

Page 1
www.ti.com
Table of Contents
User’s Guide
Safety Manual for TMS320F28004x
Vanjari, Ashish
ABSTRACT
This document is a safety manual for the Texas Instruments TMS320F28004x safety critical microcontroller
product family. The product family utilizes a common safety architecture that is implemented in multiple
application-focused products.
Table of Contents
1 Introduction.............................................................................................................................................................................3
2 TMS320F28004x Product Safety Capability and Constraints............................................................................................. 5
3 TI Development Process for Management of Systematic Faults....................................................................................... 5
3.1 TI New-Product Development Process.............................................................................................................................. 5
3.2 TI Functional Safety Development Process....................................................................................................................... 6
4 TMS320F28004x Product Overview...................................................................................................................................... 8
4.1 C2000 Architecture and Product Overview........................................................................................................................ 8
4.2 Functional Safety Concept................................................................................................................................................. 9
4.3 C2000 Safety Diagnostics Libraries................................................................................................................................. 19
4.4 TMS320F28004x MCU Safety Implementation................................................................................................................23
5 Brief Description of Safety Elements..................................................................................................................................26
5.1 TMS320F28004x MCU Infrastructure Components.........................................................................................................26
5.2 Processing Elements....................................................................................................................................................... 29
5.3 Memory (Flash, SRAM and ROM)................................................................................................................................... 30
5.4 On-Chip Communication Including Bus-Arbitration..........................................................................................................32
5.5 Digital I/O......................................................................................................................................................................... 35
5.6 Analogue I/O.................................................................................................................................................................... 37
5.7 Data Transmission........................................................................................................................................................... 39
6 Brief Description of Diagnostics......................................................................................................................................... 42
6.1 TMS320F28004x MCU Infrastructure Components.........................................................................................................42
6.2 Processing Elements....................................................................................................................................................... 47
6.3 Memory (Flash, SRAM and ROM)................................................................................................................................... 50
6.4 On-Chip Communication Including Bus-Arbitration..........................................................................................................53
6.5 Digital I/O......................................................................................................................................................................... 54
6.6 Analogue I/O.................................................................................................................................................................... 62
6.7 Data Transmission........................................................................................................................................................... 66
7 References............................................................................................................................................................................ 71
A Safety Architecture Configurations....................................................................................................................................72
B Distributed Developments...................................................................................................................................................75
B.1 How the Functional Safety Lifecycle Applies to Functional Safety-Compliant Products..................................................75
B.2 Activities Performed by Texas Instruments......................................................................................................................75
B.3 Information Provided........................................................................................................................................................76
C Terms and Definitions..........................................................................................................................................................77
D Summary of Safety Features and Diagnostics..................................................................................................................79
E Glossary.............................................................................................................................................................................. 104
Revision History.................................................................................................................................................................... 104
List of Figures
Figure 3-1. TI New-Product Development Process..................................................................................................................... 6
Figure 4-1. Functional Block Diagram of TMS320F28004x MCU................................................................................................8
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 1
Page 2

Trademarks
Figure 4-2. Definition of the TMS320F28004x MCU Used in a Compliant Item.......................................................................... 9
Figure 4-3. E-GAS System Overview From Standard............................................................................................................... 10
Figure 4-4. VDA E-Gas Monitoring Concept Applied to F28004x MCU.....................................................................................11
Figure 4-5. TMS320F28004x MCU With Safety Features......................................................................................................... 12
Figure 4-6. Relationship Between FDTI, Fault Reaction Time and FTTI...................................................................................13
Figure 4-7. Illustration of FTTI................................................................................................................................................... 13
Figure 4-8. TMS320F28004x MCU Safe State Definition..........................................................................................................14
Figure 4-9. TMS320F28004x MCU Device Operating States....................................................................................................15
Figure 4-10. TMS320F28004x MCU CPU Start-Up Sequence................................................................................................. 16
Figure 4-11. Fault Response Severity........................................................................................................................................16
Figure 4-12. TI Software Development Lifecycle - Quality Level...............................................................................................22
Figure 4-13. Safety Concept Implementation Option 1..............................................................................................................24
Figure 4-14. Safety Concept Implementation Option 2..............................................................................................................25
Figure 5-1. Generic Hardware of a System............................................................................................................................... 26
Figure 6-1. CLA Liveness Check............................................................................................................................................... 47
Figure 6-2. Stack Overflow Monitoring...................................................................................................................................... 49
Figure 6-3. CLAPROMCRC Functional Diagram.......................................................................................................................52
Figure 6-4. ePWM Fault Detection Using X-BAR...................................................................................................................... 55
Figure 6-5. Monitoring of ePWM by ADC.................................................................................................................................. 58
Figure 6-6. HRCAP Calibration..................................................................................................................................................61
Figure 6-7. QMA Module Block Diagram................................................................................................................................... 62
Figure 6-8. DAC to ADC Loopback............................................................................................................................................63
Figure 6-9. Testing PGA Using ADC and DAC.......................................................................................................................... 64
Figure 6-10. ADC Open-Shorts Detection Circuit...................................................................................................................... 65
Figure C-1. ISO 26262 Illustration of Item, System, Component, Hardware Part and Software Unit........................................77
www.ti.com
List of Tables
Table 1-1. Products Supported by This Safety Manual................................................................................................................3
Table 3-1. Functional Safety Activities Overlaid on Top of TI's Standard Development Process................................................ 7
Table 4-1. DC and SCC Targeted for F28004x Diagnostic Libraries......................................................................................... 19
Table 4-2. Tools Required for Integration of the F28004x STL.................................................................................................. 19
Table 4-3. API Mapping............................................................................................................................................................. 21
Table 4-4. MD5 Signatures for C28x-STL..................................................................................................................................22
Table 4-5. MD5 Signatures for CLA-STL................................................................................................................................... 23
Table 6-1. ADC Open-Shorts Detection Circuit Truth Table.......................................................................................................65
Table A-1. Safety Architecture Configurations........................................................................................................................... 72
Table B-1. Activities Performed by Texas Instruments versus Performed by the Customer......................................................75
Table B-2. Product Functional Safety Documentation............................................................................................................... 76
Table D-1. Summary Table Legend........................................................................................................................................... 79
Table D-2. Summary of Safety Features and Diagnostic...........................................................................................................80
Table E-1. Glossary................................................................................................................................................................. 104
Trademarks
C2000™ is a trademark of Texas Instruments.
All other trademarks are the property of their respective owners.
2 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 3
www.ti.com Introduction
1 Introduction
WARNING
The TMS320F28004x is being offered as a Functional Safety Compliant Safety Element out of
Context (SEooC) product. This implies that TMS320F28004x was developed in compliance with TI's
ISO-9001/IATF-16949 compliant hardware product development process. Subsequently, this product
was independently assessed to meet a systematic capability compliance of ASIL D (according to
ISO-26262:2018) and SIL 3 (according to IEC-61508:2010), see the Texas Instrument's functional
safety hardware development process. As such, this safety manual is intended to be informative only
to help explain how to use the features of TMS320F28004x device to assist the system designer in
achieving a given ASIL or SIL level. System designers are responsible for evaluating this device in
the context of their system and determining the system-level ASIL or SIL coverage achieved therein.
The products supported by this document have been assessed to be meet a systematic capability compliance of
ASIL D (according to ISO 26262) and SIL 3 (according to IEC 61508). For more information, see the Texas
Instrument's functional safety hardware development process.
This Functional Safety Manual is part of the Functional Safety-Compliant design package to aid customers who
are designing systems in compliance with ISO26262 or IEC61508 functional safety standards.
This document is a safety manual for the Texas Instruments TMS320F28004x safety critical microcontroller
product family. The product family utilizes a common safety architecture that is implemented in multiple
application focused products.
Product configurations supported by this safety manual include silicon revision B of the following products listed
in Table 1-1. The device revision can be determined by the REVID field of the device identification registers
outlined in the product data sheet.
Table 1-1. Products Supported by This Safety Manual
Orderable Devices Supported Safety Integrity Level
F280048CPMQR ASIL B
F280048PMQR ASIL B
F280049CPMS ASIL B
F280049CPZQR ASIL B
F280049CPZS ASIL B
F280049PMS ASIL B
F280049PMSR ASIL B
F280049PZQ ASIL B
F280049PZQR ASIL B
F280049PZS ASIL B
F280049PZSR ASIL B
F280040CPMQR QM
F280040PMQR QM
F280041CPMS QM
F280041CPZQR QM
F280041CPZS QM
F280041CRSHSR QM
F280041PMS QM
F280041PMSR QM
F280041PZQR QM
F280041PZS QM
F280041PZSR QM
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 3
Page 4
Introduction
www.ti.com
Table 1-1. Products Supported by This Safety Manual (continued)
Orderable Devices Supported Safety Integrity Level
F280041RSHSR QM
F280045PMS QM
F280045PMSR QM
F280045PZS QM
F280045PZSR QM
F280045RSHSR QM
F280049CRSHSR QM
F280049CRSHS QM
F280049RSHSR QM
This Functional Safety Manual provides information needed by system developers to assist in the creation of a
safety critical system using a supported TMS320F28004x MCU. This document contains:
• An overview of the component architecture
• An overview of the development process used to decrease the probability of systematic failures
• An overview of the functional safety architecture for management of random failures
• The details of architecture partitions and implemented functional safety mechanisms
The following information is documented in the Detailed Safety Analysis Report (SAR) for TMS320F28004x
C2000™ Safety Critical Microcontrollers, which is only available under Functional Safety NDA and is not
repeated in this document:
• Failure rates (FIT) of the component
• Fault model used to estimate device failure rates to enable calculation of customized failure rates
• Functional safety metrics of the hardware component for targeted standards (viz. IEC 61508:2010 and ISO
26262:2018)
• Quantitative functional safety analysis (also known as FMEDA, Failure Modes, Effects, and Diagnostics
Analysis) with detail of the different parts of the component, allowing for customized application of functional
safety mechanisms
• Assumptions used in the calculation of functional safety metrics
It is expected that the user of this document should have a general familiarity with the TMS320F28004x product
families. More information can be found at www.ti.com/C2000.
This document is intended to be used in conjunction with the pertinent data sheets, technical reference manuals,
and other documentation for the products being supplied.
For information which is beyond the scope of the listed deliverables, please contact your TI sales representative
or www.ti.com.
4 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 5
www.ti.com
TMS320F28004x Product Safety Capability and Constraints
2 TMS320F28004x Product Safety Capability and Constraints
This section summarizes the TMS320F28004x product safety capability. Each TMS320F28004x product:
• Is offered as a functional Safety Element Out Of Context (SEooC)
• Was assessed to have met the relevant systematic capability compliance requirements of IEC 61508:2010
and ISO 26262:2018 and
– Achieves systematic integrity of SIL 3 and ASIL D
• In addition, the device can meet hardware architectural metrics up to ASIL B by implementing proper safety
concept (for example, Reciprocal Comparison by Software).
• Contains multiple features to support Freedom From Interference (FFI) for mixed-criticality of safety
requirements assigned to the different sub-elements
• The TMS320F28004x MCUs are Type B devices, as defined in IEC 61508-2:2010
• This device claims no hardware fault tolerance, (for example, no claims of HFT > 0), as defined in IEC
61508:2010
• For safety components developed according to many safety standards, it is expected that the component
functional safety manual will provide a list of product safety constraints. For a simple component or more
complex components developed for a single application, this is a reasonable response. However, the
TMS320F28004x MCU product family is both a complex design and is not developed targeting a single,
specific application. Therefore, a single set of product safety constraints cannot govern all viable uses of the
product
Note
The functional safety assessment of this component is not yet complete.
3 TI Development Process for Management of Systematic Faults
For functional safety development, it is necessary to manage both systematic and random faults. Texas
Instruments follows a new-product development process for all of its components which helps to decrease the
probability of systematic failures. This new-product development process is described in Section 3.1.
Components being designed for functional safety applications will additionally follow the requirements of TI's
functional safety development process, which is described in Section 3.2.
3.1 TI New-Product Development Process
Texas Instruments has been developing components for automotive and industrial markets since 1996.
Automotive markets have strong requirements regarding quality management and product reliability. The TI newproduct development process features many elements necessary to manage systematic faults. Additionally, the
documentation and reports for these components can be used to assist with compliance to a wide range of
standards for customer’s end applications including automotive and industrial systems (e.g ISO 26262-4:2018,
IEC 61508-2:2010).
This component was developed using TI’s new product development process which has been certified as
compliant to ISO 9001 / IATF 16949 as assessed by Bureau Veritas (BV).
The standard development process breaks development into phases:
• Assess
• Plan
• Create
• Validate
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 5
Page 6
Copyright © 2018, Texas Instruments Incorporated
Assess
Review
Plan
Review
Create
Review
Validate
Review
& Release
To Market
Periodic
Post-Release
Reviews
Phase 1:
Assess
Phase 2:
Plan
Phase 3:
Create
Phase 4:
Validate
Sustain
Identify New
Product
Opportunities
Develop Project
Plan
IC Design &
Layout
Develop Product
Specification
IC Design
Verification
Manage Project Execution and Risks
Develop Test and Validation HW/SW
Develop Datasheet and other
Documentation
Product Support
Product
Monitoring
IC Valdiation
IC Qualification
TI Development Process for Management of Systematic Faults
Figure 3-1 shows the standard process.
www.ti.com
3.2 TI Functional Safety Development Process
The TI functional safety development flow derives from ISO 26262:2018 and IEC 61508:2010 a set of
requirements and methodologies to be applied to semiconductor development. This flow is combined with TI's
standard new product development process to develop Functional Safety-Compliant components. The details of
this functional safety development flow are described in the TI internal specification - Functional Safety
Hardware.
Key elements of the TI functional safety-development flow are as follows:
• Assumptions on system level design, functional safety concept, and requirements based on TI's experience
• Qualitative and quantitative functional safety analysis techniques including analyses of silicon failure modes
• Base FIT rate estimation based on multiple industry standards and TI manufacturing data
• Documentation of functional safety work products during the component development
• Integration of lessons learned through multiple functional safety component developments, functional safety
6 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
with components in functional safety applications
and application of functional safety mechanisms
standard working groups, and the expertise of TI customers
Figure 3-1. TI New-Product Development Process
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 7
www.ti.com TI Development Process for Management of Systematic Faults
Table 3-1 lists these functional safety development activities that are overlaid atop the standard development
flow in Figure 3-1.
For more information about which functional safety lifecycle activities TI performs, see Appendix B.
The customer facing work products derived from this Functional Safety-Compliant process are applicable to
many other functional safety standards beyond ISO 26262:2018 and IEC 61508:2010.
Table 3-1. Functional Safety Activities Overlaid on Top of TI's Standard Development Process
Assess Plan Create Validate Sustain and End-of-Life
Determine if functional
safety process execution
is required
Nominate a functional
safety manager
End of Phase Audit
Define component target
SIL/ASIL capability
Generate functional safety
plan
Verify the functional safety
plan
Initiate functional safety
case
Analyze target
applications to generate
system level functional
safety assumptions
End of Phase Audit
Develop component level
functional safety
requirements
Include functional safety
requirements in design
specification
Verify the design
specification
Start functional safety
design
Perform qualitative
analysis of design (i.e.
failure mode analysis)
Verify the qualitative
analysis
Verify the functional safety
design
Perform quantitative
analysis of design (i.e.
FMEDA)
Verify the quantitative
analysis
Iterate functional safety
design as necessary
End of Phase Audit
Validate functional safety
design in silicon
Characterize the functional
safety design
Qualify the functional
safety design (per AEC-
Q100)
Finalize functional safety
case
Perform assessment of
project
Release functional safety
manual
Release functional safety
analysis report
Release functional safety
report
End of Phase Audit
Document any reported
issues (as needed)
Perform incident reporting
of sustaining operations
(as needed)
Update work products (as
needed)
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 7
Page 8
Global Shared RAM - Parity
32KW (64KB)
C28x
TMU+FPU+VCU-I
M0 - 1KW (2KB)
M1 - 1KW (2KB)
Boot - 32KW (64KB)
Flash - ECC
C28x RAM - ECC
PIE
CPU Timer0
CPU Timer1
CPU Timer2
10 MHz INTOSC1, INTOSC2
10–20 MHz Crystal Oscillator
NMI Watchdog
Missing Clock Detect
PLL
CLA
(Type 2)
CLA MSG RAM - Parity
DMA
(6 Channels)
3x 12-Bit ADC
8x ePWM
(16 Hi-Res Channels)
7x eCAP
2x eQEP
(CW/CCW Support)
4x SD Filters
1x I2C
7x CMPSS
2x Buffered DAC
7x PGA
1x PMBUS
2x SPI
Windowed Watchdog
LS0–LS7
8x (2KW [4KB])
GS0–GS3
4x (8KW
[16KB])
2x SCI
2x CAN
C28x ROM
DCSM OTP
GPIO
Secure - 64KW (128KB)
Secure
Memories
Flash BANK0 - 16 Sectors
64KW (128KB)
Flash BANK1 - 16 Sectors
64KW (128KB)
CLA to CPU - 128W
CPU to CLA - 128W
1x LIN
CLA ROM
Local Shared RAM - Parity
16KW (32KB)
Data Bridge Data Bridge Data Bridge Data Bridge Data Bridge Data Bridge
Result
Configuration
Program
48KW (96KB)
Data
4KW (8KB)
Copyright © 2017, Texas Instruments Incorporated
Configuration
Data
TMS320F28004x Product Overview
www.ti.com
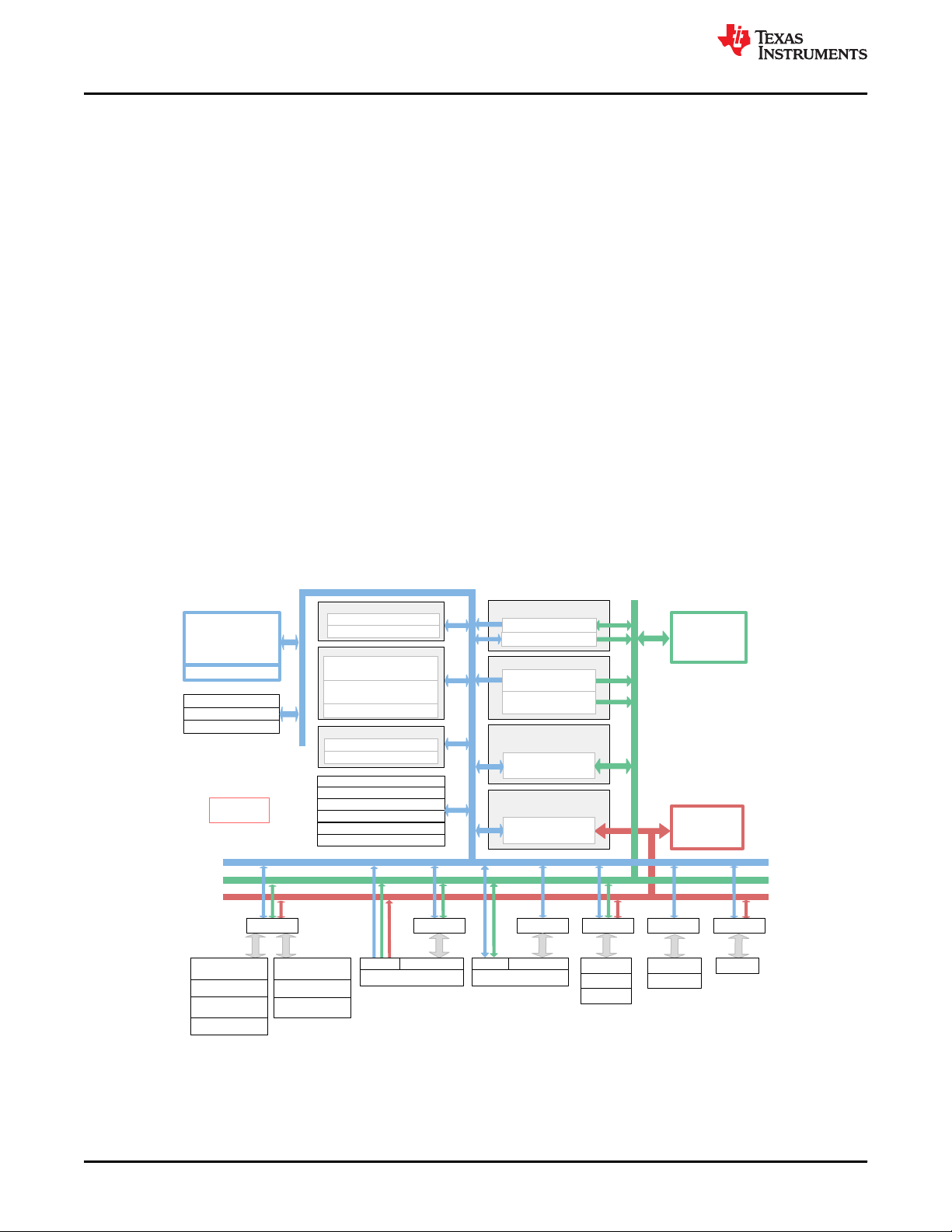
4 TMS320F28004x Product Overview
p
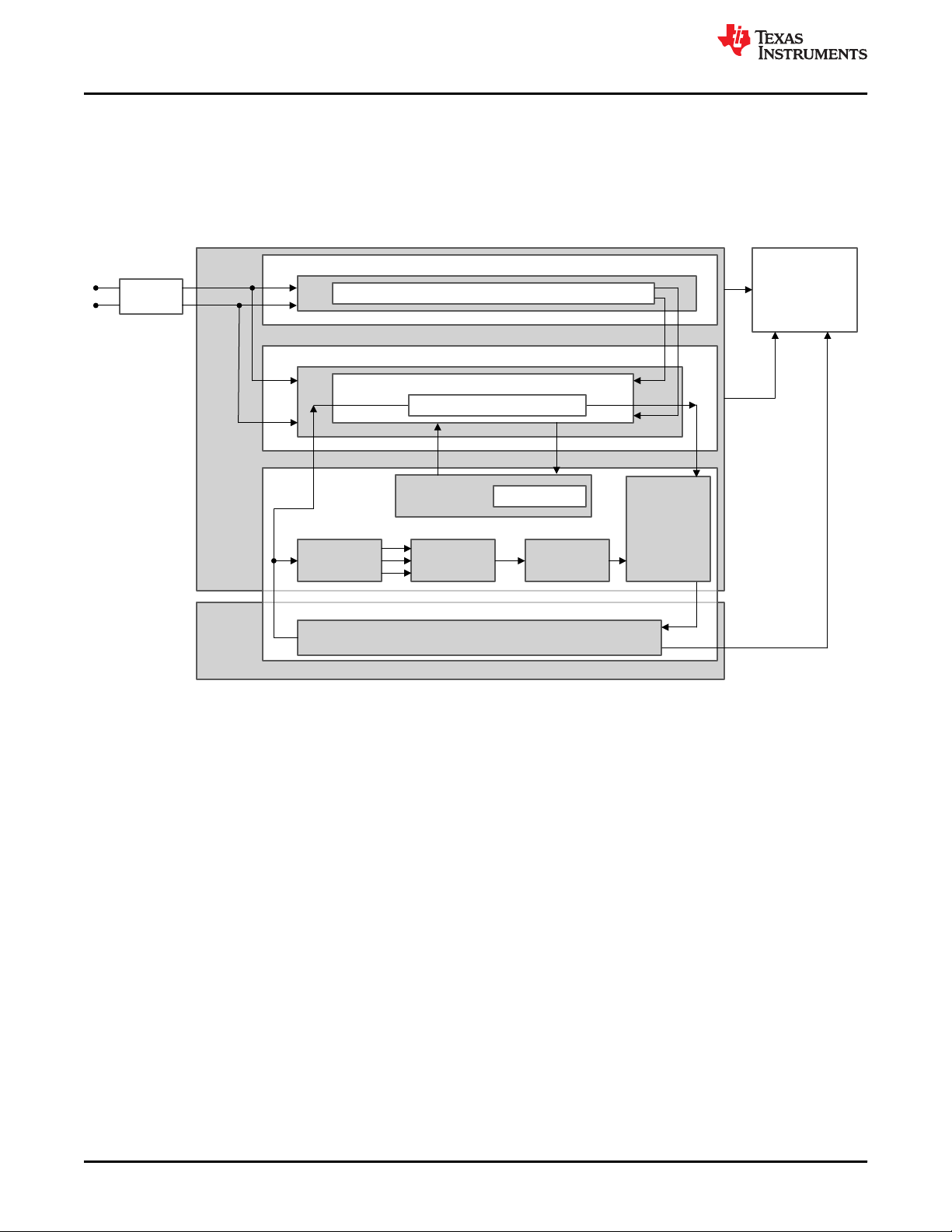
4.1 C2000 Architecture and Product Overview
The TMS320F28004x devices are powerful 32-bit floating-point microcontroller unit (MCU) designed for
advanced closed-loop control applications in automotive and industrial applications.
4.1.1 TMS320F28004x MCU
TMS320F28004x supports C28x and CLA as processing elements that boosts system performance for closed
loop control applications. This is a powerful 32-bit floating-point microcontroller unit (MCU) that lets system
integrator to access crucial control peripherals, differentiated analog, and nonvolatile memory on a single device.
The C28x CPU is further boosted by the Trigonometric Math Unit (TMU) accelerator that enables fast execution
of algorithms with trigonometric operations common in transforms and torque loop calculations. The Viterbi,
Complex Math and CRC Unit (VCU) accelerator reduces the time for complex math operations common in
encoded applications. Users may refer to Accelerators: Enhancing the Capabilities of the C2000™ MCU Family
to see how the accelerators can be employed to increase the performance of the MCU in many real-time
applications.
The CLA is an independent 32-bit floating-point accelerator that runs at the same frequency as the main C28x
CPU, responding to peripheral triggers with minimum event latency and executing code concurrently with the
main CPU.
The TMS320F28004x supports up to 256KB (128KW) of on-chip flash memory with error correction code (ECC)
and up to 100KB (50KW) of SRAM with parity or ECC.
Figure 4-1. Functional Block Diagram of TMS320F28004x MCU
8 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 9
Sensor
Processing
Element
Actuator
S
Remote
Controller
MCU
A
Remote
Controller
S
Remote
Controller
A
Remote
Controller
Sensor
Actuator
Processing Element
www.ti.com
TMS320F28004x Product Overview
High performance analog and control peripherals are also integrated to further enable system consolidation.
Three independent 12-bit ADCs provide precise and efficient management of multiple analog signals, which
ultimately boosts system throughput. The new sigma-delta filter module (SDFM) works in conjunction with the
sigma-delta modulator to enable isolated current shunt measurements. The Comparator Subsystem (CMPSS)
with windowed comparators allows for protection of power stages when current limit conditions are exceeded or
not met. Other analog and control peripherals include the Digital-to-Analog Converter (DAC), Enhanced Pulse
Width Modulation (ePWM), Enhanced Capture (eCAP), Enhanced Quadrature Encoder Pulse (eQEP) and
Programmable Gain Amplifier (PGA). The Programmable Gain Amplifier (PGA) is used to amplify an input
voltage for the purpose of increasing the effective resolution of the downstream ADC and CMPSS modules.
Peripherals such as Controller Area Network (CAN) modules (ISO11898-1/CAN 2.0B-compliant), Inter-Integrated
Communication (I2C) Bus, Local Interconnect Network (LIN), Serial Communications Interface (SCI), Serial
Peripheral Interface (SPI), Power Management Bus (PMBus) Interface, and Fast Serial Interface (FSI) extend
connectivity of TMS320F28004x MCU. The Fast Serial Interface (FSI) module is a serial communication
peripheral capable of reliable high-speed communication across isolation devices.
The device configurations supported by this safety manual for TMS320F28004x MCUs is outlined in the
TMS320F28004x Microcontrollers Data Sheet. Not all variants are available in all packages or all temperature
grades. To confirm availability, contact your local Texas Instruments sales and marketing.
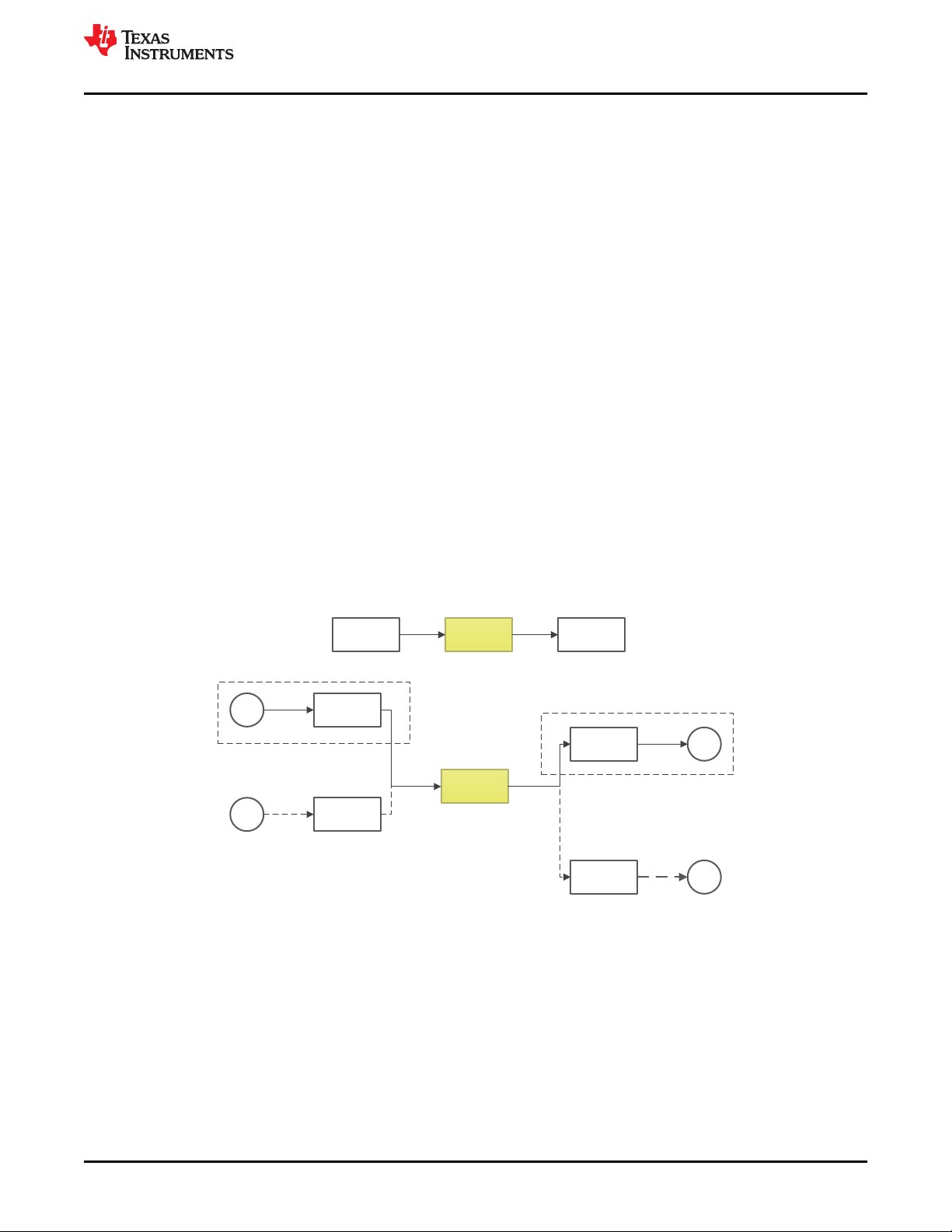
4.2 Functional Safety Concept
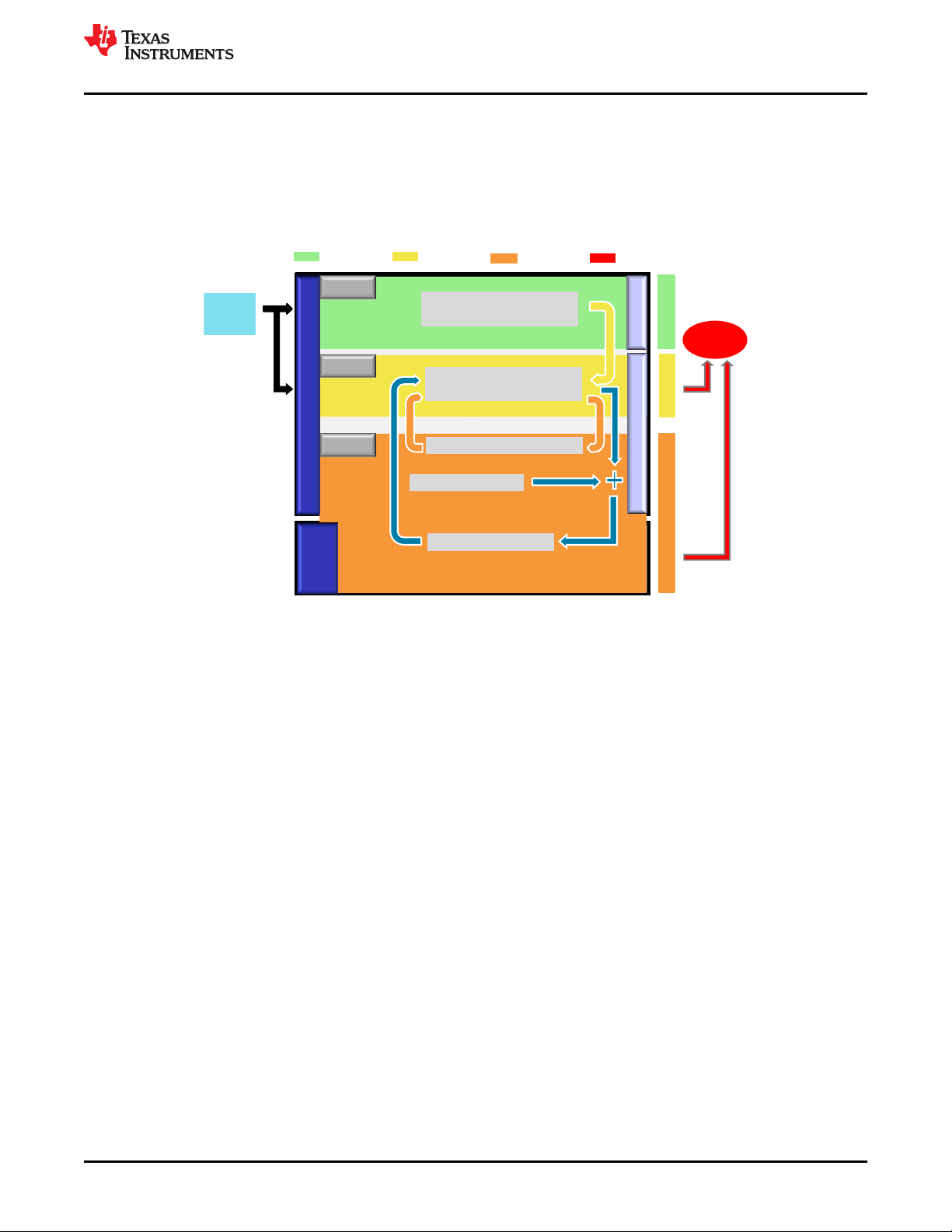
To stay as general as possible, the functional safety concept assumes the MCU playing the role of a processing
unit (or part of it) and connected to remote controller(s) by means of a communication bus as shown in Figure
4-2. The communication bus is directly or indirectly connected to sensor(s) and actuator(s).
IEC 61508-1:2010 defines a compliant item as any item (for example an element) on which a claim is being
made with respect to the clauses of IEC 61508:2010 series. A system including TMS320F28004x microcontroller
as indicated by Figure 4-2 can be used in a compliant item according to IEC 61508:2010.
Figure 4-2. Definition of the TMS320F28004x MCU Used in a Compliant Item
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 9
Page 10
Level 1
ECU Functions
Level 2
Function Monitoring
Level 3
Fault Reaction
Memory Test
Level 2
Quest Spec.
Test Data
Function Spec
Instruction Test
Response
Contribution
Linking
Monitor Modules
Function
Controller
Monitoring
Controller
Input
Signals
Power
Determining Output
Stages/
Safety-Relevant
Bus Communication
Enable
Enable
Program Flow Check
Question Answer
TMS320F28004x Product Overview
www.ti.com
4.2.1 VDA E-GAS Monitoring Concept With TMS320F28004x MCU
The standardized E-GAS monitoring concept [6] for engine management systems generated by the German
VDA working group “E-Gas-Arbeitskreis” is an example of a well-trusted safety-architecture that may be used for
applications other than engine management systems provided it fits the purpose of the new application in terms
of diagnosis feasibility, environment constraints, time constraints, robustness, and so forth [7]. For more
information, see Figure 4-3.
Figure 4-3. E-GAS System Overview From Standard
10 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 11
Monitor
Safe
State
Level 1
Primary
Input
Signals
Main Function
Level 2
Monitoring Function
Program Flow
Level 3
Verify Sequence
CLA
Device Self-Test
Q&A Monitor
Diagnostics
Real-Time Control
Fault-Response
External
Monitor
Safety Related
Fault Detection
Monitoring Sequence
Monitor
cross-check
28X
C2000
Q & A
Q & A
28X
C2000
www.ti.com
TMS320F28004x Product Overview
The MCU device family supports heterogeneous asymmetric architecture and their functional safety features
lend themselves to an E-GAS concept implementation at system level as indicated in Figure 4-4. In the first level
(Level 1), the functions required for the system mission are computed. Second level (Level 2) checks the correct
formation in first level based on selected set of parameters. Third level (Level 3) implements an additional
external monitoring element, for the correct carrying out of the mission in the first level and/or monitoring in the
second level. The exact functional safety implementation and the modules used for realizing Level 1 and Level 2
and the external monitoring device for realizing Level 3 are left to the system designer.
Figure 4-4. VDA E-Gas Monitoring Concept Applied to F28004x MCU
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 11
Page 12
TMS320F28004x Product Overview
www.ti.com
Due to the inherent versatility of the device architecture, several software voting based functional safety
configurations are possible. Some of the functional safety configurations possible with TMS320F28004x for
improving diagnostic coverage are explained in Table A-1. While implementing these configurations, system
integrator needs to consider the potential common mode failures and address them in an appropriate manner.
This may suitably be modified to adapt to TMS320F28004x requirements based on the availability of processing
units. (As stated earlier, the device claims no hardware fault tolerance, (for example, no claims of HFT > 0), as
defined in IEC 61508:2010).
The major safety features of TMS320F28004x are shown in Figure 4-5.
Figure 4-5. TMS320F28004x MCU With Safety Features
12 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 13
Fault
Normal Operation Unsafe State
Safe State
Fault Detection
Hazard
Avoided
T <= FDTI
Fault Reaction
Time
FTTI
Check OK
Check OK
Check NOT OK
Level2/Level3
function
Level1
function
Cross check Period (Tcc)
FTTI Budget for the MCU
Delay for MCU to
enter safe state,
Td
Tcc + Td < FTTI
www.ti.com
TMS320F28004x Product Overview
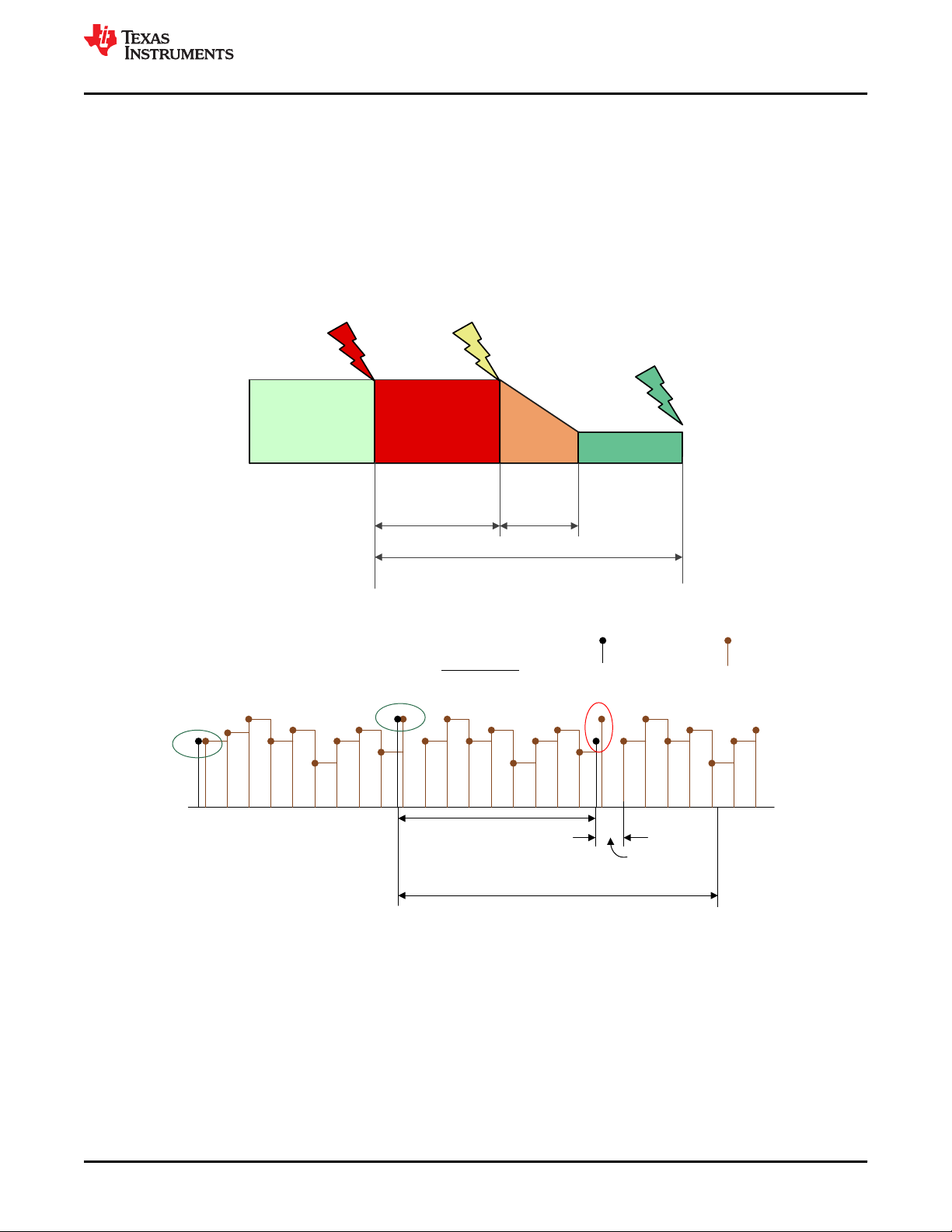
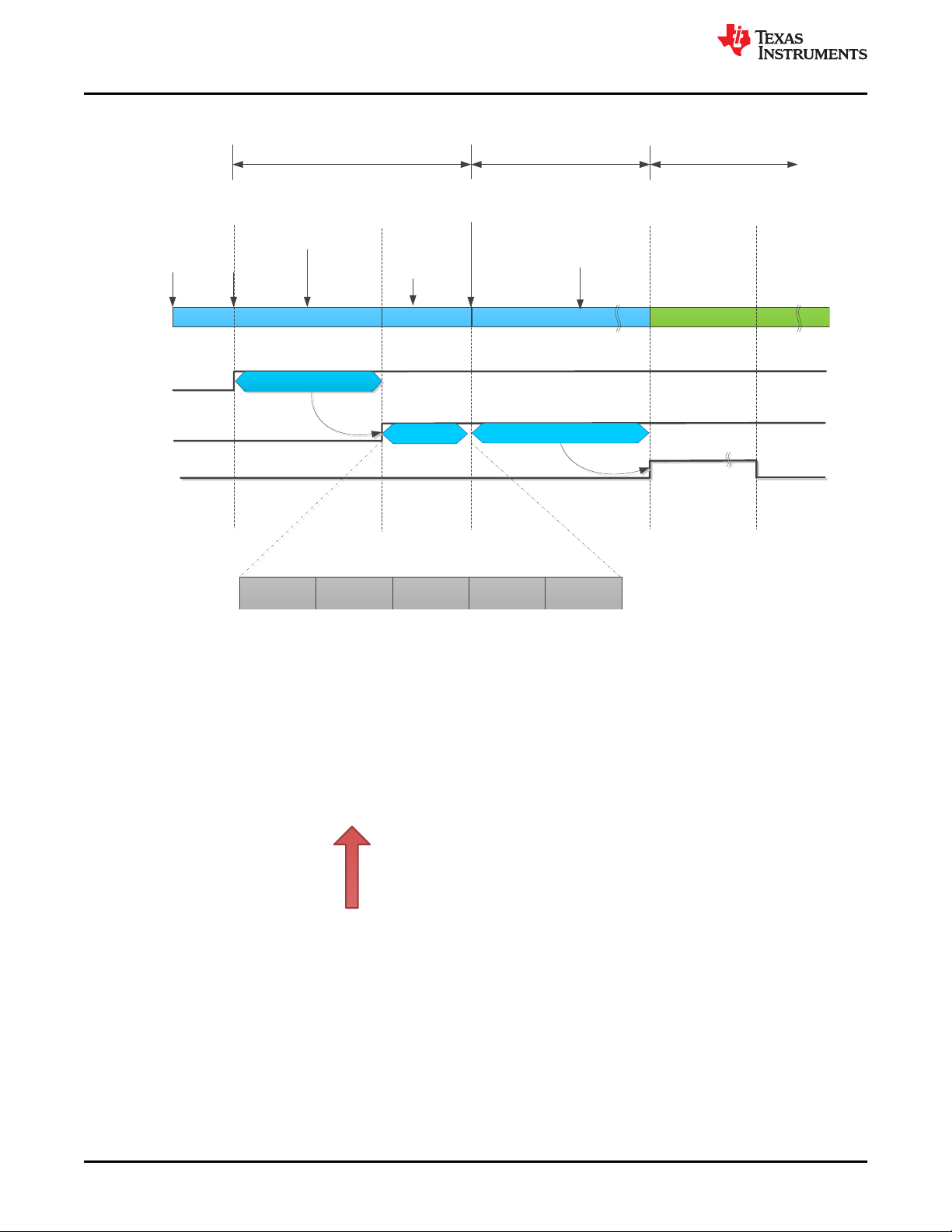
4.2.2 Fault Tolerant Time Interval (FTTI)
Various functional safety mechanisms in the devices are either always-on (see CPU Handling of Illegal
Operation, Illegal Results and Instruction Trapping, and so forth) or executed periodically (see VCU CRC Check
of Static Memory Contents, and so forth) by the application software. The maximum time that a safety
mechanism will take to detect a fault is termed as Fault Diagnostic Test Time Interval (FDTI). Once the fault is
detected, depending on the fault reaction of the associated fault (for example, external system reaction to
ERRORSTS pin assertion), the system will enter in the safe-state. The time-span in which a fault or faults can be
present in a system before a hazardous event occurs is called Fault Tolerant Time Interval (FTTI) as defined in
ISO 26262. This is similar to Process Safety Time (PST) defined in IEC 61508. Figure 4-6 illustrates the
relationship between FDTI, Fault Reaction Time and FTTI.
The frequency and extent of each of the Level 2 and Level 3 checks in E-GAS monitoring concept should be
consistent with the Fault Tolerant Time Interval (FTTI). Figure 4-7 illustrates the frequency of the required
checks. The checks should be such that single point faults of the microcontroller should be detected and
responded to, such that the TMS320F28004x MCU enters a safe state within the FTTI budget. The
microcontroller on detection of a fault enters into one of the safe states as illustrated in Figure 4-8. An example
of a diagnostic for single point faults is ECC/Parity for memories.
Figure 4-6. Relationship Between FDTI, Fault Reaction Time and FTTI
Figure 4-7. Illustration of FTTI
Copyright © 2020 Texas Instruments Incorporated
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Safety Manual for TMS320F28004x 13
Page 14
+ -
TMS320F28004x
XRSn
Input
Output
ERRORSTS
3.Reset state: MCU is
kept in reset
+ -
TMS320F28004x
XRSn
Input
Output
ERRORSTS
2.Safe state: Power supply cut-off or
not in proper operating range.
+ -
TMS320F28004x
XRSn
Input
Output
Tristated
ERRORSTS
5.Safe state: MCU
Output is tristated
+ -
TMS320F28004x
XRSn
Input
Output
ERRORSTS
4. Safe state: ERRORSTS
pin is asserted
+ -
TMS320F28004x
XRSn
Input
Output
ERRORSTS
1.Proper Operational State
TMS320F28004x Product Overview
www.ti.com
The proposed functional safety concept, subsequent functional safety features and configurations explained in
this document are for reference purpose only. The system and equipment designer or manufacturer is
responsible to ensure that the end systems (and any Texas Instruments hardware or software components
incorporated in the systems) meet all applicable safety, regulatory and system-level performance requirements.
4.2.3 TMS320F28004x MCU Safe State
Referring to Figure 4-8, the safe state of the TMS320F28004x MCU is defined as the one in which:
• TMS320F28004x MCU Reset is asserted
• Power supply to TMS320F28004x MCU is disabled using an external supervisor as a result of Level 3 check
failure. In general, a power supply failure is not considered in detail in this analysis as it is assumed that the
system level functionality exists to manage this condition.
• External system is informed using one of C2000 MCU’s IO pins as a result of Level 2 check failure (for
example, ERRORSTS pin is asserted).
• Output of the TMS320F28004x MCU driving the actuator is forced to inactive mode as a result of Level 2
check failure (for example, GPIO pins corresponding to the mission function is tri-stated).
Figure 4-8. TMS320F28004x MCU Safe State Definition
14 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 15
Powered
Off
Reset
State
Cold Boot
Warm
Boot
Pre-
Operational
Operational
Power removed
Power applied
Chip Pin Reset
released
Defined Safe State
conditions
CPU1 Reset
released
Device boot phaseCPUSS operation
Safe State
XRSn = 0
www.ti.com
TMS320F28004x Product Overview
Figure 4-9. TMS320F28004x MCU Device Operating States
4.2.4 Operating States
The C2000 MCU products have a common architectural definition of operating states. These operating states
should be observed by the system developer in their software and system level design concepts. The operating
states state machine is shown in Figure 4-9. The operating states can be classified into device boot phase and
CPU Subsystem (CPUSS) operation phase.
The various states of the device operating states state machine are:
• Powered Off - This is the initial operating state of TMS320F28004x MCU. No power is applied to either core
or I/O power supply and the device is non-functional. An external supervisor can perform this action (powerdown the TMS320F28004x MCU) in any of the TMS320F28004x MCU states as response to a system level
fault condition or a fault condition indicated by the TMS320F28004x MCU.
• Reset State – In this state, the device reset is asserted either using the external pins or using any of the
internal sources.
• Safe State – In the Safe state, the device is either not performing any functional operations or an internal fault
condition is indicated using the device I/O pins.
• Cold Boot - In the cold boot state, key analog elements, digital control logic, and debug logic are initialized.
The CPU remains powered but in reset. When the cold boot process is completed, the reset of the CPU is
internally released, leading to the warm boot stage.
• Warm Boot - The CPU begins execution from Boot ROM during the warm boot stage.
• Pre-operational - Transfer of control from boot code to customer code takes place during this phase.
Application specific configurations (for example, clock frequency, peripheral enable, pinmux, and so forth) are
performed in this phase. Boot time self-test/proof-test required to ensure proper device operation is
performed during this phase. For details, see ROM8-Power-Up Pre-Operational Security.
• Operational – This marks the system exiting the pre-operational state and entering the functional state. The
device is capable of supporting safety critical functionality during operational mode.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 15
Page 16
Cold Boot
Power
Applied
Efuse autoload
(cold boot phase)
Boot ROM
execution and
security
initialization
(Warm boot phase)
Reset
Released
Customer
Code Starts
Operational Phase
Pre Operational Phase
Warm Boot
TI boot code execution. Can be characterized
based on device configuration Customer code Self-test code
Pre operational checks by CPU1
(Verify RAM, Flash, Watchdog,
CPU, %RRW520«..)
XRSn
Internal
Reset
Boot ROM
Customer pre-operational checks
ERROR_STS
(active-low)
Efuse Autoload
Customer application code
Security Init
Analog (DAC,
ADC, OSC) Init
Bootmode SelPwr Mgmt init
Boot exception
init
x Device Powerdown
x Assertion of XRSn pin
x Assertion of CPU Reset
x NMI and assertion of ERRORSTS pin
x CPU Interrupt
TMS320F28004x Product Overview
The device start-up timeline for both the CPUs are shown in Figure 4-10.
www.ti.com
Figure 4-10. TMS320F28004x MCU CPU Start-Up Sequence
4.2.5 Management of Faults
The TMS320F28004x MCU product architecture provides different levels of fault indication from internal safety
mechanisms using CPU Interrupt, Non Maskable Interrupt (NMI), assertion of ERRORSTS pin, assertion of CPU
input reset and assertion of warm reset (XRSn). The fault response is the action that is taken by the
TMS320F28004x MCU or system when a fault is indicated. Multiple potential fault responses are possible during
a fault indication. The system integrator is responsible to determine which fault response should be taken to
ensure consistency with the system safety concept. The fault indication ordered in terms of severity (device
power down being the most severe) is shown in Figure 4-11.
Figure 4-11. Fault Response Severity
• Device Powerdown: This is the highest priority fault response where the external component (see Section
4.4.1) detects malfunctioning of the device or other system components and powers down the
TMS320F28004x MCU. From this state, it is possible to re-enter cold boot to attempt recovery.
• Assertion of XRSn: The XRSn reset could be generated from an internal or external monitor that detects a
critical fault having potential to violate safety goal. Internal sources generate this fault response when the
TMS320F28004x MCU is not able to handle the internal fault condition by itself (for example, CPU1 (master
CPU) is not able to handle NMI by itself). From this state, it is possible to re-enter cold boot and attempt
recovery.
16 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 17

