

Page 1

Programming Manual
PowerFlex 700S High Performance AC Drive - Phase II Control
Firmware Versions 1.xxx...5.002
Page 2
Important User Information
IMPORTANT
Read this document and the documents listed in the additional resources section about installation, configuration, and
operation of this equipment before you install, configure, operate, or maintain this product. Users are required to
familiarize themselves with installation and wiring instructions in addition to requirements of all applicable codes, laws,
and standards.
Activities including installation, adjustments, putting into service, use, assembly, disassembly, and maintenance are required
to be carried out by suitably trained personnel in accordance with applicable code of practice.
If this equipment is used in a manner not specified by the manufacturer, the protection provided by the equipment may be
impaired.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from the
use or application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and
requirements associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or
liability for actual use based on the examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or
software described in this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation,
Inc., is prohibited.
Throughout this manual, when necessary, we use notes to make you aware of safety considerations.
WARNING: Identifies information about practices or circumstances that can cause an explosion in a hazardous environment,
which may lead to personal injury or death, property damage, or economic loss.
ATTENTION: Identifies information about practices or circumstances that can lead to personal injury or death, property
damage, or economic loss. Attentions help you identify a hazard, avoid a hazard, and recognize the consequence.
Identifies information that is critical for successful application and understanding of the product.
Labels may also be on or inside the equipment to provide specific precautions.
SHOCK HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that dangerous
voltage may be present.
BURN HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that surfaces may
reach dangerous temperatures.
ARC FLASH HAZARD: Labels may be on or inside the equipment, for example, a motor control center, to alert people to
potential Arc Flash. Arc Flash will cause severe injury or death. Wear proper Personal Protective Equipment (PPE). Follow ALL
Regulatory requirements for safe work practices and for Personal Protective Equipment (PPE).
Allen-Bradley, Connected Components Workbench, DPI, DriveTools SP, DriveExplorer, PowerFlex, Rockwell Software, and Rockwell Automation are trademarks of Rockwell Automation, Inc.
Trademarks not belonging to Rockwell Automation are property of their respective companies.
Page 3
This manual contains new and updated information.
Summary of Changes
New and Updated Information
This table contains the changes made to this revision.
Top ic Pag e
Updated the list of Additional Resources. 9
Updated the description of parameter 338 [Mtr I2T Spd Min] to include setting it to the
minimum value for the motor overload trip to vary in time at low speeds.
Updated the description of fault 15 “Inv OTemp Trip” to include a possible juntion temperature
fault condition.
Removed the “Input Voltage Range/Tolerance” topic from Chapter B Application Notes. 161
Added a note to the “Inverter Overload IT” block diagram for parameter 338 [Mtr I2T Spd Min]. 197
69
146
Changes to this manual for previous revisions are included in Chapter F History
of Changes on page 209
.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 3
Page 4

Summary of Changes
Notes:
4 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 5

Table of Contents
Preface
Drive Start-Up
Programming and Parameters
Purpose of This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Who Should Use This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Additional Resources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
General Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Qualified Personnel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Personal Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Product Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Class 1 LED Product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Chapter 1
Drive Start-Up Checklist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Prepare for Initial Drive Start-Up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Start Up the Drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Chapter 2
About Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
How Parameters are Organized. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Parameter Data in Linear List Format. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Parameter Cross Reference By Name . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Troubleshooting
Human Interface Module Overview
Chapter 3
Status Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
Drive Status Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
DriveLogix5730 Controller Status Indicators. . . . . . . . . . . . . . . . . . 141
Precharge Board Status Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
HIM Indication of a Fault . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
Manually Clearing Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
Fault and Alarm Types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
Fault/Alarm Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Appendix A
External and Internal Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
LCD Display Elements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
HIM Key Functions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
Alternate (ALT) Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
Access the Start-Up Routine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
Menu Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
Diagnostics Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Parameter Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Device Select Menu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Memory Storage Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Start Up Menu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Preferences Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 5
Page 6

Table of Contents
Application Notes
View and Edit Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
LCD HIM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Numeric Keypad Shortcut. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Parameter Links. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Establishing A Link . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Remove/Install the HIM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
Appendix B
DPI Communication Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
Typical Programmable Controller Configurations . . . . . . . . . . . . . 162
Logic Command Word . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
Logic Status Word. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
DPI Device Limitations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
Motor Control Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
Field Oriented Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
Permanent Magnet Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
Volts/Hertz Control - v2.003 and Later . . . . . . . . . . . . . . . . . . . . . . . 165
Motor Overload. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
Setting Parameter 338 [Mtr I2T Spd Min]. . . . . . . . . . . . . . . . . . . . . 166
Motor Overload Memory Retention Per 2005 NEC . . . . . . . . . . . . 167
Motors with Compatible Thermistor Ratings. . . . . . . . . . . . . . . . . . . . . . 168
Setpt 1 Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
Setpt 2 Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
Stop Dwell Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
Sleep-Wake Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
Definitions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
Control Block Diagrams
PowerFlex 700S Permanent Magnet
Motor Specifications
ATEX Approved PowerFlex 700S,
Phase II Drives in Group II Category
(2) Applications with ATEX Approved
Motors
Appendix C
List of Control Block Diagrams. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Diagram Conventions and Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
Appendix D
Compatible Permanent Magnet Motors . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
Appendix E
General Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
Motor Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
Drive Wiring. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
Safe-Off Terminal Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
Wiring Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
Drive Hardware Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
Operation Verification. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
6 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 7

Appendix F
Table of Contents
History of Changes
Index
20D-PM001B-EN-P, July 2011 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
20D-PM001A-EN-P, June 2010 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 7
Page 8

Table of Contents
8 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 9
Preface
Purpose of This Manual
Who Should Use This Manual
Additional Resources
The purpose of this manual is to provide you with the information needed to
start-up, program and troubleshoot PowerFlex 700S Phase II Adjustable
Frequency AC drives.
Top ic Pa ge
Who Should Use This Manual 9
Additional Resources 9
General Precautions 11
This manual is intended for qualified personnel. You must be able to program
and operate adjustable frequency AC drives. In addition, you must have an
understanding of the parameter settings and functions of this drive and
programmable controllers for PowerFlex 700S Phase II drives with DriveLogix.
These documents contain additional information concerning related products
from Rockwell Automation.
Resource Description
PowerFlex 700S Phase II Drive, Frames 1…6 Installation
Instructions, publication 20D-IN024
PowerFlex 700H and 700S Drives, Frames 9…14 Installation
Instructions, publication PFLEX-IN006
PowerFlex 700S Phase II Reference Manual, publication
PFLEX-RM003
Stegmann Feedback Option for PowerFlex 700S Drives
Installation Instructions, publication 20D-IN001
Resolver Feedback Option for PowerFlex 700S Drives
Installation Instructions, publication 20D-IN002
Multi-Device Interface for PowerFlex 700S Drives Installation
Instructions, publication 20D-IN004
Second Encoder Option for PowerFlex 700S Drives with
Phase II Control Installation Instructions,
publication 20D-IN009
SynchLink™ Board for PowerFlex 700S Drives with Phase II
Control Installation Instructions, publication 20D-IN010
DriveLogix5730 Controller User Manual, publication
20D-UM003
Logix5000 Controllers Common Procedures Programming
Manual, publication 1756-PM001
Logix5000 Controllers General Instructions Reference
Manual, publication 1756-RM003
Logix5000 Controllers Process Control and Drives
Instructions Reference Manual, publication 1756-RM006
Provides you with the information needed to install and
wire PowerFlex 700S Phase II frame 1…6 drives.
Provides you with the information needed to install and
wire PowerFlex 700S Phase II frame 9…14 drives.
Provides detailed explanations and examples of
PowerFlex 700S Phase II drive control functions and
application programming.
Provides instructions for installing the Stegmann
feedback option board for PowerFlex 700S drives.
Provides instructions for installing the resolver
feedback option board for PowerFlex 700S drives.
Provides instructions for installing the multi-device
interface option board for PowerFlex 700S drives.
Provides instructions for installing the second encoder
option board for PowerFlex 700S drives.
Provides instructions for installi ng the SynchLink option
board for PowerFlex 700S drives.
Provides information to help you develop projects for
DriveLogix controllers and establish communications
with PowerFlex 700S Phase II drives.
This publication links to a collection of programming
manuals that describe how you can use procedures that
are common to all Logix5000 controller projects.
Provides a programmer with details about each
available instruction for a Logix-based controller.
Provides a programmer with details about each
available instruction for a Logix-based controller.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 9
Page 10
Preface
Resource Description
SynchLink System Design Guide, publication 1756-TD008 Provides a detailed description of SynchLink and the
Wiring and Grounding for Pulse Width Modulated (PWM) AC
Drives, publication DRIVES-IN001
Safety Guidelines for the Application, Installation and
Maintenance of Solid State Control, publication SGI-1.1
Industrial Automation Wiring and Grounding Guidelines,
publication 1770-4.1
Product Certifications website, http://www.ab.com Provides declarations of conformity, certificates, and
products that operate on it, including:
• ControlLogix SynchLink module (1756-SYNCH)
• ControlLogix Drive modules (1756-DMxxx Series)
• PowerFlex 700S drives
Provides basic information needed to properly wire and
ground Pulse Width Modulated (PWM) AC drives.
Provides general guidelines for the application,
installation, and maintenance of solid-state control in
the form of individual devices or packaged assemblies
incorporating solid state components.
Provides general guidelines for installing a Rockwell
Automation industrial system.
other certification details.
You can view or download publications at
http:/www.rockwellautomation.com/literature/
. To order paper copies of
technical documentation, contact your local Allen-Bradley distributor or
Rockwell Automation sales representative.
10 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 11
Preface
General Precautions
Qualified Personnel
ATTENTION: Only qualified personnel familiar with the PowerFlex 700S Drive
and associated machinery should plan or implement the installation, start-up
and subsequent maintenance of the system. Failure to comply may result in
personal injury and/or equipment damage.
Personal Safety
ATTENTION: To avoid an electric shock hazard, verify that the voltage on the bus
capacitors has discharged before performing any work on the drive. Measure the
DC bus voltage at the Power Terminal Block by measuring between the +DC and
–DC terminals, between the +DC terminal and the chassis, and between the -DC
terminal and the chassis. The voltage must be zero for all three measurements.
ATTENTION: Hazard of personal injury or equipment damage exists when using
bipolar input sources. Noise and drift in sensitive input circuits can cause
unpredictable changes in motor speed and direction. Use speed command
parameters to help reduce input source sensitivity.
ATTENTION: Risk of injury or equipment damage exists. DPI or SCANport host
products must not be directly connected together via 1202 cables.
Unpredictable behavior can result if two or more devices are connected in this
manner.
ATTENTION: Risk of injury or equipment damage exists. Parameters 365 [Fdbk
LsCnfg Pri]…394 [VoltFdbkLossCnfg] let you determine the action of the drive
in response to operating anomalies. Precautions should be taken to ensure that
the settings of the parameters do not create hazards of injury or equipment
damage.
ATTENTION: Risk of injury or equipment damage exists. Parameters 383 [SL
CommLoss Data]…392 [NetLoss DPI Cnfg] let you determine the action of the
drive if communications are disrupted. You can set the parameters so that the
drive continues to run. Precautions should be taken to ensure that the settings of
the parameters do not create hazards of injury or equipment damage.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 11
Page 12
Preface
Product Safety
ATTENTION: An incorrectly applied or installed drive can result in component
damage or a reduction in product life. Wiring or application errors such as under
sizing the motor, incorrect or inadequate AC supply, or excessive surrounding air
temperatures may result in malfunction of the system.
ATTENTION: This drive contains ESD (Electrostatic Discharge) sensitive parts and
assemblies. Static control precautions are required when installing, testing,
servicing or repairing drive assemblies. Component damage may result if ESD
control procedures are not followed. If you are not familiar with static control
procedures, reference Guarding Against Electrostatic Damage, publication 8000-
4.5.2 or any other applicable ESD protection handbook.
ATTENTION: A contactor or other device that routinely disconnects and
reapplies the AC line to the drive to start and stop the motor can cause drive
hardware damage. The drive is designed to use control input signals that will
start and stop the motor. If an input device is used, operation must not exceed
one cycle per minute or drive damage will occur.
Class 1 LED Product
ATTENTION: Hazard of permanent eye damage exists when using optical
transmission equipment. This product emits intense light and invisible radiation.
Do not look into module ports or fiber optic cable connectors.
12 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 13
Chapter 1
IMPORTANT
DPI Ports 1 and 2
1
2
Drive Start-Up
This chapter provides the information necessary to start up the PowerFlex 700S
Phase II drive.
Top ic Pa ge
Drive Start-Up Checklist Below
Prepare for Initial Drive Start-Up 14
Start Up the Drive 15
Drive Start-Up Checklist
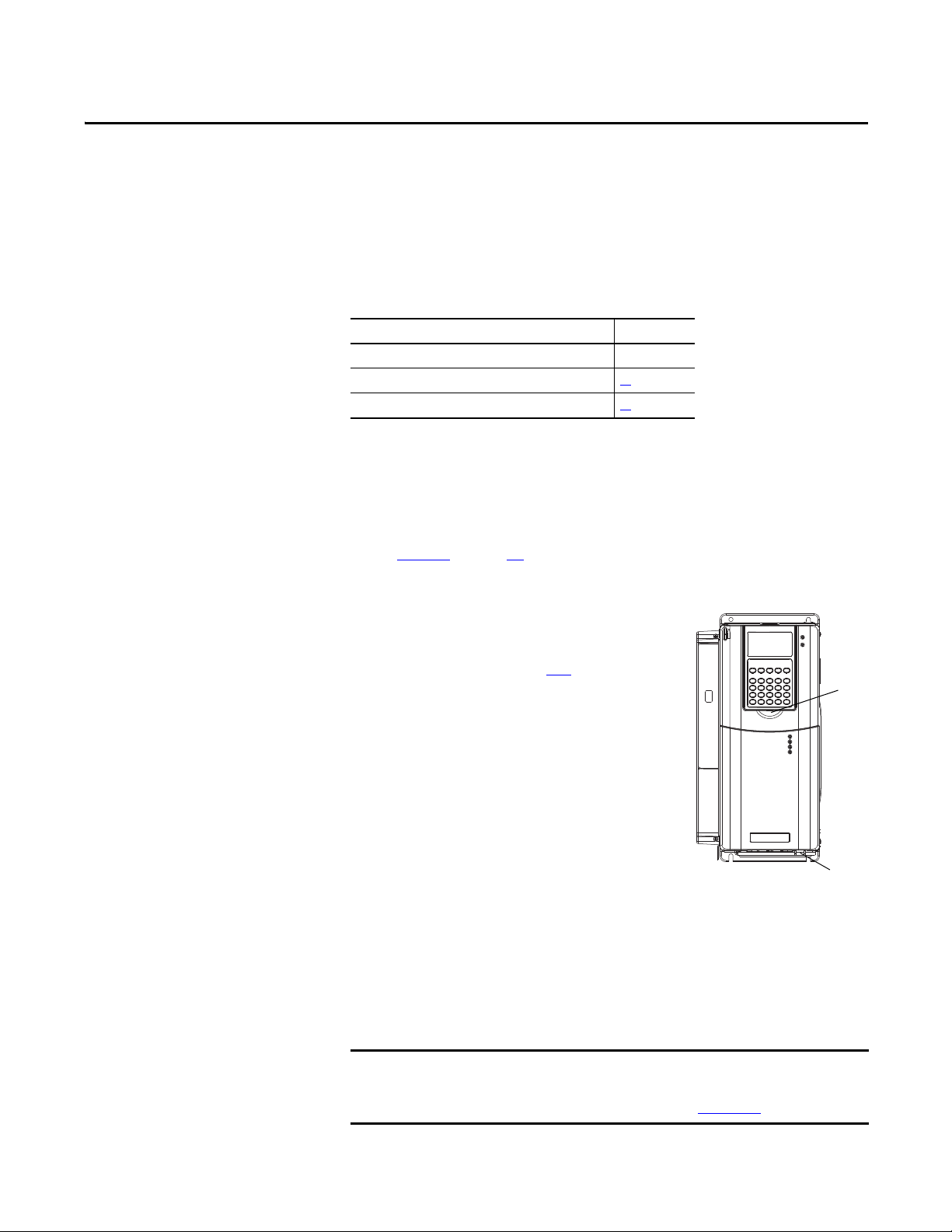
❏ A Human Interface Module (HIM) is required to complete this Start-Up
procedure, which uses the Assisted Start routine. The Assisted Start routine
prompts you for information that is needed to start up a drive for most
applications, such as line and motor data, commonly adjusted parameters and
I/O settings. The Assisted Start routine also performs autotuning procedures.
See Figure 1
❏ A HIM must be installed in Drive Peripheral
Interface (DPI) Port 1 or 2. If a HIM is not
installed, a remote device should be used to
start-up the drive. Refer to Human Interface
Module Overview on page 153
information on using the PowerFlex 7-Class
(DPI) HIM. Refer to the Enhanced PowerFlex
7-Class HIM User Manual, publication
20HIM-UM001, for information on using the
Enhanced HIM (if installed).
❏ 3-wire control is the default (and
recommended) mode of use for the Assisted
Start routine. In this case, the drive will start
when the HIM “Start” key is pressed and stop
when the HIM “Stop” key is pressed. If the drive
is configured for 2-wire control, the HIM
installed on the drive will also act as a 2-wire device. In 2-wire mode, the drive
will start when the HIM “Start” key is pressed and stop when the HIM “Start”
key is released.
on page 16 for a flow chart of the Assisted Start routine.
for more
❏ Analog and Digital I/O parameter values may be modified when using the
Assisted Start routine.
If you have a DriveLogix™ application, you must first connect the battery before
starting this section. Refer to the DriveLogix™ 5730 Controller for PowerFlex
700S Drives with Phase II Control, publication 20D-UM003
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 13
, for details.
Page 14
Chapter 1 Drive Start-Up
IMPORTANT
TIP
Prepare for Initial Drive Start-Up
ATT EN TI ON : Power must be applied to the drive to perform the following
start-up procedure. Some of the voltages present are at incoming line potential.
To avoid electric shock hazard or damage to equipment, only qualified service
personnel should perform the following procedure. Thoroughly read and
understand the procedure before beginning.
1. Confirm that all inputs are connected to the correct terminals and are
secure.
2. Verify that AC line power at the disconnect device is within the rated value
of the drive.
3. Verify that control power voltage is correct.
4. Apply AC power and control voltages to the drive. The drive and HIM
will power up.
When power is first applied, the HIM may require approximately five
seconds until commands are recognized (including the Stop key).
• If the STS (status) LED is NOT
Indicators on page f139
• If any digital input is configured to “Stop - CF” (CF=Clear Faults) or
“Enable”, verify that signals are present or the drive will not start. See
Ta b l e 1
5. When prompted on the HIM, select a display language and press Enter
().
The PowerFlex 700S Start-Up screen displays for drives that have not
been previously configured.
on page 17 for other causes of a start inhibit.
If the Assisted Start routine has already been accessed and started, you
can return to and continue with the Start-Up routine. See Access the
Start-Up Routine on page 155
or more information.
flashing green, refer to Status
for more information.
14 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 15
Drive Start-Up Chapter 1
IMPORTANT
Start Up the Drive
6. Press Enter ( ) on the HIM.
The Assisted Start routine will prompt you for the required information
needed to start-up the drive and complete the autotuning procedures. See
Figure 1
Note: When starting up some high impedance motor applications, the
“Power Circuit Test” may fail. If this test fails, the HIM displays the
following fault description text:
• Power Circuit Diagnostic Test Detected Error: XX_XX no gate, open
If this failure occurs, do the following:
• Verify the connections between the motor and the drive; make sure that
• Press Enter to continue and perform the Direction Test. If the
7. When the Assisted Start routine is finished and Done/Exit displays on the
HIM, press Enter ( ) to save any changed and/or updated data.
on page 16 for a flow chart of the Assisted Start routine.
circuit, bad I sensor, press Enter.
a disconnect device or contactor is not interfering with the signal.
Direction Test is successful, continue with the Start-Up routine ignoring the failure. If the Direction Test fails, check for an open
connection or bad current sensor.
Always exit the Assisted Start routine before cycling power to the drive.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 15
Page 16
Chapter 1 Drive Start-Up
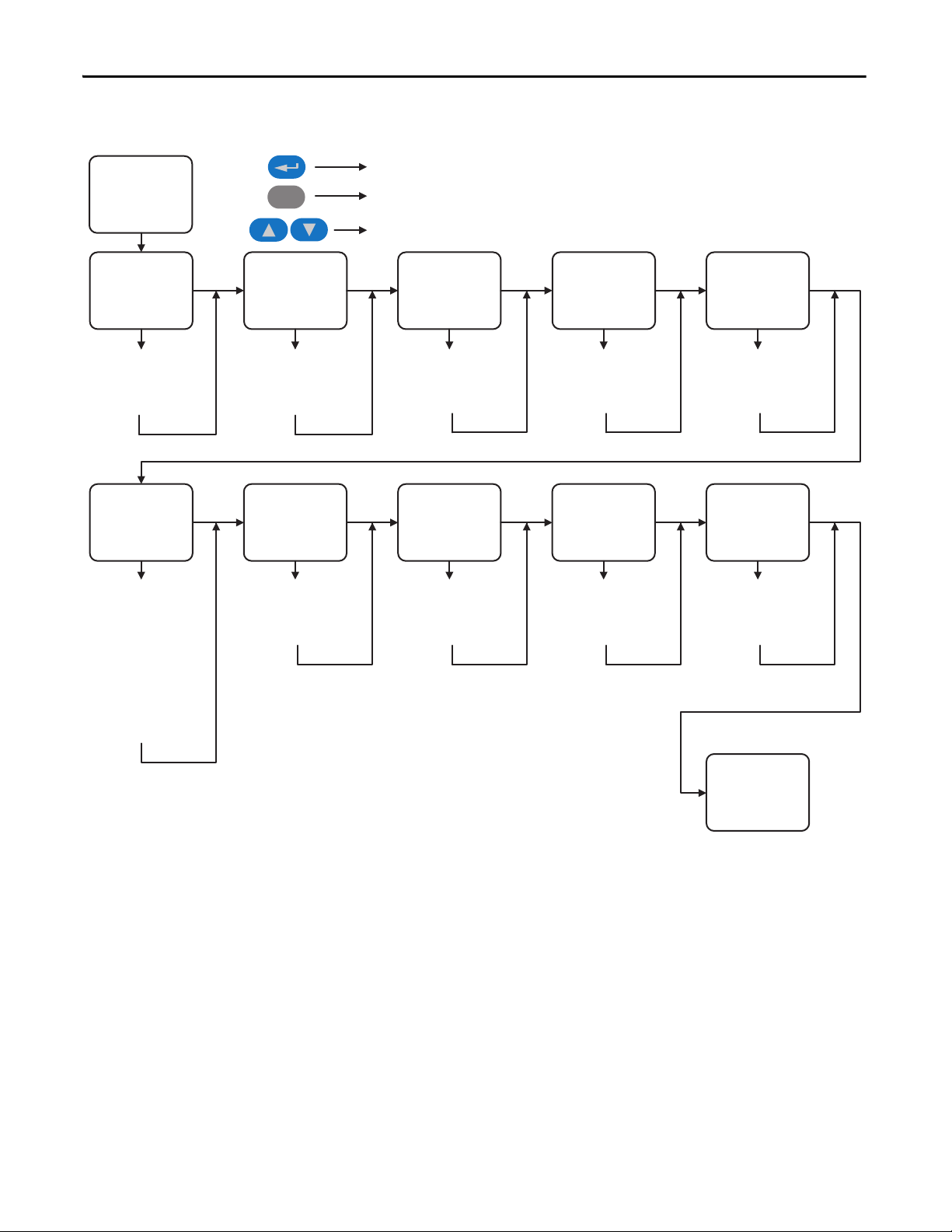
PowerFlex 700S
Start-Up
Motor Control Motor Data
Feedback
Configuration
Power Circuit
Test
Direction Test
Motor Tests Inertia Measure Speed Limits Speed Control Start / Stop / I/O
Select:
Motor Control Mode,
DB Resistor
Enter:
Motor NP Data,
Power & Units, FLA,
Volts, Hertz, RPM, Poles
Setup / Select:
Encoder, Resolver,
Hi-Res Encoder,
Linear Sensor
Diagnostic Check for:
Drive Power Circuit
Verify Direction
Field Oriented Control:
Measure: Stator
Resistance, Leakage
Inductance, Magnetizing
Inductance,
Slip Frequency
PMag Motor:
Measure: Encoder Offset,
Stator Resistance, Stator
Inductance, Back EMF
Measure:
System Inertia
Setup / Select:
Direction Control,
FWD, REV and
Absolute Speed Limits
Select:
Speed Reference
Sources
Done / Exit
Esc
Select a menu option or move down one level
Go back one selection or one level
Scroll through all choices
Configure: Digital Inputs,
Digital Outputs, Analog
Inputs, Analog Outputs
Figure 1 - PowerFlex 700S Assisted Start Routine Flow Chart
16 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 17
Drive Start-Up Chapter 1
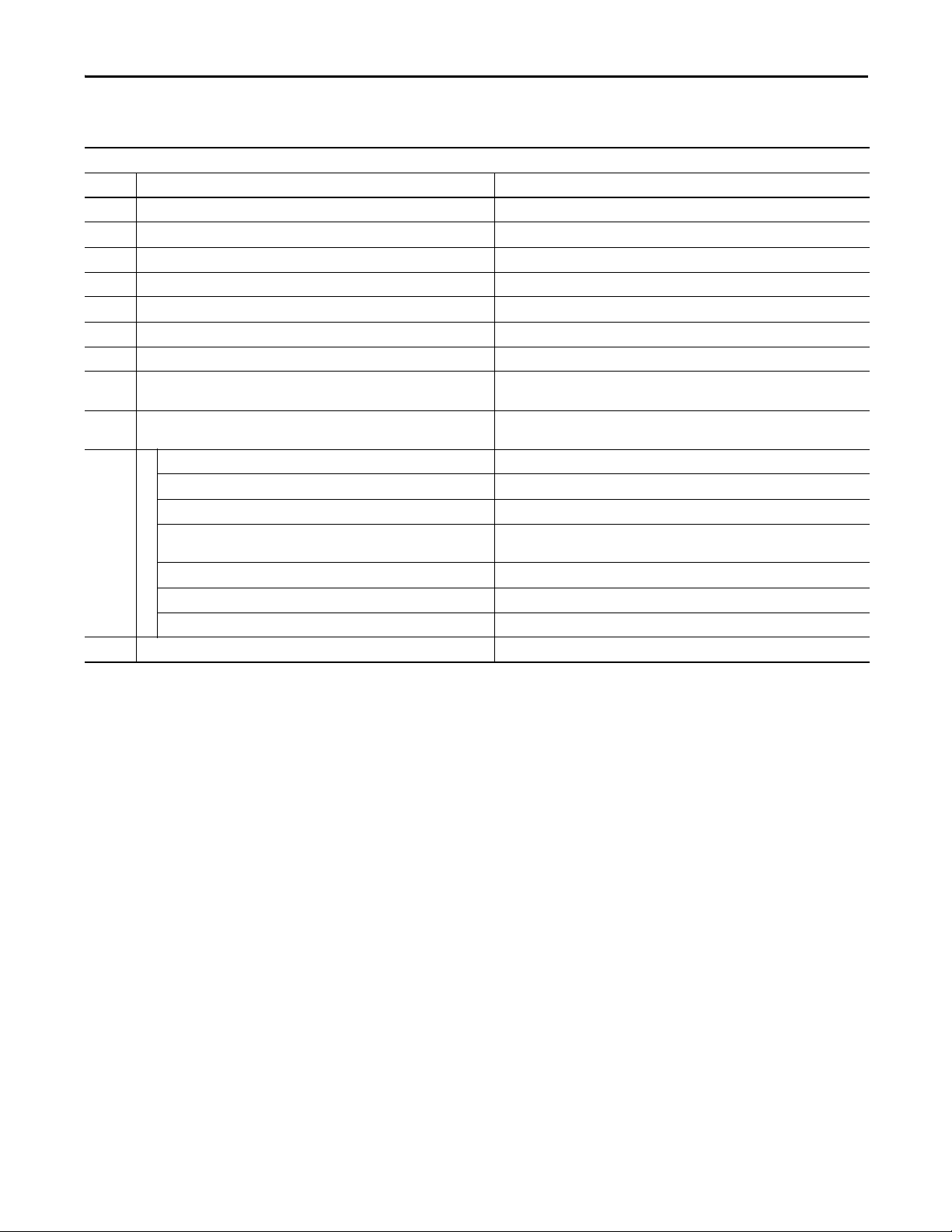
Table 1 - Common Causes of a Start Inhibit
Examine Parameter 156 [Start Inhibits]
Bit Description Action
1 No power is present at the Enable Terminal; TB2-16 Apply the enable
2, 3, 4 A stop command is being issued Close all stop inputs
5 Power loss event is in progress, indicating a loss of the AC input voltage Restore AC power
6 Data supplied by the power structure EEprom is invalid or corrupt Cycle the power - if problem persists, replace the power structure
7 Flash Update in Progress Complete Flash Procedures
8 Drive is expecting a Start Edge and is receiving a continuous signal Open all start buttons and remove all start commands
9 Drive is expecting a Jog Edge and is receiving a continuous signal Open all jog buttons and remove all jog commands
10 A conflict exists between the Encoder PPR programming (Par 232 or 242) and the
11 The drive cannot precharge because a precharge input is programmed and no
12
14 Invalid Feedback Device for Permanent Magnet Motor Control Set Par 222 to Value 5 (FB Opt Port0)
encoder configuration for edge counts (Par 233, bits 4 & 5)
signal is present
Start input configured but stop not configured Program Par 825…830 to include a stop button, rewire the drive
Run input configured but control options do not match Program Par 153, B it 8 to “0” (2 wire cont rol)
Start input configured but control options do not match Program Par 153, Bit 8 to “1” (3 wire control)
Multiple inputs configured as Start or Run Reprogram Par 825…830 so multiple starts, multiple runs or any combination do
Multiple inputs configured as Jog1 Reprogram Par 825…830 so only (1) is set to Jog1
Digital Configuration
Multiple inputs configured as Jog2 Reprogram Par 825…830 so only (1) is set to Jog2
Multiple inputs configured as Fwd/Rev Reprogram Par 825…830 so only (1) is set to Fwd/Rev
Verify encoder data and reprogram
Reprogram the input or close the precharge control contact
not exist
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 17
Page 18

