

Page 1

Product Transition Guide
GPD 515/G5 to G7
PL.G7.02.Transition Guide
Page 2

Product Transition Guide
GPD515/G5 to G7
NOTICE
The information contained within this document is the proprietary property of Yaskawa Electric
America, Inc., and may not be copied, reproduced or transmitted to other parties without the expressed
written authorization of Yaskawa Electric America, Inc. No patent liability is assumed with respect to
the use of the information contained herein. Moreover, because Yaskawa is constantly improving its
high-quality products, the information contained in this document is subject to change without notice.
Every precaution has been taken in the preparation of this document. Nevertheless, Yaskawa assumes no
responsibility for errors or omissions. Neither is any liability assumed for damages resulting from the
use of the information contained in this publication.
__________________________
PL.G7.02.TransitionGuide 4/21/04
Page 2 of 38
Yaskawa Electric America, Inc
Page 3

Product Transition Guide
GPD515/G5 to G7
Contents
Feature Overview ....................................................................................................... 5
G7 Benefits vs. G5 ..................................................................................................... 5
Main Specification Differences G5 to G7................................................................... 6
Physical Dimensions .................................................................................................. 9
I/O Terminal Cross Reference G5 to G7.................................................................. 11
Physical I/O Block Terminal Layout.......................................................................... 14
Main Power Terminal Comparison ........................................................................... 14
Available Network Communications ......................................................................... 16
Appendix 1................................................................................................................ 17
Amps, Carriers, Overload, Watt Loss and Dimensions .....................................117
Output Amps, Carrier and Overload Comparison
240V Ratings GPD515/G5 to G7................................................................ 18
Output Amps, Carrier and Overload Comparison
480V Ratings GPD515/G5 to G7................................................................ 19
Mounting Hole Data..................................................................................... 20
Panel Cut-out Data (for external heatsink mounting)................................... 21
Watts Loss Data .......................................................................................... 22
Appendix 2................................................................................................................ 23
........................................................................................23Parameter Differences
__________________________
PL.G7.02.TransitionGuide 4/21/04
Page 3 of 38
Yaskawa Electric America, Inc
Page 4

Product Transition Guide
GPD515/G5 to G7
Page Intentionally Left Blank
__________________________
PL.G7.02.TransitionGuide 4/21/04
Page 4 of 38
Yaskawa Electric America, Inc
Page 5

