3-DDC Field Unit will report Channel A with
no fault (Reg. 9, bit 10 – contents = 0), but Channel B will indicate a fault condition (Reg. 9, bit 11
– contents = 1). The Channel A fault bit is 0 because the eld unit Channel A is active with no faults,
while Channel B is 1 because the optional granddaughter board for Channel B is not installed or in
use.
For MX-DDC-based field units, the Channel A bit monitors the communication Channel A1 (terminal
points 15 and 16) and the Channel B bit monitors communication Channel A2 (terminal points 29
and 41) for redundant loop communications (the MX-DDC does not support dual redundant loop
communications).
In a redundant loop network with no faults, the MX-DDC Field Unit will report Channel A with no
fault (Reg. 9, bit 10 – contents = 0) and Channel B with no fault (Reg. 9, bit 11 – contents = 0).
This level of communication-error reporting is used for local field unit communication diagnostics.
Should a Host not be able to communicate with a field unit, the Host will not be able to retrieve this
or any other status information to indicate error conditions.
34 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 35
Page 21

The second level of monitoring Channel A/B fault occurs at the Host and provides communication
information for utilization by the Host. When a Host is configured with two network serial ports, one
port is designated as Channel A (Port 1) and the other port is designated as Channel B (Port 2).
During the course of polling, the Host will retrieve the field unit status register that contains the
field unit-defined status of Channel A/B fault described above. The Host may overwrite the retrieved
field unit Channel A/B faults (field unit Register 9 bits 10 and 11) in the Host’s memory to indicate
communication status between the Host serial ports (A and B) and each field unit.
Channel A and Channel B fault bits may equal a 1 or 0 depending on the Host’s requirement of a 1
or 0 to indicate successful communication. This provides an accurate indication of the communication status from both Host Serial ports to each field unit. Typically, this type of communication-fault
recording is consistent with Hosts containing “C”-based programs.
An equally effective method for recording the communication status between the Host’s two
network serial communication ports and networked field units is to create a separate memory location in the Host for recording Channel A/B fault status. This memory location may be configured so
a register, say Register X, bits 0 and 1 are field unit 1 Channel A/B fault status, bits 2 and 3 are field
unit 2 Channel A/B fault status and so on.
Another permutation of this method is to configure the Host memory so Register X contains the
Channel A fault status for the first 16 field units and Register X+1 contains the Channel B fault
statuses for the first 16 field units and so on.
It should be remembered that a Host with only one serial communications port will not have the
ability to handle redundant loop network communications. Therefore, communication status will be
limited to only one channel.
NOTE: In the Direct-to-Host architecture, Channel A and B faults need to be set by the Host. Setting
these faults will allow the system integrator to establish field unit time-out, retry, and field unit
communication status.
with the field unit are not successful from the second port, the corresponding Channel Fault bit
will be set to 1, and the Host will resume polling on the original port. Once the Host has completed
polling all configured field units on the first port, the polling routine will switch to the other port and
repeat the above process.
Example
There are five field units on a network (redundant loop topology) and field unit number 3 has been
turned off. The Host is currently polling field units through Host port 1 (Channel A). Field unit
numbers 1 and 2 respond to the Host port 1 poll. Field unit number 3 does not respond to the port
1 poll causing the Host to set field unit 3 Channel A Fault bit to 1. The Host now changes to port 2
(Channel B) and polls field unit number 3. Field unit number 3 does not respond to the port 2 poll,
causing the Host to set the field unit 3 Channel B Fault bit to 1. Next, the Host changes back to port
1 and attempts to poll field unit number 4. This communication attempt is successful and the Host
now polls field unit number 5 through Host port 1. Field unit number 5 responds, completing the
port 1 poll.
Next, the Host repeats the process through Host port 2 (Channel B). Field units 1 and 2 respond,
field unit 3 does not respond, and the Host sets the field unit 3 Channel B Fault bit to 1. The Host
changes to port 1 (Channel A) and attempts to communicate with field unit 3. Field unit 3 does
not respond. The Host sets the field unit 3 Channel A Fault bit to 1, switches back to port 2, and
resumes polling the remainder of the configured field units. Once field units 4 and 5 have been
successfully polled via port 2, the Host then switches to port 1 and repeats the polling process. The
intermediate alternating port process described above continues until field unit 3 is powered on and
the communication fault clears. (See Example 2 in this section.)
Commands for field unit control should interrupt the polling process and be issued through the
current poll port. Once the field unit has acknowledged the command, the Host resumes the polling
process. In the event of a communication fault between the current poll port and a commanded
field unit, the Host should issue the command through the other communication port.
4.3.2 Network Communication Examples
The following write-ups and examples indicate proven polling techniques. The programmer who
adheres to these various examples will find their projects easier to implement.
ALL EXAMPLES SHOWN DEPICT A NETWORK IN WHICH THE HOST IS OVERWRITING THE
RETRIEVED FIELD UNIT CHANNEL A/B FAULT BIT (FIELD UNIT REGISTER 9, BITS 10 AND 11).
The programmer has the choice of overwriting these communication fault bits or creating a
separate communication fault table in the Host’s memory as detailed in Section 4.3.1, Network
Communication Errors.
In Redundant Loop Mode, the Host provides communication redundancy to each configured field
unit on the network. The Host monitors the status of the communication path between port 1 and
each configured field unit and between port 2 and each configured field unit. Host port 1 communication status between port 1 and the addressed field unit is recorded in the field unit Channel A
Fault bit. Host port 2 communication status between port 2 and the addressed field unit is recorded
in the field unit Channel B Fault bit. Both Channel A and Channel B Fault bits are located in the field
unit Status Register 9, bits 10 and 11 in the Host memory table.
