

Page 1

Altivar 11
Manuel technique
Technical manual
Technisches Heft
Manual técnico
Manuale Tecnico
Variateurs de vitesse pour
moteurs asynchrones,
Variable speed drives
for asynchronous motors ,
Frequenzumrichter
für Drehstrom-Asynchronmotoren,
Variadores de velocidad
para motores asíncron os,
Variatori di velocità
per motori asincroni.
V1.2
Page 2

Altivar 11
Variateurs de vitesse pour moteurs async h ron es Page 2
Variable speed drives for asynchronous motors Page 64
Frequenzumrichter für Drehstrom-Asynchronmotoren Seite 126
FRANÇAISENGLISHDEUTSCHITALIANO ESPAÑOL
Variadores de velocidad para motores asíncronos Página 188
Variatori di velocità per motori asincroni Pagina 250
2
Page 3

Bei eingeschaltetem Umrichter werden die Leistungselektronik sowie einige Komponenten der
Steuerung über das Netz ve rsorgt. Achtung! Berührung sspannungen! Teile auch bei Motorsti llstand
nicht berühren! Die Abdeckklap pe ist geschlossen zu halten.
Grundsätzlich muss die Spannun gsversorgung des Frequenzumricht ers ausgeschaltet werden, bevor
elektrische oder mechanische Eingriffe an der Anlage oder im Gerät erfolgen.
Nach dem Ausschalten der Netzspa nnung des ALTIVAR und dem Erlöschen der Anzeige sollten Sie
mindestens 15 Minuten warten, bevor Sie am Gerät arbeiten. Dies ist die Zeit, die die Kondensatoren zur
Entladung benötigen.
Während des Betriebs kann es dur ch das Zur ücksetzen vo n Fahrbef ehlen oder Sollwer ten oder du rch
Programmierbefehle zu einem Anhalten des Motors kommen, wobei das Gerät weiterhin unter
Spannung steht. Wenn zur Sicherheit des Bedienpersonals ein unkontrolliertes Wiederanfahren
ausgeschlossen sein muss, reich t diese elektronische Verriegelung nicht aus : Sehen Sie zu diesem
Zweck eine Trennung des Leistun gsschaltkreises vor.
Der Umrichter verfügt üb er Sicherheitsvorrichtunge n, die bei Störungen das Gerät selb st und damit
auch den Motor abschalten können. Der Motor kann auch durch mechanische Fehl er blockiert werden.
Ebenso können Schwankung en der Versorgungsspannung oder Stromausfälle d ie Ursache für das
Anhalten der Motoren sein.
Nach Beseitigung der Ursa che, die das Anhalten ausgelöst hat, kann es bei ei nigen Maschinen und
Anlagen durch den au tomatische n Wiedera nlauf zu einem erhöht en Risi ko kommen; i nsbesonder e ist
dies bei Maschinen zu berücksichtigen, die bestimmten Sicherheitsanforderungen entsprechen
DEUTSCH
müssen.
Sofern dies der Fall ist, hat der Betreiber durch die Verwendung von Drehzahlwächtern, die die
Versorgungsspannung des Umrichters abschalten, dafür Sorge zu tragen, dass ein Wiederanfahren des
Motors nach einem nicht vorgesehenen A nhaltevorgang nicht möglich ist.
Einbau und Inbetriebn ahme dieses Umrichters müssen den inter nationalen IEC-Normen und de n am
Einbauort geltenden nationalen Normen entsprechen. Der Anwender ist für die Einhaltung dieser
Normen verantwortlich. Innerhalb der Europäischen Union sind außerdem die entsprechenden
Vorschriften zur Elektro magnetischen Verträglichkeit (E MV ) zu bef olgen.
Die in diesem Dokument enthaltenen Angaben müssen angewendet werden, um die grund legenden
Anforderungen der EMV-Richtlinie zu erfüllen.
Der Altivar 11 muss als Komponente angesehen werden. Er ist weder eine Maschine noch ein
einsatzbereites Gerät nach europäischen Vorschriften (Maschinenrichtlinie und Richtlinie zur
elektromagnetischen V erträglichkeit). Es liegt in der Verantwortung des Betreibers, dafür zu so rgen,
dass seine Anlage diesen Vorschriften entspricht.
Technische und betr iebsrelevante Änderungen zu den in diesen Unterlagen aufgeführ ten Produkten
und Geräten sind jederzeit auch ohne Vorankündigung vorbehalten. Die hierin enthaltenen
Beschreibungen sind unver bindlich.
3
Page 4

Inhaltsverzeichnis
Vorgehensweise zur Inbetriebnahme ____________________________________________________ 5
Werkseitige Konfiguration_____________________________________________________________ 6
Weiterentwicklung der Software ________________________________________________________ 7
Wahl des Umrichters_________________________________________________________________ 8
Montage _________________________________________________________________________ 11
Grundlegende Funktionen ______________________________________________ _____________ 23
Inbetriebnahme - Einleitende Empfehlungen _______________________________________ ______ 24
Programmierung___________________________________________________________________ 25
Einstellparameter 1. Ebene___________________________________________________________ 28
Menü „Analogeingang“ AIt __________________ _________________________________________ 29
Menü „Motorsteuerung“ drC __________________________________________________________ 30
Menü „Anwendungsfunktionen“ FUn____________________________________________________ 35
Menü „Überwachung“ SUP ___________________________________________________________ 57
Wartung ____ _____________________________________________________________________ 59
Fehler - Ursachen - Fehlerbeseitigung __________________________________________________ 60
Tabellen für Konfiguration/Einstellungen ________________________________________________ 62
DEUTSCH
4
Page 5
Vorgehensweise zur Inbetriebnahme
1 - Empfang des Umrichters
• Überprüfen, ob die Angaben auf dem Typenschild des Umrichters mit denen auf dem Lieferschein und
dem Bestellschein übereinstimmen.
• Die Verpackung öffnen und pr üfen, ob der Altivar 11 während des Transport s beschädigt wurde.
2 - Den Umrichter einbauen
3 - Anschlüsse des Umrichters
• Versorgungsnetz; darauf achten, dass es
- im Spannungsbereich des Umrichters liegt,
- ausgeschaltet ist.
• Motor; darauf achten, dass die Motorschaltung der Netzspannung entspricht.
• Steuerung über die Logikeingänge
• Frequenzsollwert über die Logik- oder Analogeingänge
4 - Einschalten ohne Erteilen eines Fahrbefehls
5 - Konfiguration
• Nennfrequenz (bFr) des Motors, wenn sie bei den Reihe n E und A v on 50 Hz ode r bei der Rei he U von
60 Hz abweicht (erscheint nur beim ersten Einschalten).
• Parameter ACC (Hochlaufzeit) und dEC (Auslaufzeit).
• Parameter LSP (Kleine Frequenz bei S ollwert Null) und HSP (Große Frequenz bei ma ximalem Sollwert ).
• Parameter ItH (Thermoschutz des Motors).
• Vorwahlfrequenzen SP2-SP3-SP4.
6 - Konfiguration im Menü AIt
• der Frequenzsollwert, falls er von 0 - 5 V (0 - 10 V oder 0 - 20 mA oder 4 - 20 mA oder X - Y mA) abweicht .
DEUTSCH
7 - Konfiguration im Menü drC
Die Motorparameter sind nur zu konfigurieren, wenn die Werkseinstellung des Umrichters nicht geeignet
ist.
8 - Einstellung im Menü FUn
Die Anwendungsfunktionen sind nur zu konfigurieren, wenn die werkseitige Konfiguration des Umrichters
nicht verwendbar ist, beispielsweise die Art der Steuerung: 3-Draht-Steuerung, 2-Draht-Steuerung bei
Übergang, 2-Draht-Steuerung bei Niveau, 2-Draht-Steuerung bei Niveau mit Vorrang für Rechtslauf oder
lokale Steuerung bei Umrichtern der Reihe A und E327.
Unbedingt sicherstellen, dass die programmierten Funktionen mit der jeweiligen
Verdrahtung vereinbar sind.
9 - Starten
5
Page 6

Werkseitige Konfiguration
Voreinstellungen
Der Altivar 11 wurde werkseitig für die am häufigsten benötigten Anwendungen voreingestellt:
• Anzeige: Umrichter bereit (rdY) bei Motor im Stillstand und Frequenzsollwert bei Motor in Betrieb.
• Motorfrequenz (bFr): 50 Hz bei den Reihen E und A, 60 Hz bei der Reihe U.
• Motorspannung (UnS): 230 V.
• Lineare Rampen (ACC, dEC): 3 Sekunden.
• Kleine Frequenz (LSP): 0 Hz.
• Große Frequenz (HSP): 50 Hz bei den Reihen E und A, 60 Hz bei der Reihe U.
• Verstärkung des Frequenzreglers: Standard.
• Thermischer Motorstrom (ItH) = Motornennstrom (Wert je nach Baugröße des Umrichters).
• Bremsstrom bei DC-Aufschaltung im Stillstand = 0,7 x Nennstrom des Umrichters, während
0,5 Sekunden.
• Automatische Anpassung der Auslauframpe im Falle von Überspannung beim Bremsen.
• Kein automatischer Wiederanlauf nach einer Störung.
• Taktfrequenz 4 kHz.
• Logikeingänge:
- LI1, LI2 (2 Drehrichtungen): 2-Draht-Steuerung bei Übergang, LI1 = Rechtslauf, LI2 = Linkslauf,
inaktiv bei der Reihe für die Reihen A und E327.
- LI3, LI4: 4 Vorwahlfrequenz en (Frequenz 1 = Frequenzsollwert oder LSP, Fre quenz 2 = 10 Hz,
Frequenz 3 = 25 Hz, Frequenz 4 = 50 Hz).
• Analogeingang:
- AI1 (0 + 5 V): Frequenzsollwert 5 V, inaktiv bei den Reihen A und E327.
• Relais R1: bei einer Störung (oder Umricht er ohne Spannung) fällt der Kontakt ab.
• Analogausgang / Logikausgang DO: als Analogausgang, Abbild der Moto rfrequenz.
Reihen A und E327
Die Umrichter ATV 11ppppppA und ATV11ppppppE327 werden ab Werk mit a ktiv ier ter lokal er S teueru ng
ausgeliefert: die Tasten RUN, ST OP und das Potent io meter des Umric hters sind ak tiv. Die Logikei ngän ge
LI1 und LI2 sowie der Analogeingang AI1 sind inaktiv.
DEUTSCH
Wenn die oben genannten Werte mit der Anwendung vereinbar sind, kann der Umrichter ohne
Modifizierung der Einstellu ngen eingesetzt werden.
6
Page 7