Product Transition Guide
GPD515/G5 to G7
Feature Overview
This document details differences between the GPD515/G5 and G7 product to assist in product transition and new product
introduction.
GPD515/G5 Drive
The GPD 515/G5 drive is a generalpurpose drive, intended for a broad
range of applications in Industrial
Automation. Accordingly, it is
available with many choices of I/O,
communications, and software. It is
available in constant torque ratings,
3/4 to 500 horsepower. The G5
HHP is available to 1500 HP.
G7 Benefits vs. G5
Enhanced G7 Performance
• Auto-tuning 3-Methods (R1/Static/Dynamic)
• World’s first commercial 3-Level Inverter architecture
(480V)
• Static no load auto-tuning offers same torque accuracy
performance as dynamic auto-tuning at base speed &
below
• DC input compatible (all models) simplified connection
to DC power, removal of internal DC bus choke not
required.
• Open-loop torque control
• Improved closed-loop speed response: 60Hz vs. 30Hz
• Improved open-loop speed response: 10Hz vs. 5Hz
• Improved open-loop speed range: 200:1 vs. 100:1
• Higher output frequency resolution: 0.001% vs. 0.01%
• Improved torque response: 300Hz vs. 150Hz
• Improved open loop starting torque: 0.3Hz vs. 0.5Hz
• Improved input voltage specification: 240 vs. 230 and
480 vs. 460.
New Keypad/Digital Operator
• Enhanced digital operator with copy function
• Simplified parameter menu navigation
• New LCD contrast adjustment
• Standard RJ-45 CAT-5 cable connection
New Functions
• New PID sleep function
• More preset speed selections: 17 vs. 9
• New automatic derating based on ambient temperature
setting
• New Bi-directional speed search with speed estimation
mode
applications. The G7 is available in constant torque/heavy dut
ratings 0.5 to 500HP. The G7 is not intended for the simple,
routine AC drive application, it is for the challenges.
(Refer to Yas
Drive” for more details on new G7 Technology.)
ew Functions (continued)
N
• Six additional monitor p
• Improved Energy Savings- manual/
• High Slip Braking
• New cooling fan on
cassette replacement design
• 8.5-300kW
New 12-pulse diode bridge 1
• Built-in DC-link choke 18.5-300kW
Improv
ed Input/Output Functions
• Analog outputs with new 4-20m
resolution.
• l inputs: 12 vs. 8
More digita
• Inputs now support sinking or
• Inputs now support internal or external power supply
• More digital outputs 6 vs. 4
• More versatile analog output
• New pulse I/O (32kHz)
• New quick disconnect term
• New motor temperature analog input
• New motor overheat alarm outputs
• Additional under-torque and over-to
• Built-in RS485 Modbus RTU communication with self
test mode
G7 Drive
The G7 AC drive is the ultimate
performance solution with increased
speed and torque response to provide
servo-like performance from an i
motor. The 480V G7 drive has the
world’s first commercial 3-Level Inver
architecture for total system protection
This patented 3-Level architecture
eliminate peripheral components
typically required to solve installation
problems. G7 drive performance
the ideal drive for high performance
speed, torque, or position control
kawa document “TR.G7.01 Technology Review G7
arameters
automatic modes
/off control and elapsed time and
A selection and 10 bit
sourcing (PNP/NPN)
s
inal I/O block
rque selection points
nduction
ter
.
can
makes it
y
__________________________
PL.G7.02.TransitionGuide 4/21/04
Page 5 of 38
Yaskawa Electric America, Inc
Page 6
Product Transition Guide
GPD515/G5 to G7
Main Specification Differences G5 to G7
Specification G5 Specification G7 Specification
Control mode
V/f, V/f w/ PG,
Open-loop vector,
Closed-loop flux vector
Open-loop vector, Closed-loop flux vector,
V/f, V/f w/ PG,
Open-loop vector 2
460V 0.4kW to 300kW (0.5 to 400HP)
Inverter capacity range
Ratings
Main power circuit
configuration
Rated output current
ASR scan time
CASE scan time
I/O Sequence Scan Time
Microprocessor
Output current limit
protection
Output frequency resolution
Speed control accuracy
Speed control range
Speed response
Starting torque
Motor surge protection
Open loop torque control
Torque reference scan time
Performance Features
(480V)
230V 0.4kW to 110kW (0.5 to 150HP)
575V 1.5kW to 160kW (2 to 200HP)
Modular: 300 to 1800HP (VT)
2-Level 3-Level
Example: 240V class, 3.7kW, 17.5A Example: 240V class, 3.7kW, 18A
2msec 1.25msec (except Open-loop vector 2)
5msec 2.5msec (except Open-loop vector 2)
5msec 2.5msec (except Open-loop vector 2)
First generation Second generation
Hardware Hardware, Software
0.01Hz 0.001Hz
Open-loop vector: ±0.2%,
Closed-loop flux vector: ±0.02%
Open-loop vector: 100:1 Open-loop vector 2: 200:1
Open-loop vector: 5Hz
Closed-loop flux vector: 30Hz
Open-loop vector: 150% at 1Hz Open-loop vector 2: 150% at 0.3Hz
No Yes (3-Level)
No Yes (Open-loop vector 2)
2msec 1.25msec (except Open-loop vector 2)
480V 0.4kW to 300kW (0.5 to 400HP)
240V 0.4kW to 110kW (0.5 to 150HP)
Open-loop vector 2: ±0.1%,
Closed-loop flux vector: ±0.01%
Open-loop vector 2: 10Hz
Closed-loop flux vector: 60Hz
Torque response
150Hz
(Closed-loop flux vector)
(Closed-loop flux vector)
300Hz
__________________________
PL.G7.02.TransitionGuide 4/21/04
Page 6 of 38
Yaskawa Electric America, Inc
Page 7
Product Transition Guide
Specification G5 Specification G7 Specification
I/O
Quick disconnect I/O
terminals
No Yes
GPD515/G5 to G7
Analog
Analog
Digital
Digital
Programmable functions
Inputs
Quantity
Type
Outputs
Programmable functions
Quantity
Inputs
Programmable functions
Outputs
Type
Quantity
Type
39 45
0-±10VDC x 2 0-±10VDC/4-20mA x 2
-10-10VDC x 2
(8 bit plus sign)
27 30
8 12
24VDC, NPN
Photo coupler isolation, 8mA
45 51
4 6
• Qty 1: Programmable: Form A,
250VAC, 1A, 30VDC, 1A
• Qty 1: Dedicated Fault, Form C,
250VAC, 1A, 30VDC, 1A
• Qty 2: Programmable, photo-
coupler (open collector output),
48V, 50mA, common emitter
connection
-10-10VDC or 4-20mA x 2
(8 bit plus sign)
24VDC, sinking or sourcing (NPN/PNP)
Photo coupler isolation, 8mA
Internal or external power supply
• Qty 3: Programmable: Form A,
250VAC, 1A, 30VDC, 1A
• Qty 1: Dedicated Fault, Form C,
250VAC, 1A, 30VDC, 1A
• Qty 2: Programmable, photo-coupler
(open collector output), 48V, 50mA,
separate emitter connection
Quantity
0 1
0-32kHz, low level: 0.0-0.8VDC high
Input
Pulse
Pulse
Output
Stopping
Fan
Cooling
Signal level
Programmable functions
Quantity
Signal level
Programmable functions
Braking DB transistor
Flux/High slip braking
Modular replacement
On/Off control
Cumulative fan operation
time
0 standard (1 with option) 1
Built-in to G5M27P5 (10HP)
Built-in to G5M4015 (25HP)
~
level: 3.5-13.2VDC, duty cycle: 30-70%,
3kohm
~ 4
~ 0-32kHz, 9.0VDC, 2.2kohm
~ 6
Built-in to G7U2015 (20HP)
Built-in to G7U4015 (25HP)
No Yes
No Yes
No Yes
No Yes
Rotational
Design
Features
Auto-tuning
Rotational
Stationary
Stationary (primary resistance only)
__________________________
PL.G7.02.TransitionGuide 4/21/04
Page 7 of 38
Yaskawa Electric America, Inc
Page 8
Product Transition Guide
GPD515/G5 to G7
Specification G5 Specification G7 Specification
Multi-step speed operation
PID sleep mode
User customized
programming
Design
Features
Speed search
Split front cover
Timer Function
Run permissive
Motor temperature input
9-step speeds 17-step speeds
No Yes
No Yes (DriveWorks EZ)
Current Detection
Uni-Directional
Current Detection or Speed Estimation
Bi-directional for Speed Estimation
No Yes
On/Off delay (0.0-25.5sec) On/Off delay (0.0-300.0sec)
No Yes
No Yes
Harmonics
Keypad/Operator
Network
Communications
Undertorque detection
12-phase rectification input
DC choke built-in
Constant access level
selection
Copy function
Display
Monitoring
Verify function
Viewable monitors
Built-in
Option Card
No Yes
No
230V, G5M2018-G5M2075
460V, G5M4018-G5M4160
3-level selectable
(Quick-Start, Basic, Advanced)
240V, G7U2018-G7U2110
480V, G7U4018-G7U4300
240V, G7U2018-G7U2110
480V, G7U4018-G7U4300
2-level selectable
(Quick-Program, Advanced)
No (optional keypad) Yes
2 Line x 16 Character LCD
5 Line x 16 Character LCD
(Contrast Adjustable)
1 monitor 3 sequential monitors at same time
Yes Modified constants can be displayed.
35 40
Modbus RTU (RS-232, 9.6kbps) Modbus RTU (RS-232/422/485, 19.2kbps)
Modbus RTU (RS-422/485), Ethernet
(Modbus/ TCP/IP), DeviceNet,
Profibus-DP, Modbus Plus
Ethernet (Modbus/ TCP/IP), DeviceNet,
Profibus-DP, Modbus Plus, LonWorks
Input specifications
Vibration/Shock
Service Conditions
Storage
Temp
ºC
__________________________
PL.G7.02.TransitionGuide 4/21/04
Page 8 of 38
Yaskawa Electric America, Inc
3-phase, 200-230VAC
3-phase, 380-460VAC,
Tolerance: +10 to -15%
~
240V: 60HP (2037) and Below, 480V: 75HP
240V: 60HP (2045) and Above, 480V: 100HP
3-phase, 200-240VAC
3-phase, 380-480VAC
Tolerance: +10 to -15%
(4045) and Below
1.0G (9.8m/s^2) 10 to 20Hz
0.6G (5.9m/s^2) 20 to 55Hz
(4055) and Above
1.0G (9.8m/s^2) 10 to 20Hz
0.2G (2.0m/s^2) 20 to 55Hz
-10ºC ~ +60ºC -20ºC ~ +60ºC
Page 9
Product Transition Guide
Terminal Comparison
Physical Dimensions
Between 20 - 200 HP, the G7 is 18% smaller volume on average than the equivalent GPD515/G5.
(See appendix 1)
savings over the GPD515/G5.
Based on meeting NEC full load amp requirements, the G7 footprint can offer a space
G7– 18% less volume
compared to GPD515/G5
__________________________
PL.G7.02.TransitionGuide 4/21/04
Page 9 of 38
Yaskawa Electric America, Inc
Page 10
Product Transition Guide
GPD515/G5 to G7
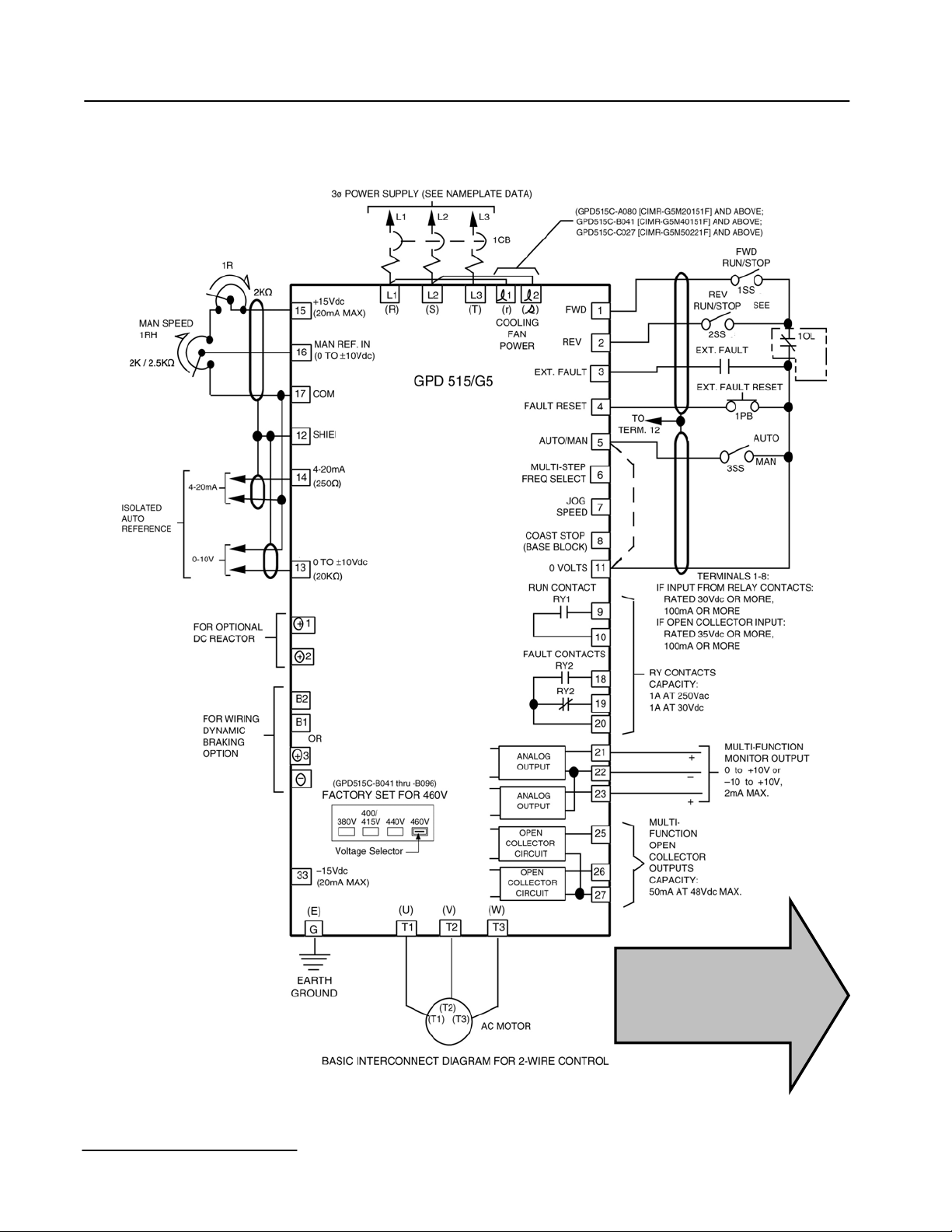
GPD515/G5 Terminal Description
GPD515/G5
PL.G7.02.TransitionGuide 4/21/04
Page 10 of 38
Yaskawa Electric America, Inc
Compare to G7
terminals, see
next page.
Page 11
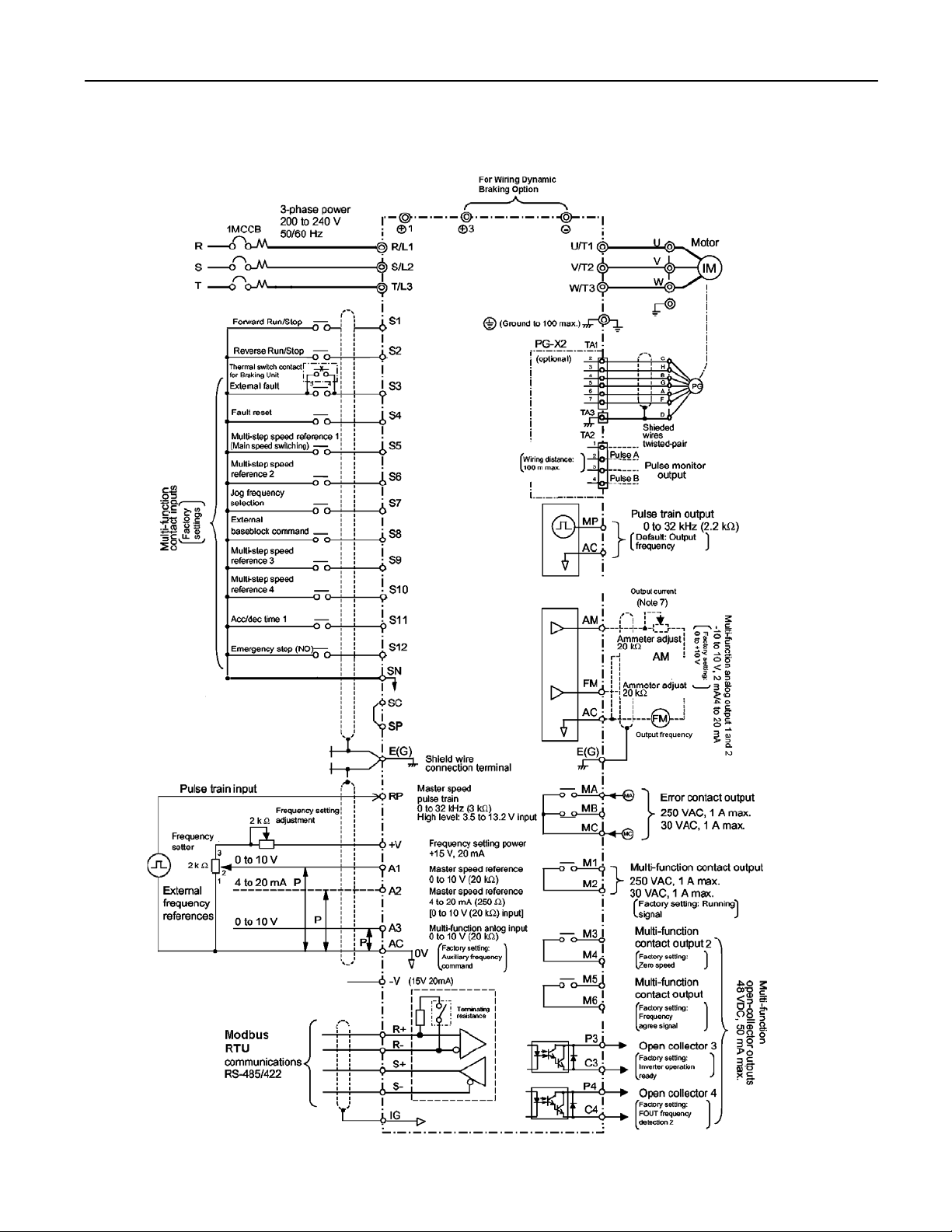
G7 Terminal Description
Product Transition Guide
GPD515/G5 to G7
G7
__________________________
PL.G7.02.TransitionGuide 4/21/04
Page 11 of 38
Yaskawa Electric America, Inc
Page 12
Product Transition Guide
GPD515/G5 to G7
I/O Terminal Cross Reference G5 to G7
GPD515/G5 Terminal
GPD515/G5
Type
Terminal
1
2
3
4
5
6
7
8
Digital Input Signals
11
–
–
Forward run/stop
Signal level: (Photo-coupler
insulated input: +24VDC, 8mA)
Reverse run/stop
External fault input
Fault reset input
Master/Aux. change Multi-step speed reference 1
Multi-step speed ref.1
Multi-step speed ref.2
Jog reference
External baseblock
Sequence control input common
Default Function
–
–
–
–
G7
Terminal
S1
S2
S3
S4
S5
S6
S7
S8
S9
S10
S11
S12
SN
SC
SP
G7 Terminal
Default Function G7 Description
Forward run/stop command –
Reverse run/stop command –
External fault input
Fault reset
(Master/auxiliary switch)
Multi-step speed reference 2
Jog frequency reference
External baseblock N.O.
Multi-step speed reference 3
Multi-step speed reference 4
Accel/Decel time select
Emergency Stop N.O.
Digital input common
Factory connected to SP
Factory connected to SC
Multi-function digital inputs
Functions set by:
H1-01 to H1-10.
+24VDC, 8mA
Photo coupler isolation
Factory connected for internal
supply, sinking mode.
Refer to G7 User Manual for
other methods.
15
33
13
14
Analog Input Signals
16
17
12
+15VDC Power supply
(20mA ma ximum)
-15VDC Power supply
(20mA ma ximum)
Master frequency ref. (voltage)
-10 to +10VDC (20kohm)
0 to +10VDC (20kohm)
Master frequency ref. (current)
4 to 20mA (250ohm)
Multi-function analog input
-10 to +10VDC (20kohm),
0 to +10VDC (20kohm)
Common for control circuit 0V
Connection to shield sheath of
signal lead
+V
-V
A1
A2
A3
AC
E(G)
+15VDC power supply
-15VDC power supply
Master frequency reference
Add to terminal A1
Auxiliary frequency
reference 1
Analog common –
Shield wire, optional ground
line connection point
+15VDC
(20mA ma ximum)
-15VDC
(20mA ma ximum)
0 to +10VDC=100%
0 to +/-10VDC=100% (H3-01)
(20kohm)
4 to 20mA=100% (250ohm)
0 to +10VDC=100% (20kohm)
Function set by H3-09.
0 to +10Vdc=100%/(20kohm)
0 to +/-10Vdc=100%
Function set by H3-05
–
PL.G7.02.TransitionGuide 4/21/04
Page 12 of 38
Yaskawa Electric America, Inc
Page 13