www.ti.com
TMS320F28004x Product Overview
• Assertion of CPU Reset: CPU Reset changes the state of the CPU from pre-operational or operational state
to warm boot phase. The CPU Reset is generated from an internal monitor that detects any security
violations. Security violations may be the effect of a fault condition.
• Non Maskable Interrupt (NMI) and assertion of ERRORSTS pin: C28x CPU supports a Non Maskable
Interrupt (NMI), which has a higher priority than all other interrupts. The TMS320F28004x MCU is equipped
with a NMIWD module responsible for generating NMI to the C28x CPU. ERRORSTS pin will also be
asserted along with NMI. Depending on the system level requirements, the fault can be handled either
internal to the TMS320F28004x MCU using software or at the system level using the ERRORSTS pin
information.
• CPU Interrupt: CPU interrupt allows events external to the CPU to generate a program sequence context
transfer to an interrupt handler where software has an opportunity to manage the fault. The peripheral
interrupt expansion (PIE) block multiplexes multiple interrupt sources into a smaller set of CPU interrupt
inputs.
4.2.6 Suggestions for Improving Freedom From Interference
The following techniques and safety measures shall be used as applicable for improving independence of
function when using the TMS320F28004x MCU:
1. Hold peripherals clocks disabled if the available peripherals are unused (CLK14-Peripheral Clock Gating
(PCLKCR)).
2. Hold peripherals in reset if the available peripherals are unused (RST9-Peripheral Soft Reset (SOFTPRES)).
3. When possible, separate critical I/O functions by using non adjacent I/O pins/balls.
4. Partition the memory as per the application requirements to respective processing units and configure the
Access Protection Mechanism for Memories, for each memory instance such that only the permitted masters
have access to memory.
5. The Dual Code Security Module (DCSM) can be used for functional safety where functions with different
safety integrity levels can be executed from different security zones (zone1, zone2, and unsecured zone),
acting as firewalls and thus mitigating the risk due to interference from one secure zone to another. For more
information, see Achieving Coexistence of Safety Functions for EV/HEV Using C2000™ MCUs
6. TMS320F28004x supports SYS10-Peripheral access protection - Type 0. After programming peripheral
access protection registers, each master can exclusively control the peripheral to safeguard usage by
particular application against errant writes or corruption by other masters in the system. This is enabled using
the dedicated access control bits per peripheral which allow or protect against the access from given master.
Each peripheral has two bit qualifier per master to decode the access allowed. For more details, see the
PERIPH_AC_REGS Registers in TMS320F28004x Technical Reference Manual.
7. ADC11-Disabling Unused Sources of SOC Inputs to ADC can help avoid interference from unused
peripherals to disturb functionality of ADC.
8. DMA9-Disabling of Unused DMA Trigger Sources will help minimize interference caused by unintentional
DMA transfers.
9. CLA11-Disabling of Unused CLA Trigger Sources will mitigate risk of interference caused due to the trigger
events.
10.To avoid interference from spurious activity on MCU’s debug port, JTAG1-Hardware Disable of JTAG Port can
be used.
11. Safety applications running on the CPU can be interfered by unintentional faulty interrupt events to PIE
module. PIE7-Maintaining Interrupt Handler for Unused Interrupts and PIE8-Online Monitoring of Interrupts
and Events will detect such interfering failures.
12.MCU resources in supporting CPU execution such as memory, interrupt controller, and so forth could be
impacted by resources from lower safety integrity safety functions coexisting on same MCU. Safety
mechanisms such as SRAM11-Access Protection Mechanism for Memories, SRAM16–Information
Redundancy Techniques, SRAM17-CPU Handling of Illegal Operation, Illegal Results and Instruction
Trapping will be able to detect such interference.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 17
Page 18
TMS320F28004x Product Overview
www.ti.com
13.Critical configuration registers could be victim of interference from bus masters on MCU which implements
lower safety integrity functions. These can be protected by SYS1-Multi-Bit Enable Keys for Control Registers,
SYS2-Lock Mechanism for Control Registers, SYS8-EALLOW and MEALLOW Protection for Critical
Registers.
4.2.7 Suggestions for Addressing Common Cause Failures
System Integrator needs to execute a common cause failure analysis to consider possible dependent/common
cause failures on the sub-elements of the TMS320F28004x MCU, including pin level connections.
1. Consider a relevant list of dependent failure initiators, such as the lists found in ISO 26262-11:2018. Analysis
of dependent failures should include common cause failures among functional redundant parts and also
between functions and the respective safety mechanisms.
2. Verify that the dependent failure analysis considers the impact of the software tasks running on the
TMS320F28004x MCU, including hardware and software interactions.
3. Verify that the dependent failure analysis considers the impact of the pin or ball level interactions on the
TMS320F28004x MCU package, including aspects related to the selected I/O multiplexing.
The following should be considered for addressing the common cause failures when using the TMS320F28004x
MCU:
1. Redundant functions and safety mechanism can be impacted by common power failure. A common cause
failure on power source can be detected by PWR1-External Voltage Supervisor, PWR2-External Watchdog.
2. In general, a clock source which is common to redundant functions should be monitored and any failures on
the same can be detected by safety mechanisms such as CLK1-Missing Clock Detect (MCD), CLK2-Clock
Integrity Check Using CPU Timer, CLK5-External Clock Monitoring via XCLKOUT and CLK8-Periodic
Software Read Back of Static Configuration Registers. Specifically, to avoid common clock failure affecting
Internal Watchdog (WD) and CPU, it is recommended to use either INTOSC2 or X1/X2 as clock source to
PLL.
3. Failure of common reset signal to redundant functions can be detected by RST1-External Monitoring of Warm
Reset (XRSn), RST2-Reset Cause Information.
4. Common cause failure on Interconnect logic could impact both redundant functions and also functional safety
mechanism in same way. In addition to other safety mechanisms, INC1-Software Test of Function Including
Error Tests can be implemented to detect faults on interconnect logic.
5. Common cause failure could impact two functions used in a redundant way. In case the of communication
peripherals, module specific Information Redundancy Techniques Including End-to-End Safing can be
implemented to detect common cause failures, for example, CAN2-Information Redundancy Techniques
Including End-to-End Safing, SPI2-Information Redundancy Techniques Including End-to-End Safing, SCI3Information Redundancy Techniques Including End-to-End Safing, I2C3-Information Redundancy Techniques
Including End-to-End Safing.
6. Use different voltage references and SOC trigger sources for ADC (see Section 6.5.8).
7. Use ePWM modules from different sync groups for implementing Hardware Redundancy.
8. Use GPIO pins from different groups when implementing Hardware Redundancy for GPIO pins.
9. It is recommended that two PGA modules used in redundant way to not share same ground pin. Refer to
device specific datasheet for details on which PGA's share common ground.
18 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 19
www.ti.com TMS320F28004x Product Overview
4.3 C2000 Safety Diagnostics Libraries
The diagnostics libraries designed for the F28004x family of devices comprise of three libraries, namely, the
CLA_STL, C28x_STL and SDL. These libraries are designed to help TI customers, using the F28004x, develop
functionally safe systems that can comply with a wide range of standards for end products in the automotive
(ISO 26262), industrial (IEC 61508) and appliance (IEC 60730) markets. The CLA_STL and the C28x_STL
implements the CLA2 - Software Test of CLA and CPU3 - Software Test of CPU safety mechanisms and the SDL
provides examples for several safety mechanisms provided in the safety manual.
Table 4-1. DC and SCC Targeted for F28004x Diagnostic Libraries
Library
CLA_STL ≥ 90% ASIL D/SIL 3
C28x_STL ≥ 60% ASIL D/SIL 3
SDL Examples Only N/A
Permanent fault Diagnostic
Coverage
The CLA_STL and C28x_STL were independently assessed and found to be suitable for being integrated into
safety related systems up to ASIL D and SIL 3 according to ISO 26262:2018 and IEC 61508:2010 respectively.
The CLA_STL represents a safety mechanism with the capability to detect permanent faults of the Control Law
Accelerator (CLA) with a 90% Diagnostic Coverage. The C28x_STL represents a safety mechanism with the
capability to detect permanent faults of the C28x CPU with a 60% Diagnostic Coverage.
Systematic Capability
Compliance Description
This STL implements CLA2 -
Software Test of CLA
This STL implements CPU3 -
Software Test of CPU
The SDL provides examples of
several safety mechanisms
described in the safety manual
The SDL is generally called a Software Diagnostic Library and is an integral part of the overall safety related
collateral provided by TI. It comprises general example implementations of several safety mechanisms. The SDL
examples are developed using a Baseline Quality software development flow and are not required to be
compliant with any particular standard. As such, the SDL is not certified by TÜV SÜD. Users are expected to
study and adapt the provided examples into their safety related applications and are responsible to for their own
product level third party certifications.
In order to assist customers with getting their own product level certifications, TI has developed an F28004x
Compliance Support Package (CSP). The CSP provides documentation, source code, static analysis results,
MISRA C compliance results, unit test reports, dynamic analysis results, functional tests and integration
examples. The STL (C28x_STL and CLA_STL) libraries and the corresponding source code released in the CSP
demonstrate the product of a software development flow that is compliant with ISO 26262 ASIL D systematic
capability.
WARNING
In order to maintain the diagnostic coverage, the source code of C28x_STL and CLA_STL listed in
Table 4-4 and Table 4-5 must be used as delivered by TI and must not be modified when integrating
the libraries into the customer application. Any modification will certainly result in a compromise of
the safety goal for the final product, resulting in an unsafe operating environment for the end user.
Table 4-2 shows the tools used to develop the F28004x libraries.
Table 4-2. Tools Required for Integration of the F28004x STL
SW/HW/Tool Version Dependency
Code Composer Studio 9.2.0.00013 Integrated Development Environment
CGT 20.2.1.LTS Code Generation Tool Chain (Compiler,
C2000Ware V3.01.00.00 F28004x Header Files
TMDSCNCD280049C Rev. A F280049 controlCARD Information Guide
Assembler, Linker)
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 19
Page 20
TMS320F28004x Product Overview
www.ti.com
The system integrator must consult the C28x_STL and CLA_STL user guides for all the details related to
installation and development.
The STLs were tested on the F28004x controlCARD.
4.3.1 Assumptions of Use - F28004x Self-Test Libraries
This section provides the high level details related to what a system integrator must consider during the process
of defining and building their F28004x based safety architecture.
The software support for the various safety mechanisms in the F28004x can be divided into the following three
categories:
• C28x Self-Test Library
• SDL – Software Diagnostic Library
• CLA Self-Test Library
A safe product built on the F28004x device hierarchically deploys each of the software solutions provided by TI.
The first in the hierarchy is the C28x_STL which detect permanent faults inside the CPU by implementing the
CPU3 - Software Test of CPU safety mechanism. The second in the hierarchy is the SDL which provides a
series of examples of safety mechanisms that are designed to detect permanent faults inside several key
elements within the F28004x device. Lastly, the CLA_STL which implements the CLA2 - Software Test of CLA
safety mechanism, can be deployed to detect permanent faults inside the CLA.
The CLA_STL makes use of, and depends on both the C28x CPU and the CLA to test the CLA. Therefore it is
important to run the C28x_STL first to make sure that the CPU is functioning properly and is capable of
performing the required safety operations. The SDL supports safety mechanisms such as: CLK2 - Clock Integrity
Check Using CPU Timer, CLK10 - Software Test of Watchdog (WD) Operation, CLK12 - Software Test of
Missing Clock Detect Functionality, SRAM14 - Software Test of Parity Logic, SRAM13 - Software Test of ECC
Logic, SRAM3 - Software Test of SRAM and several other key processing elements. The system integrator must
study all the safety mechanisms supported by the SDL and determine their applicability into the safety system
being designed. The safety system must be evaluated with respect to the startup and runtime constraints and
whether the software diagnostic tests can be run during POST, PEST or a combination of both.
The successful completion of the software diagnostics, selected by the system integrator, can be used as the
qualifier to run the test vectors supported by the CLA_STL.
4.3.2 Operational Details - F28004x Self-Test Libraries
The C28x_STL, SDL and the CLA_STL are co-hosted onto an F28004x target in order to enable the
comprehension of safety in the host application. Therefore, it is important for a system integrator to fully
comprehend all aspects of the associated system constraints imposed by the integration of the STLs to
comprehend safety.
4.3.2.1 Operational Details – C28x Self-Test Library
The C28x_STL implements the CPU3 - Software Test of CPU. This library achieves a diagnostic coverage of
60% and certified by TÜV SÜD to meet LFM for ISO26262:2018 ASIL B. The C28x_STL runs directly on the
CPU and effectively tests a subset of CPU Registers, CPU instructions, CPU flags, the FPU, TMU and VCUCRC functionality. The Viterbi and Complex Math instructions in VCU are not covered by C28x_STL and should
not be used for safety related software.
In order to run these tests, the C28x_STL occupies program memory storage space, and dedicated execution
RAM space. All the C28x_STL tests are destructive in nature, and do not have a method to restore the system
back to the original a sate. Since the C28x_STL tests and reports on the health of the CPU itself and the system
state cannot be meaningfully saved and restored, it must be integrated into the startup portion of the application.
System integrator should enable the watchdog to ensure the application is protected against runaway code.
The system integrator must consult the C28x_STL user guides and understand all aspects of integrating the
library into the host application.
20 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 21
www.ti.com
TMS320F28004x Product Overview
4.3.2.2 Operational Details – CLA Self-Test Library
The CLA_STL, implements the CLA2 - Software Test of CLA. Similar to the C28x_STL the CLA_STL’s startup
tests are also destructive in nature and should be run during startup operations. The CLA_STL’s run time tests
comprise the bulk of the tests designed to run in conjunction with the host application. The CLA host application
must allocate the time and space for the run time tests. To achieve 90% permanent DC, the CPU must run both
the CLA_STL POST and PEST tests.
The system integrator must consult the CLA_STL user guides and understand all aspects of integrating the
library into the host application.
4.3.2.3 Operational Details – SDL
Table 4-3 is a mapping of SDL software modules and APIs to safety features and diagnostic.
Table 4-3. API Mapping
API Name Unique Identifier
STL_CAN_RAM CAN4, CAN15
STL_CPU_REG None, added for IEC 60730
STL_CRC
STL_March SRAM3
STL_OSC_CT CLK2
STL_OSC_HR OTTO1, CLK3
STL_PIE_RAM PIE6
sdl_ex_flash_ecc_test FLASH6
sdl_ex_mcd_test CLK12
sdl_ex_ram_access_protect SRAM10
sdl_ex_ram_ecc_parity_test SRAM13, SRAM14
sdl_ex_watchdog CLK10
Generic CRC calculation that could be used for any memory or for adding CRC to
communications - probably applies to several mechanisms
4.3.3 C2000 Safety STL Software Development Flow
The C28x-STL and CLA-STL are developed using the TUV-SUD Certified TI internal software development
process specification which targets software development flows for baseline quality, automotive quality and/or
functional safety quality. (for functional safety, specifically the target is systematic capability compliance with the
IEC 61508 and ISO 26262 standards). TUV-SUD certificate for TI's SW development process is available here.
The software development process specification describes the contents of the required deliverables during each
of the four phases, namely, Assess, Plan, Create and Validate. By adhering to this specification and complying
with the underlying processes, including methods and techniques (IEC 61508-3, ISO 26262-6), which are
comprehended in the work-products, it is ensured that a TI SW/FW development achieves a systematic
capability of ASIL D (ISO 26262-6) and SIL 3 (IEC 61508-3).
• Figure 4-12 depicts TI's (TUV-SUD certified) Software Development Life Cycle with respect to the various
quality levels supported by the process.
• Detailed supporting procedures are documented to ensure functional safety throughout the project life cycle.
Additional tools and techniques respecting the safety integrity levels of the targeted standards are applied at
each development phase.
• Functional safety audits and assessments are planned and conducted as per defined procedure. Qualified
personnel with adequate independence as required by the targeted standards and safety levels do these
audits and assessments.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 21
Page 22

