

Page 1
Allen-Bradley
160 SSC
V ariable Speed
Controller
(Series B)
0.37 – 2.2 kW (0.5 – 3 HP)
FRN 5.xx – 6.xx
User
Manual
Page 2
Important User Information
In no event will the Allen-Bradley Company be
responsible or liable for indirect or consequential
damages resulting from the use or application of
this equipment.
The examples and diagrams in this manual are
included solely for illustrative purposes. Because
of the many variables and requirements
associated with any particular installation, the
Allen-Bradley Company cannot assume
responsibility or liability for actual use based on
the examples and diagrams.
The information in this manual is organized in
numbered chapters. Read each chapter in
sequence and perform procedures when you are
instructed to do so. Do not proceed to the next
chapter until you have completed all procedures.
Throughout this manual we use notes to make you
aware of safety considerations:
A TTENTION: Identifies information
about practices or circumstances that
can lead to personal injury or death,
property damage or economic loss.
No patent liability is assumed by Allen-Bradley
Company with respect to use of information,
circuits, equipment, or software described in this
manual.
Reproduction of the contents of this manual, in
whole or in part, without written permission of
the Allen-Bradley Company is prohibited.
Throughout this manual we use notes to make you
aware of safety considerations.
Attentions help you:
D identify a hazard
D avoid the hazard
D recognize the consequences
Important: Identifies information that is
especially important for successful application
and understanding of the product.
Page 3

This Page Intentionally Left Blank.
Notes
N-1
Page 4

Notes
This Page Intentionally Left Blank.
N-2
Page 5

This Page Intentionally Left Blank.
Notes
N-3
Page 6

Notes
This Page Intentionally Left Blank.
N-4
Page 7
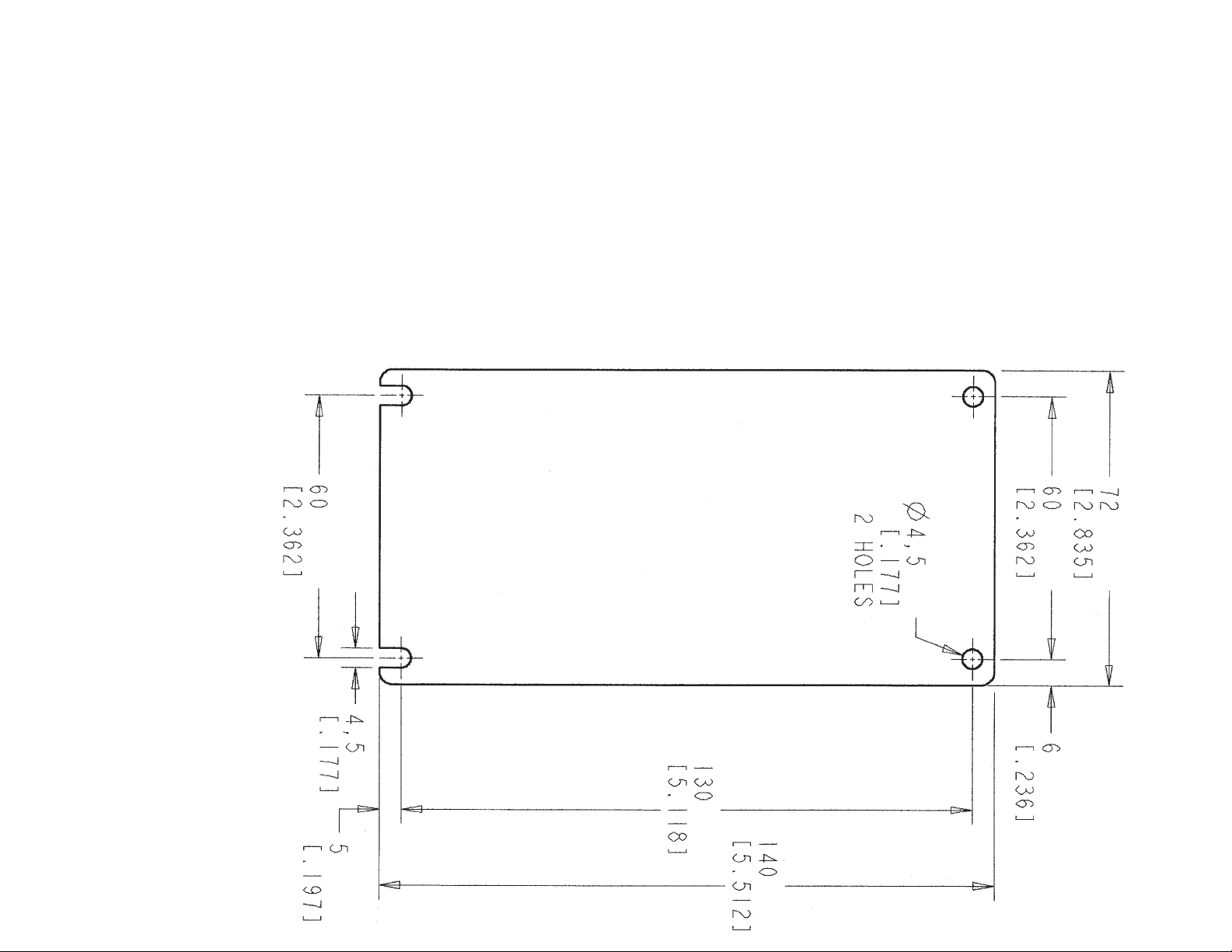
Attach template to mounting surface
and drill four (4) 4.5mm (0.177 inches) diameter holes.
Dimensions are in millimeters [inches].
Page 8

Publication 160-5.9 Summary of Changes
D The Firmware Version of the drive was
changed from FRN5.01 to FRN6.0.
D The parameter P78 – [Compensation] was
added to help eliminate non-sinusoidal motor
currents that are generated by some
motor/drive combinations. See page 5-12.
This information was supplied previously in
the form of a Document Update, Publication
160-5.9DU4, which has been eliminated.
D Firmware version FRN 6.0 includes
enhancements made to the current sensing to
help filter out capacitive current. These
enhancements improve the overall accuracy of
the drive’s displayed output current. Due to
this improvement, the installation of a
“Reactor at Drive” is no longer recommended
because it negatively effects the drive’ s
current sensing accuracy. If an external device
is required to be mounted at the drive for
Reflected Wave purposes, an RWR protective
device is recommended. Cable length
recommendations for an “RWR at Drive” have
Summary of Changes
been added to both T able 2.F and Table 2.G
replacing our previous recommendations of a
“Reactor at Drive”.
D The paragraph titled “Recommended Line
Side Protection” has been updated to provide
added clarity on the use of devices other than
fuses for the purposes of line side protection.
T able 2.C and Table 2.D have also been
updated.
D The paragraph titled “Motor Cable
Recommendations” has been updated.
T able 2.E was added to provide recommended
cable types based on cable distances and
environmental conditions.
D Part numbers and dimensional information for
the new 24V DC interface module and “RF”
series of line filters have been added to
Appendix A.
D Publication 160-5.9DU2 has been
incorporated into the manual. The contents of
the document update can now be found in
Appendix B.
Page 9

Summary of Changes
Summary of Change
This Page Intentionally Blank
Page 10

Table of Contents
Chapter 1 – Information and Precautions 1-1. . . . . . . . . . . . . . . .
General Information 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
General Precautions 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Conventions Used In This Manual 1-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapter 2 – Installation and Wiring 2-1. . . . . . . . . . . . . . . . . . . .
Installation and Storage 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CE Compliance 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Controller Features 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Power Wiring For Preset Speed and Analog Signal Follower Models 2-2. . . . . . . . . . . . .
Input Power Conditioning 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Recommended Line Side Protection 2-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Motor Cable Recommendations 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Control Wiring Requirements 2-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Control Wiring – Analog Signal Follower Model 2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Control Wiring – Preset Speed Model 2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Control Wiring Diagrams 2-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapter 3 – Program Keypad Module 3-1. . . . . . . . . . . . . . . . . . .
Features 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Display Mode 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Program Mode 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Removing Program Keypad Module 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapter 4 – Start-Up 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Start-up Procedure 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapter 5 – Parameters and Programming 5-1. . . . . . . . . . . . . . .
Overview of Parameters 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Programming Example 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Display Group Parameters 5-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Program Group Parameters 5-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapter 6 – Troubleshooting and Fault Information 6-1. . . . . . . .
Fault Information 6-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Troubleshooting 6-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Block Diagram of Bulletin 160 Analog Signal Follower 6-4. . . . . . . . . . . . . . . . . . . . . . .
Appendix A
Controller Specifications A-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Catalog Numbers for Bulletin 160 Accessories A-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Controller Dimensions A-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Accessory Dimensions A-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
i
Page 11

