

Page 1

数据表
智能电动驱动器
AMEi 6 iSET
描述
virtus.danfoss.com
AMEi 6 iSET 驱动器用于智能优化区域供热/制冷
系统运行。自动调整暖通空调系统所用 AFP 2、
AFPQ 2 和 AFQMP 2 控制器的压差设定值。
该解决方案适用于最小 - 最大流量范围宽广的
动态区域能源系统(生活热水供应)和尺寸控制
不 当 的 设 备( 控 制 阀 尺 寸 过 大 、阀 门 选 型 /特征有
误、控制精度不佳……)。
在部分/低 负 荷 操 作 条 件 下 ,自 动 稳 定 功 能 可 通 过
调整电动控制阀 (MCV) 的 压 差 ,监 控 控 制 信 号 和
稳定系统工况避免振荡。
持续的实时 MCV 操作优化可实现更稳定地控
制而无振荡,并输送符合实际需要的流量(防止
过 流)。
从而稳定二次侧的温度条件、改善一次侧的温
差,延长所装设备的使用寿命。
特点:
· 自动稳 定功能
· 电气手动操作
· 阀位指示,LED 显示
· 通过限位开关可调整最小/最大压差设定值
(可调节的压力驱动器行程限制)
· 过热和过载保护
· 外部复位按钮
· 安装简单,用钢丝条锁预固定
· 防转绑扎带,可防止驱动器旋转
· 自动校准压力驱动器行程 - 可缩短调试时间
· 免维护
· 电压或电流输入/输出信号 Y/X
· Modbus RS485
· 电绝缘 Y、X
· 带有电缆封套
主要数据:
· 工作电压:
- 24 V ac/dc、50/60 Hz
- 230 V ac、50/60 Hz
· 控 制 输 入 信 号 :调 制
· 扭矩:7 Nm
· 速度 36 s/转(18 秒/mm)
· 全行程时间 ~30 分钟
· 与模拟量 24 V 和 230 V 驱动器 AME
20/23/30/33、AME 55/56、AME 85/86、AME
655/655GA/658/659 兼容
· 尚不兼容 3 点 AMV 驱动器
iSET 不适用于管网中出现的干扰和振荡。
其他系统产生的外部振荡、由于热源控制欠
佳 造 成 的 干 扰 或 整 体 管 网 平 衡 不 当 ,超 出 了
iSET 的范围,无法管理。
订货
© 丹佛斯 | 2019.05 VD.IR.U2.41 | 1
类型
AMEi 6 iSET 230 ac 082G4300
AMEi 6 iSET 24 ac /dc 082G4301
电源电压
(V)
订货号
Page 2

数据表 AMEi 6 iSET
技术参数
请在连接之前检查电源和功耗!
驱动器型号 AMEi 6 iSE T
电源 V 24 V ac/dc 或 230 V ac; +10...-15%
功耗 VA
频率 Hz 50/60
控制输入 Y
控制输出 X
扭矩 Nm 7
速度 s/转 36
全行程时间 最低 30
最高介质温 度
环境温度 0 … + 55
储存和运输温度
湿度 5-95%(非 冷凝)
电磁防护等级
外壳防护等级 IP 54
重量 kg 2.5
手动操作 电气
电源断电响应 驱动器保持原位
- 标准认证标识
V 0-10 (2-10) [Ri = 4 0 kΩ]
mA 0-20(4 -20)[Ri = 500 Ω]
V 0-10 (2-10) [Ri = 10 kΩ]
mA 0-20 (4-20) [Ri = 510 Ω]
取决于阀门类型。低于 150 °C 没有任 何限制
°C
低 压 指令(LVD)2014/35/EU:EN 6073 0-1、E N 607 30-2-14
电 磁 兼容 指令(EMC)2014/30/ EU:EN 61000-6-2、EN 61000-6-3
8 (24V)
16 (230V )
-40 … +70(储存 3 天)
