

Page 1
Allen-Bradley
Plastic Molding
Module
(Cat. No. 1771-QI)
Reference
Manual
Page 2
Important User Information
Solid state equipment has operational characteristics differing from those
of electromechanical equipment. “Safety Guidelines for the Application,
Installation and Maintenance of Solid State Controls” (Publication
SGI-1.1) describes some important differences between solid state
equipment and hard-wired electromechanical devices. Because of this
difference, and also because of the wide variety of uses for solid state
equipment, all persons responsible for applying this equipment must
satisfy themselves that each intended application of this equipment is
acceptable.
In no event will the Allen-Bradley Company be responsible or liable for
indirect or consequential damages resulting from the use or application
of this equipment.
The examples and diagrams in this manual are included solely for
illustrative purposes. Because of the many variables and requirements
associated with any particular installation, the Allen-Bradley Company
cannot assume responsibility or liability for actual use based on the
examples and diagrams.
No patent liability is assumed by Allen-Bradley Company with respect
to use of information, circuits, equipment, or software described in this
manual.
Reproduction of the contents of this manual, in whole or in part, without
written permission of the Allen-Bradley Company is prohibited.
Throughout this manual we use notes to make you aware of safety
considerations.
ATTENTION: Identifies information about practices or
circumstances that can lead to personal injury or death,
!
property damage, or economic loss.
Attentions help you
• identify a hazard
• avoid the hazard
• recognize the consequences
Important: Identifies information that is especially important for
successful application and understanding of the product.
PLC and Pro-Set are trademarks of Allen-Bradley Company, Inc.
Page 3
Preface
Preface
Read this preface to familiarize yourself with the manual.
This preface covers the following topics:
• the purpose of this manual
• Related Publications
• Terms
• Allen-Bradley support
Purpose of this Manual
Related Publications
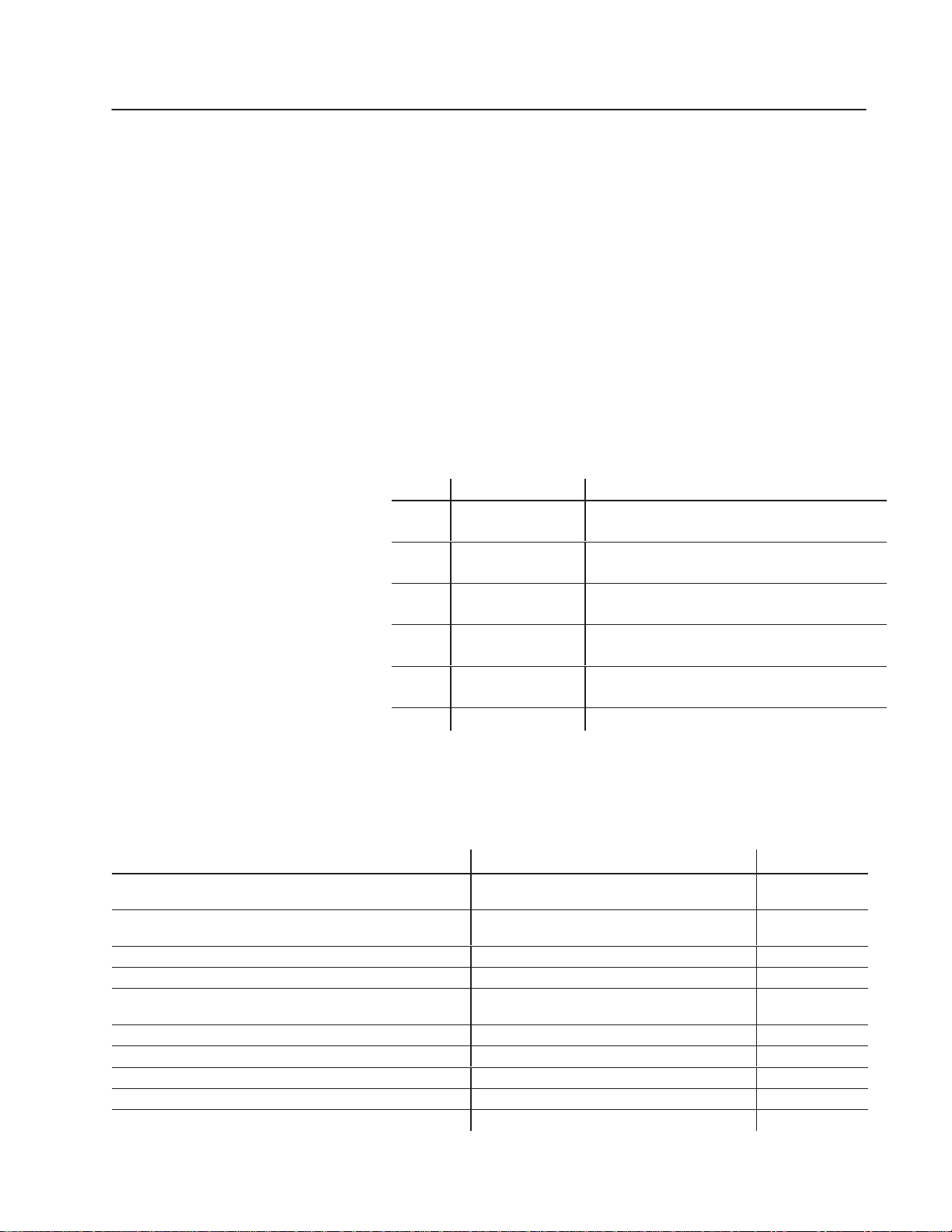
This manual provides reference information for the 1771-QI Plastic
Molding Module. It provides lists of words, bits, addresses, and
error codes needed for all applications. It also describes procedures
you use to calibrate the module. The contents include:
Chapter Title Contents
Abbreviated Command
1
and Status Blocks
Word/Bit Descriptions
2
for Command Blocks
Word/Bit Descriptions
3
for Status Blocks
Programming
4
Error Codes
Specifications Provides physical, electrical, environmental, and
5
6 Calibration Instructions Provides procedures for calibrating the QDC module.
A summary list of command and status block words with
Pro-Set addresses used by the QDC module.
A detailed list of command block words with word/bit
descriptions.
A detailed list of status block words with word/bit
descriptions.
A list of all possible error codes that could be presented
when you enter invalid data in command blocks.
functional specifications for the QDC module.
The 1771-QI module is similar the 1771-QDC module configured
for Inject Mode, but with additional co-injection capabilities.
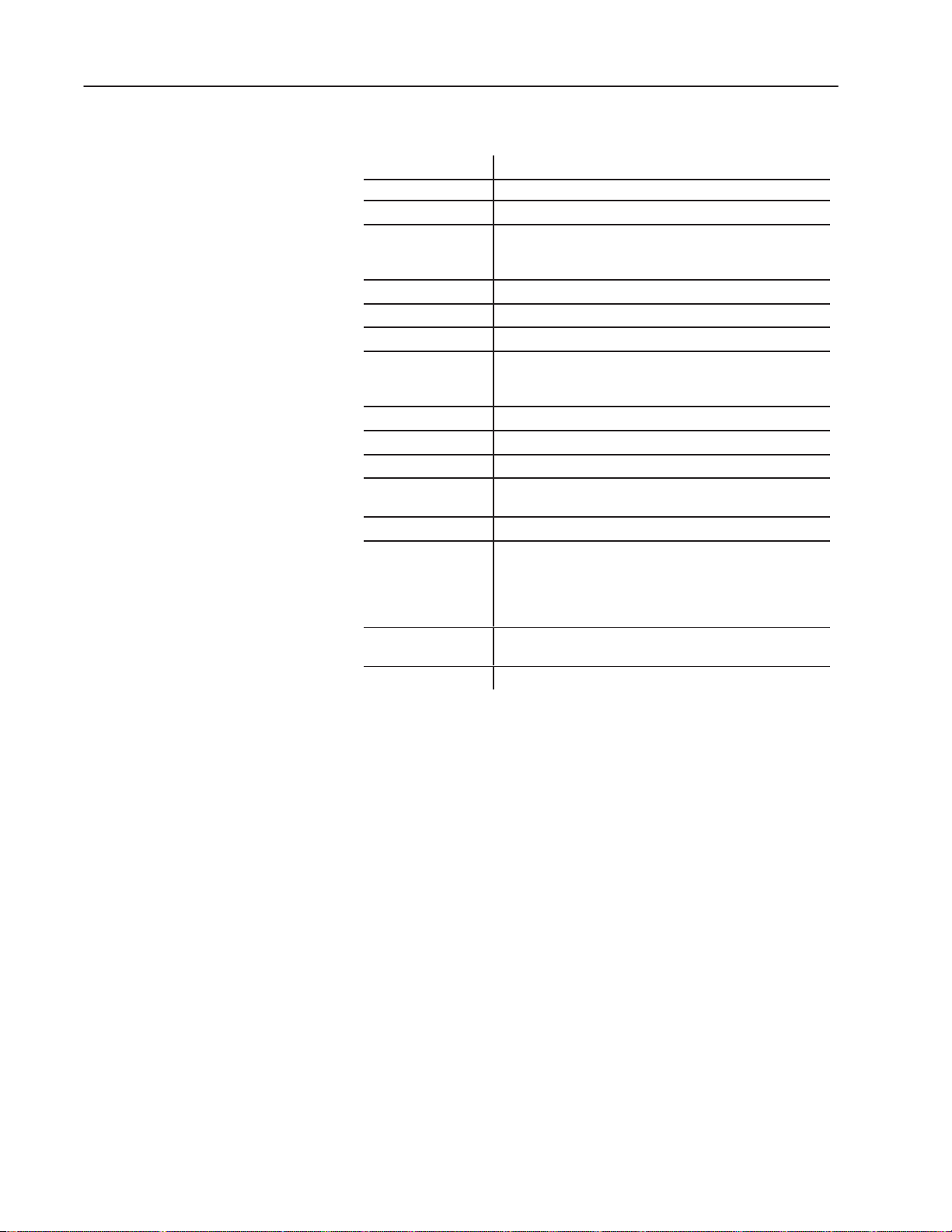
We recommend that you use the following publications:
For Read This Document Pub Number
Installing your QI module to control inject operations
Selecting instructions and organizing memory when writing ladder
logic to run your machine
Installing Pro-Set 700 injection molding software Pro-Set 700 Installation Instructions 6500-5.4
Installing your Pro-Set 700 operator interface Pro-Set 700 Operator Interface Installation Manual 6500-6.2.1
Customizing Pro-Set 700 software for your application
Setting up your molding machine for use with Pro-Set 700 software Pro-Set 700 Software Release 2.1 User Manual 6500-6.5.18
Using co-injection software Pro-Set 700 Co-injection Software User Manual 6500-6.5.19
Inputting injection molding system setpoints and actuals Pro-Set 700 Systems Jobsetting Guide 6500-6.9.3
Installing modules for co–injection applications Installing Co-injection and Plastic Molding Modules 6500-10.1
A complete listing of current Allen-Bradley documentation Allen-Bradley Publication Index SD499
Plastic Molding Module User Manual 1771-QDC
Inject Mode Operation
1785 PLC-5 Programmable Controller
Instruction Set Reference
Pro-Set 700 Software Release 2.1 Reference Mnl
Publication
1771-6.5.85
1785-6.1
6500-6.4.3
1771-6.5.126 – March 1998
Page 4
PrefaceP–2
Terms
The following terms are specific to this product or commonly used:
Term: Definition:
BTR Block-transfer Read
BTW Block-transfer Write
Command Block
(MCC)
Configuration Blocks Data blocks containing machine-specific setpoints.
Profile Blocks Data blocks with setpoints used to control profiles.
Status Blocks Module status returned by the QI module to the PLC data table.
Direct Acting
and
Reverse Acting Valves
FF Feed Forward
in.(mm)/s inches (millimeters) per second
PID Proportional-Integral-Derivative
Profile A group of mold/part setpoints which define a given machine
RFU Reserved for future use
Selected and
Unselected Valves
Unselected Valves When executing a profile in a multi-valve system, the QI
SWTL Software travel limit
Downloaded from the PLC data table to the QI module to
initiate or change machine operation. It must accompany every
configuration or profile block transferred to the QI module.
An analog control valve that delivers increasing velocity or
pressure with increasing signal input. A reverse acting valve
delivers increasing velocity or pressure with decreasing signal.
operation to the QI module
When executing a profile in a multi-valve system, the QI
module controls one valve and presets the remaining valves.
We call the valve being controlled by the QI module’s
algorithms the selected valve, and the valves that are preset
with an open loop percentage setpoint the unselected valves.
module controls one valve and presets the remaining valves.
Allen-Bradley Support
Publication
1771-6.5.126 – March 1998
Allen-Bradley offers support services worldwide, with over 75
Sales/Support Offices, 512 authorized Distributors and 260 authorized
Systems Integrators located throughout the United States alone, plus
Allen-Bradley representatives in every major country in the world.
Local Product Support
Contact your local Allen-Bradley representative for:
• sales and order support
• product technical training
• warranty support
• support service agreements
Technical Product Assistance
If you need to contact Allen-Bradley for technical assistance, please
review the information in the Troubleshooting chapter of User Manual
1771-6.85 before calling your local Allen-Bradley representative.
Page 5

Table of Contents
Abbreviated Command and Status Block
Chapter 1
Chapter
DYC – Dynamic Command Block 1–2. . . . . . . . . . . . . . . . . . . . . . . . .
HDC
HPC
INC
IPC
JGC
MCC
PKC
PLC
PPC
PRC
PSC
PTC – Process T
RLC
HPS
IPS
PPS
PTS – Process Trace Status Block 1–19. . . . . . . . . . . . . . . . . . . . . . . .
RLS
SYS – System Status Block 1–21. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Contents
– Hold Configuration Block
– Pack/Hold Profile Block
– Injection Configuration Block
– Injection Profile Block
– Jog Configuration Block
– Module Configuration Command Block
– Pack Configuration Block
– Plastication Configuration Block
– Plastication Profile Block
– Pre-decompression Configuration Block
– Post-decompression Configuration Block
race Configuration Block
– Inject ERC V
– Pack/Hold Profile Status Block
– Injection Profile Status Block
– Plastication Profile Status Block
– Inject ERC V
alues Block 1–14. . . . . . . . . . . . . . . . . . . . . . . . . .
alues Status Block 1–20. . . . . . . . . . . . . . . . . . . . .
1–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1–2. . . . . . . . . . . . . . . . . . . . . . . . .
1–3. . . . . . . . . . . . . . . . . . . . . . . . . .
1–4. . . . . . . . . . . . . . . . . . . . . . .
1–6. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1–7. . . . . . . . . . . . . . . . . . . . . . . . . .
1–8. . . . . . . . . . . . . . . .
1–19. . . . . . . . . . . . . . . . . . . . . . . . .
1–10. . . . . . . . . . . . . . . . . . . . .
1–11. . . . . . . . . . . . . . . . . . . . . . . . . .
1–12. . . . . . . . . . . . . . .
1–13. . . . . . . . . . . . . .
1–14. . . . . . . . . . . . . . . . . . .
1–15. . . . . . . . . . . . . . . . . . . . .
1–16. . . . . . . . . . . . . . . . . . . . . . . .
1–18. . . . . . . . . . . . . . . . . . . . .
Command Word/Bit Descriptions
Chapter 2
List of Command Blocks and Block ID codes 2–1. . . . . . . . . . . . . . . . .
of Data W
List
Engineering Units 2–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Data
Blocks Require I/O Configuration
Data Blocks for System Control 2–3. . . . . . . . . . . . . . . . . . . . . . . . . .
Data Blocks for Controlling Ram (Screw) Position 2–3. . . . . . . . . . . . . .
DYC – Dynamic Command Block 3–4. . . . . . . . . . . . . . . . . . . . . . . . .
Bit-mapped
Direct
Direct
ords 2–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Control W
Set-output V
Set-output Ramp Rates
ords 2–4. . . . . . . . . . . . . . . . . . . . . . . . . .
alues 2–9. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Publication
1771-6.5.126– March 1998
2–2. . . . . . . . . . . . . . . . . . . . . .
2–9. . . . . . . . . . . . . . . . . . . . . . .
Page 6

Table of Contentstoc–ii
HDC
– Hold Configuration Block
Bit-mapped
Control W
ords 2–10. . . . . . . . . . . . . . . . . . . . . . . . . .
2–10. . . . . . . . . . . . . . . . . . . . . . . . .
Expert Response Compensation (ERC) Percentage 2–10. . . . . . . .
Unselected V
alve Set-output V
alues 2–11. . . . . . . . . . . . . . . . . . .
Output Ramp Rates 2–11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
End
of Profile Set-output V
alues 2–11. . . . . . . . . . . . . . . . . . . . . .
Ram (Screw) Pressure Control Limits 2–12. . . . . . . . . . . . . . . . . .
Cavity Pressure Control Limits 2–12. . . . . . . . . . . . . . . . . . . . . . .
Profile
T
uning Constants
Profile
Pressure Alarm Setpoint
– Pack/Hold Profile Block
HPC
Bit-mapped
Pack
Pack
Hold
Hold
Control W
Profile Setpoints
Profile Of
Profile Setpoints
Profile Of
ords 2–13. . . . . . . . . . . . . . . . . . . . . . . . . .
fsets 2–14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
fsets 2–15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–12. . . . . . . . . . . . . . . . . . . . . . . . . . .
2–12. . . . . . . . . . . . . . . . . . . . . .
2–13. . . . . . . . . . . . . . . . . . . . . . . . . .
2–14. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Critical Process Setpoints 2–15. . . . . . . . . . . . . . . . . . . . . . . . . . .
INC
– Injection Configuration Block
Bit-mapped
Control W
ords 2–16. . . . . . . . . . . . . . . . . . . . . . . . . .
2–16. . . . . . . . . . . . . . . . . . . . . . .
Expert Response Compensation (ERC) Percentage 2–16. . . . . . . .
Unselected V
alve Set-output V
alues 2–16. . . . . . . . . . . . . . . . . . .
Output Ramp Rates 2–17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Pressure
Velocity
Profile
Profile
Set-outputs
IPC
– Injection Profile Block
Bit-mapped
Control Limits
Control Limits
T
uning Constants
Pressure Alarm Setpoint
During Suspended Injection
Control W
ords 2–19. . . . . . . . . . . . . . . . . . . . . . . . . .
2–17. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–18. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–18. . . . . . . . . . . . . . . . . . . . . . . . . . .
2–18. . . . . . . . . . . . . . . . . . . . . .
2–18. . . . . . . . . . . . . . . .
2–19. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Co-injection Parameters 2–20. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Injection
Injection
Pressure
Injection
Pressure
JGC
– Jog Configuration Block
Bit-mapped
Jog
Screw
Ram
Profile Setpoints
Profile Of
fsets 2–24. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Limited Injection Parameters
T
ransition Parameters
T
ransition Inhibit
Control W
ords 2–25. . . . . . . . . . . . . . . . . . . . . . . . . .
Alarm Setpoints
Rotate Jog Set-output V
alues 2–26. . . . . . . . . . . . . . . . . . .
(Screw) Forward Jog Set-output V
2–21. . . . . . . . . . . . . . . . . . . . . . . . . . .
2–24. . . . . . . . . . . . . . . . . .
2–25. . . . . . . . . . . . . . . . . . . . . . .
2–25. . . . . . . . . . . . . . . . . . . . . . . . . .
2–25. . . . . . . . . . . . . . . . . . . . . . . . . .
2–25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
alues 2–26. . . . . . . . . . . . .
Ram (Screw) Reverse Jog Set-output Values 2–26. . . . . . . . . . . . .
Publication
1771-6.5.126– March 1998
Page 7

Table of Contents toc–iii
MCC
– Module Configuration Command Block
Bit-mapped
Control W
Ram (Screw) Position T
Ram (Screw) Pressure T
Ram (Screw) Position T
Screw RPM T
ransducer Configuration
Cavity Pressure T
ords 2–27. . . . . . . . . . . . . . . . . . . . . . . . . .
ransducer Configuration
ransducer Configuration
ransducer Configuration (other injector)
ransducer Configuration
Other 2–30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PKC
– Pack Configuration Block
Bit-mapped
Control W
ords 2–30. . . . . . . . . . . . . . . . . . . . . . . . . .
Expert Response Compensation (ERC) Percentage 2–30. . . . . . . .
Unselected V
alve Set-output V
alues 2–30. . . . . . . . . . . . . . . . . . .
Output Ramp Rates 2–31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ram (Screw) Pressure Control Limits 2–31. . . . . . . . . . . . . . . . . .
Cavity Pressure Control Limits 2–31. . . . . . . . . . . . . . . . . . . . . . .
Profile
T
uning Constants
Profile
Pressure Alarm Setpoint
PLC
– Plastication Configuration Block
Bit-mapped
Control W
ords 2–32. . . . . . . . . . . . . . . . . . . . . . . . . .
Expert Response Compensation (ERC) Percentage 2–33. . . . . . . .
Watchdog
Unselected V
T
imer 2–33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
alve Set-output V
alues 2–33. . . . . . . . . . . . . . . . . . .
Output Ramp Rates 2–33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
End
of Profile Set-output V
Pressure
RPM
Profile
Profile
PPC
– Plastication Profile Block
Bit-mapped
Plastication
Plastication
Control Limits
Control Limits
T
uning Constants
Pressure Alarm Setpoint
Control W
Profile Setpoints
Profile Of
alues 2–34. . . . . . . . . . . . . . . . . . . . . .
ords 2–35. . . . . . . . . . . . . . . . . . . . . . . . . .
fsets 2–38. . . . . . . . . . . . . . . . . . . . . . . . . .
Critical Process Setpoints 2–38. . . . . . . . . . . . . . . . . . . . . . . . . . .
PRC
– Pre-decompression Configuration Block
Bit-mapped
Movement
Watchdog
Movement
Control W
Length
T
imer 2–38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Set-output V
ords 2–38. . . . . . . . . . . . . . . . . . . . . . . . . .
alues 2–39. . . . . . . . . . . . . . . . . . . . . . . .
Output Ramp Rates 2–39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
End
of Movement Set-output V
Movement
Pressure Alarm Setpoint
alues 2–39. . . . . . . . . . . . . . . . . . .
2–27. . . . . . . . . . . . . . .
2–28. . . . . . . . . . .
2–28. . . . . . . . . .
2–29
2–29. . . . . . . . . . . . . . . . . .
2–29. . . . . . . . . . . . . . .
2–30. . . . . . . . . . . . . . . . . . . . . . . . .
2–32. . . . . . . . . . . . . . . . . . . . . . . . . . .
2–32. . . . . . . . . . . . . . . . . . . . . .
2–32. . . . . . . . . . . . . . . . . . . . .
2–34. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–34. . . . . . . . . . . . . . . . . . . . . . . . . . .
2–35. . . . . . . . . . . . . . . . . . . . . .
2–35. . . . . . . . . . . . . . . . . . . . . . . . . .
2–36. . . . . . . . . . . . . . . . . . . . . . . . .
2–38. . . . . . . . . . . . . . .
2–38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–39. . . . . . . . . . . . . . . . . . .
Publication
1771-6.5.126– March 1998
Page 8

Table of Contentstoc–iv
PSC
– Post-decompression Configuration Block
Bit-mapped
Movement
Watchdog
Movement
Output Ramp Rates 2–40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
End
Movement
PTC – Process T
Bit-mapped
– Inject ERC V
RLC
Bit-mapped
Injection
Pack
Hold
Plastication
Control W
Length
T
imer 2–40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Set-output V
of Movement Set-output V
Pressure Alarm Setpoint
race Configuration Block
Control W
alues Block 2–42. . . . . . . . . . . . . . . . . . . . . . . . . .
Control W
Profile ERC V
Profile ERC V
Profile ERC V
Profile ERC V
ords 2–40. . . . . . . . . . . . . . . . . . . . . . . . . .
alues 2–40. . . . . . . . . . . . . . . . . . . . . . . .
alues 2–41. . . . . . . . . . . . . . . . . . .
ords 2–41. . . . . . . . . . . . . . . . . . . . . . . . . .
ords 2–42. . . . . . . . . . . . . . . . . . . . . . . . . .
alues 2–42. . . . . . . . . . . . . . . . . . . . . . . . .
alues 2–43. . . . . . . . . . . . . . . . . . . . . . . . . . .
alues 2–43. . . . . . . . . . . . . . . . . . . . . . . . . . . .
alues 2–43. . . . . . . . . . . . . . . . . . . . . . .
2–40. . . . . . . . . . . . . .
2–40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–41. . . . . . . . . . . . . . . . . . .
2–41. . . . . . . . . . . . . . . . . . .
Status Word/Bit Descriptions
Chapter 3
List of Status Blocks and Block ID codes 3–1. . . . . . . . . . . . . . . . . . . .
List
of Data W
Blocks Require I/O Configuration
Data
Engineering Units 3–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Status Blocks for Reporting System and Ram (Screw) Position 3–2. . . .
HPS
– Pack/Hold Profile Status Block
Bit-mapped
Pack
Hold
Pack Maximum Pressures 3–5. . . . . . . . . . . . . . . . . . . . . . . . . .
Hold Maximum Pressures 3–5. . . . . . . . . . . . . . . . . . . . . . . . . . .
Pre-decompression Maximum Pressure 3–5. . . . . . . . . . . . . . . . .
Execution
Pre-decompression Movement Actuals 3–5. . . . . . . . . . . . . . . . .
End of Hold Ram (Screw) Position 3–5. . . . . . . . . . . . . . . . . . . .
IPS
– Injection Profile Status Block
Bit-mapped
Injection
Injection Maximum Pressures 3–7. . . . . . . . . . . . . . . . . . . . . . . .
Injection
ords 3–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Status W
Profile Actuals
Profile Actuals
T
imes 3–5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Status W
Profile Actuals
T
ransition Actuals
ords 3–3. . . . . . . . . . . . . . . . . . . . . . . . . . .
ords 3–5. . . . . . . . . . . . . . . . . . . . . . . . . . .
3–2. . . . . . . . . . . . . . . . . . . . . .
3–3. . . . . . . . . . . . . . . . . . . . .
3–4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–5. . . . . . . . . . . . . . . . . . . . . . . .
3–6. . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–7. . . . . . . . . . . . . . . . . . . . . . . . . .
Publication
1771-6.5.126– March 1998
Page 9

Table of Contents toc–v
PPS
– Plastication Profile Status Block
Bit-mapped
Plastication
Plastication Maximum Pressure 3–10. . . . . . . . . . . . . . . . . . . . . .
Post-decompression Maximum Pressure 3–10. . . . . . . . . . . . . . . .
Execution
Post-decompression Movement Actuals 3–11. . . . . . . . . . . . . . . .
Shot
PTS – Process Trace Status Block 3–11. . . . . . . . . . . . . . . . . . . . . . . .
Bit-mapped
– Inject ERC V
RLS
Bit-mapped
Injection Profile ERC Actuals 3–13. . . . . . . . . . . . . . . . . . . . . . . .
Pack Profile ERC Actuals 3–13. . . . . . . . . . . . . . . . . . . . . . . . . . .
Hold Profile ERC Actuals 3–13. . . . . . . . . . . . . . . . . . . . . . . . . . .
Plastication Profile ERC Actuals 3–13. . . . . . . . . . . . . . . . . . . . . .
SYS – System Status Block 3–14. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit-mapped
Input
Input
Output
Cycle Maximum Pressures 3–25. . . . . . . . . . . . . . . . . . . . . . . . . .
Process
Process
Diagnostics 3–26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
New
Status W
Profile Actuals
T
imes 3–11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size Actual
Status W
Status W
Status W
Level In Engineering Units
Level, Raw Signal
Level in Percentage
T
race Data Collection Status
T
imes 3–26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Status Confirmation
ords 3–8. . . . . . . . . . . . . . . . . . . . . . . . . . .
ords 3–11. . . . . . . . . . . . . . . . . . . . . . . . . . .
alues Status Block 3–13. . . . . . . . . . . . . . . . . . . . .
ords 3–13. . . . . . . . . . . . . . . . . . . . . . . . . . .
ords 3–14. . . . . . . . . . . . . . . . . . . . . . . . . . .
3–8. . . . . . . . . . . . . . . . . . . . .
3–9. . . . . . . . . . . . . . . . . . . . . . . . . .
3–11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–24. . . . . . . . . . . . . . . . . . . . . .
3–24. . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–24. . . . . . . . . . . . . . . . . . . . . . . . . .
3–25. . . . . . . . . . . . . . . . . .
3–26. . . . . . . . . . . . . . . . . . . . . . . . . . .
Programming Error Codes
Chapter 4
How
to Read Error Codes
= 1 MCC – Module Configuration Command Block
ID
ID
= 2 JGC – Jog Configuration Block
ID
= 8 INC – Injection Configuration Block
= 9 IPC – Injection Profile Block
ID
= 10 PKC – Pack Configuration Block
ID
ID
= 1
1 HDC – Hold Configuration Block
ID = 12 HPC – Pack/Hold Profile Block 4–17. . . . . . . . . . . . . . . . .
ID = 13 PRC – Pre-Decompression Configuration Block
ID
= 14 PLC – Plastication Configuration Block
= 15 PPC – Plastication Profile Block
ID
ID = 16 PSC – Post-Decompression Configuration Block
ID = 25 DYC – Dynamic Command Block 4–29. . . . . . . . . . . . . . .
ID
= 26 RLC – Inject ERC V
ID = 28 PTC – Process T
alues Block 4–29. . . . . . . . . . . . . . . . .
race Configuration Block
Publication
1771-6.5.126– March 1998
4–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4–3. . . . . .
4–6. . . . . . . . . . . . . . . . . .
4–7. . . . . . . . . . . . . . .
4–9. . . . . . . . . . . . . . . . . . . .
4–15. . . . . . . . . . . . . . . .
4–16. . . . . . . . . . . . . . . .
.
4–20. . . .
4–21. . . . . . . . . . . .
4–22. . . . . . . . . . . . . . . .
.
4–28. . . .
4–30. . . . . . . . .
Page 10