On a fault-free network where all configured field units are communicating, the Host will first poll
all field units via port 1, then poll all field units via port 2, back to port 1, and so on. As each field
unit is successfully polled, the respective Channel Fault bit is set to 0 in the Host’s field unit Status
Register. Remember the Host port 1 equals Channel A and the Host port 2 equals Channel B. (See
Example 1 in this section.)
If a field unit cannot be reached on a poll, the Host will set the corresponding Channel Fault bit to 1,
switch to the other port and attempt to communicate with the same field unit. If communications
Redundant Loop Network Truth Table Summarizing the results of Examples 1 through 4:
Recorded in Host field unit Status Register Bits 10 and 11
Field
unit #
1 0 0 0 0 0 1 0 1
2 0 0 0 0 0 1 0 1
3 0 0 1 1 0 1 0 1
4 0 0 0 0 1 0 0 1
5 0 0 0 0 1 0 0 1
Example 1 Example 2 Example 3 Example 4
Ch. A Ch. B Ch. A Ch. B Ch. A Ch. B Ch. A Ch. B
Example 1: No faults
The Host is successfully communicating with each field unit and sets the bits for Channel A and B
Fault to 0. A value of 0 in Channel A and B Fault indicates successful communication.
Example 2: A field unit is off-line
The Host is successfully communicating with field units 1, 2, 4, and 5 via both ports. Field unit
number 3 is without power that causes the field unit 3 network board bypass relays to de-energize.
This de-energization of the bypass relays shorts the signal through the network board and isolates
field unit 3 from the DDC-100 Network.
Example 3: A break or short in the redundant loop
The Host is successfully communicating with field units 1, 2, and 3 via port 1, and field units 4
and 5 via port 2. When a field unit doesn’t communicate within a predetermined time-out period,
the Host sets the corresponding Channel Fault bit to a value of 1. This example indicates a wiring
problem between field units 3 and 4. This problem is typically a cable breakage, short, or improperly terminated wire.
36 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 37
Page 22

Example 4: Loss of 1 of 2 Host Ports
The Host is attempting to communicate with the field units via both ports but is unable to reach
any field units via port 2. This typically indicates a broken cable connection at port 2 or at the first
field unit from port 2, broken or shorted cable between the Host and the first field unit from port 2,
improperly terminated wires, or loss of power to the RS-232/485 converter if attached to the Host
port 2.
Non-Looped Network Truth Table via Port 1 (Channel A) Polling Only Summarizing the results
of Examples 5 through 7: Recorded in Host field unit Status Register bit 10. Bit 11 Channel B is
always 0 as set by the Host
Field unit #
1 0 0 0 0 0 0
2 0 0 1 0 0 0
3 0 0 0 0 1 0
4 0 0 0 0 1 0
5 0 0 0 0 1 0
Example 5: No faults
The Host is successfully communicating with each field unit and sets the bit equating to Channel A
Fault to 0. A value of 0 in the Channel A Fault bit indicates successful communication.
Example 5 Example 6 Example 7
Ch. A Ch. B Ch. A Ch. B Ch. A Ch. B
integrator can use to write a unique user-interface for polling and commanding the valve actuator
network. All Modbus commands for polling or commanding are implemented in a user-developed
software driver.
The advantage of this method of control is that any system integrator familiar with process control,
Visual Basic, or C++ can write a unique application. This approach provides the user with flexibility
to use the software at many sites without repeatedly purchasing site licenses for Modbus driver
software or application packages.
4.4.3 Personal Computer with a Graphical User-Interface
A Graphical User-Interface (GUI) software package can be used to communicate directly with the
DDC-100 Network without communicating through a dedicated data concentrator. This control
of the network requires a Modbus Driver for the GUI that is compatible with the Modbus function
codes supported by a DDC-100 Field Unit. The network communication will follow the polling and
command rules established by the individual application.
Most GUI Modbus drivers do not toggle the PC RS-232 serial port RTS/DTR line. The Limitorque
Self-Steered RS-232/485 converter will enable communication between the PC and the DDC-100
Network.
Examples of GUIs include, but are not limited to, Wonderware InTouch, PCSoft Wizcon, Intellution
FixDMACS, and Genesis Iconics.
Example 6: A field unit is off-line
The Host is successfully communicating with field units 1, 3, 4, and 5. Field unit 2 does not
respond, causing the Host to set field unit 2 Channel A Fault to 1. In this example, field unit 2 is
without power, causing the field unit 2 network board bypass relays to de-energize. This de-energization of the bypass relays shorts the signal through the network board and isolates the field unit
from the DDC-100 Network.
Example 7: A break or short in the network
The Host is successfully communicating with field units 1 and 2 but is not able to communicate
with field units 3, 4, and 5, causing the Host to set field unit 3, 4, and 5 Channel A Fault to 1. This
typically indicates a broken or shorted cable between field unit 2 and 3, a broken cable connection
at field units 2 or 3, improperly terminated wires at field unit 2 or 3, or loss of power to field units 3,
4, and 5.
4.4 Network Control
4.4.1 Ladder Logic Routines
The PLC running a ladder logic program is capable of being an integral part of any valve actuator
network. All commands for network polling and valve positioning may be generated by the PLC
and sent through a Modbus Master communications port to the valve actuator network. This port
is typically located on a PLC component or installed on a PLC-compatible third party Modbus
interface module. These modules may contain either one or multiple Modbus ports.