Chapter 1 Drive Start-Up
Notes:
18 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 19
Chapter 2
Programming and Parameters
This chapter provides a complete listing of the PowerFlex 700S Phase II drive
parameters. The parameters can be programmed (viewed/edited) using a Human
Interface Module (HIM). Refer to Human Interface Module Overview on page
for information on using the HIM to view and edit parameters. As an
153
alternative, programming can also be performed using DriveTools™ software and a
personal computer.
Top ic Pag e
About Parameters 19
How Parameters are Organized 21
Parameter Data in Linear List Format 33
Parameter Cross Reference By Name 131
About Parameters
To configure a drive module to operate in a specific way, certain drive parameters
may have to be configured appropriately. Three types of parameters exist:
•ENUM Parameters
These parameters allow a selection from two or more items. The LCD
HIM will display a text message for each item.
•Bit Parameters
These parameters have individual bits associated with features or
conditions. If the bit is 0, the feature is off or the condition is false. If the
bit is 1, the feature is on or the condition is true.
•Numeric Parameters
These parameters have a single numeric value, for example, “0.1 Volts”.
The example tables on the following page illustrate how each parameter type is
presented in this manual.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 19
Page 20
Chapter 2 Programming and Parameters
Options
PI Trim Rst
PI Trim Hold
Posit ion En
PI Trim En
Frict Co mp
Inertia Comp
Ext Flt/Alm
Reserved
Reserved
SReg IntgRst
SReg IntgHld
SpdRamp Hold
Time Axis En
Tac hLo ss R st
Spd S Crv En
SpdRamp Dsbl
Default 0000000000000000
Bit 1514131211109876543210
0 = False
1 = True
Table 2 - Table Explanation
12 3
Name
No.
Description Values
4 Motor NP RPM
Set to the motor namep late rated rpm.
110 Speed/TorqueMode
Selec ts the source for the drive t orque reference .
151 Logic Command
The controller-drive interface (as defined by the Controller Communication Format) sets bits to enable and disable various functions and algorithms. Bits that are changed here are reflected in Par
152 [Appl ied LogicC md].
Note: Bits 4 through 9 in Logic Command are NOT recalled from Control EEprom. They will be cleared upon drive powerup or following an EEprom recall op eration.
Default:
Min/Max:
Units:
Scale:
Default:
Options:
Calculated
1/30000
rpm
Par 4 [Motor NP RPM] = 1.0 P.U.
1 =
“Speed Reg”
0 =
“Zero Torque” 4 = “Max Spd/Torq”
1 =
“Speed Reg” 5 = “Sum Spd/Torq”
2 =
“Torque Ref” 6 = “AbsMn Spd/Tq”
3 =
“Min Spd/Torq”
Linkable
Read-Write
RW 16-bit
Data Type
Integer
Column(s) Explanation
No. - Parameter Number
1
A
Name - Parameter name as it appears in the DriveExecutive software.
2
Description - Brief description of parameter function.
Values - D efine the various operating characteristics of th e parameter.
3
There are 3 types of Values:
Numeric Default: Lists the value assigned at the factor y.
ENUM Default: Lists the value assigned at the factory.
Bit Options: Displays the bit selections available.
Linkable - “Y” indicates that the parameter is linkable.
Read-Write - Identifies if the parameter is read-write or read-only.
RW = Read-Write
RO = Read Only
Data Type - Identifies the parameter data type (i.e. integer, floating point, boolean).
= Parameter value cannot be changed until the drive is stopped.
= Parameter is displayed on the HIM only when Par 196 [ParamAccessLvl] is set to 1 “Advanced”.
Min/Max. Displays lowest possible setting/Displays highest possible setting.
Units: Unit of measure and resolution as shown on the LCD HIM.
Scale: Value sent from Controller or Comm Device = Drive Parameter Value x Comm Scale
Options: Displays the selections available.
Default: Lists the value a ssigned at the factory.
Bit: Bit number.
Important: Analog inputs can be set for current or voltage with parameter 821 [Analog I/O Units].
20 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 21
Programming and Parameters Chapter 2
User Functions
Inputs & Outputs
Communication
Utility
Speed/Posit Fdbk
Position Control
Process Control
Torque Control
Speed Control
Dynamic Control
Motor Control
Monitor
Metering
310
49
50
40
43
301
319
300
72
297
499
309
312
307
311
762
299
298
306
313
345
824
801
807
813
837
844
Output Freq
Selected SpdRefA
Selected SpdRefB
Selected Spd Ref
Ramped Spd Ref
Motor Speed Ref
Selected Trq Ref
Motor Spd Fdbk
Scaled Spd Fdbk
Output Curr Disp
Trq CurFdbk (Iq)
% Motor Flux
MotorFluxCurr FB
Output Voltage
Output Power
Position Fdbk
Elapsed MWHrs
Elapsed Run Time
DC Bus Voltage
Heatsink Temp
Drive OL JnctTmp
Local I/O Status
Anlg In1 Value
Anlg In2 Value
Anlg In3 Volts
Anlg Out1 Value
Anlg Out2 Value
Control Status
150
155
157
156
166
167
555
346
159
165
317
554
Logic State Mach
Logic Sta tus
Logic Ctr l State
Start Inhibits
Motor Ctrl Cmmd
Motor Ctrl Ackn
MC Status
Drive OL Status
DigIn ConfigStat
Tun e Tes t St atu s
SL System Time
LED Status
Drive Data
400
401
420
404
314
315
457
456
900
901
Rated Amps
Rated Volts
Pwr Strct Mode
Dead Time
VPL Firmware Rev
VPL Build Number
MC Firmware Rev
MC Build Number
SynchLink Rev
SL System Rev
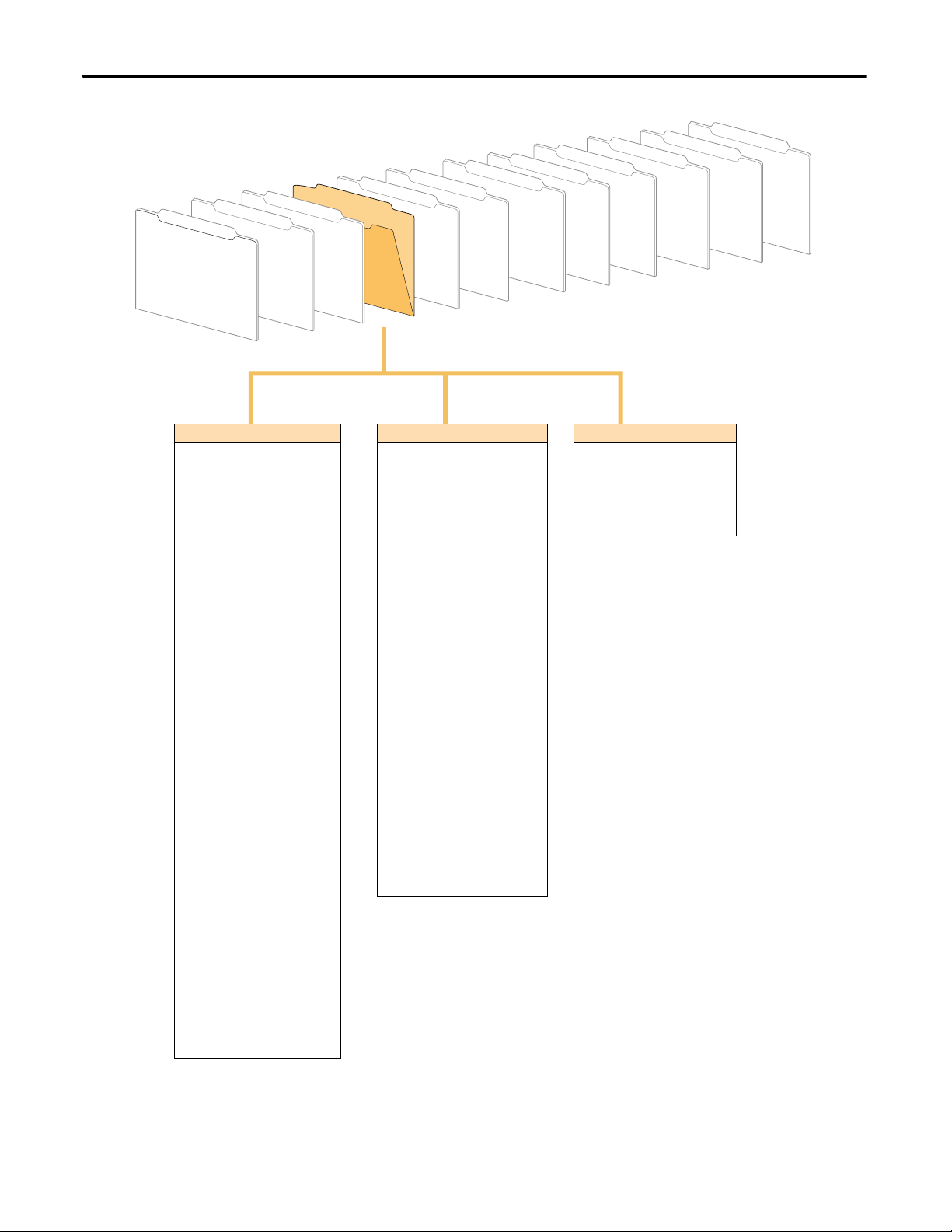
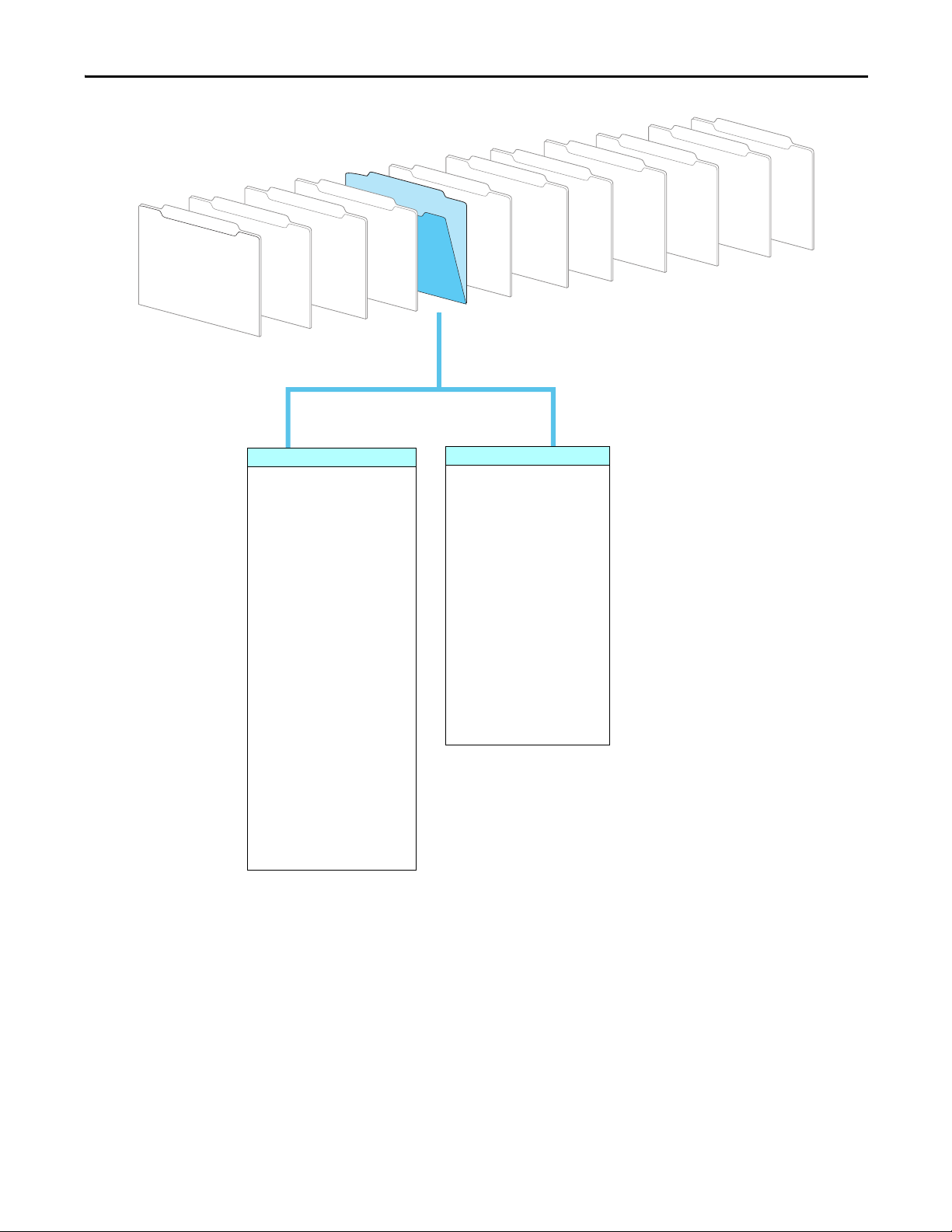
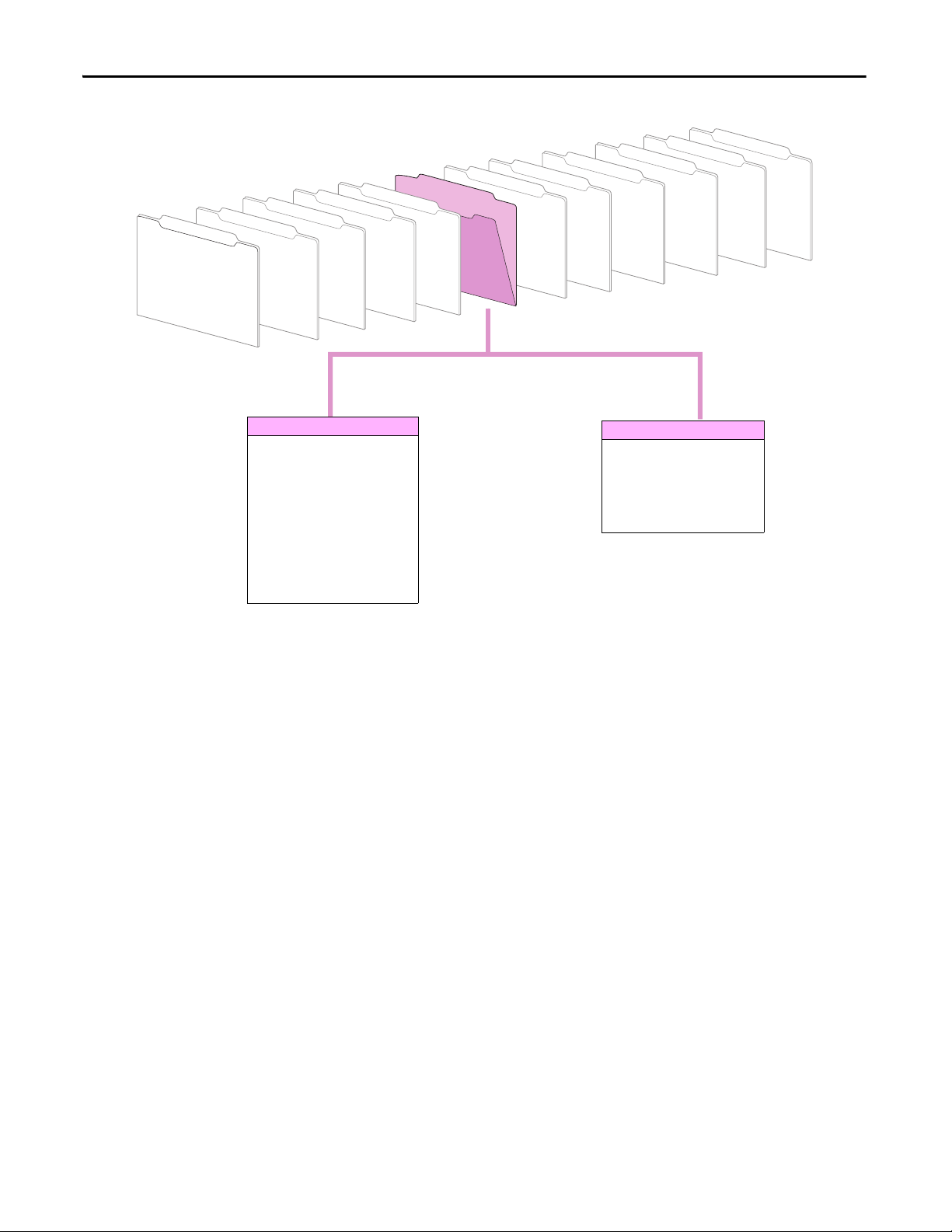
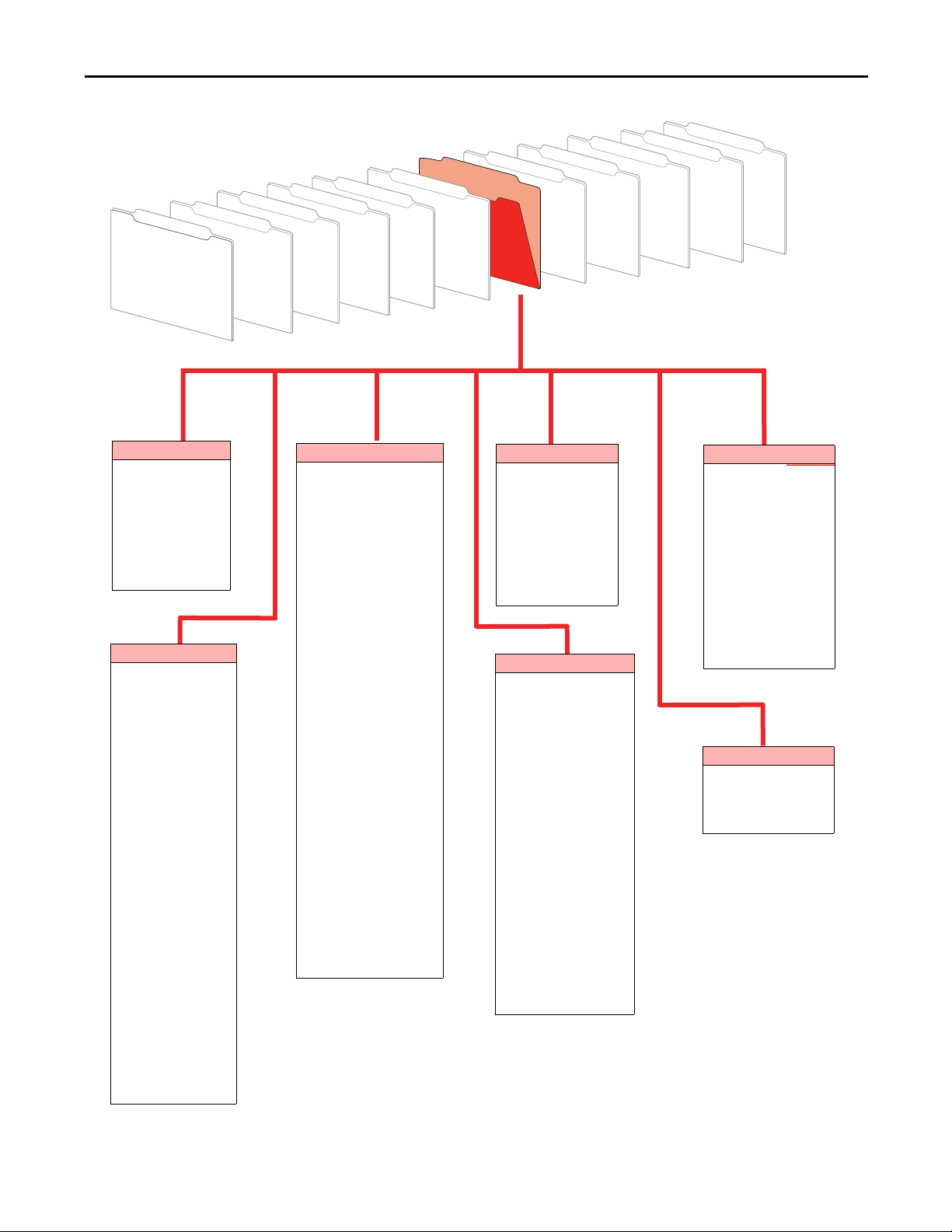
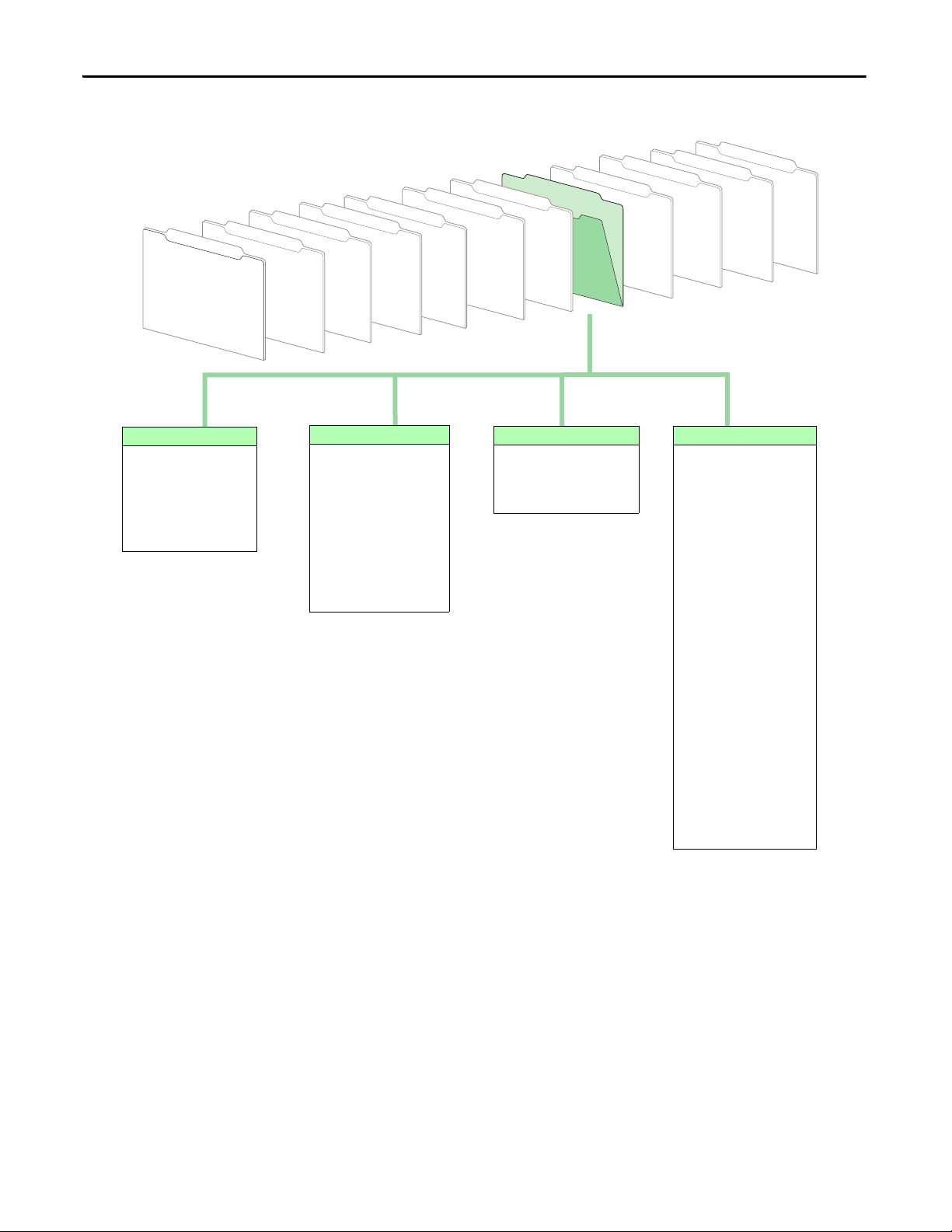
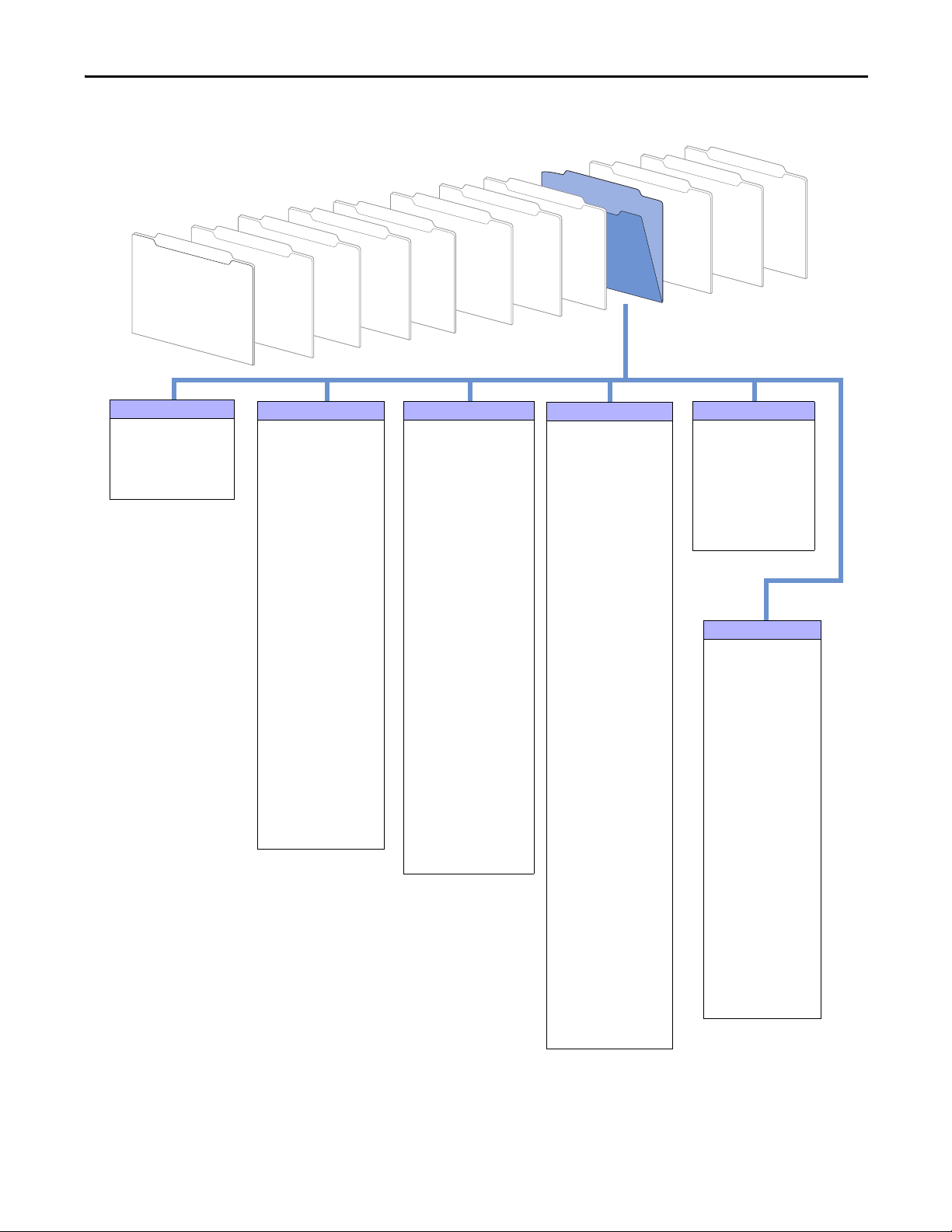
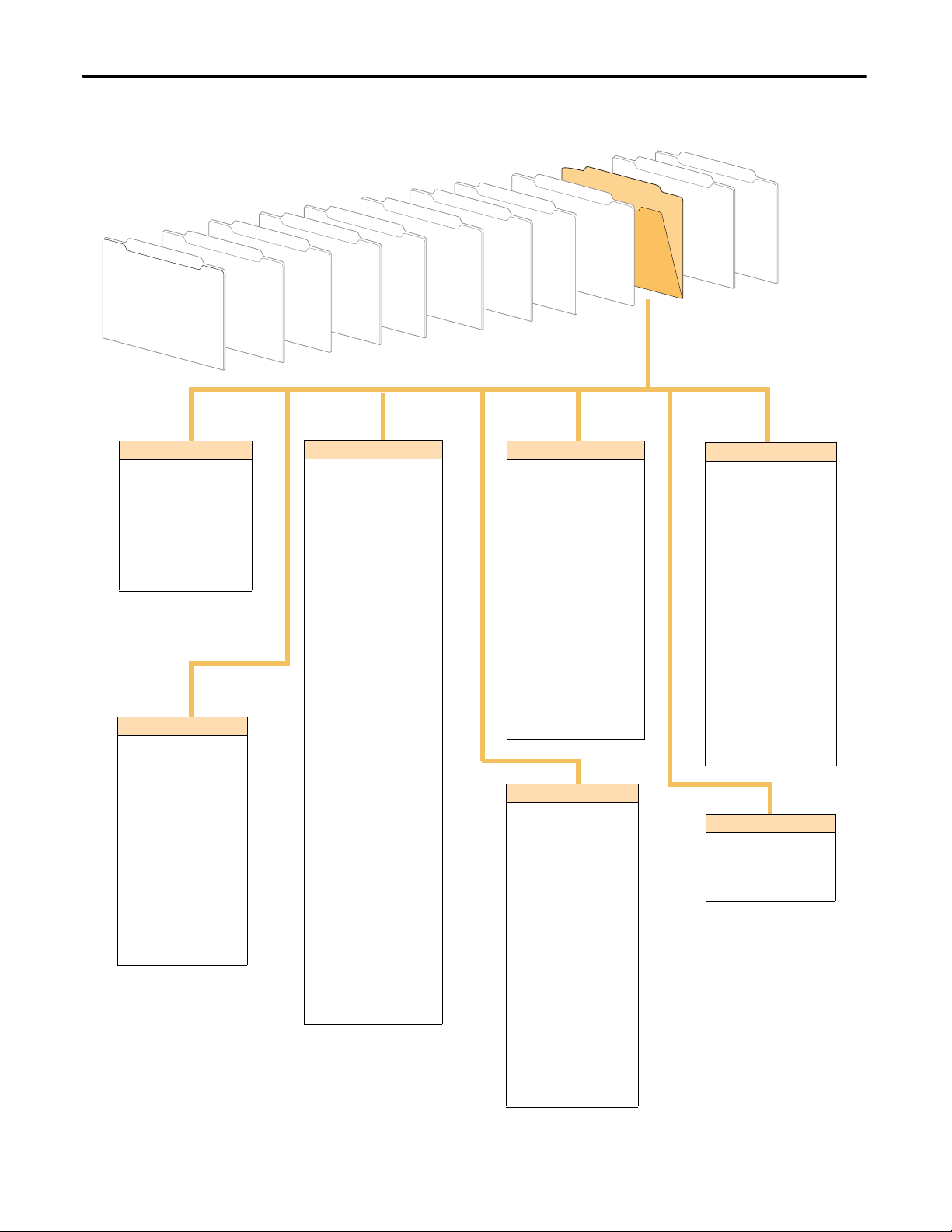
How Parameters are Organized
DriveExecutive programming software displays parameters in “Linear List” or
“File - Group - Parameter” format. Viewing the parameters in “File - Group Parameter” format simplifies programming by grouping parameters that are used
for similar functions. There are twelve files. Each file is divided into multiple
groups of parameters. Each illustration below contains a list of the Parameters
contained in each Group for each File.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 21
Page 22
Chapter 2 Programming and Parameters
User Functions
Inputs & Outputs
Communication
Utility
Speed/Posit Fdbk
Position Control
Process Control
Torque Control
Speed Control
Dynamic Control
Motor Control
Monitor
Motor Data
1
2
3
4
5
6
336
7
9
Motor NP Volts
Motor NP FLA
Motor NP Hertz
Motor NP RPM
Motor NP Power
Mtr NP Pwr Units
Motor OL Factor
Motor Poles
Total Inertia
Monitoring
525
526
434
435
441
442
497
498
495
496
499
489
Slip Ratio
Stator Frequency
Mtr Vds Base
Mtr Vqs Base
Vds Fd bk Filt
Vqs Fd bk Filt
Vqs Co mmand
Vds Co mmand
Iqs Command
Ids Command
Trq CurFdbk (Iq)
Flx CurFdbk (Id)
Drive Config
485
402
403
405
409
410
411
510
511
512
513
514
515
516
517
505
506
507
508
509
424
Motor Ctrl Mode
PWM Frequency
Voltage Class
Dead Time Comp
Line Undervolts
PreChrg TimeOut
PreChrg Control
FVC Mode Config
FVC2 Mode Config
PMag Mode Cnfg
V/Hz Mode Config
Tes t M ode Con fi g
FVC Tune Config
FVC2 Tune Config
PMag Tune Config
PM TestWait Time
PM Test Idc Ramp
PM Test FreqRamp
PM Test Freq Ref
PM Test I Ref
Flux Ratio Ref
Tuning
423
453
454
425
426
443
470
444
533
500
501
437
438
439
440
469
449
450
447
448
446
445
552
553
472
431
432
433
477
428
537
538
539
54
551
Iqs Rate Limit
Iu Offset
Iw Offset
Flux Rate Limit
Flux Satur Coef
Flux Reg P Gain1
Flux Reg P Gain2
Flux Reg I Gain
SlewRateTimeLimit
Bus Util Limit
Tor que En Dly
Vqs M ax
Vds M ax
Vqs M in
Vds M in
FVC CEMF Comp
SrLss Reg I Gain
SrLss Reg P Gain
Slip Reg P Gain
Slip Reg I Gain
Slip Gain Min
Slip Gain Max
Slip Preload Val
Slip Slew Rate
PreCharge Delay
Tes t Cu rr ent Ref
Tes t Fr eq Ref
Tes t Fr eq Rat e
Est Theta Delay
IReg IGain Fctr
SrLssAngleStblty
SrLss VoltStblty
SrLss StbltyFilt
Inertia TrqLpfBW
CurrFdbk AdjTime
Autotune Results
421
422
429
430
486
487
488
490
491
492
493
494
502
503
504
427
520
521
522
523
Iqs Integ Freq
Iqs Reg P Gain
Ids Integ Freq
Ids Reg P Gain
Rated Slip Freq
Motor NTC Coef
Flux Current
StatorInductance
StatorResistance
Leak Indu ctance
Leak Indc Satur1
Leak Indc Satur2
Rotor Resistance
Current Reg BW
PM AbsEncd Offst
PM Mtr CEMF Comp
PM Q Inductance
PM D Inductance
PM Stator Resist
PM Mtr CEMF Coef
22 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 23
Programming and Parameters Chapter 2
User Functions
Inputs & Outputs
Communication
Utility
Speed/Posit Fdbk
Position Control
Process Control
Torque Control
Speed Control
Dynamic Control
Motor Control
Monitor
Configuration
151
152
153
158
160
169
335
Logic Command
Applied LogicCmd
Control Options
Drive Logic Rslt
Zero Spe ed Lim
SrLss ZeroSpdLim
Abs OverSpd Lim
Overload Protect
337
338
339
340
341
343
344
Mtr I2T Curr Min
Mtr I2T Spd Min
Mtr I2T Calibrat
Mtr I2T Trp ThrH
Mtr I2T Count
OL OpnLp CurrLim
OL ClsLp CurrLim
Stop/Brake Modes
168
414
415
416
417
154
545
546
547
1125
544
1126
Normal Stop Mode
Brake/Bus Cnfg
BusReg/Brake Ref
Brake PulseWatts
Brake Watts
Stop Dwell Time
Bus Reg Ki
Bus Reg Kp
Bus Reg Kd
DC Brake Level
External DB Res
DC Brake Time
Power L oss
406
407
408
Power Loss M ode
Power Loss Ti me
Power Loss Le vel
Sleep/Wake
278
279
280
281
282
283
284
Sleep-Wake Mode
Sleep-Wake Ref
Wake Level
Wake Time
Sleep Level
Sleep Time
Sleep Control
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 23
Page 24
Chapter 2 Programming and Parameters
User Functions
Inputs & Outputs
Communication
Utility
Speed/Posit Fdbk
Position Control
Process Control
Torque Control
Speed Control
Dynamic Control
Motor Control
Monitor
Reference
27
28
10
11
12
13
14
15
16
17
18
19
20
29
39
40
30
31
41
32
33
34
43
53
45
61
62
63
37
35
36
38
46
21
47
56
9
57
58
60
55
59
64
65
1160
66
67
68
69
Speed Ref A Sel
Speed Ref B Sel
Speed Ref 1
Spd Ref1 Divide
Speed Ref 2
Spd Ref2 Multi
Preset Speed 1
Preset Speed 2
Preset Speed 3
Preset Speed 4
Preset Speed 5
Preset Speed 6
Preset Speed 7
Jog Speed 1
Jog Speed 2
Selected Spd Ref
Min Spd Ref Lim
Max Spd Ref Lim
Limited Spd Ref
Accel Time 1
Decel Time 1
S Curve Time
Ramped Spd Ref
Drive Ramp Rslt
Delayed Spd Ref
Virt Encoder EPR
Virt Encdr Po sit
Virt Encdr D lyed
Spd Ref Bypass
SpdRef Filt Gain
SpdRef Filt BW
Speed Ref Scale
Scaled Spd Ref
Speed Trim 1
SpdRef + SpdTrm1
Inertia SpeedRef
Total Inertia
InertiaAccelGain
InertiaDecelGain
DeltaSpeedScale
Speed Comp
Inertia Trq Add
FricComp Spd Ref
FricComp Setup
Virt EncPosi tFast
FricComp Stick
FricComp Slip
FricComp Rated
FricComp Trq Add
Regulator
48
23
24
22
25
26
74
75
76
301
300
93
94
71
100
89
84
85
87
9
90
97
91
81
82
92
86
101
106
104
105
102
103
95
96
302
Spd Ref Bypass2
Speed Trim 3
SpdTrim 3 Scale
Speed Trim 2
STrim2 Filt Gain
SpdTrim2 Filt BW
Atune Sp d Ref
Rev Speed Lim
Fwd Speed Lim
Motor Speed Ref
Motor Spd Fdbk
SRegFB Filt Gain
SReg FB Filt BW
Filtered SpdFdbk
Speed Error
Spd Err Filt BW
SpdReg AntiBckup
Servo Lock Gain
SReg Trq Preset
Total Inertia
Spd Reg BW
Act Spd Reg BW
Spd Reg Damping
Spd Reg P Gain
Spd Reg I Gain
SpdReg P Gain Mx
Spd Reg Droop
SpdReg Integ Out
SrLss Spd Reg BW
SrLss Spd Reg Kp
SrLss Spd Reg Ki
Spd Reg Pos Lim
Spd Reg Neg Lim
SRegOut FiltGain
SReg Out Filt BW
Spd Reg PI Out
Setpoint Monitor
171
172
173
174
175
176
177
Set Speed Lim
Setpt 1 Data
Setpt1 TripPoint
Setpt 1 Limit
Setpt 2 Data
Setpt2 TripPoint
Setpt 2 Limit
24 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 25
Programming and Parameters Chapter 2
Tor que
110
302
59
69
111
112
113
114
115
119
120
319
116
129
117
118
415
401
306
300
127
128
353
125
126
123
124
303
132
133
134
221
Speed/TorqueMode
Spd Reg PI Out
Inertia Trq Add
FricComp Trq Add
Tor que Re f 1
Tor que Re f1 D iv
Tor que Re f 2
Torque Ref2 Mult
Tor que Tri m
SLAT ErrorSetpnt
SLAT Dwell Time
Selected Trq Ref
Tor que St ep
Atune Trq Ref
NotchAttenuation
Notch Filt Freq
BusReg/Brake Ref
Rated Volts
DC Bus Voltage
Motor Spd Fdbk
Mtring Power Lim
Regen Power Lim
Iq Actual Lim
Tor que Pos Li mit
Tor que Ne g Li mi t
Trq PosL im A ctl
Trq NegLim Actl
Motor Torque Ref
Inert Adapt Sel
Inert Adapt BW
Inert Adapt Gain
Load Esti mate
Current
303
309
359
360
361
350
351
308
343
356
362
352
488
312
345
313
346
344
353
354
355
305
Motor Torque Ref
% Motor Flux
Motor Flux Est
Min Flux
Flx LpassFilt BW
Iq Actual Ref
Iq Ref Trim
Output Current
OL OpnLp CurrLim
Mtr Current Lim
Current Lmt Gain
Is Actual Lim
Flux Current
MotorFluxCurr FB
Drive OL JnctTmp
Heatsink Temp
Drive OL Status
OL ClsLp CurrLim
Iq Actual Lim
Iq Rate Limit
Iq Ref Limited
Mtr Trq Curr Ref
Monitor
Motor Control
Dynamic Control
Speed Control
Torque Control
Process Control
Position Control
Speed/Posit Fdbk
Utility
Communication
Inputs & Outputs
User Functions
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 25
Page 26
Chapter 2 Programming and Parameters
User Functions
Inputs & Outputs
Communication
Utility
Speed/Posit Fdbk
Position Control
Process Control
Torque Control
Speed Control
Dynamic Control
Motor Control
Monitor
Regulator
181
182
184
183
185
186
187
188
189
190
191
192
180
PI Reference
PI Feedback
PI Lpass Filt BW
PI Error
PI Preload
PI Prop Gain
PI Integ Time
PI Integ HLim
PI Integ LLim
PI Integ Output
PI High Limit
PI Lower Limit
PI Output
Limit Generator
202
203
204
205
206
207
208
Time Axis Rate
Time Axis Outpu t
LimGen Y axis Mx
LimGen Y axis Mn
LimGen X axis In
Limit Gen Hi Out
Limit Gen Lo Out
26 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 27
Programming and Parameters Chapter 2
Note: The Position Control function is disabled by default. To enable the Position Control function,
set Par 147 bit 16 to “1” enable.
Homing
1120
1121
1122
1124
1123
Home Accel Time
Home Decel Time
Home Speed
Home Actual Pos
Home Position
Phase Lock Loop
720
721
722
723
724
725
726
727
728
729
730
731
732
733
734
735
PLL Control
PLL Position Ref
PLL BandWidth
PLL Rev Input
PLL Rev Output
PLL EPR Input
PLL EPR Output
PLL VirtEncdrRPM
PLL Ext Spd Ref
PLL Ext SpdScale
PLL LPFilter BW
PLL Posit Out
PLL Posit OutAdv
PLL FiltPositOut
PLL Speed Out
PLL SpeedOut Adv
Phase Lock Loop
720
721
722
723
724
725
726
727
728
729
730
731
732
733
734
735
PLL Control
PLL Position Ref
PLL BandWidth
PLL Rev Input
PLL Rev Output
PLL EPR Input
PLL EPR Output
PLL VirtEncdrRPM
PLL Ext Spd Ref
PLL Ext SpdScale
PLL LPFilter BW
PLL Posit Out
PLL Posit OutAdv
PLL FiltPositOut
PLL Speed Out
PLL SpeedOut Adv
User Functions
Inputs & Outputs
Communication
Utility
Speed/Posit Fdbk
Position Control
Process Control
To rq ue Control
Speed Control
Dynamic Control
Motor Control
Monitor
Phase Lock Loop
720
721
722
723
724
725
726
727
728
729
730
731
732
733
734
735
PLL Control
PLL Position Ref
PLL BandWidth
PLL Rev Input
PLL Rev Output
PLL EPR Input
PLL EPR Output
PLL VirtEncdrRPM
PLL Ext Spd Ref
PLL Ext SpdScale
PLL LPFilter BW
PLL Posit Out
PLL Posit OutAdv
PLL FiltPositOut
PLL Speed Out
PLL SpeedOut Adv
Posit ion Confi g
740
741
742
777
784
780
785
781
782
783
Posit ion Contro l
Position Status
Posit Ref Sel
PositionFdbk Sel
Posit Detct1 In
Posit Detct1 Stpt
Posit Detct2 In
Posit Detct2 Stpt
In Posit BW
In Posit Dwell
Point to Point
758
745
746
744
753
754
755
756
747
757
762
763
769
796
768
761
759
760
775
776
778
779
318
797
798
799
1130
1131
1132
1133
1134
1135
1136
1137
1138
1139
1140
1141
1142
1143
1144
Pt-Pt Posit Ref
Posit Ref EGR Mul
Posit Ref EGR Div
Posit Ref EGR Out
Posit Offset 1
Posit Offset 2
Posit Offset Spd
X Offst SpdFilt
Posit ion Cmmd
Abs Posit Offset
Position Fdbk
Position Actual
Posit ion Erro r
Posit Gear Ratio
Posit Reg P Ga in
Pt-Pt Filt BW
Pt-Pt Accel Time
Pt-Pt Decel Time
XReg Spd LoLim
XReg Spd HiLim
X Notch Attenu
X Notch FiltFreq
Posit Spd Output
BasicIndx Step
BasicIndx Preset
BasicIndx Output
PPMP Pos Command
PPMP Pos Mul
PPMP Pos Div
PPMP Scaled Cmd
PPMP Control
PPMP Status
PPMP Rev Spd Lim
PPMP Fwd Spd Lim
PPMP Over Ride
PPMP Accel Time
PPMP Decel Time
PPMP SCurve Time
PPMP Spd Output
PPMP Pos Output
PPMP Pos To Go
Sync Generator
786
787
317
788
789
790
791
792
793
794
795
Xsync Status
Xsync Gen Period
SL System Time
Xsync In 1
Xsync Out 1
Xsync In 2
Xsync Out 2
Xsync Out 2 Dly
Xsync In 3
Xsync Out 3
Xsync Out 3 Dly
Interp / Direct
748
750
749
751
752
693
743
745
746
744
757
753
754
755
756
747
762
764
766
767
763
765
769
796
768
770
772
773
774
771
775
776
778
779
318
CoarsePosi t Trgt
Coarse Spd Trgt
Interp Position
Interp Speed
Interp AccelRate
Interp SyncInput
Aux Posit Ref
Posit Ref EGR M ul
Posit Ref EGR D iv
Posit Ref EGR O ut
Abs Posit Offset
Posit Offset 1
Posit Offset 2
Posit Offset Spd
X Offst SpdFilt
Posit ion Cmmd
Position Fdbk
Posit Load Fdbk
Posit FB EGR Mu l
Posit FB EGR Di v
Position Actual
Posit Actl Load
Posit ion Erro r
Posit Gear Ratio
Posit Reg P Ga in
Posit Reg Inte g
XReg Integ LoLim
XReg Integ HiLim
XReg Integ Out
Posit Reg Droo p
XReg Spd LoLim
XReg Spd HiLim
X Notch Attenu
X Notch FiltFreq
Posit Spd Output
Motion
684
685
686
687
688
689
690
691
692
694
695
696
697
698
699
700
701
702
703
704
705
706
707
708
709
710
711
MotnUpdatePeriod
Motn CoarseMulti
Motn Config
Motn Axis Status
Motn AxisControl
Motn Axis Resp
Motn Cnct Status
Motn EventStatus
Motn Event Ctrl
Motn Mx Pos Trvl
Motn Mx Neg Trvl
Motn PositErrTol
MotnPositLockTol
Motn Posit Cmmd
Motn Speed Cmmd
Motn Posit Sync
FdbkAxis FdbkSel
FdbkAxis FdbkVal
Motn TP Select
Motn TP Value
Motn RotaryCmmd
MotnUnwdTurnCmmd
SrvoAxis RotFdbk
SrvoAxisUnwdFdbk
FdbkAxis RotFdbk
FdbkAxisUnwdFdbk
MotnCnfgErrParam
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 27
Page 28
Chapter 2 Programming and Parameters
Feedback Config
222
223
777
224
300
762
73
72
MtrFdbk Sel Pri
MtrFdbk Sel Alt
Posit ionFdbk S el
TachSwitch Level
Motor Spd Fdbk
Position Fdbk
Spd Fdbk Scale
Scaled Spd Fdbk
Encoder Port 0/1
233
234
232
231
230
242
241
240
236
237
238
235
239
Encdr 0/1 Config
Encdr 0/1 Error
Encoder0 PPR
Encdr0 Spd Fdbk
Encdr0 Position
Encoder1 PPR
Encdr1 Spd Fdbk
Encdr1 Position
Enc0/1 RegisCnfg
Enc0/1 RegisCtrl
Enc0/1 RegisStat
Encdr0 RegisLtch
Encdr1 RegisLtch
Calculated Fdbk
225
226
227
228
229
Virtual Edge/Rev
Motor Speed Est
Motor Posit Est
MtrSpd Simulated
MtrPosit Simulat
Feedback Opt 0/1
249
251
250
253
252
259
260
263
264
265
266
267
268
269
277
272
273
274
275
276
254
255
256
257
258
286
289
290
285
291
1155
1156
Fdbk Option ID
FB Opt0 Spd Fdbk
FB Opt0 Posit
FB Opt1 Spd Fdbk
FB Opt1 Posit
Stegmann0 Cnfg
Stegmann0 Status
Heidenhain0 Cnfg
Heidenhain0 Stat
Heidn Mkr Offset
Heidn Encdr Type
Heidn Encdr PPR
Resolver0 Cnfg
Resolver0 Status
Reslvr0 Type Sel
Reslvr0 SpdRatio
Reslvr0 Carrier
Reslvr0 In Volts
Rslvr0 XfrmRatio
Reslvr0 CableBal
Opt0/1 RegisCnfg
Opt0/1 RegisCtrl
Opt0/1 RegisStat
Opt 0 Regis Ltch
Opt 1 Regis Ltch
Linear1 Status
Lin1 Update Rate
Linear1 CPR
Linear1 Config
Lin1Stahl Status
Heidn VM Pos Ref
Heidn VM Enc PPR
Monitor
Dynamic Control
Motor Control
Torque Control
Speed Control
Process Control
Position Control
Speed/Posit Fdbk
Utility
Communication
Inputs & Outputs
User Functions
28 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 29
Programming and Parameters Chapter 2
Peak D etectio n
210
211
212
213
214
215
216
217
218
219
PeakD tct Ctr l In
PeakD tct Stat us
PkDtct1 In DInt
PkDtct1 In Real
PeakDtct1 Preset
PeakD etect1 Out
PkDtct2 In DInt
PkDtct2 In Real
PeakDtct2 Preset
PeakD etect2 Out
Diagnostics
155
156
304
824
320
321
322
326
327
328
323
324
325
331
313
345
346
316
902
903
518
519
463
464
465
894
895
896
897
898
899
332
333
334
Logic Status
Start Inhibits
Limit Status
Local I/O Statu s
Exception Event1
Exception Event2
Exception Event3
Alarm Status 1
Alarm Status 2
Alarm Status 3
Fault Status 1
Fault Status 2
Fault Status 3
LstFaultStopMode
Heatsink Temp
Drive OL JnctTmp
Drive OL Status
SynchLink Status
SL Error Status
SL Error History
MC Diag Status
MC Diag Done
MC Diag Error 1
MC Diag Error 2
MC Diag Error 3
SL CRC Err Accum
SL CRC Error
SL BOF Err Accum
SL BOF Error
SL CRC Err Limit
SL BOF Err Limit
700L EventStatus*
700L FaultStatus*
700L AlarmStatus*
Tes t Poi nts
161
162
163
164
329
330
77
78
79
108
109
347
348
130
131
357
358
418
419
178
179
737
738
739
892
893
245
246
247
261
262
270
271
287
288
412
413
466
467
468
473
474
475
476
717
718
719
1145
1146
1147
Logic TP S el
Logic TP D ata
Stop Oper TP Sel
StopOper TP Data
Faul t TP S el
Fault TP Data
Spd Ref TP Sel
Spd Ref TP RPM
Spd Ref TP Data
Spd Reg TP Sel
Spd Reg TP Data
Drive OL TP Sel
Drive OL TP Data
Trq Ref TP S el
Trq Ref TP D ata
Curr Re f TP Sel
Curr Re f TP Data
Brake TP Sel
Brake TP Data
PI TP Sel
PI TP Data
Posit TP Selec t
PositTP DataDInt
PositTP DataReal
SL Comm TP Sel
SL Comm TP Data
Spd Fdbk TP Sel
Spd Fdbk TP RPM
Spd Fdbk TP Data
Steg&Hiedn TPSel
Steg&Heidn TPDta
Reslvr0 TP Sel
Reslvr0 TP Data
Linear1 TP Sel
Linear1 TP Data
Power EE TP Sel
Power EE TP Data
MC TP1 Select
MC TP1 Value
MC TP1 Bit
MC TP2 Select
MC TP2 Value
MC FaultTPSelect
MC FaultTP Value
PLL TP Select
PLL TP DataDInt
PLL TP DataReal
PPMP TP Select
PPMP TP DataDInt
PPMP TP DataReal
Drive Memory
196
145
147
149
146
148
ParamAccessLevel
ApplicationGroup
FW Functions En
FW FunctionsActl
FW TaskTime Sel
FW TaskTime Actl
Fault/Alm Config
379
374
373
382
381
393
394
376
377
372
371
375
369
365
366
367
391
392
383
384
390
385
386
387
388
389
370
363
364
378
395
396
397
398
399
368
Ext Flt/Alm Cnfg
Motor Stall Cnfg
Motor Stall Time
MC Cmd Lim Cnfg
PreChrg Err Cnfg
BusUndervoltCnfg
VoltFdbkLossCnfg
Inv OL Pend Cnfg
Inv OL Trip Cnfg
Mtr OL Pend Cnfg
Mtr OL Trip Cnfg
Inv OT Pend Cnfg
Brake OL Cnfg
Fdbk LsCnfg Pri
Fdbk LsCnfg Alt
Fdbk LsCnfgPosit
DPI CommLoss Cfg
NetLoss DPI Cnfg
SL CommLoss Data
SL CommLoss Cnfg
SL MultErr Cnfg
Lgx CommLos sData
Lgx OutOfRunCnfg
Lgx Timeout Cnfg
Lgx Closed Cnfg
Lgx LinkChngCnfg
HiHp InPhsLs Cfg
HiHp GndFlt Cur
HiHp GndFlt Dly
Interp Flt Cnfg
+Sft OvrTrvlCnfg
-Sft OvrTrvlCnfg
+Hrd OvrTrvlCnfg
-Hrd OvrTrvlCnfg
Position ErrCnfg
Cnv NotLogin Cfg*
Tren ding
556
557
558
559
560
561
562
563
564
565
566
567
568
569
570
571
572
573
574
575
576
577
578
579
580
581
582
583
584
585
Tre nd C ont rol
Tre nd S tat us
Tre nd S tat e
Tre nd R ate
Tre nd Tr igA DI nt
Tre nd Tr igA Re al
Tre nd Tr igB DIn t
Tre nd Tr igB Rea l
Tre nd Tr ig D ata
Tre nd Tr ig B it
Trend PreSamples
Tre nd M ark DI nt
Tre nd M ark Re al
TrendBuffPointer
Tre nd I n1 D Int
Tre nd I n1 R ea l
Tre nd O ut1 DI nt
Tre nd O ut1 Re al
Tre nd I n2 D Int
Tre nd I n2 R ea l
Tre nd O ut2 DI nt
Tre nd O ut2 Re al
Tre nd I n3 D Int
Tre nd I n3 R ea l
Tre nd O ut3 DI nt
Tre nd O ut3 Re al
Tre nd I n4 D Int
Tre nd I n4 R ea l
Tre nd O ut4 DI nt
Tre nd O ut4 Re al
*Note: This parameter is used by PowerFlex 700L drives only.
To rq ue Control
Speed Control
Monitor
Dynamic Control
Motor Control
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 29
Position Control
Process Control
Speed/Posit Fdbk
Utility
Communication
Inputs & Outputs
User Functions
Page 30
Chapter 2 Programming and Parameters
DPI Data Links
650
651
652
653
654
655
656
657
658
659
660
661
662
663
664
665
666
667
DPI In DataType
DPI Data In A1
DPI Data In A2
DPI Data In B1
DPI Data In B2
DPI Data In C1
DPI Data In C2
DPI Data In D1
DPI Data In D2
DPI Out DataType
DPI Data Out A1
DPI Data Out A2
DPI Data Out B1
DPI Data Out B2
DPI Data Out C1
DPI Data Out C2
DPI Data Out D1
DPI Data Out D2
DriveLogix I/O
600
601
602
603
604
605
606
607
608
609
610
611
612
613
614
615
616
617
618
619
620
621
622
625
626
627
628
629
630
631
632
633
634
635
636
637
638
639
640
641
642
643
644
645
646
Lgx Comm Format
From DL DataType
FromDri veLogix00
FromDri veLogix01
FromDri veLogix02
FromDri veLogix03
FromDri veLogix04
FromDri veLogix05
FromDri veLogix06
FromDri veLogix07
FromDri veLogix08
FromDri veLogix09
FromDri veLogix10
FromDri veLogix11
FromDri veLogix12
FromDri veLogix13
FromDri veLogix14
FromDri veLogix15
FromDri veLogix16
FromDri veLogix17
FromDri veLogix18
FromDri veLogix19
FromDri veLogix20
To DL DataType
To D ri veL ogi x00
To D ri veL ogi x01
To D ri veL ogi x02
To D ri veL ogi x03
To D ri veL ogi x04
To D ri veL ogi x05
To D ri veL ogi x06
To D ri veL ogi x07
To D ri veL ogi x08
To D ri veL ogi x09
To D ri veL ogi x10
To D ri veL ogi x11
To D ri veL ogi x12
To D ri veL ogi x13
To D ri veL ogi x14
To D ri veL ogi x15
To D ri veL ogi x16
To D ri veL ogi x17
To D ri veL ogi x18
To D ri veL ogi x19
To D ri veL ogi x20
SynchLink Input
928
929
930
931
932
933
934
935
936
937
938
939
940
941
942
943
944
945
946
947
948
949
950
951
Rx Dir Data Type
SL Dir Data Rx00
SL Dir Data Rx01
SL Dir Data Rx02
SL Dir Data Rx03
Rx Buf Data Type
SL Buf Data Rx00
SL Buf Data Rx01
SL Buf Data Rx02
SL Buf Data Rx03
SL Buf Data Rx04
SL Buf Data Rx05
SL Buf Data Rx06
SL Buf Data Rx07
SL Buf Data Rx08
SL Buf Data Rx09
SL Buf Data Rx10
SL Buf Data Rx11
SL Buf Data Rx12
SL Buf Data Rx13
SL Buf Data Rx14
SL Buf Data Rx15
SL Buf Data Rx16
SL Buf Data Rx17
Security
714
669
712
670
713
Port Mask Ac t
Write Mask
Write Mask Ac t
Logic Ma sk
Logic Ma sk Act
SynchLink Config
904
905
906
907
908
909
910
911
912
913
914
915
916
917
918
921
922
923
924
925
926
927
SL Node Cnfg
SL Rx CommFormat
SL Rx DirectSel0
SL Rx DirectSel1
SL Rx DirectSel2
SL Rx DirectSel3
SL Tx CommFormat
SL Tx DirectSel0
SL Tx DirectSel1
SL Tx DirectSel2
SL Tx DirectSel3
SL Rcv Events
SL Clr Events
SL Rx P0 Regis
SL Rx P1 Regis
SL Real2DInt In
SL Real2DInt Out
SL Mult Base
SL Mult A In
SL Mult B In
SL Mult Out
SL Mult State
Masks & Owners
670
671
672
673
674
677
678
679
680
681
Logic Mask
Start Mas k
Jog Mask
Direction Mask
Faul t Clr Mask
Stop Owner
Start Own er
Jog Owner
Direction Owner
Faul t Clr Owne r
SynchLink Output
964
965
966
967
968
969
970
971
972
973
974
975
976
977
978
979
980
981
982
983
984
985
986
987
Tx D ir Da ta Ty pe
SL Dir Data Tx00
SL Dir Data Tx01
SL Dir Data Tx02
SL Dir Data Tx03
Tx Buf Data Type
SL Buf Data Tx00
SL Buf Data Tx01
SL Buf Data Tx02
SL Buf Data Tx03
SL Buf Data Tx04
SL Buf Data Tx05
SL Buf Data Tx06
SL Buf Data Tx07
SL Buf Data Tx08
SL Buf Data Tx09
SL Buf Data Tx10
SL Buf Data Tx11
SL Buf Data Tx12
SL Buf Data Tx13
SL Buf Data Tx14
SL Buf Data Tx15
SL Buf Data Tx16
SL Buf Data Tx17
Dynamic Control
Motor Control
Monitor
Torque Control
Speed Control
Process Control
Position Control
Speed/Posit Fdb
k
Utility
Communication
User Functions
Inputs & Outputs
30 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 31

Programming and Parameters Chapter 2
Analog Inputs
821
803
801
802
804
805
800
1093
809
807
808
810
811
806
1094
815
813
814
816
817
812
1095
Analog I/O Units
Anlg In1 Offset
Anlg In1 Value
Anlg In1 Scale
AI 1 Filt Gain
Anlg In1 Filt BW
Anlg In1 Data
Anlg In1LossCnfg
Anlg In2 Offset
Anlg In2 Value
Anlg In2 Scale
AI 2 Filt Gain
Anlg In2 Filt BW
Anlg In2 Data
Anlg In2LossCnfg
Anlg In3 Offset
Anlg In3 Value
Anlg In3 Scale
AI 3 Filt Gain
Anlg In3 Filt BW
Anlg In3 Data
Anlg In3LossCnfg
Analog Outputs
821
831
832
833
834
835
836
837
838
839
840
841
842
843
844
Analog I/O Units
Anlg Out1 Sel
Anlg Out1 DInt
Anlg Out1 Real
Anlg Out1 Offset
Anlg Out1 Sca le
Anlg Out1 Zero
Anlg Out1 Value
Anlg Out2 Sel
Anlg Out2 DInt
Anlg Out2 Real
Anlg Out2 Offset
Anlg Out2 Sca le
Anlg Out2 Zero
Anlg Out2 Value
Digital Inputs
823
825
826
827
828
829
830
824
DigIn Debounce
Dig In1 Sel
Dig In2 Sel
Dig In3 Sel
Dig In4 Sel
Dig In5 Sel
Dig In6 Sel
Local I/O Status
Digital Outputs
845
846
847
848
849
850
851
852
853
854
855
856
857
858
859
824
Dig Out1 Sel
Dig Out1 Data
Dig Out1 Bit
Dig Out1 On Time
Dig Out1 OffTime
Dig Out2 Sel
Dig Out2 Data
Dig Out2 Bit
Dig Out2 On Time
Dig Out2 OffTime
Rly Out3 Sel
Rly Out3 Data
Rly Out3 Bit
Rly Out3 On Time
Rly Out3 OffTime
Local I/O Status
BitSwap Control
860
861
862
863
864
865
866
867
868
869
870
871
872
873
874
875
876
877
878
879
880
881
882
883
884
885
886
887
888
889
BitSwap 1A Data
BitSwap 1A Bit
BitSwap 1B Data
BitSwap 1B Bit
BitSwap 1 Result
BitSwap 2A Data
BitSwap 2A Bit
BitSwap 2B Data
BitSwap 2B Bit
BitSwap 2 Result
BitSwap 3A Data
BitSwap 3A Bit
BitSwap 3B Data
BitSwap 3B Bit
BitSwap 3 Result
BitSwap 4A Data
BitSwap 4A Bit
BitSwap 4B Data
BitSwap 4B Bit
BitSwap 4 Result
BitSwap 5A Data
BitSwap 5A Bit
BitSwap 5B Data
BitSwap 5B Bit
BitSwap 5 Result
BitSwap 6A Data
BitSwap 6A Bit
BitSwap 6B Data
BitSwap 6B Bit
BitSwap 6 Result
1
The calculation is based on the drive frame size and input voltage.
Motor Control
Monitor
Dynamic Control
Speed Control
Torque Control
Process Control
Position Control
Speed/Posit Fdbk
Utility
Communication
Inputs & Outputs
User Functions
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 31
Page 32

Chapter 2 Programming and Parameters
User Functions
Inputs & Outputs
Communication
Utility
Speed/Posit Fdbk
Position Control
Process Control
Torque Control
Speed Control
Dynamic Control
Motor Control
Monitor
Param & Co nfig
1000
1001
1002
1003
1004
1005
1006
1007
1008
1009
1010
1011
1012
1013
1014
1015
1016
1017
1018
1019
1020
1021
UserFunct Enable
UserFunct Actual
UserData DInt 01
UserData DInt 02
UserData DInt 03
UserData DInt 04
UserData DInt 05
UserData DInt 06
UserData DInt 07
UserData DInt 08
UserData DInt 09
UserData DInt 10
UserData Real 01
UserData Real 02
UserData Real 03
UserData Real 04
UserData Real 05
UserData Real 06
UserData Real 07
UserData Real 08
UserData Real 09
UserData Real 10
Select Switches
1022
1023
1024
1025
1026
1027
1028
1029
1030
1031
1032
1033
1034
1035
1036
1037
1038
1039
1040
1041
1042
1043
1044
1045
1046
Sel Switch Ctrl
Swtch Real 1 NC
Swtch Real 1 NO
Swtch Real 1 Ou t
Swtch DInt 1 NC
Swtch DInt 1 NO
Swtch DInt 1 Out
Sel Swtch In00
Sel Swtch In01
Sel Swtch In02
Sel Swtch In03
Sel Swtch In04
Sel Swtch In05
Sel Swtch In06
Sel Swtch In07
Sel Swtch In08
Sel Swtch In09
Sel Swtch In10
Sel Swtch In11
Sel Swtch In12
Sel Swtch In13
Sel Swtch In14
Sel Swtch In15
SelSwtch RealOut
SelSwtch DIntOut
Math & Logic
1047
1048
1049
1150
1151
1152
1050
1051
1052
1053
1054
1055
1056
1057
1058
1059
1060
1061
1062
1063
1064
1065
1066
1067
1068
1069
1070
1071
1072
1073
1074
1096
1097
1098
1099
1100
1101
1102
1103
1104
1105
1106
1107
DInt2Real1 In
DInt2Real1 Scale
DInt2Real1Result
DInt2Real2 In
DInt2Real2 Scale
DInt2Real2Result
Real2DInt In
Real2DInt Scale
Real2DInt Result
MulDiv 1 Input
MulDiv 1 Mul
MulDiv 1 Div
MulDiv 1 Result
MulDiv 2 Input
MulDiv 2 Mul
MulDiv 2 Div
MulDiv 2 Result
Logic Conf ig
Logic/Cmpr State
Logic 1A D ata
Logic 1A B it
Logic 1B Data
Logic 1B Bit
Logic 2A D ata
Logic 2A B it
Logic 2B Data
Logic 2B Bit
Compare 1A
Compare 1B
Compare 2A
Compare 2B
AddSub 1 Input
AddSub 1 Add
AddSub 1 Subtrct
AddSub 1 Result
AddSub 2 Input
AddSub 2 Add
AddSub 2 Subtrct
AddSub 2 Result
AddSub 3 Input
AddSub 3 Add
AddSub 3 Subtrct
AddSub 3 Result
Timers
1108
1109
1110
1111
1112
1113
1114
1115
1116
1117
DelTmr1 TrigData
DelTmr1 Trig Bit
DelayTimer1PrSet
DelayTimer1Accu
DelayTimer1Stats
DelTmr2 TrigData
DelTmr2 Trig Bit
DelayTimer2PrSet
DelayTimer2Accu
DelayTimer2Stats
Electronic Gear Ratio
1161
1162
1163
1164
1165
1166
EGR Config
EGR Mul
EGR Div
EGR Pos Input
EGR Pos Output
EGR Pos Preset
32 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 33

Parameter Data in Linear List Format
Programming and Parameters Chapter 2
No. Name
Description
1 Motor NP Volts
Set to the motor n ameplate rated volts.
2 Motor NP FLA
Set to the motor na meplate rated full load amps. Range limite d by three-second inverter rating.
3 Motor NP Hertz
Set to the motor na meplate rated frequency.
4 Motor NP RPM
Set to the motor na meplate rated rpm.
5 Motor NP Power
Set to the motor na meplate rated power.
Note: The unit of measure for this parameter was changed from kW to Hp for firmware version 2.003.
6 Mtr NP Pwr Units
The power units shown on the motor nameplate.
7 Motor Poles
Set the number of motor poles indicated on the motor nameplate or manufacturer's motor data sheet. Only even
numbers of poles are allowed.
Calculation: (120 x NP Hz) / NP rpm = Poles [round down]
Note: The maximum value was changed from 60 to 128 for firmware version 4.002.
9 Total Inertia
Time, in seconds, for a moto r coupled to a load to accelerate from zero to base spee d, at rated motor torque.
Calculated during auto-tune.
10 Speed Ref 1
Sets the speed reference that the drive should use when selected by Par 2 7 [Speed Ref A Sel] or
Par 28 [Speed Ref B Sel]. A value of 1.0 represents base speed of the motor.
11 Spd Ref1 Divide
Par 10 [Speed Ref 1] is divided by this number. This number can be used to scale the value of Par 10 [Speed Ref 1].
12 Speed Ref 2
Sets the speed reference that the drive should use when selected by Par 2 7 [Speed Ref A Sel]
or Par 28 [Speed Ref B Sel]. A value of 1.0 represents base speed of the motor.
13 Spd Ref2 Multi
Par 12 [Speed Ref 2] is multiplied by this number. This number can be used to scale the value of
Par 12 [Speed Ref 2].
14
Preset Speed 1
through
through
20
Preset Speed 7
Provides an internal fixed speed command value. The preset speeds may be selected with Par 27 [Speed Ref A Sel]
or Par 28
[Speed Ref B Sel].
21 Speed Trim 1
Provides an additive trim value to Par 3 8 [Speed Ref Scale].
22 Speed Trim 2
Provides an additive speed trim value to Par 47 [SpdRef + SpdTrm1] with a Lead/Lag filter. The Position regulator
output is linked to this parameter by default. This speed trim value affects the speed reference input to the speed
regulato r.
23 Speed Trim 3
Provides a scalable speed trim value that will be added to Pa r 47 [SpdRef + SpdTrm1]. Par 24 [SpdTrim 3 Scale]
scales this value prior to the trim value affecting the speed reference.
24 SpdTrim 3 Scale
Par 23 [Speed Trim 3] is multiplied by this number. This number can be used to scale the value of
Par 23 [Speed Trim 3].
25 STrim2 Filt Gain
Sets the lead term for the Par 22 [Speed Trim 2] filter. Values greate r than 1 wil l result in a l ead functi on and value
less than 1 will result in a lag function. A value of 1 will disable the filter.
(1) The calculation is based on the drive frame size and input voltage.
Values
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Options:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Default:
Min/Max:
(1)
Calculate d
75/705
V
(1)
Calculate d
Calculated/Calculated
A
(1)
Calculate d
2.0000/500.0000
Hz
(1)
Calculate d
1/30000
rpm
(1)
Calculate d
0.2500/3500.0000
Hp
0 =
“Hp”
0 =
“Hp”
1 =
“kW”
4
2/128
Pole
2.0000
0.0100/655.0000
s
0.0000
-/+2200000000.0000
1.0000
-/+2200000000.0000
0.0000
-/+2200000000.0000
1.0000
-/+2200000000.0000
0.0000
-/+8.0000 P.U.
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0.0000
-/+14112.0000
rpm
Par 4
[Motor NP RPM] = 1.0 P.U.
0.0000
-/+14112.0000
rpm
Par 4
[Motor NP RPM] = 1.0 P.U.
0.0000
-/+14112.0000
rpm
Par 4
[Motor NP RPM] = 1.0 P.U.
1.0000
-/+1000.0000
1.0000
-/+15.0000
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Linkable
Read-Write
RW 16-bit
RW Real
RW Real
RW 16-bit
RW 32-bit
RW 16-bit
RW Real
RW Real
RW Real
RW Real
RW Real
RW Real
RW Real
RW Real
RW Real
RW Real
RW Real
Data Type
Integer
Integer
Integer
Integer
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 33
Page 34