Table of Contents
Important Information
Appendix B
CE Compliance B-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Essential Requirements for a Conforming EMC Installation B-1. . . . . . . . . . . . . . . . . . . .
General Instructions for an EMC Compliant Installation B-2. . . . . . . . . . . . . . . . . . . . . . .
Low Voltage Directive 73/23/EEC Compliance B-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Index
Index I-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ii
Page 12
Information and Precautions
General Information1
Receiving –
thoroughly inspect the equipment before
accepting the shipment from the freight company.
Check the item(s) received against the purchase
order. If any items are obviously damaged, do not
accept delivery until the freight agent notes the
damage on the freight bill.
If you find any concealed damage during
unpacking notify the freight agent. Also, leave the
shipping container intact and have the freight
agent make a visual inspection of the equipment
in order to verify damage.
General Precautions
In addition to the precautions listed throughout
this manual, you must read and understand the
following statements which are general to the
system.
It is your responsibility to
Chapter 1
Unpacking – Remove all packing material,
wedges, or braces from within and around the
controller. Remove all packing material from the
heat sink.
Inspection – After unpacking, check the item(s)
nameplate catalog number against the purchase
order. An explanation of the catalog numbering
system for the Bulletin 160 controller is included
as an aid for nameplate interpretation. Refer to
the following page for complete nomenclature.
Important: Before you install and start up the
controller, inspect the mechanical integrity of the
system (e.g., look for loose parts, wires,
connections, etc.).
ATTENTION: The surface
temperatures of the controller may
become hot, which may cause injury.
ATTENTION: This controller
contains ESD (Electrostatic Discharge)
sensitive parts and assemblies. Static
control precautions are required when
installing, testing, servicing or
repairing this assembly. Component
damage may result if ESD control
procedures are not followed. If you are
not familiar with static control
procedures, reference A-B Publication
8000-4.5.2, “Guarding Against
Electrostatic Damage” or any other
applicable ESD protection handbook.
ATTENTION: Only personnel
familiar with the controller and
associated machinery should plan or
implement the installation, start-up,
and subsequent maintenance of the
system. Failure to comply may result
in personal injury and/or equipment
damage.
SSC is a trademark of Rockwell Automation
ATTENTION: An incorrectly
applied or installed controller can
result in component damage or
reduction in product life. Wiring or
application errors such as undersizing
the motor, supplying an incorrect or
an inadequate AC supply, or
excessive ambient temperatures may
result in system malfunction.
ATTENTION: The controller
contains high voltage capacitors
which take time to discharge after
removal of mains supply. Before
working on controller, ensure
isolation of mains supply from line
inputs [L1, L2, L3 (U, V, W)]. Wait
one minute for capacitors to
discharge to safe voltage levels.
Failure to do so may result in
personal injury or death.
1-1
Page 13
Chapter 1 –
Information and Precautions
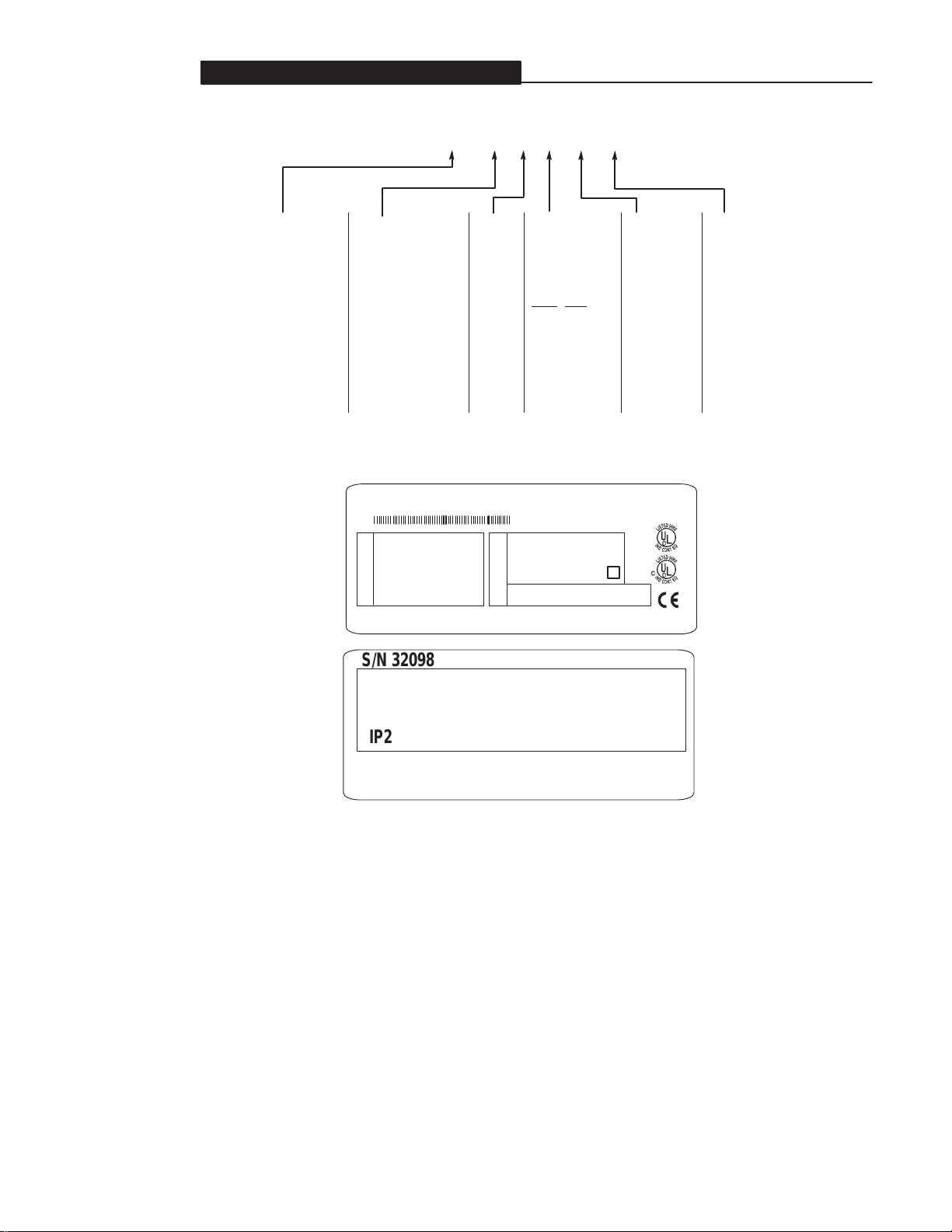
Figure 1.1 – Catalog Number Code Explanation
160 – A A04 N SF1 P1
First
Position
Bulletin
Number
An “S” in the
Bulletin Number
denotes a single
phase input
voltage.
➀ This manual applies only to the open style (IP20) device. Refer to separate instruction sheets for Chassis Mount
and NEMA 4 (IP66) devices.
Second
Position
Voltage Rating
A 200 – 240V 1∅
200 – 240V 3∅
B 380 – 460V 3∅
Figure 1.2 – Nameplate Information
CAT160–AA04NSF1P1 SER B
I
V:
N
A:
P
Hz:
U
VA:
T
ALLEN-BRADLEY
S/N 32098
OPERATING AMBIENT TEMP: 0 – 50°C
SHORT CIRCUIT CURRENT: 10KA
POWER TERMINAL WIRE: Use 75°C Cu Wire
IP20
WARNING: ! Allow 1 Minute after power is removed
before servicing. Accessible surfaces may be hot.
Compatible with Type B RCD protection devices only.
200-240
5.4
50/60
2200
Third
Position
Current
Rating
A01
A02
A03
A04
A06
Fourth
Position
Enclosure
Type
Letter Type
N Open (IP20)
P Chassis Mount
(external
heatsink)
A08
A12
O
V:
3∅
U
T
P
U
T
4mm
Torque 1.35 Nm (12 in.-lbs.)
200-230
4.5
A:
Hz:
0-240
Motor
0.75kW/1HP
Rating:
2
– .75mm2 (12 – 18 AWG.)
Fifth
Position
Control
SF1 = Analog
Signal
➀
Follower
PS1 = Preset
Speed
FRN:
6.xx
3∅
MADE IN U.S.A.
Sixth
Position
Programmer
(Optional)
Program
Keypad Module
Nameplate is located on the
side of the unit.
Conventions Used In This Manual
Parameter numbers and names are shown in bold typeface and follow the format PXX – [*] where P
denotes parameter, XX denotes the two digit parameter number, and * represents the parameter name. For
example, P01 – [Output Frequency].
1-2
Page 14
Installation and Wiring
Chapter 2
Installation and Storage
Take these actions to prolong controller life and
performance:
D store within an ambient temperature range of
–40_ to +85_C
D store within a relative humidity range of 0%
to 95%, non-condensing
D protect the cooling fan by avoiding dust or
metallic particles
D avoid storing or operating the controller where
it could be exposed to a corrosive atmosphere
D protect from moisture and direct sunlight
D operate at an ambient temperature range of 0_
to +50_C
T o maintain proper working conditions, install the
controller on a flat, vertical and level surface. Use
mounting screws up to 4.5mm (0.177 inches) in
diameter or mount on 35mm DIN Rail.
CE Compliance
Refer to Appendix B for detailed information.
Mounting Requirements
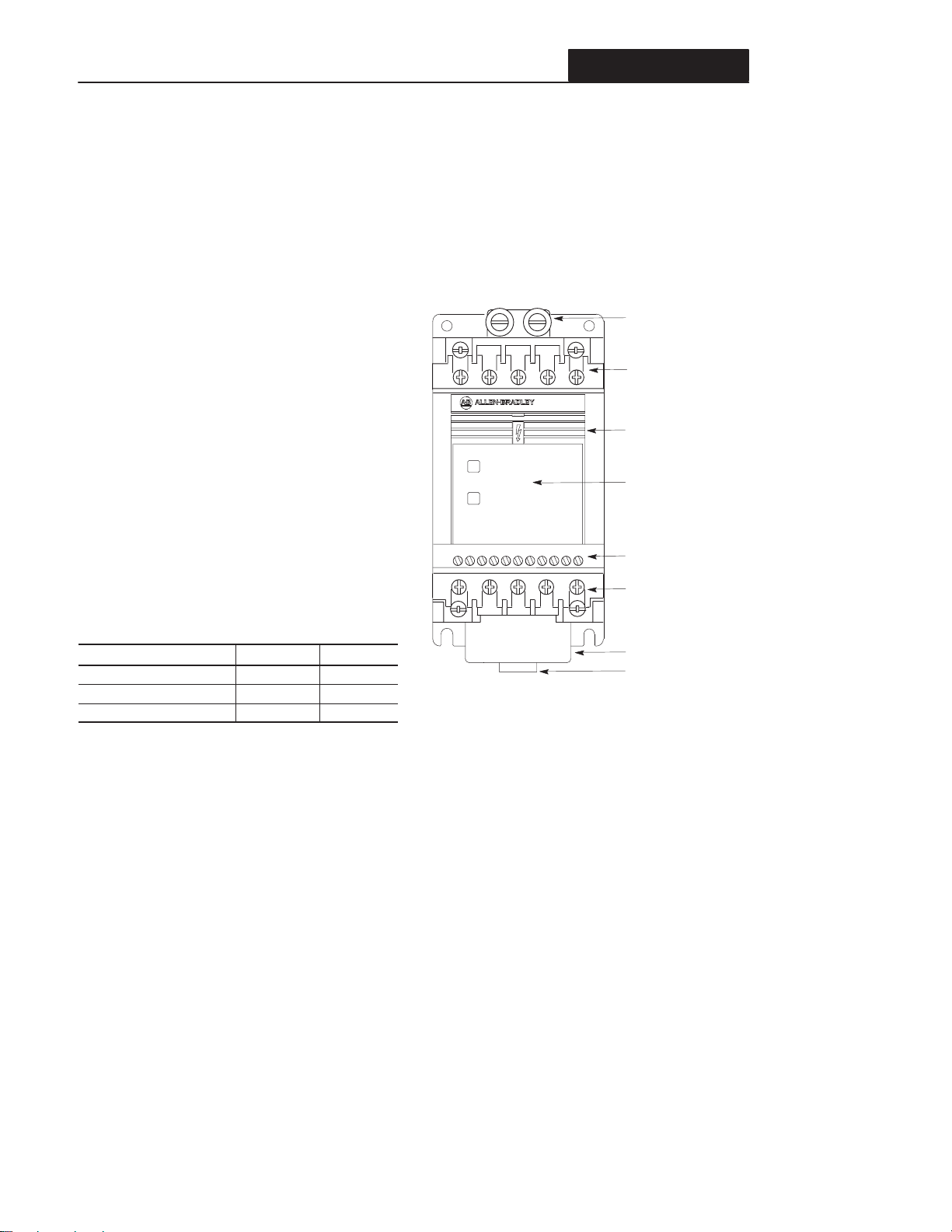
Controller Features
Figure 2.1 below details the features of both the
Analog Signal Follower and Preset Speed models.
Important: The features are the same for single
and three phase units.
Figure 2.1 – Controller Features
Ground Tab/
Protective Earth
BR
L3L2L1
FAUL T ➁
READY ➂
3
T
–
876543219110 1
–
R
ST
2
T1T
VDCDC
UW
BR
+
+
Terminal Block One
(TB1) – For Line
Power. ➀
Ready/Fault
Indicating Panel –
Standard for Bulletin
160 controllers. ➃
LEDs – Indicate
operational status.
Terminal Block Three
(TB3) – For Control
Wiring.
Terminal Block Two
(TB2) – For Motor
Wiring. ➀
Description Metric English
Min. Panel Thickness (14 GA) 1.9mm 0.0747 in.
Mounting Base Screws m4 x 0.7 # 8–32
Mounting T orque 1.13 to 1.56 Nm. 10–14 lb. in.
D See Appendix A for details on controller
dimensions and weights.
D There must be a minimum of 12.5mm
(0.5 inches) clearance around all sides of the
controller. Use either DIN rail or mounting
holes. (Use the drilling template at the back of
the manual for mounting the controller.)
D Leave debris cover attached during controller
installation to protect from falling debris. T o
ensure proper controller operation, remove
cover before applying power.
Fan
DIN Latch
➀ Refer to Figure 2.2
➁ The FAULT (red) indicator illuminates when a controller fault
condition exists. Refer to Chapter 6 for details on how to clear a fault
and general troubleshooting procedures.
➂ The READY (green) indicator illuminates when the DC bus is
charged and the controller is ready to run.
➃ Bulletin 160 controllers are fully functional when installed with a
Ready/Fault indicating panel. All control functions can be performed
from the control terminal block (TB3). Factory default parameter
settings cannot be changed with the Ready/Fault indicating panel.
A Program Keypad Module can be ordered separately, Catalog
160-P1, or as a factory-installed option by adding “P1” to the end of
the catalog number. Refer to Chapter 3, Program Keypad Module
for a detailed explanation of functionality.
2-1
Page 15
Chapter 2 –
Installation and Wiring
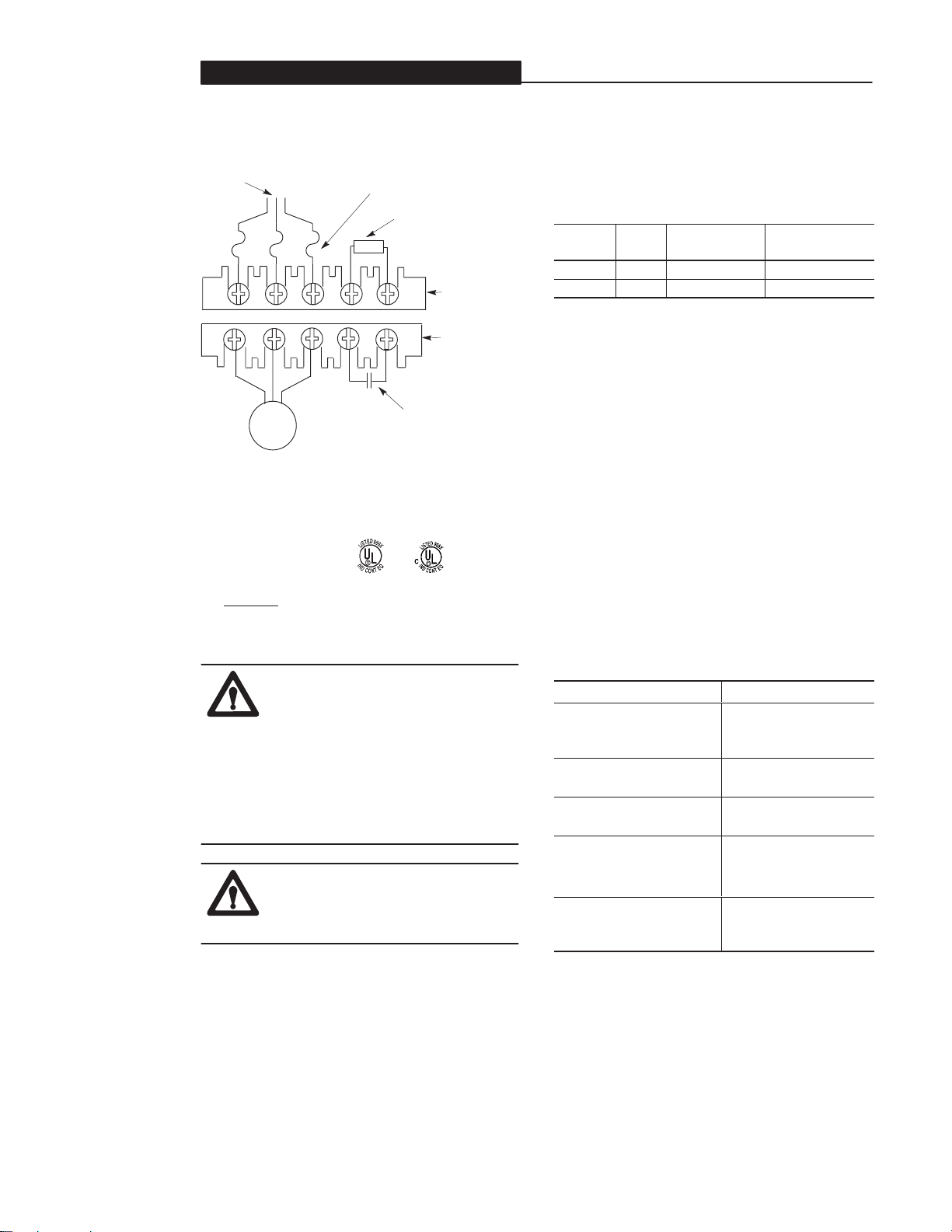
Figure 2.2 – Power Wiring For Analog
Signal Follower and Preset Speed Models
Required Branch
Circuit Disconnect ➀
R
T
1
UW
➀ For single phase input applications, connect the AC input line to
input terminals (L1) R and (L2) S.
➁ Connection for dynamic brake resistors for all models.
Important: P52 – [DB Enable] must be enabled for proper
operation. See Appendix A for part numbers.
➂ Bulletin 160 controllers are
motor overload protective devices. An external overload relay is
not required
➃ Connection for an external capacitor module. Provides extended
ride through capability and improved inherent braking
performance. See Appendix A for part number.
L3L2L1
ST
T
2
T
VDCDC
Motor ➂
for single motor applications.
Input Line Protective Device –
See Table 2.C and Table 2.D.
BR BR
–
+
–
3
+
Capacitor Module
Option ➃
Dynamic Brake
Module Option ➁
Terminal
Block One
(TB1) – For
Line Power and
Brake Resistor.
Terminal Block
Two (TB2) –
For Motor and
Capacitor
Module.
and listed as
Power Wiring For Preset Speed and Analog
Signal Follower Models
Table 2.A – Power Terminal Block Specifications
Terminal
Block
TB1
TB2
➄ The Bulletin 160 SSC is IP20 with wires installed on power
terminal blocks.
Screw
Size
➄
➄
Max/Min Wire
2
Size mm
M4 4 – 0.75 (12 – 18) 1.81 – 1.35 (16 – 12)
M4 4 – 0.75 (12 – 18) 1.81 – 1.35 (16 – 12)
(AWG)
Max/Min Torque
Nm. (lb.in.)
Input Power Conditioning
The controller is suitable for direct connection to
AC power lines within the rated voltage of the
controller (see Appendix A). Listed below are
certain power line conditions which may cause
component damage or reduction in product
life. If any of the conditions exist as described in
the table below, install “one” of the devices listed
under the heading “Corrective Action” on the line
side of the controller. Important: Only one
device per branch circuit is required. It should be
mounted closest to the branch and sized to handle
the total current of the branch circuit.
Table 2.B – Power Line Conditions
2-2
A TTENTION: The controller is
intended to be commanded by control
input signals that will start and stop the
motor. A device that routinely disconnects
then reapplies line power to the controller
for the purpose of starting and stopping the
motor should not be used. If it is necessary
to use this method for starting and stopping
or if frequent cycling of power is
unavoidable, make sure that it does not
occur more than once a minute.
ATTENTION: Do not connect power
factor correction capacitors to controller
output terminals T1, T2, and T3 (U, V, and
W) or component damage could occur.
Power Line Condition Corrective Action
Available short circuit currents
(fault currents) greater than 10,000
Amps
Line has power factor correction
capacitors
Line has frequent power
interruptions
Line has high frequency
(>10 Hz) noise spikes in excess of
900V (Induction heaters, RF
equipment, choppers)
Line has intermittent noise spikes
in excess of 2000V (lightening)
S Check supply voltage.
S Line Reactor (See A-4) or
S Isolation Transformer
S Line Reactor (See A-4) or
S Isolation Transformer
S Line Reactor (See A-4) or
S Isolation Transformer
S MOV option (See A-4) or
S Line Reactor (See A-4) or
S Isolation Transformer
S MOV option (See A-4) or
S Line Reactor (See A-4) or
S Isolation Transformer
Page 16