Weiterentwicklung der Software
Der Altivar ATV 11 wurde seit seiner Vermarktung ständig durch Zusatzfunktionen erweitert. Die
Softwareversion V1.1 wird zur Version V1.2. Diese Dokumentation bezieht sich auf die Version V1.2.
Die Angaben zur Software-Version befinden sich auf dem Typenschild, das auf der Umrichterseitenwand
aufgeklebt ist.
Neue Parameter der Version V1.2 im Vergleich zu V1.1
Menü „Analogeingang“ AIt
• Neues Menü, das die Einstellparameter der 1. Ebene AIt der Version V1.1 ersetzt und ergänzt.
Menü „Anwendungsfunktionen“ FUn
• tLS: Betriebszeit bei klei ner F r equenz.
• PI: PI-Regler (zusätzliches Untermenü).
• LC2: 2. Strombegrenzung.
• nSt: Feier Auslauf.
• SSr: Konfiguration des Frequenzsollwerts (nur bei den Reihen A und E327).
Menü „Überwachung“ SUP
• rPF: PI-Geberrückführung.
• COd: Schutz der Konfiguration durch Code.
DEUTSCH
7
Page 8
Wahl des Umrichters
Einphasige Versorgungsspannung: 200…240 V 50/60 Hz
Dreiphasiger Motor 200…240 V
Motor Versorgungsnetz Altivar 11
Stromversorg.
gemäß
Typenschild
(1)
kW/HP A kA A A W
Reihe E (5)
0,18 / 0,25 2,9 1 1,1 1,6 12 ATV11HU05M2E
0,37 / 0,5 5,3 1 2,1 3,1 20,5 ATV11pU09M2E
0,55 / 0,75 6,3 1 3 4,5 29 ATV11pU12M2E
0,75 / 1 8,6 1 3,6 5,4 37 ATV11pU18M2E
1,5 / 2 14,8 1 6,8 10,2 72 ATV11HU29M2E
2,2 / 3 20,8 1 9,6 14,4 96 ATV11HU41M2E
Reihe A
0,18 / 0,25 3,3 1 1,4 2,1 14 ATV11HU05M2A
0,37 / 0,5 6 1 2,4 3,6 25 ATV11pU09M2A
0,75 / 1 9,9 1 4 6 40 ATV11pU18M2A
1,5 / 2 17,1 1 7,5 11,2 78 ATV11HU29M2A
2,2 / 3 24,1 1 10 15 97 ATV11HU41M2A
Reihe U
0,18 / 0,25 3,3 1 1,6 2,4 14,5 ATV11HU05M2U
0,37 / 0,5 6 1 2,4 3,6 23 AT V11pU09M2U
0,75 / 1 9,9 1 4,6 6,3 43 ATV11pU18M2U
1,5 / 2 17,1 1 7,5 11,2 77 ATV11HU29M2U
2,2 / 3 24,1 1 10,6 15 101 ATV11HU41M2U
(1) Die angegebenen Leistungswerte gelten für eine Taktfrequenz von 4 kHz im Dauerbetrieb. Die
Taktfrequenz ist von 2 bis 16 kHz einstellbar.
Oberhalb von 4 kHz verringert der Umrichter die Taktfrequenz selbsttätig, wenn eine zu große
Erwärmung auftritt. Die Erwärmung wird mit Hilfe eines PTC-Fühlers im Leis tungsmodul des Umrichters
überwacht. Dennoch muss der Umri chternennstrom reduziert werden, wenn dauerhaft ein Betrieb mit
einer Taktfrequenz über 4 kHz erfolgen soll:
• Herabstufung um 10 % bei 8 kHz,
• Herabstufung um 20 % bei 12 kHz,
• Herabstufung um 30 % bei 16 kHz
(2) Werte für die Nennspannungen: 230 V bei der Reihe E, 200 V bei der Reihe A und
208 V bei der Reihe U.
(3) Während 60 Sekunden.
(4) Die Umrichter, deren Typenbezeichnung ein p enthält, sind in zwei Versionen li eferbar:
• auf Kühlkörper, das p durch ein H ersetzen (z. B. ATV11 H U0 9M2E)
• auf Grundplatte, das p durch ein P ersetzen (z. B. ATV11PU09M2E)
(5) Diese Umrichter sind mit den Tasten RUN und STOP und dem Potentiometer verfügbar (wie bei der
Reihe A). In diesem Fall wird die Beste llreferenz durch 327 ergänzt, z. B.: AT V11HU05M2E327
Max. NennNetzstrom
(2)
Max. angenommener
Ik des
Netzes
Nennstrom
Max.
Übergangsstrom (3)
Verlustleistung
bei
Nennlast
Typ (4)
DEUTSCH
8
Page 9
Wahl des Umrichters
Dreiphasige Versorgungsspannung: 200…230 V 50/60 Hz
Dreiphasiger Motor 200…230 V
Motor Versorgungsnetz Altivar 11
Stromversorg.
gemäß
Typenschild
(1)
kW/HP A kA A A W
Reihe A
0,18 / 0,25 1,8 5 1,4 2,1 13,5 ATV11HU05M3A
0,37 / 0,5 3,6 5 2, 4 3,6 24 ATV11 pU09M3A
0,75 / 1 6,3 5 4 6 38 ATV11pU18M3A
1,5 / 2 11 5 7,5 11,2 75 ATV11HU29M3A
2,2 / 3 15,2 5 10 15 94 ATV11HU41M3A
Reihe U
0,18 / 0,25 1,8 5 1,6 2,4 13,5 ATV11HU05M3U
0,37 / 0,5 3,6 5 2,4 3,6 24 ATV11pU09M3U
0,75 / 1 6,3 5 4, 6 6,3 38 ATV11 pU18M3U
1,5 / 2 11 5 7,5 11,2 75 ATV11HU29M3U
2,2 / 3 15,2 5 10,6 15 94 ATV11HU41M3U
(1) D ie angegebenen Leistungswerte gelten für eine Taktfrequenz von 4 kHz im Dauerbetrieb. Die
DEUTSCH
Taktfrequenz ist von 2 bis 16 kHz einstellbar.
Oberhal b von 4 kHz verringert der Umr i chter die Taktfrequenz selbsttätig, wenn ei ne zu große
Erwärmung auftritt. Die Erwärmung wir d mit Hilfe eines PTC-Fühler s im Leistungsmodul des Umrichter s
überwacht. Dennoch muss der Umrichternennstrom reduziert werden, wenn dauerhaft ein Betrieb mit
einer Taktfrequenz über 4 kHz erfolgen soll:
• Deklassierung um 10 % bei 8 kHz, 20 % bei 12 kHz, 30 % bei 16 kHz.
(2) Werte für die Nennspannunge n: 200 V bei der Reihe A und 208 V bei der Reihe U.
(3) Während 60 Sekunden.
(4) D ie Umrichter, deren Typenbezeichnung ein p enthält, sind in zwei Versionen lieferbar:
• auf Kühlkörper, das p durch ein H ersetzen (z. B. ATV11HU09M3A)
• auf Grundplatte , da s p durch ein P ersetzen (z. B. ATV11PU09M3A)
Max. NennNetzstrom
(2)
Max. angenommener
Ik des
Netzes
Nennstrom
Max.
Übergangsstrom (3)
Verlustleistung
bei
Nennlast
Typ (4)
9
Page 10
Wahl des Umrichters
Einphasige Versorgungsspannung: 100…120 V 50/60 Hz
Dreiphasiger Motor 200…230 V
Motor Versorgungsnetz Altivar 11
Stromvers.
gemäß
Typenschild
(1)
kW/HP A kA A A W
Reihe A
0,18 / 0,25 6 1 1,4 2,1 14 ATV11HU05F1A
0,37 / 0,5 9 1 2,4 3,6 25 ATV11pU09F1A
0,75 / 1 18 1 4 6 40 ATV11HU18F1A
Reihe U
0,18 / 0,25 6 1 1,6 2,4 14,5 ATV11HU05F1U
0,37 / 0,5 9 1 2,4 3,6 23 ATV11pU09F1U
0,75 / 1 18 1 4,6 6,3 43 ATV11HU18F1U
(1) Die angegebenen Leistungswerte gelten für eine Taktfrequenz von 4 kHz im Dauerbetrieb. Die
Taktfrequenz ist von 2 bis 16 kHz einstellbar.
Oberhalb von 4 kHz verringert der Umrichter die Taktfrequenz selbsttätig, wenn eine zu große
Erwärmung auftritt. Die Erwärmung wird mit Hilfe eines PTC-Fühlers im Leis tungsmodul des Umrichters
überwacht. Dennoch muss der Umri chternennstrom reduziert werden, wenn dauerhaft ein Betrieb mit
einer Taktfrequenz über 4 kHz erfolgen soll:
• Deklassierung um 10 % bei 8 kHz, 20 % bei 12 kHz, 30 % bei 16 kHz.
(2) Werte bei einer Nennspannung von 100 V.
Max. NennNetzstrom
(2)
Max. angenommener
Ik des
Netzes
Nennstrom
Max.
Übergangsstrom (3)
Verlustleistung
bei
Nennlast
Typ (4)
DEUTSCH
(3) Während 60 Sekunden.
(4) Die Umrichter, deren Typenbezeichnung ein p enthält, sind in zwei Versionen li eferbar:
• auf Kühlkörper, das p durch ein H ersetzen (z. B. ATV11HU09F1A)
• auf Grundplatte, das p durch ein P ersetzen (z. B. ATV11PU09F1A)
10
Page 11
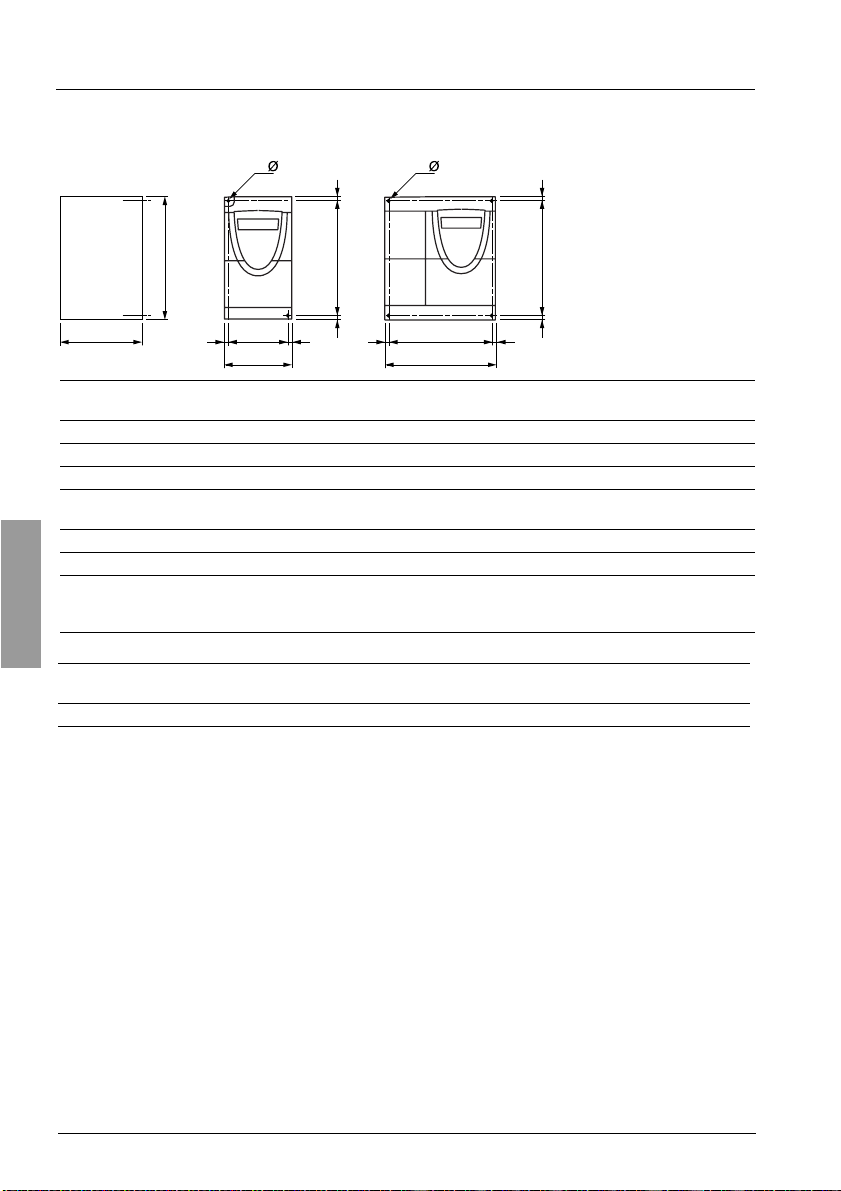
Montage
Maße und Gewichte
2
4
b
c
ATV 11H a
U05pp Reihen E, A, U 72 142 101 60±1 131±1 2 x 5 M 4 0,70
U09pp Reihe E 72 142 125 60±1 120±1 2 x 5 M4 0,85
U09pp Reihen A, U 72 142 125 60±1 131±1 2 x 5 M4 0,85
U12pp Reihe E
U18Mp Reihe E
U18Mp Reihe A 72 142 138 60±1 131±1 2 x 5 M4 0,92
U18Mp Reihe U 72 147 138 60±1 131±1 2 x 5 M4 0,95
U18F1 Reihen A, U
U29pp Reihen E, A, U
U41pp Reihen E, A, U
DEUTSCH
ATV 11P a
Alle Typen 72 142 101 60±1 131±1 2 x 5 M4 0,67
(1) Bei den Umrichtern der Reihe A und E327 sind 7 mm für den Überstand des Potentiometerknopfes
hinzuzurechnen
G
==
a
mmbmm
72 142 138 60±1 120±1 2 x 5 M4 0,92
117 142 156 106±0,5 131±1 4 x 5 M4 1,6
mmbmm
H==
==
G
a
c (1)mmG
mm
c (1)mmG
mmHmmØmm
H==
H
mmØmm
Schrauben
Schrauben
Gewicht
kg
Gewicht
kg
11
Page 12
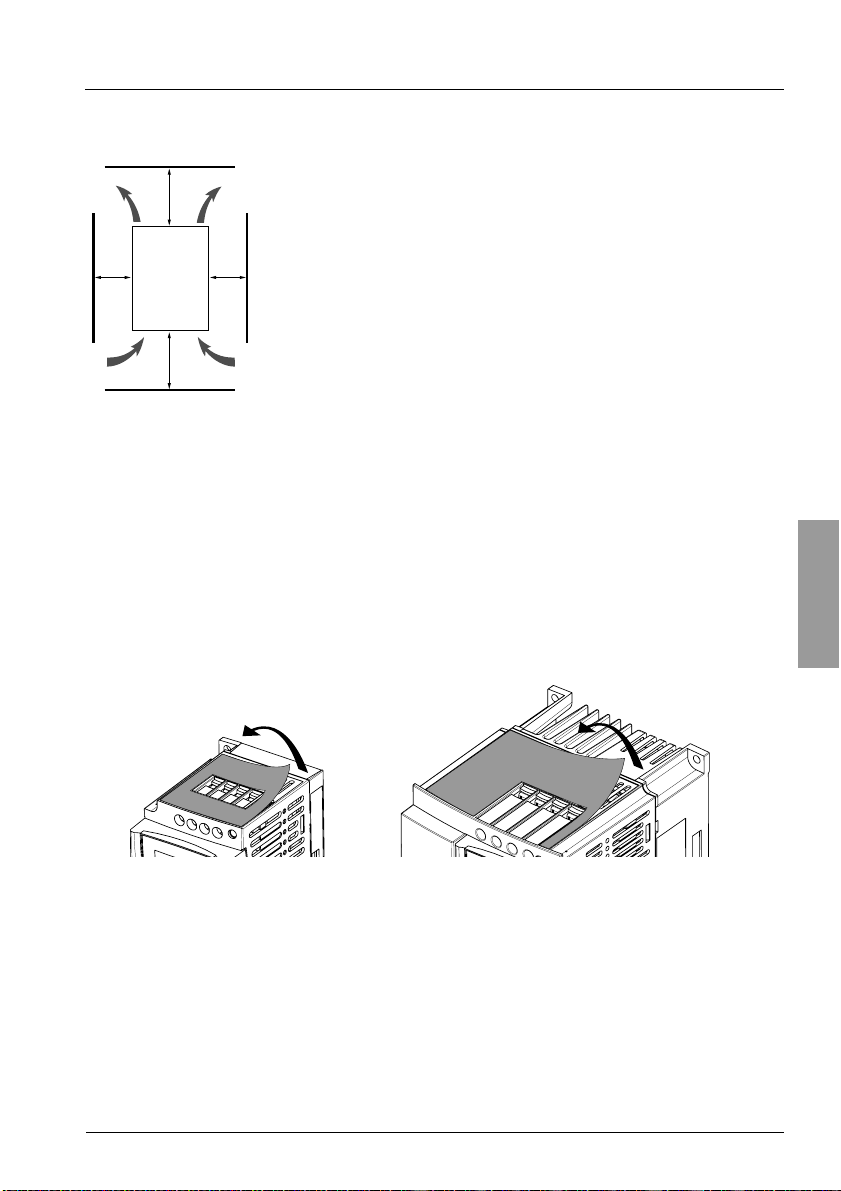
Montage
Montage- und Temperaturbedingungen
Die Installation des Geräte s erfolgt vertikal, bis ± 10°.
Nicht in der Nähe von Wärmequellen ein bauen.
≥ 50 mm
Ausreichend Freiraum lassen, damit genug Luft für die Kühlung zirkulieren
kann. Das Gerät wird von unten na ch oben belüftet.
≥ d ≥ d
≥ 50 mm
• Von -10 °C bis 40 °C: • d ≥ 50 mm: keine besonderen Vorsichtsmaßnahmen.
• Von 40°C bis 50 °C: • d ≥ 50 mm: die oben auf dem Umrichter angeklebte Schutzabdeckung wie
• Von 50 °C bis 60 °C: • d ≥ 50 mm: die oben auf dem Umrichter angeklebte Schutzabdeckung wie
.
Freiraum vor dem Umrichter: mindestens 10 mm.
Wenn die Schutzart I P20 au sreicht , empfehle n wir die En tfern ung der auf dem
Umrichter angeklebten Schutzabdeckung (siehe Abbildung).
• d = 0 (Umrichter angebaut): die oben auf dem Umrichter angeklebte Schutzabdeckung wie nachstehend angegeben entfernen (die Schutzart wird zu IP20).
nachstehend angegeben entfernen (die Schutzart wird zu IP20).
Wenn die Schutzabdeck ung ni cht entfe rnt wird , den Nenns trom des Umrichter s um
2,2 % pro °C über 40 °C reduzieren.
• d = 0: die oben auf dem Umrichte r angeklebte Schutzab deckung wie n achstehend
angegeben entfernen (die Schutzart wird zu IP20) und den Nennstrom des
Umrichters um 2,2 % je °C über 40 °C reduzieren.
nachstehend angegeben entfernen (die Schutzart wird zu IP20) und den
Nennstrom des Umrichters um 2,2 % je °C über 50 °C reduzieren.
DEUTSCH
12
Page 13
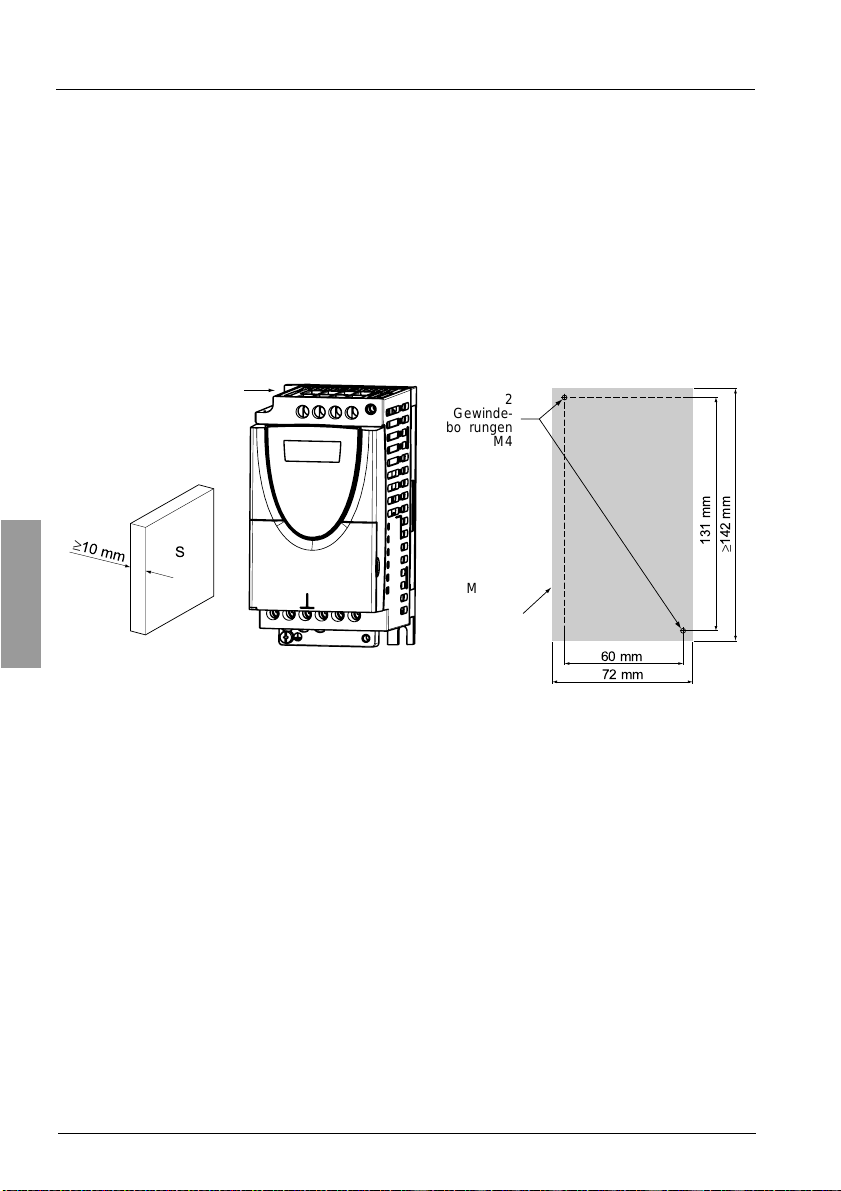
Montage
Befestigung über
Montage der Umrichter auf Grundplatte
Die Umrichter ATV 11Ppppppp können auf (oder in) einem Maschinenrahmen aus Stahl oder Aluminium
montiert werden. Dabei sind folgende Bedingungen einzuhalten:
• Maximale Umgebungstemperat ur: 40 °C
• Vertikale Montage mit ± 10 °
• Der Umrichter muss mittig auf eine m Träger (Rahmen) mit einer Stärk e von mindestens 10 mm und einer
quadratischen Wärmeableitfläche (S) von mindestens 0,12 m
befestigt werden, die von kühler Luft umströmt wird.
• Bearbeitete Auflagefläche des Umrichters (mindestens 142 x 72) auf dem Rahmen mi t einer Planheit
von maximal 100 µm und einer Rauhtiefe von maximal 3,2 µm.
• Die Gewindebohrungen leicht fräsen, um den Grat zu entfernen.
• Die gesamte Auflagefläche des Umrichters mit Wärmeleitpaste (oder vergleichbarem) bestreichen.
2
bei Stahl und 0,09 m2 bei Aluminium
2 Schrauben M4 (nicht im
Lieferumfang enthalte n)
bohrungen
≥
10 mm
S
DEUTSCH
Den thermischen Zustand des Umrichters mit Hilfe des Parameters tHd (Menü SUP) überprüfen,
damit die Wirksamkeit der hergestellten Montage sichergestellt i st.
2
Gewinde-
Ø M4
Minimale
bearbeitete
Fläche
60 mm
≥
72 mm
131 mm
142 mm
≥
13
Page 14
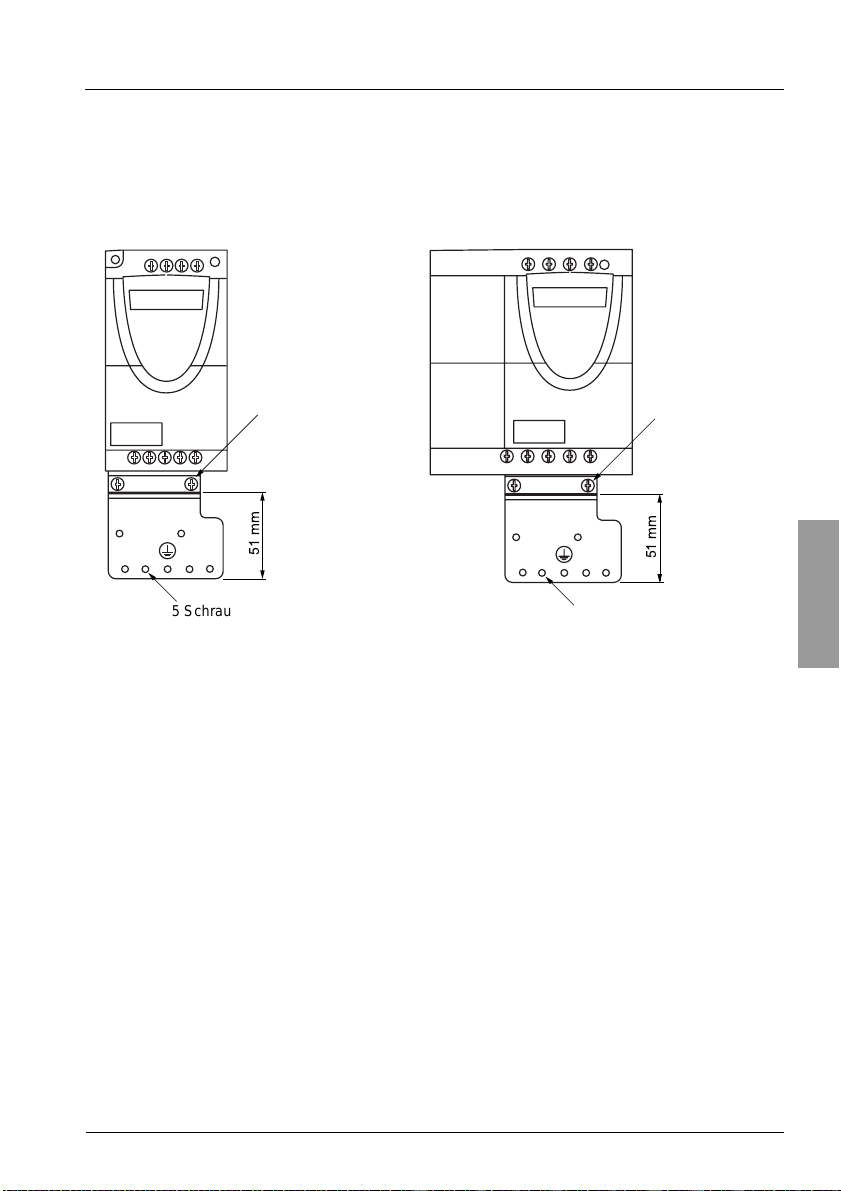
Montage
n
Elektromagnetische Verträglichkeit
EMV-Platte: VW3 A11821 muss bei Bedarf separat mitbestellt werden
Die EMV-Platte zur Herstellung eines Be zugs poten tia les auf den Bohrun gen de s Kü hlkörp ers des ATV 11
mit den beiden mitgelieferten Sc hrauben wie in nachfolgender Skizze gezeigt befestigen.
2 Schrauben 2 Schraube
51 mm
5 Schrauben M4 zur
Befestigung der EMVLaschen
51 mm
5 Schrauben M4 zur
Befestigung der EMVLaschen
DEUTSCH
14
Page 15