I/O Terminal Cross Reference G5 to G7
GPD515/G5 Terminal G7 Terminal
GPD515/G5
Type
Terminal
9 M1
10
25
27
26
27
Digital Output Signals
18 MA
19 MB
20
During run (NO contact)
Form A dry contact
250VAC1A
30VDC, 1A
Zero speed detection
Open collector output, 48V, 50mA
Open collector output common
Speed agree detection
Open collector output
48V, 50mA or less
Open collector output common
Dedicated fault contact
Form C dry contact
250VAC, 1A
30VDC, 1A
Default Function
G7
Terminal
M2
P3
C3
P4
C4
MC
Default Function G7 Description
During run
(N.O. contact)
Factory setting:
Drive ready
Open collector output common
Factory setting:
Fout detect 2
Open collector output common
Fault contact output
Product Transition Guide
GPD515/G5 to G7
Multi-function digital output
Form A dry contact
250VAC, 1A
30VDC, 1A
Function set by H2-01
Multi-function open collector
output
48VDC, 50mA
Function set by H2-04
Multi-function open collector
output
48VDC, 50mA
Function set by H2-05
Dedicated fault contact
Form C dry contact:
250VAC, 1A
30VDC, 1A
~
~
Frequency monitor
21
23
Analog Output Signals
10VDC=100% output frequency
(2mA max imum)
Current monitor
5VDC=drive rated current
(2mA max imum)
~
~
M3
M4
M5
M6
FM
AM
Zero speed
(N.O. contact)
Frequency agree
(N.O. contact)
Output frequency
Output current
Multi-function digital output
Form A dry contact
250VAC, 1A
30VDC, 1A
Function set by H2-02.
Multi-function digital output
Form A dry contact
250VAC, 1A
30VDC, 1A
Function set by H2-03
0 to +10VDC or 0 to ±10VDC
(Max current 2mA) (500ohm)
10VDC or 20mA=100% output
frequency
Function set by H4-01
0 to +10VDC or 0 to ±10VDC
(2mA maximum) (500ohm)
5VDC or 12mA=100% drive
rated current
Function set by H4-04
22
Common (Current Monitor)
Analog common –
AC
__________________________
PL.G7.02.TransitionGuide 4/21/04
Yaskawa Electric America, Inc
Page 13 of 38
Page 14

Product Transition Guide
GPD515/G5 to G7
I/O Terminal Cross Reference G5 to G7
GPD515/G5 Terminal
GPD515/G5
Terminal
Type
Pulse I/O
–
–
RS-485/422
–
Default Function
–
–
–
–
G7
Terminal
RP
MP
R+
R-
S+
S-
IG
Pulse input
Pulse output
Modbus RTU protocol
Differential input
PHC isolation
Modbus RTU protocol
Differential output
PHC isolation
Signal common –
G7 Terminal
Default Function G7 Description
Physical I/O Block Terminal Layout
G5 Terminal Block
11 12 (G) 13 14 15 16 17 26 27 3325 18 19 20
1 234567821 22 23 910
0-32kHz (3kohm) ±5%
High level: 3.5-13.2VDC
Low level: 0.0-0.8VDC
Duty Cycle: 30%-70%
Function set by H6-01
0-32kHz
Output: +5VDC
Load: 1.5kohm
Function set by H6-06
–
PL.G7.02.TransitionGuide 4/21/04
Page 14 of 38
Yaskawa Electric America, Inc
Page 15

Product Transition Guide
GPD515/G5 to G7
Main Power Terminal Comparison
G5 terminal G7 terminal Function
R L1 R/L1
S L2 S/L2
T L3 T/L3
R1/L11
S1/L21
T1/L31
U T1 U/T1
V T2 V/T2
W T3 W/T3
B1 B1
B2 B2
DC power supply input (Connection 1 to )
1 1 DC power supply connection (Connection 1 to )
2 2 DC reactor connection (Connection 1 to 2)
3 3 Braking unit connection (Connection 3 to )
r r
s200
s400
Feature availability is model dependant. Refer to the table below.
Terminal
Function
s
Product Series
Voltage Class
0.4kW (0.5HP)
0.75kW (1HP)
1.5kW (2HP)
2.2kW (3HP)
3.7kW (5HP)
Main circuit power supply input
Main circuit power supply input (12-pulse units)
Drive output
Braking resistor unit connection
DC reactor connection (Connection 1 to 2)
Cooling fan and control power supply
Cooling fan power supply
Control power supply
Cooling fan power supply
5.5kW (7.5HP)
7.5kW (10HP)
18.5kW (25HP)
15kW (20HP)
22kW (30HP)
30kW (40HP)
11kw (15HP)
37kW (50HP)
75kW (100HP)
45kW (60HP)
90kw (125HP)
55kW (75HP)
132kW (200HP)
160kW (250HP)
110kw (150HP)
185kW (300HP)
220kW (350HP)
300kW (500HP)
12-pulse diode
bridge
Braking
resistor
connection
DC power
supply input
DC reactor
connection
Braking
chopper unit
connection
NEMA1
Enclosure
Open Type
Enclosure
R1,
S1,
T1
B1,
B2
1
1
2
(B1)
3
G5
G7
G5
G7
G5
G7
G5
G7
G5
G7
G5
G7
G5
G7
230V
460V
240V
480V
230V
460V
240V
480V
230V
460V
240V
480V
230V
460V
240V
480V
230V
460V
240V
480V
230V
460V
240V
480V
230V
460V
240V
480V
Not Available No Product
Not Available
Not Available Available No Product
Not Available Available
Available
Available
Available
Available
Available
Available
Available
Available
Available
Available
Available
Available
Available
Available
Available
Available
Standard
Standard
Standard
Standard
Remove Upper/Lower Covers
Remove Upper/Lower Covers Standard
Remove Upper/Lower Covers Standard No Product
Remove Upper/Lower Covers Standard
Not Available No Product
Not Available
Not Available No Product
Not Available
Not Available No Product
No Product
N.A. (Reactor Built-in) Special No Product
N.A. (Reactor Built-in)
N.A. (Reactor Built-in) No Product
N.A. (Reactor Built-in)
No Product
No Product
No Product
N.A.
Optional N.A. No Product
Optional N.A.
No Product
__________________________
PL.G7.02.TransitionGuide 4/21/04
Page 15 of 38
Yaskawa Electric America, Inc
Page 16