Chapter 2 –Installation and Wiring
at n
at n
use
)N/A
)
A
)
(
)
****
)
(
)
A
A
***
)
)
)
***
at n
at n
use
)
A
)
)
A
)
****
()
A
AA
A
***
()
A
Recommended Line Side Protection
guidelines must be followed in order to meet the
NEC requirements for branch circuit protection:
The Bulletin 160 Smart Speed Controller has
been UL tested and approved for use with a fuse,
circuit breaker or manual motor starter installed
on the line side of the controller. The maximum
branch circuit protective rating is limited to four
times the rated output current of the drive or
30 amperes, whichever is less.
The ratings in T able 2.C and Table 2.D are the
“minimum” recommended values for use with
each drive rating. It should be noted that the
products listed under the column heading “Other
Protective Devices” must follow the proper
application guidelines stated for those products in
order to meet local or national electrical codes.
When using Bulletin 140 manual motor starters or
Bulletin 1492 circuit breakers the following
Bulletin 140 manual motor starters can be used in
single and group motor applications. In single
motor applications, a fuse or UL489 rated circuit
breaker is required upstream from the Bulletin
140 manual motor starter. In group motor
installations, the Bulletin 140 can be used for
protection of an individual motor within the group
and “one set” of fuses or a UL489 rated circuit
breaker serves as the Short Circuit Protective
Device for the entire “Group Installation”.
Bulletin 1492 circuit breakers are rated as
supplementary protective devices. When using
this device, upstream fuses or UL489 rated circuit
breakers are required for each motor in the branch
circuit regardless if it is a single or group motor
installation.
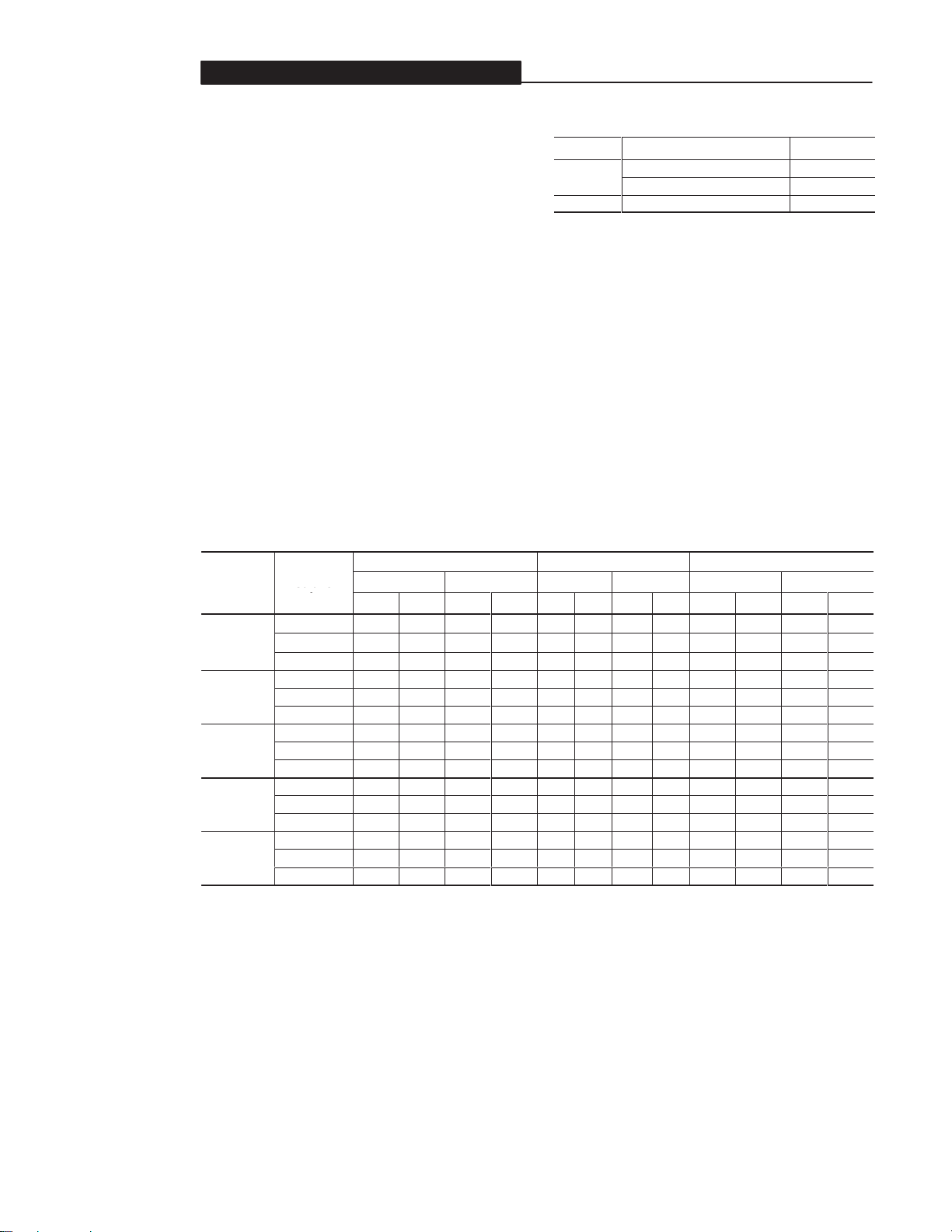
Table 2.C – Minimum Recommended Line Side Protective Devices for 200 – 240V rated units
3 ∅ Rating
kW (HP)
.37 (1/2
.55 (3/4)
.55 (3/4
.75 (1)
.75 (1
1.5 (2)
1.5 (2
2.2 (3)
1 ∅ Rating
kW (HP)
N/
.37
.37 (1/2)
1/2
.55
.55 (3/4)
3/4
.75 (1)
.75 (1
1.5 (2)
Fuse
Rating
6 16.37 (1/2
6
6
6
10
10
15 (16
15 (16)
25
Fuse Types
Class CC Class J Rating Type
KLDR/CCMR
KLDR/CCMR
➁
➂
TMR
ATMR
➃
FNQR LPJ 16
FNQR
➇
➁
JDT
JDT
➂
JT
AJT
➃
LPJ
Other Protective Devices
16
16
16
16
16
16
20
140-MN-****
140-MN-
1492-CB3-H***
1492-CB3-H
HFD ***L
HFD
➆
L
➄
➅
Table 2.D – Minimum Recommended Line Side Protective Devices for 380 – 460V rated units
3 ∅ Rating
kW (HP)
.37 (1/2) N/A 3 (4)
.37 (1/2
.55 (3/4)
.55 (3/4
.75 (1)
1.5 (2)
2.2 (3)
➀ Must be dual element time delay.
➁ Littlefuse
➂ Gould Shawmut
➃ Bussman
➄ Allen-Bradley Bulletin 140 manual motor starter. Not recommended
for repetitive application of power to the input of the drive.
Fuse ratings in ( ) denote European size.
1 ∅ Rating
kW (HP)
N/
N/A
N/
N/A
N/A
N/A 15 (16) 16
Fuse
Rating
3 (4
3 (4)
3 (4
➀
6
10
➀
➀
KLDR/CCMR
ATDR/ATQR
Fuse Types
Class CC Class J Rating Type
➁
➂
➃
FNQR
➅ Allen-Bradley Bulletin1492 circuit breaker. Not recommended for
➆ Westinghouse type HFD circuit breaker
➇ Controller is also compatible with RK1, RK5, and BS88
➇
➁
JDT
➂
AJT
➃
LPJ
repetitive application of power to the input of the drive.
fuse types.
Other Protective Devices
6.3
6.3
6.3
6.3
6.3
16
140-MN-****
1492-CB3-H***
HFD ***L
➆
➄
➅
2-3
Page 17
Chapter 2 –
Dry
Motor
Ratings
Insulat on
(3 HP)
(
)
(
)
(
)
(
)
Installation and Wiring
Motor Cable Recommendations
A variety of cable types are acceptable for
variable speed controller installations. For many
installations, unshielded cable is adequate,
provided it can be separated from sensitive
circuits. As an approximate guide, allow a
spacing of 1 meter (3.3 feet) for every 10 meters
(33 feet) of unshielded length. If you cannot
Table 2.E – Recommended Cable Type(s)
Condition Insulation Type(s) Example(s)
Dry
Wet XLPE XHHW-2
➀ For AC line voltages in excess of 264V AC, or motor cable
distances greater than 50 ft (15m), wire with XLPE insulation is
recommended.
PVC① THHN
XLPE XHHW-2
separate motor cables from sensitive circuits, or if
you must run motor cables from multiple
controllers (more than three) in a common
conduit or cable trays, shielded motor cable is
recommended to reduce system noise.
Motor cables should be four-conductor with the
ground lead and shield (if using shielded cable)
connected to the controller ground terminal and
the motor frame ground terminal.
T able 2.E provides the recommended wire type
for both wet and dry installations as defined by
NEC 1996 (70-31). These recommendations are
based upon a variety of factors such as insulation
thickness, susceptibility to moisture and
Long Motor Cable Effects
The controller should be installed as close to the
motor whenever possible. Installation with long
motor cables may require the addition of external
devices to limit voltage reflections at the motor
(reflected wave phenomona). See T able 2.F for
recommendations.
Important: The use of an external device to limit
reflected wave issues may effect the accuracy of
the Bulletin 160 current sensing. T able 2.G
provides recommended cable length due to
Capacitive Current considerations.
susceptibility to nicks and cuts during installation.
Table 2.F – Cable Length Recommendations — Reflected Wave
380 – 460V
Insulation
Rating
2.2 kW
1.5kW
2 HP
0.75 kW
1 HP
0.55 kW
0.75 HP
0.37 kW
0.5 HP
➁ The reflected wave data applies to all PWM frequencies 2 to 8 kHz. For 230V ratings see Table 2.G.
➂ Cable lengths listed are for PWM frequencies of 2 kHz. Refer to publication 1204-5.1 for cable length recommendations at other PWM frequencies.
➃ The maximum peak-to-peak voltage of the controller is 1400V due to the minimum on/off time software. Reflective Wave Testing has been
done on cable lengths up to 500 feet. See Table 2.G for Capacitive Current Considerations.
1000 Vp-p
1200 Vp-p
1600 Vp-p 500➃152➃500➃152➃360 110 600 183 500➃152➃500➃152
1000 Vp-p 40 12 40 12 300 92 300 92 250 76 250 76
1200 Vp-p 60 18 60 18 300 92 540 165 340 104 340 104
1600 Vp-p 500➃152➃500➃152➃300 92 540 165 500➃152➃500➃152
1000 Vp-p 55 17 40 12 300 92 300 92 325 99 325 99
1200 Vp-p 125 43 60 18 300 92 375 114 500 152 325 99
1600 Vp-p 500➃152➃500➃152➃300 92 375 114 500➃152➃500➃152
1000 Vp-p 45 14 40 12 300 92 300 92 300 92 300 92
1200 Vp-p 125 38 60 18 300 92 375 114 500 152 500 152
1600 Vp-p 500➃152➃500➃152➃300 92 375 114 500➃152➃500➃152
1000 Vp-p 45 14 40 12 300 92 300 92 300 92 300 92
1200 Vp-p 125 38 50 15 300 92 375 114 500 152 500 152
1600 Vp-p 500➃152➃500➃152➃300 92 375 114 500➃152➃500➃152
Motor Cable Only RWR at Drive
Shielded Unshielded Shielded Unshielded Shielded Unshielded
ft. m. ft. m. ft. m. ft. m. ft. m. ft. m.
40
60 18 60 18 360 110 600 183 260 79 260 79
12 40 12 360 110 300 92 210 64 210 64
➁
③
Reactor at Motor
➃
➃
➃
➃
➃
2-4
Page 18
Chapter 2 –Installation and Wiring
Ratings
kz
(3 HP
(2 HP
(1 HP)
(0.75 HP)
(0.5 HP)
Ratings
Table 2.G – Cable Length Recommendations — Capacitive Current
380 – 460V
2.2 kW
1.5 kW
0.75 kW
0.55 kW
0.37 kW
kHz
2 360 110 750 229 280 85 600 183 410 125 525 160
4 335 102 600 183 260 79 600 183 370 113 475 145
8 300 91 410 125
2 300 91 540 165 430 131 540 165 310 94 425 130
4 300 91 425 130 410 125 425 130 300 91 400 122
8 300 91 300 91
2 300 91 375 114 250 76 375 114 300 91 300 91
4 300 91 300 91 225 69 375 114 300 91 300 91
8 300 91 300 91
2 300 91 375 114 250 76 375 114 300 91 300 91
4 300 91 310 94 225 69 375 114 300 91 300 91
8 300 91 300 91
2 300 91 375 114 250 76 375 114 300 91 300 91
4 300 91 325 99 225 69 375 114 300 91 300 91
8 300 91 300 91
Motor Cable Only RWR at Drive
Shielded
②
Unshielded Shielded
②
ft. m. ft. m. ft. m. ft. m. ft. m. ft. m.
➀ ➀ ➀ ➀
➀ ➀ ➀ ➀
➀ ➀ ➀ ➀
➀ ➀ ➀ ➀
➀ ➀ ➀ ➀
①
Reactor at Motor
Unshielded Shielded
310 94 420 128
300 91 350 107
300 91 300 91
300 91 300 91
300 91 300 91
②
Unshielded
200 – 240V
Shielded Unshielded Shielded Unshielded Shielded Unshielded
ft. m. ft. m. ft. m. ft. m. ft. m. ft. m.
0.37 to 2.2 kW
Motor Cable Only RWR at Drive Reactor at Motor
(0.5 to 3 HP)
2 thru 8 kHz
➀ Not recommended for use above 4 kHz PWM frequency.
➁ When using shielded cable at lightly loaded conditions, the 0.75 Kw (1 Hp) and below cable length recommendations are 61m (200 ft.)
➂ Not recommended for 230V applications.
500 152 800 244 ③ ③ ③ ③ 500 152 800 244
2-5
Page 19

Chapter 2 –
Installation and Wiring
Control Wiring Requirements
D run all signal wiring in either a shielded cable,
or a separate metal conduit.
D only connect shield wire at control terminal
block common terminals TB3-3 and TB3-7.
D do not exceed control wiring length of 15
meters (50 feet). Control signal cable length is
highly dependent on electrical environment
and installation practices. T o improve noise
immunity the control terminal block common
must be connected to earth ground.
D use Belden 8760 (or equivalent) — 18AWG
(0.750mm
conductor.
Table 2.H – Control Terminal Block Specifications
Terminal
Block
2
), twisted pair, shielded or 3
Max/Min
Wire Size
2
(AWG)
mm
TB3 2.5 – 0.5
(14 – 22)
ATTENTION: The controller is
supplied with an internal 12V supply.
Dry contacts or open collectors are
required for discrete control inputs. If
an external voltage is applied,
component damage could occur.
Max/Min
Torque
Nm. (lb.in.)
0.8 – 0.4
(8 – 4)
Control Wiring – Analog Signal Follower
Model
You can control the output frequency of the
controller via the Control T erminal Block (TB3)
using a remote potentiometer, a –10 to +10V DC
analog input, a 4 – 20mA analog input, or use
P58 – [Internal Frequency]. Important: Only
one frequency source may be connected at a time.
If the frequency reference potentiometer and the
4 – 20mA reference are connected at the same
time, an undetermined frequency reference will
result.
Control Wiring – Preset Speed Model
You can control the output frequency of the
controller via the Control T erminal Block (TB3)
using dry contacts or open collector inputs to
SW1, SW2, and SW3 or use P58 – [Internal
Frequency]. A program keypad module is
required to change the factory default settings.
Refer to Chapter 5, parameters 61 – 68 for the
eight preset frequency factory default settings and
switch configurations.
Wiring Diagrams
Important: Refer to the diagrams on the
following pages for control wiring information.
2-6
A TTENTION: The drive start/stop
control circuitry includes solid-state
components. If hazards due to
accidental contact with moving
machinery or unintentional flow of
liquid, gas or solids exist, an
additional hardwired stop circuit is
required to remove AC line power to
the drive. When AC input power is
removed, there will be a loss of
inherent regenerative braking effect
and the motor will coast to a stop. An
auxiliary braking method may be
required.
Page 20

Chapter 2 –Installation and Wiring
Control Wiring
Figure 2.3 – TB3 Control Wiring for Analog Signal Follower Model
Shielded Wire
Signal Specification
+ 10V Pot
1
Pot Wiper or
2
+10/–10V DC Input
Common
3
4–20mA Input
4
Reverse
5
Start
6
Common
7
Stop
8
Normally Closed
9
FAULT
READY
Terminal
TB3
➂
Relay Common
Normally Open
1101
= N.O. Momentary Contact
= N.C. Momentary Contact
Figure 2.4 – TB3 Control Wiring for Preset Speed Model
Shielded Wire
Signal Specification
SW1
1
SW2
2
3
Common
4
SW3
5
Reverse
6
Start
Common
7
Stop
8
9
Normally Closed
Relay Common
Normally Open
1101
FAULT
READY
TerminalTB3
➂
= N.O. Momentary Contact
= N.C. Momentary Contact
10 kΩ Potentiometer, 2 Watts
Controller Input Impedance = 100 kΩ
➁
Common
Controller Input Impedance = 250 Ω
Contact closure input
Contact closure input
➁
Common
➀
➀
Contact closure input required to operate controller
Customer-programmable relay outputs.
Resistive load 0.4A at 125V AC 2A at 30V DC.
Inductive load 0.2 A at 125V AC 1A at 30V DC.
= N.O. Maintained Contact
Contact closure input
Contact closure input
➁
Common
Contact closure input
Contact closure input
Contact closure input
➁
Common
Contact closure input required to operate controller
Customer-programmable relay outputs.
Resistive load 0.4A at 125V AC 2A at 30V DC.
Inductive load 0.2 A at 125V AC 1A at 30V DC.
➀
➀
➀
➀
➀
= N.O. Maintained Contact
➀
➀
➀ Internal 12V supply.
➁ Do not exceed control wiring length of 15 meters (50 feet). Control signal cable length is highly dependent on
electrical environment and installation practices. To improve noise immunity the control terminal block common
must be connected to earth ground.
➂ This diagram shows “three wire” control. Refer to the following page for diagrams of other control wiring methods.
2-7
Page 21