TMS320F28004x Product Overview www.ti.com
Figure 4-12. TI Software Development Lifecycle - Quality Level
4.3.4 Software Delivery Form (SDF) for STLs
The source code delivered with both C28x_STL and the CLA_STL must be validated with the reference MD5
information provided in Table 4-4 and Table 4-5 respectively. This is strongly recommended as a precautionary
step to ensure that the source code is exactly the same as what was certified by TÜV SÜD.
Table 4-4. MD5 Signatures for C28x-STL
c28x_stl.c 84a196c75d5ffabebf7c9041cd3ab4ca
c28x_stl.h 8c87c78bffddb4f8a803278d16b6e8a9
c28x_stl_s.asm 615df2a99ad9fced513cdca3e45aaa04
c28x_stl_tg00.asm d244f2f993ae616c4d417a93d01d3b3f
c28x_stl_tg01.asm d232dfb25921b336bf9b20a630d8d890
c28x_stl_tg02.asm 37077dbb7f7b0225d7a74a389a2f2710
MD5 Signature
c28x_stl_tg03.asm 56f2c5bdb0872bfe1d4e175165a14688
c28x_stl_tg04.asm aa2954de7fa798adf2e1de0fca768cb0
c28x_stl_tg05.asm 38eddd1531564c2c988701a735821c99
c28x_stl_tg06.asm 866f9ebce8c5b38e15567caa10656752
c28x_stl_tg07.asm 1514d04858e81aa27eea9039ec072a9c
c28x_stl_tg08.asm 44faeb49184284bbe6a76e7fbecccddb
c28x_stl_tg09.asm fa4940544caa8228d20658babca23825
22 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 23
www.ti.com
TMS320F28004x Product Overview
Table 4-5. MD5 Signatures for CLA-STL
stl_cla_pest.c 41ec9de76bf24afc76fbd48b5b1ee197
stl_cla_post.c 8af146b665c6a5c7f76d87e8f7754181
stl_cla_registers_1.c f5d6c238e71a41e4fdf9554d51cd8bad
stl_cla_registers_2.c 4b055558d5bb49bc52fc7d2453cafadb
MD5 Signature
stl_cla_registers_3.c a2ebbc79d3f1d8a5ab347dd47443b324
stl_cla_s.asm 01c9c8f5839cf821846e97d7441a234e
stl_cla_utils.c aceeae34b58a96a403ec65bde3ec0888
stl_claswbist_s.asm 3eeb54030a2a08efef2a0a06039a5d65
stl_cla.h 3acb93691a464c7ae39020a77023d35d
stl_cla_internal.h 05b82e678c762b3250e9c5e0a4f11d74
4.4 TMS320F28004x MCU Safety Implementation
4.4.1 Assumed Safety Requirements
The following assumed safety requirements need to be implemented using external components by the Level 3
checker (VDA E-gas concept).
• External voltage monitor to supervise the power supply provided to the TMS320F28004x MCU
• External Watchdog timer that can be used for diagnostic purposes
• Components required for taking the system to safe state as per the TMS320F28004x MCU safe state defined
in Section 4.2.3.
4.4.2 Example Safety Concept Implementation Options on TMS320F28004x MCU
TMS320F28004x class of devices supports a pair of diverse processing units (C28x and CLA) with
heterogeneous asymmetric architectures, instruction sets and software tools. Either of the processing units can
be used to execute the intended function (the main real-time control function). The safety functions, which
ensure that each safety goal can be met, can be implemented by one of the processing units, utilizing the other
processing unit for diagnostic of random hardware failure by running Reciprocal Comparison by Software in
separate processing units providing high diagnostic coverage for the processing units (ISO 26262-5:2018, Table
D.4 and IEC 61508-2:2010, Table A.4). Safety mechanisms such as CPU Handling of Illegal Operation, Illegal
Results and Instruction Trapping, CLA Handling of Illegal Operation and Illegal Results, Internal Watchdog (WD)
and so forth, can also be utilized. Software Test of CLA and Software Test of CPU can be used to implement
latent fault coverage of the diagnostic function. Heterogeneous CPU cores minimize possibility of common mode
failures while implementing this reciprocal comparison, thereby improving confidence in its Diagnostic Coverage.
For common cause failures such as clock, power and reset, an external watchdog should be used. Here are
some definitions:
• Intended Function: Control application implemented on TMS320F28004x (PFC, DCDC, traction-inverter etc.)
• Safety Function: Achieves risk reduction and implemented for safety goals identified from HARA
– Example: prevent over-current, over/under voltage, over temperature, forward/reverse torque etc.)
– Shall meet >= 90% SPFM for both permanent and transient faults
• Diagnostic Function: Ensures safety-function will operate correctly when required
– Shall meet >= 60% LFM for ISO 26262:2018 (ASIL B compliance targeted) systems
The following are the safety concept options which can be implemented on TMS320F28004x.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 23
Page 24
`
Power
Electronics
Ref
+
C28x
PFC+Safety
Actuation
Sensing
CLA
DC-DC
Actuation
Ref
+
Sensing
±
±
+
Power
Electronics
+
C2000 Microcontroller
TMS320F28004x Product Overview
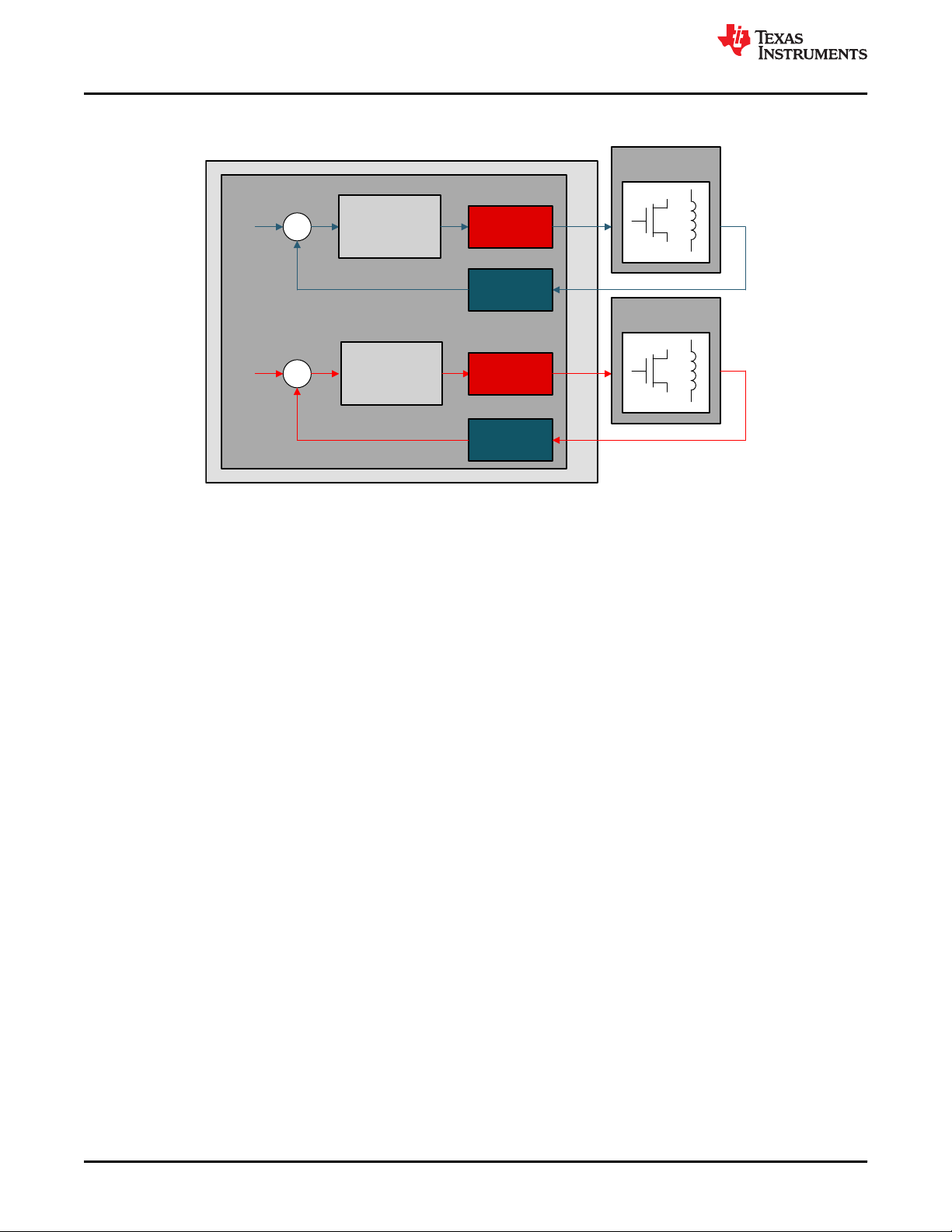
4.4.2.1 Safety Concept Implementation: Option 1
Figure 4-13. Safety Concept Implementation Option 1
www.ti.com
• Intended Function: can be implemented on both C28x and CLA.
• Safety Function: Implement on C28x or CLA.
– SPFM can be met by Reciprocal Comparison by Software
• Diagnostic Function: Implement on the other processing unit.
– LFM can be met by Software Test of CLA or Software Test of CPU
24 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 25
`
Power
Electronics
Ref
+
C28x
PFC
Actuation
Sensing
CLA
DC-DC
Actuation
Ref
+
Sensing
±
±
+
Power
Electronics
+
PPB
ADC
+
±
CMP
TRIP-PWM
ERRORSTS
C2000 Microcontroller
DAC
www.ti.com
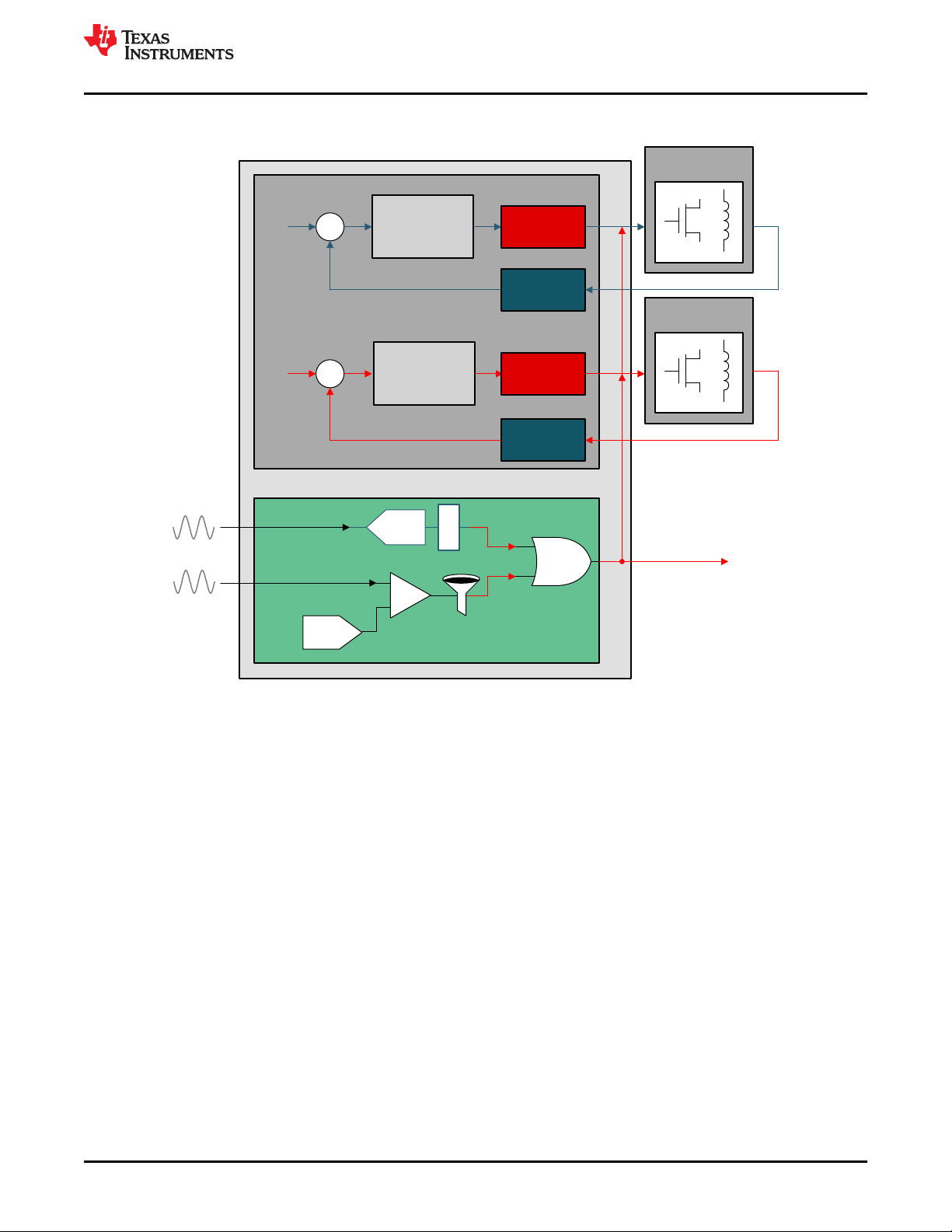
4.4.2.2 Safety Concept Implementation: Option 2
TMS320F28004x Product Overview
Figure 4-14. Safety Concept Implementation Option 2
• Intended Function: can be implemented on both C28x and CLA.
• Safety Function: Implement using hardware modules such as ADC-PPB, CMPSS, SDFM secondary filter,
CLB, and so forth.
– SPFM of the safety goal can be met by hardware redundancy between the modules used in implementing
safety function, Periodic Software Read Back of Static Configuration Registers and so forth.
• Diagnostic Function: Implement with hardware modules such as ADC-PPB, CMPSS, SDFM secondary filter,
CLB, and so forth
– LFM can be met by Software Test of Function Including Error Tests and so forth.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 25
Page 26
D.2 E/E System
D.5 Digital I
D.7 Power Supply
D.5 Digital I
D.6 Bus
interface
D.4
Processing Unit
RAM
D.5 Digital 0
D.5 Analogue 0
D.3 Relay
ROM
D.8 Clock
D.2 E/E System
D.3
Harnesses
D.10
Actuator
D.3
Harnesses
D.10
Actuator
D.3
Harnesses
D.10
Actuator
D.3
Harnesses
D.9
Sensor
D.3
Harnesses
D.9
Sensor
Brief Description of Safety Elements
www.ti.com
5 Brief Description of Safety Elements
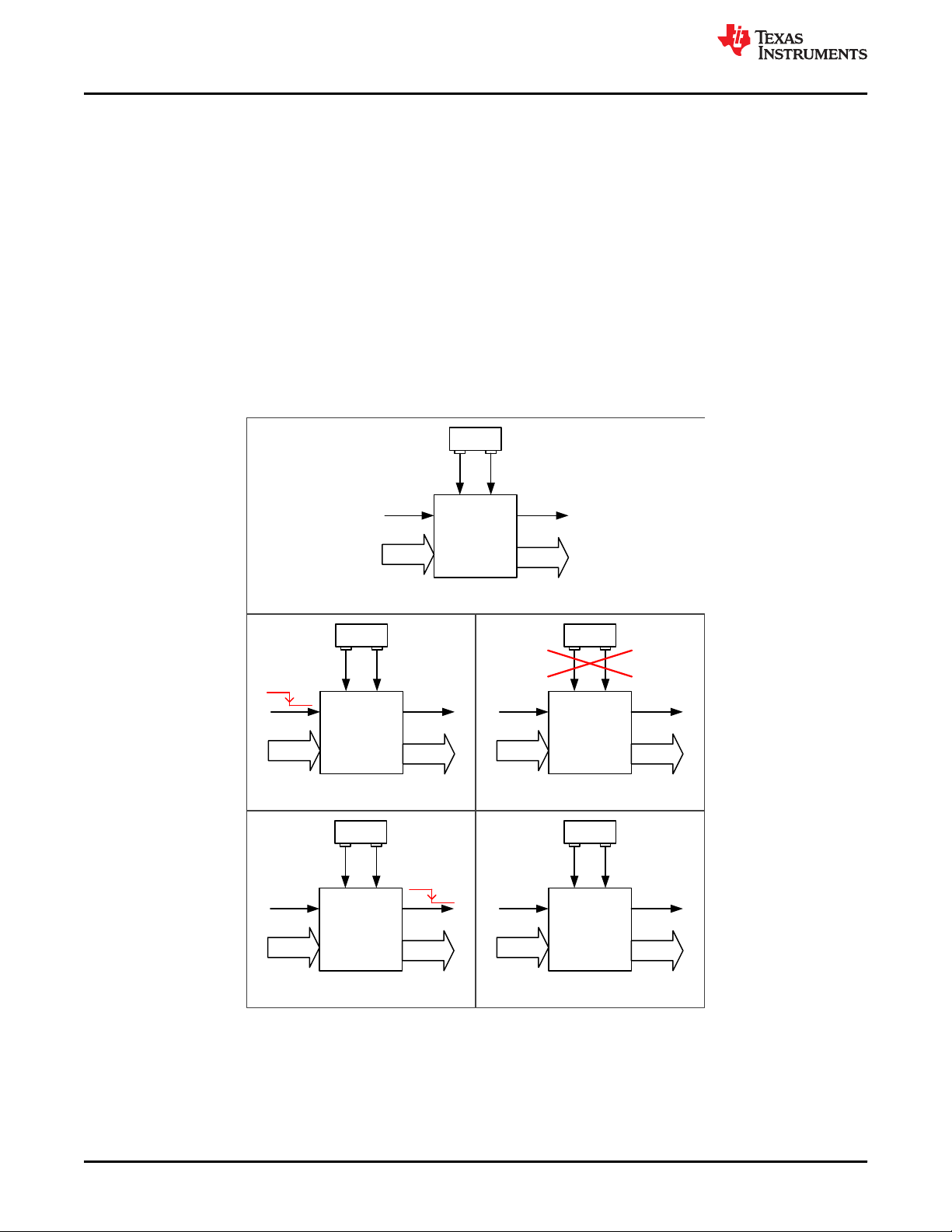
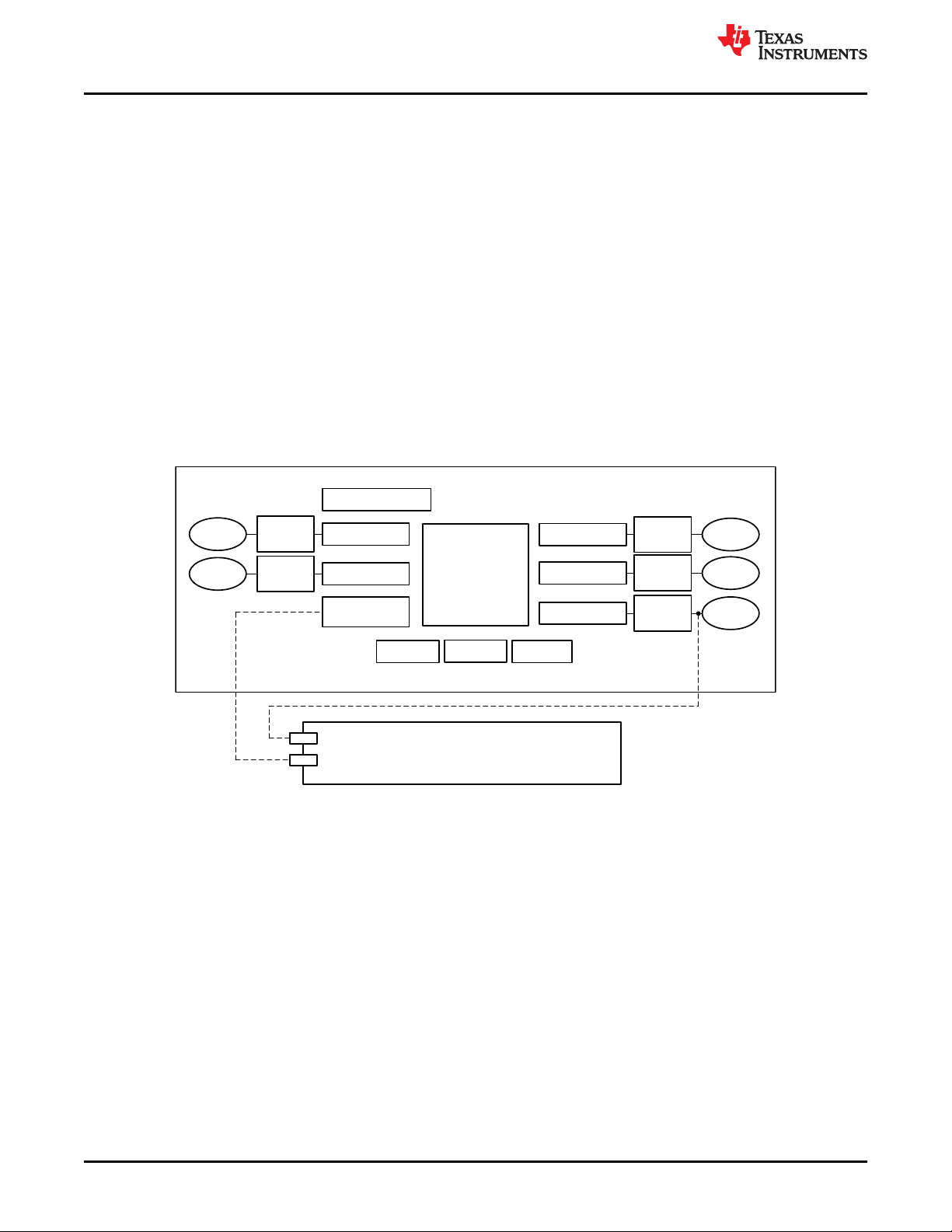
This section contains a brief description of the elements on the TMS320F28004x MCU device family, organized
based on the classification of parts of generic hardware of a system as indicated in Figure 5-1. For a full
functional description of any of these modules, see the device-specific technical reference manual. The brief
description of the hardware part is followed by the list of primary safety mechanisms that can be employed to
provide diagnostic coverage to the hardware part. Some safety standards have the requirement to provide
diagnostic coverage for the primary diagnostic measures (for example, Latent Fault Metric requirement from ISO
26262:2018). These measures are called as test of diagnostics. Primary diagnostics of type “Software” and
“Hardware/Software” involves execution of the software on the processing units and also use many of the MCU
parts like Interconnect, Memory (Flash, SRAM and ROM) and TMS320F28004x MCU infrastructure components
(Clock, Power, Reset and JTAG). In order to ensure integrity of the implemented primary diagnostics and their
associated diagnostic coverage values, measures to protect execution of primary diagnostics on respective
processing units needs to be implemented. Appropriate combination of test of diagnostics is recommended to be
implemented for parts of the MCU contributing the successful operation of the processing units. For diagnostics
for these parts, see the respective sections in this safety manual.
In case, separate test of diagnostic measures exist for a primary diagnostic measure, they are mentioned along
with the respective hardware part.
Figure 5-1. Generic Hardware of a System
5.1 TMS320F28004x MCU Infrastructure Components
5.1.1 Power Supply
The C2000 MCU device family requires an external device to supply the necessary voltage and current for
proper operation. Separate voltage rails are available for core (1.2 V), Analog (3.3 V), Flash (3.3 V) and I/O logic
(3.3 V). Following mechanisms can be used to improve the diagnostic coverage of C2000 MCU power supply.
• External Voltage Supervisor
• External Watchdog (using GPIO or a serial interface)
• Internal Watchdog (WD)
• Brownout Reset (BOR)
• Multi-Bit Enable Keys for Control Registers
• Lock Mechanism for Control Registers
• Software Read Back of Written Configuration
• Periodic Software Read Back of Static Configuration Registers
26 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 27

www.ti.com
Brief Description of Safety Elements
• Online Monitoring of Temperature
• EALLOW and MEALLOW Protection for Critical Registers
Note
• Having independent voltage supervision at system level is an assumption used while performing
safety analysis.
• Devices can be implemented with multiple power rails that are intended to be ganged together on
the system PCB. For proper operation of power diagnostics, it is recommended to implement one
voltage supervisor per ganged rail.
• Common mode failure analysis of the external voltage supervisor along with TMS320F28004x
MCU is useful to determine dependencies in the voltage generation and supervision circuitry.
• Customer can consider using TI's TPS6538x power supply and safety companion device for
voltage supervision at system level.
5.1.2 Clock
The TMS320F28004x MCU device family products are primarily synchronous logic devices and as such require
clock signals for proper operation. The clock management logic includes clock sources, clock generation logic
including clock multiplication by phase lock loops (PLLs), clock dividers, and clock distribution logic. The
registers that are used to program the clock management logic are located in the system control module. The
following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Missing Clock Detect (MCD)
• Clock Integrity Check Using CPU Timer
• Clock Integrity Check Using HRPWM
• Dual clock comparator (DCC) - Type0
• External Monitoring of Clock via XCLKOUT
• Internal Watchdog (WD)
• External Watchdog
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• PLL Lock Profiling Using On-Chip Timer
• Peripheral Clock Gating (PCLKCR)
• Efuse ECC
The following tests can be applied as test-for-diagnostics on this module to meet Latent Fault Metric
Requirements:
• Software Test of Watchdog (WD) Operation
• Software Test of Missing Clock Detect Functionality
Note
• Higher diagnostic coverage can be obtained by setting tighter bounds when checking clock
integrity using Timer2.
• TI recommends the use of an external watchdog over an internal watchdog for mitigating the risk
due to common mode failure. TI also recommends the use of a program sequence, windowed, or
question and answer watchdog as opposed to a single threshold watchdog due to the additional
failure modes that can be detected by a more advanced watchdog.
• Driving a high-frequency clock output on the XCLKOUT pin may have EMI implications. The
selected clock needs to be scaled suitably before sending out through IO.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 27
Page 28
Brief Description of Safety Elements
www.ti.com
5.1.3 Reset
The power-on reset (PORn) generates an internal warm reset signal to reset the majority of digital logic as part
of the boot process. The warm reset can also be provided at device level as an I/O pin (XRSn) with open drain
implementation. Diagnostic capabilities like NMI watchdog and Watchdog are capable of issuing a warm reset.
For more information on the reset functionality, see the device-specific data sheet.
The following tests can be applied as diagnostics for this module to provide diagnostic coverage on a specific
function.
• External Monitoring of Warm Reset (XRSn)
• Reset Cause Information
• Software Test of Reset
• Glitch Filtering on Reset Pins
• NMIWD Shadow Registers
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• NMIWD Reset Functionality
• Peripheral Soft Reset (SOFTPRES)
• Internal Watchdog (WD)
• External Watchdog
The following tests can be applied as test-for-diagnostics on this module to meet Latent Fault Metric
Requirements:
• Software Test of Watchdog (WD) Operation
Note
• Internal watchdogs are not a viable option for reset diagnostics as the monitored reset signals
interact with the internal watchdogs.
• Customer can consider using TI TPS6538x power supply and safety companion device for reset
supervision at system level.
5.1.4 System Control Module and Configuration Registers
The system control module contains the memory-mapped registers to configure clock, analog peripherals
settings and other system related controls. The system control module is also responsible for generating the
synchronization of system resets and delivering the warm reset (XRSn). The configuration registers include the
registers within peripherals that are not required to be updated periodically.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Multi-Bit Enable Keys for Control Registers
• Lock Mechanism for Control Registers
• Software Read Back of Written Configuration
• Periodic Software Read Back of Static Configuration Registers
• Online Monitoring of Temperature
• Peripheral Clock Gating (PCLKCR)
• Peripheral Soft Reset (SOFTPRES)
• EALLOW and MEALLOW Protection for Critical Registers
• Software Test of ERRORSTS Functionality
• Peripheral access protection - Type 0
28 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 29
www.ti.com
Brief Description of Safety Elements
Note
• Review the Clock and Reset sections as these features are closely controlled by the system
control module.
• Customer can consider using TI TPS6538x power supply and safety companion device for
ERRORSTS pin supervision at system level.
5.1.5 Efuse Static Configuration
The TMS320F28004x MCU device family supports a boot time configuration of certain functionality (such as trim
values for analog macros) with the help of Efuse structures. The Efuses are read automatically after power-on
reset by an autoload function.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Efuse Autoload Self-Test
• Efuse ECC
The following tests can be applied as a test-for-diagnostic on this module:
• Efuse ECC Logic Self-Test
• SRAM ECC
• SRAM Parity
• Software Test of SRAM
• VCU CRC Check of Static Memory Contents
5.1.6 JTAG Debug, Trace, Calibration, and Test Access
The TMS320F28004x MCU device family supports debug, test, and calibration implemented over an IEEE
1149.1 JTAG debug port. The physical debug interface is internally connected to a TI debug logic (ICEPICK),
which arbitrates access to test, debug, and calibration logic. Boundary scan is connected in parallel to the
ICEPICK to support usage without preamble scan sequences for easiest manufacturing board test. The following
tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific function):
• Hardware Disable of JTAG Port
• Internal Watchdog (WD)
• External Watchdog
5.2 Processing Elements
5.2.1 C28x Central Processing Unit (CPU)
The CPU is a 32-bit fixed-point processor with Floating point, Viterbi, Complex Math and CRC Unit (VCU) and
Trigonometric Math Unit (TMU) co-processors. This device draws from the best features of digital signal
processing; reduced instruction set computing (RISC); and microcontroller architectures, firmware, and tool sets.
The CPU features include a modified Harvard architecture and circular addressing. The RISC features are
single-cycle instruction execution, and register-to-register operations. The modified Harvard architecture of the
CPU enables instruction and data fetches to be performed in parallel. The CPU does this over six separate
address/data buses. Its unique architecture makes it amenable to integrate safety features external to CPU but
on chip, to provide improved diagnostic coverage.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Reciprocal Comparison by Software
• Software Test of CPU
• Periodic Software Read Back of Static Configuration Registers
• Access Protection Mechanism for Memories
• CPU Handling of Illegal Operation, Illegal Results and Instruction Trapping
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 29
Page 30
Brief Description of Safety Elements
www.ti.com
• Internal Watchdog (WD)
• External Watchdog
• Information Redundancy Techniques
• Stack Overflow Detection
• Embedded Real Time Analysis and Diagnostic (ERAD)
The following tests can be applied as test-for-diagnostics on this module:
• VCU CRC Auto Coverage
Note
Measures to mitigate Common Cause Failure in CPU Subsystem: Common-cause failures are one of
the important failure modes when a safety-related design is implemented in a silicon device. The
contribution of hardware and software dependent failures is estimated on a qualitative basis because
no general and sufficiently reliable method exists for quantifying such failures. System Integrator
should perform a detailed analysis based on the inputs from ISO 26262-11:2018, Section 4.7 and IEC
61508-2:2010 Annex E (BetaIC method).
5.2.2 Control Law Accelerator
The Control Law Accelerator (CLA) is an independent, fully-programmable, 32-bit floating-point math accelerator
with independent ISA and independent compiler and it helps concurrent control-loop execution. The low
interrupt-latency of the CLA allows it to read ADC samples "just-in-time." This significantly reduces the ADC
sample to output delay to enable faster system response and higher MHz control loops.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Reciprocal Comparison by Software
• Software Test of CLA
• CLA Handling of Illegal Operation and Illegal Results
• Software Read Back of Written Configuration
• Periodic Software Read Back of Static Configuration Registers
• Information Redundancy Techniques
• CLA Liveness Check Using CPU
• Access Protection Mechanism for Memories
• Disabling of Unused CLA Trigger Sources
The following tests on SRAM allocated for CLA can be applied as a test-for-diagnostic on this module:
• Periodic Software Read Back of Static Configuration Registers
• Software Test of Function Including Error Tests
5.3 Memory (Flash, SRAM and ROM)
5.3.1 Embedded Flash Memory
The embedded Flash memory is a non-volatile memory that is tightly coupled to the C28x CPU. Each CPUSS
have its own dedicated flash memory. The Flash memory is not accessible by CLA or DMA. The Flash memory
is primarily used for CPU instruction access, though data access is also possible. Access to the Flash memory
can take multiple CPU cycles depending upon the device frequency and flash wait state configuration. Flash
wrapper logic provides prefetch and data cache to improve performance.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Flash ECC
• VCU CRC Check of Static Memory Contents
• Bit Multiplexing in Flash Memory Array
30 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 31

www.ti.com
Brief Description of Safety Elements
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Flash Program Verify and Erase Verify Check
• Software Test of Flash Prefetch, Data Cache and Wait-States
• Internal Watchdog (WD)
• External Watchdog
• CPU Handling of Illegal Operation, Illegal Results and Instruction Trapping
• Information Redundancy Techniques
The following tests can be applied as test-for-diagnostics on this module:
• Software Test of ECC Logic
• VCU CRC Auto Coverage
5.3.2 Embedded SRAM
The TMS320F28004x MCU device family has the following types of SRAMs with different characteristics.
• Dedicated to each CPU (M0, M1)
• Shared between the CPU and its own CLA (LSx RAM)
• Used to send and receive messages between processors (MSGRAM)
All these RAMs are highly configurable to achieve control for write access and fetch access from different
masters. All dedicated RAMs are enabled with the ECC feature (both data and address) and shared RAMs are
enabled with the Parity (both data and address) feature. Each RAM has its own controller which implements
access protection, security related features and ECC/Parity features for that RAM.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• SRAM ECC
• SRAM Parity
• Software Test of SRAM
• Bit Multiplexing in SRAM Memory Array
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Data Scrubbing to Detect/Correct Memory Errors
• VCU CRC Check of Static Memory Contents
• Software Test of Function Including Error Tests
• Access Protection Mechanism for Memories
• Lock Mechanism for Control Registers
• Information Redundancy Techniques
• CPU Handling of Illegal Operation, Illegal Results and Instruction Trapping
• Internal Watchdog (WD)
• External Watchdog
• CLA Handling of Illegal Operation and Illegal Results
• Memory Power-On Self-Test (MPOST)
The following tests can be applied as a test-for-diagnostic on this module:
• Software Test of ECC Logic
• Software Test of Parity Logic
• VCU CRC Auto Coverage
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 31
Page 32