Product Transition Guide
GPD515/G5 to G7
Available Network Communications
Yaskawa Network Communication Options
Market Protocol G5 G5 HHP G7
Industrial
Modbus TCP/IP
Modbus Plus
Modbus RTU
General
Purpose
Ethernet
CM061 CM061 CM061
CM053
CM059
CM090 n/a CM090
CM071 CM071 CM071
Built-in RS-232
[CM085 for RS-485]
n/a
Built-in RS-232
[CM085 for RS-485]
CM057
CM059
Built-in
Commercial
PL.G7.02.TransitionGuide 4/21/04
Page 16 of 38
Yaskawa Electric America, Inc
CM048 n/a CM048
Page 17

Product Transition Guide
Appendix 1
Amps, Carriers, Overload, Heat loss and Dimension Comparison
GPD515/G5 to G7
____________________________
PL.G7.02.TransitionGuide 4/21/04
Page 17 of 38
Yaskawa Electric America, Inc
Page 18

Product Transition Guide
GPD515/G5 to G7
Output Amps, Carrier and Overload Comparison
240V Ratings GPD515/G5 to G7
240V
GPD515/G5 G7
GPD515
NEC Motor
HP 240V
0.5 2.2
0.75 3.2
1.5 6
7.5 22 25P51
10 28 27P51
15 42 20111
20 54 20151
25 68
30 80
40 104
50 130
60 154
75 192 20551
100 248 20751
125 312 150 360 -
NEC Motor
Amps
1 4.2
2 6.8 21P51
3 9.6 22P21
5 15.2 23P71
G5
Model
CIMR-G5M
20P41
20P71
20181
20221
20301
20371
20450
Output
Amps
3.2 15 150
6 15 150
8 15 150
11 15 150
17.5 15 150
25 15 150
33 15 150
49 15 150
64 15 150
80 15 150
96 10 150
130 10 150
160 10 150
183 10 150
224 10 150
300 10 150
- - -
- - -
Fc kHz OL %
G7
Model
CIMR-G7U
20P41
20P71
21P51
22P21
23P71
25P51
27P51
20111
20151
20181
20221
20300
20370
20450
20550
20750
20900
21100
Output
Amps
3.2 15 150
6 15 150
8 15 150
12 15 150
18 15 150
27 15 150
34 15 150
49 15 150
66 15 150
80 15 150
96 10 150
130 10 150
160 10 150
183 10 150
224 10 150
300 10 150
358 2 150
415 2 150
Fc
KHz
Overload %
PL.G7.02.TransitionGuide 4/21/04
Page 18 of 38
Yaskawa Electric America, Inc
Page 19

Product Transition Guide GPD515/G5 to G7
Appendix 1 –Amps, Carrier , Overload, Dimensions, Heat Loss
Output Amps, Carrier and Overload Comparison
480V Ratings GPD515/G5 to G7
480V
GPD515/G5 G7
GPD515/
NEC Motor
HP 480V
0.5 1.1
0.75 1.6
1.5 3
7.5 11 44P01
10 14 45P51
15 21 47P51
20 27 40111
25 34 40151
30 40 40181
40 52 40221
50 65 40301
60 77 40371
75 96 40451
100 124 40551
125 156 40751
150 180
200 240 -
250 302
300 361 41850
350 414
400 477
500 590
NEC Motor
Amps
1 2.1
2 3.4
3 4.8 41P51
5 7.6 43P71
G5
Model CIMR-
G5M
40P41
40P71
-
41101
41601
41850
42200
43000
Output
Amps
1.8 15 150
3.4 15 150
4.8 15 150
8 15 150
11.7 15 150
14 15 150
21 12.5 150
27 12.5 150
34 10 150
41 10 150
52 8 150
65 8 150
80 6 150
96 6 150
128 6 150
165 6 150
- - -
224 5 150
- - -
302 5 150
340 2 150
450 2 150
605 2 150
Fc kHz OL%
G7
Model
CIMR-G7U
40P41
40P71
41P51
42P21
43P71
44P01
45P51
47P51
40111
40151
40181
40221
40301
40371
40451
40550
40750
40900
41100
41320
41600
42200
43000
Fc
Output
Amps
1.8 8 150
3.4 8 150
4.8 8 150
6.2 8 150
9 8 150
11 8 150
15 8 150
21 8 150
27 8 150
34 8 150
42 8 150
52 8 150
65 8 150
80 8 150
97 8 150
128 5 150
165 5 150
195 3 150
240 3 150
270 2 150
302 2 150
370 2 150
450 2 150
605 2 150
kHz
(3-Level
Control)
Overload %
____________________________
PL.G7.02.TransitionGuide 4/21/04
Page 19 of 38
Yaskawa Electric America, Inc
Page 20

Product Transition Guide
GPD515/G5 to G7
Mounting Hole Data
GPD515/G5
Mounting Hole Data
GPD515/G5 GPD515/G5
Model (Millimeters) (Inches)
20P4
20P7
21P5
22P2
23P7
25P5
27P5
2011
2015
2018
2022
2030
2037
2045
2055
2075
-
40P4
40P7
41P5
42P2
43P7
45P5
47P5
4011
4015
4018
4022
4030
4037
4045
4055
4075
-
4110
-
4160
4185
4220
4300
PL.G7.02.TransitionGuide 4/21/04
Page 20 of 38
Yaskawa Electric America, Inc
W1 H1 W1 H1
126 266 4.96 10.47
126 266 4.96 10.47
126 266 4.96 10.47
126 266 4.96 10.47
126 266 4.96 10.47
186 285 7.32 11.22
186 285 7.32 11.22
236 365 9.29 14.37
236 365 9.29 14.37
275 435 10.83 17.13
275 435 10.83 17.13
320 650 12.60 25.59
320 650 12.60 25.59
370 775 14.57 30.51
370 775 14.57 30.51
445 895 17.52 35.24
- - - -
- - - 126 266 4.96 10.47
126 266 4.96 10.47
126 266 4.96 10.47
126 266 4.96 10.47
126 266 4.96 10.47
186 285 7.32 11.22
186 285 7.32 11.22
236 365 9.29 14.37
236 365 9.29 14.37
275 435 10.83 17.13
275 435 10.83 17.13
275 610 10.83 24.02
275 610 10.83 24.02
275 610 10.83 24.02
350 795 13.78 31.30
350 795 13.78 31.30
- - - 445 895 17.52 35.24
- - - 445 895 17.52 35.24
750 1400
750 1400
750 1550
29.53 55.12
29.53 55.12
29.53 61.02
G7
Mounting Hole Data
G7 G7
Model (Millimeters) (Inches)
W1 H1 W1 H1
20P4
20P7
21P5
22P2
23P7
25P5
27P5
2011
2015
2018
2022
2030
2037
2045
2055
2075
2090
2110
40P4
40P7
41P5
42P2
43P7
45P5
47P5
4011
4015
4018
4022
4030
4037
4045
4055
4075
4090
4110
4132
4160
4185
4220
4300
126 266 4.96 10.47
126 266 4.96 10.47
126 266 4.96 10.47
126 266 4.96 10.47
126 266 4.96 10.47
186 285 7.32 11.22
186 285 7.32 11.22
216 335 8.50 13.19
216 335 8.50 13.19
195 385 7.68 15.16
220 435 8.66 17.13
250 575 9.84 22.64
250 575 9.84 22.64
325 700 12.80 27.56
325 700 12.80 27.56
370 820 14.57 32.28
445 855 17.52 33.66
445 855 17.52 33.66
126 266 4.96 10.47
126 266 4.96 10.47
126 266 4.96 10.47
126 266 4.96 10.47
126 266 4.96 10.47
186 285 7.32 11.22
186 285 7.32 11.22
216 335 8.50 13.19
216 335 8.50 13.19
220 435 8.66 17.13
220 435 8.66 17.13
260 535 10.24 21.06
260 535 10.24 21.06
260 535 10.24 21.06
325 700 12.80 27.56
325 700 12.80 27.56
370 820 14.57 32.28
370 820 14.57 32.28
445 895 17.52 35.24
445 895 17.52 35.24
1270 540
1270 540
1440 730
21.26 50.00
21.26 50.00
28.74 56.69
Page 21