DEUTSCH
15
Page 16
Verdrahtung
Leistungsklemmenleisten
Der Zugang zu den Leistungsklemme nleisten ist ohne Öffnen der Ab deckung möglich. Die Verd rahtung is t
durchgehend: Die Vers orgung erf olgt über den obe ren Teil des Umrich ters (R/ L1-S/L2 an 230 V ein phasig,
R/L1-S/L2-T/L3 an 230 V dreiphasig, R/L1-N an 120 V einphasig), die Speisung des Motors über den unteren
Teil des Umrichters (U - V - W).
Die Leistungsklemmen vor den Steuerklemmen anschließen.
Kenndaten der Leistungsklemmen
Altivar ATV 11p Maximale Anschlusskapazität Anzugsmoment in Nm
AWG mm
U05ppp, U09ppp, U18Mpp AWG 14 1,5 0,75
U18F1p, U29ppp, U41ppp AWG 10 4 1
Funktion der Leistungsklemmen
Anschlüsse Funktion Für Altivar ATV 11
t Erdungsanschluss Alle Typen
R/L1 - S/L2/N Versorgung der Leistungsklemmen
R/L1 - S/L2 - T/L3 ATV11ppppM3p
R/L1 - N ATV11ppppF1p
PA/+ Ausgang + (c) zum Bremsmodul Alle Typen
PC/- Ausgang - (c) zum Bremsmodul Alle Typen
U, V, W Ausgang zum Motor Alle Typen
t Altivar - Erdungsanschluss Alle Typen
(Netzanschluss)
2
ATV11ppppM2p
DEUTSCH
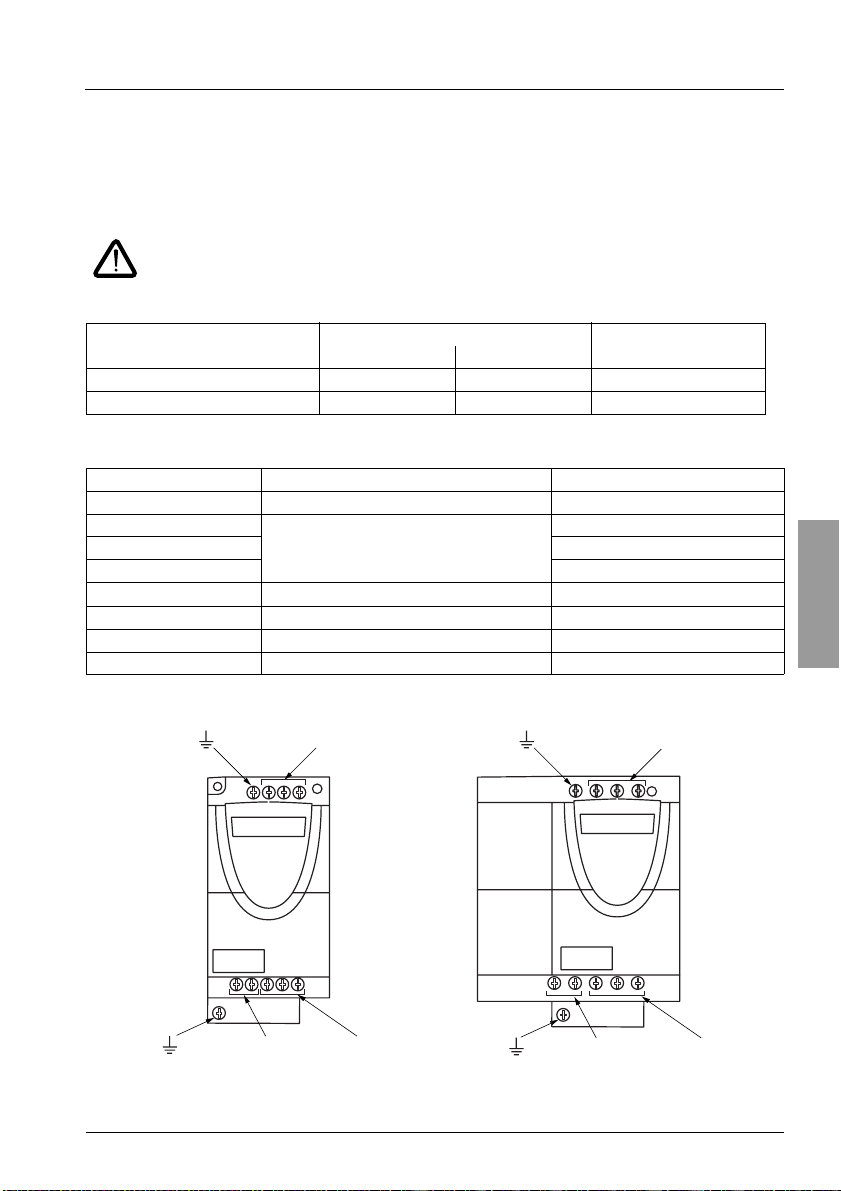
Anordnung der Leistungsklemmen
Leistungsversorgung Leistungsversorgung
Zum Bremsmodul
Zum Motor
Zum Bremsmodul
Zum Motor
16
Page 17
Verdrahtung
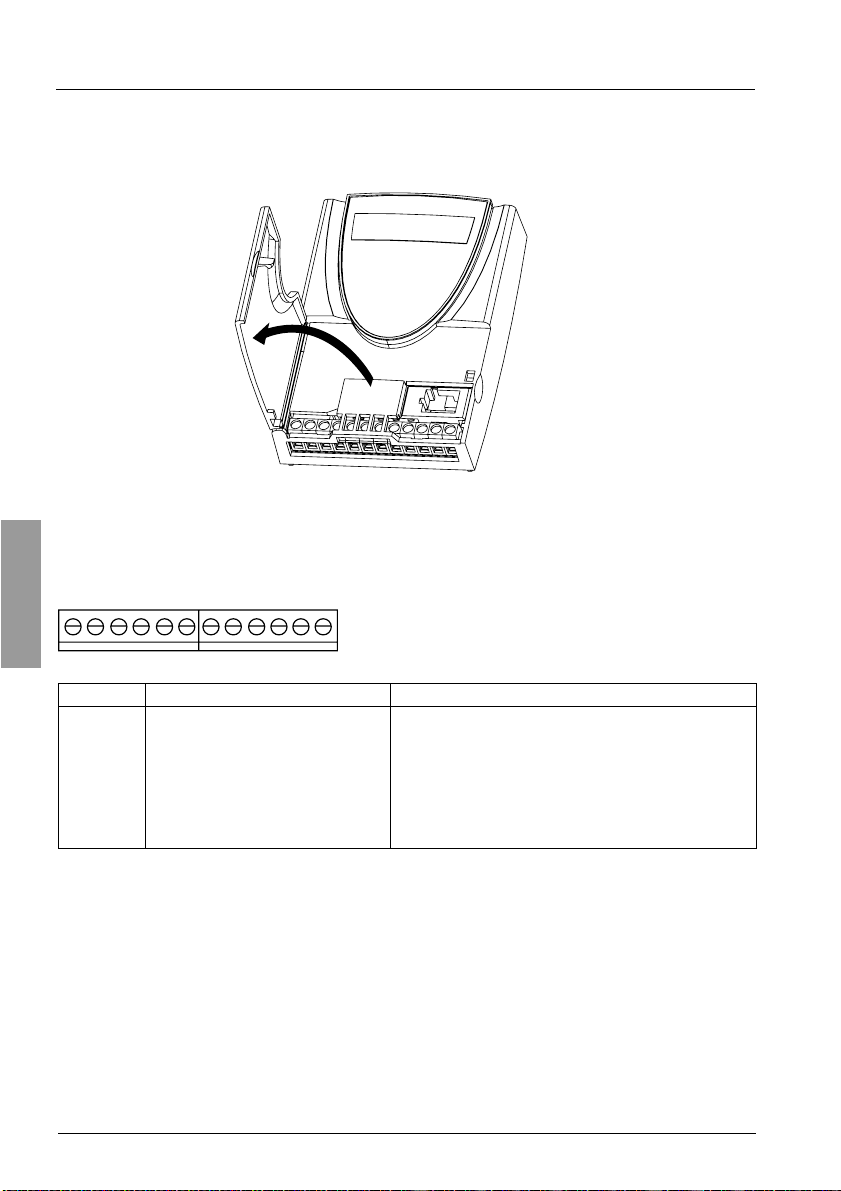
Steuerklemmenleisten
Für den Zugang zur Steuerkle mmenleiste die Klappe wie nachfolgend angegeben öffnen.
Anordnung, technische Daten und Funktionen der Steuerklemmenleisten
RCRANicht belegt0V
AI 1
+5VDOLI 1
LI 2
LI 3
DEUTSCH
Anschluss Funk tion Elektrische Kenndaten
RC
RA
17
Kontakt des Störmelderelais
(offen bei Störung oder Fehlen der
Spannung)
- Maximale Anschlusskapazität:
LI 4
+15V
2
- AWG 14
1,5 mm
- Maximales Anzugsmoment:
0,5 Nm.
Minimales Schaltvermögen:
• 10 mA bei 24 V c
Maximales Schaltvermögen:
• 2 A bei 250 V a und 30 V c bei induktiver Last
(cos ϕ = 0,4 und L/R = 7 ms)
• 5 A bei 250 V a und 30 V c bei ohmscher Last
(cos ϕ = 1 und L/R = 0)
• Abtastzeit max. 20 ms
Page 18
Verdrahtung
Anordnung, technische Daten und Funktionen der Ste uerklemmenleisten
(Fortsetzung)
Anschluss Funktion Elektrische Kenndaten
0V Bezugspotential für Ein-
AI1 Analogeingang als
+5V Spannungsversorgun g für
DO Konfigurierbarer Analog-
LI1
LI2
LI3
LI4
+15V Spannungsversorgun g der
und Ausgänge
Spannung oder als Strom
Sollwertpotentiometer 2,2
bis 10 kΩ
oder Logikausgang
Logikeingänge Programmierbare Logikeingänge
Logikeingänge
0 V
Analogeingang 0 + 5 V oder 0 + 10 V (max. Spannung 30 V)
• Impedanz 40 kΩ
• Auflösung 0,4 %
• Genauigkeit, Linearität: ± 5 %
• Probezeit max. 20 ms
Analogeingang 0 bis 10 mA oder 4 - 20 mA
• Impedanz 250 Ω (ohne Hinzufügen eines Widerstands)
• Auflösung 0,4 %
• Genauigkeit, Linearität: ± 5 %
• Probezeit max. 20 ms
• Genauigkeit: ± 5 %
Analogausgang mit Open Collector des Typs PWM mit 2 kHz:
• Spannung maximal 30 V
• Impedanz 1 kΩ, max. 10 mA
• Linearität ± 1 %
• Probezeit max. 20 ms
Logikausgang mit Open Collector:
• Spannung maximal 30 V
• Impedanz 100 Ω, max. 50 mA
• Probezeit max. 20 ms
• Spannungsversorgung +15 V (max. 30 V)
• Impedanz 5 kΩ
• Logisch 0, wenn < 5 V, logisch 1, wen n > 11 V bei p ositiver Logik
• Logisch 1, wenn < 5 V, logisch 0, wenn > 11 V oder ohne
Spannung (nicht angeschlossen) bei negativer Logik
• Probezeit max. 20 ms
+ 15 V ± 15 % geschützt gegen Kurzschlüsse und Überlasten.
Anwenderseitig max. verfügb arer Strom 100 mA
DEUTSCH
18
Page 19
Verdrahtung
A
A
A
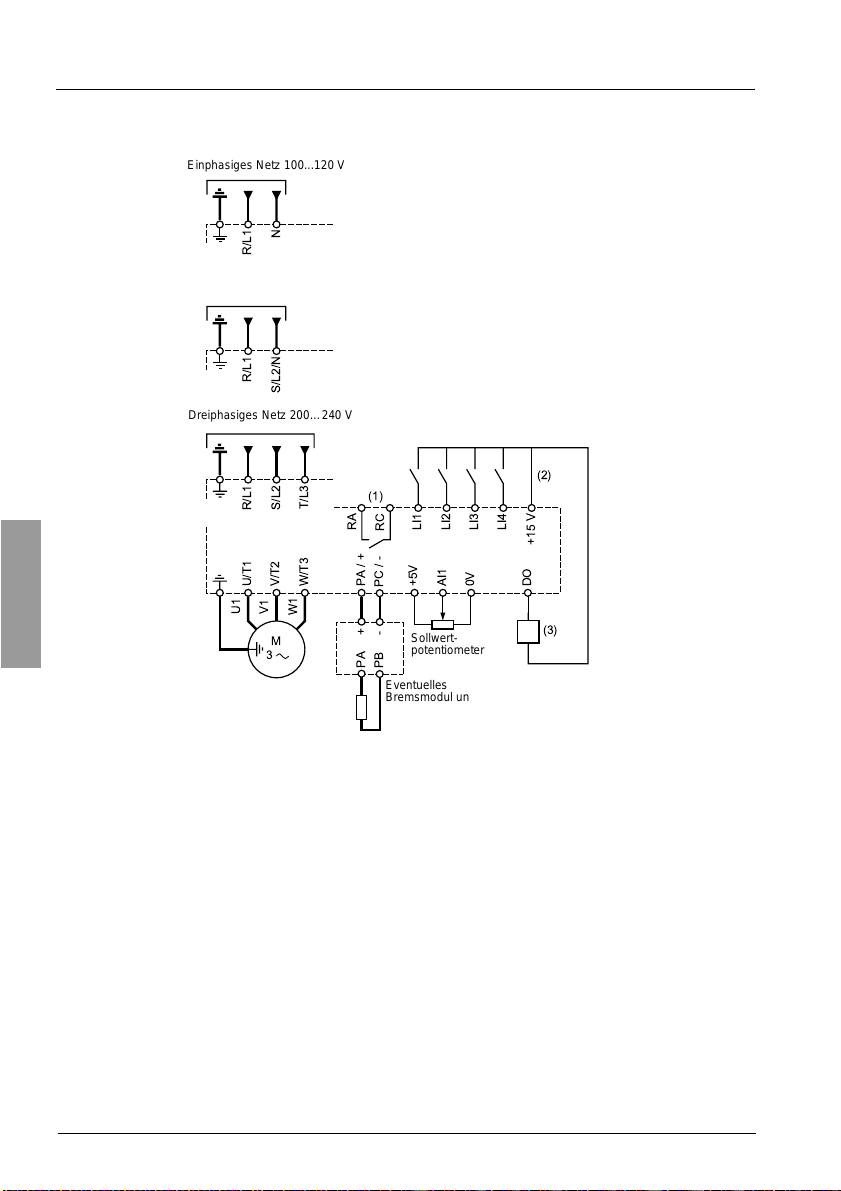
Verdrahtungsschema für werkseitige Voreinstellung
Einphasiges Netz 100...120 V
TV11ppppF1p
Einphasiges Netz 200...230 V
TV11ppppM2p
Dreiphasiges Netz 200…240 V
TV11ppppM3p
DEUTSCH
Dreiphasiger Motor
200...230 V
(1) Störmelderelaiskontakte, für Signalisierung des Umrichterzustands.
(2) + 15 V intern. Bei Verwendung einer externen Spannungsquelle (max. + 24 V), die 0 V Klemmen
=
Eventuelles
Bremsmodul und
Bremswiderstand
Sollwertpotentiometer
verbinden und die Klemme + 15 V des Umrichters nicht verwenden.
(3) Strommessgerät oder Relais mit gerin ger Leistungsaufnahme verwenden.
Hinweis: Alle induktiven Komponenten, die sich in der Nähe des Umrichters befinden oder mit diesem
galvanisch gekoppelt sind, müssen entstört werden, wie beispielsweise Relais, Schaltschütze,
Magnetventile …
Auswahl von Zubehörteilen:
Siehe Katalog Altivar 11.
Verwendung eines Bremswiderstandes
Fügen Sie unbedingt zwischen Umr i chter und Widerstand ein Bremsmodul VW3 A11701 hinzu.
19
Page 20
Verdrahtung
Ersetzen eines ATV08 durch einen ATV11
Achtung bei einem Austausch von ATV08 durch einen ATV11:
Unterschiedliche Anordnung und Kennzeichnung der Steuerklemmenleisten!
R1C
+5V
0V
not used
AI1AOCOM
AI1
R1A
RC
RA
Empfehlungen zur Verdrahtung
Stromversorgung
Die in den Normen angegebenen Empfehlungen für Kabelquerschnitte befolgen.
Der Umrichter muss geerd et werden, um de n Vorschri ften hinsich tlich ho her Ableit ströme (über 3 ,5 mA) z u
genügen.
Wenn die Installationsvorschriften einen vorgeschalteten Schutz durch ein FI-Schutzschalter oder
Differenzstromauslösen fordern, müssen Sie bei einphasigen Umrichtern ein Gerät vom „Typ A“ und bei
dreiphasigen Umrichtern ein Gerät vom „Typ B“ verwenden. Wählen Sie ein Produkt mit folgenden
Eigenschaften:
• einem Filter für hochfrequente Ströme,
• einer Verzögerung, die ein Auslösen aufgrund der Ladung von Kapazitäten und Störungskapazitäten
beim Einschalten verhindert. Diese Verzögerung ist bei 30-mA-Geräten nicht möglich. Wählen Sie in
diesem Fall Geräte, die unempfindlich gegenüber unbeabsichtigtem Ausl ösen sind, beispielsweise
Differentialrestgeräte mit ve rs tärkter Störfestigkeit der Reihe si (superimmunisiert) (Marke Merlin
Gerin).
Wenn die Anlage aus mehreren Frequenzumrichtern besteht, muss eine Fehlerstrom-Schutzeinrichtung
(FI-Schalter) pro Umrichter eingesetzt werden.
Die Leistungskabel getrennt von den Niedrigpegel-Signalkreisen in der Installation (Detektoren, SPS,
Messvorrichtungen, Video, Telefon) verlegen.
+5V
LI1
LI3
LI2
LI4
+15V
LI1
LI3
LI2
LI4
DO
+15V
DEUTSCH
Steuerung
Die Steuerkreise und Leistungskreise voneinander getrennt halten. Für Steuer- und Sollwertleitungen
empfiehlt es sich, ein abgeschirmtes und verdrilltes Kabel mit einem Verdrillungsschlag zwischen 25 und
50 mm zu verwenden. Die Abschirmung wird dabei an jed em Ende geerdet.
20
Page 21

