

Page 1
Product Transition Guide
GPD 506/P5 to P7
PL.P7.06.TransitionP5
Page 2

Product Transition Guide
GPD506/P5 to P7
NOTICE
The information contained within this document is the proprietary property of Yaskawa Electric America, Inc., and may not be
copied, reproduced or transmitted to other parties without the expressed written authorization of Yaskawa Electric America,
Inc. No patent liability is assumed with respect to the use of the information contained herein. Moreover, because Yaskawa is
constantly improving its high-quality products, the information contained in this document is subject to change without notice.
Every precaution has been taken in the preparation of this document. Nevertheless, Yaskawa assumes no responsibility for
errors or omissions. Neither is any liability assumed for damages resulting from the use of the information contained in this
publication.
Page 2 of 48
Page 3

Contents
Product Transition Guide
GPD506/P5 to P7
FEATURE OVERVIEW ........................................................................................5
BENEFITS OF THE NEW P7 WHEN COMPARED TO GPD506/P5...................5
NEW/ADDITIONAL P7 PARAMETER FUNCTIONS NOT PRESENT IN THE GPD506/P5 ...................... 5
P7 DIGITAL INPUTS (ADDITIONAL FUNCTIONS)............................................................................. 6
P7 DIGITAL INPUTS (ADDITIONAL FUNCTIONS)............................................................................. 6
P7 ANALOG INPUT (ADDITIONAL FUNCTIONS).............................................................................. 6
P7 DIGITAL OUTPUT RELAY (ADDITIONAL FUNCTIONS).................................................................6
NALOG OUTPUTS (ADDITIONAL FUNCTIONS)......................................................................... 6
P7 A
P7 S
ERIAL COMMUNICATIONS .................................................................................................... 7
P7 START-UP, INSTALLATION & MAINTENANCE IMPROVEMENTS.................................................... 7
P7 ADDITIONAL HARDWARE PROTECTION ...................................................................................7
REASONS TO CONTINUE GPD506/P5 ........................................................................................ 7
GPD506/P5 TO P7 SPECIFICATION DIFFERENCES........................................9
DIGITAL OPERATOR COMPARISON .............................................................. 12
GPD506/P5 TO P7 TERMINAL COMPARISON................................................13
NETWORK COMMUNICATIONS ......................................................................17
DETAILS ON NEW P7 FEATURES & FUNCTIONS .........................................18
APPENDIX 1 ......................................................................................................19
RATINGS AND HEAT LOSS COMPARISON ................................................................................... 19
NEC HP RATINGS FOR 240V NORMAL DUTY MODELS .............................................................. 21
NEC HP RATINGS FOR 480V NORMAL DUTY MODELS .............................................................. 22
HEAT LOSS DATA.................................................................................................................... 23
APPENDIX 2 ......................................................................................................25
M
ECHANICAL DIMENSIONS .......................................................................................................25
ANEL CUT-OUT FOR EXTERNAL HEATSINK MOUNTING ..............................................................27
P
MOUNTING HOLE DATA............................................................................................................ 28
APPENDIX 3 – PARAMETER CROSS REFERENCE.......................................29
Page 3 of 48
Page 4

Product Transition Guide
GPD506/P5 to P7
Page Intentionally Left Blank
Page 4 of 48
Page 5
Product Transition Guide
GPD506/P5 to P7
Feature Overview
This document details differences between the GPD506/P5 and P7 product to assist in product transition and new product
introduction.
GPD506/P5 Drive
The GPD 506/P5 inverter is
intended for fan and pump
applications in Building and
Industrial Automation. It is
available in constant and
variable torque ratings, 3/4 to
500 horsepower.
P7 Drive
The P7 drive is an ideal choice for
industrial applications, such as
centrifugal fans and pumps. The
P7 drive is provided in Normal
Duty ratings with 110% overload
capability. V/f control mode,
network communication options,
and an array of input/output
choices are available.
New/Additional P7 Parameter Functions not
Present in the GPD506/P5
Benefits of the New P7 When Compared to GPD506/P5
New Motor preheat function with adjustable current
setting to prevent condensation in motor, (b2-09)
P7 is flash memory upgradeable
Accel/Decel range now adjustable from 0.1 to 6000 sec.
(GPD506/P5 max. range is 3600)
Critical frequency rejection: 3 selectable, adjustable
bands, d3-03—Jump frequency 3 (additional)
(GPD506/P5 only has two)
New Wait To Run Timer function allowing output of
drive to delay start after a Run command (b1-11)
Torque boost with adjustable filter time for better
torque compensation response (C4-02)
Power loss ride-thru time settable to 25 sec.
(GPD506/P5 is 2 sec. Max.)
Auto restart now has maximum restart time after fault if
fault condition doesn’t clear during the first try
New "Up/Down" floating point control capability
Primary resistance auto-tuning
Customizable monitor display
Run permissive input
New PI Snooze function available in conjunction with
Sleep mode (b5-21)
Adjustable Undervoltage Detection level (L2-05) not
available in GPD506/P5
Speed search function with new Speed Estimation
mode and Bi-directional search mode (b3-01)
New Setpoint PI features include:
Two feedback capability, Output Limit, Offset
adjustment, Primary delay, Output gain, Output reverse,
Setpoint accel/decel, Setpoint display scaling,
Selectable sleep input source, Snooze function, Setpoint
boost, Fdbk square root function with output monitor.
(b5-06, b5-07, b5-08, b5-10, b5-11, b5-17 thru 30)
Separately adjustable e-stop times (C1-09)
Accel/decel rate switchover via output frequency (C1-
11)
14 more V/f presets than GPD506/P5 for a total of 15
V/f preset patterns (E1-03)
Mid frequency and voltage V/f points on the custom
V/f pattern (E1-11,12)
Trim speed control function (d4-02)
New/Additional P7 Parameter Functions not
Present in the GPD506/P5
Page 5 of 48
Page 6
Product Transition Guide
GPD506/P5 to P7
Motor thermistor input with
temperature filter and selectable
fault ,alarm settings (L1-02 to L1-
05)
Intelligent stall prevention on
accel/decel with decel time 1 or 2
selections (L3-01,4,5)
Extended 0.5 to 600.0 sec. autorestart time between attempts vs.
10.0 secs for GPD506/P5 (L5-03)
Hunting prevention function (n101,2)
DC Injection braking (b1-03)
Run command can be accepted
while the drive is being programmed (b1-08)
High slip braking function (n3-01,2,3,4)
Selectable power-up monitor (o1-01,2)
Keypad display contrast adjustment (o1-05)
Two independent programmable over and under torque
detection levels
P7 Digital Inputs (Additional Functions)
One more digital input for a total of seven
More versatile PNP/NPN sinking/sourcing 24 VDC
control logic
Transmitter/option power supply
29 more programmable functions for digital inputs than
GPD506/P5. 59 total :
Motor Preheat
MOP increase/decrease function
Forward and reverse jog input
Trim control increase and decrease functions
15 additional external fault action settings such as Fast-
stop, Alarm only, Coast to stop with selectable N.O or
N.C. for each fault action.
PI integral hold and PI cancel functions
Speed search 3
Serial Communication test mode
High slip braking input
Jog 2
P7 Digital Inputs (Additional Functions)
Drive enable, with selectable accept run command or
cycle run command function
P7 Analog Input (Additional Functions)
A convenient PCB switch now changes analog input A2
between current and voltage, cutting PCB jumper for
mA signal is no longer required.
Adjustable analog input signal filter for added stability
Terminal A2 is selectable for :
Frequency bias
Motor thermister
PI differential
Analog input filter
Main and Aux frequency reference is selectable
between terminals A1 and A2
P7 Digital Output Relay (Additional Functions)
27 possible programmable functions for the digital
outputs, seven more than the GPD506/P5.
One additional relay output, M3 and M4 relays
DC bus under voltage output
Reset command active output
Reverse direction output
Drive enable output
OH frequency reduction output
Restart Enabled
P7 Analog Outputs (Additional Functions)
Additional AM analog monitor output with bias and
gain settings.
Analog monitors now selectable between 0-10V and 420ma, GPD506/P5 only 0-10V
18 programmable selections for the analog outputs, 14
more than the GPD506/P5.
Frequency reference monitor
Terminal A1 or A2 monitor
Motor SEC current monitor
SFS output monitor
PI- feedback, input, output and setpoint monitors
PI feedback 2 monitor
Output Voltage
Page 6 of 48
Page 7

P7 Serial Communications
Built-in RS-485/422 modbus serial communications
Optional communication interface: Devicenet, Profibus,
and others
Serial communications loss detection timeout function
Drive Wizard upload/download and monitoring
/graphing software
Product Transition Guide
GPD506/P5 to P7
P7 Start-up, Installation & Maintenance
Improvements
Control terminal board: Quick disconnect
Enhanced digital keypad, 5 Line x 16 Character LCD
(Std)
6 new languages can be displayed on the keypad.
GPD506/P5 has only English (A1-00)
User password protection for 32 customizable user
parameters (A1-04)
A2-01 thru A2-32—User access level provides 32 user
selectable parameters.
Parameter copy function to another P7 using standard
digital operator (o3-01)
Improved fault storage, last 10 faults
Quick disconnect I/O blocks for easy wiring
Logged cooling fan hours for scheduled maintenance
Modular cooling fan for easy replacement
Automatic cooling fan run control to extend fan life
P7 Additional Hardware Protection
Adjustable heat-sink overheat pre-alarm level (L8-02)
Selectable ground fault detection (L8-09)
Selectable cooling fan operation with off delay (L8-
10,11)
Automatic ambient temperature compensation to
protect the drive in environments exceeding its rating
(L8-12)
Adjustable OH frequency reference reduction (L8-19)
Adjustable motor overload time constant (L1-02)
Page 7 of 48
Page 8