Product Transition Guide GPD515/G5 to G7
Appendix 1 –Amps, Carrier , Overload, Dimensions, Heat Loss
Panel Cut-out Data (for external heatsink mounting)
Refer to NEC Ratings tables in Appendix 1 for the appropriate GPD515/G5 to G7 cross-reference.
Note: Ampacity ratings vary between GPD515/G5 to G7 models
GPD515/G5
PANEL CUT OUT OPENING
EXTERNAL HEATSINK MOUNTING
Millimeters Inches
Model W H W H
20P4
20P7
21P5
22P2
23P7
25P5
27P5
2011
2015
2018
2022
2030
2037
2045
2055
2075
40P4
40P7
41P5
42P2
43P7
45P5
47P5
4011
4015
4018
4022
4030
4037
4045
4055
4075
4110
4160
4185
4220
4300
(mm) (mm) (Inches) (Inches)
138 271 5.43 10.67
138 271 5.43 10.67
138 271 5.43 10.67
138 271 5.43 10.67
138 271 5.43 10.67
180 298 7.09 11.73
180 298 7.09 11.73
200 377 7.87 14.84
200 377 7.87 14.84
300 404 11.81 15.91
300 404 11.81 15.91
380 627 14.96 24.68
380 627 14.96 24.68
451 756 17.76 29.76
451 756 17.76 29.76
555 894 21.85 35.20
-
-
-
-
- - - -
- - - 138 271 5.43 10.67
138 271 5.43 10.67
138 271 5.43 10.67
138 271 5.43 10.67
138 271 5.43 10.67
180 298 7.09 11.73
180 298 7.09 11.73
200 377 7.87 14.84
200 377 7.87 14.84
300 404 11.81 15.91
300 404 11.81 15.91
309 571 12.17 22.48
309 571 12.17 22.48
309 571 12.17 22.48
440 761 17.32 29.96
440 761 17.32 29.96
- - - 555 894 21.85 35.20
- - - 555 894 21.85 35.20
875 1324 34.45 52.13
875 1324 34.45 52.13
873 1475 34.37 58.07
G7
PANEL CUT OUT OPENING
EXTERNAL HEATSINK MOUNTING
Millimeters
Model W H W H
20P4
20P7
21P5
22P2
23P7
25P5
27P5
2011
2015
2018
2022
2030
2037
2045
2055
2075
2090
2110
40P4
40P7
41P5
42P2
43P7
44P0
45P5
47P5
4011
4015
4018
4022
4030
4037
4045
4055
4075
4090
4110
4132
4160
4185
4220
4300
(mm) (mm) (Inches) (Inches)
138 271 5.43 10.67
138 271 5.43 10.67
138 271 5.43 10.67
138 271 5.43 10.67
138 271 5.43 10.67
197 298 7.76 11.73
197 298 7.76 11.73
233 353 9.17 13.90
233 353 9.17 13.90
244 369 9.61 14.53
269 419 10.59 16.50
359 545 14.13 21.46
359 545 14.13 21.46
434 673 17.09 26.50
434 673 17.09 26.50
484 782 19.06 30.79
555 817 21.85 32.17
555 817 21.85 32.17
138 271 5.43 10.67
138 271 5.43 10.67
138 271 5.43 10.67
138 271 5.43 10.67
138 271 5.43 10.67
138 271 5.43 10.67
197 298 7.76 11.73
197 298 7.76 11.73
233 353 9.17 13.90
233 353 9.17 13.90
269 419 10.59 16.50
269 419 10.59 16.50
309 519 12.17 20.43
309 519 12.17 20.43
309 519 12.17 20.43
434 673 17.09 26.50
434 673 17.09 26.50
484 782 19.06 30.79
484 782 19.06 30.79
555 817 21.85 32.17
555 817 21.85 32.17
693 1227 27.28 48.31
693 1227 27.28 48.31
875 1397 34.45 55.00
Inches
__________________________
PL.G7.02.TransitionGuide 4/21/04
Page 21 of 38
Yaskawa Electric America, Inc
Page 22

Product Transition Guide
GPD515/G5 to G7
Watts Loss Data
G5
Model
20P4
20P7
21P5
22P2
23P7
25P5
27P5
2011
2015
2018
2022
2030
2037
2045
2055
2075
-
40P4
40P7
41P5
42P2
43P7
44P0
45P5
47P5
4011
4015
4018
4022
4030
4037
4045
4055
4075
4110
4160
4185
4220
4300
GPD515/G5 (W)
Internal Heatsink Total
50 15 65
65 25 90
80 40 120
60 80 140
80 135 215
90 210 300
110 235 725
160 425 585
200 525 725
230 655 885
280 830 1110
440 930 1370
620 1110 1730
660 1380 2040
890 1740 2630
1160 2050 3210
- - -
- - 50 10 60
65 20 85
80 30 110
60 65 125
65 80 145
80 120 200
85 135 220
120 240 360
150 305 455
180 390 570
195 465 660
260 620 880
315 705 1020
370 875 1245
415 970 1385
710 1110 1820
890 1430 2320
- - -
1160 1870 3030
- - -
1520 2670 4190
1510 3400 4910
2110 4740 6850
2910 6820 9730
Model
20P4
20P7
21P5
22P2
23P7
25P5
27P5
2011
2015
2018
2022
2030
2037
2045
2055
2075
2090
2110
40P4
40P7
41P5
42P2
43P7
44P0
45P5
47P5
4011
4015
4018
4022
4030
4037
4045
4055
4075
4090
4110
4132
4160
4185
4220
4300
Internal Heatsink Total
36 21 57
42 43 85
47 58 105
53 83 136
64 122 186
87 187 274
112 263 375
136 357 493
174 473 647
241 599 840
257 679 936
362 878 1240
434 1080 1514
510 1291 1801
607 1474 2081
823 2009 2832
871 1660 2531
1194 2389 3583
39 10 49
44 21 65
46 33 79
49 41 90
63 77 140
66 100 166
80 132 212
107 197 304
116 246 362
135 311 446
174 354 528
210 516 726
246 633 879
285 737 1022
340 929 1269
488 1239 1727
597 1554 2151
762 1928 2690
928 2299 3227
1105 2612 3717
1501 3614 5115
1995 4436 6431
2205 5329 7534
2941 6749 9690
G7
G7 (W)
PL.G7.02.TransitionGuide 4/21/04
Page 22 of 38
Yaskawa Electric America, Inc
Page 23

y
Appendix 2
Parameter Differences
The following parameter list shows the differences
between GPD515/G5 and G7 parameters. Parameters not
listed are identical between GPD515/G5 and G7. Refer to
the G7 instruction manual for details on specific
parameter functions. Parameters are listed alphabetically
b
GPD515/G5.
Product Transition Guide
Appendix 2- Parameter Differences
____________________________
PL.G7.02.TransitionGuide 4/21/04
Page 23 of 38
Yaskawa Electric America, Inc
Page 24

Product Transition Guide
GPD515/G5 to G7
GPD515/G5 Parameters G7 Parameters
Parameter
No.
A1-01
(Digital Operator Display)
Access Level 0: Operation Only
Name
Setting or Selection
1: User Level
2: Quick-Start [Q]
3: Basic Level [B]
4: Advanced Level [A]
Parameter
No.
A1-01
(Digital Operator Display)
Name
Access Level Selection
Remarks on
Setting or Selection
Removed:
3: Basic Level [B]
Modified selection:
2: Advanced Level
Control Method Selection
A1-02
Reference Selection 0: Operator
B1-01
Operation Method
B1-02
Selection
Speed Search Selection at
B3-01
Start
— — —
— — —
— — —
— — —
Energy -saving Mode
B8-03
Selection
0: V/F control without PG
1: V/F control with PG
2: Open Loop Vector
3: Flux Vector
1: Terminals
2: Communication Serial Com
3: Option PCB
4: EWS Reference from CP-717
0: Operator
1: Terminals
2: Communication Serial Com
3: Option PCB
4: EWSRun from CP-717
0: Disabled
1: Enabled
0:Disabled
1:Enabled
A1-02
b1-01
b1-02
b3-01
b3-05
b5-15
b5-16
b5-17
b8-01
Control Method Selection
Reference Selection
Run Command Selection
Speed Search Selection
Speed Search Delay Time
Sleep Function Start Level
Sleep Delay Time
PID Accel/Decel Time
Energy Saving Control
Selection
Additional function:
4: Open Loop Vector control 2
Changed to:
4: Pulse Input
Removed selection 4:
4: EWSRun from CP-717
Modified selections:
0: Speed Estimation Speed Search Disable
1: Speed Estimation Speed Search Enable
2: Current Detection Speed Search Disable
3: Current Detection Speed Search Enable
New Parameter
New Parameter
New Parameter
New Parameter
Changed Parameter No.
Energy-saving Control
B8-04
Gain
Energy-saving Control
B8-05
Time Constant
— — —
— — —
— — —
Output Voltage Limit 0:Disabled
C3-06
Operation Selection 1:Enabled
PL.G7.02.TransitionGuide 4/21/04
Page 24 of 38
Yaskawa Electric America, Inc
—
—
Energy Saving Gain
b8-02
Energy Saving Control
b8-03
Filter Time Constant
Energy Saving Coefficient
b8-04
Value
Power Detection Filter
b8-05
Time
Search Operation Voltage
b8-06
Limit
Output Voltage Limit
C3-05
Opera tion Selection
Changed Parameter No.
Changed Parameter No.
New Parameter
—
—
Changed Parameter No.
Page 25

