

Page 1
Instruction Manual
D102748X012
DLC3010 Digital Level Controller
Fisherr FIELDVUE™ DLC3010 Digital Level
Controller
This manual applies to:
Device Type
Device Revision
Hardware Revision
Firmware Revision
DD Revision
Contents
Section 1 Introduction and Specifications 3.
Scope of Manual 3..............................
Conventions Used in this Manual 3................
Description 3..................................
Specifications 4................................
Related Documents 5...........................
Educational Services 5...........................
Section 2 Installation 13.................
Configuration: On the Bench or in the Loop 13......
Protecting the Coupling and Flexures 13...........
Mounting 15...................................
Hazardous Area Classifications and Special
Instructions for “Safe Use” and Installations
in Hazardous Locations 15....................
Mounting the 249 Sensor 15....................
Digital Level Controller Orientation 16............
Mounting the Digital Level Controller
on a 249 Sensor 18..........................
Mounting the Digital Level Controller for High
Temperature Applications 18.................
Electrical Connections 20........................
Power Supply 20..............................
Field Wiring 21................................
Grounding 22.................................
Shielded Wire 22..........................
Power/Current Loop Connections 23.............
RTD Connections 23...........................
Two‐Wire RTD Connections 23...............
Three‐Wire RTD Connections 23.............
Communication Connections 23.................
Test Connections 23...........................
Multichannel Installations 24....................
3010
1
1
8
3
Alarm Jumper 25...............................
Changing Jumper Position 25....................
Loop Test 26...................................
Installation in Conjunction with a Rosemount
333 HART Tri‐Loopt HART‐to‐Analog
Signal Converter 27.............................
Multidrop Communication 93....................
Section 3 Overview 29...................
Section 4 Setup and Calibration 33........
Initial Setup 33.................................
Configuration Advice 34.........................
Preliminary Considerations 34....................
Write Lock 34.................................
Level Offset 34................................
Guided Setup 34...............................
Coupling 38..................................
Manual Setup 39...............................
Sensor 39....................................
Variables 41..................................
Process Fluid 43...............................
Device Information 46.........................
Instrument Display 47..........................
Alert Setup 49.................................
Primary Variable 49............................
Temperature 51...............................
October 2014
www.Fisher.com
Page 2