NOTE: This category of off-the-shelf, PC-based software also includes numerous Supervisory
Control and Data Acquisition (SCADA), Human Machine Interface (HMI), and Hybrid real-time
system configuration and development software packages.
Examples of this type of interface include, but are not limited to A-B PLC-5, A-B SLC-500, Square
D PLC, Modicon 984, Modicon Quantum, Compact or Micro PLC, Siemens S5 115U, or Simatic
TI-545/555.
4.4.2 Software Control Modules (C++ or Visual Basic Program)
The use of Visual Basic or C++ allows the user to totally customize the individual application to
meet application specific requirements. The user can create a functional specification that a system
38 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 39
Page 23

This page is intentionally blank.
Interfacing
5
Hardware for the
DDC-100 Network
The Flowserve Limitorque DDC-100 Network uses the RS-485 electrical standard for the network
communications medium. Because RS-232 ports are standard on most popular Host devices, Limitorque offers two RS-232 to RS-485 converters. These converters contain circuits that electrically
isolate the Host, improve noise immunity, and protect it from high-level voltage surges that may be
induced into the network.
RS-485 is used for the network electrical standard because it is capable of communicating data at
high rates over relatively long distances, and may be used in redundant loop or multi-drop network
topologies.
5.1 RS-232 to RS-485 Converters
Limitorque has sourced two models of the RS-232 to RS-485 converters. The primary distinction
between these models is self or auto-steering vs. steered as detailed in this section. The models
can be distinguished by the part numbers on the case of the converter. The specifications for both
models are given in Table 5.1. The dimensions of the converter enclosures are given in Figure 5.1
and the cable to connect the converter to a 25-pin serial port is shown in Figure 5.2.
40 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 41
Page 24

25-Socket Female
25-Socket Female
Table 5.1 – RS-232/RS-485 Converter Specifications
Parameter Specification
Baud Rate 600 baud to 62.5 kb
Protocols Modbus, BITBUS
Connectors RS-232 - DB9 Male
RS-485 - Detachable five-contact (Steered Converter P/N 61-825-0966-4)
RS-485 - Detachable three-contact (Self-Steered Converter
P/N 61-825-1032-4)
Indicators PWR1, PWR2, TxD, RxD, RTS/DTR (Steered Converter P/N 61-825-0966-4)
RS-232 - Power, TxD, RxD
RS-485 - Power, TxD, RxD
(Self-Steered Converter P/N 61-825-1032-4)
Surge Protection In accordance with IEC-801.5 to 1.5 kV
Power 110 - 220 VAC 50/60 Hz, single-phase
10 W, Switch Selectable
Fuse 250 VAC, .25 A
Operating Temperature Range 0 to 70°C (32 to 158°F)
Operating Humidity 95% Relative (Non-condensing)
The ordering information for the two converter types is given in Tables 5.2 and 5.3.
Table 5.2 – Steered Converter Assembly (P/N 22300-7591)
Description Part Number Quantity
Complete converter w/AC power cord 61-825-0966-4 2
Cable, RS-232, DB25M to DB9F, 6 feet long ESC-AT-PS/2Cable 2
Three-unit bracket for 19" rack mounting ES5-K1PT-H03B 1
Blank insert panel for three-unit rack ES5-19216-001B 1
Note 1: Individual assembly components may be purchased from Flowserve.
Table 5.3 – Self-Steering Converter Assembly (P/N 22300-7601)
Description Part Number Quantity
Complete converter w/AC power cord 61-825-1032-4 2
Cable, RS-232, DB25M to DB9F, 6 feet long ESC-AT-PS/2Cable 2
Three-unit bracket for 19" rack mounting ES5-K1PT-H03B 1
Blank insert panel for three-unit rack ES5-19216-001B 1
Note 1: Individual assembly components may be purchased from Flowserve.
Figure 5.1 – RS-232/RS-485 Converter Dimensions and Rack Mount Kit
End View
B
D
Front View
1.12
Rack Mounting Kits
End View
1.72
C
V
F
18.95 (For standard 19" rack)
A
Figure 5.2 – RS-232/RS-485 Cable Diagram
Connector to A/B Serial
Expander Comm 2&3
Transmit Ou t
Receive In
Signal GND
RTS Out
(Used for
steering)
Shell
Shield
2
3
7
4
25-Pin
Male
2
3
4
5
6
7
8
20
22
Limitorque P/N ESC-BC 00801
For use with RS-232/RS-485 Converter
P/N 61-825-0900-3 only .
Limitorque P/N ESC-AT-PS/2Cable
for use with RS-232/RS-485 Converters
P/N 61-825-0966-4 and P/N 61-825-1032-4
inches mm
A 5.6 141.5
B 1.5 38.6
C 6.0 152.4
D 0.2 5.3
F 5.2 130.9
V 5.0 128
Connector to RS-232/485
Converter
2
Transmit In
Receive Ou t
3
Signal GND
7
RTS In
4
9-Pin
Female
3
2
7
8
6
5
1
4
9
Shell
Shield
Converter assemblies 22300-759 and 22300-760 include two DB25M to DB9F modem cables.
These cables are appropriate for most Host connections. To determine if these cables are compatible with your Host RS-232 communication port(s), contact your System Integrator.
The System Integrator will review wiring requirements for the Host RS-232 port(s) with the
converter-assembly cables. Should the cables not be compatible with the Host RS-232 port, the
cables may be altered, a modifying connector installed, or new cables may be purchased at a local
cable supplier.