Brief Description of Safety Elements
www.ti.com
5.3.3 Embedded ROM
The TMS320F28004x MCU device family has the following types of ROMs:
• Boot ROM helps to boot the device and contain functions for security initialization, device calibration and
support different boot modes
• Secure ROM functions are not developed to meet any systematic capability compliance (ISO
26262-6:2018/IEC 61508-3:2010) and should not be used in functional safety applications.
• CLA Data ROM contains math tables for CLA application usage
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• VCU CRC Check of Static Memory Contents
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Software Test of Function Including Error Tests
• CPU Handling of Illegal Operation, Illegal Results and Instruction Trapping
• Internal Watchdog (WD)
• External Watchdog
• Power-Up Pre-Operational Security Checks
• Memory Power-On Self-Test (MPOST)
• Reciprocal Comparison by Software
The following tests can be applied as a test-for-diagnostic on this module:
• Background CRC for CLA-ROM (CLAPROMCRC)
• VCU CRC Auto Coverage
5.4 On-Chip Communication Including Bus-Arbitration
5.4.1 Device Interconnect
The device interconnects links the multiples masters and slaves within the device. The device interconnect logic
comprises of static master selection muxes, dynamic arbiters and protocol convertors required for various bus
masters (CPU, CLA, DMA) to transact with the peripherals and memories.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Software Test of Function Including Error Tests
• Internal Watchdog (WD)
• External Watchdog
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• CPU Handling of Illegal Operation, Illegal Results and Instruction Trapping
• CLA Handling of Illegal Operation and Illegal Results
• Transmission Redundancy
• Hardware Redundancy
• EALLOW and MEALLOW Protection for Critical Registers
32 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 33

www.ti.com
Brief Description of Safety Elements
5.4.2 Direct Memory Access (DMA)
The direct memory access (DMA) module provides a hardware method of transferring data between peripherals
and/or memory without intervention from the CPU, thereby freeing up bandwidth for other system functions.
Additionally, the DMA has the capability to orthogonally rearrange the data as it is transferred as well as “pingpong” data between buffers. These features are useful for structuring data into blocks for optimal CPU
processing.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Information Redundancy Techniques
• Transmission Redundancy
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Software Test of Function Including Error Tests
• DMA Overflow Interrupt
• Access Protection Mechanism for Memories
• Disabling of Unused DMA Trigger Sources
The following tests for SRAM can be applied as a test-for-diagnostic on this module:
• Periodic Software Read Back of Static Configuration Registers
• Software Test of Function Including Error Tests
5.4.3 Enhanced Peripheral Interrupt Expander (ePIE) Module
The enhanced Peripheral Interrupt Expander (ePIE) module is used to interface peripheral interrupts to the C28x
CPU. It provides configurable masking on a per interrupt basis. The PIE module includes a local SRAM that is
used to hold the address of the interrupt handler per interrupt.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• PIE Double SRAM Hardware Comparison
• Software Test of SRAM
• Software Test of ePIE Operation Including Error Tests
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Maintaining Interrupt Handler for Unused Interrupts
• Online Monitoring of Interrups and Events
• Hardware Redundancy
The following tests can be applied as a test-for-diagnostic on this module:
• PIE Double SRAM Comparison Check
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 33
Page 34

Brief Description of Safety Elements
www.ti.com
5.4.4 Dual Zone Code Security Module (DCSM)
The dual code security module (DCSM) is a security feature incorporated in this device. It prevents access and
visibility to on-chip secure memories (and other secure resources) to unauthorized persons. It also prevents
duplication and reverse engineering of proprietary code.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Multi-Bit Enable Keys for Control Registers
• Majority Voting and Error Detection of Link Pointer
• Periodic Software Read Back of Static Configuration Registers
• Software Test of Function Including Error Tests
• Software Read Back of Written Configuration
• CPU Handling of Illegal Operation, Illegal Results and Instruction Trapping
• VCU CRC Check of Static Memory Contents
• External Watchdog
• Hardware Redundancy
The following test can be applied as a test-for-diagnostic on this module:
• VCU CRC Auto Coverage
5.4.5 CrossBar (X-BAR)
The crossbars (X-BAR) provide flexibility to connect device inputs, outputs, and internal resources in a variety of
configurations. The device contains a total of three X-BARs: Input X-BAR, Output X-BAR, and ePWM X-BAR.
The Input X-BAR has access to every GPIO and can route each signal to any (or multiple) of the IP blocks (for
example, ADC, eCAP, ePWM, and so forth). This flexibility relieves some of the constraints on peripheral muxing
by just requiring any GPIO pin to be available. The ePWM X-BAR is connected to the Digital Compare (DC) submodule of each ePWM module for actions such as trip zones. The GPIO Output X-BAR takes signals from inside
the device and brings them out to a GPIO.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Software Test of Function Including Error Tests
• Hardware Redundancy
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Software Check of X-BAR Flag
5.4.6 Timer
The CPU subsystem is provided with three 32-bit CPU-Timers (TIMER0/1/2). The module provides the
Operating System (OS) timer for the device. The OS timer function is used to generate internal event triggers or
interrupts as needed to provide periodic operation of safety critical functions. The capabilities of the module
enable it to be used for clock monitoring as well.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• 1oo2 Software Voting Using Secondary Free Running Counter
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Software Test of Function Including Error Tests
34 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 35

www.ti.com
Brief Description of Safety Elements
5.5 Digital I/O
5.5.1 General-Purpose Input/Output (GPIO) and Pinmuxing
The General Purpose Input/Output (GPIO) module provides software configurable mapping of internal module
I/O functionality to device pins. These pins can be individually selected to operate as digital I/O (also called
GPIO mode), or connected to one of several peripheral I/O signals.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Lock Mechanism for Control Registers
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Software Test of Function Using I/O Loopback
• Hardware Redundancy
5.5.2 Enhanced Pulse Width Modulators (ePWM)
The enhanced Pulse Width Modulator (ePWM) peripheral is a key element in digital motor control and power
electronic systems. Some of the ePWM module instances support a High-Resolution Pulse Width Modulator
(HRPWM) mode to improve the time resolution. For more information on the ePWM instances supporting the
HRPWM mode, see the device-specific data sheet and reference manual.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Software Test of Function Including Error Tests
• Hardware Redundancy
• Monitoring of ePWM by eCAP
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Lock Mechanism for Control Registers
• ePWM Fault Detection using XBAR
• ePWM Synchronization Check
• ePWM Application Level Safety Mechanism
• Online Monitoring of Interrupts and Events
• Monitoring of ePWM by ADC
5.5.3 High Resolution PWM (HRPWM)
HRPWM module extends the time resolution capabilities of the conventionally derived digital pulse width
modulator (PWM). HRPWM is typically used when PWM resolution falls below ~ 9-10 bits. The HRPWM is
based on micro edge positioner (MEP) technology. MEP logic is capable of positioning an edge very finely by
sub-dividing one coarse system clock of a conventional PWM generator. The time step accuracy is of the order
of 150 ps.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• HRPWM Built-In Self-Check and Diagnostic Capabilities
• Hardware Redundancy
• Monitoring of ePWM by eCAP
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Lock Mechanism for Control Registers
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 35
Page 36

Brief Description of Safety Elements
www.ti.com
5.5.4 Enhanced Capture (eCAP)
The enhanced CAPture (eCAP) module provides input capture functionality for systems where accurate timing of
external events is important. The eCAP module features include speed measurements of rotating machinery (for
example, toothed sprockets sensed via Hall sensors), elapsed time measurements between position sensor
pulses, period and duty cycle measurements of pulse train signals and decoding current or voltage amplitude
derived from duty cycle encoded current/voltage sensors.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Software Test of Function Including Error Tests
• Information Redundancy Techniques
• Monitoring of ePWM by eCAP
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• eCAP Application Level Safety Mechanism
• Hardware Redundancy
Note
Use of a sensorless positioning algorithm can provide information redundancy through plausibility
checking of eCAP results.
5.5.5 High Resolution Capture (HRCAP)
The high-resolution capture (HRCAP) peripheral measures the width of external pulses with a typical resolution
within hundreds of picoseconds. This module includes capture channel in addition to a HW calibration block to
enable continuous on-line calibration, this drastically reduces software overhead to calibrate. HRCAP input can
be connected to HRPWM output using X-BAR to enable periodic testing. The HRCAP enhancement has been
added to eCAP 6 and eCAP 7.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Software Test of Function Including Error Tests
• Hardware Redundancy
• Monitoring of HRPWM by HRCAP
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• HRCAP Calibration Logic Test Feature
5.5.6 Enhanced Quadrature Encoder Pulse (eQEP)
The enhanced Quadrature Encoder Pulse (eQEP) module is used for direct interface with a linear or rotary
incremental encoder to get position, direction, and speed information from a rotating machine for use in a highperformance motion and position-control system. The following tests can be applied as diagnostics for this
module (to provide diagnostic coverage on a specific function):
• Software Test of Function Including Error Tests
• eQEP Quadrature Watchdog
• Information Redundancy Techniques
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• eQEP Application Level Safety Mechanisms
• Hardware Redundancy
36 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 37
www.ti.com
Brief Description of Safety Elements
The following tests can be applied as a test-for-diagnostic on this module:
• eQEP Software Test of Quadrature Watchdog Functionality
Note
Use of a sensorless positioning algorithm can provide information redundancy through plausibility
checking of eQEP results.
5.5.7 Sigma Delta Filter Module (SDFM)
Sigma Delta Filter Module (SDFM) is a four-channel digital filter designed specifically for current measurement
and resolver position decoding in motor control applications. Each channel can receive an independent deltasigma (ΔΣ) modulator bit stream. The bit streams are processed by four individually-programmable digital
decimation filters. The filter set includes a fast comparator for immediate digital threshold comparisons for overcurrent and under-current monitoring.
• SDFM Comparator Filter for Online Monitoring
• Information Redundancy Techniques
• SD Modulator Clock Fail Detection Mechanism
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Software Test of Function Including Error Tests
• Hardware Redundancy
5.5.8 External Interrupt (XINT)
Interrupts from external sources can be provided to the device using GPIO pins with help of XINT module. The
module allows configuring the GPIOs to be selected as interrupt sources. The polarity of the interrupts can also
be configured with this module.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Software Test of Function Including Error Tests
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Hardware Redundancy
5.6 Analogue I/O
5.6.1 Analog-to-Digital Converter (ADC)
The Analog-to-Digital Converter (ADC) module is used to convert analog inputs into digital values. Results are
stored in internal registers for later transfer by CLA, DMA or CPU. The TMS320F28004x MCU device family
products implement up to three modules with shared channels used for fast conversion (ping-pong method).
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Software Test of Function Including Error Tests
• DAC to ADC Loopback Check
• ADC Information Redundancy Techniques
• Opens/Shorts Detection Circuit for ADC
• Software Read Back of Written Configuration
• Periodic Software Read Back of Static Configuration Registers
• ADC Signal Quality Check by Varying Acquisition Window
• ADC Input Signal Integrity Check
• Monitoring of ePWM by ADC
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 37
Page 38

Brief Description of Safety Elements
www.ti.com
• Hardware Redundancy
• Disabling Unused Sources of SOC Inputs to ADC
Note
• ADC module voltages should be supervised as noted in the device-specific data sheet.
• To reduce probability of common mode failure, user should consider implementing multiple
channels (information redundancy) using non adjacent pins and different voltage reference.
5.6.2 Buffered Digital to Analog Converter (DAC)
The buffered DAC module consists of an internal reference DAC and an analog output buffer that is capable of
driving an external load. An integrated pull-down resistor on the DAC output helps to provide a known pin
voltage when the output buffer is disabled. Software writes to the DAC value register can take effect immediately
or can be synchronized with PWMSYNC events.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Software Test of Function Including Error Tests
• DAC to ADC Loopback Check
• Lock Mechanism for Control Registers
• Software Read Back of Written Configuration
• Periodic Software Read Back of Static Configuration Registers
• DAC to Comparator Loopback Check
• Hardware Redundancy
The following tests for ADC and CMPSS can be applied as a test-for-diagnostic on this module:
• Software Test of Function Including Error Tests
• Periodic Software Read Back of Static Configuration Registers
5.6.3 Comparator Subsystem (CMPSS)
The Comparator Subsystem (CMPSS) consists of analog comparators and supporting components that are
combined into a topology that is useful for power applications such as peak current mode control, switchedmode power, power factor correction, and voltage trip monitoring. The comparator subsystem is built around a
pair of analog comparators and helps detection of signal exception conditions including High/Low thresholds.
The positive input of the comparator is always driven from an external pin, but the negative input can be driven
by either an external pin or by an internal programmable 12-bit DAC. Each comparator output passes through a
programmable digital filter that can remove spurious trip signals. A ramp generator circuit is optionally available
to control the internal DAC value for one comparator in the subsystem.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Software Test of Function Including Error Tests
• Hardware Redundancy
• Software Read Back of Written Configuration
• Periodic Software Read Back of Static Configuration Registers
• Lock Mechanism for Control Registers
• VDAC Conversion by ADC
• CMPSS Ramp Generator Functionality Check
The following tests for ADC can be applied as a test-for-diagnostic on this module:
• Software Test of Function Including Error Tests
• Periodic Software Read Back of Static Configuration Registers
38 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 39

www.ti.com
Brief Description of Safety Elements
5.6.4 Programmable Gain Amplifier (PGA)
The Programmable Gain Amplifier (PGA) is used to amplify an input voltage for the purpose of increasing the
dynamic range of the downstream ADC and CMPSS modules. The integrated PGA helps to reduce cost and
design effort for many control applications that traditionally require external, standalone amplifiers. Software
selectable gain and filter settings make the PGA adaptable to various performance needs.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• PGA to ADC Loopback Test
• Hardware Redundancy
• Software Read Back of Written Configuration
• Periodic Software Read Back of Static Configuration Registers
• Lock Mechanism for Control Registers
5.7 Data Transmission
5.7.1 Controller Area Network (DCAN)
The Controller Area Network (DCAN) interface provides medium throughput networking with event based
triggering, compliant to the CAN protocol. The DCAN modules requires an external transceiver to operate on the
CAN network. The following tests can be applied as diagnostics for this module (to provide diagnostic coverage
on a specific function):
• Software Test of Function Using I/O Loopback
• Information Redundancy Techniques Including End-to-End Safing
• SRAM Parity
• Software Test of SRAM
• Bit Multiplexing in SRAM Memory Array
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Transmission Redundancy
• DCAN Stuff Error Detection
• DCAN Form Error Detection
• DCAN Acknowledge Error Detection
• Bit Error Detection
• CRC in Message
• Hardware Redundancy
The following tests can be applied as a test-for-diagnostic on this module:
• Software Test of Parity Logic
5.7.2 Serial Peripheral Interface (SPI)
The Serial Peripheral Interface (SPI) modules provide serial I/O compliant to the SPI protocol. SPI
communications are typically used for communication to smart sensors and actuators, serial memories, and
external logic such as a watchdog device.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Software Test of Function Using I/O Loopback
• Information Redundancy Techniques Including End-to-End Safing
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Transmission Redundancy
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 39
Page 40

Brief Description of Safety Elements
www.ti.com
• SPI Data Overrun Detection
• Hardware Redundancy
5.7.3 Serial Communication Interface (SCI)
The module provides serial I/O capability for typical asynchronous Serial Communication Interface (SCI)
protocols, such as UART. Depending on the serial protocol used, an external transceiver may be necessary.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Software Test of Function Using I/O Loopback
• Parity in Message
• Information Redundancy Techniques Including End-to-End Safing
• Overrun Error Detection
• SCI Break Error Detection
• Frame Error Detection
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Transmission Redundancy
• Hardware Redundancy
5.7.4 Inter-Integrated Circuit (I2C)
The Inter-Integrated Circuit (I2C) module provides a multi-master serial bus compliant to the I2C protocol. The
following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Software Test of Function Using I/O Loopback
• I2C Data Acknowledge Check
• Information Redundancy Techniques Including End-to-End Safing
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Transmission Redundancy
• I2C Access Latency Profiling Using On-Chip Timer
5.7.5 Fast Serial Interface (FSI)
The Fast Serial Interface (FSI) is a serial peripheral capable of reliable and high-speed communication. The FSI
is architected specifically to ensure reliable and high-speed communication for those system scenarios involving
communication across isolation devices. The FSI consists of independent transmitter (FSITX) and receiver
(FSIRX) cores. The FSITX and FSIRX cores are configured and operated independently.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Software Test of Function Using I/O Loopback Including Error Tests
• Information Redundancy Techniques Including End-to-End Safing
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Transmission Redundancy
• FSI Data Overrun/Underrun Detection
• FSI Frame Overrun Detection
• FSI CRC Framing Checks
• FSI ECC Framing Checks
• FSI Frame Watchdog
• FSI RX Ping Watchdog
40 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 41

www.ti.com
Brief Description of Safety Elements
• FSI Tag Monitor
• FSI Frame Type Error Detection
• FSI End of Frame Error Detection
• FSI Register Protection Mechanisms
5.7.6 Local Interconnect Network (LIN)
The LIN module supported is compliant to the LIN 2.1 protocol specification. This module can be programmed to
work either as an SCI or as a LIN. The SCI’s hardware features are augmented to achieve LIN functionality. The
SCI module is a universal asynchronous receiver-transmitter (UART) that implements the standard non-return to
zero format. The SCI can be used to communicate, for example, through an RS-232 port or over a K line.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a specific
function):
• Software Test of Function Using I/O Loopback
• Information Redundancy Techniques Including End-to-End Safing
• Transmission Redundancy
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Data Parity Error Detection
• Overrun Error Detection
• Frame Error Detection
• LIN Physical Bus Error Detection
• LIN No-Response Error Detection
• Bit Error Detection
• Checksum Error Detection
• LIN ID Parity Error Detection
• SCI Break Error Detection
• Communication Access Latency Profiling Using On-Chip Timer
5.7.7 Power Management Bus Module (PMBus)
The PMBus module provides an interface between the microcontroller and devices compliant with the SMI
Forum PMBus Specification Part I version 1.0 and Part II version 1.1. PMBus is based on SMBus, which uses a
similar physical layer to I2C.This module supports both master and slave modes.
The following tests can be applied as diagnostics for this module (to provide diagnostic coverage on a Specific
function):
• I2C Data Acknowledge Check
• Information Redundancy Techniques Including End to End Safing
• Periodic Software Read Back of Static Configuration Registers
• Software Read Back of Written Configuration
• Transmission Redundancy
• PMBus Protocol CRC in Message
• Clock Timeout
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 41
Page 42

Brief Description of Diagnostics
www.ti.com
6 Brief Description of Diagnostics
This section provides a brief summary of the diagnostic mechanisms available on the TMS320F28004x MCU
device family. The diagnostic mechanisms are arranged as per the device portioning given in Figure 5-1. At
places where the safety mechanism is applicable for more than one component, it is placed at an appropriate
place based on the applicable use case scenario. For a detailed description or implementation details for a
diagnostic, see the device-specific technical reference manual.
6.1 TMS320F28004x MCU Infrastructure Components
6.1.1 Clock Integrity Check Using CPU Timer
It is recommended to use the CPU Timer module to detect incorrect clock frequencies and drift between clock
sources. CPU Timer2 has a programmable counter whose prescale value and clock source can be selected.The
frequency relationship between selected clock and system clock can be determined by using the system clock
as a reference time base. For more information on the clock selection options implemented, see the devicespecific data sheet. Higher diagnostic coverage can be obtained by setting tighter bounds when checking clock
integrity using Timer2. Common cause failures can be reduced by using different clock sources and different
prescale values for the reference clock and measured clock. The Timer diagnostic is not enabled by default and
must be enabled via software. The cyclical check applied by the Timer module provides an inherent level of selfchecking (auto-coverage), which can be considered for application in latent fault diagnostics.
6.1.2 Clock Integrity Check Using HRPWM
Calibration logic of OTTO (HRPWM) can be used to detect incorrect system clock (SYSCLK) frequencies. The
clock whose frequency needs to be measured is configured as the system clock and the auto-calibration function
is executed. The result obtained from the calibration function can be checked against the predetermined range
of values to detect incorrect clock frequency or frequency drift. Error response, diagnostic testability, and any
necessary software requirements are defined by the software implemented by the system integrator.
6.1.3 EALLOW and MEALLOW Protection for Critical Registers
EALLOW (CPU, DMA) and MEALLOW (CLA) protection enables write access to emulation and other protected
registers. CPU (CLA) can set this bit using EALLOW (MEALLOW) instruction and cleared using EDIS (MEDIS)
instruction. The protection can be used to prevent data being written to the wrong place, which could result from
conditions like boundary exceeding, incorrect pointers, stack overflow or corruption, and so forth. Reads from the
protected registers are always allowed. It is recommended to issue an EDIS (or MEDIS) for protection once the
write of protected registers are complete.
6.1.4 Efuse Autoload Self-Test
Efuse provides a capability to ensure proper loading of the efuse values to all the registers. The capability is
enabled by default and configuration cannot be changed by software. Any error in this process will be indicated
via ERRORSTS. The device reset is asserted and autoload is re-attempted when the error occurs.
6.1.5 Efuse ECC
The Efuse utilizes a SECDED ECC diagnostic to detect and possibly correct errors in the configuration values
fetched from the fuse ROM. Errors are indicated via ERRORSTS. This diagnostic is ON by default and this
configuration cannot be changed by software. It covers only data bits of the EFUSE ROM. The device reset is
asserted and autoload is re-attempted when the error occurs.
6.1.6 Efuse ECC Logic Self-Test
The Efuse controller has a self-test logic that executes automatically before the efuse operation. Errors are
indicated via ERRORSTS and a system control register. The device will remain in a reset state as long as the
error occurs.
42 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 43

www.ti.com
Brief Description of Diagnostics
6.1.7 External Monitoring of Clock via XCLKOUT
The TMS320F28004x MCU device family provides the capability to export selected internal clocking signals for
external monitoring. This feature can be configured via software by programming registers in the system control
module. To determine the number of external clock outputs implemented and the register mapping of internal
clocks that can be exported, see the device-specific data sheet. Export of internal clocks on the XCLKOUT
outputs is not enabled by default and must be enabled via software.
6.1.8 External Monitoring of Warm Reset (XRSn)
The XRSn warm reset signal is implemented as an open drain I/O pin. An external monitor can be utilized to
detect expected or unexpected changes to the state of the internal warm reset control signal and ensuring
proper signaling (for example, low duration) when it is asserted. Error response, diagnostic testability, and any
necessary software requirements are defined by the external monitor selected by the system integrator.
6.1.9 External Voltage Supervisor
Texas Instruments highly recommends the use of an external voltage supervisor to monitor all voltage rails
(VDDIO, VDDA, and VDD). The voltage supervisor should be configured with over voltage and under voltage
thresholds within the recommended operating conditions of the target device as noted in the device-specific data
sheet. Error response, diagnostic testability, and any necessary software requirements are defined by the
external voltage supervisor selected by the system integrator.
6.1.10 External Watchdog
External watchdog helps to reduce common mode failure, as it utilizes clock, reset, and power that are separate
from the system being monitored. Error response, diagnostic testability, and any necessary software
requirements are defined by the external watchdog selected by the system integrator.
Texas Instruments highly recommends the use of an external watchdog in addition to the internally provided
watchdogs. An internal or external watchdog can provide an indication of inadvertent activation of logic which
results in impact to safety critical execution. Any watchdog added externally should include a combination of
temporal and logical monitoring of program sequence [IEC 61508-7:2010, clause A.9.3] or other appropriate
methods such that high diagnostic effectiveness can be claimed.
6.1.11 Glitch Filtering on Reset Pins
Glitch filters are implemented on XRSn and JTAG reset of the device. These structures filter out noise and
transient signal spikes on the input reset pins in order to reduce unintended activation of the reset circuitry. The
glitch filters are enabled by default and operates continuously. Their behavior cannot be changed by the
software.
6.1.12 Hardware Disable of JTAG Port
The JTAG debug port can be physically disabled to prevent JTAG access in deployed systems. The
recommended scheme is to hold Test Mode Select (TMS) high. Disabling of the JTAG port also provides
coverage for inadvertent activation of many debug and trace activities.
6.1.13 Internal Watchdog (WD)
The internal watchdog has two modes of operation: normal watchdog (WD) and windowed watchdog (WWD).
The system integrator can select to use one mode or the other but not both at the same time. For details of
programming the internal watchdogs, see the device-specific technical reference manual. The WD is a traditional
single threshold watchdog. The user programs a timeout value to the watchdog and must provide a
predetermined WDKEY to the watchdog before the timeout counter expires. Expiration of the timeout counter or
an incorrect WDKEY triggers an error response. The WD can issue either a warm system reset or a CPU
maskable interrupt upon detection of a failure. The WD is enabled after reset.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 43
Page 44

Brief Description of Diagnostics
www.ti.com
The use of the time window allows detection of additional clocking failure modes as compared to the WD
implementation. User programs an upper bound and lower bound to create a time window during which the
software must provide a predetermined WDKEY to the watchdog. Failure to receive the correct response within
the time window or an incorrect WDKEY triggers an error response. The WWD can issue either a warm system
reset or a CPU maskable interrupt upon detection of a failure. Normal WD operation is enabled by default after
reset. For details of programming the internal watchdogs, see the device-specific technical reference manual.
In order to avoid common cause failure of clock input to both Internal Watchdog(WD) and CPU, it is
recommended to select either INTOSC2 or X1/X2 as clock source to main PLL.
6.1.14 Lock Mechanism for Control Registers
The module contains a lock mechanism for protection of critical control registers. Once the associated LOCK
register bits are set, the write accesses to the registers are blocked. Locked registers cannot be updated by
software. Once locked, only reset can unlock the registers.
6.1.15 Missing Clock Detect (MCD)
The missing clock detector (MCD) is a safety diagnostic that can be used to detect failure of PLL reference
clock. MCD utilizes the embedded 10 MHz internal oscillator (INTOSC1). This circuit only detects complete loss
of PLL reference clock and doesn’t do any detection of frequency drift. The MCD circuit is enabled by default
during the power-on reset state. The diagnostic can be disabled via software.
6.1.16 NMIWD Reset Functionality
On receiving an NMI, the software can attempt recovery from the NMI condition. Based on the severity and type
of the fault condition, recovery may not always be successful. In such a situation, an additional protection is
provided by having an independent watchdog monitoring the NMI recovery. If the attempted recovery is not
successful, a reset is issued. The timeout for reset can be configured (using NMIWDPRD) based on the FTTI of
the device.
6.1.17 NMIWD Shadow Registers
The use of a two stage cold and warm reset scheme on the device allows the implementation of NMIWD shadow
registers. Shadow registers are reset only by power-on reset. These registers are used to store the NMIFLG
information before reset assertion. This information can be used by the application software to provide additional
information on the NMI status of the device before the last warm reset operation.
6.1.18 Multi-Bit Enable Keys for Control Registers
Some modules include features to support avoidance of unintentional control register update. Implementation of
multi-bit keys for critical control registers is one such feature (for example, EPWM_REGS.EPWMLOCK and so
forth). The multi-bit keys are particularly effective for avoiding unintentional activation. For more details on the
registers for which the diagnostic is applicable, see the device-specific technical reference manual. The
operation of this safety mechanism is continuous and cannot be altered by the software. This mechanism can be
tested by generating software transactions with and without correct keys and observing the updated register
value.
6.1.19 Online Monitoring of Temperature
The internal temperature sensor measures the junction temperature of the device. The output of the sensor can
be sampled with the ADC through an internal connection. This can be enabled on channel ADCIN14 on ADCB
by setting the ENABLE bit in the TSNSCTL register.
6.1.20 Periodic Software Read Back of Static Configuration Registers
Configuration registers are typically configured once in the beginning and hold their value until the particular task
execution. Periodic read back of configuration registers can provide a diagnostic for inadvertent writes or
disturbances to these registers.
44 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 45

www.ti.com
Brief Description of Diagnostics
The diagnostic coverage can be improved by extending the test to include read back of the flag registers that are
expected to remain constant (PLL lock status, eQEP phase error flag, and so forth) during the device operation
as well. Error response, diagnostic testability, and any necessary software requirements are defined by the
software implemented by the system integrator.
The diagnostic coverage of some peripherals can be further enhanced by applying some module specific tests
as follows:
• For improving the enhanced peripheral interrupt expander (ePIE) coverage, the PIE flag registers can be
periodically checked to ensure that all pending interrupts are serviced by reading the PIE flag registers
(PIE_CTRL_REGS.PIEIFRx.all) and the peripheral interrupt flag registers.
• While serving the interrupt, the ISR routine can check for interrupt flag in peripherals and PIE module to
ensure that correct interrupt is being serviced.
Since the CLA configuration registers are accessible to C28x CPU only, this safety mechanism for CLA module
has to be executed by C28x CPU.
6.1.21 Peripheral Clock Gating (PCLKCR)
Peripherals can be clock gated on a per peripheral basis. This can be utilized to disable unused features such
that they cannot interfere with active safety functions. This safety mechanism is enabled after reset. Software
must configure and disable this mechanism to use a particular peripheral. It is possible to lock the particular
configuration to avoid inadvertent writes.
6.1.22 Peripheral Soft Reset (SOFTPRES)
Peripherals can be kept in reset on a per peripheral basis. This can be utilized to reset the unused features such
that they cannot interfere with active safety functions. These safety mechanisms are disabled after reset.
Software must configure and enable these mechanisms.
6.1.23 PLL Lock Profiling Using On-Chip Timer
Clock setup for the TMS320F28004x MCU device family includes selecting the appropriate clock source,
configuring the PLL multiplier, waiting for the lock status and switching the clock to the PLL output once the
internal lock status is set. The time required for the PLL lock sequence can be profiled using on-chip timer to
detect faults in the PLL wrapper logic. Once the PLL is locked, the frequency of the output clock can be checked
by using the following:
• Clock Integrity Check Using CPU Timer
• Clock Integrity Check Using HRPWM
• External Clock Monitoring via XCLKOUT to ensure proper clock output
6.1.24 Reset Cause Information
The system control module provides a status register (RESC) that latches the cause of the most recent reset
event. Application software executed during boot-up can check the status of this register to determine the cause
of the last reset event. This information can be used by the software to identify the cause and manage failure
recovery if required.
6.1.25 Software Read Back of Written Configuration
In order to ensure proper configuration of memory-mapped registers in this module, it is recommended for
software implement a test to confirm proper configuration of all control register by reading back the contents.
This test also provides diagnostic coverage for the peripheral bus interface and peripheral interconnect bridges.
Since the CLA configuration registers are accessible to C28x CPU only, this safety mechanism for CLA module
has to be executed by C28x CPU.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 45
Page 46