DLC3010 Digital Level Controller
October 2014
Instruction Manual
D102748X012
Communications 53............................
Burst Mode 53................................
Burst Option 53...............................
Calibration 54..................................
Introduction: Calibration of Smart Instruments 54..
Primary 54...................................
Guided Calibration 54......................
Full Calibration 55.........................
Min/Max Calibration 55...................
Two Point Calibration 55..................
Weight Calibration 56....................
Theoretical Calibration 56...................
Partial Calibration 57.......................
Capture Zero 57.........................
Trim Gain 57............................
Trim Zero 58............................
Secondary 58.................................
Temperature Calibration 58.................
Trim Instrument Temperature 59..........
Trim Process Temperature 59..............
Manual Entry of Process Temperature 59......
Analog Output CalibratIon 59................
Scaled D/A Trim 59......................
Calibration Examples 60........................
Calibration with Standard displacer and
Torque Tube 60.........................
Calibration with Overweight Displacer 61......
Density Applications - with Standard Displacer
and Torque Tube 63.....................
Calibration at Process Conditions (Hot Cut‐Over)
when input cannot be varied 63...........
Entering Theoretical Torque Tube Rates 64....
Excessive Mechanical Gain 65................
Determining the SG of an Unknown Fluid 65...
Accuracy Considerations 65.....................
Effect of Proportional Band 65...............
Density Variations in Interface Applications 65..
Extreme Temperatures 66...................
Temperature Compensation 66..............
Section 5 Service Tools 67...............
Active Alerts 67................................
Variables 68...................................
Maintenance 70................................
Section 6 Maintenance and
Troubleshooting 71....................
Diagnostic Messages 71.........................
Hardware Diagnostics 72........................
Test Terminals 74..............................
Removing the Digital Level
Controller from the Sensor 74....................
Removing the DLC3010 Digital Level Controller
from a 249 Sensor 75........................
Standard Temperature Applications 75........
High Temperature Applications 76...........
LCD Meter Assembly 76.........................
Removing the LCD Meter Assembly 77............
Replacing the LCD Meter Assembly 77............
Electronics Module 78...........................
Removing the Electronics Module 78.............
Replacing the Electronics Module 78.............
Terminal Box 79................................
Removing the Terminal Box 79..................
Replacing the Terminal Box 79...................
Removing and Replacing the Inner Guide
and Access Handle Assembly 80..................
Lever Assembly 81..............................
Removing the Lever Assembly 81................
Replacing the Lever Assembly 82................
Packing for Shipment 83.........................
Section 7 Parts 85......................
Parts Ordering 85...............................
Mounting Kits 85...............................
Repair Kits 85..................................
Parts List 86...................................
DLC3010 Digital Level Controllers 86.............
Transducer Assembly 87........................
Terminal Box Assembly 88......................
Terminal Box Cover Assembly 88.................
Mounting Parts 89.............................
249 Sensors with Heat Insulator 89...........
Appendix A Principle of Operation 93......
HART Communication 93........................
Digital Level Controller Operation 94..............
Appendix B Field Communicator
Menu Tree 99........................
Glossary 105...........................
2
Page 3
Instruction Manual
D102748X012
Introduction and Specifications
October 2014
Section 1 Introduction and Specifications
Scope of Manual1‐1‐
This instruction manual includes specifications, installation, operating, and maintenance information for FIELDVUE
DLC3010 digital level controllers.
This instruction manual supports the 475 or 375 Field Communicator with device description revision 3, used with
DLC3010 instruments with firmware revision 8. You can obtain information about the process, instrument, or sensor
using the Field Communicator. Contact your Emerson Process Management sales office to obtain the appropriate
software
Note
AMS Suite: Intelligent Device Manager can also be used to calibrate and configure the DLC3010, and to obtain information about
the process, instrument, or sensor.
Do not install, operate, or maintain a DLC3010 digital level controller without being fully trained and qualified in valve,
actuator, and accessory installation, operation, and maintenance. To avoid personal injury or property damage, it is
important to carefully read, understand, and follow all of the contents of this manual, including all safety cautions and
warnings. If you have any questions about these instructions, contact your Emerson Process Management sales office.
Conventions Used in this Manual
This manual describes using the Field Communicator to calibrate and configure the digital level controller.
Procedures that require the use of the Field Communicator have the text path and the sequence of numeric keys
required to display the desired Field Communicator menu.
For example, to access the Full Calibration menu:
Field Communicator Configure > Calibration > Primary > Full Calibration (2-5-1-1)
Menu selections are shown in italics, e.g., Calibrate. An overview of the Field Communicator menu structure is shown
in Appendix B.
Description
DLC3010 Digital Level Controllers
DLC3010 digital level controllers (figure 1‐1) are used with level sensors to measure liquid level, the level of interface
between two liquids, or liquid specific gravity (density). Changes in level or specific gravity exert a buoyant force on a
3
Page 4
Introduction and Specifications
October 2014
displacer, which rotates the torque tube shaft. This rotary motion is applied to the digital level controller, transformed
to an electrical signal and digitized. The digital signal is compensated and processed per user configuration
requirements, and converted back to a 4‐20 mA analog electrical signal. The resulting current output signal is sent to
an indicating or final control element.
Figure 1‐1. FIELDVUE DLC3010 Digital Level Controller
W7977-1
Instruction Manual
D102748X012
DLC3010 digital level controllers are communicating, microprocessor‐based level, interface, or density sensing
instruments. In addition to the normal function of providing a 4‐20 milliampere current signal, DLC3010 digital level
controllers, using the HART
You can gain information from the process, the instrument, or the sensor using a Field Communicator with device
descriptions (DDs) compatible with DLC3010 digital level controllers. The Field Communicator may be connected at
the digital level controller or at a field junction box.
Using the Field Communicator, you can perform several operations with the DLC3010 digital level controller. You can
interrogate, configure, calibrate, or test the digital level controller. Using the HART protocol, information from the
field can be integrated into control systems or be received on a single loop basis.
DLC3010 digital level controllers are designed to directly replace standard pneumatic and electro‐pneumatic level
transmitters. DLC3010 digital level controllers mount on a wide variety of caged and cageless 249 level sensors. They
mount on other manufacturers' displacer type level sensors through the use of mounting adaptors.
R
communications protocol, give easy access to information critical to process operation.
249 Caged Sensors (see table 1‐6)
D 249, 249B, 249BF, 249C, 249K, and 249L sensors side‐mount on the vessel with the displacer mounted inside a cage
outside the vessel. (The 249BF caged sensor is available only in Europe, Middle East, and Africa.)
249 Cageless Sensors (see table 1‐7)
D 249BP, 249CP, and 249P sensors top‐mount on the vessel with the displacer hanging down into the vessel.
D 249VS sensor side‐mounts on the vessel with the displacer hanging out into the vessel.
D 249W wafer‐style sensor mounts on top of a vessel or on a customer‐supplied cage.
Specifications
Specifications for the DLC3010 digital level controller are shown in table 1‐1. Specifications for the 249 sensor are
shown in table 1‐3. Specifications for the Field Communicator can be found in the Product Manual for the Field
Communicator.
4
Page 5
Instruction Manual
D102748X012
Introduction and Specifications
October 2014
Related Documents
Other documents containing information related to the DLC3010 digital level controller and 249 sensors include:
D Bulletin 11.2:DLC3010 - FIELDVUE DLC3010 Digital Level Controller (D102727X012)
D FIELDVUE DLC3010 Digital Level Controller Quick Start Guide (D103214X012)
D Using FIELDVUE Instruments with the Smart HART Loop Interface and Monitor (HIM) (D103263X012)
D Audio Monitor for HART Communications (D103265X012)
D Fisher 249 Caged Displacer Sensors Instruction Manual (D200099X012)
D Fisher 249 Cageless Displacer Sensors Instruction Manual (D200100X012)
D Fisher 249VS Cageless Displacer Sensor Instruction Manual (D103288X012)
D Fisher 249W Cageless Wafer Style Level Sensor Instruction Manual (D102803X012)
D Simulation of Process Conditions for Calibration of Fisher Level Controllers and Transmitters (D103066X012)
D Bolt Torque Information (D103220X012)
D Technical Monograph 7: The Dynamics of Level and Pressure Control
D Technical Monograph 18: Level‐Trol Density Transmitter
D Technical Monograph 26: Guidelines for Selection of Liquid Level Control Equipment
These documents are available from your Emerson Process Management sales office. Also visit our website at
www.Fisher.com.
Educational Services
For information on available courses for the DLC3010 digital level controller, as well as a variety of other products,
contact:
Emerson Process Management
Educational Services, Registration
Phone: +1-641-754-3771 or +1-800-338-8158
e‐mail: education@emerson.com
http://www.emersonprocess.com/education
5
Page 6
Introduction and Specifications
October 2014
Table 1‐1. DLC3010 Digital Level Controller Specifications
Instruction Manual
D102748X012
Available Configurations
DLC3010 Digital Level Controller:
Mounts on caged and cageless 249 sensors. See
tables 1‐6 and 1‐7 and sensor description.
Function: Transmitter
Communications Protocol: HART
Input Signal
Level, Interface, or Density: Rotary motion of torque
tube shaft proportional to changes in liquid level,
interface level, or density that change the buoyancy
of a displacer.
Process Temperature: Interface for 2‐ or 3‐wire 100
ohm platinum RTD for sensing process temperature,
or optional user‐entered target temperature to
permit compensating for changes in specific gravity
Output Signal
Analog: 4‐20 milliamperes DC (
Jdirect
action—increasing level, interface, or density
increases output; or
Jreverse action—increasing
level, interface, or density decreases output)
High saturation: 20.5 mA
Low saturation: 3.8 mA
High alarm: 22.5 mA
Low Alarm: 3.7 mA
Only one of the above high/low alarm definitions is
available in a given configuration. NAMUR NE 43
compliant when high alarm level is selected.
Digital: HART 1200 Baud FSK (frequency shift keyed)
Performance
(1)
w/ NPS 3
249W, Using
a 14‐inch
Displacer
$0.8% of
output span
- - - - - -
$0.5% of
output span
- - - - - -
<1.0% of
output span
w/ All Other
249 Sensors
$0.5% of
output span
$0.3% of
output span
<1.0% of
output span
Performance
Criteria
Independent
Linearity
Hysteresis
Repeatability
Dead Band
Hysteresis plus
Deadband
NOTE: At full design span, reference conditions.
1. To lever assembly rotation inputs.
DLC3010
Digital Level
Controller
$0.25% of
output span
<0.2% of
output span
$0.1% of full
scale output
<0.05% of
input span
- - -
At effective proportional band (PB)<100%, linearity,
dead band, and repeatability are derated by the factor
(100%/PB)
Operating Influences
Power Supply Effect: Output changes <±0.2% of full
scale when supply varies between min. and max
voltage specifications.
Transient Voltage Protection: The loop terminals are
protected by a transient voltage suppressor. The
specifications are as follows:
Pulse Waveform
Rise Time
s)
10 1000 93.6 16
8 20 121 83
Note: μs = microsecond
Decay to
50% s)
Max V
CL
(Clamping
Voltage) (V)
Max I
PP
(Pulse Peak
@ Current) (A)
HART impedance requirements must be met to
enable communication. Total shunt impedance
across the master device connections (excluding the
master and transmitter impedance) must be between
230 and 1100 ohms. The transmitter HART receive
impedance is defined as:
Rx: 42K ohms and
Cx: 14 nF
Note that in point‐to‐point configuration, analog and
digital signalling are available. The instrument may be
queried digitally for information, or placed in Burst
mode to regularly transmit unsolicited process
information digitally. In multi‐drop mode, the output
current is fixed at 4 mA, and only digital
communication is available.
6
Ambient Temperature: The combined temperature
effect on zero and span without the 249 sensor is less
than 0.03% of full scale per degree Kelvin over the
operating range -40 to 80_C (-40 to 176_F)
Process Temperature: The torque rate is affected by
the process temperature (see figure 1‐2). The process
density may also be affected by the process
temperature.
Process Density: The sensitivity to error in knowledge
of process density is proportional to the differential
density of the calibration. If the differential specific
gravity is 0.2, an error of 0.02 specific gravity units in
knowledge of a process fluid density represents 10%
of span.
-continued-
Page 7
Instruction Manual
D102748X012
Table 1‐1. DLC3010 Digital Level Controller Specifications (continued)
Introduction and Specifications
October 2014
Electromagnetic Compatibility
Meets EN 61326‐1 and EN 61326‐2‐3
Immunity—Industrial locations per Table 2 of
EN 61326‐1 and Table AA.2 of EN 61326‐2‐3.
Performance is shown in table 1‐2 below.
Emissions—Class A
ISM equipment rating: Group 1, Class A
Supply Requirements (See figure 2‐10)
12 to 30 volts DC; instrument has reverse polarity
protection.
A minimum compliance voltage of 17.75 is required
to guarantee HART communication.
Compensation
Transducer compensation: for ambient temperature.
Density parameter compensation: for process
temperature (requires user‐supplied tables).
Manual compensation: for torque tube rate at target
process temperature is possible.
Digital Monitors
Linked to jumper‐selected Hi (factory default) or Lo
analog alarm signal:
Torque tube position transducer: Drive monitor and
signal reasonableness monitor
User‐configurable alarms: Hi‐Hi and Lo‐Lo Limit
process alarms
HART‐readable only:
RTD signal reasonableness monitor: When RTD
installed
Processor free‐time monitor.
Writes‐remaining in Non Volatile Memory monitor.
User‐configurable alarms: Hi and Lo limit process
alarms, Hi and Lo limit process temperature alarms,
and Hi and Lo limit electronics temperature alarms
Diagnostics
Output loop current diagnostic.
LCD meter diagnostic.
Spot specific gravity measurement in level mode: used
to update specific gravity parameter to improve
process measurement
Digital signal‐tracing capability: by review of
“troubleshooting variables”, and
Basic trending capability for PV, TV and SV.
LCD Meter Indications
LCD meter indicates analog output on a percent scale
bar graph. The meter also can be configured to
display:
Process variable in engineering units only.
Percent range only.
Percent range alternating with process variable or
Process variable, alternating with process temperature
(and degrees of pilot shaft rotation).
Electrical Classification
Hazardous Area:
CSA— Intrinsically Safe, Explosion‐proof, Division 2,
Dust Ignition‐proof
FM— Intrinsically Safe, Explosion‐proof,
Non‐incendive, Dust Ignition‐proof
ATEX— Intrinsically Safe, Type n, Flameproof
IECEx— Intrinsically Safe, Type n, Flameproof
Electrical Housing:
CSA— Type 4X ATEX— IP66
FM— NEMA 4X IECEx— IP66
Other Classifications/Certifications
FSETAN—Russian - Federal Service of Technological,
Ecological and Nuclear Inspectorate
GOST‐R—Russian GOST‐R
INMETRO— National Institute of Metrology,
Standardization, and Industrial Quality (Brazil)
NEPSI— National Supervision and Inspection Centre
for Explosion Protection and Safety of
Instrumentation (China)
PESO CCOE— Petroleum and Explosives Safety
Organisation - Chief Controller of Explosives (India)
TIIS— Technology Institution of Industrial Safety
(Japan)
Contact your Emerson Process Management sales
office for classification/certification specific
information
Minimum Differential Specific Gravity
With a nominal 4.4 degrees torque tube shaft
rotation for a 0 to 100 percent change in liquid level
(specific gravity=1), the digital level controller can be
adjusted to provide full output for an input range of
5% of nominal input span. This equates to a minimum
differential specific gravity of 0.05 with standard
volume displacers.
-continued-
7
Page 8
Introduction and Specifications
October 2014
Table 1‐1. DLC3010 Digital Level Controller Specifications (continued)
Instruction Manual
D102748X012
Minimum Differential Specific Gravity (continued)
See 249 sensor specifications for standard displacer
volumes and standard wall torque tubes. Standard
volume for 249C and 249CP sensors is ∼980 cm
3
in
), most others have standard volume of ∼1640 cm
3
(60
(100 in3).
3
encapsulated printed wiring boards; Neodymium Iron
Boron Magnets
Electrical Connections
Two 1/2‐14 NPT internal conduit connections; one on
bottom and one on back of terminal box. M20
adapters available.
Operating at 5% proportional band will degrade
accuracy by a factor of 20. Using a thin wall torque
tube, or doubling the displacer volume will each
roughly double the effective proportional band.
When proportional band of the system drops below
50%, changing displacer or torque tube should be
considered if high accuracy is a requirement.
Options
J Heat insulator. See description under Ordering
Information.
J Mountings for Masoneilant,
Yamatake, and Foxborot‐Eckhardt displacers
available.
J Level Signature Series Test (Performance
Validation Report) available (EMA only) for
instruments factory‐mounted on 249 sensor.
Mounting Positions
Digital level controllers can be mounted right‐ or
left‐of‐displacer, as shown in figure 2‐5.
J Factory Calibration: available for instruments
factory‐mounted on 249 sensor, when application,
process temperature and density(s) are supplied.
J Device is compatible with user‐specified remote
indicator.
Instrument orientation is normally with the coupling
access door at the bottom, to provide proper
drainage of lever chamber and terminal
compartment, and to limit gravitational effect on the
lever assembly. If alternate drainage is provided by
user, and a small performance loss is acceptable, the
instrument could be mounted in 90 degree rotational
increments around the pilot shaft axis. The LCD meter
may be rotated in 90 degree increments to
accommodate this.
Operating Limits
Process Temperature: See table 1‐4 and figure 2‐7.
Ambient Temperature and Humidity: See below
Conditions
Ambient
Temperature
Ambient
Relative
Humidity
(non‐condensing)
Construction Materials
Case and Cover: Low‐copper aluminum alloy
Internal: Plated steel, aluminum, and stainless steel;
NOTE: Specialized instrument terms are defined in ANSI/ISA Standard 51.1 - Process Instrument Terminology.
1. LCD meter may not be readable below -20_C (-4_F)
2. Contact your Emerson Process Management sales office or application engineer if temperatures exceeding these limits are required.
Weight
Less than 2.7 Kg (6 lbs)
Normal
(1,2)
Limits
-40 to 80_C
(-40 to 176_F)
0 to 95%,
Transport and
Storage Limits
-40 to 85_C
(-40 to 185_F)
0 to 95%,
(non‐condensing)
Nominal
Reference
25_C
(77_F)
40%
Table 1‐2. EMC Summary Results—Immunity
Port Phenomenon Basic Standard Test Level
Electrostatic discharge (ESD) IEC 61000‐4‐2
Enclosure
I/O signal/control
Note: RTD wiring must be shorter than 3 meters (9.8 feet)
1. A = No degradation during testing. B = Temporary degradation during testing, but is self‐recovering. Specification limit = +/- 1% of span.
2. HART communication was considered as “not relevant to the process” and is used primarily for configuration, calibration, and diagnostic purposes.
8
Radiated EM field IEC 61000‐4‐3
Rated power frequency
magnetic field
Burst IEC 61000‐4‐4
Surge IEC 61000‐4‐5
Conducted RF IEC 61000‐4‐6
IEC 61000‐4‐8
4 kV contact
8 kV air
80 to 1000 MHz @ 10V/m with 1 kHz AM at 80%
1400 to 2000 MHz @ 3V/m with 1 kHz AM at 80%
2000 to 2700 MHz @ 1V/m with 1 kHz AM at 80%
60 A/m at 50 Hz
1 kV
1 kV (line to ground only, each)
150 kHz to 80 MHz at 3 Vrms
Performance
(1)(2)
Criteria
A
A
A
A
B
A
Page 9
Instruction Manual
Introduction and Specifications
D102748X012
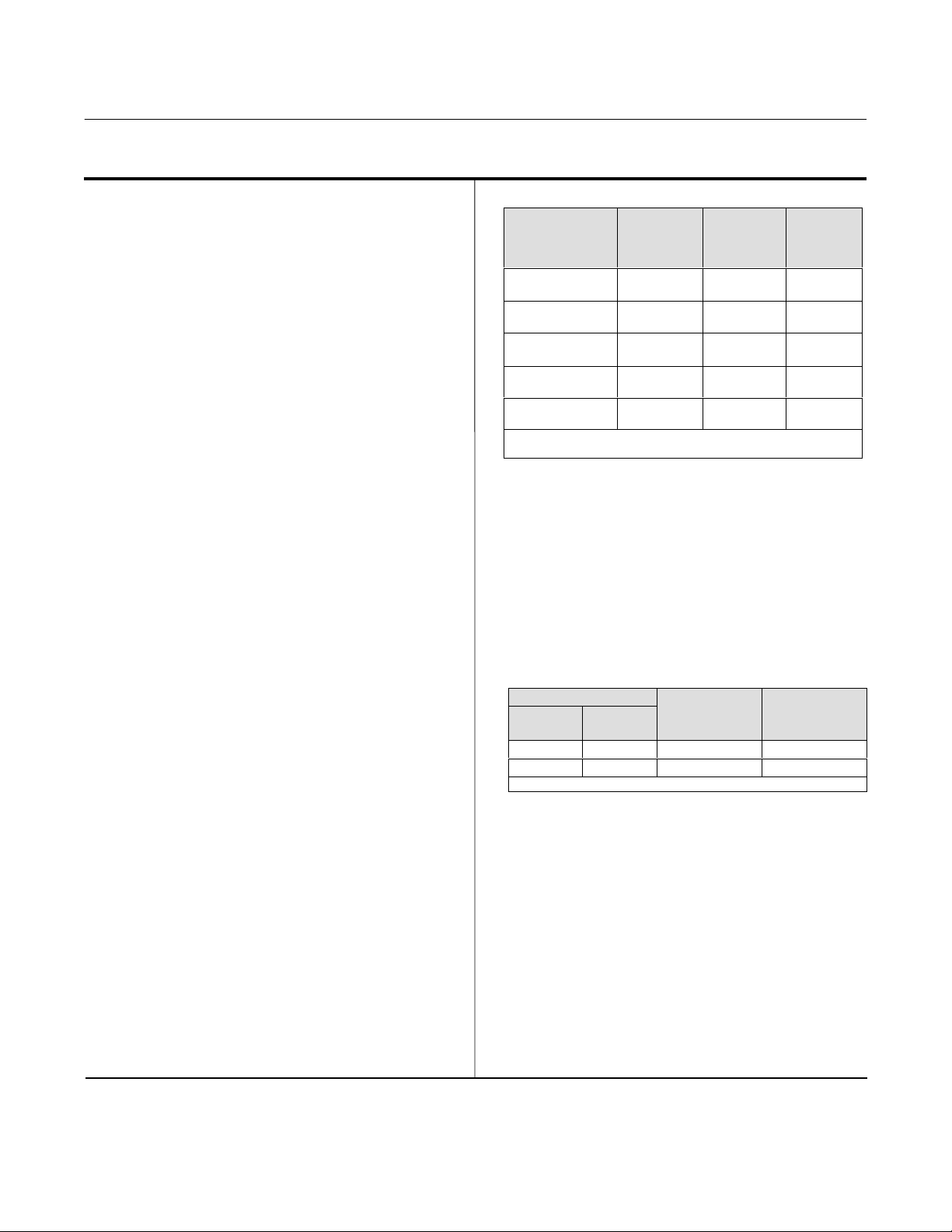
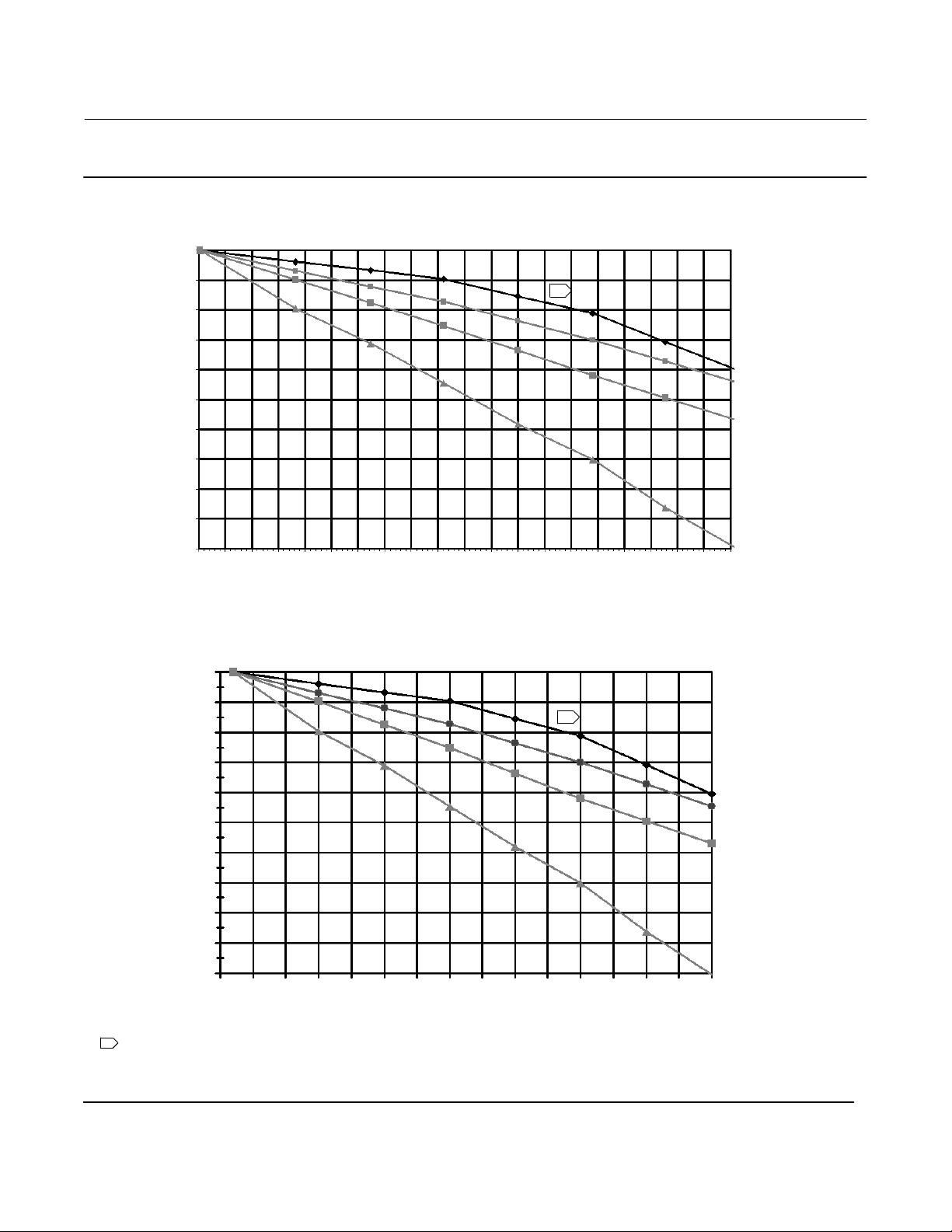
Figure 1‐2. Theoretical Reversible Temperature Effect on Common Torque Tube Materials
TORQUE RATE REDUCTION
(NORMALIZED MODULUS OF RIGIDITY)
1.00
October 2014
0.98
0.96
0.94
0.92
0.90
norm
G
0.88
0.86
0.84
0.82
0.80
20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360 380 400 420
1
TEMPERATURE (_C)
TORQUE RATE REDUCTION
(NORMALIZED MODULUS OF RIGIDITY)
1.00
0.98
0.96
1
N05500
N06600
N10276
S31600
0.94
0.92
norm
0.90
G
0.88
0.86
0.84
0.82
0.80
50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800
TEMPERATURE (_F)
NOTE:
1 DUE TO THE PERMANENT DRIFT THAT OCCURS NEAR AND ABOVE 260_C (500_F), N05500 IS NOT
RECOMMENDED FOR TEMPERATURES ABOVE 232_C (450_F).
N05500
N06600
N10276
S31600
9
Page 10
Introduction and Specifications
October 2014
Table 1‐3. 249 Sensor Specifications
Input Signal
Liquid Level or Liquid‐to‐Liquid Interface Level:From 0
to 100 percent of displacer length
Liquid Density: From 0 to 100 percent of
displacement force change obtained with given
displacer volume—standard volumes are
(60 inches3) for 249C and 249CP sensors or J1640
3
cm
(100 inches3) for most other sensors; other
J980 cm
volumes available depending upon sensor
construction
Sensor Displacer Lengths
See tables 1‐6 and 1‐7 footnotes
Sensor Working Pressures
Consistent with applicable ANSI
pressure/temperature ratings for the specific sensor
constructions shown in tables 1‐6 and 1‐7
Caged Sensor Connection Styles
Cages can be furnished in a variety of end connection
styles to facilitate mounting on vessels; the
Instruction Manual
D102748X012
equalizing connection styles are numbered and are
shown in figure 1‐3.
Mounting Positions
3
Most level sensors with cage displacers have a
rotatable head. The head may be rotated through
360 degrees to any of eight different positions, as
shown in figure 2‐5.
Construction Materials
See tables 1‐5, 1‐6, and 1‐7
Operative Ambient Temperature
See table 1‐4
For ambient temperature ranges, guidelines, and use
of optional heat insulator, see figure 2‐7.
Options
J Heat insulator, see description under Ordering
Information
232_C (420 psig at 450_F), and
J Gauge glass for pressures to 29 bar at
J Reflex gauges for
high temperature and pressure applications
Table 1‐4. Allowable Process Temperatures for
Common 249 Sensor Pressure Boundary Materials
MATERIAL
Cast Iron -29_C (-20_F) 232_C (450_F)
Steel -29_C (-20_F) 427_C (800_F)
Stainless Steel -198_C (-325_F) 427_C (800_F)
N04400 -198_C (-325_F) 427_C (800_F)
Graphite
Laminate/SST
Gaskets
N04400/PTFE
Gaskets
-198_C (-325_F) 427_C (800_F)
-73_C (-100_F) 204_C (400_F)
PROCESS TEMPERATURE
Min. Max.
Table 1‐5. Displacer and Torque Tube Materials
Part Standard Material Other Materials
316 Stainless Steel,
Displacer 304 Stainless Steel
Displacer Stem
Driver Bearing,
Displacer Rod
and Driver
Torque Tube N05500
1. N05500 is not recommended for spring applications above 232_C
(450_F). Contact your Emerson Process Management sales office or
application engineer if temperatures exceeding this limit are required.
316 Stainless Steel
(1)
N10276, N04400,
Plastic, and Special
Alloys
N10276, N04400,
other Austenitic
Stainless Steels, and
Special Alloys
316 Stainless Steel,
N06600, N10276
10
Page 11
Instruction Manual
D102748X012
Introduction and Specifications
October 2014
Table 1‐6. Caged Displacer Sensors
TORQUE TUBE
ORIENTATION
249
SENSOR
(3)
(1)
STANDARD CAGE, HEAD,
AND TORQUE TUBE ARM
MATERIAL
Cast iron
EQUALIZING CONNECTION
Style Size (NPS)
Screwed 1‐1/2 or 2
Flanged 2
Screwed or optional socket weld 1‐1/2 or 2 CL600
1‐1/2
2
1‐1/2
Torque tube
arm rotatable
with respect to
equalizing
connections
249B, 249BF
(3)
249C
(4)
Steel
316 stainless steel
Raised face or optional ring‐type joint
flanged
Screwed 1‐1/2 or 2 CL600
Raised face flanged
2
249K Steel
249L Steel Ring‐type joint flanged 2
1. Standard displacer lengths for all styles (except 249) are 14, 32, 48, 60, 72, 84, 96, 108 and 120 inches. The 249 uses a displacer with a length of either 14 or 32 inches.
2. EN flange connections available in EMA (Europe, Middle East and Africa).
3. Not available in EMA.
4. The 249BF available in EMA only. Also available in EN size DN 40 with PN 10 to PN 100 flanges and size DN 50 with PN 10 to PN 63 flanges.
5. Top connection is NPS 1 ring‐type joint flanged for connection styles F1 and F2.
Table 1‐7. Cageless Displacer Sensors
Mounting Sensor
Standard Head
Body
(1)
(6)
(2),
and Torque Tube
Wafer
Raised face or optional ring‐type joint
flanged
1‐1/2 or 2 CL900 or CL1500
(5)
Flange Connection (Size) Pressure Rating
Arm Material
NPS 4 raised face or optional ring‐type joint CL150, CL300, or CL600
NPS 6 or 8 raised face CL150 or CL300
NPS 4 raised face or optional ring‐type joint
NPS 6 or 8 raised face
CL900 or 1CL500
(EN PN 10 to DIN PN 250)
CL150, CL300, CL600, CL900,
CL1500, or CL2500
CL125, CL150, CL250, CL300,
For NPS 4 raised face or flat face
CL600, CL900, or CL1500
(EN PN 10 to DIN PN 160)
Mounts on
top of vessel
Mounts on
side of vessel
(4)
249BP
Steel
249CP 316 Stainless Steel NPS 3 raised face CL150, CL300, or CL600
(5)
249P
Steel or stainless steel
WCC (steel) LCC (steel), or
249VS
CF8M (316 stainless steel)
WCC, LCC, or CF8M For NPS 4 buttweld end, XXZ CL2500
Mounts on top of
vessel or on
customer
249W
supplied cage
1. Standard displacer lengths are 14, 32, 48, 60, 72, 84, 96, 108, and 120 inches.
2. Not used with side‐mounted sensors.
3. EN flange connections available in EMA (Europe, Middle East and Africa).
4. Not available in EMA.
5. 249P available in EMA only.
6. Wafer Body only applicable to the 249W.
WCC or CF8M For NPS 3 raised face CL150, CL300, or CL600
LCC or CF8M For NPS 4 raised face CL150, CL300, or CL600
PRESSURE RATING
CL125 or CL250
CL150, CL300, or
CL600
CL150, CL300, or
CL600
CL150, CL300, or
CL600
CL150, CL300, or
CL600
CL2500
(3)
(2)
11
Page 12
Introduction and Specifications
October 2014
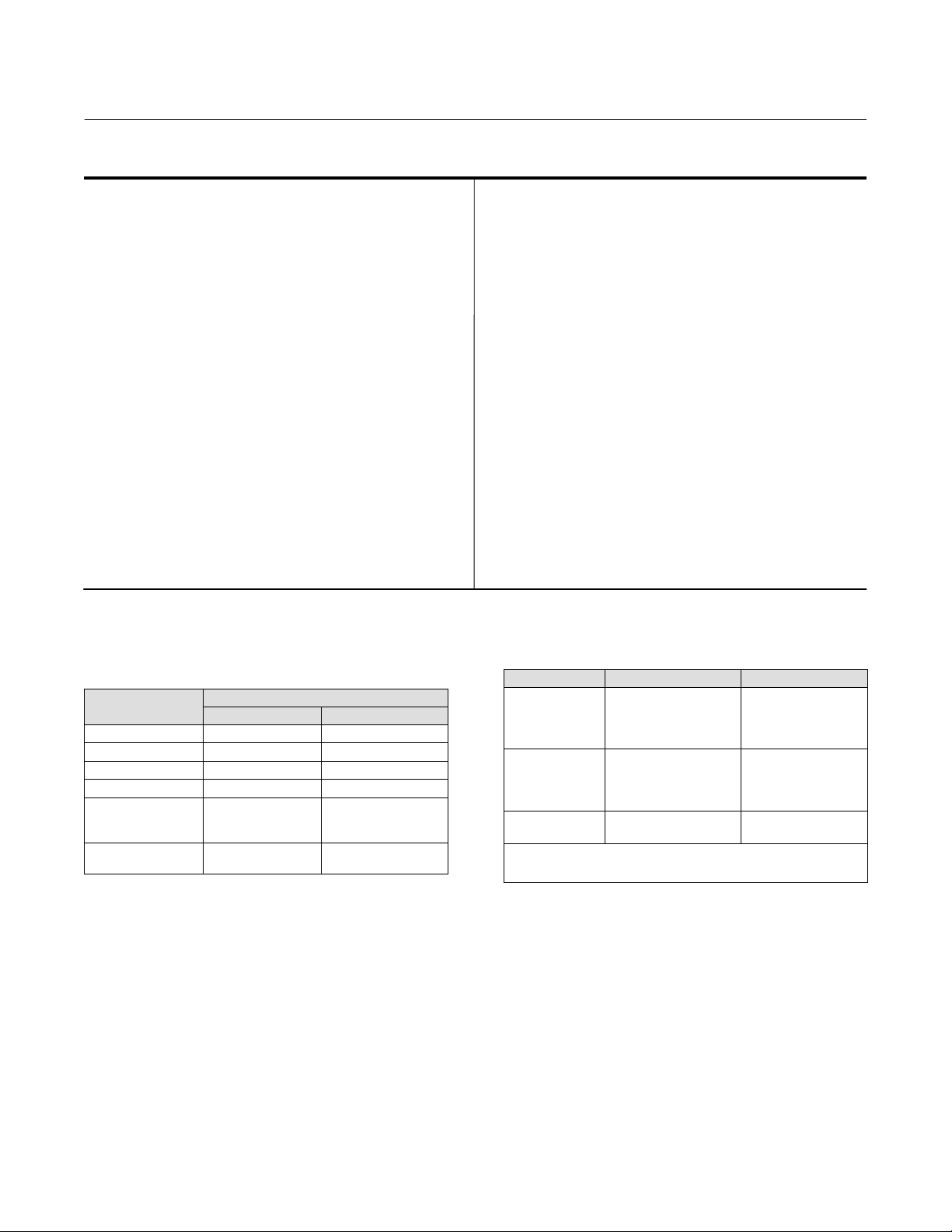
Figure 1‐3. Style Number of Equalizing Connections
Instruction Manual
D102748X012
TOP AND BOTTOM CONNECTIONS,
STYLE 1
SCREWED (S‐1) OR FLANGED (F‐1)
TOP AND LOWER SIDE CONNECTIONS,
28B5536‐1
B1820‐2
SCREWED (S‐2) OR FLANGED (F‐2)
STYLE 2
UPPER AND LOWER SIDE CONNECTIONS,
STYLE 3
SCREWED (S‐3) OR FLANGED (F‐3)
STYLE 4
UPPER SIDE AND BOTTOM CONNECTIONS,
SCREWED (S‐4) OR FLANGED (F‐4)
12
Page 13
Instruction Manual
D102748X012
Installation
October 2014
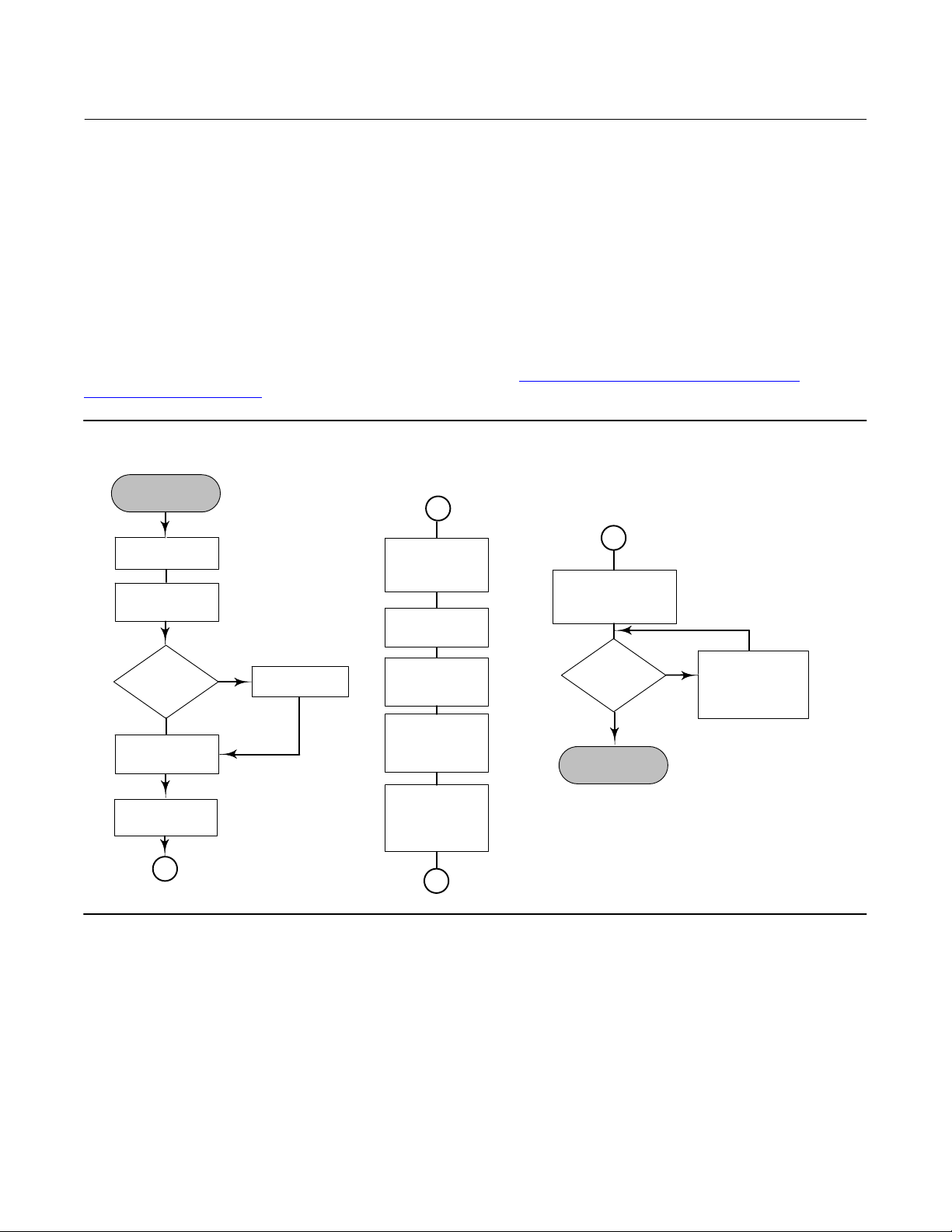
Section 2 Installation2-2-
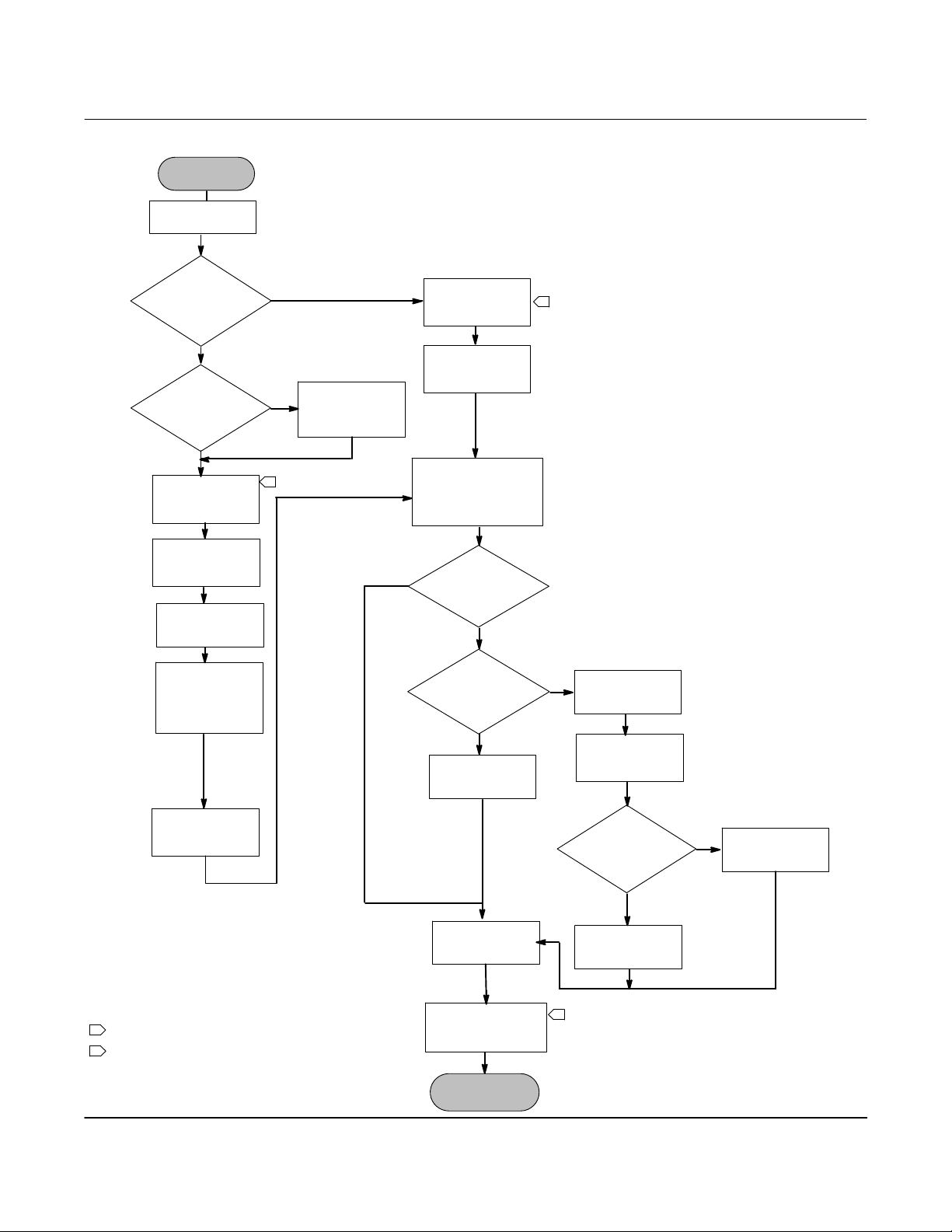
This section contains digital level controller installation information including an installation flowchart (figure 2‐1),
mounting and electrical installation information, and a discussion of failure mode jumpers.
Configuration: On the Bench or in the Loop
Configure the digital level controller before or after installation. It may be useful to configure the instrument on the
bench before installation to ensure proper operation, and to familiarize yourself with its functionality.
Protecting the Coupling and Flexures
CAUTION
Damage to flexures and other parts can cause measurement errors. Observe the following steps before moving the sensor
and controller.
Lever Lock
The lever lock is built in to the coupling access handle. When the handle is open, it positions the lever in the neutral
travel position for coupling. In some cases, this function is used to protect the lever assembly from violent motion
during shipment.
A DLC3010 controller will have one of the following mechanical configurations when received:
1. A fully assembled and coupled caged‐displacer system shipped with the displacer or driver rod blocked within the
operating range by mechanical means. In this case, the access handle (figure 2‐4) will be in the unlocked position.
Remove the displacer‐blocking hardware before calibration. (See the appropriate sensor instruction manual). The
coupling should be intact.
CAUTION
When shipping an instrument mounted on a sensor, if the lever assembly is coupled to the linkage, and the linkage is
constrained by the displacer blocks, use of the lever lock may result in damage to bellows joints or flexure.
2. If the displacer cannot be blocked because of cage configuration or other concerns, the transmitter is uncoupled
from the torque tube by loosening the coupling nut, and the access handle will be in the locked position. Before
placing such a configuration into service, perform the Coupling procedure found on page 38.
3. For a cageless system where the displacer is not connected to the torque tube during shipping, the torque tube
itself stabilizes the coupled lever position by resting against a physical stop in the sensor. The access handle will be
in the unlocked position. Mount the sensor and hang the displacer. The coupling should be intact.
13
Page 14
Installation
October 2014
Figure 2‐1. Installation Flowchart
START HERE
Check Alarm
Jumper Position
Instruction Manual
D102748X012
Factory mounted
on 249 sensor?
No
High
temperature
application?
No
Mount and Wire
Digital level
Controller
Power
Digital level
Controller
Set Level Offset
to Zero
Use Setup Wizard
to enter sensor
data and
calibration
condition
Yes
1
Yes
Install heat
insulator
assembly
Digital Level
Controller
Digital Level
Controller
Enter Tag, Messages,
Date, and check or set
target application data
Yes
Measurement?
Temperature
Correction?
Specific Gravity
Wire
Power
Density
Using
Set
No
No
1
Yes
Set
Temperature
Units
Setup specific
gravity tables
Calibrate
sensor
NOTE:
1 IF USING RTD FOR TEMPERATURE CORRECTION,
ALSO WIRE RTD TO DIGITAL LEVEL CONTROLLER
2 DISABLING WRITES IS EFFECTIVE ONLY IF THE DLC3010 REMAINS
POWERED‐UP
14
Set
Range Values
Disable Writes
DONE
2
Using RTD?
No
Enter Process
Temperature
Yes
Setup and
Calibrate RTD
Page 15
Instruction Manual
D102748X012
4. If the controller was shipped alone, the access handle will be in the locked position. All Mounting, Coupling and
Calibration procedures must be performed.
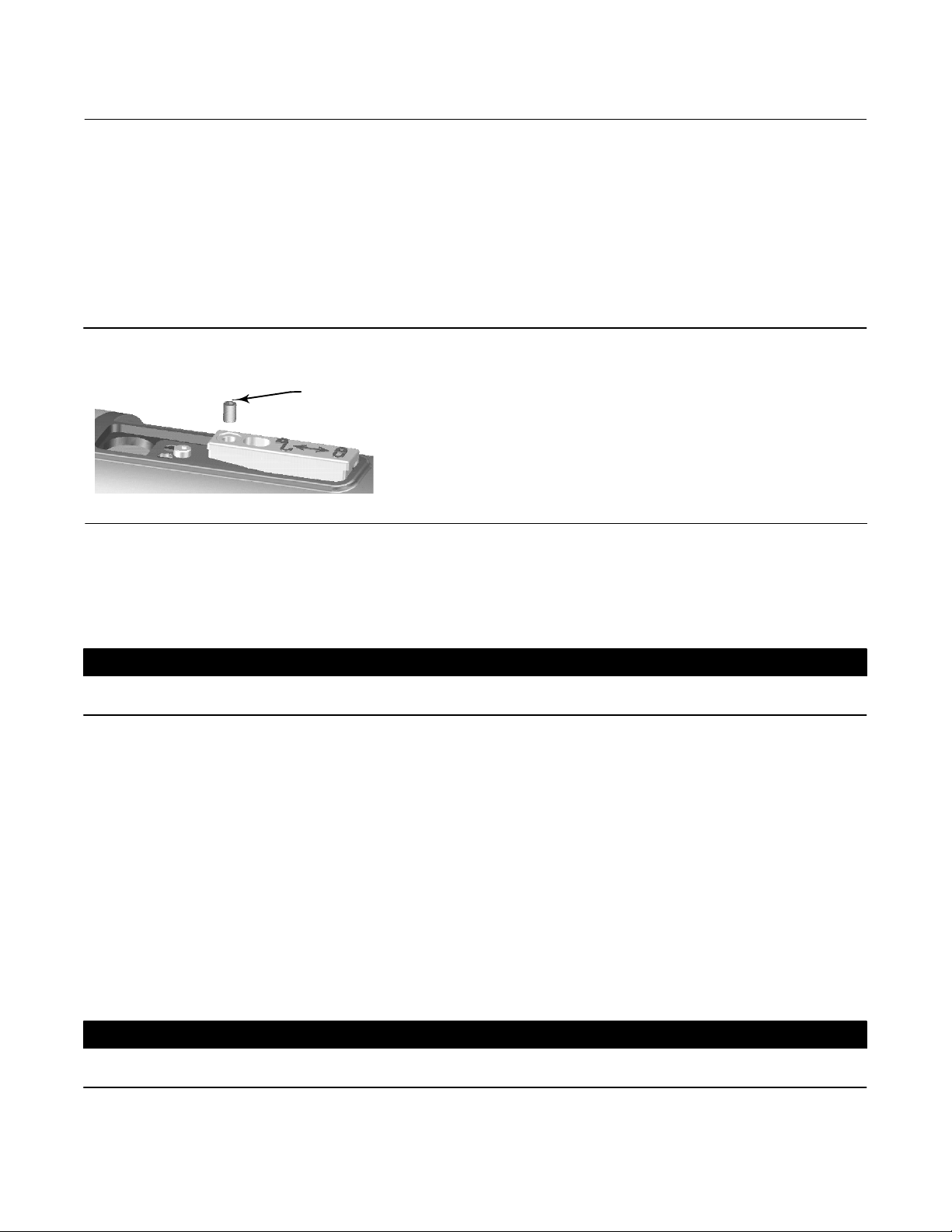
The access handle includes a retaining set screw, as shown in figures 2‐4 and 2‐6. The screw is driven in to contact the
spring plate in the handle assembly before shipping. It secures the handle in the desired position during shipping and
operation. To set the access handle in the open or closed position, this set screw must be backed out so that its top is
flush with the handle surface.
Installation
October 2014
Mounting
WARNING
To avoid personal injury, always wear protective gloves, clothing, and eyewear when performing any installation
operations.
Personal injury or property damage due to sudden release of pressure, contact with hazardous fluid, fire, or explosion can
be caused by puncturing, heating, or repairing a displacer that is retaining process pressure or fluid. This danger may not
be readily apparent when disassembling the sensor or removing the displacer. Before disassembling the sensor or
removing the displacer, observe the appropriate warnings provided in the sensor instruction manual.
Check with your process or safety engineer for any additional measures that must be taken to protect against process
media.
Hazardous Area Classifications and Special Instructions for “Safe Use” and
Installations in Hazardous Locations
Refer to the DLC3010 Quick Start Guide (D103214X012) that ships with the instrument for Hazardous Area
Classifications and Special Instructions for “Safe Use” and Installations in Hazardous Locations. If a copy of this quick
start guide is needed contact your Emerson Process Management sales office or visit our website at www.Fisher.com.
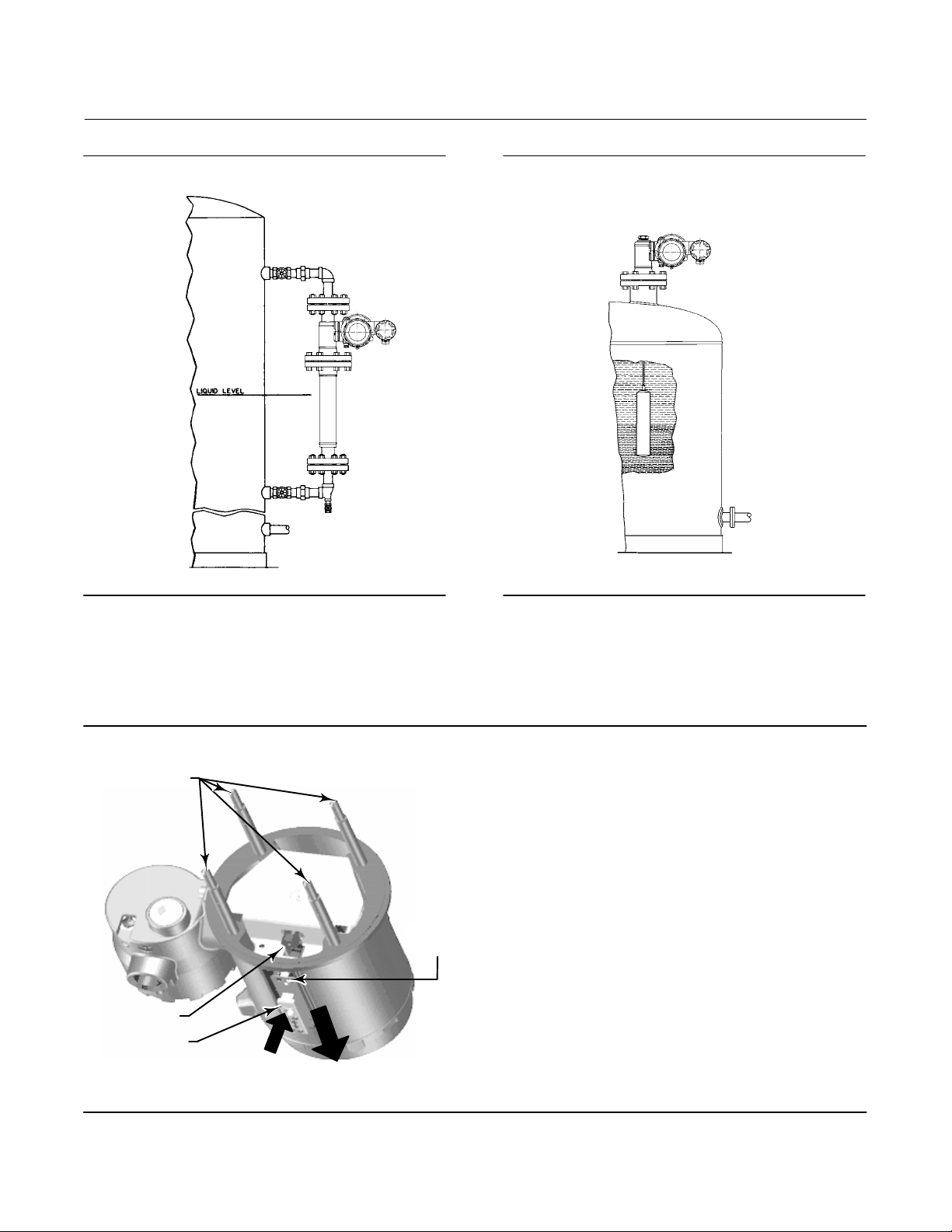
Mounting the 249 Sensor
The 249 sensor is mounted using one of two methods, depending on the specific type of sensor. If the sensor has a
caged displacer, it typically mounts on the side of the vessel as shown in figure 2‐2. If the sensor has a cageless
displacer, the sensor mounts on the side or top of the vessel as shown in figure 2‐3.
The DLC3010 digital level controller is typically shipped attached to the sensor. If ordered separately, it may be
convenient to mount the digital level controller to the sensor and perform the initial setup and calibration before
installing the sensor on the vessel.
Note
Caged sensors have a rod and block installed on each end of the displacer to protect the displacer in shipping. Remove these parts
before installing the sensor to allow the displacer to function properly.
15
Page 16
Installation
October 2014
Instruction Manual
D102748X012
Figure 2‐2. Typical Caged Sensor Mounting
A3789‐1
Figure 2‐3. Typical Cageless Sensor Mounting
A3788‐1
Digital Level Controller Orientation
Mount the digital level controller with the torque tube shaft clamp access hole (see figure 2‐4) pointing downward to
allow accumulated moisture drainage.
Figure 2‐4. Sensor Connection Compartment (Adapter Ring Removed for Clarity)
MOUNTING
STUDS
ACCESS
HOLE
SHAFT CLAMP
SET SCREW
PRESS HERE TO
MOVE ACCESS
HANDLE
SLIDE ACCESS HANDLE
TOWARD FRONT OF UNIT
TO EXPOSE ACCESS HOLE
16
Page 17
Instruction Manual
D102748X012
Installation
October 2014
Note
If alternate drainage is provided by the user, and a small performance loss is acceptable, the instrument could be mounted in 90
degree rotational increments around the pilot shaft axis. The LCD meter may be rotated in 90 degree increments to accommodate
this.
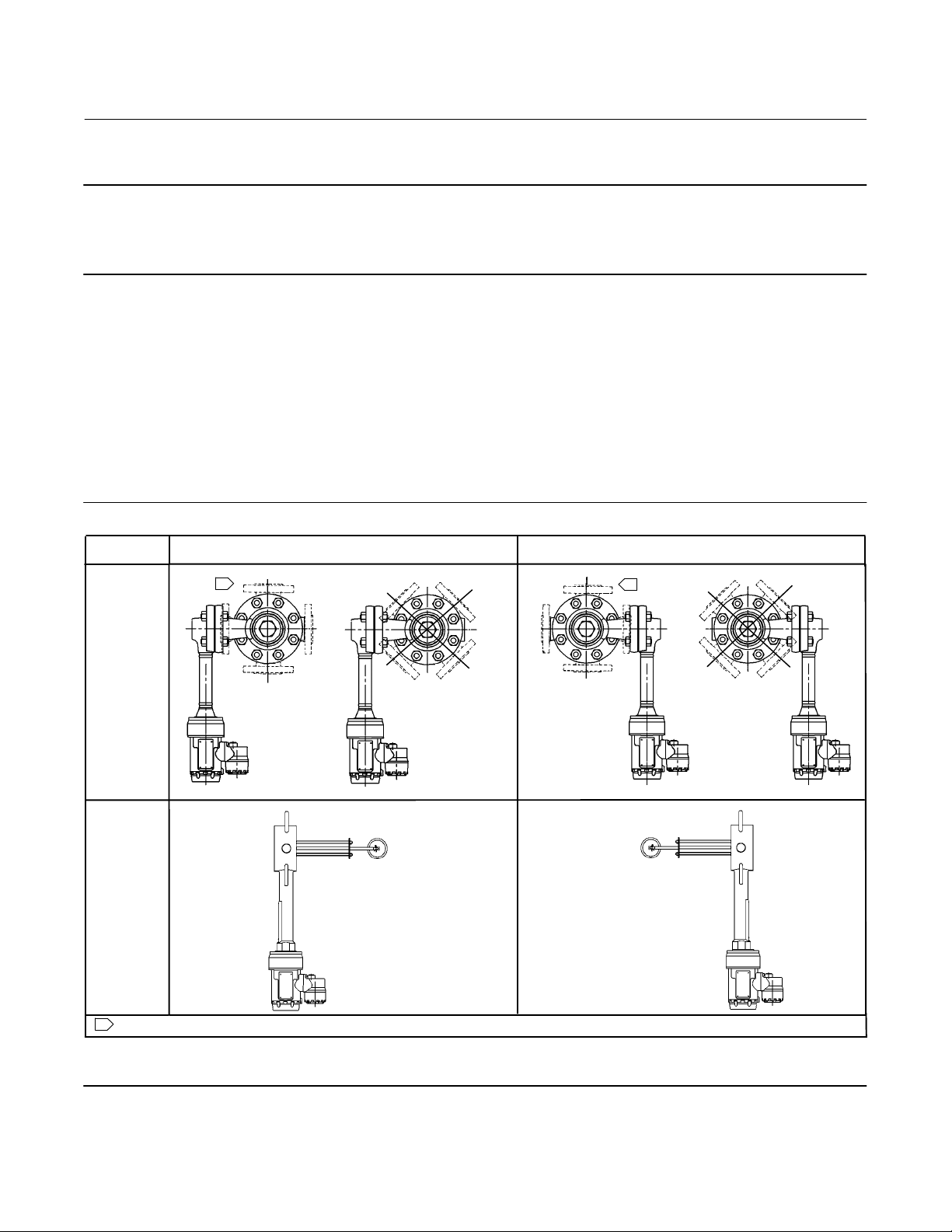
The digital level controller and torque tube arm are attached to the sensor either to the left or right of the displacer, as
shown in figure 2‐5. This can be changed in the field on the 249 sensors (refer to the appropriate sensor instruction
manual). Changing the mounting also changes the effective action, because the torque tube rotation for increasing
level, (looking at the protruding shaft), is clockwise when the unit is mounted to the right of the displacer and counter‐
clockwise when the unit is mounted to the left of the displacer.
All caged 249 sensors have a rotatable head. That is, the digital level controller can be positioned at any of eight
alternate positions around the cage as indicated by the position numbers 1 through 8 in figure 2‐5. To rotate the head,
remove the head flange bolts and nuts and position the head as desired.
Figure 2‐5. Typical Mounting Positions for the FIELDVUE DLC3010 Digital Level Controller on Fisher 249 Sensor
SENSOR
CAGED
CAGELESS
LEFT‐OF‐DISPLACER
7
1
5
3
RIGHT‐OF‐DISPLACER
6
1
4
8
2
3
1
7
1
5
2
8
4
6
NOT AVAILABLE FOR SIZE NPS 2 CL300 AND CL600 249C SENSOR.
1
19B2787 Rev. D
19B6600 Rev. C
B1407‐2
17
Page 18
Installation
October 2014
Instruction Manual
D102748X012
Mounting the Digital Level Controller on a 249 Sensor
Refer to figure 2‐4 unless otherwise indicated.
1. If the set‐screw in the access handle (figure 2‐6) is driven against the spring plate, back it out until the head is flush
with the outer surface of the handle, using a 2 mm hex key. Slide the access handle to the locked position to expose
the access hole. Press on the back of the handle as shown in figure 2‐4 then slide the handle toward the front of the
unit. Be sure the locking handle drops into the detent.
Figure 2‐6. Close‐up of Set‐Screw
SET‐SCREW
2. Using a 10 mm deep well socket inserted through the access hole, loosen the shaft clamp (figure 2‐4). This clamp
will be re‐tightened in the Coupling portion of the Initial Setup section.
3. Remove the hex nuts from the mounting studs. Do not remove the adapter ring.
CAUTION
Measurement errors can occur if the torque tube assembly is bent or misaligned during installation.
4. Position the digital level controller so the access hole is on the bottom of the instrument.
5. Carefully slide the mounting studs into the sensor mounting holes until the digital level controller is snug against
the sensor.
6. Reinstall the hex nuts on the mounting studs and tighten the hex nuts to 10 NSm (88.5 lbfSin).
Mounting the Digital Level Controller for High Temperature Applications
Refer to figure 2‐8 for parts identification except where otherwise indicated.
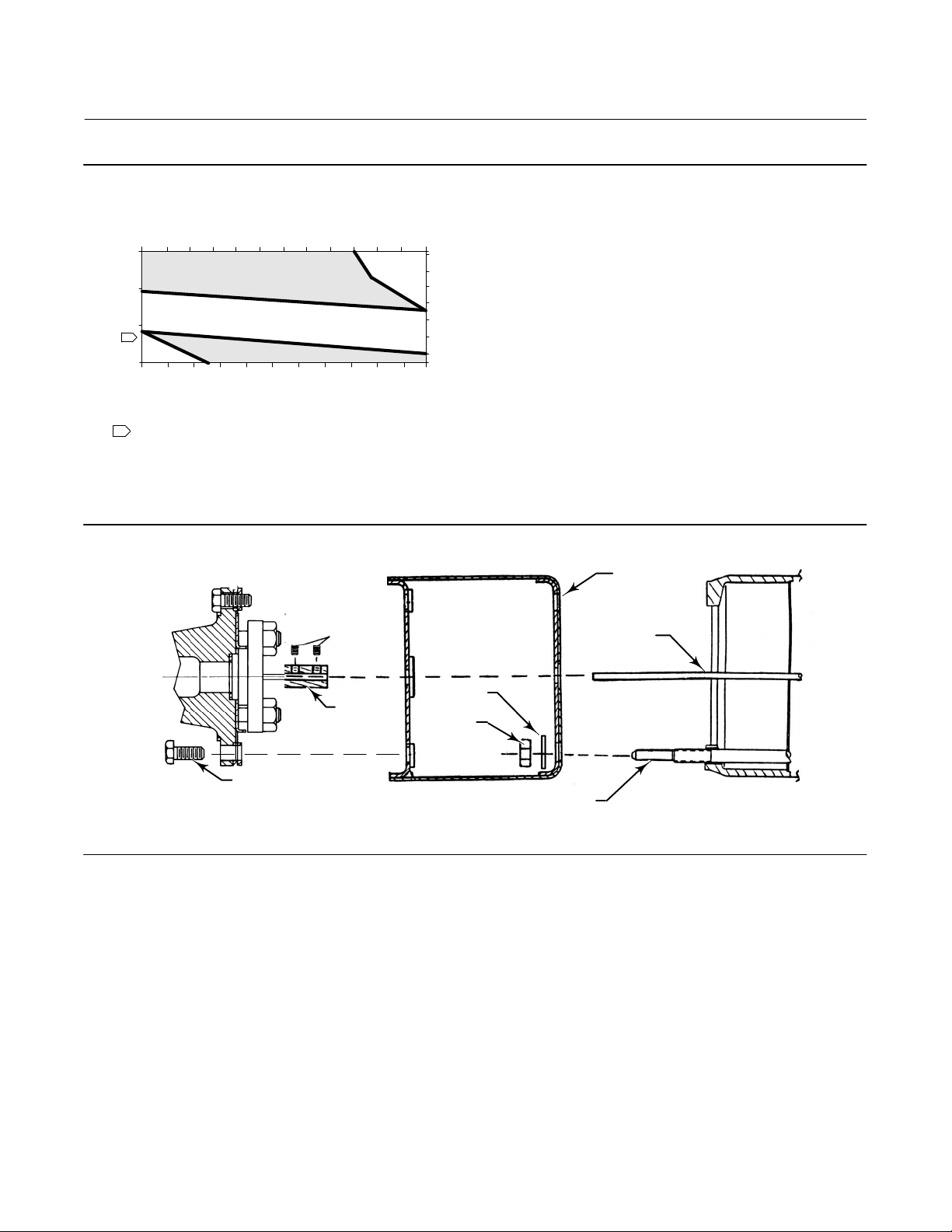
The digital level controller requires an insulator assembly when temperatures exceed the limits shown in figure 2‐7.
A torque tube shaft extension is required for a 249 sensor when using an insulator assembly.
CAUTION
Measurement errors can occur if the torque tube assembly is bent or misaligned during installation.
18
Page 19
Instruction Manual
D102748X012
Figure 2‐7. Guidelines for Use of Optional Heat Insulator Assembly
Installation
October 2014
-40 -30
800
-20 -10
010 20
30 40 50 60
AMBIENT TEMPERATURE (_C)
HEAT INSULATOR
400
0
1
TOO
COLD
-325
PROCESS TEMPERATURE (_F)
0 20 40 60 80 100 120 140 160
-20-40
REQUIRED
NO HEAT INSULATOR NECESSARY
HEAT INSULATOR
REQUIRED
AMBIENT TEMPERATURE (_F)
TOO
HOT
70
80
425
400
300
200
100
0
-100
-200
176
PROCESS TEMPERATURE (_C)
STANDARD TRANSMITTER
NOTES:
1 FOR PROCESS TEMPERATURES BELOW -29_C (-20_F) AND ABOVE 204_C (400_F)
SENSOR MATERIALS MUST BE APPROPRIATE FOR THE PROCESS; SEE TABLE 1‐4.
2. IF AMBIENT DEW POINT IS ABOVE PROCESS TEMPERATURE, ICE FORMATION MIGHT
CAUSE INSTRUMENT MALFUNCTION AND REDUCE INSULATOR EFFECTIVENESS.
39A4070‐B
A5494‐1
Figure 2‐8. Digital Level Controller Mounting on Sensor in High Temperature Applications
INSULATOR
(KEY 57)
SET SCREWS
(KEY 60)
SHAFT
EXTENSION
(KEY 58)
WASHER
SHAFT
COUPLING
(KEY 59)
(KEY 78)
HEX NUTS
(KEY 34)
CAP SCREWS
MN28800
20A7423‐C
B2707
(KEY 63)
SENSOR
MOUNTING STUDS
(KEY 33)
DIGITAL LEVEL CONTROLLER
1. For mounting a digital level controller on a 249 sensor, secure the shaft extension to the sensor torque tube shaft
via the shaft coupling and set screws, with the coupling centered as shown in figure 2‐8.
2. Slide the access handle to the locked position to expose the access hole. Press on the back of the handle as shown in
figure 2‐4 then slide the handle toward the front of the unit. Be sure the locking handle drops into the detent.
3. Remove the hex nuts from the mounting studs.
4. Position the insulator on the digital level controller, sliding the insulator straight over the mounting studs.
5. Install 4 washers (key 78) over the studs. Install the four hex nuts and tighten.
6. Carefully slide the digital level controller with the attached insulator over the shaft coupling so that the access hole
is on the bottom of the digital level controller.
7. Secure the digital level controller and insulator to the torque tube arm with four cap screws.
8. Tighten the cap screws to 10 NSm (88.5 lbfSin).
19
Page 20
Installation
October 2014
Instruction Manual
D102748X012
Electrical Connections
WARNING
Select wiring and/or cable glands that are rated for the environment of use (such as hazardous area, ingress protection and
temperature). Failure to use properly rated wiring and/or cable glands can result in personal injury or property damage
from fire or explosion.
Wiring connections must be in accordance with local, regional, and national codes for any given hazardous area approval.
Failure to follow the local, regional, and national codes could result in personal injury or property damage from fire or
explosion.
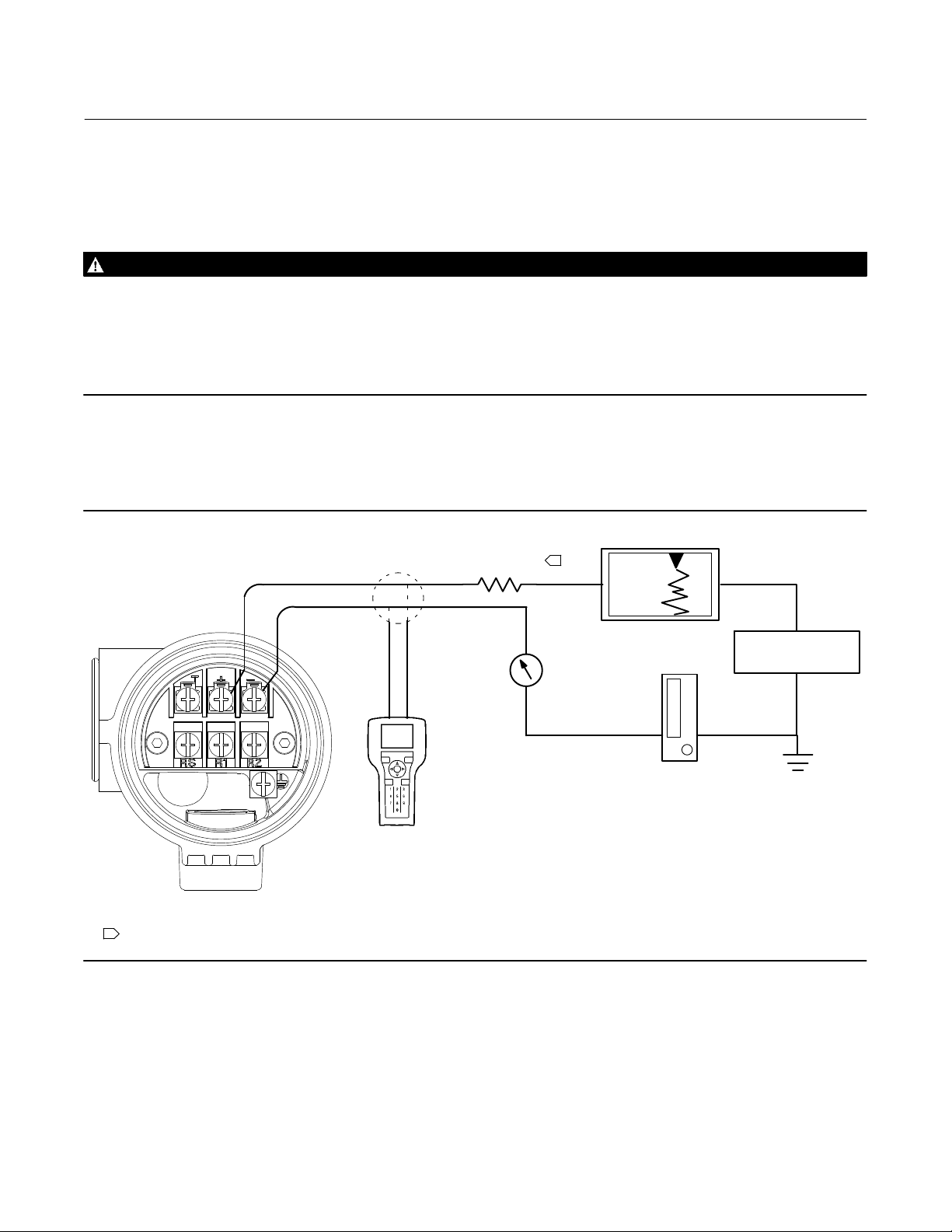
Proper electrical installation is necessary to prevent errors due to electrical noise. A resistance between 230 and 1100
ohms must be present in the loop for communication with a Field Communicator. Refer to figure 2‐9 for current loop
connections.
Figure 2‐9. Connecting a Field Communicator to the Digital Level Controller Loop
NOTE:
1 THIS REPRESENTS THE TOTAL SERIES LOOP RESISTANCE.
E0363
230 RL 1100
A Field Communicator
may be connected at any
termination point in the signal
loop. Signal loop must have
between 250 and 1100 ohms
load for communication.
1
Reference meter
for calibration
+
or monitoring
operation. May
be a voltmeter
across 250 ohm
−
resistor or a
current meter.
−
+
Signal loop may be grounded at
any point or left ungrounded.
−
+
+
POWER
SUPPLY
−
Power Supply
To communicate with the digital level controller, you need a 17.75 volt DC minimum power supply. The power
supplied to the transmitter terminals is determined by the available supply voltage minus the product of the total loop
resistance and the loop current. The available supply voltage should not drop below the lift‐off voltage. (The lift‐off
voltage is the minimum “available supply voltage” required for a given total loop resistance). Refer to figure 2‐10 to
20
Page 21
Instruction Manual
D102748X012
Installation
October 2014
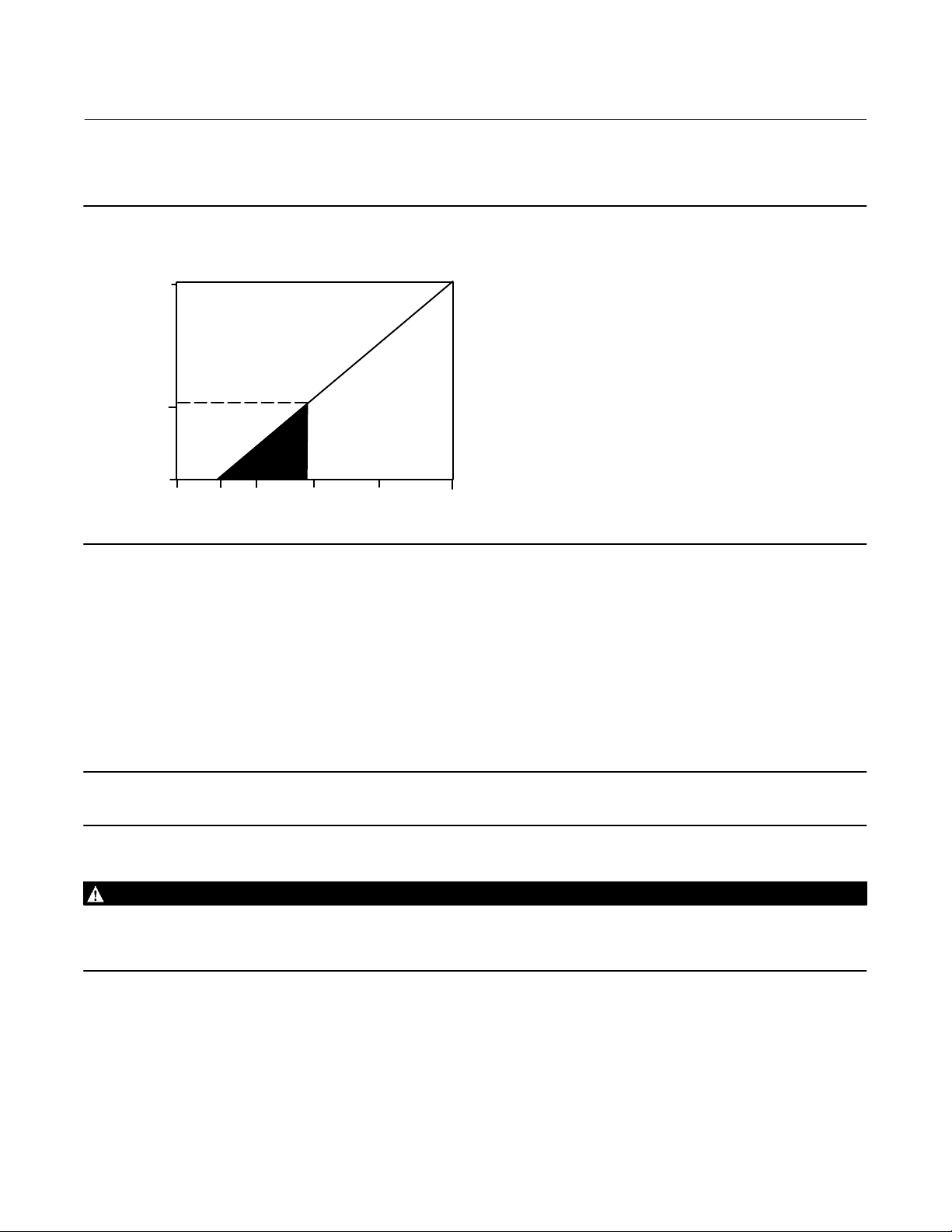
determine the required lift‐off voltage. If you know your total loop resistance you can determine the lift‐off voltage. If
you know the available supply voltage, you can determine the maximum allowable loop resistance.
Figure 2‐10. Power Supply Requirements and Load Resistance
Maximum Load = 43.5 X (Available Supply Voltage - 12.0)
783
Load (Ohms)
250
0
10 20 2515
12 30
LIFT‐OFF SUPPLY VOLTAGE (VDC)
Operating
Region
If the power supply voltage drops below the lift‐off voltage while the transmitter is being configured, the transmitter
may output incorrect information.
The DC power supply should provide power with less than 2% ripple. The total resistance load is the sum of the
resistance of the signal leads and the load resistance of any controller, indicator, or related pieces of equipment in the
loop. Note that the resistance of intrinsic safety barriers, if used, must be included.
Field Wiring
Note
For intrinsically safe applications, refer to the instructions supplied by the barrier manufacturer.
WARNING
To avoid personal injury or property damage caused by fire or explosion, remove power to the instrument before removing
the digital level controller cover in an area which contains a potentially explosive atmosphere or has been classified as
hazardous.
All power to the digital level controller is supplied over the signal wiring. Signal wiring need not be shielded, but use
twisted pairs for best results. Do not run unshielded signal wiring in conduit or open trays with power wiring, or near
heavy electrical equipment. If the digital controller is in an explosive atmosphere, do not remove the digital level
controller covers when the circuit is alive, unless in an intrinsically safe installation. Avoid contact with leads and
terminals. To power the digital level controller, connect the positive power lead to the + terminal and the negative
power lead to the - terminal as shown in figure 2‐11.
21
Page 22
Installation
October 2014
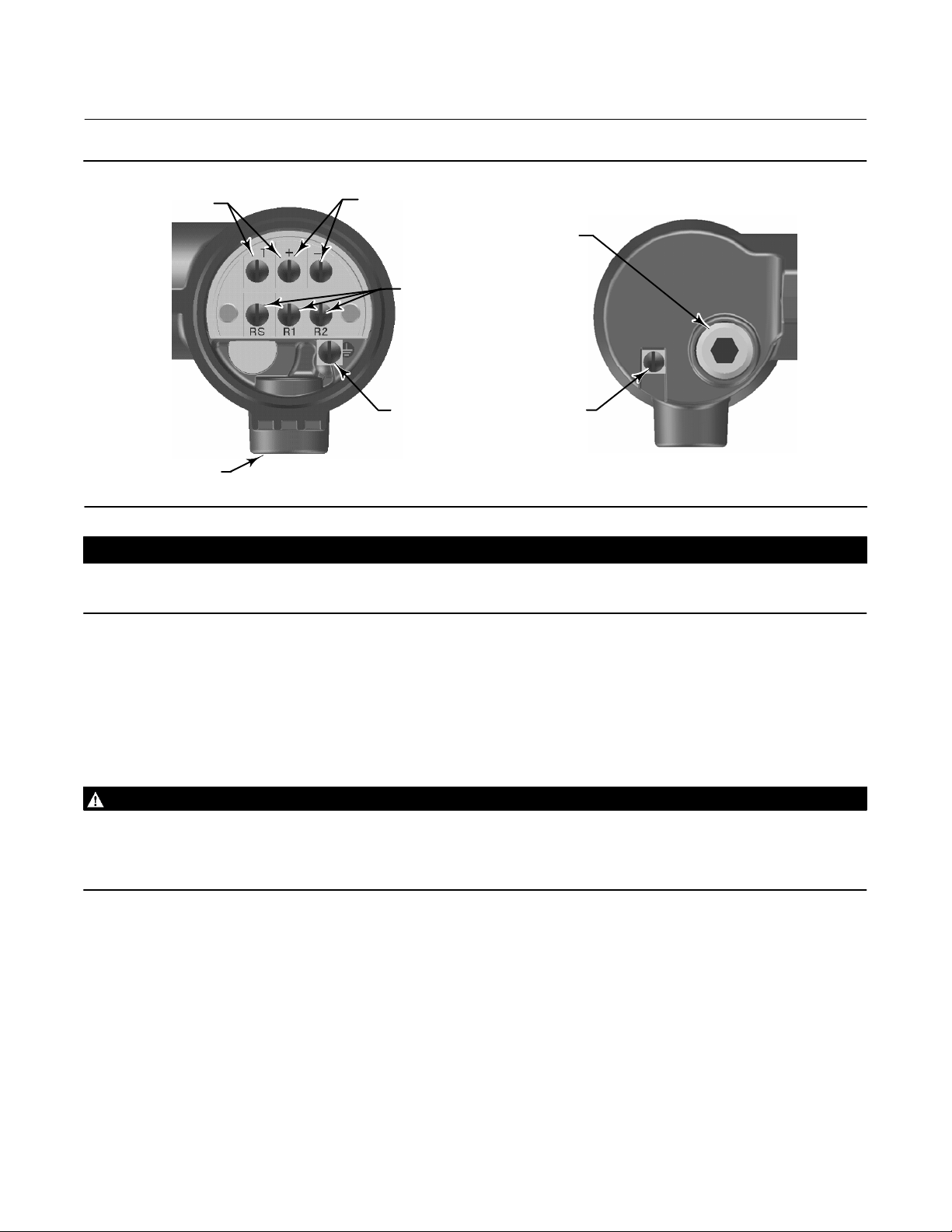
Figure 2‐11. Digital Level Controller Terminal Box
TEST CONNECTIONS
4‐20 mA LOOP
CONNECTIONS
Instruction Manual
D102748X012
1/2 NPT
CONDUIT
CONNECTION
RTD
CONNECTIONS
EXTERNAL
GROUND
CONNECTION
REAR VIEW
W8041
1/2 NPT
CONDUIT
CONNECTION
INTERNAL
GROUND
CONNECTION
FRONT VIEW
CAUTION
Do not apply loop power across the T and + terminals. This can destroy the 1 Ohm sense resistor in the terminal box. Do not
apply loop power across the Rs and — terminals. This can destroy the 50 Ohm sense resistor in the electronics module.
When wiring to screw terminals, the use of crimped lugs is recommended. Tighten the terminal screws to ensure that
good contact is made. No additional power wiring is required. All digital level controller covers must be fully engaged
to meet explosion proof requirements. For ATEX approved units, the terminal box cover set screw must engage one of
the recesses in the terminal box beneath the terminal box cover.
Grounding
WARNING
Personal injury or property damage can result from fire or explosion caused by the discharge of static electricity when
flammable or hazardous gases are present. Connect a 14 AWG (2.1 mm
and earth ground when flammable or hazardous gases are present. Refer to national and local codes and standards for
grounding requirements.
2
) ground strap between the digital level controller
The digital level controller will operate with the current signal loop either floating or grounded. However, the extra
noise in floating systems affects many types of readout devices. If the signal appears noisy or erratic, grounding the
current signal loop at a single point may solve the problem. The best place to ground the loop is at the negative
terminal of the power supply. As an alternative, ground either side of the readout device. Do not ground the current
signal loop at more than one point.
Shielded Wire
Recommended grounding techniques for shielded wire usually call for a single grounding point for the shield. You can
either connect the shield at the power supply or to the grounding terminals, either internal or external, at the
instrument terminal box shown in figure 2‐11.
22
Page 23
Instruction Manual
D102748X012
Installation
October 2014
Power/Current Loop Connections
Use ordinary copper wire of sufficient size to ensure that the voltage across the digital level controller terminals does
not go below 12.0 volts DC. Connect the current signal leads as shown in figure 2‐9. After making connections,
recheck the polarity and correctness of connections, then turn the power on.
RTD Connections
An RTD that senses process temperatures may be connected to the digital level controller. This permits the instrument
to automatically make specific gravity corrections for temperature changes. For best results, locate the RTD as close to
the displacer as practical. For optimum EMC performance, use shielded wire no longer than 3 meters (9.8 feet) to
connect the RTD. Connect only one end of the shield. Connect the shield to either the internal ground connection in
the instrument terminal box or to the RTD thermowell. Wire the RTD to the digital level controller as follows (refer to
figure 2‐11):
Two‐Wire RTD Connections
1. Connect a jumper wire between the RS and R1 terminals in the terminal box.
2. Connect the RTD to the R1 and R2 terminals.
Three‐Wire RTD Connections
1. Connect the 2 wires which are connected to the same end of the RTD to the RS and R1 terminals in the terminal
box. Usually these wires are the same color.
2. Connect the third wire to terminal R2. (The resistance measured between this wire and either wire connected to
terminal RS or R1 should read an equivalent resistance for the existing ambient temperature. Refer to the RTD
manufacturer's temperature to resistance conversion table.) Usually this wire is a different color from the wires
connected to the RS and R1 terminals.
Communication Connections
WARNING
Personal injury or property damage caused by fire or explosion may occur if this connection is attempted in an area which
contains a potentially explosive atmosphere or has been classified as hazardous. Confirm that area classification and
atmosphere conditions permit the safe removal of the terminal box cap before proceeding.
The Field Communicator interfaces with digital level controller from any wiring termination point in the 4–20 mA loop
(except across the power supply). If you choose to connect the HART communicating device directly to the
instrument, attach the device to the loop + and - terminals inside the terminal box to provide local communications
with the instrument.
Test Connections
WARNING
Personal injury or property damage caused by fire or explosion may occur if the following procedure is attempted in an
area which contains a potentially explosive atmosphere or has been classified as hazardous. Confirm that area classification
and atmosphere conditions permit the safe removal of the terminal box cap before proceeding.
23
Page 24
Installation
October 2014
Instruction Manual
D102748X012
Test connections inside the terminal box can be used to measure loop current across an internal 1 ohm resistor.
1. Remove the terminal box cap.
2. Adjust the test meter to measure a range of 0.001 to 0.1 volts.
3. Connect the positive lead of the test meter to the + connection and the negative lead to the T connection inside the
terminal box.
4. Measure Loop current as:
Voltage (on test meter) 1000 = milliamps
example:
Test meter Voltage X 1000 = Loop Milliamps
0.004 X1000 = 4.0 milliamperes
0.020 X 1000 = 20.0 milliamperes
5. Remove test leads and replace the terminal box cover.
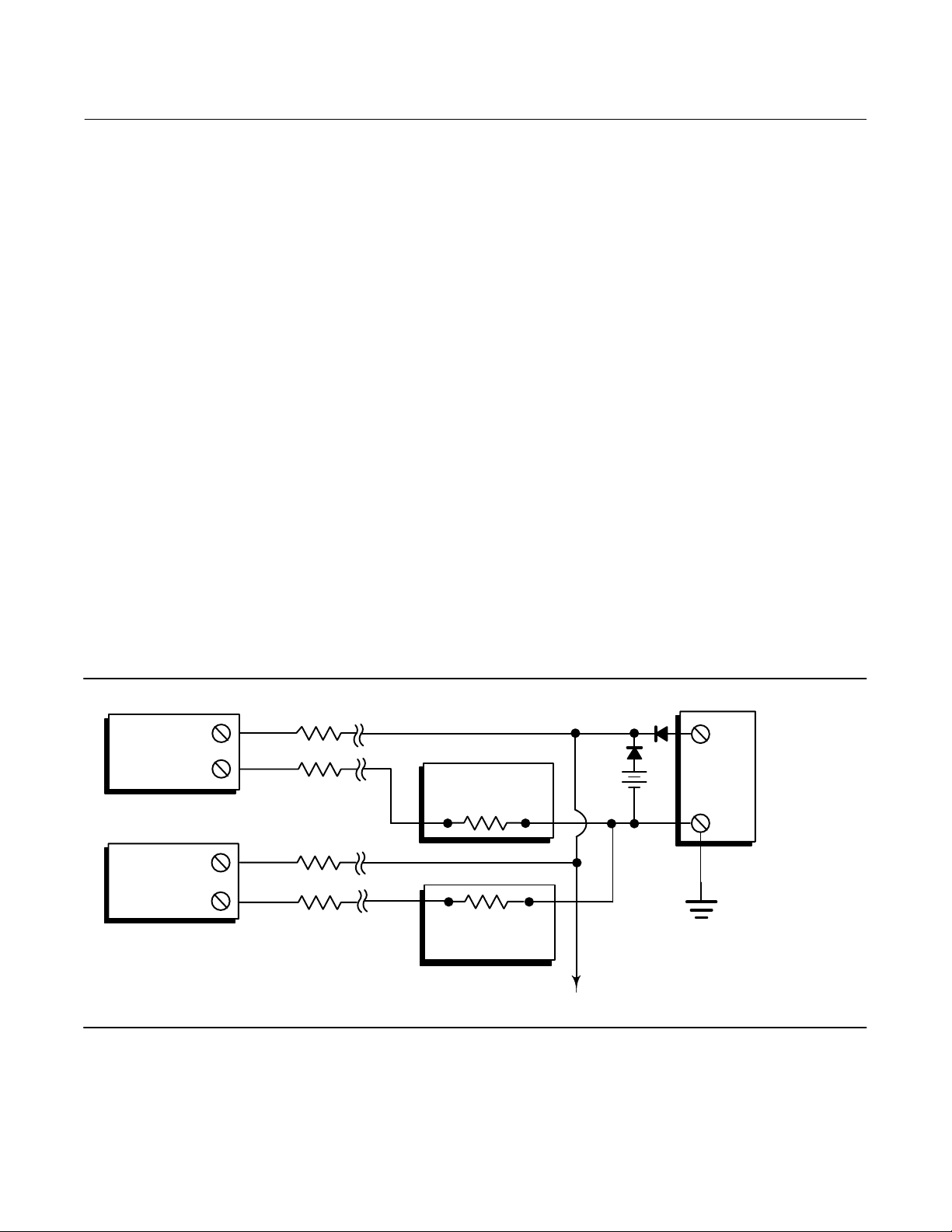
Multichannel Installations
You can connect several instruments to a single master power supply as shown in figure 2‐12. In this case, the system
may be grounded only at the negative power supply terminal. In multichannel installations where several instruments
depend on one power supply, and the loss of all instruments would cause operational problems, consider an
uninterruptible power supply or a back‐up battery. The diodes shown in figure 2‐12 prevent unwanted charging or
discharging of the back‐up battery. If several loops are connected in parallel, make sure the net loop impedance does
not reach levels that would prevent communication.
Figure 2‐12. Multichannel Installations
R
Lead
+
Instrument
Instrument
E0364
No. 1
No. 2
+
-
-
R
Lead
+
R
Lead
-
R
Lead
Readout
Device No. 1
Readout
Device No. 2
Between
230 and 1100
if no Load Resistor
Battery
Backup
+
-
To Additional
Instruments
+
DC Power
Supply
-
Note that to provide a 4‐20 mA analog output signal, the DLC3010 must use HART polling address 0. Therefore, if a
multichannel installation is used with all transmitters in 4‐20 mA output mode, some means must be provided to
isolate an individual transmitter for configuration or diagnostic purposes. A multichannel installation is most useful if
the instruments are also in multi‐drop mode and all signaling is done by digital polling.
24
Page 25