Chapter 2 –
Shielded Wire
Installation and Wiring
Control Wiring (continued)
Use P46 – [Input Mode] to select the control
method for start, stop, and direction control.
Important: Settings 4 through 6 provide
additional flexibility of TB3 control input
terminal 8.
D Setting 0 — Three Wire Control. (This is the
factory default setting). Refer to Figure 2.5.
D Setting 1 — T wo Wire “Run Forward/Run
Reverse” Control. Refer to Figure 2.6.
D Setting 2 — Program Keypad Module control.
See Page 3-1.
D Setting 3 — Momentary “Run Forward/Run
Reverse” control. Refer to Figure 2.7.
D Setting 4 — T wo Wire “Accel/Decel” control.
Refer to Figure 2.8.
D Setting 5 — T wo Wire “Enable” control.
Refer to Figure 2.9.
D Setting 6 — T wo Wire “Local/Remote”
control. Refer to Figure 2.10.
Explanation of Symbols:
= N.O. Momentary Contact
= N.C. Momentary Contact
= N.O. Maintained Contact
= N.C. Maintained Contact
➀ Internal 12V supply.
➁ If both Run Forward and Run Reverse inputs are closed at
the same time an undetermined state could occur.
➂ Do not exceed control wiring length of 15 meters (50 feet).
Control signal cable length is highly dependent on
electrical environment and installation practices. To
improve noise immunity the control terminal block
common must be connected to earth ground.
Figure 2.5 – TB3 Three Wire control (Setting 0)
( Factory Default Setting)
Shielded Wire
Signal
TerminalTB3
5
Reverse
6
Start
7
Common
8
Stop
Specification
Contact closure input
Contact closure input
➂
Common
Contact closure input required to
operate controller
➀
➀
➀
Important: After a Stop input, the Start input
must be toggled to Run again.
Figure 2.6 – TB3 Two Wire “Run Forward/Run
Reverse” control (Setting 1)
➁
Signal Specification
TerminalTB3
Run Reverse
5
Run Forward
6
Common
7
Stop
8
Contact closure input
Contact closure input
➂
Common
Contact closure input required to
operate controller
➀
➀
➀
Important: The “Run” inputs must be
maintained. After a Stop input, either a Run
Forward or a Run Reverse input must be toggled
to run again.
Figure 2.7 – TB3 Momentary “Run Forward/Run
Reverse” control (Setting 3)
Shielded Wire
➁
Signal Specification
TerminalTB3
Run Reverse
5
Run Forward
6
Common
7
8
Stop
Contact closure input
Contact closure input
➂
Common
Contact closure input required to
operate controller
➀
➀
➀
Important: The “Run” inputs do not need to be
maintained. After a stop input, either a Run
Forward or a Run Reverse input does not need to
be toggled to run again.
ATTENTION: Hazard of injury
exists due to unintended operation.
When P46 – [Input Mode] is set to
“3” and the “Run” input is
maintained, a stop function is
provided only when the stop input is
active (open).
2-8
Page 22

Chapter 2 –Installation and Wiring
Control Wiring (continued)
Figure 2.8 – TB3 Two Wire “Accel/Decel” control
Shielded Wire
➁
③
Refer to Figure 2.11.
Figure 2.9 – TB3 Two Wire “Enable” control
Shielded Wire
➁
③
Refer to Figure 2.11.
Figure 2.10 – TB3 Two Wire “Local/Remote” control
Shielded Wire
➁
③
Refer to Figure 2.11.
(Setting 4)
Signal
TerminalTB3
5
Run Reverse
6
Run Forward
7
Common
③
8
Accel/decel
select
(Setting 5)
TerminalTB3
5
6
7
③
8
(Setting 6)
Signal
TerminalTB3
5
Run Reverse
6
Run Forward
7
Common
③
8
Local/
Remote
Signal
Run Reverse
Run Forward
Common
Enable
Specification
Contact Closure Input
Contact Closure Input
③
Common
Contact Closure Input
Used to select Accel/Decel.
Specification
Contact Closure Input
Contact Closure Input
Common
Contact Closure Input required
to operate controller
Specification
Contact Closure Input
Contact Closure Input
③
Common
Contact Closure Input
Used to select local (TB3)
Control.
①
①
①
①
①
③
①
①
①
①
Figure 2.11
Input Mode
Setting
➃
4
➃
5
➃
6
➃ The “Run” input must be a maintained input. After a stop
command, either a “Run Forward” or “Run Reverse” input must
be toggled to start the controller.
➄ When this input is in an open state, P69 – [Accel Time 2] and
P70 – [Decel Time 2] are active.
➅ When this input in in an open state, all power is removed from
the motor and it will “coast to rest”.
➆ When this input is in an open state the Frequency source is
always from the terminal block regardless of the setting of
P59 – [Frequency Select].
TB3-8
Open
Accel 2
Decel 2
Controller
Disabled
Local (TB3)
Control
TB3-8
Closed
➄
➅
➆
Accel 1
Decel 1
Controller
Enabled
Remote
Control
Important: In modes 4 through 6, Terminal
TB3-8 is also used to clear faults. See Figure 2.12
for details.
Important: The system programmer is
responsible for returning terminal TB3-8 to its
original state if necessary.
Figure 2.12
TB3-8
CLOSED
TB3-8
OPEN
Fault
occurs
Fault
clears
Fault
occurs
Fault
clears
2-9
Page 23

Chapter 2 –
Installation and Wiring
This Page Intentionally Blank
2-10
Page 24

Program Keypad Module
Chapter 3
Features
The program keypad module is located on the
front panel of the controller. It features the
following:
D five keys on the module for display or
programming controller parameters
D three keys for control inputs to the controller
D directional LEDs
D a 6 digit, seven segment LED display
Figure 3.1 – Program Keypad Module Features
These two digits display the active
parameter number for both display and
program parameters, which are
designated as P## throughout this
SELect
The
program mode. It enables the editing of
a parameter value. When you press this
key the program mode indicator flashes.
disables the editing of a parameter
The
motor rotates in reverse direction.
key is only used while in
The
ESCape
toggle between the display mode
and program mode. When in
program mode, this key also
key allows you to
counter clockwise LED
illuminates constantly when the
manual.
value.
➀
When the
indicator
parameter value. When in display
mode, the program indicator does not
display.
Display Mode
The controller always powers up in the display
mode. While in this mode you may view all read
only controller parameters, but not modify them.
Program Mode
You enter the program mode by pressing the ESC
key. While in program mode, you can edit any
programmable controller parameters. Refer to
Chapter 5 for programming steps.
program mode
flashes, you can edit the
These four digits
display the parameter
value or fault code
number.
up/down
Use the
arrow keys to scroll
through a list of
parameters, or increase
and decrease parameter
values. Press and hold
either key to increase
scrolling speed.
Pressing the
while in programming
mode causes the current
value displayed to be
entered into memory. When
you press this key the
program mode indicator
remains on, but stops
flashing.
enter
➂
key
Pressing the
motor to ramp down to 0 Hz and then
ramp up to its set speed in the opposite
➀
Indicates commanded direction. Actual motor rotation could be
different if motor leads are not connected properly. See
Chapter 4, Start-up for details on how to verify motor rotation.
➁
When the motor is running, pressing this key causes the
(currently illuminated) LED to flash indicating motor rotation while
reverse
key causes the
direction.
The
illuminates constantly when
➁
the motor rotates in forward
clockwise LED
direction.
➂
stop
The
start
key initiates a
start command when the
controller is programmed
➀
for local start/stop control
(when P46 – [Input Mode]
is set to “2”).
decelerating to zero. The opposite LED will illuminate indicating
the commanded direction.
Real time frequency adjustment can be achieved when using
P58 – [Internal Frequency].
The
motor to “Coast”, “Ramp” or
“DC Brake” to stop
depending on the setting of
P34 – [Stop Mode].
key initiates the
3-1
Page 25

Chapter 3 –Program Keypad Module
Removing Program Keypad Module
ATTENTION: Ensure that you
disconnect line power and wait
one minute before installing or
removing the program keypad
module. Failure to do so may
result in personal injury or death.
Figure 3.2 – Removing Program Keypad Module
Insert a small screw driver into
slot, pry back, and pivot module
out. Avoid bending or twisting the
contact pins located underneath
the center portion of the module.
ATTENTION: This controller contains
ESD (Electrostatic Discharge) sensitive
parts and assemblies. Static control
precautions are required when installing,
testing, servicing or repairing this
assembly. Component damage may
result if ESD control procedures are not
followed. If you are not familiar with
static control procedures, reference A-B
Publication 8000-4.5.2, “Guarding
Against Electrostatic Damage” or any
other applicable ESD protection
handbook.
Program Keypad
Module
Dipswitch that changes P35 – [Base
Frequency] from 50 to 60 Hertz
when program keypad module is not
installed.
Installing Program Keypad Module
Insert the module bottom end first and then press on the symbol at the top
of the module until the module is fully seated. The module is fully seated
when its face is flush with the edges of its surrounding case.
3-2
Important: When a program keypad
module is installed, P35 – [Base
Frequency] overrides this switch
setting. Once P35 – [Base Frequency]
is changed from its factory default
setting, the switch remains overridden
until all parameters are reset to their
factory default settings using
P56 – [Reset Defaults]
Page 26

Start-Up
Chapter 4
Chapter 5 provides a comprehensive
description of all controller parameters.
Review the factory default settings. If
your controller is equipped with a
Program Keypad Module these
parameters can be changed to meet
your specific application requirements.
An example of how to program a
parameter is shown at the beginning of
Chapter 5.
Start Here
ATTENTION: Power must be applied to the controller to perform the following start-up procedure. Some of the
voltages present are at incoming line potential. To avoid electric shock hazard or damage to equipment, only
qualified service personnel should perform the following procedure. Thoroughly read and understand the
procedure before beginning. If an event does not occur while performing this procedure, Do Not Proceed.
Remove Power by opening the branch circuit disconnect device and correct the malfunction before continuing.
Verify the controller is installed per instructions outlined in Chapter 2 including:
D Minimum clearance distance between controller and other equipment.
D Proper grounding practices have been followed.
D Proper power and control wiring has been used.
Commonly Changed Parameters
Parameter
P30 – [Accel Time 1]
P31 – [Decel Time 1]
P33 – [Maximum Frequency]
P34 – [Stop Mode Select]
P35 – [Base Frequency]
P36 – [Base Voltage]
P42 – [Motor Overload Current]
P46 – [Input Mode]
P47 – [Output Configure]
Preset Speed Model Only
P61 – P68 – [Preset Frequency 0–7]
Start-Up Checklist
Set to...
desired accel time.
desired decel time.
maximum frequency required.
desired stopping mode.
motors rated nameplate frequency.
motors rated nameplate voltage.
motor nameplate Full Load Amps [FLA].
desired control method.
desired output functionality.
desired preset frequencies.
Verify that AC line power at the
disconnect device is within the rated
value of the controller.
Disconnect and lock out all incoming power to
the controller including incoming AC power to
terminals L1, L2 and L3 (R, S and T) of power
terminal block TB1.
Verify that the motor leads are connected to the
power terminal block TB2, terminals T1, T2, T3 (U,
V, W).
Verify that the STOP input is present at the TB3 control terminal block.
See page 2-9 for details on TB3-8 functionality when using P46 – [Input
Mode] settings 4 through 6.
Confirm that all other control inputs are connected to
the correct terminals and are secure. GO TO THE
NEXT PAGE.
A
ATTENTION: A DC Bus
voltage may be present at the
power terminal blocks (TB1)
and (TB2) for approximately
one minute after power is
removed from the controller.
4-1
Page 27

Chapter 4 –Start-Up
A
If you have a blank display panel.
The READY [green] indicator
will illuminate. Use remote
inputs to TB3 control terminal
block to operate the controller.
Check for proper motor rotation by setting the frequency
source to its minimum setting.
If you are using a program keypad module, verify that the
CLOCKWISE LED is illuminated. If you are using a blank
display panel, verify that the REVERSE input to TB3 is in
the OPEN position.
Issue a START command from either the program keypad
module or TB3 control terminal block.
Reconnect the power to the
controller.
Do you have a Analog Signal
Follower controller or a Preset Speed
controller?
Analog Signal Follower controller Preset Speed controller
If you have a program keypad module.
P01– [Output Frequency] will display. If the
controller has been previously powered up, a
different parameter number may display .
Important: To enable the start and reverse
keys from the program keypad module, set
P46 – [Input Mode] to a “2” and cycle power
or set P56 – [Reset Function] to 2. Refer to
the programming example in Chapter 5.
Check for proper motor rotation by selecting P61 –
[Preset Frequency 0]. This requires removing all inputs
to SW1, SW2, and SW3 on TB3 [see Figure 2.5 in
Chapter 2]. The factory default setting for P61 – [Preset
Frequency 0] is 3 Hz.
If you are using a program keypad module, verify that the
CLOCKWISE LED is illuminated. If you are using a blank
display panel, verify that the REVERSE input to TB3 is in
the OPEN position.
Slowly increase the speed until the motor begins to turn.
Check the direction of the motor.
Issue a STOP command from either the program
keypad module or TB3 control block terminal.
Start-Up is complete.
Disconnect and lock out all incoming power to TB1 terminals L1, L2, and L3 [R, S and T].
Switch any two of the three motor leads connected to TB2, terminals T1, T2 and T3 [U, V and W].
Yes No
4-2
Issue a START command from either the program
keypad module or TB3 control terminal block. Check the
direction of motor rotation.
Issue a STOP command from either the program
keypad module or TB3 control block terminal.
Is the direction of motor
rotation correct?
ATTENTION: A DC Bus voltage may be present at the
power terminal blocks (TB1) and (TB2) for approximately
one minute after power is removed from the controller.
Page 28

Parameters and Programming
Chapter 5
Overview of Parameters
This chapter covers both display and program parameters. Display parameters are read only (they cannot
be programmed), while program parameters can be changed to fit your motor control requirements. You
must have a Program Keypad Module to view/change display and program parameters. The table below
describes which parameters apply to the Preset Speed and Analog Signal Follower models. Refer to the
programming example below for programming instructions.
Parameter Type Parameter Numbers
Analog Signal Follower Model Preset Speed Model
Display 1 through 14 and 16 1 through 15
Program 30 through 60 and 69 through 76, 78 30 through 59 and 61 through 73, 78
The following pages contain descriptions of both display and program
parameters. Any parameter description that is shaded pertains only
to the Preset Speed or Analog Signal Follower model. Refer to the
legend to the right.
Programming Example
The following is an example of the programming steps required to change a program group parameter setting. In this example,
parameter 31 – [Decel Time] is changed from its factory default setting of 10.0 seconds to 2.2 seconds. Refer to Chapter 3,
Figure 3.1 on page 3-1 for an explanation of Program Keypad Module display and programming keys.
Important: To reset ALL values to original factory default settings, refer to P56 – [Reset Defaults].
Action Description Keypad Display
1. To program the value of a program group parameter, enter the
program group by pressing the ESCape key. The “program mode
indicator” will illuminate.
2. Press up/down keys until the desired parameter displays. In this case,
press the up key until parameter 31 – [Decel Time] displays.
= Parameter applies only to the Analog Signal Follower model
= Parameter applies only to the Preset Speed model
300.
Program Mode Indicator
3
1.
1
0.
1
0
0.
3. Press the SELect key. The program mode indicator flashes indicating
that you can use the up/down keys to change the parameter
value.
4. Change the decel time value from the factory default of 10 seconds to
2.2 seconds by pressing the down key until 2.2 displays.
Important: Continuously holding the up or down key will cause the value
to increase or decrease as long as the key is pressed.
5. When the desired value displays, press the ENTER key. This writes
the new value to memory. The program mode indicator will stop
flashing and the display will flash once indicating that the new value
has been accepted.
Important:
the editing process, press the ESCape key. The original value of the
parameter will remain unchanged and you will be exited from the program
mode.
If at any time (while in the program mode) you wish to abort
3
1.
Program Mode Indicator Flashes
3
3
Program Mode Indicator
Stops Flashing
3
Program Mode Indicator
Stops Flashing
1
1. 2.
1.
1. 1 0.
0.
2.
0
2
2
0
5-1
Page 29