Individual converter part numbers 61-825-0966-4 and 61-825-1032-4 do not include a serial cable
for connection to a Host. It is the responsibility of the System Integrator to obtain the correct serial
cable based on the Host RS-232 port connector and Limitorque converter RS-232 port connector.
5.1.1 RS-232/RS-485 Control Line Steered Converter
(P/N 61-825-0966-4)
This is the standard converter offered by Flowserve for use with Limitorque networks. This
converter provides isolation, surge protection, data rate, and distance capability that is equivalent
to the self-steered converter. This converter uses either Host RS-232 port RTS (Request To Send)
or DTR (Data Terminal Ready) (DIP switch selectable) signals to steer the RS-485 data direction.
This converter also provides a directional steering output for Limitorque’s A/B Switch (P/N EEC-
90001840).
In the converter, the RS-232 data is converted to TTL signals. The signals drive indicating LEDs and
inputs of optical couplers that drive the RS-485 converter circuit. The optical couplers isolate the
Host hardware from the RS-485 Network. The RS-485 circuit is bi-directional and must be steered
42 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 43
Page 25

to place it in the transmit or receive mode. This converter requires that the Host serial port driver
software must toggle RTS or DTR in order to steer the converter.
There are five LED indicators, one DIP switch, two connectors, and a selector switch to select
between 110 and 220 VAC power. The placement of the indicators, switches, and connectors is
shown in the photographs of the front and back panels of the converter enclosure in Figure 5.3. All
jumpers are located inside the enclosure. The LEDs are labeled with their functions, and the DIP
switch, connectors, and jumpers are detailed below:
Figure 5.3 – Front and Back Panels of Steered Converter
Table 5.4 – RS-232/RS-485 Converter (P/N 61-825-0966-4) DIP Switch Functions
Switch Function
Down RTS Steering (Default)
1
2
3
4 Up (Default)
5 Up (Default)
6 Up (Default)
7 Up (Default)
8 Up (Default)
Up RTS Steering OFF
Down DTR Steering
Up DTR Steering OFF (Default)
Down Normal Steering, Transmit when RTS or DTR high (Default)
Up Inverted Steering, Transmit when RTS or DTR low
Table 5.6 – RS-232/RS-485 Converter (P/N 61-825-0966-4) RS-485 Connector
RS-485
Connector
Pin Number
Note 1: Indicates negative side of signal.
Note 2: Must be connected to earth ground to ensure surge protection.
WARNING: Disconnect the converter from the power source and from the Host and
c
Function
1 Data
1
2 Data*
3 Earth ground
4 RS-485 RTS steering
5 RS-485 RTS*
ground
2
1
steering
network before removing the cover. Potentially lethal voltages are present inside the
enclosure when it is connected to the power source.
Table 5.7 – RS-232/RS-485 Converter (P/N 61-825-0966-4) Jumpers
1
Jumper
JP1 and JP2
JP3 and JP4
JP5
Note 1: The jumpers JP1 through JP5 are located inside the converter. The enclosure
must be opened for access. The positions for the jumpers are shown in the silkscreen
on the PC board.
Function
Bias and line termination for RS-485 data lines
Position 1:2 (ON) adds bias and termination
Position 2:3 (OFF) removes bias and termination
Both jumpers must be set to the same position
Bias and line termination for RS-485 steering lines
Position 1:2 (ON) adds bias and termination
Position 2:3 (OFF) removes bias and termination
Both jumpers must be set to the same position
Reverses RS-232 TxD and RxD lines
DCE 1:3, 2:4
DTE 3:5, 4:6 (Default)
5.1.2 RS-232/RS-485 Converter
with RS-485 Self-Steering (P/N 61-825-1032-4)
This converter provides the same network capabilities as the steered converter, but this converter
Table 5.5 – RS-232/RS-485 Converter (P/N 61-825-0966-4) RS-232
does not require the RTS or DTR signals from the Host RS-232 port.
Connector
RS-232
Connector
Pin Number
Note 1: The pin numbers of these signals can be reversed with jumpers inside the
converter box (see Table 5.7).
44 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 45
Function
1 Carrier Detect
2 Transmit Data (TxD)
3 Receive Data (RxD)
4 DTR
5 Signal Ground
6 DSR
7 RTS (in)
1
1
There is a patented self-steering circuit in this converter that senses the direction of data, processes
the data, and retransmits it via the appropriate output port. The data is processed using a noise
elimination circuit ensuring that only valid data is retransmitted. Received data is sent to the selfsteering circuit for proper port direction control and signal processing. The data bits are checked,
recentered, and reclocked before being directed to the proper output port.
Six LED indicators, two connectors, and a selector switch to select between 110 and 220 VAC
power are located on the enclosure. The placement of the indicators, connectors, and the switch is
shown in the photographs of the front and back panels in Figure 5.4. All jumpers are located inside
the enclosure. The LED indicators are labeled with their functions, and the connectors and jumpers
are detailed below:
Page 26

Figure 5.4 – Front and Back Panels of Self-Steering Converter
Table 5.8 – RS-232/RS-485 Converter (P/N 61-825-1032-4) RS-232 Connector
RS-232
Connector
Pin Number
2 Transmit data (TxD)1
3 Receive data (RxD)1
5 Signal ground
Note 1: The pin numbers of these signals can be reversed with jumpers inside the converter
box (see Table 5.10).