Instruction Manual
D102748X012
Installation
October 2014
Alarm Jumper
Each digital level controller continuously monitors its own performance during normal operation. This automatic
diagnostic routine is a timed series of checks repeated continuously. If diagnostics detect a failure in the electronics,
the instrument drives its output to either below 3.70 mA or above 22.5 mA, depending on the position (HI/LO) of the
alarm jumper.
An alarm condition occurs when the digital level controller self‐diagnostics detect an error that would render the
process variable measurement inaccurate, incorrect, or undefined, or a user defined threshold is violated. At this point
the analog output of the unit is driven to a defined level either above or below the nominal 4‐20 mA range, based on
the position of the alarm jumper.
On encapsulated electronics 14B5483X042 and earlier, if the jumper is missing, the alarm is indeterminate, but usually
behaves as a FAIL LOW selection. On encapsulated electronics 14B5483X052 and later, the behavior will default to
FAIL HIGH when the jumper is missing.
Alarm Jumper Locations
Without a meter installed
The alarm jumper is located on the front side of the electronics module on the electronics side of the digital level
controller housing, and is labeled FAIL MODE.
With a meter installed
The alarm jumper is located on the LCD faceplate on the electronics module side of the digital level controller housing,
and is labeled FAIL MODE.
Changing Jumper Position
WARNING
Personal injury or property damage caused by fire or explosion may occur if the following procedure is attempted in an
area which contains a potentially explosive atmosphere or has been classified as hazardous. Confirm that area classification
and atmosphere conditions permit the safe removal of the instrument cover before proceeding.
Use the following procedure to change the position of the alarm jumper:
1. If the digital level controller is installed, set the loop to manual.
2. Remove the housing cover on the electronics side. Do not remove the cover in explosive atmospheres when the
circuit is alive.
3. Set the jumper to the desired position.
4. Replace the cover. All covers must be fully engaged to meet explosion proof requirements. For ATEX approved
units, the set screw on the transducer housing must engage one of the recesses in the cover.
25
Page 26
Installation
October 2014
Instruction Manual
D102748X012
Loop Test
Field Communicator Service Tools > Maintenance > Tests > Loop Test (3-3-1-1) or (3-3-1-2) if LCD Configuration is installed
Loop test can be used to verify the controller output, the integrity of the loop, and the operations of any recorders or
similar devices installed in the loop. To initiate a loop test, perform the following procedure:
1. Connect a reference meter to the controller. To do so, either connect the meter to the test connections inside the
terminal box (see the Test Connections procedure) or connect the meter in the loop as shown in figure 2‐9.
2. Access Loop Test.
3. Select OK after you set the control loop to manual.
The Field Communicator displays the loop test menu.
4. Select a discreet milliamp level for the controller to output. At the “Choose analog output” prompt, select 4 mA,
20 mA, or Other to manually input a value between 4 and 20 milliamps.
5. Check the reference meter to verify that it reads the value you commanded the controller to output. If the readings
do not match, either the controller requires an output trim, or the meter is malfunctioning.
After completing the test procedure, the display returns to the loop test screen and allows you to choose another
output value or end the test.
26
Page 27
Instruction Manual
D102748X012
Installation
October 2014
Installation in Conjunction with a Rosemount 333 HART Tri‐Loop
HART‐to‐Analog Signal Converter
Use the DLC3010 digital level controller in operation with a Rosemount 333 HART Tri-Loop HART‐to‐Analog Signal
Converter to acquire an independent 4‐20 mA analog output signal for the process variable, % range, electronics
temperature, and process temperature. The Tri‐Loop divides the digital signal and outputs any or all of these variables
into as many as three separate 4‐20 mA analog channels.
Refer to figure 2‐13 for basic installation information. Refer to the 333 HART Tri‐Loop HART‐to‐Analog Signal
Converter Product Manual for complete installation information.
Figure 2‐13. HART Tri‐Loop Installation Flowchart
START HERE
Unpack the
HART Tri‐Loop
Review the
HART Tri‐Loop
Product Manual
Digital level
controller
Installed?
Yes
Set the digital
level controller
Burst Option
Set the digital
level controller
Burst Mode
E0365
No
Install the digital
level controller.
Install the HART
Tri‐Loop. See
HART Tri‐Loop
Product Manual
Mount the HART
Tri‐Loop to the
DIN rail.
Wire the digital
level controller to
the HART Tri‐Loop.
Install Channel 1
wires from HART
Tri‐Loop to the
control room.
(Optional)
Install Channel
2 and3 wires from
HART Tri‐Loop to
the control room.
Configure the HART
Tri‐Loop to receive
digital level controller
burst commands
Pass system
test?
Yes
DONE
No
troubleshooting
procedures in HART
Tri‐Loop product
Check
manual.
27
Page 28