Brief Description of Diagnostics
www.ti.com
6.1.26 Software Test of ERRORSTS Functionality
As indicated in Figure 4-8, ERRORSTS pin is an integral part of MCU safety concept used for indicating to an
external system about a critical error occurring within in the MCU. Proper functioning of ERRORSTS pin and
error handling of the system external to MCU can be checked by asserting ERRORSTS pin by generating an
error condition using one of the software provided ways (e.g. asserting CLOCLKFAIL NMIFLG by updating the
NMIFLGFRC.bit.CLOCKFAIL). Error response, diagnostic testability, and any necessary system requirements
are defined by the system integrator.
6.1.27 Software Test of Missing Clock Detect Functionality
Proper operation of Missing Clock Detect (MCD) functionality can be checked by configuring MCDCR.OSCOFF.
The diagnostic test can check for issue of missing clock NMI and setting of missing clock status flag
(MCDCR.MCLKSTS).
6.1.28 Software Test of Reset
A software test for detecting basic functionality as well as errors for reset sources and reset logic can be
implemented. Each of the reset sources (including peripheral resets, DEV_CFG_REGS.SOFTPRESx) except
PORn can be generated internally and the basic reset functionality can be checked by ensuring the correct
setting of reset cause register and making sure only the intended logic is reset.
In order to confirm if individual peripherals have received the reset correctly, software can run a peripheral
specific test of functionality and confirm the expected state of the peripheral after reset. Depending on the
complexity of the peripheral this software test of functionality can include testing of complex features of the
peripheral including error tests necessary to confirm correct propagation of reset. For peripheral specific
Software Test of Function including Error tests, see the device-specific safety mechanism listed for the
peripheral.
6.1.29 Software Test of Watchdog (WD) Operation
A basic test of the internal watchdog operation can be performed via software including checking of error
response by configuring the expected lower and higher threshold value for servicing WDKEY followed by
servicing or not servicing the WDKEY during the programmed threshold values. If a reset is detrimental to the
system operation, the test can be performed by configuring the internal watchdog in Interrupt mode
(SCSR.WDENINT) and reverting back to reset mode after completion of the test.
6.1.30 Brownout Reset (BOR)
An internal BOR circuit monitors the VDDIO rail for dips in voltage which result in the supply voltage dropping out
of operational range. When the VDDIO voltage drops below the BOR threshold, the device is forced into reset,
and XRSn is pulled low. XRSn will remain in reset until the voltage returns to the operational range. The BOR is
enabled by default.
6.1.31 Dual clock comparator (DCC) - Type0
The Dual-Clock Comparator module can be used to validate or monitor the output frequency of the PLL
(PLLRAWCLK) over defined time window. While checking for the PLL Clock frequency DCC uses a known good
reference clock to compare with, which is INTOSC1, INTOSC2 or XTAL. If the PLL clock frequency deviates
from the targeted frequency more than a pre-defined threshold, DCC will report an ERROR status flag and send
an interrupt to the PIE.
Proper operation of Dual clock comparator (DCC) functionality can be checked by configuring DCC with wrong
ratio between counter 0 (DCCCNTSEED0) and counter 1 (DCCCNTSEED1) to force a failure. The fail flag /
interrupt can then be checked to verify the functionality of DCC.
46 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 47
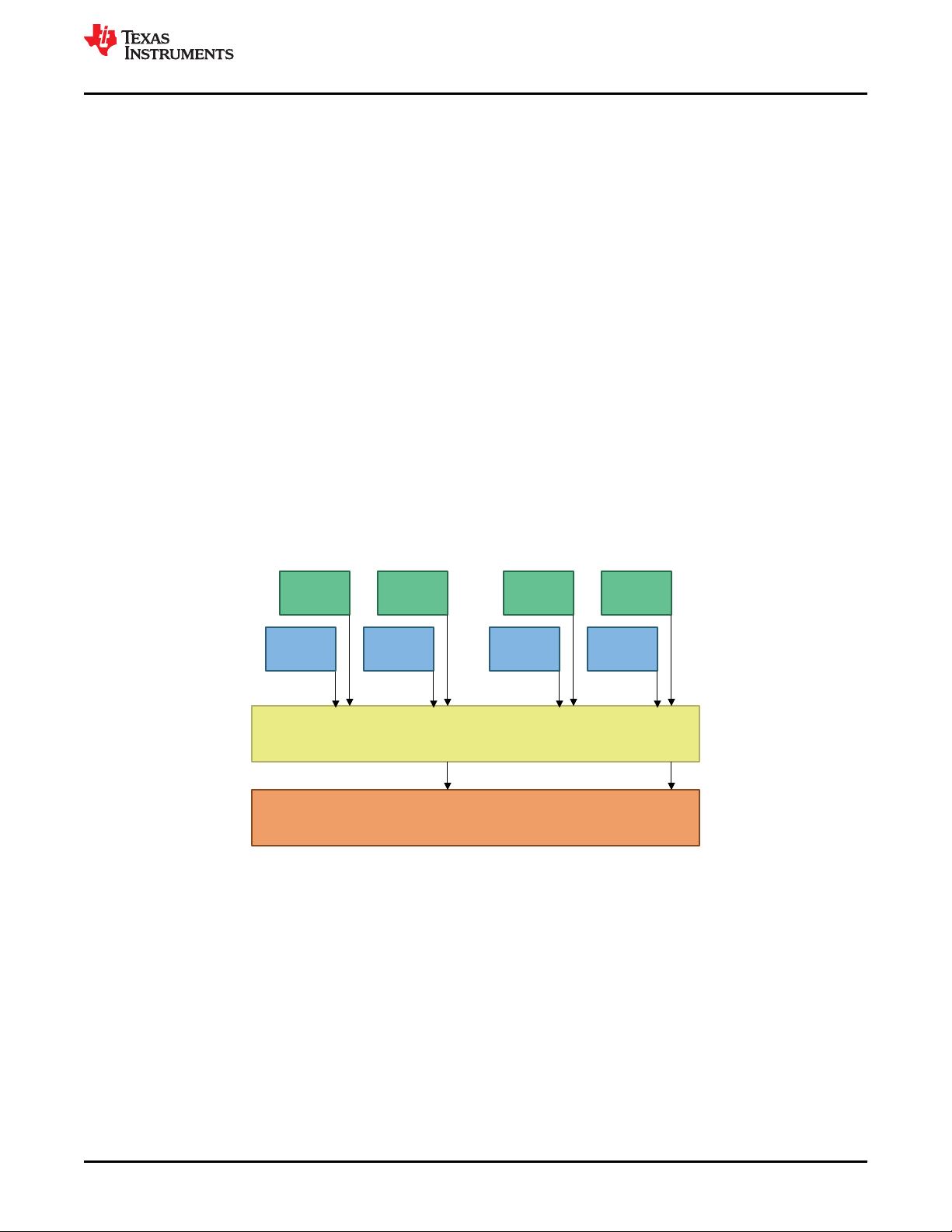
Watchdog
CPU Watchdog Function
CPU1 Task1 CPU1 Task2
CLA1 Task1 CLA1 Task1
CPU1 Task1 CPU1 Task2
CLA1 Task1 CLA1 Task1
www.ti.com
Brief Description of Diagnostics
6.1.32 Peripheral Access Protection - Type 0
Peripheral access protection is a fault avoidance measure to block unintended accesses from each master. Each
module has a configuration to control the type of accesses to be serviced from each master (CPU, CLA, DMA).
After programming peripheral access protection registers, each master can exclusively control the peripheral to
safeguard usage by particular application against errant writes or corruption by other masters in the system. This
is enabled using the dedicated access control bits per peripheral that allows or protects against the access from
given master. Each peripheral has two bit qualifiers per master to decode the access allowed. For details, see
the PERIPH_AC_REGS Registers in TMS320F28004x Technical Reference Manual.
6.2 Processing Elements
6.2.1 CLA Handling of Illegal Operation, Illegal Results
The CLA co-processor has built in mechanisms to detect execution of an illegal instruction (illegal opcode),
floating point underflow or overflow conditions. CLA will interrupt CPU under such conditions. CPU can decode
the interrupt cause by checking the required CLA flags. Error response, diagnostic testability, and any necessary
software requirements are defined by the software implemented by the system integrator.
6.2.2 CLA Liveness Check Using CPU
CLA doesn’t have an independent watchdog of its own. Hence, it is recommended to perform liveness check
periodically by the CPU. Typically, sequential set of events is used to trigger the watchdog (for example,
completion of CPU Task1, CLA Task1, CPU Task2, and CLA Task2). The output of the CLA liveness check can
be used as one of the tasks to decide the watchdog triggering as indicated in Figure 6-1. The liveness check can
be based on application-specific parameters as illustrated in the VDA Egas concept [6] to improve the diagnostic
coverage.
6.2.3 CPU Handling of Illegal Operation, Illegal Results and Instruction Trapping
The C28x CPU includes diagnostics for illegal operations, illegal results (underflow and overflow conditions) and
instructions trapping (illegal opcode) that can serve as safety mechanisms. Any access to an invalid memory
range will return 0x00000000 data. Access to an erased flash (default state for a new device) will return
0xFFFFFFFF. Both 0x00000000 and 0xFFFFFFFF are decoded as invalid instructions so that an erased flash or
cleared memory, or an invalid address will force the CPU to ITRAP. Installation of software handlers to support
the hardware illegal operation and instruction trapping is highly recommended
Examples of CPU illegal operation, illegal results and instruction traps include:
• Illegal instruction
• TMS320C28x Extended Instruction Sets. Technical Reference Manual
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Figure 6-1. CLA Liveness Check
Safety Manual for TMS320F28004x 47
Copyright © 2020 Texas Instruments Incorporated
Page 48

Brief Description of Diagnostics
www.ti.com
6.2.4 Reciprocal Comparison by Software
The CPU subsystem has a pair of diverse processing units (C28x and CLA) with different architecture and
instruction set. This enables one processing unit to be used for handling the time critical portion code (control
CPU) and other processing unit (supervisor CPU) to execute non critical portion of the code, perform diagnostic
functions and supervise execution of the control CPU.
In case of identification of fault during diagnostic functions of the supervisor CPU, it can cause the
TMS320F28004x MCU to move to a safe state. This concept, “reciprocal comparison by software in separate
processing units” acts as a 1oo1D structure providing high diagnostic coverage for the processing units as per
ISO 26262-5:2018, Table D.4. The comparison need to be performed several times during a FTTI. Reciprocal
comparison is a software diagnostic feature and hence care should be taken to avoid common mode failures.
The final attained coverage will depend on quality of comparison (determined by extend and frequency of cross
checking). The proposed cross checking mechanism allows for hardware and software diversity since different
processors with different instruction set and compiler is used for enabling this. The diversity can be further
increased by having separate algorithms being executed in both the cores. In case, failure is identified during
reciprocal comparison, NMI can be triggered by software and this in turn will assert ERRORSTS. During the
runtime, CLA has access to GPIO_Data_Regs that can indicate the error condition on a GPIO pin independent
of C28x.
6.2.5 Software Test of CLA
It is possible to test the integrity of various CLA blocks including register file, control unit, data path, and so forth,
using software-based self-test library (STL). Based on the safety requirement, this test can be performed at startup or during application time. For details on implementing the particular test, see the safety package delivered
with the specific TMS320F28004x MCU device. Error response, diagnostic testability, and any necessary
software requirements are defined by the software implemented by the system integrator.
6.2.6 Software Test of CPU
It is possible to test the integrity of various CPU logic (C28x, FPU, TMU, and so forth) using software-based selftest library (STL). TI will provide a C28x-STL startup test library with 60% diagnostic coverage for C28x, FPU
and TMU. For details on implementing the particular test, check the safety package delivered with the specific
TMS320F28004x MCU device. Error response, diagnostic testability, and any necessary software requirements
are defined by the software implemented by the system integrator.
48 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 49

Stack grows
Towards
higher
Memory
addresses
Data Memory
Region of
memory
occupied by
the stack
Monitor for data writes
near the end of the stack
www.ti.com
Brief Description of Diagnostics
6.2.7 Stack Overflow Detection
A stack overflow in a safety application may result in a catastrophic software crash due to data corruption, lost
return addresses, or both. Hence, it is important to detect an impending stack overflow. The enhanced bus
comparator (EBC) unit in ERAD module can monitor the internal address and data buses, and triggers the
RTOSINT interrupt when a specified bus and mask matches a specified value. Hence, the basic approach for
detecting stack overflow will be to configure the EBC unit to trigger an interrupt when the data write address bus
falls within some range prior to the end of a stack. This is illustrated in Figure 6-2. Since this memory is reserved
for stack usage only, a data write within the specified address range indicates that the stack usage is
approaching its allocated size limit. Detection of an impending stack overflow triggers a maskable interrupt.
Programmed error response and any necessary software requirements are defined by the system integrator.
Figure 6-2. Stack Overflow Monitoring
6.2.8 VCU CRC Check of Static Memory Contents
The TMS320F28004x MCU device family includes co-processor implementing cyclic redundancy check (CRC)
using standard polynomials. The CRC module can be used to test the integrity of SRAM, Flash, and OTP
contents by calculating a CRC for all memory contents and comparing this value to a previously generated
"golden" CRC. The comparison of results, indication of fault, and fault response are the responsibility of the
software managing the test. The cyclical check applied by the CRC logic provides an inherent level of selfchecking (auto-coverage), which can be considered for application in latent fault diagnostics.
6.2.9 VCU CRC Auto Coverage
The VCU CRC diagnostic is based on up to 32-bit polynomial. For a given test, only one code is valid out of 2
32
possibilities. Therefore, if there is a fault in the VCU CRC logic or associated data path, it is extremely unlikely
that the correct passing code will be generated via the fault.
6.2.10 Disabling of Unused CLA Trigger Sources
The CLA can receive input task triggers from various peripherals and software. To avoid interference from
unused trigger sources resulting in disturbance to CLA operation it is recommended to disable these in
application.
6.2.11 Embedded Real Time Analysis and Diagnostic (ERAD) - Type 0
The ERAD module provides system analysis capabilities that can be used to detect faults in CPU and other logic
on MCU by configuring bus comparator units that monitor CPU buses and counter units that count events. This
module which is accessible by the application software, consists of the Enhanced Bus Comparator units and
Benchmark System Event Counter units.
The Enhanced Bus Comparator units are used to monitor various CPU buses and generate events which can
then be further processed or used directly. The activity monitored and detected by these units can be used to
generate breakpoints, watch-points or an interrupt (RTOSINT).
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 49
Page 50

Brief Description of Diagnostics
www.ti.com
The Benchmark System Event Counter units are used to analyze and profile the system. It can count events
when setup as Event Mode and duration between system events when setup as Duration mode.
After application code sets up the ERAD module, it can work independently and generate RTOSINT interrupt in
case of event match occurs. This module can be used as a continuous online monitor of system events on MCU.
6.3 Memory (Flash, SRAM and ROM)
6.3.1 Bit Multiplexing in Flash Memory Array
The flash modules implemented in the TMS320F28004x MCU device family have a bit multiplexing scheme
implemented such that the bits accessed to generate a logical (CPU) word are not physically adjacent. This
scheme helps to reduce the probability of physical multi-bit faults resulting in logical multi-bit faults. Rather, they
manifest as multiple single bit faults. As the SECDED flash ECC can correct a single bit fault and detect double
bit fault in a logical word, this scheme improves the usefulness of the flash ECC diagnostic. Bit multiplexing is a
feature of the flash memory and cannot be modified by the software.
6.3.2 Bit Multiplexing in SRAM Memory Array
The SRAM modules implemented in the TMS320F28004x MCU device family have a bit multiplexing scheme
implemented such that the bits accessed to generate a logical (CPU) word are not physically adjacent. This
scheme helps to reduce the probability of physical multi-bit faults resulting in logical multi-bit faults. Rather, they
manifest as multiple single bit faults. The SECDED SRAM ECC diagnostic can correct a single bit fault and
detect double bit fault in a logical word. Similarly, the SRAM parity diagnostic can detect single bit faults. This
scheme improves the usefulness of the SRAM ECC and parity diagnostic. Bit multiplexing is a feature of the
SRAM and cannot be modified by the software.
6.3.3 Data Scrubbing to Detect/Correct Memory Errors
Bus masters (CPU, CLA or DMA) can be configured to provide dummy reads to the memory (provided a
particular bus master has access to the memory) and the read data can be checked by the built-in ECC or Parity
logic. In the case of SRAMs with ECC protection, single bit errors are corrected and written back. For both
SRAMs and flash, interrupt is issued once the count exceeds the preset threshold in the case of correctable
errors and NMI will be issued in the case of uncorrectable errors.
Since the contents of flash memory are static, VCU CRC Check of Static Memory Contents provides better
diagnostic coverage compared to this diagnostic.
6.3.4 Flash ECC
The on-chip flash memory is supported by single error correction, double error detection (SECDED) error
correcting code (ECC) diagnostic. In this SECDED scheme, an 8-bit code word is used to store the ECC of 64 bit
data and corresponding address. The ECC decoding logic at the flash bank output checks the correctness of
memory content. ECC evaluation is done on every data and program read. The data and program interconnects
that connect the CPU and flash memory is not protected by ECC. Detected correctable errors can be corrected
or not corrected, depending on whether correction functionality is enabled. Single bit address ECC errors are
flagged as uncorrectable errors. Errors that cannot be corrected will generate an NMI and ERRORSTS pin is
asserted. Count of the corrected errors (single bit data errors) is monitored by the flash wrapper and an interrupt
is generated once the count exceeds the programmed threshold. The corrupted memory address of the last error
location is also logged in flash wrapper.
6.3.5 Flash Program Verify and Erase Verify Check
Whenever any program and erase operation is done, the flash controller will perform program and erase verify
check. If the program and erase operation is failed, FSM status register (FMSTAT) will indicate the error by
setting the corresponding flags into the status register.
50 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 51

www.ti.com
Brief Description of Diagnostics
6.3.6 Software Test of ECC Logic
It is possible to test the functionality of the SRAM ECC by injecting single bit and double bit errors in test mode
and performing reads on locations with ECC errors, and checking for the error response. Flash ECC logic can be
checked with the help of ECC test registers (FECC_CTRL, FADDR_TEST, FECC_TEST, FDATAH_TEST,
FDATAL_TEST). Correct functioning of error counter and threshold interrupt associated with single bit errors can
also be verified using this technique. Error response, diagnostic testability, and any necessary software
requirements are defined by the software implemented by the system integrator.
For additional details on implementing this diagnostic for SRAM and FLASH memory, see the Application Test
Hooks for Error Detection and Correction and SECDED Logic Correctness Check sections in the
TMS320F28004x Microcontrollers Technical Reference Manual.
6.3.7 Software Test of Flash Prefetch, Data Cache and Wait-States
Once enabled, prefetch logic keeps fetching the next 128-bit row (4 x 32-bit words) from flash bank. On detecting
the discontinuity, the prefetch buffer will be cleared. A software test can be performed to ascertain the proper
behavior of this logic. The following sequence of operation can be performed.
1. Disable the prefetch mechanism, enable the timer and Watchdog. Execute a particular function which might
have linear code and code with multiple discontinuities. Store the time “time_1” (timer value) taken for
executing this function.
2. Enable the prefetch mechanism and execute the same function again. Store the time “time_2” (timer value)
taken for executing this function. This value should be less than the time_1 (time_1 > time_2). We can mark
this timer value as a golden value and should expect the same timer values for each run of the same
function.
3. Since each flash bank row has 4 x 32-bit words, number of rows fetched from the flash bank varies as per the
code alignment within the flash bank. Hence, user needs to make sure that the prefetch logic test function
should be aligned/located in particular location within flash to guarantee the same timing behavior and does
not vary compile to compile.
Similar timer-based profiling can be performed to ascertain proper functioning of the data cache and wait states.
6.3.8 Access Protection Mechanism for Memories
All volatile memory blocks including external memories except for M0/M1 have different levels of protection. This
capability allows the user to enable or disable specific access (e.g. Fetch, Write) to individual RAM blocks from
individual masters (viz. CPU,CLA,DMA). There is no protection for read accesses, therefore, reads are always
allowed from all the masters which have access to that RAM block. To identify conditions when the master
access to an SRAM is blocked, see the device-specific technical reference manual. This configuration can be
changed during run-time and allows memory to block access from specific masters or specific application
threads within the same master. This capability helps support freedom from interference requirements required
by some applications.
6.3.9 SRAM ECC
Selected on-chip SRAMs support SECDED ECC diagnostic with separate ECC bits for data and address. For
the specific address ranges that support ECC, see the TMS320F28004x MCU device-specific data sheet. In
SECDED scheme, a 21-bit code word is used to store the ECC data calculated independently for each 16 bit of
data and for address. The ECC logic for the SRAM access is located in the SRAM wrapper. The ECC is
evaluated directly at the memory output and data is sent to CPU after the data integrity check. The data and
address interconnects from SRAM to the CPU is not protected using ECC. Detected correctable errors are
corrected and it is possible to monitor the number of corrected errors. The SRAM wrapper can be configured to
trigger an interrupt once the number of corrected errors crosses a threshold. Uncorrectable SRAM errors trigger
an NMI and the ERRORSTS pin is asserted. The ECC logic for the SRAM is enabled at reset. For more
information regarding memories supporting ECC, see the TMS320F28004x MCU device-specific data sheet.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 51
Page 52

CLA
CLA PROGRAM BUS
CRC FETCH REQ
DATA
fetch
unit
CRC32
Polynomial : 0x04C11DB7
Control, Status, Interrupts
Registers
CLAPROM REQUEST
CLA
ROM
wrapper
CPU debug accesses
CLA
PROM
idle cycle on CLA PROM
CRC_INT
CRC 32
Brief Description of Diagnostics
www.ti.com
6.3.10 SRAM Parity
Selected on-chip SRAMs support parity diagnostic with separate parity bits for data and address. For the specific
address ranges that support parity, see the device-specific data sheet. In the parity scheme, a 3-bit code word is
used to store the parity data calculated independently for each 16 bit of data and for address. The parity
generation and check logic for the SRAM is located in the SRAM wrapper. The parity is checked directly at the
memory output and data is sent to CPU after the data integrity check. The data and address interconnect from
SRAM to the CPU is not protected using parity. SRAM parity errors trigger an NMI and the ERRORSTS is
asserted. The parity logic for the SRAM is enabled at reset. For more information regarding memories supporting
parity, see the TMS320F28004x MCU device-specific data sheet.
6.3.11 Software Test of Parity Logic
It is possible to test the functionality of parity error detection logic by forcing a parity error into the data or parity
memory bits, and observing whether the parity error detection logic reports an error. Parity can also be
calculated manually and compared to the hardware calculated value stored in the parity memory bits.
For additional details on implementing this diagnostic for SRAM, see the Application Test Hooks for Error
Detection and Correction section in TMS320F28004x Microcontrollers Technical Reference Manual.
6.3.12 Software Test of SRAM
It is possible to test the integrity of SRAM (bit cells, address decoder and sense amplifier logic) using the CPU.
Based on the safety requirement, this test can be performed at start-up or during application time. If the SRAM
contents are static, a CRC check using VCU can also be performed in place of destructive test (test where
memory contents need to be restored after the test). For details on implementing this particular test, check the
safety package delivered with this specific C2000 MCU device.
6.3.13 Background CRC for CLA-PROM (CLAPROMCRC)
The CLAPROMCRC is a safety feature performs CRC on a configurable block of memory in the CLA program
ROM space. Neither the C28x nor the CLA have access to compute CRC on the CLA program ROM. The
CLAPROMCRC solves this problem by calculating a CRC in a non-intrusive manner (that is, without impacting
CLA accesses to CLA PROM). It is a hardware CRC-32 module tbat automatically fetches the CLA program
ROM in background during idle cycles (when CLA is not accessing the ROM on the CLA program bus), and
calculates the CRC-32 in order to perform a code integrity check. It then compares the result with a golden
CRC-32 value and registers pass or fail condition. The module issues an interrupt on completion of the test.
Figure 6-3 is a functional diagram of the CLAPROMCRC module.
Figure 6-3. CLAPROMCRC Functional Diagram
52 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 53

www.ti.com
Brief Description of Diagnostics
6.3.14 Memory Power-On Self-Test (MPOST)
Start-up test of the memories provides detection for permanent faults inside on-chip memories. Some of the
C2000 devices family products supports the Programmable Built in Self-Test (PBIST), an easy and efficient way
of testing the memories by configuring the customer OTP field. PBIST architecture consists of a small coprocessor with a dedicated instruction set targeted specifically toward testing memories. This co-processor when
triggered, executes test routines stored in the PBIST ROM and runs them on multiple on-chip memory instances.
The on-chip memory configuration information is also stored in the PBIST ROM. PBIST provides very high
diagnostic coverage for permanent faults on the implemented SRAMs and ROMs. If PBIST is configured, test
(March13n for SRAMs or triple_read_xor_read for ROMs) is executed on all the memory instances. The PBIST
test status is stored in the on chip memory. The term “memory” covered by PBIST indicates to SRAM and ROM.
Flash testing is not covered as part of this specification.
Since the code for testing of the memories resides in boot rom, it is not be possible to test the boot-rom using
PBIST. Hence a separate boot-rom checksum test will be done prior to PBIST. Prior to performing any test using
PBIST, an always fail test case is executed. This is to validate the proper functioning of the PBIST controller and
its ability to indicate failure. For more details, see C2000 Memory Power-On Self-Test (M-POST).
6.4 On-Chip Communication Including Bus-Arbitration
6.4.1 1oo2 Software Voting Using Secondary Free Running Counter
The TIMER module contains three counters that can be used to provide an operating system time base. While
one counter is used as the operating system time base, it is possible to use one of the other counters as a
diagnostic on the first, using periodic check via software of the counter values in the two timers. The CPU Timer2
can be fed with a different clock source and a different prescale configuration can be selected to avoid common
mode errors. Error response, diagnostic testability, and any necessary software requirements are defined by the
software implemented by the system integrator.
6.4.2 DMA Overflow Interrupt
DMA supports latching one additional trigger event. Before DMA services this latched event if additional event
occurs DMA overflow interrupt is generated, such that, the CONTROL_REG.PERINTFLG is set and another
interrupt event occurs. The CONTROL_REG.PERINTFLG being set indicates a previous peripheral event is
latched and has not been serviced by the DMA
6.4.3 Maintaining Interrupt Handler for Unused Interrupts
The TMS320F28004x MCU devices contain a large number of interrupts; a typical application only uses a very
small subset of all the available interrupts. Multiple configurations are possible for the unused interrupts. This
includes disabling of the unused interrupts, enabling the unused interrupts and return to the application in the
interrupt service routine (ISR), and so forth. Receiving of an interrupt not used in the application might be an
early indication of some faulty scenarios within the TMS320F28004x MCU. Hence, it is highly recommended to
enable all the interrupts and configure the ISR to a common routine for logging or error handling.
6.4.4 Power-Up Pre-Operational Security Checks
During the device boot, it goes through various phases as indicated in Figure 4-9. In the pre-operational phase
(before starting the application), the application code is expected to perform a set of checks to ensure correct
initialization of device security which includes checks to confirm correct link pointer settings, CRC lock setting,
correct partitioning of secure RAM blocks and flash sectors (Grab Bits), setting for execute only protection for
secure RAM blocks and Flash sectors, correct partitioning of the CLA and flash Bank2 and correct settings for
boot configuration. Before starting the execution of downloaded code user should check the integrity of the code
using CRC function. Once pre-operational checks are successfully completed with expected results, the device
can enter the application phase.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 53
Page 54

Brief Description of Diagnostics
www.ti.com
6.4.5 Majority Voting and Error Detection of Link Pointer
The link pointer OTP location is not protected by ECC. To provide better security to the customer code and
enable application safety, majority voting and data consistency based error detection is implemented. The
location of the zone select region in OTP is decided based on the value of three 29-bit link pointers (ZxLINKPOINTERx) programmed in the OTP of each zone. The final value of the link pointer is resolved in
hardware when a dummy read is issued to all the link pointers by comparing all the three values (bit-wise voting
logic). Any error in the resolution of the final link pointer value will set the Zx_LINKPOINTERERR register.
6.4.6 PIE Double SRAM Hardware Comparison
PIE SRAM address space is duplicated and data is placed in two memories. During a vector fetch, the ePIE
performs a hardware comparison of both vector table outputs. If there is a mismatch between the two vector
tables, the CPU branches to the address in the PIEVERRADDR register and the ePIE sends trip signals to the
PWMs. If the PIEVERRADDR register value has not been set, the default boot ROM handler at address
0x003FFFBE is used.
6.4.7 PIE Double SRAM Comparison Check
In order to check the PIE double SRAM comparison feature and the fault handling, it is possible to inject different
data to both the SRAMs by waiting to a redundant vector address. The interrupt corresponding to the
mismatched PIE vector in SRAM needs to be triggered by software. Then software needs to verify that CPU
branches to the address in the PIEVERRADDR register and the ePIE sends trip signals to the PWMs. For details
for implementation of this check, see the Vector Address Validity Check section in the TMS320F28004x
Microcontrollers Technical Reference Manual.
6.4.8 Software Check of X-BAR Flag
X-BAR flag registers are used to flag the inputs of the ePWM and output X-Bars to provide software knowledge
of the input sources which got triggered. This flag registers can be periodically read to ascertain that no ePWM
tripzones, ePWM syncing or GPIO output signaling is missed.
6.4.9 Software Test of ePIE Operation Including Error Tests
A software test for testing the basic functionality as well as failure modes such as continuous interrupts, no
interrupts, and crossover interrupts can be implemented. Such testing can be based on generating the interrupts
from the peripherals and ensuring that the interrupt is serviced and serviced in proper order. The interrupt can be
generated using either software force capability, for example, ECAP_REGS.ECFRC.CTROVF or creating the
interrupt scenario functionally, for example, creating a counter overflow condition in eCAP. Error response,
diagnostic testability, and any necessary software requirements are defined by the software implemented by the
system integrator.
6.4.10 Disabling of Unused DMA Trigger Sources
Unintended trigger of DMA transfers could corrupt critical data and that could be a potential source of
interference to safety critical applications. In order to avoid the initiation of unintended DMA transfers, it is
recommended that unused DMA channels and DMA trigger sources are disabled at source or by configuring
DMACHSRCSELx registers.
6.5 Digital I/O
6.5.1 eCAP Application Level Safety Mechanism
eCAP module outputs can be checked for saturation, zero width or out of range based on the application
requirement. While measuring the speed of rotating machinery, the application can set bounds on the measured
speed based on the operating profile. Similar bound settings are possible for other application scenarios like
period and duty cycle measurement, decoding current or voltage from the duty cycle of the encoded current or
voltage sensors, and so forth. Online monitoring of periodic interrupts can also be performed for improved
diagnostic coverage based on the application profile.
54 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 55