Chapter 5 –Parameters and Programming
Display Group Parameters
This group of parameters consists of commonly viewed controller operating conditions such as controller
output frequency , output voltage, output current and frequency command. All parameters in this group
are read only.
Important: The last user selected Display Group parameter will be saved on power down.
Display Group
P#
[Output Frequency] Displays the output frequency at TB2 terminals T1, T2 and
01
T3 (U, V and W).
[Output Voltage] Displays the output voltage present at TB2 terminals T1, T2 and
02
T3 (U, V and W).
[Output Current] Displays the output current present at TB2 terminals T1, T2 and
03
T3 (U, V and W).
[Output Power] Displays the output power present at TB2 terminals T1, T2 and T3
04
(U, V and W).
Parameter Description
05 [Bus Voltage] Displays the DC Bus Voltage level.
[Frequency Command] Displays the frequency that the controller is
06
commanded to output. This command may come from any of the frequency sources
selected by P59 – [Frequency Select] or from a currently selected preset frequency.
[Last Fault] Displays the coded last fault number. If a fault is currently active (has not
07
been cleared) the display will flash. See Chapter 6 for fault code descriptions.
08 [Heatsink Temperature] Displays the temperature of the controller heatsink.
[Controller Status] Displays the status of the controller in a binary
09
coded format.
Important: A “0” = inactive
and a “1” = active.
Bit 3 Bit 2 Bit 1 Bit 0
Running
Forward
Accel
Decel
Min/Max
Range
0 to 240 0.1 Hz
0 to [Max Voltage] 1 V olt
0 to 2 Times
Controller Rated
Output Current
0 to 2 Times Rated
Controller Output
Power
0 to 400 – [230V]
0 to 800 – [460V]
0 to 240 0.1 Hz
0 to 49 Numeric Value
0 to 150 1 Degree C
0000 to 1011 Binary Number
Units
0.01Amps
0.01 kW
1 Volt
5-2
[Controller Type] Used by Rockwell Automation field service personnel.
10
[Control Version] Displays version of controller firmware. Used by Rockwell
11
Automation field service personnel.
Numeric Value Numeric Value
Fixed Value Numeric Value
Page 30

Display Group
Á
Á
ÁÁÁÁ
Á
Á
É
É
É
É
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
P#
[Input Status] Displays the open (0) and closed (1) state of the
12
inputs to TB3 in binary coded format as follows:
Parameter Description
Chapter 5 – Parameters and Programming
Min/Max
Range
Bit 3 Bit 2 Bit 1 Bit 0
Units
Input
Mode 2
(Keypad)
N/A
Input Mode 3
(Momentary
Run FWD/
Run REV)
Run
Reverse
Input
Mode 4
(Accel/
Decel)
Reverse
Bit 0
TB3-5
Input
Mode 0
(3-Wire)
Reverse
Input
Mode 1
(2-Wire)
Run
Reverse
0=Accel 2/
Bit 1
TB3-8
Bit 2
TB3-6
Bit 3
Polarity
[Power Factor Angle] Displays the angle in electrical degrees between motor
13
Stop
Start
Forward
0 = Positive Analog Input
1 = Negative Analog Input
Stop
Run
Stop
N/A
Stop
Run
Forward
Decel 2
1=Accel 1/
Decel 1
Forward
Input
Mode 5
(Enable)
Run
Reverse
0=Drive
1=Drive
Run
Forward
Input Mode 6
(Local/
Remote)
Run
0=Local (TB3)
Disable
1=Remote
Enable
Run
voltage and motor current.
14 [Memory Probe Display] Used by Rockwell Automation field service
personnel.
Á
[Preset Status] Displays the open (0) and closed (1) state of Terminal Block Three
15
(TB3) inputs SW1, SW2, and SW3 in binary coded format. This parameter applies to the
Preset Speed model only.
Bit 3 Bit 2 Bit 1 Bit 0
SW1
SW2
SW3
Not Used
[Analog Input] Displays the analog input as a percent of full scale. Used in setting
16
P60 – [Zero Offset], P75 – [Analog Input Minimum], and P76 – [Analog Input
É
É
É
É
БББББББББББББББББ
Maximum].
Important: On initial set up of the controller, apply a 0V or 4mA analog command to the
БББББББББББББББББ
controller. Once applied, if the value of this parameter displays something other than zero,
БББББББББББББББББ
program that value into P60 – [Zero Offset]. Important: The value of the [Zero Offset] will
БББББББББББББББББ
be subtracted from the value of this parameter.
= This parameter applies only to the Preset Speed model.
Run
Reverse
Control
Control
Run
Forward
0000 to 1111 Binary Number
0.0 to 180.0 0.1 degrees
Numeric Value
ÁÁÁÁ
Numeric Value
ÁÁ
0000 to 0111 Binary Number
–150 to +150.0
ÁÁÁÁ
ÁÁÁÁ
ÁÁÁÁ
ÁÁÁÁ
0.1%
ÁÁ
ÁÁ
ÁÁ
ÁÁ
= This parameter applies only to the Analog Signal Follower model.
5-3
Page 31

Chapter 5 –Parameters and Programming
Program Group Parameters
This group contains parameters whose values can be programmed. Refer to the “Programming Example”
outlined earlier in this chapter. Unless otherwise stated, parameters that are programmed while the
controller is running take immediate effect.
Program Group
P# Parameter Description
[Accel Time 1] Time for the controller to ramp from 0.0 Hz. to P33
30
– [Maximum Frequency]. The rate is linear for any increase in command
frequency unless P53 – [S-Curve] is set to a value other than “0”. Setting
this to 0.0 sec. gives
0.1 sec acceleration
with the initial current
limit turned off. This allows
quicker acceleration times
for low inertia systems. For
medium to high inertia
systems, the minimum value
should be 0.1 sec.
[Decel Time 1] Time for the controller to ramp from P33 – [Maximum
31
Frequency] to 0.0 Hz. The rate is linear for any decrease in command frequency
unless P53 – [S-Curve] is set to a value other than “0”. See P30 – [Accel Time 1]
figure above.
➀
[Minimum Frequency] Lowest frequency that controller will output
32
continuously.
➀
[Maximum Frequency] Highest frequency the controller will output.
33
Important: This parameter can’t be changed while running.
[Stop Mode Select] Determines stopping mode used by the controller
34
when a stop is initiated. Refer to the P44 – [DC Hold Time] and P45 – [DC Hold
Voltage] diagrams. Settings: 0 = Ramp to Stop 1 = Coast to Stop
2 = DC Injection Braking 3 = DC Injection Braking (w/Auto Shutoff)
Max. Frequency
Speed
'
0
Accel
0
Time
'a a
Time
Decel
Time
Min/Max
Range
0.0 to 600 0.1 Seconds
'
0.1 to 600 0.1 Seconds 10.0
0 to 240 1 Hz 0 Hz
0 to 240 1 Hz 60 Hz
0 to 3 Numeric
Units Factory
Value
Default
10.0
Seconds
Seconds
0
Important: DC Injection braking with auto shutoff: works the same as standard
DC injection braking except that it may shut off before the P44 – [DC Hold Time].
This occurs if the controller is out of current limit before the P44 – [DC Hold
Time] expires.
35 [Base Frequency] Set value to motor’s rated nameplate frequency.
36 [Base Voltage] Set value to motor’s rated nameplate voltage.
➀ The analog inputs to the controller (i.e., 4–20mA, 0 to +10V, or remote potentiometer) can be scaled to P32 – [Minimum Frequency] and
P33 – [Maximum Frequency] by programming P75 – [Analog Input Minimum] and P76 – [Analog Input Maximum].
➁ For controllers without a program keypad module, you can change P35 – [Base Frequency] to 50 Hz via a dipswitch located under the blank
front panel. See the Removing Program Keypad Module section in Chapter 3.
10 to 240 1 Hz 60 Hz
20 to 460 for
460V units and
20 to 230 for
230V units
1 Volt 460 Volts for
460V units
and 230 for
230V units
➁
5-4
Page 32

Boost Select
Chapter 5 – Parameters and Programming
Program Group
P# Parameter Description
37 [Maximum Voltage] Sets the highest voltage that the controller will
output.
P37 – [Maximum Voltage] must be greater than or equal to P36 – [Base Voltage].
38
[
curve.
See Settings 1
through 8 below
39
[Skip Frequency] Works in conjunction with P40 – [Skip
Frequency Band] creating a range of frequencies at which the controller will
not operate continuously.
Frequency
Command
Frequency
Skip
Frequency
Setting
40 [Skip Frequency Band] Determines the band around the P39 –
[Skip Frequency] parameter. The actual band width will be 2 times [Skip
Frequency Band] – 1/2 the band above and 1/2 the band below. A value of zero
will disable the skip frequency.
] Sets the boost voltage and redefines the Volts per Hz
100
1/2
50
Base
Volts
[Base Voltage], %
8
y
b
1
0
[Base Frequency], %
Setting Boost Voltage % of [Base Voltage]
0
0
1
2.5
2
5.0
3
7.5
4
10.0
5
12.5
6
15.0
7
17.5
8
20.0
Controller Output
Frequency
a
'
'
9
10
11
12
Freq.
1/2 Base
50 100
Setting Fan/Pump Curves
9
45.0
10
40.0
11
35.0
12
30.0
Time
➀
➀
Break Point Voltages
in % of
[Base Voltage]
Two times
y
P40–[Skip Freq Band]
b
Setting
.
Min/Max
Range
20 to 510 for
460V units and
20 to 255 for
230V units
0 to 12 Numeric
0 to 240 1 Hz 240 Hz
0 to 30 1 Hz 0 Hz
Units Factory
1 Volt 460 Volts for
Value
Default
460V units
and 230 for
230V units
2
5-5
Page 33

Chapter 5 –Parameters and Programming
DC Injection Braking Mode
amp to Stop Mode
Program Group
P# Parameter Description
41 [Motor Overload Select] Selects the derating factor for the I
load function.
2
t over-
Min/Max
Range
Units Factory
Default
100
[Overload Current]% of Setting
100
80
60
40
20
[Overload Current]% of Setting
No Derating
80
60
40
20
0 25 50 75100 125150
Max Derating
0 25 50 75100125 150
% Base Speed
% Base Speed
175 200
175 200
100
[Overload Current]% of Setting
Min Derating
80
60
40
20
0 25 50 75100 125 150
% Base Speed
Settings:
0 = No Derating
1 = Minimum Derating
2 = Maximum Derating
175 200
42 [Motor Overload Current] Set to motor nameplate full load Amps
(FLA).
43 [Current Limit] Maximum output current allowed before current limiting
occurs. Value set in percent of controller rated output current.
44 [DC Hold Time] Time that P45 – [DC Hold Voltage] will be applied to the
motor when P34 – [Stop Mode Select] is set to either “DC Injection Braking” or
“Ramp to Stop” mode.
45 [DC Hold Voltage] DC Voltage level applied to the motor during braking
when P34 – [Stop Mode Select] is set to either “DC Injection Braking” or “Ramp
to Stop” mode.
0 to 2 Numeric
0.1 to 200%
of controller
rating
1 to 180%
of controller
rating
0 to 25 0.1 Second 0 Seconds
0 to 115 1 Volt 0 Volts
Value
.01 Amperes 115% of
1 % 150%
Controller
Rating
0
Volts and Speed
5-6
Important: If the current exceeds P43 – [Current Limit] the voltage applied to
the motor will be less than this setting.
R
Speed
y
Stop Command
Voltage
[DC Hold Time]
[DC Hold Voltage]
Time
Volts and Speed
Voltage
Speed
y
Stop Command
[DC Hold Time]
[DC Hold Voltage]
Time
Page 34

Chapter 5 – Parameters and Programming
Program Group
P# Parameter Description
46 [Input Mode] Configures the TB3 control inputs for various “3 wire” or “2
wire run-fwd/run-rev control” schemes. Also enables/disables the program keypad
module input control.
the controller is running. Also, power must be cycled or P56 – [Reset Func-
tion] must be set to “2” for the change to take effect.
Settings: 0 = “3 wire” control
See Chapter 2 for wiring diagrams and description of settings.
47 [Output Configure] Configures the TB3 relay output functionality.
Important: This parameter cannot be programmed while
1 = “2 wire” control
2 = Program Keypad Module control
3 = Momentary ‘‘Run Forward/ Run Reverse” control
4 = 2 wire “Accel/Decel” control
5 = 2 wire “Enable” control
6 = 2 wire “Local/Remote” control
Min/Max
Range
0 to 6 Numeric
Units Factory
Value
Default
0
Settings
0 = Controller
Ready/Faulted
1 = At Frequency
2 = Controller Running
3 = Reverse
4 = Motor Overload
5 = Ramp Regulated
6 = Above Frequency
7= Above Current
8 = Above DC Bus
Voltage
9 = Retries Exhausted the number of retries for P50 – [Restart Tries] is
Output changes state when...
energized and returns to shelf state when
power is removed or when a fault occurs.
the controller reaches commanded frequency.
the controller is running.
the controller is commanded to run in the reverse
direction.
when a motor overload condition exists.
the ramp regulator is modifying the
programmed accel/decel times to avoid an
overcurrent or overvoltage fault from occurring.
the controller exceeds the frequency value
set in P48 – [Output Threshold].
the controller exceeds the value set in P48 –
[Output Threshold]. Important: Value for
P48 – [Output Threshold] must be entered in
% of controller rated output current.
the controller exceeds the DC bus voltage value set
in P48 – [Output Threshold].
exceeded.
0 to 9
Numeric
Value
0
5-7
Page 35

Chapter 5 –Parameters and Programming
Program Group
P# Parameter Description
48 [Output Threshold] Determines the on/off point for the TB3
output relay when [P47 – Output Configure] is set to 6, 7, and 8.
49 [PWM Frequency] Carrier frequency for the PWM output waveform.
The chart below provides derating guidelines based on the PWM freq. setting.
100
98
96
94
92
90
88
% Output Current (A)
86
84
Important: Ignoring derating guidelines can cause reduced controller perfor-
mance.
50 [Restart Tries] Maximum number of times the controller will attempt to
reset a fault.
51 [Restart Time] Time between restart attempts.
52 [DB Enable] Enables/disables external dynamic braking.
Setting “0” = Disable. Settings 1 through 100 = % duty cycle braking.
Important: The Rockwell Automation Bulletin 160 DB Resister package is rated
for 5% duty cycle. Use of this package above 5% should not be used and voids
the UL rating of this device. When setting this parameter to a value above 5%
duty cycle the resister must be sized to avoid overheating of the resister package.
Important: This parameter cannot be programmed while the controller is
running.
Settings
12345678
Ranges
0 to 240 Hz
6
0 to 180 %
7
0 to 815 Volts
8
Carrier Frequency, kHz
Min/Max
Range
0 to 815 Numeric
2.0 to 8.0 0.1 kHz 4.0 kHz
0 to 9 Numeric
0.5 to 300 0.1 Seconds 10.0
0 to 100 Numeric
Units Factory
Value
Value
Value
Default
0
0
Seconds
0
5-8
Page 36