Table of Contentstoc–vi
Sequencing Co-injection
Module Specifications
Chapter 5
Chapter Objectives 5–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A, Only or B, Only 5–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A
and B
then B
A
Standard Programming 5–2. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Co-injection Programming 5–2. . . . . . . . . . . . . . . . . . . . . . . . . .
Suspended
Suspended Outputs Are Programmed 5–4. . . . . . . . . . . . . . . . . .
During
Flow
Chart for Co-injection Programming
Co-injection Diagram for ABA 5–6. . . . . . . . . . . . . . . . . . . . . . . .
List
of Co-injection Parameters for ABA
Flow
Flow
Outputs Are T
B, A Maintains Low Pressure or Flow (plateau)
Chart for A in Sequence ABA
Chart for Sequence ABA
urned Of
f 5–3. . . . . . . . . . . . . . . . . . . .
Chapter 6
I/O
Specifications
Environmental
Hardware Requirements 6–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Process
Conditions
Control Options
5–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5–5. . . . . .
5–6. . . . . . . . . . . . . . . . . . . .
5–6. . . . . . . . . . . . . . . . .
5–7. . . . . . . . . . . . . . . . . . . .
5–8. . . . . . . . . . . . . . . . . . . . . . .
6–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Calibration Instructions
Chapter 7
Calibration
Map Your BTW and BTR Data Blocks 7–2. . . . . . . . . . . . . . . . . . . . . .
Write Y
Set
Wire the Wiring Arms 7–5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Calibration
Calibration
Calibration
Calibration
Equipment Required
our Calibration Logic
Internal Jumpers
Setup Using Optional Equipment
Setup at the Machine Location
Procedure for Inputs
Procedure for Outputs
7–1. . . . . . . . . . . . . . . . . . . . . . . . . .
7–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7–6. . . . . . . . . . . . . . . . .
7–6. . . . . . . . . . . . . . . . . . .
7–7. . . . . . . . . . . . . . . . . . . . . . . . . .
7–8. . . . . . . . . . . . . . . . . . . . . . . . .
Publication
1771-6.5.126– March 1998
Page 11
Chapter 1
Abbreviated Command and Status Blocks
Chapter Contents
Use this chapter as a quick reference to word descriptions and
Pro-Set addresses of all data blocks used by the QI module.
For complete word and bit descriptions of these data blocks,
see Chapter 2 (command) and Chapter 3 (status).
The following tables list command and status blocks in this chapter
by page number. Blocks are presented in abbreviated format.
Command
Block:
DYC 25 1-2
HDC 11 1-2
HPC 12 1-3 HPS 12 1-15
INC 8 1-4
IPC 9 1-6 IPS 9 1-16
JGC 2 1-7
MCC 1 1-8 SYS 1 1-21
PKC 10 1-9
PLC 14 1-10
PPC 15 1-11 PPS 15 1-18
PRC 13 1-12
PSC 16 1-13
PTC 28 1-14 PTS 28 1-19
RLC 26 1-14 RLS 26 1-20
Block
ID: Page:
Status
Block:
Block
ID:
Page:
Important: Addresses are identical for both Pro-Set 600
(1771-QDC) and Pro-Set 700 except where noted for the following:
MCC05-08 and SYS23, 24
Important: In the listings that follow, we use the term RFU for
reserved for future use. Do not program the use of these words.
Publication
1771-6.5.126 – March 1998
Page 12
1–2 Abbreviated Command and Status Blocks
DYC – Dynamic
Command Block
Word Pro-Set Address Description
Bit-mapped Control Words
DYC01 B34:24 Block ID 00011001 and jog commands
DYC02 B34:25 Action-execution commands
DYC03 B34:26 Miscellaneous commands
DYC04 B34:27 Status request and status clear commands
DYC05-06 B34:28-29 RFU
DYC07 B34:30 Process trace commands
DYC08 B34:31 Process trace data block request
Direct Set-output Values
DYC09 N40:121 Output #1
DYC10 N40:122 Output #2
DYC11 N40:123 Output #3
DYC12 N40:124 Output #4
DYC131-16 N40:125-128 RFU
Acceleration Ramp Rates
DYC17 N40:129 Output #1
DYC18 N40:130 Output #2
DYC19 N40:131 Output #3
DYC20 N40:132 Output #4
DYC21-24 N40:133-136 RFU
Deceleration Ramp Rates
DYC25 N40:137 Output #1
DYC26 N40:138 Output #2
DYC27 N40:139 Output #3
DYC28 N40:140 Output #4
DYC29-32 N40:141-144 RFU
DYC33-60 N40:145-172 RFU
Request for Programming Error
DYC61 N40:173 Fetch SYS61 and SYS62
DYC62-64 N40:174-176 RFU
(Series D and newer only)
(Series D and newer only)
HDC – Hold
Configuration Block
Publication
1771-6.5.126 – March 1998
Word Pro-Set Address Description
Bit-mapped Control Words
HDC01 B38:12 Block ID 00000000 00001011
HDC02 B38:13 Selected valve configurations
HDC03-04 B38:14-15 RFU
Expert Response Compensation Percentage
HDC05 N44:181 ERC % minimum cavity pressure
HDC06 N44:182 ERC % minimum ram pressure
HDC07-08 N44:183-184 RFU
Set-output Values for Unselected Valves (During Profile)
HDC09 N44:185 Output #1
HDC10 N44:186 Output #2
HDC11 N44:187 Output #3
HDC12 N44:188 Output #4
HDC13-16 N44:189-192 RFU
Page 13
1–3Abbreviated Command and Status Blocks
Acceleration Ramp Rates
HDC17
HDC18 N44:194 Output #2
HDC19 N44:195 Output #3
HDC20 N44:196 Output #4
HDC21-24 N44:197-200 RFU
Deceleration Ramp Rates
HDC25 N44:201 Output #1
HDC26 N44:202 Output #2
HDC27 N44:203 Output #3
HDC28 N44:204 Output #4
HDC29-32 N44:205-208 RFU
End of Profile Set-output Values
HDC33 N44:209 Output #1
HDC34 N44:210 Output #2
HDC35 N44:211 Output #3
HDC36 N44:212 Output #4
HDC37-40 N44:213-216 RFU
Ram (Screw) Pressure Control Limits
HDC41 N44:217 Minimum limit
HDC42 N44:218 Maximum limit
HDC43 N44:219 % output for minimum
HDC44 N44:220 % output for maximum
Cavity Pressure Control Limits
HDC45 N44:221 Minimum limit
HDC46 N44:222 Maximum limit
HDC47 N44:223 % output for minimum
HDC48 N44:224 % output for maximum
Profile Tuning Constants
HDC49 N44:225 Proportional gain, ram (screw) pressure control
HDC50 N44:226 Integral gain, ram (screw) pressure control
HDC51 N44:227 Derivative gain, ram (screw) pressure control
HDC52 N44:228 Proportional gain, cavity pressure control
HDC53 N44:229 Integral gain, cavity pressure control
HDC54 N44:230 Derivative gain, cavity pressure control
HDC55-56 N44:231-232 RFU
Setpoints for Profile Pressure Alarms
HDC57 N44:233 High ram (screw) pressure alarm
HDC58 N44:234 High cavity pressure alarm
HDC59-64 N44:235-240 RFU
N44:193 Output #1
HPC – Pack/Hold
Profile Block
Word Pro-Set Address Description
Bit-mapped Control Words
HPC01 B38:16 Block ID 00000000 00001100
HPC02 B38:17 RFU
HPC03 B38:18 Algorithm and logical bridging selections
HPC04 B38:19 Open/closed loop and ERC selections
Publication
1771-6.5.126 – March 1998
Page 14
1–4 Abbreviated Command and Status Blocks
Setpoints for Pack Profile
HPC05-08
HPC09 N44:245 Segment 1 cavity pressure
HPC10 N44:246 Segment 1 ram (screw) pressure
HPC11 N44:247 Segment 1 time
HPC12 N44:248 Segment 2 cavity pressure
HPC13 N44:249 Segment 2 ram (screw) pressure
HPC14 N44:250 Segment 2 time
HPC15 N44:251 Segment 3 cavity pressure
HPC16 N44:252 Segment 3 ram (screw) pressure
HPC17 N44:253 Segment 3 time
HPC18 N44:254 Segment 4 cavity pressure
HPC19 N44:255 Segment 4 ram (screw) pressure
HPC20 N44:256 Segment 4 time
HPC21 N44:257 Segment 5 cavity pressure
HPC22 N44:258 Segment 5 ram (screw) pressure
HPC23 N44:259 Segment 5 time
Pack Profile Offsets
HPC24 N44:260 Cavity pressure
HPC25 N44:261 Ram (screw) pressure
Setpoints for Hold Profile
HPC26 N44:262 Segment 1 cavity pressure
HPC27 N44:263 Segment 1 ram (screw) pressure
HPC28 N44:264 Segment 1 time
HPC29 N44:265 Segment 2 cavity pressure
HPC30 N44:266 Segment 2 ram (screw) pressure
HPC31 N44:267 Segment 2 time
HPC32 N44:268 Segment 3 cavity pressure
HPC33 N44:269 Segment 3 ram (screw) pressure
HPC34 N44:270 Segment 3 time
HPC35 N44:271 Segment 4 cavity pressure
HPC36 N44:272 Segment 4 ram (screw) pressure
HPC37 N44:273 Segment 4 time
HPC38 N44:274 Segment 5 cavity pressure
HPC39 N44:275 Segment 5 ram (screw) pressure
HPC40 N44:276 Segment 5 time
Hold Profile Offsets
HPC41 N44:277 Cavity pressure
HPC42 N44:278 Ram (screw) pressure
HPC43-60 N44:279-296 RFU
Critical Process Setpoints
HPC61 N44:297 Cure timer preset
HPC62-64 N44:298-300 RFU
N44:241-244 RFU
INC – Injection
Configuration Block
Publication
1771-6.5.126 – March 1998
Word Pro-Set Address Description
Bit-mapped Control Words
INC01 B38:0 Block ID 00000000 00001000
INC02 B38:1 Selected valve configurations
INC03-04 B38:2-3 RFU
Page 15
Expert Response Compensation Percentage
INC05
N44:1 ERC % minimum velocity
INC06 N44:2 ERC % minimum pressure
INC07, 08 N44:3, 4 RFU
Set-output Values for Unselected Valves (During Profile)
INC09 N44:5 Output #1
INC10 N44:6 Output #2
INC11 N44:7 Output #3
INC12 N44:8 Output #4
INC13-16 N44:9-12 RFU
Acceleration Ramp Rates
INC17 N44:13 Output #1
INC18 N44:14 Output #2
INC19 N44:15 Output #3
INC20 N44:16 Output #4
INC21-24 N44:17-20 RFU
Deceleration Ramp Rates
INC25 N44:21 Output #1
INC26 N44:22 Output #2
INC27 N44:23 Output #3
INC28 N44:24 Output #4
INC29-32 N44:25-28 RFU
End of Profile Set-output Values
INC33 N44:29 Output #1
INC34 N44:30 Output #2
INC35 N44:31 Output #3
INC36 N44:32 Output #4
INC37-40 N44:32-36 RFU
Pressure Control Limits
INC41 N44:37 Minimum limit
INC42 N44:38 Maximum limit
INC43 N44:39 % output for minimum
INC44 N44:40 % output for maximum
Velocity Control Limits
INC45 N44:41 Minimum limit
INC46 N44:42 Maximum limit
INC47 N44:43 % output for minimum
INC48 N44:44 % output for maximum
Profile Tuning Constants
INC49 N44:45 Proportional gain, pressure control
INC50 N44:46 Integral gain, pressure control
INC51 N44:47 Derivative gain, pressure control
INC52 N44:48 Proportional gain, velocity control
INC53 N44:49 Feedforward gain, velocity control
INC54-56 N44:50-52 RFU
Setpoints for Profile Pressure Alarms
INC57 N44:53 High ram (screw) pressure alarm
INC58 N44:54 High cavity pressure alarm
INC59-60 N44:55-56 RFU
1–5Abbreviated Command and Status Blocks
Publication
1771-6.5.126 – March 1998
Page 16
1–6 Abbreviated Command and Status Blocks
Set-outputs During Suspended Injection
INC:61
INC:62 N44:58 Output #2
INC:63 N44:59 Output #3
INC:64 N44:60 Output #4
IPC – Injection
Profile Block
Word Pro-Set Addr Description
Bit-mapped Control Words
IPC01 B38:4 Block ID 00000000 00001001
Bit-mapped Control Words
IPC02 B38:5 RFU
IPC03 B38:6 Algorithm and offset polarity selections
IPC04 B38:7 Open/closed loop and ERC selections
Co-injection Parameters
IPC05-06 N44:61-62 RFU
IPC07 N44:63 Time delay after reaching opposite screw position, co-inject
IPC08 N44:64 Screw position to exit injection suspension, co-injection
Injection Profile Setpoints
IPC09 N44:65 Segment 1 velocity
IPC10 N44:66 Segment 1 pressure
IPC11 N44:67 End of Segment 1 position
IPC12 N44:68 Segment 1 time
IPC13 N44:69 Segment 2 velocity
IPC14 N44:70 Segment 2 pressure
IPC15 N44:71 End of Segment 2 position
IPC16 N44:72 Segment 2 time
IPC17 N44:73 Segment 3 velocity
IPC18 N44:74 Segment 3 pressure
IPC19 N44:75 End of Segment 3 position
IPC20 N44:76 Segment 3 time
IPC21 N44:77 Segment 4 velocity
IPC22 N44:78 Segment 4 pressure
IPC23 N44:79 End of Segment 4 position
IPC24 N44:80 Segment 4 time
IPC25 N44:81 Segment 5 velocity
IPC26 N44:82 Segment 5 pressure
IPC27 N44:83 End of Segment 5 position
IPC28 N44:84 Segment 5 time
IPC29 N44:85 Segment 6 velocity
IPC30 N44:86 Segment 6 pressure
IPC31 N44:87 End of Segment 6 position
IPC32 N44:88 Segment 6 time
IPC33 N44:89 Segment 7 velocity
IPC34 N44:90 Segment 7 pressure
IPC35 N44:91 End of Segment 7 position
IPC36 N44:92 Segment 7 time
IPC37 N44:93 Segment 8 velocity
IPC38 N44:94 Segment 8 pressure
IPC39 N44:95 End of Segment 8 position
IPC40 N44:96 Segment 8 time
N44:57 Output #1
Publication
1771-6.5.126 – March 1998
Page 17
1–7Abbreviated Command and Status Blocks
Setpoints for Injection Profile (continued)
IPC41
IPC42 N44:98 Segment 9 pressure
IPC43 N44:99 End of Segment 9 position
IPC44 N44:100 Segment 9 time
IPC45 N44:101 Segment 10 velocity
IPC46 N44:102 Segment 10 pressure
IPC47 N44:103 End of Segment 10 position
IPC48 N44:104 Segment 10 time
IPC49 N44:105 Segment 11 velocity
IPC50 N44:106 Segment 11 pressure
Profile Offsets
IPC51 N44:107 Velocity Profile
IPC52 N44:108 Pressure Profile
IPC53 N44:109 RFU
Setpoints for Suspended Injection
IPC54 N44:110 Closed-loop velocity setpoint during suspended injection
IPC55 N44:111 Closed-loop pressure setpoint during suspended injection
IPC56 N44:112 Screw position (of own) to start suspension
Pressure Limiting Values
IPC57 N44:113 Ram (Screw) pressure, LimVel/Pos profile
IPC58 N44:114 Ram (Screw) position to begin pressure limiting
IPC59 N44:115 Time delay for change in algorithm
Transition (Transfer) Values
IPC60 N44:116 Time
IPC61 N44:117 Ram (Screw) position
IPC62 N44:118 Ram (Screw) pressure
IPC63 N44:119 Cavity pressure
Transition (Transfer) Pressure Inhibit
IPC64 N44:120 Ram (Screw) position
N44:97 Segment 9 velocity
JGC – Jog
Configuration Block
Word Pro-Set Address Description
Bit-mapped Control Words
JGC01 B34:36 Block ID 00000000 00000010
JGC02-04 B34:37-39 RFU
Jog Alarm Setpoints
JGC05 N40:61 Screw jog RPM alarm
JGC06 N40:62 Ram jog pressure alarm
JGC07 N40:63 RFU
JGC08 N40:64 RFU
Screw-rotate Jog Set-output Values
JGC09 N40:65 Output #1
JGC10 N40:66 Output #2
JGC11 N40:67 Output #3
JGC12 N40:68 Output #4
JGC13-16 N40:69-72 RFU
Publication
1771-6.5.126 – March 1998
Page 18
1–8 Abbreviated Command and Status Blocks
Ram(Screw) Forward-jog Set-output Values
JGC17
JGC18 N40:74 Output #2
JGC19 N40:75 Output #3
JGC20 N40:76 Output #4
JGC21-24 N40:77-80 RFU
Ram(Screw) Reverse-jog Set-output Values
JGC25 N40:81 Output #1
JGC26 N40:82 Output #2
JGC27 N40:83 Output #3
JGC28 N40:84 Output #4
JGC29-64 N40:85-120 RFU
MCC – Module
Configuration Command
Block
Word Pro-Set Address Description
Bit-mapped Control Words
MCC01 B34:32 Block ID 00000000 00000001
MCC02 B34:33 Module density and operating modes
MCC03 B34:34 Input range selection
MCC04 B34:35 Output range selection
Output Stop-position Adjustment
MCC05*_0** N40:1* N24:72** Output #1 stop position adjustment
MCC06*_0** N40:2 N24:73** Output #2 stop position adjustment
MCC07*_0** N40:3 N24:74** Output #3 stop position adjustment
MCC08*_0** N40:4 N24:75** Output #4 stop position adjustment
*Pro-set
600 **Pro-Set 700
Ram (Screw) Position Sensor Configuration
MCC09 N40:5 Minimum position
MCC10 N40:6 Maximum position
MCC11 N40:7 Analog signal @ min position
MCC12 N40:8 Analog signal @ max position
MCC13 N40:9 Minimum SWTL (software travel limit)
MCC14 N40:10 Maximum SWTL
MCC15 N40:11 SWTL alarm deadband
MCC16 N40:12 Digital filter
MCC17 N40:13 Minimum pressure
MCC18 N40:14 Maximum pressure
MCC19 N40:15 Analog signal @ min pressure
MCC20 N40:16 Analog signal @ max pressure
MCC21 N40:17 High pressure alarm setpoint
MCC22 N40:18 Time delay for pressure alarms
MCC43 N40:39 SWTL alarm deadband
MCC44 N40:40 Digital filter
MCC50 N40:46 Time delay for pressure alarms
Screw RPM Sensor Configuration
MCC51 N40:47 Minimum RPM
MCC52 N40:48 Maximum RPM
MCC53 N40:49 Analog signal @ min RPM
MCC54 N40:50 Analog signal @ max RPM
MCC55 N40:51 High RPM alarm setpoint
MCC56 N40:52 Time delay for RPM alarms
N40:73 Output #1
For example, MCC05_0 is correct for Pro-Set 700.
Publication
1771-6.5.126 – March 1998
Page 19
PKC – Pack
Configuration Block
1–9Abbreviated Command and Status Blocks
Cavity Pressure Sensor Configuration
MCC57
MCC58 N40:54 Maximum pressure
MCC59 N40:55 Analog signal @ min pressure
MCC60 N40:56 Analog signal @ max pressure
MCC61 N40:57 High pressure alarm setpoint
MCC62 N40:58 Time delay for pressure alarms
MCC63 N40:59 Switchover time delay, input 3: cavity pressure/RPM
MCC64 N40:60 Number of input samples for loss-of-sensor alarms
Word Pro-Set Address Description
Bit-mapped Control Words
PKC01 B38:8 Block ID 00000000 00001010
PKC02 B38:9 Selected valve configurations
PKC03-04 B38:10-11 RFU
Expert Response Compensation Percentage
PKC05 N44:121 ERC % minimum cavity pressure
PKC06 N44:122 ERC % minimum ram pressure
PKC07-08 N44:123-124 RFU
Set-output Values for Unselected Valves (During Profile)
PKC09 N44:125 Output #1
PKC10 N44:126 Output #2
PKC11 N44:127 Output #3
PKC12 N44:128 Output #4
PKC13-16 N44:129-132 RFU
Acceleration Ramp Rates
PKC17 N44:133 Output #1
PKC18 N44:134 Output #2
PKC19 N44:135 Output #3
PKC20 N44:136 Output #4
PKC21-24 N44:137-140 RFU
Deceleration Ramp Rates
PKC25 N44:141 Output #1
PKC26 N44:142 Output #2
PKC27 N44:143 Output #3
PKC28 N44:144 Output #4
PKC29-40 N44:145-156 RFU
Ram (Screw) Pressure Control Limits
PKC41 N44:157 Minimum limit
PKC42 N44:158 Maximum limit
PKC43 N44:159 % output for minimum
PKC44 N44:160 % output for maximum
Cavity Pressure Control Limits
PKC45 N44:161 Minimum limit
PKC46 N44:162 Maximum limit
PKC47 N44:163 % output for minimum
PKC48 N44:164 % output for maximum
N40:53 Minimum pressure
Publication
1771-6.5.126 – March 1998
Page 20
1–10 Abbreviated Command and Status Blocks
Profile Tuning Constants
PKC49
PKC50 N44:166 Integral gain, ram (screw) pressure control
PKC51 N44:167 Derivative gain, ram (screw) pressure control
PKC52 N44:168 Proportional gain, cavity pressure control
PKC53 N44:169 Integral gain, cavity pressure control
PKC54 N44:170 Derivative gain, cavity pressure control
Setpoints for Profile Pressure Alarms
PKC55-56 N44:171-172 RFU
PKC57 N44:173 High ram (screw) pressure alarm
PKC58 N44:174 High cavity pressure alarm
PKC59-64 N44:175-180 RFU
PLC – Plastication
Configuration Block
Word Pro-Set Address Description
Bit-mapped Control Words
PLC01 B38:24 Block ID 00000000 00001110
PLC02 B38:25 Selected valve configurations
PLC03-04 B38:26-27 RFU
Expert Response Compensation Percentage
PLC05 N44:361 ERC % minimum RPM
PLC06 N44:362 ERC % minimum pressure
PLC07 N44:363 RFU
Watchdog Timer
PLC08 N44:364 Profile timer preset
Set-output Values for Unselected Valves (During Profile)
PLC09 N44:365 Output #1
PLC10 N44:366 Output #2
PLC11 N44:367 Output #3
PLC12 N44:368 Output #4
PLC13-16 N44:369-372 RFU
Acceleration Ramp Rates
PLC17 N44:373 Output #1
PLC18 N44:374 Output #2
PLC19 N44:375 Output #3
PLC20 N44:376 Output #4
PLC21-24 N44:377-380 RFU
Deceleration Ramp Rates
PLC25 N44:381 Output #1
PLC26 N44:382 Output #2
PLC27 N44:383 Output #3
PLC28 N44:384 Output #4
PLC29-32 N44:385-388 RFU
End of Profile Set-output Values
PLC33 N44:389 Output #1
PLC34 N44:390 Output #2
PLC35 N44:391 Output #3
PLC36 N44:392 Output #4
PLC37-40 N44:393-396 RFU
N44:165 Proportional gain, ram (screw) pressure control
Publication
1771-6.5.126 – March 1998
Page 21
PPC – Plastication
Profile Block
Pressure Control Limits
PLC41
PLC42 N44:398 Maximum limit
PLC43 N44:399 % output for minimum
PLC44 N44:400 % output for maximum
RPM Control Limits
PLC45 N44:401 Minimum limit
PLC46 N44:402 Maximum limit
PLC47 N44:403 % output for minimum
PLC48 N44:404 % output for maximum
Profile Tuning Constants
PLC49 N44:405 Proportional gain, pressure control
PLC50 N44:406 Integral gain, pressure control
PLC51 N44:407 Derivative gain, pressure control
PLC52 N44:408 Proportional gain, RPM control
PLC53 N44:409 Integral gain, RPM control
PLC54 N44:410 Derivative gain, RPM control
PLC55-56 N44:411-412 Open
Setpoint for Profile Pressure Alarm
PLC57 N44:413 High pressure alarm
PLC58-64 N44:414-420 RFU
Word Pro-Set Address Description
Bit-mapped Control Words
PPC01 B38:28 Block ID 00000000 00001111
PPC02 B38:29 RFU
PPC03 B38:30 Algorithm and logical bridging selections
PPC04 B38:31 Open/closed loop and ERC selections
Setpoints for Plastication Profile
PPC05-08 N44:421-424 RFU
PPC09 N44:425 Segment 1 RPM
PPC10 N44:426 Segment 1 pressure
PPC11 N44:427 End of Segment 1 position
PPC12 N44:428 Segment 1 time
PPC13 N44:429 Segment 2 RPM
PPC14 N44:430 Segment 2 pressure
PPC15 N44:431 End of Segment 2 position
PPC16 N44:432 Segment 2 time
PPC17 N44:433 Segment 3 RPM
PPC18 N44:434 Segment 3 pressure
PPC19 N44:435 End of Segment 3 position
PPC20 N44:436 Segment 3 time
PPC21 N44:437 Segment 4 RPM
PPC22 N44:438 Segment 4 pressure
PPC23 N44:439 End of Segment 4 position
PPC24 N44:440 Segment 4 time
PPC25 N44:441 Segment 5 RPM
PPC26 N44:442 Segment 5 pressure
PPC27 N44:443 End of Segment 5 position
PPC28 N44:444 Segment 5 time
N44:397 Minimum limit
1–11Abbreviated Command and Status Blocks
Publication
1771-6.5.126 – March 1998
Page 22
1–12 Abbreviated Command and Status Blocks
Setpoints for Plastication Profile (continued)
PPC29
PPC30 N44:446 Segment 6 pressure
PPC31 N44:447 End of Segment 6 position
PPC32 N44:448 Segment 6 time
PPC33 N44:449 Segment 7 RPM
PPC34 N44:450 Segment 7 pressure
PPC35 N44:451 End of Segment 7 position
PPC36 N44:452 Segment 7 time
PPC37 N44:453 Segment 8 RPM
PPC38 N44:454 Segment 8 pressure
PPC39 N44:455 End of Segment 8 position
PPC40 N44:456 Segment 8 time
PPC41 N44:457 Segment 9 RPM
PPC42 N44:458 Segment 9 pressure
PPC43 N44:459 End of Segment 9 position
PPC44 N44:460 Segment 9 time
PPC45 N44:461 Segment 10 RPM
PPC46 N44:462 Segment 10 pressure
PPC47 N44:463 End of Segment 10 position
PPC48 N44:464 Segment 10 time
PPC49 N44:465 Segment 11 RPM
PPC50 N44:466 Segment 11 pressure
Profile Offsets
PPC51 N44:467 RPM
PPC52 N44:468 Pressure
PPC53-60 N44:469-476 RFU
Critical Process Setpoints
PPC61 N44:477 Cushion
PPC62 N44:478 Shot size
PPC63-64 N44:479-480 RFU
N044:445 Segment 6 RPM
PRC – Pre-decompression
Configuration Block
Publication
1771-6.5.126 – March 1998
Word Pro-Set Address Description
Bit-mapped Control Words
PRC01 B38:20 Block ID 00000000 00001101
PRC02-04 B38:21-23 RFU
Movement Length
PRC05 N44:301 Length of pre-decompress movement
PRC06-07 N44:302-303 RFU
Watchdog Timer
PRC08 N44:304 Movement timer preset
Set-output Values During Movement
PRC09 N44:305 Output #1
PRC10 N44:306 Output #2
PRC11 N44:307 Output #3
PRC12 N44:308 Output #4
PRC13-16 N44:309-312 RFU
Page 23
Acceleration Ramp Rates
PRC17
PRC18 N44:314 Output #2
PRC19 N44:315 Output #3
PRC20 N44:316 Output #4
Deceleration Ramp Rates
PRC25 N44:321 Output #1
PRC26 N44:322 Output #2
PRC27 N44:323 Output #3
PRC28 N44:324 Output #4
PRC29-32 N44:325-328 RFU
End of Movement Set-output Values
PRC33 N44:329 Output #1
PRC34 N44:330 Output #2
PRC35 N44:331 Output #3
PRC36 N44:332 Output #4
PRC37-56 N44:333-352 RFU
Setpoint for Movement Pressure Alarm
PRC57 N44:353 High pressure alarm
PRC58-64 N44:354-360 RFU
N44:313 Output #1
1–13Abbreviated Command and Status Blocks
PSC –
Post-decompression
Configuration Block
Word Pro-Set Address Description
Bit-mapped Control Words
PSC01 B38:32 Block ID 00000000 00010000
PSC02-04 B38:33-35 RFU
Movement Length
PSC05 N44:481 Length of post-decompress movement
PSC06-07 N44:482-483 RFU
Watchdog Timer
PSC08 N44:484 Movement timer preset
Set-output Values During Movement
PSC09 N44:485 Output #1
PSC10 N44:486 Output #2
PSC11 N44:487 Output #3
PSC12 N44:488 Output #4
PSC13-16 N44:489-492 RFU
Acceleration Ramp Rates
PSC17 N44:493 Output #1
PSC18 N44:494 Output #2
PSC19 N44:495 Output #3
PSC20 N44:496 Output #4
PSC21-24 N44:497-500 RFU
Deceleration Ramp Rates
PSC25 N44:501 Output #1
PSC26 N44:502 Output #2
PSC27 N44:503 Output #3
PSC28 N44:504 Output #4
PSC29-32 N44:505-508 RFU
Publication
1771-6.5.126 – March 1998
Page 24
1–14 Abbreviated Command and Status Blocks
End of Movement Set-output Values
PSC33
PSC34 N44:510 Output #2
PSC35 N44:511 Output #3
PSC36 N44:512 Output #4
PSC37-56 N44:513-532 RFU
Setpoint for Movement Pressure Alarm
PSC57 N44:533 High pressure alarm
PSC58-64 N44:534-40 RFU
PTC – Process Trace
Configuration Block
Word Pro-Set Address Description
Bit-mapped Control Words
PTC01 B131:9 Block ID 00000000 00011100
PTC02 B131:10 Process trace and trigger control
PTC03-04 B131:11-12 Open
PTC05 N132:0 Trigger delay
PTC06 N132:1 Trigger position
PTC07 N132:2 Trace data collection sample rate
PTC08 N132:3 Trace 1 selection
PTC09 N132:4 Trace 2 selection
PTC10 N132:5 Trace 3 selection
PTC11 N132:6 Trace 4 selection
PTC12-64 N132:7-59 RFU
N44:509 Output #1
RLC – Inject ERC Values
Block
Word Pro-Set Address Description
Bit-mapped Control Words
RLC01 B38:36 Block ID 00000000 00011010
RLC02-04 B38:37-39 RFU
ERC Values for Injection Profile
RLC05-08 N44:541-544 RFU
RLC09 N44:545 Injection segment 1
RLC10 N44:546 Injection segment 2
RLC11 N44:547 Injection segment 3
RLC12 N44:548 Injection segment 4
RLC13 N44:549 Injection segment 5
RLC14 N44:550 Injection segment 6
RLC15 N44:551 Injection segment 7
RLC16 N44:552 Injection segment 8
RLC17 N44:553 Injection segment 9
RLC18 N44:554 Injection segment 10
RLC19 N44:555 Injection segment 11
ERC Values for Pack Profile
RLC20 N44:556 Pack segment 1
RLC21 N44:557 Pack segment 2
RLC22 N44:558 Pack segment 3
RLC23 N44:559 Pack segment 4
RLC24 N44:560 Pack segment 5
Publication
1771-6.5.126 – March 1998
Page 25
ERC Values for Hold Profile
RLC25
RLC26 N44:562 Hold segment 2
RLC27 N44:563 Hold segment 3
RLC28 N44:564 Hold segment 4
RLC29 N44:565 Hold segment 5
ERC Values for Plastication Profile
RLC30 N44:566 Plastication segment 1
RLC31 N44:567 Plastication segment 2
RLC32 N44:568 Plastication segment 3
RLC33 N44:569 Plastication segment 4
RLC34 N44:570 Plastication segment 5
RLC35 N44:571 Plastication segment 6
RLC36 N44:572 Plastication segment 7
RLC37 N44:573 Plastication segment 8
RLC38 N44:574 Plastication segment 9
RLC39 N44:575 Plastication segment 10
RLC40 N44:576 Plastication segment 11
RLC41-64 N44:577-600 RFU
N44:561 Hold segment 1
1–15Abbreviated Command and Status Blocks
HPS – Pack/Hold Profile
Status Block
Word Pro-Set Address Description
Bit-mapped Status Words
HPS01 B34:0 Block ID 00000100 (lower byte)
HPS01 B34:0 Jog status (upper byte)
HPS02 B34:1 Status of profile execution
HPS03 B34:2 Miscellaneous status
HPS04 B34:3 Status of watchdog timers
HPS05-06 B38:44-45 RFU
HPS07 B38:46 CV high limit alarms
HPS08 B38:47 CV low limit alarms
Actuals from Pack Profile
HPS09 N44:657 Segment 1 cavity pressure
HPS10 N44:658 Segment 1 ram (screw) pressure
HPS11 N44:659 End of Segment 1 position
HPS12 N44:660 Segment 2 cavity pressure
HPS13 N44:661 Segment 2 ram (screw) pressure
HPS14 N44:662 End of Segment 2 position
HPS15 N44:663 Segment 3 cavity pressure
HPS16 N44:664 Segment 3 ram (screw) pressure
HPS17 N44:665 End of Segment 3 position
HPS18 N44:666 Segment 4 cavity pressure
HPS19 N44:667 Segment 4 ram (screw) pressure
HPS20 N44:668 End of Segment 4 position
HPS21 N44:669 Segment 5 cavity pressure
HPS22 N44:670 Segment 5 ram (screw) pressure
HPS23 N44:671 End of Segment 5 position
HPS24-25 N44:672 RFU
Publication
1771-6.5.126 – March 1998
Page 26
1–16 Abbreviated Command and Status Blocks
Actuals from Hold Profile
HPS26
HPS27 N44:675 Segment 1 ram (screw) pressure
HPS28 N44:676 End of Segment 1 position
HPS29 N44:677 Segment 2 cavity pressure
HPS30 N44:678 Segment 2 ram (screw) pressure
HPS31 N44:679 End of Segment 2 position
HPS32 N44:680 Segment 3 cavity pressure
HPS33 N44:681 Segment 3 ram (screw) pressure
HPS34 N44:682 End of Segment 3 position
HPS35 N44:6834 Segment 4 cavity pressure
HPS36 N44:684 Segment 4 ram (screw) pressure
HPS37 N44:685 End of Segment 4 position
HPS38 N44:686 Segment 5 cavity pressure
HPS39 N44:687 Segment 5 ram (screw) pressure
HPS40 N44:688 End of Segment 5 position
HPS41-50 N44:689-698 RFU
Maximum Pressures During Pack
HPS51 N44:699 Ram (screw)
HPS52 N44:700 Cavity
Maximum Pressures During Hold
HPS53 N44:701 Ram (screw)
HPS54 N44:702 Cavity
Maximum Pressure During Pre-decompression
HPS55 N44:703 Ram (screw)
HPS56 N44:704 RFU
Profile Execution Times
HPS57 N44:705 During pack
HPS58 N44:706 During hold
HPS59 N44:707 During pre-decompression
HPS60 N44:708 RFU
Actuals from Pre-decompression Movement
HPS61 N44:709 Velocity
HPS62 N44:710 Pressure
End of Hold Ram (Screw) Position
HPS63 N44:711 Position at End of-hold
HPS64 N44:712 RFU
N44:674 Segment 1 cavity pressure
IPS – Injection Profile
Status Block
Publication
1771-6.5.126 – March 1998
Word Pro-Set Address Description
Bit-mapped Status Words
IPS01 B34:0 Block ID 00000011 (lower byte)
IPS01 B34:0 Jog status (upper byte)
IPS02 B34:1 Status of profile execution
IPS03 B34:2 Miscellaneous status
IPS04 B34:3 Status of watchdog timers
IPS05 B38:40 Status of pressure limit alarms
IPS06 B38:41 Status of injection transitions
IPS07 B38:42 CV high limit alarms
IPS08 B38:43 CV low limit alarms
Page 27
Injection Profile Actuals
IPS09
N44:601 Segment 1 velocity
IPS10 N44:602 Segment 1 pressure
IPS11 N44:603 Segment 1 execution time
IPS12 N44:604 End of Segment 1 position
IPS13 N44:605 Segment 2 velocity
IPS14 N44:606 Segment 2 pressure
IPS15 N44:607 Segment 2 execution time
IPS16 N44:608 End of Segment 2 position
IPS17 N44:609 Segment 3 velocity
IPS18 N44:610 Segment 3 pressure
IPS19 N44:611 Segment 3 execution time
IPS20 N44:612 End of Segment 3 position
IPS21 N44:613 Segment 4 velocity
IPS22 N44:614 Segment 4 pressure
IPS23 N44:615 Segment 4 execution time
IPS24 N44:616 End of Segment 4 position
IPS25 N44:617 Segment 5 velocity
IPS26 N44:618 Segment 5 pressure
IPS27 N44:619 Segment 5 execution time
IPS28 N44:620 End of Segment 5 position
IPS29 N44:621 Segment 6 velocity
IPS30 N44:622 Segment 6 pressure
IPS31 N44:623 Segment 6 execution time
IPS32 N44:624 End of Segment 6 position
IPS33 N44:625 Segment 7 velocity
IPS34 N44:626 Segment 7 pressure
IPS35 N44:627 Segment 7 execution time
IPS36 N44:628 End of Segment 7 position
IPS37 N44:629 Segment 8 velocity
IPS38 N44:630 Segment 8 pressure
IPS39 N44:631 Segment 8 execution time
IPS40 N44:632 End of Segment 8 position
IPS41 N44:633 Segment 9 velocity
IPS42 N44:634 Segment 9 pressure
IPS43 N44:635 Segment 9 execution time
IPS44 N44:636 End of Segment 9 position
IPS45 N44:637 Segment 10 velocity
IPS46 N44:638 Segment 10 pressure
IPS47 N44:639 Segment 10 execution time
IPS48 N44:640 End of Segment 10 position
IPS49 N44:641 Segment 11 velocity
IPS50 N44:642 Segment 11 pressure
IPS51 N44:643 Segment 11 execution time
IPS52 N44:644 RFU
Maximum Pressures During Injection
IPS53 N44:645 Ram (screw)
IPS54 N44:646 Cavity
IPS55-60 N44:647-652 RFU
1–17Abbreviated Command and Status Blocks
Publication
1771-6.5.126 – March 1998
Page 28
1–18 Abbreviated Command and Status Blocks
Transition (Transfer) Actuals
IPS61
IPS62 N44:654 Position
IPS63 N44:655 Ram (screw) pressure
IPS64 N44:656 Cavity pressure
PPS – Plastication Profile
Status Block
Word Pro-Set Address Description
Bit-mapped Status Words
PPS01 B34:0 Block ID 00000101 (lower byte)
PPS01 B34:0 Jog status (upper byte)
PPS02 B34:1 Status of profile execution
PPS03 B34:2 Miscellaneous status
PPS04 B34:3 Status of watchdog timers
PPS05-06 B38:48-49 RFU
PPS07 B38:50 CV high limit alarms
PPS08 B38:51 CV low limit alarms
Plastication Profile Actuals
PPS09 N44:713 Segment 1 RPM
PPS10 N44:714 Segment 1 pressure
PPS11 N44:715 Segment 1 execution time
PPS12 N44:716 End of Segment 1 position
PPS13 N44:717 Segment 2 RPM
PPS14 N44:718 Segment 2 pressure
PPS15 N44:719 Segment 2 execution time
PPS16 N44:720 End of Segment 2 position
PPS17 N44:721 Segment 3 RPM
PPS18 N44:722 Segment 3 pressure
PPS19 N44:723 Segment 3 execution time
PPS20 N44:724 End of Segment 3 position
PPS21 N44:725 Segment 4 RPM
PPS22 N44:726 Segment 4 pressure
PPS23 N44:727 Segment 4 execution time
PPS24 N44:728 End of Segment 4 position
PPS25 N44:729 Segment 5 RPM
PPS26 N44:730 Segment 5 pressure
PPS27 N44:731 Segment 5 execution time
PPS28 N44:732 End of Segment 5 position
PPS29 N44:733 Segment 6 RPM
PPS30 N44:734 Segment 6 pressure
PPS31 N44:735 Segment 6 execution time
PPS32 N44:736 End of Segment 6 position
PPS33 N44:737 Segment 7 RPM
PPS34 N44:738 Segment 7 pressure
PPS35 N44:739 Segment 7 execution time
PPS36 N44:740 End of Segment 7 position
PPS37 N44:741 Segment 8 RPM
PPS38 N44:742 Segment 8 pressure
PPS39 N44:743 Segment 8 execution time
PPS40 N44:744 End of Segment 8 position
N44:653 Time
Publication
1771-6.5.126 – March 1998
Page 29
Plastication Profile Actuals (continued)
PPS41
PPS42 N44:746 Segment 9 pressure
PPS43 N44:747 Segment 9 execution time
PPS44 N44:748 End of Segment 9 position
PPS45 N44:749 Segment 10 RPM
PPS46 N44:750 Segment 10 pressure
PPS47 N44:751 Segment 10 execution time
PPS48 N44:752 End of Segment 10 position
PPS49 N44:753 Segment 11 RPM
PPS50 N44:754 Segment 11 pressure
PPS51 N44:755 Segment 11 execution time
PPS52 N44:756 RFU
Maximum Plastication Pressure
PPS53 N44:757 Ram (screw)
Maximum Post-decompression Pressure
PPS54 N44:758 Ram (screw)
PPS55-56 N44:759-760 RFU
Profile Execution Times
PPS57 N44:761 During plastication
PPS58 N44:762 During post-decompression
PPS59-60 N44:763-764 RFU
Actuals from Post-decompression Movement
PPS61 N44:765 Velocity
PPS62 N44:766 Pressure
Actual Shot Size
PPS63 N44:767 Total length
PPS64 N44:768 RFU
N44:745 Segment 9 RPM
1–19Abbreviated Command and Status Blocks
PTS – Process Trace
Status Block
Word Pro-Set Address Description
Bit-mapped Status Words
PTS01 B131:0 Block ID 00001010 (lower byte)
PTS01 B131:1 Power up, jog execution status (hi byte)
PTS02 B131:2 Status of profile execution
PTS03 B131:3 Miscellaneous status
PTS04 B131:4 Status of watchdog timers
PTS05 B131:5 Trace selection
PTS06 B131:6 Trace data block number
PTS07-08 B131:7-8 RFU
Data Point Time/Count
PTS09 N132:60 Time to first trace data point
PTS10 N132:61 Trace data point count
PTS11-14 N132:62-65 RFU
Starting Data Points from Injection Profile
PTS15 N132:66 Inject segment 1 start data point
PTS16 N132:67 Inject segment 2 start data point
PTS17 N132:68 Inject segment 3 start data point
PTS18 N132:69 Inject segment 4 start data point
PTS19 N132:70 Inject segment 5 start data point
Publication
1771-6.5.126 – March 1998
Page 30
1–20 Abbreviated Command and Status Blocks
Starting Data Points from Injection Profile (continued)
PTS20
PTS21 N132:72 Inject segment 7 start data point
PTS22 N132:73 Inject segment 8 start data point
PTS23 N132:74 Inject segment 9 start data point
PTS24 N132:75 Inject segment 10 start data point
PTS25 N132:76 Inject segment 11 start data point
Starting Data Points from Pack/Hold Profiles
PTS26 N132:77 Pack segment 1 start data point
PTS27 N132:78 Pack segment 2 start data point
PTS28 N132:79 Pack segment 3 start data point
PTS29 N132:80 Pack segment 4 start data point
PTS30 N132:81 Pack segment 5 start data point
PTS31 N132:82 Hold segment 1 start data point
PTS32 N132:83 Hold segment 2 start data point
PTS33 N132:84 Hold segment 3 start data point
PTS34 N132:85 Hold segment 4 start data point
PTS35 N132:86 Hold segment 5 start data point
PTS36 N132:87 Pre-decompress start data point
Starting Data Points from Plastication Profile
PTS37 N132:88 Plastication segment 1 start data point
PTS38 N132:89 Plastication segment 2 start data point
PTS39 N132:90 Plastication segment 3 start data point
PTS40 N132:91 Plastication segment 4 start data point
PTS41 N132:92 Plastication segment 5 start data point
PTS42 N132:93 Plastication segment 6 start data point
PTS43 N132:94 Plastication segment 7 start data point
PTS44 N132:95 Plastication segment 8 start data point
PTS45 N132:96 Plastication segment 9 start data point
PTS46 N132:97 Plastication segment 10 start data point
PTS47 N132:98 Plastication segment 11 start data point
PTS48 N132:99 Post-decompress start data point
PTS49 - 64 N132:100-115 RFU
N132:71 Inject segment 6 start data point
RLS – Inject ERC Values
Status Block
Publication
1771-6.5.126 – March 1998
Word Pro-Set Address Description
Bit-mapped Status Words
RLS01 B34:0 Block ID 00001000 (lower byte)
RLS01 B34:0 Jog status (upper byte)
RLS02 B34:1 Status of profile execution
RLS03 B34:2 Miscellaneous status
RLS04 B34:3 Status of watchdog timers
ERC Actuals from Injection Profile
RLS05-08 N44:541-544 RFU
RLS09 N44:545 Injection segment 1
RLS10 N44:546 Injection segment 2
RLS11 N44:547 Injection segment 3
RLS12 N44:548 Injection segment 4
RLS13 N44:549 Injection segment 5
Page 31