TZ Event
GPIO Logic
(Inverts one signal)
Input X-BAR
DC Event
EPWM2B
EPWM1A
!EPWM2B
TZ1
TZ2
TZ1 & !TZ2
EPWM1A & !(!EPWM2B)
DC Event
GPIO Logic
(Inverts one signal)
Input X-BAR
EPWM1A
EPWM2B
TZ1 & !TZ2
EPWM1A & !(!EPWM2B)
!EPWM2B
EPWM1A
TZ1
TZ2
www.ti.com
6.5.2 ePWM Application Level Safety Mechanism
ePWM is typically used as the output signal in closed loop control applications such as EV traction, DC-DC and
industrial drive. In such applications, the failure in ePWM output, such as stuck-at fault or frequency or duty cycle
change, will result in disturbance to control loop parameters or variables, leading to conditions such as over
voltage, over current or over temperature. By monitoring characteristics of these control loop parameters
implemented at application-level, faults in the ePWM module can be detected.
6.5.3 ePWM Fault Detection Using X-BAR
A combination of ePWM outputs feedback to input X-BAR, GPIO inversion logic and Digital Compare (DC) submodule of ePWM can be used for implementing simple (for example, signal cross over) but effective anomaly
checks on the PWM outputs. The feature can be used to trip the PWM and enter safe state if any anomaly is
detected.
Brief Description of Diagnostics
Figure 6-4. ePWM Fault Detection Using X-BAR
6.5.4 ePWM Synchronization Check
ePWM modules can be chained together via a clock synchronization scheme that allows them to operate as a
single system when required. In the synchronous mode of operation, it is critical to check the proper
synchronization of the various PWM instances to avoid catastrophic conditions. The synchronization of the
various PWMs can be checked by reading the TBSTS.SYNCI bit of ePWM module. The proper phase
relationship intended as a result of the sync operation can be cross-checked by comparing the TBCTR register
value.
6.5.5 eQEP Application Level Safety Mechanism
eQEP is typically used in closed loop control applications to have direct interface with a linear or rotary
incremental encoder to get position, direction, and speed information from a rotating machine for use in highperformance motion and position-control system. In such applications, it is possible to monitor eQEP outputs for
saturation, zero value or out of range based on the application requirement. While estimating the speed/position
of rotating machinery, the application can set bounds on the measured speed/position based on the operating
profile. Online monitoring of periodic interrupts from eQEP can also be performed for improved diagnostic
coverage based on the application profile.
6.5.6 eQEP Quadrature Watchdog
eQEP peripheral contains a 16-bit watchdog timer that monitors the quadrature-clock to indicate proper
operation of the motion-control system. The eQEP watchdog timer is clocked from SYSCLKOUT/64 and the
quadrate clock event (pulse) resets the watchdog timer. If no quadrature-clock event is detected until a period
match, then the watchdog timer will time out and the watchdog interrupt flag will be set. The timeout value is
programmable through the watchdog period register.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 55
Page 56

Brief Description of Diagnostics
www.ti.com
6.5.7 eQEP Software Test of Quadrature Watchdog Functionality
A software test can be used to test for basic functionality of the quadrature watchdog as well as to inject
diagnostic errors and check for proper error response. Such a test can be executed at boot or periodically.
Software requirements necessary are defined by the software implemented by the system integrator.
6.5.8 Hardware Redundancy
Hardware redundancy techniques can be applied via hardware or as a combination of hardware and software to
provide runtime diagnostic. In this implementation, redundant hardware resources are utilized to provide
diagnostic coverage for elements within and outside (wiring harness, connectors, transceiver) TMS320F28004x
MCU.
In case of peripherals like GPIO, X-BAR, ePWM, OTTO, DAC, CMPSS and XINT, hardware redundancy can be
implemented by having multi-channel parallel outputs (where independent outputs are used for transmitting
information, and failure detection is carried out via internal or external comparators) or input comparison or
voting (comparison of independent inputs to ensure compliance with a defined tolerance range on time and
value). In such scenarios, the system can be designed such that the failure of one input/output does not cause
the system to go into a dangerous state. While servicing the error conditions (e.g. redundancy conditions) as in
two redundant sources tripping the PWM, always read-back the status flags and ensure that both sources are
active while tripping and thus providing latent fault coverage for the trip logic.
In case of peripherals like ADC, PGA, eCAP, HRCAP and eQEP, hardware redundancy may be implemented by
having multiple instance of the peripheral sample the same input and simultaneously perform the same
operation followed by cross check of the output values.
In case of SDFM, hardware redundancy may be implemented by having multiple channels sample the same
input followed by cross check of the output values.
In case of communication peripherals like DCAN, SPI and SCI, hardware redundancy during signal reception
can be implemented by having multiple instance of the peripheral receive the same data followed by comparison
to ensure data integrity. Hardware redundancy during transmission can be employed by having complete
redundant signal path (wiring harness, connectors, transceiver) from the transmitter to receiver or by sampling
the transmitted data by a redundant peripheral instance followed by data integrity check.
Hardware Redundancy for device interconnect (INC) can be implemented by redundant data storage/
transmission by independent processing units for computation followed by comparison of the computed results.
Hardware Redundancy for peripheral interrupt (PIE) can be implemented by connecting interrupt to CLA in
parallel as trigger source. Reciprocal comparison can be implemented between CPU and CLA to enable
detection of faulty PIE behavior.
In case of Dual Code Security Module (DCSM), C28x CPU and CLA can be configured to access its resources
via independent Zones. Reciprocal comparison can be implemented between CPU and CLA to enable detection
of a fault in DCSM module.
While implementing hardware redundancy for ADC and DAC modules, additional care needs to be taken to
ensure common cause failures do not impact both instances in same way. Reference voltage sources configured
for redundant module instances should be independent. Additionally, for ADC SOC trigger sources used for
redundant ADC instance should be configured to different ePWM module instance. In case of DAC module the
comparator can be implemented using an external device.
While implementing hardware redundancy for the ePWM module, it is recommended that ePWM module
instance used is part of separate sync chains. This is to avoid common cause failure on sync signal affecting
both the ePWM modules in same way.
While implementing hardware redundancy for GPIO module, it is recommended to use GPIO pins from different
GPIO groups to avoid common cause failures.
56 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 57

www.ti.com
Brief Description of Diagnostics
6.5.9 HRPWM Built-In Self-Check and Diagnostic Capabilities
The micro edge positioner (MEP) logic in HRPWM is capable of placing an edge in one of 255 discrete time
steps. The size of these steps is of the order of 150 ps. For typical MEP step size, see the device-specific data
sheet. The MEP step size varies based on worst-case process parameters, operating temperature, and voltage.
MEP step size increases with decreasing voltage and increasing temperature and decreases with increasing
voltage and decreasing temperature. Applications that use the HRPWM feature should use the TI-supplied MEP
scale factor optimization (SFO) software function. The SFO function helps to dynamically determine the number
of MEP steps per EPWMCLK period while the HRPWM is in operation.
The HRPWM module has built in self-check and diagnostic capabilities that can be used to determine the
optimum MEP scale factor value for any operating condition. TI provides a C-callable library containing one SFO
function that utilizes this hardware and determines the optimum MEP scale factor. For a given System Clock
frequency at a given temperature, a known MEP scale factor value is returned by the SFO determination
function. Proper System Clock frequency operation is verified by comparing the MEP scale factor value returned
with the expected value.
6.5.10 Information Redundancy Techniques
Information redundancy techniques can be applied via software as an additional runtime diagnostic. In order to
provide diagnostic coverage for network elements outside the TMS320F28004x MCU (wiring harness,
connectors, transceiver) end-to-end safety mechanisms are applied. These mechanisms can also provide
diagnostic coverage inside the TMS320F28004x MCU.
In the case of processing elements (CPU and CLA), this refers to multiple executions of the code and software
based cross checking to ensure correctness. The multiple execution and result comparison may be based on
either the same code executed multiple times or diversified software code implemented. For details regarding
the implementation, see the ISO 26262-5:2018, D.2.3.4.
In the case of the DMA, information redundancy techniques refers to additional information besides the data
payload which ensures data integrity. For example, SECDED codes, parity codes, CRCs etc. enable information
redundancy.
Typical control applications involve measuring three phase the voltage and current. These values are either
sampled directly using the on chip ADC or send to the TMS320F28004x MCU by the sensors which are captured
using eCAP, SDFM, and so forth. In such scenarios, the correlation between input signals can be used to check
the integrity (for example, if the three phase voltage, V1, V2, V3 is being measured, the function V1 + V2 + V3 = 0
can be used to provide diagnostic coverage for input signal integrity).
In the case of SRAM and flash memory, critical data, program, variables, and so forth can be stored redundantly
and compared before it is getting used. Care should be taken to avoid compiler optimizing code containing
redundant data/programs. Safety program in flash can be copied to SRAM and execute after performing a CRC
check against a pre-calculated golden CRC value.
6.5.11 Monitoring of ePWM by eCAP
The ePWM outputs can be monitored for proper operation by an input capture peripheral, such as the eCAP. The
connection between ePWM output and eCAP input can be made either externally in the board or internally using
X-BAR. Error response, diagnostic testability, and any necessary software requirements are defined by the
software implemented by the system integrator. Similarly eCAP can be tested by measuring ePWM pulse width
as a test for diagnostic. XINTxCTR (counter of XINT module), capture mode of eQEP and DCCAP (PWM event
filter unit) can also be used to detect rising/falling edges of the PWM and extract the timestamping information.
This information can be further used to build additional diagnostics.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 57
Page 58

ADC
PWM1
B
A
A0
A1
A2
A3
A4
Brief Description of Diagnostics
www.ti.com
6.5.12 Monitoring of ePWM by ADC
The ePWM outputs can be monitored for proper operation by ADC using a board level feedback as indicated in
Figure 6-5. The technical details for implementing such a loopback like signal resolution, and so forth is provided
in the link [9]. Error response, diagnostic testability, and any necessary software requirements are defined by the
software implemented by the system integrator.
Figure 6-5. Monitoring of ePWM by ADC
6.5.13 Online Monitoring of Periodic Interrupts and Events
For interrupts and events, failures can be detected using information about the time behavior of the system. The
monitored signals can be either periodic or aperiodic.
For a typical closed loop control application, most of the critical events are periodic in nature and these periodic
events can be monitored and incoherence in the events can be used for fault detection. A few places where
online monitoring periodic interrupts and events can be employed using peripherals such as ERAD include:
• Online monitoring of periodic occurrence of interrupts, for example, ePWM, ADC end-of-conversion (EOC),
eCAP and eQEP interrupts
• Online monitoring of periodic events:
– Periodic generation of ADC start-of-conversion (SOC): ADC SOC signal can be used to generate an
external interrupt (XINT) with the help of X-BAR. The occurrence of periodic interrupts can be monitored.
– Periodic DMA trigger: Some of the DMA events may also be periodic in nature (for example, copy of ADC
results, updating of CMPA register, and so forth). DMA supports interrupt generation on the completion of
the DMA action and this capability can be used for online monitoring.
Monitoring of interrupts and events which are normally not expected during the correct operation can also be
used to improve the diagnostic coverage (e.g. ECC correctable error interrupt).
6.5.14 SDFM Comparator Filter for Online Monitoring - Type 0
Comparator unit of SDFM can be used for online monitoring of primary filter’s operation. The comparator filter
has a configurable Sinc filter whose output is compared with three programmed threshold levels to detect over
and under-value conditions and zero crossing events. In case comparator filter’s data output crosses low or high
threshold limit, it will fire interrupt to the CPU. The output of the comparator filter can also be used to verify the
primary filter output with proper scaling.
58 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Page 59

www.ti.com
Brief Description of Diagnostics
6.5.15 SD Modulator Clock Fail Detection Mechanism
When SD modulator clock fails or goes missing for 256 continuous system clock cycles, clock fail detection submodule in the input control unit of SD modulator detects the failure and generates an interrupt to CPU. This
mechanism can be used to detect missing modulator clock faults or any faults in digital I/O connecting modulator
clock.
6.5.16 Software Test of Function Including Error Tests
A software test can be utilized to test basic functionality of the module and to inject diagnostic errors and check
for proper error response. Such a test can be executed at boot or periodically. Software requirements necessary
are defined by the software implemented by the system integrator.
Ideas for creating some module specific tests functionality and error tests are given below:
• SDFM functionality can be checked by sending a known input test sequence to the TMS320F28004x MCU,
process it using the digital decimation filters and cross check the value against a known value. For detecting
faults in comparator interrupt generation logic, a test pattern can be created to configure the high and low
threshold register values to minimum and maximum values respectively. Interrupt should always be
generated with such a configuration.
• DMA functionality can be checked by transferring a known good data from a source memory to the
destination memory and checking for data integrity after the transfer. The transfer can be initiated using the
software trigger available (CONTROL.PERINTFRC). On chip timer can be used to profile the time required
for such a data transfer.
• Software test of input and output X-BAR module can be performed by having a loop created (output X-BAR
can be used as stimulus to input X-BAR) using the input and output X-BAR, sending a known test sequence
at the input and observing it at the final output. Integrity of ePWM X-BAR can be checked by sending the test
stimulus and observing the response using ePWM trip or sync functionality.
• Software test of XINT functionality can be checked by configuring the input X-BAR and forcing the
corresponding GPIO register to generate an interrupt. The diagnostic coverage can be enhanced by
performing checks for the polarity (XINTxCR.POLARITY) and enable (XINTxCR.ENABLE) functionality as
well.
• eCAP, HRCAP and eQEP functionality can be checked by looping back the PWM, HRPWM or GPIO outputs
to the respective module inputs, providing a known good sequence as required by the module and observing
the module output. In the case of eCAP and HRCAP, the test can be done internally with the help of input XBAR.
• ROM prefetch functionality can be checked using similar techniques as given in Section 6.3.7.
• The ePWM module consists of Time-Base (TB), Counter Compare (CC), Action Qualifier (AQ), Dead-Band
Generator (DB), PWM Chopper (PC), Trip Zone (TZ), Event Trigger (ET) and Digital Compare (DC) submodules. The individual sub-modules can be tested by providing suitable stimulus using ePWM and
observing the response using one of the capture (time stamping) modules (eCAP, XINT, eQEP, and so forth).
It is recommended to cover the various register values associated with application configuration while
performing the software test. Due to the regular linear nature of the various sub-modules, it is possible to get
high coverage using a software test.
• A software test of SRAM wrapper logic should provide diagnostic coverage for arbitration between various
masters having access to the particular SRAM and correct functioning of access protection. This is in addition
to the test used to provide coverage of SRAM bit cells (see Section 6.3.12).
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 59
Page 60

Brief Description of Diagnostics
www.ti.com
• The interconnect (INC) functionality can be tested by writing complementary data-patterns like
0xA5A5,0x5A5A, and so forth from processing units from CPU and CLA, and reading back it from registers of
the IPs’ connected via different bridges .The read-back data can be compared with expected golden values to
ensure fault-free interconnect operation. This exercise can be repeated for different data width types of
accesses (16 and 32 bits) and wide address ranges as applicable using both CPU and CLA. The CPU
accesses can be repeated for different instances of peripherals used in application connected to various
bridges as shown in Figure 4-1.
• To test core functionality of the ADC module and post processing block (PPB), a set of predetermined voltage
levels can be provided on the ADC input pin by external circuit or internal DAC. The ADC / PPB results thus
obtained can be cross checked against the expected value to ensure proper operation. Extreme corner
values of ADC being used in application can be applied and tested to check the successful conversion across
the operational range. ADC configuration registers can be checked by writing complementary data-patterns,
read back and compared to expected values.
• DAC has a set of control registers that can be checked by writing complementary data-patterns like 0xA5A5,
0x5A5A, and so forth in 16-bit access mode. All the registers can be read back and compared to expected
values. Registers can be checked for reset feature by configuring the registers to 0xA5A5 pattern, asserting
soft reset of DAC, reading back the registers and comparing the read back value with the expected reset
value. Lock register can be checked to ensure it is set-once. Also, the registers which are getting locked must
not update when written. To test core functionality of the DAC module, it can be configured using software to
provide a set of predetermined voltage levels. These voltage levels can be measured by external or internal
ADC and results thus obtained can be cross checked against the expected value to ensure proper operation.
Extreme corner values of DAC as per application can be programmed and tested to check the successful
conversion of digital to analog module across a valid range.
• Comparator sub-system (CMPSS) has a set of registers which can be checked by writing complementary
data-patterns like 0xA5A5, 0x5A5A, and so forth in both 16 and 32 bit access modes. These can be read
back and compared against expected values. These accesses can be covered by applicable masters viz.
DMA, CLA and CPU. Features of the CMPSS module such as ramp decrement can be checked for counting
down of RAMPDLYA after it is loaded from RAMPDLYS by a rising PWMSYNC signal. It should be ensured
that the decrementer reduces to zero and stays there until next reload from RAMPDLYS. Extreme values of
RAMPDLYS can be configured before count down. Digital filter CTRIPHFILCTL/CTRIPLFILCTL registers can
be checked by configuring them to a variety of SAMPWIN (Sample window) and THRESH (Majority voting
threshold) values, and then verifying COMPHSTS/COMPLSTS changes with change in filter output.
Applicable range of filter clock pre-scaler values (CTRIPLFILCLKCTL) can be exercised to ensure that filter
samples correctly.
• The general operation of the CPU Timers can be tested by a software test by loading 32-bit counter register
TIMH from period register PRDH, starts decrementing of the counter on every clock cycle. When counter
reaches zero a timer interrupt output generates an interrupt pulse. While testing the timer functionality vary
the Timer Prescale Counter (TPR) value and also vary input clocks by selecting clock source as SYSCLK,
INTOSC1, INTOSC2, or XTAL. Test interrupts generation capability at the end of the timer counting. Check
for the time overflow flag and Timer reload (TRB) functions in TCR register for correct functioning.
• A software test function in DCSM can be implemented independently in zone1, zone2 and unsecured zone to
check DCSM functionality. Device security configurations are loaded from OTP to DCSM during the device
boot phase. The test function can implement access filtering checks (read-write and execute permissions) to
RAMs and flash sectors belonging to the same zone and different zone. An additional check for EXEONLY
configuration can also be implemented for the RAMs and flash sectors to ensure that all access other than
execute access is blocked.
60 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 61
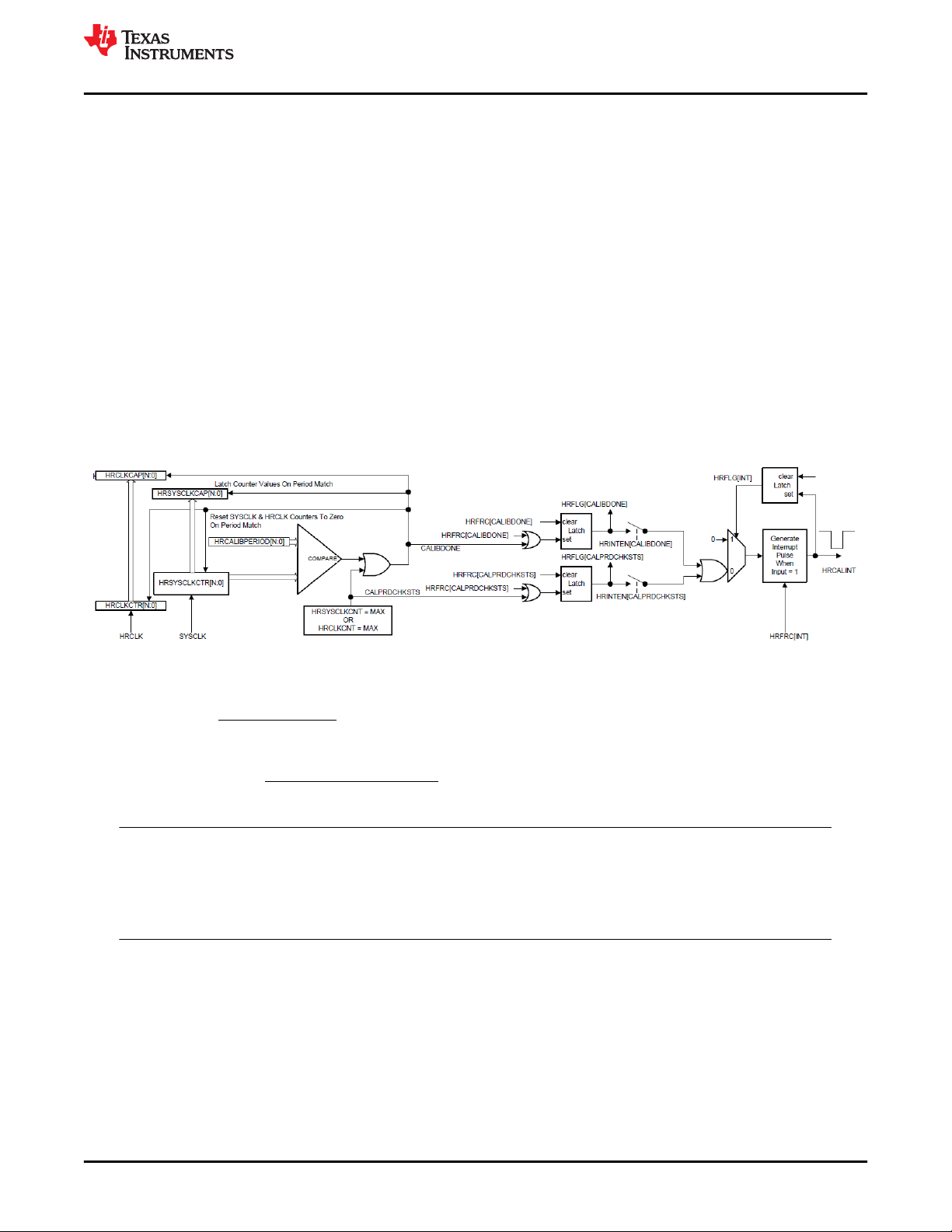
HRSYSCLKCAP
HRCLKCAP
* Pr
128
u
RawCount scaleFactor
Measurement ns SysClk d ns
www.ti.com
Brief Description of Diagnostics
6.5.17 Monitoring of HRPWM by HRCAP
The HRPWM outputs can be monitored for proper operation by an input capture peripheral, such as the HRCAP.
The connection between HRPWM output and HRCAP input can be made either externally in the board or
internally using X-BAR. Error response, diagnostic testability, and any necessary software requirements are
defined by the software implemented by the system integrator. Similarly, HRCAP can be tested by measuring
HRPWM pulse width as a test for diagnostic. XINTxCTR (counter of XINT module), capture mode of eQEP and
DCCAP (PWM event filter unit) can also be used to detect rising/falling edges of the PWM and extract the
timestamping information. This information can be further used to build additional diagnostics.
6.5.18 HRCAP Calibration Logic Test Feature
The calibration logic consists of two free-running counters; one clocked by HRCLK(HRCLKCTR) and the other
clocked by SYSCLK(HRSYSCLKCTR). When HRSYSCLKCTR is equal to HRCALIBPERIOD, the calibration
block will capture and reset both counter values, then trigger an interrupt indicating a new scale factor is ready to
be calculated. The scale factor can be found by dividing HRSYSCLKCAP by HRCLKCAP, see Equation 1. This
scale factor computation should be done inside of the calibration interrupt service routine. After computing scale
factor, Equation 2 can be applied to get actual measurement of captured value from raw count.
The full details of the calibration block are described in Figure 6-6.
Figure 6-6. HRCAP Calibration
Note
Even with calibration, noise on the 1.2 V VDD supply will negatively affect the standard deviation of
the HRCAP sub-module. Care should be taken to ensure that the 1.2 V supply is clean, and that noisy
internal events such as enabling and disabling clock trees have been minimized while using the
HRCAP.
(1)
(2)
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 61
Page 62

Brief Description of Diagnostics
6.5.19 QMA Error Detection Logic
The QEP Mode Adapter (QMA) is designed to extend the C2000 eQEP module capabilities to support the
additional modes described in QMA Module section in the TMS320F28004x Microcontrollers Technical
Reference Manual. The QMA module has error detection logic to detect illegal transitions on EQEPA and
EQEPB input signals. The QMA module’s error and interrupt are integrated inside the eQEP module.
www.ti.com
Figure 6-7. QMA Module Block Diagram
6.6 Analogue I/O
6.6.1 ADC Information Redundancy Techniques
Information redundancy techniques can be applied via software for providing runtime diagnostic coverage on
ADC conversions. Time redundancy technique can be applied where multiple conversions on same ADC
followed by comparison of results done in software. In addition, the correlation between input signals can be
used to check the integrity (for example, if the three phase voltage, V1, V2, V3 is being measured using ADC, the
function V1 + V2 + V3 = 0 can be used to provide diagnostic coverage for input signal integrity and ADC
conversion).
Error response, diagnostic testability, and any necessary software requirements are defined by the software
implemented by the system integrator.
6.6.2 ADC Input Signal Integrity Check
ADC input signal integrity can be checked using a mix of hardware and software runtime diagnostic on ADC
conversions. Filtering or plausibility check (e.g. value fall in an expected range) of the converted values can be
performed using some of the built in hardware mechanisms available within the device. Plausibility check of the
input signal can be checked with the help of comparator by setting the proper high and low threshold values. The
plausibility check of converted results can be checked by using ADC Post Processing Block.
62 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 63

12-bit
Buffered
DAC
VREFVDAC
Ax/DACy
ADCx
12 bit
0
1
.
.
VREF1
www.ti.com
Brief Description of Diagnostics
6.6.3 ADC Signal Quality Check by Varying Acquisition Window
External signal sources vary in their ability to drive an analog signal quickly and effectively. In order to achieve
rated resolution, the signal source needs to charge the sampling capacitor in the ADC core to within 0.5 LSBs of
the signal voltage. The acquisition window is the amount of time the sampling capacitor is allowed to charge and
is configurable for SOCx by the ADCSOCxCTL.ACQPS register. This configurable parameter can also be used
to provide diagnostic coverage for the input signal path and ADC sampling capacitor logic. The test can be done
by redundant conversion of the same input signal by ADC using the preset ACQPS configuration and an ACQPS
configuration higher than the preset configuration. The results thus obtained have to be within a pre-defined
range determined by the application and ADC specification parameters.
6.6.4 CMPSS Ramp Generator Functionality Check
CMPSS ramp generation functionality is used in certain control applications (e.g. peak current mode control).
The functionality of ramp generator can be checked by reading back the contents of DACHVALA register and
ensuring that the register value is periodically updated based on the RAMPDLY, RAMPDECVAL and
RAMPMAXREF. Error response, diagnostic testability, and any necessary software requirements are defined by
the software implemented by the system integrator.
6.6.5 DAC to ADC Loopback Check
Integrity of DAC and ADC can be checked monitoring DAC output using ADC. DAC can be configured using
software to provide a set of predetermined voltage levels. These voltage levels can be measured by the ADC
and results thus obtained can be cross checked against the expected value to ensure proper functioning of DAC
and ADC. This technique can be applied during run time as well to ensure that proper voltage levels are being
driven from DAC.
For more information on the DAC channels that can be sampled by ADC without external board level
connections, see the device-specific data sheet or technical reference manual. While performing the loopback
checks for 12-bit differential input mode, two DACs should be used to provide input the ADC. To avoid common
cause failures, it is recommended to keep the references voltages of the ADC and DAC different while
performing the test. In addition, the input signal to ADC should not be driven by any other sources while the test
is being performed.
Figure 6-8. DAC to ADC Loopback
6.6.6 DAC to Comparator Loopback Check
The DAC outputs can be looped back to comparator inputs to check whether the outputs being driven are at
proper voltage levels. The connections need to be provided externally on the board to enable this check. Higher
diagnostic coverage can be obtained by configuring tighter limits to the comparator. This technique can also be
used to detect control flow errors which cause the DAC output to be set at a value outside the applications safe
operating range.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 63
Page 64

12-bit
Buffered
DAC
VREFVDAC
Ax/DACy
ADC-A
12-bit
0
1
.
.
VREF1
ADC-C
12-bit
0
1
.
.
VREF1
PGAx_IN
PGAx_GND
Comparison in
SW?
12-bit
Buffered
DAC
VREFVDAC
ADC-C
12-bit
0
1
.
.
VREF1
PGAx_IN
Compensate PGA
Amplification Gain
in SW
3x,6x,12x,24x
Compensate PGA
Amplification Gain
in SW
3x,6x,12x,24x
Program DAC
to output
predetermined
values from SW
Program DAC
to output
predetermined
values from SW
±
+
±
+
Pass/Fail
PGAx
PGAx
Brief Description of Diagnostics
www.ti.com
6.6.7 PGA to ADC Loopback Test
Integrity of PGA can be checked driving PGAx_IN input with a known set of values and monitoring output after
conversion using on-chip ADC. DAC can be configured using software to provide a set of predetermined voltage
levels. With an external connection, output of DAC can be connected to PGAx_IN. ADC can convert PGAx_OUT
and SW can compare the ADC output to test if PGA amplified input signal to appropriate scale.
Figure 6-9 represents two possible schemes of setting up testing of PGA using DAC and ADC.
Figure 6-9. Testing PGA Using ADC and DAC
64 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 65

CHSEL
0
ADCIN0
1
ADCIN1
2
ADCIN2
3
ADCIN3
4
ADCIN4
5
ADCIN5
6
ADCIN6
7
ADCIN7
8
ADCIN8
9
ADCIN9
10
ADCIN10
11
ADCIN11
ADCIN12
12
13
ADCIN13
14
ADCIN014
15
ADCIN15
S2
VDDA
S1
VSSA
Opens/Shorts Detection Circuit
S3
VDDA
S4
VSSA
5 kW
7 kW
To S+H
www.ti.com
Brief Description of Diagnostics
6.6.8 Opens/Shorts Detection Circuit for ADC
The opens/shorts detection circuit (OSDETECT) can be used to detect ADC input channel faults in the system.
The circuit connects to the ADC input after the channel select multiplexer but before the S+H circuit as shown in
Figure 6-10. Error response, diagnostic testability, and any necessary software requirements are defined by the
software implemented by the system integrator.
Figure 6-10. ADC Open-Shorts Detection Circuit
The circuit can be operated by writing a value to the DETECTCFG field in the ADCOSDETECT register. This will
cause the circuit to source a voltage onto the input during the S+H phase of any conversion. The voltage and
drive strength of the OSDETECT circuit for different DETECTCFG settings is given in Table 6-1. For additional
details on implementing this diagnostic, see the Opens/Shorts Detection Circuit (OSDETECT) section in the
TMS320F28004x Microcontrollers Technical Reference Manual.
Table 6-1. ADC Open-Shorts Detection Circuit Truth Table
ADCOSDETECT.DETECT
CFG
0 Off Open Open Open Open Open
1 Zero Scale Closed Open Open Closed 5K || 7K
2 Full Scale Open Closed Closed Open 5K || 7K
3 5/12 VDDA Open Closed Open Closed 5K || 7K
4 7/12 VDDA Closed Open Closed Open 5K || 7K
5 Zero Scale Open Open Open Closed 5K
6 Full Scale Open Open Closed Open 5K
6.6.9 VDAC Conversion by ADC
Reference voltage input to COMPDACs (VDAC) is double bonded with ADCB input. For detecting faults in
VDAC supply and corresponding analog I/O, it can be converted by ADC. The ADC result output can be cross
checked against the expected output to identify any faults. Programmed error response and any necessary
software requirements are defined by the system integrator.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
7 Zero Scale Closed Open Open Open 7K
Source Voltage S4 S3 S2 S1 Drive Impedance
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 65
Page 66

