

Page 1
3B SCIENTIFIC3B SCIENTIFIC
3B SCIENTIFIC®
3B SCIENTIFIC3B SCIENTIFIC
U15040 Drehpendel nach Prof. Pohl
Bedienungsanleitung
12/03 ALF
PHYSICSPHYSICS
PHYSICS
PHYSICSPHYSICS
9
8
7
6
5
4
bl bm bn bo bp
bq br bs
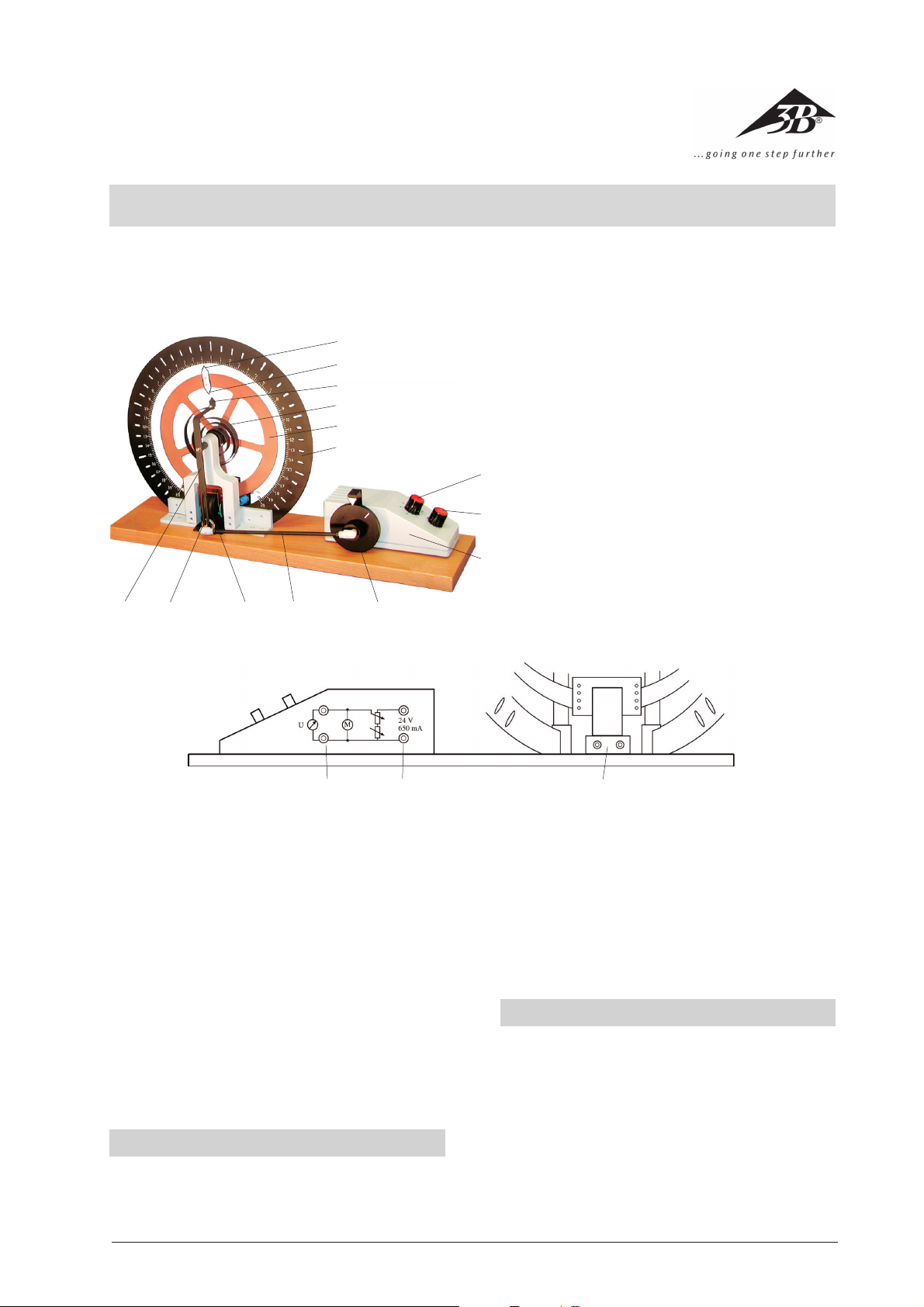
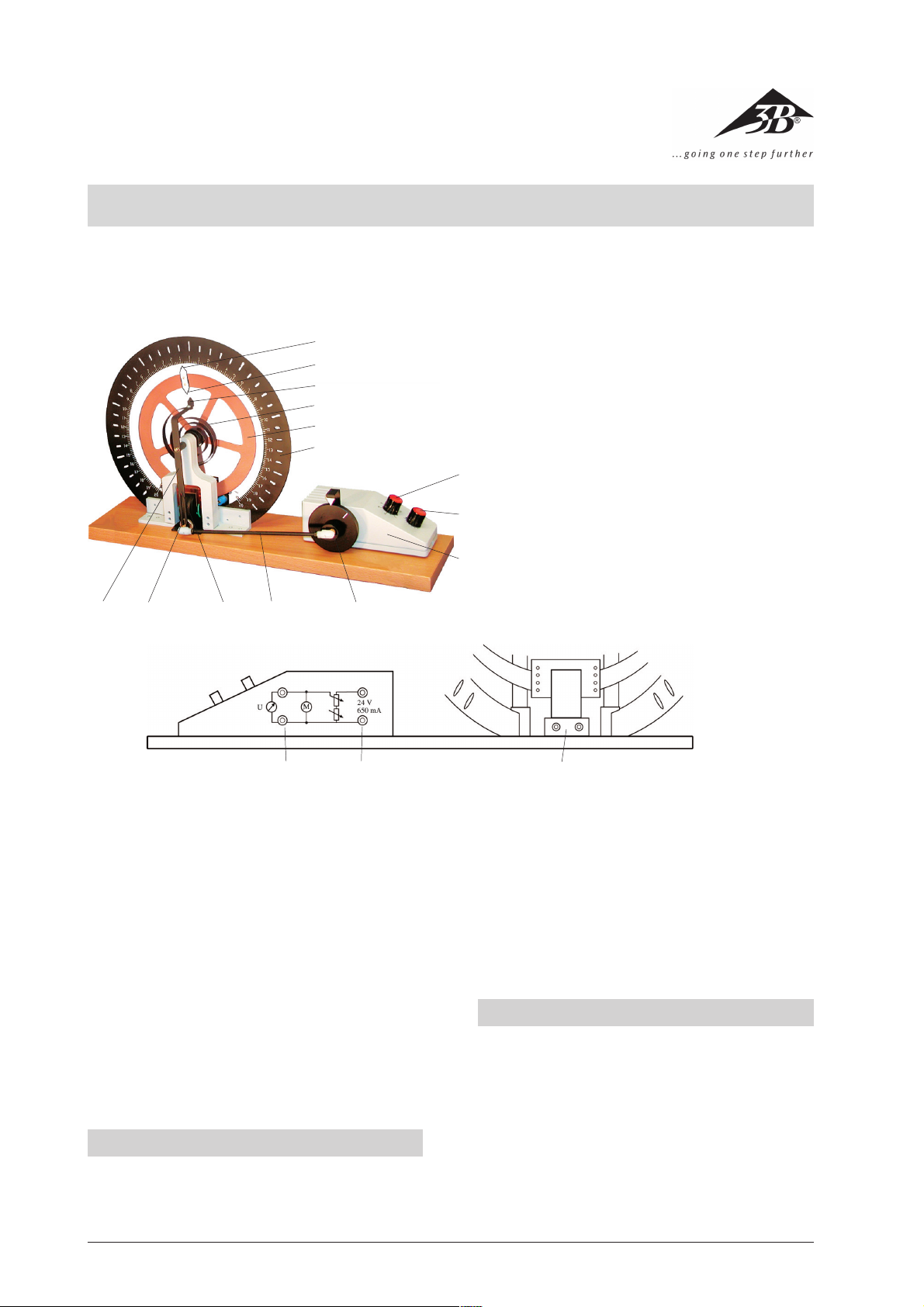
1 Erregermotor
2 Drehknopf zur Feineinstellung der Erregerspannung
3 Drehknopf zur Grobeinstellung der Erregerspannung
4 Skalenring
5 Pendelkörper
6 Schneckenfeder
7 Zeiger zur Phasenlage des Erregers
8 Zeiger zur Phasenlage des Pendelkörpers
9 Zeiger für Auslenkung des Pendelkörpers
3
bl Erreger
bm Wirbelstrombremse
bn Führungsschlitz und Schraube zur Einstellung der Erreger-
2
amplitude
bo Schubstange
bp Antriebsrad mit Exzenter
1
bq 4-mm-Sicherheitsbuchsen zum Messen der Erregerspannung
br 4-mm-Sicherheitsbuchsen zur Versorgung des Erregermotors
bs 4-mm-Sicherheitsbuchsen zur Versorgung der Wirbelstrom-
bremse
Das Drehpendel dient zur Untersuchung von freien,
erzwungenen und chaotischen Schwingungen bei verschiedenen Dämpfungen.
Versuchsthemen:
• Freie Drehschwingungen bei verschiedenen Dämp-
fungen (Schwingfall mit mäßiger Dämpfung, aperiodische Schwingung und aperiodischer Grenzfall)
• Erzwungene Schwingungen und deren Resonanz-
kurven bei verschiedenen Dämpfungen
• Phasenverschiebung zwischen Erreger und Resona-
tor im Resonanzfall
• Chaotische Drehschwingungen
• Statische Bestimmung der Richtgröße D
• Dynamische Bestimmung des Trägheitsmoments J
1. Sicherheitshinweise
• Das Drehpendel bei der Entnahme aus der Verpa-
ckung nicht am Skalierring anfassen! Beschädi-
gungsgefahr! Entnahme immer mit Entnahmehilfe (Innenverpackung) vornehmen!
• Zum Tragen des Drehpendels Gerät immer an der
Grundplatte halten.
• Maximal zulässige Versorgungsspannung des
Erregermotors (24 V DC) nicht überschreiten.
• Das Drehpendel keinen unnötigen mechanischen
Belastungen aussetzen.
2. Beschreibung, technische Daten
Das Drehpendel nach Prof. Pohl besteht aus einem auf
einer hölzernen Grundplatte montiertem schwingenden System und einem Elektromotor. Das schwingende System ist ein kugelgelagertes Kupferrad (5), das
über eine Spiralfeder (6), die das rücktreibende Moment liefert, mit dem Erregergestänge verbunden ist.
Zur Anregung des Drehpendels dient ein Gleichstrommotor mit grob- und fein einstellbarer Drehzahl, der
über einen Exzenter (14) mit Schubstange (13) die Spi-
1
Page 2