GPD515/G5 Parameters G7 Parameters
Parameter
No.
— — —
Name
(Digital Operator Display)
Setting or Selection
Parameter
No.
C6-02
Name
(Digital Operator Display)
Carrier Frequency
Selection
Product Transition Guide
Appendix 2- Parameter Differences
Remarks on
Setting or Selection
New parameter function different than old
C6-02 in GPD515/G5
0: Low noise
1: Fc = 2.0 kHz
2: Fc = 5.0 kHz
3: Fc = 8.0 kHz
4: Fc = 10.0 kHz
5: Fc = 12.5 kHz
6: Fc = 15.0 kHz
F: Program Determined by the settings of C603 thru C6-05
Carrier Frequency Upper
C6-01
Limit
Carrier Frequency Lower
C6-02
Limit
Carrier Frequency
C6-03
Proportional Gain
— — —
Hunting Prevention
C7-01
Selection
Hunting Prevention Gain —
C7-02
AFR Gain —
C8-08
AFR Time Constant —
C8-09
— — —
— — —
— — —
— — —
— — —
— — —
— — —
— — —
— — —
Jog Frequency Reference
D1-09
— — —
0:Disabled
1:Enabled
—
—
—
C6-03
C6-04
C6-05
C6-11
n1-01
n1-02
n2-01
n2-02
n2-03
d1-09
d1-10
d1-11
d1-12
d1-13
d1-14
d1-15
d1-16
d1-17
d2-03
Carrier Frequency
Upper Limit
Carrier Frequency
Lower Limit
Carrier Frequency
Proportional Gain
Carrier Frequency
Selection Open Loop
Vector Control 2
Hunting Prevention
Selection
Hunting Prevention Gain
Setting
Speed Feedback Detection
Control AFR Gain
AFR Time
Speed Feedback Detection
Control
AFR Time Constant 2
Frequency Reference 9
Frequency Reference 10
Frequency Reference 11
Frequency Reference 12
Frequency Reference 13
Frequency Reference 14
Frequency Reference 15
Frequency Reference 16
Jog Frequency Reference
Master Speed Reference
Lower Limit
Changed Parameter No.
Changed Parameter No.
Changed Parameter No.
New Parameter
Select the carrier frequency when open loop
vector control 2 is used.
1: 2 kHz
2: 4 kHz
3: 6 kHz
4: 8 kHz
Changed Parameter No.
Changed Parameter No.
Changed Parameter No.
Changed Parameter No.
New parameter
Sets the time constant to control the amount
of change in the speed at low speed.
New Parameter
New Parameter
New Parameter
New Parameter
New Parameter
New Parameter
New Parameter
New Parameter
Changed Parameter No.
New Parameter
— — —
— — —
d6-01
d6-02
Magnetic Field Weakening
Level
Magnetic Field Frequency
New Parameter
New Parameter
____________________________
PL.G7.02.TransitionGuide 4/21/04
Page 25 of 38
Yaskawa Electric America, Inc
Page 26

Product Transition Guide
GPD515/G5 to G7
GPD515/G5 Parameters G7 Parameters
Parameter
No.
(Digital Operator Display)
— — —
E1-02
Motor Selection
Motor 2 Control Method
E3-01
Selection
Motor 2 Max. Output
E4-01
Frequency
Motor 2 Max.Voltage —
E4-02
Motor 2 Max.
E4-03
Voltage Frequency
Base Frequency
Motor 2 Mid.
E4-04
Output Frequency 1
Mid Frequency
Motor 2 Mid.
E4-05
Output Frequency
Voltage 1
Mid Voltage
Motor 2 Min.
E4-06
Output Frequency
Min Frequency
Motor 2 Min.
E4-07
Output Frequency
Voltage
Min Voltage
Motor 2 Rated Current —
E5-01
Motor 2 Rated Slip —
E5-02
Motor 2
E5-03
No-load Current
Motor 2
E5-04
Number of poles
Motor 2 Line-to-line
E5-05
Resistance
Motor 2 Leak Inductance —
E5-06
— — —
— — —
— — —
Name
Setting or Selection
0:Std Fan-Cooled
1:Std Blower-Cooled
2:Vector Motor
—
0: V/F control
1: V/F with PG Feedback
2: Open Loop Vector
3: Flux Vector
—
—
—
—
—
—
—
—
—
Parameter
(Digital Operator Display)
No.
Magnetic Field Forcing
d6-03
Function Selection
Motor Overload Protection
Selection
L1-01
Motor Rated Output
E2-11
Motor 2 Control Method
E3-01
Selection
Motor 2 Maximum Output
E3-02
Frequency
Motor 2 Maximum Output
E3-03
Voltage
Motor 2 Base Frequency
E3-04
Base Frequency
Motor 2 Mid Output
E3-05
Frequency
Mid Frequency
Motor 2 Mid Output
E3-06
Voltage VA
Mid Voltage
Motor 2 Minimum Output
E3-07
Frequency
Min Frequency
Motor 2 Minimum Output
E3-08
Voltage
Min Voltage
Motor 2 Rated Current
E4-01
Motor 2 Rated Slip
E4-02
Motor 2 No-Load Current
E4-03
Motor 2 Number of Poles
E4-04
Motor 2 Line-to-Line
E4-05
Resistance
Motor 2 Leakage
E4-06
Inductance
Motor 2 Rated Output
E4-07
AO-12 Channel 1 Signal
F4-07
Level
AO-12 Channel 2 Signal
F4-08
Level
Name
Remarks on
Setting or Selection
New Parameter
0:Disabled
1:Enabled
Changed Parameter No.
Additional selection
0: Disabled
1: Standard Fan Cooled
2: Standard Blower Cooled
3: Vector Motor
New Parameter
This value is automatically set during auto
tuning.
Additional selection
4: Open Loop Vector Control 2
Changed Parameter No.
Changed Parameter No.
Changed Parameter No.
Changed Parameter No.
Changed Parameter No.
Changed Parameter No.
Changed Parameter No.
Changed Parameter No.
Changed Parameter No.
Changed Parameter No.
Changed Parameter No.
Changed Parameter No.
Changed Parameter No.
New Parameter
This value is automatically set during autotuning.
New Parameter
Sets the range of the voltage output.
0: 0 to 10 Vdc
1: -10 to +10 Vdc
New Parameter
Sets the range of the voltage output.
0: 0 to 10 Vdc
1: -10 to +10 Vdc
PL.G7.02.TransitionGuide 4/21/04
Page 26 of 38
Yaskawa Electric America, Inc
Page 27

GPD515/G5 Parameters G7 Parameters
Parameter
No.
— — —
Name
(DigitalOperator Display)
Setting or Selection
Parameter
(Digital Operator Display)
No.
DO-08 Channel 3 Output
F5-03
Selection
Product Transition Guide
Appendix 2- Parameter Differences
Name
New Parameter
Remarks on
Setting or Selection
— — —
— — —
— — —
— — —
— — —
— — —
Option External Fault
F9-02
Detection Selection
Option External Fault
F9-03
Detection Operation
Selection
0:Always Detected
1:Only During Run
0: Ramp to Stop
1: Coast to Stop
2: Fast - Stop
3: Alarm Only
F5-04
F5-05
F5-06
F5-07
F5-08
F5-09
F6-02
F6-03
DO-08 Channel 4 Output
Selection
DO-08 Channel 5 Output
Selection
DO-08 Channel 6 Output
Selection
DO-08 Channel 7 Output
Selection
DO-08 Channel 8 Output
Selection
DO-08 Output Mode
Selection
Option External Fault
Detection Selection
Option External Fault
Detection Operation
Selection
New Parameter
New Parameter
New Parameter
New Parameter
New Parameter
New Parameter
0:8-channel individual outputs.
1:Binary code output.
2:Output according to
F5-01 to F5-08 settings.
Changed Parameter No.
Changed Parameter No.
Trace Sampling Time —
F9-04
TorqueReference/
F9-05
Torque Limit Selection
through DP-RAM
communication
DP-RAM Communication
F9-06
Error Detection Operation
Selection
0: Disabled
1: Enabled
0:Ramp to Stop
1:Coast to Stop
2:Fast - Stop
3:Alarm Only
Trace Sampling from
F6-04
Communications Option
Board
Torque Reference/Torque
F6-06
Limit Selection through
DP- RAM communication
DP-RAM Communication
F6-01
Error Detection Operation
Selection
Changed Parameter No.
Changed Parameter No.
Changed Parameter No.
____________________________
PL.G7.02.TransitionGuide 4/21/04
Page 27 of 38
Yaskawa Electric America, Inc
Page 28

Product Transition Guide
GPD515/G5 to G7
GPD515/G5 Parameters G7 Parameters
Parameter
No.
H1-01
Name
(DigitalOperator Display)
Terminal 3 Selection
Setting or Selection
Multi-function input terminal 3
0: 3-Wire Control
1: Local/Remote Selection
2: Option/Inverter Selection
3: Multi-Step Reference 1
4: Multi-Step Reference 2
5: Multi-Step Reference 3
6: Jog Frequency Reference
7: Multi-Accel/Decel 1
8: External Baseblock N.O.
9: External Baseblock N.C.
A: Accel/Decel Ramp Hold
B: OH2 Alarm Signal
C: Terminal 16 Enable
D: V/F Mode Select
E: ASR Integral Reset
F: Terminal Not Used
10: MOP Increase
11: MOP Decrease
12: Forward Jog
13: Reverse Jog
14: Fault Reset
15: Fast-Stop N.O.
16: Motor 2 Select
17: Fast Stop N.C. input
18: Timer Function
19: PID Disable
1A: Multi-Accel/Decel 2
1B: Program Lockout
1C: Trim Control Increase
1D: Trim Control Decrease
1E: Ref Sample Hold
1F: Terminal 13/14 Switch
24: External Fault
30: PID Integral Reset
31: PID Control Integral Hold
60: DC Injection Activate
61: Speed Search 1
62: Speed Search 2
63: Energy Save Mode
64: Speed Search 3
65: KEB Ridethrough N.C.
66: KEB Ridethrough N.O
71: Speed/Torque Control Change
72: Zero Servo Command
77: ASR Gain Switch
Parameter
No.
H1-01
Name
(Digital Operator Display)
Multi-Function Digital
Input Terminal S3
Function Selection
Remarks on
Setting or Selection
Modified selection:
C: Multi-function Analog Input Selection
Additional selections:
32: Multi-Step Reference 4
34: PID Soft Starter Cancel
35: PID Input Error Polarity Change
67: Communications Test Mode
68: High Slip Braking
78: Polarity Reversing Command for
External Torque Control
PL.G7.02.TransitionGuide 4/21/04
Page 28 of 38
Yaskawa Electric America, Inc
Page 29