Installation
October 2014
Instruction Manual
D102748X012
Commissioning the Digital Level Controller for use with the HART Tri‐Loop
To prepare the digital level controller for use with a 333 HART Tri‐Loop, you must configure the digital level controller
to burst mode, and select the dynamic variables to burst. In burst mode, the digital level controller provides digital
information to the HART Tri‐Loop HART‐to‐Analog Signal Converter. The HART Tri‐Loop converts the digital
information to a 4‐20 mA analog signal. The HART Tri‐Loop divides the signal into separate 4‐20 mA loops for the
primary (PV), secondary (SV), tertiary (TV), and quaternary (QV) variables. Depending upon the burst option selected,
the digital level controller will burst the variables as shown in table 2‐1.
The DLC3010 status words are available in the HART Burst messages. However, the Tri‐Loop cannot be configured to
monitor them directly.
To commission a DLC3010 digital level controller for use with a HART Tri‐Loop, perform the following procedure.
Table 2‐1. Burst Variables Sent by the FIELDVUE DLC3010
Burst Option Variable Variable Burst
Read PV Primary Process variable (EU) 1
Read PV mA and % Range
Read Dynamic Vars
1. EU—engineering units; mA—current in milliamperes; %—percent
Primary Process variable (mA)
Secondary Percent range (%)
Primary Process variable (EU)
Secondary Electronics temperature (EU)
Tertiary Process temperature (EU)
Quaternary Not used
(1)
Set the Burst Operation
Field Communicator Configure > Communications > Burst Option (2-4-2)
1. Access Burst Option.
2. Select the desired burst option and press ENTER
3. Access Burst Mode and select On to enable burst mode. Press ENTER.
4. Select SEND to download the new configuration information to the digital level controller.
Burst Command
2
3
28
Page 29

Instruction Manual
D102748X012
Section 3 Overview3-3-
Overview
Field Communicator Overview (1)
Device Status
Good there are no active alerts and instrument is In Service
Failed a failed alert is active
Maintenance a configured maintenance alert is active and a failed alert is turned on
Overview
October 2014
Advisory a configured advisory alert is active and configured failed or a maintenance alert is turned on
Comm Status
Polled communication with Digital Level Controller is established. Burst mode is turned off.
Burst provides continuous communication from the digital level controller. Burst mode applies only to the
transmission of burst mode data and does not affect the way other data is accessed.
PV is
Indicates the type of measurement either level, interface (the interface of two liquids of different specific gravities), or
density (measures the liquid specific gravity). The process variable displayed and measured depends on the entry for
“PV is” under PV Setup.
Primary Variable
PV Value displays the process variable (level, interface, or density) in engineering units.
% Range displays the process variable as a percent of span (determined by the LRV and URV).
AO
Indicates the current analog output value of the instrument, in milliamperes.
29
Page 30

Overview
October 2014
Instruction Manual
D102748X012
Process Temperature
Proc Temp Source— Manual or RTD
Proc Temp— indicates the process temperature.
Device Information
Identification
Follow the prompts on the Field Communicator display to view the following information.
D HART Tag— a unique name (up to eight characters) that identifies the physical instrument.
D Distributor— identifies the distributor of the instrument.
D Model— identifies the instrument model; ie. DLC3010.
D Device ID— each instrument has a unique Device Identifier. The Device ID provides additional security to prevent
this instrument from accepting commands meant for other instruments.
D Date— userdefined variable that provides a place to save the date of the last revision of configuration or calibration
information.
D Descriptor— a longer userdefined electronic label to assist with more specific controller identification that is
available with the HART tag.
D Message— user‐defined means for identifying individual controllers in multi‐controller environments.
Revisions
Follow the prompts on the Field Communicator display to view revision information.
D HART Universal Revision— the revision number of the HART Universal Commands which are used as the
communications protocol for the instrument.
D Field Device Revision— the revision of the protocol for interfacing to the functionality of the instrument.
D Firmware Revision— the revision number of the Fisher software in the instrument.
D Hardware Revision— the revision number of the Fisher instrument hardware.
D DD Information— the revision level of the Device Description used by the Field Communicator while communicating
with the instrument.
30
Page 31

Instruction Manual
D102748X012
Overview
October 2014
Alarm Type and Security
Alarm Type
D Alarm Jumper— displays the position of the hardware alarm jumper, either high current or low current.
D Display Alert/Saturation Level
Security
D Write Lock
D Write Lock Setup
To setup and calibrate the instrument, write lock must be set to Writes Enabled. (Write Lock is reset by a power cycle. If
you have just powered up the instrument Writes will be enabled by default.) In AMS, go to Device Information in the
Overview page. Select the Alarms tab to change the write lock.
31
Page 32

Overview
October 2014
Instruction Manual
D102748X012
32
Page 33

Instruction Manual
D102748X012
Configuration
October 2014
Section 4 Configuration and Calibration 4-4-
Initial Setup
If a DLC3010 digital level controller ships from the factory mounted on a 249 sensor, initial setup and calibration is not
necessary. The factory enters the sensor data, couples the instrument to the sensor, and calibrates the instrument and
sensor combination.
Note
If you received the digital level controller mounted on the sensor with the displacer blocked, or if the displacer is not connected,
the instrument will be coupled to the sensor and the lever assembly unlocked. To place the unit in service, if the displacer is
blocked, remove the rod and block at each end of the displacer and check the instrument calibration. (If the “factory cal” option
was ordered, the instrument will be precompensated to the process conditions provided on the requisition, and will not appear to
be calibrated if checked against room temperature 0 and 100% water level inputs).
If the displacer is not connected, hang the displacer on the torque tube, and re‐zero the instrument by performing the Capture
Zero procedure.
If you received the digital level controller mounted on the sensor and the displacer is not blocked (such as in skid mounted
systems), the instrument will not be coupled, to the sensor, and the lever assembly will be locked. To place the unit in service,
couple the instrument to the sensor, then unlock the lever assembly. You may then perform the Capture Zero procedure.
To review the configuration data entered by the factory, connect the instrument to a 24 VDC power supply as shown in
figure 2‐9. Connect the Field Communicator to the instrument and turn it on. Go to Configure and review the data
under Manual Setup, Alert Setup, and Communications. If your application data has changed since the instrument was
factory‐configured, refer to the Manual Setup section for instructions on modifying configuration data.
For instruments not mounted on a level sensor or when replacing an instrument, initial setup consists of entering
sensor information. The next step is coupling the sensor to the digital level controller. When the digital level controller
and sensor are coupled, the combination may be calibrated.
Sensor information includes displacer and torque tube information, such as:
D Length units (meters, inches, or centimeters)
D Volume units (cubic inches, cubic millimeters, or milliliters)
D Weight units (kilograms, pounds, or ounce)
D Displacer Length
D Displacer Volume
D Displacer Weight
D Displacer Driver Rod Length (moment arm) (see table 4‐1)
D Torque Tube Material
Note
A sensor with an N05500 torque tube may have NiCu on the nameplate as the torque tube material.
33
Page 34

Configuration
October 2014
D Instrument mounting (right or left of displacer)
D Measurement Application (level, interface, or density)
Instruction Manual
D102748X012
Configuration Advice
Guided Setup directs you through initialization of configuration data needed for proper operation. When the
instrument comes out of the box, the default dimensions are set for the most common Fisher 249 construction, so if
any data is unknown, it is generally safe to accept the defaults. The mounting sense 'instrument left or right of
displacer' - is important for correct interpretation of positive motion. The torque tube rotation is clockwise with rising
level when the instrument is mounted to the right of the displacer, and counterclockwise when mounted to the left of
the displacer. Use Manual Setup to locate and modify individual parameters when they need to be changed.
Preliminary Considerations
Write Lock
Field Communicator Overview > Device Information > Alarm Type and Security > Security > Write Lock (1-7-3-2-2)
To setup and calibrate the instrument, write lock must be set to Writes Enabled. Write Lock is reset by a power cycle. If
you have just powered up the instrument Writes will be enabled by default.
Level Offset
Field Communicator Configure > Manual Setup > Variables > Primary Variables > Set Level Offset (2-2-2-1-5)
The Level Offset parameter should be cleared to zero before running Instrument Setup. To clear Level Offset enter the
value 0.0 and press Enter > Send.
Guided Setup
Field Communicator Configure > Guided Setup > Instrument Setup (2-1-1)
Note
Place the loop into manual operation before making any changes in setup or calibration.
Instrument Setup is available to aid initial setup. Follow the prompts on the Field Communicator display to enter
information for the displacer, torque tube, and digital measurement units. Most of the information is available from
the sensor nameplate, shown in figure 4‐1. The moment arm is the effective length of the driver rod and depends
upon the sensor type. For a 249 sensor, refer to table 4‐1 to determine driver rod length. For a special sensor, refer to
figure 4‐2.
34
Page 35

Instruction Manual
D102748X012
Figure 4‐1. Example Sensor Nameplate
Configuration
October 2014
SENSOR TYPE
DISPLACER
PRESSURE RATING
DISPLACER
MATERIAL
23A1725‐E sht 1
E0366
76543210
249B
1500 PSI
103 CU‐IN
316 SST
DISPLACER
VOLUME
PSI
2 x 32 INCHES
4 3/4 LBS
K MONEL/STD
DISPLACER SIZE
(DIAMETER X LENGTH)
Table 4‐1. Moment Arm (Driver Rod) Length
SENSOR TYPE
(2)
DISPLACER
WEIGHT
285/100 F
WCB STL
MONEL
TORQUE TUBE MATERIAL
(1)
mm Inch
ASSEMBLY
PRESSURE RATING
ASSEMBLY MATERIAL
TRIM MATERIAL
MOMENT ARM
249 203 8.01
249B 203 8.01
249BF 203 8.01
249BP 203 8.01
249C 169 6.64
249CP 169 6.64
249K 267 10.5
249L 229 9.01
249N 267 10.5
249P
(CL125-CL600)
249P
(CL900-CL2500)
249VS (Special)
(1)
203 8.01
229 9.01
See serial card See serial card
249VS (Std) 343 13.5
249W 203 8.01
1. Moment arm (driver rod) length is the perpendicular distance between the vertical centerline of the displacer and the horizontal centerline of the torque tube. See figure 4‐2. If you cannot
determine the driver rod length, contact your Emerson Process Management sales office and provide the serial number of the sensor.
2. This table applies to sensors with vertical displacers only. For sensor types not listed, or sensors with horizontal displacers, contact your Emerson Process Management sales office for the
driver rod length. For other manufacturers' sensors, see the installation instructions for that mounting.
1. Enter displacer length, weight, volume units and values, and moment arm length (in the same units chosen for
displacer length) when prompted.
2. Choose Instrument Mounting (left or right of displacer, refer to figure 2‐5).
3. Choose Torque Tube Material.
35
Page 36

Configuration
October 2014
Instruction Manual
D102748X012
4. Select the measurement application (level, interface, or density).
Note
For interface applications, if the 249 is not installed on a vessel, or if the cage can be isolated, calibrate the instrument with
weights, water, or other standard test fluid, in level mode. After calibrating in level mode, the instrument can be switched to
interface mode. Then, enter the actual process fluid specific gravity(s) and range values.
If the 249 sensor is installed and must be calibrated in the actual process fluid(s) at operating conditions, enter the final
measurement mode and actual process fluid data now.
Figure 4‐2. Method of Determining Moment Arm from External Measurements
VESSEL
VERTICAL C
OF DISPLACER
E0283
L
MOMENT
ARM LENGTH
HORIZONTAL C
OF TORQUE TUBE
L
a. If you choose “Level” or “Interface,” the default process variable units are set to the same units chosen for
displacer length. You are prompted to key in the level offset. Range values will be initialized based on Level Offset
and displacer size. The default upper range value is set to equal the displacer length and the default lower range
value is set to zero when the level offset is 0.
b. If you choose “Density,” the default process variable units are set to “SGU” (Specific Gravity Units). The default
upper range value is set to “1.0” and the default lower range value is set to “0.1”.
5. Select the desired output action: Direct or Reverse
Choosing “reverse acting” will swap the default values of the upper and lower range values (the process variable values
at 20 mA and 4 mA). In a reverse acting instrument, the loop current will decrease as the fluid level increases.
6. You are given the opportunity to modify the default value for the process variable engineering units.
7. You are then given the opportunity to edit the default values that were entered for the upper range value (PV Value
at 20 mA) and lower range value (PV Value at 4 mA).
8. The default values of the alarm variables will be set as follows:
(Span = Upper Range Value - Lower Range Value
Direct‐Acting Instrument
Alarm Variable Default Alarm Value
Hi‐Hi Alarm Upper Range Value
Hi Alarm 95% span + Lower Range Value
Lo Alarm 5% span + Lower Range Value
Lo‐Lo Alarm Lower Range Value
(Span = Lower Range Value - Upper Range Value
Alarm Variable Default Alarm Value
Hi‐Hi Alarm Lower Range Value
Hi Alarm 95% span + Upper Range Value
Lo Alarm 5% span + Upper Range Value
Lo‐Lo Alarm Upper Range Value
Reverse‐Acting Instrument
36
Page 37

Instruction Manual
D102748X012
Configuration
October 2014
PV alert thresholds are initialized at 100%, 95%, 5% and 0% span.
PV alert deadband is initialized to 0.5% span.
PV alerts are all disabled. Temperature alerts are enabled.
D If Density mode was chosen, setup is complete.
D If Interface or Density mode was chosen, you are prompted to enter the specific gravity of the process fluid (if
interface mode, the specific gravities of the upper and lower process fluids).
Note
If you are using water or weights for calibration, enter a specific gravity of 1.0 SGU. For other test fluids, enter the specific gravity
of the fluid used.
For temperature compensation, go to Manual Setup. Under Process Fluid select View Fluid Tables. Temperature
compensation is enabled by entering values into the fluid tables. Two data tables are available that may be entered in
the instrument to provide specific gravity correction for temperature (see tables 4‐2 and 4‐3). For interface level
applications, both tables are used. For level measurement applications, only the lower specific gravity table is used.
Neither table is used for density applications. Both tables may be edited during detailed setup.
Note
The existing tables may need to be edited to reflect the characteristics of the actual process fluid.
D You can accept the current table(s), modify an individual entry, or enter a new table manually. For an interface
application, the user can switch between the upper and lower fluid tables.
Note
In firmware version 07 and 08, the data tables for torque‐tube correction are simply stored without implementation. The
information may be used to pre‐compensate the measured torque‐tube rate manually.
37
Page 38

Configuration
October 2014
Instruction Manual
D102748X012
Coupling
If the digital level controller is not already coupled to the sensor, perform the following procedure to couple the digital
level controller to the sensor.
1. Slide the access handle to the locked position to expose the access hole. Press on the back of the handle as shown in
figure 2‐4 then slide the handle toward the front of the unit. Be sure the locking handle drops into the detent.
2. Set the displacer to the lowest possible process condition, (i.e. lowest water level or minimum specific gravity) or
replace the displacer by the heaviest calibration weight.
Note
Interface or density applications with displacer/torque tube sized for a small total change in specific gravity are designed to be
operated with the displacer always submerged. In these applications, the torque rod is sometimes resting on a stop while the
displacer is dry. The torque tube does not begin to move until a considerable amount of liquid has covered the displacer. In this
case, couple with the displacer submerged in the fluid with the lowest density and the highest process temperature condition, or
with an equivalent condition simulated with the calculated weights.
If the sizing of the sensor results in a proportional band greater than 100% (total expected rotational span greater than 4.4
degrees), couple the transmitter to the pilot shaft while at the 50% process condition to make maximum use of available
transmitter travel ($6_). The Capture Zero procedure is still performed at the zero buoyancy (or zero differential buoyancy)
condition.
3. Insert a 10 mm deep well socket through the access hole and onto the torque tube shaft clamp nut. Tighten the
clamp nut to a maximum torque of 2.1 NSm (18 lbfSin).
4. Slide the access handle to the unlocked position. (Press on the back of the handle as shown in figure 2‐4 then slide
the handle toward the rear of the unit.) Be sure the locking handle drops into the detent.
38
Page 39