Verdrahtung
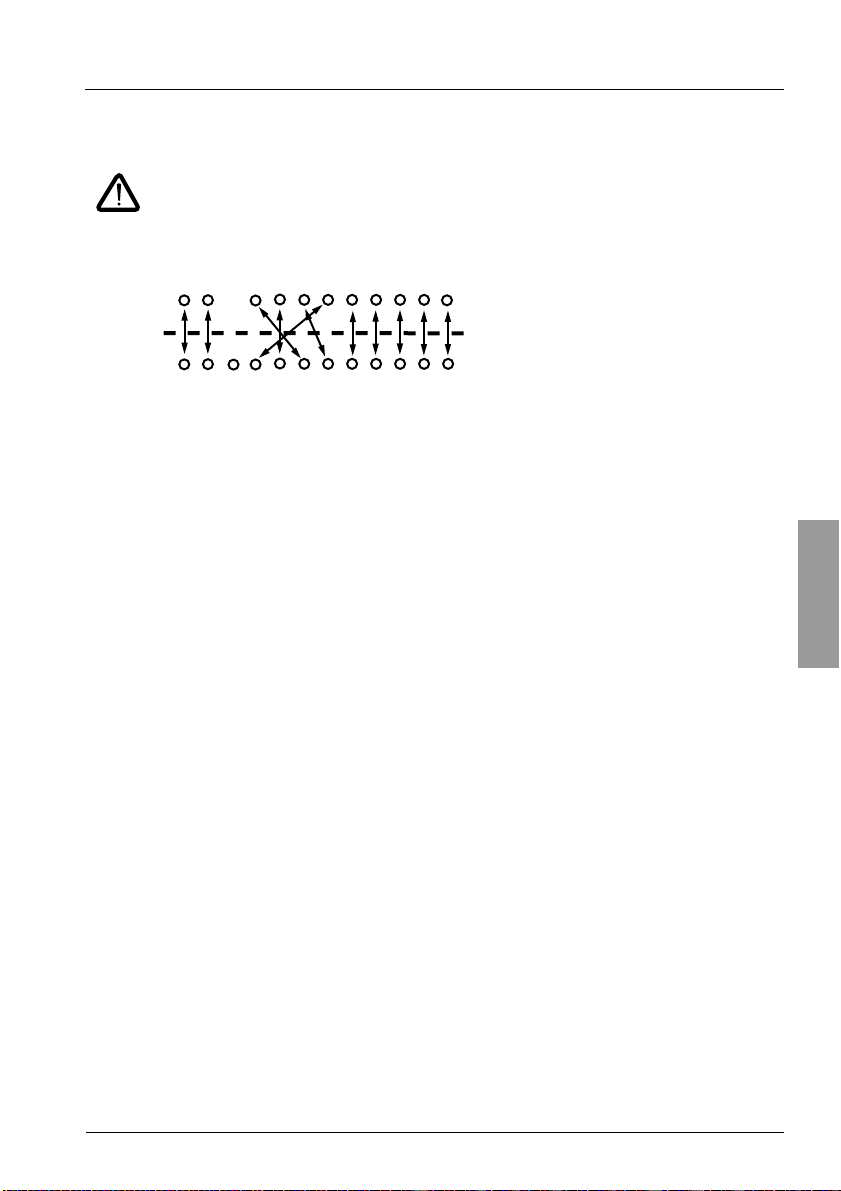
Elektromagnetische Verträglichkeit
Prinzip
• Erdverbindungen zwischen Frequenzumrichter, Motor und Kabelabschirmung müssen nach
Hochfrequenz-Gesichtspunkten niederohmig gestaltet sein.
• Abgeschirmte Kabel verwenden, wobei die Abschirmung der Motorkabel, des eventuellen
Bremswiderstands sowie von Steuerung und Überwachung beidseitig (360°) kontaktiert und geerdet
sein muss. Diese Abschirmung kann ganz oder teilweise in Form von Rohren oder Metallkanälen
ausgeführt werden, solange keine Unterbrechungen der Verbindungen vorkommen.
• Das Spannungsversorgungskabel (Netz) so weit entfernt wie möglich vom Motorkabel verlegen.
Installationsdiagramm (Beispiel)
!
DEUTSCH
"
$
%
#
&
21
Page 22

Verdrahtung
1 Im Lieferumfang nicht enthaltene EMV-Platte (VW3A11831), Montage auf dem Umrichter wie in der
Abbildung angegeben.
2Altivar 11
3 Nicht abgeschirmte Netzanschlusskabel
4 Nicht abgeschirmte Kabel für Kontakte des Störmelderelais
5 Die Abschirmung für die Kabel 6 und 7 muss so nahe wie mögli ch am F requenz umri chte r befes ti gt und
niederohmig geerdet werden:
- die Abschirmung abisolieren,
- die abisolierten Teile der Abschirmung mit Kabelschellen der richtigen Größe an der EMV-Platte
befestigen.
Die Kabelschellen müssen fest angezogen werden, um einen guten Kontakt zu gewährleisten.
- Art der Kabelschellen: rostfreier Stahl
6 Abgeschirmtes Motorkabel, Abschirmung an beiden Enden geerdet
Sie muss ununterbrochen sein, etwaige zwischenliegende Anschlussleisten müssen sich in einem
abgeschirmten Metallge häuse befinden. Der Schutzleiter PE (grün-gelb) des Motorkabels muss an die
EMV-Platte angeschlossen werden, z. B. unter der Kabelschelle aus Metall.
7 Abgeschirmtes Steuerkabel
Für Anwendungen, die mehre r e Leiter erfordern, sollten kleine Querschnitte verwendet werden
2
(0,5 mm
Die Abschirmung muss an beiden Enden geerdet werden. Sie muss ununterbrochen sein, etwaige
zwischenliegende Anschl ussleisten müssen sich in einem abgeschirmten Metallgehäuse befinden.
8 Schutzleiter, Querschnitt 10 mm
Hinweis:
• Bei Verwendung eines zusätzlichen Netzfilters muss dieser unter dem Umrichter angebracht und über
ein nicht abgeschirmtes Kabel direkt an das Netz angeschlossen werden. Der Anschluss (3) am
Umrichter wird durch das Ausgangskabel des Filters realisiert.
• Die niederohmige Erdung vo n Frequen zumrichter, Motor und Kab elabschirmung entbindet nicht davon,
die Schutzleiter PE (grün-gelb) an die entsprechenden Anschlüs se an jeder Komponente
anzuschließen.
).
2
DEUTSCH
22
Page 23

Grundlegende Funktionen
Störmelderelais, Entriegelung
Das Störmelderelais ist geschlossen, wenn der Frequenzumrichter eingeschaltet ist und keine Störung
aufweist. Bei einer Störun g (oder Umrichter ohne Spannung) fällt der Kont akt ab.
Die Entriegelung des Umrichters nach einer Störung geschieht wie folgt:
• durch Abschalten und Abwar ten bis zum Erlösch en der Anzeige und anschließende s Wiederanschalt en
des Umrichters,
• automatisch in den unter „Automatischer Wiederanlauf“ (Menü FUn, Atr = YES) beschriebenen Fällen,
• durch einen Logikeingang, der der Funktion „Reset“ zugeordnet ist
(Menü FUn, rSF = LIp).
Thermischer Schutz des Umrichters
Thermischer Schutz über in das Leis tungsmodul integrierten PTC-Fühler.
Belüftung der Umrichter
Bestimmte Umrichtertypen besitzen eine Fremdbelüftung: ATV 11HU18F1A, ATV 11HU18F1U, ATV
11pU18M2U, ATV 11pU18M3U, ATV 11HU29ppp, ATV 11HU41ppp
Der Lüfter wird automatisch mit Spannung versorgt, sobald der Umrichter eingeschaltet ist.
Thermischer Schutz des Motors
Funktion:
Thermischer Schutz durch Be rechnung von I
2
t.
DEUTSCH
23
Der Speicher des thermischen Motorzu standes wi rd beim Absch alten des Umrich ters auf
Null zurückgesetzt.
Page 24

Inbetriebnahme - Einleitende Empfehlungen
Vor dem Einschalten und Konfigurieren des Umrichters:
- Die Logikeingänge ausschalten (logisch 0), um ein versehentliches Anlaufen zu
verhindern. Unterbleibt dies, kann nach Verlassen der Konfigurationsmenüs ein mit
einem Fahrbefehl belegter Eingang sofort das Anlaufen des Motors auslösen.
Bei Leistungssteuerung über Netzschütz:
- Häufige Betätigung des Schützes vermeiden (vorzeitiges Altern der
Filterkondensatoren); die Eingänge LI1 bis LI4 zum Steuern des Umrichters verwenden.
- Bei Zyklen < 5 Minuten sind diese Anordnungen unbedingt erforderlich, um e in Ris iko
der Zerstörung des Lastwiderstands zu vermeiden.
Benutzereinstellung und Funktionserweiterungen
Falls notwendig, können mit Hilfe der Anzeige und der Tasten die Einstellungen verändert und die
Funktionen erweitert werden, wie auf den nächsten Seiten ausführlich beschrieben. Die Rückkehr zur
werkseitigen Einstellung ist einfach.
Sicherstellen, dass die Veränderungen der E instellungen während des Betriebs keine
Gefahr darstellen; Einstellungsänderungen vorzugsweise bei Stillstand durchführen.
DEUTSCH
24
Page 25

Programmierung
r
•
•
r
T
Funktionen der Anzeige und der Tasten
Reihen E und U:
• 3 7-Segme n tAnzeigen
Verlassen eines Menüs
oder Parameters oder
Rückkehr vom
angezeigten Wert zum
zuletzt gespeicherten
Wert
Wechsel zum vorherigen
Menü oder Parameter oder
Erhöhen des angezeigte n
Werts
Über oder erfolgt keine Speicherung der Auswahl.
DEUTSCH
Speicherung, Aufzeichnung der angezeigten Auswahl:
Bei Speicherung blinkt die Anzeige
Normalanzeige ohne Störung und außer Betrieb:
- rdY: Umri chter berei t
- 43.0: Anzeige des gewählten Parameters im Menü SUP- (Voreinstellung: Frequenzsollwert).
- dcb: Gleichstrombremsung erfolgt
- nSt: Freier Auslauf
Eine Störung wird durch Blinken angezeigt.
ESC ENT
EN
• Aufruf eines Menüs ode
Parameters oder
Speicherung des
Parameters oder des
angezeigten Werts
• Wechsel z um n äc h s ten
Menü oder Parameter ode
Verringerung des
angezeigten Werts
25
Page 26

Programmierung
•
r
• Wechsel zum vorherigen
•
•
t
t
f
t
.
•
T
Funktionen der Anzeige und der Tasten
Reihen A und E327:
Menü oder Parameter
oder Erhöhen des
angezeigten Werts
Verlassen eines Menüs
oder Parameters oder
Rückkehr vom
angezeigten Wert zum
zuletzt gespeicher ten Wert
RUN-Taste: steuert das
Einschalten des Motors im
Rechtslauf, wenn der
Parameter tCC im Menü FUn
auf LOC konfiguriert ist
Wechsel zum nächsten
Menü oder Parameter
oder Verringerung des
angezeigten Werts
Sollwertpotentiometer,
aktiv, wenn der Parameter LSr im
Menü FUn auf LOC konfiguriert ist
ESC
RUN
ENT
STOP
• 3 7-Segment-Anzeigen
• Aufruf eines Menüs ode
Parameters oder
Speicherung des
Parameters oder des
angezeigten Werts
• STOP-Taste: Kann jederzei
den Stillstand des Motors
erwirken.
- Wenn tCC (Menü FUn)
nicht auf LOC konfigurier
ist, erfolgt das Anhalten im
freien Auslauf.
- Wenn tCC (Menü FUn) au
LOC konfiguriert ist, erfolg
das Anhalten über Rampe
Ist jedoch eine Bremsung
mit Gleichstrombremsung
aktiv, erfolgt das Anhalten
im freien Auslauf.
Über oder erfolgt keine Speicherung der Auswah l.
Speicherung, Aufzeichnung der angezeigten Auswahl:
Bei Speicherung blinkt die Anzeige
Normalanzeige ohne Störung und außer Betrieb:
- rdY: Umrichter bereit
- 43.0 : Anzeige des gewählten Parameters im Menü SUP- (Voreinstellung: Frequenzsollwert)
- dcb: Gleichstrombremsung erfolgt
- nSt: Freier Auslauf
Eine Störung wird durch Blinken angezeigt.
EN
DEUTSCH
26
Page 27

Programmierung
Zugriff auf die Menüs
Zeigt den Zustand des Umrichters an
Nennfrequenz des Motors (der vorein ges tellte Wert
erscheint nur beim ersten Eins chalten)
Hochlaufzeit
Auslaufzeit
Kleine Frequenz
Große Frequenz
Thermischer Motorstrom
2. Vorwahlfrequenz (1)
3. Vorwahlfrequenz (1)
4. Vorwahlfrequenz (1)
DEUTSCH
Menü: Analogeingang (2)
Menü: Motorsteuerung
Menü: Anwendungsfunk tionen
Menü: Überwachung
:::
bFr
ACC
dEC
LSP
HSP
ItH
SP2
SP3
SP4
AIt
drC
Fun
SUP
-5+
-5+
-5+
-5+
-5+
-5+
Einstellparameter
1. Ebene
-5+
-5+
-5+
-5+
-5+
Menüs
-5+
-5+
(1) Die Vorwahlfrequenzen erscheinen nur, wenn sich die entsprechende Funktion in Werkseinstellung
befindet oder im Menü FUn neu konfiguriert wurde.
(2) Neues Menü der Version V1.2, ersetzt den Einstellparameter der 1. Ebene „AIt“ der Version V1.1.
27
Page 28

Einstellparameter 1. Ebene
T
Zugang zu den Parametern
Speicherung der angezeigten Auswahl :
Bei Speicherung blinkt die Anzeige
Beispiel:
Parameter
Wert oder Belegung
ENT
-// #$(
ESC
@1/
#%) #%)
(nächster Parameter)
Die nicht grau hinterlegten Parameter sind nur im Stillstand, bei verriegeltem Umrichter,
veränderbar.
Die grau hinterlegten Parameter können sowohl während des Betriebs als auch im Stillstand
verändert werden.
EN
ESC
ENT
1 Aufblinken
(Speicherung)
Code Beschreibung Einstellbereich Werkseitige
Voreinstellung
>2H Motorfrequenz 50 Hz
oder
60 Hz
50 (Reihen E und A)
oder
60 (Reihe U)
Dieser Parameter ist hier nur beim ersten Einschalten sichtbar.
Im Menü FUn kann er jedoch jederzeit geändert werden.
-// Hochlaufzeit 0,1 s bis 99,9 s 3
Definiert für einen Bereich von 0 Hz bis zur Nennfrequenz des Motors FrS (Parameter im Menü
drC).
@1/ Auslaufzeit 0,1 s bis 99,9 s 3
Definiert für einen Bereich von der Nennfrequenz des Motors FrS (Parameter im Menü drC) bis
0Hz.
7;: Kleine Frequenz 0 Hz bis HSP 0
Motorfrequenz bei Sollwert 0.
4;: Große Frequenz LSP bis 200 Hz = bFr
Motorfrequenz bei maximalem Sollwert.
Überprüfen, dass die Einstellung mit Motor und Anwendung vereinbar ist.
5I4 Thermischer Motorstrom 0 bis 1,5 In
Je nach Umrichter
(1)
Für den thermischen Mo torschutz verwendeter S trom. ItH au f den vom Ty penschild ab gelesenen
Bemessungsbetriebsstrom einstellen.
;:% 2. Vorwahlfrequenz (2) 0,0 Hz bis HSP 10
;:& 3. Vorwahlfrequenz (2) 0, 0 H z bi s HS P 25
;:' 4. Vorwahlfrequenz (2) 0, 0 H z bi s HS P 50
(1) In = Nennstrom des Umrichters
(2) Die Vorwahlfrequenzen erscheinen nur, wenn sich die entsprechende Funktion in Werks einstellung
befindet oder im Menü FUn neu konf iguriert wurde.
DEUTSCH
28
Page 29