Program Group
P# Parameter Description
53 [S-Curve] Enables a fixed shape S-Curve. See formula below:
Formula:
S-Curve Time = Accel or Decel Time x “S-Curve” setting
1/2 S-Curve
Time
a'
1/2 S-Curve
Time
a'a'
(in percent)
Example:
Accel Time = 10 seconds
S-Curve Setting = 3
S-Curve Time = 10 x .3
a'
Enabled
Important: Maximum
S-Curve time is 60
seconds.
Disabled
Chapter 5 – Parameters and Programming
➀
= 3 Seconds
Min/Max
Range
S-Curve
Setting
0 = 0%
1 = 10%
2 = 20%
3 = 30%
4 = 40%
5 = 50%
6 = 60%
7 = 70%
8 = 80%
9 = 90%
10 = 100%
Units Factory
Numeric
Value
Default
0
a'
Accel Time Decel Time
a'
➀ See values in the Min/Max Range column
54 [Clear Fault] Setting this parameter to a “1” performs a fault reset. When
the fault reset function is complete, the value is automatically set back to “0”.
Important: This parameter cannot be programmed while the controller is
running.
55 [Memory Probe Address] Used by Rockwell Automation field
service personnel.
0 to 1 Numeric
Numeric Value Numeric
Value
Value
0
Numeric
Value
5-9
Page 37

Chapter 5 –Parameters and Programming
É
Program Group
P# Parameter Description
56 [Reset Functions] When using this parameter, the controller’s
parameters and their associated defaults are reset according to the descriptions
below:
0 = Idle State
1 = Reset defaults (restores all controller parameter settings to factory defaults).
2 = Update input mode (restores the controller to most recent programmed P46 –
[Input Mode] setting).
After the reset/update function is complete, this parameter will set itself back to a
“0”. This parameter cannot be programmed while the controller is running.
Important: For setting “1” only, an F48 – [Reprogram Fault] will occur and must
be cleared by cycling the STOP input to the controller. Important: P46 – [Input
Mode] factory defaults to “3 wire” control. If using keypad control, change
parameter setting back to a “2” to regain program keypad control.
57 [Program Lock] When set to a “1”, this parameter protects all controller
parameters from being changed by unauthorized personnel.
58 [Internal Frequency] When P59 – [Frequency Select] is set to a “1”
this parameter provides the controller frequency command. This parameter will
change the frequency command in “Real time”.
Important: Follow normal programming procedures. Once the desired
command frequency is reached the ENTER key must be pressed to store this
value to EEPROM memory. If the ESC key is used before the ENTER key, the
frequency will return to the original value following the normal accel/decel curve.
59 [Frequency Select] Selects the source of the frequency command for
the controller.
Settings: 0 = external frequency command
1 = internal frequency command from P58 – [Internal Frequency].
60 [Zero Offset] Used to add or subtract any system offset to the analog
input. See P16 – [Analog Input] for additional information.
É
Important: This parameter cannot be programmed while the drive is running.
= This parameter applies only to the Analog Signal Follower model.
Min/Max
Range
0 to 2 Numeric
0 to 1 Numeric
0 to 240 0.1 Hz 60.0 Hz
0 to 1 Numeric
–50.0 to 50.0 Numeric
Units Factory
Value
Value
Value
Value
Default
0
0
0
0%
5-10
Page 38

Chapter 5 – Parameters and Programming
P
ccel Time
P
Decel Time
P
ccel Time
P7
Decel Time
Program Group
P# Parameter Description
61 [Preset Frequency 0] The programmed value sets the frequency that
the controller outputs when selected.
62 [Preset Frequency 1] The programmed value sets the frequency that
the controller outputs when selected
63 [Preset Frequency 2] The programmed value sets the frequency that
the controller outputs when selected.
64 [Preset Frequency 3] The programmed value sets the frequency that
the controller outputs when selected.
65 [Preset Frequency 4] The programmed value sets the frequency that
the controller outputs when selected.
66 [Preset Frequency 5] The programmed value sets the frequency that
the controller outputs when selected.
67 [Preset Frequency 6] The programmed value sets the frequency that
the controller outputs when selected.
68 [Preset Frequency 7] The programmed value sets the frequency that
the controller outputs when selected.
69 [Accel Time 2] Time for the controller to ramp from 0.0 Hz. to P33 –
[Maximum Frequency]. The rate is linear for any increase in command frequency
unless P53 – [S-Curve] is set to a value other than “0”. Setting this to 0.0 sec.
gives 0.1 sec acceleration with the initial current limit turned off. This allows
quicker acceleration times for low inertia systems. For medium to high inertia
systems, the minimum value should be 0.1 sec.
70 [Decel Time 2] Time for the controller to ramp from P33 – [Maximum
Frequency] to 0.0 Hz. The rate is linear for any decrease in command frequency
unless P53 – [S-Curve] is set to a value other than “0”.
= This parameter applies only to the Preset Speed model
Min/Max
Range
0 to 240 0.1 Hz 3 Hz
0 to 240 0.1 Hz 20 Hz
0 to 240 0.1 Hz 30 Hz
0 to 240 0.1 Hz 40 Hz
0 to 240 0.1 Hz 45Hz
0 to 240 0.1 Hz 50 Hz
0 to 240 0.1 Hz 55 Hz
0 to 240 0.1 Hz 60 Hz
0.0 to 600 0.1 Sec. 20.0 Sec.
0.1 to 600 0.1 Sec. 20.0 Sec.
Units Factory
Default
Preset Accel/Decel Chart For Preset Speed Model Only
TB3-4
(SW3)
0 0 0 Preset 0
0 0 1 Preset 1
0 1 0 Preset 2
0 1 1 Preset 3
1 0 0 Preset 4
1 0 1 Preset 5
1 1 0 Preset 6
1 1 1 Preset 7
Refer to Figure 2.4 for the Preset Speed model control wiring diagram.
➀ When using P46 – [Input Mode] setting “4” the Accel and Decel times are selected by providing an input to TB3-8. See page 2-9 for additional
information.
TB3-2
(SW2)
TB3-1
(SW1) Preset Accel
30 – [A
69 – [A
➀
1]
2]
31 – [
0 – [
Decel
➀
1]
2]
5-11
Page 39

Chapter 5 –Parameters and Programming
É
É
É
É
É
É
É
É
É
É
É
É
É
É
Program Group
P# Parameter Description
71 [IR Compensation] The programmed value adds a voltage to the
output based on the torque current. An additional 31 volts (150%) are added to
460 volt units to compensate for stator resistance. 15.5 volts (150%) is added for
230 volt units. If the drive trips on an Overload fault (F7), or has trouble
accelerating to commanded speed, this value should be reduced. A setting of 0%
disables this function.
72 [Slip Compensation] This parameter compensates for the inherent slip in an
induction motor. A frequency is added to the commanded output frequency based on
torque current. If motor shaft speed decreases significantly under heavy loads then this
value should be increased. A setting of 0.0 Hz disables the function.
73 [Reverse Disable] When this parameter is set to a 1, the reverse is
disabled. The reverse command may come from the analog input, the TB3-5 input, the
keypad, or a serial command. With a negative analog input and reverse disabled, the
frequency command will be zero in bipolar mode and minimum frequency in unipolar
mode. All digital reverse inputs including two-wire “Run Reverse” will be ignored with
reverse disabled.
Important: This parameter cannot be programmed while the drive is running.
74 [Analog Select]
É
0 =unipolar analog input 0 to +10V
1 =bipolar analog input –10 to +10V
É
Important: With bipolar analog input selected, the reverse inputs (keypad, terminal
É
block, serial) are ignored. In addition, two-wire “Run Reverse” commands, P75 –
[Analog Input Minimum] and P32 – [Minimum Frequency] settings are ignored.
É
Important: This parameter cannot be programmed while the drive is running.
75 [Analog Input Minimum]
É
Important: Do not adjust this parameter until setting P60 – [Zero Offset].
Sets the percent of analog input used to represent P32 – [Minimum Frequency]. If
É
the minimum analog input equals minimum frequency no action is needed. If it is
desired to adjust the analog input to equal [Minimum Frequency], use
É
P16 – [Analog Input] to adjust the analog input to the desired level and then enter
É
this value into P75.
Analog inversion can be accomplished by setting this value larger than P76.
É
Important: This parameter cannot be programmed while the drive is running.
76 [Analog Input Maximum]
É
Important: Do not adjust this parameter until setting P60 – [Zero Offset].
Sets the percent of analog input used to represent P33 – [Maximum Frequency]. If
É
the maximum analog input equals maximum frequency no action is needed. If it is
desired to adjust the analog input to equal [Maximum Frequency], use
É
P16 – [Analog Input] to adjust the analog input to the desired level and then enter
É
this value into P76.
Analog inversion can be accomplished by setting this value smaller than P75.
É
Important: This parameter cannot be programmed while the drive is running.
78 [Compensation] Some drive/motor combinations have inherent instabilities
which are exhibited as non-sinusoidal motor currents. A setting of 1 will enable this
parameter and attempt to correct this condition. A setting of 0 disables this function.
Important: Available in FRN 6.XX and later.
= This parameter applies only to the Analog Signal Follower model.
5-12
Min/Max
Range
Units Factory
Default
0 to 150 1% 50%
0.0 to 5.0 0.1 Hz 2.0 Hz
0 to 1 Numeric
0
value
0 to 1 Numeric
0
value
0.0 to 150.0 0.1% 0.0%
0.0 to 150.0 0.1% 100.0%
0 to 1 Numeric
0
value
Page 40

Troubleshooting and Fault Information
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Fault Information
Figure 6.1 – Fault Display
P07 – [Last Fault] Fault Code Number
➀
047 0
➀
See Table 6.A below for fault descriptions.
Controllers equipped with a program keypad
module will flash the display when a fault is
present. If a fault occurs, parameter 07 – [Last
Fault] displays. You can cross reference the
number that appears on the display (e.g., 04) with
the fault numbers listed in T able 6.A.
Fault LED – (Without Program Keypad
Module)
Controllers without a program keypad module
come equipped with a fault LED. When the fault
LED illuminates, a fault condition exists.
Tips To Clear a Fault
Important: If a fault occurs, it is important to
address and correct the fault as well as the
condition that caused the fault.
To clear a fault, perform one of the following:
D Press the program keypad’s stop button.
D Cycle power to the controller.
D Cycle the input signal at TB3-8 to the
D Set P54 – [Clear Fault] parameter to a “1”.
controller
Chapter 6
.
Table 6.A – Bulletin 160 Fault Descriptions
Fault
Number
03
Á
04
Á
Á
Á
Á
Á
05
Á
Á
Á
Á
Á
Á
Fault
Indication
Power Loss
ÁÁ
Fault
Under Voltage
Fault
ÁÁ
ÁÁ
ÁÁ
ÁÁ
ÁÁ
Over Voltage
ÁÁ
Fault
ÁÁ
ÁÁ
ÁÁ
ÁÁ
ÁÁ
Fault Description
DC Bus voltage remains below 85% nominal on
ББББББББББ
power up for longer than 5 seconds.
DC Bus voltage fell below the minimum. For
ББББББББББ
controllers rated at input voltage 200 – 240V AC,
undervoltage trip occurs at 210V DC bus voltage
ББББББББББ
(equivalent to 150V AC incoming line voltage).
ББББББББББ
For controllers rated at input voltage
ББББББББББ
380 – 460V AC, undervoltage trip occurs at
390V DC bus voltage (equivalent to 275V AC
ББББББББББ
incoming line voltage).
DC Bus maximum voltage exceeded. For
ББББББББББ
controllers rated at input voltage 200 – 240V AC,
overvoltage trip occurs at 410V DC bus voltage
ББББББББББ
(equivalent to 290V AC incoming line voltage).
ББББББББББ
For controllers rated at input voltage
ББББББББББ
380 – 460V AC, overvoltage trip occurs at
815V DC bus voltage (equivalent to 575V AC
ББББББББББ
incoming line voltage).
ББББББББББ
Corrective Action
Monitor incoming AC line for low voltage or line
БББББББББББ
power interruption.
Monitor incoming AC line for low voltage or line
power interruption.
БББББББББББ
БББББББББББ
БББББББББББ
БББББББББББ
БББББББББББ
Bus overvoltage caused by motor regeneration.
БББББББББББ
Monitor incoming AC line for excessive voltage.
Extend the decel time or install dynamic brake
БББББББББББ
module or external capacitor module. See
БББББББББББ
Appendix A.
БББББББББББ
БББББББББББ
БББББББББББ
6-1
Page 41

Chapter 6 –Troubleshooting and Fault Information
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Table 6.A – Bulletin 160 Fault Descriptions (continued)
Fault
Number
06
ÁÁ
07
ÁÁ
ÁÁ
08
ÁÁ
11
ÁÁ
12
ÁÁ
32 EEPROM
Fault
Indication
Motor Stall
ÁÁ
Fault
Motor
Overload
ÁÁ
Fault
ÁÁ
Over
Temperature
ÁÁ
Fault
Operator
ÁÁ
Fault
Overcurrent
FauIt
ÁÁ
Fault Description Corrective Action
Motor has stalled. Motor load is excessive.
ББББББББББ
Internal electronic overload trip. Excessive
motor load exists.
ББББББББББ
ББББББББББ
Excessive heat detected.
ББББББББББ
Keypad has been removed while controller is
ББББББББББ
powered.
Overcurrent detected in hardware trip circuit.
ББББББББББ
EEPROM has invalid data. Reset EEPROM using P56 – [Reset Functions].
Fault
33 Max Retries
Fault
Controller failed to reset fault within the number
of retries set in P50 – [Restart Tries].
38 Phase U Fault Phase to ground fault detected between
controller and motor in phase U.
39 Phase V Fault Phase to ground fault detected between
controller and motor in phase V.
40 Phase W
Fault
41 UV Short
Fault
42 UW Short
Fault
43 VW Short
Fault
48 Reprogram
Fault
49 Zero
Overload
Phase to ground fault detected between
controller and motor in phase W.
Excessive current has been detected between
these two controller output terminals.
Excessive current has been detected between
these two controller output terminals.
Excessive current has been detected between
these two controller output terminals.
Occurs when controller parameters are reset to
defaults.
Occurs when load requires excessive current at
zero hertz, or P38 – [Boost Volts] set too high.
Fault
Longer acceleration time or a reduced load
ББББББББББ
required.
Reduce motor load until controller output current
does not exceed the current set by P42 – [Motor
ББББББББББ
Overload Current]. Reduce P38 – [Boost
ББББББББББ
Select].
Clear blocked or dirty heat sink fins. Check
ambient temperature. Check for blocked or
ББББББББББ
non-operating fan.
Clear fault. Do not remove keypad under power.
ББББББББББ
Check short circuit at the controller output or
excessive load conditions at the motor.
ББББББББББ
Set to 1. Cycle power.
Repair system fault.
Check the wiring between the controller and
motor. Check motor for grounded phase.
Check the wiring between the controller and
motor. Check motor for grounded phase.
Check the wiring between the controller and
motor. Check motor for grounded phase.
Check the motor and external wiring to the
controller output terminals for a shorted condition.
Check the motor and external wiring to the
controller output terminals for a shorted condition.
Check the motor and external wiring to the
controller output terminals for a shorted condition.
Clear fault.
Reduce motor load at zero hertz. Reduce motor
dwell time at zero hertz. Reduce P38 – [Boost
Volts].
6-2
Page 42

Table 6.B – Troubleshooting
Problem Corrective Action
Motor does not start
(No output voltage to motor).
Controller Started but motor
NOT rotating.
(P01 – [Output Frequency]
displays “0.0”).
Motor not accelerating properly.
Can not operate in “RUN FWD/
RUN REV” mode.
Chapter 6 –
1. Check power circuit.
S Check supply voltage.
S Check all fuses and disconnects.
2. Check motor.
S Verify that motor is connected properly.
3. Check control input signals.
S Verify that START signal is present.
S Verify that STOP signal is present.
S Verify that RUN FORWARD and RUN REVERSE signals are NOT both active.
4. Check
1. Check motor.
2. Check frequency source P06 – [Frequency Command].
3. Check control input signals.
4. Check parameter settings.
1. Check motor.
2. Check parameter settings.
1. Verify that P46 – [Input Mode] is set to “1”.
2. Verify that P73 – [Reverse Disable] or P74 – [Analog Select] are not set to “1”.
3. Verify that power has been cycled for above change to take effect.
4. Verify that both RUN FORWARD and RUN REVERSE switches are NOT closed simultaneously.
P46 – [Input Mode].
S If P46 – [Input Mode] is set to “2”, only the program keypad module Start button will start the
motor.
S Verify that motor is connected properly.
S Verify that frequency signal is present at terminal block TB3.
S –10- +10V signal
S 4–20mA signal
S Verify that Preset Frequencies are set properly.
S Verify that SW1, SW2 and SW3 are correct. (Refer to the chart at the end of Chapter 5).
S Verify that P59 – [Frequency Select] is showing desired frequency source.
S Verify that P58 – [Internal Frequency] is the desired value.
S Verify that motor is connected properly.
S Verify that no mechanical problems exist.
S Verify that
S Verify that P43 – [Current Limit] is set properly.
S Verify that
P30 – [Accel Time 1] or P69 – [Accel Time 2] is set properly.
P38 – [Boost Volts] is set properly.
Troubleshooting and Fault Information
6-3
Page 43