Product Transition Guide
GPD506/P5 to P7
Page left intentionally blank
Page 8 of 48
Page 9
Product Transition Guide
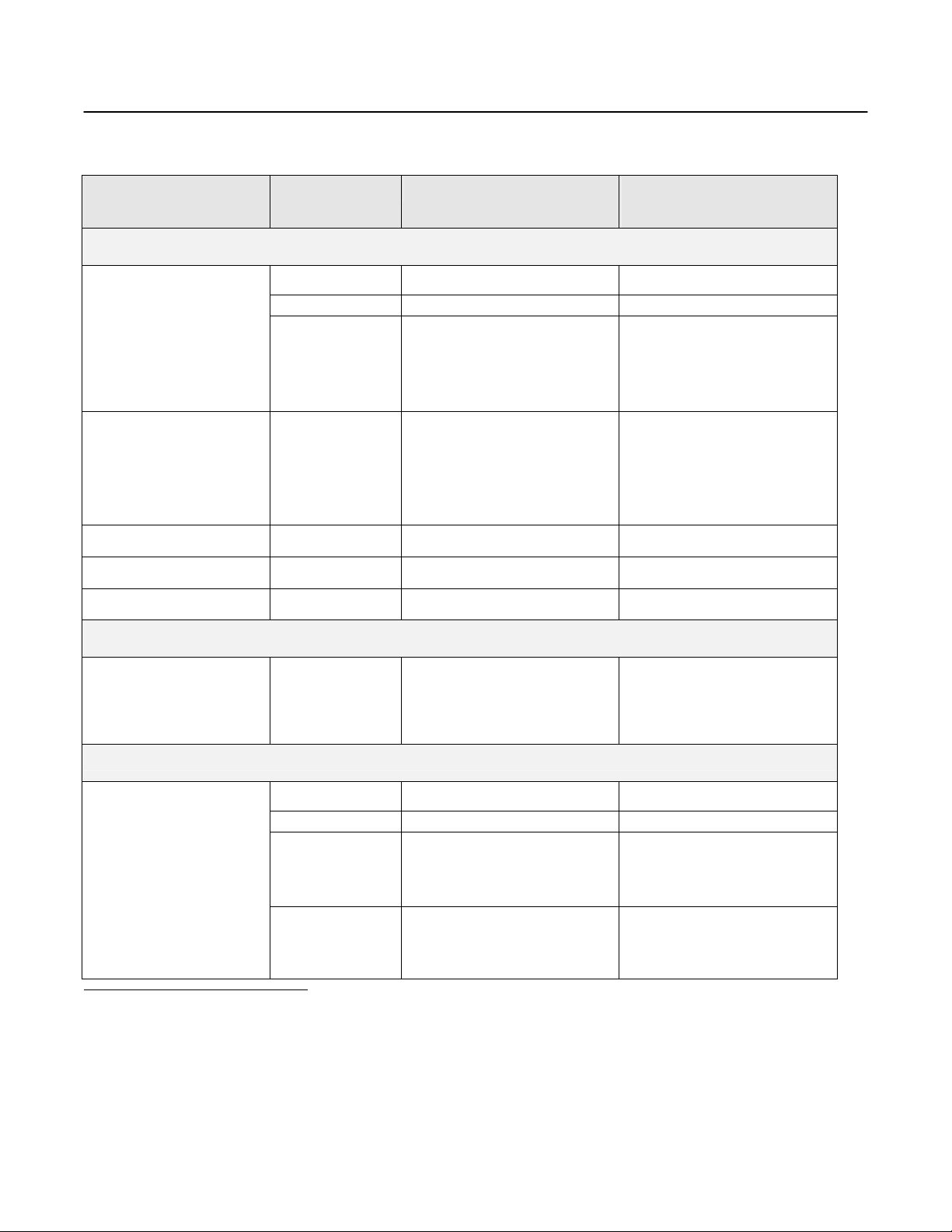
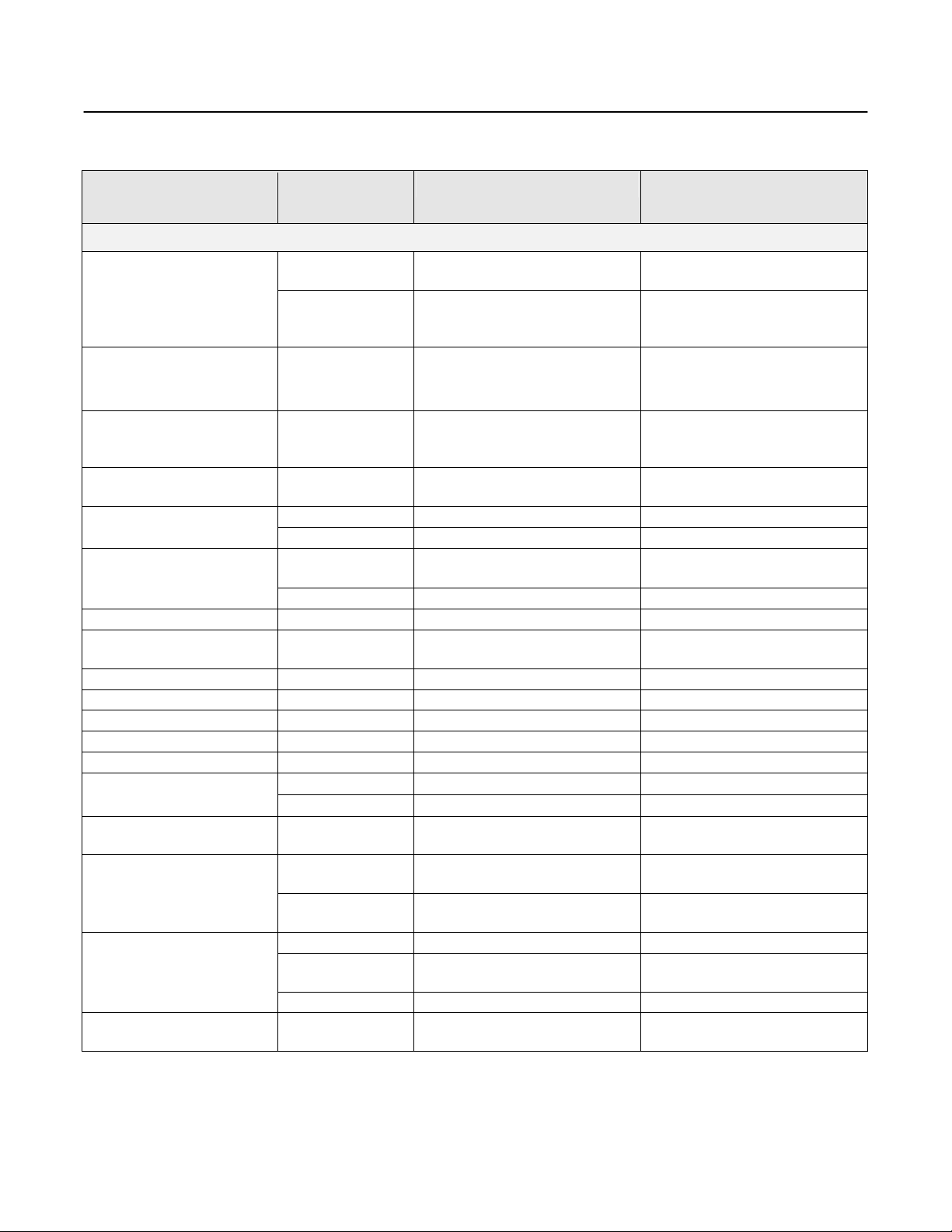
GPD506/P5 to P7 Specification Differences
GPD506/P5 to P7
Feature
Item Yaskawa GPD506/P5 Yaskawa P7
or Function
Performance Features
HP Range
Note: The voltage rating in
the “Item” column is
generalized. Refer to the
Service Conditions section
for rated input voltage
requirements.
Overload Rating
% for Minutes
PWM Carrier Frequency
Max. Output Frequency
Speed Range
Protective Features
240V 0.75 to 125HP (VT) 5 to 150HP (ND2)
480V 0.75 to 500HP (VT) 5 to 500HP (ND2)
600V 2 to 200HP (VT)
150% for 1 min (CT)
200% peak
120% for 1 min (VT)
180% peak
Range See Carrier Frequency Table See Carrier Frequency Table
Hz 400Hz 0 To 120Hz
V/f 40:1 40:1
Available w/GPD506/P5
Not Available in P7
110% for 1 min (ND2)
150% peak
Heat Sink Temperature Fault
Fault Action Coast, Ramp, Continue
Design Features
Keypad Design
Qty of keys 7 11
Copy Function No
--Coast, Ramp, Continue or
Continue with reduced speed
--OH Pre-alarm level setting
Language 1 7 (w/LCD)
Yes
Display
LCD display, alpha numeric, 16
char x 2 lines
LCD display, alpha numeric, 16
char x 5 lines, backlit
Page 9 of 48
Page 10
Product Transition Guide
GPD506/P5 to P7
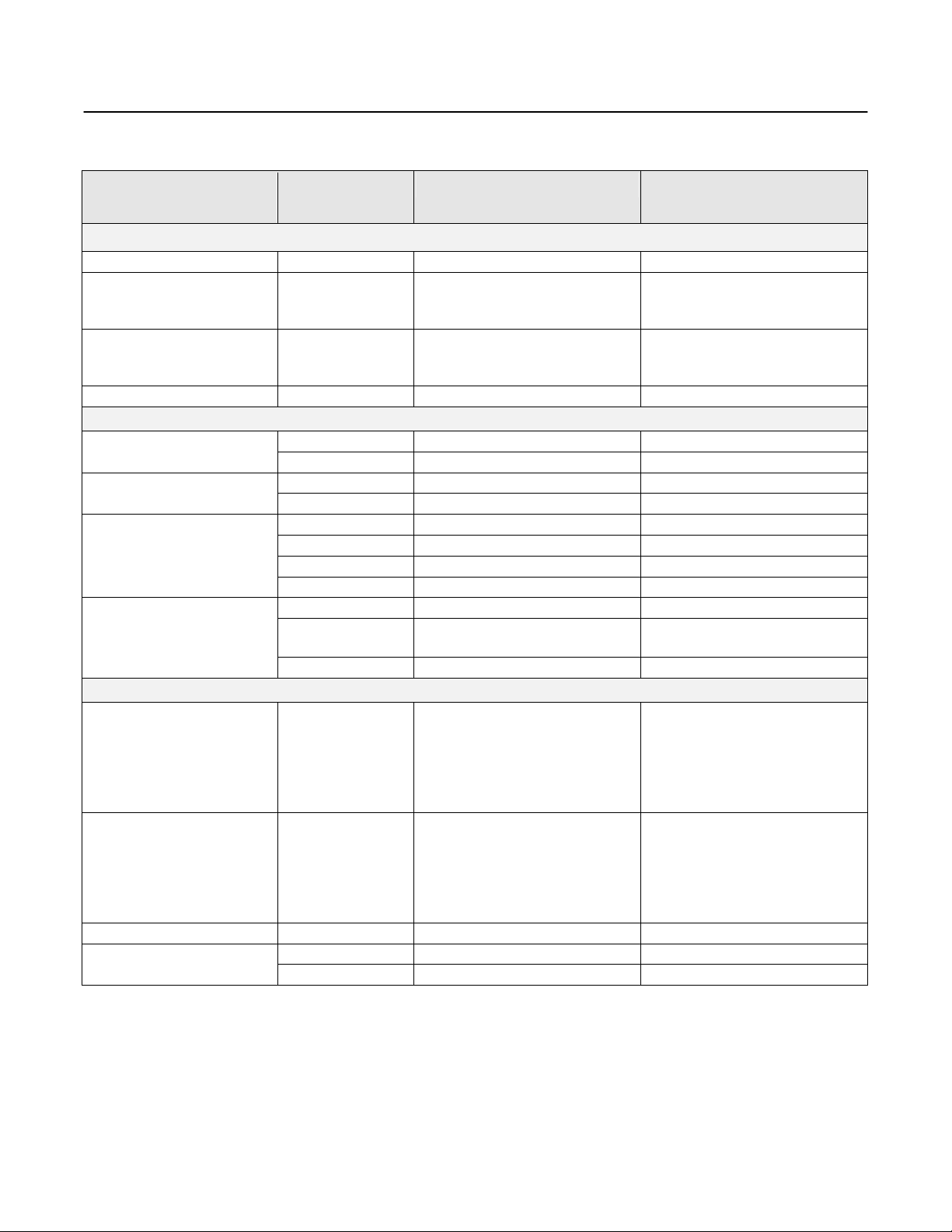
GPD506/P5 to P7 Specification Differences (continued)
Feature
or Function
Item Yaskawa GPD506/P5 Yaskawa P7
Design Features (continued)
Network Communications
Diagnostics
Quick Disconnect I/O
Terminals
Auto-Tuning
Synchronized Start
PI / PID Control
Sleep Function In Open Loop Mode No Yes
Automatic Restart Time Between
V/Hz Patterns Qty. 1 Preset, 1 Custom 15 Preset, 2 Custom
Skip Frequencies Qty. 2 3
Custom Drive Software Embedded No Flash memory
Parameter Upload/Download PC Software InverterWin Drive Wizard Software
Accel/Decel Time Sec. 0.0 - 3600.0 sec 0.1 - 6000.0 sec.
DC Injection Function
Braking Function
Cooling Fan
Timer Function
Standard Modbus RTU via RS232
RS232 to RS485, DeviceNet,
Optional
Fault Storage Last 4 Faults
Type No
Rotating/Stationary No
Bi/Uni-Directional Uni-Directional Bi-Directional Speed Search
Method Current Current/Speed
Analog Input Signal
Filter
Two Feedback No Yes
Attempts
Analog Input Filter No Yes Closed Loop PID Control
Two Feedback No Yes
At Start/At Stop At Start/At Stop
DB Transistor
Special No
On/Off Control Power-up based Run Based
Service Disassembly required
Operating Hours Drive power-up hours logged Logged
On/Off Delay On/Off Delay (0-25.5 sec)
Lonworks, ApogeeFLN,
MetasysN2
No Yes
Not Adjustable 0.0 – 600.0 sec (selectable)
Built-in to 10HP (VT-230V)
Built-in to 25HP (VT-460V)
Modbus RTU via built in
RS485/422
DeviceNet, Profibus-DP,
Lonworks,
Ethernet
Last 10 Faults with Elapsed Time,
Most Recent Fault with all
Operating Conditions
Yes (Phoenix)
With split front cover for easy
wiring
Primary
resistance auto-tuning
At Start/At Stop (adjustable)
+HSB during stop
Built-in to 25HP
High Slip Braking all models
(Faster stopping without options)
Modular/pluggable fan select
models
On Delay at start (0-600 sec)
On/Off Delay Timer ( 0-3000sec)
Page 10 of 48
Page 11
Product Transition Guide
GPD506/P5 to P7
GPD506/P5 to P7 Specification Differences (continued)
Feature
or Function
Item Yaskawa GPD506/P5 Yaskawa P7
Design Features (continued)
Common DC Bus Capable - No Yes
DC Link or AC Choke
Harmonic Counter Measures
Unique Feature/Function - - HSB – High Slip Braking
-
-
230V: 30HP to 125HP (VT)
460V: 30 to 250HP (VT)
12 Pulse: 230V: 30HP and Above
460V: 30HP to 250HP
Inputs and Outputs
Total Qty. 6 7 (optically isolated) Digital Input Terminal
NPN/PNP NPN Switchable NPN/PNP
Total Qty 2 3 Digital Output Terminal
Relay Output 1 x Form C, 1 x Form A, 2 x Form A, 1 x Form C
Analog Input
Analog Output
Qty. 2 2
Level Input 0-10V or 4-20mA 0-10 or 4-20mA
Scan Rate 5 msec 5 msec
Loss Detection Ramp or Continue Ramp, Coast or Continue
Qty. 1 2
Output Level 0-10V
Resolution 9 bit 10 bit plus sign
Service Conditions
Rated Input
-
Ambient Temperature
ºC
Storage Temperature ºC -10ºC ~ +60ºC -20ºC ~ +60ºC
NEMA 4X Optional N/A Enclosure Types
NEMA 3/3R Optional N/A
3-phase, 200-230Vac
3-phase, 380-460Vac
Tolerance +10 to –15%
3-phase,500-600Vac
Tolerance +10 to –10%
Frequency: 50/60 Hz +/- 5%
(IP21/NEMA1)
-10ºC ~ +40ºC
(IP00/Protected Chassis)
-10ºC ~ +45ºC
DC Link (Standard)
240V: 30HP to 150 HP
480V: 40 HP to 500 HP
12 Pulse:
240V: 30HP to 150HP
480V: 40HP to 500HP
0-10V or 4-20ma
With independent level selections
3-phase, 200-240Vac
3-phase, 380-480Vac
Tolerance +10 to –15%
Frequency: 50/60 Hz +/- 5%
Note: P7 Models 2037-2110 rated
for 200-230Vac.
-10ºC ~ +40ºC (IP21/NEMA1)
-10ºC ~ +45ºC
(IP00/Protected Chassis)
(Automatic OL protection curve
based on ambient temperature
setting of L8-12)
Page 11 of 48
Page 12
Product Transition Guide
A
GPD506/P5 to P7
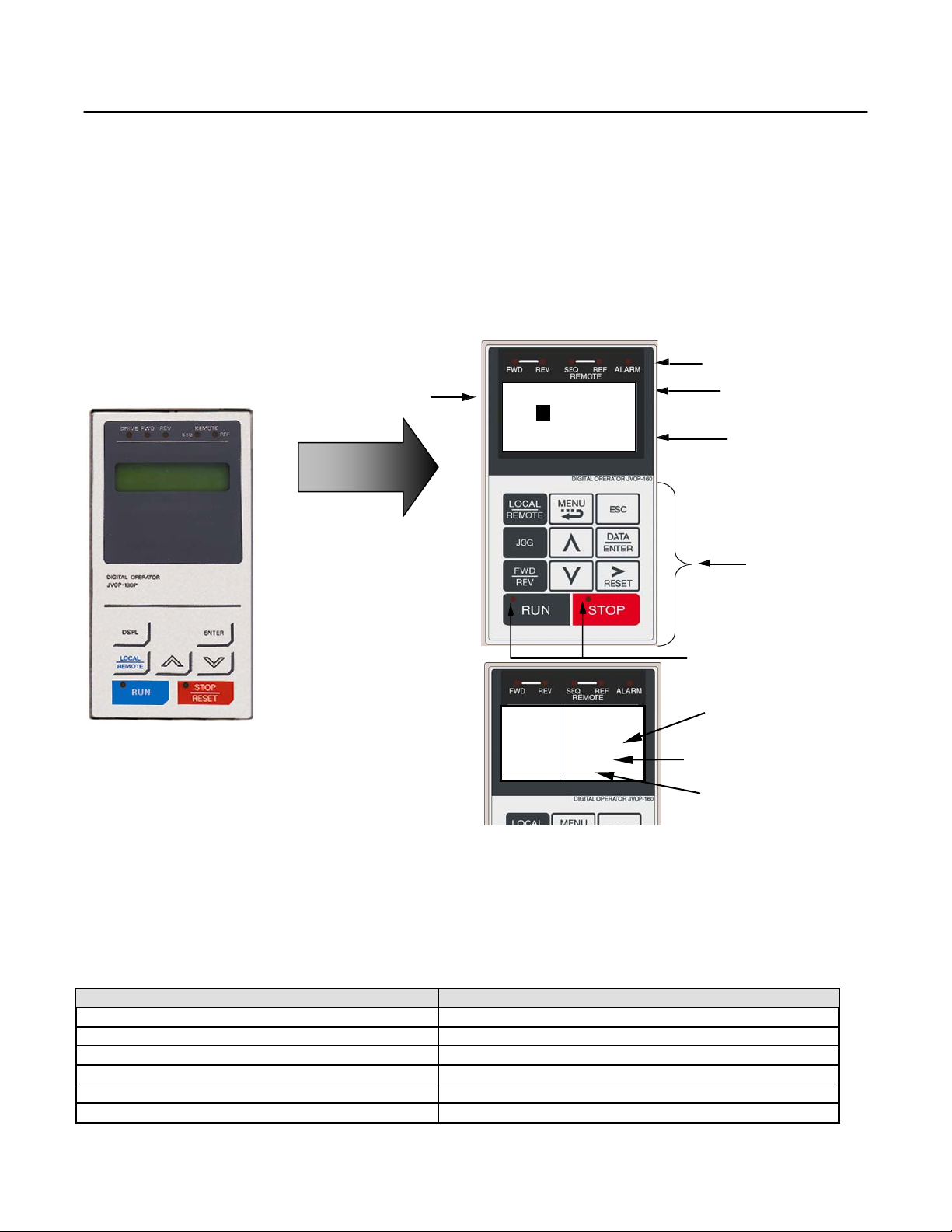
Digital Operator Comparison
• Enhanced LCD operator with built-in copy function and parameter verify for P7
• Optional LED operator available for P7
• LCD contrast adjustment
• Simplified parameter grouping for easier navigation and set-up
GPD506/P5 Operator New P7 Operator
LCD DISPLAY
Frequency Ref
-
=
Menu Display
-DRIVE- Rdy
Frequency Ref
U1-01= 60.00Hz
- - - - - - - - - - - - - - - - - - - - - - - - - - - - -
U1-02= 60.00Hz
U1-03= 10.05A
-QUICK-
Accel Time 1
------------------------------
21.0secs
C1-01=
(0.0~6000.0)
“30.0 sec”
-Rdy-
• P7 copy keypad is capable of uploading all of the parameter settings from the P7 drive memory.
o Upload of GPD506/P5 parameters to P7 not possible at this time
o P7 Drives must have the same software version, model, and control mode to copy parameters.
• A Quick Start menu is added to aid in simple start-ups.
• The Quick Start menu consists of 64 parameters. The Advanced menu is the other menu choice.
Simplified Menu Structure in P7:
GPD506/P5 P7
-- Operation “DRIVE”
Quick Start -- 16 Parameters Quick Setting “QUICK”
Programming (All Parameters) Programming “ADV”
-- Modified Constants “VERIFY”
-- Auto-Tuning “A.TUNE”
--
Drive Mode Indicators
Dr ive ca n o pe rate when a driv e co mman d is inpu t
Displays monitor data, parameter data and settings
Read y Display
Data Display
1 line x 13 characters
3 li nes x 1 6 ch arac ter s
RUN & STOP Indicators
Present Setting
(user adjusts)
llowed Setting Range
Factory Default
Keys
Page 12 of 48
Page 13
GPD506/P5 to P7 Terminal Comparison
The factory default is 2-wire control as shown.
Type
Digital Input Signals
GPD506/P5 Terminal
GPD506/P5
Terminal
S1
S2
S3
S4
S5
S6
SC
Default Function & Description P7
Forward run/stop, Forward run
when closed, and stop when
open.
Photo-coupler insulation
Input: +24VDC 8mA
Reverse run/stop, Reverse run
when closed, Stop when open.
Multi-function contact
input (n036)
Photo-coupler insulation
Input: +24VDC 8mA
External fault input, Fault when
closed, normal state when open.
Multi-function contact input
(n037)
Photo-coupler insulation
Input: +24VDC 8mA
Fault reset input,
Reset when closed.
Multi-function contact input
(n038)
Photo-coupler insulation
Input: +24VDC 8mA
Multi-step speed reference 1,
Enabled when closed.
Multi-function contact input
(n039)
Photo-coupler insulation
Input: +24VDC 8mA
Multi-step speed reference 2,
Enabled when closed.
Multi-function contact input
(n040)
Photo-coupler insulation
Input: +24VDC 8mA
– –
Sequence input common
terminal
–
–
Terminal
S1
S2
S3
S4
S5
S6
S7
SN
SC
SP
(Designations similar to GPD506/P5)
Default Function P7 Description
Forward run/stop command –
Reverse run/stop command –
External fault input
Fault reset
Multi-step speed reference 1
Multi-step speed reference 2
Jog frequency reference
Digital input common
Factory connected to SP
Factory connected to SC
Product Transition Guide
GPD506/P5 to P7
P7 Terminal
Multi-function digital inputs.
Functions set by:
H1-01 to H1-05.
24 VDC, 8mA
Photo coupler isolation
Factory connected for internal
supply sinking mode.
Refer to P7 User Manual for
other methods.
Page 13 of 48
Page 14
Product Transition Guide
g
GPD506/P5 to P7
Type
Analog Input Signals
Digital Output Signals
Analog Output
GPD506/P5 Terminal
GPD506/P5
Terminal
FS
FV
FI
FC
E(G)
M1 M1
M2
MA MA
MB MB
MC
nals
AM
Si
Default Function & Description P7
+15V Power supply output for
analog command
(Allowable current, 20mA max.)
Frequency reference input
(voltage) 0 to +10V/100%,
n043 = “FV=MSTR”:
FV enabled
n043 = “FI=MSTR”:
FI enabled
0 to +10V (20kW)
Frequency reference input
(current) 4 to 20mA/100%
n043 = “FV=MSTR”:
FV enabled
n043 = “FI=MSTR”:
FI enabled
4 to 20mA (250W)
Common terminal 0V
Connection to shield sheath of
signal lead
During running (N.O. contact)
Closed when running.
Multi-function contact output
(n042)
Dry contact capacity:
250VAC 1A or less
30VDC 1A or less
–
–
–
Fault contact output
(N.O./N.C. contact)
Fault when closed between
terminals MA and MC
Fault when open between
terminals MB and MC
Multi-function contact output
(n041)
Dry contact capacity:
250VAC 1A or less
30VDC 1A or less
Frequency meter output
0 to +10V/100% frequency
Multi-function analog monitor 1
(n052)
0 to +10V
2mA or less
–
Terminal
+V
A1
A2
AC
E(G)
M2
M3
M4
MC
FM
Page 14 of 48
(Designations similar to GPD506/P5)
Default Function P7 Description
+15Vdc power output
Analog input or speed
command
Analog input or speed
command
Analog common –
Shield wire, optional ground
line connection point
During run
(N.O. contact)
Remote/Auto Operation
(N.O. contact)
Same function as
GPD506/P5. Nonprogrammable
Output frequency
P7 Terminal
+15Vdc
(Max. current: 20mA)
0 to +10Vdc=100%
(20k ohm)
4 to 20mA=100%/(250 ohms)
0 to +10Vdc=100%/(20k ohm)
Function set by H3-09.
–
Form A Dry contacts capacity:
1 A max. at 250Vac
1 A max. at 30Vdc
Multi-function digital output.
Function set by H2-01.
Form A Dry contacts capacity:
1 A max. at 250Vac
1 A max. at 30Vdc
Multi-function digital output.
Function set by H2-02.
Form C Dry contacts
capacity:
1 A max. at 250Vac
1 A max. at 30Vdc
0 to +10Vdc
10V=100% Output frequency
(Max current 2mA).
Function set by H4-01.
Page 15
Product Transition Guide
Terminal Comparison
Type
GPD506/P5 Terminal
GPD506/P5
Terminal
AC
RS-485/422
Default Function & Description P7
–
Frequency meter output “AM”
Common
–
–
–
–
–
P7 Terminal
(Designations similar to GPD506/P5)
Terminal
–
AM
AC
–
–
–
–
–
R+
RS+
S-
IG
Default Function P7 Description
0 to +10Vdc or
10V=100% Drive output
Output current
Analog common –
Modbus communication
Differential input,
PHC isolation
Modbus communication
Differential output,
PHC isolation
Signal common –
current (Max current 2mA)
Drive's rated output current /
Function set by H4-04.
–
Page 15 of 48
Page 16