Function
Table 5.9 – RS-232/RS-485 Converter (P/N 61-825-1032-4) RS-485 Connector
RS-485
Connector
Pin Number
1 Data
2 Data*1
3 Earth ground2
Note 1: Indicates negative side of signal.
Note 2: Must be connected to earth ground to assure surge protection.
WARNING: Disconnect the converter from the power source and from the Host and
c
Function
network before removing the cover. Potentially lethal voltages are present inside the
enclosure when it is connected to the power source.
Table 5.10 – RS-232/RS-485 Converter (P/N 61-825-1032-4) Jumpers
Jumper Function
Bias and termination for RS-485 data lines
JP1 and JP2
JP3
JP4
JP5
JP6
JP7
JP8
Note 1: The jumpers JP1 through JP8 are located inside the converter. The enclosure must be opened for
access. The positions for the jumpers are shown in the silk screen on the PC board.
Note 2: High-Level Data Line Control
Position 1:2 Adds bias and termination
Position 2:3 Disables bias and termination
Both jumpers must be in the same position
BAUD Rate Select
Position 0 Not Used
Position 1 62.5K
Position 2 38.4K
Position 3 19.2K
Position 4 9600
Position 5 4800
Position 6 2400
Position 7 1200
Position 8 600
Position 9 N/A
Position 10 N/A
Protocol Select
Position 1:2 BITBUS
Position 2:3 Modbus
Reverses RS-232 TxD and RxD lines
DCE 1:2, 3:4
DTE 1:3, 2:4
XTAL Select.
Position 1:2 62.5 Baud
Position 2:3 Standard Baud
Asynchronous or HDLC
Position 1:2 HDLC
Position 2:3 Asynchronous
Filter Ground
Position 1:2 Common Ground
Position 2:3 Isolated Ground
2
1
46 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 47
Page 27

5.2 RS-485 Connection Direct
to the DDC-100 Field Unit
The RS-232/RS-485 converters that are sourced by Flowserve were specifically designed to comply
with the EIA RS-232 and the EIA RS-485 data transmission standards and to protect the DDC-100
Network and the Host device. The successful operation of a large number of installed systems has
demonstrated the robustness and reliability of these converters. Flowserve strongly recommends
the use of these converters for all DDC-100 applications in which the Host has RS-232 ports available. The use of these converters in most cases will simplify the installation and commissioning of
the DDC-100 Network.
If the user wishes to attach a Host device to the DDC-100 Network through other RS-232/RS-485
converters or directly from Host RS-485 ports, the following guidelines must be followed:
1) The Host ports that attach to the DDC-100 Network must adhere to the EIA RS-485 Standard.
The DDC-100 Network only uses the DATA, DATA*, and earth ground terminals. The following
additional details are provided for interfacing guidance to the Limitorque DDC-100 Network:
a) The network signal is based on +5 Volts and typical line voltage levels are
0 to 4.5 Volts.
b) Network biasing for the MX-DDC RS-485 data lines:
• terminals 15 and 16 (A1) 570 mV
• terminals 29 and 41 (A2) 280 mV
Network biasing for the UEC-3-DDC RS-485 data lines:
• D-M and D-M* (A1) 208 mV
• D-S and DS* (A2) 208 mV
Bias voltage is measured without the network attached to the field unit RS-485 communications ports.
c) DATA is the most positive voltage and DATA* is the least positive voltage level.
d) When using RS-485 direct (without Limitorque RS-232/RS-485 converter), the user is
responsible for ensuring proper surge protection between the network and the Host device.
e) Each Host port must be resistively terminated with 120 ohms to prevent line
reflections.
Programming
6
Programming the Host to control a DDC-100 Network of Flowserve Limitorque Field Units will
require information about the design of the network. Flowserve recommends gathering this information before starting the program. After the program has been completed, the network should be
fully tested before commissioning. The following recommendations are provided as the result of a
number of successful installations:
1) Obtain a wiring diagram of the digital inputs and digital outputs to the controlled devices before
programming the controller.
2) Develop a tag table for the installation. This table should include the tag name, network
address, desired status indication, and command format (bit or register write).
3) If possible, test the program prior to site installation. This will provide a program verification
time for debugging.
4) Attach a protocol analyzer to the DDC-100 Network and monitor the timing, message structure,
and message issuance to verify the Host code. This will assist in the diagnosis of proper
command issuing and sequencing of the Host control algorithm.
Recommendations
f) The DDC-100 Field Units are certified in accordance with IEC 801-5 (EEC-EMC directive
89/336/EEC) to 1.5 kV communication lines.
2) After the Host has finished a transmission that requires a field unit response, the Host
transceiver must be turned before the field unit begins transmitting data back to the Host. The
field unit can respond in 10 ms.
3) Earth ground should not be routed through sensitive electronic equipment. Connect the
network cable shield directly to an effective local, low-impedance earth ground (less than 5
ohms).
48 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 49
6.1 Monitoring Field Unit Status
Network control involves two basic functions—monitoring field unit status and issuing control
commands. The following checklist is provided for monitoring the status of the field units:
1) Determine the Host time-out period. Verify that the time-out period is of sufficient duration to
allow a field unit response under the worst-case conditions (greater than 200 ms).
2) Limit the number of retries to a maximum of three. This will enable the Host to continue with
the polling process without undue delays.
3) Do not allow more than one Master control of the network at any time. A Host with two serial
ports should only have one actively in control at any time.
4) The actuator field unit digital input 0 is factory defaulted for local ESD (Emergency Shutdown).