Chapter 6 –Troubleshooting and Fault Information
Block Diagram of Bulletin 160 Analog
Signal Follower
Capacitor ModuleBrake Module
DC–DC+BR–BR+
F
r
e
q
u
e
n
c
y
R
–10 to +10V
e
or
f
e
Potentiometer
r
e
or
n
c
4 – 20 mA
e
L1/R
L2/S
L3/T
Reverse
Start
Stop
Common
GND/PE
TB3 - 1
TB3 - 2
TB3 - 3
(Common)
TB3 - 4
TB3 - 5
TB3 - 6
TB3 - 8
TB3 - 7
Control
Power
Opto
Isolator
Bus
Voltage
Circuitry
C P U
Current
Circuitry
Fault Feedback
Relay
Circuitry
T1/U
T2/V
T3/W
GND/PE
Program Keypad
Module
TB3 - 9
TB3 - 10
TB3 - 11
Customer
Programmable
Output
Motor
6-4
Page 44

Appendix A –
Specifications and Accessories
Controller Specifications
Table A.1 and Table A.2 contain information that is unique to each SSC Controller rating. Table A.3
contains information that applies to all Controller ratings.
Table A.1 – Specifications for Controllers Rated 200 – 240V Single and Three Phase Input
Controller Catalog Number
Single Phase (input)
Three Phase (input)
Output Ratings
3 Phase Motor Rating kW (HP) 0.37 (1/2) 0.55 (3/4) 0.75 (1) 1.5 (2) 2.2 (3)
Output Current (A) Max 2.3 3.0 4.5 8.0 12.0
Power Dissipation (Watts) 20 25 40 70 105
Input Ratings
Input Voltage, Frequency 200/240V Single Phase and Three Phase, 50/60 Hz
Operational Range (V) 180 – 265V
Input kVA 1.1 1.4 2.2 3.7 5.7
Environmental Specifications
Cooling Method Convection Cooled Fan Cooled
AC Dynamic Braking Torque
With external Dynamic Brake Module (%) 300 233 200 150 115
Without external Dynamic Brake Module (%) 100 100 100 50 50
➀
160S-AA02 160S-AA03 160S-AA04 160S-AA08
160-AA02 160-AA03 160-AA04 160-AA08 160-AA12
Table A.2 – Specifications for Controllers Rated 380 – 460V Three Phase Input
Controller Catalog Number
Three Phase (input)
Output Ratings
3 Phase Motor Rating kW (HP) 0.37 (1/2) 0.55 (3/4) 0.75 (1) 1.5 (2) 2.2 (3)
Output Current (A) Max 1.2 1.7 2.3 4.0 6.0
Power Dissipation (Watts) 25 30 40 65 80
Input Ratings
Input Voltage, Frequency 380/460V Three Phase, 50/60 Hz
Operational Range (V) 340 – 506V
Input kVA 1.1 1.6 2.2 3.7 5.7
Environmental Specifications
Cooling Method Convection Cooled Fan Cooled
AC Dynamic Braking Torque
With external Dynamic Brake Module (%) 300 233 200 150 115
Without external Dynamic Brake Module (%) 100 100 100 50 50
➀ Estimated. Actual value depends on motor characteristics.
➀
160-BA01 160-BA02 160-BA03 160-BA04 160-BA06
A-1
Page 45

Appendix A – Specifications and Accessories
Table A.3 – Specifications For All Controller Ratings
Input/Output Ratings (All Controller Ratings)
Output Voltage (V) Adjustable from 0V to input voltage
Output Frequency (Hz) 0 to 240 Hertz Programmable
Efficiency (%) 97.5% (Typical)
Transient Protection Standard 2 kV (Optional 6 kV using MOV module). See accessories on page A-5.
Environmental Specifications (All Controller Ratings)
Enclosure IP 20
Ambient T emperature 0_C to 50_C
Storage T emperature –40_C to 85_C
Relative Humidity 0 to 95% (non condensing)
Vibration 1.0 G Operational – 2.5 G Non-operational
Shock 15 G Operational – 30 G Non-operational
Altitude 1,000 m (3,300 ft.) without derating
Control Inputs (All Controller Ratings)
Control Input Type For dry contact closure input – the controller has an internal 12V power supply that provides
Also accepts open collector/solid state inputs (sinking) with maximum leakage current of 50 mA.
Start, Stop, Forward/Reverse Configurable inputs for 2 or 3 wire control
SW1, SW2, SW3
(Preset Speed Model only)
Programmable Input TB3-8 can be configured to select:
Approvals and Standards Compliance (All Controller Ratings)
Approvals
Optional 24V DC interface allows use of 24V DC sinking inputs.
Configurable Inputs for control of 8 preset speeds and 2 Accel/Decel times
10mA (typical) current flow.
See page A-4 for ordering information.
Accel/Decel Times
Controller Enable/Disable
Local/Remote
UL508C CSA 22.2
Designed to meet these standards IEC 146–1–1
Control Inputs (Analog Signal Follower only – All Controller Ratings)
External Speed Potentiometer 1K to 10K Ohms, 2 Watts Minimum
Analog Input (4 to 20mA) Input lmpedance 250 Ohms
Analog Input (–10 to +10V DC) Input Impedance 100K Ohms
Control Output (All Controller Ratings)
Programmable Output
(Form C Relay contact)
➀
With external components.
Resistive rating: 0.4A @125V AC, 0.2A @ 230V AC, 2A @ 30V DC
Inductive rating: 0.2A @ 125V AC, 0.1A @ 230V AC, 1A @30V DC
FCC Class A➀ and B
VDE 0871➀ and 0875
A-2
➀
➀
Page 46

Appendix A – Specifications and Accessories
Table A.3 – Specifications For All Controller Ratings (continued)
Control Features (All Controller Ratings)
PWM Algorithm Sine Weighted PWM with Harmonic Compensation
Switching Device (3-Phase Output) IGBT (Intelligent Power Module)
V/Hz Ratio Programmable
Carrier Frequency Adjustable from 2 kHz to 8 kHz in 100 Hz Increments (Factory default is 4 kHz)
DC Boost Adjustable – Select from a family of Boost Curves
Current Limiting Trip Free Operation, Co-ordinated for Controller and Motor Protection – Programmable from
Motor Protection I2t Overload Protection – 150% for 60 seconds, 200% for 30 seconds
Overload Pattern #0 Flat response over speed range (no speed compensation)
Overload Pattern #1 Speed compensation below 25% of Base Speed
Overload Pattern #2 Speed compensation below 100% of Base Speed
Acceleration/Deceleration Time(s) 0.1 to 600 Seconds
S-Curve Accel/Decel Time(s) 0 to 100% of Accel/Decel time – not to exceed 60 seconds
Stopping Modes 3 modes (programmable)
Ramp to stop 0.1 to 600 seconds
Coast to stop Stops all PWM Output
DC Injection Braking Applies DC Voltage to the Motor for 0 to 25 seconds
Protective Features (All Controller Ratings)
Overcurrent 200% hardware limit, 300% instantaneous fault
Excessive Temperature Embedded temperature sensor trips if heatsink temperature exceeds 95°C
Over/Under Voltage DC Bus voltage is monitored for safe operation.
For controllers rated at input voltage 200 – 240V AC, overvoltage trip occurs at 410V DC bus
For controllers rated at input voltage 380 – 460V AC, overvoltage trip occurs at 815V DC bus
For controllers rated at input voltage 200 – 240V AC, undervoltage trip occurs at 210V DC bus
For controllers rated at input voltage 380 – 460V AC, undervoltage trip occurs at 390V DC bus
Control Ride Through Minimum ride through is 0.5 seconds – typical value 2 seconds
Ground Short Any output phase to ground, detected at run
Faultless Ride Through 100 Milliseconds
Output Short Circuit Any output phase to phase short
Programming (All Controller Ratings)
Programmer Optional, Removable Program Keypad Module
Type of Display 6 character LED – two digit parameter number and four digit value
Local Controls SPEED, RUN, STOP, and DIRECTION controls
1% to 180% of Controller Output Current
voltage (equivalent to 290V AC incoming line voltage).
voltage (equivalent to 575V AC incoming line voltage ).
voltage (equivalent to 150V AC incoming line voltage).
voltage (equivalent to 275V AC incoming line voltage).
A-3
Page 47

Appendix A – Specifications and Accessories
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
se
se
se
Á
Á
Á
Á
Dr e Mo el
Accessories
For All Controller Ratings – 0.37 to 2.2kW (1/2 to 3 HP)
Rating
200 – 240V
50/60Hz
1 Phase
1 Pha
200 – 230V
50/60Hz
3 Phase
3 Pha
380 – 460V
50/60Hz
3 Phase
3 Pha
Controller
Ratings
HP
1/2
3/4
1/2
3/4
1/2
3/4
kW
0.37
0.55
1
0.75
2
1.5
0.37
0.55
1
0.75
2
1.5
3
2.2
0.37
0.55
1
0.75
2
1.5
3
2.2
ББББББББ
ББББББББ
Input Voltage
Dynamic
ÁÁ
Brake
Module
ÁÁ
Cat. No.
160-BMA1
160-BMA1
160-BMA1
160-BMA2
160-BMA1
160-BMA1
160-BMA1
160-BMA2
160-BMA2
160-BMB1
160-BMB1
160-BMB1
160-BMB2
160-BMB2
MOV
ÁÁ
Module
ÁÁ
Cat. No.
160-MMA1
160-MMA1
160-MMA1
160-MMA1
160-MMA1
160-MMA1
160-MMA1
160-MMA1
160-MMA1
160-MMB1
160-MMB1
160-MMB1
160-MMB1
160-MMB1
3% Line
ÁÁ
Reactors
Open
ÁÁ
➀
Style
Cat. No.
–
–
–
–
1321-3R4-B
1321-3R4-A
1321-3R4-A
1321-3R8-A
1321-3R12-A
1321-3R2-B
1321-3R2-A
1321-3R2-A
1321-3R4-B
1321-3R8-B
Line
БББББ
Filters
БББББ
②
Cat. No.
160S-LFA1
160S-LFA1
160S-LFA1
160S-LFA1
160-LFA1
160-LFA1
160-LFA1
160-LFA1
160-LFA2
160-LFB1
160-LFB1
160-LFB1
160-LFB1
160-LFB1
Cat. No.
160S-RFA-6-A
160S-RFA-6-A
160S-RFA-10-A
160S-RFA-16-A
160-RFB-3-A
160-RFB-3-A
160-RFB-9-A
160-RFB-9-A
160-RFB-3-A
160-RFB-3-A
160-RFB-3-A
160-RFB-9-A
160-RFB-9-A
Capacitor
ÁÁ
Module
ÁÁ
③
Cat. No.
160-CMA1
160-CMA1
160-CMA1
④
160-CMA1
160-CMA1
160-CMA1
160-CMA1
–
160-CMA1
160-CMB1
160-CMB1
160-CMB1
160-CMB1
160-CMB1
Replacement Parts and Accessories
Fan ➄
ÁÁ
Replacement
Kit
Cat. No. Cat. No. Cat. No. Cat. No.
160-FRK1 160-B1 160-P1 160-DN1
Ready/
ÁÁ
Fault
Panel
Program
ÁÁ
Keypad
Module
DeviceNet
ÁÁÁ
Communication
Module
Drive Model
Analog 160-DM-SF1
Preset 160-DM-PS1
➀ Catalog numbers listed are for 3% impedance open style units. NEMA 1 and 5% impedance reactor types are also available, refer to
Publication 1321-2.0 for detailed information.
➁ The 160-LF type filters are designed to meet Class A conducted emissions. These units have been tested with a maximum motor cable length of
75m (250 ft.) for 230V units and 40m (133 ft.) for 460V units.
➂ The 160-RF type filters are designed to meet Class A and B conducted emissions. These units have been tested with a maximum motor cable length
of 25m (80 ft.) for both 230V and 460V units.
➃ Included with controller.
➄ The MTBF for the fan is 40,000 hours at 50_C.
➅ Allows 24V DC sinking inputs.
A-4
24V DC Interface ➅
Cat. No.
Page 48

Figure A.1 – Controller Dimensions
Controllers Rated 200 – 240V Single Phase
Overall
Dimensions
H mm (inches) 152 (6.00) 152 (6.00) 152 (6.00) 152 (6.00)
W mm (inches) 72 (2.83) 72 (2.83) 72 (2.83) 72 (2.83)
D mm (inches) 136 (5.4) 136 (5.4) 136 (5.4) 136 (5.4)
Weight Kg. (lbs.) 0.8 (1.76) 0.8 (1.76) 0.9 (1.98) 0.9 (1.98)
Overall
Dimensions
H mm (inches) 152 (6.00) 152 (6.00) 152 (6.00) 152 (6.00) 152 (6.00)
W mm (inches) 72 (2.83) 72 (2.83) 72 (2.83) 72 (2.83) 130 (5.12)
D mm (inches) 136 (5.4) 136 (5.4) 136 (5.4) 136 (5.4) 136 (5.4)
Weight Kg. (lbs.) 0.8 (1.76) 0.8 (1.76) 0.9 (1.98) 0.9 (1.98) 1.1 (2.46)
Overall
Dimensions
H mm (inches) 152 (6.00) 152 (6.00) 152 (6.00) 152 (6.00) 152 (6.00)
W mm (inches) 72 (2.83) 72 (2.83) 72 (2.83) 72 (2.83) 130 (5.12)
D mm (inches) 136 (5.4) 136 (5.4) 136 (5.4) 136 (5.4) 136 (5.4)
Weight Kg. (lbs.) 0.8 (1.76) 0.8 (1.76) 0.8 (1.98) 0.9 (1.98) 1.1 (2.46)
160S
AA02
160S
AA03
160S
AA04
160S
AA08
Controllers Rated 200 – 240V 3 Phase
160
AA02
160
AA03
160
AA04
160
AA08
Controllers Rated 380 – 460V 3 Phase
160
BA01
160
BA02
160
BA03
160
BA04
➀
160
AA12
160
BA06
Appendix A – Specifications and Accessories
H
➀
External capacitor modules are provided with this model and mount separately.
Use the drilling template at the back of the manual for mounting the controller.
Figure A.2 – Mounting Requirements
DIN Mounting
Debris Cover
Dimensions Metric English
Min. Panel Thickness (14 GA) 19mm 0.0747 in.
Mounting Base Screws m4 x 0.7 # 8 – 32
Mounting T orque 1.13 to 1.56 Nm 10 – 14 lb. in.
D See Figure A.1 for details on controller
dimensions and weights.
D There must be a minimum of 12.5mm
(0.5 inches) clearance around all sides of the
controller. Use either DIN rail or mounting
holes. (Use the drilling template at the back of
the manual for mounting the controller.)
D Leave debris cover attached during controller
installation to protect from falling debris. T o
ensure proper controller operation, remove
cover before applying power.
A-5
Page 49

Appendix A – Specifications and Accessories
Approximate Dimensions
Dimensions are shown in millimeters (inches). Dimensions are not to be used for manufacturing
purposes.
Figure A.3 – Dynamic Brake Module – Both Sizes
72
(2.8)
50
(1.9)
GND BR BR
6,8
(.230)
4 places
8
(.315)
A
B
14
(.551)
29
(1.1)
86,4
(3.4)
7,5
(.295)
Cat. No. A B
160-BMA1 & 160-BMB1 245
160-BMA2 & 160-BMB2 334
(9.64)
(13.15)
A-6
225
(8.86)
314
(12.36)
Page 50