Product Transition Guide
Ω
Ω
Ω
A
(
)
(
)
)
(
)
(
) (0V)
(
A
y
A
Terminal Comparison
Multi-Function
Inputs
nalog Inputs
Input FI selectable
4~20mA
or
0~10V
Serial Port
0~ + 10V
4~20mA
L1
L2
GPD506/P5
L3
L11
L21
L31
S1 - Fixed
S2
S3
S4
S5
S6
SC (Com
G
FS
+15V
Ω
FV
20k
Ω
250
RS-232
10-pin
FI
FC
Gate Drive
PWM
8 bit
/D
10 bit
Digital
Operator
0~10VAM
Com) AC
G
MA
MB
MC
M1
M2
Shorting Bar Standard:
Ω
2k
PP
CIMR-P7U23P7 to 2018
CIMR-P7U43P7 to 4018
R/L1
S/L2
T/L3
S1
S2
S3 (H1-01)
S4 (H1-02)
S5 (H1-03)
S6 (H1-04)
S7 (H1-05)
SN
SC
SP
E(G)
+V +15VDC, 20mA
A1 0-10VDC, 20 K
A2 (H3-08)
4-20mA, 250 K
[0 to +10VDC, 20K ]
AC
R+
R-
S+
S-
T1
T2
IM
T3
Foward Run/Stop
Reverse Run/Stop
External Fault
Multi-Function
nalog Outputs
Fault Reset
Multi-step Speed Setting 1
Multi-step Speed Setting 2
Jog Frequency Reference
Multi-Function
Outputs
Rela
Power Supply
L1
L2
L3
PE
2k
Modbus
RS-485/422
3-Phase
50/60Hz
MCCB
Multi-function
Contact Inputs
(Factory Default)
External
Frequency
Reference
4 to 20mA
UX
Terminating
Resistance
110
1+2+
P7
E7
Digital Outputs
250VAC/30VDC, 1A
S1-1
DC Reactor Standard:
CIMR-P7U2022 to 2110
CIMR-P7U4030 to 4300
+
3
-
Multi-function
(H2-01)
(H2-02)
(H4-01) FM
(H4-04) AM
U/T1
V/T2
W/T3
MA
MB
MC
M1
M2
M3
M4
E(G)
AC
Motor
M
Fault Contact
Digital Output
250VAC/30VDC, 1A
Digital Output 1
(Default: During RUN)
Digital Output 2
(Default: Remote/
Auto Operation)
Multi-function
Analog Outputs
0 to +10VDC, 2mA
+
+
-
-
IG
Page 16 of 48
Page 17

Product Transition Guide
GPD506/P5 to P7
Network Communications
GPD506/P5 P7
Not Available DeviceNet
Not Available EtherNet
Not Available Profi-Bus
RS-232 PCB Port (2CN) RS-232 via Digital Operator Port
SI-K2/P RS-485 Modbus Communication Card Standard Built-in RS-485
Lon Works Lon Works2
Johnson Controls MetaSys N2 Not Applicable
Software Upload/Download Tool
2
Available as an option based on market demands
FLN Network for System 600/ Apogee Not Applicable
InverterWin DriveWizard
Network Communications Option Availability
Note: Communication option release schedule is subject to change. Yaskawa Marketing
Communications will provide official notice of product availability.
Ethernet
Ethernet
MODBUS TCP/IP
MODBUS TCP/IP
Present
Present
Ready now, available at P7 launch
Ready now, available at P7 launch
P7 (CM058) available at P7 launch
P7 (CM058) available at P7 launch
Modbus - Plus, testing, available at P7 launch
Modbus - Plus, testing, available at P7 launch
Available at P7 launch
Available at P7 launch
Ready now, available at P7 launch
Ready now, available at P7 launch
Page 17 of 48
Page 18

Product Transition Guide
GPD506/P5 to P7
Details on New P7 Features & Functions
Note: This section details only a few of the new P7 features.
o New Auto Tuning
The P7 comes with a Motor Auto-tuning function to help to optimize the drive performance.
Feature GPD506/P5 P7
R1 Primary Resistance Tuning No Yes
R1 Primary Resistance Auto-tuning method is for motor terminal resistance. This method involves no motor shaft
rotation.
o New High Slip Braking
The P7 incorporates a
new braking function called High
Slip Braking (HSB).
By using a method that utilizes
increased rotor slip, the drive
will gain the capability of
stopping up to 50% faster than
without a braking resistor.
All of this without the need of any
external equipment or resistors!
Greater than 150% brake
torque is possible.
Motor speed
Motor voltag e
DC-Bus voltage
Motor speed
Motor voltage
DC-Bus voltage
Page 18 of 48
Page 19