For the MX-DDC or UEC-3-DDC, placing 24 VDC or 120 VAC (MX-DDC only) on this input will
cause the field unit to send the actuator to the default local ESD position of close. To use this
digital input as a generic input, the local ESD setting must be set to Ignore.
Page 28

5) Field unit register 10, bit 10 will only report network ESD when the field unit network ESD
parameter is set to any value but Ignore.
in increased network traffic that increases network scan times. Also, repeating acknowledged
commands can cause erratic field unit operation (e.g., stop).
6) Field unit register 9, bit 5 (Valve Jammed) will only be active when the actuator is moving the
valve and the torque switch is tripped.
7) In MOV (Motor-Operated Valve) mode, Field unit registers 9, 10, 11 bits are a value of 0 when
false. A value of 1 indicates true.
8) In MOV mode, field unit register 12 low-byte bits are a value of 0 when false. A value of 1
indicates true.
9) In MOV mode, field unit register 12 bit 11 is default inverted, by default, to a value of 1 on false
and 0 on true. The remaining bits in the high-byte are set, by default, to a value of 0 on false
and 1 on true.
6.2 Issuing Control Commands
The following checklist is provided for issuing control commands:
1) The normal polling process should be interrupted to issue any control commands to a field
unit on the network. This interruption should take place after the Host receives the response
from a previously issued query. Once the field unit control command has been issued and the
acknowledge returned, the normal polling process should resume.
2) Prior to issuing commands to an actuator-mounted field unit:
• Verify successful communication. This is accomplished via the normal
polling process.
• Verify actuator is in Remote mode.
• Verify the actuator is capable of movement.
a) Combined Fault bit is not a value of 1.
b) Actuator is not at desired position. (Do not send open command
if actuator is in open position.)
c) Verify that the desired direction of travel does not have a torque
switch fault.
7) The field unit will automatically stop (disengage contactor) when the actuator reaches the full
open or close position. There is no requirement for issuing a Stop command when the actuator
reaches the open or close limit switch.
8) A Stop command can be used to stop the actuator in mid-travel. When the actuator has
stopped in mid-travel (between the open and close limit switches), the field unit register 9 bit
02 (Stopped) will be true (1).
9) There is no requirement to first issue a Stop command when changing directions from open to
close or close to open. When the field unit receives the command to change directions, the field
unit will first disengage the contactor (stop the actuator), then engage the other contactor.
10) A network Stop command will stop the actuator if the selector switch is in Remote or Local
mode. The actuator local Stop pushbutton will stop the actuator if the selector switch is in
Remote or Local mode.
Table 6.1 – Sample Tag Table for Direct-to-Host applications
Tag Name Description
80-HS-4141A Open actuator 1 Command to open the valve 40001 256 (Dec)
80-HS-4141B Close actuator 1 Command to close the valve 40001 768 (Dec)
80-POS-4141 Position feedback 1 Valve position in % of Open 40008 n/a
80-STAT-4141 Status register 1 16 bits of status 40009 n/a
80-HS-4142A Open actuator 2 Command to open the valve 40001 256 (Dec)
80-HS-4142B Close actuator 2 Command to close the valve 40001 768 (Dec)
80-POS-4142 Position feedback 2 Valve position in % of Open 40008 n/a
80-STAT-4142 Status register 2 16 bits of status 40009 n/a
80-GO-5253A Initiate “move-to” 3 Initiate “move-to” 40001 6656 (Dec)
80-GO-5253B “move-to” value 3 % of Open value 40002 0-100 (Dec)
80-POS-5253 Position feedback 3 Valve position in % of Open 40008 n/a
80-STAT-5253 Status register 3 16 bits of status 40009 n/a
Modbus
Slave
Address
Comments
Modbus
Register
Modbus
Command
Data
3) Prior to issuing commands to an I/O Module-style field unit:
• Verify successful communication. This is accomplished via the normal
polling process.
• When using 2 relays to control a single device, always disengage the
first relay before engaging the second relay.
4) Commands can be issued with either the Modbus function code 05 or 06. Either command is
capable of opening or closing the actuator or engaging or disengaging field unit physical relays
1 - 6. If the actuator is configured for intermediate position control, Modbus function code 06
must be used to move the actuator to the desired position.
5) An actuator configured for intermediate position control (“move-to”) should be issued position
commands between 2 and 98% of open. Issue open or close commands for 0 and 100% of
open.
6) Commands issued to the field unit should never be repeated if the command acknowledgment
is received from the field unit. Commands should be reissued only when the field unit does
not acknowledge receipt of the command. Repeated commands sent to the field unit will result
50 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 51
Page 29

This page is intentionally blank.
Typical DDC-100
A
Network Installation
Assignments
Various project suppliers play important roles in the design, purchase, installation, and commissioning of a plant control system. A typical assignment of roles for the installation of a DDC-100
Network with its valve controllers is presented in this section. This material is presented for
guidance only and is not necessarily representative of a particular installation.
Project supplier responsibilities
S.I. (System Integrator) Responsible for developing code to operate the plant per the specification. This includes the interface between the DDC-100 Network and the Host. The System Integrator
may be a third-party programmer or a site engineer responsible for computer programming.
Engineer (Project Engineer) Responsible for developing the site layout, specifications, and
requirements for the project.
Contractor Responsible for site project development. The contractor is the site coordinator
responsible for completing the upgrade or new facility installation per the specification. This may be
a third-party (independent) contractor or a site maintenance group.
Flowserve Limitorque Valve actuator manufacturer. Supplier of the valve actuators per the
specification.