Chapter 2 Programming and Parameters
S Curve Time = 1.0 second
Speed
Time in Seconds
0.5 sec.
Accel Time = 5.0 seconds
Total Ramp Time = 6.0 seconds
0.5 sec.
No. Name
Description
26 SpdTrim2 Filt BW
Sets the frequency for the Speed Trim 2 filter.
2728Speed Ref A Sel
Speed Ref B Sel
Selects the speed reference source for the drive. The selected speed reference values converge in the final
selection of the drives speed reference with Par 1 52
See the Block Diagrams beginning on page 173
29 Jog Speed 1
Sets the speed reference that the drive should use when responding to bit 18 [Jog 1] of
Par 15 2
[Applied LogicCmd].
30 Min Spd Ref Lim
Sets the minimum speed reference limit. This value may be negative or positive but not greater than
Par 31 [Max Spd Ref Lim].
31 Max Spd Ref Lim
Sets the maximum speed reference limit. This value may be negative or positive but not less than
[Min Spd Ref Lim].
Par 30
32 Accel Time 1
Sets the rate of acceleration for all speed increases, with time in seconds to base speed.
Accel Rate = Par 4
33 Decel Time 1
Sets the rate of deceleration for all speed decreases, with time in seconds to base speed.
Decel Rate = Par 4 [Motor NP RPM] / Par 3 3 [Decel Time]
34 S Curve Time
Sets the S time (Round In and Round Out ) in seconds. Half of the time specified is added to the beginning and
half to the end of the applied ramp. The S time is independent of speed and results in a trapezoidal torque profile.
For example:
[Motor NP RPM] / Par 32 [Accel Time]
[Applied LogicCmd] and are selected with bits 28, 29, 30.
for a description.
Values
Default:
Min/Max:
Units:
Default A:
Default B:
Options:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
200.0000
0.0000/1000.0000
rad/s
1 =
“Spd Ref 1”
5 =
“Preset Spd 1”
0 =
“Zero Speed” 9 = “Preset Spd 5”
1 =
“Speed Ref 1” 10 = “Preset Spd 6”
2 =
“Speed Ref 2” 11 = “Preset Spd 7”
3 =
“Sum Sref 1+2” 12 = “DPI Port 1”
4 =
“MOP Level” 13 = “DPI Port 2”
5 =
“Preset Spd 1” 14 = “DPI Port 3”
6 =
“Preset Spd 2” 15 = “Reser ved”
7 =
“Preset Spd 3 16 = “DP I Port 5”
8 =
“Preset Spd 4”
0.0000
-/+8.0000 P.U.
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0.0000
-8.0000/Par 31 [Max Spd Ref Lim]
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0.0000
Par 30 [Min Spd Ref Lim]/8.0000
rpm
Par 4 [Motor NP RPM] = 1.0 P.U.
10.0000
0.0100/6553.5000
s
10.0000
0.0100/6553.5000
s
0.5000
0.0000/4.0000
s
Y
Y
Y
Y
Y
Linkable
RW Real
RW Real
RW Real
RW Real
RW Real
RW Real
RW Real
Read-Write
Data Type
35 SpdRef Filt Gain
Sets the lead term for the Speed Reference filter. Values greater than 1 will result in a lead function and values
less than 1 will result in a lag function. A value of 1 will disable the filter.
36 SpdRef Filt BW
Sets the frequency for the Speed Reference filter.
37 Spd Ref Bypass
The speed command after the limit, ramp and s-cur ve blocks. Link a source directly to this parameter to bypass
these blocks.
38 Speed Ref Scale
This parameter is multiplied with the value in Pa r 37 [Spd Ref Bypass].
39 Jog Speed 2
Sets the speed reference that the drive should use when responding to bit 23 [Jog 2] of
[Applied LogicCmd].
Par 15 2
34 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Default:
Min/Max:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Default:
Min/Max:
Units:
Scale:
1.0000
-/+5.0000
0.0000
0.0000/500.0000
rad/s
0.0000
-/+14112.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
1.0000
-/+1000.0000
0.0000
-/+8.0000 P.U.
rpm
Par 4 [Motor NP RPM] = 1.0 P.U.
Y
Y
Y
Y
Y
RW Real
RW Real
RW Real
RW Real
RW Real
Page 35

Programming and Parameters Chapter 2
A
No. Name
Description
40 Selected Spd Ref
Displays the speed command before the speed reference limit block.
41 Limited Spd Ref
Displays the speed command after the limit block, limited by Par 30 [Min Spd Ref Lim] and
[Max Spd Ref Lim].
Par 31
42 Jerk
Allows you to adjust the amount of S-Curve or "Jerk" applied to the Accel/Decel rate.
Note: This parameter was added for firmware version 2.003.
43 Ramped Spd Ref
Displays the speed command after the ramp block, modified by Par 32 [Accel Time 1], Par 33 [Decel Time 1] and
Par 34 [S Curve Time].
45 Delayed Spd Ref
One sample period delayed output of Par 43 [Rampe d Spd Ref]. Used in some applications to synchronize the
speed reference value through SynchLink. This master drive Par 43 [Ramped Spd Ref] would then be transmitted
to the slave drives over SynchLink.
46 Scaled Spd Ref
Displays the speed command after scaling.
47 SpdRef + Spd Trm1
Displays the final speed command used by the Speed Regulator. It is the sum of Par 4 6 [Scaled Spd Ref] and
[Speed Trim 1].
Par 21
48 Spd Ref Bypass2
The speed command after the limit, ramp and s-cur ve blocks. Link a source directly to this parameter to bypass
these blocks.
49 Selected SpdRefA
Used to view the value of Speed Reference A, Par 27 [Speed Ref A Sel] from a Human Interface Module (HIM).
Note: This parameter is new for firmware version 3.001.
50 Selected SpdRefB
Used to view the value of Speed Reference B, Par 28 [Speed Ref B Sel] from a HIM.
Note: This parameter is new for firmware version 3.001.
53 Drive Ramp Rslt
Displays the speed reference value, after the limit function. This is the input to the error calculator and speed
regulator. Available for use in peer-to-peer data links (DPI interface) . This number is scaled so that rated motor
speed will read 32768.
54 Inertia TrqLpfBW
Sets the bandwidth of the inertia compensation torque output low pass filter. A value of 0.0 will disable the filter.
Note: This parameter is new for firmware version 3.001.
55 Speed Comp
Displays the derivative or change in Par 56 [Iner tia SpeedRef] on a per second basis. Link this parameter to
[Speed Trim 3] and set Par 24 [SpdTrim 3 Scale] to 0.002 to reduce position error in following applications.
Par 23
56 Inertia SpeedRef
The speed input of the inertia compensator. Link this parameter to the output of an internal ramp or s-curve
block. The inertia compensator generates a torque reference that is proportional to the rate of change of speed
input and total inertia.
57 InertiaAccelGain
Sets the acceleration gain for the Inertia Compensation function. A value of 1 produces 100% compensation.
58 InertiaDecelGain
Sets the deceleration gain for the Inertia Compensation function. A value of 1 produces 100% compensation.
59 Inertia Trq Add
The torque reference output generated by the inertia compensator. This torque level is modified by Par 57
[InertiaAccelGain] and Par 5 8
60 DeltaSpeedScale
Multiplier in the Inertia Compensation function - affec ts the value of Par 59 [Inertia Trq Add]. Use in center winder
and unwind applications to compensate for roll diameter build-up.
61 Virt Encoder EPR
Equivalent Edges Per Revolution (EPR) or line count of a virtual encoder. A virtual encoder is a position reference
whose input comes from speed reference. It accumulates pulses at the same rate as a real encoder of identical
Pulses Per Revolution (PPR). Enter the equivalent PPR. For example, enter 1024 PPR to match an encoder with
1024 EPR.
[InertiaDecelGain]. A value of 1.0 represents rated torque of the moto r.
Values
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:0-/+262144
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:
Units:
0.0000
-/+8.0000 P.U.
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0.0000
-/+8.0000 P.U.
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
900
2/30000
0.0000
-/+8.0000 P.U.
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0.0000
-/+14112.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0.0000
-/+14112.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0.0000
-/+8.0000 P.U.
rpm
Par 4 [Motor NP RPM] = 1.0 P.U.
0.0000
-/+8.0000 P.U.
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0.0000
-/+8.0000
rpm
0.0000
-/+8.0000
rpm
35.0000
0.0000 /2000.0000
rad/s
0.0000
-/+2200000000.0000
/s
0.0000
-/+14112.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
1.0000
1.0000/2.0000
1.0000
1.0000/2.0000
1.0000
-/+8.0000 P.U.
P. U .
1.0000
-/+1000.0000
4096
10/67108864
EPR
Y
Y
Y
Y
Y
Y
Linkable
Read-Write
RO Real
RO Real
RW 16-bit
RO Real
RO Real
RO Real
RO Real
RW Real
RO Real
RO Real
RO 32-bit
RW Real
RO Real
RW Real
RW Real
RW Real
RO Real
RW Real
RW 32-bit
Data Type
Integer
Integer
Integer
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 35
Page 36
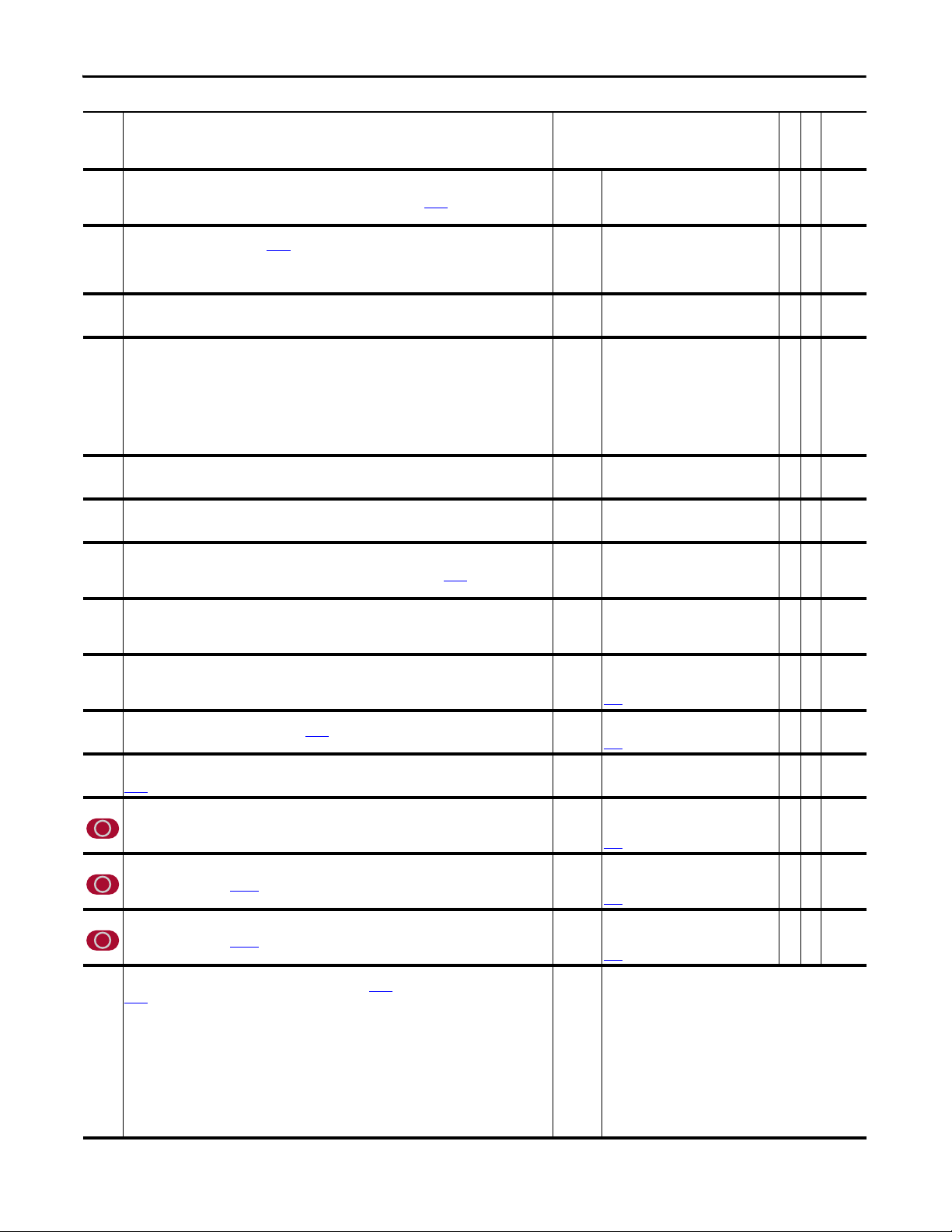
Chapter 2 Programming and Parameters
No. Name
Description
62 Virt Encdr Posit
A 32 bit pulse accumulator of the virtual encoder. The accumulated pulse count is equivalent to the hardware
accumulator of a real encoder. It accumulates at a rate of 4x the value placed in Par 61
accumulator starts at zero upon position enable.
63 Virt Encdr Dlyed
One sample period delayed output of Par 62 [ Virt Encdr Posit]. Used in some applications to phase synchronize
position reference through SynchLink. The master is delayed one sample while the downstream drives update
their position references – then all drives sample position simultaneously. The downstream drives do not select a
delay.
64 FricComp Spd Ref
Supplies a speed input to the Friction Compensation algorithm. This input is normally a speed reference from a
motion planner or ramped speed reference. It will trigger a torque feed forward response depending on its value.
65 FricComp Setup
Enter or write a value to configure the friction compensation algorithm. This is a packed word of 3 digits. Each
digit has a possible selection of 10 levels.
• The least significant digit sets the speed threshold in intervals of 0.0 005 P.U. speed.
• The next (middle) digit sets the hysteresis band for the “units” digit in intervals of 0.0005 P.U. velocity.
• The most significant digit sets the number of time steps from stick to slip, each step is 0.002 sec.
Example: Value = 524 means: 5 time steps between stick and slip, each of 0.002 sec. duration, 2 counts of
hysteresis or 0.001 pu_speed (each count is 0.0005 pu_speed), and 4 counts or 0.002 pu_speed is the trigger
threshold (each count is 0.0005 pu_speed).
66 FricComp Stick
The torque needed to break away from zero speed. By nature of friction, the break away sticktion will always be
greater than the running friction.
67 FricComp Slip
The torque level to sustain very low speed – once “break away” has been achieved. By nature of friction, viscous
friction will always be less than sticktion.
68 FricComp Rated
The torque needed to keep the motor running at base speed and with no process loading. The friction
compensation algorithm assumes a linear or viscous component of friction between Par 67 [FricComp Slip] and
Par 68 [FricComp Rated].
69 FricComp Trq Add
The torque reference output of the Friction Compensation function. A value of 1.0 represents rated torque of the
motor.
71 Filtered SpdFdbk
Displays the motor speed feedback value output from the feedback Lead/Lag filter.
72 Scaled Spd Fdbk
Displays the product of the speed feedback and Par 73 [Spd Fdbk Scale]. This parameter is for display only.
73 Spd Fdbk Scale
A user-adjustable scale factor (multiplier) for speed feedback . It is multiplied with speed feedback to produce
[Scaled Spd Fdbk].
Par 72
74 Atune Spd Ref
Sets the maximum speed of the motor during the Flux current and inertia tests.
75 Rev Speed Limit
Sets a limit on the speed reference in the negative direction. This value can be entered as a negative value or zero.
The maximum value equals Par 532
76 Fwd Speed Limit
Sets a limit on the speed reference in the positive direction. This value can be entered as a positive value or zero.
The maximum value equals Par 532
77 Spd Ref TP Sel
Enter or write a value to select speed reference data displayed in Par 7 9 [Spd Ref TP Data] and
[Spd Ref TP RPM].
Par 78
Note: The values for options 7, 8, & 9 were changed to “Reserved” for firmware version 2.004.
[Maximum Freq] x 0.95.
[Maximum Freq] x 0.95.
[Virt Encoder EPR]. The
Values
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Scale:
Default:
Min/Max:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Options:
0.0000
-/+8.0000 P.U.
rpm
325
0/999
0.1500
0.0000/8.0000
P. U .
0.1000
0.0000/8.0000
P. U .
0.2000
0.0000/8.0000
P. U .
0.0000
-/+8.0000 P.U.
P. U .
Motor P.U. Torque
0.0000
-/+14112.0000
rpm
Par 4 [Motor NP RPM] = 1.0 P.U.
0.0000
-/+2200000000.0000
Par 4 [Motor NP RPM] = 1.0 P.U.
1.0000
-/+2200000000.0000
Par 4 x 0.8500
Par 4 x 0.1000/Par 4 x 1.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
Par 4 x -1.2500
-8.0000/0.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
Par 4 x 1.2500
0.0000/8.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0 =
“Zero”
0 =
“Zero” 12 = “S Crv Match”
1 =
“User Ref” 13 = “S Array size”
2 =
“Logic Select” 14 = “S Array Indx”
3 =
“Lgc Sel Ref” 15 = “Reserved”
4 =
“Ramp Spd Ref” 16 = “Scl Ext Trim”
5 =
“Ramp In” 17 = “Trim FiltOut”
6 =
“Filt Spd Ref” 18 = “Ref w/Trim”
7 =
“Reserved” 19 = “Amp Lim2 In”
8 =
“Reserved” 20 = “Amp LimStat2”
9 =
“Reserved” 21 = “Amp Lim2 Out”
10 =
“Amp Lim Stat” 22 = “FTD Ramp Out”
11 =
“Ramp Match” 23 = “Reserved”
Y
Y
Y
Y
Y
Y
Linkable
Read-Write
RO 32-bit
RO 32-bit
RW Real
RW 16-bit
RW Real
RW Real
RW Real
RO Real
RO Real
RO Real
RW Real
RW Real
RW Real
RW Real
Data Type
Integer
Integer
Integer
36 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 37

Programming and Parameters Chapter 2
Tot al I ner tia
(Par 9)
Maximum Speed Regulator
Bandwidth (Par 90)
Maximum Speed Regulator
Proportional Gain (Par 81)
0.01 475 (0.5 ms) 4.75
0.01 650 (0.25 ms) 6.50
0.01 30 (sensorless mode) 0.03
2.0 475 (0.5 ms) 950
2.0 650 (0.25 ms) 1300
2.0 30 (sensorless mode) 60
Under-Shoot
Over-Shoot
Over-Shoot
Under-Shoot
Error
Reference
Feedback, SpdReg AntiBckup = 0.0
Feedback, SpdReg AntiBckup = 0.3
Error
No. Name
Description
78 Spd Ref TP RPM
Displays the value selected in Par 77 [Spd Ref TP Sel ] in rpm. Thi s display sh ould only b e used if th e selected value
is floating point data.
79 Spd Ref TP Data
Displays the value selected in Par 77 [Spd Ref TP Sel]. This display should only be used if the selected value is
integer data.
81 Spd Reg P Gain
Sets the proportional gain of the speed regulator. This value is automatically calculated based on the bandwidth
setting in Par 90
value of zero. Units are (per unit torque) / (per unit speed).
The maximum value for Par 81 [Spd Reg P Gain] = Par 90 [Spd Reg BW] x Par 9
Note: The Max. value was increased from 600.0000 for firmware version 3.001.
82 Spd Reg I Gain
Sets the integral gain of the speed regulator. This value is automatically calculated based on the bandwidth
setting in Par 9 0
of zero. Units are (per unit torque/sec) / (per unit speed).
84 SpdReg AntiBckup
By setting this parameter to 0.3, the drive will not over shoot to a step response. This parameter has no affect on
the drive's response to load changes. The recommended setting is 0.1000 to 0.5000.
Note: This parameter was changed to non-linkable for firmware version 3.001.
[Spd Reg BW]. Proportional gain may be manually adjusted by setting Par 90 [Spd Reg BW] to a
[Total Inertia]
[Spd Reg BW]. Integral gain may be manually adjusted by setting Par 90 [Spd Reg BW] to a value
Values
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:0-/+32768
Default:
Min/Max:
Default:
Min/Max:
Units:
Default:
Min/Max:
0.0000
-/+8.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
20.0000
0.0000/3000.0000
50.0000
0.0000/100000.0000
/s
0.0000
0.0000/0.5000
Y
Y
Linkable
Read-Write
RO Real
RO 16-bit
RW Real
RW Real
RW Real
Data Type
Integer
85 Servo Lock Gain
Sets the gain of an additional integrator in the speed regulator. The effect of Servo Lock is to increase stiffness of
the speed response to a load disturbance. It behaves like a position regulator with velocity feed forward, but
without the pulse accuracy of a true position regulator. The units of Servo Lock are rad/sec. Gain should normally
be set to less than 1/3 speed regulator bandwidth, or for the desired response. Set to zero to disable Servo Lock.
86 Spd Reg Droop
Specifies the amount of base speed that the speed reference is reduced when at full load torque. Use the droop
function to cause the motor speed to decrease with an increase in load. The units are per unit speed / per unit
torque.
87 SReg Trq Preset
When the drive is not enabled, this parameter presets integrator output Par 1 01 [SpdReg Integ Out] to a specified
torque le vel. This ensures that the torque c ommand will b e at the preset value when the drive is enabled and run.
[Control Options], bit 18 [SpdRegPreset] = 0, enables this preset.
Par 15 3
89 Spd Err Filt BW
Sets the bandwidth of a 2nd order Butterworth low pass filter, which reduces quantization noise. The units are
rad/sec. A value of 0 will disable the filter. The value should be greater than 5 times the value of
[Spd Reg BW].
Par 90
Note: The default value for this parameter was changed from 200.0000 to 700.0000 for firmware version 2.003.
Y
Y
Y
Y
RW Real
RW Real
RW 16-bit
Integer
RW Real
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
0.0000
0.0000/300.0000
/s
0.0000
0.0000/0.2500
P. U .
0.0000
-/+8.0000 P.U.
P. U .
700.0000
0.0000/2000.0000
rad/s
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 37
Page 38

Chapter 2 Programming and Parameters
No. Name
Description
90 Spd Reg BW
Sets the bandwidth of the speed regulator in rad/sec. Bandwidth is also referred to as the crossover frequency.
Small signal time response is approximately 1/BW and is the time to reach 63% of set point. A change to this
parameter will cause an automatic update of Par 81
automatic gain calculation, set this parameter to a value of zero.
91 Spd Reg Damping
Sets the damping factor of the drive's characteristic equation and factors in the calculation of the integral gain. A
damping factor of 1.0 is considered critical damp. Lowering the damping will produce faster load disturbance
rejection, but may cause a more oscillatory response. When Par 90 [Spd Reg BW] is set to zero, damping factor has
no effect.
92 SpdReg P Gain Mx
Places a limit on the maximum value of proportional gain in Par 81 [Spd Reg P Gain] and
Par 10 4
[Srlss Spd Reg Kp]. When gains are automatically calculated, this parameter is necessary to limit the
amplification of noise with increased inertia.
Note: The Max. value was increased from 600.0000 for firmware version 3.001.
93 SRegFB Filt Gain
Sets the lead term for the speed feedback filter. Values greater than 1 will result in a lead functi on and values less
than 1 will result in a lag function. A value of 1 will disable the f ilter.
94 SReg FB Filt BW
Sets the frequency for the Speed Feedback filter.
95 SRegOut FiltGain
Sets the lead term for the Speed Regulator output filter. Values greater than 1 will result in a lead function and
values less than 1 will result in a lag function. A value of 1 will disable the filter.
Note: The default value for this parameter was changed from 0.7000 to 1.0000 for firmware version 2.003.
96 SReg Out Filt BW
Sets the frequency for the Speed Regulator output filter.
97 Act Spd Reg BW
Displays the actual speed regulator bandwidth or crossover frequency. The value represents the bandwidth in
Par 90 [Spd Reg BW] after the maximum bandwidth limits have been applied.
98 Slip RPM @ FLA
Sets the amount of compensation to drive output at motor full load current (FLA).
Note: This parameter was added for firmware version 2.003.
99 Slip Comp Gain
Sets the response time of slip compensation.
Note: This parameter was added for firmware version 2.003.
100 Speed Error
The error (difference) between the motor speed reference (+) and the filtered motor speed feedback (–).
101 SpdReg Integ Out
The output value of the Speed Regulator Integral channel.
102 Spd Reg Pos Lim
Sets the positive limit of the Speed Regulator output value. The output of the Speed Regulator is limited by
adjustable high and low limits.
103 Spd Reg Neg Lim
Sets the negative limit of the Speed Regulator output value. The output of the Speed regulator is limited by
adjustable high and low limits.
104 SrLss Spd Reg Kp
Sets the proportional gain of the Speed Regulator when sensorle ss motor speed feedback is used. This value is
automatically calculated based on the bandwidth set in Par 10 6 [Srlss Spd Reg BW]. Proportional gain may be
manually adjusted by setting Par 106 to zero. This gain setting has no units (per unit torque) / (per unit speed
error).
105 SrLss Spd Reg Ki
Sets the integral gain of the Speed Regulator when sensorless motor spee d feedback is used. This value is
automatically calculated based on the bandwidth set in Par 10 6
manually adjusted by setting Par 106 to zero. Units are '/s' (per unit torque/sec) / (per unit speed error).
106 SrLss Spd Reg BW
Sets the bandwidth of the Speed Regulator when sensorless motor speed feedback is used. Bandwidth is also
referred to as the crossover frequency. Small integral time response is approximately 1/BW and is the time to
reach 63% of set point. A cha nge to this parameter will cause an automatic update of Par 104
and Par 10 5 [Srlss Spd Reg Ki]. To disable the automatic gain calculation, set this parameter to zero.
[Spd Reg P Gain] and Par 8 2 [Spd Reg I Gain]. To disable the
[Srlss Spd Reg BW]. Integral gain may be
[Srlss Spd Reg Kp]
Values
Default:
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min.Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
10.0000
0.0000/500.0000
rad/s
1.0000
0.5000/3.0000
100.0000
0.0000/3000.0000
1.0000
-5.0000/20.0000
35.0000
0.0000/3760.0000
rad/s
1.0000
-/+5.0000
30.0000
0.0000/3760.0000
rad/s
10.0000
0.0000/500.0000
rad/s
Based on [Motor NP RPM]
0.0/1200.0 rpm
rpm
40.0
1.0/100.0
rad/s
0.0000
-/+14112.0000
rpm
Par 4 [Motor NP RPM] = 1.0 P.U.
0.0000
-/+8.0000 P.U.
P. U .
1.0 P.U. Torque
3.0000
0.0000/6.0000
P. U .
Par 4 [Motor NP RPM] = 1.0 P.U.
-3.0000
-6.0000/0.0000
P. U .
[Motor NP RPM] = 1.0 P.U.
Par 4
8.0000
0.0000/200.0000
8.0000
0.0000/4095.8000
/s
10.0000
0.0000/30.0000
rad/s
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Linkable
Read-Write
RW Real
RW Real
RW Real
RW Real
RW Real
RW Real
RW Real
RO Real
RW 16-bit
RW 16-bit
RO Real
RO Real
RW Real
RW Real
RW Real
RW Real
RW Real
Data Type
Integer
Integer
38 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 39
Programming and Parameters Chapter 2
No. Name
Description
107 Slip RPM Meter
Displays the present amount of adjustment being applied as slip compensation.
Note: This parameter was added for firmware version 2.003.
108 Spd Reg TP Sel
Enter or write a value to select Speed Regulator data displayed in Par 109 [Spd Reg TP Data].
Note: The values for options 10 & 11 were changed to “Reserved” for firmware version 2.004.
109 Spd Reg TP Data
Displays the data selected by Par 108 [Spd Reg TP Sel].
110 Speed/TorqueMode
Selec ts the source for the drive torque reference .
Note: Values 7 & 8 were added for firmware version 3.001.
111 Torque Ref 1
Supplies an ex ternal motor torque reference to the drive. This parameter is divided by the value in
Par 11 2 [Torq Ref1 Div]. A value of 1.0 represents rated torque of the motor.
112 Torque Ref1 Div
Par 11 1 [Torque Ref 1] is divided by this number. Use this parameter to scale the value of Par 111 [Torque Ref 1].
113 Torque Ref 2
Supplies an extern al motor torque reference to the drive. This parameter is multipli ed by the value in
Par 11 4 [Torq Ref2 Mult]. A value of 1.0 represents rated torque of the motor.
114 Torque Ref2 Mult
Par 11 3 [Torque Ref 2] is multiplied by this number. Use this parameter to scale the value of Par 113 [Torque Ref
2].
115 Torque Trim
The amount added to Par 111 [Torque Ref 1] and Par 113 [Torque Ref 2] before the Speed/Torque Mode Selector.
A value of 1.0 represents rated torque of the motor.
116 Torque Step
The amou nt added to th e selected Torque Reference be fore notch filtering or limits are applied. A value of 1.0
represents rated torque of the motor.
Values
Default:
Min/Max:
Units:
Default:
Options:
Default:
Min/Max:
Units:
Default:
Options:
Default:
Min/Max:
Scale:
Default:
Min/Max:
Default:
Min/Max:
Scale:
Default:
Min/Max:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
0.0
+/- 3000.0
rpm
0 =
“Zero”
0 =
“Zero” 27 = “Spd FiltOut”
1 =
“Iq Rate BW” 2 8 = “Servo Lock”
2 =
“Reserved” 29 = “Spd+ServLock”
3 =
“PGain Max BW” 30 = “Prop Output”
4 =
“BW Limit” 31 = “Intg Input”
5 =
“InertiaMaxBW” 32 = “Scld Int Pre”
6 =
“BW Lim Stat” 33 = “Sel Int Pre”
7 =
“BW Select” 34 = “Droop Output ”
8 =
“Totl Inertia” 35 = “Out Lim Stat”
9 =
“TI Lim Stat” 36 = “Intg Hold ”
10 =
“Reserved” 37 = “Srlss ZeroWe”
11 =
“Reserved” 38 = “I GainParLim”
12 =
“I Rate Limit” 39 = “P GainParLim”
13 =
“I RtLim Stat” 40 = “SrvLck ParLm”
14 =
“PGain Max” 41 = “AntiBkup PLm”
15 =
“GnMx LimStat” 42 = “Droop ParLim”
16 =
“Damping” 43 = “Pos Lim Stat”
17 =
“Dmp Lim Stat” 44 = “Neg Lim Stat”
18 =
“Reserved” 45 = “Limiter Out”
19 =
“Srls KpMxBW” 46 = “Active Pgain”
20 =
“Srls BWLimit” 47 = “Active Igain”
21 =
“SrlsInrtMxBW” 48 = “Reserved”
22 =
“SrlsBWSelect” 49 = “Reserved”
23 =
“Srls BW Calc” 50 = “Reserved’
24 =
“Snsr BW Calc” 5 1 = “Reserved”
25 =
“Reserved” 52 = “Reserved”
26 =
“Reserved” 53 = “Reserved”
0.0000
-/+8.0000 P.U.
P. U .
1 =
“Speed Reg”
0 =
“Zero Torque” 5 = “Sum Spd/Trq”
1 =
“Speed Reg” 6 = “AbsMnSpd/Trq”
2 =
“Torque Ref” 7 = “SLAT Minimum”
3 =
“Min Spd/Trq” 8 = “SLAT Maximum”
4 =
“Max Spd/Trq”
0.0000
-/+2200000000.0000
1.0 Rated Motor Torque
1.0000
-/+2200000000.0000
0.0000
-/+2200000000.0000
1.0 Rated Motor Torque
1.0000
-/+2200000000.0000
0.0000
-/+8.0000 P.U.
P. U .
1.0 Rated Motor Torque
0.0000
-/+8.0000 P.U.
P. U .
1.0 Rated Motor Torque
Y
Y
Y
Y
Y
Y
Linkable
Read-Write
RO 16-bit
RO Real
RW Real
RW Real
RW Real
RW Real
RW Real
RW Real
Data Type
Integer
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 39
Page 40

Chapter 2 Programming and Parameters
Freq (Hz)
Attenuation
A
A
No. Name
Description
117 NotchAttenuation
Sets the depth for the Notch Filter. Attenuation is the ratio of the output to the input at the notch frequency. An
attenuation of 30 means that the notch output is 1/30
Calculation: Attenuation = Input / Output
118 Notch Filt Freq
The center frequency for Notch filter. To disable, set to zero (0).
119 SLAT ErrorSetpnt
Determines the rpms at which the drive will switch from speed mode to the Speed Limited Adjustable Torque
(SLAT) min. or SLAT max. mode, identified in Par 110
Maximum”.
Note: This parameter was added for firmware version 3.001.
120 SLAT Dwell Time
SLAT control dwell time. The time in seconds that the drive can be above the error set point in
Par 119 [SLAT ErrorSetpnt] before returning to the SLAT min. or SLAT max. mode.
Note: This parameter was added for firmware version 3.001.
123 Trq PosLim Actl
Sets the internal torq ue limit for positive torque reference values. The posit ive internal motor torque will not be
allowed to exceed this value.
124 Trq NegLim Actl
Sets the internal torque limit for negative torque ref erence values. The internal n egative motor t orque will not be
allowed to exceed this value.
125 Torque Pos Limit
Sets the exter nal torque limit for positive torque reference values. The ex ternal positive motor torque will not be
allowed to exceed this value.
126 Torque Neg Limit
Sets the external to rque limit for negative torque reference values. The external neg ative motor torque will not be
allowed to exceed this value.
127 Mtring Power Lim
Sets the maximum motoring (positive) power of the drive. This can be calculated by multiplying the desired
maximum motor torque and the maximum motor speed. A value of 1.0 = nominal motor power.
128 Regen Power Lim
Sets the maximum regenerative (negative) power of the drive. This can be calculated by multiplying the desired
maximum motor torque and the maximum motor speed. A value of 1.0 = nominal motor power.
Note: The default value for this parameter was changed from -1.0000 to -0.5000 for firmware version 2.003.
129 Atune Trq Ref
Sets the motor torque that is applied to the motor during the flux current and inertia tests.
Note: The minimum value for this parameter was changed from 0.2500 to 0.2000 for firmware version 2.003.
130 Trq Ref TP Sel
Enter or write a value to select torq ue reference da ta displayed i n Par 131 [Trq Ref TP Data].
Note: The value for option 5 was changed to “Reserved” for firmware version 2.004.
131 Trq Ref TP Data
Displays the data selected by Par 13 0 [Trq Ref TP Sel].
th
of the input at the specified frequency.
[Speed/Torque Mode] bit 7 “SLAT Minimum” or bit 8 “SLAT
Values
Default:
Min/Max:500/500
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Scale:
Default:
Options:
Default:
Min/Max:
Units:
Scale:
0.0000
0.0000/500.0000
Hz
0.005
0.0/0.1
rpm
0.0
0.0/2.0
s
1.0
0.0/8.0
P. U .
-1.0
-8.0/0.0
P. U .
2.0000
0.0000/8.0000
P. U .
-2.0000
-8.0000/0.0000
P. U .
8.0000
0.0000/8.0000
P. U .
-0.5000
-8.0000/0.0000
P. U .
0.50
0.2/1.0
P. U .
1.0 = P.U. Motor to Torque
0 =
0 =
1 =
2 =
3 =
4 =
5 =
6 =
7 =
8 =
9 =
10 =
11 =
12 =
13 =
14 =
15 =
0.0
-/+8.0 P.U.
P. U .
1.0 = P.U. Motor to Torque
Y
Y
Y
Y
Y
Y
Y
Y
“Zero”
“Zero” 16 = “Neg Lim Src”
“Scale Output” 17 = “MPwr Par Lim”
“Spd Torque” 18 = “RP wr Par Lim”
“Trq Mode Out” 19 = “+Trq ParLim”
“Ac tv TrqM ode ” 20 = “ -Trq P arL im”
“Reserved” 21 = “Nom Bus Volt”
“Trq En Input” 22 = “Bus Volt Hys”
“NotchFiltOut” 23 = “Bus Reg Ref”
“NotchFilt In” 24 = “Bus Reg Err”
“Trq Lim In” 25 = “Bus Reg Intg”
“Bus Reg Out” 26 = “BusReg Clamp”
“Pos Pwr Lim” 27 = “BusRegOutput”
“Neg Pwr Lim” 28 = “IAA Filt Out”
“Pos Atun Trq” 29 = “IAA dVf/d t”
“Neg Atun Trq” 30 = “MC Trq Lim”
“Pos Lim Src” 31 = “IqActlTrqLim”
Linkable
RW Real
RW Real
RW Real
RW Real
RO Real
RO Real
RW Real
RW Real
RW Real
RW Real
RW Real
RO Real
Read-Write
Data Type
40 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 41

Programming and Parameters Chapter 2
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
First Diff
Load Est
Inrtia Adapt
Default xxxxxxxxxxxxxx000
Bit 161514131211109 8 7 6 5 4 3 2 1 0
0 = False
1 = True
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
DriveLogix
Stahl Fdbck
Reserved
TemposonFdbk
Resolver Brd
MDI Brd
Heidenhain
StegmannHiRs
2nd Encoder
Reserved
Reserved
SafeOff Brd
Reserved
SynchLinkBrd
Reserved
EmbeddedENET
DPI Comm Brd
Default xxxxxxxxxxxxxxx00x000000xx0x0x00
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Options
DvlpmntDeBug
Tre nd in g
Reserved
Peak D etect
Tes t Po in ts
Reserved
Reserved
Phase LockLp
Sync Gener
PosWtc h/Dtc t
Reserved
Reserved
MotinPlanner
Reserved
Reserved
Posit ionCtr l
DI BitSwaps
Digital Outs
Analog Outs
Analog Ins
PF700S
Reserved
Reserved
Lim/Func Gen
Process Trim
Reserved
Speed Reg
Virt Encoder
FrictionComp
Inertia Comp
Spd Ref Ctrl
Spd Ref Sel
Default 11x11xx011xx0xx011111xx11x111111
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Values
Description
132 Inert Adapt Sel
Configures the Inertia Adaptation Algorithm (IAA Function).
• Bit 0 “Inrtia Adapt” when set to 1 (on), the Inertia Adaptation function will effect enhanced stability, higher bandwidths and dynamic stiffness. Useful when systems with a ge ar-box becomes
disconnected from the load. Also used with motors that have very little inertia that otherwise lack dynamic stiffness, even at high bandwidths.
• Bit 1 “Load Est” when set to 1 (on), the Load Estimate option removes or greatly reduces load disturbances and gives quicker system response.
• Bit 2 “First Diff ” selects the first difference feedback for Inertia Adaptation.
Notes: When setting both Bit 0 & 1, stability is enhanced and load disturbances are removed. Bit 2 “First Diff” was added for firmware version 3.001.
Default:
133 Inert Adapt BW
This parameter sets the bandwidth of the Inertia Adaptation function when the IAA function is selected
[Inert Adapt Sel], bit 0 = 1). Typical IAA bandwidths range from 70 to 150 rad/sec with 100 rad/sec
(Par 13 2
nominal best.
If the Load Estimate function is selected (Par 132
frequency of a filter in rad/sec. Typical values range from 10 to 150 rad/sec with higher values being more
responsive to disturbances but with increased system noise. There is no nominal best value, but 40 rad/sec is a
suggested starting point. This adjustm ent may not function well in 'sloppy' geared systems.
If both Inertia Adaptation and Load Estimate functions are active, use a bandwidth setting of 100 rad/sec.
134 Inert Adapt Gain
This parameter sets a multiplier of system inertia when the Inertia Adaptation function is selected
(Par 13 2 [Inert Adapt Sel], bit 0 = 1). Higher values may cause high frequency ringing, while smaller values may
cause fundamental load instability. A typical value is 0.5 This parameter has no affect on the Load Estimate
function.
136
Skip Speed 1
137
Skip Speed 2
138
Skip Speed 3
Sets a frequency at which the drive will not operate. [Skip Speed 1 - 3] and Par 139 [Skip Speed Band] must not
equal 0.
Note: These parameters were added for firmware version 2.003.
139 Skip Speed Band
Determines the bandwidth around a skip frequency. [Skip Speed Band] is split, applying 1/2 above and 1/2 below
the actual skip frequency. The same bandwidth applies to all skip frequencies.
Note: This parameter was added for firmware version 2.003.
145 Hardware Present
Indicates if optional hardware is installed.
[Inert Adapt Sel], bit 0 = 1), then this parameter sets the natural
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
100.0000
10.0000/250.0000
rad/s
0.500
0.300/1.000
0.0
–/+30000.0
rpm
0.0
0.0/1000.0
rpm
Linkable
Y
Y
Y
Y
Read-Write
Data Type
RW Real
RW Real
RW 16-bit
Integer
RW 16-bit
Integer
Default:
0 =
0 =
1 =
2 =
“0.5 /2 /8ms”
“0.5 /2 /8ms”
“0.5 /1 /8ms”
“0.25 /1 /8ms”
146 FW TaskTime Sel
Sets the scan times for the drive firmware. Changing the firmware scan times will affect drive performance. Faster
scan times may allow for higher bandwidth of the internal regulators. To achieve faster scan times some functions
may need to be disabled. Only the most demanding application may benefit from faster scan times. Typically,
adjusting this parameter is not needed, it is recommended you consult the factor y before changing.
147 FW Functions En
Allows specific firmware functions to be disabled. When a bit is false, the associated function is disabled and all related parameters will be hidden. When a bit is true, the associated function is
enabled and all related parameters will be displayed.
Notes: Bits 18, 20, & 21 were changed to “Reserved” for firmware version 2.004. Bit 19 “MotinPlanner” and 24 “PhaseLockLp” were added for firmware version 3.001.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 41
Options:
RW 16-bit
Integer
Page 42

Chapter 2 Programming and Parameters
Options
DvlpmntDeBug
Tre nd in g
Reserved
Peak D etect
Tes t Poi nts
Reserved
Reserved
Phase LockLp
Sync Gener
PosWtc h/Dtc t
Posit Offset
Posit Motion
MotinPlanner
Posit Pt2Pt
Posit Direct
Posit Interp
DI BitSwaps
Digital Outs
Analog Outs
Analog Ins
Reserved
Reserved
Reserved
Lim/Func Gen
Process Trim
Reserved
Speed Reg
Virt Encoder
FrictionComp
Inertia Comp
Spd Ref Ctrl
Spd Ref Sel
Default 00x00xx0000000000000xxx00x000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Options
PI Trim Rst
PI Trim Hold
Posit ion En
PI Trim En
Frict Co mp
Inertia Comp
Ext Flt/Alm
Reserved
Reserved
SReg IntgRst
SReg IntgHld
SpdRamp Hold
Time Ax is En
Tac hLo ss R st
Spd S Crv En
SpdRamp Dsbl
Default 0000000xx 0000000
Bit 1514131211109876543210
0 = False
1 = True
Options
Reserved
Spd Ref Sel2
Spd Ref Sel1
Spd Ref Sel0
Reserved
Reserved
Coast S top
CurrLim Stop
Jog 2
Reserved
Reverse
Forw ard
Clear Fault
Jog 1
Start
Normal Stop
PI Trim Rst
PI Trim Hold
Posit ion En
PI Trim En
Frict Co mp
Inertia Comp
Ext Flt/Alm
Reserved
Reserved
SReg IntgRst
SReg IntgHld
SpdRamp Hold
Time Axis En
Tac hLo ss R st
Spd S Crv En
SpdRamp Dsbl
Default x000xx000x0000000000000xx0000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Speed Reference Select Inputs
Bit 30 Bit 29 Bit 28
Spd Ref
Sel2
Spd Ref
Sel1
Spd Ref
Sel0
Auto Reference Source
0 0 0 S peed Ref A Sel To access Preset Speed 1, set
parameter 27 [Speed Ref A Sel]
or 28 [Speed Ref B Sel] to 5 “Preset Spd 1.”
001Speed Ref B Sel
0 1 0 Preset Speed 2
0 1 1 Preset Speed 3
1 0 0 Preset Speed 4
1 0 1 Preset Speed 5
1 1 0 Preset Speed 6
1 1 1 Preset Speed 7
No. Name
Values
Description
148 FW TaskTime Actl
Displays the actual firmware scan times selected by Par 146 [FW TaskTime Sel]. Before the change to the firmware
scan time is accepted, the drive evaluates the change to ensure the processor will not be overloaded. If there is risk
of overloading the processor, the change will not be accepted.
149 FW FunctionsActl
Displays the actual state of the firmware functions. If activating requested functions could overload the processor, the change to Par 147 [FW Functions En] will not be accepted.
Note: Bit 19 “MotinPlanner” and 24 “PhaseLockLp” were added for firmware version 3.001
150 Logic State Mach
Indicates the logical state of the drive.
• “Stopped” indicates zero speed has been detected and the speed and torque regulators are disabled.
• 8 “Slip Test” indicates that the Slip Frequency Auto Tune test is in progress.
• 11 “Sleep Mode” indicates that the drive has entered sleep mode.
Note: Value 11 “Sleep Mode” was added for firmware version 5.002. Value 8 “Slip Test” was added for firmware
version 3.001. Values 9 “Finding Home” and 10 “Homing Done” were added for firmware version 3.003.
151 Logic Command
The controller-drive interface (as defined by the Controller Communication Format) sets bits to enable and disable various functions and algorithms. Bits that are changed here are reflected in Par
152 [Applied Lo gicCmd].
Note: Bits 4 through 9 are NOT recalled from Control EEprom. They will be cleared upon drive powerup or following an EEprom recall operation.
Default:
Options:
Default:
Options:
0 =
“0.5 /2 /8ms”
0 =
“0.5 /2 /8ms”
1 =
“0.5 /1 /8ms”
2 =
“0.25 /1 /8ms”
3 =
“0.25 /0.5 /8ms”
4 =
“0.1/0.5 /8ms”
5 =
“0.5/1 /2ms”
6 =
“0.25 /1 /2ms”
7 =
“0.25 /0.5 /2ms”
8 =
“0.1/0.5 /2ms”
0 =
“Stopped”
0 =
“Stopped” 6 = “Test Done”
1 =
“Starting” 7 = “Enabl eHealth”
2 =
“Running” 8 = “Slip Test”
3 =
“Stopping” 9 = “Finding Home”
4 =
“Inertia Test” 10 = “Homing Done”
5 =
“MC Diag” 11 = “Sleep Mode”
Linkable
Read-Write
RO 16-bit
Data Type
Integer
152 Applied LogicCmd
Displays the Logic Command that is applied to the Regulators and Control Algorithms within the drive. Logic Commands come from the 32-bit Logic Command found in a connection with the Logix
Controlle r.
Note: Bits 7 & 8 were changed to “Reserved” for firmware version 2.004.
42 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 43
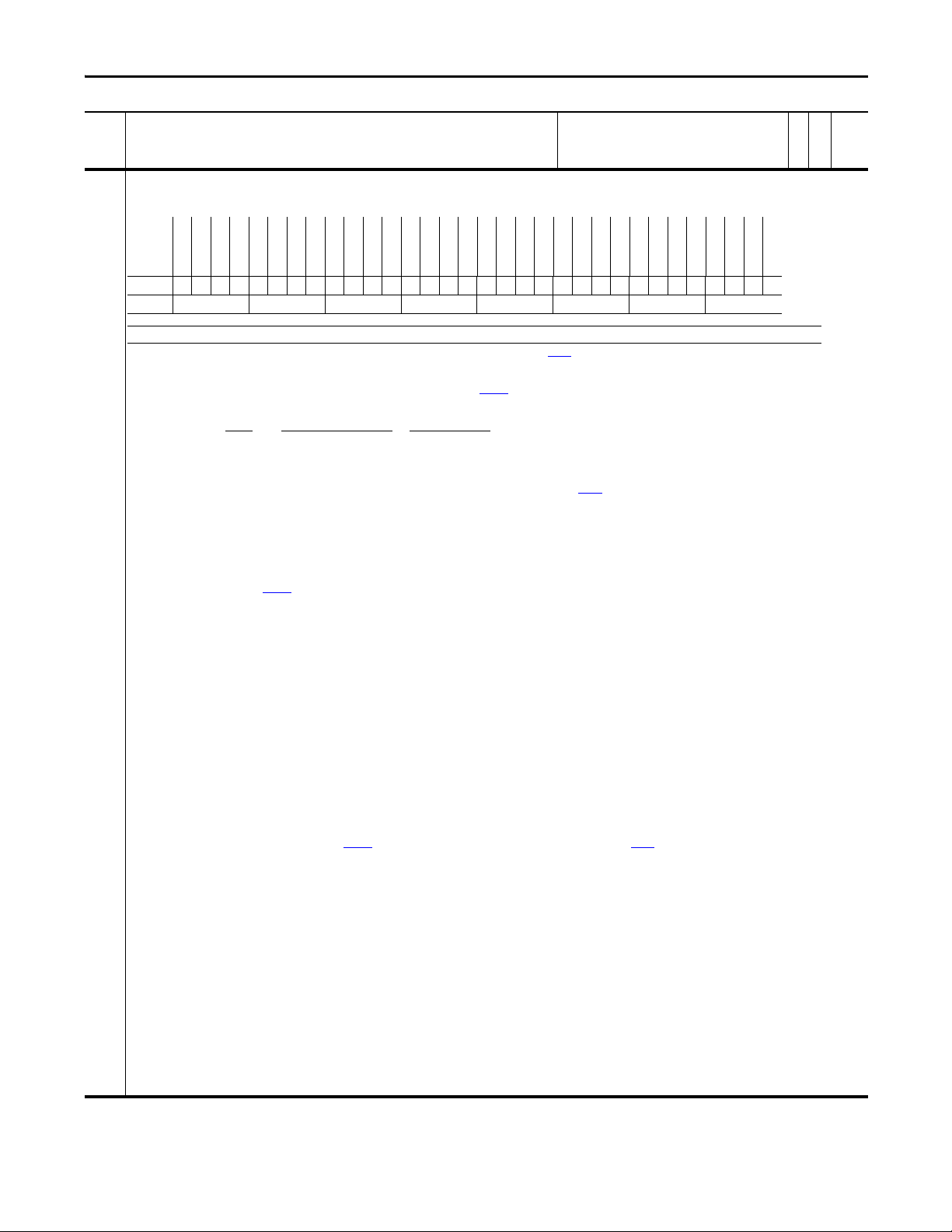
Programming and Parameters Chapter 2
Options
Ids Test Enable
Sys Inrt En
Slip Test En
PM Offset En
Pwr Diag En
Trq Trim En
MC Atune En
Time Axis En
PITrim EnOut
Reserved
Inrt TrqLPEn
Motor OL Ret
Slip Comp En
SpdRegPreset
Aux Pwr Sply
Auto Tach Sw
Reserved DM
Reserved DM
OL ClsLpDsbl
Jog -NoInteg
Iq Delay
Motor Dir
Reserved
3WireControl
Trq DsblZSpd
Trq Sto pRa mp
Jog - NoRamp
Jog in Trq
Flying Start
SErrFilt1Stg
SRef LdLg En
Bipolar SRef
Default 000000000x1000000000000100001001
Bit 313029282726252423222120191817161514131211109876543210
Bit Name Current Fun ction
0 Bipolar SRef When this bit is enabled a bipolar speed reference is used. In bipolar reference mode, Par 4 0 [Selected Spd Ref] indicates both the speed magnitu de and the
direc tion: Positive speed referen ce values (+) = forward di rection and negative speed reference values (–) = reverse direction. When this bit is disabled a
unipolar speed reference is used. In unipolar mode, the speed reference is limited to a minimum value of zero (0). In this case Par 40 [Selected Spd Ref]
supplies only the speed magnitude. The direction is determined by Par 152
[Applied LogicCmd] bits 20 “Forward” and 21 “Reverse”. The forward/reverse
direction button on the HIM is one possible source for the Applied Logic Command direction bits. The following chart explains the effect that the direction
button on the HIM has based on the condition of the “Bipolar SRef” bit:
Bipolar
Reference Controlled By HIM? HIM Direction Button
Enabled Yes Changes the motor direction due to a HIM supplied (+) or (-) command signal.
Enabled No Has no effect on motor direction. Direction determined by sign of Par 40 [Selected Spd Ref].
Disabled Yes Changes the motor direction due to a HIM supplied Forward or Reverse Logic Command bit.
Disabled No Changes the motor direction due to a HIM supplied Forward or Reverse Logic Command bit.
In either Bipolar or Unipolar mode, the selected direction can be dete rmined from the sign of Par 41
[Limited Spd Ref]. Positive values indicate forward
rotation and negative values indicate reverse rotation.
1 SRef LdLg En Ena bles/disables the Speed Reference Lead Lag Filter
2 SErrFilt1Stg
Setting this bit will configure the speed error filter as a single first order low pass filter. Clearing this bit will configure the speed error filter as two casc aded
first order low pass filters
3 Flying Star t Enables/disables the function which reconnects to a spinning motor at ac tual rpm when a start command is issued
4 Jog in Torq Overrides Par 110
[Speed/TorqueMode] setting when a jog command is received
5 Jog-NoRam p Bypasses the Speed Reference Ramp and S-Curve
6 Trq StopRamp Overrides Par 110 [Speed/TorqueMode] setting when stopping
7 Trq DsblZSpd Configures how the drive uses stop dwell time
8 3 WireControl Co nfigures th e drive for 3- wire control
10 Motor Dir Changes direction of the motor rotation
11 Iq Delay Enables the Torque Current Delay option
12 Jog-NoInteg Configures the speed regulator’s integrator to “hold” when jogging
13 OL ClsLpDsbl Overload Closeloop Calculation Disable
14 Reserved DM Reserved for use by the Drive module for “Invert Speed Feedback”
15 Reserved DM Reserved for use by the Drive module for “Invert Motor Torque Current”
16 Auto Tach Sw Switches the drive to secondary motor feedback. This bit cannot be set when Par 485 [Motor Ctrl Mode] = 2 “PMag Motor”.
17 Aux Pwr Sply
Enables the use of an auxiliary power sup ply. When set to 1, the Ma in Control Board (MCB) examines internal 12V DC p ower to see when it is energized. When
set to 0, the MCB examines the voltage of the DC Bus. This bit enables the MCB to remain energized when 3-Ø voltage is de-energized.
18 SpdRegPreset When set to “1”, this bit selects Par 303
[Motor Torque Ref ] for the Speed Regulator preset. When set to “0”, Par 8 7 [SReg Trq Preset] is selected.
19 Slip Comp Enables slip compens ation
20 Motor OL Ret Enable s motor over-load retention
21 Inrt TrqLPEn Enables the Inertia Compensation Torque Output Low Pass Filter
23 PITrim EnOut Enables the output of Process Trim
24 Time Axis En Ramps the output of the Time Function Generator
25 MC Atune En Enables Autotune tests
26 Trq Trim En En abl es To rqu e Tri m
27 Pwr Diag En Enables the Power Diagnostic test
28 PM Offset En Enables the Permanent Magnet Motor offset test
29 Slip Test En Enables the Slip Frequency Auto-Tune function
30 Sys Inrt En Enable s the System Inertia test
31 Ids Test Enable Enables the flux producing (d-axis) current test for the Field Oriented Control (FOC) encoder mode
0 = False
1 = True
No. Name
Values
Description
153 Control Options
Set bits to configure the options for operating the drive. Note: Bit 3 “Flying Start” was added for firmware version 2.004. Bit 20, 21, and 29 were added for firmware version 3.001. Added bit 31 “Ids
Test Enable” for firmware version 4.001.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 43
Linkable
Read-Write
Data Type
Page 44