Product Transition Guide
Appendix 1
Ratings and Heat Loss Comparison
Page 19 of 48
Page 20

Product Transition Guide
GPD506/P5 to P7
Page Intentionally Left Blank
Page 20 of 48
Page 21

Product Transition Guide
Appendix 1 –Ratings and Heat Loss Comparison
NEC HP Ratings for 240V Normal Duty Models
GPD506/P5 230V Models P7 240V Models
Variable Torque (n116=1) Normal Duty (C6-01=2)
NEC
HP
230V
Amps
NEC
GPD506/P5
Model
CIMR-P5U
Output
Amps
Fc
kHz
Overload%
VT
1 minute
P7
Model
CIMR-P7U
Output
Amps
Fc
kHz
Overload %
ND
1 minute
5 15.2
7.5 22
10 28
15 42
20 54
25 68
30 80
40 104
50 130
60 154
75 192
100 248
125 312
150 360
150 360
*Note: Optional NEMA1 kit required for NEMA1 rating. Input voltage rating is 230V on these
models.
23P71 17.5 15 120
25P51 27 10 120
27P51 36 10 120
20111 54 10 120
20151 68 10 120
20181 80 15 120
20221 104 15 120
20301 130 10 120
20371* 160 10 120
20451* 192 10 120
20551* 248 8 120
20751* 312 8 120
- - - -
- - - -
23P71 16.8 10 107
25P51 23 15 120
27P51 31 15 102
20111 46.2 8 117
20151 59.4 10 117
20181 74.8 10 114
20221 88 10 116
20301 115 10 120
20371* 162 5 107
20451* 192 5 113
20551* 215 8 120
20751* 312 2 109
20901* 360 2 115
21100* 415 2 120
Page 21 of 48
Page 22

Product Transition Guide
Appendix 1 –Ratings and Heat Loss Comparison
NEC HP Ratings for 480V Normal Duty Models
GPD506/P5 460V Models P7 480V Models
Variable Torque (n116=1) Normal Duty (C6-02=2)
NEC
HP
Amps
460V
5.0 7.6
7.5 11
10 14
15 21
20 27
25 34
30 40
40 52
50 65
60 77
75 96
100 124
125 156
150 180
200 240
250 302
300 361
350 414
400 477
450 506
500 590
550 660
*Note: Optional NEMA1 kit required on these models for NEMA1 rating.
NEC
GPD506/P5
Model
CIMR-P5U
43P71 8.5 10 120 43P71 7.6 15 120
44P01 11.7 10 120 45P51 12.5 15 120
45P51 14.8 10 120 47P51 17 15 120
47P51 21 10 120
40111 28.6 10 120
40151 34 10 120 40151 34 10 109
40181 41 10 120 40181 40 10 117
40221 52 8 120
40301 65 5 120
40371 80 5 120 40371 77 8 117
40451 96 5 120 40451 96 8 114
40551 128 5 120 40551 125 5 108
40751* 180 5 120 40751* 156 5 115
41101* 240 5 120 41101* 240 5 108
41601* 302 5 120 41601* 304 5 120
41850 380 2.5 120
42200 506 2.5 120
43000 675 2.5 120
Output
Amps
Fc kHz
OL %
VT
1 minute
P7
Model
CIMR-P7U
44P01 8.7 15 120
40111 27 8 107
40301 67.2 8 107
40901* 180 8 120
41321* 260 5 120
41850 414 2 107
42200 506 2 118
43000 675 2 120
Output
Amps
Fc
kHz
Overload %
ND
1 minute
Page 22 of 48
Page 23

Product Transition Guide
Appendix 1 –Ratings and Heat Loss Comparison
Heat Loss Data
Note: Ampacity ratings vary between GPD506/P5 and P7 models.
Refer to NEC Ratings tables in Appendix 1 for the appropriate GPD506/P5 to P7 cross-reference.
GPD506/
P5 Model
23P7
25P5
27P5
2011
2015
2018
2022
2030
2037
2045
2055
2075
2090
2110
40P4
40P7
43P7
44P0
45P5
47P5
4011
4015
4018
4022
4030
4037
4045
4055
4075
4090
4110
4132
4160
4185
4220
4300
GPD506/P5 (W)
Internal Heatsink Total
80 135 215
90 210 300
110 235 345
160 425 585
200 525 725
230 655 885
280 830 1110
500 1050 1550
700 1250 1950
750 1550 2300
1000 1950 2950
1300 2300 3600
-
-
50 10 60
65 20 85
65 80 145
80 120 200
85 135 220
120 240 360
150 305 455
180 390 570
195 465 660
260 620 880
315 705 1020
370 875 1245
415 970 1385
710 1110 1820
890 1430 2320
-
1160 1870 3030
-
1520 2670 4190
1510 3400 4910
2110 4740 6850
2910 6820 9730
P7
Model
23P7
25P5
27P5
2011
2015
2018
2022
2030
2037
2045
2055
2075
2090
2110
40P4
40P7
43P7
44P0
45P5
47P5
4011
4015
4018
4022
4030
4037
4045
4055
4075
4090
4110
4132
4160
4185
4220
4300
P7 (W)
Internal Heatsink Total
74 110 184
84 164 248
113 219 332
168 357 525
182 416 598
208 472 680
252 583 835
333 883 1216
421 1010 1431
499 1228 1727
619 1588 2207
844 1956 2800
964 2194 3158
1234 2733 3967
39 14 53
41 17 58
68 80 148
70 90 160
81 127 208
114 193 307
158 232 390
169 296 465
201 389 590
233 420 653
297 691 988
332 801 1133
386 901 1287
478 1204 1682
562 1285 1847
673 1614 2287
847 1889 2736
1005 2388 3393
1144 2791 3935
1328 2636 3964
1712 3797 5509
2482 5838 8320
Page 23 of 48
Page 24

Product Transition Guide
Appendix 1 – Ratings and Heat Loss Comparison
Page Intentionally Left Blank
Page 24 of 48
Page 25

Product Transition Guide
Appendix 1 – Ratings and Heat Loss Comparison
Appendix 2
Mechanical Dimensions
Page 25 of 48
Page 26

Product Transition Guide
GPD506/P5 to P7
Page Intentionally Left Blank
Page 26 of 48
Page 27

Product Transition Guide
Appendix 2 – Mechanical Dimensions
Panel Cut-out for External Heatsink Mounting
Note: Ampacity ratings vary between GPD506/P5 and P7 models.
Refer to NEC Ratings tables in Appendix 1 for the appropriate GPD506/P5 to P7 cross-reference.
GPD506/P5 Panel Cutout for
External Heatsink
Model GPD506/P5
(mm)
W H W H W H W H
23P7
25P5
27P5
2011
2015
2018
2022
2030
2037
2045
2055
2075
2090
2110
43P7
45P5
47P5
4011
4015
4018
4022
4030
4037
4045
4055
4075
4090
4110
4132
4160
4185
4220
4300
138 271 5.43 10.67
180 298 7.09 11.73
180 298 7.09 11.73
200 377 7.87 14.84
200 377 7.87 14.84
308 404 12.13 15.91
308 404 12.13 15.91
403 627 15.87 24.69
403 627 15.87 24.69
445 756 17.52 29.76
445 756 17.52 29.76
555 894 21.85 35.20
-
138 271 5.43 10.67
180 298 7.09 11.73
180 298 7.09 11.73
200 377 7.87 14.84
200 377 7.87 14.84
308 404 12.13 15.91
308 404 12.13 15.91
309 571 12.17 22.48
309 571 12.17 22.48
309 571 12.17 22.48
440 761 17.32 29.96
440 761 17.32 29.96
555 894 21.85 35.20
-
555 894 21.85 35.20
875 1324 34.45 52.13
875 1324 34.45 52.13
873 1475 34.37 58.07
GPD506/P5 (in) Model P7 (mm) P7 (in)
-
-
P7 Panel Cutout for
External Heatsink
23P7
25P5
27P5
2011
2015
2018
2022
2030
2037
2045
2055
2075
2090
2110
43P7
45P5
47P5
4011
4015
4018
4022
4030
4037
4045
4055
4075
4090
4110
4132
4160
4185
4220
4300
138 271 5.43 10.67
138 271 5.43 10.67
197 298 7.76 11.73
197 298 7.76 11.73
233 353 9.17 13.90
233 353 9.17 13.90
244 369 9.61 14.53
269 419 10.59 16.50
359 545 14.13 21.46
359 545 14.13 21.46
434 673 17.09 26.50
434 673 17.09 26.50
484 782 19.06 30.79
555 817 21.85 32.17
138 271 5.43 10.67
138 271 5.43 10.67
197 298 7.76 11.73
197 298 7.76 11.73
233 353 9.17 13.90
233 353 9.17 13.90
269 419 10.59 16.50
269 419 10.59 16.50
309 519 12.17 20.43
309 519 12.17 20.43
309 519 12.17 20.43
434 673 17.09 26.50
434 673 17.09 26.50
484 782 19.06 30.79
484 782 19.06 30.79
555 817 21.85 32.17
-
Page 27 of 48
Page 28

Product Transition Guide
Appendix 2 – Mechanical Dimensions
Mounting Hole Data
Note: Ampacity ratings vary between GPD506/P5 and P7 models.
Refer to NEC Ratings tables in Appendix 1 for the appropriate GPD506/P5 to P7 cross-reference.
GPD506/P5 P7
Model Enclosure
23P71
25P51
27P51
20111
20151
20181
20221
20301
20371
20451
20551
20751
20900
21100
43P71
45P51
47P51
40111
40151
40181
40221
40301
40371
40451
40551
40751
40901
41101
41321
41601
41850
42200
43000
NEMA1 10.47 4.96 266 126
NEMA1 11.22 7.32 285 186
NEMA1 11.22 7.32 285 186
NEMA1 14.37 9.29 365 236
NEMA1 14.37 9.29 365 236
NEMA1 17.13 10.83 435 275
NEMA1 17.13 10.83 435 275
NEMA1 25.59 12.6 650 320
NEMA1 25.59 12.6 650 320
NEMA1 30.51 14.57 775 370
NEMA1 30.51 14.57 775 370
NEMA1 35.24 17.52 895 445
Open (IP00) -
Open (IP00) -
NEMA1 10.47 4.96 266 126
NEMA1 10.22 7.32 260 186
NEMA1 10.22 7.32 260 186
NEMA1 14.37 9.29 365 236
NEMA1 14.37 9.29 365 236
NEMA1 17.13 10.83 435 275
NEMA1 17.13 10.83 435 275
NEMA1 24.02 10.83 610 275
NEMA1 24.02 10.83 610 275
NEMA1 24.02 10.83 610 275
NEMA1 31.3 13.78 795 350
NEMA1 31.3 13.78 795 350
NEMA1 -
NEMA1 35.24 17.52 895 445
NEMA1 35.24 17.52 895 445
NEMA1 35.24 17.52 895 445
Open (IP00) 55.12 29.53 1400 750
Open (IP00) 55.12 29.53 1400 750
Open (IP00) 61.02 29.53 1550 750
(in) (mm) (in) (mm)
H1 W1 H1 W1
Model Enclosure
23P71
25P51
27P51
20111
20151
20181
20221
20301
20371
20451
20551
20751
20901
21100
43P71
45P51
47P51
40111
40151
40181
40221
40301
40371
40451
40551
40751
40901
41101
41321
41601
41850 (1)
42200 (1)
43000 (1)
Note (1): 3 mounting holes top and 3 mounting holes bottom.
Dimension is between each mounting hole.
NEMA1 10.47 4.96 266 126
NEMA1 10.47 4.96 266 126
NEMA1 11.22 7.32 285 186
NEMA1 11.22 7.32 285 186
NEMA1 13.19 8.5 335 216
NEMA1 13.19 8.5 335 216
NEMA1 15.16 7.68 385 195
NEMA1 17.13 8.66 435 220
NEMA1 22.64 9.84 575 250
NEMA1 22.64 9.84 575 250
NEMA1 27.56 12.8 700 325
NEMA1 27.56 12.8 700 325
NEMA1 32.28 14.57 820 370
Open (IP00) 33.56 17.52 852 445
NEMA1 10.47 4.96 266 126
NEMA1 10.47 4.96 266 126
NEMA1 11.22 7.32 285 186
NEMA1 11.22 7.32 285 186
NEMA1 13.19 8.5 335 216
NEMA1 13.19 8.5 335 216
NEMA1 17.13 8.66 435 220
NEMA1 17.13 8.66 435 220
NEMA1 21.06 10.24 535 260
NEMA1 21.06 10.24 535 260
NEMA1 21.06 10.24 535 260
NEMA1 27.56 12.8 700 325
NEMA1 27.56 12.8 700 325
NEMA1 32.28 14.57 820 370
NEMA1 32.28 14.57 820 370
NEMA1 33.66 17.52 855 445
Open (IP00) 50 10.63 1270 270
Open (IP00) 50 10.63 1270 270
Open (IP00) 56.7 14.37 1440 365
H1 W1 H1 W1
Page 28 of 48
Page 29

Product Transition Guide
Appendix 3 – Parameter Cross Reference
The following parameter list shows each GPD506/P5 parameter and
the P7 equivalent. P7 parameters without a GPD506/P5 equivalent
are omitted for brevity. For details on P7 parameters please refer to
the P7 manual. Parameters are listed numerically by GPD506/P5.
Page 29 of 48
Page 30