ERC Actuals from Injection Profile (continued)
RLS14
RLS15 N44:551 Injection segment 7
RLS16 N44:552 Injection segment 8
RLS17 N44:553 Injection segment 9
RLS18 N44:554 Injection segment 10
RLS19 N44:555 Injection segment 11
ERC Actuals from Pack Profile
RLS20 N44:556 Pack segment 1
RLS21 N44:557 Pack segment 2
RLS22 N44:558 Pack segment 3
RLS23 N44:559 Pack segment 4
RLS24 N44:560 Pack segment 5
ERC Actuals from Hold Profile
RLS25 N44:561 Hold segment 1
RLS26 N44:562 Hold segment 2
RLS27 N44:563 Hold segment 3
RLS28 N44:564 Hold segment 4
RLS29 N44:565 Hold segment 5
ERC Actuals from Plastication Profile
RLS30 N44:566 Plastication segment 1
RLS31 N44:567 Plastication segment 2
RLS32 N44:568 Plastication segment 3
RLS33 N44:569 Plastication segment 4
RLS34 N44:570 Plastication segment 5
RLS35 N44:571 Plastication segment 6
RLS36 N44:572 Plastication segment 7
RLS37 N44:573 Plastication segment 8
RLS38 N44:574 Plastication segment 9
RLS39 N44:575 Plastication segment 10
RLS40 N44:576 Plastication segment 11
RLS41-64 N44:577-600 RFU
N44:550 Injection segment 6
1–21Abbreviated Command and Status Blocks
SYS - System Status Block
Word Pro-Set Address Description
Bit-Mapped Status Words
SYS01 B34:0 Block ID 00000001 (lower byte)
SYS01 B34:0 Jog status (upper byte)
SYS02 B34:1 Status of profile execution
SYS03 B34:2 Miscellaneous status
SYS04 B34:3 Status of watchdog timers
SYS05-08 B34:4-7 Status of real-time alarms
SYS09-12 B34:8-11 Status of latched alarms
SYS13-14 B34:12-13 Command errors
SYS15-16 B34:14-15 Status of transferred command blocks
SYS17-18 B34:16-17 Status of last block decoding
SYS19-20 B34:18-19 Programming error alarms
SYS21 B34:20 Status of profile execution
SYS22 B34:21 Status of End of Profile action
Publication
1771-6.5.126 – March 1998
Page 32

1–22 Abbreviated Command and Status Blocks
Bit-Mapped Status Words (continued)
SYS23*_0**
SYS24*_0** B34:23* B21:19** Status of process trace data collected
*Pro-set
600 **Pro-Set 700
Input Level in Engineering Units
SYS25 N40:177 Input #1
SYS26 N40:178 Input #2
SYS27 N40:179 Input #3
SYS28 N40:180 Input #4
SYS29-32 N40:181-184 RFU
Input Level, Raw Signal Level at A/D Converter
SYS33 N40:185 Input #1
SYS34 N40:186 Input #2
SYS35 N40:187 Input #3
SYS36 N40:188 Input #4
SYS37-40 N40:189-192 RFU
Output Level in Percent
SYS41 N40:193 Output #1
SYS42 N40:194 Output #2
SYS43 N40:195 Output #3
SYS44 N40:196 Output #4
SYS45-48 N40:197-200 RFU
Maximum Pressures of Each Cycle
SYS49 N40:201 Maximum ram (screw) pressure, last cycle
SYS50, 51 N40:202, 203 RFU
SYS52 N40:204 Maximum cavity pressure, last cycle
SYS53 N40:205 RFU
Process Trace
SYS54 N40:206 Process trace data collection in progress
SYS55 N40:207 Process trace data collection done
SYS56 N40:208 RFU
Accumulated Process Times
SYS57 N40:209 Tonnage
SYS58 N40:210 Cure
SYS59 N40:211 Mold open dwell
SYS60 N40:212 Cycle
Programming Error Codes
SYS61 N40:213 ID of data block with error
SYS62 N40:214 Programming error code
Firmware ID
SYS63 N40:215 Module Series/Revision
Confirmation of New Status
SYS64 N40:216 Counter accumulated value, each new SYS
B34:22* B21:18** Status of trace data collection in progress
For example, MCC05_0 is correct for Pro-Set 700.
Publication
1771-6.5.126 – March 1998
Page 33

Command Word/Bit
Descriptions
Chapter 2
Alphabetical List of Command Blocks and Block ID Codes
Command blocks provide the parameters that control machine
operation. Command blocks are transferred from the PLC processor
to the QI module by block transfer write (BTW) instructions in
software ladder logic.
Acronym:
DYC 00011001 25 Dynamic Command Block 2-4
HDC 00001011 11 Hold Configuration Block 2-10
HPC 00001100 12 Pack/Hold Profile Block 2-13
INC 00001000 8 Injection Configuration Block 2-16
IPC 00001001 9 Injection Profile Block 2-19
JGC 00000010 2 Jog Configuration Block 2-25
MCC 00000001 1 Module Configuration Command Block 2-26
PKC 00001010 10 Pack Configuration Block 2-30
PLC 00001110 14 Plastication Configuration Block 2-32
PPC 00001111 15 Plastication Profile Block 2-35
PRC 00001101 13 Pre-Decompression Configuration Block 2-38
PSC 00010000 16 Post-Decompression Configuration Block 2-40
PTC 00011100 28 Process Trace Configuration Block 2-41
RLC 00011010 26 Inject ERC Values Block 2-42
Block ID
Binary: Decimal: Description: Page:
List of Data Words
Refer to chapter 3 for the word/bit descriptions of status blocks.
The listings of command blocks use five types of data words:
• Block ID
• Bit-mapped
• Stored-value
• Reserved (RFU)
Block ID Word
The first word in each command block contains a binary number
code in the low byte that identifies the block. The QI module uses
block IDs to identify command blocks sent from the PLC processor,
while the PLC processor uses them to identify status blocks received
from the QI module.
Publication
1771-6.5.126 – March 1998
Page 34

2–2 Command Word/Bit Descriptions
Bit-mapped Words
The first several words in any data block are bit-mapped. For
bit-mapped command words, you must set/reset or latch/ unlatch
command bits to set QI module operating configurations.
Stored-value Words
These words establish operating conditions for the QI module, such as:
• output values for certain conditions
• minimum and maximum pressures, positions, and velocities
• alarm setpoints
Reserved Words (RFU)
These words are Reserved for Future Use. Do not use them.
Engineering Units
#Code Type of Block Units and Range
01 Ram (Screw) Pressure (0000.0 to 9999.0 PSI or 000.0 to 999.9 Bar)
04 Cavity Pressure (00000.0 to 20000.0 PSI or 0000.0 to 2000.0 Bar)
05 Ram (Screw) Percent of maximum velocity (00.00 to 99.99%)
06 Ram (Screw) Velocity along axis (00.00 to 99.99 in. per sec. or 000.0 to 999.9 mm per sec.)
11 Ram (Screw) Measured from zero Incremental distance (00.00 to 99.99 in. or 000.0 to 999.9 mm.)
12 Ram (Screw) Measured from MCC13 Incremental distance (00.00 to 99.99 in. or 000.0 to 999.9 mm.)
17 Measured as noted in text Incremental distance (00.00 to 99.99 in. or 000.0 to 999.9 mm.)
18 Measured as noted in text Incremental distance (00.00 to 00.99 in. or 000.0 to 009.9 mm.)
19 Percent signal output (00.00 to 99.99%)
20 Percent signal output per second (0000. To 9999.)
21 Time measured in seconds (00.00 to 99.99)
22 Time measured in seconds (000.0 to 999.9)
23 Time measured in seconds (00.00 to 00.99)
24 Input signal range (00.00 to 10.00 or 01.00 to 05.00 or 04.00 to 20.00)
25 Screw rotational speed (000.0 to 999.9 RPM)
26 Time (algorithm) (00.00 to 9.99 minutes)
27 Inverse time (algorithm) (00.00 to 99.99 inverse minutes)
28 Inverse time (algorithm) (00.00 to 99.99 inverse seconds)
29 Unit-less
30 Binary Bit Map: bit value of 0 or 1; range of 00-15
31 Percent (00.00 to 99.99%)
In the listings of command blocks, each stored-value word is followed
by a bracketed [ ] 2-digit number code denoting the engineering units
and range associated with the value as shown in the following table:
Data Blocks Require I/O Configuration
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
The QI module decodes its own I/O configuration based on parameters
that you provide in the Module Configuration Command Block (MCC).
I/O configuration determines which of the command and status blocks
the module supports. For the module to support command and status
blocks, you must establish the following position input:
• Connect a ram (screw) position sensor to input 1.
Page 35

2–3Command Word/Bit Descriptions
Data Blocks for System Control
Command Blocks for system level control are:
Block Description
MCC Module Configuration Command Block
JGC Jog Configuration Command Block
DYC Dynamic Command Block
You must establish the QI module’s I/O configuration before it can
decide which command blocks to support. Although the module always
accepts the Module Configuration Command Block (MCC), the module
considers all other command blocks unrecognizable until it has received,
processed, and successfully error checked an MCC download from the
host processor. After you configure the QI module with a valid MCC,
the module always accepts and processes (considers them recognizable)
either of the two basic command blocks JGC and DYC when received.
The module reports system status in the system status block (SYS). The
module can always return the System Status Block to the host processor.
It returns this block after each block transfer read (BTR) request from the
PLC processor unless the previous block transfer write (BTW) to the
module was a valid dynamic command block (DYC) containing a request
for some other status block.
Data Blocks for Controlling Ram (Screw) Position
The host processor can write any of these command blocks to the QI
module to control ram (screw) position:
Command
Block
INC Injection Configuration Block –
IPC Injection Profile Block IPS
PKC Pack Configuration Block –
HDC Hold Configuration Block –
HPC Pack/Hold Profile Block HPS
PRC Pre-decompression Configuration Block –
PLC Plastication Configuration Block –
PPC Plastication Profile Block PPS
PSC Post-decompression Configuration Block –
PTC Process Trace Configuration Block PTS
RLC Inject ERC Values Block RLS
Description
Corresponding
Status Block
After you configure the QI module with a valid MCC, the module
determines if it has access to ram (screw) position data from the ram
(screw) position sensor. The module considers these command
blocks recognizable and can return these status blocks when it has an
analog input reserved for a ram (screw) position sensor, and the
sensor is physically connected to input 1.
Publication
1771-6.5.126 – March 1998
Page 36

2–4 Command Word/Bit Descriptions
DYC – Dynamic Command
Block
The module will not accept or process the Dynamic Command
Block unless it has a valid MCC installed.
Bit-mapped Control Words
Word Bit Description
DYC01 Block ID = 00011001 (low byte)
Action Execution Commands in high byte
Bits DYC01-B08 - DYC01-B15 and all 16 bits in DYC02 are the 24 action execution commands to control the module.
Because the module cannot respond to more than one action execution command at a time, it ceases all action execution and sets its outputs to zero when it decodes a valid dynamic command block with more than one of these bits SET.
The module senses this invalid request and latches alarm status bit SYS14-B00, and unlatches SYS14-B00 when it
decodes a valid Dynamic Command Block with one or none of the action execution bits SET.
B08 Set-output Command
= 0 Normal
= 1 Execute Set-output
When the module decodes a valid DYC having this bit SET, it sets its outputs to DYC09–12. The outputs remain at
these values as long as this bit is SET, and return to zero when this bit is RESET.
Jog Commands
B09 = 0 Normal
= 1 Execute Screw Rotate Jog
When the module decodes a valid DYC having this bit SET, it sets its outputs to JGC09–12. The outputs remain at
these values as long as this bit is SET, and return to zero when this bit is RESET.
B10 = 0 Normal
= 1 Execute Ram (Screw) Forward Jog
When the module decodes a valid DYC having this bit SET, it set its outputs to JGC17–20. The outputs remain at
these values as long as this bit is SET, and return to zero when this bit is RESET.
B11 = 0 Normal
= 1 Execute Ram (Screw) Reverse Jog
When the module decodes a valid DYC having this bit SET, it sets its outputs to JGC25–28. The outputs remain at
these values as long as this bit is SET, and return to zero when this bit is RESET.
B12-15 RFU
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 37

Word Bit Description
DYC02 Action Execution Commands
Bits DYC01-B08 - DYC01-B15 and all 16 bits in DYC02 are the 24 action execution commands to control the module. Because the module cannot respond to more than one action execution command at a time, it ceases all action execution and
sets its outputs to zero when it decodes a valid Dynamic Command Block with more than one of these SET. The module
senses this invalid request and latches alarm status bit SYS14-B00, and unlatches SYS14-B00 when it decodes a valid Dynamic Command Block having one or none of the action execution bits SET.
B00-03 RFU
Ram (Screw) Profiles Execution Commands
Bits DYC02-B04 - DYC02-B09 are the six action execution commands available to initiate all profiled ram (screw) movements
(including both decompression movements). You may logically link all six in a single integrated machine movement if all three
Logical Bridge Bits are RESET. These three bits are:
HPC03-B08 - Link Inj/Pack/Hold and Pre-decompress (Inj/Pack/Hold always linked)
HPC03-B09 - Link Pre-decompress and Plastication
PPC03-B08 - Link Plastication and Post-decompress
If all three of these bits are RESET, transfer only DYC02-B04 to the module to force the entire Ram (Screw) portion of an
automatic machine cycle.
B04
B05 if: then the module:
B06 = 0 Normal
= 0 Normal
= 1 Execute Injection Profile
A false-to-true transition of this bit forces the module to do one of the following, attempted in the order listed.
if: then the module:
any of SYS07-B00 through B05 are SET ignores any profile commands
SYS15-B08 is RESET latches SYS13-B05
either of the following are true:
– ram (screw) position exceeds non-zero IPC61
– IPC61 is zero
both of the following are true:
– ram (screw) position equals or is less than non-zero IPC61
– HPC11 is not zero
both of the following are true:
– ram (screw) position equals or is less than non-zero IPC61
– HPC11 is zero
= 0 Normal
= 1 Execute Pack Profile
A false-to-true transition of this bit forces the module to do one of the following, attempted in the order listed.
if: then the module:
any of SYS07-B00 through B05 are SET ignores any profile commands
SYS15-B11 is RESET latches SYS13-B06
HPC11 is not zero terminates any action in progress and
HPC11 is zero terminates any action in progress and
= 1 Execute Hold Profile
A false-to-true transition of this bit forces the module to do one of the following, attempted in the order listed.
if: then the module:
any of SYS07-B00 through B05 are SET ignores any profile commands
SYS15-B11 is RESET latches SYS13-B07
this bit (B06) is SET terminates any action in progress and
2–5Command Word/Bit Descriptions
DYC
terminates any action in progress and
starts the Injection Profile
terminates any action in progress and
starts the Pack Profile
terminates any action in progress and
starts the Hold Profile
starts the Pack Profile
starts the Hold Profile
starts the Hold Profile
Publication
1771-6.5.126 – March 1998
Page 38

2–6 Command Word/Bit Descriptions
Word
DYC02
Bit Description
B07
= 0 Normal
= 1 Execute Pre-decompression Movement
A false-to-true transition of this bit forces the module to do one of the following, attempted in the order listed.
if:
any of SYS07-B00 through B05 are SET
either of the following are true:
– SYS15-B11 is RESET
– HPC03-B09 is SET and SYS15-B12 is RESET
all of the following are true:
– PRC05 equals zero or SYS15-B12 is RESET
– HPC03-B09 is RESET
– SYS15-B14 is RESET
PRC05 is not zero
both of the following are true:
– PRC05 is zero
– HPC03-B09 is SET
either pair of the following are true:
– PRC05 is zero
or
– SYS15-B12 is RESET
– HPC03-B09 is RESET – HPC03-B09 is RESET
B08
= 0 Normal
= 1 Execute Plastication Profile
A false-to-true transition of this bit forces the module to do one of the following, attempted in the order listed.
if:
any of SYS07-B00 through B05 are SET
SYS15-B14 is RESET
all of the following are true:
– ram (screw) position equals or exceeds sum of PPC61 + PPC62
– PPC03-B08 is RESET
– SYS15-B15 is RESET
ram (screw) position is less than the sum of PPC61 + PPC62
both of the following are true:
– ram (screw) position equals or exceeds sum of PPC61 + PPC62
– PPC03-B08 is SET
all of the following are true:
– ram (screw) position equals or exceeds sum of PPC61 + PPC62
– PPC03-B08 is SET
– PSC05 is not zero
all of the following are true:
– ram (screw) position equals or exceeds sum of PPC61 + PPC62
– PPC03-B08 is SET
– PSC05 is zero
B09
= 0 Normal
= 1 Execute Post-decompression Movement
A false-to-true transition of this bit forces the module to do one of the following, attempted in the order listed.
if:
any of SYS07-B00 through B05 are SET
SYS15-B15 is RESET
PSC05 is not zero
PSC05 is zero
B10-14 RFU
then the module:
ignores any movement commands
latches SYS13-B08
latches SYS13-B09
terminates any action in progress and
starts the Pre-decompression Movement
terminates any action in progress and
sets outputs to PRC33–36
terminates any action in progress and
starts the Plastication Profile
then the module:
ignores any profile commands
latches SYS13-B09
latches SYS13-B10
terminates any action in progress and
starts the Plastication Profile
terminates any action in progress and
sets outputs to PLC33–36
terminates any action in progress and
starts Post-decompression Movement
terminates any action in progress and
sets outputs to PSC33–36
then the module:
ignores any movement commands
latches SYS13-B10
terminates any action in progress and
starts Post-decompression Movement
terminates any action in progress and
sets outputs to PSC33–36
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 39

Word Bit Description
DYC02 B15 Stop Command
DYC03 Timer Reset Commands
B00
B01
B02-03
B04 DYC03.B04 for QI(A) DYCB03.B04 for QI(B)
B05 DYC03.B05 for QI(A) DYCB03.B05 for QI(B)
B08
B09
B10
B11-15 RFU
= 0 Outputs Enabled
= 1 Outputs Disabled
When the module decodes a valid DYC having this bit SET, it halts any ongoing profile or jog movement and set its outputs to
zero. The module will not respond to any new jog or profile execution commands as long as this bit remains SET. This bit may
be latched by the end user to serve as a module Stop command, or may be momentarily asserted to force the module to
terminate an ongoing profile.
= 0 Normal
= 1 Reset Tonnage Watchdog Timer
A false-to-true transition of this bit forces the module to zero the accumulated value of the Tonnage Watchdog Timer in SYS57.
= 0 Normal
= 1 Reset Cure Timer
A false-to-true transition of this bit forces the module to:
reset master status bit SYS03-B03, reset master status bit SYS03-B05, and reset SYS58 to zero
RFU
Co-injection Parameters
Start Delayed Injection
Starts delayed injection of A when the screw position of B reaches IPCB08 after both QI modules are commanded to start
injection (DYC02.B04 = 1):
0 = QI(A) starts injection regardless of the B’s screw position.
If reset before B reaches IPCB08, A starts injection immediately.
1 = QI(A) suspends its inject profile until B’s preset position is reached.
Suspended injection is indicated by SYS03:B00 (SYSB03:B00).
During suspension, IPC02:B11 and .B12 determine the status of outputs.
Important: Program permissive logic that prevents starting the injection profile with this bit set in SETUP or MANUAL mode.
Select the Mode for Input #3:
0 (default) = screw RPM
1 = cavity pressure
You may switch the input mode dynamically when the machine is idle, never during the injection phase. You must NOT bridge
directly to plastication to use this bit. If toggled during injection, the QI module will halt operation and return error codes in
SYS61, 62. You may use time delay (MCC63) to allow for relay signal settling and disable alarms during the switch-over.
Reset Commands
Power Start-up Reset Command
= 0 Normal
= 1 Reset Power Start-up Bit
A false-to-true transition of this bit forces the module to unlatch SYS01-B08.
Alarm Reset Command
= 0 Normal
= 1 Reset Latched Alarms
A false-to-true transition of this bit forces the module to unlatch all bits in SYS09, SYS10, SYS11, and SYS12.
Profile Status Bits Reset Command
= 0 Normal
= 1 Reset Profile Status Bits
A false-to-true transition of this bit forces the module to unlatch the 15 profile complete status bits, SYS02-B00 – B14 inclusive.
2–7Command Word/Bit Descriptions
DYC
Publication
1771-6.5.126 – March 1998
Page 40

2–8 Command Word/Bit Descriptions
Y4
Y5
DYC04
Status Request Commands
Bits DYC04-B00 - DYC04-B07 are the eight command bits available to request the Status Blocks that the module returns with
the next BTR to the PLC processor. The module does not respond to any bit associated with an unsupported status block
(based on Module I/O configuration). The module defaults to returning System Status Block (SYS) if none of these eight bits are
set or if the last BTW received at the module was not the Dynamic Command Block (DYC). If more than one of these eight bits
are set, the module prioritizes BTR service by responding to the lowest-numbered bit.
B00 RFU
B01 = 0 Normal
= 1 Return IPS with next BTR
B02 = 0 Normal
= 1 Return HPS with next BTR
B03 = 0 Normal
= 1 Return PPS with next BTR
B04, 05 RFU
B06 = 0 Normal
= 1 Return RLS with next BTR
B07 RFU
Profile Status Block Clear Commands
B08 RFU
B09 = 0 Normal
= 1 Clear IPS
A false-to-true transition of this bit forces the module to zero all words in IPS buffer (except Master Status Words IPS01 - IPS04).
The module does not respond to this bit if the IPS is an unsupported status block based upon Module I/O configuration.
B10 = 0 Normal
= 1 Clear HPS
A false-to-true transition of this bit forces module to zero all words in HPS buffer (except Master Status Words HPS01 – HPS04)
The module does not respond to this bit if the HPS is an unsupported status block based upon Module I/O configuration.
B11 = 0 Normal
= 1 Clear PPS
A false-to-true transition of this bit forces module to zero all words in PPS buffer (except Master Status Words PPS01 - PPS04).
The module does not respond to this bit if the PPS is an unsupported status block based upon Module I/O configuration.
B12-14 RFU
B15
DYC05
= 0 Normal
= 1 Clear PTS (Same description as B13, but for PTS.)
ERC Re-initialize Commands
B00-03 RFU
B04 = 0 Normal
= 1 Re-initialize Injection Profile ERC Values
A false-to-true transition of this bit forces module to re-initialize the 11 ERC values associated with the Injection Profile.
B05 = 0 Normal
= 1 Re-initialize Pack Profile ERC Values
A false-to-true transition of this bit forces the module to re-initialize the five ERC values associated with Pack Profile.
B06 = 0 Normal
= 1 Re-initialize Hold Profile ERC Values
A false-to-true transition of this bit forces the module to re-initialize the five ERC values associated with the Hold Profile.
B07 = 0 Normal
= 1 Open
B08 = 0 Normal
= 1 Re-initialize Plastication Profile ERC Values
A false-to-true transition of this bit forces module to re-initialize the 11 ERC values associated with Plastication Profile.
B09-14 RFU
B15 = 0 Normal
= 1 Re-initialize All ERC Values
A false-to-true transition of this bit forces the module to re-initialize the 62 ERC values associated with all profiles.
DYC06 RFU
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 41