Chapter 2 Programming and Parameters
Options
Logix Present
Spd Ref Act2
Spd Ref Act1
Spd Ref Act0
Reserved
RunCommanded
Start Active
Posit ionMod e
Speed Mode
Tor que Mo de
Hw Enable On
Spd Commis
MC Commis
MC Active
Above Setpt2
At Setpt 1
Enable On
At Setpt Spd
At Zero Spd
Tac h Lo ss S w
At Limit
Ready
Flash Mo de
Alarm
Faul ted
Jogging
Decelerating
Accelerat ing
Actual Dir
Comma nd Dir
Running
Active
Default 00000000000000000000000000000000
Bit 313029282726252423222120191817161514131211109 8 7 6 5 4 3 2 1 0
Bit Name Current Function Bit Name Current Function
0 Active Drive is controlling motor 15 Enable On
1 Running Run command received & controlling motor 16 At Setpt 1 Par 17 2
value is within limits defined by Par 173 and Par 174
2 Command Dir Commanded direction is forward 17 Above Setpt 2 Par 175 value is within limits defined by Par 176 and Par 1 77
3 Actual Dir Actual motor direction is forward 18 MC Active Drive is controlling motor (same as enabled)
4 Accelerating Motor is increasing speed 19 MC Commis Motor control commissioning in progress
5 D ecelerating Motor is decreasing speed 20 Spd Commis Speed control commissioning in progress
6 Jogging Jog command received & controlling motor 21 Hw Enable On
7 Faulted Exception event that causes a fault has occurred 22 Torque Mode Par 110
value is 2, 3, 4, 5 or 6
8 Alarm Exception event that causes an alarm has occurred 23 Speed Mode Par 110 value is 1 & position control is not enabled
9 Flash Mode Flash upgrade in progress 24 Position Mode Position control active & Par 110 value is not 2, 3, 4, 5 or 6
10 Ready Enable input is high & drive is fault free 25 Start Active Start command received & controlling motor
11 At Limit Speed, Power, Current or Torque is being limited, refer to Par 304
26 Command Run Run command received
12 Tach Loss SW
Failure is detected in primary speed or position feedback device &
drive has switched to secondary device 28-30 Spd Ref Act1-3
13 At Zero Spd Speed feedback is within limits defined in Par 160
31 LogixPresent
14 At Setpt Spd Sp eed feedback is within limits defined in Par 41
and Par 17 1
0 = False
1 = True
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Sleep Config
Sleep Stop
High BusVolt
Reserved
MC Config
SafeOff Enbl
GateShutDown
Posit FdbkSe l
PM Mtr Fdbk
Motin Shtdwn
DigIn Config
Bus PreChrg
Encoder PPR
Jog
Start
Flash Upgrd
Power E E
Power Lo ss
SW I Lim Stp
SW Coast Stp
SW Ramp Stop
No Enable
Faul ted
Default xxxxxxxxx000x 0000000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Options
ProcsTrim En
Cmd Dir Upol
Lgx I/O Cnx
Lgx Run Mode
Reserved
VP Gate Enbl
MC Gate Enbl
Ramp Hold
Slip Test En
S Tst FulSpd
PM Offset Rq
Mtr Dir Req
Pwr Diag Req
MC Atune Req
FTD Ramp EN
MC En Req
RThru Flux
DC Brake En
Mtr Sim Mode
RThru Coast
CurrRef En
Forced Spd
Trq Ref En
Spd Reg En
SReg IntgHld
CurLim Stop
J Tst FulSpd
Inert Tst En
Posit ionEnb l
SRef SCrv En
SRef Ramp En
Spd Ref En
Default 0000x000000000000000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Description
154 Stop Dwell Time
Sets an adjustable delay time between detecting zero speed and disabling the speed and torque regulators, when
responding to a stop command. For more information, please see Stop Dwell Time on page 170
Important: Consult industry and local codes when setting the value of this parameter.
155 Logic Status
Displays the status - condition of the drive.
Values
Linkable
Read-Write
Data Type
Default:
.
Min/Max:
Units:
0.0000
0.0000/10.0000
s
Y
RW Real
156 Start Inhibits
Indicates which condition is preventing the drive from starting or running.
• Bit 16 “GateShutDown” is set when the shunt jumper in the 16-15 position on the Main Control board is missing and a Safe-Off option board is not present.
• Bit 17 “SafeOff Enbl” is set when the HW Enable jumper (P22) is in the Bypass position (on pins 1&3) and the Safe-Off option board is present. A HW Enable is required when a safe-off board is
used.
• Bit 21 “Sleep Stop” is set when the sleep mode has stopped the drive.
• Bit 22 “Sleep Config” is set when sleep mode has not been setup correctly. Check the sleep/wake levels and digital input configuration.
Note: Bit 18 “MC Config” was added to this parameter for firmware version 2.003. Added bit 20 “High BusVolt” for firmware version 4.001. Bits 21 and 22 were added for firmware version 5.002.
157 Logic Ctrl State
Indicates which logic control functions are enabled.
• Bit 22 “S Tst FulSpd” set to “1” indicates that the Slip Auto Tune function is active
• Bit 23 “Slip Test En” set to “1” indicates that the drive is at speed for the Auto Tune function.
Notes: Bits 22 and 23 were added for firmware version 3.001. Bit 14 “DC Brake En” is not functional.
44 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 45

Programming and Parameters Chapter 2
Options
Reserved
Spd Ref Sel2
Spd Ref Sel1
Spd Ref Sel0
Reserved
Reserved
Coast S top
CurrLim Stop
Jog 2
Reserved
Reverse
Forw ard
Clear Fault
Jog 1
Start
Normal Stop
Reserved
Spd Ref Sel2
Spd Ref Sel1
Spd Ref Sel0
Reserved
Reserved
Coast S top
CurrLim Stop
Jog 2
Reserved
Reverse
Forw ard
Clear Fault
Jog 1
Start
Normal Stop
Default x000xx000x000000x000xx000x000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Values
Description
158 Drive Logic Rslt
This is the logic output of the logic parser that combines the outputs from the DPI ports and the DriveLogix controller to determine drive control based on the masks and owners. The control bits are
reflected in Par 152
159 DigIn ConfigStat
This parameter indicates the status of the digital inputs.
• If 8 “Sleep Config” is displayed, the sleep mode has not been set up correctly. Check the values of parameters
280 [Wake Level] and 282 [Sleep Level] to verify that they are not set outside the bounds of the analog input.
Also verify the digital input configuration. See Figure 9 on page 172
Mode configuration.
Note: Value 8 “Sleep Config” was added for firmware version 5.002.
160 Zero Speed Lim
Establishes a band around zero speed that is used to determine when the drive considers the motor to be at zero
speed.
161 Logic TP Sel
Enter or write a value to select logic status indication displayed in Par 162 [Logic TP Data].
162 Logic TP Data
Displays the indication selected by Par 161 [Logic TP Sel].
163 Stop Oper TP Sel
Enter or write a value to select data displayed in Par 164 [StpOper TPData] at the time of the last initiated stop.
[Applied LogicCmd] bits 16-31.
for more information on Sleep / Wake
Default:
Options:
Default:
Min/Max:
Units:
Scale:
Default:
Options:
Default:
Min/Max:
Default:
Options:
0 =
“DigIn Ok”
0 =
“DigIn Ok” 4 = “Strt+UnLatch”
1 =
“2 Run/Starts” 5 = “2 Jog1's”
2 =
“Start NoStop” 6 = “2 Jog2's”
3 =
“Run+Latched” 7 = “2Fwd's/Rev's”
8 =
“Sleep Config”
17.6400
0.0000/882.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0 =
“Zero”
0 =
“Zero” 28 = “Sys Friction”
1 =
“Avg Spd Ref” 29 = “Iq proc time”
2 =
“Avg Spd Fdbk” 30 = “Enable Inhib”
3 =
“LastStopMode” 31 = “DI Src Index ”
-(0=None) 32 = “DI SrcRevIdx”
-(1=Coast) 33 = “DI TrendTrig”
-(2=Current Limit) 34 = “DI Prchg Ena”
-(3=Ramp) 35 = “Enable State”
-(4=Torque Mode) 36 = “LID Revision”
4 =
“Spd Ref Sel” 37 = “DI MOP Incr”
5 =
“Start State” 38 = “DI MOP Decr”
6 =
“Run State” 39 = “DI MOP Reset ”
7 =
“Stop State” 40 = “Cmd Term Blk”
8 =
“PrChrg Logic” 41 = “Cmd DPI 1”
9 =
“Meas State” 42 = “Cmd DPI 2”
10 =
“Data State” 43 = “Cmd DPI 3”
11 =
“Diag State” 44 = “Cmd DPI 4”
12 =
“MC CalcState” 45 = “Cmd DPI 5”
13 =
“Task 1 time” 46 = “Cmd DPI 6”
14 =
“Task 1 max” 47 = “Cmd ELC”
15 =
“Task 2 time” 48 = “Cmd Debugg er”
16 =
“Task 2 max” 49 = “Reser ved”
17 =
“Task 3 time” 50 = “SelSw Posit”
18 =
“Task 3 max” 51 = “DI SelSw 00”
19 =
“BkGnd Time” 52 = “DI SelSw 01”
20 =
“BkGnd Max” 53 = “DI SelSw 02”
21 =
“Task 1 %” 54 = “DI SelSw 03”
22 =
“Task 2 %” 55 = “Ids Motoring”
23 =
“Task 3 %” 56 = “IqsRef Motor ”
24 =
“BkGnd %” 57 = “Ids Regen”
25 =
“RThru State” 58 = “IqsRef Regen”
26 =
“RThru Timer”
27 =
“Health State”
0.0000
-/+2200000000.0000
0 =
“Zero”
0 =
“Zero” 14 = “ZM1 Spd Fdbk”
1 =
“Logic State” 15 = “Speed Ref”
2 =
“Logic Input” 16 = “Avg Spd Ref”
3 =
“Lcl In State” 17 = “ZM1 Spd Ref ”
4 =
“Logic Status” 18 = “SReg PI Out”
5 =
“Run Inhibit” 19 = “Trq Ref”
6 =
“Logic Ctrl” 20 = “TrqRef Stat”
7 =
“Mtr Ctrl Cmd” 21 = “DC Bus Volts”
8 =
“Mtr Ctrl Ack” 22 = “M otor Volts”
9 =
“Reserved” 23 = “Mtr Current”
10 =
“Flt Status 1” 24 = “Motor Flux”
11 =
“Flt Status 2” 25 = “Motor Freq”
12 =
“Motor Speed” 26 = “Motor Power”
13 =
“Avg Spd Fdbk” 27 = “Flt Status 3”
Y
Linkable
RW Real
RO Real
Read-Write
Data Type
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 45
Page 46

Chapter 2 Programming and Parameters
A
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Faul t Res et
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Base Block
Reserved
Reserved
Tor que Ru n
Flux Run
CP Enable
Default xxxxxxxxxxxxxxxx0xxxxxxxx0000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
A
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Faul t Res et
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Power D iag
Precharge
Tor que Ru n
Flux Run
CP Enable
Default xxxxxxxxxxxxxxxx0xxxxxxxxxx00000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
A
No. Name
Description
164 StopOper TP Data
Displays the data selected by Par 16 3 [Stop Oper TP Sel].
165 Tune Test Status
Indicates which test (if any) is in progress.
• Value 7 is retained and is used to continue the Auto Tune test from the last point at which it was stopped.
Notes: Value 5 was changed to “Res erved” for firmware version 2.004. Value 7 “Mtr+Sys J” was changed to “Slip
Test” for firmware version 3.001. Value 8 “Find Home” was added for firmware version 3.003.
166 Motor Ctrl Cmmd
Displays the command bits to the Motor Control Processor from the Velocity Processor.
167 Motor Ctrl Ackn
Displays the Motor Control Processor's acknowledgment to the Velocity Processor for the Motor Control Command bits.
168 Normal Stop Mode
Sets the method of stopping the drive when a stop command is given. Normal Stop command and the RUN input
changing from true to false will command a Normal Stop.
Ramp Stop = decelerates to zero speed at the decal rate
CurLim Stop = Max torque / current applied until zero speed
Coast Stop = power removed from moto r, motor coasts to zero
169 SrLss ZeroSpdLim
Functionally equivalent to Par 160 [Zero Speed Lim], but is used exclusively in Sensorless speed mode. The value is
automatically set from Par 3
corresponds to the rated slip speed of the motor (synchronous speed - nameplate speed). The value can be
manually set.
170 Flying StartGain
This parameter is currently not used.
Note: This parameter was added for firmware version 2.003.
171 Set Speed Lim
Creates a tolerance - hysteresis band around the value in Par 41 [Limited Spd Ref] for comparison to average speed
feedback. The comparison controls bit 14 “At Setpt Spd” of Par 155
turns on when the feedback is within the tolerance of the reference.
• Turn-on level for rising feedback = Limited Spd Ref - Limit.
• Turn-off level for rising feedback = Limited Spd Ref + 2(Limit).
• Turn-on level for falling feedback = Limited Spd Ref + Limit.
• Turn-off level for falling feedback = Limited Spd Ref - 2(Limit).
172 Setpt 1 Data
Provides data for comparison to Par 173 [Setpt1 TripPoint], driving bit 16 “At Setpt 1” of Par 155 [Logic Status]. For
more information, please see Setpt 1 Data on page 169
173 Setpt1 TripPoint
Provides the midpoint for operation of bit 16 “At Setpt 1” of Par 15 5 [Logic Status].
174 Setpt 1 Limit
Creates a tolerance - hysteresis band around the value in Par 173 [Setpt1 TripPoint].
• Turn-on level for ascending data = TripPoint - Limit.
• Turn-off level for ascending data = TripPoint + 2(Limit).
• Turn-on level for descending data = TripPoint + Limit.
• Turn-off level for descending data = TripPoint - 2(Limit).
175 Setpt 2 Data
Provides data for comparison to Par 176 [Setpt2 TripPoint], driving bit 17 “Above Setpt 2” of Par 155 [Logic Status].
For more information, please see Setpt 2 Data on page 169.
176 Setpt2 TripPoint
Provides the midpoint for operation of bit 17 “Above Setpt 2” of Par 155 [Logic Status].
[Motor NP Hertz], Par 4 [Motor NP RPM] or Par 7 [Motor Poles]. The automatic setting
[Logic Status]. In general bit 14 “At Setpt Spd”
.
Values
Default:
Min/Max:0-/+2147483648
Default:
Options:
Default:
Options:
Default:
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
0 =
“None”
0 =
“None” 5 = “Reserved”
1 =
“MC Autotune” 6 = “Sys Inertia”
2 =
“Power Diag” 7 = “Slip Test”
3 =
“Motor Direct” 8 = “Find Home”
4 =
“PM Offset”
0 =
“Ramp Stop”
0 =
“Ramp Stop”
1 =
“CurLim Stop”
2 =
“Coast Stop”
49.9975
0.0000/875.0000
rpm
4000
0/32767
17.6400
0.0000/882.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0.0000
-/+8.0000 P.U.
P. U .
0.1000
-/+8.0000 P.U.
P. U .
0.0100
0.0000/0.5000
P. U .
0.0000
-/+8.0000 P.U.
P. U .
0.2000
-/+8.0000 P.U.
P. U .
Linkable
Y
Y
Y
Y
Y
Y
Y
Read-Write
Data Type
RO 32-bit
Integer
RW Real
RW 16-bit
Integer
RW Real
RW Real
RW Real
RW Real
RW Real
RW Real
46 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 47

Programming and Parameters Chapter 2
No. Name
Description
177 Setpt 2 Limit
Creates a tolerance - hysteresis band around the value in Par 176 [Setpt2 TripPoint].
For positive setpoints:
• Turn-on level = TripPoint
• Turn-off level = TripPoint - Limit.
For negative setpoints:
• Turn-on level = TripPoint
• Turn-off level = TripPoint + Limit.
178 PI TP Sel
Enter or write a value to select Process Control PI data displayed by Par 179 [PI TP Data].
The values for options 1 & 8 were changed to “Reserved” for firmware version 2.004.
179 PI TP Data
Displays the data selected by Par 17 8 [PI TP Sel].
180 PI Output
The final output of the Process Control regulator. A value of 1 can represent either base motor speed, motor rated
torque, or 100% for some external function.
181 PI Reference
The reference input for the process control regulator. A value of 1 can represent either base motor speed, motor
rated torque, or 100% for some external function.
182 PI Feedback
The feedback input for the process control regulator. A value of 1 can represent either base motor speed, motor
rated torque, or 100% for some external function.
183 PI Error
Displays the error of the process trim reference minus the process trim feedback.
184 PI Lpass Filt BW
Sets the bandwidth of a single pole filter applied to the error input of the Process Control regulator. The input to
the filter is the difference between Par 181 [PI Reference] and Par 18 2 [PI Feedback]. The output of this filter is
used as the input to the process control regulator.
185 PI Preload
Presets the integrator of the Process Control regulator.
186 PI Prop Gain
Controls the proportional gain of the Process Control regulator. If the proportional gain is 1.0, the regulator output
e q u al s 1 P. U . f o r 1 P. U. e r r o r.
187 PI Integ Time
Controls the integral gain of the Process Control regulator. If the integrator time is 1.0, the regulator output equals
1 P.U. in 1 second for 1 P.U. error.
188 PI Integ HLim
The high limit of the integral gain channel for the Process Control regulator. A value of 1 can represent either base
motor speed, motor rated torque, or 100% for some external functi on.
189 PI Integ LLim
The low limit of the integral gain channel for the Process Control regulator. A value of 1 can represent either base
motor speed, motor rated torque, or 100% for some external functi on.
190 PI Integ Output
Displays the output value of the integral channel of the Process Control regulator. A value of 1 can represent either
base motor speed, moto r rated torque, or 100% for some external fu nction.
191 PI High Limit
The high limit of the Process Control regulator output. A value of 1 can represent either base motor speed, motor
rated torque, or 100% for some external function.
192 PI Lower Limit
The low limit of the Process Control regulator output. A value of 1 can represent either base motor speed, motor
rated torque, or 100% for some external function.
196 ParamAccessLevel
The value of this parameter establishes the level of parameter access for the Human Interface Module (HIM).
• Value 0 - Basic grants access to the minimum number of parameters
• Value 1 - Advanced grants access to a larger group of parameters
201 Language
Selects the display language when using an LCD HIM. Currently, only option 0 - “English” is available.
Values
Default:
Min/Max:
Units:
Default:
Options:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Options:
Default:
Options:
0.0100
0.0000/0.5000
P. U .
0 =
“Zero”
0 =
“Zero” 7 = “Status Hold”
1 =
“Reserved” 8 = “Reserved”
2 =
“LPF Output” 9 = “Reset Status”
3 =
“P Gain Term” 10 = “Time Axis En”
4 =
“Reg Output” 11 = “Enbl Status”
5 =
“On Intg Lim” 12 = “Out Max Lim”
6 =
“On Out Limit” 13 = “Out Min Lim”
0.0000
-/+8.0000 P.U.
P. U .
0.0000
-/+8.0000 P.U.
P. U .
0.0000
-/+8.0000 P.U.
P. U .
0.0000
-/+8.0000 P.U.
P. U .
0.0000
-/+8.0000 P.U.
P. U .
0.0000
0.0000/500.0000
rad/s
0.0000
-/+8.0000 P.U.
P. U .
8.0000
0.0000/200.0000
8.0000
0.0000/4000.0000
/s
0.1000
0.0000/8.0000
P. U .
-0.1000
-8.0000/0.0000
P. U .
0.0000
-/+8.0000 P.U.
P. U .
0.1000
0.0000/8.0000
P. U .
-0.1000
-8.0000/0.0000
P. U .
0 =
“Basic”
0 =
“Basic”
1 =
“Advanced”
0 =
“English”
0 =
“English”
1 =
“Al t L ang uag e”
Linkable
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Read-Write
Data Type
RW Real
RO Real
RO Real
RW Real
RW Real
RO Real
RW Real
RW Real
RW Real
RW Real
RW Real
RW Real
RO Real
RW Real
RW Real
RW 16-bit
Integer
RW 16-bit
Integer
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 47
Page 48

Chapter 2 Programming and Parameters
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Peak2 SelHig h
Peak 2 Hold
Peak 2 Set
Reserved
Peak1 SelHig h
Peak 1 Hold
Peak 1 Set
Default xxxxxxxxx0000000
Bit 1514131211109876543210
0 = False
1 = True
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Peak 2 Chng
Peak 1 Chng
Default xxxxxxxxxxxxxx00
Bit 1514131211109876543210
0 = False
1 = True
No. Name
Values
Description
202 Time Axis Rate
Sets rate (1/sec) for the Time Function Generator to ramp from an output of 0 to 1 and from 1 to 0.
203 Time Axis Output
The output of the Time Function Generator. When the Time Function Generator is enabled by Par 151 [Logic
Command] bit 3 “Time Axis En”, or Par 153
ramps from 0 to 1 at a rate determined by Par 202
is disabled, the value of this parameter ramps from 1 to 0.
204 LimGen Y axis Mx
Sets Par 207 [Limit Gen Hi Out] and Par 208 [Limit Gen Lo Out] when the absolute value of Par 206 [LimGen X axis
In] is greater than or equal to 1.
205 LimGen Y axis Mn
Sets Par 207 [Limit Gen Hi Out] and Par 208 [Limit Gen Lo Out] when the absolute value of Par 206 [LimGen X axis
In] is equal to 0.
206 LimGen X axis In
The X axis input to the Lim it Generator. Typically this parameter is linked to a speed reference or to Par 203 [Time
Axis Output].
207 Limit Gen Hi Out
Displays the positive output of the Limit Generator. When Par 20 6 [Limit Gen X axis In] is greater than or equal to
1, this value equals Par 2 04
equals Par 205 [Limit Gen Y axis Mn]. For values of X Axis input between 0 and 1, the value of this parameter is
interpolated from Y axis min. and max. values. Typically it is linked to Par 18 8 [PI Integ HLim].
208 Limit Gen Lo Out
Displays the negative output of the Limit Generator. The value of this parameter is the negative of Par 207 [Limit
Gen Hi Out]. Typically it is linked to Par 189 [PI Integ LLim].
210 PeakDtct Ctrl In
Sets the configuration of the two peak/level detectors. Peak detection (when “set” and “hold” are off) causes the output to capture the peak min./max.
• Bit 2 “Peak1SelHigh” and bit 6 “Peak2SelHigh” determine if the peak/level detector is positive or negative. If the bit is set the detector detects positive peaks or levels above the preset. If the bit
is not set the detector detects "valleys" or levels below the preset. The output shows the min. or max. peak.
• Bit 0 “Peak 1 Set” bit is used to reset the output to the value in Par 214
(default 0).
• Bit 1“Peak 1 Hold” is used to hold the output at the present value in Par 214 [PeakDtct1 Preset]. Bit 5 “Peak 2 Hold” is used to hold the output at the present value in Par 218 [PeakDtct2 Preset].
[Limit Gen Y axis Mx]. When Par 206 [Limit Gen X axis In] is equal to 0, this value
[Control Options], bit 24 “Time Axis En”, the value of this parameter
[Time Axis Rate]. Conversely, when the Time Function Generator
[PeakDtct1 Preset] (default 0). Bit 4 “Peak 2 Set” bit is used to reset the output to the value in Par 218 [PeakDtct2 Preset]
Default:
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
1.0000
0.0100/20.0000
/s
0.0000
0.0000/1.0000
0.2500
0.0000/8.0000
P. U .
0.0500
0.0000/8.0000
P. U .
YY Y
8.0000
0.0000/8.0000
P. U .
-8.0000
-8.0000/0.0000
P. U .
Y
Y
Y
Linkable
RW Real
RO Real
RW Real
RW Real
RW Real
RO Real
RO Real
Read-Write
Data Type
211 PeakDtct Status
Status of peak/level detectors. A peak detector sets its “Change” bit for one scan when it detects a peak. The” Change” bit is off when set or when the “Hold” bit is on.
212 PkDtct1 In DInt
Integer input to the first peak/level detector.
213 PkDtct1 In Real
Floating point input to the first peak/level detector.
214 PeakDtct1 Preset
The first detector (in set or hold modes) compares this value to its input for level detection. When the detector
trips (in set mode) it transfers the value of this parameter to its output.
215 PeakDetect1 Out
Output from the first peak/level detector.
216 PkDtct2 In DInt
Integer input to second peak/level detector.
217 PkDtct2 In Real
Floating point input to second peak/level detector.
218 PeakDtct2 Preset
The second detector (in set or hold modes) compares this value to its input for level detection. When the detector
trips (in set mode) it transfers the value of this parameter to its output.
48 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:
Default:
Min/Max:
0.0000
-/+2200000000.0000
0.0000
-/+2200000000.0000
0.0000
-/+2200000000.0000
0.0000
-/+2200000000.0000
0.0000
-/+2200000000.0000
Y
Y
Y
Y
Y
Y
RW 32-bit
Integer
RW Real
RW Real
RO Real
RW 32-bit
Integer
RW Real
RW Real
Page 49

Programming and Parameters Chapter 2
No. Name
Description
219 PeakDetect2 Out
Output from the second peak/level detector.
221 Load Estimate
Displays the estimated load torque, which is the side effect of the speed obser ver and does not include torque to
accelerate or decelerate the motor if the inertia input is correct. The value is provided for display purposes.
222 Mtr Fdbk Sel Pri
Selects primary feedbac k device. The primary feedback device configuration must not be set to fault on an event
in order to allow operational feedback switch over to the alternate feedback device set in Par 223
Alt].
Notes: Par 485 [Motor Ctrl Mode] must be set to FOC for Sensorless feedback selection to be active. Selection 5 is
only avai lable when c ompatible fe edback opti on card is installed. This parameter was changed to non-linkable for
firmware version 3.001.
223 Mtr Fdbk Sel Alt
Selects alternate feedback device if the feedback device selected in Par 222 [Mtr Fdbk Sel Pri] fails.
Notes: Par 485
only avai lable when c ompatible fe edback opti on card is installed. This parameter was changed to non-linkable for
firmware version 3.001.
224 TachSwitch Level
Sets the detection level for the automatic tach loss switch-over routine. A drop in feedback speed at this percent of
rated speed over 0.5 msec will cause a tach switch from primar y to alternate feedback device. This feature is
enabled when bit 16 “Auto Tach Sw” in Par 153 [Control Options] is selected.
Setting this level lower will make the tach switch detection more sensitive and lower the minimum speed at
which a tach switch can occur. Setting this level higher will make the tach switch less sensitive and raise the
minimum speed for tach switch detection.
Note: This parameter was changed to non-linkable for firmware version 3.001.
225 Virtual Edge/Rev
Set the edges per revolution (EPR) scaling for calculating motor position. Used in the calculation of the position
feedback such as Par 2 29 [MtrPosit Stimulat].
226 Motor Speed Est
Displays the estimated motor speed, calculated when the selected feedback is sensorless or when encoderless
ridethrough is enabled.
227 Motor Posit Est
Summation (or integration) of Par 226 [Motor Speed Est] scaled by the value in Par 225 [Virtual Edge/Rev].
228 MtrSpd Simulated
The motor speed output of the motor simulator. The motor simulator provides motor speed information during
setup and troubleshoo ting when actual motor control is not desi red or possible. To use the motor simulator, enter
a value of 4 in Par 222 [Mtr Fdbk Sel Pri] or Par 223 [Mtr Fdbk Sel Alt].
229 MtrPosit Simulat
The motor position out put of the motor simulator. The motor simulator provides motor posi tion information
during setup and troubleshooting when actual motor control is not desired o r possible. To use the motor
simulator, enter a value of 4 in Par 222
230 Encdr0 Position
Displays the position feedback (accumulator) from encoder 0. The value changes by a value of four times (4x) the
Pulses Per Revolution (PPR) rating of the encoder for each full revolution of the encoder shaft. Used by the Velocity
Position Loop (VPL) to close the position loop if position control is selected.
231 Encdr0 Spd Fdbk
Displays the speed feedback from encoder 0. Calculated from the change of Par 230 [Encdr0 Position] and Par 232
[Encoder0 PPR].
[Motor Ctrl Mode] must be set to FOC for Sensorless feedback selection to be active. Selection 5 is
[Mtr Fdbk Sel Pri] or Par 22 3 [Mtr Fdbk Sel Alt].
[Mtr Fdbk Sel
Values
Default:
Min/Max:
Default:
Min/Max:
Units:
Default:
Options:
Default:
Options:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:
Units:
Scale:
0.00
0.00/1200.00
0.0
-/+8.0 P.U.
P. U .
0 =
“Encoder 0”
0 =
“Encoder 0” 4 = “Motor Sim”
1 =
“Encoder 1” 5 = “FB Opt Port0”
2 =
“Sensorless”
3 =
“Reserved”
2 =
“Sensorless”
0 =
“Encoder 0” 4 = “Motor Sim”
1 =
“Encoder 1” 5 = “FB Opt Port0”
2 =
“Sensorless”
3 =
“Reserved”
10.0000
5.0000/25.0000
%
4096
10/16777216
EPR
0.0000
-/+14112.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0.0000
-/+14112.0000
rpm
Par 4 [Motor NP RPM] = 1.0 P.U.
0.0000
-/+14112.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
Linkable
Read-Write
RO Real
RO Real
RW Real
RW 32-bit
RO Real
RO 32-bit
RO Real
RO 32-bit
RO 32-bit
RO Real
Data Type
Integer
Integer
Integer
Integer
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 49
Page 50
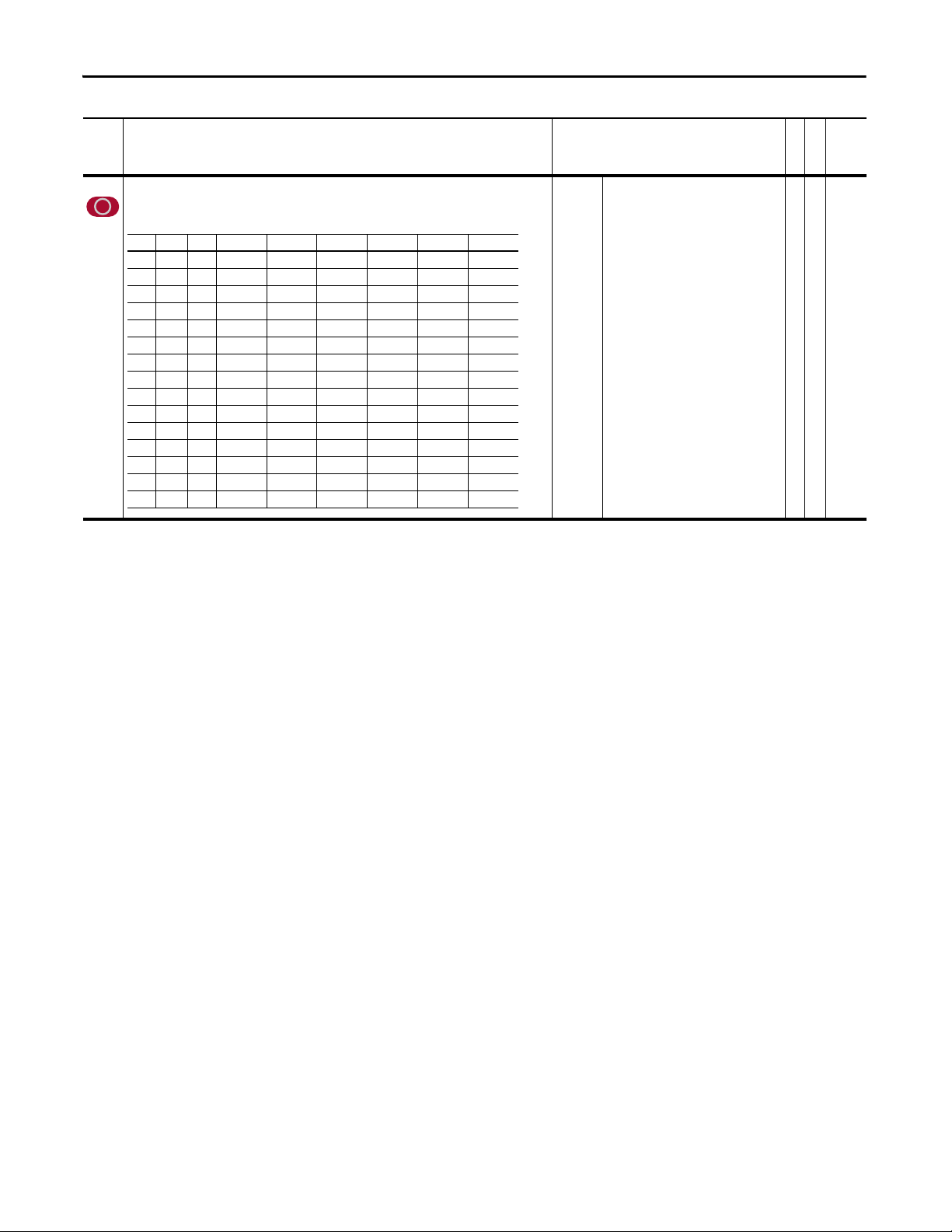
Chapter 2 Programming and Parameters
Table 232A: PPR Rating Values
n = 2n = x mod 75 mod 125 mod 225 mod 375 mod 625 mod1125
01 75 125 225 375 625 1125
12 150 250 450 750 1250 2250
24 300 500 900 1500 2500 4500
38 600 1000 1800 3000 5000 9000
4 16 1200 2000 3600 6000 10000 18000
5 32 2400 4000 7200 12000 20000 --
6 64 -- -- -- -- -- --
7 128 -- -- -- -- -- --
8 256 -- -- -- -- -- --
9 512 -- -- -- -- -- --
10 1024 -- -- -- -- -- --
11 2048 -- -- -- -- -- --
12 4096 -- -- -- -- -- --
13 8192 -- -- -- -- -- --
14 16384 -- -- -- -- -- --
No. Name
Description
232 Encoder0 PPR
Sets the pulse per revolution rating of the feedback device connected to the Encoder 0 input. This parameter must
be set to one of the values displayed in bold in Table 232A below.
Values
Default:
Min/Max:
Units:
1024
10/20000
PPR
Linkable
Read-Write
RW 16-bit
Data Type
Integer
50 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 51

Programming and Parameters Chapter 2
Options
Reserved
Reserved
Reserved
En1SmplRt b2
En1SmplRt b1
En1SmplRt b0
Reserved
Reserved
Enc1 EdgTime
Enc1 Dir
Enc1 A Phs
Enc1 4x
Enc1 Filt b3
Enc1 Filt b2
Enc1 Filt b1
Enc1 Filt b0
Reserved
Reserved
Reserved
En0SmplRt b2
En0SmplRt b1
En0SmplRt b0
Reserved
Reserved
Enc0 EdgTime
Enc0 Dir
Enc0 A Phs
Enc0 4x
Enc0 Filt b3
Enc0 Filt b2
Enc0 Filt b1
Enc0 Filt b0
Default xxx011xx10011010xxx011xx10011010
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Table 233A: Encoder Input Filter Settings
Bit 3/19 2/18 1/17 0/16 Encoder Bit Filter Settings
0000Filter disabled
0001100 ns filter
0010200 ns filter
0011300 ns filter
0100400 ns filter
0101500 ns filter
0110600 ns filter
0111700 ns filter
1000800 ns filter (default setting)
1001900 ns filter
10101000 ns filter
10111100 ns filter
11001200 ns filter
11011300 ns filter
11101400 ns filter
11111500 ns filter
Table 233B: Multiplier and Direction Settings
Bit 5/21 4/20 Mult Direct ions Comment s
0 0 2x fwd/rev Counts rise/fall of phase A, phase B only used to find direction
0 1 4x fwd/rev Counts rise/fall of both A and B phases (default setting)
1 0 1x fwd only Counts rise of phase A. Phase B ignored.
1 1 2X fwd only Counts rise of phase A. Phase B ignored.
Table 233C: FIR Filter Settings
Bit 12/28 11/27 10/26 Taps
0001
0012
0104
0118
10016
10132
11064
111127
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Enc1 PhseLev
Enc1 PhseLos
Enc1 QuadLos
Enc1 Missing
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Enc0 PhseLev
Enc0 PhseLos
Enc0 QuadLos
Enc0 Missing
Default xxxxxxxxxxxx0000xxxxxxxxxxxx0000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Values
Description
233 Encdr 0/1 Config
Specifies the configuration options for the encoder 0 and encoder 1.
• Bits 0 “Enc0 Filt bt0” through 3 “Enc0 Filt bt3”, or Bits 16 “Enc1 Filt bt0” through 19 “Enc1 Filt bt3” configure the encoder input filter (see Table 233A: Encoder Input Filter Settings
requires the input signal to be stable for the specified time period. Input signal transitions within the filter time setting will be ignored. Bits 0-3 and 16-19 add 100ns filtering per stage to
encoder inputs.
• Bits 4 “Enc0 4x” and 5 “Enc0 A Phs” or 20 “Enc1 4x ” and 21”Enc1 A Phs” determine how the encoder channel A and B signals will be interpreted. Typically, both encoder phases A and B are used
so that di rection inform ation is available. Par 230
encoder position will only increase, regardless of rotation direction. Bits 4 and 5 together also determine the number of edg es counted per encoder pulse (see Table 233B: Multiplier and Direction
Settings). “4x” sampling counts both rise and fall of both A and B encoder phases, hence 4 edges per pulse. In 4x mode, the encoder position will change by four times the encoder pulses per
revolution rating (PPR) per encoder revolution (e.g., it increments the value in Par 230 [Encdr0 Position] by 4096 for one revolution of a 1024 PPR encoder).
• Bit 6 “Enc0 Dir” and 22 “Enc1 Dir” inverts the channel A input, thus reversing the direction of the feedback. Note that changes in encoder direction (bit 6 or 22) may require changing Par 153
[Control Options] bit 10 “Motor Dir”.
• Bit 7 “Enc0 EdgTime” or bit 23 “Enc1 EdgTime” configures the method of sampling used by the Velocity Position Loop (VPL). Setting the bit chooses "Edge to Edge" sampling, while resetting the
bit to zero selects "Simple Difference" sampling. "Simple Difference" sampling calculates speed by examining the difference between pulse counts over a fixed sample time. "Edge to Edge"
sampling adjusts the sample time to synchronize with the position count updates from the daughter card - improving the accuracy of the speed calculation.
• Bits 10 “En0SmplRate bt0” through 12 “En0SmplRate bt2” or bits 26 “En1SmplRate bt0” through 28 “En1SmplRate bt2” configure the Finite Impulse Response (FIR) Filter (see Table 233C: FIR
Filter Settings). This setting reduces the effect of noisy feedback on the system. Refer to the “Speed/Position Feedback” section of the Po werFlex ® 700S wi th Phas e II Cont rol Refere nce Manua l,
publication PFLEX-RM003 for details.
Note: Bit 27 is set to 0 = False by default for firmware version 1.11 and is set to 1 = True by default for firmware version 2.003.
[Encdr0 Position] counts up for forward rotation and down for reverse rotation. If bit 5 is set, then the B phase signal is ignored. As a result, th e
Linkable
Read-Write
). The filter
Data Type
234 Encdr 0/1 Error
Indicates the error status of the encoder 0 and encoder 1.
Note: Bit 4 was changed to “Reserved” for firmware version 2.004.
235 RegisLtch0 Value
Displays the registration data of port 0. Indicates the posit ion reference counter value latched by the external
strobes. The strobe signal used to trigger the latch is configurable by Par 236
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 51
[RegisLtch 0/1 Cnfg].
Default:
Min/Max:0-/+2147483648
RW 32-bit
Integer
Page 52

Chapter 2 Programming and Parameters
Table 236A: Encoder0 Trigger Source Settings
Note: When the Z-pulse is selected as a trigger source, registration latch port 0 is used for
Encoder0 regardless of the setting of bit 0 “RL0 Encoder1”.
Bit 2 1
0 0 Encoder 0 Z-pulse AND Ext Trig A
0 1 Ext Trig B (Digital Input 2)
1 0 Ext Trig A (Digital Input 1)
1 1 Encoder 0 (Primary Encoder) Z-pulse
Table 236D: Trigger Direction Settings
Bit 6/22 5/21
00Not Configured
01Reverse
10Forward
11Both Directions
Table 236E: Filter Settings
Bit 11 10 9 8 Input Filter Setting
0000Filter disabled
0001100 ns filter
0010200 ns filter
0011300 ns filter
0100400 ns filter
0101500 ns filter
0110600 ns filter
0111700 ns filter
1000800 ns filter (default setting)
1001900 ns filter
10101000 ns filter
10111100 ns filter
11001200 ns filter
11011300 ns filter
11101400 ns filter
11111500 ns filter
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
RL1 Dir Fwd
RL1 Dir Rev
RL1 TrgEdge1
RL1 TrgEdge0
RL1 TrgSrc1
RL1 TrgSrc0
RL1 Encoder1
Reserved
Reserved
Reserved
Reserved
SL DI Filt 3
SL DI Filt 2
SL DI Filt 1
SL DI Filt 0
Reserved
RL0 Dir Fwd
RL0 Dir Rev
RL0 TrgEdge1
RL0 TrgEdge0
RL0 TrgSrc1
RL0 TrgSrc0
RL0 Encoder1
Default xxxxxxxxx0000000xxxx0000x1100011
Bit 313029282726252423222120191817161514131211109876543210
Table 236C: Edge Selection Settings
Bit 4/20 3/19
0 0 Capture on rising edge
0 1 Capture on falling edge
1 0 Capture on both edges
1 1 Disable capture
0 = False
1 = True
Table 236B: Encoder1 Trigger Source Settings
Note: When the Z-pulse is selected as a trigger source, registration latch port 1 is used for
Encoder1 regardless of the setting of bit 16 “RL1 Encoder1”.
Bit 18 17
0 0 Encoder 1 Z-pulse AND Ext Trig A
0 1 Ext Trig B (Digital Input 2)
1 0 Ext Trig A (Digital Input 1)
1 1 Encoder 1 (Secondary Encoder) Z-pulse
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
RL1 DisarmReq
RL1 Arm Req
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
RL0 DisarmReq
RL0 Arm Req
Default xxxxxxxxxxxxxx00xxxxxxxxxxxxxx00
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Values
Description
236 RegisLtch 0/1Cnfg
Configures the registration latch at port 0 or port 1 to be used with Encoder 0 or Encoder 1, respectively.
• Bit 0 “RL0 Encoder 1” selects the encoder for the input source of latched data. Setting bit 0 selects encoder 1, resetting the bit to zero selec ts encoder 0.
• Bits 1 “RL0 TrgSrc0” and 2 “RL0 TrgSrc1” select the trigger source (see Table 236A: Encoder0 Trigger Source Settings
• Bits 3 “RL0 TrgEdge0”, 4 “RL0 TrgEdge1”, 19 “RL1 TrgEdge0” and 20 “RL1 TrgEdge1” select which edges signal the position (see Table 236C: Edge Selection Settings).
• Bits 5 “RL0 Dir Rev”, 6 “RL0 Dir Fwd”, 21 “RL1 Dir Rev” and 22 “RL1 Dir Fwd” set the direction of position capture (see Table 236D: Trigger Direction Settings
• Bits 8 “SL DI Filt 0”, 9 “SL DI Filt 1”, 10 “SL DI Filt 2”, and 11 “SL DI Filt 3” configure a filter for the digital input 1 and 2 (see Table 236E: Filter Settings
for the specified time period. Input transitions within the filter time setting will be ignored. Bits 8-11 add 100ns filter per stage to external trigger.
• 17 “RL1 TrgSrc0” and 18 “RL1 TrgSrc1” select the trigger source (see Table 236B: Encoder1 Trigger Source Settings
• Bit 0 &16 - o ff = Enc0 input to latch, on = Enc1 inpu t to latch.
).
).
Linkable
Read-Write
Data Type
).
). The filter requires the input signal to be stable
237 RegisLtch0/1 Ctrl
Configures the control for registration latch 0 and 1.
• Set bit 0 “R L0 Arm Req” and bit 16 “RL1 Arm Req” to arm the re gistration logic for the next trigger event. The particular latch will be armed an d ready to be strobed on the next occurrence o f the
trigger input.
• Set bit 1 “RL0 DisarmReq” and bit 17 “RL1 DisarmReq” to disarm the registration logic for next trigger event.
After the registration is captured, bit 0 “RL0 Arm Req” and bit 16 “RL1 Arm Req” automatically resets back to 0 after found. Bit 1 “RL0 DisarmReq” and bit 17 “RL1 DisarmReq” are only needed to
disarm a registration latch that has not been found yet. Setting bits 1 and 17 will clear the bits 0 and 6. Setting bits 0 and 6 sets bits 0 “RL0 Armed” and bit 16 “RL1 Armed” and clears bits 1 “RL0
Found” and bit 17 “RL1 Found” of Par 238
[RegisLtch0/1Stat].
52 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 53

Programming and Parameters Chapter 2
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
RL1 Found
RL1 Armed
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
RL0 Found
RL0 Armed
Default xxxxxxxxxxxxxx00xxxxxxxxxxxxxx00
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Table 242A: PPR Rating Values
n = 2
n
= x mod 75 mod 125 mod 225 mod 375 mod 625 mod1125
01 75 125 225 375 625 1125
12 150 250 450 750 1250 2250
24 300 500 900 1500 2500 4500
38 600 1000 1800 3000 5000 9000
4 16 1200 2000 3600 6000 10000 18000
5 32 2400 4000 7200 12000 20000 --
6 64 -- -- -- -- -- --
7 128 -- -- -- -- -- --
8 256 -- -- -- -- -- --
9 512 -- -- -- -- -- --
10 1024 -- -- -- -- -- --
11 2048 -- -- -- -- -- --
12 4096 -- -- -- -- -- --
13 8192 -- -- -- -- -- --
14 16384 -- -- -- -- -- --
No. Name
Description
238 RegisLtch0/1Stat
Indicates the control status of registration latch 0 and 1.
• Bit 0 “RL0 Armed” and bit 16 “RL1 Armed” indicates the registration latch is armed.
• Bit 1 “RL0 Found” and bit 17 “RL1 Found” indicates the registration event has triggered the latch.
• Rising edge of 'Arm request' will set the 'Armed' status bit.
• Rising edge of 'Disarm request' will clear the 'Armed' status bit.
239 RegisLtch1 Value
Displays the registration data of port 1. Indicates the posit ion reference counter value latched by the external
strobes. The strobe signal used to trigger the latch is configurable by Par 236
240 Encdr1 Position
Displays the position feedback (accumulator) from encoder 1. The value changes by a value of four times (4x) the
Pulses Per Revolution (PPR) rating of the encoder for each full revolution of the encoder shaft. Used by the VPL to
close the position loop if position control is selected.
241 Encdr1 Spd Fdbk
Displays the speed feedback from encoder 1. Calculated from the change of Pa r 240 [Encdr1 Position] and Par 242
[Encoder1 PPR].
242 Encoder1 PPR
Sets the pulse per revolution rating of the feedback device connected to the Encoder 1 input. This parameter must
be set to one of the values displayed in bold in Table 242A below.
[RegisLtch 0/1Cnfg].
Values
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:0-/+2147483648
Default:
Min.Max:
Units:
Scale:
Default:
Min/Max:
Units:
0
-/+14112.0000
rpm
Par 4 [Motor NP RPM] = 1.0 P.U.
1024
10/20000
PPR
Linkable
Read-Write
RO 32-bit
RO 32-bit
RO Real
RW 16-bit
Data Type
Integer
Integer
Integer
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 53
Page 54