ralfeder in periodischer Folge auseinanderzieht und
ω
0
2
=
D
J
zusammendrückt und so das Kupferrad in Schwingung
versetzt. Für die Dämpfung wird eine elektromagnetische Wirbelstrombremse (11) verwendet. Ein Skalenring (4) mit Schlitzen und Skala in 2-mm-Teilung umgibt das schwingende System; Zeiger befinden sich an
Erreger und Resonator.
Das Gerät kann auch in der Demonstration zur
Schattenprojektion verwendet werden.
Für die Stromversorgung wird ein DC-Netzgerät für
Drehpendel U11755 benötigt.
Eigenfrequenz: ca. 0,5 Hz.
Erregerfrequenz: 0 bis 1,3 Hz (stufenlos einstellbar)
Anschlüsse:
Motor: max. 24 V DC, 0,7 A,
über 4-mm-Sicherheitsbuchsen
Wirbelstrombremse:0 bis 24 V DC, max. 2 A,
über 4-mm- Sicherheitsbuchsen
Skalenring: 300 mm Ø
Abmessungen: 400 mm x 140 mm x 270 mm
Masse: 4 kg
2.1 Lieferumfang
1 Drehpendel
2 Zusatzmassen 10 g
2 Zusatzmassen 20 g
3. Theoretische Grundlagen
3.1 Verwendete Formelzeichen
D = Winkelrichtgröße
J = Massenträgheitsmoment
M = Rücktreibendes Drehmoment
T = Periodendauer
T0= Periodendauer des ungedämpften Systems
Td= Periodendauer des gedämpften Systems
= Amplitude des Erreger-Drehmoments
M
E
b = Dämpfungsmoment
n = Periodenzahl
t = Zeit
Λ = Logarithmisches Dekrement
δ = Dämpfungskonstante
ϕ
= Auslenkwinkel
ϕ
= Amplitude zur Zeit t = 0 s
0
ϕ
= Amplitude nach n Perioden
n
ϕ
= Erregeramplitude
E
ϕ
= Systemamplitude
S
ω0= Eigenfrequenz des schwingenden Systems
ωd= Eigenfrequenz des gedämpften Systems
ωE= Erregerkreisfrequenz
ωE
= Erregerkreisfrequenz für max. Amplitude
res
Ψ0S= Systemnullphasenwinkel
3.2 Harmonische Drehschwingung
Eine harmonische Schwingung liegt vor, wenn die rücktreibende Kraft proportional zur Auslenkung ist. Bei
harmonischen Drehschwingungen ist das rück-
treibende Drehmoment proportional zum Auslenkwinkel ϕ:
M = D ·
ϕ
Der Proportionalitätsfaktor D (Winkelrichtgröße) lässt
sich durch Messung des Auslenkwinkels und des auslenkenden Moments errechnen.
Die Eigenkreisfrequenz des Systems ω0 ergibt sich nach
Messung der Periodendauer T aus
ω
= 2 π/T
0
und das Massenträgheitsmoment J aus
3.3 Freie gedämpfte Drehschwingung
Bei einem schwingenden System, bei dem durch Reibungsverluste Energie verloren geht, ohne dass diese
durch von außen zugeführte Energie kompensiert wird,
verringert sich die Amplitude ständig, d.h. die Schwingung ist gedämpft.
Dabei ist das Dämpfungsmoment b proportional zur
Winkelgeschwindigkeit
.
ϕ
.
Aus dem Drehmoment-Gleichgewicht ergibt sich die
Bewegungsgleichung
.
..
JbD⋅+⋅+⋅=
ϕϕϕ
0
Für die ungedämpfte Schwingung ist b = 0
Beginnt die Schwingung zur Zeit t = 0 s mit der maxi-
malen Amplitude
ϕ
ergibt sich die Lösung der Diffe-
0
renzialgleichung bei einer nicht zu starken Dämpfung
(δ² < ω0²) (Schwingfall)
–δ ·t
ϕ
ϕ
=
· e
· cos (
ω
0
d
· t)
δ = b/2 J ist die Dämpfungskonstante und
2
ωωδ
=−
d
2
0
die Eigenfrequenz des gedämpften Systems.
Bei einer starken Dämpfung (δ² > ω0²) schwingt das
System nicht, sondern kriecht in die Ruhelage (Kriechfall).
Die Periodendauer Td des gedämpft schwingenden Systems ändert sich gegenüber T0 des ungedämpft schwingenden Systems bei nicht zu starker Dämpfung nur
geringfügig.
Durch Einsetzen von t = n · Td in die Gleichung
–δ ·t
ϕ
ϕ =
und für die Amplitude nach n Perioden ϕ =
man mit der Beziehung
ϕ
ϕ
· e
0
n
0
δ
−⋅
n
=⋅
eT
· cos (
ω
= 2 π/T
d
d
ω
· t)
d
ϕ
erhält
n
d
und daraus das logarithmische Dekrement Λ:
Λ
=⋅ =⋅
δ
T
d
ϕ
1
n
n
In In
ϕ
0
ϕ
=
n
ϕ
n+1
2
Page 3
Durch Einsetzen von δ = Λ / Td ,
Ψ
ω
= 2π / Td in die Gleichung
d
2
ωωδ
=−
d
2
0
ω
= 2 π / T0 und
0
erhält man:
2
TT
=⋅+1
d0
Λ
2
4
π
womit sich die Periodendauer Td genau berechnen
lässt, wenn T0 bekannt ist.
3.4 Erzwungene Drehschwingung
Bei erzwungenen Drehschwingungen wirkt von außen
ein periodisch mit einer Sinusfunktion veränderliches
Drehmoment auf das schwingende System. In der
Bewegungsgleichung ist dieses Erregermoment zu ergänzen
.
..
JbD M t⋅+⋅+⋅= ⋅ ⋅
ϕϕϕ ω
sin
E
()
E
Nach einer Einschwingzeit schwingt das Drehpendel
in einem stationären Zustand mit derselben Kreisfrequenz wie der Erreger, dabei kann ωE noch gegen ω
phasenverschoben sein. Ψ0S ist der System-Nullphasenwinkel, die Phasenverschiebung zwischen dem schwingenden System und dem Erreger.
ϕ
ϕ
=
· sin (
ω
· t –
Ψ
S
E
Für die Systemamplitude
ϕ
=
2
ωω δω
−
()
02E
M
J
2
)
0S
ϕ
gilt
S
E
2
+⋅
4
2
E
Für das Verhältnis von Systemamplitude zu Erregeramplitude gilt
M
ϕ
S
=
ϕ
E
ω
E
−
14
ω
0
E
J
2
2
+
2
δ
ω
0
2
ω
E
⋅
ω
0
Bei starker Dämpfung gibt es keine Amplitudenüberhöhung.
Für den System-Nullphasenwinkel Ψ0S gilt
arctan
ωω
=
0S
δω
2
22
−
ω
0
Für ωE = ω0 (Resonanz) ist der System-Nullphasenwinkel Ψ0S = 90°. Dies gilt auch für δ = 0 mit entsprechendem Grenzübergang.
Bei gedämpften Schwingungen (δ > 0) und ωE < ω
ergibt sich 0° ≤ Ψ0S ≤ 90°, für ωE > ω0 gilt 90° ≤ Ψ
0
0S
≤ 180°.
Bei ungedämpften Schwingungen (δ = 0) gilt Ψ0S = 0°
bei ωE < ω0 und Ψ0S = 180° für ωE > ω0.
4.Bedienung
4.1 Freie gedämpfte Drehschwingung
• Wirbelstrombremse mit dem Ausgang für einstell-
bare Spannung des Drehpendel-Netzgeräts verbinden.
• Amperemeter in den Stromkreis schalten.
0
• Dämpfungskonstante in Abhängigkeit vom Strom
bestimmen.
4.2 Erzwungene Drehschwingung
• Anschlussbuchsen (16) des Erregermotors mit dem
Festspannungsausgang des Drehpendel-Netzgeräts
verbinden.
• Voltmeter mit den Anschlussbuchsen (15) des
Erregermotors verbinden.
• Bestimmung der Schwingungsamplitude in Abhän-
gigkeit der Erregerfrequenz bzw. der Versorgungsspannung.
• Bei Bedarf Wirbelstrombremse mit dem Ausgang
für einstellbare Spannung des Drehpendel-Netzgeräts verbinden.
4.3 Chaotische Schwingungen
• Zur Erzeugung chaotischer Schwingungen stehen 4
Zusatzmassen zur Verfügung, die das lineare Rückstellmoment des Drehpendels verändern.
• Dazu Zusatzmasse am Pendelkörper (5) anschrau-
ben.
Bei ungedämpften Schwingungen steigt die Amplitude im Resonanzfall (ωE gleich ω0) theoretisch unendlich an und führt zur „Resonanzkatastrophe“.
Bei gedämpften Schwingungen und nicht zu starker
Dämpfung wird die Systemamplitude maximal, wobei
die Erregerkreisfrequenz ω
kleiner ist als die Eigen-
E res
kreisfrequenz des Systems. Diese Frequenz ergibt sich
aus
2
δ
ωω
=⋅−1
Eres 0
2
2
ω
0
3
Page 4
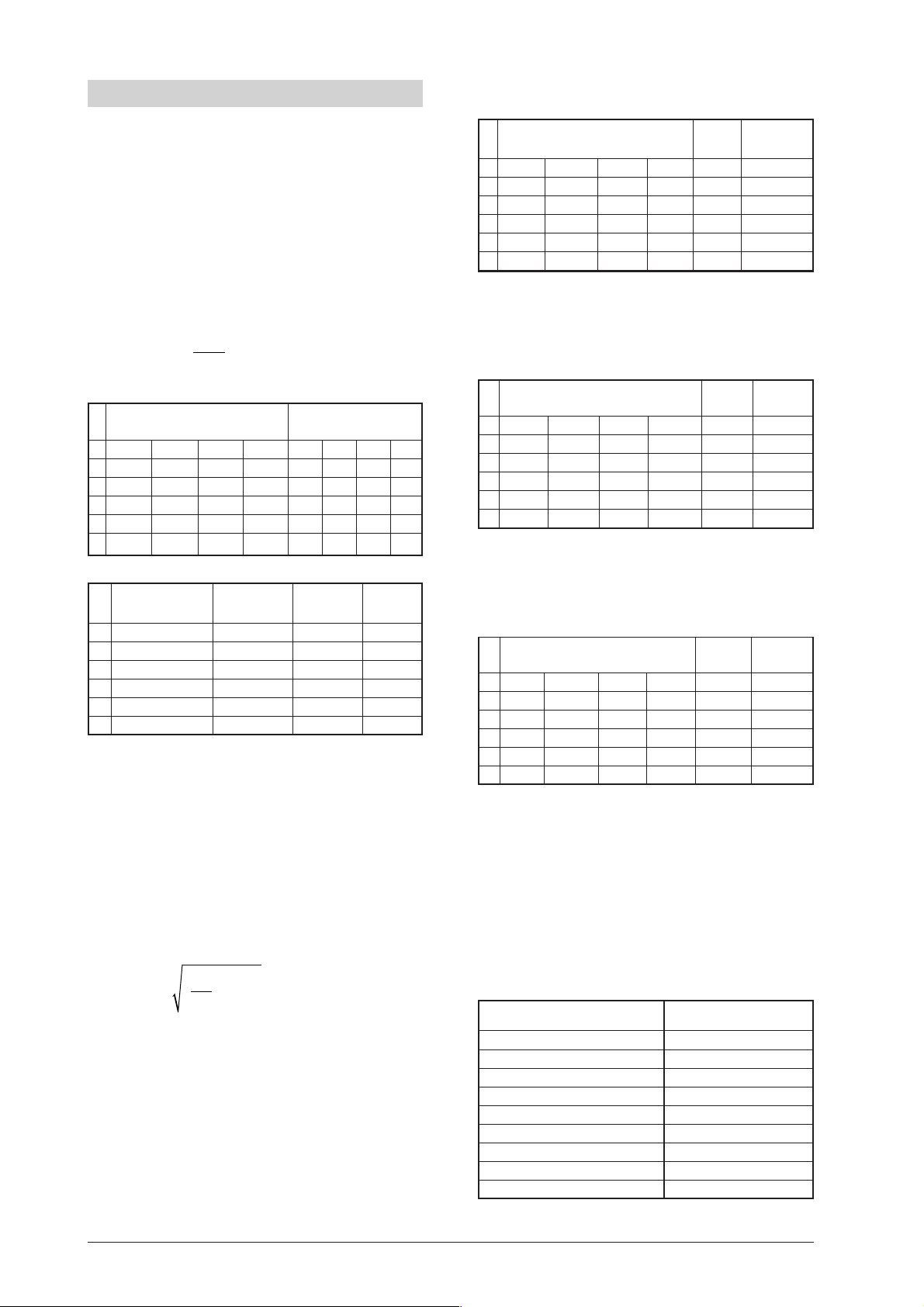
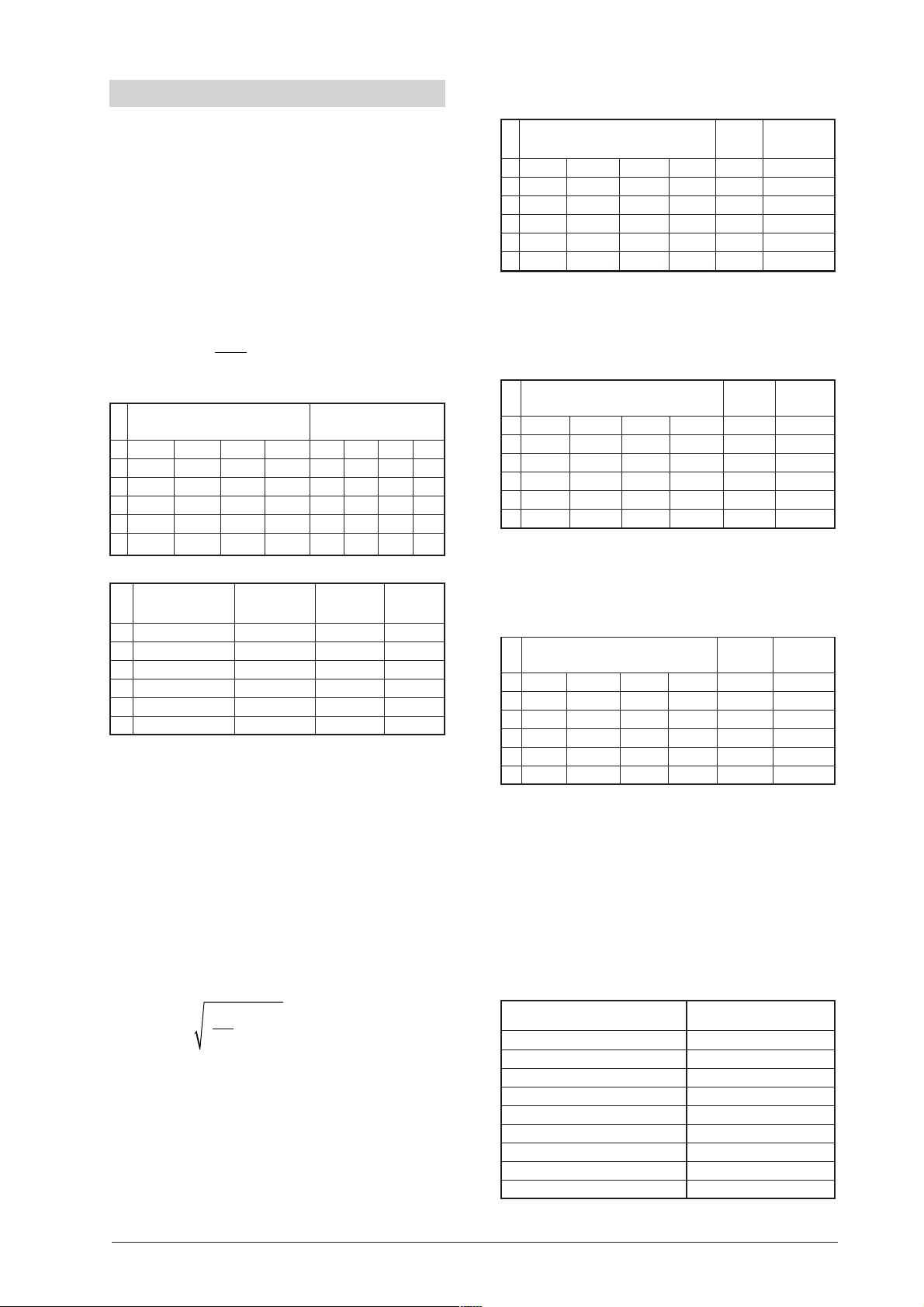
5. Versuchsbeispiele
5.1 Freie gedämpfte Drehschwingung
• Zur Bestimmung des logarithmischen Dekrements
Λ werden die Amplituden in mehrfachen Durch-
läufen gemessen und gemittelt. Dazu werden in
zwei Messreihen die Ausschläge des Drehpendels
auf der Skala jeweils links und rechts abgelesen.
• Der Startpunkt des Pendelkörpers lag bei 15 bzw.
–15 auf der Skala. Fünf Ausschläge wurden abgelesen.
• Aus dem Verhältnis der Amplituden ergibt sich Λ
nach der Formel
ϕ
n
Λ
=
In
n
ϕ
n+1
ϕ
–
ϕ
+
0 –15 –15 –15 –15 15 15 15 15
1 –14,8 –14,8 –14,8 –14,8 14,8 14,8 14,8 14,8
2 –14,4 –14,6 –14,4 –14,6 14,4 14,4 14,6 14,4
3 –14,2 –14,4 –14,0 –14,2 14,0 14,2 14,2 14,0
4 –13,8 –14,0 –13,6 –14,0 13,8 13,8 14,0 13,8
5 –13,6 –13,8 –13,4 –13,6 13,4 13,4 13,6 13,6
nØ
ϕ
– Ø
ϕ
+
Λ
–
Λ
+
0 –15 15
1 –14,8 14,8 0,013 0,013
2 –14,5 14,5 0,02 0,02
3 –14,2 14,1 0,021 0,028
4 –13,8 13,8 0,028 0,022
5 –13,6 13,5 0,015 0,022
• Der gemittelte Wert für Λ beträgt Λ = 0,0202.
• Für die Schwingungsdauer T des Pendels gilt
t = n · T. Dazu die Zeit für 10 Schwingungen mit
einer Stoppuhr messen und T berechnen.
T = 1,9 s
• Aus diesen Werten lässt sich die Dämpfungskonstante δ mit δ = Λ / T bestimmen.
δ
= 0,0106 s
–1
• Für die Eigenfrequenz ω gilt
2
2
π
2
ω
=
ω
= 3,307 Hz
−
δ
T
5.2 Freie gedämpfte Drehschwingung
• Zur Bestimmung der Dämpfungskonstante δ in Abhängigkeit vom Strom Ι durch den Elektromagne-
ten wurde der gleiche Versuch mit zugeschalteter
Wirbelstrombremse bei Ι = 0,2 A, 0,4 A und 0,6 A
durchgeführt.
ΙΙ
Ι = 0,2 A
ΙΙ
n
ϕ
– Ø
ϕ
– Λ –
0 –15 –15 –15 –15 –15
1 –13,6 –13,8 –13,8 –13,6 –13,7 0,0906
2 –12,6 –12,8 –12,6 –12,4 –12,6 0,13
3 –11,4 –11,8 –11,6 –11,4 –11,5 0,0913
4 –10,4 –10,6 –10,4 –10,4 –10,5 0,0909
5 9,2 –9,6 –9,6 –9,6 –9,5 0,1
• Bei T = 1,9 s und gemitteltem Λ = 0,1006 ergibt
ϕ
– Λ –
–1
sich die Dämpfungskonstante: δ = 0,053 s
ΙΙ
Ι = 0,4 A
ΙΙ
n
ϕ
– Ø
0 –15 –15 –15 –15 –15
1 –11,8 –11,8 –11,6 –11,6 –11,7 0,248
2 –9,2 –9,0 –9,0 –9,2 –9,1 0,25
3 –7,2 –7,2 –7,0 –7,0 –7,1 0,248
4 –5,8 –5,6 –5,4 –5,2 –5,5 0,25
5 –4,2 –4,2 –4,0 –4,0 –4,1 0,29
• Bei T = 1,9 s und gemitteltem Λ = 0,257 ergibt sich
die Dämpfungskonstante: δ = 0,135 s
ΙΙ
Ι = 0,6 A
ΙΙ
n
ϕ
– Ø
–1
ϕ
– Λ –
0 –15 –15 –15 –15 –15
1 –9,2 –9,4 –9,2 –9,2 –9,3 0,478
2 –5,4 –5,2 –5,6 –5,8 –5,5 0,525
3 –3,2 –3,2 –3,2 –3,4 –3,3 0,51
4 –1,6 –1,8 –1,8 –1,8 –1,8 0,606
5 –0,8 –0,8 –0,8 –0,8 –0,8 0,81
• Bei T = 1,9 s und gemitteltem Λ = 0,5858 ergibt
sich die Dämpfungskonstante: δ = 0,308 s
–1
5.3 Erzwungene Drehschwingung
• Zur Bestimmung der Schwingungsamplitude in Abhängigkeit der Erregerfrequenz bzw. der Versorgungsspannung wird der maximale Ausschlag
des Pendelkörpers abgelesen.
T = 1,9 s
Motorspannung V
ϕ
3 0,8
4 1,1
5 1,2
6 1,6
7 3,3
7,6 20,0
8 16,8
9 1,6
10 1,1
4
Page 5
• Die Eigenkreisfrequenz des Systems ω0 ergibt sich
nach Messung der Periodendauer T aus
ω
= 2 π/T = 3,3069 Hz
0
• Bei einer Motorspannung von 7,6 V findet die größ-
te Auslenkung statt, d.h. der Resonanzfall tritt ein.
• Dann wurde der gleiche Versuch mit zugeschalteter
Wirbelstrombremse bei Ι = 0,2 A, 0,4 A und 0,6 A
durchgeführt.
ΙΙ
Ι = 0,2 A
ΙΙ
Motorspannung V
ϕ
3 0,9
4 1,1
5 1,2
6 1,7
7 2,9
7,6 15,2
8 4,3
9 1,8
10 1,1
ΙΙ
Ι = 0,6 A
ΙΙ
Motorspannung V
7,6 3,6
5 1,3
6 1,8
7 3,6
7,6 7,4
8 3,6
9 1,6
10 1,0
ϕ
3 0,9
4 1,1
5 1,2
6 1,6
7 2,8
8 2,6
9 1,3
10 1,0
ΙΙ
Ι = 0,4 A
ΙΙ
Motorspannung V
3 0,9
4 1,1
A
[skt]
20
15
10
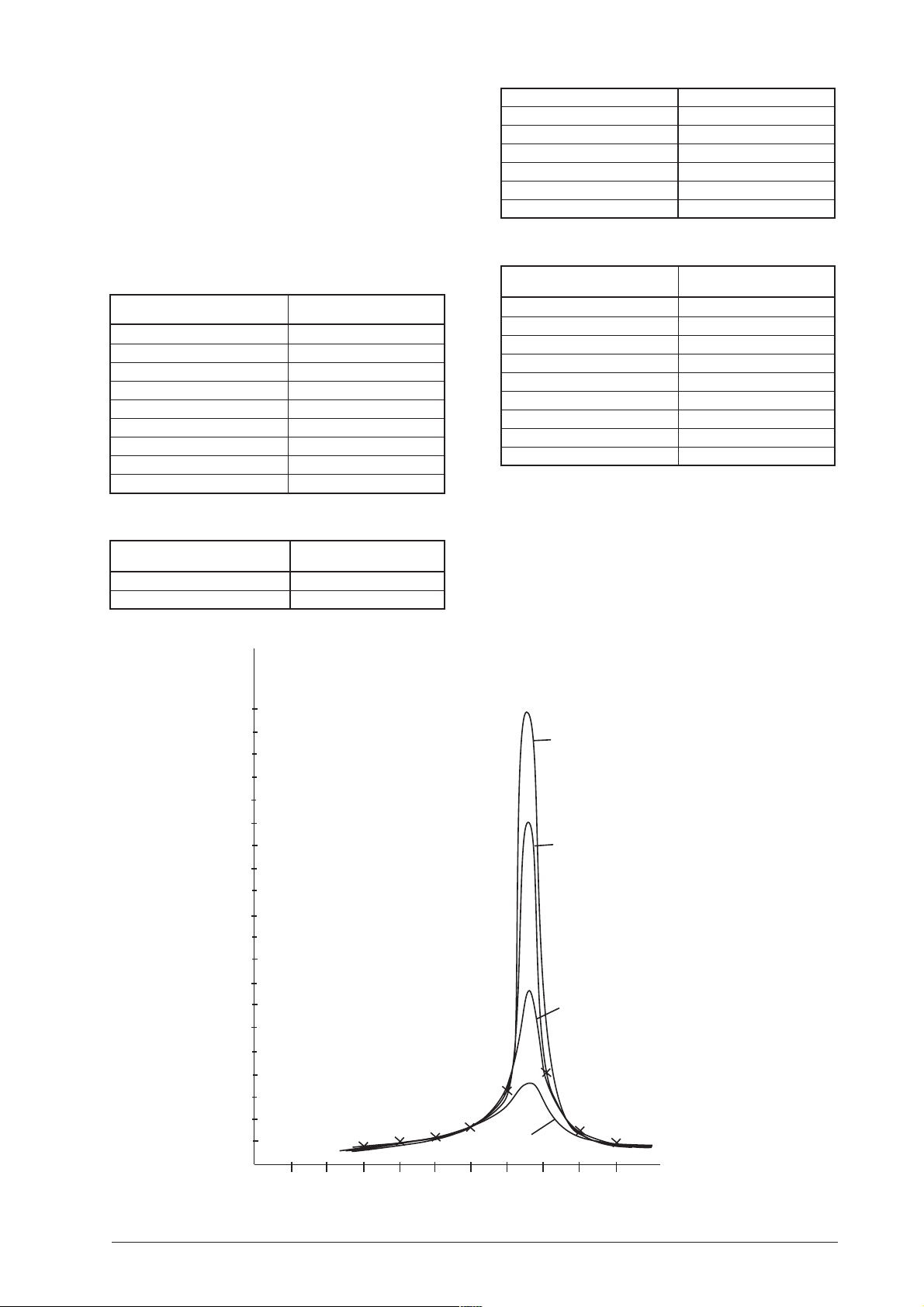
• Aus diesen Messungen lassen sich die Resonanz-
kurven grafisch darstellen, indem man die Ampli-
ϕ
tuden in Abhängigkeit zur Motorspannung aufträgt.
• Aus der Halbwertsbreite des Grafen kann die Reso-
nanzfrequenz grafisch ermittelt werden.
I=0,0A
I=0,2A
I=0,4A
5
1
Resonanzkurven
012
3
567 8910
4
3B Scientific GmbH • Rudorffweg 8 • 21031 Hamburg • Deutschland • www.3bscientific.com • Technische Änderungen vorbehalten
I=0,6A
u[v]
5
Page 6
3B SCIENTIFIC3B SCIENTIFIC
3B SCIENTIFIC®
3B SCIENTIFIC3B SCIENTIFIC
PHYSICSPHYSICS
PHYSICS
PHYSICSPHYSICS
U15040 Torsion pendulum according to Professor Pohl
Operating instructions
12/03 ALF
9
8
7
6
5
4
bl bm bn bo bp
bq br bs
1 Exciter motor
2 Control knob for fine adjustment of the exciter voltage
3 Control knob for coarse adjustment of the exciter voltage
4 Scale ring
5 Pendulum body
6 Coil spring
7 Pointer for the exciter phase angle
8 Pointer for the pendulum’s phase angle
9 Pointer for the pendulum’s deflection
3
bl Exciter
bm Eddy current brake
bn Guide slot and screw to set the exciter amplitude
2
bo Connecting rod
bp Eccentric drive wheel
bq 4-mm safety socket for exciter voltage measurement
1
br 4-mm safety sockets for the exciter motor power supply
bs 4-mm safety sockets for the eddy current brake power
supply
The torsion pendulum may be used to investigate free,
forced and chaotic oscillations with various degrees of
damping.
Experiment topics:
• Free rotary oscillations at various degrees of damp-
ing (oscillations with light damping, aperiodic oscillation and aperiodic limit)
• Forced rotary oscillations and their resonance
curves at various degrees of damping
• Phase displacement between the exciter and reso-
nator during resonance
• Chaotic rotary oscillations
• Static determination of the direction variable D
• Dynamic determination of the moment of inertia J
1. Safety instructions
• When removing the torsional pendulum from the
packaging do not touch the scale ring. This could
lead to damage. Always remove using the handles
provided in the internal packaging.
• When carrying the torsional pendulum always hold
it by the base plate.
• Never exceed the maximum permissible supply
voltage for the exciter motor (24 V DC).
• Do not subject the torsional pendulum to any un-
necessary mechanical stress.
2. Description, technical data
The Professor Pohl torsional pendulum consists of a
wooden base plate with an oscillating system and an
electric motor mounted on top. The oscillating system
is a ball-bearing mounted copper wheel (5), which is
connected to the exciter rod via a coil spring (6) that
provides the restoring torque. A DC motor with coarse
and fine speed adjustment is used to excite the torsional pendulum. Excitement is brought about via an
eccentric wheel (14) with connecting rod (13) which
6
Page 7