Word Bit Description
DYC07 Process Trace Commands
B00 Process trace data collection inhibited (examined at beginning of injection phase)
B01 Return injection position trace data in next PTS block
B02 Return trace #1 data in next PTS block
B03 Return trace #2 data in next PTS block
B04 Return trace #3 data in next PTS block
B05 Return trace #4 data in next PTS block
B06-14 RFU
B15 Return phase/segment start information in next PTS block
DYC08 Process Trace Data Block Request
B00 Return trace data points 1 to 50 in next PTS block
B01 Return trace data points 51 to 100 in next PTS block
B02 Return trace data points 101 to 150 in next PTS block
B03 Return trace data points 151 to 200 in next PTS block
B04 Return trace data points 201 to 250 in next PTS block
B05 Return trace data points 251 to 300 in next PTS block
B06 Return trace data points 301 to 350 in next PTS block
B07 Return trace data points 351 to 400 in next PTS block
B08-15 RFU
2–9Command Word/Bit Descriptions
DYC
Direct Set-output Values
The module sets its outputs to the following values when responding
to command bit DYC01-B08 = 1. The module uses ramp rates
DYC17-20 and DYC25-28 when moving the outputs to these values
after DYC01-B08 is SET, and will also use the ramps when one of
DYC09-12 is changed while DYC01-B08 is SET.
Word Description
DYC09 Output #1 Direct Set-output Value [19]
DYC10 Output #2 Direct Set-output Value [19]
DYC11 Output #3 Direct Set-output Value [19]
DYC12 Output #4 Direct Set-output Value [19]
DYC13-16 RFU
Direct Set-output Ramp Rates
Word Description
DYC17 Output #1 Accel Ramp Rate for Direct Set-output Moves [20]
DYC18 Output #2 Accel Ramp Rate for Direct Set-output Moves [20]
DYC19 Output #3 Accel Ramp Rate for Direct Set-output Moves [20]
DYC20 Output #4 Accel Ramp Rate for Direct Set-output Moves [20]
DYC21-24 RFU
DYC25 Output #1 Decel Ramp Rate for Direct Set-output Moves [20]
DYC26 Output #2 Decel Ramp Rate for Direct Set-output Moves [20]
DYC27 Output #3 Decel Ramp Rate for Direct Set-output Moves [20]
DYC28 Output #4 Decel Ramp Rate for Direct Set-output Moves [20]
DYC29-60 RFU
Publication
1771-6.5.126 – March 1998
Page 42

2–10 Command Word/Bit Descriptions
Word Description
DYC61 Programming Error Return Request [29] When the module has a valid MCC and DYC installed, it responds to any non-zero com-
mand block ID to the lower byte of this word by returning the identical command block ID in SYS61. In SYS62, it also returns the
existing programming error code associated with the command block.
If the module does not have a current programming error associated with the requested command block, or if this entry is zero, the
module reports values in SYS61 and SYS62 in the order that programming errors were received.
DYC62 - 64 RFU
HDC – Hold Configuration Block
Bit-mapped Control Words
Word Bit Description
HDC01 Block ID = 00001011 (Low byte). High byte reserved for the module. Do not use.
HDC02 Configuration Selections
B00-02 Selected Cavity Pressure Control Valve
The module uses its algorithm to drive the following output during any Cav Press/Time Hold Profile.
B02 B01 B00
0 0 0 Output #1
0 0 1 Output #2
0 1 0 Output #3
0 1 1 Output #4
1 x x Invalid
B03 Cavity Pressure Algorithm Selection
= 0 Dependent Gains (ISA)
= 1 Independent Gains (A-B)
B04-06 Selected Ram (Screw) Pressure Control Valve
The module uses its algorithm to drive the following output during any Ram Press/Time Hold Profile.
B06 B05 B04
0 0 0 Output #1
0 0 1 Output #2
0 1 0 Output #3
0 1 1 Output #4
1 x x Invalid
B07 Ram (Screw) Pressure Algorithm Selection
= 0 Dependent Gains (ISA)
= 1 Independent Gains (A-B)
B08-15 RFU
HDC03 - 04 RFU
Expert Response Compensation (ERC) Percentage
Word Description
HDC05 Minimum Cav Press Control ERC Percentage [31]
Although error coding allows range of 00000 to 09999, the module limits it to a minimum of 01000.
HDC06 Minimum Ram Press Control ERC Percentage [31]
Although error coding allows range of 00000 to 09999, the module limits it to a minimum of 01000.
HDC07-08 RFU
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 43

Unselected Valve Set-output Values
When the module starts the Hold Profile, it:
• ignores the unselected value of the selected output
• uses ramp rates HDC17-20 and HDC25-28 to ramp unselected outputs
• sets its unselected outputs to the values listed below
Word Description
HDC09 Output #1 Set-output Value during Profile [19]
HDC10 Output #2 Set-output Value during Profile [19]
HDC11 Output #3 Set-output Value during Profile [19]
HDC12 Output #4 Set-output Value during Profile [19]
HDC13-16 RFU
Output Ramp Rates
The module uses the following ramp rates when moving its outputs
from setpoint to setpoint during the Hold Profile. The module
interprets a ramp rate of zero as a step function ramp (ramp disable).
Word Description
HDC17 Output #1 Acceleration Ramp Rate during Profile [20]
HDC18 Output #2 Acceleration Ramp Rate during Profile [20]
HDC19 Output #3 Acceleration Ramp Rate during Profile [20]
HDC20 Output #4 Acceleration Ramp Rate during Profile [20]
HDC21-24 RFU
HDC25 Output #1 Deceleration Ramp Rate during Profile [20]
HDC26 Output #2 Deceleration Ramp Rate during Profile [20]
HDC27 Output #3 Deceleration Ramp Rate during Profile [20]
HDC28 Output #4 Deceleration Ramp Rate during Profile [20]
HDC29-32 RFU
2–11Command Word/Bit Descriptions
HDC
End of Profile Set-output Values
When the module completes the Hold Profile and HPC03-B08 is SET, it:
• sets status bit SYS22-B06
• uses ramp rates HDC17-20 and HDC25-28 when changing outputs
• sets its outputs to the following values
Word Description
HDC33 Output #1 Set-output Value at End of Profile [19]
HDC34 Output #2 Set-output Value at End of Profile [19]
HDC35 Output #3 Set-output Value at End of Profile [19]
HDC36 Output #4 Set-output Value at End of Profile [19]
HDC37-40 RFU
Publication
1771-6.5.126 – March 1998
Page 44

2–12 Command Word/Bit Descriptions
Ram (Screw) Pressure Control Limits
Word Description
HDC41 Ram (Screw) Pressure Minimum Control Limit [01] Minimum controllable ram (screw) pressure attainable during any Ram Press/
Time Hold Profile. The module expects this ram (screw) pressure when setting its selected ram (screw) pressure valve to the %-output in HDC43.
HDC42 Ram (Screw) Pressure Maximum Control Limit [01] Maximum controllable ram (screw) pressure attainable during any Ram Press/
Time Hold Profile. The module expects this ram (screw) pressure when setting its selected ram (screw) pressure valve to the %-output in HDC44.
HDC43 Selected Ram (Screw) Pressure Valve Output for Minimum [19] 0% CV output percentage that the module uses to drive the se-
lected pressure valve during any Ram Press/Time Hold Profile. The module expects a pressure equal to HDC41 when setting the
selected ram (screw) pressure valve to this %-output during profile execution. Ram Press/Time Hold Profile will be executed as a
reverse-acting algorithm if this entry is greater than HDC44.
HDC44 Selected Ram (Screw) Pressure Valve Output for Maximum [19] 100% CV output percentage that the module uses to drive the
selected pressure valve during any Ram Press/Time Hold Profile. The module expects a pressure equal to HDC42 when setting the
selected ram (screw) pressure valve to this %-output during profile execution. Ram Press/Time Hold Profile will be executed as a
reverse-acting algorithm if this entry is less than HDC43.
Cavity Pressure Control Limits
Word Description
HDC45 Cavity Pressure Minimum Control Limit [04] Minimum controllable cavity pressure attainable during any Cav Press/Time Hold Pro-
file. The module expects this cavity pressure when setting its selected cavity pressure valve to the %-output in HDC47.
HDC46 Cavity Pressure Maximum Control Limit [04] Maximum controllable cavity pressure attainable during any Cav Press/Time Hold Pro-
file . The module expects this cavity pressure when setting its selected cavity pressure valve to the %-output in HDC48.
HDC47 Selected Cavity Pressure Valve Output for Minimum [19] 0% CV output percentage that the module uses to drive the selected pres-
sure valve during any Cav Press/Time Hold Profile. The module expects a pressure equal to HDC45 when setting the selected
cavity pressure valve to this %-output during profile execution. The Cav Press/Time Hold Profile will be executed as a reverse-acting
algorithm if this entry is greater than HDC48.
HDC48 Selected Cavity Pressure Valve Output for Maximum [19] 100% CV output percentage that the module uses to drive the selected
pressure valve during any Cav Press/Time Hold Profile. The module expects a pressure equal to HDC46 when setting the selected
cavity pressure valve to this %-output during profile execution. The Cav Press/Time Hold Profile will be executed as a reverse-acting
algorithm if this entry is less than HDC47.
Profile Tuning Constants
Word Description
HDC49 Proportional Gain for Ram Press Control [30]
HDC50 Integral Gain for Ram Press Control [27] or [28]
HDC51 Derivative Gain for Ram Press Control [26] or [21]
HDC52 Proportional Gain for Cav Press Control [30]
HDC53 Integral Gain for Cav Press Control [27] or [28]
HDC54 Derivative Gain for Cav Press Control [26] or [21]
HDC55 - 56 RFU
Profile Pressure Alarm Setpoint
Word Description
HDC57 Profile High Ram (Screw) Pressure Alarm Setpoint [01] The module compares real-time ram (screw) pressure against this entry
when executing the Hold Profile. The module sets alarm status bit SYS06-B04 when ram (screw) pressure equals or exceeds this
entry during the Hold Profile. A zero entry inhibits SYS06-B04.
HDC58 Profile High Cavity Pressure Alarm Setpoint [04] The module compares real-time cavity pressure against this entry when executing
the Hold Profile. The module sets alarm status bit SYS06-B05 when cavity pressure equals or exceeds this entry during the Hold
Profile. A zero entry inhibits SYS06-B05.
HDC59 - 64 RFU
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 45

HPC – Pack/Hold
Profile Block
Word Bit Description
HPC01 Block ID = 00001100 (Low byte). High byte reserved for the module. Do not use.
HPC02 RFU
HPC03 Configuration Selections
Profile Algorithm Selections
B00 = 0 Ram Press/Time selected for Pack Profile
= 1 Cav Press/Time selected for Pack Profile
B01 RFU
B02 = 0 Ram Press/Time selected for Hold Profile
= 1 Cav Press/Time selected for Hold Profile
B03-07 RFU
B08 Hold/Pre-decompression Logical Bridge Selection
= 0 Start Pre-decompression Movement at End of Hold Profile
= 1 Stop and Set-output at End of Hold Profile
The module checks the state of this pause bit upon completion of Hold Profile to determine what further action to take:
if: then the module:
SET sets its outputs to HDC33–36
RESET, SYS15-B12 = 1, immediately begins the Pre-decompression Movement
and PRC05 > 00000
RESET, SYS15-B12 = 1, reacts as if it had just completed the Pre-decompression Movement and continues
and PRC05 = 00000 operation based on the state of HPC03-B09
RESET, SYS15-B12 = 0, reacts as if it had just received an F-to-T transition of DYC02-B08
and HPC03-B09 = 0
RESET, SYS15-B12 = 0, sets its outputs to zero and latches SYS13-B08
and HPC03-B09 = 1
B09 Pre-decompression/Plastication Logical Bridge Selection
= 0 Start Plastication Profile at End of Pre-decompression Movement
= 1 Stop and Set-output at End of Pre-decompression Movement
The module checks the state of this pause bit after completing the Pre-decompression Movement to determine what
further action to take:
if: then the module:
SET sets its outputs to PRC33–36
RESET and SYS15-B14 = 1 immediately begins the Plastication Profile
RESET and SYS15-B14 = 0 sets its outputs to zero and latches SYS13-B09
B10-11 RFU
Profile Offset Sign Selection
B12 = 0 Pack Cav Press Profile Offset is Positive
= 1 Pack Cav Press Profile Offset is Negative
B13 = 0 Pack Ram Press Profile Offset is Positive
= 1 Pack Ram Press Profile Offset is Negative
B14 = 0 Hold Cav Press Profile Offset is Positive
= 1 Hold Cav Press Profile Offset is Negative
B15 = 0 Hold Ram Press Profile Offset is Positive
= 1 Hold Ram Press Profile Offset is Negative
HPC04 Configuration Selections
Open/Closed Loop Selection
B00 = 0 Ram Press/Time Pack Profiles Closed Loop
= 1 Ram Press/Time Pack Profiles Open Loop
B01 = 0 Cav Press/Time Pack Profiles Closed Loop
= 1 Cav Press/Time Pack Profiles Open Loop
B02 = 0 Ram Press/Time Hold Profiles Closed Loop
= 1 Ram Press/Time Hold Profiles Open Loop
B03 = 0 Cav Press/Time Hold Profiles Closed Loop
= 1 Cav Press/Time Hold Profiles Open Loop
Bit-mapped Control Words
2–13Command Word/Bit Descriptions
HPC
Publication
1771-6.5.126 – March 1998
Page 46

2–14 Command Word/Bit Descriptions
Word
HPC04 B04-07 RFU
HPC05 - 08 RFU
Bit Description
ERC Enabled/Disabled Selection
B08 = 0 Ram Press/Time Pack Profiles ERC On
= 1 Ram Press/Time Pack Profiles ERC Off
B09 = 0 Cav Press/Time Pack Profiles ERC On
= 1 Cav Press/Time Pack Profiles ERC Off
B10 = 0 Ram Press/Time Hold Profiles ERC On
= 1 Ram Press/Time Hold Profiles ERC Off
B11 = 0 Cav Press/Time Hold Profiles ERC On
= 1 Cav Press/Time Hold Profiles ERC Off
B12-15 RFU
Pack Profile Setpoints
Word Description
HPC09 Pack Segment 1 Cavity Pressure Setpoint [04] If you select Cav Press/Time profile execution, the module controls cavity pressure
to this setpoint after starting the Pack Profile for time period specified by HPC11.
HPC10 Pack Segment 1 Ram (Screw) Pressure Setpoint [01] If you select Ram Press/Time profile execution, the module controls ram
(screw) pressure to this setpoint after starting the Pack Profile for time period specified by HPC11.
HPC11 Pack Segment 1 Time Setpoint [21] The module controls the selected process pressure to the setpoint HPC09 or HPC10 for this
time period beginning with initiation of the Pack Profile.
HPC12 Pack Segment 2 Cavity Pressure Setpoint [04] If you select Cav Press/Time profile execution, the module controls cavity pressure
to this setpoint at completion of segment 1 for time period specified by HPC14.
HPC13 Pack Segment 2 Ram (Screw) Pressure Setpoint [01] If you select Ram Press/Time profile execution, the module controls ram
(screw) pressure to this setpoint at completion of segment 1 for time period specified by HPC14.
HPC14 Pack Segment 2 Time Setpoint [21] The module controls the selected process pressure to the setpoint HPC12 or HPC13 for this
time period beginning at completion of Segment 1.
HPC15 Pack Segment 3 Cavity Pressure Setpoint [04] If you select Cav Press/Time profile execution, the module controls cavity pressure
to this setpoint at completion of segment 2 for time period specified by HPC17.
HPC16 Pack Segment 3 Ram (Screw) Pressure Setpoint [01] If you select Ram Press/Time profile execution, the module controls ram
(screw) pressure to this setpoint at completion of segment 2 for time period specified by HPC17.
HPC17 Pack Segment 3 Time Setpoint [21] The module controls the selected process pressure to the setpoint HPC15 or HPC16 for this
time period beginning at completion of Segment 2.
HPC18 Pack Segment 4 Cavity Pressure Setpoint [04] If you select Cav Press/Time profile execution, the module controls cavity pressure
to this setpoint at completion of segment 3 for time period specified by HPC20.
HPC19 Pack Segment 4 Ram (Screw) Pressure Setpoint [01] If you select Ram Press/Time profile execution, the module controls ram
(screw) pressure to this setpoint at completion of segment 3 for time period specified by HPC20.
HPC20 Pack Segment 4 Time Setpoint [21] The module controls the selected process pressure to the setpoint HPC18 or HPC19 for this
time period beginning at completion of Segment 3.
HPC21 Pack Segment 5 Cavity Pressure Setpoint [04] If you select Cav Press/Time profile execution, the module controls cavity pressure
to this setpoint at completion of segment 4 for time period specified by HPC23.
HPC22 Pack Segment 5 Ram (Screw) Pressure Setpoint [01] If you select Ram Press/Time profile execution, the module controls ram
(screw) pressure to this setpoint at completion of segment 4 for time period specified by HPC23.
HPC23 Pack Segment 5 Time Setpoint [21] The module controls the selected process pressure to the setpoint HPC21 or HPC22 for this
time period beginning at completion of Segment 4.
Pack Profile Offsets
Word Description
HPC24 Pack Profile Cavity Pressure Offset [04] If you select Cav Press/Time profile execution , the module applies this entry (after reading
the sign bit) to each cavity pressure profile setpoint.
HPC25 Pack Profile Ram (Screw) Pressure Offset [01] If you select Ram Press/Time profile execution, the module applies this entry (after
reading the sign bit) to each ram (screw) pressure profile setpoint.
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 47

2–15Command Word/Bit Descriptions
Hold Profile Setpoints
Word Description
HPC26 Hold Segment 1 Cavity Pressure Setpoint [04] If you select Cav Press/Time profile execution, the module controls cavity pressure to
this setpoint after starting the Hold Profile for time period specified by HPC28.
HPC27 Hold Segment 1 Ram (Screw) Pressure Setpoint [01] If you select Ram Press/Time profile execution, the module controls ram
(screw) pressure to this setpoint after starting the Hold Profile for time period specified by HPC28.
HPC28 Hold Segment 1 Time Setpoint [21] The module controls the selected process pressure to the setpoint HPC26 or HPC27 for this
time period beginning with initiation of the Hold Profile.
HPC29 Hold Segment 2 Cavity Pressure Setpoint [04] If you select Cav Press/Time profile execution, the module controls cavity pressure to
this setpoint at completion of segment 1 for time period specified by HPC31.
HPC30 Hold Segment 2 Ram (Screw) Pressure Setpoint [01] If you select Ram Press/Time profile execution, the module controls ram
(screw) pressure to this setpoint at completion of segment 1 for time period specified by HPC31.
HPC31 Hold Segment 2 Time Setpoint [21] The module controls the selected process pressure to the setpoint HPC29 or HPC30 for this
time period beginning at completion of Segment 1.
HPC32 Hold Segment 3 Cavity Pressure Setpoint [04] If you select Cav Press/Time profile execution, the module controls cavity pressure to
this setpoint at completion of segment 2 for time period specified by HPC34.
HPC33 Hold Segment 3 Ram (Screw) Pressure Setpoint [01] If you select Ram Press/Time profile execution, the module controls ram
(screw) pressure to this setpoint at completion of segment 2 for time period specified by HPC34.
HPC34 Hold Segment 3 Time Setpoint [21] The module controls the selected process pressure to the setpoint HPC32 or HPC33 for this
time period beginning at completion of Segment 2.
HPC35 Hold Segment 4 Cavity Pressure Setpoint [04] If you select Cav Press/Time profile execution, the module controls cavity pressure to
this setpoint at completion of segment 3 for time period specified by HPC37.
HPC36 Hold Segment 4 Ram (Screw) Pressure Setpoint [01] If you select Ram Press/Time profile execution, the module controls ram
(screw) pressure to this setpoint at completion of segment 3 for time period specified by HPC37.
HPC37 Hold Segment 4 Time Setpoint [21] The module controls the selected process pressure to the setpoint HPC35 or HPC36 for this
time period beginning at completion of Segment 3.
HPC38 Hold Segment 5 Cavity Pressure Setpoint [04] If you select Cav Press/Time profile execution, the module controls cavity pressure to
this setpoint at completion of segment 4 for time period specified by HPC40.
HPC39 Hold Segment 5 Ram (Screw) Pressure Setpoint [01] If you select Ram Press/Time profile execution, the module controls ram
(screw) pressure to this setpoint at completion of segment 4 for time period specified by HPC40.
HPC40 Hold Segment 5 Time Setpoint [21] The module controls the selected process pressure to the setpoint HPC38 or HPC39 for this
time period beginning at completion of Segment 4.
HPC
Hold Profile Offsets
Word Description
HPC41 Hold Profile Cavity Pressure Offset [04] If you select Cav Press/Time profile execution, the module applies this entry (after reading
the sign bit) to each cavity pressure profile setpoint.
HPC42 Hold Profile Ram (Screw) Pressure Offset [01] If you select Ram Press/Time profile execution, the module applies this entry (after
reading the sign bit) to each ram (screw) pressure profile setpoint.
HPC43 - 60 RFU
Critical Process Setpoints
Word Description
HPC61 Cure Timer Preset [22]
HPC62 - 64 RFU
At completion of the Hold Profile, the module:
S starts an internal Cure Timer
S sets master status bit SYS03-B03
S reports the accumulated time in SYS58
When the Cure Timer accumulated value in SYS58 equals this entry, the module:
S resets master status bit SYS03-B03
S sets master status bit SYS03-B05
S stops accumulating time in SYS58
If it receives an F-to-T transition of DYC02-B00, -B01, -B02, -B03 or DYC03-B01, the module:
S resets master status bit SYS03-B03
S resets master status bit SYS03-B05
S resets SYS58 to zero
Publication
1771-6.5.126 – March 1998
Page 48

2–16 Command Word/Bit Descriptions
INC – Injection
Configuration Block
Word Bit Description
INC01 Block ID = 00001000 (Low byte). High byte reserved for the module. Do not use.
INC02 Configuration Selections
B00-02 Selected Velocity Control Valve
The module uses its algorithm to drive the following output during any Vel/Pos or LimVel/Pos Injection Profile.
B02 B01 B00
0 0 0 Output #1
0 0 1 Output #2
0 1 0 Output #3
0 1 1 Output #4
1 x x Invalid
B03 RFU
B04-06 Selected Pressure Control Valve
The module uses its algorithm to drive the following output during any Press/Pos or Press/Time Injection Profile.
B06 B05 B04
0 0 0 Output #1
0 0 1 Output #2
0 1 0 Output #3
0 1 1 Output #4
1 x x Invalid
B07 Pressure Algorithm Selection
= 0 Dependent Gains (ISA)
= 1 Independent Gains (A-B)
B08-15 RFU
INC03 - 04 RFU
Bit-mapped Control Words
Expert Response Compensation (ERC) Percentage
Word Description
INC05 Minimum Velocity Control ERC Percentage [31]
Although error coding allows range of 00000 to 09999, the module limits it to a minimum of 01000.
INC06 Minimum Pressure Control ERC Percentage [31]
Although error coding allows range of 00000 to 09999, the module limits it to a minimum of 01000.
INC07, 08 RFU
Unselected Valve Set-output Values
When the module starts the Injection Profile, it:
• ignores the unselected value of the selected output
• uses ramp rates INC17-20 and INC25-28 to ramp unselected outputs
• sets its unselected outputs to the values listed below
Word Description
INC09 Output #1 Set-output Value during Profile [19]
INC10 Output #2 Set-output Value during Profile [19]
INC11 Output #3 Set-output Value during Profile [19]
INC12 Output #4 Set-output Value during Profile [19]
INC13-16 RFU
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 49

Output Ramp Rates
The module uses the following ramp rates when moving its outputs
from setpoint to setpoint during the Injection Profile. The module
interprets a ramp rate of zero as a step function ramp (ramp disable).
Word Description
INC17 Output #1 Acceleration Ramp Rate during Profile [20]
INC18 Output #2 Acceleration Ramp Rate during Profile [20]
INC19 Output #3 Acceleration Ramp Rate during Profile [20]
INC20 Output #4 Acceleration Ramp Rate during Profile [20]
INC21-24 RFU
INC25 Output #1 Deceleration Ramp Rate during Profile [20]
INC26 Output #2 Deceleration Ramp Rate during Profile [20]
INC27 Output #3 Deceleration Ramp Rate during Profile [20]
INC28 Output #4 Deceleration Ramp Rate during Profile [20]
INC29-32 RFU
End of Profile Set-output Values
2–17Command Word/Bit Descriptions
INC
When module completes the Injection Profile and IPC02-B08 is SET, it:
• sets status bit SYS02-B04
• uses ramp rates INC17-20 and INC25-28 when changing outputs
• sets its outputs to the following values
Word Description
INC33 Output #1 Set-output Value at End of Profile [19]
INC34 Output #2 Set-output Value at End of Profile [19]
INC35 Output #3 Set-output Value at End of Profile [19]
INC36 Output #4 Set-output Value at End of Profile [19]
INC37-40 RFU
Pressure Control Limits
Word Description
INC41 Pressure Minimum Control Limit [01] Minimum controllable ram (screw) pressure attainable during any Press/Pos or Press/Time
Injection Profile. The module expects this ram (screw) pressure when setting its selected pressure valve to the %-output in INC43.
INC42 Pressure Maximum Control Limit [01] Maximum controllable ram (screw) pressure attainable during any Press/Pos or Press/Time
Injection Profile. The module expects this ram (screw) pressure when setting its selected pressure valve to the %-output in INC44.
INC43 Selected Pressure Valve Output for Minimum [19] 0% CV output percentage that the module uses to drive the selected pressure
valve during any Press/Pos or Press/Time Injection Profile. The module expects a pressure equal to INC41 when setting the selected pressure valve to this %-output during profile execution. The Press/Pos or Press/Time Injection Profile will be executed as a
reverse-acting algorithm if this entry is greater than INC44.
INC44 Selected Pressure Valve Output for Maximum [19] 100% CV output percentage that the module uses to drive the selected pressure
valve during any Press/Pos or Press/Time Injection Profile. The module expects a pressure equal to INC42 when setting the selected pressure valve to this %-output during profile execution. The Press/Pos or Press/Time Injection Profile will be executed as a
reverse-acting algorithm if this entry is less than INC43.
Publication
1771-6.5.126 – March 1998
Page 50

2–18 Command Word/Bit Descriptions
Velocity Control Limits
Word Description
INC45 Velocity Minimum Control Limit [06] Minimum controllable ram (screw) velocity attainable during any Vel/Pos Injection Profile. The
module expects this ram (screw) velocity when setting its selected velocity valve to the %-output in INC47.
INC46 Velocity Maximum Control Limit [06] Maximum controllable ram (screw) velocity attainable during any Vel/Pos Injection Profile. The
module expects this ram (screw) velocity when setting its selected velocity valve to the %-output in INC48.
INC47 Selected Velocity Valve Output for Minimum [19] 0% CV output percentage that the module uses to drive the selected velocity valve
during any Vel/Pos or LimVel/Pos Injection Profile. The module expects a velocity equal to INC45 when setting the selected velocity
valve to this %-output during profile execution. The Vel/Pos or LimVel/Pos Injection Profile will be executed as a reverse-acting
algorithm if this entry is greater than INC48.
INC48 Selected Velocity Valve Output for Maximum [19] 100% CV output percentage that the module uses to drive the selected velocity
valve during any Vel/Pos or LimVel/Pos Injection Profile. The module expects a velocity equal to INC46 when setting the selected
velocity valve to this %-output during profile execution. The Vel/Pos or LimVel/Pos Injection Profile will be executed as a reverseacting algorithm if this entry is less than INC47.
Profile Tuning Constants
Word Description
INC49 Proportional Gain for Pressure Control [30]
INC50 Integral Gain for Pressure Control [27] or [28]
INC51 Derivative Gain for Pressure Control [26] or [21]
INC52 Proportional Gain for Velocity Control [28]
INC53 Feed Forward Gain for Velocity Control [30]
INC54 - 56 RFU
Profile Pressure Alarm Setpoint
Word Description
INC57 Profile High Ram (screw) Pressure Alarm Setpoint [01] The module compares real-time ram (screw) pressure against this entry
when executing the Injection Profile. The module sets alarm status bit SYS06-B00 when ram (screw) pressure equals or exceeds
this entry during the Injection Profile. A zero entry inhibits SYS06-B00.
INC58 Profile High Cavity Pressure Alarm Setpoint [04] The module compares real-time cavity pressure against this entry when executing
the Injection Profile. The module sets alarm status bit SYS06-B01 when cavity pressure equals or exceeds this entry during the
Injection Profile. A zero entry inhibits SYS06-B01.
INC59 - 60 RFU
Set-outputs During Suspended Injection
Word Description
INC61 Output #1 Set-output value during suspended injection [19] During suspension, IPC02:B11, B12 determine the status of outputs.
INC62 Output #2 Set-output value during suspended injection [19] During suspension, IPC02:B11, B12 determine the status of outputs.
INC63 Output #3 Set-output value during suspended injection [19] During suspension, IPC02:B11, B12 determine the status of outputs.
INC64 Output #4 Set-output value during suspended injection [19] During suspension, IPC02:B11, B12 determine the status of outputs.
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 51

P2
IPC – Injection Profile Block
Bit-mapped Control Words
Word Bit Description
IPC01 Block ID = 00001001 (Low byte). High byte reserved for the module. Do not use.
IPC02
B00-07 RFU
B08 Selection bit IPC02:B08 for QI(A) IPCB02:B08 for QI(B)
B09 RFU
B10 Command bit IPC02:B10 for QI(A) IPCB02:B10 for QI(B)
B11, B12 Selection bits IPC02:B11, B12 for QI(A) IPCB02:B11, B12 for QI(B)
B13-15 RFU
IPC03 Configuration Selections
B00-01 Profile Algorithm Selection
B02-11 RFU
B12 = 0 Injection Velocity Profile Offset is Positive
B13 = 0 Injection Pressure Profile Offset is Positive
B14 = 0 Velocity Parameters in Percent Velocity
B15 RFU
IPC04 Configuration Selections
B00 = 0 Vel/Pos Injection Profiles Closed Loop
B01 = 0 Vel/Pos (limited) Injection Profiles Closed Loop
B02 = 0 Press/Pos Injection Profiles Closed Loop
B03 = 0 Press/Time Injection Profiles Closed Loop
Co-injection Parameters
Select whether to inhibit or allow bridging from injection to pack
0 = bridge from injection to pack
1 = disabled bridging. Your logic must continue the process.
Upon reaching screw position (in IPC56), QI(A) suspends its injection profile until B’s screw position (in ICPB08) is
reached. Then QI(A) resumes injection.
0 = command inhibited
1 = enables the command
IPC56 and IPCB08 must have valid non-zero values for this command.
During suspension, IPC02:B11, B12 determine the status of outputs.
Select the module’s output mode during suspended injection. When using closed-loop pressure or velocity control of
the injection valve, the other three outputs are set-outputs in INC61–64.
B11
B12
0 0 = control all four outputs with set-outputs stored in INC61–64
0 1 = control injection valve with pressure setpoint in IPC55
1 0 = control injection valve with velocity setpoint in IPC54
1 1 = error condition
B01 B00
0 0 Vel/Pos selected
0 1 Vel/Pos (pressure limited) selected
1 0 Press/Pos selected
1 1 Press/Time selected
Profile Offset Sign Selection
= 1 Injection Velocity Profile Offset is Negative
= 1 Injection Pressure Profile Offset is Negative
Velocity Units Selection
= 1 Velocity Parameters in in.(mm)/s
if: then the module:
RESET returns all segment velocity actuals (and assumes all velocity setpoints) in percent velocity where INC46
SET returns all velocity actuals (and assumes all velocity setpoints) in in.(mm)/s
Open/Closed Loop Selection
= 1 Vel/Pos Injection Profiles Open Loop
= 1 Vel/Pos (limited) Injection Profiles Open Loop
= 1 Press/Pos Injection Profiles Open Loop
= 1 Press/Time Injection Profiles Open Loop
represents 100% velocity
2–19Command Word/Bit Descriptions
IPC
Publication
1771-6.5.126 – March 1998
Page 52

2–20 Command Word/Bit Descriptions
Word
IPC04 Selections to Inhibit Closed Loop Up To Shot Size
IPC05 - 06 RFU
Bit Description
B04 = 0 Allow Closed Loop Vel/Pos During Entire Profile
= 1 Inhibit Closed Loop Vel/Pos Until 100% Shot Size
if: then the module:
SET when IPC04-B00 is SET inhibits closed-loop control of all Vel/Pos Injection Profiles until ram
(screw) position equals or is less than the 100% shot size position
RESET when IPC04-B00 is SET performs closed-loop control of the entire Vel/Pos Injection Profile.
If IPC04-B00 is RESET ignores the state of this bit.
B05 = 0 Allow Closed Loop LimVel/Pos During
= 1 Inhibit Closed Loop LimVel/Pos Until 100%
if: then the module:
SET when IPC04-B01 is SET inhibits closed-loop control of all LimVel/Pos Injection Profiles until ram
(screw) position equals or is less than the 100% shot size position
RESET when IPC04-B01 is SET performs closed-loop control of the entire LimVel/Pos Injection Profile
IPC04-B01 is RESET ignores the state of this bit
B06 = 0 Allow Closed Loop Press/Pos During Entire Profile
= 1 Inhibit Closed Loop Press/Pos Until 100% Shot Size
if: then the module:
SET when IPC04-B02 is SET inhibits closed-loop control of all Press/Pos Injection Profiles until ram
(screw) position equals or is less than the 100% shot size position
RESET when IPC04-B02 is SET performs closed-loop control of the entire Press/Pos Injection Profile
IPC04-B02 is RESET ignores the state of this bit
B07 = 0 Allow Closed Loop Press/Time During Entire Profile
= 1 Inhibit Closed Loop Press/Time Until 100% Shot Size
if: then the module:
SET when IPC04-B03 is SET inhibits closed-loop control of all Press/Time Injection Profiles until ram
(screw) positionequals or is less than the 100% shot size position
RESET when IPC04-B03 is SET performs closed-loop control of the entire Press/Time Injection Profile
IPC04-B03 is RESET ignores the state of this bit
ERC Enabled/Disabled Selection
B08 = 0 Vel/Pos ERC On
= 1 Vel/Pos ERC Off
B09 = 0 Vel/Pos (limited) ERC On
= 1 Vel/Pos (limited) ERC Off
B10 = 0 Press/Pos ERC On
= 1 Press/Pos ERC Off
B11 = 0 Press/Time ERC On
= 1 Press/Time ERC Off
B12-15 RFU
Co-injection Parameters
Word Description
IPC07 IPC07 for QI(A) IPCB07 for QI(B)
Time delay for resuming injection after reaching screw position (IPC08). Units are 0.01 sec. Zero disables the time delay.
IPC08 IPC08 for QI(A) IPCB08 for QI(B)
Notes: For [ ] engineering units, see page 2.
Publication
Screw position at which opposite injection starts after suspension.
1771-6.5.126 – March 1998
Page 53