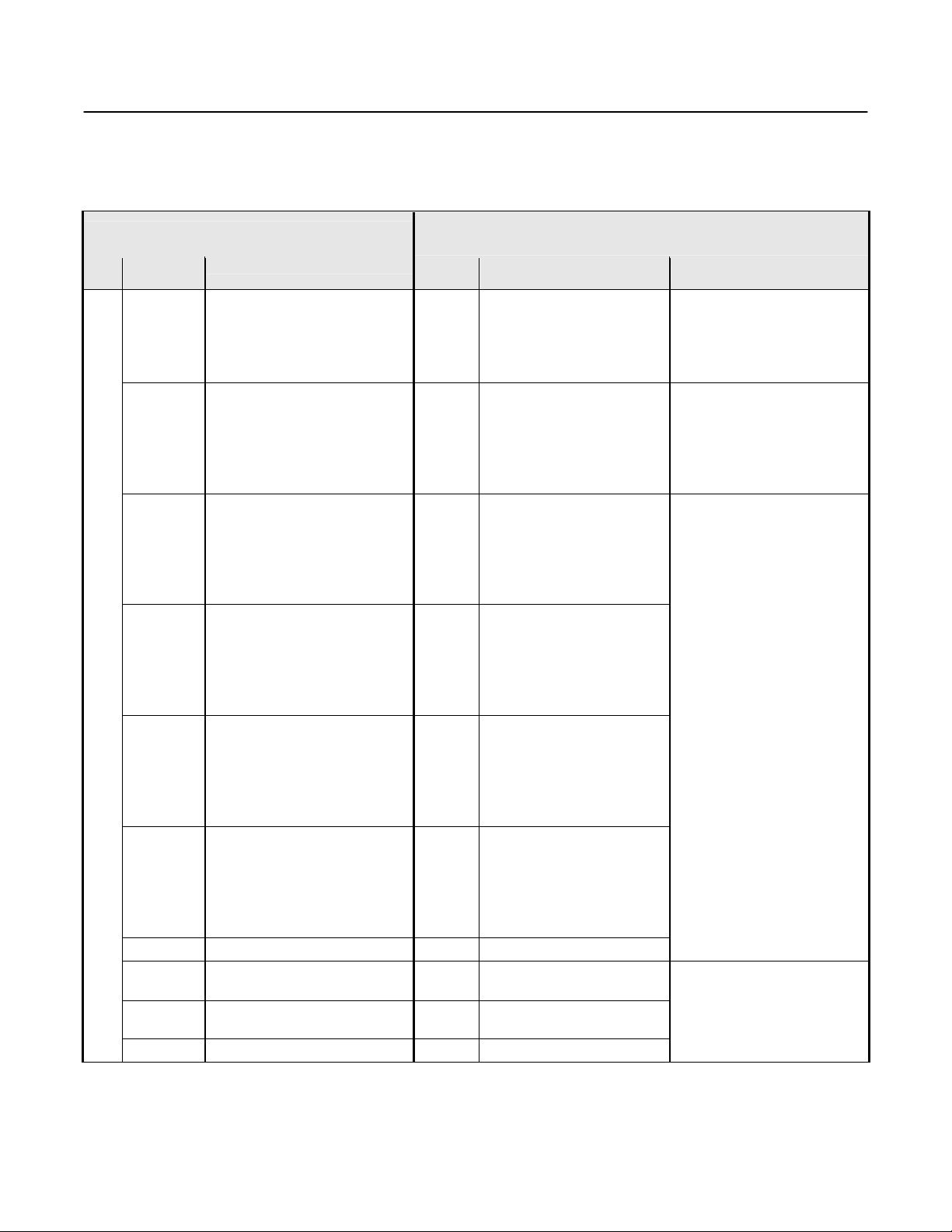
Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Nxxx
001
002
003
004
005
006
007
008
009
Parameter
Description or Selection
Name
Password
Run Signal Selection
Input voltage Set unit:0.1V and set ranges:150.0-733.1V
Stop method selection 0: Deceleration stop
Motor Rotation
Reverse inhibit 0: Reverse enabled
Remote/Local key 0: The function of the Remote/Local key is
Function selection of STOP
key
Frequency Reference
selection
0: Parameter n001 read/write and parameter
n002 ~ n116 read only. (Operator's FREF and
F/R is read/write. Others are read only,
1: The 1st function (n001 ~ n036)are
read/write, others read only
2: The 2nd function (n001 ~ n053) are
read/write, others read only
3: The 1st, 2nd, and 3rd functions
(n001 ~ n116) are read/write
6: 2-wire initialization (Japanese spec.)
8: Initialization (2wire sequence)
9: Initialization (3wire sequence)
Value--Run Command-------Freq Reference
0: Operator---------------------Operator
1: Terminal block ------------Operator
2: Operator-------------------- Terminal block
3: Terminal block -------------Terminal block
4: Operator --------------------Communication
5: Terminal block -------------Communication
6: Communication-------------Transmission
7: Communication-------------Operator
8: Communication------------ Terminal block
1: Coast to stop
2: Coast to stop 1 with timer
3: Coast to stop 2 with timer
0: Rotation CCW from load side.
1: Rotation CW from load side
1: Reverse disabled
disabled.
1: The function of the Remote/Local key is
enabled.
0: The STOP key is effective when run
command is from the operator.
1: The STOP key is always enabled.
0: Frequency reference setting by the operator,
the 'Enter' input is not required.
1: Frequency reference setting by the operator,
the 'Enter' input is required.
Description or Selection
0: Operation Only
1: User Level (only available if A2
parameters have been set)
2: Advanced Level
0: No Initialize
1110: User Initialize (The user must first
set their own parameter values and then
store them using parameter o2-03.)
2220: 2-Wire Initialization
3330: 3-Wire Initialization
0: Operator - Digital preset speed U1-01 or
d1-01 to d1-17.
1: Terminals - Analog input terminal A1
(or terminal A2 based on parameter
H3 13).
2: Serial Com - Modbus RS-422/485
terminals R+, R-, S+, and S-.
3: Option PCB - Option board connected
on 2CN.
0: Operator - RUN and STOP keys on
Digital Operator.
1:Terminals - Contact closure on terminals
S1 or S2.
2: Serial Com - Modbus RS-422/485
terminals R+, R-, S+, and S-.
3: Option PCB - Option board connected
on 2CN.
Set to the nominal voltage of the incoming
line. Sets the maximum and base voltage
used by preset V/F patterns, adjusts the
levels of drive protective features (i.e.
overvoltage, braking resistor turn-on, stall
prevention, etc.).
0: Ramp to Stop
1: Coast to Stop
2: DC Injection to Stop
3: Coast with Timer
(A new run command is ignored if received
before the timer expires).
Determines the forward rotation of the
motor, and if reverse operation
is disabled.
0: Reverse Enabled
1: Reverse Disabled
2: Exchange Phase - Change direction of
forward motor rotation.
3: ExchgPhs, Rev Dsbl - Change direction
of forward motor
rotation and disable reverse operation.
0: Disabled
1: Enabled
0: Disabled
1: Enabled
0: Disabled - Data/Enter key must be
pressed to enter a frequency reference.
1: Enabled - Data/Enter key is not required.
The frequency reference is adjusted by
the up and down arrow keys on the
Digital Operator without having to press
the data/enter key.
Parameter
Name
Access Level Selection
Initialize Parameters
Frequency Reference
Selection
Run Command Selection
Input Voltage Setting
Stopping Method Selection
Reverse Operation Selection
Local/Remote Key Function
Selection
STOP Key Function
Selection
Frequency Reference Setting
Method Selection
Param.
No.
A1-01
A1-03
b1-01
b1-02
E1-01
b1-03
b1-04
o2-01
o2-02
o2-05
Page 30 of 48
Page 31

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Nxxx
010
011
012
013
014
015
016
017
018
019
020
021
022
Parameter
Description or Selection
Name
V/f pattern selection 1: Fixed V/f pattern
Max. output frequency Set unit: 0.1Hz and set range: 50.0-400.0Hz
Maximum voltage Set unit: 0.1V and set ranges: 0.1-733.1V
Base Frequency Set unit: 0.1Hz and set range: 0.2-400.0Hz
Mid Freq output Set unit: 0.1Hz and set range: 0.1-399.9Hz
Mid Freq. voltage Set unit: 0.1V and set ranges: 0.1-733.1V
Min output frequency Set unit: 0.1Hz and set range: 0.1-10.0Hz
Min output voltage Set unit: 0.1V and set ranges: 0.1-143.7V
Acceleration time 1 Set unit: 0.1sec (1sec in 1000sec or more)
Deceleration time 1 Set unit: 0.1sec (1sec in 1000sec or more)
Acceleration time 2 Set unit: 1sec and set range: 0-255sec
Deceleration time 2 Set unit: 1sec and set range: 0-255sec
S curve selection 0: No S curve
0: Adjustible V/f pattern
(Constant n011-n017 can be set)
Set range: 0 to 3600sec
Set range: 0.to 3600sec
1 : 0.2sec
2 : 0.5sec
3 : 1.0sec
Description or Selection
There are 15 different preset V/F patterns
to select from (E1-03 = 0 to E) with
varying voltage profiles, base levels (base
level = frequency at which maximum
voltage is reached), and maximum
frequencies. There are also settings for
Custom V/F patterns that will use the
settings of parameters E1-04 through E1-
13. E1-03 = F selects a custom V/F pattern
with an upper voltage limit and E1-03 = FF
selects a custom V/F pattern without an
upper voltage limit.
0: 50 Hz
1: 60 Hz
2: 60Hz (50 Hz Base)
3: 72 Hz (60 Hz Base)
4: 50 Hz VT1
5: 50 Hz VT2
6: 60 Hz VT1
7: 60 Hz VT2
8: 50 Hz HST1
9: 50 Hz HST2
A: 60 Hz HST1
B: 60 Hz HST2
C: 90 Hz (60Hz Base)
D: 120 Hz (60Hz Base)
E: 180 Hz (60Hz Base)
F: Custom V/F
FF: Custom w/o limit
0.0 to 120.0
0 to 255.0 (240V), 0 to 510.0(480V) Maximum Output Voltage
Parameter
V/F Pattern Selection
Maximum Output Frequency
0.0 to 200.0
0.0 to 200.0
0 to 255.0 (240V, ) 0 to 510.0 (480V) Mid Output Voltage A
Base Frequency
Mid Output Frequency A
0.0 to 200.0
0 to 255.0 (240V), 0 to 510.0 (480V) Minimum Output Voltage
Minimum Output Frequency
Acceleration Time 1
0.0 to 6000.0
Deceleration Time 1
Acceleration Time 2
Deceleration Time 2
0.00 to 2.50
S-Curve Characteristic at
Accel Start
S-Curve Characteristic at
Accel End
Name
Param.
No.
E1-03
E1-04
E1-05
E1-06
E1-07
E1-08
E1-09
E1-10
C1-01
C1-02
C1-03
C1-04
C2-01
C2-02
Page 31 of 48
Page 32

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Nxxx
023
024
025
026
027
030
031
032
033
034
Parameter
Description or Selection
Name
Digital operator
display mode
Freq Ref 1 Set unit: Set range by constant n023 setting:
Freq Ref 2 Set unit: Set range by constant n023 setting:
Freq Ref 3 Set unit: Set range by constant n023 setting:
Freq Ref 4 Set unit: Set range by constant n023 setting:
Jog Ref Set unit: Set range by constant n023 setting:
Output freq upper
limit
Output freq lower
limit
Rated motor current
Motor protection selection
(OL1)
Set range: 0-4999
0: Hz with 0.1Hz
1: % speed with 0.1%
2-39: RPM. RPM =120 * freq ref(Hz) /n023
(N023 is a motor pole)
40-4999:
n23 fourth digit = decimal point
n23 1,2,3 digits = 100% freq set value
(100% frequency = xxx*10 in case of 4xxx)
0-9999
0-9999
0-9999
0-9999
0-9999
Set unit: 1% and set range:0-109%
Set unit: 1% and set range:0-100%
Set unit: 0.1A (In 1000A or more, every 1A)
Set range:10-200% of drive rated current
0: Disabled.
1: Standard motor (eight minutes)
2: Standard motor (five minutes)
3: Inverter rated motor (eight minutes)
4: Inverter rated motor (five minutes)
Description or Selection
Sets the units of the Freque ncy Refe rences (d 1- 01 to
d1-17), the F requency Reference M o nitors (U1-01,
U1-02 , U1 -05 ), and the Modbus communication
frequency reference.
0: H z
1: % (100% = E1-04)
2 to 39: R PM (E nter the nu mb e r of mot o rpole s ).
40 to 39999: User display.
Example 1: o1-03 = 12 000, will result in fre qu ency
refere nce fr om 0.0 to 20 0.0 ( 200.0 = Fmax ).
Example 2: o1-03 = 21 234, will result in fre qu ency
refere nce from 0. 00 to 12.34 (1 2.34 = Fmax) .
Setting units are affected by o1-03
Frequency reference when multi-function
input “Multi-step speed reference 1” is ON.
Setting units are affected by o1-03.
Frequency reference when multi-function
input “Multi-step speed reference 2” is ON.
Setting units are affected by o1-03.
Frequency reference when multi-function
input “Multi-step speed reference 1,2” is
ON. Setting units are affected by o1-03.
Frequency reference when:
“Jog frequency reference” is selected via
multi-function input
terminals. “Jog frequency reference” has
priority over “multi-step speed reference 1
to 4”. d1-17 is also the reference for the
JOG key on the Digital Operator, and the
multi-function inputs “forward jog” and
“reverse jog”. Setting units are affected by
o1-03.
Determines maximum frequency reference,
set as a percentage of maximum output
frequency (E1-04). If the frequency
reference is above this value, actual Drive
speed will be limited to this value. This
parameter applies to all frequency
reference sources.
Determines minimum frequency reference,
set as a percentage of maximum output
frequency (E1-04). If frequency reference
is below this value, actual Drive speed will
be set to this value. This parameter applies
to all frequency reference sources.
Set to the motor nameplate full load current
in amperes (A). This value is automatically
set during Auto-Tuning.
Sets the motor thermal overload protection
(OL1) based on the cooling capacity of the
motor.
0: Disabled
1: Standard Fan Cooled
Set the number desired at maximum
output frequ enc y.
4 digit number
Number of digits from the right of the
decimal po int
0.00 to E1-04 Value
0.00 to E1-04 Value
0.00 to E1-04 Value
0.00 to E1-04 Value
0.00 to E1-04 Value
0.0 to 110.0
0.0 to 110.0
Parameter
Name
Digital Operator Display
Selection
Frequency Reference 1
Frequency Reference 2
Frequency Reference 3
Frequency Reference 4
Jog Frequency Reference
Frequency Reference Upper
Limit
Frequency Reference Lower
Limit
Motor Rated Current
Motor Overload Protection
Selection
Param.
No.
o1-03
d1-01
d1-02
d1-03
d1-04
d1-17
d2-01
d2-02
E2-01
L1-01
Page 32 of 48
Page 33