Menü „Analogeingang“ AIt
A
Neues Menü der Version V1.2.
(<
-5I -/I
ENT
ESC
/H7
ESC
/H4
ESC
Die Parameter sind nur im Stillstand, bei verriegeltem Umrichter, veränderbar.
$#<
ENT
#-
ESC
'-
/<;
ENT
Wert
ESC
ENT
Wert
ESC
Code Bezeichnung Einstell-
bereich
Werkseitige
Voreinstellung
-/I Skalierung des Analogeingangs AI1
5U
(<: als Spannung 0 - 5 V (nur interne Spannungsversorgung)
$#<: als Spannung 0 - 10 V (externe Spannungsversorgung)
#-: als Strom 0 - 20 mA
'-: als Strom 4 - 20 mA
/<;: als Strom X - Y mA (benutzerdefiniert)
DEUTSCH
Wenn CUS aktiv ist, ist CrL (X) und CrH (Y) zu konfigurieren.
Diese beiden Parameter definieren das an AI1 gesendete Signal.
Möglichkeit der Konfiguration des Eingangs für 0-20 mA-/4-20 mASignale.
Analogeingang
nwendung 10 V extern
AI1
SollwertPotentiometer
2,2 bis 10 kΩ
+10V
0V
Quelle
0 - 20 mA
oder
4 - 20 mA
Analogeingang
0 - 20 oder 4 - 20 mA
/H7 Min. Wert des Signals am Eingang AI1
Erscheint, wenn CUS aktiviert wurde. Min. Referenz von AI 1 in mA.
(CrL < CrH)
/H4 Max. Wert des Signals am Eingang AI1
Erscheint, wenn CUS aktiviert wurde. Max. Referen z von AI1 in mA.
(CrH > CrL)
AI1
0V
0 bis 20.0 4.0
0 bis 20.0 20.0
29
Page 30

Menü „Motorsteuerung“ drC
drC
ENT
UnS
ESC
ESC
FrS
ESC
StA
ESC
FLG
ESC
UFr
ESC
nCr
ESC
CLI
ESC
nSL
ESC
SLp
ESC
COS
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
Nennspannung Motor
Wert
Nennfrequenz Motor
Wert
Wert
Stabilität des Frequenzreglers
Verstärkung des Fr equenzreglers
Wert
RI-Kompensation
Wert
Motorbemessungs-Betriebsstrom
Wert
Motorbegrenzungsstrom
Wert
Wert
Motornennschlupf
Schlupfkompensation
Wert
Cosinus ϕ Motor (Nennwert)
Wert
DEUTSCH
30
Page 31

Menü „Motorsteuerung“ drC
Die nicht grau hinterlegten Parameter sind nur im Stillstand, bei verriegeltem Umrichter
veränderbar.
Die grau hinterlegten Parameter können sowohl während des Betriebs als auch im Stillstand
verändert werden.
Eine Optimierung der Antriebsleistungen wird erreicht, indem die auf dem Leistungsschild des Motors
abgelesenen Werte eingegeben werden.
Code Bezeichnung Einstellbereich Werkseitige
<D; Vom Typenschild abgelesene Nennspannung
des Motors
Wenn die Netzspannung niedriger als die auf dem
Typenschild angegebene Motors pannung ist, ist
UnS auf den Wert der Netzspannung ei nzustellen,
die an die Umrichterklemmen angelegt wurde.
2H; Vom Typenschild abgelesene Nennfrequenz des
Motors
;I- Stabilität des Frequenzreglers (2)
Ein zu hoher Wert führt zu einer Verl ängerung der
Ansprechzeit.
Ein zu niedriger Wert führt zu einem Überschwing en
der Frequenz und somit zu Instabilität .
273 Verstärkung des Frequenzreglers (2)
Ein zu hoher Wert führt z u einem Über schwingen der
Frequenz und somit zu Instabilität.
DEUTSCH
Ein zu niedriger Wert führt z u einer Verlängeru ng der
Ansprechzeit.
<2H RI-Kompensation
Ermöglicht die Optimierung des Drehmoments bei
sehr niedriger Drehzahl oder die Anpassung an
Sonderfälle (Beispiel: bei parallelgeschalteten
Motoren UFr absenken).
Ist das Drehmoment bei niedriger Drehzahl nicht
ausreichend, muss UFr erhö ht werden. Ei n zu hoher
Wert kann den Motoranlauf blockier en oder zu einer
Strombegrenzung führen.
D/H Vom Typenschild abgelesener Nennstrom des
Motors.
/75 Motorbegrenzungsstrom 0,5 bis 1,5 In (1) 1,5 In
100 bis 500 V Je nach Baugröße
40 bis 200 Hz 50 / 60 Hz je nach
0 bis 100 % im
Stillstand
1 bis 100 % im
Betrieb
0 bis 100 % im
Stillstand
1 bis 100 % im
Betrieb
0 bis 200 % 50
0,25 bis 1,5 In (1) Je nach Baugröße
Voreinstellung
bFr
20
20
(1) In = Nennstrom des Umrichters
(2) Verfahren auf beilg. Blat t
31
Page 32

Menü „Motorsteuerung“ drC
E
rn
n
Verfahren für die Drehzahlregelung - FLG und StA
Falls die Einstellungen für FLG und StA geändert werden müssen:
• Anwendungen mit hohem Trägheitsmoment
• Bedarf an kurzen Reaktions zeiten und schnellen Zyklen
• Lasten mit Un wucht
FLG
Mit dem Parameter FLG werden die Anstiegswerte der Frequenzrampe in Abhängigkeit der Trägheit der
Maschine abgeglichen.
influssbereich des FLG-Para meters
Hz
50
40
30
20
10
0
-10
0 0,1 0,2 0,3 0,4 0,5
In diesem Fall FLG erhöhen
StA
Über den Parameter StA können Überschwinger und Schwingungen bei Hochlaufende reduziert werden.
Hz
50
40
30
20
10
0
-10
t
0 0,1 0,2 0,3 0,4 0,5
FLG korrekt
Hz
50
40
30
20
10
0
-10
t
0 0,1 0,2 0,3 0,4 0,5
In diesem Fall FLG verminde
t
DEUTSCH
Hz
50
40
30
20
10
0
-10
0 0,1 0,2 0,3 0,4 0,5 t
In diesem Fall StA erhöhen
Einflussbereich des StA-Parameters
Hz
50
40
30
20
10
0
-10
0 0,1 0,2 0,3 0,4 0,5 t
StA korrekt
Hz
50
40
30
20
10
0
-10
0 0,1 0,2 0,3 0,4 0,5 t
In diesem Fall StA verminder
Hinweis:
Wenn FLG = 0 oder StA = 0, dann Wechsel des Profils: Wechsel eines Profils für die Flussvektorregelung
ohne Sensor zu einer Regelung des Typs U/f-Kennlinie (identisch mit den Profilen vo n AT V08).
Aus diesem Grund unterscheiden sich bei derselben Anwendung die Einstellungen für UFr, FLG und StA
von denen des ATV08.
32
Page 33

Menü „Motorsteuerung“ drC
Ns - Nn
Die nicht grau hinterlegten Parameter sind nur im Stillstand, bei verriegeltem Umrichter
veränderbar.
Die grau hinterlegten Parameter können sowohl während des Betriebs als auch im Stillstand
verändert werden.
Code Bezeichnung Einstellbereich Werkseitige
D;7 Motornennschlupf
Berechnung mit Hilfe der Formel:
nSL = Parameter FrS x
Nn = Vom Typenschild abgelesene Nenndrehzahl
des Motors
Ns = Synchrondrehzahl des Motors
Die Geschwindigkeitsangaben auf den
Motortypenschildern sind nicht unbedingt exakt.
• Ist die eingestellte Schlupffrequenz niedriger als
die tatsächliche Schlupffrequenz, läuft der Motor
nicht mit der korrekten Drehzahl.
• Ist die eingestellte Schlupffrequenz höher als die
tatsächliche Schlupffrequenz, ist die
Kompensation des Motors zu hoch, und die
Drehzahl ist nicht stabil.
DEUTSCH
In beiden Fällen muss der Wert für SLP
(Schlupfkompensation) erneut eingestellt werden.
;7: Schlupfkompensation
Ermöglicht die Regelung der Schlupfkompensation
um den durch den Motornennschlupf nSL
festgelegten Wert oder die Anpassung an
Sonderfälle (Beispiel: bei parallel geschalteten
Motoren SLP absenken).
/9; Vom Typenschild abgelesener Nennwert für den
Cosinus ϕ des Motors
Ns
0 bis 10,0 Hz Je nach Baugröße
0 bis 150 %
(von nSL)
0.50 bis 1.00 Je nach Baugröße
Voreinstellung
100
33
Page 34

DEUTSCH
34
Page 35

Menü „Anwendungsfunktionen“ FUn
2<D
DEUTSCH
ENT
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
;;H
ESC
ESC
ESC
ESC
ESC
I//
HH;
:;%
I7;
:5
H;2
H:%
7/%
D;I
;I:
>H-
-@/
;2I
27H
@#
-IH
7;H
D:7
>2H
5:7
;/;
2/;
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
Art der Steuerung
Linkslauf
(2. Drehrichtung)
Vorwahlfrequenzen
Betriebsdauer bei kleiner Frequenz (1)
PI-Regler (1)
Wiedereinschalten bei Störungen
2. Rampe
2. Strombegrenzung (1)
Freier Auslauf (1)
Geführter Auslauf bei Netzaus fall
Anpassung der Auslauframpe
Automatische Einspeisung von Gleichstrom
Taktfrequenz
Einfangen im Lauf
Zuordnung Logikausga ng / Analogausgang
Automatischer Wiederanlauf
Modus Frequenzsollwert
(nur Reihen A und E327)
Modus Frequenzsollwert
(nur Reihen A und E327) (1)
Auswahl der Logik für die Logikeingänge
(nur Reihen A und E327)
Motorfrequenz
Konfiguration des Fehlers PHF
(nur dreiphasige Modelle)
Speichern der Konfiguration
Aufrufen der Konfigu r ation
(1) Neues Menü der Version V1.2.
35
Page 36

Menü „Anwendungsfunktionen“ FUn
Achtung
Einem Eingang können mehrere Funktionen zugeordnet werden. Dies bedeutet, dass
wenn ein Eingang aktiviert ist, auch alle diesem Eingang zugeordneten Funktionen
aktiviert sind.
Unvereinbare Funktionen
Folgende Funktionen sind in den nachstehend beschriebenen Fällen nicht zug änglich oder deaktiviert:
Automatischer Wiederanlauf
Ist nur möglich für die Steuerungsart „2-Draht-St euerung bei Niveau“ (tCC = 2C und t C t = LEL oder PFO).
Eine Änderung der Steuerungsart nach Konfiguration des automatischen Wiederanlaufs deaktiviert die
Funktion.
Einfangen im Lauf
Ist nur möglich für die Steuerungsart „2-Draht-St euerung bei Niveau“ (tCC = 2C und t C t = LEL oder PFO).
Eine Änderung der Steuerungs art nach Konfiguration des Einfangens im Lauf deaktiviert die Funktion.
Diese Funktion ist gesperrt, wenn eine permanente automatische Einspeisung im Stillstand konfiguriert
wurde (AdC = Ct).
Durch Umschalten auf Ct, n achde m die Funkt ion „Ein fangen im L auf “ ko nfi guri ert wurd e, wird die Funk tion
deaktiviert.
Linkslauf
Diese Funktion ist bei den Reihen A und E327 nur gesperrt, wenn die lokale Steuerung aktiv ist
(tCC = LOC).
DEUTSCH
36
Page 37

Menü „Anwendungsfunktionen“ FUn
A
rt der Steuerung
I// -/I
ESC
ENT
I/I
%/
ESC
&/
ENT
79/
717
ESC
IHD
ENT
:29
Die nicht grau hinterlegten Parameter sind nur im Stillstand, bei verriegeltem Umrichter
veränderbar.
Die grau hinterlegten Parameter können sowohl während des Betriebs als auch im Stillstand
verändert werden.
2-Draht-Steuerung:
Der Fahrbefehl (Rechtslauf oder Linkslauf) und das Anhalten werden über denselben Logikeingang
gesteuert.
Arten der 2-Draht-Steuerung:
• tCt = LEL: Logisch 0 oder 1 wird für das Ei n- oder Ausschalten berücksichtigt.
• tCt = trn: Eine Zustan dsänd erun g (Übe rgan g oder F lanke) is t für da s Eins chal ten erf orderlic h, da durc h
lässt sich ein unbeabsichtigt er Wiederanlauf nach einer Unterbrechung der Spann ungs versorgung
vermeiden.
• tCt = PFO: Logisch 0 oder 1 wird für das E in- oder Aus schalten berü cksichtigt, der Einga ng „Rechtslauf “
DEUTSCH
hat jedoch immer den Vorrang gegenüber dem Eingang „Linkslauf“.
3-Draht-Steuerung:
Der Fahrbefehl (Rechtslauf oder Linkslauf) und das Anhalten werden über 2 verschiedene Logikeingänge
gesteuert.
LI1 ist immer der Anhaltefunktion zugeordnet. Das Anhalten über Rampe wird durch das Öffnen erreicht
(logisch 0).
Der Impuls des Eingangs „Betrieb“ wird bis zu m Öffnen des Eingangs „Anhalten“ gespeichert.
Bei einem Einschalten oder einem manuellen Reset nach einer Störung bzw. bei einem Haltebefehl kann
der Motor erst nach einem Rücksetzen der Befehle „Rechtslauf“ oder „Linkslauf“ wieder anlaufen.
37
Page 38
Menü „Anwendungsfunktionen“ FUn
Code
der Funktion
I//
Beschreibung Werkseitige
Art der Steuerung
-/I
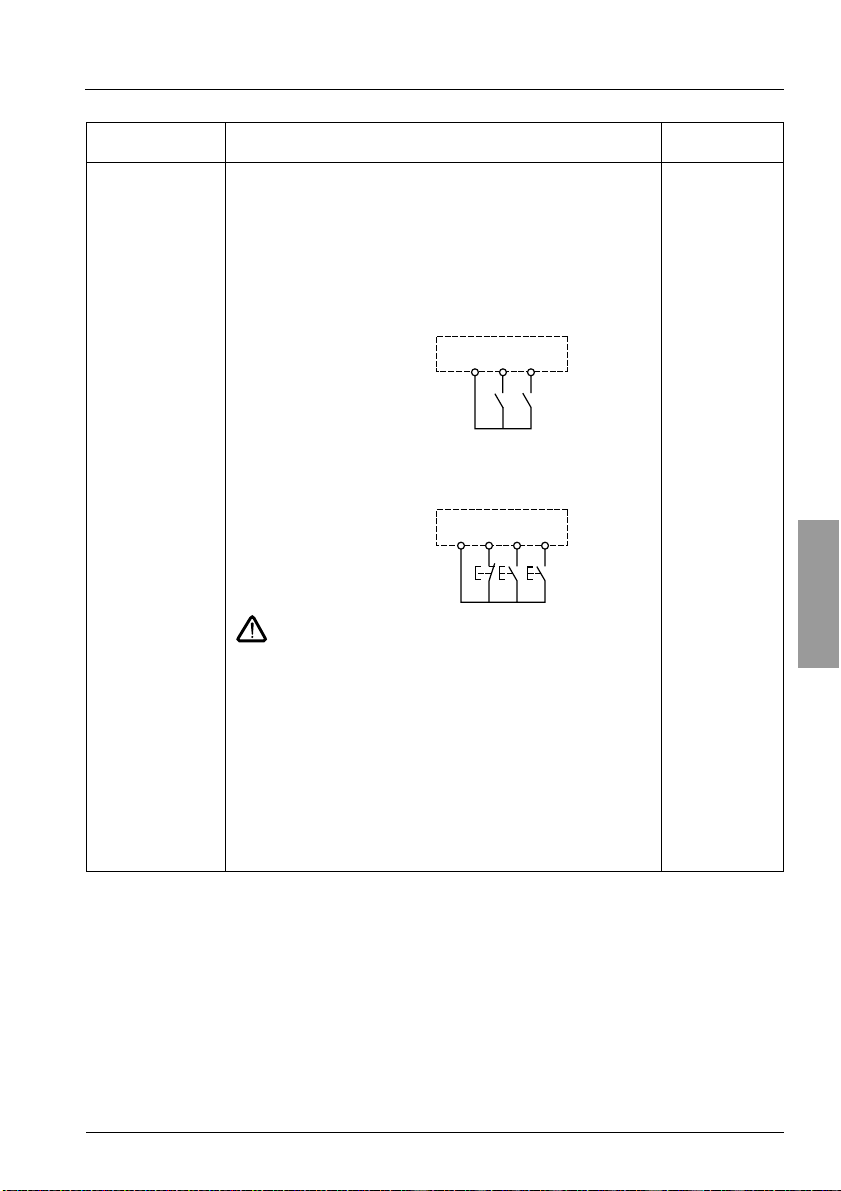
Konfiguration der Steuerung:
%/ = 2-Draht-Steuerung
&/= 3-Draht-Steuerung
79/ = Lokale Steuerung (RUN / STOP des Umrichters), nur
bei den Reihen A und E327.
2-Draht-Steuerung: Das Ein- oder Ausschalten wird über den
geöffneten oder geschlossenen Zustand des Eingangs
gesteuert.
Anschlussbeispiel:
LI1: Rechtslauf
LIx: Linkslauf
3-Draht-Steuerung (Steuerung über Impulse): ein Impuls
„Rechtslauf“ oder „Linkslauf“ reicht aus, um das Anlaufen des
Motors zu steuern; ein Impuls „Stopp“ reicht aus, um das
Anhalten des M ot or s zu st eu ern.
Anschlussbeispiel:
LI1: Stopp
LI2: Rechtslauf
LIx: Linkslauf
Zum Ändern der Belegung von tCC zwei Sekunden lang
auf die Taste „ENT“ drücken. Hierdurch werden folgende
Funktionen auf die Werkseinstellung zurückgesetzt: rrS,
tCt, Atr, PS2 (LIA, L Ib ).
I/I Art der 2-Draht-Steueru ng
(Parameter nur zugänglich, wenn tCC = 2C):
ATV 11
+15 V LI1 LIx
ATV 11
+15 V LI1 LI2 LIx
717: Logisch 0 oder 1 wird für das Ein- oder Ausschalten
berücksichtigt.
IHD: Für das Einschalten ist eine Zustandsänderung
(Übergang oder Flanke) erforderlich. Dadurch lässt sich ein
unbeabsichtigter Wiede ranlauf nach einer Unterbrechung der
Spannungsversorgun g vermeiden.
:29: Logisch 0 oder 1 wird für das Ein- oder Ausschalten
berücksichtigt. Der Eingang „Rechtslauf“ hat jedoch immer den
Vorrang gegenüber dem Eingang „Linkslauf“.
Voreinstellung
Reihen E und U:
2C
Reihen A und
E327:
LOC
DEUTSCH
trn
38
Page 39