2–21Command Word/Bit Descriptions
Injection Profile Setpoints
Word Description
IPC09 Segment 1 Velocity Setpoint [05] or [06]
if: then the module:
you select Vel/Pos controls ram (screw) forward speed to this setpoint after starting the Injection Profile until ram
profile execution (screw) position reaches IPC11 (or until transition if sooner)
IPC03-B14 is RESET reads this parameter in percent velocity
IPC03-B14 is SET reads it in in.(mm)/s
IPC10 Segment 1 Pressure Setpoint [01]
if: then the module:
If you select Press/Pos controls ram (screw) pressure to this setpoint after starting the Injection Profile until ram (screw)
profile execution position reaches IPC11 (or until transition if sooner)
you select Press/Time controls ram (screw) pressure to this setpoint after starting the Injection Profile for time period
profile execution IPC12 (or until transition if sooner)
IPC11 End of Segment 1 Position Setpoint [12]
IPC12 Segment 1 Time Setpoint [21] If you select Press/Time profile execution, the module controls ram (screw) pressure to the setpoint
IPC10 for this time period (or until transition if sooner) after starting the Injection Profile.
IPC13 Segment 2 Velocity Setpoint [05] or [06]
if: then the module:
you select Vel/Pos controls ram (screw) forward speed to this setpoint from ram (screw) position IPC11 until ram
profile execution (screw) position reaches IPC15 (or until transition if sooner)
IPC03-B14 is RESET reads this parameter in percent velocity
IPC03-B14 is SET reads it in in.(mm)/s
IPC14 Segment 2 Pressure Setpoint [01]
if: then the module:
you select Press/Pos controls ram (screw) pressure to this setpoint from ram (screw) position IPC11 until ram (screw)
profile execution position reaches IPC15 (or until transition if sooner)
you select Press/Time controls ram (screw) pressure to this setpoint at completion of Segment 1 for time period IPC16
profile execution period IPC16 (or until transition if sooner)
IPC15 End of Segment 2 Position Setpoint [12]
IPC16 Segment 2 Time Setpoint [21] If you select Press/Time profile execution, the module controls ram (screw) pressure to setpoint
IPC14 for this time period (or until transition if sooner) beginning at completion of Segment 1.
IPC17 Segment 3 Velocity Setpoint [05] or [06]
if: then the module:
you select Vel/Pos controls ram (screw) forward speed to this setpoint from ram (screw) position IPC15 until ram
profile execution (screw) position reaches IPC19 (or until transition if sooner)
IPC03-B14 is RESET reads this parameter in percent velocity
IPC03-B14 is SET reads it in in.(mm)/s
IPC18 Segment 3 Pressure Setpoint [01]
if: then the module:
you select Press/Pos controls ram (screw) pressure to this setpoint from ram (screw) position IPC15 until ram (screw)
profile execution position reaches IPC19 (or until transition if sooner)
you select Press/Time controls ram (screw) pressure to this setpoint at completion of Segment 2 for time period IPC20
profile execution (or until transition if sooner)
IPC19 End of Segment 3 Position Setpoint [12]
IPC20 Segment 3 Time Setpoint [21] If you select Press/Time profile execution, the module controls ram (screw) pressure to setpoint IPC18
for this time period (or until transition if sooner) beginning at completion of Segment 2.
IPC21 Segment 4 Velocity Setpoint [05] or [06]
if: then the module:
you select Vel/Pos controls ram (screw) forward speed to this setpoint from ram (screw) position IPC19 until ram
profile execution (screw) position reaches IPC23 (or until transition if sooner)
IPC03-B14 is RESET reads this parameter in percent velocity
IPC03-B14 is SET reads it in in.(mm)/s
IPC
Publication
1771-6.5.126 – March 1998
Page 54

2–22 Command Word/Bit Descriptions
Word
Description
IPC22 Segment 4 Pressure Setpoint [01]
if: then the module:
you select Press/Pos controls ram (screw) pressure to this setpoint from ram (screw) position IPC19 until ram (screw)
profile execution position reaches IPC23 (or until transition if sooner)
you select Press/Time controls ram (screw) pressure to this setpoint at completion of Segment 3 for time period IPC24
profile execution (or until transition if sooner)
IPC23 End of Segment 4 Position Setpoint [12]
IPC24 Segment 4 Time Setpoint [21] If you select Press/Time profile execution, the module controls ram (screw) pressure to setpoint
IPC22 for this time period (or until transition if sooner) beginning at completion of Segment 3.
IPC25 Segment 5 Velocity Setpoint [05] or [06]
Segment 4 Velocity Setpoint [05] or [06]
if: then the module:
you select Vel/Pos controls ram (screw) forward speed to this setpoint from ram (screw) position IPC23 until ram
profile execution (screw) position reaches IPC27 (or until transition if sooner)
IPC03-B14 is RESET reads this parameter in percent velocity
IPC03-B14 is SET reads it in in.(mm)/s
IPC26 Segment 5 Pressure Setpoint [01]
if: then the module:
you select Press/Pos controls ram (screw) pressure to this setpoint from ram (screw) position IPC23 until ram (screw)
profile execution position reaches IPC27 (or until transition if sooner)
you select Press/Time controls ram (screw) pressure to this setpoint at completion of Segment 4 for time period IPC28
profile execution (or until transition if sooner)
IPC27 End of Segment 5 Position Setpoint [12]
IPC28 Segment 5 Time Setpoint [21] If you select Press/Time profile execution, the module controls ram (screw) pressure to setpoint
IPC26 for this time period (or until transition if sooner) beginning at completion of Segment 4.
IPC29 Segment 6 Velocity Setpoint [05] or [06]
if: then the module:
you select Vel/Pos controls ram (screw) forward speed to this setpoint from ram (screw) position IPC27 until ram
profile execution (screw) position reaches IPC31 (or until transition if sooner)
IPC03-B14 is RESET reads this parameter in percent velocity
IPC03-B14 is SET reads it in in.(mm)/s
IPC30 Segment 6 Pressure Setpoint [01]
if: then the module:
you select Press/Pos controls ram (screw) pressure to this setpoint from ram (screw) position IPC27 until ram (screw)
profile execution position reaches IPC31 (or until transition if sooner)
you select Press/Time controls ram (screw) pressure to this setpoint at completion of Segment 5 for time period IPC32
profile execution (or until transition if sooner)
IPC31 End of Segment 6 Position Setpoint [12]
IPC32 Segment 6 Time Setpoint [21] If you select Press/Time profile execution, the module controls ram (screw) pressure to setpoint
IPC30 for this time period (or until transition if sooner) beginning at completion of Segment 5.
IPC33 Segment 7 Velocity Setpoint [05] or [06]
if: then the module:
you select Vel/Pos controls ram (screw) forward speed to this setpoint from ram (screw) position IPC31 until ram
profile execution (screw) position reaches IPC35 (or until transition if sooner)
IPC03-B14 is RESET reads this parameter in percent velocity
IPC03-B14 is SET reads it in in.(mm)/s
IPC34 Segment 7 Pressure Setpoint [01]
if: then the module:
you select Press/Pos controls ram (screw) pressure to this setpoint from ram (screw) position IPC31 until ram (screw)
profile execution position reaches IPC35 (or until transition if sooner)
you select Press/Time controls ram (screw) pressure to this setpoint at completion of Segment 6 for time period IPC36
profile execution (or until transition if sooner)
IPC35 End of Segment 7 Position Setpoint [12]
IPC36 Segment 7 Time Setpoint [21] If you select Press/Time profile execution, the module controls ram (screw) pressure to setpoint
IPC34 for this time period (or until transition if sooner) beginning at completion of Segment 6.
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 55

IPC37 Segment 8 Velocity Setpoint [05] or [06]
if: then the module:
you select Vel/Pos controls ram (screw) forward speed to this setpoint from ram (screw) position IPC35 until ram
profile execution (screw) position reaches IPC39 (or until transition if sooner)
IPC03-B14 is RESET reads this parameter in percent velocity
IPC03-B14 is SET reads it in in.(mm)/s
IPC38 Segment 8 Pressure Setpoint [01]
if: then the module:
you select Press/Pos controls ram (screw) pressure to this setpoint from ram (screw) position IPC35 until ram (screw)
profile execution position reaches IPC39 (or until transition if sooner)
you select Press/Time controls ram (screw) pressure to this setpoint at completion of Segment 7 for time period IPC40
profile execution (or until transition if sooner)
IPC39 End of Segment 8 Position Setpoint [12]
IPC40 Segment 8 Time Setpoint [21] If you select Press/Time profile execution, the module controls ram (screw) pressure to setpoint
IPC38 for this time period (or until transition if sooner) beginning at completion of Segment 7.
IPC41 Segment 9 Velocity Setpoint [05] or [06]
if: then the module:
you select Vel/Pos controls ram (screw) forward speed to this setpoint from ram (screw) position IPC39 until ram
profile execution (screw) position reaches IPC43 (or until transition if sooner)
IPC03-B14 is RESET reads this parameter in percent velocity
IPC03-B14 is SET reads it in in.(mm)/s
IPC42 Segment 9 Pressure Setpoint [01]
if: then the module:
you select Press/Pos controls ram (screw) pressure to this setpoint from ram (screw) position IPC39 until ram (screw)
profile execution position reaches IPC43 (or until transition if sooner)
you select Press/Time controls ram (screw) pressure to this setpoint at completion of Segment 8 for time period IPC44
profile execution (or until transition if sooner)
IPC43 End of Segment 9 Position Setpoint [12]
IPC44 Segment 9 Time Setpoint [21] If you select Press/Time profile execution, the module controls ram (screw) pressure to setpoint
IPC42 for this time period (or until transition if sooner) beginning at completion of Segment 8.
IPC45 Segment 10 Velocity Setpoint [05] or [06]
if: then the module:
you select Vel/Pos controls ram (screw) forward speed to this setpoint from ram (screw) position IPC43 until ram
profile execution (screw) position reaches IPC47 (or until transition if sooner)
IPC03-B14 is RESET reads this parameter in percent velocity
IPC03-B14 is SET reads it in in.(mm)/s
IPC46 Segment 10 Pressure Setpoint [01]
if: then the module:
you select Press/Pos controls ram (screw) pressure to this setpoint from ram (screw) position IPC43 until ram (screw)
profile execution position reaches IPC47 (or until transition if sooner)
you select Press/Time controls ram (screw) pressure to this setpoint at completion of Segment 9 for time period IPC48
profile execution (or until transition if sooner)
IPC47 End of Segment 10 Position Setpoint [12]
IPC48 Segment 10 Time Setpoint [21] If you select Press/Time profile execution, the module controls ram (screw) pressure to setpoint
IPC46 for this time period (or until transition if sooner) beginning at completion of Segment 9.
2–23Command Word/Bit Descriptions
IPC
Publication
1771-6.5.126 – March 1998
Page 56

2–24 Command Word/Bit Descriptions
IPC49
IPC50 Segment 11 Pressure Setpoint [01]
Segment 11 Velocity Setpoint [05] or [06]
if: then the module:
you select Vel/Pos controls ram (screw) forward speed to this setpoint from ram (screw) position IPC47 until transition
profile execution
IPC03-B14 is RESET reads this parameter in percent velocity
IPC03-B14 is SET reads it in in.(mm)/s
if: then the module:
you select Press/Pos controls ram (screw) pressure to this setpoint from ram (screw) position IPC47 until transition
profile execution
you select Press/Time controls ram (screw) pressure to this setpoint at completion of Segment 10 until transition
profile execution
Injection Profile Offsets
Word Description
IPC51 Profile Velocity Offset [05] or [06]
if: then the module:
you select Vel/Pos profile execution applies this entry (after reading the sign bit) to each velocity profile setpoint
IPC03-B14 is RESET reads this parameter in percent velocity
IPC03-B14 is SET reads it in in.(mm)/s
IPC52 Profile Pressure Offset [01] If you select Press/Pos or Press/Time profile execution, the module applies this entry (after reading the
sign bit) to each pressure profile setpoint.
IPC53 RFU
Setpoints for Suspended Injection
Word Description
IPC54 IPC54 for QI(A) IPCB54 for QI(B)
IPC55 IPC55 for QI(A) IPCB55 for QI(B)
IPC56 IPC56 for QI(A) IPCB56 for QI(B)
Closed-loop velocity setpoint for the injection valve during suspended injection (IPC02.B12 = 1). The remaining three set-outputs
(in IPC61-64) are also applied. If not using closed–loop velocity-control, all four set-outputs are applied.
Closed-loop pressure setpoint for the injection valve during suspended injection (IPC02.B11 = 1). The remaining three set-outputs
(in IPC61-64) are also applied. If not using closed–loop pressure-control, all four set-outputs are applied.
Screw position at which the QI suspends its own injection profile.
Pressure Limited Injection Parameters
Word Description
IPC57 Ram (Screw) Pressure Limit for Vel/Pos Injection Profile [01], Profile Velocity Offset [05] or [06]
if: then the module:
you select Pressure Limited Vel/Pos profile execution limits action of the selected valve(s) during the Injec-
tion Profile to maintain ram (screw) pressure equal to
or below this entry
ram (screw) pressure equals or exceeds this entry during a Pressure Limited
Injection Profile and ram (screw) position is equal to or less than IPC58
ram (screw) pressure equals or exceeds this entry after expiration of time
delay IPC59
the module switches to PID control during a Pressure Limited Injection Profile,
and bit pattern in INC02 requires the module to control injection velocity and
pressure with different outputs
the module switches to the PID algorithm during a Pressure Limited Injection
Profile, and the actual ram (screw) velocity equals or exceeds the velocity
setpoint for the segment under execution
the actual ram (screw) velocity equals or exceeds the velocity setpoint after
expiration of time delay IPC59
the module returns to VelFF control during a Pressure Limited Injection
Profile, and bit pattern in INC02 requires the module to control injection
velocity and pressure with different outputs
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
sets the applicable status bit in IPS05 and freezes
output to selected velocity valve for time period IPC59
continues Injection Profile execution using its PID
algorithm with this entry as the algorithm setpoint
returns the selected velocity valve to its profile Setoutput value as defined in INC09–12
freezes output to selected pressure valve for time
period IPC59
returns to the VelFF mode of profile execution to drive
the selected velocity valve using the segment’s programmed setpoint
returns the selected pressure valve to its profile Setoutput value as defined in INC09–12
Page 57

2–25Command Word/Bit Descriptions
Word Description
IPC58 Ram (Screw) Position for Pressure Limiting Inhibit [12]
A non-zero entry forces the module to ignore the magnitude of ram (screw) pressure during a Pressure Limited Vel/Pos Injection
Profile until ram (screw) position is equal to or less than this entry. A zero entry forces the module to pressure limit the entire Injection
Profile if you have selected Pressure Limited Vel/Pos as the profile mode.
IPC59 Algorithm Change Time Delay During Pressure Limit [23]
Total time that the module must monitor a continuous ram (screw) pressure in excess of the non-zero entry in IPC57 before changing
to its internal PID algorithm for continuing a Pressure Limited Vel/Pos Injection Profile. Also the total time that the module must
monitor a continuous ram (screw) velocity greater than the programmed setpoint before changing back to its internal VelFF algorithm
during a Pressure Limited Vel/Pos Injection Profile that has entered pressure limit. Use a non-zero entry to filter out early ram (screw)
pressure spikes of short duration to avoid pressure limiting during the Injection Profile.
Injection Transition Parameters
Injection transition-to-pack or hold occurs when the four words in
this table go to a state of non-zero. If you want the module to ignore
one or more parameters when monitoring the Injection Profile for
transition, enter zero for that parameter.
Word Description
IPC60 Time Limit for Transition [21] The module immediately terminates the Injection Profile and begins the Pack(Hold) Profile if the total
Injection Profile execution time equals or exceeds the non-zero entry in this word. The module ignores this parameter if zero.
IPC61 Ram (Screw) Position for Transition [12] The module immediately terminates the Injection Profile and begins the Pack(Hold) Profile
if real-time ram (screw) position is less than or equal to the non-zero entry in this word. The module ignores this parameter if zero.
IPC62 Ram (Screw) Pressure for Transition [01] If real-time ram (screw) position is less than or equal to any non-zero entry in IPC64, the
module immediately terminates the Injection Profile and begins the Pack(Hold) Profile if real-time ram (screw) pressure equals or
exceeds this non-zero entry. The module ignores this parameter if zero.
IPC63 Cavity Pressure for Transition [04] If real-time ram (screw) position is less than or equal to any non-zero entry in IPC64, the module
immediately terminates the Injection Profile and begins the Pack(Hold) Profile if real-time cavity pressure equals or exceeds this
non-zero entry. The module ignores this setpoint if zero.
JGC
Pressure Transition Inhibit
Word Description
IPC64 Ram (Screw) Position for Pressure Transition Inhibit [12] A non-zero entry forces the module to ignore any non-zero IPC62 and
IPC63 until ram (screw) position is equal to or less than this entry. A zero entry forces the module to use any non-zero entry in
IPC62 and IPC63 during the entire Injection Profile.
JGC – Jog
Configuration Block
The The module will not accept or process the Jog Configuration
Command Block unless it has a valid MCC installed.
Bit-mapped Control Words
Word Description
JGC01 Block ID = 00000010 (Low byte). High byte reserved for the module. Do not use
JGC02 - 04 RFU
Jog Alarm Setpoints
Word Description
JGC05 Screw Rotate Jog RPM Alarm Setpoint [25] The module compares real-time screw RPM against this entry when responding to
command bit DYC01-B09 = 1. The module sets alarm status bit SYS05-B08 when screw RPM equals or exceeds this entry during a
Screw Rotate Jog. A zero entry inhibits SYS05-B08.
JGC06 Ram (Screw) Jog Pressure Alarm Setpoint [01] The module compares real-time ram (screw) pressure against this entry when re-
sponding to command bit DYC01-B10 = 1 or DYC01-B11 = 1. The module sets alarm status bit SYS05-B09 when ram (screw) pres-
sure equals or exceeds this entry during a Ram (Screw) Jog. A zero entry inhibits SYS05-B09.
JGC07, 08 RFU
Publication
1771-6.5.126 – March 1998
Page 58

2–26 Command Word/Bit Descriptions
M1
M2
= English Units (Inches and PSI)
1 = Required selection The module configures itself as a 1-slot module containing four inputs and four outputs,
Screw Rotate Jog Set-output Values
The module sets its outputs to these values when DYC01-B09 = 1.
Word Description
JGC09 Output #1 Set-output Value for Screw Rotate Jogs [19]
JGC10 Output #2 Set-output Value for Screw Rotate Jogs [19]
JGC11 Output #3 Set-output Value for Screw Rotate Jogs [19]
JGC12 Output #4 Set-output Value for Screw Rotate Jogs [19]
JGC13-16 RFU
Ram (Screw) Forward Jog Set-output Values
The module sets its outputs to these values when DYC01-B10 = 1.
Word Description
JGC17 Output #1 Set-output Value for Ram (Screw) Forward Jogs [19]
JGC18 Output #2 Set-output Value for Ram (Screw) Forward Jogs [19]
JGC19 Output #3 Set-output Value for Ram (Screw) Forward Jogs [19]
JGC20 Output #4 Set-output Value for Ram (Screw) Forward Jogs [19]
JGC21-24 RFU
Ram (Screw) Reverse Jog Set-output Values
The module sets its outputs to these values when DYC01-B11 = 1.
Word Description
JGC25 Output #1 Set-output Value for Ram (Screw) Reverse Jogs [19]
JGC26 Output #2 Set-output Value for Ram (Screw) Reverse Jogs [19]
JGC27 Output #3 Set-output Value for Ram (Screw) Reverse Jogs [19]
JGC28 Output #4 Set-output Value for Ram (Screw) Reverse Jogs [19]
JGC29 Output #5 Set-output Value for Ram (Screw) Reverse Jogs [19]
JGC30 Output #6 Set-output Value for Ram (Screw) Reverse Jogs [19]
JGC31 Output #7 Set-output Value for Ram (Screw) Reverse Jogs [19]
JGC32 Output #8 Set-output Value for Ram (Screw) Reverse Jogs [19]
JGC33-64 RFU
MCC – Module Configuration
Command Block
Word Bit Description
MCC01
MCC02
B00 - B07 Block ID 00000001
B08-15 Reserved for the module. Do not use.
MCC Configuration Selections
B00 Data Range Selection
0
1 = Metric Units (Millimeters and Bar)
B01 Module designation for co-injection
0 = QIA
1 = QIB
B02 RFU
B03 Module Inputs
0 = Invalid
Bit-mapped Control Words
and accesses bits MCC02-B04 and MCC02-B05 to determine layout of its inputs.
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 59

Word Bit Description
M2
4- 5
B B Input Conf gurat on
Input #
Input #
Input #
Input #4
MCC02 B04-05 B05 B04 Input Configuration
0 0 Inject Control (both bits must be zero)
B06 MCC02.B06 for QI(A) MCCB02.B06 for QI(B)
Configuration bit
0 = module not configured for screw RPM
1 = tells the module to verify screw RPM configuration or declare a fault
Input 3 must be connected to a sensor and this bit must be set whenever the MCC contains valid screw RPM parameters.
B07 MCC02.B07 for QI(A) MCCB02.B07 for QI(B)
Configuration bit
0 = module not configured for cavity pressure
1 = tells the module to verify cavity pressure configuration or declare a fault
Input 3 must be connected to a sensor and this bit must be set whenever MCC contains valid cavity pressure parameters.
B08 Inhibit (override) loss of sensor protection for screw position input
B09 Inhibit (override) loss of sensor protection for screw pressure input
B10-13 RFU
B14 Inhibit (override) loss of sensor protection for screw RPM input
B15 Inhibit (override) loss of sensor protection for cavity pressure input
MCC03 MCC Input Range Selection
All inputs have the following range selections:
Byy Bxx Range
0 0 0 to 10 V dc
0 1 1 to 5 V dc
1 0 4 to 20 mA dc
1 1 Not Connected
Use these bit pairs to select the input range:
B01-00 Input #1
B03-02 Input #2
B05-04 Input #3
B07-06 Input #4
B08-15 Important: These bits must be SET.
MCC04 MCC Output Range Selection
All outputs have the following range selections:
Byy Bxx Range
0 0 –10 to +10 V dc
0 1 0 to +10 V dc
1 0 4 to 20 mA dc
1 1 Not Connected
Use these bit pairs to select the output range:
B01-00 Output #1
B03-02 Output #2
B05-04 Output #3
B07-06 Output #4
B08 – 15 Important: These bits must be SET.
MCC05 Adds percentage offset up to "10% (–1000 to +1000) to Stop Position of Output #1 (0 V dc or 4 mA).
MCC06 Adds percentage offset up to "10% (–1000 to +1000) to Stop Position of Output #2 (0 V dc or 4 mA).
MCC07 Adds percentage offset up to "10% (–1000 to +1000) to Stop Position of Output #3 (0 V dc or 4 mA).
MCC08 Adds percentage offset up to "10% (–1000 to +1000) to Stop Position of Output #4 (0 V dc or 4 mA).
1
Ram (Screw) Position Ram (Screw) Pressure Screw RPM Cavity Pressure
2
3
2–27Command Word/Bit Descriptions
MCC
Publication
1771-6.5.126 – March 1998
Page 60

2–28 Command Word/Bit Descriptions
MCC22Ram (Screw) Pressure Alarm Time Delay [23] Total time the module must monitor a continuous ram (screw) pressure in excess o
the non- ero entr in all ra ( cre ) re ure alar et oint be ore ettin the a ociated alar tatu bit.
oint/bit pairs affected are:
MCC21
6
9
57
57
PK 57 Y 6- 2
PRC57
6
PLC57
7
P
57
8
PSC57
8
Ram (Screw) Position Transducer Configuration (own injection head)
The module accesses data in MCC09-16 if bit patterns in MCC02, 03
indicate that the module is connected to a ram (screw) position sensor.
Word Description
MCC09 Minimum Ram (Screw) Position [11]
MCC10 Maximum Ram (Screw) Position [11]
MCC11 Analog Signal at Minimum Ram (Screw) Position [24]
MCC12 Analog Signal at Maximum Ram (Screw) Position [24] The module continuously compares real-time ram (screw) position against
this entry. The module sets alarm status bit SYS07-B00 and forces all of its outputs to zero when executing a ram (screw) forward
profile (Injection, Pack, Hold) and ram (screw) position is less than or equals this entry. A zero entry inhibits SYS07-B00.
MCC13 Ram (Screw) Position Minimum Software Travel Limit [11]
MCC14 Ram (Screw) Position Maximum Software Travel Limit [11] The module continuously compares real-time ram (screw) position
against this entry. The module sets alarm status bit SYS07-B01 and forces all of its outputs to zero when executing a ram (screw)
reverse profile or movement (Pre-decompression, Plastication, Post-decompression) and ram (screw) position equals or exceeds
this entry. A zero entry inhibits SYS07-B01.
MCC15 Ram (Screw) Software Travel Limit Alarm Deadband [17] After sensing a ram (screw) overtravel and latching alarm status bit
SYS07-B00 or SYS07-B01, the module will not unlatch bit until real-time ram (screw) position is inside the overtravel setpoint by an
incremental length equal to this entry. This incremental position is added to MCC13 in order to determine ram (screw) position re-
quired to unlatch SYS07-B00. This incremental position is subtracted from MCC14 in order to determine ram (screw) position re-
quired to unlatch SYS07-B01.
MCC16 Ram (Screw) Position Transducer Digital Filter [23] A non-zero entry forces the module to filter the input before using the result for
ram (screw) position calculations. Use this parameter when required to soften the input signal from a linear potentiometer.
Ram (Screw) Pressure Transducer Configuration
The module accesses data in MCC17-22 if bit patterns in MCC02, 03
indicate that the module is connected to a ram (screw) pressure sensor.
Word Description
MCC17 Minimum Ram (Screw) Pressure [01]
MCC18 Maximum Ram (Screw) Pressure [01]
MCC19 Analog Signal at Minimum Ram (Screw) Pressure [24]
MCC20 Analog Signal at Maximum Ram (Screw) Pressure [24]
MCC21 High Ram (Screw) Pressure Alarm Setpoint [01] The module continuously compares real-time ram (screw) pressure against this
entry. The module sets alarm status bit SYS05-B00 when ram (screw) pressure equals or exceeds this entry. A zero entry inhibits
SYS05-B00.
MCC22 Ram (Screw) Pressure Alarm Time Delay [23] Total time the module must monitor a continuous ram (screw) pressure in excess of
the non-zero entry in all ram (screw) pressure alarm setpoints before setting the associated alarm status bit.
Setp
Setpoint Alarm Status Bit
JGC0
INC
PKC57 SYS06-B02
HDC57 SYS06-B04
SC
Use non-zero entry to filter out ram (screw) pressure spikes of short enough duration that they should not be considered an alarm.
SYS05-B00
SYS05-B0
SYS06-B00INC
SYS06-B00
SYS06-B0
SYS06-B0
SYS06-B0
SYS06-B0
f
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 61

2–29Command Word/Bit Descriptions
Ram (Screw) Position Transducer Configuration (other injection head)
The module accesses data in MCC09-16 if bit patterns in MCC02, 03
indicate that the module is connected to a ram (screw) position sensor.
Word Description
MCC23 Minimum Ram (Screw) Position [11]
MCC24 Maximum Ram (Screw) Position [11]
MCC25 Analog Signal at Minimum Ram (Screw) Position [24]
MCC26 Analog Signal at Maximum Ram (Screw) Position [24] The module continuously compares real-time ram (screw) position against
this entry. The module sets alarm status bit SYS07-B00 and forces all of its outputs to zero when executing a ram (screw) forward
profile (Injection, Pack, Hold) and ram (screw) position is less than or equals this entry. A zero entry inhibits SYS07-B00.
MCC27-29 RFU
MCC30 Ram (Screw) Position Transducer Digital Filter [23] A non-zero entry forces the module to filter the input before using the result for
ram (screw) position calculations. Use this parameter when required to soften the input signal from a linear potentiometer.
Screw RPM Transducer Configuration
The module accesses data in MCC51-56 if bit patterns in MCC02 and
MCC03 indicate that the module is connected to a screw RPM sensor.
Word Description
MCC51 Minimum Screw RPM [25]
MCC52 Maximum Screw RPM [25]
MCC53 Analog Signal at Minimum Screw RPM [24]
MCC54 Analog Signal at Maximum Screw RPM [24]
MCC55 High Screw RPM Alarm Setpoint [25] The module continuously compares real-time screw RPM against this entry. The module sets
alarm status bit SYS05-B03 when screw RPM equals or exceeds this entry. A zero entry inhibits SYS05-B03.
MCC56 High Screw RPM Alarm Time Delay [23] Total time the module must monitor a continuous screw RPM in excess of the non-zero
entry in all screw RPM alarm setpoints before setting the associated alarm status bit. Setpoint/bitpairs affected are:
Setpoint Alarm Status Bit
MCC55 SYS05-B03
JGC05 SYS05-B08
Use a non-zero entry in this word to filter out screw RPM spikes of short enough duration to avoid nuisance alarms.
MCC
Cavity Pressure Transducer Configuration
The module accesses data in MCC57-62 if bit patterns in MCC02, 03
indicate that the module is connected to a cavity pressure sensor.
Word Description
MCC57 Minimum Cavity Pressure [04]
MCC58 Maximum Cavity Pressure [04]
MCC59 Analog Signal at Minimum Cavity Pressure [24]
MCC60 Analog Signal at Maximum Cavity Pressure [24]
MCC61 High Cavity Pressure Alarm Setpoint [04] The module continuously compares real-time cavity (or system) pressure against this entry.
The module sets alarm status bit SYS05-B04 when cavity (or system) pressure equals or exceeds this entry. A zero entry inhibits
SYS05-B04.
MCC62 High Cavity Pressure Alarm Time Delay [23] Total time the module must monitor a continuous cavity (or system) pressure in excess of
the non-zero entry in all cavity (or system) pressure alarm setpoints before setting the associated alarm status bit.
If bit patterns in MCC02 and MCC03 indicate that the module is connected to a cavity pressure sensor, setpoint/bit pairs affected are:
Setpoint Alarm Status Bit
MCC61 SYS05-B04
INC58 SYS06-B01
PKC58 SYS06-B03
HDC58 SYS06-B05
Use a non-zero entry in this word to filter out cavity pressure spikes of short enough duration to avoid nuisance alarms.
Publication
1771-6.5.126 – March 1998
Page 62

2–30 Command Word/Bit Descriptions
Other
Word Description
MCC63 MCC63 for QI(A) MCCB63 for QI(B)
Switch-over time delay required to switch the mode of input 3 from screw RPM to cavity pressure (or vice versa)
before processing data or setting alarms. Units of 0.01 sec.
MCC64 Number of Input Samples for Loss-of-sensor Alarms [29] Range of 0-200. The module monitors sensor inputs for out-of-range
signals. To avoid nuisance alarms caused by electrical noise, enter a non-zero value. When the module detects a number of
consecutive out-of-range input scans (consecutive loss-of-sensor samples) equal to or greater than this value, it sets the
loss-of-sensor alarm. Setting to zero gives no protection against nuisance alarms.
PKC – Pack
Configuration Block
Word Bit Description
PKC01 Block ID = 00001010 (Low byte). High byte reserved for the module. Do not use.
PKC02 Configuration Selections
B00-B02 Selected Cavity Pressure Control Valve
The module uses its algorithm to drive the following output during any Cav Press/Time Pack Profile.
B02 B01 B00
0 0 0 Output #1
0 0 1 Output #2
0 1 0 Output #3
0 1 1 Output #4
1 x x Invalid
B03 Cavity Pressure Algorithm Selection
= 0 Dependent Gains (ISA)
= 1 Independent Gains (A-B)
B04-06 Selected Ram (Screw) Pressure Control Valve
The module uses its algorithm to drive the following output during any Ram Press/Time Pack Profile.
B06 B05 B04
0 0 0 Output #1
0 0 1 Output #2
0 1 0 Output #3
0 1 1 Output #4
1 x x Invalid
B07 Ram (Screw) Pressure Algorithm Selection
= 0 Dependent Gains (ISA)
= 1 Independent Gains (A-B)
B08-15 RFU
PKC03 - 04 RFU
Bit-mapped Control Words
Expert Response Compensation (ERC) Percentage
Word Description
PKC05 Minimum Cav Press Control ERC Percentage [31]
Although error coding allows range of 00000 to 09999, the module limits it to a minimum of 01000.
PKC06 Minimum Ram Press Control ERC Percentage [31]
Although error coding allows range of 00000 to 09999, the module limits it to a minimum of 01000.
PKC07 - 08 RFU
Unselected Valve Set-output Values
When the module starts the Pack Profile, it:
• sets its unselected outputs to the values listed below
• ignores the unselected value of the selected output
• uses ramp rates PKC17-20 and PKC25-28 to ramp unselected outputs
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 63