OEM (Valve Original Equipment Manufacturer) Valve manufacturer responsible for providing
valves per specification to contractor or job site. The valve OEM may also provide the Limitorque
actuators as a part of its scope of supply.
Fourth-Party Hardware/Software Supplier of hardware and/or software packages needed to
complete system integrator’s scope of supply. Equipment typically includes: PLC racks, components, personal computers, Graphical User Interfaces, etc.
52 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 53
Page 30

System Integrator Tasks
Deliverable From To Comments
Specification Engineer S.I Detail functionality of system
Schedule Contractor S.I. Production Schedule
Manuals for DDC-100 Operation:
• LMAIM4019 Direct-to-Host Programming
Guide
• LMAIM1329 Accutronix Installation and
Operation for MX-DDC Field Unit
• LMAIM4029 DDC-100 UEC Field Unit
Manuals Limitorque S.I.
Hardware for
system development
Fourth-Party
Hardware/Software
Actuator Contractor S.I.
Site Preparation Contractor S.I.
Operational System S.I. Contractor
Documentation S.I. Contractor
Contractor S.I.
Component supplier S.I.
(Modbus) Installation and Operation Manual
• LMAIM4030 DDC-100 UEC Field Unit Installation and Commissioning Manual
• LMAIM4022 DDC-100 UEC Field Unit
Wiring and Startup Guidelines
• Modicon Modbus Protocol Reference Guide
PI-MODBUS-300 Rev. G (available from
Modicon)
Hardware may include: DDC-100 Field Units,
RS-232/485 converters
Modbus interface modules, Modbus drivers,
non-Limitorque converters, or surge
suppression
Availability of DDC-100 Field Unit for testing
developed application software
Complete actuator or field unit installation.
Provide actual (as installed) site loop diagram
to System Integrator
Software only (code) or Hardware and
Software (hardware and code)
System Operation and Maintenance Manuals,
Operational characteristics of system,
Network Addresses to equipment tag names
Engineer Tasks
Deliverable From To Comments
Specification End-user Engineer Site and system requirements
Schedule End-user Engineer Production Schedule. Completion dates
Sales Support Limitorque Engineer Information on Limitorque products
Manuals for DDC-100 Operation:
• LMAIM4019 Direct-to-Host Programming
Guide
• LMAIM1329 Accutronix Installation and
Operation for MX-DDC Field Unit
• LMAIM4029 DDC-100 UEC Field Unit
Manuals Limitorque Engineer
Contractor,
Project Specification Engineer
Project Responsibility
P&ID Engineer Contractor
Site Electrical and
electronics
Loop Drawings Engineer Contractor
Engineer Contractor
Engineer Contractor
S/I, OEM,
Limitorque
(Modbus) Installation and Operation Manual
• LMAIM4030 DDC-100 UEC Field Unit Installation and Commissioning Manual
• LMAIM4022 DDC-100 UEC Field Unit
Wiring and Startup Guidelines
• Modicon Modbus Protocol Reference Guide
PI-MODBUS-300 Rev. G (available from
Modicon)
Provide operational specifications for all
equipment and service providers
Define which supplier is responsible for each
portion of project
Detailed layout and instructions for building
site. Information should include actuator tag
names, required data points from actuator,
field unit, and field wiring
Detail site electrical requirements, cable type,
layout, and locations. Voltages available for
equipment
Detail cable routings from Host to each field
device. This defines how the network cable is
to run throughout the facility
54 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 55
Page 31

Contractor Tasks
Deliverable From To Comments
Specifications Engineer Contractor Complete P&IDs for site
Schedule Engineer Contractor Time line complete w/milestones
Project Responsibilities
P&ID Engineer Contractor
Site Electrical
and electronics
Loop Drawings Engineer Contractor
Schedule Contractor Limitorque
Hardware
Manuals Limitorque Contractor
Operational System S.I. Contractor
Documents S.I. Contractor
Schedule Contractor S.I.
Hardware for
system development
Actuator Contractor S.I.
Site Preparation Contractor S.I.
Site Preparation Contractor Limitorque
Field Unit Startup Limitorque Contractor
Engineer Contractor
Engineer Contractor
Limitorque,
OEM
Contractor S.I.
Contractor
Define which supplier is responsible for each
portion of project
Detailed layout and instructions for building
site. Information should include actuator tag
names, required data points from actuator,
field unit, and field wiring
Detail site electrical requirements, cable type,
layout, and locations. Voltages available for
equipment
Detail cable routings from Host to each field
device. This defines how the network cable is
to run throughout the facility
Provide material delivery dates for hardware.
Schedule Flowserve Limitorque Controls
Service Technician for actuator commissioning (when requested according to
purchase order)
Provide Motor-Operated Valves, RS-232/485
converters (if supplied), valves, mounting
adapters, etc.
Product Bulletins for Actuators:
• LMAIM4019 Direct-to-Host Programming
Guide
• LMAIM1329 Accutronix Installation and
Operation for MX-DDC Field Unit
• LMAIM4029 DDC-100 UEC Field Unit
(Modbus) Installation and Operation Manual
• LMAIM4030 DDC-100 UEC Field Unit Installation and Commissioning Manual
• LMAIM4022 DDC-100 UEC Field Unit
Wiring and Startup Guidelines
• Modicon Modbus Protocol Reference Guide
PI-MODBUS-300 Rev. G (available from
Modicon)
Develop and test programming for DCS
system
Documentation of program operational characteristics, equipment used, and Operation
and Maintenance Manuals for equipment
Provide delivery dates for commissioning
control system. Include dates for testing,
documentation, and turnover to site personnel
Hardware may include: DDC-100 Field Units,
RS-232/485 converters
Availability of DDC-100 Field Unit for testing
developed application software
Complete actuator or field unit installation.