Menü „Anwendungsfunktionen“ FUn
nO
Linkslauf
Vorwahlfrequenzen
rrS
PS2 LIA
ESC
ENT
ESC
ENT
LIb
SP2
SP3
SP4
LI1
LI2
LI3
LI4
nO
LI1
ESC
LI2
ENT
LI3
LI4
nO
LI1
ESC
LI2
ENT
LI3
LI4
ESC
Wert
ENT
ESC
Wert
ENT
ESC
Wert
ENT
Betriebsdauer bei kleiner
DEUTSCH
Die nicht grau hinterlegten Parameter sind nur im Stillstand, bei verriegeltem Umrichter
veränderbar.
Die grau hinterlegten Parameter können sowohl während des Betriebs als auch im Stillstand
verändert werden.
39
Frequenz
tLS
ESC
ENT
Wert
Page 40

Menü „Anwendungsfunktionen“ FUn
Vorwahlfrequenzen
Es können 2 oder 4 Fre quenzen vorgewählt werden, d ie jeweils einen oder zwei Logikeingä nge ben ötigen.
Die folgende Reihenfolge der Zuordnungen muss eingehalten werden: LIA (LIx ), dann LIb (LIy).
2 Vorwahlfrequenzen 4 Vorwahlfrequenzen
Zuordnen: LIx zu LIA Zuordnen: LIx zu LIA,
LIx Frequenzsollwert LIy LIx Frequenzsollwert
0 Sollwert (mind. = LSP) 0 0 Sollwert (mind. = LSP)
1 SP2 0 1 SP2
Die Vorwahlfrequenzen besitzen den Vorrang gegenüber einem über den Analogeingang, oder dem
Potentiometer des Umrichters (Reihen A und E327) erteilt en Sollwert.
Code
der Funktion
HH; Linkslauf
Beschreibung Werkseitige
D9: Funktion inaktiv
75$ bis 75': Auswahl des Eingangs, der der
Steuerung des Linkslaufs zugeordnet ist.
Wenn tCC = LOC ist dieser Parameter nicht zugänglich.
Wenn PIF = AI1 (Seite 46), wird rrS auf nO forciert.
:;% Vorwahlfrequenzen
Wenn LIA und LIb = 0: Frequenz = Sollwert
Wenn LIA = 1 und LIb = 0: Frequenz = SP2
Wenn LIA = 0 und LIb = 1: Frequenz = SP3
Wenn LIA = 1 und LIb = 1: Frequenz = SP4
Wurde die Funktion PI k onfiguriert, wi rd bei ATV31ppE und U
(PIF = AI1, s. S. 46), LIA auf LI1 forciert.
Die Vorwahlfre quenzen bleiben bei den Reihen A und E327
selbst bei lokaler Steuerung aktiv (tCC und/oder LSr = LOC).
75- Belegung des Eingangs LIA
75> Belegung des Eingangs LIb
D9: Funktion inaktiv
-
75$ bis 75': Auswahl des LIA zugeordneten Eingangs
-
D9: Funktion inaktiv
-
75$ bis 75': Auswahl des LIb zuge ordneten Einga ngs
-
anschließend LIy zu LIb
1 0 SP3
1 1 SP4
Voreinstellung
Wenn tCC = 2C: LI2
Wenn tCC = 3C: LI3
Wenn tCC = 2C: LI3
Wenn tCC = 3C: LI4
Wenn tCC = LOC: LI3
Wenn tCC = 2C: LI4
Wenn tCC = 3C: nO
Wenn tCC = LOC: LI4
DEUTSCH
SP2 ist nur dann erreichbar, wenn LIA zugeordnet ist, SP3
und SP4, wenn LIA und LIb zugeordnet sind.
;:%
2. Vorwahlfrequenz, von 0,0 Hz bis HSP einstellbar (1)
;:&
3. Vorwahlfrequenz, von 0,0 Hz bis HSP einstellbar (1)
;:'
4. Vorwahlfrequenz, von 0,0 Hz bis HSP einstellbar (1)
I7; Betriebsdauer bei kleiner Frequenz
(1) Die Einstellungen der Vorwa hlfrequenzen sind auch bei den Einstellparam etern der 1. Ebene
zugänglich.
Von 0 bis 999 Sekunden einstellbar.
Nach Betrieb in LSP während der festgelegten Dauer wird
der Auslauf des Motors a utomatisch befohlen. Der Motor läuft
wieder an, wenn der Frequenzs ollwert über LSP lie gt und ein
Betriebsbefehl immer noch vorhanden ist.
Achtung, der Wert 0 entspr icht einer unbegrenzten Zeit.
10
25
50
0 (keine
Zeitbegrenzung)
40
Page 41

Menü „Anwendungsfunktionen“ FUn
PI-Regler
Mit dem PI-Regler können Prozesse (Pegel, Druck, usw…) geregelt werden, die durch die Motorfrequenz
mit einem Frequenzsollwert und einem von einem Geber übermittelten Istwert gest euert werden.
Betriebsbedingungen
• Der Frequenzsollwert wird geliefert :
- entweder durch eine intern e Refer enz (rPI) , d ie e in P rozent sat z v on 0,1 % bi s 100 % des maxima len
Frequenzwerts HSP (bei allen Baureihen) ist;
- oder durch einen Frequenzsollwert (AIP), der vom Potentiometer auf der Frontseite bei den
Umrichtern ATV11 der Reihen A und E327 gegeben wird;
- oder durch drei über Logikeingänge vorgewählte Sollwerte (PI2, PI3 und PI4), die gegenüb er den
beiden zuvor genannten vorrangig sind.
• Die Geberrückführung erfolgt über den Analogeingang AI1.
Der Analogeingang AI1 wird im Menü AIt konfiguriert.
• Die PI-Funktion wird im Untermenü PI des Menüs FUn progra mmi ert.
• Folgende Parameter werden zur Konfiguration der PI-Funktion verwendet:
:52 = Zuweisung des Istwerts für die PI-Funktion
-
:55 = Wahl des internen Frequenzsollwerts
-
-
H:5 = Interner PI-Sollwert
H:3 = Proportionalverstärkung des PI-Reglers
-
H53 = Integralverstärkung des PI-Reglers
-
2>; = Skalierungsfaktor des PI-Istwerts
-
:5/ = PI-Umkehrung der Abweichung
-
:H% = 2 PI-Sollwerte vorgewählt über Logikeingang
-
-
:H' = 4 PI-Sollwerte vorgewählt über Logikeingänge
:5% = 2. vorgewählter PI-Sollwert
-
:5& = 3. vorgewählter PI-Sollwert
-
:5' = 4. vorgewählter PI-Sollwert
-
DEUTSCH
Hinweis: der 1. vorgewählte Sollwert ist:
- rPI, bei den Reihen E und U
- rPI oder AIP (bei den Reihen A und E327 vom Potentiometer gelieferter Sollwert).
Pr2 Pr4
LIx Frequenzsollwert LIy LIx Frequenzsollwert
0 rPI oder AIP (Reihen A und
E327)
1PI2 0 1PI2
Hinweis:
0 0 rPI oder AIP (Reihen A und
E327)
11PI3
10PI4
Bei den Reihen A und E327, ist die PI-Funktion in der Werkseins tellung nicht zugänglich. Zuerst
muss die lokale Steuerung deaktiviert und dann auf 2-Draht-Steuerung umgeschaltet werden (tCC/
ACt = 2C, siehe Seite 38).
Wird die PI-Funktion (PIF = AI1) aktiviert:
- wird rrS auf nO forciert.
- Bei den Baureihen A und E327, wird LSr auf LOC forc iert (vom Potentiometer gelieferter
Frequenzsollwert).
- Der Logikausgang DO kann der PI-Funktion zugewiesen werden. Wenn der PI-Regler in Betrieb ist,
wechselt der Ausgang in den logischen Zustand 1.
- Bei den Baureihen E und U wird die Funktion PS2-Vorwahlfrequenz automatisch LIA = LI1
zugewiesen (siehe Seite 40).
41
Page 42

Menü „Anwendungsfunktionen“ FUn
I
S
P
(
E
P
)
Hand-/Automatikbetrieb mit PI
Wird einem Logikeingang der Parameter PAU zugewiesen, kann über diese Funktion zwischen einem
Sollwert gewählt werden, der durch di e PI-Reg lerfunkt ion (automa tischer Betrie b) gelief ert wird u nd e inem
Sollwert (Handbetrieb), der entweder über das Potentiometer (Reihe A und E327) oder über die
Frequenzvorwahl SP2 festgelegt wird (Reihen E und U).
Anmerkung: Bei den Reihen E und U ist eine zweite Frequenzvorwahl SP4 abrufbar, indem in PS2 LIB
ein Logikeingang zugeordne t wird (LI1 immer noch auf 1).
Bei Handbetrieb wird der nicht aktive Sollwert am Ausgang des PI-Reglers automatischauf den gleichen
Wert geführt wie der Hand-Sollwert, damit bei einem Wechsel in den Automatikbetrieb die Differenz
zwischen den beiden Sollwerten so gering wie möglich is t, um eventuelle Ruckbe wegungen zu begrenzen .
PAU
LIX Betrieb Sollwert
0 Handbetrieb AIP (Reihe A und E327)
1 Automatikbetrieb Ausgang des PI-Reglers
Verfahrensweise zur Konfiguration der PI-Funktion
Aktion Menü Seiten
1 Konfigurieren des Analogeingangs AI1, Geberrückführung AIt 29
2 Konfigurieren der für die PI-Funktion notwendigen Parameter FUn 45
3 (Optional) Konfigurieren der Parameter für die
Betriebsdauer bei kleiner Frequenz (tLS)
und für den minimalen Schwellwert der Abwei ch ung bei Wiederanlauf
(rSL).
SP2 (Reihen E & U)
FUn 40 und 46
DEUTSCH
Pr2
nterner
ollwert
otentiometer
Reihen A und
327)
I-Istwert
PII
PIF
Pr4
Vorgewählte PI-
Sollwerte
FbS
AIP (Reihen A und E327)
Umkehrung der
Abweichung
PIC
(Automatikbetrieb)
Schwellwert der Abweichung
bei Wiederanlauf
(Weckalarm)
tLS
Verstärkung
PAU
(Handbetrieb)
Legende:
Rampen
.H0
H.H
Parameter
(Das schwarze
Rechteck
entspricht der
Belegung gemäß
Werkseinstellung
SP2 (Reihen E und U)
42
Page 43

Menü „Anwendungsfunktionen“ FUn
Inbetriebnahme des PI-Reglers
1 Einen Versuch in der Werkseinstellung starten (in den meisten Fällen ist diese geeignet)
Zur Optimierung rPG oder rIG schrittweise und unabhängig voneinander abgleichen und die Wirkung auf
den PI-Istwert und den Sollwert beobachten.
2 Wenn die Werkseinstellungen instabil sind oder der Sollwert nicht eingehalten wird
Für den Frequenzbereich des Systems unter Last einen Versuch mit einem Frequenzsollwert im
Handbetrieb ausführen (ohne PI-Regler):
- Im eingestellten Betrieb muss die Drehzahl stabil bleiben und dem Sollwert entsprechen, und der PIIstwert muss stabil bleiben.
- Im temporären Betrieb muss die Drehzahl der Rampe folgen und sich schnell stabilisieren, und der PIIstwert muss der Drehzahl folgen.
Andernfalls die Antriebseinstellungen und/oder das Gebersignal und di e Verdrahtung überprüfen.
Verwendung im PI-Modus
Die Auslauf-/Hochlauframpe (ACC, dEC) auf die für die Maschine zulässigen Minimalwerte einstellen,
ohne eine Störung auszulösen.
Den I-Anteil (rIG) auf den Minimalwert einstellen.
Den PI-Istwert und den Sollwert beobac hten.
Eine Reihe von Anlauf-/Anhalteoperationen oder schnelle Last- oder Sollwert-Änderungen durchführen.
Den P-Anteil (rPG) so einstellen, dass der beste Kompromiss zwischen Ansprechzeit und Stabilität
während der temporären Phasen gefunden wird (leichtes Überschwingen und maximal 1 bis 2
Schwingungen vor Stabilität).
Wird der Sollwert nicht im eingestellten Bet r ieb eingehalten, den I-Anteil (rIG) progressiv erhöhen, und bei
Instabilität (Pendeln) den P-Anteil vermindern (rPG). Einen Kompromiss zwischen Ansprechzeit und
statischer Genauigkeit finden (vgl. Diagramm auf der nächsten Seite).
DEUTSCH
Versuche über den gesamten Sollwertbereich durchführen.
43
Page 44

Menü „Anwendungsfunktionen“ FUn
Stabilisierungszeit
Regel-
größe
P-Anteil rPG
rPG hoch
Überschwingen
rPG niedrig
Anstiegszeit
Statischer Fehler
Regel-
größe
I-Anteil rIG
rIG niedrig
Regel-
größe
Die Schwingungsfrequenz hängt von der Kinematik des Systems ab.
Einfluss der Parameter:
Parameter Anstiegszeit Überschwingen Stabilisierungszeit Statischer Fehler
rPG
rIG
rIG hoch
rPG und rIG korrekt
=
Zeit
Zeit
DEUTSCH
Zeit
44
Page 45

Menü „Anwendungsfunktionen“ FUn
Untermenü PI
PI-Regler
DEUTSCH
ENT
:52:5
ESC
ESC
:5$
ESC
H:3
ESC
H53
ESC
2>;
ESC
H:5
ESC
:5/
ESC
:-<
ESC
:H%
ESC
:H'
ESC
:5%
ESC
:5&
ESC
:5'
ESC
H;7
ENT
ESC
ENT
ENT
ESC
D9
-5$
D9
=1;
Wert
ESC
ENT
Wert
ESC
ENT
Wert
ESC
ENT
Wert
ESC
ENT
ESC
ENT
D9
=1;
D9
75$
75%
ESC
ENT
75&
75'
D9
75$
75%
ESC
ENT
75&
75'
D9
75$
75%
ESC
ENT
75&
75'
Wert
ESC
ENT
Wert
ESC
ENT
Wert
ESC
ENT
Wert
ESC
Die nicht grau hinterlegten Parameter sind nur im Stillstand, bei verriegeltem Umrichter, veränderbar.
Die grau hinterlegten Parameter können sowohl während des Betriebs als auch im Stillstand
verändert werden.
45
Page 46

Menü „Anwendungsfunktionen“ FUn
Code
der
Funktion
Beschreibung Einstell-
bereich
:52 Zuweisung des Istwerts für die PI-Funktion
D9: Nicht zugewiesen (PI-Funktion nicht aktiv)
-5$: Analogeingang AI1 (P I-Funktion aktiviert)
:55 Aktivierung der Wahl des internen Frequenzsollwerts
D9: AIP, wenn nur Reihen A und E327 (Sollwert durch
Potentiometer)
=1;: rPI
PII = nO ist nur bei den Baureihen A und E327 sichtbar
H:3 Proportionalverstärkung des PI-Reglers 0 bis 9,99 1
H53 Integralverstärkung des PI-Reglers 0 bis 9,99 1
2>; Skalierungsfaktor des PI-Istwerts
Multiplikationsfaktor für den PI-Istwert, mit dem der maximale
Istwert entsprechend dem maximalen Sollwert des PI-Reglers
abgeglichen werden kann.
H:5 Interner PI-Sollwert 0 bis 100 % 0
:5/ Umkehr PI-Abweichung
0.01 bis 100 1
D9: Nein
=1;: Ja
:-< Hand-/Automatikbetrieb (Umschalten der Sollwerte)
D9: Nicht belegt
75$ bis 75': Wahl des zugeordneten Logikeingangs
Der Automatikbetrieb wird freigegeben, wenn der Eingang im
Zustand 1 ist.
:H% 2 vorgewählte PI-Sollwerte durch Zuordnung von LI
D9: Nicht belegt
75$ bis 75': Wahl des zugeordneten Logikeingangs
:H' 4 vorgewählte PI-Sollwerte durch Zuordnung von LI
Pr2 muss vor der Zuordnung von Pr4 zugeordnet werden.
D9: Nicht belegt
75$ bis 75': Wahl des zugeordneten Logikeingangs
:5% 2. vorgewählter PI-Sollwert 0 bis 100 % 30
:5& 3. vorgewählter PI-Sollwert 0 bis 100 % 60
:5' 4. vorgewählter PI-Sollwert 0 bis 100 % 90
H;7 Schwellwert der Abweichung bei Wiederanlauf.
Wenn die Funktionen „PI“ und „Betriebsdauer bei kleiner
Frequenz“ tLS gleichzeitig konfiguriert werden, besteht die
Möglichkeit, dass der PI-Regler eine Frequenz einzustellen
versucht, die kleiner als LSP ist. Hierdurch ergibt sich ein nicht
zufriedenstellender Betrieb, d. h. Anlauf, Drehung bei kleiner
Frequenz LSP, Stillstan d usw.
Mit dem Parameter rSL (Schwellwert der Abweichung bei
Wiederanlauf) kann ein minimaler Schwellwert der PIAbweichung für den Wiederanlauf nach einem Stillstand bei
„längerem LSP“ eingestel lt werden.
Nur sichtbar, wenn tLS > 0 und die PI-Funktion aktiviert sind.
0 bis 999 (999
= 99,9 %
Abweichung)
Werkseitige
Voreinstellung
nO
YES
nO
nO
DEUTSCH
nO
nO
0
46
Page 47

Menü „Anwendungsfunktionen“ FUn
Wiedereinschalten bei
rSF
Störungen
Zweite Rampe
2. Strombegrenzung
Anhalten im freien Auslauf
rP2 LI
LC2 LI
nSt
DEUTSCH
Geführter Auslauf bei Netzaus fall
Anpassung der Auslauframpe
StP
brA
ESC
ENT
ESC
ENT
AC2
dE2
ESC
ENT
CL2
ESC
ENT
ESC
ENT
ESC
ENT
nO
LI1
LI2
LI3
LI4
nO
LI1
ESC
LI2
ENT
LI3
LI4
ESC
Wert
ENT
ESC
Wert
ENT
nO
LI1
ESC
LI2
ENT
LI3
LI4
ESC
Wert
ENT
nO
LI1
LI2
LI3
LI4
nO
FrP
FSt
nO
YES
Die nicht grau hinterlegten Parameter sind nur im Stillstand, bei verriegeltem Umrichter,
veränderbar.
Die grau hinterlegten Parame ter können sowohl während des Betriebs als auch im Stillstand
verändert werden.
47
Page 48