Instruction Manual
D102748X012
Configuration
October 2014
Manual Setup
The DLC3010 digital level controller has the capability to communicate via the HART protocol. This section describes
the advanced features that can be accessed with the Field Communicator.
Note
Changing setup parameters may require enabling writing to the instrument with the Field Communicator (Overview > Device
Information > Alarm Type and Security > Security > Write Lock Setup). Select Writes Enabled to enable writing setup and calibration
data, or select Writes Disabled to disable writing data. Note that cycling power will clear the Write Lock condition to “Writes
Enabled”.
Sensor
Field Communicator Configure > Manual Setup > Sensor (2-2-1)
Sensor Units
Follow the prompts on the Field Communicator to enter the desired sensor units.
D Length Units— Permits setting the units of measure for the displacer length (in feet, meters, inches, or centimeters).
D Volume Units— Permits setting the units of measure for the displacer volume (in liters, cubic inches, cubic
millimeters, or milliliters).
D Weight Units— Permits setting the units of measure for the displacer weight (in grams, kilograms, pounds, or
ounces).
D Torque Rate Units— Permits setting the torque rate units (in lbf‐in per deg—pounds‐force inches per degree
rotation; newton‐m per deg—newton‐meters per degree rotation; or dyne‐cm per deg—dyne-centimeters per
degree rotation.
D Temperature Units— Select either degC (degrees centigrade) or degF (degrees Fahrenheit) to enter the temperature
units. Note that when using degF, the Temperature Alert Deadband parameter is incorrectly displayed with a 32_
bias.
Sensor Dimensions
Follow the prompts on the Field Communicator to enter the sensor dimensions. Dimensions can be found on the
sensor name plate as shown in figure 4‐1.
D Displacer Length— Enter the displacer length from the sensor nameplate.
D Displacer Volume— Enter the displacer volume from the sensor nameplate.
D Displacer Weight— Enter the displacer weight from the sensor nameplate.
39
Page 40

Configuration
October 2014
D Driver Rod Length— Enter the displacer rod length. The displacer rod length depends upon the sensor type. For a
249 sensor, obtain the displacer rod length from table 4‐1 or from the Field Communicator Help. Refer to figure 4‐2
to physically measure this value.
Instruction Manual
D102748X012
Torque Tube
Follow the prompts on the Field Communicator to enter torque tube data.
D Torque Rate— Displays the torque rate currently stored in the instrument.
Change Torque Rate— Permits changing the torque rate stored in the instrument.
D TT Material— Displays the torque tube material currently stored in the instrument.
Note
A sensor with an N05500 torque tube may have NiCu on the nameplate as the torque tube material.
TT Comp Selection— Torque Tube Compensation Selection permits changing the torque tube material stored in the
instrument.
D TT Comp Table— Torque Tube Compensation Table permits you to load a table with the material temperature
coefficients.
Instrument Mounting
Follow the prompts on the Field Communicator display to specify if the instrument is to the right or left of the
displacer. See figure 2‐5.
Sensor Damping
Follow the prompts on the Field Communicator display to configure the input filter.
Time constant for the input filter, in seconds, for the A/D measurement. The filter is applied before PV processing,
after the A/D conversion. Range is 0 to 16 seconds in 0.1 second increments. The default value is 0.0 seconds. To
disable the filter, set the time constant to 0 seconds. This filter is provided for extreme input noise situations. Use of
this filter normally should not be necessary.
Net instrument response is a combination of analog input filtering and output filtering.
40
Page 41

Instruction Manual
D102748X012
Configuration
October 2014
Variables
Field Communicator Configure > Manual Setup > Variables (2-2-2)
Primary Variables
Follow the prompts on the Field Communicator to view or edit Primary Variable information.
D PV is— Display the PV currently stored in the instrument.
Change PV— Follow the prompts to change the PV. Select Level Units if the PV is level, Interface Units if the PV is
Interface, or Density Units if the PV is Density.
D PV Units— Permits changing the PV units.
For density measurement:
g/cm
kg/m
3
—grams per cubic centimeter
3
—kilograms per cubic meter
lb/gal—pounds per gallon
lb/ft
3
—pounds per cubic foot
g/mL—grams per milliliter
kg/L—kilograms per liter
g/L—grams per liter
lb/in
3
—pounds per cubic inch
SGU—specific gravity units
For level and interface measurement:
ft—feet
m—meters
in—inches
cm—centimeters
mm—millimeters
D Level Offset— Displays the current Level Offset stored in the instrument.
Set Level Offset— Adding a level offset permits the process variable engineering units to correspond to the externally
measured level or interface (see figure 4‐3). Follow the prompts on the Field Communicator to enter the offset value. If
you set the level offset after you have set the range values, be sure to verify that the range values are still correct.
Figure 4‐3. Example of the Use of Level Offset
URV
(10 FEET)
LRV
(6 FEET)
E0368
DISPLACER
LEVEL
OFFSET
(6 FEET)
41
Page 42

Configuration
October 2014
Instruction Manual
D102748X012
Sensor Limits
Follow the prompts on the Field Communicator to view sensor limit information.
D Upper Sensor Limit— Indicates the maximum usable value for the Upper Range Value.
D Lower Sensor Limit— Indicates the minimum usable value for the Lower Range Value.
D Minimum Span— Difference between the Upper Range Value and the Lower Range Value below which amplification
of instrument errors may become a concern. This effect should be considered when sizing displacer / torque tube.
Primary Variable Range
Follow the prompts on the Field Communicator to view or edit range information.
D Upper Range Value— Defines the operational end point from which the Analog Value and the 100% point of the
percent range are derived.
D Lower Range Value— Defines the operational end point from which the Analog Value and the 0% point of the
percent range are derived.
View/Change AO Action— Follow the prompt and change the output action: Direct/Reverse.
For Reverse action, the Upper Range Value and Lower Range Value will be swapped.
42
Page 43

Instruction Manual
D102748X012
Configuration
October 2014
PV Damping
PV Damping changes the response time of the controller to smooth variations in output readings caused by rapid
changes in input. Determine the appropriate damping setting based on the necessary response time, signal stability,
and other requirements of the loop dynamics of your system. The default damping value is 0.2 seconds. and can be
reset to any value between 0 and 16 seconds in 0.1 second increments. When set to 0, the damping function is off.
Net instrument response is a combination of analog input filtering and output filtering.
Process Fluid
Field Communicator Configure > Manual Setup > Process Fluid (2-2-3)
Note
Process Fluid is only visible if PV is Level or Interface.
Process Fluid
Follow the prompts on the Field Communicator to view or edit process fluid information.
D Upper Fluid Density— Indicates the density of the upper fluid.
Note
Upper Fluid Density is only visible if PV is Interface.
D Lower Fluid Density— Indicates the density of the lower fluid.
D View Fluid Tables
Upper Density Table (only visible if PV is Interface)
Lower Density Table
Two specific gravity tables are available in the instrument to provide specific gravity correction for temperature. For
level measurement applications, only the lower specific gravity table is used. For interface applications, both the upper
and lower table can be displayed and edited. For density applications, no specific gravity correction table is presented.
Example entries for saturated water are given in table 4‐2. Figure 4‐4 shows the curve that results when these values
are plotted.
43
Page 44

Configuration
October 2014
Table 4‐2. Example Specific Gravity vs Temperature Table for Saturated Water
Data Point
10
_C _F
1
2
3
4
5
6
7
8
9
26.7
93.3
176.7
248.9
304.4
337.8
354.4
365.6
371.1
374.7
Temperature
80.0
200.0
350.0
480.0
580.0
640.0
670.0
690.0
700.0
706.5
Figure 4‐4. Example Saturated Water Curve Plotted with Values from Table 4‐2
TEMPERATURE _C
1.0
0.9
0.8
100 200 300-18 30 380
Instruction Manual
D102748X012
Specific Gravity
0.9985
0.9655
0.8935
0.8040
0.7057
0.6197
0.5570
0.4940
0.4390
0.3157
0.7
0.6
0.5
SPECIFIC GRAVITY
0.4
0.3
0 100 200 300 400 500 600 700
E0369
TEMPERATURE _F
You can enter up to 10 temperature and specific gravity pairs in the table. The table entry function is terminated by
entering zero for the specific gravity. Keep this in mind when setting up a table for a upper fluid, such as steam, whose
specific gravity approaches 0 at lower temperatures.
The resolution of the table entry for specific gravity is 5 decimal places. This means the smallest specific gravity value
you can enter is 0.00001, which should be sufficient to allow a starting temperature around 15.6 _C (60 _F) for the
steam specific gravity table.
The example set of tables given are generated by visually laying linear segments over a reference curve, and are not
guaranteed to provide any particular accuracy. They are provided to illustrate the guidelines for developing your own
table.
1. Establish a table for the fluid(s) you are using over the expected operating range of process temperature. This
allows you to make best use of the maximum of ten points to obtain the accuracy you require. If your fluid specific
gravity is very linear over the operating temperature range, two data points may be sufficient. (The correction
algorithm provides linear interpolation between data points, and bounds the result at the table end points.)
2. Pick points closer together in regions of higher slope.
3. Pick linear segments that distribute the error equally on each side of the true curve.
Enter or display the specific gravity, or enter values in the specific gravity tables. The Field Communicator prompts for
either a single value for specific gravity or a table of specific gravity versus temperature. To enter a single specific
44
Page 45

Instruction Manual
D102748X012
Configuration
October 2014
gravity value, select Single Point and enter the specific gravity value. To display or enter values in the tables, select Table
of SG vs T.
The Field Communicator begins by prompting for the temperature of the first pair in the lower table. After entering
the temperature for the first pair, press ENTER. Enter the specific gravity for the first pair and press ENTER. The Field
Communicator then prompts for the temperature for the second pair. Enter this temperature and press ENTER. The
Field Communicator then prompts for the specific gravity for the second pair. Continue entering each temperature
and specific gravity pair. When finished, enter zero at the Field Communicator prompt for the next specific gravity
value to exit the table. For level applications, the Field Communicator exits to the Instrument Setup menu. For interface
applications, the Field Communicator prompts for the first temperature and specific gravity pair for the upper table.
Enter Constant Density— Enter the density of the process fluid
Measure Density— Select OK to measure the differential density between lower and upper phases of the process fluid.
Note
Measure Density is only visible if PV is Level.
If the instrument and sensor are calibrated, you can have the digital level controller measure the liquid specific gravity,
if it is not known. You must be able to manipulate the level and externally measure it to have the instrument measure
the specific gravity. To work properly, this procedure must be in done in Level measurement mode, and a valid dry
coupling reference must have been obtained at the zero buoyance condition. Use as high a test level as possible to
improve accuracy. Follow the prompts on the Field Communicator and the following procedure to measure specific
gravity:
1. Set the control loop for manual control.
2. Adjust the liquid level so that the displacer is partially submerged.
3. Enter the externally measured level, in engineering units.
After you press OK on the Field Communicator, the instrument begins calculating the specific gravity. You can then
elect to use this value as the specific gravity for all level measurements. If you select No, the instrument uses the
specific gravity entered under PV Setup, or the values from the specific gravity tables.
4. When finished measuring specific gravity, return the control loop to automatic control.
D Load Steam Tables
Note
Load Steam Tables is only visible if PV is Interface.
Table 4‐3 lists example entries for saturated steam. Figure 4‐5 is the curve that results when these values are plotted.
Table 4‐3. Example Specific Gravity vs Temperature Table for Saturated Steam
DATA POINT
1
2
3
4
5
6
7
8
9
10
_C _F
126.7
210.0
271.1
304.4
326.7
343.3
357.8
365.6
371.1
374.4
TEMPERATURE
260
410
520
580
620
650
676
690
700
706
SPECIFIC GRAVITY
0.00095
0.00850
0.02760
0.04900
0.07200
0.09800
0.13500
0.16800
0.21000
0.31570
45
Page 46

Configuration
October 2014
Figure 4‐5. Example Saturated Steam Curve Plotted from Values in Table 4‐3
TEMPERATURE _C
-18
0.35
0.30
0.25
0.20
0.15
0.10
SPECIFIC GRAVITY
0.05
0.0
0 100 200 300 400 500 600 700
E0370
100 200 300 375
TEMPERATURE _F
Instruction Manual
D102748X012
Process Temperature
The digital level controller can receive the process temperature from a resistance temperature detector (RTD)
connected to the unit or, if no RTD is connected to the unit, you can enter the process temperature directly. The digital
level controller uses the process temperature to make specific gravity corrections. Follow the prompts on the Field
Communicator to view or edit process temperature information.
D Proc Temp Source— Manual or RTD
Change Proc Temp Source— Select Keep Value, Edit Value, or Install RTD.
You must select the number of wires for an RTD; either 2 or 3.
For a 2‐wire RTD, you must specify the connecting wire resistance. If you know the resistance, select Resistance and
enter the resistance of the wire. 250 feet of 16 AWG wire has a resistance of 1 ohm. If you do not know the resistance,
select Wire Gauge/Length and the Field Communicator will prompt you for the length and gauge of the wire and
calculate the resistance.
D Proc Temp— Display the process temperature.
D RTD Wire Resistance— Displays the RTD wire resistance.
Device Information
Field Communicator Configure > Manual Setup > Device Information (2-2-4)
Follow the prompts on the Field Communicator display to view or edit information in the following fields.
D HART Tag— The HART tag is the easiest way to identify and distinguish between controllers in multi‐controller
environments. Use the HART tag to label controllers electronically according to the requirements of your
application. The tag you define is automatically displayed when a HART‐based communicator establishes contact
with the controller at power‐up. The tag may be up to eight characters long and has no impact on the primary
variable readings of the controller.
46
Page 47

Instruction Manual
D102748X012
Configuration
October 2014
D Date— Date is a user‐defined variable that provides a place to save the date of the last revision of configuration or
calibration information. It has no impact on the operation of the controller or Field Communicator. Enter a date
with the format MM/DD/YY.
D Descriptor— The Descriptor provides a longer user‐defined electronic label to assist with more specific controller
identification that is available with the HART tag. The descriptor may be up to 16 characters long and has no impact
on the operation of the controller or HART‐based communicator.
D Message— Message provides the most specific user‐defined means for identifying individual controllers in
multi‐controller environments. it allows for 32 characters of information and is stored with the other configuration
data. Message has no impact on the operation of the controller or the Field Communicator.
D Polling Address— If the digital level controller is used in a point‐to‐point configuration, the Polling Address is 0.
When several devices are connected in the same loop, each device must be assigned a unique polling address. The
Polling Address may be set to a value between 0 and 15.
For the Field Communicator to be able to communicate with a device whose polling address is not 0, it must be
configured to automatically search for all or specific connected devices.
D Serial Numbers— Follow the prompts on the Field Communicator display to enter or view the following serial
numbers.
Instrument Serial Number— Use this field to enter or view the serial number on the instrument nameplate, up to
12 characters.
Sensor Serial Number— Use this field to enter or view the sensor serial number. The sensor serial number is found
on the sensor nameplate.
Final Assembly Number— A number that can be used to identify the instrument and sensor combination.
Instrument Display
Field Communicator Configure > Manual Setup > Instrument Display (2-2-5)
Follow the prompts on the Field Communicator display to view or edit what is visible in the instrument display.
D LCD Configuration— Select this parameter to indicate if the meter is installed. If the meter is physically installed,
select Installed. The meter must be installed before you can set the display type or the decimal places.
D Display Mode—Only visible if the meter is installed.
Change Display Mode— Select the type of information the meter should display and how it should be displayed by
selecting 'Change display mode'. You can select for display:
PV— Displays the process variable (level, interface, or density) in engineering units.
PV/Process Temperature— Alternately displays the process variable in engineering units, the process temperature
in the units selected under Temp Units (PV Setup), and the degrees of torque tube rotation.
% Range— Displays the process variable as a percent of span (determined by the LRV and URV).
PV/% Range— Alternately displays the process variable in engineering units and the process variable in percent of
span.
D Decimal Places—Selects the number of decimal places to display, up to four. Setting the value to zero puts the
display in auto‐scale mode. It will then display as may decimals places as will fit.
47
Page 48

Configuration
October 2014
Instruction Manual
D102748X012
If PV/Proc Temp or PV/% Range is selected, the display alternates every two seconds between the selected readings.
The meter also simultaneously displays the analog output signal using a percent of scale bar graph around the
perimeter of the display face as shown in figure 4‐6, no matter what display type is selected.
Figure 4‐6. LCD Meter Display
ANALOG OUTPUT
DISPLAY
PROCESS VARIABLE VALUE
WHEN PRESENT,
INDICATES WRITES
DISABLED
PROCESS
VARIABLE UNITS
E0371
MODE
After you have selected the desired meter settings, press SEND on the Field Communicator to download the meter
settings to the instrument.
48
Page 49

Instruction Manual
D102748X012
Configuration
October 2014
Alert Setup
The following menus are available for configuring Alerts.
Primary Variable
Field Communicator Configure > Alert Setup > Primary Variable (2-3-1)
Follow the prompts on the Field Communicator display to view or edit the following primary variable alerts.
Primary Variable Hi
D Hi Alert
PV Hi Alert Enable— On or Off. PV High Alert Enable activates checking the primary variable against the PV High
Alert limit. The High Alert is set if the primary variable rises above the PV High Alert limit. Once the alert is set, the
primary variable must fall below the PV High Alert limit by the PV Alerts Threshold Deadband before the alert is
cleared. See figure 4‐7.
PV Hi Alert Threshold— Primary Variable Hi Alert Threshold is the value of the process variable, in engineering
units, which, when exceeded, sets the Primary Variable High Alert.
PV Hi Alert Threshold— Method to change the PV Hi Alert Threshold
D Hi Hi Alert
PV Hi Hi Alert Enable— On or Off. PV High High Alert Enable activates checking the primary variable against the PV
High‐High Alert limit. The High High Alert is set if the primary variable rises above the PV High High Alert limit
Once the alert is set, the primary variable must fall below the PV High High Alert limit by the PV Alerts Threshold
Deadband before the alert is cleared. See figure 4‐7.
PV HiHi Alert Threshold— Primary Variable HiHi Alert Threshold is the value of the process variable, in engineering
units, which, when exceeded, sets the Primary Variable High‐High Alert.
PV HiHi Alert Threshold— Method to change the PV HiHi Alert Threshold
Note
If the Hi Hi Alert is enabled and set, the digital level controller output will go to below 3.75 mA or above 21.0 mA, depending on
the position of the alarm jumper.
Primary Variable Lo
D Lo Alert
PV Lo Alert Enable— On or Off. PV Lo Alert Enable activates checking the primary variable against the PV Lo Alert
limit. The Lo Alert is set if the primary variable rises above the PV Lo Alert limit. Once the alert is set, the primary
variable must fall below the PV Lo Alert limit by the PV Alerts Threshold Deadband before the alert is cleared. See
figure 4‐7.
49
Page 50

Configuration
October 2014
Instruction Manual
D102748X012
PV Lo Alert Threshold— Primary Variable Lo Alert Threshold is the value of the primary variable, in engineering
units, which, when exceeded, sets the Primary Variable Low Alert.
PV Lo Alert Threshold— Method to change the PV Lo Alert Threshold
D Lo Lo Alert
PV LoLo Alert Enable— On or Off. PV Lo Lo Alert Enable activates checking the primary variable against the PV Lo Lo
Alert limit. The Lo Lo Alert is set if the primary variable rises above the PV Lo Lo Alert limit. Once the alert is set, the
primary variable must fall below the PV Lo Lo Alert limit by the PV Alerts Threshold Deadband before the alert is
cleared. See figure 4‐7.
PV LoLo Alert Threshold— Primary Variable LoLo Alert Threshold is the value of the primary variable, in engineering
units, which, when exceeded, sets the Primary Variable LowLow Alert.
PV LoLo Alert Threshold — Method to change the PV Lo Lo Alert Threshold
Note
If the Lo Lo Alert is enabled and set, the digital level controller output will go to below 3.75 mA or above 21.0 mA, depending on
the position of the alarm jumper.
PV Value— Current process variable (level, interface, or density) in engineering units.
Upper Range Value— Highest value of the primary variable that the digital level controller is currently configured to
measure in the 4 to 20 mA loop.
Lower Range Value — Lowest value of the primary variable that the digital level controller is currently configured to
measure in the 4 to 20 mA loop.
PV Alerts Threshold Deadband — The Primary Variable Alerts Threshold Deadband is the amount the primary variable,
in engineering units, must change to clear a primary variable alert, once it has been set. The deadband applies to all
the primary variable alarms. See figure 4‐7.
Figure 4‐7. Process Variable Alert Threshold Deadband (Process Variable High Alert Example)
ALERT IS SET
PROCESS VARIABLE
HIGH ALERT LIMIT
PROCESS VARIABLE ALERT
THRESHOLD DEADBAND
ALERT IS CLEARED
PROCESS VARIABLE
50
E0372
Page 51

Instruction Manual
D102748X012
Configuration
October 2014
Temperature
Field Communicator Configure > Alert Setup > Temperature (2-3-2)
Follow the prompts on the Field Communicator display to set the following temperature alerts.
Instrument Temperature
D Hi Alert
Inst Temp Hi Alert Enable— On or Off. Instrument Temperature High Alert Enable activates checking of the
instrument temperature against the Instrument Temperature High Alert Threshold. Instrument Temperature High
Alert is set if the instrument temperature rises above the Instrument Temperature High Alert Threshold. Once the
alarm is set, the instrument must fall below the Instrument Temperature High Alert Threshold by the Temperature
Deadband before the alarm is cleared. See figure 4‐8.
Inst Temp Hi Alert Threshold— Instrument Temperature High Alert Threshold is the instrument electronics
temperature, in temperature units, which, when exceeded, will set the Electronics High Alert.
D Lo Alert
Inst Temp Lo Alert Enable— On or Off. Instrument Temperature Low Alert Enable activates checking of the
instrument temperature against the Instrument Temperature Low Alert Threshold. Instrument Temperature High
Alert is set if the instrument temperature rises above the Instrument Temperature Low Alert Threshold. Once the
alarm is set, the instrument must fall below the Instrument Temperature Low Alert Threshold by the Temperature
Deadband before the alert is cleared. See figure 4‐8.
Inst Temp Lo Alert Threshold— Instrument Temperature Low Alert Threshold is the instrument electronics
temperature, in temperature units, which, when exceeded, will set the Electronics Low Alert.
D Inst Temp— Current Instrument Temperature.
D Inst Temp Offset— Offset to trim instrument temperature output to an independent reference. Factory calibration
that may be modified by user.
Process Temperature
D Hi Alert
Proc Temp Hi Alert Enable— On or Off. Process Temperature High Alert Enable activates checking of the process
variable temperature against the Process Temperature High Alert Threshold. The Process Temperature High Alert
is set if the process variable temperature rises above the Process Temperature High Alert Threshold. Once the alert
is set, the process variable temperature must fall below the Process Temperature High Alert Threshold by the
Temperature Deadband before the alert is cleared. See figure 4‐8.
Proc Temp Hi Alert Threshold— Process Temperature High Alert Threshold is the process variable temperature, in
temperature units, which, when exceeded, will set the Process Temperature High Alert.
D Lo Alert
Proc Temp Lo Alert Enable— On or Off. Process Temperature Low Alert Enable activates checking of the process
variable temperature against the Process Temperature Low Alert Threshold. The Process Temperature Low Alert is
set if the process variable temperature rises above the Process Temperature Low Alert Threshold. Once the alert is
set, the process variable temperature must fall below the Process Temperature Low Alert Threshold by the
Temperature Deadband before the Alert is cleared. See figure 4‐8.
51
Page 52

Configuration
October 2014
Instruction Manual
D102748X012
Proc Temp Lo Alert Threshold— Process Temperature Low Alert Threshold is the process variable temperature, in
temperature units, which, when exceeded, will set the Temperature Low Alert.
D Proc Temp— Displays the process temperature stored in the instrument.
D Proc Temp Offset— Bias to improve the accuracy of the (RTD) temperature measurement used to provide
compensation for processtemperaturerelated density changes.
D Temperature Deadband— The Temperature Deadband is the amount the temperature, in temperature units, must
change to clear a temperature alert, once it has been set. The deadband applies to all the temperature alerts. See
figure 4‐8. In firmware revision 8, the Temp Alert Offset is displayed incorrectly when the units are DegF. (The
number displayed is 32 more than the actual deadband.)
Figure 4‐8. Process Temperature Alert Threshold Deadband (Temperature High Alert Example)
ALERT IS SET
PROCESS TEMPERATURE
HIGH ALERM LIMIT
E0373
ALERT IS CLEARED
PROCESS TEMPERATURE ALERT
THRESHOLD DEADBAND
TEMPERATURE
52
Page 53

Instruction Manual
D102748X012
Configuration
October 2014
Communications
Field Communicator Configure > Communications > Burst Mode (2-4-1) or Burst Option (2-4-2)
Burst Mode
Enabling burst mode provides continuous communication from the digital level controller. Burst mode applies only to
the transmission of burst mode data and does not affect the way other data is accessed.
Depending upon the burst option selected, the digital level controller will burst the variables as shown in table 2‐1.
Table 4‐4. Burst Variables Sent by the FIELDVUE DLC3010
Burst Option Variable Variable Burst
Read PV Primary Process variable (EU) 1
Read PV mA and % Range
Read Dynamic Vars
1. EU—engineering units; mA—current in milliamperes; %—percent
Primary Process variable (mA)
Secondary Percent range (%)
Primary Process variable (EU)
Secondary Electronics temperature (EU)
Tertiary Process temperature (EU)
Quaternary Not used
(1)
Burst Option
1. Select On in the Burst Mode menu; press ENTER to enable Burst Mode.
2. Select the desired option from the Burst Option menu and press ENTER.
3. Press SEND to download the new configuration information to the digital level controller.
Burst Command
2
3
53
Page 54

Configuration
October 2014
Instruction Manual
D102748X012
Calibration
Introduction: Calibration of Smart Instruments
Analog instruments generally have only one interface that can be calibrated by the user. A zero and span output
calibration is normally performed at the corresponding two input conditions. Zero/Span calibration is very simple to
use, but provides little versatility. If the 0% and 100% input conditions are not available to the user, a calibration can
sometimes be accomplished, but the gain and offset adjustments will likely interact, requiring considerable iteration
to achieve accuracy. In contrast, intelligent instruments have many interfaces that can be calibrated or scaled by the
user, with consequent increased versatility.
Refer to table 4‐5 for a list of relationships in the DLC3010 that can be calibrated or configured by the user. Note that
not all relationships are listed here.
Table 4‐5. Relationships in the FIELVUE DLC3010 that can be User Calibrated or Configured
Torque Tube Rate
Reference (dry) Coupling Point
Driver Rod Length
Displacer Volume
SG
Displacer Length The scale factor to convert normalized level to level on the displacer in engineering units.
Level Offset
URV (Upper Range Value) The value of computed process variable at which a 20 mA output (100% Range) is desired.
LRV (Lower Range Value) The value of computed process variable at which a 4 mA output (0% Range) is desired.
D/A Trim The gain and offset of the D/A converter which executes the digital commands to generate output
Instrument Temperature Offset
Proc Temp Offset
The scale factor between the internal digital representation of the measured pilot shaft rotation and the physical torque
input to the sensor.
The angle of pilot shaft rotation associated with the zero buoyancy condition. (The zero reference for the input of the PV
calculation).
The scale factor (moment arm) between a force input to the sensor driver rod and the torque developed as input to the
torque tube.
The scale factor relating the density of the process fluid to the maximum force that can be produced as an input to the
driver rod of the sensor.
The density of the process fluid normalized to the density of water at reference conditions. The scale factor that
transforms displacer volume and measured buoyancy into a level signal normalized to displacer length.
The zero reference for the output of the PV calculation, referred to the location of the bottom of the displacer at zero
buoyancy condition.
Bias to improve the accuracy of the ambient temperature measurement used to provide temperature compensation for
the mechanical‐to‐electronic transducer.
Bias to improve the accuracy of the (RTD) temperature measurement used to provide compensation for
process‐temperature‐related density changes.
These parameters are factory‐set to the most common values for the 249 sensors. Therefore, for the bulk of units sold
in simple level applications, it is possible to accept the defaults and proceed to Trim Zero. If any of the advanced
features of the instrument are to be used, accurate sensor and test fluid information should generally be entered
before beginning the calibration.
Primary
Guided Calibration
Field Communicator Configure > Calibration > Primary > Guided Calibration (2-5-1-1)
Guided Calibration recommends an appropriate calibration procedures for use in the field or on the bench based on
your input. Follow the Field Communicator prompts to calibrate the digital level controller.
54
Page 55

Instruction Manual
D102748X012
Configuration
October 2014
Full Calibration
Field Communicator Configure > Calibration > Primary > Full Calibration (2-5-1-2)
Full Calibration operations compute the sensor gain and offset from two independent observations of process data
points. They are appropriate for cases where the two input conditions can be established relatively quickly in one
session.
Min/Max Calibration
The following procedure can be used to calibrate the sensor if the process condition can be changed to the equivalent
of a completely dry and completely submerged displacer, but the actual precise intermediate values cannot be
observed. (E.g., no sight glass is available, but the cage can be isolated and drained or flooded.)
Correct displacer information and the SG of the test fluid must be entered before performing this procedure. Capture
Zero can be performed at minimum buoyancy (or completely submerged in upper fluid) before peforming Min/Max
Calibration.
Follow the prompts on the Field Communicator to calibrate the instrument and sensor.
1. Set the control loop for manual control.
2. Enter the specific gravity for the liquid in the system.
3. Adjust the liquid level until the displacer is dry (or completely submerged in upper liquid). Allow the output to
settle, then acknowledge establishment of the minimum buoyancy condition to the system.
4. Adjust the liquid level until the displacer is completely submerged in the lower liquid. Allow the output to settle,
then acknowledge establishment of the maximum buoyancy condition of the system.
The sensor torque rate is calibrated. If the Capture Zero procedure was run at the minimum buoyancy (or completely
submerged in upper liquid) condition, the zero of the PV calculation will be correct also. Verify that the upper and
lower range values are correct and return the loop to automatic control.
Two Point Calibration
This procedure is usually the most accurate method for calibrating the sensor. It uses independent observations of two
valid process conditions, together with the hardware dimensional data and SG information, to compute the effective
torque rate of the sensor. The two data points can be separated by any span between a minimum of 5% to 100%, as
long as they remain on the displacer. Within this range, the calibration accuracy will generally increase as the
data‐point separation gets larger. Accuracy is also improved by running the procedure at process temperature, as the
temperature effect on torque rate will be captured. (It is possible to use theoretical data to pre‐compensate the
measured torque rate for a target process condition when the calibration must be run at ambient conditions.)
An external method of measuring the process condition is required. This procedure may be run before or after Capture
Zero. It adjusts the calculation gain only, so the change in PV output will track the change in input correctly after this
procedure. However, there may be a constant bias in the PV until the Capture Zero procedure has been run.
Follow the prompts on the Field Communicator to calibrate the sensor.
1. Put the control loop in manual control.
2. Adjust the process condition to a value near the top or bottom of the valid range.
3. Enter this externally measured process condition in the current PV units.
4. Adjust the process condition to a value near the bottom or top of the valid range, but at a position that is toward the
opposite end of the range relative to the condition used in step 2.
5. Enter this second externally measured process condition in the current PV units.
55
Page 56