unwinds the coil spring then compresses it again in a
periodic sequence and thereby initiates the oscillation
of the copper wheel. The electromagnetic eddy current brake (11) is used for damping. A scale ring (4)
with slots and a scale in 2-mm divisions extends over
the outside of the oscillating system; indicators are
located on the exciter and resonator.
The device can also be used in shadow projection demonstrations.
A DC power supply unit for the torsional pendulum
U11755 is required to power the equipment.
Natural frequency: 0.5 Hz approx.
Exciter frequency: 0 to 1.3 Hz (continuously adjustable)
Terminals:
Motor: max. 24 V DC, 0.7 A,
via 4-mm safety sockets
Eddy current brake: 0 to 24 V DC, max. 2 A,
via 4-mm safety sockets
Scale ring: 300 mm Ø
Dimensions: 400 mm x 140 mm x 270 mm
Ground: 4 kg
2.1 Scope of supply
1 Torsional pendulum
2 Additional 10 g weights
2 Additional 20 g weights
3. Theoretical Fundamentals
3.1 Symbols used in the equations
D = Angular directional variable
J = Mass moment of inertia
M = Restoring torque
T = Period
T0= Period of an undamped system
Td= Period of the damped system
= Amplitude of the exciter moment
M
E
b = Damping torque
n = Frequency
t = Time
Λ = Logarithmic decrement
δ = Damping constant
ϕ
= Angle of deflection
ϕ
= Amplitude at time t = 0 s
0
ϕ
= Amplitude after n periods
n
ϕ
= Exciter amplitude
E
ϕ
= System amplitude
S
ω0= Natural frequency of the oscillating system
ωd= Natural frequency of the damped system
ωE= Exciter angular frequency
ωE
= Exciter angular frequency for max. amplitude
res
Ψ0S= System zero phase angle
3.2 Harmonic rotary oscillation
A harmonic oscillation is produced when the restoring
torque is proportional to the deflection. In the case of
harmonic rotary oscillations the restoring torque is
proportional to the deflection angle ϕ:
M = D ·
ϕ
The coefficient of proportionality D (angular direction
variable) can be computed by measuring the deflection angle and the deflection moment.
If the period duration T is measured, the natural resonant frequency of the system ω0 is given by
ω
= 2 π/T
0
and the mass moment of inertia J is given by
D
2
ω
=
0
J
3.3 Free damped rotary oscillations
An oscillating system that suffers energy loss due to
friction, without the loss of energy being compensated
for by any additional external source, experiences a
constant drop in amplitude, i.e. the oscillation is
damped.
At the same time the damping torque b is proportional
to the deflectional angle
.
ϕ
.
The following motion equation is obtained for the
torque at equilibrium
.
..
JbD⋅+⋅+⋅=
ϕϕϕ
0
b = 0 for undamped oscillation.
If the oscillation begins with maximum amplitude
ϕ
at t = 0 s the resulting solution to the differential equation for light damping (δ² < ω0²) (oscillation) is as follows
–δ ·t
ϕ
ϕ
=
· e
· cos (
ω
0
d
· t)
δ = b/2 J is the damping constant and
2
ωωδ
=−
d
2
0
the natural frequency of the damped system.
Under heavy damping (δ² > ω0²) the system does not
oscillate but moves directly into a state of rest or equilibrium (non-oscillating case).
The period duration Td of the lightly damped oscillating system varies only slightly from T0 of the undamped
oscillating system if the damping is not excessive.
By inserting t = n · Td into the equation
–δ ·t
ϕ
ϕ =
and ϕ =
ϕ
tain the following with the relationship
ϕ
ϕ
· e
· cos (
ω
0
for the amplitude after n periods we ob-
n
n
0
δ
−⋅
n
=⋅
eT
d
d
· t)
ω
= 2 π/T
d
d
and thus from this the logarithmic decrement Λ:
Λ
=⋅ =⋅
δ
T
d
ϕ
1
In In
n
ϕ
n
0
ϕ
n
=
ϕ
n+1
0
7
Page 8
By inserting δ = Λ / Td ,
Ψ
ω
= 2 π / T0 and
0
ω
= 2π / T
d
into the equation
2
ωωδ
=−
d
2
0
we obtain:
2
TT
=⋅+1
d0
Λ
2
4
π
whereby the period Td can be calculated precisely provided that T0 is known.
3.4 Forced oscillations
In the case of forced oscillations a rotating motion with
sinusoidally varying torque is externally applied to the
system. This exciter torque can be incorporated into
the motion equation as follows:
.
..
JbD M t⋅+⋅+⋅= ⋅ ⋅
ϕϕϕ ω
sin
E
()
E
After a transient or settling period the torsion pendulum oscillates in a steady state with the same angular
frequency as the exciter, at the same time ωE can still
be phase displaced with respect to ω0. Ψ0S is the system’s zero-phase angle, the phase displacement between the oscillating system and the exciter.
ϕ
ϕ
=
· sin (
ω
· t –
Ψ
S
E
The following holds true for the system amplitude
M
−
02E
J
2
2
ϕ
=
ωω δω
()
)
0S
E
2
+⋅
4
ϕ
2
E
The following holds true for the ratio of system amplitude to the exciter amplitude
M
ϕ
S
=
ϕ
E
ω
E
−
14
ω
0
E
J
2
2
+
2
δ
ω
0
2
ω
E
⋅
ω
0
d
Stronger damping does not result in excessive amplitude.
For the system’s zero phase angle Ψ0S the following is
true:
arctan
ωω
=
0S
δω
2
22
−
ω
0
For ωE = ω0 (resonance case) the system’s zero-phase
angle is Ψ0S = 90°. This is also true for δ = 0 and the
oscillation passes its limit at this value.
In the case of damped oscillations (δ > 0) where
ωE < ω0, we find that 0° ≤ Ψ0S ≤ 90° and when ωE > ω
0
it is found that 90° ≤ Ψ0S ≤ 180°.
In the case of undamped oscillations (δ = 0), Ψ0S = 0°
for ωE < ω0 and Ψ0S = 180° for ωE > ω0.
4. Operation
4.1 Free damped rotary oscillations
• Connect the eddy current brake to the variable volt-
age output of the DC power supply for torsion pendulum.
• Connect the ammeter into the circuit.
• Determine the damping constant as a function of
the current.
4.2 Forced oscillations
S
• Connect the fixed voltage output of the DC power
supply for the torsion pendulum to the sockets (16)
of the exciter motor.
• Connect the voltmeter to the sockets (15) of the
exciter motor.
• Determine the oscillation amplitude as a function
of the exciter frequency and of the supply voltage.
• If needed connect the eddy current brake to the
variable voltage output of the DC power supply for
the torsion pendulum.
4.3 Chaotic oscillations
• To generate chaotic oscillations there are 4 supple-
mentary weights at your disposal which alter the
torsion pendulum’s linear restoring torque.
• To do this screw the supplementary weight to the
body of the pendulum (5).
In the case of undamped oscillations, theoretically
speaking the amplitude for resonance (ωE equal to ω0)
increases infinitely and can lead to “catastrophic resonance”.
In the case of damped oscillations with light damping
the system amplitude reaches a maximum where the
exciter’s angular frequency ω
is lower than the sys-
E res
tem’s natural frequency. This frequency is given by
2
δ
ωω
=⋅−1
Eres 0
2
2
ω
0
8
Page 9
5. Example experiments
5.1 Free damped rotary oscillations
• To determine the logarithmic decrement Λ, the
amplitudes are measured and averaged out over
several runs. To do this the left and right deflections of the torsional pendulum are read off the
scale in two sequences of measurements.
• The starting point of the pendulum body is located
at +15 or –15 on the scale. Take the readings for
five deflections.
• From the ratio of the amplitudes we obtain Λ us-
ing the following equation
ϕ
n
Λ
=
n
In
ϕ
n+1
ϕ
–
ϕ
+
0 –15 –15 –15 –15 15 15 15 15
1 –14.8 –14.8 –14.8 –14.8 14.8 14.8 14.8 14.8
2 –14.4 –14.6 –14.4 –14.6 14.4 14.4 14.6 14.4
3 –14.2 –14.4 –14.0 –14.2 14.0 14.2 14.2 14.0
4 –13.8 –14.0 –13.6 –14.0 13.8 13.8 14.0 13.8
5 –13.6 –13.8 –13.4 –13.6 13.4 13.4 13.6 13.6
nØ
ϕ
– Ø
ϕ
+
Λ
–
Λ
+
0 –15 15
1 –14.8 14.8 0.013 0.013
2 –14.5 14.5 0.02 0.02
3 –14.2 14.1 0.021 0.028
4 –13.8 13.8 0.028 0.022
5 –13.6 13.5 0.015 0.022
• The average value for Λ comes to Λ = 0.0202.
• For the pendulum oscillation period T the follow-
ing is true: t = n · T. To measure this, record the
time for 10 oscillations using a stop watch and calculate T.
T = 1.9 s
• From these values the damping constant δ can be
determined from δ = Λ / T.
δ
= 0.0106 s
–1
• For the natural frequency ω the following holds
true
2
π
2
ω
=
ω
= 3.307 Hz
T
2
δ
−
5.2 Free damped rotary oscillations
• To determine the damping constant δ as a function of the current Ι flowing through the electromagnets the same experiment is conducted with
an eddy current brake connected at currents of
Ι = 0.2 A, 0.4 A and 0.6 A.
ΙΙ
Ι = 0.2 A
ΙΙ
n
ϕ
– Ø
ϕ
– Λ –
0 –15 –15 –15 –15 –15
1 –13.6 –13.8 –13.8 –13.6 –13.7 0.0906
2 –12.6 –12.8 –12.6 –12.4 –12.6 0.13
3 –11.4 –11.8 –11.6 –11.4 –11.5 0.0913
4 –10.4 –10.6 –10.4 –10.4 –10.5 0.0909
5 9.2 –9.6 –9.6 –9.6 –9.5 0.1
• For T = 1.9 s and the average value of Λ = 0.1006
we obtain the damping constant: δ = 0.053 s
ΙΙ
Ι = 0.4 A
ΙΙ
n
ϕ
– Ø
ϕ
– Λ –
–1
0 –15 –15 –15 –15 –15
1 –11.8 –11.8 –11.6 –11.6 –11.7 0.248
2 –9.2 –9.0 –9.0 –9.2 –9.1 0.25
3 –7.2 –7.2 –7.0 –7.0 –7.1 0.248
4 –5.8 –5.6 –5.4 –5.2 –5.5 0.25
5 –4.2 –4.2 –4.0 –4.0 –4.1 0.29
• For T = 1.9 s and an average value of Λ = 0.257 we
ϕ
– Λ –
–1
obtain the damping constant: δ = 0.135 s
ΙΙ
Ι = 0.6 A
ΙΙ
n
ϕ
– Ø
0 –15 –15 –15 –15 –15
1 –9.2 –9.4 –9.2 –9.2 –9.3 0.478
2 –5.4 –5.2 –5.6 –5.8 –5.5 0.525
3 –3.2 –3.2 –3.2 –3.4 –3.3 0.51
4 –1.6 –1.8 –1.8 –1.8 –1.8 0.606
5 –0.8 –0.8 –0.8 –0.8 –0.8 0.81
• For T = 1.9 s and an average value of Λ = 0.5858
we obtain the damping constant: δ = 0.308 s
–1
5.3 Forced rotary oscillation
• Take a reading of the maximum deflection of the
pendulum body to determine the oscillation amplitude as a function of the exciter frequency or
the supply voltage.
T = 1.9 s
Motor voltage V
ϕ
3 0.8
4 1.1
5 1.2
6 1.6
7 3.3
7.6 20.0
8 16.8
9 1.6
10 1.1
9
Page 10