Provide actual (as installed)
Install specified equipment, cables for
power and network communication. Verify
all network and power cables are properly
routed, terminated, and documented prior
to commissioning of DDC-100 Network. The
contractor should provide detail on network
routing from Host system to each field unit.
Verify all field units are properly grounded
According to purchase order requirements,
when scheduled
Limitorque Tasks
Deliverable From To Comments
Specifications Engineer Limitorque
Schedule Contractor Limitorque
Site Preparation Contractor Limitorque
Operational S.I. Limitorque
Tag List S.I. Limitorque
Sales Support Limitorque Engineer Information on Limitorque products
S.I.
Manuals Limitorque
Hardware Limitorque, Contractor
Field Unit Startup Limitorque Contractor
Engineer
Contractor
Provide specification on Motor-Operated
Valves, other DDC-100 Field Units (I/O
Modules). Provide P&IDs
Provide material delivery dates for hardware.
Schedule Flowserve Limitorque Controls
Service Technician for actuator commissioning
Install specified equipment, cables for
power, and network communication. Verify
all network and power cables are properly
routed, terminated, and documented prior
to commissioning of DDC-100 Network. The
contractor should provide detail on network
routing from Host system to each field unit.
Verify all field units are properly grounded
Provide unique field unit requirements to
Controls Service Technician Requirements
prior to start of field unit commissioning
process. Include: ESD requirements, open/
close service or position control (“move-to”),
digital inputs/outputs, analog inputs
Provide a tag list detailing valve tag name
to network address. This will allow the
Limitorque Controls Service Technician
(when requested according to purchase
order) to properly address the actuators to
the developed Host software
Product Bulletins for Actuators:
• LMAIM4019 Direct-to-Host Programming
Guide
• LMAIM1329 Accutronix Installation and
Operation for MX-DDC Field Unit.
• LMAIM4029 DDC-100 UEC Field Unit
(Modbus) Installation and Operation Manual
• LMAIM4030 DDC-100 UEC Field Unit Installation and Commissioning Manual
• LMAIM4022 DDC-100 UEC Field Unit
Wiring and Startup Guidelines
• Modicon Modbus Protocol Reference Guide
PI-MODBUS-300 Rev. G (available from
Modicon)
Provide Motor-Operated Valves, RS-232/485
converters (if supplied), OEM valves,
mounting adapters, etc.
According to purchase order requirements,
when scheduled
56 DDC-100 Direct-to-Host Programming Guide FCD LMAIM4019-00 FCD LMAIM4019-00 DDC-100 Direct-to-Host Programming Guide 57
Page 32

Page 33

Flowserve Corporation has established industry leadership in the design and manufacture of its products. When properly
selected, this Flowserve product is designed to perform its intended function safely during its useful life. However, the
purchaser or user of Flowserve products should be aware that Flowserve products might be used in numerous applications
under a wide variety of industrial service conditions. Although Flowserve can (and often does) provide general guidelines,
it cannot provide specific data and warnings for all possible applications. The purchaser/user must therefore assume the
ultimate responsibility for the proper sizing and selection, installation, operation, and maintenance of Flowserve products.
The purchaser/user should read and understand the Installation Operation Maintenance (IOM) instructions included with
the product, and train its employees and contractors in the safe use of Flowserve products in connection with the specific
application.
While the information and specifications contained in this literature are believed to be accurate, they are supplied for
informative purposes only and should not be considered certified or as a guarantee of satisfactory results by reliance
thereon. Nothing contained herein is to be construed as a warranty or guarantee, express or implied, regarding any
matter with respect to this product. Because Flowserve is continually improving and upgrading its product design, the
specifications, dimensions and information contained herein are subject to change without notice. Should any question
arise concerning these provisions, the purchaser/user should contact Flowserve Corporation at any one of its worldwide
operations or offices.
For more information about Flowserve Corporation, visit www.flowserve.com or call USA 1-800-225-6989.
Limitorque
5114 Woodall Road, P.O. Box 11318
Lynchburg, VA 24506-1318
Phone: 434-528-4400
Facsimile: 434-845-9736
www.limitorque.com
Limitorque India, Ltd.
15/4, Mile Stone
Mathura Road
Faridabad 121002
India
Phone: 91-129-2276586
Facsimile: 91-129-2277135
Limitorque
Abex Road
Newbury
Berkshire, RG14 5EY
England
Phone: 44-1-635-46999
Facsimile: 44-1-635-36034
Flowserve Australia, Pty. Ltd.
14 Dalmore Drive
Scoresby, Victoria 3179
Australia
Phone: 61 3 9759 3300
Facsimile: 61 3 9759 3301
Limitorque Nippon Gear Co., Ltd.
Asahi-Seimei Bldg. 4th Floor
1-11-11 Kita-Saiwai, Nishi-Ku
Yokohama-Shi, (220-0004)
Japan
Limitorque Asia, Pte., Ltd.
12, Tuas Avenue 20
Singapore 638824
Phone: 65-6868-4628
Facsimile: 65-6862-4940
Phone: 81-45-326-2065
Facsimile: 81-45-320-5962
(Replaces 435-23009)
© 2004 Flowserve Corporation, Irving, Texas, USA. Flowserve is a registered trademark of Flowserve Corporation. FCD LMAIM4019-00 9/04 Printed in USA.
 Loading...
Loading...