Configuration
October 2014
Instruction Manual
D102748X012
The sensor torque rate is now calibrated. Be sure to verify that there is no bias in the PV calculation and that the upper
and lower range values are correct before returning the loop to automatic control.
Weight Calibration
This procedure may be used on the bench or with a calibration jig that is capable of applying a mechanical force to the
driver rod to simulate displacer buoyancy changes. It allows the instrument and sensor to be calibrated using
equivalent weights or force inputs instead of using the actual displacer buoyancy changes. If the displacer information
has been entered prior to beginning the procedure, the instrument will be able to compute reasonable weight value
suggestions for the calibration. However, the only preliminary data essential for the correct calibration of the torque
rate is the length of the driver rod being used for the calibration.
Weight equivalent to the net displacer weight at two valid process conditions must be available. The sensor must have
been sized properly for the expected service, so that the chosen process conditions are in the free‐motion linear range
of the sensor. The coupling point should be marked at what is going to be the zero buoyancy weight or the zero
differential‐buoyancy weight, depending on the calibration approach. The instrument should normally be physically
coupled to the pilot shaft at that condition. (However, if the expected operational travel of the pilot is greater than 5
degrees, it is advisable to couple the transmitter to the pilot shaft at the condition representing mid‐travel instead.
This will prevent hitting a stop in the transmitter before limiting in the sensor.) The Capture Zero procedure may be
run either before or after the Weight‐based Cal. However, the PV output is expected to have a bias error until the
Reference Coupling Point is correctly marked.
Follow the prompts on the Field Communicator to calibrate the sensor.
1. For interface level or density measurements, enter the specific gravity of the upper fluid and lower fluid as
requested.
2. Place a weight on the displacer rod that is approximately equal to that indicated on the prompt. The suggested
weight is equivalent to the effective displacer weight when the liquid is at its lowest level or the displacer is
suspended in the liquid with the lower specific gravity.
3. After allowing the system to stabilize, enter the actual value of the weight suspended on the displacer rod.
4. Place a weight on the displacer rod that is approximately equal to that indicated on the prompt. The suggested
weight is equivalent to the effective displacer weight when the liquid is at its highest level or the displacer is
suspended in the liquid with the higher specific gravity.
5. After allowing the system to stabilize, enter the actual value of the weight suspended on the displacer rod.
The sensor torque rate is calibrated. If the Capture Zero procedure was performed at the zero buoyancy (or zero
differential buoyancy) condition, the zero of the PV calculation will be correct also. Check the range values before
putting the loop in service.
Theoretical Calibration
In cases where it is not possible to manipulate the input at all, the user may set up a nominal calibration using
information available about the hardware and the process. The theoretical torque rate for the installed torque tube
may be looked up and compensated for process temperatures. This value is then manually entered in the instrument
configuration. The displacer information and fluid SGs are entered. The desired range values are entered manually.
Finally,Trim Zero computes PV to the current value of the process. It should be possible to control the loop with this
rough calibration.
Note
The theoretical torque rate for the installed torque tube is available in the Simulation of Process Conditions for Calibration of Fisher
Level Controllers and Transmitters instruction manual supplement (D103066X012). Contact your Emerson Process Management
sales office for information on obtaining this manual supplement.
56
Page 57

Instruction Manual
D102748X012
Configuration
October 2014
Observations of the sight glass or other independent measurements may be logged against DLC3010 outputs over
time. The ratio of the independent‐observable process changes to the DLC3010 output changes may then be used as a
scale factor to modify the theoretical torque rate stored in the instrument. After each gain adjustment, a new zero
trim will be required. When a plant‐maintenance shutdown occurs, the instrument may be isolated and calibrated in
the normal manner.
Partial Calibration
Field Communicator Configure > Calibration > Primary > Partial Calibration (2-5-1-3)
Partial Calibration operations are useful when it would take too long to establish a second data point in a single
session. There are of two partial calibrations: capture and trim. The 'capture zero' operation sets the input zero
reference angle to the value currently being measured. It is therefore valid only at the defined zero process condition.
Trim operations recompute either gain or zero reference angle with one observation of process data. The calibration
parameter that is NOT being trimmed is assumed to be correct.
Capture Zero
Capture Zero captures the current value of the torque tube angle as the input zero. The displacer must be loading the
torque tube, and not resting on a travel stop. The torque tube must be coupled to the DLC3010 and the coupling
access door must be closed. In Level mode, the captured angle represents zero differential buoyancy on displacer, and
must be obtained at the actual process zero condition. In Interface and Density mode, the captured angle represents
zero absolute buoyancy on displacer, and must be obtained at actual dry condition.
If the displacer is overweight and it is necessary to use the partial calibration methods, select Level mode and enter the
differential density before using ‘Capture Zero’ and ‘Trim Gain’. After the gain is correct, switch back to Density or
Interface mode, (reenter individual densities if Interface), then perform a ‘Trim Zero’ procedure to backcompute the
required zero buoyancy angle.
The Capture zero procedure prompts you to verify the instrument is coupled to torque tube, coupling access door is
closed, and verify that the displacer is completely dry.
Note
If the handle on the coupling access door is in the position towards the front of the transmitter, the coupling access hole is open
and the lever is “locked” (pinned in the neutral travel position). In this condition, the true “at‐rest” position of the linkage may not
be captured correctly. Moving the handle to the rear of the transmitter closes the coupling‐access hole and unlocks the lever.
It functions as the pre‐calculation zero for the process measurement algorithm. This procedure can be run either
before or after most of the gain. However, the procedure returns a valid result at only one input condition - zero
buoyancy, although in Level mode, it is equivalent to zero differential buoyancy.
Before calibration, use the Configure > Manual Setup >Sensor menu to verify that all sensor and compensation data
match the calibration conditions.
Trim Gain
Trim Gain operations recompute gain with one observation of process data. The calibration parameter that is NOT
being trimmed is assumed to be correct.
Trim Gain trims the torque rate value to align the digital Primary Variable with the user’s observation. This calibration
assumes that sensor zero is already accurate and only a gain error exists. Actual process condition must be nonzero
57
Page 58

Configuration
October 2014
Instruction Manual
D102748X012
and able to be measured independently. Configuration data must contain density of calibration fluid, displacer
volume, and driver rod length.
Before calibration, use the Configure > Manual Setup >Sensor menu to verify that all sensor and compensation data
match the calibration conditions.
Trim Zero
Trim Zero computes the value of the input angle required to align the digital Primary Variable with the user’s
observation of the process, and corrects the stored input zero reference, assuming that the calibration gain is
accurate. Use this procedure when the process cannot be moved to zero for capture, but gain is known to be correct
(only a bias error exists).
If the computed process variable is biased due to the inability to capture zero point correctly, (which can happen when
the sensor hardware is oversized to provide additional gain for some interface‐level applications), the Trim Zero can be
used to trim out that bias.
Before calibration, use the Configure > Manual Setup >Sensor menu to verify that all sensor and compensation data
match the calibration conditions.
Note
If displacer sizing for a density application results in an overweight displacer, it will be necessary to set the system up in Level or
Interface measurement mode to calibrate effectively. The output of the instrument will only make sense in “% Range” units in such
a case, since density units are not available in Level or Interface Mode.
Follow the prompts on the Field Communicator.
1. Adjust the process condition or simulation to any valid and observable value.
2. Enter the external observation of the measurement in the current PV units.
Secondary
Temperature Calibration
Field Communicator Configure > Calibration > Secondary > Temperature Calibration (2-5-2-1)
This procedure allows you to display the temperature as measured by the instrument. You can then trim the
temperature reading so that it matches the actual temperature more closely in the region of interest. (This is an offset
adjustment only. There is no ability to change the gain.)
This calibration is initially performed at the factory. Performing it in the field requires an accurate independent
measurement of the instrument housing temperature or process temperature, (as appropriate). The instrument
should be at a steady‐state condition with respect to that temperature when performing the procedure.
Note
The effectiveness of the instrument electronic temperature compensation depends upon the accuracy of the electronics
temperature offset stored in the NVM (non‐volatile memory). If the electronics temperature is incorrect, the temperature curve
applied to the magnets and Hall sensor will be misaligned, resulting in over‐ or under‐compensation.
58
Page 59

Instruction Manual
D102748X012
Configuration
October 2014
Trim Instrument Temperature
Follow the prompts on the Field Communicator to trim the instrument temperature.
Trim Process Temperature
Trim Process Temperature is available if the Process Temperature Source is not Manual. Follow the prompts on the
Field Communicator to trim the process temperature.
Manual Entry of Process Temperature
Field Communicator Configure > Manual Setup > Process Fluid > Process Temperature > Change Proc Temp (2-2-3-2-2)
If a process temperature sensor (RTD) is not installed, it is possible to manually set the Digital Process Temperature
variable to the target process temperature. This value will be used by any SG-compensation tables that the user has
entered. If no compensation tables are active, the Digital Process Temperature value may be used to document the
process temperature at which the instrument was calibrated, or the process temperature for which the stored torque
rate is pre-compensated.
Follow the prompts on the Field Communicator to edit the Digital Proc Temp.
Analog Output Calibration
Scaled D/A Trim
Field Communicator Configure > Calibration > Secondary > Analog Output Calibration > Scaled D/A Trim (2-5-2-2)
This procedure allows trimming the gain and offset of the Digital‐to‐Analog (D/A) converter to adjust the accuracy at
which the output follows 4 to 20 mA current commands from the firmware. This relationship is initially set in the
factory, and should not require frequent user adjustment. Reasons for using this procedure include:
D Correction for component aging after the instrument has been in service for an extended period.
D Adjusting D/A calibration to be optimum at the normal operating temperature, when that temperature is
considerably removed from room temperature conditions.
The procedure is iterative, and will eventually reach a resolution limit where attempts to improve the result will cycle
at a few decimal places to either side of the target.
Follow the prompts on the Field Communicator to trim the D/A output.
1. Scale the output from 4 to 20 mA? If your reference meter is graduated in “mA”, select Proceed and go to step 5. If
the reference reading is presented in some other unit system, such as “%” or “mm”, select Change and continue
with step 2.
2. Enter the scale low output value.
3. Enter the scale high output value.
4. If the high and low output values are correct, select Proceed and continue to step 5. If they are not correct, select
Change and return to step 2.
5. Connect a reference meter across the test connections in the terminal box. See the Test Connections procedure in
the Installation section. You can also connect a reference meter in the loop as shown in figure 2‐9.
6. The Field Communicator commands the instrument to set its output to 4 mA or the low output value.
7. Enter the reading from the reference meter.
59
Page 60

Configuration
October 2014
8. If the reference meter reading equals 4 mA or the low output value, select Yes and continue to step 9. If not, select
No and return to step 7.
9. The Field Communicator commands the instrument to set its output to 20 mA or the high output value.
10. Enter the reading from the reference meter.
11. If the reference meter reading equals 20 mA or the high output value, select Yes and continue to step 12. If not,
select No and return to step 10.
12. The Field Communicator commands the instrument to set its output back to the original value.
Instruction Manual
D102748X012
Calibration Examples
Calibration—with Standard Displacer and Torque Tube
Run the initial calibration near ambient temperature at design span to take full advantage of the available resolution.
This is accomplished by using a test fluid with a specific gravity (SG) close to 1. The value of SG in the instrument
memory during the calibration process should match the SG of the test fluid being used in the calibration. After the
initial calibration, the instrument may be set up for a target fluid with a given specific gravity, or an interface
application, by simple configuration data changes.)
1. Run through Guided Setup and verify that all sensor data is correct.
Procedure:
Change the PV mode to Level
Set the Level Offset value to 0.00
Set the Specific Gravity value to the SG of the test fluid being used.
Establish the test fluid level at the desired process zero point. Make sure that the DLC3010 lever assembly has been
properly coupled to the torque tube (see coupling procedure on page 38). To unlock the lever assembly and allow it to
freely follow the input, close the coupling access door on the instrument. It is often possible to watch the instrument
display and/or the analog output to detect when the fluid hits the displacer, because the output will not start moving
upward until that point is reached.
Select the Min/Max calibration from the Full Calibration menu, and confirm that you are at the 'Min' condition at the
prompt. After the 'Min' point has been accepted, you will be prompted to establish the 'Max' condition. (The 'displacer
completely covered' condition should be slightly higher than the 100% level mark to work correctly. for example, 15
inches above the zero mark would generally be enough for a 14 inch displacer on a 249B, because the amount of
displacer rise expected for that configuration is about 0.6 inch.)
Accept this as the 'Max' condition. Adjust the test fluid level and check the instrument display and current output
against external level at several points distributed across the span to verify the level calibration.
a. To correct bias errors, 'Capture Zero' at the exact zero level condition.
b. To correct gain errors, 'Trim Gain' at a preciselyknown high level condition.
If the measured output doesn't come off the low saturation value until the level is considerably above the bottom of
the displacer, it is possible that the displacer is overweight. An overweight displacer will rest on the lower travel stop
until sufficient buoyancy has developed to allow the linkage to move. In that case, use the calibration procedure for
overweight displacers found on page 61.
60
Page 61

Instruction Manual
D102748X012
Configuration
October 2014
After the initial calibration:
For a level application— Go to the Sensor Compensation menu and use the 'Enter constant SG' item to configure the
instrument for the target process fluid density.
For an interface application— Change the PV mode to Interface, verify or adjust the range values presented by the
Change PV mode procedure, and then use 'Enter constant SG' to configure the instrument for the SGs of each of the
target process fluids.
For a density application— Change the PV mode to Density, and establish the desired range values in the 'Change PV
mode' procedure.
If the target application temperature is considerably elevated or depressed from ambient, refer to pages 37 and 66 for
information on temperature compensation.
If you are able to adjust both process fluids, the Two Point Calibration is recommended.
If you are unable to carry out Min/Max or Two Point Calibration, set the lowest process condition or zero buoyancy for
DLC3010 and Capture Zero. Run Trim Gain at a process level of minimum 5% above the Lower Range Value.
If you only have a single fluid for calibration, run through Instrument Setup and verify all displacer data is correct. Set
Level Offset to 0. Select Level application with direct action, and enter SG=1.0 (water) or actual SG of test fluid if
different than 1.0. Proceed with Min/Max or Two Point Calibration.
Note
Information on computing precise simulation of this effect is available in the Simulation of Process Conditions for Calibration of
Fisher Level Controllers and Transmitters instruction manual supplement (D103066X012), available from your Emerson Process
Management sales office or at www.fisher.com.
Calibration with an Overweight Displacer
When the sensor hardware is sized for greater mechanical gain (as it is in some interface or density measurement
applications), the dry displacer weight is often greater than the maximum permissible load on the torque tube. In this
situation it is impossible to 'capture' the zero buoyancy rotation of the torque tube, because the linkage is lying on a
travel stop at that condition.
The 'Capture Zero' routine in the Partial Calibration menu group will therefore not function correctly in the target PV
modes of Interface or Density when the displacer is overweight.
The Full Calibration routines: Min/Max, TwoPoint, and Weight, will all work correctly at the actual process conditions
when in interface or density mode, because they backcompute the theoretical zerobuoyancy angle instead of
capturing it.
If it is necessary to use the Partial Calibration methods when the displacer is overweight, the following transformation
may be used:
An interface or density application can be mathematically represented as a level application with a single fluid whose
density is equal to the difference between the actual SGs of the fluid covering the displacer at the two process
extremes.
61
Page 62

Configuration
October 2014
Instruction Manual
D102748X012
The calibration process flows as follows:
D Change the PV mode to Level.
D Set the Level Offset to zero.
D Set the Range Values to:
LRV = 0.0,
URV = displacer length.
D Capture Zero at the lowest process condition (that is, with the displacer completely submerged in the fluid of
the lowest density NOT dry).
D Set Specific Gravity to the difference between the SGs of the two fluids (for example, if SG_upper = 0.87 and
SG_lower = 1.0, enter a specific gravity value of 0.13).
D Set up a second process condition more than 5% of span above the minimum process condition, and use the Trim
Gain procedure at that condition. The gain will now be initialized correctly. (The instrument would work fine in
this configuration for an interface application. However, if you have a density application, it won't be possible to
report the PV correctly in engineering units if the instrument calibration is concluded at this point.)
Since you now have a valid gain:
D Change the PV mode to Interface or Density,
D reconfigure the fluid SGs or range values to the actual fluid values or extremes, and
D use the Trim Zero procedure in the Partial Calibration menu to backcompute the theoretical zerobuoyancy
angle.
The last step above will align the value of the PV in engineering units to the sight glass observation.
Note
Information on simulating process conditions is available in the Simulation of Process Conditions for Calibration of Fisher Level
Controllers and Transmitters instruction manual supplement (D103066X012), available from your Emerson Process Management
sales office or at www.fisher.com.
Following are some guidelines on the use of the various sensor calibration methods when the application uses an
overweight displacer:
Weight‐based: Use two accurately known weights between minimum and maximum buoyancy conditions. The full
displacer weight is invalid because it will put the unit on a stop.
Min/Max: Min now means submerged in the lightest fluid and Max means submerged in the heaviest fluid.
Two point: Use any two interface levels that actually fall on the displacer. Accuracy is better if the levels are farther
apart. The result should be close if you can move the level even 10%.
Theoretical: If the level cannot be changed at all, you can enter a theoretical value for torque tube rate manually. In
this case you would not be able to Capture Zero at the 0% interface condition.
62
Page 63

Instruction Manual
D102748X012
Configuration
October 2014
Density Applications - with Standard Displacer and Torque Tube
Note
When you change 'PV is' from level or interface to density, the range values will be initialized to 0.1 and 1.0 SGU. You may edit the
range values according to the specify gravity unit.
It is necessary to back out of Manual Setup and reenter the Manual Setup menu to see the changes being refreshed.
If the displacer is overweight, there is no way to get the output numerically correct in density mode, because the Level
Offset is not available. Therefore, density calibration normally has to begin with the assumption that the displacer is
free moving at zero buoyancy (dry) conditions. Capture Zero accurately at dry displacer conditions, and any of the full
sensor calibration methods (Weight, Min/Max, and Two Point) can be used in density mode. The terminology can be
confusing, because it usually refers to a “level” as the process condition to set up. When using one of these method,
remember that you are in the density mode and enter observed PV in current units of SGU, g/L, lb/in
Weight Based: The Weight Calibration asks you for the lowest and highest density you want to use for the calibration
points, and computes weight values for you. If you can't come up with the exact values asked for, you are allowed to
edit the values to tell it what weights you actually used.
3
, kg/m3, etc.
Min/Max: The Min/Max Calibration essentially reverts to level mode during the calibration process. It asks for the SG of
your test fluid first. Then, it has you set up first a dry and then a completely submerged displacer condition.
Two Point: The Two Point Calibration requires you to set up two different process conditions with as much difference
as possible. You could use two standard fluids with well‐known density and alternately submerge the displacer in one
or the other. If you are going to try to simulate a fluid by using a certain amount of water, remember that the amount
of displacer covered by the water is what counts, not the amount in the cage. The amount in the cage will always need
to be slightly more because of the displacer motion. Because of this inconvenience, and the extra work of draining and
flooding with two fluids, the two‐point calibration method is probably the least attractive in density mode.
Note
These calibration methods advise you to trim zero for better accuracy. That command is not available in density mode.
Sensor Calibration at Process Conditions (Hot Cut‐Over) when input cannot be varied
If the input to the sensor cannot be varied for calibration, you can configure the instrument gain using theoretical
information and use Trim Zero to trim the output to the current process condition. This allows you to make the
controller operational and to control a level around a setpoint. You can then use comparisons of input changes to
output changes over time to refine the gain estimate. A new trim zero will be required after each gain adjustment. This
approach is not recommended for a safety‐related application, where exact knowledge of the level is important to
prevent an overflow or dry sump condition. However, it should be more than adequate for the average level‐control
application that can tolerate large excursions from a midspan set point.
There are a number of calibration methods available in the DLC3010 Device Description. Two Point Calibration allows
you to calibrate the torque tube using two input conditions that put the measured interface anywhere on the
displacer. The accuracy of the method increases as the two points are moved farther apart, but if the level can be
adjusted up or down a minimum 5% span, it is enough to make a calculation. Most level processes can accept a small,
manual adjustment of this nature. If your process cannot, then the theoretical approach is the only method available.
63
Page 64

Configuration
October 2014
Instruction Manual
D102748X012
1. Determine all the information you can about the 249 hardware: 249 type, mounting sense (controller to the right or
left of displacer), torque tube material and wall thickness, displacer volume, weight, length, and driver rod length.
(the driver rod length is not the suspension rod length, but the horizontal distance between the centerline of the
displacer and the centerline of the torque tube). Also obtain process information: fluid densities, process
temperature, and pressure. (The pressure is used as a reminder to consider the density of an upper vapor phase,
which can become significant at higher pressures.)
2. Run Instrument Setup and enter the various data that is requested as accurately as possible In Manual Setup. Set
the Range Values (LRV, URV) to the PV values where you will want to see 4 mA and 20 mA output, respectively.
These might be 0 and 14 inches on a 14 inch displacer.
3. Mount and couple at the current process condition. It is not necessary to run the Capture Zero procedure, because
it stores the current torque tube angle as the zero buoyancy condition, and will therefore not be accurate.
4. With the torque tube type and material information, find a theoretical value for the composite or effective
torque-tube rate, (Refer to the Entering Theoretical Torque Tube (TT) Rates procedure in this section), and enter it
in the instrument memory. The value can be accessed by selecting:
Configure > Manual Setup > Sensor > Torque Tube > Change Torque Rate (2-2-1-3-2)
5. If the process temperature departs significantly from room temperature, use a correction factor interpolated from
tables of theoretical normalized modulus of rigidity. Multiply the theoretical rate by the correction factor before
entering the data. You should now have the gain correct to within perhaps 10%, at least for the standard wall, short
length torque tubes. (For the longer torque tubes (249K, L, N) with thin‐wall and a heat insulator extension, the
theoretical values are much less accurate, as the mechanical path departs considerably from the linear theory.)
Note
Tables containing information on temperature effects on torque tubes can be found in the Simulation of Process Conditions for
Calibration of Fisher Level Controllers and Transmitters instruction manual supplement (D103066X012), available from your
Emerson Process Management sales office or at www.fisher.com.
6. Now using a sight glass or sampling ports, obtain an estimate of the current process condition. Run the Trim Zero
calibration and report the value of the actual process in the PV engineering units.
7. You should now be able to go to automatic control. If observations over time show the instrument output exhibits,
for example,1.2 times as much excursion as the sight glass input, you could divide the stored torque tube rate by
1.2 and send the new value to the instrument. Then run another Trim Zero calibration and observe results for
another extended period to see if further iteration is required.
Entering Theoretical Torque Tube (TT) Rates
The Simulation of Process Conditions for Calibration of Fisher Level Controllers and Transmitters instruction manual
supplement (D103066X012) provides the theoretical composite torque tube (TT) rate for 249 sensors with DLC3010
controllers. These numbers are nominal values. They should be within 10% of the values that the instrument would
compute when you perform a sensor calibration. They will be less accurate for the long torque tubes (249K, L, N, VS,
and P), especially with thin‐wall constructions.
If you are unable to perform a sensor calibration during installation, you may enter the values into the instrument at
the following menu item in the handheld:
Configure > Manual Setup > Sensor > Torque Tube > Change Torque Rate (2-2-1-3-2)
Then, manually set the LRV and URV to the PV values at which you desire 4 and 20 mA output, respectively:
Configure > Manual Setup > Variables > Primary Variable Range > Upper or Lower Range Value (2-2-2-3-1 or -2)
Next, perform a Trim Zero operation to align the instrument output with the sight glass reading:
Configure > Calibration > Primary > Partial Calibration > Trim Zero (2-5-1-3-3)
64
Page 65

Instruction Manual
D102748X012
These steps will provide an approximate PV calibration to get a system operational. Further refinements can then be
made when it is possible to manipulate and observe the level and instrument output.
Configuration
October 2014
Excessive Mechanical Gain
If the displacer/torque tube sizing provides more than 4.4 degrees of torque tube rotation for a full span change in
process input, It may be difficult to obtain a valid calibration with the normal coupling procedure. In such a case, you
can utilize the full mechanical span of the DLC3010 by coupling the instrument to the torque tube at the 50% travel
condition, instead of at the lowest process condition. When coupled at the 50% travel condition, the travel limits of the
249 hardware will be the constraining factor. If the 249 travel limit is reached before full process input travel is
achieved, the hardware is either improperly sized for the application, improperly assembled, or damaged.
Determining the SG of an Unknown Fluid
If the instrument has been calibrated with weights or by using a test fluid with a wellknown SG, it is possible to use the
instrument to measure the SG of an unknown fluid, or the differential SG between two fluids. A procedure called
'Measure Density' is provided in the Manual Setup Process Fluid menu when you are in Level measurement mode. The
procedure presents the measured value and allows you either to automatically move it into the instrument
configuration, or to manually record it for later use.
Accuracy Considerations
Effect of Proportional Band
If you are operating at low Proportional Band [PB = 100% times (full span torque tube rotation) / (4.4 degrees)], you
can expect a degradation factor of about (100%)/(PB%) on the Transmitter accuracy specifications.
Note
This formula is most correct for linearity errors that are relatively steep‐sided. If the linearity error curve shape is simple with
relatively gradual slope, the net effect of reducing span may be less. Instruments such as the DLC3010, that use a compensation
technique to reduce the residual mechanical or electrical non‐linearity, will generally have a complex shape for the net‐error curve.
If this is too much degradation, an improvement of 2.0 can be obtained by using a thin‐wall torque tube. Additional
gain can be achieved by increasing the displacer diameter. Available clearance inside the cage, and the need to keep
the net displacer weight at the highest and lowest process conditions within the usable range of the torque tube /
driver rod combination, place practical limits on how much the sizing can be adjusted.
With an overweight displacer, the calibration process becomes more difficult, (because the zero buoyancy condition
will occur with the linkage driven hard into a travel stop). In interface measurement mode it becomes impossible to
Capture Zero. One simple and effective solution is to use Level measurement mode. Capture Zero at the lowest
process condition instead of zero buoyancy, and enter the differential SG = (SGlowerfluid - SGupperfluid). The
algorithm then computes level correctly.
Density Variations in Interface Applications
A high sensitivity to errors in the knowledge of fluid density can develop in some interface applications. For example:
Suppose the whole input span is represented by an effective change in SG of 0.18. Then a change in the actual SG of
the upper fluid from 0.8 to 0.81 could cause a measurement error of 5.6% of span at the lowest interface level. The
65
Page 66

Configuration
October 2014
Instruction Manual
D102748X012
sensitivity to the knowledge of a fluid density is maximum at the process condition where that fluid covers all of the
displacer, and zero at the opposite extreme process condition.
If the fluid density changes are batch‐related or very gradual, it may be practical to keep track of the SG of the fluid and
periodically reconfigure the transmitter memory to match the actual process condition. Frequent automatic updates
to this variable are not advised, as the NVM location where it is stored has an expected lifetime of about 10,000 write
operations. If changes are only a function of temperature, the characteristic of the fluid can be loaded once in the NVM
table, and an RTD connected to measure the process temperature and drive the correction table. If temperature is not
the driving influence, the best that can be done is to calibrate for the widest potential differential SG. (This will keep
the variations as small a percentage of calibrated span as possible.) Then calculate an alarm threshold that will prevent
vessel over‐ or under‐flow at the worst case error.
Extreme Process Temperatures
For applications that will run at extreme temperatures, the effect of process temperature on the torque tube must be
taken into account. Best results are obtained by running the torque tube calibration at actual process temperature.
However, the decrease in spring rate with temperature can be simulated at room temperature by increasing the load
on the torque tube during room‐temperature calibration. This will produce the same deflection that would occur at
actual process conditions. This compensation is theoretical and not perfect, but is still an improvement over ambient
calibration with no attempt at compensation.
Note
For additional information, refer to the Simulation of Process Conditions for Calibration of Fisher Level Controllers and
Transmitters instruction manual supplement (D103066X012), available from your Emerson Process Management sales office or at
www.fisher.com.
Temperature Compensation
If the process temperature departs significantly from calibration temperature, you will need to apply a correction
factor. Interpolate the correction factor from the material‐specific tables of theoretical normalized modulus of rigidity
versus temperature, as described in the Simulation of Process Conditions for Calibration of Fisher Level Controllers and
Transmitters instruction manual supplement. Multiply the measured torque tube rate (editable in the review menu
under factory settings) by the correction factor and enter the new value. When you cannot calibrate at process
temperature this approach allows a better approximation of the actual torque tube behavior at process conditions.
66
Page 67