• After measuring the period T the natural frequency
of the system ω0 can be obtained from
ω
= 2 π/T = 3.3069 Hz
0
• The most extreme deflection arises at a motor voltage of 7.6 V, i.e. the resonance case occurs.
• Then the same experiment is performed with an
eddy current brake connected at currents of
Ι = 0.2 A, 0.4 A and 0.6 A.
ΙΙ
Ι = 0.2 A
ΙΙ
Motor voltage V
ϕ
3.0 0.9
4.0 1.1
5.0 1.2
6.0 1.7
7.0 2.9
7.6 15.2
8.0 4.3
9.0 1.8
10.0 1.1
ΙΙ
Ι = 0.6 A
ΙΙ
Motor voltage V
5.0 1.3
6.0 1.8
7.0 3.6
7.6 7.4
8.0 3.6
9.0 1.6
10.0 1.0
3.0 0.9
4.0 1.1
5.0 1.2
6.0 1.6
7.0 2.8
7.6.0 3.6
8.0 2.6
9.0 1.3
10.0 1.0
ϕ
ΙΙ
Ι = 0.4 A
ΙΙ
Motor voltage V
3.0 0.9
4.0 1.1
A
[skt]
20
15
10
• From these measurements the resonance curves can
be plotted in a graph depicting the amplitudes
ϕ
against the motor voltage.
• The resonant frequency can be determined by find-
ing the half-width value from the graph.
I=0,0A
I=0,2A
I=0,4A
5
1
012
Resonance curves
3
3B Scientific GmbH • Rudorffweg 8 • 21031 Hamburg • Germany • www.3bscientific.com • Technical amendments may occur
567 8910
4
10
I=0,6A
u[v]
Page 11

3B SCIENTIFIC3B SCIENTIFIC
3B SCIENTIFIC®
3B SCIENTIFIC3B SCIENTIFIC
U15040 Pendule tournant d’après Prof. Pohl
Instructions d‘utilisation
12/03 ALF
PHYSICSPHYSICS
PHYSICS
PHYSICSPHYSICS
®
9
8
7
6
5
4
bl bm bn bo bp
1 Moteur excitateur
2 Bouton tournant pour le réglage fin de la tension d’excita-
tion
3 Bouton tournant pour le réglage grossier de la tension
d’excitation
4 Bague graduée
5 Corps du pendule
6 Ressort conique
7 Pointeur indiquant la phase de l’excitateur
8 Pointeur indiquant la phase du corps du pendule
3
9 Pointeur indiquant la déviation du corps du pendule
bl Excitateur
2
bm Frein à courants de Foucault
bn Fente de guidage et vis pour le réglage de l’amplitude
d’excitation
bo Barre de traction
1
bp Roue d’entraînement à excentrique
bq Douilles de sécurité de 4 mm pour la mesure de la tension
d’excitation
br Douilles de sécurité de 4 mm pour l’alimentation du moteur
excitateur
bs Douilles de sécurité de 4 mm pour l’alimentation du frein à
courants de Foucault
bq br bs
Le pendule tournant sert à l’analyse d’oscillations libres, forcées et chaotiques en présence de différents
amortissements.
Thèmes des expériences :
• Libres oscillations tournantes avec différents amor-
tissements (oscillations avec amortissement modéré, oscillation apériodique et cas limite apériodique)
• Oscillations forcées et ses courbes de résonance avec
différents amortissements
• Déphasage entre l’excitateur et le résonateur en cas
de résonance
• Oscillations tournantes chaotiques
• Détermination statique de la grandeur direction-
nelle D
• Détermination dynamique du moment d’inertie J
1. Consignes de sécurité
• Lorsque vous retirez le pendule de l’emballage, ne
le saisissez pas à hauteur de la bague graduée !
Risque d’endommagement ! Retirez-le toujours en
saisissant l’emballage intérieur.
• Pour porter le pendule, tenez toujours l’appareil
par la plaque de base.
• Ne pas dépasser la tension d’alimentation maxi-
mum admissible du moteur excitateur de 24 V CC.
• Ne pas exposer le pendule à des charges mécani-
ques inutiles.
2. Description, caractéristiques techniques
Le pendule tournant d’après Prof. Pohl est constitué
d’un système oscillant monté sur une plaque de base
en bois et d’un moteur électrique. Le système oscillant
est constitué d’une roue en cuivre (5) montée sur un
roulement à billes qui est reliée à la barre de
l’excitateur par un ressort spiral (6) fournissant le couple de rappel. Le pendule est excité par un moteur à
courant continu à vitesse réglage (réglages grossier et
fin) qui, par l’action d’un excentrique (14) à barre de
11
Page 12

traction (13), étire et comprime régulièrement le res-
ω
0
2
=
D
J
sort spiral et fait ainsi osciller la roue en cuivre. Un
frein électromagnétique à courants de Foucault (11)
est utilisé pour l’amortissement. Une bague graduée
(4) à fentes et graduation en pas de 2 mm entoure le
système oscillant ; l’excitateur et le résonateur sont
pourvus de pointeurs.
L’appareil peut aussi être utilisé en démonstration pour
la projection d’ombres.
L’alimentation électrique nécessite une alimentation
CC pour pendule tournant U11755.
Fréquence propre : env. 0,5 Hz.
Fréquence d’excitateur : 0 à 1,3 Hz
(réglable en continu)
Connexions :
Moteur : max. 24 V CC, 0,7 A,
douilles de sécurité
de 4 mm
Frein à courants
de Foucault : 0 à 24 V CC, max. 2 A,
douilles de sécurité
de 4 mm
Bague graduée : Ø 300 mm
Dimensions : 400 mm x 140 mm x 270 mm
Masse : 4 kg
2.1 Matériel fourni
1 pendule tournant
2 masses supplémentaires de 10 g
2 masses supplémentaires de 20 g
3. Notions théoriques
3.1 Symboles utilisés dans les formules
D = grandeur directionnelle angulaire
J = moment d’inertie de masse
M = couple de rappel
T = durée d’une période
T0= durée d’une période du système non amorti
Td= durée d’une période du système amorti
= amplitude du couple de l’excitateur
M
E
b = couple d’amortissement
n = nombre de périodes
t = temps
Λ = décrément logarithmique
δ = constante d’amortissement
ϕ
= angle de déviation
ϕ
= amplitude au temps t = 0 s
0
ϕ
= amplitude après n périodes
n
ϕ
= amplitude de l’excitateur
E
ϕ
= amplitude du système
S
ω0= propre fréquence du système oscillant
ωd= propre fréquence du système amorti
ωE= fréquence angulaire de l’excitateur
ωE
= fréquence angulaire de l’excitateur
res
pour l’amplitude max.
Ψ0S= angle de phase nulle du système
3.2 Oscillation tournante harmonique
Une oscillation est harmonique lorsque la force de rappel est proportionnelle à la déviation. En présence d’oscillations tournantes harmoniques, le couple de rappel est proportionnel à l’angle de déviation ϕ:
M = D ·
ϕ
Le facteur de proportionnalité D (grandeur directionnelle angulaire) peut être déterminé en mesurant l’angle de déviation et le couple déviant.
D’après la mesure de la durée d’une période T, la fréquence angulaire propre du système ω
résulte de
0
l’équation suivante :
ω
= 2 π/T
0
et le moment d’inertie de masse de l’équation suivante :
3.3 Oscillation tournante amortie libre
En présence d’un système oscillant où de l’énergie est
perdue suite à des pertes dues aux frottements, sans
qu’elle ne soit compensée par de l’énergie apportée
de l’extérieur, l’amplitude diminue continuellement,
c’est-à-dire que l’oscillation est amortie.
Le couple d’amortissement b est proportionnel à la
vitesse angulaire
.
ϕ
.
L’équation suivante du mouvement résulte de l’équilibre du couple :
.
..
JbD⋅+⋅+⋅=
ϕϕϕ
0
Si l’oscillation n’est pas amortie, b = 0.
Si l’oscillation commence au moment t = 0 s avec une
amplitude maximale
ϕ
on obtient l’équation diffé-
0
,,
,
,,
rentielle avec un amortissement pas trop élevé
(δ² < ω0²) (cas d’oscillation)
–δ ·t
ϕ
ϕ
=
· e
· cos (
ω
0
d
· t)
δ = b/2 J représente la constante d’amortissement et
2
ωωδ
=−
d
2
0
la propre fréquence du système amorti.
Si l’amortissement est élevé (δ² > ω0²) le système n’oscille plus, mais rampe en position de repos (cas de
rampement).
Lorsque l’amortissement n’est pas trop important, la
durée Td d’une période du système oscillant amorti ne
se modifie que légèrement par rapport à T0 du système oscillant non amorti.
En remplaçant t = n · Td dans l’équation
–δ ·t
ϕ
ϕ =
et pour l’amplitude après n périodes ϕ =
tient avec l’équation
ϕ
ϕ
· e
0
ω
n
0
δ
−⋅
n
=⋅
eT
· cos (
= 2 π/T
d
d
ω
· t)
d
ϕ
, on ob-
n
d
12
Page 13

et ainsi le décrément logarithmique Λ:
Ψ
Λ
=⋅ =⋅
δ
1
T
d
In In
n
En remplaçant δ = Λ / Td ,
ϕ
n
ϕ
0
ω
= 2 π / T0 et
0
ϕ
=
n
ϕ
n+1
ω
= 2π / T
d
dans l’équation
2
ωωδ
=−
d
2
0
on obtient :
2
TT
=⋅+1
d0
Λ
2
4
π
ce qui permet de calculer avec précision la durée d’une
période Td, dans la mesure où l’on connaît T0.
3.4 Oscillation tournante forcée
En présence d’oscillations tournantes forcées, un couple modifiable périodiquement par une fonction sinusoïdale agit de l’extérieur sur le système oscillant.
Ce couple d’excitation doit être complété dans l’équation de mouvement
.
..
JbD M t⋅+⋅+⋅= ⋅ ⋅
ϕϕϕ ω
sin
E
()
E
Après une certaine période transitoire, le pendule tournant oscille dans un état stationnaire à la même fréquence angulaire que l’excitateur, ωE pouvant encore
être déphasé par rapport à ω0. Ψ0S représente l’angle
de phase nulle du système, le déphasage entre le système oscillant et l’excitateur.
ϕ
ϕ
=
· sin (
ω
· t –
Ψ
S
E
Pour l’amplitude du système
)
0S
ϕ
, on a l’équation sui-
S
vante :
M
E
−
02E
J
2
2
+⋅
4
2
2
E
ϕ
=
ωω δω
()
Pour le rapport entre l’amplitude du système et celle
de l’excitateur, on a l’équation suivante :
M
ϕ
S
=
ϕ
E
ω
E
−
14
ω
0
E
J
2
2
+
2
δ
ω
0
2
ω
E
⋅
ω
0
Cette fréquence résulte de
2
δ
ωω
=⋅−1
Eres 0
2
2
ω
0
Si l’amortissement est trop important, l’amplitude
d
n’augmente pas.
L’équation suviante s’applique à l’angle de phase nulle
du système Ψ0S :
arctan
=
0S
ωω
2
δω
22
−
ω
0
Si ωE = ω0 (résonance), l’angle de phase nulle du système Ψ0S = 90°. Ceci s’applique également pour δ = 0
avec un passage correspondant à la limite.
Avec des oscillations amorties (δ > 0) et ωE < ω0, on
obtient 0° ≤ Ψ0S ≤ 90°, avec ωE > ω0 on obtient 90° ≤
Ψ0S ≤ 180°.
Avec des oscillations amorties (δ = 0), Ψ0S = 0° à ωE < ω
0
et Ψ0S = 180° à ωE > ω0.
4. Manipulation
4.1 Oscillation tournante amortie libre
• Relier le frein à courants de Foucault à la sortie de
tension réglable de l’alimentation du pendule tournant.
• Connecter l’ampèremètre au circuit électrique.
• Déterminer la constante d’amortissement en fonc-
tion du courant.
4.2 Oscillation tournante forcée
• Relier les douilles de connexion (16) du moteur
excitateur à la sortie de tension fixe de l’alimentation du pendule tournant.
• Relier le voltmètre aux douilles de connexion (15)
du moteur excitateur.
• Déterminer l’amplitude de l’oscillation en fonction
de la fréquence de l’excitateur et de la tension d’alimentation.
• Au besoin, relier le frein à courants de Foucault à
la sortie destinée à la tension réglable de l’alimentation du pendule tournant.
4.3 Oscillations chaotiques
• Pour générer des oscillations chaotiques, on peut
utiliser les 4 masses supplémentaires qui permettent de modifier le couple de rappel linéaire du
pendule tournant.
• Visser pour cela la masse au corps du pendule (5).
En cas de résonance (ωE = ω0), si les oscillations ne
sont pas amorties, l’amplitude augmente théoriquement jusqu’à l’infini et entraîne une « catastrophe de
résonance ».
Si les oscillations sont amorties et l’amortissement pas
trop important, l’amplitude du système est maximale,
la fréquence angulaire de l’excitateur ω
étant infé-
E res
rieure à la fréquence angulaire propre du système.
13
Page 14