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Nxxx
035
036
037
Parameter
Name
Cooling fin overheat
Stop method
selection
Multi-function
contact input 1
(terminal S2)
Multi-function
contact input 2
(terminal S3)
Description or Selection
0: Deceleration stop
(Decelerate by deceleration time 1)
1: Coast to stop
2: Deceleration stop
(Decelerate by deceleration time 2)
3: Operation continues
(The alarm is displayed, and drive runs at
80% of the freq ref)
0: REV command (2wire sequence selection)
1: FWD/REV Command
(3wire sequence selection)
2: External fault. (N.O contact input)
3: External fault. (N.C contact input)
4: Fault reset
5: LOCAL/REMOTE switch
(run and freq ref)
6: Communication/Control circuit terminal
switch (run and freq ref)
7: Emergency stop (N.O. contact input)
8: Emergency stop (N.C contact input)
9: FV/FI terminal switch
10: Multistep speed set 1
11: Multistep speed set 2
12: Multistep speed set 3
13: Jog frequency select
14: Accel/decel time switch
15: External base block instruction
(N.O.contact input)
16: External base block instruction
(N.C contact input)
17: Speed search command from Max
frequency
18: Speed search command from set
frequency
19: Parameter set enable/disable
20: PID integral value reset
21: PID control disable
22: Timer start command
23: Inverter overheat
(blinking display of OH3)
24: Sample/holding of analog reference
25: KEB instruction (N.O. contact)
26: KEB instruction (N.C. contact)
27: Decel/accel prohibit
28: PID input characteristic switchover
Set range: 2-28
(It is the same as constant n036)
Description or Selection
Drive Operation upon OH Pre Alarm
Detection.
0: Ramp to Stop (Decel Time C1-02).
1: Coast to Stop
2: Fast-Stop (Decel Time = C1-09).
3: Alarm Only
*0 to 2 is recognized as fault detection, and
3 is
recognized as alarm. (For the fault
detection, the fault
contact operates.)
4: OH Alarm & Reduce (Continue
operation and reduce
output frequency by L8-19)
0 to 70
Selects the function of terminal S3.
0: 3-wire control
FWD/REV selection for 3-wire sequence
1: Local/Remote Sel
Hand/Auto Selection - Closed = Hand,
Open = Auto
2: Option/Inv Sel
Selects source of speed command and
sequence
Closed = Option Card, Open = b1-01 & b102
3: Multi-Step Ref 1
Closed = speed command from d1-02 or
Terminal A2,
Open = speed command determined by b101
4: Multi-Step Ref 2
Closed = speed command from d1-03 or
d1-04
Open speed command determined by b1-01
Parameter
Name
Overheat Pre-Alarm
Operation Selection
Param.
No.
L8-03
Terminal S2 is not
programmable in P7 :
P7 default setting for terminal
S2:
Reverse run when closed,
stopped when open.
Initialization parameter
A1-03 programs terminals
S1 and S2 for 2-Wire or
3-Wire run control.
Multi-Function Digital Input
Terminal S3 Function
Selection
-
H1-01
Page 33 of 48
Page 34

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Nxxx
(con’t)
037
Parameter
Name
Multi-function
contact input 2
(terminal S3)
Description or Selection
Set range: 2-28
Description or Selection
6: Jog Freq Ref
Closed = speed command from d1-17
Open = speed command determined by b101
7: Multi-Acc/Dec 1
Closed = Accel & Decel Ramps
determined by C1-03 & C1-04,
Open = Accel & Decel Ramps determined
by C1-01 & C1-02
8: Ext BaseBlk N.O.
Closed = Output transistors forced off,
Open = Normal operation
9: Ext BaseBlk N.C.
Closed = Normal Operation, Open =
Output transistors forced
off
A: Acc/Dec RampHold
Closed = Acceleration suspended and
speed held, Open =
Normal Operation
C: Term A2 Enable
Closed = Terminal A2 is active, Open =
Terminal A2 is disabled
F: Term Not Used
Terminal has no effect
10: MOP Increase
Closed = Speed Command Increases, Open
= Speed Command
Held.
Must be set in conjunction with MOP
Decrease and b1-02 must
be set to 1.
11: MOP Decrease
Closed = Speed Command Decreases,
Open = Speed Command
Held.
Must be set in conjunction with MOP
Increase and b1-02 must
be set to 1.
12: Forward Jog
Closed = drive runs forward at speed
command entered into
parameter d1-17.
13: Reverse Jog
Closed = drive runs in reverse at speed
command entered into
parameter d1-17.
14: Fault Reset
Closed = Resets the drive after the fault
and the run
command have been removed.
15: Fast-Stop N.O.
Closed = Drive decelerates using C1-09,
regardless of run
command status.
17: Fast-Stop N.C.
Closed = Normal operation
Open = Drive decelerates using C1-09,
regardless of run
command status.
Closed = Normal operation
Open = Drive decelerates using C1-09,
regardless of run command status.
18: Timer Function
Input for independent timer, controlled by
b4-01 and b4-02.
Used in conjunction with a multi-function
digital output.
19: PI Disable
Turns off the PI controller, and PI setpoint
becomes speed command.
1B: Program Lockout
Closed =All parameter settings can be
changed.
Parameter
Name
Multi-Function Digital Input
Terminal S3 Function
Selection
Param.
No.
H1-01
Page 34 of 48
Page 35

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Parameter
Nxxx
Multi-function contact input 2
(con’t)
(terminal S3)
037
Name
Description or Selection
Set range: 2-28
(It is the same as constant n036)
Description or Selection
Open = Only speed command at U1-01 can
be changed.
1C: TrimCtl Increase
Closed = Increase motor speed by value in
d4-02.
Open = Return to normal speed command.
Not effective when using d1-01 thru d1-04
as a speed command.
Must be used in conjunction with Trim Ctrl
Decrease.
1D: Trim Ctl Decrease
Closed = Decrease motor speed by value in
d4-02
Open = Return to normal speed command.
Not effective when using d1-01 thru d1-04
as speed command.
Must be used in conjunction with Trim Ctrl
Increase.
1E: Ref Sample Hold
Analog speed command is sampled then
held at time of input
closure.
20: External fault, Normally Open, Always
Detected, Ramp To
Stop
21: External fault, Normally Closed,
Always Detected, Ramp To
Stop
22: External fault, Normally Open, During
Run, Ramp To Stop
23: External fault, Normally Closed,
During Run, Ramp To Stop
24: External fault, Normally Open, Always
Detected, Coast To
Stop
25: External fault, Normally Closed,
Always Detected, Coast To
Stop
26: External fault, Normally Open, During
Run, Coast To Stop
27: External fault, Normally Closed,
During Run, Coast To Stop
28: External fault, Normally Open, Always
Detected, Fast-Stop
29: External fault, Normally Open, Always
Detected, Fast-Stop
2A: External fault, Normally Open, During
Run, Fast-Stop
2B: External fault, Normally Closed,
During Run, Fast-Stop
2C: External fault, Normally Open, Always
Detected, Alarm Only
2D: External fault, Normally Closed,
Always Detected, Alarm
Only
2E: External fault, Normally Open, During
Run, Alarm Only
2F: External fault, Normally Closed,
During Run, Alarm Only
30: PI Integral Reset
Resets the PI Integral component to zero
when closed
31: PI Integral Hold
Holds the PI integral value when closed
34: PI SFS Cancel (SFS= SoftStart, also
called Accel/Decel,
See Parameter b5-17)
35: PI Input Level Sel
Inverts the PI error signal when closed
36: Option/Inv Sel 2 Selects source of
speed command and
sequence
Closed = b1-01 & b1-02, Open = Option
Card
Parameter
Name
Multi-Function Digital Input
Terminal S3 Function
Selection
Param.
No.
H1-01
Page 35 of 48
Page 36

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Parameter
Nxxx
Multi-function
(con’t)
contact input 2
037
(terminal S3)
Multi-function contact input 3
038
(terminal S4)
Multi-function contact input 4
039
(terminal S5)
Multi-function contact input 5
040
(terminal S6)
Name
Description or Selection
Set range: 2-28
(It is the same as constant n036)
Set range: 2-28
(It is the same as constant n036)
Set range: 2-28
(It is the same as constant n036)
Set range: 2-29
Description or Selection
60: Motor Preheat
Applies current to create heat to avoid
condensation
Closed = Apply amount of current as set in
parameter b2-09
61: Speed Search 1
When closed as a run command is given,
drive does a speed
search starting at maximum frequency (E1-
04).
62: Speed Search 2
When closed as a run command is given,
drive does a speed
search starting at speed command.
64: Speed Search 3
When opened, the Drive performs a
baseblock (motor coasts).
When closed, the Drive performs Speed
Search from set
frequency.
67: Com Test Mode - Used to test RS485/422 interface.
68: High Slip Braking - Closed = Drive
stops using High Slip
Braking regardless of run command status.
69: Jog2 - Closed = Drive runs at speed
command entered into
parameter d1-17. Direction determined by
fwd/rev input.
3-wire control Only.
6A: Drive Enable - Closed = Drive will
accept run command.
Open = Drive will not run.
If running, drive will stop per b1-03.
Run Command must be cycled
6B: Com/Inv Sel - Selects source of Speed
Command and
Sequence.
Closed = Serial Communication (R+,R,S+,S-), Open = b1-01
& b1-02
6C: Com/Inv Sel 2 - Selects source of
Speed Command and
Sequence.
Closed = b1-01 & b1-02, Open = Serial
Communication
(R+,R-,S+,S-)
6D: Auto Mode Sel - Hand/Auto Selection
- Closed = Auto, Open
= Hand
6E: Hand Mode Sel - Hand/Auto Selection
- Closed = Hand,
Open = Auto
70: Drv Enbl. Same as 6A except a run
command is accepted
Same selections as H1-01
Same selections as H1-01
Same selections as H1-01
0-70
0-70
0-70
Parameter
Name
Multi-Function Digital Input
Terminal S3 Function
Selection
Multi-Function Digital Input
Terminal S4 Function
Selection
Multi-Function Digital Input
Terminal S5 Function
Selection
Multi-Function Digital Input
Terminal S6 Function
Selection
Param.
No.
H1-01
H1-02
H1-03
H1-04
Page 36 of 48
Page 37

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Nxxx
Multi-function
041
contact output 1
(terminal MA-MB-MC)
Parameter
Name
Description or Selection
0: Fault
1: During run.
2: Frequency agree
3: At set frequency agree
4: Freq detect
(output freq = set freq detection level)
5: Freq detect
(output frequency = set freq detect level)
6: Overtorque detect. (N.O contact)
7: Overtorque detect. (N.C contact)
8: The base block.
9: Operation mode
10: Inverter drive ready
11: Timer function
12: Auto restart. (Fault retry)
13: OL pre-alarm (OL1,OL2)
14: Frequency reference loss
15: Closed from serial communication.
16: PID feedback loss
17: OH1 alarm
Description or Selection
Selects the function of terminals M1 to M4.
0: During RUN 1 = Closed when a run
command is input or
the drive is outputting voltage.
1: Zero Speed = Closed when drive output
frequency is less
than Fmin (E1-09)
2: Fref/Fout Agree 1 = Closed when drive
output speed
equals the speed command within the
bandwidth of L4-02.
3: Fref/Set Agree 1 = Closed when the
drive output speed
and the speed command are equal to
the value in L4-01 within the bandwidth of
L4-02.
4: Freq Detect 1 = Closed when the drive
output speed is
less than or equal to the value in L4-01,
with hysteresis determined by L4-02.
5: Freq Detect 2 = Closed when the drive
output speed is
greater than or equal to the value in
L4-01, with hysteresis determined by L4-
02.
6: Inverter Ready = Closed when the drive
is not in a fault
state, and not in program mode.
7: DC Bus Undervolt = Closed when the
DC bus voltage
falls below the UV trip level (L2-05)
8: Base Blk 1 = Closed when the drive is
not outputting
voltage.
9: Operator Reference = Closed when the
speed command
is coming from the digital operator.
A: Remote/Auto Oper = Closed when the
run command is
coming from the digital operator.
B: Trq Det 1 N.O. - Closes when the output
current exceeds
the value set in parameter
L6-02 for more time than is set in
parameter L6-03.
C: Loss of Ref - Closes when the drive has
detected a loss
of analog speed command.
Speed command is considered lost when it
drops 90% in
0.4 seconds.
Parameter L4-05 determines drive reaction
to a loss of
speed command.
E: Fault - Closes when the drive
experiences a major fault.
F: Not Used
10: Minor Fault - Closes when drive
experiences a minor
fault or alarm.
11: Reset Cmd Active - Closes when the
drive receives a
reset command from terminals or serial
comms.
12: Timer Output - Output for independent
timer, controlled
by b4-01 and b4-02.
Used in conjunction with a multi-function
digital input.
17: Trq. Det 1 N.C. - Opens when the
output current
exceeds the value set in parameter
L6-02 for more time than is set in
parameter L6-03.
Parameter
Name
Terminal M3-M4 Function
Selection
Param.
No.
H2-01
Page 37 of 48
Page 38