230V - 防护等级 II
24V - 防护等级 III
废弃处理
设计
1. 接线盒盖
2. 功能按钮
3. 钢丝条锁
4. 电缆封套
5. 限位开关
6. LED 显示驱动器运行模式
7. LED 显示 Modbus 通信状态
安装
废弃之前,必须将驱动器拆解,并将元件分类。
驱动器应安装在干燥的环境中。
在室外安装时,需要采取适当的措施来防止驱动
器受气候影响。请遵照相关压力驱动器的确切安
装说明手册。
机械安装
请检查阀门和压力驱动器的允许安装位置。
AMEi 6 驱动器可以安装在任意位置(
安装时应注意留出适当的空间以便维护(
尺寸部分
)。
见方案
请参见
)。
电气连接
打开可拆卸的保护盖可进行电气连接。
在组装之前请联系丹佛斯技术支持部门了解组
装说明。
2 | VD.IR.U2.41 © 丹佛斯 | 2019.05
Page 3
数据表 AMEi 6 iSET
AMEi 6 iSET
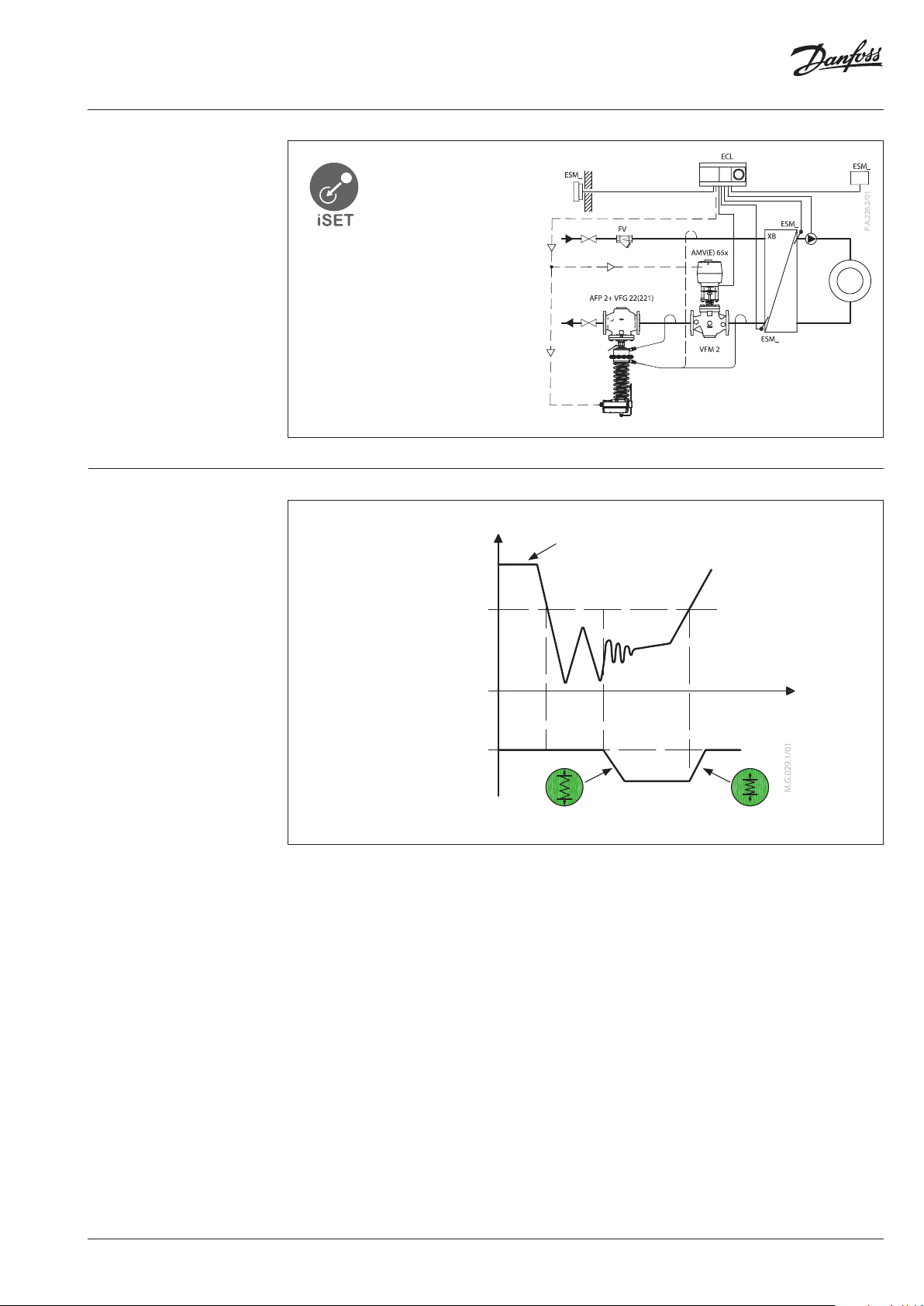
应用原理
示例:
- 间接连接供暖系统
- 回水安装
- 模拟量电压信号
自动稳定功能
控制信号
(来 自控 制 器)
MCV 位置
阈值
(阀 门 开启 %)
iSET压差设定值
P2
P1
P3
设计 流 量下的压差
图 1
自动稳定功能 (ASF)
iSET 自动稳定功能 (ASF) 可持续监控控制 信号。
一旦信号出现 振 荡,iSET 算法会检测振荡,并通过更改压差控制器上的压差设定值,自动调整电动控
制阀 (MCV) 的压差 (Δp )。
这是通过拉伸和压缩压力驱动器的设定弹簧来实现的,直到控制信号稳定。从而使 MCV 的运行状况
更 加 稳 定 ,并 提 高 机 组 /系统的效率。
运行原理
自动稳 定功能 (ASF) 会搜索控制信号的 3 个 连 续 峰 值(P1、P2、P3)。一 旦 检 测 到 峰 值 ,且 MCV 的位置低于
阈值,ASF 会计算出需要降低的 Δp 幅 度 ,并 通 过 拉 伸 压 力 驱 动 器 的 弹 簧 来 降 低 MCV 的设定 Δp。当达到
计 算 出 的 点 时 ,便 会 停 止 。
如果振荡重复出现,则重复该程序,直到振荡消失,MCV 的打开幅度则超过 50%(阀 门 行 程 /控制信号的出
厂 设 定 阈 值)。
一旦控制信号超过阈值, iSET 便会移向最初设定的 Δp(Δ p 设定用于设计流量条件)。
如果控制信号稳 定且低于阈值,iSET 则保持原位。
为防止系统稳定后发生振荡,ASF 功能不仅会监控振荡,还会分析控制信号的类型(阻尼减缓、合适的
阻尼、阻尼太强……)。根 据 信 号 的 规 格 ,它 会 做 出 正 确 的 反 应 ( 校 正 Δp)。
(图 1)
VD.IR.U2.41 | 3© 丹佛斯 | 2019.05
Page 4

数据表 AMEi 6 iSET
驱动器运行模式
LED 运行模式指示灯
三 色(绿 /黄/红)LED 功能指示灯位于驱动器顶盖的前面。它们代表不同的运行模式。
复位按钮
驱动器 AMEi 6 iNET/iSET 的外部复位按钮位于驱动器的顶盖上。通过该按钮,您可以进入或退出“待
机 ”模 式(按 一 次)或“ 自 定位 ”模 式(根 据 预 设 限 位 开 关 的 位 置)(按 住 5 秒)。详细信息请参阅以下
介绍。
LED 运行模式指示灯
三 色(绿 /黄/红)LED 功能指示灯位于驱动器顶盖的前面。它们代表不同的运行模式。
运行模式
• 校准模式:
用于校准所需的压力驱动器行程(最小 - 最 大弹簧 设 定值)。要开始校 准程 序,请按住“复位”按钮
5 秒,直 到 绿 灯 开 始 闪 烁 。驱动器的末端位置会根据预设限位开关定位销自动调整。驱动器进入静