5. Exemples d’expériences
5.1 Oscillation tournante amortie libre
• Pour définir le décrément logarithmique Λ, mesu-
rer et déterminer les amplitudes en plusieurs passages. Pour cela, au cours de deux séries de mesures, lire les déviations du pendule tournant sur la
graduation à gauche et à droite.
• Le point de départ du corps du pendule était 15 ou
–15 sur la graduation. Cinq déviations ont été lues.
• A partir du rapport des amplitudes, on obtient Λ à
l’aide de la formule suivante :
ϕ
n
Λ
=
In
ϕ
n+1
ΙΙ
Ι = 0,2 A
ΙΙ
n
ϕ
– Ø
ϕ
– Λ –
0 –15 –15 –15 –15 –15
1 –13,6 –13,8 –13,8 –13,6 –13,7 0,0906
2 –12,6 –12,8 –12,6 –12,4 –12,6 0,13
3 –11,4 –11,8 –11,6 –11,4 –11,5 0,0913
4 –10,4 –10,6 –10,4 –10,4 –10,5 0,0909
5 9,2 –9,6 –9,6 –9,6 –9,5 0,1
• Avec T = 1,9 s et la moyenne Λ = 0,1006, on ob-
tient la constante d’amortissement : δ = 0,053 s
ΙΙ
Ι = 0,4 A
ΙΙ
–1
n
ϕ
–
ϕ
+
0 –15 –15 –15 –15 15 15 15 15
1 –14,8 –14,8 –14,8 –14,8 14,8 14,8 14,8 14,8
2 –14,4 –14,6 –14,4 –14,6 14,4 14,4 14,6 14,4
3 –14,2 –14,4 –14,0 –14,2 14,0 14,2 14,2 14,0
4 –13,8 –14,0 –13,6 –14,0 13,8 13,8 14,0 13,8
5 –13,6 –13,8 –13,4 –13,6 13,4 13,4 13,6 13,6
nØ
ϕ
– Ø
ϕ
+
Λ
–
Λ
+
0 –15 15
1 –14,8 14,8 0,013 0,013
2 –14,5 14,5 0,02 0,02
3 –14,2 14,1 0,021 0,028
4 –13,8 13,8 0,028 0,022
5 –13,6 13,5 0,015 0,022
• La valeur déterminée pour Λ est Λ = 0,0202.
• Pour la durée d’oscillation T du pendule, t = n · T.
Pour cela, mesurer avec un chronomètre la durée
de 10 oscillations et calculer T.
T = 1,9 s
• Ces valeurs permettent de déterminer la constante
d’amortissement δ avec δ = Λ / T.
δ
= 0,0106 s
–1
• Pour la fréquence propre ω, on a l’équation
2
π
2
ω
=
ω
= 3,307 Hz
T
2
δ
−
5.2 Oscillation tournante amortie libre
• Pour déterminer la constante d’amortissement δ
en fonction de l’intensité Ι par l’électro-aimant, la
même expérience a été réalisée avec un frein à courants de Foucault à Ι = 0,2 A, 0,4 A et 0,6 A.
n
ϕ
– Ø
ϕ
– Λ –
0 –15 –15 –15 –15 –15
1 –11,8 –11,8 –11,6 –11,6 –11,7 0,248
2 –9,2 –9,0 –9,0 –9,2 –9,1 0,25
3 –7,2 –7,2 –7,0 –7,0 –7,1 0,248
4 –5,8 –5,6 –5,4 –5,2 –5,5 0,25
5 –4,2 –4,2 –4,0 –4,0 –4,1 0,29
• Avec T = 1,9 s et la moyenne Λ = 0,257, on obtient
la constante d’amortissement : δ = 0,135 s
ΙΙ
Ι = 0,6 A
ΙΙ
n
ϕ
– Ø
ϕ
–1
– Λ –
0 –15 –15 –15 –15 –15
1 –9,2 –9,4 –9,2 –9,2 –9,3 0,478
2 –5,4 –5,2 –5,6 –5,8 –5,5 0,525
3 –3,2 –3,2 –3,2 –3,4 –3,3 0,51
4 –1,6 –1,8 –1,8 –1,8 –1,8 0,606
5 –0,8 –0,8 –0,8 –0,8 –0,8 0,81
• Avec T = 1,9 s et la moyenne Λ = 0,5858 on obtient
la constante d’amortissement : δ = 0,308 s
–1
5.3 Oscillation tournante forcée
• Pour déterminer l’amplitude de l’oscillation en
fonction de la fréquence de l’excitateur et de la tension d’alimentation, lire la déviation maximale du
corps du pendule.
T = 1,9 s
Tension moteur V
ϕ
3 0,8
4 1,1
5 1,2
6 1,6
7 3,3
7,6 20,0
8 16,8
9 1,6
10 1,1
14
Page 15

• D’après la mesure de la durée d’une période T, la
fréquence angulaire propre du système ω0 résulte
de l’équation suivante :
ω
= 2 π/T = 3,3069 Hz
0
• La déviation maximale a lieu avec une tension de
moteur de 7,6 V, c’est-à-dire qu’il y a résonance.
• Puis, la même expérience a été réalisée avec un
frein à courants de Foucault à Ι = 0,2 A, 0,4 A et
0,6 A.
ΙΙ
Ι = 0,2 A
ΙΙ
Tension moteur V
ϕ
3 0,9
4 1,1
5 1,2
6 1,7
7 2,9
7,6 15,2
8 4,3
9 1,8
10 1,1
ΙΙ
Ι = 0,4 A
ΙΙ
Tension moteur V
ϕ
3 0,9
4 1,1
5 1,3
6 1,8
7 3,6
7,6 7,4
8 3,6
9 1,6
10 1,0
ΙΙ
Ι = 0,6 A
ΙΙ
Tension moteur V
ϕ
3 0,9
4 1,1
5 1,2
6 1,6
7 2,8
7,6 3,6
8 2,6
9 1,3
10 1,0
• A partir de ces mesures, on peut représenter les
courbes de résonance sous forme graphique en reportant les amplitudes en fonction de la tension
de moteur.
• La largeur de valeur moyenne du graphe permet
de représenter dans un graphique la fréquence de
résonance.
A
[skt]
20
15
10
I=0,0A
I=0,2A
I=0,4A
5
1
012
Courbes de résonance
3
3B Scientific GmbH • Rudorffweg 8 • 21031 Hamburg • Allemagne • www.3bscientific.com • Sous réserve de modifications techniques
567 8910
4
15
I=0,6A
u[v]
Page 16

3B SCIENTIFIC3B SCIENTIFIC
3B SCIENTIFIC®
3B SCIENTIFIC3B SCIENTIFIC
U15040 Pendolo di torsione del Prof. Pohl
Istruzioni per l’uso
12/03 ALF
PHYSICSPHYSICS
PHYSICS
PHYSICSPHYSICS
9
8
7
6
5
4
bl bm bn bo bp
1 Motore ad eccitazione
2 Manopola di microregolazione della tensione di eccitazione
3 Manopola di macroregolazione della tensione di eccitazione
4 Anello graduato:
5 Corpo del pendolo
6 Molle a spirale
7 Indicatore della posizione di fase dell’eccitatore
8 Indicatore della posizione di fase del corpo del pendolo
9 Indicatore per la deviazione del corpo del pendolo
bl Eccitatore
3
bm Freno a corrente di Foucault:
bn Fessura di guida e vite per la regolazione dell’ampiezza
2
dell’eccitatore
bo Leva di trasmissione
bp Ruota motrice con eccentrico
bq Jack di sicurezza da 4 mm per la misurazione della tensione
1
di eccitazione
br Jack di sicurezza da 4 mm per l’alimentazione del motore
ad eccitazione
bs Jack di sicurezza da 4 mm per l’alimentazione del freno a
corrente di Foucault
bq br bs
Il pendolo di torsione serve per esaminare oscillazioni
libere, forzate e caotiche con smorzamenti diversi.
Argomenti degli esperimenti:
• oscillazioni di torsione libere con smorzamenti di-
versi (oscillazione con smorzamento moderato,
oscillazione aperiodica e caso limite aperiodico)
• oscillazioni forzate e relative curve di risonanza con
smorzamenti diversi
• spostamento di fase tra eccitatore e risonatore in
caso di risonanza
• oscillazioni di torsione caotiche
• determinazione statica della costante di collega-
mento D
• determinazione dinamica del momento d’inerzia J
1. Norme di sicurezza
• Durante l’estrazione dall’imballaggio, non afferra-
re il pendolo di torsione in corrispondenza dell’anello graduato! Rischio di danneggiamento! Du-
rante l’estrazione utilizzare sempre l’opportuno
ausilio (imballaggio interno)!
• Per trasportare il pendolo di torsione, tenere sem-
pre l’apparecchio sulla piastra di base.
• Non superare la tensione di alimentazione max.
ammessa del motore ad eccitazione (24 V CC).
• Non sottoporre il pendolo di torsione a sollecita-
zioni meccaniche non necessarie.
2. Descrizione, caratteristiche tecniche
Il pendolo di torsione del Prof. Pohl è composto da un
sistema oscillante montato su una piastra di base in
legno e da un motore elettrico. Il sistema oscillante si
compone di una ruota di rame con cuscinetti a sfera
(5), collegata all’asta di eccitazione tramite una molla
a spirale (6), che fornisce il momento di richiamo. Per
eccitare il pendolo di torsione è necessario un motore
a corrente continua con velocità a regolazione fine e
grossolana, che mediante un eccentrico (14) con leva
di trasmissione (13) separa e comprime le molle a spi-
16
Page 17

rale in sequenza periodica, mettendo in tal modo in
moto la ruota di rame. Per lo smorzamento si utilizza
un freno elettromagnetico a corrente di Foucault (11).
Un anello graduato (4) con fessure e scala con divisioni da 2 mm circonda il sistema oscillante; sull’eccitatore
e sul risonatore si trovano indicatori.
L’apparecchio può essere utilizzato anche nella dimostrazione della proiezione d’ombra.
Per l’alimentazione di corrente è necessario un alimentatore CC per pendolo di torsione U11755.
Frequenza propria: ca. 0,5 Hz.
Frequenza di eccitazione: da 0 a 1,3 Hz
(regolabile di continuo)
Connessioni:
Motore: max. 24 V CC, 0,7 A,
mediante jack di
sicurezza da 4 mm
Freno a corrente di Foucault: da 0 a 24 V CC, max. 2 A,
mediante jack di
sicurezza da 4 mm
Anello graduato: 300 mm Ø
Dimensioni: 400 mm x 140 mm x 270 mm
Peso: 4 kg
2.1 Fornitura
1 pendolo di torsione
2 masse supplementari da 10 g
2 masse supplementari da 20 g
3. Principi teorici
3.1 Simboli delle formule utilizzati
D = costante di collegamento angolare
J = momento di inerzia delle masse
M = momento torcente di richiamo
T = periodo
T0= periodo del sistema non smorzato
Td= periodo del sistema smorzato
= ampiezza del momento torcente
M
E
dell'eccitatore
b = momento di smorzamento
n = frequenza
t = tempo
Λ = decremento logaritmico
δ = costante di smorzamento
ϕ
= angolo di deviazione
ϕ
= ampiezza relativa al tempo t = 0 s
0
ϕ
= ampiezza dopo n periodi
n
ϕ
= ampiezza di eccitazione
E
ϕ
= ampiezza del sistema
S
ω0= frequenza propria del sistema oscillante
ωd= frequenza propria del sistema smorzato
ωE= frequenza del circuito di eccitazione
ωE
= frequenza del circuito di eccitazione per
res
ampiezza max.
Ψ0S= angolo di fase zero del sistema
3.2 Oscillazione di torsione armonica
Un'oscillazione armonica è presente se la forza di ri-
chiamo è proporzionale alla deviazione. In caso di oscillazioni di torsione armoniche il momento torcente di
richiamo è proporzionale all'angolo di deviazione ϕ:
M = D ·
ϕ
Il fattore di proporzionalità D (costante di collegamento
angolare) può essere calcolato mediante misurazione
dell'angolo di deviazione e del momento deviante.
La frequenza del circuito proprio del sistema ω0 si ottiene dalla misurazione del periodo T
ω
= 2 π/T
0
e il momento di inerzia delle masse J da
D
2
ω
=
0
J
3.3 Oscillazione di torsione smorzata libera
In un sistema oscillante, nel quale si verificano perdite di energia a causa di perdite per attriti, senza che
l'energia venga compensata da energia apportata dall'esterno, l'ampiezza si riduce costantemente, ossia
l'oscillazione è smorzata.
In ciò il momento di smorzamento b è proporzionale
alla velocità angolare
.
ϕ
.
Dall'equilibrio del momento torcente si ottiene l'equazione del moto
.
..
JbD⋅+⋅+⋅=
ϕϕϕ
0
Per l'oscillazione non smorzata, b = 0
Se inizia l'oscillazione relativa al tempo t = 0 s con
l'ampiezza massima
ϕ
si ottiene la soluzione del-
0
l'equazione differenziale con uno smorzamento non
troppo potente (δ² < ω0²) (oscillazione)
–δ ·t
ϕ
ϕ
=
· e
· cos (
ω
0
d
· t)
δ = b/2 J è la costante di smorzamento e
2
ωωδ
=−
d
ω
= frequenza propria del sistema smorzato.
d
2
0
In caso di smorzamento potente (δ² > ω0²) il sistema
non oscilla ma scorre in posizione di riposo (scorrimento).
In caso di smorzamento non troppo potente, il periodo Td del sistema oscillante smorzato cambia solo leggermente rispetto a T0 del sistema oscillante non smorzato.
Inserendo t = n · Td nell'equazione
–δ ·t
ϕ
ϕ =
e per l'ampiezza in base a n periodi ϕ =
con la definizione
ϕ
ϕ
· e
0
ω
= 2 π/T
d
n
0
δ
−⋅
n
=⋅
eT
· cos (
d
ω
· t)
d
ϕ
si ottiene
n
d
e da ciò il decremento logaritmico Λ:
Λ
=⋅ =⋅
δ
T
d
ϕ
1
In In
n
ϕ
n
0
ϕ
n
=
ϕ
n+1
17
Page 18