Parameter
No.
Appendix 2- Parameter Differences
GPD515/G5 Parameters G7 Parameters
Name
(DigitalOperator Display)
Setting or Selection
Parameter
No.
Name
(Digital Operator Display)
Product Transition Guide
Remarks on
Setting or Selection
H1-02
Terminal 4
Selection
—
H1-02
H1-03
H1-04
H1-05
H1-06
— — —
— — —
— — —
Terminal 5 Selection —
Terminal 6 Selection —
Terminal 7 Selection —
Terminal 8 Selection —
H1-03
H1-04
H1-05
H1-06
H1-07
H1-08
H1-09
Multi-Function Digital
Input Terminal S4
Function Selection
Multi-Function Digital
Input Terminal S5
Function Selection
Multi-Function Digital
Input Terminal S6
Function Selection
Multi-Function Digital
Input Terminal S7
Function Selection
Multi-Function Digital
Input Terminal S8
Function Selection
Multi-Function Digital
Input Terminal S9
Function Selection
Multi-Function Digital
Input Terminal S10
Function Selection
Multi-Function Digital
Input Terminal S11
Function Selection
Terminal number renamed
Terminal number renamed
Terminal number renamed
Terminal number renamed
Terminal number renamed
New Parameter
New Parameter
New Parameter
— — —
H1-10
Multi-Function Digital
Input Terminal S12
Function Selection
New Parameter
____________________________
PL.G7.02.TransitionGuide 4/21/04
Page 29 of 38
Yaskawa Electric America, Inc
Page 30

Product Transition Guide
GPD515/G5 to G7
GPD515/G5 Parameters G7 Parameters
Parameter
No.
Multi-function Output
H2-01
Terminal 9-10
Multi-function Output
H2-02
Terminal 25/27
Open Collector
Multi-function Output
H2-03
Terminal 26/27
Open Collector
— — —
— — —
Signal Level Selection
H3-01
Terminal 13
Terminal 13 Gain Frequency reference gain of AI-
H3-02
Terminal 13 Bias
H3-03
Terminal 16 Signal Level
H3-04
Selection
Terminal 16
H3-05
Multifunction Analog
Input
Name
(DigitalOperator Display)
Setting or Selection
—
—
—
—
14U, AI-14B 3ch addition input,
DI-08, and DI-16 is common.
0:0 - 10 VDC
1:10 +10 VDC
Multi-function analog input
selection terminal 16
0: Auxiliary Reference
1: Frequency Gain
2: Frequency Bias
4: Voltage Bias
5: Accel/Decel Change
6: DC Brake Current
7: Overtorque Level
8: Stall Prevention Level
9: Reference Lower Limit
A: Jump Frequency
B: PID Feedback
C: PID Setpoint
D: Frequency Bias 2
10: Forward Torque Limit
11: Reverse Torque Limit
12: Regenerative Torque Limit
13: Torque reference
14: Torque Compensation
15: Forward/Reverse Torque Limit
1F: Not Used
Parameter
(Digital Operator Display)
No.
Terminal M1-M2 Function
H2-01
Selection
Terminal M3-M4 Function
H2-02
Selection
Terminal M5-M6
H2-03
Function Selection
Terminal P3 Function
H2-04
Selection
Open Collector
Terminal P4 Function
H2-05
Selection
Open Collector
Terminal A1 Signal Level
H3-01
Selection
Terminal A1 Gain Setting
H3-02
Terminal A1 Bias Setting
H3-03
Terminal A3 Signal Level
H3-04
Selection
Name
Remarks on
Setting or Selection
Additional selections:
32: During Speed Limit
38: Drive Enable
Terminal number renamed
Terminal number renamed
New Parameter
New Parameter
Terminal number renamed
Terminal number renamed
Terminal number renamed
Terminal number renamed
Modified selection:
2:Aux Frequency Reference1
Used in conjunction with multi-function
inputs “multi-step frequency reference 1-4”.
Additional
3:Aux Frequency Reference 2
Used in conjunction with multi-function
inputs “multi-step frequency reference 1-4”.
E: Motor Temperature
See parameters L1-03 & L1-04.
Terminal 16 Gain —
H3-06
Terminal 16 Bias —
H3-07
Signal Level
H3-08
Selection Terminal 14
Multi-function Analog
H3-09
Input Terminal 14
Terminal 14 Gain
H3-10
H3-11
H3-12
Terminal 14 Bias
Filter Avg Time
PL.G7.02.TransitionGuide 4/21/04
Page 30 of 38
Yaskawa Electric America, Inc
—
—
Terminal A3 Gain Setting
H3-06
Terminal A3 Bias Setting
H3-07
Terminal A2 Signal Level
H3-08
Selection
Terminal A2 Function
H3-09
Selection
Terminal A2 Gain Setting
H3-10
Terminal A2 Bias Setting
H3-11
Filter Avg Time
H3-12
Terminal number renamed
Terminal number renamed
Terminal number renamed
Terminal number renamed
Terminal number renamed
Terminal number renamed
Input is from the A2 terminal for the G7.
Page 31

Parameter
No.
H4-01
H4-02
H4-03
H4-04
H4-05
H4-06
H4-07
—
H5-04
—
—
Appendix 2- Parameter Differences
GPD515/G5 Parameters G7 Parameters
Name
(DigitalOperator Display)
Monitor Selection
Terminal 21
Terminal 21
Output Gain
Terminal 21Output Bias —
Terminal 23 Monitor —
Terminal 23
Output Gain
Terminal 23
Output Bias
Analog Output
Signal Selection
— —
Stopping Method After
Communication Error
— —
— —
Setting or Selection
Analog output selection terminal
21 same as F4-01
1: Frequency reference
2: Output frequency
3: Inverter output current
5: Motor speed
6: Output voltage
7: DC bus voltage
8: Output power
9: Torque reference internal
15: External terminal 13 input
voltage
16: External terminal 14 input
voltage
17: External terminal 16 input
voltage
18: Motor secondary current Iq
19: Motor excitation current Id
20: Primary frequency after SFS
21: Speed controller ASR input
22: Speed controller ASR output
23: Speed deviation
24: PID feedback
26: Voltage reference Vq output
27: Voltage reference Vd output
31: Not Used
32: ACR q Output
33: ACR d Output
36: PID Input
37: PID Output
38: PID Reference
—
—
—
0: 0 - +10 VDC
1: 10V +10 VDC
0: Ramp to Stop
1: Coast to Stop
2: Fast - Stop
3: Alarm Only
Parameter
H4-01
H4-02
H4-03
H4-04
H4-05
H4-06
H4-07
H4-08
H5-06
H5-07
(Digital Operator Display)
No.
H4-01Terminal FM
Monitor Selection
Terminal FM Gain Setting
Terminal FM Bias Setting
Terminal AM Monitor
Selection
Terminal AM Gain
Setting
Terminal AM Bias Setting
Terminal FM Signal
Level
Selection
Terminal AM Signal
Level Selection
Drive Transmit Wait
Time
RTS Control Selection
Name
Product Transition Guide
Remarks on
Setting or Selection
Terminal number renamed
15: Terminal A1 Input Level
100% = 10Vdc
16: Terminal A2 Input Level
100% = 10Vdc or 20mA
17: Terminal A3 Input Level
100% = 10Vdc
Removed:
23: Speed deviation
Additional:
42: Motor flux calculation value
43: Motor flux current compensation
44: ASR Output without filter
45: Feedforward Control Output
48: Stabalizing speed during regen
Terminal number renamed
Terminal number renamed
Terminal number renamed
Terminal number renamed
Terminal number renamed
Terminal number renamed
0: 0 - 10 Vdc
1: -10 to +10V
2: 4-20 mA*
* Set the analog output jumper CN15 in the
proper position.
New Parameter
0: 0 - 10 Vdc
1: -10 to +10V
2: 4-20 mA*
* Set the analog output jumper CN15 in the
proper position.
Additional selection:
4: Run at D1-04
New parameter
New parameter
0: Disabled RTS is always on
1: Enabled RTS turns on only when
sending
____________________________
PL.G7.02.TransitionGuide 4/21/04
Page 31 of 38
Yaskawa Electric America, Inc
Page 32

Product Transition Guide
GPD515/G5 to G7
GPD515/G5 Parameters G7 Parameters
Parameter
No.
—
—
—
—
—
—
—
L1-01
—
—
—
—
—
L3-07
L3-08
— — —
— — —
L4-05
—
Name
(DigitalOperator Display)
— —
—
—
—
—
—
—
— —
— —
— —
Motor Protection
Selection
MOL Fault Select
— —
— —
— —
— —
— —
Stall Prevention
Function P Gain
Stall Prevention
Function Integral Time
Frequency Loss
Detection Selection
— —
Setting or Selection
0:Disabled
1:Coast to Stop
See: GPD515/G5 E1-02
0: Stop
1: Run@ 80% PrevRef
—
—
Parameter
No.
H6-01
H6-02
H6-03
H6-04
H6-05
H6-06
H6-07
L1-01
L1-03
L1-04
L1-05
L2-07
L2-08
—
—
L3-11
L3-12
L4-05
L4-06
(Digital Operator Display)
Name
Pulse Train Input
Function Selection
Pulse Train Input Scaling
Pulse Train Input Gain
Pulse Train Input Bias
Pulse Train Input Filter
Time
Pulse Train Monitor
Selection
Pulse Train Monitor
Scaling
Motor Overload
Protection Selection
Motor Overheat Alarm
Operation Selection
Motor Overheat Fault
Oper ation Selection
Motor Temperature Input
Filter Time
Momentary Recovery
Time
Frequency Reduction
Gain at KEB Start
—
—
OV Supression function
selection
OV suppression function
level
Frequency Reference Loss
Detection Selection
Frequency Reference
Level at Loss Frequency
Remarks on
Setting or Selection
New parameter
0: Frequency reference
1: PID feedback value
2: PID setpoint value
New parameter
New parameter
New parameter
New parameter
New parameter
New parameter
Modified function
0: Disabled
1: Fan Cooled <10:1 motor
2:Blower Cooled 10:1 motor
3: Vector Motor 1000:1 motor
New parameter
0: Ramp to Stop
1: Coast to Stop
2: Fast-Stop
3: Alarm Only
New parameter
0: Ramp to Stop
1: Coast to Stop
2: Fast-Stop
New parameter
New parameter
New parameter
Deleted in G7
Deleted in G7
New parameter
New parameter
Modified function
0: Normal Operation - Drive will run at the
frequency reference.
1: Run at L4-06 PrevRef
Drive will run at the
percentage set in L4-06
New parameter
PL.G7.02.TransitionGuide 4/21/04
Page 32 of 38
Yaskawa Electric America, Inc
Page 33