止模式并开始响应控制信号。
• 待机模式,用于手动操作
按“ 复 位 ”按 钮 1 秒,进入“待机”模式。驱动器停止在当前位置,并停止响应任何控制信号。红灯
处于常亮状态。您可以通过按住“压缩弹簧”或“拉伸弹簧”按钮 > 10 秒,手动操作驱动器。驱动
器按 照 所需方向自动行进。要让它在指定位置停止,请再次按“压缩弹簧”或“拉伸弹簧”按钮。
按住“压缩弹簧”或“拉伸弹簧”按钮 < 10 秒 ,可 进 行 微 调 。在按住按钮期间(但不超过 10 秒 ),驱
动器会按照所需方向行进。
在调试期间或检修时,待机模式非常实用。若 要 退 出“ 待 机 ”模 式 ,请 再 按 一 次“ 复 位 ”按 钮 。
• 定位模式
驱动器会根据控制信号自动运行。定位完成后,驱动器将进入固定模式。
• 固定模式
驱动器无故障运行。
• 故障模式
工作温 度过高 - 检查环境温度。
驱动器的机械连接不正确 - 检查连接。压力驱动器阻塞。
4 | VD.IR.U2.41 © 丹佛斯 | 2019.05
Page 5

数据表 AMEi 6 iSET
LED 信号
驱动器正在压 缩弹簧
驱动器正在拉伸 弹簧
驱动器正在压 缩弹簧
驱动器正在拉伸 弹簧
驱动器已达到上端(弹簧压缩)
驱动器已达到下端(弹簧拉伸)
Y 信 号 出 现 ,驱 动 器 已 达 到 设 定 点
Y 信号未连接 - (线 缆 破 损)
指示类型 运行模式
常亮
常亮
闪烁
(1秒/次)
闪烁
(1秒/次)
常亮
常亮
闪烁
间隔 1秒后
快速闪烁 2 次
标准模式
驱动器正在 压缩弹簧
标准模式
驱动器正在拉伸弹簧
校准模式
驱动器正在 压缩弹簧
校准模式
驱动器正在拉伸弹簧
标准模式
驱动器 在上 端停止
标准模式
驱动器在下端停止
标准模式
驱动器在 Y 设定点对应的位置停止
标准模式
Y 信号未连接 - (线缆破损)
电机在 Y 上次出现的位置停止
待机模式
故障模式
驱动器正在压 缩弹簧
驱动器正在拉伸 弹簧
驱动器正在压 缩弹簧
驱动器正在拉伸 弹簧
在“ 压 缩 弹 簧 ”定 位 模 式 下 ,
电机停止
在“拉伸弹簧”定位模式下,
电机停止
无电源
常亮 待机模式
闪烁 故障模式
闪烁 1 s 循环
常亮
常亮
闪烁 1 s 循环
手动模式
按 下“ 压 缩 弹 簧 ”按 钮 >10 秒
驱动器正在 压缩弹簧
手动模式
按下“拉伸弹簧”按钮 >1 0 秒
驱动器正在拉伸弹簧
手动模式
常亮
按 下“ 压 缩 弹 簧 ”按 钮 <10 秒
驱动器正在 压缩弹簧
手动模式
常亮
按下“拉伸弹簧”按钮 <10 秒
驱动器正在拉伸弹簧
手动模式
常亮
在“ 压 缩 弹 簧 ”定 位 模 式 下 ,
电机停止
手动模式
常亮
在“拉伸弹簧”定位模式下,
电机停止
指示类型 Modbus 通信状态
不亮 无通信
闪烁
我本人的 RX 电报
总线上的 RX 活动
消息解释故障
VD.IR.U2.41 | 5© 丹佛斯 | 2019.05
Page 6

数据表 AMEi 6 iSET
0mA (4mA)
20mA
DIP 开关设定
S1/DIP 1
输入信号类型选择开关:
关 :输 入 信 号 Y 设定为电压 (V)
开:输入信号 Y 设定为电流 (mA)
S1/DIP 2
输出信号类型选择开关:
关:输出信号 X 设定为电压 (V)
开:输出信号 X 设 定为电流 (mA)
S1/DIP 3
正向或反向作用选择开关
(图 2)
:
关:驱动器正向输入信号
开:驱动器反向作用以控制信号(仅限与 AFA 2 组
合的 AMEI 6 iNET)
S1/DIP 4
标准模式或分段模式选择开关:
关:驱动器在 0(2)-10 V 或 0(4)-20 mA 范围内
工作。