Inserendo δ = Λ / Td ,
Ψ
ω
= 2 π / T0 e
0
ω
= 2π / T
d
nell'equazione
2
ωωδ
=−
d
2
0
si ottiene:
2
TT
=⋅+1
d0
Λ
2
4
π
dove il periodo Td può essere calcolato con precisione,
se è noto T0.
3.4 Oscillazione di torsione forzata
In caso di oscillazioni di torsione forzate agisce dall'esterno un momento torcente variabile periodicamente con una funzione sinusoidale sul sistema oscillante. Questo momento di eccitazione deve essere integrato nell'equazione del moto.
.
..
JbD M t⋅+⋅+⋅= ⋅ ⋅
ϕϕϕ ω
sin
E
()
E
Dopo un tempo di assestamento il pendolo di torsione oscilla in uno stato stazionario con la stessa frequenza del circuito dell'eccitatore, dove ωE può essere
ulteriormente spostato di fase verso ω0. Ψ0S è l'angolo
di fase zero del sistema, lo spostamento di fase tra il
sistema oscillante e l'eccitatore.
ϕ
ϕ
=
· sin (
ω
· t –
Ψ
S
E
Per l'ampiezza del sistema
M
−
02E
J
2
2
ϕ
=
ωω δω
()
)
0S
ϕ
vale
S
E
2
+⋅
4
2
E
Per il rapporto tra l'ampiezza del sistema e l'ampiezza
dell'eccitatore vale
M
ϕ
S
=
ϕ
E
ω
E
14
−
ω
0
E
J
2
2
+
2
δ
ω
0
2
ω
E
⋅
ω
0
Con oscillazioni non smorzate aumenta l'ampiezza in
caso di risonanza (ωE uguale a ω0) teoricamente all'infinito e viene determinata una "catastrofe di risonanza".
Con oscillazioni smorzate e uno smorzamento non
troppo potente, l'ampiezza del sistema diventa massima, dove la frequenza del circuito dell'eccitatore ω
E res
è inferiore rispetto alla frequenza del circuito proprio
del sistema. Questa frequenza si ottiene da
2
δ
ωω
=⋅−1
Eres 0
2
2
ω
0
d
In caso di smorzamento potente non si verifica alcun
incremento di ampiezza.
Per l'angolo di fase zero del sistema Ψ0S vale
arctan
ωω
=
0S
δω
2
22
−
ω
0
Per ωE = ω0 (risonanza) l'angolo di fase zero del sistema Ψ0S = 90°. Ciò vale anche per δ = 0 con relativa
transizione.
Con oscillazioni smorzate (δ > 0) e ωE < ω0 si ottiene
0° ≤ Ψ0S ≤ 90°, per ωE > ω0 vale 90° ≤ Ψ0S ≤ 180°.
Con oscillazioni non smorzate (δ = 0) vale Ψ0S = 0° con
ωE < ω0 e Ψ0S = 180° per ωE > ω0.
4. Comandi
4.1 Oscillazione di torsione smorzata libera
• Collegare il freno a corrente di Foucault con l'usci-
ta per la tensione regolabile dell'alimentatore del
pendolo di torsione.
• Attivare l'amperometro nel circuito elettrico.
• Determinare la costante di smorzamento in fun-
zione della corrente.
4.2 Oscillazione di torsione forzata
• Collegare i jack di raccordo (16) del motore ad ecci-
tazione con l'uscita di tensione fissa dell'alimentatore del pendolo di torsione.
• Collegare il voltmetro con i jack di raccordo (15)
del motore ad eccitazione.
• Determinazione dell'ampiezza di oscillazione in
funzione della frequenza dell'eccitatore o della tensione di alimentazione.
• Se necessario, collegare il freno a corrente di
Foucault con l'uscita per la tensione regolabile dell'alimentatore del pendolo di torsione.
4.3 Oscillazioni caotiche
• Per la produzione di oscillazioni caotiche sono di-
sponibili 4 masse supplementari, che modificano
il momento di rovesciamento lineare del pendolo
di torsione.
• A tale scopo avvitare la massa supplementare sul
corpo del pendolo (5).
18
Page 19

5. Esempi di esperimenti
5.1 Oscillazione di torsione smorzata libera
• Per la determinazione del decremento logaritmico
Λ le ampiezze vengono misurate in più flussi e ven-
gono determinati i valori medi. A tale scopo le deviazioni del pendolo di torsione sulla scala di volta
in volta a sinistra e a destra vengono lette in due
serie di misure.
• Il punto di partenza del corpo del pendolo era compreso tra 15 e –15 sulla scala. Sono state lette cinque deviazioni.
• Dal rapporto delle ampiezze si ricava Λ in base alla
formula
ϕ
n
Λ
=
In
ϕ
n+1
ΙΙ
Ι = 0,2 A
ΙΙ
n
ϕ
– Ø
ϕ
– Λ –
0 –15 –15 –15 –15 –15
1 –13,6 –13,8 –13,8 –13,6 –13,7 0,0906
2 –12,6 –12,8 –12,6 –12,4 –12,6 0,13
3 –11,4 –11,8 –11,6 –11,4 –11,5 0,0913
4 –10,4 –10,6 –10,4 –10,4 –10,5 0,0909
5 9,2 –9,6 –9,6 –9,6 –9,5 0,1
• Con T = 1,9 s e Λ = 0,1006 medio si ottiene la costante di smorzamento: δ = 0,053 s
ΙΙ
Ι = 0,4 A
ΙΙ
n
ϕ
– Ø
–1
ϕ
– Λ –
n
ϕ
–
ϕ
+
0 –15 –15 –15 –15 15 15 15 15
1 –14,8 –14,8 –14,8 –14,8 14,8 14,8 14,8 14,8
2 –14,4 –14,6 –14,4 –14,6 14,4 14,4 14,6 14,4
3 –14,2 –14,4 –14,0 –14,2 14,0 14,2 14,2 14,0
4 –13,8 –14,0 –13,6 –14,0 13,8 13,8 14,0 13,8
5 –13,6 –13,8 –13,4 –13,6 13,4 13,4 13,6 13,6
nØ
ϕ
– Ø
ϕ
+
Λ
–
Λ
+
0 –15 15
1 –14,8 14,8 0,013 0,013
2 –14,5 14,5 0,02 0,02
3 –14,2 14,1 0,021 0,028
4 –13,8 13,8 0,028 0,022
5 –13,6 13,5 0,015 0,022
• Il valore medio per Λ ammonta a Λ = 0,0202.
• Per la durata dell'oscillazione T del pendolo vale
t = n · T. A tale scopo misurare il tempo per 10 oscillazioni con un cronometro e calcolare T.
T = 1,9 s
• Da questi valori è possibile determinare la costante di smorzamento δ con δ = Λ / T.
δ
= 0,0106 s
–1
• Per la frequenza propria ω vale
2
π
2
ω
=
ω
= 3,307 Hz
T
2
δ
−
5.2 Oscillazione di torsione smorzata libera
• Per la determinazione della costante di
smorzamento δ in funzione della corrente Ι mediante l'elettromagnete è stato eseguito lo stesso
tentativo con il freno a corrente di Foucault inserito con Ι = 0,2 A, 0,4 A e 0,6 A.
0 –15 –15 –15 –15 –15
1 –11,8 –11,8 –11,6 –11,6 –11,7 0,248
2 –9,2 –9,0 –9,0 –9,2 –9,1 0,25
3 –7,2 –7,2 –7,0 –7,0 –7,1 0,248
4 –5,8 –5,6 –5,4 –5,2 –5,5 0,25
5 –4,2 –4,2 –4,0 –4,0 –4,1 0,29
• Con T = 1,9 s e Λ = 0,257 medio si ottiene la costante di smorzamento: δ = 0,135 s
ΙΙ
Ι = 0,6 A
ΙΙ
n
ϕ
– Ø
–1
ϕ
– Λ –
0 –15 –15 –15 –15 –15
1 –9,2 –9,4 –9,2 –9,2 –9,3 0,478
2 –5,4 –5,2 –5,6 –5,8 –5,5 0,525
3 –3,2 –3,2 –3,2 –3,4 –3,3 0,51
4 –1,6 –1,8 –1,8 –1,8 –1,8 0,606
5 –0,8 –0,8 –0,8 –0,8 –0,8 0,81
• Con T = 1,9 s e Λ = 0,5858 medio si ottiene la costante di smorzamento: δ = 0,308 s
–1
5.3 Oscillazione di torsione forzata
• Per la determinazione dell'ampiezza di oscillazione in funzione della frequenza di eccitazione o della
tensione di alimentazione viene letta la deviazione massima del corpo del pendolo.
T = 1,9 s
Tensione motore V
ϕ
3 0,8
4 1,1
5 1,2
6 1,6
7 3,3
7,6 20,0
8 16,8
9 1,6
10 1,1
19
Page 20

• La frequenza del circuito proprio del sistema ω0 si
ottiene dalla misurazione del periodo T
ω
= 2 π/T = 3,3069 Hz
0
• In caso di tensione del motore pari a 7,6 V ha luo-
go la deviazione massima, ossia si verifica la risonanza.
• Quindi è stato eseguito lo stesso tentativo con freno a corrente di Foucault inserito con Ι = 0,2 A,
0,4 A e 0,6 A.
ΙΙ
Ι = 0,2 A
ΙΙ
Tensione motore V
ϕ
3 0,9
4 1,1
5 1,2
6 1,7
7 2,9
7,6 15,2
8 4,3
9 1,8
10 1,1
ΙΙ
Ι = 0,4 A
ΙΙ
Tensione motore V
ϕ
3 0,9
4 1,1
5 1,3
6 1,8
7 3,6
7,6 7,4
8 3,6
9 1,6
10 1,0
ΙΙ
Ι = 0,6 A
ΙΙ
Tensione motore V
ϕ
3 0,9
4 1,1
5 1,2
6 1,6
7 2,8
7,6 3,6
8 2,6
9 1,3
10 1,0
• Da queste misurazioni è possibile rappresentare
graficamente le curve di risonanza, tracciando le
ampiezze in funzione della tensione del motore.
• Dalla semilarghezza del grafo può essere determi-
nata graficamente la frequenza della risonanza.
A
[skt]
20
15
10
I=0,0A
I=0,2A
I=0,4A
5
1
012
Curve di risonanza
3
3B Scientific GmbH • Rudorffweg 8 • 21031 Hamburg • Germania • www.3bscientific.com • Con riserva di modifiche tecniche
567 8910
4
20
I=0,6A
u[v]
Page 21

3B SCIENTIFIC3B SCIENTIFIC
3B SCIENTIFIC®
3B SCIENTIFIC3B SCIENTIFIC
U15040 Péndulo oscilatorio según Pohl
Instrucciones de uso
12/03 ALF
PHYSICSPHYSICS
PHYSICS
PHYSICSPHYSICS
9
8
7
6
5
4
bl bm bn bo bp
bq br bs
1 Motor de excitación
2 Botón para ajuste fino de la tensión de excitación
3 Botón para ajuste grueso de la tensión de excitación
4 Anillo graduado
5 Cuerpo pendular
6 Muelle espiral
7 Indicador de la posición de fase del excitador
8 Indicador de la posición de fase del péndulo
9 Indicador de desviación del péndulo
bl Excitador
3
bm Freno de corrientes parásitas
bn Ranura guía y tornillo para el ajuste de la amplitud de
2
excitación
bo Biela
bp Rueda con palanca excéntrica
bq Clavijeros de seguridad de 4 mm para medición de la
1
tensión de excitación
br Clavijeros de seguridad de 4 mm para alimentación del
motor de excitación
bs Clavijeros de seguridad de 4 mm para alimentación del
freno de corrientes parásitas
El péndulo oscilatorio sirve para el estudio de oscilaciones libres, forzadas y caóticas frente a diferentes
atenuaciones.
Temas experimentales:
• Oscilaciones torsionales libres con distintas atenua-
ciones (caso oscilante con atenuación media, oscilación no periódica y caso límite no periódico)
• Oscilaciones forzadas y sus características de reso-
nancia frente a diferentes atenuaciones
• Desfase entre excitador y resonador en caso de re-
sonancia
• Oscilaciones torsionales caóticas
• Determinación estática de la magnitud de referen-
cia D
• Determinación dinámica del momento de inercia J
1. Aviso de seguridad
• ¡Al retirar el péndulo oscilatorio de su embalaje no
se lo debe tomar por el anillo graduado! ¡Peligro
de daño! ¡El equipo siempre se debe retirar con
ayuda de material auxiliar (envoltura interna)!
• Para transportar el péndulo oscilatorio se lo debe
sujetar siempre de la placa base.
• No se debe sobrepasar la máxima tensión de ali-
mentación permitida del motor de excitación (24 V
c.c.).
• El péndulo oscilatorio no se debe someter a esfuer-
zos mecánicos innecesarios.
2. Descripción, datos técnicos
El péndulo según Pohl se compone de un sistema
oscilatorio, montado sobre una placa base de madera,
y de un motor eléctrico. El sistema oscilatorio consta
de un rueda de cobre (5) asentada sobre un rodamiento de bolas y conectada a la varilla de excitación por
medio de un muelle espiral (6), que suministra el momento de retroceso. Para la excitación del péndulo
oscilatorio se utiliza un motor de corriente continua,
con velocidad de giro de ajuste grueso y fino, el cual
21
Page 22