Brief Description of Diagnostics
www.ti.com
6.6.10 Disabling Unused Sources of SOC Inputs to ADC
ADC SOC (start of conversion) signal input to ADC module can be triggered by multiple sources, include
software, CPU Timers, GPIO, and ePWM module instances, and so forth. In order to achieve freedom from
interference due to a fault originating from an peripheral not used in implementing the safety function and
cascading into ADC, it is recommended that application enables only the required SOC triggers. This is a way to
avoid faults originating from an outside source to impact functionality of ADC.
6.7 Data Transmission
6.7.1 Information Redundancy Techniques Including End-to-End Safing
Information redundancy techniques can be applied via software as an additional runtime diagnostic. There are
many techniques that can be applied, such as read back of written values and multiple reads of the same target
data with comparison of results.
In order to provide diagnostic coverage for network elements outside the TMS320F28004x MCU (wiring harness,
connectors, transceiver), end-to-end safety mechanisms are applied. These mechanisms can also provide
diagnostic coverage inside the TMS320F28004x MCU. There are many different schemes applied, such as
additional message checksums, redundant transmissions, time diversity in transmissions, and so forth. Most
commonly checksums are added to the payload section of a transmission to ensure the correctness of a
transmission. These checksums, sequence counter and timeout expectation (or time stamp) are applied in
addition to any protocol level parity and checksums. As these are generated and evaluated by the software at
either end of the communication, the whole communication path is safed, resulting in end-to-end safing.
Any end-to-end communications diagnostics implemented should consider the failure modes and potential
mitigating safety measures described in IEC 61784-3:2016 and summarized in IEC 61784-3:2016, Table 1.
6.7.2 Bit Error Detection
When the CAN module transmits information onto its bus, it can also monitor the bus to ensure that the
transmitted information is appearing as expected on the bus. If the expected values are not read back from the
bus, the hardware can flag the error and signal an interrupt to the CPU. This feature must be enabled and
configured in software.
LIN module supports detection of bit error condition. An error flag bit is set when there has been a bit error
detected by the bit monitor in TED (TXRX Error Detector sub-module). A bit error indicates that a collision has
happened on the LIN bus, for example, the bit value that is monitored is different from the bit value that is sent.
When bit error is detected the transmission is aborted no later than the next byte
6.7.3 CRC in Message
The CAN module appends a CRC word along with the message. The CRC values are calculated and transmitted
by the transmitter, and then re-calculated by the receiver. If the CRC value calculated by the receiver does not
match the transmitted CRC value, a CRC error will be flagged. Error response and any necessary software
requirements are defined by the system integrator.
6.7.4 DCAN Acknowledge Error Detection
When a node on the CAN network receives a transmitted message, it sends an acknowledgment that it received
the message successfully. When a transmitted message is not acknowledged by the recipient node, the
transmitting DCAN will flag an acknowledge error. Error response and any necessary software requirements are
defined by the system integrator.
6.7.5 DCAN Form Error Detection
Certain types of frames in the DCAN have a fixed format per the CAN protocol. When a receiver receives a bit in
one of these frames that violate the protocol, the module will flag a form error. Error response and any necessary
software requirements are defined by the system integrator.
66 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 67

www.ti.com
Brief Description of Diagnostics
6.7.6 DCAN Stuff Error Detection
In the CAN message protocol, several of the frame segments are coded through bit stuffing. Whenever a
transmitter detects five consecutive bits of identical value in the bit stream to be transmitted, it automatically
inserts a complementary bit into the actual transmitted bit stream. If a 6th consecutive equal bit is detected in a
received segment that should have been coded by bit stuffing, the DCAN module will flag a stuff error. Error
response and any necessary software requirements are defined by the system integrator.
6.7.7 I2C Access Latency Profiling Using On-Chip Timer
Each I2C message takes fixed number of system clock cycles for completing the transaction. The master can
detect the transaction completion based on message acknowledge signaling from the slave. On chip timer
module can be used for profiling the time required for completing each transaction.
6.7.8 I2C Data Acknowledge Check
When a node on the I2C network receives a byte (address or data), it sends an acknowledgment that the
address is acknowledged or the data byte is received successfully. When a transmitted message is not
acknowledged by the recipient I2C, the transmitting I2C will flag NACK. Necessary software requirements are
defined by the system integrator. For example a function which needs to transfer 4 bytes of data and can sent
CRC as 5th byte. The device software can be designed such that the acknowledge is not provided if the data
and CRC doesn’t match.
PMBus supports detection of errors using acknowledgment handshake, which can be configured to work in
either automatic or manual mode(PMBSC.MAN_SLAVE_ACK bit). This acknowledgment handshake can be
effectively implemented by firmware to detect communication faults such as masquerading faults by asserting
NACK if the received address does not equal the slave address or acknowledging every byte received by
PMBus slave receive byte acknowledge, or acknowledging received command byte, and so forth. For more
details, see the UCD3138 Monitoring and Communications Programmer’s Manual.
6.7.9 Parity in Message
This module supports insertion of a parity bit into the data payload of every outgoing message by hardware.
Evaluation of incoming message parity is also supported by hardware. Detected errors generate an interrupt to
the CPU.
6.7.10 SCI Break Error Detection
A SCI break detect condition occurs when the SCIRXD is low for ten bit periods following a missing stop bit. This
action sets the BRKDT flag bit (SCIRXST, bit 5) and initiates an interrupt.
This feature is applicable only when LIN is working in SCI mode. A SCI break detect condition occurs when the
LINRX is low for ten bit periods following a missing stop bit. This action sets the BRKDT flag bit and initiates an
interrupt.
6.7.11 Frame Error Detection
When receiving serial data, each byte of information on the SCI has an expected format. If the received
message does not match this, the SCI hardware can flag an error and generate an interrupt to the CPU. This
feature must be enabled and configured in software.
LIN module supports detection of framing error condition. An error flag bit is set when an expected stop bit is not
found. In SCI compatible mode, only the first stop bit is checked. The missing stop bit indicates that
synchronization with the start bit has been lost and that the character is incorrectly framed. Detection of a
framing error generates an error interrupt if the RXERR INT ENA bit is set. LIN module supports feature to verify
valid Synch Field. It helps in automatic baud rate adjustment by comparing baud rate and adjust if baud rates
differ. If the synch field is not detected within the given tolerances, the inconsistent-synch-field-error (ISFE) flag
will be set and an ISFE interrupt will be generated.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 67
Page 68

Brief Description of Diagnostics
www.ti.com
6.7.12 Overrun Error Detection
If the SCI RX buffer receives new data before the previous data has been read, the existing data will be
overwritten and lost. If this occurs, the SCI hardware can flag the error and generate an interrupt to the CPU.
This feature must be enabled and configured in software.
LIN module supports detection of data overrun condition. An error flag bit is set when the transfer of data from
receive shift register to receiver data buffer register overwrites unread data already in received data register.
Detection of an overrun error also causes the LIN to generate an error interrupt if the SET OE INT bit is one.
6.7.13 Software Test of Function Using I/O Loopback
Most communication modules support digital or analog loopback capabilities for the I/Os. To confirm the
implemented loopback capabilities of the module, see the device-specific technical reference manual. Digital
loopback tests the signal path to the module boundary. Analog loopback tests the signal path from the module to
the I/O cell with output driver enabled. For best results any tests of the functionality should include the I/O
loopback.
6.7.14 SPI Data Overrun Detection
If SPI RX buffer receives new data before the previous data has been read, the existing data will be overwritten
and lost. If this occurs, SPI hardware can flag the error and generate an interrupt to the CPU. This feature must
be enabled and configured in software.
6.7.15 Transmission Redundancy
The information is transferred several times in sequence using the same module instance and compared. When
the same data path is used for duplicate transmissions, transmission redundancy will only by useful for detecting
transient faults. The diagnostic coverage can be improved by sending inverted data during the redundant
transmission.
In order to provide diagnostic coverage of device interconnects and EMIF, read back of written data (in case of
data writes) and multiple read backs of information (in case of data reads) can be employed.
6.7.16 FSI Data Overrun/Underrun Detection
FSI module supports detection of data overrun or underrun conditions.
• Receive buffer Overrun - This event indicates that the transfer of data from receive shift register to receiver
data buffer register overwrites unread data already in received data.
• Receive buffer Underrun – This event indicates that software reads the buffer while it is empty
• Transmit buffer Overrun – This event occurs if a piece of data is overwritten before it has been transmitted.
• Transmit buffer Underrun – This event occurs when the transmitter tries to read data from a location which
has not yet been written.
A flag bit is set and an interrupt is generated when data overrun/underrun error occurs and corresponding
register bit is enabled.
6.7.17 FSI Frame Overrun Detection
FSI module supports detection of frame overrun event. This event indicates that a new frame has been received
while the FRAME_DONE flag was still set. A flag is set and an interrupt is generated if corresponding register bit
is enabled.
6.7.18 FSI CRC Framing Checks
FSI module supports detection of CRC framing error condition. A CRC error will be generated when the received
expected CRC value and the computed CRC value do not match. A flag is set and an interrupt is generated if
enabled.
68 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 69

www.ti.com
Brief Description of Diagnostics
6.7.19 FSI ECC Framing Checks
FSI module supports detection of ECC framing error condition. It supports 16-bit or 32-bit ECC computation
module in both the transmitter and receiver mode. In Transmit mode, software can configure the FSI registers to
compute the ECC value on the data in transmit buffer and include it to be part of the transmit frame in receive
mode. Software can feed the ECC module with received data and ECC value to detect and autocorrect single bit
errors in data, or detect multi-bit errors in received data and invalidate the received data.
Note
ECC check supported in FSI module needs software assistance. The hardware in FSI module
supports ECC computation, but the task of writing data and checking the ECC error has to be handled
in software.
6.7.20 FSI Frame Watchdog
FSI module supports detection of Frame Watchdog Timeout event. This event indicates that the frame watchdog
timer has timed out. The conditions of this timeout are set using the RX_FRAME_WD_CTRL register. As soon
as the start of frame phase is detected, the frame watchdog counter will start counting from 0. The end of frame
phase must complete by the time the watchdog counter reaches the reference value. If this does not happen, the
watchdog will time out and this event will be generated. If this event occurs, the receiver must undergo a soft
reset and subsequent resynchronization in order to guarantee proper operation. When this condition occurs, a
flag is set and an interrupt is generated if enabled.
6.7.21 FSI RX Ping Watchdog
FSI module supports detection of RX Ping Watchdog Timeout event. This event indicates that the ping watchdog
timer has timed out. The receiver has not received a valid frame within the time period specified in the
RX_PING_WD_REF register. The ping frame triggered interrupt is generated when the ping frame has been
triggered and corresponding register bit is enabled. This bit will be set when the ping counter has timed out. An
interrupt is generated if corresponding register bit is enabled. On the transmitter, the ping frame can be set up
and transmitted without any further software or DMA intervention. Ping frames can be transmitted by automatic
ping timer, software, or external triggers.
6.7.22 FSI Tag Monitor
FSI module supports Tag field in the transfer frame. It contains 4-bit FRAME_TAG field of the last successfully
received frame. FSI Tag Monitor checks has to be implemented in software. Tag field for each of the frame on
the receive side can be monitored through software and verified against expected values. In addition to
FRAME_TAG, FSI module supports the user data as fully user-configurable data field, available in data frames.
The user data to be transmitted is set by writing to TX_FRAME_TAG_UDATA.USER_DATA. The received user
data is stored in RX_FRAME_TAG_UDATA.USER_DATA.
6.7.23 FSI Frame Type Error Detection
FSI module supports detection of Frame Type Error. This error indicates that an invalid frame type has been
received. If this error occurs, the receiver must undergo a soft reset and subsequent resynchronization in order
to guarantee proper operation. An interrupt is generated if corresponding register bit is enabled.
6.7.24 FSI End of Frame Error Detection
This error indicates that an invalid end-of-frame bit pattern has been received. If this error occurs, the receiver
must undergo a soft reset and subsequent resynchronization in order to ensure proper operation. An interrupt is
generated if corresponding register bit is enabled.
6.7.25 FSI Register Protection Mechanisms
As a fault avoidance safety measure for key registers of FSI module, registers are protected by EALLOW
privilege, register keys, and a master register lock. These protections ensure that no spurious writes or
unintentional modifications to these registers are avoided. Some bits in the FSI registers are protected by a key.
In order to write to these bits, the key must be written at the same time.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 69
Page 70

Brief Description of Diagnostics
www.ti.com
The control register lock will prevent any writes to the control registers until the lock is released. To set the
control register lock, write 0xA501 to RX_LOCK_CTRL and TX_LOCK_CTRL for the receiver and transmitter,
respectively.
6.7.26 LIN Physical Bus Error Detection
LIN module supports detection of Physical Bus Error condition, an error flag is set and interrupt generated. A
Physical Bus Error (PBE) is detected by a master if no valid message can be generated on the bus (Bus shorted
to GND or VBAT). The bit monitor detects a PBE during the header transmission, if no Synch Break can be
generated (for example, because of a bus shortage to VBAT) or if no Synch break Delimiter can be generated
(for example, because of a bus shortage to GND).
6.7.27 LIN No-Response Error Detection
LIN module supports detection of No-Response Error detection. An error flag bit is set and interrupt is generated
when there is no response to a master's Header completed within TFRAME_MAX(maximum time length allowed
for response). The No-Response Error flag is cleared by reading the corresponding interrupt offset in the
SCIINTVECT0/1 register.
6.7.28 LIN Checksum Error Detection
LIN module supports detection of checksum error on received data. An error flag bit is set and interrupt is
generated when there is checksum error detected by a receiving node. The type of checksum to be used
depends on the CIGCR1.CTYPE bit (Classic checksum - compatible with LIN 1.3 slave nodes or Enhanced
checksum - compatible with LIN 2.0 and newer slave nodes). The Checksum Error flag is cleared by reading the
corresponding interrupt offset in the SCIINTVECT0/1 register.
6.7.29 Data Parity Error Detection
LIN module supports detection of parity error on received data. An error flag bit is set when a parity error is
detected in the received data. In address-bit mode, the parity is calculated on the data and address bit fields of
the received frame. In idle-line mode, only the data is used to calculate parity. An error is generated when a
character is received with a mismatch between the number of 1s and its parity bit. If the parity function is
disabled (that is, SCIGCR1.2 = 0), the PE flag is disabled and read as 0. Detection of a parity error causes the
LIN to generate an error interrupt if the SCISETINT.SETPEINT bit =1.
6.7.30 LIN ID Parity Error Detection
LIN module supports detection of parity error on ID field. If parity is enabled, an ID parity error (PE) is detected if
any of the two parity bits(even/odd) of the sent ID byte are not equal to the calculated parity on the receiver
node. The two parity bits (even/odd) are generated using the mixed parity algorithm. If an ID-parity error is
detected, the ID-parity error is flagged, and the received ID is not valid
6.7.31 PMBus Protocol CRC in Message
PMBus module supports detection of data corruption during transfer using Packet Error Check (PEC) value
feature. When this feature is enabled, it forces the PMBus transmitter interface to append a PEC byte onto the
end of the message. Receiver hardware checks the last byte in a message for a valid Packet Error Check value
corresponding to the number of bytes in the message.
6.7.32 Clock Timeout
PMBus module support detection of stuck fault on clock(SCL) pin. If the SCL pin is stuck during communication
to either High or Low value for duration more than programmed value (in PMBTIMHIGHTIMOUT and
PMBTIMLOWTIMOUT Registers), an interrupt is generated and respective Flags are set in PMBSTS status
register.
6.7.33 Communication Access Latency Profiling Using On-Chip Timer
Each communication message takes fixed number of system clock cycles for completing the transaction. The
master can detect the transaction completion based on message acknowledge signaling from the slave. On chip
timer module can be used for profiling the time required for completing each transaction.
70 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 71

www.ti.com
References
7 References
1. Texas Instruments: Calculating Useful Lifetimes of Embedded Processors
2. Moisture/Reflow Sensitivity Classification for Nonhermetic Solid State Surface Mount Devices, https://
www.jedec.org/standards-documents/docs/jesd-22-a112
3. Handling, Packing, Shipping and Use of Moisture/Reflow Sensitive Surface Mount Devices, https://
www.jedec.org/sites/default/files/docs/jstd033b01.pdf
4. IEC 61508 Functional Safety of Electrical/Electronic/Programmable Electronic Safety-Related Systems,
International Electrotechnical Commission, Edition 2.0 2010.
5. ISO 26262–Road Vehicles-Functional Safety, International Standard ISO, vol. 26262, 2018.
6. Standardized E-Gas Monitoring Concept for Gasoline and Diesel Engine Control Units
7. J. Astruc and N. Becker, Toward the Application of ISO 26262 for Real-Life Embedded Mechatronic Systems,
in International Conference on Embedded Real Time Software and Systems. ERTS2, 2010.
8. Texas Instruments: Using PWM Output as a Digital-to-Analog Converter on a TMS320F280x Digital Signal
Controller
9. W. M. Goble and H. Cheddie, Safety Instrumented Systems Verification: Practical Probabilistic Calculations.
Isa, 2004.
10.Texas Instruments: TMS320C28x FPU Primer
11. Texas Instruments: Online Stack Overflow Detection on the TMS320C28x DSP
12.IEC-61784 official website. Available online at https://www.iec.ch.
13.Texas Instruments: TMS320F28004x Microcontrollers Technical Reference Manual
14.Texas Instruments: TMS320F28004x Microcontrollers Data Manual
15.Texas Instruments: UCD3138 Monitoring and Communications Programmer’s Manual
16.Texas Instruments: Accelerators: Enhancing the Capabilities of the C2000™ MCU Family
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 71
Page 72
Sensor
Input
Circuit
Processing
Unit
Output Circuit
Actuator
Final Element
+
-
Input
Circuit
Sensor
Diagnostic Circuit
Actuator
Final Element
+
-
Processing
Unit
Output Circuit
Sensor
Input
Circuit
Processing
Unit
Output Circuit
Input
Circuit
Processing
Unit
Output Circuit
Actuator
Final Element
+
-
Safety Architecture Configurations www.ti.com
A Safety Architecture Configurations
The various redundancy architectures possible for the safety instrumented systems are indicated in Table A-1.
For more information, see [10].
Table A-1. Safety Architecture Configurations
Diagnostic Implementation
1 1oo1 Architecture
None.
2 1oo1D
3 1oo1D
Same figure as above.
4 1oo2
Diagnostic channel is
implemented using various
hardware diagnostic features
like Watchdog, and so forth.
Diagnostic channel is
implemented using reciprocal
comparison (uses two
processing units for
implementing reciprocal
comparison) and other
hardware diagnostic features.
Two different processing units
are used to implement one
channel.
72 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 73

Sensor
Input
Circuit
Processing
Unit
Output Circuit
Input
Circuit
Processing
Unit
Output Circuit
Actuator
Final Element
+
-
Diagnostic Circuit
Diagnostic Circuit
Sensor
Input
Circuit
Processing
Unit
Output Circuit
Input
Circuit
Processing
Unit
Output Circuit
Actuator
Final Element
+
-
www.ti.com Safety Architecture Configurations
Table A-1. Safety Architecture Configurations (continued)
Diagnostic Implementation
5 2oo2
Two different processing units
are used to implement one
channel.
6 2oo2D
7 2oo2D
Same figure as above.
Two 1oo1D structures of #2
wired together to implement a
safe channel.
Two 1oo1D structures of #3
wired together.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 73
Page 74
Diagnostic
Circuit
Diagnostic
Circuit
Sensor
Input
Circuit
Processing
Unit
Output Circuit
Input
Circuit
Processing
Unit
Output Circuit
Actuator
Final Element
+
-
Sensor
Actuator
Final Element
-
Input
Circuit
Processing
Unit
Output Circuit 1
Output Circuit 2
Input
Circuit
Processing
Unit
Output Circuit 1
Output Circuit 2
Input
Circuit
Processing
Unit
Output Circuit 1
Output Circuit 2
ABACB
C
Voting Circuit
Safety Architecture Configurations www.ti.com
Table A-1. Safety Architecture Configurations (continued)
Diagnostic Implementation
8 1oo2D
Similar to 2oo2D
implementation of #6 with
additional control lines wired to
control one set of units using
the other unit
9 1oo2D
10 2oo3
Same figure as above.
Similar to 2oo2D
implementation of #7 with
additional control lines wired to
control one set of units using
the other unit.
Use three different processing
units to implement majority
voting. The fourth channel can
be used either standalone or
with hardware diagnostic
features.
74 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 75

www.ti.com
Distributed Developments
B Distributed Developments
A Development Interface Agreement (DIA) is intended to capture the agreement between two parties towards
the management of each party’s responsibilities related to the development of a functional safety system.
Functional Safety-Compliant components are typically designed for many different systems and are considered
to be Safety Elements out of Context (SEooC) hardware components. The system integrator is then responsible
for taking the information provided in the hardware component safety manual, safety analysis report and safety
report to perform system integration activities. Because there is no distribution of development activities, TI does
not accept DIAs with system integrators.
“Functional Safety-Compliant” components are products that TI represents, promotes or markets as helping
customers mitigate functional safety related risks in an end application and/or as compliant with an industry
functional safety standard. For more information about Functional Safety-Compliant components, go to here.
B.1 How the Functional Safety Lifecycle Applies to Functional Safety-Compliant Products
TI has tailored the functional safety lifecycles of ISO 26262:2018 and IEC 61508:2010 to best match the needs
of a functional Safety Element out of Context (SEooC) development. The functional safety standards are written
in the context of the functional safety systems, which means that some requirements only apply at the system
level. Since Functional Safety-Compliant components are hardware or software components, TI has tailored the
functional safety activities to create new product development processes for hardware and for software that
makes sure state-of-the-art techniques and measures are applied as appropriate. These new product
development processes have been certified by third-party functional safety experts. To find these certifications,
go to here.
B.2 Activities Performed by Texas Instruments
The functional safety compliant Integrated Circuit (IC) products are hardware components developed as
functional Safety Elements out of Context. As such, TI's functional safety activities focus on those related to
management of functional safety around hardware component development. System level architecture, design,
and functional safety analysis are not within the scope of TI activities and are the responsibility of the system
integrator. Some techniques for integrating the SEooC safety analysis of this hardware component into the
system level can be found in ISO 26262-11:2018.
Table B-1. Activities Performed by Texas Instruments versus Performed by the Customer
Functional Safety Lifecycle
Management of functional safety Yes Yes
Definition of end equipment and
assessment (of end equipment/
Creation of end equipment
Allocation of end equipment
requirements to sub-systems,
hardware components, and
Definition of hardware component
architecture and design execution
Hardware component functional
Hardware component verification
Activity TI Execution System Integrator Execution
item
Hazard analysis and risk
item)
functional safety concept
software components
safety requirements
Hardware component
safety analysis
and validation (V&V)
No. Assumptions made for internal development. Yes
No. Assumptions made for internal development. Yes
V&V executed to support internal development. Yes
No Yes
No Yes
Yes No
Yes No
Yes No
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 75
Page 76
Distributed Developments
www.ti.com
Table B-1. Activities Performed by Texas Instruments versus Performed by the Customer (continued)
Functional Safety Lifecycle
component into end equipment
Verification of IC performance in
Selection of safety mechanisms
End equipment level verification
End equipment level functional
End equipment level functional
End equipment release to
Management of functional safety
Activity TI Execution System Integrator Execution
Integration of hardware
end equipment
to be applied to IC
and validation
safety analysis
safety assessment
production
issues in production
Support provided as needed Yes
No Yes
No Yes
No Yes
No Yes
No Yes
No Yes
No Yes
B.3 Information Provided
Texas instruments has summarized what it considers the most critical functional safety work products that are
available to the customer either publicly or under a nondisclosure agreement (NDA). NDAs are required to
protect proprietary and sensitive information disclosed in certain functional safety documents.
Table B-2. Product Functional Safety Documentation
Deliverable Name Contents
Functional Safety Product Preview
Functional Safety Manual
Functional Safety Analysis Report
Functional Safety Report
Assessment Certificate
(1) When an Assessment Certificate is available for a functional safety compliant product, the Functional Safety Report may not be
provided. When a Functional Safety Report is provided, an Assessment Certificate may not be available. These two documents fulfill
the same functional safety requirements and will be used interchangeably depending on the functional safety compliant product.
(1)
(1)
Overview of functional safety considerations in product development and product
architecture. Delivered ahead of public product announcement.
User guide for the functional safety features of the product, including system level
assumptions of use.
Results of all available functional safety analysis documented in a format that allows
computation of custom metrics.
Summary of arguments and evidence of compliance to functional safety standards.
References a specific component, component family, or TI process that was
analyzed.
Evidence of compliance to functional safety standards. References a specific
component, component family, or TI process that was analyzed. Provided by a 3rd
party functional safety assessor.
76 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 77

Item
(e.g. Airbag Controller)
Function
(e.g. Airbag)
System/Sub-system
(e.g. Sensor)
System/Sub-system
(e.g. Controller)
System/Sub-system
(e.g. Actuator)
Component
(e.g. MCU)
Electric and Electronic
Part
Communication Mechanical Part
Component
(e.g. Application
software)
Hardware Part
(e.g: CPU)
Software Unit
(e.g: SRAM test
module)
Element
Item
www.ti.com
Terms and Definitions
C Terms and Definitions
• IEC 61508: Functional safety standard for E/E/PE safety-related systems. This is intended to be a basic
functional safety standard applicable to all kinds of industry. It defines functional safety as: “part of the overall
safety relating to the EUC (Equipment Under Control) and the EUC control system which depends on the
correct functioning of the E/E/PE safety-related systems, other technology safety-related systems and
external risk reduction facilities” [4].
• ISO13849: provides safety requirements and guidance for the design and integration of safety-related parts
of control systems (SRP/CS), including software design.
• M out of N (MooN) architecture: A safety instrumented system where ‘M’ channels out of ‘N’ channels are
required for functionally safe operation, (for example, 2oo3, 2 out of 3 architecture, where majority voting is
used to implement a safety function).
Figure C-1. ISO 26262 Illustration of Item, System, Component, Hardware Part and Software Unit
• M out of N Channel Architecture with diagnostics (MooND).
• Functional Safety: Part of the overall safety relating to the EUC and the EUC control system that depends on
the correct functioning of the E/E/PE safety-related systems and other risk reduction measures
• Item: system or array of systems to implement a function at the vehicle level, to which ISO 26262:2018 is
applied (for example, power steering of a car).
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Copyright © 2020 Texas Instruments Incorporated
Safety Manual for TMS320F28004x 77
Page 78

Terms and Definitions
www.ti.com
• Element: System or part of a system including components, hardware, software, hardware parts, and
software units.
• System: set of elements that relates at least a sensor, a controller and an actuator with one another
• Component: Non-system level element that is logically and technically separable and is comprised of
hardware parts and software units.
• Hardware part: Hardware that cannot be subdivided (for example, CPU).
• Software unit: Atomic level software component of the software architecture that can be subjected to standalone testing (for example, SRAM test module).
• Failure: termination of the ability of an element, to perform a function as required.
• Failure mode: manner in which an element or an item fails.
• Single Point Fault: Fault in an element that is not covered by a safety mechanism and that leads directly to
the violation of a safety goal.
• Single-point failure: Failure that results from a single-point fault and that leads directly to the violation of a
safety goal.
• Multiple-point fault: Individual fault that, in combination with other independent faults, leads to a multiple-point
failure.
• Multiple-point failure: Failure resulting from the combination of several independent faults, which leads
directly to the violation of a safety goal. For a multiple-point failure to directly violate a safety goal, presence
of all independent faults is necessary.
• Multiple-point fault detection interval: time span to detect multiple-point fault before it can contribute to a
multiple-point failure.
• Latent fault: multiple-point fault whose presence is not detected by a safety mechanism nor perceived by the
driver within the multiple-point fault detection interval.
• Functional Safety Assessment: Investigation, based on evidence, to judge the functional safety achieved by
one or more E/E/PE safety-related systems and/or other risk reduction measures.
• Functional Safety Audit: Systematic and independent examination to determine whether the procedures
specific to the functional safety requirements to comply with the planned arrangements are implemented
effectively and are suitable to achieve the specified objectives.
• Hazard and Risk Analysis (IEC 61508:2010)/Hazard Analysis and Risk Assessment (ISO 26262:2018): An
end equipment level functional safety analysis that is used to identify safety functions and/or functional safety
goals. This process also establishes the SIL (IEC 61508:2010) or ASIL (ISO 26262:2018), which defines the
level of risk reduction necessary per safety function and/or functional safety goal.
• Process Tailoring: The act of changing a development process or functional safety lifecycle to match needs of
a business engagement. Requirements can be moved from phase to phase or performed by other
developers, but removal of process requirements is not allowed.
• Quality Managed: Describes a design element which is developed compliant to applicable quality standards
but is not developed compliant to applicable functional safety standards. It may be possible to use a quality
managed design element in a specific functional safety design contingent upon results of a functional safety
qualification.
• Safety Requirement Decomposition: Safety requirements decomposition is the process in which safety
requirements are split into a series of redundant safety requirements at a lower level of abstraction in order to
support tailoring of the SIL (ISO 26262:2018)/ASIL (ISO 26262:2018) compliance requirements of design
elements at the lower level of abstraction. For example, a requirement for a peripheral function with high
safety integrity might be addressed by redundant instances of a peripheral with lower safety integrity.
• For the full list of applicable terms and their definitions for ISO 26262, see the ISO 26262-1:2018, Road
vehicles — Functional safety — Part 1: Vocabulary.
• For the full list of applicable terms and their definitions for IEC 61508, see the IEC 61508:2010, Functional
safety of electrical/electronic/programmable electronic safety-related systems – Part 4: Definitions and
abbreviations.
78 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 79

www.ti.com Summary of Safety Features and Diagnostics
D Summary of Safety Features and Diagnostics
Table D-1. Summary Table Legend
Unique Identifier Identifier Used to Reference the Contents
Safety Feature or Diagnostic Safety feature
Usage Each test listed in this chart can be one of two types. A "diagnostic" test or a "test for diagnostic".
Diagnostic: Provides coverage for faults on a primary function of the device. It may, in addition, provide fault coverage on other diagnostics, and can
therefore be also used as a test-for-diagnostic in certain cases
Test-for-Diagnostic Only: Does NOT provide coverage for faults on a primary function of the device. It's only purpose is to provide fault coverage on
other diagnostics
Diagnostic Type Hardware - A diagnostic which is implemented by TI in silicon and can communicate error status upon the detection of failures. It may require software to
Diagnostic Operation This can be one among the following:
Test Execution Time This column lists the time required for this diagnostic to complete.
Action on Detected Fault The response this diagnostic takes when an error is detected.
Error Reporting Time Typical time required for diagnostic to indicate a detected fault to the system. For safety mechanisms where fault detection time is known, this value is
enable the diagnostic and/or to take action upon the detection of a failure.
Software - A test recommended by TI which must be created by the software implementer. This test may use additional hardware implemented on the
device by TI.
Hardware / Software - A test recommended by TI which requires both, diagnostic hardware which has been implemented in silicon by TI, and which
requires software that must be created by the software implementer.
System - A diagnostic implemented externally of the microcontroller
(i) Bootup (enabled by default)
(ii) Continuous - Enabled at reset: Hardware safety mechanism that is enabled by default at reset.
(iii) Continuous - Enabled by software: Hardware safety mechanism that needs to be enabled by software.
(iv) On demand (Software defined): Software or Hardware-software safety mechanism that gets activated in the diagnostic test interval by the software
(v) System defined: Implemented by the system.
For software-driven tests, this action is often software implementation-dependent.
indicated. For software-driven tests, this time is often software implementation-dependent.
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Safety Manual for TMS320F28004x 79
Copyright © 2020 Texas Instruments Incorporated
Page 80

Summary of Safety Features and Diagnostics www.ti.com
Table D-2. Summary of Safety Features and Diagnostic
Device Partition
Power Supply
Clock
Unique
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
PWR1 External Voltage Supervisor Diagnostic System System defined System defined System defined System defined
PWR2 External Watchdog Diagnostic System System defined System defined System defined System defined
PWR4 Brownout Reset (BOR) Diagnostic Hardware
CLK1 Missing Clock Detect (MCD) Diagnostic Hardware
CLK2 Clock Integrity Check Using CPU
Diagnostic Software On demand
Timer
CLK3 Clock Integrity Check Using
Diagnostic Software On demand
HRPWM
CLK4 Dual clock comparator (DCC) -
Type0
CLK5 External Monitoring of Clock via
Diagnostic Hardware -
Software
Diagnostic System System defined System defined System defined System defined
XCLKOUT
CLK6 Internal Watchdog (WD) Diagnostic Hardware Continuous -
CLK7 External Watchdog Diagnostic System System defined System defined System defined System defined
CLK8 Periodic Software Read Back of
Diagnostic Software On demand
Static Configuration Registers
CLK9 Software Read Back of Written
Diagnostic Software On demand
Configuration
CLK10 Software Test of Watchdog (WD)
Operation
CLK12 Software Test of Missing Clock
Detect Functionality
CLK13 PLL Lock Profiling using On-Chip
Test for
Software On demand
diagnostic
Test for
Software On demand
diagnostic
Diagnostic Software On demand
Timer
CLK14 Peripheral Clock Gating (PCLKCR) Fault
avoidance
Hardware Software
Diagnostic
Operation
Continuous Enabled at reset
Continuous Enabled at reset
(Software defined)
(Software defined)
On demand
(Software defined)
Enabled at reset
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
On demand
(Software defined)
Test Execution
Time
Zero or very low
overhead
Action on
Detected Fault
Device reset
Error Reporting
Time
Typically less than
1us
NMI with
Zero or very low
overhead
ERRORSTS
assertion and PLL
reference clock
0.82ms
switch to INTOSC1
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Device reset or
interrupt as per
Software defined
configuration
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
80 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 81

www.ti.com Summary of Safety Features and Diagnostics
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
Reset RST1 External Monitoring of Warm Reset
(XRSn)
RST2 Reset Cause Information Fault
RST3 Software Test of Reset Diagnostic Software On demand
RST4 Glitch Filtering on Reset Pins Fault
RST5 NMIWD Shadow Registers Fault
RST6 Periodic Software Read Back of
Static Configuration Registers
RST7 Software Read Back of Written
Configuration
RST8 NMIWD Reset Functionality Diagnostic Hardware Continuous -
RST9 Peripheral Soft Reset (SOFTPRES) Fault
Unique
System Control
Module and
SYS1 Multi-Bit Enable Keys for Control
Registers
Configuration
Registers
SYS2 Lock Mechanism for Control
Registers
SYS3 Software Read Back of Written
Configuration
SYS4 Periodic Software Read Back of
Static Configuration Registers
SYS5 Online Monitoring of Temperature Diagnostic Hardware -
SYS8 EALLOW and MEALLOW Protection
for Critical Registers
Diagnostic System System defined System defined System defined System defined
Hardware -
avoidance
Software
Hardware Continuous -
avoidance
Hardware -
avoidance
Software
Diagnostic Software On demand
Diagnostic Software On demand
Hardware -
avoidance
Fault
Software
Hardware Continuous -
avoidance
Fault
Hardware Continuous -
avoidance
Diagnostic Software On demand
Diagnostic Software On demand
Software
Fault
Hardware Continuous -
avoidance
Diagnostic
Operation
On demand
(Software defined)
(Software defined)
Enabled at reset
On demand
(Software defined)
(Software defined)
(Software defined)
Enabled at reset
On demand
(Software defined)
Enabled at reset
Enabled by
software
(Software defined)
(Software defined)
On demand
(Software defined)
Enabled at reset
Test Execution
Time
NA (Fault
Avoidance)
Action on
Detected Fault
NA (Fault
avoidance
technique)
Error Reporting
Time
NA (Fault
avoidance
technique)
Software defined Software defined Software defined
NA (Fault
Avoidance)
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
Software defined Software defined Software defined
Software defined Software defined Software defined
Zero or very low
Device reset Software defined
overhead
NA (Fault
Avoidance)
NA (Fault
Avoidance)
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Safety Manual for TMS320F28004x 81
Copyright © 2020 Texas Instruments Incorporated
Page 82