开:驱动器在分段范围内工作; 0-5 V 或
(0-10 mA) 或 (5-10 V) 或 (10-20 mA)。
信号范围选择开关 S1/DIP 6 设定分段范围
S1/DIP 5
0-10 V/2-10 V - 输入/输出
关:0-10 V; 输入信号范围为 0-10 V(电 压 输 入)
或者 0-20 mA(电 流 输 入)
开:2 –10 V; 输入信号范围为 2-10 V(电 压 输 入)
或者 4-20 mA(电 流 输 入)
信号范围选择开关 S1/DIP 1 和 DIP 2设定 Y 和
X 信号。
S1/DIP 6
分段范围选择 开关:
关:0-5 V 或 (0-10 mA)
开:5-10 V 或 (10 -20 mA)。
[S1/DIP 4 = 开!]
S1/DIP 7
关:iSET
开:iNET**
S1/DIP 8
未使用
** 请参阅 AMEi 6 iNET 数据表
S2
DIP 2 = С
ൣՓὈ
0V (2V)
0mA (4mA)
DIP 2 =
ԥՓὈ
0V (2V)
S2/DIP 1
关:模拟 MCV 1 控制信号
开:3 点 MCV 1 控制信号
S2/DIP 2
关:模拟 MCV 2 控制信号
开:3 点 MCV 2 控制信号
S2/DIP 3
未使用
S2/DIP 4*
关:模拟信号 (V/mA)
驱动器在模拟量模式下工作
开:MOD BUS
驱动器在数字模式下工作
S1
10V
20mA
3
10V
图 2
*在模拟模式 S2/DIP 4 = 关时,DIP 开关 S1/DIP
1-7 的功能 激活。
在数字模式 S2/DIP 4 = 开时,DIP 开关 S1/DIP 1-7
用作数字地址。
在 数 字 模 式下,Modbus RS485 可用于监控或
AMEi 6 驱动器定位。
6 | VD.IR.U2.41 © 丹佛斯 | 2019.05
Page 7
数据表 AMEi 6 iSET
24V/230V
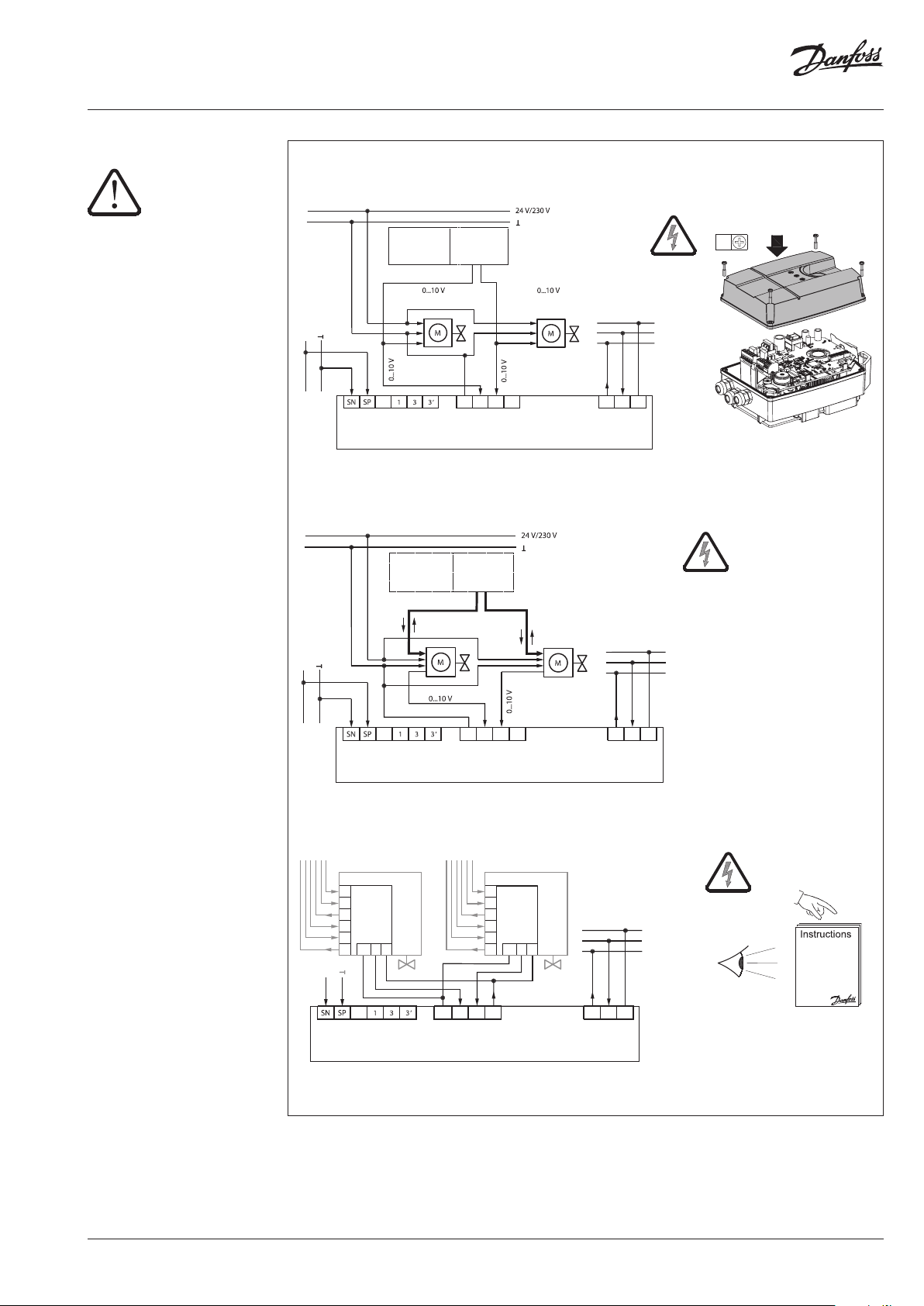
接线
模拟量电压信号
切勿触碰印刷电路板 (PCB) 上的任何
元 件 !在 完 全 切 断 电 源 之 前 ,切 勿 揭 开
保护盖。
建议导线的横截面积为 1.5 mm
2
ଌ҃٧
dc
AME 1 AME 2
24V/230V
dc
1’ GND
dc
Y2 X
Y
AMEi 6 iSET
模拟量 / 3p 信 号 ,提 供 模 拟 反 馈 ( AME 作为 3P 驱 动)
ଌ҃٧
AME 1
AME 2
dc
A
a) 0 - 10V dc
b) 0 - 20mA dc
c) AME ͺ˝ 3P Ү
BGND
24V
230V
MODBUS
MODBUS
24V
230V
①
4×
dc
1’ GND
dc
Y2 X
Y
BGND
A
AMEi 6 iSET
3 点 MCV 控 制 信 号(可 能 与 230V 驱动器类型 AMV 2x/3x、85/86 配套使用)
SN
SP
4
1
3
5
-
24V/230V
AMEi 6 iSET
* 3P POI
ഴڰ
Y
1’
AMV
XGND
GND
SN
SP
4
1
3
5
Y2 X
Y
* 3P POI
ഴڰ
YXGND
AMV
24V
230V
MODBUS
BGND
A
* 3P POI - 3P 位置指示模块插入式配件,适用于 AMV 230V 驱动器类型 AMV 2x /3x、85/86(尚 不 提 供)
MCV
VD.IR.U2.41 | 7© 丹佛斯 | 2019.05
Page 8

数据表 AMEi 6 iSET
Modbus 寄存器 - 配置
MODBUS
虚拟地址
MODBUS
虚拟地址
[hex]
0x8000 32768 R/W 3,4 & 6 WORD 配置