presiona y estira el muelle espiral, en secuencias pe-
ω
0
2
=
D
J
riódicas, por medio de una palanca excéntrica (14),
dotada de una biela (13), provocando de esta manera
la oscilación de la rueda de cobre. Para la atenuación
se emplea un freno electromagnético de corrientes
parásitas (11). Un anillo graduado (4), con ranuras y
escala con división de 2 mm, rodea el sistema
oscilatorio; los indicadores se encuentran en el excitador y el resonador.
El equipo también se puede utilizar para experimentos de demostración con proyección de sombras.
Para la alimentación de corriente se requiere una fuente de alimentación de c.c. U11755 para péndulo
oscilatorio.
Frecuencia propia: aprox. 0,5 Hz.
Frecuencia de excitación: 0 a 1,3 Hz
(ajuste continuo)
Conexiones:
Motor: máx. 24 V c.c., 0,7 A,
a través de clavijeros
de seguridad de 4 mm
Freno de corrientes
parásitas: 0 a 24 V c.c., máx. 2 A,
a través de clavijeros
de seguridad de 4 mm
Anillo graduado: 300 mm Ø
Dimensiones: 400 mm x 140 mm x 270 mm
Peso: 4 kg
2.1 Volumen de suministro
1 péndulo oscilatorio
2 pesas adicionales de 10 g
2 pesas adicionales de 20 g
3. Fundamentos teóricos
3.1 Símbolos empleados
D = magnitud de referencia angular
J = momento de inercia de masa
M = momento de giro de retroceso
T = duración de periodo
T0= duración de periodo del sistema
sin atenuación
Td= duración de periodo del sistema
con atenuación
= amplitud del momento de giro del excitador
M
E
b = momento de atenuación
n = cantidad de periodos
t = tiempo
Λ = decremento logarítmico
δ = constante de atenuación
ϕ
= ángulo de desviación
ϕ
= amplitud para tiempo t = 0 s
0
ϕ
= amplitud tras n periodos
n
ϕ
= amplitud del excitador
E
ϕ
= amplitud del sistema
S
ω0= frecuencia propia del sistema oscilatorio
ωd= frecuencia propia del sistema amortiguado
ωE= frecuencia angular del excitador
ωE
= frecuencia angular del excitador para
res
la máx. amplitud
Ψ0S= ángulo de fase cero del sistema
3.2 Oscilación torsional armónica
Una oscilación armónica se presenta cuando la fuerza
de reacción es proporcional a la desviación. En el caso
de las oscilaciones torsionales armónicas, el par de giro
de retroceso es proporcional al ángulo de desviación
ϕ:
M = D ·
ϕ
El factor de proporcionalidad D (magnitud de referencia angular) se puede calcular a partir de la medición
del ángulo de desviación y del momento de desviación.
La frecuencia angular propia del sistema ω0 se obtiene de la medición de la duración de periodo T a partir
de:
ω
= 2 π/T ,
0
mientras que el momento de inercia de masa J se obtiene de:
3.3 Oscilación torsional sin amortiguación
En un sistema oscilatorio cuya energía decrece debido
a las pérdidas por fricción, sin que dicha energía se
vea compensada por una alimentación externa, la
amplitud disminuye constantemente, esto es, la oscilación sufre una amortiguación.
En este caso, el momento de amortiguación b es proporcional a la velocidad angular
.
ϕ
.
Partiendo del equilibrio del momento se obtiene la
ecuación de movimiento:
.
..
JbD⋅+⋅+⋅ =
ϕϕϕ
0
En el caso de la oscilación sin amortiguación, b es igual
a 0.
Si con el tiempo t = 0 s, la oscilación se inicia con la
amplitud máxima
ϕ
, se obtiene la solución de la
0
ecuación diferencial con una amortiguación no muy
elevada (δ² < ω0²) (caso oscilante)
–δ ·t
ϕ
ϕ
=
· e
· cos (
ω
0
d
· t)
δ = b/2 J es la constante de amortiguación y
2
ωωδ
=−
d
2
0
la frecuencia propia del sistema amortiguado.
Frente a una amortiguación fuerte (δ² > ω0²) el sistema no oscila, sino que se arrastra hacia el estado de
reposo.
Frente a una amortiguación no muy fuerte, la duración de periodo Td del sistema oscilante varía de manera mínima en relación al periodo T0 del sistema oscilante no amortiguado.
Si se sustituye t = n · Td en la ecuación
–δ ·t
ϕ
ϕ =
0
· e
· cos (
ω
· t)
d
22
Page 23

Ψ
y para la amplitud tras n periodos ϕ =
lo siguiente, con la relación
ϕ
n
ϕ
0
δ
−⋅
n
=⋅
eT
ω
= 2 π/T
d
d
ϕ
, se obtiene
n
d
y, a partir de ello, el decremento logarítmico Λ:
Λ
=⋅ =⋅
δ
1
T
d
In In
n
Si se reemplaza δ = Λ / Td ,
ϕ
n
ϕ
0
ω
= 2 π / T0 y
0
ϕ
=
n
ϕ
n+1
ω
= 2π / T
d
en la ecuación
En el caso de las oscilaciones no amortiguadas, si se
presenta el caso de resonancia (ωE es igual a ω0), teóricamente, la amplitud aumenta hasta el infinito, lo cual
produciría la destrucción del sistema.
Con oscilaciones atenuadas por una amortiguación no
demasiado fuerte, se alcanza la máxima amplitud del
sistema, siendo la frecuencia angular del excitador ω
E res
menor que la frecuencia angular propia del sistema.
Esta frecuencia se obtiene a partir de:
2
δ
ωω
=⋅−1
d
Eres 0
2
2
ω
0
2
ωωδ
=−
d
2
0
se obtiene:
2
TT
=⋅+1
d0
Λ
2
4
π
con lo que se puede calcular exactamente la duración
del periodo Td, si se conoce el valor de T0.
3.4 Oscilación torsional forzada
Las oscilaciones torsionales forzadas se generan cuando, sobre el sistema oscilante, actúa externamente un
par de giro de variación periódica con una función
sinusoidal. Se debe sustituir este momento de excitación en la ecuación de movimiento
.
..
JbD M t⋅+⋅+⋅= ⋅ ⋅
ϕϕϕ ω
sin
E
()
E
Una vez transcurrido el tiempo de establecimiento de
la oscilación, el péndulo oscilatorio alcanza un estado
estacionario con la misma frecuencia angular que la
del excitador, siendo incluso factible que ωE se encuentre desfasada en relación a ω0. Ψ0S es el ángulo de fase
cero del sistema, el desfase entre el sistema oscilante
y el excitador.
ϕ
ϕ
=
· sin (
ω
· t –
Ψ
S
E
)
0S
Si se tiene una amortiguación fuerte, no se producen
excesos de amplitud.
Para el ángulo de fase cero Ψ0S del sistema es válido:
arctan
=
0S
ωω
2
δω
22
−
ω
0
Para ωE = ω0 (resonancia), el ángulo de fase cero Ψ
del sistema es igual a 90°. Esto también es válido para
δ = 0, en donde la oscilación sobrepasa su valor límite.
Con oscilaciones amortiguadas (δ > 0) y ωE < ω0 se
obtiene 0° ≤ Ψ0S ≤ 90°, para ωE > ω0 es válido 90° ≤
Ψ0S ≤ 180°.
Con oscilaciones no amortiguadas (δ = 0) es válido
Ψ0S = 0° con ωE < ω0 y Ψ0S = 180° para ωE > ω0.
4. Servicio
4.1 Oscilación torsional de amortiguación libre
• Conectar el freno de corrientes parásitas a la salida
de tensión regulable de la fuente de alimentación
del péndulo oscilatorio.
• Conectar el amperímetro al circuito de corriente.
• Determinar la constante de amortiguación en fun-
ción de la corriente.
0S
Para la amplitud
ϕ
ϕ
es válido lo siguiente:
S
M
E
−
02E
J
2
2
+⋅
=
ωω δω
()
2
2
4
E
Para la relación entre la amplitud del sistema y la del
excitador se aplica:
M
ϕ
S
=
ϕ
E
ω
E
−
14
ω
0
E
J
2
2
+
2
δ
ω
0
2
ω
E
⋅
ω
0
4.2 Oscilación torsional forzada
• Conectar el clavijero (16) del motor de excitación a
la salida de tensión fija de la fuente de alimentación del péndulo oscilatorio.
• Conectar el voltímetro a los clavijeros de conexión
(15) del motor de excitación.
• Determinar la amplitud de oscilación en función
de la frecuencia del excitador o de la tensión de
alimentación.
• En caso de ser necesario, conectar el freno de co-
rrientes parásitas a la salida de tensión ajustable
de la fuente de alimentación del péndulo
oscilatorio.
4.3 Oscilaciones caóticas
• Para generar oscilaciones caóticas se dispone de 4
pesas adicionales que varían el momento lineal de
retroceso del péndulo oscilatorio.
23
Page 24

• Lo anterior se realiza atornillando las pesas al cuer-
po del péndulo (5).
• Para la frecuencia propia ω es válido
2
π
2
ω
=
ω
= 3,307 Hz
T
2
δ
−
5.2 Oscilación torsional de amortiguación libre
• Para determinar la constante de amortiguación δ
en función de la corriente Ι que fluye por los electroimanes, se realizó el mismo experimento conectándose adicionalmente el freno de corrientes parásitas con Ι = 0,2 A, 0,4 A y 0,6 A.
5. Ejemplos de experimentos
5.1 Oscilación torsional de amortiguación libre
• Para determinar el decremento logarítmico Λ se
miden y se promedian las amplitudes de varios ciclos, para lo cual se leen las oscilaciones del péndulo tanto a la derecha como a la izquierda de la
escala.
• El punto de partida del cuerpo pendular se encon-
traba en 15, ó bien en –15, de la escala. Se leyeron
cinco oscilaciones.
• A partir de la relación de amplitud se obtiene Λ de
acuerdo con la fórmula:
ϕ
n
Λ
=
In
n
ϕ
n+1
ϕ
–
ϕ
+
0 –15 –15 –15 –15 15 15 15 15
1 –14,8 –14,8 –14,8 –14,8 14,8 14,8 14,8 14,8
2 –14,4 –14,6 –14,4 –14,6 14,4 14,4 14,6 14,4
3 –14,2 –14,4 –14,0 –14,2 14,0 14,2 14,2 14,0
4 –13,8 –14,0 –13,6 –14,0 13,8 13,8 14,0 13,8
5 –13,6 –13,8 –13,4 –13,6 13,4 13,4 13,6 13,6
nØ
ϕ
– Ø
ϕ
+
Λ
–
Λ
+
0 –15 15
1 –14,8 14,8 0,013 0,013
2 –14,5 14,5 0,02 0,02
3 –14,2 14,1 0,021 0,028
4 –13,8 13,8 0,028 0,022
5 –13,6 13,5 0,015 0,022
• El valor promedio de Λ es igual a 0,0202.
• Para la duración de oscilación T del péndulo es
válido t = n · T. Medir para ello, con un cronómetro, el tiempo necesario para 10 oscilaciones y calcular el valor de T.
T = 1,9 s
• A partir de estos valores se puede determinar la
constante de amortiguación δ por medio de
δ = Λ /T.
δ
= 0,0106 s
–1
ΙΙ
Ι = 0,2 A
ΙΙ
n
ϕ
– Ø
ϕ
– Λ –
0 –15 –15 –15 –15 –15
1 –13,6 –13,8 –13,8 –13,6 –13,7 0,0906
2 –12,6 –12,8 –12,6 –12,4 –12,6 0,13
3 –11,4 –11,8 –11,6 –11,4 –11,5 0,0913
4 –10,4 –10,6 –10,4 –10,4 –10,5 0,0909
5 9,2 –9,6 –9,6 –9,6 –9,5 0,1
• Con T = 1,9 s y el valor promedio Λ = 0,1006 se obtiene la constante de amortiguación: δ = 0,053 s
ΙΙ
Ι = 0,4 A
ΙΙ
n
ϕ
– Ø
ϕ
–1
– Λ –
0 –15 –15 –15 –15 –15
1 –11,8 –11,8 –11,6 –11,6 –11,7 0,248
2 –9,2 –9,0 –9,0 –9,2 –9,1 0,25
3 –7,2 –7,2 –7,0 –7,0 –7,1 0,248
4 –5,8 –5,6 –5,4 –5,2 –5,5 0,25
5 –4,2 –4,2 –4,0 –4,0 –4,1 0,29
• Con T = 1,9 s y el valor promedio Λ = 0,257 se obtiene la constante de amortiguación: δ = 0,135 s
ΙΙ
Ι = 0,6 A
ΙΙ
n
ϕ
– Ø
ϕ
– Λ –
–1
0 –15 –15 –15 –15 –15
1 –9,2 –9,4 –9,2 –9,2 –9,3 0,478
2 –5,4 –5,2 –5,6 –5,8 –5,5 0,525
3 –3,2 –3,2 –3,2 –3,4 –3,3 0,51
4 –1,6 –1,8 –1,8 –1,8 –1,8 0,606
5 –0,8 –0,8 –0,8 –0,8 –0,8 0,81
• Con T = 1,9 s y el valor promedio Λ = 0,5858 se obtiene la constante de amortiguación: δ = 0,308 s
–1
5.3 Oscilación torsional forzada
• Para determinar la amplitud de oscilación en función de la frecuencia del excitador, o bien de la
tensión de alimentación, se lee la máxima oscilación del cuerpo pendular.
24
Page 25

T = 1,9 s
Tensión del motor V
ϕ
3 0,8
4 1,1
5 1,2
6 1,6
7 3,3
7,6 20,0
8 16,8
9 1,6
10 1,1
• La frecuencia circular propia del sistema ω0 se ob-
tiene de la medición de la duración de periodo T a
partir de:
ω
= 2 π/T = 3,3069 Hz
0
• Con una tensión del motor de 7,6 V se presenta la
mayor desviación, esto es, se presenta el caso de
resonancia.
• A continuación se llevó a cabo el mismo experi-
mento con la presencia adicional del freno de corrientes parásitas con I = 0,2 A, 0,4 A y 0,6 A.
ΙΙ
Ι = 0,2 A
ΙΙ
Tensión del motor V
ϕ
3 0,9
4 1,1
A
[skt]
5 1,2
6 1,7
7 2,9
7,6 15,2
8 4,3
9 1,8
10 1,1
ΙΙ
Ι = 0,4 A
ΙΙ
Tensión del motor V
3 0,9
4 1,1
5 1,3
6 1,8
7 3,6
7,6 7,4
8 3,6
9 1,6
10 1,0
ΙΙ
Ι = 0,6 A
ΙΙ
Tensión del motor V
3 0,9
4 1,1
5 1,2
6 1,6
7 2,8
7,6 3,6
8 2,6
9 1,3
10 1,0
ϕ
ϕ
20
15
10
5
1
012
• A partir de estas mediciones se pueden represen-
tar gráficamente las características de resonancia,
I=0,0A
trazando la amplitud en función de la tensión del
motor.
• A partir del valor promedio del ancho de los gráfi-
cos se puede obtener la frecuencia de resonancia.
I=0,2A
I=0,4A
I=0,6A
3
567 8910
4
u[v]
Curvas de resonancia
3B Scientific GmbH • Rudorffweg 8 • 21031 Hamburg • Alemania • www.3bscientific.com • Se reservan las modificaciones técnicas
25
Page 26