Parameter
No.
L6-01
L6-04
L8-07
L8-10
—
—
—
Appendix 2- Parameter Differences
GPD515/G5 Parameters G7 Parameters
Name
(DigitalOperator Display)
Overtorque
Detection Selection 1
Overtorque
Detection Selection 2
Output phase loss
protection
Short-circuit
Protection Selection
— —
— —
— —
Setting or Selection
0: Disabled
1: @SpdAgree - Alm
2: At RUN - Alarm
3: @SpdAgree - Flt
4:At RUN - Fault
0: Disabled
1: @SpdAgree - Alm
Detected during speed agree
only.
2: At RUN - Alarm
Overtorque detection during
running.
3: @SpdAgree - Flt
Detected during the speed
agree only.
4: At RUN - Fault
Detected during running, and
the inverter trips on OL4.
0: Disabled
1: Enabled
0:Disabled
1: Enabled
Parameter
No.
L6-01
L6-04
L8-07
L8-09
L8-10
L8-11
L8-12
(Digital Operator Display)
Torque Detection
Selection 1
Torque Detection
Selection 2
Output phase loss
protection
Output Ground Fault
Detection Selection
Heatsink Cooling Fan
Operation Selection
Heatsink Cooling Fan
Operation Delay Time
Ambient Temperature
Setting
Name
Product Transition Guide
Remarks on
Setting or Selection
Additional selections:
5: UL3 at SpeedAgree - Alarm Undertorque
Detec tion is only active during Speed Agree
and operation continues after detection.
6: UL3 at RUN - Alarm Undertorque
Detection is always active and operation
continues after detection.
7: UL3 at Speed Agree - Fault Undertorque
Detection only active during Speed Agree
and drive output will shut down on an OL3
fault.
8: UL3 at RUN - Fault Undertorque
Detection is always active and drive output
will shut down on an OL3 fault.
Additional selections:
5: UL4 at SpeedAgree - Alarm Undertorque
Detec tion is only active during Speed Agree
and opera tion continues after detection.
6: UL4 at RUN - Alarm Undertorque
Detection is always active and operation
continues after detection.
7: UL4 at Speed Agree - Fault Undertorque
Detection only active during Speed Agree
and drive out put will shut down on an OL4
fault.
8: UL4 at RUN - Fault Undertorque
Detection is always active and drive output
will shut down on an OL4 fault.
Additional selections
2: 2/3 phase loss protection
Changed parameter number
New parameter
0: Fan On-Run Mode
1: Fan Always On
New parameter
New parameter
____________________________
PL.G7.02.TransitionGuide 4/21/04
Page 33 of 38
Yaskawa Electric America, Inc
Page 34

Product Transition Guide
GPD515/G5 to G7
GPD515/G5 Parameters G7 Parameters
Parameter
No.
L8-17
L8-19
—
—
—
—
—
—
—
—
(DigitalOperator Display)
Name
IGBT Protection
Selection at Low
Frequency
OL2 Characteristic
Selection at Low Speed
— —
— —
— —
— —
— —
— —
—
—
— —
Setting or Selection
0: Conventional
1: Lower fc
Carrier frequency is decreased
when fout 10Hz and the
load is > 100% iac.
2: Short term OL2
OL occurs after 2 seconds
during low speed
[fout 6Hz] current limit.
3: I-Limit=150%
Current limit is set to 150% of
the inverter rated current.
0: Disabled-Low frequency OL
disabled
1: Enabled-Low frequency OL
enabled
Parameter
No.
L8-15
L8-18
n3-01
n3-01
n3-02
n3-03
n3-04
n4-07
n4-08
n4-10
n4-11
n4-15
n4-17
n4-18
n4-28
n4-29
n4-30
n4-32
n4-33
n4-34
n5-01
n5-02
n5-03
(Digital Operator Display)
Name
OL2 Characteristic
Selection at Low Speeds
Soft CLA Selection
High Slip Braking
Deceleration Frequency
Width
High slip braking decel
frequency width
High Slip Braking Current
Limit
High Slip Braking Dwell
Time at Stop
High Slip Braking
Overload Time
Observer Integral Time
Observer Proportional
Gain
Proportional Gain on HiSpeed Side of Observer
Observer Switching
Frequency
Lo-Speed + Regen
Stability Coefficient 1
Torque Adjustment Gain
Gain for Feeder
Resistance Adjustment
Observer Switching
Frequency 2
Torque Adjustment Gain
2
Low Speed + Regen
Stability Coefficient 2
Observer Gain
Modulation Frequency
Observer Gain
Modulation Frequency 2
Observer Gain
Modulation Rate
Feed Forward Control
Selection
Motor Accel Time
Feed Forward
Proportional Gain
Remarks on
Setting or Selection
Deleted in G7
Changed parameter number
New parameter
0: Disabled
1: Enabled.
New parameter
New parameter
New parameter
New parameter
New parameter
New parameter
New parameter
New parameter
New parameter
New parameter
New parameter
New parameter
New parameter
New parameter
New parameter
New parameter
New parameter
New parameter
New parameter
0:Disabled
1:Enabled
New parameter
New parameter
PL.G7.02.TransitionGuide 4/21/04
Page 34 of 38
Yaskawa Electric America, Inc
Page 35

Parameter
No.
O1-01
Appendix 2- Parameter Differences
GPD515/G5 Parameters G7 Parameters
(DigitalOperator Display)
Name
Monitor Selection
User Monitor Sel
Setting or Selection
Monitor selection
4: Control method
5: Motor speed
6: Output voltage
7: DC bus voltage
8: Output power
9: Torque reference internal
10: Input terminal status
11: Output terminal status
12: Internal Control Status 1
13: Elapsed time
14: Flash software ID number
15: External terminal 13 input
voltage
16: External terminal 14 input
voltage
17: External terminal 16 input
voltage
18: Motor secondary current Iq
19: Motor excitation current Id
20: Primary frequency after SFS
21: Speed controller ASR input
22: Speed controller ASR output
23: Speed deviation
24: PID feedback
25: DI-16 reference
26: Voltage reference Vq output
27: Voltage reference Vd output
28: CPU ID number
32: ACR output of q axis
33: ACR output of d axis
34: First Parameter Causing an
OPE
35: Zero Servo Pulse Count
36: PID Input
37: PID Output
38: PID Setpoint
Parameter
No.
(Digital Operator Display)
Name
Product Transition Guide
Remarks on
Setting or Selection
Modified name:
15:Terminal A1 Input Voltage
16:Terminal A2 InputVoltage
17:Terminal A3 Input Voltage
Deleted in G7
23: Speed deviation
Added selections:
29: kWh Lo 4 Digits
30: MWh kWh Hi 5 Digits
39: Memobus Communication Error Code
Transmit Err
40:Heatsink Cooling Fan Operation Time
41: Heatsink Temperature
42: Motor flux calculation value
43: Motor flux current compensation
44: ASR output without filter
45: Feed forward control output
48: Stabalizing speed during regen
____________________________
PL.G7.02.TransitionGuide 4/21/04
Page 35 of 38
Yaskawa Electric America, Inc
Page 36

Product Transition Guide
GPD515/G5 to G7
GPD515/G5 Parameters G7 Parameters
Parameter
No.
O1-05
—
—
—
—
—
Name
(DigitalOperator
Display)
Parameter No.
Display Selection
Address Display
— —
— —
— —
— —
— —
Setting or Selection
0:Parameter Number
1:Memobus Address
Parameter
No.
o1-05
o2-10
o2-12
o2-14
o3-01
o3-02
(Digital Operator Display)
Name
LCD Brightness
Adjustment
Cumulative CoolingFan
Operation Time Setting
Fault Trace/Fault
History Clear Function
kWh User Monitor
Initialization
Copy Function
Selection
Copy Allowed
Selection
Read Allowable
Remarks on
Setting or Selection
Modified function:
Sets the contrast of the digital
operator LCD. A set ting of
“1” is the lightest contrast and
a setting of “5” is the darkest
contrast.
New parameter
New parameter
0: Disabled no effect.
1: Enabled - resets U2 and U3
monitors, and returns o2-12 to
zero.
New parameter
0: Disabled no change.
1: Enabled - Resets U1-29 to
zero and returns o2-14 to zero.
New parameter
0: COPY SELECT no
function
1: INV -> OP READ - All
parameters are copied from
the Drive to the digital
operator.
2: OP -> INV WRITE - All
parameters are copied from
the digital operator to the
Drive.
3: OP<-->INV VERIFY Parameter settings in the Drive
are compared to those in the
digital operator.
NOTE: When using the copy
function, the Drive model
number o2-04, software
number U1-14, and control
method A1-02 must match or
an error will occur.
New parameter
0: Disabled - No digital
operator copy functions are
allowed.
1: Enabled - Copying allowed
PL.G7.02.TransitionGuide 4/21/04
Page 36 of 38
Yaskawa Electric America, Inc
Page 37

Product Transition Guide
GPD515/G5 to G7
Page intentionally blank
PL.G7.02.TransitionGuide 4/21/04
Page 37 of 38
Yaskawa Electric America, Inc
Page 38

Product Transition Guide
GPD515/G5 to G7
Yaskawa Electric America, Inc
16555 W. Ryerson Rd
(800)YASKAWA (927-5292) Fax (262) 782-3418
YEA Document Number: PL.G7.02 4/21/04 Yaskawa Electric America, Inc.©
New Berlin, WI
www.drives.com
 Loading...
Loading...