0x8 001 32769 R/W 3,4 & 6 WORD 配置
0x8002 32770 R/W 3,4 & 6 WORD 配置 控制模式 选择驱动器应用模式 Y
0x8 010 32784 R/W 3,4 & 6 WORD 配置 字节序类型 LONG 和 FLOAT 类型的字节排序 Y
0x 80 11 32785 R/W 3,4 & 6 WORD 配置 波特率 Modbus 通 信所用的波特率 Y
0x 8012 32786 R/W 3,4 & 6 WORD 配置 UART 校验位 选择 UART 校验位 Y
0x8020 32 800 R/W 3,4 & 6 WORD 配置 设备变体 驱动器变体的选择 Y
0x8 021 328 01 R/W 3,4 & 6 WORD 配置 MCV 变体 MCV 变体的选择 Y
读取/写入Modbus 功能Modbus
[dec]
数据类型
类别 对象/参数名称 描述 持久性 状态文本 状态数量
正向或反向
工作模 式
模拟控制 信号
类型和范围
此时可在正向和反向工作模式之间
用于选择 模拟控 制信号输 入类型和 范围 N
进行选择
N
0 - 正向
1 - 反向
1: 0 -5Vdc
2: 0 -10Vd c
3: 2-10Vdc
4: 5 -10Vdc
5: 2-6Vdc
6: 6 -10Vd c
7: 0 -20mA
8: 4 -20mA
1 - 模拟控制
2 - 数字控制
0 - 大字节序
1 - 小字节序
1: 自动波特 率
检测
2: 9600 bp s
3: 19200 bps
4: 3840 0 bps
5: 57600 bps
6: 76800 bps
7: 115200 b ps
1: 1- 8-N -2
2: 1 -8- O-1
3: 1- 8- E-1
4: 1 -8- N-1
5: 自动校验 位
1: iN ET
2: iSET
0:AME
1:AMV
默认
2
8 0-10 Vdc
2 模拟控制
2 0 - 大字节序
7
5 自动校验 位
2 默认为生产集
2 默认为 AME
正向
自动波特率
检测
MODBUS
虚拟地址
MODBUS
虚拟地址
[hex]
0x 8013 32787 R 3,4 WORD 配置 MAC 地址 Modbu s 通信所用的 MAC 地址 N 1 127 na
读取/写入Modbus 功能Modbus
[dec]
数据类型
类别 对象/参数名称
描述
持久性 最小 最大 单位
默认
na
8 | VD.IR.U2.41 © 丹佛斯 | 2019.05
Page 9

数据表 AMEi 6 iSET
Modbus 寄存器 - 信息
MODBUS
虚拟地址
0x810 0 33024 R 3&4 FLOAT 信息
0x810 2 33026 R 3&4 FLOAT 信息 模拟输入 Y1 (%)
0x8104 330 28 R 3& 4 FLOAT 信息
0x8106 33030 R 3&4 FLOAT 信息 模 拟输入 Y2 (%)
[hex]
MODBUS
虚拟地址
[dec]
读取/写入Modbus 功能Modbus
数据类型
类别 对象/参数名称 描述 持久性 可靠性 单位
模拟输入 Y1 的
电压或电流
模拟输入 Y2 的
电压或电流
驱动器测得的 Y1 模拟 输入的电压 ( V) 或
驱动器测得的 Y1 模拟 输入的电压 ( V) 或
驱动器测得的 Y2 模拟 输入的电压 ( V) 或
驱动器测得的 Y2 模拟 输入的电压 ( V) 或
电流 (mA) 水平
电流 (mA) 水平 (%)
电流 (mA) 水平
电流 (mA) 水平 (%)
测得的电压水平
即 0.000… 10.000 对应于