Word Description
PKC09 Output #1 Set-output Value during Profile [19]
PKC10 Output #2 Set-output Value during Profile [19]
PKC11 Output #3 Set-output Value during Profile [19]
PKC12 Output #4 Set-output Value during Profile [19]
PKC13–16 RFU
Output Ramp Rates
The module uses the following ramp rates when moving its outputs
from setpoint to setpoint during the Pack Profile. The module
interprets a ramp rate of zero as a step function ramp (ramp disable).
Word Description
PKC17 Output #1 Acceleration Ramp Rate during Profile [20]
PKC18 Output #2 Acceleration Ramp Rate during Profile [20]
PKC19 Output #3 Acceleration Ramp Rate during Profile [20]
PKC20 Output #4 Acceleration Ramp Rate during Profile [20]
PKC21-24 RFU
PKC25 Output #1 Deceleration Ramp Rate during Profile [20]
PKC26 Output #2 Deceleration Ramp Rate during Profile [20]
PKC27 Output #3 Deceleration Ramp Rate during Profile [20]
PKC28 Output #4 Deceleration Ramp Rate during Profile [20]
PKC29-40 RFU
2–31Command Word/Bit Descriptions
PKC
Ram (Screw) Pressure Control Limits
Word Description
PKC41 Ram (Screw) Pressure Min Control Limit [01] Min controllable ram (screw) pressure attainable during any Ram Press/Time Pack
Profile. Module expects this ram (screw) pressure when setting its selected ram (screw ) pressure valve to the %-output in PKC43.
PKC42 Ram (Screw) Pressure Max Control Limit [01] Maxi controllable ram (screw) pressure attainable during any Ram Press/Time Pack
Profile. Module expects this ram (screw) pressure when setting its selected ram (screw) pressure valve to the %-output in PKC44.
PKC43 Selected Ram (Screw) Pressure Valve Output for Minimum [19] 0% CV output percentage that the module uses to drive the se-
lected pressure valve during any Ram Press/Time Pack Profile. The module expects a pressure equal to PKC41 when setting the
selected ram (screw) pressure valve to this %-output during profile execution. Ram Press/Time Pack Profile will be executed as a
reverse-acting algorithm if this entry is greater than PKC44.
PKC44 Selected Ram (Screw) Pressure Valve Output for Maximum [19] 100% CV output percentage that the module uses to drive the
selected pressure valve during any Ram Press/Time Pack Profile. The module expects a pressure equal to PKC42 when setting the
selected ram (screw) pressure valve to this %-output during profile execution. Ram Press/Time Pack Profile will be executed as a
reverse-acting algorithm if this entry is less than PKC43.
Cavity Pressure Control Limits
Word Description
PKC45 Cavity Pressure Minimum Control Limit [04] Minimum controllable cavity pressure attainable during any Cav Press/Time Pack Pro-
file . The module expects this cavity pressure when setting its selected cavity pressure valve to the %-output in PKC47.
PKC46 Cavity Pressure Maximum Control Limit [04] Maximum controllable cavity pressure attainable during any Cav Press/Time Pack
Profile . The module expects this cavity pressure when setting its selected cavity pressure valve to the %-output in PKC48.
PKC47 Selected Cavity Pressure Valve Output for Minimum [19] 0% CV output percentage that the module uses to drive the selected pres-
sure valve during any Cav Press/Time Pack Profile. The module expects a pressure equal to PKC45 when setting the selected
cavity pressure valve to this %-output during profile execution. The Cav Press/Time Pack Profile will be executed as a reverse-acting algorithm if this entry is greater than PKC48.
PKC48 Selected Cavity Pressure Valve Output for Maximum [19] 100% CV output percentage that the module uses to drive the selected
pressure valve during any Cav Press/Time Pack Profile. The module expects a pressure equal to PKC46 when setting the selected
cavity pressure valve to this %-output during profile execution. The Cav Press/Time Pack Profile will be executed as a reverse-acting algorithm if this entry is less than PKC47.
Publication
1771-6.5.126 – March 1998
Page 64

2–32 Command Word/Bit Descriptions
Profile Tuning Constants
Word Description
PKC49 Proportional Gain for Ram Press Control [30]
PKC50 Integral Gain for Ram Press Control [27] or [28]
PKC51 Derivative Gain for Ram Press Control [26] or [21]
PKC52 Proportional Gain for Cav Press Control [30]
PKC53 Integral Gain for Cav Press Control [27] or [28]
PKC54 Derivative Gain for Cav Press Control [26] or [21]
PKC55 - 56 RFU
Profile Pressure Alarm Setpoint
Word Description
PKC57 Profile High Ram (Screw) Pressure Alarm Setpoint [01] The module compares real-time ram (screw) pressure against this entry
when executing the Pack Profile. The module sets alarm status bit SYS06-B02 when ram (screw) pressure equals or exceeds this
entry during the Pack Profile. A zero entry inhibits SYS06-B02.
PKC58 Profile High Cavity Pressure Alarm Setpoint [04] The module compares real-time cavity pressure against this entry when executing
Pack Profile. The module sets alarm status bit SYS06-B03 when cavity pressure equals or exceeds this entry during the Pack Profile. A zero entry inhibits SYS06-B03.
PKC59 - 64 RFU
Plastication Configuration Command Block (PLC)
Word Bit Description
PLC01 Block ID = 00001110 (Low byte). High byte reserved for the module. Do not use.
PLC02 Configuration Selections
B00-B02 Selected RPM Control Valve
The module uses its algorithm to drive the following output during any RPM/Pos or RPM/Time Plastication Profile.
B02 B01 B00
0 0 0 Output #1
0 0 1 Output #2
0 1 0 Output #3
0 1 1 Output #4
1 x x Invalid
PLC02 B03 RPM Algorithm Selection
= 0 Dependent Gains (ISA)
= 1 Independent Gains (A-B)
B04-B06 Selected Pressure Control Valve
The module uses its algorithm to drive the following output during any RPM/Pos or RPM/Time Plastication Profile.
B06 B05 B04
0 0 0 Output #1
0 0 1 Output #2
0 1 0 Output #3
0 1 1 Output #4
1 x x Invalid
B07 Pressure Algorithm Selection
= 0 Dependent Gains (ISA)
= 1 Independent Gains (A-B)
B08-B15 RFU
PLC03 - 04 RFU
Bit-mapped Control Words
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 65

Expert Response Compensation (ERC) Percentage
Word Description
PLC05 Minimum RPM Control ERC Percentage [31]
PLC06 Minimum Pressure Control ERC Percentage [31]
Although error coding allows range of 00000 to 09999, the module limits it to a minimum of 01000.
PLC07 RFU
Watchdog Timer
Word Description
PLC08 Profile Watchdog Timer Preset [21] When the module starts Plastication Profile, it:
starts an internal Profile Watchdog timer
stops this timer and reset its accumulated value to zero (after reporting total execution time in PPS57) when it completes the profile
sets master status bit SYS04-B08 when the accumulated value of this timer equals or exceeds this entry
A zero entry inhibits SYS04-B08.
Unselected Valve Set-output Values
When the module starts the Plastication Profile, it:
• ignores the unselected value of the selected output
• uses ramp rates PLC17-20 and PLC25-28 to ramp unselected outputs
• sets its unselected outputs to the values listed below
2–33Command Word/Bit Descriptions
PLC
Word Description
PLC09 Output #1 Set-output Value during Profile [19]
PLC10 Output #2 Set-output Value during Profile [19]
PLC11 Output #3 Set-output Value during Profile [19]
PLC12 Output #4 Set-output Value during Profile [19]
PLC13-16 Reserved for Future Use
Output Ramp Rates
The module uses the following ramp rates when moving its outputs
from setpoint to setpoint during the Plastication Profile. The module
interprets a ramp rate of zero as a step function ramp (ramp disable).
Word Description
PLC17 Output #1 Acceleration Ramp Rate during Profile [20]
PLC18 Output #2 Acceleration Ramp Rate during Profile [20]
PLC19 Output #3 Acceleration Ramp Rate during Profile [20]
PLC20 Output #4 Acceleration Ramp Rate during Profile [20]
PLC21-24 RFU
PLC25 Output #1 Deceleration Ramp Rate during Profile [20]
PLC26 Output #2 Deceleration Ramp Rate during Profile [20]
PLC27 Output #3 Deceleration Ramp Rate during Profile [20]
PLC28 Output #4 Deceleration Ramp Rate during Profile [20]
PLC29-32 RFU
Publication
1771-6.5.126 – March 1998
Page 66

2–34 Command Word/Bit Descriptions
End of Profile Set-output Values
When module completes Plastication Profile and PPC03-B08 is set, it:
• sets status bit SYS22-B08
• uses ramp rates PLC17-20 and PLC25-28 when changing outputs
• sets its outputs to the following values
Word Description
PLC33 Output #1 Set-output Value at End of Profile [19]
PLC34 Output #2 Set-output Value at End of Profile [19]
PLC35 Output #3 Set-output Value at End of Profile [19]
PLC36 Output #4 Set-output Value at End of Profile [19]
PLC37-40 RFU
Pressure Control Limits
Word Description
PLC41 Pressure Minimum Control Limit [01] Minimum controllable ram (screw) pressure attainable during any Press/Pos or Press/Time
Plastication Profile. The module expects this ram (screw) pressure when setting its selected valve to the %-output in PLC43.
PLC42 Pressure Maximum Control Limit [01] Maximum controllable ram (screw) pressure attainable during any Press/Pos or Press/Time
Plastication Profile. The module expects this ram (screw) pressure when setting its selected valve to the %-output in PLC44.
PLC43 Selected Pressure Valve Output for Minimum [19] 0% CV output percentage that the module uses to drive the selected pressure
valve during any Press/Pos or Press/Time Plastication Profile. The module expects a pressure equal to PLC41 when setting the
selected pressure valve to this %-output during profile execution. The profile will be executed as a reverse-acting algorithm if this
entry is greater than PLC44.
PLC44 Selected Pressure Valve Output for Maximum [19] 100% CV output percentage that the module uses to drive the selected pressure
valve during any Press/Position or Press/Time Plastication Profile. The module expects a pressure equal to PLC42 when setting the
selected pressure valve to this %-output during profile execution. The profile will be executed as a reverse-acting algorithm if this
entry is less than PLC43.
RPM Control Limits
Word Description
PLC45 RPM Minimum Control Limit [25] Minimum controllable RPM attainable during any RPM/Pos or RPM/Time Plastication Profile. The
module expects this RPM when setting its selected valve to the %-output in PLC47.
PLC46 RPM Maximum Control Limit [25] Maximum controllable RPM attainable during any RPM/Pos or RPM/Time Plastication Profile. The
module expects this RPM when setting its selected valve to the %-output in PLC48.
PLC47 Selected RPM Valve Output for Minimum [19] 0% CV output (%) that the module uses to drive the selected RPM valve during any
Press/Position or Press/Time Plastication Profile. The module expects an RPM equal to PLC45 when setting the selected RPM
valve to this %-output during profile execution. The profile will be executed as reverse-acting if this entry is greater than PLC48.
PLC48 Selected RPM Valve Output for Maximum [19] 100% CV output (%) that the module uses to drive the selected RPM valve during
any Press/Position or Press/Time Plastication Profile. The module expects an RPM equal to PLC46 when setting the selected RPM
valve to this %-output during profile execution. The profile will be executed as reverse-acting if this entry is less than PLC47.
Profile Tuning Constants
Word Description
PLC49 Proportional Gain for Pressure Control [30]
PLC50 Integral Gain for Pressure Control [27] or [28]
PLC51 Derivative Gain for Pressure Control [26] or [21]
PLC52 Proportional Gain for RPM Control [30]
PLC53 Integral Gain for RPM Control [27] or [28]
PLC54 Derivative Gain for RPM Control [26] or [21]
PLC55 - 56 RFU
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 67

2–35Command Word/Bit Descriptions
Profile Pressure Alarm Setpoint
Word Description
PLC57 Profile High Pressure Alarm Setpoint [01] The module compares real-time ram (screw) pressure against this entry when executing
the Plastication Profile. The module sets alarm status bit SYS06-B07 when ram (screw) pressure equals or exceeds this entry
during the Plastication Profile. A zero entry inhibits SYS06-B07.
PLC58 - 64 RFU
PPC – Plastication
Profile Block
Word Bit Description
PPC01 Block ID = 00001111 (Low byte). High byte reserved for the module. Do not use.
PPC02 RFU
PPC03 Configuration Selections
B00-B01 Profile Algorithm Selection
B01 B00
0 0 Ram (Screw) Press/Pos
0 1 Ram (Screw) Press/Time
1 0 RPM/Pos
1 1 RPM/Time
B02-B07 RFU
B08 Plastication/Post-decompression Logical Bridge Selection End of Plastication Profile
= 0 Start Post-decompression Movement at End of Plastication Profile
= 1 Stop and Set-output at End of Plastication Profile
Module checks the state of this pause bit at completion of Plastication Profile to determine what further action to take:
if: then the module:
SET sets its outputs to PLC33–36
RESET, SYS15-B15 = 1, immediately begins the Post-decompression Movement
and PSC05 > 00000
RESET, SYS15-B15 = 1, sets its outputs to PSC33–36
and PRC05 = 00000
RESET and SYS15-B12 = 0 sets its outputs to zero and latches SYS13-B10
B09-B11 RFU
Profile Offset Sign Selection
B12 = 0 Plastication RPM Profile Offset is Positive
= 1 Plastication RPM Profile Offset is Negative
B13 = 0 Plastication Pressure Profile Offset is Positive
= 1 Plastication Pressure Profile Offset is Negative
B14-B15 RFU
PPC04 Configuration Selections
Open/Closed Loop Selection
B00 = 0 Press/Pos Plastication Profiles Closed Loop
= 1 Press/Pos Plastication Profiles Open Loop
B01 = 0 Press/Time Plastication Profiles Closed Loop
= 1 Press/Time Plastication Profiles Open Loop
B02 = 0 RPM/Pos Plastication Profiles Closed Loop
= 1 RPM/Pos Plastication Profiles Open Loop
B03 = 0 RPM/Time Plastication Profiles Closed Loop
= 1 RPM/Time Plastication Profiles Open Loop
B04-B07 RFU
ERC Enabled/Disabled Selection
B08 = 0 Press/Pos Plastication ERC On
= 1 Press/Pos Plastication ERC Off
B09 = 0 Press/Time Plastication ERC On
= 1 Press/Time Plastication ERC Off
Bit-mapped Control Words
PPC
Publication
1771-6.5.126 – March 1998
Page 68

2–36 Command Word/Bit Descriptions
Word
PPC05 - 08 RFU
Bit Description
B10 = 0 RPM/Pos Plastication ERC On
= 1 RPM/Pos Plastication ERC Off
B11 = 0 RPM/Time Plastication ERC On
= 1 RPM/Time Plastication ERC Off
B12-B15 RFU
Plastication Profile Setpoints
Word Description
PPC09 Segment 1 RPM Setpoint [25] If you select RPM/Pos profile execution, the module controls RPM to this setpoint after starting the
Plastication Profile until ram (screw) position reaches PPC11 (or until 100% shot size if sooner). If you select RPM/Time profile execution, the module controls RPM to this setpoint after starting the Plastication Profile for time period PPC12 (or until 100% shot size
if sooner).
PPC10 Segment 1 Pressure Setpoint [01] If you select Press/Pos profile execution, the module controls ram (screw) backpressure to this
setpoint after starting the Plastication Profile until ram (screw) position reaches PPC11 (or until 100% shot size if sooner). If you
select Press/Time profile execution, the module controls ram (screw) backpressure to this setpoint after starting the Plastication
Profile for time period PPC12 (or until 100% shot size if sooner).
PPC11 End of Segment 1 Position Setpoint [12]
PPC12 Segment 1 Time Setpoint [21] If you select RPM/Time or Press/Time profile execution, the module controls RPM to PPC09 or ram
(screw) backpressure to PPC10 for this time period (or until 100% shot size if sooner) beginning with initiation of Plastication Profile.
PPC13 Segment 2 RPM Setpoint [25] If you select RPM/Pos profile execution, the module controls RPM to this setpoint from ram (screw)
position PPC11 to position PPC15 (or until 100% shot size if sooner). If you select RPM/Time profile execution, the module controls
RPM to this setpoint for time period PPC12 (or until 100% shot size if sooner).
PPC14 Segment 2 Pressure Setpoint [01] If you select Press/Pos profile execution, the module controls ram (screw) backpressure to this
setpoint from ram (screw) position PPC11 to position PPC15 (or until 100% shot size if sooner). If you select Press/Time profile
execution, the module controls ram (screw) backpressure to this setpoint starting at completion of Segment 1 for time period PPC16
(or until 100% shot size if sooner).
PPC15 End of Segment 2 Position Setpoint [12]
PPC16 Segment 2 Time Setpoint [21] If you select RPM/Time or Press/Time profile execution, the module controls RPM to PPC13 or ram
(screw) backpressure to PPC14 for this time period (or until 100% shot size if sooner) beginning at completion of Segment 1.
PPC17 Segment 3 RPM Setpoint [25] If you select RPM/Pos profile execution, the module controls RPM to this setpoint from ram (screw)
position PPC15 to position PPC19 (or until 100% shot size if sooner). If you select RPM/Time profile execution, the module controls
RPM to this setpoint for time period PPC20 (or until 100% shot size if sooner).
PPC18 Segment 3 Pressure Setpoint [01] If you select Press/Pos profile execution, the module controls ram (screw) backpressure to this
setpoint from ram (screw) position PPC15 to position PPC19 (or until 100% shot size if sooner). If you select Press/Time profile
execution, the module controls ram (screw) backpressure to this setpoint starting at completion of Segment 2 for time period PPC20
(or until 100% shot size if sooner).
PPC19 End of Segment 3 Position Setpoint [12]
PPC20 Segment 3 Time Setpoint [21] If you select RPM/Time or Press/Time profile execution, the module controls RPM to PPC17 or ram
(screw) backpressure to PPC18 for this time period (or until 100% shot size if sooner) beginning at completion of Segment 2.
PPC21 Segment 4 RPM Setpoint [25] If you select RPM/Pos profile execution, the module controls RPM to this setpoint from ram (screw)
position PPC19 to position PPC23 (or until 100% shot size if sooner). If you select RPM/Time profile execution, the module controls
ram (screw) RPM to this setpoint for time period PPC24 (or until 100% shot size if sooner).
PPC22 Segment 4 Pressure Setpoint [01] If you select Press/Pos profile execution, the module controls ram (screw) backpressure to this
setpoint from ram (screw) position PPC19 to position PPC23 (or until 100% shot size if sooner). If you select Press/Time profile
execution, the module controls ram (screw) backpressure to this setpoint starting at completion of Segment 3 for time period PPC24
(or until 100% shot size if sooner).
PPC23 End of Segment 4 Position Setpoint [12]
PPC24 Segment 4 Time Setpoint [21] If you select RPM/Time or Press/Time profile execution, the module controls RPM to PPC21 or ram
(screw) backpressure to PPC22 for this time period (or until 100% shot size if sooner) beginning at completion of Segment 4.
PPC25 Segment 5 RPM Setpoint [25] If you select RPM/Pos profile execution, the module controls RPM to this setpoint from ram (screw)
position PPC23 to position PPC27 (or until 100% shot size if sooner). If you select RPM/Time profile execution, the module controls
RPM to this setpoint for time period PPC28 (or until 100% shot size if sooner).
PPC26 Segment 5 Pressure Setpoint [01] If you select Press/Pos profile execution, the module controls ram (screw) backpressure to this
setpoint from ram (screw) position PPC23 to position PPC27 (or until 100% shot size if sooner). If you select Press/Time profile
execution, the module controls ram (screw) backpressure to this setpoint starting at completion of Segment 4 for time period PPC28
(or until 100% shot size if sooner).
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 69

2–37Command Word/Bit Descriptions
Word Description
PPC27 End of Segment 5 Position Setpoint [12]
PPC28 Segment 5 Time Setpoint [21] If you select RPM/Time or Press/Time profile execution, the module controls RPM to PPC25 or ram
(screw) backpressure to PPC26 for this time period (or until 100% shot size if sooner) beginning at completion of Segment 4.
PPC29 Segment 6 RPM Setpoint [25] If you select RPM/Pos profile execution, the module controls RPM to this setpoint from ram (screw)
position PPC27 to position PPC31 (or until 100% shot size if sooner). If you select RPM/Time profile execution, the module controls
RPM to this setpoint for time period PPC32 (or until 100% shot size if sooner).
PPC30 Segment 6 Pressure Setpoint [01] If you select Press/Pos profile execution, the module controls ram (screw) backpressure to this
setpoint from ram (screw) position PPC27 to position PPC31 (or until 100% shot size if sooner). If you select Press/Time profile
execution, the module controls ram (screw) backpressure to this setpoint starting at completion of Segment 5 for time period PPC32
(or until 100% shot size if sooner).
PPC31 End of Segment 6 Position Setpoint [12]
PPC32 Segment 6 Time Setpoint [21] If you select RPM/Time or Press/Time profile execution, the module controls RPM to PPC29 or back-
pressure to PPC30 for this time period (or until 100% shot size if sooner) beginning at completion of Segment 5.
PPC33 Segment 7 Ram (Screw) RPM Setpoint [25] If you select RPM/Pos profile execution, the module controls RPM to this setpoint from
ram (screw) position PPC31 to position PPC35 (or until 100% shot size if sooner). If you select RPM/Time profile execution, the
module controls RPM to this setpoint for time period PPC36 (or until 100% shot size if sooner).
PPC34 Segment 7 Pressure Setpoint [01] If you select Press/Pos profile execution, the module controls ram (screw) backpressure to this
setpoint from ram (screw) position PPC31 to position PPC35 (or until 100% shot size if sooner). If you select Press/Time profile
execution, the module controls ram (screw) backpressure to this setpoint starting at completion of Segment 6 for time period PPC36
(or until 100% shot size if sooner).
PPC35 End of Segment 7 Position Setpoint [12]
PPC36 Segment 7 Time Setpoint [21] If you select RPM/Time or Press/Time profile execution, the module controls RPM to PPC33 or ram
(screw) backpressure to PPC34 for this time period (or until 100% shot size if sooner) beginning at completion of Segment 6.
PPC37 Segment 8 RPM Setpoint [25] If you select RPM/Pos profile execution, the module controls RPM to this setpoint from ram (screw)
position PPC35 to position PPC39 (or until 100% shot size if sooner). If you select RPM/Time profile execution, the module controls
RPM to this setpoint for time period PPC40 (or until 100% shot size if sooner).
PPC38 Segment 8 Pressure Setpoint [01] If you select Press/Pos profile execution, the module controls ram (screw) backpressure to this
setpoint from ram (screw) position PPC35 to position PPC39 (or until 100% shot size if sooner). If you select Press/Time profile
execution, the module controls ram (screw) backpressure to this setpoint starting at completion of Segment 7 for time period PPC40
(or until 100% shot size if sooner).
PPC39 End of Segment 8 Position Setpoint [12]
PPC40 Segment 8 Time Setpoint [21] If you select RPM/Time or Press/Time profile execution, the module controls RPM to PPC37 or ram
(screw) backpressure to PPC38 for this time period (or until 100% shot size if sooner) beginning at completion of Segment 7.
PPC41 Segment 9 RPM Setpoint [25] If you select RPM/Pos profile execution, the module controls RPM to this setpoint from ram (screw)
position PPC39 to position PPC43 (or until 100% shot size if sooner). If you select RPM/Time profile execution, the module controls
RPM to this setpoint for time period PPC44 (or until 100% shot size if sooner).
PPC42 Segment 9 Pressure Setpoint [01] If you select Press/Pos profile execution, the module controls ram (screw) backpressure to this
setpoint from ram (screw) position PPC39 to position PPC43 (or until 100% shot size if sooner). If you select Press/Time profile
execution, the module controls ram (screw) backpressure to this setpoint starting at completion of Segment 8 for time period PPC44
(or until 100% shot size if sooner.
PPC43 End of Segment 9 Position Setpoint [12]
PPC44 Segment 9 Time Setpoint [21] If you select RPM/Time or Press/Time profile execution, the module controls ram (screw) RPM to
PPC41 or ram (screw) backpressure to PPC42 for this time period (or until 100% shot size if sooner) beginning at completion of
Segment 8.
PPC45 Segment 10 Ram (Screw) RPM Setpoint [25] If you select RPM/Pos profile execution, the module controls RPM to this setpoint from
ram (screw) position PPC43 to position PPC47 (or until 100% shot size if sooner). If you select RPM/Time profile execution, the
module controls RPM to this setpoint for time period PPC48 (or until 100% shot size if sooner).
PPC46 Segment 10 Pressure Setpoint [01] If you select Press/Pos profile execution, the module controls ram (screw) backpressure to this
setpoint from ram (screw) position PPC43 to position PPC47 (or until 100% shot size if sooner). If you select Press/Time profile
execution, the module controls ram (screw) backpressure to this setpoint at completion of Segment 9 for time period PPC48 (or until
100% shot size if sooner).
PPC47 End of Segment 10 Position Setpoint [12]
PPC48 Segment 10 Time Setpoint If you select RPM/Time or Press/Time profile execution, the module controls RPM to PPC45 or ram
(screw) backpressure to PPC46 for this time period (or until 100% shot size if sooner) beginning at completion of Segment 9.
PPC
Publication
1771-6.5.126 – March 1998
Page 70

2–38 Command Word/Bit Descriptions
Word
PPC49 Segment 11 Ram (Screw) RPM Setpoint [25] If you select RPM/Pos profile execution, the module controls RPM to this setpoint from
ram (screw) position PPC47 until 100% shot size. If you select RPM/Time profile execution, the module controls RPM to this setpoint at completion or segment 10 until 100% shot size.
PPC50 Segment 11 Pressure Setpoint [01] If you select Press/Pos profile execution, the module controls ram (screw) backpressure to this
setpoint from ram (screw) position PPC47 until 100% shot size. If you select Press/Time profile execution, the module controls ram
(screw) backpressure to this setpoint at completion of Segment 10 until 100% shot size.
Description
Plastication Profile Offsets
Word Description
PPC51 Profile RPM Offset [01] If you select RPM/Pos or RPM/Time profile execution, the module applies this entry (after reading the sign
bit) to each RPM profile setpoint.
PPC52 Profile Pressure Offset [01] If you select Press/Pos or Press/Time profile execution, the module applies this entry (after reading the
sign bit) to each pressure profile setpoint.
PPC53 - 60 RFU
Critical Process Setpoints
These two entries let the module establish the 100% shot size position,
defined at ram (screw) position of MCC13 + PPC61 + PPC62. The
module terminates all Plastication Profiles at 100% shot size position.
Word Description
PPC61 Cushion Size [12] Informs the module of the nominal length of molten plastic that should remain in the barrel at conclusion of the
Hold Profile. The module uses it only to calculate the 100% shot size position.
PPC62 Shot Size [17] Informs the module of the nominal length of molten plastic that should be drawn during the Plastication Profile. The
module uses it only to calculate the 100% shot size position.
PPC63 - 64 RFU
PRC – Pre-decompression
Configuration Block
Word Description
PRC01 Block ID = 00001101 (Low byte). High byte reserved for the module. Do not use.
PRC02 - 04 RFU
Word Description
PRC05 Incremental Movement Length [17] When the module starts the Pre-decompression Movement, it adds this entry to the current ram
(screw) position to establish the End of Pre-decompression position. The module uses the End of pre-decompression position as
the termination point of all pre-decompression movements.
PRC06 - 07 RFU
Word Description
PRC08 Movement Watchdog Timer Preset [21]
When the module starts the Pre-decompression Movement, it:
starts an internal Movement Watchdog timer
stops this timer and resets its accumulated value to zero (after reporting total execution time in HPS59) when it completes the
movement
sets master status bit SYS04-B07 when the accumulated value of this timer equals or exceeds this entry.
A zero entry inhibits SYS04-B07.
Bit-mapped Control Words
Movement Length
Watchdog Timer
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 71

Movement Set-output Values
When the module starts the Pre-decompression Movement, it:
• uses ramp rates PRC17-20 and PRC25-28 to ramp outputs
• sets its outputs to the values listed below
Word Description
PRC09 Output #1 Set-output Value during Movement [19]
PRC10 Output #2 Set-output Value during Movement [19]
PRC11 Output #3 Set-output Value during Movement [19]
PRC12 Output #4 Set-output Value during Movement [19]
PRC13-16 RFU
Output Ramp Rates
The module uses the following ramp rates when moving its outputs
from setpoint to setpoint during the Pre-decompression Movement.
A ramp rate entry of zero gives a step function ramp (ramp disable).
Word Description
PRC17 Output #1 Acceleration Ramp Rate during Movement [20]
PRC18 Output #2 Acceleration Ramp Rate during Movement [20]
PRC19 Output #3 Acceleration Ramp Rate during Movement [20]
PRC20 Output #4 Acceleration Ramp Rate during Movement [20]
PRC21-24 RFU
PRC25 Output #1 Deceleration Ramp Rate during Movement [20]
PRC26 Output #2 Deceleration Ramp Rate during Movement [20]
PRC27 Output #3 Deceleration Ramp Rate during Movement [20]
PRC28 Output #4 Deceleration Ramp Rate during Movement [20]
PRC29-32 RFU
2–39Command Word/Bit Descriptions
PRC
End of Movement Set-output Values
When the module completes the Pre-decompression Movement and
HPC03-B09 is SET, it:
• sets status bit SYS22-B07
• uses ramp rates PRC17-20 and PRC25-28 when changing outputs
• sets its outputs to the following values
Word Description
PRC33 Output #1 Set-output Value at End of Movement [19]
PRC34 Output #2 Set-output Value at End of Movement [19]
PRC35 Output #3 Set-output Value at End of Movement [19]
PRC36 Output #4 Set-output Value at End of Movement [19]
PRC37-56 RFU
Movement Pressure Alarm Setpoint
Word Description
PRC57 Movement High Pressure Alarm Setpoint [01] The module compares real-time ram (screw) pressure against this entry during the
Pre-decompression Movement. The module sets alarm status bit SYS06-B06 when ram (screw) pressure equals or exceeds this
entry during the Pre- decompression Movement. A zero entry inhibits SYS06-B06.
PRC58 - 64 RFU
Publication
1771-6.5.126 – March 1998
Page 72

2–40 Command Word/Bit Descriptions
PSC – Post-decompression
Configuration Block
Word Bit Description
PSC01 Block ID = 00010000 (Low byte). High byte reserved for the module. Do not use.
PSC02 - 04 RFU
Word Description
PSC05 Incremental Movement Length [17] When the module starts the Post-decompression Movement, it adds this entry to the sum of
cushion size (PPC61) + shot size (PPC62) to establish the End of Post-decompression ram (screw) position. The module uses End
of Post-decompression position as termination point of all Post-decompression Movements.
PSC06 - 07 RFU
Word Description
PSC08 Movement Watchdog Timer Preset [21] When the module starts the Post-decompression Movement, it:
starts an internal Movement Watchdog timer
stops timer and resets accumulated value to zero (after reporting total execution time in PPS58) when it completes the movement
sets master status bit SYS04-B09 when the accumulated value of this timer equals or exceeds this entry.
A zero entry inhibits SYS04-B09.
Bit-mapped Control Words
Movement Length
Watchdog Timer
Movement Set-output Values
When the module starts the Post-decompression Movement, it:
• uses ramp rates PRC17-20 and PRC25-28 to ramp outputs
• sets its outputs to the values listed below
Word Description
PSC09 Output #1 Set-output Value during Movement [19]
PSC10 Output #2 Set-output Value during Movement [19]
PSC11 Output #3 Set-output Value during Movement [19]
PSC12 Output #4 Set-output Value during Movement [19]
PSC13-16 RFU
Output Ramp Rates
The module uses the following ramp rates when moving its outputs
between setpoints during Post-decompression Movement. The module
interprets a ramp rate of zero as a step function ramp (ramp disable).
Word Description
PSC17 Output #1 Acceleration Ramp Rate during Movement [20]
PSC18 Output #2 Acceleration Ramp Rate during Movement [20]
PSC19 Output #3 Acceleration Ramp Rate during Movement [20]
PSC20 Output #4 Acceleration Ramp Rate during Movement [20]
PSC21-24 RFU
PSC25 Output #1 Deceleration Ramp Rate during Movement [20]
PSC26 Output #2 Deceleration Ramp Rate during Movement [20]
PSC27 Output #3 Deceleration Ramp Rate during Movement [20]
PSC28 Output #4 Deceleration Ramp Rate during Movement [20]
PSC29-32 RFU
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 73