Instruction Manual
D102748X012
Service Tools
October 2014
Section 5 Service Tools5-5-
Active Alerts
Field Communicator Service Tools > Active Alerts (3-1)
Visible if an alert is not active
No Active Alerts
Visible if an alert is active
Refresh Alerts—the following menu/methods will be visible only if the associated alert is active:
D F: Process Temperature Signal Failed - When active, indicates the process temperature sensor (RTD) reading has
exceeded the hardcoded limits (<10 ohms or >320 ohms). If this status message appears, reinstall the process
temperature sensor (RTD).
D F: Sensor Drive Failed - The Hall sensor drive current readback is outside of the hardcoded limits.
D F: Sensor Signal Failed - The instrumentation amplifier output for the torque tube position is outside of range.
D M: Non‐Primary Variable Out of Limits - When active, indicates the process applied to a sensor, other than that of
the Primary Variable, is beyond the operating limits of the device. This indicates Electronics or Process
Temperature has reached or exceeded the associated temperature alert limits.
D M: Analog Output Saturated - The Analog Output value reported by the instrument is beyond the limits (3.8 or
20.5 mA) and no longer represent the true applied process.
D M: Processor Free Time Depleted - There is insufficient free time remaining in the execution period to complete
the scheduled tasks.
D M: NVM Write Limit Exceeded - When active, indicates the total number of writes to one of the three areas of
NVM has exceeded the hardcoded limit. Try cycling power to the instrument and see if it clears. If it does not
clear, replace the Electronics Module. If the Hall (Transducer) count is zero, replace the Transducer Module.
D A: Analog Output Fixed - The Analog Output is in Fixed Current Mode.
D A: Cold Start - A power failure or device reset has occurred.
D A: Instrument Temperature Too Low - When active, indicates that the Instrument Temperature has exceeded the
value of the Instrument Temperature Low Alert Threshold.
D A: Instrument Temperature Too High - When active, indicates that the Instrument Temperature has exceeded
the value of the Instrument Temperature High Alert Threshold.
D A: Process Temperature Too Low - When active, indicates that the Process Temperature has exceeded the value
of the Process Temperature Low Alert Threshold.
D A: Process Temperature Too High - When active, indicates that the Process Temperature has exceeded the value
of the Process Temperature High Alert Threshold.
D A: PV LoLo Alert - When active, indicates that the Process Variable has exceeded the value of the Process Variable
Low Low Alert Threshold. Analog Output set to jumperselected alarm current.
D A: PV Lo Alert - When active, indicates that the Process Variable has exceeded the value of the Process Variable
Low Alert Threshold.
67
Page 68

Service Tools
October 2014
Instruction Manual
D102748X012
D A: PV HiHi Alert - When active, indicates that the Process Variable has exceeded the value of the Process Variable
High High Alert Threshold. Analog Output set to jumperselected alarm current.
D A: PV Hi Alert - When active, indicates that the Process Variable has exceeded the value of the Process Variable
High Alert Threshold.
D A: PV Out of Limits - Primary Variable value is beyond its operating limit.
Variables
Field Communicator Service Tools > Variables (3-2)
Follow the prompts on the Field Communicator display to view the following analog output variables.
PV is— Indicates the type of measurement either level, interface (the interface of two liquids of different specific
gravities), or density (measures the liquid specific gravity). The process variable displayed and measured depends on
the entry for “PV is” under PV Setup.
Primary Variable
D PV Value— Indicates the current process variable (level, interface, or density) in engineering units.
D % Range— Indicates the current process variable in percent of the span determined by the lower range value and
the upper range value.
Refer to figure 5‐1. If the digital level controller is setup for direct action (i.e., the lower range value is less than the
upper range value), 0% range corresponds to the lower range value (LRV) and 100% range corresponds to the upper
range value (URV). If the digital level controller is setup for reverse action (i.e., the lower range value is greater than the
upper range value), 0% range corresponds to the upper range value (URV) and 100% range corresponds to the lower
range value (LRV). Use the following equation to calculate the % range values:
(PV
* LRV)
PV(%range) +
EU
(URV * LRV)
100
where:
PV
= process variable in engineering units
EU
The LRV always represents the 0% range value and the URV always represents the 100% range value.
68
Page 69

Instruction Manual
D102748X012
Service Tools
October 2014
Figure 5‐1. PV % Range Indication for Direct and Reverse Action with a 32‐Inch Displacer Ranged for 8 to 24 Inches
150
130
110
90
70
50
30
PV (% RANGE)
10
–10
–30
–50
0 4 8 1216 20242832
150
130
110
90
70
50
30
PV (% RANGE)
10
–10
–30
–50
0 4 8 1216 20242832
LRV URV
LEVEL (INCHES)
E0383
DIRECT ACTION
AO— Indicates the current analog output value of the instrument, in milliamperes.
Inst Temp— Indicates the current Instrument Temperature.
Process Temperature
D Proc Temp Source— The source of measurement for Process Temperature.
D Proc Temp—- Indicates the current Process Temperature.
LEVEL (INCHES)
LRVURV
REVERSE ACTION
Torque Rate— Torque rate of the torque tube applied in PV measurements.
Upper Fluid Density — Density of Upper Fluid applied in PV measurements.
Note
Upper Fluid Density is only visible if PV is Interface
Lower Fluid Density— Density of Lower Fluid applied in PV measurements.
Note
Lower Fluid Density is only visible if PV is Level or Interface
69
Page 70

Service Tools
October 2014
Instruction Manual
D102748X012
Maintenance
Tests
Field Communicator Service Tools > Maintenance > Tests (3-3-1-1)
LCD Test— only visible if LCD Configuration is installed
The meter activates all segments immediately after power‐up, during a digital level controller self‐test, or during a
master reset sent by a host supporting HART communications. You can also test the meter by selecting Turn Cells On
to turn on all display segments, including the analog output bar graph, or select Turn Cells Off to turn off all display
segments. When finished with the test, press OK to return the meter to normal display mode.
Loop Test— used to verify the controller output, the integrity of the loop, and the operations of any recorders or similar
devices installed in the loop. To initiate a loop test, perform the following procedure:
1. Connect a reference meter to the controller. To do so, either connect the meter to the test connections inside the
terminal box (see the Test Connections procedure) or connect the meter in the loop as shown in figure 2‐9.
2. Access Loop Test.
3. Select OK after you set the control loop to manual.
The Field Communicator displays the loop test menu.
4. Select a discreet milliamp level for the controller to output. At the “Choose analog output” prompt, select 4 mA,
20 mA, or Other to manually input a value between 4 and 20 milliamps.
5. Check the reference meter to verify that it reads the value you commanded the controller to output. If the readings
do not match, either the controller requires an output trim, or the meter is malfunctioning.
After completing the test procedure, the display returns to the loop test screen and allows you to choose another
output value or end the test.
Reset/Restore
Field Communicator Service Tools > Mainentance > Reset/Restore (3-3-2)
Restore Factory Defaults
D Restore Factory Configuration— Follow the prompts on the Field Communicator display to restore the digital
level controller to the factory configuration.
D Restore Factory Compensation— Replaces all calibration and compensation data with factory defaults.
Both Restore Factory Configuration and Restore Factory are drastic procedures which should be used only as a last
resort.
Reset Device— Issues a master reset request to the processor in the DLC3010.
70
Page 71

Instruction Manual
D102748X012
Maintenance & Troubleshooting
October 2014
Section 6 Maintenance & Troubleshooting6‐6‐
The DLC3010 digital level controller features a modular design for easy maintenance. If you suspect a malfunction,
check for an external cause before performing the diagnostics described in this section.
Sensor parts are subject to normal wear and must be inspected and replaced as necessary. For sensor maintenance
information, refer to the appropriate sensor instruction manual.
WARNING
To avoid personal injury, always wear protective gloves, clothing, and eyewear when performing any maintenance
operations.
Personal injury or property damage due to sudden release of pressure, contact with hazardous fluid, fire, or explosion can
be caused by puncturing, heating, or repairing a displacer that is retaining process pressure or fluid. This danger may not
be readily apparent when disassembling the sensor or removing the displacer. Before disassembling the sensor or
removing the displacer, observe the appropriate warnings provided in the sensor instruction manual.
Check with your process or safety engineer for any additional measures that must be taken to protect against process
media.
CAUTION
When replacing components, use only components specified by the factory. Always use proper component replacement
techniques, as presented in this manual. Improper techniques or component selection may invalidate the approvals and
the product specifications, as indicated in table 1‐1. It may also impair operations and the intended function of the device.
Diagnostic Messages
In addition to the output, the LCD meter displays abbreviated diagnostic messages for troubleshooting the digital
level controller. To accommodate two‐word messages, the display alternates between the first and second word. The
meter displays messages simultaneously on the Process Variable and Process Variable Unit lines as shown in figure 6‐1.
Messages on the Process Variable line refer to general device conditions, while messages on the Process Variable Unit
line refer to specific causes for these conditions. A description of each diagnostic message follows.
D [BLANK]— If the meter does not appear to function, and the instrument is otherwise functioning correctly, make
sure the digital level controller is configured for the LCD meter. The meter will not function if the LCD Configuration
selection is “Not Installed.” To check this function, connect the Field Communicator to the digital level controller
and turn it on. From the Online menu, select:
Configure > Manual Setup > Instrument Display > LCD Configuration (2-2-5-1)
For information on setting up the LCD meter see page 47. A diagnostic test for meter function is also detailed later
in this section.
71
Page 72

Maintenance & Troubleshooting
October 2014
Figure 6‐1. LCD Meter Diagnostic Display
ANALOG DISPLAY
OF OUTPUT
Instruction Manual
D102748X012
PROCESS
VARIABLE VALUE
DIAGNOSTIC
MESSAGE
E0380
MODE
D FAIL HDWR— This message indicates the existence of one or more of the following conditions:
—The primary sensor input conversion is out of range.
—The primary sensor drive current is out of range.
—The internal reference voltage for controlling the loop current is out of range.
Perform the diagnostic procedures detailed later in this section to isolate the specific failure. If diagnostics indicate a
failure of a particular module, replace the indicated module with a new one. Otherwise, correct the mechanical input
condition to clear the message.
D OFLOW— The location of the decimal point, as configured in the meter setup, is not compatible with the value to be
displayed by the meter. For example, if the meter is measuring a level greater that 99.999 mm, and the meter
decimal point is set to 3 digit precision, the meter will display an “OFLOW” message because it is only capable of
displaying a maximum value of 99.999 when set to 3 digit precision. The position of the decimal point may be
adjusted by using the Field Communicator. From the Online menu, select:
Configure > Manual Setup > Instrument Display > Decimal Places (2-2-5-4).
Selecting “0” will put the display in auto‐scale mode. (The number of decimal places displayed will be the maximum
remaining in the display field for the current value of PV.)
Hardware Diagnostics
If you suspect a malfunction despite the absence of diagnostic messages on the Field Communicator display, follow
the procedures described in table 6‐1 to verify that the digital level controller hardware and process connections are in
good working order. Under each of the major symptoms, specific suggestions are offered for solving problems. Always
deal with the most likely and easiest‐to‐check conditions first.
72
Page 73

Instruction Manual
D102748X012
Table 6‐1. Troubleshooting
Symptom Potential Source Corrective Action
1. Check resistance between the power supply and the Field Communicator connection. The net resistance in the
loop must be between 230 and 1100 Ohms for HART communication.
Loop Wiring
Analog Output is within valid
range but Instrument does
not communicate with Field
Communicator
Output ` 0 mA
Fixed Output ` 3.7 mA
Fixed Output = 3.8 mA Low Saturation
Fixed Output = 20.5 mA High Saturation
Fixed Output ` 22.5 mA
Fixed Output > 22.5 mA
Output is within 4-20 mA
range, but does not track
displayed PV value (e.g.,
a) gain error,
b) low saturation occurs at a
higher than 3.8 mA,
value
c) high
saturation occurs at a
value lower than 20.5 mA)
Output Drifting while at
fixed process input.
Erratic Output Loop Wiring
Scrambled or erratic Display
on LCD
Terminal Box
Electronics Module 5. Swap the electronics module with a known good part.
Transducer Module
Loop Wiring
Terminal Box
Electronics Module — See item 5. above.
Transducer Module — See item 6. above.
Alarm Condition
(Fail‐low setting)
Alarm Condition
(Fail‐high setting)
Loop Wiring 13. Check for short circuits.
Terminal Box
Electronics Module — See item 5. above.
Electronics Module
Sensor
Transducer Module
Electronics Module
Configuration Data
Loop Wiring —see item 20. above. (Insufficient voltage to operate display)
LCD Assy 21. Swap LCD Assy with known good part.
Electronics Module 22. Connector solder joint failure in electronics module. Replace module.
2. Check for adequate voltage to the digital level controller. Refer to figure 2‐10 for requirements. Some models
of battery‐operated field calibrators do not have sufficient compliance voltage to operate a DLC3010 over the
entire output current range.
3. Check for excessive capacitance in the field wiring. (Isolate the instrument from field wiring and try to
communicate locally.)
4. If the terminal box does not have a 4‐digit date‐code sticker inside the lower lip, it may have developed a high
internal resistance. Try a new terminal box.
6. If the electronics module and terminal box work on a known good transducer module, replace the old
transducer module.
7. Check for open circuits.
8. Check for proper polarity at the signal terminals.
— See item 2. above.
9. Check resistance between “Loop+” and “T” terminals of terminal box. If greater than 1.1 Ohm, the internal
sense resistor may be damaged. An external jumper may be added for a temporary repair. Replace terminal box
and avoid applying loop voltage across “T” and “Loop+” for long term solution.
— See item 4. above
Connect the Field Communicator and:
10. Select LCD Test (3-3-1-1)to isolate a module failure.
11. Check PV against Hi‐Hi and Lo‐Lo alarm thresholds and PV alarm deadband setting, if these alarms are
enabled.
Connect the Field Communicator and:
12. Check the PV against the upper and lower range values. Check actual process condition and calibration
adjustments.
Connect the Field Communicator and:
— see item 12. above.
Connect the Field Communicator and:
— see items 10. and 11. above.
14. Remove terminal box from the instrument, and apply 24 Volts between Loop+ and Loop- terminals, (with a
series resistance of approximately 1200 Ohms to protect power supply). If any current flows, replace terminal box.
Connect the Field Communicator and:
15. Run Loop diagnostic test (3-3-1-1) [(3-3-1-2) if LCD Configuration is installed]. If the forced output does not
track commands, attempt Scaled D/A Trim procedure (2‐5-2-2-1). If D/A calibration cannot be restored, replace
Electronics Module.
16. Check torque tube spring rate change versus process temperature per figure 1‐2. Use appropriate material for
process
temperature. Pre‐compensate the calibration for target process condition.
Connect the Field Communicator and:
17. Check Instrument Temperature (3‐2-4) against an independent measurement of DLC3010 temperature.
a) If inaccurate, trim the instrument temperature measurement (2-5-2-1-1) to improve ambient temperature
compensation performance.
b) If Instrument Temperature value is extreme, replace transducer module.
Connect the Field Communicator and:
18. Run Loop diagnostic test (3-3-1-1) [(3-3-1-2) if LCD Configuration is installed]). Leave instrument in fixed
current mode at 12 mA command and observe analog output variation with ambient temperature. If
specifications replace electronics
Connect the Field Communicator and:
19. Check stored Specific Gravity values (2-2-3-1) against independent measurement of process density. If process
SG has changed from calibration values, correct configuration data to match process
If output current enters a limit cycle between zero and a value within the 4-20 mA range when level reaches some
arbitrary upper threshold,
20. Check for excessive loop resistance or low compliance voltage. (See items 2. and 4. above.)
module.
Maintenance & Troubleshooting
October 2014
drift exceeds
73
Page 74

Maintenance & Troubleshooting
October 2014
Instruction Manual
D102748X012
Test Terminals
Test connections inside the terminal box can be used to measure loop current. These terminals are across an internal 1
ohm resistor that is in series with the loop.
1. Remove the terminal box cap.
2. Adjust the test meter to measure a range of 0.001 to 0.1 volts.
3. Connect the positive lead of the test meter to the + connection and the negative lead to the T connection inside the
terminal box.
4. Measure Loop current as:
Voltage (on test meter) 1000 = milliamps
example:
Test meter Voltage X 1000 = Loop Milliamps
0.004 X1000 = 4.0 milliamperes
0.020 X 1000 = 20.0 milliamperes
5. Remove test leads and replace the terminal box cover.
Removing the Digital Level Controller from the Sensor
Because of its modular design, most of the service and maintenance to the digital level controller can be done without
removing it from the sensor. However, if necessary to replace sensor to instrument mating parts or parts in the
transducer housing, or to perform bench maintenance, perform the following procedures to remove the digital level
controller from the sensor.
WARNING
On an explosion‐proof instrument, remove the electrical power before removing the instrument covers in a hazardous
area. Personal injury or property damage may result from fire and explosion if power is applied to the instrument with the
covers removed.
Tools Required
Table 6‐2 lists the tools required for maintaining the DLC3010 digital level controller.
74
Page 75

Instruction Manual
D102748X012
Maintenance & Troubleshooting
October 2014
Table 6‐2. Tools Required
Tool Size Usage Keys
Hex Key 2 mm
Hex Key 2.5 mm Small cap screws 13
Hex Key 4 mm Lever assembly mtg cap screw 14
Hex Key 5 mm Terminal box mtg cap screw 7
Hex Socket 10 mm Coupling nut 76
Open‐end 13 mm Transmitter mounting nuts 34
Phillips Screwdriver
Small flat blade screwdriver LCD assy mtg screws 40
Strap wrench Helpful for removing a display cover that has been over‐tightened 3
Large flat blade screwdriver
Needle nose pliers
1. Needed to remove a flex circuit if date code numbers are requested for warranty information.
(1)
(1)
Handle
Cover‐lock set screws
Terminal screws
Electronics module mtg screws
Flex circuit mtg screws 19
Align/clamp ring extraction 17
31
20
25
36
Removing the DLC3010 Digital Level Controller from a 249 Sensor
249 Sensor in Standard Temperature Applications
1. Loosen the set screw (key 31) in the terminal box cover assembly (key 6) so that the cover can be unscrewed from
the terminal box.
2. After removing the cover (key 6), note the location of field wiring connections and disconnect the field wiring from
the wiring terminals.
3. As shown in figure 2‐4, locate the access handle on the bottom of the transducer housing. Using a 2 mm hex key,
back out the set screw in the depression on the access handle until it is flush with the handle surface. Press on the
back of the handle, as shown in the figure, and slide the handle toward the front of the unit, (the locked position), to
expose the access hole. Be sure the locking handle drops into the detent.
Note
If the access handle will not slide, the sensor linkage is most likely in an extreme position. When the lever assembly is at a hard stop
inside the housing, the locking pin on the access door may not be able to engage the mating slot in the lever assembly. This
condition can occur if the displacer has been removed, if the sensor is lying on its side, or if the instrument had been coupled to the
sensor while the displacer was not connected. To correct this condition, manipulate the sensor linkage to bring the lever assembly
to within approximately 4 degrees of the neutral position before attempting to slide the handle. A probe inserted through the top
vent of the 249 head may be required to deflect the driver rod to a position where the lever assembly is free.
4. Using a 10 mm deep well socket inserted through the access hole, loosen the shaft clamp (figure 2‐4).
5. Loosen and remove the hex nuts (key 34) from the mounting studs (key 33).
6. Carefully pull the digital level controller straight off the sensor torque tube.
CAUTION
Tilting the instrument when pulling it off of the sensor torque tube can cause the torque tube shaft to bend. To prevent
damage to the torque tube shaft, ensure that the digital level controller is level when pulling it off of the sensor torque
tube.
75
Page 76

Maintenance & Troubleshooting
October 2014
Instruction Manual
D102748X012
7. When re‐installing the digital level controller, follow the appropriate procedure outlined in the Installation section.
Also setup the digital level controller as described in the Initial Setup section.
249 Sensor in High Temperature Applications
1. Loosen the set screw (key 31) in the terminal box cover assembly (key 6) so that the cover can be unscrewed from
the terminal box.
2. After removing the cover (key 6), note the location of field wiring connections and disconnect the field wiring from
the wiring terminals.
3. As shown in figure 2‐4, locate the access handle on the bottom of the transducer housing. Using a 2 mm hex key,
back out the set screw in the depression on the access handle until it is flush with the handle surface. Press on the
back of the handle, as shown in the figure, and slide the handle toward the front of the unit, (the locked position), to
expose the access hole. Be sure the locking handle drops into the detent.
Note
If the access handle will not slide, the sensor linkage is most likely in an extreme position. When the lever assembly is at a hard stop
inside the housing, the locking pin on the access door may not be able to engage the mating slot in the lever assembly. This
condition can occur if the displacer has been removed, if the sensor is lying on its side, or if the instrument had been coupled to the
sensor while the displacer was not connected. To correct this condition, manipulate the sensor linkage to bring the lever assembly
to within approximately 4 degrees of the neutral position before attempting to slide the handle. A probe inserted through the top
vent of the 249 head may be required to deflect the driver rod to a position where the lever assembly is free.
4. Using a 10 mm deep well socket inserted through the access hole, loosen the shaft clamp (figure 2‐4).
5. While supporting the instrument, loosen and remove the cap screws (key 63).
6. Carefully pull the digital level controller straight off the torque tube shaft extension (key 58).
CAUTION
Tilting the instrument when pulling it off of the sensor torque tube can cause the torque tube shaft to bend. To prevent
damage to the torque tube shaft, ensure that the digital level controller is level when pulling it off of the sensor torque
tube.
7. Loosen and remove the hex nuts (key 34) from the mounting studs (key 33).
8. Pull the heat insulator (key 57) off the mounting studs.
9. When re‐installing the digital level controller, follow the appropriate procedure outlined in the Installation section.
Also setup the digital level controller as described in the Setup and Calibration section.
LCD Meter Assembly
WARNING
In an explosion‐proof or flame‐proof installation remove the electrical power before removing the instrument covers in a
hazardous area. Personal injury or property damage may result from fire and explosion if power is applied to the
instrument with the covers removed.
76
Page 77

Instruction Manual
D102748X012
Maintenance & Troubleshooting
October 2014
The digital level controller is designed with a dual‐compartment housing; one compartment contains the LCD meter
and Electronics Module; the other contains all wiring terminals and the communication receptacles. The LCD meter is
located in the compartment opposite the wiring terminals, as shown in figure 6‐2.
Figure 6‐2. DLC3010 Digital Level Controller Assembly
STUD (KEY 33)
HEX NUT (KEY 34)
ADAPTER RING (KEY 32)
LEVER ASSEMBLY
TERMINAL BOX
(KEY 5)
TERMINAL BOX COVER
(KEY 6)
TRANSDUCER ASSEMBLY
ELECTRONICS
MODULE (KEY 2)
LCD METER
ASSEMBLY
(KEY 4)
COVER
(KEY 3)
Removing the LCD Meter
Perform the following procedure to remove the LCD meter.
1. Disconnect power to the digital level controller.
2. Remove the cover from the transducer housing. In explosive atmospheres, do not remove the instrument cover
when the circuit is alive, unless in an intrinsically safe installation.
3. Loosen the two screws that anchor the LCD meter to the Electronics Module. These screws are captive and should
not be removed.
4. Firmly grasp the LCD meter and pull it straight away from the Electronics Module. Retain the six‐pin dual header for
later reinstallation.
Replacing the LCD Meter
Perform the following procedure to replace the LCD meter.
1. Verify that the interconnection header is in the six‐pin socket on the face of the Electronics Module. The longer set
of pins should be inserted in the Electronics Module socket.
2. Decide which direction to orient the meter. The meter can be rotated in 90‐degree increments for easy viewing.
Position one of the four six‐pin sockets on the back of the meter to accept the interconnection header, and insert
77
Page 78

Maintenance & Troubleshooting
October 2014
the long meter screws into the two holes on the meter to coincide with the appropriate holes on the Electronics
Module.
3. Attach the meter to the interconnection pins. Thread the long meter screws into the holes on the Electronics
Module and tighten to secure the meter.
4. Note the position of the alarm jumper on the LCD meter removed from the digital level controller. Remove the
alarm jumper and install it on the replacement meter in the same position.
5. Install the six‐pin dual header on the LCD meter. Carefully insert the LCD meter to mate with the interconnecting
pins with the receptacles on the Electronics Module .
Instruction Manual
D102748X012
CAUTION
To prevent damage to the interconnecting pins when installing the LCD Meter, use the guide pins to insert the LCD meter
straight onto the Electronics Module, without twisting or turning.
6. Replace the cover. Tighten 1/3 of a revolution after the cover begins to compress the O‐ring. Both instrument
covers must be fully engaged to meet explosion‐proof or flame‐proof requirements.
Electronics Module
Removing the Electronics Module
Perform the following procedure to remove the Electronics Module.
Note
The electronics are sealed in a moisture‐proof plastic enclosure referred to as the Electronics Module. The assembly is a
non‐repairable unit; if a malfunction occurs the entire unit must be replaced.
WARNING
On an explosion‐proof instrument, remove the electrical power before removing the instrument covers in a hazardous
area. Personal injury or property damage may result from fire and explosion if power is applied to the instrument with the
covers removed.
1. Disconnect power to the digital level controller.
2. Remove the cover from the transducer housing. In explosive atmospheres, do not remove the instrument cover
when the circuit is alive, unless in an intrinsically safe installation. Remove the LCD meter assembly.
3. Loosen the two screws that anchor the Electronics Module to the transducer housing. These screws are captive and
should not be removed.
4. Firmly grasp the Electronics Module and pull it straight out of the housing.
Replacing the Electronics Module
Perform the following procedure to replace the Electronics Module.
78
Page 79

Instruction Manual
D102748X012
1. Carefully insert the Electronics Module to mate the interconnecting pins with the receptacles on the Transducer
housing.
Maintenance & Troubleshooting
October 2014
CAUTION
To prevent damage to the interconnecting pins when installing the Electronics Module, use the guide pins to insert the
Electronics Module straight onto the Transducer housing receptacles without twisting or turning.
2. Tighten the two mounting screws. Replace the LCD meter assembly.
3. Replace the cover. Tighten 1/3 of a revolution after the cover begins to compress the O‐ring. Both instrument
covers must be fully engaged to meet explosion‐proof requirements.
Terminal Box
The terminal box is located on the transducer housing and contains the terminal strip assembly for field wiring
connections. Unless indicated otherwise, refer to figure 7‐3.
WARNING
On an explosion‐proof instrument, remove the electrical power before removing the instrument covers in a hazardous
area. Personal injury or property damage may result from fire and explosion if power is applied to the instrument with the
covers removed.
Removing the Terminal Box
1. Loosen the set screw (key 31) in the terminal box cover assembly (key 6) so that the cover can be unscrewed from
the terminal box.
2. After removing the cover (key 6), note the location of field wiring connections and disconnect the field wiring from
the wiring terminals.
3. Remove the screw (key 7), and pull out the terminal box assembly.
CAUTION
To avoid damaging the terminal box assembly connector, pull the terminal box assembly straight out of the housing,
without twisting or turning.
Replacing the Terminal Box
Note
Inspect all O‐rings for wear and replace as necessary.
79
Page 80

Maintenance & Troubleshooting
October 2014
1. Apply sealant to the O‐ring (key 27) and install the O‐ring over the stem of the terminal box as shown in figure 7‐3.
2. Orient the terminal box so that the connectors engage properly, and carefully insert the terminal box into the
transducer housing until the O‐ring is seated.
Instruction Manual
D102748X012
CAUTION
To avoid damaging the mating pins in the Transducer housing, ensure that the guiding mechanism is engaged properly
before applying force.
3. Fasten the terminal box to the transducer housing with the screw (key 7). Tighten the screw to 6 NSm (53 lbfSin).
4. Apply sealant to the O‐ring (key 26) and install the O‐ring over the cover threads on the terminal box. Use a tool to
prevent cutting the O‐ring while installing it over the threads.
5. Reconnect the field wiring as noted in step 2 in the Removing the Terminal Box procedure.
6. Apply lubricant to the threads on the terminal box to prevent seizing or galling while installing the terminal box
cover.
7. Screw the terminal box cover assembly (key 6) completely onto the terminal box to seat the O‐ring (key 26). Loosen
the cover (not more than 1 turn) until the set screw (key 31) aligns with one of the recesses in the terminal box
beneath the cover. Tighten the set screw to engage the recesses but no more than 0.88 NSm (7.8 lbfSin).
8. Apply lubricant to the conduit entrance plug (key 28) and install it in the unused conduit entrance.
Removing and Replacing the Inner Guide and Access Handle
Assembly
The access handle and inner guide are located on the transducer housing. Unless indicated otherwise, refer to
figure 7‐2.
1. Remove the digital level controller from the sensor as described in Removing the Digital Level Controller from
the Sensor.
2. Loosen and remove the hex nuts (key 34) from the studs (key 33) and remove the adapter ring (key 32).
Note
In the next step the screws (key 13) will be attracted by the magnets on the lever assembly. Use care to keep the screws from
falling beneath the coupling shield.
3. Remove the coupling shield (key 16) by removing the two screws (key 13). Take care not to drop the screws into the
lever assembly compartment where they will be attracted by the magnets.
4. Loosen and remove the two screws (key 13) in the handle assembly (key 12). Remove the handle assembly and the
inner guide (key 11).
5. Apply thread lock to the internal threads of the replacement inner guide. Also apply a thin coat of a light grade of
grease to the zero locking pin on the inner guide and on the surface that is opposite the zero locking pin, as shown
in figure 6‐3 (this surface contacts the transducer housing when installed).
80
Page 81