0.00… 10. 00 V,或 者 电 流 水 平 ,
N
N 0 - 100 % %
N
N 0 - 100 % %
即 0.000 … 20.000 对应于
0.000 … 20.000 mA;
- 2 表示线缆破损
测得的电压水平
即 0.000… 10.000 对应于
0.00… 10. 00 V,或 者 电 流 水 平 ,
即 0.000 … 20.000 对应于
0.000 … 20.000 mA;
- 2 表示线缆破损
V / mA
V / mA
Modbus 寄存器 - 信息
MODBUS
虚拟地址
0x810 8 330 32 R 3 & 4 WORD 信息
0x810 A 33034 R 3 & 4 WORD 信息 SW 版本 驱动器的 SW 版本 N 0 0xFFFF na 0
0x810 B 33035 R 3 & 4 WOR D 信息 HW 版本 驱动器的 HW 版本 N 0 0x FFFF na 0
0x810 C 33036 R 3& 4 LONG 信息 生产 ID 驱动器的序列号 N 0
0x 8120 33056 R/W 3 & 4 字符串 信息 设备名称 As cii 编码的字符串 Y
0x 8140 33088 R 3 & 4 字 符串 信息 型号名称 AMEi 6、iSE T 或 iNET、24V 或 230V N
0x8160 3312 0 R 3 & 4 字符串 信息 供应商名称 丹佛斯 公司 N
0x818 0 33152 R/W 3,4 & 16 字符串 信息 位置名称 Ascii 编码的字符串 Y
0x 81A0 33184 R 3 & 4 字符串 信息 序列号
[hex]
MODBUS
虚拟地址
[dec]
(续)
读取/写入Modbus 功能Modbus
数据类型
类别 对象/参数名称 描述 持久性 最小 最大 单位 默认
所连接的 MCV
数量
所连接的 MCV 数量 N 0 2 na 0
0xFFFFFFFF
本对象的说明保留了生产时设定的驱动
器序列号。
N
na 0
-
Modbus 寄存器 - 操作
MODBUS
虚拟地址
MODBUS
虚拟地址
[hex]
0x8200 3328 0 R/W 3,4 & 16 FLOAT 操作 驱动器设定点 驱动器设定点 (%) N
0x8202 33282 R 3 & 4 FLOAT 操作 驱动器反馈 驱动器的位置指示 (%) N
读取/写入Modbus 功能Modbus
[dec]
数据类型
类别 对象/参数名称 描述 持久性 可靠性 单位 默认
驱动器设定点,
即 0 …100 对应于 0 … 10 0%。
仅在 选定数 字 模式时,
本寄存器才有 效
驱动器的位置指示 (%),
即 0 … 100 对应于 0 … 100% 。
仅在 选定数 字 模式时,
本寄存器才有 效。
% 0
% 0
MODBUS
虚拟地址
0x8204 3328 4 R/W 3,4 & 6 WORD 操作
0x8205 33285 R/W 3,4 & 6 WORD 操作 模拟输出类型 选择模拟输出类型 N
MODBUS
虚拟地址
0x8206 33286 R/W 3,4 & 16 FLOAT 操作
[hex]
[hex]
MODBUS
虚拟地址
[dec]
MODBUS
虚拟地址
[dec]
读取/写入Modbus 功能Modbus
读取/写入Modbus 功能Modbus
数据类型
数据类型
类别 对象/参 数名称 描述 持久性 状态文本 状态数量 默认
驱动器模式和特
殊功能
类别 对象/参数名称 描述 持久性 可靠性 单位 默认
模拟输出的电 压
或电流
显示驱 动器的当前 模
式。可在此 启动校准。
模拟输出的电 压 (V ) 或
电流 (mA)(反 馈 信 号 或