Menü „Anwendungsfunktionen“ FUn
Code
der Funktion
H;2 Wiedereinschalten bei Störungen
H:%
7/% 2. Strombegrenzung
D;I Anhalten im freien Auslauf
;I: Geführter Auslauf bei Netzausfall
>H- Anpassung der Auslauframpe
(1) In: Nennstrom des Umrichters
Beschreibung Werkseitige
D9: Funktion inaktiv
-
-
75$ bis 75': Auswahl des dieser Funktion zugeordneten
Eingangs
Das Wiedereinschalten erfolgt bei einem Übergang des Eingangs
(ansteigende Flanke 0 auf 1).
Ermöglicht die Beseitigung der gespeicherten Störung und das
Wiedereinschalten des Umrichters, sobald die Störung beseitigt ist.
Dies gilt nicht für die Störungen OCF (Überstrom), SCF
(Motorkurzschluss) und InF (interne Störung); in diesen Fällen muss
das Gerät ausgeschaltet werden.
Zweite Rampe
75
Belegung des Eingangs zur Steuerung der zweiten Rampe
D9: Funktion inaktiv
-
75$ bis 75': Wahl des zugeordneten Eingangs
AC2 und dE2 sind nur dann zugänglich, wenn LI zugeordnet wurde.
-/%
2. Hochlaufzeit, einstellbar von 0,1 bis 99,9 s
@1%
2. Auslaufzeit, einst ellbar von 0,1 bis 99,9 s
Funktion aktiv, wenn der Eingang unter Spannung steht.
75 -
/7% Wert der 2. Strombegrenzung.
D9: Funktion inaktiv
-
75$ bis 75': Wahl des zugeordneten Eingangs
Wenn der Eingang im Zustand 0 ist: 1. Strombegrenzung CL1
Wenn der Eingang im Zustand 1 ist: 2. Strombegrenzung CL2
CL2 ist nicht zugänglich, wenn LI zugeordnet ist.
-
D9: Funktion inaktiv
75$ bis 75': Wahl des zugeordneten Eingangs
Anhalten, wenn der Eingang „schwebend“ (Zustand 0), d. h., nicht
angeschlossen (Kontakt offen) ist.
Anhalten des Motors ausschließlich über das Lastmoment, die
Spannungsversorgung des Motors ist unterbrochen.
D9: Verriegelung des Umrichters und Anhalten des Motors im
„freien Auslauf“
2H:: Anhalten gemäß der freigegebenen Rampe (dEC oder dE2)
Das Trägheitsmoment der Maschine muss ausr eichend sein, um der
Rampe folgen zu können.
2;I: Schnellhalt, die Anhaltezeit hängt vom Massenträg-
heitsmoment und den Bremsmöglic hk eiten des Umrichters ab.
D9: Funktion inaktiv
-
=1;: Diese Funktion ermöglicht eine automatische Verlängerung
der Auslaufzeit, wenn diese unter Berücksichtigung des Massenträgheitsmoments der Last auf einen zu geringen Wert eingestellt wurde.
Somit lässt sich die Störung „Überspannung“ vermeiden.
Diese Funktion kann mit einer Positionierung auf einer Rampe
unvereinbar sein. Sie darf nur bei Verwendung eines angepassten
Bremsmoduls und eines angepassten Bremswiderstands inaktiv sein.
Voreinstellung
nO
nO
5,0
5,0
nO
1,5 In (1)
nO
nO
YES
DEUTSCH
48
Page 49

Menü „Anwendungsfunktionen“ FUn
Automatische Einspeisung
von Gleichstrom
Taktfrequenz
Die nicht grau hinterlegten Parameter sind nur im Stillstand, bei verriegeltem Umrichter
veränderbar.
Die grau hinterlegten Parameter können sowohl während des Betriebs als auch im Stillstand
verändert werden.
DEUTSCH
AdC
SFt
ESC
ACt
ENT
tdC
SdC
ESC
ACt
ENT
nO
ESC
YES
ENT
Ct
ESC
Wert
ENT
ESC
Wert
ENT
LFr
ESC
LF
ENT
HF
2
SFr
ESC
4
8
ENT
12
16
49
Page 50

Menü „Anwendungsfunktionen“ FUn
Code
der Funktion
-@/
;2I
Beschreibung Werkseitige
Automatische Einspeisung von Gleichstrom
-/I
Betriebsart
D9: Funktion inaktiv
-
=1;: Automatische Ei nspeisung von Gleichstrom im
Stillstand mit einer über tdC einst ellbaren Dauer, wenn der
Betrieb nicht mehr ge steu ert und di e Mot or freque nz gle ic h Null
ist. Der Wert dieses Stroms ist über SdC einstellbar.
/I: Permanente Einspeisung von Gleic hstrom i m Stillsta nd,
wenn der Betrieb nicht mehr gesteuert und die Motorfrequenz
gleich Null ist. Der Wert d ieses S troms ist ü ber SdC eins tellbar.
Bei 3-Draht-Steuerung ist die Einspeisung nur aktiv, wenn LI1
auf 1 gesetzt ist.
tdC ist nur dann zugänglich , wenn ACt = YES, SdC wenn ACt =
YES oder Ct.
I@/
Einspeisezeit im Stillstand, eins tellbar von 0,1 bis 30,0 s
;@/
Einspeisestrom, einstellbar von 0 bis 1,2 In (In =
Umrichternennstrom)
Taktfrequenz
-/I
Frequenzbereich
72H: Zufallsgesteuerte Frequenz um 2 oder 4 kHz gemäß
SFr
72: Feste Frequenz 2 oder 4 kHz gemäß SFr
-
-
42: Feste Frequenz 8, 12 oder 16 kH z gemäß SFr.
;2H Taktfrequenz:
-
% : 2 kHz (wenn ACt = LF oder LFr)
' : 4 kHz (wenn ACt = LF oder LFr)
-
+ : 8 kHz (wenn ACt = HF)
-
$% : 12 kHz (wenn ACt = HF)
-
-
$) : 16 kHz (wenn ACt = HF)
Wenn SFr = 2 kHz, geht die Frequ enz bei der gro ßen Frequenz
automatisch auf 4 kHz über.
Bei SFt = HF geht die gewählte Frequenz automatisch auf die
nächst kleinere Frequenz über, wenn die Temperatur des
Umrichters zu hoch ist. Sobald der the rmische Zustand dies
zulässt, kehrt sie automatisch zur Frequenz SFr zurück.
Voreinstellung
YES
0,5
0,7 In
LF
4 (wenn ACt = LF
oder LFr)
12 (wenn ACt =
HF)
DEUTSCH
50
Page 51

Menü „Anwendungsfunktionen“ FUn
DEUTSCH
Einfangen im Lauf
FLr
ESC
ENT
nO
YES
nO
Zuordnung
Logikausgang/
Analogausgang
dO
ESC
ACt
ENT
OCr
ESC
rFr
FtA
ENT
SrA
CtA
ESC
Ftd
Ctd
Wert
ENT
Die nicht grau hinterlegten Parameter sind nur im Stillstand, bei verriegeltem Umrichter,
veränderbar.
Die grau hinterlegten Parameter können sowohl während des Betriebs als auch im Stillstand
verändert werden.
51
Page 52

Menü „Anwendungsfunktionen“ FUn
R (Ω)
)
Funktionscode Beschreibung Werkseitige
27H Einfangen im Lauf
Ermöglicht die Freigabe eines ruckfreien Wiederanlaufs, wenn
der Fahrbefehl nach folgenden Ereignissen gehalten wird:
- Netzausfall oder Ausschalten
- Reset der Störungen oder automatischer Wiederanlauf
- Freier Auslauf
Beim Fangen wird die effektive Motordrehzahl gemessen; der
Wiederanlauf erfolgt, ausgehend von dieser Drehzahl, der
Rampe folgend, bis zum Sollwert.
Für diese Funktion i st die 2- Draht-Steueru ng (tCC = 2 C) mit tCt =
LEL oder PFO erforderlich.
D9: Funktion inaktiv
Voreinstellung
nO
=1;: Funktion aktiv
Wenn die Funktion aktiv ist, greift sie bei jedem Fahrbefehl ein, dies
führt zu einer leichten Verzögerung (max. 1 Sekunde).
Wenn die Bre msung mit perm anenter automa tischer Eins peisung
(Ct) konfigur ie rt wurd e, kan n di es e Fu nk ti on ni cht ak ti vie rt werd en .
@9
Analogausgang/Logikausgang DO
Zuordnung
-/I
2I@ Frequenzschwellwert, einstellbar von 0 bis 200 Hz = bFr
/I@ Stromschwellwert, einstellbar von 0 bis 1,5 In (In =
D9: nicht belegt
-
-
9/H: Analogausgang = Motorstrom. Das volle Signal
entspricht 200 % des Umrichternennstroms.
-
H2H: Analogausgang = Motorf requenz. Das volle Signal
entspricht 100 % von HSP.
-
2I-: Logikausgang = Frequenzsch wellwert errei cht, „logisch
1“ wenn die Motorfrequenz den einstellbaren Sc hwellwert Ftd
überschreitet.
-
;H-: Logikausgang = Sollwert erreicht, „logisch 1“ wenn die
Motorfrequenz gleich dem Sollwert ist.
-
/I-: Logikausgang = Stromschwellwert erreicht,
„logisch 1“, wenn der Mot orstrom d en einst ellbaren Sch wellwert
Ctd überschreitet.
-
:5: Logikausgang = PI in Betrieb, „logis ch 1“, wenn der Regler
in Betrieb ist.
Ftd ist nur zugänglich, wenn ACt = FtA; Ct d ist nur zugänglich,
wenn ACt = CtA.
Betriebsbemessungsstrom)
rFr
In
DEUTSCH
Verwendung des Analog-/Logikausgangs DO
Schaltbild mit interner Spannungsversorgung: Schaltbild mit externer Spannungsversorgung:
ATV11
DO +15 V
Z
Bei einem Logikausgang: Z = Relais oder Eingang Niederspannung
Bei einem Analogausgang: Z = Galvanometer z. B. Bei einem Galvanometer mit dem Widerstand R
beträgt die maximale abgegebene Spannung: U x
R (Ω) + 1000 (Ω
Stromversorgung
52
Page 53

Menü „Anwendungsfunktionen“ FUn
Automatischer Wiederanlauf
Modus Frequenzsollwert
Modus Frequenzsollwert
-IH
7;H
;;H
ESC
ENT
ESC
ENT
ESC
ENT
D9
=1;
I1H
79/
D9
75$
75%
75&
75'
Auswahl der Logik für die
Logikeingänge
D:7
ESC
ENT
:9;
D13
Die nicht grau hinterlegten Parameter sind nur im Stillstand, bei verriegeltem Umrichter,
veränderbar.
Die grau hinterlegten Parameter können sowohl während des Betriebs als auch im Stillstand
verändert werden.
DEUTSCH
53
Page 54

Menü „Anwendungsfunktionen“ FUn
Code
der Funktion
-IH Automatischer Wiederanlauf
7;H Modus Frequenzsollwert
;;H Umschaltung der Frequenz (Version V1.2)
Beschreibung Werkseitige
-
D9: Funktion inaktiv
-
=1;: Automatischer Wiederanlauf na ch Verriege lung bei Störun g,
wenn die Störung behoben wurde und die übrigen
Betriebsbedingungen ein Wiederanlaufen ermöglichen. Das Gerät
startet eine Reihe von automatis chen Anlaufversuch en mit steigenden
Wartezeiten zwischen den Versuchen: 1 s, 5 s, 10 s und dann 1 Minute
bei den nachfolgenden. Wenn nach 6 Minuten noch kein
Wiederanlaufen erfolgt is t, wird der Vorgang beendet, und der
Umrichter bleibt solange verriegel t, bis er aus- und anschließend
wieder eingeschaltet wird.
Folgende Störmeldungen k önnen diese Funktion aktivieren: OHF,
OLF, ObF, OSF, PHF. Das Störmelderelais des Umrichters bleibt
eingeschaltet, solange die Funktion aktiv ist. Der Frequenzsollwert und
die Drehrichtung müssen beibehalten werden.
Diese Funktion ist nur bei einer 2-Draht-Steuerung (tCC = 2C) mit tC t
= LEL oder PFO zugänglich.
Sicherstellen, dass ein plötzlicher Wiederanla uf keine
Gefahr für Mensch oder Maschine in sich birgt.
Dieser Parameter ist nur bei Umrichtern der Baureihen A und E327
zugänglich.
-
79/: Der Frequenzsollwert wird über das Potentiometer auf der
Frontseite des Umrichters vorgegeben.
-
I1H: Der Frequenzsollwert wird über den Analogeingang
AI1vorgegeben
Zur Berücksichtigung von LOC und t Er muss die Taste ENT
länger (2 s) gedrückt werden.
Wenn PIF = AI1 (Seite 46), wird LSr auf LOC forciert.
Dieser Parameter ist nur bei Umrichtern der Baureihen A und E327
zugänglich.
Ermöglicht die Umschaltung des Soll we rts über einen Logikeingang.
-
D9: Nicht belegt: der Sollwert wird entsprechend der Konfiguration
von LSr gegeben.
-
75$: Logikeingang LI1
-
75%: Logikeingang LI2
-
75&: Logikeingang LI4
-
75': Logikeingang LI4
Logikeingang im Zustand 0: Der So llwert wir d ü ber da s Pot entio meter
auf der Frontseite des Umrichters vorgegeben.
Logikeingang im Zust and 1: Der Soll wert wird über den Analogei ngang
AI1 vorgegeben
Achtung: Die Umschaltung über den Logikeingang ist nicht
mit der PI-Funktion kompatibel.
D:7 Auswahl der Logik für die Logikeingänge
Dieser Parameter ist nur bei Umrichtern der Baureihen A und E327
zugänglich.
-
:9;: Die Eingänge sind aktiv (logisch 1), wenn die Spannung größer
oder gleich 11 V ist (Klemme +15 V beispielsweise) und inaktiv (logisch
0), wenn keine Spannung oder eine Spannung unter 5 V anliegt.
-
D13: Die Eingänge sind aktiv (logisch 1), wenn die Spannung
kleiner als 5 V ist (Klemme 0 V beispielsweise) und inaktiv (logisch 0),
wenn die Spannung größer als oder gleich 11 V ist oder keine
Spannung anliegt.
Zur Berücksichtigung von PoS und nEG muss die Taste ENT
2 Sekunden lang gedrückt wer den.
Voreinstellung
nO
LOC
DEUTSCH
nO
54
Page 55

Menü „Anwendungsfunktionen“ FUn
Konfiguration des Fehlers „Ausfall
Speichern der Konfiguration
Aufrufen de r Konfigurat i on
Die nicht grau hinterlegten Parameter sind nur im Stillstand, bei verriegeltem Umrichter,
veränderbar.
Die grau hinterlegten Parameter können sowohl während des Betriebs als auch im Stillstand
verändert werden.
DEUTSCH
Motorfrequenz
einer Phase“
>2H
5:7
;/;
2/;
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
Wert
D9
=1;
D9
=1;
D9
H1/
5D5
55
Page 56