Chapter 2 Programming and Parameters
N N NNN N N NNN
N NNN
Module ID No.
Vers ion N o.
Revision No. Low
N NNN
Revision No. High
No. Name
Description
245 Spd Fdbk TP Sel
Enter or write a value to select the data displayed in Par 2 46 [Spd Fdbk TP RPM] and Par 24 7 [Spd Fdbk TP Data].
Note: Option values 5 - 15 were changed to “Reserved” and option 41 “First Diff ” was added for firmware version
2.004.
246 Spd Fdbk TP RPM
Displays the value selected in Par 245 [Spd Fdbk TP Sel] in rpm. This display should only be used if the selected
value is floating point data.
247 Spd Fdbk TP Data
Displays the value selected in Par 245 [Spd Fdbk TP Sel]. This display should only be used if the selected value is
integer data.
249 Fdbk Option ID
Displays information about the Feedback Option.
• Bits 15-11 indicate Module ID Number.
• Bits 10-6 indicate Version Number.
• Bits 5-3 indicate Revision Number High.
• Bits 2-0 indicate Revision Number Low.
Hexadecimal 1000 indicates resolver, hexadecimal 2000 indicates old high-resolution board, and hexadecimal
2040 indicates new high-resolution board.
250 FB Opt0 Posit
Displays the position feedback (accumulator) from the feedback option card port 0.
251 FB Opt0 Spd Fdbk
Displays the speed feedback from the feedback option card port 0.
252 FB Opt1 Posit
Displays position feedback (accumulator) from port 1 of the feedback option card.
253 FB Opt1 Spd Fdbk
Displays speed feedback from port 1 of the feedback option c ard.
Values
Default:
Options:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:0-/+32768
Options:
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:00/2147483648
Default:
Min/Max:
Units
0 =
“Zero”
0 =
“Zero” 21 = “E0 EPR”
1 =
“Clock Time” 22 = “E0 Edge Mode”
2 =
“InactvFbkDev” 23 = “E0 nMax ”
3 =
“ActiveFbkDev” 24 = “E0 Error”
4 =
“MCP Fdbk Dev” 25 = “E0 Qloss pk”
5 =
“Reserved” 26 = “E0 Ploss pk”
6 =
“Reserved” 27 = “E0 PlevlHist”
7 =
“Reserved” 28 = “E1 Edge Time”
8 =
“Reserved” 29 = “E1 dEdge”
9 =
“Reserved” 30 = “E1 dTime”
10 =
“Reserved” 31 = “E1 EPR”
11 =
“Reserved” 32 = “E1 Edge Mode”
12 =
“Reserved” 33 = “E1 nMax ”
13 =
“Reserved” 34 = “E1 Error”
14 =
“Reserved” 35 = “E1 Qloss pk”
15 =
“Reserved” 36 = “E1 Ploss pk”
16 =
“MCP PPR” 37 = “E1 PlevlHist”
17 =
“MCP 2^n” 38 = “E0 Delta2Err”
18 =
“E0 Edge Time” 39 = “E1 Delta2Err”
19 =
“E0 dEdge” 40 = “EOB Present”
20 =
“E0 dTime” 41 = “First Diff ”
0.0
-/+8.0 P.U.
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0.0000
-/+14000.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0.0
-/+8.0 P.U.
rpm
Linkable
Read-Write
RO Real
RO 16-bit
RO 32-bit
RO Real
RO 32-bit
RO Real
Data Type
Integer
Integer
Integer
54 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 55
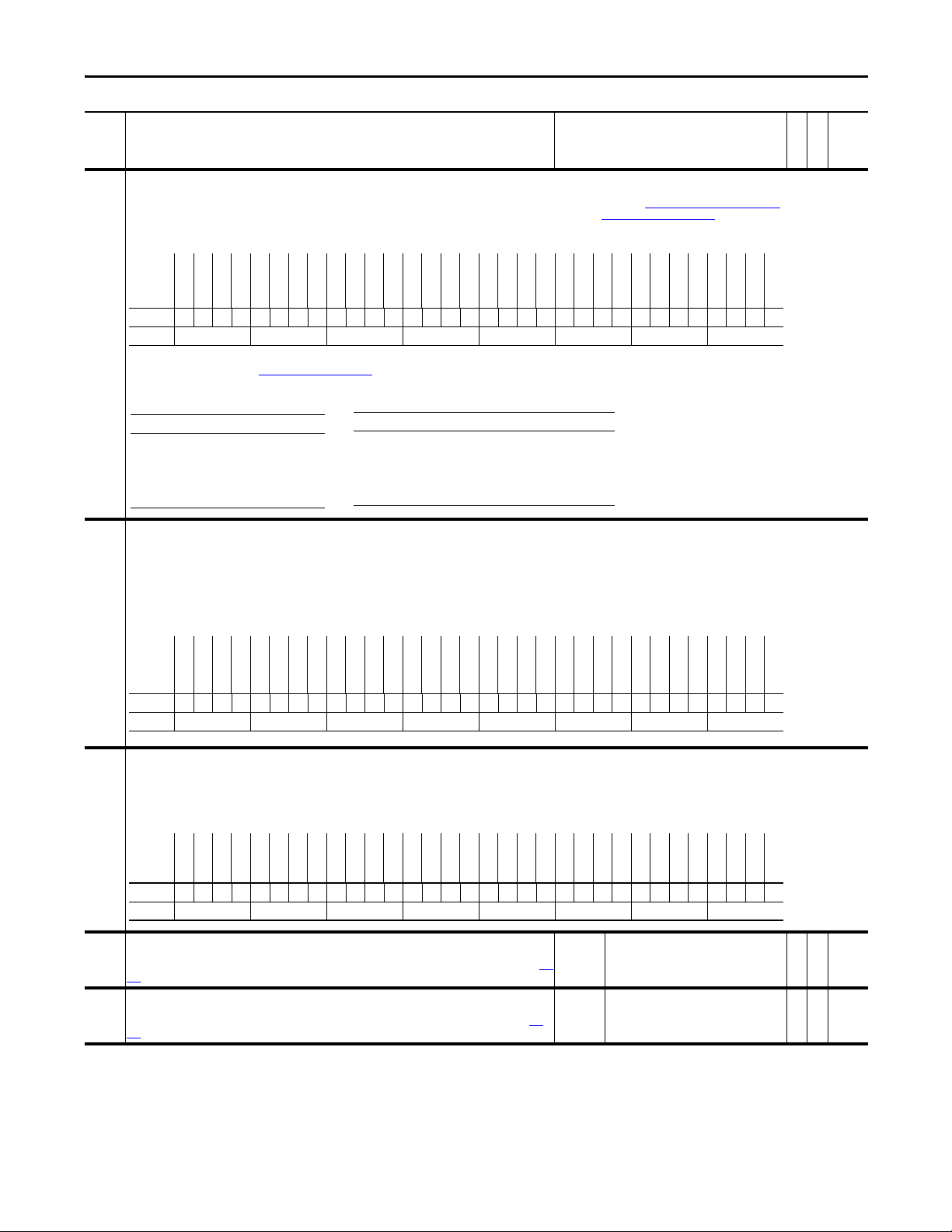
Programming and Parameters Chapter 2
Bits 3 & 4, 19 & 20, please refer to Table 254A: Edge Selection Settings below:
Bits 5 & 6, 21 & 22, please refer to Table 254B: Direction Settings
.
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
O1 RL DirFwd
O1 RL DirRev
O1 RLTrgEdg1
O1 RLTrgEdg0
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
RL Filt bit3
RL Filt bit2
RL Filt bit1
RL Filt bit0
Reserved
O0 RL DirFwd
O0 RL DirRev
O0 RLTrgEdg1
O0 RLTrgEdg0
Reserved
Reserved
Reserved
Default xxxxxxxxx0000x xx xxxx1000x1100x xx
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Table 254A: Edge Selection Settings
Bit 4/20 3/19
0 0 Capture on rising edge
0 1 Capture on falling edge
1 0 Capture on both edges
1 1 Disable capture
Table 254B: Direction Settings
Bit 6/22 5/21
0 0 Disable capture
0 1 Capture position during Reverse rotation
1 0 Capture position during Forward rotation
1 1 Capture position during either rotation
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
O1 DisarmReq
O1 Arm Req
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
O0 DisarmReq
O0 Arm Req
Default xxxxxxxxxxxxxx00xxxxxxxxxxxxxx00
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Opt1 Found
Opt1 Armed
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Opt0 Found
Opt0 Armed
Default xxxxxxxxxxxxxx00xxxxxxxxxxxxxx00
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Values
Description
254 Opt0/1 RegisCnfg
Configures the registration latch for port 0 of the feedback option card.
• Bits 3 “O0 RLTrgEdg0”, 4 “O0 RLTrgEdg1”, 19 “O1 RLTrgEdg0” and 20 “O1 RLTrgEdg1” select which trigger edges signal the position (see Table 254A: Edge Selection Settings
• Bits 5 “O0 RL DirRev”, 6 “O0 RL DirFwd”, 21 “O1 RL DirRev” and 22 “O1 RL DirFwd” set the direction of position capture (see Table 254B: Direction Settings
• Bits 8-11 configure a digital filter for the registration trigger signal. This filter can be used to reject spurious noise. The filter works by waiting a programmed time before deciding that the signal
is valid. This waiting imposes a mandatory delay in the registration signal. The filter delay is programmable in increments of 100 nanoseconds from 0 (or no delay) up to 700 nanoseconds.
255 Opt0/1 RegisCtrl
Configures the registration control on port 0 of the feedback option card.
• Set bits 0 “O0 Arm Req” and 16 “01 Arm Req” to arm the registration logic for the next trigger event. The particular latch will be armed and ready to be strobed on the next occurrence of the
trigger input.
• Set bits 1 “O0 DisarmReq” and 17 “01 DisarmReq” to disarm the registration logic for next trigger event.
After the registration is captured, bit 0 “O0 Arm Req” and bit 16 “O1 Arm Req” automatically resets back to 0 after fou nd. Bit 1 “O0 DisarmReq” and bit 17 “O1 DisarmReq” are only needed to disarm
a registration latch that has not been found yet. Setting bits 1 and 17 will clear the bits 0 and 6. Setting bits 0 and 6 sets bits 0 “Opt0 Armed” and bit 16 “Opt1 Armed” and clears bits 1 “Opt0 Found”
and bit 17 “Opt1 Found” of parameter 256 [Opt0/1 RegisStat].
).
Linkable
Read-Write
Data Type
).
256 Opt0/1 RegisStat
Indicates the registration control status on port 0 of the feedback option card.
• Bit 0 “Opt0 Armed” indicates the registration latch is armed.
• Bit 1 “Opt0 Found” indicates the registration event has triggered the latch.
• Rising edge of 'Arm request' will set the 'Armed' status bit.
• Rising edge of 'Disarm request' will clear the 'Armed' status bit.
257 Opt 0 Regis Ltch
Displays the registration data of the feedback option card port 0. The registration data is the position reference
counter value latched by the external strobes. The strobe signa l used to trig ger the latch is configurab le by the Par
254 [Opt0/1 RegisCnfg].
258 Opt 1 Regis Ltch
Displays the registration data of the feedback option card port 0. The registration data is the position reference
counter value latched by the external strobes. The strobe signal used to trigger the latch is configurable by Par
254 [Opt0/1 RegisCnfg].
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 55
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:0-/+2147483648
RO 32-bit
Integer
RO 32-bit
Integer
Page 56

Chapter 2 Programming and Parameters
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
SmplRate bt2
SmplRate bt1
SmplRate bt0
Reserved
Reserved
Reserved
SW Reset
Direction
Reserved
Reserved
Reserved
Reserved
Reserved
Default xxxxxxxxxxxxxxxxxxx000xxx00xxxxx
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Table 259A: FIR Filter Settings
Bit 12 11 10 Taps
0001
0012
0104
0118
10016
10132
11064
111127
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Time Ou t Err
MsgChksum Er
PwrUpDiag Er
Power Sup Er
Open Wire
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Default xxxxxxxxxxxxxxxxxxx00000xxxxxxxx
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Values
Description
259 Stegmann0 Cnfg
Configures the Stegmann Hi-Resolution Encoder Feedback Option.
• Bit 5 “Direction” determines counting direction. If clear, direction is forward or up. If set, the direction is reverse or down.
• Bits 10 “SmplRate bt0” -12 “Smpl Rate bt2” configure the Finite Impulse Response (FIR) Filter (see Table 259A: FIR Filter Settings
Refer to the Speed/Position Feedback section of the PowerFlex® 700S with Phase II Control Reference Manual, publication PFLEX-RM003 for details.
Notes: Bit 11 “SmplRate bt1” is set to 0 = False by default for firmware version 1.11 and is set to 1 = True by default for firmware version 2.003. This parameter was changed to non-linkable for
firmware version 3.001.
). This setting reduces the effect of noisy feedback on the system.
Linkable
Read-Write
Data Type
260 Stegmann0 Status
Indicates faults on the Stegmann Hi-Resolution Encoder Feedback Option.
• Bit 8 “Open Wire” indicates an open wire fault.
The feedback option card checks for a pre-determined constant value. If this value is not within tolerances, an open wire fault is declared. A quadrature check also is done. If an error occurs during
the check, the ope wire check is aborted. If 3 quadrature errors occur in succession, the open wire check will complete and the constant value checked again. If this value is not within tolerances,
the fault is declared.
• Bit 9 “PowerSup Er” indicates the failure of the power supply.
• Bit 10 “PwrUpDiag Er” indicates the option board failed its power-up diagnostic test.
The pattern on the FPGA must be identical to the pattern written from the DSP, or the board status test will fail.
• Bit 11 “MsgChksum Er” indicates a message checksum fault.
The check sum associated with the Heidenhain encoder must be correct and acknowledged by the feedback option c ard.
• Bit 12 “Time Out Err” indicates a RS -485 time-out fault.
This check requires information to be sent from the encoder to the feedback option card within a specified time. Typical times are about 10 clock cycles before an error is detected. This check is
done only at power-up.
261 Steg&Hiedn TPSel
Selects data displayed by Par 262 [Steg&Hiedn TPDta].
• Hh0 Edge Time - Latency counter value, not used for Hi-Resolution Feedback Option.
• Hh0 dEdge - Change in edge counts for one 500 microsecond update. At constant speed, this value should be
constant.
• Hh0 dTime - Change in update time. This value should be constant, 500 microseconds.
• Hh0 EPR - This value should be 1,048,576 counts per revolution-this is a constant value.
• Hh0 nMax - This is a scaled value of 2.
• Hho Delta2Err - Derivative of value 2.
262 Steg&Hiedn TPDta
Displays data selected by Par 260 [Stegmann0 Status].
56 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Default:
Options:
Default:
Min/Max:0-/+32768
0 =
“Zero”
0 =
“Zero” 10 = “Reser ved”
1 =
“St0 EdgeTime” 11 = “Hh0 EdgeTime”
2 =
“St0 dEdge” 12 = “Hh0 dEdge”
3 =
“St0 dTime” 13 = “ Hh0 dTime”
4 =
“St0 EPR” 14 = “Hh0 EPR”
5 =
“St0 EdgeMode” 15 = “Hh0 EdgeMode”
6 =
“St0 nMax” 16 = “Hh0 nMax”
7 =
“St0 Delta2Er” 17 = “Hh0 Delta2Er”
8 =
“Reserved”
9 =
“Reserved”
RO 16-bit
Integer
Page 57

Programming and Parameters Chapter 2
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
SmplRate bt2
SmplRate bt1
SmplRate bt0
Reserved
Reserved
VM Direction
SW Reset
Direction
Reserved
Reserved
Reserved
Reserved
Reserved
Default xxxxxxxxxxxxxxxxxxx011xx000xxxxx
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Table 263A: Sample Rate Bit Settings
Bit 12 11 10 Exponent Value ‘n’ Filter Sample Size = 2
n
0000 1
0011 2
0102 4
0113 8 (Default)
1004 16
1015 32
1106 64
1 1 1 7 127
Options
Reserved
Reserved
Reserved
RefPoint Alm
Reserved
LghtCtrl Alm
Tem pr tr A lm
FrqExced Alm
Reserved
Reserved
Over Current
Undr Voltage
Over Voltage
PstvValue Er
Sig Amplitud
LightSrc Er
FW VersionEr
Bootup Error
PPR Error
Time Out Err
MsgChecksum Er
PowerU pDiag E r
PowerS up Er
Volt ageLv lEr
Open Wire
Quadrate Er
Sig Amplitud
Reserved
Reserved
Reserved
Emul Enc Out
VM Enc Out
Default xxx0x000xx 00000000000000000xxx00
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Values
Description
263 Heidenhain0 Cnfg
Configures the Heidenhain Encoder Feedback Option.
• Bit 5 “Direction” determines the counting direction. Set to “0” to count up or forward. Set to “1” to count in reverse or down.
• Bit 6 “SW Reset” setting this bit to “1” resets and restarts the option card.
• Bit 7 “VM Direction” determines the direction of the encoder pulse output from the Heidenhain option card when bit 6 “VrtlMasterEn” of Par 266
“0”, the direction of the e ncoder pulse output is the same as Par 1155
• Bits 10 -12 form a 3 bit moving average filter sampling rate. (See Table 263A: Sample Rate Bit Settings
Notes: This parameter was added for firmware version 2.003. This parameter was changed to non-linkable for firmware version 3.001. Added bit 7 for firmware version 4.001.
[Heidn VM Pos Ref], and the reverse of Par 1155 when this bit is set, = “1”.
).
[Heidn Encdr Type] is set. When this bit is off, =
Linkable
Read-Write
Data Type
264 Heidenhain0 Stat
Indicates fault and alarm statuses on the Heidendhain encoder feedback option card and Endat communication.
• Bit 0 “VM Enc Out” when set, indicates that the encoder output from the Heidenhain option card is the virtual encoder position determined by Par 1155
• Bit 1 “Emul Enc Out” when set, indicates that the encoder output from the Heidenhain option card is the emulated encoder position determined by the connected Heidenhain encoder.
• Bit 5 “Sig Amplitud” indicates that the signal a mplitude is insufficient or too large.
• Bit 6 “Quadrate Er” indicates that there is a signal quadrature error.
• Bit 7 “Open Wire” indicates an open wire fault.
• Bit 8 “VoltageLvlEr” indicates that the operating voltage is too high or too low.
• Bit 9 “PowerSup Er” indicates the failure of the power supply.
• Bit 10 “PowerUpDiag Er” indicates the option board failed its power-up diagnostic test.
The pattern on the FPGA must be identical to the pattern written from the DSP, or the board status test will fail.
• Bit 11 “MsgChecksum Er” indicates a message checksum fault.
The check sum associated with the Endat communication device must be correct and acknowledged by the feedback option card.
• Bit 12 “Time Out Err” indicates an Endat time-out fault.
• Bit 13 “PPR Error” indicates an encoder PPR setting mismatch fault.
• Bit 14 “Bootup Error” indicates an Endat boot-up fault.
• Bit 15 “FW VersionEr” indicates that the firmware version of the encoder does not match the firmware version of the Heidenhain option card in the drive.
• Bit 16 “LightSrc Er” indicates an Endat light source fault.
• Bit 17 “Sig Amplitud” indicates an Endat signal amplitude fault.
• Bit 18 “PstvValue Er” indicates an Endat positive value fault.
• Bit 19 “Over Voltage” indicates an Endat over voltage fault.
• Bit 20 “Undr Voltage” indicates an Endat under voltage fault.
• Bit 21 “Over Current” indicates an Endat over current fault.
• Bit 24 “FrqExced Alm” indicates an Endat frequency exceeded alarm.
• Bit 25 “Temprtr Alm” indicates an Endat temperature exceeded alarm.
• Bit 26 “LghtCtrl Alm” indicates an Endat limit of light control alarm.
• Bit 28 “RefPoint Alm” indicates an Endat reference point alarm.
Notes: This parameter was added for firmware version 2.003. Bit 14 was changed from “Endat BootEr” to “Bootup Error” and bit 15 “FW VersionErr” is new for firmware version 3.001. Bits 0 and 1
were added for firmware version 4.001.
265 Heidn Mkr Offset
Configures marker offset values for the Heidenhain Encoder Feedback Option. The marker offset is specified
within one revolution.
Note: This parameter was added for firmware version 2.003.
Default:
Min/Max:
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 57
0.0000
0.0000/4294967295
[Heidn VM Pos Ref].
Y
RW 32-bit
Integer
Page 58
Chapter 2 Programming and Parameters
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Vrtl Master En
Endat24bitSl
Reserved
Reserved
Multi Turn
Not EnDat
Reserved
Default xxxxxxxxx00xx01x
Bit 1514131211109876543210
0 = False
1 = True
No. Name
Values
Description
266 Heidn Encdr Type
Configures the encoder type manually if the Endat type is not used.
• Bit 0 “Reserved” Automatically set after power-up. Do not change.
• Bit 1 “Not EnDat” Enables/Disables EnDat serial communications. Serial comm unications must be turned on for permanent magnet motors or if absolute position is
required. With EnDat serial communications enabled, bit 2 “Multi Turn” and the value of parameter 267 [Heidn Encdr PPR] will be automatically set on power-up.
• Bit 2 “Multi Turn” set to “1” (True) if the encoder supports mutli-turn absolute position. This bit is set automatically if bit 1 “Not EnDat” is set to “0” (False).
• Bit 5 “Endat24bitSl” when this bit is on, the Heidenhain encoder works as Endat / Single turn / 24 bits. When this bit is off, the Heidenhain encoder works as Endat / Single
turn / 20 bits.
• Bit 6 “Vrtl MasterEn” when set, indicates that the Virtual Master encoder function of the Heidenhain option card is active. The Virtual Master function is available with v3.00
or later of the Heidenhain option card.
Notes: This parameter was added for firmware version 2.003. Bit 1 “Not Endat” was changed to “0” (false) and bit 2 “Multi Turn” was changed to “1” (true) for firmware version
2.004. Bit 1 “Not Endat” was changed to “1” (true), bit 2 “Multi Turn” was changed to “0” (False), and bit 6 “Endat24bitSl” was added for firmware version 3.001. Added bit 6 for
firmware version 4.001.
267 Heidn Encdr PPR
Set this value equal to the Heidenhain encoder PPR (e.g., 2048). This value is automatically set when bit 1
“NotEnDat” of parameter 266 [Heidn Encdr Type] is set to “0” (False).
Note: This parameter was added for firmware version 2.003. Changed the minimum value from “10” to “1” for
firmware version 4.001.
Default:
Min/Max:
Units:
2048
1/100000
PPR
Linkable
Y
Read-Write
Data Type
RW 16-bit
Integer
RW 32-bit
Integer
58 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 59
Programming and Parameters Chapter 2
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
SmplRate bt2
SmplRate bt1
SmplRate bt0
Reserved
Reserved
Reserved
Reserved
Resolver Dir
Energize
Resolution 1
Resolution 0
Reserved
Cable Tune
Default xxxxxxxxxxxxxxxxxxx010xxxx0101x0
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Table 268D: FIR Filter Settings
Bit121110Taps
0001
0012
0104
0118
10016
10132
11064
111127
Table 268A: Resolution Settings
Table 268B: Resolution and Least Significant Bits Used
Table 268C: Resolution and Resolver Tracking Speed
Bit 32Resolution
0 0 10 b it resolution
0 1 12 bit resolution (default setting)
1 0 14 b it resolution
1 1 16 b it resolution
Resolution LSB Not Used Parameter 250 Increments by
16 bit All bits used 1
14 bit 2 LSB not used 4
12 bit 4 LSB not used 8
10 bit 6 LSB not used 64
Resolution
Maximum
Carrier Freq.
Tracking Speed
for X1 Resol ver
Tracking Speed
for X2 Resol ver
Tracking Speed
for X5 Resolver
10 bit 34 kHz 55 K-rpm 27.5 K-rpm 11 K-rpm
12 bit 24kHz 13.8 K-rpm 6.9 K-rpm 2.76 K-rpm
14 bit 14kHz 3480 rpm 1740 rpm 696 rpm
16 bit 10 kHz 900 rpm 450 rpm 180 rpm
Options
Reserved
Reserved
Reserved
Reserved
Select OK
Diag Fail
Power S upply
Open Wire
Reserved
Reserved
Reserved
Energized
-Cable Comp
-Mtr Turning
-Tune R esult
-Cable Tune
Default xxxx0000xxx00000
Bit 1514131211109876543210
0 = False
1 = True
No. Name
Values
Description
268 Resolver0 Cnfg
Configures options for the resolver option card port 0.
• Setting bit 0 “Cable Tune” enables the cable tuning test, resetting the bit to zero disables the test. Refer to the section on Resolver Cable Tuning Tests in publication PFLEX-RM003, Reference
Manual - PowerFlex 700S Drives with Phase II Control for more information.
• Bit 1 “Tune Param” has been disabled.
• Bits 2 “Resolution 0” and 3 “Resolution 1” select the resolver resolution (see Table 268A: Resolution Settings
250 [FB Opt0 Posit]. It does not affect the number of counts created per resolver revolution (see Table 268B: Resolution and Least Significant Bits Used). Also, the resolution sets a limit on the
maximum tracking speed (see Table 268C: Resolution and Resolver Tracking Speed
• Setting bit 4 “Energize” energizes the resolver, resetting the bit to zero de-energizes the resolver.
• Bit 5 “Resolver Dir” determines counting direction. If clear, direction is forward or up. If set, the direction is reverse or down.
• Bit 9 “Edge Time” configures the method of sampling used by the Velocity Position Loop (VPL). Setting the bit chooses "Edge to Edge" sampling, while resetting the bit to zero chooses "Simple
Difference" sampling. "Simple Difference" sampling calculates speed by examining the difference between pulse counts over a fixed sample time. "Edge to Edge" sampling adjusts the sample
time to synchronize with the position count updates from the daughter card - improving the accuracy of the speed calculation.
• Bits 10 “SmplRate bt0” through 12 “SmplRate bt2” configure the Finite Impulse Response (FIR) Filter (see Table 268D: FIR Filter Settings
system. Refer to the Speed/Position Feedback section of the PowerFlex® 700S with Phase II Control Reference Manual, publication PFLEX-RM003 for details.
Note: Bit 11 “SmplRate bt0” is set to 0 = False by default for firmware version 1.11 and bit 11 “SmplRate1” is set to 1 = True by default for firmware version 2.003.
).
). This determines the number of significant bits that are calculated in the value of Par
). This setting reduces the effect of noisy feedback on the
Linkable
Read-Write
Data Type
269 Resolver0 Status
Indicates status of the resolver option card port 0.
•Bit 0 “-Cable Tune”
• Bit 1 “-Tune Result” indicates the tuning Parameter type. When set, it indicates the tuning is using the parameter database. When cleared, it indicates the tuning is using derived data.
• Bit 2 “-Mtr Turning” indicates that the motor is turning.
• Bit 4 “Energized” indicates the resolver is energized.
• Bit 8 “Open Wire” indicates a problem with the cable (open circuit).
• Bit 9 “Power Supply” indicates problem with the option card's power supply.
• Bit 10 “Diag Fail” indicates the option card has failed its power-up diagnostics.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 59
Page 60

Chapter 2 Programming and Parameters
No. Name
Description
270 Reslvr0 TP Sel
Enter or write a value to select Fault data displayed in Par 271 [Reslvr0 TP Data].
271 Reslvr0 TP Data
Displays the data selected by Par 270 [Reslvr0 TP Sel].
272 Reslvr0 SpdRatio
Specifies the speed ratio for the resolver option card port 0. The speed ratio comes from the following formula.
Speed ratio = electrical revolutions / mechanical revolutions = pole count / 2.
Note: Option 0 = “Zero” was added for firmware version 2.004.
273 Reslvr0 Carrier
Specifies the resolver carrier frequency for the resolver option card port 0.
274 Reslvr0 In Volts
Specifies the resolver input voltage for the resolver option card port 0.
275 Rslvr0 XfrmRatio
Specifies the resolver transform ratio for the resolver option card port 0.
276 Reslvr0 CableBal
Specifies the resolver cable balance for the resolver option card port 0.
277 Reslvr0 Type Sel
Specifies used resolver.
The values for options 5 & 12 were changed to “Reserved” for firmware version 2.004. Added options 15 and 16
for firmware version 4.001 but are not functional (for future use).
Values
Default:
Options:
Default:
Min/Max:0-/+2147483648
Default:
Options:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:00/255
Default:
Options:
0 =
“Zero”
0 =
“Zero” 4 = “R0 EPR”
1 =
“R0 Edge Time” 5 = “R0 Edge Mode”
2 =
“R0 dEdge” 6 = “R0 nMax”
3 =
“R0 dTime” 7 = “R0 Delta2Err”
1 =
2 poles (x1)
0 =
“Zero” 3 = 6 Poles (x3)
1 =
2 Poles (x1) 4 = 8 Poles (x4)
2 =
4 Poles (x2) 5 = 10 Poles(x5)
0
0/10000
Hz
0.0000
0.0000/31.0810
V
0.0000
0.0000/4.0950
0 =
“Disabled”
0 =
“Disabled” 9 = “1326Ax 460v”
1 =
“T2014/2087x1” 10 = “Rese rved”
2 =
“T2014/2087x2” 11 = “Rese rved”
3 =
“T2014/2087x5” 12 = “Rese rved”
4 =
“MPL 460v” 13 = “Reser ved”
5 =
“Reserved” 14 = “AmciR11XC107”
6 =
“Siemens 1FT6” 15 = “PowerTec R1”
7 =
“PrkrHn ZX600” 16 = “PowerTec R2”
8 =
“Reserved”
Linkable
Read-Write
RO 32-bit
RO 32-bit
RO Real
RO Real
RO Real
Data Type
Integer
Integer
60 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 61

Programming and Parameters Chapter 2
ATTENTION: Enabling the Sleep-Wake function can cause unexpected machin e operation during the Wake mode. Equipment damage
and/or personal injury can result if parameter 278 [Sleep-Wake Mode] is used in an inappropriate application. Do Not use this function
without considering the information below and in Sleep-Wake Mode on page 171
. In addition, all applicable local, national and
international codes, standards, regulations or industry guidelines must be considered.
Conditions Required to Start Drive
(1)(2)(3)
(1) When power is cycled, if all of the above conditions are present after power is restored, restart will occur.
(2) If all of the above conditions are present when [Sleep -Wake Mode] is “enabled,” the drive will start.
(3) The active speed reference is determined as explained in “Reference Selection” in the PowerFlex 700S AC Drives Phase II Control Reference Manual, publication PFLEX-RM003
. The Sleep-Wake function and the speed
reference may be assigne d to the same in put.
(4) Command must be issued from HIM, TB or network.
(5) Run Command must be cycled.
(6) Signal does not need to be greater than wake level.
Input After Power-Up After a Drive Fault After a Stop Command
Reset by Stop-CF, HIM or TB Reset by Clear Faults (TB) HIM or TB
Stop Stop Closed
Wake S igna l
Stop Closed
Wake S igna l
New Start or Run Cmd.
(4)
Stop Closed
Wake S igna l
Stop Closed
Direct Mode
Analog Sig. > Sleep Level
(6)
Invert Mode
Analog Sig. < Sleep Level
(6)
New Start or Run Cmd.
(4)
Enable Enable Closed
Wake S igna l
(4)
Enable Closed
Wake S igna l
New Start or Run Cmd.
(4)
Enable Closed
Wake S igna l
Enable Closed
Direct Mode
Analog Sig. > Sleep Level
(6)
Invert Mode
Analog Sig. < Sleep Level
(6)
New Start or Run Cmd.
(4)
Run New Run Cmd.
(5)
Wake S igna l
New Run Cmd.
(5)
Wake S igna l
New Run Cmd.
(5)
Wake S igna l
New Run Cmd.
(5)
Wake Sig nal
No. Name
Description
278 Sleep-Wake Mode
Enables/disables the Sleep-Wake function.
Important: When enabled, the following conditions must be met:
• A proper value must be programmed for parameters 280 [Wake Level] and 282 [Sleep Level].
• A speed reference must be selected in parameter 27 [Speed Ref A Sel].
• At least one of the following must be programmed (and input closed) in [Dig Inx Sel]; “Enable,” “Stop=CF,”
“Run.”
Note: This parameter was added with firmware version 5.002.
Values
Default:
Options:
0 =
0 =
1 =
2 =
“Disabled”
“Disabled”
“Direct”
“Invert”
Linkable
Read-Write
Data Type
279 Sleep-Wake Ref
Selects the source of the input controlling the Sleep-Wake function.
Note: This parameter was added with firmware version 5.002.
280 Wake Level
Defines the analog input level (at or above) that will start the drive.
281 Wake Time
282 Sleep Level
283 Sleep Time
Note: This parameter was added with firmware version 5.002.
Defines the amount of time that the value of [Wake Level] must be present before a Start is issued.
Note: This parameter was added with firmware version 5.002.
Defines the analog input level (at or below) that will stop the drive.
Note: This parameter was added with firmware version 5.002.
Defines the amount of time that the value of [Sleep Level] must be present before a Stop is issued.
Note: This parameter was added with firmware version 5.002.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 61
Default:
Options:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
“An alo g I n 2”
2 =
“An alo g I n 1”
1 =
“An alo g I n 2”
2 =
6.000 mA, 6.000V
[Sleep Level]/20.000 mA, 10.000V
0.001 mA / 0.001V
0.0 s
0.0/1000.0 s
0.1 s
5.000 mA / 5.000V
4.000 mA, 0.000V / [Wake Level]
0.001 mA / 0.001V
0.0 s
0.0/1000.0 s
0.1 s
RW Real
RW Real
RW Real
RW Real
Page 62
Chapter 2 Programming and Parameters
Options
unused 3
unused 2
unused 1
Level Cnf lct
Not Running
Start Latch
Stop Latch
Digin Cnflct
State 2
State 1
State 0
Mode 1
Mode 0
Analog Ref 1
Analog Ref 0
Enable
Default xxx0000000000000
Bit 1514131211109 8 7 6 5 4 3 2 1 0
0 = False
1 = True
Table 284A: Sleep-Wake Mode Active State
Bit 7 6 5 Active Mode
0 0 0 Drive is powering up
0 0 1 Drive is asleep
0 1 0 Drive is waiting
011Drive is awake
Options
Reserved
Reserved
Reserved
Op1SmplRt b3
Op1SmplRt b2
Op1SmplRt b1
Reserved
Reserved
Reserved
Stahl Linear
Direction
Reserved
Reserved
Reserved
Reserved
Reserved
Default xxx011xxx00xxxxx
Bit 1514131211109 8 7 6 5 4 3 2 1 0
0 = False
1 = True
Table 285A: Sample Rate Bit Settings
Bit 12 11 10 Exponent Value ‘n’ Filter Sample Size = 2
n
0000 1
0011 2
0102 4
0113 8 (Default)
1004 16
1015 32
1106 64
1 1 1 7 127
No. Name
Description
284 Sleep Control
Status of the Sleep-Wake function.
• Bit 0 “Enable” when set, Sleep-Wake mode is enabled.
• Bit 1 “Analog Ref 0” when set, indicates that analog input 1 is used for Sleep mode control.
• Bit 2 “Analog Ref 1” when set, indicates that analog input 2 is used for Sleep mode control.
• Bit 3 “Mode 0” when set, direct control is used.
• Bit 4 “Mode 1” when set, inverted control is used.
• Bits 5…7 “State x” ind icate the Sleep-Wake mode state that is currently active. See Table 284A: Sleep-Wake Mode Active State below.
• Bit 8 “Digin Cnflct” w hen set indicates that a digital input conflict exists. See Par Par 278
• Bit 9 “Stop Latch” when set, a Stop command is being issued from the sleep mode.
• Bit 10 “Start Latch” Not used.
• Bit 11 “Not Running” when set, the drive is not running.
• Bit 12 “Level Cnflct” when set, the value of Par 280
[Sleep Level] is greater than the value of [Wake Level].
Note: This parameter was added with firmware version 5.002.
[Wake Level] or Par 282 [Sleep Level] is outside the Min/Max range of the assigned analog input (mA or V). Or, if in direct mode, the value of
[Sleep-Wake Mode] for details on digital input programming for the Sleep-Wake function.
Values
Linkable
Read-Write
Data Type
285 Linear1 Config
Used to configure a linear encoder when a Multi Device Inter face (MDI) feedback card is installed.
Note: This parameter was added for firmware version 2.003.
• Bit 5 “Direction” - Setting this bit to “1” inverts the count (up/down) direction of the linear feedbac k position Par 252 [FB Opt1 Posit]. If [FB Opt1 Posit] has been counting up for forward feedback
sensor travel then setting this bit will cause [FB Opt1 Posit] to count down. The opposite behavior will occur when the sensor moves in the other direction.
• Bit 6 “Stahl Linear” - Setting this bit to “1” indicates to the MDI card that a Stahl type linear device is being used. It this bit is set to “0” then a Temposonics linear device is being used.
• Bits 10 - 12 form a 3 bit moving average filter sampling rate. See Table 285A: Sample Rate Bit Settings
62 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
.
Page 63
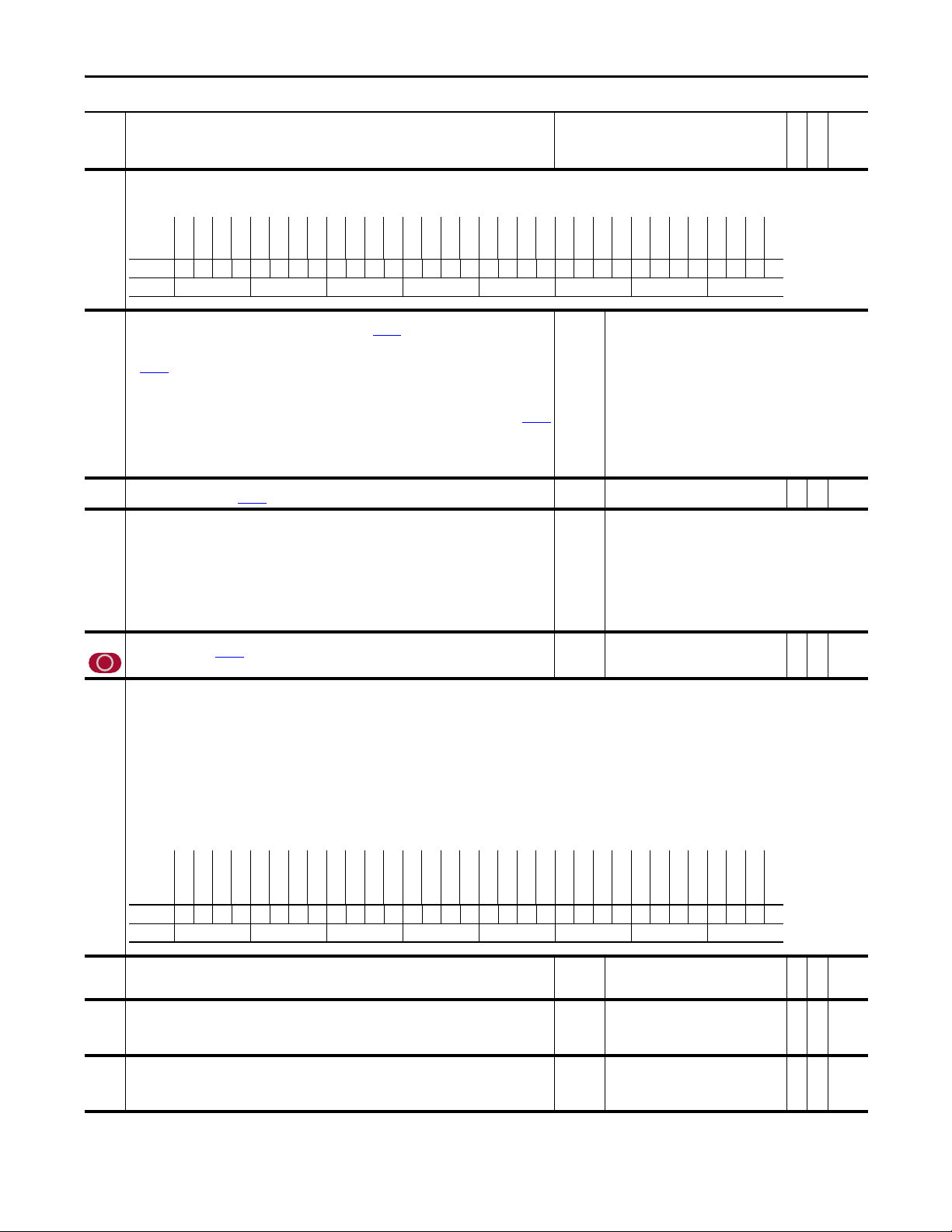
Programming and Parameters Chapter 2
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Open Wire
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Default xxxxxxxxxxxxxxxxxxxxxxx0xxxxxxxx
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
No Position
Reserved
ROM error
EPROM error
RAM error
Read Head
Fault Optics
Reserved
Reserved
Reserved
Reserved
ErrBits16-31
Out of Range
Alarm Optics
No Data Read
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Default xxxxxxxxx0x00000xxxx0000xxxxxxxx
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Description
286 Linear1 Status
Indicates faults on the Multi Device Interface (MDI).
Bit 8 “Open Wire” indicates an open wire fault.
287 Linear1 TP Sel
Enter or write a value to select Linear Feedback data displayed in Par 288 [Linear1 TP Data].
• Value 0 - Zero displays a value of zero.
• Value 1 - L1 Edge Time displays the change displays the latency or edge time (the time since the last update of
[FB Opt1 Posit]).
Par 252
• Value 2 - L1 dEdge displays the change in Par 252 [FB Opt1 Posit] since the last feedback sample.
• Value 3 - L1 DTime displays the change in time since the last feedback sample Note the sample rate is 10,000
counts per second (10 Mhz).
• Value 4 - L1 EPR displays the change in edges per motor revolution. This number is the same value in Par 290
[Linear1 CPR].
• Value 5 - Edge Mode should always display a zero (0).
• Value 6 - L1 nMax displays the numerator term for speed calculation. This number divided by change in time
(TP3) is the calculated per unit speed for the linear feedback sensor.
288 Linear1 TP Data
Displays the data selected by Par 287 [Linear1 TP Sel].
289 Lin1 Update Rate
Sets the sample rate for the linear channel on the Multi Device Interface (MDI) feedback option.
290 Linear1 CPR
Specifies the change in Par 252 [FB Opt1 Posit] for one revolution of the motor shaft. This value is used to scale
the calculated speed, based on the change in feedback position. Units are count per motor revolution (CPR).
291 Lin1Stahl Status
Displays the status of the Stahl linear encoder. The Stahl linear encoder works with the MDI option card.
• Bit 8 “No Data Read” indicates that no data can be read from the encoder
•Bit 9 “Alarm Optics” displays an alarm when fiber optics require cleaning
• Bit 10 “Out of Range” indicates that the encoder read count is at the maximum value (524,287)
• Bit 11 “ErrBits16-31” displays a diagnostic error code (refer to bits 16-31)
• Bit 16 “Fault Optics” indicates that the read head for fiber optic cable must be cleaned or replaced
• Bit 17 “Read Head” indicates that the fiber optic cable read head must be checked, aligned or replaced
• Bit 18 “RAM error” indicates that the fiber optic cable read head must be replaced
• Bit19 “EPROM error” indicates that there is an error with the communication module, replace read head.
• Bit 20 “ROM error” indicates, rep lace read head.
• Bit 22 “No Position” Cycle power to Stahl read head.
Values
Default:
Options:
Default:
Min/Max:0-/+32768
Default:
Options:
Default:
Min/Max:
Units:
0 =
0 =
1 =
2 =
3 =
2 =
0 =
1 =
2 =
3 =
4 =
5 =
6 =
7 =
1000
10/100000
CPR
“Zero”
“Zero” 4 = “L1 EPR”
“L1 Edg e Time” 5 = “L1 Edge M ode”
“L1 dEdge” 6 = “L1 nMax”
“L1 dTime” 7 = “L1 Delta2Err”
“1.0 msec”
“8.0 msec” 8 = “4.0 msec”
“0.5 msec” 9 = “4.5 msec”
“1.0 msec” 10 = “5.0 msec”
“1.5 msec” 11 = “5.5 msec”
“2.0 msec” 12 = ”6.0 msec”
“2.5 msec” 13 = “6.5 msec”
“3.0 msec” 14 = “7.0 msec”
“3.5 msec” 15 = “7.5 msec”
Linkable
Read-Write
RO 16-bit
RW 32-bit
Data Type
Integer
Integer
296 Motor Freq Ref
Currently not used.
Note: This parameter was added for firmware version 2.003.
297 Output Curr Disp
Displays measured RMS motor current with a resolution of 1/10 amperes.
298 Elapsed Run Time
Displays the total time that the drive has been running (inverter power devices active) with a resolution of 1/10
hour. This parameter is saved in power EE non-volatile memory. The value in this parameter can be changed
(written to) by the user.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 63
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
0.00
-/+500.00
Hz
0.0
0.0/9999.9
A
x 10
0.0
0.0/429496736.0
hr
x 10
RO Real
RO 32-bit
Integer
RW 32-bit
Integer
Page 64

Chapter 2 Programming and Parameters
Options
Power L imit
Tor que Li mi t
-0 Curr Enbl
-0 Trq Enbl
Bus Reg Lim
-Trq Cu rLim
Regen PwrLim
-Trq L imit
SpdReg Open
-DriveProtCL
-DriveProtOL
-Current Lim
-Iq Calc
0 Iq from -
-MCS Ws Lim
-MCS Iq Lim
Current Lim
Speed Limit
+0 Curr Enbl
+0 Trq Enbl
Atun Trq Lim
+Trq CurLim
Mtrng PwrLim
+Trq Limit
+SpdReg Open
+DriveProtCL
+DriveProtOL
+Current Lim
+Iq Calc
0 Iq from +
+MCS Ws Lim
+MCS Iq Lim
Default 00000000000000000000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Values
Description
299 Elapsed MWHrs
Displays the total energy the drive has consumed or produced. Calculated from the absolute magnitude of the
product of motor speed and motor torque (power), accumulated over time. This value will increase in both regen
and motoring modes of operation. This parameter value can be changed (written to) by the user.
300 Motor Spd Fdbk
Displays measured motor speed information from the selected feedback device.
301 Motor Speed Ref
Displays the speed reference value, after the limit function. This is the input to the error calculator and speed
regulator.
302 Spd Reg PI Out
Displays the output of the speed regulator. This is the input to torque control. A value of 1.0 represents base
torque of the motor.
303 Motor Torque Ref
Displ ays the referen ce value of mo tor torque. The a ctual value of the motor torque is within 5% of this value.
304 Limit Status
Displays the limit status of conditions that may be limiting the current ref erence or torqu e reference.
• Bit 0 “+MCS Iq Lim” indicates that torque producing current is at its positive limit.
• Bit 1 “+MCS Ws Lim” indicates that flux producing torque is at its positive limit.
• Bit 2 “0 Ia from +” indicates that torque producing current is limited to zero from the positive direction - refer to Par 35 3
• Bit 3 “+Iq Calc” indicates the calculation for torque producing current has reached its positive limit.
• Bit 4 “+Current Lim” indicates that the current reference has reached the positive Motor Current Limit set by Par 356 [Mtr Current Lim].
• Bit 5 “+DriveProtOL” indicates that the current reference has reached the positive current limit set by the Open Loop Inverter Overload, shown in Par 343
• Bit 6 “+DriveProtCL” indicates that the current reference has reached the positive current limit set by the Closed Loop Inverter Overload, shown in Par 344 [OL ClsLp CurrLim].
• Bit 8 “+Torq Limit” indicates that the torque reference has reached the Positive Torque Limit set by Par 1 25
• Bit 9 “Mtrng PwrLim” indicates that the torque reference is being limited by the Motoring Power Limit set by Par 12 7 [Mtring Power Lim].
• Bit 10 “+Torq CurLim” in dicates that current refere nce has reached the Actual Torque Producing Current Limit set by Par 353 [Iq Actual Lim].
• Bit 11 “Atune Tq Lim” indicates that the torque reference is being limited by Par 129
• Bit 12 “+0 Torq Ena” indic ates that the torq ue reference is l imited to zero b ecause Par 1 57 [Logic Ctrl State] bit 9 “Torq Ref En” is off.
• Bit 13 “+0 Curr Ena” indicates that the current reference is limited to zero because Par 157 [Logic Ctrl State] bit 11 “CurrRef En” is off.
• Bit 14 “Speed Limit” i ndicates the collective status of all speed limitations.
• Bit 15 “Current Lim” indicates the collective status of all current limitations
• Bit 16 “-MCS Iq Lim” indicates that torque producing current is at its negative limit.
• Bit 17 “-MCS Ws Lim” indicates that flux producing torque is at its negative limit.
• Bit 18 “0 Ia from -” indicates that torque producing current is limited to zero from the negative direction - refer to Par 353
• Bit 19 “-Iq Calc’ indicates the calculation for torque producing current has reached its negative limit.
• Bit 20 “-Current Lim” indicates that the current reference has reached the negative Motor Current Limit set by Par 356
• Bit 21 “-DriveProtOL” indicates that the current reference has reached the negative current limit set by the Open Loop Inverter Overload, shown in Par 343 [OL OpnLp CurrLim].
• Bit 22 “-DriveProtCL” indicates that the current reference has reached the negative current limit set by the Closed Loop Inverter Overload, shown in Par 344 [OL ClsLp CurrLim].
• Bit 24 “-Torq Limit” indicates that the to rque reference has reached the Negative Torque Limit set by Par 126
• Bit 25 “Regen PwrLim” indicates that the torque reference is being limited by the Regenerative Power Limit set by Par 128 [Regen Power Lim].
• Bit 26 “-Torq CurLim” ind icates that c urrent refere nce has reached the Actual Torque Producing Current Limit set by Par 353 [Iq Actual Lim].
• Bit 27 “Bus Reg Tq Lim” indicates the bus voltage regulator is active and limiting the regenerative torque.
• Bit 28 “-0 Torq Ena” indic ates that the to rque reference i s limited to zero because Par 157
• Bit 29 “-0 Curr Ena” indicates that the current reference is limited to zero because Par 157 [Logic Ctrl State] bit 11 “CurrRef En” is off.
• Bit 30 “Torque Limit” indicates the collective status of all torque limitations.
• Bit 31 “Power Limit” indicates the collective status of all power limitations.
[Atune Trq Ref ].
[Logic Ctrl State] bit 9 “Torq Ref En” is off.
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
[Torque Pos Limit].
[Torque Neg Limit].
0.0
0.0/429496736.0
MWhr
x 10
0.0000
-/+14112.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0.0000
-/+14112.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Par 4
0.0000
-/+8.0000 P.U.
P. U .
0.0000
-/+8.0000 P.U.
P. U .
[Iq Actual Lim].
[Iq Actual Lim].
[Mtr Current Lim].
[OL OpnLp CurrLim].
Linkable
Read-Write
RW 32-bit
RO Real
RO Real
RO Real
RO Real
Data Type
Integer
305 Mtr Trq Curr Ref
Displays the torque current reference present at the output of the current rate limiter. 100% is equal to 1 per unit
(P.U.) rated motor torque.
306 DC Bus Voltage
Displays measured bus voltage.
Note: The maximum value was increased from 1000.0000 to 1170.0000 for firmware version 3.001.
307 Output Voltage
Displays RMS line-to-line fundamental motor voltage. This data is averaged and updated every 50 milliseconds.
308 Output Current
Displays measured RMS motor current.
64 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
0.0000
-/+8.0000 P.U.
P. U .
0.0000
0.0000/1170.0000
V
0.00
0.00/3000.00
V
0.00
0.00/10000.00
A
RO Real
RO Real
RO Real
RO Real
Page 65
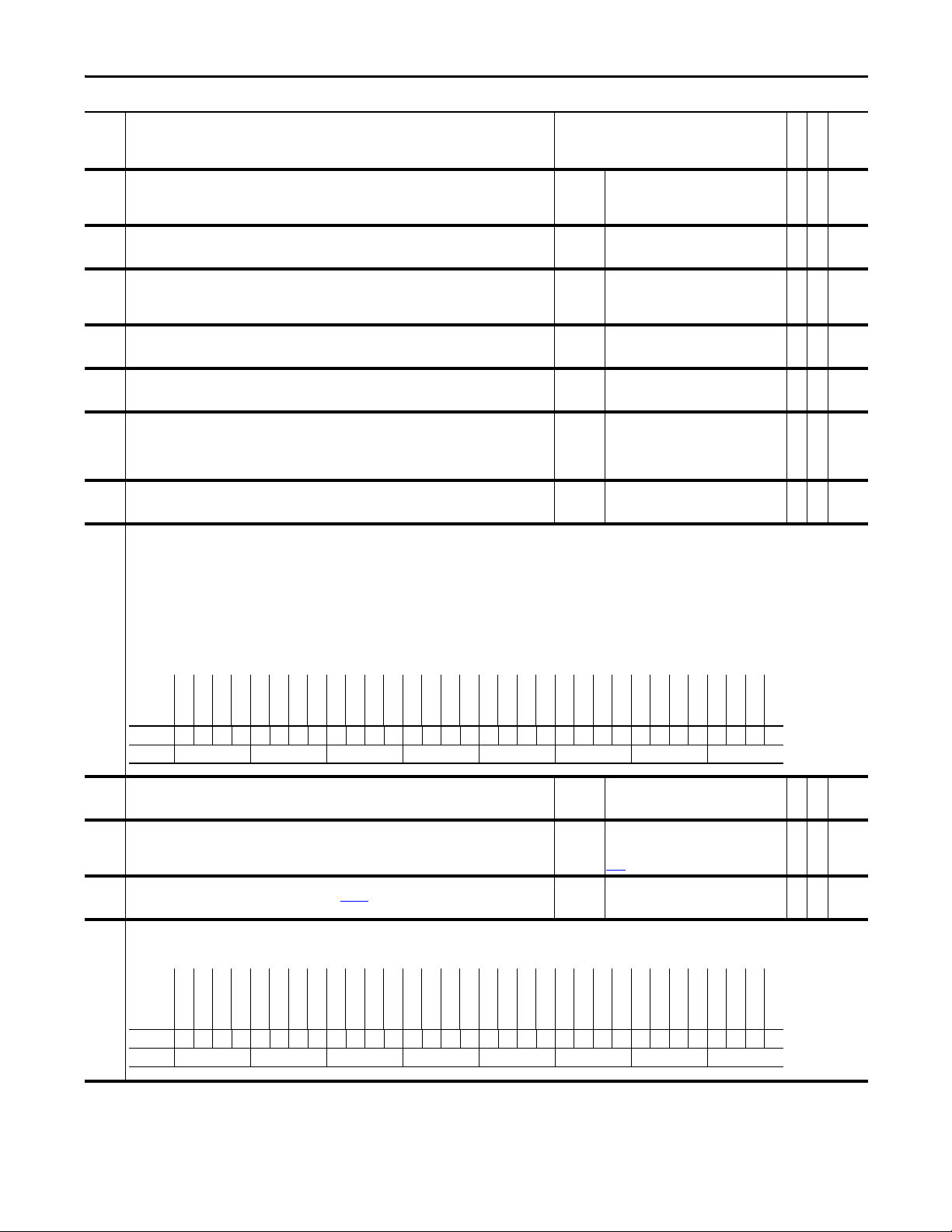
Programming and Parameters Chapter 2
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Rx Data Enbl
Reset Req'd
Reserved
SOB Present
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Rx Active
Tx Ac tive
In Sync
Encdr1 Prsnt
Encdr0 Prsnt
FB Opt Prsnt
Default xxxxxxxxxxxxxxxx00x0xxxxxx000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Options
PWM Asynchro
Precharge Er
MC Firmware
PWM Short
VPL/MC Comm
OverCurrent
Ground Fault
Trans Desat
Bus OverVolt
MC Commissn
Over Freq
Inertia Test
DSP Error
DSP Mem Err
Ext Fault In
Inv OL Trip
Inv OL Pend
Inv TempTrip
Inv TempPend
Motor Stall
Mtr OL Pend
Mtr OL Trip
Power Lo ss
SLink Comm
SLink HW
Ctrl EE Mem
FB Opt1 Loss
FB Opt0 Loss
Encdr1 Loss
Encdr0 Loss
SpdRef Decel
Abs OverSpd
Default 00000000000000000000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Description
309 % Motor Flux
Displays the motor flux in % of nominal.
310 Output Freq
Displays the motor stator frequency.
311 Output Power
Motor Power is the calculated product of the torque reference and motor speed feedback. A 125ms filter is
applied to this result. Positive values indicate motoring power; negative values indicate regenerative power.
Note: The units were changed from kW to Hp for firmware version 2.003.
312 MotorFluxCurr FB
Displays the measured per unit motor flux producing current.
313 Heatsink Temp
Displays the measured temperature of the drive's heatsink.
314 VPL Firmware Rev
Displays the major and minor revision levels of the drive's Velocity Position Loop (VPL) software.
Notes: The default value was changed from 1.11 to 2.003 for firmware version 2.003. The default value was
changed from 2.003 to 3.001 for firmware version 3.001. Changed all values to three dec imal places for firmware
version 4.001.
315 VPL Build Number
Displays the build number of the drive's Velocity Position Loop (VPL) software.
Note: The default value was changed from 8001 to 1 for firmware version 2.003.
316 SynchLink Status
Indicates status of SynchLink functions.
• Bit 0 “FB Opt Prsnt” indicates the presence of an optional feedback daughter card.
• Bit 1 “Encdr0 Prsnt” indicates the presence of encoder 0.
• Bit 2 “Encdr1 Prsnt” indicates the presence of encoder 1.
• Bit 3 “In Sync” indicates SynchLink communications is synchronized.
• Bit 4 “Tx Active” indicates TX frames are being transmitted downstream from this node.
• Bit 5 “Rx Active” indicates RX frames are being received from nodes upstream.
• Bit 15 “Rx Data Enbl” indicates received data is being updated.
Note: Bit 8 “Open Wire” was changed to “Reserved”, and bit 12 “SOB Present” and bit 14 “Reset Req’d” were added for firmware 2.004.
Refer to the SynchLink System Design Guide, publication 1756-TD008, for more information.
Values
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Scale:
Default:
Min/Max:11/10000
0.0
0.0/100.0
%
100 = 4096
0.00
-/+250.00
Hz
0.00
-/+9999.00
Hp
0.0000
0.0000/1.0000
P. U .
0.0000
-30.0000/200.0000
°C
1.003
0.001/99.999
000
Linkable
Read-Write
RO 16-bit
RO Real
RO Real
RO Real
RO Real
RO 16-bit
RO 16-bit
Data Type
Integer
Integer
Integer
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
317 SL System Time
Displays the SynchLink system time counter.
318 Posit Spd Output
Final output of the position regulator.
319 Selected Trq Ref
Displays the actual selected torque reference value after Par 110 [Speed/TorqueMode].
320 Exception Event1
Indicates the presence of certain drive anomalies. In some cases, you may configure the drive's response to these events by entering values in the parameters of the fault/alarm configuration group
of the utility file.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 65
0
0/1048575
μs
0.0000
-/+14112.0000
rpm
Par 4 [Motor NP RPM] = 1.0 P.U.
0.0
-/+8.0 P.U.
P. U .
RO 32-bit
Integer
RO Real
RO Real
Page 66