3B SCIENTIFIC3B SCIENTIFIC
3B SCIENTIFIC®
3B SCIENTIFIC3B SCIENTIFIC
U15040 Pêndulo de torção segundo Prof. Pohl
Instruções para o uso
12/03 ALF
PHYSICSPHYSICS
PHYSICS
PHYSICSPHYSICS
9
8
7
6
5
4
bl bm bn bo bp
1 Motor do excitador
2 Botão rotativo para o ajuste fino da tensão do excitador
3 Botão rotativo para o ajuste grosseiro da tensão do
excitador
4 Anel graduado
5 Corpo pendular
6 Mola caracol
7 Indicador da situação de fase do excitador
8 Indicador da situação de fase do corpo pendular
9 Indicador do ângulo de oscilação do corpo pendular
3
bl Excitador
bm Freio de corrente parasita
2
bn Fresta de controle e parafuso para o ajuste da
amplitude do excitador
bo Vara para impulso
bp Roda de acionamento com excêntrico
1
bq Tomadas de segurança de 4 mm para a medição
da tensão do excitador
br Tomadas de segurança de 4 mm para a alimentação do
motor do excitador
bs Tomadas de segurança de 4 mm para a alimentação do
freio de corrente parasita
bq br bs
O pêndulo de torção serve para a análise de oscilações
livres, forçadas e caóticas em diferentes casos de amortecimento.
Temas para experiências:
• Vibrações de torção livres em diferentes amorteci-
mentos (queda na oscilação com amortecimento
moderado, oscilação aperiódica e queda aperiódica
da limitação)
• Oscilações forçadas e suas curvas de ressonância
em vários casos de amortecimentos
• Transição fásica entre excitador e ressonador com
queda de ressonância
• Oscilações de torção caóticas
• Determinação estática da grandeza de referência D
• Determinação dinâmica do momento de inércia J
1. Indicações de segurança
• Ao retirar o pêndulo de torção da sua embalagem,
nunca o pegue pelo anel graduado! Podem ocor-
rer danos! Sempre retire o aparelho com o dispositivo previsto para isto! (Interior da embalagem).
• Para transportar o pêndulo de torção, sempre pegar o aparelho pela base.
• Não ultrapassar a tensão de alimentação máxima
admitida do motor do excitador (24 V DC).
• O pêndulo de torção não deve ser sujeito a qualquer esforço físico desnecessário.
2. Descrição, dados técnicos
O pêndulo de torção segundo Prof. Pohl consiste num
sistema oscilatório montado sobre uma placa base de
madeira e um motor elétrico. O sistema oscilatório
consiste numa roda de cobre com rolamento (5), a qual
está conectada com a vara do excitador por meio de
uma mola espiral (6) que por sua vez fornece o momento de restituição. Para a excitação do pêndulo de
torção, utiliza-se um motor de corrente contínua com
número de rotações ajustável de modo aproximado
ou preciso, o qual expande e comprime a mola espiral
26
Page 27

numa seqüência periódica através de um excêntrico
(14) com uma vara de impulso (13), levando assim a
roda de cobre a oscilar. Para o amortecimento é utilizado um freio de corrente parasita eletromagnético
(11). Um anel graduado (4) com frestas e uma escala
com divisões de 2 mm envolve o sistema oscilatório;
indicadores encontram-se no excitador e no ressoador.
O aparelho também pode ser utilizado para a projeção de sombras em demonstrações.
Para a alimentação elétrica é necessária a unidade de
alimentação elétrica DC para o pêndulo de torção
U11755.
Freqüência própria: aprox. 0,5 Hz.
Freqüência do
excitador: 0 até 1,3 Hz (ajustável sem
escalonamento)
Conexões:
motor: máx. 24 V DC, 0,7 A,
por tomadas de segurança
de 4 mm
freio de corrente
parasita: 0 até 24 V DC, máx. 2 A,
por tomadas de segurança
de 4 mm
Anel graduado: 300 mm Ø
Medidas: 400 mm x 140 mm x 270 mm
Massa: 4 kg
2.1 Fornecimento
1 pêndulo de torção
2 massas adicionais de 10 g
2 massas adicionais de 20 g
3. Fundamentos teóricos
3.1 Símbolos utilizados nas fórmulas
D = Grandeza de referência angular
J = Momento de inércia da massa
M = Momento de torção de restituição
T = Duração do período
T0= Duração do período do sistema sem
amortecimento
Td= Duração do período do sistema com
amortecimento
M
= Amplitude do momento de torção do
E
excitador
b = Momento do amortecimento
n = Número de períodos
t = Tempo
Λ = Decremento logarítmico
δ = Constante de amortecimento
ϕ
= Deslocamento angular
ϕ
= Amplitude no tempo t = 0 s
0
ϕ
= Amplitude após n períodos
n
ϕ
= Amplitude do excitador
E
ϕ
= Amplitude do sistema
S
ω0= Freqüência própria do sistema oscilatório
ωd= Freqüência própria do sistema amortecido
ωE= Freqüência circular do excitador
ωE
= Freqüência circular para a amplitude máx.
res
Ψ0S= Ângulo de fase do sistema
3.2 Oscilações de torção harmônicas
Uma oscilação de torção harmônica se dá quando a
força de restituição é proporcional ao deslocamento
angular. Nas oscilações de torção harmônicas, o momento de torção de reação é proporcional ao deslocamento angular ϕ:
M = D ·
ϕ
O fator de proporcionalidade D (grandeza de referência angular) pode ser calculado através da medição do
deslocamento angular e do momento deslocador.
A freqüência própria circular do sistema ω0 resulta das
medições da duração do período T a partir de
ω
= 2 π/T
0
e do momento de inércia da massa J a partir de
D
2
ω
=
0
J
3.3 Oscilações de torção livres amortecidas
Num sistema oscilatório no qual energia é perdida por
causa de perdas por atrito sem que esta energia seja
compensada por aporte externo de energia, a amplitude diminui constantemente, ou seja, a oscilação é
amortecida.
Enquanto isso, o momento de amortecimento b é proporcional à velocidade angular
.
ϕ
.
A partir do equilíbrio de momentos de torção resulta
a equação de movimento
.
..
JbD⋅+⋅+⋅ =
ϕϕϕ
0
Para a oscilação sem amortecimento vale b = 0
Se a oscilação no tempo t = 0 s começa com a amplitu-
de máxima
ϕ
a solução da equação diferencial com
0
um amortecimento não muito forte resulta em
(δ² < ω0²) (caso oscilatório)
–δ ·t
ϕ
ϕ
=
· e
· cos (
ω
0
d
· t)
δ = b/2 J é a constante de amortecimento e
2
ωωδ
=−
d
2
0
é a freqüência própria do sistema amortecido.
No caso de um amortecimento forte (δ² > ω0²) o sistema não oscila, mais se arrasta para o ponto de descanso (caso de arraste).
A duração de período Td do sistema oscilatório amortecido só varia muito pouco com relação ao valor T
do sistema oscilatório sem amortecimento.
Pela introdução de t = n · Td na equação
–δ ·t
ϕ
ϕ =
e a amplitude após n períodos ϕ =
a relação
ω
ϕ
ϕ
· e
0
= 2 π/T
d
n
0
d
δ
−⋅
n
=⋅
eT
· cos (
d
ω
· t)
d
ϕ
obtém-se com
n
0
27
Page 28

e a partir disso o decremento logarítmico Λ:
Ψ
ϕ
Λ
=⋅ =⋅
δ
T
d
1
n
n
In In
ϕ
0
Pela introdução de δ = Λ / Td ,
ϕ
=
ϕ
ω
= 2 π / T0 e
0
n+1
n
/ Td na equação
2
ωωδ
=−
d
2
0
freqüência resulta de
2
δ
ωω
=⋅−1
Eres 0
2
2
ω
0
Com amortecimento forte não há aumento excessivo
ω
= 2
π
d
de amplitude.
Para o ângulo de fase do sistema Ψ0S é válido
arctan
=
0S
ωω
2
δω
22
−
ω
0
obtém-se:
2
TT
=⋅+1
d0
Λ
2
4
π
pelo qual a duração de período Td pode ser calculada
exatamente se o valor T0 é conhecido.
3.4 Oscilações de torção forçadas
No caso de oscilações de torção forçadas, um momento de torção variável periodicamente com uma função
seno age do exterior sobre o sistema oscilatório. Completa-se esse momento do excitador na equação de
movimento
.
..
JbD M t⋅+⋅+⋅= ⋅ ⋅
ϕϕϕ ω
sin
E
()
E
Depois da iniciação da oscilação, o pêndulo de torção
oscila num estado estacionário com a mesma freqüência circular que o excitador, sendo que não se encontra defasado nem com ωE ou contra ω0. Ψ0S é o ângulo
de fase do sistema, a defasagem entre o sistema
oscilatório e o excitador.
ϕ
ϕ
=
· sin (
ω
· t –
Ψ
S
E
Para a amplitude do sistema
M
−
02E
J
2
2
ϕ
=
ωω δω
()
)
0S
ϕ
é válido
S
E
2
+⋅
4
2
E
Para ωE = ω0 (ressonância), o ângulo de fase do sistema Ψ0S = 90°. Isto é válido também para δ = 0 com a
extrapolação correspondente.
No caso das oscilações amortecidas (δ > 0) e ωE < ω
resulta 0° ≤ Ψ0S ≤ 90°, para ωE > ω0 é válido 90° ≤ Ψ
≤ 180°.
No caso de oscilações sem amortecimento (δ = 0) é
válido Ψ0S = 0° com ωE < ω0 e Ψ0S = 180° para ωE > ω0.
4. Utilização
4.1 Oscilações de torção livres amortecidas
• Conectar o freio de corrente parasita com a saída
para tensão ajustável do transformador de alimentação do pêndulo de torção.
• Conectar o amperímetro com o circuito elétrico.
• Determinar a constante de amortecimento depen-
dendo da corrente.
4.2 Oscilações de torção forçadas
• Conectar as tomadas de conexão (16) do motor do
excitador com a saída de tensão fixa do transformador do pêndulo de torção.
• Conectar o voltímetro com as tomadas de conexão
(15) do motor do excitador.
• Determinar a amplitude de oscilação em relação
de dependência com a freqüência do excitador ou
com a tensão de alimentação.
• Caso seja necessário, conectar o freio de corrente
parasita com a saída de tensão ajustável do transformador do pêndulo de torção.
0
0S
Para a relação entre a amplitude do sistema e a amplitude do excitador é válido
M
ϕ
S
=
ϕ
E
ω
E
−
14
ω
0
E
J
2
2
+
2
δ
ω
0
2
ω
E
⋅
ω
0
Nas oscilações sem amortecimento, a amplitude, em
caso de ressonância (ωE igual a ω0) cresce teoricamente infinitamente e leva ao “colapso por ressonância”.
Nas oscilações amortecidas e com amortecimento não
muito forte a amplitude do sistema atinge seu máximo, sendo que a freqüência circular do excitador ω
E res
é menor do que a freqüência própria do sistema. Esta
4.3 Oscilações caóticas
• Para a produção de oscilações caóticas, encontram-
se 4 massas adicionais, estas modificam o momento de restauração linear do pêndulo de torção.
• Para tal, aparafusar as massas adicionais no corpo
pendular (5).
28
Page 29

5. Exemplos de experiências
5.1 Oscilações de torção livres amortecidas
• Para determinar o decremento logarítmico Λ, me-
dem-se e estabelece-se a média das amplitudes em
várias operações. Para tal, registra-se o balanço do
pêndulo na escala em duas séries de medições, a
cada vez com leitura à esquerda e à direita.
• O ponto inicial do pêndulo encontrava-se em 15
ou –15 na escala. Cinco deslocamentos foram
registrados.
• Da relação entre as amplitudes, obtém-se Λ com a
fórmula
ϕ
n
Λ
=
n
In
ϕ
n+1
ϕ
–
ϕ
+
0 –15 –15 –15 –15 15 15 15 15
1 –14,8 –14,8 –14,8 –14,8 14,8 14,8 14,8 14,8
2 –14,4 –14,6 –14,4 –14,6 14,4 14,4 14,6 14,4
3 –14,2 –14,4 –14,0 –14,2 14,0 14,2 14,2 14,0
4 –13,8 –14,0 –13,6 –14,0 13,8 13,8 14,0 13,8
5 –13,6 –13,8 –13,4 –13,6 13,4 13,4 13,6 13,6
nØ
ϕ
– Ø
ϕ
+
Λ
–
Λ
+
0 –15 15
1 –14,8 14,8 0,013 0,013
2 –14,5 14,5 0,02 0,02
3 –14,2 14,1 0,021 0,028
4 –13,8 13,8 0,028 0,022
5 –13,6 13,5 0,015 0,022
• O valor obtido para Λ é Λ = 0,0202.
• Para duração de oscilação T do pêndulo é válido
t = n · T. Para tal, medir o tempo par 10 oscilações
com um cronômetro e calcular T.
T = 1,9 s
• A partir destes valores pode-se determinar a constante de amortecimento δ com δ = Λ / T.
δ
= 0,0106 s
–1
• Para a freqüência própria ω é válido
2
2
π
2
ω
=
ω
= 3,307 Hz
−
δ
T
5.2 Oscilações de torção livres amortecidas
• Para determinar a constante de amortecimento δ
em relação de dependência com a corrente Ι através do imã eletromagnético, foi realizado o mesmo ensaio com o freio de corrente parasita ligado
com Ι = 0,2 A, 0,4 A e 0,6 A.
ΙΙ
Ι = 0,2 A
ΙΙ
n
ϕ
– Ø
ϕ
– Λ –
0 –15 –15 –15 –15 –15
1 –13,6 –13,8 –13,8 –13,6 –13,7 0,0906
2 –12,6 –12,8 –12,6 –12,4 –12,6 0,13
3 –11,4 –11,8 –11,6 –11,4 –11,5 0,0913
4 –10,4 –10,6 –10,4 –10,4 –10,5 0,0909
5 9,2 –9,6 –9,6 –9,6 –9,5 0,1
• Com T = 1,9 s e média de Λ = 0,1006 resulta a
ϕ
– Λ –
–1
constante de amortecimento: δ = 0,053 s
ΙΙ
Ι = 0,4 A
ΙΙ
n
ϕ
– Ø
0 –15 –15 –15 –15 –15
1 –11,8 –11,8 –11,6 –11,6 –11,7 0,248
2 –9,2 –9,0 –9,0 –9,2 –9,1 0,25
3 –7,2 –7,2 –7,0 –7,0 –7,1 0,248
4 –5,8 –5,6 –5,4 –5,2 –5,5 0,25
5 –4,2 –4,2 –4,0 –4,0 –4,1 0,29
• Com T = 1,9 s e média de Λ = 0,257 resulta a constante de amortecimento: δ = 0,135 s
ΙΙ
Ι = 0,6 A
ΙΙ
n
ϕ
– Ø
–1
ϕ
– Λ –
0 –15 –15 –15 –15 –15
1 –9,2 –9,4 –9,2 –9,2 –9,3 0,478
2 –5,4 –5,2 –5,6 –5,8 –5,5 0,525
3 –3,2 –3,2 –3,2 –3,4 –3,3 0,51
4 –1,6 –1,8 –1,8 –1,8 –1,8 0,606
5 –0,8 –0,8 –0,8 –0,8 –0,8 0,81
• Com T = 1,9 s e média de Λ = 0,5858 resulta a
constante de amortecimento: δ = 0,308 s
–1
5.3 Oscilações de torção forçadas
• Para determinar amplitude de oscilação dependendo da freqüência do excitador ou da tensão de alimentação registra-se a oscilação máxima do corpo
pendular.
T = 1,9 s
Tensão do motor V
ϕ
3 0,8
4 1,1
5 1,2
6 1,6
7 3,3
7,6 20,0
8 16,8
9 1,6
10 1,1
29
Page 30

• A freqüência circular do sistema ω0 obtém-se pela
medição da duração de período T
ω
= 2 π/T = 3,3069 Hz
0
• Com uma tensão de motor de 7,6 V ocorre a maior
distância angular, ou seja, ocorre o caso de ressonância.
• Logo foi efetuado o mesmo ensaio com o freio de
corrente parasita ligado com Ι = 0,2 A, 0,4 A e 0,6 A.
ΙΙ
Ι = 0,2 A
ΙΙ
Tensão do motor V
ϕ
3 0,9
4 1,1
5 1,2
6 1,7
7 2,9
7,6 15,2
8 4,3
9 1,8
10 1,1
10 1,0
ΙΙ
Ι = 0,6 A
ΙΙ
Tensão do motor V
10 1,0
5 1,3
6 1,8
7 3,6
7,6 7,4
8 3,6
9 1,6
ϕ
3 0,9
4 1,1
5 1,2
6 1,6
7 2,8
7,6 3,6
8 2,6
9 1,3
ΙΙ
Ι = 0,4 A
ΙΙ
Tensão do motor V
ϕ
3 0,9
4 1,1
A
[skt]
20
15
10
• A partir destas medições pode-se representar as
curvas de ressonância de forma gráfica integrando
as amplitudes dependendo da tensão do motor.
• Pela amplitude dos valores médios do gráfico pode-
se determinar graficamente a freqüência de ressonância.
I=0,0A
I=0,2A
I=0,4A
5
1
012
Curvas de ressonância
3
3B Scientific GmbH • Rudorffweg 8 • 21031 Hamburg • Alemanha • www.3bscientific.com • Sob reserva de modificações técnicas
567 8910
4
30
I=0,6A
u[v]
 Loading...
Loading...