远程 I/O)
1 - 无限制模 式,
2 - 标准模 式,
N
N
3 - 校准模 式,
4 - 报警模 式,
5 - 维修模 式,
0 - X 信 号(电 压)
1 - X 信 号(电 流)
2 - 远 程 模 拟 输 出(电 压)
3 - 远 程 模 拟 输 出(电 流)
电 压 水 平 ,即 0.000 -10.000
对应于 0.000 -10.000 V,电 流 水 平 ,
即 0.000 -20.000 对应于
6 - 睡眠模式
0mA - 20mA
无限制
6
0 - X 信号
4
(电 压)
V / mA 0
VD.IR.U2.41 | 9© 丹佛斯 | 2019.05
模式
Page 10

数据表 AMEi 6 iSET
Modbus 寄存器 - 报警与警告
MODBUS
虚拟地址
0x8300 33536 R 3&4 WORD 报警与警告 报警:校准过程中出现 故障 驱动器校准过程中出现故障 N 开 关 na 位 0:na
0x8300 33536 R 3&4 WORD 报警与警告
0x8300 33536 R 3&4 WORD 报警与警告
0x8300 33536 R 3&4 WORD 报警与警告 报警:驱动器温度过高 驱动器内的温度过高 N 开 关 na 位 3:na
0x8300 33536 R 3&4 WORD 报警与警告 报警:电源电压过低 测得的电 源电压过低 N 开 关 na 位 4:na
0x8300 33536 R 3&4 WORD 报警与警告 报警:开关状态异常
0x8300 33536 R 3&4 LONG 报警与警告
0x83 01 33537 R 3& 4 WORD 报警与警告 警告:电源电压高 测得的电源电压较高 N 开 关 na 位 0:na
0x83 01 33537 R 3& 4 WORD 报警与警告 警告:电源电压低 测得的电源电压较 低 N 开 关 na 位 1:na
0x83 01 33537 R 3& 4 WORD 报警与警告 警告:异常停转 检测到驱动器异常停 转 N 开 关 na 位 2:na
0x83 01 33537 R 3& 4 WORD 报警与警告 警告:电机速 度过低 驱动器电机未达到指定 速度 N 开 关 na 位 3:na
0x83 01 33537 R 3& 4 WORD 报警与警告 警告:无控制信号 驱动器检测到无控制信号 N 开 关 na 位 4:na
0x83 01 33537 R 3& 4 WORD 报警与警告
0x83 01 33537 R 3& 4 WORD 报警与警告
0x83 01 33537 R 3& 4 WORD 报警与警告 警告:D IP 开关设定无效
[hex]
MODBUS
虚拟地址
[dec]
读取/写入Modbus 功能Modbus
数据类型
类别 对象/参数名称 描述 持久性 最小 最大 单位 默认
报警:校准出现 故障,
行程太高
报警:校准出现 故障,
行程太低
报警:内 部 故 障 ,请 更 换
驱动器
警告:驱动器的位置超出
“ 拉 伸 ”范 围
警告:驱动器的位置超出
“ 压 缩 ”范 围
校 准 过 程 中 出 现 故 障 ,行 程 太 高 N 开 关 na 位 1:na
校 准 过 程 中 出 现 故 障 ,行 程 太 低 N 开 关 na 位 2:na
开关的活动范围超出了指定参数
(状 态 有 误)
发 现 无 法 校 正 的 内 部 故 障 ,请 更
换驱动器
驱 动 器 的 位 置 超 出“ 拉 伸 ”
方向的范围
驱 动 器 的 位 置 超 出“ 压 缩 ”
MAC 地址分配是通过 DIP 开关设定
方向的范围
的,但却将其错误地设定为 0
N 开 关 na 位 5:na