Chapter 2 Programming and Parameters
Options
Lgx LinkChng
Lgx Closed
Lgx Timeout
Lgx OutOfRun
NetLoss DPI6
NetLoss DPI5
NetLoss DPI4
NetLoss DPI3
NetLoss DPI2
NetLoss DPI1
DPI Loss P6
DPI Loss P5
DPI Loss P4
DPI Loss P3
DPI Loss P2
DPI Loss P1
No Ctrl Devc
NonCnfgAlarm
Interp Synch
EnableHealth
NonCnfgAlarm
VoltFdbkLoss
BusUnderVolt
RidethruTime
Slink Mult
PowerE E Cksm
BrakeOL Trip
PSC Sys Flt2
PSC Sys Flt1
Ctrl EE Cksm
MC Command
+/- 12v Pwr
Default 00000000000000000000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Options
AnlgIn3 Loss
AnlgIn2 Loss
AnlgIn1 Loss
NonCnfgAlarm
Reserved
Reserved
Reserved
Reserved
NonCnfgAlarm
Reserved
NonCnfgAlarm
Posi t Err
-Hrd OvrTrvl
+Hrd OvrTrvl
-Sft OvrTrvl
+Sft OvrTrvl
Reserved
NonCnfgAlarm
NonCnfgAlarm
NonCnfgAlarm
NonCnfgAlarm
HH PwrBdTemp
HH PwrEE Er
HHPrChrgCntc
HH PwrBd Prc
HH Drv Ovrld
HH FanFdbkLs
HH BusWtchDg
HH BusCRC Er
HH BusLinkLs
HH BusComDly
HH InPhaseLs
Default 0000xxxx0x000000x000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Options
PWM Asynchro
Precharge Er
MC Firmware
PWM Short
VPL/MC Comm
OverCurrent
Ground Fault
Trans Desat
Bus OverVolt
MC Commissn
Over Freq
Inertia Test
DSP Error
DSP Mem Err
Ext Fault In
Inv OL Trip
Inv OL Pend
Inv OTmpTrip
Inv OTmpPend
Motor Stall
Mtr OL Pend
Mtr OL Trip
Power Lo ss
SLink Comm
SLink HW
Ctrl EE Mem
FB Opt1 Loss
FB Opt0 Loss
Encdr1 Loss
Encdr0 Loss
SpdRef Decel
Abs OverSpd
Default 00000000000000000000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Options
Lgx LinkChng
Lgx Close d
Lgx Timeout
Lgx OutO fRun
NetLoss DPI6
NetLoss DPI5
NetLoss DPI4
NetLoss DPI3
NetLoss DPI2
NetLoss DPI1
DPI Loss P6
DPI Loss P5
DPI Loss P4
DPI Loss P3
DPI Loss P2
DPI Loss P1
No Ctrl Devc
NonCnfgAlarm
Interp Synch
EnableHealth
NonCnfgAlarm
VoltFdbkLoss
BusUnderVolt
RidethruTime
Slink Mult
PowerEE Cksm
BrakeOL Trip
PSC Sys Flt2
PSC Sys Flt1
Ctrl EE Cksm
MC Command
+/- 12v Pwr
Default 00000000000000000000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Options
AnlgIn3 Loss
AnlgIn2 Loss
AnlgIn1 Loss
NonCnfgAlarm
Reserved
Reserved
Reserved
Reserved
NonCnfgAlarm
Reserved
NonCnfgAlarm
Posi t Err
-Hrd OvrTrvl
+Hrd OvrTrvl
-Sft OvrTrvl
+Sft OvrTrvl
Reserved
NonCnfgAlarm
NonCnfgAlarm
NonCnfgAlarm
NonCnfgAlarm
HH PwrBdTemp
HH PwrEE Er
HHPrChrgCntc
HH PwrBd Prc
HH Drv Ovrld
HH FanFdbkLs
HH BusWtchDg
HH BusCRC Er
HH BusLinkLs
HH BusComDly
HH InPhaseLs
Default 0000xxxx0x000000x000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Values
Description
321 Exception Event2
Indicates the presence of certain drive anomalies. Configure the drive's response to these events by entering values in the parameters of the fault/alarm configuration group of the utility file.
Note: Changed bit 14 to “NonCnfgAlarm” for firmware version 3.003.
322 Exception Event3
Indicates the presence of certain drive anomalies. Configure the drive's response to these events by entering values in the parameters of the fault/alarm configuration group of the utility file.
• Bit 11 “HH HW Ver” is sed to indicate a High Horsepower hardware version fault.
• Bit 12 “HH CurUnblnc” is used to indicate a High Horsepower output current unbalanced fault.
• Bit 13 “HH VltUnblnc” is used to indicate a High Horsepower Bus voltage unbalanced fault.
• Bit 29 “AnlgIn1 Loss” is used to indicate an Analog Input 1 loss fault.
• Bit 30 “AnlgIn2 Loss” is used to indicate an Analog Input 2 loss fault.
• Bit 31 “AnlgIn3 Loss” is used to indicate an Analog Input 3 loss fault.
Notes: Bits 16, 20 and 23 were added for firmware version 2.004. Bits 11, 12, 13, 29, 30 and 31 were added for firmware version 3.001. Changed bits 11, 12, 13, 21, and 28 to “NonCnfgAlarm” for
firmware version 3.003. Bit 14 “NonCnfgAlarm” was added for firmware version 3.004.
Linkable
Read-Write
Data Type
323 Fault Status 1
Indicates the occurrence of exception events that have been configured as fault conditions. These events are from Par 320 [Exception Event1].
324 Fault Status 2
Indicates the occurrence of exception events that have been configured as fault conditions. These events are from Par 321 [Exception Event2]
Note: Changed bit 14 to “NonCnfgAlarm” for firmware version 3.003.
325 Fault Status 3
Indicates the occurrence of exception events that have been configured as fault conditions. These events are from Par 322 [Exception Event3].
• Bit 11 “HH HW Ver” is sed to indicate a High Horsepower hardware version fault.
• Bit 12 “HH CurUnblnc” is used to indicate a High Horsepower output current unbalanced fault.
• Bit 13 “HH VltUnblnc” is used to indicate a High Horsepower Bus voltage unbalanced fault.
• Bit 29 “AnlgIn1 Loss” is used to indicate an Analog Input 1 loss fault.
• Bit 30 “AnlgIn2 Loss” is used to indicate an Analog Input 2 loss fault.
• Bit 31 “AnlgIn3 Loss” is used to indicate an Analog Input 3 loss fault.
Notes: Bits 16, 20 and 23 were added for firmware version 2.004. Bits 11, 12, 13, 29, 30 and 31 were added for firmware version 3.001. Changed bit 21 to “D rive Homing” and bit 28 to “+/- 12v Pwr”
for firmware version 3.003. Bit 14 “NonCnfgAlarm” was added for firmware version 3.004.
66 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 67

Programming and Parameters Chapter 2
Options
NonCnfg Fault
Precharge Er
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
Inertia Test
NonCnfg Fault
NonCnfg Fault
Ext Fault In
Inv OL Trip
Inv OL Pend
Non Cnfg Fault
Inv TempPend
Motor Stall
Mtr OL Pend
Mtr OL Trip
NonCnfgFault
SLink Comm
NonCnfgFault
NonCnfgFault
FB Opt 1 Loss
FB Opt0 Loss
Encdr1 Loss
Encdr0 Loss
NonCnfgFault
NonCnfgFault
Default 00000000000000000000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Options
Lgx LinkChng
Lgx Close d
Lgx Timeout
Lgx OutO fRun
NetLoss DPI6
NetLoss DPI5
NetLoss DPI4
NetLoss DPI3
NetLoss DPI2
NetLoss DPI1
DPI Loss P6
DPI Loss P5
DPI Loss P4
DPI Loss P3
DPI Loss P2
DPI Loss P1
NonCnfg Fault
MC CML Fail
Interp Synch
EnableHealth
Runtime Data
VoltFdbkLoss
BusUnderVolt
NonCnfg Fault
Slink Mult
NonCnfg Fault
BrakeOL Trip
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
MC Command
NonCnfg Fault
Default 00000000000000000000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Options
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
+/- 12v Pwr
RideThruAlrm
Reserved
Reserved
Drv Waking
Stahl Optics
Reserved
Drive Homing
Posit Err
-Hrd OvrTrvl
+Hrd OvrTrvl
-Sft OvrTrvl
+Sft OvrTrvl
Reserved
HH Bus Data
HH VltUnblnc
HH CurrUnblnc
HH HW Ver
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
NonCnfg Fault
HH InPhaseLs
Default 00000xx000000000x000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Values
Description
326 Alarm Status 1
Indicates the occurrence of exception events that have been configured as alarm conditions. These events are from Par 320 [Exception Event1].
327 Alarm Status 2
Indicates the occurrence of exception events that have been configured as alarm conditions. These events are from Par 321 [Exception Event2]
Note: Changed bit 14 to “NonCnfgAlarm” for firmware version 3.003.
328 Alarm Status 3
Indicates the occurrence of exception events that have been configured as alarm conditions. These events are from Par 322 [Exception Event3].
• Bit 11 “HH HW Ver” indicates a non-configurable High Horsepower hardware version fault.
• Bit 12 “HH CurUnblnc” indicates a non-configurable High Horsepower output current unbalanced fault.
• Bit 13 “HH VltUnblnc” indicates a non-configurable High Horsepower Bus voltage unbalanced fault.
• Bit 14 “HH Bus Data” indicates when Communication Bus data are mismatched between left side unit and right side unit.
• Bit 21 “Drive Homing” when the drive is in “Drive Homing” mode (parameter Par 740
drive moves to a home position automatically.
• Bit 24 “Drv Waking” when set, the drive is in wake mode and could start at any time.
• Bit 28 “+/- 12v Pwr” i dentifies when the12V dc control voltage is outside the tolerance range. The positive voltage power exceeds +15.50 V dc and the negative voltage power exceeds -15.50V
DC.
• Bit 29 “AnlgIn1 Loss” indicates a non-configurable Analog Input 1 loss fault.
• Bit 30 “AnlgIn2 Loss” indicates a non-configurable Analog Input 2 loss fault.
• Bit 31 “AnlgIn3 Loss” indicates a non-configurable Analog Input 3 loss fault.
Notes: Bits 16, 20 and 23 were added for firmware version 2.004. Bits 11, 12, 13, 29, 30 and 31 were added for firmware version 3.001. Changed bit 21 to “Drive Homing” and bit 28 to “+/- 12v Pwr”
for firmware version 3.003. Bit 14 “HH Bus Data” was added for firmware version 3.004. Bit 24 “Drv Waking” and 27 “RideThruAlrm” were added for firmware version 5.002.
[Position Control] bit 24 “Find Home” or bit 27 “Return Home” is set to “1”) this alarm is triggered and the
Linkable
Read-Write
Data Type
329 Fault TP Sel
Enter or write a value to sele ct Fault data displayed in Par 330 [Fault TP Data].
• 24 “ElpsSec.mSec” = Elap sed time in seconds and milliseconds since the last power up
• 25 “ElpsMin.Sec” = Elapsed time in minutes and seconds since the last power up
• 26 “ElpsHour.Min” = Elapsed time in hours and minutes since the last power up
• 27 “ElpsDay.Hour” = Elapsed time in days and hours since the last power up
Note: 'Values 24 - 27 were added for firmware version 4.002.
330 Fault TP Data
Displays the data selected by Par 329 [Fault TP Sel].
331 LstFaultStopMode
Displays the action taken by the drive during the last fault. When a fault occurs, an action is taken as a result of
that fault.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 67
Default:
Options:
Default:
Min/Max:0-/+2200000000
Default:
Options:
0 =
“Zero”
0 =
“Zero” 14 = “MtrStallTime”
1 =
“Abs OverSpd” 15 = “MC Handshake”
2 =
“EE Pwr State” 16 = “VPL Handshak”
3 =
“Inv DataStat” 17 = “MC Diag”
4 =
“Run Time Err” 18 = “PwrLossState”
5 =
“LowBus Thres” 19 = “12 volt loss”
6 =
“LowBus Detct” 20 = “PwrEE Chksum”
7 =
“PwrLosBusVlt” 21 = “Db Read Cnt1”
8 =
“MCPLosBusVlt” 22 = “Db Rea d Cnt2”
9 =
“MC Flt Reset” 23 = “Db Read Cnt3”
10 =
“Ext Flt Stat” 24 = “ElpsSec.mSec”
11 =
“VPL TaskErr” 25 = “Elps Min.Sec”
12 =
“Mtr OL Input” 26 = “ElpsHour.Min”
13 =
“Mtr OL Outpt” 27 = “ElpsDay.Hour”
0 =
“Ignore”
0 =
“Ignore” 3 = “Flt RampStop“
1 =
“Al arm ” 4 = “F ltC urL imS top ”
2 =
“FltCoastStop”
RO Real
Page 68

Chapter 2 Programming and Parameters
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Latch Err2
HW Disable2
Pwr Suply2
Asym DcLink2
Ovr Volt2
Ovr Current2
Dsat Phs W2
Dsat Phs V2
Dsat Phs U2
Cnv NotStart
Cnv NotLogin
Reserved
Reserved
Reserved
Reserved
Reserved
Latch Err1
HW Disable1
Pwr Suply1
Asym DcLink1
Ovr Volt1
Ovr Current1
Dsat Phs W1
Dsat Phs V1
Dsat Phs U1
Default xxxxxxx00000000000xxxxx000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Latch Err2
HW Disable2
Pwr Suply2
Asym DcLink2
Ovr Volt2
Ovr Current2
Dsat Phs W2
Dsat Phs V2
Dsat Phs U2
Cnv NotStart
Cnv NotLogin
Reserved
Reserved
Reserved
Reserved
Reserved
Latch Err1
HW Disable1
Pwr Suply1
Asym DcLink1
Ovr Volt1
Ovr Current1
Dsat Phs W1
Dsat Phs V1
Dsat Phs U1
Default xxxxxxx00000000000xxxxx000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Description
332 700L EventStatus
Indicates the presence of certain drive anomalies for PowerFlex 700L (LiquiFlo) drive.
• Bit 0 “Dsat Phs U1” indicates that the primary s tructure detected a Dsat on phase U.
• Bit 1 “Dsat Phs V1” indicates that the primary structure detected a Dsat on phase V.
• Bit 2 “Dsat Phs W” indicates that the primary structure detected a Dsat on phase W.
• Bit 3 “Ovr Current1” indicates that the primary struc ture detected an over current.
• Bit 4 “Ovr Volt1” indicates that the primary structure detected an over voltage.
• Bit 5 “Asym DcLink1” indicates that the primary structure detected an unbalanced DC Link.
• Bit 6 “Pwr Suply1” indicates that the primary structure detected a power supply failure.
• Bit 7 “HW Disable1” indicates that the primary structure detec ted a hardware disable.
• Bit 8 “Latch Err1” indicates that the primary structure fault was generated but no indicating bit was set.
• Bit 14 “Cnv NotLogin” the converter was expected but none logged in.
• Bit 15 “Cnv NotStart” the converter was commanded to start but did not become active.
• Bit 16 “Dsat Phs U2” the second structure detected a Dsat on phase U.
• Bit 17 “Dsat Phs V2” the second structure detected a Dsat on phase V.
• Bit 18 “Dsat Phs W2” the second structure detected a Dsat on phase W.
• Bit 19 “Ovr Current2” the second structure detected an over current.
• Bit 20 “Ovr Volt2” the second structure detected an over voltage.
• Bit 21 “Asym DcLink2” the second structure detected an unbalanced DC Link.
• Bit 22 “Pwr Suply2” the second structure detec ted a power supply failure.
• Bit 23 “HW Disable2” the second structure detected a hardware disable.
• Bit 24 “Latch Err2” the second structure fault was generated but no indicating bit was set.
Note: This parameter was added for firmware version 2.003.
Values
Linkable
Read-Write
Data Type
333 700L FaultStatus
Indicates the occurrence of exception events that have been configured as fault conditions for PowerFlex 700L (LiquiFlo) drive.
• Bit 0 “Dsat Phs U1” indicates that the primary s tructure detected a Dsat on phase U.
• Bit 1 “Dsat Phs V1” indicates that the primary structure detected a Dsat on phase V.
• Bit 2 “Dsat Phs W” indicates that the primary structure detected a Dsat on phase W.
• Bit 3 “Ovr Current1” indicates that the primary struc ture detected an over current.
• Bit 4 “Ovr Volt1” indicates that the primary structure detected an over voltage.
• Bit 5 “Asym DcLink1” indicates that the primary structure detected an unbalanced DC Link.
• Bit 6 “Pwr Suply1” indicates that the primary structure detected a power supply failure.
• Bit 7 “HW Disable1” indicates that the primary structure detec ted a hardware disable.
• Bit 8 “Latch Err1” indicates that the primary structure fault was generated but no indicating bit was set.
• Bit 14 “Cnv NotLogin” indicates that the converter expected but none logged in.
• Bit 15 “Cnv NotStart” indicates that the converter commanded to start but did not become active.
• Bit 16 “Dsat Phs U2” indicates that the second structure detected a Dsat on phase U.
• Bit 17 “Dsat Phs V2” indicates that the second structure detected a Dsat on phase V.
• Bit 18 “Dsat Phs W2” indicates that the second structure detected a Dsat on phase W.
• Bit 19 “Ovr Current2” indicates that the second structure detected an over current.
• Bit 20 “Ovr Volt2” indicates that the second structure detected an over voltage.
• Bit 21 “Asym DcLink2” indicates that the second structure detected an unbalanced DC Link.
• Bit 22 “Pwr Suply2” indicates that the second structure detected a power supply failure.
• Bit 23 “HW Disable2” indicates that the second structure detected a hardware disable.
• Bit 24 “Latch Err2” indicates that the second structure fault was generated but no indicating bit was set.
Note: This parameter was added for firmware version 2.003.
68 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 69

Programming and Parameters Chapter 2
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
NonCnfgFault
NonCnfgFault
NonCnfgFault
NonCnfgFault
NonCnfgFault
NonCnfgFault
NonCnfgFault
NonCnfgFault
NonCnfgFault
NonCnfgFault
NonCnfgFault
Reserved
Reserved
Reserved
Reserved
Reserved
NonCnfgFault
NonCnfgFault
NonCnfgFault
NonCnfgFault
NonCnfgFault
NonCnfgFault
NonCnfgFault
NonCnfgFault
NonCnfgFault
Default xxxxxxx00000000000xxxxx000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Description
334 700L AlarmStatus
Indicates the occurrence of exception events that have been configured as alarm conditions for PowerFlex 700L (LiquiFlo) drive.
• Bit 0 “NonCnfgFault” Not configured as alarm.
• Bit 1 “NonCnfgFault” Not configured as alarm.
• Bit 2 “NonCnfgFault” Not configured as alarm.
• Bit 3 “NonCnfgFault” Not configured as alarm.
• Bit 4 “NonCnfgFault” Not configured as alarm.
• Bit 5 “NonCnfgFault” Not configured as alarm.
• Bit 6 “NonCnfgFault” Not configured as alarm.
• Bit 7 “NonCnfgFault” Not configured as alarm.
• Bit 8 “NonCnfgFault” Not configured as alarm.
• Bit 14 “NonCnfgFault” Not configured as alarm.
• Bit 15 “NonCnfgFault” Not configured as alarm.
• Bit 16 “NonCnfgFault” Not configured as alarm.
• Bit 17 “NonCnfgFault” Not configured as alarm.
• Bit 18 “NonCnfgFault” Not configured as alarm.
• Bit 19 “NonCnfgFault” Not configured as alarm.
• Bit 20 “NonCnfgFault” Not configured as alarm.
• Bit 21 “NonCnfgFault” Not configured as alarm.
• Bit 22 “NonCnfgFault” Not configured as alarm.
• Bit 23 “NonCnfgFault” Not configured as alarm.
• Bit 24 “NonCnfgFault” Not configured as alarm.
Note: This parameter was added for firmware version 2.003.
Values
Linkable
Read-Write
Data Type
335 Abs OverSpd Lim
Sets an incremental speed above Par 76 [Fwd Speed Limit] and below Par 75 [Rev Speed Limit] that is allowable
before the drive indicates its speed is out of range.
336 Motor OL Factor
Sets the minimum level of current that causes a motor overload trip under continuous operation. Current levels
below this value will not result in an overload trip. For example, a service factor of 1.15 implies continuous
operation up to 115% of nameplate motor current.
337 Mtr I2T Curr Min
Sets the minimum current threshold for the motor overload (I2T) function. The value indicates minimum current
at the minimum speed, Par 338 [Mtr I2T Spd Min], and these are the first current/speed breakpoint. From this
point the current threshold is linear to the value specified by Par 336 [Motor OL Factor].
338 Mtr I2T Spd Min
Sets the minimum speed for the motor overload (I2T) function. The value indicates minimum speed below the
minimum current threshold Par 337
point the current threshold is linear to the value specified by the motor service factor Par 336
Set this parameter to the minimum value for the motor overload t rip to vary in time at low speeds. For more
information, please see Motor Overload on page 166
339 Mtr I2T Calibrat
Sets the current calibration level for the motor overload (I2T) function. The value indicates the current level that
the drive will fault at this current in 60 seconds.
340 Mtr I2T Trp ThrH
Displays the trip threshold current for the motor overload (I2T) function. The value depends on the motor speed,
and is calculated from the minimum current Par 337
Min] and the motor service factor Par 33 6 [Motor OL Factor].
341 Mtr I2T Count
The accumulator for Motor Overload detection (Motor I2T function). When the motor runs at the over rated motor
current, the accumulator s tarts counting up. If the motor runs at bel ow rated motor current, the accumulator
counts down. If the value of this parameter exceeds 0.5, the “Motor OLoad Pend” alarm (fault 12) occurs. If the
value of this parameter exceeds 1.0, the “Motor OLoad Trip” fault (fault 11) occurs. The value of this parameter is
saved in non-volatile memory after power-down if Par 15 3
bit 20 of Par 153 [Control Options] clears the value of this parameter.
Note: This parameter was added for firmware version 3.001.
[Mtr I2T Curr Min], and these are the first current/speed breakpoint. From this
.
[Mtr I2T Curr Min], the minimum speed Par 338 [Mtr I2 T Spd
[Control Options], bit 20 “Motor OL Ret” is on. Toggling
[Motor OL Factor].
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Default:
Min Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
352.8000
0.0000/1750.0000
rpm
Par 4 [Motor NP RPM] = 1.0 P.U.
1.1500
1.0000/2.0000
P. U .
0.5000
0.0500/2.0000
P. U .
1.0000
0.0500/1.0000
P. U .
2.0000
1.1000/4.0000
P. U .
1.1500
0.0500/2.0000
P. U .
0.0
0.0/1.5
RW Real
RW Real
RW Real
RW Real
RW Real
RO Real
RO Real
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 69
Page 70

Chapter 2 Programming and Parameters
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Jnc OverTemp
IT Foldback
IT Pending
IT Trip
HS Pending
HS OverTemp
NTC Open
NTC Shorted
Default xxxxxxxx00000000
Bit 1514131211109876543210
0 = False
1 = True
No. Name
Values
Description
343 OL OpnLp CurrLim
Displays the current limit set by the Open Loop Inverter Overload (OL) function. This function sets this c urrent limit
based on stator current feedback and the current ratings of the drive - continuous and short term (three-second
rating). Typically the drive will have a sixty-second rating of 110% of continuous current and a three-second
rating at 150% of the continuous. Under normal operating conditions, the open loop function sets this current
limit to the short term (three-second) rating. If the function detects an overload, it lowers the limit to the
continuous level. After a period of time (typically one to three minutes), the function returns the limit to the short
term rating.
344 OL ClsLp CurrLim
Displays the current limit set by the Closed Loop Inverter Overload (OL) function. This function will set a current
limit level based on the values in Par 355
of the drive. Under normal operating conditions, the function typically sets the limit at 250% of the continuous
drive rating. If the function determines that the power device junction temperature is approaching maximum, it
will reduce this limit to the level required to prevent additional heating of the inverter. This level could be as low
as the continuous rating of the drive. If the inverter temperature decreases, the function will raise the limit to a
higher level. Disable this protection by setting bit 13 “OL ClsLpDsbl” of Par 153
345 Drive OL JnctTmp
Displays the calculated junction temperature of the power semiconductors in the inverter. The calculation uses the
values of Par 313
power EE memory. If this value exceeds the maximum junction temperature (visible in Par 3 48
when Par 34 7 [Drive OL TP Sel] option 12 “fJunTmprMax” is selected), two faults occur: Inverter Overtemperature
Fault (fault code 15), and Junction Overtemperature Fault - indicated by bit 7 “Jnc OverTemp” of Par 346 [Drive OL
Status].
346 Drive OL Status
Indicates the status of various overload (OL) conditions.
• Bit 0 “NTC Shorted” indicates the Negative Temperature Coefficient (NTC) device has a short circuit.
• Bit 1 “NTC Open” indicates the NTC has an open circuit.
• Bit 2 “HS OverTemp” indicates heatsink temperature is above 105 °C for ratings 1.1…11.0 A, 115 °C for 14…34 A, 100 °C for 40…52 A.
• Bit 3 “HS Pending” indicates heatsink temperature is above 95C for ratings 1.1…11 A, 105 °C for 14…34 A, 90 °C for 40…52 A.
• Bit 4 “IT Trip” indicates the drive has exceed the 3 second rating of either the 150% normal duty rating or 200% of the heavy duty rating.
• Bit 5 “IT Pending” indicates the drive OL integrator is at 50% of the time out time.
• Bit 6 “IT Foldback” indicates the drive closed loop current limit is in a fold back condition. The value of the fold back is proportional to the calculated junction temperature.
• Bit 7 “Jnc Over Temp” indicates the junction temperature has exceeded the maximum temperature for the power semiconductor device.
[Heatsink Temp], Par 355 [Iq Ref Limited], and inver ter thermal characteristics contained in the
[Iq Ref Limited], Par 31 3 [Heatsink Temp] and the thermal characteristics
[Control Options].
[Drive OL TP Data]
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
8.0000
0.0000/8.0000
P. U .
8.0000
0.0000/8.0000
P. U .
0.0000
-50.0000/300.0000
°C
Linkable
Read-Write
RO Real
RO Real
RO Real
Data Type
347 Drive OL TP Sel
Enter or write a value to select the drive overload data displayed in Par 348 [Drive OL TP Data].
Note: Value 44 “HH PwrBdTemp” was added for firmware version 2.004. Added values 45 “IGBT CndLoss”, 46 “IGBT
SwtLoss” and 47 “Fwd CndLoss” for firmware version 3.003.
348 Drive OL TP Data
Displays the value selected by Par 347 [Drive OL TP Sel].
350 Iq Actual Ref
Displays the value of motor current reference that is present at the output of the divide by flux calculation.
Default:
Options:
Default:
Min/Max:
Default:
Min/Max:
Units:
0 =
“Zero”
0 =
“Zero” 24 = “fIgbtWatts”
1 =
“fAbsIsCurr” 25 = “iIgbtPerMod”
2 =
“fDelta” 26 = “f FdThres”
3 =
“fAbsIqCurr” 2 7 = “fFdSlope”
4 =
“fOL_l” 28 = “fFdJu nCase”
5 =
“fOL_m” 29 = “fFdWatts”
6 =
“fOL_k ” 3 0 = “f MaxHsDegc ”
7 =
“fOL_g” 31 = “fC sImp”
8 =
“fOL_in tg” 32 = “fC sFltr”
9 =
“fCL_in tg” 3 3 = “fP wmHz”
10 =
“fInvOLCl im” 34 = “fEl ecHz”
11 =
“fJuncD egc” 35 = “f ModIdex”
12 =
“fJunTmprMax” 36 = “fBoost”
13 =
“f60sPUCur” 37 = “fTotalWatts”
14 =
“f60sAmp” 38 = “fHSDegc ”
15 =
“f3sPUCur ” 39 = “iAdconv ”
16 =
“f3sAmp” 40 = “Jct Temp”
17 =
“fRatioInvMtr” 41 = “Jct Tmp HiHp”
18 =
“fRatioMtrInv” 42 = “Jct Tmp Fwd“
19 =
“iConvertStat” 43 = ”HH Loss Intg”
20 =
“fIgbtThres” 44 = “HH PwrBdTemp”
21 =
“fIgbtSlope” 45 = “IGBT CndLoss”
22 =
“fIgbtEnergy” 46 = “IGBT SwtLoss”
23 =
“fIgbtJuncase” 47 = “Fwd CndLoss”
0.0000
-/+2200000000.0000
0.0000
-/+8.0000 P.U.
P. U .
RO Real
RO Real
70 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 71

Programming and Parameters Chapter 2
A
A
No. Name
Description
351 Iq Ref Trim
Provides an external source to command, trim or offset the internal motor current reference. This value is summed
with Par 350
352 Is Actual Lim
Displays the largest allowable stator motor current. The range of allowable motor current is limited by the
maximum drive current. Scaling is in per unit motor current.
353 Iq Actual Lim
Displays the largest allowable torque producing (Iq) motor current. The range of allowable Iq motor current is
limited by the maximum drive current and is adjusted by the motor flux current. Scaling is in per unit Iq motor
current.
354 Iq Rate Limit
Enter the maximum rate of change for Current Reference, in per unit current / sec. Par 90 [Spd Reg BW] will be
limited to 2/3 of this value.
355 Iq Ref Limited
Displays the current reference output of the rate limiter.
356 Mtr Current Lim
Sets the largest allowable motor stator current. The online maximum value of this parameter is Par 2 [Motor NP
FLA]. The online minimum value is 105% of the current indicated in Par 488
357 Curr Ref TP Sel
Enter or write a value to select current reference data displayed in Par 3 58 [Curr Ref TP Data].
Note: Added values 20…52 for firmware version 3.003. Added value 53 for firmware version 4.001.
358 Curr Ref TP Data
Sets the limit value for the motor torque producing current.
359 Motor Flux Est
The Q-axis motor voltage is divided by the motor frequency while fi eld weakening is active. This value is used to
convert the torque command to a motor current (Iqs) command.
360 Min Flux
Sets the smallest level of flux used to convert Par 303 [Motor Torque Ref] to a current reference above base speed.
Note: Changed the minimum value from “0.2500” to “0.1000” for firmware version 4.001.
361 Flx LpassFilt BW
Sets the bandwidth of the low pass filter that adjusts the response of the flux estimate used in the torque to
current conversion. Since the field time constant varies between motors, a better control response may be
obtained by adjusting the filter time constant. Normally this parameter is not changed unless a significant
disturbance occurs as the motor enters field weakening AND Par 360
362 Current Limit Gain
Sets the responsiveness of the current limit. This parameter should not be changed by the user.
Note: This parameter was added for firmware version 2.003.
363 Ki Current Limit
Current Limit Integral gain. This gain is applied to the current limit error signal to eliminate steady state current
limit error. A larger value increases overshoot during a step of motor current/load. This parameter should not be
changed by the user.
Note: This parameter was added for firmware version 2.003.
[Iq Actl Ref] before the current limit is applied. Scaling is in per unit motor cu rrent.
[Flux Current].
[Min Flux] is less than 1 per unit.
Values
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Options:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:
0.0000
-/+8.0000 P.U.
P. U .
1.0000
0.0000/8.0000
P. U .
1.0000
0.0000/8.0000
P. U .
1000.0000
5.0000/10000.0000
/s
0.0000
-/+8.0000 P.U.
P. U .
1.5000
0.0000/Calculated
P. U .
0 =
“Zero”
0 =
“Zero” 27 = “Rated Vds”
1 =
“Iq Sum” 28 = “Rated Vqs”
2 =
“Iq Lim In” 29 = “RatedLamdVds”
3 =
“Iq Lim Out” 30 = “RatedLamdIds”
4 =
“Iq Rate Stat” 31 = “RatedLamd ds”
5 =
“IqLmOutNoFil” 32 = “RatedLamd qs”
6 =
“MtrCrLimStat” 33 = “Iqs”
7 =
“Lim'dMtrCrLm” 34 = “Ids”
8 =
“Iq Act Limit” 35 = “Vqs”
9 =
“Iq Cal Gain” 36 = “Vds”
10 =
“Min Lim Stat” 37 = “ We”
11 =
“Iq Prescale” 38 = “Torque”
12 =
“IqtoIs Stat” 39 = “Torque Filtr”
13 =
‘Flux Status” 40 = “Lamda Ids”
14 =
“Flux LPF Out” 41 = “Lamda Iqs”
15 =
“Is Per Unit” 42 = “Lamda Vds”
16 =
“Iq Actl +Lim” 43 = “Lamda Vqs”
17 =
“Iq Actl -Lim” 44 = “Lamda ds”
18 =
“Flx Filt Hld” 45 = “Lamda qs”
19 =
“Inverse Flux” 46 = “Lamda ds Flt”
20 =
“Impedance P.U.” 47 = “Lamda qs Flt”
21 =
“ImpedanceOhm” 48 = “Torque Ref”
22 =
“Rated We” 49 = “Iq Reference”
23 =
“Leak Induct” 50 = “1/Motor Pole”
24 =
“Rated Torque” 51 = “1/Rated Iqs”
25 =
“Rated Ids” 52 = “1/Rated Torq”
26 =
“Rated Iqs” 53 = “Rs Temp Coef”
0.0000
-/+8.0000 P.U.
P. U .
0.0000
-/+8.0000 P.U.
P. U .
0.2500
0.1000/1.0000
P. U .
12.0000
0.5000/100.0000
rad/s
250
0/10000
1500
0/10000
Linkable
Y
Y
Y
Y
Y
Read-Write
Data Type
RW Real
RO Real
RO Real
RW Real
RO Real
RW Real
RO Real
RO Real
RW Real
RW Real
RW 16-bit
Integer
RW 16-bit
Integer
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 71
Page 72

Chapter 2 Programming and Parameters
A
No. Name
Description
364 Kd Current Limit
Current Limit Derivative gain. This gain is applied to the sensed motor current to anticipate a current limit
condition. A larger value reduces overshoot of the current relative to the current limit value. This parameter should
not be changed by the user.
Note: This parameter was added for firmware version 2.003.
365
Fdbk LsCnfg Pri
366
Fdbk LsCnfg Alt
367
Fdbk LsCnfgPosit
Enter a value to configure the drive's response to an Encoder 0/1 Loss exception event.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
368 Cnv NotLogin Cfg
Configures the 700L drive’s response when the active convertor is not logged-in via a DPI port.
Note: This parameter was added for firmware version 3.001.
369 Brake OL Cnfg
Enter a value to configure the drive's response to a Brake Overload (OL) Trip exception event. This event is
triggered when a Dynamic Brake (DB) overload condition occurs.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
370 HiHp InPhsLs Cfg
Selector for the input phase loss configuration.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit in
response to this event.
Notes: The default value was changed from 1 “Alarm” to 3 “Flt RampStop” for firmware version 3.001. The default
value was changed from 3 to 2 for firmware version 4.002.
371 Mtr OL Trip Cnfg
Enter a value to configure the drive's response to a Motor Overload (OL) Trip exception event.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
372 Mtr OL Pend Cnfg
Enter a value to configure the drive's response to a Motor Overload (OL) Pending exception event.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
373 Motor Stall Time
Enter a value to specify the time delay between when the drive detects a Motor Stall condition and when it
declares the exception event.
374 Motor Stall Cnfg
Enter a value to configure the drive's response to a Motor Stall exception event.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
Values
Default:
Min/Max:
Default:
Default:
Default:
Options:
Default:
Options:
Default:
Options:
Default
Options:
Default
Options:
Default
Options:
Default:
Min/Max:
Units:
Default
Options:
500
0/10000
2 =
“FltCoastStop”
1 =
“Al ar m”
1 =
“Al ar m”
1 =
“Al ar m”
2 =
“FltCoastStop”
“FltCoastStop”
2 =
“Ignore””
0 =
“Al ar m”
1 =
“FltCoastStop”
2 =
1 =
“Al ar m”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
2 =
“FltCoastStop”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
2 =
“FltCoastStop”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
1 =
“Al ar m”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
1.0000
0.1000/3000.0000
s
0 =
“Ignore”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
Linkable
Y
Read-Write
Data Type
RW 16-bit
Integer
RW Real
72 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 73

Programming and Parameters Chapter 2
No. Name
Description
375 Inv OT Pend Cnfg
Enter a value to configure the drive's response to a Inverter Over-Temperature (OT) Pending exception event. This
event is triggered when the Inverter Negative Temperature Coefficient (NTC) function detects the heat-sink
temperature reaches to the overload warning level.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
376 Inv OL Pend Cnfg
Enter a value to configure the drive's response to an Inverter Overload (OL) Pending exception event. This event is
triggered when one of the Inverter Protection Current-Over-Time functions (Open Loop or Closed Loop) detects
current and temperature at warning levels.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
377 Inv OL Trip Cnfg
Enter a value to configure the drive's response to an Inverter Overload (OL) Trip exception event. This event is
triggered when one of the Inverter Protection Current-Over-Time functions (Open Loop or Closed Loop) detects
current and temperature at a fault level.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
378 Interp Flt Cnfg
Enter a value to configure the drive's response to a position interpolator exception event. If the interpolator loses
the synchronization pulse or is out of synch, this event occurs.
379 Ext Flt/Alm Cnfg
Enter a value to configure the dr ive's response to an External Input exception event. The event is triggered by a
digital input that is configured for auxiliary fault or auxiliary aux fault by se lecting 3 “Ext Fault” or 38 “ExtFault
Inv” in Par 825
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
381 PreChrg Err Cnfg
Enter a value to configure the drive's response to a Precharge Error exception event.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
382 MC Cmd Lim Cnfg
Enter a value to configure the dr ive's response to a Motor-Controller (MC) Command Limitation exception event.
This event is triggered when the motor-controller detects limit of the command values used in the motorcontroller, and returns the exception event to the Velocity Position Loop (VPL).
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
[DigIn 1 Sel], Par 826 [DigIn 2 Sel] or Par 827 [D igIn 3 Sel].
this event.
this event.
response to this event.
this event
this event.
Values
Default
Options:
Default
Options:
Default:
Options:
Default:
Options:
Default
Options:
Default:
Options:
Default:
Options:
1 =
“Al ar m”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
1 =
“Al ar m”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
1 =
“Al ar m”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
1 =
“Al ar m”
0 =
“Ignore” 3 = “Flt RampStop”
1 =
“Alarm” 4 = “FltCurLimStp”
2 =
“FltCoastStop”
2 =
“FltCoastStop”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
2 =
“Al ar m”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
“Al ar m”
2 =
“Ignore”
0 =
“Al ar m”
1 =
“FltCoastStop”
2 =
Linkable
Read-Write
Data Type
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 73
Page 74
Chapter 2 Programming and Parameters
ATT EN TI ON : Risk of injury or equipment damage exists. Par 383 [SL CommLoss Data] lets you determine the action of the
drive if communications are disrupted. By default this parameter causes the drive to hold the data in its last state. You can
set this parameter so that the drive resets the data to zero. Precautions should be taken to ensure that the setting of this
parameter does not create hazards of injury or equipment damage.
ATT EN TI ON : Risk of injury or equipment damage exists. Par 384 [SL CommLoss Cnfg] lets you determine the action of the
drive if communications are disrupted. By default this parameter causes the drive fault and coast to a stop. You can set this
parameter so that the drive continues to run. Precautions should be taken to ensure that the setting of this parameter does
not create hazards of injury or equipment damage.
ATTENTION: Risk of injury or equipment damage exists. Par 385 [Lgx CommLossData] lets you determine the action of the
drive if communications are disrupted. By default this parameter causes the drive to hold the data in its last state. You can
set this parameter so that the drive resets the data to zero. Precautions should be taken to ensure that the setting of this
parameter does not create hazards of injury or equipment damage.
ATTENTION: Risk of injury or equipment damage exists. Par 386 [Lgx OutOfRunCnfg] lets you determine the action of the
drive if communications are disrupted. By default this parameter causes the drive fault and coast to a stop. You can set this
parameter so that the drive continues to run. Precautions should be taken to ensure that the setting of this parameter does
not create hazards of injury or equipment damage.
No. Name
Description
383 SL CommLoss Data
Enter a value to determine what is done with the data received from SynchLink when a communication loss
occurs. Refer to Par 902
• 0 - Zero Data Resets data to zero.
• 1 - Last State Holds data in its last state.
384 SL CommLoss Cnfg
Enter a value to configures the drive's response to SynchLink communication loss.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
[SL Error Status] for possible causes of communication loss.
Values
Default:
Options:
Default
Options:
1 =
“Last State”
0 =
“Zero Data”
1 =
“Last State”
2 =
“FltCoastStop”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
Linkable
Read-Write
Data Type
385 Lgx CommLossData
Enter a value to configure what the drive does with the data received from the DriveLogix controller when the
connection is closed or times out.
• 0 - Zero Data Resets data to zero.
• 1 - Last State Holds data in its last state.
386 Lgx OutOfRunCnfg
Enter a value to configure the drive's response to the DriveLogix processor being in a “Non-Run” mode. Non-Run
modes include Program, Remote-Program and Faulted.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
Default:
Options:
Default
Options:
1 =
“Last State”
0 =
“Zero Data”
1 =
“Last State”
2 =
“FltCoastStop”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
74 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 75
Programming and Parameters Chapter 2
ATT EN TI ON : Risk of injury or equipment damage exists. Par 387 [Lgx Timeout Cnfg] lets you determine the action of the
drive if communications are disrupted. By default this parameter causes the drive fault and coast to a stop. You can set this
parameter so that the drive continues to run. Precautions should be taken to ensure that the setting of this parameter does
not create hazards of injury or equipment damage.
ATT EN TI ON : Risk of injur y or equipment damage exists. Par 388 [Lgx Closed Cnfg] lets you determine the action of the drive
if communications are disrupted. By default this parameter causes the drive fault and coast to a stop. You can set this
parameter so that the drive continues to run. Precautions should be taken to ensure that the setting of this parameter does
not create hazards of injury or equipment damage.
ATTENTION: Risk of injury or equipment damage exists. Par 389 [Lgx LinkChngCnfg] lets you determine the action of the
drive if communications are disrupted. By default this parameter causes the drive fault and coast to a stop. You can set this
parameter so that the drive continues to run. Precautions should be taken to ensure that the setting of this parameter does
not create hazards of injury or equipment damage.
No. Name
Description
387 Lgx Timeout Cnfg
Enter a value to configure the drive's response to a “Controller-to-Drive” connection timeout, as detected by the
drive.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
388 Lgx Closed Cnfg
Enter a value to configure the drive's response to the controller closing the “Controller-to-Drive” connection.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
Values
Default
Options:
Default
Options:
2 =
0 =
1 =
2 =
3 =
4 =
2 =
0 =
1 =
2 =
3 =
4 =
“FltCoastStop”
“Ignore”
“Al ar m”
“FltCoastStop”
“Flt RampStop”
“FltCurLimStp”
“FltCoastStop”
“Ignore”
“Al ar m”
“FltCoastStop”
“Flt RampStop”
“FltCurLimStp”
Linkable
Read-Write
Data Type
389 Lgx LinkChngCnfg
Enter a value to configure the drive's respon se to “Controller-to-Drive” default links being removed. A default link
is a link automatically set up when a communication format is selected for the Controller to Drive connecti on.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
Default
Options:
2 =
0 =
1 =
2 =
3 =
4 =
“FltCoastStop”
“Ignore”
“Al ar m”
“FltCoastStop”
“Flt RampStop”
“FltCurLimStp”
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 75
Page 76
Chapter 2 Programming and Parameters
ATT EN TI ON : Risk of injur y or equipment damage exists. Par 390 [SL MultErr Cnfg] lets you determine the action of the drive
if communications are disrupted. By default this parameter causes the drive fault and coast to a stop. You can set this
parameter so that the drive continues to run. Precautions should be taken to ensure that the setting of this parameter does
not create hazards of injury or equipment damage.
ATTENTION: Risk of injury or equipment damage exists. Par 391 [DPI CommLoss Cfg] lets you determine the action of the
drive if communications are disrupted. By default this parameter causes the drive fault and coast to a stop. You can set this
parameter so that the drive continues to run. Precautions should be taken to ensure that the setting of this parameter does
not create hazards of injury or equipment damage.
ATT EN TI ON : Risk of injury or equipment damage exists. Par 392 [NetLoss DPI Cnfg] lets you determine the action of the
drive if communications are disrupted. By default this parameter causes the drive fault and coast to a stop. You can set this
parameter so that the drive continues to run. Precautions should be taken to ensure that the setting of this parameter does
not create hazards of injury or equipment damage.
No. Name
Description
390 SL MultErr Cnfg
Enter a value to configure the Drive Module's response to a SynchLink Multiplier error. Refer to Par 927 [SL Mult
State] for possible causes for multiplier errors.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
391 DPI CommLoss Cfg
Enter a value to configure the drive's response to the failure of a DPI port.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
Values
Default
Options:
Default
Options:
2 =
“FltCoastStop”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
2 =
“FltCoastStop”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
Linkable
Read-Write
Data Type
392 NetLoss DPI Cnfg
Enter a value to configure the drive's response to a communication fault from a network card at a DPI port.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
393 BusUndervoltCnfg
Enter a value to configure the drive's response to the DC Bus voltage falling below the minimum value.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
394 VoltFdbkLossCnfg
Enter a value to configure the drive's response to a communication error between Motor Control (MC) and the
motor voltage feedback board.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
76 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Default
Options:
Default
Options:
Default:
Options:
2 =
“FltCoastStop”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
1 =
“Al ar m”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
2 =
“FltCoastStop”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
Page 77
Programming and Parameters Chapter 2
A
No. Name
Description
395 +Sft OvrTrvlCnfg
Enter a value to configure the drive’s response to a positive software positioning over travel condition.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
396 -Sft OvrTrvlCnfg
Enter a value to configure the drive’s response to a negative software positioning over travel condition.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
397 +Hrd OvrTrvlCnfg
Enter a value to configure the drive’s response to a positive hardware positioning over travel condition.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
398 -Hrd OvrTrvlCnfg
Enter a value to configure the drive’s response to a negative hardware positioning over travel condition.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
399 Position ErrCnfg
Enter a value to configure the drive’s response to a position error condition.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
400 Rated Amps
Current rating of the inverter. The drive automatically sets this at power up.
Notes: The maximum value was changed for firmware version 2.003. The maximum value was changed from
2500.0000 to 3000.0000 for firmware version 4.002.
401 Rated Volts
Nameplate voltage rating of the inverter. The drive automatically sets this at power up.
402 PWM Frequency
Carrier frequency for the PWM output of the drive. Drive derating may occur at higher carrier frequencies. For
derating information, refer to the PowerFlex Reference Manual. Default is dependant on power structure of the
drive.
Note: This parameter was changed for firmware version 3.004 to not allow changes while the drive is running.
403 Voltage Class
Sets the drive configuration for high or low voltage class (for example, 400…480V AC drive). Allows choice of
configuration and affects many drive parameters including drive rated current, voltage, power, over loads and
maximum PWM carrier frequency.
Note: This parameter was changed for firmware version 3.004 to allow the drive to produce an output voltage
limited by Par 53 1
Voltage], and DC bus voltage utilization limit, Par 50 0
404 Dead Time
The time delay between turning off and turning on an upper device and a lower device in the power structure.
This parameter is set at power up and is not user adjustable.
[Maximum Voltage] (or maximum voltage defined by the DC bus voltage level, Par 306 [DC Bus
[Bus Util Limit]).
Values
Default
Options:
Default
Options:
Default
Options:
Default
Options:
Default
Options:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Options:
Default:
Min/Max:
Units:
1 =
“Al ar m”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
1 =
“Al ar m”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
1 =
“Al ar m”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
1 =
“Al ar m”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
1 =
“Al ar m”
0 =
“Ignore”
1 =
“Al ar m”
2 =
“FltCoastStop”
3 =
“Flt RampStop”
4 =
“FltCurLimStp”
22.0000
0.1000/3000.0000
A
480
75/750
V
2.0000 (Fr 5, 6, 9 & Up)
4.0000 (Fr 1-4)
1.0000/15.0000 (10.0000 Fr 5, 6, 9 & Up)
kHz
“High Voltage”
3 =
“Low Voltage”
2 =
“High Voltage”
3 =
5.0000
2.0000/100.0000
μs
Linkable
Read-Write
RO Real
RO 16-bit
RW Real
RO Real
Data Type
Integer
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 77
Page 78
Chapter 2 Programming and Parameters
A
0.221 480Vac 2×× 150 Vdc=
0.615 480Vac 2×× 418 Vdc=
No. Name
Description
405 Dead Time Comp
The amount of voltage correction used to compensate for the loss of voltage during dead time. Do not adjust.
Contact factor y for alternative settings.
406 Power Loss Mode
Enter a value to configure the drive's response to a loss of input power, as sensed by an input voltage below the
value specified in Par 408
• Enter a value of “0” to make the drive fault and coast to a stop (supply no current to the motor) after the
amount of time specified in Par 4 07 [Power Loss Time] has expired.
• Enter a value of “2” to make the drive fault and continue "normal" operation after the amount of time
specified in Par 407 [Power Loss Time] has expired.
• Enter a value of “5” to make the drive provide only motor flux current during the power loss time.
407 Power Loss Time
Sets the amount of time that the drive will remain in a ride through condition before a fault is detected.
408 Power Loss Level
Sets the percentage of the bus voltage at which ride-through begins and modulation ends. When the bus voltage
falls below this level and Par 406
will be displayed on the HIM and the drive prepares for an automatic restart. Enter a percentag e of the bus voltage
derived from the high voltage setting for the voltage class. For example: On a 400-480V drive,
Note: The definition was updated to include the bit settings for parameter 406 for firmware version 4.002.
409 Line Undervolts
Controls the level of bus voltage that is needed to complete precharge and sets the level for undervoltage alarm/
fault detection. Enter a percentage of the bus voltage derived from the value in Par 4 01 [Rated Volts].
For example: on a 480V drive,
[Power Loss Level].
[Power Loss Mode] is set to 0 “Coast” or 5 “Flux Only”, an alarm (F92 “Ride Thru”)
Values
Default:
Min/Max:
Units:
Default:
Options:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
0
0/200
%
0 =
“Coast”
0 =
“Coast” 3 = “Reser ved”
1 =
“Reserved” 4 = “Reserved”
2 =
“Continue” 5 = “Flux Only”
2.0000
0.0000/60.0000
s
22.1
15/95
%
0
61.5000
10.0000/90.0000
%
Linkable
Read-Write
RW 16-bit
RW Real
RW 16-bit
RW Real
Data Type
Integer
Integer
410 PreChrg TimeOut
Sets the time duration of precharge. If bus voltage does not stabilize within this amount of time, a Precharge Error
exception event occurs.
411 PreChrg Control
Must equal 1 to allow drive to exit precharge and begin to run. Link this parameter to a controller o utput word to
coordinate the precharge of multiple drives.
Default:
Min/Max:
Units:
Default:
Options:
30.0000
10.0000/180.0000
s
1 =
“Enbl PrChrg”
0 =
“Hold PrChrg”
1 =
“Enbl PrChrg”
RW Real
78 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 79