Summary of Safety Features and Diagnostics www.ti.com
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
System Control
Module and
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
SYS9 Software Test of ERRORSTS
Diagnostic Software On demand
Functionality
Configuration
Registers (cont.)
Unique
SYS10 Peripheral Access Protection - Type
0
Fault
avoidance
Hardware Software
EFuse EFUSE1 Efuse Autoload Self-Test Diagnostic Hardware Bootup (enabled
EFUSE2 Efuse ECC Diagnostic Hardware Bootup (enabled
EFUSE4 Efuse ECC Logic Self-Test Test for
Hardware Bootup (enabled
diagnostic
Debug Logic JTAG1 Hardware Disable of JTAG Port Fault
System Continuous -
avoidance
JTAG3 Internal Watchdog (WD) Diagnostic Hardware Continuous -
JTAG4 External Watchdog Diagnostic System System defined System defined System defined System defined
C28x Central
CPU1 Reciprocal Comparison by Software Diagnostic Software On demand
Processing Unit
CPU3 Software Test of CPU Diagnostic Software On demand
CPU4 Periodic Software Read Back of
Diagnostic Software On demand
Static Configuration Registers
CPU5 Access Protection Mechanism for
Diagnostic Hardware Continuous -
Memories
CPU7 CPU Handling of Illegal Operation,
Diagnostic Hardware Continuous -
Illegal Results and Instruction
Trapping
Diagnostic
Operation
(software defined)
On demand
(software defined)
by default)
by default)
by default)
Enabled at reset
Enabled at reset
(Software defined)
(Software defined)
(Software defined)
Enabled by
software
Enabled at reset
Test Execution
Time
Action on
Detected Fault
Error Reporting
Time
Software defined System defined System defined
NA (Fault
Avoidance)
Zero or very low
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
Device reset <400 CPU cycles
overhead
Zero or very low
Device reset <400 CPU cycles
overhead
Zero or very low
Device reset <400 CPU cycles
overhead
NA (Fault
Avoidance)
Zero or very low
overhead
NA (Fault
avoidance
technique)
Device reset or
interrupt as per
NA (Fault
avoidance
technique)
Software defined
configuration
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
82 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 83

www.ti.com Summary of Safety Features and Diagnostics
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
C28x Central
Processing Unit
(cont.)
Control Law
Accelerator (CLA)
Unique
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
CPU8 Internal Watchdog (WD) Diagnostic Hardware Continuous -
CPU9 External Watchdog Diagnostic System System defined System defined System defined System defined
CPU10 Information Redundancy
Diagnostic Software On demand
Techniques
CPU14 Stack Overflow Detection Diagnostic Hardware Continuous -
CPU15 VCU CRC Auto Coverage Test for
Hardware Continuous -
diagnostic
CPU18 Embedded Real Time Analysis and
Diagnostic (ERAD) - Type 0
Diagnostic Hardware -
Software
CLA1 Reciprocal Comparison by Software Diagnostic Software On demand
CLA2 Software Test of CLA Diagnostic Software On demand
CLA3 CLA Handling of Illegal Operation
Diagnostic Hardware Continuous -
and Illegal Results
CLA4 Software Read Back of Written
Diagnostic Software On demand
Configuration
CLA5 Periodic Software Read Back of
Diagnostic Software On demand
Static Configuration Registers
CLA7 Information Redundancy
Diagnostic Software On demand
Techniques
CLA8 CLA Liveness Check Using CPU Diagnostic Software On demand
Diagnostic
Operation
Enabled at reset
(Software defined)
Enabled by
software
Enabled at reset
On demand
(Software defined)
(Software defined)
(Software defined)
Enabled at reset
(Software defined)
(Software defined)
(Software defined)
(Software defined)
Test Execution
Time
Zero or very low
overhead
Action on
Detected Fault
Device reset or
interrupt as per
Error Reporting
Time
Software defined
configuration
Software defined Software defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
Software defined Software defined
overhead
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Safety Manual for TMS320F28004x 83
Copyright © 2020 Texas Instruments Incorporated
Page 84

Summary of Safety Features and Diagnostics www.ti.com
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Control Law
Accelerator (CLA)
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
CLA9 Access Protection Mechanism for
Diagnostic Hardware Continuous -
Memories
(cont.)
Unique
CLA11 Disabling of Unused CLA Trigger
Sources
Fault
avoidance
Software Continuous -
Flash FLASH1 Flash ECC Diagnostic Hardware Continuous -
FLASH2 VCU CRC Check of Static Memory
Diagnostic Software On demand
Contents
FLASH3 Bit Multiplexing in Flash Memory
Array
FLASH4 Periodic Software Read Back of
Fault
Hardware Continuous -
avoidance
Diagnostic Software On demand
Static Configuration Registers
FLASH5 Software Read Back of Written
Diagnostic Software On demand
Configuration
FLASH6 Software Test of ECC Logic Test for
diagnostic
FLASH7 Flash Program Verify and Erase
Verify Check
FLASH8 Software Test of Flash Prefetch,
Fault
avoidance
Diagnostic Software On demand
Hardware Software
Software On demand
Data Cache and Wait-States
FLASH9 Internal Watchdog (WD) Diagnostic Hardware Continuous -
FLASH10 External Watchdog Diagnostic System System defined System defined System defined System defined
Diagnostic
Operation
Enabled by
software
Enabled by
software
Enabled at reset
(Software defined)
Enabled at reset
(Software defined)
(Software defined)
On demand
(Software defined)
(Software defined)
(Software defined)
Enabled at reset
Test Execution
Time
Zero or very low
overhead
Action on
Detected Fault
Error Reporting
Time
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Zero or very low
overhead
NA (Fault
avoidance
technique)
NMI with
ERRORSTS
assertion or
interrupt to CPU
based on error
severity
NA (Fault
avoidance
technique)
Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
Software defined Software defined Software defined
Zero or very low
overhead
Device reset or
interrupt as per
Software defined
configuration
84 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 85

www.ti.com Summary of Safety Features and Diagnostics
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Flash (cont.) FLASH12 CPU Handling of Illegal Operation,
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
Diagnostic Hardware Continuous -
Illegal Results and Instruction
Trapping
Unique
FLASH14 Information Redundancy
Diagnostic Software On demand
Techniques
SRAM SRAM1 SRAM ECC Diagnostic Hardware Continuous -
SRAM2 SRAM Parity Diagnostic Hardware Continuous -
SRAM3 Software Test of SRAM Diagnostic Software On demand
SRAM4 Bit Multiplexing in SRAM Memory
Array
SRAM5 Periodic Software Read Back of
Fault
Hardware Continuous -
avoidance
Diagnostic Software On demand
Static Configuration Registers
SRAM6 Software Read Back of Written
Diagnostic Software On demand
Configuration
SRAM7 Data Scrubbing to Detect/Correct
Memory Errors
SRAM8 VCU CRC Check of Static Memory
Fault
Software On demand
avoidance
Diagnostic Software On demand
Contents
SRAM10 Software Test of Function Including
Diagnostic Software On demand
Error Tests
Diagnostic
Operation
Enabled at reset
(Software defined)
Enabled at reset
Enabled at reset
(Software defined)
Enabled at reset
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
Test Execution
Time
Zero or very low
overhead
Action on
Detected Fault
Error Reporting
Time
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
Zero or very low
overhead
Zero or very low
overhead
NMI with
ERRORSTS
assertion or
interrupt to CPU
based on error
severity
NMI with
ERRORSTS
assertion
Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined NMI with
ERRORSTS
assertion or
interrupt to CPU
based on error
severity
Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
Software defined Software defined Software defined
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Safety Manual for TMS320F28004x 85
Copyright © 2020 Texas Instruments Incorporated
Page 86

Summary of Safety Features and Diagnostics www.ti.com
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
SRAM (cont.) SRAM11 Access Protection Mechanism for
Memories
SRAM12 Lock Mechanism for Control
Registers
SRAM13 Software Test of ECC Logic Test for
SRAM14 Software Test of Parity Logic Test for
SRAM16 Information Redundancy
Techniques
SRAM17 CPU Handling of Illegal Operation,
Illegal Results and Instruction
Trapping
SRAM18 Internal Watchdog (WD) Diagnostic Hardware Continuous -
SRAM19 External Watchdog Diagnostic System System defined System defined System defined System defined
SRAM20 CLA handling of illegal operation
and illegal results
SRAM21 Memory Power-On Self-Test
(MPOST)
ROM ROM1 VCU CRC Check of Static Memory
Contents
ROM2 Periodic Software Read Back of
Static Configuration Registers
ROM3 Software Read Back of Written
Configuration
Unique
Diagnostic Hardware Continuous -
Fault
Hardware Continuous -
avoidance
Hardware -
diagnostic
Software
Hardware -
diagnostic
Software
Diagnostic Software On demand
Diagnostic Hardware Continuous -
Diagnostic Hardware Continuous -
Diagnostic Hardware Bootup (enabled
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic
Operation
Enabled by
software
Enabled by
software
On demand
(Software defined)
On demand
(Software defined)
(Software defined)
Enabled at reset
Enabled at reset
Enabled at reset
by default)
(Software defined)
(Software defined)
(Software defined)
Test Execution
Time
Zero or very low
overhead
Action on
Detected Fault
Error Reporting
Time
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Device reset or
interrupt as per
Software defined
configuration
Zero or very low
overhead
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
86 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 87

www.ti.com Summary of Safety Features and Diagnostics
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
ROM (cont.) ROM4 Software Test of Function Including
Error Tests
ROM5 CPU Handling of Illegal Operation,
Illegal Results and Instruction
Trapping
ROM6 Internal Watchdog (WD) Diagnostic Hardware Continuous -
ROM7 External Watchdog Diagnostic System System defined System defined System defined System defined
ROM8 Power-Up Pre-Operational Security
Checks
ROM9 Background CRC for CLA-PROM
(CLAPROMCRC)
ROM10 Memory Power-On Self-Test
(MPOST)
Unique
Device
Interconnect
INC1 Software Test of Function Including
Error Tests
INC2 Internal Watchdog (WD) Diagnostic Hardware Continuous -
INC3 External Watchdog Diagnostic System System defined System defined System defined System defined
INC4 Periodic Software Read Back of
Static Configuration Registers
INC5 Software Read Back of Written
Configuration
INC6 CPU Handling of Illegal Operation,
Illegal Results and Instruction
Trapping
Diagnostic Software On demand
Diagnostic Hardware Continuous -
Diagnostic Software On demand
Diagnostic Hardware -
Software
Diagnostic Hardware Bootup (enabled
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Hardware Continuous -
Diagnostic
Operation
(Software defined)
Enabled at reset
Enabled at reset
(Software defined)
On demand
(Software defined)
by default)
(Software defined)
Enabled at reset
(Software defined)
(Software defined)
Enabled at reset
Test Execution
Time
Action on
Detected Fault
Error Reporting
Time
Software defined Software defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Device reset or
interrupt as per
Software defined
configuration
Software defined Software defined Software defined
Software defined Software defined Software defined
Zero or very low
Software defined Software defined
overhead
Software defined Software defined Software defined
Zero or very low
overhead
Device reset or
interrupt as per
Software defined
configuration
Software defined Software defined Software defined
Software defined Software defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Safety Manual for TMS320F28004x 87
Copyright © 2020 Texas Instruments Incorporated
Page 88

Summary of Safety Features and Diagnostics www.ti.com
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Device
Interconnect
(cont.)
Direct Memory
Access (DMA)
Unique
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
INC7 CLA Handling of Illegal Operation
Diagnostic Hardware Continuous -
and Illegal Results
INC8 Transmission Redundancy Diagnostic Software On demand
INC9 Hardware Redundancy Diagnostic Software On demand
DMA2 Information Redundancy
Diagnostic Software On demand
Techniques
DMA3 Transmission Redundancy Diagnostic Software On demand
DMA4 Periodic Software Read Back of
Diagnostic Software On demand
Static Configuration Registers
DMA5 Software Read Back of Written
Diagnostic Software On demand
Configuration
DMA6 Software Test of Function Including
Diagnostic Software On demand
Error Tests
DMA7 DMA Overflow Interrupt Diagnostic Hardware Continuous -
DMA8 Access Protection Mechanism for
Diagnostic Hardware Continuous -
Memories
DMA9 Disabling of Unused DMA Trigger
Sources
Fault
avoidance
Software Continuous -
Diagnostic
Operation
Enabled at reset
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
Enabled at reset
Enabled by
software
Enabled by
software
Test Execution
Time
Zero or very low
overhead
Action on
Detected Fault
Error Reporting
Time
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software Defined Software defined
Software defined System Defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software Defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
88 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 89

www.ti.com Summary of Safety Features and Diagnostics
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Enhanced
Peripheral
Interrupt Expander
(ePIE)
Dual Zone Code
Security Module
(DCSM)
Unique
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
PIE1 PIE Double SRAM Hardware
Diagnostic Hardware Continuous -
Comparison
PIE2 Software Test of SRAM Diagnostic Software On demand
PIE3 Software Test of ePIE Operation
Diagnostic Software On demand
Including Error Tests
PIE4 Periodic Software Read Back of
Diagnostic Software On demand
Static Configuration Registers
PIE5 Software Read Back of Written
Diagnostic Software On demand
Configuration
PIE6 PIE Double SRAM Comparison
Check
PIE7 Maintaining Interrupt Handler for
Test for
Software On demand
diagnostic
Diagnostic Software Continuous -
Unused Interrupts
PIE8 Online Monitoring of Interrupts and
Diagnostic Software On demand
Events
PIE9 Hardware Redundancy Diagnostic Software On demand
DCSM1 Multi-Bit Enable Keys for Control
Registers
DCSM2 Majority Voting and Error Detection
Fault
Hardware Continuous -
avoidance
Diagnostic Software On demand
of Link Pointer
DCSM3 Periodic Software Read Back of
Diagnostic Software On demand
Static Configuration Registers
DCSM4 Software Test of Function Including
Diagnostic Software On demand
Error Tests
DCSM5 Software Read Back of Written
Diagnostic Software On demand
Configuration
Diagnostic
Operation
Enabled at reset
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
Enabled by
software
(Software defined)
(Software defined)
Enabled at reset
(Software defined)
(Software defined)
(Software defined)
(Software defined)
Test Execution
Time
Zero or very low
overhead
Action on
Detected Fault
CPU exception for
single core device,
NMI with
ERRORSTS
assertion for dual
core device
Error Reporting
Time
Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
Software defined Software defined Software defined
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Safety Manual for TMS320F28004x 89
Copyright © 2020 Texas Instruments Incorporated
Page 90

Summary of Safety Features and Diagnostics www.ti.com
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Dual Zone Code
Security Module
(DCSM) (cont.)
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
DCSM6 CPU Handling of Illegal Operation,
Illegal Results and Instruction
Trapping
DCSM8 VCU CRC Check of Static Memory
Contents
DCSM9 External Watchdog Diagnostic System System defined System defined System defined System defined
DCSM11 Hardware Redundancy Diagnostic Software On demand
Unique
Cross Bar (XBAR)
XBAR1 Software Test of Function Including
Error Tests
XBAR2 Hardware Redundancy Diagnostic Software Continuous -
XBAR3 Periodic Software Read Back of
Static Configuration Registers
XBAR4 Software Read Back of Written
Configuration
XBAR5 Software Check of X-BAR Flag Diagnostic Software On demand
Timer TIM1 1oo2 Software Voting Using
Secondary Free Running Counter
TIM2 Periodic Software Read Back of
Static Configuration Registers
TIM3 Software Read Back of Written
Configuration
TIM4 Software Test of Function Including
Error Tests
General Pupose
I/O and
GPIO1 Lock Mechanism for Control
Registers
Multiplexing (GPIO
and PINMUX)
GPIO2 Periodic Software Read Back of
Static Configuration Registers
GPIO3 Software Read Back of Written
Configuration
Diagnostic Hardware Continuous -
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Software On demand
Fault
Hardware Continuous -
avoidance
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic
Operation
Enabled at reset
(Software defined)
(Software defined)
(Software defined)
Enabled by
software
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
Enabled by
software
(Software defined)
(Software defined)
Test Execution
Time
Zero or very low
overhead
Action on
Detected Fault
Error Reporting
Time
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Zero or very low
Software defined Software defined
overhead
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
Software defined Software defined Software defined
Software defined Software defined Software defined
90 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 91
www.ti.com Summary of Safety Features and Diagnostics
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
General Pupose
I/O and
Multiplexing (GPIO
and PINMUX)
(cont.)
Enhanced Pulse
Width Modulators
(ePWM)
High Resolution
Capture (HRCAP)
Unique
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
GPIO4 Software Test of Function Using I/O
Loopback
Diagnostic Hardware -
Software
GPIO5 Hardware Redundancy Diagnostic Software On demand
PWM1 Software Test of Function Including
Diagnostic Software On demand
Error Tests
PWM2 Hardware Redundancy Diagnostic Software Continuous -
PWM3 Monitoring of ePWM by eCAP Diagnostic Software On demand
PWM4 Periodic Software Read Back of
Diagnostic Software On demand
Static Configuration Registers
PWM5 Software Read Back of Written
Diagnostic Software On demand
Configuration
PWM6 Lock Mechanism for Control
Registers
Fault
avoidance
Hardware Continuous -
PWM8 ePWM Fault Detection using XBAR Diagnostic Software Continuous -
PWM9 ePWM Synchronization Check Diagnostic Software On demand
PWM11 ePWM Application Level Safety
Diagnostic Software On demand
Mechanism
PWM12 Online Monitoring of Periodic
Diagnostic Software On demand
Interrupts and Events
PWM13 Monitoring of ePWM by ADC Diagnostic System On demand
HRCAP1 Software Test of Function Including
Diagnostic Software On demand
Error Tests
HRCAP2 Hardware Redundancy Diagnostic Software On demand
Diagnostic
Operation
On demand
(Software defined)
(Software defined)
(Software defined)
Enabled by
software
(Software defined)
(Software defined)
(Software defined)
Enabled by
software
Enabled by
software
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
Test Execution
Time
Action on
Detected Fault
Error Reporting
Time
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Zero or very low
Software defined Software defined
overhead
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
NA (Fault
Avoidance)
Zero or very low
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
Software defined Software defined
overhead
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Safety Manual for TMS320F28004x 91
Copyright © 2020 Texas Instruments Incorporated
Page 92

Summary of Safety Features and Diagnostics www.ti.com
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
High Resolution
Capture (HRCAP)
(cont.)
High Resolution
Pulse Width
Modulator
(HRPWM)
Enhanced Capture
(eCAP)
Unique
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
HRCAP3 Monitoring of HRPWM by HRCAP Test for
Software On demand
diagnostic
HRCAP4 Periodic Software Read Back of
Diagnostic Software On demand
Static Configuration Registers
HRCAP5 Software Read Back of Written
Diagnostic Software On demand
Configuration
HRCAP7 HRCAP Calibration Logic Test
Feature
OTTO1 HRPWM Built-In Self-Check and
Diagnostic Hardware -
Software
Diagnostic Software On demand
Diagnostic Capabilities
OTTO2 Hardware Redundancy Diagnostic Software On demand
OTTO3 Monitoring of ePWM by eCAP Diagnostic Software On demand
OTTO4 Periodic Software Read Back of
Diagnostic Software On demand
Static Configuration Registers
OTTO5 Software Read Back of Written
Diagnostic Software On demand
Configuration
CAP1 Software Test of Function Including
Diagnostic Software On demand
Error Tests
CAP2 Information Redundancy
Diagnostic Software On demand
Techniques
CAP3 Monitoring of ePWM by eCAP Test for
Software On demand
diagnostic
CAP4 Periodic Software Read Back of
Diagnostic Software On demand
Static Configuration Registers
CAP5 Software Read Back of Written
Diagnostic Software On demand
Configuration
CAP6 eCAP Application Level Safety
Diagnostic Software On demand
Mechanism
CAP7 Hardware Redundancy Diagnostic Software On demand
Diagnostic
Operation
(Software defined)
(Software defined)
(Software defined)
On demand
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
Test Execution
Time
Action on
Detected Fault
Error Reporting
Time
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
92 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 93

www.ti.com Summary of Safety Features and Diagnostics
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Enhanced
Quadrature
Encoder Pulse
(eQEP)
Programmable
Gain Amplifier
(PGA)
Unique
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
QEP1 Software Test of Function Including
Diagnostic Software On demand
Error Tests
QEP2 eQEP Quadrature Watchdog Diagnostic Hardware Continuous -
QEP3 Information Redundancy
Diagnostic Software On demand
Techniques
QEP4 Periodic Software Read Back of
Diagnostic Software On demand
Static Configuration Registers
QEP5 Software Read Back of Written
Diagnostic Software On demand
Configuration
QEP6 eQEP Application Level Safety
Diagnostic Software On demand
Mechanism
QEP7 Hardware Redundancy Diagnostic Software On demand
QEP8 QMA Error Detection Logic Diagnostic Hardware Continuous -
QEP9 eQEP Software Test of Quadrature
Watchdog Functionality
Test for
diagnostic
Software On demand
PGA1 PGA to ADC Loopback Test Diagnostic Software On demand
PGA2 Hardware Redundancy Diagnostic Software On demand
PGA3 Software Read Back of Written
Diagnostic Software On demand
Configuration
PGA4 Periodic Software Read Back of
Diagnostic Software On demand
Static Configuration Registers
Diagnostic
Operation
(Software defined)
Enabled by
software
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
Enabled by
software
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
Test Execution
Time
Action on
Detected Fault
Error Reporting
Time
Software defined Software defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Safety Manual for TMS320F28004x 93
Copyright © 2020 Texas Instruments Incorporated
Page 94

Summary of Safety Features and Diagnostics www.ti.com
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Programmable
Gain Amplifier
(PGA) (cont.)
Local Interconnect
Network (LIN)
Unique
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
PGA6 Lock Mechanism for Control
Registers
LIN1 Software Test of Function Using I/O
Loopback
LIN2 Information Redundancy
Fault
Hardware Continuous -
avoidance
Diagnostic Hardware -
Software
Diagnostic Software On demand
Techniques Including End-to-End
Safing
LIN3 Transmission Redundancy Diagnostic Software On demand
LIN4 Periodic Software Read Back of
Diagnostic Software On demand
Static Configuration Registers
LIN5 Software Read Back of Written
Diagnostic Software On demand
Configuration
LIN6 Data Parity Error Detection Diagnostic Software On demand
LIN7 Overrun Error Detection Diagnostic Hardware Continuous -
LIN8 Frame Error Detection Diagnostic Hardware Continuous -
LIN9 LIN Physical Bus Error Detection Diagnostic Hardware Continuous -
LIN10 LIN No-Response Error Detection Diagnostic Hardware Continuous -
Diagnostic
Operation
Enabled by
software
On demand
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
Enabled by
software
Enabled by
software
Enabled by
software
Enabled by
software
Test Execution
Time
NA (Fault
Avoidance)
Action on
Detected Fault
NA (Fault
avoidance
technique)
Error Reporting
Time
NA (Fault
avoidance
technique)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
94 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 95

www.ti.com Summary of Safety Features and Diagnostics
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Local Interconnect
Network (LIN)
(cont.)
Fast Serial
Interface (FSI)
Unique
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
LIN11 Bit Error Detection Diagnostic Hardware Continuous -
LIN12 LIN Checksum Error Detection Diagnostic Hardware Continuous -
LIN13 LIN ID Parity Error Detection Diagnostic Hardware Continuous -
LIN15 SCI Break Error Detection Diagnostic Hardware Continuous -
LIN16 Communication Access Latency
Profiling Using On-Chip Timer
FSI1 Software Test of Function Using I/O
Loopback
FSI2 Information Redundancy
Techniques Including End-to-End
Diagnostic Hardware -
Software
Diagnostic Hardware -
Software
Diagnostic Hardware -
Software
Safing
FSI3 Periodic Software Read Back of
Diagnostic Software On demand
Static Configuration Registers
FSI4 Software Read Back of Written
Diagnostic Software On demand
Configuration
FSI5 Transmission Redundancy Diagnostic Software On demand
Diagnostic
Operation
Enabled by
software
Enabled by
software
Enabled by
software
Enabled by
software
On demand
(Software defined)
On demand
(Software defined)
On demand
(Software defined)
(Software defined)
(Software defined)
(Software defined)
Test Execution
Time
Zero or very low
overhead
Action on
Detected Fault
Error Reporting
Time
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Safety Manual for TMS320F28004x 95
Copyright © 2020 Texas Instruments Incorporated
Page 96

Summary of Safety Features and Diagnostics www.ti.com
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Fast Serial
Interface (FSI)
(cont.)
Unique
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
FSI6 FSI Data Overrun/Underrun
Diagnostic Hardware Continuous -
Detection
FSI7 FSI Frame Overrun Detection Diagnostic Hardware Continuous -
FSI8 FSI CRC Framing Checks Diagnostic Hardware Continuous -
FSI9 FSI ECC Framing Checks Diagnostic Hardware -
Software
FSI10 FSI Frame Watchdog Diagnostic Hardware Continuous -
FSI11 FSI RX Ping Watchdog Diagnostic Hardware Continuous -
FSI12 FSI Tag Monitor Diagnostic Software On demand
FSI13 FSI Frame Type Error Detection Diagnostic Hardware Continuous -
Diagnostic
Operation
Enabled by
software
Enabled by
software
Enabled by
software
On demand
(Software defined)
Enabled by
software
Enabled by
software
(Software defined)
Enabled by
software
Test Execution
Time
Zero or very low
overhead
Action on
Detected Fault
Error Reporting
Time
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
96 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 97

www.ti.com Summary of Safety Features and Diagnostics
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Fast Serial
Interface (FSI)
(cont.)
Power
Management Bus
Module (PMBus)
Sigma Delta Filter
Module (SDFM)
Unique
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
FSI14 FSI End of Frame Error Detection Diagnostic Hardware Continuous -
FSI15 FSI Register Protection
Mechanisms
Fault
avoidance
Hardware Continuous -
PMBUS2 I2C Data Acknowledge Check Diagnostic Software On demand
PMBUS3 Information Redundancy
Diagnostic Software On demand
Techniques Including End-to-End
Safing
PMBUS4 Periodic Software Read Back of
Diagnostic Software On demand
Static Configuration Registers
PMBUS5 Software Read Back of Written
Diagnostic Software On demand
Configuration
PMBUS6 Transmission Redundancy Diagnostic Software On demand
PMBUS7 PMBus Protocol CRC in Message Diagnostic Hardware -
Software
PMBUS8 Clock Timeout Diagnostic Hardware Continuous -
SDFM1 SDFM Comparator Filter for Online
Diagnostic Hardware Continuous -
Monitoring - Type 0
SDFM2 Information Redundancy
Diagnostic Software On demand
Techniques
Diagnostic
Operation
Enabled by
software
Enabled by
software
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
On demand
(Software defined)
Enabled by
software
Enabled at reset
(Software defined)
Test Execution
Time
Zero or very low
overhead
Action on
Detected Fault
Error Reporting
Time
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Safety Manual for TMS320F28004x 97
Copyright © 2020 Texas Instruments Incorporated
Page 98

Summary of Safety Features and Diagnostics www.ti.com
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Sigma Delta Filter
Module (SDFM)
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
SDFM3 SD Modulator Clock Fail Detection
Mechanism
(cont.)
SDFM4 Periodic Software Read Back of
Static Configuration Registers
SDFM5 Software Read Back of Written
Configuration
SDFM6 Software Test of Function Including
Error Tests
SDFM7 Hardware Redundancy Diagnostic Software On demand
XINT XINT1 Software Test of Function Including
Error Tests
XINT2 Periodic Software Read Back of
Static Configuration Registers
XINT3 Software Read Back of Written
Configuration
XINT4 Hardware Redundancy Diagnostic Software Continuous -
Unique
Analog-to-Digital
Converter (ADC)
ADC1 Software Test of Function Including
Error Tests
ADC2 DAC to ADC Loopback Check Diagnostic Software On demand
ADC3 ADC Information Redundancy
Techniques
ADC4 Opens/Shorts Detection Circuit for
ADC
ADC5 Software Read Back of Written
Configuration
ADC6 Periodic Software Read Back of
Static Configuration Registers
ADC7 ADC Signal Quality Check by
Varying Acquisition Window
Diagnostic Hardware Continuous -
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Hardware -
Software
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic
Operation
Enabled at reset
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
(Software defined)
Enabled by
software
(Software defined)
(Software defined)
(Software defined)
On demand
(Software defined)
(Software defined)
(Software defined)
(Software defined)
Test Execution
Time
Zero or very low
overhead
Action on
Detected Fault
Error Reporting
Time
Interrupt to CPU Typically <1 µS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Zero or very low
Software defined Software defined
overhead
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
98 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
Page 99

www.ti.com Summary of Safety Features and Diagnostics
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Analog-to-Digital
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
ADC8 ADC Input Signal Integrity Check Diagnostic Hardware Continuous Converter (ADC)
(cont.)
ADC9 Monitoring of ePWM by ADC Diagnostic System On demand
ADC10 Hardware Redundancy Diagnostic Software On demand
ADC11 Disabling Unused Sources of SOC
Inputs to ADC
BUFDAC DAC1 Software Test of Function Including
Error Tests
DAC2 DAC to ADC Loopback Check Diagnostic Software On demand
DAC3 Lock Mechanism for Control
Registers
DAC4 Software Read Back of Written
Configuration
DAC5 Periodic Software Read Back of
Static Configuration Registers
DAC6 Hardware Redundancy Diagnostic Software On demand
DAC7 DAC to Comparator Loopback
Check
CMPSS CMPSS1 Software Test of Function Including
Error Tests
CMPSS3 Hardware Redundancy Diagnostic Software Continuous -
CMPSS4 Software Read Back of Written
Configuration
CMPSS5 Periodic Software Read Back of
Static Configuration Registers
CMPSS6 Lock Mechanism for Control
Registers
Unique
Fault
Software Continuous -
avoidance
Diagnostic Software On demand
Fault
Hardware Continuous -
avoidance
Diagnostic Software On demand
Diagnostic Software On demand
Diagnostic Hardware -
Software
Test for
Software On demand
diagnostic
Diagnostic Software On demand
Test for
Software On demand
diagnostic
Fault
Hardware Continuous -
avoidance
Diagnostic
Operation
Enabled by
software
(Software defined)
(Software defined)
Enabled by
software
(Software defined)
(Software defined)
Enabled by
software
(Software defined)
(Software defined)
(Software defined)
On demand
(Software defined)
(Software defined)
Enabled by
software
(Software defined)
(Software defined)
Enabled by
software
Test Execution
Time
Zero or very low
Action on
Detected Fault
Error Reporting
Time
Software defined Software defined
overhead
Software defined Software defined Software defined
Software defined Software defined Software defined
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
Software defined Software defined Software defined
Software defined Software defined Software defined
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Submit Document Feedback
Safety Manual for TMS320F28004x 99
Copyright © 2020 Texas Instruments Incorporated
Page 100

Summary of Safety Features and Diagnostics www.ti.com
Table D-2. Summary of Safety Features and Diagnostic (continued)
Device Partition
Identifier Safety Feature or Diagnostic Usage Diagnostic Type
CMPSS (cont.) CMPSS7 VDAC Conversion by ADC Diagnostic Software On demand
Unique
CMPSS8 CMPSS Ramp Generator
Diagnostic Software On demand
Functionality Check
Controller Area
Network (DCAN)
CAN1 Software Test of Function Using I/O
Loopback
CAN2 Information Redundancy
Diagnostic Hardware -
Software
Diagnostic Software On demand
Techniques Including End-to-End
Safing
CAN3 SRAM Parity Diagnostic Hardware Continuous -
CAN4 Software Test of SRAM Diagnostic Software On demand
CAN5 Bit Multiplexing in SRAM Memory
Array
CAN7 Periodic Software Read Back of
Fault
Hardware Continuous -
avoidance
Diagnostic Software On demand
Static Configuration Registers
CAN8 Software Read Back of Written
Diagnostic Software On demand
Configuration
CAN9 Transmission Redundancy Diagnostic Software On demand
CAN10 DCAN Stuff Error Detection Diagnostic Hardware Continuous -
CAN11 DCAN Form Error Detection Diagnostic Hardware Continuous -
Diagnostic
Operation
(Software defined)
(Software defined)
On demand
(Software defined)
(Software defined)
Enabled by
software
(Software defined)
Enabled at reset
(Software defined)
(Software defined)
(Software defined)
Enabled at reset
Enabled at reset
Test Execution
Time
Action on
Detected Fault
Error Reporting
Time
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Software defined Software defined Software defined
NA (Fault
Avoidance)
NA (Fault
avoidance
technique)
NA (Fault
avoidance
technique)
Software defined Software defined Software defined
Software defined Software defined Software defined
Software defined Software defined Software defined
Zero or very low
overhead
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
Zero or very low
overhead
Interrupt to CPU Typically <1 μS to
notify *(Interrupt
Handling Time is
System Load and
Software
Dependent)
100 Safety Manual for TMS320F28004x SPRUID8C – AUGUST 2019 – REVISED SEPTEMBER 2020
Copyright © 2020 Texas Instruments Incorporated
Submit Document Feedback
 Loading...
Loading...