N 开 关 na 位 15:na
N 开 关 na 位 5:na
N 开 关 na 位 6:na
N 开 关 na 位 7:na
Modbus 寄存器 - 故障排除与维修
MODBUS
虚拟地址
0x8400 33792 R 3 & 4 LO NG 故 障排除与维修 校准次数 驱动器校准次数 Y 0 最高 na na
0x8402 33794 R 3 & 4 LO NG 故 障排除与维 修 完全拉伸的次 数 驱动器完全拉伸的次 数 Y 0 最高 na na
0x8404 33796 R 3 & 4 LONG 故障排 除与维修 完全压缩的次数 驱动器完全压缩的次数 Y 0 最高 na na
0x8406 33798 R 3 & 4 LONG 故障排 除与维修 总运行时数 驱动器的总运行时数 Y 0 最高 小时 na
0x8408 33800 R 3 & 4 LO NG 故 障排除与维 修 驱动器执行的总步骤数
0x840A 338 02 R 3 & 4 LONG 故障排 除与维修 通电后的 分钟数 自驱 动器上次通电后的分钟数 N 0 最高 分钟 na
0x840C 33 804 R 3 & 4 LONG 故障 排除与维修 通电次数 驱动器通电次数 Y 0 最高 na na
0x840E 33806 R 3 & 4 LO NG 故 障排除与维修 高压运行次数 接通高压电源的次数 Y 0 最高 na na
0x 8410 338 08 R 3 & 4 LONG 故障 排除与维修 高压运行的分钟数 驱动器接 通高压电源的分钟数 Y 0 最高 分钟 na
0x 8412 33810 R 3 & 4 LONG 故障 排除与维修 低 压运行次数 接通低压电源的次 数 Y 0 最高 na na
0x 8414 338 12 R 3 & 4 LONG 故障排除与维 修 低压运行的分钟数 驱动器接通低压电源的分钟数 Y 0 最高 分钟 na
0x 8416 33814 R 3 & 4 LONG 故 障排除与维 修 检测到 iSET 的次数 检测到振荡的次数 Y 0 最高 na na
[hex]
MODBUS
虚拟地址
[dec]
读取/写入Modbus 功能Modbus
数据类型
类别 对象/参数名称 描述 持久性 最小 最大 单位 默认
自第一次开启以来,驱动 器执行的
总步骤数
Y 0 最高 na na
Modbus 寄存器 - 配置
MODBUS
虚拟地址
MODBUS
虚拟地址
[hex]
0x8500 34048 W 6 WORD 特殊 复位 热复位或 冷复位 - 0x5741 - 热,0 x434F - 冷 2
0x85 01 34 049 R/W 3,4 & 6 WORD 特殊 更新状态 - N
读取/写入Modbus 功能Modbus
[dec]
数据类型
类别 对象/参数名称 描述 持久性 状态文本 状态数量 默认状态
1 - 默认,
2 - 正在 准备,
3 - 准备就绪,
4 - 故障,
5 - 已接收,
6 - 执行更新
6
-
10 | VD.IR.U2.41 © 丹佛斯 | 2019.05
Page 11

数据表 AMEi 6 iSET
尺寸
ØA
100
AMEi 6 iSET 智能驱动器
应另行订购
H
250
最低
AFP 2 驱动器
尺寸
(cm2)
80 175 602
160 228 622
320 295 622
630 300 747
ØA H
mm
220
140
VD.IR.U2.41 | 11© 丹佛斯 | 2019.05
Page 12

数据表 AMEi 6 iSET
© 丹佛斯 | DHS-SRMT/SI | 2019.0512 | VD.IR.U2.41
 Loading...
Loading...