Programming and Parameters Chapter 2
Options:
0 = Zero 19 = Bus VltScale 38 = IGBT Rated A 61 = Convt Type 80 = HH1 P/B ID 99 = HH2 P/B ID
1 = Volt Class 20 = Sml PS Watts 39 = IGBT V Thres 62 = DC Bus Induc 81 = HH1 S/W ID 100 = HH2 S/W ID
2 = Assy Rev 21 = Sml PS Min V 40 = IGBT Slope R 63 = AC Inp Induc 82 = HH1 P/B Rev 101 = HH2 P/B Rev
3 = ASA S/N 22 = Lrg PS Watts 41 = I GBT Sw Engy 64 = Precharg Res 83 = HH1 S/W Rev 102 = HH2 S/W Rev
4 = Manuf Year 23 = Lrg PS Min V 44 = IGBT CS Tres 65 = PrechThrm Tc 84 = HH1 Extr Data 103 = HH2 ExtrData
5 = Manuf Month 24 = Inv Rated Kw 45 = IGBT CS Tc 66 = Mtr NP Units 8 5 = HH1 VoltIndx 104 = HH2 VoltIndx
6 = Manuf Day 25 = Inv Rated V 46 = Diode V Thrs 67 = Mtr NP Power 86 = HH1 SizeIndx 105 = HH2 SizeIndx
7 = Tst ProcStat 26 = Inv Rated A 47 = Diode SlopeR 68 = Mtr NP Volts 87 = HH1 Option 106 = HH2 Option
8 = Life PwrCycl 2 7 = Inv 1min Amp 48 = Diode JC Tr 6 9 = Mtr NP Amps 88 = HH1 HrdPrdct 107 = HH2 HrdPrdct
9 = Life Pwrup 28 = inv 3sec Amp 49 = Diode JC Tc 70 = Mtr NP Freq 89 = HH1 H/W Mdfy 108 = HH2 H/W Mdfy
10 = Life RunTime 29 = SW OverC Amp 50 = GBT Tjmax 71 = Mtr NP RPM 90 = HH1 1V/Amp 109 = HH2 1V/Amp
11 = Kw Accum 30 = D C Bus Cap 51 = HS Max DegC 7 2 = Mtr IR Vdrop 91 = HH1 2s/Amp 110 = HH2 2s/Amp
12 = Mw Hrs Accum 3 1 = Min PWM Khz 52 = DB IGBT Amp 73 = Mtr Id Ref 92 = HH1 Scale 111 = HH2 Scale
13 = Inv High Vlt 32 = Max PWM Khz 53 = DB ohms 74 = HH1 Data Rev 93 = HH2 Data Rev
14 = Reserved 33 = Dfl PWM Khz 54 = DB E Jo/degC 75 = HH1 D ev Type 94 = HH2 Dev Type
15 = Fan/Pwr Cntl 34 = PWM Dead us 55 = DB EB C/Watt 76 = HH1 Serial # 95 = HH2 Serial #
16 = Temp Sensor 35 = Drive Frame 56 = DB B Jo/degC 77 = HH1 Test Date 96 = HH2 Te stDate
17 = Phs AmpScale 36 = IGBTs per Pk 57 = DB BA C/Watt 78 = HH1 Vcn Code 97 = HH2 Vcn Code
18 = Gnd AmpScale 37 = GBT Rated V 60 = DB Ambt Tmax 79 = HH1 CrsCncID 98 = HH2 CrsCncID
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Bus Reg En
Bus Ref High
Brake Extern
Brake Enable
Default xxxxxxxxxxxx1100
Bit 1514131211109876543210
0 = False
1 = True
111 2× 480 VDC=×
No. Name
Description
412 Power EE TP Sel
Enter or write a value to select drive power EEPROM data displayed in Par 41 3 [Power EE TP Data]. The default is 0 “Zero”.
Note: Options 74 - 92 were changed and options 93 - 111 were added for firmware version 3.001.
Values
Linkable
Read-Write
Data Type
413 Power EE TP Data
Displays the data selected by Par 412 [Power EE TP Sel].
414 Brake/Bus Cnfg
Configures the brake and bus operation of the drive.
• Set bit 0 “Brake Enable” to enable the operation of the internal brake transistor.
• Set bit 1 “Brake Extern” to configure the brake to use an external resistor.
• Set bit 2 “Bus Ref High” to select the “h igh” voltage setting as the turn-on point for the Bus Voltage Regulator. With the “high” setting brake operation starts when bus voltage reaches the value
• Set bit 3 “Bus Reg En” to enable the Bus Voltage Regulator. The output of the Bus Voltage Regulator is summed with Par 128
Notes: This parameter was c hanged to non-linkable and bits 5 and 6 were added for future use - not active for use with firmware version 3.001. Remove bits 5 and 6 for firmware version 4.001 - not
used.
415 BusReg/Brake Ref
Sets the “turn-on” voltage for the bus regulator and brakes. Enter a percentage of the high voltage setting for
the voltage class. For example, on a 400…480V AC drive,
Note: The minimum value for frame 5 and up, 600V AC input drives was changed from 110.5000 to 100.0000
for firmware version 4.002.
(1) The minimum value is 100.0000 for frame 5 and up, 600V AC input drives.
416 Brake PulseWatts
Limits the power delivered to the external Dynamic Brake (DB) resistor for one second, without exceeding the
rated element temperature. You may change the value of this parameter only if you have selected an external
DB resistor (set bit 1 “Brake Extern” of Par 414
vendor, you can approximate it with this equation: Par 416
Weight equals the weight of resistor wire element in pounds (not the entire weight of the resistor). Another
equation you can use is: Par 416 [Brake PulseWatts] = Time Constant x Brake Watts; where Time Constant
equals the amount of time to reach 63% of its rated temperature while the maximum power is applied, and
Brake Watts is the peak power rating of the resistor.
Note: The maximum value was changed from 1000000.0000 to 1000000000.0000 for firmware version 3.001.
[BusReg/Brake Ref ], and Bus Voltage Regulator operation starts when bus voltage reaches the value of Par 415 [BusReg/Brake Ref ] plus 4.5%. With the “low” setting, the bus
of Par 415
regulator turns on first at the value set by Par 415 [BusReg/Brake Ref] and then the dynam ic braking turns on when there are any transients above the value set in Par 415 [BusReg/Brake Ref].
effec t, reduces rege nerative torqu e references wh en the bus vo ltage is too h igh.
[Brake/Bus Cnfg]. If this rating is not available from the resistor
[Brake PulseWatts] = 75,000 x Weight, where
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 79
Default:
Min/Max:0-/+2200000000
[Regen Power Lim] and fed into the Power Limit Calculator. It, in
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
111.0000
(1)
/117.8000
110.5000
%
2000.0000
1.0000/1000000000.0000
W
RO Real
RW Real
RW Real
Page 80

Chapter 2 Programming and Parameters
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Para llel D rv
PF 700L
Hi Pwr Strct
Lo Pwr Strct
Default xxxxxxxxxxxx0000
Bit 1514131211109876543210
0 = False
1 = True
A
A
A
A
A
AAA
No. Name
Description
417 Brake Watts
Sets the continuous rated power reference for the Dynamic Brake (DB). You may change the value of this
parameter only if you have selected and external DB resistor (set bit 1 “Brake Extern” of Par 414
Cnfg].
Note: The maximum value was changed from 5000.0000 to 500000.0000 for firmware version 3.001.
418 Brake TP Sel
Enter or write a value to select the drive brake data displayed in Par 41 9 [Brake TP Data].
419 Brake TP Data
Displays the data selected by Par 418 [Brake TP Sel].
420 Pwr Strct Mode
Displays the power structure used in the drive. This is an identifier to the firmware for power structure control.
• Bit 0 “Lo Pwr Strct” = PowerFlex 700S Frame 1 to 6
• Bit 1 “Hi Pwr Strct” = PowerFlex 700S above Frame 6
• Bit 3 “Parallel Drv” = PowerFlex 700S Frame 12
Note: Bit 3 “Parallel Drv” was added for firmware version 3.001.
[Brake/Bus
Values
Default:
Min/Max:
Units:
Default:
Options:
Default:
Min/Max:
100.0000
0.0000/500000.0000
W
0 =
“Zero”
0 =
“Zero” 10 = “Data State”
1 =
“Duty Cycle” 11 = “MC BrakeEnbl”
2 =
“Power Actual” 12 = “1/rdb”
3 =
“Max BodyTemp” 1 3 = “1/th_e b”
4 =
“Max ElemTemp” 14 = “1/ce”
5 =
“BodyTemp Act” 15 = “tamax”
6 =
“ElemTemp Act” 16 = “1/th_ba”
7 =
“BTmpTripStat” 17 = “1/cb”
8 =
“ETmpTripStat” 18 = “DB IGBT Amp”
9 =
“Int DB Ohms”
0.0000
-/+2200000000.0000
Linkable
RW Real
RO Real
Read-Write
Data Type
421 Iqs Integ Freq
Sets the break frequency of the torque producing (q-axis) current regulator. This and Par 422 [Iqs Reg P Gain]
determine the integral gain for the q-axis current regulator. Set by the autotune procedure. Do not change
this value.
422 Iqs Reg P Gain
Sets the proportional gain of the torque producing (q-axis) current regulator. Set by the autotune procedure.
Do not change this value.
423 Iqs Rate Limit
Sets the limit of the rate of change for the torque producing (q-axis) current regulator. Do not change this
parameter. Use Par 35 5 [Iq Rate Limited] to control the q- axis current rate limit.
424 Flux Ratio Ref
Active only in the Field O riented Control (FOC) 2 motor control mode (when Par 485 [Motor Ctrl Mode] equals
1 - “FOC 2”). Provides a scaling factor for the flux producing (d-axis) current reference.
• When ac tive (Par 511
Reference = Par 48 8 [Flux Current] x Par 424 [Flux Ratio Ref ].
• When inactive (Par 511 [FVC2 Mode Config], bit 28 “FlxRatRef Use” is cleared) Flux Producing (d-axis)
Current Reference = Par 488 [Flux Current] below base speed and Flux Producing (d-axis) Current
Reference = Par 488 [Flux Current] x motor base speed/motor speed above base speed.
425 Flux Rate Limit
Sets the limit for the maximum rate of change for flux producing (d-axis) current.
426 Flux Satur Coef
This represents the amount of flux current required to compensate for the flux saturation effect of the motor.
Active only for FOC 2 motor control mode.
427 PM Mtr CEMF Comp
Provides CEMF compensation for the torque producing (q-axis) current in the permanent magnet motor
mode.
428 IReg IGain Fctr
Adjustment for current regulator integral frequency factor (gain).
[FVC2 Mode Config], bit 28 “FlxRatRef Use” is set), Flux Producing (d-axis) Current
Default:
Min/Max:
Units:
Default:
Min/Max:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Default:
Min/Max:11/20
10
0/32767
rad/s
1.0
0.0/100.0
x 10
800.0
0.0/800.0
%/ms
x 10
99.99
12.50/399.99
%
100 = 32767
1.0
0.0/195.3
%/ms
x 10
0.0
0.0/51.3
%
x 10
0
0/100
%
RW 16-bit
Integer
RW 16-bit
Integer
RW 16-bit
Integer
RW 16-bit
Integer
RW 16-bit
Integer
RW 16-bit
Integer
RW 16-bit
Integer
RW 16-bit
Integer
80 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 81

Programming and Parameters Chapter 2
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
No. Name
Description
429 Ids Integ Freq
Sets the break frequency of the flux producing (d-axis) current regulator. This and Par 430 [Ids Reg P Gain]
determine the integral gain for the d-axis current regulator. Set by the autotune procedure. Do not change
this value.
430 Ids Reg P Gain
Sets the proportional gain of the flux producing (d-axis) current regulator. Set by the autotune procedure. Do
not change this value.
431 Test Current Ref
Sets the current reference used for Motor Control (MC) Test Mode.
432 Test Freq Ref
Sets the frequency reference used for Motor Control (MC) Test Mode.
Note: The default value was changed for firmware version 2.003.
433 Test Freq Rate
Sets the rate of change of frequency reference used for Motor Control (MC) Test Mode.
434 Mtr Vds Base
Displays the motor flux producing (d-axis) voltage command when running at nameplate motor speed and
load. This value is determined during the auto-tune procedure. Do not change this value. Used only in FOC
modes.
435 Mtr Vqs Base
Displays the motor torque producing (q-axis) voltage command when running at nameplate motor speed and
load. This value is determined during the auto-tune procedure. Do not change this value. Used only in FOC
modes.
437 Vqs Max
Displays the maximum torque producing (q-axis) voltage allowed on the motor. Adaptation is disabled below
this voltage. This value is determined during the auto-tune procedure. Do not change this value. Used only in
FOC modes.
438 Vds Max
Displays the maximum flux producing (d-axis) voltage allowed on the motor. Adaptation is disabled below
this voltage. This value is determined during the auto-tune procedure. Do not change this value. Used only in
FOC modes.
439 Vqs Min
Displays the minimum torque producing (q-axis) voltage required for motor control adaptation. This value is
determined during the auto-tune procedure. Do not change this value. Used only in FOC modes.
440 Vds Min
Displays the minimum flux producing (d-axis) voltage required for motor control adaptation. Adaptation is
disabled below this voltage. This value is determined during the auto-tune procedure. Do not change this
value.
441 Vds Fdbk Filt
Displays measured filtered motor flux producing (d-axis) voltage.
Values
Default:
Min/Max:
Units:
Default:
Min/Max:
Scale:
Units:
Default:
Min/Max:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max0-8192/0
Default:
Min/Max:00/8192
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:0-/+32767
10
0/32767
rad/s
1.0
0.0/100.0
x 10
%
50.0
0.0/799.9
x 10
1.0
-/+799.9
%
x 10
5.0
0.0/1000.0
%/s
x 10
7971
0/32767
5793
0/32767
246
-/+32767
246
-/+32767
Linkable
Read-Write
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RO 16-bit
RO 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RO 16-bit
Data Type
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
442 Vqs Fdbk Filt
Displays measured filtered motor torque producing (q-axis) voltage.
443 Flux Reg P Gain1
Sets the Proportional (P) gain for the flux regulator. Do not change this value.
444 Flux Reg I Gain
Sets the Integral (I) gain for the flux regulator. Do not change this value.
445 Slip Gain Max
Displays the maximum slip frequency allowed in the motor control. The scaling is in hertz x 256. This value is
determined during the auto-tune procedure. Do not change this value.
446 Slip Gain Min
Displays the minimum slip frequency allowed in the motor control. The scaling is in hertz x 256. This value is
determined during the auto-tune procedure. Do not change this value.
447 Slip Reg P Gain
Sets the Proportional (P) gain for the slip regulator. Do not change this value.
448 Slip Reg I Gain
Sets the Integral (I) gain for the slip regulator. Do not change this value.
Default:
Min/Max:0-/+32767
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:350/32767
Default:
Min/Max:
150
0/32767
350
0/32767
300
100/10000
%
50
0/100
%
100
0/32767
RO 16-bit
Integer
RW 16-bit
Integer
RW 16-bit
Integer
RW 16-bit
Integer
RW 16-bit
Integer
RW 16-bit
Integer
RW 16-bit
Integer
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 81
Page 82

Chapter 2 Programming and Parameters
A
A
A
A
A
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Neg Parametr
Not Rotating
Not Rotating
Reserved
Reserved
WP-VNOn-Wcur
WP-UNOn-U,W
VP-WNOn-Wcur
VP-UNOn-Ucur
UP-WNOn-U,W
UP-VNOn-Ucur
Ground Fault
Ground Fault
UP,VPdevShr t
UP,WPdevShr t
VP,WPdevShr t
UN,VNdevShrt
UN,WNdevShrt
VN,WNdevShrt
Vbus Range
Default xxxxxxxxxxxx000xx000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
A
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Negative Wr
Reserved
Reserved
WP-VNOn-Vvw
WPUN-Vuv,Vvw
VP-WNOn-Vvw
VP-UNOn-Vuv
UPWN-Vuv,Vvw
UP-VNOn-Vuv
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
SensOfstRnge
Default xxxxxxxxxxxxxx0xx000000xxxxxxxx0
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Values
Description
449 SrLss FreqReg Ki
Sets the integral gain of the Frequency Regulator, which estimates motor speed when sensorless feedback is
selected. Do not change this value.
450 SrLss FreqReg Kp
Sets the proportional gain of the Frequency Regulator, which estimates motor speed when sensorless
feedback is selected. Do not change this value.
453 Iu Offset
Sets the current offset correction for the phase U current. This value is set automatically when the drive is not
running and Motor Control (MC) is not faulted. Do not change this value.
454 Iw Offset
Sets the current offset correction for the flux producing (d-axis) current regulator. This value is set
automatically when the drive is not running and Motor Control (MC) is not faulted. Do not change this value.
456 MC Build Number
Displays the build number of the drive's Motor Control (MC) software.
457 MC Firmware Rev
Displays the major and minor revision levels of the drive's Motor Control (MC) software. Changed all values to
three decimal places for firmware version 4.001.
459 IdsCompCoeff Mot
Defines the flux producing current (Ids) command compensation coefficient used during motoring. When this
parameter is set to 1024 the amount of compensation, which is proportional to torque producing current (Iqs)
command, is 100% of the rated flux current at 1 P.U. of Iqs command when the torque producing voltage
(Vqs) regulator is off and Par 510
compensation will be applied when Par 510 [FVC Mode Config], bit 7 = “0”.
Notes: Refer to “Ids Compensation Coefficient Set Up” in the PowerFlex 700S with Phase II Control Reference
Manual, publication PFLEX-RM003
4.001.
460 IdsCompCoeff Reg
Defines the flux producing current (Ids) command compensation coefficient used during regeneration. When
this parameter is set to 1024 the amount of compensation, which is proportional to torque producing current
(Iqs) command, is 100% of the rated flux current at 1 P.U. of Iqs command when the Vqs regulator is off and
[FVC Mode Config], bit 7 “Ids Comp En” = “1”. No Ids command compensation will be applied when
Par 51 0
Par 510 [FVC Mode Config], bit 7 = “0”.
Notes: Refer to “Ids Compensation Coefficient Set Up” in the PowerFlex 700S with Phase II Control Reference
Manual, publication PFLEX-RM003
4.001.
461 SlipReg Off Iqs
Defines the torque producing current (Iqs) reference level below which the slip regulator turns off, when the
slip regulator turn off point is defined as ((Par 461 / 10) + 5) % of the rated Iqs reference. The slip regulator
turn on point is defined as ((Par 461 / 10) + 10) % of the rated Iqs reference with the condition of the Vqs
regulator is turned on.
Note: This parameter was added for firmware version 4.001.
462 VqsReg Off Freq
Defines the output frequency level below which the Vqs regulator turns off, when the Vqs regulator turn off
point is defined as (Par 462 / 10) % of the rated motor frequency. The Vqs regulator turn on point is defined as
((Par 462 / 10) + 2) % of the rated motor frequency.
Note: This parameter was added for firmware version 4.001.
463 MC Diag Error 1
Displays the first diagnostic error encountered by the Motor Control (MC). Errors appear in this parameter in the order in which they occurred.
Note: Bits 7 & 8 have been changed to “Ground Fault” for firmware version 2.004.
[FVC Mode Config], bit 7 “Ids Comp En” = “1”. No Ids command
, for more information. This parameter was added for firmware version
, for more information. This parameter was added for firmware version
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:0-/+32767
Default:
Min/Max:0-/+32767
Default:
Min/Max:00/65535
Default:
Min/Max:
Scale:
Default:
Min/Max:0+/-32767
Default:
Min/Max:0+/-32767
Default:
Min/Max:
Default:
Min/Max:
250
0/32767
350
0/32767
0.000
0.000/655.350
x 10
200
+/-32767
150
0/1000
Linkable
Read-Write
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RO 16-bit
RO 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
Data Type
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
464 MC Diag Error 2
Displays the second diagnostic error encountered by the Motor Control (MC). Errors appear in this parameter in the order in which they occurred.
82 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 83

Programming and Parameters Chapter 2
A
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
IFlux Range
Reserved
Reserved
Reserved
CurrSensor W
Reserved
CurrSensor V
Reserved
CurrSensor U
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Default xxxxxxxxxxxxxx0xxx0x0x0xxxxxxxxx
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Values
Description
465 MC Diag Error 3
Displays the third diagnostic error encountered by the Motor Control (MC). Errors appear in this parameter in the order in which they occurred.
• Bit 9 “CurrSensor U” - indicates a current sensing fault in the U phase power structure of a frame 12 drive.
• Bit 11 “CurrSensor V” - indicates a current sensing fault in the V phase power structure of a frame 12 drive.
• Bit 13 “CurrSensor W” - indicates a current sensing fault in the W phase power structure of a frame 12 drive.
• Bit 17 “IFlux Range” - indicates that the Flux current is above 90% of the motor rated current.
Note: Bits 1 - 7, 10, 12 and 18 were changed to “Reserved”, bits 9, 11, 13 and 17 were changed for firmware version 3.001.
Linkable
Read-Write
Data Type
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 83
Page 84

Chapter 2 Programming and Parameters
A
Options:
0 = MuIqsRef2 43 = FluxR atio4 86 = SlipGainRate 129 = RWVvOut 172 = VqsComp 215 = CurrSnsChck1
1 = SlipRatio 44 = MuFlxRtioRef 87 = FiltSlipGain 130 = RW VwOut 173 = S4096 2.5V 216 = CurrSnsChck3
2 = Ws 45 = RcpFlxRatio1 88 = SlipScale 131 = RWuErr 174 = FreqAdjustFS 217 = CurrSnsChck5
3 = WrEst2 46 = MuIfluxRef 89 = SlipSclShift 132 = RWvErr 175 = Reserved 218 = FrameSize
4 = We 4 7 = MuItestRef 90 = VdsError 133 = RWwErr 176 = FreqIntMonFB 219 = Reserved
5 = VdsCmd 48 = MotVntc 91 = MotorRegen 134 = RW VuOut2 177 = MtrCntrlSel 220 = Reserved
6 = VqsCmd 49 = BaseSlip 92 = VqsSlwRtCLim 135 = RWVvOut2 178 = WeMon 221 = Reserved
7 = VuCmd1 5 0 = VbusFdbk2 93 = MotorVlts 136 = RWVwOut2 179 = BusUtlMtrVlt 222 = PowerMon
8 = VvCmd1 51 = VdsFdbk2 94 = B usUtil 137 = RWPosState 180 = IqsCmd2 223 = RawIwFdbk2
9 = VwCmd1 52 = VqsFdbk2 95 = IdsCompMon 138 = RWNegState 181 = PosErrSum 224 = VqsFbFltrCom
10 = IuFdbk 53 = VdsSpdVltFlt 96 = IqsLimit 139 = BusDropVolts 182 = NegErrSum 225 = VqsErrorComm
11 = IwFdbk 54 = WrEst1 97 = VqsSlwRtCnt 140 = Re coverVolts 183 = Reserved 226 = ReconswFreq
12 = IdsFdbk 55 = MuTestFrqRef 98 = VqsErrMon 141 = DbDuty 184 = VLmtVqsRef 227 = ReconAngleAc
13 = IqsFdbk 56 = TestFrqRef 99 = VqsNoErrCnt 142 = VdsFdbkFltr 185 = VRefVqsRefNm 228 = VsCmdAngleVf
14 = VdsFdbk 57 = FluxFltrN_1 100 = VqsIdsCmd 143 = VqsFdbkFltr 186 = VRefRsIqsNm 229 = ReconFreqInt
15 = VuvFdbk 58 = PrchgDlayCtr 101 = VqsMaxMotor 144 = VbusFdbkFltr 187 = VRefVqsSpdVN 230 = SpeedRef
16 = VvwFdbk 59 = PrchTimOutCr 102 = VqsMaxVbus 145 = VbusMemory 188 = EconoVoltGn 231 = CurFbkIdsFbk
17 = VqsFdbk 60 = PrchPilotCtr 103 = FreqMinFB 146 = VpEnc0VelFbk 189 = F Output Fre 2 32 = CurFbkIqsFbk
18 = IdsCmd 61 = TrqEnableCtr 104 = FreqMaxFB 147 = VpEnc1VelFbk 190 = TrqCreflqsCm 233 = VqsThetaEst
19 = IqsRatio 6 2 = MuTscan1 105 = IdsCmdFilter 148 = VPOpt0VelFbk 191 = Snk Wr 234 = VdsThetaEst
20 = MuIqsRef 63 = ErStatFromCp 106 = DelFreqIntFB 149 = VPO pt1VelFbk 192 = SrLssWrAve 235 = RecnSwitch
21 = IqsCmd 64 = FlxCurRteOut 107 = VqsError 150 = BitSe lect1 193 = CurFbkIqsFbk 236 = VqsFbTransf
22 = We2 65 = ThetaE 108 = SlipBrkErrFB 151 = BitSelec t2 194 = ACRIqsErr 237 = VdsFbTransf
23 = VuTd 66 = SinThetaE1 109 = FastBrkOnFB 152 = SrLssWeEst2 195 = CrefsqIdsCmd 238 = BusLimitVBEr
24 = VvTd 67 = SinThetaE2 110 = FreqOutput 153 = MuIqsRef2 196 = CurFbkIdsFbk 239 = ParDecelRtMC
25 = VwTd 68 = SinThetaE3 111 = AbsFreqOut 154 = EstThetaByMV 197 = VqsCmd700B 240 = ACRIqsRef
26 = VuCmd2 69 = SinThetaE4 112 = TestMark70 155 = ETVdsFbkA 198 = VdsCmc700B 241 = ACRIqsCmd
27 = VvCmd2 70 = SinThetaE5 113 = TestMark71 156 = ETVqsFbkA 199 = VqsRefNom 242 = IqsCmdFltr
28 = VwCmd2 71 = Si nThetaE6 114 = TestMark72 157 = ETVdsFbkS 200 = VqsRsIqsNom 243 = ISpdCmd
29 = Kpwm 72 = ThetaEcor 115 = TestMark73 158 = ETVqsFbkS 201 = VqsSpdVltNom 244 = AccDecRate
30 = Vds_cemf 73 = SinThtaEcor1 116 = TestMark74 159 = ETAtanVqVd 202 = VltLmtVqsRef 245 = RecThetaEx4
31 = Vqs_cemf 74 = SinThtaEcor2 117 = TestMark75 160 = ETByMtrVDfr 203 = IdsFbkDeriv 246 = RecVqsFdbk
32 = VdsCmd2 75 = SinThtaEcor3 118 = TestMark76 161 = VelRef2 204 = VdsRefNom 247 = RecVdsFdbk
33 = VqsCmd2 76 = SinThtaEcor4 119 = TestMark76 162 = VelOutput 205 = VdsRsIdsNom 248 = VdeFilter
34 = IdsIntegral 77 = MuIR ef2B 120 = TestMark78 163 = Flux Up Time 206 = VdsSpdVltNom 249 = VqsFdbkTrans
35 = IqsIntegral 78 = Sp dFdbk 121 = TestMark79 164 = FrameSize 207 = VltLmtVdsRef 250 = VdsFdbkTrans
36 = DcBus 79 = SpdIntegral 122 = TestMark7A 165 = VdTargetMon 208 = IdsFbkDeriv 251 = Excitation
37 = AGnd 80 = SpdPrportnal 123 = TestMark7B 166 = ThetaELiner 209 = VuvFbkOffset 252 = ExciteStatus
38 = Wr2 81 = SpdPI 124 = TestMark7C 167 = PprCntD fcOt 210 = VvwFbkOff set 253 = CommIdsCount
39 = FluxRatio1 82 = SpdRef 125 = TestMark7D 168 = PprCntDfcTh 211 = IuFbkOffset 254 = ThetaEsample
40 = VbusFdbk 83 = SlipGainEst 126 = TestMark7E 169 = LinearPprCnt 212 = IwFbkOf fset 255 Reserved
41 = FluxRatio2 84 = LatchSlipGin 127 = TestMark7F 170 = ActiveFdbk 213 = KSlipNP
42 = FluxRatio3 85 = Ws2 128 = RWVuOut 171 = VdsComp 214 = IUnbalanceSt
A
No. Name
Values
Description
466 MC TP1 Select
Enter a value to select Moto r Control (MC) data displayed in Par 467 [MC TP1 Value] and Par 468 [MC TP1 Bit]. Par 467 [MC TP1 Value] and Par 468 [MC TP1 Bit] are diagnostic tools you can use to
view internal drive parameters.
The default value is option 0 “MuIqsRef2”.
Notes: Options 209 - 212 were added for firmware version 2.004. Options 213 - 254 were added for firmware version 3.001. Changed the following selections for firmware 4.001: 84,86, 87, 88, 89,
90, 91, 92, 95, 97, 98, 99, 103, 104, 105, 106, 108, 109, 110, 111, 163, 16 4, 165, 174, 175, 176, 177, 178, 179, 181, 182, 183. 222, 223, 224, 225, 226, 227, 228, 229, 230, 231, 232, 233, 234, 236,
237, 253. Added option 163 “Flux Up Time” for firmware version 4.002.
467 MC TP1 Value
Displays the data selected by Par 46 6 [MC TP1 Select]. This display should only be used if the selected value is
integer data. This parameter is a diagnostic tool you can use to view internal drive parameters.
84 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Default:
Min/Max:0-/+2147483648
Linkable
Read-Write
RO 32-bit
Data Type
Integer
Page 85
Programming and Parameters Chapter 2
A
A
A
A
No. Name
Description
468 MC TP1 Bit
Displays the data selected by Par 46 6 [MC TP1 Select]. This display should only be used if the selected value is
bit-enumerated data. Par 468 [MC TP1 Bit] is a diagnostic tool you can use to view internal drive parameters.
469 FVC CEMF Comp
Displays the current regulator feedforward compensation. Do not change this value.
470 Flux Reg P Gain2
Displays the additional proportional gain used at the start of Bus voltage limited field weakening. Do not
change this value.
471 Estimated Torque
Displays the calculated motor shaft torque.
Notes: This parameter was added for firmware version 2.003. The Units and Scale information were added for
firmware version 4.002.
472 PreCharge Delay
Adjusts the delay between the time all other precharge conditions have been met and the time the drive
leaves the precharge state. Can be used to control the sequence of precharge completion in a drive system.
The maximum value of this parameter is calculated as follows:
Par 472 [PreCharge Delay] = Par 41 0
[PreChrg TimeOut] - 1. 0 second.
Values
Default:
Min:
Max:
Default:
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
00000000000000000000000000000000
00000000000000000000000000000000
11111111111111111111111111111111
0
0/100
%
1000
0/32767
0.0
+/-8.0 P.U.
P. U .
1.0 = 100% of the Motor Torque
2.0
0.0/Calculated
s
Linkable
Read-Write
RO 32-bit
RW 16-bit
RW 16-bit
RO Real
RW 16-bit
Data Type
Boolean
Integer
Integer
Integer
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 85
Page 86

Chapter 2 Programming and Parameters
A
Options:
0 = MuIqsRef2 43 = FluxR atio4 86 = SlipGainRate 129 = RWVvOut 172 = VqsComp 215 = CurrSnsChck1
1 = SlipRatio 44 = MuFlxRtioRef 87 = FiltSlipGain 130 = RW VwOut 173 = S4096 2.5V 216 = CurrSnsChck3
2 = Ws 45 = RcpFlxRatio1 88 = SlipScale 131 = RWuErr 174 = FreqAdjustFS 217 = CurrSnsChck5
3 = WrEst2 46 = MuIfluxRef 89 = SlipSclShift 132 = RWvErr 175 = Reserved 218 = FrameSize
4 = We 4 7 = MuItestRef 90 = VdsError 133 = RWwErr 176 = FreqIntMonFB 219 = Reserved
5 = VdsCmd 48 = MotVntc 91 = MotorRegen 134 = RW VuOut2 177 = MtrCntrlSel 220 = Reserved
6 = VqsCmd 49 = BaseSlip 92 = VqsSlwRtCLim 135 = RWVvOut2 178 = WeMon 221 = Reserved
7 = VuCmd1 5 0 = VbusFdbk2 93 = MotorVlts 136 = RWVwOut2 179 = Reserved 222 = PowerMon
8 = VvCmd1 51 = VdsFdbk2 94 = B usUtil 137 = RWPosState 180 = IqsCmd2 223 = RawIwFdbk2
9 = VwCmd1 52 = VqsFdbk2 95 = IdsCompMon 138 = RWNegState 181 = Reserved 224 = VqsFbFltrCom
10 = IuFdbk 53 = VdsSpdVltFlt 96 = IqsLimit 139 = BusDropVolts 182 = Reserved 225 = VqsErrorComm
11 = IwFdbk 54 = WrEst1 97 = VqsSlwRtCnt 140 = Re coverVolts 183 = Reserved 226 = ReconswFreq
12 = IdsFdbk 55 = MuTestFrqRef 98 = VqsErrMon 141 = DbDuty 184 = VLmtVqsRef 227 = ReconAngleAc
13 = IqsFdbk 56 = TestFrqRef 99 = VqsNoErrCnt 142 = VdsFdbkFltr 185 = VRefVqsRefNm 228 = VsCmdAngleVf
14 = VdsFdbk 57 = FluxFltrN_1 100 = VqsIdsCmd 143 = VqsFdbkFltr 186 = VRefRsIqsNm 229 = ReconFreqInt
15 = VuvFdbk 58 = PrchgDlayCtr 101 = VqsMaxMotor 144 = VbusFdbkFltr 187 = VRefVqsSpdVN 230 = SpeedRef
16 = VvwFdbk 59 = PrchTimOutCr 102 = VqsMaxVbus 145 = VbusMemory 188 = EconoVoltGn 231 = CurFbkIdsFbk
17 = VqsFdbk 60 = PrchPilotCtr 103 = FreqMinFB 146 = VpEnc0VelFbk 189 = F Output Fre 2 32 = CurFbkIqsFbk
18 = IdsCmd 61 = TrqEnableCtr 104 = FreqMaxFB 147 = VpEnc1VelFbk 190 = TrqCreflqsCm 233 = VqsThetaEst
19 = IqsRatio 6 2 = MuTscan1 105 = IdsCmdFilter 148 = VPOpt0VelFbk 191 = Snk Wr 234 = VdsThetaEst
20 = MuIqsRef 63 = ErStatFromCp 106 = DelFreqIntFB 149 = VPO pt1VelFbk 192 = SrLssWrAve 235 = RecnSwitch
21 = IqsCmd 64 = FlxCurRteOut 107 = VqsError 150 = BitSe lect1 193 = CurFbkIqsFbk 236 = VqsFbTransf
22 = We2 65 = ThetaE 108 = SlipBrkErrFB 151 = BitSele ct2 194 = ACRIqsErr 237 = VdsFbTransf
23 = VuTd 66 = SinThetaE1 109 = FastBrkOnFB 152 = SrLssWeEst2 195 = CrefsqIdsCmd 238 = BusLimitVBEr
24 = VvTd 67 = SinThetaE2 110 = FreqOutput 153 = MuIqsRef2 196 = CurFbkIdsFbk 239 = ParDecelRtMC
25 = VwTd 68 = SinThetaE3 111 = AbsFreqOut 154 = EstThetaByMV 197 = VqsCmd700B 240 = ACRIqsRef
26 = VuCmd2 69 = SinThetaE4 112 = TestMark70 155 = ETVdsFbkA 198 = VdsCmc700B 241 = ACRIqsCmd
27 = VvCmd2 70 = SinThetaE5 113 = TestMark71 156 = ETVqsFbkA 199 = VqsRefNom 242 = IqsCmdFltr
28 = VwCmd2 71 = Si nThetaE6 114 = TestMark72 157 = ETVdsFbkS 200 = VqsRsIqsNom 243 = ISpdCmd
29 = Kpwm 72 = ThetaEcor 115 = TestMark73 158 = ETVqsFbkS 201 = VqsSpdVltNom 244 = AccDecRate
30 = Vds_cemf 73 = SinThtaEcor1 116 = TestMark74 159 = ETAtanVqVd 202 = VltLmtVqsRef 245 = RecThetaEx4
31 = Vqs_cemf 74 = SinThtaEcor2 117 = TestMark75 160 = ETByMtrVDfr 203 = IdsFbkDeriv 246 = RecVqsFdbk
32 = VdsCmd2 75 = SinThtaEcor3 118 = TestMark76 161 = VelRef2 204 = VdsRefNom 247 = RecVdsFdbk
33 = VqsCmd2 76 = SinThtaEcor4 119 = TestMark76 162 = VelOutput 205 = VdsRsIdsNom 248 = VdeFilter
34 = IdsIntegral 77 = MuIR ef2B 120 = TestMark78 163 = Flux Up Time 206 = VdsSpdVltNom 249 = VqsFdbkTrans
35 = IqsIntegral 78 = Sp dFdbk 121 = TestMark79 164 = FrameSize 207 = VltLmtVdsRef 250 = VdsFdbkTrans
36 = DcBus 79 = SpdIntegral 122 = TestMark7A 165 = VdTargetMon 208 = IdsFbkDeriv 251 = Excitation
37 = AGnd 80 = SpdPrportnal 123 = TestMark7B 166 = ThetaELiner 209 = VuvFbkOffset 252 = ExciteStatus
38 = Wr2 81 = SpdPI 124 = TestMark7C 167 = PprCntD fcOt 210 = VvwFbkOff set 253 = CommIdsCount
39 = FluxRatio1 82 = SpdRef 125 = TestMark7D 168 = PprCntDfcTh 211 = IuFbkOffset 254 = ThetaEsample
40 = VbusFdbk 83 = SlipGainEst 126 = TestMark7E 169 = LinearPprCnt 212 = IwFbkOf fset 255 Reserved
41 = FluxRatio2 84 = LatchSlipGin 127 = TestMark7F 170 = ActiveFdbk 213 = KSlipNP
42 = FluxRatio3 85 = Ws2 128 = RWVuOut 171 = VdsComp 214 = IUnbalanceSt
A
No. Name
Values
Description
473 MC TP2 Select
Enter a value to select Moto r Control (MC) data displayed in Par 474 [MC TP2 Value] and Par 468 [MC TP1 Bit]. Par 474 [MC TP2 Value], and Par 468 [MC TP1 Bit] are diagnostic tools you can use to
view internal drive parameters. This parameter should not be changed by the user.
The default value is option 0 “MuIqsRef2”.
Note: This parameter was added for firmware version 2.003. Added option 163 “Flux Up Time” for firmware version 4.002.
474 MC TP2 Value
Displays the data selected by Par 47 3 [MC TP2 Select]. This display should only be used if the selected value is
integer data. This parameter is a diagnostic tool you can use to view internal drive parame ters. This parameter
should not be changed by the user.
Note: This parameter was added for firmware version 2.003.
86 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Default:
Min/Max:
0.0
+/- 2147483648
Linkable
Read-Write
RO 32-bit
Data Type
Integer
Page 87

Programming and Parameters Chapter 2
A
Options:
0 = IqsRef2 14 = DcBus 29 = DbDuty 43 = RotorFluxEst 57 = VbusDrop 71 = HH OverLoad
1 = Ws 15 = VbusFdbk 30 = VelFdbkEnc0 44 = Ws2 58 = VdsMax 72 = HH Precharge
2 = We 16 = VbusFdbkFltr 31 = VelFdbkEnc1 45 = BusDropVolts 59 = VbusLow 73 = HH Fan Alarm
3 = We2 17 = VbusMemory 32 = VdsCmd2 46 = RecoverVolts 60 = VbusRising 74 = HH BusComm
4 = VdsCmd 18 = Kpwm 33 = VelFdbkOpt1 47 = TestDtoA0 61 = PreChrgDone 75 = HH HW Incomp
5 = VqsCmd 19 = ThetaE 34 = Reserved 48 = TestDtoA1 62 = FieldWeak 76 = HH GateShort
6 = VdsFdbk 20 = FldWeakActiv 35 = Reserved 49 = TestDtoA2 63 = Reserved
7 = VqsFdbk 21 = MtrFlxPU 36 = Reser ved 50 = TestDtoA3 64 = DynamBrakeOn
8 = l uFdbk 23 = SlipGainFltr 37 = Reser ved 51 = R ideThruActv 65 = Reserved
9 = IwFdbk 24 = SlipVdsCmd 38 = TorqueEst 52 = PreChrgReqVp 66 = MCStatusMon
10 = IdsFdbk 25 = MotorVolts 39 = TorqueEstFlt 53 = Re served 67 = MCStatus1
11 = IqsFdbk 26 = BusUtil 40 = Reserved 54 = Reserved 68 = HH OverCurr
12 = IdsCmd 27 = IqsLimit 41 = PowerCalc 55 = Reserved 69 = HH BusOvrVlt
13 = IqsCmd 28 = VqsIdsCmd 42 = TorqueCmd 56 = TorqTrimActv 70 = HH Tr Desat
A
A
A
A
A
A
A
A
A
A
No. Name
Values
Description
475 MC FaultTPSelect
Enter or write a value to select the Motor Control (MC) Fault Data displayed in Par 476 [MC FaultTP Value]. This parameter should not be changed by the user.
Notes: This parameter was added for firmware version 2.003. The value for option 67 was changed from “HH GateShort” to “MCStatus1” for firmware version 2.004. Values 68 - 76 were added for
firmware version 3.001.
476 MC FaultTP Value
Displays the data selected by Par 475 [MC FaultTPSelect]. This parameter should not be changed by the user.
Note: This parameter was added for firmware version 2.003.
477 Est Theta Delay
Active only in Permanent Magnet motor mode (when Par 485 [Motor Ctrl Mode] equals 2 − “PMag Motor”).
Provides a delay for the function that compares the estimated rotor position and the data from the position
sensor.
478 VPL Mem Password
VPL memory password.
Note: This parameter was added for firmware version 2.003.
479 VPL Mem Address
VPL memory address.
Note: This parameter was added for firmware version 2.003.
480 VPL Mem Data Int
VPL memory data integer.
Note: This parameter was added for firmware version 2.003.
481 VPL Mem Data Flt
VPL memory data filter.
Note: This parameter was added for firmware version 2.003.
482 VPL Mem Data Bit
VPL memory data bit.
Note: This parameter was added for firmware version 2.003.
483 VPL Mem Link Int
VPL memory link integer.
Note: This parameter was added for firmware version 2.003.
484 VPL Mem Link Flt
VPL memory link filter.
Note: This parameter was added for firmware version 2.003.
485 Motor Ctrl Mode
Enter a value to select the operating mode for the Motor Control (MC).
• Value 0 - Field Oriented Control (FOC) is induction motor control with voltage adaptation.
• Value 1 - Field Oriented Control 2 (FOC 2) is induction motor control with temperature adaptation. (This
option is used only for motors manufactured by Reliance Electric - Japan.)
• Value 2 - Permanent Magnet Motor Control (Pmag Motor) is permanent magnet motor operation.
• Value 3 - V/Hz is volts per hertz motor control.
• Value 4 - Test is the test mode.
486 Rated Slip Freq
Displays the control slip frequency, determined from Par 3 [Motor NP Her tz] and Par 4 [Motor NP RPM].
Measured and updated by the autotune procedure. Do not change this value.
Note: Changed the attributes to allow changing this parameter while the drive is running for firmware version
3.001.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 87
Default:
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:0+/-2147483648
Default:
Min/Max:00 - 4294967295
Default:
Min/Max:32+/-2147483648
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max: +/-2147483648
Default:
Min/Max:
Default:
Options:
Default:
Min/Max:
Units:
Scale:
0.0
+/- 2147483648
ms
10
2/1024
1.25 RW Real
1.25 RW 32-bit
1.25000 RO Real
0 =
“FOC”
0 =
“FOC” 3 = “V/Hz”
1 =
“FOC 2” 4 = “ Test”
2 =
“PMag Motor”
0.470
0.000/32.000
Hz
x 1000
Linkable
Read-Write
RO 32-bit
RW 16-bit
RW 32-bit
RW 32-bit
RW 32-bit
RO 32-bit
RW 16-bit
Data Type
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Page 88