Menü „Anwendungsfunktionen“ FUn
Code
der Funktion
>2H Motorfrequenz
5:7 Konfiguration des Fehlers „Ausfall einer Netzphase“
;/; Speichern der Konfiguration
2/; Aufrufen der Konfiguration
Beschreibung Werkseitige
(Übernahme des Einstellparameters bFr der 1. Ebene)
Einstellung auf 50 Hz oder 60 Hz, siehe Angaben auf dem
Typenschild des Motors.
Dieser Parameter ist nur bei dreiphasigen Umrichtern
zugänglich.
D9: Unterdrücken des Fehlers „Ausfall einer Netzphase“
-
-
=1;
:
Aktivierung der Überwachung des Fehlers „Ausfall
einer Netzphase“
D9: Funktion inaktiv
-
-
=1;
:
Sichert die aktuelle Konfiguration im EEPROMSpeicher. SCS stellt sich automatisch auf nO zurück, sobald die
Speicherung erfolgt i st. Mit die ser F unkti on k ann z usät zlich z ur
aktuellen Konfigurat ion eine Ko nf igur ati on i n Reser ve gehalt en
werden.
Bei Verlassen des Werks sind die aktuelle und die g espeicherte
Konfiguration der Umrichter auf die Werkskonfiguration
eingestellt.
D9: Funktion inaktiv
-
-
H1/
: Die zuvor über SCS gesicherte Konf iguration wird zur
aktuellen Konfigura tion. rEC ist nur dan n sichtbar, wenn bereits
eine Sicherung erfolgt ist. F C S wechselt automatisch auf nO
zurück, sobald diese Aktion erfolgt ist.
-
5D5
: Die Werkseinstellung wird zur ak tuellen Konfigurat ion.
FCS wechselt automatisch auf nO zurück, sobald diese Aktion
erfolgt ist.
Zur Berücksichtigung von rEC und InI muss die Taste
ENT länger (2 s) gedrückt werden.
Voreinstellung
50 (Reihen E und A)
oder
60 (Reihe U)
YES
nO
nO
DEUTSCH
56
Page 57
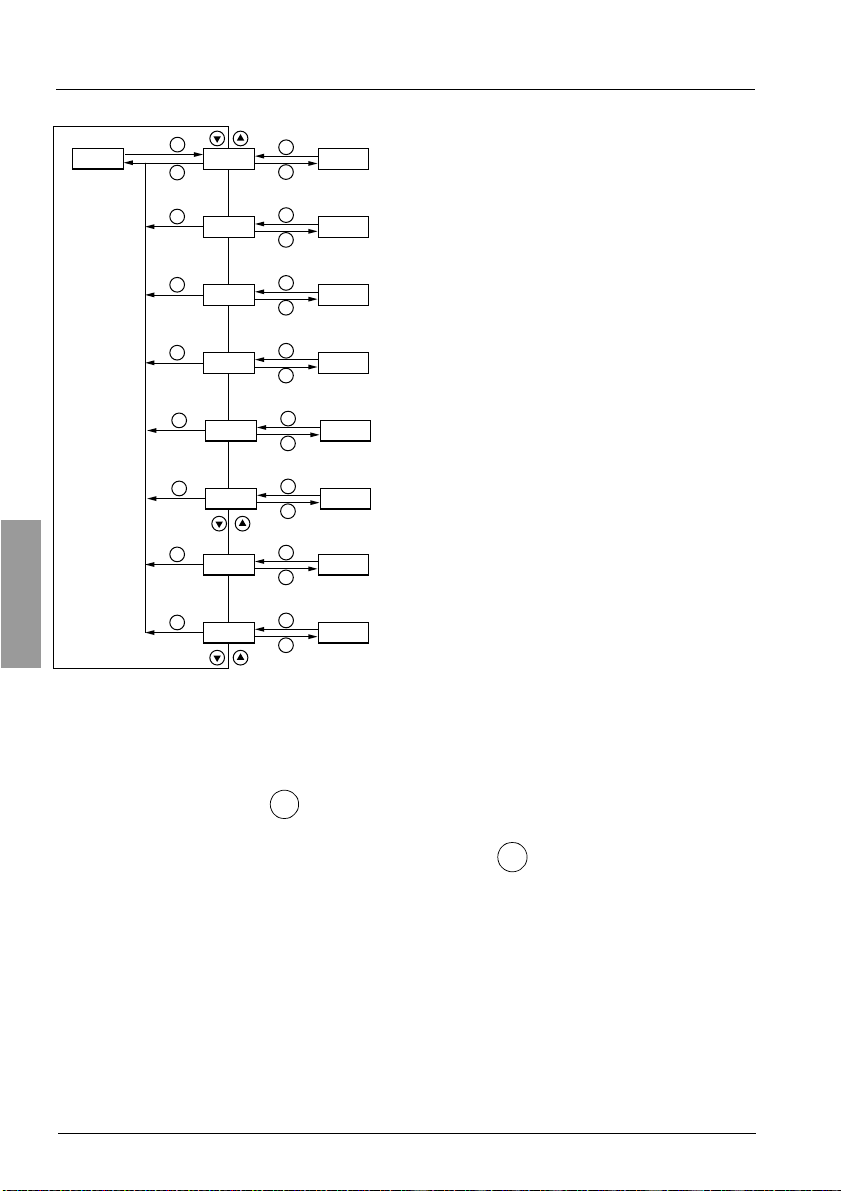
Menü „Überwachung“ SUP
T
;<:
DEUTSCH
ENT
2H4
ESC
ESC
H2H
ESC
7/H
ESC
<7D
ESC
I4H
ESC
I4@
ESC
H:2
ESC
/9@
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
Frequenzsollwert
Wert
Auf den Motor wirkende Ausgangsfrequenz
Wert
Motorstrom (A)
Wert
Netzspannung
Wert
Thermischer Zustand des Motors
Wert
Thermischer Zustand des Umrichters
Wert
PI-Istwert
Wert
Zugriffscode des Terminals
Wert
Wenn der Umrichter in Betrieb ist, entspricht der angezeigte Wert dem Wert eines der
Überwachungsparameter. Standardmäßig ist der angezeigte Wert der Frequenzsollwert des Motors
(Parameter FrH).
Während der Anzeige des Werte s des neuen, gewünschten Überwachungsparameters
muss ein zweites Mal die Taste gedrückt werden, um die Änderung des Überwachungsparameters
EN
freizugeben und diesen zu speichern. Daraufhin wird der Wert dieses Parameters während des Betriebs
angezeigt (selbst nach dem Abschalten).
Wenn die neue Auswahl nicht durch ein zweites Drücken von bestätigt wird, stellt sich dieser
ENT
Parameter nach dem Abschalten auf den vorherigen Parameter zurück.
57
Page 58

Menü „Überwachung“ SUP
Auf die folgenden Parameter kann sowohl während des Betriebs als auch bei Stillstand zugegriffen
werden.
Code Parameter Einheit
2H4 Anzeige des Frequenzsollwerts (Werkseinstellung) Hz
H2H Anzeige der am Motor liegenden Ausgangsfrequenz Hz
7/H Anzeige des Motorstroms A
<7D Anzeige der Netzspannung V
I4H Anzeige des thermischen Zustands des Motors: 100 % entsprechen dem
I4@ Anzeige des thermischen Zustands des Umrich ters: 100 % entsprechen dem
H:2 PI-Istwert
/9@ Zugriffscode des Terminals
thermischen Nennzustand.
Oberhalb von 118 % löst der Umrichter die Störmeldung OLF (Motorüberlast) aus.
Wenn der Wert unter 100 % absinkt, kann er wieder eingeschaltet werden.
thermischen Nennzustand.
Oberhalb von 118 % löst der Umrichter die Störung OHF (Überhitzung Umrichter)
aus.
Wenn der Wert unter 80 % absinkt, kann er wieder eingeschaltet werden.
Dieser Parameter ist nur zugänglich, wenn die PI-Funktion aktiviert wurde (PIF =
AI1).
Ermöglicht den Schutz der Konfiguration des Umrichters durch einen Zugriffscode.
Achtung: Vor der Eingabe eines Codes sollten Sie diesen sorgfältig
notieren.
922: Der Zugriff wird durch keinen Code gesperrt.
•
- Um den Zugriff zu sperren, einen Code (2 bis 999) eingeben. Die Anzeige dabei
über erhöhen und anschließend „ENT“ drücken. Daraufhin wird „
eingeblendet, und der Zugriff auf den Parameter ist gesperrt.
• 9D : Der Zugriff wird über einen Code (2 bis 999) gesperrt.
- Um den Zugriff frei zu schalten, den Code eingeben. Die Anzeige dabei über
erhöhen und anschließend „ENT“ drücken. Der Code wird weiterhin angezeigt,
und der Zugriff ist bis zum nächsten Abschalten freigegeben. Beim nächsten
Einschalten wird der Zugriff auf den Parameter wieder gesperrt.
- Wird ein fehlerhaft er Code eingegeben, wechselt die A nzeige wieder auf „On“, und
der Zugriff auf den Parameter ble i bt gesperrt
%
%
%
On“
DEUTSCH
XXX: Der Zugriff auf den Parameter ist freigegeben (der Code wird weiterhin
angezeigt).
- Zur erneuten Aktivierung der Sperre mit demselben Code, wenn der Zugriff auf
den Parameter freigegeben ist, über die Taste zu „On“ zurückkehren und dann
„ENT“ drücken. „On“ wird weiterhin angezeigt, und der Zugrif f auf den Par amet er ist
gesperrt.
- Um den Zugriff mit einem neuen Code zu s perren, wenn der Zugriff auf den
Parameter freigegeben ist, den neuen Code eingeben, und dabei die Anzeige über
oder ändern und anschließend „ENT“ drücken. Daraufhin wird „On“
eingeblendet, und der Zugriff auf den Parameter ist gesperrt.
- Um die Sperre zu entfernen, wenn der Zugriff auf den Parameter freigegeben ist,
über die Taste zu „OFF“ zurückkehren und anschließe nd „ENT“ drücken . „OFF“
wird weiterhin angezeigt, der Zugriff auf den Parameter ist freigegeben und bleibt
dies auch nach einem Abschalten und anschließendem Wiedereinschalten.
Wenn der Zugriff durch einen Code gesperrt ist, sind nur die Überwachungsparameter zugänglich.
58
Page 59

Wartung
Wartung
Der Altivar 11 erfordert keine vorbeugende Wartung. Dem Benutzer wird jedoch empfohlen, folgende
Inspektionen in regelmäßigen Abständen durchzuführen:
• Überprüfung des Zustands und der Festigkeit der Verbindungen,
• Überprüfen, dass die Temperat ur im Bereich um das Gerät auf de m zulässigen Niveau bleibt, und dass
die Belüftung wirksam ist (durchschnittliche Lebensdauer von Lüftern: 3 bis 5 J ahre, abhängig von den
Einsatzbedingungen),
• Erforderlichenfalls Staub vom Frequenzumrichter entfernen.
Unterstützung bei der Wartung, Anzeige von Störmeldungen
Bei einer Störung während der Inbetriebnahme oder im Betrieb muss zuerst sichergestellt werden, dass
die Anweisungen bezüglich der Umgebung, des Einbaus und der Anschlüsse befolgt wurden.
Der erste festgestellte Fehler wird ge speicher t und durch B linken i m Display angez eigt: Der Umri chter wird
gesperrt, und der Kontakt des Störmelderelais (RA - RC) öffnet sich.
Beseitigung von Störungen
Die Spannungsversorgung des Umrichters unterbrechen, wenn Störungen auftreten, die ein
Wiedereinschalten nich t zulassen.
Abwarten, bis die Anzeige komplett erloschen ist.
Stellen Sie den Grund für die St örung fest, und beseitigen Sie ihn.
Stellen Sie die Stromzufuhr wieder her: Wenn die Störung verschwunden ist, wird sie daraufhin gelöscht.
In bestimmten Fällen erfolgt nach Beseitigung der Störung ein automatischer Wiederanlauf, falls diese
Funktion vorher programmiert wurde.
Menü „Überwachung“:
DEUTSCH
Ermöglicht die Verhinderung von und die Suche nach Störungsursachen, indem der Zustand und die
aktuellen Werte des Umrichters angezeigt werden.
Ersatzteile und Reparaturen:
Wenden Sie sich bitte an die Service-Abteilungen von Schneider Electric.
59
Page 60

Fehler - Ursachen - Fehlerbeseitigung
Kein Anlaufen ohne Fehleranzeige
• Prüfen, dass der oder die Eingänge für die Steuerung des Betriebs entsprechend dem gewählten
Steuerungsmodus betätigt wurden (Parameter tCC im Menü FUn).
• Bei einem Einschalten oder einem manuellen Reset nach einer Störung bzw. bei ei nem Haltebefehl
kann der Motor erst nac h einem Rü cks etzen d er B efehle „Recht sl auf“ o der „Linksl auf“ wiede r an laufen.
Unterbleibt dies, so zeigt der Umrichter „rdY“ oder „nSt“ au f dem Display, läuft aber nicht an. Wenn die
Funktion automatisch er Wiederanlauf konfiguriert ist (Paramet er Atr im Menü FUn), werden diese
Befehle ohne vorherige s Reset ausgeführt.
• Falls ein Eingang der Funktion „An halten im freien Aus lauf“ zugeord net ist, muss dies er Eingang, de r im
Status 0 aktiv ist (nicht angeschlossen: Kontakt offen),
- bei den Reihen E und U: an + 15 V angeschlossen werden, um das Anlaufen des Umrichters zu
ermöglichen.
- bei den Reihen A und E327: an + 15 V angesch l ossen werden, wenn nPL = POS oder an 0V, wenn
nPL = nEG, damit das Anlaufen des Umrichters möglich wird (siehe nPL, Seite 54).
Betriebsstörung ohne Fehleranzeige
• Klemmen des Umrichters auf Vorhandensein der Netzspannung überprüfen.
• Klemmen Sie alle Anschlüsse an den Klemmen U, V, W des Umrichters ab:
- Motorkabel oder Motor auf Kurzschluss zwischen Phase und Erde überprüf en.
- Überprüfen, ob ein Bremswiderst and nicht dire kt an den Klemme n PA/+ und PC/- angeschlosse n ist.
Achtung, ist dies der Fall, wurd e der Umric hter möglicherweise beschädigt. Die Verwendung eines
Bremsmoduls zwischen dem Umrichter und dem Widerstand ist obligatorisch.
Fehler, die kein automatisches Wiedereinschalten zulassen
Vor einem Wiederanlauf muss die Fehlerursache durch Aus- und anschließendes Wiedereinschalten
beseitigt werden.
Bei Auftreten des Fehlers SOF kann auch über einen Logikeingang wieder eingeschaltet werden
(Paramet e r rS F im Menü FUn).
Störung Wahrscheinliche Ursache Maßnahmen zur Behebung
/22
Konfigurationsfehler
/H2
Ladeschaltung der
Kondensatoren
5D2
Interne Störung
9/2
Überstrom
;/2
Kurzschluss im
Motor
;92
Überdrehzahl
• Die aktuelle Konfiguration ist
inkonsistent.
• Störung der Steuerung des
Lastrelais oder Ladevorwiderstand beschädigt
• Interne Störung • Umgebung überprüfen (elektromagnetische
•Rampe zu kurz
• Massenträgheit oder Last zu
hoch
• Mechanische Blockierung
• Isolationsfehler oder
Kurzschluss im
Umrichterausgang
• Instabilität oder
• zu stark antreibende Last
• Zu den Werkseinstellungen zurückkehren oder
die gesicherte Konfiguration aufrufen, falls
diese verwendbar ist. Siehe Parameter FCS
im Menü FUn.
• Den Umrichter ersetzen.
Verträglichkeit).
• Den Umrichter ersetzen.
• Einstellungen überprüfen.
• Dimensionierung von Motor/Umrichter/Last
prüfen.
• Zustand der Mechanik überprüfen
• Anschlusskabel vom Umrichter zum Motor und
die Isolierung des Motors überprüfen.
• Die Parameter von Motor, Verstärkung und
Stabilität überprüfen.
• Ein Bremsmodul und einen Bremswiderstand
zuschalten.
• Dimensionierung von Motor/Umrichter/Last
prüfen.
DEUTSCH
60
Page 61

Fehler - Ursachen - Fehlerbeseitigung
Fehler, bei denen ein automatischer Wiederanlauf nach Verschwinden der
Störungsursache erfolgt
Diese Fehler können auch durch Aus- und anschließendes Einschalten oder über einen Logikeingang
(Parameter rSF im Menü FUn) rückgesetzt werden.
Störung Wahrscheinliche Ursache Maßnahmen zur Behebung
9>2
Überspannung
bei Auslauf
942
Überlast des
Umrichters
972
Motorüberlast
9;2
Überspannung
:42
Ausfall einer
Netzphase
DEUTSCH
• Zu starke Bremsung
oder antreibende Last
• Überhitzung des Umrichters • Motorlast, Belüftung des Umrichters und
• Auslösung durch zu hohen
Motorstrom
• Netzspannung zu hoch
• Störung im Netz
• Umrichter fehlerhaft versorgt
oder Sicherung geschmolzen
• Ausfall einer Phase
• Verwendung eines
dreiphasigen ATV 11 in
einem einphasigen Netz
• Last mit Unwucht
Diese Schutzfunktion wirkt nur
unter Last.
• Auslaufzeit erhöhen.
• Bei Bedarf einen Bremswiderstand verwenden.
• Die Funktion brA aktivi eren, wenn sie mit der
Anwendung vereinbar ist.
Umgebung überprüfen. Das Abkühlen abwarten,
um wieder einschalten zu könne n.
• Die Einstellung des Ther moschutzes des Motors
und die Motorlast überprüfen. Das Abkühlen
abwarten, um wieder einschalten zu können.
• Netzspannung überpr üfen. Der Schwel lwert de r
Überspannung beträgt 415 V c am
Gleichstromzwischenkreis.
• Den Leistungsanschluss und die Sicherungen
überprüfen.
• Wieder einschalten.
• Ein dreiphasiges Netz v erwenden.
• Den Fehler über IPL = nO (Menü FUn) sperren.
Störung, die bei Verschwinden der Ursache von selbst ein
Wiedereinschalten zulässt
Störung Wahrscheinliche Ursache Maßnahmen zur Behebung
<;2
Unterspannung
61
• Netzspannung zu niedrig
• Vorübergehender
Spannungsabfall
• Ladevorwiderstand
beschädigt
• Die Netzspannung und den Parameter
„Netzspannung“ überprüfen. Der Schwellwert
der Unterspannung beträg t 230 V c am
Gleichstromzwischenkreis.
• Den Umrichter ersetzen.
Page 62

Tabellen für Konfiguration/Einstellungen
Umrichter ATV 11.......................................................................................................................................
Kundenspezifische Bezeichnung:.................. ......................... ...................................................................
Einstellparameter 1. Ebene
Code
Werkseitige
Voreinstellung
Einstellung des
Kunden
Code
Werkseitige
Voreinstellung
Einstellung des
Kunden
>2H 50 / 60 Hz Hz 5I4 AA
-// 3s s;:% 10 Hz Hz
@1/ 3s s;:& 25 Hz Hz
7;: 0Hz Hz;:' 50 Hz Hz
4;: 50 /60 Hz Hz
Menü „Analogeingang“
Code Werkseitige
Voreinstellung
-5I
Einstellung des
Kunden
Code Werkseitige
Voreinstellung
Einstellung des
Kunden
-/I 5U /H4 20.0 mA mA
/H7 4.0 mA mA
DEUTSCH
Menü „Motorsteuerung“
Code Werkseitige
Voreinstellung
<D;
2H;
;I-
273
<2H
50 / 60 Hz Hz
20 % %
20 % %
50 % %
@H/
Einstellung des
Kunden
VV
Code Werkseitige
D/H
/75
D;7
;7:
/9;
Voreinstellung
AA
AA
Hz Hz
100 % %
Einstellung des
Kunden
62
Page 63

Tabellen für Konfiguration/Einstellungen
Menü „Anwendungsfunktionen“
Code Werkseitige
Voreinstellung
2<D
Einstellung des
Kunden
Code Werkseitige
Voreinstellung
Einstellung des
Kunden
I// H:%
-/I
2C/LOC
75
nO
I/I trn -/% 5s s
HH; LI2 @1% 5s s
:;% 7/%
75-
LI3 75 nO
75> LI4 /7% AA
;:% 10 Hz Hz D;I nO
;:& 25 Hz Hz ;I: nO
;:' 50 Hz Hz >H- YES
I7;
:5
:52
:5$
H:3
H53
DEUTSCH
2>;
H:5
:5/
:-<
:H%
:H'
0s s-@/
-/I
nO I@/ 0,5 s s
YES ;@/ AA
1 ;2I
1 -/I LF
1 ;2H 4 kHz kHz
0% %27H nO
nO @9
nO -/I rFr
nO 2I@ 50 / 60 Hz Hz
nO /I@ AA
YES
:5% 30 % % -IH nO
:5& 60 % % 7;H(1) LOC
:5'
90 % %
;;H(1)
nO
H;7 0 D:7(1) POS
H;2 nO >2H 50 / 60 Hz Hz
5:7 YES
(1) Nur Reihen A und E327
63
Page 64

DEUTSCH
64
Page 65

DEUTSCH
65
Page 66

VVDED303083
W9 1677144 01 12 A02
064939
2004-03
 Loading...
Loading...