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Nxxx
Multi-function
(con’t)
contact output 1
041
(terminal MA-MB-MC)
Parameter
Name
Description or Selection
Description or Selection
1A: Reverse Dir - Closes when the drive is
running in the
reverse direction.
1E: Restart Enabled - Closes when the
drive is performing
an automatic restart.
Automatic restart is configured by
parameter L5-01.
1F: Overload (OL1) - Closes before a
motor overload
occurs. (90% of OL1 time)
20: OH Prealarm - Closes when the Drive’s
heatsink
temperature exceeds the setting
of parameter L8-02.
38: Drive Enable - Closes when the drive
enable input is
active.
39: Waiting to Run - Closes during the time
after a run
command is issued, but the Drive is not
running due to
the time set in parameter b1-10.
3A: OH Freq Reduce
3B: Run Src Com/Opt
Parameter
Name
Param.
No.
H2-01
Page 38 of 48
Page 39

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Nxxx
042
044
045
046
047
048
049
050
051
052
Parameter
Description or Selection
Name
Multi-function
contact output 2
(terminal M1-M2)
Terminal FI signal Level
Selection
Frequency Reference
Retention
Frequency Ref
Loss selection
Frequency Ref
when frequency reference is
lost
Terminal FV gain Set unit: 1% and set range: 0 to 200%
Terminal FV bias Set unit: 1% and set range = -100 to +100%
Terminal FI gain Set unit: 1% and set range: 0 to 200%
Terminal FI bias Set unit: 1% and set range -100 to +100%
Analog output
Select
(terminal AM-AC)
It is the same as constant n041.
0: The FI terminal inputs 0-10V.
(Jumper J1 is cut)
1: The FI terminal inputs 4-20mA.
1: The holding frequency reference is not
memorized.
0: The holding frequency reference is
memorized and stored in n024
0: No detection
1: Continue running at n047 setting
Set unit: 1% and set range: 0-100%
0: Output frequency
(10V = Max frequency n011)
1: Output current
(10V = rated current of inverter)
2: Output power (10V = inverter rated power)
3: DC bus voltage (10V = 1150VDC)
Description or Selection
Same selections as H2-01
Selects the signal level of terminal A2.
0: 0 to 10Vdc (switch S1-2 must be in the
OFF position).
2: 4 to 20mA (switch S1-2 must be in the
ON position)
This parameter is used to retain the held
frequency reference in U1-01 (d1-01) when
power is removed. This function is
available when the multi-function inputs
“accel/decel ramp hold” or “up/down”
commands are selected
(H1-XX = A or 10 and 11).
0: Disabled
1: Enabled
The frequency reference is considered lost
when reference drops 90% or more of its
current value in less than 400ms.
0: Normal Operation - Drive will run at the
frequency reference.
1: Run at L4-06 PrevRef - Drive will run at
the percentage set in L4-06 of the
frequency reference level at the time
frequency reference was lost.
0 to 100.0
If the frequency reference loss function is
enabled (L4-05=1) and frequency reference
is lost, the Drive will run at a reduced
frequency reference determined by the
following formula:
Fref=Fref at time of loss * L4-06.
0.0 to1000.0
Sets the output level when 10V is input, as
a percentage of the maximum output
frequency (E1-04).
–100.0 to +100.0
Sets the output level when 0V is input, as a
percentage of the maximum output
frequency (E1-04).
0.0 to 1000.0
Sets the output level when 10V is input.
–100.0 to+100.0
Sets the output level when 0V is input.
Selects which monitor will be output on
terminals FM
and FC.
1: Frequency Ref (100% = max. output
frequency)
2: Output Freq (100% = max. output
frequency)
3: Output Current (100% = drive rated
current)
6: Output Voltage (100% = 230V or 100%
= 460V)
7: DC Bus Voltage (100% = 400V or 100%
= 800V)
8: Output kWatts (100% = drive rated
power)
15: Term A1 Level
16: Term A2 Level
18: Mot SEC Current (100% = Motor rated
secondary
current)
20: SFS Output (100% = max. output
frequency)
24: PI Feedback
Parameter
Name
Terminal M3-M4 Function
Selection
Terminal A2 Signal Level
Selection
MOP Ref Memory
Frequency Reference Loss
Detection Selection
Frequency Reference Level at
Loss Frequency
Terminal A1 Gain Setting
Terminal A1 Bias Setting
Terminal A2 Gain Setting
Terminal A2 Bias Setting
Terminal FM Monitor
Selection
Param.
No.
H2-02
H3-08
d4-01
L4-05
L4-06
H3-02
H3-03
H3-10
H3-11
H4-01
Page 39 of 48
Page 40

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Nxxx
(cont)
052
053
054
Parameter
Description or Selection
Name
Analog output
Select
(terminal AM-AC)
Analog output gain Set unit: 0.01 and set range: 0.01-2.00
Carrier frequency 1, 2, 4 ~ 6: carrier freq = set value * 2.5 Khz
3: Carrier frequency =8kHz
7, 8, 9: The output freq of 2.5kHz or less is
proportional to the carrier frequency.
(7: 12*fout ,8: 24*fout, 9:36*fout)
10: Carrier frequency =7kHz
(Only 400V 45kW)
Description or Selection
31: Not Used
36: PI Input
37: PI Output (100% = max. output
frequency)
38: PI Setpoint
51: Auto Mode Fref (100% = max. output
frequency)
52: Hand Mode Fref (100% = max. output
frequency)
53: PI Feedback 2
NOTE: 100% = 10V DC output * FM gain
setting
(H4-02).
0.0 to 1000.0
Sets terminal FM output voltage (in percent
of 10V)
when selected monitor is at 100% output.
Carrier frequency sets the number of pulses
per second of the output
voltage waveform.
0: Low Noise (Carrier frequency is
randomly moduled for lower
audible noise)
1: Fc = 2.0 kHz
2: Fc = 5.0 kHz
3: Fc = 8.0 kHz
4: Fc = 10.0 kHz
5: Fc = 12.5 kHz
6: Fc = 15.0 kHz
F: Program (Determined by the settings of
C6-03 thru C6-05)
0.4 to 15.0 kHz Carrier Frequency Upper
Parameter
Name
Terminal FM Monitor
Selection
Terminal FM Gain Setting
Carrier Frequency Selection
Limit
Param.
No.
H4-01
H4-02
C6-02
C6-03
Operation after
055
momentary power
loss
Speed search operation level Set unit: 1%
056
Minimum base block time Set unit: 0.1sec
057
0: Not Provided.
1: Operation continues after power recovery
within 2 sec
2: Operation continues while control power is
on ( UV1, UV3 faults not are detected)
Set range: 0-200%
(100%= rated current of inverter)
Set range: 0.5-10.0sec
Page 40 of 48
0.4 to 15.0 kHz Carrier Frequency Lower
Sets the relationship of output frequency to
carrier frequency when C6-02 = F.
Enables and disables the momentary power
loss function.
0: Disabled - Drive trips on (UV1) fault
when power is lost.
1: Power Loss Ride Thru Time - Drive will
restart if power returns within the time
set in L2-02.*
2: CPU Power Active - Drive will restart if
power returns prior to control power
supply shut down.*
* In order for a restart to occur, the run
command must be maintained throughout
the ride thru period.
0 to 200
Used only when b3-01 = 2 or 3. Sets the
speed search operation current as a
percentage of Drive rated current.
0.1 to 5.0sec
Sets the minimum time to wait to allow the
residual motor voltage to decay before the
Drive output turns back on during power
loss ride thru. After a power loss, if L2-03
is greater than L2-02, operation resumes
after the time set in L2-03.
0 to 99
Limit
Carrier Frequency
Proportional
Gain
Momentary Power Loss
Detection
Selection
Speed Search Deactivation
Current
Momentary Power Loss
Minimum
Base Block Time
C6-04
C6-05
L2-01
b3-02
L2-03
Page 41

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Nxxx
059
060
061
062
063
064
065
066
067
068
069
070
Parameter
Description or Selection
Name
Power ride through
time
No. of Fault Retries Setting unit = 1 times
Fault contact during
fault retry
Jump frequency 1 Set unit: 0.1Hz and set range: 0.0-400.0Hz
Jump frequency 2 Set unit: 0.1Hz and set range: 0.0-400.0Hz
Width of jump Set unit: 0.1Hz and set range: 0.0-25.5Hz
Elapsed timer 1
mode
Elapsed timer 1
(lower 4 digits)
Elapsed timer 1
(upper 4 digits)
DC injection braking current Set unit: 1%
DC braking time at stop Set unit:0.1sec and set range: 0.0-10.0sec
DC braking time at start Set unit: 0.1sec and set range: 0.0-10.0sec
Set unit: 0.1sec and set range: 0.0-2.0sec
Set range: 0-10 times
(There is no fault retry at 0)
0: Fault contact output enabled while fault
retry.
1: Fault contact output disabled while fault
retry.
0: Operation time accumulates.
1: Operation time accumulates. (During Run)
Setting unit = 1 hour, range = 0 ~ 9999 hours
1 minute is stored in EEPROM, < 1day
rounded up
Set unit: 1(For 10000 hours) and a set range:
0-27.
* Initial value becomes 0 only when
initialized during
CPF4 occurrence.
Set range: 0-100%
(100%= rated current of inverter)
Description or Selection
0.0 to 25.5sec
Sets the power loss ride-thru time. This
value is dependent on the capacity of the
Drive. Only effective when L2-01 = 1.
0 to 10
Sets the counter for the number of times the
Drive will perform an automatic restart on
the following faults: GF, LF, OC, OV, PF,
PUF, RH, RR, OL1, OL2, OL3, OL4,
UV1. Auto restart will check to see if the
fault has cleared every 5ms. When no fault
is present, the Drive will attempt an auto
restart. If the Drive faults after an auto
restart attempt, the counter is incremented.
When the drive operates without fault for
10 minutes, the counter will reset to the
value set in L5-01
Determines if the fault contact activates
during an automatic restart attempt.
0: No Fault Relay - fault contact will not
activate during an automatic restart
attempt.
1: Fault Relay Active - fault contact will
activate during an automatic restart
attempt.
0.0 to 200.0
These parameters allow programming of up
to three prohibited frequency reference
points for eliminating problems with
resonant vibration of the motor / machine.
This feature does not actually eliminate the
selected frequency values, but will
accelerate and decelerate the motor through
the prohibited bandwidth.
Sets how time is accumulated for the
elapsed operation timer U1-13.
0: Power-On Time - Time accumulates
when the Drive is powered.
1: Running Time - Time accumulates only
when the Drive is running.
0 to 65535
Sets the initial value of the elapsed
operation timer U1-13.
0 to 100
Sets the DC injection braking current as a
percentage of the Drive rated current.
0.00 to 10.00
Sets the time length of DC injection
braking at stop in units of 0.01 seconds.
NOTE: When b1-03 = 2, actual DC
Injection time is calculated as follows:
b2-04 * 10 * Output Frequency / E1-04.
NOTE: When b1-03 = 0, this parameter
determines the amount of time DC
Injection is applied to the motor at the end
of the decel ramp.
NOTE: This should be set to a minimum of
0.50 seconds when using HSB. This will
activate DC injection during the final
portion of HSB and help ensure that the
motor stops completely.
0.00 to 10.00
Sets the time of DC injection braking at
start in units of 0.01 seconds.
Parameter
Name
Momentary Power Loss
Ride-thru
Time
Number of Auto Restart
Attempts
Auto Restart Operation
Selection
Jump Frequency 1
Jump Frequency 2
Jump Frequency Width
Cumulative Operation Time
Selection
Cumulative Operation Time
Setting
DC Injection Braking
Current
DC Injection Braking Time at
Stop
DC Injection Braking Time at
Start
Param.
No.
L2-02
L5-01
L5-02
d3-01
d3-02
d3-04
o2-08
o2-07
b2-02
b2-04
b2-03
Page 41 of 48
Page 42

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Nxxx
Torque comp gain
071
Stall prevention during
072
deceleration
Stall prevention level
073
during acceleration
Stall prevention level
074
during run
Parameter
Name
Description or Selection
Set unit: 0.1 and set range: 0.0-3.0
0: Stall prevention function none at
deceleration
1: The stall prevention is provided while
decelerating.
Set unit: 1%
Set range: 30-200%
(100%= rated current of inverter)
(Stall prevention disabled when set point
=200%)
Set unit: 1%
Set range: 30-200%
(100%= rated current of inverter)
(Stall prevention disabled when set point
=200%)
Description or Selection
0.00 to 2.50
This parameter sets the gain for the Drive’s
automatic torque boost function to match
the Drive’s output voltage to the motor
load. This parameter helps to produce
better starting torque. It determines the
amount of torque or voltage boost based
upon motor current, motor resistance, and
output frequency.
When using a braking resistor, use setting
“0”. Setting “3” is used in specific
applications.
0: Disabled - The Drive decelerates at the
active deceleration rate. If the load is too
large or the deceleration time is too
short, an OV fault may occur.
1: General Purpose - The Drive decelerates
at the active deceleration rate, but if the
main circuit DC bus voltage reaches the
stall prevention level (380/760Vdc),
deceleration will stop. Deceleration will
continue once the DC bus level drops
below the stall prevention level.
2: Intelligent - The active deceleration rate
is ignored and the Drive decelerates as
fast as possible w/o hitting OV fault
level. Range: C1-02 / 10.
3: Stall Prevention w/ Braking Resistor
Selects the stall prevention method used to
prevent excessive
current during acceleration.
0: Disabled - Motor accelerates at active
acceleration rate. The motor may stall if
load is too heavy or accel time is too
short.
1: General Purpose - When output current
exceeds L3-02 level, acceleration stops.
Acceleration will continue when the
output current level falls below the L3-02
level.
2: Intelligent - The active acceleration rate
is ignored. Acceleration is completed in
the shortest amount of time without
exceeding the current value set in L3-02.
0 to 200
This function is enabled when L3-01 is “1”
or “2”.Drive rated current is 100%.
Decrease the set value if stalling or
excessive current occurs with factory
setting.
Selects the stall prevention method to use
to prevent Drive faults during run.
0: Disabled - Drive runs a set frequency.
A heavy load may cause the Drive to trip
on an OC or OL fault.
1: Decel Time 1 - In order to avoid stalling
during heavy loading, the Drive will
decelerate at Decel time 1 (C1-02) if the
output current exceeds the level set by
L3-06. Once the current level drops
below the L3-06 level, the Drive will
accelerate back to its frequency reference
at the active acceleration rate.
2: Decel Time 2 - Same as setting 1 except
the Drive decelerates at Decel Time 2
(C1-04). When output frequency is 6Hz
or less, stall prevention during running is
disabled regardless of L3-05 setting.
Parameter
Name
Torque Compensation Gain
Stall Prevention Selection
During
Decel
Stall Prevention Selection
During
Accel
Stall Prevention Level During
Accel
Stall Prevention Selection
During
Run
Param.
No.
C4-01
L3-04
L3-01
L3-02
L3-05
Page 42 of 48
Page 43