Appendix A – Specifications and Accessories
Approximate Dimensions, Continued
Dimensions are shown in millimeters (inches). Dimensions are not to be used for manufacturing
purposes.
Figure A.4 – MOV Module
40,2
(1.6)
L1RL2SL3
71
(2.8)
T
Figure A.5 – Line Reactor
A
E
MODULE
22,7
(.894)
MOV
45,4
(1.8)
5,1
(.199)
Pin
Extension
0,54
(.021)
Cat. No. BA CD E
36
50
74
102
1321-3R2-A
1321-3R2-B
1321-3R4-A
B
1321-3R4-B
1321-3R8-A
1321-3R8-B
1321-3R12-A
112
(4.4)
112
(4.4)
112
(4.4)
112
(4.4)
152
(6.0)
152
(6.0)
152
(6.0)
(4.0)
102
(4.0)
102
(4.0)
102
(4.0)
122
(4.8)
122
(4.8)
122
(4.8)
(2.9)
74
(2.9)
74
(2.9)
74
(2.9)
79
(3.1)
79
(3.1)
79
(3.1)
(2.0)
50
(2.0)
50
(2.0)
50
(2.0)
54
(2.1)
54
(2.1)
54
(2.1)
(1.44)
36
(1.44)
36
(1.44)
36
(1.44)
50
(2.0)
50
(2.0)
50
(2.0)
D
C
A-7
Page 51

Appendix A – Specifications and Accessories
d
e
(
)
Approximate Dimensions, Continued
Dimensions are shown in millimeters (inches). Dimensions are not to be used for manufacturing
purposes.
Figure A.6 – Line Filters
mm
(in.)
D
A
Line Filter
Module
160S-RFA-6-A
160S-RFA-10-A
160S-RFA-16-A
160-RFB-3-A 182.0 (7.17) 75.0 (2.95) 35.0 (1.38) 167.0 (6.57) 60.0 (2.36)
160-RFB-9-A 182.0 (7.17) 75.0 (2.95) 47.5 (1.87) 167.0 (6.57) 60.0 (2.36)
160-LF
(All Types)
A B C D E F G H
182.0 (7.17) 75.0 (2.95) 30.0 (1.18) 167.0 (6.57) 60.0 (2.36)
174.0 (6.85) 75.0 (2.95) 50.0 (1.97) 163.0 (6.41) 60.0 (2.36) 6.9 x 5.25
B
E
6.5 x 4.5 (0.26 x 0.18)
hole dim.
hole dim.
(2 places)
(0.272 x 0.207)
hole dim.
H
F
G
4.2 (0.17)
(2 places)
6.9 x 5.25
(0.272 x 0.207)
hole dim.
dia. hole
ia. hol
C
200
(7.87)
7.87
200
(7.87)
A-8
Page 52

Appendix A – Specifications and Accessories
Approximate Dimensions, Continued
Dimensions are shown in millimeters (inches). Dimensions are not to be used for manufacturing
purposes.
Figure A.7 – Capacitor Module
50
4,5
140
(5.51)
(.177)
Mounting Holes
130
(5.11)
(1.97)
40
(1.5)
254 (10) Approximate
Lead Length
110,9
(4.37)
150,9
(5.94)
A-9
Page 53

Appendix A – Specifications and Accessories
Approximate Dimensions, Continued
Dimensions are shown in millimeters (inches). Dimensions are not to be used for manufacturing
purposes.
Figure A.8 – DeviceNet Module Attached to Controller
17,34
(0.68) Required
for Removal
Figure A.9 – 24V DC Interface Module
161,2
(6.35) Overall Height
with DeviceNet Module
167,82
(6.61) Overall Height
with DeviceNet Connector
A-10
29
(1.14)
➀
➀ This device does not effect
the overall height of the drive.
Page 54

Appendix B –
CE Compliance
CE Compliance
This controller is a component intended for
implementation in machines or systems for the
industrial environment. It has been tested to meet
the Council Directive 89/336 Electromagnetic
Compatibility (EMC) and all applicable standards.
Important: The conformity of the controller and
filter to any standard does not guarantee that the
entire installation will conform. Many other
factors can influence the total installation and
only direct measurements can verify total
conformity . It is therefore the responsibility of the
machine manufacturer, to ensure, that the
conformity is met.
A copy of the Declaration of Conformity (DOC) is
available from your local Rockwell Automation
sales office.
Essential Requirements for a Conforming
EMC Installation
1. An input line filter module (see “Accessories” in
Appendix A) must be installed to reduce
conducted emissions.
“LF type” Filters – These units have been
tested with a maximum motor cable length of
75 meters (250 feet) for controllers rated 200
– 240V AC, and 40 meters (130 feet) for
controllers rated 380 – 460V AC.
“RF type” Filters – These units have been
tested with a maximum motor cable length of
25 meters (80 feet) for all ratings.
2. The controller system must be mounted in a
shielded enclosure to reduce radiated emissions.
3. Grounding of equipment and cable shields must
be solid, with low impedance connections.
4. Motor and control cables entering the shielded
enclosure must have EMC-tested shielded cable
clamps, or grounded metal conduit.
5. All motor cables must use shielded cable, or be
in grounded metal conduit.
6. All control and signal wiring must use shielded
cable or be in grounded metal conduit.
7. The Common terminals (TB3-3 & 7) must have
a solid connection to PE (protective earth).
B-1
Page 55

Appendix B – CE Compliance
General Instructions for an EMC
Compliant Installation
Refer to Figure B.1.
Shielded Enclosure
D T ypical NEMA or IEC metal enclosures are
adequate.
D The ground connection of the shielded
enclosure must be solidly connected to the PE
terminal of the controller. Good conductivity
must be assured – grounding must provide a
low impedance path to high frequency signals.
D All wiring, except input power leads, must use
shielded cable.
D Input power, output power and control wiring
inside the enclosure must be physically
separated.
Figure B.1 – Recommended Grounding Configuration
Enclosure Ground Connection
T (L3)
S (L2)
R (L1)
AC
Input Line
PE
R (L1)
S (L2)
T (L3)
Line
Filter
D Input power, output power and control wiring
outside the enclosure must use separate
shielded cables, or separate conduit.
Cable Clamps
D Use suitable EMC-tested cable clamps only .
D The connection area must be 360 degrees
around the shielded cable.
D The cable clamps also provide strain-relief for
the cable.
D When using conduit, the contact point of
metal entry connections must be free of paint
or non-conductive surfaces and solidly
connected with good conductivity to the
enclosure.
B-2
Ground Tab – PE
Line Power
Control Wiring
Motor Wiring TB2
Shielded Enclosure
= EMC T ested Shielded Cable Clamp (or Metal Conduit)
*
When the control circuitry is located outside of the 160 enclosure.
TB1
TB3
L2L1 L3 BR BR
–
+ TSR
FAULT
READY
1 2 3 4 5 6 7 8 9 10 11
–
T2TI T3 +
DCDCWVU
W (T3)
V (T2)
U (T1)
to TB3
Control
Cabinet *
Shielded Motor Cable
to Motor
Page 56

Appendix B – CE Compliance
Motor Cable
D The cable between the controller and motor
must be a 4-wire shielded cable (three phases
and ground). Refer to Figure B.2 and
Figure B.3.
D Do not exceed the maximum motor cable
length for the specific line filter module used.
D Inside the shielded enclosure, shielded motor
cable must be used as close to the controller’s
output terminals as possible. The shield must
Figure B.2 – Motor Connections
Ground Tab – PE
L2L1 L3 BR BR
–
+TSR
FAUL T
READY
1 2 3 4 5 6 7 8 9 10 11
–
Motor Wiring TB2
T2TI T3 +
DCDCWVU
be solidly connected to the PE terminal of the
controller.
D Where the shielded motor cable exits the
enclosure, an EMC-tested cable clamp, or
metal conduit must be used to solidly connect
the cable shield to the enclosure.
D The shield on the motor side must be solidly
connected to the motor housing with an
EMC-tested cable clamp, or conduit,
providing good conductivity from the cable
shield to the motor housing.
4 Wire
Shielded Motor Cable
Ground to Motor Housing
W (T3)
V (T2)
Shielded Enclosure
= EMC T ested Shielded Cable Clamp (or Metal Conduit)
U (T1)
Figure B.3 – Shielded Motor and Control Cable Example
Stranded Copper Wire
Plastic Insulation
Inner Plastic Sheath
Compact Screen of Galvanized (Tinned) Copper or Steel
Outer Plastic Jacket
B-3
Page 57

Appendix B – CE Compliance
Control Cable
D Control wiring must use shielded cable, or
grounded metal conduit. Refer to Figure B.3
and Figure B.4.
D The shield must be connected to signal
common at both ends of the cable.
D The Common terminals (TB3-3 & 7) must be
solidly connected (and as short as possible) to
the PE terminal of the controller.
Figure B.4 – Control Connections
Ground Tab – PE
L2L1 L3 BR BR
RST +
FAULT
READY
1 2 4 5 6 8 9 10 11
Control Wiring
TB3
3 7
T2TI T3 +
UVWDCDC
–
Control
Cabinet *
to TB3
–
Signal
Common
Shielded Enclosure
= EMC T ested Shielded Cable Clamp (or Metal Conduit)
* When the control circuitry is located outside of the 160 enclosure.
Low Voltage Directive 73/23/EEC
Compliance
This product complies with Low Voltage Directive
73/23/EEC when conforming with the following
installation requirements:
D Review the General Precautions section on
page 1-1, inside front cover, and other
ATTENTION statements throughout this
manual prior to installation of the controller.
B-4
Shielded Control
Cable
D The controller is intended to be installed with
a fixed connection to the earth. The use of
residual-current-operated protective devices
(RCDs) or ground fault indicators is not
recommended. If unavoidable, the Bulletin
160 is compatible with type B RCDs only.
D The controller should be installed in an
appropriate or suitable enclosure.
Important: The conformity of this controller and
filter to any standard does not guarantee that the
entire installation will conform. Many factors can
influence the total installation and only direct
measurements can verify total conformity.
Page 58

Index
24V DC interface, A-10
50 Hz dipswitch, 3-2
60 Hz dipswitch, 3-2
AC input wiring, 2-2
accel/decel control, 5-4, 5-11
accessories, A-4
ambient temperature, A-2
analog input, 2-6, 2-7
analog scaling
analog input, 5-3
zero offset, 5-10
analog input maximum, 5-12
analog input minimum, 5-12
analog select, 5-12
approvals, A-2
auto restart
restart time, 5-8
restart tries, 5-8
block diagram, 6-4
branch circuit disconnect, 2-2, 2-3
cable length recommendations
capacitive current, 2-5
reflected wave, 2-4
capacitive current, cable length recommendations, 2-5
capacitor module, A-9
connecting, 2-2
carrier frequency, pwm, 5-8, A-3
catalog number description, 1-2
CE, 2-1, A-2, B-1
changing base frequency, from factory default, 3-2
clearing faults, 5-9, 6-1
compensation, 5-12
control wiring
Analog Signal Follower model, 2-6
Preset Speed model, 2-6
control wiring requirements
Analog Signal Follower model, 2-6, 2-7
Preset Speed model, 2-6, 2-7
controller features, 2-1
controller specifications, A-1
conventions used in this manual, 1-2
CSA, A-2
CUL, A-2
current limiting, 5-6
current rating, A-1
DB enable, 5-8
DC brake to stop, 5-4, 5-6
DC hold level, 5-6
defaults, resetting to, 5-10
determining drive information, 1-2
DeviceNet module, A-10
diagnostics, 5-2, 5-3, 6-2, 6-3
dimensions, A-5
display group, 5-2, 5-3
display group parameters, 5-2, 5-3
display mode, 3-1
dynamic brake, connection, 2-2
dynamic brake module, A-6
electrostatic discharge, 1-1, 3-2
EMC
control connections, B-4
grounding configuration, B-2
installation, B-1
motor connections, B-3
shielded motor and control cable example, B-3
fan/pump volts/hz patterns, 5-5
fault buffer, 5-2
fault information, troubleshooting, 6-1
fault LED, 6-1
faults, clearing, 5-9, 6-1
frequency dipswitch, 3-2
frequency source selection
Analog Signal Follower model, 2-6, 2-7, 5-10
Preset Speed Model, 2-6, 2-7, 5-11
general precautions, 1-1
grounding, 2-6
input mode selection, 2-8, 5-7
input power conditioning, 2-2
line filters, A-4, A-8
line reactor, A-4, A-8
line side protection, 2-3
I-1
Page 59

Index
low voltage directive compliance, B-4
min/max frequency, 5-4
minimum clearance, 2-1
motor cable lengths, effects, 2-4
motor cable recommendations, 2-4
mounting requirements, 2-1, A-5
MOV module, A-4, A-7
nameplate information, 1-2
operating controller
with program keypad module, 2-1, 3-1
without program keypad module, 2-1
output contacts, 2-7, 5-7
output ratings, A-1
overload protection, 2-2, 5-6
parameters
display group, 5-2
overview, 5-1
program group, 5-4
potentiometer wiring, 2-6
power, wiring, 2-2
precautions, 1-1
preset frequencies, 2-7, 5-11
program group, parameters, 5-4
program keypad module
description, 3-1
display mode, 3-1
features, 3-1
installation, 3-2
key descriptions, 3-1
program mode, 3-1
removal, 3-2
program lock, 5-10
program mode, 3-1
programming, 3-1, 5-1
reflected wave, cable length recommendations, 2-4
replacement parts, A-4
resetting, to factory defaults, 5-10
reverse, 2-6, 3-1
RWR (reflected wave reducer), 2-4, 2-5
S-curve, 5-9
skip frequency, 5-5
specifications, A-1, A-2, A-3
standards compliance, A-2
start, 2-7, 2-8, 2-9, 3-1
start-up, 4-1
stopping, 2-7, 2-8, 2-9, 3-1, 5-4
storage temperature, 2-1, A-2
terminal blocks
specifications, 2-2, 2-6
TB1, 2-1, 2-2
TB2, 2-1, 2-2
TB3, 2-1, 2-2, 2-7
torque ratings, A-1
troubleshooting, 6-3
fault descriptions, 6-1
vibration, A-2
voltage rating, A-1
wiring
control and signal, 2-6, 2-7, 2-8, 2-9
input line fuses, 2-3
motor cable recommendations, 2-4
terminal blocks specifications, 2-2, 2-6
wire size recommendations, 2-2, 2-6
I-2
Page 60

Rockwell Automation helps its customers receive a superior return on their
investment by bringing together leading brands in industrial automation,
creating a broad spectrum of easy-to-integrate products. These are supported by local technical resources available worldwide, a global network of
system solutions providers, and the advanced technology resources of
Rockwell.
Worldwide representation.
Argentina • Australia • Austria • Bahrain • Belgium • Bolivia • Brazil • Bulgaria • Canada • Chile • China, People’s Republic of • Colombia • Costa
Rica • Croatia • Cyprus • Czech Republic • Denmark • Dominican Republic • Ecuador • Egypt • El Salvador • Finland • France • Germany • Ghana •
Greece • Guatemala • Honduras • Hong Kong •Hungary • Iceland • India • Indonesia • Iran •Ireland •Israel • Italy • Jamaica • Japan • Jordan
• Korea • Kuwait • Lebanon • Macau • Malaysia • Malta • Mexico •Morocco • The Netherlands •New Zealand • Nigeria • Norway • Oman •
Pakistan • Panama • Peru • Philippines • Poland • Portugal • Puerto Rico • Qatar • Romania • Russia •Saudi Arabia • Singapore • Slovakia • Slovenia
• South Africa, Republic of • Spain • Sweden •Switzerland • Taiwan • Thailand • Trinidad • Tunisia • Turkey • United Arab Emirates • United Kingdom •
United States • Uruguay • Venezuela
Rockwell Automation Headquarters, 1201 South Second Street, Milwaukee, WI 53204 USA, Tel: (1) 414 382-2000
Fax: (1) 414 382-4444
Publication 0160-5.9 – May 1998
Supercedes Publications 0160-5.9 – December 1996, 0160-5.9DU2 – May 1997, 0160-5.9DU4 – January 1998
Copyright 1996 Allen-Bradley Company, Inc., a Rockwell International company
40055–180–01(01)
 Loading...
Loading...