Chapter 2 Programming and Parameters
A
A
A
A
A
A
A
A
A
A
A
A
AAA
No. Name
Description
487 Motor NTC Coef
Defines a coefficient used to calculate the rotor temperature from the measured stator temperature. Used only
in Field Oriented Control - 2 (FOC2) mode. See Par Par 485
488 Flux Current
Specifies the magnetizing current that produces rated flux in the motor in a per unit (percent representation).
Measured by the auto-tune procedure. Do not change this value.
489 Flx CurFdbk (Id)
Displays flux producing (d-axis) current feedback.
490 StatorInductance
Displays the sum of the stator and cable inductances of the motor in per unit (percent representation), as
determined by the auto-tune procedure. Scaled to percent of rated motor impedance. Do not change this
value.
Note: the default value was changed from 8192 to 4096 for firmware version 3.001.
491 StatorResistance
Displays the sum of the stator and cable resistances of the motor in per unit (percent representation), as
determined by the auto-tune procedure. Scaled to percent of rated motor impedance. Do not change this
value.
492 Leak Inductance
Displays the sum of the motor stator and rotor leak inductance, and motor cable inductances in per unit
(percent representation), as determined by the auto-tune procedure. Scaled to percent of rated motor
impedance. Do not change this value.
[Motor Ctrl Mode].
Values
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
100
50/200
%
30.00
0.00/75.00
%
x 100
0.0000
-/+8.0000 P.U.
P. U .
100.0
0.00/799.99
%
100 = 4096
1.00
0.00/100.00
%
100 = 8192
20.00
0.00/100.00
%
100 = 8192
Linkable
Read-Write
RW 16-bit
RW 16-bit
RO Real
RW 16-bit
RW 16-bit
RW 16-bit
Data Type
Integer
Integer
Integer
Integer
Integer
493 Leak Indc Satur1
Displays the leakage inductance correction for the first overload level as determined by the autotune
procedure.
494 Leak Indc Satur2
Displays the leakage inductance correction for the first overload level as determined by the auto-tune
procedure.
495 Iqs Command
Displays the torque producing (q-axis) current command.
496 Ids Command
Displays the flux producing (d-axis) current command.
497 Vqs Command
Displays the command for initiation of voltage on the torque producing axis (q-axis).
498 Vds Command
Displays the command for initiation of voltage on the flux producing axis (d-axis).
499 Trq CurFdbk (Iq)
Displays torque producing (q-axis) current feedback.
500 Bus Util Limit
Sets the maximum allowed bus voltage utilization for the Motor Control. Do not change this value. Higher
values may result in control instability or over-current faults.
501 Torque En Dly
Sets the delay between the time the drive is enabled and the time the Motor Control applies torque.
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
100.00
25.00/100.00
%
100.00
25.00/100.00
%
0.0
-/+800.0
%
x 10
0.0
-/+800.0
%
x 10
0
-/+200
%
100 = 8192
0
-/+200
%
100 = 8192
0.0000
-/+8.0000
P. U .
90.0
0.0/100.0
%
100 = 8192
100
0/32767
ms
100 = 8192
RW 16-bit
Integer
RW 16-bit
Integer
RO 16-bit
Integer
RO 16-bit
Integer
RO 16-bit
Integer
RO 16-bit
Integer
RO Real
RW 16-bit
Integer
RW 16-bit
Integer
88 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 89

Programming and Parameters Chapter 2
A
A
A
A
A
A
A
A
ATT EN TI ON : Do not modify this parameter. Motor/Drive instabilities and damage may result.
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
SyncTrans En
SrLss RdThru
VltMinorLpEn
SoftAdptGain
Reserved
Reserved
ManuVltOffst
ManuCurOffst
LwSpdRflctWv
Slip Reg En
SlipGain Est
SlipRsCompEn
SlipPrloadEn
SlipSlewRtEn
ReflWaveComp
BusGain Comp
Ids Comp En
Flux Reg Use
Flux Reg En
SlipTuneDone
Fast Flu xDsb l
Reserved
Reserved
Reserved
Default xxxxxxxx1010xx000110001101100xxx
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Description
502 Rotor Resistance
Displays rotor resistance, as determined by the auto-tune procedure. Scaled to percent of rated motor
impedance. Do not change this value.
503 Current Reg BW
Sets the bandwidth for the current regulator. Par 40 2 [PWM Frequency] limits the maximum value. Reducing
the value reduces current regulator over-shoot.
504 PM AbsEncd Offst
Determined by auto-tune procedure.
505 PM TestWait Time
Defines the time interval used for the automated measurement of Par 504 [PM AbsEncd Offst] for a Permanent
Magnet (PM) motor.
506 PM Test Idc Ramp
Defines the ramp rate of the Flux Producing (d-axis) current reference that is used for the automated
measurement of Par 504 [PM AbsEncd Offst] for a Permanent Magnet (PM) motor.
507 PM Test FreqRamp
Defines the ramp rate of the frequency reference that is used for the automated measurement of Par 504 [PM
AbsEncd Offst] for a Permanent Magnet (PM) motor.
Values
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Default:
Min/Max:00/65535
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
1.00
0.00/100.00
%
100 = 8192
600
100/30000
rad/s
2000
500/5000
ms
0.1
0.0/195.3
%/ms
x 10
0.1
0.0/195.3
%/ms
x 10
Linkable
Read-Write
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
Data Type
Integer
Integer
Integer
Integer
Integer
Integer
508 PM Test Freq Ref
Defines the frequency reference that is used for the automated measurement of Pa r 504 [PM AbsEncd Offst] for
a Permanent Magnet (PM) motor.
509 PM Test I Ref
Defines the amplitude of the Flux Producing (d-axis) current reference that is used for the automated
measurement of Par 504 [PM AbsEncd Offst] for a Permanent Magnet (PM) motor.
510 FVC Mode Config
Configures Field Oriented Control (FOC) operation.
• Bit 4 “SlipTuneDone” when set, the value in Par 486
system. When the Slip Tune is completed, this bit will be automatically be set and Par 486 will be updated.
• Bit 7 “Ids Comp En” setting this bit runs the Ids test, to establish the initial flux current level for the motor, and the inertia test (even if already run).
• Bit 12 “SlipRsCompEn” when set, the stator resistance will be compensated based on the output of the slip regulator.
• Bit16 “ManuCurOffst” when set, Par 4 53
is not set (default) the phase U and W current feedback offset values are automatically updated when the drive is in a stop condition except during the first 10 seconds of the stop condition.
• Bit17 “ManuVltOffst” when this bit is set, Par 549
• Bit 23 “SyncTrans En” when set (default), the synchronous transfer algorithm using voltage feedback data is active.
Notes: Bit changes were made for firmware version 2.003. Bits 10 and 11 were added for firmware version 3.001. Changed bit 3 from “Reserved” to “FastFluxDsbl” for firmware version 3.003. Added
bits 4, 7, 12, 16, 17 and 23 for firmware version 4.001.
[Rated Slip Freq] is used as the slip gain before the slip regulator becomes active, after power is cycled, or when the drive is reset by the
[Iu Offset] is used as the phase U current feedback offset value and Par 454 [Iw Offset] is used as the phase W current feedback offset value. When this bit
[Vuv Fdb k Offset] i s used as th e UV voltage feedback of fset value a nd Par 55 0 [Vvw Fdbk Offset] is used as the VW voltage feedback off set value.
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
10.0
-/+799.9
%
x 10
30.0
0.0/799.9
%
x 10
RW 16-bit
Integer
RW 16-bit
Integer
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 89
Page 90
Chapter 2 Programming and Parameters
ATT EN TI ON : Do not modify this parameter. Motor/Drive instabilities and damage may result.
Options
LnfSnsr Dir
LnfSnsr Use
Reserved
FlxRatRf Use
NTC Active
Reserved
Reserved
CEMF We Use
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
BusGain Comp
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Default 00x01xx0xxxxxxxxxxxxxxx1xxxxxxxx
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
ATT EN TI ON : Do not modify this parameter. Motor/Drive instabilities and damage may result.
Options
LinrSnsr Dir
LinrSnsr Use
Reserved
FlxRatRf Use
Reserved
Reserved
Reserved
CEMF We Use
Reserved
Reserved
Reserved
Reserved
PMVltRegUse
PMVltRegEn
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
ReflWaveComp
BusGain Comp
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
PM Cogging
Default 00x0xxx0xxxx11xxxxxxxx11xxxxxxx0
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
ATT EN TI ON : Do not modify this parameter. Motor/Drive instabilities and damage may result.
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
VltMinorLp En
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
ReflWaveComp
BusGain Comp
Reserved
Reserved
Reserved
Reserved
Fast Flu xDs bl
Reserved
Reserved
Reserved
Default xxxxxxxxxx1xxxxxxxxxxx11xxxx1xxx
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Values
Description
511 FVC2 Mode Config
Configures Field Oriented Control - 2 (FOC2) operation.
Notes: Bit changes were made for firmware version 2.003. This parameter was changed to non-linkable for firmware version 3.001.
512 PMag Mode Config
Configures Permanent Magnet (PM) operation.
• Bit 0 “PM Cogging” when set, enables torque ripple compensation.
• Bit 9 “ReflWaveComp” when set, Reflected Wave Correction is enabled.
Notes: Bit changes were made for firmware version 2.003. This parameter was changed to non-linkable for firmware version 3.001. Added bit 9 for firmware version 4.001. Bit 0 “PM Cogging” was
added for firmware version 5.002.
Linkable
Read-Write
Data Type
513 V/Hz Mode Config
Configures V/Hz control mode operation.
Notes: This parameter was added for firmware version 2.003. Changed bit 3 from “Reserved” to “FastFluxDsbl” for firmware version 3.003. Bits 8, 9, and 21 were changed to be not changeable while
the drive is running.
90 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 91

Programming and Parameters Chapter 2
ATTENTION: Do not modify this parameter. Motor/Drive instabilities and damage may result.
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
ReflWave Comp
BusGain Comp
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Default xxxxxxxxxxxxxxxxxxxxxx11xxxxxxxx
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
ATTENTION: Do not modify this parameter. Motor/Drive instabilities and damage may result.
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
NoRotateTune
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
NoTimeLimit
FluxCurrTune
Reserved
Default xxxxxx0xxxxxx00x
Bit 1514131211109876543210
0 = False
1 = True
ATTENTION: Do not modify this parameter. Motor/Drive instabilities and damage may result.
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
NoRotateTune
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Default xxxxxx0xxxxxxxxx
Bit 1514131211109876543210
0 = False
1 = True
No. Name
Values
Description
514 Test Mode Config
Configures the Motor Control (MC) test mode.
Note: This parameter was changed to non-linkable for firmware version 3.001.
515 FVC Tune Config
Configures FOC tuning mode.
• Bit 1 “FluxCurrTune” when set, the value in Par 488 [Flux Current] is used as the flux current at the beginning of the magnetic inductance test. When this bit is not set (default), an automatically
calculated (preset) flux current is used as the flux current at the beginning of the magnetic inductance test.
• Bit 2 “NoTimeLimit” when set, the time limit fault detection during the magnetizing inductance test is disabled.
Note: Bits 1 and 2 were added for firmware version 4.001.
Linkable
Read-Write
Data Type
516 FVC2 Tune Config
Configures FOC 2 tuning mode.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 91
Page 92
Chapter 2 Programming and Parameters
ATTENTION: Do not modify this parameter. Motor/Drive instabilities and damage may result.
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
IndTestA set
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Default xxxxxxx0xxxxxxxx
Bit 1514131211109876543210
0 = False
1 = True
A
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
PwrDiagFltPt
PM EncOffset
Rot Dir Chk
CommCntEn cls
Comm Count
CommParamCal
CommLmEn cles
Comm Lm Me as
Comm Sigm aLs
Comm Rs Me as
PDgTrWP-VNOn
PDgTrWP-UNOn
PDgTrVP-WNOn
PDgVP-UNOn
PDgUP-WNOn
PDgTrUP-VNOn
PDgTrUNWNOn
PDgTrUPWPOn
Pdiag TrWNO n
Pdiag TrVNOn
Pdiag TrUNO n
Pdiag TrWPO n
Pdiag TrVPOn
Pdiag TrUPO n
Pdg VbusSens
Default xxxxxxx0000000000000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
A
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
PwrDiagFltPt
PM EncOffset
Rot Dir Chk
CommCntEn cls
Comm Count
CommParamCal
CommLmEn cles
Comm Lm Me as
Comm Sigm aLs
Comm Rs Me as
PDgTrWP-VNOn
PDgTrWP-UNOn
PDgTrVP-WNOn
PDgVP-UNOn
PDgUP-WNOn
PDgTrUP-VNOn
PDgTrUNWNOn
PDgTrUPWPOn
Pdiag TrWNOn
Pdiag TrVNOn
Pdiag TrUNOn
Pdiag TrWPOn
Pdiag TrVPOn
Pdiag TrUPOn
Pdg VbusSens
Default xxxxxxx0000000000000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
A
A
A
A
A
No. Name
Description
517 PMag Tune Config
Configures Permanent Magnet Motor tuning mode.
518 MC Diag Status
Indicates the status of the MC diagnostic tests.
519 MC Diag Done
Indicates which MC diagnostic tests are completed.
Values
Linkable
Read-Write
Data Type
520 PM Q Inductance
Indicates the percent-per unit inductance of the motor stator in the torque producing (q-axis).
521 PM D Inductance
Indicates the percent-per unit inductance of the motor stator in the flux producing (d-axis).
522 PM Stator Resist
Indicates the percent-per unit resistance of the motor stator.
523 PM Mtr CEMF Coef
Indicates the coefficient for Counter Electro Motive Force (CEMF) voltage, normalized to base motor speed.
525 Slip Ratio
Used by the Field Oriented Control - 2 (FOC2) mode. Indicates the present operating slip frequency at 100%
Torque Producing Current (Iqs) scaled to hertz x 100.
526 Stator Frequency
Displays stator frequency as a percentage of Par 3 [Motor NP Hertz].
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
Default:
Min/Max:
Units:
Scale:
20.00
0.00/399.99
%
100 = 8192
20.00
0.00/399.99
%
100 = 8192
1.50
0.00/100.00
%
100 = 8192
89.99
0.00/399.99
%
100 = 8192
0.00
0.00/327.67
Hz
x 10
0.0
-/+800.0
%
x 10
RW 16-bit
Integer
RW 16-bit
Integer
RW 16-bit
Integer
RW 16-bit
Integer
RO 16-bit
Integer
RO 16-bit
Integer
92 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 93
Programming and Parameters Chapter 2
A
A
A
A
A
A
A
A
A
A
A
A
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Bus Volt Lim
Current Lim
Default xxxxxxxxxxxxxx00
Bit 1514131211109876543210
0 = False
1 = True
A
A
No. Name
Description
527 Start/Acc Boost
Sets the voltage boost level for starting and acceleration when “V/Hz” mode is selected.
Note: This parameter was added for firmware version 2.003.
528 Run Boost
Sets the boost level for steady state or deceleration when “V/Hz” mode is selected.
Note: This parameter was added for firmware version 2.003.
529 Break Voltage
Sets the voltage the drive will output at Par 530 [Break Frequency].
Note: This parameter was added for firmware version 2.003.
530 Break Frequency
Sets the frequency the drive will output at Par 5 29 [Break Voltage].
Note: This parameter was added for firmware version 2.003.
531 Maximum Voltage
Sets the highest voltage the drive will output.
Note: This parameter was added for firmware version 2.003.
532 Maximum Freq
Sets the highest frequency the drive will output. This parameter is a function of Par 3 [Motor NP Hertz].
Note: This parameter was added for firmware version 2.003.
533 SlewRateTimeLimt
Defines the time limit in seconds during which torque producing voltage (Vqs) regulator output variations are
limited by each slew rate at the transition where the Vqs regulator turns on. The same time limit is applied at
the transition to the slip regulator when the slip regulator turns on. A value of zero disables the slew rate
function on both the Vqs regulator output and the slip regulator output. Par 553 defines the slew rate for the
slip regulator and Par 586
Notes: This parameter was added for firmware version 3.001. This parameter was renamed from “Flux Gain
Adjust” to “SlewRateTimeLimit”, the default value was changed to “10.0” and the minimum value was
changed to “0.0” for firmware version 4.001.
534 Nth CompOff Freq
The Nth compensation current amplitude is constant (defined by Par 59 5 [Nth Amplitude]) up to this
frequency, then linearly reduced to zero at the frequency of Par 534 + 6.25%.
Note: This parameter was added for firmware version 5.002.
535 Mth CompOff Freq
The Mth compensation current amplitude is constant (defined by Par 59 8 [Mth Amplitude]) up to this
frequency, then linearly reduced to zero at the frequency of Par 535 + 6.25%.
Note: This parameter was added for firmware version 5.002.
537 SrLssAngleStblty
Adjusts the electrical angle to maintain stable motor operation. An increase in the value increases the angle
adjustment.
538 SrLss VoltStblty
Adjusts the voltage to maintain stable motor operation. An increase in the value increases the output voltage
adjustment.
539 SrLss StbltyFilt
The coefficient is used to adjust the bandwidth of a low pass filter. The smaller the value of the coefficient, the
lower the bandwidth of the filter.
540 V/Hz Status
Indicates the limit status of the V/Hz Control Operation.
Note: This parameter was added form firmware version 2.003.
[IdsCmd Slew Rate] defines the slew rate for the Vqs regulator.
Values
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:
Scaling:
Default:
Min/Max:
Scaling:
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
50.0
0.0/1150.0
VAC
50.0
0.0/1150.0
VAC
1150.0
0.0/6900.0
VAC
150.0
0.0/400.0
Hz
460.0
60.0/690.0
VAC
(Par 3
[Motor NP Hertz] x 2) + 10Hz
Par 3 [Motor NP Hertz] + 10 Hz/420.0
Hz
0.0
0.0/1126.0
819
0/32767
[Motor NP Hertz]
4096/Par 3
819
0/32767
[Motor NP Hertz]
4096/Par 3
51.0
0.0/32767.0
93.0
0.0/32767.0
3250.0
0.0/32767.0
Linkable
Read-Write
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
Data Type
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
541 SrLss Angl Comp
Not currently used.
Note: This parameter was added for future use - not active for use with firmware version 2.003 and above.
542 SrLss Volt Comp
Not currently used.
Note: This parameter was added for future use - not active for use with firmware version 2.003 and above.
544 External DB Res
Sets the resistance value of an external dynamic braking resistor. This value is used to determine the power
applied to the resistor and thus calculate its temperature.
Note: This parameter was added for firmware version 4.001.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 93
Default:
Min/Max:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
0.0
+/- 16384
100.0
+/- 1000.0
V
49.0
0.1/500.0
Ohm
RW 16-bit
Integer
RW 16-bit
Integer
RW Real
Page 94

Chapter 2 Programming and Parameters
A
A
A
A
A
A
A
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
DL CF Error
DL CF Format
DL CF Flash
DL Loading
DL OK
DL NotActive
DL Fault
DL ComActive
DL I/O Fault
DL I/O Alarm
DL I/O Activ
DL Battery
DL ForceNtEn
DL Force Act
DL Run Mode
Sync NotSync
Sync InSync
Sts RunInhbt
Sts Alarm
Sts Fault
Sts HW Fault
Sts Ready
Sts Active
Default xxxxxxxxx00000000000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
No. Name
Values
Description
545 Bus Reg Ki
Sets the responsiveness of the bus regulator.
Note: This parameter was added for firmware version 2.003.
546 Bus Reg Kp
Proportional gain for the bus regulator. Used to adjust regulator response.
Note: This parameter was added for firmware version 2.003.
547 Bus Reg Kd
Derivative gain for the bus regulator. Used to control regulator overshoot.
Note: This parameter was added for firmware version 2.003.
548 Bus Reg ACR Kp
This proportional gain, in conjunction with Par 545 [Bus Reg Ki], adjusts the output frequency of the drive
during a bus limit or inertia ride through condition. The output frequency is adjusted in response to an error in
the active, or torque producing, current to maintain the active bus limit, or inertia ride through bus reference. A
larger value of gain reduces the dynamic error of the active current.
Note: This parameter was added for firmware version 2.003.
549 Vuv Fdbk Offset
Displays the motor U phase to V phase offset voltage from the voltage feedback circuit. The value of the offset
is a uni-polarity signal. A zero offset is equal to 16384.
Note: This parameter was added for firmware version 3.001.
550 Vvw Fdbk Offset
Displays the motor V phase to W phase offset voltag e from the voltage feedback circuit. The value of the offset
is a uni-polarity signal. A zero offset is equal to 16384.
Note: This parameter was added for firmware version 3.001.
551 CurrFdbk AdjTime
Compensates for current feedback delays in High Horse Power drives (frames 9 and up).
Note: This parameter was added for firmware version 3.001.
552 Slip Preload Val
The Slip Gain value to be pre-loaded if the drive is powered down.
Note: This parameter was added for firmware version 3.001.
553 Slip Slew Rate
Sets the rate at which the Slip Gain Regulator output transitions from the inactive state to the active state.
Notes: This parameter was added for firmware version 3.001. The default value was changed from “2.000” to
“0.200” for firmware version 4.001.
554 LED Status
Used to monitor LE D statuses including the ma in controller, SynchLink and DriveLogix5370 from a HIM or an application program (e.g., DriveExplorer™). This feature is only available with DriveLogix
version 15.03 or later.
• Bit 0 “Sts Active” - Drive running, no faults are present.
• Bit 1 “Sts Ready” - Drive ready, but not running & no faults are present.
• Bit 2 “Sts HW Fault” - A non-resettable fault has occurred in the drive.
• Bit 3 “Sts Fault” - A fault has occurred in the drive.
• Bit 4 “Sts Alarm” - A type 1 (user configurable) alarm condition exists, but the drive continues to run.
• Bit 5 “Sts RunInhbt” - A type 2 (non-configurable) alarm condition exists, drive continues to run.
• Bit 6 “Sync InSync” - The module is configured as the time keeper or the module is configured as a follower and synchronization is complete.
• Bit 7 “Sync NotSync” - The follower(s) are not configured with the time keeper.
• Bit 8 “DL Run Mode” - The controller is in “Run” mode.
• Bit 9 “DL Force Act” - I/O forces are active (enabled) but may or may not exist.
• Bit 10 “DL ForceNtEn” - One or more input or output addresses have been forced to an On or Off state, but the forces have not been enabled.
• Bit 11 “DL Battery” - Either the battery is not installed or 95% discharged and should be replaced.
• Bit 12 “DL I/O Activ” - The controller is communicating with all the devices in its I/O configuration.
• Bit 13 “DL I/O Alarm” - One or more devices in the I/O configuration of the controller are not responding.
• Bit 14 “DL I/O Fault” - The controller is not communicating to any devices and is faulted.
• Bit 15 “DL ComActive” - RS-232 activity.
• Bit 16 “DL Fault” - The controller detected a non-recoverable fault, so it cleared the project from memory.
• Bit 17 “DL NotActive” - If the controller is a new, then it requires a firmware update, or if the controller is not new, a major fault occurred.
• Bit 18 “DL OK” - Controller is OK.
• Bit 19 “DL Loading” - The controller is storing or loading a project to or from nonvolatile memory.
• Bit 20 “DL CF Flash” - The controller is reading from or writing to the CompactFlash™ card.
• Bit 21 “DL CF Format” - The CompactFlash memor y is not initialized.
• Bit 22 “DL CF Error” - CompactFlash card does not have a valid file system.
Note: This parameter was added for firmware version 3.001.
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
Default:
Min/Max:
Units:
Default:
Min/Max:
Default:
Min/Max:
Units:
450.0
0.0/100000
1500.0
0.0/10000.0
1000.0
0.0/10000.0
225.0
0.0/100000
16384.0
15764.0/17004.0
16384.0
15764.0/17004.0
0.0
0.0/50.0
μs
120.0
0.0/8192.0
0.200
0.010/16.383
μs
Linkable
Read-Write
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 32-bit
RW Real
Data Type
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
94 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 95
Programming and Parameters Chapter 2
Options
Min Vqs
MaxDCBus Vqs
MaxMotor Vqs
Max Vds
Min Vds
SrLssWsLimit
Slip Limit
Regen
Iqs Limit
FldWeakening
MC FW Group2
Reserved
Reserved
Vqs R eg Act
FluxRatioRef
Command L im
DC Bus Low
MC Test Mode
PreChrg Req
PWM En
PreChrg Done
Flux En
Tor que En
Change Dir
MC CommisFlt
MC CommisRun
MC Fault
MC Ready
BaseBlockReq
Tor qu e Ru n Re q
Flux Run Req
MC En Req
Default 00000000000xx 0000000000000000000
Bit 313029282726252423222120191817161514131211109876543210
0 = False
1 = True
Options
Auto Output
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
In 4 Real
In 3 Real
In 2 Real
In 1 Real
Enbl Collect
Default 0xxxxxxxxxx00000
Bit 1514131211109876543210
0 = False
1 = True
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Complete
Triggered
Reserved
Default xxxxxxxxxxxxxxxxxxxxxxxxxxxxx00x
Bit 313029282726252423222120191817161514131211109 8 7 6 5 4 3 2 1 0
0 = False
1 = True
No. Name
Values
Description
555 MC Status
Indicates the status of the Motor Control (MC) Processor and related functions.
Note: Changed bit 18 from “Reserved” to “Vqs Reg Act” for firmware version 3.003.
556 Trend Control
Set bits to configure the Data Trend function:
• Bit 0 “Enbl Collect” - Trend data collection begins on the rising edge of this bit and continues until either this bit is set low or the trend data has been completely collected. This bit should be
cleared following either the 'Triggered' status or 'Complete' status in order to complete the trend sequence. This bit can also be cleared at any time to force the trend data sampling to stop and
set the 'Complete' status bit.
• Setting bit 1 “In1 Real” - specifies the Real data type for Trend Input 1. The source for Real data is Par 571
data is Par 57 0
• Setting bit 2 “In2 Real” - specifies the Real data type for Trend Input 2. The source for Real data is Par 575
data is Par 57 4
• Setting bit 3 “In3 Real” - specifies the Real data type for Trend Input 3. The source for Real data is Par 579 [Trend In3 Real]. Clearing the bit specifies the Integer data type. The source for Integer
data is Par 57 8 [Trend In3 DInt].
• Setting bit 4 “In4 Real” - specifies the Real data type for Trend Input 4. The source for Real data is Par 583
data is Par 58 2 [Trend In4 DInt].
• Setting bit 15 “Auto Output” causes the trend output parameters to automatically cycle through the entire trend buffer at the rate specified in Pa r 559 [Trend Rate]. Typically, you link the output
to an analog output for display on an oscilloscope.
• Auto output is accomplished by writing to Par 569
[Trend In1 DInt].
[Trend In2 DInt].
[TrendBuffPointer]. Clearing this bit requires manual selection of Par 569 [TrendBuffPointer] to view the trend buffer contents.
[Trend In1 Real]. Clearing the bit specifies the Integer data type. The source for Integer
[Trend In2 Real]. Clearing the bit specifies the Integer data type. The source for Integer
[Trend In4 Real]. Clearing the bit specifies the Integer data type. The source for Integer
Linkable
Read-Write
Data Type
557 Trend Status
Bits indicate the status of the Data Trend function:
• Bit 1 “Triggered” indicates a Trend Trigge r event has been detected. This bit will clear in response to the rise of Par 556 [Trend Control], bit 0 “Enbl Collec t”.
• Bit 2 “Complete” indicates all the post trigger data samples have been gathered and the trend buffers are full. It will also be set if the Par 556 [Trend Control], bit 0 “Enbl Collect” is cleared before
the trigger occurs. The trend data outputs will be updated from the contents of the trend buffer data when this bit is set. Par 556 [Trend Control], bit 0 “Enbl Collect” can be cleared after this bit
is set without affecting the trend data buffer contents. This bit will clear in response to the rise of Par 556 [Trend Control], bit 0 “Enbl Collect”. The trend outputs will be forced to zero while this bit
is clear.
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 95
Page 96
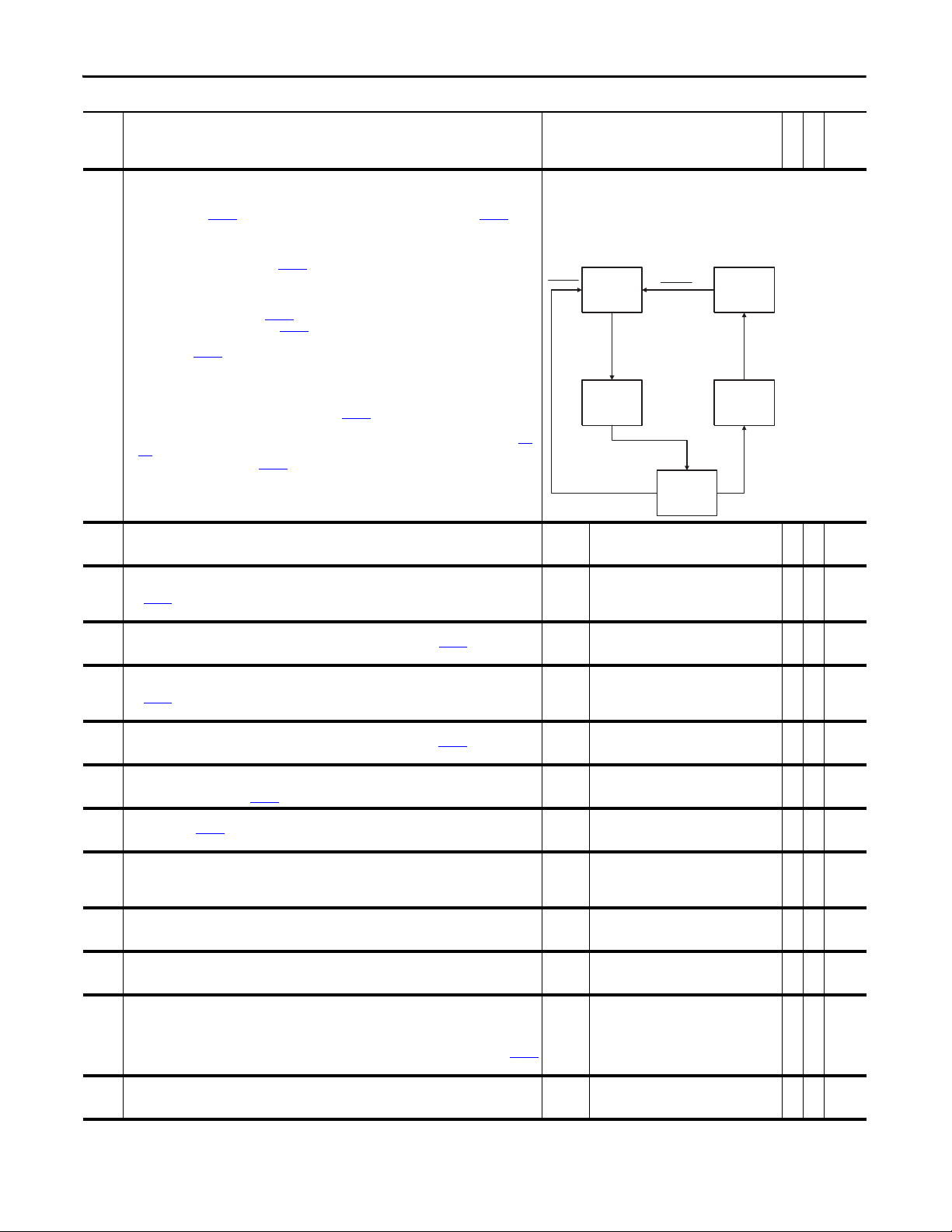
Chapter 2 Programming and Parameters
No. Name
Description
558 Trend State
Value indicates the state of the Data Trend function.
• Value 0 - Wait Enable indicates the trend function is ready and waiting to begin data collection. Setting bit
0 “Enbl Collect” of Par 556
[TrendBuffPointer] and the Trend Output Parameters are active.
• Value 1 - First Scan indicates the Trend function is executing the first pass through the trend sample buffer.
This takes 512 ms. (0.5 ms x 1024 samples). When it enters this state, the Trend function clears bit 1
“Triggered” and 2 “Complete” bits of Par 55 7
refreshes the data. Also while in this state, the function forces the Trend Output parameters to zero. When
done, it enters the Pre-trigger state.
• Value 2 - Pre-trigger indicates the Trend function is sampling the trend inputs and storing them in
memory, at a rate determined by Par 55 9
event occurs or bit 0 “Enbl Collect” of Par 556
function forces the Trend Output parameters to zero. If the trigger event occurs, the function sets bit 1
“Triggered” of Par 557
556 [Trend Control] is cleared, the function sets bit 2 “Complete” of Par 557 [Trend Status] and returns to
the Wait Enable state.
• Value 3 - Post-trigger indicates the Trend function is continuing to sample and save the trend inputs until
the buffer is full. While in this state, the function forces the Trend Output parameters to zero value. When
the buffer is full, the function sets bit 2 “Complete” of Par 557
state.
• Value 4 - Wait Disable indicates the Trend function is complete and waiting for bit 0 “Enbl Collect” of Par
556 [Trend Control] to be cleared. When this is done, the trend function returns to the Wait Enable state.
While in the Wait Disable state, Par 569
559 Trend Rate
Sets the sample time for both trend input and output updates.
560 Trend Tri gA DInt
Provides the integer input for the A trigger function. This integer is converted to a real number and su mmed
with Par 561
then a trend trigger will occur.
561 Trend Tri gA Real
Provides the real input for the A trigger function. This real number is summed with Par 560 [Trend TrigA Int].
[Trend TrigA Rea l]. The resul t is compared with the Trigger B sum. If the A sum exceeds the B sum,
The result is compared with the Trigger B sum. If the A sum exceeds the B sum, then a trend trigger will occur.
562 Trend TrigB DInt
Provides the integer input for the B trigger function. This integer is converted to a real num ber and summed
with Par 563
then a trend trigger will occur.
563 Trend Tri gB Real
Provides the real input for the B trigger function. This real number is summed with Par 562 [Trend TrigB Int].
[Trend TrigB Re al]. The resu lt is compare d with the Trigger A sum. If the A sum exceeds the B sum,
The result is compared with the Trigger A sum. If the A sum exceeds the B sum, then a trend trigger will occur.
564 Trend Tri g Data
This is the logic input for the Trend Trigger Function. A trigger will occur on the rise of the specified bit in this
word. The bit will be specified by Par 565
565 Trend Tri g Bit
Specifies the bit in Par 5 64 [Trend Trig Data] that will cause a Trend Trigger to occur. Positive numbers specify
rising edges and negative numbers specify falling edges.
566 Trend PreSamples
Specifies the number pre-trigger samples in the trend buffer. Pre-trigger samples are the samples that occur
before the trigger and remain in the buffer. The remainder of the trend buffer will contain post-trigger
samples.
567 Trend Mark DInt
Marks the start of data for trend buffers that are using integer data. The Trend Marker can be used to provide a
scope trigger signal for the Auto Output function.
568 Trend Mark Real
Marks the start of data for trend buffers that are using real data. The Trend Marker can be used to provide a
scope trigger signal for the Auto Output function.
569 TrendBuffPointer
Selects the trend buffer element to be displayed in the Trend Output Parameters when the trend function is
inac tive (n ot coll ecting data sa mples) . A zero va lue poi nts to the element that corresponds to the trigger event.
Negative values point to pre-trigger data. Positive values point to post-trigger data. When the Auto Output
function is running, this parameter will automatically sequence through it's full range, at a rate set by Par 559
[Trend Rate].
570 Trend In1 DInt
Provides integer input to the Trend 1. The Trending function samples this parameter for Trend Buffer 1, if bit 1
“In 1 Real” is cleared.
[Trend Control] will cause data collection to begin. In this state, Par 569
[Trend Status]. While in this state, the Trend function
[Trend Rate]. Sampling continues until either the trend trigger
[Trend Control] is cleared. While in this state, the Trend
[Trend Status] and enters the Post-trigger state. If bit 0 “Enbl Collect” of Parameter
[Trend Status] and enters the Wait Disable
[TrendBuffPointer] and the Trend Output Parameters are active.
[Trend Trig Bit].
Values
Default:
Options:
Default:
Min/Max:
Units:
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:
Default:
Min:
Max:
Default:
Min/Max:0-32/31
Default:
Min/Max:
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:
Default:
Min/Max:0-/+1023
Default:
Min/Max:0-/+2147483648
0 =
“Wait Enable”
0 =
“Wait Enable”
1 =
“First Scan”
2 =
“Pre-trigger”
3 =
“Post-trigger”
4 =
“Wait Disable”
Enbl Collect
Val 0
Wait Enable
Val 1
First Scan
Enbl Collect
0.5000
0.5000/1000.0000
ms
0.0000
-/+2200000000.0000
0.0000
-/+2200000000.0000
00000000000000000000000000000000
00000000000000000000000000000000
11111111111111111111111111111111
511
0/1022
0.0000
-/+2200000000.0000
Done
Enbl Collect
Val 2
Pre-Trigger
Val 4
Wait Disable
Val 3
Post-Trigger
Trigger Event
Buffer Full
Linkable
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Read-Write
Data Type
RW Real
RW 32-bit
Integer
RW Real
RW 32-bit
Integer
RW Real
RW 32-bit
Boolean
RW 16-bit
Integer
RW 16-bit
Integer
RW 32-bit
Integer
RW Real
RW 16-bit
Integer
RW 32-bit
Integer
96 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Page 97

Programming and Parameters Chapter 2
A
No. Name
Description
571 Trend In1 Real
Provides real input to the Trend 1. The Trending function samples this parameter for Trend Buffer 1, if bit 1 “In 1
Real” is set.
572 Trend Out1 DInt
Displays the output for Trend Buffer 1, if the buffer is using integer data. This will equal the value of the
element, in Trend Buffer 1, specified by Par 569
573 Trend Out1 Real
Displays the output for Trend Buffer 1, if the buffer is using real data. This will equal the value of the element,
in Trend Buffer 1, specified by Par 569
574 Trend In2 DInt
Provides integer input to the Trend 2. The Trending function samples this parameter for Trend Buffer 2, if bit 2
“In 2 Real” is cleared.
575 Trend In2 Real
Provides real input to the Trend 2. The Trending function samples this parameter for Trend Buffer 2, if bit 2 “In 2
Real” is set.
576 Trend Out2 DInt
Displays the output for Trend Buffer 2, if the buffer is using integer data. This will equal the value of the
element, in Trend Buffer 2, specified by Par 569
577 Trend Out2 Real
Displays the output for Trend Buffer 2, if the buffer is using real data. This will equal the value of the element,
in Trend Buffer 2, specified by Par 569
578 Trend In3 DInt
Provides integer input to the Trend 3. The Trending function samples this parameter for Trend Buffer 3, if bit 3
“In 3 Real” is cleared.
579 Trend In3 Real
Provides real input to the Trend 3. The Trending function samples this parameter for Trend Buffer 3, if bit 3 “In 3
Real” is set.
580 Trend Out3 DInt
Displays the output for Trend Buffer 3, if the buffer is using integer data. This will equal the value of the
element, in Trend Buffer 3, specified by Par 569 [TrendBuffPointer].
581 Trend Out3 Real
Displays the output for Trend Buffer 3, if the buffer is using real data. This will equal the value of the element,
in Trend Buffer 3, specified by Par 569
582 Trend In4 DInt
Provides integer input to the Trend 4. The Trending function samples this parameter for Trend Buffer 4, if bit 4
“In 4 Real” is cleared.
583 Trend In4 Real
Provides real input to the Trend 4. The Trending function samples this parameter for Trend Buffer 4, if bit 4 “In 4
Real” is set.
584 Trend Out4 DInt
Displays the output for Trend Buffer 4, if the buffer is using integer data. This will equal the value of the
element, in Trend Buffer 4, specified by Par 569
585 Trend Out4 Real
Displays the output for Trend Buffer 4, if the buffer is using real data. This will equal the value of the element,
in Trend Buffer 4, specified by Par 569 [TrendBuffPointer].
586 IdsCmd Slew Rate
Defines the slew rate for the torque producing voltage (Vqs) regulator. The output variation is limited by one
count every Par 586 / 16 sec.
Notes: This value should not be changed. This parameter was added for firmware version 4.001.
587 SlipReg Err Lmt
Defines the error level at which the slip regulator input becomes active. When the error level reaches the value
specified in this parameter and the error count condition (specified in Pa r 589 [Err Count Lmt]) is met, the drive
control will transition from the slew rate limit mode to normal operation of the slip regulator.
Notes: This value should not be changed. This parameter was added for firmware version 4.001.
588 VqsReg Err Lmt
Defines the error level at which the Flux Producing Voltage (Vqs) regulator input becomes active. When the
error level reaches the value specified in this parameter and the error count condition (specified in Par 589
Count Lmt]) is met, the drive control will transition from the slew rate limit mode to normal operation of the
Vqs r egul ator.
Notes: This value should not be changed. This parameter was added for firmware version 4.001.
589 Err Count Lmt
Defines the control loop counts limit, where the counter counts up if the error level of the Vqs regulator input is
equal to the error level during Flux Producing Current (Ids) command Slew Rate operation. When the counter
exceeds the value of this parameter then the normal Vqs regulator operation becomes active. The same limit of
control loop counts is applied to the Slip Slew Rate operation, where the counter counts up if the error level of
the Slip regulator input is equal to the error level during Slip Slew Rate operation. When the counter exceeds
the value of this parameter then the normal Slip regulator operation becomes active.
Notes: This value should not be changed. This parameter was added for firmware version 4.001.
[TrendBuffPointer].
[TrendBuffPointer].
[TrendBuffPointer].
[TrendBuffPointer].
[TrendBuffPointer].
[TrendBuffPointer].
Values
Default:
Min/Max:
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:
Default:
Min/Max:0-/+2147483648
Default:
Min/Max:0-/+2200000000.0000
Default:
Min/Max:
Units:
Default:
Min/Max:0+/-32767
Default:
Min/Max:0+/-32767
[Err
Default:
Min/Max:0+/-32767
0.0000
-/+2200000000.0000
0.0000
-/+2200000000.0000
0.0000
-/+2200000000.0000
0.0000
-/+2200000000.0000
0.0000
-/+2200000000.0000
0.0000
-/+2200000000.0000
0.0000
-/+2200000000.0000
5.000
0.000/16.383
s
Linkable
Y
Y
Y
Y
Y
Y
Y
Read-Write
Data Type
RW Real
RO 32-bit
Integer
RO Real
RW 32-bit
Integer
RW Real
RO 32-bit
Integer
RO Real
RW 32-bit
Integer
RW Real
RO 32-bit
Integer
RO Real
RW 32-bit
Integer
RW Real
RO 32-bit
Integer
RO Real
RW Real
RW 16-bit
Integer
RW 16-bit
Integer
RW 16-bit
Integer
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 97
Page 98

Chapter 2 Programming and Parameters
A
A
A
A
A
A
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
DL 20 Real
DL 19 Real
DL 18 Real
DL 17 Real
DL 16 Real
DL 15 Real
DL 14 Real
DL 13 Real
DL 12 Real
DL 11 Real
DL 10 Real
DL 09 Real
DL 08 Real
DL 07 Real
DL 06 Real
DL 05 Real
DL 04 Real
DL 03 Real
DL 02 Real
DL 01 Real
DL 00 Real
Default xx xx xxxxxxx000000000000000000000
Bit 313029282726252423222120191817161514131211109 8 7 6 5 4 3 2 1 0
0 = False
1 = True
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
DL 20 Real
DL 19 Real
DL 18 Real
DL 17 Real
DL 16 Real
DL 15 Real
DL 14 Real
DL 13 Real
DL 12 Real
DL 11 Real
DL 10 Real
DL 09 Real
DL 08 Real
DL 07 Real
DL 06 Real
DL 05 Real
DL 04 Real
DL 03 Real
DL 02 Real
DL 01 Real
DL 00 Real
Default xx xx xxxxxxx000000000000000000000
Bit 313029282726252423222120191817161514131211109 8 7 6 5 4 3 2 1 0
0 = False
1 = True
No. Name
Description
590 RsTempCoefAdjust
The value specified in this parameter adjusts the temperature compensation coefficient which is calculated
based on the Slip regulator output. A value of 4096 in this parameter doubles the compensation coefficient.
Notes: This value should not be changed. This parameter was added for firmware version 4.001.
591 RsTmpCoefAdjstEn
A value of “1” in this parameter enables the temperature compensation function in flux and torque estimate
calculation, where the temperature information is based on the Slip regulator output. A value of “0” in this
parameter disables the temperature compensation function.
Notes: This value should not be changed. This parameter was added for firmware version 4.001.
592 VqsReg On Hystr
For Future U se.
Note: This parameter was added for firmware version 4.001.
593 SlipReg On Hystr
For Future U se.
Note: This parameter was added for firmware version 4.001.
594 Nth Torq Compen
Defines harmonic frequency as <n> times mechanical frequency.
Note: This parameter was added for firmware version 5.002.
595 Nth Amplitude
Defines the compensation current amplitude for the Nth harmonic component.
Note: This parameter was added for firmware version 5.002.
596 Nth Phase Shift
Defines the phase shift for the Nth harmonic component.
Note: This parameter was added for firmware version 5.002.
597 Mth Torq Compen
Defines harmonic frequency as <m> times mechanical frequenc y.
Note: This parameter was added for firmware version 5.002.
598 Mth Amplitude
Defines the compensation current amplitude for the Mth harmonic component.
Note: This parameter was added for firmware version 5.002.
599 Mth Phase Shift
Defines the phase shift for the Mth harmonic component.
Note: This parameter was added for firmware version 5.002.
600 Lgx Comm Format
Indicates the Controller to Drive communication format.
Note: Option values 1…15 and 20…31 are “Reserved”
Values
Default:
Min/Max:0+/-32767
Default:
Min/Max:0+/-32767
Default:
Min/Max:0+/-32767
Default:
Min/Max:0-/+32767
Default:
Min/Max:00/1000
Default:
Min/Max:
Scaling:
Default:
Min/Max:
Scaling:
Default:
Min/Max:00/1000
Default:
Min/Max:
Scaling:
Default:
Min/Max:
Scaling:
Default:
Options:
0
0/4096
4096/Par 2 [Motor NP FLA]
0
-/+16384
16384/360 deg
0
0/4096
4096/Par 2 [Motor NP FLA]
0
-/+16384
16384/360 deg
16 =
0 =
16 =
17 =
“Speed Ctrl”
“Not Used” 18 = “UserDefin 1”
“Speed Ctrl” 19 = “Motion”
“PositionCtrl” 32 = “CustmUserDef ”
Linkable
Read-Write
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
RW 16-bit
Data Type
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
Integer
601 From DL DataType
Sets the type of data for each word communicated from DriveLogix™ to the PowerFlex 700S drive. Setting a bit High will configure the associated word as a Real data type and setting the bit Low will
configure it for Integer data type.
FromDriveLogix00
602
to
to
622
FromDriveLogix20
These parameters display the input values communicated from the DriveLogix controller to the PowerFlex 700S
drive.
625 To DL DataType
Sets the data type for each word communicated from the PowerFlex 700S drive to DriveLogix. Setting a bit High will configure the associated word as a Real data type and setting the bit Low will
configure it for Integer data type.
98 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Default:
Min/Max: 0-/+32 (dependant on Par 601 [From DL
DataType])
RO 32-bit
Integer
Page 99

Programming and Parameters Chapter 2
Options
DPI D2 Real
DPI D1 Real
DPI C2 Real
DPI C1 Real
DPI B2 Real
DPI B1 Real
DPI A2 Real
DPI A1 Real
Default 00000000
Bit 76543210
0 = False
1 = True
Options
DPI D2 Real
DPI D1 Real
DPI C2 Real
DPI C1 Real
DPI B2 Real
DPI B1 Real
DPI A2 Real
DPI A1 Real
Default 00000000
Bit 76543210
0 = False
1 = True
Options
DriveLogix
Reserved
Int DPI Comm
Reserved
Aux DPI Conn
Ext DPI Conn
Local HI M
Ter mi nal Bl k
Default 111x 1111
Bit 76543210
0 = False
1 = True
No. Name
Value s
Description
626
To DriveLogix00
to
to
646
To DriveLogix20
These parameters display the output values communicated from the PowerFlex 700S drive to the DriveLogix
controller.
650 DPI In DataType
Sets the data type for each word communicated from an external controller to the PowerFlex 700S drive via a DPI communication module. Setting a bit high will configure the associated word as a
Real data type and setting the bit low will configure it for Integer data type.
651
DPI Data In A1
652
DPI Data In A2
653
DPI Data In B1
654
DPI Data In B2
655
DPI Data In C1
656
DPI Data In C2
657
DPI Data In D1
658
DPI Data In D2
These parameters display the input values communicated from DPI communication modules to the PowerFlex
700S drive.
659 DPI Out DataType
Sets the data type for each word communicated from the PowerFlex 700S drive to an external controller via a DPI communication module. Setting a bit high will configure the associated word as a
Real data type and setting the bit low will configure it for Integer data type.
Default:
Min/Max:0-/+32 (dependant on Par 6 25
Default:
Min/Max:0-/+32 (dependant on Par 65 0
DataType])
[To DL DataType])
[DPI In
Linkable
RO Set by Par
Y
RO 32-bit
Read-Write
Data Type
625
Integer
660
DPI Data Out A1
661
DPI Data Out A2
662
DPI Data Out B1
663
DPI Data Out B2
664
DPI Data Out C1
665
DPI Data Out C2
666
DPI Data Out D1
667
DPI Data Out D2
These parameters display the output values communicated from the PowerFlex 700S drive to DPI communication
modules.
669 Write Mask
Enables/disables write access (parameters, links, etc.) for DPI ports. Changes to this parameter only become effective when power is c ycled, the drive is reset or bit 15 “Security” of Par 712 [Write
Mask Act], transitions from “1” to “0.”
Note: This parameter was added for firmware version 3.001.
Default:
Min/Max:0-/+32 (dependant on Par 65 9
DataType])
[DPI Out
RW Set by Par
Y
659
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013 99
Page 100

Chapter 2 Programming and Parameters
Options
DriveLogix
Reserved
Int DPI Conn
Reserved
Aux DPI Conn
Ext DPI Conn
Local HI M
Ter mi nal Bl k
Default 11111111
Bit 76543210
0 = False
1 = True
A
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Hrd Ovr Trvl
Sft Ovr Trvl
Polar ity Neg
Default xxxxxxxxxxxxx000
Bit 1514131211109876543210
0 = False
1 = True
A
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
AxisShtdwnC1
Reserved
Reserved
Chng Ref
Reserved
Reserved
Course Updt
CST Updt Err
-Hrd OvrTrvl
+Hrd OvrTrvl
-Sft OvrTrvl
+Sft OvrTrvl
Reserved
Reserved
Reserved
Posit Lock
AxisShutdown
Drv Enable
Motn Action
Default xxxxxxxxxxxxx0xx0xx000000xxx0000
Bit 313029282726252423222120191817161514131211109 8 7 6 5 4 3 2 1 0
0 = False
1 = True
A
Options
ChngCmdRefC1
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Abrt Evnt C1
Abrt Home C1
Reserved
Shutdown C1
Reserved
ChngCmdRefC0
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Abrt Evnt C0
Abrt Home C0
Reserved
Shutdown C0
Reserved
Default 0xxxxxxxxxx00x0x0xxxxxxxxxx00x0x
Bit 313029282726252423222120191817161514131211109 8 7 6 5 4 3 2 1 0
0 = False
1 = True
No. Name
Description
Logic Mask
670
Determines which adapters can control the drive.
Start Mask
671
Controls which adapters can issue start commands.
672
Jog Mask
Controls which adapters can issue jog commands.
673
Direction Mask
Controls which adapters can issue forward/reverse direction commands.
674
Fault Clr Mask
Controls which adapters can clear a fault.
677
Stop Owner
Indicates which adapter are currently issuing a valid stop command.
678
Start Owner
Indicates which adapter are currently issuing a valid start command.
679
Jog Owner
Indicates which adapter are currently issuing a valid jog command.
680
Direction Owner
Indicates which adapter is currently has exclusive control of direction changes.
681
Fault Clr Owner
Indicates which adapter is currently clearing a fault.
684 MotnUpdatePeriod
The servo update period for the servo axis (drive).
685 Motn CoarseMulti
Number of Par 684 [MotnUpdatePeriod] comprising one Course Update Period from the Motion Period.
686 Motn Config
Configuration bits pertaining to Motion-related functions for the Servo axis.
Value s
Default:
Min/Max:
Unit:
Default:
Min/Max:42/16
2000
1/999999
μs
Linkable
Read-Write
RO 32-bit
RO 32-bit
Data Type
Integer
Integer
687 Motn Axis Status
Status bits pertaining to Motion-related functions for the Servo axis.
688 Motn AxisControl
Command request bits from the Motion Planner both the Servo and Feedback Only axis.
100 Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
 Loading...
Loading...