Instruction Manual
D102748X012
Figure 6‐3. Installing Inner Guide and Access Handle Assembly
SCREWS (KEY 13)
HANDLE
ASSEMBLY
(KEY 12)
VENT HOLES
LUBRICATE
THIS SURFACE
VENT HOLE
TRANSDUCER
HOUSING
LUBRICATE
THIS SURFACE
Maintenance & Troubleshooting
October 2014
E0381
INNER GUIDE
(KEY 11)
ZERO LOCKING PIN
ACCESS HOLE
6. Place the inner guide in the slot inside the transducer housing so that the vent holes in the inner guide (the milled
slots in the inner guide, see figure 6‐3) face the exterior of the housing and are over the access hole.
7. Apply a thin coat of a light grade of grease to the surface of the replacement handle assembly (see figure 6‐3) where
it will contact the transducer housing.
8. Install the handle assembly (key 12) in the slot of the transducer housing over the inner guide (key 11) so that the
vent holes in the handle assembly are over the access hole.
9. Install two screws (key 13) to secure the handle assembly (key 12) to the inner guide (key 11). Tighten the screws to
0.48 NSm (4.2 lbfSin).
10. Press down on the handle as shown in figure 2‐4 and slide it forward to make sure it works smoothly and that the
zero locking pin engages the lever assembly. Also check for free travel of the lever assembly when the handle is in
the unlocked position.
11. Install the coupling shield (key 16) and secure with the two screws (key 13). Tighten the screws to 0.48 NSm
(4.2 lbfSin).
12. Refer to figure 7‐1. Install the adapter ring
(key 32) on the studs (key 33) and secure with hex nuts (key 34).
13. When re‐installing the digital level controller, follow the appropriate procedure outlined in the Installation section.
Also setup the digital level controller as described in the Setup and Calibration section.
Lever Assembly
Removing the Lever Assembly
The lever assembly is located in the transducer housing. Unless indicated otherwise, refer to figure 7‐2.
81
Page 82

Maintenance & Troubleshooting
October 2014
1. Remove the digital level controller from the sensor as described in Removing the Digital Level Controller from the
Sensor.
2. Loosen and remove the hex nuts (key 34) from the studs (key 33) and remove the adapter ring (key 32).
3. Remove the coupling shield (key 16) by removing the two screws (key 13). Take care not to drop the screws into the
lever assembly compartment where they will be attracted by the magnets.
4. Inspect the lever assembly alignment with the housing. If it is off center or not co‐axial with the main housing,
continue with the removal procedure.
5. Loosen and remove the mounting screw (key 14) from the lever assembly.
6. Loosen the flexure block from its machined pocket in the housing, by inserting a smooth tool into the hole for the
mounting screw, and gently rocking it back and forth in what would be the vertical axis if the transmitter were
installed.
7. Lift the lever assembly out of the housing.
Inspect the flexure for damage. If the flexure is bent or torn, replace the lever assembly.
Instruction Manual
D102748X012
Replacing the Lever Assembly
Replacing the lever assembly in the field may result in a slight degradation in linearity performance, since the factory
characterizes the entire transducer module as a unit. For most applications, this degradation should not be noticeable.
(If guaranteed restoration to factory specification is desired, the entire transducer module should be replaced.)
1. Move the zero‐pin slide to the locking position.
2. Apply a thin coat of a light grade of grease to the internal thread of the hole for the lever mounting bolt.
3. Hold lever assembly by coupling block and guide the flexure block into its aligning slot in the housing without
applying any downward force to the sprung parts of the lever assembly.
CAUTION
To prevent damage to the flexure when inserting the flexure block into its aligning slot in the housing, apply pressure to
the flexure block only.
A long pin inserted into the bolt‐hole in the flexure block may be used to pull it against the inside corner of the aligning
slot.
4. Secure the block by reinstalling the M5x20 socket‐head cap screw (key 14). Torque to 2.8 NSm (25 lbfSin) $10%.
5. Mark bolt head and block with a movement‐detecting sealant.
6. Install the coupling shield (key 16) and secure with the two screws (key 13). Tighten the screws to 0.48 NSm
(4.2 lbfSin).
7. Refer to figure 7‐1. Install the adapter ring (key 32) on the studs (key 33) and secure with hex nuts (key 34). When
re‐installing the digital level controller, follow the appropriate procedure outlined in the Installation section. Set up
the digital level controller as described in the Setup and Calibration section.
82
Page 83

Instruction Manual
D102748X012
Maintenance & Troubleshooting
October 2014
Packing for Shipment
If it becomes necessary to return the unit for repair or diagnosis, contact your Emerson Process Management sales
office for returned goods information.
CAUTION
Lock the lever assembly when shipping the stand‐alone instrument, to prevent damage to the flexure.
Use the original shipping carton if possible.
83
Page 84

Maintenance & Troubleshooting
October 2014
Instruction Manual
D102748X012
84
Page 85

Instruction Manual
D102748X012
Parts
October 2014
Section 7 Parts7‐7‐
Parts Ordering
Whenever corresponding with your Emerson Process Management sales office about this equipment, always mention
the controller serial number. When ordering replacement parts, refer to the 11‐character part number of each
required part as found in the following parts list. Parts that do not show part numbers are not orderable.
WARNING
Use only genuine Fisher replacement parts. Components that are not supplied by Emerson Process Management, should
not, under any circumstances, be used in any Fisher instrument. The use of components not manufactured by Emerson
Process Management may void your warranty, might adversely affect the performance of the instrument, and could cause
personal injury and property damage.
Mounting Kits
Contact your Emerson Process Management sales
office for FS numbers for the following DLC3010
mounting options:
D Fisher
D Masoneilan 12100, 12800 Series
D Masoneilan 12100, 12800 Series with heat insulator
D Masoneilan 12200, 12300 Series
D Masoneilan 12200, 12300 Series with heat insulator
D Yamatake Honeywell
D Yamatake Honeywell Type NQP with heat insulator
D Foxboro‐Eckardt 134LD and 144LD
249 sensors - heat insulator for field
mounting the DLC3010
t
Type NQP
D Foxboro‐Eckardt LP167 with heat insulator
Note
Contact your Emerson Process Management sales office for
information on the availability of additional mounting kits.
Parts Kits
Description Part Number
1* Small Hardware Spare Parts Kit 19B1643X052
Includes Qty/kit
Screw (key 7) 1
Screw, hex socket (key 13) 6
Screw, cap, hex socket (key 14) 1
Set Screw (key 20) 2
Set Screw (key 31) 2
Test Terminal (key 24) 4
Wire Retainer (key 25) 8
Nut (key 34) 4
Alarm Jumper (key 35) 2
Header Assembly (key 38) 2
2* Spare O‐Rings Kit
Includes three each of keys 21, 26, and 27 19B1643X022
D Foxboro‐Eckardt 134LD and 144LD with heat
insulator
D Foxboro‐Eckardt LP167
*Recommended spare parts
3* Coupling Hardware Spare Parts Kit 19B1643X042
Includes Qty/kit
Clamp Nut (key 76) 1
Washer, Lock, Spring (key 77) 1
Bolt, lock, coupling block(key 82) 1
85
Page 86

Parts
October 2014
Instruction Manual
D102748X012
Parts List
Key Description Part Number
Note
Part numbers are shown for recommended spares only. For part
numbers not shown, contact your Emerson Process Management sales
office.
DLC3010 Digital Level Controllers
(figure 7‐1)
1 Transducer Module
2* Electronics Ass'y, includes alarm jumper (key 35) and
captive screws (key 36), header ass'y (key 38) and
encapsulated board
For use with transducer module 48B5739X012
(has obsolete Hall sensor on Flex circuit) 18B5529X022
For use with transducer module GE18497X022
(has new Hall sensor on rigid boards) 18B5529X032
Figure 7‐1. DLC3010 Digital Level Controller Assembly
(1)
Key Description Part Number
3 Cover Assy, includes O‐ring (key 21)
4 LCD Meter Ass'y, includes alarm jumper (key 35),
header ass'y (key 38) and captive screws (key 40),
and LCD Meter ass'y 28B5738X012
5* Terminal Box Ass'y 28B5740X022
6 Terminal Box Cover Ass'y, includes labels
(key 30 and 64) and set screw (key 31)
7 Screw, hex socket
8 Nameplate
9 Drive Screw, 18‐8 SST
21* O‐ring, nitrile
32 Adaptor Ring, A03600
33 Stud, SST (4 req'd)
34 Hex Nut, 304 SST (4 req'd)
35 Alarm Jumper
36 Screw, captive, 18‐8 SST
For electronics ass'y (2 req'd)
38 Header Assembly, dual row (not shown)
40 Screw, captive, 18‐8 SST
For LCD meter (2 req'd)
66 Anti‐Seize Sealant (not furnished with instrument)
67 Thread locking adhesive (medium strength)
(not furnished with instrument)
70 Lithium grease (not furnished with instrument)
(3)
(2)(4)(5)
(2)
1K1810X0012
(4)
(5)
(2)(4)(5)
18B5732X012
21
2
1
NOTES:
1 INSTALL ALARM JUMPER (KEY 35) ON ELECTRONICS ASSEMBLY (KEY2) WHEN LCD METER (KEY 4) IS NOT INSTALLED.
2 LOCATION OF ALARM JUMPER (KEY 35) WHEN LCD METER (KEY 4) IS INSTALLED.
APPLY LUB/THREADLOCK
58B5510‐D
*Recommended spare parts
1. These parts are not replaced in the field due to serialization and characterization
issues, but can be replaced at a qualified service center. Contact your Emerson
Process Management sales office for additional information.
2. Included in small hardware spare parts kit.
3. Included in spare O‐rings kit.
86
4. Included in the Electronics Ass'y, key 2
5. Included in the LCD Meter Ass'y. key 4
Page 87

Instruction Manual
D102748X012
Parts
October 2014
Key Description Part Number
Transducer Assembly (figure 7‐2)
11 Inner Guide, aluminum
12 Handle Ass'y aluminum/SST
13 Screw, hex socket, 18‐8 SST (4 req'd)
14 Screw, cap, 18‐8 SST
15* Lever Assembly, aluminum/SST/NdFeB/CS 38B5509X042
16 Coupling Shield, 18‐8 SST
17 Ring, align/clamp
Key Description
19 Machine Screw, pan head
20 Set Screw, 18‐8 SST
31 Set Screw, hex socket, 18‐8 SST
67 Thread Locking adhesive (medium strength)
68 Sealant
76 Clamp Nut, 18‐8 SST
77 Spring Lock Washer, 18‐8 SST
79 Transducer Board Assembly
80 Hall Guard
81 Compound, silicone
82 Bolt, lock, coupling block, SST
Figure 7‐2. DLC3010 Digital Level Controller Transducer Assembly
(2)
(2)
(not furnished with instrument)
(2)(6)
(2)(6)
(1)
(6)
GE18497
77
76
82
31
*Recommended spare parts
1. These parts are not replaced in the field due to serialization and characterization
issues, but can be replaced at a qualified service center. Contact your Emerson
Process Management sales office for additional information.
2. Included in small hardware spare parts kit.
6. Included in Coupling Hardware Spare Parts Kit
87
Page 88

Parts
October 2014
Figure 7‐3. Terminal Box Assembly
Instruction Manual
D102748X012
A
SECTION A‐A
A
APPLY LUBRICANT
28B5740-B
Key Description Part Number
Terminal Box Assembly
(figure 7‐3)
24 Test Terminal, 18‐8 SST (2 req'd)
25 Wire Retainer, 18‐8 SST (8 req'd)
26* O‐Ring, nitrile
27* O‐Ring, nitrile
28 Pipe Plug, 18‐8 SST
65 Lubricant, Silicone (not furnished with instrument)
66 Anti‐Seize Sealant (not furnished with instrument)
(3)
(3)
(2)
(2)
1H8762X0012
10A8218X032
Terminal Box Cover Assembly
(figure 7‐4)
30 Label, internal, plastic
31* Set Screw, hex socket, 18‐8 SST
64 Label, external
(2)
Figure 7‐4. Terminal Box Cover Assembly
28B5531‐B
88
*Recommended spare parts
2. Included in small hardware spare parts kit.
3. Included in spare O‐rings kit.
Page 89

Instruction Manual
D102748X012
Figure 7‐5. Mounting Kit for 249 Sensors with Heat Insulator
Parts
October 2014
28B5741‐A
Mounting Parts
These parts are available as a kit as indicated in the
Mounting Kits section. Contact your Emerson Process
Management sales office for FS numbers for these
mounting options.
Key Description
249 Sensors with Heat Insulator
(figure 7‐5)
57 Heat Insulator, S30400
58 Shaft Extension, N05500
59 Shaft Coupling, S30300
60 Set Screw, hex socket, SST (2 req'd)
61 Screw, hex hd, SST (4 req'd)
78 Washer, plain (4 req'd)
Key Description
Masoneilan Sensors (figures 7‐6 and 7‐7)
12100 or 12800 without Heat Insulator
58 Shaft Extension, S31600
59 Shaft Coupling, S30300
60 Set Screw, hex socket, SST (2 req'd)
61 Screw, hex hd, 18‐8 SST (4 req'd)
62 Mounting Adapter, A03560
63 Screw, hex socket, (4 req'd)
12100 or 12800 with Heat Insulator
57 Heat Insulator, S30400
58 Shaft Extension, S31600
59 Shaft Coupling, S30300
60 Set Screw, hex socket, SST (2 req'd)
61 Screw, hex hd, SST (4 req'd)
62 Mounting Adapter, A03560
63 Screw, hex socket, steel (4 req'd)
78 Washer, plain (4 req'd)
89
Page 90

Parts
October 2014
Figure 7‐6. Mounting Kit for Masoneilan 12200 and 12300 Sensor without Heat Insulator
29B8444‐A
Instruction Manual
D102748X012
Figure 7‐7. Mounting Kit for Masoneilan 12200 and 12300 Sensor with Heat Insulator
29B8445‐A
Key Description
Key Description
12200 or 12300 with Heat Insulator
12200 or 12300 without Heat Insulator
58 Shaft Extension N05500
59 Shaft Coupling, S30300
60 Hex Socket Screw (2 req'd)
62 Mounting Adaptor, A92024
74 Hex Nut, SST (4 req'd)
75 Hex Cap Screw, SST (4 req'd)
57 Heat Insulator, S30400
58 Shaft Extension, S31600
59 Shaft Coupling, S30300
61 Hex Cap Screw, SST (4 req'd)
60 Hex Socket Screw (2 req'd)
62 Mounting Adaptor, A92024
74 Hex Nut, SST (4 req'd)
75 Hex Cap Screw, SST (4 req'd)
78 Washer, plain (4 req'd) not shown
90
Page 91

Instruction Manual
D102748X012
Parts
October 2014
Key Description
Yamatake NQP Sensor
Without Heat Insulator
58 Shaft Extension, S31600
59 Shaft Retainer, S30400
60 Hex Socket Screw, SST
62 Mounting Adaptor, A96061
63 Hex Socket Screw, SST (3 req'd)
71 Hex Socket Screw, SST (3 req'd)
72 Shaft Adapter, S30400
73 Hex Socket Screw, SST (2 req'd)
With Heat Insulator
57 Heat Insulator, S30400
58 Shaft Extension, S31600
59 Shaft Retainer, S30300
60 Hex Socket Screw, SST
61 Hex Cap Screw, SST (4 req'd)
62 Mounting Adaptor, A96061
63 Hex Socket Screw, SST (3 req'd)
71 Hex Socket Screw, SST (3 req'd)
72 Shaft Adapter, S30400
73 Hex Socket Screw, SST (2 req'd)
78 Washer, plain (4 req'd)
Key Description
Foxboro‐Eckardt Sensors
144LD without Heat Insulator
58 Shaft Extension, S31600
59 Shaft Coupling, S30300
60 Set Screw, hex socket, SST (2 req'd)
62 Mounting Adapter, A92024
74 Hex Nut, steel (4 req'd)
75 Hex Cap Screw, steel (4 req'd)
144LD with Heat Insulator
57 Heat Insulator, S30400
58 Shaft Extension, 316 SST
59 Shaft Coupling, S30300
60 Set Screw, hex socket, SST (2 req'd)
61 Screw, hex hd, SST (4 req'd)
62 Mounting Adapter, A92024
74 Hex Nut, steel (4 req'd)
75 Hex Cap Screw, steel (4 req'd)
78 Washer, plain (4 req'd)
LP167 without Heat Insulator
58 Shaft Extension, S31600
59 Shaft Coupling, S30300
60 Set Screw, hex socket, SST (2 req'd)
62 Mounting Adapter, A92024
63 Screw, hex socket, (4 req'd)
91
Page 92

Parts
October 2014
Instruction Manual
D102748X012
92
Page 93

Instruction Manual
D102748X012
Principle of Operation
October 2014
Appendix A Principle of OperationA‐
HART Communication
The HART (Highway Addressable Remote Transducer) protocol gives field devices the capability of communicating
instrument and process data digitally. This digital communication occurs over the same two‐wire loop that provides
the 4-20 mA process control signal, without disrupting the process signal. In this way, the analog process signal, with
its faster update rate, can be used for control. At the same time, the HART protocol allows access to digital diagnostic,
maintenance, and additional process data. The protocol provides total system integration via a host device.
The HART protocol uses the frequency shift keying (FSK) technique based on the Bell 202 communication standard. By
superimposing a frequency signal over the 4-20 mA current, digital communication is attained. Two individual
frequencies of 1200 and 2200 Hz are superimposed as a sinewave over the 4-20 mA current loop. These frequencies
represent the digits 1 and 0 (see figure A‐1). The average value of this sinewave is zero, therefore no DC value is added
to the 4-20 mA signal. Thus, true simultaneous communication is achieved without interrupting the process signal.
Figure A‐1. HART Frequency Shift Keying Technique
+0.5 mA
A6174
0
-0.5 mA
1200 Hz
“1”
AVERAGE CURRENT CHANGE DURING COMMUNICATION = 0
2200 Hz
“0”
ANALOG
SIGNAL
The HART protocol allows the capability of multidropping, networking several devices to a single communications line.
This process is well suited for monitoring remote applications such as pipelines, custody transfer sites, and tank farms.
Multidrop Communication
“Multidropping” refers to the connection of several digital level controllers or transmitters to a single communications
transmission line. Communication between the host and the field instruments takes place digitally with the analog
output of the instruments deactivated. With the HART communications protocol, up to 15 field instruments can be
connected on a single twisted pair of wires or over leased phone lines. Multidrop installations are not recommended
where intrinsic safety is a requirement.
The application of a multidrop installation requires consideration of the update rate necessary from each instrument,
the combination of instrument models, and the length of the transmission line. Communication with the field
instruments can be accomplished with commercially available Bell 202 modems and a host implementing the HART
protocol. Each instrument is identified by a unique address (1-15) and responds to the commands defined in the HART
protocol.
Figure A‐2 shows a typical multidrop network. Do not use this figure as an installation diagram. Contact your Emerson
Process Management sales office with specific requirements for multidrop applications.
93
Page 94

Principle of Operation
October 2014
Figure A‐2. Typical Multidropped Network
BELL 202
MODEM
HOST
E0375
Instruction Manual
D102748X012
LOAD
POWER
SUPPLY
The Field Communicator can test, configure, and format a multidropped DLC3010 digital level controller in the same
way as in a standard point‐to‐point installation.
Note
DLC3010 digital level controllers are set to address 0 at the factory, allowing them to operate in the standard point‐to‐point
manner with a 4-20 mA output signal. To activate multidrop communication, the address must be changed to a number between
1 and 15. This change deactivates the 4-20 mA analog output, sending it to 4 mA. The failure mode current also is disabled.
Digital Level Controller Operation
The DLC3010 digital level controller is a loop‐powered instrument that measure changes in liquid level, level of an
interface between two liquids, or density of a liquid. Changes in the buoyancy of a displacer suspended in a vessel vary
the load on a torque tube. The displacer and torque tube assembly constitute the primary mechanical sensor. The
angular deflection of the torque tube is measured by the instrument transducer, which consists of a magnet system
moving over a Hall effect device. A liquid crystal display (LCD) meter can display the analog output; process variable
(level, interface level, or density); the process temperature, if an RTD (resistance temperature detector) is installed;
the degrees of torque tube rotation; and percent range.
The instrument uses a microcontroller and associated electronic circuitry to measure the process variable, provide a
current output, drive the LCD meter, and provide HART communications capability. Figure A‐3 shows the digital level
controller assembly. Figure A‐4 is a block diagram of the main components in the instrument electronics; the LCD
meter, the processor module, the transducer board, and the terminal board. The processor module contains the
microprocessor, the analog‐to‐digital (A/D) converters, loop interface, signal conditioning, the digital‐to‐analog (D/A)
output, power supply and interfaces to other boards.
94
Page 95

Instruction Manual
D102748X012
Figure A‐3. FIELDVUE DLC3010 Digital Level Controller Assembly
ADAPTER RING
Principle of Operation
October 2014
TERMINAL BOX
TRANSDUCER
BOARD
LEVER ASSEMBLY
HOUSING
ELECTRONICS
ASSEMBLY
E0377
Figure A‐4. FIELDVUE DLC3010 Digital Level Controller Principle of Operation
TERMINAL BOX
COVER
LCD METER
ASSEMBLY
COVER
Torque Tube
Rotation
E0378
Transducer Module
Electronics
Temperature
Sensor
Shaft Position
Transducer
Linearization Data
resident in NVM
Processor
Module
LCD Meter
Terminal
Box
RTD
Process
Temperature
Interface
Loop / HART
Interface
95
Page 96

Principle of Operation
October 2014
Instruction Manual
D102748X012
The transducer board contains the Hall sensor, a temperature sensor to monitor the Hall sensor temperature, and an
EEPROM to store the coefficients associated with the Hall sensor. The terminal board contains the EMI filters, the loop
connection terminals, and the connections for the optional RTD used to measure process temperature.
A level, density, or interface level change in the measured fluid causes a change in the displacer position (figure A‐5).
This change is transferred to the torque tube assembly. As the measured fluid changes, the torque tube assembly
rotates up to 4.4 degrees for a 249 sensor, varying the digital level controller output between 4 and 20 mA.
Figure A‐5. Typical Sensor Operation
TORQUE
TUBE
DISPLACER
W1389‐1
249 SENSOR (SIDE VIEW)
The rotary motion of the torque tube is transferred to the digital level controller lever assembly. The rotary motion
moves a magnet attached to the lever assembly, changing the magnetic field that is sensed by the Hall effect sensor.
The sensor converts the magnetic field signal to an electronic signal.
The microcontroller accepts the electronic signal, which is ambient‐temperature‐compensated and linearized. The
microcontroller can also actively compensate for changes in liquid specific gravity due to changes in process
temperature based on an input via HART protocol or via an optional RTD, if it is connected. The D/A output circuit
accepts the microcontroller output and provides a 4 to 20 mA current output signal.
During normal operation, when the input is between the lower and upper range values, the digital level controller
output signal ranges between 4 and 20 mA and is proportional to the input. See figure A‐6. If the input should exceed
the lower and upper range values, the output will continue to be proportional to the input until the output reaches
either 3.8 or 20.5 mA. At this time the output is considered saturated and will remain at this value until the input
returns to the normal operating range. However, should an alarm occur, the output is driven to either 3.7 or 22.5 mA,
depending upon the position of the alarm jumper.
96
Page 97

Instruction Manual
D102748X012
Figure A‐6. Digital Level Controller Analog Output Signal
24
Principle of Operation
October 2014
22
20
18
16
14
12
Output (mA)
10
8
6
4
2
-20% 0% 20% 40% 60% 80% 100% 120%
E0379
Output Saturated
(3.8 mA)
Normal Operation
Output during Alarm with
Alarm Jumper in Hi Position
(22.5 mA)
Output during Alarm with
Alarm Jumper in Lo
Position
(3.7 mA)
PV Range
Note
The upper alarm value is compliant with NAMUR NE‐43, but the lower alarm value is not.
If using in a system with NAMUR NE‐43 compatibility, the high alarm value may be an appropriate choice.
Output Saturated
(20.5 mA)
Other circuits in the digital level controller provide reverse polarity protection, transient power surge protection, and
electromagnetic interference (EMI) protection.
97
Page 98

Principle of Operation
October 2014
Instruction Manual
D102748X012
98
Page 99

Instruction Manual
D102748X012
Field Communicator Menu Tree
October 2014
Appendix B Fast-Key Sequence and Field
Communicator Menu TreeB‐B‐0
Fast-key sequences are included for common DLC3010 digital level controller fuctions. Also included are Field
Communiator menu trees.
D Fast-key sequences, see table B‐1
D Hot Key menu, see figure B‐1
D Overview menu, see figure B‐2
D Guided Setup menu, see figure B‐3
D Manual Setup menu, see figure B‐4
D Alert Setup menu, see figure B‐5
D Communications menu, see figure B‐6
D Calibration menu, see figure B‐7
D Service Tools menu, see figure B‐8
99
Page 100

Field Communicator Menu Tree
October 2014
Table B‐1. Fast Key Sequence
Function Fast-Key Sequence See Figure
Active Alerts 3-1 B‐8
Alarm Jumper 1-7-3-1-1 B‐2
Analog Output
Burst Mode 2-4-1 B‐6
Burst Options 2-4-2 B‐6
Calibration, Full 2-5-1-2 B‐7
Calibration, Partial 2-5-1-3 B‐7
Calibration, Temperature 2-5-2-1 B‐7
Change Process Temperature
Change Primary Variable 2-2-2-1-2 B‐1
Change Torque Rate 2-2-1-3-2 B‐4
Comm Status 1-2 B‐2
Date
DD Information 1-7-2-5 B‐2
Decimal Places 2-2-5-4 B‐4
Descriptor
Device ID 1-7-1-4 B‐2
Device Status 1-1 B‐2
Displacer Units 2-2-1-2 B‐4
Display Alert/Saturation Level 1-7-3-1-2 B‐2
Display Mode 2-2-5-2 B‐4
Distributor 1-7-1-2 B‐2
Enter Constant Density 2-2-3-1-3
Field Device Revision 1-7-2-2 B‐2
Final Assembly Number
Firmware Revision 1-7-2-3 B‐2
Guided Setup 2-1 B‐3
Hardware Revision 1-7-2-4 B‐2
HART Tag
HART Universal Revision 1-7-2-1 B‐2
Instrument Mounting 2-2-1-4 B‐4
Instrument Serial Number
Instrument Temperature 3-2-4 B‐8
Instrument Temperature Alerts 2-3-2-1 B‐5
LCD Configuration 2-2-5-1 B‐4
LCD Test 3-3-1-1
Level Offset 2-2-2-1-4 B‐4
Loop Test
Lower Density Table
Lower Fluid Density
Lower Range Value
1. If PV is Density
2. If PV is Level or Interface.
3. LCD Configuration is installed
4. If PV is Level
5. If PV is Interface
1-5 B‐2
3-2-3 B‐8
(1)
2-2-3-2
(2)
2-2-3-2-2
1-7-1-8 B‐2
2-2-4-2 B‐4
1-7-1-9 B‐2
2-2-4-3 B‐4
(2)
1-7-1-7 B‐2
2-2-4-8-3 B‐4
1-7-1-1 B‐2
2-2-4-1 B‐4
1-7-1-5 B‐2
2-2-4-8-1 B‐4
(3)
3-3-1-1 B‐8
(3)
3-3-1-2
2-2-3-1-1-1
2-2-3-1-1-2
2-2-3-1-1 or 3-2-7
2-2-3-1-2 or 3-2-8
(4)
(5)
(4)
(5)
2-2-2-3-2 B‐4
2-3-1-4 B‐5
B‐4
B‐4
B‐1
B‐8
B‐8
B‐4
B‐4
B‐4
B‐4
Instruction Manual
D102748X012
Function Fast-Key Sequence See Figure
Lower Sensor Limit 2-2-2-2-2 B‐4
Measure Density 2-2-3-1-4
Message 2-2-4-4 B‐4
Minimum Sensor Span 2-2-2-2-3 B‐4
Model 1-7-1-3 B‐2
Number of Request Preambles 2-2-4-7 B‐4
Percent Range
Physical Signalling Code 2-2-4-6 B‐4
Polling Address 2-2-4-5 B‐4
Primary Variable Hi Alerts 2-3-1-1 B‐5
Primary Variable Lo Alerts 2-3-1-2 B‐5
Process Temperature
Process Temperature Alerts 2-3-2-2 B‐5
Process Temperature Source
PV Alerts Threshold Deadband 2-3-1-5 B‐5
PV is
PV Units 2-2-2-1-3 B‐4
PV Value
Reset Device 3-3-2-2 B‐8
Restore Factory Defaults 3-3-2-1 B‐8
RTD Wire Resistance
Scaled D/A Trim 2-5-2-2-1 B‐7
Sensor Damping 2-2-1-5 B‐4
Sensor Serial Number
Sensor Unit 2-2-1-1 B‐4
Set Level Offset 2-2-2-1-5 B‐4
Torque Rate
Torque Tube Compensation
Selection
Torque Tube Compensation Table 2-2-1-3-5 B‐4
Torque Tube Material 2-2-1-3-3 B‐4
Upper Density Table 2-2-3-1-1-1
Upper Fluid Density
Upper Range Value
Upper Sensor Limit 2-2-2-2-1 B‐4
Write Lock 1-7-3-2-1 B‐1
Write Lock Setup 1-7-3-2-2 B‐1
(4)
1-4-2 B‐2
3-2-2-2 B‐8
1-6-2 B‐2
(2)
2-2-3-2-3
(1)
2-2-3-3
3-2-5-2 B‐8
1-6-1 B‐4
(2)
2-2-3-2-1
(1)
2-2-3-
3-2-5-1 B‐8
1-3 B‐2
2-2-2-1-1 B‐4
1-4-1 B‐2
3-2-2-1 B‐8
(2)
2-2-3-2-4
(1)
2-2-3-4
1-7-1-6 B‐2
2-2-4-8-2 B‐4
2-2-1-3-1 B‐4
3-2-6 B‐8
2-2-1-3-4 B‐4
(4)
(4)
2-2-3-1-1
(4)
3-2-7
2-2-2-3-1 B‐4
2-3-1-3 B‐5
B‐4
B‐4
B‐4
B‐4
B‐2
B‐4
B‐4
B‐4
B‐4
B‐8
100
 Loading...
Loading...