End of Movement Set-output Values
When the module completes the Post-decompression Movement, it:
• sets status bit SYS22-B09
• uses ramp rates PSC17-20 and PSC25-28 when changing outputs
• sets its outputs to the following values
Use these values for-pulling cores if applied before starting the first
clamp open profile.
Word Description
PSC33 Output #1 Set-output Value at End of Movement [19]
PSC34 Output #2 Set-output Value at End of Movement [19]
PSC35 Output #3 Set-output Value at End of Movement [19]
PSC36 Output #4 Set-output Value at End of Movement [19]
PSC37-56 RFU
Movement Pressure Alarm Setpoint
Word Description
PSC57 Movement High Pressure Alarm Setpoint [01] The module compares real-time ram (screw) pressure against this entry when ex-
ecuting the Post-decompression Movement. The module sets alarm status bit SYS06-B08 when ram (screw) pressure equals or
exceeds this entry during the Post-decompression Movement. A zero entry inhibits SYS06-B08.
PSC58 - 64 RFU
2–41Command Word/Bit Descriptions
PTC
PTC – Process Trace
Configuration Block
Bit-mapped Control Words
Word Bit Description
PTC01 Block ID = 00011100 (Low Byte). High byte reserved for the module. Do not use.
PTC02 Control bits
B00 0 = Process trace disabled
1 = Process trace enabled
B01 0 = Trigger on time delay
1 = Trigger on position
PTC03, 04 RFU
PTC05 Trigger delay (in hundredths of seconds) for data collection after injection begins
PTC06 Trigger position (in hundredths of inches or tenths of millimeters) on which to collect data when PTC02-B01 = 1
PTC07 Sample rate at which the module collects trace data in milliseconds (must be an even number between 2 and 230)
PTC08 Trace #1 selection
B01 Injection position
B02 Injection pressure
B03 Injection velocity
B04 Cavity pressure
B05 Screw RPM
B06 Injection flow valve output
B07 Injection pressure valve output
B08 - B15 RFU
(when PTC02-B01 = 0)
The module will return unscaled injection position data if injection velocity is selected. The process trace screen uses
this position information to calculate and display velocity.
Publication
1771-6.5.126 – March 1998
Page 74

2–42 Command Word/Bit Descriptions
Word DescriptionBit
PTC09 Trace #2 selection
B01 Injection position
B02 Injection pressure
B03 Injection velocity
B04 Cavity pressure
B05 Screw RPM
B06 Injection flow valve output
B07 Injection pressure valve output
B08-15 Reserved Do not use.
PTC10 Trace #3 selection
B01 Injection position
B02 Injection pressure
B03 Injection velocity
B04 Cavity pressure
B05 Screw RPM
B06 Injection flow valve output
B07 Injection pressure valve output
PTC11 Trace #4 selection
B01 Injection position
B02 Injection pressure
B03 Injection velocity
B04 Cavity pressure
B05 Screw RPM
B06 Injection flow valve output
B07 Injection pressure valve output
B08 - B15 Reserved Do not use.
PTC12 - 64 RFU
The module will return unscaled injection position data if injection velocity is selected. The process trace screen uses
this position information to calculate and display velocity.
The module will return unscaled injection position data if injection velocity is selected. The process trace screen uses
this position information to calculate and display velocity.
The module will return unscaled injection position data if injection velocity is selected. The process trace screen uses
this position information to calculate and display velocity.
RLC – Inject ERC Values
Block
Word Description
RLC01 Block ID = 00011010 (Low byte). High byte reserved for the module. Do not use.
RLC02 - 08 RFU
Word Description
RLC09 Injection Segment 1
RLC10 Injection Segment 2
RLC11 Injection Segment 3
RLC12 Injection Segment 4
RLC13 Injection Segment 5
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Bit-mapped Control Words
Injection Profile ERC Values
Page 75

Word Description
RLC14 Injection Segment 6
RLC15 Injection Segment 7
RLC16 Injection Segment 8
RLC17 Injection Segment 9
RLC18 Injection Segment 10
RLC19 Injection Segment 11
Pack Profile ERC Values
Word Description
RLC20 Pack Segment 1
RLC21 Pack Segment 2
RLC22 Pack Segment 3
RLC23 Pack Segment 4
RLC24 Pack Segment 5
Hold Profile ERC Values
Word Description
RLC25 Hold Segment 1
RLC26 Hold Segment 2
RLC27 Hold Segment 3
RLC28 Hold Segment 4
RLC29 Hold Segment 5
2–43Command Word/Bit Descriptions
RLC
Plastication Profile ERC Values
Word Description
RLC30 Plastication Segment 1
RLC31 Plastication Segment 2
RLC32 Plastication Segment 3
RLC33 Plastication Segment 4
RLC34 Plastication Segment 5
RLC35 Plastication Segment 6
RLC36 Plastication Segment 7
RLC37 Plastication Segment 8
RLC38 Plastication Segment 9
RLC39 Plastication Segment 10
RLC40 Plastication Segment 11
RLC41 - 64 RFU
Publication
1771-6.5.126 – March 1998
Page 76

2–44 Command Word/Bit Descriptions
Notes:
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 77

Chapter 3
-
Status Word/Bit Descriptions
List of Status Blocks and Block ID Codes
List of Data Words
Status blocks report current status of molding machine operation.
They are returned from the QI module to the PLC processor by means
of block transfer read (BTR) instructions in software ladder logic.
Acronym:
HPS 00000100 12 Pack/Hold Profile Status Block 3-3
IPS 00000011 9 Injection Profile Status Block 3-5
PPS 00000101 15 Plastication Profile Status Block 3-8
PTS 00001010 28 Process Trace Status Block 3-11
RLS 00001000 26 Inject ERC Values Status Block 3-13
SYS 00000001 1 System Status Block 3-14
Block ID
Binary: Decimal: Description: Page:
The listings of status blocks use five types of data words:
• Block ID
• Bit-mapped
• Stored-value
• Reserved (RFU)
Block ID Word
The first word in each status block contains a binary number code in
the low byte that identifies the block. The PLC processor uses them
to identify status blocks received from the QI module.
For all status block ID words, the high byte is identical to the high
byte of the system status word SYS01, and contains jog-execution
and power start-up status.
Bit-mapped Words
The first several words in any data block are bit-mapped. As the QI
module monitors and detects changes in events of machine cycles, it
sets/resets or latches/unlatches status bits to inform the PLC-5
processor that these events have occurred.
Stored-value Words
The QI module reports actual values of machine operation obtained
from sensor devices that you connect to its input terminals. The values
are transferred to the PLC processor for data processing and alarm
purposes. These values include positions, pressures, and velocities.
Reserved Words (RFU)
These words are Reserved for Future Use. Do not use them.
Publication
1771-6.5.126 – March 1998
Page 78

3–2 Status Word/Bit Descriptions
Data Blocks Require I/O Configuration
Engineering Units
#Code Type of Block Units and Range
01 Ram (Screw) Pressure (0000.0 to 9999.0 PSI or 000.0 to 999.9 Bar)
04 Cavity Pressure (00000.0 to 20000.0 PSI or 0000.0 to 2000.0 Bar)
05 Ram (Screw) Percent of maximum velocity (00.00 to 99.99%)
06 Ram (Screw) Velocity along axis (00.00 to 99.99 in. per sec. or 000.0 to 999.9 mm per sec.)
11 Ram (Screw) Measured from zero Incremental distance (00.00 to 99.99 in. or 000.0 to 999.9 mm.)
12 Ram (Screw) Measured from MCC13 Incremental distance (00.00 to 99.99 in. or 000.0 to 999.9 mm.)
17 Measured as noted in text Incremental distance (00.00 to 99.99 in. or 000.0 to 999.9 mm.)
18 Measured as noted in text Incremental distance (00.00 to 00.99 in. or 000.0 to 009.9 mm.)
19 Percent signal output (00.00 to 99.99%)
20 Percent signal output per second (0000. To 9999.)
21 Time measured in seconds (00.00 to 99.99)
22 Time measured in seconds (000.0 to 999.9)
23 Time measured in seconds (00.00 to 00.99)
24 Input signal range (00.00 to 10.00 or 01.00 to 05.00 or 04.00 to 20.00)
25 Screw rotational speed (000.0 to 999.9 RPM)
26 Time (algorithm) (00.00 to 9.99 minutes)
27 Inverse time (algorithm) (00.00 to 99.99 inverse minutes)
28 Inverse time (algorithm) (00.00 to 99.99 inverse seconds)
31 Percent (00.00 to 99.99%)
The QI module decodes its own I/O configuration based on parameters
that you provide in the Module Configuration Command Block (MCC).
I/O configuration determines which of the command and status blocks
the module supports. For the module to support command and status
blocks, you must establish the following position input:
• Connect a ram (screw) position sensor to input 1.
In the listings of status blocks, each stored-value word is followed by
a bracketed [ ] 2-digit number code denoting the engineering units
and range associated with the value as shown in the following table:
Status Blocks for Reporting System and Ram (Screw) Position Status
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
The System Status Block (SYS) reports system status.
The module can always return the System Status Block to the host
processor. It returns this block after each block transfer read (BTR)
request from the PLC processor unless the previous block transfer
write (BTW) to the module was a valid dynamic command block
(DYC) containing a request for some other status block.
The QI module can return any of these status blocks:
Block Description
IPS Injection Profile Status Block
HPS Pack/Hold Profile Status Block
PPS Plastication Profile Status Block
PTS Process Trace Status Block
RLS Inject ERC Values Status Block
After you configure the QI module with a valid MCC, the module
determines if it has access to ram (screw) position data from the ram
(screw) position sensor connected to input 1.
Page 79

HPS – Pack/Hold Profile
Status Block
Word Bit Description
HPS01 Block ID = 00000100 (Low byte). High byte identical to SYS01
HPS02 See SYS02
HPS03 See SYS03
HPS04 See SYS04
HPS05, 06 RFU
HPS07 CV High Limit Alarms
For Pack Phase
The module latches each bit when executing the subject profile segment in closed loop, and drives its algorithm CV to
maximum (100%) in an attempt to control the profile setpoint.
The module unlatches each bit when it completes execution of the subject profile segment in open loop, or in closed
loop without driving its algorithm CV to maximum (100%).
This bit
latched ON:
B00 Pack Segment 1
B01 Pack Segment 2
B02 Pack Segment 3
B03 Pack Segment 4
B04 Pack Segment 5
B05-B07 RFU
This bit
latched ON:
B08 Hold Segment 1
B09 Hold Segment 2
B10 Hold Segment 3
B11 Hold Segment 4
B12 Hold Segment 5
B13-B15 RFU
HPS08 CV Low Limit Alarms
This bit
latched ON:
B00 Pack Segment 1
B01 Pack Segment 2
B02 Pack Segment 3
B03 Pack Segment 4
B04 Pack Segment 5
B05-B07 RFU
when algorithm CV
is maximum during:
For Hold Phase
The module latches each bit when executing the subject profile segment in closed loop, and drives its algorithm CV to
maximum (100%) in an attempt to control the profile setpoint.
The module unlatches each bit when it completes execution of the subject profile segment in open loop, or in closed
loop without driving its algorithm CV to maximum (100%).
when algorithm CV
is maximum during:
For Pack Phase
The module latches each bit when executing the subject profile segment in closed loop, and drives its algorithm CV to
minimum (0%) in an attempt to control the profile setpoint.
The module unlatches each bit when it completes execution of the subject profile segment in open loop, or in closed
loop without driving its algorithm CV to minimum (0%).
when algorithm CV
is minimum during:
Bit-mapped Status Words
3–3Status Word/Bit Descriptions
HPS
Publication
1771-6.5.126 – March 1998
Page 80

3–4 Status Word/Bit Descriptions
Word DescriptionBit
For Hold Phase
The module latches each bit when executing the subject profile segment in closed loop, and drives its algorithm CV to
minimum (0%) in an attempt to control the profile setpoint.
The module unlatches each bit when it completes execution of the subject profile segment in open loop, or in closed
loop without driving its algorithm CV to minimum (0%).
This bitlatched ON:
B08 Hold Segment 1
B09 Hold Segment 2
B10 Hold Segment 3
B11 Hold Segment 4
B12 Hold Segment 5
B13-B15 RFU
when algorithm CV
is minimum during:
Pack Profile Actuals
Word Description
HPS09 Actual Pack Segment 1 Cavity Pressure [04] Average cavity pressure during last Segment 1.
HPS10 Actual Pack Segment 1 Ram (Screw) Pressure [01] Average ram (screw) pressure during last Segment 1.
HPS11 Actual Pack End of Segment 1 Position [12] Ram (Screw) position at completion of last Segment 1.
HPS12 Actual Pack Segment 2 Cavity Pressure [04] Average cavity pressure during last Segment 2.
HPS13 Actual Pack Segment 2 Ram (Screw) Pressure [01] Average ram (screw) pressure during last Segment 2.
HPS14 Actual Pack End of Segment 2 Position [12] Ram (Screw) position at completion of last Segment 2.
HPS15 Actual Pack Segment 3 Cavity Pressure [04] Average cavity pressure during last Segment 3.
HPS16 Actual Pack Segment 3 Ram (Screw) Pressure [01] Average ram (screw) pressure during last Segment 3.
HPS17 Actual Pack End of Segment 3 Position [12] Ram (Screw) position at completion of last Segment 3.
HPS18 Actual Pack Segment 4 Cavity Pressure [04] Average cavity pressure during last Segment 4.
HPS19 Actual Pack Segment 4 Ram (Screw) Pressure [01] Average ram (screw) pressure during last Segment 4.
HPS20 Actual Pack End of Segment 4 Position [12] Ram (Screw) position at completion of last Segment 4.
HPS21 Actual Pack Segment 5 Cavity Pressure [04] Average cavity pressure during last Segment 5.
HPS22 Actual Pack Segment 5 Ram (Screw) Pressure [01] Average ram (screw) pressure during last Segment 5.
HPS23 Actual Pack End of Segment 5 Position [12] Ram (Screw) position at completion of last Segment 5.
HPS24 - 25 RFU
Hold Profile Actuals
Word Description
HPS26 Actual Hold Segment 1 Cavity Pressure [04] Average cavity pressure during last Segment 1.
HPS27 Actual Hold Segment 1 Ram (Screw) Pressure [01] Average ram (screw) pressure during last Segment 1.
HPS28 Actual Hold End of Segment 1 Position [12] Ram (Screw) position at completion of last Segment 1.
HPS29 Actual Hold Segment 2 Cavity Pressure [04] Average cavity pressure during last Segment 2.
HPS30 Actual Hold Segment 2 Ram (Screw) Pressure [01] Average ram (screw) pressure during last Segment 2.
HPS31 Actual Hold End of Segment 2 Position [12] Ram (Screw) position at completion of last Segment 2.
HPS32 Actual Hold Segment 3 Cavity Pressure [04] Average cavity pressure during last Segment 3.
HPS33 Actual Hold Segment 3 Ram (Screw) Pressure [01] Average ram (screw) pressure during last Segment 3.
HPS34 Actual Hold End of Segment 3 Position [12] Ram (Screw) position at completion of last Segment 3.
HPS35 Actual Hold Segment 4 Cavity Pressure [04] Average cavity pressure during last Segment 4.
HPS36 Actual Hold Segment 4 Ram (Screw) Pressure [01] Average ram (screw) pressure during last Segment 4
HPS37 Actual Hold End of Segment 4 Position [12] Ram (Screw) position at completion of last Segment 4.
HPS38 Actual Hold Segment 5 Cavity Pressure [04] Average cavity pressure during last Segment 5.
HPS39 Actual Hold Segment 5 Ram (Screw) Pressure [01] Average ram (screw) pressure during last Segment 5.
HPS40 Actual Hold End of Segment 5 Position [12] Ram (Screw) position at completion of last Segment 5
HPS41 - 50 RFU
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 81

Pack Maximum Pressures
Word Description
HPS51 Maximum Ram (Screw) Pressure During Pack [01] Maximum instantaneous ram (screw) pressure during last profile.
HPS52 Maximum Cavity Pressure During Pack [04] Maximum instantaneous cavity pressure during last profile.
Hold Maximum Pressures
Word Description
HPS53 Maximum Ram (Screw) Pressure During Hold [01] Maximum instantaneous ram (screw) pressure during last profile.
HPS54 Maximum Cavity Pressure During Hold [04] Maximum instantaneous cavity pressure during last profile.
Pre-decompression Maximum Pressure
Word Description
HPS55 Maximum Ram (Screw) Pressure During Pre-decompression [01] Max instantaneous ram (screw) pressure during last movement.
HPS56 RFU
Execution Times
Word Description
HPS57 Pack Profile Execution Time [21] Total time required for last profile.
HPS58 Hold Profile Execution Time [21] Total time required for last profile.
HPS59 Pre-decompression Movement Execution Time [21] Total time required for last movement.
HPS60 RFU
3–5Status Word/Bit Descriptions
IPS
Pre-decompression Movement Actuals
Word Description
HPS61 Pre-decompression Movement Actual Velocity [06] Average ram (screw) velocity during last movement, reported in in.(mm)/s.
HPS62 Pre-decompression Movement Actual Pressure [01] Average ram (screw) pressure during last movement.
End of Hold Ram (Screw) Position
Word Description
HPS63 Position at End of Hold [12] Instantaneous ram (screw) position at completion of last profile.
HPS64 RFU
IPS – Injection Profile
Status Block
Word Bit Description
IPS01 Block ID = 00000011 (Low byte). High byte identical to SYS01
IPS02 See SYS02
IPS03 See SYS03
IPS04 See SYS04
IPS05 Pressure Limit Alarms
Module latches bits individually when executing a pressure-limited Vel/Pos Injection Profile and monitors a real-time
ram (screw) pressure equal to or greater than IPC57 during the subject profile segment. The module unlatches each
bit when it completes the segment without monitoring a real-time ram (screw) pressure equal to or greater than IPC57.
This bit
latched ON:
B00 Segment 1
B01 Segment 2
B02 Segment 3
B03 Segment 4
B04 Segment 5
at pressure limit for
this LimVel/Pos segment:
Bit-mapped Status Words
Publication
1771-6.5.126 – March 1998
Page 82

3–6 Status Word/Bit Descriptions
Word DescriptionBit
B05 Segment 6
B06 Segment 7
B07 Segment 8
B08 Segment 9
B09 Segment 10
B10 Segment 11
B11-B15 RFU
IPS06 Injection Transition Status
B00 = 0 Normal
= 1 Injection Transition on Time
The module sets this bit when the Transition Time Setpoint (IPC60) triggered completion of last Injection Profile.
B01 = 0 Normal
= 1 Injection Transition on Ram (Screw) Position
Module sets this bit when Transition Ram (Screw) Position Setpoint (IPC61) triggered completion of last Injection Profile
B02 = 0 Normal
= 1 Injection Transition on Ram (Screw) Pressure
Module sets bit when Transition Ram (Screw) Pressure Setpoint (IPC62) triggered completion of last Injection Profile.
B03 = 0 Normal
= 1 Injection Transition on Cavity Pressure
Module sets this bit when the Transition Cavity Pressure Setpoint (IPC63) triggered completion of last Injection Profile.
B04-B15 RFU
IPS07 CV High Limit Alarms
The module latches each bit when executing the subject profile segment in closed loop, and drives its algorithm CV to
maximum (100%) in an attempt to control the profile setpoint.
The module unlatches each bit when it completes execution of the subject profile segment in open loop, or in closed
loop without driving its algorithm CV to maximum (100%).
This bit
latched ON:
when algorithm CV
is maximum during:
B00 Segment 1
B01 Segment 2
B02 Segment 3
B03 Segment 4
B04 Segment 5
B05 Segment 6
B06 Segment 7
B07 Segment 8
B08 Segment 9
B09 Segment 10
B10 Segment 11
B11-B15 RFU
IPS08 CV Low Limit Alarms
The module latches each bit when executing the subject profile segment in closed loop, and drives its algorithm CV to
minimum (0%) in an attempt to control the profile setpoint.
The module unlatches each bit when it completes execution of the subject profile segment in open loop, or in closed
loop without driving its algorithm CV to minimum (0%).
This bit
latched ON:
when algorithm CV
is maximum during:
B00 Segment 1
B01 Segment 2
B02 Segment 3
B03 Segment 4
B04 Segment 5
B05 Segment 6
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 83

Word Bit Description
B06 Segment 7
B07 Segment 8
B08 Segment 9
B09 Segment 10
B10 Segment 11
B11-B15 RFU
Injection Profile Actuals
Word Description
IPS09 Actual Segment 1 Velocity [05] or [06] Average ram (screw) velocity during last Segment 1.
If IPC03-B14 is RESET, the module reports this average in percent velocity.
If IPC03-B14 is SET, it reports it in in.(mm)/s.
IPS10 Actual Segment 1 Pressure [01] Average ram (screw) pressure during last Segment 1.
IPS11 Actual Segment 1 Execution Time [21] Time required for last Segment 1.
IPS12 Actual End of Segment 1 Position [12] Ram (Screw) position at completion of last Segment 1.
IPS13 Actual Segment 2 Velocity [05] or [06] Average ram (screw) velocity during last Segment 2.
If IPC03-B14 is RESET, the module reports this average in percent velocity.
If IPC03-B14 is SET, it reports it in in.(mm)/s.
IPS14 Actual Segment 2 Pressure [01] Average ram (screw) pressure during last Segment 2.
IPS15 Actual Segment 2 Execution Time [21] Time required for last Segment 2.
IPS16 Actual End of Segment 2 Position [12] Ram (Screw) position at completion of last Segment 2.
IPS17 Actual Segment 3 Velocity [05] or [06] Average ram (screw) velocity during last Segment 3.
If IPC03-B14 is RESET, the module reports this average in percent velocity.
If IPC03-B14 is SET, it reports it in in.(mm)/s.
IPS18 Actual Segment 3 Pressure [01] Average ram (screw) pressure during last Segment 3.
IPS19 Actual Segment 3 Execution Time [21] Time required for last Segment 3.
IPS20 Actual End of Segment 3 Position [12] Ram (Screw) position at completion of last Segment 3.
IPS21 Actual Segment 4 Velocity [05] or [06] Average ram (screw) velocity during last Segment 4.
If IPC03-B14 is RESET, the module reports this average in percent velocity.
If IPC03-B14 is SET, it reports it in in.(mm)/s.
IPS22 Actual Segment 4 Pressure [01] Average ram (screw) pressure during last Segment 4.
IPS23 Actual Segment 4 Execution Time [21] Time required for last Segment 4.
IPS24 Actual End of Segment 4 Position [12] Ram (Screw) position at completion of last Segment 4.
IPS25 Actual Segment 5 Velocity [05] or [06] Average ram (screw) velocity during last Segment 5.
If IPC03-B14 is RESET, the module reports this average in percent velocity.
If IPC03-B14 is SET, it reports it in in.(mm)/s.
IPS26 Actual Segment 5 Pressure [01] Average ram (screw) pressure during last Segment 5.
IPS27 Actual Segment 5 Execution Time [21] Time required for last Segment 5.
IPS28 Actual End of Segment 5 Position [12] Ram (Screw) position at completion of last Segment 5.
IPS29 Actual Segment 6 Velocity [05] or [06] Average ram (screw) velocity during last Segment 6.
If IPC03-B14 is RESET, the module reports this average in percent velocity.
If IPC03-B14 is SET, it reports it in in.(mm)/s.
IPS30 Actual Segment 6 Pressure [01] Average ram (screw) pressure during last Segment 6.
IPS31 Actual Segment 6 Execution Time [21] Time required for last Segment 6.
IPS32 Actual End of Segment 6 Position [12] Ram (Screw) position at completion of last Segment 6.
IPS33 Actual Segment 7 Velocity [05] or [06] Average ram (screw) velocity during last Segment 7.
If IPC03-B14 is RESET, the module reports this average in percent velocity.
If IPC03-B14 is SET, it reports it in in.(mm)/s.
IPS34 Actual Segment 7 Pressure [01] Average ram (screw) pressure during last Segment 7.
IPS35 Actual Segment 7 Execution Time [21] Time required for last Segment 7.
IPS36 Actual End of Segment 7 Position [12] Ram (Screw) position at completion of last Segment 7.
3–7Status Word/Bit Descriptions
IPS
Publication
1771-6.5.126 – March 1998
Page 84

3–8 Status Word/Bit Descriptions
Word Description
IPS37 Actual Segment 8 Velocity [05] or [06] Average ram (screw) velocity during last Segment 8.
If IPC03-B14 is RESET, the module reports this average in percent velocity.
If IPC03-B14 is SET, it reports it in in.(mm)/s.
IPS38 Actual Segment 8 Pressure [01] Average ram (screw) pressure during last Segment 8.
IPS39 Actual Segment 8 Execution Time [21] Time required for last Segment 8.
IPS40 Actual End of Segment 8 Position [12] Ram (Screw) position at completion of last Segment 8.
IPS41 Actual Segment 9 Velocity [05] or [06] Average ram (screw) velocity during last Segment 9.
If IPC03-B14 is RESET, the module reports this average in percent velocity.
If IPC03-B14 is SET, it reports it in in.(mm)/s.
IPS42 Actual Segment 9 Pressure [01] Average ram (screw) pressure during last Segment 9.
IPS43 Actual Segment 9 Execution Time [21] Time required for last Segment 9.
IPS44 Actual End of Segment 9 Position [12] Ram (Screw) position at completion of last Segment 9.
IPS45 Actual Segment 10 Velocity [05] or [06] Average ram (screw) velocity during last Segment 10.
If IPC03-B14 is RESET, the module reports this average in percent velocity.
If IPC03-B14 is SET, it reports it in in.(mm)/s.
IPS46 Actual Segment 10 Pressure [01] Ram (screw) pressure during last Segment 10.
IPS47 Actual Segment 10 Execution Time [21] Time required for last Segment 10.
IPS48 Actual End of Segment 10 Position [12] Ram (Screw) position at completion of last Segment 10.
IPS49 Actual Segment 11 Velocity [05] or [06] Average ram (screw) velocity during last Segment 11.
If IPC03-B14 is RESET, the module reports this average in percent velocity.
If IPC03-B14 is SET, it reports it in in.(mm)/s.
IPS50 Actual Segment 11 Pressure [01] Average ram (screw) pressure during last Segment 11.
IPS51 Actual Segment 11 Execution Time [21] Time required for last Segment 11.
IPS52 RFU
Injection Maximum Pressures
Word Description
IPS53 Maximum Ram (Screw) Pressure During Injection [01] Maximum instantaneous ram (screw) pressure during last profile.
IPS54 Maximum Cavity Pressure During Injection [04] Maximum instantaneous cavity pressure during last profile.
IPS55 - 60 RFU
Injection Transition Actuals
Word Description
IPS61 Actual Time to Transition [21] Total time required for last Injection Profile.
IPS62 Actual Ram (Screw) Position at Transition [12] Instantaneous ram (screw) position at completion of last Injection Profile.
IPS63 Actual Ram (Screw) Pressure at Transition [01] Instantaneous ram (screw) pressure at completion of last Injection Profile.
IPS64 Actual Cavity Pressure at Transition [04] Instantaneous cavity pressure at completion of last Injection Profile.
PPS – Plastication Profile
Status Block
Word Bit Description
PPS01 Block ID = 00000101 (Low byte). High byte identical to SYS01
PPS02 See SYS02
PPS03 See SYS03
PPS04 See SYS04
PPS05, 06 RFU
Bit-mapped Status Words
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 85

Word Bit Description
PPS07 CV High Limit Alarms
The module latches each bit when executing the subject profile segment in closed loop, and drives its algorithm CV to
maximum (100%) in an attempt to control the profile setpoint.
The module unlatches each bit when it completes execution of the subject profile segment in open loop, or in closed
loop without driving its algorithm CV to maximum (100%).
This bit
latched ON:
B00 Segment 1
B01 Segment 2
B02 Segment 3
B03 Segment 4
B04 Segment 5
B05 Segment 6
B06 Segment 7
B07 Segment 8
B08 Segment 9
B09 Segment 10
B10 Segment 11
B11-B15 RFU
PPS08 CV Low Limit Alarms
This bit
latched ON:
B00 Segment 1
B01 Segment 2
B02 Segment 3
B03 Segment 4
B04 Segment 5
B05 Segment 6
B06 Segment 7
B07 Segment 8
B08 Segment 9
B09 Segment 10
B10 Segment 11
B11-B15 RFU
when algorithm CV
is maximum during:
The module latches each bit when executing the subject profile segment in closed loop, and drives its algorithm CV to
minimum (0%) in an attempt to control the profile setpoint.
The module unlatches each bit when it completes execution of the subject profile segment in open loop, or in closed
loop without driving its algorithm CV to minimum (0%).
when algorithm CV
is minimum during:
3–9Status Word/Bit Descriptions
PPS
Plastication Profile Actuals
Word Description
PPS09 Actual Segment 1 RPM [25] Average RPM during last Segment 1.
PPS10 Actual Segment 1 Pressure [01] Average ram (screw) pressure during last Segment 1.
PPS11 Actual Segment 1 Execution Time [21] Time required for last Segment 1.
PPS12 Actual End of Segment 1 Position [12] Ram (Screw) position at completion of last Segment 1.
PPS13 Actual Segment 2 RPM [25] Average RPM during last Segment 2.
PPS14 Actual Segment 2 Pressure [01] Average ram (screw) pressure during last Segment 2.
PPS15 Actual Segment 2 Execution Time [21] Time required for last Segment 2.
PPS16 Actual End of Segment 2 Position [12] Ram (Screw) position at completion of last Segment 2.
Publication
1771-6.5.126 – March 1998
Page 86

3–10 Status Word/Bit Descriptions
Word Description
PPS17 Actual Segment 3 RPM [25] Average RPM during last Segment 3.
PPS18 Actual Segment 3 Pressure [01] Average ram (screw) pressure during last Segment 3.
PPS19 Actual Segment 3 Execution Time [21] Time required for last Segment 3.
PPS20 Actual End of Segment 3 Position [12] Ram (Screw) position at completion of last Segment 3.
PPS21 Actual Segment 4 RPM [25] Average RPM during last Segment 4.
PPS22 Actual Segment 4 Pressure [01] Average ram (screw) pressure during last Segment 4.
PPS23 Actual Segment 4 Execution Time [21] Time required for last Segment 4.
PPS24 Actual End of Segment 4 Position [12] Ram (Screw) position at completion of last Segment 4.
PPS25 Actual Segment 5 RPM [25] Average RPM during last Segment 5.
PPS26 Actual Segment 5 Pressure [01] Average ram (screw) pressure during last Segment 5.
PPS27 Actual Segment 5 Execution Time [21] Time required for last Segment 5.
PPS28 Actual End of Segment 5 Position [12] Ram (Screw) position at completion of last Segment 5.
PPS29 Actual Segment 6 RPM [25] Average RPM during last Segment 6.
PPS30 Actual Segment 6 Pressure [01] Average ram (screw) pressure during last Segment 6.
PPS31 Actual Segment 6 Execution Time [21] Time required for last Segment 6.
PPS32 Actual End of Segment 6 Position [12] Ram (Screw) position at completion of last Segment 6.
PPS33 Actual Segment 7 RPM [25] Average RPM during last Segment 7.
PPS34 Actual Segment 7 Pressure [01] Average ram (screw) pressure during last Segment 7.
PPS35 Actual Segment 7 Execution Time [21] Time required for last Segment 7.
PPS36 Actual End of Segment 7 Position [12] Ram (Screw) position at completion of last Segment 7.
PPS37 Actual Segment 8 RPM [25] Average RPM during last Segment 8.
PPS38 Actual Segment 8 Pressure [01] Average ram (screw) pressure during last Segment 8.
PPS39 Actual Segment 8 Execution Time [21] Time required for last Segment 8.
PPS40 Actual End of Segment 8 Position [12] Ram (Screw) position at completion of last Segment 8.
PPS41 Actual Segment 9 RPM [25] Average RPM during last Segment 9.
PPS42 Actual Segment 9 Pressure [01] Average ram (screw) pressure during last Segment 9.
PPS43 Actual Segment 9 Execution Time [21] Time required for last Segment 9.
PPS44 Actual End of Segment 9 Position [12] Ram (Screw) position at completion of last Segment 9.
PPS45 Actual Segment 10 RPM [25] Average RPM during last Segment 10.
PPS46 Actual Segment 10 Pressure [01] Average ram (screw) pressure during last Segment 10.
PPS47 Actual Segment 10 Execution Time [21] Time required for last Segment 10.
PPS48 Actual End of Segment 10 Position [12] Ram (Screw) position at completion of last Segment 10.
PPS49 Actual Segment 11 RPM [25] Average RPM during last Segment 11.
PPS50 Actual Segment 11 Pressure [01] Average ram (screw) pressure during last Segment 11.
PPS51 Actual Segment 11 Execution Time [21] Time required for last Segment 11.
PPS52 RFU
Plastication Maximum Pressure
Word Description
PPS53 Maximum Ram (Screw) Pressure During Plastication [01] Maximum instantaneous ram (screw) pressure during last profile.
Post-decompression Maximum Pressure
Word Description
PPS54 Maximum Ram (Screw) Pressure During Post-decompression [01] Max instantaneous ram (screw) pressure during last movement.
PPS55 - 56 RFU
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 87