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Nxxx
075
076
077
078
079
080
Parameter
Description or Selection
Name
Set frequency
detection level
Width of frequency
agreement detection
Overtorque/
Undertorque
Selection
Overtorque detection
level
Overtorque detection time Set unit: 0.1sec and set range: 0.1-10.0sec
(timer function)
ON Delay time
Set unit: 0.1Hz and set range: 0.0-400.0Hz
Set unit: 0.1Hz and set range: 0.0-25.5Hz
0: Overtorque/undertorque detection disabled.
1: Overtorque is detected during constant
speed operation and operation continues
after overtorque detection.
2: Overtorque is always detected and
operation continues after overtorque
detection.
3: Overtorque is detected during constant
speed operation and inverter output is
disabled after overtorque detection.
4: Overtorque is always detected and inverter
output is disabled after overtorque detection.
5: Undertorque is detected during constant
speed operation and operation continues
after undertorque detection.
6: Undertorque is always detected and
operation continues after undertorque
detection.
7: Undertorque is detected during constant
speed operation and inverter output is
disabled after undertorque detection.
8: Undertorque is always detected and inverter
output is disabled after undertorque
detection.
Set unit: 1%
Set range: 30-200%
(100%= rated current of inverter)
Set unit: 0.1sec
Set range: 0.0-25.5sec
Description or Selection
0.0 to 200.0
L4-01 and L4-02 are used in conjunction
with the
multi-function outputs, (H2-01and H2-02)
as a setpoint
and hysteresis for a contact closure.
0.0 to 20.0
Determines the drive's response to an
overtorque /
undertorque condition. Overtorque and
Undertorque
are determined by the settings in
parameters L6-02 and
L6-03.
0: Disabled
1: OL@SpdAgree - Alm (Overtorque
Detection only
active during Speed Agree and Operation
continues
after detection)
2: OL At RUN - Alm (Overtorque
Detection is always
active and operation continues after
detection)
3: OL@SpdAgree - Flt (Overtorque
Detection only
active during Speed Agree and drive output
will shut
down on an OL3 fault.)
4: OL At RUN - Flt (Overtorque Detection
is always
active and drive output will shut down on
an OL3
fault.)
5: UL@SpdAgree - Alm (Undertorque
Detection is
only active during Speed Agree and
operation
continues after detection.)
6: UL at RUN - Alm (Undertorque
Detection is always
active and operation continues after
detection.)
7: UL @ SpdAgree - Flt (Undertorque
Detection only
active during Speed Agree and drive output
will shut
down on an OL3 fault.)
8: UL At RUN - Flt (Undertorque
Detection is always
active and drive output will shut down on
an OL3
fault.)
0 to 300
Sets the overtorque/undertorque detection
level as a
percentage of Drive rated current.
0.0 to 10.0
Sets the length of time an Over/Under
torque condition must exist before torque
detection 1 recognized by the Drive.
0.0 to 3000.0
Used in conjunction with a multi-function
digital input and a multi-function digital
output programmed for the timer function.
This sets the amount of time between when
the digital input is closed, and the digital
output is energized.
Parameter
Name
Speed Agreement Detection
Level
Param.
No.
L4-01
Speed Agreement Detection
Width
Torque Detection Selection 1
Torque Detection Level 1
L4-02
L6-01
L6-02
Torque Detection Time 1
Timer Function ON-Delay
Time
L6-03
b4-01
Page 43 of 48
Page 44

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Parameter
Nxxx
(timer function)
081
Off delay time
Braking resistor
082
Overheat protection
Input open-phase
083
detection level
(PID control)
084
PID control selection
(PID control)
086
Proportional gain
(PID control)
087
Integral time
(PID control)
089
Integration upper limit
PID Feedback loss
090
detection selection
PID Feedback loss
091
detection level
PID Feedback loss
092
detection time
PID output
093
reverse-characteristic
PID Sleep function
094
operation level
PID Sleep function
095
operation time
Energy Saving
096
Selection
Energy Save Voltage Lower
098
limit @ 60 Hz
Energy Save Voltage Lower
099
limit @ 6 Hz
Name
Description or Selection
Set unit: 0.1sec
Set range: 0.0-25.5sec
0: Braking resistor overheat protection
disabled.
1: Braking resistor overheat protection
enabled.
Set unit:1% and set range: 1-100%
(Open-phase detection disabled at set point
=100%)
0: PID control disabled.
1: PID control enabled. (D=Fdbk)
2: PID control enabled. (D=Fdfwd)
3: PID control enabled.
(D=Fdbk, feedback=reverse)
Set unit: 0.1
Set range: 0.0-10.0
Set unit: 0.1sec
Set range: 0.0-100.0sec
Set unit: 1%
Set range: 0-109%
0: PID feedback loss disabled.
1: PID feedback loss enabled, no fault
detected.
2: PID feedback loss enabled, fault detection
enabled.
Set unit:1%
Set range: 0-100%
Set unit: 0.1sec
Set range: 0.0-25.5sec
0: Reverse-characteristic disabled
1: Reverse-characteristic enabled.
Set unit: 0.1Hz
Set range: 0.0-400.0Hz
Set unit: 0.1sec
Set range: 0.0-25.5sec
0: Energy saving disabled
1: Energy saving enabled
Set unit: 1%
Set range: 0-120%
Set unit:1%
Set range:0-25%
Description or Selection
0.0 to 3000.0
Used in conjunction with a multi-function
digital input and a multi-function digital
output programmed for the timer function.
This sets the amount of time the output
stays energized after the digital input is
opened.
Selects the DB protection only when using
3% duty cycle heatsink mount Yaskawa
braking resistor. This parameter does not
enable or disable the DB function of the
Drive.
0: Not Provided
1: Provided
Monitors the DC Bus current ripple and
activates when
one of the input phases is lost (PF).
This parameter enables / disables the closed
loop (PI) controller.
0: Disabled
1: Enabled (commanded speed becomes PI
setpoint)
3: Fref+PI
0.00 to25.00
Sets the proportional gain of the PID
controller.
0.0 to 360.0
Sets the integral time for the PID
controller. A setting of zero disables
integral control.
0.0 to100.0
Sets the maximum output possible from the
integrator. Set as a% of maximum
frequency.
0: Disabled
1: Alarm
2: Fault
0 to 100
Sets the PID feedback loss detection level
as a percentage of maximum frequency
(E1-04).
0.0 to 25.5
Sets the PID feedback loss detection delay
time in terms of seconds.
Determines whether the PID controller will
be direct or reverse acting.
0: Normal Output (direct acting)
1: Reverse Output (reverse acting)
0.0 to 200.0
Sets the sleep function start frequency.
0.0 to 25.5
Sets the sleep function delay time in terms
of seconds.
Energy Savings function enable/disable
selection.
0: Disabled
1: Enabled
Used to fine-tune the energy savings
function when in V/F control method.
Parameter
Timer Function OFF-Delay
Time
Internal Dynamic Braking
Resistor
Protection Selection
Input Phase Loss Detection
Level
Proportional Gain Setting
Integral Time Setting
Integral Limit Setting
PI Feedback Reference
Missing Detection Selection
PI Feedback Loss Detection
Level
PI Feedback Loss Detection
Time
PI Output Level Selection
Sleep Function Start
Level
Sleep Delay Time
Energy Saving Control
Selection
Power Detection Filter Time
Search Operation Voltage
Limit
Name
PI Mode Setting
Param.
No.
b4-02
L8-01
L8-06
b5-01
b5-02
b5-03
b5-04
b5-12
b5-13
b5-14
b5-09
b5-15
b5-16
b8-01
b8-05
b8-06
Page 44 of 48
Page 45

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Nxxx
100
101
102
104
105
106
108
110
111
112
113
Parameter
Name
Time of average
KW
MEMOBUS timeout
detection
MEMOBUS Stop
method selection at
communication error (CE)
MEMOBUS
Slave address
MEMOBUS
Baud rate selection
MEMOBUS
Parity selection
Motor no-load current Set unit: 1%
Operator Connection Fault
Detect Select
Local/remote Change- over
function Select
Low frequency OL
starting point
Continuous running
level at 0Hz
Description or Selection
Set unit:1 (1=25ms)
Set range: 1-200 (25ms=5.0sec)
0: Timeout detection disabled.
1: Timeout detection enabled.
0: Deceleration stop
(Decelerate by deceleration time 1)
1: Coast stop
2: Deceleration stop
(Decelerate by deceleration time 2)
3: Continue operation (alarm display)
Set unit:1 Set range:0-31
(There is no MEMOBUS communication at
set point =0)
0: 2400bps
1: 4800bps
2: 9600bps
0: Parity none
1: Even parity
2: Odd parity
Set range: 0-99%
(100%= rated current of motor)
0: Operator connection fault disabled.
1: Operator connection fault enabled.
0: Cycle External run
1: Accept external run
Set unit: 0.1Hz
Set range: 0.0-10.0Hz
Set unit: 1%
Set range: 25-100%
Description or Selection
0 to 2000
Used to fine-tune the energy savings
function when in V/F control method.
Enables or disables the communications
timeout fault (CE).
0: Disabled - A communication loss will
not cause a communication fault.
1: Enabled - If communication is lost for
more than 2 seconds, a CE fault will
occur.
Selects the stopping method when a
communication timeout fault (CE) is
detected.
0: Ramp to Stop
1: Coast to Stop
2: Fast-Stop
3: Alarm Only
4: Run at d1-04
0 to 20 Hex
Selects Drive station node number
(address) for Modbus terminals R+, R-, S+,
S-. The Drive’s power must be cycled for
the setting to take effect.
Selects the baud rate for Modbus terminals
R+, R-, S+ and S-. The Drive’s power must
be cycled for the setting to take effect.
0: 1200 bps
1: 2400 bps
2: 4800 bps
3: 9600 bps
4: 19200 bps
Selects the communication parity for
Modbus terminals R+, R-, S+ and S-. The
Drive’s power must be cycled for the
setting to take effect.
0: No Parity
1: Even Parity
2: Odd Parity
Set to the magnetizing current of the motor
as a percentage of full load amps (E2-01).
This value is automatically set during
rotational Auto-Tuning.
Determines if the Drive will stop when the
Digital Operator is removed when in
LOCAL mode or b1-02=0.
0: Disabled - The Drive will not stop when
the Digital Operator is removed.
1: Enabled - The Drive will fault (OPR)
and coast to stop when the operator is
removed.
0: Cycle External RUN - If the run
command is closed when switching from
local mode to remote mode, the Drive
will not run.
1: Accept External RUN - If the run
command is closed when switching
from local mode to remote mode, the
Drive will run.
This parameter assists in protecting the
output transistors from overheating when
output current is high and output frequency
is low (6Hz and less).
0: Disabled
1: Enabled (L8-18 is active)
Parameter
Name
Power Detection Filter Time
Communication Error
Detection
Selection
Stopping Method after
Communication Error
Drive Node Address
Communication Speed
Selection
Communication Parity
Selection
No-Load Current
Operation Selection when
Digital
Operator is Disconnected
Local/Remote Run Selection
OL2 Characteristic Selection
at
Low Speeds
b8-05
H5-05
H5-04
H5-01
H5-02
H5-03
E2-03
o2-06
b1-07
L8-15
Param.
No.
Page 45 of 48
Page 46

Appendix 3- Parameter Cross Reference
GPD506/P5 Parameter P7 Parameter
Param
No.
Nxxx
115
116
Parameter
Description or Selection
Name
KVA selection Set unit: 1
CT/VT selection 0: Constant Torque selection
Set range: PC5 (0~8, 20~29),
GPD506/P5(9~F, 2A~35)
1: Variable Torque selection
Description or Selection
0 to FF
Sets the kVA of the Drive. Enter the
number based on Drive model number. Use
the last four digits of the model number.
CIMR-P7U.
This parameter only needs to be set when
installing a new control board. Do not
change for any other reason.
Refer to Table B.1. in the P7 Instruction
Manual
Selects Drive’s rated input and output
current, overload capacity, carrier
frequency, current limit, and maximum
output frequency. See Introduction for
details.
1: Normal Duty 1
2: Normal Duty 2
Parameter
Name
Drive/kVA Selection
Reduced Current Rating
Standard Current Rating
Param.
No.
o2-04
C6-01
Page 46 of 48
Page 47

Appendix 3- Parameter Cross Reference
Page left intentionally blank
Page 47 of 48
Page 48

GPD506/P5 to P7 Product Transition Guide
Yaskawa Electric America, Inc
16555 W. Ryerson Rd
(800)YASKAWA (927-5292) Fax (262) 782-3418
YEA Document Number: PL.P7.06.Transistion 9/24/03
New Berlin, WI
www.drives.com
 Loading...
Loading...