Execution Times
Word Description
PPS57 Plastication Profile Execution Time [21] Total time required for last profile.
PPS58 Post-decompression Movement Execution Time [21] Total time required for last movement.
PPS59 - 60 RFU
Post-decompression Movement Actuals
Word Description
PPS61 Post-decompression Movement Actual Velocity [06] Average ram (screw) velocity during last movement, reported in in.(mm)/s.
PPS62 Post-decompression Movement Actual Pressure [01] Average ram (screw) pressure during last movement.
Shot Size Actual
Word Description
PPS63 Actual Shot Size Extruded [17] Total shot size length drawn at completion of last Plastication Profile.
The module measures total shot size as an incremental length from the End of Hold position (HPS63).
PPS64 RFU
PTS – Process Trace
Status Block
Bit-mapped Status Words
3–11Status Word/Bit Descriptions
PTS
Word Bit Description
PTS01 B00-B07 Block ID = 00001010 (Low byte).
B08-B15 Power start-up and jog execution status (refer to bit description for SYS01)
PTS02 Profile execution status (refer to bit description for SYS02)
PTS03 Miscellaneous status (refer to bit description for SYS03)
PTS04 Watchdog timeout status (refer to bit description for SYS04)
PTS05 Trace selection
B00 RFU
B01 Block contains injection position trace data
B02 Block contains trace #1 data
B03 Block contains trace #2 data
B04 Block contains trace #3 data
B05 Block contains trace #4 data
B06-B14 RFU
B15 Block contains phase/segment start information
PTS06
B00 Block contains trace data points 1 to 50
B01 Block contains trace data points 51 to 100
B02 Block contains trace data points 101 to 150
B03 Block contains trace data points 151 to 200
B04 Block contains trace data points 201 to 250
B05 Block contains trace data points 251 to 300
B06 Block contains trace data points 301 to 350
B07 Block contains trace data points 351 to 400
B08-B15 RFU
PTS07, 08 RFU
If one of PTS05-B01 to B05 is set, PTS15 to PTS64 contain trace data. If PTS05-B15 is set, PTS15 to PTS48 contain
phase/segment start information. Each word contains starting data point (1 - 400) for the listed phase or segment.
If the phase or segment was not executed, this value will be zero.
Trace data block number
Publication
1771-6.5.126 – March 1998
Page 88

3–12 Status Word/Bit Descriptions
Word
PTS09
Bit Description
Reports the time (in hundredths of seconds) after injection starts until the first trace data point is recorded.
PTS10 Reports how many data points (0 to 400) have been collected for the trace indicated in PTS05 and PTS06.
This value will not exceed the last data point for the block indicated in PTS06.
PTS11-14 RFU
PTS15 Injection Segment 1 starting data point
If one of PTS05-B01 to -B05 is set, PTS15 to PTS64 contain trace data. If PTS05-B15 is set, PTS15 to PTS48 contain
phase/segment start information. Each word contains starting data point (1 - 400) for the listed phase or segment.
If the phase or segment was not executed, this value will be zero.
PTS16 Injection Segment 2 starting data point
PTS17 Injection Segment 3 starting data point
PTS18 Injection Segment 4 starting data point
PTS19 Injection Segment 5 starting data point
PTS20 Injection Segment 6 starting data point
PTS21 Injection Segment 7 starting data point
PTS22 Injection Segment 8 starting data point
PTS23 Injection Segment 9 starting data point
PTS24 Injection Segment 10 starting data point
PTS25 Injection Segment 11 starting data point
PTS26 Pack Segment 1 starting data point
PTS27 Pack Segment 2 starting data point
PTS28 Pack Segment 3 starting data point
PTS29 Pack Segment 4 starting data point
PTS30 Pack Segment 5 starting data point
PTS31 Hold Segment 1 starting data point
PTS32 Hold Segment 2 starting data point
PTS33 Hold Segment 3 starting data point
PTS34 Hold Segment 4 starting data point
PTS35 Hold Segment 5 starting data point
PTS36 Pre-decompress starting data point
PTS37 Plastication Segment 1 starting data point
PTS38 Plastication Segment 2 starting data point
PTS39 Plastication Segment 3 starting data point
PTS40 Plastication Segment 4 starting data point
PTS41 Plastication Segment 5 starting data point
PTS42 Plastication Segment 6 starting data point
PTS43 Plastication Segment 7 starting data point
PTS44 Plastication Segment 8 starting data point
PTS45 Plastication Segment 9 starting data point
PTS46 Plastication Segment 10 starting data point
PTS47 Plastication Segment 11 starting data point
PTS48 Post-decompress starting data point
PTS49-64 RFU
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 89

RLS – Inject ERC Values
Status Block
Word Description
RLS01 Block ID = 00001000 (Low byte). High byte identical to SYS01
RLS02 See SYS02
RLS03 See SYS03
RLS04 See SYS04
RLS05-08 RFU
Word Description
RLS09 Injection Segment 1
RLS10 Injection Segment 2
RLS11 Injection Segment 3
RLS12 Injection Segment 4
RLS13 Injection Segment 5
RLS14 Injection Segment 6
RLS15 Injection Segment 7
RLS16 Injection Segment 8
RLS17 Injection Segment 9
RLS18 Injection Segment 10
RLS19 Injection Segment 11
Bit-mapped Status Words
Injection Profile ERC Actuals
3–13Status Word/Bit Descriptions
RLS
Pack Profile ERC Actuals
Word Description
RLS20 Pack Segment 1
RLS21 Pack Segment 2
RLS22 Pack Segment 3
RLS23 Pack Segment 4
RLS24 Pack Segment 5
Hold Profile ERC Actuals
Word Description
RLS25 Hold Segment 1
RLS26 Hold Segment 2
RLS27 Hold Segment 3
RLS28 Hold Segment 4
RLS29 Hold Segment 5
Plastication Profile ERC Actuals
Word Description
RLS30 Plastication Segment 1
RLS31 Plastication Segment 2
RLS32 Plastication Segment 3
RLS33 Plastication Segment 4
RLS34 Plastication Segment 5
RLS35 Plastication Segment 6
RLS36 Plastication Segment 7
Publication
1771-6.5.126 – March 1998
Page 90

3–14 Status Word/Bit Descriptions
Y1
Word Description
RLS37 Plastication Segment 8
RLS38 Plastication Segment 9
RLS39 Plastication Segment 10
RLS40 Plastication Segment 11
RLS41 - 64 RFU
SYS – System Status Block
Word Bit Description
SYS01
SYS02
B00-B07 Block ID = 00000001
B08-B15 Power-up Status
B08 = 0 The module Wants Complete Download
= 1 Valid MCC on Board
Jog Execution Status
B09 = 0 Normal
= 1 Executing Screw Rotate Jog
The module sets this bit when responding to command bit DYC01-B09 = 1 and sets its outputs to JGC09–12.
B10 = 0 Normal
= 1 Executing Ram (Screw) Jog Forward
The module sets this bit when responding to command bit DYC01-B10 = 1 and sets its outputs to JGC17–20
B11 = 0 Normal
= 1 Executing Ram (Screw) Jog Reverse
The module sets this bit when responding to command bit DYC01-B11 = 1 and sets its outputs to JGC25–28
B12-15 RFU
Profile Execution Status
The module sets each bit, SYS02 - B00 through B14 when:
it completes the profile or movement, or
it receives a new action execution command that terminates the profile or movement
The module resets each bit, SYS02 - B00 through B14 when:
it starts the profile or movement, or
it receives a valid DYC with DYC03-B10 SET
B00-03 RFU
B04 SYS02.B04 for QI(A) SYSB02.B04 for QI(B)
= 0 Normal
= 1 Injection Profile Complete
Important: The QI module will not set this bit during suspended injection.
B05 = 0 Normal
= 1 Pack Profile Complete
B06 = 0 Normal
= 1 Hold Profile Complete
B07 = 0 Normal
= 1 Pre-decompression Movement Complete
B08 = 0 Normal
= 1 Plastication Profile Complete
B09 = 0 Normal
= 1 Post-decompression Movement Complete
B10-14 RFU
Module Busy Status
B15 = 0 Normal
= 1 No Action in Progress
The module resets this bit when it is performing one of the following:
executing a profile or decompression movement
holding its outputs at any End of phase values
executing any jog movement
Bit-mapped Status Words
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 91

Y3
Word Bit Description
SYS03
B00 SYS03:B00 for QI(A) SYSB03:B00 for QI(B)
B01, 02 RFU
B03 = 0 Normal
B04 = 0 Normal
B05 = 0 Normal
B06-15 RFU
SYS04 Watchdog Time-Out Status
B00-B06 RFU
B07 = 0 Normal
B08 = 0 Normal
B09 = 0 Normal
B10-15 RFU
SYS05 High Pressure Alarm Status (Real Time)
B00 = 0 Normal
B01, 02 RFU
Miscellaneous Status
When set, indicates that injection has been suspended
Injection suspension applies to these conditions:
when A reaches screw position (IPC56), QI(A) suspends injection until B reaches screw position (IPCB08)
to let QI(A) resume injection.
upon a start command, QI(A) suspends injection until B reaches screw position (IPCB08)
to let QI(A) start its injection profile.
This bit is reset when the machine cycle is in progress.
= 1 Cure Timer Timing
If bit patterns in MCC02 and MCC03 indicate that the module is connected to a ram (screw) position transducer, the
module sets this bit when the internal Cure Timer is timing and the accumulated Cure Time (SYS58) is less than the
Cure Timer preset (HPC61).
= 1 Ram (Screw) Retracted
If bit patterns in MCC02 and MCC03 indicate that the module is connected to a ram (screw) position transducer, the
module sets this bit when ram (screw) position equals or exceeds the Full Retract position of Cushion + Shot Size +
Post-decompression (PPC61 + PPC62 + PSC05).
= 1 Cure Time Complete
If bit patterns in MCC02 and MCC03 indicate the module is connected to a ram (screw) position transducer, the module
sets this bit when the accumulated value of its internal Cure Timer (SYS58) equals the Cure Timer preset (HPC61).
= 1 Pre-decompression Movement Watchdog Time-Out
Module sets this bit when the time required for the movement equals or exceeds the Watchdog Timer preset (PRC08).
The module resets this bit when:
it completes the movement, or
it receives a new action execution command that terminates the movement
The module does not leave this bit set when holding its outputs to PRC33–36 at completion of this movement.
= 1 Plastication Profile Watchdog Time-Out
The module sets this bit when the time required for the profile equals or exceeds the Watchdog Timer preset (PLC08).
The module resets this bit when:
it completes the profile, or
it receives a new action execution command that terminates the profile
The module does not leave this bit set when holding its outputs to PLC33–36 at completion of this profile.
= 1 Post-decompression Movement Watchdog Time-Out
The module sets this bit when the time required for the movement equals or exceeds the Watchdog Timer preset
(PSC08). The module resets this bit when:
it completes the movement, or
it receives a new action execution command that terminates the movement
The module does not leave this bit set when holding its outputs to PSC33–36 at completion of this movement.
The module sets alarm bits on a real-time basis. These bits are not latched.
You can inhibit each bit by setting its associated alarm setpoint to zero.
= 1 High Ram (Screw) Pressure
The module sets this bit when real-time ram (screw) pressure equals or exceeds MCC21.
3–15Status Word/Bit Descriptions
SYS
Publication
1771-6.5.126 – March 1998
Page 92

3–16 Status Word/Bit Descriptions
Word
Bit Description
SYS05 B03 = 0 Normal
= 1 High Screw RPM
The module sets this bit when real-time screw RPM equals or exceeds MCC55.
B04 = 0 Normal
= 1 High Cavity Pressure
The module sets this bit when real-time cavity pressure equals or exceeds MCC61.
B05-B07 RFU
B08 = 0 Normal
= 1 High Screw Rotate Jog RPM
Module sets this bit when responding to command DYC01-B09 = 1 and real-time screw RPM equals or exceeds JGC05
B09 = 0 Normal
= 1 High Ram (Screw) Jog Pressure
The module sets this bit when responding to command DYC01-B10 = 1 or DYC01-B11 = 1 and real-time ram (screw)
pressure equals or exceeds JGC06.
B10-15 RFU
SYS06 High Pressure Alarm Status (Real Time)
The module sets alarm bits on a real-time basis. These bits are not latched.
You can inhibit each bit by setting its associated alarm setpoint to zero.
B00 = 0 Normal
= 1 Injection Profile High Ram (Screw) Pressure
The module sets this bit when real-time ram (screw) pressure equals or exceeds INC57.
B01 = 0 Normal
= 1 Injection Profile High Cavity Pressure
The module sets this bit when real-time cavity pressure equals or exceeds INC58.
B02 = 0 Normal
= 1 Pack Profile High Ram (Screw) Pressure
The module sets this bit when real-time ram (screw) pressure equals or exceeds PKC57.
B03 = 0 Normal
= 1 Pack Profile High Cavity Pressure
The module sets this bit when real-time cavity pressure equals or exceeds PKC58.
B04 = 0 Normal
= 1 Hold Profile High Ram (Screw) Pressure
The module sets this bit when real-time ram (screw) pressure equals or exceeds HDC57.
B05 = 0 Normal
= 1 Hold Profile High Cavity Pressure
The module sets this bit when real-time cavity pressure equals or exceeds HDC58.
B06 = 0 Normal
= 1 Pre-decompress Movement High Ram (Screw) Pressure
The module sets this bit when real-time ram (screw) pressure equals or exceeds PRC57.
B07 = 0 Normal
= 1 Plastication Profile High Ram (Screw) Pressure
The module sets this bit when real-time ram (screw) pressure equals or exceeds PLC57.
B08 = 0 Normal
= 1 Post-decompress Movement High Ram (Screw) Pressure
The module sets this bit when real-time ram (screw) pressure equals or exceeds PSC57.
B09-15 RFU
SYS07 Overtravel Alarm Status (Real Time)
The module sets alarm bits in real time. These bits are not latched.
You can inhibit each bit by setting its associated alarm setpoint to zero.
B00 = 0 Normal
= 1 Ram (Screw) Overtravel at Bottom
The module sets this bit when real-time ram (screw) position is less than or equal to MCC13. The module resets this
bit when real-time position equals or exceeds the position defined by MCC13 + MCC15.
When SET, the module ignores any profile action execution command in DYC02.
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 93

3–17Status Word/Bit Descriptions
Word Bit Description
SYS07 B01 = 0 Normal
= 1 Ram (Screw) Overtravel at Top
The module sets this bit when real-time ram (screw) position equals or exceeds MCC14. The module resets this bit
when real-time position is less than or equal to the position defined by MCC14 – MCC15.
When SET, the module ignores any profile action execution command in DYC02.
B02-15 RFU
SYS08 Alarm Status for Loss of Input Sensor (Real Time). The module sets alarm bits in real time. These bits are not latched.
B00 = 0 Normal
= 1 Loss of Ram (Screw) Position Sensor (Set MCC64 to inhibit)
If bit patterns in MCC02 and MCC03 indicate that the module is connected to a ram (screw) position transducer, the
module sets this bit when it detects a loss of signal input from the transducer.
When SET, module stops profile in progress and ignores action execution command in DYC02 unless MCC64 is SET.
B01 = 0 Normal
= 1 Loss of Ram (Screw) Pressure Sensor (Set MCC64 to inhibit)
If bit patterns in MCC02 and MCC03 indicate that the module is connected to a ram (screw) pressure transducer, the
module sets this bit when it detects a loss of signal input from the transducer.
When SET, module stops profile in progress and ignores action execution command in DYC02 unless MCC64 is SET.
B02-05 RFU
B06 = 0 Normal
= 1 Loss of Ram (Screw) RPM Sensor (Set MCC64 to inhibit)
If bit patterns in MCC02 and MCC03 indicate that the module is connected to a screw RPM transducer, the module
sets this bit when it detects a loss of signal input from the transducer.
When SET, module stops profile in progress and ignores action execution command in DYC02 unless MCC64 is SET.
B07 = 0 Normal
= 1 Loss of Cavity Pressure Sensor (Set MCC64 to inhibit)
If bit patterns in MCC02 and MCC03 indicate that the module is connected to a cavity pressure transducer, the module
sets this bit when it detects a loss of signal input from the transducer.
When SET, module stops profile in progress and ignores action execution command in DYC02 unless MCC64 is SET.
B08-B15 RFU
SYS09 High Pressure Alarm Status (Latched)
Module latches alarm bits on each false-to-true transition of the corresponding real-time alarm bit in SYS05.
Module unlatches all 16 bits when it receives a false- to-true transition of DYC03-B09. You can inhibit each bit by set-
ting its associated alarm setpoint to zero.
This bit
latched ON:
B00 High Ram (Screw) Pressure
B01, 02 RFU
B03 High Screw RPM
B04 System Pressure
B05-B07 RFU
B08 High Screw Rotate Jog RPM
B09 High Ram (Screw) Jog Pressure
B10-15 RFU
SYS10 High Pressure Alarm Status (Latched)
This bit
latched ON:
B00 Injection Profile High Ram (Screw) Pressure
B01 Injection Profile High Cavity Pressure
B02 Pack Profile High Ram (Screw) Pressure
B03 Pack Profile High Cavity Pressure
B04 Hold Profile High Ram (Screw) Pressure
when the module detected this alarm:
Module latches alarm bits on each false-to-true transition of the corresponding real-time alarm bit in SYS06.
Module unlatches all 16 bits when it receives a false-to-true transition of DYC03-B09. You can inhibit each bit by setting
its associated alarm setpoint to zero.
when the module detected this alarm:
SYS
Publication
1771-6.5.126 – March 1998
Page 94

3–18 Status Word/Bit Descriptions
DYC01-B11 is SET
Word
Bit Description
SYS10 B05 Hold Profile High Cavity Pressure
B06 Pre-decompress Movement High Ram (Screw) Pressure
B07 Plastication Profile High Ram (Screw) Pressure
B08 Post-decompress Movement High Ram (Screw) Pressure
B09-15 RFU
SYS11 Overtravel Alarm Status (Latched)
Module latches alarm bits on each false-to-true transition of the corresponding real-time alarm bit in SYS07.
Module unlatches all 16 bits when it receives a false-to-true transition of DYC03-B09. You can inhibit each bit by setting
its associated alarm setpoint to zero.
This bit
when the module detected this alarm:
latched ON:
B00 Ram (Screw) Overtravel at Bottom
B01 Ram (Screw) Overtravel at Top
B02-07 RFU
B08-B15 Reserved for the module. Do not use.
SYS12 Alarm Status for Loss of Input Sensor (Latched)
Module latches alarm bits on each false-to-true transition of the corresponding real-time alarm bit in SYS08.
Module unlatches all 16 bits when it receives a false-to-true transition of DYC03-B09.
This bit
when the module detected this alarm
latched ON:
B00 Loss of Ram (Screw) Position Sensor (except when MCC64 is SET)
B01 Loss of Ram (Screw) Pressure Sensor (except when MCC64 is SET)
B02-05 RFU
B06 Loss of Screw RPM Sensor (except when MCC64 is SET)
B07 Loss of Cavity Pressure Sensor (except when MCC64 is SET)
B08-B15 RFU
SYS13 Action-execution Command Errors
B00
= 0 Normal
= 1 Jog Command Error
The module latches this bit when SYS15-B01 is RESET and one of the following is true:
DYC01-B09 is SET
DYC01-B10 is SET
DYC01-B12 is SET
DYC01-B13 is SET
DYC01-B14 is SET
DYC01-B15 is SET
Module unlatches this bit when it decodes a valid DYC Block with any SET action execution bit other than listed above.
B01-04 RFU
B05 = 0 Normal
= 1 Injection Profile Command Error
The module latches this bit when both of the following are true:
DYC02-B04 is SET
SYS15-B08 is RESET
The module unlatches this bit when it decodes a valid Dynamic Command Block with any SET action execution bit
other than DYC02-B04.
B06 = 0 Normal
= 1 Pack Profile Command Error
The module latches this bit when both of the following are true:
DYC02-B05 is SET
the Injection Profile completes
The module unlatches this bit when it decodes a valid Dynamic Command Block with any SET action execution bit
other than DYC02-B05.
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 95

Word Bit Description
SYS13 B07 = 0 Normal
= 1 Hold Profile Command Error
The module latches this bit when both of the following are true:
DYC02-B06 is SET
SYS15-B11 is RESET
The module unlatches this bit when it decodes a valid Dynamic Command Block with any SET action execution bit
other than DYC02-B06.
B08 = 0 Normal
= 1 Pre-decompression Movement Command Error
The module latches this bit at completion of the Hold Profile if all of the following are true:
HPC03-B08 is RESET
HPC03-B09 is SET
SYS15-B12 is RESET
The module also latches this bit if all of the following are true:
DYC02-B07 is SET
HPC03-B09 is SET
SYS15-B12 is RESET
The module also latches this bit if both of the following are true:
DYC02-B07 is SET
SYS15-B11 is RESET
The module also latches this bit if both of the following are true:
DYC02-B07 is SET
PRC05 added to the actual ram (screw) position equals or exceeds MCC12
Module unlatches this bit when it decodes a valid DYC Block with any SET action execution bit other than DYC02-B07.
B09 = 0 Normal
= 1 Plastication Profile Command Error
The module latches this bit at completion of the Hold Profile if all of the following are true:
HPC03-B08 is RESET
SYS15-B12 is RESET
HPC03-B09 is RESET
SYS15-B14 is RESET
The module also latches this bit at completion of the Pre-decompression Movement if both of the following are true:
HPC03-B09 is RESET
SYS15-B14 is RESET
The module also latches this bit if all of the following are true:
DYC02-B07 is RESET
PRC05 equal zero
HPC03-B09 is RESET
SYS15-B14 is RESET
The module also latches this bit if all of the following are true:
DYC02-B07 is RESET
SYS15-B12 is RESET
HPC03-B09 is RESET
SYS15-B14 is RESET
The module also latches this bit if both of the following are true:
DYC02-B08 is SET
SYS15-B14 is RESET
The module unlatches this bit when it decodes a valid DYC Block with any SET action execution bit other than
DYC02-B07 or DYC02-B08.
3–19Status Word/Bit Descriptions
SYS
Publication
1771-6.5.126 – March 1998
Page 96

3–20 Status Word/Bit Descriptions
Word DescriptionBit
B10 = 0 Normal
= 1 Post-decompression Movement Command Error
The module latches this bit at completion of the Plastication Profile if both of the following are true:
PPC03-B08 is RESET
SYS15-B15 is RESET
The module also latches this bit if all of the following are true:
Ram (screw) position equals or exceeds the sum of PPC61 and PPC62
PPC03-B08 is RESET
SYS15-B15 is RESET
The module also latches this bit if both of the following are true:
DYC02-B09 is SET
SYS15-B15 is RESET
The module also latches this bit if both of the following are true:
DYC02-B09 is SET
PSC05 added to the actual ram (screw) position equals or exceeds MCC12
The module unlatches this bit when it decodes a valid Dynamic Command Block with any SET action execution bit
other than DYC02-B08 or DYC02-B09.
B11-15 RFU
SYS14 Miscellaneous
B00 = 0 Normal
= 1 Dual-command Error
The module latches this bit when it decodes a valid Dynamic Command Block having more than one action execution
command bit SET. Bits DYC01-B08 thru B11 and selected bits in DYC02 are the action execution command bits.
The module unlatches this bit when it decodes a valid Dynamic Command Block having one or none of the action execution bits SET.
B01 RFU
Command Block Rejection Errors
Module discards and does not attempt to decode any command block associated with a profiled movement in progress.
B02 RFU
B03 = 0 Normal
= 1 Injection Command Block Rejected
The module latches this bit when it receives an INC or IPC for decode and SYS21-B04 is SET.
The module unlatches this bit when it receives an INC or IPC for decode and SYS21-B04 is RESET.
B04 = 0 Normal
= 1 Pack/Hold Command Block Rejected
The module latches this bit when it receives a PKC, HDC, HPC, or PRC for decode and any one of SYS21-B05 -
SYS21-B07 is SET.
The module unlatches this bit when it receives a PKC, HDC, HPC, or PRC for decode and all of SYS21-B05 -
SYS21-B07 are RESET.
B05 = 0 Normal
= 1 Plastication Command Block Rejected
The module latches this bit when it receives a PLC, PPC, or PSC for decode and SYS21-B08 or SYS21-B09 is SET.
The module unlatches this bit when it receives a PLC, PPC, or PSC for decode and both SYS21-B08 and SYS21-B09
are RESET.
B06-13 RFU
B14 = 0 Invalid Input
= 1 Valid Ram (Screw) Position at Input 3 (Used with SYS14-B15 and MCC63 for change-over handshaking, input 3)
The module latches this bit when it detects that a ram (screw) position transducer is connected to input 3.
The module unlatches this bit when it detects that the position transducer has been disconnected during change-over
or that a cavity pressure transducer is permanently connected to input 3.
B15 = 0 Invalid Input
= 1 Valid Ram Cavity Pressure at Input 3 (Used with SYS14-B14 and MCC63 for change-over handshaking, input 3)
The module latches this bit when it detects that a cavity pressure transducer is connected to input 3.
The module unlatches this bit when it detects that the pressure transducer has been disconnected during change-over
or that a ram (screw) position transducer is permanently connected to input 3.
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 97

Word Bit Description
SYS15 Status of On-board Command Blocks
Module latches bits individually when it successfully decodes the referenced command block and places new data into
operational memory. The module does not latch any bit associated with an unrecognizable command block.
Module unlatches all bits in this word:
on power start-up, or
when it receives a new MCC for decode
This bit
latched ON:
B00 MCC
B01 JGC
B02-06 RFU
B07 INC
B08 IPC The module also unlatches this bit when it successfully decodes a new INC.
B09 PKC
B10 HDC
B11 HPC The module also unlatches this bit when it successfully decodes a new PKC or HDC.
B12 PRC
B13 PLC
B14 PPC The module also unlatches this bit when it successfully decodes a new PLC.
B15 PSC
SYS16
This bit
latched ON:
B00-07 RFU
B08 DYC
B09 RLC
B10 RFU
B11 PTC
B12-B15 RFU
SYS17
This bit
latched ON:
B00 MCC
B01 JCC
B02-06 RFU
B07 INC
B08 IPC
B09 PKC
B10 HDC
B11 HPC
B12 PRC
B13 PLC
B14 PPC
B15 PSC
when this on-board block is valid:
Status of On-board Command Block
The module latches bits individually when it successfully decodes the referenced command block and places new data
into operational memory. The module does not latch any bit associated with an unrecognizable command block.
The module unlatches all bits in this word on power start-up or when it receives a new MCC for decoding.
when this on-board block is valid:
Status of Last Successful Decode
The module latches one of the bits in SYS17 and SYS18 (while unlatching all others) when it successfully decodes the
referenced command block and places the new data into operational memory. The module does not latch any bit associated with an unrecognizable command block. Set no more than one bit at a time in SYS17 and SYS18.
when last successful decode was:
3–21Status Word/Bit Descriptions
SYS
Publication
1771-6.5.126 – March 1998
Page 98

3–22 Status Word/Bit Descriptions
Word
Bit Description
SYS18 Status of Last Successful Decode
The module latches one of the bits in SYS17 and SYS18 (while unlatching all others) when it successfully decodes the
referenced command block and places the new data into operational memory. The module does not latch any bit asso-
ciated with an unrecognizable command block. Set no more than one bit at a time in SYS17 and SYS18.
This bit
when last successful decode was:
latched ON:
B00-07 RFU
B08 DYC
B09 RLC
B10 RFU
B11 PTC
B12-B15 RFU
SYS19 Programming-error Alarms
The module latches bits when it attempts to decode a newly received copy of the subject command block and is forced
to discard the data due to the presence of a programming error in the newly received block. The module does not latch
any bit associated with an unrecognizable command block. The module unlatches each bit when it successfully de-
codes the referenced command block and places the new data into operational memory.
This bit
latched
when the module detected a programming error in:
ON:
B00 MCC The module ceases all action execution and sets its outputs to zero when forced to set this bit. The module
does not respond to any action execution commands as long as this bit remains SET.
B01 JGC
B02-06 RFU
B07 INC
B08 IPC
B09 PKC
B10 HDC
B11 HPC
B12 PRC
B13 PLC
B14 PPC
B15 PSC
SYS20 Programming-error Alarms
The module latches bits when it attempts to decode a newly received copy of the subject command block and is forced
to discard the data due to the presence of a programming error in the newly received block. The module does not latch
any bit associated with an unrecognizable command block. The module unlatches each bit when it successfully decodes the referenced command block and places the new data into operational memory.
This bit
when the module detected a programming error in:
latched ON:
B00-07 RFU
B08 DYC The module ceases all action execution and sets its outputs to zero when forced to set this bit. The module
does not respond to any action execution commands as long as this bit remains SET.
B09 RLC
B10 RFU
B11 PTC
B12-B15 RFU
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
Page 99

Word Bit Description
Y21
SYS21
B00-03 RFU
B04 SYS21.B04 for QI(A) SYSB21.B04 for QI(B)
B05 = 0 Normal
B06 = 0 Normal
B07 = 0 Normal
B08 = 0 Normal
B09 = 0 Normal
B10-15 RFU
SYS22 Status of End of Profile Set-Output Execution
B00-03 RFU
B04 = 0 Normal
B05 RFU
Status of Profile Execution
= 0 Normal
= 1 Injection Profile in Progress
The module sets this bit when it starts the profile.
Important: This bit remains set independent of injection suspensions.
The module resets this bit when:
it completes the profile, or
it receives a new action execution command that terminates the profile
= 1 Pack Profile in Progress
The module sets this bit when it starts the profile.
The module resets this bit when:
it completes the profile, or
it receives a new action execution command that terminates the profile
= 1 Hold Profile in Progress
The module sets this bit when it starts the profile.
The module resets this bit when:
it completes the profile, or
it receives a new action execution command that terminates the profile
The module does not leave this bit set when holding outputs to HDC33–36 at completion of the hold profile.
= 1 Pre-decompression Movement in Progress
The module sets this bit when it starts the movement.
The module resets this bit when:
it completes the movement, or
it receives a new action execution command that terminates the movement
Module does not leave this bit set when holding outputs to PRC33–36 at completion of Pre-decompression movement.
= 1 Plastication Profile in Progress
The module sets this bit when it starts the profile.
The module resets this bit when:
it completes the profile, or
it receives a new action execution command that terminates the profile
Module does not leave this bit set when holding outputs to PLC33–36 at completion of the plastication profile.
= 1 Post-decompression Movement in Progress
The module sets this bit when it starts the movement.
The module resets this bit when:
it completes the movement, or
it receives a new action execution command that terminates the movement
Module does not leave this bit set when holding outputs to PSC33–36 at completion of Post-decompression movement
= 1 End of Injection Profile Set-Output in Progress
The module sets this bit when holding its outputs to INC33–36 after completion of the profile.
The module resets this bit when it receives any new action execution command bit.
3–23Status Word/Bit Descriptions
SYS
Publication
1771-6.5.126 – March 1998
Page 100

3–24 Status Word/Bit Descriptions
Word DescriptionBit
B06 = 0 Normal
= 1 End of Hold Profile Set-Output in Progress
The module sets this bit when holding its outputs to HDC33-36 after completion of the profile.
The module resets this bit when it receives any new action execution command bit.
B07 = 0 Normal
= 1 End of Pre-decompression Movement Set-Output in Progress
The module sets this bit when holding its outputs to PRC33-36 after completion of the movement.
The module resets this bit when it receives any new action execution command bit.
B08 = 0 Normal
= 1 End of Plastication Profile Set-Output in Progress
The module sets this bit when holding its outputs to PLC33-36 after completion of the profile.
The module resets this bit when it receives any new action execution command bit.
B09 = 0 Normal
= 1 End of Post-decompression Movement Set-Output in Progress
The module sets this bit when holding its outputs in PSC33-36 after completion of the movement.
The module resets this bit when it receives any new action execution command bit.
B10-15 RFU
SYS23 Double command error. You can determine from DYC01 which bits were set or downloaded at the same time.
SYS24 Double command error. You can determine from DYC02 which bits were set or downloaded at the same time.
Input Level In Engineering Units
The module reports real-time input levels scaled to engineering units.
Word Description
SYS25 Input #1 [11]
SYS26 Input #2 [01]
SYS27 Input #3 [25]
SYS28 Input #4 [04] or [25]
SYS29-32 RFU
Input Level, Raw Signal
Module reports real-time signals at the input to each A/D input converter.
Word Description
SYS33 Input #1 [24]
SYS34 Input #2 [24]
SYS35 Input #3 [24]
SYS36 Input #4 [24]
SYS37-40 RFU
Output Level in Percentage
Module reports real-time %-output it sends to each D/A output converter.
Word Description
SYS41 Output #1 [19]
SYS42 Output #2 [19]
SYS43 Output #3 [19]
SYS44 Output #4 [19]
SYS45-48 RFU
Notes: For [ ] engineering units, see page 2.
Publication
1771-6.5.126 – March 1998
 Loading...
Loading...